Embed Size (px)
Citation preview

50
驗證技術
精選論文
影音推薦
產情趨勢
創新研發
車輛定位融合系統
但經過長時間的測試後,使用者發現
GPS定位系統在導航上並不如預期中的完美,
雖然已改善原先 INS 誤差累積所造成的定位偏
移,但 GPS 的訊號穩定度也同樣存在著許多
干擾問題,如都會區中建築物群及隧道衍生的
環境遮蔽,或是天候不良而影響訊號無法正常
接收的情況,使得系統可靠度備受質疑。
因此開始有研究嘗試將兩種不同屬性的
導航定位系統相結合,利用慣性導航系統的核
心—感測器,來輔助 GPS 全球定位系統,完
成一種整合式的導航定位架構,而如何有效的
整合兩種定位系統便成為當今導航定位設計的
新趨勢。
綜觀目前 GPS 與 INS 的整合,不論是二
維或三維的整合定位都已有相當多的研究成
果,大多是利用多種感測器來進行整合定位,
但感測器的數量會對系統成本造成一定的負
擔,如何在不影響定位精度下,以最少成本的
感測器達成自主性定位亦是一項重要的性能指
標。伴隨著光達(LiDAR)感測器的商品化,
以及發展高精密度圖資資訊,儼然已成為自駕
車不可或缺的相關技術,本文所介紹之車輛定
位融合系統將更進一步加入上述兩項元素,發
展出在都市環境下 RTK-GPS 不穩定或失效
時,仍可以提供 50 公分精度誤差之定位訊息。
壹、 系統架構
一、 定位系統架構
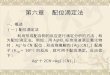
定位系統架構有接收絕對經緯度座標的
GPS,跟車輛動態有關的輪速計、方向盤轉角
以及慣性測量儀器(IMU)等獲得車輛動態模
型參數,用來計算相對座標,搭配車道跟隨系
統(Lane Follow System,LFS)所使用的
影像感測器,用來確定行駛於車道內,並利用
Map-Matching 演算法,以及偵測車輛周圍環
境的光達感測器,來偵測道路特徵點,並搭配
高精密度圖資資訊,修正定位誤差與 IMU 累計
誤差,圖 1 為本系統之架構。
車輛中心 研究發展處 姚文盛
大型載具最早期的導航定位系統都是以慣性導航(Inertial Navigation System,INS)為基礎,
但慣性導航在長時間使用下會有誤差累積而產生定位偏移的情形,而隨著科技的日新月異,使得
全球衛星定位系統(Global Position System,GPS)的發展逐漸成熟,只要有衛星接收器,且
接收機與衛星之間訊號不被遮蔽,無論身在地球何處,隨時都可以藉由衛星訊號的資訊,快速且
準確的得知目前的位置,因此當 GPS 的成熟度受到肯定後,INS 的市場即被 GPS 所取代,如今
這種導航技術也已從大型載具上拓展到車輛領域。

驗證技術
精選論文
影音推薦
產情趨勢
創新研發
51
2018 車輛研測專刊
二、 儀器
( 一 ) 全球衛星定位系統
(Global Positioning System,GPS)
GPS 系統架構,可分為太空部份、地面控
制部份與用戶端部分,在太空部分的資訊,包
含 24 顆衛星構成 6 軌道,傾斜角為 55 度、軌
道高度為 20,200 公里,運行的速度為 2.7km/
sec,然後在大氣中會發射導航訊號,提供使用
者端接收衛星相關軌道資訊進行定位運算,導
航資訊包含衛星星曆、時鐘參數、系統的狀態
碼、電離層延遲資訊,及其他供導航用的資訊。
地面站的部分,它的主控制站位置在美國克羅
拉多州的許雷瓦空軍基地。地面監控系統則由
分布在地球上的四個地面天線,及五個遙控監
控站組成,它們的位置分別在美國的夏威夷、
赤道島、第雅歌哥西亞、瓦赫林等地,監控站
位置設定原則是考慮能平均分布在地球赤道面
上,以保持在全世界範圍內,任何時間任何地
點都可以監控每一顆 GPS 衛星。GPS 衛星分
佈在六個與赤道成 55 度角的軌道。它在赤道
360 度圓周上從東經 17 度開始,每隔 60 度
有一個軌道,也就是在赤道的 17、77、137、
197、257、317 度上空各有一個軌道。
DGPS(Differential GPS)即是針對改
善 GPS 利用電碼定位之精度而發展出來的系
統。DGPS 是利用差分方式,消除大部分誤差
項。系統利用已知精確位置座標之 GPS 量測
點作為參考點。由參考點接收衛星資料並計算
衛星位置與參考點之間的距離,此一計算距離
與參考點所測得之虛擬距離間之差值(稱為虛
擬距離差);或是直接計算出參考點,利用測
得之虛擬距離所得的位置座標與參考點之實際
位置座標間之分量差視為修正值,並且藉由數
據傳送的方式傳送至未知量測點上的接收儀進
行修正,以提高未知量測點之定位精度。
即時動態測量(Real Time Kinematic,
RTK),為一種結合 GPS 動態定位與即時性
兩個特性的 GPS 施測法,且是在現今成熟的
GPS 誤差修正技術中最精準的一項,動態時最
高精度可達 2 公分左右。所謂的動態定位有別
▲ 圖 1. 定位系統架構

52
驗證技術
精選論文
影音推薦
產情趨勢
創新研發
於一般靜態相對定位,是指待測點相對於附近
的固定已知點,是會移動而並非固定不動的,
而即時性是指在瞬間或接收數筆觀測資料的時
間內完成座標解算的成果。
為了能獲得更高的精度,一般都會使用載
波相位資料來進行差分計算。然而在發展初期,
這種計算方式並無法用在移動的情況下求解出
週波未定值,必須先用靜態的方式觀測一段時
間來求解。然而這種方式不僅耗時間,而且在
動態的即時性上也不具效率。之後有不少學者
提出能快速解算週波未定值方法,使得能在即
時動態的情況下,使用相位資料進行施測。
( 二 ) 慣性測量儀器
(Inertial Measurement Unit,IMU)
慣性測量儀器,一般是利用三個方向的
陀螺儀和三個方向的加速度計,來量測三軸的
角速度及加速度,運用這些資料算出物體的姿
態,為了確保計算正確,通常安裝於物體的重
心上,有些 IMU 還會有其他感測器像是磁力計
或氣壓計來計算方位與高度。然而 IMU 容易產
生累積誤差,這將使得系統經過一段時間後,
IMU 所計算出的位置精準度甚至比商用 GPS
receiver 所得到的位置訊息還差。
( 三 ) 光達
(Light Detection And Ranging,LiDAR)
光達為一種光學感測技術,它藉由向環境
或目標物照射光束,測量發射和接收到光束訊
號的時間間隔來計算與目標物的距離,利用多
道光束的反射訊號來預測目標物的形狀,還能
利用接收到光束的反射率來判斷目標物表面的
材質,本系統利用光達的上述特性來偵測是否
為交通號誌或者為電線桿,並且測量與交通號
誌或電線桿的二維距離。
三、 技術
( 一 ) 座標校正
座標校正係將經緯度座標系轉換成笛卡爾
座標系,經緯度座標系與笛卡爾座標系都為以
地球中心為圓點的 ECEF(Earth-Centered
Earth-Fixed)坐標系,但地球並非為完美正
圓,而是有傾斜角的橢圓球體,因此國際上
在將經緯度座標系轉成笛卡爾座標系時,會
使用 WGS84 的參數來大地量測系統標準,
WGS84 制定一些地球半徑長度、橢圓扁平比
等參數,以便大家計算使用。
利用 WGS84 將經緯度座標(極座標)轉
換為較常見的笛卡爾座標(XYZ 三維座標),
在使用上依然有些困難,因為以地球中心為原
點的 XYZ 三維座標較不為人所熟悉,且感測
器除了全球衛星定位系統外,大部分量測到定
位數值皆為相對距離,為了資料融合使用,須
再將 xyz 座標系原點作旋轉平移至最佳的參
考點,此過程稱為 XYZ 坐標系與 ENU(East
North UP)座標系轉換(圖 2)。
▲ 圖 2. ECEF 與 ENU 座標系轉換

驗證技術
精選論文
影音推薦
產情趨勢
創新研發
53
2018 車輛研測專刊
( 二 ) 光達物體偵測
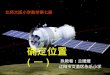
本系統架構藉由裝設在車頂的光達捕捉周
圍環境點雲圖 (point cloud),利用點雲圖回饋
所掃描的周遭物體的外型與高度,判斷環境四
周是否存在路燈或交通號誌,圖 3 (b) 下方可看
出實際環境中,左前方及右前方各有一根路燈,
右前方路燈在影像尚未清楚呈現時,光達已經
偵測出物體,如圖 3 (a) 左方紅色區塊即為路燈
位置,而左前方路燈因受到路樹遮蔽而無法偵
測出來,可加入反光貼條,利用光達反光率偵
測特性強化路燈或交通號誌物體偵測的演算法。
( 三 ) 資料融合
對於車輛定位來說,資料融合是一項重大
議題,前段座標校正所討論內容皆是為了將感
測器的資料融合所做的準備,首先將 GPS 與
IMU 整合入擴展式卡爾曼濾波器(Extended
Kalman Filter,EKF),EKF 所要估計的參數
有車輛座標、車輛速度和車輛航向等,並且搭
配車輛動態模型來做濾波演算法的計算,融入
方向盤轉角去除不合理的航向角雜訊。
自動駕駛所需定位資訊及精度必須非常精
確(圖 4),本文介紹之系統利用上述感測器
的特性與功能提升定位的精度,透過攝影機影
像處理資訊判斷是否行駛於車道內,以及藉由
GPS 經緯度座標點進行 Map-Matching,過濾
不合理的經緯度座標點跳動。
在光達物體偵測一節提到利用光達的路燈
/ 交通號誌偵測,搭配精密圖資可以修正定位資
料,其中精密圖資的資料至少須包含道路資訊,
而且有路燈之經緯度座標訊息。第一步先利用
商用 GPS 鎖定在精密圖資中所在的小區塊,
擷取出該區塊的特徵點資訊;第二步,利用光
▲ 圖 4. 導航定位資訊與自動駕駛定位資訊差異
▲ 圖 3. 光達偵測車輛周圍環境
(a) (b)

54
驗證技術
精選論文
影音推薦
產情趨勢
創新研發
達所回傳的路燈 / 交通號誌距離與 GPS 得知車
輛位置,得出所偵測到的路燈經緯度資訊;最
後,使用光達所測得車輛與路燈的相對距離,
搭配路燈的絕對經緯度座標回推,修正車輛的
經緯度資訊。前曾提及 IMU 為車輛定位相當重
要的感測器,具有非常良好的精度,但是它會
有累計誤差的問題,拿來計算車輛座標時,定
位誤差會隨著行駛的時間而變大,可透過光達
修正完車輛座標,來消除 IMU 的累計誤差。
貳、 實驗分析
一、 實驗環境
▲ 圖 5. 實驗車輛與感測器配置圖
▲ 圖 6. 實驗道路 - 鹿工路與鹿工南七路路口

驗證技術
精選論文
影音推薦
產情趨勢
創新研發
55
2018 車輛研測專刊
( 一 ) 實驗車輛
本系統用以實驗的車款為 Luxgen U6,並
且由車輛中心(ARTC)將該平台車改裝為可
進行自動駕駛控制之模式,車輛定位融合系統
相關感測器GPS、IMU、LiDAR等配置如圖5。
( 二 ) 實驗路線
測試道路為彰濱工業區的鹿工路與鹿工南
七路,鹿工路測試道路長度約 500 公尺,鹿工
南七路測試道路長度約 2 公里(圖 6)。
二、 實驗數據
( 一 ) Map-Matching 誤差
商用 GPS 在一般沒有遮蔽的道路,會有
3 公尺多的誤差,而搭配 Map-Matching 演算
法能減少定位誤差於0.5公尺至1.5公尺內(圖
7),對於有車道線的道路來說,可使用車道
追隨系統(LFS)控制,因此定位精度需求相
對沒有那麼高,只要能確定行駛於哪一個車
道,並利用車道線當作參考點擷取圖資資訊。
( 二 ) L-Turn 定位系統誤差
對於沒有車道線的 T 字路口,因為環境較
為複雜,需要進行 L 型轉彎動作,且會有其他
控制系統加入,所需求的定位精度較高,在 T
字入口長 80 公尺、寬 80 公尺的道路空間,入
彎前有一特徵點修正的定位精度,能達到平均
0.35公尺,最大0.8公尺的定位精度(圖8)。
對於沒有車道線的 T 字路口或十字路口,
亦因為環境較為複雜,需要進行U型迴轉動作,
且會有其他控制系統加入,所需求的定位精度
較高,在長 50 公尺、寬 15 公尺的道路空間,
入彎前有一特徵點修正的定位精度,能達到平
均0.46公尺,最大1.2公尺的定位精度(圖9)。
▲ 圖 7. Map-Matching 定位誤差
▲ 圖 8. L-Turn 定位誤差
▲ 圖 9. U-Turn 定位誤差

56
驗證技術
精選論文
影音推薦
產情趨勢
創新研發
( 三 ) 特徵點修正誤差
當使用光達偵測到路燈或交通號誌時,定
位系統會根據精密圖資所回饋的特徵點之經緯
▲ 圖 10. 外側車道定位誤差
▲ 圖 11. 內側車道定位誤差
度資訊,搭配光達所量測到的相對距離,回推
出車輛所在的位置座標以修正定位結果,圖 10
為車速 10kph 行駛於外側車道的特徵點修正誤

驗證技術
精選論文
影音推薦
產情趨勢
創新研發
57
2018 車輛研測專刊
表 1. 外側車道定位誤差實驗數據
10kph- 外側車道 test1 test2 test3
最大距離誤差 1.18m 1.35m 1.43m
平均距離誤差 0.34m 0.34m 0.31m
平均橫向距離誤差(紅線) 0.18m 0.17m 0.19m
平均縱向距離誤差(綠線) 0.26m 0.26m 0.18m
表 2. 內側車道定位誤差實驗數據
10kph- 內側車道 test1 test2 test3
最大距離誤差 1.01m 0.90m 1.17m
平均距離誤差 0.32m 0.32m 0.31m
平均橫向距離誤差(紅線) 0.17m 0.16m 0.18m
平均縱向距離誤差(綠線) 0.25m 0.23m 0.19m
差,圖 11 為車速 10kph 行駛於內側車道的特
徵點修正誤差,由這兩張圖可以看出,內外車
道對於號正修正結果影響不大,由眾多測試結
果可以得出,當光達與特徵點的距離越近,特
徵點修正結果越準確,因此當使用光達偵測障
礙物時,可以在光達與目標物小於一定距離時
才開始作動,能夠使特徵點修正精準度更高,
有關車速 10kph 行駛於內外側車道的特徵點修
正誤差等相關測試數據整如表 1 與表 2,平均
誤差約 0.31 公尺至 0.34 公尺。
參、 結論
本文所介紹之定位系統係 ARTC 為了因
應未來自動駕駛 / 自動輔助駕駛而設計,除了
傳統的 GPS 和 IMU 定位外,加入了車身動
態模型,融合入擴展式卡爾曼濾波器,以提供
較佳的定位精度為目標,在定位精度需求較
小的有車道線道路,使用自駕車必備的相機
感測器,確定行駛於單一車道內,搭配 Map-
Matching,讓定位誤差能保持在 1 公尺左右;
而在沒有車道線的路口,因需控制動作較為複
雜,需要良好的定位精度的環境下,使用光達
偵測路邊特徵點,搭配圖資資訊,能提供誤差
在 50 公分內的定位資訊,目前 ARTC 使用的
圖資資訊為路邊特徵點,後續會導入高精密圖
資,能有更多的特徵點可以參考校正,另一方
面再加入3D LiDAR 的SLAM(Simultaneous
localization and mapping)技術,進行協同
式車輛定位系統模組開發,期許能達到平均 10
公分的定位誤差。