Embed Size (px)
Citation preview
USEF09L-R-001
衛星打上げロケットの 高機能・低コスト化に関する検討
平成22年3月
財団法人無人宇宙実験システム研究開発機構

i
目 次 はじめに ............................................................ 1 1. 小型衛星動向 ..................................................... 2 1.1 米国 ............................................................ 2 1.2 欧州 ............................................................ 3 1.3 その他 .......................................................... 4 2. 商業打ち上げ市場 ................................................. 7 3. Chimera コンセプト................................................ 9 3.1 Chimera ロケットの目標........................................... 9 3.2 システム構成 ................................................... 10 3.3 運用コスト ..................................................... 11 3.4 機体コスト ..................................................... 11 3.5 打ち上げコスト ................................................. 11 3.6 目標コスト達成への技術課題 ..................................... 12 4. SpaceX の Falcon ................................................. 18 4.1 SpaceX 会社概要................................................. 18 4.2 SpaceX の Falcon 計画............................................ 19
4.2.1 1 段エンジン.............................................. 22 4.2.2 2 段エンジン.............................................. 24 4.2.3 構造系及び工作機械 ....................................... 24 4.2.4 フェアリング ............................................. 28 4.2.5 アビオ二クス ............................................. 29
4.3 ロケット輸送と射場関連施設 ..................................... 35 4.4 打ち上げ作業 ................................................... 40 4.5 打ち上げ成功までの変遷 ......................................... 44 4.6 Falcon 1 のコスト分析........................................... 49 4.7 Falcon の低コスト化技術のまとめ................................. 56 5. ロケットの高機能化・低コスト化に関する検討 ...................... 61 5.1 諸外国の小型衛星打上ロケットの動向 ............................. 61 5.2 技術課題の抽出 ................................................. 70
5.2.1 ロケットモータ ........................................... 70 5.2.2 アビオニクス ............................................. 73 5.2.3 軌道投入精度 ............................................. 78 5.2.4 構造の高付加価値化 ....................................... 79 5.2.5 地上インフラ ............................................. 81 5.2.6 技術課題まとめ ........................................... 83
5.3 アビオニクス技術課題への対応策 ................................. 84 5.3.1 民生部品と宇宙用部品の比較 ............................... 84 5.3.2 民生品使用による低コスト化のための対応策 ................. 86
参考文献 .......................................................... 101
1
はじめに
世界的に小型(ピコ、ナノ、マイクロ)衛星の宇宙開発や実用衛星としての
有効性が確認され、国の支援の下に小型衛星や専用の小型ロケットの研究や開
発が積極的に進められている。しかし我が国においては、未だに大学の教育や
技術者育成の手段としてしか捉えられていない。平成 20 年度より、経済産業省
が ASNARO 計画として小型衛星による実用化開発を開始した。また、経済危
機対策の一環として、超小型衛星システムの開発・活用による新市場創造が取
り上げられ、今後、小型衛星の開発、利活用はますます広がりをみせるように
なると考えられる。
小型衛星の活性化には、専用の小型衛星の利用が不可欠であるが、我が国で
は H-IIA ロケットの相乗り打ち上げやピギーバック打ち上げに頼らざるを得
ないのが現状である。しかし、これらの打ち上げでは主ミッションが優先され
ることから、打上げ軌道や打上げ時期の自由度がなく、また、現在のピギーバ
ック打ち上げは非営利目的の衛星に限られていること等の制約が多く、利用し
にくい状況にある。したがって、打ち上げの制約が少なく、自由度の高い小型
衛星専用のロケットの実現が求められている。しかし、我が国のロケット技術
等は世代交代が遅れており、特に小型化では世界と価格競争ができるレベルに
ないのが実情である。我が国のこれまでのロケット開発は、開発期間や開発費
の低減が求められることから、既存技術や既存品の適用が優先され小型、高機
能化の基盤技術開発が不足していたものと思われる。
本調査は、このような状況を踏まえて、今後の小型衛星打上げ市場における
我が国の宇宙産業の競争力向上のための検討の第1段階として、小型ロケット
の高機能・低コスト化に係わる技術等に関する検討を行った。検討に当たって
は、米国 Space Exploration Technologies Corp.(SpaceX)の Falcon の計画、技術
等を調査した。
本報告書は、財団法人無人宇宙実験システム研究開発機構が、自主事業とし
て実施した、調査検討結果をまとめたものである。
2
1. 小型衛星動向
小型衛星は、大型衛星に比し低コスト化、開発期間の短縮が図れることに
加え、基盤技術(電子部品・機器の小型化、MEMS の進歩など)の進展等に
より高機能化が可能となった。このため、中・大型衛星によるミッションを
代替あるいは補完し得る能力を確保しつつあるとして、諸外国では、小型衛
星の研究、開発が積極的に進められている。
また、小型衛星の機能向上、コスト低減が進み、これまでは教育、技術者
育成が主流と考えられていた小型衛星の利用が、ミッション実証、通信、災
害監視、環境監視、安全保障、ベンチャ企業のアイデア実証などへと広がり
つつある。2008 年には、500kg 以下の衛星が約 30 機打ち上げられており、
そのうち 27 機が 200kg 以下の衛星で占めている。昨今、アジアやアフリカ
の新興国が自国衛星の所有による災害監視や地図作成等の情報取得を目指
しており、今後更なる小型衛星の市場活性化が期待される。
1.1 米国
ブッシュ大統領が2000年1月に発表した米国家ナノテクノロジー・イニシ
アティブ(NNI)のグランドチャレンジ(挑戦的研究)においては、小型宇
宙機が宇宙探査の鍵となる要素として位置付けられており、国防総省、NASA
等が小型衛星の開発を開始した。また、2006 年の上院予算歳出委員会の予算
議会レポートのなかで小型衛星をサポートする考え方を示している。米国で
は、ORS 計画として、国防高等研究計画局(Defense Advanced Research Projects
Agency)の支援を得て、低コスト小型衛星(300kg 級)と低コスト小型ロケ
ットの開発を進めている。
(1) 国防総省(DoD)
民事・商業利用分野、安全保障分野共にその有用性、将来性には高い関
心が示されており、その中でもマイクロ衛星に も注目している。DoD で
は、戦略安全保障上の有用性を高く評価し、“Operationally Responsive Space
(ORS)”の研究開発においては、米国国防総省国防高等研究計画局
(DARPA:Defense Advanced Research Projects Agency)が大きな役割を果
たしている。ORS では、軍事目的として Tacsat シリーズにより小型衛星、
通信、運用等の技術開発を行うとともに、本技術は商用利用が可能として、
3
民間企業を交えた Operationally Responsive Space Office を構築しミッショ
ン選定等を行っている。
(2) NASA
NASA では、90 年代後半から科学探査ミッションを中心に衛星の小型・
高機能化が進められ、将来の技術戦略の一つとして、マイクロ衛星の革新
的な機能・性能向上を MEMS などの高機能化技術を使って達成すること
を目指してきた。NASA の技術開発戦略及び戦略技術分野が包括的に示さ
れた「NASA 技術計画(NASA Technology Plan)」では革新的で重要な技
術の第一に先端小型化技術が挙げられている。
(3) 民間の動き
小型衛星に対して、米国民間企業も具体的な動きを見せている。ORS に
おける小型衛星開発は、主に軍の支援を得てベンチャ企業が主体となって
進められてきたが、昨今では大企業も大きな関心を持って参画を計ってい
る。
1.2 欧州
NASA に比べて小型衛星プログラムが多く、特に月を含めた惑星探査に小
型衛星を積極的に利用しようとしている。また、Proba、SMART ミッション
を通して、小型衛星の有効性を認識したと思われる。英国の SSTL 社は、諸
外国の技術者育成、技術移転等を通じて、自社衛星の海外展開を進めるとと
もに、ナノ、マイクロの商用衛星を目指した開発を行っている。
2004 年 9 月に開催された ESA/CNES 主催の 4S(Small Satellite Systems and
Service)シンポジウムでは小型衛星による編隊飛行の有効性が議論され、小
型衛星は、コンステレーション化することにより、少ない予算で諜報等の軍
事宇宙能力の向上、地球観測ミッションの高度化に寄与し、エレクトロニク
ス技術の進展がプログラムコスト削減に有効な手段とされている。
(1) 英国
イギリスでは、サレー大学発のベンチャ企業である Surrey Satellite
Technology Ltd (SSTL)が小型衛星開発を進めている。SSTL は 2008 年 4 月
に EADS 傘下に入り、財務基盤が安定したことで着実な成長が見込まれて
4
いる。SSTL では、宇宙途上国に対して衛星の供給と衛星製造・運用ノウ
ハウを提供する事業形態で、大きな躍進を遂げている。SSTL は SSTL-70
バスを基準にして、さらなる小型化と大型化を進めている。SSTL の主要
な衛星としては、130kg の光学分解能衛星 TOPSAT、DMC(Disaster
Monitoring Constellation)、Rapideye などがある。また、SSTL-150 は近年
カザフスタンとカナダから高分解能衛星を受注する他、ナイジェリア向け
の NigeriaSat 2 の開発を行っている。2008 年には SSTL-300 バスをベースと
して、Skysight 衛星システム(光学衛星 4 基(分解能 0.5m と 1m を各 2 基)、
打上ロケット 2 基、運用費用 3 年)を$184mil で英国政府へ提案している。
また、SSTL は光学衛星の他、雲を通して観測できる合成開口レーダ
(SAR)衛星の開発計画を発表している。
(2) フランス
フランスは、小型衛星バス(Myriade、Proteus)を科学、工学、地球観測、
軍事、商用の実用ミッションへ対応させている。Myriade は 150kg 級衛星、
Proetusは 500kg衛星の共通バスとして開発されている。現在までにMyriade
は商業含めて 10 ミッション 18 基、Proteus は7基の衛星が打上もしくは打
上が予定されている。
フランス国立宇宙センタ(CNES)では、Myriade、Proteus に継ぐ次世代
の小型衛星バス ISIS(Initiative for Space Innovative Standards)の検討を開始
している。ISIS は、産業競争力の強化を行うため、プラットフォームとサ
ブシステムを更新した上で、運用等を含めたコストダウンを進めるとして
いる。CNES は、ISIS を低軌道向けとして構築し、多様なミッションへ適
用させながら標準化を進め、自国の産業競争力強化を図っている。また、
CNES は ISIS による技術革新を進めるため、他の産業や機関との交流を進
めるとしている。CNES は、2009 年~2012 年にかけて標準化の育成、技術
構築を行い、Proteus の後継として ISIS に交替するとしている。
1.3 その他
(1) イスラエル
2005 年 6 月、イスラエルの Israel Aerospace Industries(IAI)がフランス
の Rafale との協力で、ベンチャ企業 MicroSat Ltd を設立した。新会社は質
量 10kg 程度から 120kg の小型衛星の開発と販売を行う。長期的には小型衛
5
星コンステレーションを目指しているが、まだ研究開発段階にある。
(2) 中国
中国は「十五」計画(第 10 次 5 ヵ年計画=2001~2005 年)で小型衛星の
開発利用をハイテク分野における 20 の重要項目の一つとして掲げ、「863
計画」(1986 年 3 月に提案された中国における「ハイテク研究発展計画」)
によって積極的に開発を推進した。中国空間技術研究院(CAS)は独自の
小型衛星バス CAST968 を開発し欧州などと国際協力を推進している他、
ベンチャ企業「航天清華衛星技術有限公司(HTST 社)が 50~60kg クラス
のマイクロ衛星を SSTL 社の技術協力を得て開発し商業サービスを展開中
している。また、中国は MEMS、ナノテクノロジー分野でも積極的な研究
開発を行っている。
(3) インド
インド宇宙研究機構( ISRO)は、アマチュア無線用マイクロ衛星
HAMSAT(43.5kg)と CARTOSAT-1 を 2005 年 5 月に打ち上げ、Anna 大学
Aerospace Research Centre との共同でマイクロ衛星 ANUSAT(50kg)を 2009
年に打ち上げた実績を有する。このプログラムは 2002 年 1 月に ISRO によ
って承認され、インドにおけるマイクロ衛星開発及び利用の COE(Center of
Excellence)を構築し、MEMS の利用など将来に向けた技術蓄積を図るほ
か、学生の教育機会の提供などを目的としている。また、3 バンド CCD カ
メラを搭載したリモートセンシング衛星 TWSAT(83kg)を 2008 年に打ち
上げている。TWSAT は大学や途上国へのデータ提供を目的としており、
バングラデッシュ、スリランカ、ネパール、インドネシア、マレーシアな
どが参画している。
(4) 韓国
韓国は、 韓国航空宇宙研究所(KARI)が 2003 年 9 月に「科学技術衛星
1号」(質量 110kg)のマイクロ衛星を打ち上げたほか、衛星ベンチャ企
業の SaTReC-i 社がマレーシアの国有企業とマイクロ衛星の共同開発を行
うなど、官民両サイドで小型・マイクロ衛星の開発に積極的である。さら
に、小型ロケットの開発を行うなど、マイクロ衛星とその打上げ手段の双
方の獲得を急いでいる。2008 年に改定された韓国宇宙計画においても、計
6
画が前倒しされるなど国家として衛星、ロケット、射場の整備を進め、世
界の宇宙産業における地位獲得に戦略的に取り組んでいる。
7
2. 商業打ち上げ市場
衛星打ち上げの世界市場においては、ICBM 転用の ROCKOT(SS-19)、
Dnepr(SS-18)、SOYUZ(8K74 or R-7a)等がその信頼性、価格において他
を大きく引き離している。また、新興国である中国の Long March やインドの
PSLV、GSLV が価格競争力において優位に立ちつつある。欧米では、既存ロ
ケットの統廃合や拡張性を持たせることにより既存ロケットの延命を図る他、
新規ロケット開発や計画を進めている。小型衛星の低コスト打ち上げ手段と
して、1990 年から市場投入された空中発射システムである Orbital Sciences
Corp.(OSC)の Pegasus ロケットも打ち上げ価格に占める人件費比率が高く、
現在の仕様では中国やインド等のロケットとの価格競争力には勝てないとし
て、2010 年中にフェーズアウトさせることを考えている。OSC では、さらな
る低コスト化を図った空中発射システムとして、Raptor 2 の開発を進めてい
る。
ロシアの ICBM 派生型ロケットが低コスト打ち上げ手段として注目される
ようになるに伴い、2002 年に米国のジョージア工科大学が、米国空軍(United
States Air Force:USAF)の委託研究として ICBM の有効活用の研究成果を報
告している。ジョージア大学では更に研究を進め、価格、性能ともに優位に
立てるとして、空中発射システムである Chimera コンセプトを 2003 年に発表
している。
また米国では、ORS の低コストロケット開発である DARPA の FALCON
計画(Force Application and Launch from CONUS(Continental U.S.))として、
Air Launch LLC の QuickReach、Space Exploration Technologies Corp.(SpaceX)
の Falcon の開発を進めてきた。QuickReach はエンジン開発に失敗し開発を断
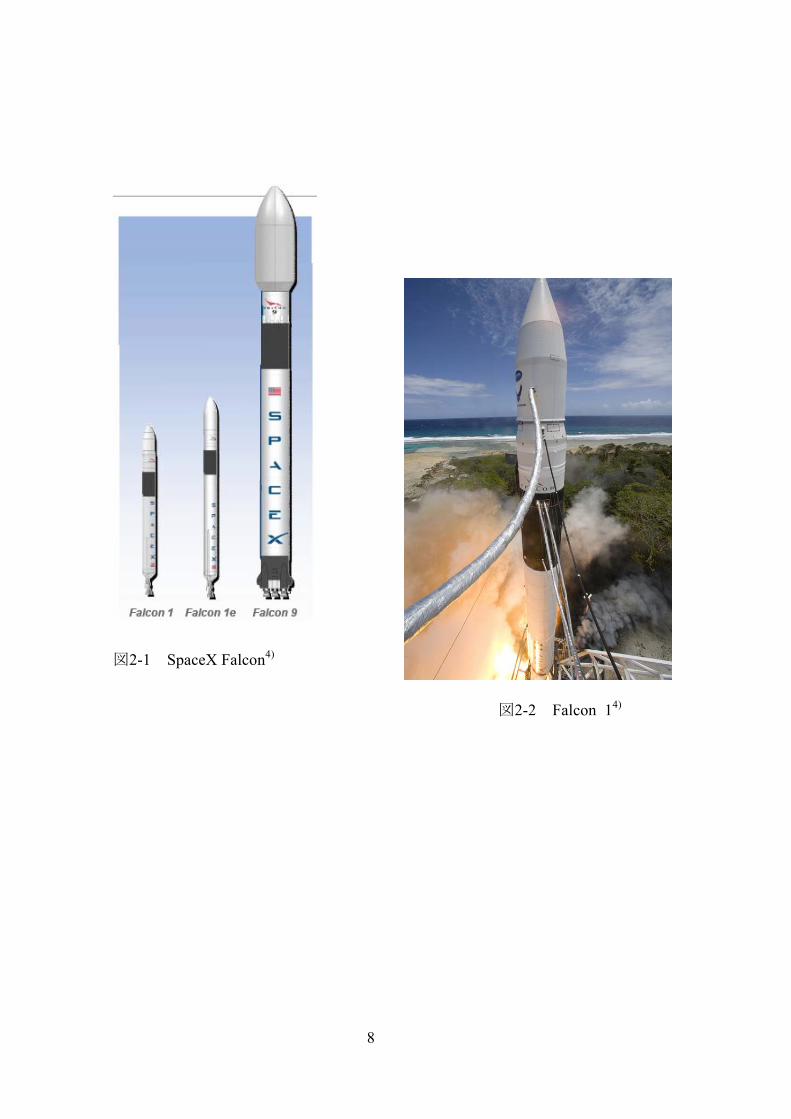
念したものの、SpaceX の Falcon 1 は 2009 年から打ち上げ運用を開始してい
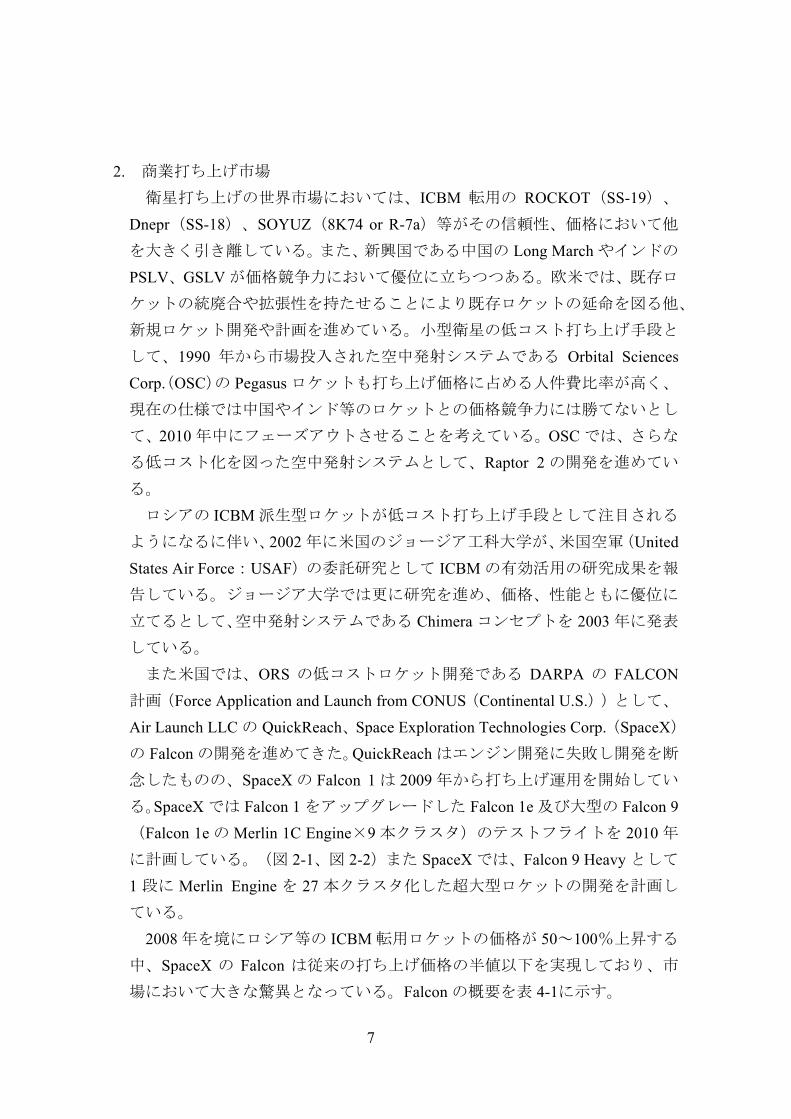
る。SpaceX では Falcon 1 をアップグレードした Falcon 1e 及び大型の Falcon 9
(Falcon 1e の Merlin 1C Engine×9 本クラスタ)のテストフライトを 2010 年
に計画している。(図 2-1、図 2-2)また SpaceX では、Falcon 9 Heavy として
1 段に Merlin Engine を 27 本クラスタ化した超大型ロケットの開発を計画し
ている。
2008 年を境にロシア等の ICBM 転用ロケットの価格が 50~100%上昇する
中、SpaceX の Falcon は従来の打ち上げ価格の半値以下を実現しており、市
場において大きな驚異となっている。Falcon の概要を表 4-1に示す。
8
図2-1 SpaceX Falcon4)
図2-2 Falcon 14)
9
3. Chimera コンセプト
Chimera ロケットは、低コスト ICBM 転用ロケットに対応するために、小
型衛星打ち上げを行う Pegasus の代替手段として、Georgia 大学が検討を進め
た空中発射システムである。
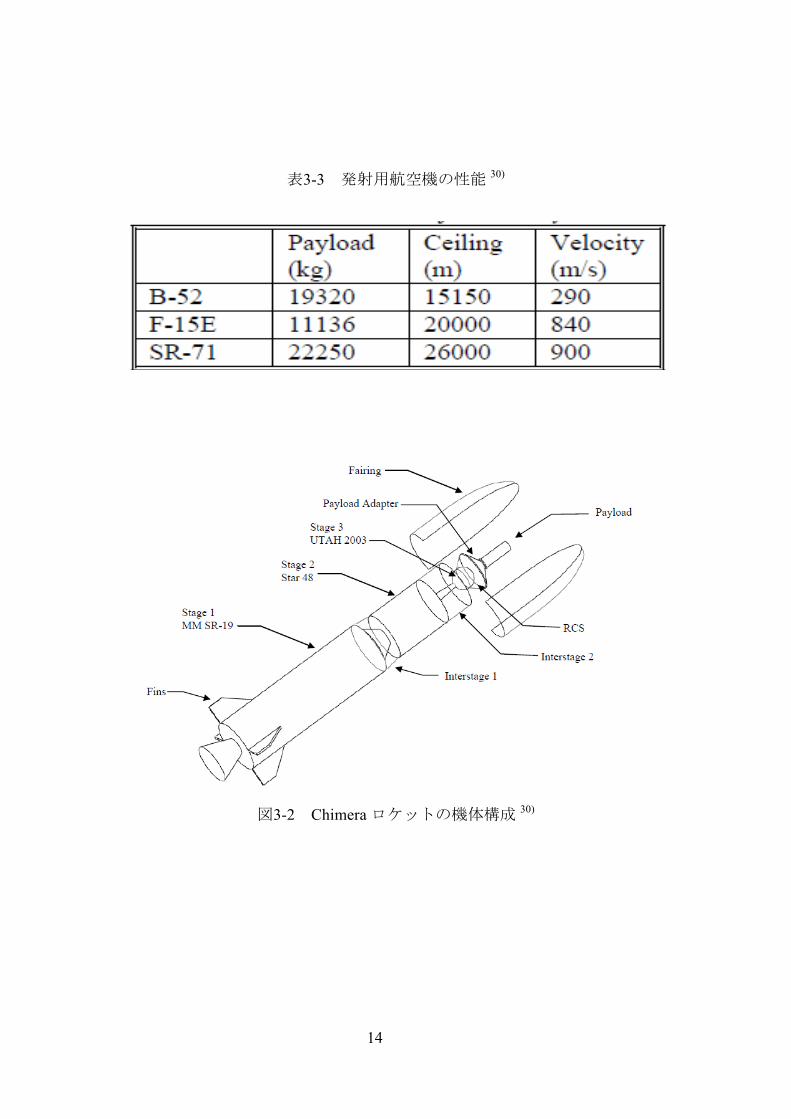
発射用航空機は超音速機の SR-71、ペガサスでも使用された NB-52、戦闘
攻撃機 F-15E とし、ロケットはピースキーパーとミニットマン ICBM のロケ
ットモータ及び、ATK サイオコール製モータを組み合わせた空中発射システ
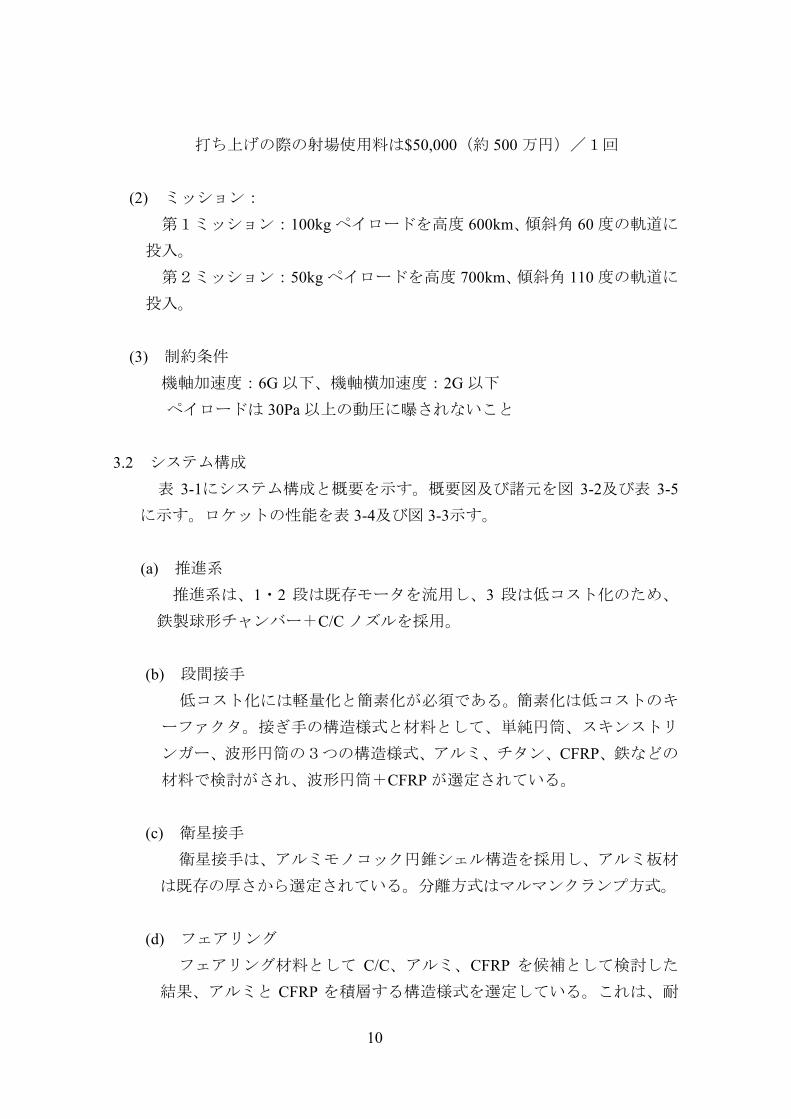
ムを発表した。(図 3-1)この研究成果からロッキードマーチン社は C-5 ギ
ャラクシー輸送機を発射用航空機とする ICBM ベースの空中発射システムを
提案している。
Chimera ロケットは、科学ミッションを行いたいと考えている大学関係者か
らの調査に基づき、打ち上げコスト$5M(約 5 億円)を目標としている。低
コスト打ち上げシステムを構築するために、大気球や航空機を利用した空中
発射、通常の地上発射から、大砲や磁気浮上を用いた発射まで方式の違いの
評価を行い、3段式ロケットを航空機から打ち上げる方式を採用している。
コストモデル等の詳細は示されていないが、既存技術の組み合わせで達成
できる初号機コストは$10M(約 10 億円)程度という結果となり、年間機数
や習熟度を加味しても目標コストを達成できる解は見出せていない。しかし
ながら、既存技術の組み合わせで目標コストを達成できる確率を算出し、更
に、構造効率向上や推進薬技術向上を取り入れた場合の達成可能性を評価し
ている点で今後の検討の参考になる。以下、Chimera ロケットの目標、構成、
運用及び機体コスト、打ち上げコストとコスト低減への技術課題についてま
とめる。
3.1 Chimera ロケットの目標
Chimera ロケット検討の目標コスト、ミッション及び制約条件を以下に示
す。
(1) 目標運用コスト:$5M
・コストにかかわる前提条件
会社として GCIP は 10%
開発費として$500M(約 500 億円)の無償ローンを受けられる。
10
打ち上げの際の射場使用料は$50,000(約 500 万円)/1回
(2) ミッション:
第1ミッション:100kg ペイロードを高度 600km、傾斜角 60 度の軌道に
投入。
第2ミッション:50kg ペイロードを高度 700km、傾斜角 110 度の軌道に
投入。
(3) 制約条件
機軸加速度:6G 以下、機軸横加速度:2G 以下
ペイロードは 30Pa 以上の動圧に曝されないこと
3.2 システム構成
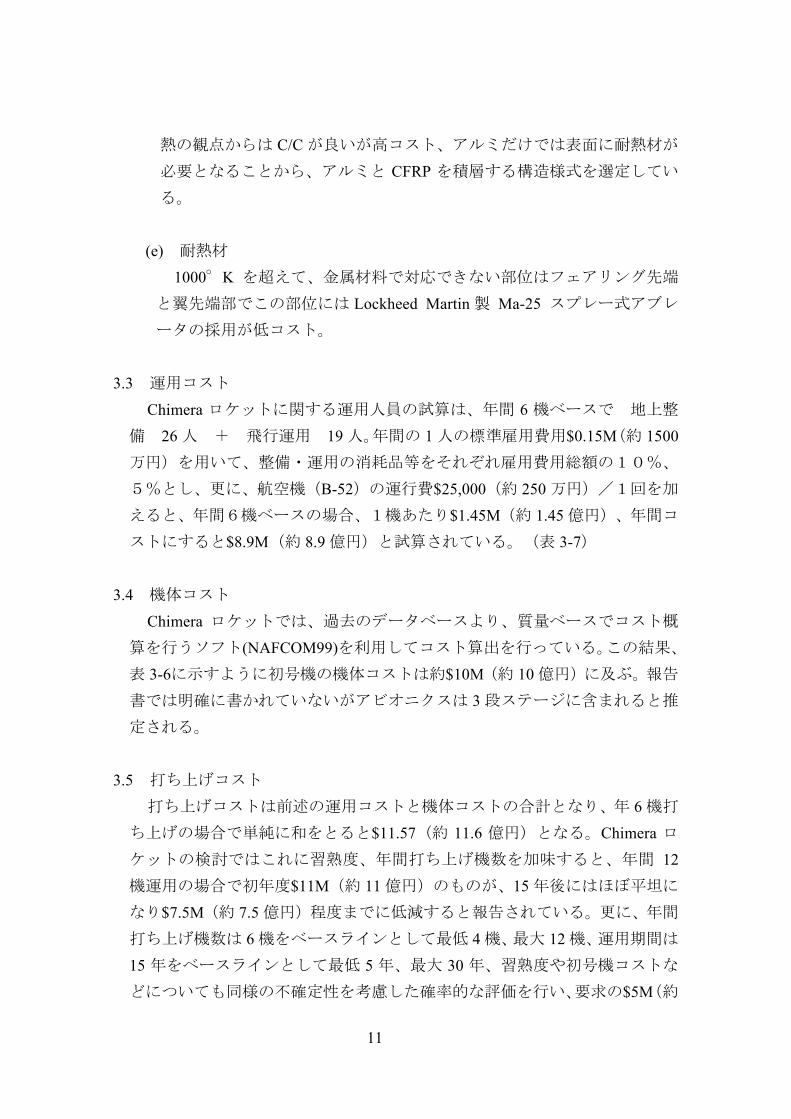
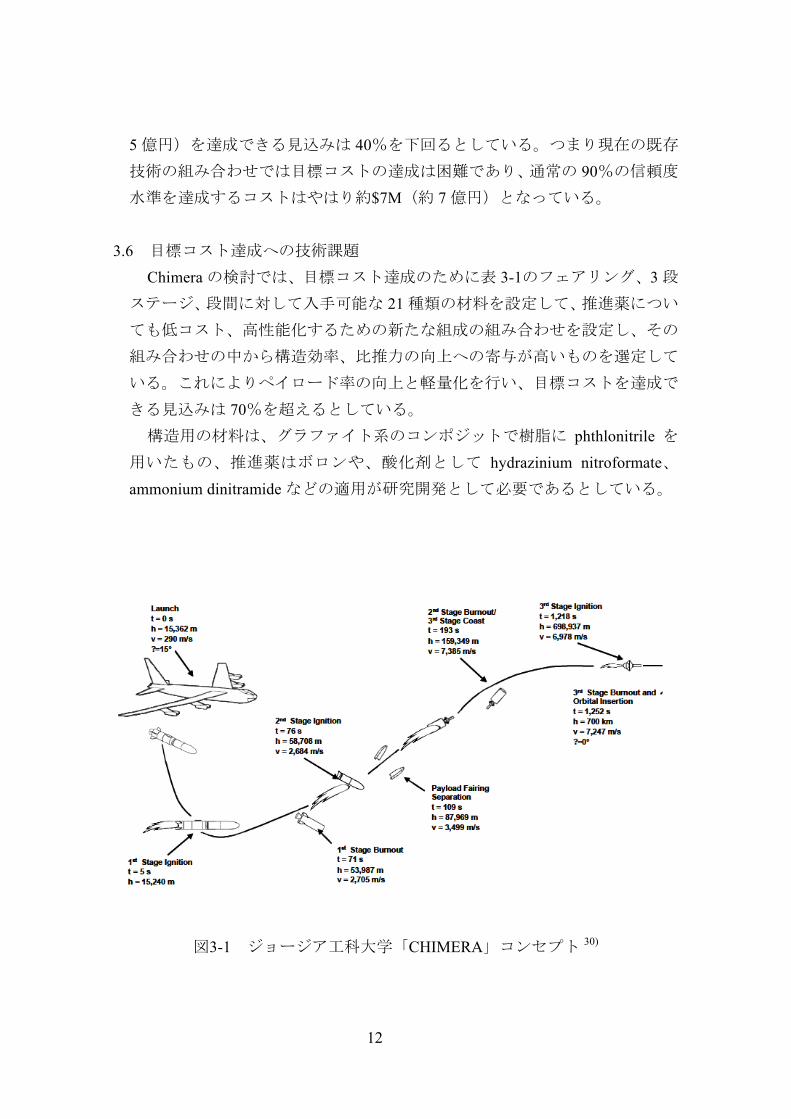
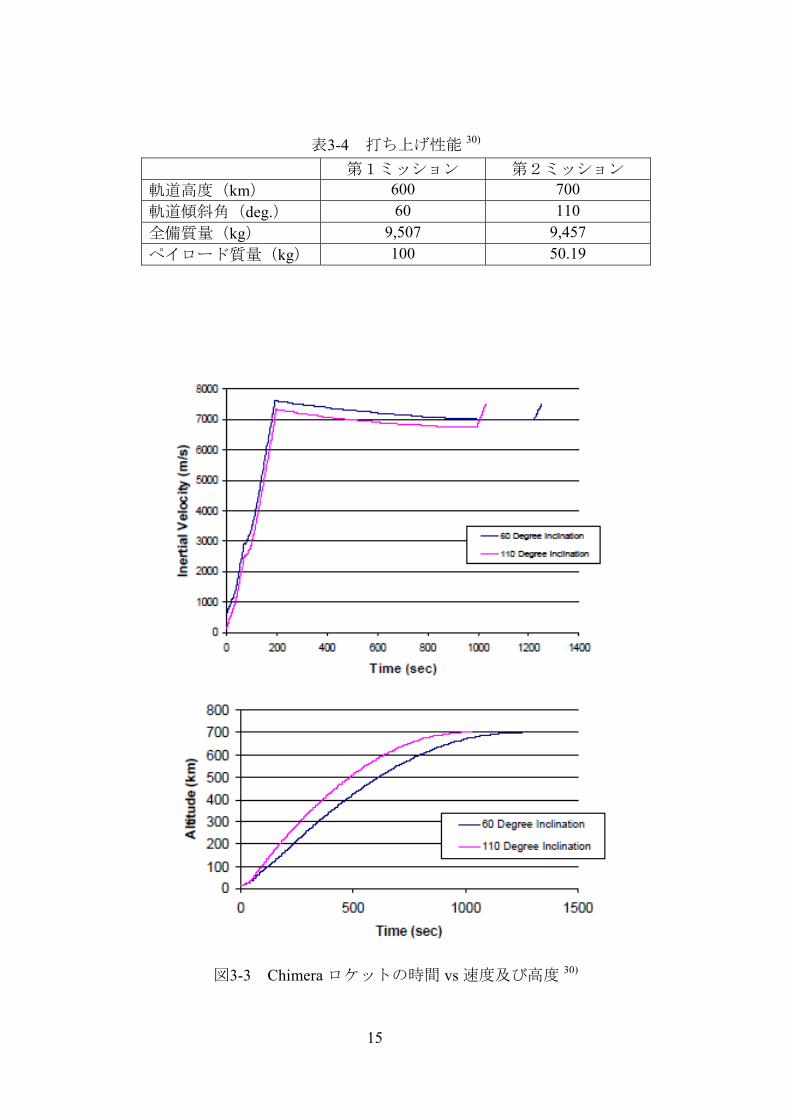
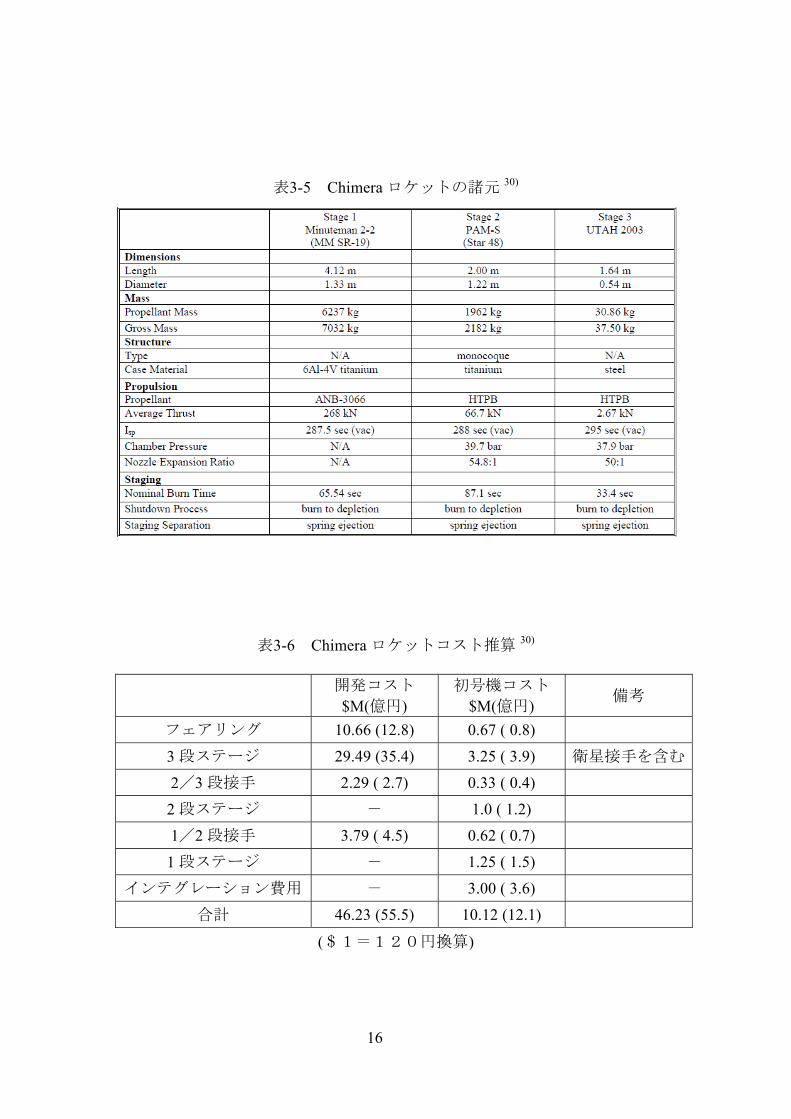
表 3-1にシステム構成と概要を示す。概要図及び諸元を図 3-2及び表 3-5
に示す。ロケットの性能を表 3-4及び図 3-3示す。
(a) 推進系
推進系は、1・2 段は既存モータを流用し、3 段は低コスト化のため、
鉄製球形チャンバー+C/C ノズルを採用。
(b) 段間接手
低コスト化には軽量化と簡素化が必須である。簡素化は低コストのキ
ーファクタ。接ぎ手の構造様式と材料として、単純円筒、スキンストリ
ンガー、波形円筒の3つの構造様式、アルミ、チタン、CFRP、鉄などの
材料で検討がされ、波形円筒+CFRP が選定されている。
(c) 衛星接手
衛星接手は、アルミモノコック円錐シェル構造を採用し、アルミ板材
は既存の厚さから選定されている。分離方式はマルマンクランプ方式。
(d) フェアリング
フェアリング材料として C/C、アルミ、CFRP を候補として検討した
結果、アルミと CFRP を積層する構造様式を選定している。これは、耐
11
熱の観点からは C/C が良いが高コスト、アルミだけでは表面に耐熱材が
必要となることから、アルミと CFRP を積層する構造様式を選定してい
る。
(e) 耐熱材
1000°K を超えて、金属材料で対応できない部位はフェアリング先端
と翼先端部でこの部位には Lockheed Martin 製 Ma-25 スプレー式アブレ
ータの採用が低コスト。
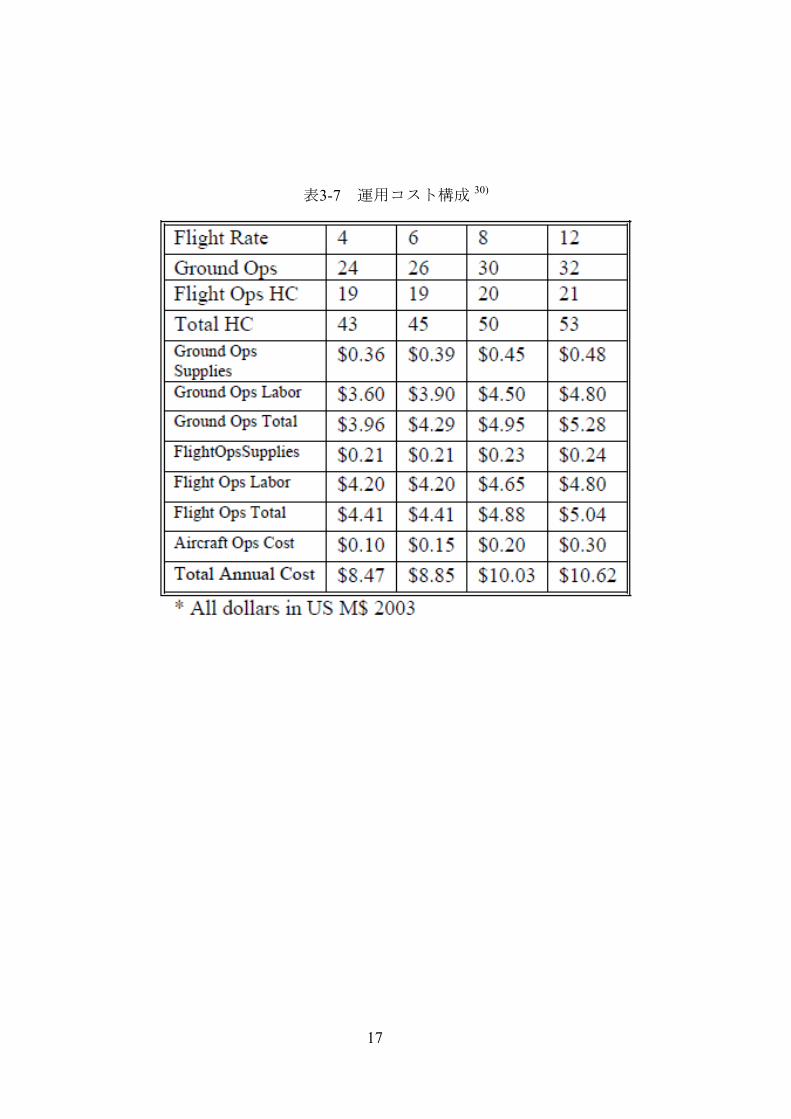
3.3 運用コスト
Chimera ロケットに関する運用人員の試算は、年間 6 機ベースで 地上整
備 26 人 + 飛行運用 19 人。年間の 1 人の標準雇用費用$0.15M(約 1500
万円)を用いて、整備・運用の消耗品等をそれぞれ雇用費用総額の10%、
5%とし、更に、航空機(B-52)の運行費$25,000(約 250 万円)/1回を加
えると、年間6機ベースの場合、1機あたり$1.45M(約 1.45 億円)、年間コ
ストにすると$8.9M(約 8.9 億円)と試算されている。(表 3-7)
3.4 機体コスト
Chimera ロケットでは、過去のデータベースより、質量ベースでコスト概
算を行うソフト(NAFCOM99)を利用してコスト算出を行っている。この結果、
表 3-6に示すように初号機の機体コストは約$10M(約 10 億円)に及ぶ。報告
書では明確に書かれていないがアビオニクスは 3 段ステージに含まれると推
定される。
3.5 打ち上げコスト
打ち上げコストは前述の運用コストと機体コストの合計となり、年 6 機打
ち上げの場合で単純に和をとると$11.57(約 11.6 億円)となる。Chimera ロ
ケットの検討ではこれに習熟度、年間打ち上げ機数を加味すると、年間 12
機運用の場合で初年度$11M(約 11 億円)のものが、15 年後にはほぼ平坦に
なり$7.5M(約 7.5 億円)程度までに低減すると報告されている。更に、年間
打ち上げ機数は 6 機をベースラインとして 低 4 機、 大 12 機、運用期間は
15 年をベースラインとして 低 5 年、 大 30 年、習熟度や初号機コストな
どについても同様の不確定性を考慮した確率的な評価を行い、要求の$5M(約
12
5 億円)を達成できる見込みは 40%を下回るとしている。つまり現在の既存
技術の組み合わせでは目標コストの達成は困難であり、通常の 90%の信頼度
水準を達成するコストはやはり約$7M(約 7 億円)となっている。
3.6 目標コスト達成への技術課題
Chimera の検討では、目標コスト達成のために表 3-1のフェアリング、3 段
ステージ、段間に対して入手可能な 21 種類の材料を設定して、推進薬につい
ても低コスト、高性能化するための新たな組成の組み合わせを設定し、その
組み合わせの中から構造効率、比推力の向上への寄与が高いものを選定して
いる。これによりペイロード率の向上と軽量化を行い、目標コストを達成で
きる見込みは 70%を超えるとしている。
構造用の材料は、グラファイト系のコンポジットで樹脂に phthlonitrile を
用いたもの、推進薬はボロンや、酸化剤として hydrazinium nitroformate、
ammonium dinitramide などの適用が研究開発として必要であるとしている。
図3-1 ジョージア工科大学「CHIMERA」コンセプト 30)
13
表3-1 Chimera ロケットの構成 30)
構成 内容 備考 概要 構成:固体3段式ロケット
打ち上げ方式:空中発射 発射用航空機:B-52
発射用航空機 候補(表 3-3)
ペイロード 能力
100[kg]@LEO600km、60°inc. 50[kg]@LEO700km、110°inc.
全備質量 9.5トン 推進系 1 段:推進薬 6.2 トン、チタンケース
2 段:推進薬 2.0 トン、チタンケース 3 段:推進薬 31 kg、スチールケース
MM SR-19(既存)
Star 48(既存) 新規開発(表 3-2)
段間接手 構造様式:波形円筒形状 材料:CFRP
衛星接手 構造様式:アルミモノコック円錐シェル (既存の板厚のものから選定) 分離方式:マルマンクランプ方式
RCS 搭載
フェアリング 構造様式:アルミと CFRP の積層構造
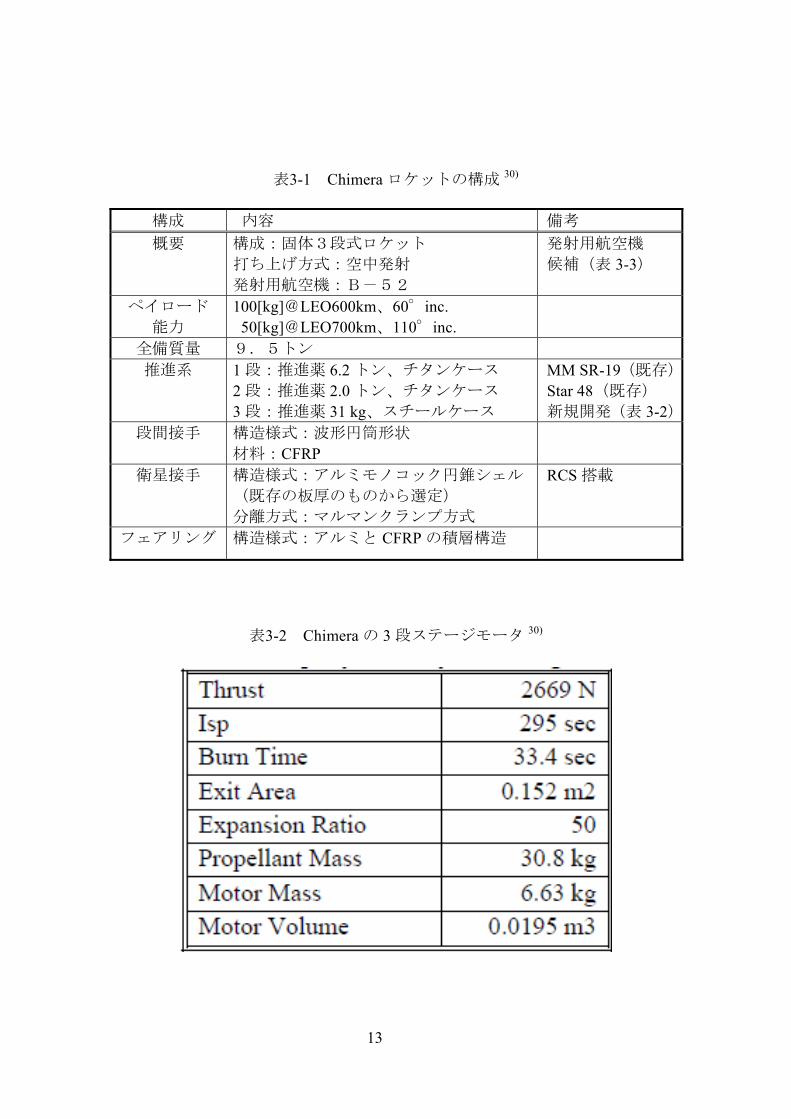
表3-2 Chimera の 3 段ステージモータ 30)
14
表3-3 発射用航空機の性能 30)
図3-2 Chimera ロケットの機体構成 30)
15
表3-4 打ち上げ性能 30)
第1ミッション 第2ミッション 軌道高度(km) 600 700 軌道傾斜角(deg.) 60 110 全備質量(kg) 9,507 9,457 ペイロード質量(kg) 100 50.19
図3-3 Chimera ロケットの時間 vs 速度及び高度 30)
16
表3-5 Chimera ロケットの諸元 30)
表3-6 Chimera ロケットコスト推算 30)
開発コスト $M(億円)
初号機コスト $M(億円) 備考
フェアリング 10.66 (12.8) 0.67 ( 0.8)
3 段ステージ 29.49 (35.4) 3.25 ( 3.9) 衛星接手を含む
2/3 段接手 2.29 ( 2.7) 0.33 ( 0.4)
2 段ステージ - 1.0 ( 1.2)
1/2 段接手 3.79 ( 4.5) 0.62 ( 0.7)
1 段ステージ - 1.25 ( 1.5)
インテグレーション費用 - 3.00 ( 3.6)
合計 46.23 (55.5) 10.12 (12.1)
($1=120円換算)
17
表3-7 運用コスト構成 30)
18
4. SpaceX の Falcon
これまでの衛星打ち上げロケット市場において、高い競争力を有する
SpaceX の Falcon について、その概要を紹介する。
4.1 SpaceX 会社概要
SpaceX は、IT 業界で財を貯えた Paypal 創業者のイーロンマスク氏(Elon
Musk/南アフリカ出身)により、2002 年にカリフォルニア州ロサンゼルス
の El Segundo で起業された。その投資金額は 2002 年~2006 年にかけて総額
$100mil とされている。その他にも 2008 年には投資会社より$20mil の融資が
行われている。事業活動としては、①Falcon ロケットの製造、②打上サービ
ス、③Dragon 宇宙船による ISS 貨物輸送(ドラゴンカプセル)及び④受託実
験サービス(DragonLab™ )があげられる。
従業員は 2005 年 11 月時点で 160 人、2007 年 7 月で 300 人以上、2008 年 7
月で 500 人、2009 年 7 月で 800 人と成長し、2009 年 10 月に開催された宇宙
産業利用促進フォーラムにおける発表では 850 人、2010 年 3 月発表では 900
人と成長している。
設備は設立当初、El Segundo 工場として 25000 平方フィート(2322m2)を
有していたが 2007 年 7 月に同ロサンゼルスの Hawthorne へ移転拡張し、2009
年末段階で 550,000 平方フィート(51096 m2)としている。また、2003 年 6
月にワシントン DC にオフィスを新設し、行政書類の作成・申請など対官庁
向けの事務作業を行っている。その他にも推進装置の試験場としてテキサス
州の内陸中部 McGregor にあり、ここでステージ燃焼試験及び単体エンジン
試験を実施している。敷地面積は 300 エーカー(1213800m2)である。射場
も Falcon 1 ロケット用として太平洋クェゼリン環礁(Kwajalein Atoll)にあり、
現在運用されている。将来的には Falcon 9 射場も増築予定とされている。ま
た、Falcon 9 射場がフロリダ州ケープカナベラル空軍基地内の Titan-Ⅳ射場跡
地に建設された。
SpaceX の施設を図 4-1に示す。
19
図4-1 SpaceX の施設一覧 5)
4.2 SpaceX の Falcon 計画
SpaceX の Falcon 1 ロケットは、Operationally Responsive Space(ORS)の小
型衛星打ち上げ手段であるDARPAの FALCON計画(打ち上げ質量:450kg、
LEO:200km、目標コスト:$5million)の一つとして、開発が開始された。
その後、空軍からロケット製造と開発に関するコントラクトを請けて本格的
な開発に着手した。Falcon 1 は、4 度目の打上で成功し 5 回目から商業打上を
開始し 2009 年 7 月に ATSB(Malaysia)を成功裡に打ち上げている。打上機
としては、当初 Falcon 1、Falcon 5、Falcon 9 が公表されていたが、Falcon 5
はキャンセルされ、Falcon 1e と Falcon 9 が開発中であるとともに、新たに
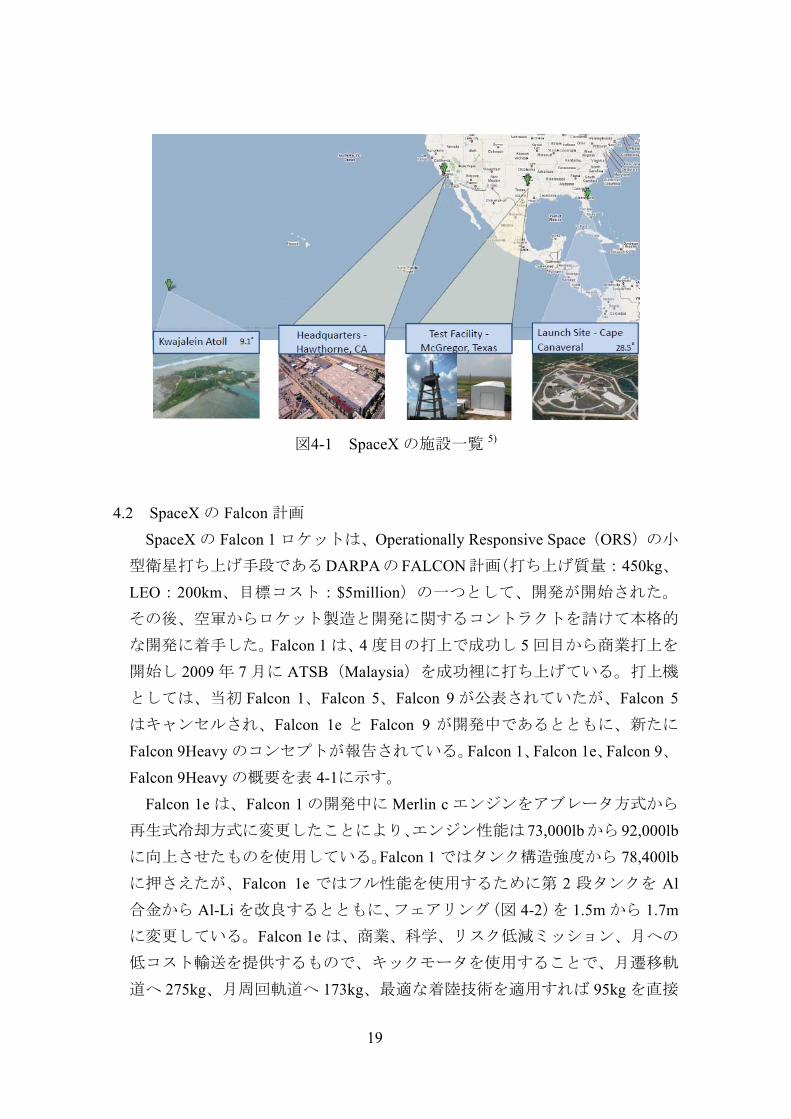
Falcon 9Heavy のコンセプトが報告されている。Falcon 1、Falcon 1e、Falcon 9、
Falcon 9Heavy の概要を表 4-1に示す。
Falcon 1e は、Falcon 1 の開発中に Merlin c エンジンをアブレータ方式から
再生式冷却方式に変更したことにより、エンジン性能は 73,000lbから 92,000lb
に向上させたものを使用している。Falcon 1 ではタンク構造強度から 78,400lb
に押さえたが、Falcon 1e ではフル性能を使用するために第 2 段タンクを Al
合金から Al-Li を改良するとともに、フェアリング(図 4-2)を 1.5m から 1.7m
に変更している。Falcon 1e は、商業、科学、リスク低減ミッション、月への
低コスト輸送を提供するもので、キックモータを使用することで、月遷移軌
道へ 275kg、月周回軌道へ 173kg、 適な着陸技術を適用すれば 95kg を直接

20
月表面投入できる能力を有する。
また SpaceX は、NASA の商業打ち上げサービスの促進を目的とした
Commercial Orbital Transportation Services (COTS)の出資を 2006 年に受けて、
Falcon 9 に搭載する Dragonspacecraft の開発を開始した。Dragonspacecraft は
与圧式のカプセルと非与圧部のトランクから構成される。デモフライトは無
人だが、SpaceX は有人用の Dragonspacecraft と Falcon 9 の開発を計画してい
る。フライト H/W は回収され、リハーブして再利用される。
図4-2 Falcon 1 と Falcon 1e のフェアリング 4)
図4-3 SpaceX の DoragonLabTH 4)
21
表4-1 Falcon の概要
Falcon 1 運用中
Falcon 1e 開発中
Falcon 9 開発中
Falcon9 Heavy 計画中
形 状
全長(m) 21.3 24.7 54.9 54.9 直径(m) 1.7 1.7 3.6 3.6 全備質量(kg) 27,670 35,180 333,400 885,000 推力(Lift off) 347kN 512kN 4,940kN 15,000kN 段数 2 2 2 2
1 段 Merlin C F1(M1)
(LOX/RP-1) 89klbf(vac.)
Merlin C F9(M9) (LOX/RP-1) 138klbf(vac.)
Merlin C F9(M9)×9 本 (LOX/RP-1)
855klbf
Merlin C F9(M9)×9 本 (LOX/RP-1)
2 段 Kestrel Engine (LOX/RP-1) ~7klbs(vac.)
Kestrel Engine (LOX/RP-1) ~7klbs(vac.)
Merlin vacuum (LOX/RP-1) ~96klbs(vac.)
Merlin vacuum (LOX/RP-1) ~96klbs(vac.)
Strap-on-Booster - - - M9×18 本 (LOX/RP-1) 射場 Kwajalein Kwajalein CCAFS Kwajalein CCAFS LEO 420(9.1°) 1,010(9.1°) 10,450(28.5°) 8,560(90°) 32,000(28.5°)
打上能力
(kg) GTO - - 4,450(28.5°) 4,680(9.1°) 19,500
価格(M$) 9.6 10.9 45.6~51.5
22
4.2.1 1 段エンジン
Falcon 1 の 1 段エンジンには、ポンプフィード式ガスジェネレーターサイ
クルの Merlin エンジン(LOX/RP-1)を採用している。Merlin エンジンは使
用後、1 段目と共にパラシュートにより海上回収を行い、再使用を計画され
ているが、2009 年 12 月末現在で Merlin エンジンを含む 1 段の回収は行われ
ていない。Merlin エンジンは、比較的燃焼振動が発生しないとされるピント
ル式噴射機を採用している。ターボポンプの製造元は Barber-Nichols(図 4-4)
である。推進剤はシングルシャフトを介して渦巻型ターボポンプへ流れる。
この他にターボポンプの高圧ケロシン液は液圧式アクチュエータへ供給し、
TVC 作動としても利用される。この設計方法は、別々のハイドロリック・パ
ワー・システムの必要性を排除するためとしている。液体燃焼圧により、TVC
の故障が油圧アクチュエータ単体で発生するものとしない思想である。
さらにターボポンプ利用は、ロール制御にも利用されている。タービン排
気ノズルをピボット上に配置し、圧力を供給して制御している。この Merlin
エンジンは Merlin-1A、Merlin-1B、Merlin-1C と 3 種類が開発されたが、現在
では Merlin-1C が使用されている。Merlin-1C は、Falcon 1、Falcon 1e 及び Falcon
9 の 1 段に使用される。
Falcon 1 の Merlin C(M1)の推力は、Sea level で 78,400lbf(348.74kN)、Vacuum
で 887,00lbf(394.56kN)、1 秒間に約 300lbf(135kg)の燃料を消費するとし
ている。Falcon 1e 及び Falcon 9 に適用する Merlin C(M9)は、sea level で
115,000lbf(511.54kN)、Vacuum で 138,415lbf(615.57kN)と向上させている。
エンジン外観を図 4-5に、性能を表 4-2に示す。
SpaceX では、将来計画として Merlin-2 エンジンを計画している。その能力
はサターン V 型ロケットで使用された F-1 エンジンを目標とし、再生冷却式
エンジンを搭載、推力は 1,500,000 lbf (6.7 MN )とし、月探査用ロケットとし
て Zenit クラスを計画している。

23
図4-4 Merlin ターボポンプ(Barber-Nichols)4)
図4-5 Merlin 1C エンジン(右:M1、中央及び左:M9)4)
表4-2 Merlin-1 エンジンの性能概要
エンジン名 Merlin 1A Merlin 1C-F1(M1) Merlin 1C-F9 (M9)
使用ロケットFALCON-1デモ飛行用(現在は不使
現在のFALCON-1 FALCON-9用FALCON-1e用
推力/Sea Level (lbf) 73000 78400 115000推力/Vacuum (lbf) 83000 88700 138415推力/Sea Level (kN) 324.72 348.74 511.54推力/Vacuum (kN) 368.20 394.56 615.57混合比 (O/F) 2.2 2.2 2.2チャンバー圧(Psia) 782 8825 959ノズル拡大比 14.5 14.5 14.5Isp /Sea Level (sec) 244 256 263Isp /Vacuum (sec) 288.5 302.5 304.0エンジン長 (ft) 9.5 9.6 9.4エンジン直径 (ft) 5.5 5.5 4.7燃料系
ポンプフィード型ガスジェネレーターサイクル
ノズル アブレーティブ型 再生冷却型 再生冷却型
RP1/LOX
燃焼系
制御系油圧式TVCタービン排出ロール制御
ピントル噴射器形状
24
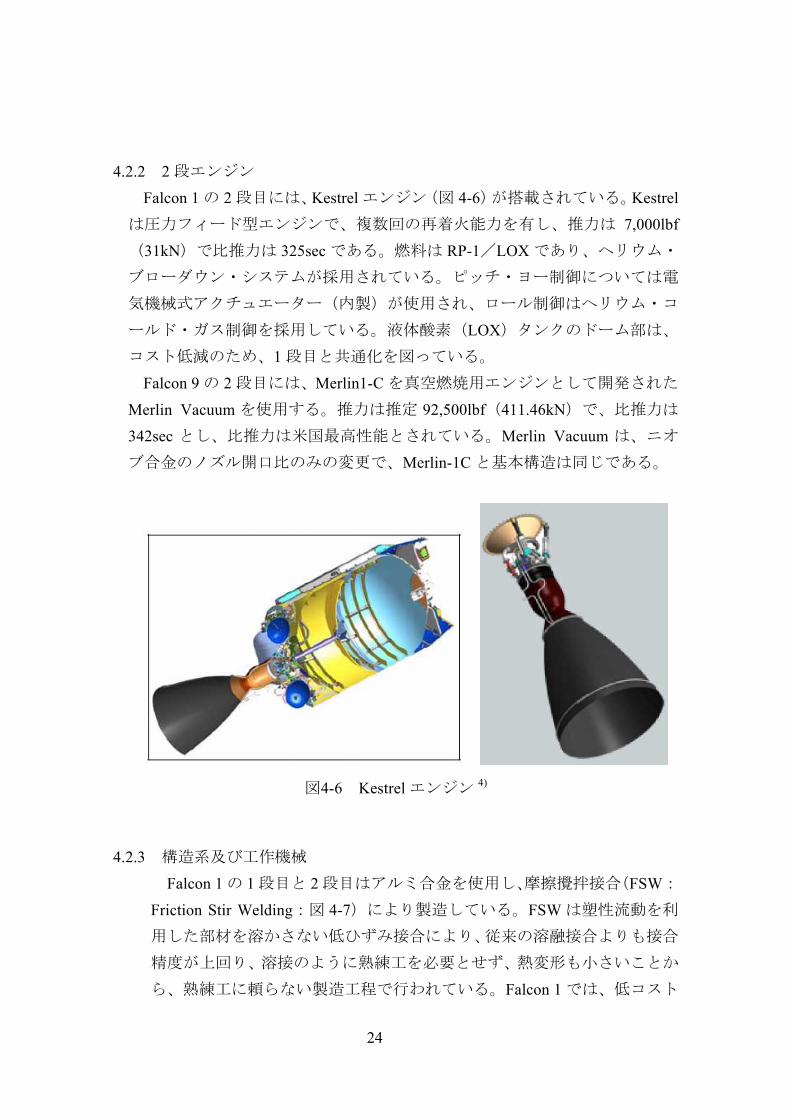
4.2.2 2 段エンジン
Falcon 1 の 2 段目には、Kestrel エンジン(図 4-6)が搭載されている。Kestrel
は圧力フィード型エンジンで、複数回の再着火能力を有し、推力は 7,000lbf
(31kN)で比推力は 325sec である。燃料は RP-1/LOX であり、ヘリウム・
ブローダウン・システムが採用されている。ピッチ・ヨー制御については電
気機械式アクチュエーター(内製)が使用され、ロール制御はヘリウム・コ
ールド・ガス制御を採用している。液体酸素(LOX)タンクのドーム部は、
コスト低減のため、1 段目と共通化を図っている。
Falcon 9 の 2 段目には、Merlin1-C を真空燃焼用エンジンとして開発された
Merlin Vacuum を使用する。推力は推定 92,500lbf(411.46kN)で、比推力は
342sec とし、比推力は米国 高性能とされている。Merlin Vacuum は、ニオ
ブ合金のノズル開口比のみの変更で、Merlin-1C と基本構造は同じである。
図4-6 Kestrel エンジン 4)
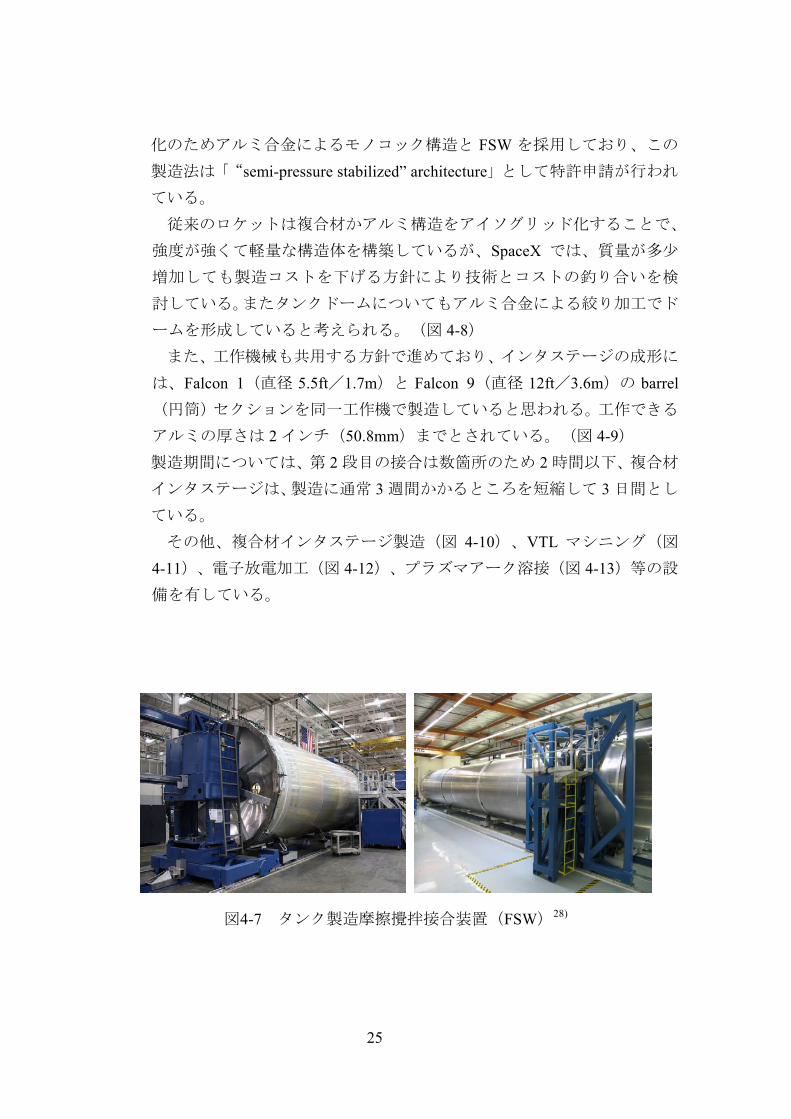
4.2.3 構造系及び工作機械
Falcon 1 の 1 段目と 2 段目はアルミ合金を使用し、摩擦攪拌接合(FSW:
Friction Stir Welding:図 4-7)により製造している。FSW は塑性流動を利
用した部材を溶かさない低ひずみ接合により、従来の溶融接合よりも接合
精度が上回り、溶接のように熟練工を必要とせず、熱変形も小さいことか
ら、熟練工に頼らない製造工程で行われている。Falcon 1 では、低コスト
25
化のためアルミ合金によるモノコック構造と FSW を採用しており、この
製造法は「“semi-pressure stabilized” architecture」として特許申請が行われ
ている。
従来のロケットは複合材かアルミ構造をアイソグリッド化することで、
強度が強くて軽量な構造体を構築しているが、SpaceX では、質量が多少
増加しても製造コストを下げる方針により技術とコストの釣り合いを検
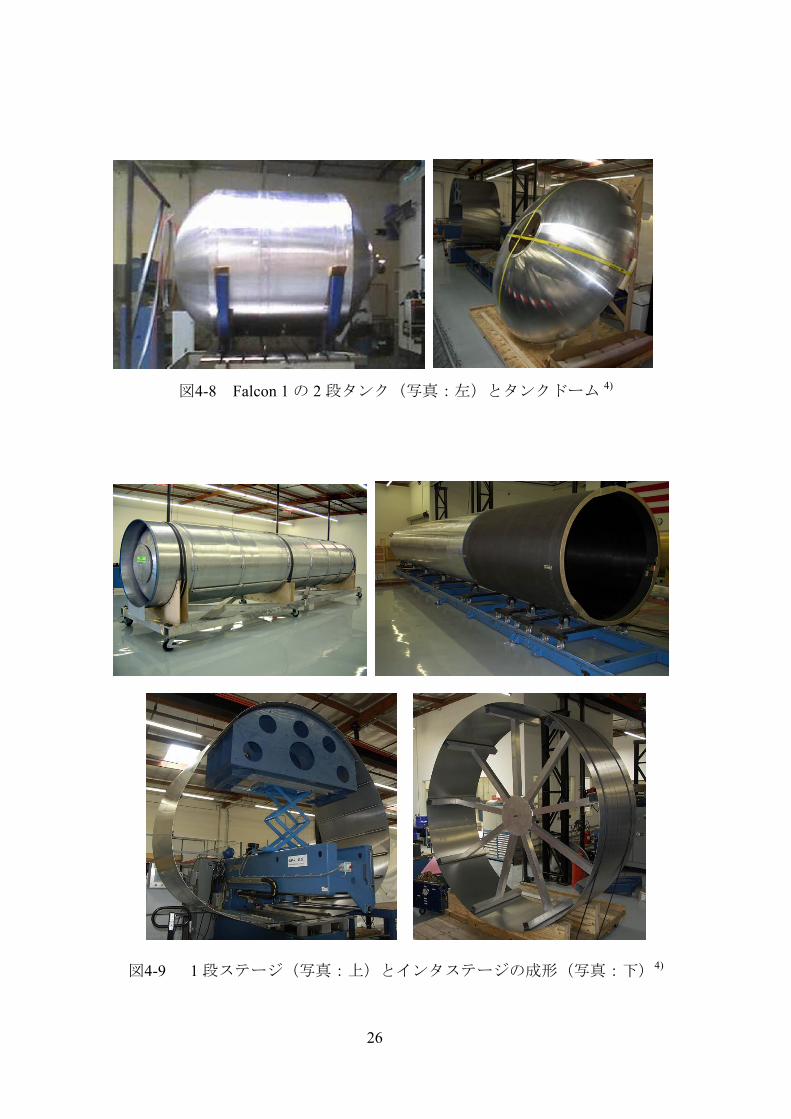
討している。またタンクドームについてもアルミ合金による絞り加工でド
ームを形成していると考えられる。(図 4-8)
また、工作機械も共用する方針で進めており、インタステージの成形に
は、Falcon 1(直径 5.5ft/1.7m)と Falcon 9(直径 12ft/3.6m)の barrel
(円筒)セクションを同一工作機で製造していると思われる。工作できる
アルミの厚さは 2 インチ(50.8mm)までとされている。(図 4-9)
製造期間については、第 2 段目の接合は数箇所のため 2 時間以下、複合材
インタステージは、製造に通常 3 週間かかるところを短縮して 3 日間とし
ている。
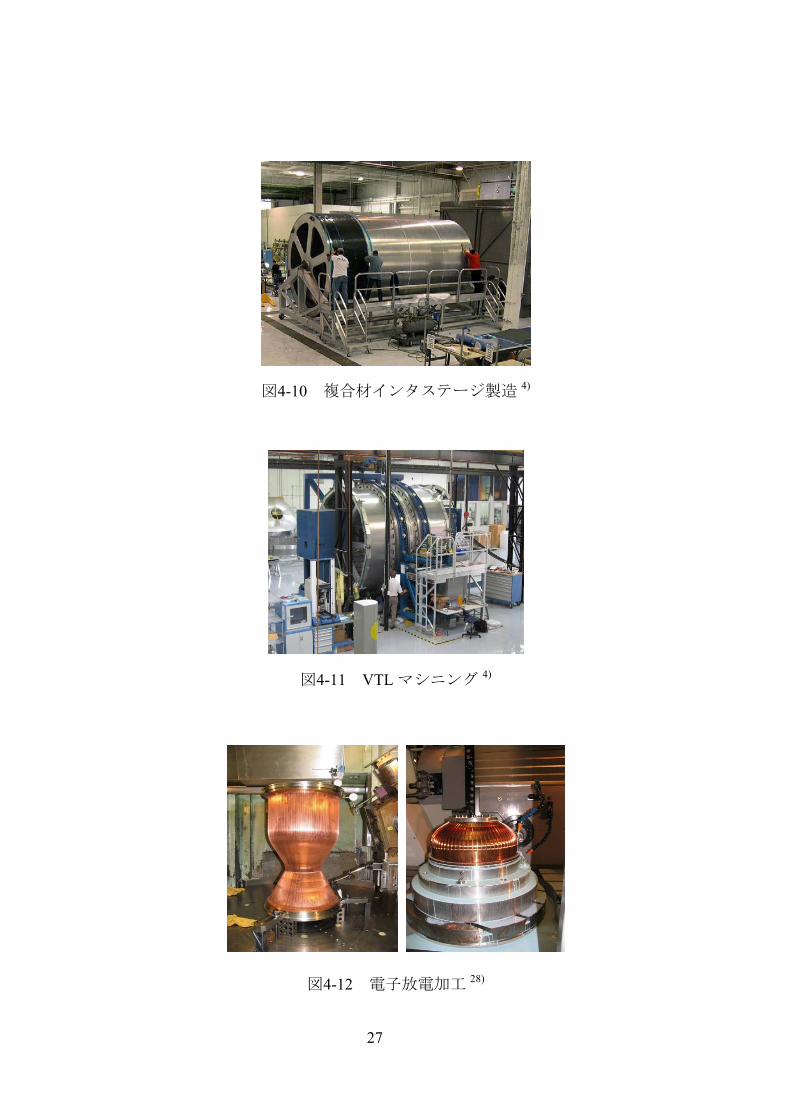
その他、複合材インタステージ製造(図 4-10)、VTL マシニング(図
4-11)、電子放電加工(図 4-12)、プラズマアーク溶接(図 4-13)等の設
備を有している。
図4-7 タンク製造摩擦攪拌接合装置(FSW)28)
26
図4-8 Falcon 1 の 2 段タンク(写真:左)とタンクドーム 4)
図4-9 1 段ステージ(写真:上)とインタステージの成形(写真:下)4)
27
図4-10 複合材インタステージ製造 4)
図4-11 VTL マシニング 4)
図4-12 電子放電加工 28)

28
図4-13 プラズマアーク溶接 28)
4.2.4 フェアリング
Falcon 1 のフェアリング(図 4-14)は、直径 1.5m、高さ 3.5 m、質量 157kg
のアルミ構造の双円錐形状で 2 分割分離方式であるが、Falcon 1e では直径
1.7m、高さ 4.4m、質量 136kg の複合材のフェアリングに変更されている。
近年のロケットフェアリングの軽量化の観点からサンドイッチパネルを
採用し、その多くは複合材(CFRP)を表皮とし、コア部をアルミハニカム
にしている。 近の Minotaur-I では、更なる軽量化を目的としてアイソグリ
ッド形状の CFRP フェアリングとしている。Falcon 1 では比較的質量のある
アルミ合金に耐熱加工を施したフェアリングを製造しており、質量よりもコ
スト低減を優先したが、Falcon 1e では複合材に変更している。
図4-14 Falcon 1 のフェアリング 4)
29
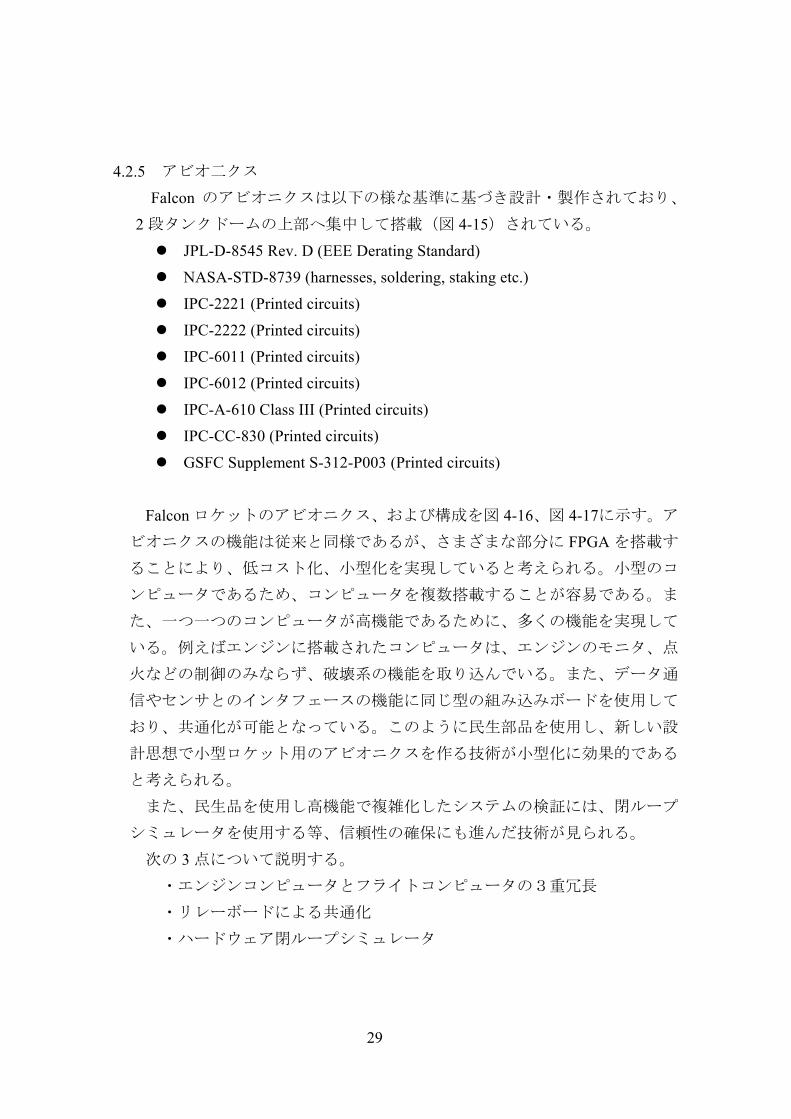
4.2.5 アビオ二クス
Falcon のアビオニクスは以下の様な基準に基づき設計・製作されており、
2 段タンクドームの上部へ集中して搭載(図 4-15)されている。
JPL-D-8545 Rev. D (EEE Derating Standard)
NASA-STD-8739 (harnesses, soldering, staking etc.)
IPC-2221 (Printed circuits)
IPC-2222 (Printed circuits)
IPC-6011 (Printed circuits)
IPC-6012 (Printed circuits)
IPC-A-610 Class III (Printed circuits)
IPC-CC-830 (Printed circuits)
GSFC Supplement S-312-P003 (Printed circuits)
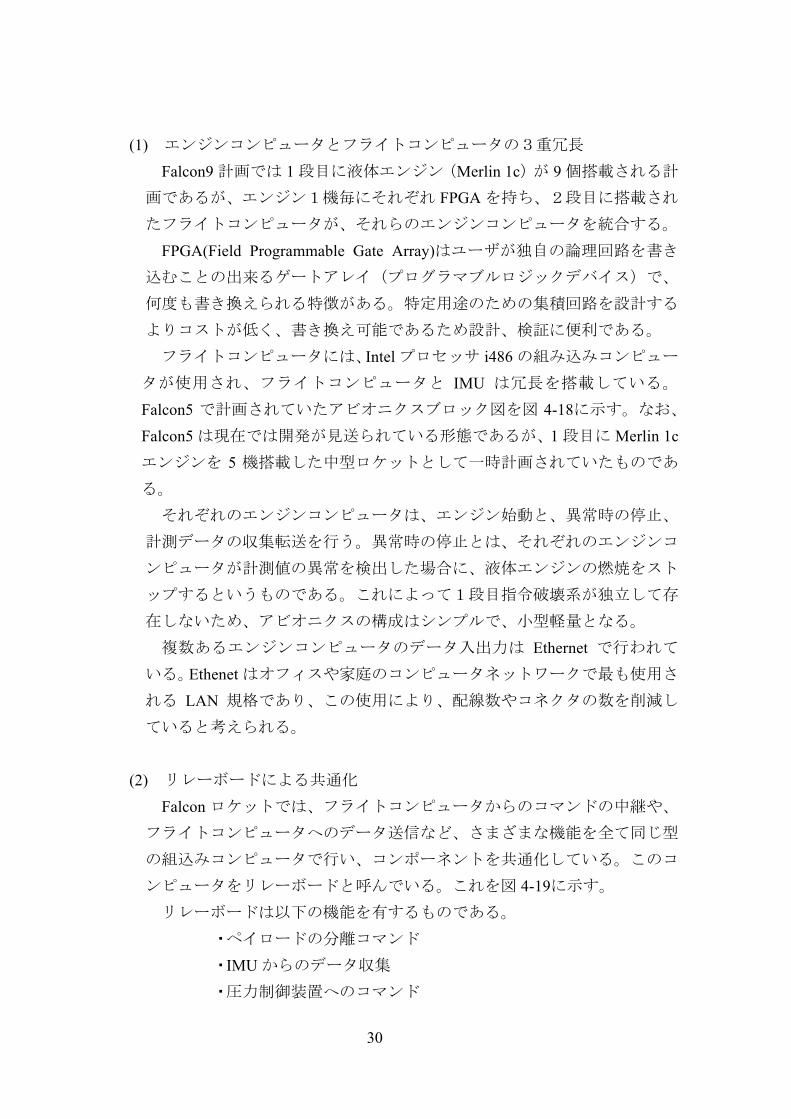
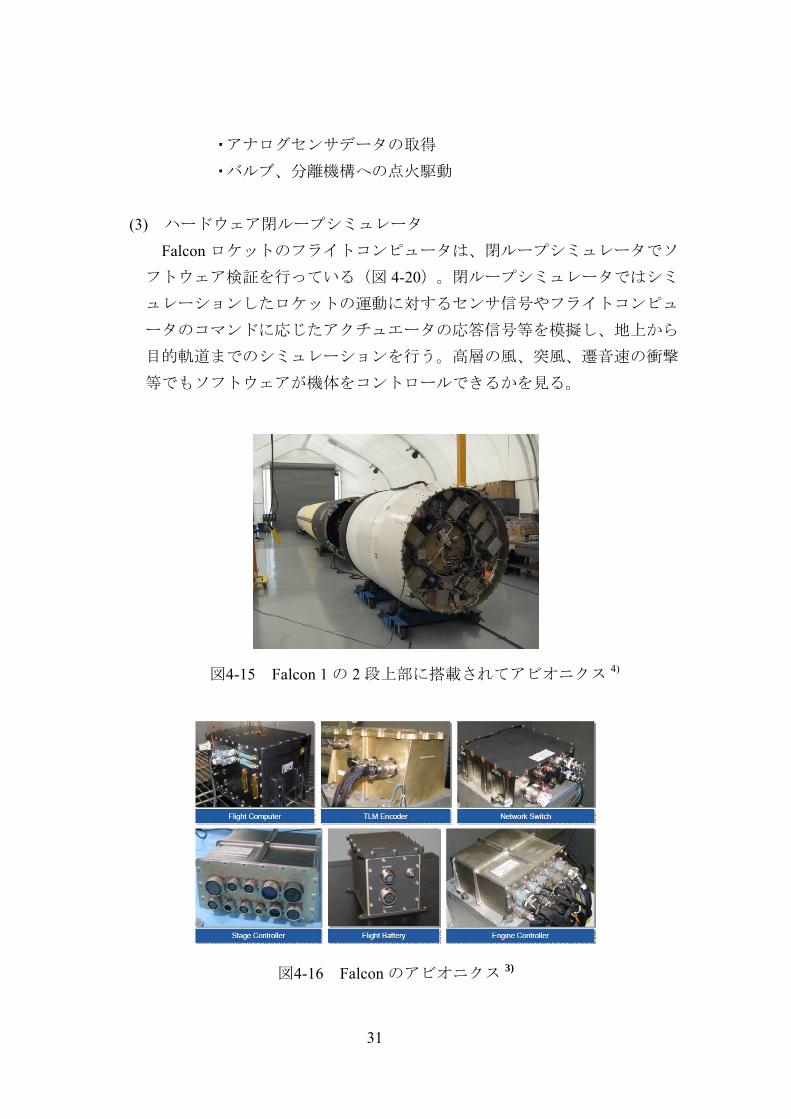
Falcon ロケットのアビオニクス、および構成を図 4-16、図 4-17に示す。ア
ビオニクスの機能は従来と同様であるが、さまざまな部分に FPGA を搭載す
ることにより、低コスト化、小型化を実現していると考えられる。小型のコ
ンピュータであるため、コンピュータを複数搭載することが容易である。ま
た、一つ一つのコンピュータが高機能であるために、多くの機能を実現して
いる。例えばエンジンに搭載されたコンピュータは、エンジンのモニタ、点
火などの制御のみならず、破壊系の機能を取り込んでいる。また、データ通
信やセンサとのインタフェースの機能に同じ型の組み込みボードを使用して
おり、共通化が可能となっている。このように民生部品を使用し、新しい設
計思想で小型ロケット用のアビオニクスを作る技術が小型化に効果的である
と考えられる。
また、民生品を使用し高機能で複雑化したシステムの検証には、閉ループ
シミュレータを使用する等、信頼性の確保にも進んだ技術が見られる。
次の 3 点について説明する。
・エンジンコンピュータとフライトコンピュータの3重冗長
・リレーボードによる共通化
・ハードウェア閉ループシミュレータ
30
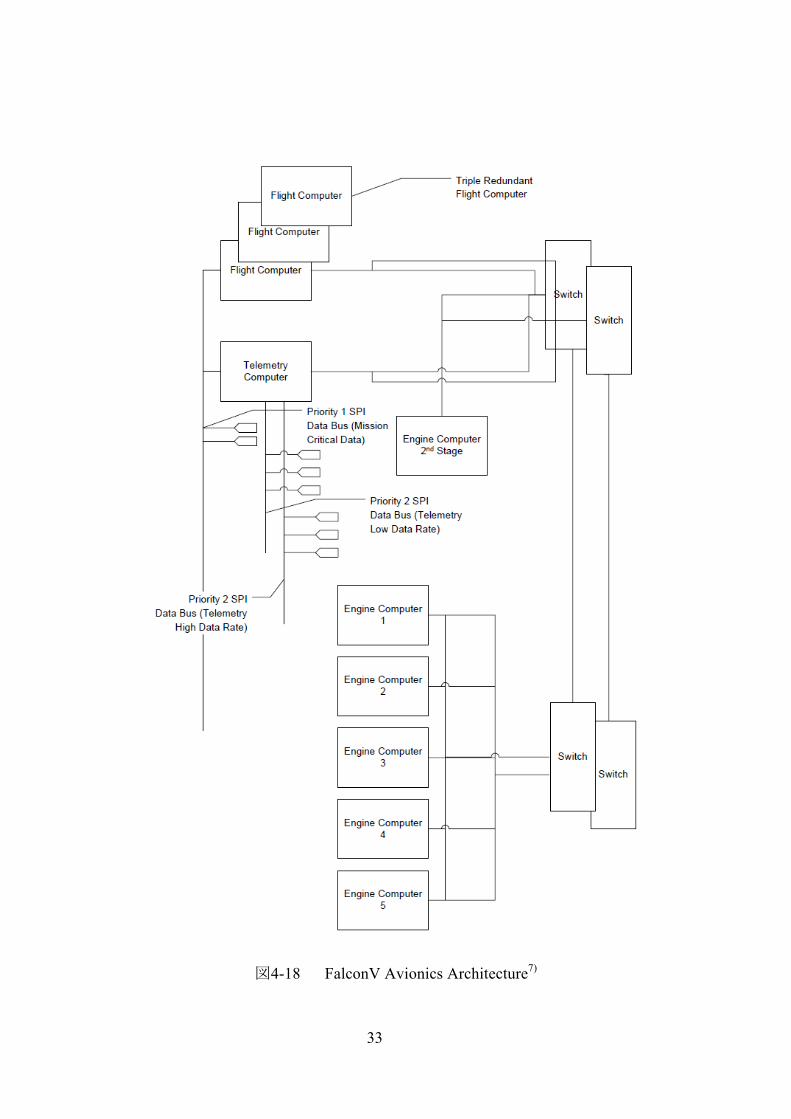
(1) エンジンコンピュータとフライトコンピュータの3重冗長
Falcon9 計画では 1 段目に液体エンジン(Merlin 1c)が 9 個搭載される計
画であるが、エンジン1機毎にそれぞれ FPGA を持ち、2段目に搭載され
たフライトコンピュータが、それらのエンジンコンピュータを統合する。
FPGA(Field Programmable Gate Array)はユーザが独自の論理回路を書き
込むことの出来るゲートアレイ(プログラマブルロジックデバイス)で、
何度も書き換えられる特徴がある。特定用途のための集積回路を設計する
よりコストが低く、書き換え可能であるため設計、検証に便利である。
フライトコンピュータには、Intel プロセッサ i486 の組み込みコンピュー
タが使用され、フライトコンピュータと IMU は冗長を搭載している。
Falcon5 で計画されていたアビオニクスブロック図を図 4-18に示す。なお、
Falcon5 は現在では開発が見送られている形態であるが、1 段目に Merlin 1c
エンジンを 5 機搭載した中型ロケットとして一時計画されていたものであ
る。
それぞれのエンジンコンピュータは、エンジン始動と、異常時の停止、
計測データの収集転送を行う。異常時の停止とは、それぞれのエンジンコ
ンピュータが計測値の異常を検出した場合に、液体エンジンの燃焼をスト
ップするというものである。これによって1段目指令破壊系が独立して存
在しないため、アビオニクスの構成はシンプルで、小型軽量となる。
複数あるエンジンコンピュータのデータ入出力は Ethernet で行われて
いる。Ethenet はオフィスや家庭のコンピュータネットワークで も使用さ
れる LAN 規格であり、この使用により、配線数やコネクタの数を削減し
ていると考えられる。
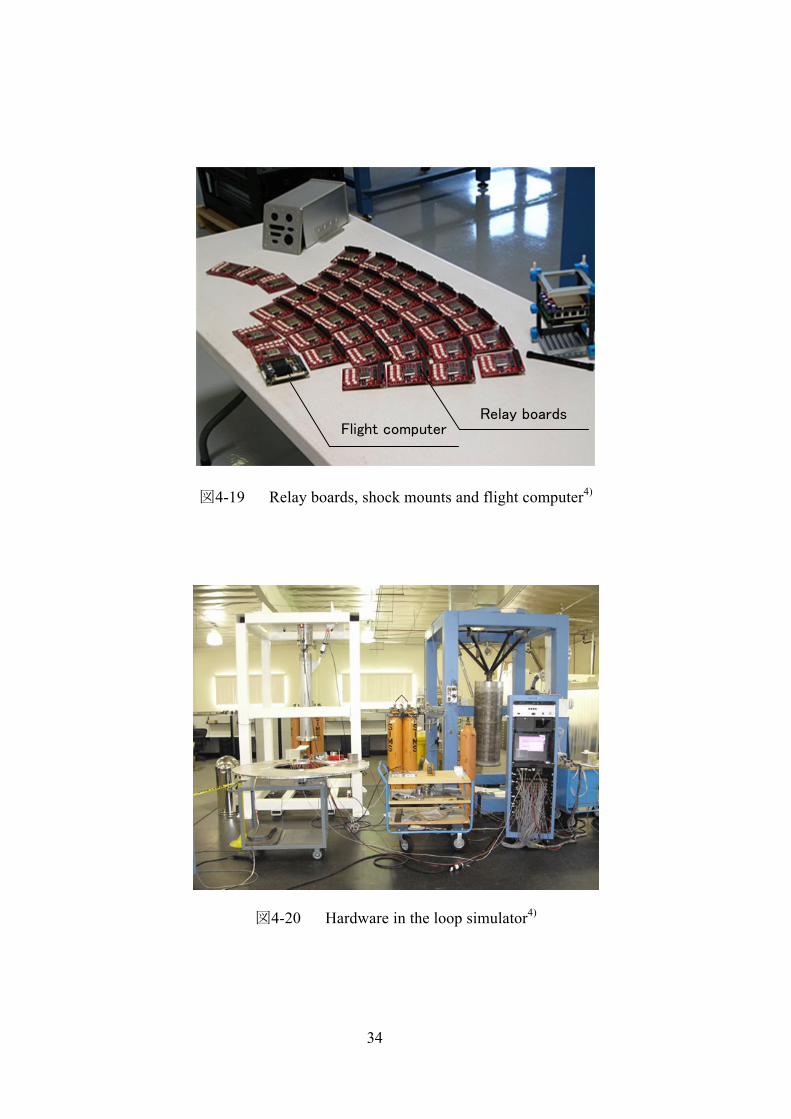
(2) リレーボードによる共通化
Falcon ロケットでは、フライトコンピュータからのコマンドの中継や、
フライトコンピュータへのデータ送信など、さまざまな機能を全て同じ型
の組込みコンピュータで行い、コンポーネントを共通化している。このコ
ンピュータをリレーボードと呼んでいる。これを図 4-19に示す。
リレーボードは以下の機能を有するものである。
・ ペイロードの分離コマンド
・ IMU からのデータ収集
・ 圧力制御装置へのコマンド
31
・ アナログセンサデータの取得
・ バルブ、分離機構への点火駆動
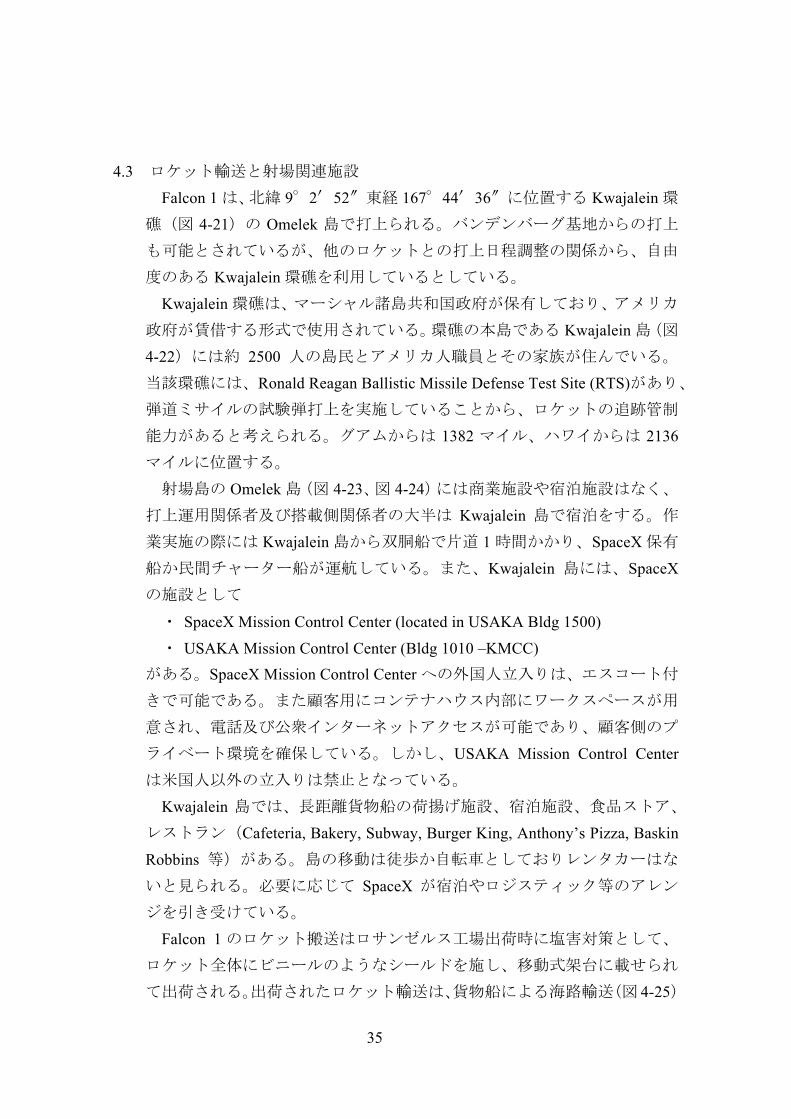
(3) ハードウェア閉ループシミュレータ
Falcon ロケットのフライトコンピュータは、閉ループシミュレータでソ
フトウェア検証を行っている(図 4-20)。閉ループシミュレータではシミ
ュレーションしたロケットの運動に対するセンサ信号やフライトコンピュ
ータのコマンドに応じたアクチュエータの応答信号等を模擬し、地上から
目的軌道までのシミュレーションを行う。高層の風、突風、遷音速の衝撃
等でもソフトウェアが機体をコントロールできるかを見る。
図4-15 Falcon 1 の 2 段上部に搭載されてアビオニクス 4)
図4-16 Falcon のアビオニクス 3)
32
図4-17 Falcon1 Avionics Architecture6)
33
図4-18 FalconV Avionics Architecture7)
34
図4-19 Relay boards, shock mounts and flight computer4)
図4-20 Hardware in the loop simulator4)
Flight computerRelay boards
35
4.3 ロケット輸送と射場関連施設
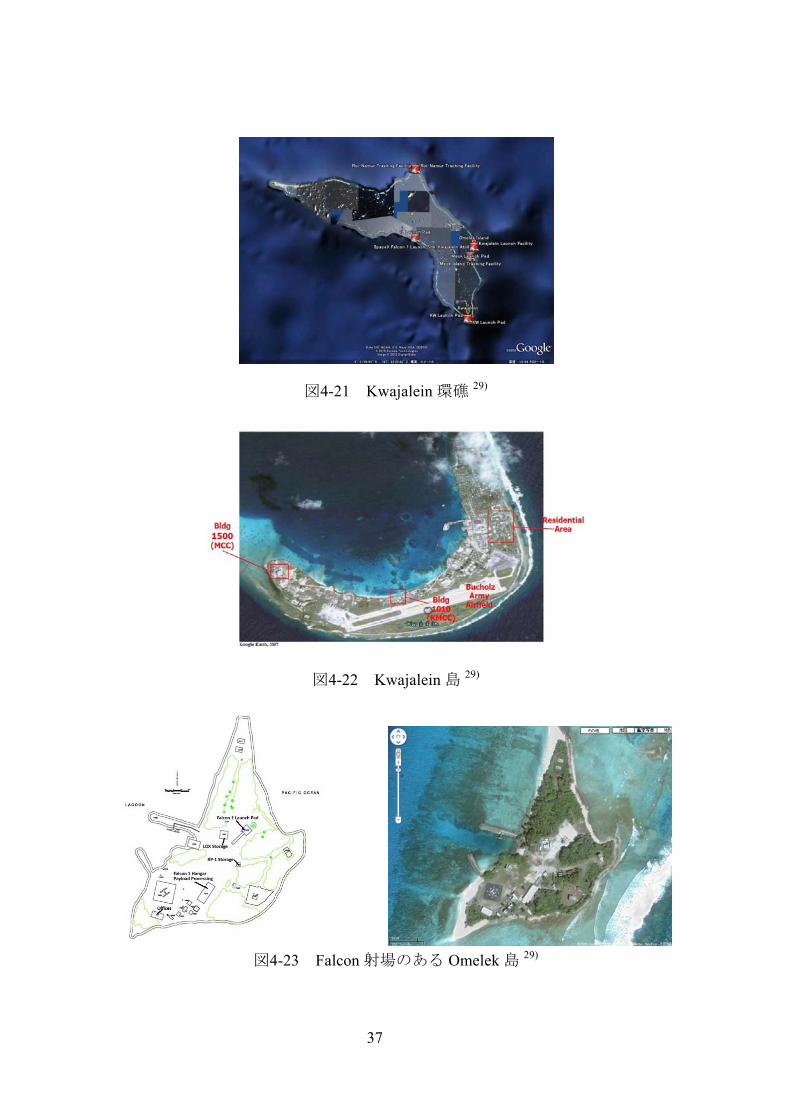
Falcon 1 は、北緯 9°2′52″東経 167°44′36″に位置する Kwajalein 環
礁(図 4-21)の Omelek 島で打上られる。バンデンバーグ基地からの打上
も可能とされているが、他のロケットとの打上日程調整の関係から、自由
度のある Kwajalein 環礁を利用しているとしている。
Kwajalein 環礁は、マーシャル諸島共和国政府が保有しており、アメリカ
政府が賃借する形式で使用されている。環礁の本島である Kwajalein 島(図
4-22)には約 2500 人の島民とアメリカ人職員とその家族が住んでいる。
当該環礁には、Ronald Reagan Ballistic Missile Defense Test Site (RTS)があり、
弾道ミサイルの試験弾打上を実施していることから、ロケットの追跡管制
能力があると考えられる。グアムからは 1382 マイル、ハワイからは 2136
マイルに位置する。
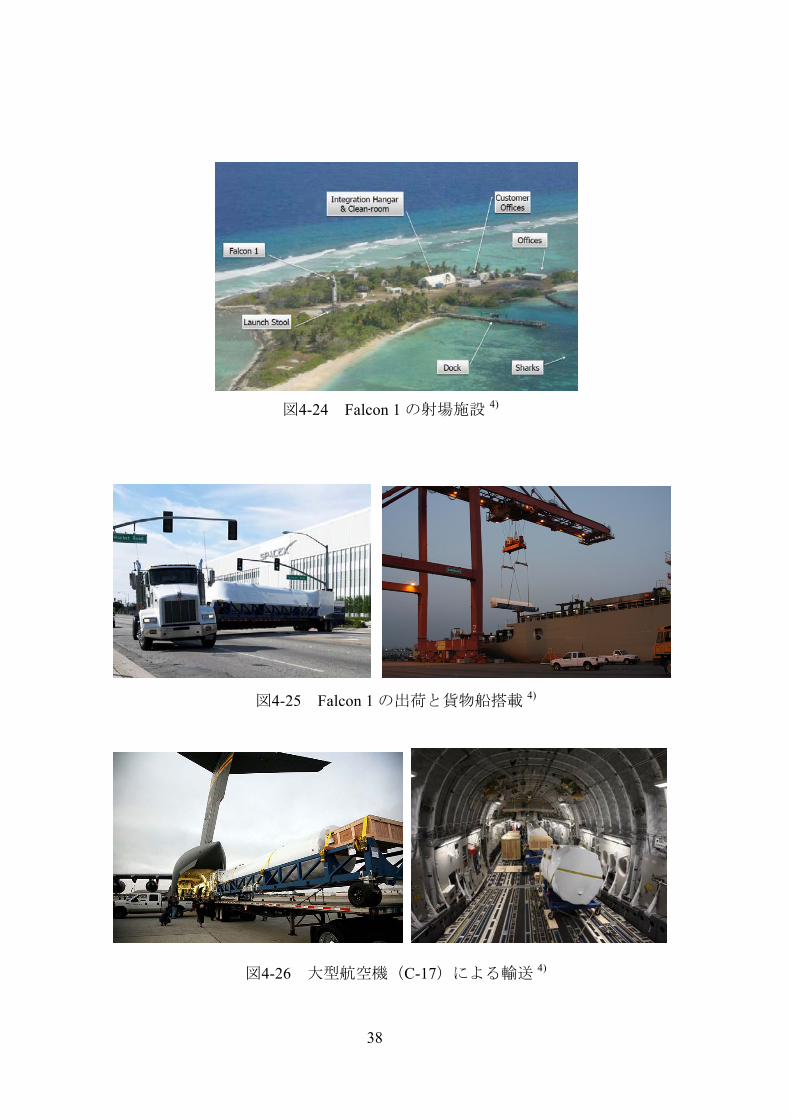
射場島の Omelek 島(図 4-23、図 4-24)には商業施設や宿泊施設はなく、
打上運用関係者及び搭載側関係者の大半は Kwajalein 島で宿泊をする。作
業実施の際には Kwajalein 島から双胴船で片道 1 時間かかり、SpaceX 保有
船か民間チャーター船が運航している。また、Kwajalein 島には、SpaceX
の施設として
・ SpaceX Mission Control Center (located in USAKA Bldg 1500)
・ USAKA Mission Control Center (Bldg 1010 –KMCC) がある。SpaceX Mission Control Center への外国人立入りは、エスコート付
きで可能である。また顧客用にコンテナハウス内部にワークスペースが用
意され、電話及び公衆インターネットアクセスが可能であり、顧客側のプ
ライベート環境を確保している。しかし、USAKA Mission Control Center
は米国人以外の立入りは禁止となっている。
Kwajalein 島では、長距離貨物船の荷揚げ施設、宿泊施設、食品ストア、
レストラン(Cafeteria, Bakery, Subway, Burger King, Anthony’s Pizza, Baskin
Robbins 等)がある。島の移動は徒歩か自転車としておりレンタカーはな
いと見られる。必要に応じて SpaceX が宿泊やロジスティック等のアレン
ジを引き受けている。
Falcon 1 のロケット搬送はロサンゼルス工場出荷時に塩害対策として、
ロケット全体にビニールのようなシールドを施し、移動式架台に載せられ
て出荷される。出荷されたロケット輸送は、貨物船による海路輸送(図 4-25)
36
か大型輸送機にて空輸(図 4-26)する 2 方式があり、空路は ORS
(Operationally Responsive Space:即応型宇宙運用)で実施され、コンテナ
輸送の場合はロサンゼルス近郊の港湾施設へ運び込まれ、他のコンテナ船
と一緒に混載されて出港する。実例では Falcon 1 初号機は海路輸送だった
が、4 号機は即応型宇宙システムのミッションとして、C-17 で Kwajalein
に空輸されている。Kwajalein 島の滑走路は全長 2032m x 幅 60m あり、米
国 大輸送機の C-5 ギャラクシーも着陸可能である。またヘリポートもあ
り、空路で輸送されたロケット及び関連部品はここで荷降ろしして、
Kwajalein 島にある港湾施設もしくは SpaceX の保有する倉庫へ運ばれる。
海上輸送の大型輸送コンテナ船(混載定期輸送船)は、Kwajalein 島の港湾
施設で荷降ろしされる。空路もしくは海路にて Kwajalein 島へ到着したロ
ケットは、ここから小型貨物船へ搭載され、島から 30km 北部の Omelek
島へ搬送される。
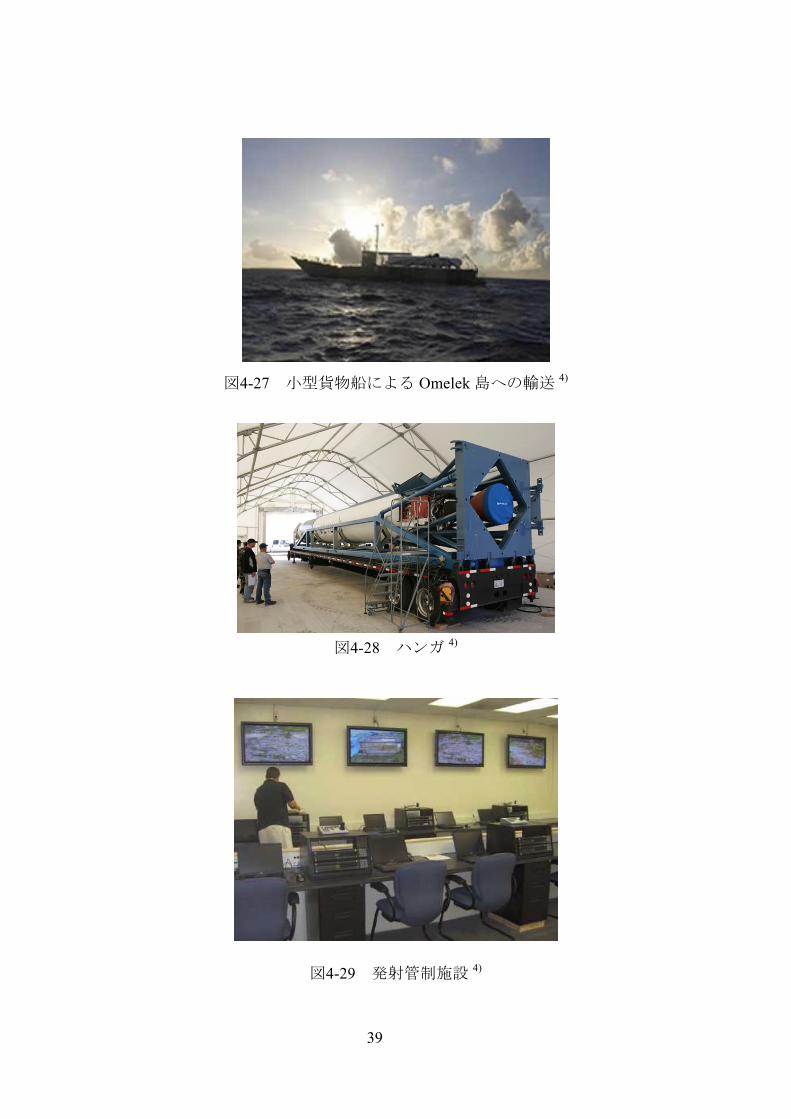
小型船舶で到着したロケットは港にて降ろされ、白いビニールハウスの
ハンガに収納・保管される。Omelek 島にはヘリポート、ロケット燃料であ
るケロシン貯蔵タンク、液体酸素貯蔵タンク、移動式コンテナ管制施設、
発射管制施設(図 4-29)などがある。
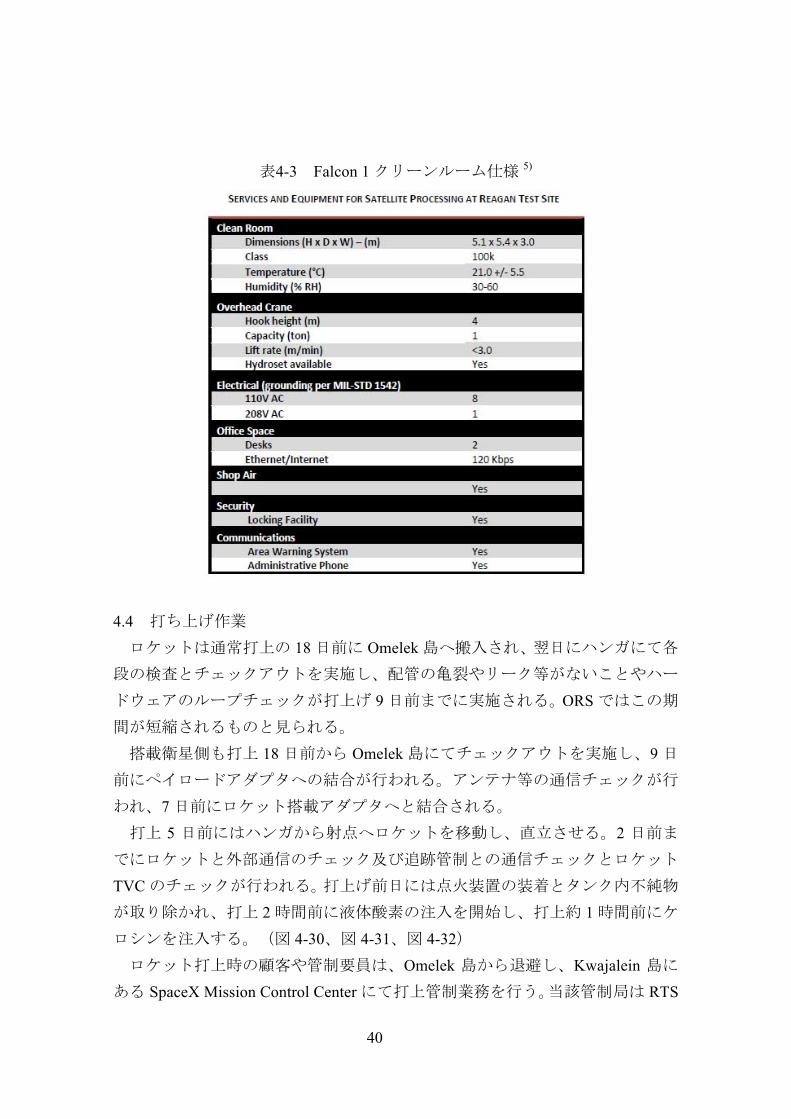
Falcon 1 を保管するハンガのスペースは 6x22.5x12m(HxDxW)あり、ク
リーンレベルは 100k で 2t のクレーンがあり、ロケットと衛星を結合する
場合等に使用される。またハンガ内には、5.1x5.4x3.0m(HxDxW)の衛星
のクリーンルームがある。クリーンルーム(表 4-3)のレベルは 100k(10k
も可能)であり、温度は 21(±5.5)℃、湿度は 30-60%である。また、ク
リーンルームにはクレーンがあり、 大 1t まで吊下げられ、電力系として
は MIL-STD-1542 に準拠した 110V 電源が 8 つ、208V 電源が 1 つある。他
にも机が 2 個、ネット接続速度は 120kbps、電話設備も用意されている。
37
図4-21 Kwajalein 環礁 29)
図4-22 Kwajalein 島 29)
図4-23 Falcon 射場のある Omelek 島 29)
38
図4-24 Falcon 1 の射場施設 4)
図4-25 Falcon 1 の出荷と貨物船搭載 4)
図4-26 大型航空機(C-17)による輸送 4)
39
図4-27 小型貨物船による Omelek 島への輸送 4)
図4-28 ハンガ 4)
図4-29 発射管制施設 4)
40
表4-3 Falcon 1 クリーンルーム仕様 5)
4.4 打ち上げ作業
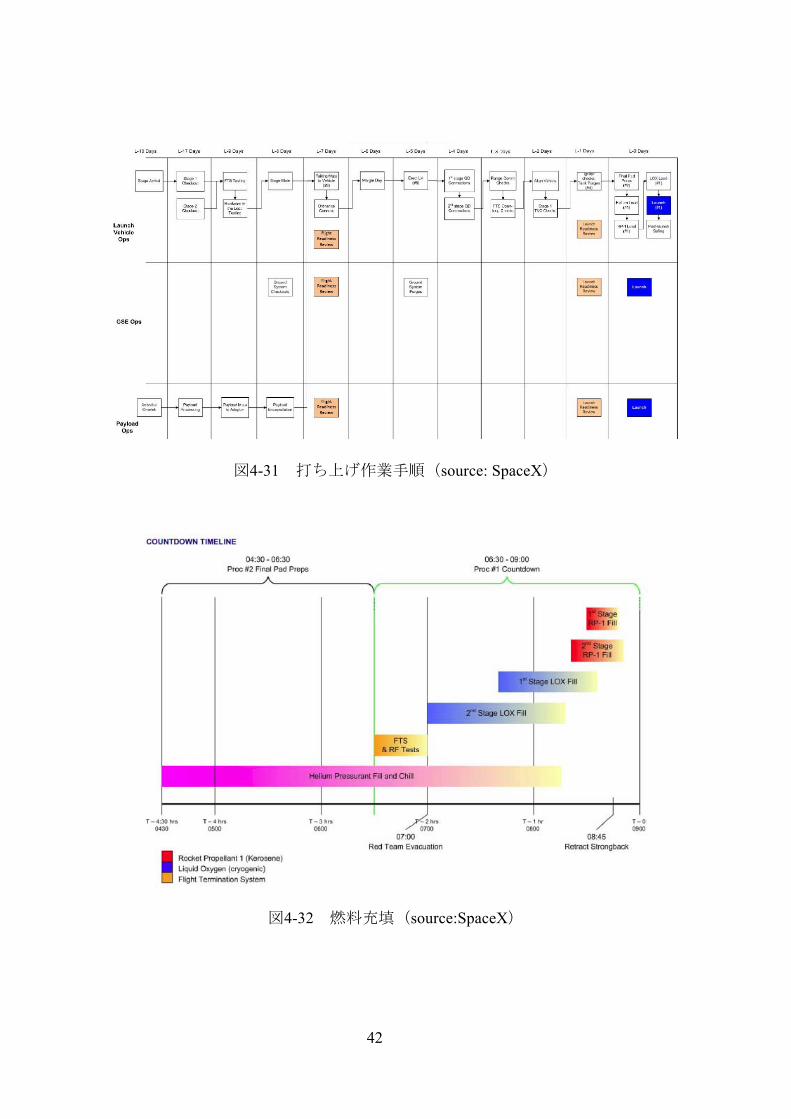
ロケットは通常打上の 18 日前に Omelek 島へ搬入され、翌日にハンガにて各
段の検査とチェックアウトを実施し、配管の亀裂やリーク等がないことやハー
ドウェアのループチェックが打上げ 9 日前までに実施される。ORS ではこの期
間が短縮されるものと見られる。
搭載衛星側も打上 18 日前から Omelek 島にてチェックアウトを実施し、9 日
前にペイロードアダプタへの結合が行われる。アンテナ等の通信チェックが行
われ、7 日前にロケット搭載アダプタへと結合される。
打上 5 日前にはハンガから射点へロケットを移動し、直立させる。2 日前ま
でにロケットと外部通信のチェック及び追跡管制との通信チェックとロケット
TVC のチェックが行われる。打上げ前日には点火装置の装着とタンク内不純物
が取り除かれ、打上 2 時間前に液体酸素の注入を開始し、打上約 1 時間前にケ
ロシンを注入する。(図 4-30、図 4-31、図 4-32)
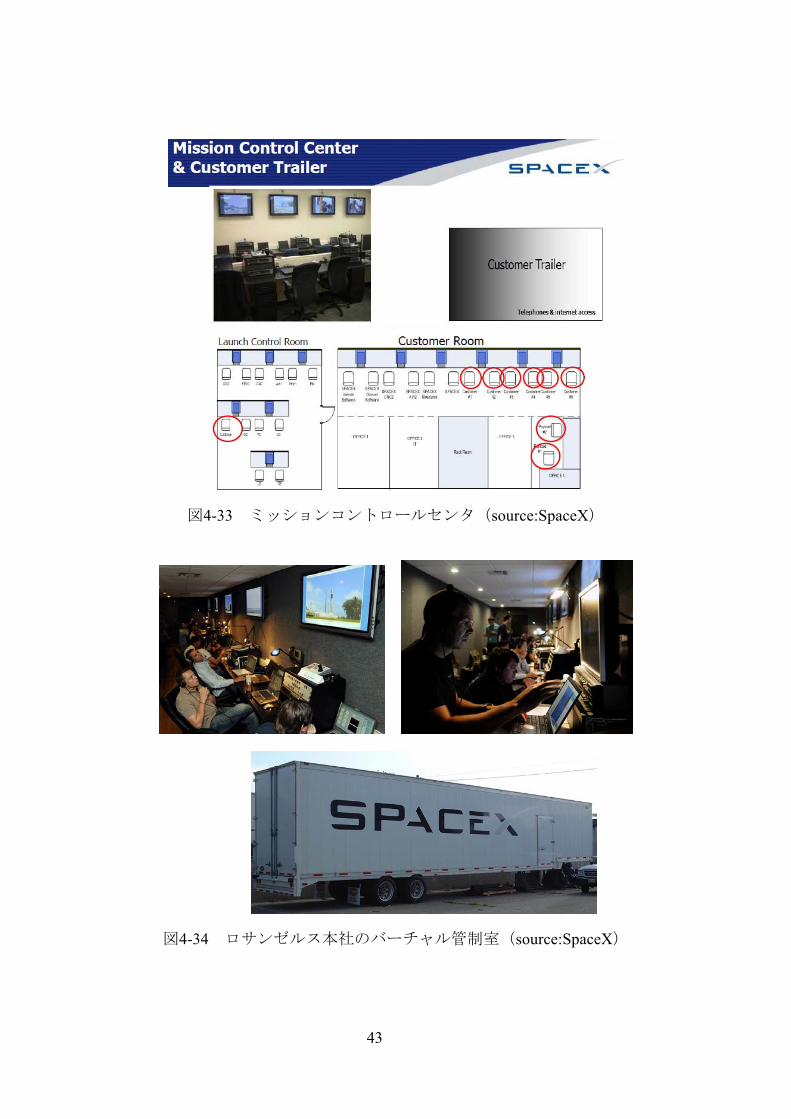
ロケット打上時の顧客や管制要員は、Omelek 島から退避し、Kwajalein 島に
ある SpaceX Mission Control Center にて打上管制業務を行う。当該管制局は RTS
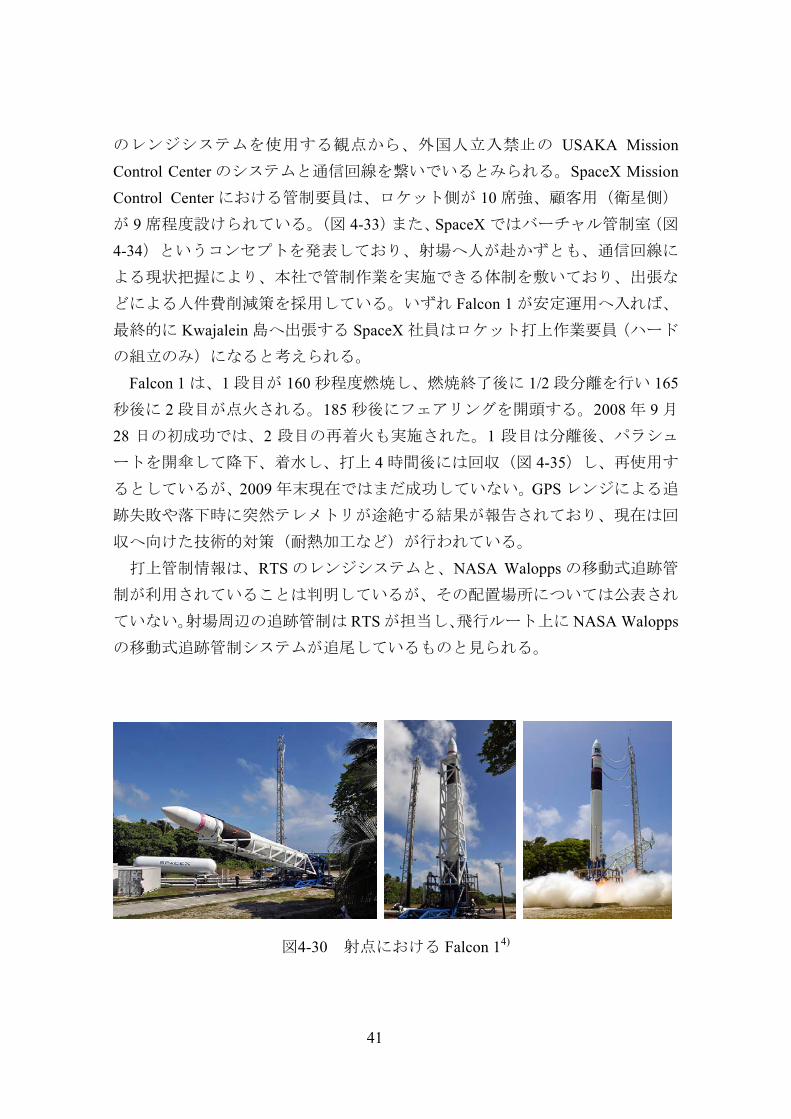
41
のレンジシステムを使用する観点から、外国人立入禁止の USAKA Mission
Control Center のシステムと通信回線を繋いでいるとみられる。SpaceX Mission
Control Center における管制要員は、ロケット側が 10 席強、顧客用(衛星側)
が 9 席程度設けられている。(図 4-33)また、SpaceX ではバーチャル管制室(図
4-34)というコンセプトを発表しており、射場へ人が赴かずとも、通信回線に
よる現状把握により、本社で管制作業を実施できる体制を敷いており、出張な
どによる人件費削減策を採用している。いずれ Falcon 1 が安定運用へ入れば、
終的に Kwajalein 島へ出張する SpaceX 社員はロケット打上作業要員(ハード
の組立のみ)になると考えられる。
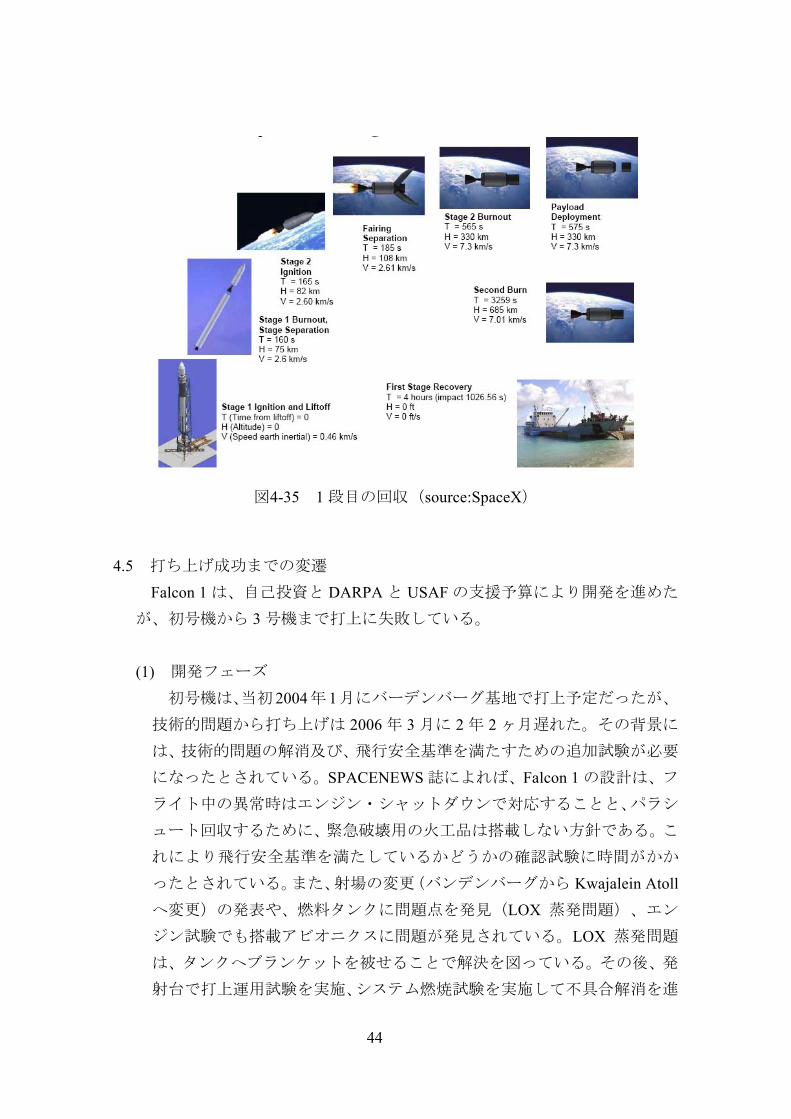
Falcon 1 は、1 段目が 160 秒程度燃焼し、燃焼終了後に 1/2 段分離を行い 165
秒後に 2 段目が点火される。185 秒後にフェアリングを開頭する。2008 年 9 月
28 日の初成功では、2 段目の再着火も実施された。1 段目は分離後、パラシュ
ートを開傘して降下、着水し、打上 4 時間後には回収(図 4-35)し、再使用す
るとしているが、2009 年末現在ではまだ成功していない。GPS レンジによる追
跡失敗や落下時に突然テレメトリが途絶する結果が報告されており、現在は回
収へ向けた技術的対策(耐熱加工など)が行われている。
打上管制情報は、RTS のレンジシステムと、NASA Walopps の移動式追跡管
制が利用されていることは判明しているが、その配置場所については公表され
ていない。射場周辺の追跡管制は RTS が担当し、飛行ルート上に NASA Walopps
の移動式追跡管制システムが追尾しているものと見られる。
図4-30 射点における Falcon 14)
42
図4-31 打ち上げ作業手順(source: SpaceX)
図4-32 燃料充填(source:SpaceX)
43
図4-33 ミッションコントロールセンタ(source:SpaceX)
図4-34 ロサンゼルス本社のバーチャル管制室(source:SpaceX)
44
図4-35 1 段目の回収(source:SpaceX)
4.5 打ち上げ成功までの変遷
Falcon 1 は、自己投資と DARPA と USAF の支援予算により開発を進めた
が、初号機から 3 号機まで打上に失敗している。
(1) 開発フェーズ
初号機は、当初 2004年 1月にバーデンバーグ基地で打上予定だったが、
技術的問題から打ち上げは 2006 年 3 月に 2 年 2 ヶ月遅れた。その背景に
は、技術的問題の解消及び、飛行安全基準を満たすための追加試験が必要
になったとされている。SPACENEWS 誌によれば、Falcon 1 の設計は、フ
ライト中の異常時はエンジン・シャットダウンで対応することと、パラシ
ュート回収するために、緊急破壊用の火工品は搭載しない方針である。こ
れにより飛行安全基準を満たしているかどうかの確認試験に時間がかか
ったとされている。また、射場の変更(バンデンバーグから Kwajalein Atoll
へ変更)の発表や、燃料タンクに問題点を発見(LOX 蒸発問題)、エン
ジン試験でも搭載アビオニクスに問題が発見されている。LOX 蒸発問題
は、タンクへブランケットを被せることで解決を図っている。その後、発
射台で打上運用試験を実施、システム燃焼試験を実施して不具合解消を進
45
めた。
一方、Falcon 1 が DELTA、ATLAS、TITAN ロケット開発以降、新規開
発するロケットとして注目されていたが、ノウハウの再習得に時間を要し
たことから、初打ち上げは延期に延期を重ねた。
(2) Falcon 1 初号機
初号機は、2006 年 3 月 24 日に打上げられ、打上 26 秒後に大きく姿勢
を崩し、約 40 秒後に海上落下した。失敗直後の報道では、「作業員が打
上前に緩めたプラグを締め忘れた」という説があったが、1 段目を回収・
し検査した結果、失敗原因は「燃料ポンプ入口圧力センシング配管のアル
ミ製ナットが応力腐食割れを起こし、腐食部から燃料が漏れたことで燃料
に引火し、火炎が制御用空圧系ラインを焼き切ったのが原因」と発表され
た。また、応力腐食割れの推定原因は判明していないが、赤道上付近の小
島という高温多湿な環境に 3 ヶ月間ロケットを晒したとあるが、ステンレ
スフィッティングとナット間の異種金属接触による電解腐食が原因とい
う情報もある。また、配管バルブ表面はアノダイズ処理されているが、カ
ウントダウンを繰り返して実施しているため、傷があった可能性もあると
指摘されている。さらに、直接失敗原因ではないものの、燃料タンクから
発生する LOX 蒸発問題の対策として、ブランケットを装着していたが、
これが発射時に分離されるはずが、打上 20 秒後に分離落下している点も
指摘されている。
この結果から、SpaceX では、ロケットのバルブ等の腐食問題を防止す
るため、設計変更を加える一方、デリケートな部位は梱包を解いてから数
週間以内に打上げるよう運用基準を変更したとしている。
(3) Falcon 1 の 2 号機
初号機打上失敗の 1 年後の 2007 年 3 月 20 日に 2 号機の打ち上げを実施
し、失敗している。
打上前のカウントダウンにおいて、テレメトリが地上から電波へ切替す
る際に、地上ソフトウェア側での切り替え過程でトラブルが発生、カウン
トダウンが停止して打上は 1 日延期された。搭載燃料は排液処理されてい
る。不具合の原因は、地上から電波切替する際に、切り替え時の遅れを考
慮した設計が反映されていなかったためであり、即日ソフトウェアを更新
46
している。
改修後の翌日(打上日当日)は、カウントダウンが順調に進んだが、燃
焼室圧力が危険ラインを下回ったことで、Merlin エンジン点火直前に中止
された。原因として燃料のケロシン温度が低かったとされ、燃料再充填し
て 1 時間 5 分後に再打ち上げを実施、ロケットは発射台を離れた。打上げ
られた 2 号機は、第1段 Merlin エンジンが正常に燃焼したが、1/2 段分離
時に第 2 段エンジン Kestrel のノズルに第 1 段が接触、姿勢を崩している。
その後、Kestrel エンジン着火、フェアリング分離と、2 段目の燃焼は正常
に動作したが、高度 300km へ達したものの、ターゲット軌道への投入に
は失敗している。
打上失敗後の 2007 年 6月 15 日に、SpaceXは DARPA と共に「Demo Flight
2 Flight Review Update ( http://www.SpaceX.com/F1-DemoFlight2-Flight-
Review.pdf)」において、下記の不具合項目、原因等を公表している。
(a) Stage 2 LOX Quick Disconnect (QD) Failed to Disconnect at Liftoff
Quick Disconnect パネルと LOX 充填配管が機体から脱落
チェックバルブによって LOX 漏洩の発生はなし。
(b) Stage 1 LOX, Fuel, and Electrical QD’s Poor Disconnect at Liftoff
リフトオフ時の液体燃料と電気系統の離脱(計画より離脱が遅い)
(c) Stage 1 Trajectory Performance
1 段目エンジンの PU(Propellant Utilization)ファイルに不具合があ
り、燃料混合比が変わったため初期推力が低下して予測高度・速度を
不達成
LOX タンクで圧力低下が発生し、キャビテーションが発生。圧力
制御の設計変更
(d) Stage 2 Propellant Utilization (PU)
2 段目の PU 機能不良
(e) Stage Separation Re-contact
1 段目分離時に姿勢異常
高度が低く、仰角が予想より大
高度以上は、Merlin-1C エンジンの採用解消
混合比と圧力用 He のマージンを変更
47
(f) Marmon Clamp Joint Separation Anomaly at Fairing Jettison
フェアリング分離時にテレメータ上はクランプを切り離す爆発ボ
ルトは作動したが、搭載カメラ観測では、落下するクランプ同士が繋
がっている様子を確認
(g) Upper Stage Control Anomaly
アッパステージの制御不具合のため、2nd stage slosh baffles を追加
(h) 1st Stage Location and Recovery
1 段目回収失敗については、パラシュートの動作不明
GPS による位置判定不良 - 3 重冗長へ変更
また、第1段目の帰還時における熱対策の強化
(パラシュートは高度 4km で展開する設計)
この原因究明に加えて SpaceX は、ロケットの技術的リスクの 90%はク
リアできたとし、「試験飛行としては成功したといって良い」とのコメン
トを打上後に発表している。
(4) Falcon 1 の 3 号機
初号機、2 号機で失敗した Falcon 1 は、エンジンを Merlin-1C へ変更し
て過去の問題点を改良して再製造された。Merlin-1C は RP-1 による再生冷却
型に変更されている。
Falcon 1 の 3 号機は 2008 年 4 月 18 日に出荷され、8 月 2 日に打上げられ
た。しかし、打ち上げ前のカウントダウン時にターボポンプの圧力が規定値
より 0.5PSI ズレたことで、自動カウントダウンが緊急停止した。その問題
を解決し、再度カウントダウンを実施し、約 30 分後に打上げを実施してい
る。
3 号機の新型エンジンは予定通り燃焼したが、第 1 段が分離後、残留推力
によって第 2 段に追突し、2 段目は正常に燃焼したものの打上は失敗した。
追突については動画でも観測されている。SpaceX では、第1段分離の 1.5
秒前にシャットダウンするシーケンスだったとしている。この残留推力の推
定が失敗原因としているが、2 号機、3 号機共に分離時に“ノズル接触”や
“残留推力による衝突”による問題が発生したことで、分離時における不具
合対策は時間をかけて検証・解決されたと考えられる。そして SpaceX は 3
回目の打上に対して、以下のコメントを公表している。
48
・ Merlin 1C エンジンや 1 段目全体のシステムは正常に作動し、総合的に
は 1 段ステージは良好であった。
・ 残留推力による衝突があったものの、分離時の姿勢は正常で火工品も
正常作動して pneumatic pushers(空気圧による押出装置)も正常作動し
た。
・ 2 段目ステージの点火とチャンバー圧力も正常だった
・ フェアリング分離も正常
・ 多くの問題を Falcon 9 ではなく Falcon 1 で経験した
・ ロケットのステージ・インテグレーションと発射台設置と打上を 7 日
間で実施できた。
・ 過去のフライトでの失敗や問題になるリスクが発生せず、技術的諸問
題は解決したとし、近いうちに 4 号機を打ち上げる。
(5) Falcon 1 の 4 号機
3 号機失敗から約 2 ヵ月後の 2008 年 9 月 28 日、SpaceX は Falcon 1 の 4
号機を打上げて成功した。打上前の事前作業では、9 月 20 日に短時間の燃
焼試験を実施して成功裡に終了している。しかし、2 段目の LOX 系部品交
換が行われたため、9 月 23 日の打上は 9 月 28 日に延期されている。4 号機
打上では衛星を搭載しておらず、衛星分離信号の受信をもって成功と定義
している。また、第 2 段の Kestrel エンジンの再着火が行われている。
SpaceX のプレスリリースでは、第 1 回燃焼終了時の軌道は高度 330.5km、
軌道傾斜角 8.99 度であり、再着火による上昇により、到達軌道は高度
621x643km・軌道傾斜角 9.3 度と発表し、傾斜角の変更を実施している。
この理由として、SpaceX は投入軌道が長楕円軌道になるためとしている。
また、4 号機打上ではテレメータのデータより、1 段目が分離後の落下中
に空中分解したことで、1 段目回収には失敗している。今後は熱対策を実施
して 1 段目回収を実施するとしていることから、1 段目回収は後日の課題と
して残っている。
(6) Falcon 1 の 5 号機
Falcon 1 の衛星打上成功は 5 号機からである。5 号機は 2009 年 3 月 17
日に出荷され、4 月 21 日に打上予定であったが、4 月 19 日に振動環境レベ
ルに問題があり、打上延期が発表されている。この問題解決のため、ロケ
49
ットと衛星の結合振動対策として振動減衰装置を追加装備することで解決
している。この装置は Pegasus や Minotaur-I で採用実績のある CSA
Engineering (2008 年 5 月に Moog に買収される)の SoftRide を採用して
いる。この改良の後、2009 年 7 月 14 日にマレーシアの RazakSAT(韓国の
SaTReC Initiative 社製)を搭載して初商業打上に成功している。
また、第 1 段の回収が実施されたかは明らかにはされていない。SpaceX
は、「Flight 5 is a better shot, but I think on Flight 6 it's highly likely we'll recover
the first stage.」としており、1 段回収は元々計画されておらず、6 号機で実
施予定と見られる。
4.6 Falcon 1 のコスト分析
SpaceX による Falcon 1 ロケットは、元々DARPA の FALCON プログラム
により価格目標($5million)と打ち上げ能力(LEO 200km、傾斜角 28.5 度、
450kg)が定められていた。
DARPA の FALCON プログラムでは、Airlaunch LLC の提案する LOX/プロ
パンエンジンの「QuickReach」、SpaceX の LOX/RP1 エンジンの「Falcon 1」、
Microcosm の LOX/Jet-A エンジン、複合材多様の「Scorpius」、Lockheed Martin
のハイブリッドロケットを使用した空中発射システムである「FALCON
Small Launch Vehicle」の 4 社へ基盤開発予算が与えられ、SpaceX のみが実
機開発まで進んだ。
Falcon 1 の実機開発段階では、DARPA ではなく USAF からフライト 3 基
分($100mil)の契約を受注しており、この費用にて射場建設や必要な資産
を購入したと見られる。
以下に Falcon 1 のコスト低減策を『ロケット』、『施設』、『輸送』、『射
場・打上運用』及び『政治的背景』に分けてまとめる。
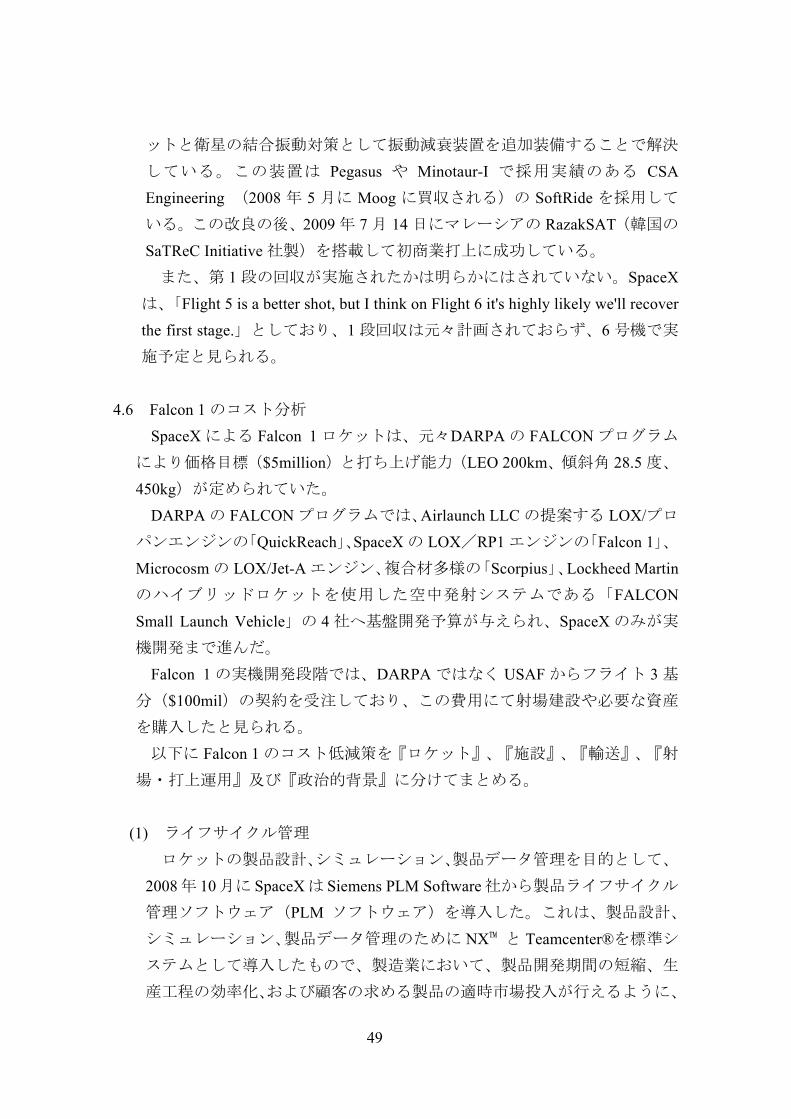
(1) ライフサイクル管理
ロケットの製品設計、シミュレーション、製品データ管理を目的として、
2008 年 10 月に SpaceX は Siemens PLM Software 社から製品ライフサイクル
管理ソフトウェア(PLM ソフトウェア)を導入した。これは、製品設計、
シミュレーション、製品データ管理のために NX™ と Teamcenter®を標準シ
ステムとして導入したもので、製造業において、製品開発期間の短縮、生
産工程の効率化、および顧客の求める製品の適時市場投入が行えるように、
50
企画・開発から設計、製造・生産、出荷後のサポートやメンテナンス、生
産・販売の打ち切りまで、製品にかかわるすべての過程を包括的に管理す
るシステムである。NX は、CAD や CAM などを統合したソフトウェアで
ある。(図 4-36)このシステムは ATK も採用している。また、SpaceX 社
は Siemens PLM Software と、PLM に関して広範な専門性を有する認定プラ
チナ・ビジネス・パートナーである Saratech 社のサポートを受ける契約を
結んでいる。NASA の COTS(商業軌道輸送サービス)計画のコンペで勝
利した SpaceX は、2010 年に予定されているスペースシャトル退役後の就
航の空白を埋めるため、コスト効率に優れた打ち上げロケットを納品する
必要があり、強力でダイナミックな設計基盤を提供してくれる PLM ソリ
ューションを必要としていた。NX の高度な設計/シミュレーション技術、
それを堅牢なバックボーンの Teamcenter が支え、さらに Saratech 社の広範
な業界専門性が加わったことがシーメンス PLM ソフトウェアを 適なベ
ンダーとして選択した理由である。
図4-36 Teamcenter 2007 の BOM 管理画面(http://monoist.atmarkit.co.jp/)
51
(2) ロケットシステム
SpaceX は、Falcon 1 ロケットの材料調達、設計方針、製造プロセスにお
けるコスト低減策として、下記を挙げている。
・推進薬が全段同じ(LOX/RP1)
・低コスト推進薬
・シンプルなエンジン
・他のステージと材料を共通化
・米国道路交通法の制限内に収める
・共通のバルクヘッド設計を用い、燃料タンクの構造強度要求を低減
推進薬は、入手性・コスト・取扱性の良い LOX/RP1 を採用し、材料
面では比較的コストの安いアルミ合金(2014 アルミ合金など)を採用し
ている。Falcon 1 では外板・タンク・フェアリングはアルミ合金であり、
複合材に比べて質量は増えるが、コスト面では有利となる。Falcon 1e で
はアルミリチウム合金への変更とフェアリングの複合材料化を進めてお
り、将来的にはコスト増が見込まれるが、業界 安値は確保できる。
ロケット構造は、モノコック構造を採用し、加工しやすいアルミ合金を
用いて‘絞り加工’や‘曲げ加工’によってアイソグリッドのように手間
の掛からない構造を行っている。
エンジンは、量産体制を構築するため、Falcon 1 の 1 段と Falcon 9 の 1
段、2 段目に共通エンジン(Merlin-1C)を採用し、1 基/2 週間のペースで
組み立て、量産化効果によるコスト低減を図っている。Merlin C エンジン
は、ターボポンプから発生する液圧や排気ガスを活用して姿勢制御(TVC
やロール制御)を行う設計とされている。
(3) 輸送
工場から射場(Kwajalein 島)への輸送は、ロケットを塩害や湿度によ
るダメージから守るため、加熱・収縮するビニール材で梱包(図 4-37)し
て密封し、打上前作業の際にも利用できる架台へ載せられる。架台に乗せ
られたロケットはさらに、エンジン付近のみがボックス収納される。これ
は直射日光による劣化等を防ぐためと見られ、基本的にロケットは形状を
晒したまま輸送される。このロケットを搭載した架台は、そのままトラッ

52
ク(図 4-38)、貨物機(C-17、C-5 など)、コンテナ船へ搭載(図 4-39)
できる仕様となっており、クレーンによる移動へ対応できるよう、フック
が取り付けられている。Falcon 9 も含めて、路上輸送時に大型貨物による
交通規制及び通行許可申請の煩雑さを避けるため、直径 3.6m 以内で輸送
できるようロケット形状を設定している。Falcon 1 は直径 1.7m と車両走
行基準内のため、輸送時の道路封鎖や、警察車両による先導によってコス
トが上昇しないようにし、路上輸送は通常のコンテナ輸送トラックのサイ
ズと同等で、輸送車両は一般のドライバーで対応可能であり、特別な道路
通過許可証は必要ないと見られる。
出荷されたロケットは即応型運用による航空機輸送ではない船舶輸送
の場合は、日中、一般道を走行して港湾施設へ輸送され、米国本土からア
ジア方面へ向かう定期便のコンテナ貨物船に混載される。一般の貨物輸送
船の輸送コストは1コンテナあたり通常 50 万円~100 万円と言われてお
り、Falcon 1 の輸送費も数十万円~百数十万円程度と推測される。また
Falcon 1 コンテナの搭載方式は「上部にコンテナを載せないオントップ扱
い」として輸送していると見られる。
よって SpaceX は簡易包装とコンテナサイズによる汎用トラック利用に
より、一般道路を特殊申請なしで走行できる上に、輸送船も混載型の定期
貨物船を利用することでコスト削減している。輸送において特別なことを
しないことがコスト低減に繋がっているものと考えられ、SpaceX では「従
来の特殊輸送車、道路封鎖、チャーター船輸送と比較してコストが 大
10 分の 1 になる」としている。
図4-37 ロケットの梱包(SpaceX)

53
図4-38 トラック輸送(SpaceX)
図4-39 コンテナ貨物船へ混載(SpaceX)
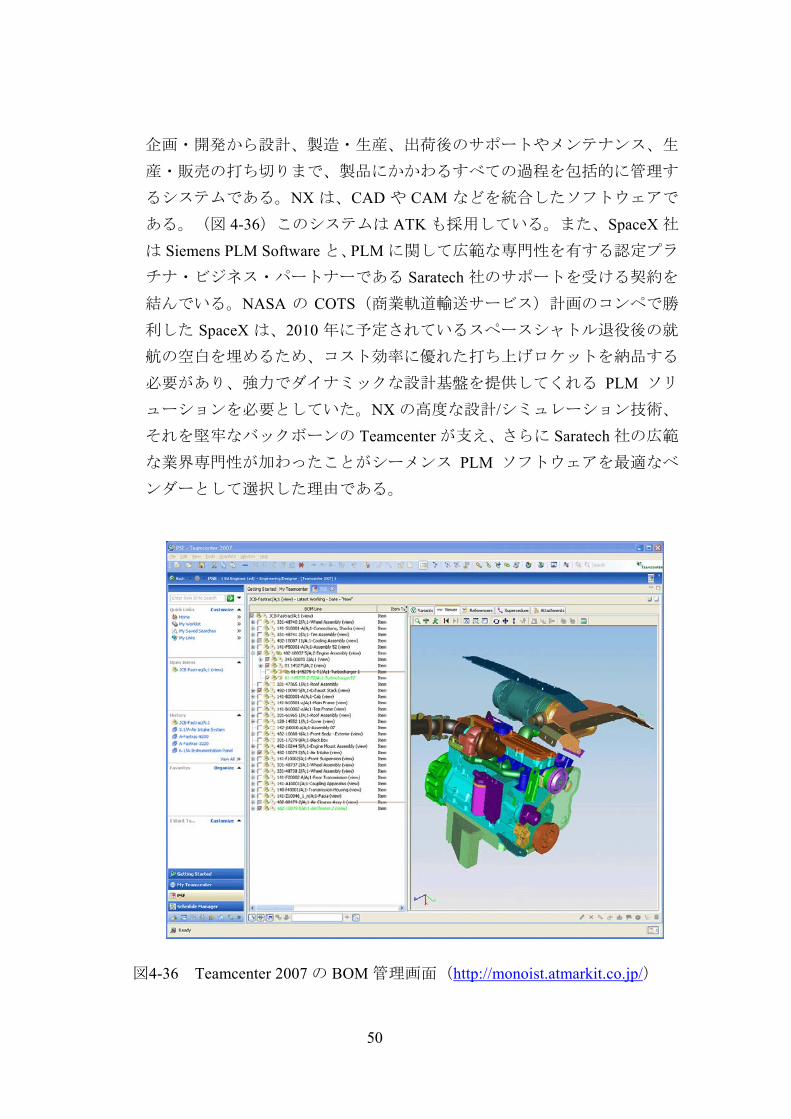
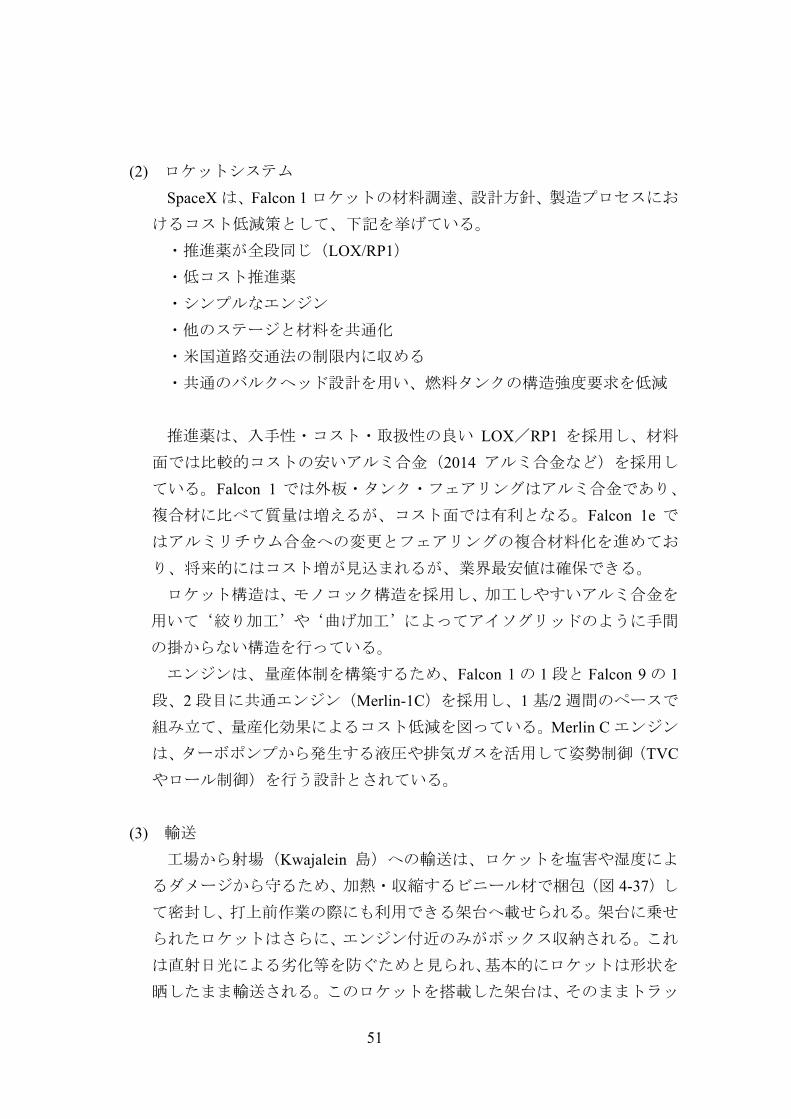
(4) 射場及び打ち上げ作業
SpaceX の Kwajalein 環礁の Omelek 島射場システムは、シンプルな設計
コンセプトである。まず、ロケットの打上前インテグレーションはロケッ
トを横倒しした(出荷時と同じ姿勢のまま)状態でインテグレーションを
行う。多くのロケットは直立させて打上準備作業を行う方式を採用してい
るため、インテグレーション施設(図 4-40)が高コスト化する傾向がある
が、Falcon は水平(横倒し)方式のため、インテグレーション施設建設費
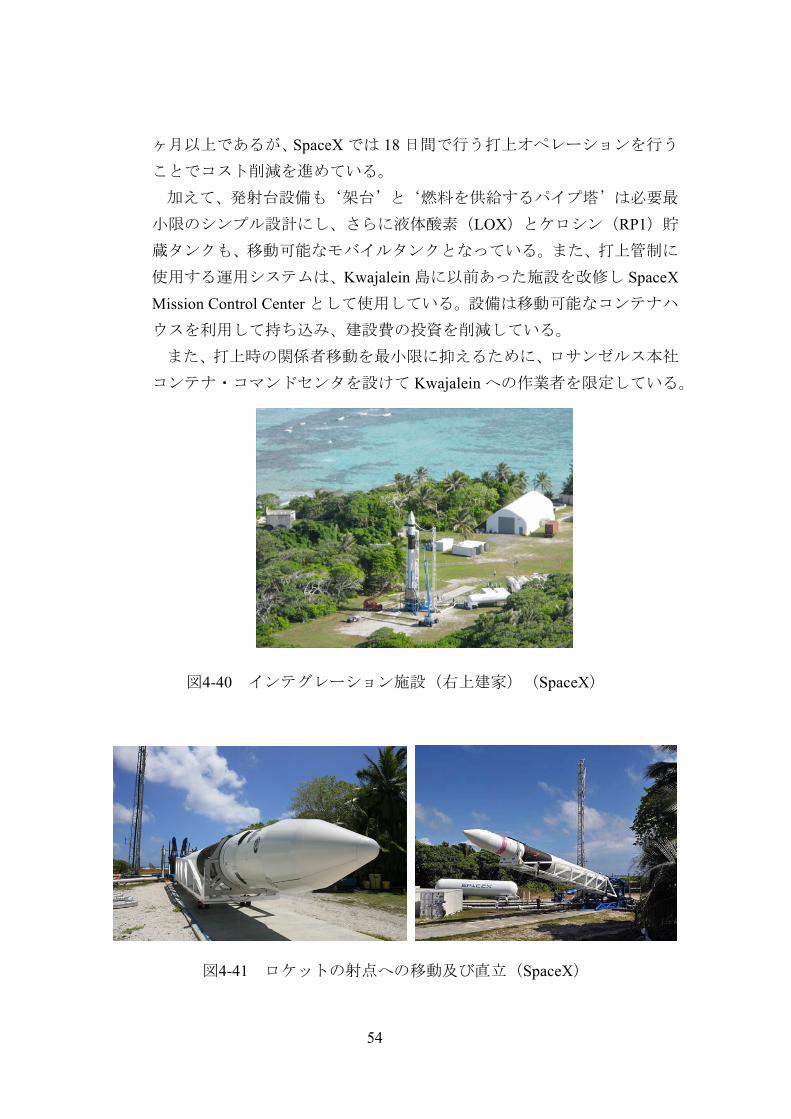
を低コスト化できるとし、組み立て後に射点へ移動し直立させている。(図
4-41)また、ロケットと衛星クリーンルームを同一の建物内に集約し、コ
ンパクトに纏めることでコスト低減を図っている。また、この施設も機密
性を確保したプレハブ式の建築物であり、投資コストの低い施設である。
打上運用においても、打上期間を短縮することによる人件費抑制(コス
トダウン)を狙っている。従来の液体ロケットは射場搬入から打上まで 1
54
ヶ月以上であるが、SpaceX では 18 日間で行う打上オペレーションを行う
ことでコスト削減を進めている。
加えて、発射台設備も‘架台’と‘燃料を供給するパイプ塔’は必要
小限のシンプル設計にし、さらに液体酸素(LOX)とケロシン(RP1)貯
蔵タンクも、移動可能なモバイルタンクとなっている。また、打上管制に
使用する運用システムは、Kwajalein 島に以前あった施設を改修し SpaceX
Mission Control Center として使用している。設備は移動可能なコンテナハ
ウスを利用して持ち込み、建設費の投資を削減している。
また、打上時の関係者移動を 小限に抑えるために、ロサンゼルス本社
コンテナ・コマンドセンタを設けて Kwajalein への作業者を限定している。
図4-40 インテグレーション施設(右上建家)(SpaceX)
図4-41 ロケットの射点への移動及び直立(SpaceX)
55
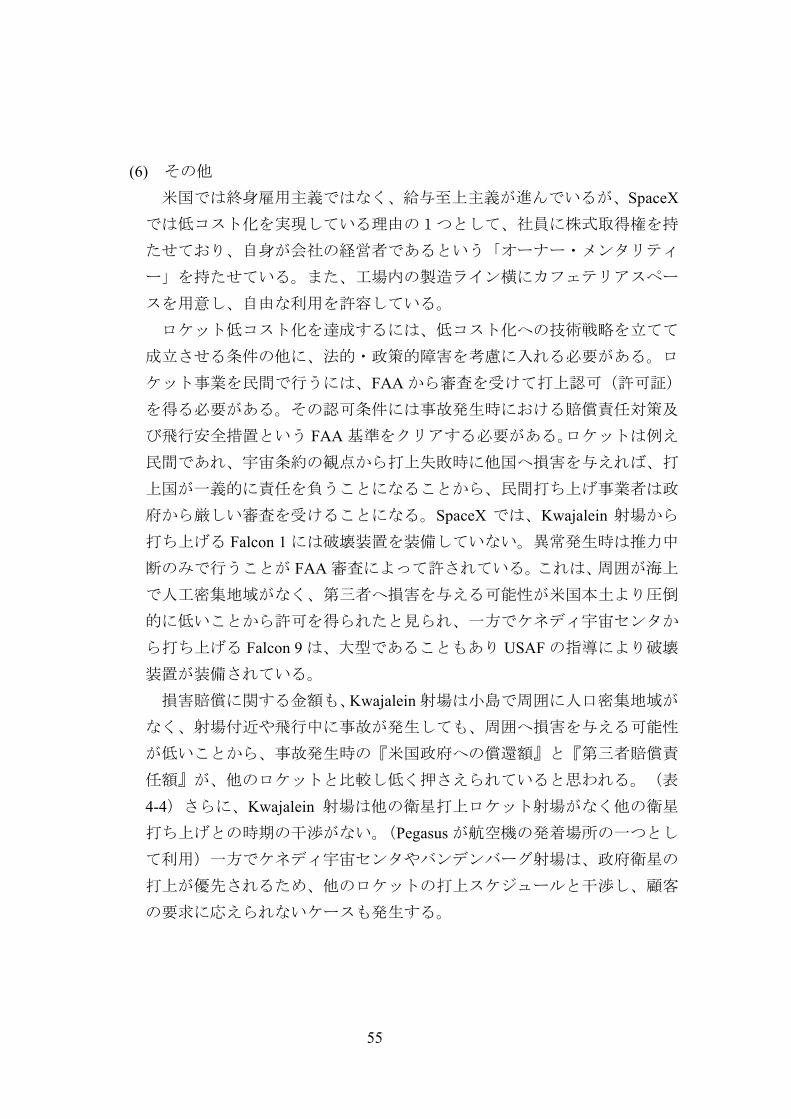
(6) その他
米国では終身雇用主義ではなく、給与至上主義が進んでいるが、SpaceX
では低コスト化を実現している理由の1つとして、社員に株式取得権を持
たせており、自身が会社の経営者であるという「オーナー・メンタリティ
ー」を持たせている。また、工場内の製造ライン横にカフェテリアスペー
スを用意し、自由な利用を許容している。
ロケット低コスト化を達成するには、低コスト化への技術戦略を立てて
成立させる条件の他に、法的・政策的障害を考慮に入れる必要がある。ロ
ケット事業を民間で行うには、FAA から審査を受けて打上認可(許可証)
を得る必要がある。その認可条件には事故発生時における賠償責任対策及
び飛行安全措置という FAA 基準をクリアする必要がある。ロケットは例え
民間であれ、宇宙条約の観点から打上失敗時に他国へ損害を与えれば、打
上国が一義的に責任を負うことになることから、民間打ち上げ事業者は政
府から厳しい審査を受けることになる。SpaceX では、Kwajalein 射場から
打ち上げる Falcon 1 には破壊装置を装備していない。異常発生時は推力中
断のみで行うことが FAA 審査によって許されている。これは、周囲が海上
で人工密集地域がなく、第三者へ損害を与える可能性が米国本土より圧倒
的に低いことから許可を得られたと見られ、一方でケネディ宇宙センタか
ら打ち上げる Falcon 9 は、大型であることもあり USAF の指導により破壊
装置が装備されている。
損害賠償に関する金額も、Kwajalein 射場は小島で周囲に人口密集地域が
なく、射場付近や飛行中に事故が発生しても、周囲へ損害を与える可能性
が低いことから、事故発生時の『米国政府への償還額』と『第三者賠償責
任額』が、他のロケットと比較し低く押さえられていると思われる。(表
4-4)さらに、Kwajalein 射場は他の衛星打上ロケット射場がなく他の衛星
打ち上げとの時期の干渉がない。(Pegasus が航空機の発着場所の一つとし
て利用)一方でケネディ宇宙センタやバンデンバーグ射場は、政府衛星の
打上が優先されるため、他のロケットの打上スケジュールと干渉し、顧客
の要求に応えられないケースも発生する。
56
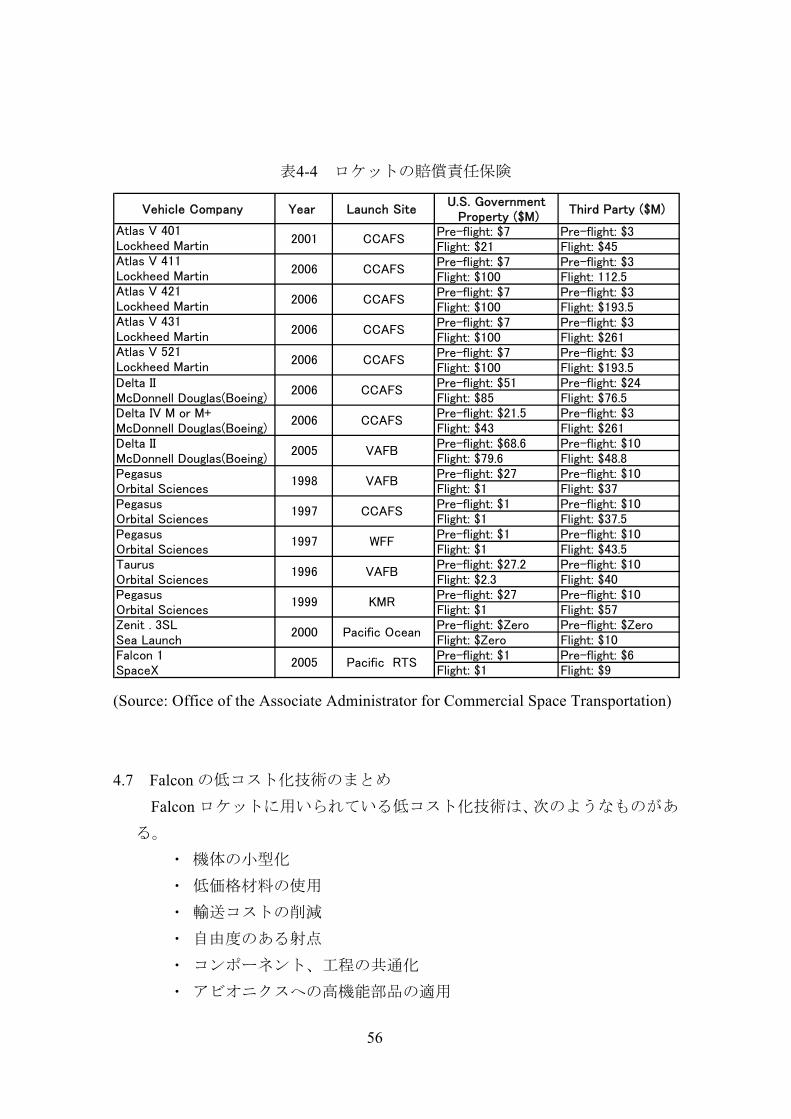
表4-4 ロケットの賠償責任保険
Vehicle Company Year Launch Site U.S. Government Property ($M)
Third Party ($M)
Pre-flight: $7 Pre-flight: $3 Flight: $21 Flight: $45 Pre-flight: $7 Pre-flight: $3 Flight: $100 Flight: 112.5 Pre-flight: $7 Pre-flight: $3 Flight: $100 Flight: $193.5Pre-flight: $7 Pre-flight: $3 Flight: $100 Flight: $261 Pre-flight: $7 Pre-flight: $3 Flight: $100 Flight: $193.5
Delta II Pre-flight: $51 Pre-flight: $24 McDonnell Douglas(Boeing) Flight: $85 Flight: $76.5 Delta IV M or M+ Pre-flight: $21.5 Pre-flight: $3 McDonnell Douglas(Boeing) Flight: $43 Flight: $261 Delta II Pre-flight: $68.6 Pre-flight: $10 McDonnell Douglas(Boeing) Flight: $79.6 Flight: $48.8 Pegasus Pre-flight: $27 Pre-flight: $10 Orbital Sciences Flight: $1 Flight: $37 Pegasus Pre-flight: $1 Pre-flight: $10 Orbital Sciences Flight: $1 Flight: $37.5 Pegasus Pre-flight: $1 Pre-flight: $10 Orbital Sciences Flight: $1 Flight: $43.5 Taurus Pre-flight: $27.2 Pre-flight: $10 Orbital Sciences Flight: $2.3 Flight: $40 Pegasus Pre-flight: $27 Pre-flight: $10 Orbital Sciences Flight: $1 Flight: $57 Zenit . 3SL Pre-flight: $Zero Pre-flight: $Zero Sea Launch Flight: $Zero Flight: $10 Falcon 1 Pre-flight: $1 Pre-flight: $6SpaceX Flight: $1 Flight: $9
KMR
Pacific Ocean
Pacific RTS
VAFB
CCAFS
WFF
VAFB
CCAFS
CCAFS
CCAFS
VAFB
CCAFS
CCAFS
CCAFS
CCAFS
1996
1999
2000
2005
2005
1998
1997
1997
2006
2006
2006
2006
Atlas V 401Lockheed Martin
2001
2006
2006
Atlas V 521Lockheed Martin
Atlas V 431Lockheed Martin
Atlas V 421Lockheed Martin
Atlas V 411Lockheed Martin
(Source: Office of the Associate Administrator for Commercial Space Transportation)
4.7 Falcon の低コスト化技術のまとめ
Falcon ロケットに用いられている低コスト化技術は、次のようなものがあ
る。
・ 機体の小型化
・ 低価格材料の使用
・ 輸送コストの削減
・ 自由度のある射点
・ コンポーネント、工程の共通化
・ アビオニクスへの高機能部品の適用
57
以下に概要を示す。
(1) 機体の小型化
ロケットの構造質量を減らすことは、 もコスト低減に効果がある方法
である。Falcon1 ロケットでは、エンジンの数と分離動作を 小にするよ
う設計を行い、一段あたり一機のエンジンとしている。さらに、二段式に
して分離機構などの構造要素を少なくし、部品点数を減らしている。
(2) 低価格材料の使用
機体にアルミ合金を使用し、複合材に比べ質量は大きくなるものの、価
格を小さく抑えている。
(3) 輸送コストの削減
機体サイズは輸送性を考慮した設計となっており、汎用的な輸送トラッ
クで輸送できるため、輸送に特別なコストが発生しない。また、パッキン
グに熱収縮材を用い、時間と手間を省いている。
また、ロケットは横倒しで射点に運ばれ、支持タワーが立ち上がること
で起立するため、移動準備は非常に迅速である。
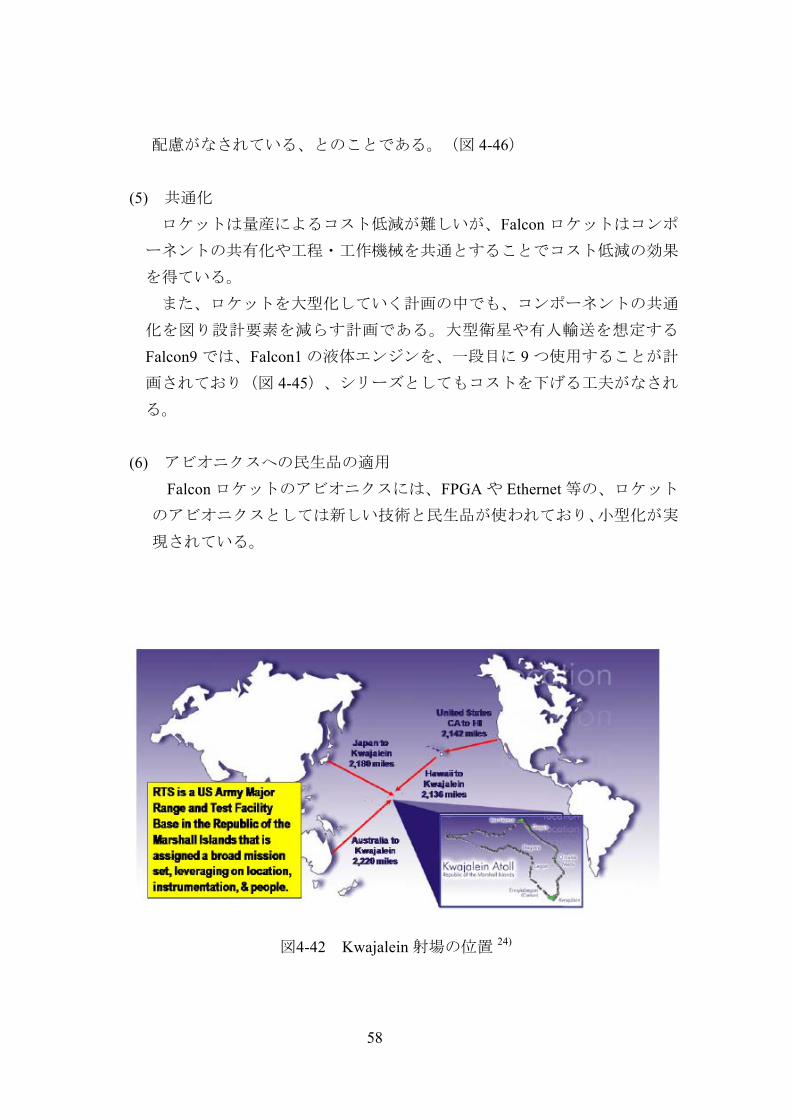
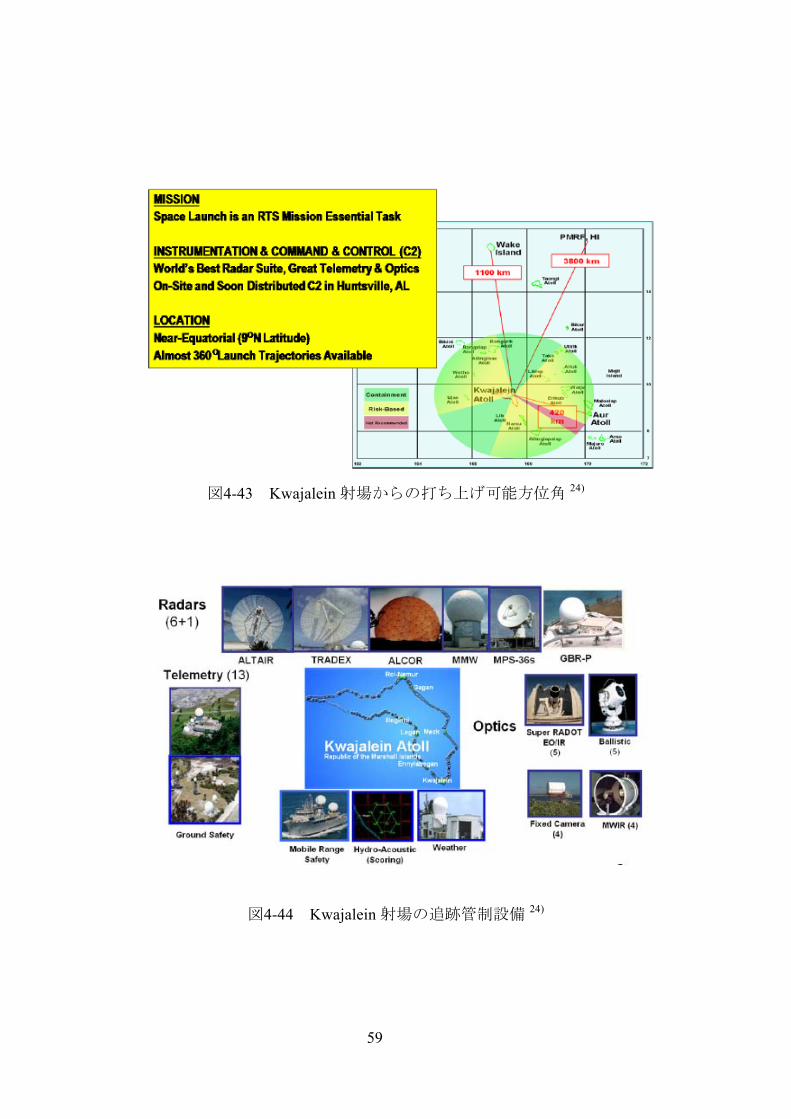
(4) 射点
Falcon1 の打上げは、太平洋上の北緯 8°43’東経 167°44’に位置する、マ
ーシャル諸島クェゼリン(Kwaialein)環礁の島で行われている。(図 4-42)
ここは元々、Ronald Reagan Ballistic Missile Defense Test Site (RTS)と呼ばれ、
弾道ミサイルの試験弾打上げを実施している。太平洋上ということもあり、
ロケットの打上げ方位に大きな自由度があり、ほぼ 360 度全方位への打上
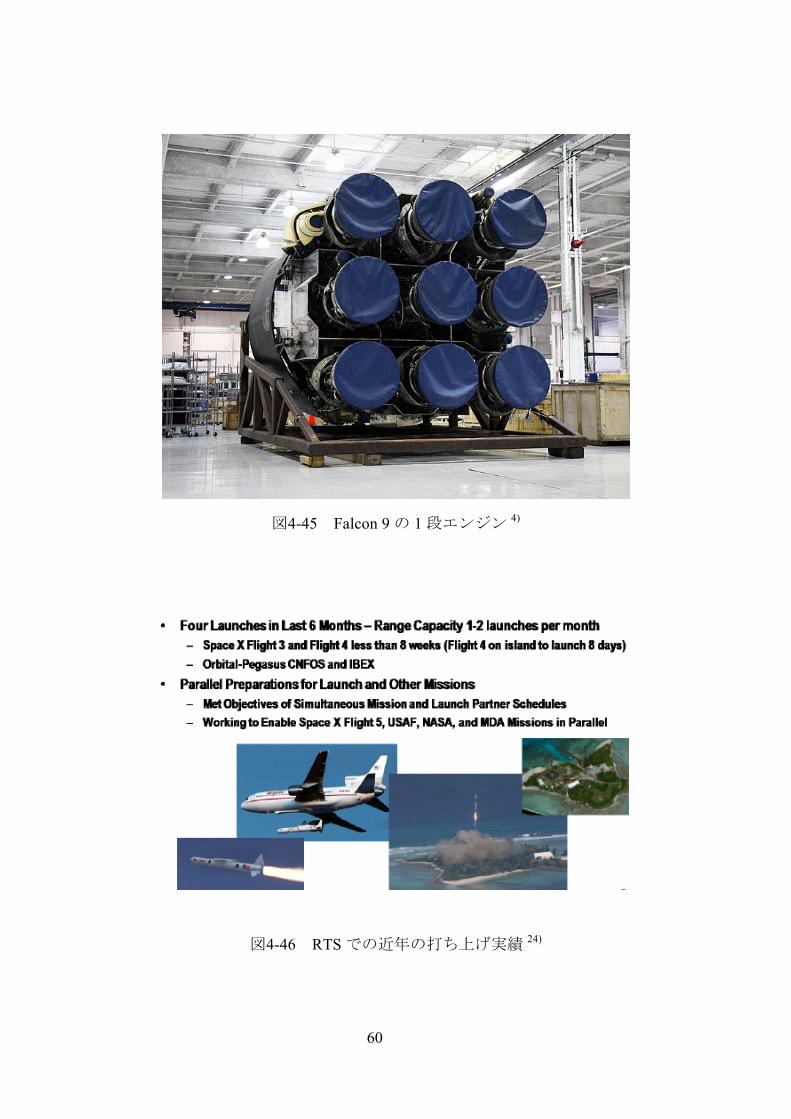
げが可能である(図 4-43)。また、ロケットの追跡管制設備が多く存在し
ており、これら既存設備の利用が可能と考えられる(図 4-44)。ここに、
SpaceX 社の専用射点が建設されており、他のロケットとの打上げ日程調
整に自由度がある、という特徴を有している。
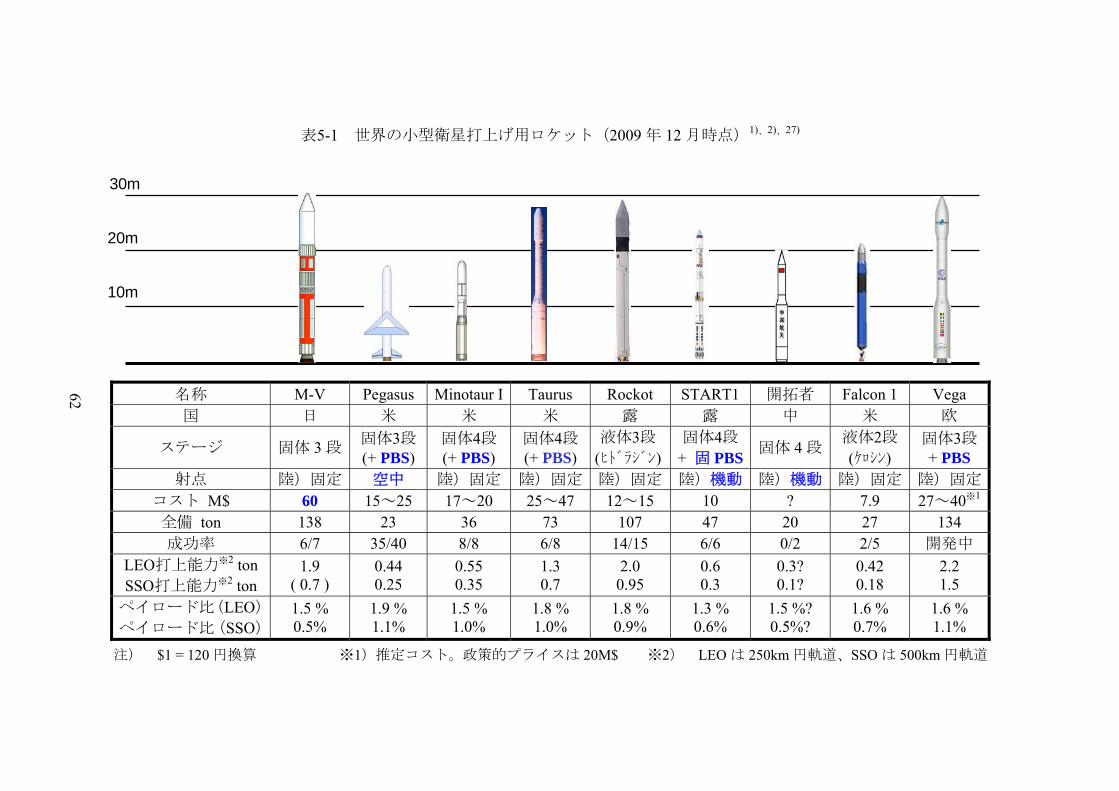
なお、RTS からは、Falcon1 のほか、米 Orbital Sciences 社(OSC)の Pegasus
ロケットの打上げも行われている。この射場はこういった商業ロケットの
打上げにも門戸を開いており、他ロケットの打上げとの平行準備作業にも
58
配慮がなされている、とのことである。(図 4-46)
(5) 共通化
ロケットは量産によるコスト低減が難しいが、Falcon ロケットはコンポ
ーネントの共有化や工程・工作機械を共通とすることでコスト低減の効果
を得ている。
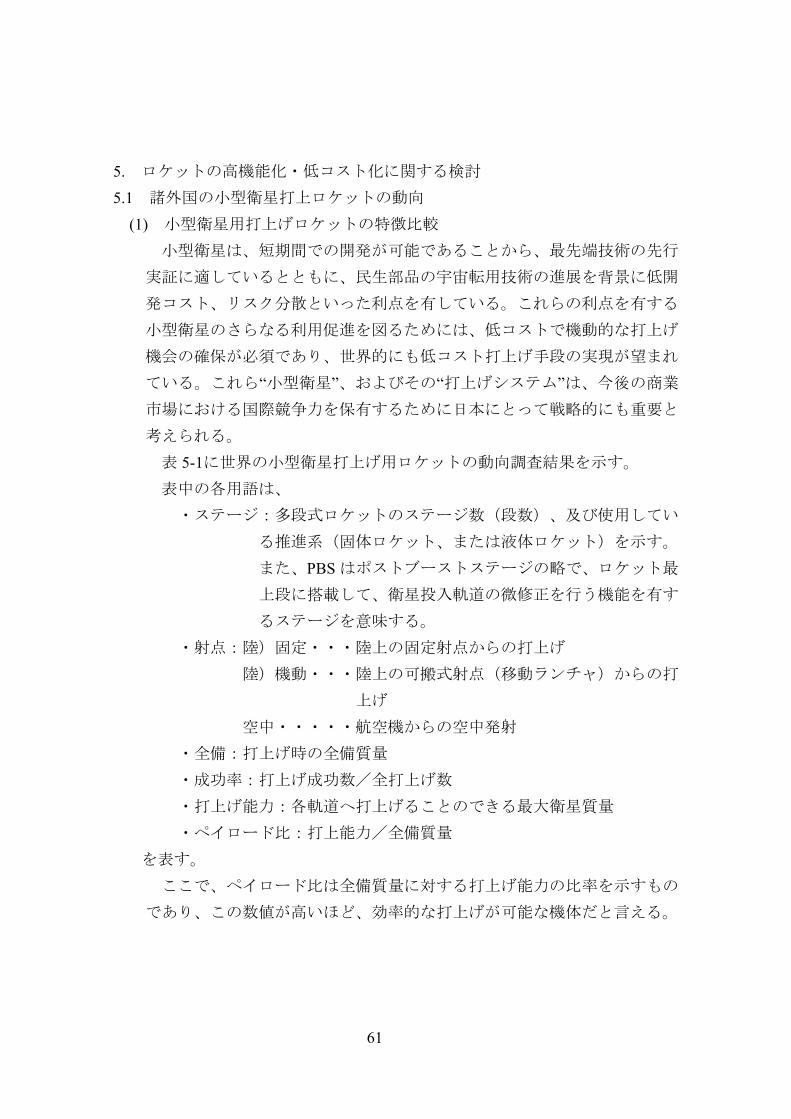
また、ロケットを大型化していく計画の中でも、コンポーネントの共通
化を図り設計要素を減らす計画である。大型衛星や有人輸送を想定する
Falcon9 では、Falcon1 の液体エンジンを、一段目に 9 つ使用することが計
画されており(図 4-45)、シリーズとしてもコストを下げる工夫がなされ
る。
(6) アビオニクスへの民生品の適用
Falcon ロケットのアビオニクスには、FPGA や Ethernet 等の、ロケット
のアビオニクスとしては新しい技術と民生品が使われており、小型化が実
現されている。
図4-42 Kwajalein 射場の位置 24)
59
図4-43 Kwajalein 射場からの打ち上げ可能方位角 24)
図4-44 Kwajalein 射場の追跡管制設備 24)
60
図4-45 Falcon 9 の 1 段エンジン 4)
図4-46 RTS での近年の打ち上げ実績 24)
61
5. ロケットの高機能化・低コスト化に関する検討
5.1 諸外国の小型衛星打上ロケットの動向
(1) 小型衛星用打上げロケットの特徴比較
小型衛星は、短期間での開発が可能であることから、 先端技術の先行
実証に適しているとともに、民生部品の宇宙転用技術の進展を背景に低開
発コスト、リスク分散といった利点を有している。これらの利点を有する
小型衛星のさらなる利用促進を図るためには、低コストで機動的な打上げ
機会の確保が必須であり、世界的にも低コスト打上げ手段の実現が望まれ
ている。これら“小型衛星”、およびその“打上げシステム”は、今後の商業
市場における国際競争力を保有するために日本にとって戦略的にも重要と
考えられる。
表 5-1に世界の小型衛星打上げ用ロケットの動向調査結果を示す。
表中の各用語は、
・ステージ:多段式ロケットのステージ数(段数)、及び使用してい
る推進系(固体ロケット、または液体ロケット)を示す。
また、PBS はポストブーストステージの略で、ロケット
上段に搭載して、衛星投入軌道の微修正を行う機能を有す
るステージを意味する。
・射点:陸)固定・・・陸上の固定射点からの打上げ
陸)機動・・・陸上の可搬式射点(移動ランチャ)からの打
上げ
空中・・・・・航空機からの空中発射
・全備:打上げ時の全備質量
・成功率:打上げ成功数/全打上げ数
・打上げ能力:各軌道へ打上げることのできる 大衛星質量
・ペイロード比:打上能力/全備質量
を表す。
ここで、ペイロード比は全備質量に対する打上げ能力の比率を示すもの
であり、この数値が高いほど、効率的な打上げが可能な機体だと言える。
62
表5-1 世界の小型衛星打上げ用ロケット(2009 年 12 月時点)1)、2)、27)
名称 M-V Pegasus Minotaur I Taurus Rockot START1 開拓者 Falcon 1 Vega 国 日 米 米 米 露 露 中 米 欧
ステージ 固体 3 段固体3段(+ PBS)
固体4段 (+ PBS)
固体4段(+ PBS)
液体3段 (ヒドラジン)
固体4段+ 固 PBS 固体 4 段
液体2段(ケロシン)
固体3段+ PBS
射点 陸)固定 空中 陸)固定 陸)固定 陸)固定 陸)機動 陸)機動 陸)固定 陸)固定 コスト M$ 60 15~25 17~20 25~47 12~15 10 ? 7.9 27~40※1
全備 ton 138 23 36 73 107 47 20 27 134 成功率 6/7 35/40 8/8 6/8 14/15 6/6 0/2 2/5 開発中
LEO打上能力※2 ton SSO打上能力※2 ton
1.9 ( 0.7 )
0.44 0.25
0.55 0.35
1.3 0.7
2.0 0.95
0.6 0.3
0.3? 0.1?
0.42 0.18
2.2 1.5
ペイロード比(LEO) ペイロード比(SSO)
1.5 % 0.5%
1.9 % 1.1%
1.5 % 1.0%
1.8 % 1.0%
1.8 % 0.9%
1.3 % 0.6%
1.5 %? 0.5%?
1.6 % 0.7%
1.6 % 1.1%
注) $1 = 120 円換算 ※1)推定コスト。政策的プライスは 20M$ ※2) LEO は 250km 円軌道、SSO は 500km 円軌道
10m
20m
30m
63
(2) 低コスト化のためのロケットシステム設計
大型ロケット、小型ロケットに関わらず、低コスト化のためには機体を
シンプルな構成とすることが必要である。よって、ステージ数はなるべく
少なくすることが得策といえる。一方で、ロケットの打ち上げ能力はステ
ージ数を増やした方が高くなる。言い換えれば、ステージ数を多くするほ
ど、少ない全備質量で同じ打ち上げ能力を持つロケットとすることができ
る。全備質量が少ないほど、機体製造にかかる材料費が減って取り回しも
良くなることから、低コスト化につながる。したがって、ロケットシステ
ム設計においては、両者のバランスを取って 適なコストパフォーマンス
が得られるステージ数にすることが重要となる。前項で示したとおり、小
型ロケットは諸外国でも固体ロケットが主流であるが、液体ロケットを使
用したものも存在する。固体ロケットは 3~4 段、液体ロケットでは 2~3
段の構成となっている。この点に着目し、以下、推進薬の特性の違いによ
るロケットの 適ステージ数について考察を行う。ロケットの性能(理論
獲得速度)は以下のツィオルコフスキーの式で表される。
∑=
⎟⎟⎠
⎞⎜⎜⎝
⎛−
×=Δn
i iieVV
1, 1
1lnλ
ispie IgV ,0, = i
ippi W
W
,0
,=λ
また、ペイロード比(=打上能力/全備質量)は以下の式に書き換えら
れる。
∏ ⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=n
i i
i
αλ
π1
10
段ステージ全質量
段不活性質量
ii
i =α
VΔ :理論獲得速度 n :ステージ数(段数)
ieV , :i 段目燃焼ガス排出速度 ispI , :i 段目比推力
0g :地球表面における重力加速度 iW ,0 :i 段目初期質量
ippW , :i 段目推進薬質量 iλ :i 段目ロケットの質量比
0π :全段ペイロード比 iα :i 段のステージ構造効率
iα−1 :i 段のステージマスレシオ
64
ここで、衛星を所定の軌道に投入するために必要となる速度を必要獲得
速度 VΔ req と称する。所定の軌道への衛星打ち上げを可能とするためには、
必要獲得速度以上の理論獲得速度が得られるロケットにする必要がある
( VΔ ≧ VΔ req)。衛星を軌道に投入するには空気抵抗や重力による損失
等を考慮する必要があり、 VΔ req は投入軌道によっておよそ一定となる
(表 5-2)。
VΔ req=衛星の軌道速度+抵抗損失+重力損失
+その他損失(制御損失、大気圧による推力損失)
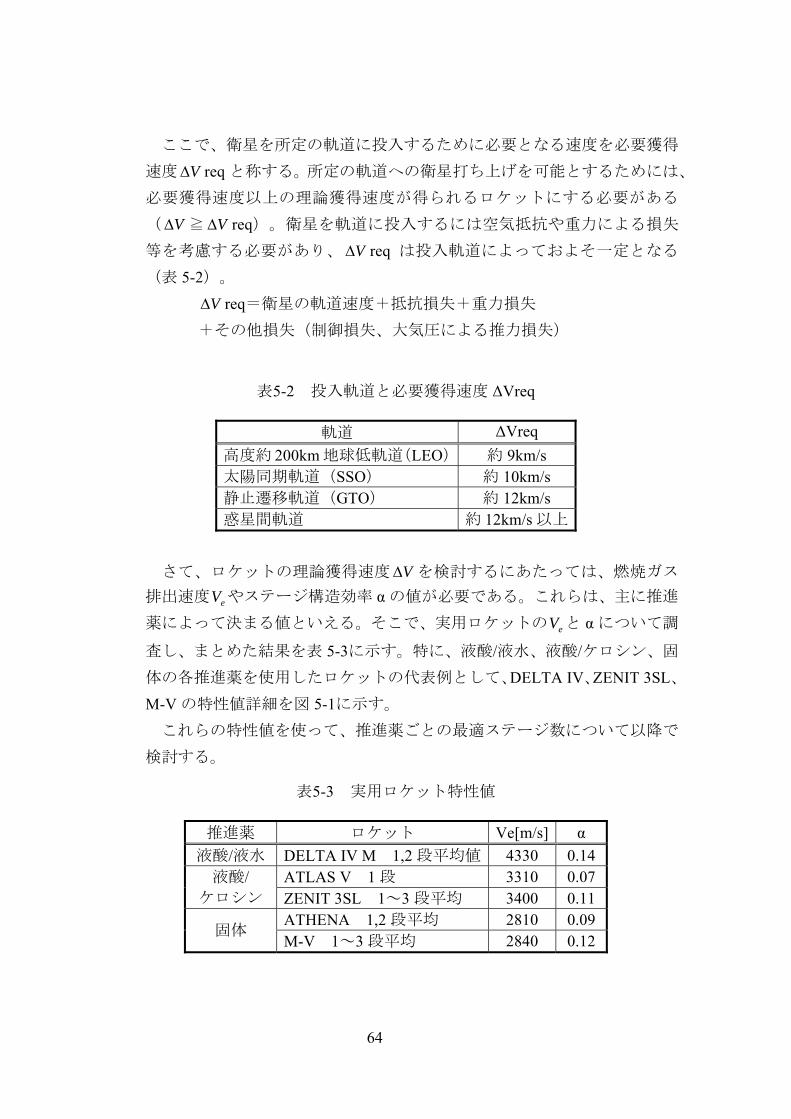
表5-2 投入軌道と必要獲得速度 ΔVreq
軌道 ΔVreq 高度約 200km地球低軌道(LEO) 約 9km/s 太陽同期軌道(SSO) 約 10km/s 静止遷移軌道(GTO) 約 12km/s 惑星間軌道 約 12km/s 以上
さて、ロケットの理論獲得速度 VΔ を検討するにあたっては、燃焼ガス
排出速度 eV やステージ構造効率 αの値が必要である。これらは、主に推進
薬によって決まる値といえる。そこで、実用ロケットの eV と αについて調
査し、まとめた結果を表 5-3に示す。特に、液酸/液水、液酸/ケロシン、固
体の各推進薬を使用したロケットの代表例として、DELTA IV、ZENIT 3SL、
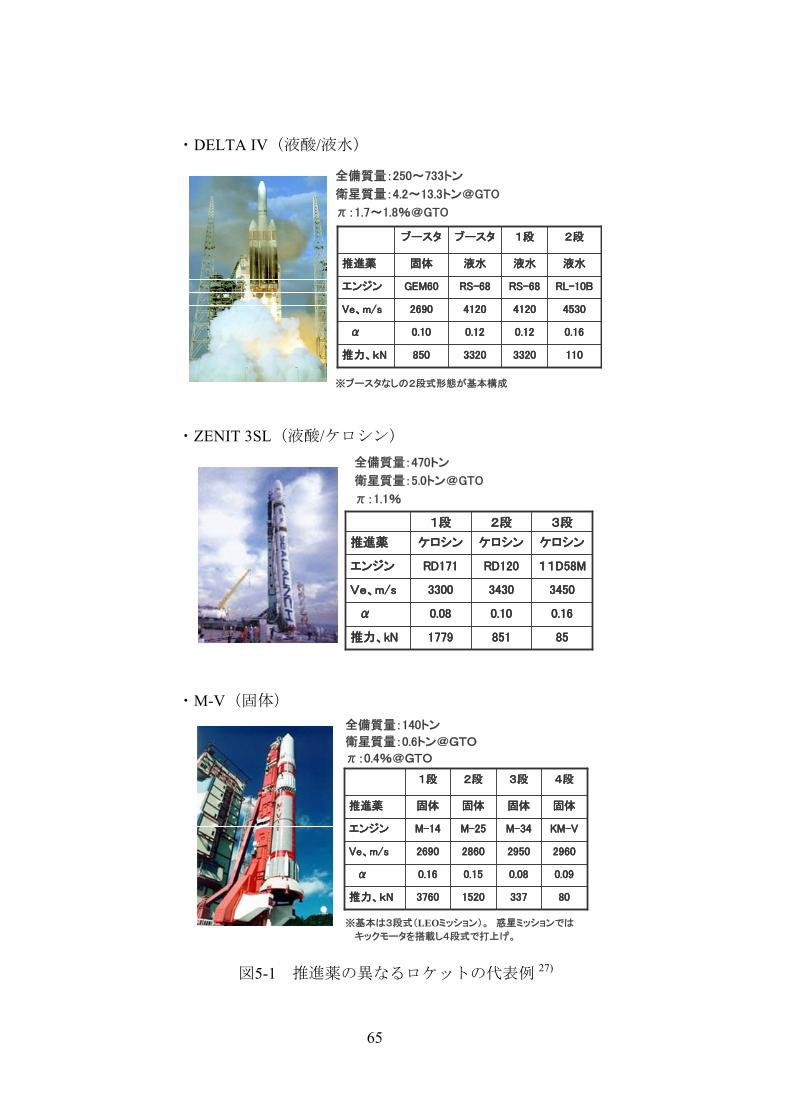
M-V の特性値詳細を図 5-1に示す。
これらの特性値を使って、推進薬ごとの 適ステージ数について以降で
検討する。
表5-3 実用ロケット特性値
推進薬 ロケット Ve[m/s] α 液酸/液水 DELTA IV M 1,2 段平均値 4330 0.14
ATLAS V 1 段 3310 0.07 液酸/ ケロシン ZENIT 3SL 1~3 段平均 3400 0.11
ATHENA 1,2 段平均 2810 0.09 固体
M-V 1~3 段平均 2840 0.12
65
・DELTA IV(液酸/液水)
全備質量:250~733トン
衛星質量:4.2~13.3トン@GTO
π:1.7~1.8%@GTO
※ブースタなしの2段式形態が基本構成
0.160.120.120.10α
11033203320850推力、kN
4530412041202690Ve、m/s
RL-10BRS-68RS-68GEM60エンジン
液水液水液水固体推進薬
2段1段ブースタブースタ
0.160.120.120.10α
11033203320850推力、kN
4530412041202690Ve、m/s
RL-10BRS-68RS-68GEM60エンジン
液水液水液水固体推進薬
2段1段ブースタブースタ
・ZENIT 3SL(液酸/ケロシン) 全備質量:470トン
衛星質量:5.0トン@GTO
π:1.1%
858511779推力、kN
0.160.100.08α
345034303300Ve、m/s
11D58MRD120RD171エンジン
ケロシンケロシンケロシン推進薬
3段2段1段
858511779推力、kN
0.160.100.08α
345034303300Ve、m/s
11D58MRD120RD171エンジン
ケロシンケロシンケロシン推進薬
3段2段1段
・M-V(固体) 全備質量:140トン
衛星質量:0.6トン@GTO
π:0.4%@GTO
※基本は3段式(LEOミッション)。 惑星ミッションでは
キックモータを搭載し4段式で打上げ。
0.090.080.150.16α
8033715203760推力、kN
2960295028602690Ve、m/s
KM-VM-34M-25M-14エンジン
固体固体固体固体推進薬
4段3段2段1段
0.090.080.150.16α
8033715203760推力、kN
2960295028602690Ve、m/s
KM-VM-34M-25M-14エンジン
固体固体固体固体推進薬
4段3段2段1段
図5-1 推進薬の異なるロケットの代表例 27)
66
ロケットの 適ステージ構成の検討フローを図 5-2に示す。
表 5-3に示したロケットの内、DELTA IV、ZENIT 3SL、M-V を代表例と
し、各推進薬の特性値を使用する。なお、今回、例として挙げた、DELTA
IV、ZENIT 3SL は大型ロケットであり、GTO ミッションをターゲットに開
発されたものと考えられ、それぞれステージ数は、2 段式、3 段式となって
いる。一方、M-V ロケットは LEO および惑星ミッションをターゲットと
して開発されており、LEO に対しては 3 段式、惑星ミッションではキック
モータを追加した 4 段式となっている。これら実用ロケットのステージ数
選定の理由について以下に考察する。
さて、上記の特性値を用い、図 5-2の検討フローに従い、ステージ数を
変化させたときの LEO 打上げ( VΔ =9km/s)、および GTO または惑星ミ
ッション打上げ( VΔ =12km/s)に対するペイロード比を算出した。結果を
表 5-4に示す。表 5-4より、ステージ数が多い程、ペイロード比が向上する
ことがわかる。しかし、実用ロケットで採用しているステージ数は、必ず
しもペイロード比が高いものではない。一般には、ステージ数が増えると
エンジンの数が増え、分離イベントの数も増えるため、コストの増大およ
び信頼性の低下を招くことから、極力ステージ数を少なくしている。
このようなことから、実用ロケットのステージ数選定の指標として、ペ
イロード比 πをステージ数 n で除した π/n 値が考えられる。表 5-4に示した
ペイロード比を元に、π/n 値を図示したものを図 5-3に示す。
これより、推進薬によって π/n 値のピークは異なっており、π/n 値の 大
値かその付近が、その推進薬を使用したロケットの実用ステージ数と一致
していることがわかる。なお、ケロシン系のロケットで LEO ミッションを
ターゲットとした場合、π/n 値のピークは2段式となっている。ケロシン
系ロケットの ZENIT 3SL は GTO ミッションターゲットのため 3 段式が選
定されているが、LEO ターゲットの場合には 2 段式が適切と考えられる。
実際、同じケロシン系の小型ロケットである Falcon1 は LEO ターゲットに
開発されているが、2 段式が選定されている。
このように、ロケットの基本設計にあたっては、狙いとするターゲット
ミッション(LEO、SSO、GTO 等)を明確にした上で、推進薬の特性を鑑
みて適切なステージ数を選定することが、コストパフォーマンスの高いロ
ケット開発の必要条件となっているといえる。
67
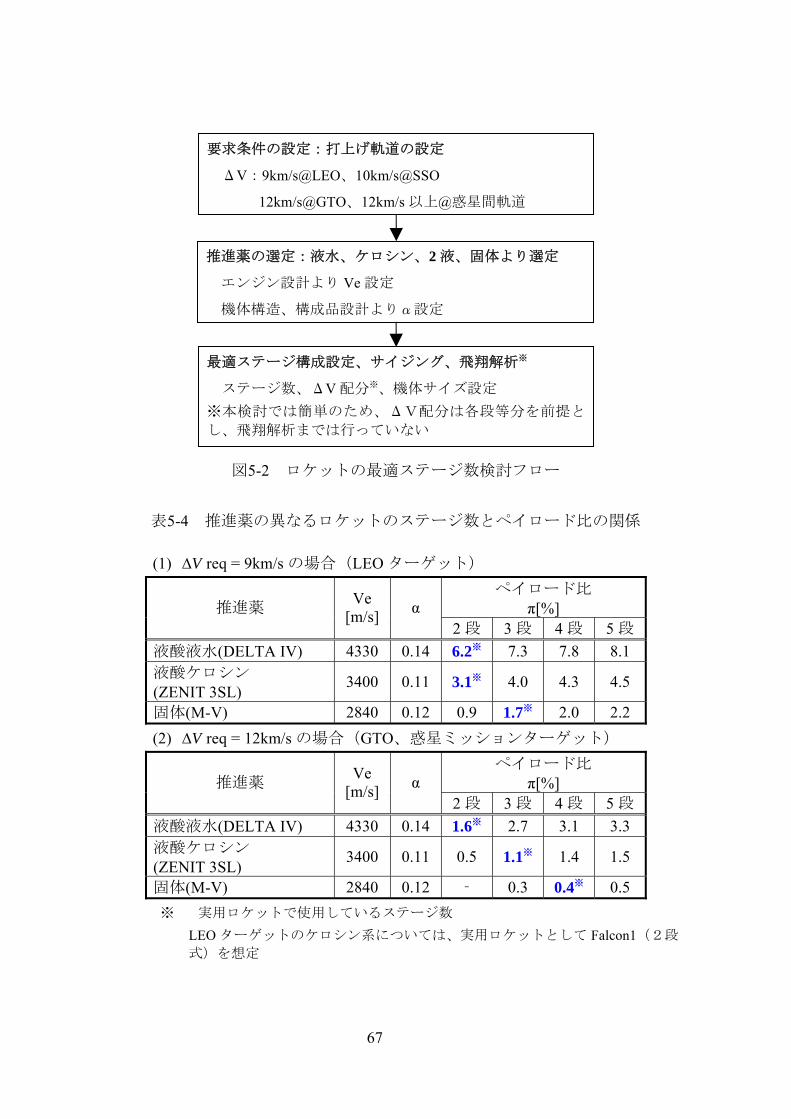
図5-2 ロケットの 適ステージ数検討フロー
表5-4 推進薬の異なるロケットのステージ数とペイロード比の関係
(1) VΔ req = 9km/s の場合(LEO ターゲット) ペイロード比
π[%] 推進薬 Ve [m/s] α
2 段 3 段 4 段 5 段 液酸液水(DELTA IV) 4330 0.14 6.2※ 7.3 7.8 8.1 液酸ケロシン (ZENIT 3SL) 3400 0.11 3.1※ 4.0 4.3 4.5
固体(M-V) 2840 0.12 0.9 1.7※ 2.0 2.2 (2) VΔ req = 12km/s の場合(GTO、惑星ミッションターゲット)
ペイロード比 π[%] 推進薬 Ve
[m/s] α 2 段 3 段 4 段 5 段
液酸液水(DELTA IV) 4330 0.14 1.6※ 2.7 3.1 3.3 液酸ケロシン (ZENIT 3SL) 3400 0.11 0.5 1.1※ 1.4 1.5
固体(M-V) 2840 0.12 ‐ 0.3 0.4※ 0.5 ※ 実用ロケットで使用しているステージ数
LEO ターゲットのケロシン系については、実用ロケットとして Falcon1(2段
式)を想定
要求条件の設定:打上げ軌道の設定
ΔV:9km/s@LEO、10km/s@SSO
12km/s@GTO、12km/s 以上@惑星間軌道
推進薬の選定:液水、ケロシン、2 液、固体より選定
エンジン設計より Ve 設定
機体構造、構成品設計よりα設定
適ステージ構成設定、サイジング、飛翔解析※
ステージ数、ΔV 配分※、機体サイズ設定 ※本検討では簡単のため、ΔV配分は各段等分を前提と
し、飛翔解析までは行っていない
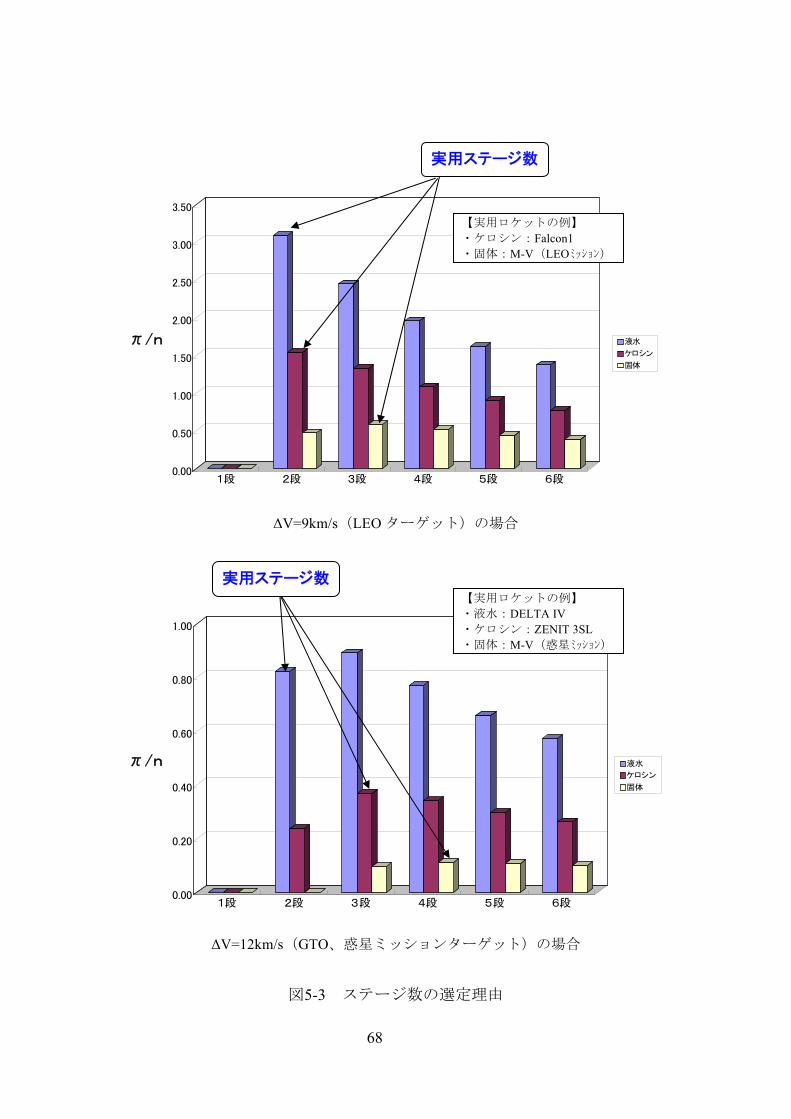
68
ΔV=9km/s(LEO ターゲット)の場合
ΔV=12km/s(GTO、惑星ミッションターゲット)の場合
図5-3 ステージ数の選定理由
0.00
0.50
1.00
1.50
2.00
2.50
3.00
3.50
π/n
1段 2段 3段 4段 5段 6段
液水
ケロシン
固体
実用ステージ数
【実用ロケットの例】 ・ケロシン:Falcon1 ・固体:M-V(LEOミッション)
0.00
0.20
0.40
0.60
0.80
1.00
π/n
1段 2段 3段 4段 5段 6段
液水
ケロシン
固体
実用ステージ数【実用ロケットの例】 ・液水:DELTA IV ・ケロシン:ZENIT 3SL ・固体:M-V(惑星ミッション)
69
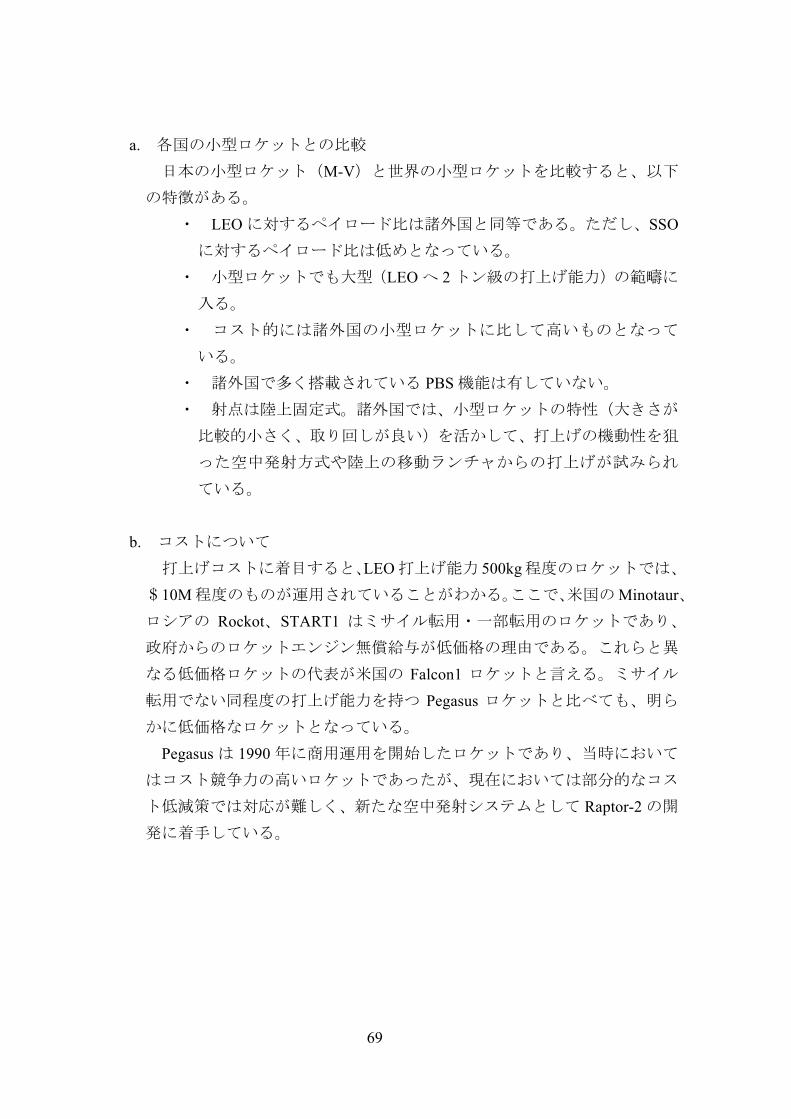
a. 各国の小型ロケットとの比較
日本の小型ロケット(M-V)と世界の小型ロケットを比較すると、以下
の特徴がある。
・ LEO に対するペイロード比は諸外国と同等である。ただし、SSO
に対するペイロード比は低めとなっている。
・ 小型ロケットでも大型(LEO へ 2 トン級の打上げ能力)の範疇に
入る。
・ コスト的には諸外国の小型ロケットに比して高いものとなって
いる。
・ 諸外国で多く搭載されている PBS 機能は有していない。
・ 射点は陸上固定式。諸外国では、小型ロケットの特性(大きさが
比較的小さく、取り回しが良い)を活かして、打上げの機動性を狙
った空中発射方式や陸上の移動ランチャからの打上げが試みられ
ている。
b. コストについて
打上げコストに着目すると、LEO 打上げ能力 500kg 程度のロケットでは、
$10M 程度のものが運用されていることがわかる。ここで、米国の Minotaur、
ロシアの Rockot、START1 はミサイル転用・一部転用のロケットであり、
政府からのロケットエンジン無償給与が低価格の理由である。これらと異
なる低価格ロケットの代表が米国の Falcon1 ロケットと言える。ミサイル
転用でない同程度の打上げ能力を持つ Pegasus ロケットと比べても、明ら
かに低価格なロケットとなっている。
Pegasus は 1990 年に商用運用を開始したロケットであり、当時において
はコスト競争力の高いロケットであったが、現在においては部分的なコス
ト低減策では対応が難しく、新たな空中発射システムとして Raptor-2 の開
発に着手している。
70
5.2 技術課題の抽出
国際競争力のある小型ロケットとするためには実機コストの低減が必要
であるが、そのための方策として、まずは機体サイズを極力小さくすること
が も効果的と考えられる。機体サイズが小さくなれば、材料費削減ととも
に、部品レベルから取り回しが良くなることで、組立費も低減、運用性の向
上にも繋がる。さらに、ライフサイクルコスト 小の観点から、多くの地上
設備を必要としないシステムを目指すことが望ましい。
このような観点から、本検討では固体ロケットシステムをベースに技術課
題の抽出を行った。ただし、以下で抽出された推進系(固体ロケットモータ)
以外の技術課題は、液体ロケット・固体ロケットにかかわらず、輸送系共通
の課題と言うことができる。
競争力のある小型衛星打上げシステム実現に向け、注力すべき技術要素及
び国内の現状を以下の項で述べる。
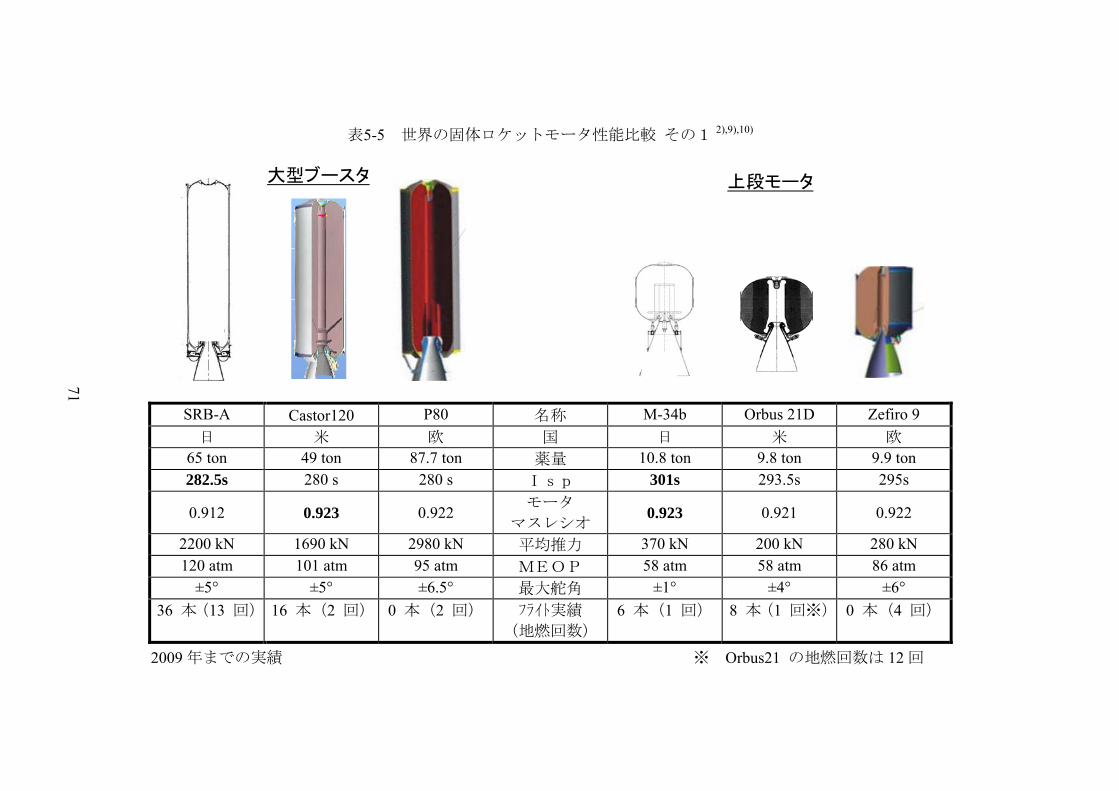
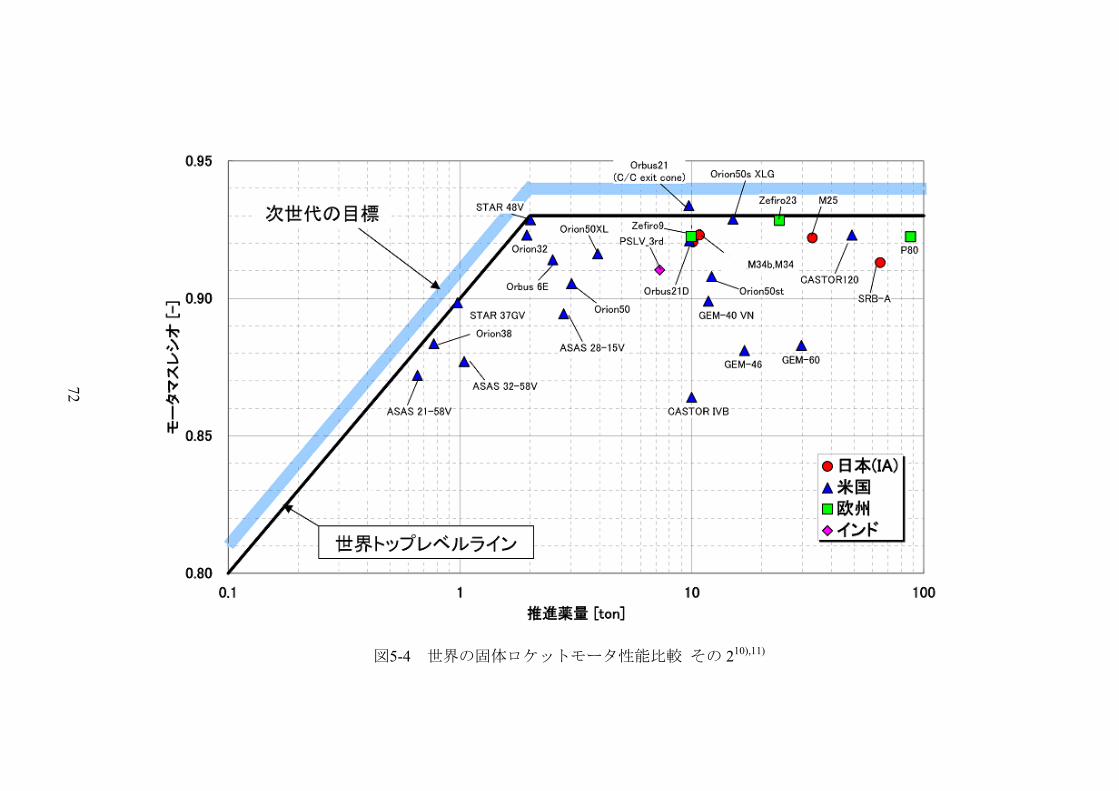
5.2.1 ロケットモータ
表 5-5、図 5-4に世界の固体ロケットモータの性能比較を示す。日本の固
体ロケットモータ(SRB-A、M-34b)と世界の固体ロケットモータを比較
すると、以下の特徴がある。
(a) 大型ブースタ(SRB-A)
・Isp は世界トップレベル。
・モータマスレシオ(=推進薬質量/モータ全質量)は諸外国と同等。
・MEOP(予測 大燃焼圧力)が高い。
・フライト実績、地上燃焼試験回数が諸外国よりも多い。
(b) 上段モータ(M-34b)
・Isp は世界トップレベル。
・モータマスレシオは諸外国と同等。
・フライト実績は米国に比べて少ない。
従って、日本の固体ロケットモータは米国同等、一部で上回る技術を有し
ている。これらの高い技術力を小型ロケットに反映させていく事が必要とな
る。
71
表5-5 世界の固体ロケットモータ性能比較 その1 2),9),10)
SRB-A Castor120 P80 名称 M-34b Orbus 21D Zefiro 9 日 米 欧 国 日 米 欧
65 ton 49 ton 87.7 ton 薬量 10.8 ton 9.8 ton 9.9 ton 282.5s 280 s 280 s Isp 301s 293.5s 295s
0.912 0.923 0.922 モータ マスレシオ 0.923 0.921 0.922
2200 kN 1690 kN 2980 kN 平均推力 370 kN 200 kN 280 kN 120 atm 101 atm 95 atm MEOP 58 atm 58 atm 86 atm
±5° ±5° ±6.5° 大舵角 ±1° ±4° ±6° 36 本(13 回) 16 本(2 回) 0 本(2 回) フライト実績
(地燃回数)
6 本(1 回) 8 本(1 回※) 0 本(4 回)
2009 年までの実績 ※ Orbus21 の地燃回数は 12 回
大型ブースタ 上段モータ
72
図5-4 世界の固体ロケットモータ性能比較 その 210),11)
73
5.2.2 アビオニクス
ロケットのアビオニクスは、大型ロケットと小型ロケットで必要な機能に
ほとんど違いが無い。そのため、従来の大型衛星打ち上げ用ロケットに使用
してきたアビオニクス技術や機器を小型ロケットに適用しようとすると、コ
ストと質量がロケットの大きさに見合わないものになってしまう。従来のア
ビオニクスの使用は小型打上げロケットにおいては全体のコストに占める
割合が大きくなり、且つ衛星打上げ能力の低下に繋がる。
そこで、小型ロケットの代表である Pegasus ロケットのアビオニクスと国
内技術とを比較することで、国内技術レベルの評価を行った。
Pegasus ロケットは、米 Orbital Sciences 社により低軌道に小型の宇宙機を
投入することを目的として設計されたロケットである。例えば、高度 370km
の極軌道に 270kg のペイロードを乗せるという小型衛星用のロケットで、小
型衛星のユーザが望む「短期間」に「低予算」で打ち上げられるロケットを
コンセプトに掲げている。
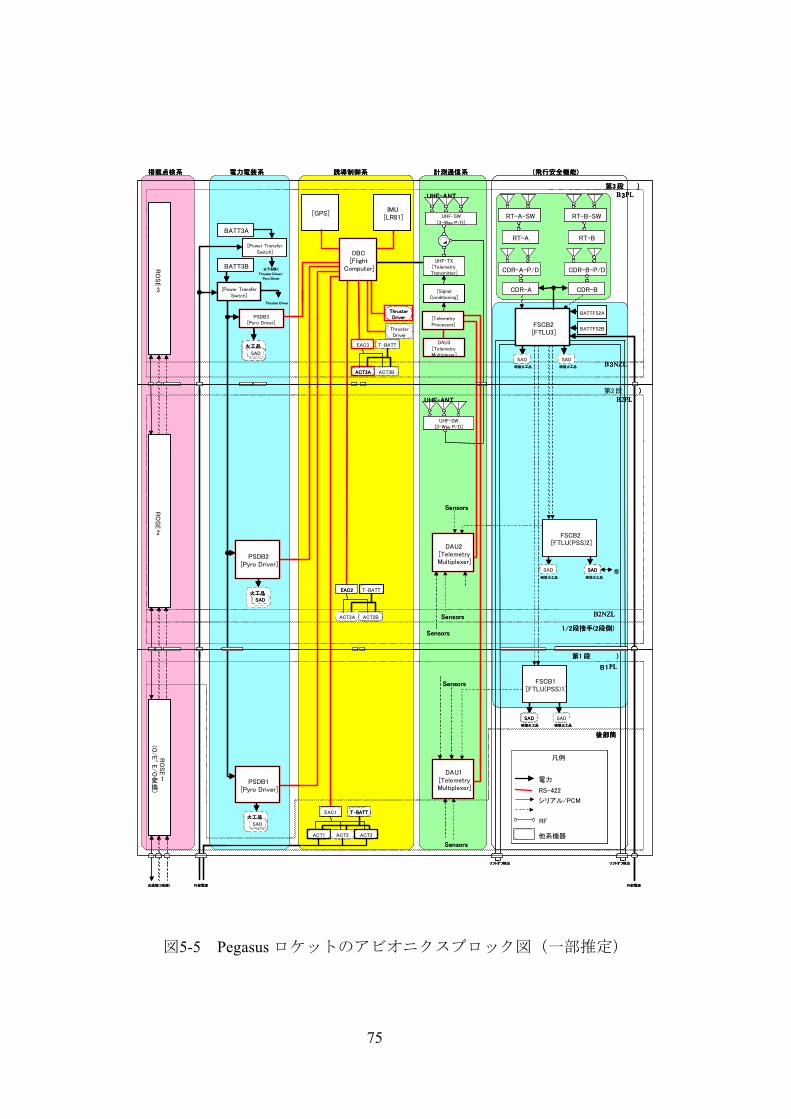
Pegasus ロケットのアビオニクスは図 5-5に示すように、フライトコンピュ
ータと慣性センサ、テレメータ、送受信機など主要機能を 上段に集約した
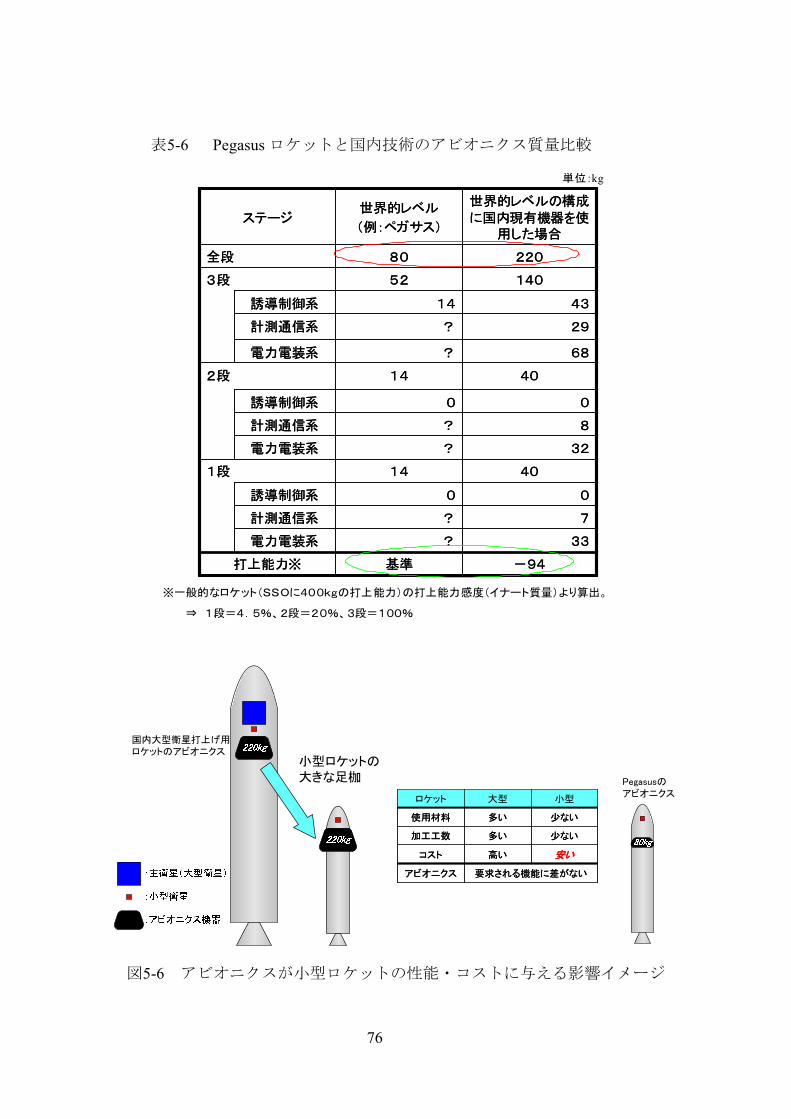
シンプルな構成である。表 5-6に示すように、国内現有機器を使用して
Pegasus ロケットのアビオニクス構成を実現した場合、Pegasus ロケットのア
ビオニクスが全段で 80kg である。それに対して、日本には大型衛星打ち上
げ用に 適化され、信頼性の高い H-ⅡA ロケット用のアビオニクスしか存
在していないため、これを小型ロケットに適用して作るとおよそ 220kg とな
る。Pegasus と比較すると三倍にもなる。アビオニクスが重いほど、打ち上
げ能力は損なわれる。例えば SSO400kg 程度の打上げ能力を持つ3段式のロ
ケットで考えると、Pegasus に比べてペイロード打ち上げ能力が約 100kg 減
になる。よって、アビオニクスの構成を小型衛星打上げ用のシンプルなもの
にし、構成要素である電子機器の質量を軽減することが必要である。
同様のことはコストについても言える。大型ロケットでも小型ロケットで
も、アビオニクスに要求される機能に基本的な差はない。しかし、大型ロケ
ットと同じアビオニクスを小型ロケットへ適用した場合には全体コストに
占めるアビオニクスの割合が非常に大きくなってしまう。アビオニクスが小
型ロケットの性能・コストに与える影響イメージを図 5-6に示す。
74
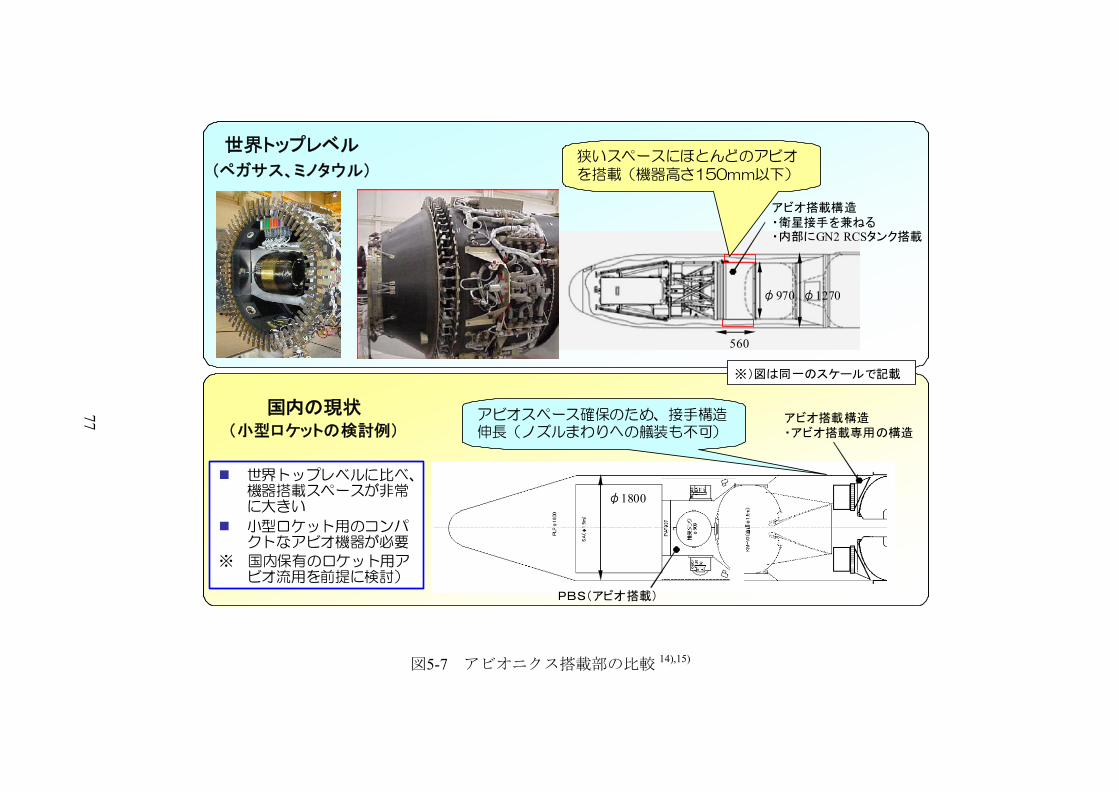
さらに、アビオニクスの搭載スペースを比較すると、図 5-7に示すように、
国内の技術では縦長のロケット構造の中にアビオニクスのために幅を確保
した搭載部分を設けるなど大きなスペースが必要である。一方 Pegasus ロケ
ット(Minotaur ロケットとはステージ共用)のアビオニクス搭載構造を見て
みる。フェアリング内面とアビオニクス搭載構造との間は 150 mmほどしか
ないが、機器が小型であるためにこの狭いスペースにほとんど全てを搭載で
きており、開発当初から機器のコンパクト性を重視した設計としていること
が伺える。 これにより、アビオニクス搭載のために必要となる構造体もコ
ンパクト、即ち軽量化が図られ、さらに構造内部の空間にGN 2 のRCSタ
ンクを搭載して空間の有効活用も図っている。 このような思想は従来の国
内のアビオニクスには反映されておらず、ロケットの小型軽量化の足枷とな
っている。
以上からわかるように、国内のアビオニクスを小型ロケットに適用するた
めには、構成見直し・機能の削減・機器単体の軽量化などを実施することで
狭い機器搭載スペースに収まる、低コストでコンパクトなアビオ機器を開発
することが必要である。
上述のとおり、小型衛星打上げには小型ロケット専用のアビオニクスが必
要である。そのためには、高価な衛星打上げを行うために必然的に高信頼性
が要求される大型ロケット用のアビオニクスとは違った考え方での開発が
必要となってくると考える。
現状のアビオニクスの価格を高止まりさせている原因の一つは、認定部品
の使用であると考えられる。また、アビオニクスの小型化軽量化を阻んでき
たのも、認定部品の使用や既存技術の踏襲であると考えられる。これら認定
部品の使用は信頼性の確保、という観点で重要な役割を果たしてきたことは
事実である。しかしながら、小型ロケット開発にあたっては、同様の考え方
の踏襲では国際競争力の確保が困難なこともまた事実である。
4項にて調査したFalconロケットはフライトコンピュータ等に民生品を使
用しており、これがロケット全体の低コスト化の大きな要因の一つとなって
いる。このことからも、小型ロケット用アビオニクスを低コスト、小型化す
るための活路は民生品の積極利用であると考えられる。ただし、そのために
は信頼性をどのように保証するかが課題であり、検討を深める必要がある。
75
第2 段 )
電力電装系 誘導制御系 計測通信系
CDR-A-P/D CDR-B-P/D
SADSAD
火工品
第1 段 )
(飛行安全機能)
B2PL
B2NZL
Sensors
Sensors
B1PL
後部筒
破壊火工品 破壊火工品
破壊火工品 破壊火工品
リフトオフ検出 リフトオフ検出
Sensors
Sensors
ACT2A ACT2B
SADSAD
火工品
ACT1 ACT2
T-BATT
RT-A
Thruster Driver
第3 段 )B3PL
B3NZL
SAD SAD
⑤SAD SAD
外部電源外部電源光通信(3系統)
Sensors1/2段接手(2段側)
RT-B
CDR-A CDR-B
搭載点検系
RO
SE
1
(O/E
、E/O
変換)
RO
SE
3
RO
SE
2 FSCB2[FTLU(PSS)2]
FSCB1[FTLU(PSS)1]
アナログ/ディスクリート
EAC2
EAC1
[GPS]
UHF-ANT
RT-B-SWRT-A-SW
[SignalConditioning]
UHF-SW[3-Way P/D]
UHF-ANT
UHF-SW[3-Way P/D]
破壊火工品 破壊火工品
BATTFS2A
BATTFS2B
SAD SAD
FSCB2[FTLU3]
UHF-TX[TelemetryTransmitter]
IMU[LR81]
DAU3[TelemetryMultiplexer]
[TelemetryProcessor]
DAU2[TelemetryMultiplexer]
DAU1[TelemetryMultiplexer]
PSDB2[Pyro Driver]
PSDB1[Pyro Driver]
凡例
電力
RS-422
シリアル/PCM
RF
他系機器
PSDB3[Pyro Driver]
ThrusterDriver
ThrusterDriver
OBC[Flight
Computer]
T-BATT
ACT3A ACT3B
T-BATTEAC3
SADSAD
火工品
[Power TransferSwitch]
BATT3B
[Power TransferSwitch]
以下を除く
Thruster Driver/
Pyro Driver
BATT3A
ACT3
第2 段 )
電力電装系 誘導制御系 計測通信系
CDR-A-P/D CDR-B-P/D
SAD
第2 段 )
電力電装系 誘導制御系 計測通信系
CDR-A-P/D CDR-B-P/D
SADSAD
火工品
第1 段 )
(飛行安全機能)
B2PL
B2NZL
Sensors
Sensors
B1PL
後部筒
SAD
火工品
第1 段 )
(飛行安全機能)
B2PL
B2NZL
Sensors
Sensors
B1PL
後部筒
破壊火工品 破壊火工品
破壊火工品 破壊火工品
リフトオフ検出 リフトオフ検出
Sensors
Sensors
ACT2A ACT2B
破壊火工品 破壊火工品
破壊火工品 破壊火工品
リフトオフ検出 リフトオフ検出
Sensors
Sensors
ACT2A ACT2B
SADSAD
火工品
ACT1 ACT2
SADSAD
火工品
ACT1 ACT2
T-BATT
RT-A
Thruster Driver
T-BATT
RT-A
Thruster Driver
第3 段 )B3PL
B3NZL
第3 段 )B3PL
B3NZL
SAD SAD
⑤SAD
SAD SAD
⑤SAD SAD
外部電源外部電源光通信(3系統)
SAD
外部電源外部電源光通信(3系統)
Sensors1/2段接手(2段側)
RT-B
CDR-A CDR-B
搭載点検系
RO
SE
1
(O/E
、E/O
変換)
Sensors1/2段接手(2段側)
RT-B
CDR-A CDR-B
搭載点検系
RO
SE
1
(O/E
、E/O
変換)
RO
SE
3
RO
SE
2 FSCB2[FTLU(PSS)2]
FSCB1[FTLU(PSS)1]
アナログ/ディスクリート
RO
SE
3
RO
SE
2 FSCB2[FTLU(PSS)2]
FSCB1[FTLU(PSS)1]
アナログ/ディスクリート
EAC2
EAC1
[GPS]
UHF-ANT
RT-B-SWRT-A-SW
[SignalConditioning]
UHF-SW[3-Way P/D]
UHF-ANT
UHF-SW[3-Way P/D]
破壊火工品 破壊火工品
BATTFS2A
BATTFS2B
SAD
EAC2
EAC1
[GPS]
UHF-ANT
RT-B-SWRT-A-SW
[SignalConditioning]
UHF-SW[3-Way P/D]
UHF-ANT
UHF-SW[3-Way P/D]
破壊火工品 破壊火工品
BATTFS2A
BATTFS2B
SAD SAD
FSCB2[FTLU3]
UHF-TX[TelemetryTransmitter]
IMU[LR81]
DAU3[TelemetryMultiplexer]
[TelemetryProcessor]
DAU2[TelemetryMultiplexer]
DAU1[TelemetryMultiplexer]
PSDB2[Pyro Driver]
PSDB1[Pyro Driver]
凡例
電力
RS-422
シリアル/PCM
RF
他系機器
PSDB3[Pyro Driver]
SAD
FSCB2[FTLU3]
UHF-TX[TelemetryTransmitter]
IMU[LR81]
DAU3[TelemetryMultiplexer]
[TelemetryProcessor]
DAU2[TelemetryMultiplexer]
DAU1[TelemetryMultiplexer]
PSDB2[Pyro Driver]
PSDB1[Pyro Driver]
凡例
電力
RS-422
シリアル/PCM
RF
他系機器
PSDB3[Pyro Driver]
ThrusterDriver
ThrusterDriver
OBC[Flight
Computer]
T-BATT
ThrusterDriver
ThrusterDriver
OBC[Flight
Computer]
T-BATT
ACT3A ACT3B
T-BATTEAC3
ACT3A ACT3B
T-BATTEAC3
SADSAD
火工品
[Power TransferSwitch]
BATT3B
[Power TransferSwitch]
以下を除く
Thruster Driver/
Pyro Driver
SADSAD
火工品
[Power TransferSwitch]
BATT3B
[Power TransferSwitch]
以下を除く
Thruster Driver/
Pyro Driver
BATT3A
ACT3
図5-5 Pegasus ロケットのアビオニクスブロック図(一部推定)
76
表5-6 Pegasus ロケットと国内技術のアビオニクス質量比較
単位:kg
-94基準打上能力※
33?電力電装系
1段
2段
7?計測通信系
00誘導制御系
4014
32?電力電装系
8?計測通信系
00誘導制御系
4014
68?電力電装系
29?計測通信系
4314誘導制御系
140523段
22080全段
世界的レベルの構成に国内現有機器を使
用した場合
世界的レベル
(例:ペガサス)ステージ
-94基準打上能力※
33?電力電装系
1段
2段
7?計測通信系
00誘導制御系
4014
32?電力電装系
8?計測通信系
00誘導制御系
4014
68?電力電装系
29?計測通信系
4314誘導制御系
140523段
22080全段
世界的レベルの構成に国内現有機器を使
用した場合
世界的レベル
(例:ペガサス)ステージ
※一般的なロケット(SSOに400kgの打上能力)の打上能力感度(イナート質量)より算出。
⇒ 1段=4.5%、2段=20%、3段=100%
小型ロケットの大きな足枷
要求される機能に差がないアビオニクス
安い高いコスト
少ない多い加工工数
使用材料
ロケット
少ない多い
小型大型
要求される機能に差がないアビオニクス
安い高いコスト
少ない多い加工工数
使用材料
ロケット
少ない多い
小型大型
Pegasusのアビオニクス
国内大型衛星打上げ用ロケットのアビオニクス
図5-6 アビオニクスが小型ロケットの性能・コストに与える影響イメージ
77
φ1270φ970
560
国内の現状(小型ロケットの検討例)
世界トップレベル
(ペガサス、ミノタウル)
アビオ搭載構造・衛星接手を兼ねる・内部にGN2 RCSタンク搭載
狭いスペースにほとんどのアビオを搭載(機器高さ150mm以下)
φ1800
※)図は同一のスケールで記載
アビオスペース確保のため、接手構造伸長(ノズルまわりへの艤装も不可)
アビオ搭載構造・アビオ搭載専用の構造
PBS(アビオ搭載)
世界トップレベルに比べ、機器搭載スペースが非常に大きい
小型ロケット用のコンパクトなアビオ機器が必要
※ 国内保有のロケット用アビオ流用を前提に検討)
φ1270φ970
560
φ1270φ970
560
国内の現状(小型ロケットの検討例)
世界トップレベル
(ペガサス、ミノタウル)
アビオ搭載構造・衛星接手を兼ねる・内部にGN2 RCSタンク搭載
狭いスペースにほとんどのアビオを搭載(機器高さ150mm以下)
φ1800
※)図は同一のスケールで記載
アビオスペース確保のため、接手構造伸長(ノズルまわりへの艤装も不可)
アビオ搭載構造・アビオ搭載専用の構造
PBS(アビオ搭載)
世界トップレベルに比べ、機器搭載スペースが非常に大きい
小型ロケット用のコンパクトなアビオ機器が必要
※ 国内保有のロケット用アビオ流用を前提に検討)
図5-7 アビオニクス搭載部の比較 14),15)
78
5.2.3 軌道投入精度
日本の小型ロケット(M-V)には諸外国で多く採用されている PBS が搭
載されていない。このように日本では今まで PBS の開発実績はないが、RCS
スラスタ等の共通技術要素は保有しており、開発能力は十分に有していると
いえる。
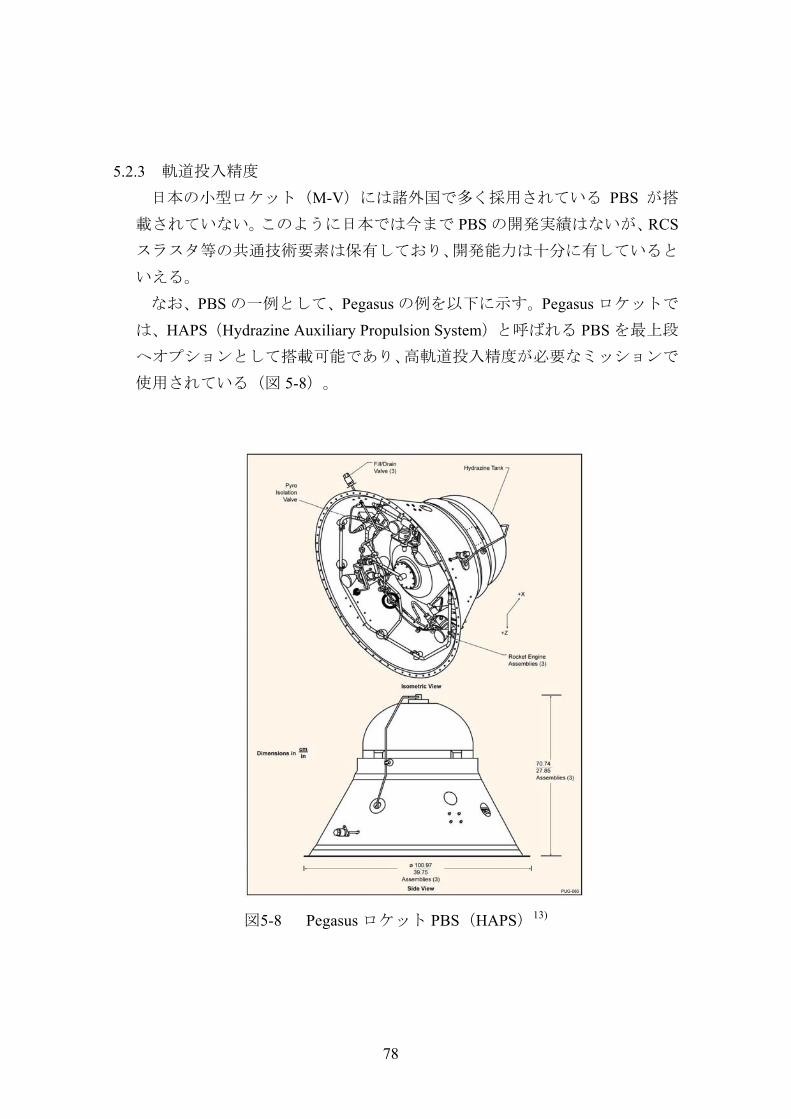
なお、PBS の一例として、Pegasus の例を以下に示す。Pegasus ロケットで
は、HAPS(Hydrazine Auxiliary Propulsion System)と呼ばれる PBS を 上段
へオプションとして搭載可能であり、高軌道投入精度が必要なミッションで
使用されている(図 5-8)。
図5-8 Pegasus ロケット PBS(HAPS)13)
79
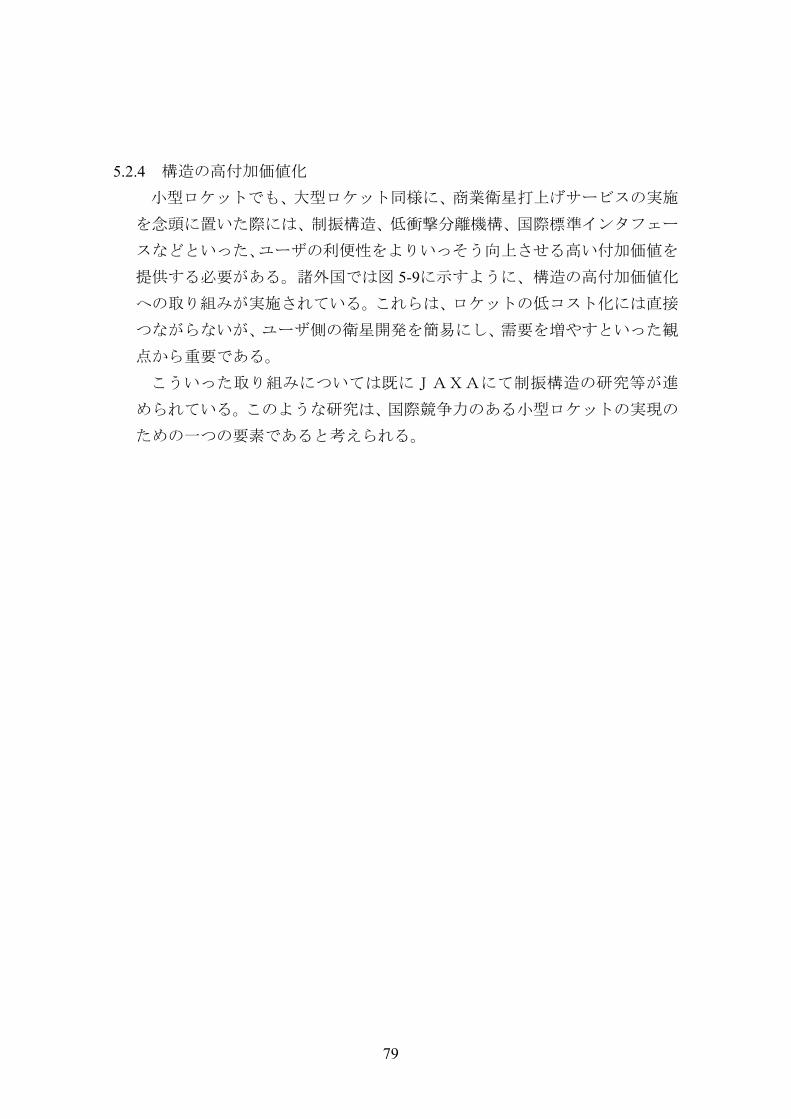
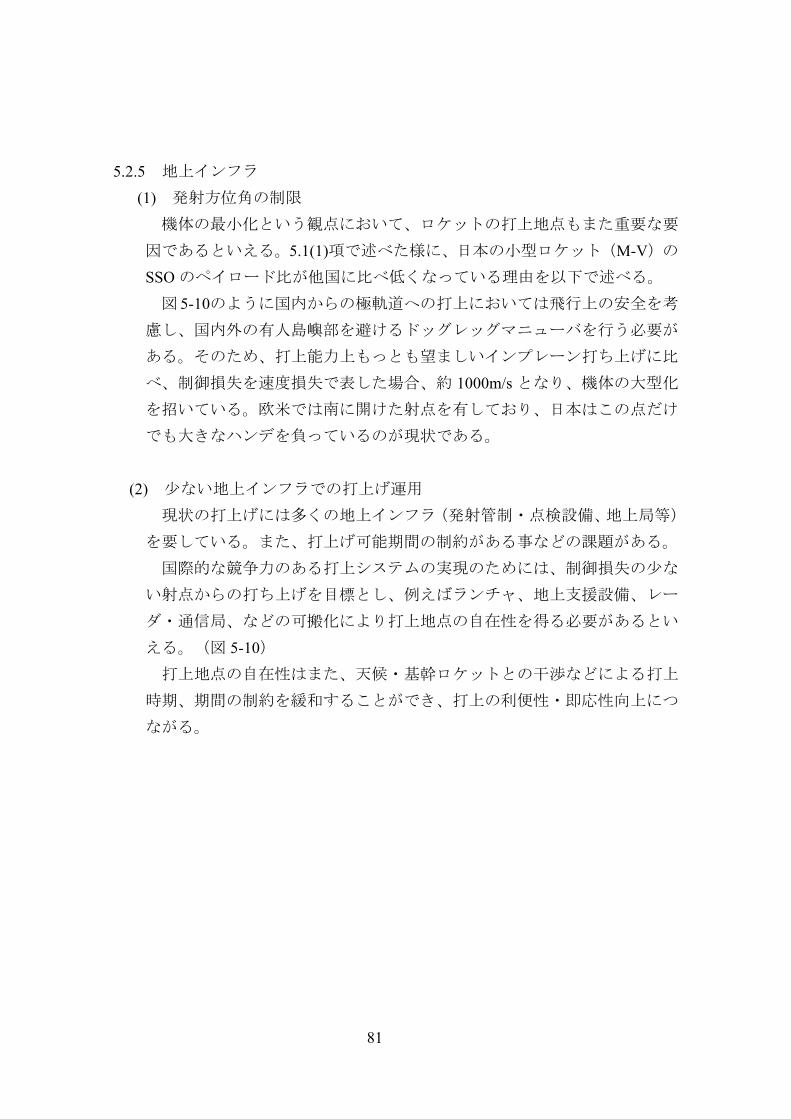
5.2.4 構造の高付加価値化
小型ロケットでも、大型ロケット同様に、商業衛星打上げサービスの実施
を念頭に置いた際には、制振構造、低衝撃分離機構、国際標準インタフェー
スなどといった、ユーザの利便性をよりいっそう向上させる高い付加価値を
提供する必要がある。諸外国では図 5-9に示すように、構造の高付加価値化
への取り組みが実施されている。これらは、ロケットの低コスト化には直接
つながらないが、ユーザ側の衛星開発を簡易にし、需要を増やすといった観
点から重要である。
こういった取り組みについては既にJAXAにて制振構造の研究等が進
められている。このような研究は、国際競争力のある小型ロケットの実現の
ための一つの要素であると考えられる。
80
図5-9 構造の高付加価値化 14),15)
ESPA(DELTA ATLAS) ASAP5
衛星継ぎ手
共通規格 既存の衛星用継ぎ手との 規格を共通化し、既存小型衛星 ユーザを取り込む
Light band
(Planetary Systems Corp.)
非火工品分離 火工品を用いないことによる
低衝撃分離、組み立ての簡素化
81
5.2.5 地上インフラ
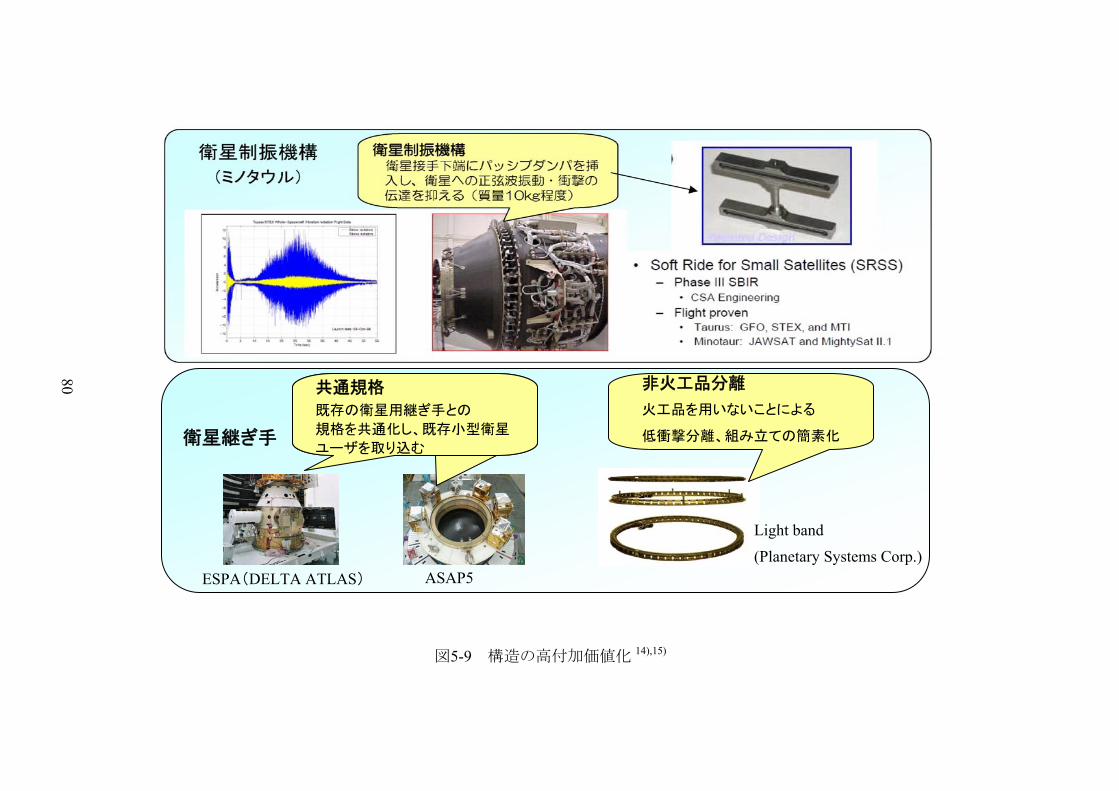
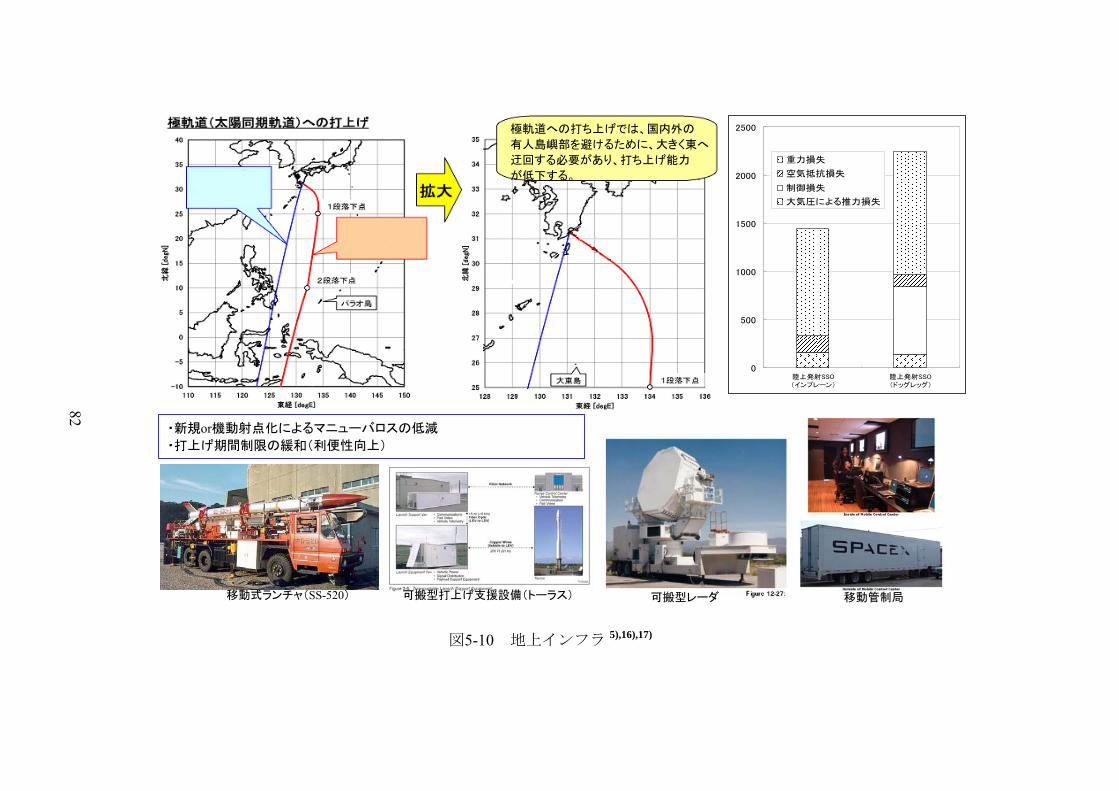
(1) 発射方位角の制限
機体の 小化という観点において、ロケットの打上地点もまた重要な要
因であるといえる。5.1(1)項で述べた様に、日本の小型ロケット(M-V)の
SSO のペイロード比が他国に比べ低くなっている理由を以下で述べる。
図 5-10のように国内からの極軌道への打上においては飛行上の安全を考
慮し、国内外の有人島嶼部を避けるドッグレッグマニューバを行う必要が
ある。そのため、打上能力上もっとも望ましいインプレーン打ち上げに比
べ、制御損失を速度損失で表した場合、約 1000m/s となり、機体の大型化
を招いている。欧米では南に開けた射点を有しており、日本はこの点だけ
でも大きなハンデを負っているのが現状である。
(2) 少ない地上インフラでの打上げ運用
現状の打上げには多くの地上インフラ(発射管制・点検設備、地上局等)
を要している。また、打上げ可能期間の制約がある事などの課題がある。
国際的な競争力のある打上システムの実現のためには、制御損失の少な
い射点からの打ち上げを目標とし、例えばランチャ、地上支援設備、レー
ダ・通信局、などの可搬化により打上地点の自在性を得る必要があるとい
える。(図 5-10)
打上地点の自在性はまた、天候・基幹ロケットとの干渉などによる打上
時期、期間の制約を緩和することができ、打上の利便性・即応性向上につ
ながる。
82
図5-10 地上インフラ 5),16),17)
極軌道に最適な 飛行経路 (インプレーン)
飛行安全を考慮した
飛行経路 (ドッグレッグ)
0
500
1000
1500
2000
2500
陸上発射SSO(インプレーン)
陸上発射SSO(ドッグレッグ)
重力損失
空気抵抗損失
制御損失
大気圧による推力損失
極軌道への打ち上げでは、国内外の 有人島嶼部を避けるために、大きく東へ 迂回する必要があり、打ち上げ能力 が低下する。
・新規or機動射点化によるマニューバロスの低減 ・打上げ期間制限の緩和(利便性向上)
可搬型レーダ 移動管制局可搬型打上げ支援設備(トーラス)移動式ランチャ(SS-520)
83
5.2.6 技術課題まとめ
小型衛星打上げ用ロケットの国際競争力確保のためには、小型衛星打上げ
システム全体の低コスト化・高機能化が重要である。そのための技術課題は
前項までに示した。
この中で特に日本で注力すべき課題と考えられるのは、アビオニクスの小
型・低コスト化と自由度の高い地上インフラである。そこで、次項以降では、
特にアビオニクスの小型・低コスト化に対する対応策を詳細に検討する。一
方、地上インフラについては、用地や法律上の問題等、国という立場での検
討が必要であると考えており、本検討では対応策検討の対象とはしないこと
とした。
ちなみに、自由度の高い地上インフラ実現のための対応策の一つとしては、
空中発射システムがある。空中発射システムには 5.2.5 項で示したドッグレッ
グマニューバによる速度損失が無い、多くの地上インフラ(発射管制・点検
設備、地上局等)が不要、打上げ可能期間の制約がない、等の利点を有して
おり、機動的な低コスト打上げの実現となり得る。空中発射システムについ
てはこれまで USEF により調査研究が行われてきているが、競争力確保のた
めの重要な要素の一つであり、今後の動向が注目される。
技術課題まとめ
◆小型ロケットシステムで注力すべき技術要素と国内の現状
・ロケットモータの高性能化
固体ロケットモータは世界トップレベルの技術を有する。
・アビオニクスの小型・軽量、低コスト化
小型軽量・低コスト化を進める必要がある。
・構造の高付加価値化
ユーザフレンドリ化(制振機構等)を進める必要がある。
・高軌道投入精度化
PBS の開発実績はないが、RCS 等の共通技術要素を保有している。
・地上インフラ
(1)発射方位角の制限によりロケット性能が低下している。
(2)多くの地上インフラ(射点設備、追跡管制等)を要している。
84
5.3 アビオニクス技術課題への対応策
本項では、小型ロケットの国際競争力確保のためのキー技術と考えられる
アビオニクスについて、低コスト化、および小型・軽量化のための対応策を
検討する。
これまでに述べたように対応策としては、特に民生品の積極利用が活路と
考えられるが、そのためには課題もある。そこで、民生品利用の課題に焦点
を絞り、検討を行うこととした。
5.3.1 民生部品と宇宙用部品の比較
大型衛星打ち上げロケットでは、高価な衛星打上げという性格上、アビ
オニクスにも相応の高い信頼性が要求され、その要求に見合うアビオニクス
が開発されてきている。この高い信頼性は宇宙用としてスクリーニングされ
た専用部品を用いることを前提として得られていたものである。しかし現在
では、商業化のために、信頼性と同時に低コスト化が宇宙用部品に望まれる
ようになってきている。
以下、宇宙用部品と民生部品を比較し、民生品利用の問題点について検討
した。
(1) 信頼性
宇宙用部品は、アビオニクスの構成部品の信頼度を積み重ねることによ
ってアビオニクスの信頼性を確保するという考えに基づくものである。宇
宙用部品は、民生部品に比べ、宇宙環境で壊れにくいという保証を有して
いる。しかしながら、宇宙用部品においても、このような信頼性を確保す
る方法は、以下のような考え方を加え、転換が必要とも言われ始めている。
・分散型システムによる冗長構成
・構成部品数の削減
・インタフェースの標準化
・コンポーネントレベルの信頼性確保
・宇宙だけでなく他分野でも継続的に使用されること
(2) コスト
宇宙用部品は、厳しい使用条件や、小ロッド受注生産である等のために
85
高価である。一方、民生部品は宇宙用部品に比較して安価であり、自動車
等、他産業で大量に使用されるものは同等機能を有するものでも大幅に低
コストである。
(a) 小型、軽量
宇宙用部品は、高信頼性が要求されることから、実績のある古い技術
を踏襲する傾向があり、大型で重いものが多い。民生部品は一般に宇宙
用部品に比べて性能が劣るが、小型軽量な特性を有する。
(b) 供給安定
宇宙用部品は輸入品が多く供給が不安定であるものが少なくない。国
内メーカであっても、利益が少なく条件の厳しい宇宙用部品から撤退す
る場合も多い。また、小ロット受注生産であるため長納期であって、保
管コストが発生するものも有る。
民生部品は他業種で一般的に使われているものであり、入手性につい
ては当然有利といえる。ただし、技術革新のスピードが速く、世代交代
が激しいために、早期に部品枯渇が起こることが予測される。
ロケット開発においては、打上げの信頼性維持の観点から、十年単位
での安定的な部品供給が求められる。宇宙用部品はメーカの撤退、民生
品は世代交代、という問題を抱えており、どちらも供給が安定している
とは言えない。
(c) 先端技術
他分野の 先端の技術を使用したい場合、そのデバイスが認定される
のを待たなければならない。他分野の市場は 先端技術を活発に取り入
れるため、先行して宇宙での使用に耐えるよう改良したり、試験したり
する企業はまず存在しないと思われる。宇宙用部品は信頼性維持の観点
からも同じ部品が使用され続け、一般から見れば古い技術であることは
少なくない。
以上より、民生品利用においては、以下のことが期待できる。
・ 他分野で多く使用されていることによる一定水準以上の信頼性
・ 低コスト化
86
・ 小型化・軽量化
・ 先端技術の導入
一方、民生品の導入に当たっては以下のような課題が存在するといえる。
・ 品質をどのように保証するか(信頼性評価の方法)
・ 世代交代の早い民生品をどう使いこなすか(部品枯渇への対応)
・ 精度の低いコンポーネントで、性能を保証するにはどうするか(宇
宙用部品に劣る性能への対応)
5.3.2 民生品使用による低コスト化のための対応策
前項より、民生品を活用する場合、そのアビオニクスが、十分な機能と
信頼性を得ることが必要である。以下のような問題に対し、対応策を挙げ
ていく。
(a)民生部品単体の低コストな信頼性評価方法の確立
(b)統合的な検証
(c)世代交代・部品枯渇に対する対応
(d)機器別の課題
(e)省電力化
(1) 民生部品単体の低コストな信頼性評価方法の確立
アビオニクスの信頼性を確保する手段の一つとして、今まで高信頼性部
品が適用されてきたが、民生部品を使用するにあたって、どのように信頼
性を評価するかが課題となる。
対応策として、次の4点を挙げる。
・ 認定部品のように部品単品の性能試験は行なわず、その代わりに、
コンポーネント単位で評価する。設計段階で、コンポーネントの脆
弱な部分を調べ、設計を強化、マージンの 適化をする。
⇒HALT
・ MIL 規格に基づく従来の信頼性(故障率)解析は古く、民生品は
過小評価されており、妥当な故障率が算出されているとはいえない。
また、宇宙用部品の信頼性解析手法として日本で広く用いられてい
るMIL‐HDBK-217Fは 1996年には使用中止されたため更新されず、
新の電子部品に対応していない。新しい信頼性解析方法を使用す
87
る必要がある。
⇒FIDES
・ 製造運用時のスクリーニングを、使用環境条件ではなく、その機
器の能力の限界を基準として行うことでふるいわけの確実性を増す。
⇒HASS
・ アビオニクス機器単体ではなく、システムレベルで環境試験及び
機能試験を行うことで、部品スクリーニングコストを削減する。
⇒システムレベルでの機能試験による不適合摘出
(a) HALT/HASS
HALT は設計による欠陥・不良・弱点を短い時間で発見する設計ツー
ルである。コンポーネントが破壊に至るまでの高い環境負荷を短時間で
加えることで、部品の比較を行ったり、故障の要因を見つけたりするこ
とが出来る。試験によって発生した故障をきっかけに設計の見直しを数
回繰り返すことで設計不備を取り除く、又は設計マージンの 適化を行
うことが出来る。コンポーネント単位で試験を行うため、試験時間を短
縮することにもなる。
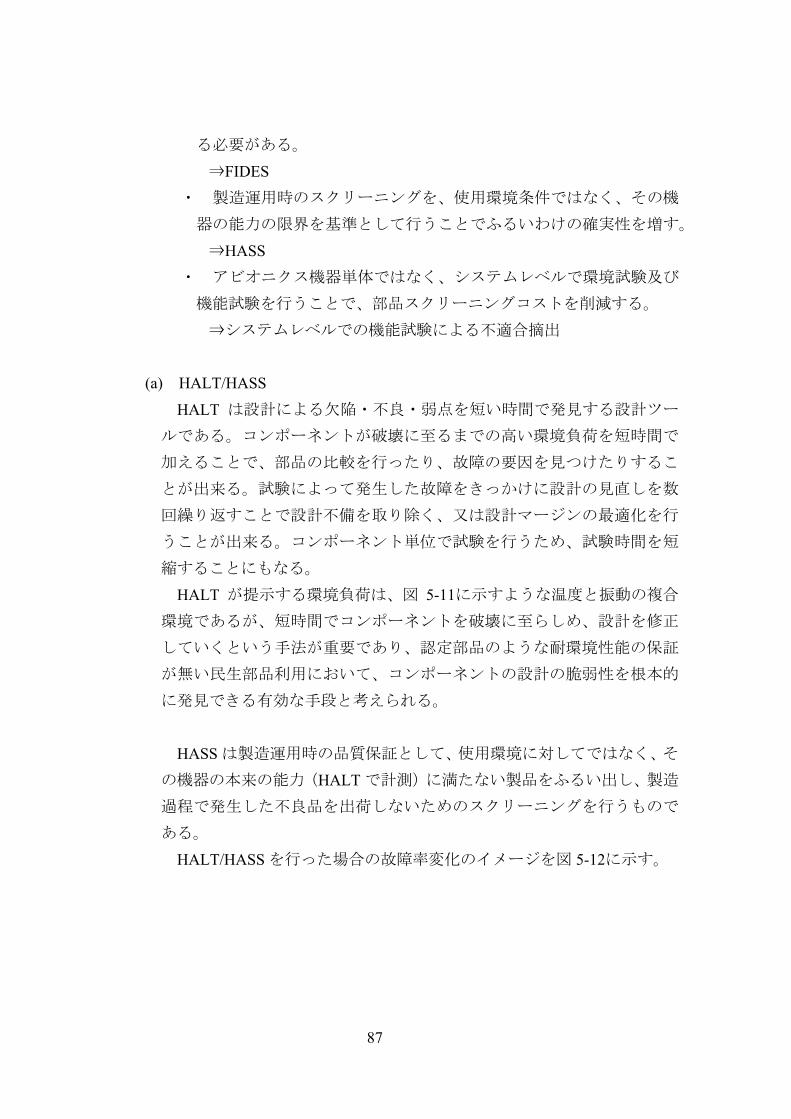
HALT が提示する環境負荷は、図 5-11に示すような温度と振動の複合
環境であるが、短時間でコンポーネントを破壊に至らしめ、設計を修正
していくという手法が重要であり、認定部品のような耐環境性能の保証
が無い民生部品利用において、コンポーネントの設計の脆弱性を根本的
に発見できる有効な手段と考えられる。
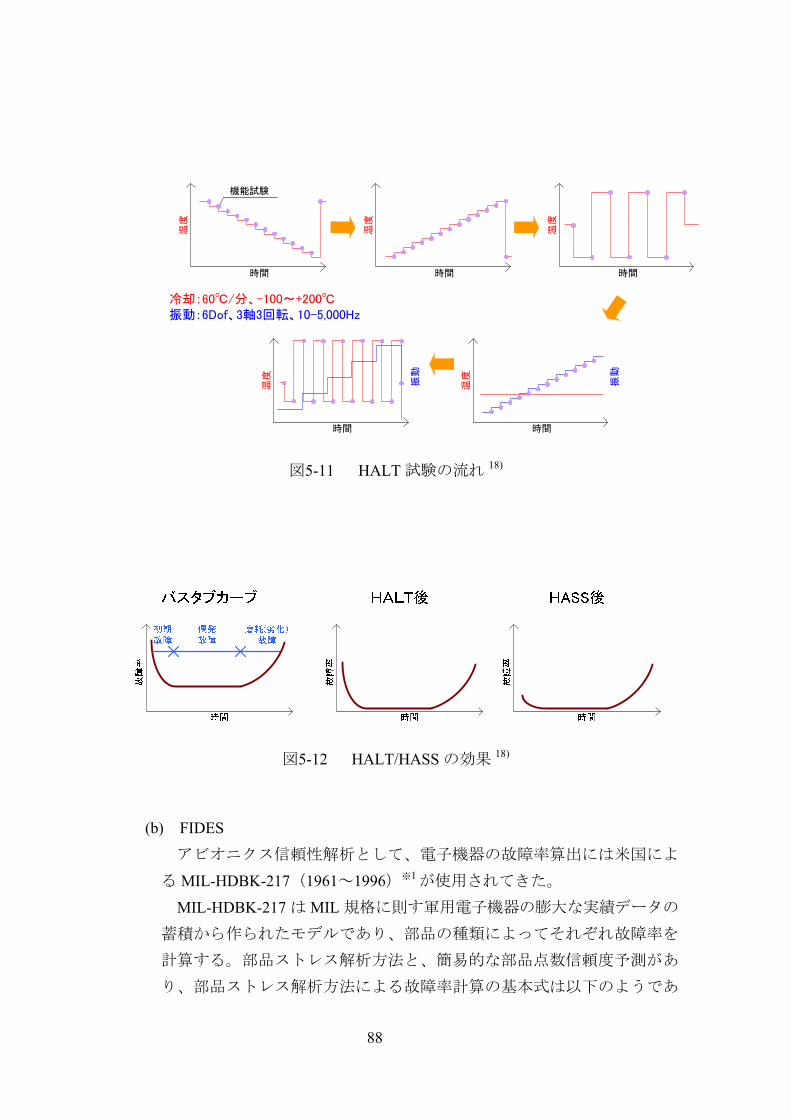
HASS は製造運用時の品質保証として、使用環境に対してではなく、そ
の機器の本来の能力(HALT で計測)に満たない製品をふるい出し、製造
過程で発生した不良品を出荷しないためのスクリーニングを行うもので
ある。
HALT/HASS を行った場合の故障率変化のイメージを図 5-12に示す。
88
機能試験
時間
温度
時間
温度
時間
温度
時間
温度
振動
時間
温度
振動
冷却:60℃/分、-100~+200℃振動:6Dof、3軸3回転、10-5,000Hz
図5-11 HALT 試験の流れ 18)
図5-12 HALT/HASS の効果 18)
(b) FIDES
アビオニクス信頼性解析として、電子機器の故障率算出には米国によ
る MIL-HDBK-217(1961~1996)※1 が使用されてきた。
MIL-HDBK-217 は MIL 規格に則す軍用電子機器の膨大な実績データの
蓄積から作られたモデルであり、部品の種類によってそれぞれ故障率を
計算する。部品ストレス解析方法と、簡易的な部品点数信頼度予測があ
り、部品ストレス解析方法による故障率計算の基本式は以下のようであ
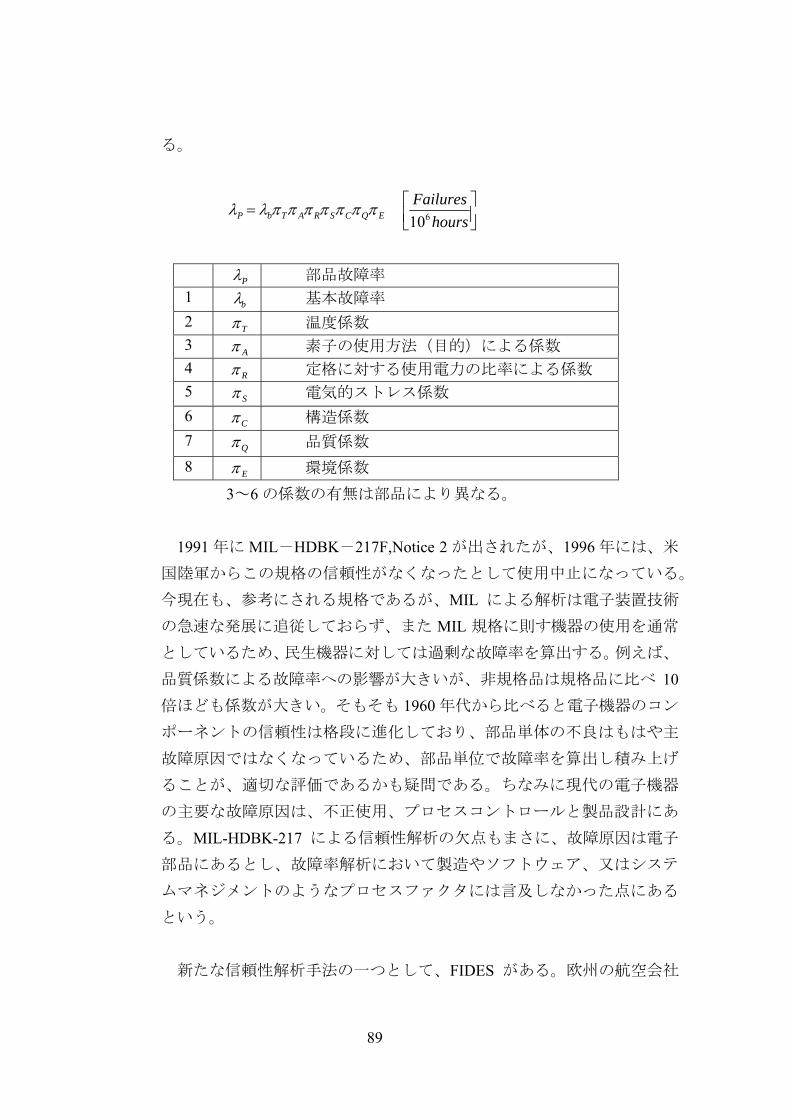
89
る。
⎥⎦⎤
⎢⎣⎡=
hoursFailures
EQCSRATbP 610 πππππππλλ
Pλ 部品故障率 1 bλ 基本故障率 2 Tπ 温度係数 3 Aπ 素子の使用方法(目的)による係数 4 Rπ 定格に対する使用電力の比率による係数 5 Sπ 電気的ストレス係数 6 Cπ 構造係数 7 Qπ 品質係数 8 Eπ 環境係数
3~6 の係数の有無は部品により異なる。
1991 年に MIL-HDBK-217F,Notice 2 が出されたが、1996 年には、米
国陸軍からこの規格の信頼性がなくなったとして使用中止になっている。
今現在も、参考にされる規格であるが、MIL による解析は電子装置技術
の急速な発展に追従しておらず、また MIL 規格に則す機器の使用を通常
としているため、民生機器に対しては過剰な故障率を算出する。例えば、
品質係数による故障率への影響が大きいが、非規格品は規格品に比べ 10
倍ほども係数が大きい。そもそも 1960 年代から比べると電子機器のコン
ポーネントの信頼性は格段に進化しており、部品単体の不良はもはや主
故障原因ではなくなっているため、部品単位で故障率を算出し積み上げ
ることが、適切な評価であるかも疑問である。ちなみに現代の電子機器
の主要な故障原因は、不正使用、プロセスコントロールと製品設計にあ
る。MIL-HDBK-217 による信頼性解析の欠点もまさに、故障原因は電子
部品にあるとし、故障率解析において製造やソフトウェア、又はシステ
ムマネジメントのようなプロセスファクタには言及しなかった点にある
という。
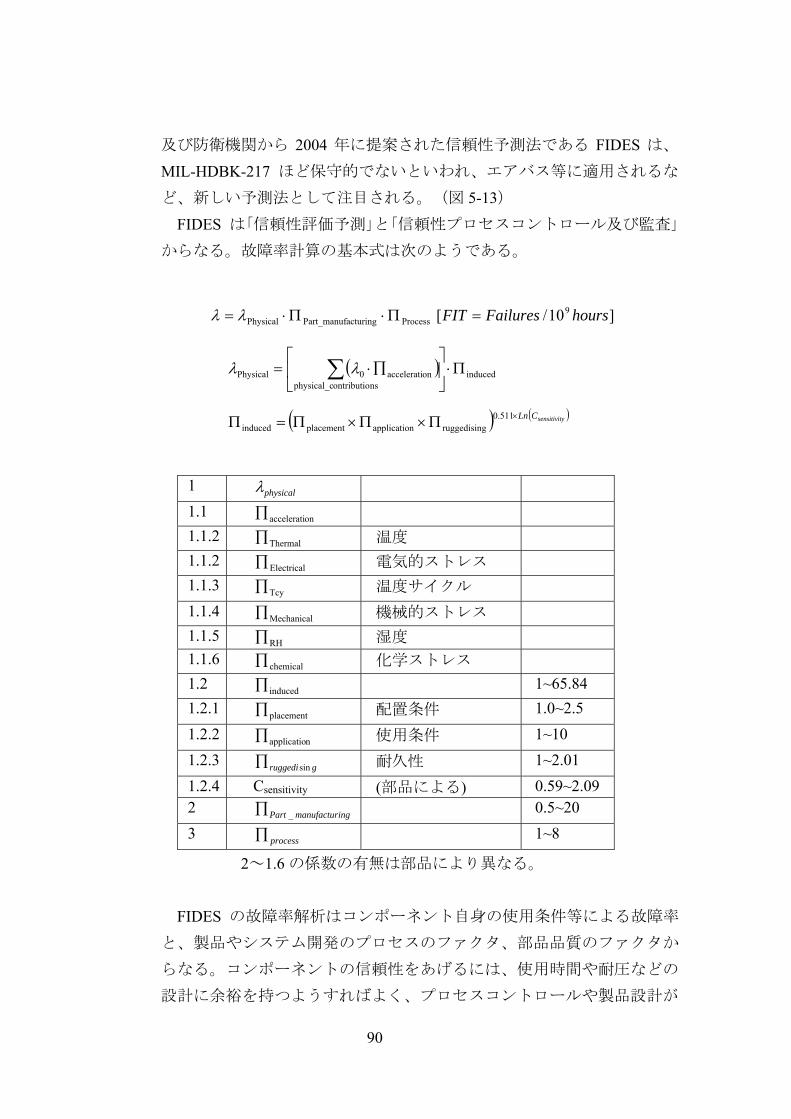
新たな信頼性解析手法の一つとして、FIDES がある。欧州の航空会社
90
及び防衛機関から 2004 年に提案された信頼性予測法である FIDES は、
MIL-HDBK-217 ほど保守的でないといわれ、エアバス等に適用されるな
ど、新しい予測法として注目される。(図 5-13)
FIDES は「信頼性評価予測」と「信頼性プロセスコントロール及び監査」
からなる。故障率計算の基本式は次のようである。
]10/[ 9 ProcessacturingPart_manufPhysical hoursFailuresFIT =Π⋅Π⋅= λλ
( ) induced
nsontributiophysical_conaccelerati0Physical Π⋅⎥⎦
⎤⎢⎣
⎡∏⋅= ∑ λλ
( ) ( )ysensitivitCLn×Π×Π×Π=Π 511.0gruggedisinnapplicatioplacementinduced
1 physicalλ
1.1 onaccelerati∏ 1.1.2 Thermal∏ 温度 1.1.2 Electrical∏ 電気的ストレス 1.1.3 Tcy∏ 温度サイクル 1.1.4 Mechanical∏ 機械的ストレス 1.1.5 RH∏ 湿度 1.1.6 chemical∏ 化学ストレス 1.2 induced∏ 1~65.84 1.2.1 placement∏ 配置条件 1.0~2.5 1.2.2 napplicatio∏ 使用条件 1~10 1.2.3 gruggedisin∏ 耐久性 1~2.01 1.2.4 Csensitivity (部品による) 0.59~2.09 2 ingmanufacturPart _∏ 0.5~20 3 process∏
1~8
2~1.6 の係数の有無は部品により異なる。
FIDES の故障率解析はコンポーネント自身の使用条件等による故障率
と、製品やシステム開発のプロセスのファクタ、部品品質のファクタか
らなる。コンポーネントの信頼性をあげるには、使用時間や耐圧などの
設計に余裕を持つようすればよく、プロセスコントロールや製品設計が
91
主な故障原因であるという考えに合っているといえる。
民生部品使用による小型化、低価格化を目指す小型アビオニクス開発
においては、適切な信頼性予測を行い、 適な機器を作ることが必須で
ある。MIL による故障率解析は前述の通り適当でないため、これに代わ
る FIDES 等の手法を用いる必要がある。
但し、新たな予測手法の導入には多くの部品のフィールドデータに基
づく検証が必要である。民生部品は、メーカ独自で信頼性データを取得
しているはずであるがその多くは企業ノウハウに関わるものであり、容
易に開示されるものではない。このあたりのフィールドデータの蓄積や
予測手法の検証についてはメーカごとに行っていては統一的でなく非効
率と考えられるため、国の機関で独立して実施する枠組を作っていくこ
とも重要と考える。
92
図5-13 MIL-HDBK-217 と FIDES19),20)
※1 Military‐Handbook‐217
Reliability Prediction of electronic equipment
1961 に Department of Defense と Quanterion Solutions Inc. により作
られた。
※2 FIDES Guide 2009
Reliability Methodology for Electronic System
2004 に AIRBUS France, Eurocopter, GIAT Industries, MBDA missile
systems, Tales 等の企業、軍事機関によって作られた。
93
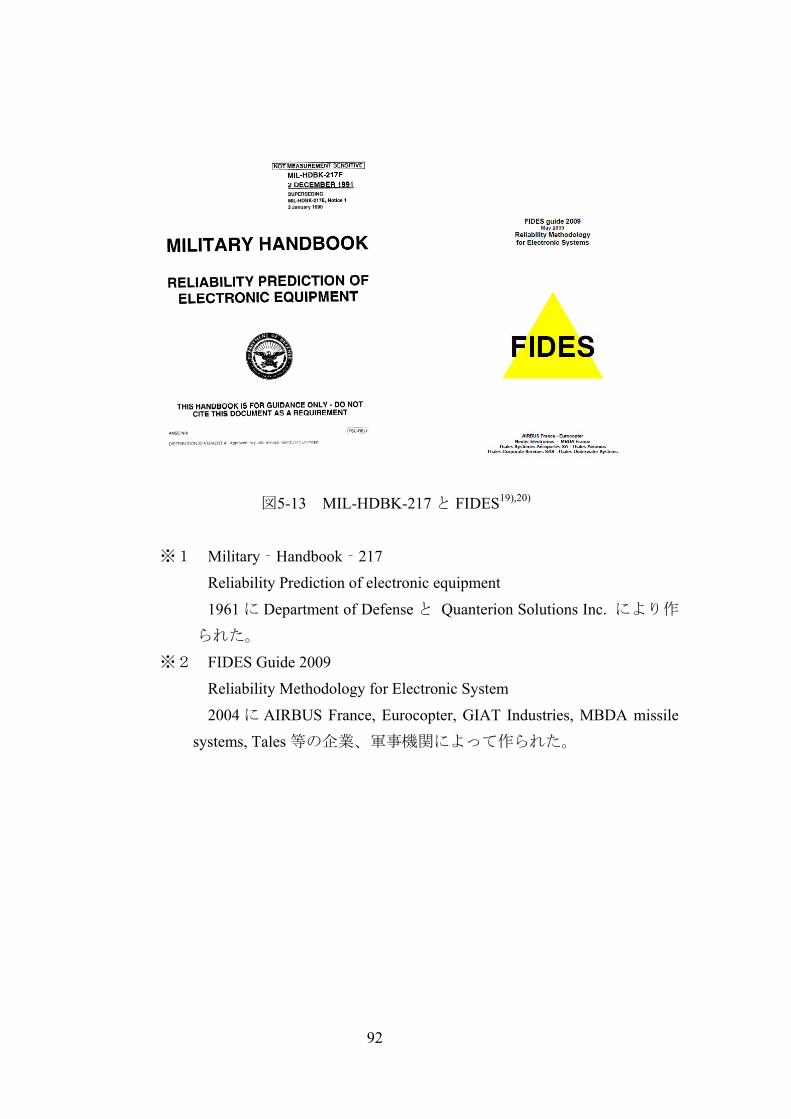
(c) システムレベルでの機能試験による不適合摘出
アビオニクス機器の製造後の環境試験・機能試験はそれぞれ別々に行
われてきた。個別に行うと時間もコストもかかるが、図 5-14のように搭
載構造に組み付けた状態で試験することにより、短時間で統合的な機能
確認を行えると考えられる。また、システムレベルで行うことにより、
部品スクリーニングコストをカットできる。
図5-14 アビオニクス組込み~環境・システム試験
(2) 統合的な検証
ロジック回路を含む FPGA や複雑化したソフトウェアの機能検証を単体
で十分に行うことはもはや不可能である。コンポーネント単位での環境試
験やロケットアビオニクスとしての統合的な検証が必要である。
対応策として、次の 3 点を挙げる
・ソフトウェア検証環境
・統合機能検証プラットホーム
・統一的なツールを用いた開発
94
(a) ソフトウェア検証環境
ロケット搭載ソフトウェアはプロセッサ技術の進化や、軌道投入精度
の向上などのため大規模で複雑なものになっている。その結果、ソフト
ウェアには多くのエンジニアが介在し、一個人が全てを把握するもので
はなくなっているのが現状である。民生品を使用するに当たっても、
MEMS 型 IMU を使用し IMU/GPS 複合航法(後述)を行うなどソフトウ
ェアへの要求はますます高度なものになっていくと予想される。
また、搭載ハードウェアにソフトウェアを書き込んだ状態での従来の
検証方法では、ハードウェアの異常や故障等への検証は不十分であった。
よって、各アビオニクスのソフトウェアに包括的なテストを実施するこ
とやハードウェアに依存しない検証方法が必要である。
ソフトウェアの信頼性を総合的に評価するため、コンピュータ上にロ
ケットを再現し、シミュレーションを行う方法が有効であると考えられ
る。
コンピュータ上でロケットダイナミクスやセンサ出力を模擬してソフ
トウェアを検証するもので、設計段階では実環境に依存しないアルゴリ
ズム検証を行い、ロケット搭載コードが作成された後ではエミュレータ
上あるいは作成コードを組み込んだ実機ハードウェアでの検証を行う
(図 5-15)。
コンピュータ上での検証は、安全で再現性もあり、テストケースを決
めてやれば自動化も可能である。そのためには、実環境のモデルを作り、
リアルタイム処理機能を持ったコンピュータを用意する必要がある。そ
のような検証環境を整備し、さまざまな条件で検証を行うことで、ソフ
トウェアの信頼性を高め、低コスト化、設計期間の縮小につながる効果
が見込まれる。
このような研究はJAXAでは「次世代搭載ソフトウェア検証環境の
研究」として、研究が進められている 25)。
http://stage.tksc.jaxa.jp/jxithp/research/07.html
また、NEDOにおいても次世代輸送系システム設計基盤技術開発に
おいて、「高度信頼性飛行制御検証技術の研究開発」として、研究開発
が実施されている 26)。
http://www.nedo.go.jp/activities/portal/p02008.html
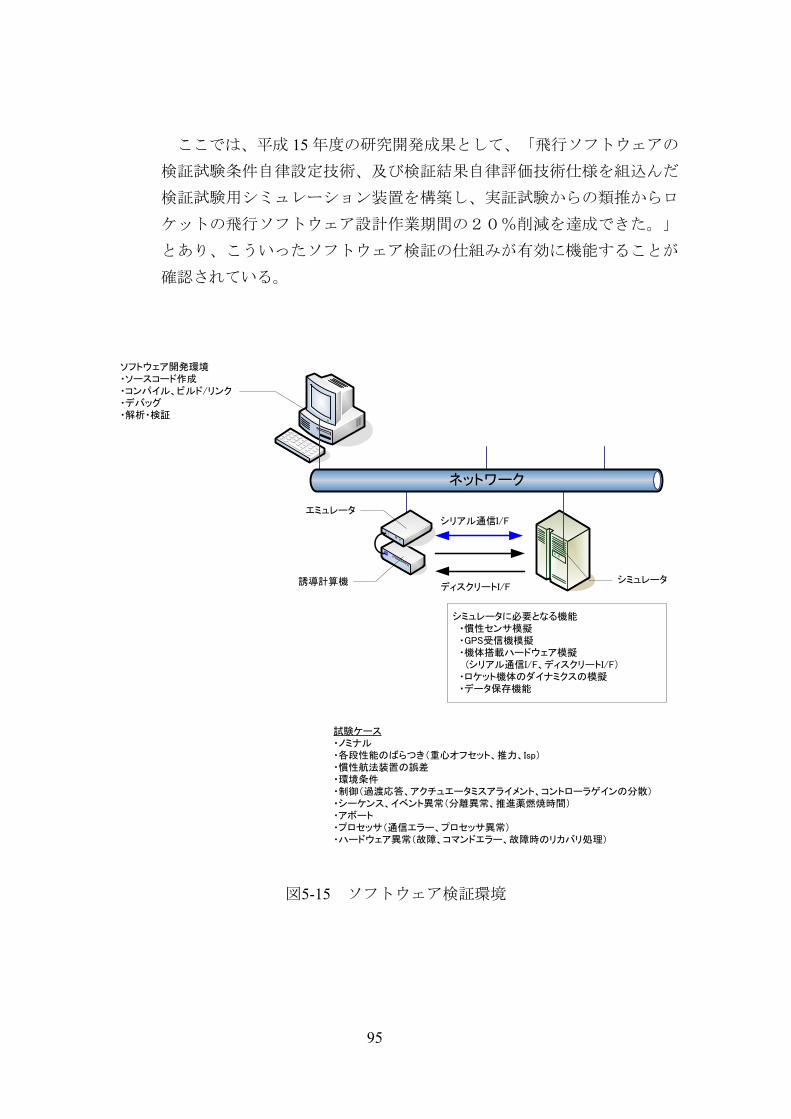
95
ここでは、平成 15 年度の研究開発成果として、「飛行ソフトウェアの
検証試験条件自律設定技術、及び検証結果自律評価技術仕様を組込んだ
検証試験用シミュレーション装置を構築し、実証試験からの類推からロ
ケットの飛行ソフトウェア設計作業期間の20%削減を達成できた。」
とあり、こういったソフトウェア検証の仕組みが有効に機能することが
確認されている。
ネットワーク
エミュレータ
誘導計算機
ソフトウェア開発環境・ソースコード作成・コンパイル、ビルド/リンク・デバッグ・解析・検証
シミュレータ
シリアル通信I/F
ディスクリートI/F
シミュレータに必要となる機能・慣性センサ模擬・GPS受信機模擬・機体搭載ハードウェア模擬
(シリアル通信I/F、ディスクリートI/F)・ロケット機体のダイナミクスの模擬・データ保存機能
試験ケース・ノミナル・各段性能のばらつき(重心オフセット、推力、Isp)・慣性航法装置の誤差・環境条件・制御(過渡応答、アクチュエータミスアライメント、コントローラゲインの分散)・シーケンス、イベント異常(分離異常、推進薬燃焼時間)・アボート・プロセッサ(通信エラー、プロセッサ異常)・ハードウェア異常(故障、コマンドエラー、故障時のリカバリ処理)
図5-15 ソフトウェア検証環境
96
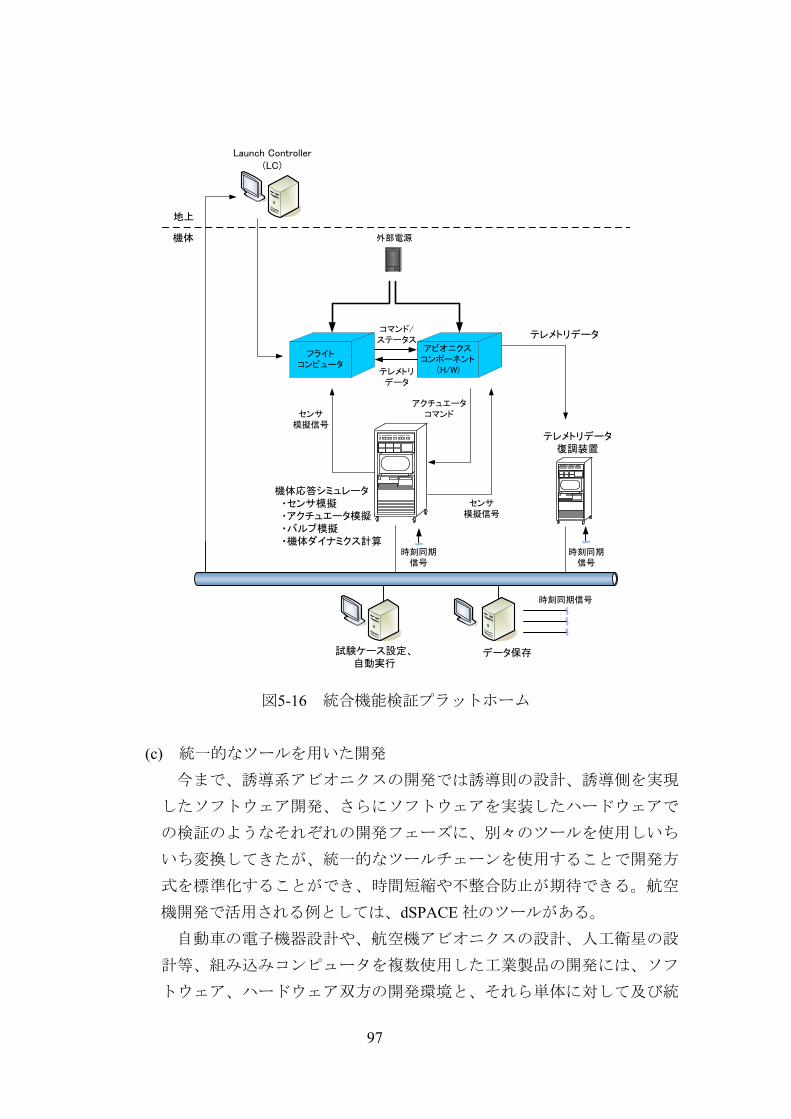
(b) 統合機能検証プラットホーム
高度化したアビオニクス機器は機器単体やソフト単位の他に、総合機
能として検証する必要がある。アビオニクスの小型化に伴い、複数の CPU
や FPGA ロジックが複雑に作用し、各機器がさまざまな制御ロジックを
搭載しているため、システムとした統合した形で機能を確認しなければ
ならないためである。また、高級言語で開発されたソフトウェアは、各
コンポーネントの入出力を利用した外部からの機能確認を行うほかに、
十分な検証方法はない。
そこで、フライトコンピュータにシミュレータを接続し、様々な誤差
ケースを用いておこなう閉ループフライトシミレーションから、シミュ
レータで模擬していた機器を実物に置き換えたシステムとしての機能確
認まで、段階を踏んで行う統合機能検証プラットホームの構築が有効と
考えられる(図 5-16)。これは、前項で述べたソフトウェア検証環境の
拡張版として位置づけられ、ハードウェアを組み合わせて、統合的に
End-to-End でシステムの機能を検証するものである。
こういったプラットホームを用いることにより、ハードウェアの開発
初期段階での設計不良の抽出や、コスト高要因である機器製造の中間段
階での検証作業の簡略化が期待され、信頼性の確保のみならず、低コス
ト化にも大きな効果を発揮すると考えられる。さらに、一部の部品交換
に対しても機能全体で検証が可能であることから世代交代の早い民生品
に適した検証環境であり、後述する世代交代・部品枯渇に対する対応方
策の一つにもなると考えられる。
低コストロケットの代表である Falcon1 は、この統合機能検証プラット
ホーム同様のハードウェア閉ループシミュレータを用いてソフトウェア
検証を実施しており、今後の低コストロケット開発に必要となるアビオ
ニクス/ソフトウェアの検証環境であると考えられる。
97
Launch Controller(LC)
地上
機体
データ保存試験ケース設定、自動実行
機体応答シミュレータ・センサ模擬・アクチュエータ模擬・バルブ模擬・機体ダイナミクス計算
テレメトリデータ復調装置
時刻同期信号
外部電源
アビオニクスコンポーネント
(H/W)
時刻同期信号
フライトコンピュータ
時刻同期信号
テレメトリデータコマンド/
ステータス
テレメトリデータ
センサ模擬信号
アクチュエータコマンドセンサ
模擬信号
図5-16 統合機能検証プラットホーム
(c) 統一的なツールを用いた開発
今まで、誘導系アビオニクスの開発では誘導則の設計、誘導側を実現
したソフトウェア開発、さらにソフトウェアを実装したハードウェアで
の検証のようなそれぞれの開発フェーズに、別々のツールを使用しいち
いち変換してきたが、統一的なツールチェーンを使用することで開発方
式を標準化することができ、時間短縮や不整合防止が期待できる。航空
機開発で活用される例としては、dSPACE 社のツールがある。
自動車の電子機器設計や、航空機アビオニクスの設計、人工衛星の設
計等、組み込みコンピュータを複数使用した工業製品の開発には、ソフ
トウェア、ハードウェア双方の開発環境と、それら単体に対して及び統
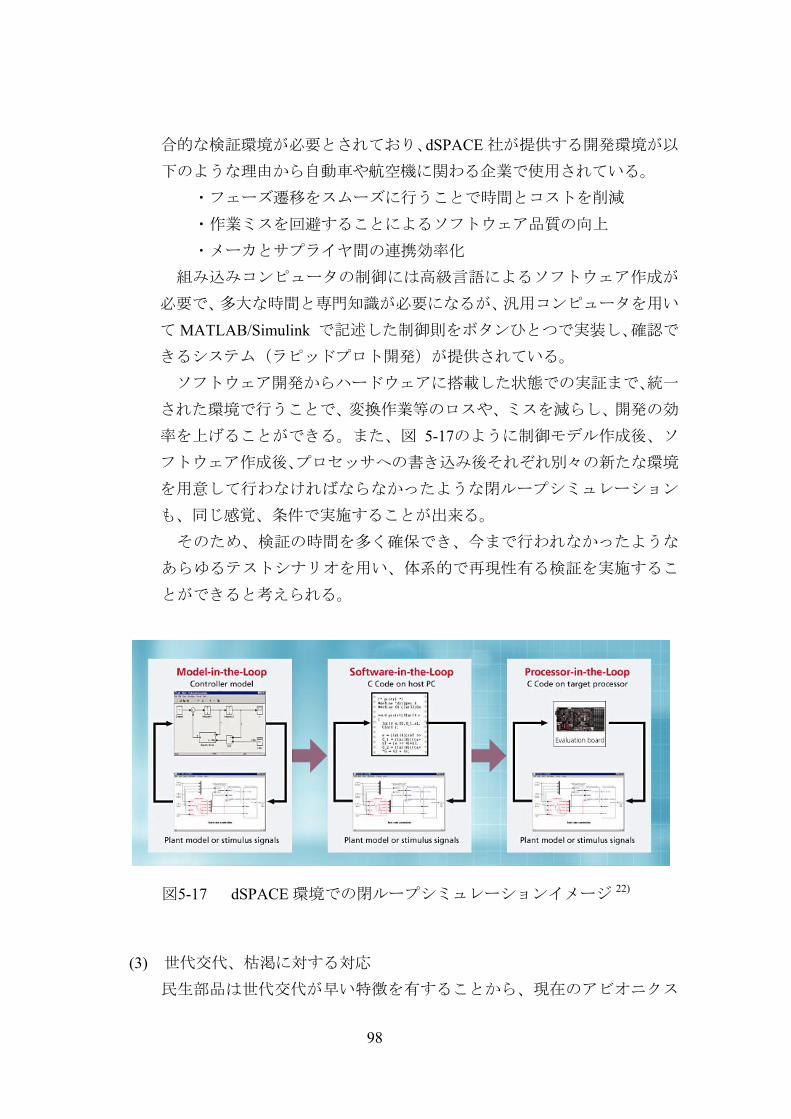
98
合的な検証環境が必要とされており、dSPACE 社が提供する開発環境が以
下のような理由から自動車や航空機に関わる企業で使用されている。
・フェーズ遷移をスムーズに行うことで時間とコストを削減
・作業ミスを回避することによるソフトウェア品質の向上
・メーカとサプライヤ間の連携効率化
組み込みコンピュータの制御には高級言語によるソフトウェア作成が
必要で、多大な時間と専門知識が必要になるが、汎用コンピュータを用い
て MATLAB/Simulink で記述した制御則をボタンひとつで実装し、確認で
きるシステム(ラピッドプロト開発)が提供されている。
ソフトウェア開発からハードウェアに搭載した状態での実証まで、統一
された環境で行うことで、変換作業等のロスや、ミスを減らし、開発の効
率を上げることができる。また、図 5-17のように制御モデル作成後、ソ
フトウェア作成後、プロセッサへの書き込み後それぞれ別々の新たな環境
を用意して行わなければならなかったような閉ループシミュレーション
も、同じ感覚、条件で実施することが出来る。
そのため、検証の時間を多く確保でき、今まで行われなかったような
あらゆるテストシナリオを用い、体系的で再現性有る検証を実施するこ
とができると考えられる。
図5-17 dSPACE 環境での閉ループシミュレーションイメージ 22)
(3) 世代交代、枯渇に対する対応
民生部品は世代交代が早い特徴を有することから、現在のアビオニクス
99
でも生じている部品枯渇の問題は、避けて通れないと予測される。民生部
品の世代交代が起こった際、新しい部品への切り替えに迅速に対応できる
必要がある。
これに対する設計段階での対策としては、モジュール化設計が有効であ
る。部品枯渇が生じた場合、一部の機能モジュールのみの置き換えで対応
可能なように、あらかじめ機器を機能ごとにモジュール化しておく、とい
う方策である。
また、部品枯渇に対し、いちいち機器単体での開発を繰り返すようなこ
とになれば民生品利用のメリットが大きく損なわれることになる。これに
対しては、一部の部品交換に対しても機能全体で検証が可能な、先述の統
合機能検証プラットホームが有効と考えられる。
(4) 機器別の課題と対応策
民生部品の使用に当たって、個別のアビオニクス機器に生じる問題と対
応策を以下に挙げる。
(a) MEMS 型 IMU と GPS による複合航法
ロケットの航法機器である IMU は一般に高い精度が要求され、リン
グ・レーザ・ジャイロ等、高価な機器が用いられてきた。この航法機器
の低コスト化手段として、安価だが精度の低い IMU(例えば MEMS 型
IMU)と、衛星から位置情報を取得できる GPS を組み合わせた複合航法
を用いることで航法誤差を抑える、という手段が考えられている。複合
航法は航空機の分野でも取り入れられており、ロケットでも使用され始
めている技術である。これまでのところ、MEMS 型まで安価な IMU を用
いた商業用ロケットは実現していないと考えられるが、低コスト化のた
めに、今後ますます注目される技術と考えられる。
MEMS 型 IMU を使用した場合、価格は 1/1000、質量は 1/100 となるが、
誤差は 100~1000 倍となる。そのため、通常のロケット誘導制御ロジッ
クに加えカルマンフィルタ等の処理をフライトコンピュータで実行可能
な計算量で実現する技術が必要である。
(b) 自己点検機能
ロケットでは火工品等、安全性に大きな注意を払わなければならない
100
装置を使用している。そのため、ロケット用電力制御装置では、これま
での実績を重視して、実装スペースが大きく質量も重いメカニカルリレ
ーをスイッチ素子として適用し続けているのが現状である。ただし、小
型・軽量化のためには、従来と同等の信頼性・安全性を維持しつつ、適
用技術の近代化が必要であると考えられ、自動車等でも一般に用いられ
ている半導体リレーのスイッチ素子としての適用を考える時期に来てい
るといえる。この実現にあたっては、半導体スイッチを適用した場合の
安全性の確保がポイントとなる。この方策としては、半導体リレーの故
障を検知するための自己点検機能を備えることが挙げられる。
(5) 省電力化
地球温暖化やエネルギー問題等から、電気製品では省電力化が進んでお
り、CPU の駆動電圧などは 2V を下回っている。一方、ロケット用のアビオ
ニクスは、火工品点火等、短時間に比較的大きな電力を消費する機器が存
在するために、それに合わせて 24V 等の高電圧を使用しているのが現状で
ある。
これにより、搭載電池が大型になるばかりか、低電圧駆動の民生品を利
用したとき、二次電源を作るための機器をいくつも使用しなければならず、
民生品による小型化の効果を十分発揮できない。
対応策としては、消費電力の小さい民生品を使用することでアビオニク
スの消費電力を削減し、大電流放電が必要な火工品点火にはキャパシタを
併用することで電池への負荷を軽減する案などがある。
こういった省電力化設計が実現されれば、搭載電池質量が削減され、ア
ビオニクスの小型化、ひいては低コスト化に繋がると考えられる。
101
参考文献
1) “Commercial Space Transportation: 2005-2008 Year In Review”, FAA
2) FAA HP http://www.faa.gov
3) Max Vozoff (Director):”Availability of Launch Vechicles Falcon Family is
Filling the Void for Space Science Missions”,SpaceX,2009
4) Space Exploration Technologies HP http://www.spacex.com/
5) SpaceX:"Falcon 1 Launch Vehicle Payload User’s Guide",Rev.7,(2008)
6) Hans Koenigsmann, Elon Musk, Gwynne Gurevich(Space Exploration
Technologies coporation),"THE FALCON LAUNCH VEHICLE"
7) Hans Koenigsman,Steve Davis,Elon Musk,Gwynne Shotwell(Space Exploration
Technologies):"The Falcon Ⅴ Medium Lift Launch Vehicle",55th IAC(2004)
8) Gwynne E.Shotwell(Space Exploration Technologies):"The FalconⅠ Launch
Vehicle Development Status and Steps to First Flight",55th IAC(2004)
9) “VEGA User's Manual Issue 3”, Arianspace
10) D. Boury and C. Roussille, Snecma Propulsion Solide, Le Haillan:” Large Solid
Propulsion For Space Launcher “,AIAA-2003-4963,(2003)
11) “ATK Space Propulsion Catalog”, Alliant Techsystems
12) David A.Steffy (Pegasus Engineering Manager): "The Pegasus Avionics System
design",IEEE,1990
13) "Pegasus User's Guide Release 6.0", Orbital Sciences(2007)
14) Orbital Sciences HP http://www.orbital.com/
15) Planetary Systems http://www.planetarysystemscorp.com/
16) JAXA HP http://www.jaxa.jp/
17) “Taurus Launch System Payload User's Guide 2006”, Orbital Sciences
18) 東陽テクニカ HP http://www.toyo.co.jp
19) "MIL-HDBK-217F, Notice 2(217F-2) Reliability Prediction of electronic
equipment",(1991)
20) "FIDES Guide2009 Reliability Methodology for Electronic System",(2009)
102
21) Juan J.Marin,Robert W.Pollard(Raytheon Company):"Experience Report on the
FIDES Reliability Prediction Method", Proc Annu Reliab Maintainab
Symp(IEEE), Vol2005, pp8-pp13, (2005)
22) dSPACE HP http://dspace.com
23) ESA HP http://www.esa.int
24) "Ronald Reagan Ballistic Missile Defense Test Site at Kwajalein Atoll (RTS)",
12th Annual FAA Commercial Space Transportation Conference(Feb 2009)
25) JAXA HP http://stage.tksc.jaxa.jp/jxithp/research/07.html
26) NEDO HP http://www.nedo.go.jp/activities/portal/p02008.html
27) AIAA “International Reference Guide to Space Launch Systems”, 4th Edition
28) Brown University of Engineering
http://www.engin.brown.edu/NLV/Spacex.ppt
29) Google Map
30) “Chimera-A Low Cost Solution to Small Satellite Space Access” ,
Georgia Institute of Technology
USEF09-L-001 平成21年度 「衛星打上げ用ロケットの高機能・低コスト化に関する検討」
平成 21 年 3 月 作成 財団法人無人宇宙実験システム研究開発機構
東京都千代田区神田小川町二丁目12番地
TEL:03-3294-4834
―禁無断転載―





























