Embed Size (px)
Citation preview
Game Architecture2/2/16: Linear Algebra II: Matrices
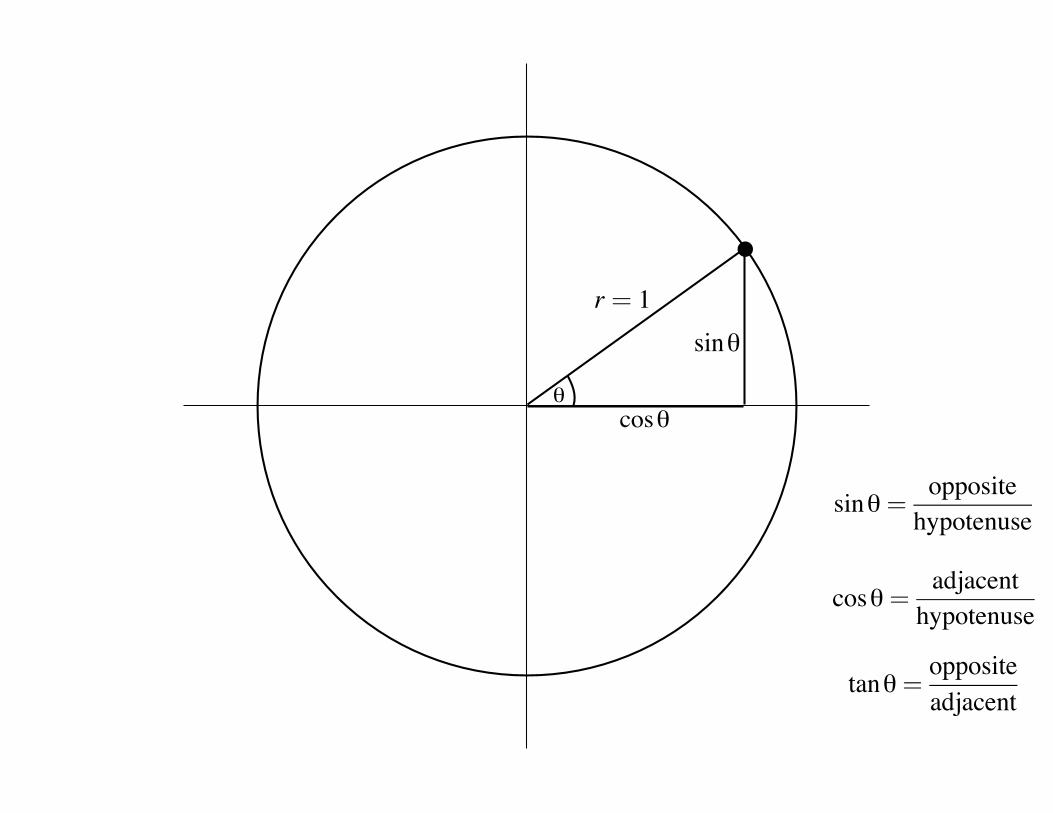
θcosθ
sinθr = 1
sinθ=oppositehypotenuse
cosθ=adjacenthypotenuse
tanθ=oppositeadjacent
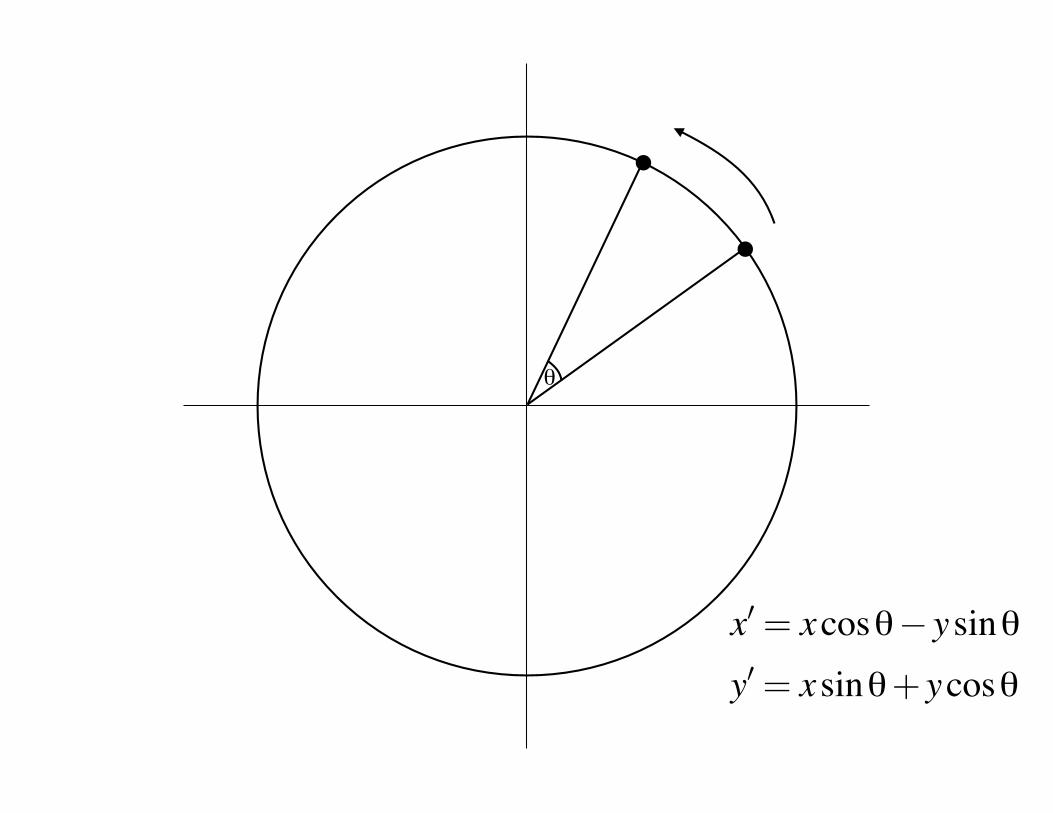
θ
x0 = xcosθ� ysinθy0 = xsinθ+ ycosθ
Dot Producta ·b= axbx+ayby+azbz = d
a ·b= |a||b|cos(θ)
a ·b= b ·a
a · (b+ c) = a ·b+a · c
sa ·b= a · sb= s(a ·b)
a ·a= |a|2
Enter the Matrix
M =
������
M11 M12 M13
M21 M22 M23
M31 M32 M33
������
⌘����x
0
y
0
���� =
����cos ✓ � sin ✓
sin ✓ cos ✓
����
����x
y
����y
0= x sin ✓ + y cos ✓
x
0= x cos ✓ � y sin ✓
����x
0
y
0
���� =
����cos ✓ � sin ✓
sin ✓ cos ✓
����
����x
y
����


or? ?
The Burning Question of Vector Representation
v =��a1 a2 a3
��v =
������
a1
a2
a3
������
v0 = (C(B(Av))) v0 = (((vA)B)C)
v=
������
a1a2a3
������
v0 =Mv v0 = vM
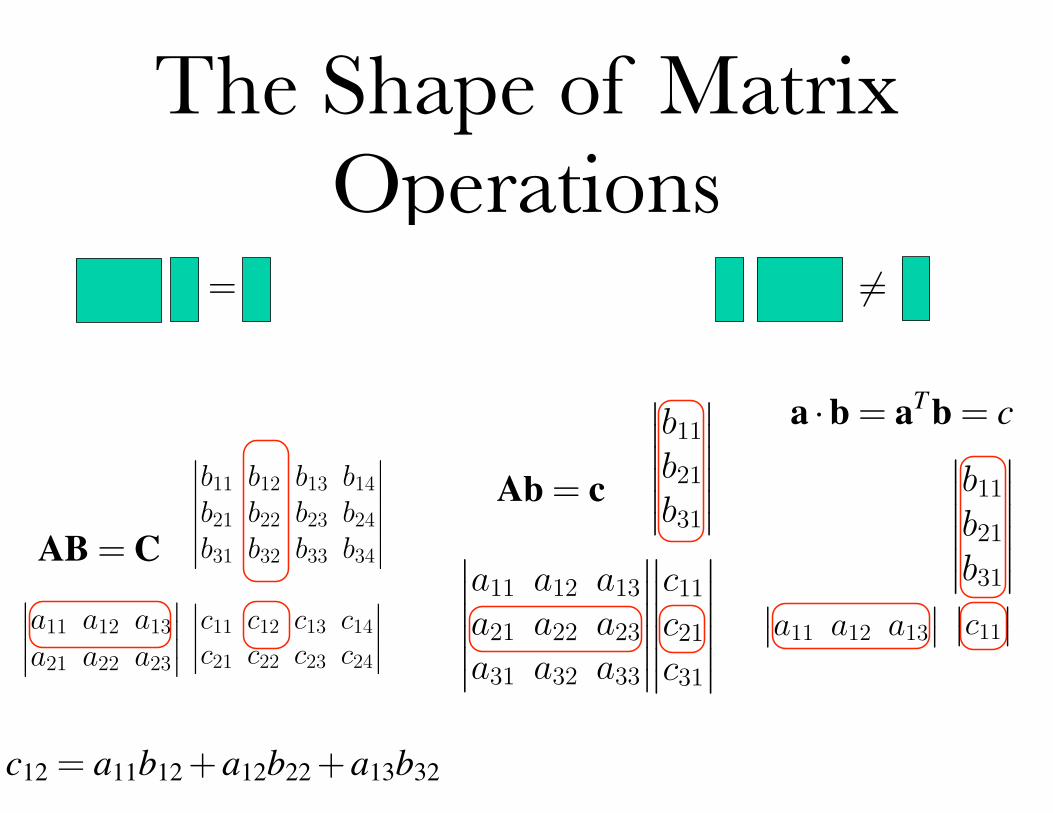
AB= C
a ·b= aTb= c
The Shape of Matrix Operations
c12 = a11b12+a12b22+a13b32
= 6=
Ab= c
����a11 a12 a13
a21 a22 a23
����
������
b11 b12 b13 b14
b21 b22 b23 b24
b31 b32 b33 b34
������
����c11 c12 c13 c14
c21 c22 c23 c24
����
������
c11
c21
c31
������
������
b11
b21
b31
������������
a11 a12 a13
a21 a22 a23
a31 a32 a33
������
������
b11
b21
b31
��������c11
����a11 a12 a13
��
������
x
0
y
0
z
0
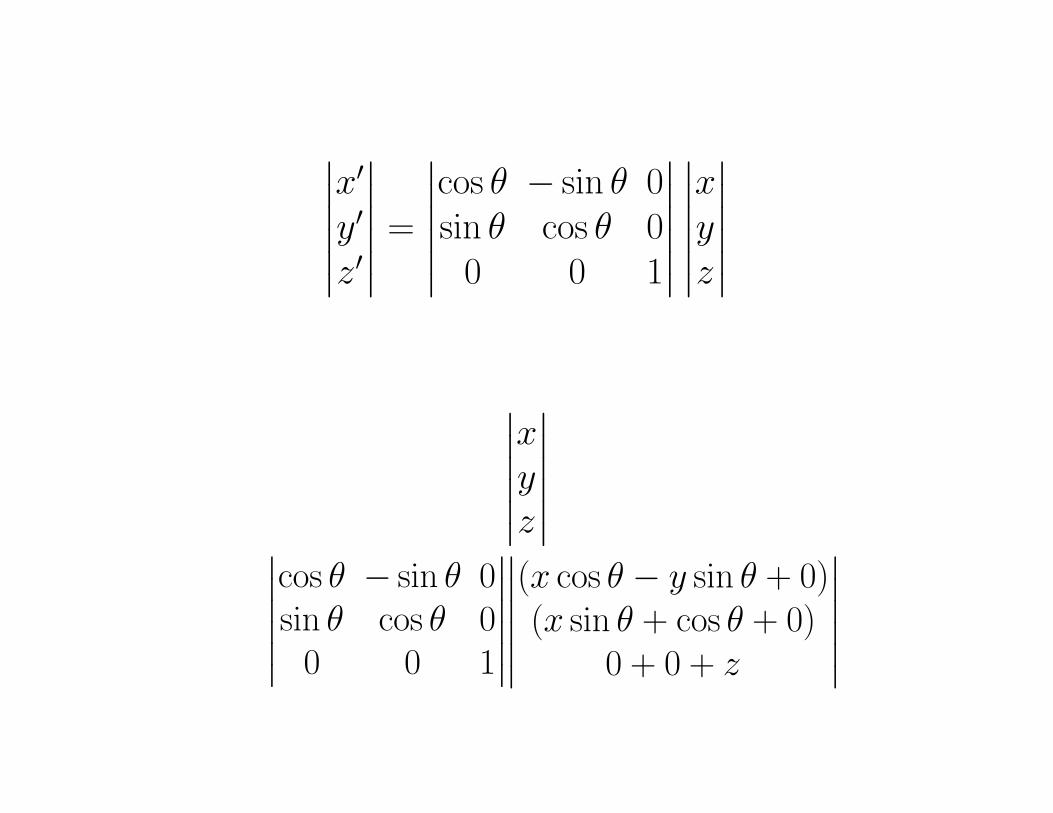
������=
������
cos ✓ � sin ✓ 0
sin ✓ cos ✓ 0
0 0 1
������
������
x
y
z
������
������
x
y
z
������������
cos ✓ � sin ✓ 0
sin ✓ cos ✓ 0
0 0 1
������
������
(x cos ✓ � y sin ✓ + 0)
(x sin ✓ + cos ✓ + 0)
0 + 0 + z
������
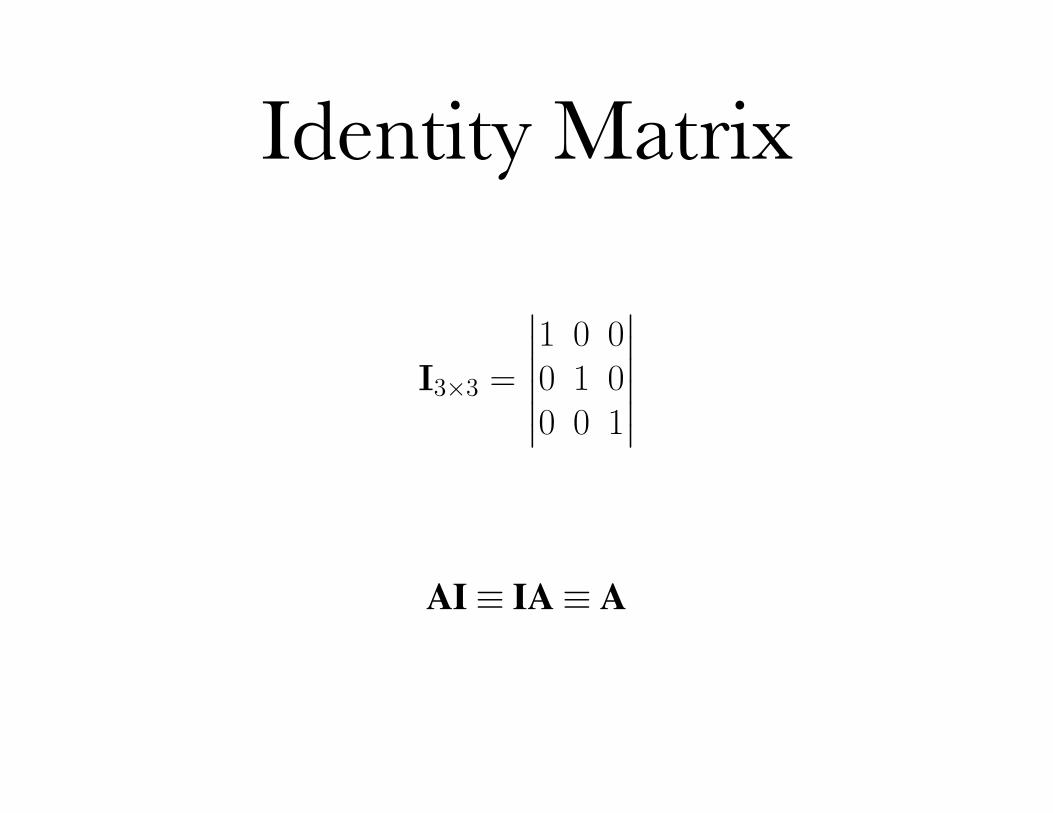
Identity Matrix
AI⌘ IA⌘ A
I3⇥3 =
������
1 0 00 1 00 0 1
������
The inverse of a sequence of concatenated matrices can be written as the reverse concatenation of
the individual matrices’ inverses
(ABC)�1 = C�1B�1A�1
Transposition• The transpose of an orthonormal (pure
rotation) matrix is equal to it’s inverse (and much cheaper computationally!)
(ABC)T = CTBTAT
������
a b cd e fg h i
������
T
=
������
a d gb e hc f i
������
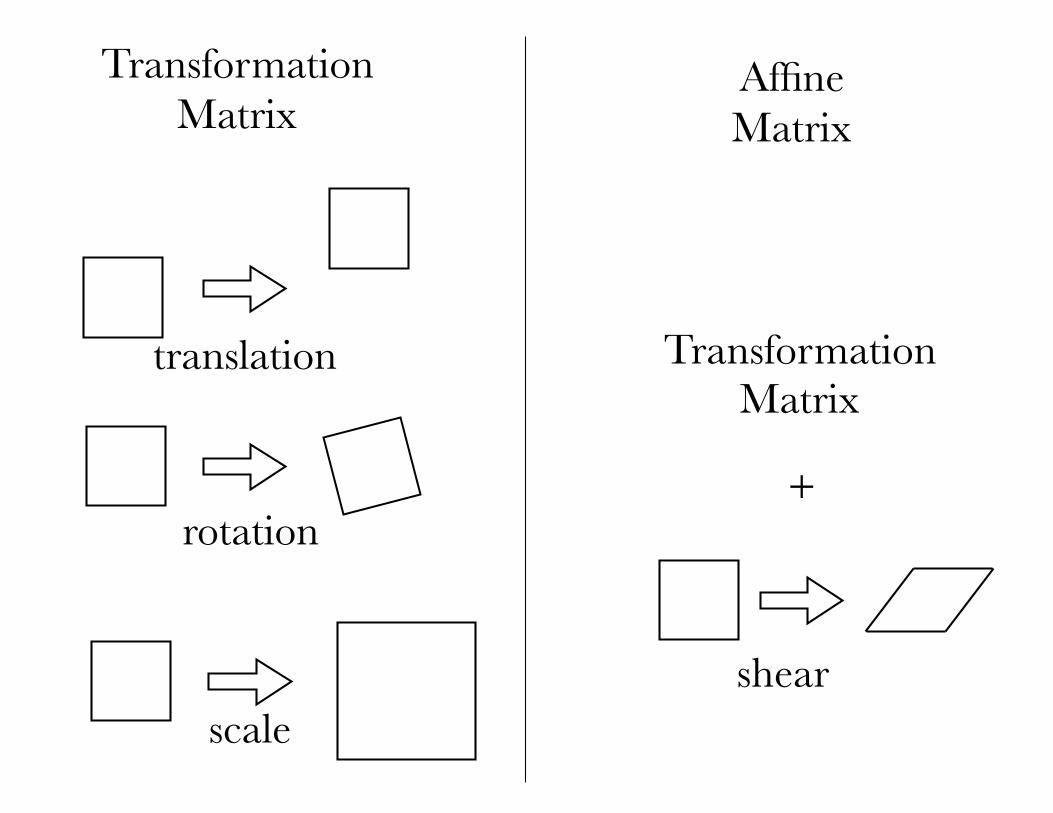
translation
rotation
scaleshear
Transformation Matrix
Affine Matrix
Transformation Matrix
+
Translations?• The result of translating a point p by a
translation t requires adding the components of t to the components of p individually:
p+ t= [(px+ tx),(py+ ty),(pz+ tz)]
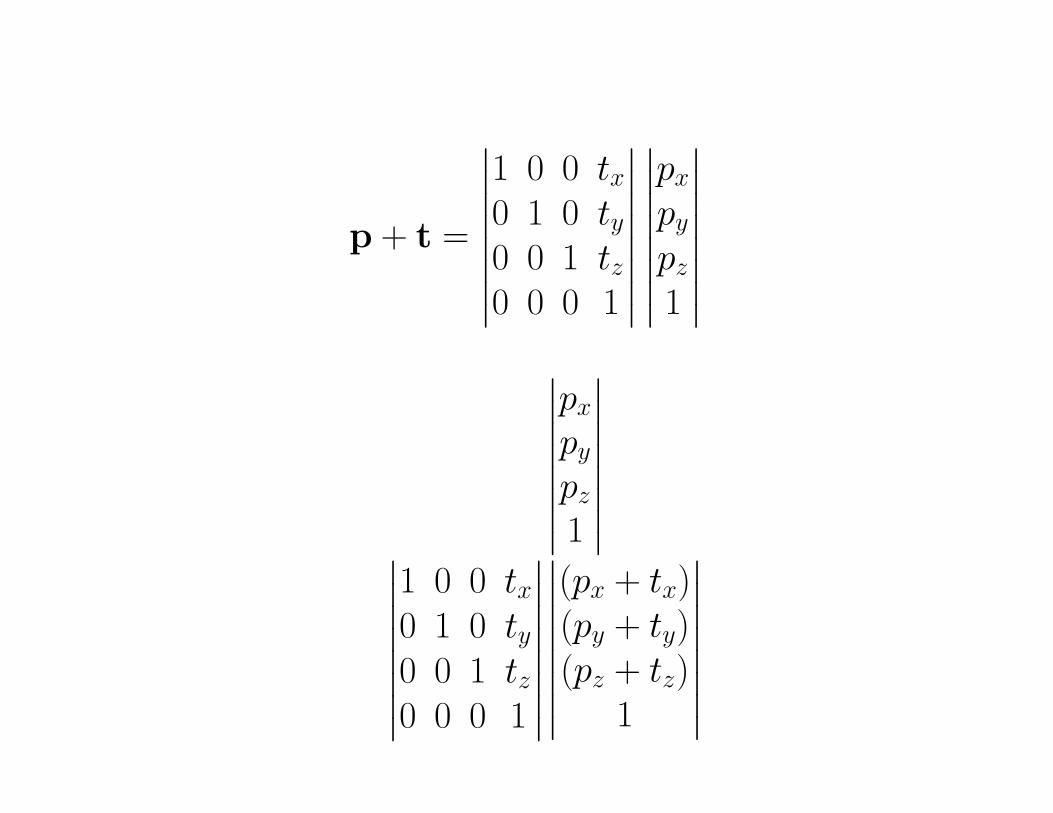
p + t =
��������
1 0 0 t
x
0 1 0 t
y
0 0 1 t
z
0 0 0 1
��������
��������
p
x
p
y
p
z
1
��������
��������
p
x
p
y
p
z
1
����������������
1 0 0 t
x
0 1 0 t
y
0 0 1 t
z
0 0 0 1
��������
��������
(px
+ t
x
)(p
y
+ t
y
)(p
z
+ t
z
)1
��������
Points vs. Vectors (again)• What does it mean to rotate a point?
• What does it mean to rotate a vector?
• What does it mean to scale a point?
• What does it mean to scale a vector?
• What does it mean to translate a point?
• What does it mean to translate a vector?
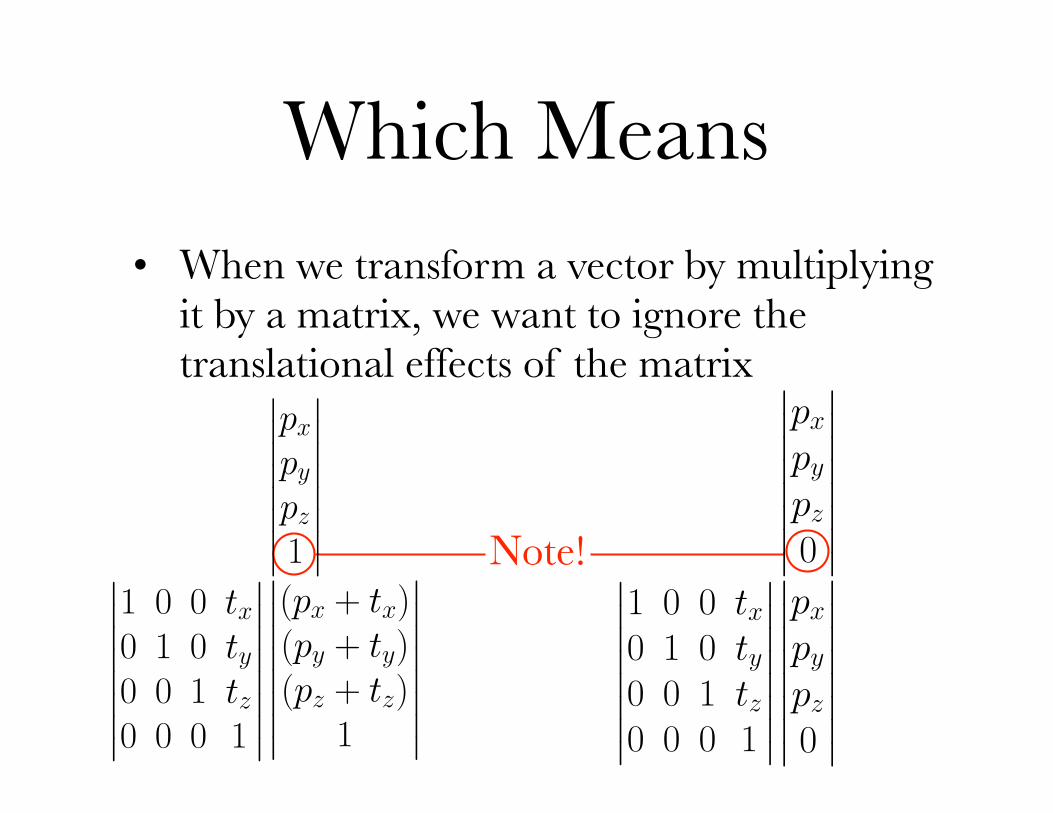
Which Means• When we transform a vector by multiplying
it by a matrix, we want to ignore the translational effects of the matrix
Note!
��������
p
x
p
y
p
z
1
����������������
1 0 0 t
x
0 1 0 t
y
0 0 1 t
z
0 0 0 1
��������
��������
(px
+ t
x
)(p
y
+ t
y
)(p
z
+ t
z
)1
��������
��������
1 0 0 t
x
0 1 0 t
y
0 0 1 t
z
0 0 0 1
��������
��������
p
x
p
y
p
z
0
����������������
p
x
p
y
p
z
0
��������
Atomic Components
• Any affine transformation matrix can be created by concatenating a sequence of 4x4 matrices representing pure translation, pure rotations, and/or pure scale operations
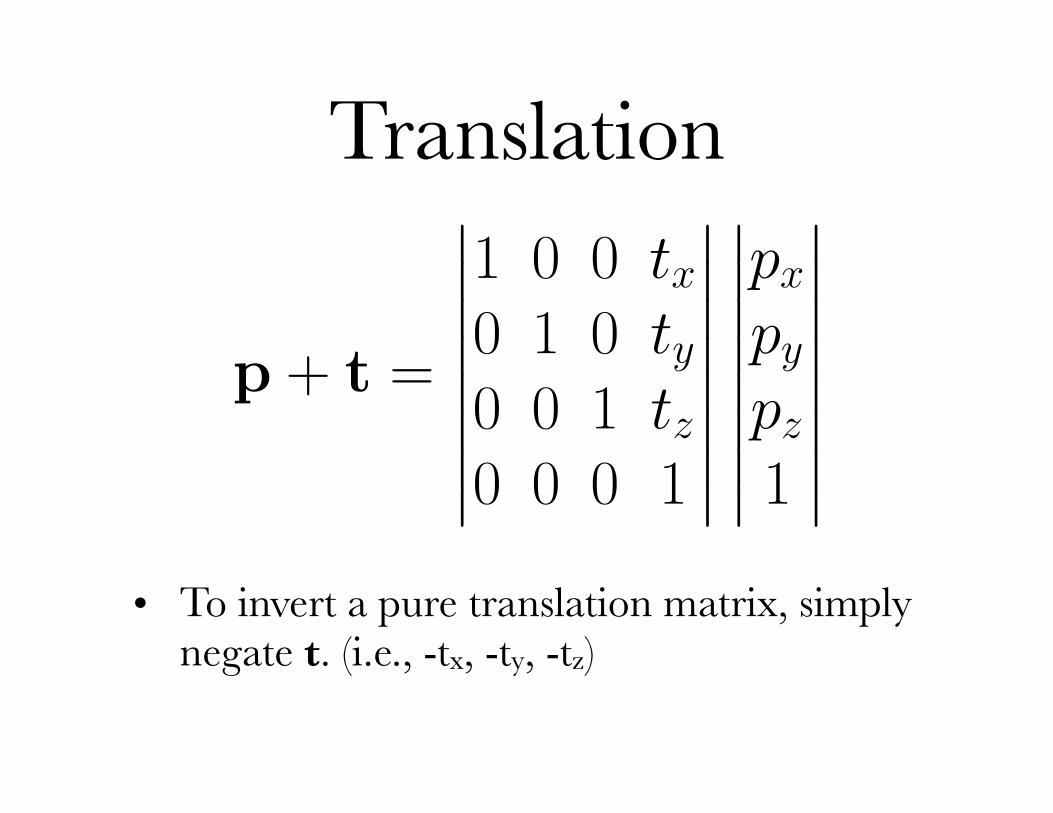
Translation
• To invert a pure translation matrix, simply negate t. (i.e., -tx, -ty, -tz)
p + t =
��������
1 0 0 t
x
0 1 0 t
y
0 0 1 t
z
0 0 0 1
��������
��������
p
x
p
y
p
z
1
��������
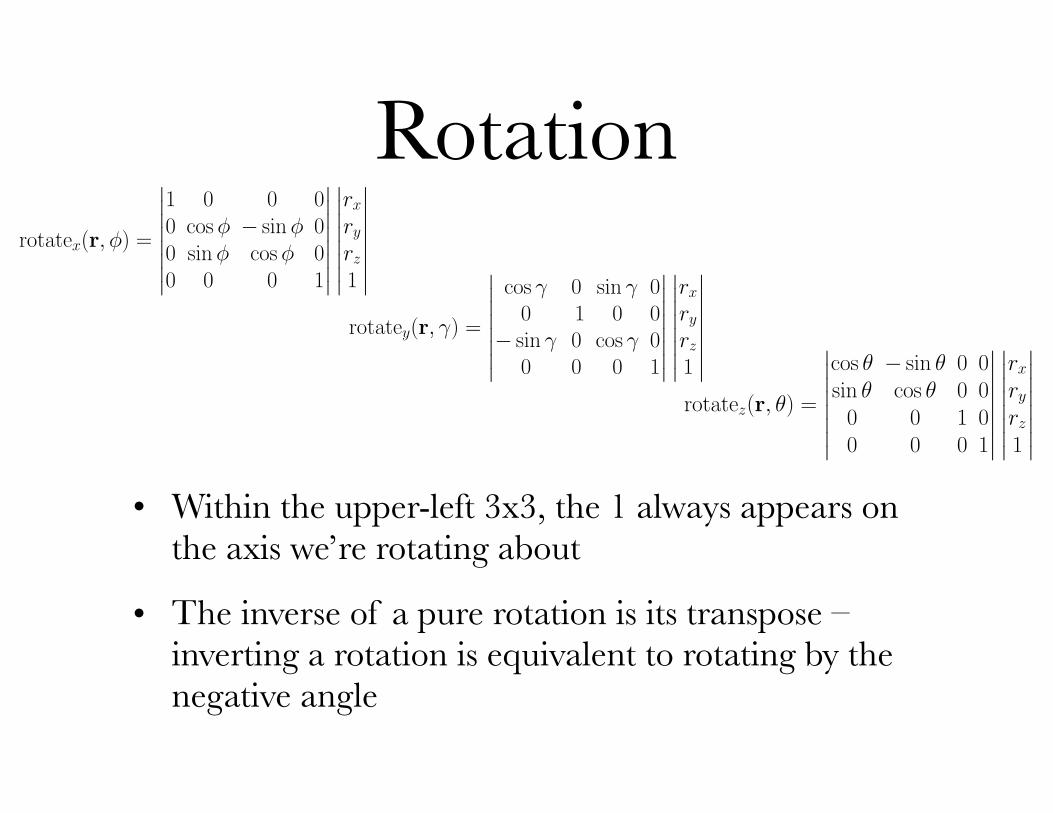
Rotation
• Within the upper-left 3x3, the 1 always appears on the axis we’re rotating about
• The inverse of a pure rotation is its transpose – inverting a rotation is equivalent to rotating by the negative angle
rotate
x
(r, �) =
��������
1 0 0 0
0 cos � � sin � 0
0 sin � cos � 0
0 0 0 1
��������
��������
r
x
r
y
r
z
1
��������
rotate
y
(r, �) =
��������
cos � 0 sin � 0
0 1 0 0
� sin � 0 cos � 0
0 0 0 1
��������
��������
r
x
r
y
r
z
1
��������
rotate
z
(r, ✓) =
��������
cos ✓ � sin ✓ 0 0
sin ✓ cos ✓ 0 0
0 0 1 0
0 0 0 1
��������
��������
r
x
r
y
r
z
1
��������
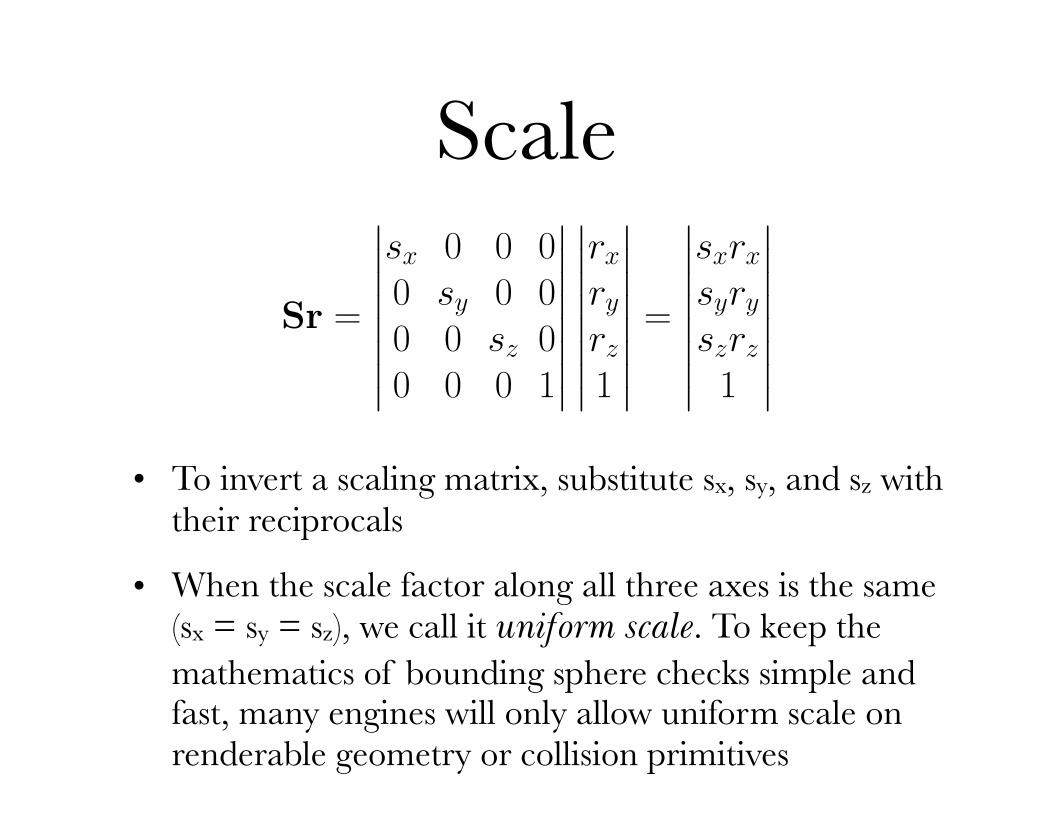
Scale
• To invert a scaling matrix, substitute sx, sy, and sz with their reciprocals
• When the scale factor along all three axes is the same (sx = sy = sz), we call it uniform scale. To keep the mathematics of bounding sphere checks simple and fast, many engines will only allow uniform scale on renderable geometry or collision primitives
Sr =
��������
s
x
0 0 00 s
y
0 00 0 s
z
00 0 0 1
��������
��������
r
x
r
y
r
z
1
��������=
��������
s
x
r
x
s
y
r
y
s
z
r
z
1
��������
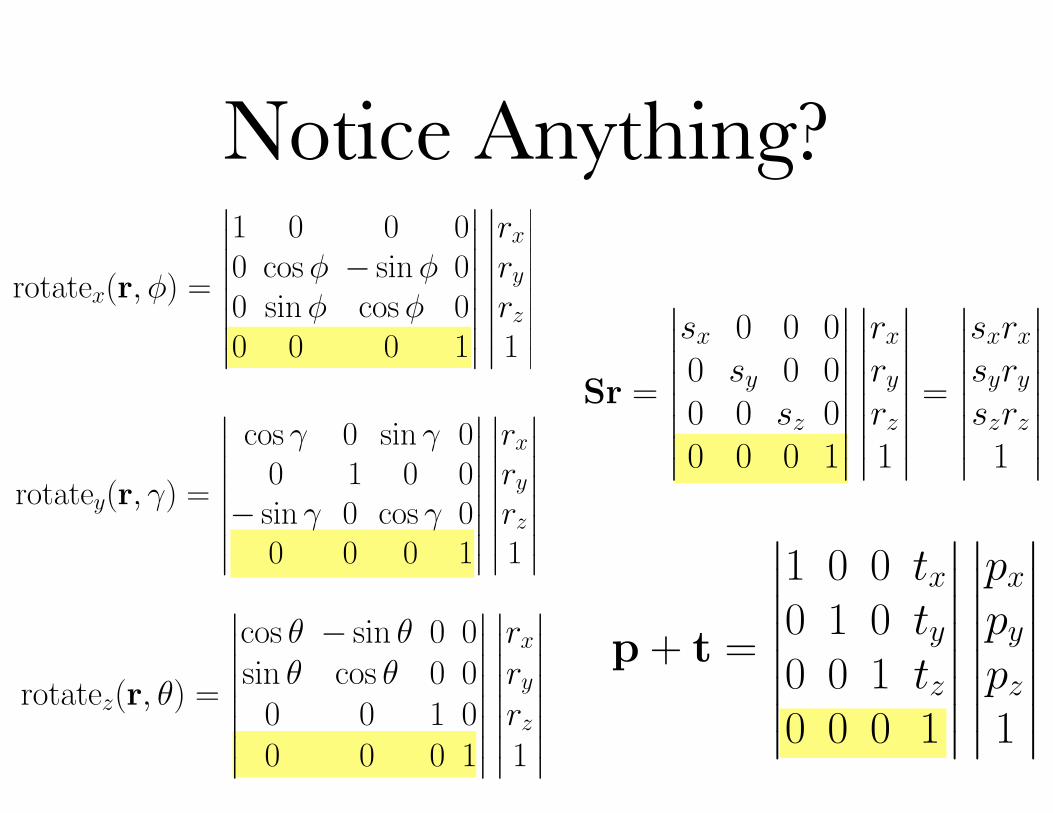
Notice Anything?
Sr =
��������
s
x
0 0 00 s
y
0 00 0 s
z
00 0 0 1
��������
��������
r
x
r
y
r
z
1
��������=
��������
s
x
r
x
s
y
r
y
s
z
r
z
1
��������
p + t =
��������
1 0 0 t
x
0 1 0 t
y
0 0 1 t
z
0 0 0 1
��������
��������
p
x
p
y
p
z
1
��������
rotate
x
(r, �) =
��������
1 0 0 0
0 cos � � sin � 0
0 sin � cos � 0
0 0 0 1
��������
��������
r
x
r
y
r
z
1
��������
rotate
y
(r, �) =
��������
cos � 0 sin � 0
0 1 0 0
� sin � 0 cos � 0
0 0 0 1
��������
��������
r
x
r
y
r
z
1
��������
rotate
z
(r, ✓) =
��������
cos ✓ � sin ✓ 0 0
sin ✓ cos ✓ 0 0
0 0 1 0
0 0 0 1
��������
��������
r
x
r
y
r
z
1
��������
Coordinate Spaces
• We can extend the idea of applying transforms to points and vectors to transforming rigid bodies – apply the transform matrix to all vertices of the mesh
Coordinate Spaces
• A point is a vector whose tail is fixed to the origin
• (origin of what?)
• A point is always expressed relative to a set of coordinate axes

Frames of Reference
yayb
xb
xa
PA = (2,4)
PB = (1,5)
Coordinate Spaces
• World Space
• Model Space
• View Space
• Perspective
From Python to JavaScript
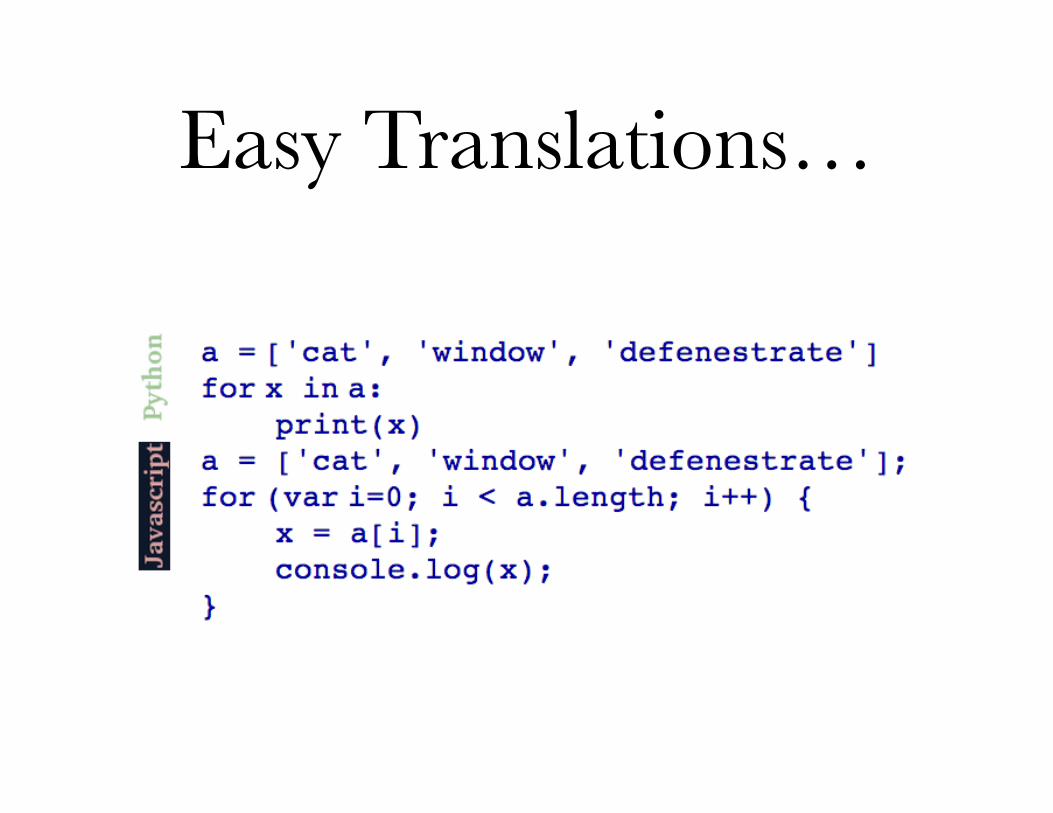
Easy Translations…
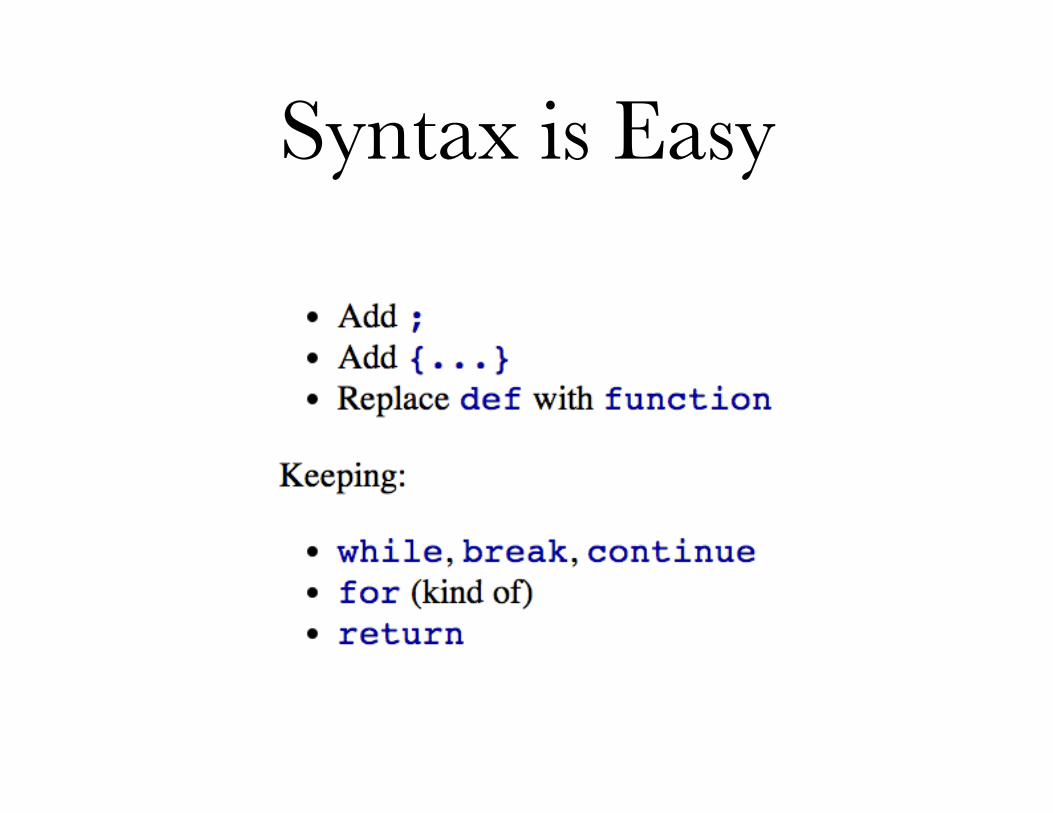
Syntax is Easy
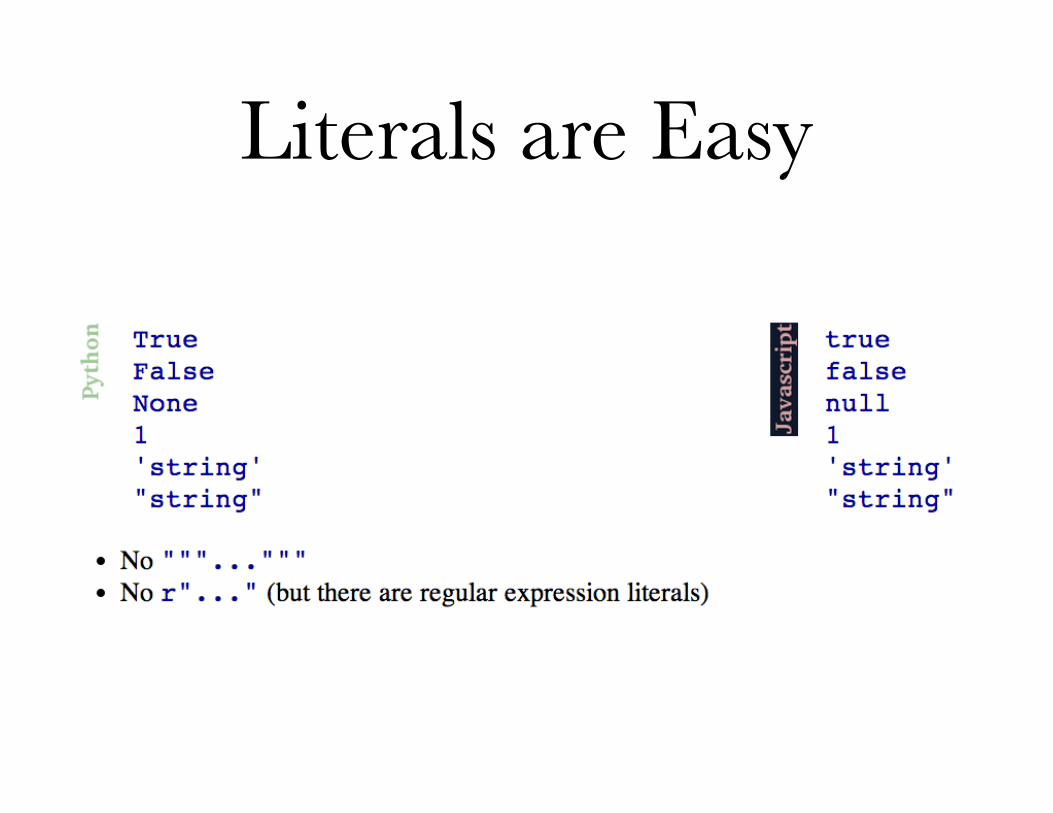
Literals are Easy

Data Structures… Less So

Objects are Both Fun and Annoying
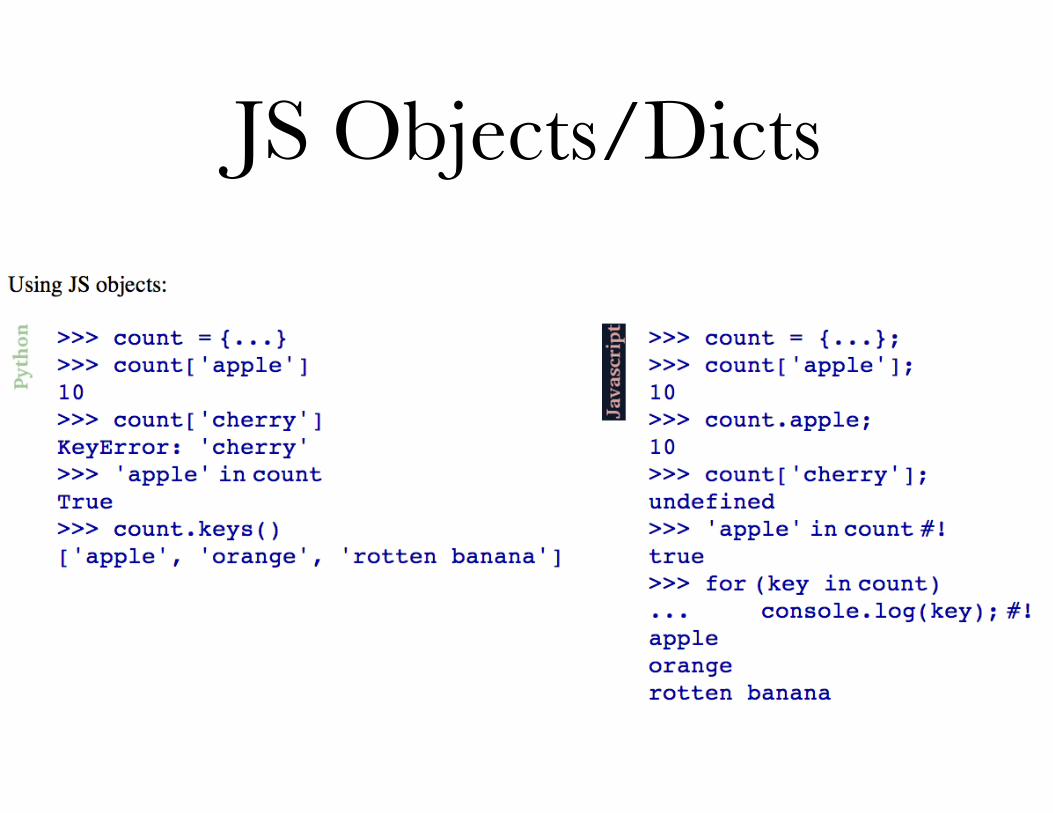
JS Objects/Dicts

Functions
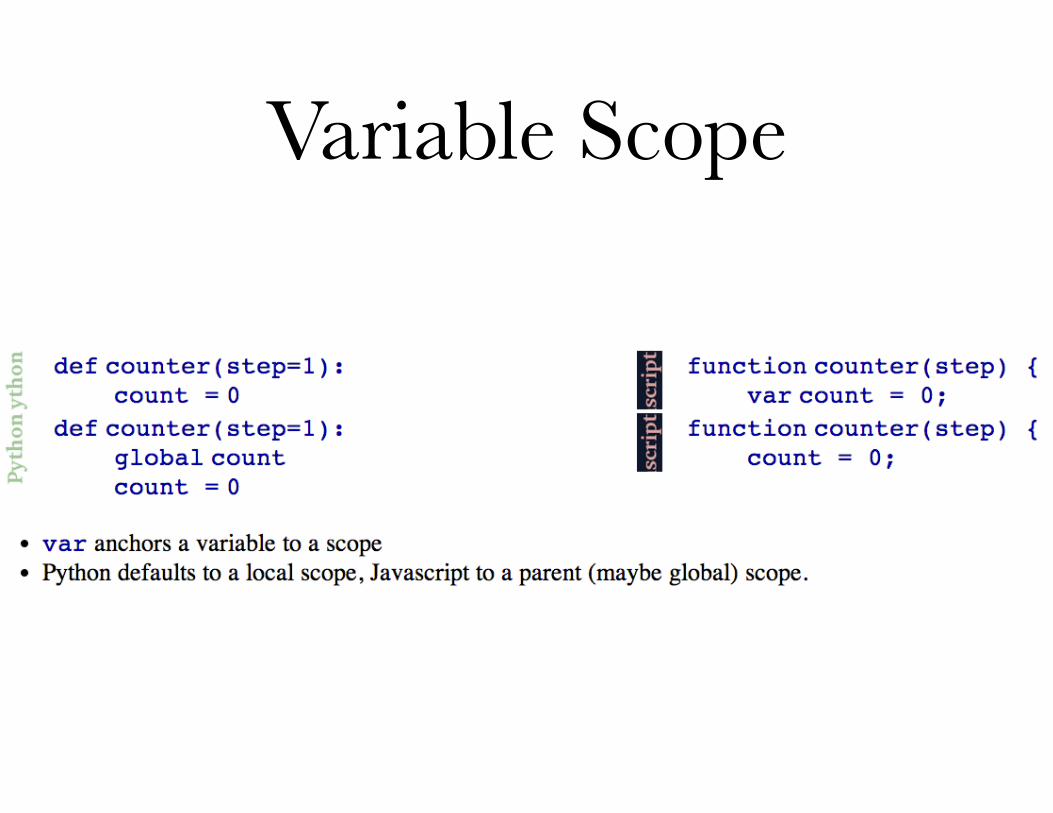
Variable Scope
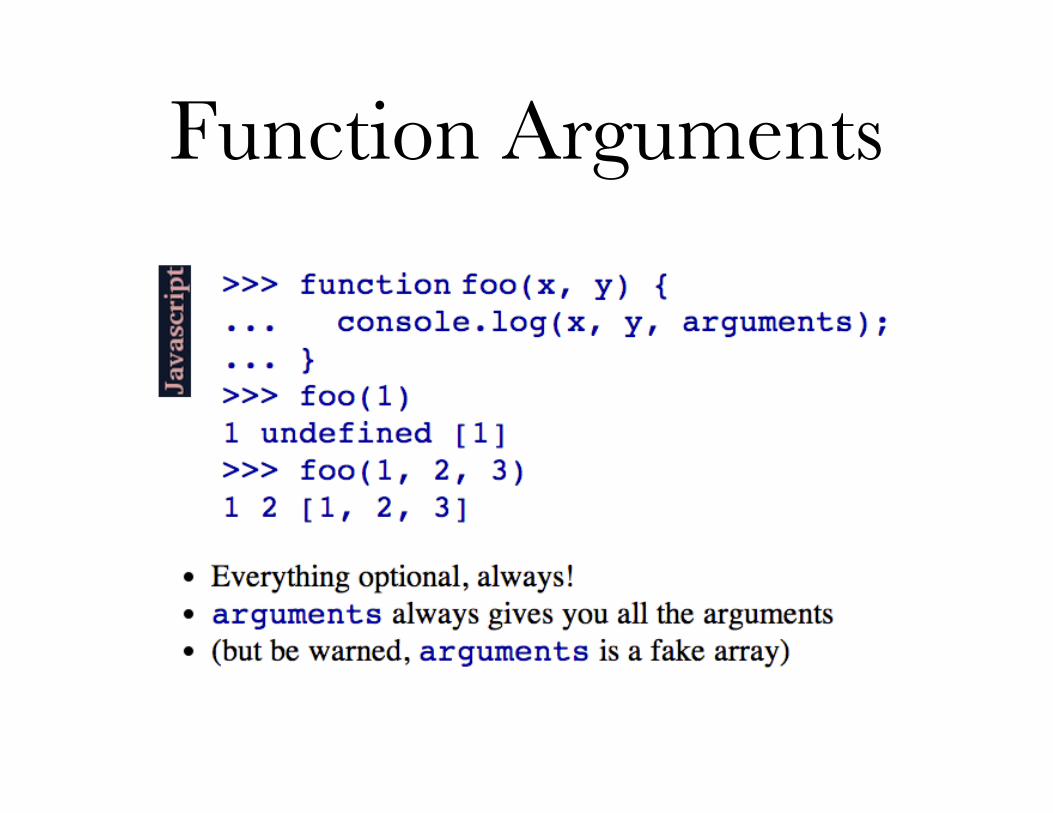
Function Arguments
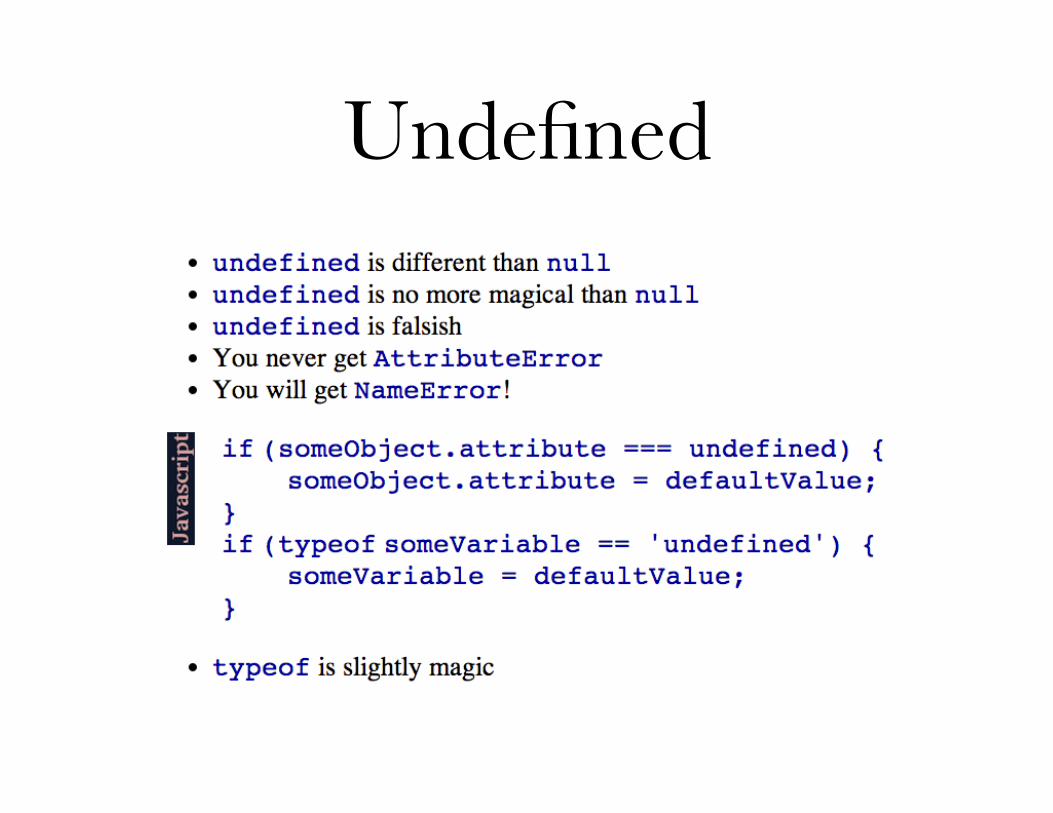
Undefined
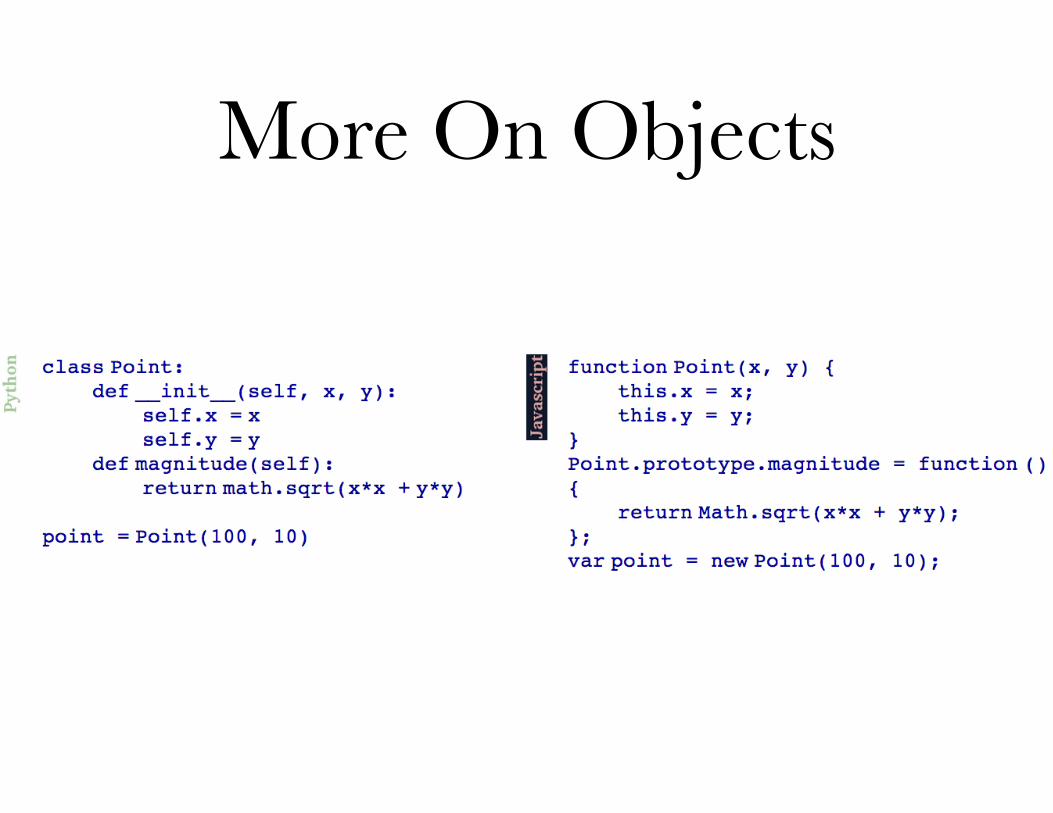
More On Objects
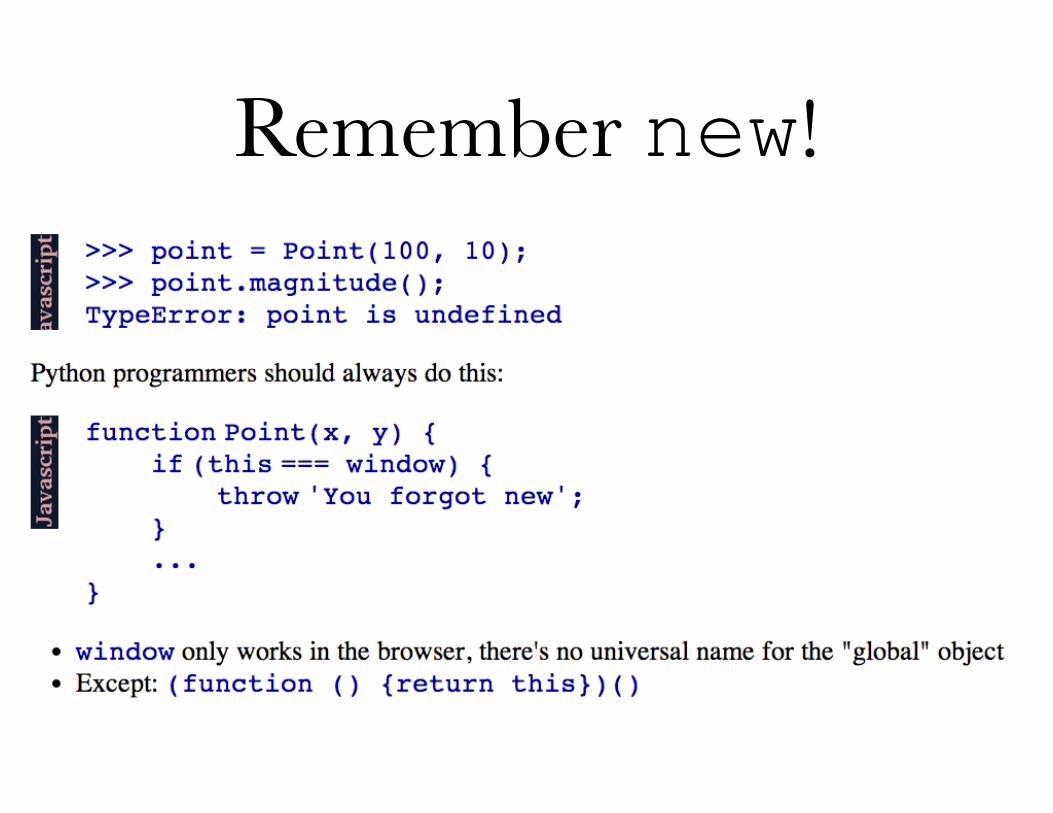
Remember new!
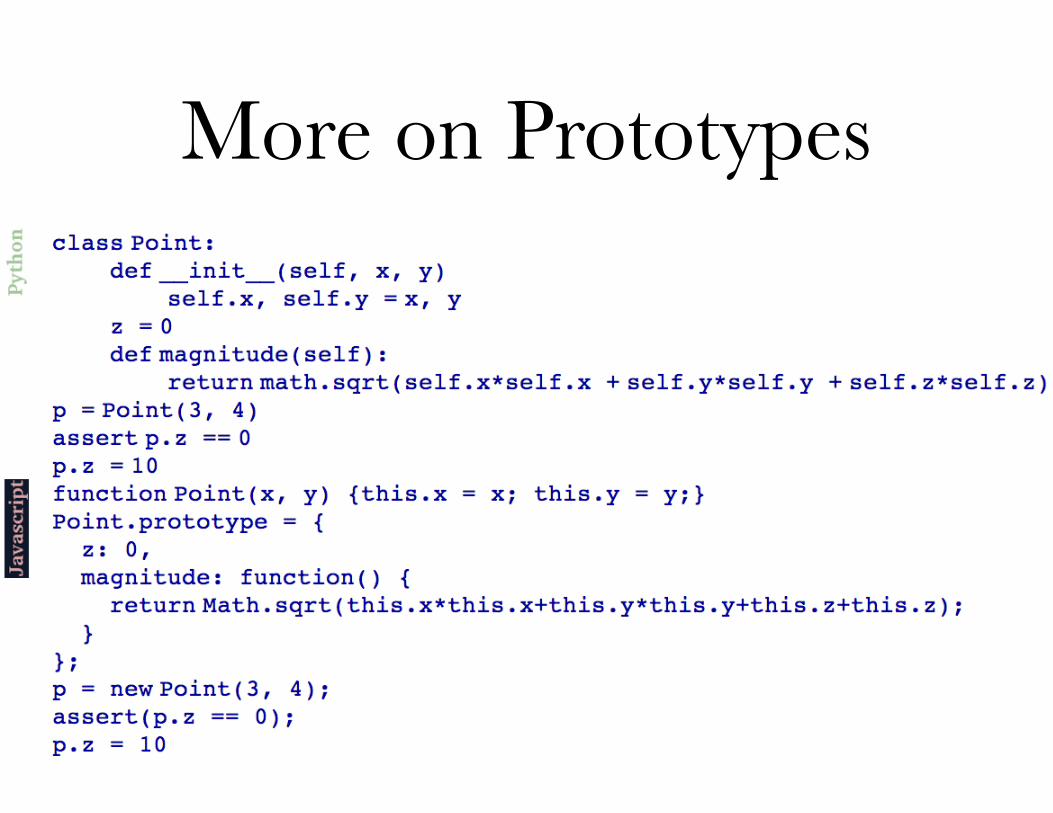
More on Prototypes
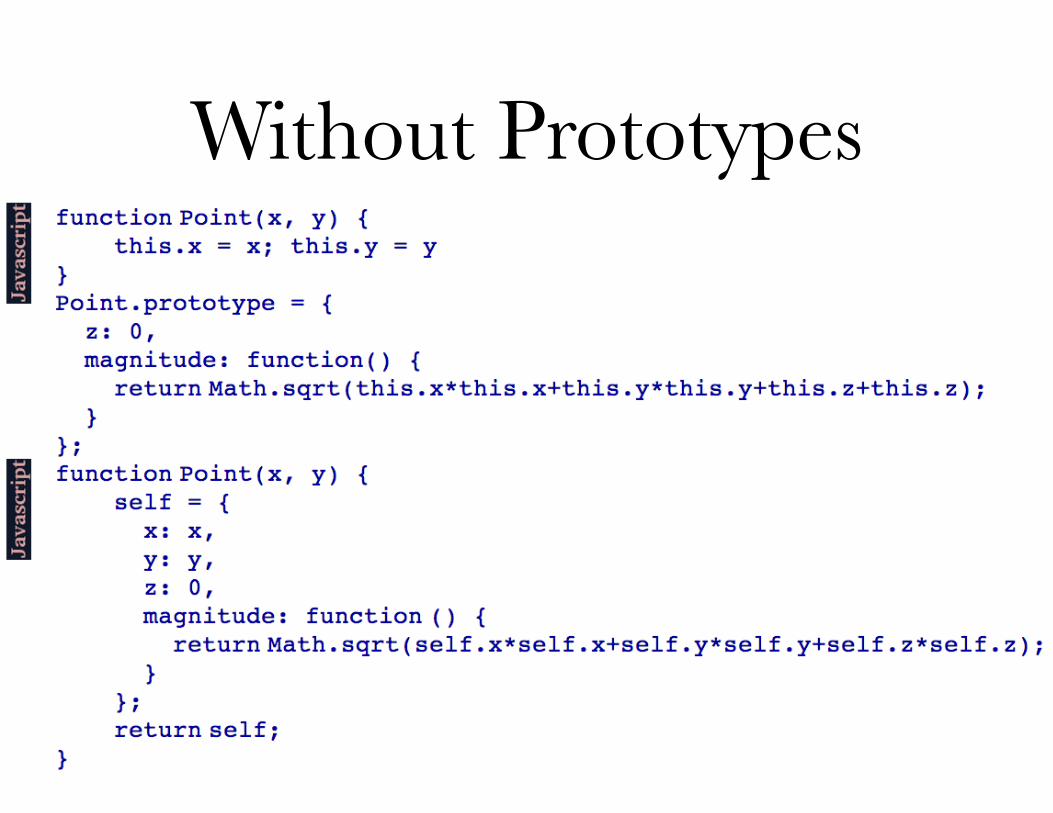
Without Prototypes
Prototypes
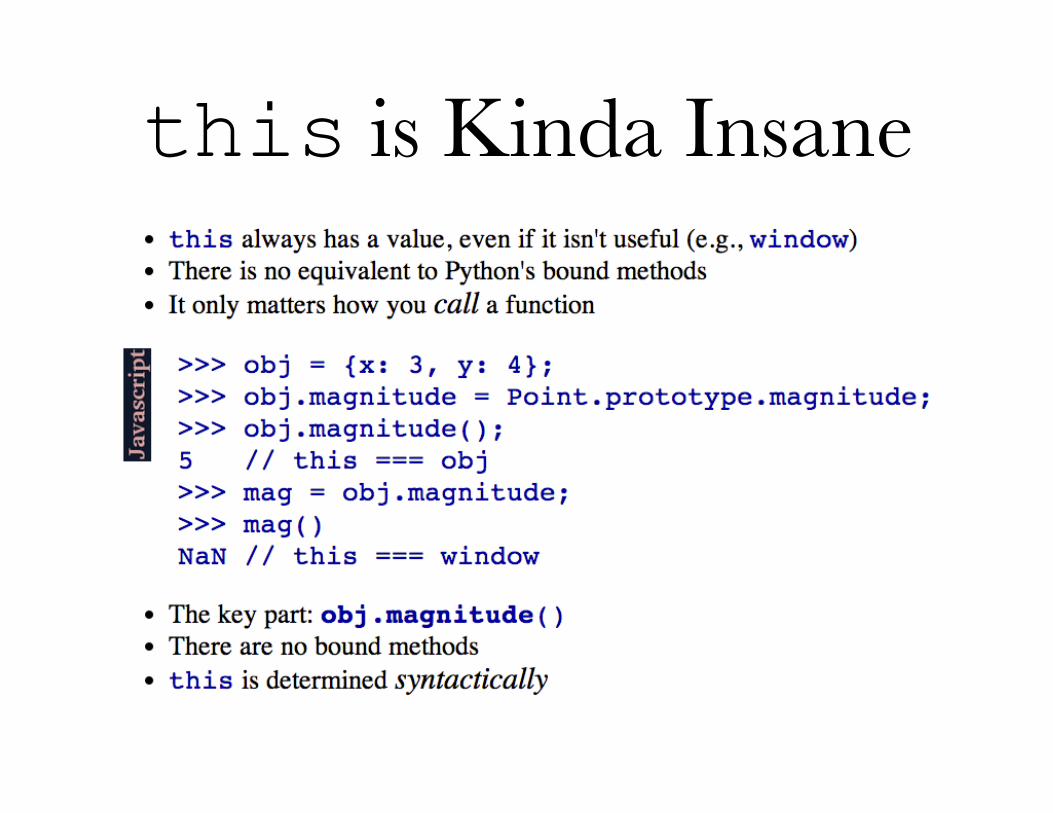
this is Kinda Insane
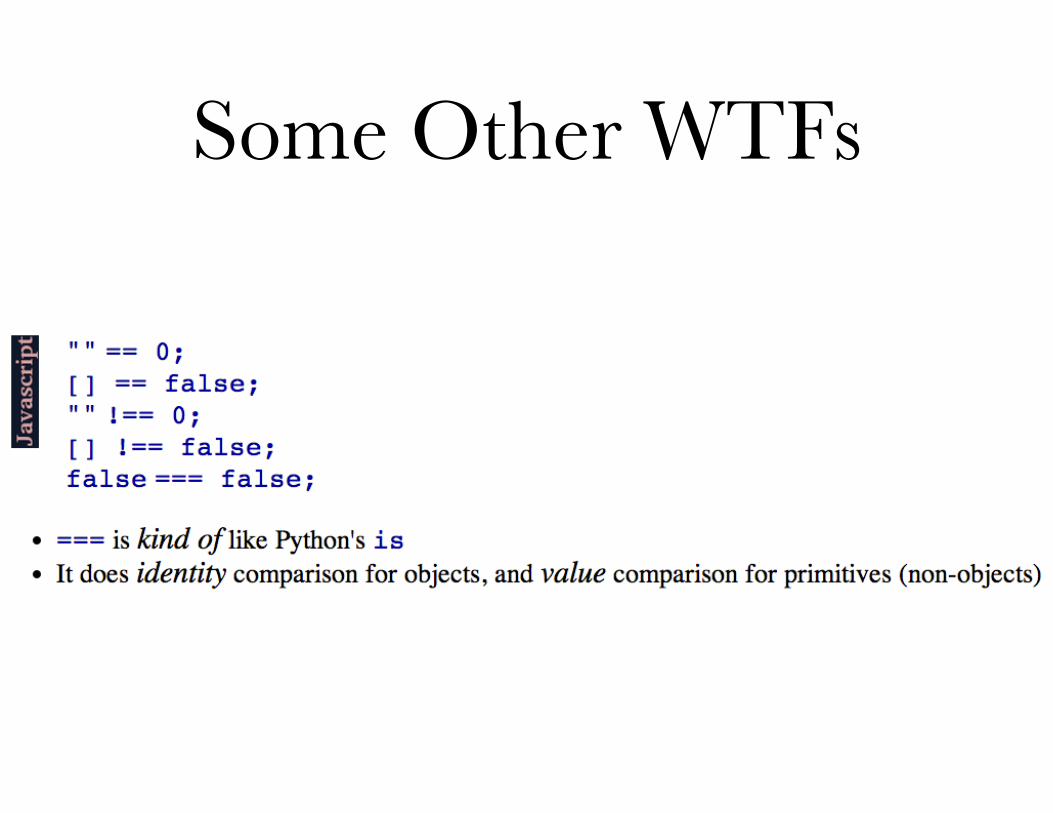
Some Other WTFs
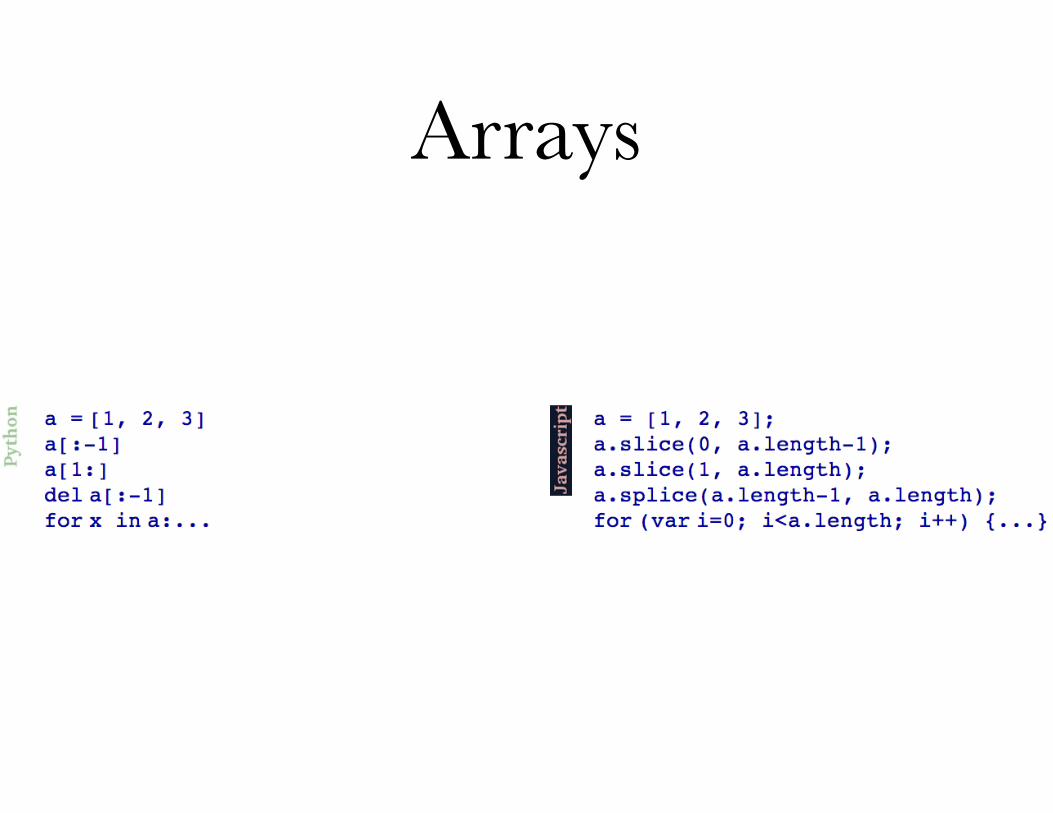
Arrays
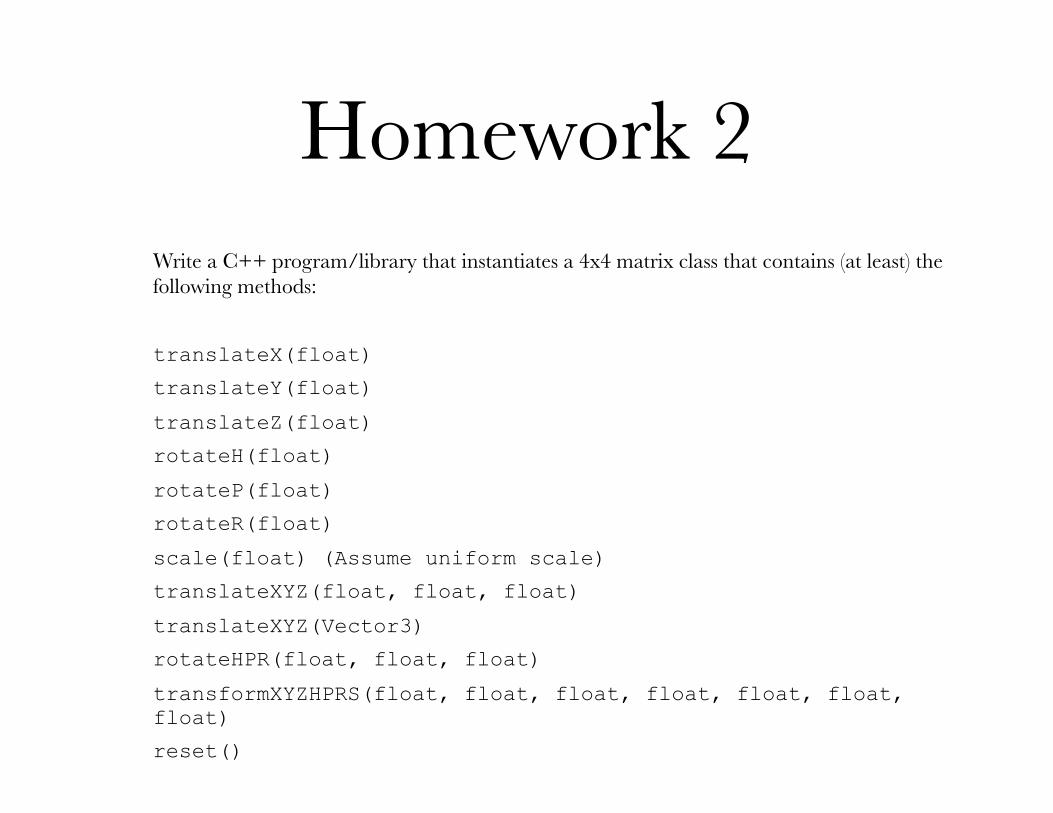
Homework 2Write a C++ program/library that instantiates a 4x4 matrix class that contains (at least) the following methods:
translateX(float)
translateY(float)
translateZ(float)
rotateH(float)
rotateP(float)
rotateR(float)
scale(float) (Assume uniform scale)
translateXYZ(float, float, float)
translateXYZ(Vector3)
rotateHPR(float, float, float)
transformXYZHPRS(float, float, float, float, float, float, float)
reset()
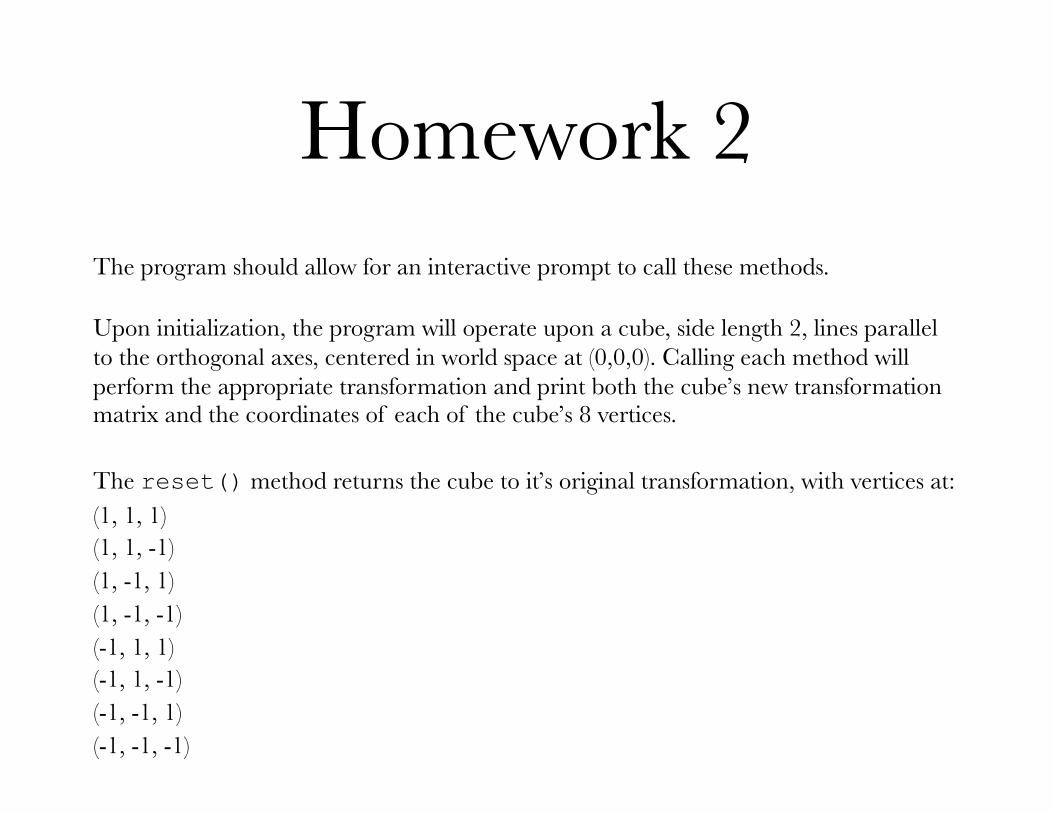
Homework 2The program should allow for an interactive prompt to call these methods.
Upon initialization, the program will operate upon a cube, side length 2, lines parallel to the orthogonal axes, centered in world space at (0,0,0). Calling each method will perform the appropriate transformation and print both the cube’s new transformation matrix and the coordinates of each of the cube’s 8 vertices.
The reset() method returns the cube to it’s original transformation, with vertices at: (1, 1, 1) (1, 1, -1) (1, -1, 1) (1, -1, -1) (-1, 1, 1) (-1, 1, -1) (-1, -1, 1) (-1, -1, -1)