Embed Size (px)
Citation preview

702食品と容器 2014 VOL. 55 NO. 11
はじめに
「食」は,ヒトの生活にとって不可欠な衣食住の1つであるが,ヒトの生命おび健康を維持する直接的かつ重要な役割を果たすものである。この役割を果たす過程において,経口によりヒトの身体へ取り込まれるため,その被咀
そしゃく
嚼性は対象となる食品を評価・検討する際に着目すべき重要な事項の1つである。特に高機能化・高付加価値化が重視される最近の製品開発プロセスにおいては,被咀嚼性の「質」についても評価・検討すべき点として考えるべき事項となっている。この食品の被咀嚼性の評価テクノロジーとしては,その官能表現をテクスチャー等の指標によって測定する専門的な装置が存在1)する一方で,これを食品以外のさまざまな幅広い分野でも横断して管理・評価できる教養的な測定方法の有用性も見逃すことはできない。 そこで本稿では,食の質を被咀嚼性の観点から計測評価するテクノロジーの実用化を目的として,食品の変形特性を物理的でアカデミックに計測し分かりやすく表現する方法に関わる取り組みを紹介する。特に,ヒトが咀嚼プロセスを評価する食感を物理的に分析するため,食品の変形挙動の数理的な解析を可能とする物理量を紹介するとともに,これを同定する計測テクノロジーを確立する
基盤となった医師の触診メカニズムの分析についても紹介する。
1.ヒトが表現するモノの変形 1-1)モノの「やわさ」 モノの変形の特性についてヒトが表現する言葉の1つの「やわらかい」があるが,これに当てはめる漢字として,「柔」は,力を加えて変形してでも元に戻る場合,「軟」は,力を加えると変形しやすく元に戻らない場合によく使う2)。一方でモノの変形は,元に戻る変形特性は「弾性」,戻らない特性は「塑性」と物理的に表現されることから,弾性の程度を一般的に表す言葉には「柔さ」,塑性には「軟さ」が当てはまることとなる。 1-2)触感表現と触診メカニズムの分析 ヒトがモノの変形程度の違いを触って感じ取る部位としては,触感に関わる四肢の掌や指,食感に関わる口(歯)を挙げることができる。特に触感は,感じ取る対象となるモノの種類が食品・食材に限らないため格段に多く,これをヒトが表現する際には表現の多様性も大きくなる。 この触感は,ヒトの生活の多くの場面において重要な役割を果たしているが,技術として直接役立っているものの1つとして医師の触診(第1図)を挙げることができる。これは,熟練した技量を有する場合については高度な情報を瞬時かつ簡便
食感の数値データ化のための触診メカニズムによる計測システム実用化
● 特別解説 ●
佐 久 間 淳
さ く ま・ あ つ し 京都大学大学院工学研究科機械工学専攻博士後期課程修了。現在,東京農工大学大学院工学研究院准教授。博士(工学)

703食品と容器 2014 VOL. 55 NO. 11
に得たい場面で診察や手術の際に用いることができる一方で,高度な技量と熟練が要求される上に,得られる情報の多くが感覚的に表現される場合が多い。このことから,触診を実用的なシステムとして結実して成果とした例は,触診のメカニクスを数学的・理論的に体系付けの困難さから,これまで無いに等しかった。 このような状況において筆者らは,やわさの違いを適切に見極められる触診のメカニクスを解明した上で,これによって柔軟な材料の特性を定量的に測る技術の確立を目指した研究取り組みから,このほど球圧子の押込試験で納得できる成果3)
を得られたので,これを本稿で紹介する。 触診は,指の触感から的確にヒト軟組織の状態を把握する技術であるが,この実施プロセスに診られるヒトの部位の違いや個人差等の影響は熟練した医師であれば極めて小さい。特に,施術者の個人差の影響は技術のシステム化によって排除できるが,ヒト軟組織の厚さが診る場所によって異なることから,被術部位による影響の最小化は状態の違いの客観的な把握に欠くことができない実現すべき要件である。 そこで本稿で示す方法では,まず医師がやわさを感覚的に分析するアルゴリズムを評価し,これを次の様に分類して整理した4)。 (a) 医師は,指で触った瞬間に,まず柔さの予 測値を出す。 (b) 次に,指を押し込んだ際の反力の変化率から, 診る部位の組織厚さを予測する。 (c) さらに,厚さの予測値から柔さの最初の予測 を修正し,最終的な「柔さ」や「軟さ」を同定する。つまり,軟組織の厚さによらず的確に軟組織の状態を把握できるテクニックは,やわさと同時に組
織厚さも計測しているという触診メカニクスの分析結果である。 さらに,この評価した分析アルゴリズムを基にして,弾性を対象として柔さの違いをヤング率によって表現することを考える。ここで,極めて多くある弾性の違いを表す指標の中でも,教養課程の物理テキストには必ず記載されていることから最も基本的かつ代表的な物性値であると考え,本稿の方法では柔さの違いの表現にヤング率を用いることとした。 このヤング率については,物質の接触メカニクスでは Hertz の弾性接触理論6)によって評価できることが知られており,すでに産業の幅広い分野で利用されている(この Hertz の名は,電気の周波数の単位 Hz としても日頃から馴染まれている)。この Hertz の弾性接触理論では,半無限体試料に対して十分に硬い球圧子を押し込むとき,球圧子の直径φと試料ヤング率 E,ポアソン比νを用いて,押込荷重と押込量δの関係を式⑴で表現できる。
⑴
しかし,押し込む対象の試料が有限の厚さであって,かつ下に試料より固いものがある場合において得られる荷重Fは,式⑴で表される荷重 Fより高くなる(第2図 (a))。この荷重 F の上昇は,式⑴で評価するヤング率 E の上昇も招くが,上昇が押込量δの増加に伴って顕著となる性質から,これを表す関係として係数 B を用いた次式による評価を考える。 ⑵
このとき,式⑴の係数 A との比較から,式⑵の係数 Â から演
えんえき
繹される見かけのヤング率 Ê と試料本来のヤング率 Ê とには,次の関係が成立することとなる。 ⑶
この式⑶は,押込量δ =0の場合に Ê=E となり,
第1図 指による触診の様子(カラー写真を HP に掲載 C093)

704食品と容器 2014 VOL. 55 NO. 11
先述にあった分析 (a) の関係を表現できる関係となっている。また式⑶から,その大小によって押込量δの増加に伴って見かけのヤング率 Ê が変化する状況も変わることから,係数 B は試料厚さの影響を表す性質を有し,式⑵,⑶は有限厚さ試料の押込み変形を半無限体試料の接触変形と有限厚さ試料の圧縮変形の和とする際の重ね合わせの割
合を表すこととなる(第2図 (b))。 以上で示した関係を用いて,次にさまざまな対象のヤング率 E を求めた結果について示すこととする。
2.食品の「柔さ」計測と製品開発 2-1)さまざまな食品の「柔さ」計測
ここでは,計測方法の有効性を確認する目的で,示した関係式によりヤング率 E の計測を実施した結果を示す。計測に用いた装置は,汎用的な試験機である島津製作所(株)製の小型卓上試験機 EZ-S である。本稿では,特に特徴のある「こんにゃくゼリー」,「スライスハム」および「卵の黄身」の計測結果について第3~5図に示す。 まず第3図に示すこんにゃくゼリーの測定結果では,第3図 (b)の押込量 - 変位曲線で綺き れ い
麗な J カーブが測定されており,式⑵による近似曲線にもよく一致した結果を得ることができていることが分かる。このことから,こんにゃくゼリーの様な柔らかい対象物であっても,押込試験によるヤング率の計測法の適用が可能であることが示されている。 第4図に示すスライスハムの測定からは,厚さ1.2mm という薄
第3図 こんにゃくゼリーのヤング率計測の様子 (a) と得られた押込量 - 荷重曲線 (b)ヤング率 E=722Pa (カラー写真を HP に掲載 C094)
第2図 試料厚さ h が小さいほど押込み荷重 F は大きいが (a),この有限厚さ試料への押込みを無限体試料の接触変形と有限厚さ試料の圧縮変形の重ね合わせと考える (b)
(a) 計測の様子
(a) 押込量δ - 荷重 F 曲線と試料厚さ h (b) 薄い試料への押し込み
(b) 押込量δ [mm]- 荷重 F[N]
第4図 スライスハムのヤング率計測の様子 (a) と得られた押込量 - 荷重曲線 (b)ヤング率 E=339Pa (カラー写真を HP に掲載 C095)
(a) 計測の様子 (b) 押込量δ [mm]- 荷重 F[N]

705食品と容器 2014 VOL. 55 NO. 11
い対象の J カーブからもヤング率を求められる事が分かる。 最後の第5図に示す卵の黄身の測定結果では,これも模式第2図(a)に示したような綺麗な J カーブが得られたことから,この結果からもヤング率の導出が原理的には可能である事が分かった。 さらに,これまで筆者らは他の多様な食品のヤング率を計測してきているが,その結果について教科書的に知られている物質のヤング率と併せて第6図に示す。これまで引張試験により教科書に記載されるような標準的なヤング率が求められてきたが,低いヤング率のため試料の引張試験が困難である場合は,本稿で示した Hertz の弾性接触理論に基づく押込試験によってもヤング率を求めることができる。なお,ここで得られた卵の黄身のヤング率 E の値は,筆者らの実験的に計測した現時点で最も小さなものである。 2-2)同一種の食品の「柔さ」計測 異なる種類の食品に対するヤング率の違いの観察結果を前節において示したが,さらに同一種の食品におけるヤング率の違いを観察した結果を本節において示す。種類が異なれば組成も異なる等の理由から必然的にヤング率にも違いが生じることは理解しやすいが,基本的に同一組成とみなせる場合が多い同一種の食品においてヤング率に違
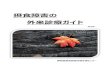
いがある場合は,その製造方法や品質管理,製品コンセプトの違い等に起因するものと考えることができる。したがって,同一種の食品においてメーカー等が異なる製品のヤング率の違いを観察することで,製造方法等が食品の咀嚼に必要となる力をコントロールできる可能性について本節では評価・検討する。 ここで計測する食品は,品質が安定した加工食品の中でも複数のメーカーから多数の製品が販売されていることからチーズを対象とし,特にメーカーや製品の間で寸法や形状に差異が少ない6Pチーズを対象とした計測結果を示す。ここでチーズのヤング率計測に用いる装置は(株)堀内電機製作所の柔さ計測ロボット SoftMeasure HS-3001で,基本仕様が最大荷重20N,駆動範囲(x,y, z)が(180mm, 180mm, 80mm)の製品である。この製品の外観を第7図(a)に示す。また6Pチーズの計測の様子を第7図 (b)に示す。 この測定結果については第8図に示す。同じコ
第6図 さまざまな素材について基本的な物理量「ヤング率」で一律に評価する
第5図 卵の黄身のヤング率計測の様子 (a) と得られた押込量 - 荷重曲線 (b)ヤング率 E=15.6Pa (カラー写真を HP に掲載 C096)
(a) 計測の様子 (b) 押込量δ [mm]- 荷重 F[N]

706食品と容器 2014 VOL. 55 NO. 11
ンセプトの製品であっても,製品毎にヤング率の違いに差があることが分かる。ここで示す6P チーズのヤング率の分布はおよそ50kPa ~ 500kPaの範囲を有していたが,特に A 社の製品については300kPa 付近に集中する結果となっていた。このヤング率300kPa 付近というのは第4図のスライ
スハムと同程度の数値であり,A 社の6P チーズは食肉製品と同様の食感が得られる様なコンセプトの製品であると類推することができる。他方の B,C 社の製品については,A 社よりも明確にヤング率が小さくなっており,比較的柔らかな製品とするコンセプトを有していると考えられる。
以上の結果から,製品タイプごと,あるいはメーカーごとに,ヤング率(ヤング率)の管理に違いのあることが数値データとして明確となった。これは,製品開発コンセプトに依存したものと推察される。 2-3)農産物の「柔さ」計測 農作物は,加工食品の生産管理が比較的容易なのに対して,個体差が大きくて経時変化も顕著であり,また品種・品目も多岐にわたることから,その柔さ計測については評価が非常に難しい課題の1つである。しかしヒトの食生活における農産物は,加工食品の素材としてばかりではなく,生鮮食品として高度な評価管理が望まれる対象の1つである。そこで本項では,柔さによる農作物の評価テクノロジーを確立することを目指して,どのよう
第7図 食品のヤング率計測に用いた ( 株 ) 堀内電機製作所製「柔さ計測ロボット」 SoftMeasure HS-3001 (a) と直径10mm のステンレス球圧子によって6Pチーズの 押込試験を実施している様子 (b) (カラー写真を HP に掲載 C097)
ヤング率, kPa
A社:製品5
B社:製品1
C社:製品1
B社:製品2
A社:製品4
A社:製品3
A社:製品2
A社:製品1
第8図 押込試験により求めたチ6P チーズのヤング率 E の分布
第9図 農作物のヤング率計測に用いた ( 株 ) 堀内電機製作所製 「ハンディ柔さ計測デバイス」SoftMeasure HG-1003 (カラー写真を HP に掲載 C098)
a b

707食品と容器 2014 VOL. 55 NO. 11
に農作物の柔さが収穫時から変化していくかを調べた1例を示す。ここで柔さに用いる装置は,(株)堀内電機製作所のハンディ柔さ計測デバイスSoftMeasure HG-1003で,基本仕様が最大荷重5N の製品である。この製品の外観を第9図に示す。また,今回の計測対象としたナスについて,収穫直前の状態を第10図に示す。 第11図には,この今回の計測したナスの柔さ変化を示す。1日目は収穫直後に計測した値であるが,2日目との比較では顕著に高い値となっており,樹上にある状態は収穫して経日したものとは極端に異なることが分かる。また2日目以降については,ほぼ300kPa というヤング率となっており,数値としては第6図のハム,第8図の A 社の6Pチーズに近い結果となっている。その特性が品種改良によって最適化されてきた農作物の結果でもあることから,この300kPa がヒトの食感としては1つの目安として考えることができる。今後,このような数値データを用いて,いかに食感のデザインを進めていくかが重要になっていくことが示唆される。
3.これからの食感デザインへ向けた計測システム 食感は,食品の変形という物理的な側面ばかりでなく,最終的には前述の「歯応え」などヒトから観たデザインが重要である。しかし,本稿で示した「柔さ」ばかりでなく,噛
か
み切り特性へ大きく影響する「軟さ」は物理的に計測評価が現時点でも大きな困難を伴うことから,食感の計測システムの開発・実用化には多くの課題を抱えている状態と言える。しかしながら,この課題解決へ取り組む契機として,まず変形を分析するときに最も基本となる柔さ(ヤング率)を計測できる実用的なシステムの登場は,これからの課題解決へ向けて大きな前進と言えるものである。まず身近な食品の柔さを測ってみることで,この前進を是非とも実感してもらいたいと考える次第である。
謝 辞 なお本稿で示したデータ分析に関しては,またJSPS 科研費22360045(基盤研究 B)および一般財団法人糧食研究会の研究助成により実施した成果の一部です。
第10図 収穫直前の計測対象としたナス (カラー写真を HP に掲載 C099)
第11図 計測したナスの柔さの経日変化
参 考 文 献1)各社の美味しさ評価技術,フードサイエンス,606, pp.62-64 (2012)。2)広辞苑(第六版),pp.2849-2850(2008)。3)谷充博,佐久間淳,篠宮将光:球圧子の押込試験によ る軟材料の厚さとヤング率の計測,日本機械学會論文 集,75A-755,pp.901-908 (2009)。4)佐久間淳,張 月琳:触診を模擬した柔さ計測システ
ムの展開,57-1,pp. 66-70 (2012)。5)佐久間淳:モノの弾性を触診メカニクスにより計測する デスクトップロボット,日本機械学会誌,116 -1134, p.355 (2013)。6)H.Hertz:Uber die Beruhrung Fester ElastischerKorper, Journal für die reine und angewandte Mathematik,92, pp.156-171 (1882) 。