Embed Size (px)
DESCRIPTION
ters sarkaç
Citation preview

Pozisyon ve Hız kontrol
Oransal (P) kontrol
Oransal ve İntegral (PI) kontrol
Oransal, İntegral ve Türev (PID) kontrol
PID algoritmaları
Gerçek zamanlı kontrol
Açık ve kapalı devre geri besleme ile kontrol
Motor kontrol teknikleri :PWM
Titresim ve analiz
Ters sarkaç, Terazi
Doğrusal Servo kontrol
EOS MEC-Ters sarkaç ve EOS MEC-Servo mekanik sistemleri aynı mekanik alt yapıyı kullanan tek bir sistemdir. Doğrusal bir ray üzerindehareket eden arabadan oluşmatadır. Araba üzerinde bulunan bir dc motor ve enkoder ile kızağın haketi ve motorun devri ölçülebildiği gibi,farklı uygulamalar için kızak posizyonunu doğrudan ölçmek için 10 turlu hassas bir potansiyometre kullanılmıştır.Yapılacak uygulamaya yönelik olarak sistem istendiğinde bir ters sarkaç, istendiğinde doğrusal servo, istendiğinde teraziyada daha karmaşık deneyler yapmak için opsiyonel donanımları ile eşit kollu terazi ve sarkaç gibi ikinci dereceden karmaşık kontroluygulamalarına uygun olarak genişletilebilir. Sistem tümüyle gömülü bir işlemci (EOS PIC Developent System) ile çalıştırılabileceğigibi çok fonksiyonlu bir DAQ kartı ile MATLAB yada LABVIEW gibi mühendislik paket yazılımları ile de kullanılabilir. Standart ürün dışındatercih edilebilecek kitlerde (EOS MEC-TERS SARKAÇ yada EOS MEC-SERVO + EOS PIC Dev. Sys.) kullanılan PIC ailesininmikrodenetleyicileri ile 25'i aşkın örnek uygulama yazılımı sunulmuştur.
TEKNİK ÖZELLİKLER
Doğrusal hareket yolu
Toplam ray uzunluğu (diştan-dişa)
Araba boyutlari
Araba kütlesı
Sarkaç boyu
Sarkaç kütlesı
Sarkaç açi sensörü ve çözünürlük
Araba pozısyon sensörü
Araba max. İvme ve max. hiz
DC motor çalışma gerilimi
DC motor Max. Akım
DC motor max PWM
SERVO MOTOR UYGULAMASI
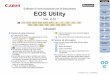
Standart kit içinde bulunan ve araba posizyonunun ölçülmesini
sağlayan 10 turlu hassas potansiyometre ile yaklaşık 0.2 mm/mV çözünürlükde ölçüm
yapılabilmektedir. Sistem eğer EOS PIC Development sistemi ile birlikte kullanılırsa
10 bit ADC çözünürlüğü ile sınırlı olan pozisyon ölmünde yaklaşık 0.8~0.9 mm
çözünürlük elde edilebilir. Yandaki grafikte sistemden alınmış veriler görülmektedir.
Grafikte dikey eksenler pozisyonu, yatay eksenler ise zamanı temsil etmektedir.
Alttaki ölçüm, sadece oransal (P) olarak kontrol edilen ve kazanç ayarı yapılmamış
sistem verileridir. Arabanın istenen pozisyona giderken değeri aşması ve etrafında salınım
yapması görülmektedir. Üstteki ölçümde ise kazancı ayarlanmış ve sadece oransal (P)
olarak kontrol edilen arabanın istenen noktaya daha kesin bir hareketle gittiği görülmektedir.
Bütün bu deneyler PI ve PID olarak tekrarlanmış ve örnek yazılım kodları standart kit
içinde sunulmuştur.
TERS SARKAÇ
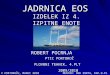
EOS MEC-SARKAÇ uygulamasında ray üzerinde hareket eden araba üzerine
bir potansiyometre yerleştirilmiş ve miline bir sarkaç (çelik çubuk) eklemlenmiştir.
Uygulamada farklı kontrol algoritmelerı denenebilir ve karşılaştırma yapılabilir.
Yandaki grafikte bir denge açısı ve referansı olan durum görülmektedir. Burada araba
pozisyonunu kontrol etmek için sarkacın hareketi, kapalı devre bir PID algoritmasında
geri-besleme olarak kullanılmıştır. Grafikte dikey eksen açı (0 sarkacın denge
durumunu temsil eder), yatay eksen ise zamandır.
EŞİT KOLLU TERAZİ
Benzer şekilde TERAZİ uygulaması için opsiyonel olan terazı denge aparatı kullanılarak
ray bir eşit kollu teraziye dönüştürülür ve ray üzerindeki arabanın hareketi ile terazinin
dengesinin korunması sağlanır. Burada da yine SERVO MOTOR uygulaması,
farklı bir noktadan alınan geri-besleme ve kapalı-devre PID algoritması uygulamaları
gerçekleştirilir.
°
EOS Mühendislik Danışmanlık Yazılım San.Tic. Ltd. Şti. - http://www.eosmuhendislik.com.tr - [email protected]
EOS MEC-TERS SARKAÇEOS MEC-SERVOEOS MEC-TERS SARKAÇEOS MEC-SERVO
900 mm
1050 mm
100 x 60 x 50 mm
Max. 280 ±10 gr
1000 ± 5 mm
1230 ±10 gr
1 tur 270 , 0.054 /mV
10 tur 3600 , 0.2 mm/mV2~8.5 m/s , ~850 mm/s
24 Vdc
1 A
1000 Hz
° °
°

EOS PIC Devolopment System
EOS Mühendislik Danışmanlık Yazılım San.Tic. Ltd. Şti. - http://www.eosmuhendislik.com.tr - [email protected]
ÖRNEK UYGULAMA KODLARI
ANALOG GİRİŞ UYGULAMALARI ANA.asmPIC16F877'nin analog girişlerinin okunması ve tüm girişlerinsıra ile okunarak LCD ekranda gösterilmesi
PWM ÇIKIŞ VE GÜÇ KONTROL UYGULAMASI PWM_P.asmPIC16F628'in PWM çıkış portunun kullanılması ve 12V-10W'lık bir ampülün şiddetinin değiştirilmesi
PWM İLE DC MOTOR ÇALIŞTIRMA PWMDC.asmPIC16F877 mikrodenetleyicisinin PWM çıkışı ve OUTPUT modülkullanılarak bir dc motorun devrinin geri beslemesiz kontrolü (Open-loop kontrol)
ENKODER İLE DC MOTOR DEVİR AYARI ENCDC.asmPIC16F877 entegresinin PWM çıkışı, analog girişi ve sayısal portlarıve Output modül kullanılarak, motor devrinin enkoder ile ölçülmesi kontrol edilmesi (Closed-loop kontrol)
TERS SARKAÇ MEKATRONİK KİT DENEYİ-I INVP_1.asmTers sarkacı, sadece oransal (P) kontrolle bir denge açısı değerinegetiren uygulama kodudur. Bu uygulamada PIC16F877'nin analoggirişleri, PWM çıkışları ve Output Modül kullanılmıştır.
DOĞRUSAL SERVO MOTOR KİT DENEYİ-I SERVO_1.asmServo motoru, sadece oransal (P) kontrolle istenen pozisyonagetiren uygulama kodudur. Bu uygulamada PIC16F877'nin analog girişleri, PWM çıkışları ve Output Modül kullanılmıştır.
TERS SARKAÇ MEKATRONİK KİT DENEYİ-II INVP_2.asmTers sarkacı, oransal-integral(PI) ve oransal-türevsel (PD) kontrolledenge açısı değerine getiren uygulama kodudur. Bu uygulamada PIC16F877'nin analog girişleri, PWM çıkışları ve Output Modül kullanılmıştır.
TERS SARKAÇ MEKATRONİK KİT DENEYİ-III INVP_3.asmTers sarkacı, oransal, integral ve türevsel yöntemlerle kızağın hızı kontrol edilerek dengeye getiren uygulama kodudur. Bu uygulamada sabit bir denge açısı yoktur. Uygulamada PIC16F877'ninanalog girişleri, PWM çıkışları ve Output Modül kullanılmıştır.
DOĞRUSAL SERVO MOTOR KİT DENEYİ-II SERVO_2.asmServo motoru, oransal-integral (PI) ve oransal-türevsel (PD) kontrolle istenen pozisyona getiren uygulama kodudur. Bu uygulamada PIC16F877'nin analog girişleri, PWM çıkışları ve Output Modül kullanılmıştır.
DOĞRUSAL SERVO MOTOR KİT DENEYİ-III SERVO_3.asmServo motoru, oransal-integral-türevsel (PID) kontrolle istenenpozisyona getiren uygulama kodudur. Bu uygulamada PIC16F877'nin analog girişleri, PWM çıkışları ve Output Modül kullanılmıştır.
ÜRÜN KODLARI ve FİYAT BİLGİLERİ
ÜRÜN ADI ÜRÜN KODU FİYATI(EUR)
24 Vdc SMPS güç kaynağıH-Köprüsü DCmotor sürücü (200W)24V/6W dc motor10 tur 10K bilyalı hassas potansiyometre270 derece bilyalı hassas potansiyometre100 CPR enkoder kitiMini limit anahtarıTers sarkaç mekatronik kontrol deney kitiTers sarkaç arabası (motorsuz)Sarkaç bağlantı aparatıDoğrusal servo mekatronik deney kitiDenge terazisi bağlantı aparatıEOS PIC Development System Kit - I
Assembler koduEDU-1010-50, EDU-1010-60TEMP_PI.asmTEMP_PID.asmENCDC.asmSONAR.asmINVP_1.asmINVP_2.asmINVP_3.asmSERVO_1.asmSERVO_2.asmSERVO_3.asm
Dökümentasyon
TEMP_PI.pdfTEMP_PID.pdfENCDC.pdfSONAR.pdfINVP_1.pdfINVP_2.pdfINVP_3.pdfSERVO_1.pdfSERVO_2.pdfSERVO_3.pdf
EDU-1124HW-122ME-101SE-140SE-142SE-150SE-190EDU-1010-20EDU-1010-21EDU-1010-25EDU-1010-30EDU-1010-35EDU-1010-10
25,0035,0025,0025,004,50
22,002,00
1.200,00220,0040,00
1.000,00125,00375,00
Kit içindekiler :
NOT: EDU-1010-20 (Ters sarkaç mekatronik kontrol deney kiti:MEC-TERS SARKAÇ)ve EDU1010-30 (Doğrusal servo mekatronik kontrol deney kiti: MEC-SERVO) kitlerinden EDU-1010-20 aynı zamanda EDU1010-30 uygulamalarını da yapmaya uygundur. Eğer, EDU-1010-20, EDU-1010-35, EDU-1010-21 parça numaralı ürünler seçilirse aşağıdaki uygulamalar yapılabilir.
TERS SARKAÇ (TS)DOĞRUSAL SERVO (DS)EŞİT KOLLU TERAZİ (EKB)EŞİT KOLLU TERAZİ ÜZERİNDEKİ TERS SARKAÇ (EKB-TS)ZORLAMALI SALINIM HAREKETİ (FOSC)





![MAGYAR Bevezetés A fényképezőgép kommunikációs szoftvere · 2013-01-27 · EOS 600D EOS 550D EOS 500D EOS 450D EOS 1100D EOS 1000D ... [Canon EOS Utility] lehetőséget, majd](https://img.pdfslide.tips/doc/110x75/5e519523f2de307dbc3d6640/magyar-bevezets-a-fnykpezgp-kommunikcis-2013-01-27-eos-600d-eos.jpg)