Embed Size (px)
Citation preview
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 1
შესავალი რადიოტექნიკის მიღწევები თავის განვითარების საუკუნოვან
ისტორიაში არ ემსახურებოდა მხოლოდ საკომუნიკაციო საშუალებებს,
არამედ იგი გამოყენებულ იქნა, როგორც ეფექტური სანავიგაციო საშუალება.
სპეციალური ანტენის საშუალებით შესაძლებელი გახდა მიმართულების
განსაზღვრა ზღვიდან ნაპირზე განთავსებულ რადიო გადმცემ სადგურზე.
სანაპირო რადიო პელენგატორები პირველად 1912 წელს გამოჩნდა და მათი
საშუალებით შეიძლებოდა ნაპირიდან გემებზე მიმართულების დადგენა.
ბრიტანულმა კომპანია "დეკა ნავიგატორმა" ბრიტანეთის ფლოტის
ადმირალიტეტის შეკვეთით პირველად შეიმუშავა მე-20 საუკუნის
დასაწყისში სარადარო სისტემა, რომელიც ცნობილი გახდა სახელწოდებით
"დეკა".
რადიოს შემდგომი განვითარების ეტაპს საზღვაო ნაოსნობაში
წარმოადგენს დაბალ სიხშირული რადიო ნავიგაციური სისტემების
დანერგვა, როგორიც იყო „ლორან ა“, „ლორან -ს“, „ომეგა“ და სხვა.
1954 მსოფლიოში პირველი დედამიწის ხელოვნური თანამგზავრის
გაშვებამ კოსმოსში დასაბამი მისცა კოსმოსურ რადიო ნავიგაციას.
მოგვიანებით მსოფლიოში გამოჩნდა პირველი თანამგზავრული საზღვაო
რადიონავიგაციის სისტემები, როგორიცაა „TRANZIT“-ი (აშშ 1964 წ.),
სისტემა “COSPAS-SARSAT”-ი უბედურებაში მყოფი ავარიული გემებისა და
საფრენი აპარატების ადგილმდებარეობის განსაზღვრისათვის,
თანამგზავრული საზღვაო რადიონავიგაციური სისტემა „NAVSTAR”-ი (აშშ
1973წ.), რომელიც მთელი დატვირთვით 1989 წელს ამოქმედდა და
ცნობილია დასახელებით "GPS".
დღეისათვის არსებობს ამ სისტემის ანალოგიური სისტემები,
როგორიცაა GLONASS-ი, (რუსეთი), GALILEO (ევროკავშირი) და COMASS-ი
(ჩინეთი).
სატრანსპორტო სფეროს, კერძოდ კი საზღვაო სატრანსპორტო
ინფრასტრუქტურის განვითარება საქართველოს მთავრობის მიერ
აღიარებულია ქვეყნის განვითარების ერთ-ერთ სტრატეგიულ
მიმართულებად. გლობალური ტრანსნაციონალური პროექტების
რეალიზებამ ჩვენი ქვეყნის განვითარებას მნიშვნელოვანი ეკონომიკური და
პოლიტიკური დივიდენდები უნდა შესძინოს.
მსოფლიო ეკონომიკის ზრდისა და გლობალიზაციის ფონზე
განსაკუთრებულ მნიშვნელობას იძენს ტვირთების იაფი და უსაფრთხო
გადაადგილება. ამ თვალსაზრისით საზღვაო ტრანსპორტს ალტერნატივა არ
ჰყავს. შედეგად, საზღვაო ტრანსპორტირების ხვედრითი წილი მსოფლიო
სატრანსპორტო სისტემაში წლიდან წლამდე იზრდება, რაც თავის მხრივ
კიდევ უფრო ზრდის მოთხოვნილებებს საზღვაო ინფრასტრუქტურის
გამართულ მუშაობაზე სხვადასხვა მიმართულებით. ამ მიმართულებით
განსაკუთრებული როლი ენიჭება საზღვაო ფლოტის გემებზე მზარდი
თანამედროვე რადიოლოკაციური და რადიონავიგაციური სისტემების
გამართულ მუშაობას, რაც თავის მხრივ განაპირობებს გემის უსაფრთხო
მართვას და მის გადაადგილებას.
წარმოდგენილი სალექციო კურსის დანიშნულებაა მოდულის
შესწავლის შედეგად სტუდენტმა შეიძინოს - ნავიგაციური და ავტომატური
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 2
რადიოლოკაციური სისტემების, დაბალსიხშირული რადიონავიგაციური
სისტემების, თანამგზავრული რადიონავიგაციური სისტემების მიმღებ-
ინდიკატორების, ელექტრონული ნავიგაციური ინფორმაციული სისტემების
მიმღებ-ინდიკატორების, ავტომატური საიდენტიფიკაციო სისტემების და
ავტომატიზირებული ნავიგაციური კომპლექსების საწყისი თეორიული
ცოდნა, შეძლოს - მიღებული ინფორმაციის გაანალიზება და ამ სისტემების
გამოყენება დანიშნულების მიხედვით.
სალექციო კურსი განკუთვნილია ბაკალავრიატის სწავლების
საფეხურის, საზღვაო ნავიგაციის მიმართულების სტუდენტებისათვის და
სხვა დაინტერესებულ პირთათვის.
თავი I. რადიოლოკაციური სისტემები (რლს)
ნაწილი 1. ნავიგაციური რადიოლოკაციური სადგურები (ნრლს)
1.1. ნრლს-ის დანიშნულება, ფუნქციონირების პრინციპები. სადგურის
სტრუქტურული სქემა, შემადგენელი მოწყობილობების
დანიშნულება:სინქრონიზატორი, გადამცემი, ანტენა, მიმღები,
საანტენო გადამრთველი. ნრლს-ში სიშორის გაზომვის პრინციპები.
უძრავი სიშორის რგოლები, მოძრავი სიშორის რგოლი, სიშორის
ელექტრონული ვიზირი, მოძრავი სიშორის ვიზირი. მიმართულების
ათვლის მექანიკური და ელექტრონული ვიზირი, კურსის აღნიშვნა.
სხვადასხვა მოძრავი და უძრავი წყალ ზემოთ მყოფი ობიექტების
კოორდინატებისა და პარამეტრების განსაზღვრას შეზღუდული
მხედველობის პირობებში, რომელთაც შეუძლიათ გაასხიონ ან აირეკლონ
რადიოტალღები - რადიოლოკაცია ეწოდება.
სიტყვა „ლოკაცია“ წარმოდგება ლათინური სიტყვიდან “Location” და
„განლაგებას“ აღნიშნავს. რადიოელექტრონულ მოწყობილობათა კომპლექსს,
რომელიც ასრულებს რადიოლოკაციის ამოცანებს რადიოლოკაციური
სადგური (რლს) ეწოდება, ზოგიერთ შემთხვევებში მას ნავიგაციურ რლს
უწოდებენ. ინგლისურ ლიტერატურაში იყენებენ სიტყვას - Radar – Radio
Detection and Ranging - რადიო აღმოჩენა და მანძილის განსაზღვრა.
ფიზიკურ სხეულს ან სხეულთა ჯგუფს, რომელთა ელექტრული და
მაგნიტური (დიელექტრიკული და მაგნიტური შეღწევადობა,
გამტარებლობა) თვისებები განსხვავდება გარემოს თვისებებისაგან, სადაც
ვრცელდება რადიოტალღები გასხივებული რლს-დან - რადიოლოკაციური
ობიექტი ეწოდება.
რადილოკაციური ობიექტები ანუ სამიზნეები შეიძლება იყოს -
წერტილოვანი და სიგრძეზე განფენილი. წერტილოვანი ობიექტების
რადიოლოკაციურ გამოსახულებას რლს-ის იდიკატორის ეკრანზე გააჩნია
მცირე, ერთნაირი ზომები და ფორმა, ხოლო სიგრძეზე განფენილი
ობიექტები რლს-ის იდიკატორის ეკრანზე პრაქტიკულად იმეორებენ
ობიექტების ფორმებსა და ზომებს შესაბამის მასშტაბში.
წერტილოვანი ობიექტებს მიეკუთვნება მცირე ზომის წყალზემოთ მყოფი
სამიზნეები - სანავიგაციო ნიშნები, პატარა გემები, ასევე დიდ ტონაჟიანი
გემები და აისბერგები თუ ისინი საკმაო მანზილზე იმყოფებიან რლს-დან.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 3
სიგრძეზე განფენილ ობიექტებს მიეკუთვნება სანაპირო ზოლი, სანაპირო
და წყლის ზედაპირზე განთავსებული დიდი ზომის ობიექტები, მცირე
მანძილზე მყოფი დიდ ტონაჟიანი გემები და აისბერგები.
იმისდა მიხედვით, თუ როგორ მიეწოდება რლს-ის მიმღებს
სამიზნიდან არეკლილი რადიოტალღა, არსებობს პასიური და აქტიური
რადიოლოკაცია.
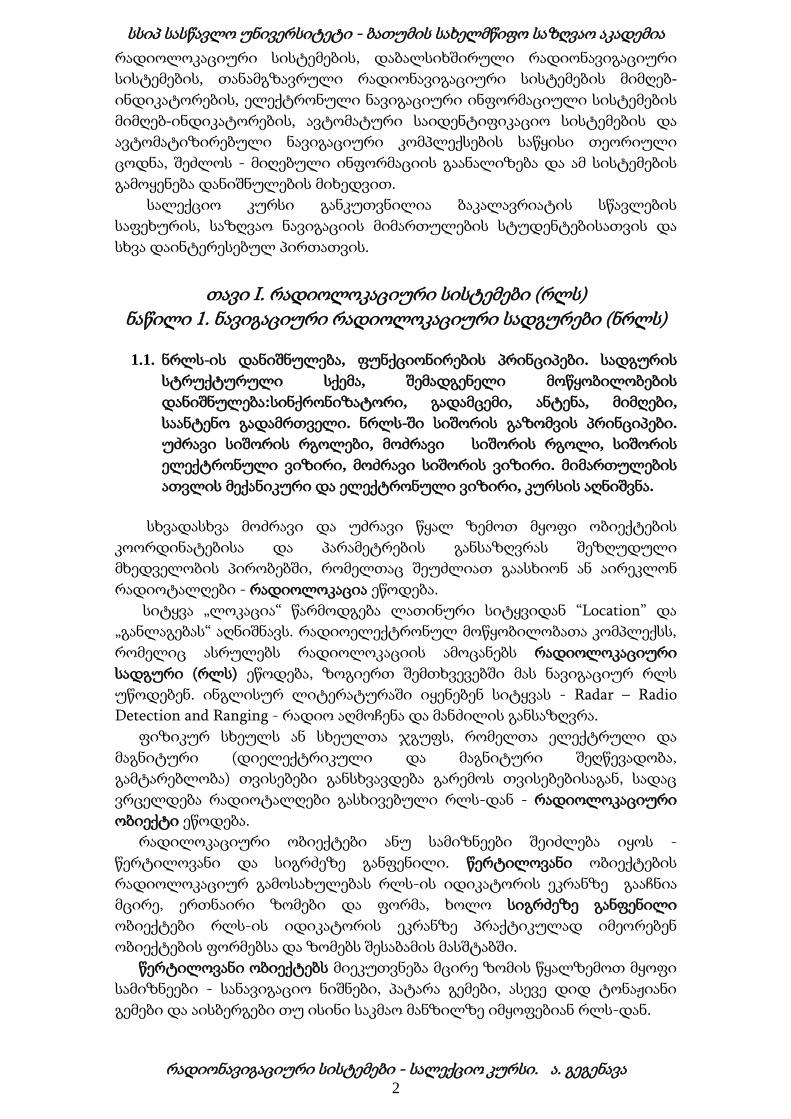
რლს პასიური მოქმედებით შესდგება - ძლიერ მიმართული მიმღები
ანტენისაგან, მიმღებისა და ინდიკატორისაგან.
ნახ. 1.1. რლს პასიური მოქმედებით - გამარტივებული სქემა.
ასეთი ტიპის რლს-ს იყენებენ სიგნალების მისაღებად, რომელთაც
სითბური რადიოგამოსხივება გააჩნიათ, მაგ, ელექტრომაგნიტური ტალღების
მიღება ვარსკლავებიდან, მზიდან, მთვარიდან და სხვა სხეულებიდან.
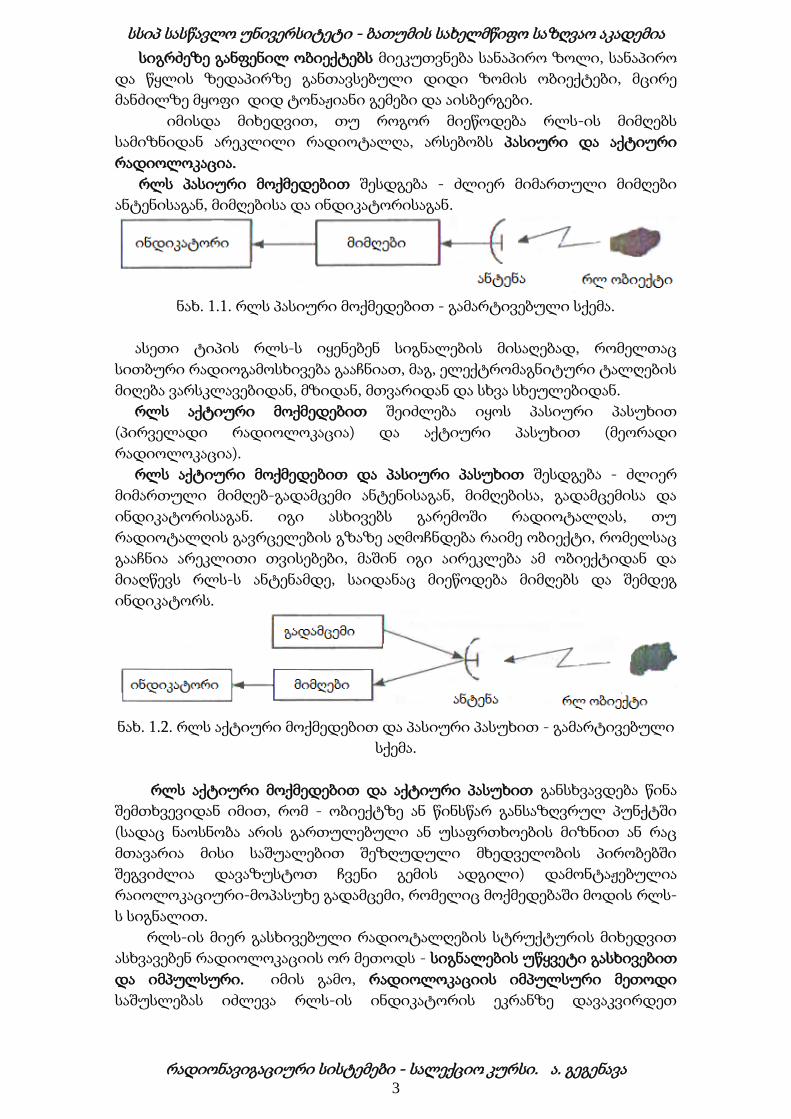
რლს აქტიური მოქმედებით შეიძლება იყოს პასიური პასუხით
(პირველადი რადიოლოკაცია) და აქტიური პასუხით (მეორადი
რადიოლოკაცია).
რლს აქტიური მოქმედებით და პასიური პასუხით შესდგება - ძლიერ
მიმართული მიმღებ-გადამცემი ანტენისაგან, მიმღებისა, გადამცემისა და
ინდიკატორისაგან. იგი ასხივებს გარემოში რადიოტალღას, თუ
რადიოტალღის გავრცელების გზაზე აღმოჩნდება რაიმე ობიექტი, რომელსაც
გააჩნია არეკლითი თვისებები, მაშინ იგი აირეკლება ამ ობიექტიდან და
მიაღწევს რლს-ს ანტენამდე, საიდანაც მიეწოდება მიმღებს და შემდეგ
ინდიკატორს.
ნახ. 1.2. რლს აქტიური მოქმედებით და პასიური პასუხით - გამარტივებული
სქემა.
რლს აქტიური მოქმედებით და აქტიური პასუხით განსხვავდება წინა
შემთხვევიდან იმით, რომ - ობიექტზე ან წინსწარ განსაზღვრულ პუნქტში
(სადაც ნაოსნობა არის გართულებული ან უსაფრთხოების მიზნით ან რაც
მთავარია მისი საშუალებით შეზღუდული მხედველობის პირობებში
შეგვიძლია დავაზუსტოთ ჩვენი გემის ადგილი) დამონტაჟებულია
რაიოლოკაციური-მოპასუხე გადამცემი, რომელიც მოქმედებაში მოდის რლს-
ს სიგნალით.
რლს-ის მიერ გასხივებული რადიოტალღების სტრუქტურის მიხედვით
ასხვავებენ რადიოლოკაციის ორ მეთოდს - სიგნალების უწყვეტი გასხივებით
და იმპულსური. იმის გამო, რადიოლოკაციის იმპულსური მეთოდი
საშუსლებას იძლევა რლს-ის ინდიკატორის ეკრანზე დავაკვირდეთ
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 4
ერთდროულად სამიზნეთა დიდ რაოდენობას, თითქმის ყველგან სავაჭრო
ფლოტის გემებზე იყენებენ რადიოლოკაციის იმპულსურ მეთოდს.
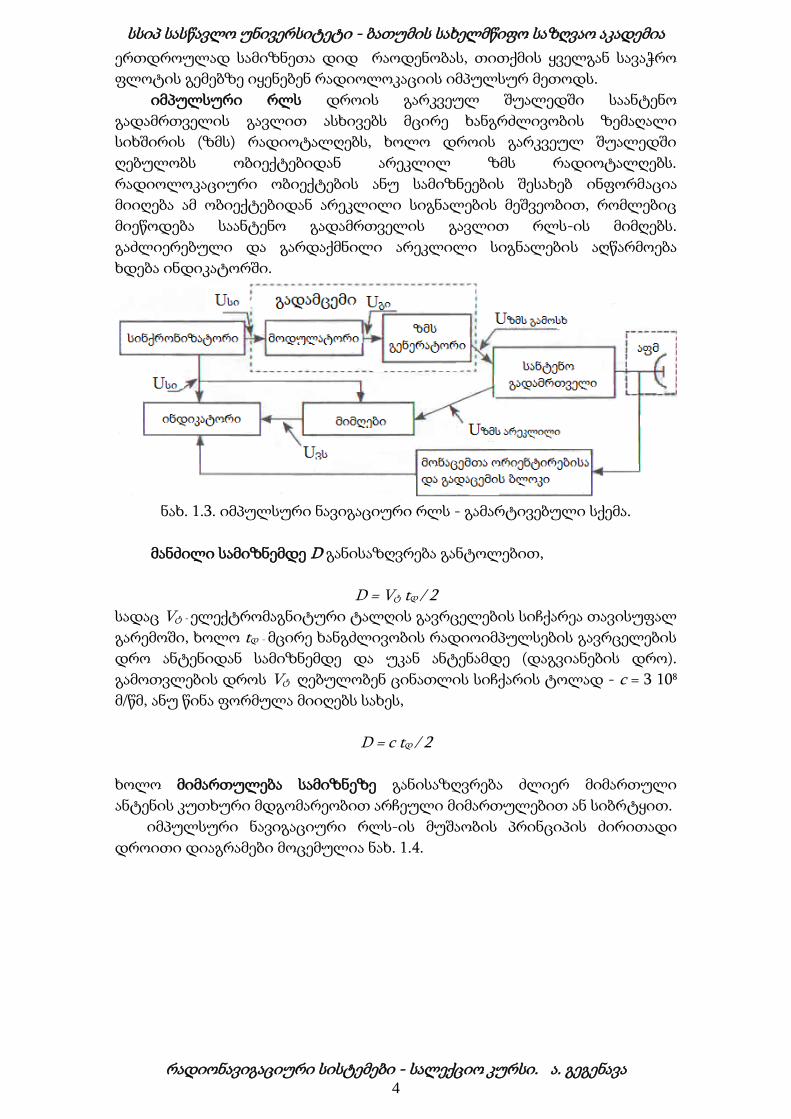
იმპულსური რლს დროის გარკვეულ შუალედში საანტენო
გადამრთველის გავლით ასხივებს მცირე ხანგრძლივობის ზემაღალი
სიხშირის (ზმს) რადიოტალღებს, ხოლო დროის გარკვეულ შუალედში
ღებულობს ობიექტებიდან არეკლილ ზმს რადიოტალღებს.
რადიოლოკაციური ობიექტების ანუ სამიზნეების შესახებ ინფორმაცია
მიიღება ამ ობიექტებიდან არეკლილი სიგნალების მეშვეობით, რომლებიც
მიეწოდება საანტენო გადამრთველის გავლით რლს-ის მიმღებს.
გაძლიერებული და გარდაქმნილი არეკლილი სიგნალების აღწარმოება
ხდება ინდიკატორში.
ნახ. 1.3. იმპულსური ნავიგაციური რლს - გამარტივებული სქემა.
მანძილი სამიზნემდე D განისაზღვრება განტოლებით,
D = Vტ tდ / 2
სადაც Vტ - ელექტრომაგნიტური ტალღის გავრცელების სიჩქარეა თავისუფალ
გარემოში, ხოლო tდ - მცირე ხანგძლივობის რადიოიმპულსების გავრცელების
დრო ანტენიდან სამიზნემდე და უკან ანტენამდე (დაგვიანების დრო).
გამოთვლების დროს Vტ ღებულობენ ცინათლის სიჩქარის ტოლად - c = 3 108
მ/წმ, ანუ წინა ფორმულა მიიღებს სახეს,
D = c tდ / 2
ხოლო მიმართულება სამიზნეზე განისაზღვრება ძლიერ მიმართული
ანტენის კუთხური მდგომარეობით არჩეული მიმართულებით ან სიბრტყით.
იმპულსური ნავიგაციური რლს-ის მუშაობის პრინციპის ძირითადი
დროითი დიაგრამები მოცემულია ნახ. 1.4.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 5
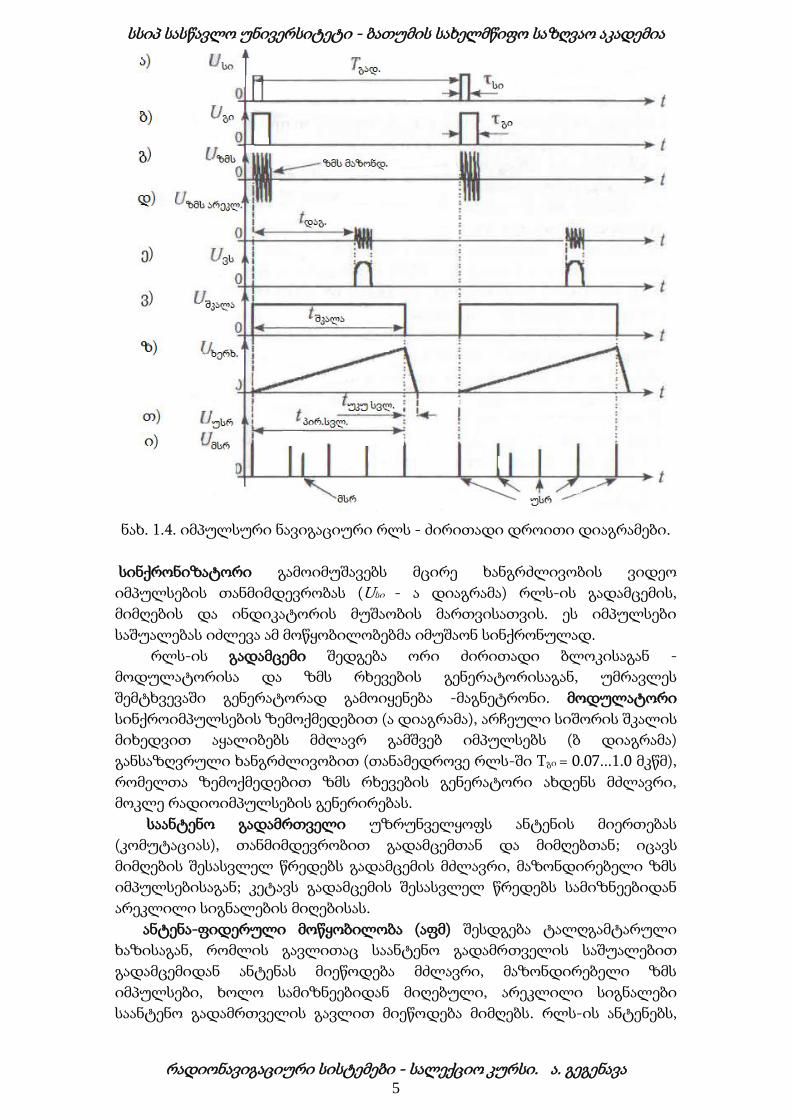
ნახ. 1.4. იმპულსური ნავიგაციური რლს - ძირითადი დროითი დიაგრამები.
სინქრონიზატორი გამოიმუშავებს მცირე ხანგრძლივობის ვიდეო
იმპულსების თანმიმდევრობას (Uსი - ა დიაგრამა) რლს-ის გადამცემის,
მიმღების და ინდიკატორის მუშაობის მართვისათვის. ეს იმპულსები
საშუალებას იძლევა ამ მოწყობილობებმა იმუშაონ სინქრონულად.
რლს-ის გადამცემი შედგება ორი ძირითადი ბლოკისაგან -
მოდულატორისა და ზმს რხევების გენერატორისაგან, უმრავლეს
შემტხვევაში გენერატორად გამოიყენება -მაგნეტრონი. მოდულატორი
სინქროიმპულსების ზემოქმედებით (ა დიაგრამა), არჩეული სიშორის შკალის
მიხედვით აყალიბებს მძლავრ გამშვებ იმპულსებს (ბ დიაგრამა)
განსაზღვრული ხანგრძლივობით (თანამედროვე რლს-ში Tგი = 0.07...1.0 მკწმ),
რომელთა ზემოქმედებით ზმს რხევების გენერატორი ახდენს მძლავრი,
მოკლე რადიოიმპულსების გენერირებას.
საანტენო გადამრთველი უზრუნველყოფს ანტენის მიერთებას
(კომუტაციას), თანმიმდევრობით გადამცემთან და მიმღებთან; იცავს
მიმღების შესასვლელ წრედებს გადამცემის მძლავრი, მაზონდირებელი ზმს
იმპულსებისაგან; კეტავს გადამცემის შესასვლელ წრედებს სამიზნეებიდან
არეკლილი სიგნალების მიღებისას.
ანტენა-ფიდერული მოწყობილობა (აფმ) შესდგება ტალღგამტარული
ხაზისაგან, რომლის გავლითაც საანტენო გადამრთველის საშუალებით
გადამცემიდან ანტენას მიეწოდება მძლავრი, მაზონდირებელი ზმს
იმპულსები, ხოლო სამიზნეებიდან მიღებული, არეკლილი სიგნალები
საანტენო გადამრთველის გავლით მიეწოდება მიმღებს. რლს-ის ანტენებს,
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 6
როგორც წესი გააჩნიათ ზმს იმპულსების ძლიერმიმართული გასხივების
(მიღების) თვისებები.
მიმღები აძლიერებს სამიზნეებიდან მიღებულ (დ დიაგრამა), არეკლილ
სიგნალებს, გარდაქმნის მათ ვიდეოიმპულსებად (ე დიაგრამა) და აწოდებს
შემდეგ ინდიკატორს.
ინდიკატორში აღმწარმოებელი მოწყობილობის საშუალებით
(ელექტრონულ-სხივური მილაკი ან თხევად კრისტალური მონიტორი)
მიმღების მიერ გამომუშავებული ვიდეო იმპულსები გარდაიქმნება
გამოსახულებად: გამომუშავდება დამატებითი ინფორმაციული აღნიშვნები
რადიოლოკაციური სურათის ფორმირებისათვის:
უძრავი სიშორის რგოლები (უსრ);
მოძრავი სისორის რგოლები (მსრ);
გემის კურსის აღნიშვნა (კა);
მიმართულების ელექტრონული მაჩვენებელი (მემ); ასევე,
დამატებით სხვადასხვა აღნიშვნები გამოყენებული რლს-ის ტიპის
მიხედვით. ინდიკატორის საშუალებით, როგორც წესი მიმდინარეობს რლს-
ის მართვა და მისი მუშა მდგომარეობის კონტროლი. ზემოთ ჩამოთვლილი
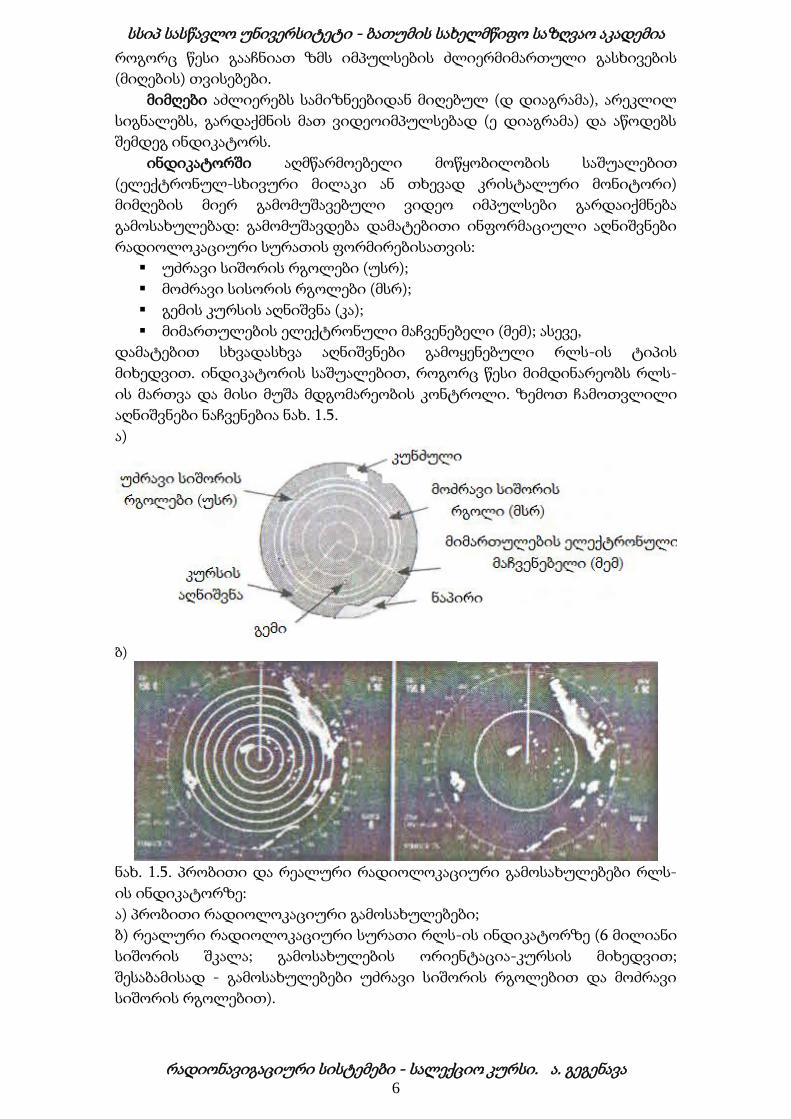
აღნიშვნები ნაჩვენებია ნახ. 1.5.
ა)
ბ)
ნახ. 1.5. პრობითი და რეალური რადიოლოკაციური გამოსახულებები რლს-
ის ინდიკატორზე:
ა) პრობითი რადიოლოკაციური გამოსახულებები;
ბ) რეალური რადიოლოკაციური სურათი რლს-ის ინდიკატორზე (6 მილიანი
სიშორის შკალა; გამოსახულების ორიენტაცია-კურსის მიხედვით;
შესაბამისად - გამოსახულებები უძრავი სიშორის რგოლებით და მოძრავი
სიშორის რგოლებით).
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 7
მონაცემთა ორიენტირებისა და გადაცემის ბლოკი განკუთვნილია
ანტენის კუთხური მდებარეობის გადასაცემად ინდიკატორში და
ელექტრონულ სხივურ მილაკზე (ესმ) გამოსახულების საჭირო
ორიენტაციისა და მოძრაობის სახეობის ფორმირებისათვის.
1.2. რადიოლოკაციური სურათის ფორმირება. რადიოსაკურსო კუთხე.
რადიოლოკაციური პელენგი. გამოსახულების ორიენტაცია: „კურსი“,
„ჩრდილოეთი“, „კურსი სტაბილიზირებული“. ფარდობითი და
ჭეშმარიტი მოძრაობის ინდიკაცია.
უნდა აღინიშნოს, რომ რლს-ის ინდიკატორის ეკრანზე აღწარმოებული
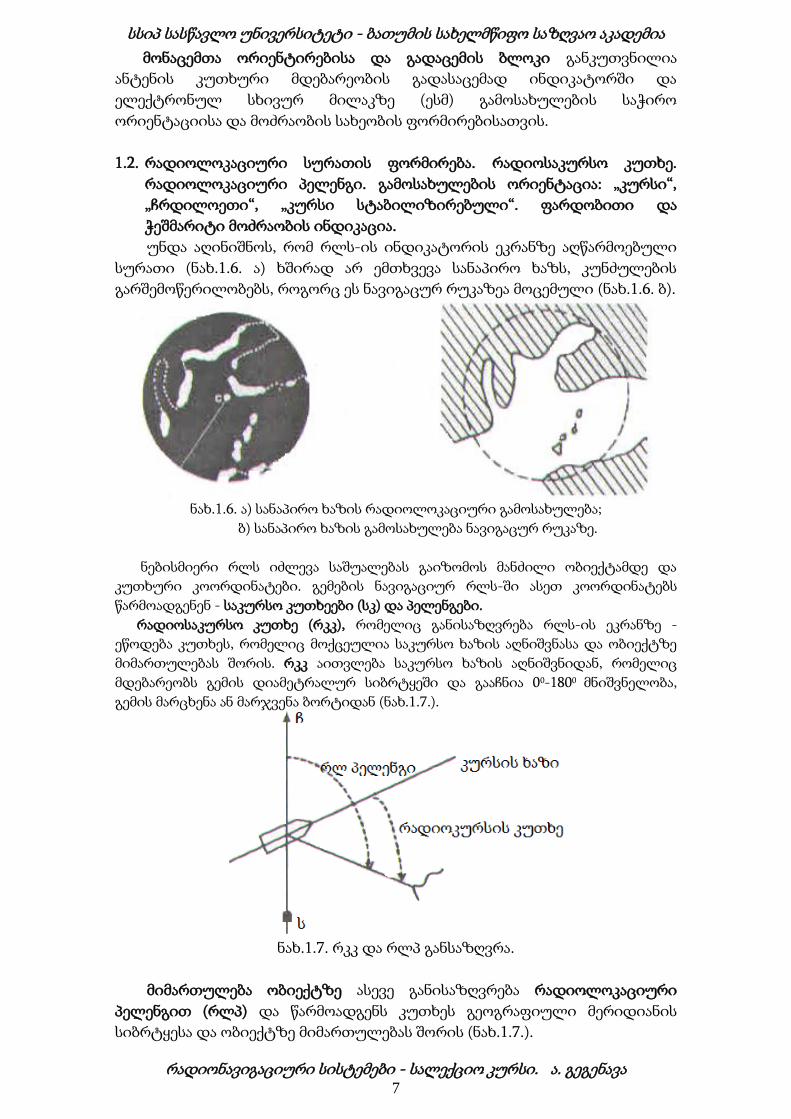
სურათი (ნახ.1.6. ა) ხშირად არ ემთხვევა სანაპირო ხაზს, კუნძულების
გარშემოწერილობებს, როგორც ეს ნავიგაცურ რუკაზეა მოცემული (ნახ.1.6. ბ).
ნახ.1.6. ა) სანაპირო ხაზის რადიოლოკაციური გამოსახულება;
ბ) სანაპირო ხაზის გამოსახულება ნავიგაცურ რუკაზე.
ნებისმიერი რლს იძლევა საშუალებას გაიზომოს მანძილი ობიექტამდე და
კუთხური კოორდინატები. გემების ნავიგაციურ რლს-ში ასეთ კოორდინატებს
წარმოადგენენ - საკურსო კუთხეები (სკ) და პელენგები.
რადიოსაკურსო კუთხე (რკკ), რომელიც განისაზღვრება რლს-ის ეკრანზე -
ეწოდება კუთხეს, რომელიც მოქცეულია საკურსო ხაზის აღნიშვნასა და ობიექტზე
მიმართულებას შორის. რკკ აითვლება საკურსო ხაზის აღნიშვნიდან, რომელიც
მდებარეობს გემის დიამეტრალურ სიბრტყეში და გააჩნია 00-1800 მნიშვნელობა,
გემის მარცხენა ან მარჯვენა ბორტიდან (ნახ.1.7.).
ნახ.1.7. რკკ და რლპ განსაზღვრა.
მიმართულება ობიექტზე ასევე განისაზღვრება რადიოლოკაციური
პელენგით (რლპ) და წარმოადგენს კუთხეს გეოგრაფიული მერიდიანის
სიბრტყესა და ობიექტზე მიმართულებას შორის (ნახ.1.7.).
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 8
პელენგი აითვლება ჩრდილოეთიდან, საათის ისრის მიმართულებით -
3600 ფარგლებში და მისი აღწარმოება ხდება რლს-ის ინდიკატორზე
გიროკომპასის საშუალებით.
კუთხური კოორდინატების გაზომვა დაფუძნებულია რლს-ის ანტენების
მიმართული მოქმედების თვისებებზე ჰორიზონტალურ სიბრტყეში, სხვა
სიტყვებით - კუთხე საკურსო ხაზსა და ანტენის გამოსხივების დიაგრამის
ღერძს შორის, მიმართული ობიექტზე არის - რკკ, ხოლო კუთხე
ჩრდილოეთის მიმართულებასა და ობიექტს შორის - რლპ.
გემების ნავიგაციურ რლს-ში იყენებენ ორიენტაციის სამ სახეობას:
1. გემის დიამეტრიული სიბრტყის მიმართ - ორიენტაცია „კურსით“;
2. ჩრდილოეთის მიმართ - ორიენტაცია „ჩრდილოეთით“ (NORD); და
3. ორიენტაცია - „სტაბილიზირებული კურსი“.
ბოლო ორ შემთხვევაში რლს აუცილებლად უნდა იყოს მიერთებული
გიროკომპასთან.
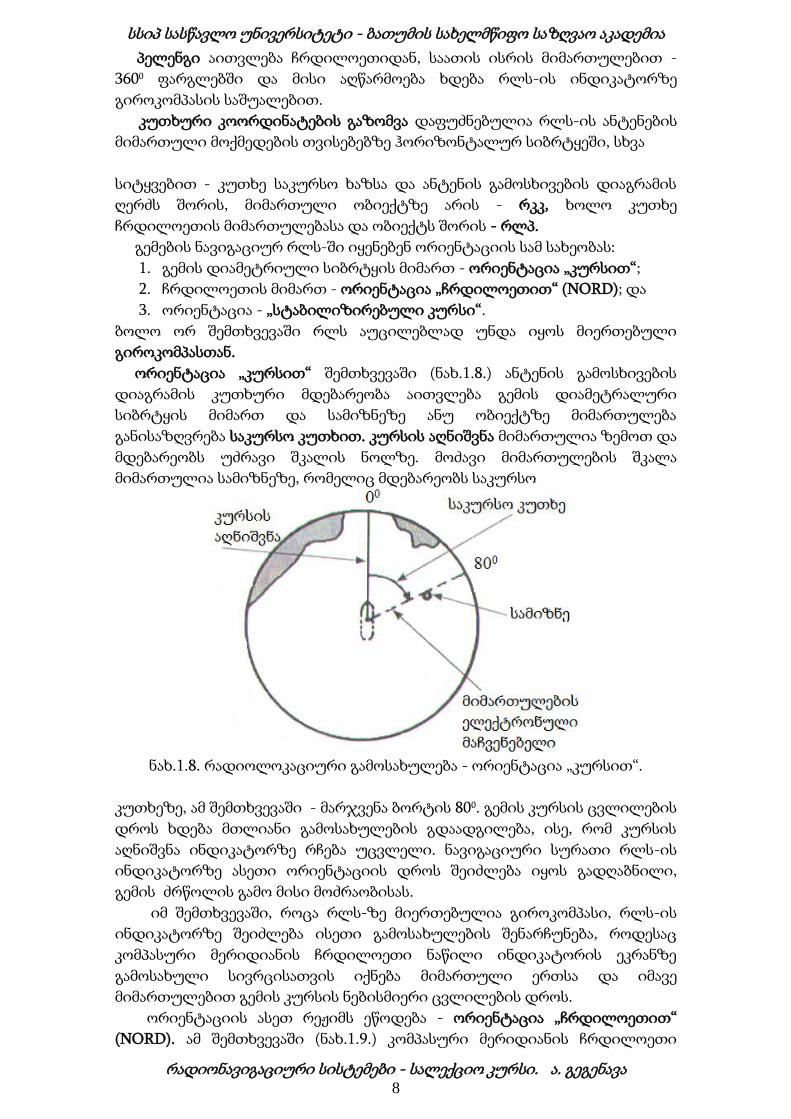
ორიენტაცია „კურსით“ შემთხვევაში (ნახ.1.8.) ანტენის გამოსხივების
დიაგრამის კუთხური მდებარეობა აითვლება გემის დიამეტრალური
სიბრტყის მიმართ და სამიზნეზე ანუ ობიექტზე მიმართულება
განისაზღვრება საკურსო კუთხით. კურსის აღნიშვნა მიმართულია ზემოთ და
მდებარეობს უძრავი შკალის ნოლზე. მოძავი მიმართულების შკალა
მიმართულია სამიზნეზე, რომელიც მდებარეობს საკურსო
ნახ.1.8. რადიოლოკაციური გამოსახულება - ორიენტაცია „კურსით“.
კუთხეზე, ამ შემთხვევაში - მარჯვენა ბორტის 800. გემის კურსის ცვლილების
დროს ხდება მთლიანი გამოსახულების გდაადგილება, ისე, რომ კურსის
აღნიშვნა ინდიკატორზე რჩება უცვლელი. ნავიგაციური სურათი რლს-ის
ინდიკატორზე ასეთი ორიენტაციის დროს შეიძლება იყოს გადღაბნილი,
გემის ძრწოლის გამო მისი მოძრაობისას.
იმ შემთხვევაში, როცა რლს-ზე მიერთებულია გიროკომპასი, რლს-ის
ინდიკატორზე შეიძლება ისეთი გამოსახულების შენარჩუნება, როდესაც
კომპასური მერიდიანის ჩრდილოეთი ნაწილი ინდიკატორის ეკრანზე
გამოსახული სივრცისათვის იქნება მიმართული ერთსა და იმავე
მიმართულებით გემის კურსის ნებისმიერი ცვლილების დროს.
ორიენტაციის ასეთ რეჟიმს ეწოდება - ორიენტაცია „ჩრდილოეთით“
(NORD). ამ შემთხვევაში (ნახ.1.9.) კომპასური მერიდიანის ჩრდილოეთი
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 9
ნაწილის მოჩვენებითი ხაზი ყოველთვის მიმართული იქნება ზემოთ. არ
ექნება ადგილი ინდიკატორზე გამოსახულების წანაცვლებას გემის კურსის
ცვლილებისას. შეიცვლის მდებარეობას მხოლოდ გემის კურსის აღნიშვნის
ხაზი, რომლის მიმართულება შეესაბამება გემის კურსს. ამ ცვლილების
სიდიდე დამოკიდებული იქნება გემის მობრუნების კუთხეზე. ამ
შემთხვევაში რლს-ის ანტენის გამოსხივების დიაგრამის კუთხური
მდებარეობის ათვლა წარმოებს ჭეშმარიტი მერიდიანის მიმართ
(„ჩრდილოეთი“) და სამიზნის კუთხური მდებარეობა განისაზღვრება
პელენგით. მაგალითად - გამოსახულება ორიენტირებულია და
სტაბილიზირებულია „ჩრდილოთით“, კურსის აღნიშვნის უძრავი შკალა
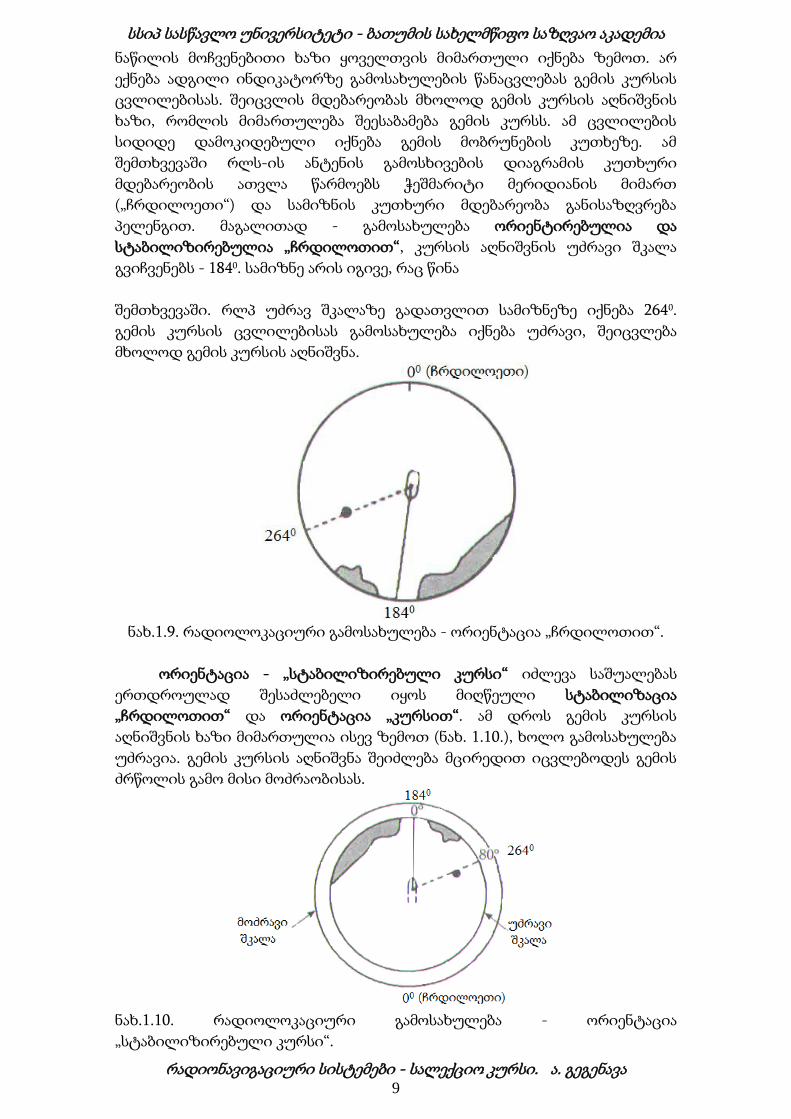
გვიჩვენებს - 1840. სამიზნე არის იგივე, რაც წინა
შემთხვევაში. რლპ უძრავ შკალაზე გადათვლით სამიზნეზე იქნება 2640.
გემის კურსის ცვლილებისას გამოსახულება იქნება უძრავი, შეიცვლება
მხოლოდ გემის კურსის აღნიშვნა.
ნახ.1.9. რადიოლოკაციური გამოსახულება - ორიენტაცია „ჩრდილოთით“.
ორიენტაცია - „სტაბილიზირებული კურსი“ იძლევა საშუალებას
ერთდროულად შესაძლებელი იყოს მიღწეული სტაბილიზაცია
„ჩრდილოთით“ და ორიენტაცია „კურსით“. ამ დროს გემის კურსის
აღნიშვნის ხაზი მიმართულია ისევ ზემოთ (ნახ. 1.10.), ხოლო გამოსახულება
უძრავია. გემის კურსის აღნიშვნა შეიძლება მცირედით იცვლებოდეს გემის
ძრწოლის გამო მისი მოძრაობისას.
ნახ.1.10. რადიოლოკაციური გამოსახულება - ორიენტაცია
„სტაბილიზირებული კურსი“.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 10
რადიოლოკაციური გამოსახულების განხილულ შემთხვევებში გემის
გამოსახულებას აქვს ფიქსირებული ადგილი რლს-ის იდიკატორის ეკრანზე -
იგი მუდმივად იმყოფება ეკრანის (სხივის გაშლის) ცენტრში.
გემის მოძრაობის დროს ეკრანზე არსებული ყველა სამიზნის
აღნიშვნები შეასრულებენ მოძრაობას სიჩქარეებით, რომელთა სიდიდე და
მიმართულება განისაზღვრება სამიზნეებისა და გემის მოძრაობის ჯამური
სიჩქარეებით. შესაბამისად ყველა გარშემო მყოფ ობიექტს, სამიზნეს,
რომლებიც ჩანს ეკრანზე ექნებათ ხილვადი გადაადგილება გემის მიმართ,
სხვა სიტყვებით - ისინი გადაადგილდებიან ფარდობითი სიჩქარეებით და
ფარდობითი მიმართულებებით კონკრეტული გამოსახულების მაშტაბში.
ასეთ რეჟიმს ფარდობითი მოძრაობის (ფმ) იდიკაციის რეჟიმი ეწოდება.
ფმ რეჟიმი, როგორც წესი ხორციელდება, როცა გამოსახულება
ორიენტირებულია „კურსის“ ან „ჩრდილოეთის“ მიმართ, ასევე მაშინ, როცა
ერთდროულად გამოსახულება ორიენტირებული იქნება „კურსით“და
„ჩრდილოეთით“.
თანამედროვე ნავიგაციურ რლს-ში ასევე გამოიყენება ჭეშმარიტი
მოძრაობის (ჭმ) ინდიკაციის რეჟიმი. ამ შემთხვევაში ეკრანის (სხივის
გაშლის) ცენტრი, რომელიც წარმოადგენს ჩვენი გემის აღნიშვნას
გადაადგილდება ეკრანზე სიჩქარით და მიმართულებით, რომელიც
შეესაბამება ჩვენი გემის ჭეშმარიტ კურსსა და სიჩქარეს კონკრეტული
გამოსახულების მაშტაბში და სტაბილიზირებულია „ჩრდილოეთით“. ყველა
უძრავი ობიექტი (სანაპირო ხაძი და სხვ.) იქნება უძრავი, ხოლო მოძრავი
სამიზნეები - გადაადგილდებიან თავიანთი ჭეშმარიტი კურსებითა და
სიჩქარეებით.
ჭმ რეჟიმის დროს მიმდინარეობს სამიზნეების აღნიშვნების ფმ-დან
გამოკლება. ეს ოპერაცია სრულდება ეკრანის (სხივის გაშლის) ცენტრის
გამოსახულების გადაადგილებით იმ მიმართულებითა და სიჩქარით,
რომელიც რლს-ს მიეწოდება გიროკომპასიდან და ლაგიდან.
ჩვენი გემის გამოსახულების გადაადგილების საზღვრები ეკრანზე
შეზღუდულია იმ აუცილებლობით, რომ იყოს სამიზნეების აღმოჩენის
შესაძლებლობა გემის წინ და უკან, როცა ჩვენი გემის აღნიშვნა უახლოვდება
ეკრანის კიდეს.
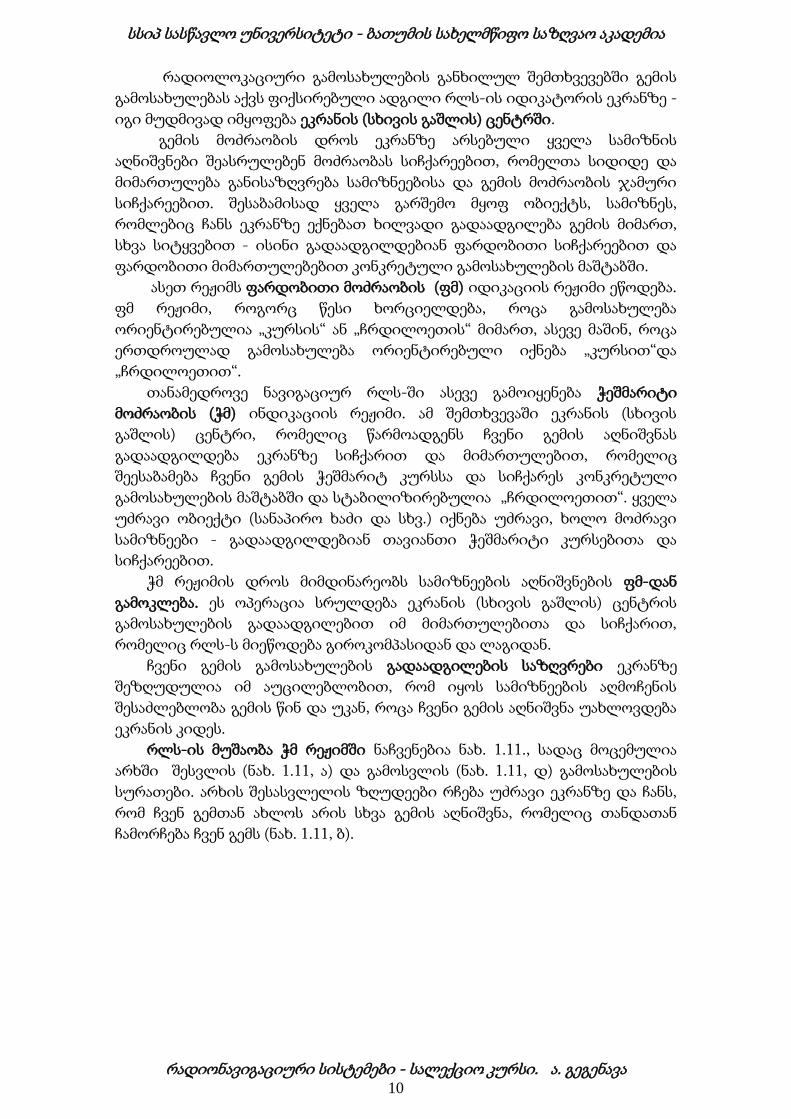
რლს-ის მუშაობა ჭმ რეჟიმში ნაჩვენებია ნახ. 1.11., სადაც მოცემულია
არხში შესვლის (ნახ. 1.11, ა) და გამოსვლის (ნახ. 1.11, დ) გამოსახულების
სურათები. არხის შესასვლელის ზღუდეები რჩება უძრავი ეკრანზე და ჩანს,
რომ ჩვენ გემთან ახლოს არის სხვა გემის აღნიშვნა, რომელიც თანდათან
ჩამორჩება ჩვენ გემს (ნახ. 1.11, ბ).
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 11
ნახ. 1.11. ჭეშმარიტი მოძრაობის რეჟიმში გემის მოძრაობის ფაზები.
ნავიგაციურ რლს-ში ჭმ რეჟიმის პირველადი ჩართვის და მისი
შემდგომი ორიენტირების შეცვლისას ჩვენი გემის აღნიშვნა გადაადგილდება
ბოლო კურსის საწინააღმდეგოდ, გვერდზე, ეკრანის რადიუსის 2/3-ით (ნახ.
1.11, ა). ორიენტირების შეცვლა ეკრანზე ხდება ავტომატურად (ნახ. 1.11, დ)
თუ ჩვენი გემის აღნიშვნა მიუახლოვდება ეკრანის კიდეს მისი რადიუსის 1/3-
ზე (ნახ. 1.11, გ). გარდა ამისა კურსის აღნიშვნის დაბრუნება შესაძლებელია
შესრულდეს ოპერატორის მიერ ხელით, ნებისმიერ მომენტში, შესაბამისი
ღილაკზე დაჭერით.
ნახ. 1.11, დ. წინა სამი სურათისაგან განსხვავებით ვაკვირდებით ახალ
რადიოლოკაციურ სურათს.
ნავიგაციურ რლს-ში ჭმ რეჟიმის შესასრულებლად უნდა არსებობდეს
სპეციალური ჭმ მოწყობილობა. როგორც წესი ჭმ რეჟიმი ხორციელდება
სიშორის შკალებზე - 8 მილის ჩათვლით. თუ ჭმ რეჟიმში ვაკვირდებით
უძრავი ობიექტების (სანაპირო ხაზი, კუნძულები დასხვ.) გადაადგილებას ეს
მიგვანიშნებს იმაზე, რომ გიროკომპასიდან ან ლაგიდან რლს ღებულობს
არასწორ მონაცემებს. ამისათვის ჭმ მოწყობილობაში უნდა შევიყვანოთ
აღნიშნულ ხელსაწყოებზე მაკორექტირებელი მონაცემები და უნდა
მივაღწიოთ უძრავი ობიექტების „უძრაობას“, რითაც თავის მხრივ
განვსაზღვრავთ ამ ხელსაწყოების ცდომილებებს. უნდა აღინიშნოს, რომ
თანამედროვე გემების ნავიგაციურ ხელსაწყოებში ასეთი ცდომილებები
მინიმალურია.
ნაპირებთან ახლოს და არხებში ნაოსნობის დროს ჭმ რეჟიმში ხშირად
ადგილი აქვს უზრავი ობიექტების გამოსახულებების გადღაბნას, გემის
ძრწოლის გამო მისი მოძრაობისას, რაც ჭმ რეჟიმის ურყოფით მხარეს
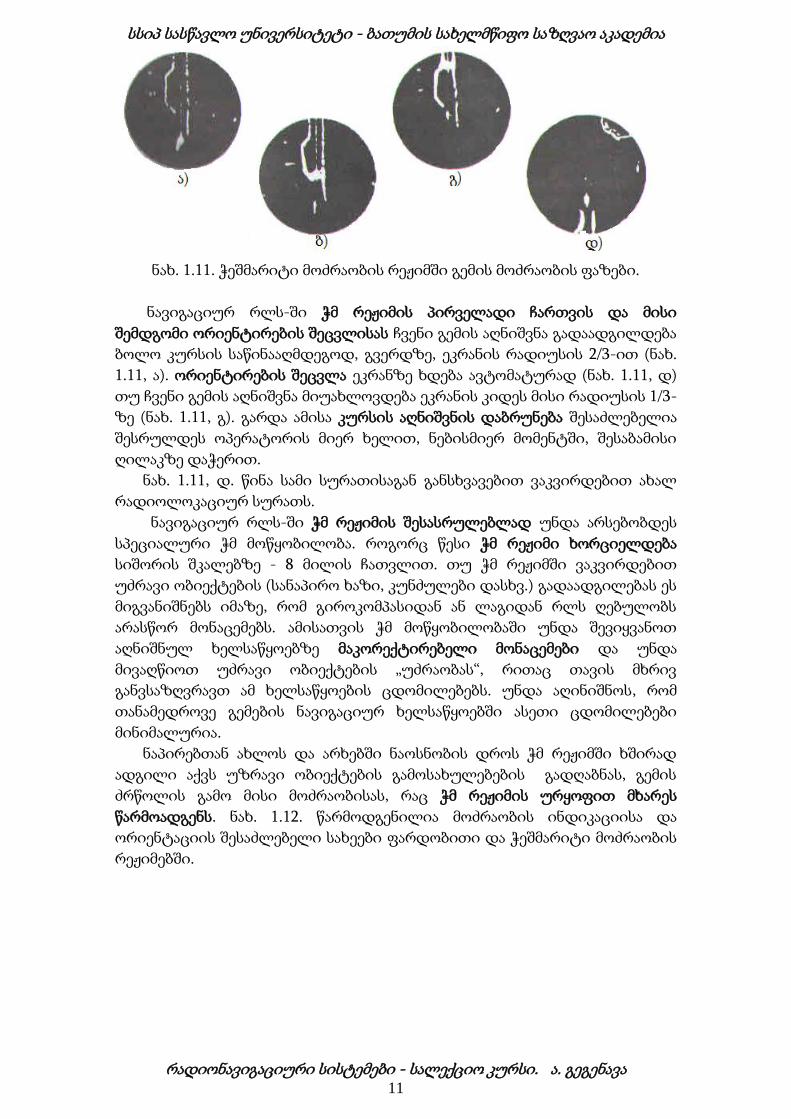
წარმოადგენს. ნახ. 1.12. წარმოდგენილია მოძრაობის ინდიკაციისა და
ორიენტაციის შესაძლებელი სახეები ფარდობითი და ჭეშმარიტი მოძრაობის
რეჟიმებში.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 12
ნახ. 1.12. მოძრაობის ინდიკაციისა და ორიენტაციის შესაძლებელი სახეები.
1.3. ნრლს-ის ძირითადი საექსპლუატაციო მახასიათებლები:
კოორდინატების გაზომვის ცდომილება, მაქსიმალური და მინიმალური
აღმოჩენის სიშორე, გარჩევითუნარიანობა სიშორით და მიმართულებით.
ნრლს-ის ძირითადი ტექნიკური მახასიათებლები: იმპულსური
სიმძლავრე, ტალღის სიგრძე, იმპულსების ხანგრძლივობა, ანტენის
მიმართულობის დიაგრამა ჰორიზონტალურ და ვარტიკალურ
სიბრტყეებში, მიმღების მგრძნობიარობა. სახვადასხვა ობიექტების
არეკვლითი თვისებები. რადიოლოკაციური კუთხოვანი ამრეკლავები.
გემების ნავიგაციური რლს-ბი ხასიათდება სხვადასხვა საექსპლუატაციო
და ტექნიკური მახასიათებლებით, რომლებიც განსაზღვრავენ მის თვისებებს
შეასრულოს ყველა ტექნიკური ამოცანა, რომელიც აუცილებელია ნავიგაციის
ამოცანების გადასაწყვეტად გემის მართვისას..
რლს-ის ძირითადი საექსპლუატაციო მახასიათებლებია:
რადიოლოკაციური აღმოჩენის (მოქმედების) მაქსიმალური სიშორე -
Dmax; მინიმალური აღმოჩენის (მოქმედების) სიშორე - Dmin;
გარჩევითუნარიანობა მანძილით ანუ სიშორით - ΔD; გარჩევითუნარიანობა მიმართულებით ანუ კუთხით - Δα;
სამიზნეების კოორდინატების გაზომვის სიზუსტე;
მუშაობის საიმედობა.
რლს მოქმედების (აღმოჩენის) მაქსიმალური სიშორე დამოკიდებულია
რლს-ის ენერგეტიკულ პოტენციალზე (გადამცემის სიმძლავრე, მიმღების
მგრძნობიარობა), ანტენის მიმართულობაზე, სამიზნის მახასიათებლებზე,
ატმოსფეროს მდგომარეობაზე და სხვა.
რლს-ის მინიმალური აღმოჩენის (მოქმედების) სიშორე დამოკიდებულია
მაზონდირებელი იმპულსების ხანგრძლივობაზე, ანტენის დამაგრების
სიმაღლეზე, ანტენის მიმართულობის დიაგრამის სიფართეზე ვერტიკალურ
სიბრტყეში, ასევე ეგრეთ წოდებულ მკვდარ ზონაზე. კონკრეტულ
შემთხვევაში რლს მინიმალური აღმოჩენის სიშორე შეიძლება განისაზღვროს
მაზონდირებული იმპულსის ხანგრძლივობით,
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 13
Dmin=C τი/2.
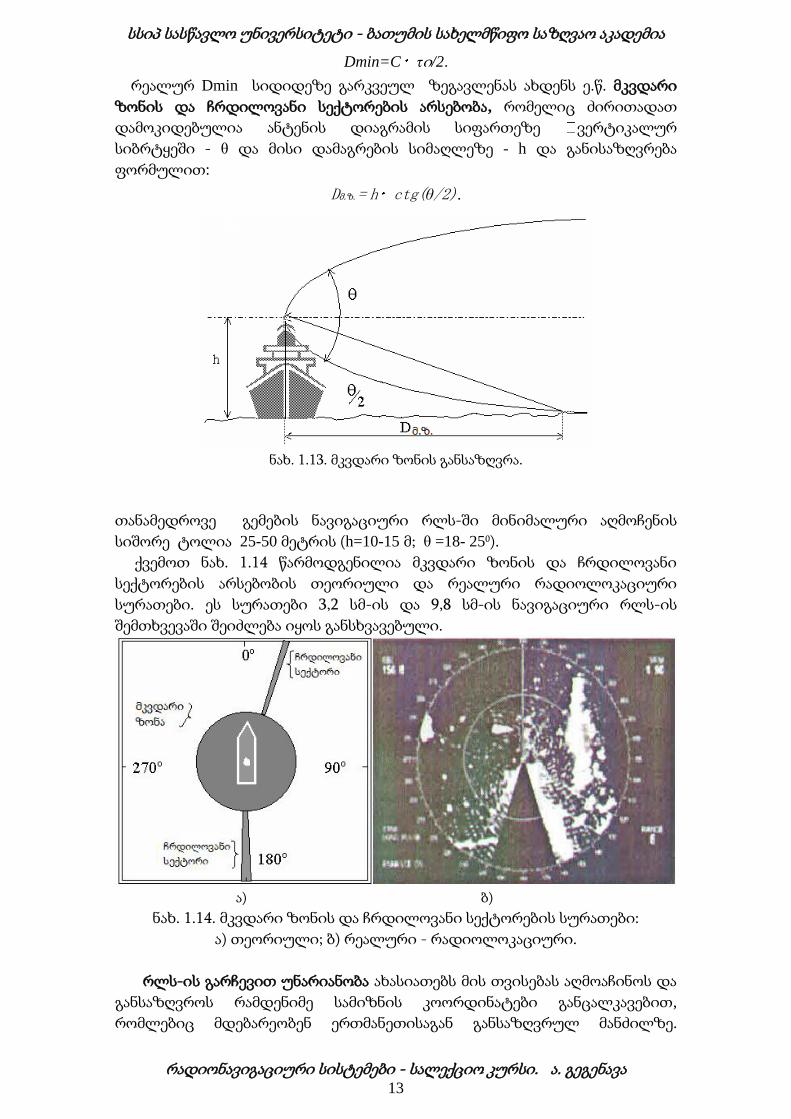
რეალურ Dmin სიდიდეზე გარკვეულ ზეგავლენას ახდენს ე.წ. მკვდარი
ზონის და ჩრდილოვანი სექტორების არსებობა, რომელიც ძირითადათ
დამოკიდებულია ანტენის დიაგრამის სიფართეზე ვერტიკალურ
სიბრტყეში - θ და მისი დამაგრების სიმაღლეზე - h და განისაზღვრება
ფორმულით:
Dმ.ზ. = h ctg(θ/2).
ნახ. 1.13. მკვდარი ზონის განსაზღვრა.
თანამედროვე გემების ნავიგაციური რლს-ში მინიმალური აღმოჩენის
სიშორე ტოლია 25-50 მეტრის (h=10-15 მ; θ =18- 250).
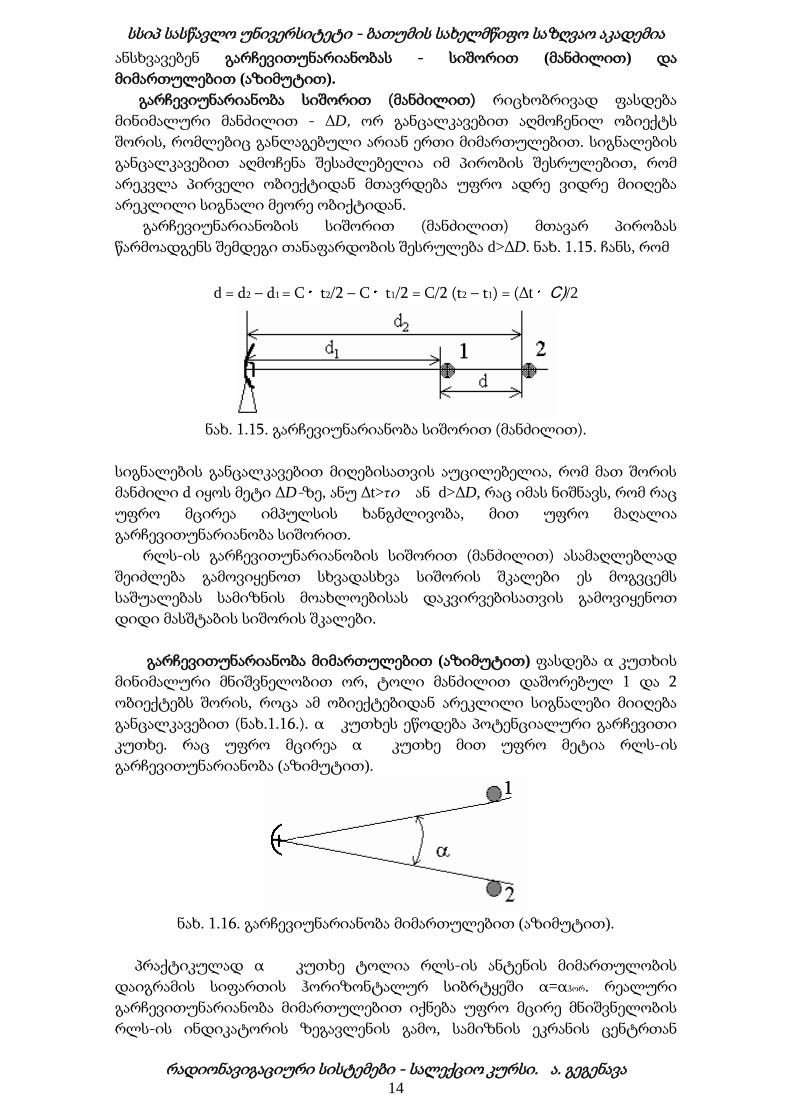
ქვემოთ ნახ. 1.14 წარმოდგენილია მკვდარი ზონის და ჩრდილოვანი
სექტორების არსებობის თეორიული და რეალური რადიოლოკაციური
სურათები. ეს სურათები 3,2 სმ-ის და 9,8 სმ-ის ნავიგაციური რლს-ის
შემთხვევაში შეიძლება იყოს განსხვავებული.
ა) ბ)
ნახ. 1.14. მკვდარი ზონის და ჩრდილოვანი სექტორების სურათები:
ა) თეორიული; ბ) რეალური - რადიოლოკაციური.
რლს-ის გარჩევით უნარიანობა ახასიათებს მის თვისებას აღმოაჩინოს და
განსაზღვროს რამდენიმე სამიზნის კოორდინატები განცალკავებით,
რომლებიც მდებარეობენ ერთმანეთისაგან განსაზღვრულ მანძილზე.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 14
ანსხვავებენ გარჩევითუნარიანობას - სიშორით (მანძილით) და
მიმართულებით (აზიმუტით).
გარჩევიუნარიანობა სიშორით (მანძილით) რიცხობრივად ფასდება
მინიმალური მანძილით - ΔD, ორ განცალკავებით აღმოჩენილ ობიექტს
შორის, რომლებიც განლაგებული არიან ერთი მიმართულებით. სიგნალების
განცალკავებით აღმოჩენა შესაძლებელია იმ პირობის შესრულებით, რომ
არეკვლა პირველი ობიექტიდან მთავრდება უფრო ადრე ვიდრე მიიღება
არეკლილი სიგნალი მეორე ობიქტიდან.
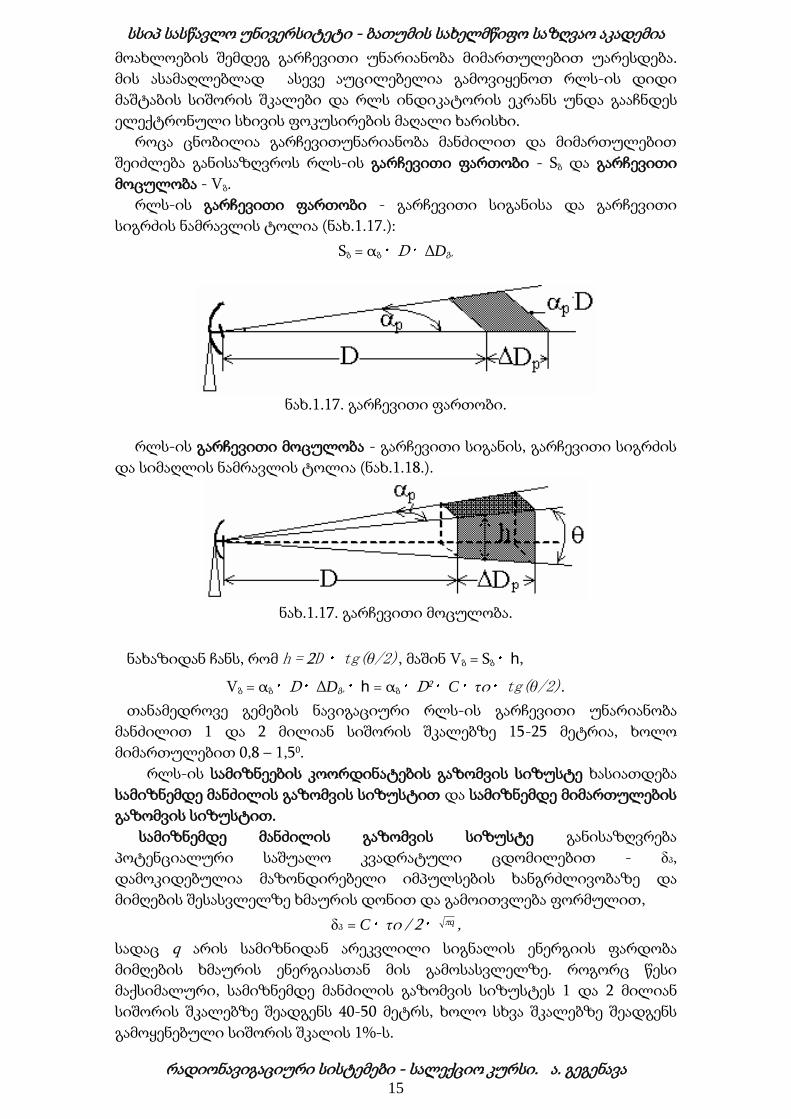
გარჩევიუნარიანობის სიშორით (მანძილით) მთავარ პირობას
წარმოადგენს შემდეგი თანაფარდობის შესრულება d>ΔD. ნახ. 1.15. ჩანს, რომ
d = d2 – d1 = C t2/2 – C t1/2 = C/2 (t2 – t1) = (Δt C)/2
ნახ. 1.15. გარჩევიუნარიანობა სიშორით (მანძილით).
სიგნალების განცალკავებით მიღებისათვის აუცილებელია, რომ მათ შორის
მანძილი d იყოს მეტი ΔD-ზე, ანუ Δt>τი ან d>ΔD, რაც იმას ნიშნავს, რომ რაც
უფრო მცირეა იმპულსის ხანგძლივობა, მით უფრო მაღალია
გარჩევითუნარიანობა სიშორით.
რლს-ის გარჩევითუნარიანობის სიშორით (მანძილით) ასამაღლებლად
შეიძლება გამოვიყენოთ სხვადასხვა სიშორის შკალები ეს მოგვცემს
საშუალებას სამიზნის მოახლოებისას დაკვირვებისათვის გამოვიყენოთ
დიდი მასშტაბის სიშორის შკალები.
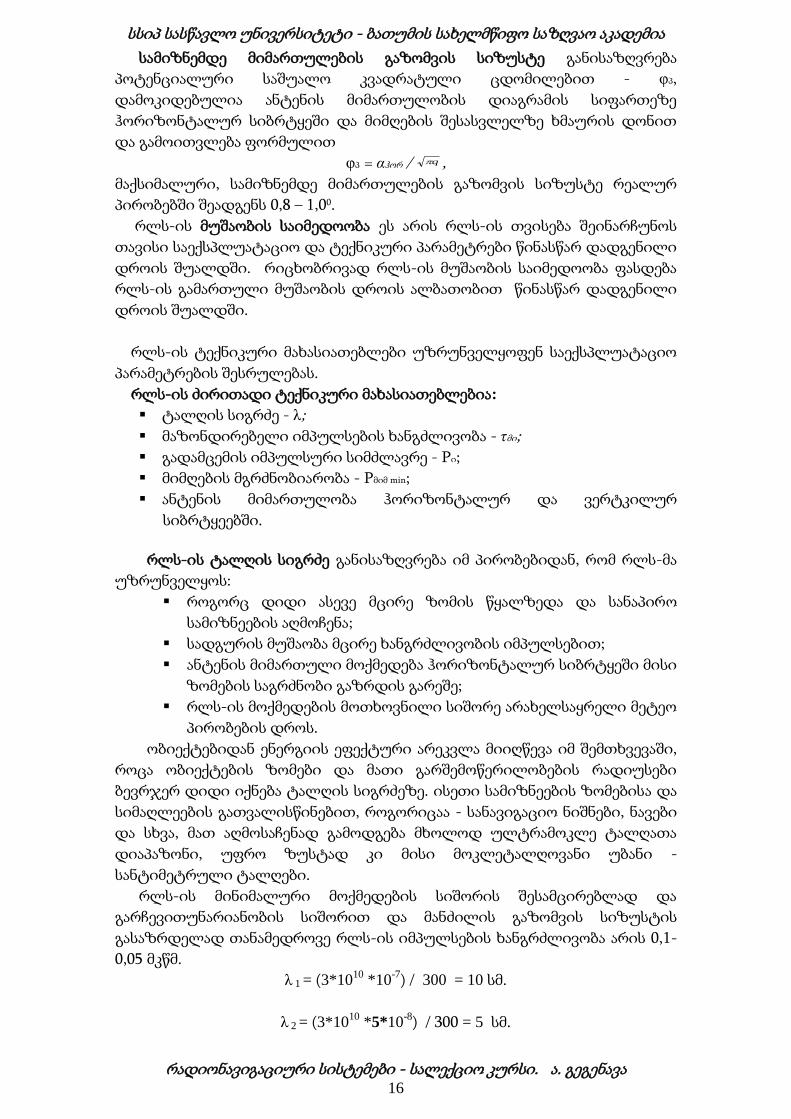
გარჩევითუნარიანობა მიმართულებით (აზიმუტით) ფასდება α კუთხის
მინიმალური მნიშვნელობით ორ, ტოლი მანძილით დაშორებულ 1 და 2
ობიექტებს შორის, როცა ამ ობიექტებიდან არეკლილი სიგნალები მიიღება
განცალკავებით (ნახ.1.16.). α კუთხეს ეწოდება პოტენციალური გარჩევითი
კუთხე. რაც უფრო მცირეა α კუთხე მით უფრო მეტია რლს-ის
გარჩევითუნარიანობა (აზიმუტით).
ნახ. 1.16. გარჩევიუნარიანობა მიმართულებით (აზიმუტით).
პრაქტიკულად α კუთხე ტოლია რლს-ის ანტენის მიმართულობის
დაიგრამის სიფართის ჰორიზონტალურ სიბრტყეში α=αჰორ. რეალური
გარჩევითუნარიანობა მიმართულებით იქნება უფრო მცირე მნიშვნელობის
რლს-ის ინდიკატორის ზეგავლენის გამო, სამიზნის ეკრანის ცენტრთან
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 15
მოახლოების შემდეგ გარჩევითი უნარიანობა მიმართულებით უარესდება.
მის ასამაღლებლად ასევე აუცილებელია გამოვიყენოთ რლს-ის დიდი
მაშტაბის სიშორის შკალები და რლს ინდიკატორის ეკრანს უნდა გააჩნდეს
ელექტრონული სხივის ფოკუსირების მაღალი ხარისხი.
როცა ცნობილია გარჩევითუნარიანობა მანძილით და მიმართულებით
შეიძლება განისაზღვროს რლს-ის გარჩევითი ფართობი - Sგ და გარჩევითი
მოცულობა - Vგ.
რლს-ის გარჩევითი ფართობი - გარჩევითი სიგანისა და გარჩევითი
სიგრძის ნამრავლის ტოლია (ნახ.1.17.):
Sგ = αგ D ΔDგ,
ნახ.1.17. გარჩევითი ფართობი.
რლს-ის გარჩევითი მოცულობა - გარჩევითი სიგანის, გარჩევითი სიგრძის
და სიმაღლის ნამრავლის ტოლია (ნახ.1.18.).
ნახ.1.17. გარჩევითი მოცულობა.
ნახაზიდან ჩანს, რომ h = 2D tg(θ/2), მაშინ Vგ = Sგ h,
Vგ = αგ D ΔDგ, h = αგ D2 C τი tg(θ/2).
თანამედროვე გემების ნავიგაციური რლს-ის გარჩევითი უნარიანობა
მანძილით 1 და 2 მილიან სიშორის შკალებზე 15-25 მეტრია, ხოლო
მიმართულებით 0,8 – 1,50.
რლს-ის სამიზნეების კოორდინატების გაზომვის სიზუსტე ხასიათდება
სამიზნემდე მანძილის გაზომვის სიზუსტით და სამიზნემდე მიმართულების
გაზომვის სიზუსტით.
სამიზნემდე მანძილის გაზომვის სიზუსტე განისაზღვრება
პოტენციალური საშუალო კვადრატული ცდომილებით - δპ,
დამოკიდებულია მაზონდირებელი იმპულსების ხანგრძლივობაზე და
მიმღების შესასვლელზე ხმაურის დონით და გამოითვლება ფორმულით,
δპ = C τი / 2 q ,
სადაც q არის სამიზნიდან არეკვლილი სიგნალის ენერგიის ფარდობა
მიმღების ხმაურის ენერგიასთან მის გამოსასვლელზე. როგორც წესი
მაქსიმალური, სამიზნემდე მანძილის გაზომვის სიზუსტეს 1 და 2 მილიან
სიშორის შკალებზე შეადგენს 40-50 მეტრს, ხოლო სხვა შკალებზე შეადგენს
გამოყენებული სიშორის შკალის 1%-ს.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 16
სამიზნემდე მიმართულების გაზომვის სიზუსტე განისაზღვრება
პოტენციალური საშუალო კვადრატული ცდომილებით - φპ,
დამოკიდებულია ანტენის მიმართულობის დიაგრამის სიფართეზე
ჰორიზონტალურ სიბრტყეში და მიმღების შესასვლელზე ხმაურის დონით
და გამოითვლება ფორმულით
φპ = αჰორ / q , მაქსიმალური, სამიზნემდე მიმართულების გაზომვის სიზუსტე რეალურ
პირობებში შეადგენს 0,8 – 1,00. რლს-ის მუშაობის საიმედოობა ეს არის რლს-ის თვისება შეინარჩუნოს
თავისი საექსპლუატაციო და ტექნიკური პარამეტრები წინასწარ დადგენილი
დროის შუალდში. რიცხობრივად რლს-ის მუშაობის საიმედოობა ფასდება
რლს-ის გამართული მუშაობის დროის ალბათობით წინასწარ დადგენილი
დროის შუალდში.
რლს-ის ტექნიკური მახასიათებლები უზრუნველყოფენ საექსპლუატაციო
პარამეტრების შესრულებას.
რლს-ის ძირითადი ტექნიკური მახასიათებლებია:
ტალღის სიგრძე - λ; მაზონდირებელი იმპულსების ხანგძლივობა - τმი; გადამცემის იმპულსური სიმძლავრე - Pი;
მიმღების მგრძნობიარობა - Pმიმ min;
ანტენის მიმართულობა ჰორიზონტალურ და ვერტკილურ
სიბრტყეებში.
რლს-ის ტალღის სიგრძე განისაზღვრება იმ პირობებიდან, რომ რლს-მა
უზრუნველყოს:
როგორც დიდი ასევე მცირე ზომის წყალზედა და სანაპირო
სამიზნეების აღმოჩენა;
სადგურის მუშაობა მცირე ხანგრძლივობის იმპულსებით;
ანტენის მიმართული მოქმედება ჰორიზონტალურ სიბრტყეში მისი
ზომების საგრძნობი გაზრდის გარეშე;
რლს-ის მოქმედების მოთხოვნილი სიშორე არახელსაყრელი მეტეო
პირობების დროს.
ობიექტებიდან ენერგიის ეფექტური არეკვლა მიიღწევა იმ შემთხვევაში,
როცა ობიექტების ზომები და მათი გარშემოწერილობების რადიუსები
ბევრჯერ დიდი იქნება ტალღის სიგრძეზე. ისეთი სამიზნეების ზომებისა და
სიმაღლეების გათვალისწინებით, როგორიცაა - სანავიგაციო ნიშნები, ნავები
და სხვა, მათ აღმოსაჩენად გამოდგება მხოლოდ ულტრამოკლე ტალღათა
დიაპაზონი, უფრო ზუსტად კი მისი მოკლეტალღოვანი უბანი -
სანტიმეტრული ტალღები.
რლს-ის მინიმალური მოქმედების სიშორის შესამცირებლად და
გარჩევითუნარიანობის სიშორით და მანძილის გაზომვის სიზუსტის
გასაზრდელად თანამედროვე რლს-ის იმპულსების ხანგრძლივობა არის 0,1-
0,05 მკწმ.
λ 1 = (3*1010
*10-7) / 300 = 10 სმ.
λ 2 = (3*1010
*5*10-8) / 300 = 5 სმ.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 17
გემების თანამედროვე რლს-ში ამჟამად გამოიყენება ორი ტალღის
სიგრძის რლს-ი λ 1 = 3.2 სმ (X - დიაპაზონი) და λ 2 = 9,8 სმ (Y - დიაპაზონი).
რლს-ის მაზონდირებელი იმპულსების ხანგძლივობა განისაზღვრება
იმპულსების გასხივების სიხშირით და შეირჩევა პირობიდან, რომ
განისაზღვროს რლს-ის მოქმედების სიშორე მისი წრიული მიმოხილვის
მუშაობის რეჟიმში. ამ დროს ითვალისწინებენ ანტენის ბრუნვის სიხშირეს,
ანტენის სიფართეს ჰორიზონტალურ სიბრტყეში და სხვა. პრაქტიკულად
მაზონდირებელი იმპულსების განმეორების სიხშირე შეირჩევა პირობიდან,
Fი max < Fი < Fი min
და იცვლება ფარგლებში, მცირე შკალებიდან 3200იმპ/წმ - დიდ შკალებამდე
400იმპ/წმ. თუ გავითვალისწინებთ, რომ რლს-ს გააჩნია არა ერთი სიშორის
შკალა არამედ რამდენიმე, მაგალითისათვის 1 და 2 მილიან სიშორის
შკალებზე აიღება 3000 - 3200იმპ/წმ, ხოლო 4 და 8 მილიან სიშორის შკალებზე
1500-1600იმპ/წმ, და ა.შ.
რლს-ის გადამცემის სიმძლავრე ზეგავლენას ახდენს რლს-ის მოქმედების
სიშორეზე. ასხვავებენ რლს-ის გადამცემის იმპულსურ - Pი და საშუალო - Pს
სიმძლავრეებს.
იმპულსური ეწოდება სიმძლავრეს, რომელიც მოქმედებს
მაზონდირებელი იმპულსის ხანგრძლივობის დროში, ხოლო საშუალო
ეწოდება - საშუალო სიმძლავრეს იმპულსების განმეორების პერიოდში.
Pი τი = Pსაშ Tი
საშუალო სიმძლავრე იზომება ვატებში, ხოლო იმპულსური სიმძლავრე კი
კილოვატებში. თანამედროვე ნავიგაციური რლს-ის იმპულსური სიმძლავრე
6-50 კვტ-ის ტოლია.
რლს-ის მიმღების მგძნობიარობა წარმოადგენს ერთ-ერთ მთავარ
ტექნიკურ პარამეტრს, რომელიც განსაზღვრავს რლს-ის აღმოჩენის სიშორეს
და აღწარმოებული სიგნალების ხარისხს.
რლს-ის მიმღების მგძნობიარობა ეს არის რლს-ის მიმღების თვისება
გამოყოს ხელშეშლების ფონზე საჭირო არეკვლილი სიგნალები შესაბამისი
ალბათობით. სანტიმეტრულ ტალღათა დიაპაზონში ხელშეშლების ძირითად
წყაროს წარმოადგენს ანტენისა და მიმღების ხმაური. ხმაურის ჯამური დონე,
რომელსაც ადგილი აქვს მიმღების შესასვლელზე ტოლია:
Pხმ = K T0 Δf Nხმ m,
სადაც K - ბოლცმანის მუდმივაა ();
T0 - აბსოლუტური გარემოს ტემპერატურა - გრადუსებში:
Δf - მიმღების სიხშირეთა გატარების ზოლი - ჰერცებში;
Nხმ - ხმაურის კოეფიციენტი;
m - გარჩევითობის კოეფიციენტი.
Δf - მიმღების სიხშირეთა გატარების ზოლი დამოკიდებულია იმპულსების
ხანგრძლივობაზე - Δf = 1 / τმი.
Nხმ - ხმაურის კოეფიციენტი გვიჩვენებს რამდენჯერ მეტი ხმაური აქვს
რეალურ მიმღებს იდეალურ მიმღებთან შედარებით და იგი ტოლია Nხმ =
30...100.
m - გარჩევითობის კოეფიციენტის მნიშვნელობა ერთეულების ტოლია.
რეალურად რლს-ის მიმღების მგძნობიარობა მიმღების შესასვლელზე
ხმაურის ჯამური სიმძლავრის ტოლია და იზომება ვატებში ან დეციბელებში:
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 18
Pმიმ min = Pხმ = K T0 Δf Nხმ m
თანამედროვე რლს-ის მიმღების მგძნობიარობა ტოლია Pმიმ min = 10-12 ვტ ან 120
დბ საწყისი სიმძლავრის მიმართ, რომელიც 1 ვტ ტოლია.
რლს-ის ანტენა ხასიათდება მიმართულობის დიაგრამის სიფართით
ჰორიზონტალურ და ვერტიკალურ სიბრტყეებში, მიმართულობის
კოეფიციენტით, ელექტრომაგნიტური ველის პოლარიზაციით და ანტენის
ბრუნვის კუთხური სიჩქარით.
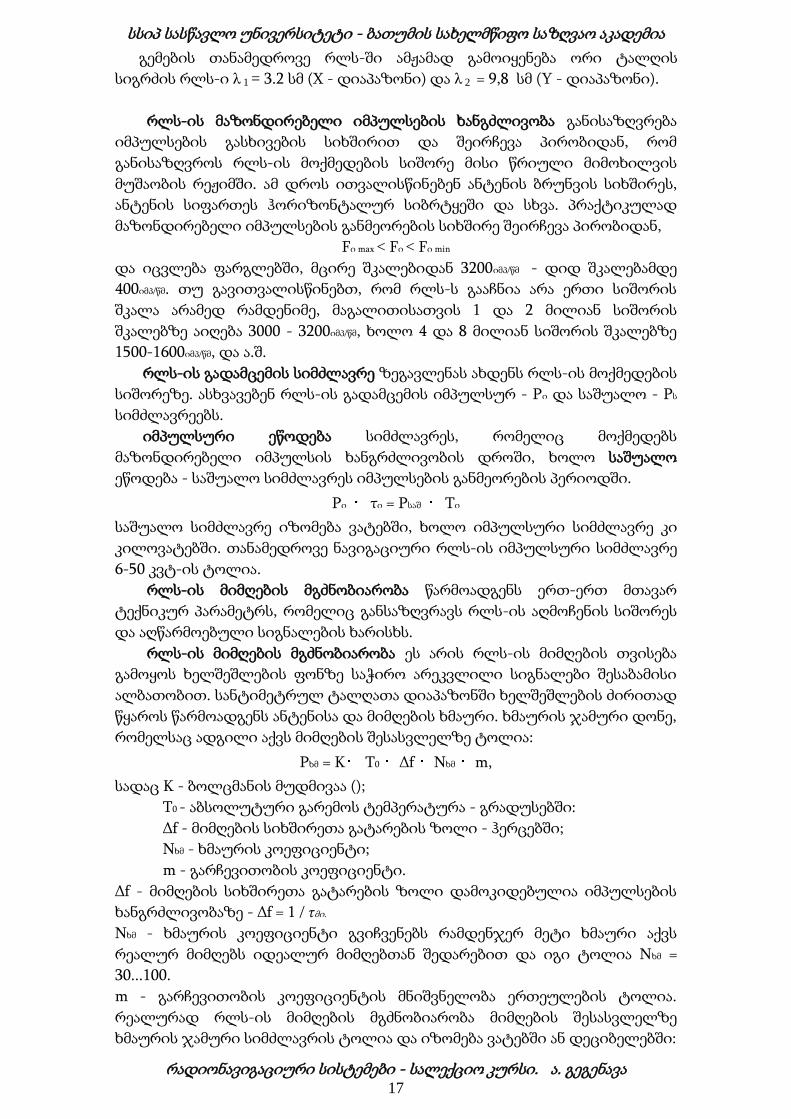
რლს-ის ანტენის მიმართულობის დიაგრამის სიფართე ჰორიზონტალურ
სიბრტყეში - α, რლს-ის 3,2 სმ ტალთათა დიაპაზონში (ნახ. 1.18, ა) შეადგენს
0,70... 1,20, ხოლო 9,8 სმ ტალთათა დიაპაზონში კი მიახლოებით 2,30-ია,
d,
სადაც d ანტენის გაშლის ზომებია შესაბამის სიბრტყეში. თუ
გავითვალისწინებთ ჰორიზონტალურ სიბრტყეში ანტენის საშუალო გაშლის
ზომებს - 220 სმ, მაშინ სმ-ის ტოლი იქნება. ტალღის სიგრძის გაზრდა
გამოიწვევს ან ანტენის ზომების გაზრდას ან ჰორიზონტალურ სიბრტყეში
მიმართულობის დიაგრამის სიფართის გაზრდას. ასევე 3 სმ-ზე ნაკლები
ტალღის სიგრძის გამოყენების დროს შესამჩნევად იზრდება ენერგიის
დანაკარგები ატმოსფეროში (წყლით გაჯერებული დაბალი ღრუბლები,
წვიმა, ნისლი, სველი თოვლი და სხვა), რითაც მცირდება რადიოლოკაციური
აღმოჩენის სიშორე და იზრდება ხელშეშლები. ამიტომ მცირე მანძილებზე
ხელსაყრელია 3,2 სმ ტალღის სიგრძის რლს-ის გამოყენება, ხოლო დიდ
მანძილებზე და ხელშეშლების შესამცირებლად 9,8 სმ რლს-ი.
რლს-ის ანტენის მიმართულობის დიაგრამის სიფართე ვერტიკალურ
სიბრტყეში - θ ორივე ტალთათა დიაპაზონში (ნახ. 1.18, ბ) შეადგენს 200... 220.
ხოლო 9,8 სმ ტალთათა დიაპაზონში კი მიახლოებით 230-ია.
ნახ.1.18. ანტენის მიმართულობის დიაგრამა.
ა) ჰორიზონტალურ სიბრტყეში; ბ) ვერტიკალურ სიბრტყეში.
ანტენის მიმართულობის კოეფიციენტი ეს არის რიცხვი, რომელიც
აჩვენებს მოცემული მიმართულებით წარმოქმნილი ველის სიმძლავრე
რამდენჯერ მეტია სფერული მიმართულებით წარმოქმნილ ველის
სიმძლავრეზე,
G ,
სადაც Sა - ანტენის გაშლის ფართობია.

სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 19
რლს-ის ანტენის ელექტრომაგნიტური ველის პოლარიზაცია
განისაზღვრება ელექტრომაგნიტური ველის მდგენელის გავრცელების
სიბრტყით, არსებობს ვერტიკალური და ჰორიზონტალური პოლარიზაცია,
როგორც წესი გემების ნავიგაციურ რლს-ში გამოიყენება ანტენები
ჰორიზონტალური პოლარიზაციით.
ანტენის ბრუნვის კუთხური სიჩქარე შეადგენს 16...24 ბრ/წთ, ხოლო
ჩქაროსნული გემებისათვის 30...48 ბრ/წთ.
თუ ობიექტი, რომლის დასხივებაც ხდება რლს-ის ზმს რადიო
იმპულსებით თავისი ელექტრული და მაგნიტური პარამეტრებით
განსხვავდება გარემოსაგან მაშინ ამ ობიექტების ზედაპირულ ფენებში
აღიძვრება ზმს დენები, რომლებიც წარმოქმნიან მეორად ელექტრომაგნიტურ
ველს, რომელიც თავის მხრივ აღწევს რლს-დე და წარმოადგენს არეკვლილი
სიგნალების წყაროს, რომელთაც შემდგომ ვაკვირდებით რლს-ის ეკრანზე.
ობიექტებიდან რადიო ტალღების არეკვლა შეიძლება იყოს ორი ტიპის -
სარკული ან გაბნევითი (დიფუზიური).
სარკულ არეკვლას ადგილი აქვს, როცა ობიექტის ზედაპირი არის
გლუვი და მისი ზომები და გარშემოწერილობების რადიუსი ბევრად მეტია
ტალღის სიგრძეზე (ნახ.1.19.), არეკვლა წარმოებს ოპტიკური კანონებით,
დაცემული და არეკვლილი კუთხე ერთმანეთის ტოლია.
ნახ.1.19. სარკული არეკვლა.
გაბნევითი (დიფუზიური) არეკვლის დროს (ნახ.1.20.) ადგილი აქვს არეკვლილი
რადიო ტალღების გავრცელებას სხვადასხვა მიმართულებით, ამ დროს არეკლილი
რადიო ტალღების ინტენსიობა კლებულობს..
ნახ.1.20. დიფუზიური არეკვლა.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 20
ობიექტის არეკვლითი თვისებები ზეგავლენას ახდენს რლს-ის აღმოჩენის
სიშორეზე და დამოკიდებულია ძირითადათ ობიექტების ფორმაზე, ზომებზე
და რლს-ის ტალღის სიგრძეზე. რიცხობრივად ობიექტის არეკვლითი
თვისებები ფასდება ობიექტის არეკვლის ეფექტური ზედაპირით (აეზ) –Sეფ.
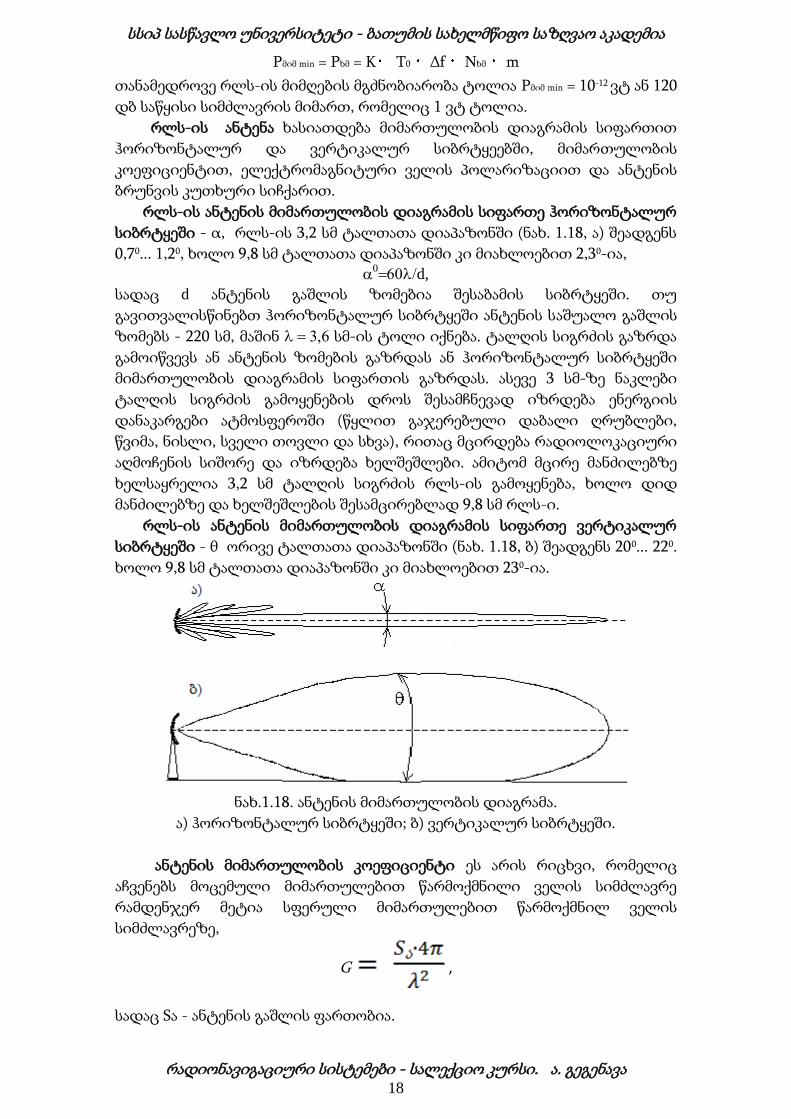
მაგალითად ობიექტზე რომლის ფართობია S (ნახ.1.21.) ეცემა სიმძლავრის
სიმკვრივის ნაკადი П1, რომელიც ტოლია,
П1=Рგ /Sა,
სადაც Рგ - გადამცემის სიმძლავრეა;
Sა - ანტენის გაშლ;ის ფართობი.
თუ ჩავთვლით, რომ დანაკარგებს ადგილი არ აქვს მაშინ ობიექტი
აირეკლავას სიმძლავრეს,
Р=S П1.
ნახ.1.21. არეკვლა ობიექტიდან.
ამ ენერგიის ნაწილი ბრუნდება უკან რლს-ის ანტენაში და წარმოწმნის მასში
П2 სიმძლავრის სიმკვრივის ნაკადს,
П2 = (Р G) / (4π D2) = (S П1 G) / (4 π D
2),
საადაც G - ანტენის მიმართულობის კოეფიციენტია;
D - მანძილი რლს-დან ობიექტამდე;
ხოლო S G = Sეფ, მაშინ ობიექტის აეზ ტოლი იქნება:
Sეფ = 4 π D2 (П2/ П1)
ამ ხერხით აეზ შეიძლება გამოთვლილი იყოს მარტივი ფორმის
ობიექტებისათვის, როგორებიცაა - ნახევარტალღოვანი პასიური
სიმეტრიული ვიბრატორი, მეტალის ფურცელი, სფერო, კუთხოვანი
ამრეკლავი და სხვა. რაც შეეხება რთული ფორმის ობიექტებს, როგორიცაა
გემები, სანავიგაციო ნიშნები, სხვადასხვა წყალზემო და სანაპირო
ობიექტები, მათი აეზ შეიძლება გამოთვლილი იყოს მხოლოდ
ექსპერიმენტულად.
პასიური ნახევარტალღოვანი სიმეტრიული ვიბრატორის აეზ ტოლია,
Sეფ = 0,86 λ2
მაგალითად, თუ λ = 3,2 სმ, მაშინ Sეფ = 8,8 სმ2, ხოლო თუ λ = 9,8 სმ, მაშინ Sეფ
= 82 სმ2.
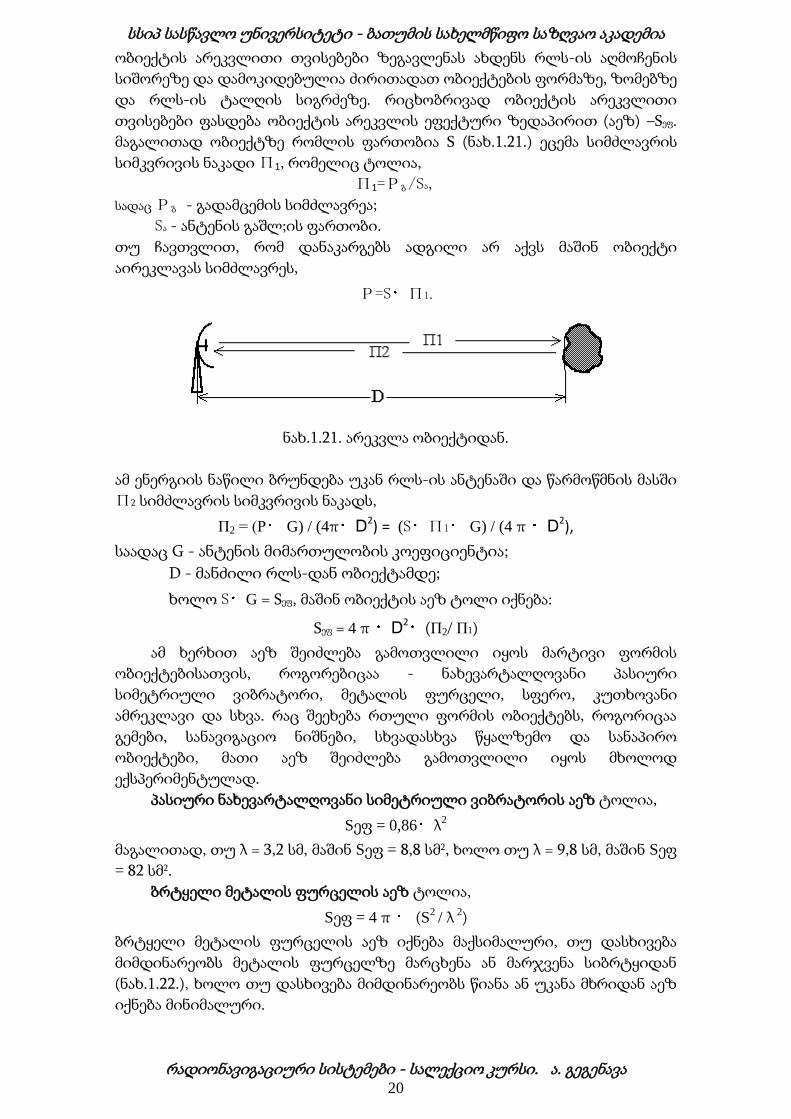
ბრტყელი მეტალის ფურცელის აეზ ტოლია,
Sეფ = 4 π (S2 / λ 2)
ბრტყელი მეტალის ფურცელის აეზ იქნება მაქსიმალური, თუ დასხივება
მიმდინარეობს მეტალის ფურცელზე მარცხენა ან მარჯვენა სიბრტყიდან
(ნახ.1.22.), ხოლო თუ დასხივება მიმდინარეობს წიანა ან უკანა მხრიდან აეზ
იქნება მინიმალური.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 21
ნახ.1.22. არეკვლა ბრტყელი მეტალის ფურცელიდან.
მაგალითად, თუ ბრტყელი მეტალის ფურცელის ფართობია S = 1 მ2, λ = 3,2 სმ,
მაშინ Sეფ = 12560 მ2, ხოლო თუ λ = 9,8 სმ, მაშინ Sეფ = 1308 მ2.
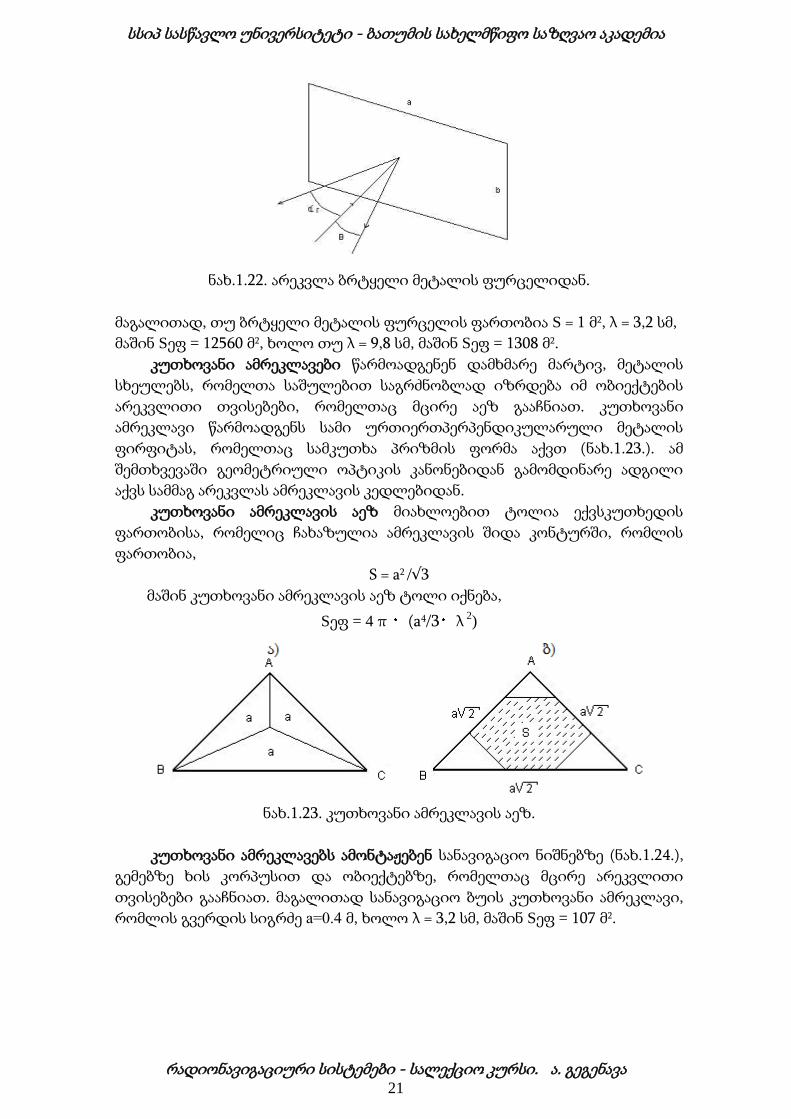
კუთხოვანი ამრეკლავები წარმოადგენენ დამხმარე მარტივ, მეტალის
სხეულებს, რომელთა საშულებით საგრძნობლად იზრდება იმ ობიექტების
არეკვლითი თვისებები, რომელთაც მცირე აეზ გააჩნიათ. კუთხოვანი
ამრეკლავი წარმოადგენს სამი ურთიერთპერპენდიკულარული მეტალის
ფირფიტას, რომელთაც სამკუთხა პრიზმის ფორმა აქვთ (ნახ.1.23.). ამ
შემთხვევაში გეომეტრიული ოპტიკის კანონებიდან გამომდინარე ადგილი
აქვს სამმაგ არეკვლას ამრეკლავის კედლებიდან.
კუთხოვანი ამრეკლავის აეზ მიახლოებით ტოლია ექვსკუთხედის
ფართობისა, რომელიც ჩახაზულია ამრეკლავის შიდა კონტურში, რომლის
ფართობია,
S = a2 /√3
მაშინ კუთხოვანი ამრეკლავის აეზ ტოლი იქნება,
Sეფ = 4 π (a4/3 λ 2)
ნახ.1.23. კუთხოვანი ამრეკლავის აეზ.
კუთხოვანი ამრეკლავებს ამონტაჟებენ სანავიგაციო ნიშნებზე (ნახ.1.24.),
გემებზე ხის კორპუსით და ობიექტებზე, რომელთაც მცირე არეკვლითი
თვისებები გააჩნიათ. მაგალითად სანავიგაციო ბუის კუთხოვანი ამრეკლავი,
რომლის გვერდის სიგრძე а=0.4 მ, ხოლო λ = 3,2 სმ, მაშინ Sეფ = 107 მ2.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 22
ნახ.1.24. კუთხოვანი ამრეკლავი სანავიგაციო ნიშანზე.
სფეროს ფორმის სხეულების აეზ დამოკიდებულია მის რადიუსზე - R.
გამოკვლევები აჩვენებს, როცა R>> λ, მაშინ სფეროს აეზ არ არის
დამოკიდებული რლს-ის ტალღის სიგრძეზე და განისაზღვრება, როგორც
Sსფ ეფ = π R2
ამ თვისების გათვალისწინებით ასეთი სფერო შეიძლება გამოყენებული
იქნეს, როგორც ეტალონური სხეული რთული ფორმის ობიექტების აეზ
გამოთვლისას, როგორიცაა გემები და სხვა.
გემები განეკუთვნება რთული ფორმის რადიოლოკაციურ ობიექტებს,
რომელთაც გააჩნიათ მრავალი, სხვადასხვა ფორმისა და ზომის ცალკეული
ამრეკლავები (გემის კორპუსი, მაჩტები, მილსადენები, ტაკელაჟი და სხვა).
შესაბამისად გემებიდა არეკვლილი სიგნალები წარმოადგენენ სხვადასხვა
ამპლიტუდისა და ფაზის მქონე სიგნალების ინტერფერენციას. გემების
მოძრაობა და რხევა ასევე ზეგავლენას ახდენენ არეკვლილ სიგნალებზე.
გემებს გააჩნიათ მაქსიმალური აეზ, როცა დასხივება წარმოებს მარცხენა ან
მარჯვენა ბორტებიდან, ხოლო მინიმალური, გემის წინა ან უკანა მხრიდან.
ექსპერიმენტალურად გემების აეზ განისაზღვრება ეტალონური ობიექტების
საშულებით, როგორიცაა მაგალითად გლუვ ზედაპირიანი სფერო, რომლის
რადიუსი რამოდენიმეჯერ მეტია რლს-ის ტალღის სიგრძეზე. სფეროს აეზ
მუდმივი სიდიდეა და არ არ არის დამოკიდებული დასხივების
მიმართულებაზე. რიცხობრივად ასეთი ობიექტის აეზ ტოლია,
Sეფ = Sსფ ეფ (P / Pსფ),
სადაც, Sსფ ეფ ეტალონური სფეეროს აეზ,
P - გასაზომი ობიექტიდან არეკვლილი სიგნალის სიმძლავრე,
Pსფ - ეტალონური სფეეროდან არეკვლილი სიგნალის სიმძლავრე.
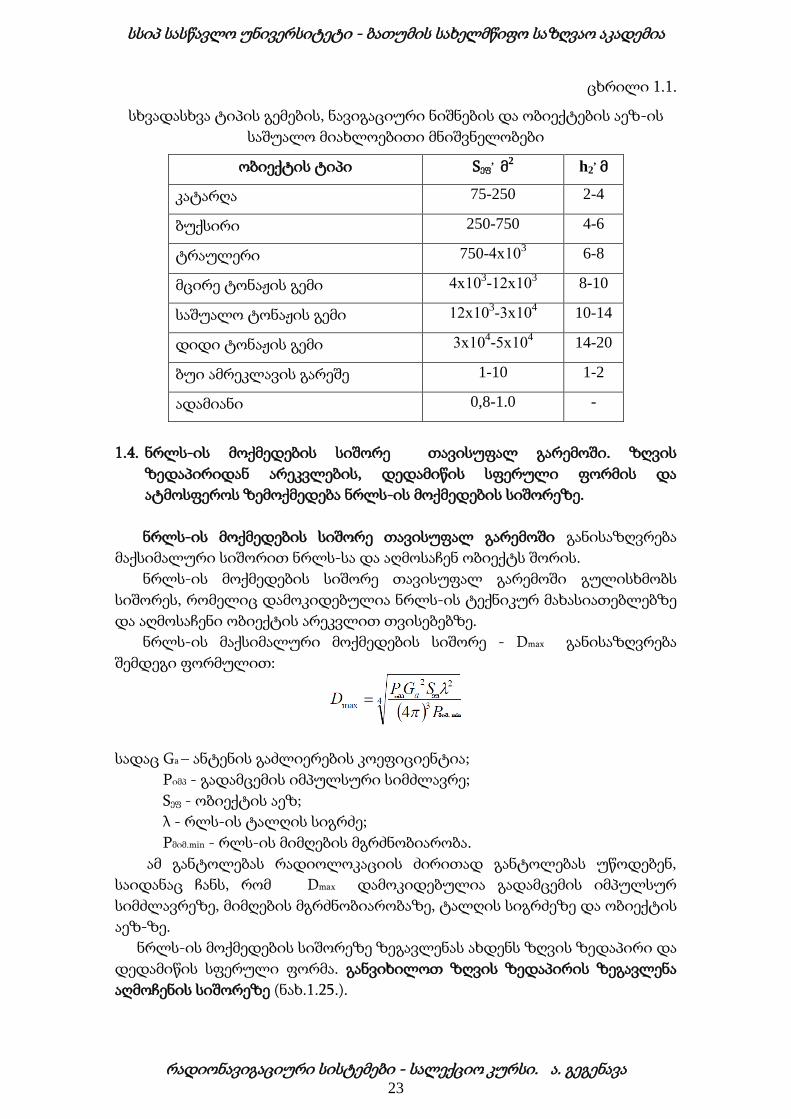
ცხრილში 1.1. მოცემულია სხვადასხვა ტიპის გემების, ნავიგაციური ნიშნების
და ობიექტების აეზ-ის საშუალო მიახლოებითი მნიშვნელობები 3, 2 სმ
ტალღის სიგრძეზე.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 23
ცხრილი 1.1.
სხვადასხვა ტიპის გემების, ნავიგაციური ნიშნების და ობიექტების აეზ-ის
საშუალო მიახლოებითი მნიშვნელობები
ობიექტის ტიპი Sეფ, მ2
h2, მ
კატარღა 75-250 2-4
ბუქსირი 250-750 4-6
ტრაულერი 750-4х103 6-8
მცირე ტონაჟის გემი 4х103-12х10
3 8-10
საშუალო ტონაჟის გემი 12х103-3х10
4 10-14
დიდი ტონაჟის გემი 3х104-5х10
4 14-20
ბუი ამრეკლავის გარეშე 1-10 1-2
ადამიანი 0,8-1.0 -
1.4. ნრლს-ის მოქმედების სიშორე თავისუფალ გარემოში. ზღვის
ზედაპირიდან არეკვლების, დედამიწის სფერული ფორმის და
ატმოსფეროს ზემოქმედება ნრლს-ის მოქმედების სიშორეზე.
ნრლს-ის მოქმედების სიშორე თავისუფალ გარემოში განისაზღვრება
მაქსიმალური სიშორით ნრლს-სა და აღმოსაჩენ ობიექტს შორის.
ნრლს-ის მოქმედების სიშორე თავისუფალ გარემოში გულისხმობს
სიშორეს, რომელიც დამოკიდებულია ნრლს-ის ტექნიკურ მახასიათებლებზე
და აღმოსაჩენი ობიექტის არეკვლით თვისებებზე.
ნრლს-ის მაქსიმალური მოქმედების სიშორე - Dmax განისაზღვრება
შემდეგი ფორმულით:
სადაც Ga – ანტენის გაძლიერების კოეფიციენტია;
Pიმპ - გადამცემის იმპულსური სიმძლავრე;
Sეფ - ობიექტის აეზ;
λ - რლს-ის ტალღის სიგრძე;
Pმიმ.min - რლს-ის მიმღების მგრძნობიარობა.
ამ განტოლებას რადიოლოკაციის ძირითად განტოლებას უწოდებენ,
საიდანაც ჩანს, რომ Dmax დამოკიდებულია გადამცემის იმპულსურ
სიმძლავრეზე, მიმღების მგრძნობიარობაზე, ტალღის სიგრძეზე და ობიექტის
აეზ-ზე.
ნრლს-ის მოქმედების სიშორეზე ზეგავლენას ახდენს ზღვის ზედაპირი და
დედამიწის სფერული ფორმა. განვიხილოთ ზღვის ზედაპირის ზეგავლენა
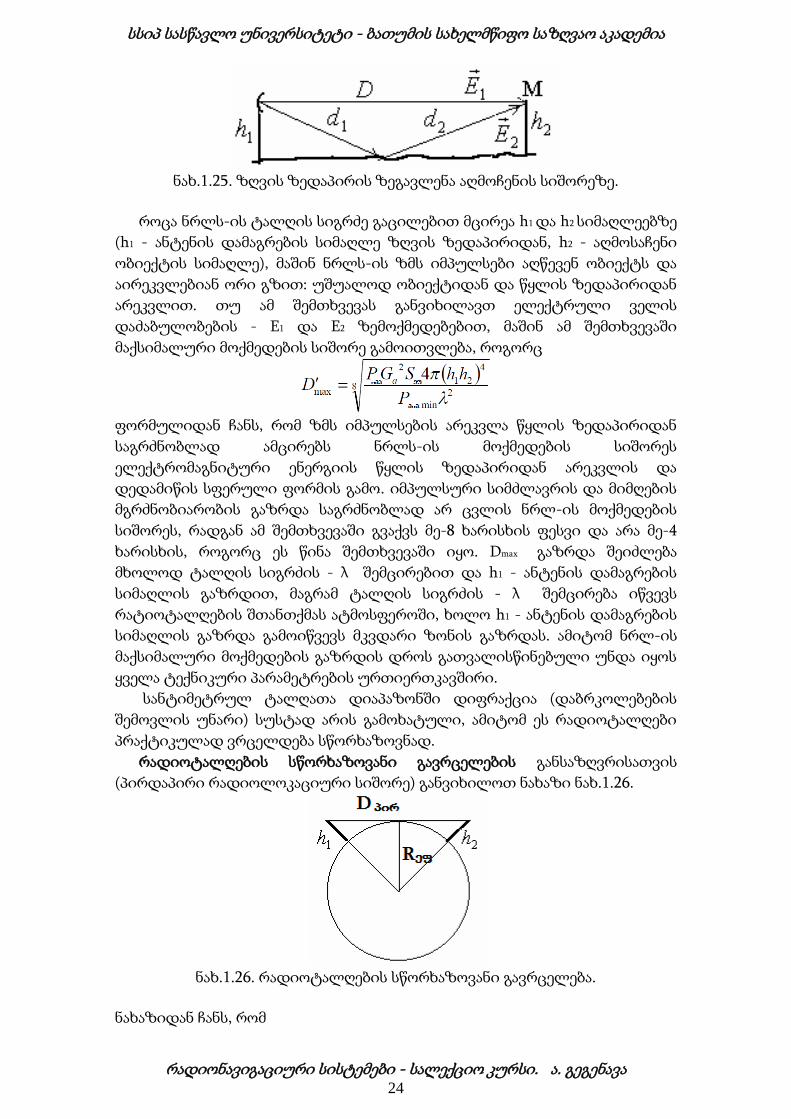
აღმოჩენის სიშორეზე (ნახ.1.25.).
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 24
ნახ.1.25. ზღვის ზედაპირის ზეგავლენა აღმოჩენის სიშორეზე.
როცა ნრლს-ის ტალღის სიგრძე გაცილებით მცირეა h1 და h2 სიმაღლეებზე
(h1 - ანტენის დამაგრების სიმაღლე ზღვის ზედაპირიდან, h2 - აღმოსაჩენი
ობიექტის სიმაღლე), მაშინ ნრლს-ის ზმს იმპულსები აღწევენ ობიექტს და
აირეკვლებიან ორი გზით: უშუალოდ ობიექტიდან და წყლის ზედაპირიდან
არეკვლით. თუ ამ შემთხვევას განვიხილავთ ელექტრული ველის
დაძაბულობების - E1 და E2 ზემოქმედებებით, მაშინ ამ შემთხვევაში
მაქსიმალური მოქმედების სიშორე გამოითვლება, როგორც
ფორმულიდან ჩანს, რომ ზმს იმპულსების არეკვლა წყლის ზედაპირიდან
საგრძნობლად ამცირებს ნრლს-ის მოქმედების სიშორეს
ელექტრომაგნიტური ენერგიის წყლის ზედაპირიდან არეკვლის და
დედამიწის სფერული ფორმის გამო. იმპულსური სიმძლავრის და მიმღების
მგრძნობიარობის გაზრდა საგრძნობლად არ ცვლის ნრლ-ის მოქმედების
სიშორეს, რადგან ამ შემთხვევაში გვაქვს მე-8 ხარისხის ფესვი და არა მე-4
ხარისხის, როგორც ეს წინა შემთხვევაში იყო. Dmax გაზრდა შეიძლება
მხოლოდ ტალღის სიგრძის - λ შემცირებით და h1 - ანტენის დამაგრების
სიმაღლის გაზრდით, მაგრამ ტალღის სიგრძის - λ შემცირება იწვევს
რატიოტალღების შთანთქმას ატმოსფეროში, ხოლო h1 - ანტენის დამაგრების
სიმაღლის გაზრდა გამოიწვევს მკვდარი ზონის გაზრდას. ამიტომ ნრლ-ის
მაქსიმალური მოქმედების გაზრდის დროს გათვალისწინებული უნდა იყოს
ყველა ტექნიკური პარამეტრების ურთიერთკავშირი.
სანტიმეტრულ ტალღათა დიაპაზონში დიფრაქცია (დაბრკოლებების
შემოვლის უნარი) სუსტად არის გამოხატული, ამიტომ ეს რადიოტალღები
პრაქტიკულად ვრცელდება სწორხაზოვნად.
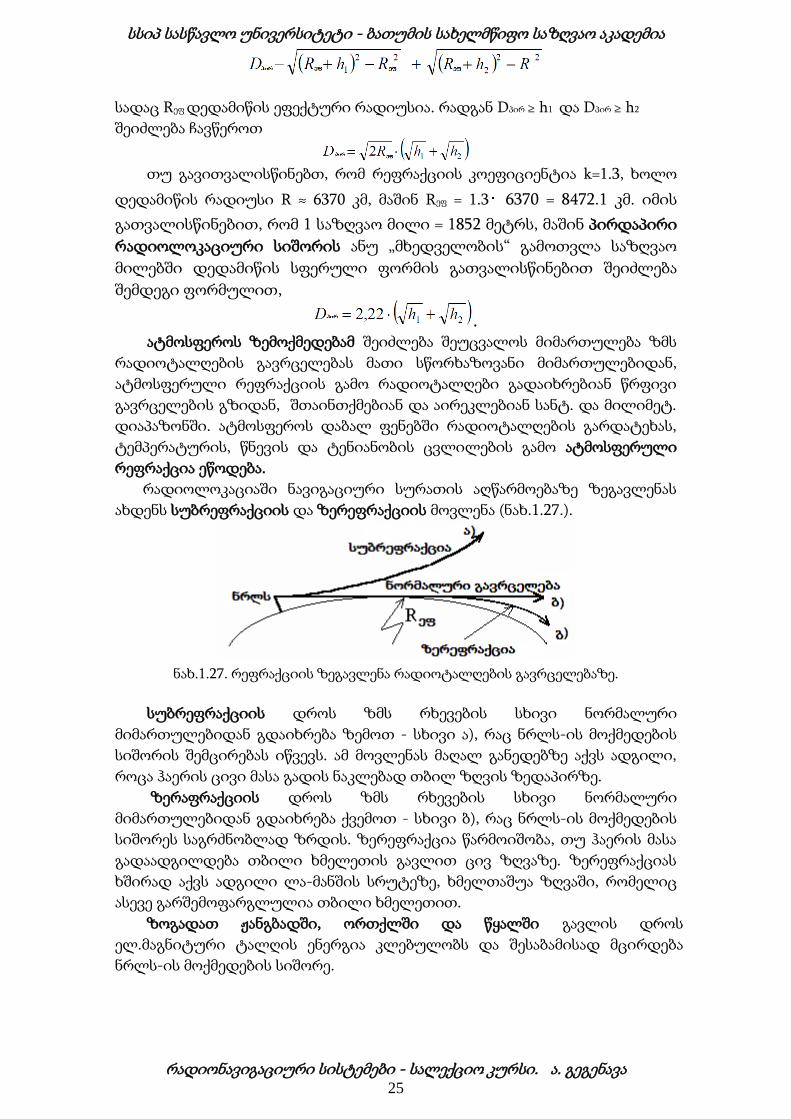
რადიოტალღების სწორხაზოვანი გავრცელების განსაზღვრისათვის
(პირდაპირი რადიოლოკაციური სიშორე) განვიხილოთ ნახაზი ნახ.1.26.
ნახ.1.26. რადიოტალღების სწორხაზოვანი გავრცელება.
ნახაზიდან ჩანს, რომ
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 25
სადაც Rეფ დედამიწის ეფექტური რადიუსია. რადგან Dპირ ≥ h1 და Dპირ ≥ h2
შეიძლება ჩავწეროთ
თუ გავითვალისწინებთ, რომ რეფრაქციის კოეფიციენტია k=1.3, ხოლო
დედამიწის რადიუსი R ≈ 6370 კმ, მაშინ Rეფ = 1.3 6370 = 8472.1 კმ. იმის
გათვალისწინებით, რომ 1 საზღვაო მილი = 1852 მეტრს, მაშინ პირდაპირი
რადიოლოკაციური სიშორის ანუ „მხედველობის“ გამოთვლა საზღვაო
მილებში დედამიწის სფერული ფორმის გათვალისწინებით შეიძლება
შემდეგი ფორმულით,
.
ატმოსფეროს ზემოქმედებამ შეიძლება შეუცვალოს მიმართულება ზმს
რადიოტალღების გავრცელებას მათი სწორხაზოვანი მიმართულებიდან,
ატმოსფერული რეფრაქციის გამო რადიოტალღები გადაიხრებიან წრფივი
გავრცელების გზიდან, შთაინთქმებიან და აირეკლებიან სანტ. და მილიმეტ.
დიაპაზონში. ატმოსფეროს დაბალ ფენებში რადიოტალღების გარდატეხას,
ტემპერატურის, წნევის და ტენიანობის ცვლილების გამო ატმოსფერული
რეფრაქცია ეწოდება.
რადიოლოკაციაში ნავიგაციური სურათის აღწარმოებაზე ზეგავლენას
ახდენს სუბრეფრაქციის და ზერეფრაქციის მოვლენა (ნახ.1.27.).
ნახ.1.27. რეფრაქციის ზეგავლენა რადიოტალღების გავრცელებაზე.
სუბრეფრაქციის დროს ზმს რხევების სხივი ნორმალური
მიმართულებიდან გდაიხრება ზემოთ - სხივი ა), რაც ნრლს-ის მოქმედების
სიშორის შემცირებას იწვევს. ამ მოვლენას მაღალ განედებზე აქვს ადგილი,
როცა ჰაერის ცივი მასა გადის ნაკლებად თბილ ზღვის ზედაპირზე.
ზერაფრაქციის დროს ზმს რხევების სხივი ნორმალური
მიმართულებიდან გდაიხრება ქვემოთ - სხივი ბ), რაც ნრლს-ის მოქმედების
სიშორეს საგრძნობლად ზრდის. ზერეფრაქცია წარმოიშობა, თუ ჰაერის მასა
გადაადგილდება თბილი ხმელეთის გავლით ცივ ზღვაზე. ზერეფრაქციას
ხშირად აქვს ადგილი ლა-მანშის სრუტეზე, ხმელთაშუა ზღვაში, რომელიც
ასევე გარშემოფარგლულია თბილი ხმელეთით.
ზოგადათ ჟანგბადში, ორთქლში და წყალში გავლის დროს
ელ.მაგნიტური ტალღის ენერგია კლებულობს და შესაბამისად მცირდება
ნრლს-ის მოქმედების სიშორე.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 26
1.5. ნრლს-ის გადამცემი მოწყობილობები. ანტენა-
ტალღგამტარული მოწყობილობები. საანტენო
გადამრთველები. მიმღები მოწყობილობები.
რლს-ის გადამცემი შესდგება ზმს გენერატორისაგან, იმპულსური
მოდულატორისაგან და კვების წყაროსაგან. ზმს გენერატორებად ხშირად
იყენებენ მაგნეტრონებს ან ნახევარგამტარულ გენერატორებს
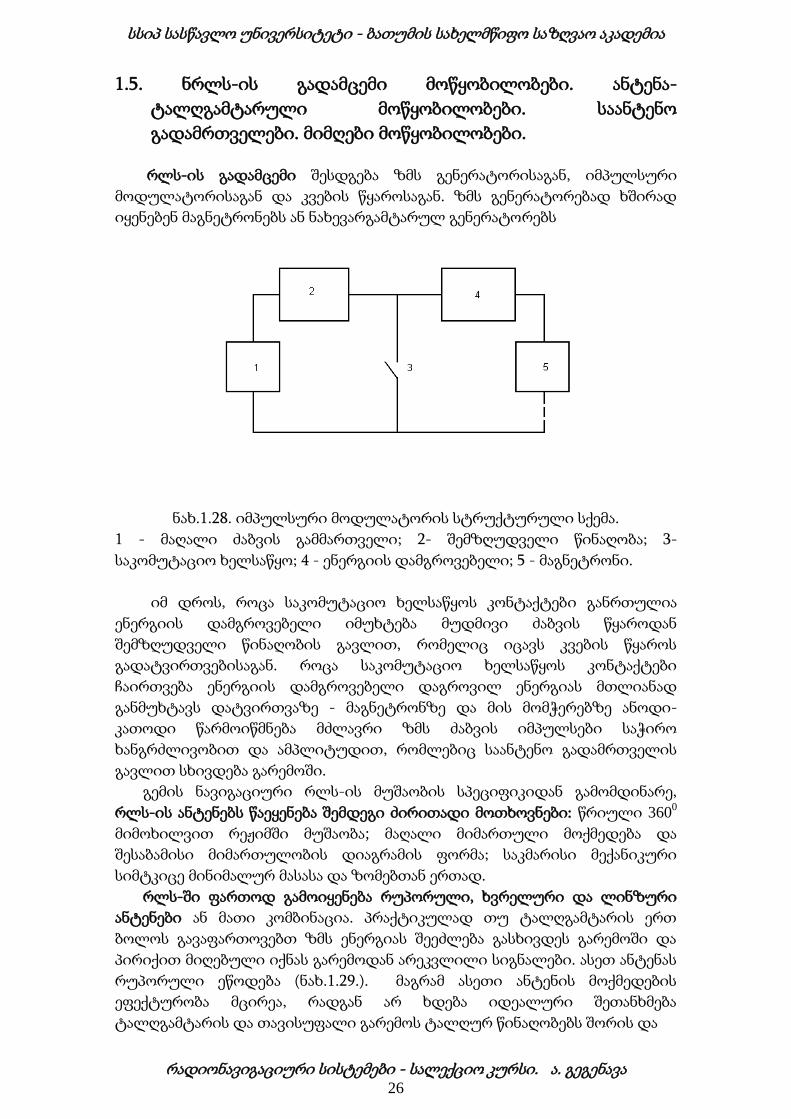
ნახ.1.28. იმპულსური მოდულატორის სტრუქტურული სქემა.
1 - მაღალი ძაბვის გამმართველი; 2- შემზღუდველი წინაღობა; 3-
საკომუტაციო ხელსაწყო; 4 - ენერგიის დამგროვებელი; 5 - მაგნეტრონი.
იმ დროს, როცა საკომუტაციო ხელსაწყოს კონტაქტები განრთულია
ენერგიის დამგროვებელი იმუხტება მუდმივი ძაბვის წყაროდან
შემზღუდველი წინაღობის გავლით, რომელიც იცავს კვების წყაროს
გადატვირთვებისაგან. როცა საკომუტაციო ხელსაწყოს კონტაქტები
ჩაირთვება ენერგიის დამგროვებელი დაგროვილ ენერგიას მთლიანად
განმუხტავს დატვირთვაზე - მაგნეტრონზე და მის მომჭერებზე ანოდი-
კათოდი წარმოიწმნება მძლავრი ზმს ძაბვის იმპულსები საჭირო
ხანგრძლივობით და ამპლიტუდით, რომლებიც საანტენო გადამრთველის
გავლით სხივდება გარემოში.
გემის ნავიგაციური რლს-ის მუშაობის სპეციფიკიდან გამომდინარე,
რლს-ის ანტენებს წაეყენება შემდეგი ძირითადი მოთხოვნები: წრიული 3600
მიმოხილვით რეჟიმში მუშაობა; მაღალი მიმართული მოქმედება და
შესაბამისი მიმართულობის დიაგრამის ფორმა; საკმარისი მექანიკური
სიმტკიცე მინიმალურ მასასა და ზომებთან ერთად.
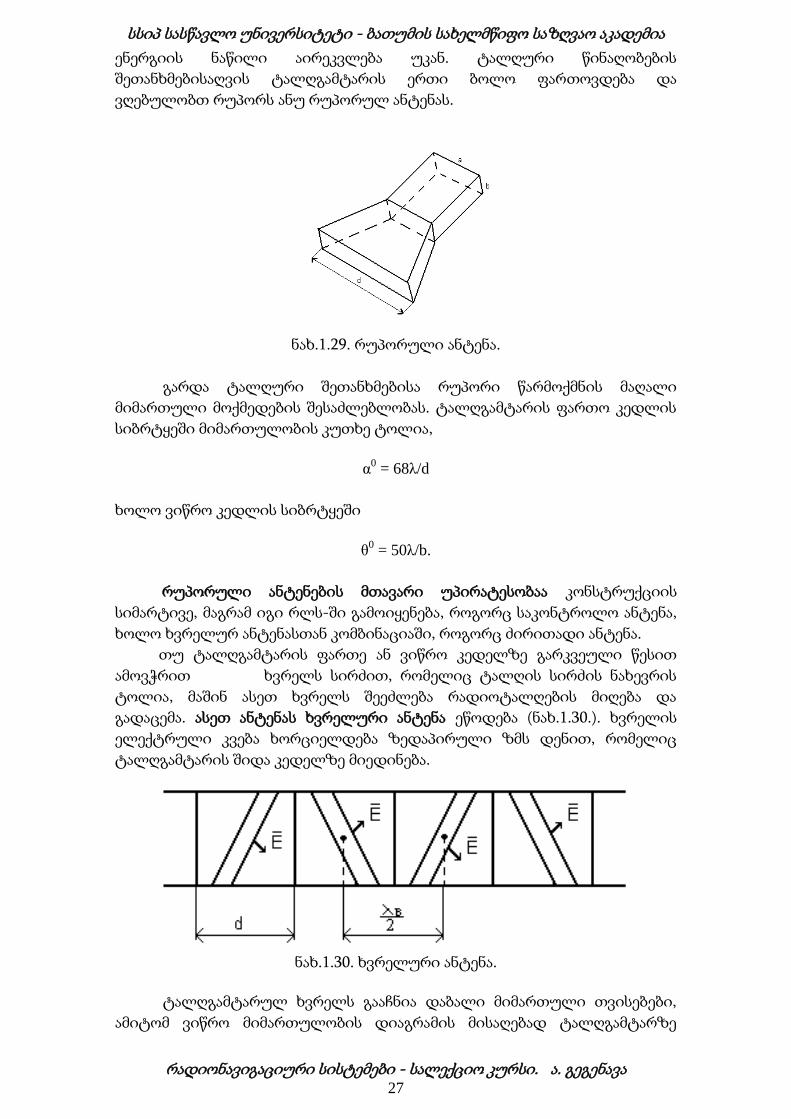
რლს-ში ფართოდ გამოიყენება რუპორული, ხვრელური და ლინზური
ანტენები ან მათი კომბინაცია. პრაქტიკულად თუ ტალღგამტარის ერთ
ბოლოს გავაფართოვებთ ზმს ენერგიას შეეძლება გასხივდეს გარემოში და
პირიქით მიღებული იქნას გარემოდან არეკვლილი სიგნალები. ასეთ ანტენას
რუპორული ეწოდება (ნახ.1.29.). მაგრამ ასეთი ანტენის მოქმედების
ეფექტურობა მცირეა, რადგან არ ხდება იდეალური შეთანხმება
ტალღგამტარის და თავისუფალი გარემოს ტალღურ წინაღობებს შორის და
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 27
ენერგიის ნაწილი აირეკვლება უკან. ტალღური წინაღობების
შეთანხმებისაღვის ტალღგამტარის ერთი ბოლო ფართოვდება და
ვღებულობთ რუპორს ანუ რუპორულ ანტენას.
ნახ.1.29. რუპორული ანტენა.
გარდა ტალღური შეთანხმებისა რუპორი წარმოქმნის მაღალი
მიმართული მოქმედების შესაძლებლობას. ტალღგამტარის ფართო კედლის
სიბრტყეში მიმართულობის კუთხე ტოლია,
α
0 = 68λ/d
ხოლო ვიწრო კედლის სიბრტყეში
θ
0 = 50λ/b.
რუპორული ანტენების მთავარი უპირატესობაა კონსტრუქციის
სიმარტივე, მაგრამ იგი რლს-ში გამოიყენება, როგორც საკონტროლო ანტენა,
ხოლო ხვრელურ ანტენასთან კომბინაციაში, როგორც ძირითადი ანტენა.
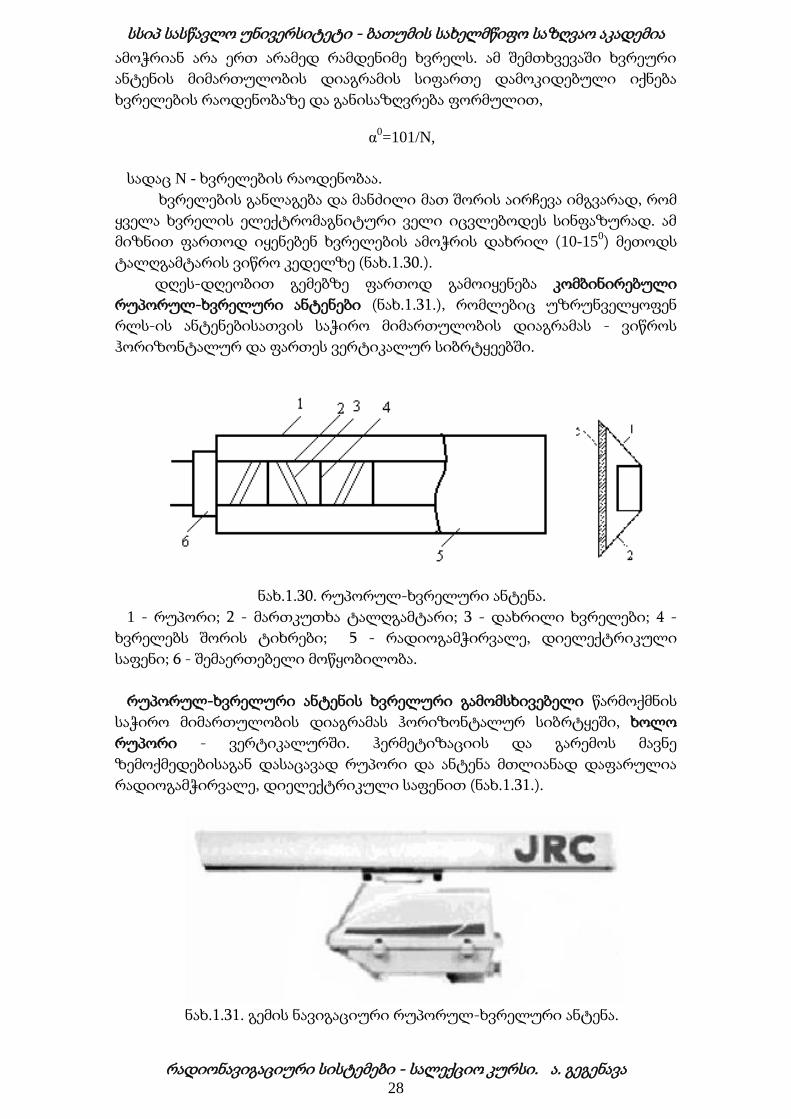
თუ ტალღგამტარის ფართე ან ვიწრო კედელზე გარკვეული წესით
ამოვჭრით ხვრელს სირძით, რომელიც ტალღის სირძის ნახევრის
ტოლია, მაშინ ასეთ ხვრელს შეეძლება რადიოტალღების მიღება და
გადაცემა. ასეთ ანტენას ხვრელური ანტენა ეწოდება (ნახ.1.30.). ხვრელის
ელექტრული კვება ხორციელდება ზედაპირული ზმს დენით, რომელიც
ტალღგამტარის შიდა კედელზე მიედინება.
ნახ.1.30. ხვრელური ანტენა.
ტალღგამტარულ ხვრელს გააჩნია დაბალი მიმართული თვისებები,
ამიტომ ვიწრო მიმართულობის დიაგრამის მისაღებად ტალღგამტარზე
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 28
ამოჭრიან არა ერთ არამედ რამდენიმე ხვრელს. ამ შემთხვევაში ხვრეური
ანტენის მიმართულობის დიაგრამის სიფართე დამოკიდებული იქნება
ხვრელების რაოდენობაზე და განისაზღვრება ფორმულით,
α0=101/N,
სადაც N - ხვრელების რაოდენობაა.
ხვრელების განლაგება და მანძილი მათ შორის აირჩევა იმგვარად, რომ
ყველა ხვრელის ელექტრომაგნიტური ველი იცვლებოდეს სინფაზურად. ამ
მიზნით ფართოდ იყენებენ ხვრელების ამოჭრის დახრილ (10-150) მეთოდს
ტალღგამტარის ვიწრო კედელზე (ნახ.1.30.).
დღეს-დღეობით გემებზე ფართოდ გამოიყენება კომბინირებული
რუპორულ-ხვრელური ანტენები (ნახ.1.31.), რომლებიც უზრუნველყოფენ
რლს-ის ანტენებისათვის საჭირო მიმართულობის დიაგრამას - ვიწროს
ჰორიზონტალურ და ფართეს ვერტიკალურ სიბრტყეებში.
ნახ.1.30. რუპორულ-ხვრელური ანტენა.
1 - რუპორი; 2 - მართკუთხა ტალღგამტარი; 3 - დახრილი ხვრელები; 4 -
ხვრელებს შორის ტიხრები; 5 - რადიოგამჭირვალე, დიელექტრიკული
საფენი; 6 - შემაერთებელი მოწყობილობა.
რუპორულ-ხვრელური ანტენის ხვრელური გამომსხივებელი წარმოქმნის
საჭირო მიმართულობის დიაგრამას ჰორიზონტალურ სიბრტყეში, ხოლო
რუპორი - ვერტიკალურში. ჰერმეტიზაციის და გარემოს მავნე
ზემოქმედებისაგან დასაცავად რუპორი და ანტენა მთლიანად დაფარულია
რადიოგამჭირვალე, დიელექტრიკული საფენით (ნახ.1.31.).
ნახ.1.31. გემის ნავიგაციური რუპორულ-ხვრელური ანტენა.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 29
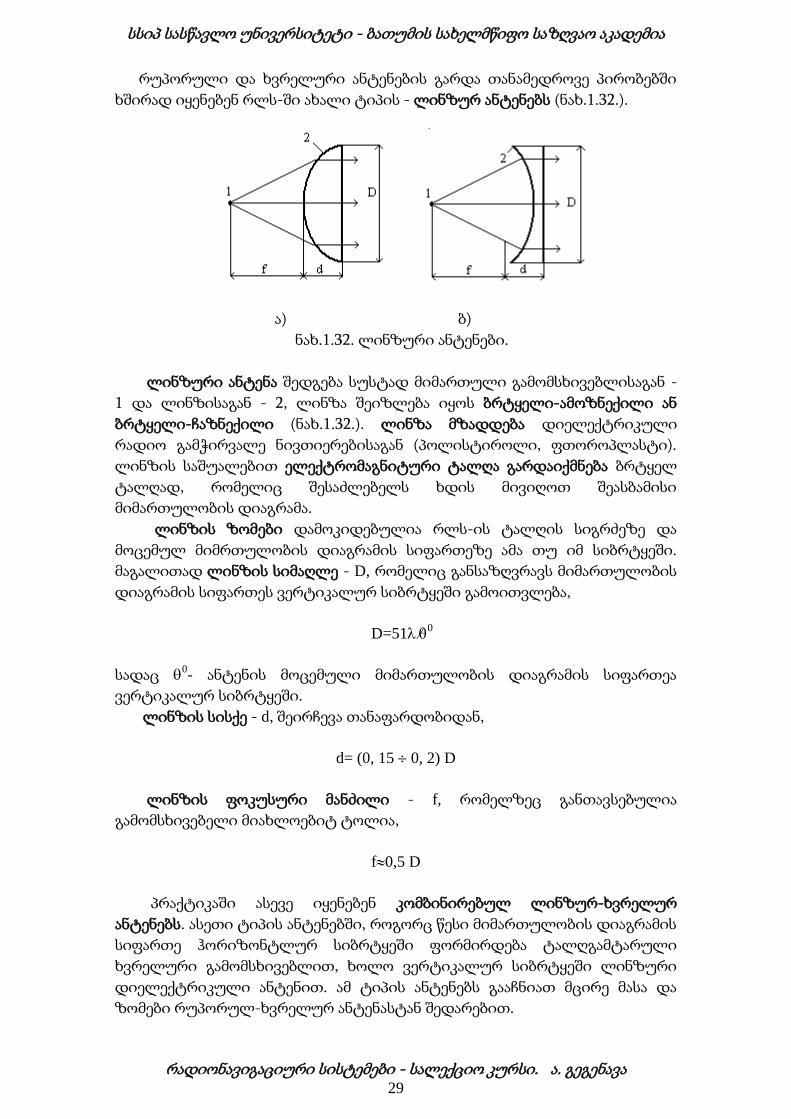
რუპორული და ხვრელური ანტენების გარდა თანამედროვე პირობებში
ხშირად იყენებენ რლს-ში ახალი ტიპის - ლინზურ ანტენებს (ნახ.1.32.).
ა) ბ)
ნახ.1.32. ლინზური ანტენები.
ლინზური ანტენა შედგება სუსტად მიმართული გამომსხივებლისაგან -
1 და ლინზისაგან - 2, ლინზა შეიზლება იყოს ბრტყელი-ამოზნექილი ან
ბრტყელი-ჩაზნექილი (ნახ.1.32.). ლინზა მზადდება დიელექტრიკული
რადიო გამჭირვალე ნივთიერებისაგან (პოლისტიროლი, ფთოროპლასტი).
ლინზის საშუალებით ელექტრომაგნიტური ტალღა გარდაიქმნება ბრტყელ
ტალღად, რომელიც შესაძლებელს ხდის მივიღოთ შეასბამისი
მიმართულობის დიაგრამა.
ლინზის ზომები დამოკიდებულია რლს-ის ტალღის სიგრძეზე და
მოცემულ მიმრთულობის დიაგრამის სიფართეზე ამა თუ იმ სიბრტყეში.
მაგალითად ლინზის სიმაღლე - D, რომელიც განსაზღვრავს მიმართულობის
დიაგრამის სიფართეს ვერტიკალურ სიბრტყეში გამოითვლება,
D=510
სადაც 0- ანტენის მოცემული მიმართულობის დიაგრამის სიფართეა
ვერტიკალურ სიბრტყეში.
ლინზის სისქე - d, შეირჩევა თანაფარდობიდან,
d= (0, 15 0, 2) D
ლინზის ფოკუსური მანძილი - f, რომელზეც განთავსებულია
გამომსხივებელი მიახლოებიტ ტოლია,
f0,5 D
პრაქტიკაში ასევე იყენებენ კომბინირებულ ლინზურ-ხვრელურ
ანტენებს. ასეთი ტიპის ანტენებში, როგორც წესი მიმართულობის დიაგრამის
სიფართე ჰორიზონტლურ სიბრტყეში ფორმირდება ტალღგამტარული
ხვრელური გამომსხივებლით, ხოლო ვერტიკალურ სიბრტყეში ლინზური
დიელექტრიკული ანტენით. ამ ტიპის ანტენებს გააჩნიათ მცირე მასა და
ზომები რუპორულ-ხვრელურ ანტენასტან შედარებით.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 30
გემების ნავიგაციურ რლს-ი, სადაც ერთი ანტენა გამოიყენება, როგორც
მიღებაზე ასევე გადაცემაზე აუცილებელია საანტენო გადამრთველის
არსებობა.
საანტენო გადამრთველი უზრუნველყოფს ანტენის კომუნიკაციას
პერიოდულად მიმღებსა და გადამცემს შორის, ასევე იცავს მიმღების
შესასვლეს ზმს დიდი სიმძლავრის იმპულსებიდან. ასეთი იმპულსების
წყაროა თვით რლს-ის გადამცემი და ასევე ახლომყოფი რლს-ი, რომლებიც
ერთსა და იმავე სიხშირეზე მუშაობენ.
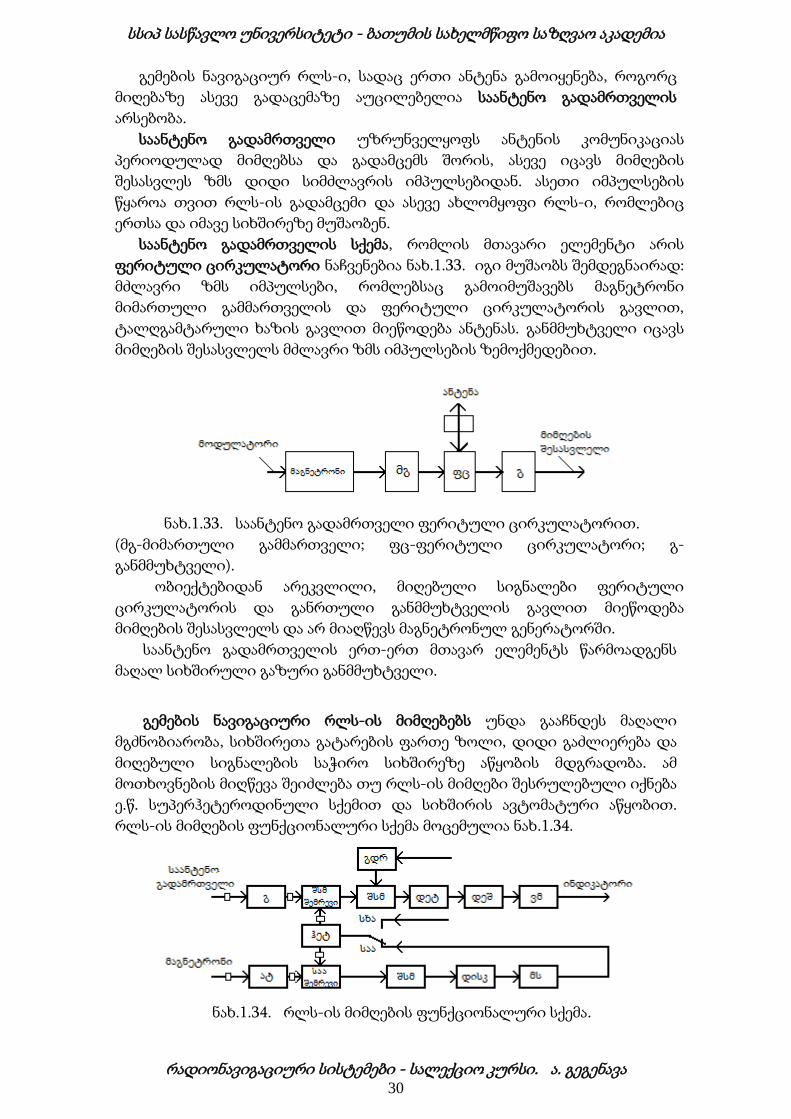
საანტენო გადამრთველის სქემა, რომლის მთავარი ელემენტი არის
ფერიტული ცირკულატორი ნაჩვენებია ნახ.1.33. იგი მუშაობს შემდეგნაირად:
მძლავრი ზმს იმპულსები, რომლებსაც გამოიმუშავებს მაგნეტრონი
მიმართული გამმართველის და ფერიტული ცირკულატორის გავლით,
ტალღგამტარული ხაზის გავლით მიეწოდება ანტენას. განმმუხტველი იცავს
მიმღების შესასვლელს მძლავრი ზმს იმპულსების ზემოქმედებით.
ნახ.1.33. საანტენო გადამრთველი ფერიტული ცირკულატორით.
(მგ-მიმართული გამმართველი; ფც-ფერიტული ცირკულატორი; გ-
განმმუხტველი).
ობიექტებიდან არეკვლილი, მიღებული სიგნალები ფერიტული
ცირკულატორის და განრთული განმმუხტველის გავლით მიეწოდება
მიმღების შესასვლელს და არ მიაღწევს მაგნეტრონულ გენერატორში.
საანტენო გადამრთველის ერთ-ერთ მთავარ ელემენტს წარმოადგენს
მაღალ სიხშირული გაზური განმმუხტველი.
გემების ნავიგაციური რლს-ის მიმღებებს უნდა გააჩნდეს მაღალი
მგძნობიარობა, სიხშირეთა გატარების ფართე ზოლი, დიდი გაძლიერება და
მიღებული სიგნალების საჭირო სიხშირეზე აწყობის მდგრადობა. ამ
მოთხოვნების მიღწევა შეიძლება თუ რლს-ის მიმღები შესრულებული იქნება
ე.წ. სუპერჰეტეროდინული სქემით და სიხშირის ავტომატური აწყობით.
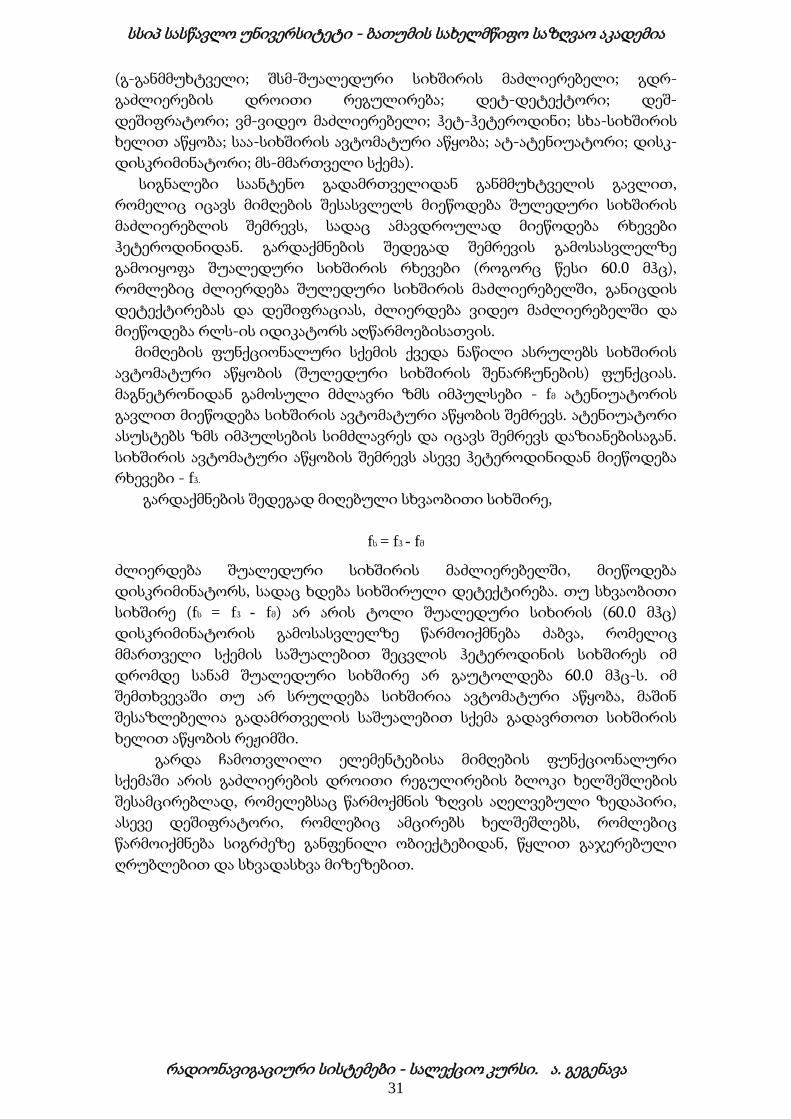
რლს-ის მიმღების ფუნქციონალური სქემა მოცემულია ნახ.1.34.
ნახ.1.34. რლს-ის მიმღების ფუნქციონალური სქემა.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 31
(გ-განმმუხტველი; შსმ-შუალედური სიხშირის მაძლიერებელი; გდრ-
გაძლიერების დროითი რეგულირება; დეტ-დეტექტორი; დეშ-
დეშიფრატორი; ვმ-ვიდეო მაძლიერებელი; ჰეტ-ჰეტეროდინი; სხა-სიხშირის
ხელით აწყობა; საა-სიხშირის ავტომატური აწყობა; ატ-ატენიუატორი; დისკ-
დისკრიმინატორი; მს-მმართველი სქემა).
სიგნალები საანტენო გადამრთველიდან განმმუხტველის გავლით,
რომელიც იცავს მიმღების შესასვლელს მიეწოდება შულედური სიხშირის
მაძლიერებლის შემრევს, სადაც ამავდროულად მიეწოდება რხევები
ჰეტეროდინიდან. გარდაქმნების შედეგად შემრევის გამოსასვლელზე
გამოიყოფა შუალედური სიხშირის რხევები (როგორც წესი 60.0 მჰც),
რომლებიც ძლიერდება შულედური სიხშირის მაძლიერებელში, განიცდის
დეტექტირებას და დეშიფრაციას, ძლიერდება ვიდეო მაძლიერებელში და
მიეწოდება რლს-ის იდიკატორს აღწარმოებისათვის.
მიმღების ფუნქციონალური სქემის ქვედა ნაწილი ასრულებს სიხშირის
ავტომატური აწყობის (შულედური სიხშირის შენარჩუნების) ფუნქციას.
მაგნეტრონიდან გამოსული მძლავრი ზმს იმპულსები - fმ ატენიუატორის
გავლით მიეწოდება სიხშირის ავტომატური აწყობის შემრევს. ატენიუატორი
ასუსტებს ზმს იმპულსების სიმძლავრეს და იცავს შემრევს დაზიანებისაგან.
სიხშირის ავტომატური აწყობის შემრევს ასევე ჰეტეროდინიდან მიეწოდება
რხევები - fჰ.
გარდაქმნების შედეგად მიღებული სხვაობითი სიხშირე,
fს = fჰ - fმ
ძლიერდება შუალედური სიხშირის მაძლიერებელში, მიეწოდება
დისკრიმინატორს, სადაც ხდება სიხშირული დეტექტირება. თუ სხვაობითი
სიხშირე (fს = fჰ - fმ) არ არის ტოლი შუალედური სიხირის (60.0 მჰც)
დისკრიმინატორის გამოსასვლელზე წარმოიქმნება ძაბვა, რომელიც
მმართველი სქემის საშუალებით შეცვლის ჰეტეროდინის სიხშირეს იმ
დრომდე სანამ შუალედური სიხშირე არ გაუტოლდება 60.0 მჰც-ს. იმ
შემთხვევაში თუ არ სრულდება სიხშირია ავტომატური აწყობა, მაშინ
შესაზლებელია გადამრთველის საშუალებით სქემა გადავრთოთ სიხშირის
ხელით აწყობის რეჟიმში.
გარდა ჩამოთვლილი ელემენტებისა მიმღების ფუნქციონალური
სქემაში არის გაძლიერების დროითი რეგულირების ბლოკი ხელშეშლების
შესამცირებლად, რომელებსაც წარმოქმნის ზღვის აღელვებული ზედაპირი,
ასევე დეშიფრატორი, რომლებიც ამცირებს ხელშეშლებს, რომლებიც
წარმოიქმნება სიგრძეზე განფენილი ობიექტებიდან, წყლით გაჯერებული
ღრუბლებით და სხვადასხვა მიზეზებით.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 32
წრიული მიმოხილვის ინდიკატორი რლს-ში განკუთვნილია:
1. ელექტრონულ სხივური მილაკის ეკრანზე რადიოლოკაციური
გამოსახულების აღსაწარმოებლად, რომელიც ასხავს წყალზემოთ
არსებულ სიტუაციას;
2. წყალზედა ობიექტების კოორდინატების განსაზღვრისათვის;
3. ნრლს-ის ოპერაციული მართვისათვის და მისი მუშაობის
კონტროლისათვის.
წრიული მიმოხილვის ინდიკატორი წარმოადგენს ნრლს-ის საბოლოო
რგოლს. ყველაზე უფრო გავრცელებულია წრიული მიმოხილვის
ინდიკატორები, საიდანაც გემთწამყვანი ღებულობს ხედვით ინფორმაციას
და საკუთარი გემისა და ობიექტების განლაგებით შეიძლება ნავიგაციურ
სიტუაციაზე მსჯელობა. წრიული მიმოხილვის ინდიკატორები შეიძლება
დაჯგუფდეს შემდეგი ნიშნებით:
გამოყენებული ელექტრონულ სხივური მილაკის ტიპით;
ნრლს-ის დანიშნულების მიხედვით;
სამიზნის აღნიშვნის მიღების მეთოდით;
გამოყენებული ელექტრული სხივის გაშლის მიხედვით.
ელექტრონულ სხივური მილაკები შეიძლება იყოს სხივის
ელექტროსტატიკური მართვით ან სხივის მაგნიტური მართვით.
გემების თანამედროვე ნრლს-ში, როგორც წესი გამოიყენება ელექტრონულ
სხივური მილაკები სხივის მაგნიტური მართვით, რადგან მათი საშუალებით
შესაძლებელია ინდიკატორის ეკრანზე მკაფიო გამოსახულების მიღება და
ელექტრული სხივის გადახრის მაქსიმალური მნიშვნელობის მიღწევა.
ნრლს-ი დანიშნულების მიხედვით შეიძლება იყოს - აღმოსაჩენი, მიწის
ან წყლის მიმოხილვითი, კოორდინატების ზუსტი განსაზღვრისათვის და ა.შ.
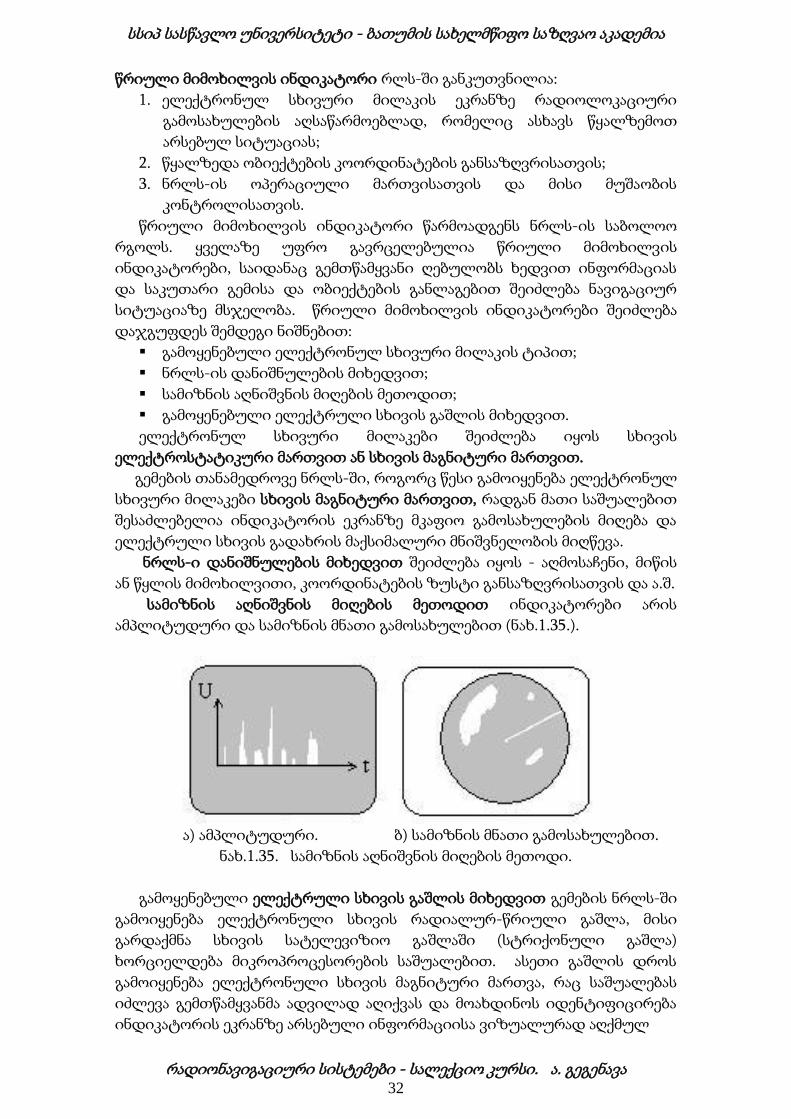
სამიზნის აღნიშვნის მიღების მეთოდით ინდიკატორები არის
ამპლიტუდური და სამიზნის მნათი გამოსახულებით (ნახ.1.35.).
ა) ამპლიტუდური. ბ) სამიზნის მნათი გამოსახულებით.
ნახ.1.35. სამიზნის აღნიშვნის მიღების მეთოდი.
გამოყენებული ელექტრული სხივის გაშლის მიხედვით გემების ნრლს-ში
გამოიყენება ელექტრონული სხივის რადიალურ-წრიული გაშლა, მისი
გარდაქმნა სხივის სატელევიზიო გაშლაში (სტრიქონული გაშლა)
ხორციელდება მიკროპროცესორების საშუალებით. ასეთი გაშლის დროს
გამოიყენება ელექტრონული სხივის მაგნიტური მართვა, რაც საშუალებას
იძლევა გემთწამყვანმა ადვილად აღიქვას და მოახდინოს იდენტიფიცირება
ინდიკატორის ეკრანზე არსებული ინფორმაციისა ვიზუალურად აღქმულ
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 33
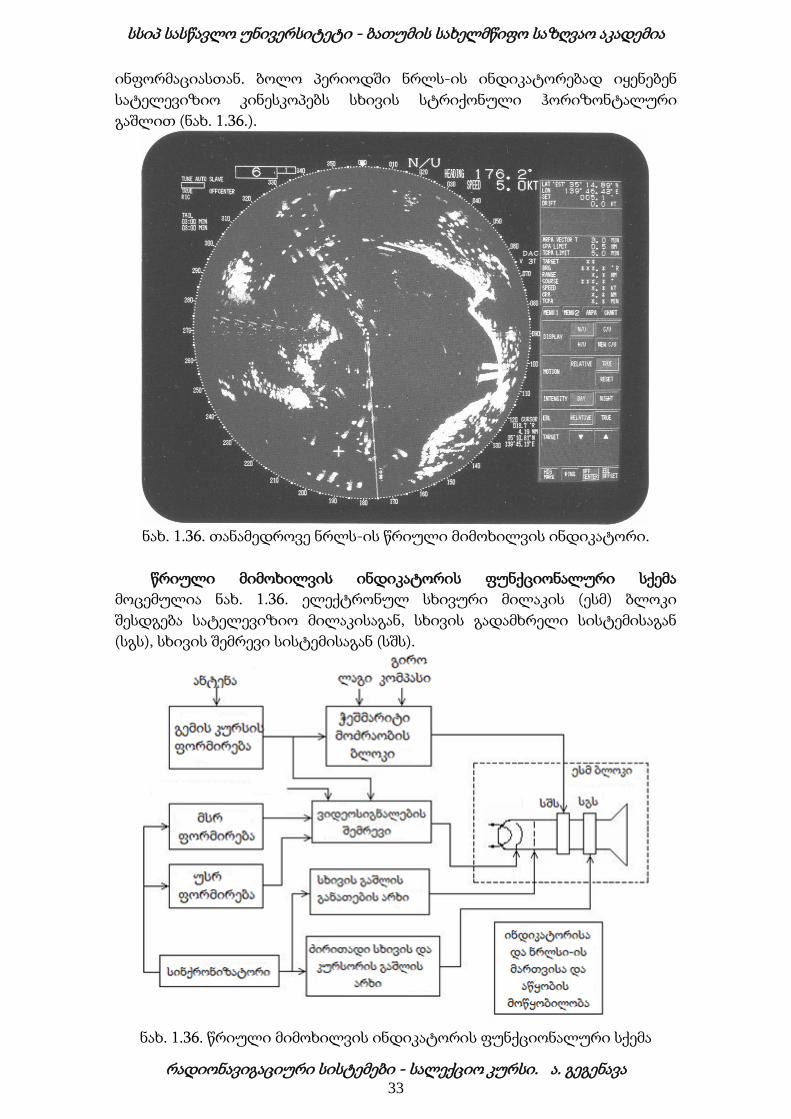
ინფორმაციასთან. ბოლო პერიოდში ნრლს-ის ინდიკატორებად იყენებენ
სატელევიზიო კინესკოპებს სხივის სტრიქონული ჰორიზონტალური
გაშლით (ნახ. 1.36.).
ნახ. 1.36. თანამედროვე ნრლს-ის წრიული მიმოხილვის ინდიკატორი.
წრიული მიმოხილვის ინდიკატორის ფუნქციონალური სქემა
მოცემულია ნახ. 1.36. ელექტრონულ სხივური მილაკის (ესმ) ბლოკი
შესდგება სატელევიზიო მილაკისაგან, სხივის გადამხრელი სისტემისაგან
(სგს), სხივის შემრევი სისტემისაგან (სშს).
ნახ. 1.36. წრიული მიმოხილვის ინდიკატორის ფუნქციონალური სქემა
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 34
ესმ-ზე გამოისახება - ნავიგაციური სიტუაცია, მიმართულების
ელექტრონული აღნიშვნა, კურსის აღნიშვნა. მოძრავი სიშორის რგოლების
(მსრ) და უძრავი სიშორის რგოლების (უსრ) ფორმირების შედეგად
ინდიკატორის ეკრანზე მიიღება შესაბამისი აღნიშვნები. ანტენიდან
მიღებული სიგნალებით მიმდინარეობს გემის კურსის აღნიშვნის
ფორმირება. ასევე ლაგიდან და გიროკომპასიდან მიღებული სიგნალბით
ხდება ჭეშმარიტი მოზრაობის და სხვა რეჟიმების ფორმირება.
ინდიკატორისა და ნრლს-ის მართვისა და აწყობის მოწყობილობა
ასრულებს შემდეგ ფუნქციებს:
ნრლს-ის ჩარვას და გამორთვას;
არეგულირებს და აწყობს გამოსახულებას ესმ-ის ინდიკატორზე;
ახორციელებს ნრლს-ის ოპერატიულ მართვას;
აკონტროლებს ნრლს-ის მუშა პროცესს.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 35
ნაწილი 2. ავტომატური რადიოლოკაციური სისტემები (არლს)
2.1.არლს-ის დანიშნულება და ძირითადი ტიპები. მოქმედების პრინციპი.
საერთაშორისო საზღვაო ორგანიზაციის მიერ წაყენებული ძირითადი
მოთხოვნები. შემადგენლობა. დაყოფის პრინციპები. ინფორმაციის წარმოდგენის
მეთოდები. პირველადი და მეორადი რადიოლოკაციური ინფორმაცია.
საზღვაო ფლოტში გემების შეჯახების პრევენცია წარმოადგენს ერთ-
ერთ მთავარ პრობლემას. ყოველწლიურად მსოფლიო საზღვაო ფლოტში
შეჯახების შედეგად განიცდიან ავარიას ასეულობით სატრანსპორტო გემები,
რაც იწვევს უზარმაზარ დანაკარგებს - როგორც ადამიანთა დაღუპვის,
ტვირთის დაკარგვის, თვიით გემების ჩაძირვის და გარემოზე უარყოფითი
ზემოქმედების სახით.
ამ ზემოქმედებების თავიდან აცილების და მათი მინიმუმამდე
დაყვანის მიზნით გასული საუკუნის 70-იან წლებში საერთაშორისო საზღვაო
ორგანიზაციისა და საზღვაო თანამეგობრობის მიერ დაიწყო გემების
აღჭურვა სპეციალური რადიოლოკაციური სისტემებით, რომელთა
ძირითადი დანიშნულება იყო გაეადვილებინა გემთწამყვანებისათვის,
განსაკუთრებით კი დიდი ტონაჟის გემებზე რადიოლოკაციური
ინფორმაციის დატანისა და ნავიგაციური ინფორმაციის გამოთვლის
მეთოდები.
ამ პერიოდში საერთაშორისო საზღვაო ორგანიზაციის რეკომენდაციით
გამოიყენებოდა 2 ტიპის მოწყობილობა გემებზე: გემების დაახლოების
საშიშროების შემფასებელი სისტემა და ავტომატური რადიოლოკაციური
დატანის სისტემა - არლს (САРП – Система Автоматической
Радиолокационной Прокладки; ARPA – Automatic Radar plotting Aid).
დაწყებული 1984 წლიდან საერთაშორისო საზღვაო ორგანიზაციის A.422(XI)
(1979) რეზოლუციით არლს-ი აუცილებელი გახდა დიდ ტონაჟიან გემებზე
გამოსაყენებლად. შემდგომ საერთაშორისო საზღვაო ორგანიზაციამ გამოსცა
განახლებული რეზოლუციაა - A.823(19) (1995), რომელიც არეგულირებს
გემებზე არლს-ის გამოყენებას. დღესდღეობით მსოფლიო ფლოტის გემების
უდიდესი ნაწილი აღჭურვილია არლს-ით.
ზოგადად არლს-ი უზრუნველყოფს ირგვლივ მყოფი გემების
მოძრაობის პარამეტრების ავტომატურ გამოთვლას და მონაცემთა
მოწოდებას შესაბამისი ფორმით, რომელიც აუცილებელია
გემთწამყვანისათვის სხვა გემებთან დაახლოებისას სიტუაცის სწორად
შეაფასებისათვის და დასაბუთებული გადაწყვეტილების მისაღებად მათთან
წარმატებული დაშორიშორებისათვის.
არლს-ი წარმოადგენს სპეციალურ რადიოლოკაციურ სადგურს,
რომელშიც გარდა რლს-ის ცნობილი ფუნქციებისა დამატებულია
სპეციალური ელექტრონული გამომთვლელი მოწყობილობა, რომელიც
ასრულებს ავტომატური რადიოლოკაციური დატანის ფუნქციებს და
მთლიანი ინფორმაცია გამოისახება ინდიკატორის ეკრანზე შესაბამისი
ფორმით (ნახ. 1.36.). არლს-ი შეიძლება მუშაობდეს, როგორც 3,2 სმ ასევე 9,8
სმ ტალღის სიგრძეებზე.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 36
თანამედროვე საზღვაო ფლოტის გემებზე ძირითადათ გამოიყენებენ
შემდეგი ქვეყნების წარმოების არლს-ს: “Bridge Master” (“Decca”-ინგლისი),
“Digiplot” (“Lotron”-აშშ), “Cas” (“Sperry”-აშშ), “Krupp-Atlas Elektronik”
(გერმანია), “Furuno”, “JRC” (იაპონია) და სხვა.
მიუხედავად იმისა, რო გემებზე გამოიყენება სხვადასხვა მწარმოებლების
მიერ დამზადებული არლს-ი, ზოგადად მათ გააჩნიათ ერთნაირი ფუნქციები
და ისინი უნდა პასუხობდნენ საერთაშორისო საზღვაო ორგანიზაციის მიერ
წაყენებულ ძირითად მოთხოვნებს:
ჩვენი გემის ირგვლივ სამიზნეების ავტომატური აღმოჩენა;
აღმოჩენილი სამიზნეების ავტომიყოლის რეჟიმში ხელით და
ავტომატურად აყვანა, რაც გულისხმობს აყვანილი სამიზნეების
კოორდინატების მუდმივ გაზომვებს;
ავტომიყოლის რეჟიმში აყვანილი სამიზნეების მოძრაობის
პარამეტრებისა (კურსი-Heading, სიჩქარე-Speed) და დაახლოების
ელემენტების (უმოკლესი დაახლოების დისტანცია - CPA) და
უმოკლესი დაახლოების დრო - TCPA) გამოთვლა;
ინდიკატორის ეკრანზე ძირითადი რადიოლოკაციური
გამოსახულების გარდა შემხვედრი და სხვა გემების მოძაობის
ვექტორების გამოსახვა, ასევე ინდიკატორის ეკრანის სპეციალურ
გამოყოფილ ადგილზე სამიზნეების გამოთვლილი მოძრაობის
პარამეტრებისა და დაახლოების ელემენტების გამოსახვა;
საშიში სიტუაციების მნათი და ხმოვანი სიგნალიზაცია (საშიში
სამიზნის გამოჩენა ან ავტომიყოლის რეჟიმიდან დაკარგვა ან
საგრძნობლად დაახლოება სამიზნესთან);
გემთწამყვანის მიერ ინდიკატორის ეკრანზე სპეციალური დამცავი
სრგოლებისა და ზონების შექმნა ხელით;
მანევრის სიტუაციის ექსტრაპოლაცია (წინასწარ გათამაშება მანევრის)
საშიშ სამიზნესთან უსაფრთხო დაშორიშორების მიზნით, რომლის
არჩევა შეიძლება ავტომატურად ან გემთწამყვანის გადაწყვეტილებით;
ასევე არლს-ს გააჩნია მრავალი სხვა ფუნქცია, რომელიც
გემთწამყვანიდან მოითხოვს დიდ ყურადღებას გადაწყვეტილების მიღებაზე,
რათა ჩატარებული მანევრი იყოს უსაფრთხო.
არლს-ი შესდგება შემდეგი ძირითადი ნაწილებისაგან: ინფორმაციის
მომწოდებელი მოწყობილობებისაგან, დამაკავშირებელი ინტერფეისისაგან
და სიტუაციის ინდიკატორის ეკრანისაგან, რომელშიც გაერთიანებულია
სპეციალური ელექტრონული გამომთვლელი მოწყობილობა.
ინფორმაციის მომწოდებელი მოწყობილობებია: ერთ ან ორ
დიაპაზონიანი რლს, ლაგი, გიროკომპასი, რადიონავიგაციური სისტემის
მიმღებ-ინდიკატორი (GPS) და ავტომატური საიდენტიფიკაციო სისტემა
(AIS). ინფორმაციის მომწოდებელი მოწყობილობები ელექტრონულად
დამაკავშირებელი ინტერფეისის სასშუალებით უკავშირდება სიტუაციის
ინდიკატორის ეკრანს და სპეციალურ ელექტრონულ გამომთვლელ
მოწყობილობას.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 37
არლს-ი იყოფა:
1. ინფორმაციის დაგროვების მეთოდის მიხედვით-ინფორმაცია
შეიძლება გროვდებოდეს მყარი დიკის მეხსიერებაში ან ლაზერული
დისკების საშუალებით;
2. პირველადი და მეორადი რადიოლოკაციური ინფორმაციის
წარმოდგენის მიხედვით - როცა პირველადი და მეორადი ინფორმაცია
წარმოდგენილია ერთ ეკრანზე და როცა პირველადი და მეორადი
ინფორმაცია წარმოდგენილია განცალკავებით სხვადასხვა ეკრანზე.
არლს-ში გამოიყენება ინფორმაციის წარმოდგენის ორი მეთოდი -
პრველადი და მეორადი ინფორმაციის სახით. არლს-ის გამოყენების
პრაქტიკამ აჩვენა, თუ პირველადი და მეორადი ინფორმაცია
წარმოდგენილია განცალკავებით სხვადასხვა ინდიკატორის ეკრანზე, ეს
იწვევს გემთწამყვანის ყურადღების დამატებით დაძაბვას, რათა მან შეძლოს
სამიზნეების იდენტიფიცირება მათი მეორადი ინფორმაციით. ამიტომ
თანამედროვე არლს-ში გამოიყენებენ პირველ მეთოდს, როცა პირველადი და
მეორადი ინფორმაცია წარმოდგენილია ერთ ეკრანზე.
პირველადი რადიოლოკაციიური ინფორმაცია წარმოდგენილია არლს-ის
ეკრანზე რადიოლოკაციური გამოსახულების სახით - აღმოჩენილი
ობიექტების არეკვლილი ექო-სიგნალები, სანაპირო ზოლი, კურსის აღნიშვნა,
მორავი და უძრავი სიშორის განმსაზღვრავი წრეები, მიმართულების
განმსაზღრავი აღნიშვნა.
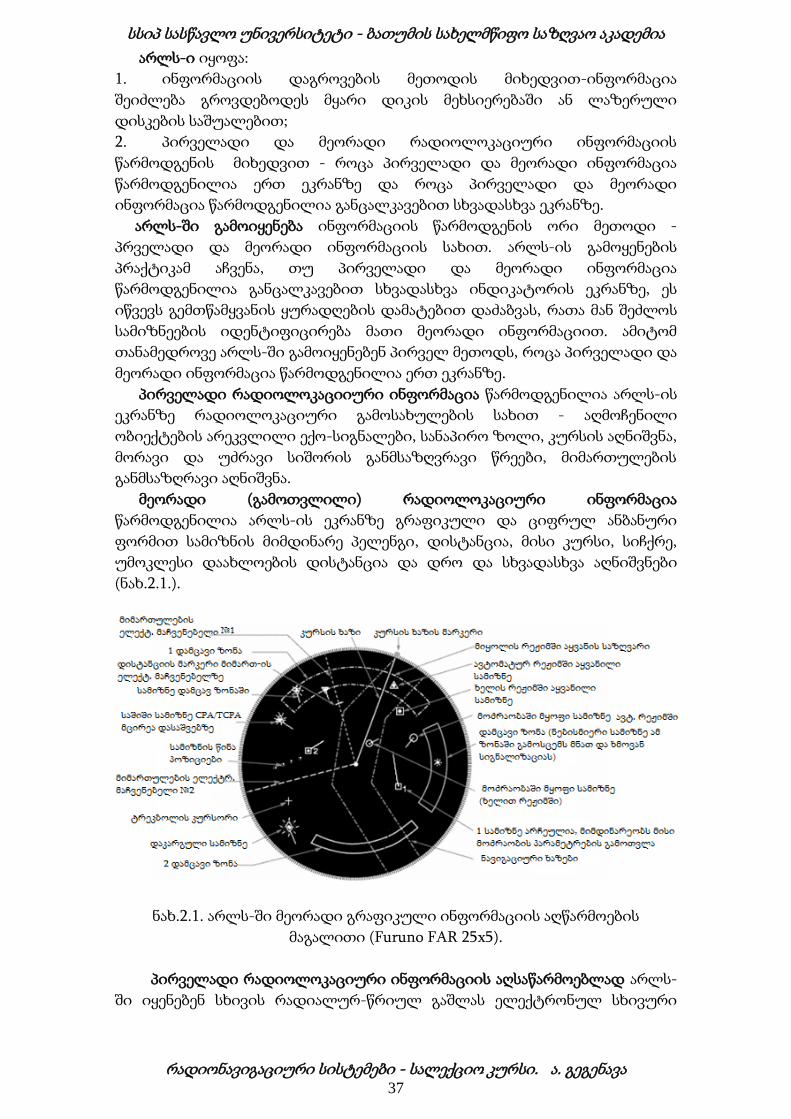
მეორადი (გამოთვლილი) რადიოლოკაციური ინფორმაცია
წარმოდგენილია არლს-ის ეკრანზე გრაფიკული და ციფრულ ანბანური
ფორმით სამიზნის მიმდინარე პელენგი, დისტანცია, მისი კურსი, სიჩქრე,
უმოკლესი დაახლოების დისტანცია და დრო და სხვადასხვა აღნიშვნები
(ნახ.2.1.).
ნახ.2.1. არლს-ში მეორადი გრაფიკული ინფორმაციის აღწარმოების
მაგალითი (Furuno FAR 25x5).
პირველადი რადიოლოკაციური ინფორმაციის აღსაწარმოებლად არლს-
ში იყენებენ სხივის რადიალურ-წრიულ გაშლას ელექტრონულ სხივური
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 38
მილაკების გამოყენებით, რომელთა უმთავრეს უარყოფით მხარეს
წარმოადგენს გამოსახულების მცირე სიდიდის ნათება.
თანამედროვე არლს-ში გამოყენებულია სხივის სატელევიზიო
(სტრიქონული) გაშლა და ელექტრონულ სხივური მილაკები სხივის
მაგნიტური მართვით, ხოლო სხივის რადიალურ-წრიული გაშლა
ინდიკატორის ეკრანზე მიიღწევა სპეციალური მიკროპროცესორების
გამოყენებით. ეს მეთოდი საშუალებას იძლევა დაავაკვირდეთ არლს-ის
ინდიკატორის ეკრანზე გამოსახულებას, როგორც დღისით ასევე ღამით
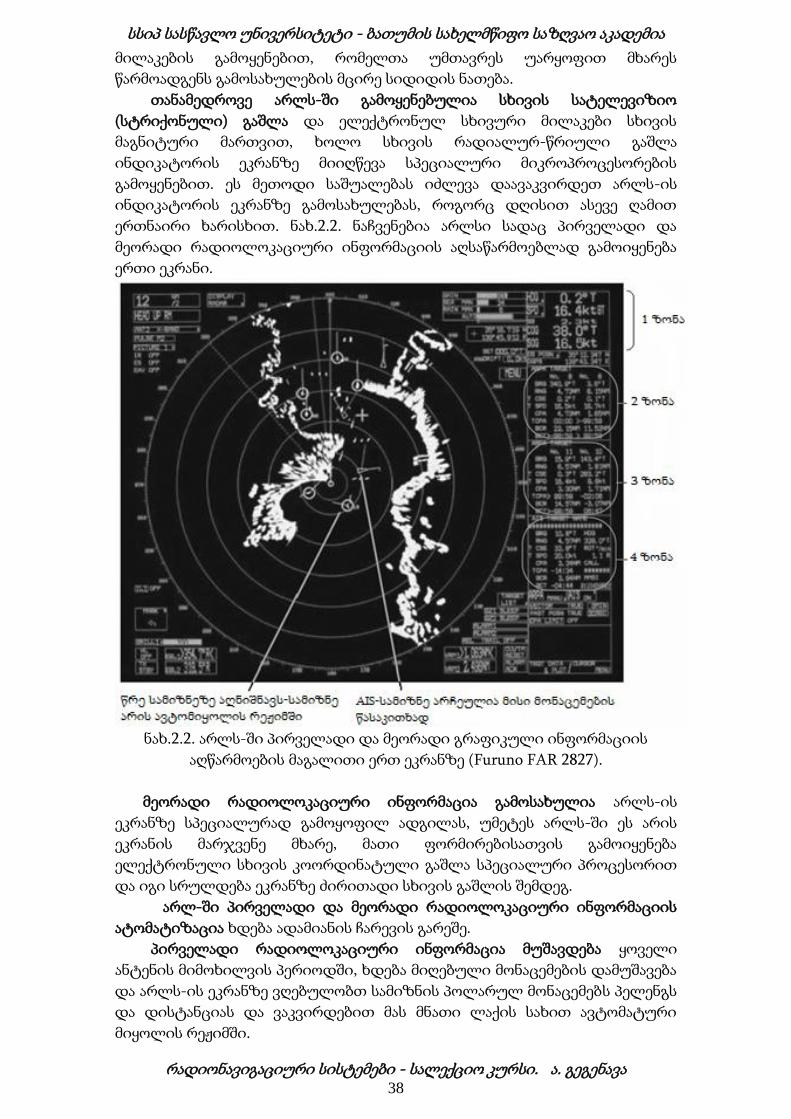
ერთნაირი ხარისხით. ნახ.2.2. ნაჩვენებია არლსი სადაც პირველადი და
მეორადი რადიოლოკაციური ინფორმაციის აღსაწარმოებლად გამოიყენება
ერთი ეკრანი.
ნახ.2.2. არლს-ში პირველადი და მეორადი გრაფიკული ინფორმაციის
აღწარმოების მაგალითი ერთ ეკრანზე (Furuno FAR 2827).
მეორადი რადიოლოკაციური ინფორმაცია გამოსახულია არლს-ის
ეკრანზე სპეციალურად გამოყოფილ ადგილას, უმეტეს არლს-ში ეს არის
ეკრანის მარჯვენე მხარე, მათი ფორმირებისათვის გამოიყენება
ელექტრონული სხივის კოორდინატული გაშლა სპეციალური პროცესორით
და იგი სრულდება ეკრანზე ძირითადი სხივის გაშლის შემდეგ.
არლ-ში პირველადი და მეორადი რადიოლოკაციური ინფორმაციის
ატომატიზაცია ხდება ადამიანის ჩარევის გარეშე.
პირველადი რადიოლოკაციური ინფორმაცია მუშავდება ყოველი
ანტენის მიმოხილვის პერიოდში, ხდება მიღებული მონაცემების დამუშავება
და არლს-ის ეკრანზე ვღებულობთ სამიზნის პოლარულ მონაცემებს პელენგს
და დისტანციას და ვაკვირდებით მას მნათი ლაქის სახით ავტომატური
მიყოლის რეჟიმში.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 39
მეორადი რადიოლოკაციური ინფორმაციის დამუშავების შედეგად,
ანტენის მიმოხილვის რამდენიმე პერიოდის შემდეგ დაზუსტებული და
გამოთვლილი მონაცემების მიღების შემდეგ არლს-ის ეკრანზე სპეციალურ
გამოყოფილ ადგილას ვაკვირდებით სამიზნის მოძრაობის პარამეტრებს და
დაახლოების ელემენტებს. ინფორმაციის დამუშავება და წარმოდგენა
მიმდინარეობს სპეციალიზირებული მიკროპროცესორის საშუალებით.
რას წარმოადგენს დაბალ სიხშირული რადიონავიგაციური სისტემა
დაბალ სიხშირული რადიონავიგაციური სისტემა წარმოადგენს რთულ
რადიოტექნიკურ სისტემას, რომელიც შესდგება ნაპირზე განთავსებული
სინქრონიზირებული გამომსხივებლებისაგან და გემებზე არსებული მიმღებ-
ინდიკატორებისაგან და განკუთვნილია გემის ადგილმდებარეობის
განსაზღვრისათვის. გარდა ადგილის განსაზღვრის ამოცანისა აღნიშნული
სისტემები საშუალებას იძლევა ნავიგაციური ამოცანების და მოძრაობის
პარამეტრების განსაზღვრისათვის. დაბალსიხშირულ რადიონავიგაციურ
სისტემებს საფუძველად უდევს რადიოტალღების ცნობილი თვისება-
გავრცელება უმოკლესი მანძილით და სასრული და ცნობილი სიჩქარით.
როგორ ხდება გემის ადგილის დადგენა დაბალსიხშირულ
რადიონავიგაციურ სისტემებში.
დაბალსიხშირულ რადიონავიგაციურ სისტემებს საფუძველად უდევს
რადიოტალღების ცნობილი თვისება- გავრცელება უმოკლესი მანძილით და
სასრული და ცნობილი სიჩქარით. გამომსხივებლები წარმოადგენენ
ნავიგაციურ ორიენტირებს ცნობილი კოორდინატებით, წერტილების
გეომეტრიული ადგილები წარმოქმნიან იზოხაზებს, ამ იზოხაზების
გადაკვეთა გვაძლევს გემის ადგილმდებარეობას, ეს ინფორმაცია მუშავდება
გემის მიმღებ-ინდიკატორებში, ამ მეთოდს ადგილმდებარეობის
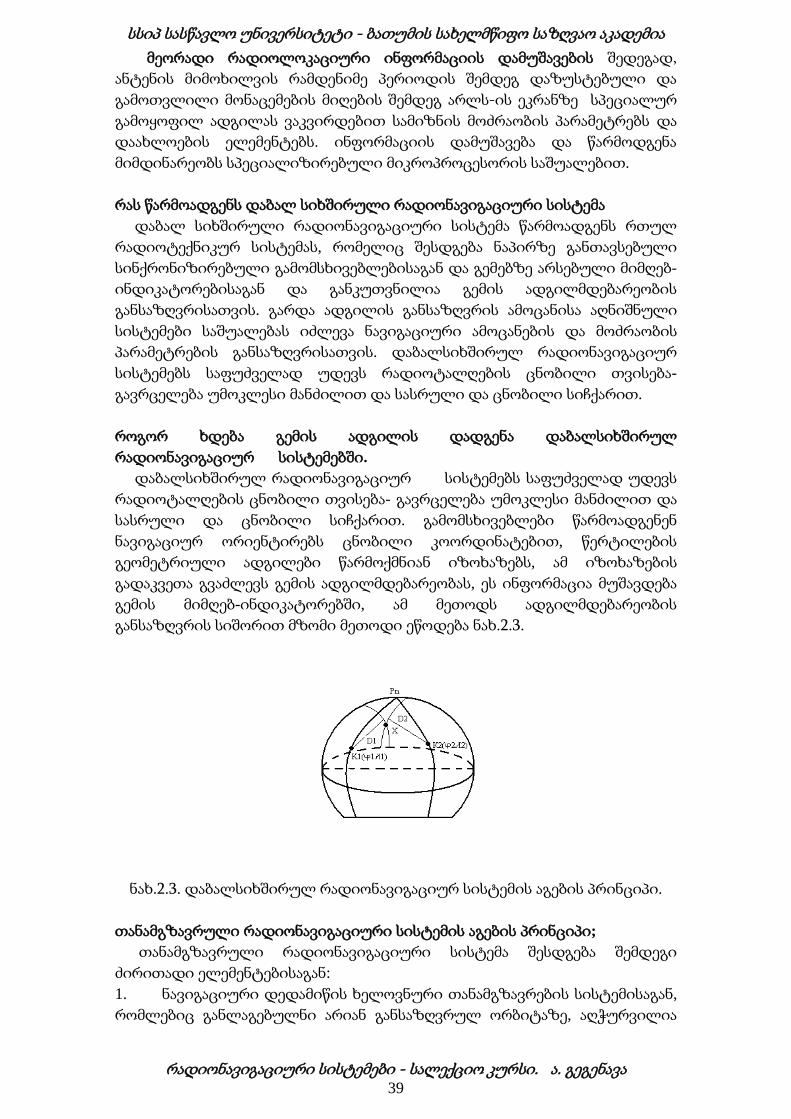
განსაზღვრის სიშორით მზომი მეთოდი ეწოდება ნახ.2.3.
ნახ.2.3. დაბალსიხშირულ რადიონავიგაციურ სისტემის აგების პრინციპი.
თანამგზავრული რადიონავიგაციური სისტემის აგების პრინციპი;
თანამგზავრული რადიონავიგაციური სისტემა შესდგება შემდეგი
ძირითადი ელემენტებისაგან:
1. ნავიგაციური დედამიწის ხელოვნური თანამგზავრების სისტემისაგან,
რომლებიც განლაგებულნი არიან განსაზღვრულ ორბიტაზე, აღჭურვილია
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 40
სპეციალური რადიოტექნიკური მოწყობილობებით, რომლებიც საშუალებას
იძლევა გაასხივონ და მიიღონ რადიოსიგნალები;
2. სახმელეთო კომპლექსები, საიდანაც ხდება თანამგზავრების მართვა,
ორბიტაზე მოძრაობის პარამეტრების ცვლილება და თანამგზავრის
მოწყობილობების მართვა დედამიწიდან.
3. გემებზე არსებული თანამგზავრული რადიონავიგაციური სისტემის
მიმღებ-ინდიკატორები.
თანამგზავრები გამოიყენება, როგორც ნაიგაციური წერტილები ცნობილი
კოორდინატებით. მაგალითად დროის რაღაც მომენტში თანამგზავრი და
გემი იმყოფებიან ურთიერთ რადიო მხედველობის არეში და მართკუთხა
გეოცენტრიულ კოორდინატთა სისტემაში OXYZ შესაბამისად იმყოფებოდნენ
წერტილებში K და S. გემისა და თანამგზავრის მდებარეობა აღნიშნულ
სიბრტყეში განისაზღვრება ვექტორებით R და r ვექტორი B განსაზღვრავს
თანამგზავრის ადგილს გემის მიმართ. ამგვარად ნავიგაციის ამოცანა
დაიყვანება R განსაზღვრაზე, იმ პირობით, რომ ვექტორები D და i
მოცემულია:
R=r-D
თუ ამ განტოლებას ამოვხსნით, როგორც დროის ფუნქციას:
R(t)=r(t)-D(t)
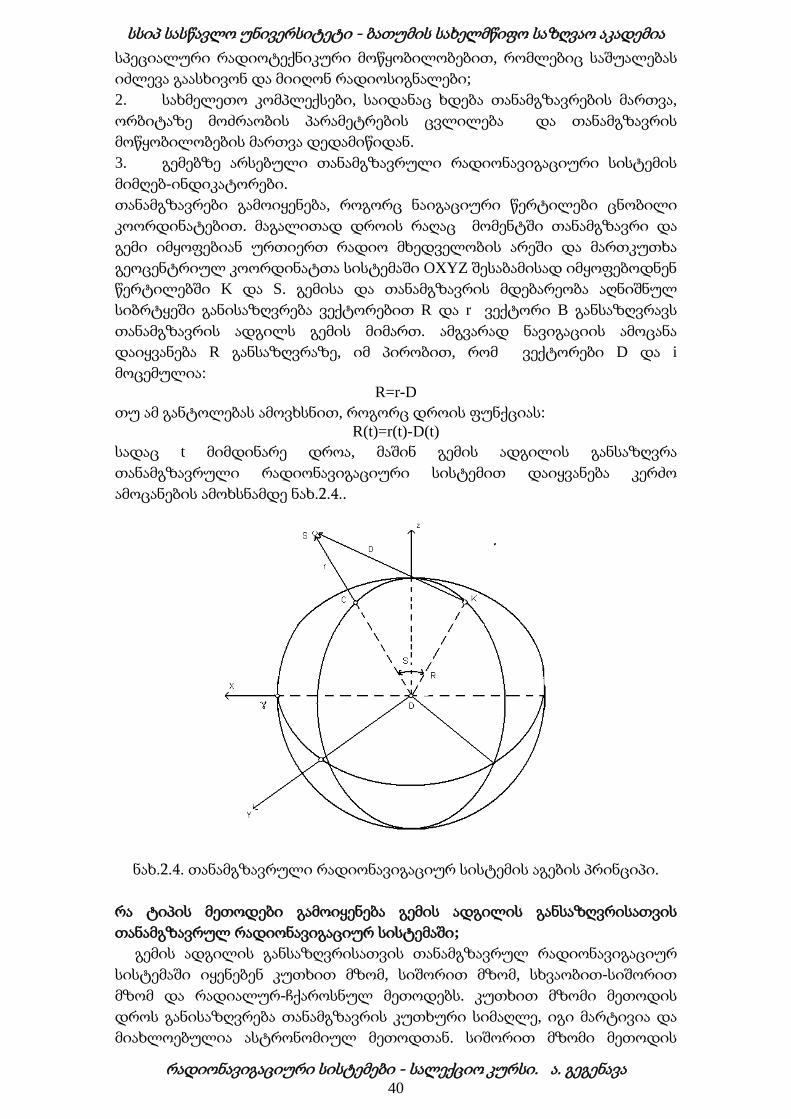
სადაც t მიმდინარე დროა, მაშინ გემის ადგილის განსაზღვრა
თანამგზავრული რადიონავიგაციური სისტემით დაიყვანება კერძო
ამოცანების ამოხსნამდე ნახ.2.4..
ნახ.2.4. თანამგზავრული რადიონავიგაციურ სისტემის აგების პრინციპი.
რა ტიპის მეთოდები გამოიყენება გემის ადგილის განსაზღვრისათვის
თანამგზავრულ რადიონავიგაციურ სისტემაში;
გემის ადგილის განსაზღვრისათვის თანამგზავრულ რადიონავიგაციურ
სისტემაში იყენებენ კუთხით მზომ, სიშორით მზომ, სხვაობით-სიშორით
მზომ და რადიალურ-ჩქაროსნულ მეთოდებს. კუთხით მზომი მეთოდის
დროს განისაზღვრება თანამგზავრის კუთხური სიმაღლე, იგი მარტივია და
მიახლოებულია ასტრონომიულ მეთოდთან. სიშორით მზომი მეთოდის
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 41
დროს განისაზღვრება დახრილობის მანძილი თანამგზავრამდე. სხვაობით-
სიშორით მზომი მეთოდის დროს განისაზღვრება დისტანციების სხვაობა
გემსა და თანამგზავრის ორ მიმდევრობით მდებარეობას შორის მისი
მოძრაობის ორბიტაზე.
თანამგზავრული რადიონავიგაციური სისტემა NAVSTAR-ის (GPS)
დანიშნულება;
GPS (Global Positioning System) — თანამგზავრული რადიონავიგაციური
სისტემა, რომელიც უზრუნველყოფს მანძილის და დროის გაზომვას და
ადგილმდებარეობის განსაზღვრას WGS-84 კოორდინატთა მსოფლიო
გეოდეზიურ სისტემაში. მისი საშუალებით შესაძლებელია დედამიწის
ნებისმიერ წერტილში და დედამიწის მახლობლად კოსმოსურ სივრცეში
ობიექტების ადგილმდებარეობის და სიჩქარის განსაზღვრა. სისტემა
შემუშავდა, განხორციელდა და ექსპლუატაციაში შევიდა აშშ თავდაცვის
სამინისტროს მიერ. ამჟამად ხელმისაწვდომია მისი გამოყენება სამოქალაქო
და სხვადასხვა მიზნებისთვის. თანამგზავრული რადიონავიგაციური
სისტემა NAVSTAR-ის (GPS) ერთ-ერთი დანიშნულებაა გემების
ადგილმდებარეობის უწყვეტი, გლობალური განსაზღვრა.
ნახ.2.5. სისტემა NAVSTAR-ის (GPS) .
რა ძირითადი ნაწილებისაგან შესდგება სისტემა NAVSTAR-ი (GPS)
სისტემა NAVSTAR-ი (GPS) შესდგება: ნავიგაციური დედამიწის
ხელოვნური თანამგზავრების სისტემისაგან, სახმელეთო კომპლექსებისაგან,
გემებზე არსებული თანამგზავრული რადიონავიგაციური სისტემის მიმღებ-
ინდიკატორებისაგან.
სისტემა NAVSTAR-ის (GPS) დედამიწის ხელოვნურ თანამგზავრთა
თანავარსკლავედი
სისტემა NAVSTAR-ის (GPS) დედამიწის ხელოვნურ თანამგზავრთა
თანავარსკლავედი მოძრაობს დედამიწის ირგვლივ წრიულ ორბიტაზე
(აღჭურვილია სპეციალური რადიოტექნიკური მოწყობილობებით,
რომლებიც საშუალებას იძლევა გაასხივონ და მიიღონ რადიოსიგნალები)
ერთი სიმაღლით და გარაშემოვლის პერიოდით. წრიული ორბიტის სიმაღლე
დედამიწიდან შეადგენს 20200 კმ-ს, იგი დედამიწის დღე-ღამის ბრუნვის
ჯერადია და 11 საათის 58 წუთის ტოლია, რის შედეგადაც ერთი
თანამგზავრი ასრულებს 2 ბრუნს დედამიწის ირგვლივ ერთი ვარსკლავური
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 42
დღე-ღამის განმავლობაში (23 საათი და 56 წუთი). ყველა თანამგზავრთა
ორბიტების დახრილობა 55°-ის ტოლია. ერთადერთი განსხვავება
თანამგზავრთა ორბიტებს შორის არის იმ წერტილის განედი, სადაც
თანამგზავრის ორბიტის სიბრტყე კვეთს ეკვატორს - ეს წერტილები
დაცილებულია ერთმანეთისაგან 60°-ით და შესაბამისად დედამიწის
ირგვლივ სისტემას გააჩნია 6 ორბიტა სხვადასხვა დახრილობის სიბრტყით
და 4 თანამგზავრით თითოეულ ორბიტაზე.
ნახ.2.6. სისტემა NAVSTAR-ის (GPS) დედამიწის ხელოვნურ თანამგზავრთა
თანავარსკლავედი.
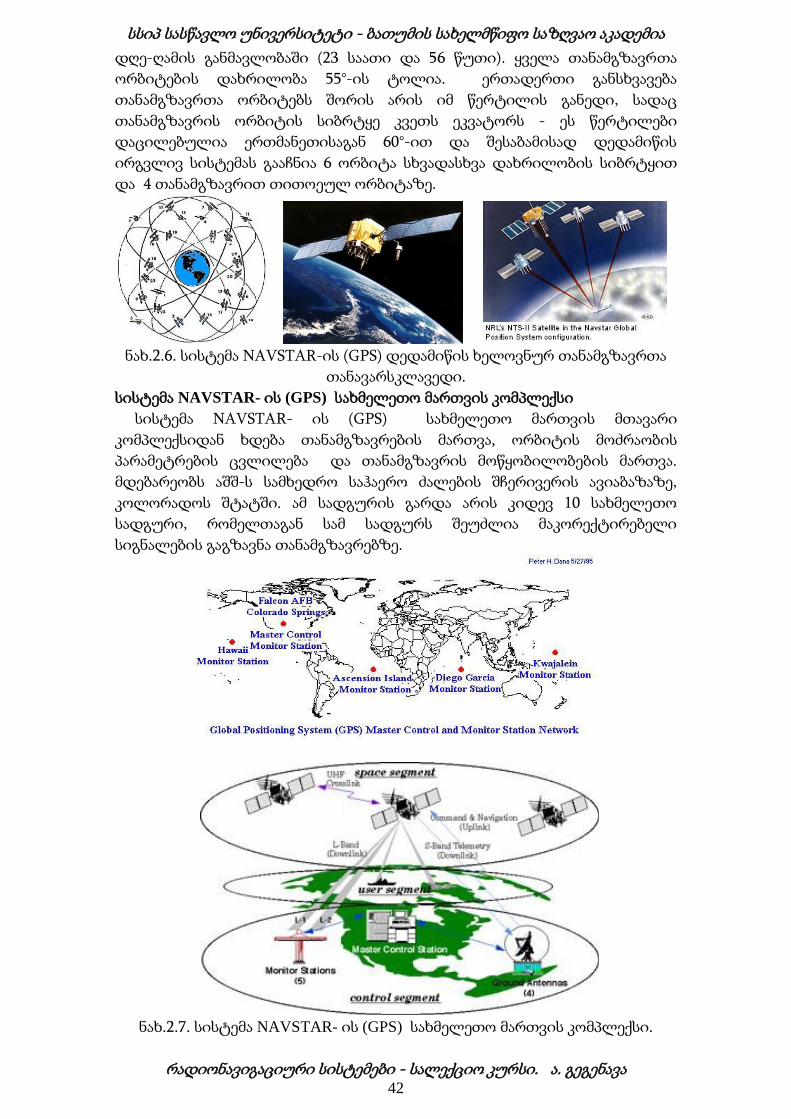
სისტემა NAVSTAR- ის (GPS) სახმელეთო მართვის კომპლექსი
სისტემა NAVSTAR- ის (GPS) სახმელეთო მართვის მთავარი
კომპლექსიდან ხდება თანამგზავრების მართვა, ორბიტის მოძრაობის
პარამეტრების ცვლილება და თანამგზავრის მოწყობილობების მართვა.
მდებარეობს აშშ-ს სამხედრო საჰაერო ძალების შჩერივერის ავიაბაზაზე,
კოლორადოს შტატში. ამ სადგურის გარდა არის კიდევ 10 სახმელეთო
სადგური, რომელთაგან სამ სადგურს შეუძლია მაკორექტირებელი
სიგნალების გაგზავნა თანამგზავრებზე.
ნახ.2.7. სისტემა NAVSTAR- ის (GPS) სახმელეთო მართვის კომპლექსი.
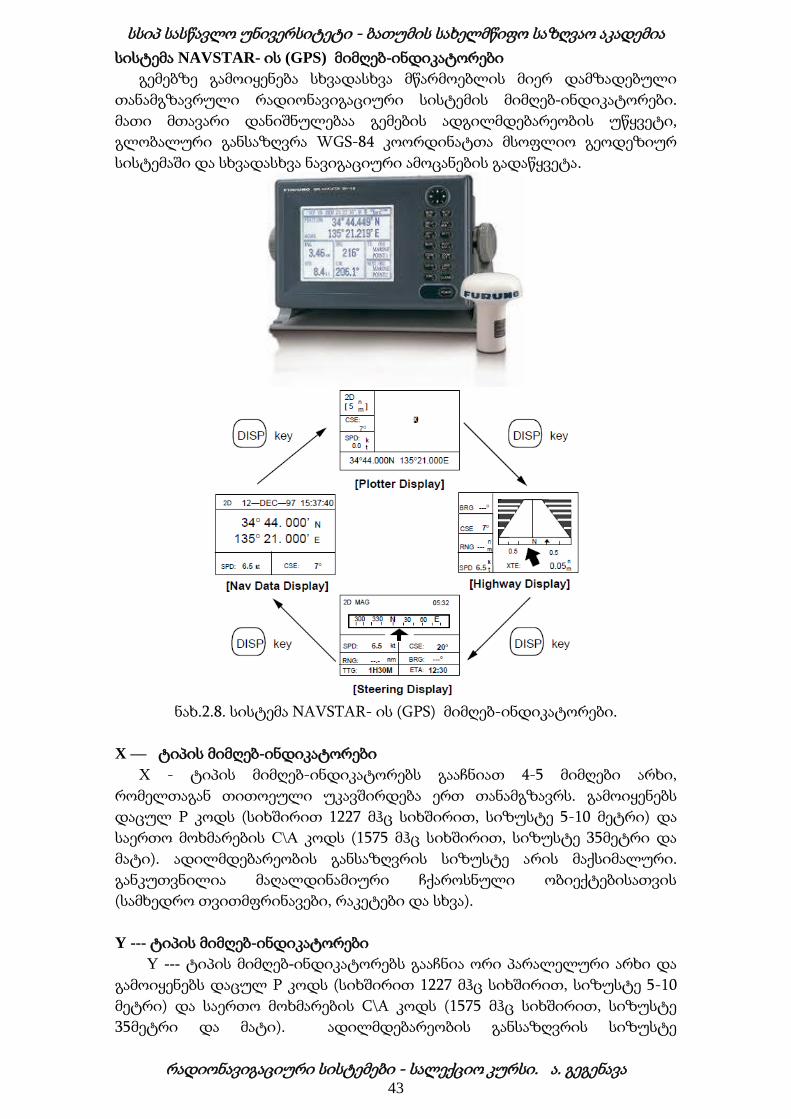
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 43
სისტემა NAVSTAR- ის (GPS) მიმღებ-ინდიკატორები
გემებზე გამოიყენება სხვადასხვა მწარმოებლის მიერ დამზადებული
თანამგზავრული რადიონავიგაციური სისტემის მიმღებ-ინდიკატორები.
მათი მთავარი დანიშნულებაა გემების ადგილმდებარეობის უწყვეტი,
გლობალური განსაზღვრა WGS-84 კოორდინატთა მსოფლიო გეოდეზიურ
სისტემაში და სხვადასხვა ნავიგაციური ამოცანების გადაწყვეტა.
ნახ.2.8. სისტემა NAVSTAR- ის (GPS) მიმღებ-ინდიკატორები.
X –– ტიპის მიმღებ-ინდიკატორები
Х - ტიპის მიმღებ-ინდიკატორებს გააჩნიათ 4-5 მიმღები არხი,
რომელთაგან თითოეული უკავშირდება ერთ თანამგზავრს. გამოიყენებს
დაცულ P კოდს (სიხშირით 1227 მჰც სიხშირით, სიზუსტე 5-10 მეტრი) და
საერთო მოხმარების С\А კოდს (1575 მჰც სიხშირით, სიზუსტე 35მეტრი და
მატი). ადილმდებარეობის განსაზღვრის სიზუსტე არის მაქსიმალური.
განკუთვნილია მაღალდინამიური ჩქაროსნული ობიექტებისათვის
(სამხედრო თვითმფრინავები, რაკეტები და სხვა).
Y --- ტიპის მიმღებ-ინდიკატორები
Y --- ტიპის მიმღებ-ინდიკატორებს გააჩნია ორი პარალელური არხი და
გამოიყენებს დაცულ P კოდს (სიხშირით 1227 მჰც სიხშირით, სიზუსტე 5-10
მეტრი) და საერთო მოხმარების С\А კოდს (1575 მჰც სიხშირით, სიზუსტე
35მეტრი და მატი). ადილმდებარეობის განსაზღვრის სიზუსტე
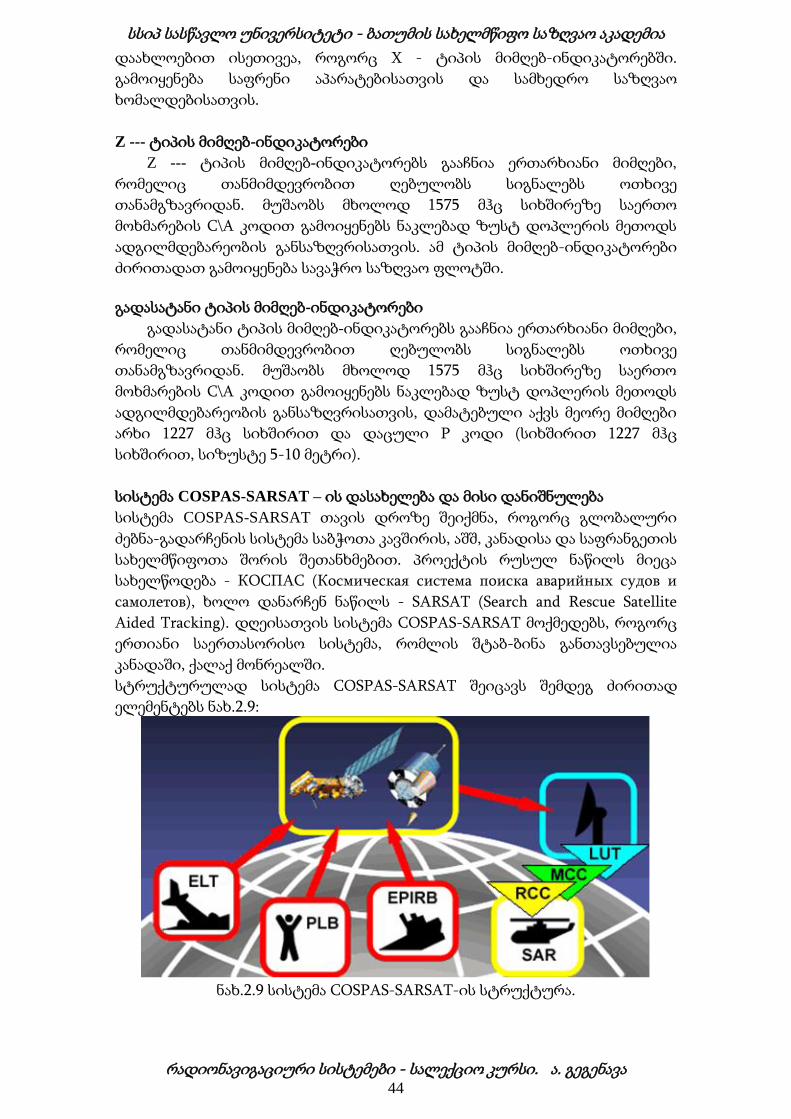
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 44
დაახლოებით ისეთივეა, როგორც Х - ტიპის მიმღებ-ინდიკატორებში.
გამოიყენება საფრენი აპარატებისათვის და სამხედრო საზღვაო
ხომალდებისათვის.
Z --- ტიპის მიმღებ-ინდიკატორები
Z --- ტიპის მიმღებ-ინდიკატორებს გააჩნია ერთარხიანი მიმღები,
რომელიც თანმიმდევრობით ღებულობს სიგნალებს ოთხივე
თანამგზავრიდან. მუშაობს მხოლოდ 1575 მჰც სიხშირეზე საერთო
მოხმარების С\А კოდით გამოიყენებს ნაკლებად ზუსტ დოპლერის მეთოდს
ადგილმდებარეობის განსაზღვრისათვის. ამ ტიპის მიმღებ-ინდიკატორები
ძირითადათ გამოიყენება სავაჭრო საზღვაო ფლოტში.
გადასატანი ტიპის მიმღებ-ინდიკატორები
გადასატანი ტიპის მიმღებ-ინდიკატორებს გააჩნია ერთარხიანი მიმღები,
რომელიც თანმიმდევრობით ღებულობს სიგნალებს ოთხივე
თანამგზავრიდან. მუშაობს მხოლოდ 1575 მჰც სიხშირეზე საერთო
მოხმარების С\А კოდით გამოიყენებს ნაკლებად ზუსტ დოპლერის მეთოდს
ადგილმდებარეობის განსაზღვრისათვის, დამატებული აქვს მეორე მიმღები
არხი 1227 მჰც სიხშირით და დაცული P კოდი (სიხშირით 1227 მჰც
სიხშირით, სიზუსტე 5-10 მეტრი).
სისტემა COSPAS-SARSAT – ის დასახელება და მისი დანიშნულება
სისტემა COSPAS-SARSAT თავის დროზე შეიქმნა, როგორც გლობალური
ძებნა-გადარჩენის სისტემა საბჭოთა კავშირის, აშშ, კანადისა და საფრანგეთის
სახელმწიფოთა შორის შეთანხმებით. პროექტის რუსულ ნაწილს მიეცა
სახელწოდება - КОСПАС (Космическая система поиска аварийных судов и
самолетов), ხოლო დანარჩენ ნაწილს - SARSAT (Search and Rescue Satellite
Aided Tracking). დღეისათვის სისტემა COSPAS-SARSAT მოქმედებს, როგორც
ერთიანი საერთასორისო სისტემა, რომლის შტაბ-ბინა განთავსებულია
კანადაში, ქალაქ მონრეალში.
სტრუქტურულად სისტემა COSPAS-SARSAT შეიცავს შემდეგ ძირითად
ელემენტებს ნახ.2.9:
ნახ.2.9 სისტემა COSPAS-SARSAT-ის სტრუქტურა.
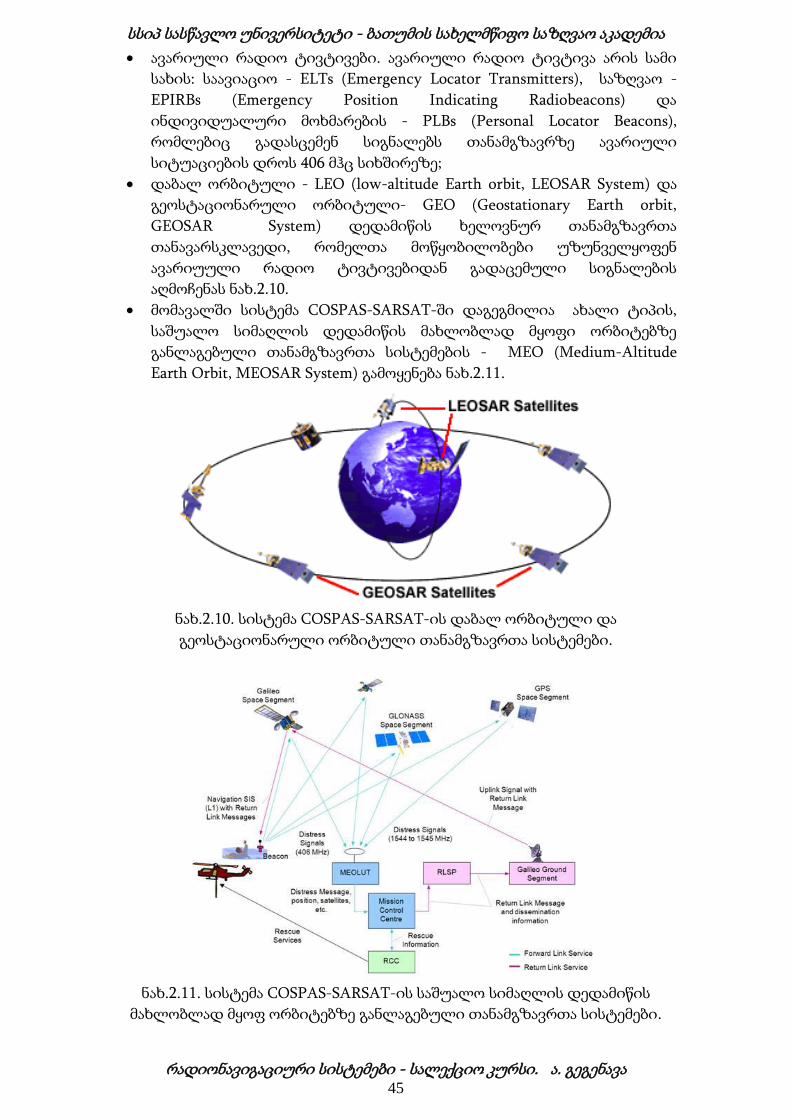
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 45
ავარიული რადიო ტივტივები. ავარიული რადიო ტივტივა არის სამი
სახის: საავიაციო - ELTs (Emergency Locator Transmitters), საზღვაო -
EPIRBs (Emergency Position Indicating Radiobeacons) და
ინდივიდუალური მოხმარების - PLBs (Personal Locator Beacons),
რომლებიც გადასცემენ სიგნალებს თანამგზავრზე ავარიული
სიტუაციების დროს 406 მჰც სიხშირეზე;
დაბალ ორბიტული - LEO (low-altitude Earth orbit, LEOSAR System) და
გეოსტაციონარული ორბიტული- GEO (Geostationary Earth orbit,
GEOSAR System) დედამიწის ხელოვნურ თანამგზავრთა
თანავარსკლავედი, რომელთა მოწყობილობები უზუნველყოფენ
ავარიუული რადიო ტივტივებიდან გადაცემული სიგნალების
აღმოჩენას ნახ.2.10.
მომავალში სისტემა COSPAS-SARSAT-ში დაგეგმილია ახალი ტიპის,
საშუალო სიმაღლის დედამიწის მახლობლად მყოფი ორბიტებზე
განლაგებული თანამგზავრთა სისტემების - MEO (Medium-Altitude
Earth Orbit, MEOSAR System) გამოყენება ნახ.2.11.
ნახ.2.10. სისტემა COSPAS-SARSAT-ის დაბალ ორბიტული და
გეოსტაციონარული ორბიტული თანამგზავრთა სისტემები.
ნახ.2.11. სისტემა COSPAS-SARSAT-ის საშუალო სიმაღლის დედამიწის
მახლობლად მყოფ ორბიტებზე განლაგებული თანამგზავრთა სისტემები.
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 46
სახმელეთო ინფორმაციის მიღებისა და დამუშავების ცენტრები - LUTs
(Local User Terminals), სისტემის საკოორდინაციო ცენტრები - MCCs
(Mission Control Centers), რომლებიც ღებულობენ ავარიულ
შეტყობინებებს სახმელეთო ინფორმაციის მიღებისა და დამუშავების
ცენტრებიდან და აგზავნიან ამ შეტყობინებებს სამაშველო
საკოორდინაციო ცენტრებში - RCCs (Rescue Coordination Centers),
რომლებიც წარმოადგენენ ძებნა-გადარჩენის საკონტაქტო პუნქტებს -
SPOCs (Search and Rescue Points Of Contacts) შესაბამის ქვეყანაში,
რომლის დროშითაც რეგისტრირებულია ესა თუ ის ავარიული რადიო
ტივტივა. სამაშველო საკოორდინაციო ცენტრები ვალდებული არიან
აწარმოონ ძებნა-გადარჩენის ოპერაციები - SAR (Search and Rescue
Operation).
სისტემა COSPAS-SARSAT– ის ავარიული რადიობუები, დანიშნულება, მუშა
სიხშირეები
სისტემა COSPAS-SARSAT–ის ავარიული რადიობუები ანუ რადიო
ტივტივა არის სამი სახის: საავიაციო - ELTs (Emergency Locator Transmitters),
საზღვაო - EPIRBs (Emergency Position Indicating Radiobeacons) და
ინდივიდუალური მოხმარების - PLBs (Personal Locator Beacons), რომლებიც
გადასცემენ სიგნალებს 406 მჰც სიხშირეზე თანამგზავრზე ავარიული
სიტუაციების დროს. დღეისათვის სისტემა COSPAS-SARSAT–ი აღმოაჩენს და
განსაზღვრავს ადგილმდებარეობას, მხოლოდ იმ რადიოტივტივებისა,
რომლებიც მუშაობენ 406 მჰც სიხსირეზე. 2009 წლის 1 თებერვლიდან აღარ
წარმოებს იმ რადიო ტივტივების აღმოჩენა, რომლებიც მუშაობდნენ 121,5/243
მჰც სიხშირეზე. ავარიული რადიოტივტივაში დაპროგრამებულია გემის ან
საფრენი აპარატის 9 ნიშნა საიდენტიფიკაციო კოდი. ავრიული
რადიოტივტივები მოქმედებაში შეიძლება მოყვანილი იქნას ხელით ან
ავტომატურად წყალში ჩაძირვისას და ავიაკატასროფის დროს.
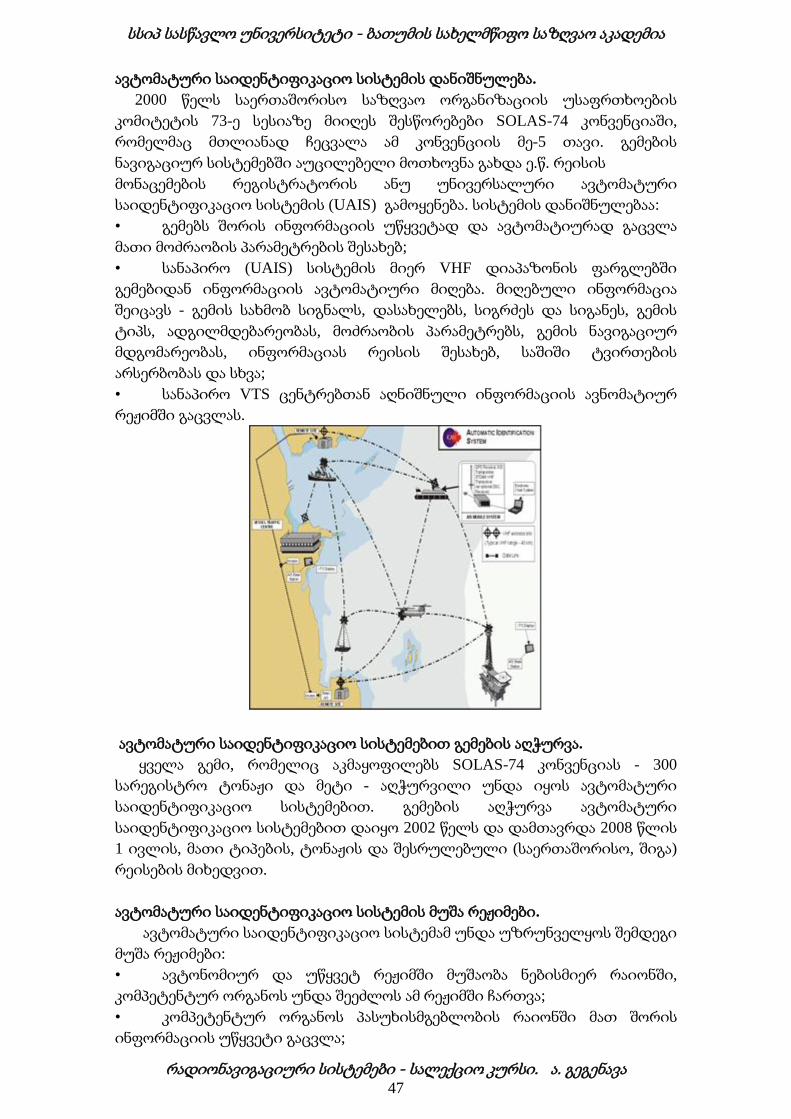
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 47
ავტომატური საიდენტიფიკაციო სისტემის დანიშნულება.
2000 წელს საერთაშორისო საზღვაო ორგანიზაციის უსაფრთხოების
კომიტეტის 73-ე სესიაზე მიიღეს შესწორებები SOLAS-74 კონვენციაში,
რომელმაც მთლიანად ჩეცვალა ამ კონვენციის მე-5 თავი. გემების
ნავიგაციურ სისტემებში აუცილებელი მოთხოვნა გახდა ე.წ. რეისის
მონაცემების რეგისტრატორის ანუ უნივერსალური ავტომატური
საიდენტიფიკაციო სისტემის (UAIS) გამოყენება. სისტემის დანიშნულებაა:
• გემებს შორის ინფორმაციის უწყვეტად და ავტომატიურად გაცვლა
მათი მოძრაობის პარამეტრების შესახებ;
• სანაპირო (UAIS) სისტემის მიერ VHF დიაპაზონის ფარგლებში
გემებიდან ინფორმაციის ავტომატიური მიღება. მიღებული ინფორმაცია
შეიცავს - გემის სახმობ სიგნალს, დასახელებს, სიგრძეს და სიგანეს, გემის
ტიპს, ადგილმდებარეობას, მოძრაობის პარამეტრებს, გემის ნავიგაციურ
მდგომარეობას, ინფორმაციას რეისის შესახებ, საშიში ტვირთების
არსერბობას და სხვა;
• სანაპირო VTS ცენტრებთან აღნიშნული ინფორმაციის ავნომატიურ
რეჟიმში გაცვლას.
ავტომატური საიდენტიფიკაციო სისტემებით გემების აღჭურვა.
ყველა გემი, რომელიც აკმაყოფილებს SOLAS-74 კონვენციას - 300
სარეგისტრო ტონაჟი და მეტი - აღჭურვილი უნდა იყოს ავტომატური
საიდენტიფიკაციო სისტემებით. გემების აღჭურვა ავტომატური
საიდენტიფიკაციო სისტემებით დაიყო 2002 წელს და დამთავრდა 2008 წლის
1 ივლის, მათი ტიპების, ტონაჟის და შესრულებული (საერთაშორისო, შიგა)
რეისების მიხედვით.
ავტომატური საიდენტიფიკაციო სისტემის მუშა რეჟიმები.
ავტომატური საიდენტიფიკაციო სისტემამ უნდა უზრუნველყოს შემდეგი
მუშა რეჟიმები:
• ავტონომიურ და უწყვეტ რეჟიმში მუშაობა ნებისმიერ რაიონში,
კომპეტენტურ ორგანოს უნდა შეეძლოს ამ რეჟიმში ჩართვა;
• კომპეტენტურ ორგანოს პასუხისმგებლობის რაიონში მათ შორის
ინფორმაციის უწყვეტი გაცვლა;
სსიპ სასწავლო უნივერსიტეტი - ბათუმის სახელმწიფო საზღვაო აკადემია
რადიონავიგაციური სისტემები - სალექციო კურსი. ა. გეგენავა 48
• მართვის ანუ შეკითხვის რეჟიმში მუშაობა გემებს და კომპეტენტურ
ორგანოს შორის.
ავტომატური საიდენტიფიკაციო სისტემის ძირითადი ფუნქციონალური
მოთხოვნები.
ავტომატური საიდენტიფიკაციო სისტემაში უნდა შედიოდეს:
• მთავარი პროცესორი, რომელსაც შეეძლება VHF დიაპაზონის არხებზე
და ფარგლებში მუშაობა;
• ადგილმდებარეობის განსაზღვრისათვის ინფორმაციის დამუშავების
მოწყობილობა, რომელიც გამოიყენებს WGS-84 კოორდინატთა მსოფლიო
გეოდეზიურ სისტემას;
• მონაცემების ავტომატურად შეყვანის მოწყობილობა;
• მონაცემების ხელით შეყვანის მოწყობილობა;
• მიღებული დსა გადაცემული მონაცემების შესამოწმებელი
მოწყობილობა.
ინფორმაციის წარმოდგენის მეთოდები ავტომატურ საიდენტიფიკაციო
სისტემაში.
ავტომატურ საიდენტიფიკაციო სისტემას უნდა შეეძლოს - სტატიკური,
დინამიური და რეისის შესახებ ინფორმაციის გადაცემა სხვადასხვა დროითი
ინტერვალებით, რისთვისაც ეს ინფორმაცია უნდა გადაიცემოდეს სხვადასხვა
სიჩქარით. ავტომატური საიდენტიფიკაციო სისტემის გემის შეტყობინებების
მოცულობა არ უნდა აღემატებოდეს 1 წუთში 2000 შეტყობინებას, რადგან არ
იქნეს გამოტოვებული მიღებული შეტყობინებები და უზრუნველყოფილი
იქნას სისტემის ყველა რეჟიმით მუშაობა.
სტატიკური და დინამიური ინფორმაცია ავტომატურ საიდენტიფიკაციო
სისტემაში.
სტატიკური ინფორმაცია, რომელსაც წარმოდგენს გემის ავტომატური
საიდენტიფიკაციო სისტემა არის შემდეგი:
• IMO ნომერი;
• სახმობი სიგნალი;
• დასახელება;
• სიგრძე და სიგანე;
• ტიპი;
• სისტემის ანტენის განთავსების ადგილი გემზე მარცხენა და მარჯვენა
ბორტების, გემის წინა და უკანა ნაწილების მიმართ.
დინამიური ინფორმაცია, რომელსაც წარმოდგენს გემის ავტომატური
საიდენტიფიკაციო სისტემა არის შემდეგი:
გემის ადგილმდებარეობა სიზუსტის მითითებით;
დრო - UTC;
სიჩქარე გრუნტის მიმართ;
კურსი გრუნტის მიმართ;
ნავგაციური სტატუსი (გემის მდგომარეობა, მარტვადია თუ არა გემი,
ღუზაზე დგომა და სხვა);
მობრუნების კუთხური სიჩქარე;
დახრილობის კუთხე.





























