Embed Size (px)
Citation preview

1 河北优控新能源科技有限公司 http://eco-ev.com/
EH2175A
技术手册 V1.8
河北优控新能源科技有限公司
http://www.eco-ev.com

2 河北优控新能源科技有限公司 http://eco-ev.com/
更改历史 修改日期 版本 描述
2015.9 V 1.1 初始版本
2016.10 V 1.2
2016.10 V 1.3
2016.12 V 1.4
2017.02 V1.5 更新 4.2 引脚定义 A00 A02 A04 A16
2017.06 V1.6 主控芯片 TC275
2018.01 V1.7
2018.09 V1.8

3 河北优控新能源科技有限公司 http://eco-ev.com/
1. 概述 ...................................................................................... 5
1.1 HCU 简介 ................................................... 5
1.2 HCU 特点 ................................................... 5
1.3 电气属性 .................................................... 6
2. 硬件参数............................................................................... 7
2.1 硬件特性 .................................................... 7
2.2 接插件结构图 ................................................ 7
2.3 接插件 ...................................................... 8
2.4 引脚定义 .................................................... 9
3. 功能描述和应用 .................................................................. 17
3.1 系统框图 ................................................... 17
3.2 供电电源 ................................................... 18
3.2.1 供电输入 ................................................................................... 18
3.2.2 传感器供电输出 ........................................................................ 19
3.2.3 VPWR 逻辑控制..................................................................... 20
3.3 输入 ....................................................... 21
3.3.1 数字输入 ................................................................................... 21
3.3.2 模拟输入 ................................................................................... 22
3.3.3 频率输入 ................................................................................... 23
3.4 输出 ....................................................... 23
3.4.1 低边驱动 ................................................................................... 23
3.4.2 高边驱动 ................................................................................... 25
3.5 通信模块 ................................................... 27
3.5.1 CAN 通信模块 ............................................................................. 27
3.5.2 唤醒功能 .................................................................................... 27
3.5.3 LIN 通信模块 ............................................................................... 28
3.5.4 FlexRay 通信模块 ....................................................................... 28
3.6 安全监控 ................................................... 28
3.6.1 三层架构概述 ........................................................................... 30
3.6.2 双核功能分配 ........................................................................... 31
3.7 控制器硬件故障诊断 ......................................... 31
4 河北优控新能源科技有限公司 http://eco-ev.com/
3.7.1 主芯片故障诊断 ........................................................................ 31
4. 软件简述............................................................................. 32
4.1 软件架构 ................................................... 32
4.2 自动代码生成工具- EcoCoder ................................. 34
4.3 标定软件 – EcoCAL ......................................... 36
4.4 程序下载 – EcoFlash ........................................ 37
5. 机械结构............................................................................. 38
5.1 控制器外观 ................................................. 38
5.2 机械尺寸 ................................................... 39
6. 试验标准............................................................................. 40
6.1 环境试验标准 ............................................... 40
6.2 EMC 试验标准 .............................................. 41
6.3 电性能试验标准 ............................................. 41

5 河北优控新能源科技有限公司 http://eco-ev.com/
1. 概述
1.1 HCU 简介
HCU (Hybrid Combined Unit)是新能源混动车控制系统的核心控制器,负
责整车动力系统能量管理、动力模式管理和电气附件控制。其核心功能包括:上
下电管理功能、动力系统管理分配、驱动模式管理、驱动和制动控制、附件管理
功能和诊断功能等。
1.2 HCU 特点
ISO26262 功能安全标准 符合 ISO 26262 功能安全标准,双核架构,基于
AURIX+TLF35584 平台,用于功能安全。
基础软件 基础软件 BSW, 支持所有典型的车辆控制输入/输出驱
动程序。
自动代码生成工具
BSW封装为 Matlab/Simulink 函数库,使开发者能够
以图形化的方式使用基础软件和进行一些参数配置,
从应用层模型能够一键生成可执行文件以及数据描述
文件。
刷写工具 基于 CAN总线的软件刷写工具 EcoFlash,用户可以使
用此工具将程序刷写到目标控制器中。
标定工具
标定采用我司自主研发的标定工具软件 EcoCAL,同时
兼容 INCA, CANape,或者其他基于 CCP 协议的标定工
具。

6 河北优控新能源科技有限公司 http://eco-ev.com/
1.3 电气属性
项目 设计指标
工作电压 DC 12V(9∼16V)
工作温度 -40∼85
工作湿度 0∼95%,不结露
存储温度 -40∼85
防护等级 IP67
耐机械冲击 50g
产品设计寿命 10年
电气性能及可靠
性 满足 ISO16750, ISO7637 行业标准
控制器 EMC 满足 CISPR25标准
重量 ≤600g
外壳尺寸 207×150×36mm
材料 压铸铝
外壳 装有防水透气阀,良好的散热性
7 河北优控新能源科技有限公司 http://eco-ev.com/
2. 硬件参数
2.1 硬件特性
主控芯片:32位 TC275汽车级 MCU,主频 200MHZ,Flash 4MB,SRAM 472KB,
支持浮点数运算
CAN:4路 CANA,CANB,CANC,CAND,其中 CANA支持 CAN唤醒
LIN Bus:1路
FlexRay:1路
5V传感器供电输出:9路
模拟量输入:14 路,12 位精度。支持 14 路 0~5V输入,1路 0~12V输入
数字输入:19路,其中默认 10路为低有效,9路为高有效
频率输入:2路
低边驱动:26路,4路单路最大 0.5A,6路单路最大 1A,6路单路最大 2A, 10
路单路最大 0.2A,可配置为 PWM输出
高边驱动:10路,4路单路最大 2A,6路单路最大 0.5A
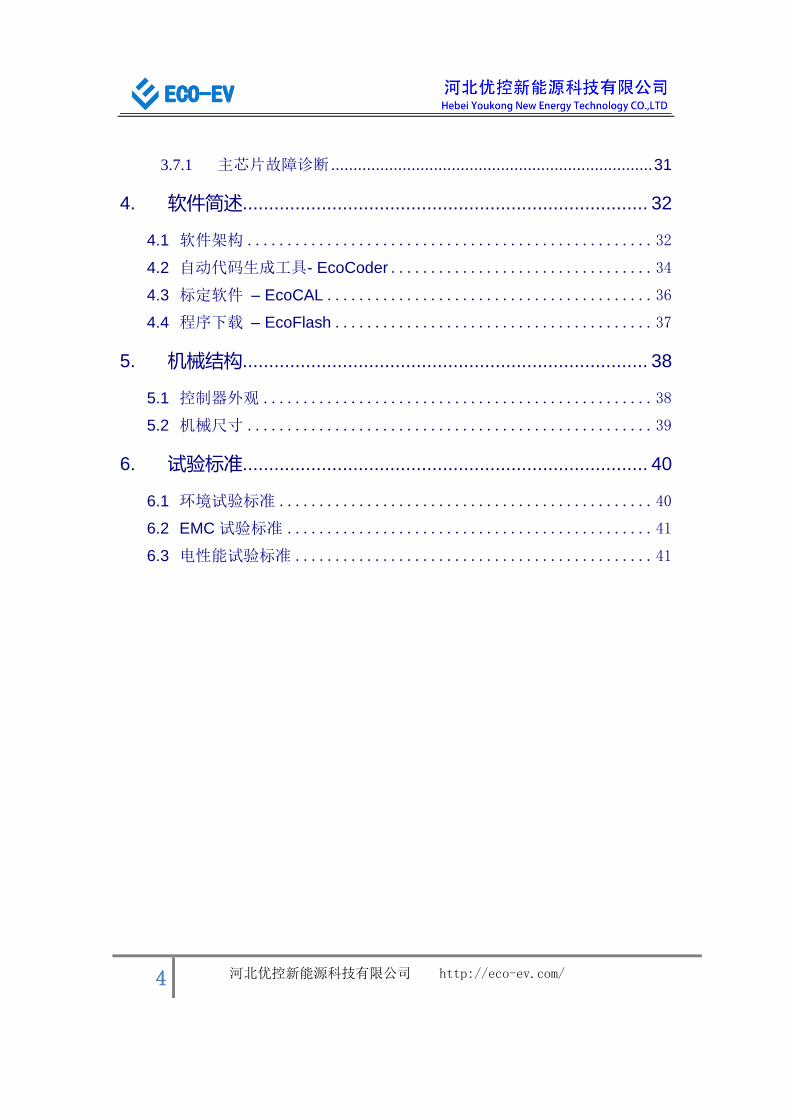
2.2 接插件结构图
接插件为双排 121 针,其中引脚号排列如下图。

8 河北优控新能源科技有限公司 http://eco-ev.com/
2.3 接插件
HCU 的接插件采用全球知名的“泰科”品牌的接插件产品,该接插件产品
是符合汽车安全等级的合格产品,接插件型号如下表。
序号 名称 类别 供应商 链接
1 PCB 针座 1241434-1 TE --
2 81P 护套 1473244-1 TE http://www.digikey.com/produc
ts/en?keywords=1473244-1
3 40P 护套 1473252-1 TE http://www.digikey.com/produc
ts/en?keywords=1473252-1
4 大端子 964282-2 TE http://www.digikey.com/produc
ts/en?keywords=964282-2%20
5 小端子 968220-1 TE http://www.digikey.com/produc
ts/en?keywords=968220-1
6 81P 后盖 1473247-1 TE http://www.digikey.com/produc
ts/en?keywords=1473247-1
7 40P 后盖 1473255-1 TE http://www.digikey.com/produc
ts/en?keywords=1473255-1
8 81P 卡扣 368382-1 TE http://www.digikey.com/produc
ts/en?keywords=368382-1
9 40P卡扣 368388-1 TE http://www.digikey.com/produc
ts/en?keywords=368388-1

9 河北优控新能源科技有限公司 http://eco-ev.com/
2.4 引脚定义
ID 引脚号 名称 描述 备注
电源
BATT
1
电池电源正极, 9-16V
内 部 采 集 对 应
A28,12 位精度,
EcoCoder 设置分
压 比 为
(22K+100K)/ 22K
3
GND
4
控制电源地
5
DRVP
119 电源正极, 9-16V,给高
低边通道供电
120
PGND
96
DRVP地
97
88
89
5V2_1 16
5V传感器电源输出 单路输出电流 100mA
5V2_2 22
5V2_3 38

10 河北优控新能源科技有限公司 http://eco-ev.com/
5V3_1 19
5V3_2 35
5V3_3 41
5V4_1 53
5V4_2 56
5V4_3 59
GND
17
信号地 对应 5V电源输出的 GND
20
23
36
39
42
54
57
60
81
74
76

11 河北优控新能源科技有限公司 http://eco-ev.com/
78
80
上电
KEYON 24 钥匙信号 高有效,数字类型,唤醒
电压>5V
内部采集对应
A27,12位精度,
EcoCoder设置分
压比为
(22K+100K)/ 22K
WAKEUP 27 WAKEUP input 高有效,唤醒电压>6V
通信
CANA_H 64 CANA_H CANA 信号,支持普通唤
醒
CANA_L 65 CANA_L
CANB_H 25 CANB_H
CANB信号
CANB_L 26 CANB_L
CANC_H 7 CANC_H
CANC信号
CANC_L 8 CANC_L
CAND_H 45 CAND_H
CAND信号
CAND_L 46 CAND_L
LIN1 9 LINBUS

12 河北优控新能源科技有限公司 http://eco-ev.com/
FlexRay_P 63 FlexRay通讯 P
FlexRay_N 44 FlexRay通讯 N
输入
AI01 15
模拟输入 X
(通道号)
12位精度,
5V电压型,
采集电压范围 0-5V
AI02 18
AI03 21
AI04 34
AI05 37
AI06 40
AI08 55
AI09 58
AI07 52
模拟输入 X
(通道号)
12位精度
5V 电阻型,采集电压范
围 0-5V,上拉电源 5V,
上拉电阻 10K
AI11 61
AI12 73
AI13 75

13 河北优控新能源科技有限公司 http://eco-ev.com/
AI14 77
AI15 79
AI16 43 钥匙信号(Crank模式)
12位精度
采集范围 0-12V,分压电
阻(100K+22K)/22K
DIO1 33
数字输入 X
(通道号)
低有效
有效电压≤2V
DIO2 11
DIO3 70
DIO4 50
DIO5 14
DIO6 69
DIO7 32
DIO8 49
DI09 48
DI10 13
DI11 31
数字输入 X
(通道号)
高有效
有效电压≥4V
DI12 68
DI13 67
DI14 47
DI15 29

14 河北优控新能源科技有限公司 http://eco-ev.com/
DI16 10
DI17 28
DI18 12
DI19 30
SPEED1 71
频率信号输入 X 输入频率范围 15Hz –
10KHz
SPEED2 51
输出
HSO01 108
高边驱动 X
(通道号)
单路输出额定电流 2A
HSO02 107
HSO03 110
HSO04 109
HSO05 82
高边驱动 X
(通道号)
单路输出额定电流 0.5A
HSO06 90
HSO07 98
HSO08 106
HSO09 62

15 河北优控新能源科技有限公司 http://eco-ev.com/
HSO10 2
LSO01 114
低边驱动 X
(通道号)
单路输出额定电流 2A
LSO02 121
LSO03 117
LSO04 115
LSO05 116
LSO06 118
LSO07 112
低边驱动 X
(通道号)
单路输出额定电流 1A
LSO08 113
LSO09 105
LSO10 95
LSO11 111
LSO12 87
LSO13 84
低边驱动 X
(通道号)
单路输出额定电流 0.5A
LSO14 92
LSO15 91
LSO16 83
LSO21 100 PWM低有效输出 单路输出电流 0.2A

16 河北优控新能源科技有限公司 http://eco-ev.com/
LSO22 103 输 出 频 率 范 围
15HZ—2KHZ
LSO23 85
LSO24 93
LSO25 101
LSO26 104
LSO27 99
LSO28 102
LSO29 94
LSO30 86

17 河北优控新能源科技有限公司 http://eco-ev.com/
3. 功能描述和应用
3.1 系统框图
1
VPWR
27
Sensor
41
AI06
42
DI02
DI15
CANA_H 64
65
CANB_H
CANB_L
25
26
CANC_H
CANC_L
7
8
3
119
120
96
97
88 89
PGND
LSO01
BATT
DRVP
WAKEUP
11
114
29
GND
5V3_3
40
CANA_L
PGND
PGNDPGNDPGND
LOA
D
VPWR
HSO01 108
LOA
DGND
Active High
Active Low
24 KEYON
DRVP
BATT
GNDGND 4
5

18 河北优控新能源科技有限公司 http://eco-ev.com/
3.2 供电电源
3.2.1 供电输入
电源输出必须是低阻抗,比如电池直接供电,高压源无法作为电源输入。将
供电电源正极连接到 BATT 输入端(引脚 1,3,119,120),另一端接 GND(引脚
4,5,96,97,88,89)。
供电输入接线图
BATTFuse
Fuse
+-
BATT
VCU内部 VCU外部
1
3
5
4
GND

19 河北优控新能源科技有限公司 http://eco-ev.com/
DRVP
Fuse
+-
DRVP
VCU内部 VCU外部
120
119
97
89PGND
96
88
Fuse
注意
电源的输出必须是低阻抗,而不是用电阻和齐纳二极管串联的高压源来
控制驱动。
为避免短路或电流过大,建议串联额定电流熔断器。
3.2.2 传感器供电输出
共有 9 个通道,外部传感器电源 5V 输出,具有过流保护,过温保护,短路

20 河北优控新能源科技有限公司 http://eco-ev.com/
保护。外部传感器将电源信号反馈给模拟输入。传感器供电输入端连接 5V 电压
(引脚 16、19、22、35、38、41、53、56、59),传感器地端接 5V地(引脚 17、
20、23、36、39、42、54、57、60)。
传感器供电输出接线图
以 5V2 输出为例:
Sensor
GNDGND
AI02AI0218
17
+5V+5V
16 5V2_1
注:A_n指 0~5V模拟输入的任一模拟通道。
3.2.3 VPWR逻辑控制
VPWR由 2路外部硬线信号 KEYON,WAKEUP,或 CAN _WAKE, FlexRay 信号
唤醒上电, HCU 内部软件控制下电延时信号为 PowerDelay。
当 KEYON,WAKEUP 任意一个为高电平,或 CAN Wake 唤醒报文有效时,
HCU 上电。当外部唤醒信号无效时,HCU 内部会通过软件控制下电延时,进
而 HCU下电。

21 河北优控新能源科技有限公司 http://eco-ev.com/
WAKEUP
Power Delay
BATT
VPWR
OR
OR
KEYON
FlexRay
CAN_WAKE
3.3 输入
3.3.1 数字输入
数字输入可用于监测与 HCU外接输入信号的开关状态,共有 19个通道。其
中 DI01∼DI10,输入默认为低电平输入有效, DI11∼DI19默认为高电平输入有
效。
DI_n1
VPWR
GPIO
137K
22K
56K

22 河北优控新能源科技有限公司 http://eco-ev.com/
n1=1,2,3,4,5,6,7,8,9,10
DI_n2
47K
56K
GPIO
100K
n2=11,12,13,14,15,16,17,18,19
3.3.2 模拟输入
模拟输入模块共有 15个通道,默认 8路为 0~5V电压型输入,即 AI01∼
AI06,AI08,AI09,默认 6路为 0~5V电阻型输入,即 AI07、AI11、AI12、AI13、
AI14、AI15。1路 0~16V 电压型输入,通常用来采集钥匙信号的 Crank模式,为
AI16
5V
ADC
10K
4.7KAI_n1
n1=7、11、12、13、14、15

23 河北优控新能源科技有限公司 http://eco-ev.com/
AI_n24.7K
ADC
100K
n2=1、2、3、4、5、6、8、9
3.3.3 频率输入
频率输入模块共有 2个通道,即 SPEED1,SPEED2。可以用于测量 PWM 信号
的频率和占空比。
SPEED
VPWR
IPWM
137K
22K
10K100K
3.4 输出
3.4.1 低边驱动
HCU共提供 26路具有故障诊断功能的低边驱动通道。所有低边驱动输出电流
总共不能超过 15A.
6个通道驱动电流 2A:LSO01、LSO02、LSO03、LSO04、LSO05、LSO06。
6个通道驱动电流 1A:LSO07、LSO08、LSO09、LSO10、LSO11、LSO12。
4个通道驱动电流 0.5A:LSO13、LSO14、LSO15、LSO16。

24 河北优控新能源科技有限公司 http://eco-ev.com/
10个通道驱动电流 0.2A: LSO21、LSO22、LSO23、LSO24、LSO25、LSO26、LSO27、
LSO28、LSO29、LSO30。且可配置为 PWM输出。
LOA
D
VGND
控制信号
VPWR
VCU内部 VCU外部
低边驱动的故障诊断
低边驱动通道 诊断故障
LSO01,LSO02,LSO03,
LSO04,LSO05, LSO06,
•开路
•对地短路
•对电源短路

25 河北优控新能源科技有限公司 http://eco-ev.com/
LSO07,LSO08,LSO09,
LSO10,LSO11,LSO12,
LSO13,LSO14, LSO15,
LSO16
•开路
•对地短路
•对电源短路
•过载
•过温
LSO21、LSO22、LSO23、
LSO24、LSO25、LSO26、
LSO27、LSO28、LSO29、LSO30
•开路
•对地短路
•对电源短路
•过载
•过温
3.4.2 高边驱动
HCU提供 10路具有故障诊断功能的高边驱动通道。所有高边驱动输出电流
总共不能超过 5A.
4个通道驱动电流 2A:HSO01、HSO02、HSO03、HSO04。
6个通道驱动电流 0.5A:HSO05、HSO06、HSO07、HSO08、HSO09、HSO10。

26 河北优控新能源科技有限公司 http://eco-ev.com/
LOA
D
VGND
控制信号
VPWR
VCU内部 VCU外部
高边驱动的故障诊断
高边驱动通道 诊断故障
HSO01,HSO02,HSO03,HSO04 •开路
•对地短路
•对电源短路
HSO05,HSO06,HSO07,
HSO08,HSO09,HSO10
•对地短路
•对电源短路

27 河北优控新能源科技有限公司 http://eco-ev.com/
3.5 通信模块
3.5.1 CAN 通信模块
CAN通讯模块提供 4路 CAN2.0B高速总线,分别是 CANA,CANB,CANC,CAND。
CANA默认有一个终端电阻 120Ω。
CAN Node
Driver
CAN Node
CANH CANLCANH CANL … …
CAN Node
CANH CANL … …
CANBH CANBL
Driver
CAN Node
CANH CANL
Driv
er
CANC
H
CA
NCL
PC
CAN Bus CAN Bus
… …
120Ω
Driver
120Ω
120Ω
120Ω
CANDH
CAN NodeCAN Node
… …
CANHCANH CANL CANL
CAN Bus
VCUCAN
CANAH CANAL
CANDL
120Ω
3.5.2 唤醒功能
当 KEYON信号关闭时,HCU处于下电状态。CANA支持 CAN唤醒功能,CANA支
持任意帧唤醒。此时如果 CANA总线上有其他节点发出的有效报文, HCU 接收到
有效报文后就会进入唤醒状态,从而使 HCU上电进入工作状态。

28 河北优控新能源科技有限公司 http://eco-ev.com/
CAN
CAN_L
CAN_H
CAN Node
VPWRCAN-INH
VCU外部VCU内部
CAN_H
CAN_L
SBC
3.5.3 LIN 通信模块
HCU提供了一路 LIN总线。LIN是一种新型低成本的开放式串行通讯协议,
主要用于车内分布式电控系统,尤其是面向智能传感器或执行器的数字化通讯场
合。主要应用于电动门窗、座椅调节、灯光照明等控制。
3.5.4 FlexRay 通信模块
HCU提供了一路 FlexRay总线。FlexRay是一种用于汽车的高速的、可确定
性的,具备故障容错能力的总线技术,它将事件触发和时间触发两种方式相结合,
具有高效的网络利用率和系统灵活性特点,可以应用在无源总线和星形网络拓扑
结构中,也可以应用在两者的组合拓扑结构中,FlexRay主要应用于事关安全的
线控系统和动力系统,在本 HCU中具有本地唤醒功能。
3.6 安全监控
HCU的设计基于先进的安全监控理念,采用主芯片多核的架构,进一步提高
了系统的安全性。

29 河北优控新能源科技有限公司 http://eco-ev.com/
TC275系列作为 infineon 新一代 32位多核 MCU系列产品,最多有 3个独立
的 TriCore CPUs,其中 2个 CPU各有一个监控核心 Checker Core 。满足汽车电
子控制单元对 ISO26262 功能安全的要求,最高可以达到 ASIL-D等级。从核心数
目上来说,共有 5个核心,3个用户可编程的独立的 CPU,2个用户不可编程的
监控核 Checker Core 。
HCU使用独立双核开发方案,开发了有监控核的 2个独立 CPU,这 2 个独立
CPU各自有一个监控核心 Checker Core,监控核不可编程,主核和监控核以锁步
模式运行,在任何时候都运行/执行相同的指令,执行完每条指令后,将对两个
核的执行结果进行比较,如果结果不同,则会上报监控结果错误,提高 CPU运行
的安全等级。
独立双核使用 CPU0 和 CPU1开发,使用 2 个可编程核心开发三层架构设计:
主芯片
从芯片
Level 1
Level 2
Level 3
输入信号
整车控制器控制功能
监控第一层功能
监控模块
存储校验 程序流校验
指令校验
请求 应答
CAN
扭矩需求
CAN使能控制

30 河北优控新能源科技有限公司 http://eco-ev.com/
主芯片
从芯片
Level 1
Level 2
Level 3
输入信号
整车控制器控制功能
监控第一层功能
监控模块
存储校验 程序流校验
指令校验
请求 应答
CAN
扭矩需求
CAN使能控制
三层架构
3.6.1 三层架构概述
Level 1:整车控制功能,包括车辆控制的所有功能以及故障诊断。
Level 2:通过独立于 level 1的冗余设计,对 Level 1进行监控。
Level 1 里决定驾驶扭矩的所有输入,都同时输入到 Level 2 里去,所
有的扭矩相关的计算,在 Level 2 里 和 level 1 里是平行计算,并且 2个
Level 的算法完全独立, 代码和数据也完全独立。Level 2 是 Level 1 的
简化版,并且计算的扭矩需求是个上限(安全保障的上限),如果 Level 1 的扭矩
超过了 Level 2 的上限 ,为了确保没有加速度的扭矩需求,Level 2 就会
使 CAN总线报文里的扭矩需求不发或者发出合适的值。
Level 3:通过 CPU1,对控制器软件运行和硬件设备进行监控。
CPU0和 CPU1之间进行双向校验,当校验失败时会关闭整车控制器的 CAN,

31 河北优控新能源科技有限公司 http://eco-ev.com/
使其不发送扭矩需求。Level 3 里的 CPU0和 CPU1里都没有扭矩计算,CPU1 的
目的只是检验 CPU0的正常与否。其中校验内容包括指令校验,ROM和 RAM 存储校
验,程序流校验,实时性校验等。
3.6.2 双核功能分配
CPU0:属于功能控制器,需要实现 Level 1,Level 2的全部功能,以及 Level 3
部分功能。 负责控制器的所有输入输出。
CPU1:属于监控模块,对 CPU0 进行监控,另外还需要一个硬线输出来控制 HCU
的公共 CAN是否使能。
3.7 控制器硬件故障诊断
3.7.1 主芯片故障诊断
a) 支持主芯片(TC275)的 Flash和 Ram诊断;
b) 支持主芯片的内核自检诊断。
Flash和 Ram自检统称为内存自检,内存的故障一般体现在存储安全性、读
和写这几个方面,这就需要一种安全机制可以检测到这几个方面的故障,目前很
多单片机中都设计了内存纠错机制,在 TC275 系列中,同样也设计了这种内存纠
错机制:Error Correction Code(ECC),简称“错误检查和纠正”。ECC是一
种能够实现“错误检查和纠正”的技术,这将使整个单片机系统在工作时更趋于
安全稳定。底层软件会提供接口函数报告给应用层主芯片 Flash和 Ram的是否发
生故障的信息。
TC275 的内核自检可以通过主核和监控核的锁步模式的监控和检测机制来
达到内核诊断的目的。

32 河北优控新能源科技有限公司 http://eco-ev.com/
3.8 软件架构
Application Layer:整车控制器应用层。
基础软件(BSW)分为:服务层,ECU抽象层,微控制器抽象层
每层的 BSW中包括不同的功能模块。
服务层(Service Layer)位于 BSW 的最上面,将各种基础软件功能
以服务的形式封装起来,供应用层调用。服务层包括系统服务、内存
服务、通信服务。
ECU 抽象层(ECU Abstraction Layer)封装了微控制器层以及外围
设备的驱动,将微控制器内外设的访问进行了统一,使上层软件应用
与 ECU硬件相剥离。
外设电路驱动层(EXT Drivers)包含:高边驱动、低边驱动、电源
管理芯片、CAN收发器等外设驱动。
微控制器抽象层(Microcontroller AbstractionLayer)是在 BSW的最
底层,它包含了访问微控制器的驱动,微控制器驱动(看门狗,定时

33 河北优控新能源科技有限公司 http://eco-ev.com/
器等驱动)、通讯模块驱动(SPI、LIN、CAN等驱动)、IO驱动(ADC、
DIO、PWM 等驱动)、存储器驱动(内部 Flash 驱动等)。使上层软
件与微控制器相分离,以便应用的移植。

34 河北优控新能源科技有限公司 http://eco-ev.com/
4. 软件简述
4.1 自动代码生成工具- EcoCoder
EcoCoder是一个控制系统的应用程序开发工具,使用户在 Simulink 环境
下进行嵌入式应用层程序的开发能够更加便捷。它扩展了 Simulink 和
Real-TimeWorkshop 嵌入式编码器生成必要的代码模块的资源,对代码生成进
行自动配置以及优化。将基础软件库封装为 s-function,使开发者能够以图
形化的方式使用基础软件接口和进行一些基本参数配置。从应用层模型能够一
键生成可执行文件以及数据描述文件,并提供 A2L地址更新工具。
有关详细信息,请参阅《EcoCoder用户手册》。

35 河北优控新能源科技有限公司 http://eco-ev.com/
36 河北优控新能源科技有限公司 http://eco-ev.com/
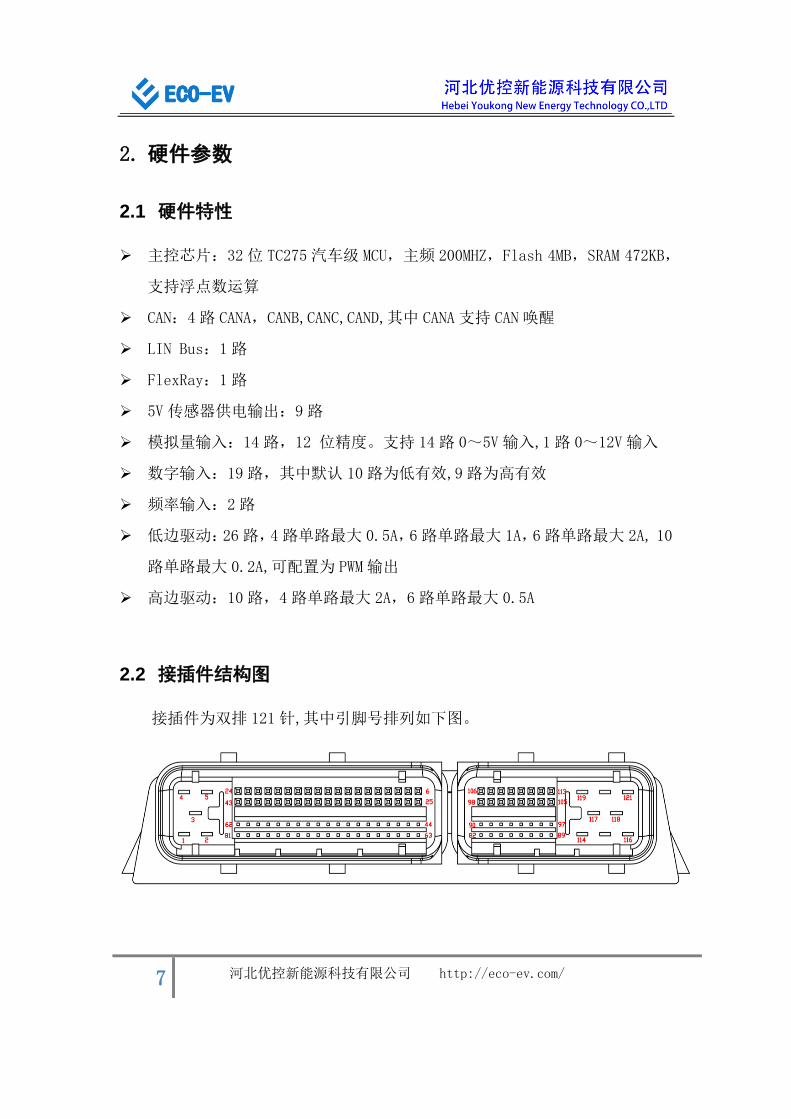
4.2 标定软件 – EcoCAL
EcoCAL是由河北优控开发的一款专业的标定测量工具,具有实时测量、
实时录制、在线标定、数据回放以及离线刷写等功能。EcoCAL基于 CCP 协议,
并使用 CAN总线进行数据通信。
更多详细信息,请参阅《EcoCAL用户手册》。

37 河北优控新能源科技有限公司 http://eco-ev.com/
4.3 程序下载 – EcoFlash
EcoFlash是由本司自主研发搭配 BootLoader进行在线刷写程序目标文件
的上位机软件,CAN 通讯协议采用 CCP协议,支持刷写的目标文件有 S19,mot,
hex等。
更多详细信息,请参阅《EcoFlash用户手册》。

38 河北优控新能源科技有限公司 http://eco-ev.com/
5. 机械结构
5.1 控制器外观
外壳 3D图

39 河北优控新能源科技有限公司 http://eco-ev.com/
5.2 机械尺寸

40 河北优控新能源科技有限公司 http://eco-ev.com/
6. 试验标准
6.1 环境试验标准
环境试验的试验标准及具体指标如下:
试验项目 试验标准 具体指标
高低温试验 ISO16750-4 +105 144 小时
-40 48 小时
温度冲击 ISO16750-4 +125∼-40100 循环
带电温度循环 ISO16750-4 +20∼-40∼+85,每循环 8小时,共
30个循环
溅水试验 ISO16750-4 85放置 1小时后用 0∼4的水喷洒
10s,100 个循环
盐雾试验 ISO16750-4 盐溶液浓度:5%,喷雾沉降率:
1∼2ml/(80cm2*h)。试验经历 4个循环,
每循环持续 7天,共 28天。
防尘防水试验 ISO16750-4 1m深的水,放置 30分钟,IP67
振动试验 ISO16750-3 随机振动的频率范围为 20~2000Hz,谱线
的均方根值为 107.3m/s2,X、Y、Z 每轴振
动时间为 8h
机械冲击 ISO16750-3 峰值为 50g、持续时间为 6ms的三轴六向
半正弦冲击,每向 10次
恒定温湿 ISO16750-4 温度+40湿度 85%RH正常工作 21 天
温湿循环 ISO16750-4 低温运行和温度+23湿度 93%RH之间循
环,每循环 24小时,10个循环

41 河北优控新能源科技有限公司 http://eco-ev.com/
6.2 EMC 试验标准
EMC试验的试验标准如下:
实验项目 实验标准 具体指标
来自电子部件传导干扰 IEC CISPR 25 2008 AV和 PK 满足 4级要求
来自电子部件辐射干扰 IEC CISPR 25 2008 AV和 PK 满足 4级要求
电子部件对磁场的辐射抗扰
度
GMW3097 2006 频率范围:调制模式;强度:
LEVEL2,功能等级 A
电子部件对电磁场的抗扰
(BCI)
GMW3097 2006 频率范围,调制模式;强度:
LEVEL2,功能等级 A
CI电源瞬态干扰 ISO7637-2 2004 功能等级 A/C
CI对信号线瞬态干扰 ISO7637-3 2007 功能等级 A
静电放电(不带电模式) GMW3097 2006 放电网络: C=150pF
R=2kΩ
静电放电(远端带电模式) GMW3097 2006 放电网络: C=330pF
R=2kΩ
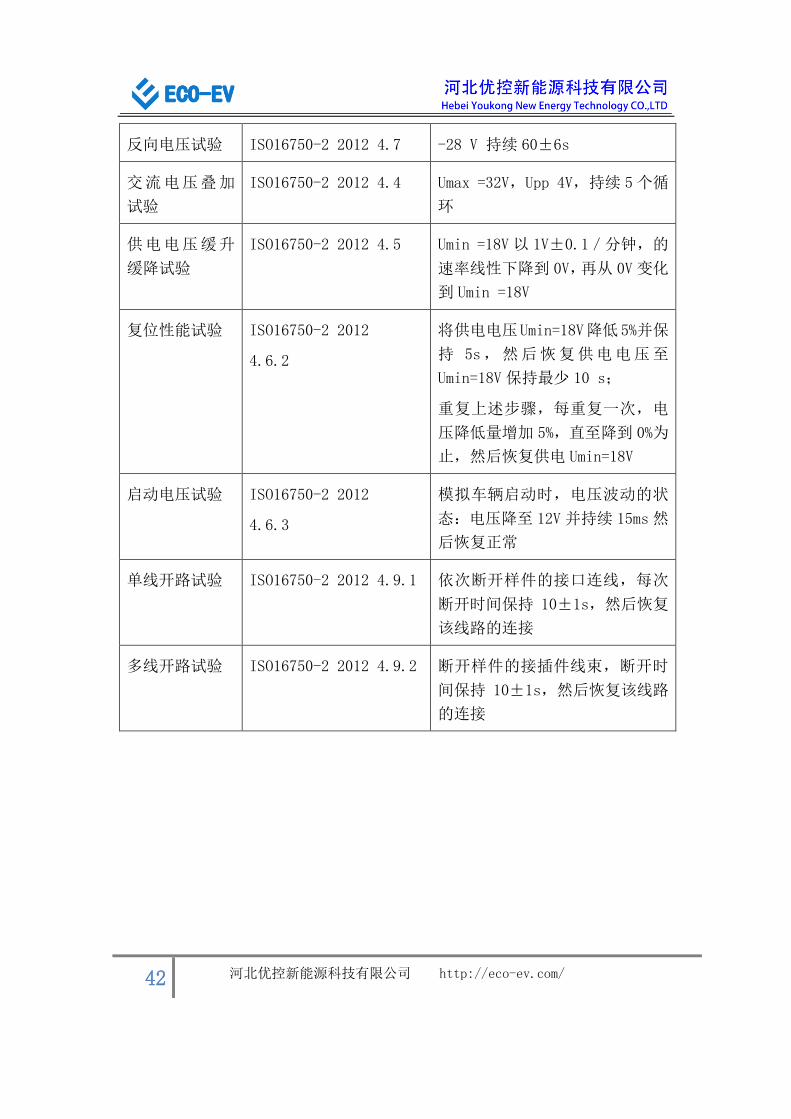
6.3 电性能试验标准
电性能试验的试验标准如下:
试验项目 试验标准 试验规范
供电电压试验 ISO16750-2 2012 4.2 USmin=9V, USmax=32V
过电压试验 ISO16750-2 2012 4.3 36V 持续 60分钟
42 河北优控新能源科技有限公司 http://eco-ev.com/
反向电压试验 ISO16750-2 2012 4.7 -28 V 持续 60±6s
交流电压叠加
试验
ISO16750-2 2012 4.4 Umax =32V,Upp 4V,持续 5个循
环
供电电压缓升
缓降试验
ISO16750-2 2012 4.5 Umin =18V以 1V±0.1/分钟,的
速率线性下降到 0V,再从 0V变化
到 Umin =18V
复位性能试验 ISO16750-2 2012
4.6.2
将供电电压Umin=18V降低 5%并保
持 5s,然后恢复供电电压至
Umin=18V保持最少 10 s;
重复上述步骤,每重复一次,电
压降低量增加 5%,直至降到 0%为
止,然后恢复供电 Umin=18V
启动电压试验 ISO16750-2 2012
4.6.3
模拟车辆启动时,电压波动的状
态:电压降至 12V并持续 15ms然
后恢复正常
单线开路试验 ISO16750-2 2012 4.9.1 依次断开样件的接口连线,每次
断开时间保持 10±1s,然后恢复
该线路的连接
多线开路试验 ISO16750-2 2012 4.9.2 断开样件的接插件线束,断开时
间保持 10±1s,然后恢复该线路
的连接

43 河北优控新能源科技有限公司 http://eco-ev.com/
短路保护试验 ISO16750-2 2012 4.10 把样件的相关输入以及输出回路
依 次 连 接 Umax 以 及 负 极 线
60s±6s。其他的输入以及输出回
路开放、或者保持规定的状态。
这个试验,按照下列条件进行。
a)连接电源电压以及接地 1)输出
回路处于工作状态 2)输出回路处
于非工作状态 b)不连接电源电压
c)不连接负极线
耐电压试验 ISO16750-2 2012 4.11 对样件加载 AC 500V(RMS);频
率:50Hz;持续时间:60s 试验中
不得出现击穿和电弧
绝缘电阻试验 ISO16750-2 2012 4.12 对样件加载 DC 500V;持续时间:
60s;绝缘电阻应大于 10MΩ