Embed Size (px)
Citation preview
TEHNIČKO VELEUČILIŠTE U ZAGREBU
STRUČNI STUDIJ ELEKTROTEHNIKE
Damir Cindrić
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
ZAVRŠNI RAD br. 1650
Zagreb, rujan, 2014.
TEHNIČKO VELEUČILIŠTE U ZAGREBU
STRUČNI STUDIJ ELEKTROTEHNIKE
Damir Cindrić
JMBAG: 0035164233
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
ZAVRŠNI RAD br. 1650
Zagreb, rujan, 2014.
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Damir Cindrić – Završni rad br. 1650 2
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Zahvala
Zahvaljujem mentoru dipl.ing.ele. Stipi Predaniću, Mirjani Cindrić, Damiru Vavri i
Ivanu Bobanu na vodstvu i potpori tijekom izrade ovog rada.
Damir Cindrić – Završni rad br. 1650 3
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Sažetak
U ovom završnom radu prikazan je i opisan način izrade inercijskog dinamometra
za mjerenje snage električnog motora u automodelu na daljinsko upravljanje pomoću
Arduino Mega2560 razvojne pločice koja se temelji na ATmega2560 mikroupravljaču.
Uređaj se sastoji od mehaničke konstrukcije sa mjernim valjcima, senzora za
očitavanje okretaja valjaka, Arduino razvojne pločice, wattmetra i ekrana za ispis
rezultata. Opisani dinamometar na stolu simulira realne uvjete sa trkaće staze te
mjeri i daje korisniku podatke potrebne za daljnji razvoj automodela.
Prikazan je postupak izrade uređaja, način rada, način spajanja električkih
komponenti te je objašnjen upravljački program.
Damir Cindrić – Završni rad br. 1650 4
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Sadržaj
1. Uvod......................................................................................................................9
2. Dinamometar u automobilizmu............................................................................10
2.1. Inercijski dinamometar.....................................................................................11
3. Arduino................................................................................................................12
3.1. Arduino Mega 2560......................................................................................12
3.2. Napajanje......................................................................................................14
3.3. Programiranje u Arduino-u............................................................................15
4. Konstrukcija uređaja............................................................................................16
4.1. Testni automodel..........................................................................................17
4.2. Mjerni valjak..................................................................................................18
4.2.1. Proračun momenta inercije mjernog valjka...................................................19
4.3. Nosači valjaka...............................................................................................21
4.4. Osovine i ležajevi..........................................................................................21
4.5. Postolje i kućište...........................................................................................22
5. Elektronički dio....................................................................................................25
5.1. Hall senzor....................................................................................................26
5.1.1. Princip rada Hall senzora..............................................................................27
5.2. LCD ekran (eng. Liquid Crystal Display).......................................................30
5.2.1. Shema i opis spajanja ekrana na Arduino Mega2560..................................31
5.3. Wattmetar.....................................................................................................34
6. Izrada..................................................................................................................36
6.1. Deklaracija varijabli.......................................................................................36
6.2. Funkcija setup...............................................................................................37
6.3. Funkcija rpmvaljka........................................................................................38
6.4. Funkcija loop.................................................................................................38
6.4.1. Proračun za mjerenje snage i ostalih parametara........................................39
Damir Cindrić – Završni rad br. 1650 5

Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
6.4.2. Ispis rezultata na LCD ekranu......................................................................42
7. Upravljanje dinamometrom.................................................................................44
8. Zaključak.............................................................................................................45
9. Literatura.............................................................................................................46
10. Prilozi...............................................................................................................47
10.1. Upravljački program......................................................................................47
10.2. Nacrti............................................................................................................53
Damir Cindrić – Završni rad br. 1650 6
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Popis oznaka i kratica
CNC Computer numerical control
CAM Computer-Aided manufacturing
LCD Liquid Crystal Display
LiPo Lithium Polymer
ABEC Annular Bearing Engineering Committee
ABS Antilock Braking System
RPM Revolutions Per Minute
PWM Pulse-Width Modulation
UART Universal Asynchronous Reciever-Transmitter
AREF Analogue Reference
LED Light-Emitting Diode
TX Transmit
RX Recieve
SPI Serial Peripheral Interface
EEPROM Electricaly Erasable Progammable Read-Only
SRAM Static Random-Access Memory
USB Universal Serial Bus
Damir Cindrić – Završni rad br. 1650 7
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Popis tablica
Tablica 1. Arduino Mega2560 karakteristike..............................................................13
Tablica 2. Električne karakteristike Hall senzora........................................................29
Tablica 3. Opis pinova LCD-a....................................................................................31
Popis slika
Slika 1. Primjena dinamometra za mjerenje snage automobila.................................10
Slika 2. Arduino Mega2560........................................................................................14
Slika 3. Xray T4 automodel koji je testiran u ovom projektu......................................17
Slika 4. Mjerni valjak..................................................................................................20
Slika 5. Nosač valjka..................................................................................................21
Slika 6. Prikaz presjeka kućišta sa instaliranim valjcima i nosačima.........................23
Slika 7. 3D Vizualni prikaz sastavljenog inercijskog dinamometra.............................24
Slika 8. Izrađeni dinamometar sa automodelom na njemu........................................24
Slika 9. LiPo akumulator Turnigy Nanotech 6000mAh...............................................25
Slika 10. Princip rada Hall senzora............................................................................28
Slika 11. Hall senzor..................................................................................................29
Slika 12.LCD 16x2 ekran...........................................................................................30
Slika 13. Shema spajanja LCD ekrana......................................................................33
Slika 14. Shema spajanja dinamometra....................................................................34
Slika 15. Wattmetar....................................................................................................35
Slika 16. Korištene biblioteke.....................................................................................36
Slika 17. Setup funkcija..............................................................................................37
Slika 18. Rpmvaljka funkcija......................................................................................38
Slika 19. Funkcija loop...............................................................................................39
Slika 20. Ispis izmjerenih vrijednosti na ekran...........................................................43
Damir Cindrić – Završni rad br. 1650 8
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
1. Uvod
Autosport je vrsta sporta u kojoj se pobjeda zasniva najviše na inženjerskom
radu te ostatak pridonosi sam vozač koji upravlja automobilom. Kako i u svakom
sportu konkurencija postaje sve jača i jača tako i inženjeri stvaraju sve bolje i
bolje proizvode tj. automobile. Da bi znao napraviti bolje mora znati koliko je
dobro ono što je već napravio, a to će znati tako da izmjeri postojeće.
Jedan od takvih mjernih alata je dinamometar koji mjeri snagu motora u
automobilu.
U nastavku ovog rada opisana je detaljna izrada inercijskog dinamometra za
automodele na daljinsko upravljanje pomoću Arduino Mega 2560
mikroupravljačke platforme. Prvo je opisana upotreba i način rada dinamometra u
autoindustriji. Zatim je opisan proces od same mehaničke konstrukcije i
proračuna, načina spajanja upravljačkih i pokazivačkih komponenata do
završenog sustava spremnog za upotrebu od strane korisnika. Na kraju je opisan
upravljački program koji upravlja uređajem.
Damir Cindrić – Završni rad br. 1650 9
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
2. Dinamometar u automobilizmu
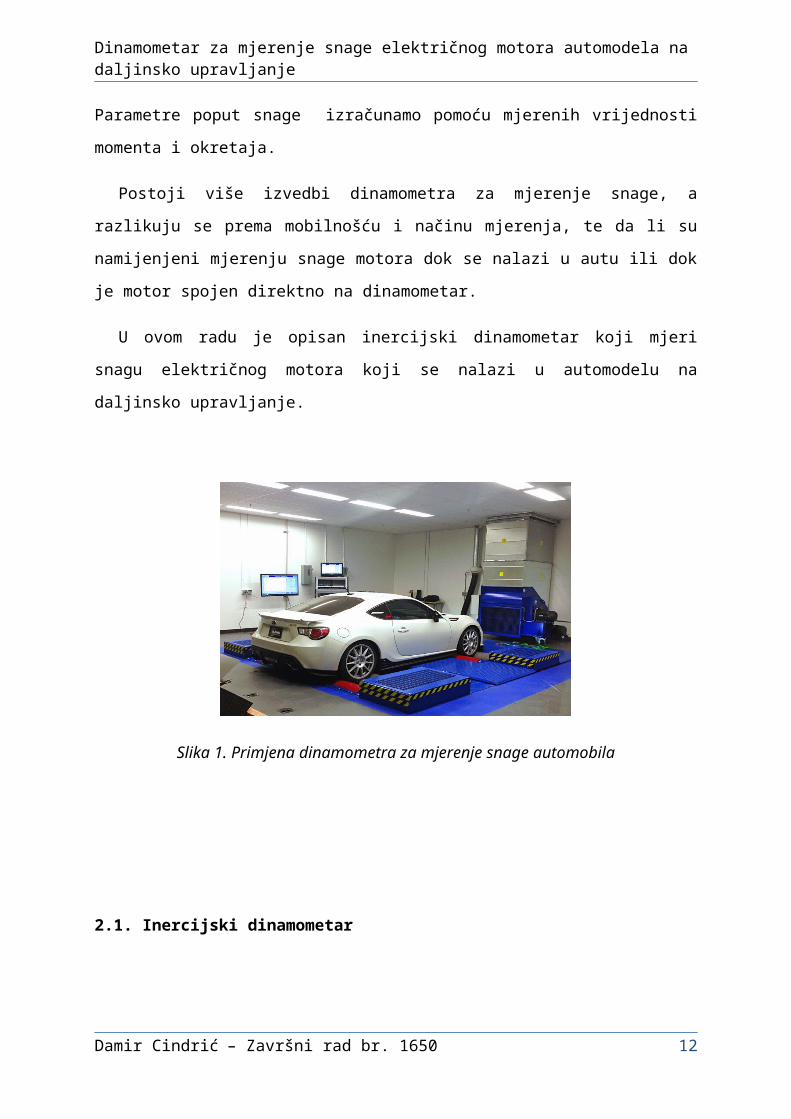
Dinamometar je uređaj koji mjeri vlačnu ili tlačnu silu. U autosportu i auto/moto
industriji dinamometar se koristi za mjerenje snage automobila. Takav dinamometar
za mjerenje snage automobila ima komercijalni naziv Dyno. Dyno je uređaj koji mjeri
moment, tj. silu koju proizvodi motor s unutarnjim izgaranjem, električni motor ili bilo
koji drugi motor koji se nalazi u automobilu. Sve parametre koje mjerimo dobivamo
tako da mjerimo frekvenciju okretaja valjaka koje pokreće automobil te mjerimo
moment koji stvaraju ti valjci prilikom vrtnje. Parametre poput snage izračunamo
pomoću mjerenih vrijednosti momenta i okretaja.
Postoji više izvedbi dinamometra za mjerenje snage, a razlikuju se prema
mobilnošću i načinu mjerenja, te da li su namijenjeni mjerenju snage motora dok se
nalazi u autu ili dok je motor spojen direktno na dinamometar.
U ovom radu je opisan inercijski dinamometar koji mjeri snagu električnog motora
koji se nalazi u automodelu na daljinsko upravljanje.
Slika 1. Primjena dinamometra za mjerenje snage automobila
Damir Cindrić – Završni rad br. 1650 10
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
2.1. Inercijski dinamometar
Inercijski dinamometar kao što mu samo ime kaže radi na principu zakona o
očuvanju količine gibanja. Takav dinamometar mjeri moment pomoću momenta
inercije valjaka i kutne akceleracije koju ti valjci stvaraju prilikom vrtnje te ima
nepromjenjivu inercijsku masu. Gubici koji se stvaraju su proporcionalni s brojem
okretaja u minuti zbog karakteristike kugličnih ležajeva na kojima su oslonjeni valjci
za mjerenje. Isto tako ovise i o vanjskoj temperaturi.
Način na koji mjeri snagu je da ubrzava poznatu masu valjaka te mjeri rotaciju
(o/min) i kutno ubrzanje valjaka. Na temelju toga se trenutno vrši kalkulacija poznatih
parametara iz kojih se dobije moment koji je potreban za dobivanje snage motora.
Ovaj oblik dinamometra je upotrebljen u ovom projektu zato što se radi o malim
snagama automodela i zbog mogućnosti mobilnosti uređaja.
Damir Cindrić – Završni rad br. 1650 11
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
3. Arduino
Arduino je platforma koja je razvijena kako bi bila pomagalo studentima da razviju
svoje ideje i lakše ih provedu u stvarnost u području mikroupravljača . Razvijena je
2005. godine u Italiji na sveučilištu Interaction Design Institute Ivera. S obzirom na
cijenu i jednostavnost Arduino je postao brzo popularan diljem svijeta.
Arduino je otvorena mikroupravljačka platforma (eng. „Open source“) koji se
temelji na 8 bitnom Atmel AVR ili na 32 bitnom Atmel ARM mikroupravljaču. S
obzirom na kompleksnosti raznih projekata Arduino je osmislio odgovor za takva
pitanja i napravio različite verzije svog mikroupravljača.
Tako imamo Arduino Uno, Arduino Nano, Arduino Mega 2560, Arduino Leonardo,
Arduino LylyPad itd.
Korisnik može odabrati mikroupravljač prema svojim potrebama. U ovom projektu je
odabran Arduino Mega 2560.
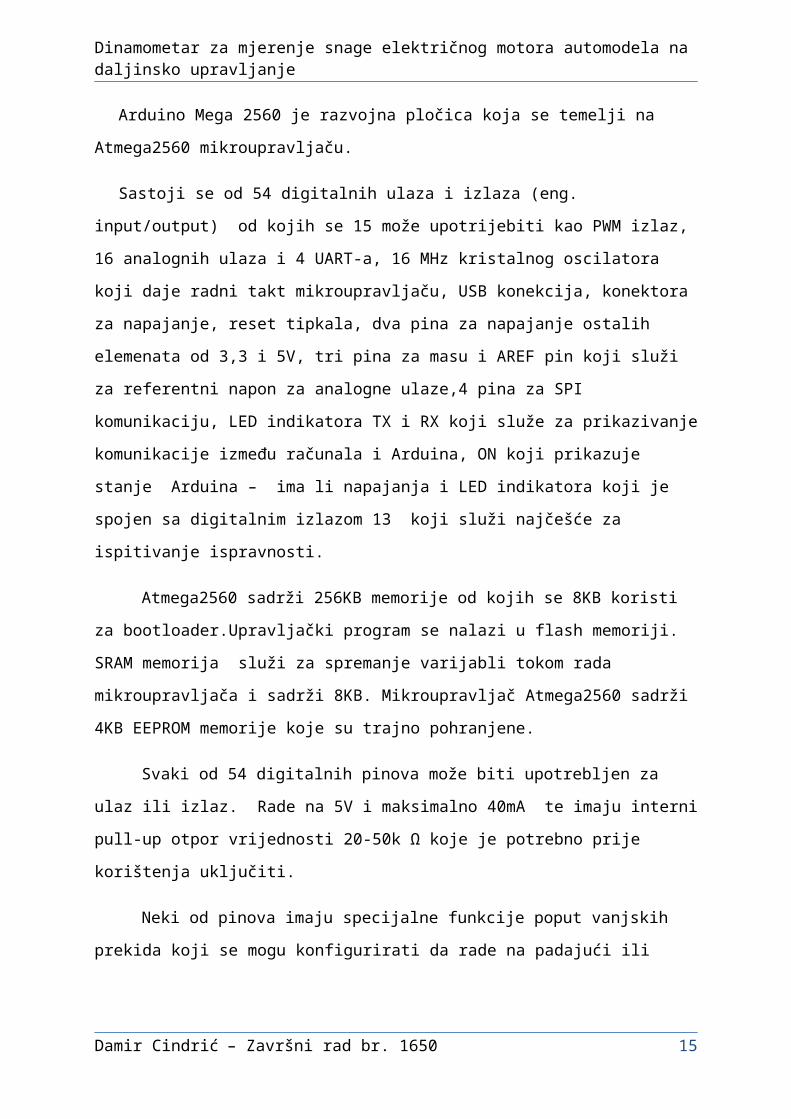
3.1. Arduino Mega 2560
Arduino Mega 2560 je razvojna pločica koja se temelji na Atmega2560
mikroupravljaču.
Sastoji se od 54 digitalnih ulaza i izlaza (eng. input/output) od kojih se 15 može
upotrijebiti kao PWM izlaz, 16 analognih ulaza i 4 UART-a, 16 MHz kristalnog
oscilatora koji daje radni takt mikroupravljaču, USB konekcija, konektora za
napajanje, reset tipkala, dva pina za napajanje ostalih elemenata od 3,3 i 5V, tri pina
za masu i AREF pin koji služi za referentni napon za analogne ulaze,4 pina za SPI
komunikaciju, LED indikatora TX i RX koji služe za prikazivanje komunikacije između
Damir Cindrić – Završni rad br. 1650 12

Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
računala i Arduina, ON koji prikazuje stanje Arduina – ima li napajanja i LED
indikatora koji je spojen sa digitalnim izlazom 13 koji služi najčešće za ispitivanje
ispravnosti.
Atmega2560 sadrži 256KB memorije od kojih se 8KB koristi za
bootloader.Upravljački program se nalazi u flash memoriji. SRAM memorija služi za
spremanje varijabli tokom rada mikroupravljača i sadrži 8KB. Mikroupravljač
Atmega2560 sadrži 4KB EEPROM memorije koje su trajno pohranjene.
Svaki od 54 digitalnih pinova može biti upotrebljen za ulaz ili izlaz. Rade na
5V i maksimalno 40mA te imaju interni pull-up otpor vrijednosti 20-50k Ω koje je
potrebno prije korištenja uključiti.
Neki od pinova imaju specijalne funkcije poput vanjskih prekida koji se mogu
konfigurirati da rade na padajući ili rastući brid, tj promijeniti vrijednost. Digitalni izlazi
PWM 2-13 and 44-46 omogućavaju 8-bitni PWM.
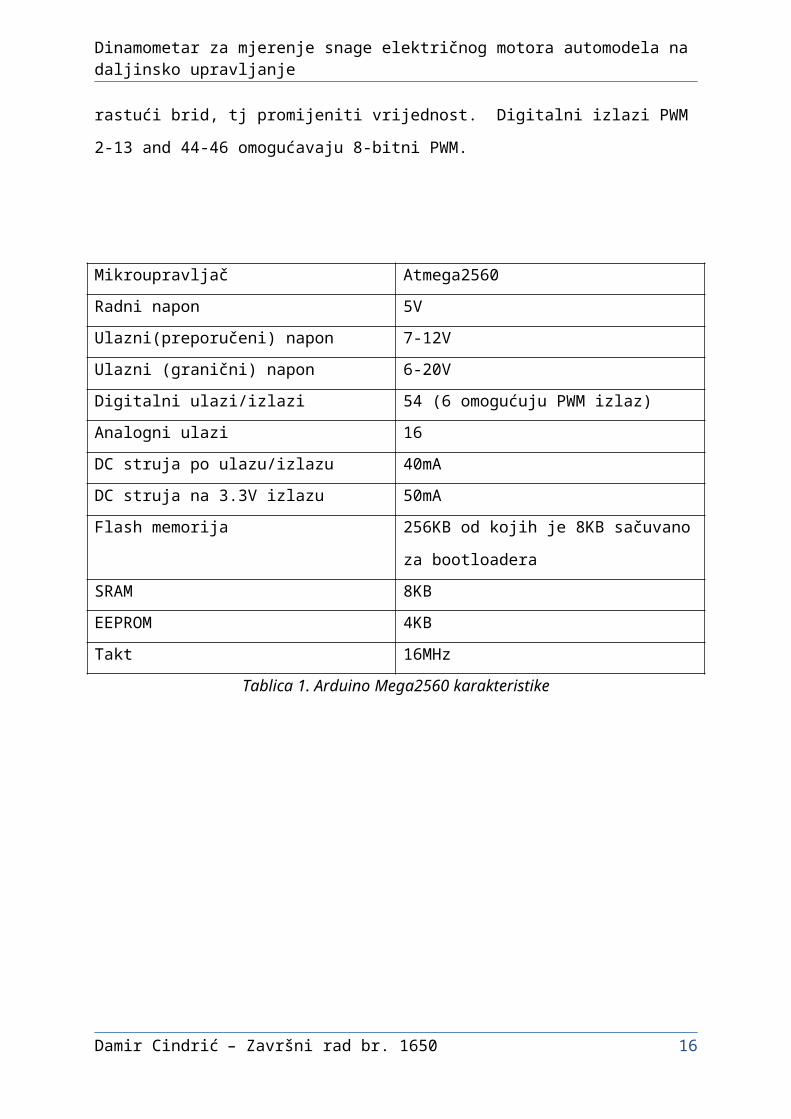
Mikroupravljač Atmega2560
Radni napon 5V
Ulazni(preporučeni) napon 7-12V
Ulazni (granični) napon 6-20V
Digitalni ulazi/izlazi 54 (6 omogućuju PWM izlaz)
Analogni ulazi 16
DC struja po ulazu/izlazu 40mA
DC struja na 3.3V izlazu 50mA
Flash memorija 256KB od kojih je 8KB sačuvano za
bootloadera
SRAM 8KB
EEPROM 4KB
Takt 16MHz
Tablica 1. Arduino Mega2560 karakteristike
Damir Cindrić – Završni rad br. 1650 13
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Slika 2. Arduino Mega2560
3.2. Napajanje
Arduino Mega2560 ima dva načina napajanja : preko USB konektora ili preko
konektora za vanjsko napajanje. Arduino automatski odabire izvor napajanja.
Vanjsko napajanje može biti sa baterije/akumulatora ili AC/DC pretvarača, a spaja
se putem konektora veličine 2.1mm s pozitivnim centrom. Moguće je spojiti bateriju i
na pinove Vin i Gnd.
Granice ulaznog napona su 6-20V ali se preporučuje 7-12V . Zato što ispod 7V
ulaznog napona postoji vjerojatnost da će doći do padova napona te mikroupravljač
neće biti stabilan, a za napone preko 12V bi moglo doći do pregrijavanja te oštećenja
pločice.
Damir Cindrić – Završni rad br. 1650 14
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
3.3. Programiranje u Arduino-u
Arduino razvojne pločice koriste službeni program koji se može besplatno
preuzeti sa službenih stranica Arduina. Program Arduino je namijenjen za sve
modele Arduino razvojnih pločica te se koristi za izradu upravljačkog programa koji
se zatim prebacuje u pločicu. Upravljački program se sprema kao .ino tip datoteke
koja se naziva skica (eng. Sketch).
Program Arduino je vrlo jednostavno osmišljen kako bi što više olakšao
studentima ili ljudima koji se prvi puta susreću s Arduino područjem. Sami program
Arduino se sastoji od prostora za pisanje i uređivanje koda, kontrolne trake,
obavijesne konzole i ostalih menija.
U konzolnoj traci su šest naredbi :
1. Verify- otkrivanje pogreški u unesenom kodu
2. Upload- kompajliranje i slanje upravljačkog programa na razvojnu
pločicu
3. New- pokretanje nove skice
4. Open- otvaranje spremljenih skica ili ostalih postojećih primjera
5. Save- spremanje skice
6. Serial Monitor- serijski promatrač koji služi za praćenje podataka koje
mikroupravljač šalje i prima
Kod pokretanja programa i prije unosa koda upravljačkog programa potrebno je
definirati Arduino program prema platformi koju koristite. Tako u ovom slučaju je
odabrana platforma Arduino Mega or Mega2560 u alatnoj traci Tools, te u
padajućem meniju Board se odabire odgovarajuća platforma. Analogno pločici
potrebno je i odabrati broj porta preko kojega računalo komunicira sa Arduinom. Port
se odabire isto pod Tools te u rubrici Port odaberete port koji koristite za
komunikaciju. U ovom slučaju se koristi port COM1.
Damir Cindrić – Završni rad br. 1650 15

Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
4. Konstrukcija uređaja
Inercijski dinamometar koji je u ovom projektu konstruiran i izrađen se sastoji od
strojarske i elektroničke cjeline .Mehanički dio sklopa je konstruiran u programu za
3D modeliranje SolidWorks.
Cijeli projekt je započeo 3D modeliranjem prototipa kako bi se uvidjeli mogući
problemi oko izrade dinamometra i hoće li sklop biti dovoljno funkcionalan za mobilne
upotrebe , što ujedno znači da je unaprijed proračunata ukupna masa uređaja u
okviru zadanih tolerancija. Nakon izrade nacrta i CAM programa, mehanički dijelovi
su izrađeni na CNC tokarskom stroju i CNC stroju za glodanje. Paralelno tome je na
proto pločici napravljen prototip sa potrebnim elektroničkim komponentama te su
izvršeni prvi testovi. Opis pojedinih elemenata i dijelova je naveden u daljnjim
cjelinama, te isto tako popis svih dijelova.
Ovaj inercijski dinamometar je namijenjen mjerenju snage, okretaja u minuti
motora i brzine automodela klase u mjerilu 1:10. Pošto je automodel umanjen deset
puta naspram pravog automodela bilo je potrebno cijeli sustav optimizirati toj skali.
Automodel nije linearno skaliran pa tako nisu niti njegove karakteristike skalirane. Pri
tome je bilo potrebno posebno obratiti pažnju kod konstrukcije valjaka i odabira
materijala.
Popis dijelova:
Mehanika:
Mjerni valjci
Nosači mjernih valjaka
Osovine i ležajevi
Kućište i postolje
Vijci i ostalo
Damir Cindrić – Završni rad br. 1650 16
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Elektronika:
Arduino Mega2560
Hall senzor
LCD 16x2 znakovni ekran
Wattmetar
Ožičenje i ostalo
4.1. Testni automodel
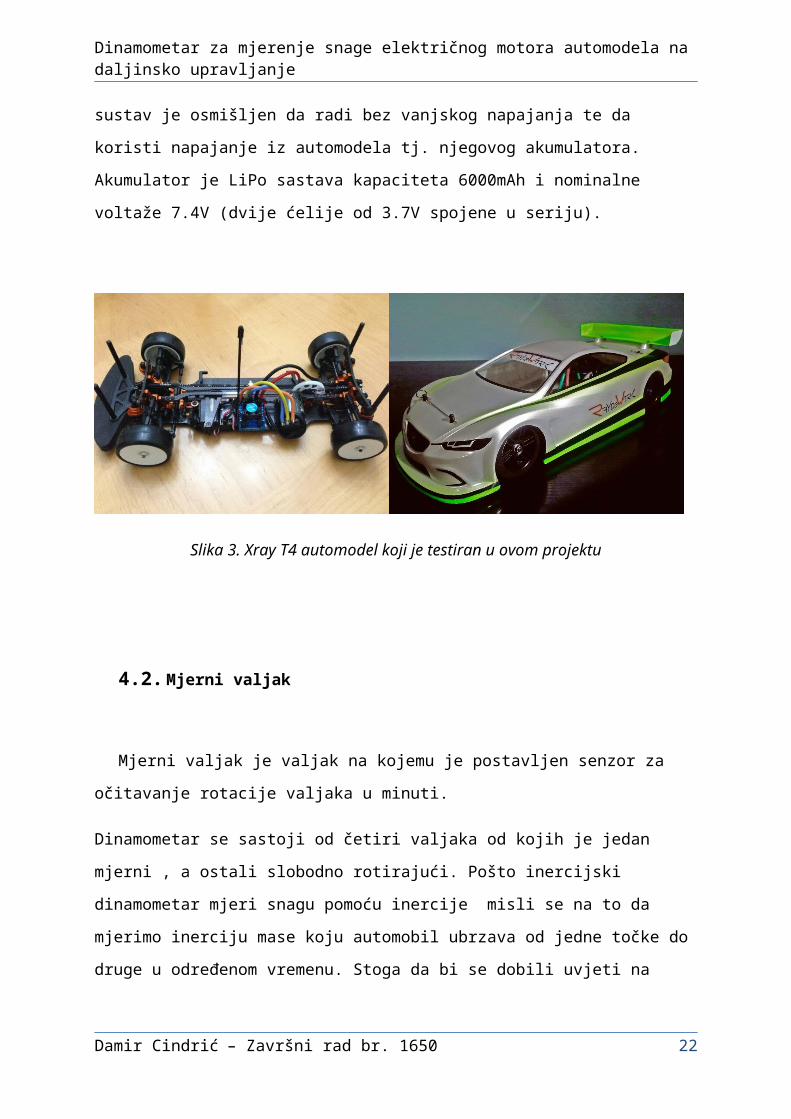
Testni subjekt automodela je Xray T4 . Motor koji se nalazi u njemu je asinkroni
istosmjerni električni motor bez četkica Hobbywing 13T 3000kV snage 200W i razvija
25000 o/min. Cijeli sustav je osmišljen da radi bez vanjskog napajanja te da koristi
napajanje iz automodela tj. njegovog akumulatora. Akumulator je LiPo sastava
kapaciteta 6000mAh i nominalne voltaže 7.4V (dvije ćelije od 3.7V spojene u seriju).
Slika 3. Xray T4 automodel koji je testiran u ovom projektu
Damir Cindrić – Završni rad br. 1650 17
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
4.2. Mjerni valjak
Mjerni valjak je valjak na kojemu je postavljen senzor za očitavanje rotacije
valjaka u minuti.
Dinamometar se sastoji od četiri valjaka od kojih je jedan mjerni , a ostali slobodno
rotirajući. Pošto inercijski dinamometar mjeri snagu pomoću inercije misli se na to da
mjerimo inerciju mase koju automobil ubrzava od jedne točke do druge u određenom
vremenu. Stoga da bi se dobili uvjeti na stolu isti kao i na trkaćoj stazi potrebno je
napraviti valjke proporcionalno skali automodela, njegovoj masi i snazi.
Svaki valjak ima masu od 350g±0.3. Izrađeni su od aluminijske legure 6061.
Aluminijska legura je odabrana zato što nije magnetična, lako obradljiva, otporna na
koroziju i manje mase u korištenim dimenzijama. Zadnji razlog je dvosmislen jer
poanta je dodavati masu i stvoriti teret ali s obzirom da se na valjak bočno
postavljaju magneti (2 komada svaki promjera 5mm) dobio bi se valjak istih dimenzija
ali puno veće mase u slučaju da je iskorišten čelik kao materijal. Tada zbog prevelike
mase potrebno je smanjiti dimenzije valjaka. Ako se smanje dimenzije valjaka tada je
teško izvesti montažu istog broja magneta kao i na većim dimenzijama. To bi
rezultiralo lošom simulacijom automodela te slabom rezolucijom očitavanja magneta.
Oblik i masa su bitni jer ta dva parametra zajedno stvaraju moment inercije koji je
potreban za računanje snage. Moment inercije raste povećanjem promjera valjka iste
mase i obrnuto. Moment inercije je proračunat prije izrade valjaka te isto tako je
izračunat nakon izrade valjaka. Razlika je minimalna i zanemariva, a postoji zato što
postoje nesavršenosti u materijalu. Isto tako je izračunat moment inercije i u
programu SolidWorks gdje je isti izmodeliran.
Damir Cindrić – Završni rad br. 1650 18

Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
4.2.1. Proračun momenta inercije mjernog valjka
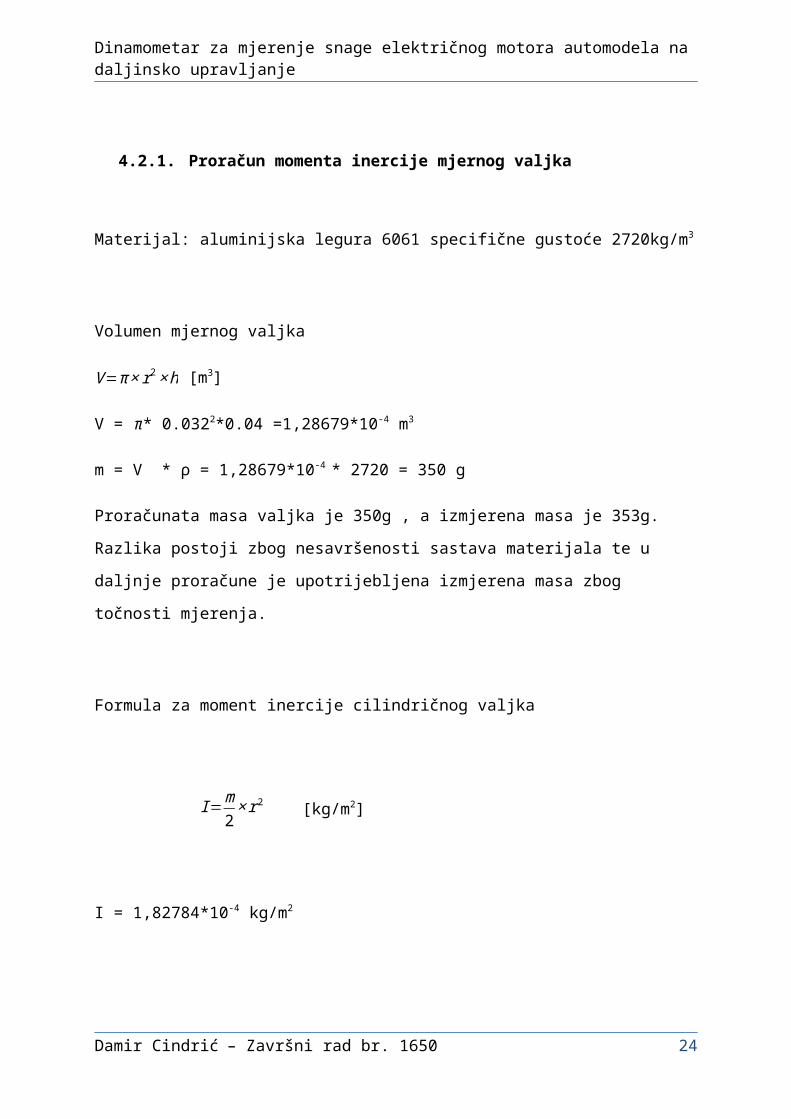
Materijal: aluminijska legura 6061 specifične gustoće 2720kg/m3
Volumen mjernog valjka
V=π ×r 2×h [m3]
V = π* 0.0322*0.04 =1,28679*10-4 m3
m = V * ρ = 1,28679*10-4 * 2720 = 350 g
Proračunata masa valjka je 350g , a izmjerena masa je 353g. Razlika postoji zbog
nesavršenosti sastava materijala te u daljnje proračune je upotrijebljena izmjerena
masa zbog točnosti mjerenja.
Formula za moment inercije cilindričnog valjka
I=m2×r2 [kg/m2]
I = 1,82784*10-4 kg/m2
Pošto postoje četiri valjaka onda je ukupni moment inercije zbroj momenta inercija
svih valjaka.
Iuk = 7,31136*10-4 kg/m2
Damir Cindrić – Završni rad br. 1650 19
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
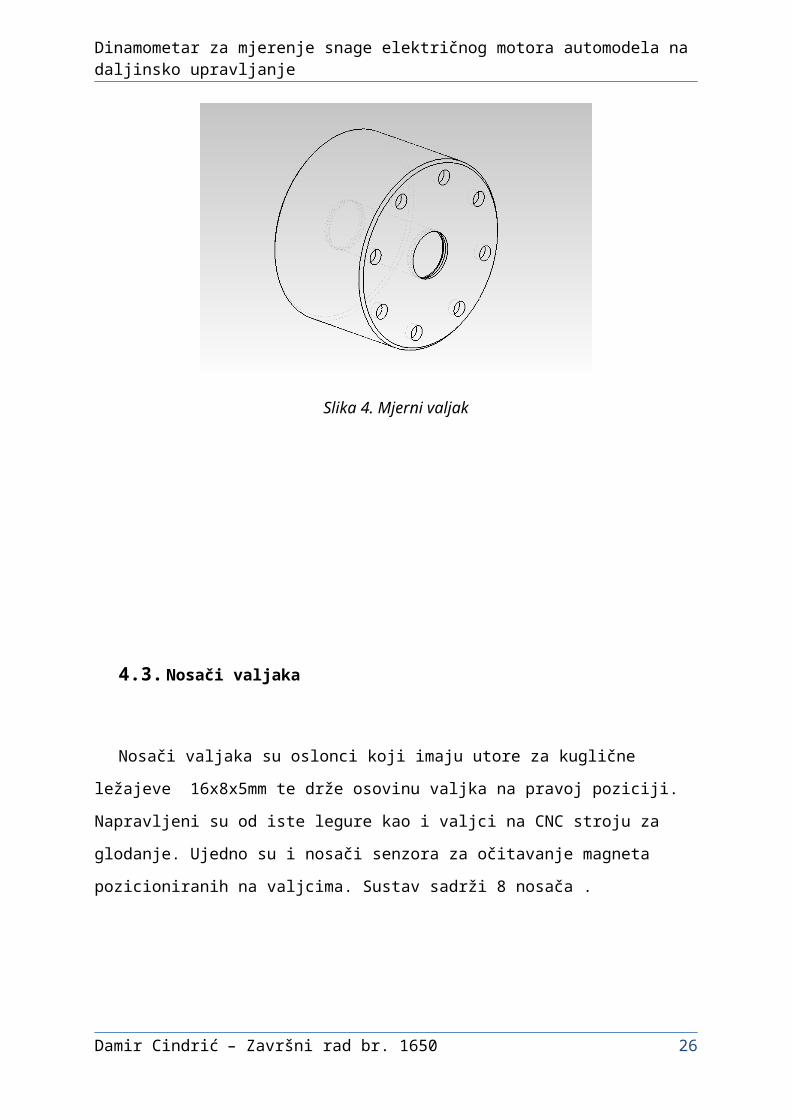
Na valjku je izbušeno bočno 8 rupa po obodu namijenjeno za instalaciju i lijepljenje
magneta koji služe za očitanje pozicije valjka. Bušeno je glodalom umjesto svrdlom
jer glodalo ima paralelne rezne oštrice naspram obradne plohe. Time je uklonjena
mogućnost zračne rupe u valjku između magneta i valjka i otklonjena mogućnost da
valjak bude nebalansiran.
Kako bi se otklonila mogućnost proklizavanja kotača automodela na valjku bilo
je potrebno renderirati dodirnu površinu. U prvoj verziji je renderirano strojno na
tokarskom stroju sa alatom za takvu obradu . Ali taj način obrade gnječi materijal i
valjak postaje nebalansiran kada se rotira na visokim okretajima. Zbog toga je druga
verzija napravljena tako da se renderiralo na klasičnoj glodalici pomoću profilnog
glodala modula 0.8 za zupčanike upuštenog u materijal 0.7mm. Proces je vremenski
ne efikasan ali se dobio izvrstan rezultat.
Nakon obrade valjci su crno eloksirani radi dizajna i otpornosti na trošenje.
Slika 4. Mjerni valjak
Damir Cindrić – Završni rad br. 1650 20
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
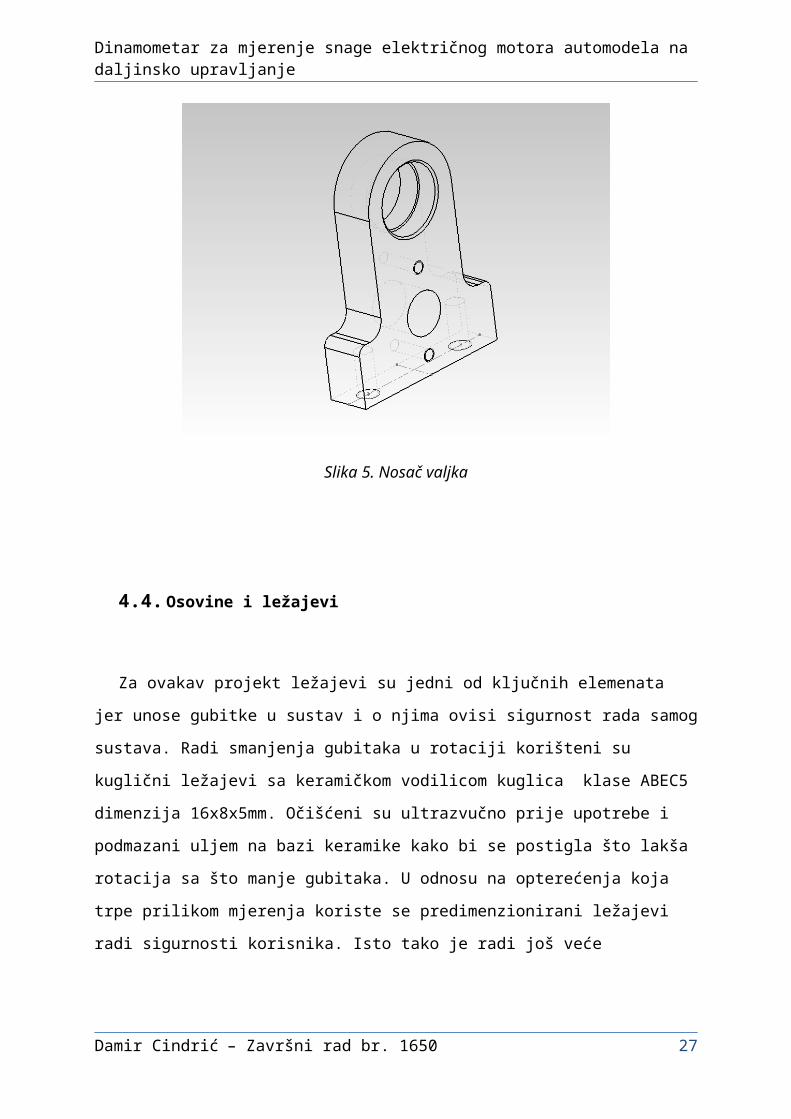
4.3. Nosači valjaka
Nosači valjaka su oslonci koji imaju utore za kuglične ležajeve 16x8x5mm te
drže osovinu valjka na pravoj poziciji. Napravljeni su od iste legure kao i valjci na
CNC stroju za glodanje. Ujedno su i nosači senzora za očitavanje magneta
pozicioniranih na valjcima. Sustav sadrži 8 nosača .
Slika 5. Nosač valjka
4.4. Osovine i ležajevi
Za ovakav projekt ležajevi su jedni od ključnih elemenata jer unose gubitke u
sustav i o njima ovisi sigurnost rada samog sustava. Radi smanjenja gubitaka u
rotaciji korišteni su kuglični ležajevi sa keramičkom vodilicom kuglica klase ABEC5
dimenzija 16x8x5mm. Očišćeni su ultrazvučno prije upotrebe i podmazani uljem na
bazi keramike kako bi se postigla što lakša rotacija sa što manje gubitaka. U odnosu
Damir Cindrić – Završni rad br. 1650 21
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
na opterećenja koja trpe prilikom mjerenja koriste se predimenzionirani ležajevi radi
sigurnosti korisnika. Isto tako je radi još veće sigurnosti dodan još jedan par ležajeva
dodatno po osovini u slučaju havarije da korisnik ne nastrada.
Osovina koja se koristi je osovina napravljena iz čelika za osovine te je kaljena
naknadno. Na sebi ima utore za uskočnike radi pozicioniranja ležajeva u valjku i
nosačima.
4.5. Postolje i kućište
Kod ovakvog sustava potrebno je obraćati pažnju na sigurnost pri radu jer se radi
o snažnim motorima koji rade na visokim okretajima te analogno tome se i valjci
relativno velike mase vrte jako brzo ( do 10 000 o/min) što stvara vibracije i
mogućnost havarije.
Stoga materijal koji je odabran za postolje je konstrukcijski čelik debljine 7mm s čime
je postignuta velika masa na najnižem težištu sustava. Time se onemogućavaju
vibracije i poskakivanje po stolu gdje se izvršava mjerenje. Kako bi se još umanjile
vibracije postavljene su gumene noge ispod postolja.
Čelična ploča je čeono obrađena glodalom kako bi bila idealno ravna radi točnije
pozicije valjaka. Jer nakon rezanja ploče na plazmi je došlo do deformacije
materijala. Kućište je izrađeno od aluminijskog lima debljine 2mm te je sve naknadno
plastificirano u crnu mat boju.
Damir Cindrić – Završni rad br. 1650 22
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Slika 6. Prikaz presjeka kućišta sa instaliranim valjcima i nosačima
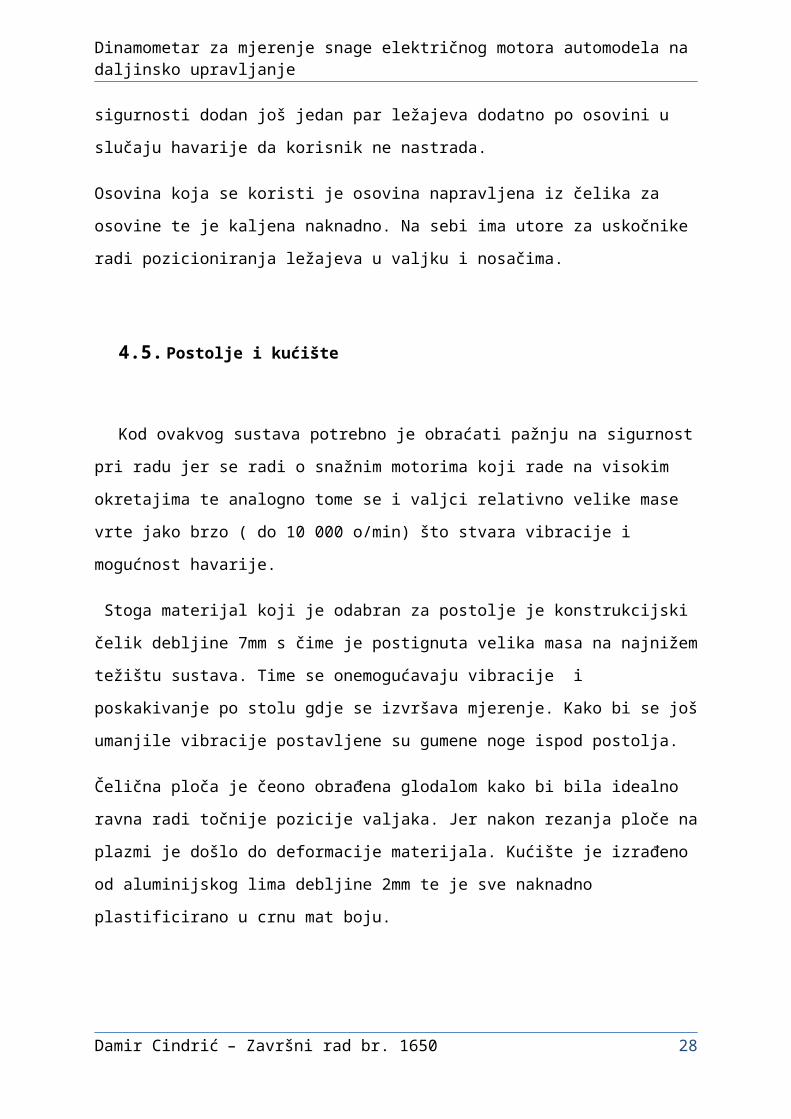
Prije početka izgradnje dijelova bilo je potrebno konstruirati sve dijelove. Te
nakon što su svi dijelovi izmodelirani u SolidWorks programu tada je sastavljen sklop
dinamometra radi provjere ispravnosti nacrta. Nakon toga je napravljen vizualni
prikaz tog sklopa radi bolje predodžbe i kvalitetnije prezentacije kao što se vidi na
slici.
Damir Cindrić – Završni rad br. 1650 23
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
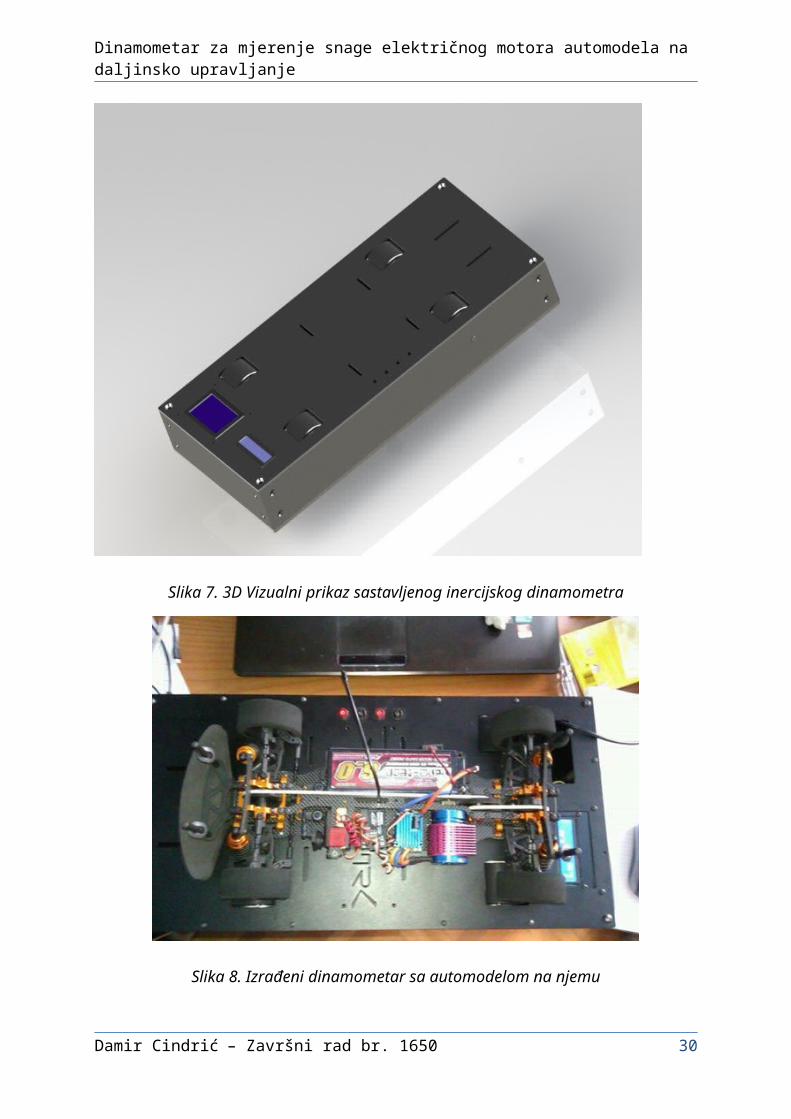
Slika 7. 3D Vizualni prikaz sastavljenog inercijskog dinamometra
Slika 8. Izrađeni dinamometar sa automodelom na njemu
Damir Cindrić – Završni rad br. 1650 24
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
5. Elektronički dio
Srcem sustava upravlja Arduino mega2560 mikroupravljač koji pomoću senzora
očitava poziciju valjka. Senzor koji se koristi radi pomoću Hallovog efekta te se tako i
zove (eng. Hall-effect sensor).
Rezultate koji se mjere i računaju, ispisuju se na LCD16x2 znakovnom ekranu. S
obzirom da sustav nema vanjsko napajanje zbog dizajna i lakše mobilnosti koristi se
unutarnje napajanje automodela . Radi dodatne telemetrije sustava ugrađen je
wattmetar koji prati pad napona napajanja pri najvećim opterećenjima te potrošnju
električne energije.
Ovaj sustav koristi LiPo akumulator nominalnog napona 7.4V kao napajanje koje
dobiva eksterno iz automodela koji je na mjerenju. Na taj način se istodobno vrši
kontrola napajanja u automodelu pomoću wattmetra koji je ugrađen u sustav.
Slika 9. LiPo akumulator Turnigy Nanotech 6000mAh
Damir Cindrić – Završni rad br. 1650 25
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
5.1. Hall senzor
Hall senzor je poluvodič koja mijenja svoj izlazni napon reakcijom na utjecaj
vanjskog magnetskog polja. Hall senzori se koriste za detektiranje blizine objekta,
pozicioniranje, određivanje brzine kretanja vozila itd.
Najčešće se koristi GaAs kao materijal za izradu Hall senzora makar se još izrađuje i
od InAs,InP i InSb.
U njegovom najjednostavnijem obliku se koristi kao analogni detektor blizine.
Približavanjem senzora magnetskom polju može analogno tome mijenjati vrijednost
izlaznog napona .
Ako se koristi u digitalnom obliku kao što se koristi u ovom projektu onda se
koristio kao prekidač. U takvom obliku se najčešće koristi u industriji npr. kod
detekcije položaja pneumatskog cilindra, ili u komercijalnoj upotrebi kod računalnih
pisača gdje detektiraju nedostaje li papir ili je poklopac otvoren.
Najčešće se koristi mjerenje brzine rotacije kotača i osovina kod automobila npr.
ABS (eng. Antilock Braking System).
Prednosti Hall senzora:
Niska cijena naspram mehaničkih prekidača , te su puno pouzdaniji
Mogućnost upotrebe i u sustavima gdje su frekvencije i do 100kHz
Otporan je na utjecaje vanjskih atmosferskih uvjeta (prašina,voda,vibracije)
Ako se upotrebljava kao linearni senzor za mjerenje jakosti magnetskog polja
tada može mjeriti širok raspon magnetskog polja i može mjeriti izmjenično i
istosmjerno magnetsko polje
Mjerenje bez kontakta
Damir Cindrić – Završni rad br. 1650 26

Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Nedostatak Hall senzora:
Postoji precizniji magnetometar od Hall senzora, a to je „Fluxgate
magnetometar“
Postoji više tipova Hall senzora a razlikuju se prema rasponu mjerenja, načinu
reakcije na detekciju magnetskog polja ovisno o polaritetu magneta u ( mogu
generirati Hallov napon pri detekciji Sjevernog ili Južnog pola u blizini), te postoje
Latch/Unlatch Hall senzori. Tj. u tom načinu rada Hall senzor radi kao prekidač te ga
aktivira jedan od polova magneta , a suprotni ga deaktivira.
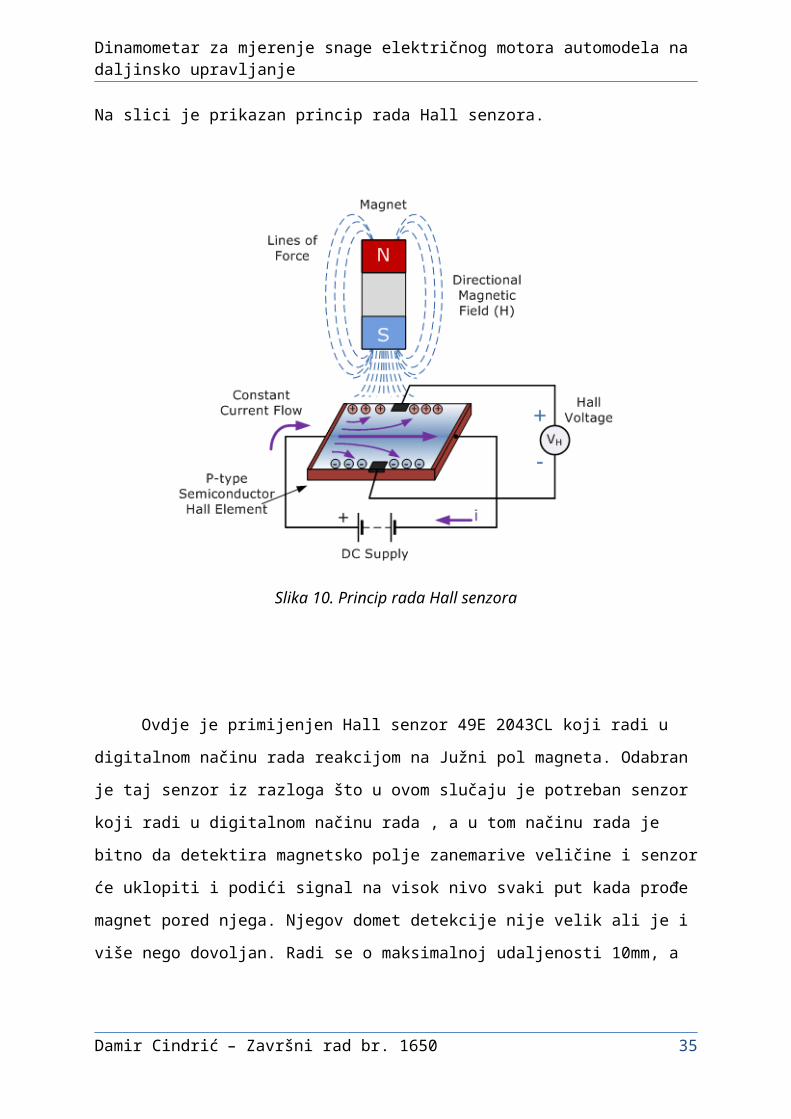
5.1.1. Princip rada Hall senzora
Hall senzor je uređaj koji se aktivira pomoću utjecaja vanjskog magnetskog polja.
Znamo da magnetsko polje ima dvije važne karakteristike, a to su magnetski tok i
polaritet (Sjeverni i Južni pol). Izlaz iz Hall senzora je reakcija na gustoću
magnetskog polja koje se trenutno nalazi oko uređaja. Kada magnetski tok prevali
određeni namješteni prag, tada senzor detektira magnetsko polje i generira izlazni
napon kojeg zovemo Hallov napon VH.
Na slici je prikazan princip rada Hall senzora.
Damir Cindrić – Završni rad br. 1650 27
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Slika 10. Princip rada Hall senzora
Ovdje je primijenjen Hall senzor 49E 2043CL koji radi u digitalnom načinu rada
reakcijom na Južni pol magneta. Odabran je taj senzor iz razloga što u ovom slučaju
je potreban senzor koji radi u digitalnom načinu rada , a u tom načinu rada je bitno da
detektira magnetsko polje zanemarive veličine i senzor će uklopiti i podići signal na
visok nivo svaki put kada prođe magnet pored njega. Njegov domet detekcije nije
velik ali je i više nego dovoljan. Radi se o maksimalnoj udaljenosti 10mm, a koristi se
na udaljenosti od 5 mm tako da je sigurnost rada dupla što je zadovoljavajuće.
Frekvencija rotacije valjaka ne dolazi do maksimalnih mogućnosti senzora tako da ta
veličina ne može utjecati na ispravnost mjerenja.
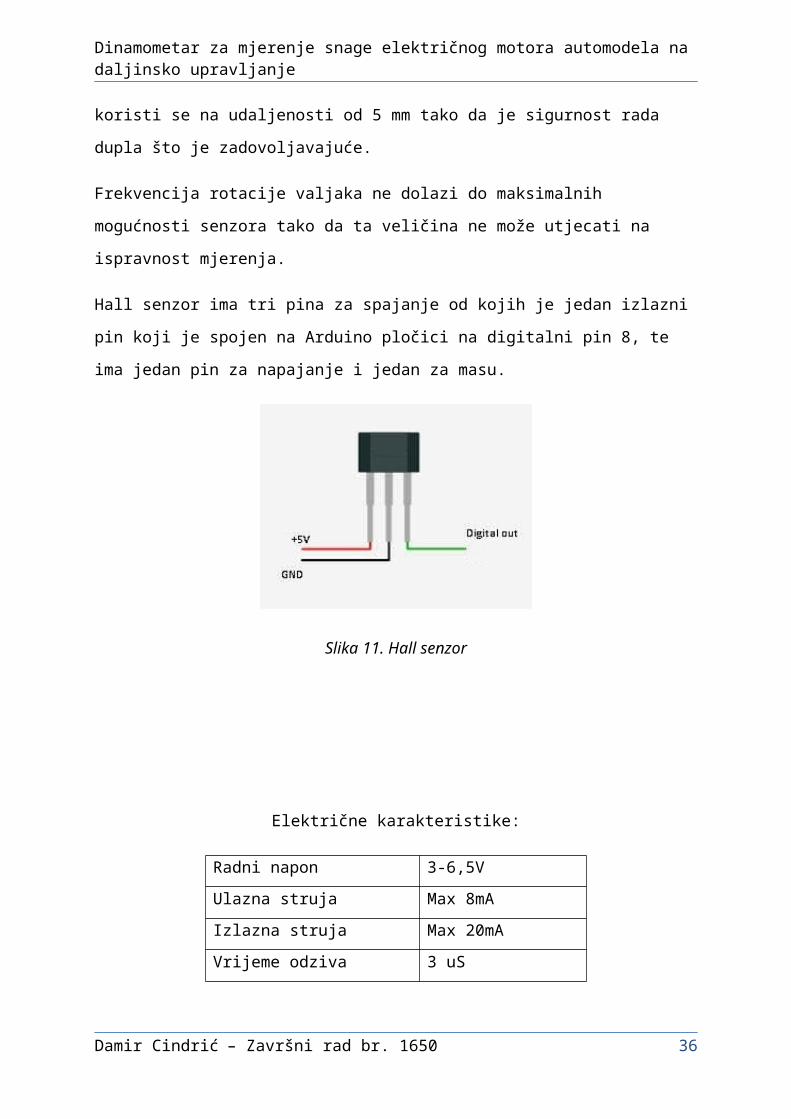
Hall senzor ima tri pina za spajanje od kojih je jedan izlazni pin koji je spojen na
Arduino pločici na digitalni pin 8, te ima jedan pin za napajanje i jedan za masu.
Damir Cindrić – Završni rad br. 1650 28
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Slika 11. Hall senzor
Električne karakteristike:
Radni napon 3-6,5V
Ulazna struja Max 8mA
Izlazna struja Max 20mA
Vrijeme odziva 3 uS
Izlazni napon 0,8-4,20V
Radna temperatura -40―85⁰CTablica 2. Električne karakteristike Hall senzora
Damir Cindrić – Završni rad br. 1650 29
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
5.2. LCD ekran (eng. Liquid Crystal Display)
Svako mjerenje koje korisnik obavlja zahtjeva rezultate ispisane u nekom obliku.
U ovom slučaju se ne koristi konekcija sa računalom nego je projekt zamišljen da
uređaj za mjerenje bude samostalan i samoodrživ bez potrebe za spajanjem na
razne periferije poput eksternog monitora.
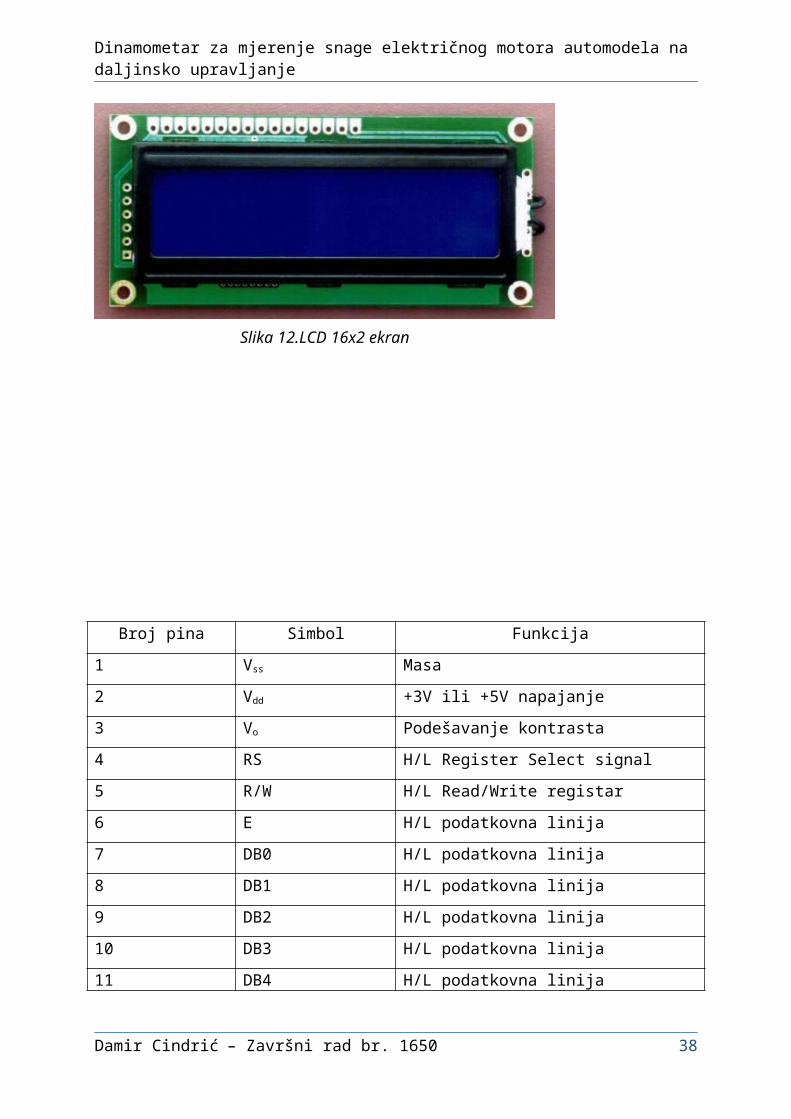
Zbog toga je ugrađen u uređaj LCD 16x2 znakovni ekran koji ima 16 znakovnih
mjesta i 2 reda. Ima LED pozadinsko osvjetljenje radi bolje vidljivosti i lakšeg
očitanja rezultata.
Na slici 12. je prikazan ekran koji se koristi.
Damir Cindrić – Završni rad br. 1650 30
Slika 12.LCD 16x2 ekran

Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
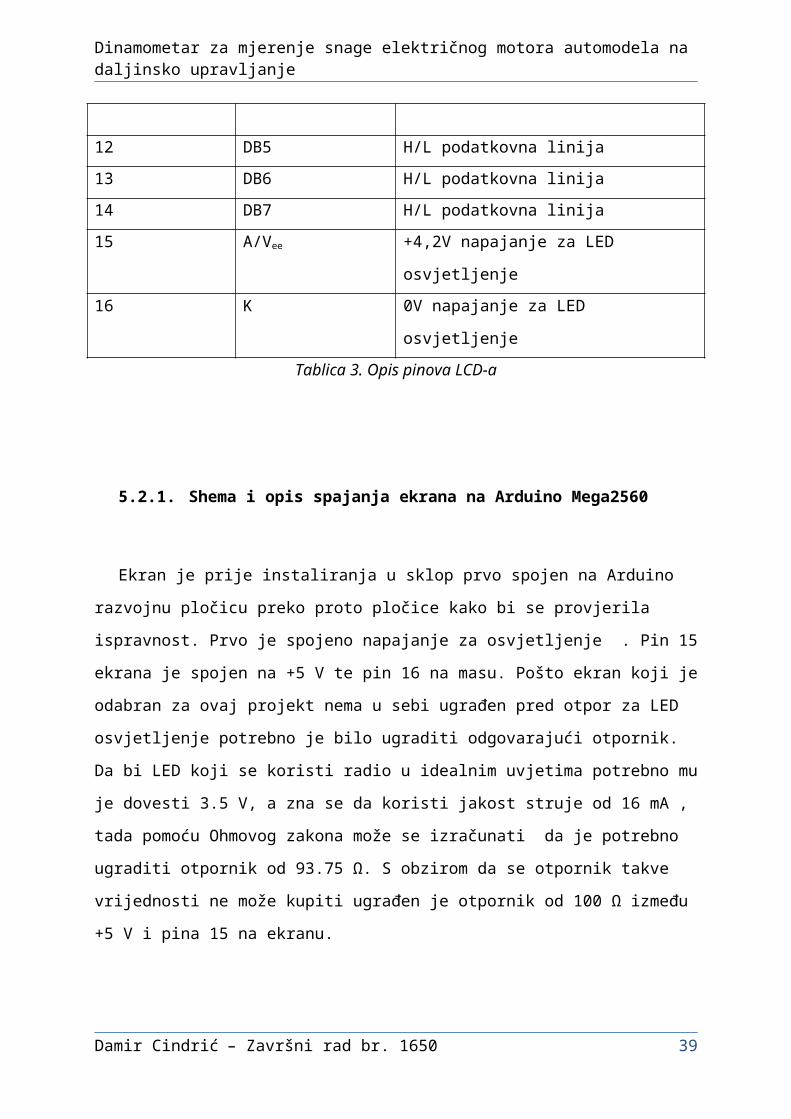
Broj pina Simbol Funkcija
1 Vss Masa
2 Vdd +3V ili +5V napajanje
3 Vo Podešavanje kontrasta
4 RS H/L Register Select signal
5 R/W H/L Read/Write registar
6 E H/L podatkovna linija
7 DB0 H/L podatkovna linija
8 DB1 H/L podatkovna linija
9 DB2 H/L podatkovna linija
10 DB3 H/L podatkovna linija
11 DB4 H/L podatkovna linija
12 DB5 H/L podatkovna linija
13 DB6 H/L podatkovna linija
14 DB7 H/L podatkovna linija
15 A/Vee +4,2V napajanje za LED osvjetljenje
16 K 0V napajanje za LED osvjetljenje
Tablica 3. Opis pinova LCD-a
5.2.1. Shema i opis spajanja ekrana na Arduino Mega2560
Ekran je prije instaliranja u sklop prvo spojen na Arduino razvojnu pločicu preko
proto pločice kako bi se provjerila ispravnost. Prvo je spojeno napajanje za
osvjetljenje . Pin 15 ekrana je spojen na +5 V te pin 16 na masu. Pošto ekran koji je
odabran za ovaj projekt nema u sebi ugrađen pred otpor za LED osvjetljenje
potrebno je bilo ugraditi odgovarajući otpornik. Da bi LED koji se koristi radio u
idealnim uvjetima potrebno mu je dovesti 3.5 V, a zna se da koristi jakost struje od 16
mA , tada pomoću Ohmovog zakona može se izračunati da je potrebno ugraditi
otpornik od 93.75 Ω. S obzirom da se otpornik takve vrijednosti ne može kupiti
ugrađen je otpornik od 100 Ω između +5 V i pina 15 na ekranu.
Damir Cindrić – Završni rad br. 1650 31
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Sljedeće što je bilo potrebno napraviti je napraviti mogućnost podešavanja
kontrasta ekrana. A to je ovdje napravljeno tako da je spojen potenciometar od 10
kΩ. Pin 3 se koristi za podešavanje kontrasta pa je tamo doveden klizač
potenciometra te je spojen na masu i napajanje od 5 V.
Nakon što je ekran osposobljen za vizualni prikaz tada ga je bilo potrebno
osposobiti za logičko povezivanje sa Arduino razvojnom pločicom te samo napajanje
ekrana koje je odvojeno od osvjetljenja.
Pin 1 je spojen na masu (0 V) razvojne pločice i pin 2 na +5 V.
Sabirnica LCD ekrana sastoji se od 11 podatkovnih linija od kojih su 8 linija
D0-D7 koje služe za slanje podataka na ekran te RS,EN i RW . RS ili Register Select
je linija preko koje mikroupravljač odabire da li će slati podatak u obliku znakova ili će
npr. mijenjati poziciju kursora.
Pin EN ili Enable koristi se da bi se ekranu naredilo kada je spreman za učitavanje
podataka. Pin RW ili Read/Write register služi da odredimo smjer slanja podataka, u
smislu da li želimo podatke slati na ekran ili ih učitavati sa ekrana u mikroupravljač. S
obzirom da se najčešće ekrani koriste tako da se šalju podaci na njega, tada se u
tom slučaju taj pin ne koristi i spaja se na masu.
U ovom projektu se koristi 6 pinova za komunikaciju mikroupravljača sa ekranom, a
to su : RS,EN,D7,D6,D5 i D4. Kao što se vidi nisu iskorišteni svi pinovi jer ovaj sustav
koristi SPI komunikaciju sa LCD ekranom.
SPI (eng. Serial Peripheral Interface) je standard koji opsuje sinkronu serijsku
komunikaciju. Služi za povezivanje periferije (u ovom slučaju LCD ekran) i glavnog
uređaja (Arduino razvojna pločica) putem brzog dvosmjernog prijenosa podataka
(eng. full duplex). Takav protokol koristi 4-žično sinkrono serijsko sučelje, tj. pinove
navedene ranije u tekstu.
RS pin je spojen na digitalnom pinu 12, EN je spojen na digitalnom pinu 11, D4 na
digitalnom pinu 5, D5 na digitalnom pinu 4, D6 na digitalnom pinu 3 i D7 na
digitalnom pinu 2 Arduino razvojne pločice.
Biblioteka koju se koristi za upravljanje ovim ekranom je LiquidCrystal .
Damir Cindrić – Završni rad br. 1650 32
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
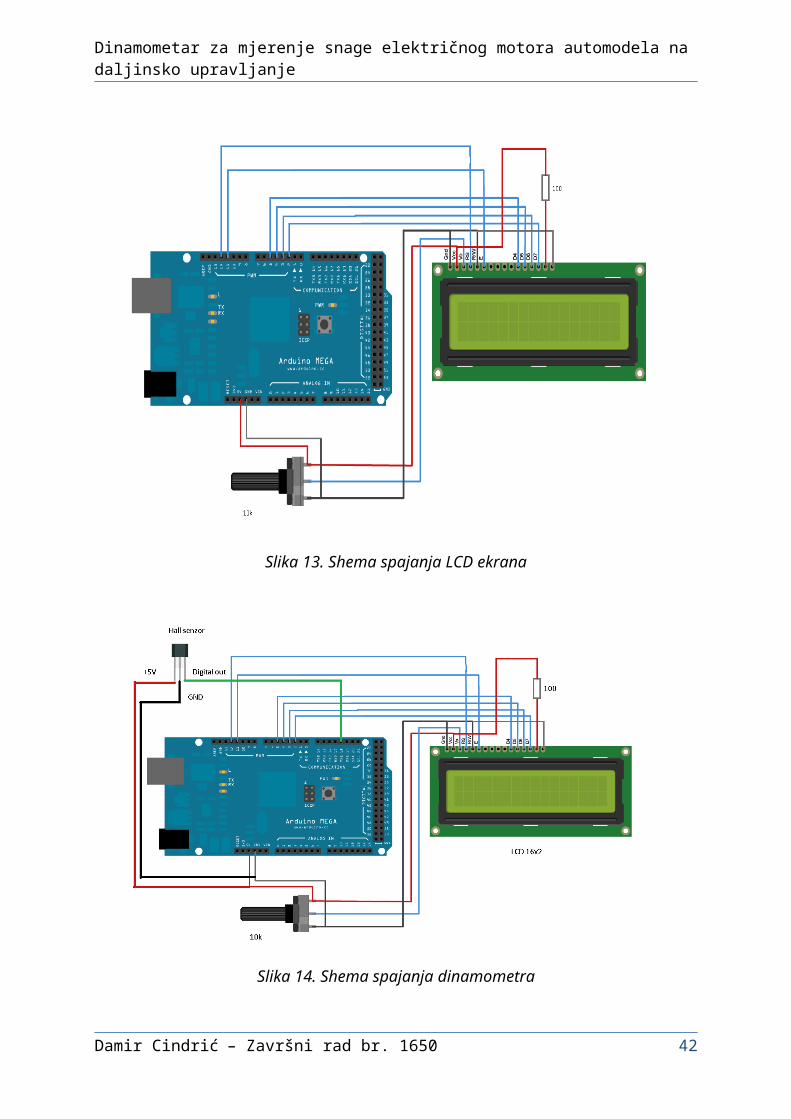
Slika 13. Shema spajanja LCD ekrana
Damir Cindrić – Završni rad br. 1650 33
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
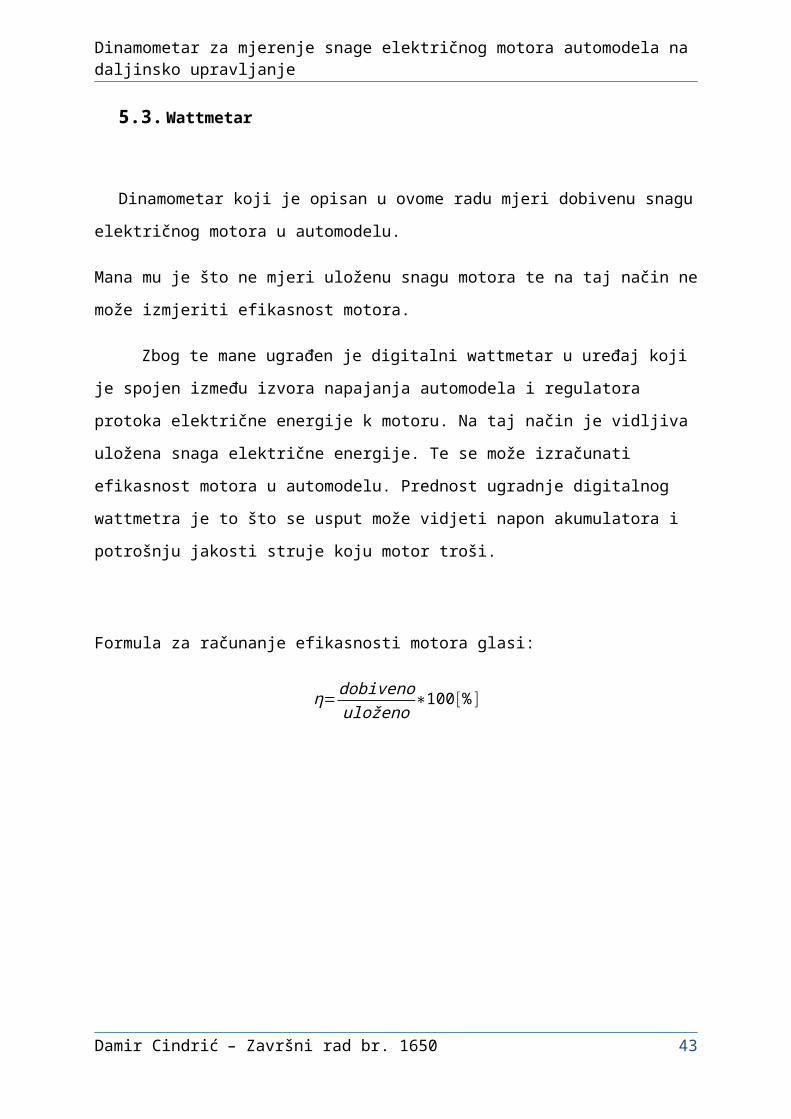
Slika 14. Shema spajanja dinamometra
5.3. Wattmetar
Dinamometar koji je opisan u ovome radu mjeri dobivenu snagu električnog
motora u automodelu.
Mana mu je što ne mjeri uloženu snagu motora te na taj način ne može izmjeriti
efikasnost motora.
Zbog te mane ugrađen je digitalni wattmetar u uređaj koji je spojen između
izvora napajanja automodela i regulatora protoka električne energije k motoru. Na taj
način je vidljiva uložena snaga električne energije. Te se može izračunati efikasnost
motora u automodelu. Prednost ugradnje digitalnog wattmetra je to što se usput
može vidjeti napon akumulatora i potrošnju jakosti struje koju motor troši.
Formula za računanje efikasnosti motora glasi:
η=dobivenouloženo
∗100 [%]
Damir Cindrić – Završni rad br. 1650 34
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Slika 15. Wattmetar
Damir Cindrić – Završni rad br. 1650 35

Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
6. Izrada upravljačkog programa
Nakon pokretanja programa Arduino i prvotnog podešavanja razvojne
okoline opisanog ranije potrebno je upisati upravljački kod kojim će sustav
funkcionirati.
Pri pisanju upravljačkog koda je korišten jezik C koji je prilagođen Arduino razvojnoj
okolini.
Upravljački kod se sastoji od nekoliko cjelina koje su u nastavku
objašnjene svaka posebno. Jedan dio se odnosi na deklariranje korištenih varijabla i
funkcije setup (). Dok se drugi dio sastoji od funkcije loop () te programu koji se
nalazi unutar te funkcije i funkcije rpmvaljka ().
6.1. Deklaracija varijabli
Na početku koda se deklariraju biblioteke koje se koriste u upravljačkom programu
Slika 16. Korištene biblioteke
Varijable poput parametara koji se računaju su deklarirane kao float jer
se radi o decimalnim brojevima. Vremenske varijable su deklarirane kao unsigned
long zbog toga što se radi o velikoj količini milisekunda pa je potrebno koristiti takvu
deklaraciju. Hall senzor je deklariran kao const int jer će uvijek biti spojen na digitalni
ulaz 18.
Nekim od varijabla je pridružena određena vrijednost , tj. te vrijednosti su konstante
poput radijusa valjka, radijusa kružnice na kojoj su pozicionirani magneti, prijenosni
omjer zupčastog prijenosa u automodelu, i tako dalje.
Pinovi koji se koriste za povezivanje sa LCD ekranom su također deklarirani.
Damir Cindrić – Završni rad br. 1650 36
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
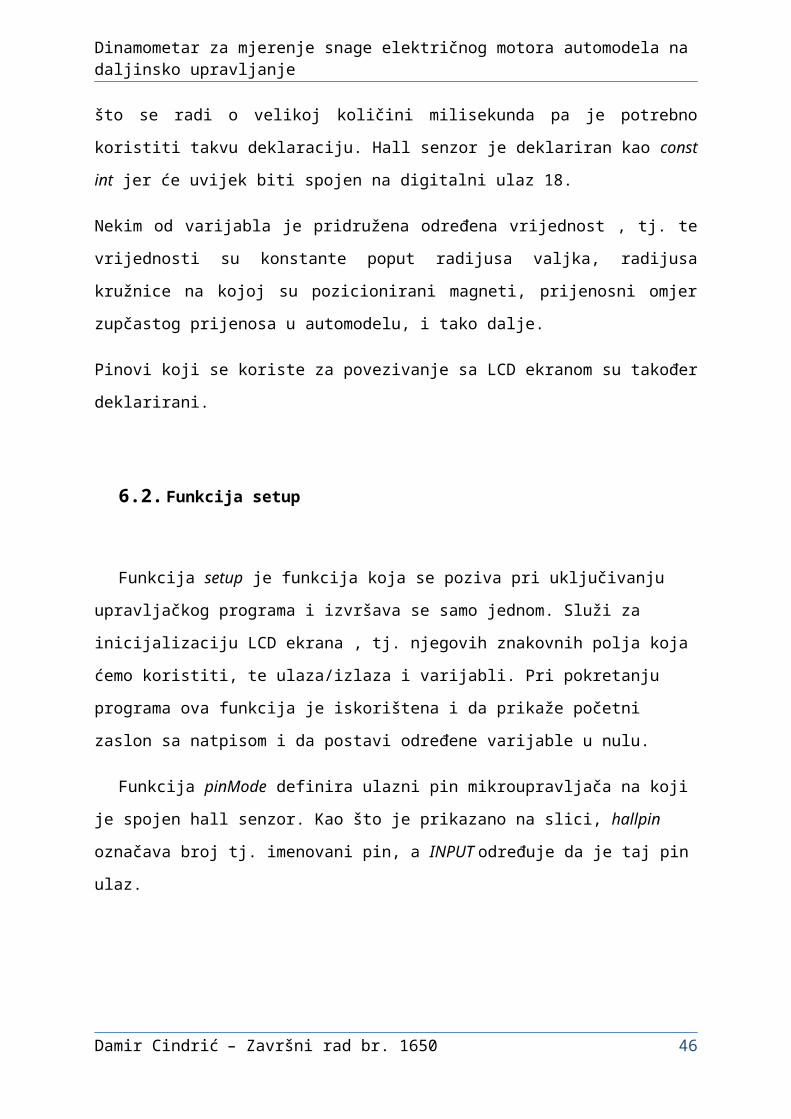
6.2. Funkcija setup
Funkcija setup je funkcija koja se poziva pri uključivanju upravljačkog programa i
izvršava se samo jednom. Služi za inicijalizaciju LCD ekrana , tj. njegovih znakovnih
polja koja ćemo koristiti, te ulaza/izlaza i varijabli. Pri pokretanju programa ova
funkcija je iskorištena i da prikaže početni zaslon sa natpisom i da postavi određene
varijable u nulu.
Funkcija pinMode definira ulazni pin mikroupravljača na koji je spojen hall senzor.
Kao što je prikazano na slici, hallpin označava broj tj. imenovani pin, a INPUT
određuje da je taj pin ulaz.
Slika 17. Setup funkcija
U setup funkciji se nalazi naredba attachInteruupt koja označava inicijalizaciju
prekida. U toj funkciji broj 5 određuje prekid koji se koristi tj., prekid broj 5 se nalazi
na digitalnom pinu 18 na kojem je spojen hall senzor. Na taj način se definira na
Damir Cindrić – Završni rad br. 1650 37
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
kojem pinu dovodimo vanjski prekid. Rpmvaljka označava koju funkciju će prekid
pokrenuti, a RISING definira to da će se prekid dogoditi na rastući brid. Pošto je
jednak razmak između magneta i magneti su istih dimenzija tada je svejedno da li će
se prekid dogoditi na rastući ili padajući brid.
6.3. Funkcija rpmvaljka
Ova funkcija se odvija svakim prekidom (eng. interrupt) koji se dogodi. U jednom
punom okretaju valjka koji ima na sebi montirana dva magneta dogoditi će se dva
prekida. Svaki prekid će se pribrojati brojaču (varijabla rpmbrojac) te će se te
vrijednosti kasnije iskoristiti u proračunavanju.
Slika 18. Rpmvaljka funkcija
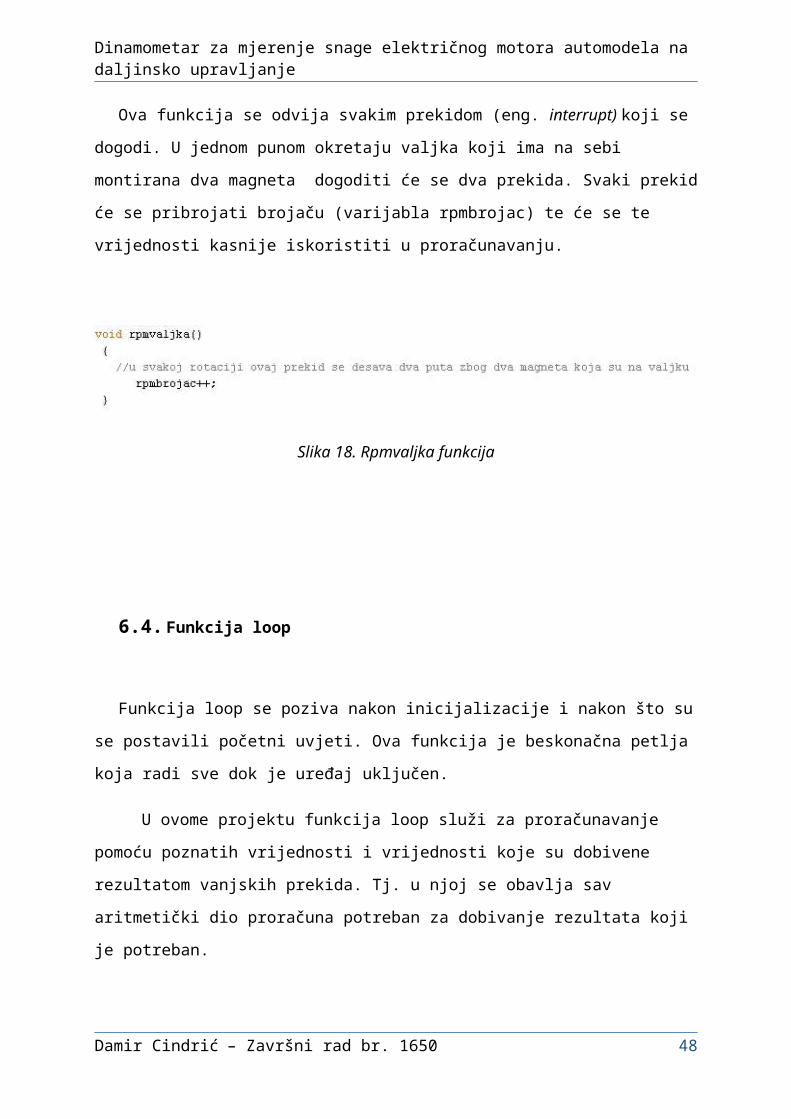
6.4. Funkcija loop
Funkcija loop se poziva nakon inicijalizacije i nakon što su se postavili početni
uvjeti. Ova funkcija je beskonačna petlja koja radi sve dok je uređaj uključen.
U ovome projektu funkcija loop služi za proračunavanje pomoću poznatih
vrijednosti i vrijednosti koje su dobivene rezultatom vanjskih prekida. Tj. u njoj se
obavlja sav aritmetički dio proračuna potreban za dobivanje rezultata koji je potreban.
Damir Cindrić – Završni rad br. 1650 38
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
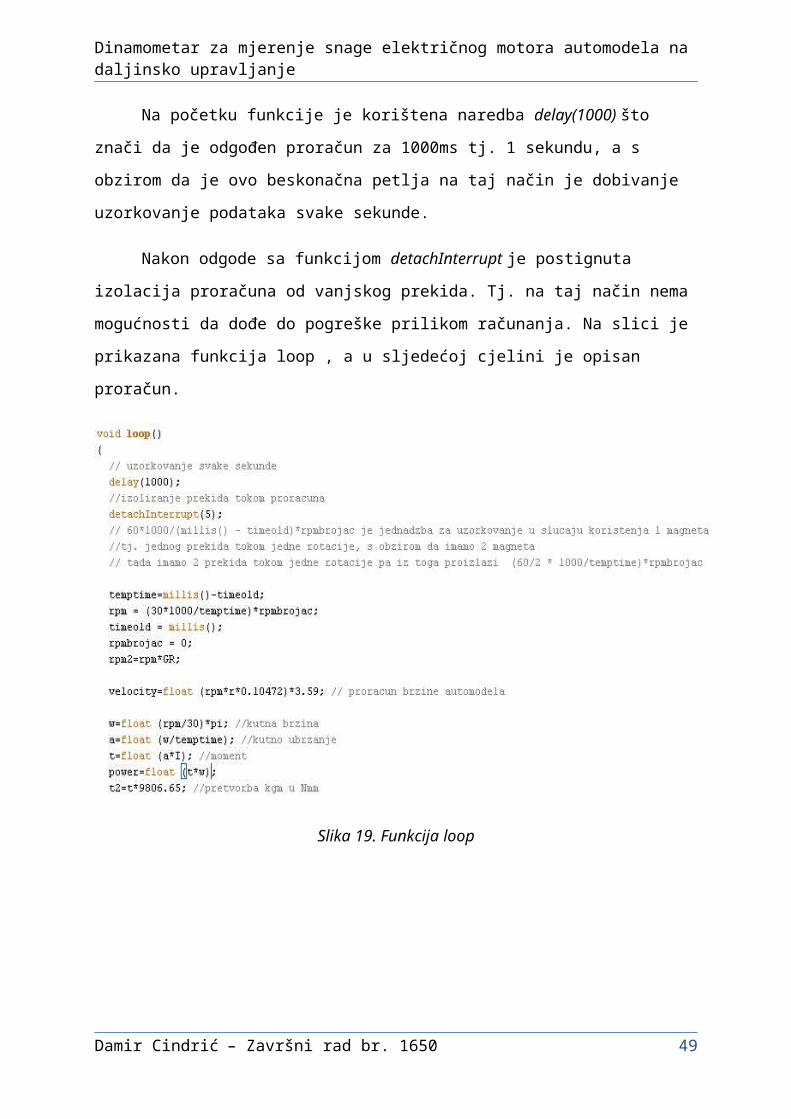
Na početku funkcije je korištena naredba delay(1000) što znači da je odgođen
proračun za 1000ms tj. 1 sekundu, a s obzirom da je ovo beskonačna petlja na taj
način je dobivanje uzorkovanje podataka svake sekunde.
Nakon odgode sa funkcijom detachInterrupt je postignuta izolacija proračuna
od vanjskog prekida. Tj. na taj način nema mogućnosti da dođe do pogreške prilikom
računanja. Na slici je prikazana funkcija loop , a u sljedećoj cjelini je opisan proračun.
Slika 19. Funkcija loop
6.4.1. Proračun za mjerenje snage i ostalih parametara
Jedan od najvažnijih parametara za izmjeriti snagu kod inercijskih dinamometra je
vrijeme. Preciznije, vrijeme koje prođe od očitanja prvog magneta do sljedećeg i tako
dalje. To vrijeme je ovdje izmjereno pomoću funkcije millis(). Funkcija millis() je
funkcija koja mjeri vrijeme od uključivanja Arduino razvojne pločice. A može mjeriti
oko 50 dana rada uređaja.
Damir Cindrić – Završni rad br. 1650 39
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Takav podatak je ovom sustavu nepotreban jer namjena uređaja nije takva da
bude upaljen više od desetak minuta. U ovome radu je ta funkcija iskorištena tako da
je trenutno vrijeme millis() dodijeljeno određenim varijablama poput temptime i
timeold .
RPM (eng. Revolutions Per Minute)
Nakon što se dogodi prekid događa se proračun za računanje vremena koje
prođe između očitanja dva magneta. Kada se očita prvi magnet tada trenutnu
vrijednost millis() oduzima sa vrijednosti varijable timeold koja je u startu deklarirana
kao 0. Te slijedi kalkulacija broja okretaja u minuti valjka pomoću formule. Zatim se
varijabli timeold dodjeljuje trenutna vrijednost millis() kako bi u sljedećem prekidu
program imao početnu vrijednost vremena kod sljedećeg očitanja magneta. Ta
razlika vremena je deklarirana varijablom temptime.
Dio koda sa formulom za mjerenje okretaje u minuti valjaka:
rpm = (30*1000/temptime)*rpmbrojac
Rpm je varijabla koja opisuje o/min valjaka. Ova jednadžba je podijeljena s 2
jer se koriste dva magneta na valjku što znači dva prekida označuju vrijednost jednog
okretaja valjka. Formula je podijeljena s dva prije unosa u kod zbog tog kako bi
mikroupravljač imao manje posla u proračunu.
S obzirom da korisniku ovog dinamometra okretaji valjaka ne predstavljaju
ništa zanimljivog dodana je varijabla nazvana rpm2 koja prikazuje okretaje u minuti
motora koji se nalazi u automodelu. Na takav način da su preračunati o/min valjaka
pomoću poznate vrijednosti prijenosnog omjera zupčastog prijenosa u automodelu u
o/min motora. Nakon proračuna varijable rpm brojaču je dodijeljena vrijednost 0.
Damir Cindrić – Završni rad br. 1650 40
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Brzina automodela
Sljedeći parametar koji mjerimo tj. računamo je brzina automodela. Pošto
imamo vrijednost RPM valjaka tada je lako matematički pomoću ove formule.
v=2∗r∗π∗RPM∗601000
[km /hr ]
Formula koja je korištena u upravljačkom kodu je skraćena i pojednostavljena
kako mikroupravljač ima više prostora za obavljati druge funkcije. Varijabla r je
radijus mjernog valjka, a varijabla RPM je broj valjaka u minuti.
Snaga električnog motora u automodelu
Da bi se mogla proračunati snaga potrebno je izmjeriti moment motora. Za
moment motora potrebno je znati kutno ubrzanje valjaka i moment inercije valjaka. S
obzirom da je moment inercije valjaka ranije već proračunat i izmjeren potrebno je
izračunati kutno ubrzanje.
α=dωdt
[rad /s2]
Kutno ubrzanje u kodu je deklarirano varijablom a , a vrijeme je već izmjereno
od prije (temptime) i potrebno je izračunati još kutnu brzinu ω koja je deklarirana u
kodu varijablom w. S obzirom na poznati podatak izmjerene vrijednosti varijable rpm
dolazi se do kutne brzine. Te tada je moguće izračunati koliko je kutno ubrzanje
mjernog valjka što je potrebno za daljnji proračun.
ω=π∗RPM30
[rad /s ]
Damir Cindrić – Završni rad br. 1650 41
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Nakon izračunatog kutnog ubrzanja u upravljačkom kodu se proračunava
moment motora pomoću ove formule:
τ=α∗I [kgm ]
Gdje je moment u kodu deklariran kao t , a moment inercije valjaka kao I.
Moment je kasnije pretvoren u drugu mjernu jedinicu (Nmm) kako bi se mogla
prikazati vrijednost na ekranu jer mjereni motori imaju male vrijednosti momenta. Ta
nova vrijednost je deklarirana kao t2 i nije korištena u daljnjem proračunu nego
samo za prikaz na ekranu.
Kada su poznate sve potrebne veličine za proračunati snagu slijedi konačno
proračun snage koji glasi
P=τ∗ω[W ]
Snaga je deklarirana u upravljačkom kodu kao power. Ta snaga dobivena ovim
proračunom je izmjerena snaga električnog motora u automodelu.
6.4.2. Ispis rezultata na LCD ekranu
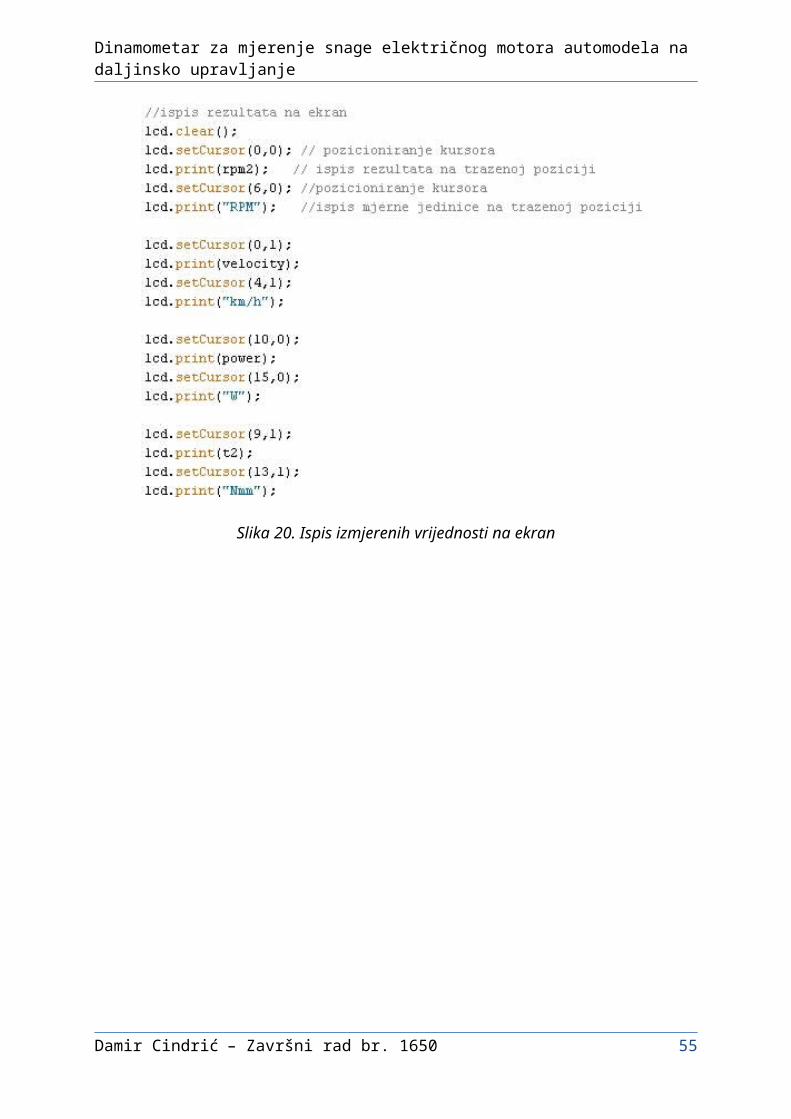
Sve izmjerene vrijednosti parametara koje se traže se ispisuju na LCD ekranu
unutar loop funkcije koja se ponaša kao beskonačna petlja pa se na ekranu
prikazuju trenutne vrijednosti parametara, a mijenjaju se ovisno o zadanoj vrijednosti
vremenskog uzorkovanja opisanog ranije.
Prije samog ispisa potrebno je unijeti u kod naredbu lcd.clear() koja služi da
obriše vrijednosti s ekrana i da bude čista podloga za znakove koji se namjeravaju
ispisati. Na taj način se izbjegava ispisivanje znaka preko postojećeg znaka.
Kako bi odredili gdje će se ispisati tekst koji želimo prije je potrebno pozicionirati
kursor . To se radi pomoću naredbe setCursor() čija je sintaksa : setCursor(a,b) gdje
a označava stupce, a b redove.
Damir Cindrić – Završni rad br. 1650 42
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Nakon što je podešena lokacija gdje će se tekst ispisati tada je potrebno unijeti
naredbu lcd.print() gdje unutar zagrada se upisuje varijabla koju se želi ispisati ili
tekst.
Na slici je prikazan dio upravljačkog koda koji ispisuje izmjerene vrijednosti na ekran
ovog projekta.
Slika 20. Ispis izmjerenih vrijednosti na ekran
Damir Cindrić – Završni rad br. 1650 43
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
7. Upravljanje dinamometrom
Prije uključenja uređaja potrebno je postaviti automodel na dinamometar tako da
svaki kotač dodiruje jedan valjak. Nakon što se postavio i učvrstio potrebno je upaliti
daljinski upravljač, zatim spojiti konektore od automodela u konektore dinamometra.
Kada je automodel postavljen i spojen u dinamometar tada se njegov akumulator
priključuje preko svojih konektora u dinamometar i pritom uređaj i automodel dobivaju
napajanje te su pušteni u rad.
Mjerenje može započeti kada je sve priključeno. Mjerenje se vrši na takav način
da se automodel ubrza iz stanja mirovanja do maksimalne brzine naglim dodavanjem
maksimalnog gasa. Gas se dodaje pomicanjem poluge za gas na daljinskom
upravljaču. Da bi mjerenje bilo točno valjci dinamometra se ne smiju okretati prije
dodavanja maksimalnog gasa. Nakon što automodel postigne maksimalnu brzinu
koju može postići tada se očitavaju podaci sa ekrana. Podaci su RPM,snaga, i
moment motora u automodelu, te brzina automodela. Kada su podaci očitani, polugu
gasa na daljinskom upravljaču je potrebno vratiti u neutralan položaj. Kada auto
miruje potrebno je očitati uloženu snagu sa wattmetra i izračunati efikasnost motora.
Kada je mjerenje izvršeno potrebno je sve konektore isključiti kako bi se isključilo
napajanje.
Damir Cindrić – Završni rad br. 1650 44
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
8. Zaključak
U ovom završnom radu opisana i prikazana izrada inercijskog dinamometra za
mjerenje snage automodela pomoću Arduino Mega2560 razvojne pločice koja se
temelji na ATmega2560 mikroupravljaču. Objašnjen je način na koji se mjeri snaga
pomoću inercijskog dinamometra, upravljački program koji upravlja uređajem te je
prikazan način spajanja elektroničkih komponenti.
Nedostatak i trenutna mana ovog dinamometra je to što ne može samostalno
izračunati efikasnost motora jer wattmetar nije napravljen i povezan pomoću Arduino
razvojne pločice nego je kupljen gotov i montiran odvojeno.
Ovaj rad je ostvario cilj, omogućio je korisniku da od sada može vidjeti
telemetrijski prikaz podataka automodela na stolu te da ne mora više koristiti
štopericu ili procjenjivati da li je postigao napredak nakon poboljšavanja sa
automodelom.
Damir Cindrić – Završni rad br. 1650 45

Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
9. Literatura
1. Arduino Mega2560, 10.9.2014
http://arduino.cc/en/Main/arduinoBoardMega2560,.
2. Arduino playground, http://playground.arduino.cc/, 10.9.2014.
3. Hall effect sensor, http://en.wikipedia.org/wiki/Hall_effect_sensor, 10.9.2014.
4. Karl Heinz Decker, Elementi strojeva, Golden marketing, 2006., 661
5. LCD 16x2 datasheet, 10.9.2014
http://arduino.cc/documents/datasheets/LCD-WH1602B-TMI-ET%23.pdf,
6. Serial Peripheral Interface, 10.9.2014,
http://en.wikipedia.org/wiki/Serial_Peripheral_Interface_Bus
7. Inertion Dyno design guide, 10.9.2014., http://dtec.net.au/Inertia%20Dyno
%20Design%20Guide.htm
8. Dynamometer, 10.9.2014., http://en.wikipedia.org/wiki/Dynamometer
9. Engine Inertia Dyno Sizer, 10.9.2014.,
http://performancetrends.com/Calculators/Engine-Inertia-Dyno/Engine-Inertia-
Dyno.php
Damir Cindrić – Završni rad br. 1650 46
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
10. Prilozi
10.1. Upravljački program
/*
Završni rad
RayceWork Dyno
Damir Cindrić
0035164233
Tehničko veleučilište u zagrebu
Elektrotehnički odjel
Komunikacijska i računalna tehnika
Strujni krug :
* LCD RS pin - digital pin 12
* LCD Enable pin - digital pin 11
* LCD D4 pin - digital pin 5
* LCD D5 pin - digital pin 4
* LCD D6 pin - digital pin 3
* LCD D7 pin - digital pin 2
* LCD R/W pin - ground
* 10K potenciometar -> +5V i GND
* hall sensor - digital pin 18 (interrupt 5)
*/
Damir Cindrić – Završni rad br. 1650 47
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
const int hallPin = 18; // hall senzor spojen na pinu 18
volatile byte rpmbrojac; // brojac magneta
unsigned int rpm; //okretaji u minuti valjka
unsigned int rpm2; //okretaji u minuti motora u automodelu
unsigned long timeold; // prijasnje vrijeme
unsigned long temptime; // vrijeme proteklo izmedju 2 prekida
float velocity; //brzina automodela
float power; // snaga automodela
float t; // moment
float t2; // moment
float w; // kutna brzina
float a; //kutno ubrzanje
float I=0.00071402052; //moment inercije valjka sa rupom , a bez rupe 0.0007168
float GR = 6.65; // prijenosni omjer automodela
float pi=3.14159265; // pi
float magrad=0.026; //radijus polozaja magneta
float r=0.032; //radijus valjka
// popis biblioteka koje su potrebne
#include <SPI.h>
#include <LiquidCrystal.h>
// inicijalizacija pinova koji se koriste za ekran
LiquidCrystal lcd(12,11, 5, 4, 3, 2);
Damir Cindrić – Završni rad br. 1650 48
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
void rpmvaljka()
//u svakoj rotaciji ovaj prekid se desava dva puta zbog dva magneta koja su na valjku
rpmbrojac++;
void setup()
lcd.begin(16, 2); // inicijaliziranje znakovnih polja na ekranu
// pocetni zaslon
lcd.print(" RayceWork ");
lcd.setCursor(0,1);
lcd.print(" Dyno");
delay(2000);
lcd.clear();
//koristimo prekid 5 koji se nalazi na arduinovom digitalnom pinu 18
//prekid se desava na rastućom bridu
attachInterrupt(5, rpmvaljka, RISING);
//definiranje hall senzora kao ulaza na pinu 18
pinMode(hallPin, INPUT);
rpmbrojac = 0;
rpm = 0;
timeold = 0;
Damir Cindrić – Završni rad br. 1650 49
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
void loop()
// uzorkovanje svake sekunde
delay(1000);
//izoliranje prekida tokom proracuna
detachInterrupt(5);
// 60*1000/(millis() - timeold)*rpmbrojac je jednadzba za uzorkovanje u slucaju koristenja 1 magneta
//tj. jednog prekida tokom jedne rotacije, s obzirom da imamo 2 magneta
// tada imamo 2 prekida tokom jedne rotacije pa iz toga proizlazi (60/2 * 1000/temptime)*rpmbrojac
temptime=millis()-timeold;
rpm = (30*1000/temptime)*rpmbrojac;
timeold = millis();
rpmbrojac = 0;
rpm2=rpm*GR;
velocity=float (rpm*r*0.10472)*3.59; // proracun brzine automodela
w=float (rpm/30)*pi;
a=float (w/temptime);
t=float (a*I);
power=float (t*w);
t2=t*9806.65; //pretvorba kgm u Nmm
Damir Cindrić – Završni rad br. 1650 50
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
//ispis rezultata na ekran
lcd.clear();
lcd.setCursor(0,0); // pozicioniranje kursora
lcd.print(rpm2); // ispis rezultata na trazenoj poziciji
lcd.setCursor(6,0); //pozicioniranje kursora
lcd.print("RPM"); //ispis mjerne jedinice na trazenoj poziciji
lcd.setCursor(0,1);
lcd.print(velocity);
lcd.setCursor(4,1);
lcd.print("km/h");
lcd.setCursor(10,0);
lcd.print(power);
lcd.setCursor(15,0);
lcd.print("W");
lcd.setCursor(9,1);
lcd.print(t2);
lcd.setCursor(13,1);
lcd.print("Nmm");
Damir Cindrić – Završni rad br. 1650 51
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
//restart prekida
attachInterrupt(5, rpmvaljka, RISING);
Damir Cindrić – Završni rad br. 1650 52
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
10.2. Nacrti
Damir Cindrić – Završni rad br. 1650 53
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Damir Cindrić – Završni rad br. 1650 54

Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Damir Cindrić – Završni rad br. 1650 55
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Damir Cindrić – Završni rad br. 1650 56
Dinamometar za mjerenje snage električnog motora automodela na daljinsko upravljanje
Damir Cindrić – Završni rad br. 1650 57