Embed Size (px)
Citation preview

2017年度 スケジュール 「空間情報構築特論」
1. (4/12)2. (4/19)
ガイダンス[空間情報の要素技術] レーザースキャニング
3. (4/26)4. (5/10)5 (5/17)
[空間情報の要素技術] GNSS(休講)学会のため[空間情報の要素技術] リモ トセンシング5. (5/17)
6. (5/24)7. (5/31)
[空間情報の要素技術] リモートセンシング[空間情報の要素技術] 写真測量および画像計測[空間情報の要素技術] GIS(地理情報システム)7. (5/31)
8. (6/7)9. (6/14)
[空間情報の要素技術] GIS(地理情報システム)[空間情報の要素技術] BIM/CIM輪講A1
10. (6/21)11. (6/28)
( )
輪講A2輪講B1輪講B212. (7/5)
13. (7/12)14 (7/19)
輪講B2ワークショップ型授業1/レポートワークショップ型授業2/レポート
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
14. (7/19) ワ クショップ型授業2/レポ ト

レーザースキャニング
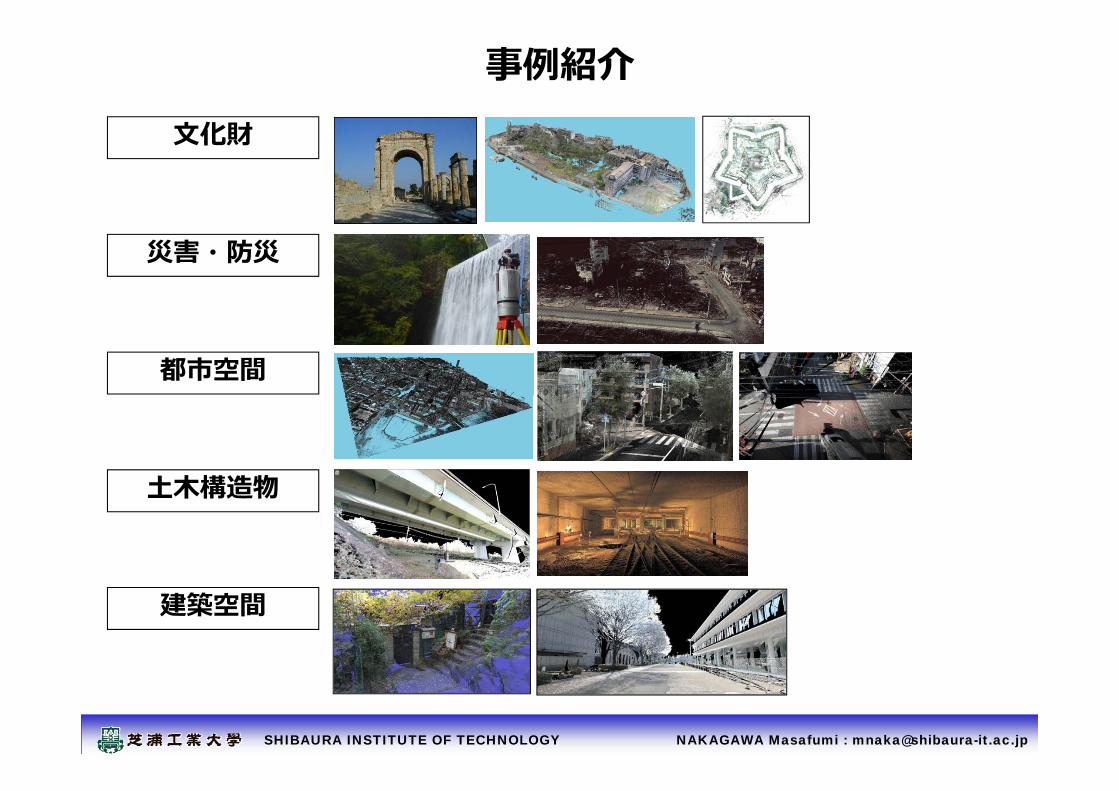
1. 事例紹介2 レーザー計測の原理2. レーザー計測の原理3. 3Dレーザースキャナ4. 点群処理5 レーザー波形解析5. レーザー波形解析6. まとめ
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

レーザースキャニング
1. 事例紹介2 レーザー計測の原理2. レーザー計測の原理3. 3Dレーザースキャナ4. 点群処理5 レーザー波形解析5. レーザー波形解析6. まとめ
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

レーザー計測
- レーザー測距(直線距離の算出)
D
- レーザー距離測量(2D/3D座標値の算出)
Dθ
X,Y,Z
- 3Dレーザースキャニング(⼤量の3D座標値の算出)
X Y ZX1,Y1,Z1
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

光⾶⾏時間測距法( Time Of Flight : TOF )⽬標物にレーザー光(⾚外線など)を照射し,ターゲットで散乱した光を
pp.034
フォトダイオードで捉え,照射・反射にかかる 時間 から測距(⽬標地点までの距離を測定)する⽅式
①レーザー光を照射 ②レ ザ 光を反射トータルステーション プリズムターゲット
①レーザー光を照射 ②レーザー光を反射
レーザー光が往復する時間を計算
往復距離を計算できる
⽚道分が計測距離
レーザー測距で使⽤するフォトダイオードは⾮常に⾼感度でありレ ザ 測距で使⽤するフォトダイオ ドは⾮常に⾼感度であり,強い外乱光を受けるとノイズを発⽣
測距を⾏うためには(特に太陽光下でも測距する場合),このノイズレベル(N)よりも,受光する散乱光レベル(S)の
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
( ) , ( )⽅が⼤きいことが必要

演習︓ TOFの計算
センサ ターゲット200ナノ秒
︖cm
レーザーの計測に,200ナノ秒かかった測距値は,何cmか︖︖cm 測距値は,何cmか︖
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

位相差⽅式
・フェーズシフト⽅式,the phase measurement principle
・数種類のレーザ波⻑の「 位相差(⼲渉波) 」で計測距離を算出する
・⾼速計測 できる
・誤表⽰ の可能性もある
B
このような場合
AB
複数 位相 計算 全 違 値 表
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
複数の位相を計算し全く違った値を表⽰する

レーザー距離測量(2D/3D座標値の算出)距離と⾓度から,座標値を算出できる
pp.121
距離と⾓度から,座標値を算出できる
①トータルステーションの絶対座標値を求めておく
①トータルステーションの絶対座標値を求めておく
トータルステーション
器械⾼ 鉛直⾓
⽔平⾓ トータルステーション
器械⾼ 鉛直⾓
⽔平⾓
プリズムターゲット
器械⾼
基準点 基準点計測対象点
②ノンプリズムレーザー測距器械⾼
計測対象点
②3Dレーザー計測
③計測対象点の座標値が求まる③計測対象点の座標値が求まる
= プリズム計測 = ノンプリズム計測プリズムターゲットを使う計測 対象物に直接レーザーを当てる計測
○⻑距離を正確に計測できる ○危ない箇所でも計測できる×ターゲット設置箇所のみの計測 ×計測距離がプリズム計測より短い
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
×タ ゲット設置箇所のみの計測 ×計測距離がプリズム計測より短い

レーザークラス(=出⼒) pp.129
レーザー機器から発⽣するレーザー光線の波⻑,放出持続時間により⼈体に与える影響 の程度を表す等級
クラス 1 1M 2 2M 3R 3B 4
内容 ⽬に対して安全
散乱された光を⾒ても危険なレーザー
航空LiDAR地上測量レーザーポインタ
地上測量
上空では⼤出⼒のレーザーを照射するが,地上では出⼒が減衰している
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
地上では出⼒が減衰している

レーザースキャニング
1. 事例紹介2 レーザー計測の原理2. レーザー計測の原理3. 3Dレーザースキャナ4. 点群処理5 レーザー波形解析5. レーザー波形解析6. まとめ
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

Total StationEstimate 2D/3D data using Distance and Angle dataEstimate 2D/3D data using Distance and Angle data
X,Y,Z
D(θ φ)
, ,
(θ, φ)
レーザー距離測量ができるが,
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
,レーザースキャナではない

3Dレーザースキャナノンプリズム測距+⾓度
pp.125
ノンプリズム測距+⾓度1軸⾛査型 2軸⾛査型
回転ミラ で 回転ミラ でレーザー測距 レーザー測距回転ミラーで放射状に測距
回転ミラーで放射状に測距
回転台でレーザースキャナを回転
レ ザ を照射する⽅向を
⽔平⾓
レーザーを照射する⽅向をどんどん変えてノンプリズム測距
3Dレーザースキャナ
鉛直⾓
⽔平⾓
点群データ(ポイントクラウド)
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
鉛直⾓ (ポイントクラウド)

レーザースキャナの⼀般的な構成
カメラ
3Dレーザスキャナ(本体)
三脚測定⽤PC
バッテリー
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
バッテリ

レーザー計測器(距離計,3Dスキャナ)
レーザー光の 帯域(紫外線〜近⾚外)に依存
・精度(分解能)・計測可能な距離
違いは︖
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
計測可能な距離

レンジ画像
レーザーの反射強度を表⽰したもの
反射強度 画像 (参考)デジカメの画像反射強度 画像 (参考)デジカメの画像
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

航空LiDAR⾶⾏しながらスキャニング
pp.132
⾶⾏しながらスキャニング
直接定位直接定位
回転型ミラー往復型ミラーレーザースキャニング
スキャニング断⾯
ミラーが回転ミラーが往復
⾶⾏⽅向 ⾶⾏⽅向
スキャニング断⾯
必要なセンサ
・レーザースキャナ
上から⾒たときの点群データ
・RTK-GNSS受信機
・IMU
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
IMU

Aerial LiDARLaser scanning + Position/rotation estimationLaser scanning + Position/rotation estimation
Position
→ RTK-GNSS
Rotation
→ IMU
Laser scanning→ Laser scanner
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

Mobile Mapping System (MMS)⾛⾏しながらスキャニング
pp.134
⾛⾏しながらスキャニング
直接定位 標識・信号機など必要なセンサ
レ ザ スキャナ直接定位
横から⾒た図⾛⾏⽅向レーザースキャナ
カメラ航法装置
・レーザースキャナ
・RTK-GNSS受信機レーザースキャニング
建物
道路⾯
レーザースキャニング
・IMU
衛星測位の環境に⼤きく影響を受ける
建物
上から⾒た図
レ ザ スキャニング技術的課題
システム同期の精度が要求される
上から⾒た図
道路⾯
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
道路⾯ 膨⼤な点群データ処理

Mobile Mapping Systems (MMS)Laser scanning + Position/rotation estimationLaser scanning + Position/rotation estimation
Signal etc
Side-view
Signal, etc.Position
→ RTK-GNSS
Road
viewRotation
→ IMU
Building Laser scanning
Top-view
→ Laser scanner
view
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

レーザースキャニング
1. 事例紹介2 レーザー計測の原理2. レーザー計測の原理3. 3Dレーザースキャナ4. 点群処理5 レーザー波形解析5. レーザー波形解析6. まとめ
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

Recommended software products in Construction
AutoCAD Revit BIM software
Manual works
LASTools
AutoCAD Revit
Filt i Fil i (LAS ASCII)
BIM software
Point cloud Browsers/EditorsLASToolsMeshLab
Filtering, File conversion (LAS -> ASCII)
Surface modeling
CloudCompareTeraPad
Registration
ASCII data
Software developmentPoint Cloud Library Open source library
VisualStudioMATLAB
Higher speed processing
Rapid prototyping
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
MATLAB Rapid prototyping

点群処理点群データ(⼤量の計測点)を取得し,有⽤な情報を⾃動抽出
pp.123
点群デ タ(⼤量の計測点)を取得し,有⽤な情報を⾃動抽出
簡単に計測できる
正確に計測できないし,時間もかかる
地物A
地物
⼿作業が介在する3D計測 時間もかかる...地物B
鉛直⽅向と⽔平⽅向において等間隔にレーザー計測
だいたい同じ形
⾚い円が有効な計測データ3D計測の⾃動化 ⾃動処理で迅速化だいたい同じ形になっている
地物B
外郭線を抽出
復元された
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
復元された地物Bの形状

点群処理の処理例点群データに「モデル」をあてはめたり,すりあわせたりする点群デ タに「モデル」をあてはめたり,すりあわせたりする
道路⾯やファサードを推定する→平⾯や曲⾯をあてはめる
RANSAC
→平⾯や曲⾯をあてはめる
Random Sample Consensus algorithmRandom Sample Consensus algorithm
点群を統合する→点群と点群をすりあわせる→点群と点群をすりあわせる
ICPIterative Closest Point algorithmIterative Closest Point algorithm
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

Issues in Point-based renderingNear-far problem and Transparent effectNear far problem and Transparent effect
(Visualization quality depends on a viewpoint)Rendered point cloud from a viewpoint (Visualization quality depends on a viewpoint)p p
Occlusion
“Near” from a viewpoint
“Far” from a viewpoint= Dense points
= Sparse points
透過効果問題 遠近効果問題透過効果問題Caused by rendering hidden points among near-side points
遠近効果問題Caused by distance differences from the viewpoint to scanned points
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

レーザースキャニング
1. 事例紹介2 レーザー計測の原理2. レーザー計測の原理3. 3Dレーザースキャナ4. 点群処理5 レーザー波形解析5. レーザー波形解析6. まとめ
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

計測距離とレーザースポット径レーザー光は直線ではない
pp.126
レ ザ 光は直線ではない
レーザーの性質上,計測距離が⻑くなると,レーザーのビーム幅であるレ ザ の性質上,計測距離が⻑くなると,レ ザ のビ ム幅であるスポットの直径( スポットサイズ )が⼤きくなる
計測距離 ビーム幅
測量における「レ ザ 光」は こういうイメ ジで考えると理解しやすい測量における「レーザー光」は,こういうイメージで考えると理解しやすい
ポ ト ズ 収スポットサイズに収まる⽮印の集合体
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

パルス解析レーザーの反射波の到達順位などを解析
pp.127
・パルスデータ = レーザーの反射波の到達順位を表す
レ ザ の反射波の到達順位などを解析
・⽴体・平⾯構造領域の区別に⽤いることができる
シングルパルス
ファーストパルス
ザ パ
ラストパルス
アザーパルス
⽴体構造 平⾯構造
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

波形記録⽅式レーザースキャナと,普通のレーザースキャナレーザー波形を記録できるかどうかレ ザ 波形を記録できるかどうか
波形記録⽅式レーザースキャナ強度
波形記録⽅式レ ザ スキャナ波形を記録できるもの
時間
0,1の情報に変換
ファーストパルス ラストパルス⼀般的なレーザースキャナ
時間
時間 光速 距離 換算
般的なレ ザ スキャナ
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
時間×光速で距離に換算

レーザー波形解析(地上LiDAR計測)レーザーの反射波の到達順位を解析する → 計測物体の分類
pp.127
レ ザ の反射波の到達順位を解析する 計測物体の分類
レーザースキャナ
レーザー光の反射 何らかの物体︖
イズ反射強度値
の反射 何らかの物体︖
時間ノイズ
波形が緩い ラストパルスファーストパル
反射強度値
ラストパルスで波形が鋭い
壁⾯スで波形が鋭い
⾦網樹⽊
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
網

レーザー波形解析(航空LiDAR計測)レーザーの反射波の到達順位を解析する → 計測物体の分類
pp.128
レ ザ の反射波の到達順位を解析する 計測物体の分類
反射強度値レーザー光の反射 反射強度値
レーザースキャナ
の反射
ファーストパルス樹冠がわかる
アザーパルスで樹⽊
ファ ストパルス
ラストパルスで
アザーパルスで波形が緩い
時間ラストパルスで波形が鋭い 地⾯
地表がわかる
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
地表がわかる

レーザースキャニング
1. 事例紹介2 レーザー計測の原理2. レーザー計測の原理3. 3Dレーザースキャナ4. 点群処理5 レーザー波形解析5. レーザー波形解析6. まとめ
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY

まとめ
3Dレーザースキャナの特徴・短時間で広範囲を測定できる
⼀般的なデータ処理⼿順
⼤量の3次元座標データを取得
必要な 次 座標デ タを抽出断⾯図
点群データ
必要な3次元座標データを抽出 コンタ図平⾯図
形状計測 変位計測 CG
構造物 形状計測構造物の形状計測⼟量計算
(ダム,橋梁,河川,港湾,ダム,・・・)
景観保存,景観シミュレーション
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
⽂化財斜⾯の形状計測

2017年度 スケジュール 「空間情報構築特論」
1. (4/12)2. (4/19)
ガイダンス[空間情報の要素技術] レーザースキャニング
3. (4/26)4. (5/10)5 (5/17)
[空間情報の要素技術] GNSS(休講)学会のため[空間情報の要素技術] リモ トセンシング5. (5/17)
6. (5/24)7. (5/31)
[空間情報の要素技術] リモートセンシング[空間情報の要素技術] 写真測量および画像計測[空間情報の要素技術] GIS(地理情報システム)7. (5/31)
8. (6/7)9. (6/14)
[空間情報の要素技術] GIS(地理情報システム)[空間情報の要素技術] BIM/CIM輪講A1
10. (6/21)11. (6/28)
( )
輪講A2輪講B1輪講B212. (7/5)
13. (7/12)14 (7/19)
輪講B2ワークショップ型授業1/レポートワークショップ型授業2/レポート
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
14. (7/19) ワ クショップ型授業2/レポ ト