Embed Size (px)
Citation preview

1
CUADERNO VII
FORMAS CANONICAS DE LOS ENDOMORFISMOS
Miguel A. Sainz, Joan Serarols, Anna M. PérezDep. de Informática y Matemática Aplicada
Universidad de Girona
RESUMEN: La matriz asociada a un endomorfismo f depende de la base de referencia delespacio vectorial. Por esto cabe preguntarse si existirá alguna base respecto de la cual lamatriz de f sea lo más simple posible. Obviamente las matrices más simples son la matriznula y la matriz unidad, que no serán matrices de f salvo en los casos particulares de que fsea la aplicación nula o la idéntica; exceptuadas éstas, las matrices más simples son lasdiagonales y vamos a resolver el problema de la diagonalización de un endomorfismo, esdecir, cuándo y cómo puede encontrarse una base respecto de la cual la matriz D de f seadiagonal. Veremos que no en todos los casos el problema de la diagonalización tienesolución, por lo que para situaciones más generales buscaremos otras matrices simplescomo las triangulares y la denominada forma de Jordan.
VII.1 .- VALORES Y VECTORES PROPIOS DE UN ENDOMORFISMO
Sea f un endomorfismo de V, e.v.s. K = R o C, de dimensión n, que respecto de una basedada (e), tiene de matriz A y vamos a averiguar cuándo y cómo puede encontrarse una baserespecto de la cual la matriz D de f sea diagonal. La relación entre ambas matrices es
D = M-1AM
siendo M la matriz del cambio de base. Por ello, diagonalizar una matriz cuadrada A esencontrar una matriz regular M tales que el producto M-1AM sea una matriz diagonal. Cuandoel problema tenga solución diremos que el endomorfismo, o la matriz, es diagonalizable y en talcaso, si (x) es la base de V respecto de la cual la matriz de f es
λ1 0 . . 0
0 λ2 . . 0
. . . . . . . . .
0 0 . . λn
seráf(x1) = λ 1x1+0 ⋅x2+...+0⋅xn
f(x2) = 0⋅x1+λ 2x2+...+0⋅xn. . . . . . . . . . . . . . . . . .
f(xn) = 0⋅x1+ 0 ⋅x2+...+λ nxn

2
es decir, los vectores de la base son soluciones de la ecuación
f(x) = λx
que es la clave del problema. Caractericemos sus soluciones.
Diremos que un vector x∈ V es vector propio de un endomorfismo f si y sólo si existeun escalar λ∈ K tales que f(x) = λx.
Diremos que un escalar λ∈ K es valor propio de un endomorfismo f si y sólo si existeun vector x ≠ 0 tales que f(x) = λx.
Así pues las soluciones de la ecuación anterior se denominan vectores y valores propios de f,están entre sí asociados y cumplen las propiedades que se enuncian en la Tabla VII.1.1
TABLA VII.1.1
___________________________________________________________________
Propiedades de los vectores y valores propios
1) 0 es vector propio asociado a cualquier valor propio.
2) Un vector propio x ≠ 0 tiene un único valor propio asociado.
3) Si λ es un valor propio, el conjunto de vectores propios
V(λ) = {x∈ V f(x) = λx }
asociados a él es un subespacio de V con dim(V(λ)) ≥ 1.
4) Si λ es un valor propio de f, entonces
V(λ) = Nuc(f−λIV)
5) El subespacio V(λ) es invariante por f.
6) Si λ1 y λ2 son valores propios distintos, entonces
V(λ1)∩V(λ2) = {0}
7) Si λ1,...,λ r son valores propios distintos, x1∈ V(λ1) ... xr∈ V(λr) yx1...xr son distintos de 0, entonces {x1,...,xr} es l.i.
8) Si λ1,...,λr son valores propios distintos, entonces
V(λ1)⊕ ...⊕ V(λ r)
9) Si dim(V) = n, f tiene como máximo n valores propios.___________________________________________________________________

3
Demostraciones:
1) En efecto, para cualquier λ∈ K se cumple que
f(0) = 0 = λ0
2) Si el vector propio x ≠ 0 tuviera dos valores propios asociados, sería
f(x) = λ1x ⇒ (λ1−λ2)x = 0 ⇒ λ1 = λ2
f(x) = λ2x
3) El conjunto
V(λ) = {x∈ V f(x) = λx}
es un subespacio de V ya que para cualesquiera x1,x2∈ V(λ) y α,β∈ K, se verifica
f(αx1+βx2) = α f(x1)+βf(x2) =α(λx1)+β(λx2) = λ(αx1+βx2)
es decir, αx1+βx2 es un vector propio asociado a λ, luego
αx1+βx2∈ V(λ)
Además dim(V(λ)) ≥1, pues por definición de valor propio, existe un vector x ≠ 0, x∈ V talque x∈ V(λ).
4) En efecto, si x∈ V(λ) es
f(x) = λx ⇔ f(x) = λIV(x) ⇔ f(x)−λIV(x) = 0 ⇔ (f−λIV)(x) = 0 ⇔ x∈ Nuc(f−λIV)
5) En efecto, para cualquier x∈ V(λ) es f(x) = λx∈ V(λ).
6) Si los subespacios asociados a ambos valores propios distintos, V(λ1) y V(λ2), tienenalgún vector común x, será
x∈ V(λ1)∩V(λ2) ⇒ f(x) = λ1x ∧ f(x) = λ2x ⇒ (λ1−λ2)x = 0 ⇒ x = 0
7) Por inducción sobre r : para r = 1 sea x∈ V(λ) con x ≠ 0, luego {x} l.i. y la proposiciónes cierta. Supongámosla ahora válida para el caso de r−1 valores propios distintos dos a dos,y demostraremos que se cumple para r; sea
β1x1+...+βrxr = 0 ⇒ f(β1x1+...+βrxr) = 0 ⇒ β1λ1x1+...+βrλrxr = 0
Por otro lado si multiplicamos la ecuación de la independencia lineal por λ 1, que loconsideramos distinto de cero (si así no fuera, bastaría permutar el orden de los valorespropios dados), y la restamos de la última igualdad anterior:
β2(λ2−λ1)x2+...+βr(λ r−λ1)xr = 0
que es una combinación lineal de (r−1) vectores propios no nulos asociados a valores

4
propios distintos dos a dos; según la hipótesis de inducción formarán un conjunto l.i., lo queimplica que
β2(λ2−λ1) = 0 β2 = 0 . . . . . . . . . . ⇒ . . . . . βr(λr−λ1) = 0 βr = 0
pues para todo i ≠ j es λi ≠ λj por hipótesis. Sustituyendo estos valores en la ecuación de laindependencia lineal, se obtiene
β1x1 = 0 ⇒ β1 = 0
al ser, por hipótesis, x1 ≠ 0 . Así todos los coeficientes de la combinación lineal son nulos yel conjunto es l.i.
8) Inmediato a partir de 6)
9) Por reducción al absurdo, si existieran más de n valores propios distintos, eligiendo unvector no nulo de cada uno de sus subespacios de vectores propios asociados, tendríamos,según la propiedad 7), más de n vectores l.i. lo que no es posible en un e.v. de dimensión n.
Las propiedades anteriores de los vectores y valores propios caracterizan suficientemente alas soluciones de la ecuación básica
f(x) = λx
estando ahora en situación de resolverla. Primero hallaremos los escalares solución, los valorespropios, y después los vectores propios. Si (e1,...,en) es una base de V, respecto de la cual lamatriz de f es
A =
a11 a12 ... a1n
a21 a22 ... a2n
. . . . . . . . . .
an1 an2 ... ann
de razonamientos análogos a los anteriores, tenemos
λ valor propio de f ⇔ existe x ≠ 0 tal que (f–λIV)(x) = f(x)–λx = 0 ⇔ Nuc(f−λIV) ≠ {0}
lo que equivale a que
det(A−λI) =
a11–λ . . a1n
. . . . . . . . . . .
an1 . . ann–λ
= 0
El desarrollo de este determinante, como suma de los productos de elementos de cada fila ycolumna, dará una ecuación polinómica en λ que se denomina ecuación característica ycuyas soluciones son los valores propios. El polinomio cuyos coeficientes son los mismos quelos de la ecuación característica se denomina polinomio característico (p.c.). Su término

5
independiente, al coincidir con el valor numérico del polinomio en 0, es el determinante de lamatriz A y el término de mayor grado procederá del producto
(a11−λ)...(ann−λ) = (−1)nλn+(−1)n-1(a11+...+ann)λn-1+...
no habiendo ningún otro sumando del desarrollo del determinante que dé un término con λn-1
(porque estaría formado por n−1 factores del tipo (aii−λ) a los que forzosamente debieraacompañar como n−ésimo factor el binomio (ajj−λ) restante, al no poder existir en un sumandodos elementos de la misma fila o columna). Así pues la ecuación y el polinomio característicosson respectivamente
(−1)nλn+(−1)n-1(a11+...+ann)λn-1+...+det(A) = 0
(−1)nxn+(−1)n-1(a11+...+ann)xn-1+...+det(A) = 0
Si referimos V a otra base, respecto de la cual la matriz de f fuera B se verifica que
B = M-1AM
siendo M la matriz del cambio de base, de donde
det(B−λI) = det(M-1AM−λI) = det(M-1·(A−λI)⋅M) = det(M-1)⋅det(A−λI)⋅det(M) =
= (det(M))-1⋅det(A−λI)⋅det(M) = det(A−λI)
es decir, la ecuación característica y el polinomio característico de f son independientes de labase respecto de la cual expresemos su matriz; por ello, también lo serán sus coeficientes yraíces, es decir, en un cambio de base son invariantes: el polinomio característico, la ecuacióncaracterística, la suma de los elementos de la diagonal, que se denomina traza de la matriz,su determinante y los valores propios. De acuerdo con las relaciones existentes entre raíces ycoeficientes en un polinomio, la suma de los valores propios es igual a la traza de la matriz.
Ejemplo VII.1.1
Calculemos valores y vectores propios del endomorfismo de R3 cuya matriz respectode la base canónica es
A =
3 2 0
–1 0 0
0 0 1
Los valores propios son las soluciones de la ecuación característica
det(A–λ I) =
3–λ 2 0
–1 –λ 0
0 0 1–λ = –λ 3
+4λ 2–5λ+2 = 0
que tiene como raíces 1 doble y 2 simple. Calculemos los vectores propios asociados acada valor propio: para λ = 1 tenemos

6
f(x) = x ⇔ Ax = x ⇔ (A–1I)x = 0 ⇔ 2 2 0
–1 –1 0
0 0 0
x1
x2
x3
=
0
0
0
que da lugar a un sistema homogéneo de rango 1 y, por ello, equivalente a la ecuación
2x1+2x2 = 0 ⇒ x1 = −x2 ⇒ V(1) = [(1,−1,0),(0,0,1)]
que es el subespacio de vectores propios asociados. Para λ = 2 :
f(x) = 2x ⇔ Ax = 2x ⇔ (A–2I)x = 0 ⇔ 1 2 0
–1 –2 0
0 0 –1
x1
x2
x3
=
0
0
0
que da lugar a un sistema homogéneo de rango 2 y, por ello, su solución es
x1
−2 =
x2
1 =
x3
0 ⇒ V(2) = (−2,1,0)
Sea λ1 una raíz de la ecuación característica, es decir, un valor propio. Se define comodimensión del valor propio λ1 la dimensión del subespacio V(λ1) de vectores propiosasociados. Si el orden de multiplicidad de λ1 como raíz de la ecuación característica es k, severifica que
dim(V(λ1)) ≤ k
En efecto, sea (e1,...,en) una base de V y (u1,...,uh) una base de V(λ1); según el teorema deSteinitz los h vectores de la base (u) pueden sustituir a h vectores de la base (e), supongamosque a los h primeros, de manera que el resultado (u1,...,uh,eh+1,...,en) es una base de V .Respecto de ella la matriz de f, de acuerdo con que
f : V V u1 f(u1) = λ1u1 = λ1u1+...+0uh+0eh+1+...+0en . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . uh f(uh) = λ1uh = 0u1+...+λ1uh+0eh+1+...+0en
eh+1 f(eh+1) = a1 h+1u1+...+ah h+1uh+ah+1h+1eh+1+...+an h+1en . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . en f(en) = a1 nu1+...+ah nuh+ah+1neh+1+...+an nen
será de la forma
A = I A'
_________
0 A''
λ 1 h

7
cuya ecuación característica desarrollando el determinante de A−λI por la regla de Laplace, es
(λ1−λ)h det(A''−λI) = 0
que tiene por raíz λ1 con multiplicidad h, como mínimo, que es la dimensión de V(λ1).
Con los resultados obtenidos hasta aquí sabemos calcular los valores propios de unendomorfismo f de un espacio vectorial V de dimensión finita sobre un cuerpo K, en el caso deque existan, y los subespacios de los vectores propios asociados, estando ahora en condicionesde resolver el problema de su diagonalización.
Ejercicios
VII.1.- Sea u = (u1,u2,u3) un vector no nulo de R3 y sea la aplicación
f : R3 R3
(x1,x2,x3) f(x1,x2,x3) = (u2x3−u3x2,u3x1−u1x3,u1x2−u2x1)
Demostrar que es un endomorfismo, hallar su matriz respecto a la base canónica de R3
determinando las bases de Nuc(f) e Im(f) y la dimensión de estos subespacios. Hallarlos valores y los vectores propios de la aplicación.
VII.2.- Sabiendo que f es un endomorfismo de R3 diagonalizable que admite como vectorespropios (−1,2,2),(2,2,−1),(2,−1,2) y que f(5,2,5) = (0,0,7). Hallar los valorespropios de f y su ecuación matricial.
VII.3.- Sea f un endomorfismo de R3 que tiene por valores propios 1, 2 y −1; y por vectorespropios (1,1,1),(0,1,2),(1,2,1) respectivamente. Hallar la matriz de f respecto de labase anterior y de la base canónica de R3.
VII.4.- Sea (e1,e2,e3) una base del espacio vectorial E sobre R. Dado el endomorfismo
f : E E e1 −e1+3e2−3e3
e2 2e2e3 −3e1+3e2−e3
Si (u1,u2,u3) es una base de E formada por los vectores propios de f, hallar lascomponentes de los vectores u1,u2,u3 respecto a la base (e1,e2,e3).
VII.5 .- Demostrar que si h ≠ 0 es valor propio de A, hn lo es de An y los vectores propioscorrespondientes son los mismos y que si A es regular, 1/h es valor propio de A-1.
VII.2 .- DIAGONALIZACION DE UN ENDOMORFISMO
Tres resultados expresan las condiciones para la solución del problema. El primero es unacondición necesaria y suficiente y expresa que f es diagonalizable si y sólo si existe una base deV formada por vectores propios. En efecto, si (x1,x2...,xn) es una base de V formada por

8
vectores propios la matriz de f respecto de ella se obtiene de
f : V Vx1 f(x1) = λ1x1 = λ1x1+0x2+...+0xnx2 f(x2) = λ2x2 = 0x1+λ2x2+...+0xn. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xn f(xn) = λnxn = 0x1+0x2+...+λnxn
resultando como matriz de f la matriz diagonal
λ1 0 . . 0
0 λ2 . . 0
. . . . . . . . .
0 0 . . λn
y recíprocamente.
Por tanto, si V está referido a una base (e) respecto de la cual la matriz de f es A , siencontramos una base (x) formada por vectores propios, la matriz de f será una matriz diagonalD y la relación entre ambas será
D = M-1AM
de acuerdo con la relación entre matrices en un cambio de base, siendo D la matriz diagonalformada por los valores propios, y M la matriz del cambio de base, cuyas columnas estánformadas por las componentes respecto de la base (e) de los vectores propios de f.
Ejemplo VII.2.1
Estudiemos la diagonalización del endomorfismo del ejemplo VII.1.1, de matriz
A =
3 2 0
–1 0 0
0 0 1
Sus valores propios eran 1 doble y 2 simple y sus valores propios asociados formabanlos subespacios
V(1) = [(1,−1,0),(0,0,1)] V(2) = [(−2,1,0)]
luego el endomorfismo es diagonalizable en la base formada por los vectores propios((1,−1,0),(0,0,1),(−2,1,0)) siendo la expresión de su diagonalización
1 0 0
0 1 0
0 0 2
=
1 0 –2
–1 0 1
0 1 0
-1
3 2 0
–1 0 0
0 0 1
1 0 –2
–1 0 1
0 0 0

9
Para la matriz
B =
1 2 3
0 2 2
0 0 1
encontramos
det(B–λ I) =
1–λ 2 3
0 2–λ 2
0 0 1–λ = (1–λ )2
(2–λ ) = 0
que tiene por raíces los valores propios 1 doble y 2 simple; calculemos sus vectorespropios asociados: para λ = 1 tenemos
f(x) = x ⇔ Bx = x ⇔ (B–1)x = 0 ⇔
0 2 3
0 1 2
0 0 0
x1
x2
x3
=
0
0
0
que da lugar a un sistema homogéneo de rango 2 y, por ello, su solución es
x1
1 =
x2
0 =
x3
0 ⇒ V(1) = [(1,0,0)]
Para λ = 2 :
f(x) = 2x ⇔ Bx = 2x ⇔ (B–2)x = 0 ⇔ –1 2 3
0 0 2
0 0 –1
x1
x2
x3
=
0
0
0
que da lugar a un sistema homogéneo de rango 2 y, por ello, su solución es
x1
2 =
x2
1 =
x3
0 ⇒ V(2) = [(2,1,0)]
Sin embargo no podemos encontrar tres vectores propios que formen un conjunto l.i.,luego no existe una base de vectores propios y el endomorfismo no es diagonalizable.
El segundo resultado es una condición suficiente para que el endomorfismo seadiagonalizable y es consecuencia directa del primero. Si f tiene n valores propios λ1,...,λndistintos en K, entonces f es diagonalizable. En efecto, según la propiedad 7) de la TablaVII.1.1 de propiedades de los vectores propios, podemos elegir un vector propio distinto de 0 ,asociado a cada valor propio
x1∈ V(λ1) ,..., xn∈ V(λn)

10
de manera que formen un conjunto l.i.; por esta razón, (x1,...,xn) es una base de V formadapor vectores propios y, de acuerdo con el resultado anterior, f es diagonalizable.
El tercer resultado completa las condiciones para que un endomorfismo f de un espaciovectorial V sobre K de dimensión n, sea diagonalizable. Es condición necesaria y suficiente paraque f sea diagonalizable que la ecuación característica tenga las n raíces en el cuerpo K y que elorden de multiplicidad de cada raíz λi sea igual a dim(V(λi)). En efecto:
Directo : Si f es diagonalizable, entonces existe una base de V formada por vectores propios def, tal que la matriz de f en esta base será:
λ1 0 . . 0
0 λ2 . . 0
. . . . . . . . .
0 0 . . λn
siendo λ i∈ K los valores propios de f. Dado que la ecuación característica es la mismaen cualquier base de referencia, será
(λ−λ1)(λ−λ2)...(λ−λn) = 0
cuyas raíces son los n elementos λ1,...,λn, puede que algunos iguales entre sí, delcuerpo K. Agrupando los binomios iguales en esta ecuación tenemos
(λ−λ1)α1...(λ−λ i)α i = 0
con α1+...+α i = n. Como para todo j = 1,..,i
1 ≤ dim(V(λ j) ≤ α j
al existir una base de V formada por vectores propios y ser V(λ1),...,V(λi) disjuntos
dim(V(λ1))+...+dim(V(λ i)) = dim(V) = n
De las tres relaciones se deduce inmediatamente que dim(V(λj)) = αj.
Recíproco: Si para todo j = 1,..,i es λ j ∈ K al ser α 1+...+α i = n y dim(V(λ j)) = αj, severifica que
dim(V(λ1)⊕ ...⊕ V(λ i)) = n
por lo tanto la reunión de las bases de V(λj) constituye una base de V formada porvectores propios de f y f es entonces diagonalizable.
Observemos que al ser los valores propios invariantes respecto a cualquier cambio de base, lamatriz diagonal D no depende de la base inicial, en el sentido de que es la misma cualquiera quesea la base de partida que da la matriz inicial del endomorfismo.

11
Ejercicios
VII.6.- Determinar los valores y vectores propios de de la matriz
A = 1 3 0
3 –2 –1
0 –1 1
Determinar una matriz regular T, tal que T-1AT sea diagonal y calcular T-1 verificandola exactitud de los cálculos.
VII.7.- Resolver la ecuación matricial X-1BX = C con
C =
1 –1 –1
–1 –1 0
–1 0 –1
y B =
α 0 0
0 β 0
0 0 γ
VII.8.- Dadas las matrices
A =
0 α1 α2
–2 1 –1
–2 2 2
B =
1 α3 1
0 1 α4
0 0 2
para α 1 = , α2 = , α 3 = , α4 = . Estudiar, en su caso, la diagonalización.Indicar la matriz diagonal y la del cambio de base.
VII.9.- Dada la matriz
A =
–4 –6 0
3 5 0
0 0 2
Hallar la matriz del cambio de base que la transforma en diagonal y hallar ésta.
VII.10.- Sea la matriz
A =
1 1 1 1
1 1 –1 –1
1 –1 1 –1
1 –1 –1 1
Hallar sus valores propios. Demostrar que es diagonalizable y determinar una matriz decambio sencilla que permita la diagonalización. Diagonalizar A2 y A-1.

12
VII.11.- Sea f un endomorfismo de matriz asociada en una cierta base de R4
A =
–1 –2 0 0
0 1 0 0
1 1 0 1
1 1 1 0
a) Hallar el polinomio característico.
b) ¿Es f diagonalizable?.
c) En caso afirmativo, hallar una base en la que f diagonaliza, así como la matriz asociada en esta base.
VII.12.- Sea E el subespacio vectorial engendrado por las funciones [1,sen,cos] sobre R. Seconsidera el endomorfismo
Φ : E Ef Φ(f) = f '
Hallar
a) Nuc (Φ).
b) Rango de Φ.
c) Matriz de Φ en la base (3 sen x,4 cos x,6).
d) Estudiar su diagonalización.
VII.13. - Siendo (u1,u2,u3,u4) una base del espacio vectorial E sobre R, consideremos elsiguiente endomorfismo definido por
f(u1) = α1u2 f(u2) = u1+au3 f(u3) = u1+α2u2−u3f(u4) = u1+α3u2+u3+α4u4
para α1 = , α2 = , α3 = , α4 = .
a) Clasificar el endomorfismo según los valores de a y, cuando sea biyectivo, calcularlas antiimágenes de los vectores cuyas componentes respecto de la base (u1,u2,u3,u4)son (1,−1,1,−1) y (2,−2,2,−2).
c) ¿Para que valores de a es diagonalizable el endomorfismo?.
VII.14.- La matriz M =
a 1 1
b 2 1/2
c –1 1/2

13
tiene como vectores propios (1,1,0), (−1,0,2) y (0,1,−1). Calcular la matriz M y sus valores propios.
VII.15.- Dada la matriz
M = a m 0
0 1 0
0 0 2
con a, m∈ R y m ≠ 0
estudiar su diagonalización para los distintos valores de a.
VII.16.- Estudiar según los valores de a y b la diagonalización del endomorfismo de R4 quetiene por matriz asociada en la base canónica
A =
1 a 0 1
0 1 0 0
0 0 2 0
0 0 0 b
VII.17.- Hallar α para que sea diagonalizable la matriz
M =
– 1/2 α 2 3/2
– 2/2 1 2/2
1/2 α 2/2 1/2
Hallar una base ortonormal de R3 a partir de la base formada por sus vectores propios.
VII.18.- Estudiar, según los valores reales de α la diagonalización de las matrices
A = 1+α –α α2+α –α α–1
2 –1 0
B =
1 –2 –2–α 0 1 α0 0 1
Para los valores de α que las hacen diagonalizables hállese su forma diagonal D y lamatriz regular P tal que D = P-1AP.
VII.19.- Estudiar la diagonalización de la matriz
1 0 0 0
a 1 0 0
a ' b 2 0
a ' ' b ' c 2

14
VII.3 .- POTENCIA DE UNA MATRIZ DIAGONALIZABLE
El cálculo de la potencia de una matriz diagonal es simple ya que se verifica que
λ1 . . 0
. . . . . . .
0 . . λn
k
= λ1
k . . 0
. . . . . . .
0 . . λnk
En efecto por inducción sobre k, para k = 1 es evidente y si es cierto para k, entonces
λ1 . . 0
. . . . . . .
0 . . λn
k+1
= λ1 . . 0
. . . . . . .
0 . . λn
k
λ1 . . 0
. . . . . . .
0 . . λn
= λ1
k+1 . . 0
. . . . . . . . .
0 . . λnk+1
Si una matriz A es diagonalizable existirá una matriz regular M tal que
D = M-1AM
es una matriz diagonal; despejando y calculando la potencia tenemos
Ak = (MDM-1)k = (MDM-1) (MDM-1) ... (MDM-1) = MDkM-1
y el cálculo de la potencia se reduce al caso de matriz diagonal.
Ejemplo VII.3.1
Según vimos en el Ejemplo VII.2.1, la matriz
A =
3 2 0
–1 0 0
0 0 1
es diagonalizable, siendo
1 0 0
0 1 0
0 0 2
=
1 0 –2
–1 0 1
0 1 0
-1
3 2 0
–1 0 0
0 0 1
1 0 –2
–1 0 1
0 1 0
es decir
3 2 0
–1 0 0
0 0 1
=
1 0 –2
–1 0 1
0 1 0
1 0 0
0 1 0
0 0 2
1 0 –2
–1 0 1
0 1 0
-1

15
por lo que, según lo anterior, es, por ejemplo
3 2 0
–1 0 0
0 0 1
6
=
1 0 –2
–1 0 1
0 1 0
1 0 0
0 1 0
0 0 2
6
1 0 –2
–1 0 1
0 1 0
-1
=
127 126 0
–63 62 0
0 0 1
Veamos ahora dos aplicaciones del cálculo de la potencia de una matriz diagonalizable, unapara el cálculo del término general de una sucesión y otra en el estudio de algunos modelosmatemáticos utilizados en Biología que describen dinámicas de poblaciones.
Sea (xn)n∈ N una sucesión en R definida en forma recurrente por
xn = axn–1+bxn–2
siendo n ≥ 2 y a y b dos números reales; esta sucesión queda determinada conociendo sus dosprimeros términos x0 y x1. Para hallar el término general de esta sucesión, debemos escribirlaen la forma
xn = axn–1+byn–1
yn = xn–1
que puede expresarse en forma matricial mediante
xn
yn =
a b
1 0
xn–1
yn–1
Si
A = a b
1 0 , Xn =
xn
yn , X1 =
x1
y1
la igualdad anterior da lugar a X n = AX n–1 , X n–1 = AX n– 2 ,..., X 2 = AX 1, de dondesustituyendo sucesivamente se obtiene
Xn = An–1X1
Si A es una matriz diagonalizable existen una matriz regular M y una matriz diagonal D
D = λ1 0
0 λ2
tales que A = MDM-1 . En este caso
An–1 = MDn–1M-1 ⇔ Xn = M λ1
n–1 0
0 λ2n–1 M -1X0 ⇔
xn
xn-1 = M
λ1n–1
0
0 λ2n–1 M-1 x1
x0

16
expresión que permite hallar el término general xn de la sucesión.
Ejemplo VII.3.2
Una sucesión de este tipo es la llamada sucesión de Fibonacci para la que a = b = 1 yx0 = x1 = 1, es decir
xn = xn–1+xn-2
de forma que cada término es la suma de los dos anteriores; los primeros términos son(1,1,2,3,5,8,13,21,34,...). Escrita la fórmula en forma matricial es
Xn = An–1X1con
A = 1 1
1 0 , Xn =
xn
yn , X1 =
1
1
La matriz A es diagonalizable pues sus valores propios son distintos
λ1 = 1+ 5
2 , λ2 =
1– 5
2
cuyos subespacios de vectores propios asociados son
V(λ1) = [(λ1,1)] y V(λ2) = [(λ2,1)]
La matriz M es, entonces
M = λ1 λ2
1 1
y la potencia (n–1)-ésima de A es
An–1 = MDn–1M-1 = 1
λ1–λ2
λ1
n–λ2
n λ1λ2(λ2
n–1–λ1
n–1)
λ1n–1
–λ2n–1
λ1λ2(λ2n-2
–λ1n-2
)
Como
X n = A n–1X1 ⇔ xn
xn-1
= 1
λ1–λ2
λ1
n–λ2
n λ1λ2(λ2
n–1–λ1
n–1)
λ1n–1
–λ2n–1
λ1λ2(λ2n-2
–λ1n-2
)
1
1
Al ser λ1λ2 = −1, el valor del término general xn de la sucesión de Fibonacci resulta

17
ser igual a
xn = λ1
n+1–λ2n+1
λ1–λ2
Veamos el planteamiento y resolución de algunos modelos matemáticos simples quedescriben la dinámica que los procesos de nacimiento y muerte inducen sobre una población.Consideraremos, en primer lugar, un modelo muy sencillo en el que la población, en un períodode tiempo de longitud t, es proporcional a la población del período anterior, con una constantede proporcionalidad fija k. Si p0 es el número de individuos de la población en el períodoinicial, un intervalo de tiempo [t0,t1] de longitud t y p1 es el número de individuos de lapoblación en el siguiente período, el intervalo de tiempo [t1,t2] (con t2 = t1+ t), y pn es elnúmero de individuos de la población en el intervalo [tn-1,tn] con (tn = t0+nt), entonces
p1 = kp0 ∧ p2 = kp1 ∧ ...∧ pn = kpn-1 ⇒ pn = knp0
Un modelo de este tipo podría presentarse en el caso en el que las generaciones (cada períodoes una generación) sean distintas, es decir, cada individuo de cada generación, produce kdescendientes y después muere. Si k = 1, la población permanece constante si k > 1, lapoblación aumenta y si 0 < k < 1, la población decrece.
También tendríamos una población que se correspondería con este modelo, si consideramosque el incremento de individuos en cada período es igual al número de individuos del períodoanterior multiplicado por una constante. Si B(i) es el número de nacimientos, D(i) el número demuertes y pi el número de individuos en la generación i, si hacemos
b = B(i)/pi, fracción de nacimientos por individuo de la población en la generación i
d = D(i)/pi, fracción de defunciones por individuo de dicha población en la generación i
Si suponemos b y d constantes para todas las generaciones, tenemos entonces
pi+1−pi = (b−d)pi ⇒ pi+1 = (1+b−d)pi
que es un modelo del tipo anterior para k = 1+b−d. A la constante 1+b−d se la denominaparámetro de Malthus, en honor a Robert Malthus, y a este modelo, modelo de Malthus.Vemos que es un caso muy especial, pues no es lógico que b y d, no dependan de la generaciónconcreta en que nos situemos.
Otro modelo sencillo se presenta cuando tenemos dos poblaciones en competencia X e Y .Sean
Xi = número de individuos de la población X en el intervalo de tiempo [ti-1,ti] con ti = t0+it.
Yi = número de individuos de la población Y en el intervalo de tiempo [ti-1,ti] con ti = t0+it.
Si consideramos que la población X se comporta según el modelo de Malthus
Xi+1 = kXi con k = 1+bx−dx

18
y análogamente para la población Y
Yi+1 = k'Xi con k' = 1+by−dy
pero que en lugar de considerar cada población independientemente las suponemos ahora encompetencia, en la cual, los individuos de la población Y son depredadores de los individuos dela población X, siendo
α = número de presas consumidas por cada individuo de la población Y en el intervalo [ti-1,ti] β = número de predadores producidos por presa consumida en el intervalo [ti-1,ti]
se cumple que
Xi+1 = kXi−αYi
Yi+1 = k 'Yi+βXi
Expresemos este sistema en forma matricial
Xi+ 1
Yi+ 1 =
k –αβ k'
X i
Y i
Si (X0,Y0) es el vector que representa la situación inicial, es decir
X0 = número de individuos de la población X en el instante t0,
Y0 = número de individuos de la población Y en el instante t0,
y si
A = k –αβ k'
entoncesX n
Yn = An
X 0
Y0
Si la matriz A es diagonalizable con valores propios λ1, λ2, y vectores propios (u1,u2), es
A = MDM-1 y An = M λ1
n 0
0 λ2n M-1
por tanto
X n
Yn
= M λ1
n 0
0 λ2n M-1
X 0
Y0
⇒ M-1 X n
Yn
= λ1
n 0
0 λ2n M-1
X 0
Y0

19
Como M-1 X n
Yn son las componentes del vector (Xn,Yn) expresado en la nueva base (u),
existen a1 y a2∈ R tales que
(Xn,Yn) = a1u1+a2u2 ⇔ M-1
X n
Yn =
a1
a2
y, análogamente, como M-1 X 0
Y0 son las son las componentes del vector (X0,Y0) expresado en
la nueva base (u), existen b1,b2∈ R tales que
(X0,Y0) = b1u1+b2u2 ⇔ M-1
X 0
Y0 =
b1
b2
De todo ello deducimos que
a1
a2
= λ1
nb1
λ2nb2
Si estamos en el caso en el que λ1 ≠ λ2, por ejemplo λ1 > λ2, entonces
a1u1+a2u2 = λ1n(b1u1+
λ2n
λ1n
b2u2) y λ2
n
λ1n
limn → +∞
= 0
por lo que
M-1 X n
Yn
≈ λ1
nb1
0 ⇒
X n
Yn
≈ M λ1
nb1
0 =
u11
u12
u21
u22
λ1
nb1
0 ⇒
X n
Yn
= λ1nb1
u11
u21
= λ1nb1u1
Es decir para valores de n suficientemente grandes el vector de población es proporcional alvector propio asociado al valor propio de mayor valor absoluto.
Ejemplo VII.3.3
Para las poblaciones en competencia dadas por
Xi+1 = 1'4 Xi−0'2 Yi
Yi+1 = 0'4 Xi+0'8 Yi

20
tenemos
A = 1'4 –0'2
0'4 0'8 ⇒ λ1 = 1'2 , λ2 = 1 ⇒ u1 = (1,1) , u2 = (1,2) ⇒ M =
1 1
1 2
luegoX n
Yn = 1'2nb1
1
1
y vemos que con el paso del tiempo, ambas poblaciones viven en una situación deequilibrio, creciendo en la misma proporción, si b1 es positivo.
Ejercicios
VII.20.- Dada la matriz
A =
1 –3 3
3 –5 3
6 –6 4
a) Resolver si es posible la ecuación A = SDS-1 siendo D una matriz diagonal.
b) Demostrar An = SDnS-1 con n∈ N y hallar A15.
VII.21.- Dos tanques, de volúmenes L1 y L2 (en litros), conteniendo solución salina seconectan entre ellos y el exterior según indica la figura
L 1L
2
x y
Q1
Q2
El líquido del primer tanque se bombea al segundo a un régimen de caudal constanteQ1 (en litros por minuto), asímismo hay un bombeo del segundo al primero con uncaudal constante de Q2. Se supone que Q1 ≥ Q2, que cada tanque siempre está lleno yque la mezcla es completa. Suponiendo que al comienzo del experimento las masas desal en cada tanque son x0 e y0, las masas de sal (en gramos) en un instante k dependende las masas de sal existentes en el instante anterior k−1, según indican las ecuacionesdel modelo discreto
xk = xk-1−Q1xk-1/L1 + Q2yk-1/L2 + (Q1−Q2)c
yk = yk-1+Q1xk-1/L1 − Q2yk-1/L2 − (Q1−Q2)yk-1/L2
21
siendo c la concentración de sal que lleva el líquido (en gramos litro) que, procedentedel exterior, entra en el primer tanque. Se pide
1) Interpretar físicamente los sumandos de cada ecuación.
2) Demostrar que para Q1 = Q2 el modelo tiene por expresión matricial xk = A kx0,siendo xk la matriz de contenido de sal en los depósitos. Para x0 = 6, y0 = 0, L1 = 3 ,L2 = 1'5, Q1 = 0'9 y Q2 = 0'9 hallar la matriz A, la masa de sal en cada depósito a los 5 minutos y la masa de sal en ambos depósitos cuando el tiempo se hace grande.
3) Demostrar que para Q1 > Q2 la forma matricial es xk = Akx0 + (Ak-1+...+A+I)C. Para x0 = 6, y0 = 0, L1 = 3 , L2 = 2, Q1 = 1'2, Q2 = 0'4 y c = 0'3 hallar las matricesA y C, la concentración de sal en el agua de salida al cabo de 5 minutos y la masa desal en ambos depósitos cuando el tiempo se hace grande.
VII.4 .- DIAGONALIZACION DE LAS MATRICES REALES SIMETRICAS.
Sea V un espacio euclidiano, con un producto escalar <,> y referido a una base ortonormal(u1,...,un). Sea A una matriz simétrica y f el endomorfismo de V que respecto a la base (u1,...,un) tiene por matriz A. Dada la simetría de A se tiene que
(∀ x,y∈ V) (<x,f(y)> = xt(Ay) = xtA ty = (Ax)ty = <f(x),y>)
En estas condiciones se verifican las propiedades que se exponen en la Tabla VII.4.1
TABLA VII .4.1____________________________________________________________________
Propiedades de las matrices reales simétricas
1) A real y simétrica, admite n valores propios reales.
2) A real y simétrica, admite al menos un vector propio.
3) Si x e y vectores propios de f asociados a valores propios distintos, entonces x ⊥ y.
4) x vector propio de f implica (∀ y∈ V) (y⊥ x ⇒ f(y)⊥ x).____________________________________________________________________
Demostraciones:
1) El polinomio característico de f es de grado n y tiene n raíces en C, al ser algebraicamentecerrado. Supongamos que λ∈ C es una de éllas, es decir, λ es valor propio de A, y x uno desus vectores propios asociados distinto de 0; tendremos
x = (x1,...,xn) con xi∈ C ∧ Ax=λx
Sea x = ( x1,...,xn ) cuyas componentes son los complejos conjugados de las componentes

22
de x0. Tendremos
x tAx = λx tx = λ xi xi∑i = 1
n
∑i = 1
n
= λ xi2
y como
x tAx = x1 . . xn
a1ixi∑i = 1
n
. . . . . .
anixi∑i = 1
n
= xj ∑j = 1
n
ajixi∑i = 1
n
= ajixj xi∑i,j = 1
n
su conjugado coincide con él, ya que por ser A una matriz real simétrica
ajixjxi∑i,j = 1
n
= ajixjxi∑i,j = 1
n
= ajixj xi∑i,j = 1
n
por lo que es un número real. Así obtenemos para el valor propio
λ = ajixj xi∑
i,j = 1
n
xi2∑
i = 1
n
∈ R
2) Si el polinomio característico de f tiene, como hemos visto, n raíces reales, iguales odistintas, como mínimo admitirá una sola raíz real de multiplicidad n, valor propio de h quetendrá asociado un vector propio.
3) Como <h(x),y> = <x,h(y)>, si x e y son vectores propios asociados a valores propios λy µ distintos,tendremos
<f(x),y> = <λx,y> = λ<x,y> ⇒ (λ−µ)<x,y> = 0 ⇒ <x,y> = 0 ⇒ x ⊥ y
<x,f(y)> = <x,µy> = µ<x,y>
4) <x,f(y)> = <f(x),y> = λ<x,y> = λ ·0 = 0
Consideremos una nueva base (e1,...,en) de V construida de la siguiente manera: e1 es unvector propio de f que esté normalizado y (e2,...,en) una base ortonormal de [e1]⊥ . Respecto deesta base la matriz B de f es una matriz simétrica ya que si M es la matriz del cambio de la base(u1,...,un) a la base (e1,...,en) es
B = M–1AM = MtAM = MtAt(Mt)t = (MtAM)t = Bt
Como f(e1) = λe1 y, debido a la propiedad 4) de la tabla anterior, si y∈ [e2,...,en], entonces

23
f(y)∈ [e2,...,en], la matriz B es
B =
λ 0 . . 0
0
. . A'
0
siendo A' una matriz también simétrica.
Todos estos resultados anteriores conducen a la importante propiedad de que si A es unamatriz real simétrica, existe una base ortonormal respecto de la cual A diagonaliza. En efecto,por inducción sobre el orden n de A:
Si n = 1, como todo conjunto unitario es ortogonal, si e1 es una base de V entonces <e1,e1>≠ 0 y si definimos
v 1 = 1
<e1,e1> e1
entonces (v1) es una base ortonormal de vectores propios.
Si es cierta la propiedad para (n−1), entonces la restricción de f a [e1]⊥ diagonaliza en unabase (v2,...,vn) ortonormal, por lo que
(v1,v2,...,vn)
es una base ortonormal de V en la cual f diagonaliza, por ser u1 ortogonal a u2,...,un alpertenecer a [e1]⊥ .
Ejemplo VII.4.1
Sea un endomorfismo de R2 cuya matriz respecto de la base canónica es la matriz
simétrica A = 3 –1
–1 1 . Su ecuación característica es
3–λ –1
–1 1–λ = λ 2
–4λ+2 = 0
Sus valores propios son
λ1 = 2+ 2 λ2 = 2− 2
y sus vectores propios
V(2+ 2) = [(1,1− 2)] con v1 = (1,1− 2) vector propio

24
V(2− 2) = [(1,1+ 2)] con v2 = (1,1+ 2) vector propio
Ambos subespacios son ortogonales, pues los valores propios son distintos. La base
v 1
v1 ,
v2
v2 =
1
4–2 2 ,
1– 2
4–2 2 ,
1
4+2 2 ,
1+ 2
4+2 2
es efectivamente ortonormal y, en ella, la matriz toma la forma diagonal
λ1 0
0 λ2 =
2+ 2 0
0 2– 2 =
1
4–2 2
1
4+2 2
1– 2
4–2 2
1+ 2
4+2 2
t
3 –1
–1 3
1
4–2 2
1
4+2 2
1– 2
4–2 2
1+ 2
4+2 2
Observación : Si partimos de un endomorfismo f que tiene por matriz la matriz simétrica Arespecto de una base (u) que no es ortonormal, respecto del producto escalar definido en V,entonces no podemos seguir el proceso anterior. Ahora bien, si definimos en V otro productoescalar g tal que g(ei,ej) = δij, según el razonamiento expuesto antes, encontraremos una base(ortonormal respecto de g) respecto de la cual A diagonaliza, como matriz de un endomorfismoy como matriz de una forma cuadrática.
Ejemplo VII.4.2
Sea R2 referido a la base canónica con el producto escalar g1 de matriz
B = 1 1
1 2
Efectivamente esta matriz define un producto escalar ya que, por ejemplo
g1(x,x) = x y 1 1
1 2
x
y = x 2+2xy+2y 2 = (x+y)2+y 2 > 0 si (x,y) ≠ (0,0)
Como g1((1,0),(0,1)) = 1 la base no es ortonormal respecto de este producto escalar ysin embargo si lo es respecto del producto escalar ordinario. Sea la matriz simétrica
A = 0 –1
−1 1
Según hemos probado, existe una base de vectores propios (v1,v2) de V, ortonormalrespecto a g2 que diagonaliza a A, tanto como matriz de una aplicación lineal como matriz de una forma cuádratica. En efecto los valores propios de A son:

25
–λ –1
–1 1–λ = λ 2
–λ–1 = 0 ⇒ λ1 = 1+ 5
2 ∧ λ2 =
1– 5
2
y como vectores propios asociados v1 = (−1, 1+ 5
2) y v2 = (−1, 1– 5
2) que son
ortogonales, por ser asociados a valores propios distintos, por lo que bastanormalizarlos para obtener la base de vectores propios, ortonormal respecto g2,buscada
v 1 = –1
1+λ12
, λ1
1+λ12
v2 = –1
1+λ22
, λ2
1+λ22
respecto de la cual
MtAM = M-1AM = D = λ1 0
0 λ2
siendo M =
−1
1+λ12
−1
1+λ22
λ1
1+λ12
λ2
1+λ22
Se observa que v1 y v2 no son ortogonales respecto g1, en efecto:
u1 1 1
1 2 u 2 =
–1
1+λ12
λ1
1+λ12
−1+λ2
1+λ22
–1+2λ2
1+λ22
= 1–λ2–λ1+2λ1λ2
1+λ12
1+λ22
≠ 0
Así pues, dada una matriz simétrica si la base en la que viene expresada es ortonormal,respecto del producto escalar definido, existe una base de vectores propios ortonormal, respectode la cual diagonaliza. Si, como en este último ejemplo, la base de origen no es ortonormal,existe la base de vectores propios respecto de la cual diagonaliza, pero no es ortonormal.
VII.5.- SIGNO DE UNA FORMA CUADRATICA
Como aplicación de la diagonalización de una matriz real simétrica, veamos la denominada regla de Silvester para estudiar el signo de una forma cuadrática. Recordemos que una formacuadrática fc, definida en V e.v.s. R, es definida positiva si y sólo si se verifica que (∀ x∈ V) (x≠ 0 ⇒ fc(x) > 0). (Análogamente definida negativa). Estudiaremos el signo de una formacuadrática fc, cuya matriz es A = (aij)∈ M(n,n)(R) simétrica. Un resultado previo necesario es elsiguiente:

26
"Si (∀ x∈ Rn) (x ≠ 0 ⇒ xtAx > 0), entonces existen matrices
L =
1 . . 0 0
t21 . . 0 0
. . . . . . . . . . . .
tn-11 . . 1 0
tn1 . . tnn-1 1
D =
d1 . . 0
. . . . . .
0 . . dn
tales que
A = LDLt d1 = a11 dk = det(Ak)/det(Ak-1) (para k = 2,...,n)
siendo Ak la submatriz de A formada por las k primeras filas y k primeras columnas".
Demostración:
Tengamos en cuenta, en primer lugar que
1) Si existen L y D y se definen las matrices Lk y Dk de forma análoga a Ak, es simplecomprobar que
(∀ k∈ {1,...,n−1}) (Ak = LkDkLkt)
2) Las matrices Ak definen formas cuadráticas definidas positivas, es decir, se cumple que
(∀ k∈ {1,...,n−1}) (∀ x∈ Rk) (x ≠ 0 ⇒ xtAkx > 0)
pues si xtAkx ≤ 0 tomando x'= (x1,...,xk,0,...,0)∈ Rn sería x'tAx' = xtAkx ≤ 0 lo que vacontra la hipótesis sobre la matriz A.
3) Los cocientes dk son positivos pues si para algún i fuera di ≤ 0, con el vector x i =(0,..,1,..,0) tendríamos xt
iDkxi = di ≤ 0
0 ≥ xtiDkxi = xt
iL-1
kLkDkL tk(L t
k)-1xi = ytAky
para y = (Ltk)
-1xi, que es distinto de 0 pues xi ≠ 0, lo cual es una contradicción con lahipótesis sobre A.
Demostremos ahora el resultado por inducción sobre el orden n de A:
Si n = 1 es trivial. Si n = 2, entonces
A = a b
b c =
1 0
b/a 1
a 0
0 (ac-b 2)/a
1 b/a
0 1
con lo que si a = d1 y ac–b 2
a = d2 vemos que se cumple d1 = a y d2 = det(A2)/det(A1).
Supongamos la afirmación cierta para k = (n−1) y veamos que se cumple para el caso k = n.
Aplicando la hipótesis de inducción a An-1 se cumplirá que existen Ln-1 y Dn-1 tales que

27
An-1 = Ln-1Dn-1Ltn-1 d1 = a11 dk = det(Ak)/det(Ak-1) (para k = 2,...,n−1)
Planteemos ahora la ecuación cuyas incógnitas son t1,...,tn-1, y dn
A = Ln-1 0_____________
t1 . . tn-1 1
d1 0 0
0 dn-1 0_______________
0 0 dn
Ln-1t t1
tn-1________________
0 1
= . .
. .
. .
y efectuando el producto por bloques, se obtiene
=
Ln-1Dn-1Ln-1t Ln-1Dn-1T t
________________________
TDn-1Ln-1t TDn-1T t+dn
A
donde T = (t1,...,tn-1) ⇒ TDn-1Ln-1t = ( an1 an2 . . ann-1 ). El sistema de ecuaciones
d1t1 = an1 y como d1 = a11 > 0, existe t1 d1t21t1+d2t2 = an2 y como d2 ≠ 0, existe t2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
d1tn1t1+...+dn-1tn-1 = ann-1 y como dn−1 ≠ 0, existe t2
Al ser dn = ann−TDn-1T t y A = LDLt, entonces
det(A) = det(D) = d1...dn ⇒ dn = det(A)/(d1...dn-1) = det(A)/det(An-1)
Ejemplo VII.5.1
El proceso de la demostración anterior aplicado a la matriz A =
1 1/2 2
1/2 1 0 2 0 7
será como
sigue: las matrices tipo Ak
A1 = 1 A2 = 1 1/2
1/2 1y como hemos visto que
a b
b c =
1 0
b/a 1
a 0
0 (ac-b 2)/a
1 b/a
0 1
tendremos que

28
1 1/2
1/2 1 =
1 0
1/2 1
1 0
0 3/4
1 1/2
0 1
Planteamos el sistema cuyas incógnitas son t1, t2 y d3
1 1/2 2
1/2 1 0
2 0 7
=
1 0 0
1/2 1 0
t1 t2 7
1 0 0
0 3/4 0
0 0 d3
1 1/2 t1
0 1 t2
0 0 1
=
1 1/2 t1
1/2 1 t1/2+3t2/4
t1 t1/2+3t2/4 t12+3t2
2/4+d3
lo que da t1 = 2 t1 = 2
t1/2+3t2/4 = 0 ⇒ t2 = −4/3 t1
2+3t22/4+d3 = 7 d3 = 5/3
Luego las matrices L y D tales que A = LDLt son
L =
1 0 0
1/2 1 0
2 − 4/3 1
D =
1 0 0
0 3/4 0
0 0 5/3
Vamos a demostrar a partir de este resultado anterior el método denominado Regla deSilvester, para estudiar el signo de una forma cuadrática. En las hipótesis anteriores, sonequivalentes las proposiciones:
1) A es la matriz de una forma cuadrática definida positiva.
2) Todos los n valores propios λi de A, cumplen que λi > 0.
3) Todas las matrices Ak tienen determinante positivo.
4) Todos los di son positivos, para todo i = 1,...,n.
Demostración:
1) implica 2): Si xi∈ V(λ i) y xi ≠ 0, entonces xitAxi = xi
tλ ixi = λ i || xi ||2 > 0 ⇒ λ i > 0
2) implica 1): Existe una base en la cual A diagonaliza como aplicación lineal y como formacuadrática, luego para un vector cualquiera x = (x1,...,xn)∈ Rn
fc(x) = xt
λ1 0
. . . . .
0 λn
x = λ1x12+...+λ nxn
2 > 0
por ser λ i > 0 para todo i = 1,...,n.

29
1) implica 3): Hemos visto anteriormente que Ak es la matriz de una forma cuadráticadefinida positiva, luego todos sus valores propios son positivos, por lo que det(Ak) > 0
3) implica 4): Sabemos que para todo k = 2,...,n es d1 = a11 > 0 y dk = det(Ak)/det(Ak-1),luego dk > 0
4) implica 1): Observemos que si en la demostración del resultado previo en vez de suponerA definida positiva suponemos di > 0, para i = 1,...,n−1, obtenemos elmismo resultado. Por tanto A = LDLt y como y = xtL y di > 0, tendremos
xtAx = xtLDLtx = d1y12+...+dnyn
2 > 0
Análogamente se deduce que son equivalentes:
1) A es la matriz de una forma cuadrática definida negativa
2) Todos los n valores propios λi de A, cumplen que λi < 0
3) (−1)k det(Ak) > 0
4) Todos los di satisfacen di < 0, para todo i = 1,...,n.
Ejemplo VII.5.2
Para la forma cuadrática definida sobre R3, que tiene por matriz la anterior
A =
1 1/2 2
1/2 1 0 2 0 7
estudiamos su signo, para lo cual hallamos
det(A1) = 1 > 0
det(A2) =
1 1/2
1/2 1 = 3/4 > 0
det(A3) =
1 1/2 2
1/2 1 0
2 0 7
= 5/4 > 0
de lo que se deduce que la forma cuadrática es definida positiva.

30
VII.6 .- REDUCCION DE MATRICES A FORMA TRIANGULAR
Si un endomorfismo f no tiene suficientes vectores propios como para formar una base, noexiste ninguna base de V respecto de la cual la matriz de f es diagonal. No obstante, si laecuación característica tiene sus n raíces pertenecientes a K, lo cual ocurrirá, p.ej., si K esalgebraicamente cerrado, existe una base respecto de la cual la matriz de f es triangular. Sedemuestra por inducción; en efecto: para n = 1 es trivial y supongamos el resultado cierto paralos endomorfismos de espacios vectoriales sobre K de dimensión n−1; sea (e1,...,en) la base deV respecto de la cual la matriz de f es A y λ1,...,λn las raíces de la ecuación característica.Existe un vector u1∈ V , no nulo, tal que
f(u1) = λ1u1
por lo que {u1} es l.i. y puede sustituir a un vector de la base (e), supongamos al primero parafijar ideas, de forma que (u1,e2,...,en) es base de V. La matriz de f en esta base será:
B =
λ1 b12 . . b1n
0 b22 . . b2n
. . . . . . . . . . .
0 bn2 . . bnn
= Q-1AQ
siendo Q la matriz del cambio de la base (e1,e2,...,en) a la (u1,e2,...,en). Su ecuacióncaracterística es
det(B–λI) = 0 ⇔
λ1–λ b12 . . b1n
0 b22–λ . . b2n
. . . . . . . . . . . . . . .
0 bn2 . . bnn–λ
= 0
que por hipótesis, tiene sus raíces en K. Sea F el subespacio de V generado por los vectorese2,...,en que al formar un conjunto l.i. hace que dim(F) = n−1, y sea la aplicación
g : F Fe2 g(e2) = f(e2)−b12u1
. . . . . . . . . . . . . . . . . . . .en g(en) = f(en)−b1nu1
cuya matriz respecto de la base (e2,...,en ) es, como puede comprobarse fácilmente
C =
b22 b23 . . b2n
b32 b33 . . b3n
. . . . . . . . . .
bn2 bn3 . . bnn
de ecuación característica

31
det(C–λI) = 0 ⇔
b22–λ b23 . . b2n
b32 b33–λ . . b3n
. . . . . . . . . . . . . . .
bn2 bn3 . . bnn–λ
= 0
y sus raíces son los valores propios de B, excepto una vez λ1, y, por ello, elementos de K. Porhipótesis de inducción, hay una base (w2,...,wn) de F
w2 = p22e2+...+pn2en
. . . . . . . . . . . . . .
wn = p2ne2+...+pnnen
tal que, respecto de ella, la matriz de g es triangular
T =
c22 c23 . . c2n
0 c33 . . c3n
. . . . . . . . . . .
0 0 . . cnn
Por construcción de F es V = [u1] ⊕ F y la matriz de f en la base (u1,w2,...,wn) es triangularya que
f(u1) = λ 1u1 = λ 1u1+0⋅w2+...+0⋅wn
f(w2) = f(p22e2+..+pn2en) = p22f(e2)+..+pn2f(en) = p22(g(e2)+b12u1)+..+pn2(g(en)+b1nu1)=
= (p22b12+..+pn2b1n)u1+p22g(e2)+..+pn2g(en) = (p22b12+..+pn2b1n)u1+g(p22e2+..+pn2en)=
= (p22b12+..+pn2b1n)u1+g(w2) = (p22b12+...+pn2b1n)u1+c22w2+0⋅w3+...+0⋅wn
razonando de forma igual para los demás vectores de la base.
Siguiendo la idea de esta demostración puede deducirse un procedimiento práctico paratriangulizar una matriz A = (aij). Conocido un valor propio λ1 y un vector propio asociado u1,formamos la matriz cuadrada Q 1 de orden n, regular y cuya primera columna sean lascomponentes del vector u1, que tendrá alguna componente no nula ui1; las demás columnas sontales que el menor complementario de esta componente sea el determinante de la matriz unidadIn-1 y la fila en la que está se completa con ceros con lo cual Q1 es la matriz del cambio de labase (e1,e2,...,en) a la (u1,e2,...,en). Tendremos así
Q1-1AQ1 =
λ1 b12 ... b1n
0 b22 ... b2n. . . . . . . . . .
0 bn2 ... bnn
= λ1 B1_______
0 A1
Reiteramos el proceso para la matriz A1, de orden n−1; conocido un valor propio λ2 , que lo es

32
también de A, y un vector propio asociado u2, formamos la matriz cuadrada Q2 de orden n−1,cuya primera columna sean las componentes del vector u2, y las demás columnas construidasde modo análogo al anterior, es decir, a partir de una componente no nula completar con eldeterminante de la matriz In-2 y ceros. Tendremos
Q2-1A1Q2 =
λ2 b23 ... b2n0 b33 ... b3n. . . . . . . . . .
0 bn3 ... bnn
= λ2 B2_______
0 A2
'
''''
'
Repetimos el proceso n−1 veces, hasta obtener
Q = Q1 I1 0
0 Q2
I2 0
0 Q3. . .
In–2 0
0 Qn–1
siendo Ir (para r = 1,..,n−2) la matriz unidad de orden r, de modo que Q-1AQ es una matriztriangular.
Ejemplo VII.6.1
Para la matriz
A =
1 –4 –1 –4
2 0 5 –4
–1 1 –2 3
–1 4 –1 6
se procede como sigue. Los valores propios de A son λ = 1 (triple) y λ = 2 (simple) ylos subespacios de vectores propios V(1) = [(3,6,−4,−5)] y V(2) = [(2,3,−2,−3)],como fácilmente puede comprobarse. Planteamos una matriz
Q1 =
3 0 0 0
6 1 0 0
–4 0 1 0
–5 0 0 1
para la cual se obtiene
Q1-1
=
1/3 0 0 0
–2 1 0 0
4/3 0 1 0
5/3 0 0 1
Q1-1
AQ1 =
1 – 4/3 – 1/3 –4/3
0 8 7 4
0 – 13/3 – 10/3 – 7/3
0 – 8/3 – 8/3 – 2/3
La matriz A1 será

33
A1 =
8 7 4
– 13/3 – 10/3 – 7/3
– 8/3 – 8/3 – 2/3
que tiene como valor propio a λ = 1, siendo el subespacio de vectores propios
V(1) = [(1,−1,0)]
por lo que si construimos la matriz
Q2 =
1 0 0
–1 1 0
0 0 1
será
Q2-1
=
1 0 0
1 1 0
0 0 1
Q2-1
A1Q2 =
1 7 4
0 11/3 5/3
0 – 8/3 – 2/3
con lo que
A2 = 11/3 5/3
– 8/3 – 2/3
que tiene como valor propio a λ = 1, siendo su subespacio de vectores propios
V(1) = [(5,−8)]
Formamos ahora la matriz
Q3 = 5 0
–8 1
para la cual
Q3-1
= 1/5 0
8/5 1 Q3
-1A2Q3 =
1 1/3
0 2
La matriz del cambio de base que trianguliza a A es
Q =
3 0 0 0 6 1 0 0–4 0 1 0–5 0 0 1
1 0 0 00 1 0 00 –1 1 00 0 0 1
1 0 0 00 1 0 00 0 5 00 0 –8 1
=
3 0 0 06 1 0 0
–4 –1 5 0 –5 0 –8 1
ya que efectivamente

34
Q-1AQ =
1 –1 9 –4/3
0 1 3 4
0 0 1 1/3
0 0 0 2
es una matriz triangular.
Este proceso de triangulación puede simplificarse si efectuamos una diagonalización parcialprevia y después triangulizamos la parte de matriz no diagonalizada. Sean λ 1,..., λ k losdistintos valores propios de A, sean dim(V(λ i) = ri y (u i1,...,u iri) una base de vectores propiosde V(λ i) (para i = 1,...,k) y sea s = r1+...+rk. De acuerdo con el teorema de Steinitz los svectores uij pueden sustituir a s vectores de la base (e1,...,en) de V de modo que el resultado
(u11,...,u1r1,...,uk1,...,ukrk,es+ 1' ,...,e n' )
es otra base de V. La matriz de f en esta base es
A1 =
λ 1
λ k
. . C '
C0
Si el p.c. de f tiene todas sus raíces en K, el p.c. de la matriz C también tiene todas sus raícesen K, por lo que existen n−s vectores que forman una base de Kn-s respecto de la cual la matrizC es triangular; si V la matriz cuyas columnas son las componentes de estos n−s vectoresrespecto de la base (e's+ 1,...,e 'n) tendremos
TC = V-1CV
siendo TC la matriz triangular. La matriz
M =
I s 00 V
trianguliza la matriz A1. En efecto
=
0I s
0 VT = M -1A1M
λ 1
λ k
. . C '
C00I s
0 V
-1
λ 1
λ k
. .
0 V V-1
C
VC'
=

35
es decir
λ 1
λ k
. . C '
0
'
TC
=T
Desde un punto de vista práctico el proceso a seguir que este razonamiento justifica es
1) Hallar la base (u11,...,u1r1,...,uk1,...,ukrk,es+ 1' ,...,e n' ).
2) Calcular la matriz A1.
3) Triangulizar la matriz C.
4) Construir la matriz M y hallar la matriz triangular T.
Ejemplo VII.6.2
Para la matriz del ejemplo anterior VII.8.1
A =
1 –4 –1 –4
2 0 5 –4
–1 1 –2 3
–1 4 –1 6
al ser los valores propios λ1 = 1, triple y λ2 = 2, simple, con V(1) = [(3,6,−4,−5)] yV(2) = [(2,3−2,−3)] la base resultado de sustituir dos vectores de la base canónica por(3,6,−4,−5) y (2,3−2,−3) es ((3,6,−4,−5),(2,3−2,−3),(0,0,1,0),(0,0,0,1)).Haciendoel cambio de base calculamos la matriz
A1 =
3 2 0 0
6 3 0 0
–4 –2 1 0
–5 –3 0 1
-1 1 –4 –1 –4
2 0 5 –4
–1 1 –2 3
–1 4 –1 6
3 2 0 0
6 3 0 0
–4 –2 1 0
–5 –3 0 1
=
1 0 13/3 4/3
0 2 –7 –4
0 0 4/3 1/3
0 0 –1/3 2/3
y las matrices C = 4/3 1/3
–1/3 2/3 y C' =
13/3 4/3
–7 –4 .
Triangulizamos C calculando sus valores y vectores propios
4/3–λ 1/3
–1/3 2/3–λ = λ 2
–2λ+1 = 0 ⇒ λ =1 doble y V(1) = [(1,–1)]
con lo que

36
Q1 = 1 0
–1 1 ⇒ TC = Q1
-1CQ1 =
1 1/3
0 1
Como
V = Q1 = 1 0
–1 1 ⇒ C '' = C 'V =
13/3 4/3
–7 –4
1 0
–1 1 =
3 4/3
–3 –4
La matriz del cambio de base que trianguliza a A1 es M =
1 0 0 00 1 0 00 0 1 00 0 –1 1
ya que
T = M-1A1M =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 –1 1
-1
1 0 13/3 4/3
0 2 –7 –4
0 0 4/3 1/3
0 0 –1/3 2/3
1 0 0 0
0 1 0 0
0 0 1 0
0 0 –1 1
=
1 0 3 4/3
0 2 –3 –4
0 0 1 1/3
0 0 0 1
por lo que la matriz
1 0 0 00 1 0 00 0 1 00 0 –1 1
⋅
1 0 0 00 1 0 00 0 1 00 0 –1 1
trianguliza A.
VII.7.- FORMA DE JORDAN
Si los valores propios no pertenecen al cuerpo K, el endomorfismo no es diagonalizable nitriangulizable por lo que es conveniente investigar nuevas formas matriciales simples. Las mássencillas podrían ser aquellas que en sus filas o columnas presentan no más de dos elementosdistintos de cero. Estas matrices existen y recibirán el nombre de matrices de Jordan.
Sea V e.v.s. K y f un endomorfismo de V. La aplicación de K[X], que es el anillo de lospolinomios sobre K, en End(V), que es el anillo de los endomorfismos de V, en la que laimagen de un polinomio P(X) = a0+a1X+...+anXn es el endomorfismo
P(f) = a0+a1f+...+anfn
(donde fn es la aplicación compuesta fofo..n.of) es compatible con la suma y producto ya que paratodo par de polinomios P,Q∈ K[X]
(P+Q)(f) = P(f)+Q(f) (PQ)(f) = P(f)oQ(f)
Se trata pues de un morfismo que hace que el conjunto de endomorfismos que son combinaciónlineal de potencias de f sea un subanillo de End(f), conmutativo y de integridad. El núcleo deeste morfismo está formado por los polinomios cuya imagen es la aplicación nula; si un

37
polinomio P(X) pertenece a este núcleo se le denomina polinomio anulador (p.a.) de f yaque, en este caso
P(f) = a0+a1f+...+anfn = 0V
El polinomio nulo es, obviamente p.a. de f y también lo es el polinomio característico (p.c.) talcomo asegura el teorema de Hamilton-Cayley:
"Si Pc(λ) es el polinomio característico de un endomorfismo f de V, entonces es tambiénpolinomio anulador de f, es decir, Pc(f) = 0V"
En efecto, al polinomio λ va asociada la aplicación f y para cualquier vector de la base es
f(ei) = a1ie1+...+ anien
Sea la matriz B(λ) = A−λI y su matriz adjunta B*(λ) con lo que
B*(λ)B(λ) = det(B(λ)) In
Como
B(f) e1. . .en
=
(a11–f)(e1)+...+a1nen
. . . . . . . . . . . . . .
an1e1+...+(an1–f)(en)
=
0
. . .
0
tenemos para todo i = 1,...,n
Pc(f)(ei) = B*(f)B(f)(ei) = 0
luego Pc(f) es la aplicación nula.
Veamos ahora unas importantes propiedades que relacionan los núcleos de losendomorfismos definidos por los polinomios de K[X]. Sea P(X) un polinomio, P(f) elendomorfismo que define y Nuc(P(f)) su núcleo.
Lema 1.- El subespacio Nuc(P(f)) es invariante por f.
En efecto, para cualquier vector x∈ Nuc(P(f)) es
P(f)(x) = 0 ⇒ 0 = f(P(f)(x)) = P(f)(f(x))
luego f(x)∈ Nuc(P(f)), es decir, f(Nuc(P(f))) ⊆ Nuc(P(f)).
Lema 2.- Si P(X) es divisor de otro polinomio Q(X), entonces Nuc(P(f)) ⊆ Nuc(Q(f)).
En efecto, si Q = PC, entonces para cualquier x∈ Nuc(P(f)) es
Q(f)(x) = C(f)(P(f)(x)) = C(f)(0) = 0
luego x∈ Nuc(Q(f)).

38
Lema 3.- Sea P un polinomio anulador de f y sea
P = P1n1
...Pknk
su descomposición en factores primos. Si Ui = Nuc(Pini
(f)), entonces
V = U1⊕ ...⊕ Uk
Por inducción sobre k. Para k = 2, como P es un p.a. de f si su descomposición factorial esP = Q1Q2, siendo Q1 y Q2 polinomios primos entre sí, por propiedades de la divisibilidadexisten otros dos polinomios B1 y B2 tales que
B1Q1+B2Q2 = 1 ⇒ (∀ u∈ V) (u = (B1Q1)(f)(u)+(B2Q2)(f)(u))
Como (B1Q1)(f)(u)∈ Nuc(Q2(f)), ya que
(Q2(B1Q1))(f)(u) = (B1(Q1Q2))(f)(u) = B1(f)(0) = 0
y (B2Q2)(f)(u)∈ Nuc(Q1(f)), según demuestra un razonamiento análogo, entonces se verificaque Nuc(Q1(f)) ∩ Nuc(Q2(f)) = {0} pues si u∈ Nuc(Q1(f)) ∩ Nuc(Q2(f)) sería Q1(f)(u) = 0 yQ2(f)(u) = 0 por lo que
u = (B1Q1)(f)(u)+(B2Q2)(f)(u) = B1(Q1(f)(u))+B2(Q2(f)(u)) = 0
Así tenemos que V = Nuc(Q1(f)) ⊕ Nuc(Q2(f)), luego el resultado es válido para k = 2.
Supongámoslo válido para k–1; si Q = P2n2...Pk
nk, entonces P = P1n1Q y, por el resultado
anterior, es V = Nuc(P1n1(f))⊕ Nuc(Q(f)). Como un p.a. de la restricción fNuc(Q(f)) es Q, que se
descompone en k–1 factores primos, podemos aplicar la hipótesis de inducción al subespacioNuc(Q(f)) obteniéndose
Nuc(Q(f)) = F'2 ⊕...⊕ F 'k
siendo Fi' = Nuc(Pini(f)) ∩ Nuc(Q(f)). Pero al ser Fi' = Nuc(Pi
ni(f)) ya que
x∈ Nuc(Pini(f)) ⇒ Pi
ni(f)(x) = 0 ⇒ Q(f)(x) = (P2n2...Pi-1
ni-1Pi+1ni+1...Pk
nk)(f)(x) = 0
es
Nuc(Q(f)) = Nuc(P2n2(f))⊕ ...⊕ Nuc(Pk
nk(f))
y el Lema queda demostrado.
Observación : En particular si la descomposición factorial del p.c. es Pc = P1n1...Pk
mk, entonces
V = Nuc(P1m1(f))⊕ ...⊕ Nuc(Pk
mk(f))
y este lema, junto con el Lema 1, reducen el estudio de un endomorfismo sobre un espacioarbitrario al estudio del endomorfismo en un espacio en el que el polinomio característico es unapotencia de un polinomio primo.
39
Sea V e.v.s. K que sea o el cuerpo R o un cuerpo algebraicamente cerrado, p.ej. el cuerpoC, por lo que todo polinomio primo es de grado 1 o 2; sea (e1,...,en) una base de V y f unendomorfismo de V cuya matriz respecto de la base es A = (aij) y, de acuerdo con laobservación del Lema 3, cuyo p.c. sea potencia de un polinomio primo
Pc(λ) = Pm(λ)
siendo P un polinomio unitario de grado igual a 1 o 2. Consideremos los núcleos de losendomorfismos definidos por las sucesivas potencias de P que, de acuerdo con el teorema deHamilton-Cayley y el Lema 2, verificarán
{0} = Nuc(P0(f)) ⊆ Nuc(P1(f)) ⊆ ... ⊆ Nuc(Pm(f)) =V
Sea s el menor número natural tal que Nuc(Ps(f)) = Nuc(Pm(f)), lo que equivale a que s ≤ my Nuc(Ps-1(f)) ⊂ Nuc(Ps(f)).
Lema 4.- Sea el polinomio primo P(x)∈ R(x). La relación binaria sobre R(x) definida por
A(x) R B(x) si y sólo si A(x)–B(x) es múltiplo de P(x)
es de equivalencia y el conjunto cociente K = R(x)/R es un cuerpo para las operaciones
<A(x)>+<B(x)> = <A(x)+B(x)> y <A(x)>·<B(x)> = <A(x)·B(x)>
En efecto, demostrar que la relación es de equivalencia es inmediato, al igual que lascondiciones de cuerpo para (K,+,·). La clase nula está formada por los múltiplos de P(x).
Lema 5 .- Si V es e.v.s. R, P(x) es un polinomio anulador de V y P(x) es primo, entonces Ves también un espacio vectorial sobre el cuerpo K.
En efecto, la operación externa <A(x)>u = A(f)(u) está bien definida, pues
A1(x), A2(x)∈ <A(x)> ⇒ A1(x) = A2(x)+M(x)P(x) ⇒ A1(f)(u) = A2(f)(u)
y las propiedades de espacio vectorial, correspondientes a esta operación, son inmediatas.
Lema 6.- Si P(x) = a0+a1x+a2x2 es un polinomio anulador de V e.v.s. R y P(x) es primo,para todo u∈ V el subespacio [u] de V e.v.s. K es igual al subespacio [u,f(u)] de V e.v.s. R.
En efecto,
[u] = {<A(x)>(u) | <A(x)>∈ K} = {(A(f)+M(f)P(f))(u) | A(x)∈ R(x) , gr(A(x)) ≤ 1}
= {A(f)(u) | A(x)∈ R(x) , gr(A(x)) ≤ 1} = {(a+bf)(u) | a,b∈ R} = [u,f(u)]
Veamos a continuación el teorema que proporciona la base para la forma de Jordan de unendomorfismo f sobre un espacio vectorial V cuando el polinomio característico es potencia deun polinomio primo, es decir, cuando V = Nuc(Ps(f)).
Teorema.- Existen vectores u 11,...,u 1k1,..,u 21,...,u 2k2,..,u s1,...,u sks tales que
40
( u11 , P(f)(u11) ,..., P s-2(f)(u11) , P s-1(f)(u11),
f(u11), f(P(f)(u11)) ,..., f(P s-2(f)(u11)) , f(P s-1(f)(u11)),
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
u1k1 , P(f)(u1k1) ,..., Ps-2(f)(u1k1) , P
s-1(f)(u1k1),
f(u1k1), f(P(f)(u1k1)),..., f(P s-2(f)(u1k1)), f(Ps-1(f)(u1k1)),
u21 ,..., P s-3(f)(u21), P s-2(f)(u21),
f(u21) ,..., f(P s-3(f)(u21)), f(P s-2(f)(u21)),
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
u2k2 ,..., Ps-3(f)(u2k2), P
s-2(f)(u2k2), (1)
f(u2k2) ,..., f(Ps-3(f)(u2k2)), f(P
s-2(f)(u2k2)),
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
us-11 , P(f)(us-11),
f(us-11) , f(P(f)(us-11)),
. . . . . . . . . . . . . . . . . . .
us-1ks-1 , P(f)(us-1ks-1),
f(us-1ks-1), f(P(f)(us-1ks-1)),
us1,
f(us1),
. . . .
usks,
f(usks))
si P es un polinomio primo de grado 2, o
(u11 , P(f)(u11),..., P s-2(f)(u11), P s-1(f)(u11),
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
u1k1, P(f)(u1k1),..., Ps-2(f)(u1k1), P
s-1(f)(u1k1),
u21 ,..., P s-3(f)(u21), P s-2(f)(u21),
. . . . . . . . . . . . . . . . . . . . . . . . .
u2k2,..., P s-3(f)(u2k2), Ps-2(f)(u2k2), (2)
. . . . . . . . . . . . . . . . . . . . . .
us-11 , P(f)(us-11),
. . . . . . . . . . . . . . .
us-1ks-1 , P(f)(us-1ks-1),
us1,
. . .
usks)

41
si P es un polinomio primo de grado 1, verifican
a) forman una base de V
b) los vectores que están en cada una de las columnas i = 1,2,...,s de estos cuadrosson vectores tales que la suma del subespacio Nuc(Ps-i(f)) con el subespacio quegeneran es directa e igual a Nuc(Ps-i+1(f)).
En efecto, vamos a demostrar el teorema por inducción sobre s, es decir, el menor númeronatural tal que Nuc(Ps(f)) = Nuc(Pm(f))
Para s = 1 es Nuc(P(f)) = V y entonces P es un polinomio anulador de V. Según el Lema 5,V es también un espacio vectorial sobre el cuerpo cociente K ; sea (u1,...,uk) una base.Obviamente los vectores u1,f(u1),...,uk,f(uk) pertenecen a Nuc(P(f)). Además, de acuerdo conel Lema 6
V = [u1]⊕ ...⊕ [uk] = [u1,f(u1)]⊕ ...⊕ [uk,f(uk)]
y (u1,f(u1),...,uk,f(uk)) es una base de V ya que generan V y son l.i. pues
α1u1+β1f(u1)+...+α kuk+βkf(uk) = 0 ⇒ (α1+β1f)(u1)+...+(α k+βkf)(uk) = 0
y como u1,...,uk son vectores l.i. de V e.v.s.K es (α 1+β1x) = ... = (α k+βkx) = <0>, esdecir, son múltiplos de P. Al ser de grado 2 deben ser α1 = β1 = ... = αk = βk = 0.
Supongamos el teorema cierto para s–1. Como el subespacio P(f)(V) tiene como polinomioanulador a Ps-1(x) existen w 11,...,w 1k1,..,w 21,...,w 2k2,..,w s-11,...,w s-1ks- 1 que verifican lasconclusiones del teorema. Por ello, y para i = 1,...,s–1 y j = 1,...,ks-1, sean los vectores uij deV tales que wij = P(f)(uij), sea A el conjunto que forman uij, f(uij), P(f)(uij), f(P(f)(u ij)),...,Ps-1(f)(uij), f(P
s-1(f)(uij)) y sea U el subespacio que generan. Se verifica:
a) A es l.i. ya que si en la ecuación de la independencia lineal de todos sus vectoresaplicamos Ps-1(f) a ambos miembros se obtiene, despues de eliminar los vectores nulos,
α1Ps-1(f)(u1)+β1f(Ps-1(f)(u1))+...+αkPs-1(f)(uk)+βkf(P
s-1(f)((uk)) = 0 ⇒
⇒ Ps-2(f)(α 1w1+β1f(w1)+...+α kwk+βkf(wk)) = 0 ⇒ ⇒ α1w1+β1f(w1)+...+α kwk+βkf(wk)) = 0 ⇒ α1 = β1 =...= α k = βk = 0
teniendo en cuenta la hipótesis de inducción. Sustituyendo estos escalares en la ecuación dela independencia lineal y hallando la imagen de ambos miembros por Ps-2(f), ysucesivamente por Ps-3(f) ,..., P(f), se prueba que todos los escalares son nulos.
b) Son iguales los subespacios P(f)(V) = P(f)(U), por construcción del subespacio U.
c) V = U+Nuc(P(f)) ya que para cualquier vector x∈ V es
P(f)(x)∈ P(f)(V) = P(f)(U) ⇒ (∃ y∈ U) (P(f)(x) = P(f)(y) ⇒ x–y∈ Nuc(P(f)))
y x = y+(x–y).
d) Si G es el subespacio suplementario de Nuc(P(f))∩U respecto de Nuc(P(f)), es decir, el

42
subespacio generado por los vectores l.i. que completan una base de Nuc(P(f))∩U hasta unabase de Nuc(P(f)), tenemos Nuc(P(f)) = (Nuc(P(f))∩U)⊕ G.
e) Se verifica que V =U⊕ G. En efecto, por una parte para cualquier x∈ V es x = y+z, con y∈ U y z∈ Nuc(P(f)); por d), será z = z1+z2 con z1∈ Nuc(P(f))∩U y z2∈ G lo que implicaque x = (y+z1)+z2 con y+z1∈ U y z2∈ G; además si existiera algún vector t∈ U∩G, seríat∈ U y t∈ G⊆ Nuc(P(f)) y por construcción de G, t = 0.
f) Al ser G⊆ Nuc(P(f)), es P(x) polinomio anulador de G y G es espacio vectorial sobre elcuerpo cociente K; sea (us1,...,usks) una base. Obviamente los vectores us1, f(us1),..., usks,f(usks) pertenecen a Nuc(P(f)) y, por el razonamiento hecho en el caso s = 1, forman unabase de G como espacio vectorial sobre R.
Todo ello demuestra el teorema para el caso gr(P) = 2. Observemos que
Nuc(P s-1(f))⊕ [u11,...,u1k1,f(u11),...,f(u1k1)] = Nuc(P s(f))
luego
2k1 = dim(Nuc(Ps(f)))–dim(Nuc(Ps-1(f)))
y análogamente
Nuc(P s-2(f))⊕ [u21, f(u21),...,u2k2, f(u2k2)]⊕
⊕ [P(f)(u11),...,P(f)(u1k1),P(f)(f(u11)),...,P(f)(f(u1k1))] = Nuc(P s-1(f))
luego
2k1+2k2 = dim(Nuc(Ps-1(f)))–dim(Nuc(Ps-2(f)))
y así sucesivamente.
En el caso gr(P) = 1, los razonamientos siguen siendo válidos, pero más simples pues nohay que considerar los vectores de la forma f(Pk(f)(uij)). Además
Nuc(P s-1(f))⊕ [u11,...,u1k1] = Nuc(P s(f))
de donde
k1 = dim(Nuc(Ps(f)))–dim(Nuc(Ps-1(f)))
y análogamente
Nuc(P s-2(f))⊕ [u21,...,u2k2]⊕ [P(f)(u11),...,P(f)(u1k1)] = Nuc(P s-1(f))
de donde
k1+k2 = dim(Nuc(Ps-1(f)))–dim(Nuc(Ps-2(f)))

43
y así sucesivamente.
Calculemos la correspondiente matriz de Jordan, para cada caso, es decir la matriz de f en labase cuya existencia demuestra el teorema.
Si el grado de P(X) es igual a 2, es decir, si P(λ ) = λ2+a1λ+a0, la matriz de f tendrá porcolumnas las imágenes de los vectores; como f2 = P(f)–a0–a1f, será
f2(Pk-1(f)(uij)) = Pk-1(f)(f2(uij)) = Pk-1(f)((P(f)–a0–a1f)(uij)) =
= –a0Pk-1(f)(uij)–a1Pk-1(f)(f(uij))+Pk(f)(uij)
para k = 1...,s y la matriz estará formada por k1 submatrices o "cajas" del tipo
J1 =
0 –a0
1 –a1
1 0 –a0
1 –a1
. . . . . .
1 0 –a0
1 –a1
(3)
de orden (2s,2s), por k2 "cajas" de orden (2(s–1),2(s–1)) y, así sucesivamente, si llamamos ral número de naturales ki distintos de cero, tendremos hasta kr "cajas" de orden(2(s–r+1),2(s–r+1)). Observemos que cada dos filas de vectores de la base (1) han definido unacaja.
Si grado de P(x) es igual a 1, es decir, si P(λ) = λ+a, como f = P(f)–a, será para k = 1,...,s
f(Pk-1(f)(uij)) = Pk-1(f)(f(uij)) = Pk-1(f)((P(f)–a)(uij)) = –aPk-1(f)(uij))+Pk(f)(uij)
la matriz estará formada por k1 submatrices o "cajas" del tipo
J1 =
–a
1 –a
. . .
1 –a
(4)
de orden (s,s), por k2 "cajas" de orden (s–1,s–1) y, así sucesivamente, si llamamos r al númerode naturales ki distintos de cero, tendremos hasta kr "cajas" de orden (s–r+1,s–r+1).Observemos asímismo como cada fila de vectores de la base (2) ha definido una caja.
En ambos caso obtenemos como matriz de Jordan

44
J =
J 1
. . . J1
. . . . . .
Jr
. . . Jr
(5)
con cajas del tipo (3) o (4).
Procedimiento práctico
Restringiremos el procedimiento de obtención de la matriz de Jordan y la base asociada comosi el p.c. fuera Pm(x), con gradP(x) igual a 1 o 2.
Consideremos dimNucP0(f), dimNucP1(f),...,dimNucPm(f) y sea s el mayor número naturaltal que s ≤ m y dimNucPs(f)−dimNucPs-1(f) ≠ 0. Si k1 es el número natural tal que
dimNucPs(f)−dimNucPs-1(f) = k1·gradP(x)
la forma de Jordan contendrá k1 submatrices, o "cajas", del tipo
J1 =
–a
1 –a . .
1 –a
si P(x) = x+a
de orden (s,s), o bien
J1 =
0 –a0
1 –a1
1 0 –a0
1 –a1
. . . . .
1 0 –a0
1 –a1
si P(x) = x 2+a1x+a0
de orden (2s,2s). Para construir la base, hallamos vectores u11,...,u1k1 tales que pertenezcan aNucPs(f)−NucPs-1(f) que sean l.i. y sea l.i. el conjunto

45
{u11 , P(f)(u11),..., P s-2(f)(u11), P s-1(f)(u11),
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
u1k1, P(f)(u1k1),..., Ps-2(f)(u1k1), P
s-1(f)(u1k1)}
si P(x) = x+a, o bien
{ u11 , P(f)(u11) ,..., P s-2(f)(u11) , P s-1(f)(u11),
f(u11), f(P(f)(u11)) ,..., f(P s-2(f)(u11)) , f(P s-1(f)(u11)),
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
u1k1 , P(f)(u1k1) ,..., Ps-2(f)(u1k1) , P
s-1(f)(u1k1),
f(u1k1), f(P(f)(u1k1)),..., f(P s-2(f)(u1k1)), f(Ps-1(f)(u1k1))}
si P(x) = x2+a1x+a0.
Se reitera el proceso, es decir, si dimNucPs-1(f)−dimNucPs-2(f) ≠ 0 y k2 es el númeronatural, mayor o igual que 0, tal que
dimNucPs-1(f)−dimNucPs-2(f) = (k1+k2)·gradP(x)
k2 es el número de submatrices, o "cajas" J2, del tipo anterior pero de orden (s−1,s−1), sigrad(P(x)) = 1, o de orden (2(s−1),2(s−1)), si grad(P(x)) = 2 y se hallan vectores u21,...,u2k2
tales que pertenezcan a NucPs-1(f)−NucPs-2(f) de modo que sean linealmente independientescon los vectores anteriores y sea también l.i. el conjunto
{u21 , P (f)(u21),..., P s-3(f)(u21), P s-2(f)(u21),
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
u2k2, P (f)(u2k2),..., Ps-3(f)(u2k2), P
s-2(f)(u2k2)}
si P(x) = x+a, o bien
{ u21 , P (f)(u21) ,..., P s-3(f)(u21) , P s-2(f)(u21),
f(u21), f(P (f)(u21)),..., f(P s-3(f)(u21)), f(P s-2(f)(u21)),
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
u2k2 , P (f)(u2k2) ,..., Ps-3(f)(u2k2) , P
s-2(f)(u2k2),
f(u2k2), f(P (f)(u2k2)),..., f(P s-3(f)(u2k2)), f(Ps-2(f)(u2k2))}
si P(x) = x2+a1x+a0. Así sucesivamente hasta obtener la matriz de Jordan (3) o (4) y completarsu correspondiente base (1) o (2).
Ejemplo VII.7.1.
Supongamos un espacio vectorial V, un endomorfismo f y un polinomio P de grado 1

46
tal que los núcleos de los endomorfismos que definen sus potencias sean tales que
{0} = Nuc(P0(f)) ⊂ Nuc(P1(f)) ⊂ Nuc(P2(f)) ⊂ Nuc(P3(f)) ⊂ Nuc(P4(f)) ⊂ Nuc(P5(f)) = V
y sus dimensiones sean tales que
k1 = dim(Nuc(P5(f)))–dim(Nuc(P4(f))) = 2 ⇒ k1 = 2
k1+k2 = dim(Nuc(P4(f)))–dim(Nuc(P3(f))) = 3 ⇒ k2 = 1
k1+k2+k3 = dim(Nuc(P3(f)))–dim(Nuc(P2(f))) = 3 ⇒ k3 = 0
k1+k2+k3+k4 = dim(Nuc(P2(f)))–dim(Nuc(P1(f))) = 6 ⇒ k4 = 3
k1+k2+k3+k4+k5 = dim(Nuc(P1(f)))–dim(Nuc(P0(f))) = 6 ⇒ k5 = 0
La forma de Jordan para la matriz de f tendrá 2 "cajas" de orden (5,5), 1 "caja" deorden (4,4), 0 "cajas" de orden (3,3), 3 "cajas" de orden (2,2) y 0 "cajas" de orden(1,1). Completando cada Nuc(Pi(f)) con vectores suficientes hasta formar Nuc(Pi+1(f))tendremos
Nuc(P4(f))⊕ [u11,u12] = Nuc(P5(f))
Nuc(P3(f))⊕ [P(f)(u11),P(f)(u12),u21] = Nuc(P4(f))
Nuc(P2(f))⊕ [P2(f)(u11),P2(f)(u12),P(f)(u21)] = Nuc(P3(f))
Nuc(P1(f))⊕ [P3(f)(u11),P3(f)(u12),P2(f)(u21),u41,u42,u43] = Nuc(P2(f))
Nuc(P0(f))⊕ [P4(f)(u11),P4(f)(u12),P3(f)(u21),P(f)(u41),P(f)(u42),P(f)(u43)] = Nuc(P1(f))
y la base asociada a la forma de Jordan será
(u11,P(f)(u11),P2(f)(u11),P3(f)(u11),P4(f)(u11),
u12,P(f)(u12),P2(f)(u12),P3(f)(u12),P4(f)(u12),
u21,P(f)(u21),P2(f)(u21),P3(f)(u21),
u41,P(f)(u41),u42,P(f)(u42),u43,P(f)(u43))
Ejemplo VII.7.2.
Para el endomorfismo de matriz
–1 0 0 0
–6 1 1 1
6 –2 –2 –1
6 –2 –1 –2
tenemos Pc(x) = (x+1)4, P(x) = x+1. Las dimensiones de los núcleos son
dim Nuc(f+1)0 = 0 , dim Nuc(f+1) = 3
dim Nuc(f+1)2 = dim Nuc(f+1)3 = dim Nuc(f+1)4 = 4

47
y como dim Nuc(f+1)2−dim Nuc(f+1) = 1 es s = 2. Al ser gradP(x) = 1, es k1 = 1 ytenemos la caja
–1 0
1 –1
Hallamos un vector u11 tal que pertenezca a Nuc(f+1)2 y no pertenezca a Nuc(f+1);como u11 = (0,0,1,0) ∈ Nuc(f+1)2 = R4 y (f+1)(0,0,1,0) = (0,1,−1,−1) ≠ (0,0,0,0)tenemos dos vectores para la base de Jordan: (0,0,1,0) y (0,1,−1,−1).
Como dim Nuc(f+1)1−dim Nuc(f+1)0 = 3, gradP (x) = 1 y k1 = 1, es k2 = 2 ytendremos dos cajas del tipo
(−1)
Hallamos dos vectores u21 y u22 tales que pertenezcan a Nuc(f+1) y no pertenezca aNuc(f+1)0; como u21 = (0,0,−1,1) u22 = (1,2,1,1) pertenecen a Nuc(f+1), nopertenecen a Nuc(f+1)0 = Nuc I = {(0,0,0,0)} y son l.i. con los vectores anteriores,tenemos como matriz de Jordan
–1 0
1 –1
–1
–1
y la base de Jordan es
((0,0,1,0), (0,1,−1,−1),(0,0,−1,1),(1,2,1,1))
Ejemplo VII.7.3.
Para el endomorfismo de matriz
0 3 2 2
–1 –1 –1 0
0 0 0 –1
0 1 2 1
tenemos Pc(x) = (x2+2)2, P(x) = x2+2. Las dimensiones de los núcleos son
dim Nuc(f 2+2)0 = 0 , dim Nuc(f 2+2) = 2 , dim Nuc(f 2+2)2 = 4
y como dim Nuc(f 2+2)2−dim Nuc(f 2+2) = 2 es s = 2. Al ser gradP(x) = 2, es k1 = 1y tenemos la única caja

48
0 –2
1 0
1 0 –2
1 0
Hallamos un vector u11 tal que pertenezca a Nuc(f2+2)2 y no pertenezca a Nuc(f 2+2);como u11 = (1,0,0,0) ∈ Nuc(f2+2)2 = R4, (f2+2)(1,0,0,0) = (−1,1,0,−1) ≠ (0,0,0,0), f(1,0,0,0) = (0,−1,0,0) y f((f2+2)(1,0,0,0)) = (1,0,1,0) son l.i, tenemos como basede Jordan
((1,0,0,0),(0,−1,0,0), (−1,1,0,−1),(1,0,1,0))
Si el polinomio característico Pc tiene otros factores primos, se desarrolla el proceso anteriorpara cada uno de ellos. La forma de Jordan final se construye alineando por la diagonal todaslas matrices J obtenidas y completando con 0 el resto de los elementos de las filas y columnasde la matriz resultante. La base asociada es la unión de todas las bases obtenidas para cada unode los factores primos de Pc.
Ejemplo VII.7.4.
Para el endomorfismo de R7 cuya matriz respecto de la base canónica sea
5 –4 4 3 0 –4 1
–13 28 0 –13 –4 –2 –9
–40 77 –10 –42 –12 7 –23
–12 21 0 –8 –3 –2 –8
–19 49 1 –26 –7 –4 –14
–24 45 –6 –24 –7 4 –14
–13 22 –5 –12 –2 4 –6
tenemos Pc(x) = –(x2+2)2(x–2)3 que tiene dos factores primos en su descomposición.Siguiendo lo anterior, desarrollaremos el proceso para cada uno de los dos factores Pc1 = (x–2)3 y Pc2(x) = –(x2+2)2.
Para Pc1(x) = (x–2)3 es P(x) = x–2. Las dimensiones de los núcleos son
dim Nuc(f–2)0 = 0 , dim Nuc(f–2) = 2 , dim Nuc(f–2)2 = 3 , dim Nuc(f–2)3 = 3
y como dim Nuc(f–2)2–dim Nuc(f–2) = 1 es s = 2; al ser gradP(x) = 1 tenemos k1 = 1y k2 = 1. Así el primer bloque de la matriz de Jordan correspondiente a este factorprimo del polinomio característico es

49
2 0 0
1 2 0
0 0 2
0 0 0
0 0 0
0 0 0
0 0 0
Para buscar la base de Jordan, hallemos un vector u11 tal que pertenezca a Nuc(f–2)2 yno pertenezca a Nuc(f–2); p.ej. puede ser el u11 = (0,0,–1,2,–4,0,–1) para el cual es (f–2)(u11) = (1,–1,–1,0,–3,0,–3). Hallemos ahora un vector u21 tal que pertenezca aNuc(f–2) y no pertenezca a Nuc(f –2)0; p.ej. puede ser el u21 = (0,1,0,1,1,0,1) que esl.i. con los anteriores.
Para el otro factor primo Pc2(x) = –(x2+2)2 es P(x) = x2+2. Las dimensiones delos núcleos son
dim Nuc(f 2+2)0 = 0 , dim Nuc(f 2+2) = 2 , dim Nuc(f 2+2)2 = 4
y como dim Nuc(f 2+2)2–dim Nuc(f 2+2) = 2 es s = 2. Al ser gradP(x) = 2, es k1 = 1y tenemos una única caja de modo que el segundo bloque de la matriz de Jordancorrespondiente a este factor primo será
0 0 0 0
0 0 0 0
0 0 0 0
0 –2 0 0
1 0 0 0
0 1 0 –2
0 0 1 0
Para completar la base de Jordan, en primer lugar hallemos un v11 tal que pertenezca aNuc(f2+2)2 y no pertenezca a Nuc( f 2+2); p.ej. puede ser el v11 = (1,0,0,0,0,–2,–1).Tenemos que f(v11) = (12,0,–31,0,3,–18,–15), (f2+2)(v11) = (–5,3,13,3,2,11,9) yf(f2+2)(v11) = (–11,–1,21,–1,–7,9,16). Estos vectores completan la base de Jordan.
((1,0,0,0,0,–2,–1),(–5,3,13,3,2,11,9),(12,0,–31,0,3,–18,–15),
(–11,–1,21,–1,–7,9,16),(0,0,–1,2,–4,0,–1),(1,–1,–1,0,–3,0,–3),(0,1,0,1,1,0,1))
respecto de la cual el endomorfismo tiene por matriz
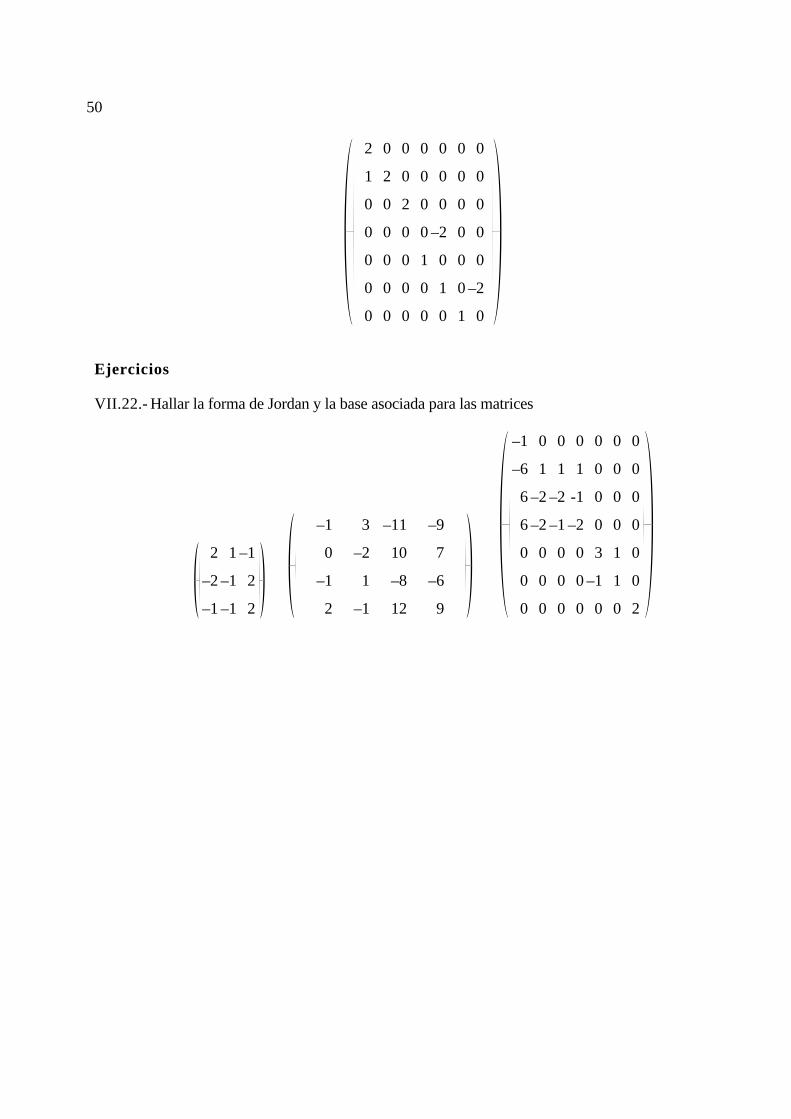
50
2 0 0 0 0 0 0
1 2 0 0 0 0 0
0 0 2 0 0 0 0
0 0 0 0 –2 0 0
0 0 0 1 0 0 0
0 0 0 0 1 0 –2
0 0 0 0 0 1 0
Ejercicios
VII.22.- Hallar la forma de Jordan y la base asociada para las matrices
2 1 –1
–2 –1 2
–1 –1 2
–1 3 –11 –9
0 –2 10 7
–1 1 –8 –6
2 –1 12 9
–1 0 0 0 0 0 0
–6 1 1 1 0 0 0
6 –2 –2 -1 0 0 0
6 –2 –1 –2 0 0 0
0 0 0 0 3 1 0
0 0 0 0 –1 1 0
0 0 0 0 0 0 2
51
PROCEDIMIENTOS PRÁCTICOS BASICOS
Los procedimientos básicos que forman los elementos constructivos a partir de los cualespueden abordarse los problemas que tratan sobre las materias desarrolladas en este Cuaderno,son los siguientes:
- Hallar valores y vectores propios de un endomorfismo.
- Diagonalizar una matriz.
- Hallar la potencia de una matriz diagonalizable.
- Triangular una matriz.
- Hallar la forma de Jordan y la base de Jordan.

52
EJERCICIOS DE RECAPITULACION
VII.23.- Sea P3(X) el espacio vectorial de los polinomios de grado menor o igual a tres concoeficientes reales. Sea f : P3(X) P3(X) definida por f(p(X)) = βp(X)+p'(X)con β∈ R.
a) Probar que f es una aplicación lineal.
b) Hallar Nuc(f) e Im(f) según los distintos valores de β.
c) Para β = 1 hallar la matriz asociada a f en la base canónica y en la base formada por los polinomios (2,X+1,X2−1,X3+1).
d) Estudiar la diagonalización de f.
VII.24.- Sea E = M(2,2)(R)
a) Comprobar que <A,B> = traza (BtA) es un producto escalar en E.
b) Verificar que
B = ( 1 0
0 0 ,
1 1
0 0 ,
1 1
1 0 ,
1 1
1 1 )
es una base de E. Aplicar el método de Gramm-Schmidt para obtener a partir de B unabase ortonormal de E.
c) Sea f : E E A f(A) = AM+MA
con M = 0 2
2 –3 . Hallar la matriz de f en la base ortonormal del apartado anterior,
razonar si es diagonalizable y en caso afirmativo hallar una base ortonormal de vectorespropios.
VII.25.- Probar que si A y B son dos matrices del mismo orden y A es regular, entonces AB yBA tienen el mismo polinomio característico.
VII.26.- Sea A una matriz cuadrada regular idempotente. Demostrar que no admite más valor propio que el 1.
VII.27.- Sea f : R4 R4
(x,y,z,t) (4z,4t,4x,4y)
Hallar una base ortonormal de R4 en la que la matriz asociada a f sea diagonal.Determinar esta matriz.

53
VII.28.- Sea E un espacio vectorial sobre C de dimensión cuatro; f un endomorfismo de E, ysea (u ,f(u),f 2(u),f 3(u)) una base de E. Sabiendo que f 4(u) = u, hallar la matrizasociada a f en dicha base. Demostrar que f es diagonalizable y obtener la matrizdiagonal asociada.
VII.29.- Calcular los valores propios y vectores propios de la matriz:
A =
2 2 – 2
2 4 2 2
– 2 2 2 1
y diagonalizarla.
VII.30.- Diagonalizar los siguientes endomorfismos:
A =
3 0 8
3 –1 6
–2 0 –5
y (A+I)
VII.31.- Sea f : R 4 R4 un endomorfismo definido por f(x,y,z,t) = (x,2x,x,x+ay).Estudiar su diagonalización según los valores de a, y obtener su forma diagonal asicomo la base respecto de la cual tiene matriz diagonal.
VII.32.- Hallar el rango de la matriz
a –1 d
b 0 e
c 1 f
sabiendo que admite como vectores propios (0,1,−1),(1,2,0),(−2,0,1).
VII.33.- Sea B = (e1,e2,e3) la base canónica de R3, y sea U = {u1,u2,u3} el conjunto de vectores:
u1 = (4,1,1) u2 = (5,2,1) u3 = (3,1,1)
y sea f la aplicación lineal de R3 en R3 tal que:
f(u1) = u1, f(u2) = −u2, f(u3) = 0
a) Probar que U es una base de R3 y calcular la matriz de paso de B a U y su inversa.
b) Calcular la matriz de f en las bases B y U.
c) Calcular las bases del núcleo y de la imagen de f.
d) Diagonalizar la matriz A de la aplicación f. Calcular An.
VII.34.- Hallar la forma de Jordan y la base asociada para las matrices
54
3 1 0 0
–4 –1 0 0
7 1 2 1
–17 –6 –1 0
,
2 0 3 0
1 2 0 3
0 0 2 0
0 0 1 2
,
0 1 0 0
0 0 2 0
0 0 0 3
0 0 0 0
,
–1 –2 0 0
0 1 0 0
1 1 0 1
1 1 1 0
BIBLIOGRAFIA
de Burgos J. (1988). Curso de Algebra y Geometría. Alhambra. Madrid.
Dixmier J. (1974). Matemáticas Generales. Editorial Aguilar. Madrid.
Godement R. (1974). Algebra. Tecnos. Madrid.
Hoffmann R., Kunze R. (1974). Algebra Lineal. Prentice. Madrid.
Lentin A., Rivaud J. (1973). Algebra Moderna. Aguilar. Madrid.
Noble B., Daniel J.W. (1988). Applied Linear Algebra. Prentice Hall. London.
Puerta F. (1986). Algebra lineal. Marcombo. Barcelona.
Queysanne M. (1985) Algebra. Vicens-Vives. Barcelona.
Sainz M.A., Serarols J.L. Pérez A.M. (1994). Álgebra. Escuela Politécnica Superior. Gerona.
Strang G. (1982). Algebra Lineal y sus aplicaciones. Fondo Educativo Interamericano. Méjico.
Torregrosa J.R., Jordan C. (1987). Algebra Lineal y sus aplicaciones. McGraw-Hill. Madrid.
Xambó S. (1977). Algebra Lineal y geometrias lineales. EUNIBAR. Barcelona.









![-3 - Comportements asymptotiques : stabilité, attractivité · xe àc ∈EV Aõ[]=0 ... aii ||aij ||aji ajj](https://img.pdfslide.tips/doc/110x75/5bf841a409d3f209398c08b0/-3-comportements-asymptotiques-stabilite-attractivite-xe-ac-ev-ao0.jpg)



















