Embed Size (px)
Citation preview

IOSH91-H301
局部排氣裝置數值控制之探討
A Study for Numerical Control of Local Exhaust Ventilation Systems
行政院勞工委員會勞工安全衛生研究所

IOSH91-H301
局部排氣裝置數值控制之探討
A Study for Numerical Control of Local Exhaust Ventilation Systems
研究主持人:張振平 計畫主辦單位:行政院勞工委員會勞工安全衛生研究所 研究期間:中華民國九十一年三月十三日至九十一年十一月三十日 印製日期:中華民國九十一年十二月三十一日
行政院勞工委員會勞工安全衛生研究所 中華民國九十一年十二月

i
摘 要
局部排氣裝置之用途在移除勞工作業場所之空氣有害物,避免空氣有害物與勞
工呼吸帶之空氣混合。過去認為局部排氣裝置的性能須由技術人員定期檢查維護以保
障勞工健康。為了輔助技術人員監控局部排氣裝置的性能,數值控制在最近十年的發
展已有相當成果,並有對應商業產品出現,但台灣的事業單位仍較少或不懂得使用此
技術。由於事業單位考慮引進數值控制的局部排氣裝置時,所注重的不外乎購置成
本、維修檢查技術的專業性、以及系統電腦的可靠性,因此若欲吸引事業單位使用局
部排氣裝置數值控制技術,則須以性能可靠、成本低廉、容易操作為發展重點。本計
畫將就局部排氣裝置之初步控制技術觀念進行整理,並為國內事業單位提出一種實
用、經濟、適應性高的數值控制設計方式,以加強維護勞工健康。
關鍵詞:數值控制、局部排氣、風門

ii
Abstract
Local Exhaust Ventilation System (LEVS) is used to remove hazardous airborne
contaminants in workplace before they mix with the fresh air in workers’ breathing zone.
The performance of LEVS was supposed to be periodically monitored and maintained by
technicians to ensure workers’ health. To help the technicians monitoring LEVS, Numerical
Control Technique for LEVS (NLS) has been proposed and embodied as commercial
products for more than ten years in Europe and Northern America, yet this technique has not
been properly acknowledged in Taiwan. Installation cost, professional maintenance/repairing
skills and reliability of computerized systems are greatly concerned when a NLS is
considered in local industries, to which a reliable, inexpensive, easy-to-operate NLS is
mostly wanted. In this project, some of the preliminary concepts of NLS will be studied, and
a practical, economic, adaptive NLS design procedure will be proposed for local industries
by which workers are better protected.
Key Words: Numerical Control, Local Exhaust Ventilation, damper.
iii
目錄 摘 要 ....................................................................................................................................... i
Abstract .................................................................................................................................... ii
目錄 ......................................................................................................................................... iii
圖目錄 ...................................................................................................................................... v
第一章 計畫概述 .................................................................................................................... 1
第一節 前言 ........................................................................................................................ 1
第二節 本計畫之工作項目與目的 .................................................................................... 2
第二章 局部排氣裝置之控制需求 ........................................................................................ 3
第一節 實際影響局部排氣裝置性能的關鍵元件 ............................................................ 3
第二節 現有的氣罩性能指標 ............................................................................................ 4
第三節 以氣罩下游靜壓讀數為氣罩性能指標 ................................................................ 5
第四節 空氣清淨裝置的數值控制性能指標 .................................................................... 6
第五節 排氣機/變頻器的數值控制性能指標 ................................................................ 7
第六節 氣罩性能的「風量控制」與「狀態控制」 ........................................................ 8
第三章 局部排氣裝置數值控制技術 .................................................................................... 9
第一節 近代數值控制技術的發展與取捨 ........................................................................ 9
第二節 控制用微電腦之比較選用 .................................................................................. 10
第三節 壓力感測器之選用 .............................................................................................. 11
第四節 排氣機之選用與特性 .......................................................................................... 12
第五節 氣罩風量與數值控制之間的介面 ...................................................................... 13
第六節 人機界面之選用 .................................................................................................. 14
第四章 蝴蝶風門特性實驗 .................................................................................................. 16
第一節 蝴蝶風門於近一大氣壓下作業的特色 .............................................................. 16
第二節 蝴蝶風門特性實驗所用元件 .............................................................................. 17
第三節 蝴蝶風門特性實驗程序 ...................................................................................... 18
第四節 實驗結果與討論 .................................................................................................. 18
iv
第五章 數值控制的實驗準備 .............................................................................................. 20
第一節 控制理論回顧 ...................................................................................................... 20
第二節 蝴蝶風門控制硬體設計 ...................................................................................... 21
第三節 排氣機轉數控制硬體設計 .................................................................................. 22
第四節 靜壓回授及數值控制的回授硬體設計 .............................................................. 23
第五節 數值控制的輸出控制硬體設計 .......................................................................... 24
第六節 初步數值控制實驗 .............................................................................................. 25
第六章 局部排氣裝置數值控制實驗 .................................................................................. 27
第一節 數值控制的務實策略 .......................................................................................... 27
第二節 可程式控制器與監控電腦間的控制分工 .......................................................... 28
第三節 單氣罩數值控制實驗 .......................................................................................... 28
第四節 雙氣罩同步控制實驗 .......................................................................................... 30
第五節 三氣罩同步控制實驗 .......................................................................................... 31
第六節 可視化流場觀測 .................................................................................................. 32
第七章 結論與建議 .............................................................................................................. 34
第一節 局部排氣裝置數值控制之效果 .......................................................................... 34
第二節 本計畫工作項目執行結果 .................................................................................. 35
第三節 本計畫研究成果運用相關建議 .......................................................................... 36
致謝 ........................................................................................................................................ 37
參考文獻 ................................................................................................................................ 38
附錄:本計畫所使用的遠端控制程式 ................................................................................ 74
v
圖目錄
圖一 以微壓轉換器間接估算氣罩風量之原理 .................................................................... 39
圖二 變頻器改變排氣轉數之影響 ........................................................................................ 39
圖五 可程式控制器外觀 ........................................................................................................ 41
圖六 工業用變頻器之外型舉例 ............................................................................................ 41
圖七 典型工業用變頻器之接線方式 .................................................................................... 42
圖八 本計畫使用之排氣機變頻器 ........................................................................................ 42
圖九 控制用微電腦核心組合完成情形 ................................................................................ 43
圖十 本計畫使用之微差壓感測器 HUBA 694 特性 ........................................................... 44
圖十一 軸流式排氣機之輪葉與外型舉例 ............................................................................ 45
圖十二 前傾(左)、徑向(中)與後傾(右)三種輪葉舉例 ..................................................... 45
圖十三 離心式排氣機之外型舉例 ........................................................................................ 45
圖十四 本計畫使用之排氣機 CY-310P 之外形與特性曲線 ............................................... 46
圖十五 排氣機與空氣清淨裝置之組合情形 ........................................................................ 47
圖十六 空氣清淨裝置段之靜壓檢出位置 ............................................................................ 47
圖十七 本計畫利用圖控軟體製作的「虛擬局部排氣裝置控制面板」 ............................ 48
圖十八 蝴蝶風門管之細部設計圖 ........................................................................................ 48
圖十九 比例風門馬達控制蝴蝶風門之安裝使用實況 ........................................................ 49
圖二十 微差壓轉換計訊號擴充迴路設計圖 ........................................................................ 50
圖二十一 中樞控制電路設計組合圖 .................................................................................... 51
圖二十二 可程式控制器邏輯設計 ........................................................................................ 52
圖二十三 實驗用局部排氣裝置教學模型示意圖 ................................................................ 53
圖二十七 空氣清淨裝置穿透特性實驗結果 ........................................................................ 55
圖二十八 蝴蝶風門洩漏特性實驗結果 ................................................................................ 55
圖二十九 蝴蝶風門啟閉響應特性實驗結果 ........................................................................ 56
圖三十 氣罩下游喉部靜壓響應特性實驗結果 .................................................................... 57
圖三十一 局部排氣裝置運轉穩定性實驗結果 .................................................................... 58
圖三十二 本計畫使用之遠端控制邏輯流程圖 .................................................................... 59
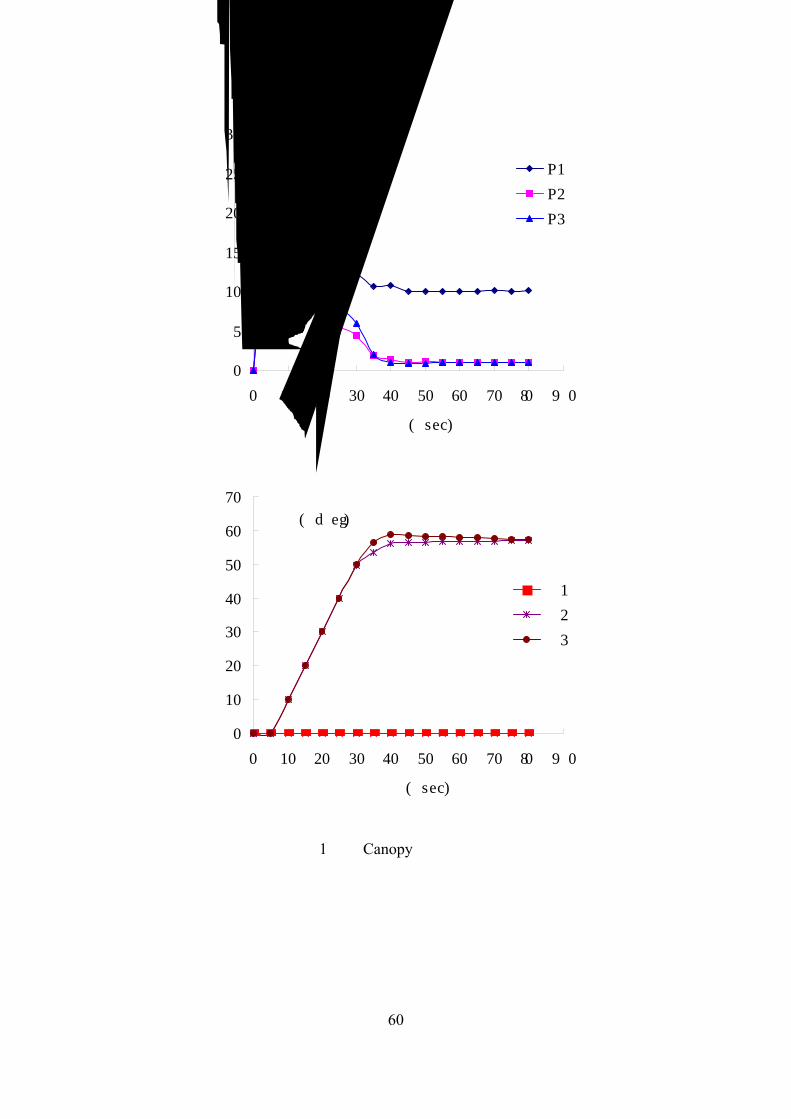
圖三十三 第 1 號(CANOPY)氣罩之數值控制響應........................................................ 60
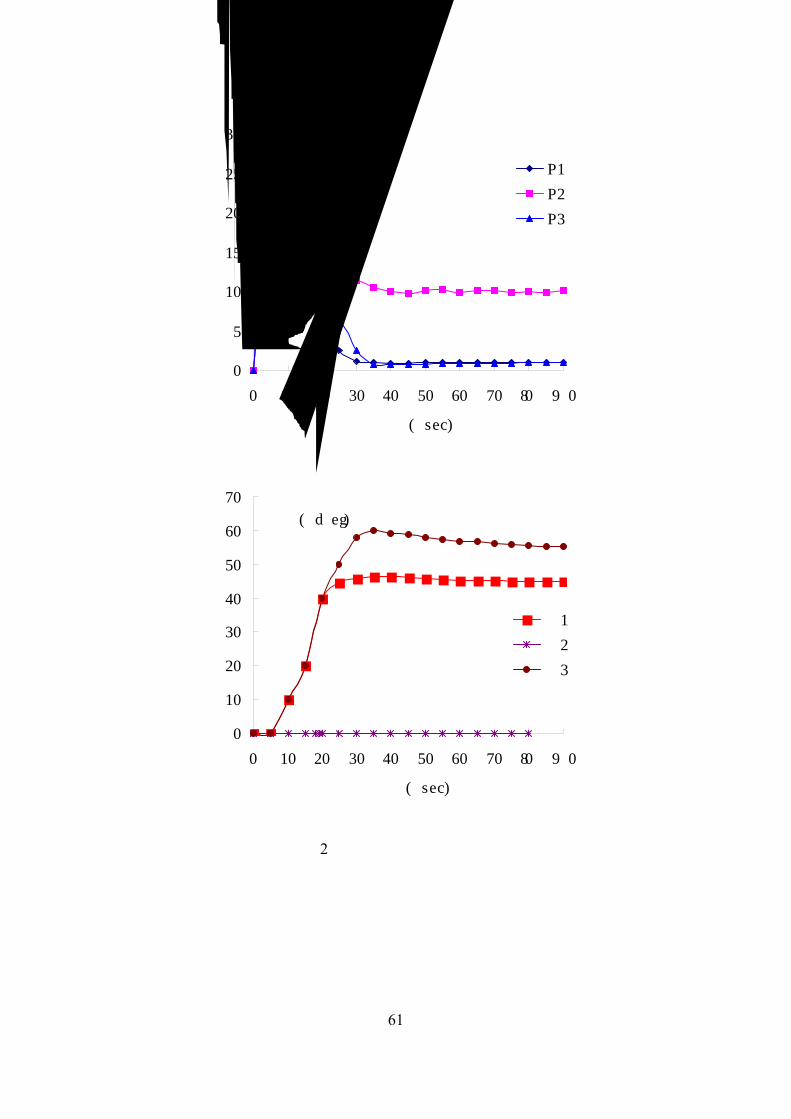
圖三十四 第 2 號(包圍式)氣罩之數值控制響應 ............................................................ 61
vi
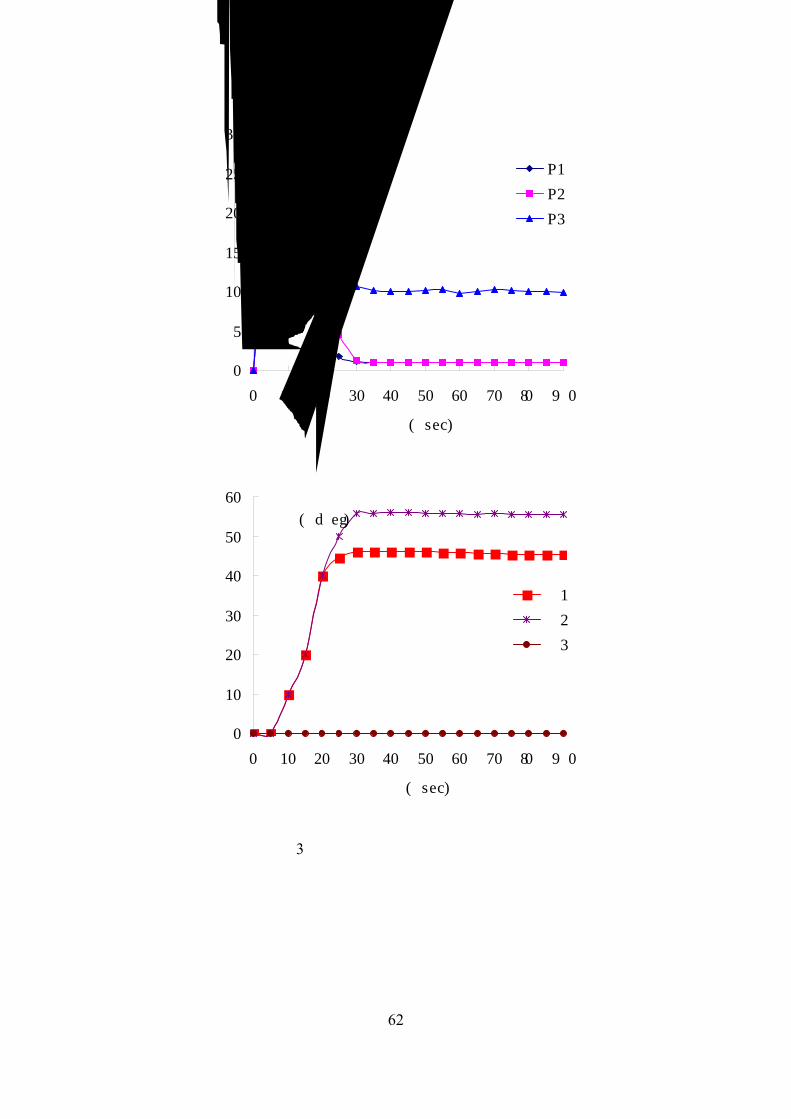
圖三十五 第 3 號(附凸緣開口型)氣罩之數值控制響應 ................................................ 62
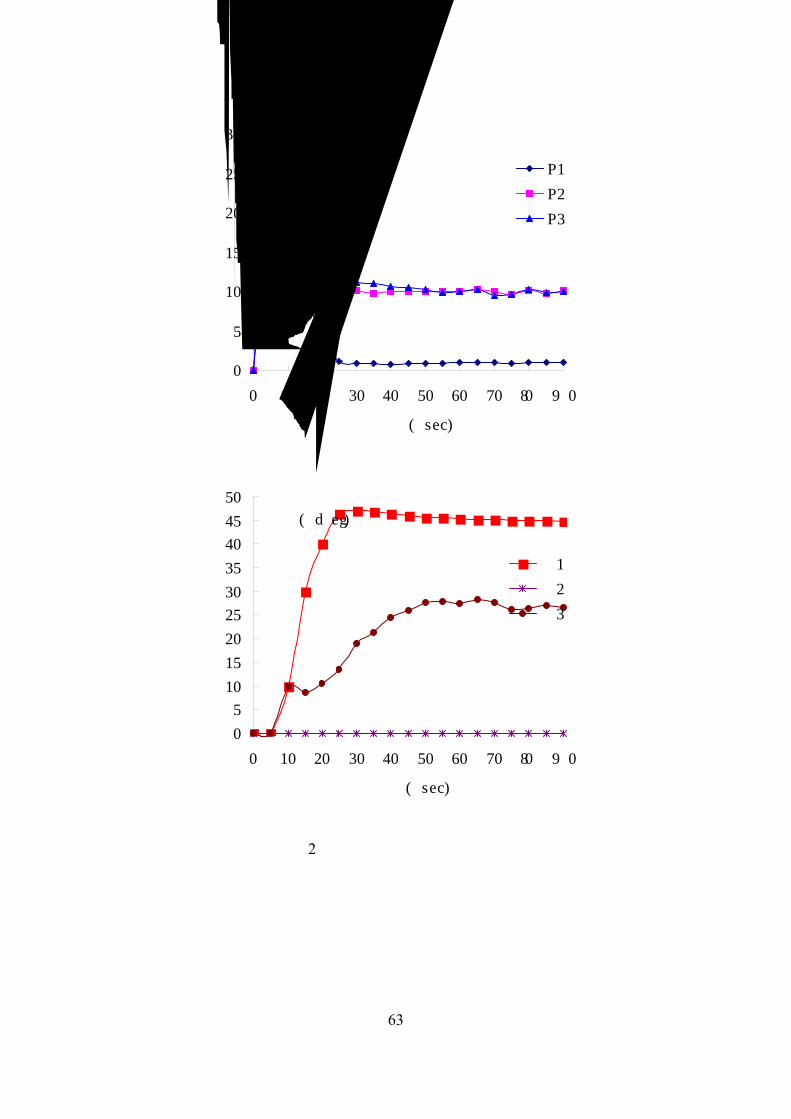
圖三十六 第 2、3號氣罩同時控制時之數值控制響應 ...................................................... 63
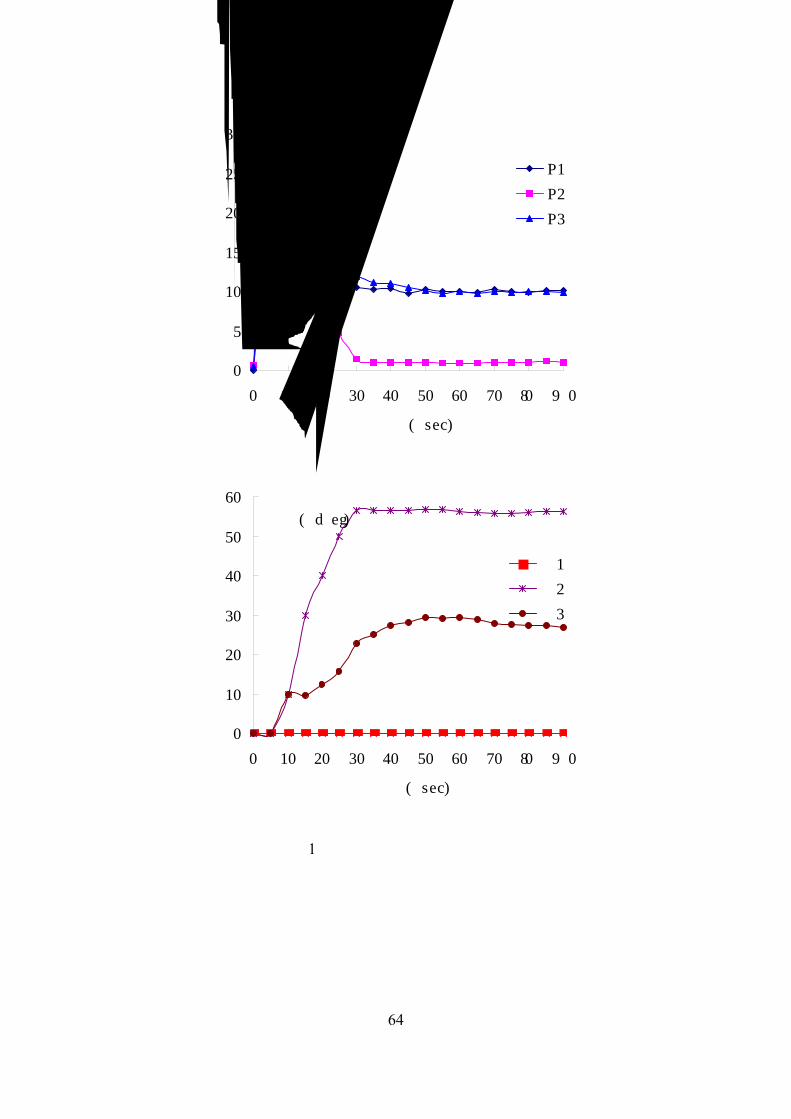
圖三十七 第 1、3號氣罩同時控制時之數值控制響應 ...................................................... 64
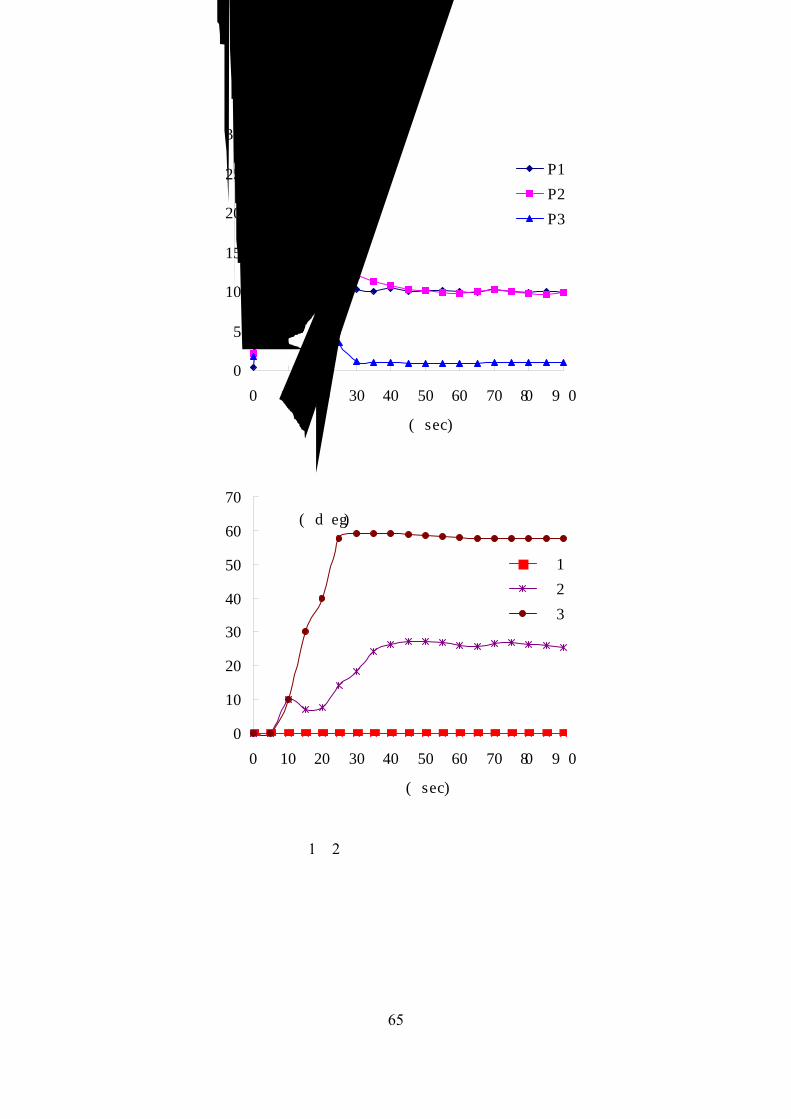
圖三十八 第 1、2 號氣罩同時控制時之數值控制響應 ...................................................... 65
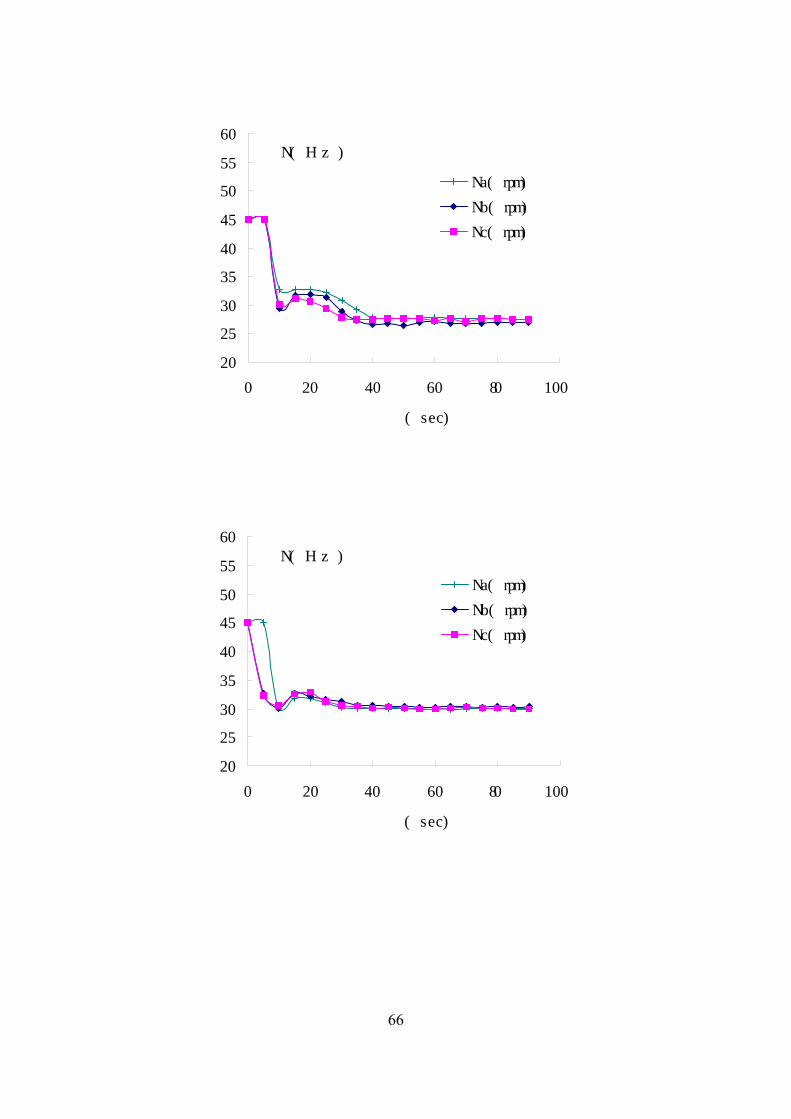
圖三十九 一個氣罩單獨控制時之排氣機頻率響應比較 .................................................... 66
圖四十 二個氣罩同時控制時之排氣機頻率響應比較 ........................................................ 66
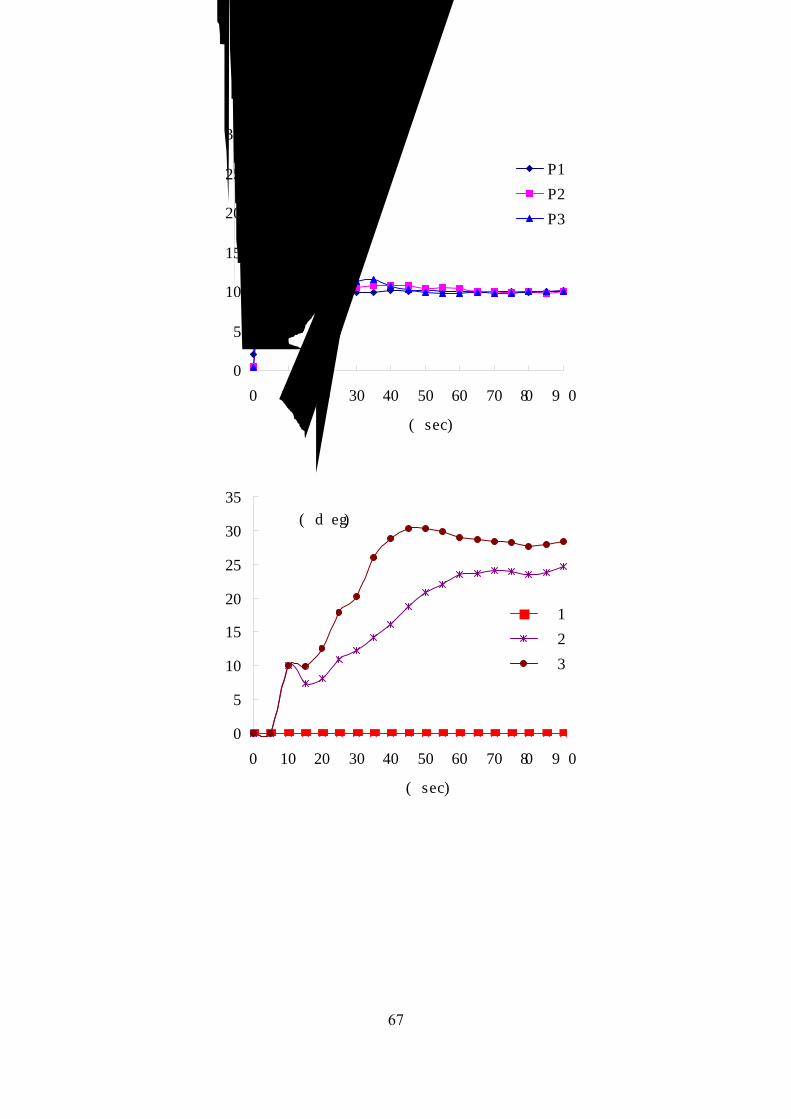
圖四十一 3 個氣罩同時控制時之數值控制響應 ................................................................. 67
圖四十二 3 個氣罩同時作最低風量控制時之數值控制響應 ............................................. 68
圖四十三 雷射光頁之產生原理與電路構成 ........................................................................ 69
圖四十四 本計畫研發之低成本雷射光頁投射器外觀 ........................................................ 69
圖四十五 雷射光頁投射器工作情形 .................................................................................... 70
圖四十六 側風影響氣罩情形(1):尚屬有效 ....................................................................... 71
圖四十七 側風影響氣罩情形(2):幾乎失效 ....................................................................... 71
圖四十八 側風影響氣罩情形(3):完全失效 ....................................................................... 72
圖四十九 氣罩口側風擋板的影響:(左)極為有效,(右)幾乎失效 ........................ 72
圖五十 氣罩口側風擋板的影響:(左)仍為有效,(右)完全失效 ............................ 73
圖五十一 氣罩口側風擋板的影響:(左)幾乎失效,(右)完全失效 ........................ 73

1
第一章 計畫概述
第一節 前言
為達到「自動管理、解省經費與人力、提昇工廠安全與衛生素質」的目的,近
十五年來工業自動控制技術已逐漸在國內生根發展。在各種控制目的之中,與勞工安
全衛生相關的控制項目在近十年裏不斷增加,由早期最簡單的「沖床安全裝置」到複
雜的「廠房冷凍空調自動監控系統」,皆屬兼顧經濟、安全、衛生等多項控制目的之
數值應用技術。然而但在工業通風設備的數值控制方面,由於臺灣地區市場規模相對
較小、性能驗證技術較不普遍,主要的控制理論與技術核心仍操之於外國廠商,故仍
有相當的發展空間。先進工業通風控制技術受制於國外的結果,使局部排氣裝置等重
要勞工衛生保護設備之數值控制產品價格偏高,且維護更新時常受制於國外廠商的電
子控制零件供應狀況,使某些機組不得不定時拆換更新,耗費不必要的設備維護成
本。基於以上原因,國內事業單位對電腦化、數值化的設備懷有戒心,不敢大幅採用
此類對局部排氣裝置性能提升有好處的設備,間接影響勞工健康福祉。
截至目前為止,國內局部排氣裝置的性能調整,大多仍是透過自動檢查表與製
程或實驗上的需要,以「拆換增刪部分導管零件、改變排氣機馬達的傳動機構減速
比、調整風門啟閉」等傳統方式進行,不僅費力費時,且在兩個性能調整時間點之
間,局部排氣裝置的性能易因人為疏忽而發生意想不到的改變,達不到設備的原始使
用目的。舉例而言,若局部排氣裝置的空氣清淨裝置發生阻塞,使靜壓損失突然增
加,則因排氣機的負荷突然增加,各氣罩的風量將因此減少,不僅影響氣罩本身捕集
空氣有害物的性能,更使在氣罩附近工作的勞工受到健康威脅。
有關局部排氣裝置的數值控制,國內已累積足夠控制技術基礎,同時也不乏工
業通風專業人才,但兩種技術未能以低成本的方式有效結合。如能透過本計畫計畫作
為橋樑,將兩種技術結合,使局部排氣裝置的長期自動運轉監控方法能透過數值控制
2
作具體的實現,並壓低數值控制設備的成本,則可提供經濟誘因,幫助國內已使用或
即將使用局部排氣裝置的事業單位引進數值監控技術,使局部排氣裝置的運轉維護困
擾減少、性能穩定且獲得提升,以加強維護勞工健康。
第二節 本計畫之工作項目與目的
本計畫之主要工作項目可逐一說明如下:
一、工業用通風控制理論之比較研究:回顧以往各種控制技術的發展沿革,評
估選用「價格低廉、實用易懂」之局部排氣裝置數值控制技術,使勞工作
業場所局部排氣裝置之性能維持穩定,實地保障勞工的呼吸健康。
二、量測元件之取得與校準工作:取得並校凖各主要量測元件,並分析其信號
聯繫原理與方式,以供數值控制系統使用。
三、可視化流場觀測組件之建構:設法研發能將氣罩開口附近的流場實況可視
化的觀測組件,以便在純粹數值控制之外,另增一個可驗證氣罩性能的途
徑,以確保局部排氣裝置的性能符合需求。
四、經濟型工業通風數值監控單元之建構:根據控制技術的比較選用結果,設
計並建構一套實用、價廉、可靠的工業通風數值監控單元,作為局部排氣
裝置性能監控的核心。
五、局部排氣裝置數值控制系統測試:建構並組合局部排氣裝置各導管元件,
進行控制性能的試運轉,找出較簡易且可行之數值控制方式。
六、本計畫研發成果技術推廣活動:本計畫研發所得之技術可透過研討會轉移
給事業單位使用,透過實際可見的案例說服與會人員採用局部排氣裝置數
值控制技術。本計畫所衍生之技術可繼續於下一年度進行數值控制器小型
化、結構化之研究,以及各種控制理論實用效果之比較研究。

3
第二章 局部排氣裝置之控制需求
第一節 實際影響局部排氣裝置性能的關鍵元件
產、學界對於局部排氣裝置的設計方式各有不同主張,但無論這些設計方式差
異如何,實際影響局部排氣裝置性能的關鍵元件皆可歸納為以下三者:
一、氣罩:氣罩為局部排氣裝置最上游的元件,氣罩開口附近的風量與流場特
徵決定了作業場所勞工呼吸帶的空氣品質,氣罩的捕集效果代表的是局部
排氣裝置在勞工作業場所內的使用性能。
二、空氣清淨裝置:空氣清淨裝置為局部排氣裝置導管系統最下游的元件,其
出口直接連往排氣機。空氣清淨裝置的性能決定局部排氣裝置排出室外的
氣體是否符合環保排放標準,因此空氣清淨裝置的過濾效果代表的是局部
排氣裝置在勞工作業場所外的使用性能。
三、排氣機:除非排氣機的使用狀態維持在高效率範圍,否則容易引發噪音、
振動,且浪費電源。排氣機的噪音沿著導管分別向上游的氣罩與下游的排
氣道出口傳遞,造成一般勞工(位於氣罩側)與專業維修人員(可能位於
排氣道出口側)的困擾,振動則沿著導管傳遞,或再次轉換為低頻噪音。
排氣機的運轉效率代表的是能源利用率與勞工作業場所的噪音控制品質。
自氣罩起至空氣清淨裝置為止的局部排氣裝置導管元件,通稱為局部排氣裝置
的「導管系統」,而導管系統的總壓力損失評估方式,各界提出的計算方式都不大一
樣。舉例而言,ACGIH(美國工業衛生師論壇)的工業通風技術手冊[2]係以通用的設
計觀念為主,並不針對特種(特殊材質、形狀或尺寸)導管元件多作考慮,較偏向於
學術路線,其總壓力損失計算結果往往低於實際情況;ASHRAE(美國冷凍空調學
會) 的冷凍空調技術手冊[3]則根據既有的特定材質、特定型態導管元件作實際性能

4
量測,並據以提出設計建議,走的是偏向工程的實用路線。至於本計畫所提出的數值
控制概念,是不理會各界對導管系統總壓力損失評估方式的差異,而採取更直接的方
式,容於以下各節作補充說明。
第二節 現有的氣罩性能指標
氣罩的性能經常受幾何設計、環境氣流、操作條件等多種因素的影響。圖四十
六至圖四十八顯示一個有效捕集距離設計錯誤的外裝式氣罩案例(於第六章第六節有
詳細的討論),當空氣有害物發生源(位於各圖下方)與氣罩開口(位於各圖上方)
距離過遠時,即使僅有 sec/2.0 m 的微弱環境側風,也能明顯影響氣罩開口的流場形
態,並決定氣罩能否有效捕集空氣有害物。
有關氣罩的傳統性能指標,以「捕集率」(Capture Efficiency, Cη )最能為工業
衛生學界普遍接受,其定義方式如下
P
CC m
m&
&=η (1)
(1)式中的 Cm& 為氣罩實際捕捉的空氣有害物質量流率(或體積流率,視情況而
定),而 Pm& 則為工作場所污染源發生的空氣有害物質量流率(或體積流率)。由於
捕集率的量測技術較為複雜,且須應用較多、較昂貴的儀器,故不適合直接應用為勞
工作業場所局部排氣裝置數值控制設備的長期性能監控指標。
除捕集率之外,退而求其次的廣用間接氣罩性能指標是「流入氣罩的風量」或
「氣罩下游風管的平均風速」,這也是大部分工業衛生設計文獻建議的間接氣罩性能
指標。風量與風速雖然比捕集率更容易測定,問題是難以取得一種「穩定可靠、耐受
5
性高、經濟實惠」的風量、風速量測元件。由於吸入氣罩的氣體通常含有各種氣、
液、固態空氣有害物(包括粉塵、燻煙、酸鹼霧滴、有毒氣體等),不但密度變化頗
為可觀,且容易阻塞「風量、風速」的量測元件,造成儀器故障。至目前為止,市面
上還找不到可靠度高、能忍耐酸鹼粉塵侵蝕、價廉物美的「風量、風速」量測元件,
故亦無法以風量作為氣罩性能的長期監控指標,而須另採其他可行的替代方式。
第三節 以氣罩下游靜壓讀數為氣罩性能指標
本計畫所提出的替代方式,是利用氣罩下游同尺寸導管某位置(例如氣罩喉
部,位於氣罩下游一個導管直徑的位置)測得的靜壓訊號,間接換算為風量或風速。
VS FPP = (2)
(2)式中的SP 代表氣罩下游同尺寸導管某位置所量得的靜壓絕對值, VP 為氣罩下
游風管任意截面的平均動壓, F代表自氣罩開口到靜壓信號量測點之間的靜壓損失係
數,可由查表、經驗公式或實測的方式取得。若氣罩的工作狀態維持不變,則在靜壓
訊號量測點取得靜壓數值之後,透過(2)式即可換算出氣罩下游風管的平均風速與氣罩
吸入風量。
至於靜壓訊號轉換為電子數值訊號的方式,可利用市售的「微差壓轉換器」電
子元件(如圖十),配合(2)式將氣罩吸入風量轉為靜壓訊號,再透過類比/數位轉換
器(A/D converter),將靜壓訊號轉為數位訊號,並傳給數值控制器。

6
第四節 空氣清淨裝置的數值控制性能指標
空氣清淨裝置出口、入口之間的全壓差異,稱為空氣清淨裝置的全壓損失,由
全壓損失數值變化情形的不同,可將空氣清淨裝置分為以下兩大類:
一、 全壓損失近似固定:如旋風集塵器(cyclone)、洗滌塔(scrubber)、靜電
集塵器等,在正常使用狀況下不會有明顯的全壓損失變化,而僅有空氣有
害物總捕集量的變化。此類空氣清淨裝置的全壓損失可視為固定,不透過
數值方式予以監控,或將數值控制的標的放在「監測空氣有害物的總捕集
量」,當已捕集的空氣有害物累積到一定的數量時,便須提醒相關人員清
理空氣清淨裝置。
二、 全壓損失不固定:如袋式集塵器、活性碳過濾器等,在工作時常能攔截固
態空氣有害物,或因濾材吸收氣、液態空氣有害物而發生阻抗變化,使裝
置的全壓損失隨時間與工作負荷累積增加。此類空氣清淨裝置的全壓損失
可透過數值方式予以監控,當全壓損失大到一定的程度時,便須提醒相關
人員拆換空氣清淨裝置。
由於空氣清淨裝置各只有一個氣體入口與出口,依照工業通風傳統設計裡「風
量守衡」的假設,若將空氣清淨裝置出入口間的監測指標由全壓損失改為靜壓損失,
同樣可以當作空氣清淨裝置的性能指標,透過類比/數位轉換器(A/D converter),
將靜壓訊號轉為數位資料並傳給數值控制器。

7
第五節 排氣機/變頻器的數值控制性能指標
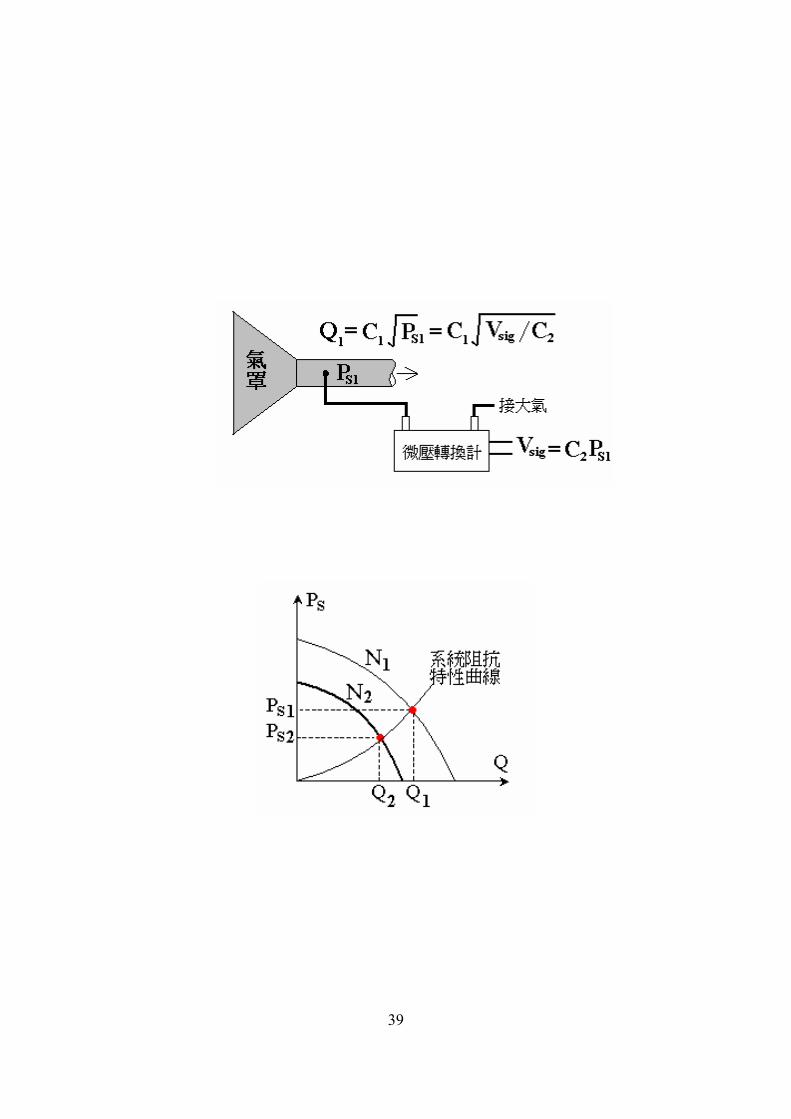
一般而言,排氣機出廠時常附有性能曲線圖,這些性能曲線圖包括「轉數-靜
壓-風量關係曲線」、「轉數-全壓-風量關係曲線」、「電源頻率-靜壓-風量關
係曲線」等(例如圖十四),當局部排氣裝置的總壓力損失與總風量需求計算出來
後,即可由性能曲線選定適當的排氣機。
局部排氣裝置各氣罩的風量需求與總壓力損失若因製程頻繁調整等因素而必須
調整變動,則排氣機性能也必須隨之調整,以匹配風量、總壓力損失的改變。針對這
一類變化頻仍的情況,傳統的因應之道是以人力進行排氣機傳動機構的減速比調整,
但此項調整耗時費力,且通常無法一次完成,往往因疏忽而使排氣機的性能未能妥善
因應新的工作狀況。為了節省調整時間與人力,近年來已逐漸使用工業級變頻器(外
形如圖六,典型接線方式如圖七)來取代傳統的機械式減速機構。
變頻器調整排氣機轉數之原理為「改變供應電源頻率,使排氣機馬達的轉數隨
之改變,則排氣機葉輪的轉數與風量也隨之改變」。除了極特殊的場合以外,排氣機
的驅動馬達大多為「交流感應馬達」;此種馬達在低轉數域常出現不受歡迎的轉數滑
差,使排氣機轉數低於電源頻率所對應的理論轉數,形成不成直線比例的對應關係,
故近兩年來出品的變頻器多已安裝一種稱為「向量補正」的補償電路,以程式補償轉
數滑差,使排氣機轉數與電源頻率成近似直線正比關係。各種變頻器的向量補正方式
可參考使用手冊,在此不再贅述。
有了向量補正電路,排氣機的性能指標可大幅簡化為「電源頻率、排氣機入出
口全壓差」二者,有了這兩個性能指標,就能決定排氣機的風量。有關電源頻率的數
值控制方式,可直接利用變頻器之類比控制接點(如圖七左下方的無段式轉數控制
鈕,其目的為產生指定的類比電流訊號)及數位/類比轉換器(D/A converter),將
數值控制器的頻率設定信號直接傳遞給變頻器;有關排氣機的出入口間全壓差,由於

8
排氣機出入口的導管截面積皆為固定,故可由排氣機的出入口間的靜壓差取代,由微
差壓轉換計讀出,再交由類比/數位轉換器(A/D converter),將靜壓訊號轉為數位
資料,傳給數值控制器。
第六節 氣罩性能的「風量控制」與「狀態控制」
依照傳統工業通風的設計程序,氣罩的位置與吸入風量是最先完成規劃的部
分。有了氣罩的風量需求與安放位置,才有後續的導管設計規劃流程。然而氣罩的流
入損失係數(全壓損失係數)受到作業場所的各種工作條件的影響(如修改氣罩細部
尺寸、安置氣罩擋板或其他臨時阻礙物等),不會是固定數值,因此在實際應用場合
裏,各氣罩的風量不會永遠與原設計預期的風量一致。
由過去的設計經驗,我們已經知道同屬一局部排氣裝置的各氣罩風量會彼此影
響[13],在這種情況下,就算局部排氣裝置能滿足保護勞工健康的需求,此種局部排
氣裝置的設計型態其實已經不是「風量控制」,而是依照作業現場特性所為的「狀態
控制」。所謂狀態控制,係以控制氣罩實際的捕集能力為主,而非只著重在間接的風
量或風速等數據。
我國工業生產已漸向「量少質精」方向發展,事業單位的工作或製程經常隨生
產需要而變動,故局部排氣裝置之各氣罩性能也必須隨著工作或製程的改變而作調
整。倘能針對不同工作型態,運用數值控制技術實現較靈活的「狀態控制」,則將比
傳統的機械式局部排氣裝置控制方式更為有利,更能實現維護勞工健康的根本目的。
9
第三章 局部排氣裝置數值控制技術
第一節 近代數值控制技術的發展與取捨
數值控制技術已經引入臺灣數十年。由最早期的簡單電晶體或流體邏輯控制閘
(例如氣、液壓邏輯閥)開始,一直到近年來廣用的可程式控制器(Programmable
Language Controller,簡稱 PLC),此方面的技術發展非常迅速。在歷經一段時間的
市場競爭後,電子式數值控制開始凌駕流體邏輯控制。如以單一控制器為例,可簡單
說明電子邏輯控制優於流體邏輯控制的情形如下:
一、 體積較小:電子邏輯閘可在晶片上縮為數微米的尺寸,但流體邏輯閘(無論
氣壓或液壓)卻需要至少數公分以上的尺寸。控制器的邏輯愈是複雜,兩者
體積差異愈大。
二、 價格較低:同樣是量產的商品,電子邏輯閘的市售價格可比流體邏輯閘低數
十倍至數千倍不等,價格差異極大。
三、 邏輯程序修改較容易:電子式的邏輯控制(以單晶片控制為例)可透過套裝
軟體輕易完成修改,但流體邏輯卻必須拆換實體的管路與邏輯閥,始能改變
控制邏輯,且控制邏輯修改的幅度愈大,電子式控制的優勢就愈明顯。
四、 能源供應容易:電子控制多半只需要用電,但流體邏輯控制需使用額外加裝
供應氣壓或液壓流體來源的裝置,不僅額外費用較高,能源的供應也容易出
問題,造成控制失敗。
由於電子邏輯控制具有以上的相對優點,故能在近二十年內蓬勃發展為各種複
雜的多功能電子控制器,也就是各種工業控制用微電腦;至於流體邏輯控制,則逐漸
侷限於「不得產生火花」、「電源取得困難」等有特殊顧慮的勞工作業場所。
10
為適應不同的工業控制用途,數值控制技術所需的核心電子元件通常都具有
「不侷限於單一用途、體積小、價格低、邏輯修改容易、設備維護容易」的通用特
點,故較適合應用「電子感測器搭配控制用微電腦」的方式來製作局部排氣裝置的控
制核心。
第二節 控制用微電腦之比較選用
目前國內實施數值控制所使用之微電腦可依照控制技術的等級區分如下:
一、 單晶片(Single Chip)微電腦:包括中央處理單元(CPU)、隨機存取記憶
體(RAM)、可燒錄式永久記憶體(EPROM)、可程式輸出入介面
(Programmable I/O Interface)等電子元件全部整理為單一晶片,將軟體程式
透過燒寫器寫入 EPROM,以發揮特定且較簡單的邏輯控制功能。此種控制
元件常見於各種專用機,例如冷氣機、智慧型電冰箱等,屬製作技術較複雜
的類型。目前單晶片的售價甚低,且可輕易購得,惟應用時必須有較高等的
資訊控制能力,無法在短時間內掌握此控制技術。
二、 可程式控制器(PLC):為模擬傳統工業配電邏輯之電子裝置,可將複雜的
階梯圖(Ladder Diagram)寫入,並透過輸出/輸入數位接點實現與傳統工業
配電完全相同的控制效果。此種控制元件常見於各種工業製程的數值控制,
近來更發展出複雜的選配零件,可發揮類比回授閉路控制(Close Loop
Control)的效果。PLC之生產技術在國內已經成熟,種類型號甚多,且價格
相當合理。
三、 工業用控制電腦:功能遠比 PLC、單晶片電腦更豐富多樣,且多半製成可自
由選配組合的控制電路板,使用者可依需求組成控制電路箱。常用於大型工
11
廠的整廠電腦化監控,價格較高,對運用技術的要求也較高。
四、 普通個人電腦:常用為資料擷取、遠程監控的工具。
本計畫所需的控制範圍介於上述第二種與第三種微電腦之間,但為考量成本與
應用的需求,仍選擇 PLC 為本計畫的近端(安裝於局部排氣裝置排氣機附近)控制
用微電腦,並搭配適當的 PLC 界面附件。本計畫選用的 PLC 型號是日本三菱公司製
造的 Fx2N-32MR 可程式控制器(如圖五),搭配 FX2N-4DA 數位/類比轉換器、
FX2N-4AD 類比數位轉換器、FREQROL-A500 變頻器等附件一起使用。組合完成情形
如圖九所示。
第三節 壓力感測器之選用
局部排氣裝置目前常用於工業通風訊號偵測的壓電子感測器可分類如下:
一、 薄膜-壓電晶體感測器:適用於壓差較小的場合。
二、 彈簧-壓電晶體感測器:適用於壓差較大的場合。
三、 彈簧-數位尺感測器:適用於壓差極大的場合。
由於本計畫所需之靜壓感測器常在低壓差(不大於 50mmAq)的範圍內工作,故
以第一種感測器為選用標的,並將所感測到的靜壓訊號與勞工作業場所的室內氣壓作
比較,並以兩者的靜壓差異絕對值為輸出的靜壓訊號。
在校正方面,係由原廠代理商於實驗前以專用校正電路實施校正。本計畫所選
用的靜壓感測器型號係英國 Huba 公司所生產的 Type 694 微差壓感測器,量測範圍 0-
5mBar(0-50.1mmAq),並以 4-20mA 電流為感測器的輸出信號。
12
第四節 排氣機之選用與特性
排氣機之種類可粗分為「軸流式、斜流式、離心式」三大類,依照業界使用經
驗,軸流式排氣機最適用於「風量相對較大、靜壓需求相對較小」的使用狀況,常用
靜壓範圍為 0-10mmAq,售價低廉且容易購得,但其應用場合與特性均不適合作變頻控
制(相對成本過高);離心式排氣機適用於「風量相對較小、靜壓需求相對較大」的
使用狀況,常用靜壓範圍為 30mmAq 以上至 300mmAq,容易購得,適於變頻控制;斜流
式排氣機適用範圍介於前兩者之間,但較不易購得。比較之後,本計畫挑選離心式排
氣機為控制標的。
離心式排氣機的葉輪又可分為「多翼式(前傾輪葉)、徑向輪葉、後傾輪葉」
三種,其中前傾輪葉之風量最大、靜壓最低、價格也最低,常用於 30-60mmAq 的靜壓
範圍,故本計畫選用安裝前傾輪葉的離心式排氣機為控制標的。
由於本計畫之目的在揭示數值控制方法,故需與微差壓計之有效感測範圍、擬
使用之導管風量相互配合,並選用風量適當之排氣機。本計畫選用臺灣 CamYork 公
司生產的 CY-310P 前傾輪葉離心式排氣機作為動力來源(圖十四),並搭配適當的
空氣清淨裝置(圖十五、圖十六),用以模擬產生壓力損失。
13
第五節 氣罩風量與數值控制之間的介面
除了直接以電子元件量取氣罩下游風管的風量之外,氣罩風量也可透過氣罩下
游單線風管某特定位置的靜壓間接換算。以圖一為例,在距離氣罩下游喉部一個導管
內徑的位置設置靜壓量測點,可由微壓轉換計讀出氣罩喉部的靜壓絕對值 1SP ;倘若
氣罩的流入損失係數(即全壓損失係數) TF 已知,則由傳統工業通風公式[2]可得氣
罩風量:
2
11 )04.4/)(1()1( VFPFP TVTS +=+=
1111
111 104.4
SqST
PCPFA
VAQ ≡+
== (3)
(3)式的VP 代表氣罩下游導管任意截面的平均動壓, 1A 代表氣罩下游導管的內截
面積, 1V 為導管任意截面的平均風速, Tq FAC += 1/04.4 11 為一比例常數。由(3)式
可建立氣罩風量與氣罩導管喉部靜壓之間的關係,只要數位界面能讀出氣罩喉部的靜
壓數據,就能依照傳統通風設計的原則來評估氣罩的風量。
有了氣罩喉部靜壓,可利用微壓轉換計進一步換算為類比電流:
2111 TSTt CPCI += (4)
(4)式中的 1TC 為類比/數位轉換比例係數,而 2TC 為移位參數。由本計畫使用的
微壓轉換計,可得
32.050/165020
404
121
221
==⇒+×==⇒+×=
TTT
TTT
CCmBarCmACCmBarCmA
(5)
因此在本計畫中,將各參數先代入(4)式,再代回(3)式,並將靜壓單位換算為常
用的毫米水柱,則可建立氣罩風量與微壓轉換計輸出電流信號之關係如下

14
)4(9.3181.9
10032.0
)4(11
11111 −=×
−== tq
tqSq IC
mbarmmAqI
CPCQ (6)
第六節 人機界面之選用
局部排氣裝置之性能監控若欲達到數值化、自動化的地步,就必須使用適當的
人機界面,使監控人員能將控制指令由遠端的辦公室個人電腦傳遞給近端的局部排氣
裝置控制核心微電腦(在本計畫為一可程式控制器),同時也使監控人員能透過人機
界面讀取來自局部排氣裝置控制核心微電腦的監控訊號。
為了同時達到經濟、可用的目的,本計畫選用「LabLink」圖控軟體,使位於辦
公室遠端的普通個人電腦能與近端勞工作業場所的局部排氣裝置控制核心微電腦連
線。此處所謂的圖控軟體,指的是能將遠方勞工作業場所的自動化機械控制面板「虛
擬化」於螢幕上,並能藉各種通訊手段讀取、改變遠方機械性能的軟體。使用圖控軟
體為人機界面的好處如下:
一、 可節省製作局部排氣裝置實體操作面板電路的費用、人力與時間。
二、 可避免無關的人員任意調整局部排氣裝置操作面板之設定而發生危險。
三、 虛擬操作面板上的每一個按鈕、調整器、輸入器、數值表頭、圖形表頭等虛
擬電子元件皆可隨時彈性增刪修改,以便適應多種局部排氣裝置,或與勞工
作業場所其他安全維護、消防監控等系統結合,進行整廠安全衛生設備的整
合性能監控。
四、圖控軟體同時也是局部排氣裝置的性能監測紀錄器,只要透過適當安排,即
可自動輸出相關報表,有利於長期追蹤。

15
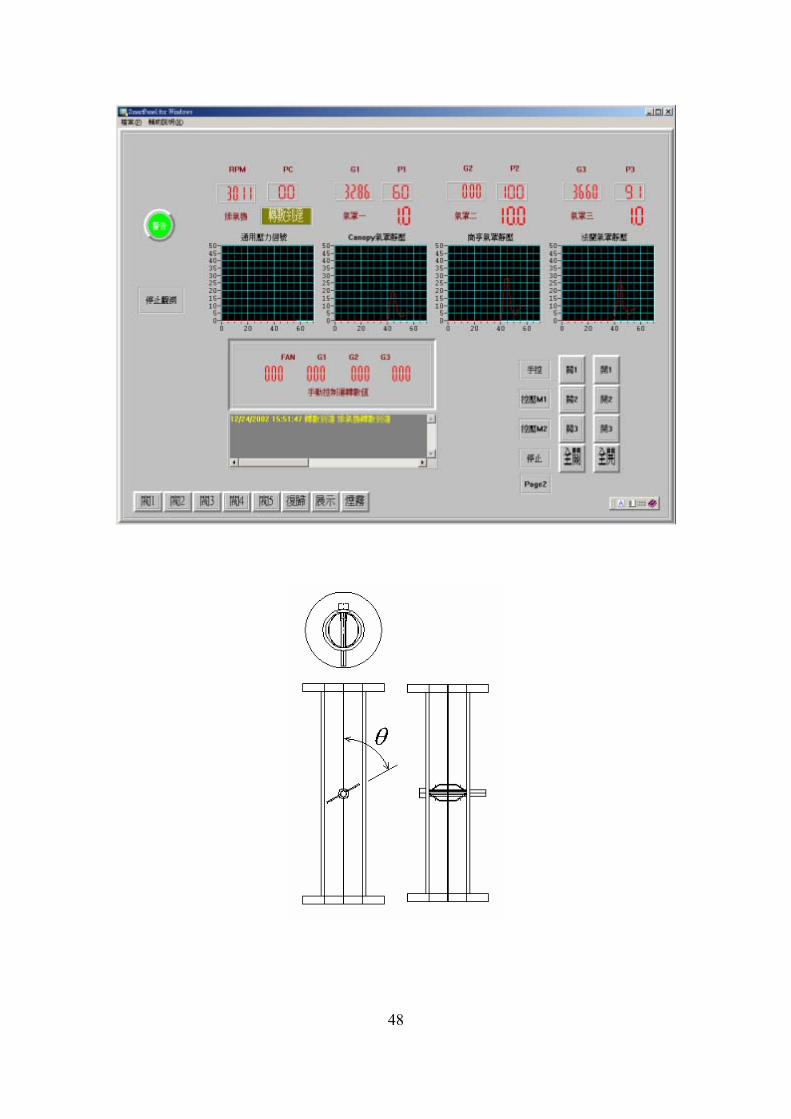
圖十七所示即為本計畫製作的「局部排氣裝置虛擬控制面板」,圖中的每一個
畫面按鈕均依照軟體指定的原則建置,並撰寫適當的監控輔助副程式,透過 RS-
232C、RS-422 等通訊協定與局部排氣裝置控制核心微電腦(可程式控制器)連線,使
監控人員能隨時隨地監督廠區局部排氣裝置的性能狀況。
16
第四章 蝴蝶風門特性實驗
蝴蝶形風門或蝴蝶形液體閥門是目前工業常用的流量控制元件,如欲遂行局部
排氣裝置的數值控制,就必須先了解蝴蝶風門的特性。在本章,我們假設並以實驗證
明:緊接於氣罩下游而與氣罩連結為一體的蝴蝶風門可視為「在近一大氣壓、視空氣
為不可壓縮流體」的條件下工作,且具有單一、容易控制的特性。
第一節 蝴蝶風門於近一大氣壓下作業的特色
為調整局部排氣裝置各氣罩之風量,目前已有多種風量調節元件可供選用,但
其中仍以「蝴蝶風門」(圖十八)的結構最為簡單且容易製造,發明年代也最為古
老,常與氣罩、排氣櫃等局部排氣元件合併使用。「蝴蝶形液體閥門」在各種水利或
液壓設施中已有廣泛的運用,但因液態水或液壓油在大多數的工作條件下近似於不可
壓縮,與空氣的明顯較易壓縮的特性有很大的差異,故於工業通風方面,雖然蝴蝶風
門為常見的局部排氣裝置元件,與實用風量控制相關的討論仍嫌不足,有些公式[6]則
較為複雜,須有專業流體力學知識為背景,始能有效控制此一元件。
目前在各種局部排氣裝置設計中,蝴蝶風門常位於氣壓較接近環境氣壓的位置
(例如圖一),或風門上下游的氣壓差異較小的位置,以盡量縮小維持風門關閉角θ
(詳圖十八)所需之控制扭矩。若風門上下游的氣壓差異低於 50mmAq,氣溫不變且
環境壓力為一大氣壓時,則風門上下游之絕對壓力差異與空氣密度差異都不到 0.5%,
此時空氣可視為「近似不可壓縮」的狀態,與工業通風設計的基本假設吻合。倘若將
空氣視為近似不可壓縮,則蝴蝶液體閥門與蝴蝶風門之操作條件便極為類似,似可整
理出類似的特性。
17
目前工業通風的基本設計手冊中,對於蝴蝶風門的討論相當簡略,本章試圖以
蝴蝶風門最常運用的「近一大氣壓」操作條件,將蝴蝶風門的特性以函數擬合,與位
於蝴蝶風門上游的氣罩結合為一體,應用於局部排氣設計之中。
第二節 蝴蝶風門特性實驗所用元件
為儘可能接近實務運用的階段,本節以一透明壓克力製造之局部排氣裝置教學
模型(如圖二十三)為實驗器材,安裝三具管徑為 94公厘之蝴蝶型風門(如圖十
八),並於風門上、下游軸向距離各 220公厘的位置安裝静壓檢知軟管,以便將靜壓
訊號傳遞至微差壓轉換計。實驗器材說明如下:
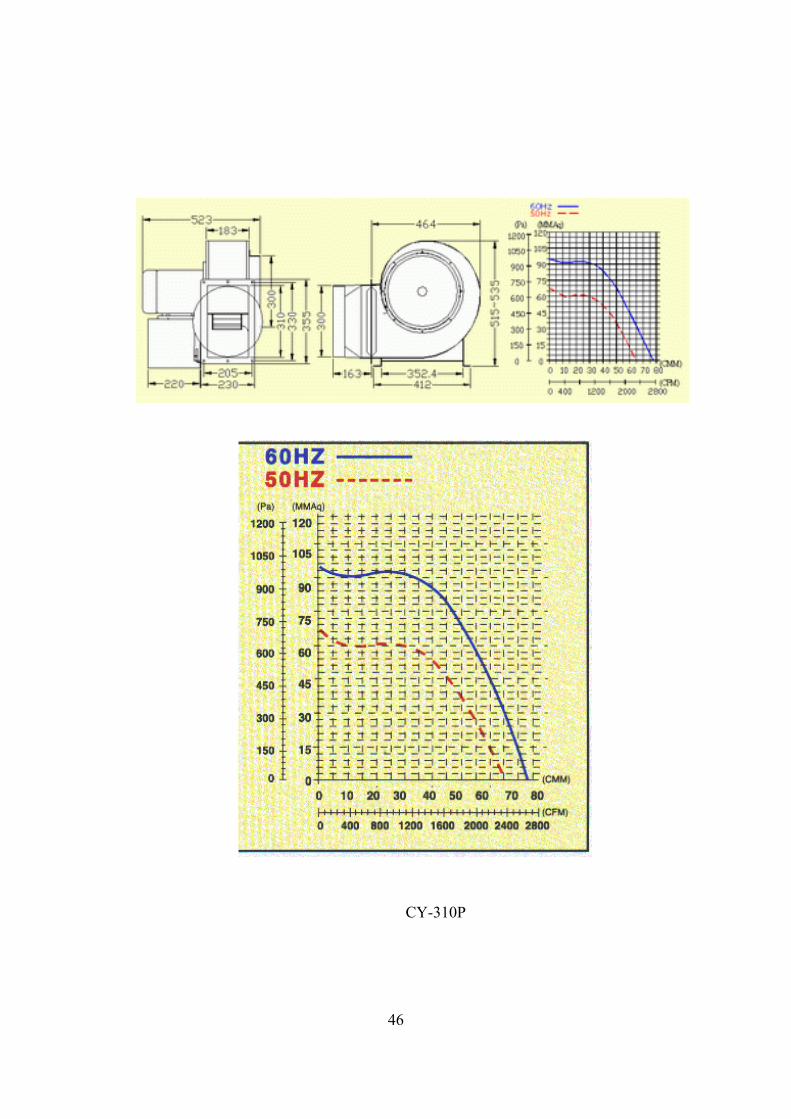
一、排氣機:選用建煜公司出品之 CY-310P多翼式離心排氣機,最大静壓可達
90mmAq,最大風量可達75CMM(外形及性能曲線詳圖十四)。
二、排氣機變頻控制器:選用日本三菱公司出品之 Freqrol-A500 變頻控制器(外
形及操作實況如圖八)。
三、蝴蝶風門管:風管內徑 94mm,管件總長 600mm,碟片直徑 93.5mm,碟片夾
持軸直徑 10mm,挾持方式為對稱夾持,使碟片形心隨時通過管件中軸。沿著
管件中軸,在碟片中心上下游各 220mm 的位置鑽鑿直徑 5mm 的静壓探測
孔,並以軟管連接於測孔及微差壓轉換計(設計圖如圖十八)。
四、微差壓轉換計:採用瑞士 Huba Control 公司出品之 694 型微差壓轉換計,有
效量測範圍 0-50mBar,線性誤差 %1± 以下。外形及主要規格如圖十。
五、A/D 轉換模組:採用日本三菱公司出品之 Fx2N-32MR 可程式控制器、Fx2N-
4AD 類比數位轉換附件,線性誤差 %1± 以下(外形及特性如圖九)。
六、數據擷取軟體:採用超鼎科技公司出品之 Lab-Link圖控軟體擷取(實際操作
18
畫面如圖十七)。
第三節 蝴蝶風門特性實驗程序
上一節所列之實驗元件在使用前均送請原廠商校正,以確定性能堪用,其詳細
性能於下一章補充說明。實驗步驟如下:
一、啟動排氣機並調整排氣機電源頻率,令蝴蝶型風門下游量測點的靜壓為 1P ,
由全開( o0=θ )到全閉( o90=θ )逐步改變風門關閉角θ ,並記錄風門上
游量測點静壓 2P 。每一次調整θ 時,都必須同步調整排氣機轉數,使 1P 的大
小始終維持不變;每一次實驗條件改變後,均等待至少二分鐘,使各點靜壓
訊號達到平衡穩定狀態。訊號穩定後,每一個 2P 的數據均以每隔五秒量測一
次的間隔連續讀取二十次,而後取其平均值。
二、提高 1P ,重複前一步驟,直到 1P 達50mmAq為止。
第四節 實驗結果與討論
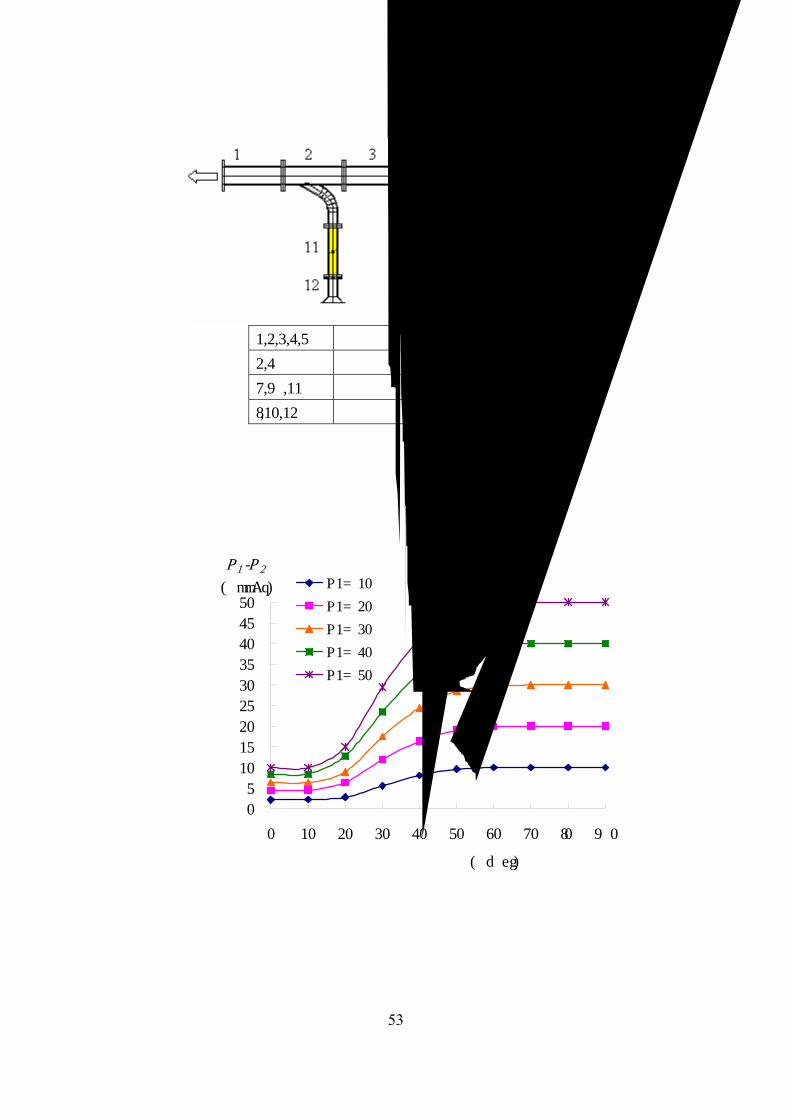
在不同的風門下游静壓 1P (10-50mmAq)條件下,改變風門關閉角θ 並量測風
門上游静壓 2P ,可圖解得圖二十四。由圖中可見不同的曲線都出現類似的行為。若將
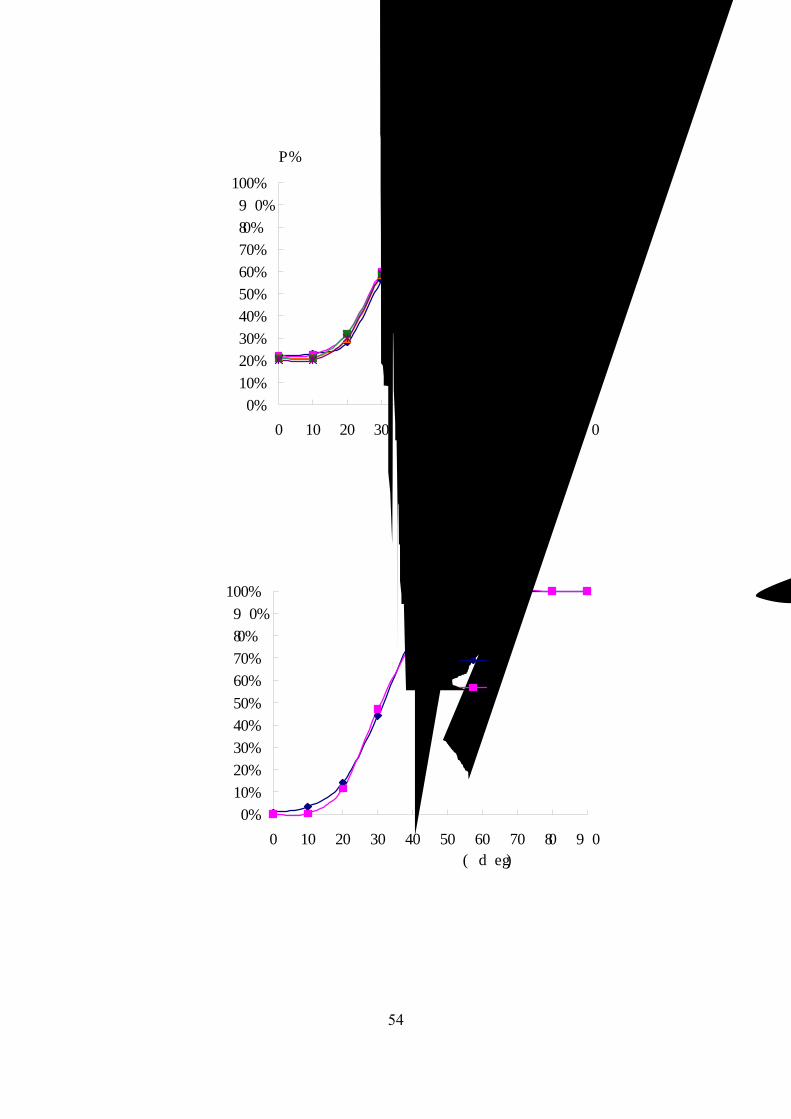
圖二十四中的各壓力數值無因次化,則可得到圖二十五的單一規律曲線。圖二十五證
實了本章的最初假設,也就是「當氣罩開口附近氣壓接近一大氣壓時,空氣近似不可
壓縮流體,此時蝴蝶液體閥門與蝴蝶風門之操作條件極為類似,可整理出類似的特

19
性。」圖二十五所示的壓力百分比 %P 之定義如下:
%100)(
%9021
21 ×−−
== oθ
PPPPP (7)
由於圖二十五所示的多條蝴蝶風門特性曲線幾乎完全重合,故可取各點平均值
為準,利用此曲線與 hyper-tangent 函數特性近似的特性,以一個簡單易懂的蝴蝶風門
特性擬合函數來擬合蝴蝶風門之特性如下:
[ ]{ } 109001)(tanh21
21 ≤≤≤≤+−= γθθγ ookk (8)
其中各參數之定義如下表。
參數 參數之定義、計算方法與物理意義
γ 壓力模數,定義為090
0
PPPP∆−∆∆−∆
=γ 。
P∆ 風門兩端量測點之壓力差。
0P∆ 風門全開(o0=θ )時所量測到的 P∆ 數值。
90P∆ 風門全閉( o90=θ )時所量測到的 P∆ 數值。
1k 斜率參數,代表曲線中段( o20=θ ∼ o50 )的斜率。
2k 平移參數,以犧牲 o0=θ 附近擬合精確度的方式來換取
整體擬合精確度。
在本例,若取 0784.01 =k 、 5.312 =k ,則擬合函數曲線各點與實際曲線之誤差低
於 3%。函數模擬比較結果如圖二十六。蝴蝶風門特性擬合函數可用於「手動調整、
擋板平衡」的局部排氣裝置設計,實際運用時可依傳統工業通風「擋板平衡」設計原
則估算各蝴蝶風門應設定的風門關閉角。
須特別注意的是:目前市面上所售的蝴蝶風門細部設計雖然都不一樣,但特性
曲線大多類似,使用前可依照本章的實驗方式,依不同的風門分別求取特性。
20
第五章 數值控制的實驗準備
第一節 控制理論回顧
局部排氣裝置的數值控制化控制理論,主要係利用閉迴路自動控制理論,即
Nagrath[1]所整理提出的 PID 控制(比例、積分、微分控制)理論,在某些高專業
性、高利潤的案例已出現商業產品。前述閉迴路控制之實現方式,主要利用電子電
路,對維持局部排氣裝置性能、提高實驗室工作人員呼吸品質確有明顯幫助,但為確
保電路設計之專利,國外廠商往往索價過高,且控制用軟硬體淘汰更新所費不貲、操
作維護專業性過高,這些問題造成使用者的困擾、提高了工業通風設備的維護經費,
故迄今國內除了各大專院校實驗室、特殊事業之無塵室外,鮮有將數值控制技術運用
於局部排氣裝置監控用途之案例。
除了閉迴路控制技術之外,ACGIH[2]在工業通風手冊中,也列出許多機械式控
制方法(如皮帶輪機構等),以控制局部排氣裝置之性能,惟實現此類控制目的須大
量人力配合,且僅以控制系統總風量為主,無法兼顧每一個氣罩。除此之外,黃榮
芳、陳友剛、葉文裕、陳春萬等人[4][7][[8][9]研究發現局部排氣裝置之氣罩捕集性能
明顯受到環境側影響,故若欲達到局部排氣裝置之性能監控目的,則個別氣罩之性能
監控也有必要。
自動控制技術在我國發展已日趨成熟,各種控制零組件多達商業化、模組化之
程度,故僅須組合並調整市售的廉價控制零組件,即可在不同用途發揮控制監測功
能,而局部排氣裝置之自動化監測控制正是其中一種可行的應用方式。黃榮芳、陳友
剛[9]發現外裝式氣罩之捕集性能與凸緣大小幾乎無關,而僅與氣罩之風量有關;此一
重大技術發現確立了局部排氣控制技術之發展方向,簡單地說,「控制個別氣罩風
量,即是控制個別氣罩性能」,而這樣的結論也呼應了葉文裕、張振平、陳春萬等人
21
[10]稍早所進行的研究。
國內不僅在工業自動控制零件已發展達相當程度,模擬氣罩性能之電腦軟體也
在進展當中。陳友剛、葉文裕、陳春萬等人[11]研究發現側風影響外裝式氣罩捕集性
能之情形,可透過可視化電腦軟體模擬之方式,使現場人員在評估現場側風風速後,
迅速了解氣罩性能受影響之幅度,以擬定維護氣罩性能之對策;此一重要研究成果對
局部排氣裝置之自動監測控制十分有利,使用者僅須透過軟體模擬方式決定氣罩之標
的風量,即可確保氣罩性能。
本計畫將以閉迴路調控方式為出發點,依照比例控制(P-Control)的模式進行數
值控制模式相關實驗。
第二節 蝴蝶風門控制硬體設計
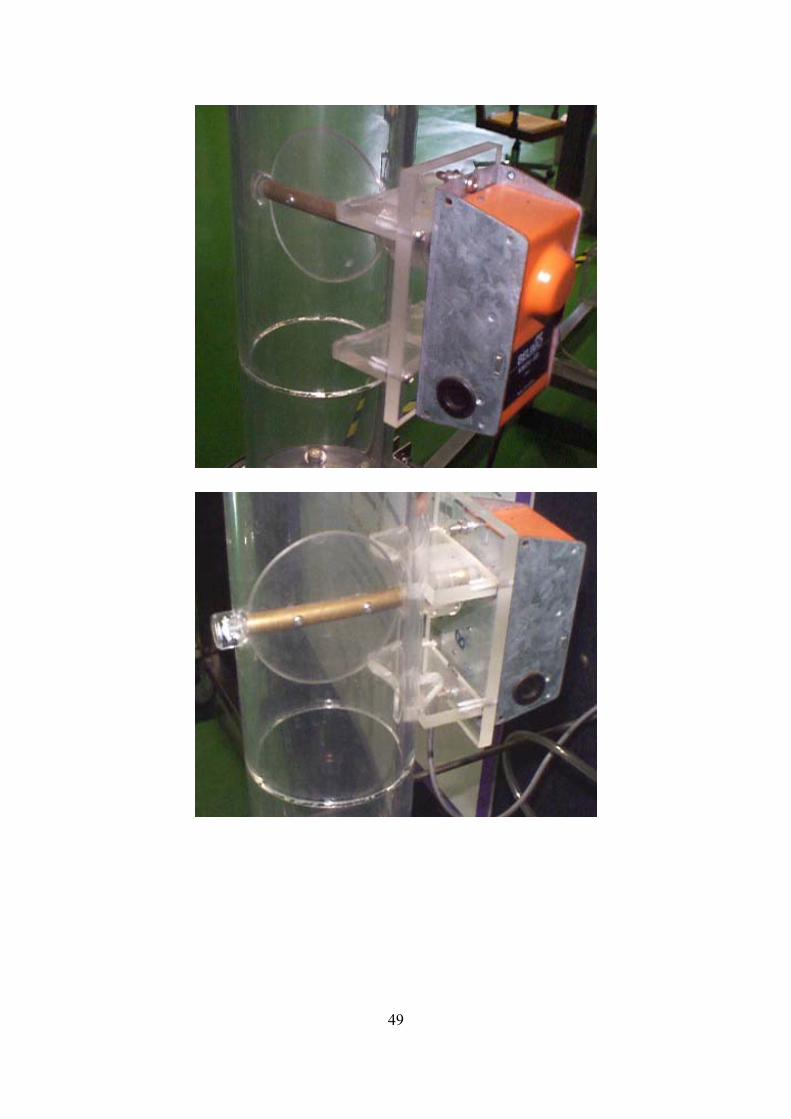
本計畫選用的線性風門馬達為瑞典 Belimo 公司出品的 KM-24SR,屬售價低廉、
轉數極慢的馬達,其實體安裝照片如圖十九。經妥為配置電源並實測結果,此風門馬
達需時 25 秒才能使蝴蝶風門自完全關閉的狀態轉為完全開啟。
此線性風門馬達係由 0 至 10 伏特的直流電壓為比例控制訊號。當控制訊號為零
伏特時,馬達驅動蝴蝶風門自保持在完全關閉的狀態;當控制訊號為 10 伏特時,馬
達驅動蝴蝶風門自保持在完全開啟的狀態。實際進行數值控制時,可依照所需要的風
門關閉角θ ,依照下列公式產生 0到 10 伏特之間的比例控制電壓 tgV
oo 90010)90/( ≤≤×= θθtgV (9)
比例控制電壓 tgV 下達後,蝴蝶風門自原關閉角 0θ 轉動到新的指定關閉角θ 所需

22
時間則可由風門馬達的轉數推估為
oo 90080360
0 ≤≤×−
= θθθ
gt (10)
本計畫設計製作的蝴蝶風門特性,已於上一章作完整的實驗與討論,由圖二十
六可看出在風門關閉角 o20=θ ∼ o50 的範圍裏,風門的反應接近線性且斜率較陡峭,
而在 o0=θ ∼ o20 以及 o50=θ ∼ o70 之間亦成接近直線的特性,但斜率較平緩。
風門馬達的比例控制電壓 tgV 自動化調整原則,係依照使用者設定的氣罩下游喉
部位置靜壓 SCP 與實際靜壓 SP 之間的差異,乘上比例參數,即得 tgV 的步進調整數值。
倘以風門馬達直接作一段式的比例控制(只有一個比例參數),則在細部微調風門關
閉角時不易達到穩定,故本計畫使用兩個比例參數:
2.1/)(
2.1/)(
20
10
≤−+=
>−+=
SSCSSCtgtg
SSCSSCtgtg
PPPPcVV
PPPPcVV (11)
其中 1c 運用於氣罩下游喉部設定靜壓與實際靜壓差異較大的情況,而 2c 則用於
氣罩下游喉部設定靜壓與實際靜壓差異較小的情況,以適應不同的運用需要。
第三節 排氣機轉數控制硬體設計
有關運用變頻器作排氣機轉數控制的方式,在第二章第五節中已有詳細的說
明。本計畫使用選用日本三菱公司出品之 Freqrol-A500 變頻控制器(外形及操作實況
如圖八)為排氣機的轉數控制元件。此變頻器提供給排氣機之電源頻率可由 4-20mA
的直流電流訊號作線性設定,且當排氣機馬達之實際轉數與排氣機電源頻率指定之理
論轉數有差異(稱為轉數滑差)時,此變頻器內建向量控制補償迴路,可補償排氣機
23
在低轉數狀態下因滑差擴大造成的轉數不穩定問題。
依照前述控制方式之說明,可將排氣機轉數視為與電源頻率成正比,也就是
說,我們不僅可以利用一個 4-20mA 的直流電流訊號作排氣機電源頻率的比例設定,
事實上也可以得到直流電流訊號與排氣機轉數之間的比例關係。
至於轉數回授的部分,此變頻器提供一「頻率到達」信號為變頻器控制的數位
回授信號,用以傳回頻率改變完成的訊息。詳細控制細節於下節繼續討論。
第四節 靜壓回授及數值控制的回授硬體設計
本計畫採用四個瑞士 Huba Control 公司出品之 694 型微差壓轉換計作為靜壓感
測器,有效量測範圍 0-50mBar,線性誤差 %1± 以下。外形及主要規格如圖十。此微
差壓轉換計將靜壓信號(負壓)線性轉為 4-20mA 的直流電流回授訊號。
本計畫所使用的四個靜壓感測器中,有三個微差壓轉換計用以量度三個氣罩喉
部靜壓,剩餘的一個則用來「輪流」監測局部排氣裝置其他重要位置之靜壓(例如空
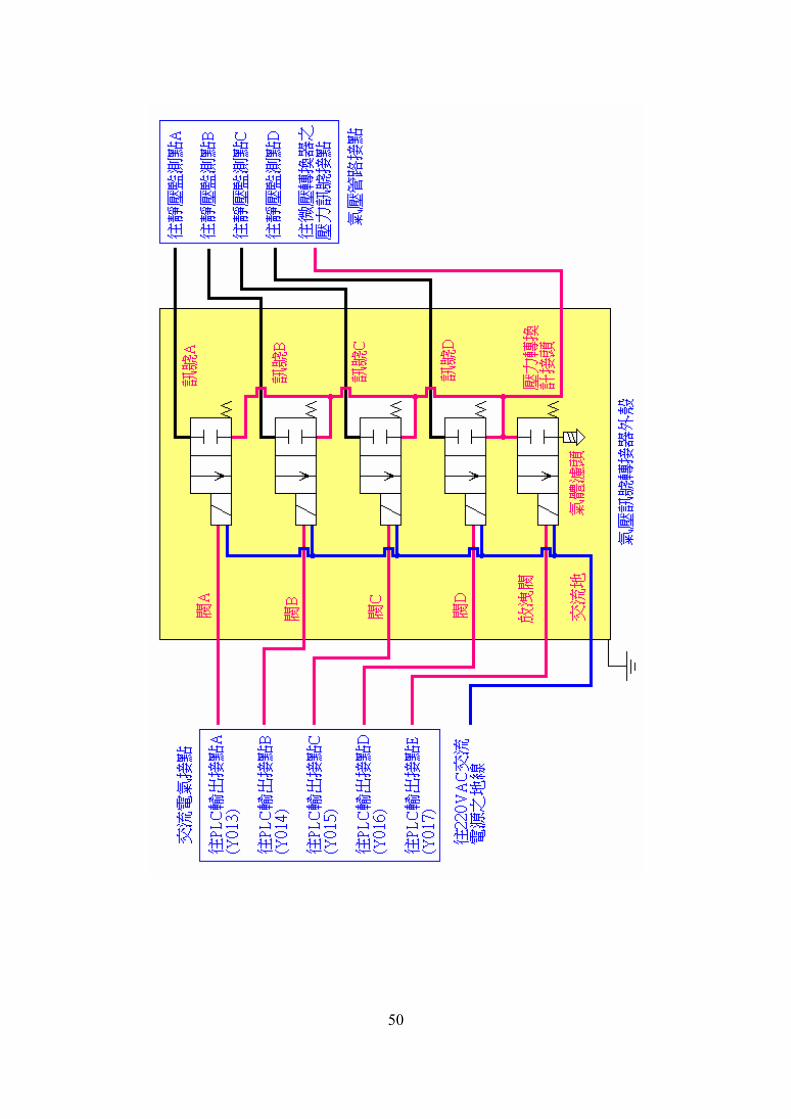
氣清淨裝置的出入口靜壓)。此處所稱的輪流監測,係利用一「微差壓轉換計訊號擴
充迴路」,使單一個微差壓轉換計能用來輪流監測多個較不重要的靜壓訊號源。詳細
的擴充迴路設計如圖二十。
為了處理微差壓轉換計產生的類比電流回授信號,本計畫採用日本三菱公司出
品之 Fx2N-4AD 類比數位轉換器作為類比訊號轉數位訊號的轉換界面,將以電流呈現
的類比靜壓訊號轉為數位資訊。此處使用電流訊號而不使用電壓訊號的原因,是為了
避免環境雜訊的干擾造成靜壓數值大幅跳動。此轉換器的線性誤差 %1± 以下,轉換
頻率遠高於 60Hz,性能堪用(外形及特性如圖十)。
24
除了由微差壓轉換計產生的類比回授信號,還有從變頻器傳回的「頻率到達」
數位回授訊號。為求經濟簡便,我們直接將此一數位回授訊號視為可程式控制器的外
部開關,由可程式控制器讀取(詳下節)。
第五節 數值控制的輸出控制硬體設計
本計畫所需的輸出控制訊號硬體設計方式逐一說明如下:
一、 風門關閉角控制訊號:為 0 至 10 伏特類比直流電壓,採用日本三菱公司出品
之 Fx2N-4DA 數位類比轉換器(線性誤差 %1± 以下,外形及特性如圖九)為
此訊號的輸出界面。此處使用電壓而不使用電流為控制訊號的原因,係因風
門馬達的轉數極慢,不易因雜訊干擾而使風門關閉角的變動過大。
二、 排氣機頻率控制訊號:為 4 至 20mA 類比直流電流,同樣由三菱公司出品之
Fx2N-4DA 數位類比轉換器為此訊號的輸出界面。此處使用電流而不使用電
壓為控制訊號的原因,係因變頻器本身就是強大的雜訊源,易因雜訊干擾而
使電壓訊號不正常跳動。
三、 微差壓轉換計訊號擴充迴路(圖二十)之閥門啟閉控制訊號:為數位訊號。
直接利用可程式控制器輸出接點的啟閉充任此項訊號。
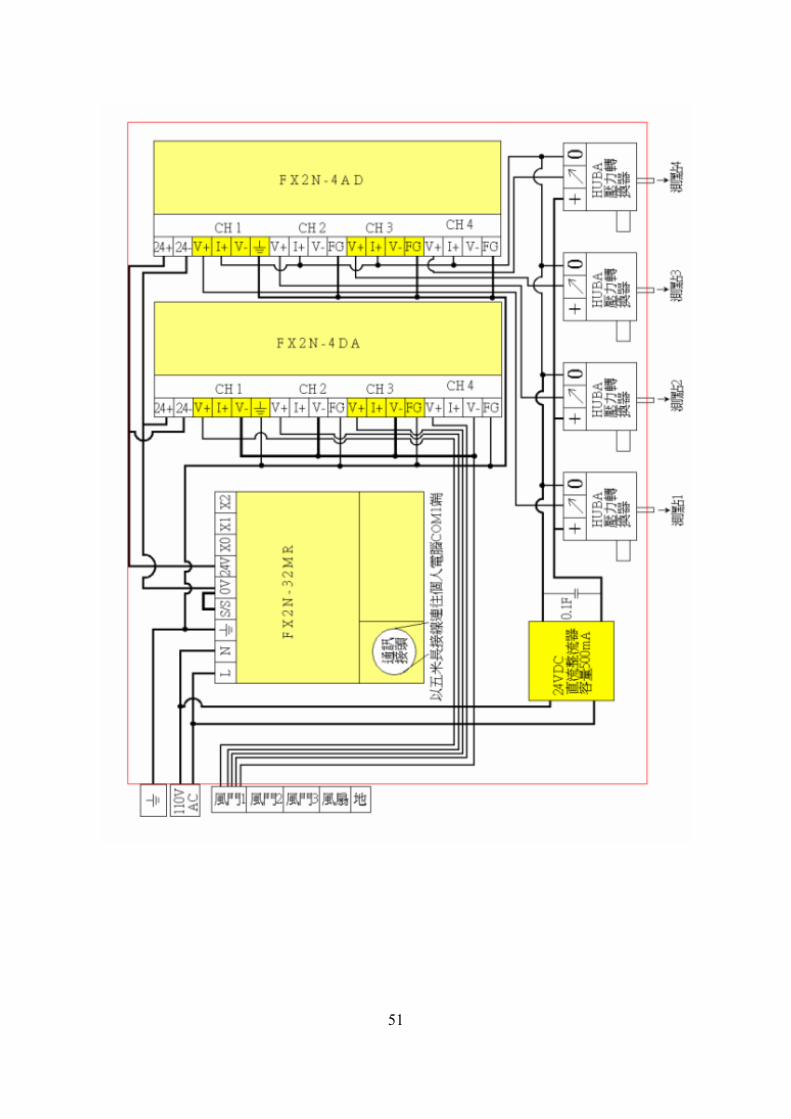
以上所有輸出控制、輸入控制電子元件,統由日本三菱公司出品之 Fx2N-32MR
可程式控制器擔任控制中樞微電腦,將所有電路結合為一體,並以 RS-232C 通信界面
與監控用個人電腦連線。詳細電路設計如圖二十一。
25
第六節 初步數值控制實驗
為了確定局部排氣裝置的基本性能,系統完成後必須實施初步數值控制實驗,
以了解基本性能。本計畫所執行的初步數值控制實驗項目與結果如下:
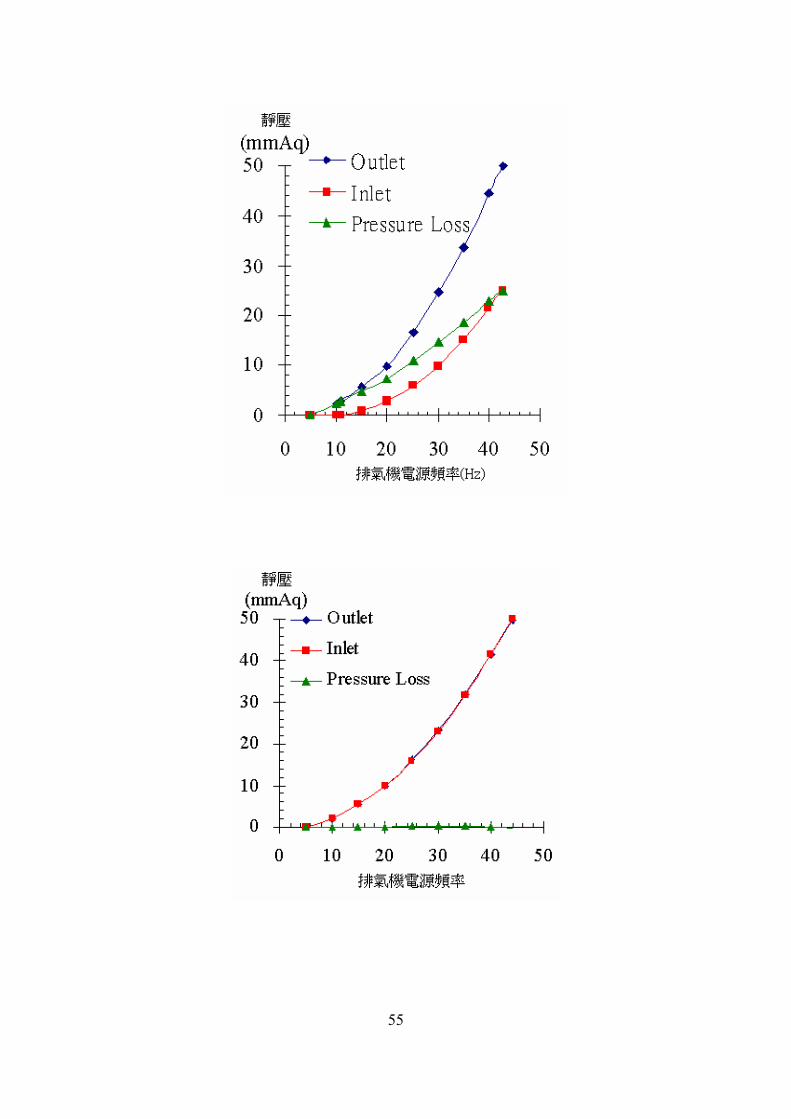
一、 空氣清淨裝置穿透實驗:本計畫使用的是摺疊濾紙式空氣清淨裝置,其
阻抗特性會隨使用時間及液、固相空氣有害物攔截量而改變。實驗時改
變排氣機電源頻率,量測並圖解空氣清淨裝置入口(inlet)、出口
(outlet)的靜壓,這兩者相減的差值則圖解為靜壓損失(Pressure
Loss)。圖二十七為實驗結果,由圖中可發現排氣機頻率與空氣清淨裝
置的靜壓損失之間並非理想的二次關係,在靜壓損失過高時趨近直線。
二、 蝴蝶風門洩漏特性實驗:本計畫所設計的蝴蝶風門係假設在風門關閉角
達九十度時能達到 99%以上的密封性能。實驗時改變排氣機電源頻率,
量測並圖解蝴蝶風門入口(inlet)、出口(outlet)的靜壓,並將這
兩者相減的差值圖解為靜壓損失(Pressure Loss)。圖二十八為實驗
結果,由圖中可看出此蝴蝶風門的良好密封效果,靜壓損失趨近於零。
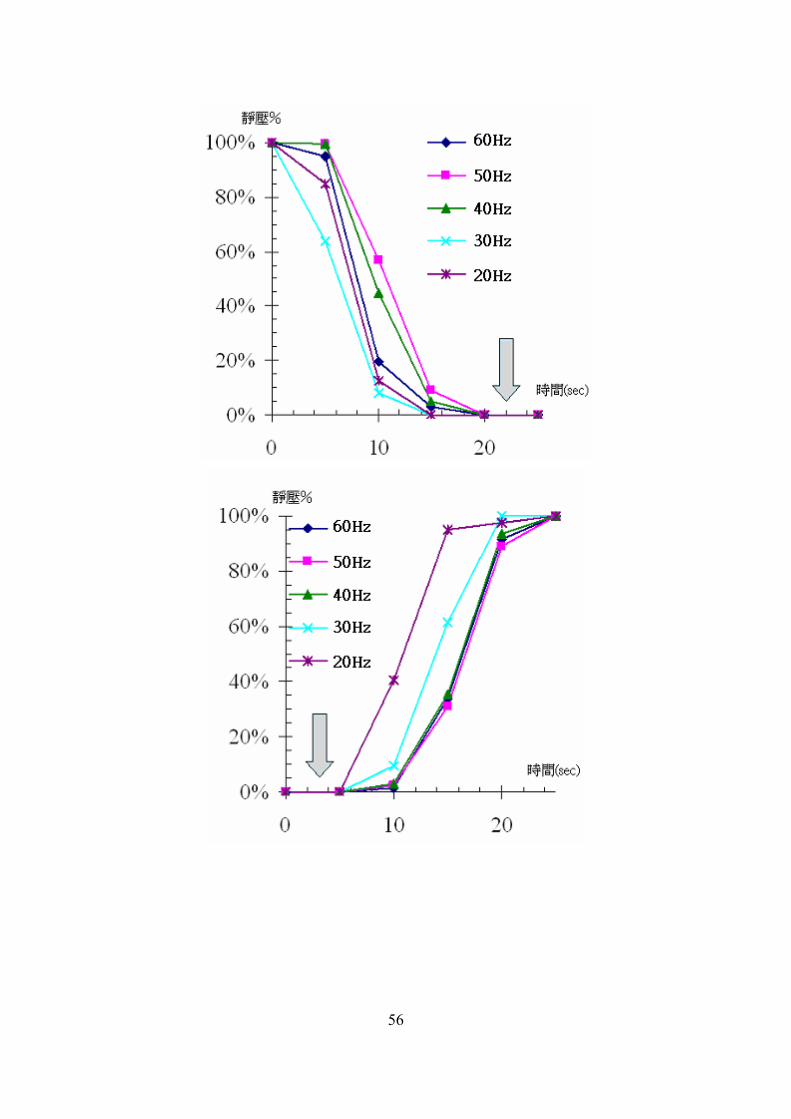
三、 蝴蝶風門啟閉響應特性實驗:本計畫使用的線性風門馬達用以控制蝴蝶
風門的啟閉,透過此實驗可了解蝴蝶風門的啟閉響應特性。實驗時使用
不同的排氣機電源頻率,使蝴蝶風門自全開(風門關閉角 o0=θ )逐漸
閉合直到全關(風門關閉角 o90=θ ),或者由全關姿態逐漸開啟直到全
開。圖二十九為實驗結果,由圖中可看到風門完全啟閉所需時間都是 25
秒左右,且無論在哪一個排氣機電源頻率下,響應時間都很接近。
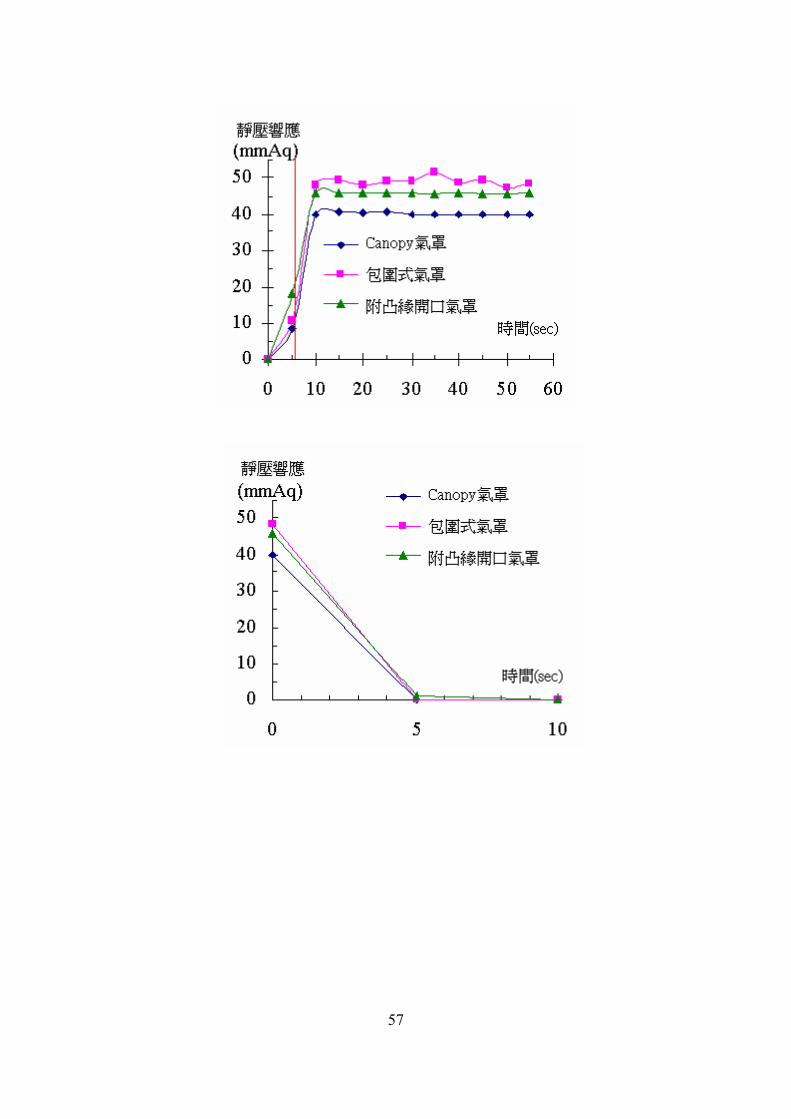
四、 氣罩下游喉部靜壓響應特性實驗:以安裝於氣罩下游喉部的監測點為信
號源,量度氣罩喉部靜壓對排氣機電源頻率的響應特性。實驗時開啟多
有氣罩下游附加的蝴蝶風門,將排氣機頻率一次設定到最大頻率
(60Hz),並觀察各氣罩喉部的靜壓響應情形。實驗結果如圖三十。
26
由上半部小圖中可看出排氣機電源頻率自零加速到達最高頻率 60Hz 時
(約 6 秒),氣罩的靜壓還要再過 4 秒鐘左右才能完全響應,且不同幾
何形狀的氣罩的響應特性不同。附凸緣開口氣罩、坦坡(Canopy)氣罩
的穩定性相對較高,包圍式氣罩的響應則穩定性不佳,這是因為包圍式
氣罩幾何設計形狀相當複雜,使空氣進入氣罩下游導管喉部時流動樣態
仍不穩定,故有較大的靜壓波動。
由下半部小圖可看出排氣機電源頻率自最高頻率 60Hz 減速到零時(約 3
秒),氣罩的靜壓還要再過 2 秒鐘左右才能完全響應。
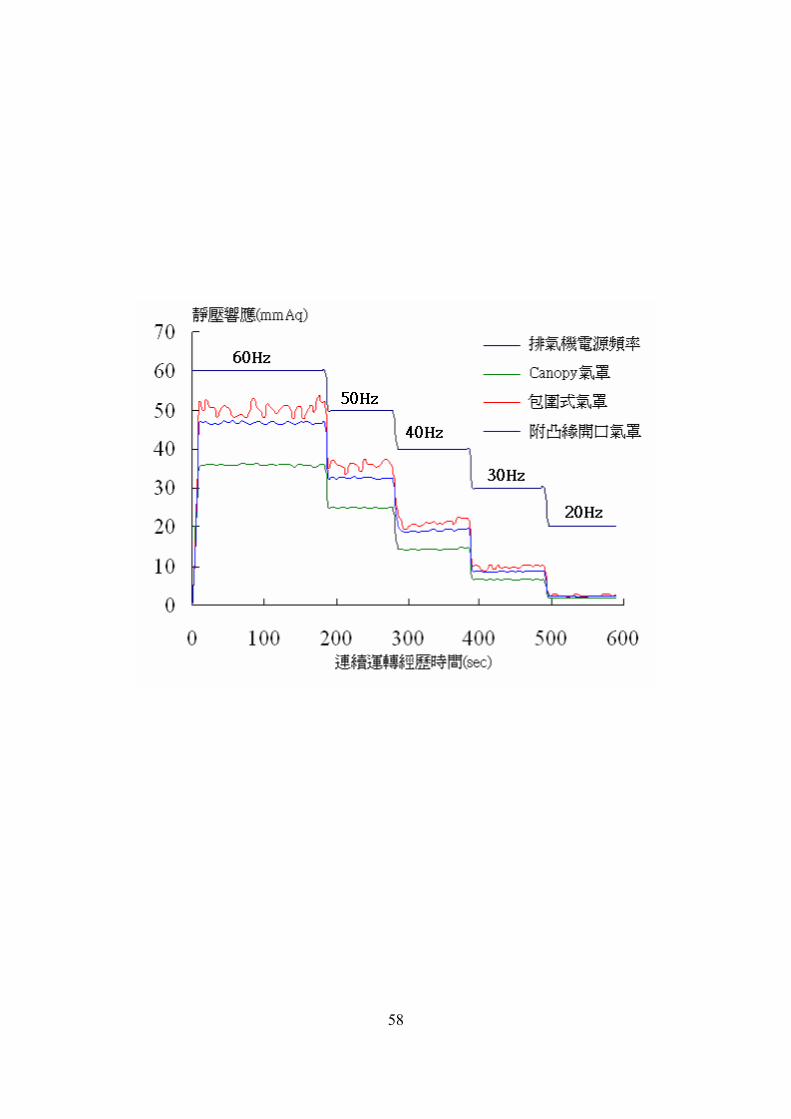
五、 局部排氣裝置運轉穩定性實驗:所謂運轉穩定性實驗,係由排氣機最高
電源頻率開始,分段減低頻率,並觀察各氣罩喉部靜壓的動態響應情
形,實驗結果如圖三十一。實驗時各氣罩附加之蝴蝶風門均保持全開,
排氣機電源頻率則自 60Hz 起每次降低 10Hz,用以觀察變頻器控制排氣
機電源頻率的響應情形,以及各氣罩對排氣機電源頻率的響應情形。由
圖中可看到排氣機電源頻率的響應特性相當優良,附凸緣開口氣罩、坦
坡(Canopy)氣罩的響應亦佳,唯獨包圍式氣罩的響應較差。
由本節的實驗結果,可分別設定數值控制的相關參數,於下一章中繼續說明。
27
第六章 局部排氣裝置數值控制實驗
第一節 數值控制的務實策略
由前幾章的推導與實驗,我們已經確定了幾個數值控制基本原則:
一、 為同時滿足傳統局部排氣設計原則與數值控制需要,我們可以先利用氣罩
下游喉部監測點的靜壓作為氣罩風量的間接觀測指標,以數值控制的手段
進行整個局部排氣裝置的性能調整(調整蝴蝶風門的關閉角,以及排氣機
的電源頻率),待自動調整過程告一段落後,再令各氣罩的蝴蝶風門關閉
角、排氣機的電源頻率固定不變,然後採取傳統局部排氣裝置檢點措施,
以風速計逐一確認各氣罩的風量是否滿足要求。
二、 由於空氣清淨裝置的靜壓損失可能隨時間改變,故若欲維持局部排氣裝置
的性能,必須定期(每日或每週)以數值控制方法重新驗證各氣罩的風量
(或氣罩下游喉部監測點的靜壓)是否仍維持不變。
三、 定期監測空氣清淨裝置的靜壓損失,觀察靜壓損失大小的改變(一律為增
大)情形,可以了解何時應該替換已阻塞失效的空氣清淨裝置。定期監測
局部排氣裝置導管系統各主要位置的靜壓,可與歷史資料比對,以了解各
導管是否有沉積物阻塞,或導管某位置發生洩漏現象。
四、 每次作局部排氣裝置的導管修改、元件替換等增刪維護工作後,宜重新進
行各氣罩風量的確認,以免因不當的修改施工而造成意料之外的局部排氣
裝置氣罩風量變動。
確認了以上的數值控制策略之後,便可進一步進行細部的軟體設計。

28
第二節 可程式控制器與監控電腦間的控制分工
本計畫選用了日本三菱公司Mitsubishi MELSEC Fx2N-32MR可程式控制器為近端
(安裝局部排氣裝置的勞工作業場所)的控制核心,搭配 FX2N-4DA 數位/類比轉換
器、FX2N-4AD 類比數位轉換器、FREQROL-A500 變頻器等附件一起組成近端控制器
(圖八、圖九、圖十)。近端控制器的任務是「接受遠端監控電腦指令,直接指揮局
部排氣裝置進行性能調整,並直接接受並紀錄各感測器的回授信號」,平時常駐且與
局部排氣裝置同時維持穩定運轉。
本計畫以普通個人電腦搭配台灣超鼎公司的圖控軟體 LabLink,組成遠端(勞工
安全衛生人員辦公室)控制器,並以 RS-232C界面與近端控制器的可程式控制器溝
通。遠端控制器的任務是「對近端控制器下達局部排氣裝置的性能調整策略,並隨時
接受近端控制器對於局部排氣裝置性能狀況的報告」。
遠端、近端控制器的設定方式與元件廠牌型號有關,並非一成不變,故應用時
必須因地制宜,採用能採購得到、價格便宜、性能堪用的元件。本計畫可程式控制器
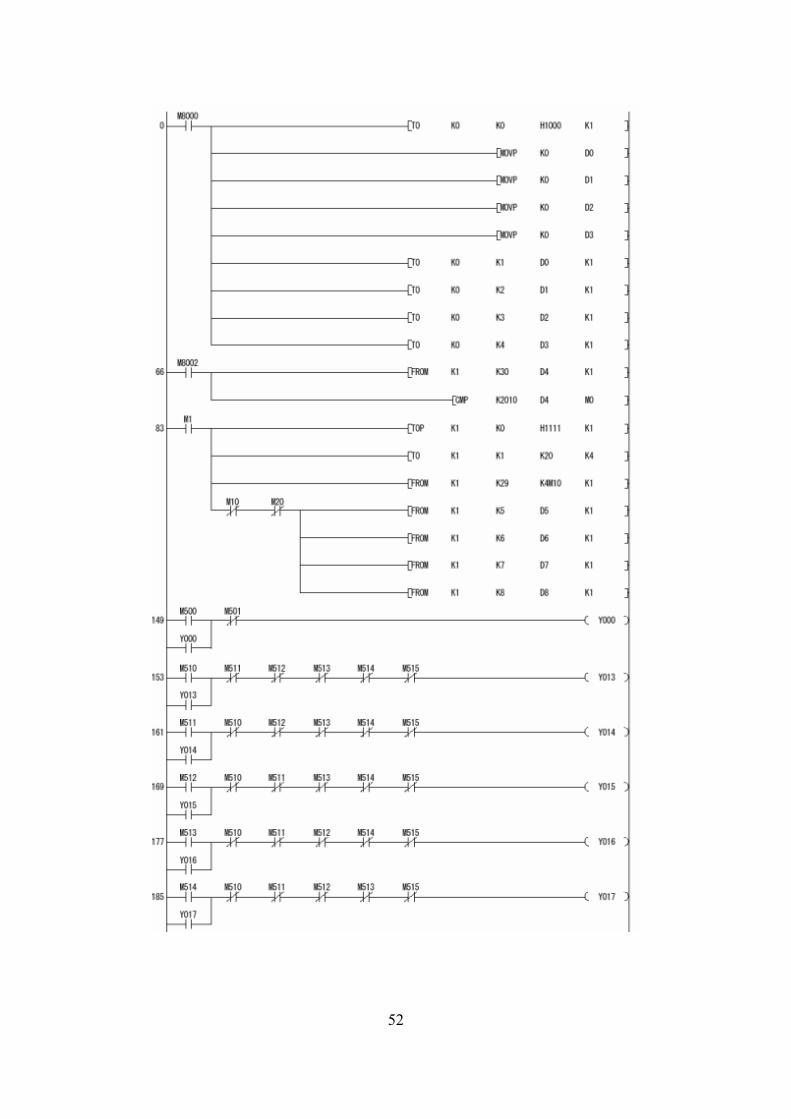
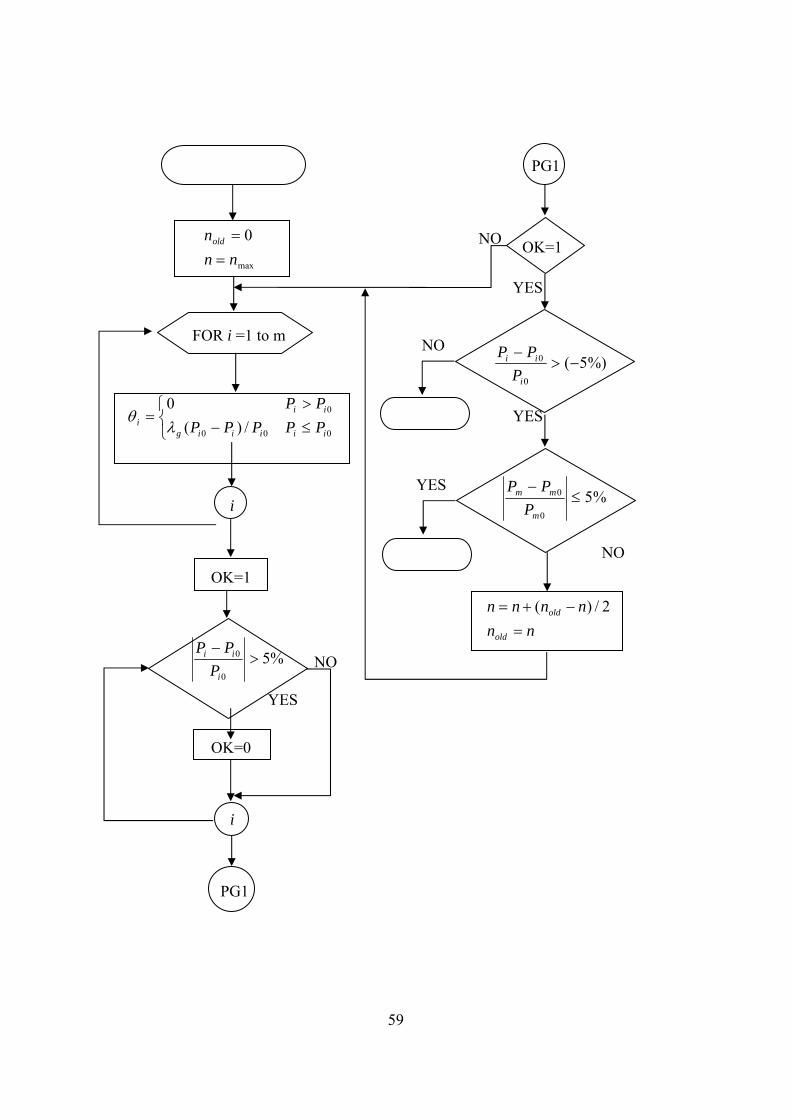
(屬近端控制器)的階梯圖程式規劃如圖二十二,圖控軟體(屬遠端控制器)的控制
軟體規劃邏輯如圖三十二,程式本身如附錄(已將前一章初步實驗結果所得之數據放
進程式裏,以利執行有效的數值控制)。
第三節 單氣罩數值控制實驗
一個局部排氣裝置裏可能有很多氣罩,若有其中一個氣罩無法控制,則整個局
部排氣裝置的數值控制仍屬失敗。本節所作的實驗統一以「氣罩下游喉部靜壓
10mmAq」為控制標的,輪流進行三個氣罩的控制實驗,所得結果如圖三十三、圖三十

29
四、圖三十五所示。
圖三十三顯示了第 1 號(Canopy)氣罩單獨進行數值控制運轉的響應情形,並
顯示數值控制系統壓抑第 2 號(包圍式)氣罩、第 3 號(附凸緣開口形)氣罩風量的
響應情形。由上方小圖可發現第 1 號氣罩不到 50 秒就進入穩定運轉狀態,且其反應
與傳統自動控制理論所預期的「SISO 系統比例控制反應」十分接近。
圖三十四顯示了第 2 號(包圍式)氣罩單獨進行數值控制運轉的響應情形,並
顯示數值控制系統壓抑第 1 號(Canopy)氣罩、第 3 號(附凸緣開口形)氣罩風量的
響應情形。由上方小圖可發現第 2 號氣罩遲到 70 秒才進入較穩定運轉狀態,且其反
應為上下波動;然而若比較下方小圖,可發現第 2、3 號氣罩的蝴蝶風門角度調整並
不劇烈,也沒有明顯上下波動的情形。由這種情況看起來,似乎數值控制手段對第 2
號氣罩沒有良好作用,但事實上若是與圖三十一相比,就能比對出數值控制的成效。
圖三十五顯示了第 3 號(附凸緣開口形)氣罩單獨進行數值控制運轉的響應情
形,並顯示數值控制系統壓抑第 1 號(Canopy)氣罩、第 2 號(包圍式)氣罩風量的
響應情形。由上方小圖可發現第 3 號氣罩在 65 秒後進入穩定運轉狀態,且其反應與
傳統自動控制理論所預期的「SISO 系統比例控制反應」十分接近。
由本節的實驗結果可發現:若僅有一個氣罩作數值控制,而其餘氣罩的風量都
受到數值控制系統壓抑時,則其反應與單氣罩的局部排氣裝置(為自動控制學上歸類
為單輸入、單輸出的控制系統)無異。

30
第四節 雙氣罩同步控制實驗
本節繼續進行雙氣罩的數值控制實驗。本節所作的實驗統一以「氣罩下游喉部
靜壓 10mmAq」為控制標的,輪流進行三個氣罩當中任兩個氣罩的數值控制實驗,所得
結果如圖三十六、圖三十七、圖三十八所示。
圖三十六顯示了第 2、3 號氣罩同時進行數值控制運轉的響應情形,並顯示數值
控制系統壓抑第 1 號氣罩風量的響應情形。由上方小圖可發現兩個受控制的氣罩約在
60 秒處就進入穩定運轉狀態,且其反應特徵為「同步的微幅震盪」,與傳統自動控制
理論所預期的「SISO 系統比例控制反應」十分接近。
圖三十七顯示了第 1、3 號氣罩同時進行數值控制運轉的響應情形,並顯示數值
控制系統壓抑第 2 號氣罩風量的響應情形。由上方小圖可發現兩個受控制的氣罩約在
60 秒處進入穩定運轉狀態,運轉性能甚佳。
圖三十八顯示了第 1、2 號氣罩同時進行數值控制運轉的響應情形,並顯示數值
控制系統壓抑第 3 號氣罩風量的響應情形。由上方小圖可發現兩個受控制的氣罩約在
60 秒處就進入穩定運轉狀態,且其反應特徵為「同步的微幅震盪」,與傳統自動控制
理論所預期的「SISO 系統比例控制反應」十分接近。
若同時比對圖三十六、圖三十八、圖三十四,則可發現第 2 號氣罩若獨立進行
數值控制,則其震盪反應較劇烈;若第 2 號氣罩與其他氣罩同時受到控制,則震盪幅
度便受到其他氣罩的影響而縮減。
由本節的實驗結果可發現:若有兩個氣罩同時作數值控制,則兩個氣罩的反應
會相互影響,但大體上仍與「SISO 系統比例控制反應」相近。若進一步引用圖三十
九、圖四十相互比較,則可發現連排氣機電源頻率的響應特徵都很接近。
31
第五節 三氣罩同步控制實驗
由前節已知兩個氣罩同時進行數值控制時,系統的反應仍很類似 SISO 系統,但
兩個氣罩的喉部靜壓反應會相互影響。本節繼續進行三氣罩(為本計畫局部排氣裝置
模型的所有氣罩)同時進行數值控制的實驗。本節所作的實驗以「氣罩下游喉部靜壓
為 10mmAq、1mmAq」為兩種不同的控制標的,同步進行三個氣罩的數值控制實驗,所
得結果如圖四十一、圖四十二所示。
圖四十一顯示三個氣罩同時作數值控制的響應情形。由上方小圖發現:系統的
響應穩定時間雖因第 2 號氣罩的拖累而延長到 70 秒,但系統穩定之後,各氣罩都響
應到數值控制標的(各氣罩的喉部靜壓設定均為 10mmAq)。有趣的是若比對下方小
圖,則可發現風門仍在頻繁地改變關閉角大小,由此可知系統響應之所以穩定,係因
各氣罩的風門關閉角不斷作微幅調整的緣故。
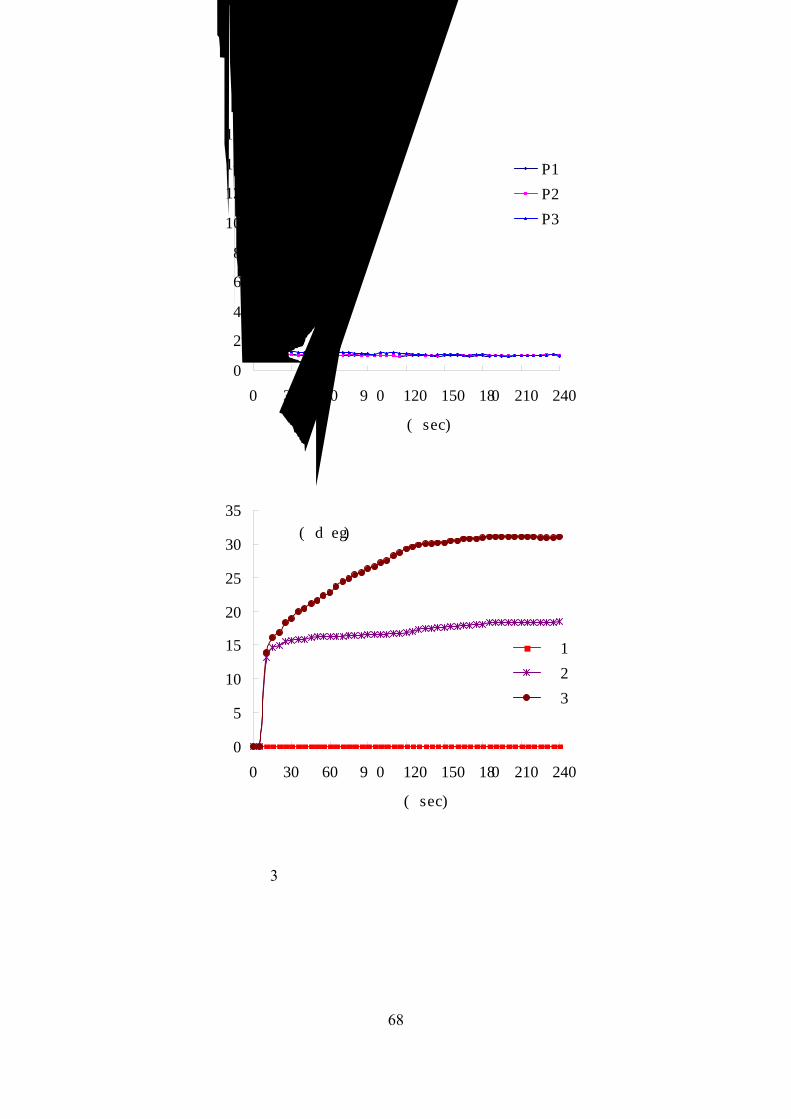
圖四十二顯示三個氣罩的風量同時受到壓抑(各氣罩的喉部靜壓設定僅為
1mmAq)的數值控制響應情形。由上方小圖可發現系統的響應穩定時間僅 20 秒左
右,這是因為蝴蝶風門關閉角若大於 60 度,則氣罩風量便趨近於零。有趣的是若比
對下方小圖,則可發現第 3 號氣罩的風門直到 120 秒左右才停止關閉的動作,由此可
知單純的兩段式比例控制(詳第五章第二節)仍不能完全達到「迅速有效」的數值控
制目的,似可再深入研究新的數值控制理論。
由本節的實驗結果可發現:若將本計畫的局部排氣裝置模型所有三個氣罩同時
進行數值控制,則三個氣罩的反應會相互影響並彼此隨機調和,大體上系統的反應仍
為穩定理想,且與「SISO 系統比例控制反應」相近。若進一步追究整個局部排氣裝置
進入穩定運轉狀態所需的總響應時間,則純粹的兩段式比例控制模式雖為最簡單的控
制模式,但似非最理想的控制模式,有機會再深入研究,以縮短總響應時間。

32
第六節 可視化流場觀測
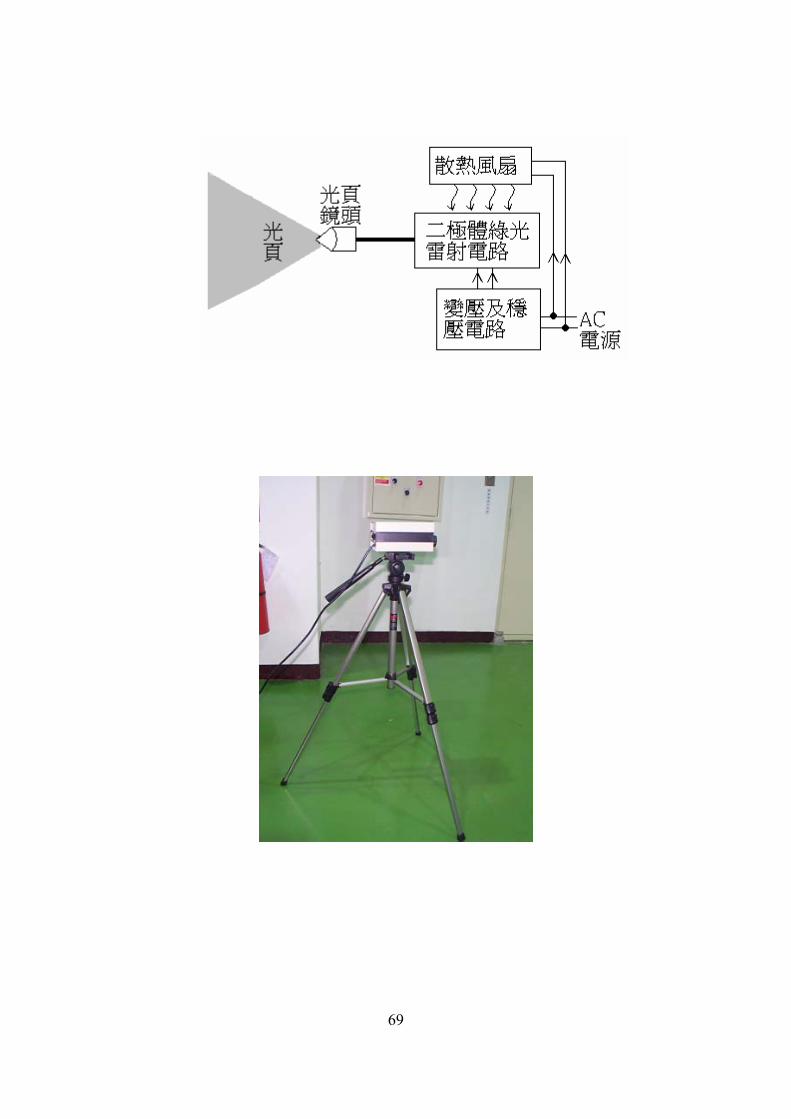
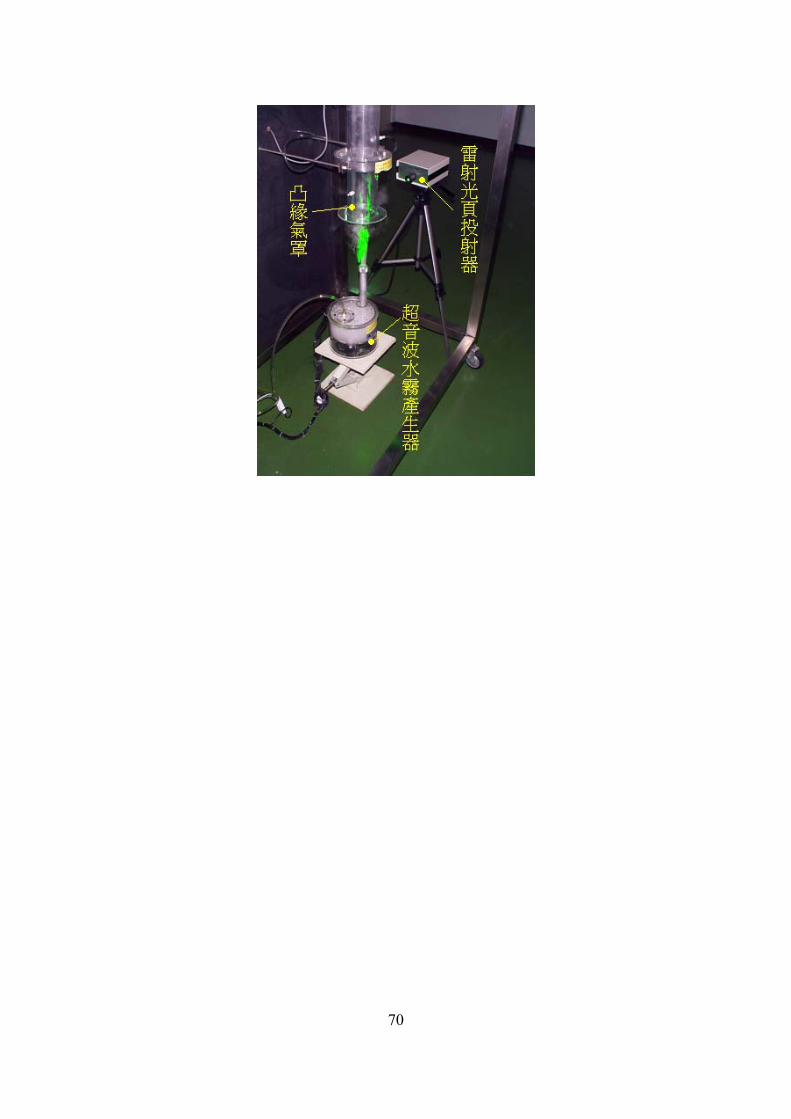
本計畫為因應可視化的流場觀測需求,研發「無公害超音波水霧產生器」與
「雷射光頁投射器」等兩項輔助工具,其設計原理、組件外觀、實驗情形如圖四十
三、圖四十四、圖四十五所示。開發本系列輔助工具的最重要目的,是要提供另一種
局部排氣裝置氣罩性能的評估方式,以「肉眼可見、即視即得」的評估方式,為傳統
的風速、風量量測等評估方法之外,再增添一種輔助的氣罩性能評估方法。
前開「無公害超音波水霧產生器」與「雷射光頁投射器」等兩項輔助工具使用
結果十分成功,確實反映出氣罩工作的效能,本計畫特以「普通的附凸緣開口氣
罩」、「加裝側風擋板的附凸緣開口氣罩」為兩種比較例,在微弱的室內側風環境中
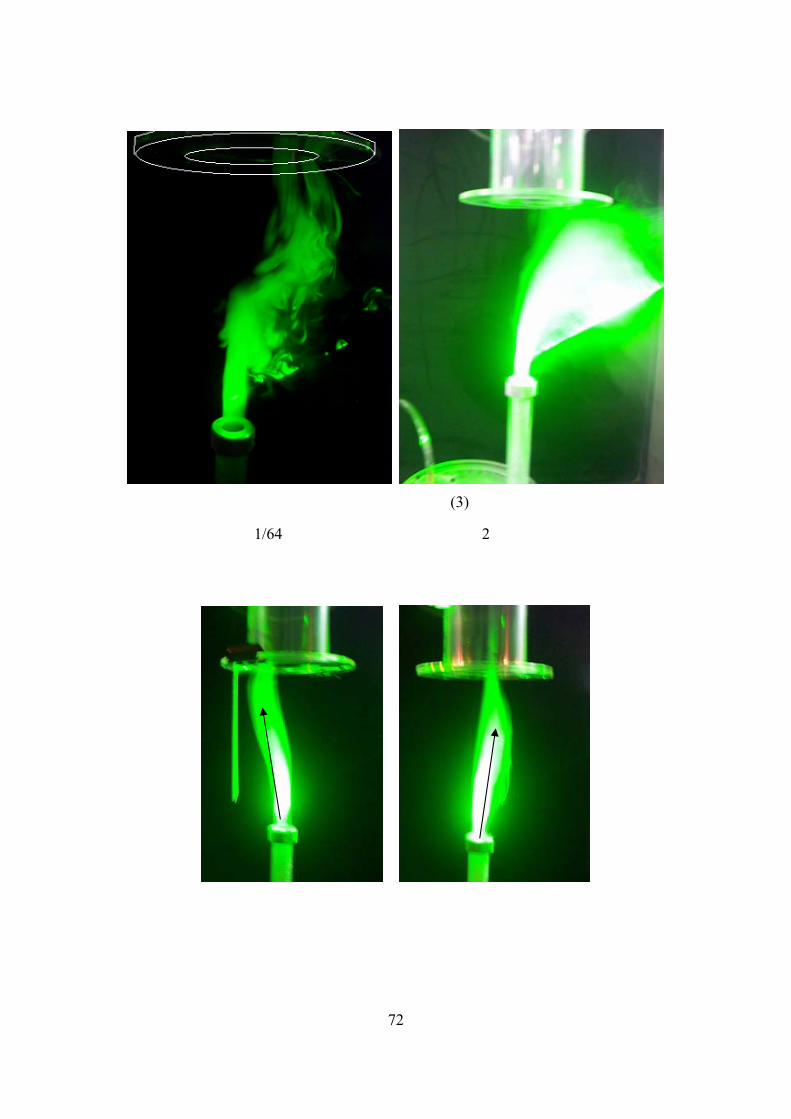
拍攝一系列數位照片如圖四十六至圖五十一。茲說明可視化觀測結果如下:
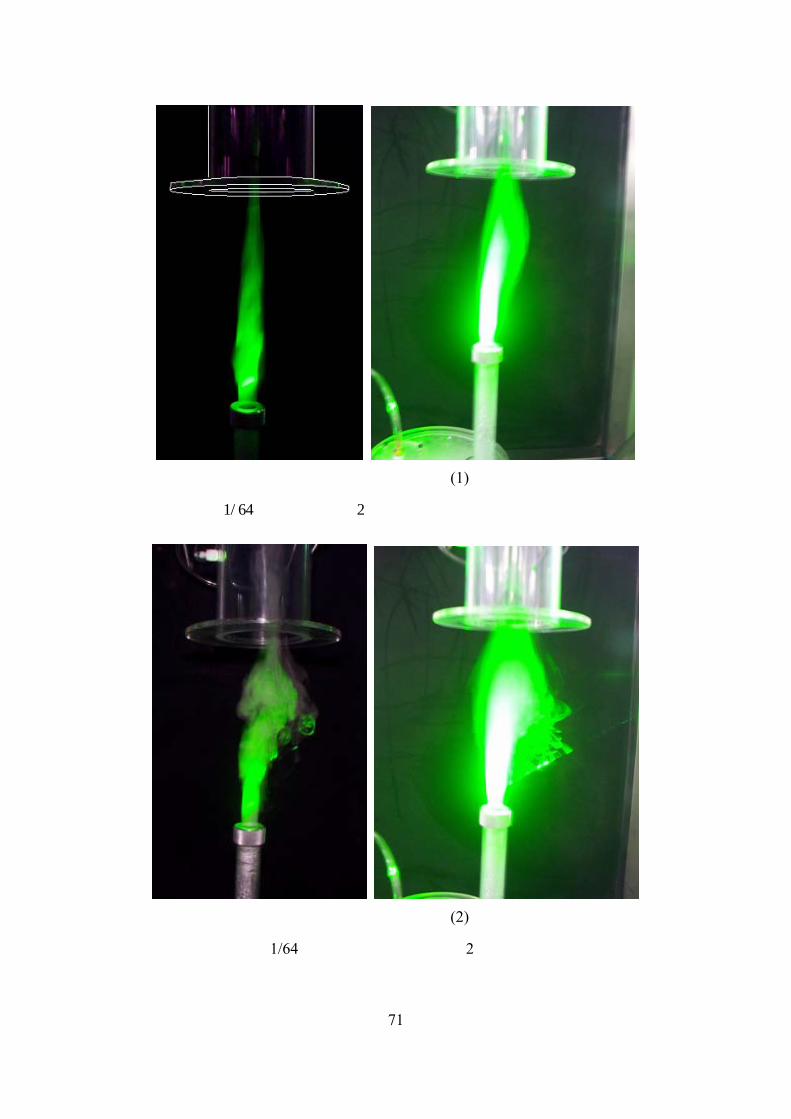
一、 不加裝側風擋板,但氣罩風量足以抵抗側風:如圖四十六,含空氣有害物的
氣流雖然略為偏離氣罩中軸,但隨即又轉而指向氣罩開口,得以順利捕集。
二、 不加裝側風擋板,且氣罩風量僅能勉強抵抗側風:如圖四十七,但此時已將
氣罩喉部的靜壓設定數值減半。含空氣有害物的氣流偏離氣罩中軸,受氣罩
開口吸引而勉強進入氣罩,但流場顯然相當不穩定。此種捕集樣態只要遭遇
稍微強一些的側風就會失敗。
三、 不加裝側風擋板,且氣罩風量無法抵抗側風:如圖四十八,但此時已將氣罩
喉部的靜壓設定數值再度減半。含空氣有害物的氣流偏離氣罩中軸就不再轉
回,空氣有害物四處擴散。無論控制風速量測結果如何,此種捕集樣態總是
失敗的。
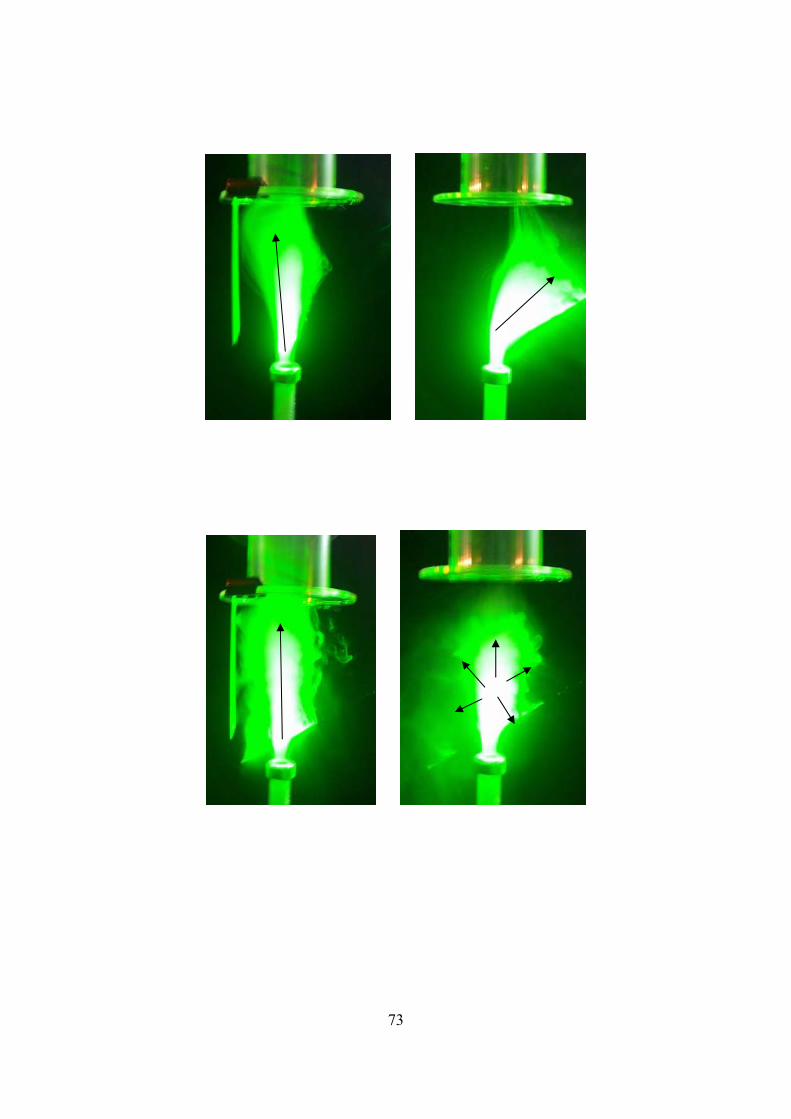
四、 在側風風速相對較低的情況下比較側風擋板效益:如圖四十九所示,左方是
安裝了擋板的氣罩,右方沒有安裝,側風風向由左向右,使用較高的氣罩風
量。圖中雖無法明顯比對出側風擋板的好處,但在安裝擋板時,氣流在迴流
胞[9]的作用下略為偏向擋板(已知這種現象稱為「貼附效應」)。

33
五、 在側風風速較高的情況下比較側風擋板效益:如圖五十所示,左方是安裝了
擋板的氣罩,右方沒有安裝,側風風向由左向右,使用的氣罩風量較低。由
圖中明顯比對出側風擋板的好處。安裝側風擋板時,含空氣有害物的氣流明
顯束縮為一小股,並順利由氣罩捕集;沒有安裝側風擋板時,含空氣有害物
的氣流受側風影響而吹向下游,使氣罩幾乎完全失效。
六、 在側風風速相對極高的情況下比較側風擋板效益:如圖五十一所示,左方是
安裝了擋板的氣罩,右方沒有安裝,側風風向由左向右,使用最高的氣罩風
量。由圖中可發現左方安裝側風擋板的氣罩仍能捕集空氣有害物,但右方沒
有安裝側風擋板的氣罩,則只見空氣有害物四處擴散,氣罩完全失效。
本節以具體可見的實例證明氣罩效能並非僅受「控制風速」或「氣罩開口面平
均風速」的影響,同時也受到側風強弱、氣罩附件等因素的影響,故若使用可視化流
場觀測方式確認氣罩性能,則可由肉眼看出氣罩捕集性能的好壞。為此我們認為第二
章第三節有關「採取氣罩下游靜壓」為氣罩性能觀測依據的方式,配合可視化的氣罩
性能驗證,可以成為一種控制、確認局部排氣裝置性能的可行之道。
34
第七章 結論與建議
第一節 局部排氣裝置數值控制之效果
由第六章相關實驗結果可以得到以下的結論與推論:
一、 以工業用數值化自動控制的方式維持、監測局部排氣裝置的性能,是可
以實現的控制技術,而且所需費用並不高、實作技術並不困難。
二、 「兩段式比例控制」的控制模式可以透過簡單手續直接套用在局部排氣
裝置的數值控制上,而且控制結果與傳統 SISO(單輸入、單輸出)控制
系統的反應相當接近。
三、 同一部局部排氣裝置的多個氣罩若同時進行兩段式比例數值控制,則每
一個氣罩對系統指令(氣罩下游喉部靜壓設定值)的響應情形會相互影
響,但只要透過適當的初步實驗(詳第五章)來選擇正確的控制參數
(詳附錄程式內容),就可以得到相當穩定的控制效果。
四、 倘僅以無方向性的風速量測儀器進行控制風速或氣罩開口平均風速量
測,則不見得能確保氣罩性能堪用,但若經由本計畫研究開發的可視化
流場觀測元件輔助,則可由肉眼觀察的方式輔助確認氣罩效能。
五、 由圖四十二下方小圖的風門響應結果,可發現「兩段式比例控制」的控
制模式並非完美無缺,如欲達到更快速有效的氣罩性能控制,則日後可
再深入研究,使用其他更有效的控制模式。
35
第二節 本計畫工作項目執行結果
對應本計畫之主要工作項目,可將執行結果逐一說明如下:
一、提出簡易工業用通風控制方式:本計畫建議選用的「比例控制」理論是工
業自動控制中最簡單易懂的控制理論,且使用的控制元件都符合「價廉耐
用、容易取得」的原則,可供局部排氣裝置設計製造業者逕行參採。
二、實地驗證數值控制效果,完成局部排氣裝置數值控制測試:本計畫以一部
可擴充式的局部排氣裝置模型為本,建立數值控制系統,所得成果已於第
五章、第六章多次驗證。
三、完成可視化流場觀測組件之開發:本計畫完成了「無公害超音波水霧產生
器」與「雷射光頁投射器」等兩項流場可視化輔助工具,設計簡單且材料
零件容易取得,可在風速量測儀器之外另增一個驗證氣罩性能的途徑,以
確保局部排氣裝置性能堪用。
四、完成經濟型工業通風數值監控單元之建構:本計畫根據工業電子控制技
術,比較並選用可程式控制器為近端控制核心,配合其他容易取得的元件
建構出一套實用廉的近端控制器,作為局部排氣裝置性能監控的核心。
五、完成研發成果技術推廣準備:本計畫各項實驗器材、實驗數據、照片、圖
說與本報告書均可投入教學,將本計畫研發所得技術透過研討會等活動轉
移給事業單位使用。

36
第三節 本計畫研究成果運用相關建議
一、 本計畫大膽提出以氣罩下游喉部靜壓為氣罩風量的間接觀測標的,但實際使
用時仍須注意:若氣罩開口因故作修改(包括臨時堆置阻礙物),或氣罩至
蝴蝶風門間的導管發生沉積阻塞現象,則氣罩口至蝴蝶風門為止的總靜壓損
失係數會發生改變,此時宜適當調高氣罩下游喉部靜壓設定數值,並以可視
化的流場觀測或其他可行的方式輔助確認氣罩性能。
二、 本計畫所使用的控制元件皆為就近取得之工業用自動控制零組件,實際運用
時可依市場實際狀況與勞工作業場所之實際需求另行選用其他適用元件,無
須使用與本計畫完全相同的控制元件。
三、 依照本計畫之方式進行局部排氣裝置的性能監控之前,務須會同勞工安全衛
生專業人員共同了解勞工作業場所之特性,並聽取專家建議,不宜貿然自行
設計施作,以免發生其他危險。

37
致謝
本計畫內容涉及電學、資訊、自動控制、空氣流體力學、光學、機械設計、通風
設計、工業衛生等學科,係屬多種科學之綜合應用,所需額外協助甚多。本計畫
除執行人員王助理研究員順志之外,感謝新埔技術學院機械系張主任瑞慶、光武
技術學院機械系謝副教授仁泓、台灣科技大學機械系黃教授榮芳、國立中正文化
中心空調科王科長順益、禮學社雷總經理永健、宸昶公司歐陽總經理國榮、章嘉
公司黃總經理振榮、本所勞工衛生組葉組長文裕、陳副研究員春萬等學者與實務
專家惠賜指導,使本計畫得以順利完成,謹此敬致萬分謝意。
38
參考文獻
[1] I. Nagrath and M. Goral: "Control Systems Engineering", Wiley Eastern Limited, New Delhi 1977。
[2] American Conference of Governmental Industrial Hygienists, “Industrial Ventilation—A
Manual of Recommended Practice”, 23rd Edition, 1988, American Conference of
Governmental Industrial Hygienists.
[3] American Society of Heating, Refrigerating, and Air-Conditioning Engineers, “2001
ASHRAE Handbook”, SI Edition, 2001, American Society of Heating, Refrigerating, and
Air-Conditioning Engineers.
[4] Huang, R. F., Chen, J. L., Chen, Y. K., Chen, C. C., Yeh, W. Y., and Chen, C. W., “The
capture envelope of a flanged circular hood in cross drafts,” AIHA J., Vol. 52,
March/April 2001, pp. 199-207.
[5] John L. Alden and John M. Kane, “Design of Industrial Ventilation Systems”, p15-28, 5th
Edition, 1982, Industrial Press Inc.
[6] Jamal Saleh, “Fluid Flow Handbook,” McGraw-Hill, New York, ISBN 0-07-136372-6,
2002, pp10.27. [7] 陳友剛、黃榮芳、陳春萬,「抽氣開口在側風下所形成的捕集區─ 數值計算」,
勞工安衛生季刊,九卷三期。
[8] 黃榮芳,「作業場所空氣有害物預估與控制研究-側風對外裝型氣罩捕集效果之
探討」,本所 89 年期末報告,IOSH88-H103L。
[9] 黃榮芳、陳友剛,「氣罩凸緣捕集效果相關性探討」,本所 90 年期末報告,
IOSH90-H102。
[10] 葉文裕、張桭平、陳春萬,「噴漆作業局部排氣抑制濃度與控制風速之探討」,
本所 89 年期末報告,IOSH85-H305。
[11] 陳友剛、葉文裕、陳春萬,「外裝型凸緣氣罩的流場與粒子軌跡模擬」,勞工安
衛生季刊,七卷三期。
[12] 許皓鈞、鄒應嶼,「泛用型變頻器空間向量脈寬調變控制 IC之研製」,1996年
電力工程研討會論文,pp. 309-313。
[13] 王順志,「加裝中間風扇機對局部排氣系統的性能影響」,勞工衛生簡訊第 49
期,pp.3-5。
39
圖一 以微壓轉換器間接估算氣罩風量之原理
圖二 變頻器改變排氣轉數之影響
40
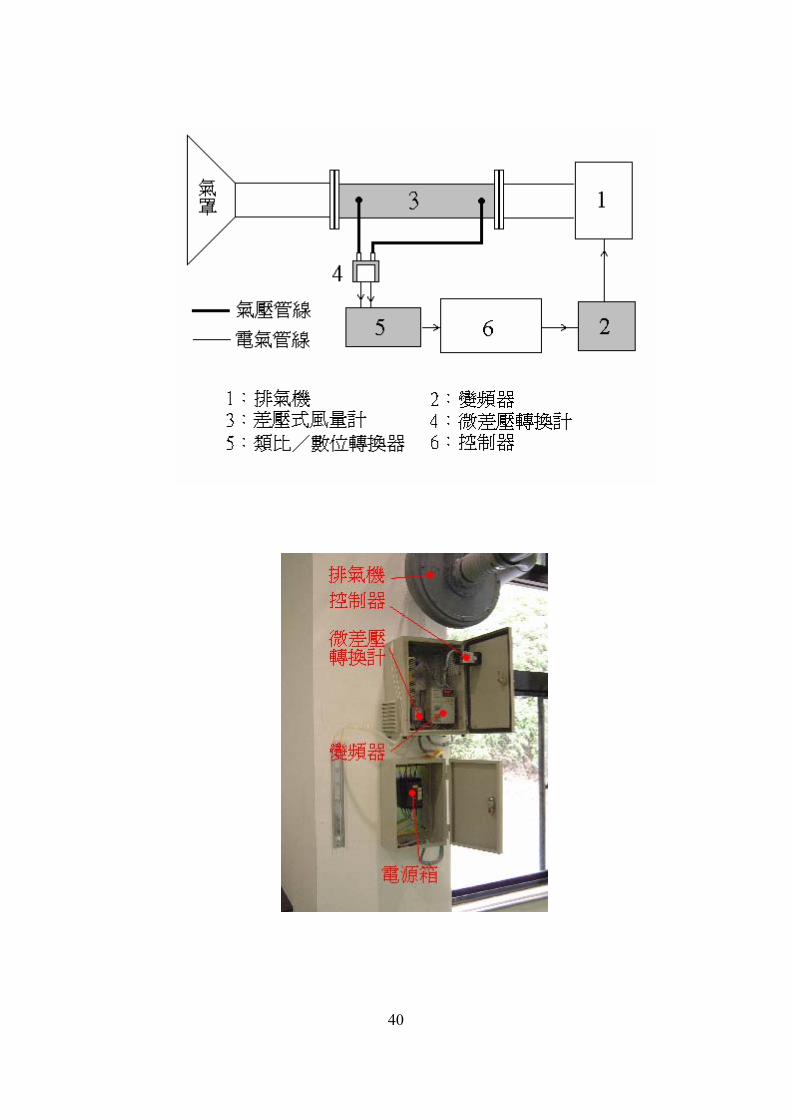
圖三 單線局部排氣裝置數值控制原理示意圖
圖四 單線局部排氣裝置數值控制實景(已應用於本所其他研究計畫)

41
圖五 可程式控制器外觀
圖六 工業用變頻器之外型舉例
42
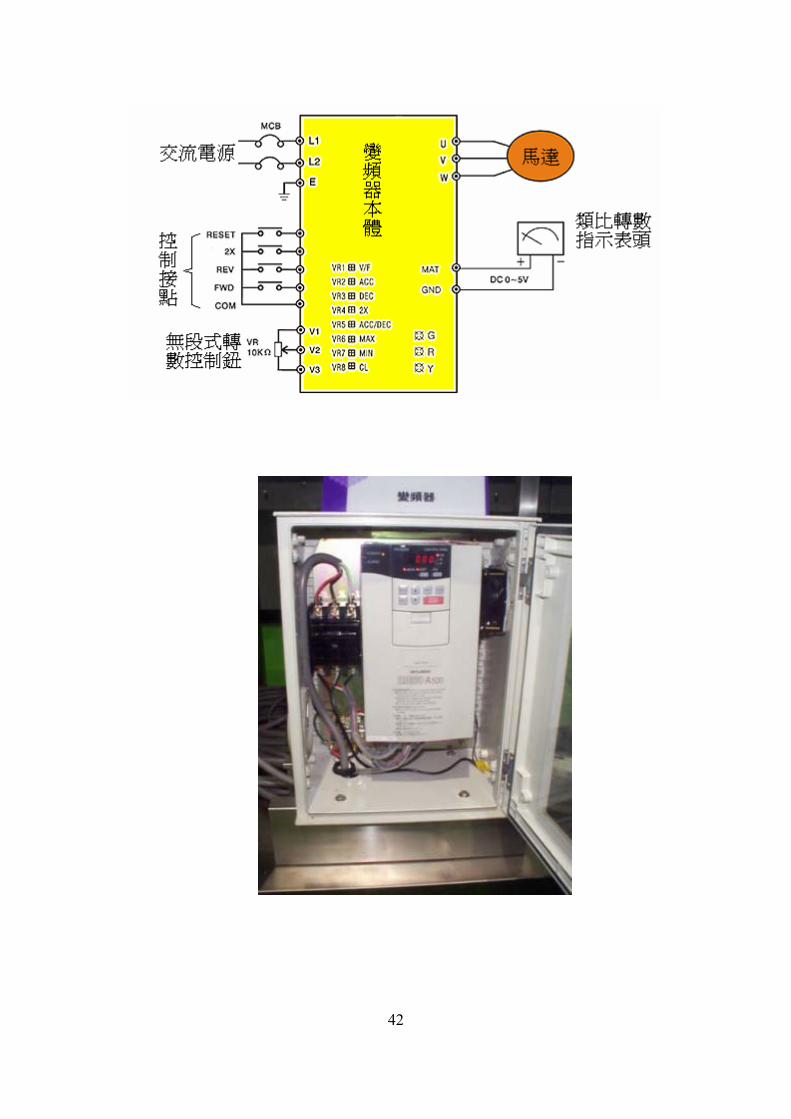
圖七 典型工業用變頻器之接線方式
圖八 本計畫使用之排氣機變頻器

43
圖九 控制用微電腦核心組合完成情形
44
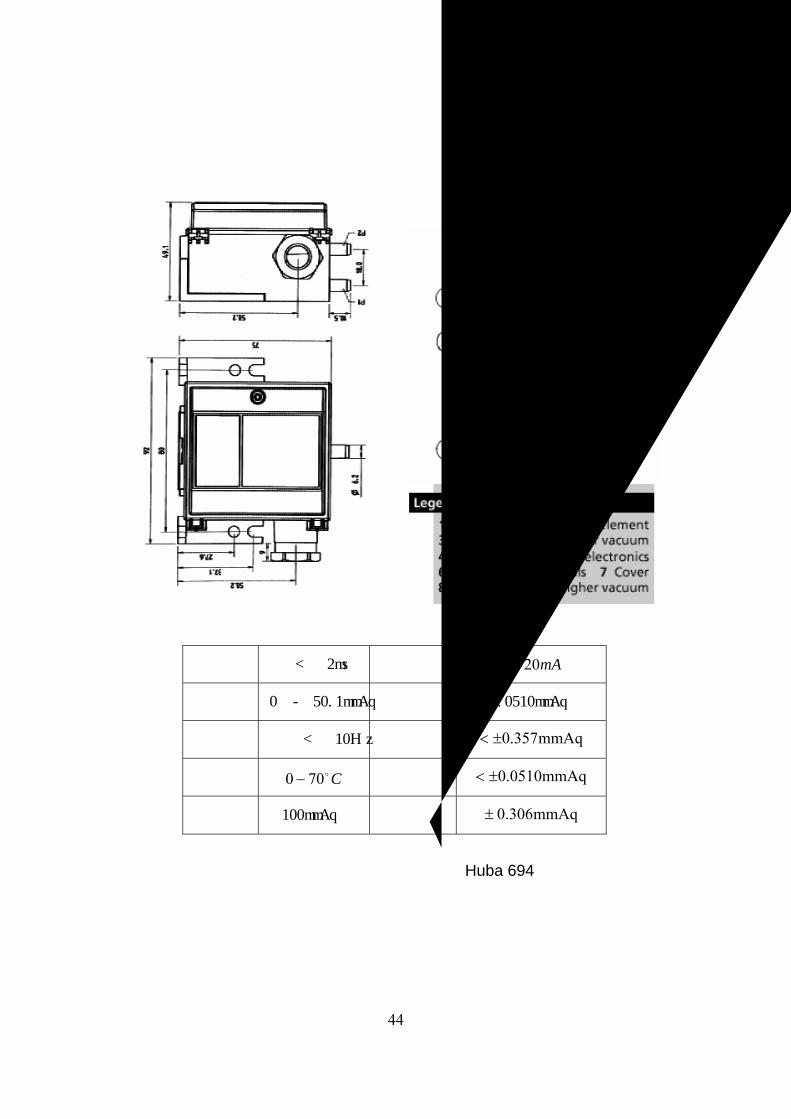
壓力響應 < 2ms 輸出電流 mA204 −
可讀範圍 0 - 50.1mmAq解析能力 0.0510mmAq
容許頻率 < 10Hz 零點漂移 mmAq357.0±<
操作溫度 Co700 − 線性漂移 mmAq0510.0±<
破壞壓力 100mmAq 整體精度 mmAq306.0±
圖十 本計畫使用之微差壓感測器 Huba 694 特性

45
圖十一 軸流式排氣機之輪葉與外型舉例
圖十二 前傾(左)、徑向(中)與後傾(右)三種輪葉舉例
圖十三 離心式排氣機之外型舉例
46
圖十四 本計畫使用之排氣機 CY-310P 之外形與特性曲線

47
圖十五 排氣機與空氣清淨裝置之組合情形
圖十六 空氣清淨裝置段之靜壓檢出位置
48
圖十七 本計畫利用圖控軟體製作的「虛擬局部排氣裝置控制面板」
圖十八 蝴蝶風門管之細部設計圖
49
圖十九 比例風門馬達控制蝴蝶風門之安裝使用實況
50
圖二十 微差壓轉換計訊號擴充迴路設計圖
51
圖二十一 中樞控制電路設計組合圖
52
圖二十二 可程式控制器邏輯設計
53
1,2,3,4,5 主風管
2,4 合流元件
7,9,11 蝴蝶風門管
8,10,12 三種不同的氣罩
圖二十三 實驗用局部排氣裝置教學模型示意圖
0
5
10
15
20
25
30
35
40
45
50
0 10 20 30 40 50 60 70 80 90
風門關閉角θ(deg)
P1-P2(mmAq) P1=10
P1=20
P1=30
P1=40
P1=50
圖二十四 蝴蝶風門兩端壓力差與風門關閉角關係圖
54
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0 10 20 30 40 50 60 70 80 90
風門關閉角θ(deg)
P%
P1=10
P1=20
P1=30
P1=40
P1=50
圖二十五 無因次化的蝴蝶風門特性
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0 10 20 30 40 50 60 70 80 90
風門關閉角θ(deg)
γ
理論
實際
圖二十六 函數擬合蝴蝶風門特性之效果
55
圖二十七 空氣清淨裝置穿透特性實驗結果
圖二十八 蝴蝶風門洩漏特性實驗結果
56
圖二十九 蝴蝶風門啟閉響應特性實驗結果
57
圖三十 氣罩下游喉部靜壓響應特性實驗結果
58
圖三十一 局部排氣裝置運轉穩定性實驗結果
59
控制程序開始 PG1
max
0nn
nold
==
OK=1
YES
FOR i =1 to m
≤−>
=000
0
/)(0
iiiiig
iii PPPPP
PPλ
θ YES
i
OK=1
%50
0 >−
i
ii
PPP
YES
OK=0
i
PG1
圖三十二 本計畫使用之遠端控制邏輯流程圖
NO
%)5(0
0 −>−
i
ii
PPP
%50
0 ≤−
m
mm
PPP
NO
NO
控制失敗
YES
控制完成
nnnnnn
old
old
=−+= 2/)(
NO
60
0
5
10
15
20
25
30
0 10 20 30 40 50 60 70 80 90
時間(sec)
氣罩靜壓
Ps(mmAq)
P1
P2
P3
0
10
20
30
40
50
60
70
0 10 20 30 40 50 60 70 80 90
時間(sec)
風門關閉
角θ(deg)
θ1
θ2
θ3
圖三十三 第 1 號(Canopy)氣罩之數值控制響應
61
0
5
10
15
20
25
30
0 10 20 30 40 50 60 70 80 90
時間(sec)
氣罩靜壓
Ps(mmAq)
P1
P2
P3
0
10
20
30
40
50
60
70
0 10 20 30 40 50 60 70 80 90
時間(sec)
風門關閉
角θ(deg)
θ1
θ2
θ3
圖三十四 第 2 號(包圍式)氣罩之數值控制響應
62
0
5
10
15
20
25
30
0 10 20 30 40 50 60 70 80 90
時間(sec)
氣罩靜壓
Ps(mmAq)
P1
P2
P3
0
10
20
30
40
50
60
0 10 20 30 40 50 60 70 80 90
時間(sec)
風門關閉
角θ(deg)
θ1
θ2
θ3
圖三十五 第 3 號(附凸緣開口型)氣罩之數值控制響應
63
0
5
10
15
20
25
30
0 10 20 30 40 50 60 70 80 90
時間(sec)
氣罩靜壓
Ps(mmAq)
P1
P2
P3
0
5
10
15
20
25
30
35
40
45
50
0 10 20 30 40 50 60 70 80 90
時間(sec)
風門關閉
角θ(deg)
θ1
θ2
θ3
圖三十六 第 2、3號氣罩同時控制時之數值控制響應
64
0
5
10
15
20
25
30
0 10 20 30 40 50 60 70 80 90
時間(sec)
氣罩靜壓
Ps(mmAq)
P1
P2
P3
0
10
20
30
40
50
60
0 10 20 30 40 50 60 70 80 90
時間(sec)
風門關閉
角θ(deg)
θ1
θ2
θ3
圖三十七 第 1、3號氣罩同時控制時之數值控制響應
65
0
5
10
15
20
25
30
0 10 20 30 40 50 60 70 80 90
時間(sec)
氣罩靜壓
Ps(mmAq)
P1
P2
P3
0
10
20
30
40
50
60
70
0 10 20 30 40 50 60 70 80 90
時間(sec)
風門關閉
角θ(deg)
θ1
θ2
θ3
圖三十八 第 1、2 號氣罩同時控制時之數值控制響應
66
20
25
30
35
40
45
50
55
60
0 20 40 60 80 100
時間(sec)
排氣機頻
率N(Hz)
Na(rpm)
Nb(rpm)
Nc(rpm)
圖三十九 一個氣罩單獨控制時之排氣機頻率響應比較
20
25
30
35
40
45
50
55
60
0 20 40 60 80 100
時間(sec)
排氣機頻
率N(Hz)
Na(rpm)
Nb(rpm)
Nc(rpm)
圖四十 二個氣罩同時控制時之排氣機頻率響應比較
67
0
5
10
15
20
25
30
0 10 20 30 40 50 60 70 80 90
時間(sec)
氣罩靜壓
Ps(mmAq)
P1
P2
P3
0
5
10
15
20
25
30
35
0 10 20 30 40 50 60 70 80 90
時間(sec)
風門關閉
角θ(deg)
θ1
θ2
θ3
圖四十一 3 個氣罩同時控制時之數值控制響應
68
0
2
4
6
8
10
12
14
16
0 30 60 90 120 150 180 210 240
時間(sec)
氣罩靜壓
Ps(mmAq)
P1
P2
P3
0
5
10
15
20
25
30
35
0 30 60 90 120 150 180 210 240
時間(sec)
風門關閉
角θ(deg)
θ1
θ2
θ3
圖四十二 3 個氣罩同時作最低風量控制時之數值控制響應
69
圖四十三 雷射光頁之產生原理與電路構成
圖四十四 本計畫研發之低成本雷射光頁投射器外觀
70
圖四十五 雷射光頁投射器工作情形
71
圖四十六 側風影響氣罩情形(1):尚屬有效
(左圖曝光1/64秒,右圖曝光2秒。雖受側風微弱影響,但能有效捕集)
圖四十七 側風影響氣罩情形(2):幾乎失效
(左圖曝光 1/64 秒加閃光燈,右圖曝光 2 秒。形態偏右的橄 欖形捕集區暗示空氣有害物可能隨時向側風下游擴散逃逸)
72
圖四十八 側風影響氣罩情形(3):完全失效
(左圖曝光 1/64 秒並作局部放大,右圖曝光 2 秒。由於氣罩抵禦
側風的能力不佳,空氣有害物受側風影響,大多向側風下游逸散)
圖四十九 氣罩口側風擋板的影響:(左)極為有效,(右)幾乎失效
73
圖五十 氣罩口側風擋板的影響:(左)仍為有效,(右)完全失效
圖五十一 氣罩口側風擋板的影響:(左)幾乎失效,(右)完全失效
74
附錄:本計畫所使用的遠端控制程式
// 靜壓控制程式 // 本程式控制三個氣罩口靜壓在指定條件下運轉 DIM x(4) DIM ps(4) DIM pinst(3) DIM cmd(3) DIM stpcmd(3) DIM gold(3) DIM newpos(3) // 設定紀錄檔名 f$="c:/work/ctrl.txt" // 設定風機最高頻率 hz1=45 // 控制頻率步進額度 stp=10 // 設定靜壓取樣行為 samples=5 // 將展示程式先暫停 // {m521}=0 {fan_ctrl}=1 // 預設各氣罩目的靜壓 pinst(1)={ip1} pinst(2)={ip2} pinst(3)={ip3} // 處理初始資料並將風扇機加速到最高頻率 GOSUB init:
75
// 讀取壓力量測結果:讀回 x(0-4)壓力取樣平均值矩陣 GOSUB measure: // 研判讀得之壓力 done=0 FOR i=1 to 3 IF(x(i)>pinst(i)) => done=done+1 LOOP IF(done<1) a$="雖加速到最高頻率,卻仍有氣罩未達指定風壓條件\n" GOTO terminate: ENDIF // 找出「壓力與目標最接近的氣罩編號」hmin minp=100 hmin=0 FOR i=1 TO 3 yy=ABS(x(i)-pinst(i)) zz=x(i)-pinst(i) IF(minp>yy) IF(zz>0) minp=yy hmin=i ENDIF ENDIF LOOP IF(hmin<1) a$="無法作業" GOTO terminate: ENDIF brk=0
76
WHILE(brk==0) times=0 // 讀取壓力量測結果:讀回 x(1-4)壓力取樣平均值矩陣 GOSUB measure: // 調整變頻器頻率 stp=(pinst(hmin)-x(hmin))*1 sgn=INT(stp/ABS(stp)) stp=ABS(stp) IF(stp>20) stp=20 ELSEIF(stp<0.01) stp=0.01 ENDIF newfan={fanspin}+sgn*stp IF(newfan>hz1) a$="風機調整結果超過頻率上限" GOTO terminate: ELSEIF(newfan<0) a$="風機調整結果造成頻率低於零" GOTO terminate: ELSE {fanspin}=newfan ENDIF // 確認風扇機頻率已經跟上 WHILE({speed}<1) LOOP // 稍候 2 秒使各量測點之靜壓響應系統指令 hold=2000 GOSUB wait: // 再讀取一次壓力量測結果:讀回 x(0-4)壓力取樣平均值矩陣
77
GOSUB measure: // 紀錄風門目前的位置 gold(1)={g1} gold(2)={g2} gold(3)={g3} // 調整設定風門開度 FOR i=1 to 3 gcmd=(x(i)-pinst(i))*2 sgn=INT(gcmd/ABS(gcmd)) gcmd=ABS(gcmd) IF(gcmd<0) cmd(i)=0*sgn ELSEIF(gcmd>10) cmd(i)=10*sgn ELSE cmd(i)=gcmd*sgn ENDIF gate=i GOSUB gatedrive: LOOP IF({stop}!=0) => brk=1 LOOP // 主程式結束 a$="管理員下令系統停止" terminate: {g1}=0 {g2}=0 {g3}=0 {fanspin}=0 {start}=0 {stop}=1
78
MESSAGE "程式異常結束", a$ END // // ----------------------------------------------------------------------------- // 副程式 init: 初始資料處理並以最高頻率啟動風扇機 init: IF({ip1}<=0) a$="第 1 號氣罩靜壓條件未設定" GOTO terminate: ELSEIF({ip2}<=0) a$="第 2 號氣罩靜壓條件未設定" GOTO terminate: ELSEIF({ip3}<=0) a$="第 3 號氣罩靜壓條件未設定" GOTO terminate: ENDIF // 三個風門全開 {g1}=0 {g2}=0 {g3}=0 // 風扇機關閉 {start}=0 {stop}=1 // 以最高頻率啟動風扇機 {fanspin}=hz1 {stop}=0 {start}=1 // 監測頻率直到設定值 WHILE({speed}<1) LOOP // 等候 2 秒使各量測點之靜壓響應系統指令
79
hold=2000 GOSUB wait: RETURN // // ----------------------------------------------------------------------------- // 副程式 pick:切片讀出壓力瞬間量測值 pick: ps(1)={p1} ps(2)={p2} ps(3)={p3} ps(4)={pc} RETURN // // ----------------------------------------------------------------------------- // 副程式 measure:取出 samples 次的壓力量測平均值 measure: // 進行各點壓力量測 FOR yy=1 to 4 x(yy)=0 LOOP FOR yy=1 to samples hold=100 GOSUB wait: // 切片取樣各點壓力值 GOSUB pick: FOR mm=1 to 4 x(mm)=x(mm)+ps(mm) LOOP LOOP FOR yy=1 to 4
80
x(yy)=x(yy)/samples LOOP // 將系統讀值寫入檔案 open 1, f$, "W" if(!fcheck(1)) create 1, f$ endif seek 1,0,"E" IF(x(1)>0) FPRINT 1, HOUR() ," ", MINUTE() ," ", SECOND(), " ", x(1), " ", x(2), " ", x(3), " ", x(4), "\r\n" ENDIF close 1 // // ----------------------------------------------------------------------------- // 副程式 wait:等待 hold 毫秒 wait: // 讀出計時器數值(午夜過後迄今之秒數) tim0=TICK() tim=0 WHILE(tim<hold) tim=TICK()-tim0 LOOP RETURN // // ----------------------------------------------------------------------------- // 副程式 gatedrive:調整第 gate 號風門之門位 gatedrive: SWITCH(gate) CASE 1 newpos(gate)={g1}*1.0
81
CASE 2 newpos(gate)={g2}*1.0 CASE 3 newpos(gate)={g3}*1.0 DEFAULT a$="風門編號指定錯誤" GOTO terminate: ENDSW newpos(gate)=newpos(gate)+cmd(gate)*1.0 IF(newpos(gate)<0) SWITCH(gate) CASE 1 {g1}=0 CASE 2 {g2}=0 CASE 3 {g3}=0 ENDSW ELSEIF(newpos(gate)>90) SWITCH(gate) CASE 1 {g1}=90 CASE 2 {g2}=90 CASE 3 {g3}=90 ENDSW ELSE SWITCH(gate) CASE 1 IF(hmin!=1) => {g1}=newpos(gate) CASE 2 IF(hmin!=2) => {g2}=newpos(gate) CASE 3 IF(hmin!=3) => {g3}=newpos(gate)
82
ENDSW ENDIF RETURN
局部排氣裝置數值控制之探討 著者:戴基福 出版機關:行政院勞工委員會勞工安全衛生研究所
221台北縣汐止市橫科路 407巷 99號 電話:02-26607600 http://www.iosh.gov.tw/
出版年月:中華民國九十一年十二月 版(刷)次:初版一刷 定價:100 元 展售處:
三民書局 http://www.sanmin.com.tw/ 台北市中正區重慶南路一段 61號 電話:02-23617511 台北市中山區復興北路 386號 電話:02-25006600
國家書坊台視總店 http://www.govbooks.com.tw/ 台北市松山區八德路三段 10號 B1 電話:02-25781515#643
五南文化廣場 台中市中區中山路 2號 B1 電話:04-22260330
新進圖書廣場 彰化市光復路 177號 電話:04-7252792
青年書局 高雄市苓雅區青年一路 141號 3樓 電話:07-3324910
本書同時登載於本所網站之「出版中心」,網址為http://www.iosh.gov.tw/。 本所保留所有權利。欲利用本書全部或部分內容者,須徵求行政院勞工委員會勞工安全衛生研究所同意或書面授權。
【版權所有,翻印必究】
GPN: 1009104793