-
自走車專題研究臺北城市科技大學 電機系 林忠杰臺北城市科技大學 電機系 林忠杰
-
ㄧ、源由
二、機構二、機構
三、種類
四 規則四、規則
五、研習
六、討論
-
自走車 機電整合應用自走車 機電整合應用
循跡 聲控 避障循跡 聲控 避障
撞球相撲
競速負重
清潔機器人
-
『整合機械工程、電子和智慧型電腦控制應用在工業產品和程序的設計和製造』
Mechanical(機械)和 Electronics(電子)
根據 1996 年美國電子電機工程和機械工程學會(IEEE/ASME)所發行根據 1996
年美國電子電機工程和機械工程學會(IEEE/ASME)所發行的機電學刊 (Transactions on
Mechatronics)創刊號的定義。
參考來源:生活科技教育月刊2011年 44卷第五期
-
機電整合控制
1.傳統控制:機構與電學自動門、自動販賣機、自動對焦照像機自動門、自動販賣機、自動對焦照像機
2.電腦控制:自動化與微處理機
機器人、自動導引車、自動化生產
3.網路控制:電腦網路與資訊有線、無線通訊、衛星定位、網路傳輸有線、無線通訊、衛星定位、網路傳輸
4.多元控制:微機電與光機電4.多元控制 微機電與光機電
精密專業技術整合
-
LEGO Mindstorms NXT
1.電機控制元件1.電機控制元件•控制器•伺服馬達•伺服馬達•感測器2 積木元件2.積木元件3.圖控式程式發展環境
-
電機控制元件
1. 包含NXT 控制器、伺服馬達、感應器等组成
2. NXT控制器就像人的大腦,伺服馬達好比人的肌肉
提供服馬達好比人的肌肉,提供動力,感應器就像人的五官,偵測外界環境並轉換成數位偵測外界環境並轉換成數位資料,再傳送回NXT控制器,驅動伺服馬達做出反應
3. 基本運算模式輸入->處理->輸出
4 圖控式程式發展環境4. 圖控式程式發展環境
-
積木元件
-
圖控式程式發展環境
-
自走車組合
控制馬達控制馬達前進一小段距離
控制馬達後退一小段距離
無窮迴圈
-
單一光感循跡
如何讓自走車使用一個光感應器,控制兩個馬達,循跡(黑線)前進 ?達 循跡(黑線)前進 ?
-
單一光感循跡演算法
1.光感應偵測地面亮度;2.若偵測到亮-左馬達出力;3.若偵測到暗-右馬達出力;不斷重複上面步驟,即可循跡前進。
-
程式設計
光感測到亮時,走上半側路徑控制馬達左轉;反之則走下半側
右馬達停止
左馬達運轉
無窮迴圈控制馬達右轉 無窮迴圈
優點:演算法簡單易懂缺點:容易脫軌 效率不佳 不適合太複雜的路線…
-
雙光感循跡
如何讓自走車使用兩個如何讓自走車使用兩個光感應器,控制兩個馬達
循跡(黑線)前進達,循跡(黑線)前進,並且到達底線時自動停止止?
-
參考網址
Lego Mindstorms (http://mindstorms.lego.com)R b Si l (h // b i l
l)Robot Simulator (http://www.robotsimulator.nl)Lego Mindstorms
Simulator (h //ddi i d b d )(http://ddi.unipaderborn.de)RobotBasic
(http://www.robotbasic.org)A d i (h // d i )Arduino
(http://www.arduino.cc)Basic Stamp BoeBot
(http://www.parallax.com)
-
教材與教具製作
1.傳統控制:機構與電學低年級學生 初階
邏輯電路低年級學生、初階
2.電腦控制:自動化與微處理機
中年級學生、進階微處理機
3.網路控制:電腦網路與資訊
高年級學生 高階嵌入式系統
4.多元控制:微機電與光機電
高年級學生、高階
系統整合4.多元控制 微機電與光機電
系統整合
-
自走車原理
-
自走車製作
四輪自走車 三輪自走車
前輪(左右)
感測器
( )
感測器
控制器
後輪驅動
-
自走車方塊
-
自走車架構
1.感測器(Sensors):感測物理變化
溫度、光線、聲音
2. 控制器(Controller):邏輯電路與微處理機
溫度、光線、聲音…
TTL、uC、FPGA…
3. 致動器(Actuators):機構動作裝置
RC Servo、DC Motor…
4. 機構(Mechanism):傳遞轉換運動方向
RC Servo DC Motor…
-
感測器
1. 紅外線感測器:紅外線 LED省電、體積小、壽命長、反應速度快
紅外線發射與接收 LED 紅外線感測模組 CNY70紅外線感測模組 CNY70
2.超音波感測器:較不容易受到外部雜訊干擾
紅外線發射與接收 LED 紅外線感測模組 CNY70 紅外線感測模組 CNY70
超音波發射接收模組
-
自走車控制
1.邏輯電路:邏輯閘、比較器
2. 微處理控制器:8051單晶片、Basic Stamp 晶片、ATMEGA8-16晶片
3. 可規劃邏輯電路裝置:FPGA 、CPLD
-
自走車致動器
1.連續型伺服機:容易控制
2 步進馬達:不易控制2.步進馬達:不易控制
3.減速直流馬達:效率高
-
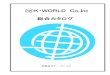
脈衝寬度調變 (PWM:Pulse Width Modulation)
Son
out VTtV
-
脈波產生器
Astable Multivibrator不穩態多諧振盪器不穩態多諧振盪器(方波產生器)
利用電容與電阻充放電的原理來產生方波,可以輕易地產生PWM 波形。
-
機構應用
傳遞轉換運動方向
減速齒輪箱
利用齒輪的速度轉換,將電動機輸出之轉速降低至所需之轉速,如此得到較大轉矩。
-
感測器應用
紅外線感測模組 CNY70
-
馬達驅動電路
直流馬達驅動電路Vcc
H Bridge控制直流馬達
INPUT
如何控制行進方向與速度?方向與速度?
-
馬達驅動電路
L298 Dual H-Bridge Motor Driver Integrated Circuit
-
馬達驅動電路
L298 Dual H-Bridge Motor Driver Integrated Circuit
-
以三輪自走車為例以三輪自走車為例
邏輯電路 TTL CMOS FPGA邏輯電路:TTL、CMOS、FPGA
微控制器:8051、BB、Arduino
-
硬體描述語言
ALTERA:MAX+Plus II、Quartus II
PAL CPLD FPGAPAL 、CPLD 、FPGA
VHDL 、Verilog HDL、AHDL
-
狀態機
L C R In1 In2 EnA In3 In4 EnB
1 0 1 1 0 “101” 0 1 “101”1 0 1 1 0 101快
0 1 101快
0 1 1 1 0 “011”慢
0 1 “101”快慢 快
… … … …
1 1 0 1 0 “101”快
0 1 “011”慢
… … … …
-
ARCHITECTURE beh OF case_sel ISsignal sen: std logic vector(2
downto 0);signal sen: std_logic_vector(2 downto 0);beginsen In1
-
單晶片微處理器 8051
-
Keil C for 8051//---- get Center CNY Status ----------------//
unsigned char readCenterCNY(void){
unsigned char
cny;if(CCNYL==1&&CCNYM==1&&CCNYR==1)
{CLEDL=1; CLEDM=1; CLEDR=1; cny=0x00;}else if
(CCNYL==1&&CCNYM==1&&CCNYR==0) else if
(CCNYL==1&&CCNYM==1&&CCNYR==0)
{CLEDL=1; CLEDM=1; CLEDR=0; cny=0x01;}else if
(CCNYL==1&&CCNYM==0&&CCNYR==1)
{CLEDL=1; CLEDM=0; CLEDR=1; cny=0x02;}else if
(CCNYL==1&&CCNYM==0&&CCNYR==0)
{CLEDL=1; CLEDM=0; CLEDR=0; cny=0x03;}else
if(CCNYL==0&&CCNYM==1&&CCNYR==1)
{CLEDL=0; CLEDM=1; CLEDR=1; cny=0x04;}{CLEDL=0; CLEDM=1;
CLEDR=1; cny=0x04;}else if
(CCNYL==0&&CCNYM==1&&CCNYR==0)
{CLEDL=0; CLEDM=1; CLEDR=0; cny=0x05;}else if
(CCNYL==0&&CCNYM==0&&CCNYR==1)
{CLEDL=0; CLEDM=0; CLEDR=1; cny=0x06;}else
{CLEDL=0; CLEDM=0; CLEDR=0; cny=0x07;}return cny; return
cny;
}
-
Keil C for 8051
while(1){cny70= readCenterCNY ();switch(cny70)
{ 0 00 SFORWARD(3) b kcase 0x00: SFORWARD(3); break;
case 0x01: SLEFT(3); break;case 0x02: SRIGHTBACK(3); break;ca e
0 03: SLEFT(4); b eak;case 0x03: SLEFT(4); break;case 0x04:
SRIGHT(3); break;case 0x05: SBACK(3); break;case 0x06:
SRIGHTBACK(3); break;case 0x06: SRIGHTBACK(3); break;case 0x07:
SBACK(3); break;default: break;
}}}
-
益眾 SPEED CAR
-
超音波感測器
分離反射型超音波感測裝置,即將超音波發射器與接收器擺在同將超音波發射器與接收器擺在同一方向。藉由發射出去遇到障礙物反射到藉由發射出去遇到障礙物反射到接收器,利用其音波所經歷的時間作為距離遠近的計算值。
-
超音波感測器脈波………ENTITY ping ISPORT(clk : in STD_LOGIC;
sig : inout std_logic;tin : out integer range 0 to 20000);
END ping;………tmg:process(clk, sig)
variable modu1,cnt: integer range 0 to 20000;………beginttrig : 5μs
en
-
ALTERA MAX® II Micro Kit
-
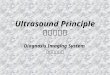
自走車競速比賽規則
自走車於靜止狀態時的長、寬、高均不得超過40 公分,重量不限。
1. 比賽場地,為一般的學校走廊,地面以黑色電工膠帶作為起跑線及終點線,比賽路程全長約 20 公尺程全長約 20 公尺。
2. 比賽時將於場地內不等距離的放置 20 個以上裝滿水的透明寶特瓶(容量約 600cc),以上裝滿水的透明寶特瓶(容量約
600cc)每個寶特瓶距離牆邊約 15 公分,每兩個寶特瓶之間的距離大於 50 公分。
3.
寶特瓶的放置數量及位置以比賽現場的為準,每一場均相同。牆壁上將標示距離終點線的段數,每段的距離大約相等,約點線的段數,每段的距離大約相等,約30-40
公分。
-
自走車賽跑場地圖
-
自走車賽跑