Embed Size (px)
Citation preview
Aula 1
30 Julho 2018
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 1 / 62
Informacoes gerais
Folha de informacoes sobre o curso
Folha de orientacoes sobre o trabalho final
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 2 / 62
Trabalhos finais
Orientacoes gerais para redacao de um artigo (sugestao):
lagunita.stanford.edu/courses/Medicine/SciWrite-SP/SelfPaced/(Prof. Kristin Sainani, Stanford University)
Unit 4: Steps in the writing process
Unit 7: Issues in scientific writing (plagiarism, authorship,ghostwriting, reproducible research)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 3 / 62
Programacao do curso - 1o Bimestre
30 Jul Conceitos preliminares. Dynamic Matrix Control (DMC).Uso de resposta a degrau.
06 Ago DMC: Solucao do problema de otimizacao. Sintonia deparametros.
13 Ago DMC: Implementacao em Matlab/Simulink (S-function).Uso de resposta a impulso.
20 Ago Uso de funcoes de transferencia.
27 Ago Uso de modelos no espaco de estados. Estimacao de estados.
03 Set Inclusao de acao integral de controle: Uso de modelos naforma incremental, estimacao de perturbacoes.
10 Set Extensao ao caso MIMO (Multiple Inputs, Multiple Outputs).
17 Set Prova.
24 Set Semana de recesso.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 4 / 62
Programacao do curso - 2o Bimestre
01 Out Resolucao da prova. Tratamento de restricoes - caso SISO(Single Input, Single Output).
08 Out Tratamento de restricoes - caso MIMO.
15 Out Estabilidade.
22 Out Estabilidade (continuacao).
29 Out Tratamento de problemas de factibilidade.
05 Nov Formulacoes empregando norma 1 e norma ∞. Robustez aperturbacoes externas desconhecidas.
12 Nov Controle preditivo robusto empregando desigualdadesmatriciais lineares.
19 Nov Prova.
26 Nov (1a semana de exames) Entrega do trabalho final.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 5 / 62

Topicos que nao serao abordados
Identificacao de sistemas (supoe-se conhecido um modelo nominalpara a planta).
Formulacoes estocasticas (serao consideradas medidas sem ruıdo eperturbacoes constantes – o caso de perturbacoes nao constantes seratratado no contexto de robustez).
Metodos para solucao de problemas de otimizacao.
Uso de modelos nao lineares.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 6 / 62
Controle
• Controlar = Atuar sobre um sistema fısico de modo a obter umcomportamento desejado.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 7 / 62
Sistema
• Sistema (planta/processo) = Parte do universo sobre a qual se foca aatencao.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 8 / 62
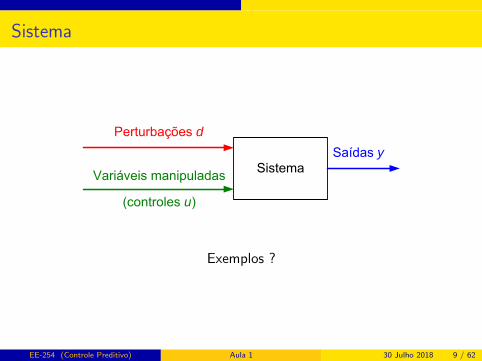
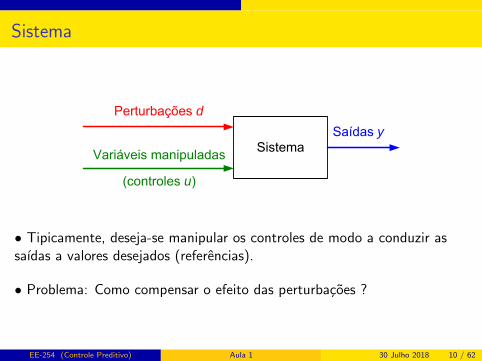
Sistema
y
u
d
Exemplos ?
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 9 / 62
Sistema
y
u
d
• Tipicamente, deseja-se manipular os controles de modo a conduzir assaıdas a valores desejados (referencias).
• Problema: Como compensar o efeito das perturbacoes ?
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 10 / 62
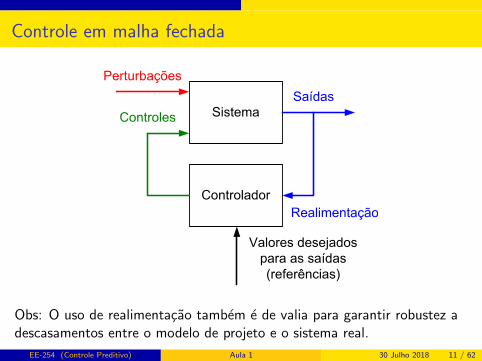
Controle em malha fechada
Obs: O uso de realimentacao tambem e de valia para garantir robustez adescasamentos entre o modelo de projeto e o sistema real.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 11 / 62
Observacao: Saıdas do sistema
As saıdas aqui consideradas podem ser:
Variaveis controladas (com referencias associadas)
Variaveis medidas
Variaveis sujeitas a restricoes
Exemplos ?
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 12 / 62
Comportamento desejado
Deseja-se que as saıdas da planta sejam conduzidas aos respectivos valoresde referencia, respeitando restricoes de operacao.
As restricoes podem estar relacionadas, por exemplo, com:
limitacoes fısicas dos atuadores (excursao e taxa de variacao do sinalde controle)
seguranca de operacao
requisitos de qualidade
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 13 / 62
Comportamento desejado
Deseja-se que as saıdas da planta sejam conduzidas aos respectivos valoresde referencia, respeitando restricoes de operacao.
Problema: Pode haver diferentes formas de se atingir as referencias comatendimento das restricoes. Como escolher a melhor ?
Adotando um ındice de desempenho a ser empregado como “criterio deselecao”.
Quando o ındice de desempenho e um valor a ser minimizado, adota-se otermo “custo”.
A area conhecida como Controle Otimo estuda formas de se obter sinaisde controle que minimizem o custo especificado em um dado problema.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 14 / 62
Exemplo: Controle Otimo Linear-Quadratico
Exemplo: Considere que o controle seja implementado a tempo discreto,tendo em vista o uso de um computador digital.
Suponha ainda que seja adotado um custo J da forma
J =∞∑i=1
[y(i)− yref ]2 + ρ[u(i − 1)− uref ]2
sendo:
u(i), y(i): entrada e saıda da planta no i-esimo instante deamostragem (i = 0: instante inicial considerado no problema)
yref : valor desejado para a saıda da planta (referencia)
uref : valor de controle correspondente ao valor desejado para a saıda
ρ > 0: Peso ajustado pelo projetista
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 15 / 62
Exemplo: Controle Otimo Linear-Quadratico
Considere, por fim, que a relacao entre as sequencias u(i) e y(i) sejadescrita por um modelo da forma:
x(i + 1) = Ax(i) + Bu(i)
y(i) = Cx(i)
para i ≥ 0, sendo x(i) um vetor de variaveis de estado e A,B,C matrizescom dimensoes apropriadas. Sob certas condicoes, a lei de controle otimae dada por
u(i) = F (x(i)− xref ) + uref
sendo xref o vetor de estado correspondente ao valor desejado para a saıdae F uma matriz obtida por meio da solucao de uma equacao de Riccatialgebrica envolvendo A,B,C , ρ.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 16 / 62
Exemplo: Controle Otimo Linear-Quadratico
Limitacao: A lei de controle assim obtida nao considera a presenca derestricoes de operacao da planta.
Para levar em conta as restricoes, tipicamente e necessario empregarmetodos numericos para determinar a sequencia de controle {u(i), i ≥ 0}otima. Contudo, o problema de otimizacao resultante envolve umainfinidade de variaveis.
Como alternativa, pode-se empregar um custo com horizonte finito (Nperıodos de amostragem):
J =N∑i=1
[y(i)− yref ]2 + ρ[u(i − 1)− uref ]2
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 17 / 62
Exemplo: Controle Otimo Linear-Quadratico
J =N∑i=1
[y(i)− yref ]2 + ρ[u(i − 1)− uref ]2
Com o transcorrer do tempo, a otimizacao precisara ser repetida,deslocando o horizonte para frente (horizonte movel/retrocedente).
Essa estrategia e a essencia do Controle Preditivo.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 18 / 62
Controle Preditivo
Model (-Based) Predictive Control, MPC
Estrategia em que as acoes de controle sao escolhidas como solucaode um problema de controle otimo com horizonte retrocedente.
As acoes de controle sao atualizadas a medida que novas observacoesse tornam disponıveis (realimentacao).
Usualmente a implementacao e realizada em tempo discreto e a tarefade otimizacao e repetida a cada perıodo de amostragem.
Um modelo do sistema e empregado para descrever a relacao entre asentradas e saıdas da planta ao longo do horizonte considerado naotimizacao.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 19 / 62
Controle Preditivo
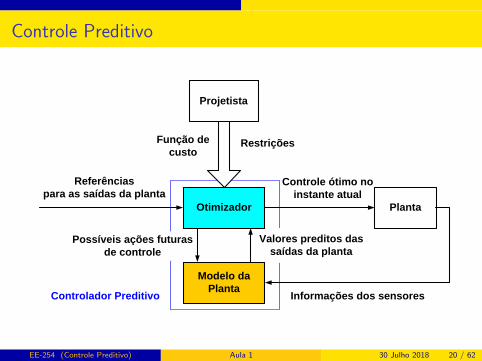
Controle ótimo noinstante atual
Função decusto
Informações dos sensores
Possíveis ações futurasde controle
Valores preditos dassaídas da planta
Planta
Restrições
Projetista
Controlador Preditivo
Otimizador
Modelo daPlanta
Referênciaspara as saídas da planta
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 20 / 62
Artigos seminais
RICHALET, J.; RAULT, A.; TESTUD, J. L.; PAPON, J. Modelpredictive heuristic control: applications to industrial processes.Automatica, v. 14, p. 413 - 428, 1978.
CUTLER, C. R.; RAMAKER, B. L. Dynamic matrix control - acomputer control algorithm. In: Proc. Joint Automatic ControlConference. San Francisco, CA, 1980.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 21 / 62
Fatores de sucesso do MPC em aplicacoes industriais
Tratamento sistematico de restricoes, permitindo operar a planta empontos de operacao economicamente adequados (menor tempo deproducao, economia de insumos, etc.).
Aplicabilidade direta a sistemas com multiplas entradas e saıdas, bemcomo atrasos de transporte.
Possibilidade de emprego de diversos tipos de modelos (nao apenasno espaco de estados).
Disponibilidade de pacotes comerciais com modulos de identificacao.
Uma lista de aplicacoes industriais pode ser encontrada em QIN, S. J.;BADGWELL, T. A. A survey of industrial model predictive controltechnology. Control Engineering Practice, v. 11, p. 733-764, 2003.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 22 / 62
Conceitos basicos
Horizonte de predicao
Horizonte retrocedente
Horizonte de controle
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 23 / 62
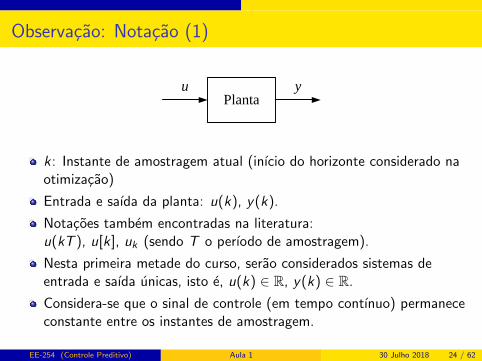
Observacao: Notacao (1)
Plantau y
k: Instante de amostragem atual (inıcio do horizonte considerado naotimizacao)
Entrada e saıda da planta: u(k), y(k).
Notacoes tambem encontradas na literatura:u(kT ), u[k], uk (sendo T o perıodo de amostragem).
Nesta primeira metade do curso, serao considerados sistemas deentrada e saıda unicas, isto e, u(k) ∈ R, y(k) ∈ R.
Considera-se que o sinal de controle (em tempo contınuo) permanececonstante entre os instantes de amostragem.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 24 / 62
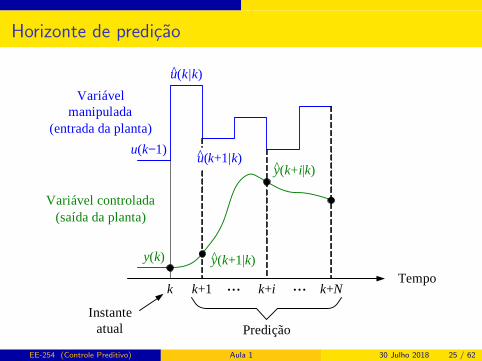
Horizonte de predicao
k k+1 k+i k+N
u(k|k)
u(k+1|k)
y(k)
... ...
Instanteatual Predição
y(k+1|k)^
y(k+i|k)^
^
^
Variávelmanipulada
(entrada da planta)
Variável controlada(saída da planta)
Tempo
u(k−1)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 25 / 62
Observacao: Notacao (2)
Horizonte de predicao: N
u(k + i |k): Valor futuro do controle no instante k + i , dentro de umhorizonte de predicao iniciado no instante k.
y(k + i |k): Valor predito da saıda no instante k + i com base nasinformacoes disponıveis ate o instante k, supondo a aplicacao dasequencia de controle u(k|k), u(k + 1|k), . . . , u(k + i − 1|k).
u∗(k + i |k): Valor otimo de u(k + i |k).
Obs: Alguns autores omitem o chapeu . Consideraremos que o chapeuindica as variaveis envolvidas no problema de otimizacao.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 26 / 62
Horizonte Retrocedente (Receding Horizon)
Em cada instante de tempo k:
1 Leem-se os sinais do(s) sensor(es).
2 Otimiza-se a sequencia de controle {u(k + i − 1|k), i = 1, 2, . . . ,N}para minimizar a funcao de custo sujeita as restricoes existentes.
3 Aplica-se o primeiro termo da sequencia otima: u(k) = u∗(k|k).
A realimentacao dos sensores e necessaria devido ao efeito de perturbacoesexogenas e incertezas no modelo de predicao.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 27 / 62
Horizonte de Controle
Na otimizacao da sequencia de controle, usualmente impoe-se que ocontrole permaneca fixo apos um numero M < N de passos, isto e:
u(k + i − 1|k) = u(k + M − 1|k), i = M + 1,M + 2, . . . ,N
Razoes:
Reduzir o numero de variaveis do problema de otimizacao.
Melhor avaliar o efeito das acoes de controle sobre a saıda da planta.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 28 / 62
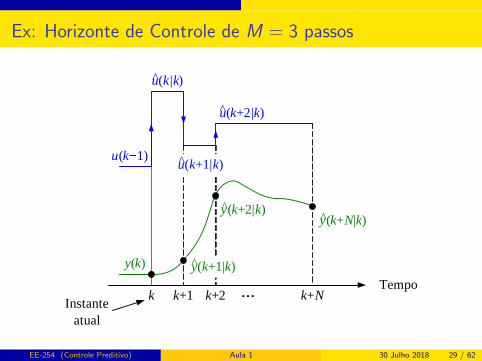
Ex: Horizonte de Controle de M = 3 passos
u(k+2|k)
k k+1 k+N
u(k|k)
y(k)
...Instante
atual
^
Tempo
^
u(k+1|k)
y(k+1|k)^
y(k+2|k)^y(k+N|k)^
u(k−1)
k+2
^
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 29 / 62
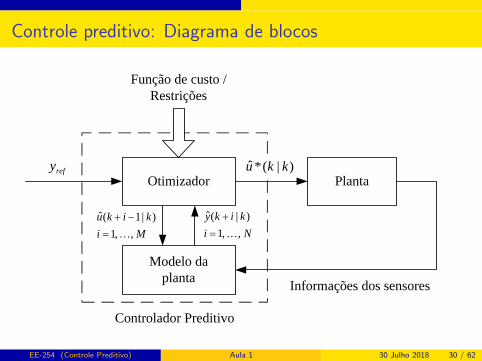
Controle preditivo: Diagrama de blocos
Otimizador
Modelo daplanta
Planta
Função de custo /Restrições
Controlador Preditivo
Nikiky,,1
)|(ˆ
Mikiku
,,1)|1(ˆ
)|(*ˆ kku
Informações dos sensores
refy
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 30 / 62
Elementos basicos de uma formulacao MPC
Funcao de custo
Erro de rastreamento / esforco de controleNorma `2, `1, `∞
Modelo de predicao (dinamica da planta + perturbacoes)
Modelos de convolucao (resposta a impulso/degrau)Funcao de transferenciaEspaco de estados
Restricoes
Excursao e taxa de variacao do controleExcursao da saıdaRestricoes terminais (tipicamente para garantia de convergencia para oequilıbrio)
Obtencao da sequencia de controle otima
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 31 / 62
Funcao de custo: Observacao
Para que nao haja erro de regime estacionario entre as referencias e assaıdas da planta, em geral duas condicoes devem ser respeitadas1:
1 Em regime estacionario, o mınimo da funcao de custo deve serconsistente com a ausencia de erro entre as referencias e as saıdas.
2 O modelo de predicao deve ser nao-polarizado (isto e, deve-se corrigiro efeito de perturbacoes constantes e descasamento de ganho estaticoentre o modelo e a planta).
1ROSSITER, J. A. Model-based predictive control. Boca Raton: CRC Press,2003 (pagina 59).
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 32 / 62
Funcao de custo: Observacao
Em regime estacionario, o mınimo da funcao de custo deve ser consistentecom a ausencia de erro entre as referencias e as saıdas.
Exemplo (1):
J =N∑i=1
[y(k + i |k)− yref ]2
Desvantagem: Devido a ausencia de penalizacao do esforco de controle, oproblema de otimizacao pode nao ficar bem-posto.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 33 / 62
Funcao de custo: Observacao
Em regime estacionario, o mınimo da funcao de custo deve ser consistentecom a ausencia de erro entre as referencias e as saıdas.
Exemplo (2):
J =N∑i=1
[y(k + i |k)− yref ]2 + ρ
M∑i=1
[u(k + i − 1|k)− uref ]2
Desvantagem: O calculo de uref requer o conhecimento do ganho estaticoda planta.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 34 / 62
Funcao de custo: Observacao
Em regime estacionario, o mınimo da funcao de custo deve ser consistentecom a ausencia de erro entre as referencias e as saıdas.
Exemplo (3):
J =N∑i=1
[y(k + i |k)− yref ]2 + ρ
M∑i=1
[∆u(k + i − 1|k)]2
sendo ∆u(k) = u(k)− u(k − 1).
→ Abordagem empregada em boa parte das formulacoes de MPC.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 35 / 62
Dynamic Matrix Control (DMC)
Desenvolvida na industria de refino de petroleo ao final da decada de1970 (Cutler e Ramaker, Shell Oil Co.)
Patente concedida em 1982 (Prett, Ramaker e Cutler – US Patent4349869).
Principais caracterısticas:
Funcao de custo quadratica.
Modelo de resposta a degrau.
Correcao de perturbacoes de saıda constantes.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 36 / 62
DMC: Funcao de custo
J(y(k + 1|k), . . . , y(k + N|k),∆u(k|k), . . . ,∆u(k + M − 1|k))
=N∑i=1
[y(k + i |k)− yref ]2 + ρ
M∑i=1
[∆u(k + i − 1|k)]2
N,M: Horizontes de predicao e controle
yref : Referencia (“setpoint”)
ρ > 0: Peso ajustado pelo projetista
∆u(k) = u(k)− u(k − 1): Incremento no controle
Assume-se ∆u(k + i − 1|k) = 0,M + 1 ≤ i ≤ N.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 37 / 62
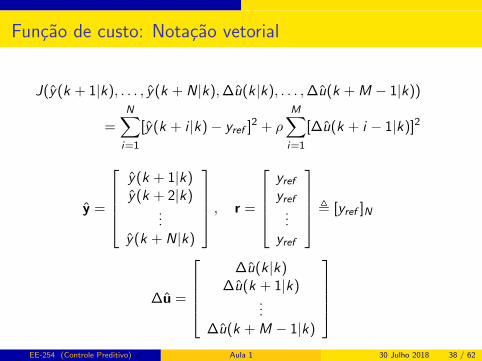
Funcao de custo: Notacao vetorial
J(y(k + 1|k), . . . , y(k + N|k),∆u(k|k), . . . ,∆u(k + M − 1|k))
=N∑i=1
[y(k + i |k)− yref ]2 + ρ
M∑i=1
[∆u(k + i − 1|k)]2
y =
y(k + 1|k)y(k + 2|k)
...y(k + N|k)
, r =
yrefyref
...yref
, [yref ]N
∆u =
∆u(k|k)
∆u(k + 1|k)...
∆u(k + M − 1|k)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 38 / 62
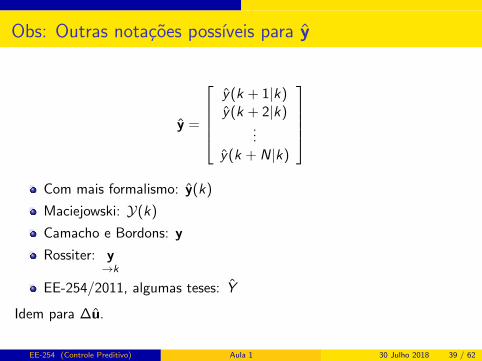
Obs: Outras notacoes possıveis para y
y =
y(k + 1|k)y(k + 2|k)
...y(k + N|k)
Com mais formalismo: y(k)
Maciejowski: Y(k)
Camacho e Bordons: y
Rossiter: y→k
EE-254/2011, algumas teses: Y
Idem para ∆u.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 39 / 62
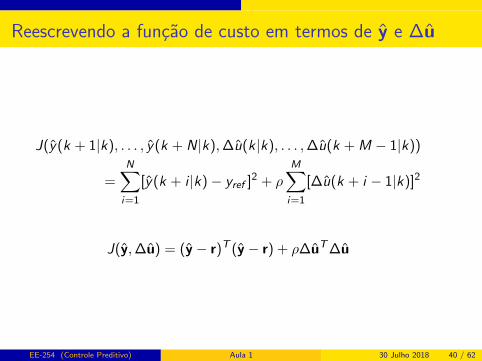
Reescrevendo a funcao de custo em termos de y e ∆u
J(y(k + 1|k), . . . , y(k + N|k),∆u(k|k), . . . ,∆u(k + M − 1|k))
=N∑i=1
[y(k + i |k)− yref ]2 + ρ
M∑i=1
[∆u(k + i − 1|k)]2
J(y,∆u) = (y − r)T (y − r) + ρ∆uT∆u
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 40 / 62

Obs: Outras notacoes comumente usadas para a funcao decusto
J(y,∆u) = (y − r)T (y − r) + ρ∆uT∆u
J(∆u)
J
J(k)
Jk
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 41 / 62
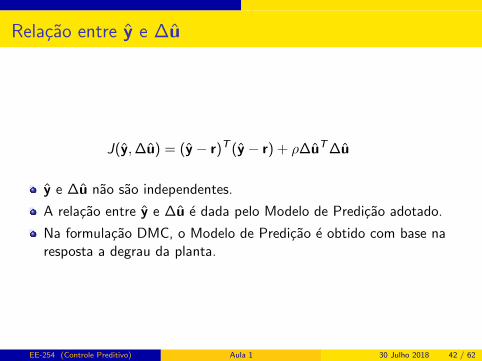
Relacao entre y e ∆u
J(y,∆u) = (y − r)T (y − r) + ρ∆uT∆u
y e ∆u nao sao independentes.
A relacao entre y e ∆u e dada pelo Modelo de Predicao adotado.
Na formulacao DMC, o Modelo de Predicao e obtido com base naresposta a degrau da planta.
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 42 / 62
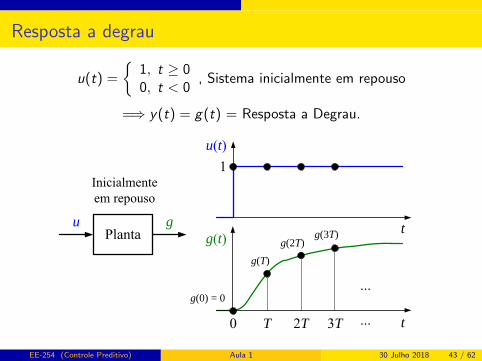
Resposta a degrau
u(t) =
{1, t ≥ 00, t < 0
, Sistema inicialmente em repouso
=⇒ y(t) = g(t) = Resposta a Degrau.
u g t
tT T
g(T)
g(2T)
T
u t
g t
g(0) = 0
g(3T)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 43 / 62
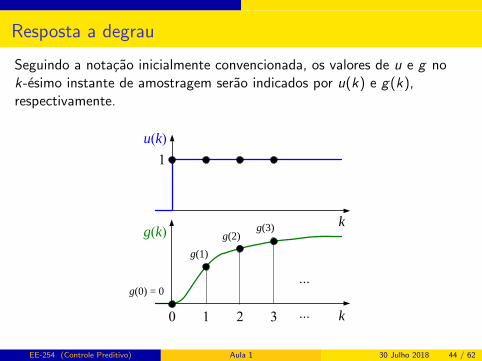
Resposta a degrau
Seguindo a notacao inicialmente convencionada, os valores de u e g nok-esimo instante de amostragem serao indicados por u(k) e g(k),respectivamente.
k
k
g(1)
g(2)
u k
g k
g(0) = 0
g(3)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 44 / 62
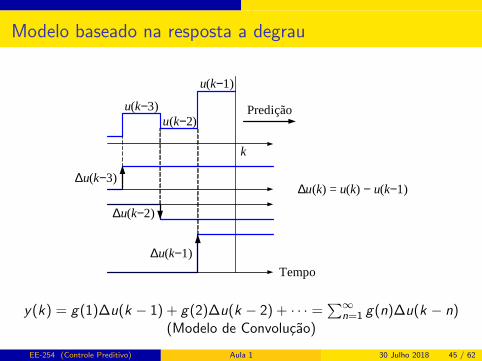
Modelo baseado na resposta a degrau
k
∆u(k−3)
u(k−3)u(k−2)
u(k−1)
∆u(k−2)
∆u(k−1)
Predição
Tempo
∆u(k) = u(k) − u(k−1)
y(k) = g(1)∆u(k − 1) + g(2)∆u(k − 2) + · · · =∑∞
n=1 g(n)∆u(k − n)(Modelo de Convolucao)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 45 / 62
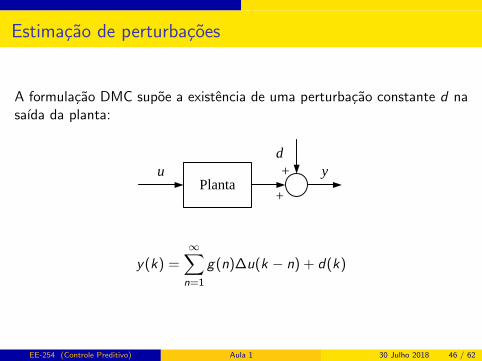
Estimacao de perturbacoes
A formulacao DMC supoe a existencia de uma perturbacao constante d nasaıda da planta:
Plantau y
d+
+
y(k) =∞∑n=1
g(n)∆u(k − n) + d(k)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 46 / 62
Estimacao de perturbacoes
y(k) =∞∑n=1
g(n)∆u(k − n) + d(k)
Supondo que y(k) seja medido por um sensor, pode-se obter umaestimativa para a perturbacao d(k) como sendo
d(k|k) = y(k)−∞∑n=1
g(n)∆u(k − n)
Nao esta sendo usado chapeu em d(k|k) por nao se tratar de uma variavelde otimizacao (de acordo com a notacao adotada neste curso).
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 47 / 62
Predicao um passo a frente
y(k) =∞∑n=1
g(n)∆u(k − n) + d(k)
y(k + 1) =∞∑n=1
g(n)∆u(k + 1− n) + d(k + 1) =
= g(1)∆u(k) +∞∑n=2
g(n)∆u(k + 1− n) + d(k + 1)
Em termos de valores preditos:
y(k + 1|k) = g(1)∆u(k|k) +∞∑n=2
g(n)∆u(k + 1− n) + d(k + 1|k)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 48 / 62
Predicao um passo a frente
Sob a hipotese de perturbacao constante:
d(k + 1|k) = d(k|k) = y(k)−∞∑n=1
g(n)∆u(k − n)
Logo:
y(k + 1|k) = g(1)∆u(k|k) +∞∑n=2
g(n)∆u(k + 1− n) + d(k + 1|k)
= g(1)∆u(k|k) +∞∑n=2
g(n)∆u(k + 1− n)
+ y(k)−∞∑n=1
g(n)∆u(k − n)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 49 / 62
Predicao um passo a frente
y(k + 1|k) = g(1)∆u(k|k) +
∑∞n=1 g(n+1)∆u(k−n)︷ ︸︸ ︷
∞∑n=2
g(n)∆u(k + 1− n)
+y(k)−∞∑n=1
g(n)∆u(k − n)
y(k + 1|k) = g(1)∆u(k|k) + y(k) +∞∑n=1
[g(n + 1)− g(n)]∆u(k − n)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 50 / 62
Predicao um passo a frente
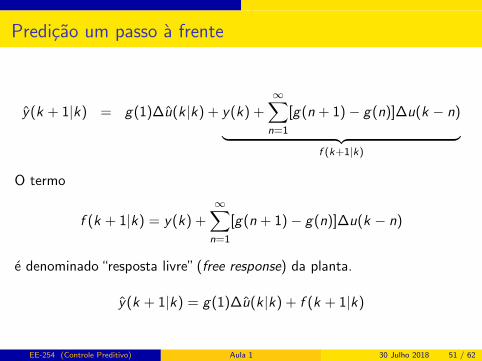
y(k + 1|k) = g(1)∆u(k|k) + y(k) +∞∑n=1
[g(n + 1)− g(n)]∆u(k − n)︸ ︷︷ ︸f (k+1|k)
O termo
f (k + 1|k) = y(k) +∞∑n=1
[g(n + 1)− g(n)]∆u(k − n)
e denominado “resposta livre” (free response) da planta.
y(k + 1|k) = g(1)∆u(k|k) + f (k + 1|k)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 51 / 62
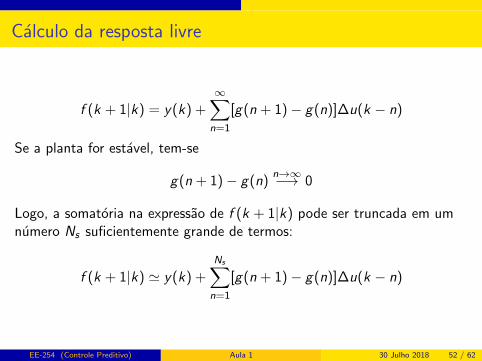
Calculo da resposta livre
f (k + 1|k) = y(k) +∞∑n=1
[g(n + 1)− g(n)]∆u(k − n)
Se a planta for estavel, tem-se
g(n + 1)− g(n)n→∞−→ 0
Logo, a somatoria na expressao de f (k + 1|k) pode ser truncada em umnumero Ns suficientemente grande de termos:
f (k + 1|k) ' y(k) +Ns∑n=1
[g(n + 1)− g(n)]∆u(k − n)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 52 / 62
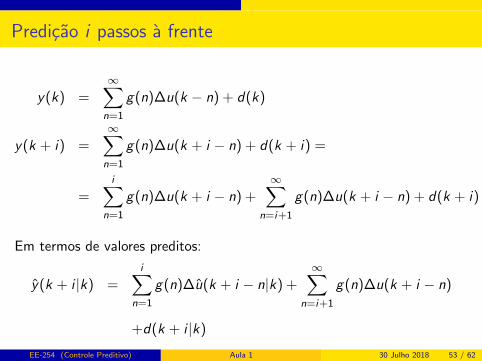
Predicao i passos a frente
y(k) =∞∑n=1
g(n)∆u(k − n) + d(k)
y(k + i) =∞∑n=1
g(n)∆u(k + i − n) + d(k + i) =
=i∑
n=1
g(n)∆u(k + i − n) +∞∑
n=i+1
g(n)∆u(k + i − n) + d(k + i)
Em termos de valores preditos:
y(k + i |k) =i∑
n=1
g(n)∆u(k + i − n|k) +∞∑
n=i+1
g(n)∆u(k + i − n)
+d(k + i |k)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 53 / 62
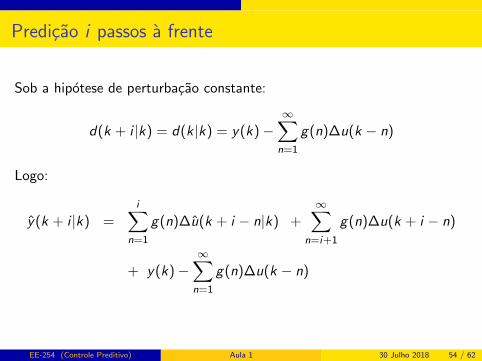
Predicao i passos a frente
Sob a hipotese de perturbacao constante:
d(k + i |k) = d(k|k) = y(k)−∞∑n=1
g(n)∆u(k − n)
Logo:
y(k + i |k) =i∑
n=1
g(n)∆u(k + i − n|k) +∞∑
n=i+1
g(n)∆u(k + i − n)
+ y(k)−∞∑n=1
g(n)∆u(k − n)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 54 / 62
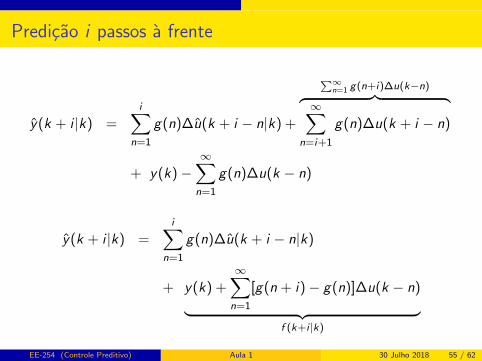
Predicao i passos a frente
y(k + i |k) =i∑
n=1
g(n)∆u(k + i − n|k) +
∑∞n=1 g(n+i)∆u(k−n)︷ ︸︸ ︷
∞∑n=i+1
g(n)∆u(k + i − n)
+ y(k)−∞∑n=1
g(n)∆u(k − n)
y(k + i |k) =i∑
n=1
g(n)∆u(k + i − n|k)
+ y(k) +∞∑n=1
[g(n + i)− g(n)]∆u(k − n)︸ ︷︷ ︸f (k+i |k)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 55 / 62
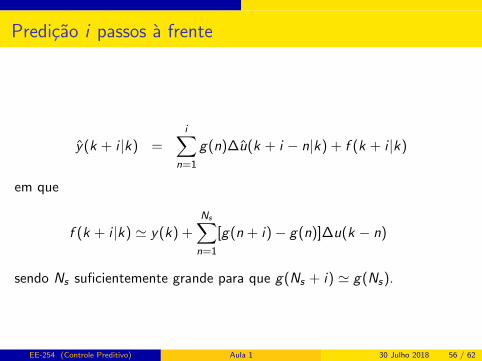
Predicao i passos a frente
y(k + i |k) =i∑
n=1
g(n)∆u(k + i − n|k) + f (k + i |k)
em que
f (k + i |k) ' y(k) +Ns∑n=1
[g(n + i)− g(n)]∆u(k − n)
sendo Ns suficientemente grande para que g(Ns + i) ' g(Ns).
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 56 / 62
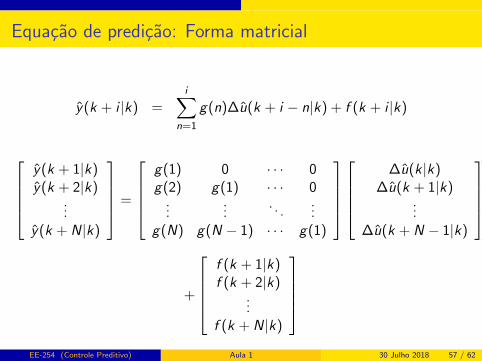
Equacao de predicao: Forma matricial
y(k + i |k) =i∑
n=1
g(n)∆u(k + i − n|k) + f (k + i |k)
y(k + 1|k)y(k + 2|k)
...y(k + N|k)
=
g(1) 0 · · · 0g(2) g(1) · · · 0
......
. . ....
g(N) g(N − 1) · · · g(1)
∆u(k|k)∆u(k + 1|k)
...∆u(k + N − 1|k)
+
f (k + 1|k)f (k + 2|k)
...f (k + N|k)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 57 / 62
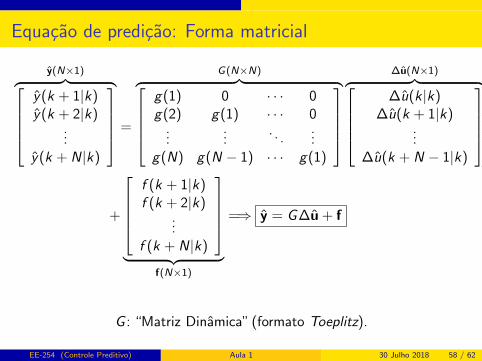
Equacao de predicao: Forma matricial
y(N×1)︷ ︸︸ ︷y(k + 1|k)y(k + 2|k)
...y(k + N|k)
=
G(N×N)︷ ︸︸ ︷g(1) 0 · · · 0g(2) g(1) · · · 0
......
. . ....
g(N) g(N − 1) · · · g(1)
∆u(N×1)︷ ︸︸ ︷∆u(k|k)
∆u(k + 1|k)...
∆u(k + N − 1|k)
+
f (k + 1|k)f (k + 2|k)
...f (k + N|k)
︸ ︷︷ ︸
f(N×1)
=⇒ y = G∆u + f
G : “Matriz Dinamica” (formato Toeplitz).
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 58 / 62
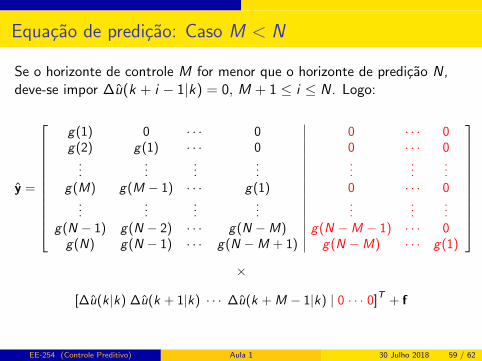
Equacao de predicao: Caso M < N
Se o horizonte de controle M for menor que o horizonte de predicao N,deve-se impor ∆u(k + i − 1|k) = 0, M + 1 ≤ i ≤ N. Logo:
y =
g(1) 0 · · · 0 0 · · · 0g(2) g(1) · · · 0 0 · · · 0
......
......
......
...g(M) g(M − 1) · · · g(1) 0 · · · 0
......
......
......
...g(N − 1) g(N − 2) · · · g(N −M) g(N −M − 1) · · · 0g(N) g(N − 1) · · · g(N −M + 1) g(N −M) · · · g(1)
×
[∆u(k|k) ∆u(k + 1|k) · · · ∆u(k + M − 1|k) | 0 · · · 0]T + f
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 59 / 62
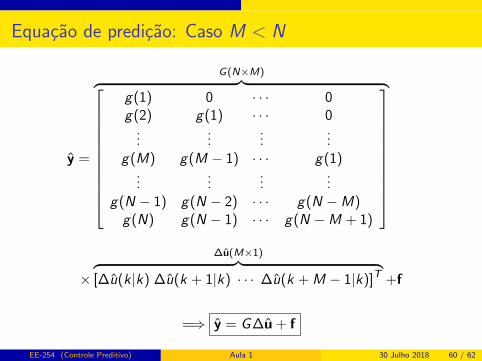
Equacao de predicao: Caso M < N
y =
G(N×M)︷ ︸︸ ︷
g(1) 0 · · · 0g(2) g(1) · · · 0
......
......
g(M) g(M − 1) · · · g(1)...
......
...g(N − 1) g(N − 2) · · · g(N −M)g(N) g(N − 1) · · · g(N −M + 1)
×
∆u(M×1)︷ ︸︸ ︷[∆u(k|k) ∆u(k + 1|k) · · · ∆u(k + M − 1|k)]T +f
=⇒ y = G∆u + f
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 60 / 62
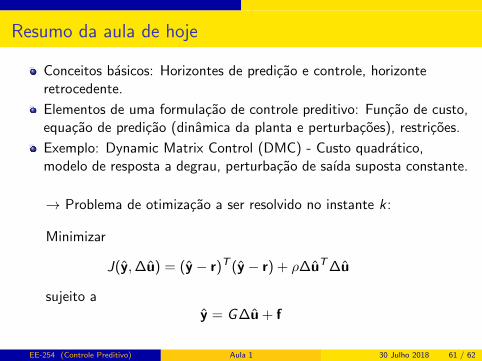
Resumo da aula de hoje
Conceitos basicos: Horizontes de predicao e controle, horizonteretrocedente.
Elementos de uma formulacao de controle preditivo: Funcao de custo,equacao de predicao (dinamica da planta e perturbacoes), restricoes.
Exemplo: Dynamic Matrix Control (DMC) - Custo quadratico,modelo de resposta a degrau, perturbacao de saıda suposta constante.
→ Problema de otimizacao a ser resolvido no instante k:
Minimizar
J(y,∆u) = (y − r)T (y − r) + ρ∆uT∆u
sujeito ay = G∆u + f
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 61 / 62
Topicos da proxima aula
DMC: Solucao do problema de otimizacao
Breve revisao de otimizacao sem restricoes
DMC: Sintonia de parametros (Perıodo de amostragem, M,N, ρ)
EE-254 (Controle Preditivo) Aula 1 30 Julho 2018 62 / 62


















![Aula 6 - Instituto Tecnológico de Aeronáuticakawakami/ee254/EE254_2oSem_2019_Aula6_hando… · 6 6 4 A 0 n 0 n 0T n 1 1 0T n 0 1 3 7 7 5; B = 2 6 6 4 B 0 0 3 7 7 5; C = [C 1 0]](https://img.pdfslide.tips/doc/110x75/5fba8b31fdcfb304746857e0/aula-6-instituto-tecnolgico-de-aeron-kawakamiee254ee2542osem2019aula6hando.jpg)









