Embed Size (px)
Citation preview

1
ECUACIONES DIFERENCIALES
ELÍPTICAS EN DERIVADAS PARCIALES
Armando Blanco A.

2
Capitulo V
ECUACIONES DIFERENCIALES ELÍPTICAS EN DERIVADAS PARCIALES
•Introducción
•Diferencias finitas
•Métodos de relajación sucesiva
•Métodos de solución directa
•Imposición de Condiciones de Neumann
•Referencias
3
Introducción
02
22
2
2
=++∂∂+
∂∂+
∂∂+
∂∂∂+
∂∂
GFuy
uE
x
uD
y
uC
yx
uB
x
uA
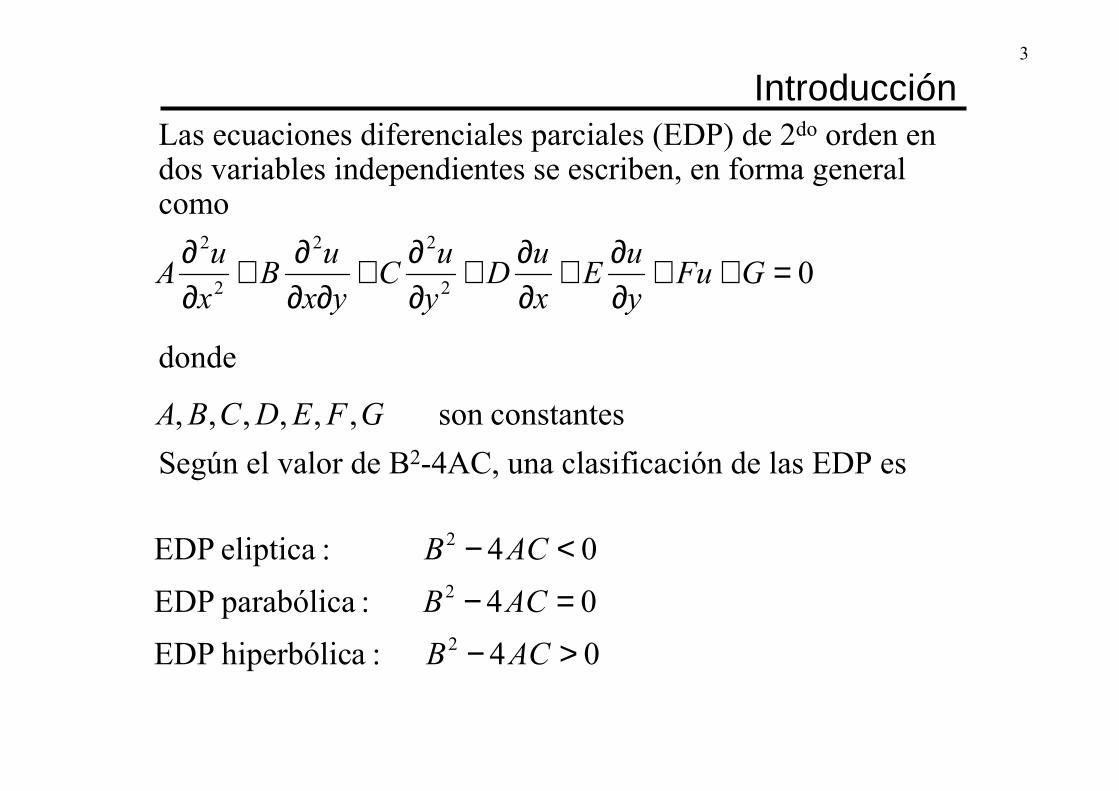
Las ecuaciones diferenciales parciales (EDP) de 2do orden en dos variables independientes se escriben, en forma general como
donde
constantesson ,,,,,, GFEDCBA
Según el valor de B2-4AC, una clasificación de las EDP es
04 :ahiperbólic EDP
04 :parabólica EDP
04 :eliptica EDP
2
2
2
>−=−
<−
ACB
ACB
ACB

4
Introducción
02
2
2
2
=∂∂+
∂∂
y
T
x
T
Ejemplos típicos de EDP son:(a) Ecuación elíptica (B2-4AC<0)
Ecuación de Laplace
2
2
x
T
t
T
∂∂=
∂∂ α
(b) Ecuación parabólica (B2-4AC=0)
(c) Ecuación hiperbólica (B2-4AC>0)
2
2
22
2 1
t
y
cx
y
∂∂=
∂∂
Ecuación de conducción del calor
Ecuación de onda

5
IntroducciónUn problema esta bien planteado (EDP + condiciones auxiliares) si•La solución existe•La solución es única•La solución depende continuamente de los datos auxiliares (las condiciones iniciales y/o de frontera)
Las condiciones auxiliares representan el punto de partida para hallar la solución a nuestro problema bien planteado. El dominio computacional podría representarse como
R
∂Rn
s

6
IntroducciónLas condiciones auxiliares se especifican de tres maneras diferentes: •Condición de Dirichlet
Rfu ∂= sobre
•Condición de Neumann
Rgs
uóf
n
u ∂=∂∂=
∂∂
sobre
•Condiciones mixtas o de Robin
Rfkun
u ∂=+∂∂
sobre

7
Introducción
Encontrar una solución numérica aproximada a una EDP implica el seguimiento de los siguientes pasos:
1.- Establecer la EDP y las condiciones auxiliares
2.- Discretizar las ecuaciones
3.- Reducir el sistema a un sistema de ecuaciones algebraicas
4.- Utilizar un algoritmo para resolver el sistema de ecuaciones algebraicas, acorde con las características del sistema
5.- Solución numérica aproximada

8
Capitulo V
ECUACIONES DIFERENCIALES ELÍPTICAS EN DERIVADAS PARCIALES
•Introducción
•Diferencias finitas
•Métodos de relajación sucesiva
•Métodos de solución directa
•Imposición de Condiciones de Neumann
•Referencias

9
Diferencias Finitas
02
2
2
2
=∂∂+
∂∂
y
T
x
T
Consideremos la ecuación de Laplace en dos dimensiones
Según la clasificación anterior tendremos que
(1)
(2)1== CA
Luego,
0442 <−=− ACB (3)
por lo que la ec. (1) es de tipo elíptico.
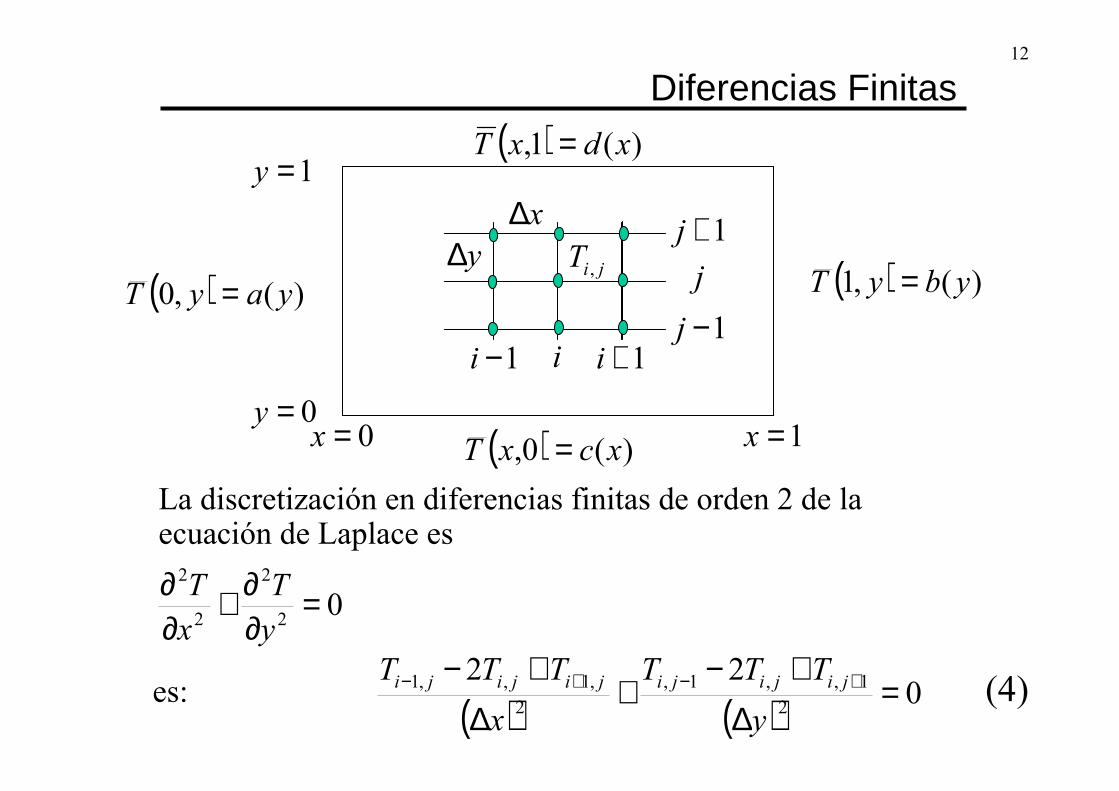
Supongamos que se desea resolver la ec. (1) en el dominio mostrado en la lamina siguiente, con condiciones de Dirichlet

10
0=x 1=x0=y
1=y
( ) )(,0 yayT = ( ) )(,1 ybyT =
( ) )(0, xcxT =
( ) )(1, xdxT =
La solución numérica de la ecuación de Laplace consistirá en generar una malla constituida por un conjunto discreto de puntos en los cuales se encontrará el valor aproximado de la variable T.La lámina siguiente presenta la discretización genérica para este caso.
Diferencias Finitas

11
0=x 1=x0=y
1=y
En cada punto del dominio se hallará el valor de T. La distancia entre nodos sucesivos en las direcciones x e y es Dxy Dy respectivamente.A las coordenadas x e y de cada punto en cual se hallará la solución numérica se le asigna un par de índices i y j, tal como muestra la lámina siguiente.
Diferencias Finitas
( )yT ,0( )yT ,1
( )0,xT
( )1,xT
x∆
y∆
12
x∆y∆
1−i i 1+i1−j
j
1+j
0=x 1=x0=y
1=y
( ) )(,0 yayT = ( ) )(,1 ybyT =
( ) )(0, xcxT =
( ) )(1, xdxT =
jiT ,
La discretización en diferencias finitas de orden 2 de la ecuación de Laplace es
( ) ( ) 022
21,,1,
2,1,,1 =
∆+−
+∆
+− +−+−
y
TTT
x
TTT jijijijijiji (4)
Diferencias Finitas
02
2
2
2
=∂∂+
∂∂
y
T
x
T
es:
13
x∆y∆
1−i i 1+i1−j
j
1+j
0=x 1=x0=y
1=y
( ) )(,0 yayT = ( ) )(,1 ybyT =
( ) )(0, xcxT =
( ) )(1, xdxT =
jiT ,
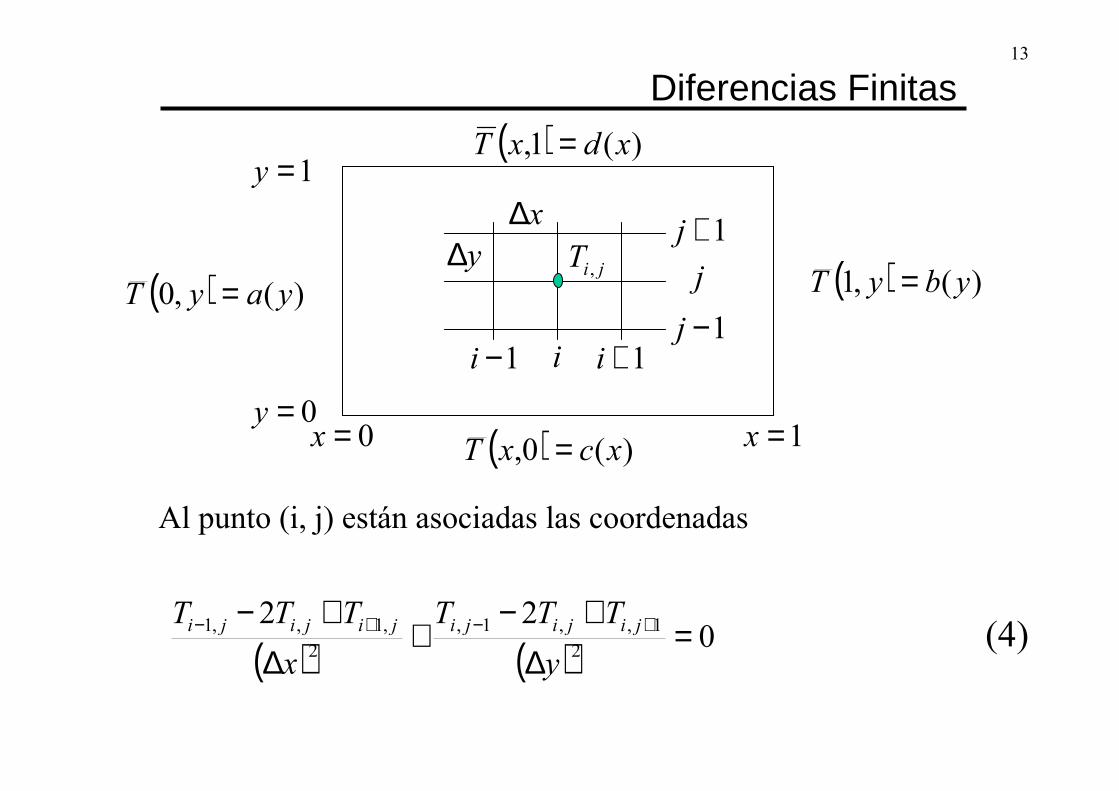
Al punto (i, j) están asociadas las coordenadas
( ) ( ) 022
21,,1,
2,1,,1 =
∆+−
+∆
+− +−+−
y
TTT
x
TTT jijijijijiji (4)
Diferencias Finitas

14
Definiendo
y
x
∆∆=β (5)
Tenemos que (4) se escribe como
022 1,2
,2
1,2
,1,,1 =+−++− +−+− jijijijijiji TTTTTT βββ (6)
o, reagrupando
( ) 012 1,2
1,2
,1,2
,1 =++++− +−+− jijijijiji TTTTT βββ (7)
Si el espaciamiento en cada dirección es el mismo tendremos que β=1 y (7) se reduce a
04 1,1,,1,,1 =+++− +−+− jijijijiji TTTTT (8)
Diferencias Finitas

15
Capitulo V
ECUACIONES DIFERENCIALES ELÍPTICAS EN DERIVADAS PARCIALES
•Introducción
•Diferencias finitas
•Métodos iterativos y de relajación sucesiva
•Métodos de solución directa
•Imposición de Condiciones de Neumann
•Referencias

16
Métodos IterativosUna alternativa para hallar los valores de los Tij podría ser utilizar un método iterativo, tipo Jacobi o Gauss-Seidel. En este caso, se despeja de cada ecuación la variable Tij, para escribir
41,1,,1,1
,+−+− +++
= jijijiji
ji
TTTTT (9)
En cada caso creamos un proceso iterativo a partir de
41,1,,1,11
,
k
ji
k
ji
k
ji
k
jik
ji
TTTTT
+−+−+ +++= (10)
Partiendo de una aproximación inicial podemos iterar hasta convergencia.
41,
11,,1
1,11
,
k
ji
k
ji
k
ji
k
jik
ji
TTTTT
++−+
+−+ +++
= (11)
Jacobi
Gauss-Seidel

17
Métodos IterativosEjemplo: Halle la temperatura en una placa cuadrada con las condiciones
0=x 1=x0=y
1=y
( ) 100,0 =yT ( ) 0,1 =yT
( ) 00, =xT
( ) 01, =xT
con una malla de 11*11.Como aproximación inicial se tomó T=0.0 en todos los puntos interiores.Luego de 109 iteraciones, con una tolerancia de 10-8 se obtiene

18
Métodos Iterativos
0
2
4
6
8
10
12
12
34
56
78
910
11
0
10
20
30
40
50
60
70
80
90
100
10
20
30
40
50
60
70
80
90

19
Métodos Iterativos
1 2 3 4 5 6 7 8 9 10 111
2
3
4
5
6
7
8
9
10
11
10
20
30
40
50
60
70
80
90
100.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000100.000 48.877 28.060 17.842 11.985 8.237 5.651 3.761 2.300 1.092 0.000100.000 67.449 45.530 31.330 21.871 15.322 10.614 7.101 4.354 2.069 0.000100.000 75.394 55.291 40.092 28.867 20.584 14.403 9.689 5.959 2.836 0.000100.000 78.845 60.165 44.900 32.947 23.770 16.750 11.313 6.974 3.322 0.000100.000 79.830 61.641 46.424 34.280 24.832 17.541 11.866 7.321 3.489 0.000100.000 78.845 60.165 44.900 32.947 23.770 16.750 11.313 6.974 3.322 0.000100.000 75.394 55.291 40.092 28.867 20.584 14.403 9.689 5.959 2.836 0.000100.000 67.449 45.530 31.330 21.871 15.322 10.614 7.101 4.354 2.069 0.000100.000 48.877 28.060 17.842 11.985 8.237 5.651 3.761 2.300 1.092 0.000100.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000

20
Programa en MATLAB: Jacobi% Laplace
nx=11;
ny=nx;
tol=1e-8;
T=zeros(nx,ny);
dif = 1e3;
T(:,1)=0;
T(:,ny)=0;
T(1,:)=100;
T(nx,:)=0;
T_n=T;
cont = 0;
while dif>tol
cont=cont+1
for i=2:nx-1
for j=2:ny-1
T_n(i,j)=(T(i-1,j)+T(i+1,j)+T(i,j-1)+T(i,j+1))/4;
end
end
% Determinación de la convergencia
num=0; den=0;
for i=1:nx
for j=1:ny
num=num + (T_n(i,j)-T(i,j))^2;
den = den + T_n(i,j)^2;
end
end
dif=num/den;
T=T_n;
end
surf(T)
figure
contour(T',100)

21
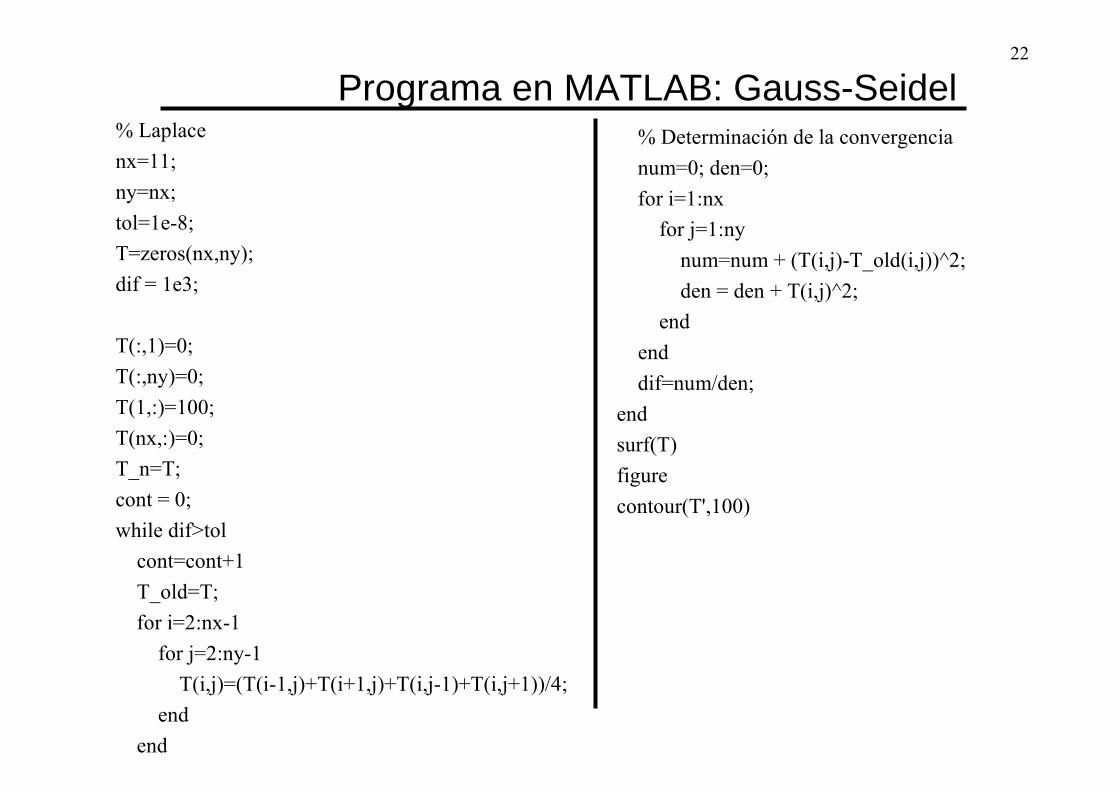
Métodos IterativosLa utilización del método de Gauss-Seidel nos da el resultado siguiente, luego de 60 iteraciones, con una tolerancia de 10-8
1 2 3 4 5 6 7 8 9 10 111
2
3
4
5
6
7
8
9
10
11
10
20
30
40
50
60
70
80
90
100.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000100.000 48.881 28.070 17.856 12.004 8.258 5.672 3.780 2.315 1.100 0.000100.000 67.458 45.550 31.360 21.909 15.365 10.658 7.140 4.384 2.085 0.000100.000 75.409 55.321 40.136 28.923 20.647 14.466 9.745 6.002 2.859 0.000100.000 78.863 60.203 44.957 33.017 23.848 16.828 11.383 7.027 3.351 0.000100.000 79.851 61.684 46.487 34.358 24.919 17.627 11.942 7.378 3.520 0.000100.000 78.866 60.208 44.964 33.025 23.856 16.835 11.388 7.031 3.353 0.000100.000 75.414 55.330 40.148 28.937 20.660 14.478 9.755 6.009 2.862 0.000100.000 67.464 45.559 31.373 21.924 15.379 10.671 7.150 4.392 2.089 0.000100.000 48.885 28.077 17.865 12.014 8.268 5.681 3.788 2.320 1.102 0.000100.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000
22
Programa en MATLAB: Gauss-Seidel% Laplace
nx=11;
ny=nx;
tol=1e-8;
T=zeros(nx,ny);
dif = 1e3;
T(:,1)=0;
T(:,ny)=0;
T(1,:)=100;
T(nx,:)=0;
T_n=T;
cont = 0;
while dif>tol
cont=cont+1
T_old=T;
for i=2:nx-1
for j=2:ny-1
T(i,j)=(T(i-1,j)+T(i+1,j)+T(i,j-1)+T(i,j+1))/4;
end
end
% Determinación de la convergencia
num=0; den=0;
for i=1:nx
for j=1:ny
num=num + (T(i,j)-T_old(i,j))^2;
den = den + T(i,j)^2;
end
end
dif=num/den;
end
surf(T)
figure
contour(T',100)

23
Métodos de sobrerelajaciónAlgunas técnicas existen para acelerar la convergencia. La mas utilizada es el método de relajación sucesiva (SuccessiveOverrelaxation Method).Con este método se utiliza de manera iterativa la ecuación
(12)
donde, a través del ajuste del parámetro ω tal que
( )k
ji
k
ji
k
ji
k
ji
k
ji
k
ji
k
ji TTTTTTT ,1,11,,1
1,1,
1, 4
4
1 −++++= ++−+
+−
+ ω
(13)
se logra una convergencia en un número menor de iteraciones. Para ω=1 (12) se reduce al método de Gauss-Seidel.La determinación del valor de ω óptimo se hace, generalmente, a través de estudios empíricos.
21 << ω

24
Determinación de w óptimo
0
20
40
60
80
100
1 1.2 1.4 1.6 1.8 2
w
Itera
cion
es
En el ejemplo anterior tendremos que la determinación empírica de ω nos lleva a los resultados siguientes:
Métodos de sobrerelajación
25
Capitulo V
ECUACIONES DIFERENCIALES ELÍPTICAS EN DERIVADAS PARCIALES
•Introducción
•Diferencias finitas
•Métodos iterativos y de relajación sucesiva
•Métodos de solución directa
•Imposición de Condiciones de Neumann
•Referencias

26
Otra opción es resolver las ecuaciones (8), que corresponden a un esquema de cinco puntos, utilizando un método directo. Puesto que estamos suponiendo que las condiciones de frontera son de Dirichlet tendremos que (8) debe ser resuelta sólo en los nodos interiores
0=x0=y
1=y
1=x
Escribamos las ecuaciones en el caso particular de una discretización con
5== yx NN
Método directo

27
El dominio discretizado luce como se muestra a continuación
0=x0=y
1=y
1=x
Las ecuaciones para cada nodo interior se escriben como
04 :2,2 2321322212 =+++−== TTTTTji
04 :2,3 3331423222 =+++−== TTTTTji
04 :2,4 4341524232 =+++−== TTTTTji
04 :3,3 3432433323 =+++−== TTTTTji
04 :3,4 4442534333 =+++−== TTTTTji
04 :3,2 2422332313 =+++−== TTTTTji
Método directo
(14a)
04 1,1,,1,,1 =+++− +−+− jijijijiji TTTTT

28
Al introducir las condiciones de borde llegamos a
04 :4,2 2523342414 =+++−== TTTTTji
04 :4,3 3533443424 =+++−== TTTTTji
04 :4,4 4543544434 =+++−== TTTTTji
2112233222 4 TTTTT −−=++−3133423222 4 TTTTT −=++−
5241434232 4 TTTTT −−=+−
04 3432433323 =+++− TTTTT
5344424333 4 TTTTT −=++−
13242233234 TTTTT −=+++−
25142334244 TTTTT −−=++−
3533443424 4 TTTTT −=++−4554434434 4 TTTTT −−=+−
Método directo
(14b)
(15)

29
Al imponer las condiciones de frontera, el sistema de ecuaciones (15) puede escribirse como
(16)
donde A es la matriz de coeficientes generada por (15), T es un vector que representa las incógnitas y b es el vector de términos independientes. Para facilitar la escritura de estas ecuaciones podemos enumerar los nodos siguiendo
[ ][ ] [ ]bTA =
Método directo
(17)1)2()2)(2( +−+−−= ijNk x
en el caso que sobre todos los lados se imponen condiciones de Dirichlet. En el ejemplo particular del sistema (15) tendremos

30
(18)
Método directo
Ordenando los términos en cada ecuación tendremos
2112241 4 TTTTT −−=++−315321 4 TTTTT −=++−
5241632 4 TTTTT −−=+−
04 82654 =+++− TTTTT
539365 4 TTTTT −=++−
1371544 TTTTT −=+++−
25144874 TTTTT −−=++−
355987 4 TTTTT −=++−4554698 4 TTTTT −−=+−
0=x0=y
1=y
1=x
1 2 3
4 5 6
7 8 9

31
Método directo
Este sistema se escribe en forma matricial como
4554986
359875
2514874
539653
86542
137541
5241632
315321
2112421
4
4
4
4
0 4
4
4
4
4
TTTTT
TTTTT
TTTTT
TTTTT
TTTTT
TTTTT
TTTTT
TTTTT
TTTTT
−−=−+
−=+−+
−−=+−
−=+−+
=++−+
−=++−
−−=+−
−=++−
−−=++−

32
Método directo
−−−
−−−
−−−
−−−
=
−−
−−
−
−−
4554
35
2514
53
13
5241
31
2112
9
8
7
6
5
4
3
2
1
0
411
1411
141
1411
11411
114-1
14-1
1141
114
TT
T
TT
T
T
TT
T
TT
T
T
T
T
T
T
T
T
T
Este sistema puede ser resuelto utilizando un método estándar como Eliminación Gaussiana, aunque ello podría ser poco eficiente, sobre todo para el caso general de sistemas grandes.Un programa en MATLAB es presentado en la lámina siguiente.
(19)

33
Método implícito : Programa MATLAB% Laplace_Directo
clear all
close all
% datos de entrada
nx=5;
ny=nx;
T=zeros(nx,ny);
% condiciones de borde
T(:,1)=0;
T(:,ny)=0;
T(1,:)=100;
T(nx,:)=0;
% inicialización de variables
dim=(nx-2)*(ny-2);
TT=zeros(dim,dim);
b(1:dim,1)=0;
% definición de los coeficientes
% para cada nodo
% fila j=2
% elemento i=2
j=2;
i=2;
k=(nx-2)*(j-2)+(i-2)+1;
TT(k,k)=-4;
TT(k,k+1)=1;
TT(k,k+nx-2)=1;
b(k)=-T(i-1,j)-T(i,j-1);
% elementos i=3...nx-2
for i=3:nx-2
k=(nx-2)*(j-2)+(i-2)+1;
TT(k,k-1)=1;
TT(k,k)=-4;
TT(k,k+1)=1;
TT(k,k+nx-2)=1;
b(k)=-T(i,j-1);
end
% elemento i=nx-1
i=nx-1;
k=(nx-2)*(j-2)+(i-2)+1;
TT(k,k-1)=1;
TT(k,k)=-4;
TT(k,k+nx-2)=1;
b(k)=-T(i+1,j)-T(i,j-1);
% filas j=3...ny-2 / nodos i=2 e i=nx-1
for j=3:ny-2
i=2;
k=(nx-2)*(j-2)+(i-2)+1;
TT(k,k)=-4;
TT(k,k+1)=1;
TT(k,k+nx-2)=1;
TT(k,k-nx+2)=1;
b(k)=-T(i-1,j);
i=nx-1;
k=(nx-2)*(j-2)+(i-2)+1
TT(k,k)=-4;
TT(k,k-1)=1;
TT(k,k+nx-2)=1;
TT(k,k-nx+2)=1;
b(k)=-T(i+1,j);
end

34
Método implícito : Programa MATLAB% fila j=ny-1
j=ny-1;
% elemento i=2
i=2;
k=(nx-2)*(j-2)+(i-2)+1;
TT(k,k)=-4;
TT(k,k+1)=1;
TT(k,k-nx+2)=1;
b(k)=-T(i-1,j)-T(i,j+1);
% elementos i=3...nx-2
for i=3:nx-2
k=(nx-2)*(j-2)+(i-2)+1;
TT(k,k-1)=1;
TT(k,k)=-4;
TT(k,k+1)=1;
TT(k,k-nx+2)=1;
b(k)=-T(i,j+1);
end
% elemento i=nx-1
i=nx-1;
k=(nx-2)*(j-2)+(i-2)+1;
TT(k,k)=-4;
TT(k,k-1)=1;
TT(k,k-nx+2)=1;
b(k)=-T(i+1,j)-T(i,j+1);
% Nodos interiores 2 < i < nx-1 y 2 < j < ny-1
for i=3:nx-2
for j=3:ny-2
k=(nx-2)*(j-2)+(i-2)+1;
TT(k,k)=-4;
TT(k,k-1)=1;
TT(k,k+1)=1;
TT(k,k-nx+2)=1;
TT(k,k+nx-2)=1;
b(k)=0;
end
end
% Cálculo de la solución
Temp=TT\b;
for k=1:dim
j=floor(k/(nx-2))+2;
if mod(k,(nx-2))==0
j=j-1;
end
i=k-(nx-2)*(j-2)+1;
T(i,j)=Temp(k);
end
surf(T)
figure
contour(T',10)

35
Método implícito : Programa MATLAB
-4 1 0 1 0 0 0 0 01 -4 1 0 1 0 0 0 00 1 -4 0 0 1 0 0 01 0 0 -4 1 0 1 0 00 1 0 1 -4 1 0 1 00 0 1 0 1 -4 0 0 10 0 0 1 0 0 -4 1 00 0 0 0 1 0 1 -4 10 0 0 0 0 1 0 1 -4
-10000
-10000
-10000
42.857118.75007.142952.678625.00009.821442.857118.75007.1429
=
100.0000 0 0 0 0100.0000 42.8571 18.7500 7.1429 0100.0000 52.6786 25.0000 9.8214 0100.0000 42.8571 18.7500 7.1429 0100.0000 0 0 0 0

36
Capitulo V
ECUACIONES DIFERENCIALES ELÍPTICAS EN DERIVADAS PARCIALES
•Introducción
•Diferencias finitas
•Métodos iterativos y de relajación sucesiva
•Métodos de solución directa
•Imposición de Condiciones de Neumann
•Referencias

37
Condiciones de Neumann
Hasta ahora, los esquemas que hemos desarrollado han utilizado condiciones de Dirichlet. Hemos visto como en esos casos, el vector que incluye los términos independientes ha sido modificado para imponer las condiciones de frontera.En el caso de las condiciones de Neumann, la imposición de las condiciones de frontera es un poco distinta. Veamos. Supongamos que el problema a resolver tiene en una frontera, por ejemplo en x=0, la condición:
0=x 1=x0=y
1=y
cx
T
x
=∂∂
=0
( ) 0,1 =yT
( ) 00, =xT
( ) 01, =xT
38
Condiciones de Neumann
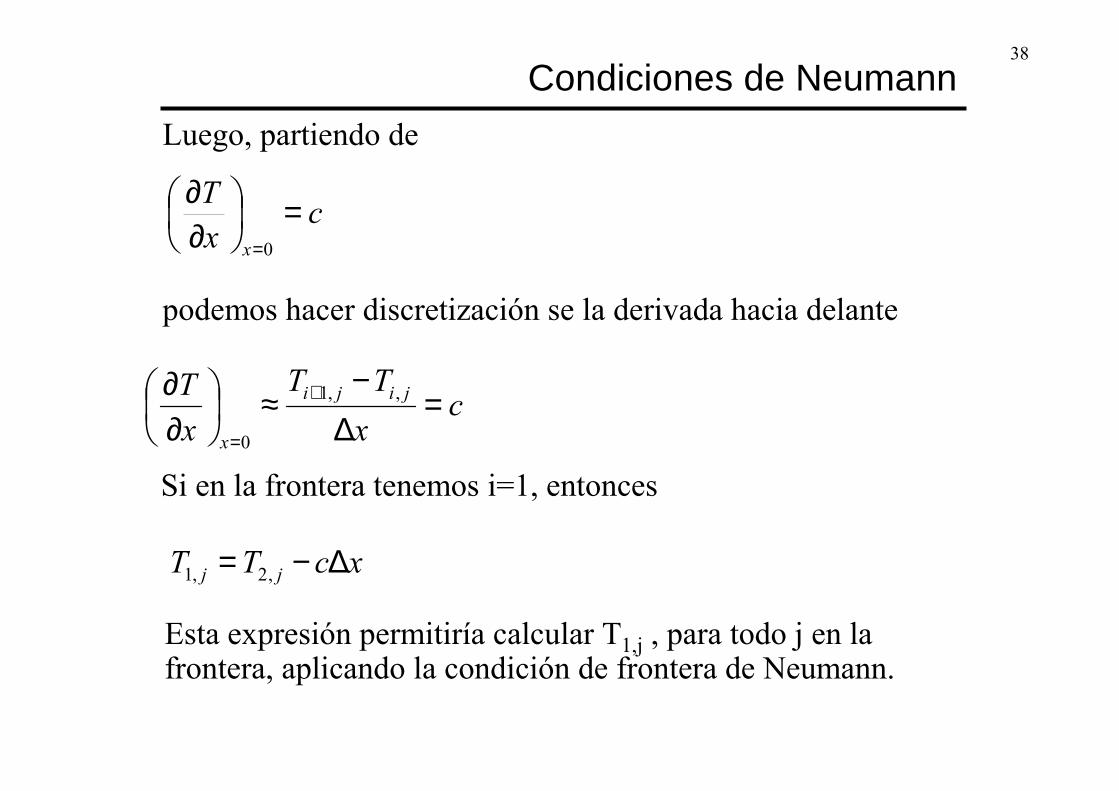
Luego, partiendo de
cx
T
x
=
∂∂
=0
podemos hacer discretización se la derivada hacia delante
cx
TT
x
T jiji
x
=∆
−≈
∂∂ +
=
,,1
0
Si en la frontera tenemos i=1, entonces
xcTT jj ∆−= ,2,1
Esta expresión permitiría calcular T1,j , para todo j en la frontera, aplicando la condición de frontera de Neumann.

39
Condiciones de Neumann
Sin embargo, siendo la expresión de la derivada espacial utilizada precisa en orden ∆x, su utilización llevará a una degradación del orden del esquema.
Una discretización que preserva la precisión del esquema (∆x2) es
cx
TT jj =∆−
2,0,2
cx
TT
x
T jiji
x
=∆−
≈
∂∂ −+
= 2,1,1
0
Si en la frontera tenemos i=1, entonces
Los puntos T0,j no pertenecen al dominio y son llamados puntos “fantasmas”.

40
Condiciones de Neumann
jT ,1 jT ,2jT ,0
Podemos despejar T0,j para obtener
xcTT jj ∆−= 2,2,0
41
Condiciones de Neumann
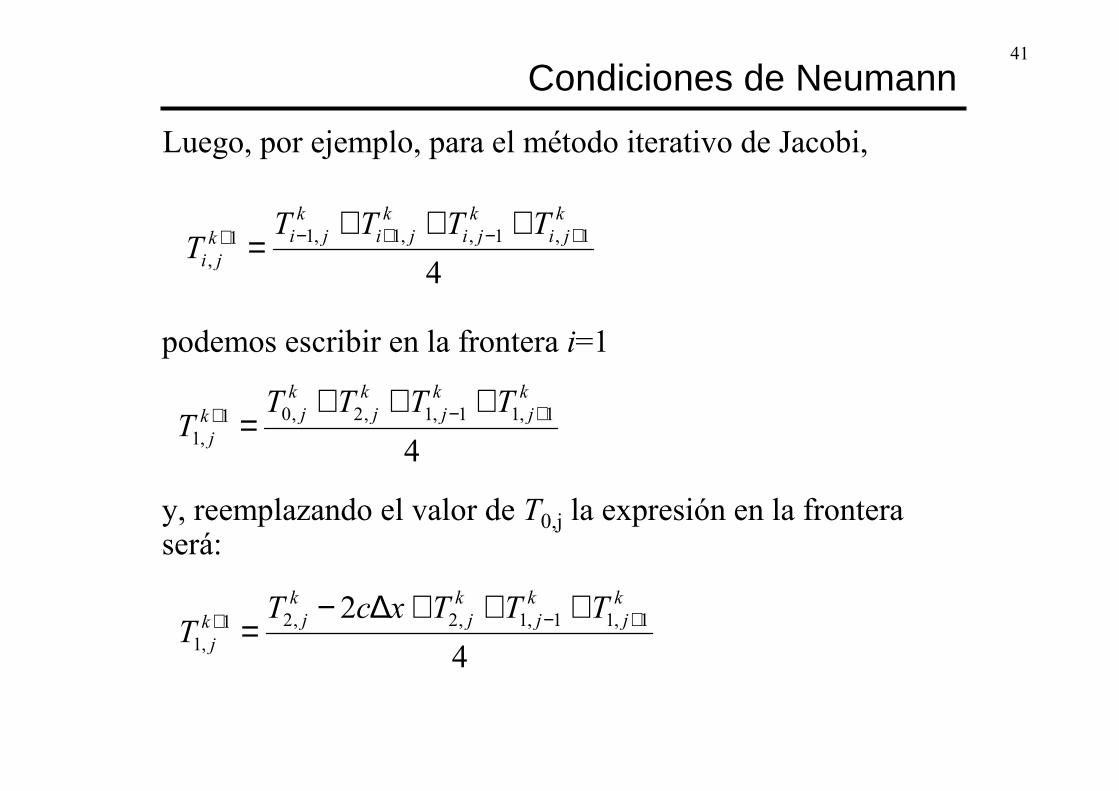
Luego, por ejemplo, para el método iterativo de Jacobi,
y, reemplazando el valor de T0,j la expresión en la frontera será:
41,1,,1,11
,
k
ji
k
ji
k
ji
k
jik
ji
TTTTT
+−+−+ +++=
podemos escribir en la frontera i=1
41,11,1,2,01
,1
k
j
k
j
k
j
k
jk
j
TTTTT
+−+ +++=
4
2 1,11,1,2,21,1
k
j
k
j
k
j
k
jk
j
TTTxcTT
+−+ +++∆−=
42
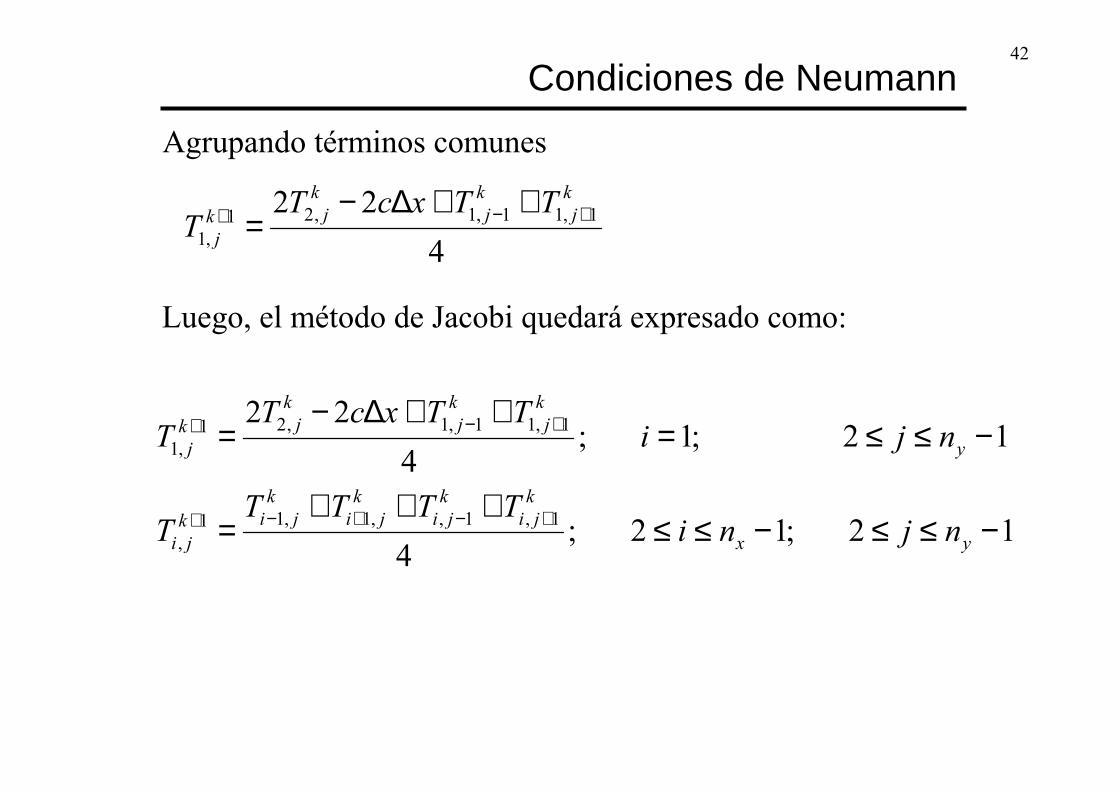
Condiciones de Neumann
Agrupando términos comunes
Luego, el método de Jacobi quedará expresado como:
4
22 1,11,1,21,1
k
j
k
j
k
jk
j
TTxcTT
+−+ ++∆−=
12 ;12 ;4
12 ;1 ;4
22
1,1,,1,11,
1,11,1,21,1
−≤≤−≤≤+++
=
−≤≤=++∆−
=
+−+−+
+−+
yx
k
ji
k
ji
k
ji
k
jik
ji
y
k
j
k
j
k
jk
j
njniTTTT
T
njiTTxcT
T

43
Condiciones de Neumann
12 ;1 ;4
22 1,11,1,21,1 −≤≤=
++∆−= +−+
y
k
j
k
j
k
jk
j njiTTxcT
T
12 ;12 ;4
1,1,,1,11, −≤≤−≤≤
+++= +−+−+
yx
k
ji
k
ji
k
ji
k
jik
ji njniTTTT
T

44
Condiciones de Neumann
Aplicación: El problema
puede reducirse al problema equivalente:
0=x1/ 2x =
0=y
1=y
( )0, 0T y =1/2,
0x y
T
y =
∂ =∂
( ),0 100T x =
( ) 01, =xT
0=x 1=x0=y
1=y
( )0, 0T y = ( ) 0,1 =yT
( ),0 100T x =
( ) 01, =xT

45
Condiciones de Neumann
El nuevo problema utiliza, para una malla de la misma densidad de nodos, la mitad del número de nodos. Utilizando el método de Jacobi tendremos soluciones como:
020
4060
80100
120 0 10 20 30 40 50 60
0
10
20
30
40
50
60
70
80
90
100
0
10
20
30
40
50
60
70
80
90
100
10 20 30 40 50
10
20
30
40
50
60
70
80
90
100
10
20
30
40
50
60
70
80
90
Ejercicio sugerido: Modifique el programa mostrado en la lámina 20 para el método de Jacobi para considerar condiciones de Neumann y reproduzca estos resultados.

46
Condiciones de Neumann
Si el método es implícito, entonces tendremos que las ecuaciones para los nodos en las fronteras vendrán dadas por la evaluación de
en i=1,
04 1,1,,1,,1 =+++− +−+− jijijijiji TTTTT
04 1,11,1,2,1,0 =+++− +− jjjjj TTTTT
que al sustituir el valor de T0,j se reduce a
xcTT jj ∆−= 2,2,0
se reduce a
042 1,11,1,2,1,2 =+++−∆− +− jjjjj TTTTxcT
o, reagrupando términos semejantes
xcTTTT jjjj ∆=++− +− 242 1,11,1,1,2

47
Condiciones de Neumann
Las ecuaciones a resolver serán entonces
12 ;12 ;04
12 ;1 ;224
1,1,,1,,1
1,11,1,2,1
−≤≤−≤≤=+++−
−≤≤=∆=+++−
+−+−
+−
yxjijijijiji
yjjjj
njniTTTTT
njixcTTTT
Por ejemplo, en nuestro ejemplo anterior para el método directo, en la malla 5 x 5, tendremos:
0=x0=y
1=y
1=x

48
Condiciones de Neumann
Por ejemplo, en nuestro ejemplo anterior para el método directo, en la malla 5 x 5, tendremos:
0=x0=y
1=y
1=x ;224
;224
;224
5,13,14,24,1
4,12,13,23,1
3,11,12,22,1
xcTTTT
xcTTTT
xcTTTT
∆=+++−
∆=+++−
∆=+++−
;04
;04
;04
3,41,42,52,42,3
3,31,32,42,32,2
3,21,22,32,22,1
=+++−
=+++−
=+++−
TTTTT
TTTTT
TTTTT
;04
;04
;04
4,42,43,53,43,3
4,32,33,43,33,2
4,22,23,33,23,1
=+++−
=+++−
=+++−
TTTTT
TTTTT
TTTTT ;04
;04
;04
5,43,44,54,44,3
5,33,34,44,34,2
5,23,24,34,24,1
=+++−
=+++−
=+++−
TTTTT
TTTTT
TTTTT

49
Condiciones de Neumann
Podemos enumerar los nodos siguiendo
1)1()2)(1( +−+−−= ijNk x
1 2 3
5 6 7
9 10 11
4
8
12
Luego, las ecuaciones serán:
1 2 1,1 54 2 2T T T T c x− + + + = ∆
xcTTTT ∆=+++− 224 9165
xcTTTT ∆=+++− 224 5,15109
;04 61,2321 =+++− TTTTT
;04 81,42,543 =+++− TTTTT
;04 71,3432 =+++− TTTTT
;04 102765 =+++− TTTTT
;04 113876 =+++− TTTTT
;04 1243,587 =+++− TTTTT
;04 5,2611109 =+++− TTTTT
;04 5,37121110 =+++− TTTTT
;04 5,484,51211 =+++− TTTTT
50
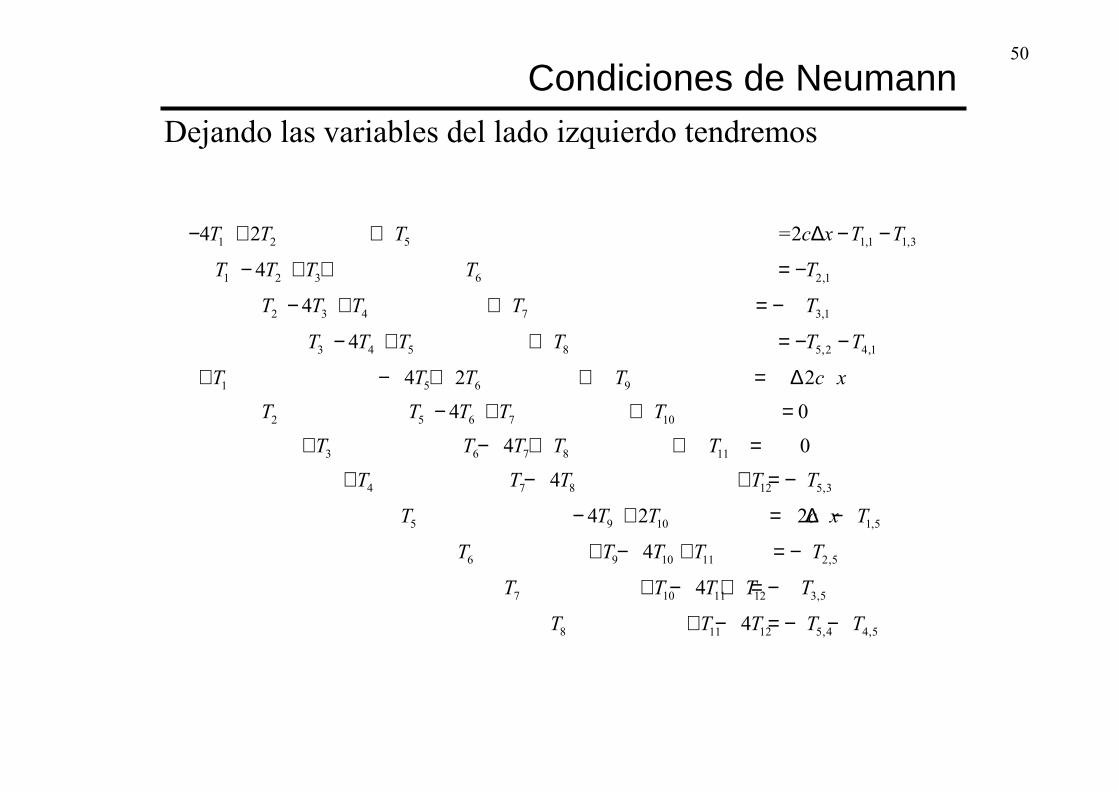
Condiciones de NeumannDejando las variables del lado izquierdo tendremos
1 2 5 1,1 1,3
1 2 3 6
4 2 =2
4
T T T c x T T
T T T T
− + + ∆ − −
− + + 2,1
2 3 4 7 3,1
3 4 5 8
4
4
T
T T T T T
T T T T
= −
− + + = −
− + + 5,2 4,1
1 5 6 9
2 5 6 7 10
4 2 2
4
T T
T T T T c x
T T T T T
= − −
+ − + + = ∆
− + +
3 6 7 8 11
4 7 8
0
4 0
4
T T T T T
T T T
=
+ − + + =
+ − 12 5,3
5 9 10 1,5
6 9
4 2 2
T T
T T T c x T
T T
+ = −
− + = ∆ −
+ − 10 11 2,5
7 10 11 12 3,5
4
4
T T T
T T T T T
T
+ = −
+ − + = −
8 11 12 5,4 4,5 4T T T T+ − = − −

51
Condiciones de NeumannEn forma matricial tendremos:
1,11
2,12
3,13
5,2 4,14
5
6
7
8
9
10
11
12
4 2 1
1 4 1 1
1 4 1 1
1 4 1 1
1 0 -4 2 1 2
1 1 -4 1 1 0
1 1 -4 1 1 0
1 1 -4 0 1
1 0 -4 2
1 1 -4 1
1 1 -4 1
1 1 4
c x TT
TT
TT
T TT
c xT
T
T
T
T
T
T
T
− ∆ − − − − − − − − ∆ = −
5,3
1,5
2,5
3,5
5,4 4,5
2
T
c x T
T
T
T T
−
∆ − −
− − −

52
Condiciones de Neumann
Nótese que la condición de Neumann afecta tanto la matriz de coeficientes. Por ejemplo, la fila 1 de nuestro sistema de ecuaciones es modificada en la 2da columna (1�2) y en el término independiente (adición de c∆x):
Ejercicio: Resuelva el problema
[ ][ ]1 1,14 2 0 0 1 0 0 0 0 0 0 0 T c x T − = ∆ −
0=x 1=x
0=y
1=y
( )0, 0T
yx
∂ =∂
( ) 0,1 =yT
( ),0 100T x =
( ) 01, =xT
1 2 3
5 6 7
9 10 11
4
8
12

53
Condiciones de Neumann
lleva a:
1
2
3
4
5
6
7
8
9
10
11
12
4 2 1 100
1 4 1 1 100
1 4 1 1 100
1 4 1 1 100
1 0 -4 2 1 0
1 1 -4 1 1 0
1 1 -4 1 1 0
1 1 -4 0 1 0
1 0 -4 2 0
1 1 -4 1 0
1 1 -4 1 0
1 1 4 0
T
T
T
T
T
T
T
T
T
T
T
T
− − − − − − − − = −
0 0 0 0 021.8988 21.0222 17.9639 11.4331 045.5509 44.2259 39.4003 27.7685 071.8529 70.9304 67.6428 60.2405 0
100 100 100 100 100
1 1.5 2 2.5 3 3.5 4 4.5 51
1.5
2
2.5
3
3.5
4
4.5
5
10
20
30
40
50
60
70
80
90

54
Capitulo V
ECUACIONES DIFERENCIALES ELÍPTICAS EN DERIVADAS PARCIALES
•Introducción
•Diferencias finitas
•Métodos iterativos y de relajación sucesiva
•Métodos de solución directa
•Imposición de Condiciones de Neumann
•Referencias
55
Referencias
1. Análisis Numérico, Burden R., Faires J. D., 6ta Edición, International Thomson Editores, 1998
2. Applied Numerical Methods, Carnahan B., Luther H. A., Wilkes J. O., John Wiley and Sons, Inc, 1969
3. Nakamura, S.:”Métodos Numéricos Aplicados
con Software”, Prentice Hall, (1992).

56
ECUACIONES DIFERENCIALES
ELÍPTICAS EN DERIVADAS PARCIALES
Armando Blanco A.












![Ecuaciones Diferenciales en Derivadas Parciales[1]](https://img.pdfslide.tips/doc/110x75/55cf9265550346f57b961a0e/ecuaciones-diferenciales-en-derivadas-parciales1.jpg)




![[v.P.mijailov] Ecuaciones Diferenciales en Derivadas Parciales](https://img.pdfslide.tips/doc/110x75/55cf9b5c550346d033a5c4ab/vpmijailov-ecuaciones-diferenciales-en-derivadas-parciales.jpg)



![Ecuaciones Diferenciales en Derivadas Parciales [v.P._mijailov]](https://img.pdfslide.tips/doc/110x75/5695cf531a28ab9b028d988b/ecuaciones-diferenciales-en-derivadas-parciales-vpmijailov.jpg)





