Embed Size (px)
Citation preview

산업화지원사업
최종보고서
건설 구조물의 안 리 모니터링을 한 다 센싱 무선
계측 시스템 개발
2009 년 6 월 30 일
주 기 한 국 건 설 기 술 연 구 원
참 여 기 업 지 디 에 스 코 리 아




- i -
과 제 요 약 서 ( 록)
사 업 명건설구조물의 안 리 모니터링을 한 다 센싱 무선
계측시스템 개발
주 연구기 한국건설기술연구원 주 연구책임자 박 기 태
개 발 기 간 2008. 7. 1 ~ 2009. 6. 30 ( 12 개월)
개발사업비
(천원)
정부출연기업부담
계물
70,000 9,340 14,060 93,400
공동연구기 지디에스코리아
탁연구기
주요기술용어안 리, 다 센싱, 무선 계측, 건설 구조물, 모니터링 시
스템, 스마트 구조물, 네트워크
1. 기술개발목표
- 첨단 센서 기술과 데이터 분석 기술을 이용하여 사용이 간편하고 경제 인
건설 구조물 안 리 용 계측/분석 시스템 개발
2. 기술개발의 목 요성
- 매년 약 2조원 이상의 산이 도로상 시설물 유지 리에 소요되고 있으나
안 사고는 끊임없이 발생하고 있음.
- 합리 이고 체계 인 모니터링 시스템을 도입하여 사회기반 시설물을 안
하게 유지 리함으로써 국민의 생명보호는 물론 국가 산 감, 기술 선도
를 통한 국가 경쟁력 확보를 이룰 수 있음.
- 재 용되고 있는 유선 센서 장치들은 센서의 설치 유지가 어려움.
무선 센서 장치들의 경우에는 센서의 성능과 독립 이고 구 인 원 공
, 효과 인 통신거리와 통신 속도, 데이터 처리를 한 임베디드 로그
램 등의 문제들이 해결되어야 함.
- 세계 으로 통신 기술과 센서, 자 기술은 속한 속도로 발 하고 있
으므로 무선 계측을 통한 시설물 모니터링 분야에서 기술 선 이 실히
요구되는 시 임.

- ii -
3. 기술개발의 내용 범
- 건설 구조물 주변 환경 정보 획득과 구조 성능 정보 획득이 가능한
력(Low Power), 가(Low Cost), 지능 (On-borad CPU), 무선(Wireless)인
다 센싱 계측 장치 하드웨어 개발
- 계측 데이터를 실시간 분석하여, 이용자 안 정보를 제공하기 한 임베디
드 알고리즘 개발
4. 기술개발 결과
- 연구동향 분석 자료수집
▪결빙감지 련 기술, 안개감지 련 기술, 화재감지 련 기술
- 환경정보 알고리즘 개발
- 무선 다 센서 시스템 H/W 개발
- 무선 통신 로토콜 작성
- 응용 로그램 개발
- 시스템 시제품 제작
- 실용화
5. 기 효과
- 안 리의 기반이 되는 신호처리 기술을 첨단 IT기술과 목하여 유비쿼
터스 컴퓨 기술에 용함으로써 시설물 안 성 모니터링 기술을 선진국
수 으로 향상.
- 매년 도로상 시설물 유지 리(약 2조원/연)와 자연재해 피해복구(평균 5천
억원/연)에 사용되는 비용 감.
- 국가주요기반 시설물의 안 리 네트워크를 구축하기 한 차세 용 스마
트 센서의 신호처리 기술을 체계화함으로써 재해를 사 에 방하여 피해
복구비의 사회 재투자 유도.
- 건설 구조물의 안 사고를 사 에 방하여 국민의 생명보호.
- 국내의 원격 무선 제어 계측 기술과 건설 구조물 안 리 분야를 세계
기술수 으로 업그 이드. 원천 기술의 확보로 인한 시장 선 을 통한 경
쟁력 확보.
- i -
< 목 차 >
제 1 장 서 론 ············································································ 1
제 1 절 연구 배경 및 필요성 ··································································· 1
제 2 절 연구 개발 목표 및 내용 ····························································· 2
제 2 장 국내외 연구 및 기술개발 현황 ···································· 5
제 1 절 연구 동향 ······················································································· 5
1. 국외 ················································································································· 5
2. 국내 ················································································································· 7
제 2 절 센싱 기술 조사 및 분석 ····························································· 8
1. 결빙감지 련 기술····················································································· 8
2. 안개감지 련 기술····················································································· 9
3. 화재감지 련 기술····················································································· 9
제 3 절 환경정보 알고리즘 개발 ··························································· 10
제 3 장 다중 센싱 무선 계측시스템 개발 ······························ 13
제 1 절 개 요 ··························································································· 13

- ii -
제 2 절 센서 설계 ····················································································· 14
1. MEMS-Based 가속도 센서···································································· 14
2. 온습도 센서································································································· 23
3. 포토 센서····································································································· 25
4. 센서보드 설계/PCB 제작 ········································································· 25
5. 마이크로컨트롤러 ····················································································· 27
6. 무선통신 모듈 ····························································································· 34
제 3 절 다중 센싱 무선 센서 제작 ······················································· 37
1. 원 장치····································································································· 38
2. 시스템 구성································································································· 39
제 4 절 응용 프로그램 개발 ································································· 40
1. 주(Main) 로그램···················································································· 40
2. 가속도 데이터를 활용한 안정성평가 로그램 ································· 43
3. 환경정보 분석 로그램··········································································· 44
제 4 장 성능검증 실험 ······························································ 47
제 1 절 현장실험을 통한 상대내하력평가 시스템 검증 ················· 47
1. 실험방법······································································································· 47
2. 실험결과······································································································· 48
3. 상 내하력(RLC) 평가 결과··································································· 49
제 5 장 결 론 ·········································································· 51
- iii -
< 표 차 례>
[표 1] Filter Capacitor Selection, CX and CY(ADXL210) ············································· 18
[표 2] Resistor Values to Set T2(ADXL210) ···································································· 18
[표 3] Trade-Offs Between Bandwidth, rms Noise(ADXL210) ···································· 19
[표 4] 마이크로컨트롤러의 카운터 속도와 T2의 주기 그리고 분해능과의 관계 ··· 19
[표 5] PWM 출력 센서 시스템 모듈들의 설계 성능 목표 ·········································· 20
[표 6] Trade-Offs Between Bandwidth & rms Noise(ADXL203) ································ 22
[표 7] Analog 출력 센서 시스템 모듈의 설계 성능 목표 ············································ 23
[표 8] SHT11 성능 사양 ······································································································ 24
[표 9] 주파수에 따른 전자파의 분류 ················································································ 36
[표 10] MSP 제품 특징 ········································································································ 37
[표 11] 무선 센서 장치의 예상 전력 소모량 ·································································· 39
< 그 림 차 례>
[그림 1] WiMMs 개발 과정 ··································································································· 5
[그림 2] MICA mote 개발 과정 ···························································································· 7
[그림 3] 노면결빙 감지장치 ·································································································· 8
[그림 4] 노면온도 감지장치 ·································································································· 8
[그림 5] 안개경보장치 ············································································································ 9
[그림 6] 화재 감지 센서 ······································································································ 10
[그림 7] 결빙감지 알고리즘 ································································································ 11
[그림 8] 안개감지 알고리즘 ································································································ 11
[그림 9] 화재감지 알고리즘 ································································································ 11
[그림 10] 다중 센싱 무선 센서 장치 구성도 ·································································· 13
[그림 11] MEMS 기술에 의한 미세 기계 구조 ······························································· 14
[그림 12] 반도체형 가속도 센서의 구조 ·········································································· 15
[그림 13] ADXL202 BEAM 구조(a) & (b)조립 ································································ 15
- iv -
[그림 14] Duty cycle Signal ································································································ 16
[그림 15] PWM 출력 센서 회로도 ·················································································· 17
[그림 16] Design of Sensor System Module ···································································· 20
[그림 17] Circuit Architecture of ADXL203 ···································································· 21
[그림 18] 온/습도 센서(SHT11) 구성 블록도 ··································································· 23
[그림 19] SHT11 전형적인 응용 회로도 ·········································································· 24
[그림 20] 포토 센서 구성도 ······························································································ 25
[그림 21] TSL250RD 센서 ··································································································· 25
[그림 22] 센서보드 설계도 ······························································································ 26
[그림 23] 센서보드와 메인 보드 ························································································ 26
[그림 24] 제어 및 처리 모듈의 설계도 ············································································ 27
[그림 25] Atmega128 구조 ·································································································· 28
[그림 26] Atmega128 메모리 구조 ···················································································· 29
[그림 27] 시리얼 전송 데이터 구조 ·················································································· 31
[그림 28] DTE & DCE 의 RS-232C 연결 방법 ······························································ 32
[그림 29] A/D Converter의 error 종류 ············································································ 34
[그림 30] 블루투스 MSP(Multi Access Point) ·································································· 37
[그림 31] 본 연구에서 개발한 다중 센싱 무선 센서 ···················································· 38
[그림 32] 태양 전지판을 이용한 전원공급장치 ······························································ 39
[그림 33] 4-CH 다중 센싱 무선 계측 시스템 ································································ 40
[그림 34] 주 프로그램의 구성 ···························································································· 41
[그림 35] 주 프로그램의 신호 그래프 창 ········································································ 41
[그림 36] 주 프로그램의 해석 창 ······················································································ 42
[그림 37] 주 프로그램의 통신제어 창 ·········································································· 42
[그림 38] 주 프로그램의 관측 창 ···················································································· 42
[그림 39] 상대내하력(RLC) 평가 추정 개념도 ································································ 43
[그림 40] 상대내하력 평가 프로그램 ·············································································· 44
[그림 41] 환경정보 획득 및 추정 프로그램 ···································································· 45
[그림 42] 상대내하력(RLC) 평가 실험 대상교량 ···························································· 47
[그림 43] 센서 위치 ·············································································································· 48
[그림 44] 가속도계 시간이력 ······························································································ 48
[그림 45] 교차 PSD 결과 ····································································································· 49
[그림 46] 대상교량 상대내하력(RLC) 평가결과 ······························································ 49

- 1 -
제 1 장 서 론
제 1 절 연구 배경 및 필요성
1970년 부터 속한 경제발 과 더불어 약 30여 년간 국내의 산업 기술 기반이
조성되면서 생활환경 개선을 한 사회 간 자본에 한 투자 규모가 빠르게 확
되어 왔고 이에 따라 형건설공사가 속히 증가하여 왔다.
재는 과거와 같은 사회 기반시설 조성을 한 형 구조물의 계획과 시공보다
는 이미 시공된 시설물의 유지 리에 이 맞춰지고 있으며, 국민의 의식 생
활수 의 향상에 발맞춰 이들 시설물에 한 안 성 문제가 차 두되고 있다.
특히 1990년 들어 신행주 교 붕괴(‘92. 7), 청주 우암상가 붕괴(‘93. 1), 성수
교 붕괴(‘94. 10), 서울아 동 가스폭발(‘94. 12), 구지하철가스폭발(‘95. 4), 삼풍
백화 붕괴(‘95. 6) 등의 재해로 말미암아 안 에 한 국민들의 심이 격히 증
가하 으며 건설 구조물의 안 을 한 유지 리와 기술 개발연구에 한 요구가
증 되었다.
한 상기와 같은 인재 외에 태풍과 같은 자연재해로부터 발생하는 연간 피해액
은 평균 5천억원 가량이며, 심한 풍수해가 발생한 경우 약 5조원 가까운 공공시설
물의 피해가 발생하 다. 이들 약 500억원 이상이 도로 시설물에 해 발생한
피해액으로 추산되고 있다. 최근 6년간 이러한 자연재해로 인해 발생하는 공공시설
물의 연간 피해액은 평균 1조원 가량이 소요되고 있으며, 심한 피해가 우려되는 경
우 5배 이상 증하는 것을 알 수 있다.
도로 시설물에 있어서 자연 인 는 부주의로 인해 발생한 재해는 교량의 지속
인 계측유지 리를 실화하는 계기가 되었으나 국내 도로상 시설물 개보수비용
은 통계청 자료에 의하면 1995년 약 1조원에서 약 10년이 지난 2005년에는 약 2
조 4천억원으로 도로 상의 시설물 유지 리를 해 소요되는 비용은 증가하 음에
도 불구하고 안 사고는 끊임없이 발생하고 있는 등 아직까지는 재해발생을 방하
기 한 극 인 유지 리보다는 발생한 문제를 해결하는 소극 인 유지 리가 행
해지고 있다.
향후, 건설 구조물의 노후화로 인하여 유지 리 안 리에 한 필요성은 높
아질 것이며 재와 같이 주기 으로 인력에 의해 구조물을 리하는 시스템은
자, 통신, 센서, IT 분야의 발 으로 원격 상시 모니터링 시스템으로 환될 것으로
망된다.

- 2 -
무선 다 센서를 활용한 안정 이면서 정확한 무선 데이터의 송수신 기술은 국
가주요기반 시설물의 안 리 네트워크를 구축함에 있어서 기반이 되는 핵심 기술
요소이다. 무선 다 센서의 신호처리에 한 기술 표 화는 시설물의 건 성을
정확히 악하고, 안 리를 한 시설물의 성능평가와 긴 상황 리를 한 원
활하고 빠른 데이터 송수신 체계 구축에 효율 이면서 국가 간의 시설물 안 리
기술 분야에서 비교 우 를 차지할 수 있게 한다.
재 국내의 시설물 안 성 모니터링 분야의 기술수 은 선진국인 미국이나 일본
에 비해 미비한 것이 사실이나, 국내의 발 된 첨단 IT분야를 계측 시스템에 목
시키는 연구를 통하여 선진국 수 의 구조물 모니터링 시스템을 개발할 수 있을 것
으로 단된다. 한 국가주요기반 시설물의 안 리 네트워크를 구축하기 한
차세 용 스마트 센서의 신호처리 기술을 체계화함으로써 재해를 사 에 방하여
피해 복구비의 사회 재투자를 유도할 수 있다.
국가주요기반 시설물의 안 사고를 방하기 한 안 감시, 평가 제어 리기
술은 시장성보다는 공공의 이익을 고려해야 하는 성격이 강하므로 국가 인 차원에
서 국민의 생명보호와 생활의 안정성 확보를 통한 국가경쟁력을 높이는데 기여하는
바가 크며, 원활하고 신속한 신호체계를 갖춘 안 리 네트워크를 구성함으로써
비용으로 고효율의 이익을 창출하게 될 것이다.
따라서 이러한 사회기반 시설물을 모니터링하여 재해로부터 안 하게 유지 리하
므로써 국내 건설 분야의 신뢰 회복은 물론이고, 나아가 세계 건설 산업 분야의
공학 기술을 선도해 나갈 핵심기술을 보유할 수 있을 것이다.
제 2 절 연구 개발 목표 및 내용
도로상 시설물의 유지 리를 하여 모니터링하는 방법은 상 구조물의 요
치에 각종 센서를 부착하여 이들로부터 취득된 데이터를 분석하는 방식으로 이루어
진다. 기존에는 이들 센서의 데이터 취득이 유선으로 이루어져 왔으나 시공성, 유지
리, 교체시 소요 비용 등 많은 문제 이 있어 최근에는 무선으로 데이터를 취득
하는 기술들이 속속 개발되고 있다.
재까지 개발되었거나 혹은 개발 에 있는 무선 계측시스템은 기본 으로 무선
에 의한 계측 데이터의 송수신이 가능하며, CPU가 내장된 별도 회로 보드(Board)
를 사용하여 자가 데이터 획득 기능 간단한 DSP(Digital Signal Processing)와
임시 데이터 장기능, 시스템 제어능력이 있을 뿐만 아니라 외형이 작고 력소모
량이 으며 가격이 비교 낮다는 특징을 가지고 있다.
- 3 -
그러나 이러한 무선 센서 장치들을 실 구조물에 용하여 모니터링 시스템을 구
성하기 해서는 센서의 성능과 독립 이고 구 인 원 공 , 효과 인 통신거
리와 통신 속도, 데이터 처리를 한 임베디드 로그램(Embedded program) 등의
문제들이 해결되어야 한다.
세계 으로 통신 기술의 발 과 센서, 자 기술은 속한 속도로 발 하고
있어 약 10년 이내에 이와 같은 문제 들은 극복될 것으로 상되며, 건설 구조물
의 계측시스템은 유선에서 무선으로, 기계 인 센서에서 자 인 센서로 체될
것으로 망된다.
본 연구의 목표는 건설 구조물 이용자의 안 을 해, 첨단 센서 기술과 데이터
분석 기술을 이용하여 사용이 간편하고 경제 인 건설 구조물 안 리 용 계측/
분석 시스템을 개발하는 것으로, 구체 으로는 '건설 구조물 주변 환경 정보 획득과
구조 성능 정보 획득이 가능한 력(Low Power), 가(Low Cost), 지능
(On-board CPU), 무선(Wireless)인 다 센싱 계측 장치 하드웨어 개발'과 '계측
데이터를 실시간 분석하여, 이용자 안 정보를 제공하기 한 임베디드 알고리즘
개발'을 연구내용으로 하고 있다.
이를 해 기존 시스템에서 불필요한 부분을 과감히 배제하여 최 한 단순화하
며, 통신의 신뢰성을 높이기 해서는 기존의 많은 양의 원시 데이터(Raw data)를
직 송하는 시스템에서 무선 센서 자체 내에서 데이터를 가공하여 산출된 메타
데이터(Meta Data)만 송신하는 방식으로 개선하고자 하 다. 이와 같이 시스템의
데이터 송수신 방식을 개선하면 데이터 송수신시 소모되는 력을 보존할 수 있으
며, 한 무선 송신시 발생되는 데이터 손실량도 일 수 있다.
본 연구와 기존 연구의 가장 큰 차별성은 무선 센서 시스템의 기능을 단순히 데
이터를 무선으로 송수신하는 기존의 방식과는 다르게 센서 자체에서 다 의 센서로
부터 획득한 다양한 정보들의 상 계 보완 계를 이용하여 구조물과 이용자의
안 에 필요한 최종 정보를 추출하는 알고리즘을 개발하는데 있다. 를 들어, 다
센서에 포함된 온도 센서와 습도 센서로부터 교량 노면의 결빙 유무의 단 정보를
추출할 수 있으며, 습도와 온도, 감도 센서들의 상 계를 이용하여 교량 주변
의 안개 유무 정도에 한 정보를 추출하는 것이다. 한 다 센서 장치에 포
함된 MEMS형 가속도 센서를 이용하여 교량의 고유진동수를 분석할 수 있다.
이를 통해 건설 구조물의 안 사고 발생으로 인한 인명 손실과 경제 인 피해를
감소시킬 수 있을 것으로 상되며 국내의 원격 무선 제어 계측 기술과 건설 구조
물 안 리 분야를 세계 기술수 으로 업그 이드(Upgrade)시키고 원천 기술
확보로 시장을 선 함으로써 경제 으로 국익에 큰 도움이 될 것으로 사료된다.


- 5 -
제 2 장 국내외 연구 기술개발 황
제 1 절 연구 동향
1. 국외
유선에 기반을 둔 모니터링 시스템의 높은 비용을 낮추기 한 방안으로 유선을
무선으로 체하자는 이론이 1996년 Straser에 의하여 처음으로 제시되었다.
Straser가 제안한 무선 계측시스템은 실시간(Near Real-time)으로 구조물에 설
치된 센서로부터 획득한 데이터를 무선모뎀을 이용하여 하나의 집 화된 데이터 획
득 시스템으로 단순히 송하는 시스템이다1).
오늘날에는 수많은 엔지니어링 응용분야에서 개발된 신 인 기술들이 스마트
센서에 채택되고 있다. 그 표 인 가 MEMS 센서이다. 디지털 회로의 실리콘
층에 기계 센싱 변환기들로 구성된 MEMS 센서는 소형이고 가의 정 한 센서
이다.
Lynch 등2)은 일반 인 자부품을 이용하여 개념 증명(Proof-of-Concept)용 무
선 센서 장치인 WiMMS(Wireless Modular Monitoring System)를 개발하 다. 이
장치는 범 한 아날로그 센서들을 수용할 수 있는 4MHz CPU가 내장된 8bit의
AVR 마이크로컨트롤러를 사용하 다.
[그림 1] WiMMs 개발 과정
1) Straser, E.G. and Kiremidjian A.S., "A modular visual approach to damage monitoring for civil structures." Proceedings of SPIE,
Smart Structures and Materials. 2719:112-122. 1996.2) Lynch, J.P., et al., "Field Validation of a Wireless Structural Monitoring System on the Alamosa Canyon Bridge",SPIE 10th, San
Diego, CA, USA, March, 2003.

- 6 -
이 외에 Maser 등3)은 교량의 상태와 성능을 원격 감시하기 한 무선 체 교
량 평가 감시 시스템(WGBEMS)을 제안하 다. WGBEMS은 소형으로 독립
(Self-contained)이며 배터리에 의해 작동되는 변환기(Transducer), 센서와 소형의
무선 송장치 그리고 배터리를 사용하 다. Brooks4)는 센서 시스템의 계산 처리
기능의 일부를 4세 센서(Fourth-generation sensor)인 센서보드(Sensor board)
로 이 할 필요성을 강조하 다. 이러한 센서보드의 특징은 양방향 통신이 가능하
며 디지털 처리기와 사용자 정의 알고리즘, 자가 검진 진단과 데이터 장창치
들이 있다.
Mitchell 등5)은 스마트 구조물의 상시감시를 한 무선 데이터 획득 시스템을 연
구 발표하 다. 이들은 하나의 통신채 을 이용하여 여러 개의 센서보드로부터 동
시에 데이터를 획득할 수 있는 아날로그 다 기(Multiplexer)를 이용한 마이크로
센서를 개발하 다. 데이터는 마이크로컨트롤러를 이용하여 송 에 디지털 형식
으로 변환된다.
Agre 등6)은 AWAIRS라 불리는 무선 센서 장치의 시제품을 발표하 다. 이 스마
트 센서는 주변 센서 장치와 양방향 통신과 P2P 통신을 지원한다. 재의 장치는
데이터 처리기, 무선 모뎀, 원 공 장치, 센서들로 구성되어 있다.
최근 개발되고 있는 무선 센서 시스템으로는 버클리 학에서 개발 인 MICA
mote가 있다. 버클리 학의 컴퓨터 공학부에서 개발 에 있는 MICA는 범용 무
선 센서 시스템으로 교통상황, 날씨, 지진 활동(Seismic Activity), 쟁터에서의 군
이동을 모니터링할 수 있도록 개발되고 있다. MICA를 이용하여 재 버클리
학에서는 “Structural Health Monitoring of the Golden Gate Bridge"이라는 구조
물의 모니터링에 한 로젝트를 수행하고 있는데 재의 연구는 MICA 시스템을
교량의 모니터링 시스템에 용할 수 있는지를 검증하는 단계이다.
MICA 시스템의 특징은 소형으로 기 소모가 고, 센서가 다양하며, 별도의 운
체계(TINYOS)에 의하여 시스템을 제어한다는 것이다. 그러나 구조물 모니터링의
목 으로 사용하기에는 시스템에 불필요한 기능들이 많고, 가장 요한 가속도 센
서의 성능이 떨어지며, 사용거리가 30m 정도로 상당히 짧다. 그러므로 MICA 시스
3) Maser, K., Egri, R., Lichtenstein, A. and Chase, S.(1997). "Development of a wireless global bridge evaluation and monitoring
system(WGBEMS)." Proceedings of he Specialty Conference on Infrastructure Condition Assessment : Art, Science, Practice.
91-100.4) Brooks, T.(1999). "Using smart accelerometers and wireless interfaces for condition monitoring." Machine Plant and Systems
Monitor. May/June issue5) Mitchell, K., Sans, S., Balakrishnan, V.S., Rao, V. and Pottinger, H.J.(1999). "Micro sensors for health monitoring of smart
structures. SPIE Conference on Smart Electronics and MEMS. 3673:351-358.6) Agre, J.R., Clare, L.P., Pottie, G.J. and Romanov, N.P.(1999). "Development platform for self-organizing wireless sensor
networks". Proceedings of SPIE-The International Society for Optical Engineering. Vol.3713, Apr.8-Apr.9 1999. Orlando, FL,
USA, 257-267

- 7 -
템을 구조물의 모니터링 시스템에 용하기 해서는 가속도센서의 성능향상과 통
신거리의 문제 을 극복하여야 한다. Kurata 등7)은 MICA를 이용하여 2층 모형구
조물을 이용한 자유 진동 실험과 험(Risk) 모니터링 실험을 실시하여 진폭이 작
은 진동에서는 구조물의 응답을 검출하기에는 MICA의 성능이 문제되지만 구조물이
붕괴가 될 정도의 험 상황에서는 충분히 구조물의 손상 징후를 악할 수 있는
응답을 획득할 수 있다는 결과를 발표하 다.
[그림 2] MICA mote 개발 과정
Shinozuka 등8)은 MEMS 센서와 마이크로컨트롤러, 무선모뎀으로 구성된
DuraNode을 개발하여 실시간(Real-time) 데이터 획득 시스템을 구 하 다. 이와
같이 구 된 시스템을 이용하여 강 트러스(Steel truss) 육교의 동특성을 분석하는
실험을 다양한 MEMS센서를 사용하여 유선 계측시스템과 병행하여 실시한 후, 그
결과를 비교하 다.
2. 국내
국내에서도 재 많은 학과 국공립연구소, 련업체에서 무선계측시스템에
한 연구를 진행 에 있다. 최근에는 한국시설안 공단에서 주 하는 『국가 주요
시설물 안 리 네트워크 시범구축 운 시스템 개발』과제 내의 요소기술 개발
과제로 (주)천일기술단에서 무선 센서기반에 의한 교량구조물 상시계측시스템 구축
에 한 연구를 수행하고 있으며, 한양 학교와 (주)동일기술공사에서는 RFID/USD
기반의 구조물 감시기술과 센싱기술에 한 연구를 진행하고 있다9). 한 (사)한국
스마트구조시스템연구원에서는 차세 스마트센서 신호처리 지원시스템에 한
연구를 하고 있다.
7) Kurata, N., Spencer Jr., B.F., Ruiz-Sandoval, M., Miyamoto, Y., and Sako, Y., “A study on building risk monitoring using
wireless sensor network MICA-Mote”. First International Conference on Structural Healh Monitoring and Intelligent Infrastructure,
Tokyo, Japan, November 13-15, 2003.8) Masanobu Shinozuka, Maria Q.Feng, Pai Chou, Yangbo Chen, chulsung Park,. "MEMS-Based Wireless Real-Time Health
Monitoring of Bridge", The 3rd International conference on Earthquake Engineering Najing, China, 8, 2004.9) 한국시설안 공단 외,. "국가 주요시설물 안 리 네트워크 시범구축 운 시스템 개발", 국토해양부, 2006~2011
- 8 -
제 2 절 센싱 기술 조사 및 분석
1. 결빙감지 련 기술
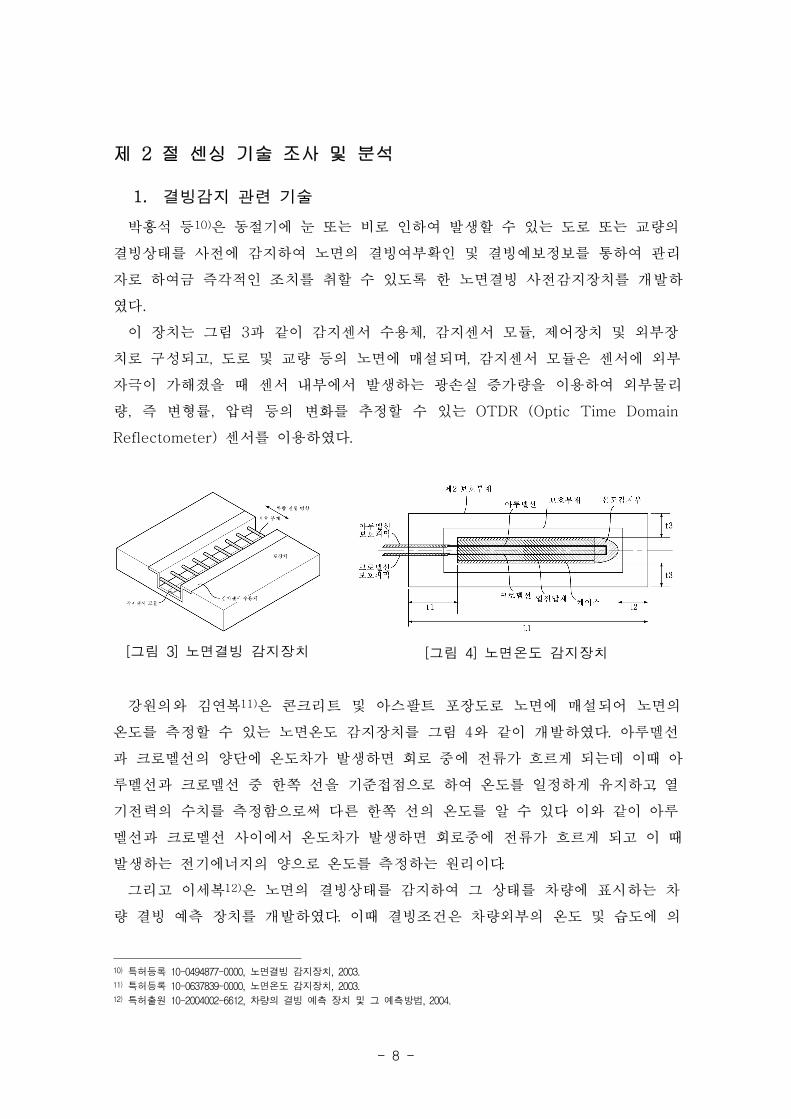
박흥석 등10)은 동 기에 는 비로 인하여 발생할 수 있는 도로 는 교량의
결빙상태를 사 에 감지하여 노면의 결빙여부확인 결빙 보정보를 통하여 리
자로 하여 즉각 인 조치를 취할 수 있도록 한 노면결빙 사 감지장치를 개발하
다.
이 장치는 그림 3과 같이 감지센서 수용체, 감지센서 모듈, 제어장치 외부장
치로 구성되고, 도로 교량 등의 노면에 매설되며, 감지센서 모듈은 센서에 외부
자극이 가해졌을 때 센서 내부에서 발생하는 손실 증가량을 이용하여 외부물리
량, 즉 변형률, 압력 등의 변화를 추정할 수 있는 OTDR (Optic Time Domain
Reflectometer) 센서를 이용하 다.
[그림 3] 노면결빙 감지장치
[그림 4] 노면온도 감지장치
강원의와 김연복11)은 콘크리트 아스팔트 포장도로 노면에 매설되어 노면의
온도를 측정할 수 있는 노면온도 감지장치를 그림 4와 같이 개발하 다. 아루멜선
과 크로멜선의 양단에 온도차가 발생하면 회로 에 류가 흐르게 되는데 이때 아
루멜선과 크로멜선 한쪽 선을 기 으로 하여 온도를 일정하게 유지하고, 열
기 력의 수치를 측정함으로써 다른 한쪽 선의 온도를 알 수 있다. 이와 같이 아루
멜선과 크로멜선 사이에서 온도차가 발생하면 회로 에 류가 흐르게 되고 이 때
발생하는 기에 지의 양으로 온도를 측정하는 원리이다.
그리고 이세복12)은 노면의 결빙상태를 감지하여 그 상태를 차량에 표시하는 차
량 결빙 측 장치를 개발하 다. 이때 결빙조건은 차량외부의 온도 습도에 의
10) 특허등록 10-0494877-0000, 노면결빙 감지장치, 2003.11) 특허등록 10-0637839-0000, 노면온도 감지장치, 2003.12) 특허출원 10-2004002-6612, 차량의 결빙 측 장치 그 측방법, 2004.

- 9 -
해 결정된다.
본 연구의 범 인 결빙감지 기술과는 무 하나 최병길과 김 식13)은 GIS를 이용
하여 3차원 모델링, 일조 시뮬 이션, 지오데이터베이스 구축, GIS 첩 기능에 의
한 공간분석을 통해 노면결빙구간을 추출하는 방법을 제안하 다. 이 방법은 산악
지역과 같이 겨울철 결빙구간이 발생할 우려가 있는 지역의 노선계획, 도로 신설
확장공사시 평가자료로 활용될 수 있다.
2. 안개감지 련 기술
노행식14)은 도로변에 설치되는 안개경보장치를 개발하 다. 이 장치는 발 부,
수 부, 구동부로 구성되어 있으며, 그 원리는 발 부에서 방사된 외선이 안개를
통과하면 량이 변하는 원리를 이용한 것이다. 안개를 통과한 외선이 수 부에
입력되면 안개로 인해 손실된 량에 상응하는 압 벨이 발생하게 되는데, 이때
검출된 압 벨에 따라 안개의 농도를 별하고 안개 발생 여부와 가시거리를 산
출하여 이에 한 정보를 출력한다.
발광부 수광부
구동부
안 개 감지신호
[그림 5] 안개경보장치
황재성15)은 시정계, 상촬 기, 식별표지 등으로 안개를 감지하는 안개방재시
스템을 개발하 다. 이 시스템은 외선 LED 원을 이용하여 기의 시정거리를
측정하고, 시정거리의 수 에 따라 안개발생 신호를 발생시키며, 상촬 기를 이용
하여 시정계의 진정성을 확보한다.
3. 화재감지 련 기술
화재감지 센서로는 조도센서, 온도센서, 연기센서 등이 있다. 조도센서는 빛의 밝
기를 압으로 변환하는 센서로, 조도의 세기를 측정하여 화염을 감지하고, 온도센
13) 최병길, 김 식, "GIS를 이용한 도로의 노면결빙구간 추출", 한국지형공간정보학회지, 13 19-25, 2005.14) 특허등록 10-0439702-0000, 안개경보장치, 2001.15) 특허등록 10-0698585-0000, 안개 방재 시스템, 2005

- 10 -
서는 음온도 계수를 가지는 반도체 소자로 이루어지며 실내온도의 격한 상승을
측정하여 화염을 감지한다. 한, 연기센서는 연기가 흘러 들어가는 외부 이온실과
내부 이온실의 압비의 차이를 이용하여 연기를 검출한다.
<조도센서>
<온도센서>
<연기센서>
[그림 6] 화재 감지 센서
강원선 (2001)16)은 센서를 이용한 화재방재 시스템에 한 연구를 수행하 고,
이복 등 (2001)17)은 외선과 자외선 장 의 빛에 지를 감지하는 센서를 이
용하여 외선 불꽃 화재 감지기와 자외선 불꽃 화재 감지기를 개발하 으며, 양태
선과 김은종 (2005)18)은 옥외형 불꽃 감지기를 이용하여 터 내 화재의 조기감지
방법을 연구하 다. 그리고 김성호와 육의수 (2007)19)는 화재감지센서를 무선네트
워크에 응용하는 연구를 수행하 다.
제 3 절 환경정보 알고리즘 개발
본 연구에서는 무선 계측 시스템에 용할 수 있는 결빙, 안개, 화재 감지를 한
알고리즘을 개발하 다. 결빙은 물의 온도가 하로 떨어지는 상으로, 온도센서와
습도센서를 이용하여 노면이 결빙조건에 해당하는지를 검출한다. 이때, 기존온도와
기 습도는 각각 0℃와 75%이다. 결빙감지 알고리즘의 흐름도는 그림 7과 같다.
안개는 기 의 수증기가 응결하여 지표 가까이에 물방울이 떠 있는 상으로 본
알고리즘에서는 포토센서와 습도센서를 이용하여 시정거리 습도가 안개조건에
해당되는지를 검출한다. 이때 기 거리와 기 습도는 각각 1km와 80%이다. 안개감
지 알고리즘의 흐름도는 그림 8과 같다. 화재는 온도센서와 포토센서를 이용하여
온도 혹은 시정거리가 화재조건에 해당되는지를 검출하게 된다. 이때 기 온도와
기 거리는 각각 70℃와 1km이며, 화재감지 알고리즘의 흐름도는 그림 9에 나타내
었다.
16) 강원선, " 이블을 이용한 화재 감지 시스템", 한국화재․소방학회, 제2권, 3호, 2001.17) 이복 외 3인, "UV-IR 복합형 화재감지장치 개발", 제16권, 1호, 2001.18) 양태선, 김은종, "터 내 화재의 조기감지방법 피난터 에 한 연구", 한국방재학회논문집, 제5권, 3호, pp.41-46, 2005.19) 김성호, 육의수, "무선 센서 네트워크 기반 지능형 화재 감지/경고 시스템 설계", 퍼지 지능시스템학회 논문지, 제17권, 3
호, pp. 310-315, 2007.

- 11 -
[그림 7] 결빙감지 알고리즘
[그림 8] 안개감지 알고리즘
[그림 9] 화재감지 알고리즘


- 13 -
제 3 장 다 센싱 무선 계측시스템 개발
제 1 절 개 요
본 연구는 토목구조물의 모니터링 시스템에 합한 다 무선 센서 장치를 개발
하는데 목 이 있다. 이러한 목 을 하여 센서 장치의 기본 인 기능인 구조물
응답 계측 데이터 송뿐만이 아니라, 계산 작업의 분산화와 계측 시스템의 스
마트화를 한 지능화된 장치를 개발하는 연구를 수행하 다.
무선 센서 장치를 개발하는데 있어서 장치의 센서 성능뿐만이 아니라 소요 비용
과 력 소모량은 장치를 설계 계획하는데 있어서 요한 설계조건이 되었다.
센서 장치에 지능화와 계산능력을 부여하기 해서는 CPU(Central Processing
Unit)를 이용하여야 하는데 근래에는 CPU 기능은 물론이고 일정한 용량의 메모리
(ROM, RAM 등)와 입출력 제어 인터페이스 회로까지를 단일 칩(Chip)에 내장한 마
이크로컨트롤러(Microcontroller)가 많이 사용된다. 한 센서 기술의 발달로 가
의 반도체형 MEMS 기반의 가속도 센서들이 개발되었다. 이러한 센서의 특징은
가이며 별도의 회로 없이 마이크로컨트롤러에 쉽게 부착할 수 있고, 크기가 단히
작다는 것이다. 그리고 무선으로 데이터를 송수신하기 한 무선 모뎀의 사용은 필
수 이다.
이러한 자 센서, 통신기기의 발 된 제품을 이용하여 다 센싱 무선 센서
장치를 그림 10과 같이 구성하 다. 다 센싱 무선 센서 장치의 하드웨어는 센서
칩(Chip)들과 마이크로컨트롤러, 배터리, 무선 통신 모듈로 구성하 다.
[그림 10] 다 센싱 무선 센서 장치 구성도
- 14 -
제 2 절 센서 설계
1. MEMS-Based 가속도 센서
가속도 센서에는 다양한 성능 특성을 가진 여러 종류의 센서가 존재한다. 이
에서 구조물의 모니터링에 주로 사용되는 가속도 센서는 측정 가능한 주 수 범
가 넓고 선형성이 우수한 압 형(Piezoelectric) 가속도 센서이다.
그러나 압 형 가속도 센서는 기계 변환시스템을 사용하여 제조되므로 가격이
비싸고 크기를 소형화하는 데는 한계가 있다. 근래에는 MEMS 기술을 이용하여 가
격이 렴하고 소형인 가속도 센서가 량으로 생산되고 있다.
MEMS(Micro Electro Mechanical Systems)는 “ 소형 자기계시스템”이며 그
림 11과 같이 자회로와 기계부품이 하나의 칩(Chip) 에 집 (Integrate)된 시
스템을 의미한다.
[그림 11] MEMS 기술에 의한 미세 기계 구조
MEMS의 장 으로는 반도체 제작 공정을 이용하므로 소형으로 제작할 수 있으
며, 일 공정에 의한 량생산이 가능하고 단가 소비 력을 크게 낮출 수 있
다는 것이다. 이러한 MEMS 기술로 만들어지는 반도체 가속도 센서는 탄성 빔에
지지된 질량이 인가되는 가속도에 비례하여 변 가 변하는 구조로 되어 있으며, 변
량을 정 용량으로 변환하여 가속도를 측정한다. 그림 12는 2축 반도체 가속도
센서의 일반 인 구조를 보여 다.

- 15 -
[그림 12] 반도체형 가속도 센서의 구조
본 연구에서는 무선 센서 장치의 센서 시스템 모듈 설계에서 반도체 가속도 센서
인 Analog Device 사의 ADXL 센서 시리즈를 용하 다. ADXL 가속도 센서는
MEMS 기술을 바탕으로 개발된 반도체 정 용량형(Capacitive) 가속도 센서로써
가이며, 소형(5mm×5mm×2mm)의 가속도(Low g) 측정용 센서이다.
(a) BEAM Structure
(b) Assemble
[그림 13] ADXL202 BEAM 구조(a) & (b)조립
MEMS 가속도 센서의 출력 형식은 PWM(Pulse Width Modulation)와 Analog
형식이 있으며, 모델에 따라 측정 범 (Range)와 민감도(Sensitivity)가 다양하게
존재한다.
본 연구에서는 PWM 출력과 Analog출력 센서 모두 사용할 수 있도록 무선 센서
장치를 설계하 다. 그러므로 센서 시스템 모듈의 설계에 있어서 두 종류의 센서에
하여 각각 설계하 다.

- 16 -
가. PWM 출력 센서
PWM(Pulse Width Modulation)은 아날로그 신호를 디지털화하여 인코딩
(Encoding)하는 방법으로 고분해능의 카운터를 통해 사각형 의 Duty cycle로 변
조된다. 그림 14는 서로 다른 세 개의 PWM에 의한 Duty cycle 신호를 보여 다.
그림 14(a)는 10%의 Duty cycle 신호로써 신호 주기의 10% 동안만 신호가 ON
상태이고 나머지 90% 동안은 신호가 OFF 상태에 있는 형을 나타낸 것이다. 그
리고 그림 14(b)와 (c)는 각각 50%와 90%의 Duty cycle 신호를 보여 다. 이 세
가지 Duty cycle 신호는 아날로그 신호를 체 크기의 10%, 50%, 90%의 값으로
디지털 값으로 표 한 것이다. 를 들어 9V로 원 공 이 이루어지고 있고 Duty
cycle이 10%라면 0.9V의 아날로그 신호가 결과로 나온다.
On=High Level
Off=High Level
10%
90%
100%
(a)
(b)
(c)
On=High Level
Off=High Level
10%On=High Level
Off=High Level
10%
90%
100%
(a)
(b)
(c)
[그림 14] Duty cycle Signal
이와 같이 PWM 방식의 장 은 로세서에서 컨트롤된 시스템에 이르는 과정이
디지털화 되어 있다는 것이다. 그러므로 디지털 신호를 계속 유지함으로써 잡음을
최소화할 수 있다.
본 연구에서 PWM 출력 센서의 설계는 차와 방법이 거의 유사하여 본 내용에
서는 이 에서 표 인 ADXL 210 센서의 설계 내용만을 기술하 다. 일반 으
로 ADXL 가속도 센서 에서 PWM 출력 형식 센서의 구성 회로도는 그림 15와
같다. 그림 15에서 사용된 용어의 정의를 살펴보면 T1은 한 주기에서 "On" 부분이
차지하는 길이로 펄스 폭(Pulse Width)을 나타내고 T2는 한 주기의 총 길이이다.
이들의 단 는 (sec)이고, 이들의 비(T1/T2)를 Duty cycle로 정의한다.
- 17 -
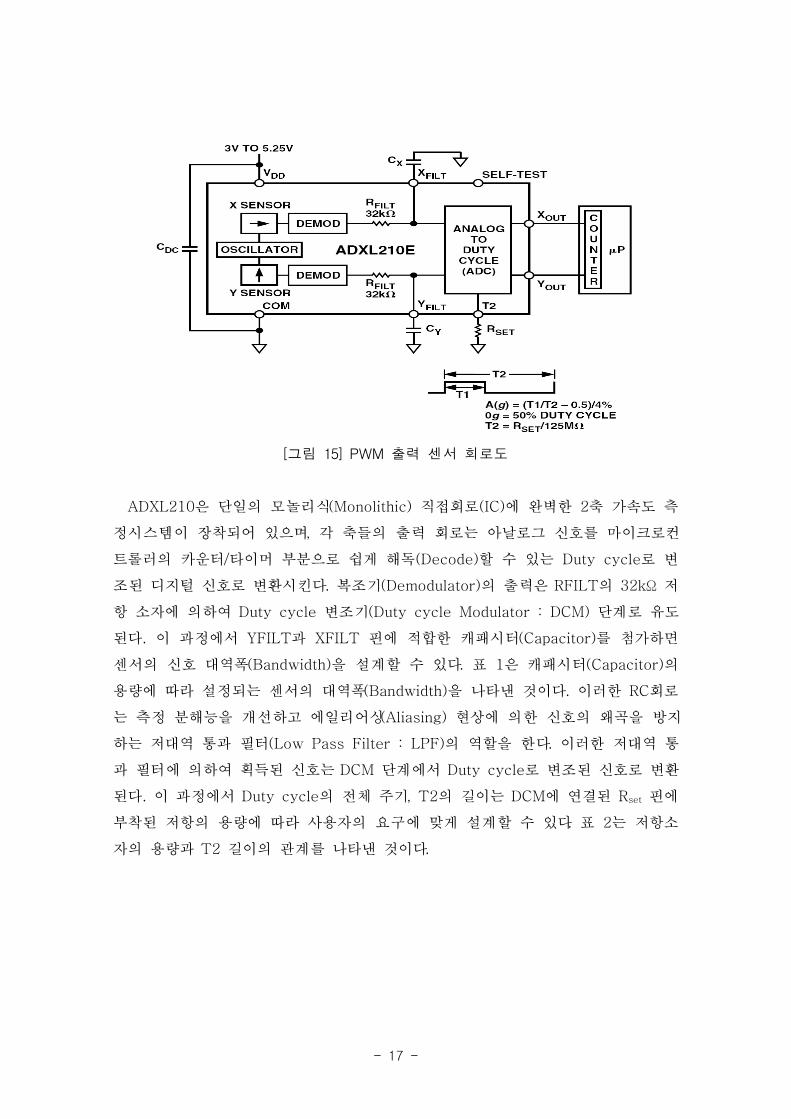
[그림 15] PWM 출력 센서 회로도
ADXL210은 단일의 모놀리식(Monolithic) 직 회로(IC)에 완벽한 2축 가속도 측
정시스템이 장착되어 있으며, 각 축들의 출력 회로는 아날로그 신호를 마이크로컨
트롤러의 카운터/타이머 부분으로 쉽게 해독(Decode)할 수 있는 Duty cycle로 변
조된 디지털 신호로 변환시킨다. 복조기(Demodulator)의 출력은 RFILT의 32kΩ
항 소자에 의하여 Duty cycle 변조기(Duty cycle Modulator : DCM) 단계로 유도
된다. 이 과정에서 YFILT과 XFILT 핀에 합한 캐패시터(Capacitor)를 첨가하면
센서의 신호 역폭(Bandwidth)을 설계할 수 있다. 표 1은 캐패시터(Capacitor)의
용량에 따라 설정되는 센서의 역폭(Bandwidth)을 나타낸 것이다. 이러한 RC회로
는 측정 분해능을 개선하고 에일리어싱(Aliasing) 상에 의한 신호의 왜곡을 방지
하는 역 통과 필터(Low Pass Filter : LPF)의 역할을 한다. 이러한 역 통
과 필터에 의하여 획득된 신호는 DCM 단계에서 Duty cycle로 변조된 신호로 변환
된다. 이 과정에서 Duty cycle의 체 주기, T2의 길이는 DCM에 연결된 Rset 핀에
부착된 항의 용량에 따라 사용자의 요구에 맞게 설계할 수 있다. 표 2는 항소
자의 용량과 T2 길이의 계를 나타낸 것이다.

- 18 -
Bandwidth(Hz) Capacitor(μF)
1 4.700
10 0.470
50 0.100
100 0.050
200 0.027
500 0.010
[표 1] Filter Capacitor Selection, CX and CY(ADXL210)
T2(ms) Rset(Ω)
1 125
2 250
5 625
10 1.25
[표 2] Resistor Values to Set T2(ADXL210)
이와 같은 방법으로 설계된 센서의 신호는 마이크로컨트롤러의 카운터/타이머
(Counter/Timer)에 의하여 펄스의 T1과 T2의 길이를 측정하여 쉽게 결정할 수 있
다. ADXL 센서의 잡음은 모든 주 수들에서 일정하게 분포하는 백색 정규 분포의
특성을 지니며, 으로 표 한다. 그리고 잡음은 가속도 신호 역폭의 제곱
근에 비례한다. 따라서 센서를 설계하는 사용자에게 넓은 측정 범 와 높은 분해능
을 갖는 센서를 설계하기 해서는 용 구조물의 측정에 필요한 가장 작은 역폭
으로 센서를 설계하도록 제한한다. 일반 으로 ADXL 210의 잡음의 크기는 식(1)
로 계산한다.
( ) 1.6 200 /Noise rms BW g Hzµ= × × (1)
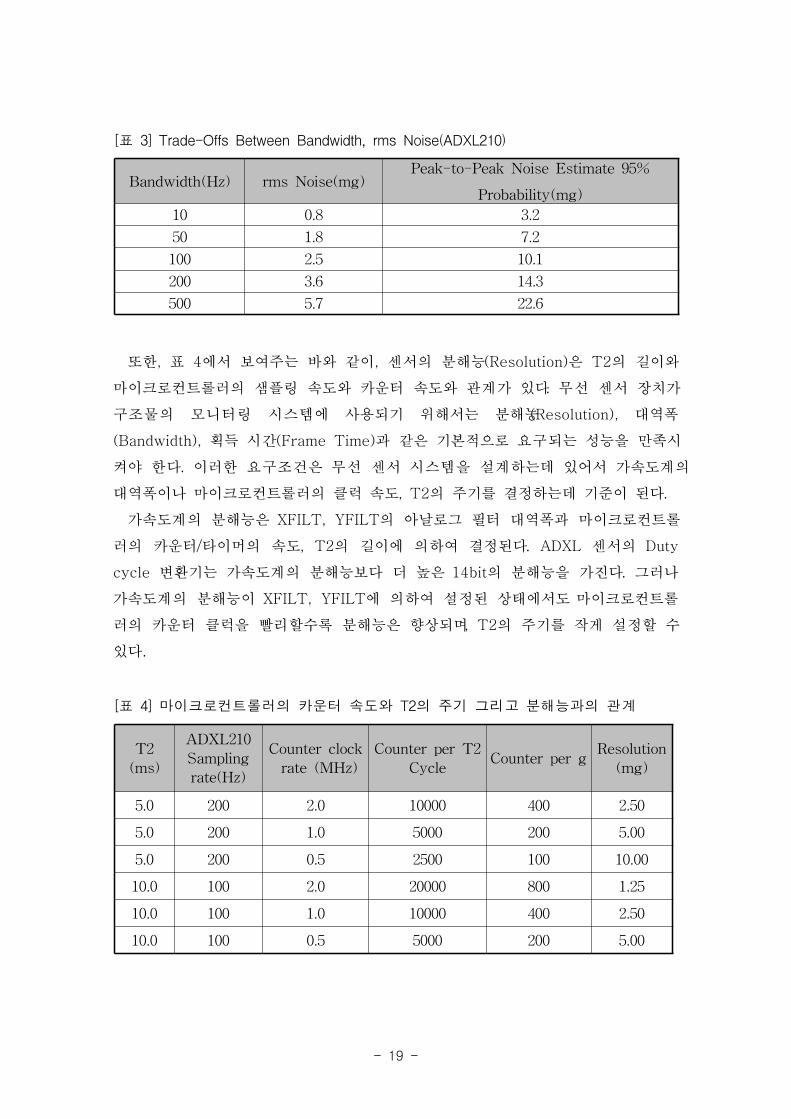
표 3은 센서(ADXL 210)의 역폭 값과 잡음(Noise)과의 계를 식(1)에 의하
여 계산하여 정리한 것이다. 역폭이 크면 클수록 센서에 포함된 잡음의 향은
증가함을 알 수 있다. 그러므로 센서의 역폭의 설정은 이러한 을 고려하여 신
히 선택하여야 한다.
- 19 -
Bandwidth(Hz) rms Noise(mg)Peak-to-Peak Noise Estimate 95%
Probability(mg)
10 0.8 3.2
50 1.8 7.2
100 2.5 10.1
200 3.6 14.3
500 5.7 22.6
[표 3] Trade-Offs Between Bandwidth, rms Noise(ADXL210)
한, 표 4에서 보여주는 바와 같이, 센서의 분해능(Resolution)은 T2의 길이와
마이크로컨트롤러의 샘 링 속도와 카운터 속도와 계가 있다. 무선 센서 장치가
구조물의 모니터링 시스템에 사용되기 해서는 분해능(Resolution), 역폭
(Bandwidth), 획득 시간(Frame Time)과 같은 기본 으로 요구되는 성능을 만족시
켜야 한다. 이러한 요구조건은 무선 센서 시스템을 설계하는데 있어서 가속도계의
역폭이나 마이크로컨트롤러의 클럭 속도, T2의 주기를 결정하는데 기 이 된다.
가속도계의 분해능은 XFILT, YFILT의 아날로그 필터 역폭과 마이크로컨트롤
러의 카운터/타이머의 속도, T2의 길이에 의하여 결정된다. ADXL 센서의 Duty
cycle 변환기는 가속도계의 분해능보다 더 높은 14bit의 분해능을 가진다. 그러나
가속도계의 분해능이 XFILT, YFILT에 의하여 설정된 상태에서도 마이크로컨트롤
러의 카운터 클럭을 빨리할수록 분해능은 향상되며, T2의 주기를 작게 설정할 수
있다.
T2
(ms)
ADXL210
Sampling
rate(Hz)
Counter clock
rate (MHz)
Counter per T2
CycleCounter per g
Resolution
(mg)
5.0 200 2.0 10000 400 2.50
5.0 200 1.0 5000 200 5.00
5.0 200 0.5 2500 100 10.00
10.0 100 2.0 20000 800 1.25
10.0 100 1.0 10000 400 2.50
10.0 100 0.5 5000 200 5.00
[표 4] 마이크로컨트롤러의 카운터 속도와 T2의 주기 그리고 분해능과의 계

- 20 -
본 설계에서는 가속도 센서의 성능을 XFILT와 YFILT에 0.10F, Rset에는 1.25M
으로 설정하여 샘 링 주기를 10msec, 즉 샘 링 율을 100Hz, 역폭은 50Hz을
갖도록 설계하 다. 그러므로 실질 인 분해능은 DCM의 분해능 2.5mg와 rms
Noise 1.8mg rms이므로 4.3mg rms로 그림 16과 같이 설계하 다.
[그림 16] Design of Sensor System Module
표 5는 본 연구에서 설계한 PWM 출력 센서들을 사용한 센서 시스템 모듈의 설
계 성능 목표를 정리한 것이다.
SensorSampling
rate(Hz)
T2
(msec)
Band
Width
(Hz)
rms Noise
(mg rms)
Voltage
Supply
(V)
DCM
resolution
(mg)
Total
resolution
(mg rms)
ADXL213 100 10 50 1.4 5 1.0 2.4
ADXL202 100 10 50 1.8 5 0.8 2.6
ADXL210 100 10 50 1.8 5 2.5 4.3
[표 5] PWM 출력 센서 시스템 모듈들의 설계 성능 목표
이와 같이 설계된 센서 시스템 모듈을 실 구조물의 모니터링 시스템에 용하기
해서는 센서 출력 값의 보정(Calibration)이 필요하다. ADXL 센서는 오 셋 값
(Offset Value)과 민감도(Sensitivity)에 해당하는 스 일 요소 값(Scale Factor
Value)을 이용하여 센서의 출력치를 교정한다.
각각의 센서에 해당되는 정확한 민감도 값은 ADXL 센서의 기울기(Tilt) 측정 기
능을 이용하여 획득할 수 있다. ADXL 센서는 각각의 축을 심으로 회 시키면 출
- 21 -
력 값이 변하는데, 최 1g에서 최소 -1g에 해당하는 값이다. 즉, 센서가 지면과
평행을 이루고 있을 때의 출력 값은 0g을 의미하고, 축을 심으로 90° 회 하면
1g, -90° 회 하면 -1g에 해당하는 값을 출력한다. 이와 같은 기능을 이용하면 다
음과 같이 쉽게 각각의 센서에 해당하는 스 일 요소 값(Scale Factor Value) 즉
민감도(Sensitivity)를 구할 수 있다.
= Accelerometer output with axis oriented 90
= Accelerometer output with axis oriented -90
, [ ] / 2
A
B
then Sensitivity A B g
°
°
= −
오 셋 값(Offset Value)은 각각의 센서의 0g에 해당하는 Duty cycle 비를 의미
하며, 보통 0.5이다. ADXL 센서의 교정은 Duty cycle 신호를 해독하는 마이크로컨
트롤러에 내장된 로그램에 교정 요소 값을 장하고 다음 식(2)를 사용하면 쉽게
해결할 수 있다.
[ Duty cycle ratio(T1/T2) - Offset value] ( ) =
Scale factor valueCalibrated Output Value g
(2)
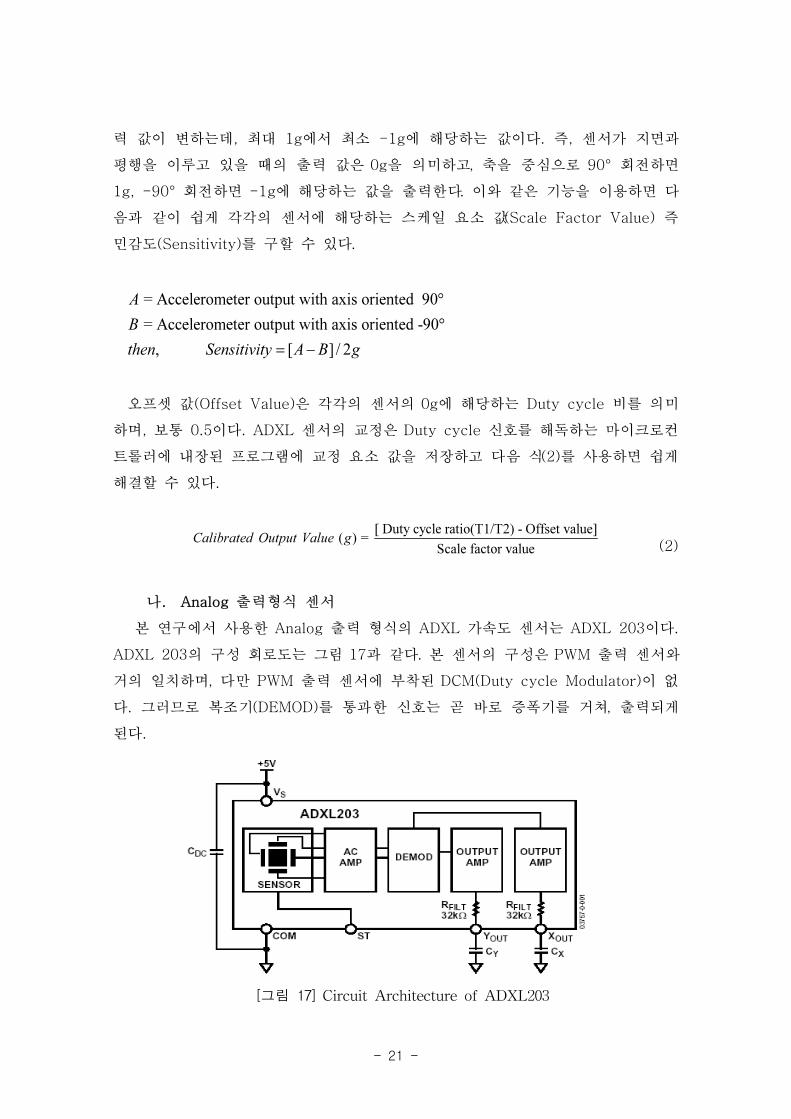
나. Analog 출력형식 센서
본 연구에서 사용한 Analog 출력 형식의 ADXL 가속도 센서는 ADXL 203이다.
ADXL 203의 구성 회로도는 그림 17과 같다. 본 센서의 구성은 PWM 출력 센서와
거의 일치하며, 다만 PWM 출력 센서에 부착된 DCM(Duty cycle Modulator)이 없
다. 그러므로 복조기(DEMOD)를 통과한 신호는 곧 바로 증폭기를 거쳐, 출력되게
된다.
[그림 17] Circuit Architecture of ADXL203

- 22 -
본 센서를 이용한 센서 시스템 모듈의 설계는 앞 에서 설명한 PWM 출력 센서
와 거의 동일하다. 다만 가장 큰 차이 은 PWM 출력 센서는 마이크로컨트롤러의
타이머/카운터를 이용하여 신호를 획득하지만 Analog 출력 센서인 ADXL 203은
마이크로컨트롤러의 ADC(Analog to Digital Converter)로 데이터를 획득하는 것이
다.
본 센서의 가장 큰 장 으로는 데이터의 샘 링 율에 제한을 받지 않는다는 것이
다. PWM 출력 센서에서의 샘 링 율은 Rset에 연결된 항소자의 용량에 따라 결
정되는 T2의 길이로 설정된다. 그러나 Analog 출력 센서는 이와 같은 설정 핀이
존재하지 않으므로 데이터의 샘 링 율을 자유롭게 설정할 수 있다. 다만, 샘 링
율을 결정하는데 있어서 고려해야 할 사항은 마이크로컨트롤러의 클럭 속도와 무선
센서 시스템의 데이터 송속도이다.
ADXL203 센서는 PWM 출력 센서와 마찬 가지로 RC회로로 구성된 필터(Filter)
설계가 가능하며, YFILT과 XFILT 핀에 합한 각각 캐패시터(Capacitor)의 용량
에 의하여 신호 역폭(Bandwidth)을 설계할 수 있다.
표 6은 ADXL203 센서의 설정 역폭(Bandwidth)에 따른 잡음의 향을 보여
다. 본 센서는 마이크로컨트롤러의 샘 링 속도에 따른 잡음의 향이나 분해능
과는 무 하고 측정 가속도 범 는 ±1.7g으로 으나 민감도는 1000mV/g로 상당
히 우수한 성능을 가지고 있다.
Bandwidth(Hz) rms Noise(mg)Peak-to-Peak Noise Estimate 95%
Probability(mg)
10 0.4 2.6
50 1.0 6.0
100 1.4 8.4
500 3.1 18.7
[표 6] Trade-Offs Between Bandwidth & rms Noise(ADXL203)
센서의 교정은 PWM 출력 센서와 동일한 방법으로 이루어지며, 0g 일 때의 출력
압은 2.5V이다. 표 7은 이와 같은 Analog 출력 센서를 사용하여 센서 시스템 모
듈을 제작하기 한 설계 성능 목표 값들이다.

- 23 -
SensorSampling
rate(Hz)
Band
Width
(Hz)
rms Noise
(mg rms)
Voltage
Supply
(V)
DCM
resolution
(mg)
Total
resolution
(mg rms)
ADXL 203 100 50 1.0 5 1.0 2.0
[표 7] Analog 출력 센서 시스템 모듈의 설계 성능 목표
2. 온습도 센서
온습도 센서는 온도와 습도의 물리 변화를 감지하여 기 신호로 출력을 해
주는 자칩이다. 근래에는 이러한 온습도 센서가 AC/DC와 집 되어 하나의 칩으
로 매되고 있다.
이러한 일체화된 센서의 장 은 해당 센서에 합한 자소자를 최 으로 구성되
기 때문에 센서 자체 성능이 우수하다는 것이다. 그림 18은 다 센싱 무선 센서
장치에 사용된 온습도 센서 SHT11의 블록도이다.
[그림 18] 온/습도 센서(SHT11) 구성 블록도
SHT11은 하나의 기 에서 센서부와 14bit A/DC, 마이크로컨트롤러와의 인터
페이스를 한 연결 단자들로 구성되어 있다. 그림 19는 SHT11과 마이크로컨트롤
러와의 형 인 연결 회로도이다. 표 8은 SHT11의 일반 인 성능 사양을 정리한
것이다.

- 24 -
[그림 19] SHT11 형 인 응용 회로도
Parameter Conditions Min. Typ. Max. Units
Humidity
Resolution 0.5 0.03 0.03 %RH
8 12 12 bit
Repeatability ±0.1 %RH
Accuracy Uncertainty linearized
Interchargeability Fully interchargeability
Nonlinearity raw data ±3 %RH
linearized ≪1 %RH
Range 0 100 %RH
Response time 1/e (63%)
at 25℃, 1m/s air6 8 10 s
Hysteresis ±1 %RH
Long term stability typical <0.5 %RH/yr
Temperature
Resolution 0.04 0.01 0.01 ℃
0.07 0.02 0.02 ℉
12 14 14 bit
Repeatability ±0.1 ℃
±0.2 ℉
Range -40 123.8 ℃
-40 254.9 ℉
Response Time 1/e (63%) 5 30 s
[표 8] SHT11 성능 사양

- 25 -
3. 포토 센서
포토 센서는 빛의 강도(Intensity)를 압 신호로 변환하는 기능을 하는 센서이
다. 그러므로 포토 센서에는 빛의 세기를 감지하는 집 부가 있다.
일반 으로 포토 센서의 성능은 집 부의 성능에 의해 좌우된다. 그림 20은 일반
인 포토 센서의 구성을 보여주는 그림이다. 본 연구에서는 력 특성을 갖고,
신호가 안정이고, 내구성이 좋은 TSL250RD 포토 센서를 사용하 다. 그림 21은
본 연구에서 사용한 TSL250RD 센서이다.
[그림 20] 포토 센서 구성도 [그림 21] TSL250RD 센서
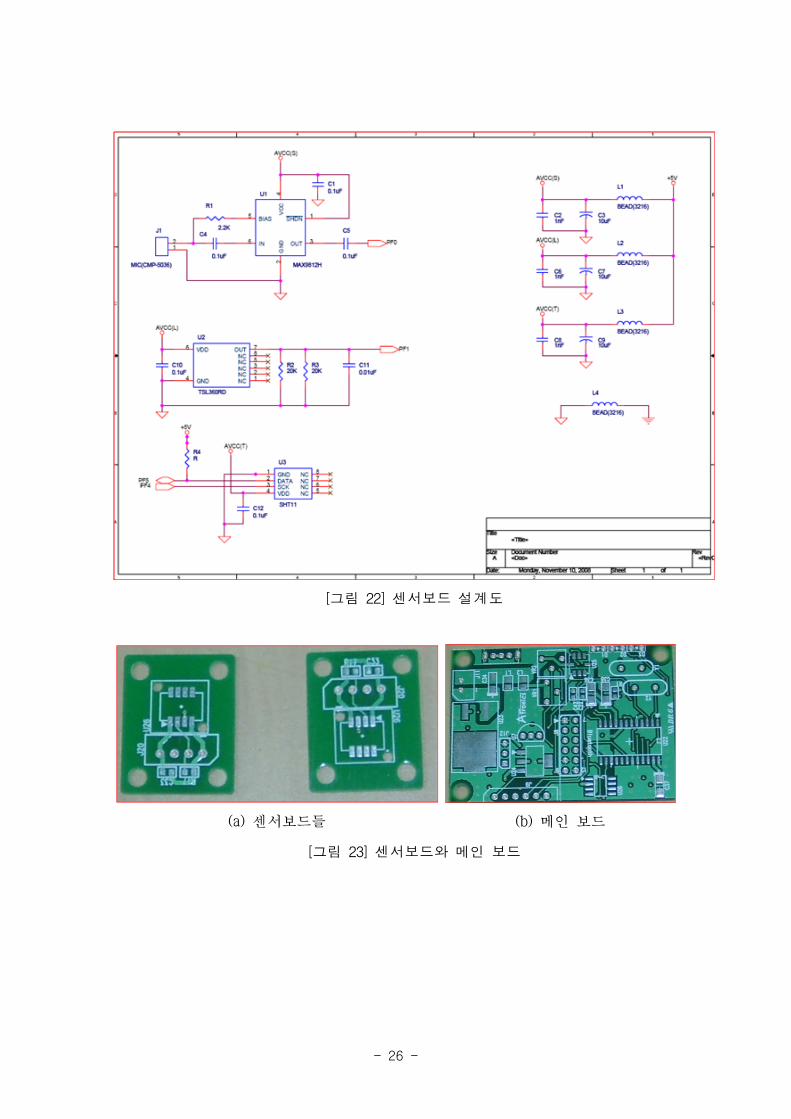
4. 센서보드 설계/PCB 제작
본 연구에서는 다 센싱을 하기 해 가속도 센서, 온습도 센서, 포토 센서를 앞
에서 소개한 바와 같이 각각 설정하여 사용하 으며, 이들 센서를 하나의 통합된
마이크로 컨트롤러에 부착시킴으로서 통합된 다 센싱 장치를 구성하 다.
그림 22는 센서보드를 제작하기 한 설계도이며, 그림 23은 설계에 의해 제작
한 PCB를 나타낸 것이다.
- 26 -
[그림 22] 센서보드 설계도
(a) 센서보드들
(b) 메인 보드
[그림 23] 센서보드와 메인 보드

- 27 -
5. 마이크로컨트롤러
본 연구에서는 제어 처리 모듈을 마이크로컨트롤러와 외부메모리 등을 이용하
여 설계하 다.
무선 센서 장치에서 마이크로컨트롤러의 역할은 단히 요하다. 왜냐하면, 이
모듈은 체 인 시스템을 조 하는 기능을 담당하기 때문이다. 이 기능은 센서보
드 모듈에서 계측된 데이터 수집과 샘 링 율과 획득시간, 획득방법을 조 하고, 데
이터를 무선 모뎀 모듈에 송하는 것이다. 이와 같은 기능은 마이크로컨트롤러에
내장된 래쉬(Flash) 메모리에 장된 로그램에 의해 이루어진다. 그림 24는 제
어 처리 모듈의 설계도이다.
[그림 24] 제어 처리 모듈의 설계도
본 연구에서 사용한 마이크로컨트롤러는 Atmel사의 Atmega128로 이 제품은 총
128k Bytes의 래시 메모리(Flash Memory)와 4,000개의 명령어를 제공한다.
로그램 실행에서 생성되거나 필요한 데이터는 마이크로컨트롤러의 4k Bytes
용량의 데이터 메모리(SRAM)에 장된다. 그러나, 효과 인 임베디드 시스템을 구
하기에는 자체 으로 제공되는 데이터 메모리에 한계가 있었다. 그러므로 본 연
구에서는 데이터 메모리의 한계를 극복하기 하여 32k Bytes 용량의 외부 메모리
- 28 -
를 모듈에 장착하 다. 한 RS232 시리얼 통신을 한 MAX232와 연결 소켓
(UART0, UART1), ISP 연결 소켓, JTAG 연결 소켓, 원 확인용 LED 1개, 리셋
스 치를 장착하 다. 작동 원은 4.5V~5.5V이고 체 회로 의 크기는 59mm
× 68mm 이다.
Atmel AVR 마이크로컨트롤러는 임베디드 시스템에 당한 8-bit 구조의 CPU이
다. AVR은 로그램 메모리와 데이터 메모리를 근하기 한 버스(Bus)를 독립
으로 사용하는 하버드 구조(Harvard Achitecture)와 이 라인 처리 방식을 기반
으로 하는 RISC(Reduced Instruction Set Computer) 기술을 용하여 매우 높은
성능을 발휘한다. 뿐만 아니라 AVR은 래쉬 메모리(Flash Memory)기술을 목
시켜 칩내에 로그램 코드용으로 래쉬 메모리를 내장하고 여기에 사용자 로그
램을 쉽게 다운로드할 수 있는 ISP(In-System Programming) 방식을 용하 다.
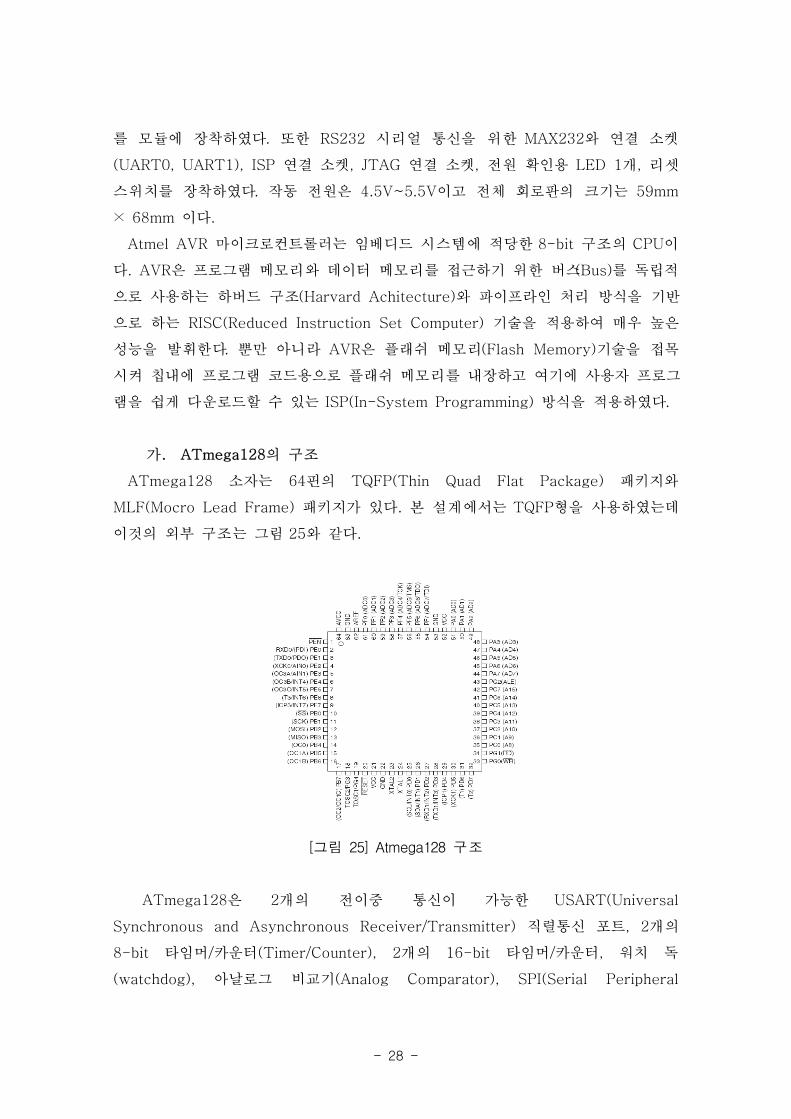
가. ATmega128의 구조
ATmega128 소자는 64핀의 TQFP(Thin Quad Flat Package) 패키지와
MLF(Mocro Lead Frame) 패키지가 있다. 본 설계에서는 TQFP형을 사용하 는데
이것의 외부 구조는 그림 25와 같다.
[그림 25] Atmega128 구조
ATmega128은 2개의 이 통신이 가능한 USART(Universal
Synchronous and Asynchronous Receiver/Transmitter) 직렬통신 포트, 2개의
8-bit 타임머/카운터(Timer/Counter), 2개의 16-bit 타임머/카운터, 워치 독
(watchdog), 아날로그 비교기(Analog Comparator), SPI(Serial Peripheral

- 29 -
Interface) TWI 직렬통신 포트, 2개의 8-bit PWM(Pulse Width Modulator) 출
력 포트 그리고 6개의 8bit 병렬(I/O) 포트 1개의 5bit 병렬 I/O 포트, 8채
10bit A/D 컨버터 등의 다양한 I/O 포트를 가지고 있다.
나. 메모리 구조
ATmega128의 메모리 구조는 매우 특이하며, 이를 먼 크게 로그램 메모리와
데이터 메모리로 나 수 있다. ATmega128은 내부에 로그램 메모리는 그림
26(a)와 같은 구조로 128k Byte의 래시 메모리를 가지고 있다. ATmega128은
8비트 마이크로컨트롤러지만 이 로그램 메모리는 각 번지가 16비트 구조로 되어
있어 64K×16의 용량을 갖는다. 따라서, 모든 명령이 16비트 는 32비트 구조로
되어 있으므로 각 명령은 로그램 메모리에서 1~2개의 번지를 차지하게 된다.
래시 메모리는 SPI 통신방식을 이용한 ISP(In-System Programming)기능을
가지고 있어 사용자가 작성한 로그램을 쉽게 용할 수 있다. 사용자 로그램은
래시 메모리에 10,000번까지 재기입이 가능(Reprogrammable)하다.
(a) Program Memory
(b) data Memory
[그림 26] Atmega128 메모리 구조
다. 인터럽트(Interrupt) 처리
마이크로컨트롤러가 오늘날 자 장치에 범 하게 이용되고 있는 가장 큰 이유
의 하나가 실시간 운 요건을 만족시키는 능력이 있기 때문이다. 이러한 능력은
규정된 시 에서 주어진 임무를 완벽히 수행하는 것이다.
- 30 -
인터럽트는 어떠한 요구가 발생하 을 때 실행 인 로그램의 비동기 차단을 허
용하는 마이크로컨트롤러의 하드웨어 특성 하나로, CPU 외부의 하드웨어 인
요구에 의해서 정상 인 로그램의 실행 순서를 변경하여 보다 시 한 작업을 먼
수행한 후에 다시 원래의 로그램으로 복귀하는 것을 의미한다. 인터럽트 실행
에는 로그램이 일시 으로 정지하게 된다. 인터럽트는 주변장치의 서비스 요청
에 CPU가 가장 빠르게 응할 수 있는 방법이며, 이것을 이용하면 주변장치로부터
의 발생시기를 측하기 어려운 비동기 인 일(Event)을 CPU가 빠르게 처리할 수
있어서, 인터럽트는 서로 비동기 으로 동작하는 CPU(매우 고속으로 동작)와 주변
장치(비교 속으로 동작) 사이에서 일을 효율 으로 수행하는 요한 수단이 된
다. 제어 처리 모듈에서는 데이터의 획득과 명령어의 송 등에 인터럽트를 이
용하 다.
인터럽트의 종류는 마이크로 로세서에 따라 다르고, 한 이를 보는 에 따
라 여러 가지의 방법으로 분류할 수 있으나 인터럽트 발생 원인에 따른 분류를 하
면 내부 인터럽트와 외부 인터럽트가 있다.
ATmega128에는 리셋(reset)을 포함하여 모두 35종의 리셋 인터럽트 벡터
를 가지고 있다. 이것들은 모두 외부 인터럽트에 해당하며 차단 가능하다. 이들 인
터럽트를 다시 구분하면 외부 핀을 통하여 요구되는 인터럽트 8개, 타이머0 련 2
개, 타이머1 련 5개, 타이머2 련 2개, 타이머3 련 5개, UART0 련 3개,
UART1 련 3개, 기타 6개이다. 본 설계에서는 2개의 외부 인터럽트와 타이머/카
운터0 오버 로워(Overflow) 인터럽트, UART0 RX 인터럽트를 사용하 다.
라. USART
무선 센서 장치에서는 획득한 데이터를 무선 모뎀에 송신하거나 모니터링 시스템
에서의 명령어를 수신하게 된다. 이러한 데이터나 명령어의 송은 마이크로컨트롤
러에 내장된 USART(Universal Synchronous and Asynchronous Receiver and
Transmitter)포트를 이용한다.
무선 센서 장치에서 USART를 사용하기 해서는 송속도와 송 데이터
임의 형식을 시스템의 규정에 맞게 설정하여야 한다. ATmega128에는 동일한 기능
을 수행하는 2개의 USART 직렬통신 포트 USART0 USART1을 가지고 있는
데, 이것들은 동기 비동기 송 모드에서 이 통신이 가능하고, 멀티 로세
서 통신 모드로 동작하는 것도 가능하며, 높은 정 도의 보 이트 발생기(Baud
Rate Generator)를 내장하고 있다. 본 설계에서는 USART의 설계를 비동기 방식
으로 설계하 다.

- 31 -
USART 직렬통신 포트에서는 송신 완료(TX Complete), 송신 데이터 지스터
비 완료(TX Data Register Empty), 수신 완료(RE Complete) 등 3가지의 인터
럽트를 사용할 수 있으며, 송 속도는 비동기 일반 모드일 경우 다음 식(3)과 같이
UBRRn 지스터 입력 값에 의하여 설정할 수 있다.
1
16
oscf
UBRRnBAUD
= −
× (3)
여기서, BAUD의 단 는 bps(bits per second)이며, UBRRn은 12bit만을 사용하
므로 0~4095 범 의 값을 가질 수 있다.
는 시스템 클럭 주 수이다.
ATmega128에서 1개의 송 데이터 임은 최소 7bit에서 최 13bit로 구성
될 수 있는데, 이를 그림으로 설명하면 그림 27과 같다.
[그림 27] 시리얼 송 데이터 구조
ModemSerial Interface
(RS 232)
DTE
Modem
DCEDTE DCE
Serial Interface
(RS 232)
ModemSerial Interface
(RS 232)
DTE
Modem
DCEDTE DCE
Serial Interface
(RS 232)
(a) RS-232C를 이용한 시스템 설정
[그림 28] DTE & DCE의 RS232C 연결 방법(계속)

- 32 -
TxD
RxD
RTS
CTS
DTR
DSR
CD
RI
GND
TxD
RxD
RTS
CTS
DTR
DSR
CD
RI
GND
DTE DCECPU 전송선
TxD
RxD
RTS
CTS
DTR
DSR
CD
RI
GND
TxD
RxD
RTS
CTS
DTR
DSR
CD
RI
GND
DTE DCECPU 전송선
(b) 이블 연결방법
[그림 28] DTE & DCE 의 RS-232C 연결 방법
RS-232C통신 방식에서 컴퓨터(DTE: Data Terminal Equipment)와 모뎀(DCE:
Data Circuit-terminating Equipment)을 속할 경우에는 그림 28의 (b)와 같이
연결한다. 이 경우에는 어느 순간에 송신동작과 수신동작이 한 가지씩만 수행되는
반이 통신(Half Duplex)을 나타내었으나, 이를 송신과 수신동작이 동시에 첩되
게 수행되는 것으로 생각하면 이 통신(Full Duplex)도 가능하다.
마. A/D Converter
A/D 변환기(Converter)는 아날로그 신호를 디지털 값으로 변환하는 장치이다.
압, 류, 온도, 습도, 유량 등 우리 주 에 있는 연속 인 아날로그 신호를 마
이크로 로세서로 처리하기 해서는 이를 디지털 신호로 먼 변환해야 한다. 이
때 몇 비트의 데이터로 변환하느냐가 분해능(Resolution)에 해당하고, 변환을 시작
시켜 변환 종료까지 소요되는 시간이 변환 시간이며, 어느 범 의 압을 입력 하
느냐 (입력 압 역) 등이 요하다.
ATmega128은 8채 10비트의 분해능의 축차비교형(Successive
Approximation) A/D 컨버터를 가지고 있다. A/D 컨버터의 앞단에는 샘 /홀드
(Sample and Hold) 회로를 가지고 있어서 A/D 변환이 수행되고 있는 동안에 아날
로그 압이 일정하게 유지되도록 한다.
A/D 변환시간은 사용 주 수 50kHz~200kHz에서 사용자가 설정할 수 있으며,
아날로그 입력 압의 범 는 기본 으로 0~이지만 차동입력의 경우에는 입력
압 범 가 -~로 되며, 기 압 는 원 압 를 과할 수 없
다. 압은 외부의 AREF 단자로 입력된 압을 사용할 수도 있고, MCU 내
부의 기 압 2.56V를 사용할 수도 있다.
- 33 -
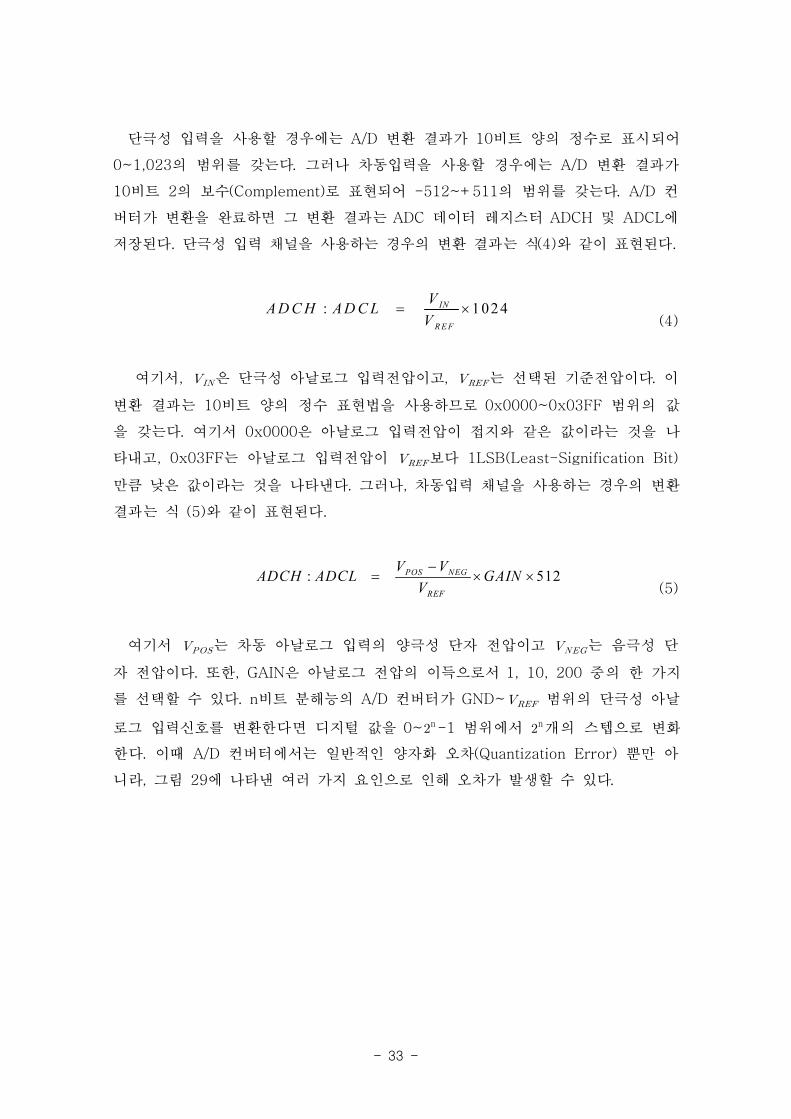
단극성 입력을 사용할 경우에는 A/D 변환 결과가 10비트 양의 정수로 표시되어
0~1,023의 범 를 갖는다. 그러나 차동입력을 사용할 경우에는 A/D 변환 결과가
10비트 2의 보수(Complement)로 표 되어 -512~+511의 범 를 갖는다. A/D 컨
버터가 변환을 완료하면 그 변환 결과는 ADC 데이터 지스터 ADCH ADCL에
장된다. 단극성 입력 채 을 사용하는 경우의 변환 결과는 식(4)와 같이 표 된다.
: 1024
IN
REF
VADCH ADCL
V= ×
(4)
여기서, 은 단극성 아날로그 입력 압이고, 는 선택된 기 압이다. 이
변환 결과는 10비트 양의 정수 표 법을 사용하므로 0x0000~0x03FF 범 의 값
을 갖는다. 여기서 0x0000은 아날로그 입력 압이 지와 같은 값이라는 것을 나
타내고, 0x03FF는 아날로그 입력 압이 보다 1LSB(Least-Signification Bit)
만큼 낮은 값이라는 것을 나타낸다. 그러나, 차동입력 채 을 사용하는 경우의 변환
결과는 식 (5)와 같이 표 된다.
: 512
POS NEG
REF
V VADCH ADCL GAIN
V
−
= × ×
(5)
여기서 는 차동 아날로그 입력의 양극성 단자 압이고 는 음극성 단
자 압이다. 한, GAIN은 아날로그 압의 이득으로서 1, 10, 200 의 한 가지
를 선택할 수 있다. n비트 분해능의 A/D 컨버터가 GND~ 범 의 단극성 아날
로그 입력신호를 변환한다면 디지털 값을 0~n-1 범 에서 n개의 스텝으로 변화
한다. 이때 A/D 컨버터에서는 일반 인 양자화 오차(Quantization Error) 뿐만 아
니라, 그림 29에 나타낸 여러 가지 요인으로 인해 오차가 발생할 수 있다.
- 34 -
(a) offset error
(b) non-linearity error
(c) gain error
(d) differential non-linearity error
[그림 29] A/D Converter의 error 종류
ATmega128의 A/D 컨버터는 디지털 회로의 향을 받지 않고 잡음에 하여 보
다 안정 인 동작을 수행할 수 있도록 독립 인 아날로그 회로 원 단자 AVCC
기 원 입력 단자 AREF를 가지고 있다. 그럼에도 불구하고 A/D 컨버터는
잡음에 상당히 민감하기 때문에 모듈 설계시 A/D 컨버터의 아날로그 입력 신호 선
은 최소한으로 짧게 하고 잡음의 향을 받지 않도록 처리하 다. 한 아날로그
회로의 모든 지는 아날로그 지 단자 AGND로 하 으며, 여러 번 A/D 변환하여
읽어 들인 결과를 평균 처리하여 사용하는 것으로 하 다.
6. 무선통신 모듈
무선 센서 장치에서 무선 모뎀 모듈은 기존의 유선에 의존한 데이터의 송수신을
무선으로 체하는 요한 역할을 수행한다. 이와 같은 기능은 본 연구에서 지향하
는 구조물의 모니터링 시스템의 가장 큰 장 이면서 특징이다.
무선 센서 장치에 용되는 무선 모뎀을 설계하거나 기존에 상업용으로 사용되는
모뎀을 선택하는 일은 무선 센서 시스템이 용되는 구조물의 치 규모 등을
고려하여 신 히 처리하여야 한다. 일반 으로 장 형 교량과 같은 토목 구조물은
규모가 크고, 해안이나 산악에 치한 경우가 많다. 이러한 열악한 환경에서 안정
이고 신뢰성 있는 데이터 송수신 시스템을 무선 통신으로 구축하기 해서는 무선

- 35 -
통신에 한 이해가 선행되어야 하며 무선 센서 장치가 실 구조물에 효과 으로
용되기 해서는 충분한 통신거리와 실시간으로 데이터 송이 가능한 통신 속도,
신뢰성 있는 통신 방법을 갖는 무선 모뎀이 필수 이다. 이 외에도 가격과 력소
모량, 크기, 통신 주 수 역, 안테나 등을 고려하여 설계하여야 한다.
가. 무선통신(RF)
무선통신은 3,000GHz 이하의 자 를 이용하여 모든 종류의 정보를 송수신하
는 것이다. 무선통신에서 반송 (Carrier Wave)로 사용되는 자 의 주 수를 무
선 주 수(RF: Radio Frequency)라고 하며, 수 kHz의 낮은 주 수로부터 수천
GHz의 높은 주 수에 이르기까지 넓은 범 를 가지고 있으나, 실제로는 표 9와 같
이 주 수 역별로 구분하여 사용하고 있다. 이러한 구분은 법에 의하여 규정
하고 있다.
국내에서는 허가를 받지 않고 사용하는 주 수로서 소 출력장비가 사용하는 주
수 있다. 이러한 소 출력장비는 부분 10mW이하의 출력을 가진다. 이 소 출력장
비들이 사용하는 주 수 역을 ISM(Industrial, Scientific, Medical) 주 수라고
한다.
무선통신시스템에서는 송하려는 신호를 먼 기 신호로 변환한 후 이것을
그 로 보내지 않고 높은 주 수의 정 의 진폭, 주 수 는 상을 원신호로
변화시켜 보낸다. 즉, 낮은 주 수의 신호를 보다 높은 주 수로 이동시켜 송한
다. 이 과정을 변조(Modulation)라고 한다. 이때 정보신호를 변조 (Modulating
Wave), 높은 주 수를 반송 (Carrier Frequency), 높은 주 수로 변조된 를 피
변조 (Modulated Wave), 변조를 수행하는 회로를 변조기(Modulator)라고 한다.
수신측에서는 피변조 에서 원래의 변조 를 추출하여 재생해야 하는데, 이 과정
을 복조(Demodulation) 는 검 (Detection)라고 하며, 이 과정을 수행하는 회로
를 복조기(Demodulator)라고 한다.

- 36 -
명칭 기호 주 수 주용도
very low
frequencyVLF
3 kHz장거리 력통신≀
30 kHzlow
frequencyLF
장거리 고정국 사이의 통신, 선박통신,
항해보조≀
300kHzmedium
frequencyMF 방송, 선박통신,항공통신, 경찰통신≀
3MHzhigh
frequencyHF
표 (5kHz), 거리 도는 장거리 국내
는 해외 각종 통신≀
30MHzvery high
frequencyVHF 텔 비젼, FM방송, 이더≀
300MHzultra high
frequencyUHF
텔 비 , 다 통신, 이더,
성통신,이동통신
≀
3GHzsuper high
frequencySHF ≀
30GHzextremely
high
frequency
EHF ≀
300GHz
특수통신( 천문, 우주연구)3THz
[표 9] 주 수에 따른 자 의 분류
나. 모듈 설계
본 연구에서의 무선 통신 모듈은 블루투스(Bluetooth) 방식을 사용하 다. 본 연
구에서 사용한 MSP는 최 14개의 시리얼 통신 장치를 연결할 수 있는 블루투스
무선 RS232멀티 시리얼 포트이다. MSP를 사용하면 기존의 RS232 직렬 인터페이
스를 무선으로 체할 수 있어 설치 공사 유지 보수에 소요되는 비용을 감할
수 있다.
여러 의 시리얼 장비를 설치하는 경우, 기존에는 고가의 멀티포트 시리얼 카드
가 필요하 다. 그러나 MSP는 네트워크 인터페이스만으로 여러 의 시리얼 장비
와 통신이 가능하다. 한 일반 시리얼 이블을 이용하는 경우에는 통신 거리에
제약이 있으나(1~10m), MSP는 네트워크를 통해 통신하기 때문에 거리상의 제약이
없으며, 인터넷을 통해 원격지에서도 통신이 가능하다. 한 단말 장치와는 블루투
스 무선 기술로 통신하기 때문에, 설치 장소에 한 제약이 없다.

- 37 -
[그림 30] 블루투스 MSP(Multi Access Point)
Model Hardware interface Specifications
promi-MSP 102
LAN 10/100×2
RS232C(config and data)
Bilt-in Bluetooth
1 USB A-type ports
(Max. 14Bluetooth links)
coverage : 10m~100m
Data rate : Max. 723 Kbps
COM port redirector supported
-Serial/IP
Supported NetWorks
HTTP / TFTP / Telnet /
IP-sharting(NAT) / DHCP /
PPPserver / PPPoE
[표 10] MSP 제품 특징
제 3 절 다중 센싱 무선 센서 제작
본 연구에서는 앞 에서 설명한 설계를 바탕으로 다 센싱 무선 센서 장치를
직 제작하 다. 본 센서는 최첨단 무선통신기술인 블루투스 통신방법을 용하여
가속도 신호를 잡음(Noise)없이 빠르게(57,600bps) 송하는 무선 가속도 센서 시
스템이다.
본 시스템은 각각의 센서 노드에 2축 MEMS형 가속도 센서와 온습도 센서, 포토
센서, 소음 센서, 16Bit A/D 컨버터, 8bit 마이크로컨트롤러, Bluetooth 통신모듈,
Li-ion 충 모듈로 구성되어 있어, 가속도 신호의 자가획득 뿐만 아니라 임베디드
알고리즘에 따라 의사결정(decision Making)이 가능하다. 가속도 센서는 측정범
가 ±1.2g, 측정 주 수 역은 50Hz 이하, 잡음층을 포함한 신호 해상도는 약
0.5mg RMS, 무선 송수신 거리 최 1.2km 이다. 그림 31은 본 연구에서 개발한
다 센싱 무선 센서이다.

- 38 -
[그림 31] 본 연구에서 개발한 다 센싱 무선 센서
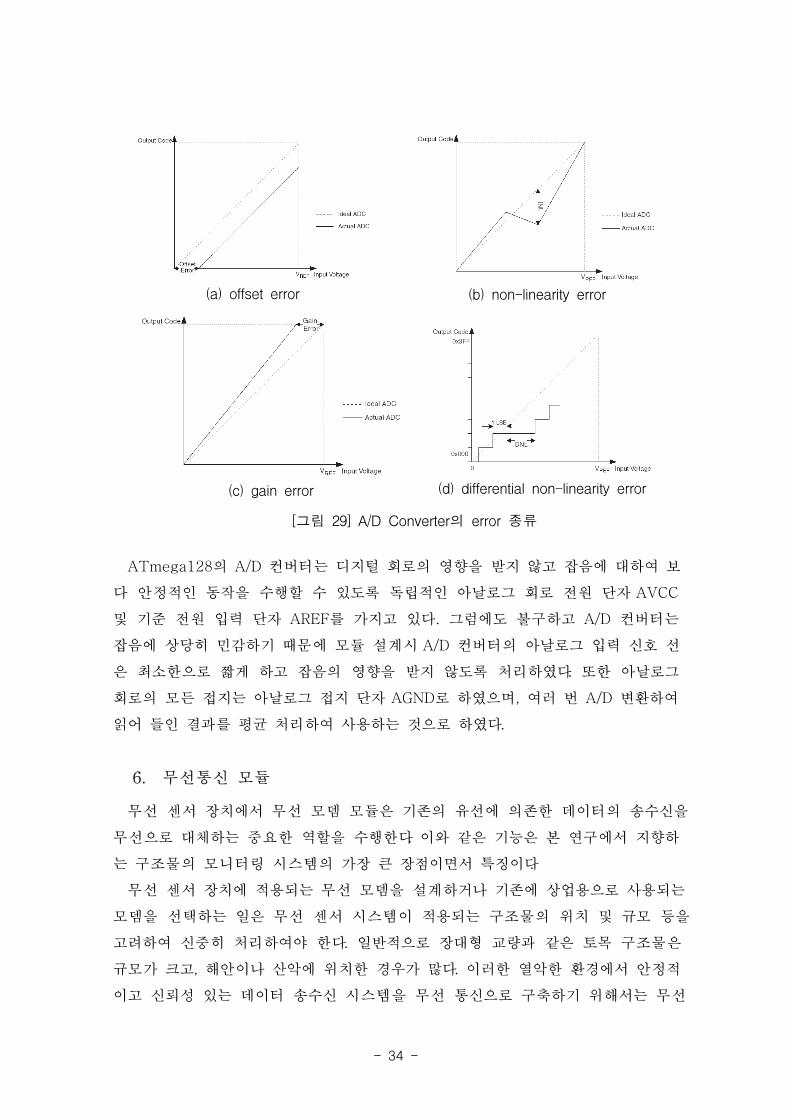
1. 원 장치
무선 센서 장치의 가장 큰 특징 하나는 데이터 송 이블이 필요없기 때문
에 계측장치의 설치와 이동이 쉽고 자유롭다는 것이다. 그러나 이러한 장 을 충분
히 이용하기 해서는 안정 이고 독립 인 원공 장치가 요구된다.
본 연구에서 설계 제작한 무선 센서 장치는 최소 9V DC 원이 필요하다. 일반
으로 이동이 용이하고 사용이 편리한 원 공 장치로써 가장 많이 이용되는 것
이 상용 배터리(Battery)이다. 본 연구에서는 9V Li-ion 충 건 지를 사용하
다. 그러나 배터리의 력량은 한계가 있고 지속 인 사용을 해서는 재충 이나
교환이 필요하다.
효과 으로 무선센서장치의 장 을 살리기 해서는 최소한 1~2년 동안은 배터
리 교환이 필요 없는 시스템을 설계하여야 한다. 토목 구조물과 같은 경우에는 무
선센서장치의 원공 을 하여 태양에 지나 풍력을 사용하는 것이 재로서는
가장 실 인 방법이다.
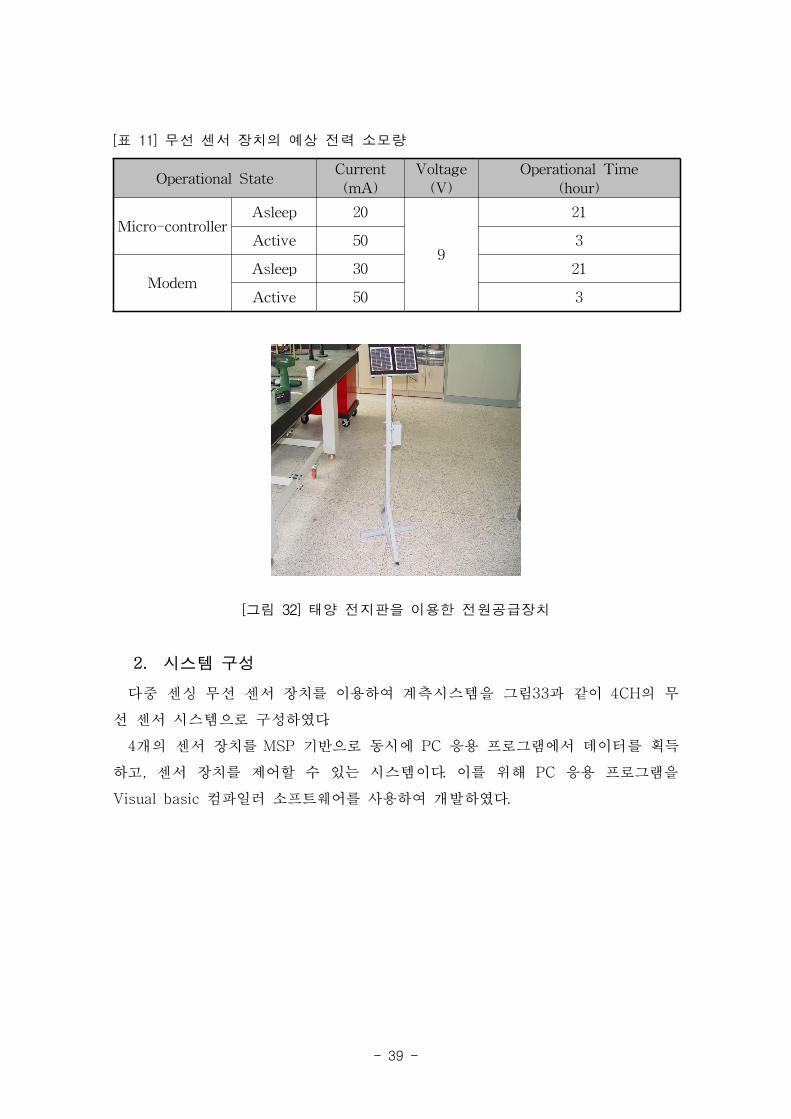
표 11은 장치의 운 을 하루에 3시간으로 가정하 을 경우에 상되는 력 소
모량을 나타낸 것이다. 데이터의 송수신을 하여 사용할 경우 약 1.35A의 력량
이 소모된다. 그러므로 본 연구에서는 그림 32와 같이 태양 지 과 축 지를 이용
한 원 공 장치를 별도로 제작하 다. 12V, 150mA 용량의 태양 지 2개를
병렬로 연결하여 12V, 1.5A 용량의 축 지를 충 할 수 있도록 원 공 장치를
구성하 다. 이와 같은 구성은 태양 지 의 충 시간을 하루에 약 6시간으로 가정
하여, 센서 장치의 력 소모량 추정치인 1.35A보다 많은 하루에 총 1.5A의 원
을 생산할 수 있도록 하 다.
- 39 -
Operational StateCurrent
(mA)
Voltage
(V)
Operational Time
(hour)
Micro-controllerAsleep 20
9
21
Active 50 3
ModemAsleep 30 21
Active 50 3
[표 11] 무선 센서 장치의 상 력 소모량
[그림 32] 태양 지 을 이용한 원공 장치
2. 시스템 구성
다 센싱 무선 센서 장치를 이용하여 계측시스템을 그림 33과 같이 4CH의 무
선 센서 시스템으로 구성하 다.
4개의 센서 장치를 MSP 기반으로 동시에 PC 응용 로그램에서 데이터를 획득
하고, 센서 장치를 제어할 수 있는 시스템이다. 이를 해 PC 응용 로그램을
Visual basic 컴 일러 소 트웨어를 사용하여 개발하 다.

- 40 -
Acquisition Method: Manual / Trigger / Period
Window Function : Hanning / Hamming ….
Filtering function : LPF /BPF
Signal Process Function : Power Spectrum / FFT …
The others : Auto Save / Sensor Check
Wireless Multi Sensor
CH 1
Bluetooth Access Point
Parani-MSP100
(www.sena.com)DHCP server로사용할경우
IP: 168.192.0.10 로자동할당
Port NUM 설정:
CH 1: 8400
CH 2: 8500
CH 3:8600
CH 4:8700
Control Port NUM: 2525
System Control &
Data Logger Program
Bluetooth MAC Address
00:00:00:00:00:01
CH 2
00:00:00:00:00:02
CH 3
00:00:00:00:00:03
CH 4
00:00:00:00:00:04
Port : 8400
Port : 8500
Port : 8600
Port :
8700
TCP/IP
In
tern
et
Netw
ork
Over 200m
[그림 33] 4-CH 다 센싱 무선 계측 시스템
제 4 절 응용 프로그램 개발
계측 시스템에는 데이터를 획득하고 센서를 제어하기 한 로그램이 요구된다.
본 연구에서는 다 센싱 무선 계측 시스템을 운 하기 해 PC 기반 계측 시스템
제어, 데이터 획득, 분석을 한 로그램을 개발하 다.
로그램은 크게 3개의 Window로 구성하 다. 센서들을 PC와 연결하고 센서 설
정 리, 가속도 데이터 획득 분석을 하는 주 로그램과 획득한 가속 데이
터를 분석하여 구조물의 상태를 평가하는 구조물 상 내하력 평가 로그램, 마지
막으로 환경 정보 즉, 온/습도 센서, 포토 센서로부터 데이터를 획득하여 구조물 환
경을 분석하는 로그램으로 구성하 다. 로그램 개발 환경은 Window XP시스템
에서 Visual Basic 6.0 소 트웨어를 이용하여 개발하 다.
1. 주(Main) 로그램
주 로그램은 여러 개의 창으로 구성되어 있다. 그림 34에서의 통신제어 창은
PC와 센서들을 MSP를 통하여 연결하기 한 센서 주소 입력과 명령을 수행한다.
센서 설정 창에서는 센서에 데이터 획득에 필요한 특성값을 설정하고 센서 장치
에 설정 값을 송하는 기능을 한다. 이외에 계측시스템의 상태를 체크 할 수 있는
측 창과 가속도 데이터를 그래 로 실시간 표 하기 한 그래 창과 해석 창,
획득한 데이터를 장하기 한 일 시스템 창 등으로 구성되어 있다.

- 41 -
[그림 34] 주 로그램의 구성
[그림 35] 주 로그램의 신호 그래 창

- 42 -
[그림 36] 주 로그램의 해석 창
[그림 37] 주 로그램의 통신제어 창
[그림 38] 주 로그램의 측 창
- 43 -
2. 가속도 데이터를 활용한 안정성평가 로그램
구조물의 안정성평가기법은 측정된 동 인자(고유진동수, 모드 형상, 그리고 감쇠
계수 등)가 구조물의 물리 성질인 질량(mass), 감쇠(damping), 그리고 강성
(stiffness)의 함수라는 기본 인 개념에서부터 시작된다.
를 들어, 구조물의 균열 발생 는 연결부의 이완 등으로 인한 강성의 감소와
같은 물리 성질의 변화는 구조물 고유의 동특성 변화를 유발하기 때문에 이를 검
출함으로써 손상정도를 추정할 수 있는 것이다.
그러나 이러한 동특성 변화 추정을 이용한 안정성평가기법은 실제 용성을 고려
할 때 해결해야 할 많은 문제 이 존재하고 있으며, 가장 요한 문제 은 센서 수
의 제한이다. 경제 인 이유로 인하여 실교량에 설치할 수 있는 센서의 수량에는
제한이 따를 수밖에 없다. 그러므로 정확한 동특성 인자를 추출할 수 있는 정보에
한계가 있어 추정된 결과에도 향을 미치게 된다. 이와 같이 제한된 정보량을 기
반으로 수행되는 안 성평가기법은 상교량의 미세한 손상이나 노후화를 감지할
수 있는 민감도가 떨어지게 된다.
본 연구에서는 다 센싱 무선 계측시스템을 이용하여 교량의 안 성을 평가하는
데 응용하는 연구를 수행하 다. 가속도 데이터를 이용한 안정성평가기법으로는 상
내하력평가(RLC)기법을 용하 다.
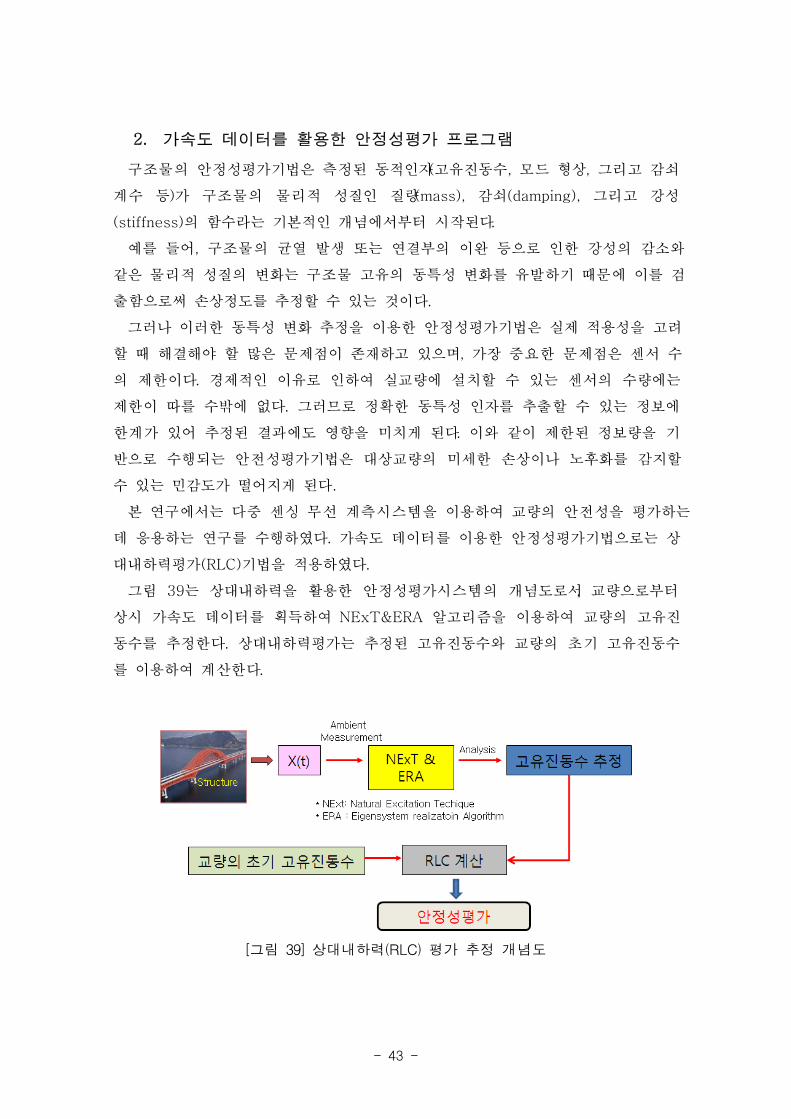
그림 39는 상 내하력을 활용한 안정성평가시스템의 개념도로서, 교량으로부터
상시 가속도 데이터를 획득하여 NExT&ERA 알고리즘을 이용하여 교량의 고유진
동수를 추정한다. 상 내하력평가는 추정된 고유진동수와 교량의 기 고유진동수
를 이용하여 계산한다.
[그림 39] 상 내하력(RLC) 평가 추정 개념도

- 44 -
[그림 40] 상 내하력 평가 로그램
그림 40은 주 로그램과 연동되는 로그램으로 실시간 가속도 데이터 로거
로그램과 상시동특성추정 로그램을 통합하여 데이터 획득과 동시에 상 내하력을
평가할 수 있도록 구성된 통합 로그램이다.
본 로그램은 추정된 고유진동수 에서 사용자가 단하여 상 내하력평가를
원하는 목 고유진동수를 설정하는 방식으로, 거의 실시간으로 결과값이 장되기
때문에 장기계측을 통한 상 내하력의 변화를 감지할 수 있도록 구성하 다.
3. 환경정보 분석 로그램
제2장에서 기술한 각종 알고리즘을 바탕으로 구조물 주변 환경정보 분석, 평가
로그램을 그림 41과 같이 개발하 다.
본 로그램은 주 로그램과 연동되는 로그램으로 설정된 센서로부터 기본 데
이터 즉, 온도와 습도, 조도, 소음 데이터를 획득한다. 획득한 기본 정보를 바탕으로
2차 환경정보를 발생 가능 확률 값으로 추정하여 나타낸다. 를 들어, 노면 결빙
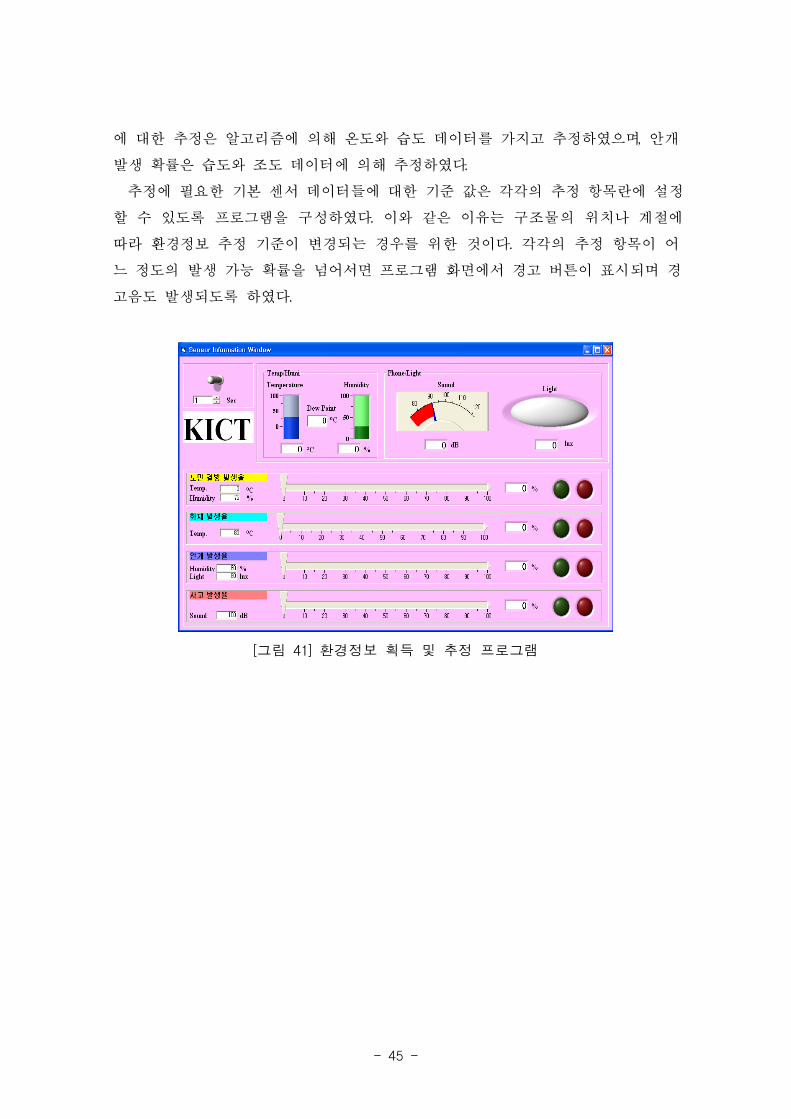
- 45 -
에 한 추정은 알고리즘에 의해 온도와 습도 데이터를 가지고 추정하 으며, 안개
발생 확률은 습도와 조도 데이터에 의해 추정하 다.
추정에 필요한 기본 센서 데이터들에 한 기 값은 각각의 추정 항목란에 설정
할 수 있도록 로그램을 구성하 다. 이와 같은 이유는 구조물의 치나 계 에
따라 환경정보 추정 기 이 변경되는 경우를 한 것이다. 각각의 추정 항목이 어
느 정도의 발생 가능 확률을 넘어서면 로그램 화면에서 경고 버튼이 표시되며 경
고음도 발생되도록 하 다.
[그림 41] 환경정보 획득 추정 로그램


- 47 -
제 4 장 성능검증 실험
제 1 절 현장실험을 통한 상대내하력평가 시스템 검증
상시계측시스템을 활용한 상 내하력평가 시스템의 성능과 장 용성 검토를
하여 장 실험을 실시하여 측정 가속도를 이용한 구조물의 동특성 추정가능성과
상기에 기술된 상 내하력평가 시스템의 신뢰성을 검토하 다.
1. 실험방법
실험에 사용된 교량은 그림 42에 나타낸 바와 같이 지간 30m 길이의 단순경간
3개로 구성된 총길이가 90m, 폭이 11m인 PSC 거더형식의 교량이다. 설계하 은
DB-24교량으로 1997년도에 공되어 재 사용년수가 12년된 국도상의 교량이다.
상시계측시스템에는 스마트제어계측에서 개발한 무선가속도 센서(WA-1000-XY)
시스템을 사용하 다. 가속도 센서는 측정범 가 ±1.2g, 민감도 1000mv/g, 측정주
수 역은 50Hz 이하의 성능을 가진 무선 가속도 센서를 사용하 다.
[그림 42] 상 내하력(RLC) 평가 실험 상교량

- 48 -
계측 치는 그림 43에서 나타낸 바와 같이 앙경간의 간 치에 양 폭 끝단
의 난간연석 에 설치하 다.
두 센서 에서 한 쪽에 있는 센서를 참고 치(reference point)로 고정하고, 나
머지 센서를 응답 채 (response point)로 설정하여 측정을 실시하 다. 데이터 획
득은 트리거 방법으로 진동크기가 1.0mg 이상 일 때마다 획득하도록 시스템을 설
정하 다. 데이터 획득 조건은 샘 링율(sampling rate) 150Hz, 데이터 개수
4,092개, 주 수 분해능 0.037Hz로 설정하 다.
[그림 43] 센서 치
2. 실험결과
그림 44는 두 개의 채 에서 획득한 가속도 신호를 시간이력 그래 로 나타낸
것이다. 획득한 상시가진 가속도 데이터는 일반 으로 최 치(Peak to Peak) 값이
0.04g 이하, 실효치(RMS) 값이 0.005g 정도로 상당히 미약한 진동수 을 보 다.
그림 45는 교량의 략 인 공진주 수를 조사하기 해 두 채 의 가속도 신호
를 교차스펙트럼 분석을 실시한 것이다. 략 으로 분석한 상교량의 공진주 수
는 2.409Hz, 3.850Hz, 4.364Hz로 추정할 수 있었으며, 3.850Hz가 가장 큰 응답
크기를 보 다. 이는 모든 응답 분석결과에서 모두 동일한 결과는 아니고, 약 60%
정도의 응답 분석 결과에서 추정된 결과이다. 이는 상시가진하 인 차량하 의 종
류나 속도 등에 따라 가진하 의 크기나 주기가 변하 기 때문인 것으로 단된다.
[그림 44] 가속도계 시간이력

- 49 -
[그림 45] 교차 PSD 결과
3. 상 내하력(RLC) 평가 결과
상교량의 상 내하력(RLC) 평가는 약 24시간동안 118회에 걸쳐 수행하 다.
그림 46은 RLC 추정 결과를 그래 로 나타낸 것이다. 평가 결과, RLC 값의 분포
는 100%에서 96%까지의 범 에 있었으며, 99% 이상 값이 체 수행회수의 80%
를 과하 다. 이와 같은 결과는 상교량의 고유진동수의 변화로 인한 것으로
단하기보다는 NExT&ERA 알고리즘으로 상교량의 고유진동수를 추정하는데 있
어서의 미세한 오차로 인한 결과로 단된다.
[그림 46] 상교량 상 내하력(RLC) 평가결과


- 51 -
제 5 장 결 론
본 연구에서는 건설 구조물 이용자의 안 을 해, 첨단 센서 기술과 데이터 분
석 기술을 이용하여 사용이 간편하고 경제 인 건설 구조물 안 리 용 계측/분
석 시스템을 개발하 다.
(1) 본 연구에서는 건설구조물 주변 환경에 한 계측항목을 가속도, 온도, 습도,
빛 등으로 정의하 으며, 이러한 계측센서를 내자한 무선기반 다 센싱 시스
템을 개발하 다. 한 이러한 센싱기술을 활용하여 결빙, 안개, 그리고 화재를
감지할 수 있는 방법론을 제안하 다.
(2) 본 연구에서 개발한 무선기반 다 센싱 시스템과 알고리즘을 구 할 수 있는
운용 로그램을 개발하 으며, 이에 한 간략한 장검증실험을 실시하 다.
(3) 본 연구 결과는 국내 건설 구조물 안 리를 한 시설물의 성능평가와 긴
상황 리를 한 경제 이고, 편리한 데이터 송수신 체계를 구축 하는데 기여
할 수 있을 것으로 단되며 다음과 같은 효과가 나타날 것으로 기 된다.
� 무선계측센서기술을 응용한 기존 구조물 안 리 시스템 개발을 통한 무배
선 효과로 비용 감 (기 이익 : 유선 설치 비용 감)
� 구조물 시공 시 무선계측센서 설치를 통한 공사기간 단축으로 인건비 등의
공사비용 감 효과 (기 이익 : 인건비 등의 감)
� 무선센서 개발의 핵심기술 보유로 인한 해외 수출기 효과
� 고 핵심 기술 인력 연구 인력의 양성을 통한 기술 연구의 수 향상
� 건설 분야의 유비쿼터스 인 라 구축 선도
(4) 본 연구에서 개발된 무선기반 다 센서의 실용화 가능성 장 용성, 그리
고 데이터의 활용성을 검증하기 하여 본 연구가 종료된 이후에는 계속 으로
주요시설물 하나인 교량시설물에 설치하여 데이터를 수집하고, 이에 한 분
석을 실시할 계획이다.

주 의
이 보고서는 소방방재청에서 시행한 산업화지원사업의 최종보고
서입니다.
이 기술개발내용을 외 으로 발표할 때에는 반드시 소방방재청
에서 시행한 산업화지원사업의 기술개발 결과임을 밝 야 합니다.




















![[전체] 2016년 모니터링을 위한 자체진단평가보고서-0602€¦ · 4) 복음전도와 선교의 원리의 실천적 방법론 숙지와 훈련 l 사회복지 학과](https://img.pdfslide.tips/doc/110x75/5f84f72d0e11f10ec1486fee/-2016e-eee-oeoe-eeeeoe-0602-4-eoee.jpg)

![매립장의 효율적인 체적 모니터링을 위한 체적 계산 …...3차원 매립형상정보의 정확도 유지 방안 연구 ∙[표준화] 3D 매립형상정보 표출](https://img.pdfslide.tips/doc/110x75/5e41e4d13c585a4b146ea02b/ee-oe-eee-oeoe-e-3.jpg)






