Embed Size (px)
Citation preview
CVO Crescendo
Vaartdijk 86
2800 Mechelen
T 015 41 30 45
CVO CRESCENDO
CENTRUM VOOR VOLWASSENENONDERWIJS
Project ingediend tot het behalen van de titel van
Gegradueerde in de Elektromechanica – HBO5
Optie procesautomatisering
Cursist: Robbe Van Assche
Projectverantwoordelijke: Linda Van den Broeck
Bedrijf: CVO Crescendo
ZONVOLGSYSTEEM MET KALENDERPROGRAMMERING
CVO Crescendo
Vaartdijk 86
2800 Mechelen
T 015 41 30 45
CVO CRESCENDO
CENTRUM VOOR VOLWASSENENONDERWIJS
Project ingediend tot het behalen van de titel van
Gegradueerde in de Elektromechanica – HBO5
Optie procesautomatisering
Cursist: Robbe Van Assche
Projectverantwoordelijke: Linda Van den Broeck
Bedrijf: CVO Crescendo
ZONVOLGSYSTEEM MET KALENDERPROGRAMMERING

VOORWOORD
Een opleiding in avondschool is geen evident gegeven. Naast de 40-uren werkweek en de dagtaken
nog tijd vinden om les te volgen en te studeren is een verwezenlijking op zichzelf. Toch is het me
gelukt om deze combinatie te volbrengen met naar mijn gevoel weinig extra moeite. De interesse in
de leerstof samenhangend met de manier waarop deze aangebracht is, heeft dit nagenoeg pijnloos
gemaakt. Als er retrospectief wordt gekeken naar de voorbije 3 jaar, zijn er serieuze sprongen op
vlak van zowel carrière als van intellect genomen. Graag wil ik Jo en Linda hiervoor bedanken om
dit mogelijk te maken. Zij voeren hun ‘job’ uit, maar er zijn verschillende manieren om dit aan te
pakken. Verder heb ik geluk gehad dat ik in mijn eindwerk een interessegebied verder heb mogen
ontwikkelen dat reeds ontwikkeld is via deze opleiding. Elektronica is toch wel een grote portie van
de opleiding, waarbij vooral vermogenelektronica de favoriet was. De mechanische ondersteuning
die door mijn vader is verzorgd tijdens het eindwerk was ook niet onbelangrijk, waarvoor dank. Nu
is het tijd voor een toekomst waarbij ik mijn kennis en kunde verder kan uitbreiden en andere
academische uitdagingen kan aangaan.
Robbe Van Assche

“De auteur geeft de toelating dit afstudeerwerk voor consultatie beschikbaar te stellen en delen
van het afstudeerwerk te kopiëren voor eigen gebruik. Elk ander gebruik valt onder de beperkingen
van het auteursrecht, in het bijzonder met betrekking tot de verplichting de bron uitdrukkelijk te
vermelden bij het aanhalen van resultaten uit dit afstudeerwerk”
Mechelen, 3 juni 2013
Robbe Van Assche
“The author gives permission to make this thesis available for consultation and to copy
parts of this thesis for personal use. Every other use is limited by the Belgian copyright,
in particular regarding the obligation to make an explicit reference to this work.”
Mechelen, 3 juni 2013
Robbe Van Assche
SAMENVATTING Een zonvolgsysteem met kalenderprogrammering is een geautomatiseerde opstelling die de
meest optimale positie van een zonnepaneel instelt. Het vermogen dat uit het zonnepaneel
gehaald kan worden onder de vorm van elektrische energie wordt hierbij geoptimaliseerd.
De positie wordt berekend door met 3 parameters rekening te houden: datum, tijd en locatie. Er
worden formules gebruikt om de stand van de zon op dat exacte moment te bepalen. Als het
zonnepaneel ingesteld wordt zodat de zonnestralen loodrecht op zijn oppervlak invallen, kan
ervan uitgaan worden dat de meest optimale opbrengst verwezenlijkt wordt.
Door formules te gebruiken worden de invoerparameters omgevormd tot twee hoeken. Deze
hoeken beschrijven eenduidig de positie van de zon. Het betreft hier de azimut en zenit. Ze worden
gebruikt om het zonnepaneel in te stellen.
Als één of meerdere van de parameters tijd, datum of locatie verandert, worden de azimut en zenit
herrekend waarop het zonnepaneel correct ingesteld wordt. Hierdoor wordt er optimaal gebruik
gemaakt van de zonne-energie.
Invoer gebeurt door het gebruik van de HMI, die de gegevens naar de PLC doorgeeft. De PLC is
verantwoordelijk voor de uitvoer van de Azimut en Zenit. Er zijn verschillende formules in de PLC
geprogrammeerd, zodat deze twee hoeken door de PLC berekend kunnen worden. Vervolgens
stuurt de PLC zijn gegevens door naar de zonnemodule. Deze zonnemodule stuurt twee
stappenmotoren aan die de positie van het zonnepaneel bepalen.
Hierdoor kan het einddoel bekomen worden: de elektrische energie maximaliseren die uit de
zonnestralen gehaald kan worden.
INHOUD Voorwoord ........................................................................................................................................................................... 5
Samenvatting....................................................................................................................................................................... 6
Nomenclatuur ..................................................................................................................................................................... 9
Verklaringen ................................................................................................................................................................... 9
Afkortingen ..................................................................................................................................................................... 9
Vertalingen .................................................................................................................................................................... 10
Hoofdstuk 1: INLEIDING ................................................................................................................................................ 1
1.1 ALGEMEENHEDEN ........................................................................................................................................ 1
1.2 PLC ....................................................................................................................................................................... 2
1.3 HMI ....................................................................................................................................................................... 2
1.4 Zonnemodule ................................................................................................................................................... 3
1.4.1 Automatische modus .......................................................................................................................... 3
1.4.2 Manuele modus ..................................................................................................................................... 5
Hoofdstuk 2: OMGEVINGSKARAKTERISTIEKEN ................................................................................................. 6
2.1 ALGEMEENHEDEN ........................................................................................................................................ 6
2.2 Locatie................................................................................................................................................................. 7
Hoofdstuk 3: ZONNECOLLECTOREN......................................................................................................................... 8
3.1 ALGEMEENHEDEN ........................................................................................................................................ 8
3.2 Zonnecollectoren ............................................................................................................................................ 9
3.2.1 Fotovoltaïsche systemen ................................................................................................................... 9
3.3 Zonnevolgers ................................................................................................................................................. 14
Hoofdstuk 4: ZONNEMODULE ................................................................................................................................... 19
4.1 ALGEMEENHEDEN ...................................................................................................................................... 19
4.2 Elektronica ...................................................................................................................................................... 20
4.2.1 Overzicht ................................................................................................................................................ 20
4.2.2 Microcontroller ................................................................................................................................... 22
4.2.3 Motorsturing ........................................................................................................................................ 24
4.2.4 Printplaat ............................................................................................................................................... 25
4.2.5 Voeding ................................................................................................................................................... 27
4.3 Programmatie ................................................................................................................................................ 27
4.3.1 Registers ................................................................................................................................................. 28
4.3.2 I/O expanders ...................................................................................................................................... 29
4.3.3 Aansturing stappenmotoren .......................................................................................................... 33
4.4 Kostprijs ........................................................................................................................................................... 33
4.5 Realisatie ......................................................................................................................................................... 34
Hoofdstuk 5: PLC & INTERFACE ............................................................................................................................... 35
5.1 ALGEMEENHEDEN ...................................................................................................................................... 35
5.2 Netwerk ............................................................................................................................................................ 35
5.3 PLC ..................................................................................................................................................................... 37
5.3.1 Programmatie ...................................................................................................................................... 38
5.4 HMI ..................................................................................................................................................................... 40
5.5 Realisatie ......................................................................................................................................................... 41
BESLUIT............................................................................................................................................................................... 42
Bibliografie ......................................................................................................................................................................... 42
Lijst van grafieken/ tabellen/ figuren .................................................................................................................... 42
6 Bijlagen ...................................................................................................................................................................... 44
6.1 Bijlage A: Zonneberekeningen ................................................................................................................ 44
6.1.1 Inleiding ................................................................................................................................................. 44
6.2 Berekeningen ................................................................................................................................................. 45
6.3 Bijlage B: Gebruikersbundel .................................................................................................................... 49
NOMENCLATUUR V Spanning [Volt]
Ω Weerstand [Ohm]
A Stroom [Ampère]
VERKLARINGEN Topologie: De structuur van een netwerk.
Periferisch: Apparatuur die geen deel uitmaakt van de centrale verwerkingseenheid doch
wel daarmee is verbonden.
AFKORTINGEN NOAA: ‘National Oceanic And Atmospheric Administration’ NB: ‘Noorderbreedte’, varieert van 0° tot -90°
ZB: ‘Zuiderbreedte’, varieert van 0° tot -90°
OL: ‘Oosterlengte’, varieert van 0° tot 180°
WL: ‘Westerlengte’, varieert van 0° tot -180°
GPS: ‘Global Positioning System’ LCD: ‘Liquid Crystal Display’ GUI: ‘Graphical User Interface’ HMI: ‘Human Machine Interface’ PLC: ‘Programmable Logic Controller’ LASER: ‘Light Amplification by Stimulated Emission of Radiation’ PCB: ‘Printed Circuit Board’ IC: ‘Integrated Circuit’ LED: ‘Light Emitting Diode’ IDE: ‘Integrated development environment’ USB: ‘Universal Serial Bus’ SMD: ‘Surface Mountable Device’ TQFP: ‘Thin Quad Flat Pack’ ADC : ‘Analog to Digital Converter’ PWM: ‘Pulse Width Modulation’ I2C: ‘Inter Integrated Circuit Bus’ TWI: ‘Two Wire Interface’ SPI: ‘Serial Peripheral Interface’ UART: ‘Universal Asynchronous Receiver Transmitter’ RISC: ‘Reduced Instruction Set Computer’ EEPROM: ‘Electric Erasable Programmable Read Only Memory’ ALU: ‘Arithmetic Logic Unit’ DIP: ‘Dual in-line package’ RMS: ‘Root Mean Square’ SRAM: ‘Static Random Acces Memory’ SCK: ‘System Clock’ CS: ‘Chip Select’ MOSI: ‘Master Out Slave In’ MISO: ‘Master In Slave Out’
VERTALINGEN Hemisphere: ‘Halfrond’
Equinox: ‘Nachtevening’
Solstice: ‘Zonnestilstand’
Equator: ‘Evenaar’
Equitorial plane: ‘Equatoriaal vlak’
Meridian: ‘Meridiaan’
Latitude: ‘Breedteligging’
Longitude: ‘Lengteligging’
Irradiance: ‘Irradiatie’
Observer: ‘Observator’
North pole: ‘Noordpool’
South pole: ‘Zuidpool’
Wavelength: ‘Golflengte’
Idle: ‘Rusttoestand’
Silicon: ‘Silicium’
1
HOOFDSTUK 1: INLEIDING
1.1 ALGEMEENHEDEN Dit eindwerk is de synthese van een 3 jaar durende opleiding waar de instrumenten aangereikt
werden om elk technisch probleem aan te pakken. Deze instrumenten strekken zich uit van een
grondige theoretische achtergrond tot een praktische kennis van de materialen en werking. Als
graduaat elektromechanica is het de bedoeling dat een breed spectrum van problemen aangepakt
kan worden. Gaande van een grote elektrische motor, tot een klein proportioneel regelventiel.
Dit eindwerk belicht echter maar een klein stuk van dit breed technisch spectrum. Als
elektromechanicus leer je dat alles verbonden is met elkaar, om zo een overzicht te behouden over
het volledige systeem. Hierdoor kunnen de theoretische principes die in de opleiding naar voor
komen, hergebruikt worden voor andere disciplines. Het principe van de werking van een LASER
(Light Amplification by Stimulated Emission of Radiation) is bijvoorbeeld vergelijkbaar met een
operationele versterker die een positieve terugkoppeling heeft.
De groene revolutie is tegenwoordig ‘hot topic’ en heeft ook mijn interesse gewekt. De keuze van
het eindwerk is gemaakt met de samenhangende uitdagingen in het achterhoofd. Van een
zonvolgsysteem zijn de technische uitwerkingen eindeloos, ze zijn echter door de financiële
middelen beperkt.
De interface van de zonnevolger gebeurt via een HMI (Human Machine Interface). Dit is een
grafisch scherm met aanraakbediening, om de koppeling tussen mens en machine mogelijk te
maken. In dit geval kan informatie in de vorm van afbeeldingen en tekst worden weergegeven,
daarenboven kunnen er ook commando’s via de aanraaklaag en de toetsbediening doorgegeven
worden.
De PLC (Programmable Logic Controller) ontvangt en verwerkt de informatie van de HMI. Het is
de PLC die naar de stuurmodule de stand voor de 2 motoren doorstuurt. Op zijn beurt stelt de
stuurmodule deze waarden in. De uitgestuurde waarden worden niet gecontroleerd. Hierdoor is
het regelsysteem een open lus.
Hoofdstuk 1: INTRODUCTIE 2
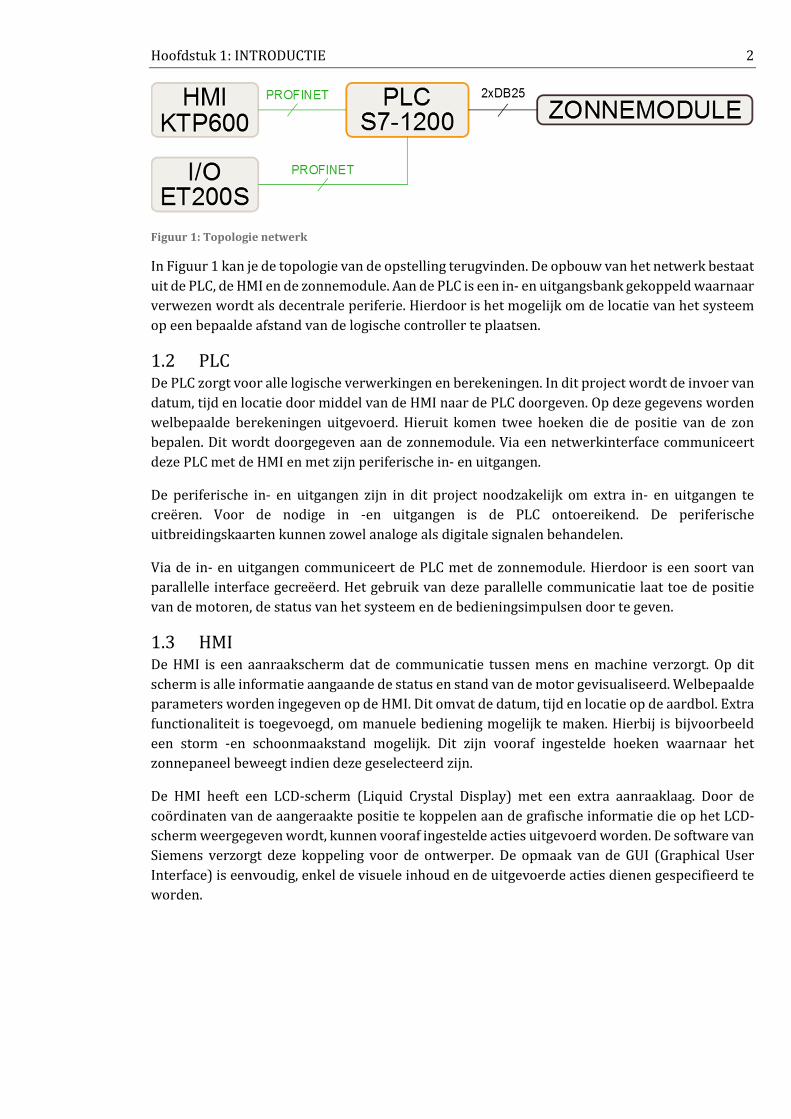
Figuur 1: Topologie netwerk
In Figuur 1 kan je de topologie van de opstelling terugvinden. De opbouw van het netwerk bestaat
uit de PLC, de HMI en de zonnemodule. Aan de PLC is een in- en uitgangsbank gekoppeld waarnaar
verwezen wordt als decentrale periferie. Hierdoor is het mogelijk om de locatie van het systeem
op een bepaalde afstand van de logische controller te plaatsen.
1.2 PLC De PLC zorgt voor alle logische verwerkingen en berekeningen. In dit project wordt de invoer van
datum, tijd en locatie door middel van de HMI naar de PLC doorgeven. Op deze gegevens worden
welbepaalde berekeningen uitgevoerd. Hieruit komen twee hoeken die de positie van de zon
bepalen. Dit wordt doorgegeven aan de zonnemodule. Via een netwerkinterface communiceert
deze PLC met de HMI en met zijn periferische in- en uitgangen.
De periferische in- en uitgangen zijn in dit project noodzakelijk om extra in- en uitgangen te
creëren. Voor de nodige in -en uitgangen is de PLC ontoereikend. De periferische
uitbreidingskaarten kunnen zowel analoge als digitale signalen behandelen.
Via de in- en uitgangen communiceert de PLC met de zonnemodule. Hierdoor is een soort van
parallelle interface gecreëerd. Het gebruik van deze parallelle communicatie laat toe de positie
van de motoren, de status van het systeem en de bedieningsimpulsen door te geven.
1.3 HMI De HMI is een aanraakscherm dat de communicatie tussen mens en machine verzorgt. Op dit
scherm is alle informatie aangaande de status en stand van de motor gevisualiseerd. Welbepaalde
parameters worden ingegeven op de HMI. Dit omvat de datum, tijd en locatie op de aardbol. Extra
functionaliteit is toegevoegd, om manuele bediening mogelijk te maken. Hierbij is bijvoorbeeld
een storm -en schoonmaakstand mogelijk. Dit zijn vooraf ingestelde hoeken waarnaar het
zonnepaneel beweegt indien deze geselecteerd zijn.
De HMI heeft een LCD-scherm (Liquid Crystal Display) met een extra aanraaklaag. Door de
coördinaten van de aangeraakte positie te koppelen aan de grafische informatie die op het LCD-
scherm weergegeven wordt, kunnen vooraf ingestelde acties uitgevoerd worden. De software van
Siemens verzorgt deze koppeling voor de ontwerper. De opmaak van de GUI (Graphical User
Interface) is eenvoudig, enkel de visuele inhoud en de uitgevoerde acties dienen gespecifieerd te
worden.
Hoofdstuk 1: INTRODUCTIE 3
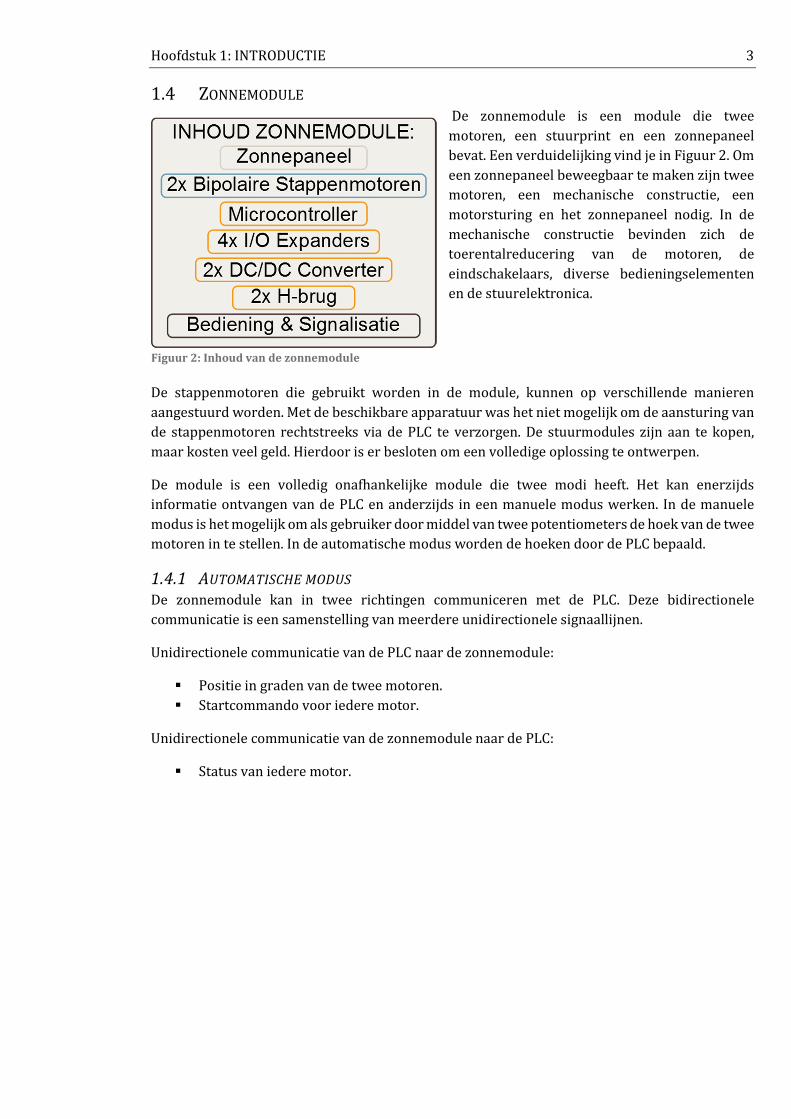
1.4 ZONNEMODULE De zonnemodule is een module die twee
motoren, een stuurprint en een zonnepaneel
bevat. Een verduidelijking vind je in Figuur 2. Om
een zonnepaneel beweegbaar te maken zijn twee
motoren, een mechanische constructie, een
motorsturing en het zonnepaneel nodig. In de
mechanische constructie bevinden zich de
toerentalreducering van de motoren, de
eindschakelaars, diverse bedieningselementen
en de stuurelektronica.
De stappenmotoren die gebruikt worden in de module, kunnen op verschillende manieren
aangestuurd worden. Met de beschikbare apparatuur was het niet mogelijk om de aansturing van
de stappenmotoren rechtstreeks via de PLC te verzorgen. De stuurmodules zijn aan te kopen,
maar kosten veel geld. Hierdoor is er besloten om een volledige oplossing te ontwerpen.
De module is een volledig onafhankelijke module die twee modi heeft. Het kan enerzijds
informatie ontvangen van de PLC en anderzijds in een manuele modus werken. In de manuele
modus is het mogelijk om als gebruiker door middel van twee potentiometers de hoek van de twee
motoren in te stellen. In de automatische modus worden de hoeken door de PLC bepaald.
1.4.1 AUTOMATISCHE MODUS De zonnemodule kan in twee richtingen communiceren met de PLC. Deze bidirectionele
communicatie is een samenstelling van meerdere unidirectionele signaallijnen.
Unidirectionele communicatie van de PLC naar de zonnemodule:
Positie in graden van de twee motoren.
Startcommando voor iedere motor.
Unidirectionele communicatie van de zonnemodule naar de PLC:
Status van iedere motor.
Figuur 2: Inhoud van de zonnemodule
Hoofdstuk 1: INTRODUCTIE 4
De zonnemodule wacht op het startcommando voor iedere motor. Als het startcommando wordt
gegeven, wordt de positie uitgelezen via de parallelle bus en de motor wordt gepositioneerd naar
de uitgelezen stand. Tijdens de herpositionering van de motor, geeft de zonnemodule zijn
statusverandering door naar de PLC. Indien de PLC dit startcommando geeft neemt hij een
statusverandering van de zonnemodule waar. Deze statusverandering wil voor de PLC zeggen dat
de motor zijn ingestelde hoek op dat moment wijzigt. Omdat het zonnepaneel aan de motor
vasthangt, verandert de positie van het zonnepaneel. Als de motor in zijn gewenste stand staat,
weet de PLC dit doordat de status van de zonnemodule wederom veranderd is. Indien de motor
zich niet herpositioneert, kan dit gedetecteerd en weergegeven worden op de HMI.
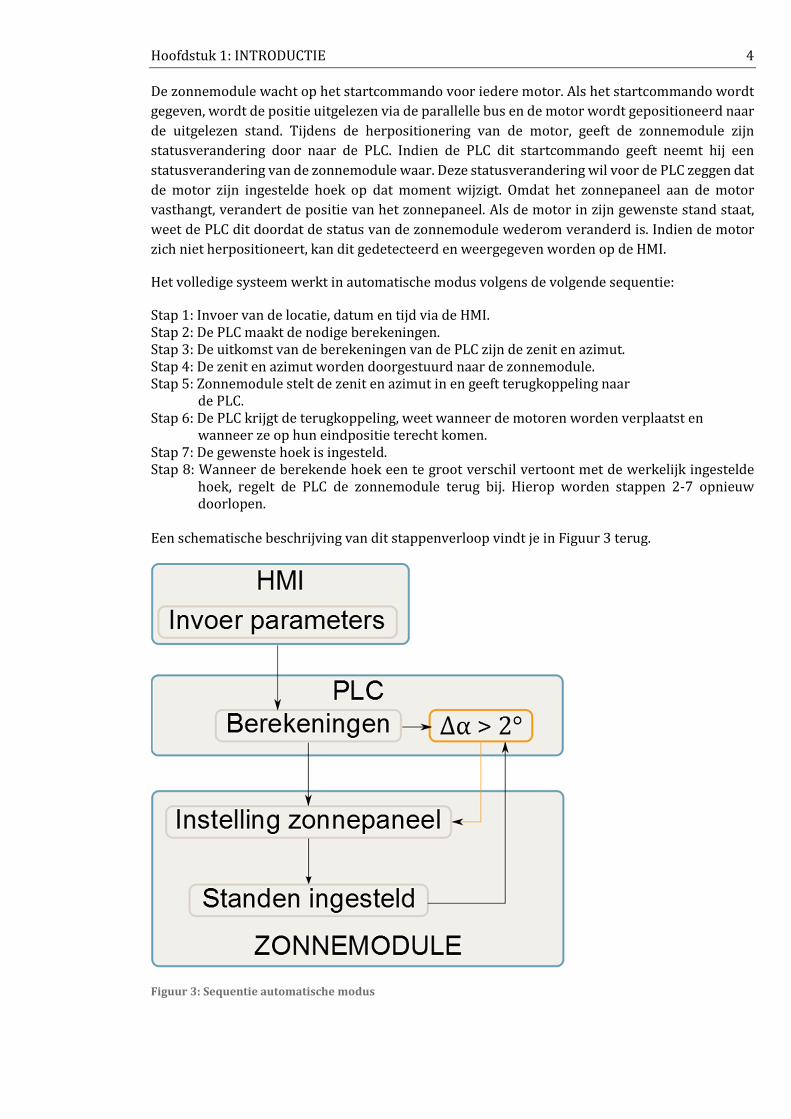
Het volledige systeem werkt in automatische modus volgens de volgende sequentie:
Stap 1: Invoer van de locatie, datum en tijd via de HMI.
Stap 2: De PLC maakt de nodige berekeningen.
Stap 3: De uitkomst van de berekeningen van de PLC zijn de zenit en azimut.
Stap 4: De zenit en azimut worden doorgestuurd naar de zonnemodule.
Stap 5: Zonnemodule stelt de zenit en azimut in en geeft terugkoppeling naar
de PLC.
Stap 6: De PLC krijgt de terugkoppeling, weet wanneer de motoren worden verplaatst en
wanneer ze op hun eindpositie terecht komen.
Stap 7: De gewenste hoek is ingesteld.
Stap 8: Wanneer de berekende hoek een te groot verschil vertoont met de werkelijk ingestelde
hoek, regelt de PLC de zonnemodule terug bij. Hierop worden stappen 2-7 opnieuw
doorlopen.
Een schematische beschrijving van dit stappenverloop vindt je in Figuur 3 terug.
Figuur 3: Sequentie automatische modus
Hoofdstuk 1: INTRODUCTIE 5
1.4.2 MANUELE MODUS Om de zonnemodule niet volledig afhankelijk te maken van de connectie met de PLC, is er een
manuele modus ingebouwd. Deze modus stelt de gebruiker in staat om de positionering van de
twee motoren te bepalen. Deze optie maakt testopstellingen zonder PLC mogelijk.
Zoals eerder vermeld, kan de stand van de motoren met twee potentiometers ingesteld worden.
Deze potentiometers stellen een analoge waarde in die door de zonnemodule op een resolutie van
10-bits wordt ingelezen. Hierop zet de module deze digitale waarde om naar een hoek en wordt
deze berekende hoek ingesteld.
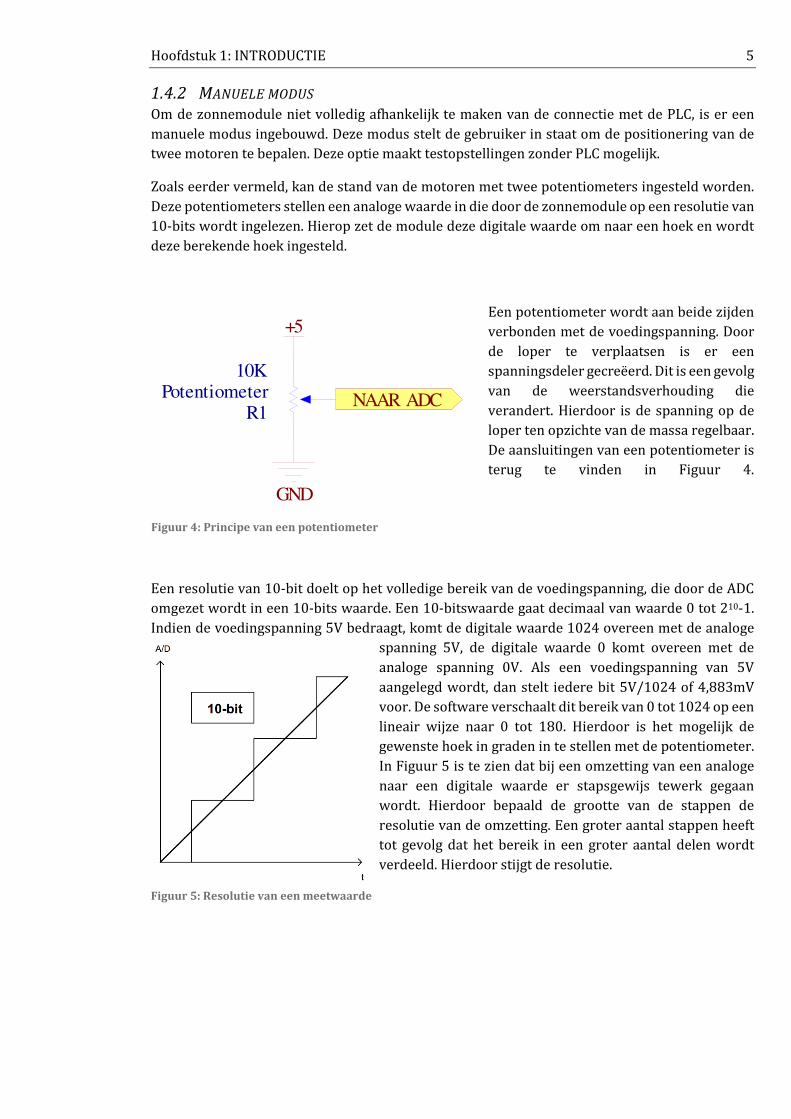
Een potentiometer wordt aan beide zijden
verbonden met de voedingspanning. Door
de loper te verplaatsen is er een
spanningsdeler gecreëerd. Dit is een gevolg
van de weerstandsverhouding die
verandert. Hierdoor is de spanning op de
loper ten opzichte van de massa regelbaar.
De aansluitingen van een potentiometer is
terug te vinden in Figuur 4.
Een resolutie van 10-bit doelt op het volledige bereik van de voedingspanning, die door de ADC
omgezet wordt in een 10-bits waarde. Een 10-bitswaarde gaat decimaal van waarde 0 tot 210-1.
Indien de voedingspanning 5V bedraagt, komt de digitale waarde 1024 overeen met de analoge
spanning 5V, de digitale waarde 0 komt overeen met de
analoge spanning 0V. Als een voedingspanning van 5V
aangelegd wordt, dan stelt iedere bit 5V/1024 of 4,883mV
voor. De software verschaalt dit bereik van 0 tot 1024 op een
lineair wijze naar 0 tot 180. Hierdoor is het mogelijk de
gewenste hoek in graden in te stellen met de potentiometer.
In Figuur 5 is te zien dat bij een omzetting van een analoge
naar een digitale waarde er stapsgewijs tewerk gegaan
wordt. Hierdoor bepaald de grootte van de stappen de
resolutie van de omzetting. Een groter aantal stappen heeft
tot gevolg dat het bereik in een groter aantal delen wordt
verdeeld. Hierdoor stijgt de resolutie.
Figuur 5: Resolutie van een meetwaarde
10K
R1
Potentiometer
+5
GND
NAAR ADC
Figuur 4: Principe van een potentiometer
6
HOOFDSTUK 2: OMGEVINGSKARAKTERISTIEKEN
2.1 ALGEMEENHEDEN Als basisparameters zijn er de tijd, datum en locatie op de wereldbol. Met deze gegevens wordt de
positie van de zon bepaalt. Deze positie wordt via formules omgevormd naar de twee hoeken die
de stappenmotoren dienen in te nemen. De berekeningen die op de 3 basisparameters uitgevoerd
worden, gebeuren door de PLC. Om de theorie achter deze berekeningen te begrijpen, is het nodig
om dieper op deze materie in te gaan. Het samenstellen van de formules geeft verschillende
resultaten die niet voldoen aan de nodige nauwkeurigheid. Het NOAA (National Oceanic And
Atmospheric Administration) heeft een Excel-bestand ter beschikking die de nodige berekeningen
bevat. Om de complexiteit van het project niet op te voeren, zijn de formules van het NOAA
gebruikt. Deze zijn omgezet naar wiskundige formules. Na deze omzetting zijn de wiskundige
formules geprogrammeerd in de PLC. De nauwkeurigheid van de tussenresultaten speelt hierbij
een belangrijke rol. De tussenresultaten bestaan uit kommagetallen met veel beduidende cijfers,
wat de programmatie bemoeilijkt. Om afrondingsfouten te vermijden is er in de PLC gekozen om
een 32-bit formaat te gebruiken voor de tussenresultaten. De berekeningen zijn als bijlage
toegevoegd. De cursussen met achterliggende theorie en principes staan op de bijgevoegde CD-
ROM.
De theorie die achter de berekeningen schuilt, is uiterst interessant. Enkele voorbeelden:
-De duurtijd van een dag varieert, waardoor hij niet steeds exact 24uur is. Dit is te wijten aan de
elliptische baan die de aarde rond de zon maakt, waarbij de invloed van de verschillende
zwaartekrachten op welbepaalde krachtmomenten de resultante anders beïnvloeden.
-De invloed van de seizoenen, wat een gevolg is van de verschuiving van 23,5° die de as van de
aarde maakt ten opzichte van een as, loodrecht op het elliptisch vlak, heeft een effect op de positie
die de zon heeft ten opzichte van de aarde in een tijdsverloop van een jaar.
Hoofdstuk 2: OMGEVINGSKARAKTERISTIEKEN 7
2.2 LOCATIE Het geografische coördinatenstelsel wordt gebruikt om een locatie op de aarde uniek te bepalen.
De drie parameters die nodig zijn om de locatie te bepalen zijn de breedte-, lengte- en
hoogteligging. Om het stelsel te vereenvoudigen, kan de hoogteligging weggelaten worden. Met de
breedte- en lengtebepaling is het voor de zonneberekeningen mogelijk om een locatie eenduidig
te bepalen.
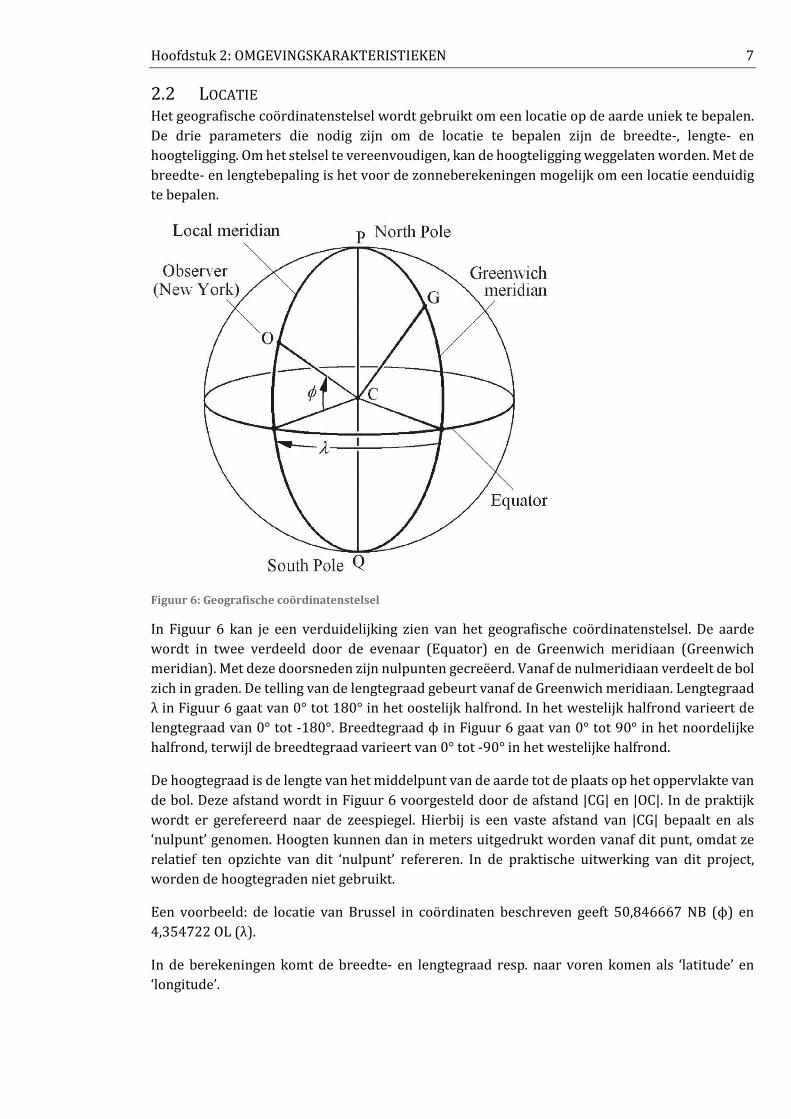
Figuur 6: Geografische coördinatenstelsel
In Figuur 6 kan je een verduidelijking zien van het geografische coördinatenstelsel. De aarde
wordt in twee verdeeld door de evenaar (Equator) en de Greenwich meridiaan (Greenwich
meridian). Met deze doorsneden zijn nulpunten gecreëerd. Vanaf de nulmeridiaan verdeelt de bol
zich in graden. De telling van de lengtegraad gebeurt vanaf de Greenwich meridiaan. Lengtegraad
λ in Figuur 6 gaat van 0° tot 180° in het oostelijk halfrond. In het westelijk halfrond varieert de
lengtegraad van 0° tot -180°. Breedtegraad ϕ in Figuur 6 gaat van 0° tot 90° in het noordelijke
halfrond, terwijl de breedtegraad varieert van 0° tot -90° in het westelijke halfrond.
De hoogtegraad is de lengte van het middelpunt van de aarde tot de plaats op het oppervlakte van
de bol. Deze afstand wordt in Figuur 6 voorgesteld door de afstand |CG| en |OC|. In de praktijk
wordt er gerefereerd naar de zeespiegel. Hierbij is een vaste afstand van |CG| bepaalt en als
‘nulpunt’ genomen. Hoogten kunnen dan in meters uitgedrukt worden vanaf dit punt, omdat ze
relatief ten opzichte van dit ‘nulpunt’ refereren. In de praktische uitwerking van dit project,
worden de hoogtegraden niet gebruikt.
Een voorbeeld: de locatie van Brussel in coördinaten beschreven geeft 50,846667 NB (ϕ) en
4,354722 OL (λ).
In de berekeningen komt de breedte- en lengtegraad resp. naar voren komen als ‘latitude’ en
‘longitude’.
8
HOOFDSTUK 3: ZONNECOLLECTOREN
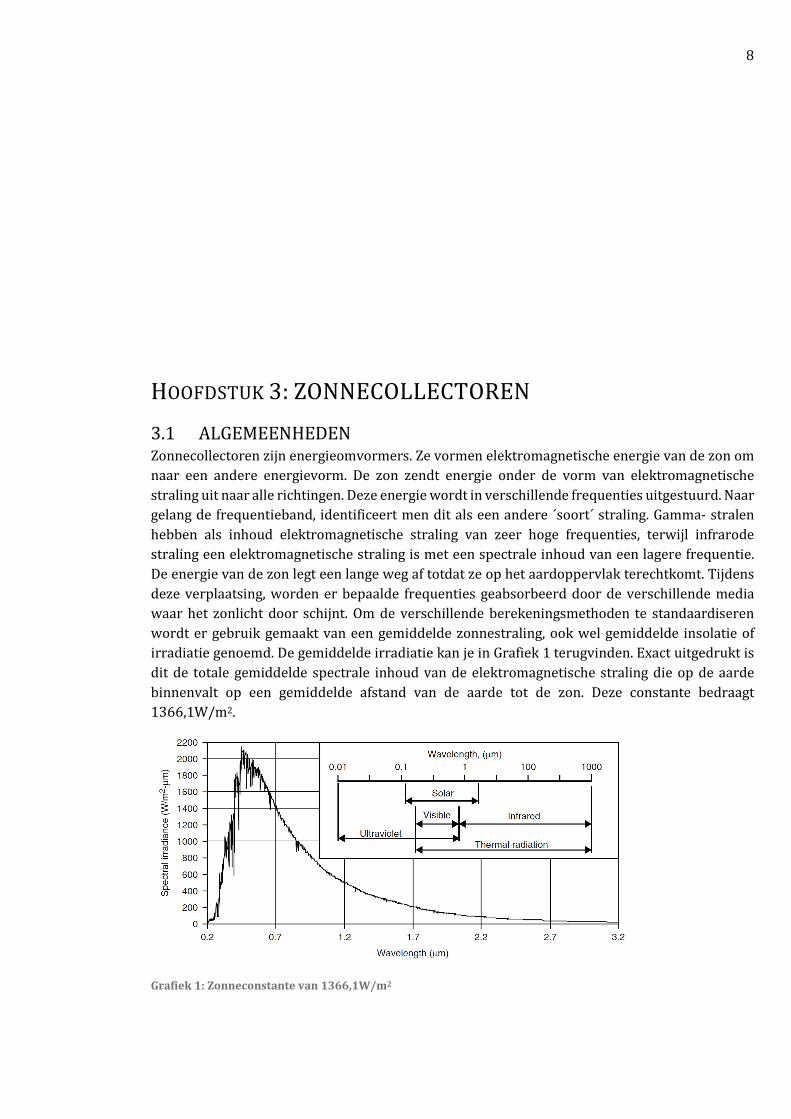
3.1 ALGEMEENHEDEN Zonnecollectoren zijn energieomvormers. Ze vormen elektromagnetische energie van de zon om
naar een andere energievorm. De zon zendt energie onder de vorm van elektromagnetische
straling uit naar alle richtingen. Deze energie wordt in verschillende frequenties uitgestuurd. Naar
gelang de frequentieband, identificeert men dit als een andere ´soort´ straling. Gamma- stralen
hebben als inhoud elektromagnetische straling van zeer hoge frequenties, terwijl infrarode
straling een elektromagnetische straling is met een spectrale inhoud van een lagere frequentie.
De energie van de zon legt een lange weg af totdat ze op het aardoppervlak terechtkomt. Tijdens
deze verplaatsing, worden er bepaalde frequenties geabsorbeerd door de verschillende media
waar het zonlicht door schijnt. Om de verschillende berekeningsmethoden te standaardiseren
wordt er gebruik gemaakt van een gemiddelde zonnestraling, ook wel gemiddelde insolatie of
irradiatie genoemd. De gemiddelde irradiatie kan je in Grafiek 1 terugvinden. Exact uitgedrukt is
dit de totale gemiddelde spectrale inhoud van de elektromagnetische straling die op de aarde
binnenvalt op een gemiddelde afstand van de aarde tot de zon. Deze constante bedraagt
1366,1W/m2.
Grafiek 1: Zonneconstante van 1366,1W/m2
Hoofdstuk 3: ZONNECOLLECTOREN 9
3.2 ZONNECOLLECTOREN Er bestaan diverse energieconvertoren die zonne-energie omvormen. Om zonnecollectoren te
behandelen zonder onnodig uit te breiden, is gekozen om enkel fotovoltaïsche collectoren te
bespreken.
De efficiëntie van fotovoltaïsche cellen ligt ver onder de efficiëntie van bijvoorbeeld parabolische
collectoren. Parabolische collectoren zijn gemaakt van spiegels die de zonnestralen op een
welbepaald punt richten. Hierbij reflecteren ze de volledige spectrale inhoud vanaf het
oppervlakte van de spiegels tot op dit brandpunt. De volledige energie van de zon wordt hierdoor
benut en net daarom worden deze technieken gebruikt voor grote installaties, waarbij de
efficiëntie een grote rol speelt.
3.2.1 FOTOVOLTAÏSCHE SYSTEMEN Een fotovoltaïsche cel is een element dat de elektromagnetische energie van het zonlicht omvormt
naar elektrische energie, waarbij er geen gebruik gemaakt wordt van bewegende onderdelen.
Hieruit komt voort dat deze systemen weinig onderhoud vereisen en een lange levensduur
hebben. Tijdens de werking van deze zonnecellen stoten ze geen CO2 uit, waardoor de term
‘groene energie’ naar boven komt. Er moet echter opgemerkt worden dat de fabricage van deze
panelen ook een bepaalde energie vergt. Net zoals de permanente magneten die deel uitmaken
van een generator die in een windmolen gebruikt is, is het delven en het verwerken van de
grondstoffen zeer energievretend. Hierdoor dient de term ‘groene energie’ met een korrel zout
genomen te worden, omdat naar het totale plaatje gekeken dient te worden. De fotovoltaïsche
cellen bestaan al enkele decennia. Het keerpunt waarbij de nodige energie om het paneel te maken
kleiner werd dan de energie die een zonnecel opbrengt heeft echter lang op zich laten wachten. In
Figuur 12 kan je de evolutie van de efficiëntie die de zonnecellen bezitten terugvinden.
De werking van een zonnecel rust op twee gedopeerde halfgeleiders, namelijk van het p- en n-
type. Door de inwerking van de elektromagnetische straling en de fotonen op het oppervlakte van
de zonnecel, staat er door de compositie van specifieke p- en n-type materialen een spanning over
de anode en kathode. Meerdere pn-juncties worden ook gebruikt. Uit de zonnecel volgt
gelijkspanning en -stroom die ten gevolge van deze excitatie van elektronen plaatsvindt. De
elektrische energievorm is het bruikbare product dat door een zonnecel geleverd wordt.
De fotovoltaïsche cellen kunnen opgebouwd zijn uit één of meerdere lagen. Deze lagen vormen
juncties van p- en n-type materiaal. Deze lagen worden steeds op een substraat bevestigd. Glas,
metaalfolie of welbepaalde polymeren kunnen hiervoor gebruikt worden.
Een cel kan uit verschillende materialen gemaakt worden, waarbij vooral de opbrengst,
levensduur en kostprijs de belangrijkste factoren zijn. Enkele van deze materialen zijn silicium,
cadmium, telluride, koper, indium, gallium en selenide. Er worden composities gemaakt zoals
Cadmiumsulfide (CdS), Kopersulfide (Cu2S), Galliumarsenide (GaAs), Koper indium gallium
selenide (CuIGaSe2), Koper telluride (CuTe).
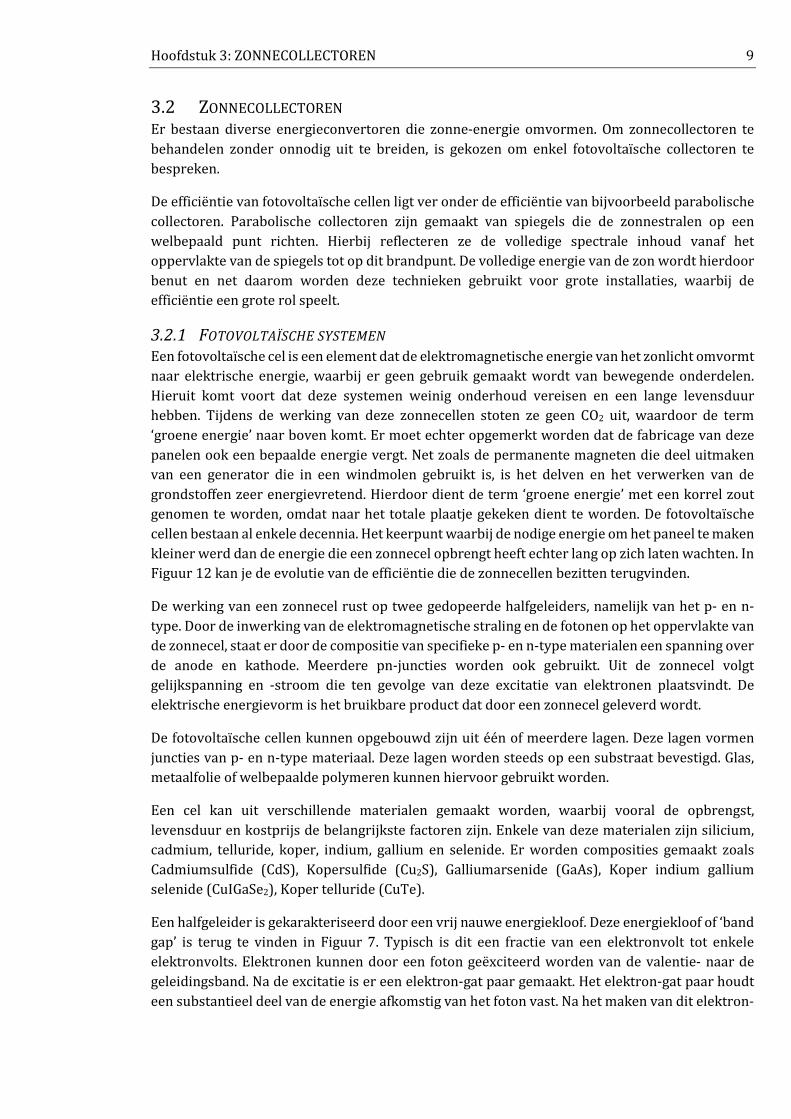
Een halfgeleider is gekarakteriseerd door een vrij nauwe energiekloof. Deze energiekloof of ‘band
gap’ is terug te vinden in Figuur 7. Typisch is dit een fractie van een elektronvolt tot enkele
elektronvolts. Elektronen kunnen door een foton geëxciteerd worden van de valentie- naar de
geleidingsband. Na de excitatie is er een elektron-gat paar gemaakt. Het elektron-gat paar houdt
een substantieel deel van de energie afkomstig van het foton vast. Na het maken van dit elektron-
Hoofdstuk 3: ZONNECOLLECTOREN 10
gat paar scheidt de pn-junctie het geëxciteerde elektron met het bijhorende gat van elkaar.
Hierdoor is een spanningsverschil opgebouwd tussen de p- en n-junctie.
Figuur 7: Verschillende energieopbouw tussen geleider, halfgeleider en isolator
(a) Voor geleiders (conductors), is het grootste ingenomen energieniveau in het midden van de energieband gesitueerd. (b)
Voor halfgeleiders (semiconductor) is het hoogste ingenomen energieniveau gelijk aan het bovenste energieniveau van de
bandkloof. De energiekloof tussen de geleidingsband is echter zeer klein. (c) Als de energiekloof zeer groot is, is het
materiaal een isolator (insulator).
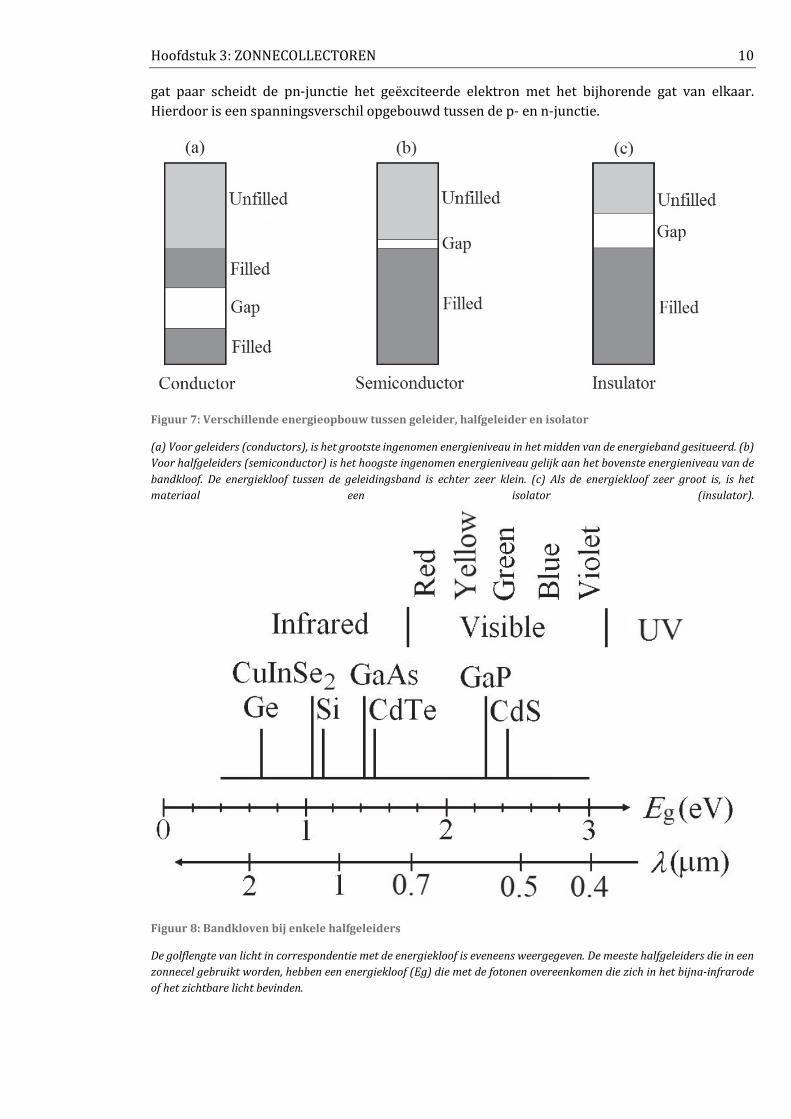
Figuur 8: Bandkloven bij enkele halfgeleiders
De golflengte van licht in correspondentie met de energiekloof is eveneens weergegeven. De meeste halfgeleiders die in een
zonnecel gebruikt worden, hebben een energiekloof (Eg) die met de fotonen overeenkomen die zich in het bijna-infrarode
of het zichtbare licht bevinden.
Hoofdstuk 3: ZONNECOLLECTOREN 11
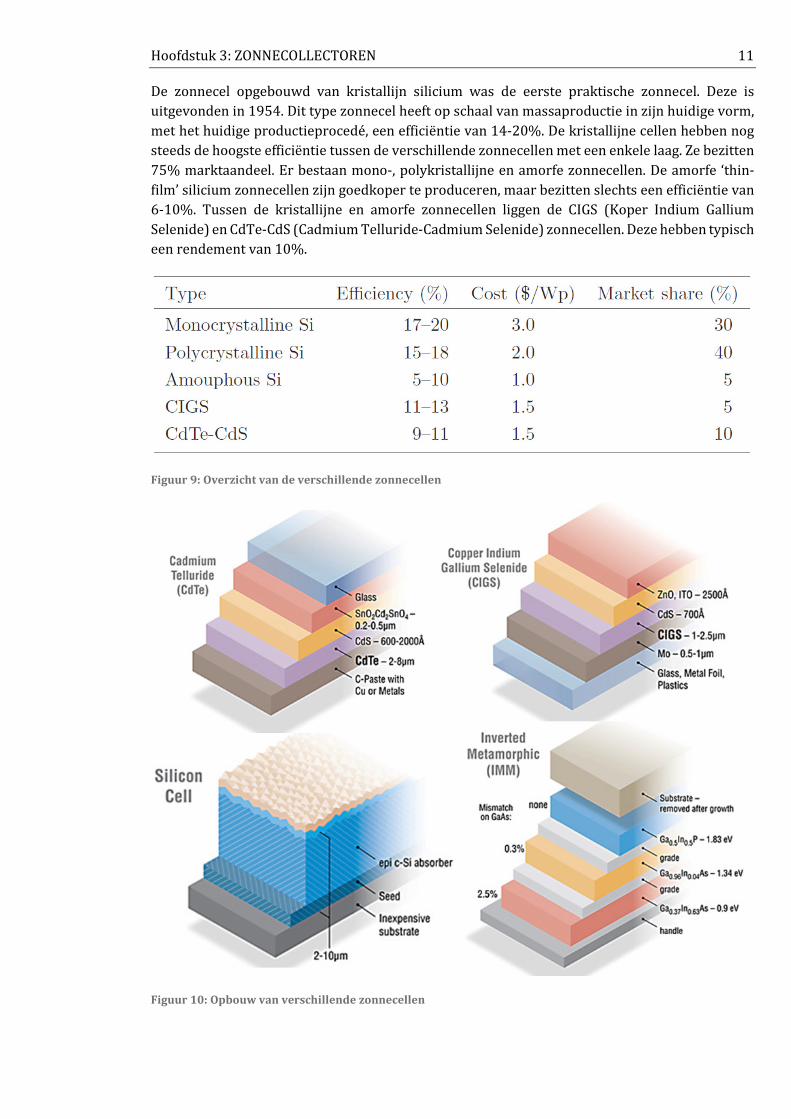
De zonnecel opgebouwd van kristallijn silicium was de eerste praktische zonnecel. Deze is
uitgevonden in 1954. Dit type zonnecel heeft op schaal van massaproductie in zijn huidige vorm,
met het huidige productieprocedé, een efficiëntie van 14-20%. De kristallijne cellen hebben nog
steeds de hoogste efficiëntie tussen de verschillende zonnecellen met een enkele laag. Ze bezitten
75% marktaandeel. Er bestaan mono-, polykristallijne en amorfe zonnecellen. De amorfe ‘thin-
film’ silicium zonnecellen zijn goedkoper te produceren, maar bezitten slechts een efficiëntie van
6-10%. Tussen de kristallijne en amorfe zonnecellen liggen de CIGS (Koper Indium Gallium
Selenide) en CdTe-CdS (Cadmium Telluride-Cadmium Selenide) zonnecellen. Deze hebben typisch
een rendement van 10%.
Figuur 9: Overzicht van de verschillende zonnecellen
Figuur 10: Opbouw van verschillende zonnecellen
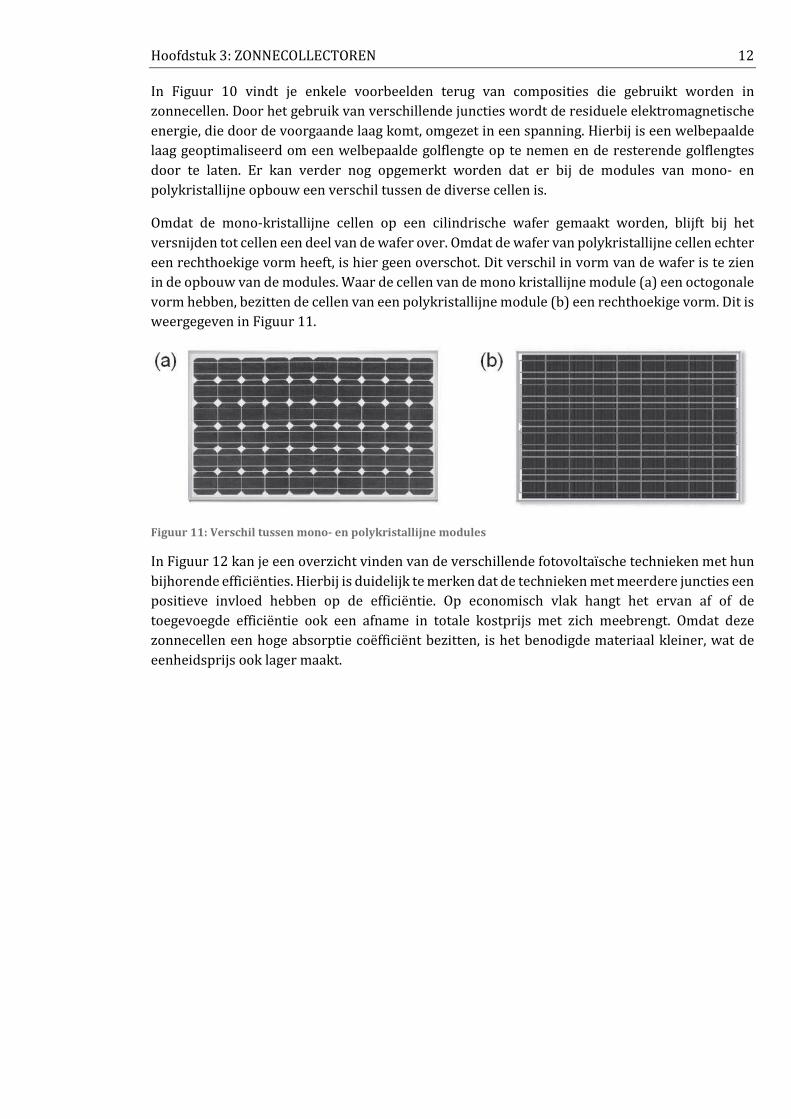
Hoofdstuk 3: ZONNECOLLECTOREN 12
In Figuur 10 vindt je enkele voorbeelden terug van composities die gebruikt worden in
zonnecellen. Door het gebruik van verschillende juncties wordt de residuele elektromagnetische
energie, die door de voorgaande laag komt, omgezet in een spanning. Hierbij is een welbepaalde
laag geoptimaliseerd om een welbepaalde golflengte op te nemen en de resterende golflengtes
door te laten. Er kan verder nog opgemerkt worden dat er bij de modules van mono- en
polykristallijne opbouw een verschil tussen de diverse cellen is.
Omdat de mono-kristallijne cellen op een cilindrische wafer gemaakt worden, blijft bij het
versnijden tot cellen een deel van de wafer over. Omdat de wafer van polykristallijne cellen echter
een rechthoekige vorm heeft, is hier geen overschot. Dit verschil in vorm van de wafer is te zien
in de opbouw van de modules. Waar de cellen van de mono kristallijne module (a) een octogonale
vorm hebben, bezitten de cellen van een polykristallijne module (b) een rechthoekige vorm. Dit is
weergegeven in Figuur 11.
Figuur 11: Verschil tussen mono- en polykristallijne modules
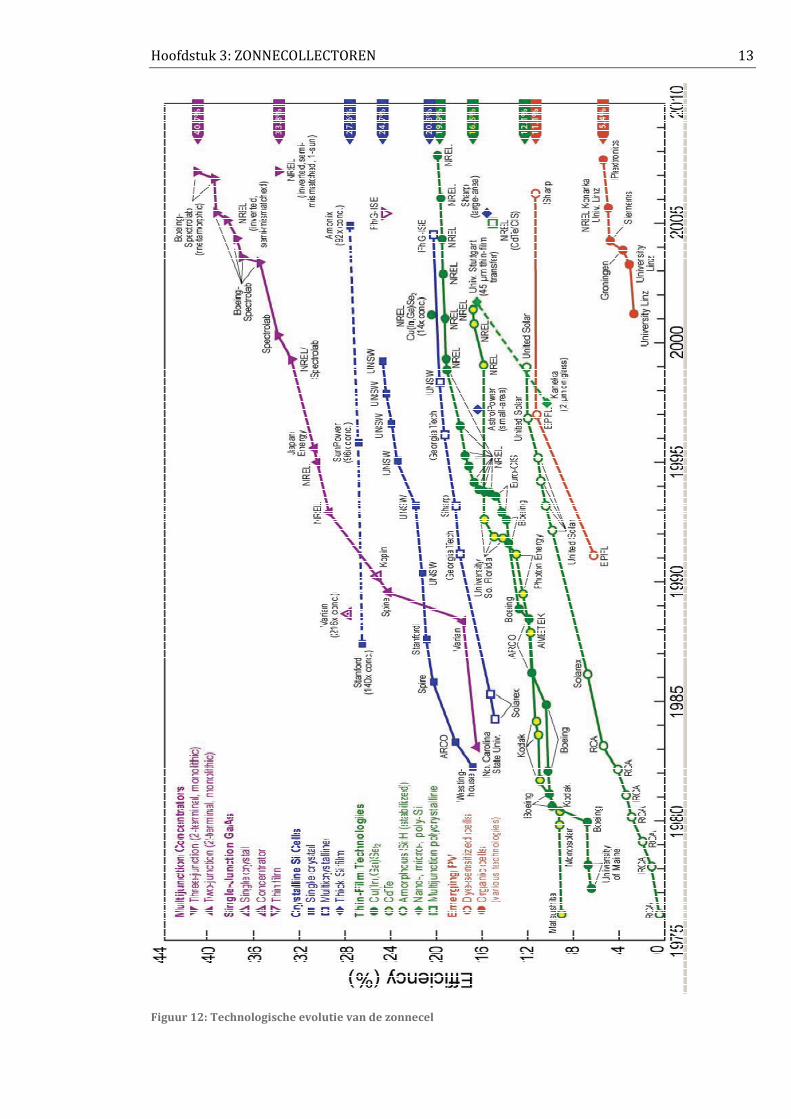
In Figuur 12 kan je een overzicht vinden van de verschillende fotovoltaïsche technieken met hun
bijhorende efficiënties. Hierbij is duidelijk te merken dat de technieken met meerdere juncties een
positieve invloed hebben op de efficiëntie. Op economisch vlak hangt het ervan af of de
toegevoegde efficiëntie ook een afname in totale kostprijs met zich meebrengt. Omdat deze
zonnecellen een hoge absorptie coëfficiënt bezitten, is het benodigde materiaal kleiner, wat de
eenheidsprijs ook lager maakt.
Hoofdstuk 3: ZONNECOLLECTOREN 13
Figuur 12: Technologische evolutie van de zonnecel
Hoofdstuk 3: ZONNECOLLECTOREN 14
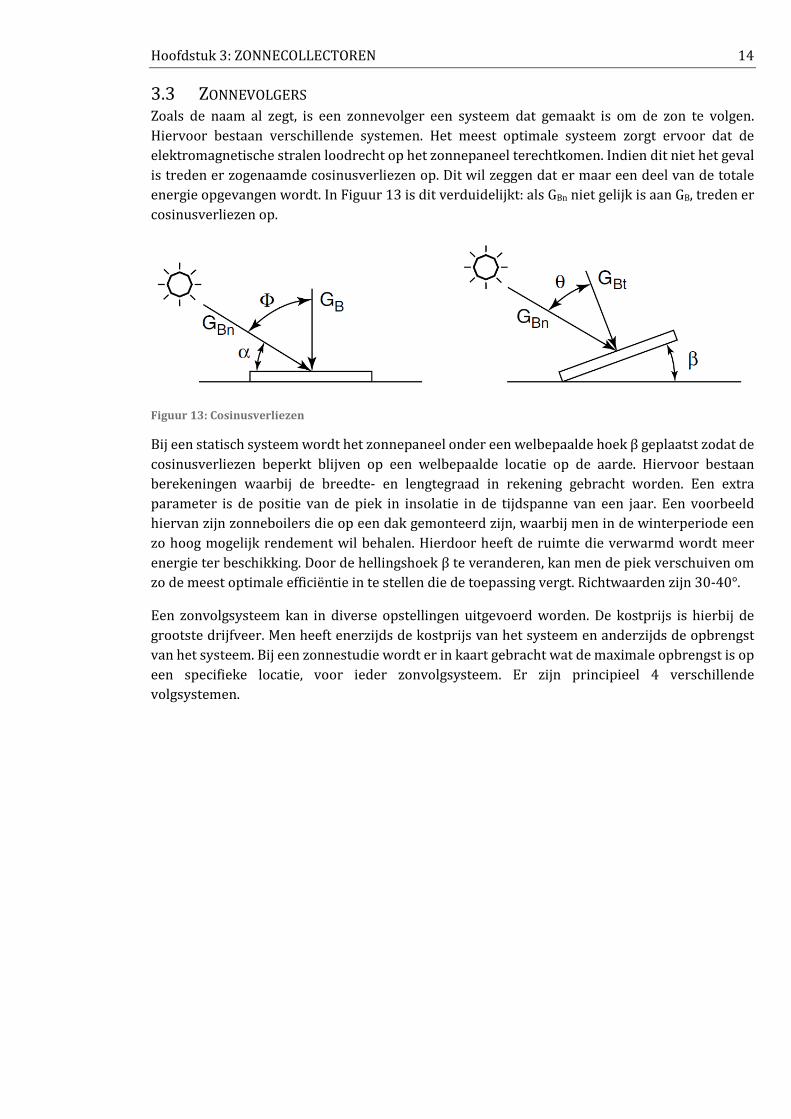
3.3 ZONNEVOLGERS Zoals de naam al zegt, is een zonnevolger een systeem dat gemaakt is om de zon te volgen.
Hiervoor bestaan verschillende systemen. Het meest optimale systeem zorgt ervoor dat de
elektromagnetische stralen loodrecht op het zonnepaneel terechtkomen. Indien dit niet het geval
is treden er zogenaamde cosinusverliezen op. Dit wil zeggen dat er maar een deel van de totale
energie opgevangen wordt. In Figuur 13 is dit verduidelijkt: als GBn niet gelijk is aan GB, treden er
cosinusverliezen op.
Figuur 13: Cosinusverliezen
Bij een statisch systeem wordt het zonnepaneel onder een welbepaalde hoek β geplaatst zodat de
cosinusverliezen beperkt blijven op een welbepaalde locatie op de aarde. Hiervoor bestaan
berekeningen waarbij de breedte- en lengtegraad in rekening gebracht worden. Een extra
parameter is de positie van de piek in insolatie in de tijdspanne van een jaar. Een voorbeeld
hiervan zijn zonneboilers die op een dak gemonteerd zijn, waarbij men in de winterperiode een
zo hoog mogelijk rendement wil behalen. Hierdoor heeft de ruimte die verwarmd wordt meer
energie ter beschikking. Door de hellingshoek β te veranderen, kan men de piek verschuiven om
zo de meest optimale efficiëntie in te stellen die de toepassing vergt. Richtwaarden zijn 30-40°.
Een zonvolgsysteem kan in diverse opstellingen uitgevoerd worden. De kostprijs is hierbij de
grootste drijfveer. Men heeft enerzijds de kostprijs van het systeem en anderzijds de opbrengst
van het systeem. Bij een zonnestudie wordt er in kaart gebracht wat de maximale opbrengst is op
een specifieke locatie, voor ieder zonvolgsysteem. Er zijn principieel 4 verschillende
volgsystemen.
Hoofdstuk 3: ZONNECOLLECTOREN 15
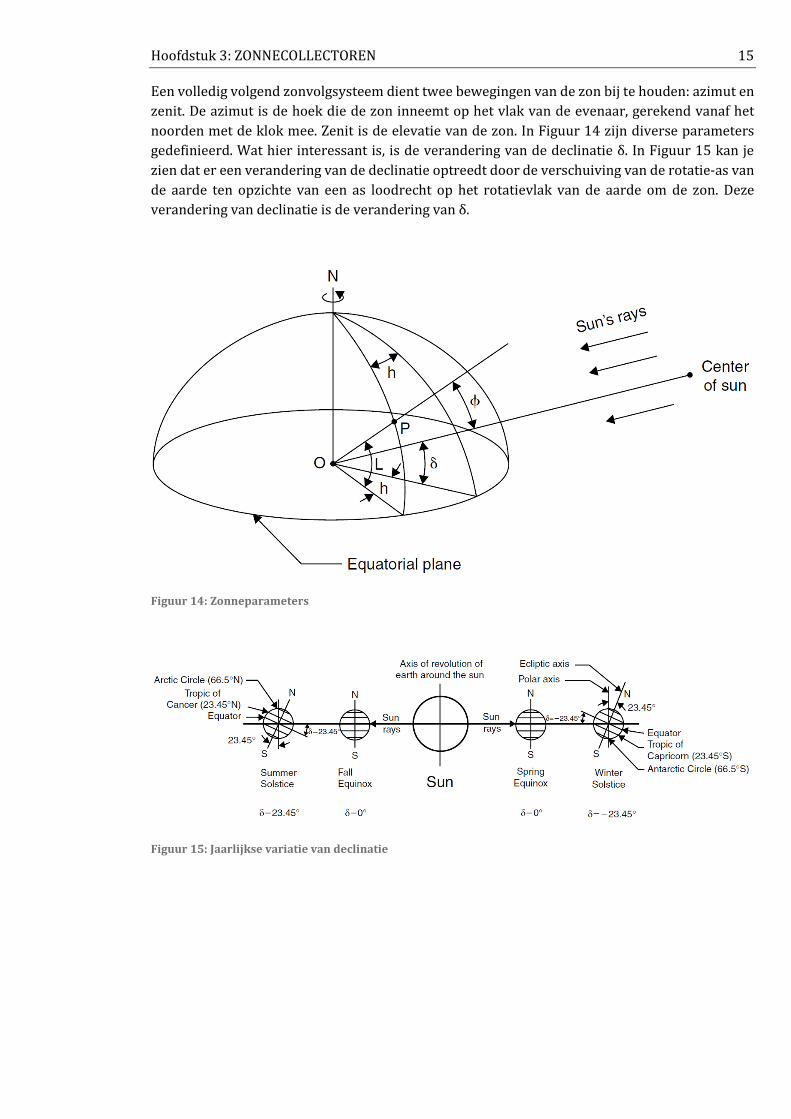
Een volledig volgend zonvolgsysteem dient twee bewegingen van de zon bij te houden: azimut en
zenit. De azimut is de hoek die de zon inneemt op het vlak van de evenaar, gerekend vanaf het
noorden met de klok mee. Zenit is de elevatie van de zon. In Figuur 14 zijn diverse parameters
gedefinieerd. Wat hier interessant is, is de verandering van de declinatie δ. In Figuur 15 kan je
zien dat er een verandering van de declinatie optreedt door de verschuiving van de rotatie-as van
de aarde ten opzichte van een as loodrecht op het rotatievlak van de aarde om de zon. Deze
verandering van declinatie is de verandering van δ.
Figuur 14: Zonneparameters
Figuur 15: Jaarlijkse variatie van declinatie
Hoofdstuk 3: ZONNECOLLECTOREN 16
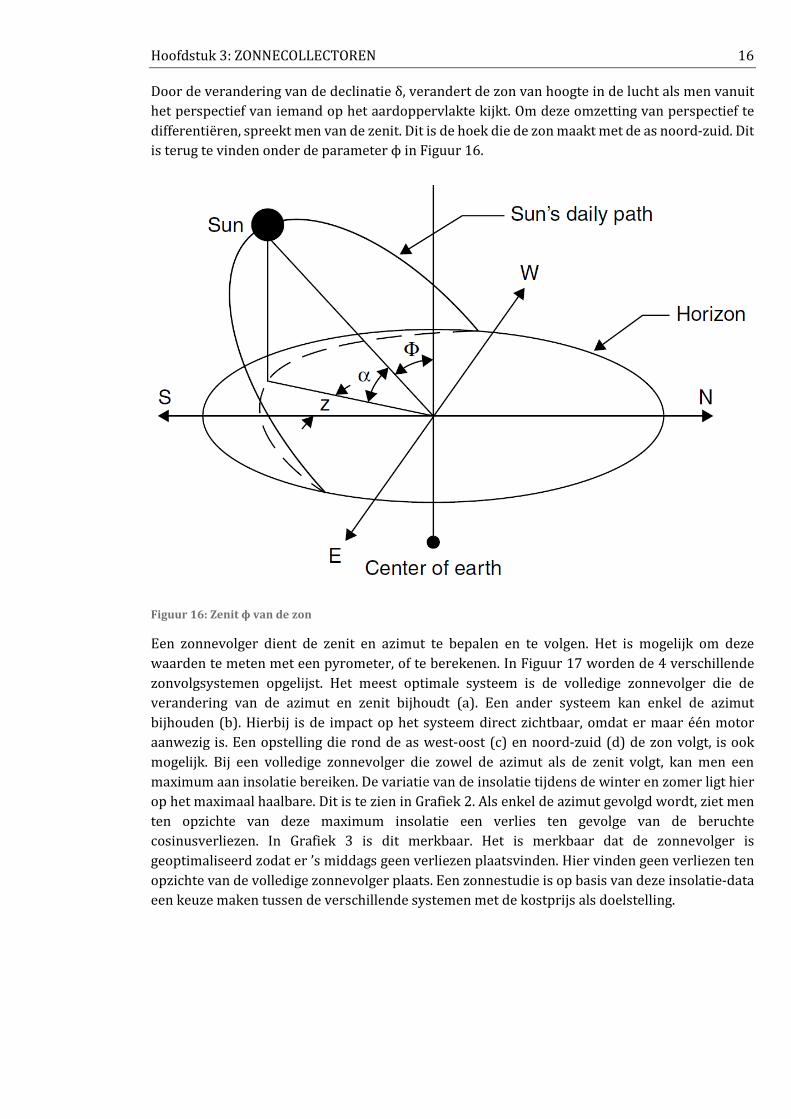
Door de verandering van de declinatie δ, verandert de zon van hoogte in de lucht als men vanuit
het perspectief van iemand op het aardoppervlakte kijkt. Om deze omzetting van perspectief te
differentiëren, spreekt men van de zenit. Dit is de hoek die de zon maakt met de as noord-zuid. Dit
is terug te vinden onder de parameter ϕ in Figuur 16.
Figuur 16: Zenit ϕ van de zon
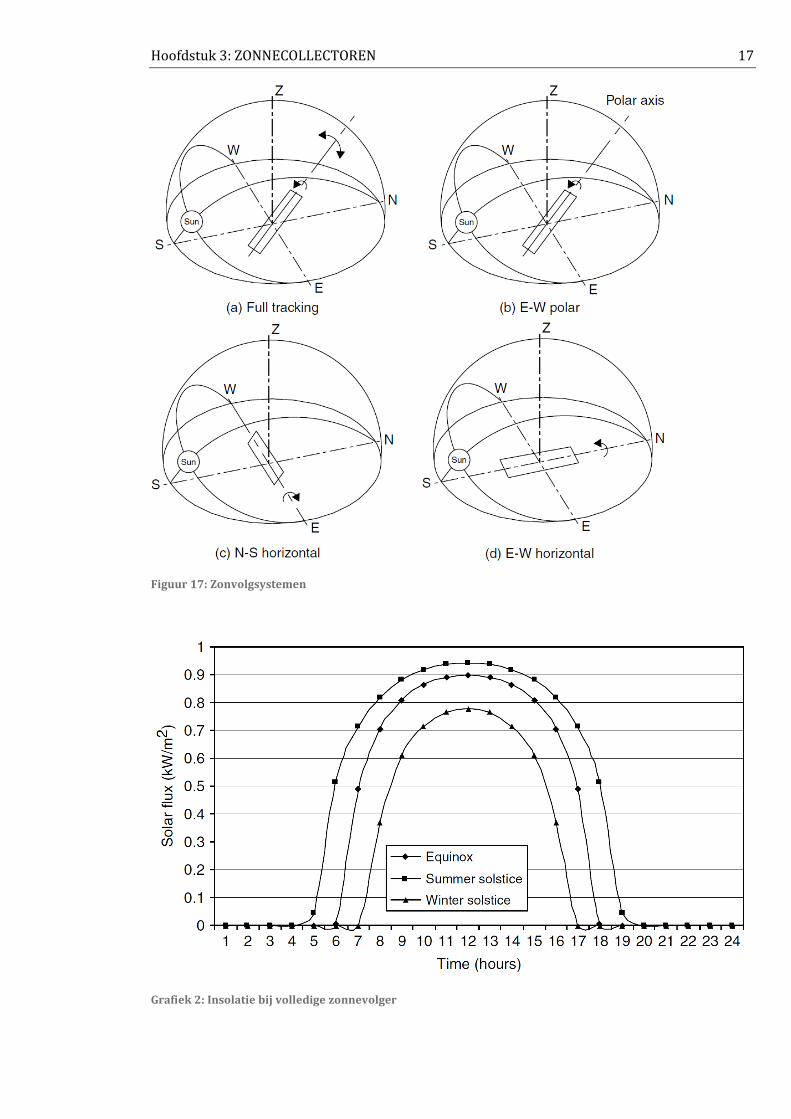
Een zonnevolger dient de zenit en azimut te bepalen en te volgen. Het is mogelijk om deze
waarden te meten met een pyrometer, of te berekenen. In Figuur 17 worden de 4 verschillende
zonvolgsystemen opgelijst. Het meest optimale systeem is de volledige zonnevolger die de
verandering van de azimut en zenit bijhoudt (a). Een ander systeem kan enkel de azimut
bijhouden (b). Hierbij is de impact op het systeem direct zichtbaar, omdat er maar één motor
aanwezig is. Een opstelling die rond de as west-oost (c) en noord-zuid (d) de zon volgt, is ook
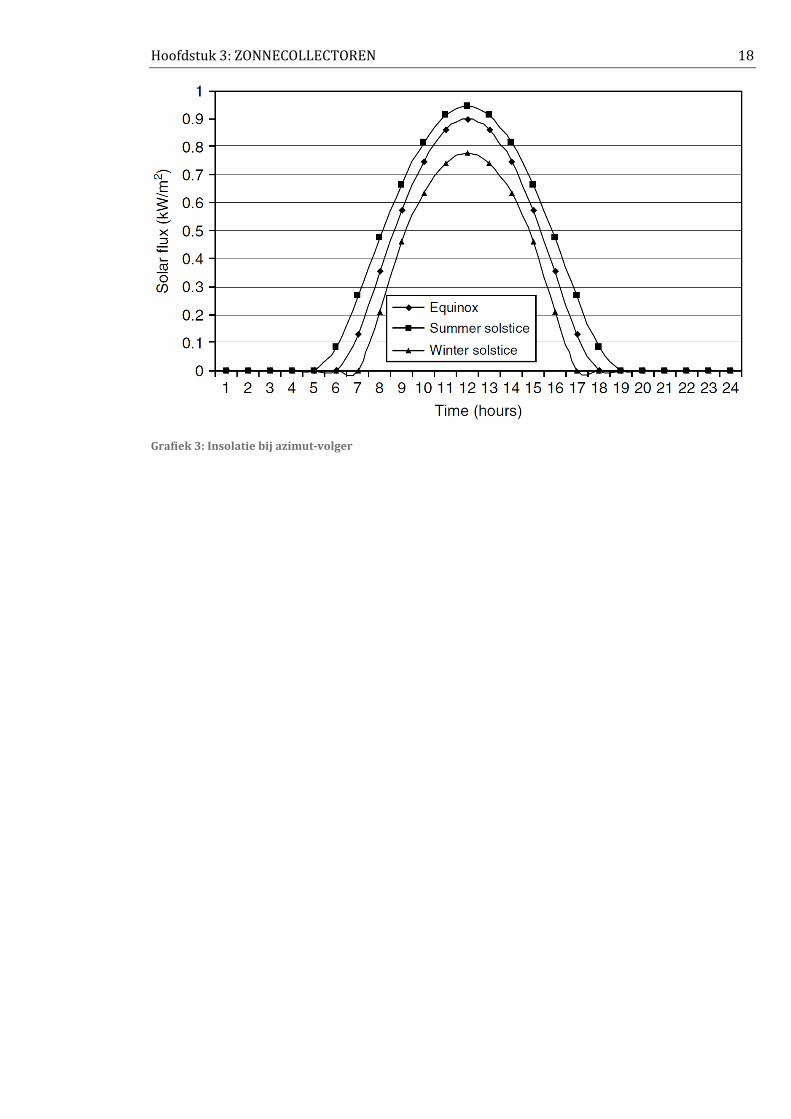
mogelijk. Bij een volledige zonnevolger die zowel de azimut als de zenit volgt, kan men een
maximum aan insolatie bereiken. De variatie van de insolatie tijdens de winter en zomer ligt hier
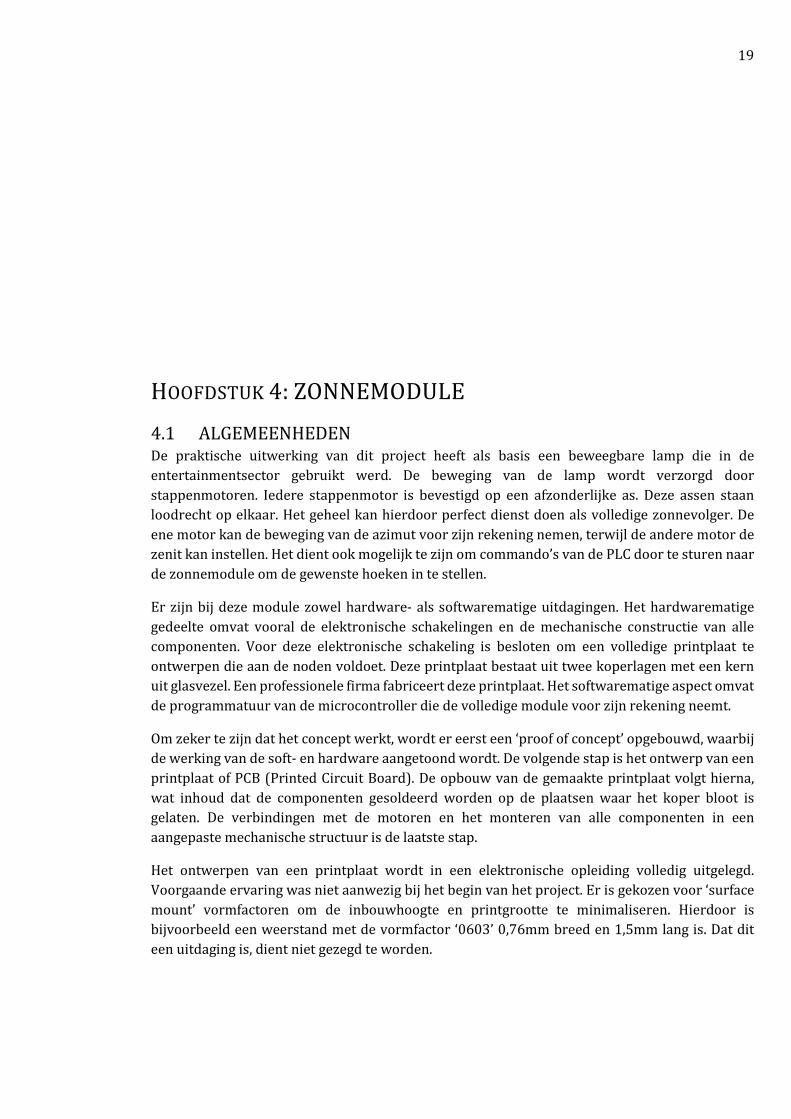
op het maximaal haalbare. Dit is te zien in Grafiek 2. Als enkel de azimut gevolgd wordt, ziet men
ten opzichte van deze maximum insolatie een verlies ten gevolge van de beruchte
cosinusverliezen. In Grafiek 3 is dit merkbaar. Het is merkbaar dat de zonnevolger is
geoptimaliseerd zodat er ’s middags geen verliezen plaatsvinden. Hier vinden geen verliezen ten
opzichte van de volledige zonnevolger plaats. Een zonnestudie is op basis van deze insolatie-data
een keuze maken tussen de verschillende systemen met de kostprijs als doelstelling.
Hoofdstuk 3: ZONNECOLLECTOREN 17
Figuur 17: Zonvolgsystemen
Grafiek 2: Insolatie bij volledige zonnevolger
Hoofdstuk 3: ZONNECOLLECTOREN 18
Grafiek 3: Insolatie bij azimut-volger
19
HOOFDSTUK 4: ZONNEMODULE
4.1 ALGEMEENHEDEN De praktische uitwerking van dit project heeft als basis een beweegbare lamp die in de
entertainmentsector gebruikt werd. De beweging van de lamp wordt verzorgd door
stappenmotoren. Iedere stappenmotor is bevestigd op een afzonderlijke as. Deze assen staan
loodrecht op elkaar. Het geheel kan hierdoor perfect dienst doen als volledige zonnevolger. De
ene motor kan de beweging van de azimut voor zijn rekening nemen, terwijl de andere motor de
zenit kan instellen. Het dient ook mogelijk te zijn om commando’s van de PLC door te sturen naar
de zonnemodule om de gewenste hoeken in te stellen.
Er zijn bij deze module zowel hardware- als softwarematige uitdagingen. Het hardwarematige
gedeelte omvat vooral de elektronische schakelingen en de mechanische constructie van alle
componenten. Voor deze elektronische schakeling is besloten om een volledige printplaat te
ontwerpen die aan de noden voldoet. Deze printplaat bestaat uit twee koperlagen met een kern
uit glasvezel. Een professionele firma fabriceert deze printplaat. Het softwarematige aspect omvat
de programmatuur van de microcontroller die de volledige module voor zijn rekening neemt.
Om zeker te zijn dat het concept werkt, wordt er eerst een ‘proof of concept’ opgebouwd, waarbij
de werking van de soft- en hardware aangetoond wordt. De volgende stap is het ontwerp van een
printplaat of PCB (Printed Circuit Board). De opbouw van de gemaakte printplaat volgt hierna,
wat inhoud dat de componenten gesoldeerd worden op de plaatsen waar het koper bloot is
gelaten. De verbindingen met de motoren en het monteren van alle componenten in een
aangepaste mechanische structuur is de laatste stap.
Het ontwerpen van een printplaat wordt in een elektronische opleiding volledig uitgelegd.
Voorgaande ervaring was niet aanwezig bij het begin van het project. Er is gekozen voor ‘surface
mount’ vormfactoren om de inbouwhoogte en printgrootte te minimaliseren. Hierdoor is
bijvoorbeeld een weerstand met de vormfactor ‘0603’ 0,76mm breed en 1,5mm lang is. Dat dit
een uitdaging is, dient niet gezegd te worden.
Hoofdstuk 4: ZONNEMODULE 20
4.2 ELEKTRONICA
4.2.1 OVERZICHT Het ontwerp van de zonnemodule dient aan enkele voorwaarden te voldoen. :
- De stuurprint moet galvanisch gescheiden zijn van de PLC;
- De zonnemodule moet door een PLC aangestuurd worden;
- De zonnemodule moet onafhankelijk kunnen werken.
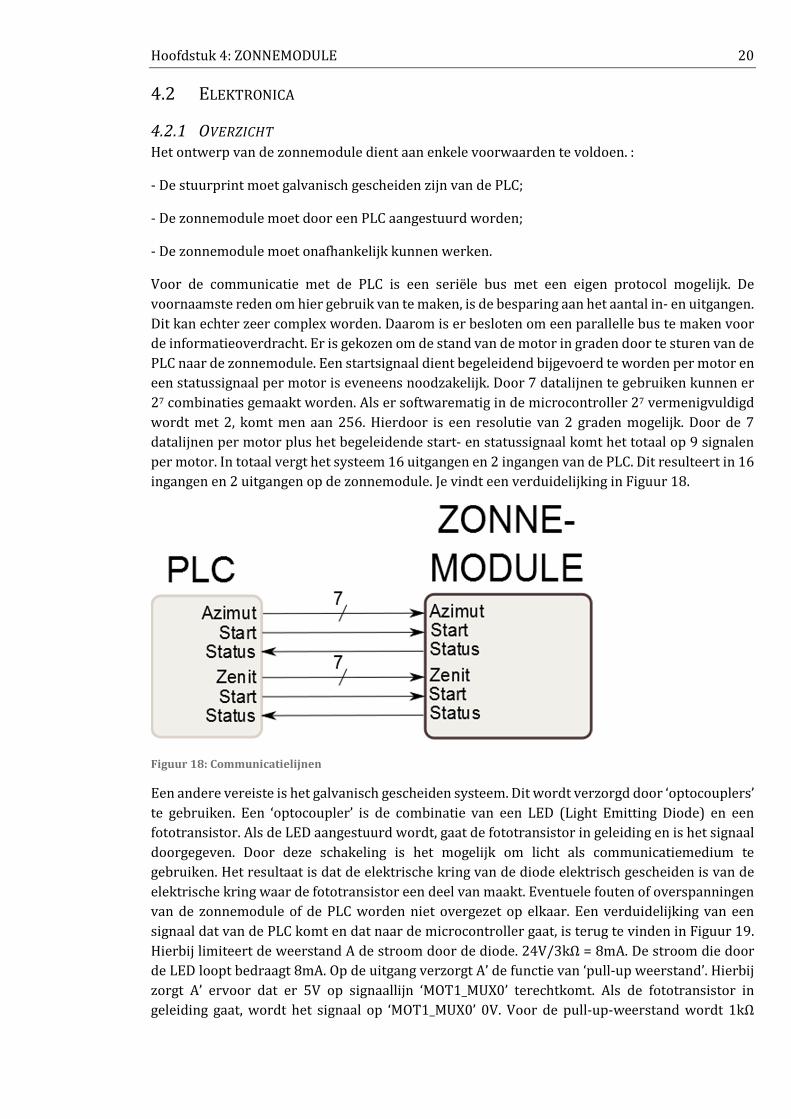
Voor de communicatie met de PLC is een seriële bus met een eigen protocol mogelijk. De
voornaamste reden om hier gebruik van te maken, is de besparing aan het aantal in- en uitgangen.
Dit kan echter zeer complex worden. Daarom is er besloten om een parallelle bus te maken voor
de informatieoverdracht. Er is gekozen om de stand van de motor in graden door te sturen van de
PLC naar de zonnemodule. Een startsignaal dient begeleidend bijgevoerd te worden per motor en
een statussignaal per motor is eveneens noodzakelijk. Door 7 datalijnen te gebruiken kunnen er
27 combinaties gemaakt worden. Als er softwarematig in de microcontroller 27 vermenigvuldigd
wordt met 2, komt men aan 256. Hierdoor is een resolutie van 2 graden mogelijk. Door de 7
datalijnen per motor plus het begeleidende start- en statussignaal komt het totaal op 9 signalen
per motor. In totaal vergt het systeem 16 uitgangen en 2 ingangen van de PLC. Dit resulteert in 16
ingangen en 2 uitgangen op de zonnemodule. Je vindt een verduidelijking in Figuur 18.
Figuur 18: Communicatielijnen
Een andere vereiste is het galvanisch gescheiden systeem. Dit wordt verzorgd door ‘optocouplers’
te gebruiken. Een ‘optocoupler’ is de combinatie van een LED (Light Emitting Diode) en een
fototransistor. Als de LED aangestuurd wordt, gaat de fototransistor in geleiding en is het signaal
doorgegeven. Door deze schakeling is het mogelijk om licht als communicatiemedium te
gebruiken. Het resultaat is dat de elektrische kring van de diode elektrisch gescheiden is van de
elektrische kring waar de fototransistor een deel van maakt. Eventuele fouten of overspanningen
van de zonnemodule of de PLC worden niet overgezet op elkaar. Een verduidelijking van een
signaal dat van de PLC komt en dat naar de microcontroller gaat, is terug te vinden in Figuur 19.
Hierbij limiteert de weerstand A de stroom door de diode. 24V/3kΩ = 8mA. De stroom die door
de LED loopt bedraagt 8mA. Op de uitgang verzorgt A’ de functie van ‘pull-up weerstand’. Hierbij
zorgt A’ ervoor dat er 5V op signaallijn ‘MOT1_MUX0’ terechtkomt. Als de fototransistor in
geleiding gaat, wordt het signaal op ‘MOT1_MUX0’ 0V. Voor de pull-up-weerstand wordt 1kΩ
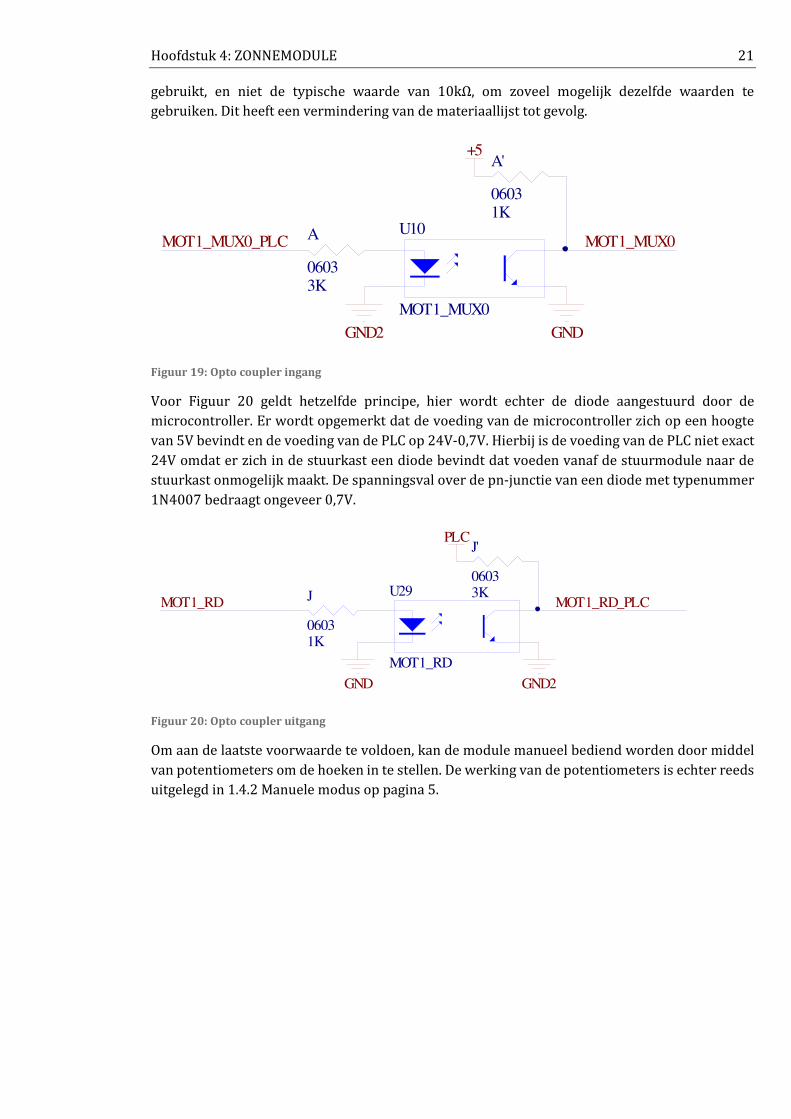
Hoofdstuk 4: ZONNEMODULE 21
gebruikt, en niet de typische waarde van 10kΩ, om zoveel mogelijk dezelfde waarden te
gebruiken. Dit heeft een vermindering van de materiaallijst tot gevolg.
Figuur 19: Opto coupler ingang
Voor Figuur 20 geldt hetzelfde principe, hier wordt echter de diode aangestuurd door de
microcontroller. Er wordt opgemerkt dat de voeding van de microcontroller zich op een hoogte
van 5V bevindt en de voeding van de PLC op 24V-0,7V. Hierbij is de voeding van de PLC niet exact
24V omdat er zich in de stuurkast een diode bevindt dat voeden vanaf de stuurmodule naar de
stuurkast onmogelijk maakt. De spanningsval over de pn-junctie van een diode met typenummer
1N4007 bedraagt ongeveer 0,7V.
Figuur 20: Opto coupler uitgang
Om aan de laatste voorwaarde te voldoen, kan de module manueel bediend worden door middel
van potentiometers om de hoeken in te stellen. De werking van de potentiometers is echter reeds
uitgelegd in 1.4.2 Manuele modus op pagina 5.
U10
MOT1_MUX0
GND2 GND
MOT1_MUX0_PLC MOT1_MUX0
3K
A
0603
1K
A'
0603
+5
GND2GND
MOT1_RD_PLCMOT1_RDU29
MOT1_RD
3K
J'
0603
PLC
1K
J
0603
Hoofdstuk 4: ZONNEMODULE 22
4.2.2 MICROCONTROLLER Door reeds opgebouwde ervaring met het Arduino-platform, is besloten om dit te gebruiken als
basis. De module dient een geïntegreerd systeem te zijn, omdat het later als didactische opstelling
in het CVO blijft staan. Hierdoor is de chip van de Arduino gebruikt, om het systeem compatibel te
maken met de Arduino IDE (Integrated development environment). Een IDE is een
softwareomgeving waarin de software geschreven kan worden. Het is mogelijk om via een extra
programmeermodule de microcontroller te programmeren. Een Arduino-bord heeft een
geïntegreerde USB-poort (Universal Serial Bus), waardoor enkel een USB-kabel nodig is.
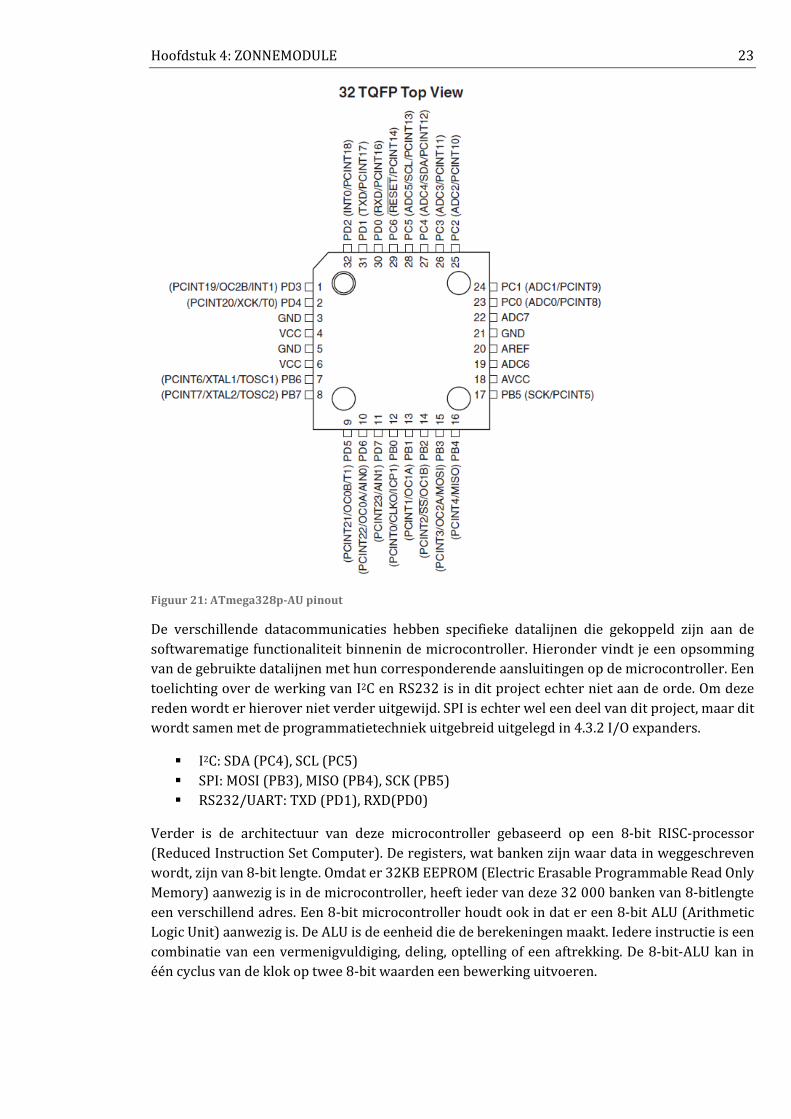
De bewuste microcontroller is de ATMega328p-AU. De vormfactor van deze geïntegreerde
schakeling is een SMD (Surface Mount Device), waarvan de footprint een TQFP32 (Thin Quad Flat
Pack) is. In Figuur 21 vindt je de aansluitingen van de chip. Hierbij is het zichtbaar dat er 3 pin-
banken beschikbaar zijn. Pin-bank B, C en D. Pin-bank C bevat voornamelijk de poorten die met
de ADC (Analog to Digital Converter) verbonden zijn: PC5, PC4, PC3, PC2, PC1, PC0. PC6 is de reset
pin. Pin-bank B en D zijn digitale banken. Verder zijn er diverse aansluitingen voor de
voedingspanning VCC en de massa-aansluiting GND. Voor de ADC is er een aparte voeding AVCC
en spanningsreferentie AREF. Deze mogen op dezelfde potentiaal als VCC aangelegd worden.
Verder bezit de microcontroller over 2 aansluitingen voor het oscillatie-kristal. Dit kristal brengt
de snelheid waarmee de microcontroller werkt van 1MHz die de interne RC-oscillator voorziet,
naar 16Mhz. Dit kristal wordt in een pi-netwerk aangesloten met twee condensatoren. Deze
aansluitingen zijn PB6 en PB7, en worden geconfigureerd als XTAL1 en XTAL2. Indien er bij een
bepaalde pin PCINTxx staat, wil dit zeggen dat er een ‘pin change interrupt’ waargenomen kan
worden. De hardware matige interrupts worden gekenmerkt door INTx. Deze pinnen hebben de
mogelijkheid om de microcontroller te onderbreken en een welbepaalde code uit te voeren bij een
verandering van de status. De status van de pin wordt geïnterpreteerd als een logische 0 als het
onder 20-30% van VCC is, en als een logische 1 als de spanning zich boven 60-70% van VCC
bevindt. PWM-functionaliteit (Pulse Width Modulation), is dan weer terug te vinden bij de OCxA
of OCxB notering, wat er op doelt dat deze functionaliteit aan interne timer A of B gekoppeld is.
De seriële datacommunicaties ‘I2C’, ‘SPI’ en ‘UART’ zijn ook aanwezig in deze microcontroller. ‘I2C’
is ontwikkeld door Philips en kan door redenen van patenten niet gebruikt worden door Atmel.
Hierdoor refereert Atmel hiernaar als TWI. I2C staat voor ‘Inter Integrated Circuit Bus’. De variant
van Atmel, TWI, staat voor ‘Two Wire Interface’. ‘SPI’, wat gebruikt wordt om de
programmeercode in de microcontroller te krijgen, staat voor ‘Serial Peripheral Interface’. Deze
seriële datatechniek wordt ook gebruikt om te communiceren met enkele componenten in dit
project. Als laatste is er de ‘UART’ mogelijkheid. Dit staat voor ‘Universal Asynchronous Receiver
Transmitter’, maar wordt ook vernoemd als ‘RS232’. De Arduino bezit een chip dat deze
‘RS232/UART’ omzet naar ‘USB’, om via dit serieel protocol de programmeercode te uploaden
naar de chip. Om van deze mogelijkheid gebruik te kunnen maken is het echter noodzakelijk dat
er reeds een stuk code op de chip aanwezig is. Deze speciale code die het programmeren via
‘UART/RS232’ mogelijk maakt, wordt de ‘bootloader’ genoemd.
Hoofdstuk 4: ZONNEMODULE 23
Figuur 21: ATmega328p-AU pinout
De verschillende datacommunicaties hebben specifieke datalijnen die gekoppeld zijn aan de
softwarematige functionaliteit binnenin de microcontroller. Hieronder vindt je een opsomming
van de gebruikte datalijnen met hun corresponderende aansluitingen op de microcontroller. Een
toelichting over de werking van I2C en RS232 is in dit project echter niet aan de orde. Om deze
reden wordt er hierover niet verder uitgewijd. SPI is echter wel een deel van dit project, maar dit
wordt samen met de programmatietechniek uitgebreid uitgelegd in 4.3.2 I/O expanders.
I2C: SDA (PC4), SCL (PC5)
SPI: MOSI (PB3), MISO (PB4), SCK (PB5)
RS232/UART: TXD (PD1), RXD(PD0)
Verder is de architectuur van deze microcontroller gebaseerd op een 8-bit RISC-processor
(Reduced Instruction Set Computer). De registers, wat banken zijn waar data in weggeschreven
wordt, zijn van 8-bit lengte. Omdat er 32KB EEPROM (Electric Erasable Programmable Read Only
Memory) aanwezig is in de microcontroller, heeft ieder van deze 32 000 banken van 8-bitlengte
een verschillend adres. Een 8-bit microcontroller houdt ook in dat er een 8-bit ALU (Arithmetic
Logic Unit) aanwezig is. De ALU is de eenheid die de berekeningen maakt. Iedere instructie is een
combinatie van een vermenigvuldiging, deling, optelling of een aftrekking. De 8-bit-ALU kan in
één cyclus van de klok op twee 8-bit waarden een bewerking uitvoeren.
Hoofdstuk 4: ZONNEMODULE 24
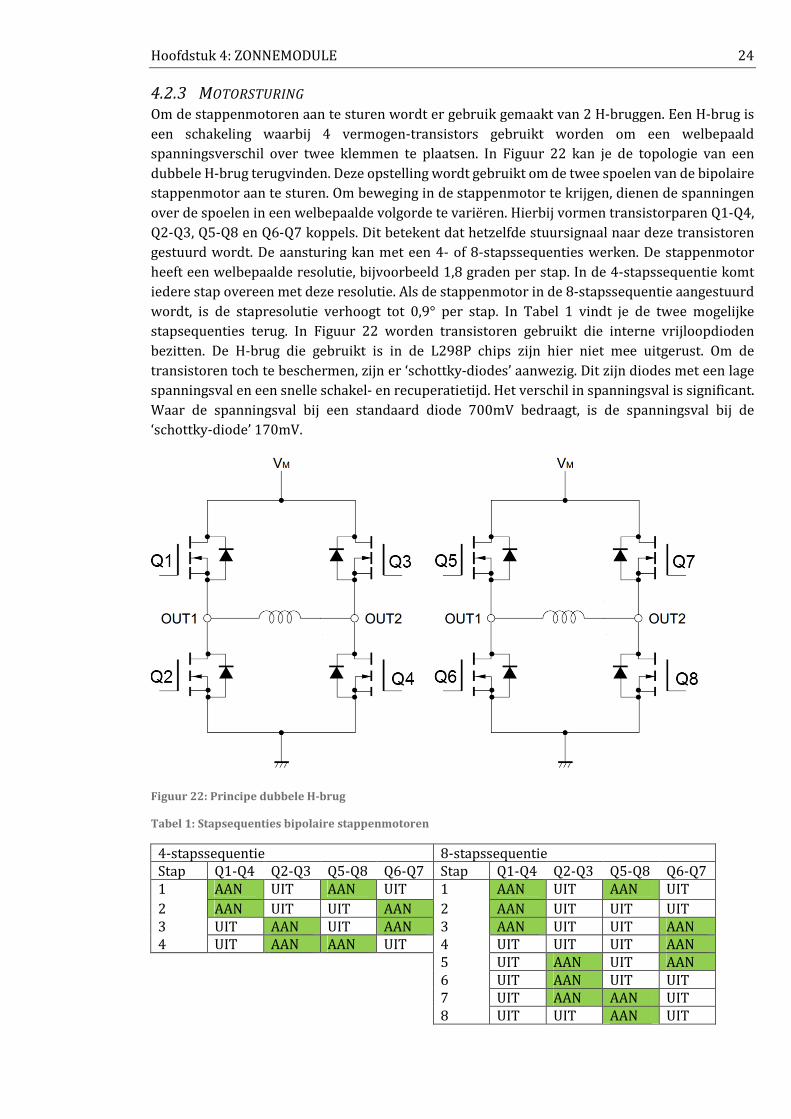
4.2.3 MOTORSTURING Om de stappenmotoren aan te sturen wordt er gebruik gemaakt van 2 H-bruggen. Een H-brug is
een schakeling waarbij 4 vermogen-transistors gebruikt worden om een welbepaald
spanningsverschil over twee klemmen te plaatsen. In Figuur 22 kan je de topologie van een
dubbele H-brug terugvinden. Deze opstelling wordt gebruikt om de twee spoelen van de bipolaire
stappenmotor aan te sturen. Om beweging in de stappenmotor te krijgen, dienen de spanningen
over de spoelen in een welbepaalde volgorde te variëren. Hierbij vormen transistorparen Q1-Q4,
Q2-Q3, Q5-Q8 en Q6-Q7 koppels. Dit betekent dat hetzelfde stuursignaal naar deze transistoren
gestuurd wordt. De aansturing kan met een 4- of 8-stapssequenties werken. De stappenmotor
heeft een welbepaalde resolutie, bijvoorbeeld 1,8 graden per stap. In de 4-stapssequentie komt
iedere stap overeen met deze resolutie. Als de stappenmotor in de 8-stapssequentie aangestuurd
wordt, is de stapresolutie verhoogt tot 0,9° per stap. In Tabel 1 vindt je de twee mogelijke
stapsequenties terug. In Figuur 22 worden transistoren gebruikt die interne vrijloopdioden
bezitten. De H-brug die gebruikt is in de L298P chips zijn hier niet mee uitgerust. Om de
transistoren toch te beschermen, zijn er ‘schottky-diodes’ aanwezig. Dit zijn diodes met een lage
spanningsval en een snelle schakel- en recuperatietijd. Het verschil in spanningsval is significant.
Waar de spanningsval bij een standaard diode 700mV bedraagt, is de spanningsval bij de
‘schottky-diode’ 170mV.
Figuur 22: Principe dubbele H-brug
Tabel 1: Stapsequenties bipolaire stappenmotoren
4-stapssequentie 8-stapssequentie
Stap Q1-Q4 Q2-Q3 Q5-Q8 Q6-Q7 Stap Q1-Q4 Q2-Q3 Q5-Q8 Q6-Q7
1 AAN UIT AAN UIT 1 AAN UIT AAN UIT
2 AAN UIT UIT AAN 2 AAN UIT UIT UIT
3 UIT AAN UIT AAN 3 AAN UIT UIT AAN
4 UIT AAN AAN UIT 4 UIT UIT UIT AAN
5 UIT AAN UIT AAN
6 UIT AAN UIT UIT
7 UIT AAN AAN UIT
8 UIT UIT AAN UIT

Hoofdstuk 4: ZONNEMODULE 25
Als de 4- of 8-stapssequentie wordt gevolgd van resp. stap 1 tot stap 4, of van stap 1 tot stap 8,
draait de stappenmotor kloksgewijs. Er dient opgemerkt te worden dat in het geval de laatste stap
van de sequentie bereikt wordt, er naar de eerste stap terug gegaan wordt om zo een vloeiende
opeenvolging van stappen te verwezenlijken. Indien de sequentie in tegengestelde zin wordt
doorlopen, draaien de motoren in tegengestelde zin.
4.2.4 PRINTPLAAT Om de gebruiker een praktische gebruikersinterface te verschaffen, is een bedieningspaneel
opgemaakt. In Figuur 23 vindt je dit bedieningspaneel terug. Ook hier is op de printplaat aan zowel
de voor- als achterkant een koperlaag aanwezig. Met de schakelaars die in een zwarte DIP (Dual
in-line package) uitgevoerd zijn, is het mogelijk om de verschillende instellingen van de
zonnemodule te selecteren. Deze functionaliteiten zijn terug te vinden in Bijlage B:
Gebruikersbundel. Op dit bedieningspaneel is eveneens een microcontroller gemonteerd. Deze
microcontroller heeft geen functie, maar kan naar de toekomst toe gebruikt worden bij eventuele
uitbreiding van de zonnemodule. Naast de markering ‘D11’ zijn 3 LEDs terug te vinden. Deze witte
LEDs zijn verbonden met het zonnepaneel om een belasting op het zonnepaneel te kunnen
simuleren.
Figuur 23: Bedieningsprint zonnemodule
In Figuur 24 kan je het ontwerp van de stuurprint terugvinden. Deze PCB neemt de motorsturing
en de communicatie met de PLC voor zijn rekening. Dit ontwerp is geflankeerd door een foto van
de printplaat waar de elektronische componenten gemonteerd zijn. In Bijlage B:
Gebruikersbundel zijn deze ontwerpen samen met het elektronische schema terug te vinden. De
stuurprint bevat een transformator met meerdere wikkelingen. Via twee ‘buck-convertoren’
wordt de gelijkgerichte en afgevlakte spanning van de transformator naar een gepaste spanning
gebracht en gestabiliseerd. Voor de 5V spanning van de microcontroller is een ‘buck’- of ‘step-
down’ convertor gebruikt. Voor de elektrische kring die het vermogen naar de motoren verzorgt
is eveneens een ‘buck-convertor’ aanwezig. De gestabiliseerde uitgangsspanning van deze
omvormer bedraagt 15V.
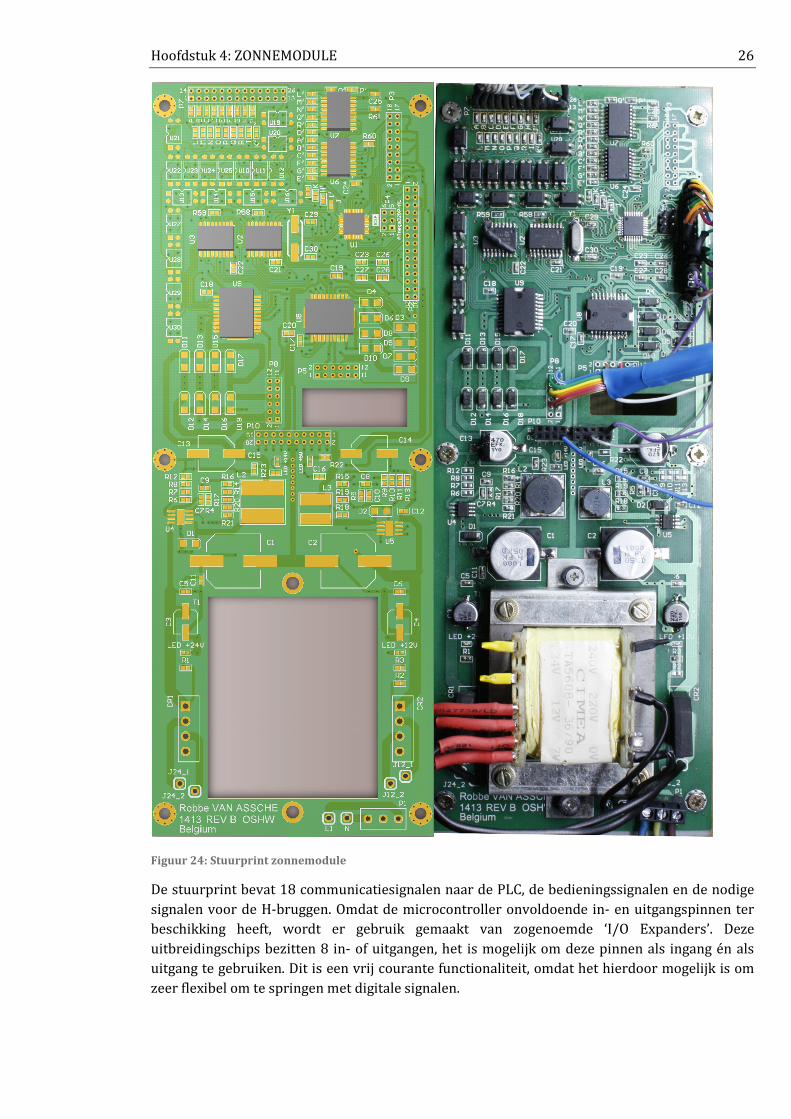
Hoofdstuk 4: ZONNEMODULE 26
Figuur 24: Stuurprint zonnemodule
De stuurprint bevat 18 communicatiesignalen naar de PLC, de bedieningssignalen en de nodige
signalen voor de H-bruggen. Omdat de microcontroller onvoldoende in- en uitgangspinnen ter
beschikking heeft, wordt er gebruik gemaakt van zogenoemde ‘I/O Expanders’. Deze
uitbreidingschips bezitten 8 in- of uitgangen, het is mogelijk om deze pinnen als ingang én als
uitgang te gebruiken. Dit is een vrij courante functionaliteit, omdat het hierdoor mogelijk is om
zeer flexibel om te springen met digitale signalen.
Hoofdstuk 4: ZONNEMODULE 27
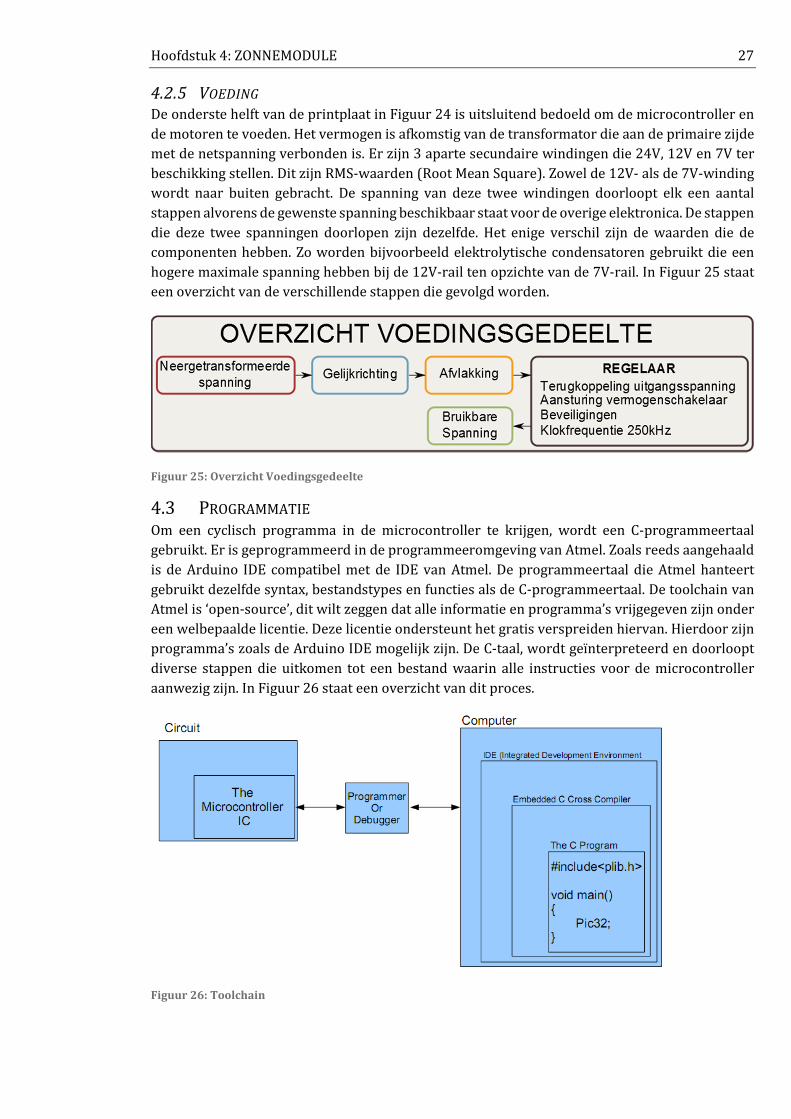
4.2.5 VOEDING De onderste helft van de printplaat in Figuur 24 is uitsluitend bedoeld om de microcontroller en
de motoren te voeden. Het vermogen is afkomstig van de transformator die aan de primaire zijde
met de netspanning verbonden is. Er zijn 3 aparte secundaire windingen die 24V, 12V en 7V ter
beschikking stellen. Dit zijn RMS-waarden (Root Mean Square). Zowel de 12V- als de 7V-winding
wordt naar buiten gebracht. De spanning van deze twee windingen doorloopt elk een aantal
stappen alvorens de gewenste spanning beschikbaar staat voor de overige elektronica. De stappen
die deze twee spanningen doorlopen zijn dezelfde. Het enige verschil zijn de waarden die de
componenten hebben. Zo worden bijvoorbeeld elektrolytische condensatoren gebruikt die een
hogere maximale spanning hebben bij de 12V-rail ten opzichte van de 7V-rail. In Figuur 25 staat
een overzicht van de verschillende stappen die gevolgd worden.
Figuur 25: Overzicht Voedingsgedeelte
4.3 PROGRAMMATIE Om een cyclisch programma in de microcontroller te krijgen, wordt een C-programmeertaal
gebruikt. Er is geprogrammeerd in de programmeeromgeving van Atmel. Zoals reeds aangehaald
is de Arduino IDE compatibel met de IDE van Atmel. De programmeertaal die Atmel hanteert
gebruikt dezelfde syntax, bestandstypes en functies als de C-programmeertaal. De toolchain van
Atmel is ‘open-source’, dit wilt zeggen dat alle informatie en programma’s vrijgegeven zijn onder
een welbepaalde licentie. Deze licentie ondersteunt het gratis verspreiden hiervan. Hierdoor zijn
programma’s zoals de Arduino IDE mogelijk zijn. De C-taal, wordt geïnterpreteerd en doorloopt
diverse stappen die uitkomen tot een bestand waarin alle instructies voor de microcontroller
aanwezig zijn. In Figuur 26 staat een overzicht van dit proces.
Figuur 26: Toolchain
Hoofdstuk 4: ZONNEMODULE 28
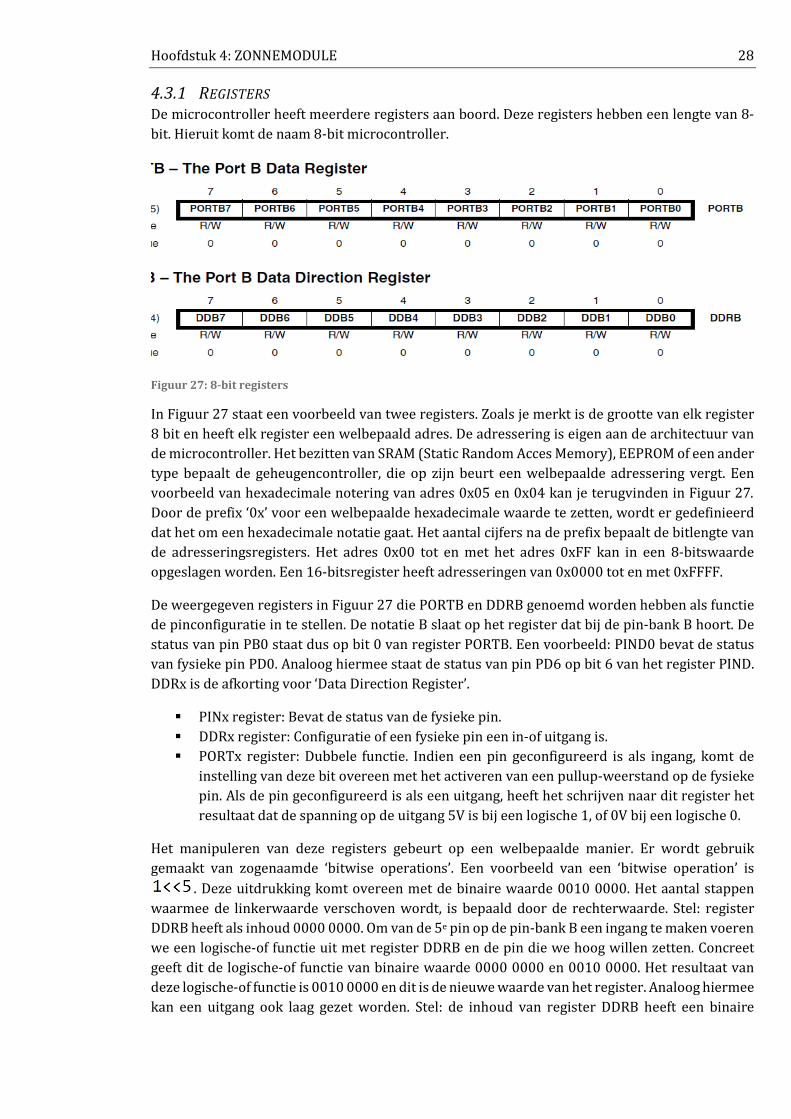
4.3.1 REGISTERS De microcontroller heeft meerdere registers aan boord. Deze registers hebben een lengte van 8-
bit. Hieruit komt de naam 8-bit microcontroller.
Figuur 27: 8-bit registers
In Figuur 27 staat een voorbeeld van twee registers. Zoals je merkt is de grootte van elk register
8 bit en heeft elk register een welbepaald adres. De adressering is eigen aan de architectuur van
de microcontroller. Het bezitten van SRAM (Static Random Acces Memory), EEPROM of een ander
type bepaalt de geheugencontroller, die op zijn beurt een welbepaalde adressering vergt. Een
voorbeeld van hexadecimale notering van adres 0x05 en 0x04 kan je terugvinden in Figuur 27.
Door de prefix ‘0x’ voor een welbepaalde hexadecimale waarde te zetten, wordt er gedefinieerd
dat het om een hexadecimale notatie gaat. Het aantal cijfers na de prefix bepaalt de bitlengte van
de adresseringsregisters. Het adres 0x00 tot en met het adres 0xFF kan in een 8-bitswaarde
opgeslagen worden. Een 16-bitsregister heeft adresseringen van 0x0000 tot en met 0xFFFF.
De weergegeven registers in Figuur 27 die PORTB en DDRB genoemd worden hebben als functie
de pinconfiguratie in te stellen. De notatie B slaat op het register dat bij de pin-bank B hoort. De
status van pin PB0 staat dus op bit 0 van register PORTB. Een voorbeeld: PIND0 bevat de status
van fysieke pin PD0. Analoog hiermee staat de status van pin PD6 op bit 6 van het register PIND.
DDRx is de afkorting voor ‘Data Direction Register’.
PINx register: Bevat de status van de fysieke pin.
DDRx register: Configuratie of een fysieke pin een in-of uitgang is.
PORTx register: Dubbele functie. Indien een pin geconfigureerd is als ingang, komt de
instelling van deze bit overeen met het activeren van een pullup-weerstand op de fysieke
pin. Als de pin geconfigureerd is als een uitgang, heeft het schrijven naar dit register het
resultaat dat de spanning op de uitgang 5V is bij een logische 1, of 0V bij een logische 0.
Het manipuleren van deze registers gebeurt op een welbepaalde manier. Er wordt gebruik
gemaakt van zogenaamde ‘bitwise operations’. Een voorbeeld van een ‘bitwise operation’ is
. Deze uitdrukking komt overeen met de binaire waarde 0010 0000. Het aantal stappen
waarmee de linkerwaarde verschoven wordt, is bepaald door de rechterwaarde. Stel: register
DDRB heeft als inhoud 0000 0000. Om van de 5e pin op de pin-bank B een ingang te maken voeren
we een logische-of functie uit met register DDRB en de pin die we hoog willen zetten. Concreet
geeft dit de logische-of functie van binaire waarde 0000 0000 en 0010 0000. Het resultaat van
deze logische-of functie is 0010 0000 en dit is de nieuwe waarde van het register. Analoog hiermee
kan een uitgang ook laag gezet worden. Stel: de inhoud van register DDRB heeft een binaire
Hoofdstuk 4: ZONNEMODULE 29
waarde van 1111 1111. Het inverse van 0010 0000 samen met de logische-en vergelijking met
het register heeft als resultaat het laag zetten van een welbepaalde bit. Concreet is dit de logische
en-functie van de binaire waarde 1101 1111 en 1111 1111. Het resultaat van deze bewerking is
dus 1101 1111.
Deze bewerkingen worden gebruikt om een specifieke bit in te stellen in een register, met de
behoud van de informatie die in de andere bits aanwezig is. De of-functie wordt met operand “|”
uitgevoerd, de inverse functie met de operand “~”, de logische-en functie wordt met “&”
beschreven en de exclusieve of-functie wordt met de operand “^” uitgevoerd.
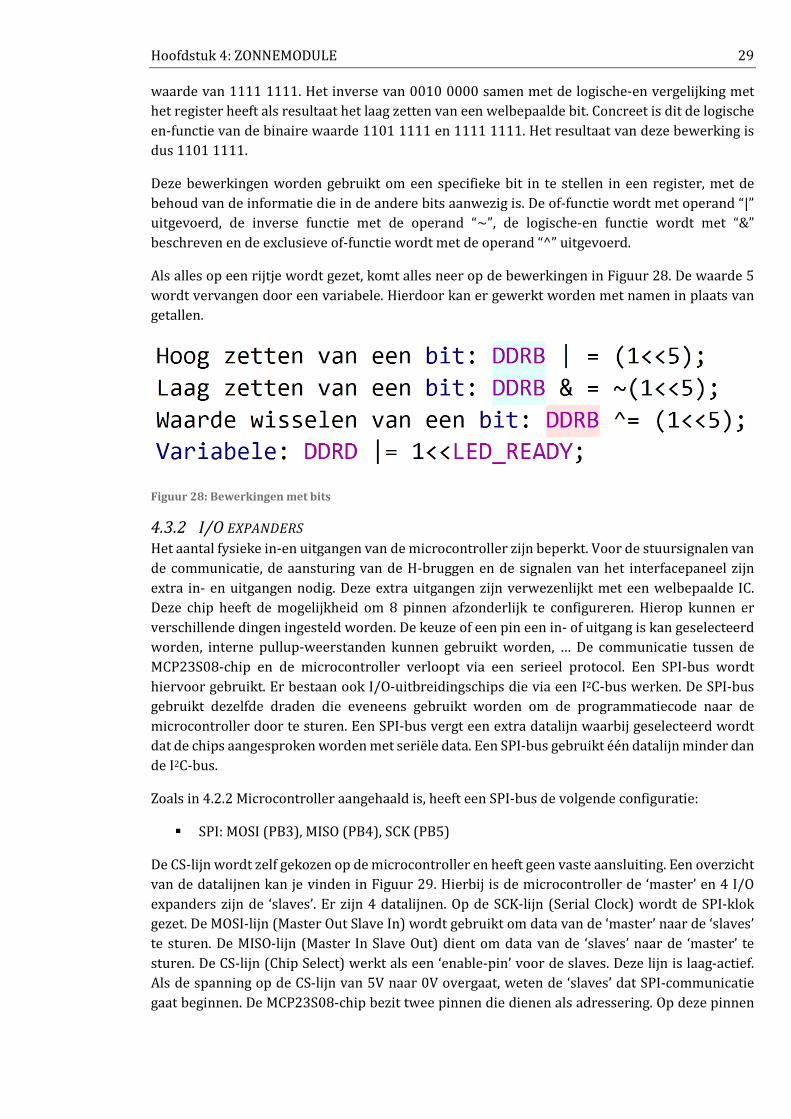
Als alles op een rijtje wordt gezet, komt alles neer op de bewerkingen in Figuur 28. De waarde 5
wordt vervangen door een variabele. Hierdoor kan er gewerkt worden met namen in plaats van
getallen.
Figuur 28: Bewerkingen met bits
4.3.2 I/O EXPANDERS Het aantal fysieke in-en uitgangen van de microcontroller zijn beperkt. Voor de stuursignalen van
de communicatie, de aansturing van de H-bruggen en de signalen van het interfacepaneel zijn
extra in- en uitgangen nodig. Deze extra uitgangen zijn verwezenlijkt met een welbepaalde IC.
Deze chip heeft de mogelijkheid om 8 pinnen afzonderlijk te configureren. Hierop kunnen er
verschillende dingen ingesteld worden. De keuze of een pin een in- of uitgang is kan geselecteerd
worden, interne pullup-weerstanden kunnen gebruikt worden, … De communicatie tussen de
MCP23S08-chip en de microcontroller verloopt via een serieel protocol. Een SPI-bus wordt
hiervoor gebruikt. Er bestaan ook I/O-uitbreidingschips die via een I2C-bus werken. De SPI-bus
gebruikt dezelfde draden die eveneens gebruikt worden om de programmatiecode naar de
microcontroller door te sturen. Een SPI-bus vergt een extra datalijn waarbij geselecteerd wordt
dat de chips aangesproken worden met seriële data. Een SPI-bus gebruikt één datalijn minder dan
de I2C-bus.
Zoals in 4.2.2 Microcontroller aangehaald is, heeft een SPI-bus de volgende configuratie:
SPI: MOSI (PB3), MISO (PB4), SCK (PB5)
De CS-lijn wordt zelf gekozen op de microcontroller en heeft geen vaste aansluiting. Een overzicht
van de datalijnen kan je vinden in Figuur 29. Hierbij is de microcontroller de ‘master’ en 4 I/O
expanders zijn de ‘slaves’. Er zijn 4 datalijnen. Op de SCK-lijn (Serial Clock) wordt de SPI-klok
gezet. De MOSI-lijn (Master Out Slave In) wordt gebruikt om data van de ‘master’ naar de ‘slaves’
te sturen. De MISO-lijn (Master In Slave Out) dient om data van de ‘slaves’ naar de ‘master’ te
sturen. De CS-lijn (Chip Select) werkt als een ‘enable-pin’ voor de slaves. Deze lijn is laag-actief.
Als de spanning op de CS-lijn van 5V naar 0V overgaat, weten de ‘slaves’ dat SPI-communicatie
gaat beginnen. De MCP23S08-chip bezit twee pinnen die dienen als adressering. Op deze pinnen
Hoofdstuk 4: ZONNEMODULE 30
komt 0V overeen met een logische 0 en 5V overeen met een logische 1. Hiermee is het mogelijk
om 1 van de 4 adressen in te stellen.
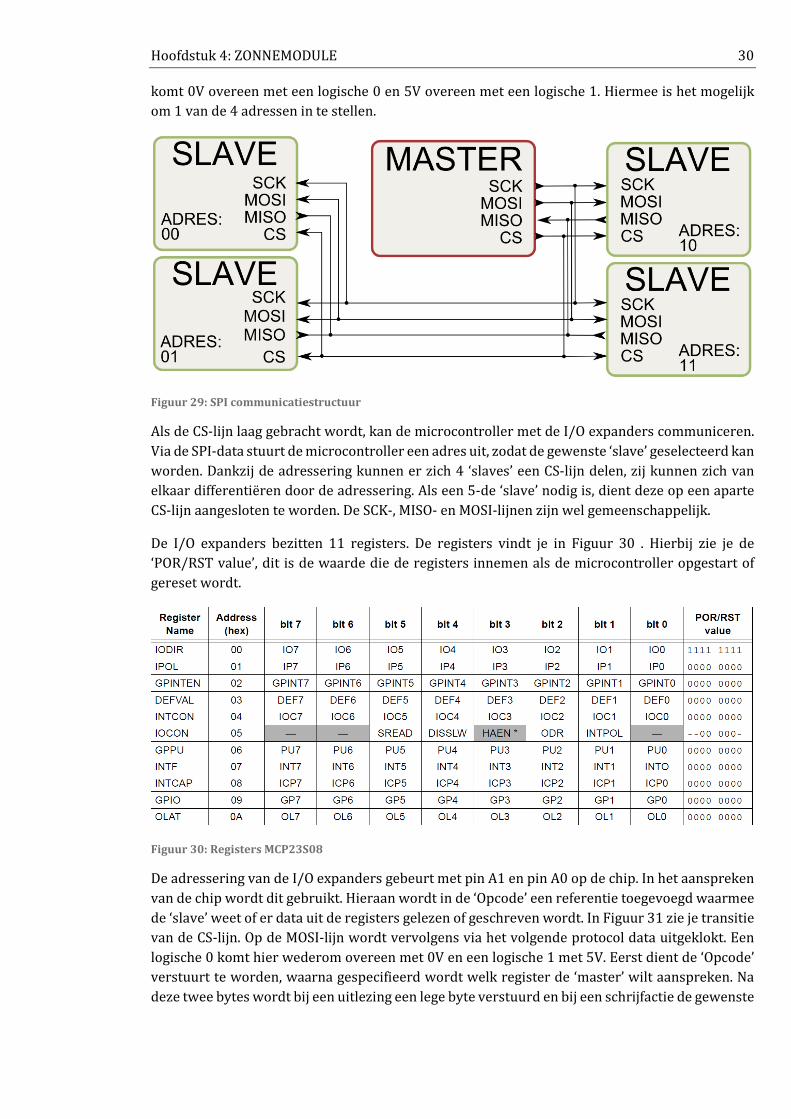
Figuur 29: SPI communicatiestructuur
Als de CS-lijn laag gebracht wordt, kan de microcontroller met de I/O expanders communiceren.
Via de SPI-data stuurt de microcontroller een adres uit, zodat de gewenste ‘slave’ geselecteerd kan
worden. Dankzij de adressering kunnen er zich 4 ‘slaves’ een CS-lijn delen, zij kunnen zich van
elkaar differentiëren door de adressering. Als een 5-de ‘slave’ nodig is, dient deze op een aparte
CS-lijn aangesloten te worden. De SCK-, MISO- en MOSI-lijnen zijn wel gemeenschappelijk.
De I/O expanders bezitten 11 registers. De registers vindt je in Figuur 30 . Hierbij zie je de
‘POR/RST value’, dit is de waarde die de registers innemen als de microcontroller opgestart of
gereset wordt.
Figuur 30: Registers MCP23S08
De adressering van de I/O expanders gebeurt met pin A1 en pin A0 op de chip. In het aanspreken
van de chip wordt dit gebruikt. Hieraan wordt in de ‘Opcode’ een referentie toegevoegd waarmee
de ‘slave’ weet of er data uit de registers gelezen of geschreven wordt. In Figuur 31 zie je transitie
van de CS-lijn. Op de MOSI-lijn wordt vervolgens via het volgende protocol data uitgeklokt. Een
logische 0 komt hier wederom overeen met 0V en een logische 1 met 5V. Eerst dient de ‘Opcode’
verstuurt te worden, waarna gespecifieerd wordt welk register de ‘master’ wilt aanspreken. Na
deze twee bytes wordt bij een uitlezing een lege byte verstuurd en bij een schrijfactie de gewenste
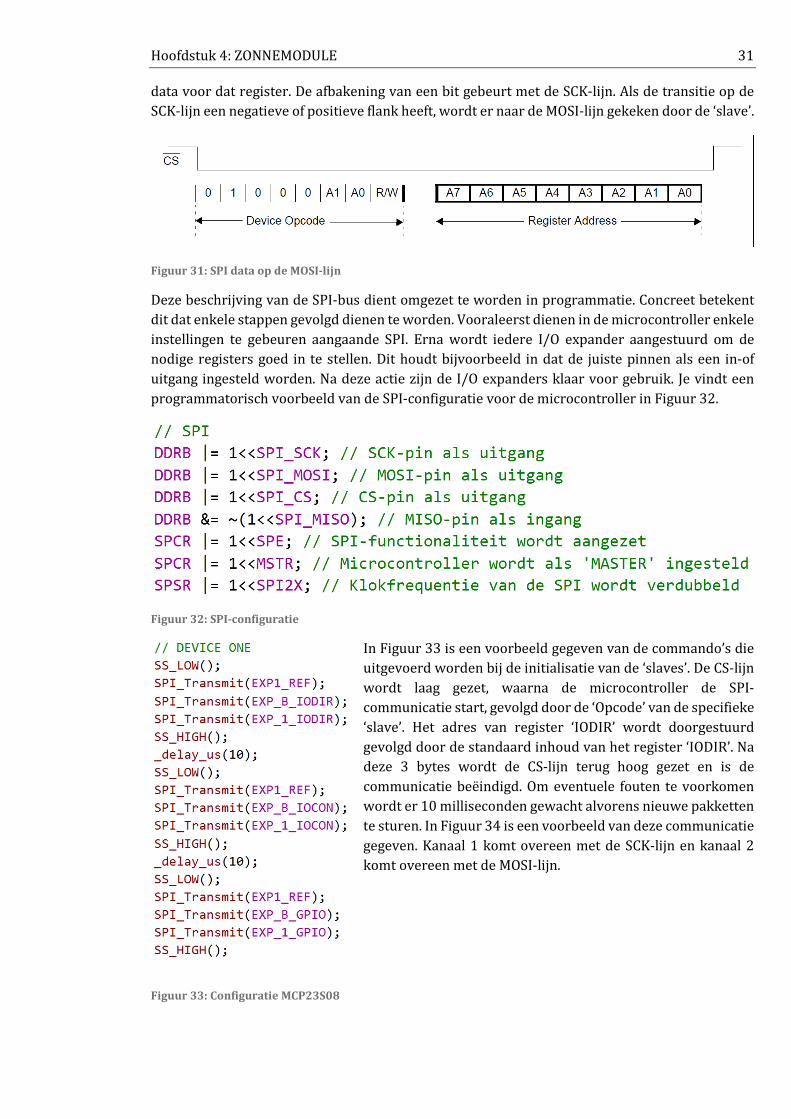
Hoofdstuk 4: ZONNEMODULE 31
data voor dat register. De afbakening van een bit gebeurt met de SCK-lijn. Als de transitie op de
SCK-lijn een negatieve of positieve flank heeft, wordt er naar de MOSI-lijn gekeken door de ‘slave’.
Figuur 31: SPI data op de MOSI-lijn
Deze beschrijving van de SPI-bus dient omgezet te worden in programmatie. Concreet betekent
dit dat enkele stappen gevolgd dienen te worden. Vooraleerst dienen in de microcontroller enkele
instellingen te gebeuren aangaande SPI. Erna wordt iedere I/O expander aangestuurd om de
nodige registers goed in te stellen. Dit houdt bijvoorbeeld in dat de juiste pinnen als een in-of
uitgang ingesteld worden. Na deze actie zijn de I/O expanders klaar voor gebruik. Je vindt een
programmatorisch voorbeeld van de SPI-configuratie voor de microcontroller in Figuur 32.
Figuur 32: SPI-configuratie
In Figuur 33 is een voorbeeld gegeven van de commando’s die
uitgevoerd worden bij de initialisatie van de ‘slaves’. De CS-lijn
wordt laag gezet, waarna de microcontroller de SPI-
communicatie start, gevolgd door de ‘Opcode’ van de specifieke
‘slave’. Het adres van register ‘IODIR’ wordt doorgestuurd
gevolgd door de standaard inhoud van het register ‘IODIR’. Na
deze 3 bytes wordt de CS-lijn terug hoog gezet en is de
communicatie beëindigd. Om eventuele fouten te voorkomen
wordt er 10 milliseconden gewacht alvorens nieuwe pakketten
te sturen. In Figuur 34 is een voorbeeld van deze communicatie
gegeven. Kanaal 1 komt overeen met de SCK-lijn en kanaal 2
komt overeen met de MOSI-lijn.
Figuur 33: Configuratie MCP23S08
Hoofdstuk 4: ZONNEMODULE 32
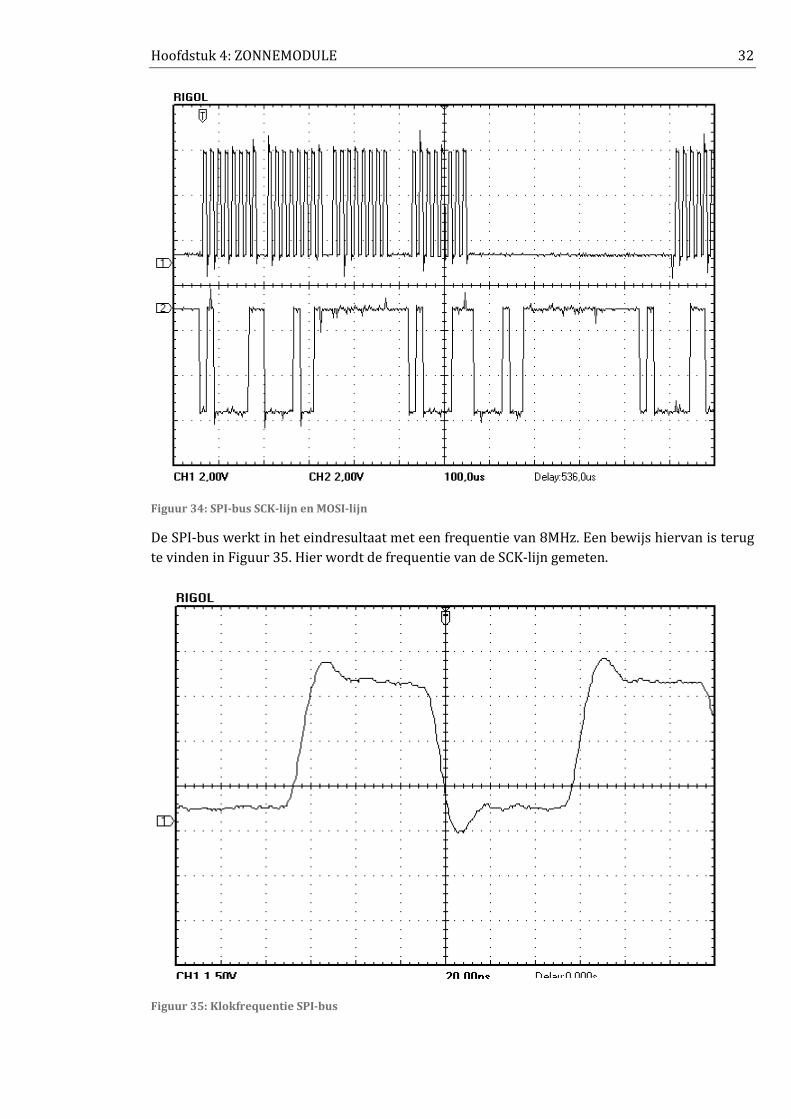
Figuur 34: SPI-bus SCK-lijn en MOSI-lijn
De SPI-bus werkt in het eindresultaat met een frequentie van 8MHz. Een bewijs hiervan is terug
te vinden in Figuur 35. Hier wordt de frequentie van de SCK-lijn gemeten.
Figuur 35: Klokfrequentie SPI-bus
Hoofdstuk 4: ZONNEMODULE 33
4.3.3 AANSTURING STAPPENMOTOREN De stappenmotoren worden via de L298P chip aangestuurd. In deze chips zitten twee H-
brugschakelingen in.
Om de tijd te bepalen die gewacht dient te worden tussen twee stappen, wordt er gebruik gemaakt
van timers. De timers hebben in de microcontroller specifieke registers om ze in te stellen. Zo kan
er gespecifieerd worden aan welke frequentie deze timers werken. Dit kan ingesteld worden door
middel van ‘clock dividers’. In dit project is de klokfrequentie van het oscillatorkristal de basis
voor de timers. De basisklokfrequentie wordt met 1024 gedeeld. Deze verlaagde kloksnelheid
dient als klokfrequentie voor de timers.
De wachttijd tussen het schakelen van de stappen is de eerste 10 stappen variabel. De eerste stap
duurt 16ms. Dit loopt steeds op, tot een staptijd wordt bereikt op de 11e stap van 2ms. Er dient
wel bij vermeld te worden dat de motor in halve-stapmodus werkt, ook gekend als 8-
stapssequentie.
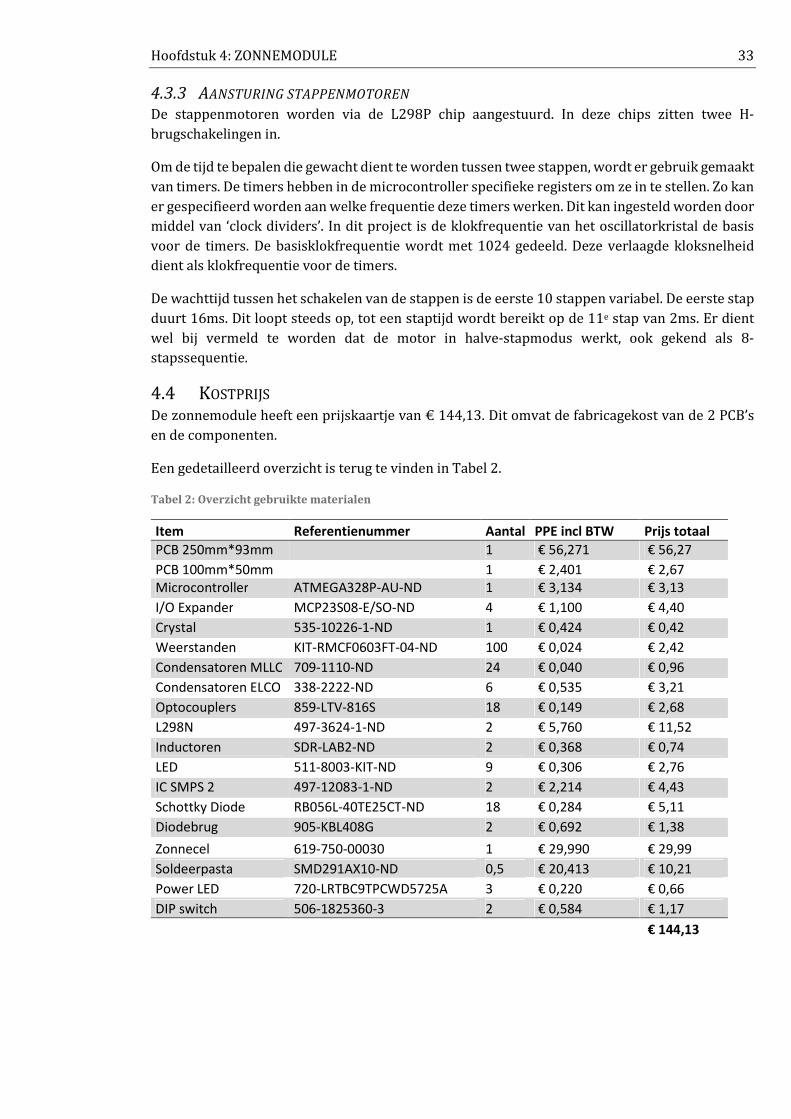
4.4 KOSTPRIJS De zonnemodule heeft een prijskaartje van € 144,13. Dit omvat de fabricagekost van de 2 PCB’s
en de componenten.
Een gedetailleerd overzicht is terug te vinden in Tabel 2.
Tabel 2: Overzicht gebruikte materialen
Item Referentienummer Aantal PPE incl BTW Prijs totaal
PCB 250mm*93mm 1 € 56,271 € 56,27
PCB 100mm*50mm 1 € 2,401 € 2,67
Microcontroller ATMEGA328P-AU-ND 1 € 3,134 € 3,13
I/O Expander MCP23S08-E/SO-ND 4 € 1,100 € 4,40
Crystal 535-10226-1-ND 1 € 0,424 € 0,42
Weerstanden KIT-RMCF0603FT-04-ND 100 € 0,024 € 2,42
Condensatoren MLLC 709-1110-ND 24 € 0,040 € 0,96
Condensatoren ELCO 338-2222-ND 6 € 0,535 € 3,21
Optocouplers 859-LTV-816S 18 € 0,149 € 2,68
L298N 497-3624-1-ND 2 € 5,760 € 11,52
Inductoren SDR-LAB2-ND 2 € 0,368 € 0,74
LED 511-8003-KIT-ND 9 € 0,306 € 2,76
IC SMPS 2 497-12083-1-ND 2 € 2,214 € 4,43
Schottky Diode RB056L-40TE25CT-ND 18 € 0,284 € 5,11
Diodebrug 905-KBL408G 2 € 0,692 € 1,38
Zonnecel 619-750-00030 1 € 29,990 € 29,99
Soldeerpasta SMD291AX10-ND 0,5 € 20,413 € 10,21
Power LED 720-LRTBC9TPCWD5725A 3 € 0,220 € 0,66
DIP switch 506-1825360-3 2 € 0,584 € 1,17
€ 144,13
Hoofdstuk 4: ZONNEMODULE 34
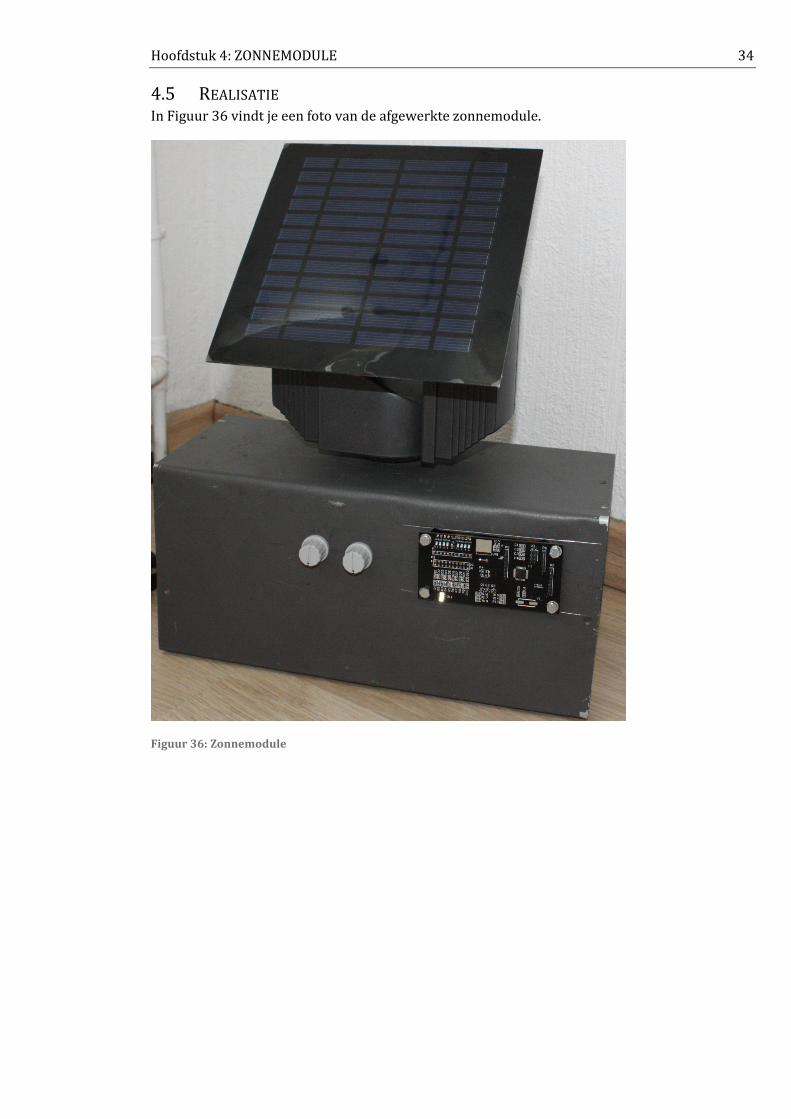
4.5 REALISATIE In Figuur 36 vindt je een foto van de afgewerkte zonnemodule.
Figuur 36: Zonnemodule
35
HOOFDSTUK 5: PLC & INTERFACE
5.1 ALGEMEENHEDEN De opleiding elektromechanica optie proces automatisering is gericht op de industrie. In deze
industrie, hetzij voeding, chemie, petrochemie of farmaceutische industrie, worden welbepaalde
elektromagnetische componenten gebruikt in de automatisering van het productieprocedé. Deze
automatisering wordt voornamelijk verwezenlijkt door diverse PLC’s die met elkaar verbonden
zijn in een welbepaald netwerk. Om de rekeneenheid, het aan te sturen systeem en de bediening
op verschillende locaties te kunnen plaatsen, wordt er gebruik gemaakt van een
datacommunicatie waarbij de rekeneenheid, het aan te sturen systeem en de bediening een
welbepaalde afstand van elkaar geplaatst kunnen worden. De rekeneenheid is in dit geval de PLC,
het systeem is de zonnemodule en de bediening wordt verzorgd door de HMI. In een werkelijke
situatie zijn meerdere systemen met lokale bediening, een controleruimte waarbij het hele proces
geobserveerd en aangestuurd wordt en een ruimte waar de PLC’s gehuisvest zijn geen
uitzondering. In werkelijke situaties wordt er ook gebruik gemaakt van stuurkasten die in de
omgeving van het aangestuurde systeem gepositioneerd zijn. Om net deze netwerkstructuur te
simuleren is er gebruik gemaakt van een centrale eenheid met decentrale periferie. Dit alles is in
een stuurkast gemonteerd.
5.2 NETWERK Bij de keuze van het systeem dient er rekening gehouden te worden met de compatibiliteit tussen
de verschillende componenten. Hierbij dient zowel het communicatiemiddel als de software
waarin de programmatie gebeurd compatibel te zijn. Er is gekozen voor een ‘S7-1200’-PLC. De
decentrale periferie wordt verzorgd door een ‘ET200S’-module waar meerdere
uitbreidingsmodules aan gekoppeld zijn. De HMI is een ‘KTP600’-model, die een 6” scherm bezit.
Elk element heeft een Profinet-interface, waarmee een netwerk gemaakt kan worden.
Een voorloper van Profinet is Profibus. Profibus is een tweedraads-netwerk waarbij RS-485 als
basis gebruikt wordt. RS485 is een differentiële databus, waarbij de signalen naar elkaar
gerefereerd zijn. Dit is een voordeel bij installaties waarbij er storing van kabels die vermogen
transporteren zich op de datalijnen overzet. Als er een referentie naar de massa gebruikt wordt,
veranderd bij een seriële datalijn de potentiaal, wat een laag signaal een hoog signaal kan
Samenvatting 36
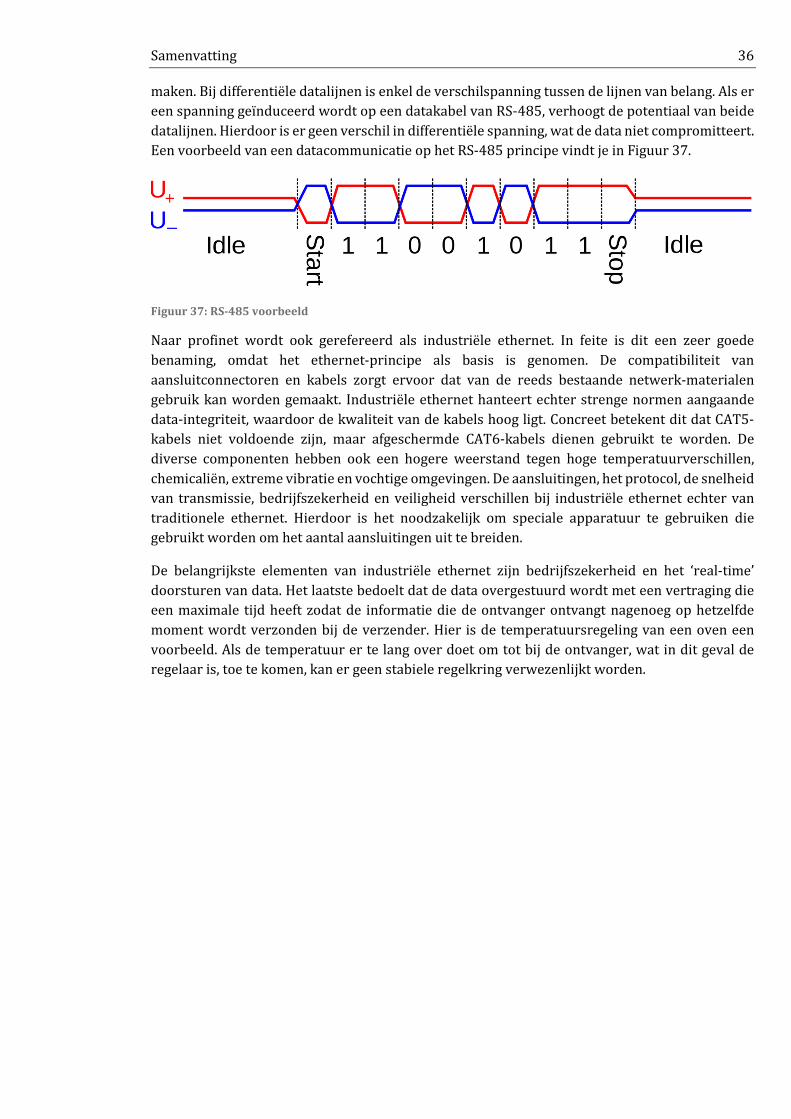
maken. Bij differentiële datalijnen is enkel de verschilspanning tussen de lijnen van belang. Als er
een spanning geïnduceerd wordt op een datakabel van RS-485, verhoogt de potentiaal van beide
datalijnen. Hierdoor is er geen verschil in differentiële spanning, wat de data niet compromitteert.
Een voorbeeld van een datacommunicatie op het RS-485 principe vindt je in Figuur 37.
Figuur 37: RS-485 voorbeeld
Naar profinet wordt ook gerefereerd als industriële ethernet. In feite is dit een zeer goede
benaming, omdat het ethernet-principe als basis is genomen. De compatibiliteit van
aansluitconnectoren en kabels zorgt ervoor dat van de reeds bestaande netwerk-materialen
gebruik kan worden gemaakt. Industriële ethernet hanteert echter strenge normen aangaande
data-integriteit, waardoor de kwaliteit van de kabels hoog ligt. Concreet betekent dit dat CAT5-
kabels niet voldoende zijn, maar afgeschermde CAT6-kabels dienen gebruikt te worden. De
diverse componenten hebben ook een hogere weerstand tegen hoge temperatuurverschillen,
chemicaliën, extreme vibratie en vochtige omgevingen. De aansluitingen, het protocol, de snelheid
van transmissie, bedrijfszekerheid en veiligheid verschillen bij industriële ethernet echter van
traditionele ethernet. Hierdoor is het noodzakelijk om speciale apparatuur te gebruiken die
gebruikt worden om het aantal aansluitingen uit te breiden.
De belangrijkste elementen van industriële ethernet zijn bedrijfszekerheid en het ‘real-time’
doorsturen van data. Het laatste bedoelt dat de data overgestuurd wordt met een vertraging die
een maximale tijd heeft zodat de informatie die de ontvanger ontvangt nagenoeg op hetzelfde
moment wordt verzonden bij de verzender. Hier is de temperatuursregeling van een oven een
voorbeeld. Als de temperatuur er te lang over doet om tot bij de ontvanger, wat in dit geval de
regelaar is, toe te komen, kan er geen stabiele regelkring verwezenlijkt worden.

Samenvatting 37
5.3 PLC Het volledige zonvolgsysteem is opgebouwd rond de ‘S7-1200’-PLC. In Figuur 38 vindt je hiervan
een foto. De PLC heeft digitale in-en uitgangsbanken en een analoge uitbreidingsmodule. In dit
project worden deze in-en uitgangen niet gebruikt, omdat de decentrale opstelling gesimuleerd
is. Hierdoor verloopt alle aansturing via het Profinet-netwerk. De zonnemodule wordt
aangestuurd via de in- en uitgangen die aanwezig zijn op de ET200S-periferie. Hierbij zijn diverse
modules aangekoppeld die ofwel ingangen of uitgangen bezitten. Het ET200S-geheel bestaat uit
deze uitbreidingsmodules, een voedingsmodule en een interfacemodule. Dit alles is ingebouwd in
de stuurkast.
Figuur 38: 'S7-1200'-PLC
Figuur 39: ET200S decentrale periferie
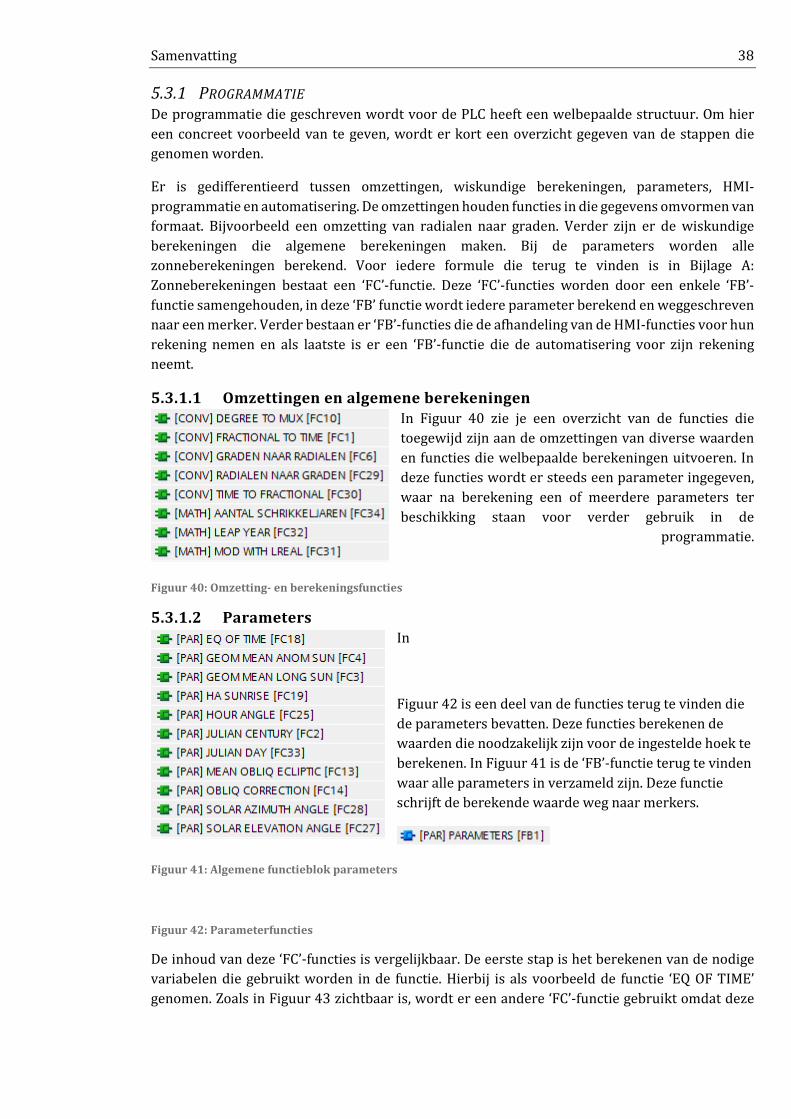
Samenvatting 38
5.3.1 PROGRAMMATIE De programmatie die geschreven wordt voor de PLC heeft een welbepaalde structuur. Om hier
een concreet voorbeeld van te geven, wordt er kort een overzicht gegeven van de stappen die
genomen worden.
Er is gedifferentieerd tussen omzettingen, wiskundige berekeningen, parameters, HMI-
programmatie en automatisering. De omzettingen houden functies in die gegevens omvormen van
formaat. Bijvoorbeeld een omzetting van radialen naar graden. Verder zijn er de wiskundige
berekeningen die algemene berekeningen maken. Bij de parameters worden alle
zonneberekeningen berekend. Voor iedere formule die terug te vinden is in Bijlage A:
Zonneberekeningen bestaat een ‘FC’-functie. Deze ‘FC’-functies worden door een enkele ‘FB’-
functie samengehouden, in deze ‘FB’ functie wordt iedere parameter berekend en weggeschreven
naar een merker. Verder bestaan er ‘FB’-functies die de afhandeling van de HMI-functies voor hun
rekening nemen en als laatste is er een ‘FB’-functie die de automatisering voor zijn rekening
neemt.
5.3.1.1 Omzettingen en algemene berekeningen
In Figuur 40 zie je een overzicht van de functies die
toegewijd zijn aan de omzettingen van diverse waarden
en functies die welbepaalde berekeningen uitvoeren. In
deze functies wordt er steeds een parameter ingegeven,
waar na berekening een of meerdere parameters ter
beschikking staan voor verder gebruik in de
programmatie.
Figuur 40: Omzetting- en berekeningsfuncties
5.3.1.2 Parameters
In
Figuur 42 is een deel van de functies terug te vinden die
de parameters bevatten. Deze functies berekenen de
waarden die noodzakelijk zijn voor de ingestelde hoek te
berekenen. In Figuur 41 is de ‘FB’-functie terug te vinden
waar alle parameters in verzameld zijn. Deze functie
schrijft de berekende waarde weg naar merkers.
Figuur 41: Algemene functieblok parameters
Figuur 42: Parameterfuncties
De inhoud van deze ‘FC’-functies is vergelijkbaar. De eerste stap is het berekenen van de nodige
variabelen die gebruikt worden in de functie. Hierbij is als voorbeeld de functie ‘EQ OF TIME’
genomen. Zoals in Figuur 43 zichtbaar is, wordt er een andere ‘FC’-functie gebruikt omdat deze
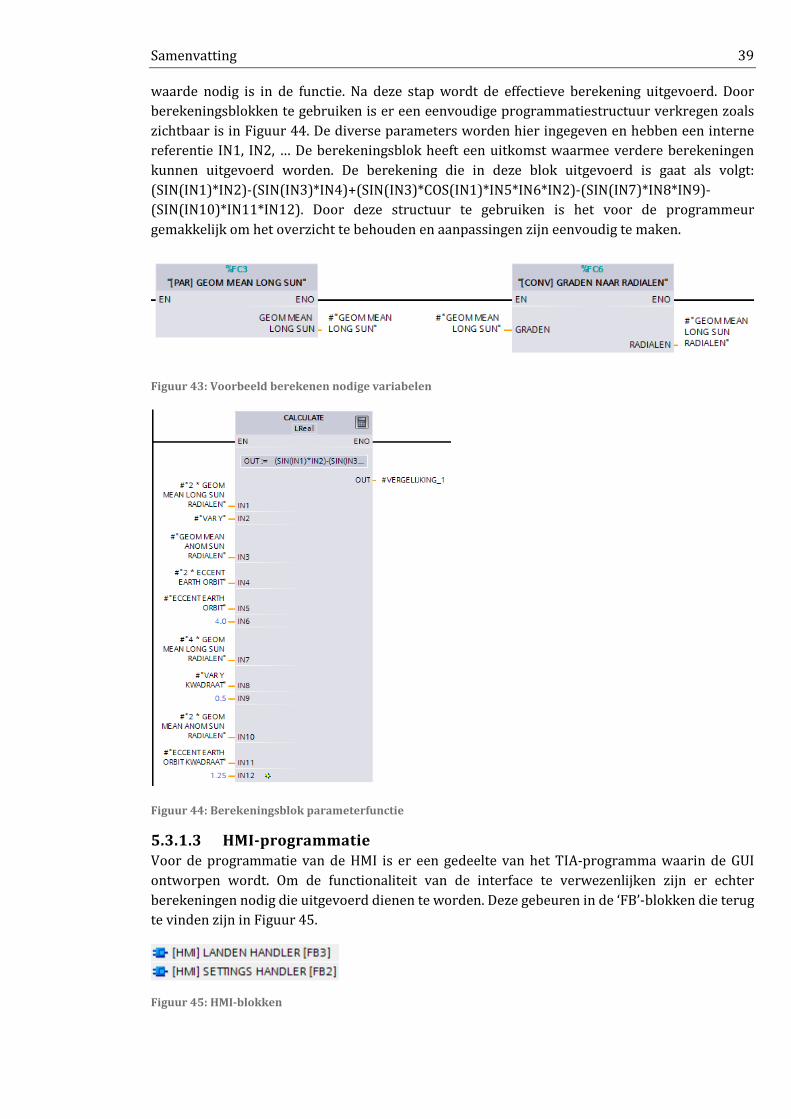
Samenvatting 39
waarde nodig is in de functie. Na deze stap wordt de effectieve berekening uitgevoerd. Door
berekeningsblokken te gebruiken is er een eenvoudige programmatiestructuur verkregen zoals
zichtbaar is in Figuur 44. De diverse parameters worden hier ingegeven en hebben een interne
referentie IN1, IN2, … De berekeningsblok heeft een uitkomst waarmee verdere berekeningen
kunnen uitgevoerd worden. De berekening die in deze blok uitgevoerd is gaat als volgt:
(SIN(IN1)*IN2)-(SIN(IN3)*IN4)+(SIN(IN3)*COS(IN1)*IN5*IN6*IN2)-(SIN(IN7)*IN8*IN9)-
(SIN(IN10)*IN11*IN12). Door deze structuur te gebruiken is het voor de programmeur
gemakkelijk om het overzicht te behouden en aanpassingen zijn eenvoudig te maken.
Figuur 43: Voorbeeld berekenen nodige variabelen
Figuur 44: Berekeningsblok parameterfunctie
5.3.1.3 HMI-programmatie
Voor de programmatie van de HMI is er een gedeelte van het TIA-programma waarin de GUI
ontworpen wordt. Om de functionaliteit van de interface te verwezenlijken zijn er echter
berekeningen nodig die uitgevoerd dienen te worden. Deze gebeuren in de ‘FB’-blokken die terug
te vinden zijn in Figuur 45.
Figuur 45: HMI-blokken
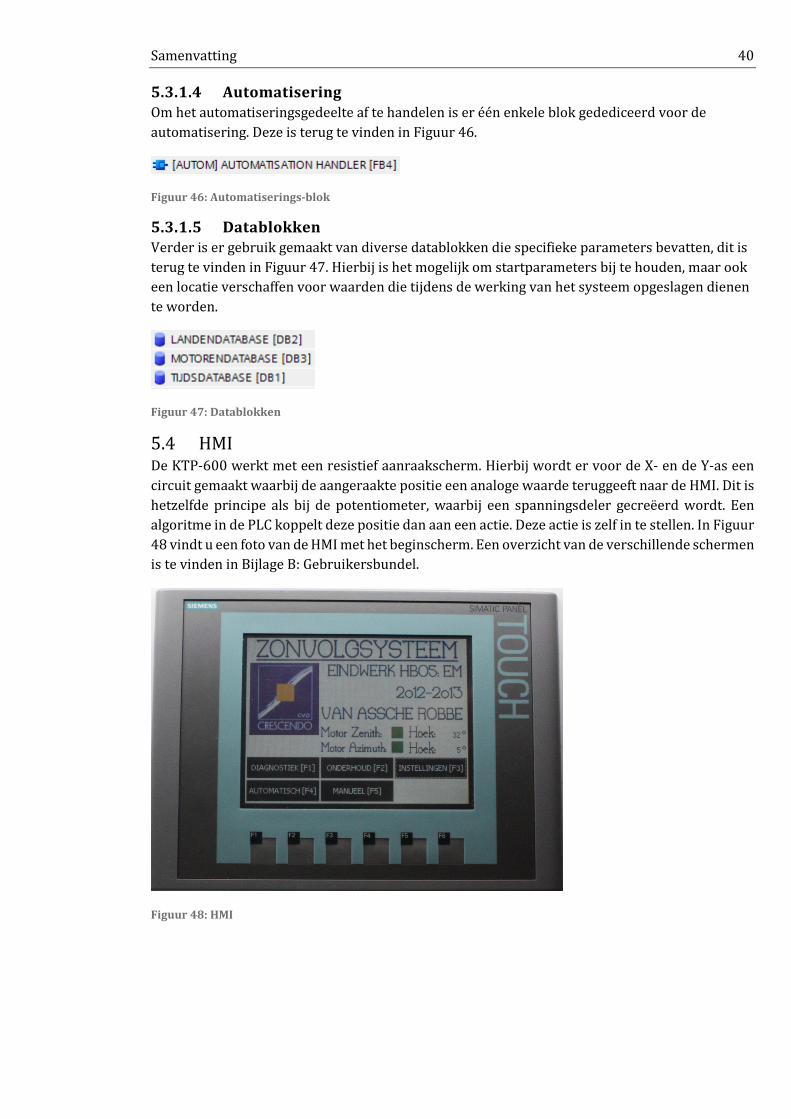
Samenvatting 40
5.3.1.4 Automatisering
Om het automatiseringsgedeelte af te handelen is er één enkele blok gedediceerd voor de
automatisering. Deze is terug te vinden in Figuur 46.
Figuur 46: Automatiserings-blok
5.3.1.5 Datablokken
Verder is er gebruik gemaakt van diverse datablokken die specifieke parameters bevatten, dit is
terug te vinden in Figuur 47. Hierbij is het mogelijk om startparameters bij te houden, maar ook
een locatie verschaffen voor waarden die tijdens de werking van het systeem opgeslagen dienen
te worden.
Figuur 47: Datablokken
5.4 HMI De KTP-600 werkt met een resistief aanraakscherm. Hierbij wordt er voor de X- en de Y-as een
circuit gemaakt waarbij de aangeraakte positie een analoge waarde teruggeeft naar de HMI. Dit is
hetzelfde principe als bij de potentiometer, waarbij een spanningsdeler gecreëerd wordt. Een
algoritme in de PLC koppelt deze positie dan aan een actie. Deze actie is zelf in te stellen. In Figuur
48 vindt u een foto van de HMI met het beginscherm. Een overzicht van de verschillende schermen
is te vinden in Bijlage B: Gebruikersbundel.
Figuur 48: HMI
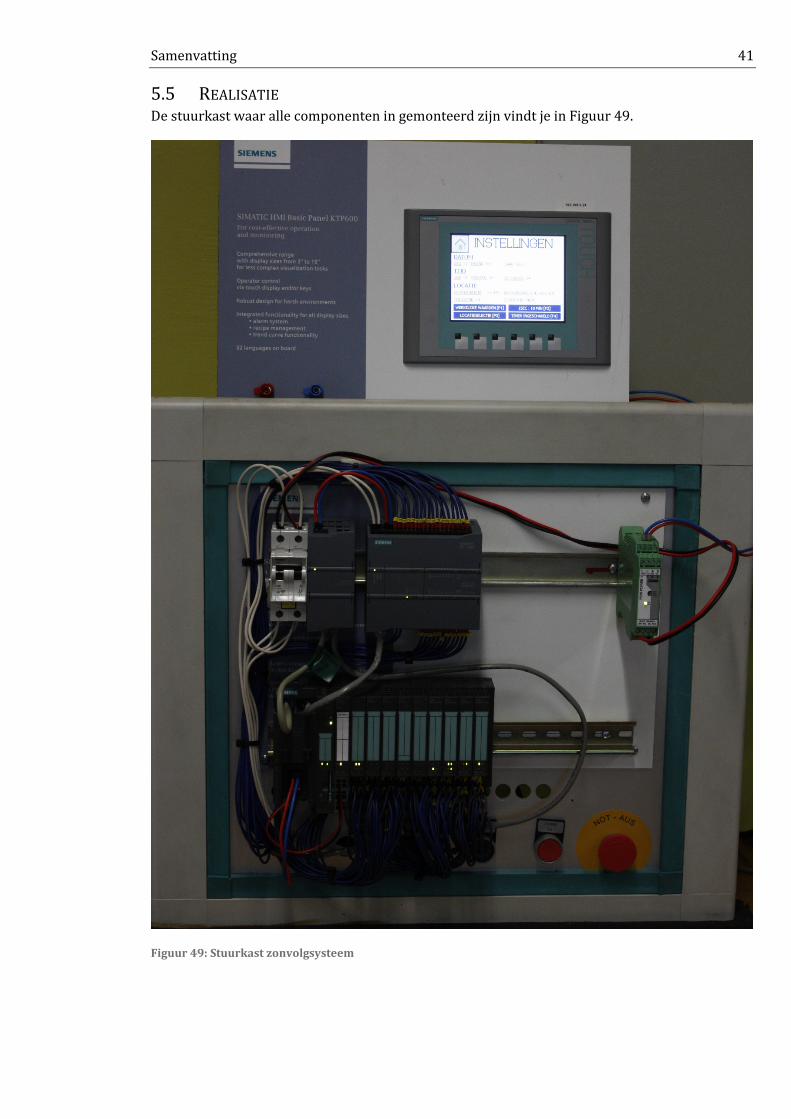
Samenvatting 41
5.5 REALISATIE De stuurkast waar alle componenten in gemonteerd zijn vindt je in Figuur 49.
Figuur 49: Stuurkast zonvolgsysteem
Samenvatting 42
BESLUIT Het is mogelijk om de zon te volgen met een combinatie van de PLC en stappenmotoren. Het
project ter afsluiting van mijn opleiding heeft in totale tijdspanne 6 maanden in beslag genomen.
Hierbij was planning een zeer groot aspect. Het proces dat nodig was om tot het eindresultaat te
komen is uiterst interessant gebleken, waarbij mijn persoonlijke technische kennis een serieuze
‘boost’ gekregen heeft. De voorbije 3 jaar heeft perspectief gebracht en op technisch en
academisch vlak deuren geopend.
BIBLIOGRAFIE http://en.wikipedia.org/wiki/Coordinate_system
http://en.wikipedia.org/wiki/Spherical_coordinate_system
http://nl.wikipedia.org/wiki/Foton
http://nl.wikipedia.org/wiki/Band_gap
http://en.wikipedia.org/wiki/RS-485
http://www.nrel.gov/
http://pranjalchaubey.wordpress.com/2010/11/25/tool-chain/
Cisco - Industrial Ethernet: A Control Engineer’s Guide
Solar Energy Engineering - Processes and Systems
Malestrom
ISBN 978-0-12-374501-9 2009
Physics of Solar Energy
C. Julian Chen
ISBN 978-0-470-64780-6 2011
ALGEMENE REFERENTIES
Siemens - http://www.siemens.com/entry/cc/en/
Altium Designer - http://www.altium.com/
Atmel - http://www.atmel.com/
National Oceanic and Atmospheric Administration - http://www.noaa.gov/
Inkscape - http://inkscape.org/
Kleurpalletten - http://www.colourlovers.com/
LIJST VAN GRAFIEKEN/ TABELLEN/ FIGUREN Grafiek 1: Zonneconstante van 1366,1W/m2 ........................................................................................................ 8
Grafiek 2: Insolatie bij volledige zonnevolger ..................................................................................................... 17
Grafiek 3: Insolatie bij azimut-volger ...................................................................................................................... 18
Tabel 1: Stapsequenties bipolaire stappenmotoren ......................................................................................... 24
Tabel 2: Overzicht gebruikte materialen ............................................................................................................... 33
Figuur 1: Topologie netwerk ........................................................................................................................................ 2
Figuur 2: Inhoud van de zonnemodule .................................................................................................................... 3
Figuur 3: Sequentie automatische modus ............................................................................................................... 4
Figuur 4: Principe van een potentiometer .............................................................................................................. 5
Figuur 5: Resolutie van een meetwaarde ................................................................................................................ 5
Figuur 6: Geografische coördinatenstelsel ............................................................................................................. 7
Samenvatting 43
Figuur 7: Verschillende energieopbouw tussen geleider, halfgeleider en isolator .............................. 10
Figuur 8: Bandkloven bij enkele halfgeleiders .................................................................................................... 10
Figuur 9: Overzicht van de verschillende zonnecellen .................................................................................... 11
Figuur 10: Opbouw van verschillende zonnecellen .......................................................................................... 11
Figuur 11: Verschil tussen mono- en polykristallijne modules ................................................................... 12
Figuur 12: Technologische evolutie van de zonnecel ....................................................................................... 13
Figuur 13: Cosinusverliezen ....................................................................................................................................... 14
Figuur 14: Zonneparameters ...................................................................................................................................... 15
Figuur 15: Jaarlijkse variatie van declinatie ......................................................................................................... 15
Figuur 16: Zenit ϕ van de zon .................................................................................................................................... 16
Figuur 17: Zonvolgsystemen ...................................................................................................................................... 17
Figuur 18: Communicatielijnen ................................................................................................................................. 20
Figuur 19: Opto coupler ingang ................................................................................................................................. 21
Figuur 20: Opto coupler uitgang ............................................................................................................................... 21
Figuur 21: ATmega328p-AU pinout ........................................................................................................................ 23
Figuur 22: Principe dubbele H-brug ........................................................................................................................ 24
Figuur 23: Bedieningsprint zonnemodule ............................................................................................................ 25
Figuur 24: Stuurprint zonnemodule ........................................................................................................................ 26
Figuur 25: Overzicht Voedingsgedeelte ................................................................................................................. 27
Figuur 26: Toolchain ...................................................................................................................................................... 27
Figuur 27: 8-bit registers ............................................................................................................................................. 28
Figuur 28: Bewerkingen met bits ............................................................................................................................. 29
Figuur 29: SPI communicatiestructuur .................................................................................................................. 30
Figuur 30: Registers MCP23S08 ................................................................................................................................ 30
Figuur 31: SPI data op de MOSI-lijn ......................................................................................................................... 31
Figuur 32: SPI-configuratie ......................................................................................................................................... 31
Figuur 33: Configuratie MCP23S08 ......................................................................................................................... 31
Figuur 34: SPI-bus SCK-lijn en MOSI-lijn ............................................................................................................... 32
Figuur 35: Klokfrequentie SPI-bus ........................................................................................................................... 32
Figuur 36: Zonnemodule .............................................................................................................................................. 34
Figuur 37: RS-485 voorbeeld ..................................................................................................................................... 36
Figuur 38: 'S7-1200'-PLC ............................................................................................................................................. 37
Figuur 39: ET200S decentrale periferie................................................................................................................. 37
Figuur 40: Omzetting- en berekeningsfuncties................................................................................................... 38
Figuur 41: Algemene functieblok parameters ..................................................................................................... 38
Figuur 42: Parameterfuncties .................................................................................................................................... 38
Figuur 43: Voorbeeld berekenen nodige variabelen ........................................................................................ 39
Figuur 44: Berekeningsblok parameterfunctie ................................................................................................... 39
Figuur 45: HMI-blokken ............................................................................................................................................... 39
Figuur 46: Automatiserings-blok .............................................................................................................................. 40
Figuur 47: Datablokken ................................................................................................................................................ 40
Figuur 48: HMI .................................................................................................................................................................. 40
Figuur 49: Stuurkast zonvolgsysteem .................................................................................................................... 41
Bijlagen 44
6 BIJLAGEN
6.1 BIJLAGE A: ZONNEBEREKENINGEN
6.1.1 INLEIDING Verschillende zonneparameters zijn nodig om de azimut en zenit te berekenen. Deze zijn
hieronder te vinden. De formules zijn uit een Excel-bestand van het NOAA (National Oceanic And
Atmospheric Administration) gehaald.
Om deze waarden een grootteorde mee te geven, is voor iedere waarde een berekening uitgevoerd
voor de drie parameters datum, tijd en locatie. Ze bedragen 1/09/2013, om 12:00:00 met als
coördinaten 51,017723NB en 4,479227OL. Dit zijn de coördinaten van CVO Crescendo.
Na de omzetting van de gregoriaanse tijdsrekening naar de Juliaanse, zijn alle gegevens aanwezig
om de berekeningen uit te voeren. Juliaanse dag: 2456536,96. Juliaanse eeuw: 0,13667237.
Enkele opmerkingen bij de berekeningen:
Er wordt gebruik gemaakt van een bewerking MOD(x;y). Dit doelt op een deling van x/y
waarvan de restwaarde het resultaat is.
De bewerking x ∗ is een omzetting van graden naar radialen. Terwijl x ∗
een omzetting van radialen naar graden is.
‘Julian Century’ staat voor Juliaanse Eeuw, ‘Julian day’ staat voor Juliaanse dag. De huidige
tijdsrekening is in gregoriaanse tijd. Iedere gregoriaanse tijd heeft een overeenkomstige
dag in de juliaanse kalender. Bij de omzetting van de gregoriaanse naar de juliaanse is er
echter een tijdspanne van 10 dagen waar er geen juliaanse dag bestaat. Het gemak bij het
formaat van de Juliaanse tijdsrekening in berekeningen, is de reden van het gebruik van
deze oude tijdsrekening.
De astronomische eenheid [AU] is de gemiddelde afstand tussen de aarde en de zon. Deze
bedraagt 149 597 870 700 meter.
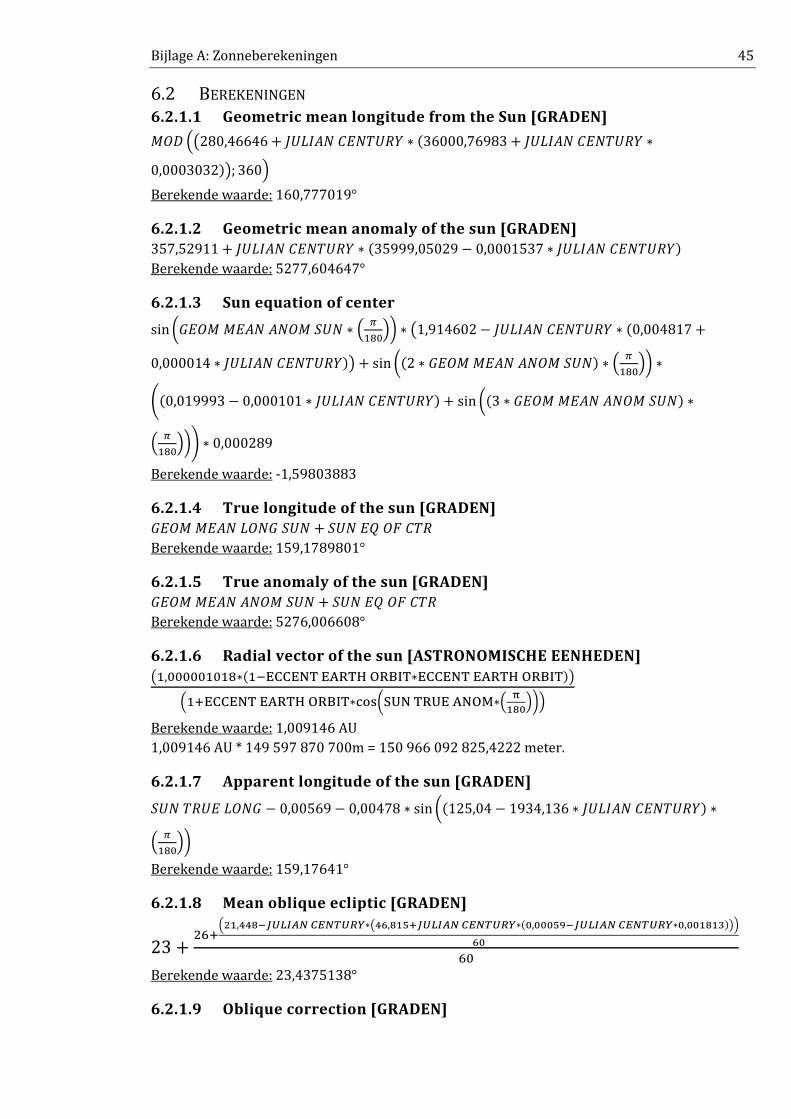
Bijlage A: Zonneberekeningen 45
6.2 BEREKENINGEN
6.2.1.1 Geometric mean longitude from the Sun [GRADEN] 280,46646 + ∗ 36000,76983 + ∗0,0003032$%; 360
Berekende waarde: 160,777019°
6.2.1.2 Geometric mean anomaly of the sun [GRADEN] 357,52911 + ∗ 35999,05029 − 0,0001537 ∗ $
Berekende waarde: 5277,604647°
6.2.1.3 Sun equation of center sin -./ ∗ 01 ∗ 1,914602 − ∗ 0,004817 +0,000014 ∗ $% + sin - 2 ∗ ./$ ∗ 01 ∗2 0,019993 − 0,000101 ∗ $ + sin - 3 ∗ ./$ ∗ 013 ∗ 0,000289
Berekende waarde: -1,59803883
6.2.1.4 True longitude of the sun [GRADEN] ../ + /45
Berekende waarde: 159,1789801°
6.2.1.5 True anomaly of the sun [GRADEN] ./ + /45
Berekende waarde: 5276,006608°
6.2.1.6 Radial vector of the sun [ASTRONOMISCHE EENHEDEN] ,∗ 678879:7;<:=><?@:∗78879:7;<:=><?@:$%A78879:7;<:=><?@:∗BCD-EF9:<F7;9>G∗ HIJK1
Berekende waarde: 1,009146 AU
1,009146 AU * 149 597 870 700m = 150 966 092 825,4222 meter.
6.2.1.7 Apparent longitude of the sun [GRADEN] /. − 0,00569 − 0,00478 ∗ sin - 125,04 − 1934,136 ∗ $ ∗ 01
Berekende waarde: 159,17641°
6.2.1.8 Mean oblique ecliptic [GRADEN]
23 + LMANI,OOJPQRSTUVWXVYRZ[∗O\,JI]^QRSTUVWXVYRZ[∗ K,KKK]_PQRSTUVWXVYRZ[∗K,KKIJI`$%\KM
Berekende waarde: 23,4375138°
6.2.1.9 Oblique correction [GRADEN]
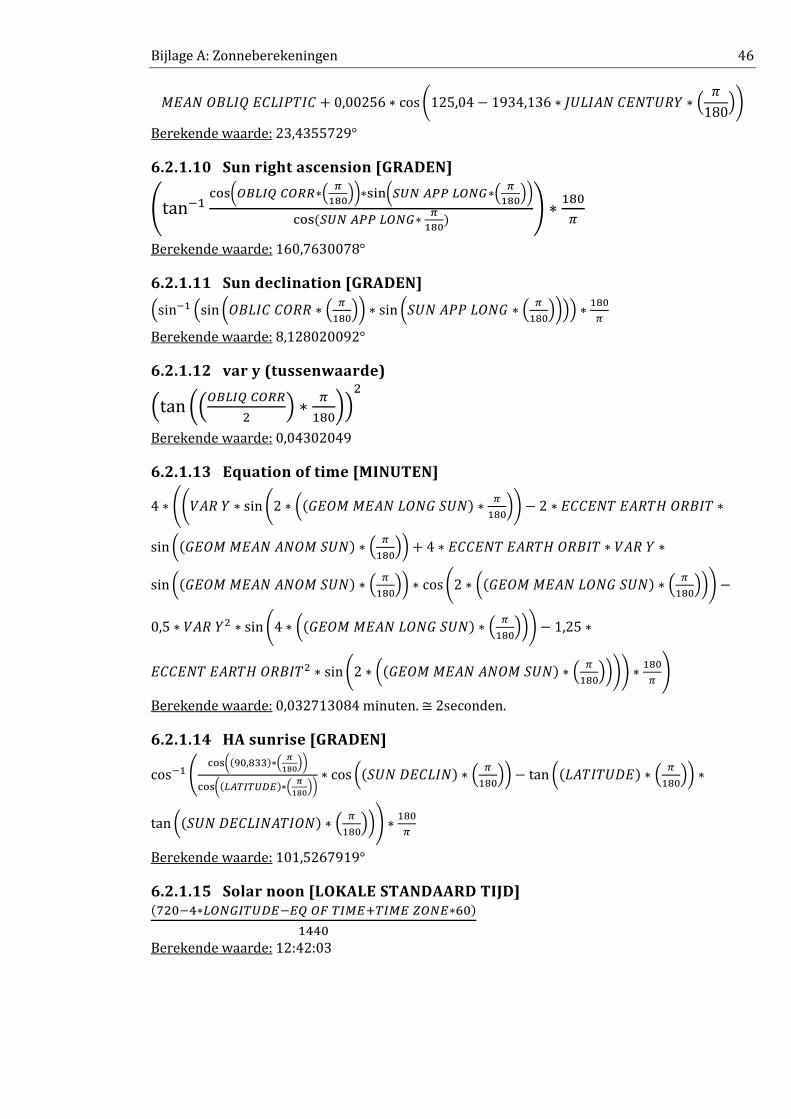
Bijlage A: Zonneberekeningen 46
a4b + 0,00256 ∗ cos2125,04 − 1934,136 ∗ ∗ e1803
Berekende waarde: 23,4355729°
6.2.1.10 Sun right ascension [GRADEN]
ftan6 BCD-ijklmnioo∗ pIJK1∗Dqr-stuvwwkiux∗ pIJK1BCD stuvwwkiux∗ pIJK$ y ∗ 0
Berekende waarde: 160,7630078°
6.2.1.11 Sun declination [GRADEN] sin6 sin -a ∗ 01 ∗ sin -/bb. ∗ 01 ∗ 0
Berekende waarde: 8,128020092°
6.2.1.12 var y (tussenwaarde)
tan -ijklmniooL ∗ 01L
Berekende waarde: 0,04302049
6.2.1.13 Equation of time [MINUTEN]
4 ∗ f2z ∗ sin 22 ∗ - ../$ ∗ 013 − 2 ∗ a ∗sin - ./$ ∗ 01 + 4 ∗ a ∗ z ∗sin - ./$ ∗ 01 ∗ cos22 ∗ - ../$ ∗ 013 −0,5 ∗ zL ∗ sin 24 ∗ - ../$ ∗ 013 − 1,25 ∗aL ∗ sin22 ∗ - ./$ ∗ 0133 ∗ 0 y
Berekende waarde: 0,032713084 minuten. ≅ 2seconden.
6.2.1.14 HA sunrise [GRADEN]
cos6 f BCD- ,~~$∗ pIJK1BCD- kvlt$∗ pIJK1 ∗ cos - /$ ∗ 01 − tan - $ ∗ 01 ∗tan - /$ ∗ 01y ∗ 0
Berekende waarde: 101,5267919°
6.2.1.15 Solar noon [LOKALE STANDAARD TIJD] L6∗kiuxlt6milAliu∗M$
Berekende waarde: 12:42:03
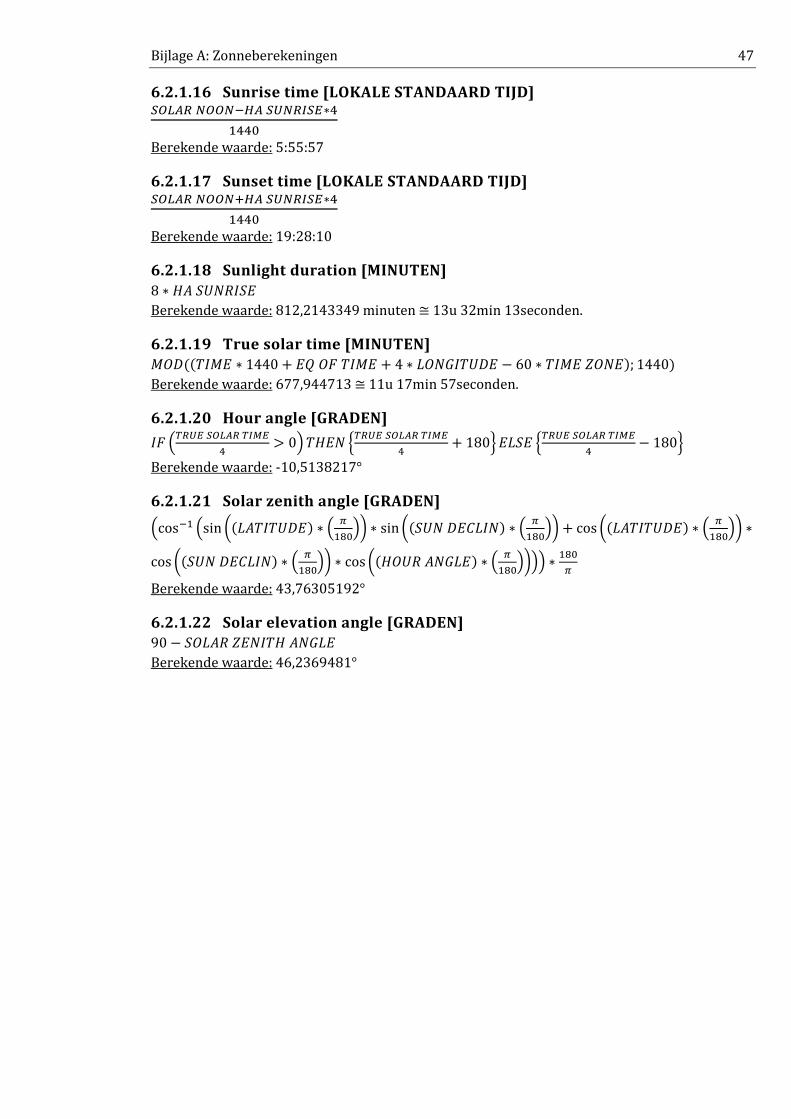
Bijlage A: Zonneberekeningen 47
6.2.1.16 Sunrise time [LOKALE STANDAARD TIJD] sikvouiiu6vstuols∗
Berekende waarde: 5:55:57
6.2.1.17 Sunset time [LOKALE STANDAARD TIJD] sikvouiiuAvstuols∗
Berekende waarde: 19:28:10
6.2.1.18 Sunlight duration [MINUTEN] 8 ∗ //
Berekende waarde: 812,2143349 minuten ≅ 13u 32min 13seconden.
6.2.1.19 True solar time [MINUTEN] ∗ 1440 + 45 + 4 ∗ . − 60 ∗ $; 1440$
Berekende waarde: 677,944713 ≅ 11u 17min 57seconden.
6.2.1.20 Hour angle [GRADEN] 5 otsikvol > 0 otsikvol + 180/ otsikvol − 180
Berekende waarde: -10,5138217°
6.2.1.21 Solar zenith angle [GRADEN] cos6 sin - $ ∗ 01 ∗ sin - /$ ∗ 01 + cos - $ ∗ 01 ∗cos - /$ ∗ 01 ∗ cos - .$ ∗ 01 ∗ 0
Berekende waarde: 43,76305192°
6.2.1.22 Solar elevation angle [GRADEN] 90 − /. Berekende waarde: 46,2369481°

Bijlage A: Zonneberekeningen 48
6.2.1.23 Solar azimuth angle [GRADEN KLOKSGEWIJS VANAF HET NOORDEN] 5 . > 0$
fcos6 fDqr- kvlt$∗ pIJK1∗BCD- sikvoulvuxk$∗ pIJK16Dqr- stunklu$∗ pIJK1BCD- kvlt$∗ pIJK1∗Dqr- sikvoulvuxk$∗ pIJK1 yy ∗0 + 180 ; 360
/
540 −fcos6 fDqr- kvlt$∗ pIJK1∗BCD- sikvoulvuxk$∗ pIJK16Dqr- stunklu$∗ pIJK1BCD- kvlt$∗ pIJK1∗Dqr- sikvoulvuxk$∗ pIJK1 yy ∗0 ; 360
Berekende waarde: 164,8609943
6.2.1.24 Refraction
Bij het neervallen van de zonnestralen op het oppervlakte van het zonnepaneel, weerkaatst een
stuk van de zonnestralen. Om dit fenomeen te compenseren, worden er extra berekeningen
uitgevoerd. De ‘Solar Elevation Angle’ wordt hierop aangepast. Een geoptimaliseerde waarde
wordt hierdoor berekend. Omdat de nauwkeurigheid van de opstelling dit niet verlangt is dit niet
omgezet.
Bijlage B: Gebruikersbundel 49
6.3 BIJLAGE B: GEBRUIKERSBUNDEL Om het onderhoud en de eventuele aanpassingen van het systeem naar de gebruiker toe te
vergemakkelijken, zijn de schema’s, de programmatuur en de handleiding apart gebundeld.
De schema’s omvatten de elektrische en elektronische schema’s.
De handleiding is een aanvulling op de paper. Hierin is de praktische informatie gespecifieerd voor
de correcte bediening van het geheel. Voor details en werking wordt er verwezen naar de paper.
De elektrische schema’s bevatten de schema’s van de stuurkast. Deze schema’s zijn in het
softwarepakket Eplan P8 1.7 gemaakt.
De elektronische schema’s zijn gemaakt met het softwarepakket Altium Designer 10. De nodige
bestanden om de printplaten opnieuw te kunnen fabriceren zijn eveneens bijgevoegd. RS-274X
Extended Gerber-bestanden samen met de ‘drill-files’ worden gebruikt om de PCB-fabrikant de
nodige informatie te verschaffen. Uiteraard zijn de digitale versies op de bijgevoegde CD-ROM
terug te vinden.
Op softwarematig niveau is er enerzijds de programmatie van de PLC in het softwarepakket TIA
Portal 11 V2. Dit omvat de volledige configuratie van het netwerk en uitbreidingsmodules. Bij
aanpassing van de hardware is het mogelijk om de software up-to-date te maken met de nieuwe
infrastructuur. Anderzijds is er de programmatie van de microcontroller.
Het is niet noodzakelijk dat de microcontroller op een later tijdstip aangepast wordt, deels omdat
dit niet in de eindtermen van de opleiding zit. Er dient wel vermeld te worden dat voor de
aanpassing van deze software er een specifieke programmeermodule nodig is. Deze
programmeermodule vormt de nodige signalen van de PC om naar een formaat dat aangepast is
voor de microcontroller. Het is mogelijk om hiervoor een ontwikkelbord van het type ‘Arduino’ te
gebruiken. De programmeercode bevat het hoofdbestand, waarbij een ‘header-file’ en een ‘C-file’
zijn ingevoegd. Dit zijn drie verschillende bestanden die op een specifieke wijze gestructureerd
zijn om een overzicht te behouden over het geheel.