Embed Size (px)
Citation preview
EES-20: Sistemas de Controle II
17 Novembro 2017
1 / 40
Programa para a ultima parte do curso
Modelo da planta amostrada no espaco de estados. Relacao com afuncao de transferencia.
Analise de estabilidade.
Projeto de controladores empregando realimentacao de estado:(1) Alocacao de polos e (2) controle otimo (“ReguladorLinear-Quadratico”).
Projeto de observador de estados:(1) Alocacao de polos e (2) estimacao otima (“Filtro de Kalman”).
2 / 40
Recapitulando: Observador de estado com estimativas “apriori” e “a posteriori”
Notacao:
Estimativa “a priori”: x [k|k − 1]
Estimativa “a posteriori”: x [k|k]
Ideia:
1) Usar y [k] para corrigir x [k|k − 1] e gerar x [k|k]:
x [k|k] = x [k|k − 1] + M(y [k]− y [k|k − 1]
)em que y [k|k − 1] = Cx [k|k − 1] e M ∈ Rn×1 e uma matriz de ganho.
2) Propagar a estimativa do instante k para o instante k + 1:
x [k + 1|k] = Ax [k|k] + Bu[k]3 / 40
Recapitulando: Projeto por alocacao de polos
Dinamica do erro de estimacao “a posteriori” x [k|k] = x [k]− x [k|k]:
x [k + 1|k + 1] = (A−MCA)x [k|k]
Se A for inversıvel, pode-se escrever
(A−MCA) = A−1(A− LC )A
em que L = AM.
Pode-se escolher L de modo a alocar os autovalores de (A− LC ) emposicoes convenientes e entao fazer
M = A−1L
4 / 40
Recapitulando: Estimacao otima na presenca deperturbacoes e ruıdo de medida
Equacao de estado: x [k + 1] = Ax [k] + Bu[k] + Gw [k]
Equacao de saıda (ou “equacao de medida”): y [k] = Cx [k] + v [k]
Vetor de estado: x [k] ∈ Rn
Entrada: u[k] ∈ RSaıda medida: y [k] ∈ RPerturbacao (“ruıdo de estado”): w [k] ∈ RRuıdo de medida: v [k] ∈ R
Matrizes do modelo: A ∈ Rn×n, B ∈ Rn×1, C ∈ R1×n, G ∈ Rn×1
Supoe-se (A,C ) observavel e (A,G ) controlavel.
5 / 40
Recapitulando: Premissas sobre os ruıdos
Ruıdos w [k], v [k]: Sequencias de variaveis aleatorias independentes eidenticamente distribuıdas (iid), com distribuicao normal de media zero:
w [k] ∼ N(0, σ2w
), k = 0, 1, . . .
v [k] ∼ N(0, σ2v
), k = 0, 1, . . .
Notacao adotada para as variancias:
σ2w = W , σ2v = V
6 / 40
Recapitulando: Custo a ser minimizado
Custo a ser minimizado:
J(L) = limk→∞
E{xT [k]x [k]
}em que x [k] denota o erro de estimacao “a priori”:
x [k] = x [k|k − 1]
7 / 40
Recapitulando: Dinamica do erro de estimacao
A dinamica do erro de estimacao e descrita por
x [k + 1] = (A− LC )x [k] + Gw [k]− Lv [k]
Portanto,
x [k] = (A− LC )k x [0] +k−1∑i=0
(A− LC )k−i−1(Gw [i ]− Lv [i ]
)
Considerando que (A− LC ) seja Schur, a parcela (A− LC )k x [0]convergira para zero quando k →∞.
Desse modo, sem perda de generalidade, fizemos o desenvolvimentoconsiderando x [0] = 0.
8 / 40
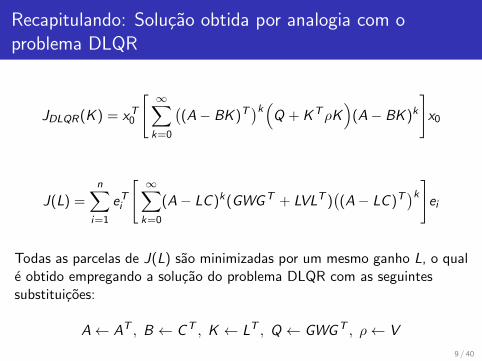
Recapitulando: Solucao obtida por analogia com oproblema DLQR
JDLQR(K ) = xT0
[ ∞∑k=0
((A− BK )T
)k(Q + KTρK
)(A− BK )k
]x0
J(L) =n∑
i=1
eTi
[ ∞∑k=0
(A− LC )k(GWGT + LVLT )((A− LC )T
)k]ei
Todas as parcelas de J(L) sao minimizadas por um mesmo ganho L, o quale obtido empregando a solucao do problema DLQR com as seguintessubstituicoes:
A← AT , B ← CT , K ← LT , Q ← GWGT , ρ← V
9 / 40
Aula de hoje
Como obter uma estimativa otima para o estado a cada instante de tempok, e nao apenas quando k →∞ ?
Vamos abordar o problema considerando inicialmente o caso em que oestado x [k] e escalar (isto e, com n = 1).
Na proxima aula, consideraremos o caso mais geral em que x [k] e umvetor.
10 / 40
Premissas: Modelo e ruıdos
Sera considerado o caso de estado x [k] escalar, com G = 1 e C = 1, porsimplicidade:
Equacao de estado: x [k + 1] = Ax [k] + Bu[k] + w [k]
Equacao de saıda (ou “equacao de medida”): y [k] = x [k] + v [k]
Ruıdos w [k], v [k]: Sequencias de variaveis aleatorias independentes eidenticamente distribuıdas (iid), com distribuicao normal de media zero:
w [k] ∼ N (0,W ) , k = 0, 1, . . .
v [k] ∼ N (0,V ) , k = 0, 1, . . .
11 / 40
Premissas: Estado inicial
O estado inicial x [0] e desconhecido.
Adota-se a premissa de que x [0] seja uma variavel aleatoria, comdistribuicao gaussiana de media e variancia conhecidas:
x [0] ∼ N(µx[0], σ
2x[0]
)Adicionalmente, considera-se que os ruıdos w [k], v [k] sejam independentesdo estado inicial x [0].
12 / 40
Observacoes (sobrecarga de notacao)
Sera usada a mesma tipografia para as variaveis aleatoriase os valores por elas assumidos.
As densidades de probabilidade
fX (x), fY (y), fXY (x ,y), fX |Y=y (x)
serao escritas simplesmente como
f (x), f (y), f (x ,y), f (x |y)
13 / 40
Passos a serem seguidos
Passo 1: Obter uma estimativa “a priori” para o estado inicial x [0],denotada por x [0| − 1].
Passo 2: Dado o valor medido de y [0], atualizar a estimativa de modo aobter uma estimativa “a posteriori” x [0|0].
Passo 3: Dada a entrada u[0], propagar a estimativa para o proximoinstante de tempo, obtendo uma nova estimativa “a priori” x [1|0].
Reiterar esse procedimento nos instantes de tempo subsequentes.
14 / 40
Passo 1: Obter a estimativa “a priori” x [0| − 1]
Ideia: Determinar a estimativa x [0| − 1] de forma otima, isto e, de modoque a magnitude esperada do erro x [0| − 1] seja a menor possıvel, em umcerto sentido.
Mais especificamente, vamos considerar o problema de minimizar oerro quadratico medio, isto e, o valor esperado de (x [0| − 1])2:
E{
(x [0| − 1])2}
= E{(
x [0]− x [0| − 1])2}
=
∫ ∞−∞
(x [0]− x [0| − 1]
)2f (x [0])dx [0]
em que f (x [0]) e a densidade de probabilidade da variavel aleatoria x [0].
15 / 40
Passo 1: Obter a estimativa “a priori” x [0| − 1]
E{
(x [0| − 1])2}
=
∫ ∞−∞
(x [0]− x [0| − 1]
)2f (x [0])dx [0]
Calculando-se a derivada dessa expressao com respeito a x [0| − 1], tem-se
d E{
(x [0| − 1])2}
d x [0| − 1]= − 2
∫ ∞−∞
(x [0]− x [0| − 1]
)f (x [0])dx [0]
que se anula para
x [0| − 1] =
∫ ∞−∞
x [0]f (x [0])dx [0] = E{x [0]
}= µx[0]
Vale notar que a derivada segunda e positiva (qual e o seu valor ?). Dessemodo, a estimativa x [0| − 1] = µx[0] de fato minimiza o erro quadraticomedio.
16 / 40
Passo 1: Obter a estimativa “a priori” x [0| − 1]
Tomando-se x [0| − 1] = µx[0], o erro quadratico medio sera
E{
(x [0| − 1])2}
=
∫ ∞−∞
(x [0]− µx[0]
)2f (x [0])dx [0] = σ2x[0]
que e a variancia assumida para o estado inicial x [0].
17 / 40
Passo 2: Obter a estimativa “a posteriori” x [0|0]
Problema: Dado o valor medido de y [0], obter uma estimativa “aposteriori” x [0|0] que minimize o erro quadratico medio com respeito aoestado x [0].
Da equacao de medida no instante k = 0, tem-se que
y [0] = x [0] + v [0]
Sabendo que x [0] e v [0] sao independentes e
x [0] ∼ N(µx[0], σ
2x[0]
), v [0] ∼ N (0,V )
conclui-se que(x [0], y [0]
)tem uma distribuicao conjunta gaussiana.
18 / 40
Passo 2: Obter a estimativa “a posteriori” x [0|0]
A media de y [0] e dada por
E{y [0]
}= E
{x [0] + v [0]
}= E
{x [0]
}+���
��E{v [0]
}= µx[0]
Sob a premissa de que x [0] e v [0] sao independentes, a variancia de y [0]pode ser calculada como
E{(
y [0]− E{y [0]
})2}= E
{(x [0] + v [0]− µx[0]
)2}= E
{(x [0]− µx[0]
)2}+ 2(((
((((((((
E{(
x [0]− µx[0])v [0]
}+ E
{v2[0]
}= σ2x[0] + V
19 / 40
Passo 2: Obter a estimativa “a posteriori” x [0|0]
Adicionalmente, pode-se calcular a covariancia entre x [0] e y [0]:
E{(
x [0]− E{x [0]
})(y [0]− E
{y [0]
})}=E{(
x [0]− µx[0])(x [0] + v [0]− µx[0]
)}=E{(
x [0]− µx[0])2}
+��
������
���
E
{(x [0]− µx[0]
)v [0]
}= σ2x[0]
20 / 40
Passo 2: Obter a estimativa “a posteriori” x [0|0]
Portanto, pode-se escrever
[x [0]
y [0]
]∼ N
([µx[0]
µx[0]
],
[σ2x[0] σ2x[0]
σ2x[0] σ2x[0] + V
])
O problema consiste em estimar x [0] dado y [0].
21 / 40
Estimativa de x dado o valor de y
Problema em questao:
Sejam duas variaveis aleatorias x e y com distribuicao conjunta f (x ,y).
Deseja-se estimar x por meio de uma funcao h(y), de modo a minimizar oerro quadratico medio definido como
E
{(x − h(y)
)2}=
∫ ∞−∞
∫ ∞−∞
(x − h(y)
)2f (x ,y)dx dy
22 / 40
Estimativa de x dado o valor de y
E
{(x − h(y)
)2}=
∫ ∞−∞
∫ ∞−∞
(x − h(y)
)2f (x ,y)dx dy
Uma vez que
f (x ,y) = f (x |y)f (y)
o erro quadratico medio pode ser reescrito como∫ ∞−∞
f (y)
[∫ ∞−∞
(x − h(y)
)2f (x |y)dx
]dy
23 / 40
Estimativa de x dado o valor de y
E
{(x − h(y)
)2}=
∫ ∞−∞
f (y)
[∫ ∞−∞
(x − h(y)
)2f (x |y)dx
]dy
Como f (y) e nao negativa, o valor mınimo da expressao acima e obtidocom
h(y) =
∫ ∞−∞
x f (x |y)dx = E{x |y}
que minimiza a integral interna para cada y .
Raciocınio apresentado, por exemplo, na seguinte referencia: Papoulis, A.Probability, random variables, and stochastic processes. 3 ed. New York:McGraw-Hill, 1991 (pagina 175).
24 / 40
Calculo de E{x |y}
Se x e y forem conjuntamente gaussianas, tem-se
f (x ,y) = κxy exp
(− 1
2
[(x − x) (y − y)
]Σ−1
[(x − x)(y − y)
])
em que κxy e uma constante, x = E{x}, y = E{y} e Σ e a matriz devariancias e covariancias dada por
Σ =
E{
(x − x)2}
E{
(x − x)(y − y)}
E{
(x − x)(y − y)}
E{
(y − y)2}
=
[Σ11 Σ12
Σ21 Σ22
]
com Σ12 = Σ21.
25 / 40
Calculo de E{x |y}
f (x ,y) = κxy exp
(− 1
2
[(x − x) (y − y)
] [ Σ11 Σ12
Σ21 Σ22
]−1 [(x − x)(y − y)
])
f (y) = κy exp
(− 1
2
(y − y)2
Σ22
)Portanto,
f (x |y) =f (x ,y)
f (y)
=κxyκy
exp
{−1
2
([(x−x) (y−y)
][ Σ11 Σ12
Σ21 Σ22
]−1[(x − x)(y − y)
]−(y − y)2
Σ22
)}
26 / 40
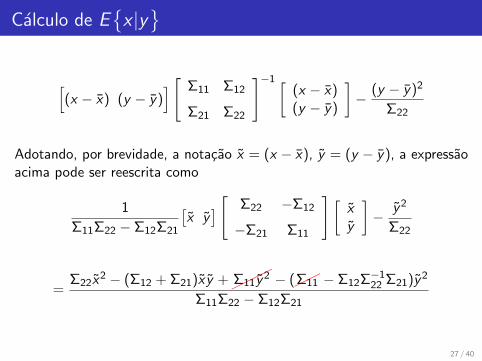
Calculo de E{x |y}
[(x − x) (y − y)
] [ Σ11 Σ12
Σ21 Σ22
]−1 [(x − x)(y − y)
]− (y − y)2
Σ22
Adotando, por brevidade, a notacao x = (x − x), y = (y − y), a expressaoacima pode ser reescrita como
1
Σ11Σ22 − Σ12Σ21
[x y
] [ Σ22 −Σ12
−Σ21 Σ11
] [xy
]− y2
Σ22
=Σ22x
2 − (Σ12 + Σ21)x y +���
Σ11y2 − (��Σ11 − Σ12Σ−122 Σ21)y2
Σ11Σ22 − Σ12Σ21
27 / 40
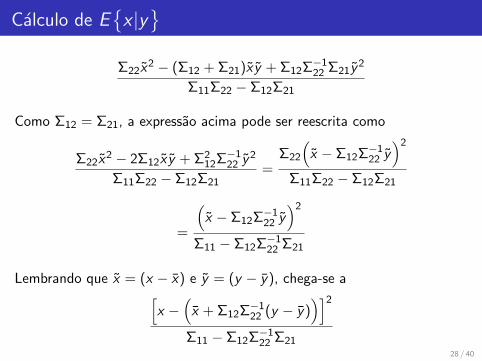
Calculo de E{x |y}
Σ22x2 − (Σ12 + Σ21)x y + Σ12Σ−122 Σ21y
2
Σ11Σ22 − Σ12Σ21
Como Σ12 = Σ21, a expressao acima pode ser reescrita como
Σ22x2 − 2Σ12x y + Σ2
12Σ−122 y2
Σ11Σ22 − Σ12Σ21=
Σ22
(x − Σ12Σ−122 y
)2Σ11Σ22 − Σ12Σ21
=
(x − Σ12Σ−122 y
)2Σ11 − Σ12Σ−122 Σ21
Lembrando que x = (x − x) e y = (y − y), chega-se a[x −
(x + Σ12Σ−122 (y − y)
)]2Σ11 − Σ12Σ−122 Σ21
28 / 40
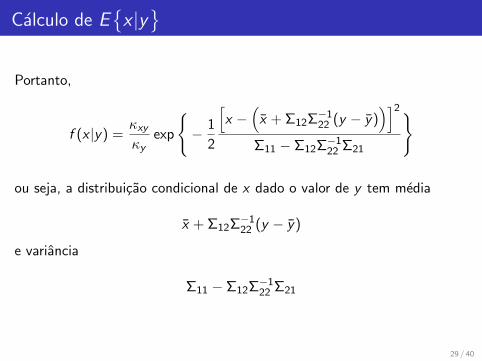
Calculo de E{x |y}
Portanto,
f (x |y) =κxyκy
exp
{− 1
2
[x −
(x + Σ12Σ−122 (y − y)
)]2Σ11 − Σ12Σ−122 Σ21
}
ou seja, a distribuicao condicional de x dado o valor de y tem media
x + Σ12Σ−122 (y − y)
e variancia
Σ11 − Σ12Σ−122 Σ21
29 / 40
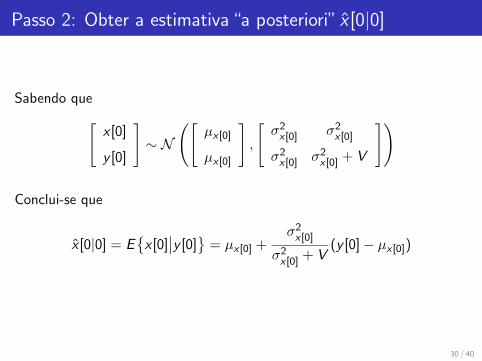
Passo 2: Obter a estimativa “a posteriori” x [0|0]
Sabendo que[x [0]
y [0]
]∼ N
([µx[0]
µx[0]
],
[σ2x[0] σ2x[0]
σ2x[0] σ2x[0] + V
])
Conclui-se que
x [0|0] = E{x [0]
∣∣y [0]}
= µx[0] +σ2x[0]
σ2x[0] + V(y [0]− µx[0])
30 / 40
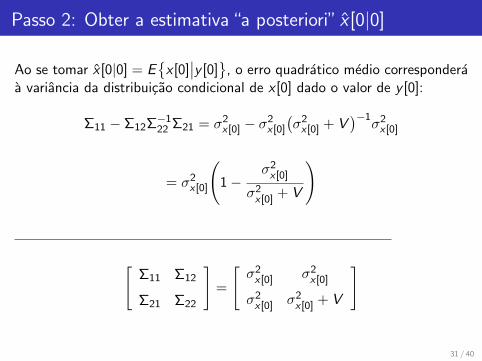
Passo 2: Obter a estimativa “a posteriori” x [0|0]
Ao se tomar x [0|0] = E{x [0]
∣∣y [0]}
, o erro quadratico medio corresponderaa variancia da distribuicao condicional de x [0] dado o valor de y [0]:
Σ11 − Σ12Σ−122 Σ21 = σ2x[0] − σ2x[0]
(σ2x[0] + V
)−1σ2x[0]
= σ2x[0]
(1−
σ2x[0]
σ2x[0] + V
)
[Σ11 Σ12
Σ21 Σ22
]=
[σ2x[0] σ2x[0]
σ2x[0] σ2x[0] + V
]
31 / 40
Passo 3: Obter uma nova estimativa “a priori” x [1|0]
No calculo de x [1|0] deve-se considerar o valor ja medido de y [0], mas semlevar em conta ainda o valor de y [1].
Por essa razao, x [1|0] e dita ser uma estimativa “a priori” para x [1].
Novamente, para minimizacao do erro quadratico medio, a melhorestimativa de x [1] dado y [0] sera a esperanca condicional:
x [1|0] = E{x [1]
∣∣y [0]}
32 / 40
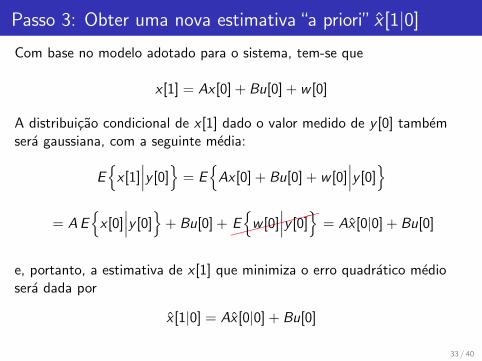
Passo 3: Obter uma nova estimativa “a priori” x [1|0]
Com base no modelo adotado para o sistema, tem-se que
x [1] = Ax [0] + Bu[0] + w [0]
A distribuicao condicional de x [1] dado o valor medido de y [0] tambemsera gaussiana, com a seguinte media:
E{x [1]
∣∣∣y [0]}
= E{Ax [0] + Bu[0] + w [0]
∣∣∣y [0]}
= AE{x [0]
∣∣∣y [0]}
+ Bu[0] +���
����
E{w [0]
∣∣∣y [0]}
= Ax [0|0] + Bu[0]
e, portanto, a estimativa de x [1] que minimiza o erro quadratico mediosera dada por
x [1|0] = Ax [0|0] + Bu[0]
33 / 40
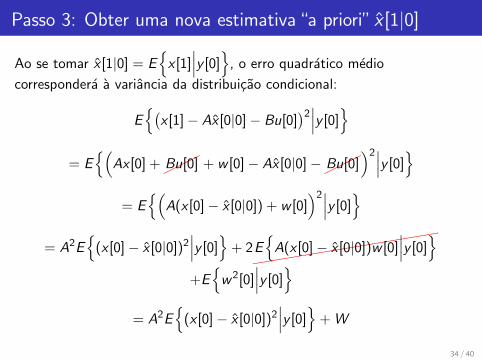
Passo 3: Obter uma nova estimativa “a priori” x [1|0]
Ao se tomar x [1|0] = E{x [1]
∣∣∣y [0]}
, o erro quadratico medio
correspondera a variancia da distribuicao condicional:
E{(
x [1]− Ax [0|0]− Bu[0])2∣∣∣y [0]
}= E
{(Ax [0] +��
�Bu[0] + w [0]− Ax [0|0]−���Bu[0])2∣∣∣y [0]
}= E
{(A(x [0]− x [0|0]) + w [0]
)2∣∣∣y [0]}
= A2E{
(x [0]− x [0|0])2∣∣∣y [0]
}+ 2((((
(((((((
(((
E{A(x [0]− x [0|0])w [0]
∣∣∣y [0]}
+E{w2[0]
∣∣∣y [0]}
= A2E{
(x [0]− x [0|0])2∣∣∣y [0]
}+ W
34 / 40
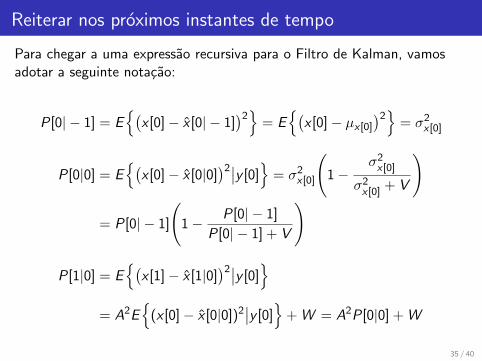
Reiterar nos proximos instantes de tempo
Para chegar a uma expressao recursiva para o Filtro de Kalman, vamosadotar a seguinte notacao:
P[0| − 1] = E{(
x [0]− x [0| − 1])2}
= E{(
x [0]− µx[0])2}
= σ2x[0]
P[0|0] = E{(
x [0]− x [0|0])2∣∣y [0]
}= σ2x[0]
(1−
σ2x[0]
σ2x[0] + V
)
= P[0| − 1]
(1− P[0| − 1]
P[0| − 1] + V
)
P[1|0] = E{(
x [1]− x [1|0])2∣∣y [0]
}= A2E
{(x [0]− x [0|0])2
∣∣y [0]}
+ W = A2P[0|0] + W
35 / 40
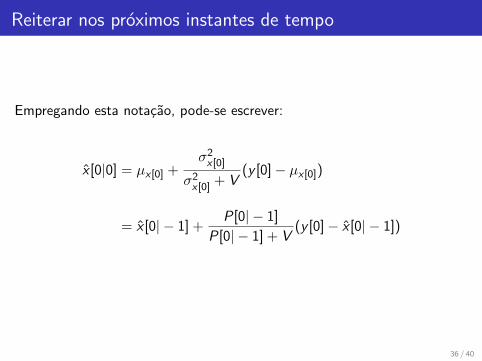
Reiterar nos proximos instantes de tempo
Empregando esta notacao, pode-se escrever:
x [0|0] = µx[0] +σ2x[0]
σ2x[0] + V(y [0]− µx[0])
= x [0| − 1] +P[0| − 1]
P[0| − 1] + V(y [0]− x [0| − 1])
36 / 40
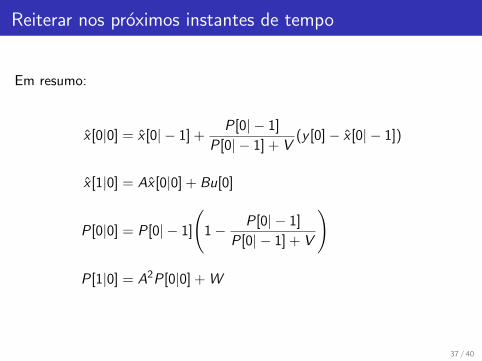
Reiterar nos proximos instantes de tempo
Em resumo:
x [0|0] = x [0| − 1] +P[0| − 1]
P[0| − 1] + V(y [0]− x [0| − 1])
x [1|0] = Ax [0|0] + Bu[0]
P[0|0] = P[0| − 1]
(1− P[0| − 1]
P[0| − 1] + V
)
P[1|0] = A2P[0|0] + W
37 / 40
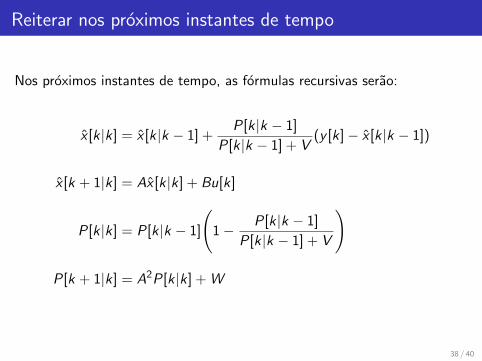
Reiterar nos proximos instantes de tempo
Nos proximos instantes de tempo, as formulas recursivas serao:
x [k|k] = x [k|k − 1] +P[k|k − 1]
P[k|k − 1] + V(y [k]− x [k|k − 1])
x [k + 1|k] = Ax [k|k] + Bu[k]
P[k|k] = P[k|k − 1]
(1− P[k|k − 1]
P[k|k − 1] + V
)
P[k + 1|k] = A2P[k|k] + W
38 / 40
Reiterar nos proximos instantes de tempo
Escrevendo
M[k] =P[k|k − 1]
P[k|k − 1] + V
nota-se que as equacoes de atualizacao da estimativa (“measurementupdate” e “time update”) correspondem as do observador de estado, comganho M[k] variante no tempo:
x [k|k] = x [k|k − 1] + M[k](y [k]− x [k|k − 1])
x [k + 1|k] = Ax [k|k] + Bu[k]
39 / 40
Proxima aula
Deducao das equacoes do Filtro de Kalman considerando que x [k]seja um vetor
Exemplo
40 / 40