Embed Size (px)
DESCRIPTION
Resumen basado en el libro de Vibraciones Mecánicas de Balachandran.
Citation preview

Ecuaciones rectoras para sistemasde un solo grado de libertad
VIBRACIONES MECÁNICAS Y DINÁMICA DE MÁQUINAS
Departamento de EstructurasFacultad de Ciencias Exactas, Físicas y Naturales
Universidad Nacional de Córdoba
CAPÍTULO 3

Ecuaciones rectoras p/ sistemas de 1 G.L.
TEMAS DE ESTUDIO
1. Ecuaciones de movimiento utilizando métodos generales
2. Métodos basados en equilibrio de fuerzas y momentos(principios de la cantidad de movimiento lineal y angular)
3. Frecuencia natural y factor de amortiguamiento
4. Ecuaciones rectoras para diferentes tipos de amortiguamiento
5. Ecuaciones rectoras para diferentes fuerzas excitatricesa) Fuerza actuante directamente sobre el elemento de inerciab) Excitación de la base de elementos de rigidez y disipaciónc) Masa giratoria desequilibrada
6. Ecuaciones de Lagrange (se utilizan sin deducción)
En este capítulo se presentan diferentes métodos para obtener la ecuación demovimiento de sistemas que pueden describirse a través de un único G.L.

Ecuaciones rectoras p/ sistemas de 1 G.L.Métodos generales para obtener las ecuaciones de movimiento
Este principio establece que “si un sistema está en equilibrio por la acción deun conjunto de fuerzas y se somete a un desplazamiento virtual, entonces eltrabajo virtual realizado por todas las fuerzas será cero”.
Principio de desplazamientos virtuales
El desplazamiento virtual se define como un desplazamiento infinitesimal ima-ginario instantáneo, que debe ser un desplazamiento físicamente posible com-patible con las restricciones del sistema (condiciones de apoyo).

Ecuaciones rectoras p/ sistemas de 1 G.L.Métodos generales para obtener las ecuaciones de movimiento
El sistema masa-resorte de la figura anterior se encuentra en una posicióndeformada donde x representa el desplazamiento de la masa.
Principio de desplazamientos virtuales (continuación)
Cuando la masa experimenta un desplazamiento virtual δx, el trabajo virtualrealizado por cada fuerza indicada en el diagrama de cuerpo libre resulta:
Trabajo virtual realizado por la fuerza reactiva del resorte ( )sW kx x
Trabajo virtual realizado por la fuerza de inercia de la masa ( )iW mx x
Igualando a cero el trabajo virtual total realizado por todas las fuerzas:
( ) ( ) 0 0mx x kx x mx kx x
Teniendo en cuenta que el desplazamiento virtual puede tomar cualquier valorarbitrario no nulo, se obtiene la ecuación de movimiento del sistema:
0mx kx

Ecuaciones rectoras p/ sistemas de 1 G.L.Métodos generales para obtener las ecuaciones de movimiento
Un sistema es conservador si no pierde energía debido a la fricción o a otrosmiembros no elásticos que disipan energía. La energía total de un sistemaconservador permanece constante si las fuerzas externas que actúansobre éste no realizan trabajo. Dado que la energía de un sistema vibra-torio es parcialmente potencial y parcialmente cinética, la suma de estas dosenergías permanece constante: la energía cinética T se almacena en la masapor efecto de su velocidad y la energía potencial V se almacena en el resortea causa de su deformación elástica.
Principio de conservación de la energía
constante 0dT V T Vdt
Considerando las expresiones de ambas formas de energías:
0 0 0mxx kxx mx kx x mx kx Se obtiene finalmente la ecuación de movimiento del sistema:
2 21 1;2 2
T mx V kx

Ecuaciones rectoras p/ sistemas de 1 G.L.Métodos generales para obtener las ecuaciones de movimiento
El Principio de Hamilton constituye una formulación de tipo “variacional” quepermite obtener también las ecuaciones de movimiento en función de lasenergías potencial y cinética del sistema.
Este principio que aquí sólo se menciona constituye un procedimiento generalque permite derivar otras formulaciones fundamentales:
La aplicación de este principio para el caso estático produce el clásico “Principio de Mínima Energía Potencial”.
Las “Ecuaciones de Lagrange” que se presentan sin deducción un poco más adelante pueden derivarse directamente a partir de las ecuaciones presentadas por Hamilton.
Principio de Hamilton

Ecuaciones rectoras p/ sistemas de 1 G.L.Método de equilibrio de fuerzas
El planteamiento del equilibrio dinámico en base al principio de la cantidad demovimiento lineal se formula de la siguiente manera:
donde F es el vector de fuerza neta sobre el sistema, y p es la cantidad demovimiento lineal absoluto del sistema. La razón de cambio de esta cantidadde movimiento para un “sistema de masa constante m” que se desplaza conuna aceleración absoluta a se expresa como: . Por lo tanto:
0 F p
mp a
0m F aEsta ecuación representa una particularización del Principio de D’Alembert, que establece que “el sistema se encuentra en equilibrio bajo la acción de lasfuerzas externas y las fuerzas de inercia”. Estas fuerzas externas están cons-tituidas por las fuerzas producidas por elementos elásticos, las fuerzas produ-cidas por elementos disipativos, y las fuerzas excitatrices que actúan directa-mente sobre el elemento de masa.
Principio de D’Alembert
Ecuaciones rectoras p/ sistemas de 1 G.L.Método de equilibrio de fuerzas
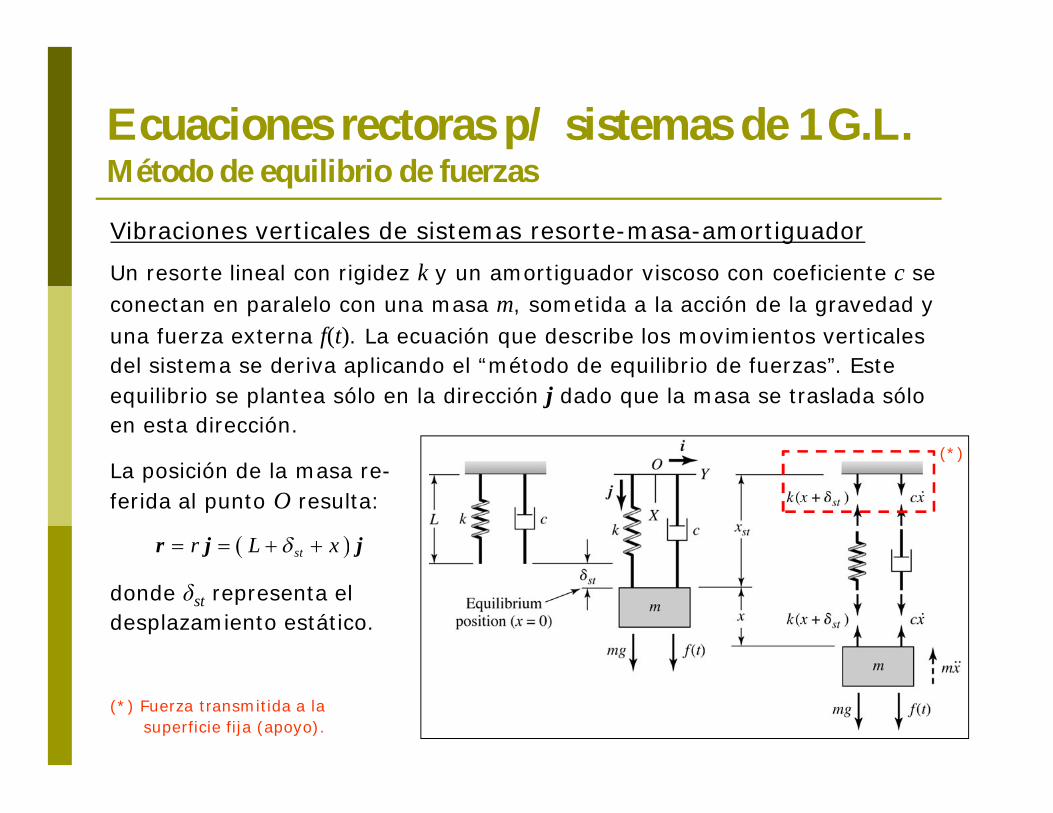
Un resorte lineal con rigidez k y un amortiguador viscoso con coeficiente c seconectan en paralelo con una masa m, sometida a la acción de la gravedad yuna fuerza externa f(t). La ecuación que describe los movimientos verticalesdel sistema se deriva aplicando el “método de equilibrio de fuerzas”. Esteequilibrio se plantea sólo en la dirección j dado que la masa se traslada sóloen esta dirección.
Vibraciones verticales de sistemas resorte-masa-amortiguador
str L x r j j
La posición de la masa re-ferida al punto O resulta:
donde δst representa eldesplazamiento estático.
(*) Fuerza transmitida a lasuperficie fija (apoyo).
(*)

Ecuaciones rectoras p/ sistemas de 1 G.L.Método de equilibrio de fuerzas
El balance de fuerzas en la dirección j produce el siguiente resultado:
Fuerza del amortiguador Fuerza de inerciaFuerzas externas Fuerza del resorte
( ) 0stf t mg kx k cr mr j j j j
Reemplazando la expresión de la posición r, y observando que L y δst son in-dependientes del tiempo, se obtiene la siguiente ecuación diferencial escalar:
( ) ( )stmx cx k x f t mg
La posición de equilibrio estático se define como la posición que correspondeal estado de reposo del sistema, y se obtiene de esta última ecuación elimi-nando la fuerza dependiente del tiempo f(t), la velocidad y la aceleración :
( )stk x mg
x x
La posición de equilibrio se encuentra tomando como referencia x = 0:
st mg k Reemplazando en la ecuación de equilibrio dinámico, se obtiene la ecuaciónde movimiento para oscilaciones respecto a la posición de equilibrio estático:
( )mx cx k x f t

Ecuaciones rectoras p/ sistemas de 1 G.L.Método de equilibrio de fuerzas
La reacción total en el apoyo se obtiene como la suma de las fuerzas estáticasy dinámicas debidas al resorte y al amortiguador:
Fuerza transmitida al apoyo
componente componente
estática dinámica
R stF k k x cx
Considerando sólo la parte dinámica de la fuerza de reacción, se obtiene lafórmula que se aplica habitualmente para calcular la fuerza transmitida alsuelo, o la fuerza transmitida a la masa durante el movimiento del apoyo:
RF k x cx
La posición de equilibrio estático no siempre está asociada a la gravedad. En elEjemplo 3.1 del libro de Balachandran se presenta un caso donde la excitaciónproducida por el viento sobre una estructura se descompone en una parte derégimen permanente (constante en el tiempo) y una parte fluctuante. De estaforma, la componente estática puede desacoplarse de la respuesta dinámica.
Consideraciones sobre la posición de equilibrio estático

Ecuaciones rectoras p/ sistemas de 1 G.L.Método de equilibrio de fuerzas
El estudio de las oscilaciones del tímpano se realiza utilizando un oscilador nolineal. La ecuación rectora no lineal correspondiente tiene la siguiente forma:
Oscilaciones del tímpano humano
2
22
no linealidadcuadrática
0d xm k x k xdt
La obtención de las posiciones de equilibrio estático permite linealizar la ecua-ción rectora para estudiar “pequeñas oscilaciones” respecto a estas posiciones.
Las posiciones de equilibrio estático x = x0 se encuentran anulando el término de aceleración (no hay fuerzas externas aplicadas):
0,120 0
0,2
0( ) 0
1x
k x xx
De esta forma, el desplazamiento absoluto puede expresarse como la sumadel desplazamiento estático y el desplazamiento dinámico relativo:
0( ) ( )rx t x x t

Ecuaciones rectoras p/ sistemas de 1 G.L.Método de equilibrio de fuerzas
La linealización del término no lineal de rigidez se realiza con la expansión de:
22 2 20 0 0( ) ( ( )) 2 ( ) ( )rr rx t x x t x tx x t x
Se observa además que:2 2 2
0 02 2 2( ) y ( )r rr r
dx d dx d x d d xx x x xdt dt dt dt dt dt
La ecuación diferencial del sistema linealizado para “pequeñas oscilaciones”alrededor de x0 = x0,1 = 0 resulta:
La ecuación diferencial del sistema linealizado para “pequeñas oscilaciones ”alrededor de x0 = x0,2 = 1 resulta:
Por lo tanto, los términos de rigidez son diferentes para cada caso.
0
2 22
0 0 02 20( 2 ) 0 0r r
r r rx
d x d xm k x x x x x m k xdt dt
0
2 22
0 0 02 21( 2 ) 0 0r r
r r rx
d x d xm k x x x x x m k xdt dt

Ecuaciones rectoras p/ sistemas de 1 G.L.Método de equilibrio de momentos
El sistema de un solo grado de libertad de la figura está sujeto a un movi-miento de rotación. Una varilla, con rigidez torsional kt y sin inercia rotacionalse conecta a un disco con inercia rotacional JG respecto al eje de rotación diri-gido en la dirección k. Al disco sumergido en una caja con aceite se la aplicaun momento externo M(t). La rotación del disco se describe con la variable θ.
La ecuación rectora se obtiene a partir del “método de balanceo de momentos”.La cantidad de movimiento angular H del disco respecto a su centroide es:
GJ H kEl principio de la cantidad de movimiento angular establece que:
ddt
HM
Por lo tanto:
0GJ M k

Ecuaciones rectoras p/ sistemas de 1 G.L.Método de equilibrio de momentos
El momento total externo M que actúa sobre el disco se establece en base aldiagrama de cuerpo libre. La ecuación rectora adopta la forma:
Momento restaurador Momento de amortiguamiento Momento de inerciaMomento externo
debido a la rigidez de la varilla debido al aceite en la cajaactuante en el disco
( ) 0t t GM t k c J k k k k
La siguiente ecuación escalar se obtiene reuniendo los coeficientes escalaresde los diferentes términos vectoriales:
( )G t tJ c k M t
Conclusión:
Los sistemas lineales de un solo grado de libertad se rigen por unaecuación diferencial lineal ordinaria de segundo orden con un términode inercia, un término de rigidez, un término de amortiguamiento y untérmino relacionado con la fuerza externa aplicada sobre el elemento de masa.

Ecuaciones rectoras p/ sistemas de 1 G.L.Frecuencia natural y factor de amortiguamiento
La frecuencia natural y el factor de amortiguamiento de un sistema vibratoriodependen de los parámetros de inercia, rigidez y amortiguamiento, resultandoindependientes de la fuerza externa impuesta sobre el sistema. Se verá que la“forma” de la respuesta sólo depende del amortiguamiento del sistema.
La frecuencia natural y el período natural de un sistema de un grado delibertad para oscilaciones de traslación se definen como:
rad 1 2, Hz , segseg 2
nn n n
n n
k f Tm f
En el caso de sistemas con oscilaciones verticales, la frecuencia natural puedeexpresarse en función de la deflexión estática δst producida por la gravedad:
2 = n nst st
mg k g radk fm seg
La frecuencia natural para movimientos de rotación se define como:
2 tn n
k radfJ seg

Ecuaciones rectoras p/ sistemas de 1 G.L.Frecuencia natural y factor de amortiguamiento
El factor de amortiguamiento o relación de amortiguamiento de los sistemas traslacionales de un solo grado de libertad es una cantidad adimen-sional que se define como:
n
n
cc cm kkm
2 22
La definición del amortiguamiento crítico como cc = 2mωn permite expresarla relación de amortiguamiento de la siguiente forma:
cc c
Un sistema con 0 < ζ < 1 se designa subamortiguado mientras que un sistemacon ζ > 1 se designa sobreamortiguado. El sistema se encuentra críticamenteamortiguado en el caso que ζ = 1.
El factor de amortiguamiento para sistemas rotacionales de un solo gradode libertad se define como:
t t t n
n tt
c c cJ kk J
2 22

Ecuaciones rectoras p/ sistemas de 1 G.L.Frecuencia natural y factor de amortiguamiento
La ecuación rectora del movimiento de un sistema puede expresarse enfunción de la frecuencia natural y el factor de amortiguamiento:
( )n n
d x dx f txdt dt m
2
22 2
Introduciendo el tiempo adimensional τ = ωnt esta ecuación adopta la forma:
( )
( )
n n nd x dx f txd d m
d x dx fxd d k
22 2 2
2
2
2
2
2
donde la frecuencia natural asociada con el sistema adimensional es la unidad,y el único parámetro que aparece explícitamente en el primer miembro es elfactor de amortiguamiento. Por lo tanto, la forma de la respuesta sólo dependede este parámetro.

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones rectoras para diferentes tipos de amortiguamiento
Las ecuaciones rectoras para otros tipos de amortiguamiento se obtienen alreemplazar el término de la fuerza causada por el amortiguamiento viscoso(proporcional a la velocidad), por la fuerza correspondiente a los otros mode-los de amortiguamiento. En general, debe recurrirse a “resolución numérica”.
Amortiguamiento de Coulomb (fricción seca)
fuerza no linealde fricción seca
sgn( ) ( )mx k x fxmg t
Amortiguamiento por fluído
2
fuerza no linealde amort. por fluído
(g ) )s n(dmx k x c x fx t
Amortiguamiento estructural (histerético)
fuerza no linealpor fricción interna
sgn( ) ( )mx k x k x f tx
(constante, con cambio de signo)
(proporcional al cuadrado de la velocidad)
(proporcional al desplazamiento)

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones rectoras para diferentes fuerzas excitatrices
Este modelo de excitación se utiliza para estudiar edificios sometidos a sismos,movimiento de vehículos y embalajes durante su transporte. La base del siste-ma se somete a un desplazamiento y(t) y se busca una ecuación que describala respuesta x(t) referida a la posición de equilibrio estático. En base al diagra-ma de cuerpo libre de la figura se obtiene la siguiente ecuación de movimiento:
Sistema con excitación en la base
mx cx k x c y k y
( ) ( ) ( ) ( ) ( ) ( )z t x t y t x t y t z t
El desplazamiento relativo de la masa respecto a la base se expresa como:
por lo tanto:
mz cz k z m y
22 n nz z z y
donde es la aceleración de la base.y
2 22 2n n n nx x x y y Planteo de desplazamientos absolutos(MGL: movimientos incoherentes)
Planteo de desp. relativos

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones rectoras para diferentes fuerzas excitatrices
Un tramo de una ruta está compuesta por una serie de viaductos de 25 m delongitud. El efecto de creep sobre los tableros ha producido una ondulación deeste tramo que se aproxima de la siguiente forma ( ):
Sistema con excitación en la base
Ejemplo de aplicación (excitación para planteo de desplazamientos relativos)
max max
max
( ) cos( ) es la amplitud vertical de una semi-onda2 se denomina "número de onda" [rad/m]
( ) cos(2 ) 25 m
y x y x yL
y x y x L L
Un vehículo que se modela como un oscilador simple para el análisis delmovimiento vertical, se desplaza por la ruta a una velocidad V = 72 km/h.El movimiento impuesto de la base en función del tiempo se calcula como:
max
max max
2max
( ) es la variable tiempo [s]( ) cos(2 ) 72 km/h 20 m/s( ) cos(2 20 25 ) cos( ) 2 2 20 25
( ) co
[rad
s )
/s]
(
x t V t ty t y V L t Vy t y t y t V L
y t y t
es la distancia recorridax

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones rectoras para diferentes fuerzas excitatrices
Este modelo de excitación se utiliza para estudiar máquinas rotarorias, comoventiladores, secarropas, motores de combustión interna y motores eléctricoscon cierto grado de desequilibrio.
Sistema con masa giratoria desbalanceada
Este desequilibrio se representacon una masa mo ubicada a unadistancia fija ε que gira con unavelocidad angular ω. La ecuaciónrectora se deriva considerandosólo los movimientos verticalesdado que los apoyos lateralesimpiden el movimiento en j.El punto fijo O se elige coinci-dente con la posición verticalde equilibrio estático, por lo quela carga de la gravedad no seconsidera en forma explícita.
fuerzacentrífuga

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones rectoras para diferentes fuerzas excitatrices
Las reacciones en el punto O’ de acuerdo al diagrama de cuerpo libre de lamasa desequilibrada mo se expresan como:
2 20 0 0sin ; cosx yN m t m x N m t
A partir del diagrama de cuerpo libre de la masa M se encuentra que:
xM x cx k x N
Reemplazando la expresión de la reacción Nx se obtiene:
donde:
20; ( ) sino
n
m M mf t m t
k m
El desplazamiento estático del resorte resulta:
( )st oM m g k mg k
20
2
( ) sin
ó 2 ( )o
n n
M m x cx k x m t
x x x f t m

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones rectoras para diferentes fuerzas excitatrices
La ecuación de movimiento del sistema sumergido de la figura resulta:
Sistema inmerso en un líquido con masa agregada
1( ) ( )mx k x f t f t
donde f1(t) representa la fuerza que ejerce el líquido sobre la masa debido a sumovimiento. Esta fuerza puede expresarse como:
1 0( ) ff t K M x C x
donde M representa una “fracción” de la masa de líquido desplazada por elcuerpo, K0 es un coef. que depende de la forma del cuerpo y del recipiente,y Cf es un coef. de amortiguamiento que depende de la forma del cuerpo, laviscosidad del líquido y la frecuencia de oscilación del cuerpo rígido.
Vinculando ambas expresiones se obtiene:
0( ) ( )fm K M x C x k x f t
donde K0M se designa “masa agregada” del líquido.Esta técnica de modelado se utiliza habitualmentede pilas de puentes y compuertas de presas.
(un término depende de la aceleración y otro de la velocidad)

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de LagrangeLas ecuaciones de Lagrange pueden deducirse ya sea a partir de principiosdiferenciales (trabajos virtuales) o de principios integrales.
Considérese un sistema con múltiples G.L. descripto a través de N coordena-das generalizadas qj, j = 1, 2, …, N, no relacionadas entre sí por condicionesgeométricas ni cinemáticas (linealmente independientes). Las ecuaciones deLagrange en términos de estas coordenadas generalizadas establecen que:
jj j j j
d T T D V Qdt q q q q
1, 2, …, j N
donde son las velocidades generalizadas, T es la energía cinética del sistema,V es la energía potencial del sistema, D es la función de disipación de Rayleighy Qj es la fuerza generalizada asociada a la ecuación j-ésima, calculada como:
jq
l lj l l
l lj j
Qq q
rF M
donde Fl y Ml son representaciones vectoriales de las fuerzas y momentos apli-cados externamente, rl es el vector posición del lugar de aplicación de la fuerza,y ωl es la velocidad angular del sistema respecto al eje del momento aplicado.
(de acuerdo a las definiciones del Capítulo 1)

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
En sistemas de 1 GL (con una única coordenada independiente), las ecuacionesde Lagrange se reducen a:
11 1 1 1
d T T D V Qdt q q q q
donde la fuerza generalizada adquiere la forma:
11 1
l ll l
l lQ
q q
rF M
Las expresiones de energía cinética, energía potencial y función de disipaciónen función de los parámetros equivalentes del sistema resultan:
2 2 21 1 1
1 1 1; ;2 2 2e e eT m q V k q D c q
Las expresiones de energía cinética, energía potencial y función de disipaciónpara sistemas vibratorios con características lineales poseen la siguiente forma:
1 1 1 1 1 1
1 1 1; ;2 2 2
N N N N N N
jn j n jn j n jn j nj n j n j n
T m q q V k q q D c q q

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
El disco de la figura posee una masa m y un momento de inercia JG respecto asu centro. El punto fijo O se ubica horizontalmente en el centroide del discocon el resorte sin estirar. La relación entre la traslación x del disco en direccióni con su rotación θ respecto a un eje paralelo a k es: x = – r θ.
Ejemplo 1 – Sistema que gira y se traslada
Eligiendo θ como coordenada generalizada (podría haberse elegido x) se tiene:
1 , 0 , ( ) yl l lq M t F M k k
La fuerza generalizada se calcula como:
11
( ) ( )ll
lQ M t M t
q
M k k
La energía potencial del sistema resulta:
2 2 2 21 1 12 2 2 eV k x kr k
donde ke = kr2 es la rigidez equivalente.

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
La energía cinética del disco es la suma de la energía cinética de traslación desu centroide y la energía cinética debida a la rotación respecto a su centroide:
2 2 2 2 21 1 1 donde:2 2 2 e eD cx cr c c cr
2 2 2 2 2 2 2
Energía cinética Energía cinéticapor traslación por rotación
1 1 1 1 3 12 2 2 2 2 2G G eT mx J mr J mr m
La función de disipación se obtiene como:
2 21 3donde: ;2 2G eJ mr m mr
2 2 23 ( )2
m r c r k r M t
La ecuación rectora del movimiento resulta:
23
en
e
k km m
Los parámetros modales se calculan como:
2 6e
e n
c cm km
Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
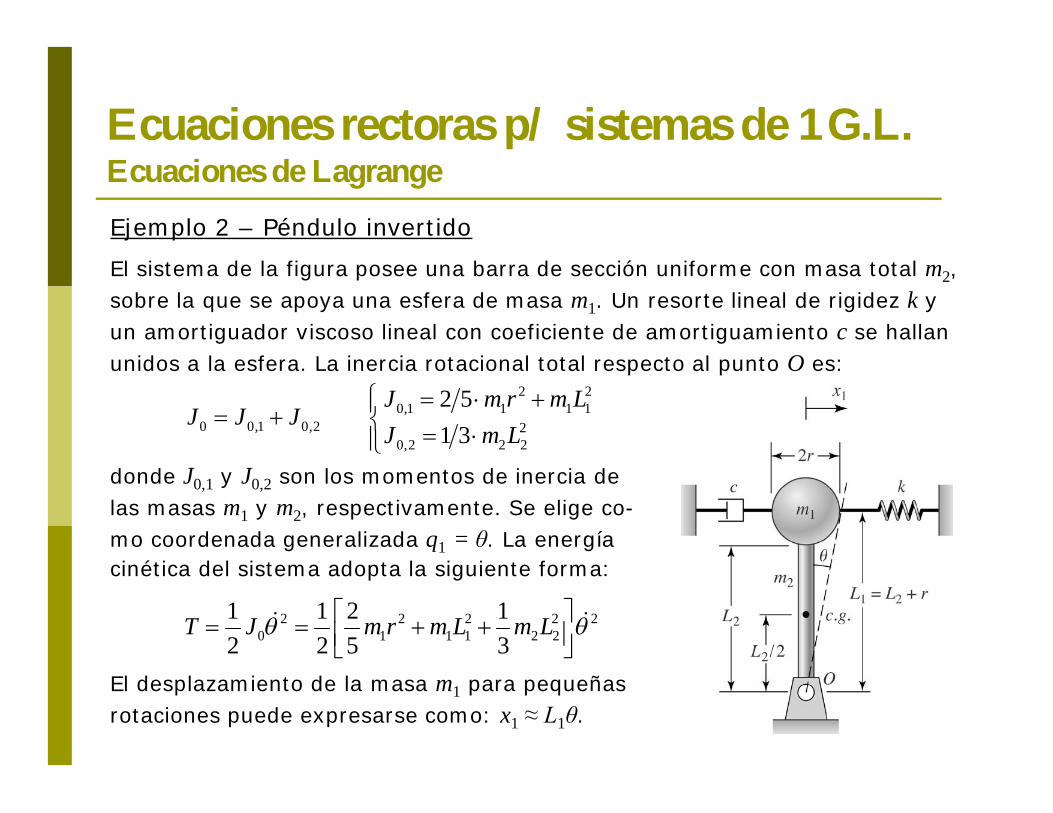
El sistema de la figura posee una barra de sección uniforme con masa total m2,sobre la que se apoya una esfera de masa m1. Un resorte lineal de rigidez k yun amortiguador viscoso lineal con coeficiente de amortiguamiento c se hallanunidos a la esfera. La inercia rotacional total respecto al punto O es:
Ejemplo 2 – Péndulo invertido
2 20,1 1 1 1
0 0,1 0,2 20,2 2 2
2 51 3
J m r m LJ J J
J m L
donde J0,1 y J0,2 son los momentos de inercia delas masas m1 y m2, respectivamente. Se elige co-mo coordenada generalizada q1 = θ. La energíacinética del sistema adopta la siguiente forma:
2 2 2 2 20 1 1 1 2 2
1 1 2 12 2 5 3
T J m r m L m L
El desplazamiento de la masa m1 para pequeñasrotaciones puede expresarse como: x1 ≈ L1θ.

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
La energía potencial del sistema se determina como (consultar ec. (2.45)):
2 2 21 1
1 12 2
D cx cL
2 2 2 2 22 21 1 1 2 1 1 1 2
1 1 1 12 2 2 2 2 2
L LV k x m g L m g k L m gL m g La función de disipación toma la forma:
2 2 21 1 1 2 2
2 21 1 1 2
21
2 15 3
2
e
e
e
m m r m L m L
Lk k L m gL m g
c cL
Las propiedades equivalentes de inercia, rigidez y amortiguamiento del siste-ma se expresan respectivamente por medio de:
Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
21 1 1 2 2 2k L m gL m g L
La rigidez equivalente ke puede ser positiva o negativa. La estabilidad delsistema sólo puede garantizarse cuando el momento “restaurador” del resorteresulta mayor al momento neto que genera la carga gravitatoria, es decir:
21 1 1 2 2
0,1 0,2
2en
e
k k L m g L m g Lm J J
La frecuencia natural del sistema se calcula como:
0e e em c k La ecuación rectora del movimiento resulta:

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
El medio disco de la figura posee masa m y momento de inercia JG respecto alcentroide G. El sistema oscila sin deslizarse. El punto de contacto C está a unadistancia Rθ a partir del punto fijo O. El vector de posición y la velocidad abso-luta del centroide G se determinan mediante las expresiones:
Ejemplo 3 – Movimiento de un segmento de disco
( sin ) ( cos )
( cos ) sin
R b R bR b b
r i jr i j
La energía cinética, adoptando como coordenada generalizada q1 = θ, toma la forma:
2
2 2 2 2
2 2 2 2
1 1 ( )2 21 1 [( cos ) ( sin ) ]2 21 1 [ 2 cos ]2 2
G
G
G
T J m
J m R b b
J m R b bR
r r

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
La energía potencial del sistema respecto al punto G resulta:
(1 cos ) siempre 0V m g b
La ecuación de movimiento que surge de utilizar las expresiones rigurosas deenergía cinética y potencial resulta no lineal. Una ecuación linealizada para des-cribir oscilaciones angulares “pequeñas” respecto a θ0 se obtiene expresando:
0 0( ) ( ) donde se adopta 0rt t
y expandiendo los términos trigonométricos en series de Taylor:2 2
0 0 0 0
20 0 0 0
cos cos( ) cos sin 2 cos 1 2
sin sin( ) sin cos 2 sinr r r r
r r r r
Las expresiones de energía cinética y energía potencial, conservando hasta lostérminos cuadráticos de giro relativo y velocidad angular, adoptan la forma:
2 2
2
1 [ ( ) ]212
G r
r
T J m R b
V m g b
e
rr k
V m g b
Obtención de la rigidez equivalente:

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
Las propiedades equivalentes de inercia y rigidez del sistema pueden inferirsede las formas estándar de energía cinética y potencial de un oscilador simple:
2( )e G
e
m J m R bk m g b
La ecuación rectora del movimiento resulta:
2[ ( ) ] 0G r rJ m R b m g b
La frecuencia natural del sistema se expresa como:
2 2( ) [ ( ) ] / ( )e
ne G G
k m g b gm J m R b J m R b mb
Comparando esta ecuación con la correspondiente a la frecuencia natural deun péndulo en el plano, se observa que resultan equivalentes, a través de ladefinición de la siguiente longitud efectiva:
2( )Ge
J m R bLmb

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
El resorte horizontal del sistema de la figura está pretensado, en la posición deequilibrio inicial, con una pre-tensión T1 producida por su extensión inicial δ0:
Ejemplo 4 – Sistema traslacional con un resorte pretensado
1 1 0T k
Las energías cinética y potencial resultan:
21 2
1 ;2
T m x V V V
donde V1 y V2 representan términos asociados a los resortes k1 y k2, respectivamente.
2 21 0 2
1 1( )2 2
V Lk k x
La carga gravitatoria no se considera dado quese considera que las oscilaciones ocurren res-pecto a la posición de equilibrio estático.
La energía potencial puede expresarse como:

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
El cambio de longitud ΔL del resorte con rigidez k1 se produce debido al movi-miento x de la masa. Este cambio para |x/L| << 1 puede aproximarse como:
2 22 2
hipotenusa
112 2
x L xL L x L L LL L
La energía potencial se expresa entonces como:22
21 0 2
1 12 2 2
L xV k k xL
La contribución de la energía potencial a la ecuación rectora del movimiento seobtiene utilizando la definición de las ecuaciones de Lagrange:
2
1 0 2
31 0 1
2 2
2
2
V L x xk k xx L L
k k xk xL L
12
términono-lineal
Tk xL

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
La ecuación rectora del movimiento del sistema resulta:
2 1 2 10 em x k T L x k k T L
mientras que la frecuencia natural se calcula como:
2 1n
k T Lm
El término “T1 / L” se conoce como rigidez geométrica, y aparece en lasecuaciones de movimiento de sistemas con elementos sometidos a carga axial(obenques de puentes, conductores eléctricos, antenas atirantadas, etc.).
Por ejemplo, en el sistema de la figura, la carga axial P = mg debida al peso dela masa “modifica” la rigidez transversal del extremo del voladizo:
m
EI, h
x3 2
3 2
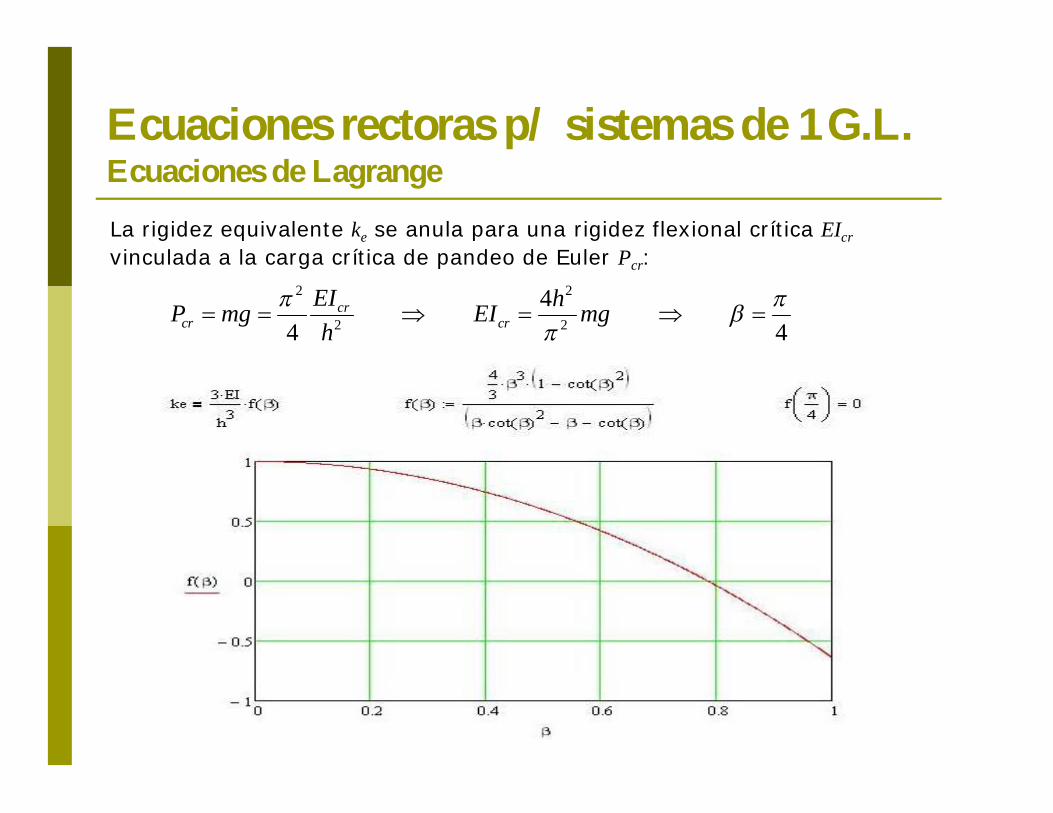
( ) 1
3 4 3 (1 cot( ) )cot( ) cot( )e
f
EIkh
2
h PEI
Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
La rigidez equivalente ke se anula para una rigidez flexional crítica EIcrvinculada a la carga crítica de pandeo de Euler Pcr:
2 2
2 2
44 4
crcr cr
EI hP mg EI mgh

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
El movimiento del cigüeñal de la figura se asume que ocurre en un plano hori-zontal (la gravedad actúa en la dirección k). La biela de masa mG y momentode inercia JG está conectada a una corredera de masa mP por un extremo, y aun disco de momento de inercia Jd respecto a O.
Ejemplo 5 – Oscilaciones de un cigüeñal (sistema biela-manibela)
La coordenada generalizada elegidaes θ. La posición de la masa mP
respecto al punto O resulta:
cos cosP r l d r i j
La posición del centroide G de la biela respecto al punto O resulta:
cos cos sin sinG r a r a r i j
Los ángulos θ y γ se relacionan “geométricamente” a través de la expresión:
sin sinr d l (ecuación de restricción)
(enfocarse principalmente en el procedimiento)
Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
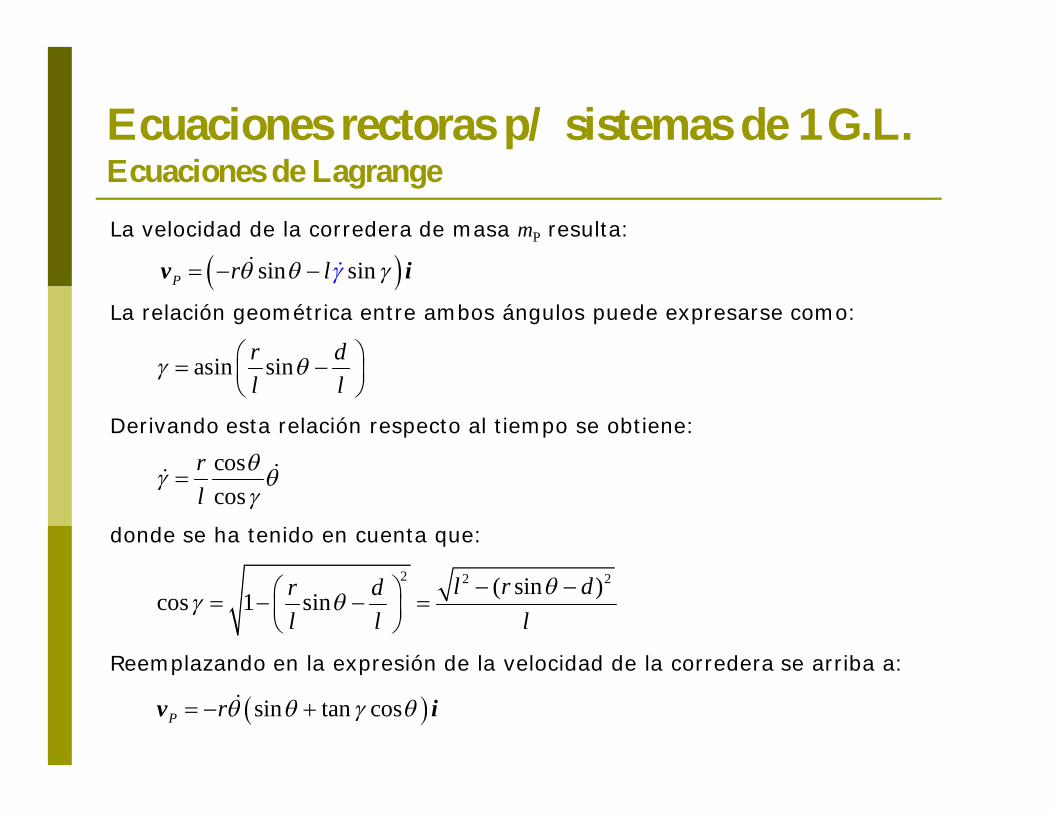
La velocidad de la corredera de masa mP resulta:
La relación geométrica entre ambos ángulos puede expresarse como:
Reemplazando en la expresión de la velocidad de la corredera se arriba a:
sin sinP r l v i
sin tan cosP r v i
asin sinr dl l
Derivando esta relación respecto al tiempo se obtiene:
donde se ha tenido en cuenta que:
coscos
rl
2 2 2( sin )cos 1 sin
l r dr dl l l

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
sin sin cos cos
sin tan cos cos
G r a r a
a br rl l
v i j
= i j
Por otra parte, la velocidad del centroide G de la biela resulta:
donde se ha considerado que: .La energía cinética total del sistema se expresa como:
2 221 1 1 1( ) ( )2 2
1 ( )22 2d G G G G P P Pm JJ JT m v v v v
donde:
22 22
22
cos( ) sin tan cos coscos
sin tan cos
d G G
P
a b rJ J r m Jl l l
r m
La energía potencial es nula dado que el movimiento se desarrolla en un planohorizontal. La función de disipación también resulta nula.
b l a

Ecuaciones rectoras p/ sistemas de 1 G.L.Ecuaciones de Lagrange
Adoptando la coordenada generalizada q1= θ, y considerando el momentogeneralizado Q1= M(t) (m(t) en diagrama), la ecuación de movimiento resulta(ver expresión simplificada de energía cinética en página anterior):
21( ) ( ) ( )2
d J J M tdt
21( ) ( ) ( ) ( )2
d dJ J J M tdt dt
2
( )
1( ) ( ) ( ) ( )2
J
d dJ J J M td dt
( )d T T M tdt
21( ) ( ) ( )2
J J M t