Embed Size (px)
Citation preview

ELEKTRONSKI UPRAVLJAČKI SISTEMI U MOTORNOM VOZILU
1. UVOD
Konkurencija, želje korisnika i zakonski propisi proizvođače vozila primoravaju na
poboljšanje karakteristika postojećih modela i razvoj novih modela vozila.
Osnovni zahtevi pri razvoju novih modela vozila su: - povećanje aktivne i pasivne bezbednosti vozila, - smanjenje potrošnje goriva, maziva i drugih fluida, - lakše upravljanje vozilom tako što se vozač oslobađa rutinskih poslova i pomaže mu se u
pronalaženju najboljeg rešenja u kritičnim situacijama, - poboljšanje komfora vozača i putnika, - poboljšanje ekoloških karakteristika smanjem emisija vozila i korišćenjem ekoloških
materijala u izradi vozila koji omogućavaju potpuno recikliranje na kraju upotrebnog veka vozila, - smanjenje troškova proizvodnje...
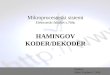
Uvođenje složenih elektronskih sistema upravljanja omogućava da se realizuju vozila koja imaju bolje pogonske i upotrebne karakteristike. Redosled uvođenja elektronskih sistema na vozila kao i trend budućeg razvoja posebno u pogledu povećanja pasivne i aktivne bezbednosti vozila dat je na slici 1.
Slika 1. Tendencije razvoja aktivne i pasivne bezbednosti
Svaki od mnogobrojnih elektronskih sistema upravljanja na vozilu ima niz različitih senzora i aktuatora i da bi vozilo funkcionisalo kao celina neophodno je da ti sistemi međusobno razmenjuju informacije. To uslovljava veoma složenu hardversku i softversku strukturu savremenih i budućih vozila. Na slici 2. je dat prikaz senzora koji se mogu koristiti na vozilu sa više elektronski
Pasivna bezbednost
Aktivna bezbednost
1960 1970 1980 1990 2000 2010 2020 …
Bezbedni akumulato
Sigurnosnipojas
Višeslojna stakla
Deformacioni elementi
Vazdušni jastuk Aktivni pojasevi
Bočna ojačanja
Bočni vazdušni Automatski poziv za pomoć
Ojačanja Priprema za sudar
Inteligentno adaptivno upravljanje
AB ETC EBD
ESP BA
ACC AB
Procena puta BbW (wb)
Procena SbW (wb)
Prinudno kočenje EMB & EMS
Vožnja u koloni
Sprečavanje sudara
Autonomna vožnja
Kopilot na autoputu N
ivo
bezb
edno
sti
visok
nizak
ABC Aktivno upravljanje karoserijom EMB Elektromehnička kočnica ABS Antiblokirajući sistem kočenja EMS Elektromehanički upravljač ACC Adaptivno upravljanje vožnjom ESP Elektronski sistem za stabilizaciju BAS Sistem za pomoć pri kočenju ETC Sistem za sprečavanje proklizavanja BbW Kočnica pomoću žice SbW Upravljač pomoću žice EBD Elektronska raspodela sile kočenja (wb) sa mehaničkom redundansom

upravljanih sistema počev od pogonskog agregata preko aktivne i pasivne bezbednosti do sistema za poboljšanje konfora. Pri tome nisu uzeti u obzir navigacioni i multimedijalni sistemi.
Slika 2. Senzori u sistemima na vozilu
Celo vozilo može da se podeli na više veoma složenih podsistema. Na slikama 3. i 4. su date
principske šeme sistema elektronskog upravljanja kočionim sistemom i motorom.
Slika 3. Principska šema upravljanja kočionim sistemom (ABS)

Slika 4. Principska šema upravljanja funkcijama motora
Konvencionalan način prenosa i razmene podataka od tačke do tačke, pomoću individualnih
linija odavno je dostigao svoje praktične limite. Kompleksnost žične instalacije na vozilima i veličine utičnica i konektora su već sada veoma teški za rukovanje. Ograničen broj pinova u konektorima takođe je usporio rad na razvoju elektronskih upravljačkih jedinica. Treba napomenuti i to da je na vozilu srednje veličine, ukupna dužina kablova veća od 1 km, ima oko 300 konektora i kućišta sa ukupnim brojem od oko 2000 pinova. Dakle, jedino rešenje je primena mrežnih sistema za prenos podataka i upravljanje.
Široki spektar primene elektronskih komunikacionih sistema i sistema upravljanja u otvorenoj i zatvorenoj povratnoj sprezi, za različite funkcije na vozilu, učinio je da je od suštinskog značaja mrežno povezivanje pojedinačnih elektronskih upravljačkih jedinica.
Klasični sistem prenosa podataka i upravljanja funkcijama vozila ima zvezdastu strukturu, prikazanu na slici 1, u kojoj postoji jedna glavna (master) upravljačka jedinica (GUJ), kao i više lokalnih upravljačkih jedinica (LUJ), senzora (S), i aktuatora (A), koje su sa GUJ povezane preko lokalne serijske ili paralelne veze. Obrada signala senzora i komande aktuatorima mogu biti realizovane u glavnoj mikroprocesorskoj upravljačkoj jedinici ili u odgovarajućem lokalnom upravljačkom sistemu.

Zvezdasta konfiguracija upravljačkog sistema zahteva da glavni upravljački sistem ima mikroprocesor velike brzine da bi obradio sve informacije koje se slivaju u njega. Žičana instalacija za povezivanje senzora i aktuatora sa upravljačkim jedinicama je veoma složena, velike dužine, što otežava interakciju između različitih sistema a istovremeno ceo sistem je podložan smetnjama.
Slika 5. Zvezdasta struktura sistema upravljanja Bolji kvalitet upravljanja vozilom postiže se primenom mreže, obično dvožične, na koju su
priključene sve upravljačke jedinice sistema na vozilu, inteligentni senzori i inteligentni aktuatori, i kod koje se komunikacija odvija serijski. Šematski prikaz jedne takve mreže dat je na slici 6. U njoj ne mora da postoji glavna upravljačka jedinica.
Slika 6. Mrežna struktura sistema upravljanja
2. OTVORENI SISTEM POVEZIVANJA
Mreža na vozilu treba da omogući i vezu sa drugim kompjuterskim sistemima koji su van
vozila (navigacija, dijagnostika, kontrola ekoloških parametara vozila, itd.), zbog čega mora da zadovolji i opšte standarde povezivanja kompjuterske opreme date standardom ISO 7498 koji definiše otvoreni sistem povezivanja OSI (Open System Interconection) sa sedam osnovnih nivoa povezivanja. U Tabeli 1. dat je pregled nivoa povezivanja i njihova osnovna funkcija polazeći od najvišeg nivoa.
S 1 S 2
S 3 S 4
A 1
A 2
A 3
GUJ
LUJ 1 LUJ 2
LUJ 3
S 1 S 2
S 3
A 1
A 4
A 3
LUJ 3
LUJ 1 LUJ 2
LUJ 4

Tabela 1. Nivo Naziv nivoa Funkcija
7 Nivo aplikacije (Application layer)
Omogućava vezu između korisnika i OSI okoline. Sadrži funkcije koje su neophodne za upravljanje sistemom
6 Nivo prikazivanja (Presentation layer)
Prikazuje podatke u odgovarajućem obliku (na primer u ASCII obliku)
5 Nivo povezivanja (Session layer)
Obezbeđuje dijalog između komunikacionih uređaja u mreži
4 Nivo transporta (Transport layer)
Obezbeđuje pouzdan prenos podataka izmeću udaljenih jedinica mreže
3 Mrežni nivo (Network layer)
Definiše povezivanje podsistema koji se razlikuju na nivou podataka i fizičkom nivou
2 Nivo podataka (Data link layer)
Omogućava povezivanje i razmenu podataka između uređaja koji su na istom fizičkom nivou pomoću odgovarajućih protokola
1 Fizički nivo (Physical layer)
Određuje fizičke karakteristike kabla za povezivanje i izlaznog dela upravljačkog uređaja. Definiše nivoe i oblike električnih signala.
Kod vozila je dovoljno realizovati tri nivoa povezivanja u mrežu: 1. nivo: fizički nivo; 2.
nivo: nivo podataka i 7. nivo: nivo aplikacije, mada postoje protokoli koji definišu svih sedam nivoa povezivanja (SAE J1939).
3. ARHITEKTURA ELEKTRONSKIH SISTEMA NA VOZILU
Vozilo, kao složeni distribuirani elektronski sistem, se sastoji od više mrežno povezanih
podsistema koji se nazivaju grupe (clusters). Svaka grupa realizuje jednu posebnu funkciju. Primeri za grupe su elektronski sistemi za upravljanje pogonskim agregatom i dinamikom vozila, elektronski sistemi karoserije (signalizacija i komfor), multimedijalni i navigacioni elektronski sistemi i td.
Grupa se sastoji od više čvorova (node). Na primer, sistem za upravljanje pogonskim
agregatom i dinamikom vozila ima čvor sa elektronskim sistemom za upravljanje motorom, čvor sa elektronskim sistemom za upravljanje kočionim sistemom, čvor sa elektronskim sistemom za upravljanje vozilom, čvor sa elektronskim sistemom za upravljanje transmisijom, čvor za komandni panel vozača, čvor za povezivanje sa drugim grupama, i td. U cilju razmene podataka svi čvorovi se povezuju komunikacionim kanalima pomoću kojih se informacije razmenjuju po odgovarajućem protokolu. Komunikacioni kanal kod sistema koji su kritični sa stanovišta bezbednosti ima redundansu dobijenu dupliranjem komunikacionog kanala pri čemu se ista informacija prenosi po oba kanala. Šematski prikaz jedne grupe dat je na slici 7.

Slika 7. Mrežno povezani podsistemi, grupe
Na slici 4. dat je šematski prikaz jednog čvora. Čvor se sastoji od tri glavna dela: 1. Ulazno-izlazni podsistem za prikupljanje informacija od inteligentnih senzora i aktuatora
koji pripadaju tom čvoru. Više senzora i aktuatora mogu biti povezani lokalnom mrežom a zatim povezani na ulazno-izlazni podsistem.
2. Upravljački računar sa odgovarajućim softverom koji u realnom vremenu izračunava i šalje aktuatorima komande na osnovu podataka od senzora i podataka dobijenih preko komunikacionog kanala. Za povezivanje sa Ulazno-Izlaznim podsistemom i komunikacionim kontrolerom koriste se odgovarajući interfejsi.
3. Komunikacioni kontroler povezuje čvor preko komunikacionog kanala sa ostalim čvorovima u grupi radi razmene informacija. Hardverska realizacija komunikacionog kontrolera zavisi od komunikacionog kanala. Komunikacioni kanal kao hardverska komponenta mreže može biti realizovan primenom žičanih veza (jednožično, dvožično, četvorožično, i td.) ili optičkim provodnicima uz unapred definisane nivoe korisnog signala. Razmena informacija, odnosno softverski oblik poruke, obavlja se prema unapred definisanom standardizovanom postupku - protokolu.
Slika 8. Šematski prikaz čvora
3. MREŽE I MREŽNI PROTOKOLI NA VOZILIMA
Vozilo obično ima više mreža koji imaju različite hardverske i softverske realizacije odnosno
funkcionišu primenjujući različite protokole. Mreža i mrežni protokol za primenu na vozilu moraju da imaju sledeće osnovne karakteristike:
- visoka integrabilnost ukomponovana sa ostalim komponentama i sistemima vozila u celinu, tj. verovatnoća pojave slučajnih grešaka treba da je beznačajna i da ne utiče na fukcionisanje vozila,
Komandni panel
vozača Komunik. kontroler
Ulaz Izlaz
Informacije
za pomoć Komunik. kontroler
Grupa navigacije
Razmena sa grupom karoserije Komunik. kontroler
Grupa karoserije
Uprav. jedinica
upravljača
Komunik. kontroler
Izlaz Ulaz
Uprav. jedinica vešanja
Komunik. kontroler
Izlaz Ulaz
Uprav. jedinica kočnica
Komunik. kontroler
Izlaz Ulaz
Uprav. jedinica motora
Komunik. kontroler
Izlaz Ulaz
Komunikacioni kanali
Aktuatori
Ulazno-izlazni podsistem
Upravljački računar
Komunikacioni kontroler
Ulazno-izlazni interfejs
Komunikacioni interfejs
Senzori Lokalna mreža
Komunikacioni kanal

- funkcionalna prilagođenost, tj. maksimalno vreme čekanja na prenos i prenos informacije treba da bude dovoljno kratko tako da ne ometa upravljanje,
- konfigurabilnost mreže tj. mreža se može lako proširivati i modifikovati, - otpornost na greške tj. komunikacija se mora obnoviti kada se otkloni greška a postojanje
rezervnog kanala je poželjno a ponekad i neophodno, - minimalan broj međuveza tj. svaka dodatna veza odnosno konektor povećava verovatnoću
pojave greške, - dimenziono i funcionalno prilagođeni konektori, - elektromagnetska kompatibilnost, - otpornost na uticaje okoline - temperaturu, vlažnost, vibracije, prašinu, kapljice goriva,
ulja, maziva i td, - niska cena.
Klasifikacija mreža može se izvršiti po različitim kriterijumima. Američko društvo
automobilskih inženjera (Society of Automotive Engineers – SAE) u zavisnosti od brzine prenosa informacija kroz mrežu, a samim tim i od primene na vozilima, podelilo je u svojim standardima mreže na vozilima u tri klase: A, B, i C. Brzi razvoj multimedijskih aplikacija (Internet, navigacija, digitalna televizija) kao i takozvano “upravljanje pomoću žice”, tj. X-By-Wire, (gde se upravljanje, “X”, odnosi na upravljač, kočnicu, menjač, motor i sl.), zahtevaju veće brzine prenosa podataka što uslovljava da se formira još nestandardizovana klasa D. Osnovne karakteristike i namene tih klasa date su u Tabeli 2.
Tabela 2.
Klasa mreže Brzina prenosa Primena
A <10kb/s Male brzine
Komfor vozača i putnika: podešavanje ogledala i sedišta, otvaranje prtljažnika, centralno zaključavanje
B 10-125kb/s Srednje brzine
Instrumenti u vozilu, brzina vozila, podaci o emisijama vozila
C 125kb/s–1Mb/s Velike brzine
Upravljanje u realnom vremenu funkcijama motora, dinamikom vozila, kočionim sistemom
D >1Mb/s
Upravljanje u realnom vremenu sistemima odgovornim za bezbednost putnika i vozača; multimedijalne aplikacije
Primena mreža u sistemima upravljanja sistemima vozila uslovila je potrebu za
odgovarajućim protokolom za razmenu informacija između čvorova u mreži [5]. Pojavilo se više tipova protokola jer su proizvođači različito realizovali i nazvali protokole: Volkswagen je razvio ABUS protokol, Renault & PSA - VAN protokol, Toyota – BEAN protokol, General Motors - J1850VPW protokol, Ford - J1850PWM protokol, itd. Lider u oblasti mrežnih protokola za primenu na vozilima postao je Bosch sa svojim CAN (Controller Area Network) protokolom koji je formiran 1985.godine, a aktuelni oblik dobio 1991. godine [6]. Bosch je omogućio da njegov protokol bude otvoren za sve korisnike zbog čega je brzo prihvaćen i postao osnova za ISO i SAE standarde kako na vozilima tako i u industriji i drugim oblastima.
Prema načinu na koji se pojavljuju informacije na mreži protokole možemo podeliti na
protokole upravljane događajem i vremenski upravljane protokole.

4. PROTOKOL UPRAVLJAN DOGAĐAJEM (CAN PROTOKOL)
Protokoli upravljani događajem rade na principu da se informacija iz nekog čvora u mreži
generiše kada dođe do promene informacije koju šalje taj čvor. U jednom trenutku samo jedan čvor u mreži emituje poruku koju primaju svi čvorovi u mreži pa i onaj koji je emituje. Ako se informacija ne menja čvor je ne šalje pa samim tim i ne opterećuje mrežu. Svi čvorovi u mreži imaju odgovarajući prioritet i pri istovremenom slanju poruke iz dva čvora odbacuje se poruka nižeg prioriteta. Ovakav tip protokola obično se implementira pomoću serijske mreže.
Protokoli upravljani događajem su CAN (Controller Area Network), LIN (Local
Interconection Network), Byteflight, i td. CAN protokol je postao osnova za standarde za mreže u vozilima u Evropi: ISO 11519-2
standard za spore aplikacije, ISO 11898 za brze aplikacije i ISO 9141 za dijagnostiku, kao i u Americi: SAE J1939 za mreže klase C na teretnim vozilima, SAE J2284 za putnička vozila (zasnovan na ISO 11898) i SAE J1850 za mreže klase A i B i dijagnostiku.
Povezivanje upravljačkih jedinica, inteligentnih senzora i inteligentnih aktuatora, koji čine
čvorove mreže, na električni vod zahteva da te jedinice imaju strukturu koja je prikazana na slici 9, u skladu sa OSI modelom povezivanja. Mreža zasnovana na CAN protokolu ima sledeće osobine:
- svaka poruka koje se šalje pomoću mreže ima odgovarajući prioritet, - za poruke nižeg prioriteta garantuje se slanje posle određenog vremena čekanja, - mreža mora da ima fleksibilnost pri dodavanju novih čvorova u mrežu, - vremenski sinhronizovan prijem i predaju svih čvorova u mreži, - promenljiv format podataka koji se šalju mrežom, - više glavnih (master) čvorova u mreži, - detekcija grešaka i njihovu signalizaciju, - automatsko ponavljanje neispravnih poruka čim je mreža slobodna, - razdvajanje privremenih od trajnih grešaka u čvorovima i autonomno isključivanje
neispravnih čvorova.
Slika 9. Struktura čvora mreže na vozilu
CAN Kontroler
Primopredajnik (Transceiver)
Mikrokontroler sa softverom za
obradu podataka, upravljanje, nadzor,
Aplikacioni nivo
Nivo povezivanja
Fizički nivo CAN L CAN H
Tx Rx
R

4.1. Fizički nivo CAN protokola
Fizičko nivo CAN protokola sastoji se od linije i primopredajnika (tj. transceiver) sa
odgovarajućim konektorom. Linija kao medijum je najčešće dvožični kabal sa upredenim provodnicima ili sa oklopom. Postoje varijante linija sa samo jednim provodnikom gde se kao drugi provodnik koristi masa. Linija mora biti zatvorena karakterističnom otpornošću od oko 120Ω. Dužina linije može biti od nekoliko metara do nekoliko kilometara ali povećanje brzine prenosa podataka utiče na dužine linije tako da je maksimalna dužina linije za brzinu prenosa od 1Mb/s 25 metara a pri dužini linije od 1000 m maksimalna brzina prenosa je 50 kb/s.
Transceiver je deo čvora u mreži i predstavlja elektronsko kolo koje se neposredno priključuje
na liniju i preko koga se ostvaruje dvosmerna komunikacija. On razdvaja ostale elektronske delove čvora od linije. Ako je linija dugačka vrši galvansko odvajanje čvora od linije na kojoj se zbog velike dužine mogu pojaviti različite smetnje. Transceiver vrši naponsku obradu signala sa linije pri prijemu podataka i postavljanje linije u odgovarajuće stanje pri predaji podataka.
CAN komunikacija se obavlja preko bitova koji mogu biti u dominantnom (logičko 1) ili
recesivnom stanju (logička nula) pa se od fizičkog nivoa mreže zahteva da ima dva različita naponska nivoa za definisanje tih bitova. S obzirom da su svi čvorovi istovremeno priključeni na liniju pri istovremenom emitovanja dominantnog i recesivnog bita iz dva različita čvora na liniji se mora nalaziti dominantni naponski nivo.
Ako je linija ostvarena dvožično onda transceiver ima dva priključka na liniju za svaki
provodnik posebno. Jedan priključak se naziva CAN H i ima dominantni naponski nivo približno jednak naponu napajanja (obično 5V) a drugi CAN L i ima dominanti naponski nivo 0V. Pri recesivnom bitu CAN H i CAN L se nalaze na približno istom potencijalu od oko polovine napona napajanja. Zbog eliminisanja šumova u liniji dominantni bit se prepoznaje sve dok je razlika između CAN H i CAH L veća od 0,9V a recesivni bit ako je ta razlika manja od 0,5V. Na slici 10. su prikazane margine naponskih nivoa transceivera.
Slika 10. Margine naponskih nivoa primopredajnika
4.2. Nivo podataka CAN protokola Osnovna pretpostavka za nesmetano funkcionisanje mreže zasnovane na CAN protokolu je da
su svi čvorovi u mreži podešeni da emituju i primaju informacije istom brzinom, odnosno da su vremenski sinhronizovani.
Poruka u mreži mora da ima tačno određeni format i sastoji se iz segmenata. Poruka počinje
sa jednim dominantnim bitom, a zatim sledi adresa, odnosno identifikator čvora sa koga se emituje poruka, pa upravljački deo poruke (dužina i tip podataka), podaci, ključ za proveru ispravnosti poruke i na kraju potvrda o ispravnosti poruke od svih čvorova u mreži. Posle poruke je neophodan
CAN H
CAN L
3,5 V 2,5 V 1,5 V
t Dominantni
bit Recesivni
bit Recesivni
bit
U

jedan period neaktivnosti mreže da bi se mreža pripremila za obradu sledeće poruke. Osnovni segmenti poruke prikazani su na slici 11.
Slika 11. Format CAN poruke Definisane su dve vrste osnovnog CAN protokola u zavisnosti od dužine identifikatora:
Standardni CAN protokol (Standard CAN) sa identifikatorom dužine 11 bitova kroz protokol CAN 2.0A, a prošireni CAN protokol (Extended CAN) sa identifikatorom dužine 29 bitova kroz protokol CAN 2.0B. U okviru iste mreže čvorovi koji podržavaju CAN 2.0B protokol mogu da razmenjuju informacije sa čvorovima koji podržavaju CAN 2.0A dok razmena u obrnutom smeru nije moguća.
Identifikatorom se određuje prioritet poruka jer svaki čvor ima jedinstveni identifikator. Ako u trenutku kada je linija slobodna dva ili više čvorova počnu da emituju poruku prioritet dobija onaj čvor kod koga je na mestu razlike u identifikatoru dominantni bit. Čvorovi manjeg prioriteta prestaju da emituju poruku i prelaze u režim prijema a emitovanje njihove poruke biće kada linija bude slobodna.
Dužina podataka u poruci može da bude od 1 do 64 bita i definiše se kontrolnim bitovima koji se šalju pre podatka. Ispravnost primljene poruke kontroliše se pomoću niza od 15+1 bitova koje generiše pošiljalac poruke na osnovu standardom definisanog algoritma a koja je segment poruke (CRC – Cyclic Redundancy Check).
Greške koje se pojavljuju pri prenosu mogu da imaju različiti oblik i poreklo a detektuju se hardverskom i softverskom obradom primljenog signala. Osnovnu hardversku detekciju greške vrši čvor koji emituje poruku upoređujući bit koji šalje sa onim koji se očitava sa linije. Sledeći nivo detekcije grešaka je ispitivanje da li ima 6 uzastopnih bitova istog tipa jer je to zabranjeno protokolom. Greška se signalizira i u slučaju kada se na kraju sekvenci fiksne dužine (identifikator, CRC, kraj poruke i td.) pojavi nelegalni bit. Softverska detekcija greške vrši se proverom poruke pomoću CRC sekvence.
Greške u CAN 2.0B protokolu čvorovi mogu da podržavaju u dva oblika: kao aktivni i kao pasivni. Aktivni čvorovi u slučaju greški šalju šest uzastopnih dominantnih bitova, dok pasivni šalju šest recesivnih bitova.
Pri pojavi greške čvorovi mreže odbacuju poruku uz registrovanje pojave greške u internom brojaču. Poruka se ponovo emituje kada je linija slobodna. Ukoliko se posle određenog broja ponavljanja ne pošalje ispravna poruka čvor koji emituje poruke se isključuje.
Linija je slobodna kada se detektuje bar 10 uzastopnih recesivnih bitova od kojih 7 predstavlja kraj prethodne poruke, a 3 i više su razmak za pripremu sledeće poruke.
4.3. Aplikacioni nivo CAN protokola
Aplikacioni nivo je specifičan za svaki čvor mreže. Ako je čvor mreže "inteligentni" senzor
onda se u njemu vrši obrada signala odgovarajućeg davača radi dovođenja u željeni oblik (linearizacija, pojačavanje), samoprovera ispravnosti, samokalibracija i priprema podataka za slanje mrežom.
SOF Početak poruke IDENTIFIER Identifikator CONTROL Upravljački deo DATA Podaci CRC Provera ispravnosti ACK Potvrda prijema EOF Kraj poruke

U aplikacionom nivou "inteligentnog" aktuatora obrađuje se komandni signal dobijen preko
mreže i na osnovu njega generiše odgovarajuća akcija aktuatora. Tu se vrši i samoprovera ispravnosti aktuatora i samopodešavanje.
Upravljačke jedinice u mreži u aplikacionom nivou vrše obradu podataka dobijenih preko mreže, kao i podataka dobijenih od senzora koji su lokalno vezani za tu upravljačku jedinicu i generiše podatke neophodne za upravljanje lokalnim ili "inteligentnim" aktuatorima.
Problem kod protokola upravljanog događajem je što opterećenje mreže nije konstantno tako da se može desiti da poruke čvorova nižeg prioriteta budu potiskivane toliko dugo da postanu neaktuelne.
5. VREMENSKI UPRAVLJAN PROTOKOL
Poruke kod vremenski upravljanih protokola, TTP (Time Trigered Protocol) šalju se u
unapred definisanim vremenskim intervalima. Ukupno vreme u kome moraju da se pojave sve poruke deli se na intervale, odeljke, i svakom čvoru se određuje odeljak u kome treba da šalje poruku. Svi čvorovi u mreži pri tome imaju pristup mreži i mogu da čitaju sve ostale poruke pa i svoju poruku. Zbog vremenske definisanosti trenutka slanja poruke, mreža mora biti vremenski sinhronizovana, što se postiže obično posebnim čvorom koji šalje sinhronizacione impulse svim čvorovima.
Vremenski upravljani protokoli su TTP/C, FlexRay® i td. Nihova osnovna primena je predviđena za sisteme kritične sa stanovišta bezbednosti, kao što su sistemi za “upravljanje pomoću žice” (X-by-Wire), gde se postojeći mehanički sistemi zamenjuju mehatroničkim sistemima. Mehatronički sistemi nemaju rezervni mehanički sistem kojim se preuzima kontrola u slučaju otkaza elektronskog sistema pa je zbog toga neophodno da elektronski sistemi sa svojim komunikacionim kanalima budu tako napravljeni da su imuni na greške bilo koje vrste.
Da bi vremenski upravljan protokol mogao da funkcioniše potrebno je da svaki čvor ima poseban TTP kontroler za kontrolu protokola koji je nezavisan od procesa koji se kontroliše u čvoru. TTP kontroler ima opis i spisak poruka u mreži, MEDL (Message Descriptor List). Opis poruka sadrži vremenski položaj odeljka u kome se šalje poruka, dužinu poruke i broj poruke koja se šalje jer se u jednom odeljku mogu slati poruke različitog sadržaja ali po unapred određenom redu. Na slici 12. dat je šematski prikaz pristupa čvorova mreži.
Slika 12. Pristup čvorova mreži kod vremenski upravljanog protokola Poruka ima unapred definisani format, slika 13. Zaglavlje sadrži informaciju o tipu podataka
koji se šalju jer postoje dva osnovna tipa informacija koja se šalju u DATA polju poruke: normalni podaci koji služe za slanje informacija neophodnih za upravljanje i inicijalizacioni podaci koji služe za slanje informacija o stanju TTP kontrolera i sinhronizaciju mreže.
Kod vremenski upravljanih protokola najopasnija je takozvana “glupa greška” (Bubling idiot failure) koja se manifestuje u nekontrolisanom slanju poruka iz nekog čvora izvan definisanih odeljaka. Taj problem se rešava postavljanjem čvora koji nadgleda saobraćaj u mreži (BUS Guardian) i koji po potrebi može da isključi čvor iz mreže ili da izvrši reinicijalizaciju mreže.
O1 O2 O3 O4 O1 O2 O3 O4 O1 O2
Odeljak
Vremenski ciklus Vremenski ciklus

Slika 13. Format poruke vremenski upravljanog protokola Determinisanost vremenski upravljanog protokola stvara veliku pouzadanost u sistemima
upravljanja uz ravnomerno opterećenje mreže, ali otežava priključenje novih čvorova u mrežu. Dodavanje novih čvorova zahteva potpuno rekonfigurisanje cele mreže.
Dobre karakteristike vremenski upravljanih protokola i protokola upravljanih događajima su pokušali u Bosch-u da integrišu u TTCAN protokolu. TTCAN deli vreme pristupa mreži tako da u određenim odeljcima mreži imaju pristup određeni čvorovi, bitni za pouzdano funkcionisanje sistema upravljanja, dok se u drugim odeljcima primenjuju standardni režimi CAN protokola.
6. ELEKTRONSKI DIJAGNOSTIČKI SISTEMI Razvoj vozila i njegovih agregata praćen je i odgovarajućim razvojem dijagnostičkih
sredstava. U tom razvoju dijagnostičkih sredstava za motorna vozila mogu da se uoče sledeće faze koje reprezentuju uređaji različite složenosti i namene:
1. Uređaji za ispitivanje pojedinih funkcija i za merenje pojedinih parametara i stanja kao što su: lambda tester, obrtomer, vakuummetar, CO analizator, i dr.
2. Uređaji za integralno ispitivanje pojedinih sistema i agregata: za ispitivanje funkcija motora, dinamometarski valjci za merenje snage na točkovima, brzine, potrošnje goriva...
3. Uređaji za integralno testiranje ispravnosti pojedinih sistema i agregata, s kompjuterskom obradom podataka i izdavanjem odgovarajućih protokola.
4. Samodijagnostički sistem na vozilu za upozorenje vozača, a posredstvom odgovarajućeg konektora s interfejsom - i za komuniciranje sa servisnom službom i nadležnim inspekcijskim organima, poznat kao OBD (On-Board Dijagnostic).
Danas najsofisticiranija rešenja elektronskog upravljanja funkcijama motora, transmisije, vešanja i dr. bazirana su na primeni digitalnog mikroračunara. Digitalni sistemi upravljanja prilagođavaju se specifičnim karakteristikama vozila u postupku aplikacije modifikovanjem upravljačkih algoritama, parametara, karakterističnih krivih i upravljačkih mapa. Dijagnosticiranje otkaza tako složenih sistema velikih mogućnosti zahteva novi pristup, nove metode i postupke uz primenu nove tehnologije i novih tehničkih sredstava. U tu svrhu pored standardne dijagnostičke opreme, kao što su osciloskopi - moto-testeri i sl., koriste se i specijalni, namenski orijentisani uređaji koje za te potrebe razvijaju proizvođači elektronskih uređaja na vozilu (Bosch, Siemens-Alied, AVL, Marelli, Lucas i dr.) ili proizvođači specijalne opreme (Snap-on Tools Corp., Matco Tools, Ferret, IGM Automotive Tooing, Inc. i dr.).
Pretpostavka za uspešno korišćenje dijagnostičkih sredstava i primenu dijagnostike jeste adekvatna obučenost nadležnog osoblja.
U cilju poboljšanja ekoloških karakteristika vozila doneti su odgovarajući propisi koje vozilo mora da zadovoljava u eksploataciji. Da bi ti propisi bili zadovoljeni moraju se nadzirati i kontrolisati svi elementi, priključeni na elektronsku upravljačku jedinicu, čiji otkaz prouzrokuje prekoračenje graničnih vrednosti emisija a svaka neispravnost mora da se zabeleži u memoriji elektronske upravljačke jedinice i signalizira vozaču pomoću odgovarajuće signalne sijalice (slika
SOF Početak poruke HEDER Zaglavlje DATA Podaci CRC Provera ispravnosti

14). Precizno očitavanje navedenih neispravnosti iz memorije mora biti moguće pomoću definisanih kodova.
Slika 14. Signalna sijalica na instrument tabli
Metode za očitavanje kodova grešaka su se vremenom razvijale tako da postoje tri osnovna
načina za očitavanje grešaka: 1. Signalna sijalica na instrument tabli (CHECK ENGINE) se pri startovanju motora koristi i
za očitavanje koda greške. Kod greške se očitava na osnovu paljenja i gašenja signalne sijalice. Broj grešaka koji se na ovaj način mogao prikazati je mali. Izgled napona na sijalici prikazan je na slici 15.
Slika 15. Očitavanje kodova grešaka pomoću signalne sijalice na instrument tabli
2. Očitavanje se vrši pomoću dijagnostičke sijalice koja se priključuje na poseban
dijagnostički konektor. Kod greške se očitava na osnovu paljenja i gašenja dijagnostičke sijalice. Izgled napona na dijagnostičkoj sijalici prikazan je na slici 16.
Slika 16. Očitavanje kodova grešaka pomoću dijagnostičke sijalice 3. Očitavanje se vrši pomoću posebnog uređaja koji se priključuje na odgovarajući
standardizovani, lako dostupan, dijagnostički konektor. Dijagnostički konektor je predviđen za razmenu podataka preko jednog od standardizovanih protokola sa dijagnostičkim uređajima u cilju čitanja i brisanja kodova greški koji su zamemorisani u sistemu za dijagnostiku, korigovanja pojedinih parametara sistema na vozilu i očitavanja stanja davača u vozilu. Dijagnostički konektor je prikazan na slici 17. Standardizovani protokola su SAE J1850 koji ima dve osnovne podvrste VPW (Variable Pulse With Modulation) i PWM (Pulse With Modulation), CAN (Controller Area Network) J-2284 i evropski standard ISO 9141-2.

Slika 17. Dijagnostički konektor
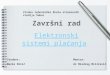
Pomoću dijagnostičkog uređaja očitavaju se kodovi grešaka koji imaju 5 znakova. Osnovna
značenja pojedinih znakova u kodu greške prikazana su na slici 18.
Slika 18. Osnovna značenja pojedinih znakova u kodu greške
Kontakt 02 - J1850 Sabirnica+ Kontakt 04 – Masa vozila Kontakt 05 – Masa signala Kontakt 06 - CAN Visoki nivo (J-2284) Kontakt 07 - ISO 9141-2 K Vo Kontakt 10 - J1850 Sabirnica Kontakt 14 - CAN Niski nivo (J-2284) Kontakt 15 - ISO 9141-2 L Vod Kontakt 16 - Napajanje