-
13.09.2018
1
Füüsika
Mehaanika alused
Ringliikumine
Nurkkiirus ja -kiirendus
Lihtsamaks kõverjooneliseks liikumiseks on
ringliikumine, ehk liikumine, mille trajektooriks on
ringjoon. Sel juhtumil trajektoori kõverusraadius ei
muutu ajas.
Tähistades konstantse kõverusraadiuse tähega R
saame normaalkiirenduse avaldada
𝑎𝑛 =𝑣2
𝑅.
Ringliikumisel nimetatakse seda tavaliselt
kesktõmbekiirenduseks, sest ta on suunatud ringi
keskpunkti.
Ringjoonelistest on kõige lihtsam ühtlane ringliikumine.
Selle puhul 𝑎𝜏 = 0 . Kiirus ei muutu suuruse poolest, suund aga
muutub. Seetõttu 𝑎𝑛 ≠ 0 .
-
13.09.2018
2
Punkti asukohta ringjoonel võib määrata ka nurgaga 𝜑 .
Kui koordinaatide alguspunkt O on ringi tsentris, siis
kohavektor muutub ainult suuna poolest. Olgu see aja ∆𝑡jooksul
pöördunud nurga ∆𝜑 võrra. Ajaühikus sooritatud pöördenurk on siis
Τ∆𝜑 ∆𝑡 . Seda nimetatakse keskmiseks nurkkiiruseks ajavahemikul ∆𝑡
või kaarel A1A2.
Vähendame ajavahemikku piiramatult
𝜔 = lim∆𝑡→0
∆𝜑
∆𝑡=
𝑑𝜑
𝑑𝑡= ሶ𝜑 = 𝜑′ .
See on nurkkiirus punktis A1 või ajahetkel t1, ehk
hetknurkkiirus.
Leiame seose kiirusega 𝑣 , mida nurkkiiruse kasutamisel
nimetatakse lineaar- ehk joonkiiruseks. Selleks avaldame
kesknurga ∆𝜑 kaarepikkuse ∆𝑠 = A1A2 kaudu
∆𝜑 =∆𝑠
𝑅
Siis
𝜔 = lim∆𝑡→0
∆𝑠
𝑅∙∆𝑡=
1
𝑅lim∆𝑡→0
∆𝑠
∆𝑡=
𝑣
𝑅.
Seega
𝑣 = 𝜔 ∙ 𝑅 .
-
13.09.2018
3
Joonkiirus näitab ajaühikus läbitavat kaarepikkust,
nurkkiirus aga ajaühikus raadiuse poolt moodustatud
pöördenurka. Seetõttu ongi nendevaheline seos täpselt
samasugune nagu kaarepikkuse ja sellele vastava
kesknurga vahel: ∆𝑠 = ∆𝜑𝑅.
Seda võrdust ajaga jagades saamegi ühel pool
võrdusmärki joonkiiruse ja teisel pool R kordajana
nurkkiiruse 𝜔 .
Valem 𝑣 = 𝜔 ∙ 𝑅 kehtib ka meelevaldsel kõverjoonelisel
liikumisel, siis tuleb R asendada muutuva
kõverusraadiusega r.
Valemi 𝑣 = 𝜔 ∙ 𝑅 abil võib normaalkiirenduse avaldada
nurkkiiruse kaudu
𝑎𝑛 =𝑣2
𝑅= 𝜔2 ∙ 𝑅
Tangentsiaalse kiirenduse jaoks leiame
𝑎𝜏 =𝑑𝑣
𝑑𝑡=𝑑 𝜔 ∙ 𝑅
𝑑𝑡= 𝑅 ∙
𝑑𝜔
𝑑𝑡
Saadud nurkkiiruse tuletist aja järgi nimetatakse
nurkkiirenduseks 𝜀. Siis
𝑎𝜏 = 𝜀 ∙ 𝑅
Sarnasuse tõttu seosega 𝑣 = 𝜔 ∙ 𝑅 nimetatakse 𝑎𝜏 tihti
joonkiirenduseks. Ühtlase ringliikumise puhul kui 𝑎𝜏 = 0, on ka
𝜀 = 0 .
-
13.09.2018
4
Pöörlemist kirjeldavate suuruste vektoriseloom
Kiiruse Ԧ𝑣 , kiirenduse Ԧ𝑎 , tangentsiaal- Ԧ𝑎𝜏 ja
normaalkiirenduse Ԧ𝑎𝑛 vektoriaalsus selgus juba eelnevalt. Osutub,
et ka nurk 𝜑 , nurkkiirus 𝜔 ja nurkkiirendus 𝜀 on vektorid. See
tuleneb asjaolust, et pöördenurga arvväärtus üksinda ei anna meile
täit
ettekujutust pöördest. Keha võib pöörduda ümber
mitmesuguse telje. Seepärast on vaja näidata ka telje
asendit ruumis, mille ümber toimub pöörlemine. Telje üks
suundadest omistataksegi nurgavektorile 𝜑 . Suund valitakse
kruvireegli järgi.
Kruvireegel
Kui pöördenurk on vektor, siis sellest võetud tuletis aja
järgi st nurkkiirus 𝜔 on samuti vektor.
Analoogiliselt leiame, et ka nurkkiirendus Ԧ𝜀 on vektor.
𝜔 on alati nurgavektoriga samasihiline, kuid Ԧ𝜀 ei lange
üldiselt kokku pöörlemisteljega.
Teljesihiline on see ainult fikseeritud telje puhul. Sel
juhul
on Ԧ𝜀 nurkkiirusvektori 𝜔 suunaline kiireneva ja vastassuunaline
aeglustuva pöörlemise korral.
-
13.09.2018
5
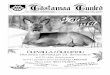
Joonisel kujutatakse
kiirenevat pöörlemist. Ԧ𝑎𝜏 on kiiruse Ԧ𝑣 suunaline ja Ԧ𝜀
-nurkkiiruse 𝜔 suunaline.
Pöörlemistelje asendi
muutumisel võib Ԧ𝜀 omada kõikvõimalikke teisi
asendeid 𝜔 suhtes. Sel juhul nurkkiirendus näitab
nii 𝜔 suuruse kui ka suuna muutumise kiirust.
Vektorite Ԧ𝑎 ja 𝑏 vektorkorrutist tähistatakse Ԧ𝑎 × 𝑏. Kahe
vektori
Ԧ𝑎 ja 𝑏 vektorkorrutise tulemuseks on kolmas vektor Ԧ𝑐 = Ԧ𝑎 ×
𝑏,
mille mooduliks ehk pikkuseks on vektori Ԧ𝑎 ja 𝑏 servadele
ehitatud rööpküliku pindala: c=ab∙sinα, kus α on vektorite Ԧ𝑎
ja
𝑏 vaheline nurk.
Vektor Ԧ𝑐 on risti nii vektori Ԧ𝑎 kui ka vektoriga 𝑏.Vektori Ԧ𝑐
suund on määratud parema käe kruvireegliga: vektori Ԧ𝑐 suund ühtib
kruvi edasinihkumise suunaga, kui
esimene vektor Ԧ𝑎 keerata lühimat teed pidi vektori 𝑏 peale.
Matemaatikast
-
13.09.2018
6
Valime koordinaattelgede alguspunkti O
pöörlemisteljel. Pöörleva punkti
asukohta näitab kohavektor Ԧ𝑟. Võime valemi 𝑣 = 𝜔 ∙ 𝑅 üles
kirjutada vektorkujul
Ԧ𝑣 = 𝜔 × Ԧ𝑟, sest Ԧ𝑣 on tõepoolest risti nii 𝜔 kui ka Ԧ𝑟 -ga ja
selle suuruse saab vektorkorrutise
reeglite järgi leida valemist
𝑣 = 𝜔 ∙ 𝑟 ∙ 𝑠𝑖𝑛𝛼 = 𝜔 ∙ 𝑅.
Analoogiliselt võib üles kirjutada ka valemid
𝑎𝑛 =𝑣2
𝑅= 𝜔2 ∙ 𝑅 kujul Ԧ𝑎𝑛 = 𝜔 × 𝜔 × Ԧ𝑟
𝑎𝜏 = 𝜀 ∙ 𝑅 kujul Ԧ𝑎𝜏 = Ԧ𝜀 × Ԧ𝑟.Oluline on siin see, et tegurite
järjekord on tähtis.
Tahke keha kulgev ja pöörlev liikumine
Liikumisülesannetes käsitletakse tahket keha tavaliselt
ainepunktidest koosnevana, kusjuures nende
vahekaugused on muutumatud. Sel juhul võib keha
meelevaldse liikumise lahutada kaheks lihtsamaks
liikumiseks (kulg- ja pöördliikumiseks), mis toimuvad
teineteisest sõltumatult.
Kulgliikumisel jäävad kõik ainepunkte ühendavad
mõttelised sirged kogu liikumise kestel iseenesega
paralleelseks.
Pöördliikumisel moodustavad kõik ainepunktid ringjooni
ümber ühise telje, mida nimetatakse pöörlemisteljeks.
-
13.09.2018
7
Kulgliikumisel on keha kõigi punktide trajektoorid
ühesugused. Seetõttu on ühesugused nii kiirused kui ka
kiirendused. Kogu keha liikumist võib kirjeldada ainult ühe
punkti liikumisega. Tavaliselt võetakse selleks punktiks
keha massikese.
Pöördliikumisel ei ole kõigi punktide trajektoorid
ühesugused. Need on ringjooned, kuid raadiused on
ringjoontel erinevad. Sellest tulenevalt on erinevad ka
joonkiirused ja –kiirendused. Ühesugune on nii
pöördenurk, nurkkiirus kui ka nurkkiirendus. Sellepärast
eelistatakse kehade pöörlemise kirjeldamisel nurksuurusi.
Joonsuurused on neist kergesti leitavad, need on
võrdelised pöörlemisraadiusega.
Ainepunkti ja tahke keha kulgliikumise dünaamika
Inertsiseadus ja inertsiaalsed taustsüsteemid
Füüsika seadused sõnastatakse tavaliselt ideaalsete
objektide või ideaalsete protsesside kohta.
Newtoni I ehk inertsiseaduses vaadeldakse ideaalset
liikumist, mis on vaba igasugustest takistustest ja
mõjutustest.
Iga keha püsib paigal või liigub ühtlaselt
sirgjooneliselt seni, kuni teiste kehade mõju ei muuda
sellist liikumisolekut.
Kui teised kehad püüavad sellist olekut muuta, siis
avaldab ta vastupanu – püüab takistada teisi kehi oma
liikumisolekut muutmast.
Kõigi kehade visa püüdu säilitada paigalseisu või
ühtlase sirgjoonelise liikumise olekut nimetatakse
inertsiks.
-
13.09.2018
8
Füüsikalist suurust, millega mõõdetakse kehade
inertsust, nimetatakse massiks. Tavaliselt tähistatakse
massi tähega m.
Inertsiseaduses räägitakse paigalseisust ja liikumisest.
Need mõisted ei ole aga absoluutsed. Keha on paigal
või liigub mingi taustsüsteemi suhtes. Kas näiteks
kiirendusega liikuvas taustsüsteemis kehtib
inertsiseadus. Ilmselt ei.
Kui aga taustsüsteem ise liigub ühtlaselt ja
sirgjooneliselt, st on välismõjudest vaba, siis on olukord
teine.
Materiaalset taustsüsteemi, milles inertsiseadus
kehtib täiesti täpselt, nimetatakse inertsiaalseks
taustsüsteemiks.
Inertsiseaduse kontroll võimaldabki kindlaks teha, kas
taustsüsteem liigub ühtlaselt ja sirgjooneliselt või mitte.
Kui
see liigub kiirendusega, siis ka kõik vabad kehad liiguvad
selles kiirendusega, ainult süsteemi kiirendusele
vastupidisega. Need säilitavad ühtlast sirgjoonelist
liikumist, mistõttu taustsüsteemi suhtes näivad liikuvat
kiirendusega. Meile tundub, et kehale mõjub jõud, sest
ainult jõu mõjul toimub kiirendusega liikumine. Sellist
jõudu
nimetatakse inertsijõuks.
Vabale kehale mõjuv inertsijõud ei ole siiski reaalne jõud,
näiteks inertsijõud ei põhjusta vaba keha deformeerumist.
Alles põrkumisel mingi kehaga hakkab mõjuma reaalne
jõud, mis sunnib muutma ühtlast sirgjoonelist liikumist
inertsiaalse taustsüsteemi suhtes. Kuid see jõud ei ole
inertsijõud. Inertsijõud mõjutab teisi kehi, mis ei võimalda
kehal jätkata endist liikumist. Nüüd pole keha enam vaba.
-
13.09.2018
9
Absoluutselt inertsiaalseid looduslikke taustsüsteeme ei ole
olemas. Tavaliselt loetakse inertsiaalseks Maaga seotud
süsteemi. Maa pöörlemise kiirendus – kesktõmbekiirendus
on Maa suure raadiuse tõttu väike, mistõttu ei avaldu
praktilistel juhtudel, täppismõõtmistel aga küll.
Kui üks vajaliku täpsusega inertsiaalne taustsüsteem on
leitud, siis on inertsiaalne ka iga teine süsteem, mis
liigub
esimese suhtes ühtlaselt ja sirgjooneliselt.
St inertsiaalseid taustsüsteeme saab põhimõtteliselt olla
kuitahes palju. Näiteks praktiliselt inertsiaalsed on Maaga
ja
selle pinnal ühtlaselt liikuva kehaga seotud taustsüsteemid.
Liikumishulk, jõud ja impulss. Newtoni II seadus
Inertsiseaduse puhul rääkisime keha liikumisolekust ja
selle muutumisest.
Katsed ja muu praktika näitab, et keha liikumist on raske
muuta, kui keha mass on suur ja see liigub suure
kiirusega. Seetõttu on füüsikas kasutusele võetud
liikumisolekut iseloomustav suurus, mis võrdub massi ja
kiiruse korrutisega
𝐿 = 𝑚 ∙ Ԧ𝑣
Seda suurust nimetatakse liikumishulgaks. 𝐿 on kiiruse suunaline
vektor, sest kiirus on korrutatud skalaarse
suurusega – massiga.
Keha liikumishulk muutub ainult teiste kehade mõjul. Mõju
iseloomustamiseks võetakse kasutusele suurus, mida
nimetatakse jõuks.
-
13.09.2018
10
Jõud on füüsikaline suurus, millega mõõdetakse ühe
keha mõju teisele, mille tulemusena muutub nende
liikumishulk.
Jõud on seda suurem, mida kiiremini see liikumishulka
muudab. Seepärast võibki jõu avaldada liikumishulga
tuletisena
Ԧ𝐹 =𝑑𝐿
𝑑𝑡Jõud on võrdeline ajaühikus toimuva liikumishulga
muutusega.
Sisuliselt on see Newtoni II seadus, sest võime kirjutada
(juhul kui mass on konstantne)
Ԧ𝐹 =𝑑 𝑚 ∙ Ԧ𝑣
𝑑𝑡= 𝑚 ∙
𝑑 Ԧ𝑣
𝑑𝑡= 𝑚 ∙ Ԧ𝑎
Tihti kirjutataksegi Newtoni II seadus kujul
𝑑 𝑚 ∙ Ԧ𝑣 = Ԧ𝐹 ∙ 𝑑𝑡Vasakpoolne avaldis on liikumishulga
muutus,
parempoolset – jõu ja selle mõjumisaja korrutist –
nimetatakse jõuimpulsiks. Seetõttu sõnastatakse
Newtoni II seadus järgmiselt
Liikumishulga muutus on võrdeline jõuimpulsiga ja
toimub jõu mõjumise suunas.
Kehale hakkab mõjuma jõud Ԧ𝐹. Aja dt möödudes on keha
liikumishulk muutunud
jõuimpulsi Ԧ𝐹𝑑𝑡 võrra, mille suund langeb kokku jõu
suunaga.
-
13.09.2018
11
Seost 𝑑 𝑚 ∙ Ԧ𝑣 = Ԧ𝐹 ∙ 𝑑𝑡 nimetatakse ka liikumishulga muutumise
seaduseks.
See on üldisem kui Ԧ𝐹 = 𝑚 ∙ Ԧ𝑎 , sest kehtib ka muutuva massiga
kehade liikumisel.
Sellisel juhul
𝑑 𝑚 Ԧ𝑣 = Ԧ𝑣𝑑𝑚 +𝑚𝑑 Ԧ𝑣
Kuna liikumishulk 𝑚 Ԧ𝑣 otseselt seotud jõuimpulsiga ehk lihtsalt
impulsiga (ühe muutus on võrdne teisega), siis
nimetatakse ka 𝑚 Ԧ𝑣 impulsiks.
Ainepunktide süsteemi dünaamika. Newtoni III seadus
Reaalse keha või kehade süsteemi liikumise kirjeldamisel
on mõnikord kasulik vaadelda seda ainepunktidest
koosnevana. Ainepunktide vahel mõjuvad jõud. Süsteemi
võidakse mõjutada ka väljastpoolt (näiteks
gravitatsioonijõuga).
Seepärast jaotatakse ainepunktile mõjuvad jõud kaheks –
sise- ja välisjõududeks.
Sisejõud mõjuvad süsteemi või keha osade vahel, välisjõud
– antud süsteemi osade ja sellest väljaspool asuvate
kehade vahel. Kehade mõju on alati vastastikune. Seda
väljendab Newtoni III seadus.
Mõjuga kaasneb alati võrdne ja vastassuunaline
vastumõju.
-
13.09.2018
12
Kui üks keha (või ainepunkt) mõjutab teist jõuga Ԧ𝐹21 ja
teine esimest jõuga Ԧ𝐹12, siisԦ𝐹12 = − Ԧ𝐹21
Kumba neist nimetada mõjuks, kumba vastumõjuks, ei ole
mitte millegagi määratud. Vaatleja seisukohalt on see vahel
võimalik.
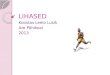
Üheks mõju ja vastumõju paari näiteks on kesktõmbe- ja
kesktõukejõud.
Kesktõmbejõud (varras)
annab kerale kesktõmbe-
ehk normaalkiirenduse.
Kesktõukejõud on kera
vastumõju vardale.
Kui summeerida kõik süsteemi osadele mõjuvad
sisejõud, saame tulemuseks nulli. See on järeldus
Newtoni III seadusest – jõud koonduvad summas
paarikaupa välja.
Vaatleme N ainepunktist koosnevat süsteemi. Olgu
𝑚𝑖 - i-nda ainepunkti mass (i=1,2,3,…N)
𝑣𝑖 - i-nda ainepunkti kiirus,
𝑓𝑖 - i-ndale ainepunktile mõjuv jõud (üldjuhul sise- ja
välisjõudude summa).
Siis võime iga ainepunkti kohta kirjutada Newtoni II
seaduse
𝑑 𝑚𝑖 Ԧ𝑣𝑖 = Ԧ𝑓𝑖𝑑𝑡
-
13.09.2018
13
Summeerime need N võrdust
𝑖=1
𝑁
𝑑 𝑚𝑖 Ԧ𝑣𝑖 =
𝑖=1
𝑁
Ԧ𝑓𝑖𝑑𝑡
ja teisendame
𝑑
𝑖=1
𝑁
𝑚𝑖 Ԧ𝑣𝑖 = 𝑑𝑡
𝑖=1
𝑁
Ԧ𝑓𝑖
Saime kaks summat
𝐿 =
𝑖=1
𝑁
𝑚𝑖 Ԧ𝑣𝑖
- süsteemi liikumishulga ja
Ԧ𝐹 =
𝑖=1
𝑁
Ԧ𝑓𝑖
Kuna sisejõudude summa on null, siis
Ԧ𝐹 =
𝑖=1
𝑁
Ԧ𝑓𝑖
on süsteemile mõjuv välisjõudude resultant.
Süsteemi liikumishulga 𝐿 võime omistada ühele punktile
süsteemis, kui samasse punkti koondada kogu süsteemi mass
M, mis on ainepunktide masside summa
𝑀 =
𝑖=1
𝑁
𝑚𝑖
𝐿 =
𝑖=1
𝑁
𝑚𝑖 Ԧ𝑣𝑖 =
𝑖=1
𝑁
𝑚𝑖𝑑Ԧ𝑟𝑖𝑑𝑡
=𝑑
𝑑𝑡
𝑖=1
𝑁
𝑚𝑖 Ԧ𝑟𝑖 = 𝑀𝑑
𝑑𝑡
σ𝑖=1𝑁 𝑚𝑖 Ԧ𝑟𝑖𝑀
-
13.09.2018
14
Tähistame sulgudes oleva avaldise Ԧ𝑟𝑀 -ga
Ԧ𝑟𝑀 =1
𝑀
𝑖=1
𝑁
𝑚𝑖 Ԧ𝑟𝑖
Seega saame, et
𝐿 = 𝑀𝑑 Ԧ𝑟𝑀𝑑𝑡
= 𝑀 ∙ Ԧ𝑣𝑀
Nii ongi süsteemi liikumishulk omistatud punktile
massiga M, mille asukohta näitab kohavektor Ԧ𝑟𝑀ja
liikumiskiiruseks on Ԧ𝑣𝑀 , kohavektori tuletis aja järgi. Seda
punkti nimetatakse süsteemi
massikeskmeks või inertsikeskmeks.
Arvestades kasutusele võetud tähistusi võtab algselt
kirjutatud summade võrdsus kuju
𝑑 𝑀 ∙ Ԧ𝑣𝑀 = Ԧ𝐹 ∙ 𝑑𝑡
- süsteemi massikeskme jaoks kehtib täpselt sama Newtoni
II seadus, mis ühe ainepunkti puhul. Eelpool esitatud seost
tuntakse ka massikeskme liikumise seadusena. Sellest
tuleneb veel, et kogu süsteemile rakendatud jõudude
summa, resultantjõu Ԧ𝐹 võime samuti rakendada massikeskmele.
NB! Käsitletud dünaamika käis kulgliikumise kohta.
Süsteem asus tingimustes, kus ei tekkinud pöörlevat
liikumist.
-
13.09.2018
15
Liikumishulga ehk impulsi jäävuse seadus
Süsteemi massikeskme liikumise seaduse abil võime
lihtsalt jõuda liikumishulga jäävuse seaduseni.
Vaatleme juhtumit, mille puhul süsteemile välisjõudusid ei
mõju, st Ԧ𝐹 = 0. Sellist süsteemi nimetatakse suletuks või
isoleerituks. Valemist
𝑑 𝑀 ∙ Ԧ𝑣𝑀 = Ԧ𝐹 ∙ 𝑑𝑡järeldub, et sellisel juhul
𝑑 𝑀 ∙ Ԧ𝑣𝑀 = 0- süsteemi liikumishulk ei muutu, see on konstantne
ajas
𝑀 Ԧ𝑣𝑀 =
𝑖=1
𝑁
𝑚𝑖 Ԧ𝑣𝑖 = 𝑐𝑜𝑛𝑠𝑡
Tavaliselt väljendatakse seda seaduspärasust lausega
- suletud süsteemi liikumishulk on jääv.
Liikumishulk on vektoriaalne suurus. Seepärast on vektor
ka võrduses olev konstant. Vektor on konstantne ainult siis,
kui selle kõik komponendid on eraldi võetuna konstantsed.
Seepärast kehtib seadus ka eraldi mingi ühe liikumissuuna
kohta. Teistes sõltumatutes suundades võivad mõjuda jõud
ja nendes liikumishulk ei ole jääv.
Liikumise sihis (näiteks x-telje sihis) võib kehtida
liikumishulga jäävuse seadus
𝑖=1
𝑁
𝑚𝑖𝑣𝑖𝑥 = 𝑐𝑜𝑛𝑠𝑡𝑥
Sama võib kehtida ka teiste koordinaattelgede sihis.
Suletud kehade süsteemi puhul kehtib seadus kõigi kolme
telje sihis eraldi, seega ka vektorkujul.
Esitatud kehadesüsteemi omadus tuleneb ruumi ja aja
homogeensusest, st sellest, et ruumi ja aja omadused ei
olene nihkest ruumis ega nihkest ajas.
-
13.09.2018
16