Embed Size (px)
Citation preview

レーンキープサポートシステムの紹介
定野 温 (日産自動車株式会社) 1.はじめに
ドライバは通常アクセル,ブレー
キ,ステアリングを操作し,それに
よって生じる車両挙動(横Gなど)
を感知している.また、周囲の車両
や道路の状況は、主に視覚で認識し,
それら状況に応じた適切な操作を
行うことにより運転を行っている.
このような運転という作業の負荷
を軽減させる方策として,本システ
ムではカメラで捉えた車両前方画
像を処理することで,車線のほぼ中
央を走行するために必要な操舵ト
ルクの一部を付加する制御を行う.
これによりドライバのハンドル操
作負荷の軽減を図ることを狙いと
する.
2. 作動及び特徴
システムは車速約 65 ~100 km/h
の間で,ドライバがスイッチを操作
したときに作動し,車線のほぼ中央
を走行する為の補助操舵トルクを
付加する.ドライバによる操舵を常
に優先させるため,制御中はドライ
バの操舵を検出し,操舵終了まで制
御を解除する.また本システムは高
速道路走行時を前提とした運転支
援システムであり,作動領域は直進
走行時にのみ制御するよう限定し
た.具体的には横加速度に応じ,付
加しているトルクを低下させると
ともに.旋回半径にも制限を設け,
曲線路にさしかかると制御により
付加しているトルクを低下させる.
尚横加速度による制限値は,道路構
造令で規定された高速道路直線部
の最大路面片勾配,及び日常的に遭
遇する横風などの外乱を考慮して
も直進走行可能な値とした.
さらに本システムでは制御中,ド
ライバの運転状況からその後の車
両位置を予測し,車線から逸脱する
おそれがあると判断した場合には,
音と表示により告知する車線逸脱
警報機能も有する.
3. システム構成
レーンキープサポートシステム
は,前方の白線を検出し推定到達自
車位置を演算する機能を有する
CCD カメラユニットと,前方推定自
車位置,舵角センサで検出した操舵
角,自車速度より,車線のほぼ中央
を走行する操舵をアシストするた
めのトルク(電流)を算出するコン
トローラ,アシスト力を発生させる
ステアリングアクチュエータ,及び
システムスイッチ,表示装置,ブザ
で構成される.(図 1)
3.1 車線検出センサ(CCD カメラ)
白線検出用 CCD カメラはインナ
ーミラー上部に設置され,白黒 CCD
で取り込んだ画像データより白線
の特徴であるエッジを検出し,左右
白線位置の候補点座標を算出する.
これら候補点座標からカルマンフ
ィルタを用い,道路形状,自車の挙
動を同時推定し,自車両前方での車
線中央からの横変位を算出し,処理
結果としてこれらの情報を出力す
る.また本システムでは,検出性能
を向上させる手段として,異なる二
つのシャッタースピードで同一の 図 1 システム構成図

シーンを写し,これら二つの画像を
合成することにより,仮想的に広い
ダイナミックレンジの道路画像を
得る二重露光制御などを採用した.
図 2 に二重露光制御の効果を、図 3
に車線認識結果の一例を示す.
3.2 コントローラ
レーンキープサポートコントロ
ーラでの制御は,ドライバの操舵を
常に優先させることを前提とした
上で,車線追従性を満足させなけれ
ばならない.自動操舵の分野では,
舵角を制御入力とする車両モデル
に基づいて制御系を設計すること
が一般的である.しかしこの様な方
法では強力なハンドル角サーボの
マイナーループで操舵系の非線形
性などを補償するため,ロバスト性
には優れるがドライバの操舵を阻
害する傾向がある.このため,ドラ
イバの操舵介入を前提とする本シ
ステムではハンドル角サーボのマ
イナーループを廃止し,操舵トルク
を制御入力とする制御系とするこ
とで設計自由度を向上させた.しか
しながら一般に操舵系には強い非
線形特性が存在するため,ハンドル
角サーボを持たない本制御方式で
はロバスト性の確保が課題となる.
そこで操舵トルク外乱特性を取り
込んだオブザーバを設計し,車両モ
デルに基づくトルク外乱推定を行
い,フィードバックすることにより,
制御のロバスト性を確保した.
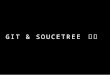
4.効果
本システムを用いた効果の一例
として,車線追従性能の確認結果を
図 4 に示す.これは車線に沿って直
進走行したときの,操舵角及び車線
中央からのずれ量を,制御有無で比
較したものである.操舵角について
見ると,操舵角の発生がおだやかで
違和感の少ない制御となっている
ことが分かる.また車両ずれ量につ
いても,制御有無で同等の軌跡とな
っており,自然な車両挙動で適度な
車線追従性能を有していることが
分かる
またドライバの運転操作負荷軽
減効果について、操舵トルクと,舵
角速度の積の積分値である操舵仕
事量、ドライバの上腕三頭筋の筋電
位での比較を行い、個人差はあるも
のの,制御による効果が認められた.
5. おわりに
今後益々盛んになるであろう、
ITS 技術の一つとして、ドライバの
負荷を軽減し,快適な運転を提供で
きるシステムとして,道路上のレー
ンマーカを検出し,車線に沿って走
行することを支援するレーンキー
プサポートシステムについて述べ
た.皆様に興味を持って頂ければ幸
いである.
図 3 車線認識結果
図 2 二重露光制御の効果
図 4 車線追従性能
制御有
-10
0
10
舵角
[°]
-0.5
0
0.5
横変
位[m
]
車速 80 [Km/h]
制御無
制御有
-10
0
10
舵角
[°]
-0.5
0
0.5
横変
位[m
]
車速 80 [Km/h]
制御無