Embed Size (px)
Citation preview
テクニカルデータ
Kinetixサーボドライブの仕様Bulletin 2071, 2093, 2094, 2097, 2098, 2099, 2198
本書は、Allen-Bradley® のサーボドライブのカタログ番号と、性能、環境、認可、および寸法図を含む製品仕様を記載しています。
本書と『Kinetix® モーションコントロール 選択ガイド』(Pub.No. GMC-SG001) と共に使用して、システム要件に最適のモーションコントロール製品を決めてください。
項目 参照ページ
Kinetix 5500 サーボドライブ 2
Kinetix 6200 および Kinetix 6500 モジュール式多軸サーボドライブ 19
Kinetix 6000 多軸サーボドライブ 36
Kinetix 300 および Kinetix 350 EtherNet/IP サーボドライブ 54
Kinetix 3 コンポーネント・サーボ・ドライブ 67
Kinetix 2000 多軸サーボドライブ 74
Kinetix 7000 高出力サーボドライブ 88
Ultra3000 デジタル・サーボ・ドライブ 100
参考資料 113
Kinetixサーボドライブの仕様
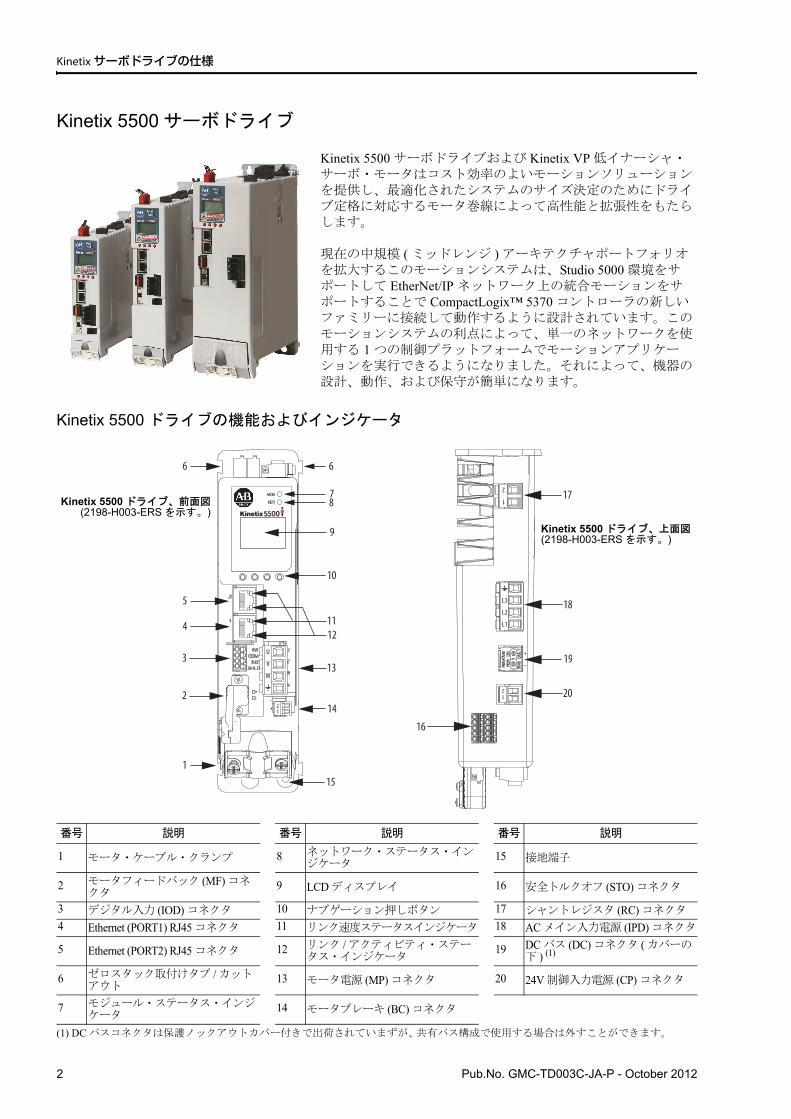
Kinetix 5500 サーボドライブ
Kinetix 5500 サーボドライブおよび Kinetix VP 低イナーシャ・サーボ・モータはコスト効率のよいモーションソリューションを提供し、最適化されたシステムのサイズ決定のためにドライブ定格に対応するモータ巻線によって高性能と拡張性をもたらします。
現在の中規模 ( ミッドレンジ ) アーキテクチャポートフォリオを拡大するこのモーションシステムは、Studio 5000 環境をサポートして EtherNet/IP ネットワーク上の統合モーションをサポートすることで CompactLogix™ 5370 コントローラの新しいファミリーに接続して動作するように設計されています。このモーションシステムの利点によって、単一のネットワークを使用する 1 つの制御プラットフォームでモーションアプリケーションを実行できるようになりました。それによって、機器の設計、動作、および保守が簡単になります。
Kinetix 5500 ドライブの機能およびインジケータ
番号 説明 番号 説明 番号 説明
1 モータ・ケーブル・クランプ 8 ネットワーク・ステータス・インジケータ
15 接地端子
2 モータフィードバック (MF) コネクタ
9 LCD ディスプレイ 16 安全トルクオフ (STO) コネクタ
3 デジタル入力 (IOD) コネクタ 10 ナブゲーション押しボタン 17 シャントレジスタ (RC) コネクタ
4 Ethernet (PORT1) RJ45 コネクタ 11 リンク速度ステータスインジケータ 18 AC メイン入力電源 (IPD) コネクタ
5 Ethernet (PORT2) RJ45 コネクタ 12 リンク / アクティビティ・ステータス・インジケータ
19 DC バス (DC) コネクタ ( カバーの下 ) (1)
(1) DC バスコネクタは保護ノックアウトカバー付きで出荷されていまずが、 共有バス構成で使用する場合は外すことができます。
6 ゼロスタック取付けタブ / カットアウト
13 モータ電源 (MP) コネクタ 20 24V 制御入力電源 (CP) コネクタ
7 モジュール・ステータス・インジケータ
14 モータブレーキ (BC) コネクタ
1
7
2
3
12
16
4
5
10
9
8
11
20
19
18
17
15
6 6
U
V
W
21
12
L3
L2
L11
2
+
–
14
13
Kinetix 5500 ドライブ、前面図(2198-H003-ERS を示す。)
Kinetix 5500 ドライブ、上面図(2198-H003-ERS を示す。)
2 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
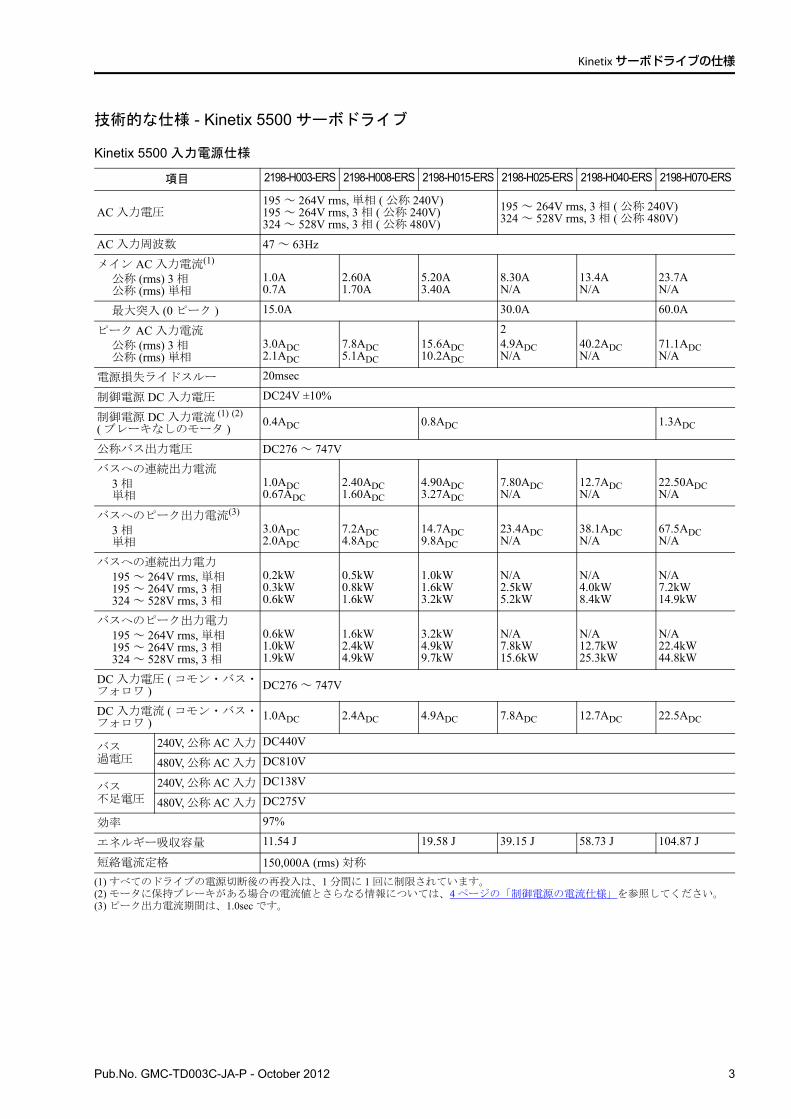
技術的な仕様 - Kinetix 5500 サーボドライブ
Kinetix 5500 入力電源仕様
項目 2198-H003-ERS 2198-H008-ERS 2198-H015-ERS 2198-H025-ERS 2198-H040-ERS 2198-H070-ERS
AC 入力電圧195 ~ 264V rms, 単相 ( 公称 240V)195 ~ 264V rms, 3 相 ( 公称 240V)324 ~ 528V rms, 3 相 ( 公称 480V)
195 ~ 264V rms, 3 相 ( 公称 240V)324 ~ 528V rms, 3 相 ( 公称 480V)
AC 入力周波数 47 ~ 63Hz
メイン AC 入力電流(1)
公称 (rms) 3 相公称 (rms) 単相
(1) すべてのドライブの電源切断後の再投入は、1 分間に 1 回に制限されています。
1.0A0.7A
2.60A1.70A
5.20A3.40A
8.30AN/A
13.4AN/A
23.7AN/A
最大突入 (0 ピーク ) 15.0A 30.0A 60.0A
ピーク AC 入力電流公称 (rms) 3 相公称 (rms) 単相
3.0ADC2.1ADC
7.8ADC5.1ADC
15.6ADC10.2ADC
24.9ADCN/A
40.2ADCN/A
71.1ADCN/A
電源損失ライドスルー 20msec
制御電源 DC 入力電圧 DC24V ±10%
制御電源 DC 入力電流 (1) (2)
( ブレーキなしのモータ )
(2) モータに保持ブレーキがある場合の電流値とさらなる情報については、4 ページの「制御電源の電流仕様」を参照してください。
0.4ADC 0.8ADC 1.3ADC
公称バス出力電圧 DC276 ~ 747V
バスへの連続出力電流3 相単相
1.0ADC0.67ADC
2.40ADC1.60ADC
4.90ADC3.27ADC
7.80ADCN/A
12.7ADCN/A
22.50ADCN/A
バスへのピーク出力電流(3)
3 相単相
(3) ピーク出力電流期間は、1.0sec です。
3.0ADC2.0ADC
7.2ADC4.8ADC
14.7ADC9.8ADC
23.4ADCN/A
38.1ADCN/A
67.5ADCN/A
バスへの連続出力電力195 ~ 264V rms, 単相195 ~ 264V rms, 3 相324 ~ 528V rms, 3 相
0.2kW0.3kW0.6kW
0.5kW0.8kW1.6kW
1.0kW1.6kW3.2kW
N/A2.5kW5.2kW
N/A4.0kW8.4kW
N/A7.2kW14.9kW
バスへのピーク出力電力195 ~ 264V rms, 単相195 ~ 264V rms, 3 相324 ~ 528V rms, 3 相
0.6kW1.0kW1.9kW
1.6kW2.4kW4.9kW
3.2kW4.9kW9.7kW
N/A7.8kW15.6kW
N/A12.7kW25.3kW
N/A22.4kW44.8kW
DC 入力電圧 ( コモン・バス・フォロワ ) DC276 ~ 747V
DC 入力電流 ( コモン・バス・フォロワ )
1.0ADC 2.4ADC 4.9ADC 7.8ADC 12.7ADC 22.5ADC
バス過電圧
240V, 公称 AC 入力 DC440V
480V, 公称 AC 入力 DC810V
バス不足電圧
240V, 公称 AC 入力 DC138V
480V, 公称 AC 入力 DC275V
効率 97%
エネルギー吸収容量 11.54 J 19.58 J 39.15 J 58.73 J 104.87 J
短絡電流定格 150,000A (rms) 対称
Pub.No. GMC-TD003C-JA-P - October 2012 3
Kinetixサーボドライブの仕様
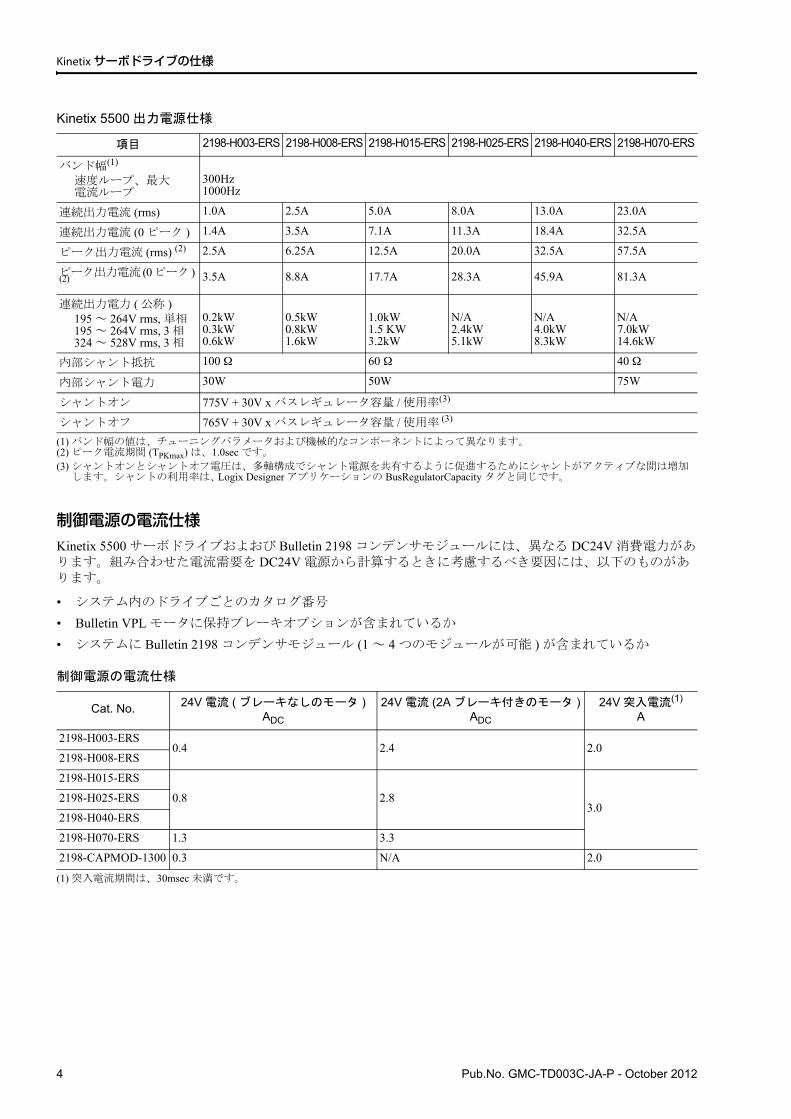
Kinetix 5500 出力電源仕様
制御電源の電流仕様Kinetix 5500 サーボドライブおよおび Bulletin 2198 コンデンサモジュールには、異なる DC24V 消費電力があります。組み合わせた電流需要を DC24V 電源から計算するときに考慮するべき要因には、以下のものがあります。
• システム内のドライブごとのカタログ番号
• Bulletin VPL モータに保持ブレーキオプションが含まれているか
• システムに Bulletin 2198 コンデンサモジュール (1 ~ 4 つのモジュールが可能 ) が含まれているか
制御電源の電流仕様
項目 2198-H003-ERS 2198-H008-ERS 2198-H015-ERS 2198-H025-ERS 2198-H040-ERS 2198-H070-ERS
バンド幅(1)
速度ループ、最大電流ループ
(1) バンド幅の値は、チューニングパラメータおよび機械的なコンポーネントによって異なります。
300Hz1000Hz
連続出力電流 (rms) 1.0A 2.5A 5.0A 8.0A 13.0A 23.0A
連続出力電流 (0 ピーク ) 1.4A 3.5A 7.1A 11.3A 18.4A 32.5A
ピーク出力電流 (rms) (2)
(2) ピーク電流期間 (TPKmax) は、1.0sec です。
2.5A 6.25A 12.5A 20.0A 32.5A 57.5A
ピーク出力電流 (0ピーク ) (2) 3.5A 8.8A 17.7A 28.3A 45.9A 81.3A
連続出力電力 ( 公称 )195 ~ 264V rms, 単相195 ~ 264V rms, 3 相324 ~ 528V rms, 3 相
0.2kW0.3kW0.6kW
0.5kW0.8kW1.6kW
1.0kW1.5 KW3.2kW
N/A2.4kW5.1kW
N/A4.0kW8.3kW
N/A7.0kW14.6kW
内部シャント抵抗 100 60 40
内部シャント電力 30W 50W 75W
シャントオン 775V + 30V x バスレギュレータ容量 / 使用率(3)
(3) シャントオンとシャントオフ電圧は、多軸構成でシャント電源を共有するように促進するためにシャントがアクティブな間は増加します。シャントの利用率は、 Logix Designer アプリケーションの BusRegulatorCapacity タグと同じです。
シャントオフ 765V + 30V x バスレギュレータ容量 / 使用率 (3)
Cat. No. 24V 電流 ( ブレーキなしのモータ )ADC
24V 電流 (2A ブレーキ付きのモータ )ADC
24V 突入電流(1)
A
(1) 突入電流期間は、30msec 未満です。
2198-H003-ERS0.4 2.4 2.0
2198-H008-ERS
2198-H015-ERS
0.8 2.83.0
2198-H025-ERS
2198-H040-ERS
2198-H070-ERS 1.3 3.3
2198-CAPMOD-1300 0.3 N/A 2.0
4 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
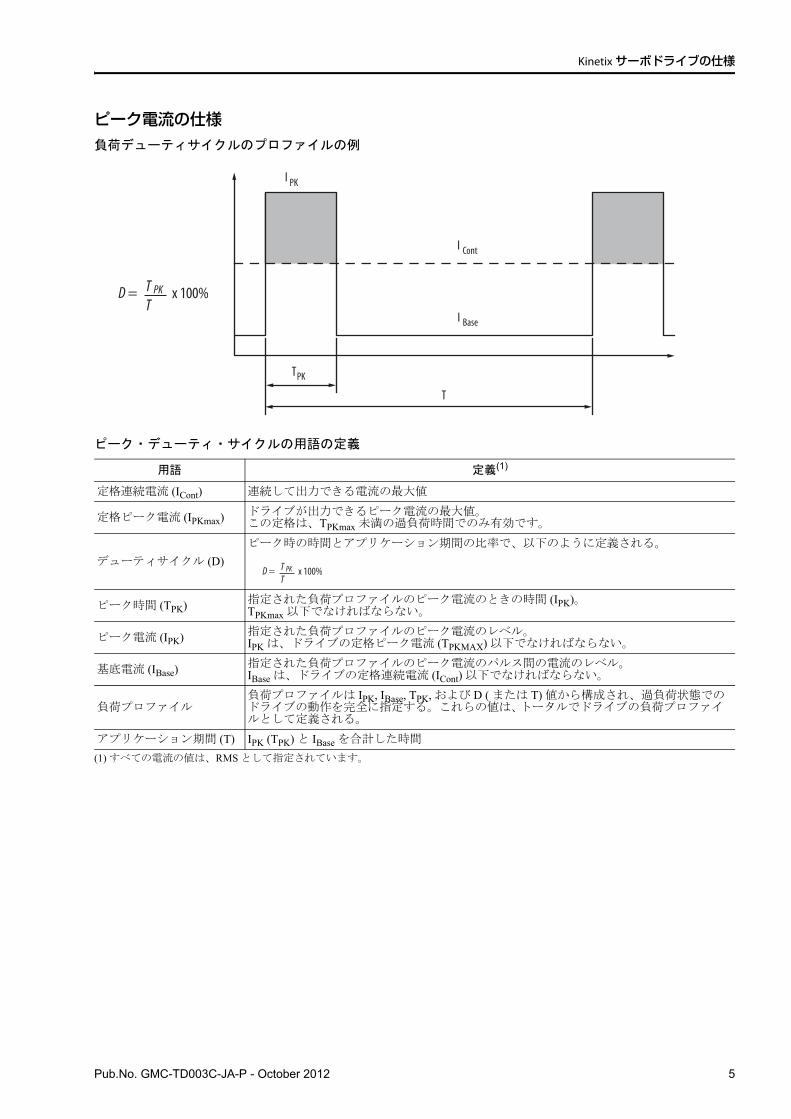
ピーク電流の仕様負荷デューティサイクルのプロファイルの例
ピーク・デューティ・サイクルの用語の定義
用語 定義(1)
(1) すべての電流の値は、RMS として指定されています。
定格連続電流 (ICont) 連続して出力できる電流の最大値
定格ピーク電流 (IPKmax) ドライブが出力できるピーク電流の最大値。この定格は、TPKmax 未満の過負荷時間でのみ有効です。
デューティサイクル (D)
ピーク時の時間とアプリケーション期間の比率で、以下のように定義される。
ピーク時間 (TPK) 指定された負荷プロファイルのピーク電流のときの時間 (IPK)。TPKmax 以下でなければならない。
ピーク電流 (IPK) 指定された負荷プロファイルのピーク電流のレベル。IPK は、ドライブの定格ピーク電流 (TPKMAX) 以下でなければならない。
基底電流 (IBase)指定された負荷プロファイルのピーク電流のパルス間の電流のレベル。IBase は、ドライブの定格連続電流 (ICont) 以下でなければならない。
負荷プロファイル負荷プロファイルは IPK, IBase, TPK, および D ( または T) 値から構成され、過負荷状態でのドライブの動作を完全に指定する。これらの値は、 トータルでドライブの負荷プロファイルとして定義される。
アプリケーション期間 (T) IPK (TPK) と IBase を合計した時間
I Cont
I Base
I PK
TPK
T
D = TT
PK x 100%
D = TT
PK x 100%
Pub.No. GMC-TD003C-JA-P - October 2012 5
Kinetixサーボドライブの仕様
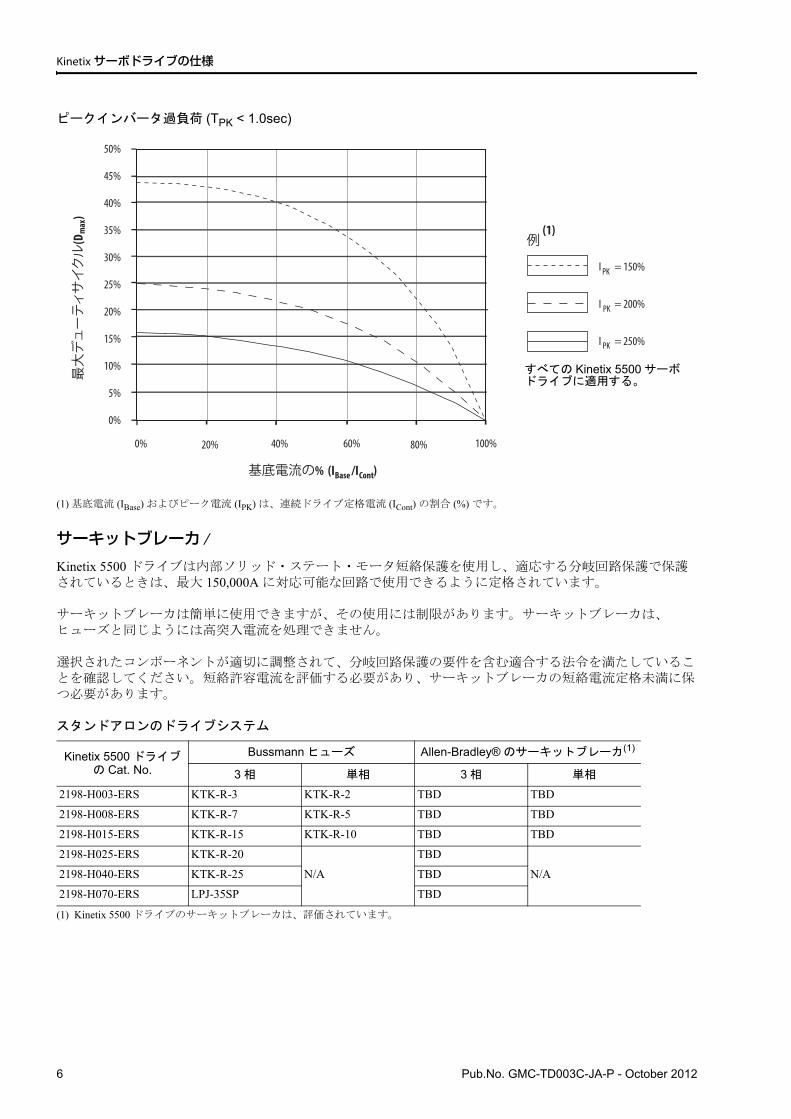
ピークインバータ過負荷 (TPK < 1.0sec)
(1) 基底電流 (IBase) およびピーク電流 (IPK) は、連続ドライブ定格電流 (ICont) の割合 (%) です。
サーキットブレーカ /
Kinetix 5500 ドライブは内部ソリッド・ステート・モータ短絡保護を使用し、適応する分岐回路保護で保護されているときは、最大 150,000A に対応可能な回路で使用できるように定格されています。
サーキットブレーカは簡単に使用できますが、その使用には制限があります。サーキットブレーカは、ヒューズと同じようには高突入電流を処理できません。
選択されたコンポーネントが適切に調整されて、分岐回路保護の要件を含む適合する法令を満たしていることを確認してください。短絡許容電流を評価する必要があり、サーキットブレーカの短絡電流定格未満に保つ必要があります。
スタンドアロンのドライブシステム
Kinetix 5500 ドライブの Cat. No.
Bussmann ヒューズ Allen-Bradley® のサーキットブレーカ(1)
(1) Kinetix 5500 ドライブのサーキットブレーカは、評価されています。
3 相 単相 3 相 単相
2198-H003-ERS KTK-R-3 KTK-R-2 TBD TBD
2198-H008-ERS KTK-R-7 KTK-R-5 TBD TBD
2198-H015-ERS KTK-R-15 KTK-R-10 TBD TBD
2198-H025-ERS KTK-R-20
N/A
TBD
N/A2198-H040-ERS KTK-R-25 TBD
2198-H070-ERS LPJ-35SP TBD
0% 60% 100%
50%
45%
40%
35%
30%
25%
20%
15%
10%
5%
0%
80%20% 40%
I = 150%
I = 200%
I = 250%
例
最大デューティサイクル
(D
)m
ax
PK
PK
PK
(1)
基底電流の% (I /I ) ContBase
すべての Kinetix 5500 サーボドライブに適用する。
6 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
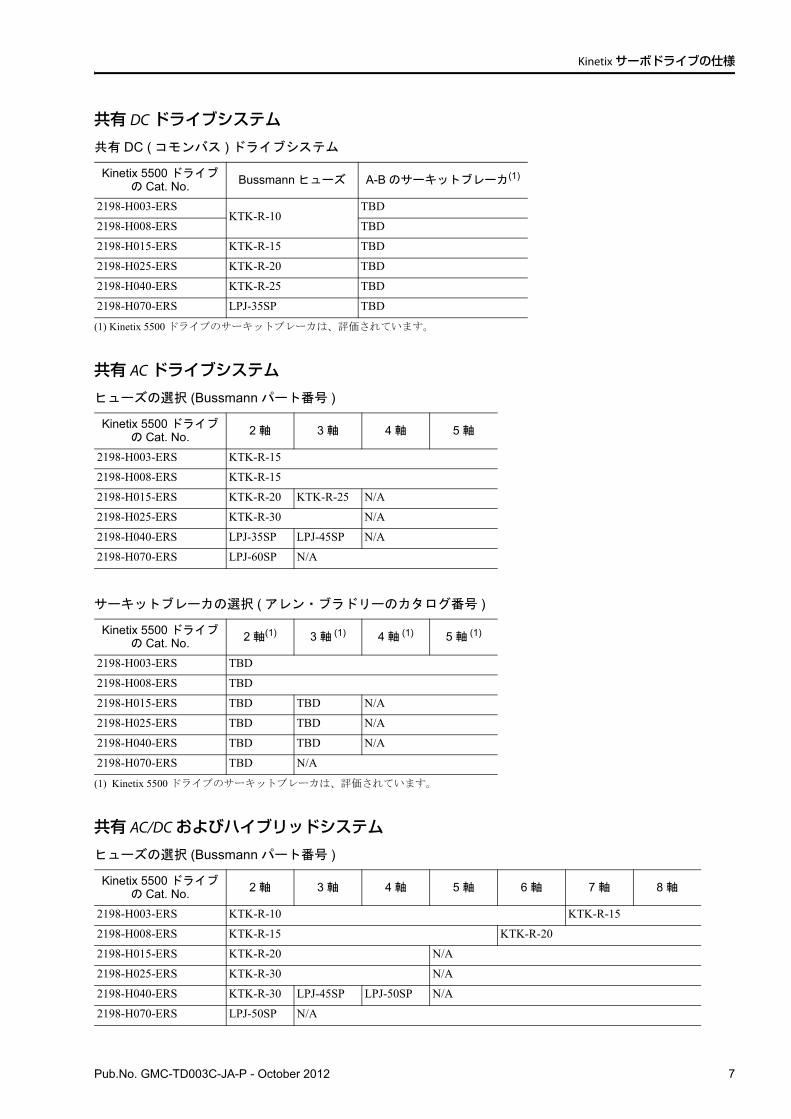
共有 DCドライブシステム共有 DC ( コモンバス ) ドライブシステム
共有 ACドライブシステムヒューズの選択 (Bussmann パート番号 )
サーキットブレーカの選択 ( アレン・ブラドリーのカタログ番号 )
共有 AC/DCおよびハイブリッドシステムヒューズの選択 (Bussmann パート番号 )
Kinetix 5500 ドライブの Cat. No.
Bussmann ヒューズ A-B のサーキットブレーカ(1)
(1) Kinetix 5500 ドライブのサーキットブレーカは、評価されています。
2198-H003-ERSKTK-R-10
TBD
2198-H008-ERS TBD
2198-H015-ERS KTK-R-15 TBD
2198-H025-ERS KTK-R-20 TBD
2198-H040-ERS KTK-R-25 TBD
2198-H070-ERS LPJ-35SP TBD
Kinetix 5500 ドライブの Cat. No. 2 軸 3 軸 4 軸 5 軸
2198-H003-ERS KTK-R-15
2198-H008-ERS KTK-R-15
2198-H015-ERS KTK-R-20 KTK-R-25 N/A
2198-H025-ERS KTK-R-30 N/A
2198-H040-ERS LPJ-35SP LPJ-45SP N/A
2198-H070-ERS LPJ-60SP N/A
Kinetix 5500 ドライブの Cat. No. 2 軸(1)
(1) Kinetix 5500 ドライブのサーキットブレーカは、評価されています。
3 軸 (1) 4 軸 (1) 5 軸 (1)
2198-H003-ERS TBD
2198-H008-ERS TBD
2198-H015-ERS TBD TBD N/A
2198-H025-ERS TBD TBD N/A
2198-H040-ERS TBD TBD N/A
2198-H070-ERS TBD N/A
Kinetix 5500 ドライブの Cat. No.
2 軸 3 軸 4 軸 5 軸 6 軸 7 軸 8 軸
2198-H003-ERS KTK-R-10 KTK-R-15
2198-H008-ERS KTK-R-15 KTK-R-20
2198-H015-ERS KTK-R-20 N/A
2198-H025-ERS KTK-R-30 N/A
2198-H040-ERS KTK-R-30 LPJ-45SP LPJ-50SP N/A
2198-H070-ERS LPJ-50SP N/A
Pub.No. GMC-TD003C-JA-P - October 2012 7
Kinetixサーボドライブの仕様
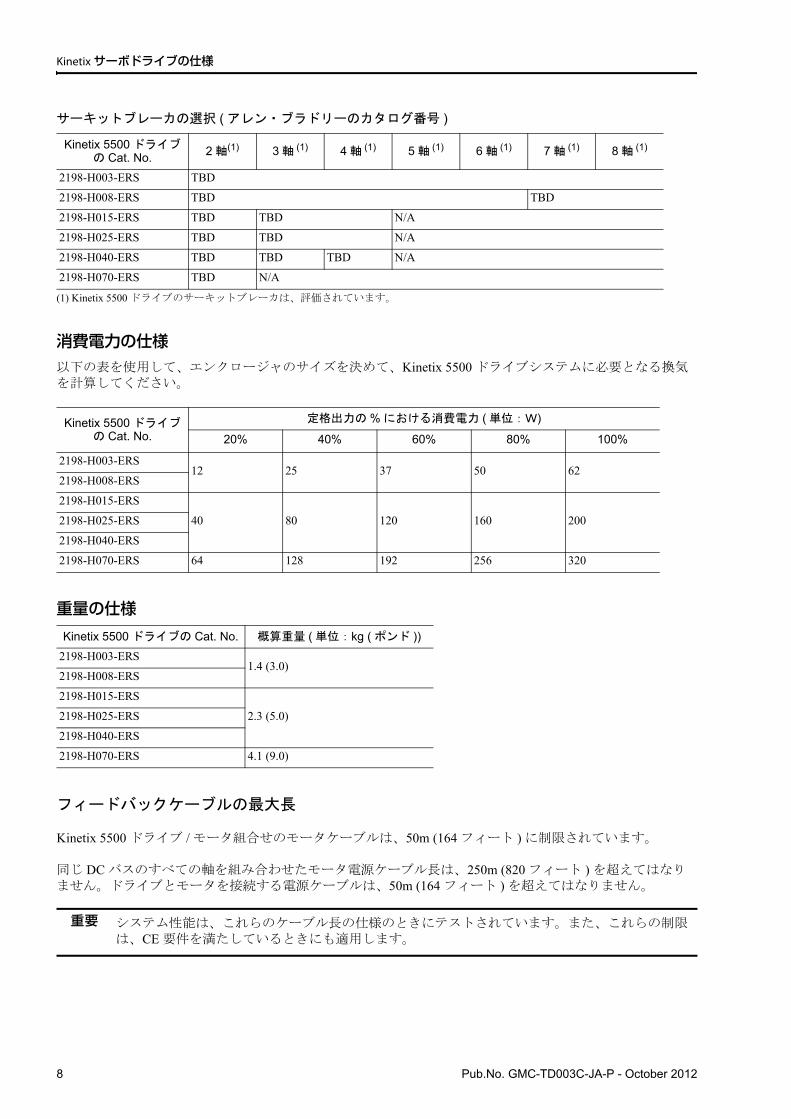
サーキットブレーカの選択 ( アレン・ブラドリーのカタログ番号 )
消費電力の仕様以下の表を使用して、エンクロージャのサイズを決めて、Kinetix 5500 ドライブシステムに必要となる換気を計算してください。
重量の仕様
フィードバックケーブルの最大長
Kinetix 5500 ドライブ / モータ組合せのモータケーブルは、50m (164 フィート ) に制限されています。
同じ DC バスのすべての軸を組み合わせたモータ電源ケーブル長は、250m (820 フィート ) を超えてはなりません。ドライブとモータを接続する電源ケーブルは、50m (164 フィート ) を超えてはなりません。
Kinetix 5500 ドライブの Cat. No.
2 軸(1)
(1) Kinetix 5500 ドライブのサーキットブレーカは、評価されています。
3 軸 (1) 4 軸 (1) 5 軸 (1) 6 軸 (1) 7 軸 (1) 8 軸 (1)
2198-H003-ERS TBD
2198-H008-ERS TBD TBD
2198-H015-ERS TBD TBD N/A
2198-H025-ERS TBD TBD N/A
2198-H040-ERS TBD TBD TBD N/A
2198-H070-ERS TBD N/A
Kinetix 5500 ドライブの Cat. No.
定格出力の % における消費電力 ( 単位:W)
20% 40% 60% 80% 100%
2198-H003-ERS12 25 37 50 62
2198-H008-ERS
2198-H015-ERS
40 80 120 160 2002198-H025-ERS
2198-H040-ERS
2198-H070-ERS 64 128 192 256 320
Kinetix 5500 ドライブの Cat. No. 概算重量 ( 単位:kg ( ポンド ))
2198-H003-ERS1.4 (3.0)
2198-H008-ERS
2198-H015-ERS
2.3 (5.0)2198-H025-ERS
2198-H040-ERS
2198-H070-ERS 4.1 (9.0)
重要 システム性能は、これらのケーブル長の仕様のときにテストされています。また、これらの制限は、CE 要件を満たしているときにも適用します。
8 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
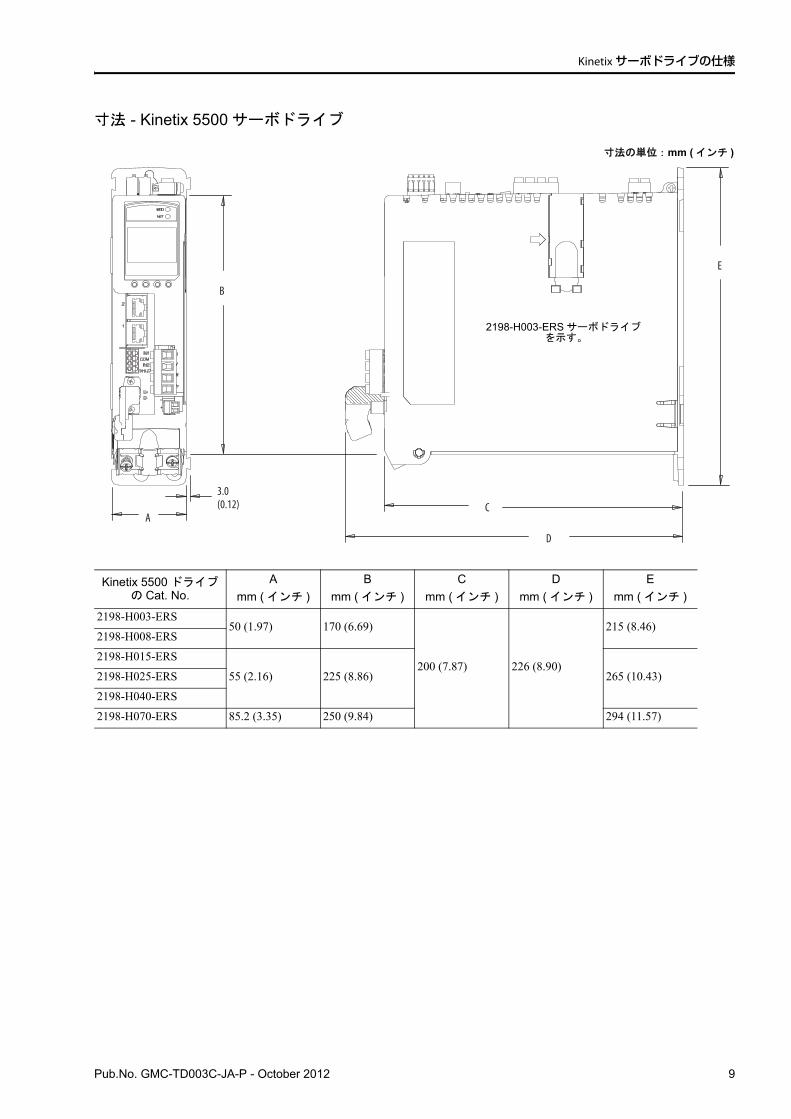
寸法 - Kinetix 5500 サーボドライブ
Kinetix 5500 ドライブの Cat. No.
A
mm ( インチ )
B
mm ( インチ )
C
mm ( インチ )
D
mm ( インチ )
E
mm ( インチ )
2198-H003-ERS50 (1.97) 170 (6.69)
200 (7.87) 226 (8.90)
215 (8.46)2198-H008-ERS
2198-H015-ERS
55 (2.16) 225 (8.86) 265 (10.43)2198-H025-ERS
2198-H040-ERS
2198-H070-ERS 85.2 (3.35) 250 (9.84) 294 (11.57)
E
D
CA
3.0(0.12)
B
寸法の単位:mm ( インチ )
2198-H003-ERS サーボドライブを示す。
Pub.No. GMC-TD003C-JA-P - October 2012 9
Kinetixサーボドライブの仕様
環境条件 - Kinetix 5500 サーボドライブ
認可 - Kinetix 5500 サーボドライブ
項目 動作範囲 保管範囲 ( 非動作時 )
周囲温度 0 ~ 50°C (32 ~ 122°F) -40 ~ 70°C (-40 ~ 158°F)
相対湿度 5 ~ 95% ( 結露なきこと ) 5 ~ 95% ( 結露なきこと )
高度 1000m (3281 フィート ) 3000m (9843 フィート ) ( 輸送時 )
振動 0.35mm (0.014 インチ ) 二重振幅のとき 5 ~ 55Hz、連続変位、2.0 G ピーク一定加速のとき 55 ~ 500Hz
衝撃 15G, 11msec 正弦波の半周期パルス (3 つの相互に直角の方向で各方向に 3 パルス )
承認機関(1)
(1) 製品がマークされているときは、適合宣言書について http://www.ab.com を参照してください。
規格
c-UL-us (2)
(2) Underwriters Laboratories Inc. では、これらの製品のセーフオフ、安全トルクオフ、または安全速度モニタオプションを評価していません。
米国とカナダの安全規格に対して UL リスト (UL 508C File E59272)
ソリッドステートのモータ過負荷保護は、UL 508C (UL File E59272) を満たすように UL で調査されたモータのピーク定格に基づくピーク電流制限で、モータ定格の 110% に達したときにモータ電流の動的なフォルドバックを提供する。
CE
EU 2004/108/EC EMC 指令は、以下に準拠している。• EN 61800-3:2004: 可変速電力ドライブシステム - パート 3; • EMC 製品規格 ( 特定のテスト方法を含む )
EU 2006/95/EC 低電圧指令は、EN 61800-5-1:2007 - 可変速電力ドライブシステムに以下に準拠している。
機能安全機能安全について TÜV に認可:EN 61800-5-2, EN 61508, および EN 62061 に従って SIL CL2 まで、EN ISO 13849-1 に従って安全遂行レベル PLd およびカテゴリ 3 まで
『Kinetix 5500 Servo Drives User Manual』(Pub.No. 2198-UM001) に説明するように使用している場合
C-Tick
オーストラリア無線通信法令は、以下に準拠している。• 無線通信法令 : 1992• 無線通信 ( 電磁適合性 ) 規格 : 1998• 無線通信 ( ラベリングの遵守 - 偶発的なエミッション ) 通知書 : 1998• AS/NZS CISPR 11: 2002 ( グループ 1, クラス A)
KC韓国の放送および通信機器の適合認証 / 登録は、以下に準拠している。• 電波法、第 3 条の第 58-2 項
• 登録番号:KCC-REM-RAA-2198
ODVA EtherNet/IP 適合がテスト済み
OSHA サーボ・ドライブ・システムからの最大可聴ノイズは、OSHA 規格 3074, 聴覚保護 (<85dBA) に準拠している。
10 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
アクセサリ - Kinetix 5500 サーボドライブ
Kinetix 5500 ドライブのアクセサリには、Bulletin 2198 コンデンサモジュール、AC ラインフィルタおよび共有バス接続システムがあります。また、Kinetix 5500 サーボドライブは Bulletin 2097 外部シャントレジスタも使用できます。
コンデンサモジュールKinetix 5500 コンデンサモジュールは、Kinetix 5500 内部シャントモジュールの容量を超えるアプリケーションのために 1360 µF 静電容量を提供します。コンデンサモジュールは、単独で使用することも、過剰な回生エネルギーのあるアプリケーションのために Bulletin 2097 外部シャントモジュールを組み合わせて使用することができます。
Bulletin 2198-CAPMOD-1300 コンデンサモジュールは、Bulletin 2198 サーボドライブ構成のオプションですwith 200V または 400V クラス動作。ここには、機能、仕様、および製品の寸法を記載しています。
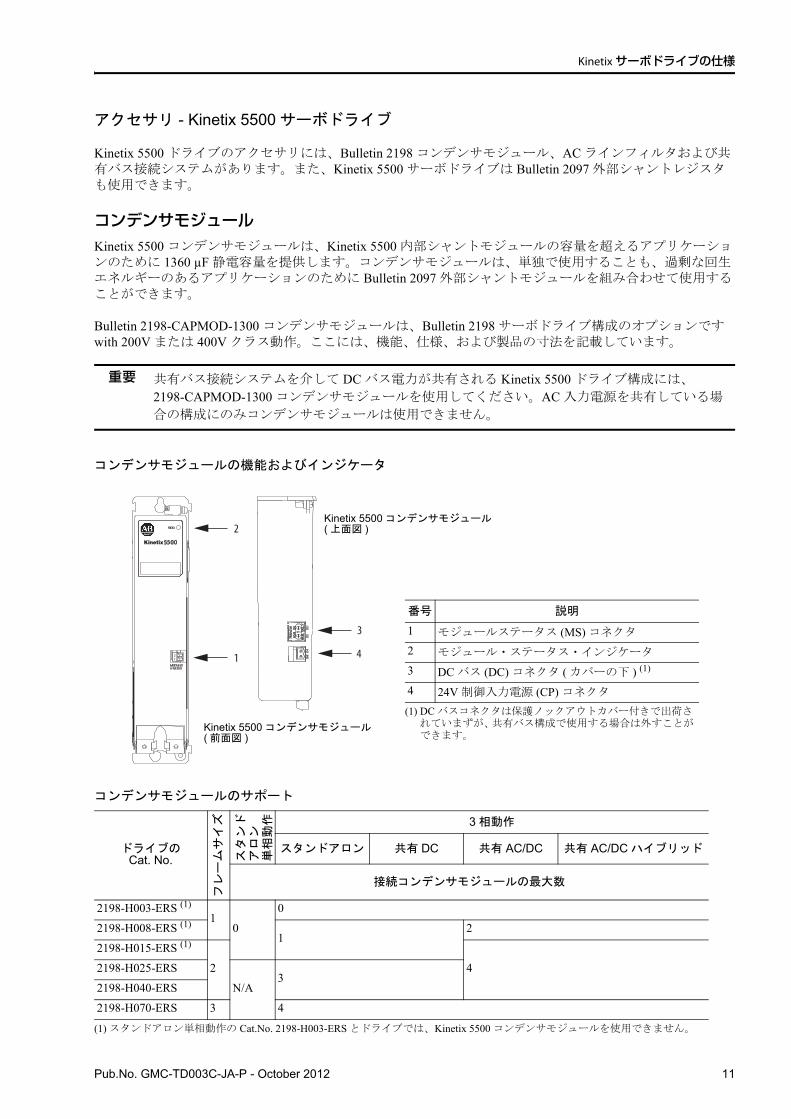
コンデンサモジュールの機能およびインジケータ
コンデンサモジュールのサポート
重要 共有バス接続システムを介して DC バス電力が共有される Kinetix 5500 ドライブ構成には、
2198-CAPMOD-1300 コンデンサモジュールを使用してください。AC 入力電源を共有している場
合の構成にのみコンデンサモジュールは使用できません。
ドライブのCat. No.
フレームサイズ
スタンド
アロン
単相動作 3 相動作
スタンドアロン 共有 DC 共有 AC/DC 共有 AC/DC ハイブリッド
接続コンデンサモジュールの最大数
2198-H003-ERS (1)
(1) スタンドアロン単相動作の Cat.No. 2198-H003-ERS とドライブでは、Kinetix 5500 コンデンサモジュールを使用できません。
10
0
2198-H008-ERS (1)
12
2198-H015-ERS (1)
2 42198-H025-ERS
N/A3
2198-H040-ERS
2198-H070-ERS 3 4
21 1
2
3
4
Kinetix 5500 コンデンサモジュール( 上面図 )
Kinetix 5500 コンデンサモジュール( 前面図 )
番号 説明
1 モジュールステータス (MS) コネクタ
2 モジュール・ステータス・インジケータ
3 DC バス (DC) コネクタ ( カバーの下 ) (1)
(1) DC バスコネクタは保護ノックアウトカバー付きで出荷されていまずが、 共有バス構成で使用する場合は外すことができます。
4 24V 制御入力電源 (CP) コネクタ
Pub.No. GMC-TD003C-JA-P - October 2012 11
Kinetixサーボドライブの仕様
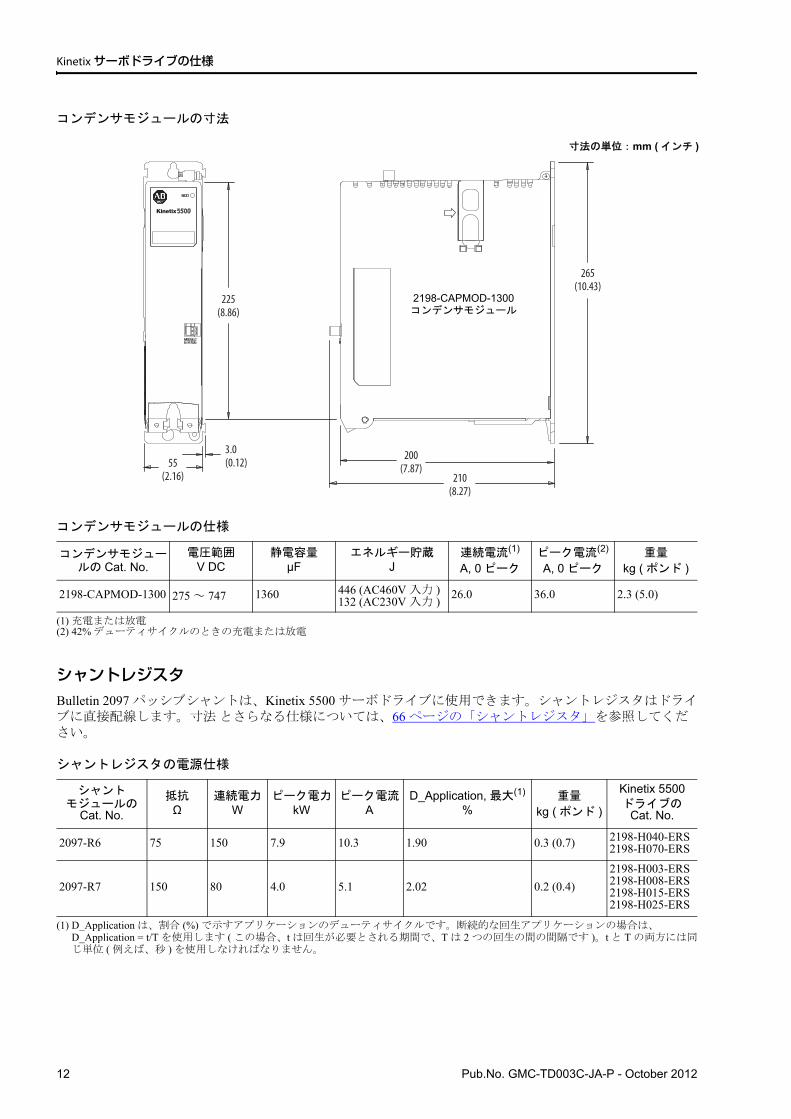
コンデンサモジュールの寸法
コンデンサモジュールの仕様
シャントレジスタBulletin 2097 パッシブシャントは、Kinetix 5500 サーボドライブに使用できます。シャントレジスタはドライブに直接配線します。寸法 とさらなる仕様については、66 ページの「シャントレジスタ」を参照してください。
シャントレジスタの電源仕様
コンデンサモジュールの Cat. No.
電圧範囲V DC
静電容量µF
エネルギー貯蔵J
連続電流(1)
A, 0 ピーク
(1) 充電または放電
ピーク電流(2)
A, 0 ピーク
(2) 42% デューティサイクルのときの充電または放電
重量
kg ( ポンド )
2198-CAPMOD-1300 275 ~ 747 1360 446 (AC460V 入力 )132 (AC230V 入力 )
26.0 36.0 2.3 (5.0)
シャントモジュールの
Cat. No.
抵抗Ω
連続電力W
ピーク電力kW
ピーク電流A
D_Application, 最大(1)
%
(1) D_Application は、割合 (%) で示すアプリケーションのデューティサイクルです。断続的な回生アプリケーションの場合は、D_Application = t/T を使用します ( この場合、t は回生が必要とされる期間で、T は 2 つの回生の間の間隔です )。t と T の両方には同じ単位 ( 例えば、秒 ) を使用しなければなりません。
重量
kg ( ポンド )
Kinetix 5500 ドライブの
Cat. No.
2097-R6 75 150 7.9 10.3 1.90 0.3 (0.7) 2198-H040-ERS2198-H070-ERS
2097-R7 150 80 4.0 5.1 2.02 0.2 (0.4)
2198-H003-ERS2198-H008-ERS2198-H015-ERS2198-H025-ERS
3.0(0.12)
225(8.86)
55(2.16)
200(7.87)
210(8.27)
265(10.43)
2198-CAPMOD-1300コンデンサモジュール
寸法の単位:mm ( インチ )
12 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
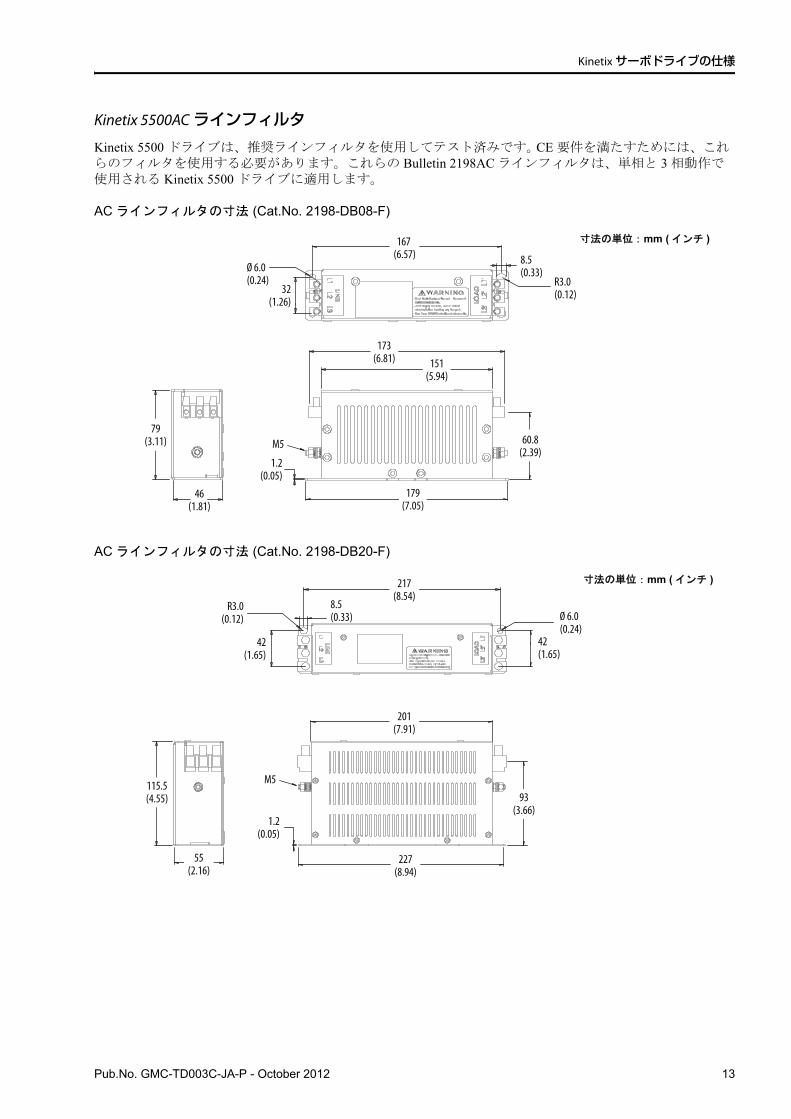
Kinetix 5500ACラインフィルタKinetix 5500 ドライブは、推奨ラインフィルタを使用してテスト済みです。 CE 要件を満たすためには、これらのフィルタを使用する必要があります。これらの Bulletin 2198AC ラインフィルタは、単相と 3 相動作で使用される Kinetix 5500 ドライブに適用します。
AC ラインフィルタの寸法 (Cat.No. 2198-DB08-F)
AC ラインフィルタの寸法 (Cat.No. 2198-DB20-F)
Ø 6.0 (0.24)
167 (6.57) 8.5
(0.33)R3.0 (0.12)32
(1.26)
173(6.81) 151
(5.94)
1.2(0.05)
179(7.05)
60.8(2.39)
46(1.81)
79(3.11) M5
寸法の単位:mm ( インチ )
Ø 6.0 (0.24)
R3.0(0.12)
8.5(0.33)
217(8.54)
201(7.91)
227(8.94)
1.2(0.05)
93(3.66)
115.5(4.55)
55(2.16)
42(1.65)
42(1.65)
M5
寸法の単位:mm ( インチ )
Pub.No. GMC-TD003C-JA-P - October 2012 13
Kinetixサーボドライブの仕様
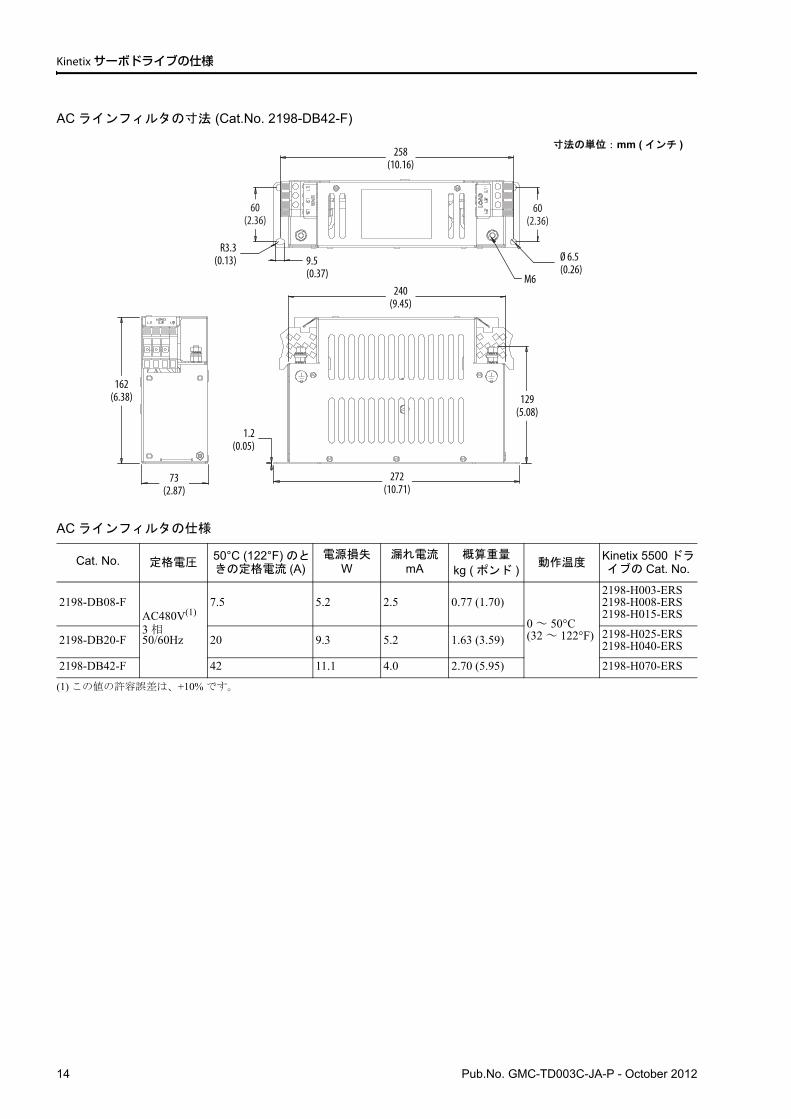
AC ラインフィルタの寸法 (Cat.No. 2198-DB42-F)
AC ラインフィルタの仕様
Cat. No. 定格電圧 50°C (122°F) のときの定格電流 (A)
電源損失W
漏れ電流mA
概算重量
kg ( ポンド )動作温度
Kinetix 5500 ドライブの Cat. No.
2198-DB08-FAC480V(1)
3 相50/60Hz
(1) この値の許容誤差は、+10% です。
7.5 5.2 2.5 0.77 (1.70)
0 ~ 50°C(32 ~ 122°F)
2198-H003-ERS2198-H008-ERS2198-H015-ERS
2198-DB20-F 20 9.3 5.2 1.63 (3.59) 2198-H025-ERS2198-H040-ERS
2198-DB42-F 42 11.1 4.0 2.70 (5.95) 2198-H070-ERS
Ø 6.5 (0.26)
R3.3(0.13) 9.5
(0.37)
60(2.36)
60(2.36)
258(10.16)
M6240
(9.45)
129(5.08)
1.2(0.05)
272(10.71)
73(2.87)
162(6.38)
寸法の単位:mm ( インチ )
14 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
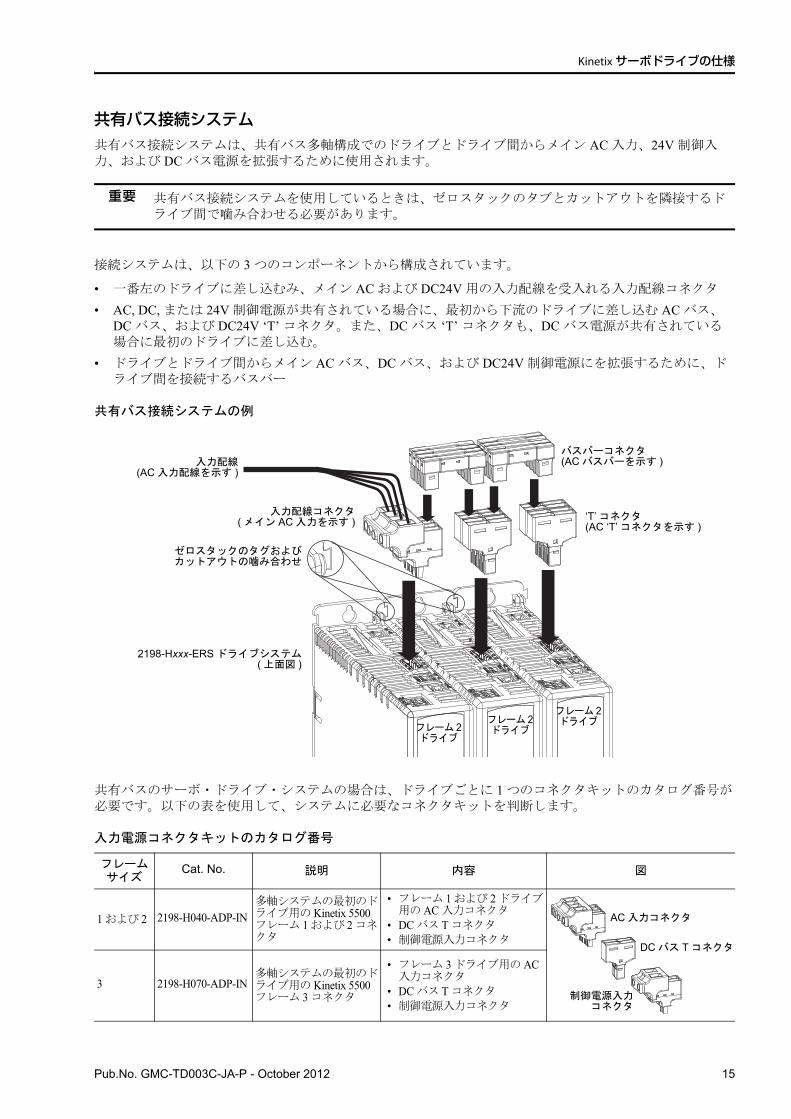
共有バス接続システム共有バス接続システムは、共有バス多軸構成でのドライブとドライブ間からメイン AC 入力、24V 制御入力、および DC バス電源を拡張するために使用されます。
接続システムは、以下の 3 つのコンポーネントから構成されています。
• 一番左のドライブに差し込むみ、メイン AC および DC24V 用の入力配線を受入れる入力配線コネクタ
• AC, DC, または 24V 制御電源が共有されている場合に、最初から下流のドライブに差し込む AC バス、DC バス、および DC24V ‘T’ コネクタ。また、DC バス ‘T’ コネクタも、DC バス電源が共有されている場合に最初のドライブに差し込む。
• ドライブとドライブ間からメイン AC バス、DC バス、および DC24V 制御電源にを拡張するために、ドライブ間を接続するバスバー
共有バス接続システムの例
共有バスのサーボ・ドライブ・システムの場合は、ドライブごとに 1 つのコネクタキットのカタログ番号が必要です。以下の表を使用して、システムに必要なコネクタキットを判断します。
入力電源コネクタキットのカタログ番号
重要 共有バス接続システムを使用しているときは、ゼロスタックのタブとカットアウトを隣接するドライブ間で噛み合わせる必要があります。
フレームサイズ
Cat. No. 説明 内容 図
1 および 2 2198-H040-ADP-IN多軸システムの最初のドライブ用の Kinetix 5500フレーム 1 および 2 コネクタ
• フレーム 1 および 2 ドライブ用の AC 入力コネクタ
• DC バス T コネクタ• 制御電源入力コネクタ
3 2198-H070-ADP-IN多軸システムの最初のドライブ用の Kinetix 5500フレーム 3 コネクタ
• フレーム 3 ドライブ用の AC入力コネクタ
• DC バス T コネクタ• 制御電源入力コネクタ
2198-Hxxx-ERS ドライブシステム( 上面図 )
入力配線コネクタ( メイン AC 入力を示す ) ‘T’ コネクタ
(AC ‘T’ コネクタを示す )
バスバーコネクタ(AC バスバーを示す )
フレーム 2ドライブ
フレーム 2ドライブ
フレーム 2ドライブ
入力配線(AC 入力配線を示す )
ゼロスタックのタグおよびカットアウトの噛み合わせ
AC 入力コネクタ
DC バス T コネクタ
制御電源入力コネクタ
Pub.No. GMC-TD003C-JA-P - October 2012 15
Kinetixサーボドライブの仕様
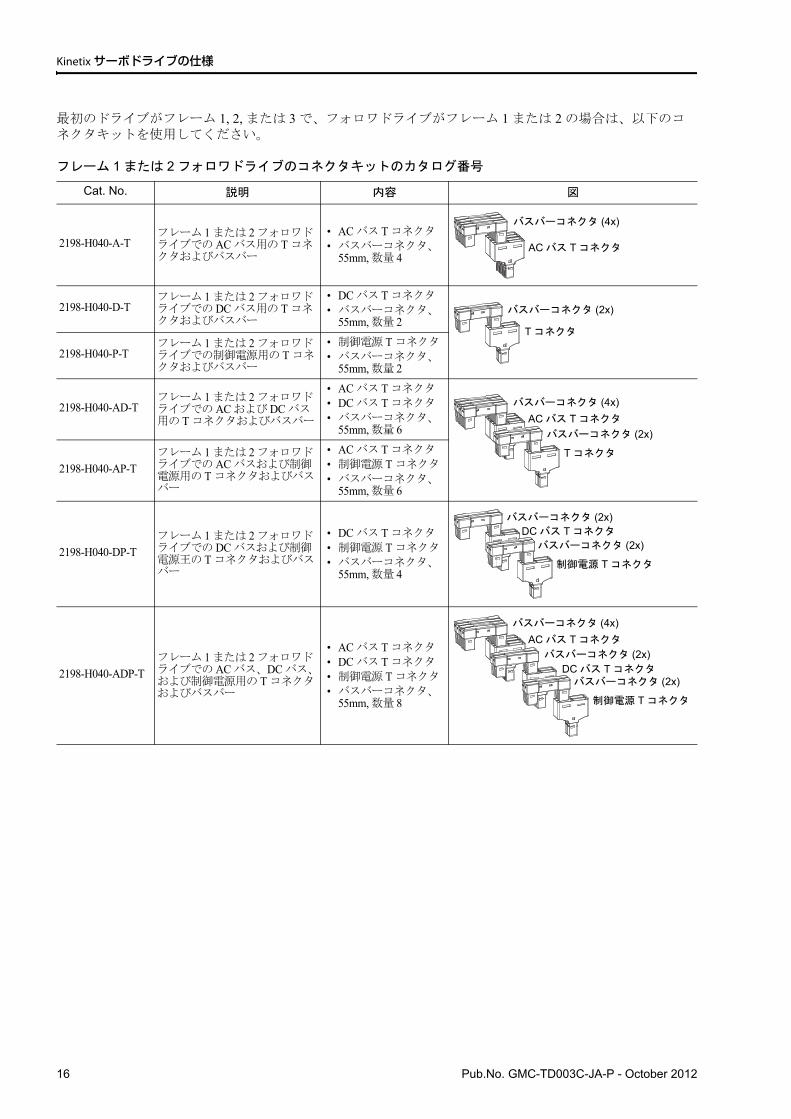
最初のドライブがフレーム 1, 2, または 3 で、フォロワドライブがフレーム 1 または 2 の場合は、以下のコネクタキットを使用してください。
フレーム 1 または 2 フォロワドライブのコネクタキットのカタログ番号
Cat. No. 説明 内容 図
2198-H040-A-Tフレーム 1 または 2 フォロワドライブでの AC バス用の T コネクタおよびバスバー
• AC バス T コネクタ• バスバーコネクタ、
55mm, 数量 4
2198-H040-D-Tフレーム 1 または 2 フォロワドライブでの DC バス用の T コネクタおよびバスバー
• DC バス T コネクタ• バスバーコネクタ、
55mm, 数量 2
2198-H040-P-Tフレーム 1 または 2 フォロワドライブでの制御電源用の T コネクタおよびバスバー
• 制御電源 T コネクタ• バスバーコネクタ、
55mm, 数量 2
2198-H040-AD-Tフレーム 1 または 2 フォロワドライブでの AC および DC バス用の T コネクタおよびバスバー
• AC バス T コネクタ• DC バス T コネクタ• バスバーコネクタ、
55mm, 数量 6
2198-H040-AP-Tフレーム 1 または 2 フォロワドライブでの AC バスおよび制御電源用の T コネクタおよびバスバー
• AC バス T コネクタ• 制御電源 T コネクタ• バスバーコネクタ、
55mm, 数量 6
2198-H040-DP-Tフレーム 1 または 2 フォロワドライブでの DC バスおよび制御電源王の T コネクタおよびバスバー
• DC バス T コネクタ• 制御電源 T コネクタ• バスバーコネクタ、
55mm, 数量 4
2198-H040-ADP-Tフレーム 1 または 2 フォロワドライブでの AC バス、DC バス、および制御電源用の T コネクタおよびバスバー
• AC バス T コネクタ• DC バス T コネクタ• 制御電源 T コネクタ• バスバーコネクタ、
55mm, 数量 8
バスバーコネクタ (4x)
AC バス T コネクタ
バスバーコネクタ (2x)
T コネクタ
バスバーコネクタ (4x)
AC バス T コネクタ
バスバーコネクタ (2x)
T コネクタ
バスバーコネクタ (2x)DC バス T コネクタ
バスバーコネクタ (2x)
制御電源 T コネクタ
バスバーコネクタ (4x)
AC バス T コネクタ
バスバーコネクタ (2x)
制御電源 T コネクタ
DC バス T コネクタバスバーコネクタ (2x)
16 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
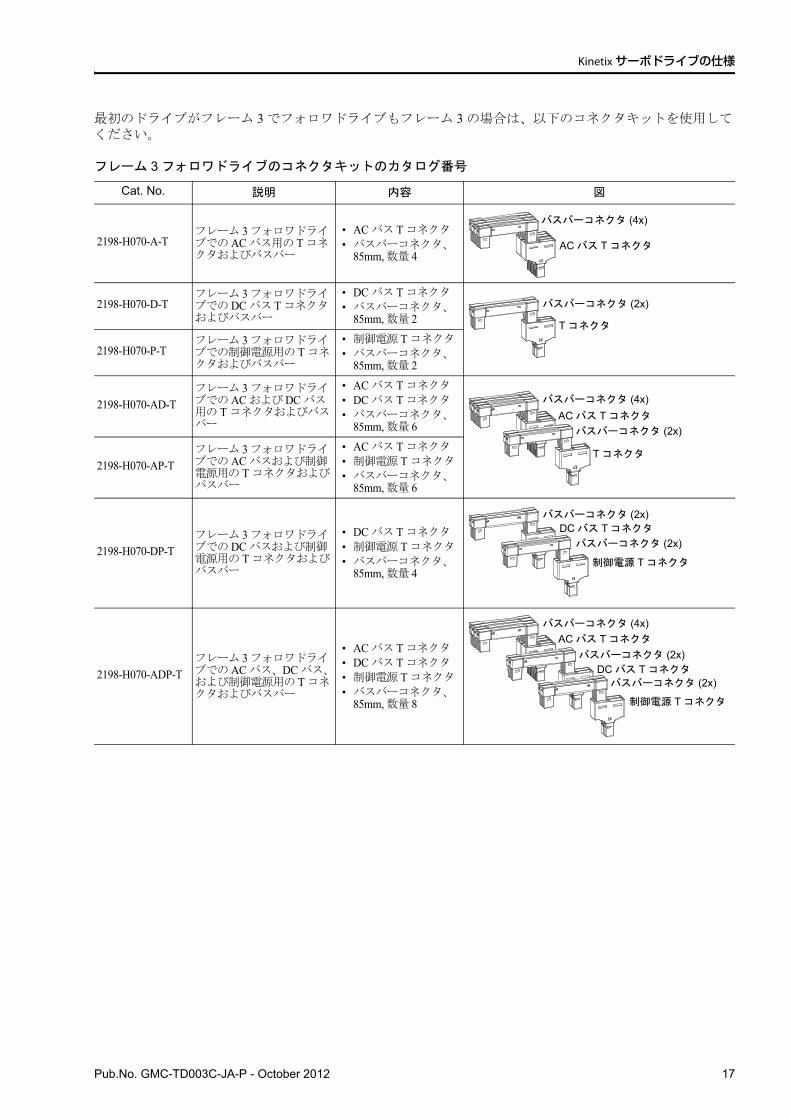
最初のドライブがフレーム 3 でフォロワドライブもフレーム 3 の場合は、以下のコネクタキットを使用してください。
フレーム 3 フォロワドライブのコネクタキットのカタログ番号
Cat. No. 説明 内容 図
2198-H070-A-Tフレーム 3 フォロワドライブでの AC バス用の T コネクタおよびバスバー
• AC バス T コネクタ• バスバーコネクタ、
85mm, 数量 4
2198-H070-D-Tフレーム 3 フォロワドライブでの DC バス T コネクタおよびバスバー
• DC バス T コネクタ• バスバーコネクタ、
85mm, 数量 2
2198-H070-P-Tフレーム 3 フォロワドライブでの制御電源用の T コネクタおよびバスバー
• 制御電源 T コネクタ• バスバーコネクタ、
85mm, 数量 2
2198-H070-AD-Tフレーム 3 フォロワドライブでの AC および DC バス用の T コネクタおよびバスバー
• AC バス T コネクタ• DC バス T コネクタ• バスバーコネクタ、
85mm, 数量 6
2198-H070-AP-Tフレーム 3 フォロワドライブでの AC バスおよび制御電源用の T コネクタおよびバスバー
• AC バス T コネクタ• 制御電源 T コネクタ• バスバーコネクタ、
85mm, 数量 6
2198-H070-DP-Tフレーム 3 フォロワドライブでの DC バスおよび制御電源用の T コネクタおよびバスバー
• DC バス T コネクタ• 制御電源 T コネクタ• バスバーコネクタ、
85mm, 数量 4
2198-H070-ADP-Tフレーム 3 フォロワドライブでの AC バス、DC バス、および制御電源用の T コネクタおよびバスバー
• AC バス T コネクタ• DC バス T コネクタ• 制御電源 T コネクタ• バスバーコネクタ、
85mm, 数量 8
バスバーコネクタ (4x)
AC バス T コネクタ
バスバーコネクタ (2x)
T コネクタ
バスバーコネクタ (4x)
AC バス T コネクタ
T コネクタ
バスバーコネクタ (2x)
バスバーコネクタ (2x)DC バス T コネクタ
バスバーコネクタ (2x)
制御電源 T コネクタ
バスバーコネクタ (4x)
AC バス T コネクタ
バスバーコネクタ (2x)
制御電源 T コネクタ
DC バス T コネクタ
バスバーコネクタ (2x)
Pub.No. GMC-TD003C-JA-P - October 2012 17
Kinetixサーボドライブの仕様
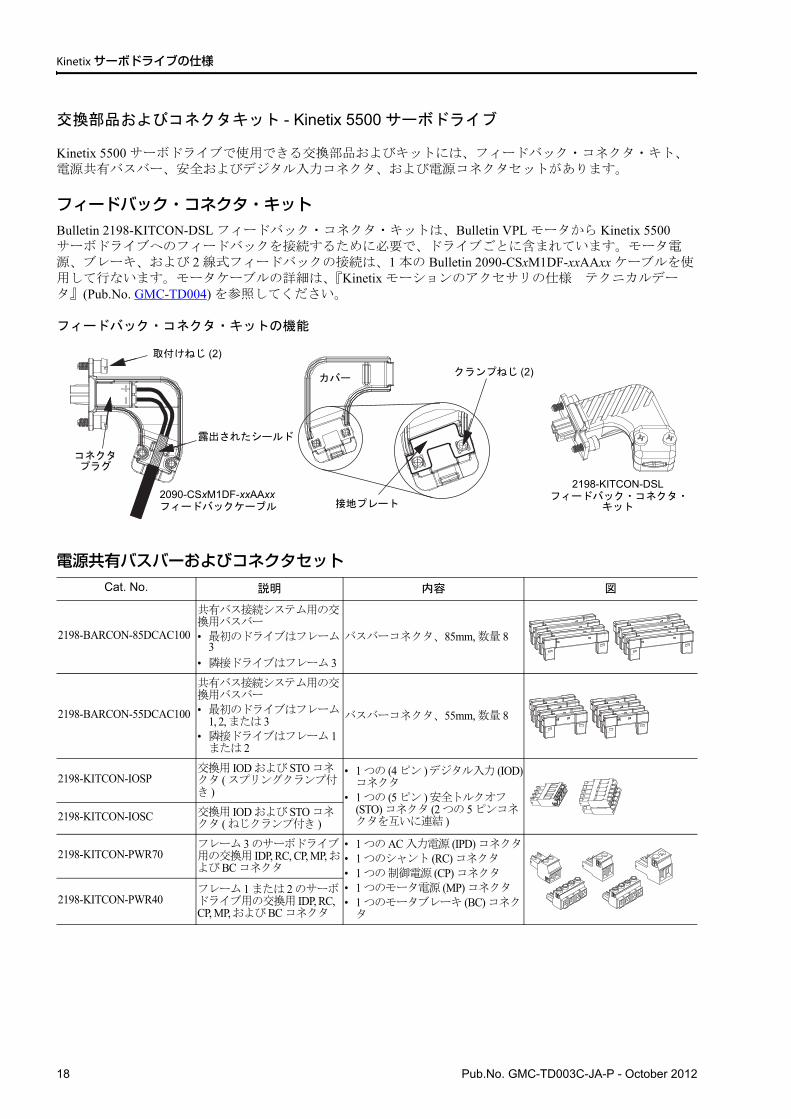
交換部品およびコネクタキット - Kinetix 5500 サーボドライブ
Kinetix 5500 サーボドライブで使用できる交換部品およびキットには、フィードバック・コネクタ・キト、電源共有バスバー、安全およびデジタル入力コネクタ、および電源コネクタセットがあります。
フィードバック・コネクタ・キットBulletin 2198-KITCON-DSL フィードバック・コネクタ・キットは、Bulletin VPL モータから Kinetix 5500サーボドライブへのフィードバックを接続するために必要で、ドライブごとに含まれています。モータ電源、ブレーキ、および 2 線式フィードバックの接続は、1 本の Bulletin 2090-CSxM1DF-xxAAxx ケーブルを使用して行ないます。モータケーブルの詳細は、『Kinetix モーションのアクセサリの仕様 テクニカルデータ』(Pub.No. GMC-TD004) を参照してください。
フィードバック・コネクタ・キットの機能
電源共有バスバーおよびコネクタセットCat. No. 説明 内容 図
2198-BARCON-85DCAC100
共有バス接続システム用の交換用バスバー• 最初のドライブはフレーム
3• 隣接ドライブはフレーム 3
バスバーコネクタ、85mm, 数量 8
2198-BARCON-55DCAC100
共有バス接続システム用の交換用バスバー• 最初のドライブはフレーム
1, 2, または 3• 隣接ドライブはフレーム 1または 2
バスバーコネクタ、55mm, 数量 8
2198-KITCON-IOSP交換用 IOD および STO コネクタ ( スプリングクランプ付き )
• 1 つの (4 ピン ) デジタル入力 (IOD)コネクタ
• 1 つの (5 ピン ) 安全トルクオフ(STO) コネクタ (2 つの 5 ピンコネクタを互いに連結 )2198-KITCON-IOSC 交換用 IOD および STO コネ
クタ ( ねじクランプ付き )
2198-KITCON-PWR70フレーム 3 のサーボドライブ用の交換用 IDP, RC, CP, MP, およびBC コネクタ
• 1 つの AC 入力電源 (IPD) コネクタ• 1 つのシャント (RC) コネクタ• 1 つの 制御電源 (CP) コネクタ• 1 つのモータ電源 (MP) コネクタ• 1 つのモータブレーキ (BC) コネクタ
2198-KITCON-PWR40フレーム 1 または 2 のサーボドライブ用の交換用 IDP, RC, CP, MP, およびBC コネクタ
2198-KITCON-DSLフィードバック・コネクタ・
キット
コネクタプラグ
接地プレート
クランプねじ (2)
取付けねじ (2)
露出されたシールド
2090-CSxM1DF-xxAAxxフィードバックケーブル
カバー
18 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
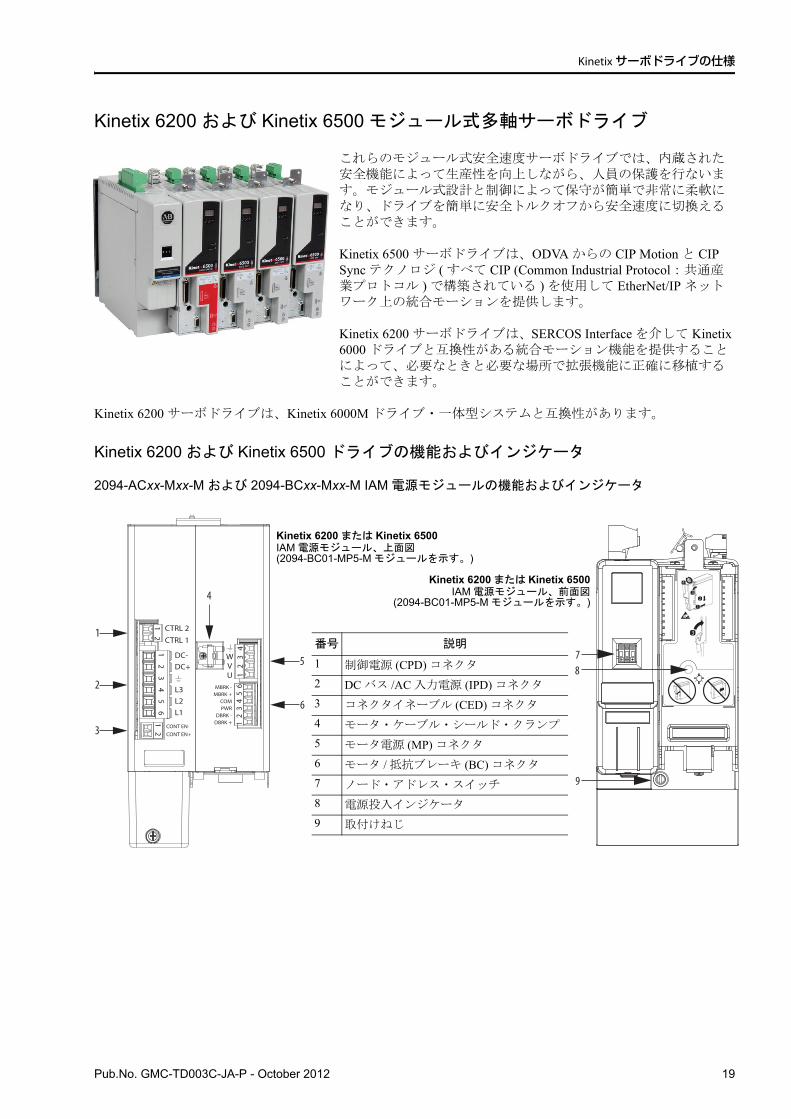
Kinetix 6200 および Kinetix 6500 モジュール式多軸サーボドライブ
これらのモジュール式安全速度サーボドライブでは、内蔵された安全機能によって生産性を向上しながら、人員の保護を行ないます。モジュール式設計と制御によって保守が簡単で非常に柔軟になり、ドライブを簡単に安全トルクオフから安全速度に切換えることができます。
Kinetix 6500 サーボドライブは、ODVA からの CIP Motion と CIP Sync テクノロジ ( すべて CIP (Common Industrial Protocol:共通産業プロトコル ) で構築されている ) を使用して EtherNet/IP ネットワーク上の統合モーションを提供します。
Kinetix 6200 サーボドライブは、SERCOS Interface を介して Kinetix 6000 ドライブと互換性がある統合モーション機能を提供することによって、必要なときと必要な場所で拡張機能に正確に移植することができます。
Kinetix 6200 サーボドライブは、Kinetix 6000M ドライブ・一体型システムと互換性があります。
Kinetix 6200 および Kinetix 6500 ドライブの機能およびインジケータ
2094-ACxx-Mxx-M および 2094-BCxx-Mxx-M IAM 電源モジュールの機能およびインジケータ
1 2
DC-DC+
L3L2L1
CONT EN-CONT EN+
CTRL 2CTRL 1
1 2
1
2 3
4 5
6
WVU
MBRK -MBRK +
COM PWR
DBRK -DBRK +
1 2
3 4
1 2
3 4
5 6
1
4
5
2
3
6
7
9
8
Kinetix 6200 または Kinetix 6500IAM 電源モジュール、上面図(2094-BC01-MP5-M モジュールを示す。)
Kinetix 6200 または Kinetix 6500IAM 電源モジュール、前面図
(2094-BC01-MP5-M モジュールを示す。)
番号 説明
1 制御電源 (CPD) コネクタ
2 DC バス /AC 入力電源 (IPD) コネクタ
3 コネクタイネーブル (CED) コネクタ
4 モータ・ケーブル・シールド・クランプ
5 モータ電源 (MP) コネクタ
6 モータ / 抵抗ブレーキ (BC) コネクタ
7 ノード・アドレス・スイッチ
8 電源投入インジケータ
9 取付けねじ
Pub.No. GMC-TD003C-JA-P - October 2012 19
Kinetixサーボドライブの仕様
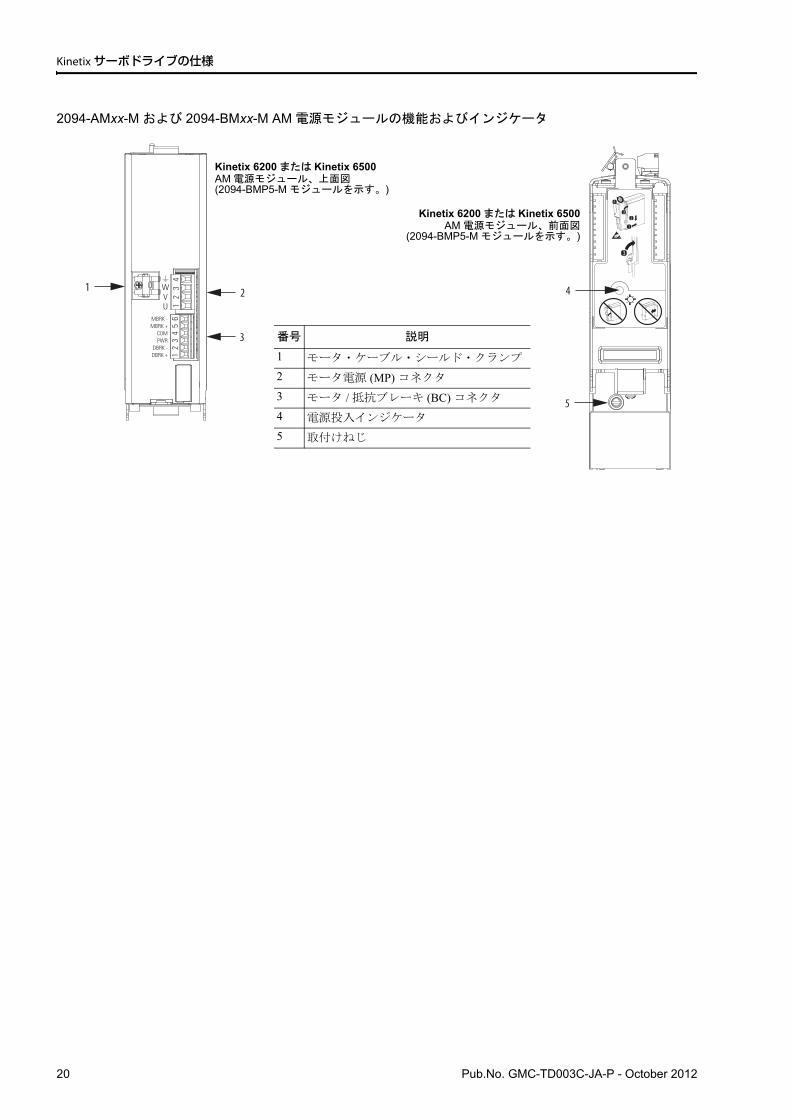
2094-AMxx-M および 2094-BMxx-M AM 電源モジュールの機能およびインジケータ
WVU
MBRK -MBRK +
COM PWR
DBRK -DBRK +
1 2
3 4
1 2
3 4
5 6
1 2
3
5
4
Kinetix 6200 または Kinetix 6500AM 電源モジュール、上面図(2094-BMP5-M モジュールを示す。)
Kinetix 6200 または Kinetix 6500AM 電源モジュール、前面図
(2094-BMP5-M モジュールを示す。)
番号 説明
1 モータ・ケーブル・シールド・クランプ
2 モータ電源 (MP) コネクタ
3 モータ / 抵抗ブレーキ (BC) コネクタ
4 電源投入インジケータ
5 取付けねじ
20 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
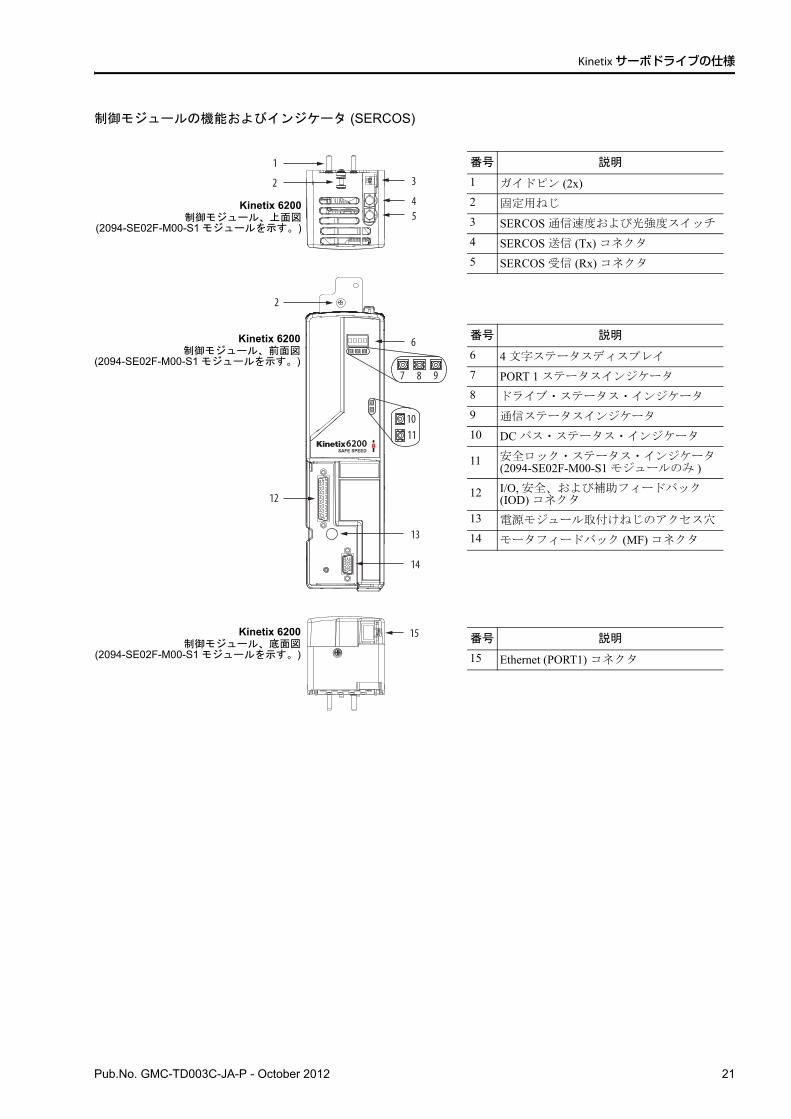
制御モジュールの機能およびインジケータ (SERCOS)
2
4
6
5
3
2
1
12
14
13
62006200SAFE SPEED
7 8 9
1011
15
Kinetix 6200制御モジュール、上面図
(2094-SE02F-M00-S1 モジュールを示す。)
Kinetix 6200制御モジュール、前面図
(2094-SE02F-M00-S1 モジュールを示す。)
番号 説明
1 ガイドピン (2x)
2 固定用ねじ
3 SERCOS 通信速度および光強度スイッチ
4 SERCOS 送信 (Tx) コネクタ
5 SERCOS 受信 (Rx) コネクタ
番号 説明
6 4 文字ステータスディスプレイ
7 PORT 1 ステータスインジケータ
8 ドライブ・ステータス・インジケータ
9 通信ステータスインジケータ
10 DC バス・ステータス・インジケータ
11 安全ロック・ステータス・インジケータ(2094-SE02F-M00-S1 モジュールのみ )
12 I/O, 安全、および補助フィードバック(IOD) コネクタ
13 電源モジュール取付けねじのアクセス穴
14 モータフィードバック (MF) コネクタ
番号 説明
15 Ethernet (PORT1) コネクタ
Kinetix 6200制御モジュール、底面図
(2094-SE02F-M00-S1 モジュールを示す。)
Pub.No. GMC-TD003C-JA-P - October 2012 21
Kinetixサーボドライブの仕様
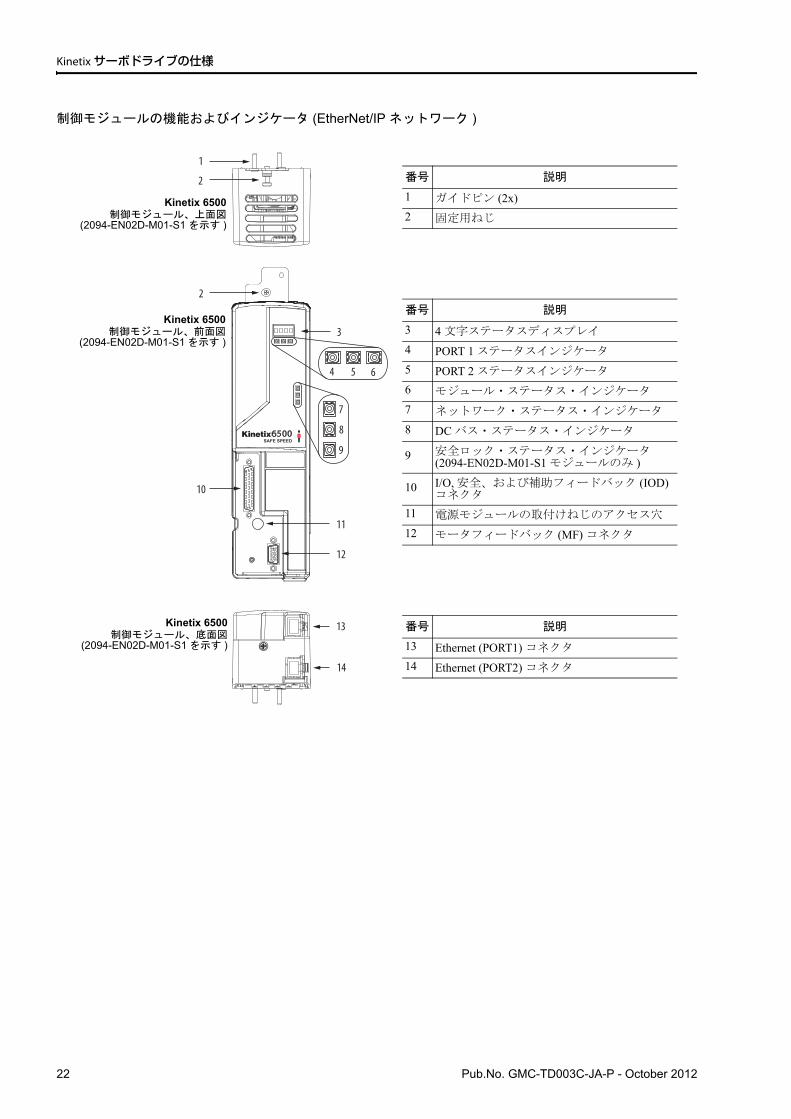
制御モジュールの機能およびインジケータ (EtherNet/IP ネットワーク )
2
3
2
7
4 5 6
1
10
12
11
13
9
8
14
番号 説明
1 ガイドピン (2x)
2 固定用ねじ
番号 説明
3 4 文字ステータスディスプレイ
4 PORT 1 ステータスインジケータ
5 PORT 2 ステータスインジケータ
6 モジュール・ステータス・インジケータ
7 ネットワーク・ステータス・インジケータ
8 DC バス・ステータス・インジケータ
9 安全ロック・ステータス・インジケータ(2094-EN02D-M01-S1 モジュールのみ )
10 I/O, 安全、および補助フィードバック (IOD)コネクタ
11 電源モジュールの取付けねじのアクセス穴
12 モータフィードバック (MF) コネクタ
番号 説明
13 Ethernet (PORT1) コネクタ
14 Ethernet (PORT2) コネクタ
Kinetix 6500制御モジュール、上面図
(2094-EN02D-M01-S1 を示す )
Kinetix 6500制御モジュール、前面図
(2094-EN02D-M01-S1 を示す )
Kinetix 6500制御モジュール、底面図
(2094-EN02D-M01-S1 を示す )
22 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
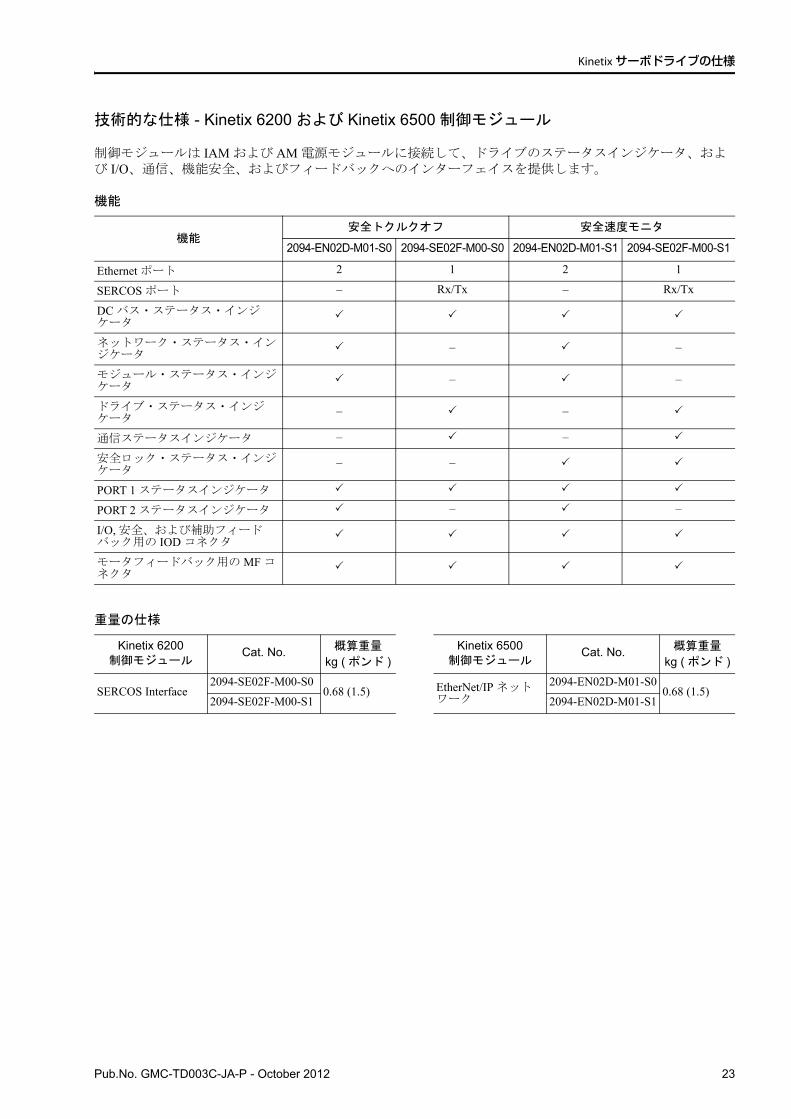
技術的な仕様 - Kinetix 6200 および Kinetix 6500 制御モジュール
制御モジュールは IAM および AM 電源モジュールに接続して、ドライブのステータスインジケータ、および I/O、通信、機能安全、およびフィードバックへのインターフェイスを提供します。
機能
重量の仕様
機能安全トクルクオフ 安全速度モニタ
2094-EN02D-M01-S0 2094-SE02F-M00-S0 2094-EN02D-M01-S1 2094-SE02F-M00-S1
Ethernet ポート 2 1 2 1
SERCOS ポート – Rx/Tx – Rx/Tx
DC バス・ステータス・インジケータ
ネットワーク・ステータス・インジケータ
– –
モジュール・ステータス・インジケータ
– –
ドライブ・ステータス・インジケータ
– –
通信ステータスインジケータ – –
安全ロック・ステータス・インジケータ
– –
PORT 1 ステータスインジケータ
PORT 2 ステータスインジケータ – –
I/O, 安全、および補助フィードバック用の IOD コネクタ
モータフィードバック用の MF コネクタ
Kinetix 6200制御モジュール
Cat. No. 概算重量
kg ( ポンド )Kinetix 6500
制御モジュールCat. No. 概算重量
kg ( ポンド )
SERCOS Interface2094-SE02F-M00-S0
0.68 (1.5) EtherNet/IP ネットワーク
2094-EN02D-M01-S00.68 (1.5)
2094-SE02F-M00-S1 2094-EN02D-M01-S1
Pub.No. GMC-TD003C-JA-P - October 2012 23
Kinetixサーボドライブの仕様
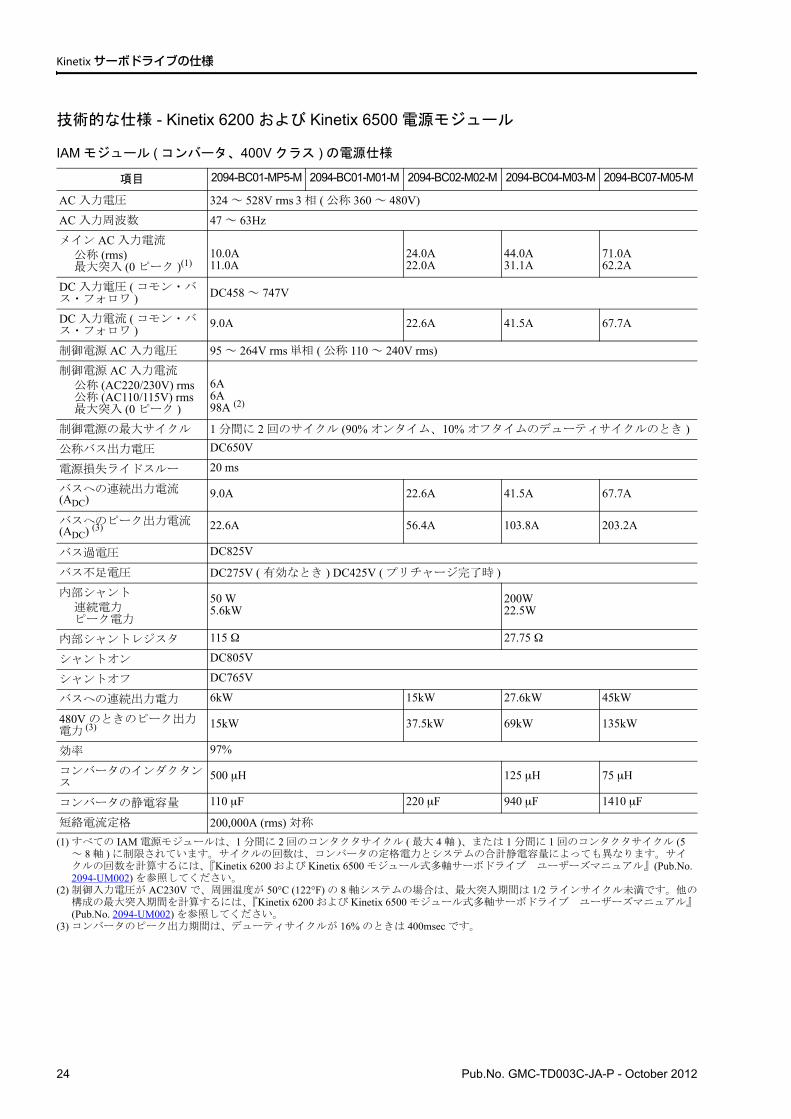
技術的な仕様 - Kinetix 6200 および Kinetix 6500 電源モジュール
IAM モジュール ( コンバータ、400V クラス ) の電源仕様
項目 2094-BC01-MP5-M 2094-BC01-M01-M 2094-BC02-M02-M 2094-BC04-M03-M 2094-BC07-M05-M
AC 入力電圧 324 ~ 528V rms 3 相 ( 公称 360 ~ 480V)
AC 入力周波数 47 ~ 63Hz
メイン AC 入力電流公称 (rms) 最大突入 (0 ピーク )(1)
(1) すべての IAM 電源モジュールは、1 分間に 2 回のコンタクタサイクル ( 最大 4 軸 )、または 1 分間に 1 回のコンタクタサイクル (5~ 8 軸 ) に制限されています。サイクルの回数は、コンバータの定格電力とシステムの合計静電容量によっても異なります。サイクルの回数を計算するには、『Kinetix 6200 および Kinetix 6500 モジュール式多軸サーボドライブ ユーザーズマニュアル』(Pub.No. 2094-UM002) を参照してください。
10.0A11.0A
24.0A22.0A
44.0A31.1A
71.0A62.2A
DC 入力電圧 ( コモン・バス・フォロワ ) DC458 ~ 747V
DC 入力電流 ( コモン・バス・フォロワ )
9.0A 22.6A 41.5A 67.7A
制御電源 AC 入力電圧 95 ~ 264V rms 単相 ( 公称 110 ~ 240V rms)
制御電源 AC 入力電流公称 (AC220/230V) rms公称 (AC110/115V) rms最大突入 (0 ピーク )
6A6A98A (2)
(2) 制御入力電圧が AC230V で、周囲温度が 50°C (122°F) の 8 軸システムの場合は、最大突入期間は 1/2 ラインサイクル未満です。他の構成の最大突入期間を計算するには、『Kinetix 6200 および Kinetix 6500 モジュール式多軸サーボドライブ ユーザーズマニュアル』(Pub.No. 2094-UM002) を参照してください。
制御電源の最大サイクル 1 分間に 2 回のサイクル (90% オンタイム、10% オフタイムのデューティサイクルのとき )
公称バス出力電圧 DC650V
電源損失ライドスルー 20 ms
バスへの連続出力電流 (ADC) 9.0A 22.6A 41.5A 67.7A
バスへのピーク出力電流(ADC) (3)
(3) コンバータのピーク出力期間は、デューティサイクルが 16% のときは 400msec です。
22.6A 56.4A 103.8A 203.2A
バス過電圧 DC825V
バス不足電圧 DC275V ( 有効なとき ) DC425V ( プリチャージ完了時 )
内部シャント連続電力ピーク電力
50 W5.6kW
200W22.5W
内部シャントレジスタ 115 27.75
シャントオン DC805V
シャントオフ DC765V
バスへの連続出力電力 6kW 15kW 27.6kW 45kW
480V のときのピーク出力電力 (3) 15kW 37.5kW 69kW 135kW
効率 97%
コンバータのインダクタンス
500 H 125 H 75 H
コンバータの静電容量 110 F 220 F 940 F 1410 F
短絡電流定格 200,000A (rms) 対称
24 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
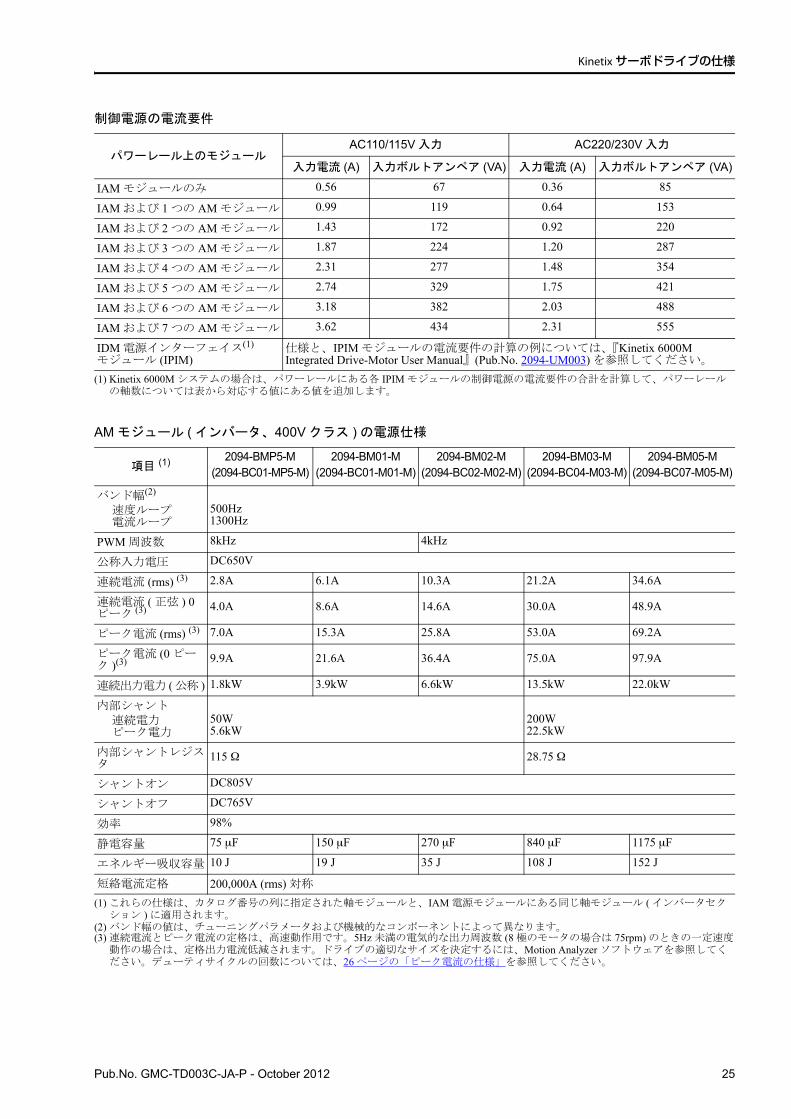
制御電源の電流要件
AM モジュール ( インバータ、400V クラス ) の電源仕様
パワーレール上のモジュールAC110/115V 入力 AC220/230V 入力
入力電流 (A) 入力ボルトアンペア (VA) 入力電流 (A) 入力ボルトアンペア (VA)
IAM モジュールのみ 0.56 67 0.36 85
IAM および 1 つの AM モジュール 0.99 119 0.64 153
IAM および 2 つの AM モジュール 1.43 172 0.92 220
IAM および 3 つの AM モジュール 1.87 224 1.20 287
IAM および 4 つの AM モジュール 2.31 277 1.48 354
IAM および 5 つの AM モジュール 2.74 329 1.75 421
IAM および 6 つの AM モジュール 3.18 382 2.03 488
IAM および 7 つの AM モジュール 3.62 434 2.31 555
IDM 電源インターフェイス(1)
モジュール (IPIM)
(1) Kinetix 6000M システムの場合は、パワーレールにある各 IPIM モジュールの制御電源の電流要件の合計を計算して、パワーレールの軸数については表から対応する値にある値を追加します。
仕様と、IPIM モジュールの電流要件の計算の例については、『Kinetix 6000M Integrated Drive-Motor User Manual』(Pub.No. 2094-UM003) を参照してください。
項目 (1)
(1) これらの仕様は、カタログ番号の列に指定された軸モジュールと、IAM 電源モジュールにある同じ軸モジュール ( インバータセクション ) に適用されます。
2094-BMP5-M(2094-BC01-MP5-M)
2094-BM01-M(2094-BC01-M01-M)
2094-BM02-M(2094-BC02-M02-M)
2094-BM03-M(2094-BC04-M03-M)
2094-BM05-M(2094-BC07-M05-M)
バンド幅(2)
速度ループ電流ループ
(2) バンド幅の値は、チューニングパラメータおよび機械的なコンポーネントによって異なります。
500Hz1300Hz
PWM 周波数 8kHz 4kHz
公称入力電圧 DC650V
連続電流 (rms) (3)
(3) 連続電流とピーク電流の定格は、高速動作用です。5Hz 未満の電気的な出力周波数 (8 極のモータの場合は 75rpm) のときの一定速度動作の場合は、定格出力電流低減されます。ドライブの適切なサイズを決定するには、Motion Analyzer ソフトウェアを参照してください。デューティサイクルの回数については、26 ページの「ピーク電流の仕様」を参照してください。
2.8A 6.1A 10.3A 21.2A 34.6A
連続電流 ( 正弦 ) 0ピーク (3) 4.0A 8.6A 14.6A 30.0A 48.9A
ピーク電流 (rms) (3) 7.0A 15.3A 25.8A 53.0A 69.2A
ピーク電流 (0 ピーク )(3) 9.9A 21.6A 36.4A 75.0A 97.9A
連続出力電力 ( 公称 ) 1.8kW 3.9kW 6.6kW 13.5kW 22.0kW
内部シャント連続電力ピーク電力
50W5.6kW
200W22.5kW
内部シャントレジスタ
115 28.75
シャントオン DC805V
シャントオフ DC765V
効率 98%
静電容量 75 F 150 F 270 F 840 F 1175 F
エネルギー吸収容量 10 J 19 J 35 J 108 J 152 J
短絡電流定格 200,000A (rms) 対称
Pub.No. GMC-TD003C-JA-P - October 2012 25
Kinetixサーボドライブの仕様
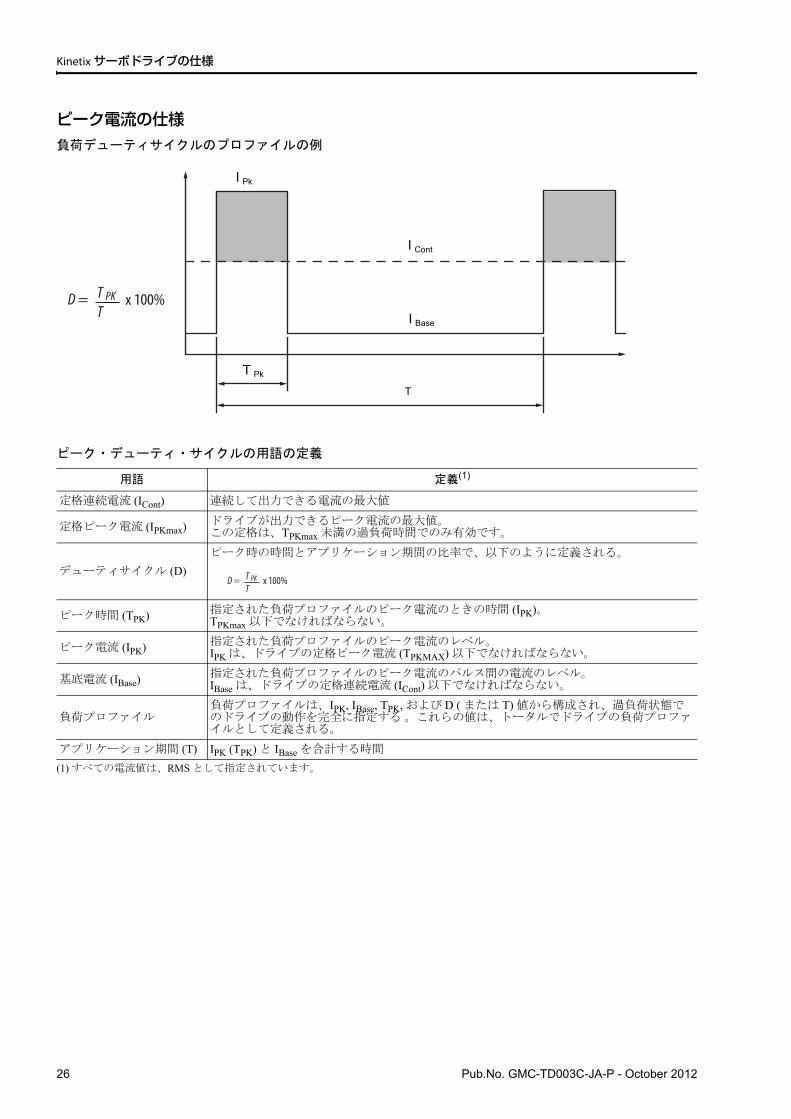
ピーク電流の仕様負荷デューティサイクルのプロファイルの例
ピーク・デューティ・サイクルの用語の定義
用語 定義(1)
(1) すべての電流値は、RMS として指定されています。
定格連続電流 (ICont) 連続して出力できる電流の最大値
定格ピーク電流 (IPKmax) ドライブが出力できるピーク電流の最大値。この定格は、TPKmax 未満の過負荷時間でのみ有効です。
デューティサイクル (D)
ピーク時の時間とアプリケーション期間の比率で、以下のように定義される。
ピーク時間 (TPK) 指定された負荷プロファイルのピーク電流のときの時間 (IPK)。TPKmax 以下でなければならない。
ピーク電流 (IPK) 指定された負荷プロファイルのピーク電流のレベル。IPK は、ドライブの定格ピーク電流 (TPKMAX) 以下でなければならない。
基底電流 (IBase)指定された負荷プロファイルのピーク電流のパルス間の電流のレベル。IBase は、ドライブの定格連続電流 (ICont) 以下でなければならない。
負荷プロファイル負荷プロファイルは、IPK, IBase, TPK, および D ( または T) 値から構成され、過負荷状態でのドライブの動作を完全に指定する 。これらの値は、トータルでドライブの負荷プロファイルとして定義される。
アプリケーション期間 (T) IPK (TPK) と IBase を合計する時間
D = TT
PK x 100%
I Pk
I Cont
I Base
T Pk
T
D = TT
PK x 100%
26 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
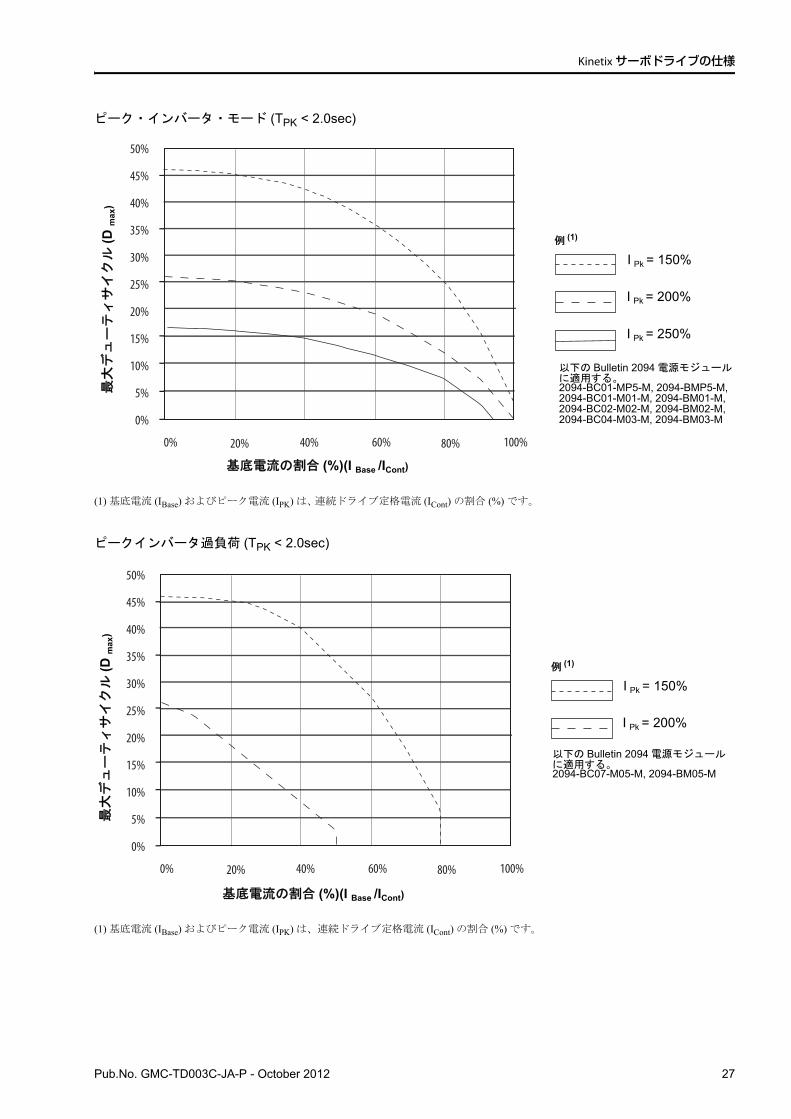
ピーク・インバータ・モード (TPK < 2.0sec)
(1) 基底電流 (IBase) およびピーク電流 (IPK) は、 連続ドライブ定格電流 (ICont) の割合 (%) です。
ピークインバータ過負荷 (TPK < 2.0sec)
(1) 基底電流 (IBase) およびピーク電流 (IPK) は、連続ドライブ定格電流 (ICont) の割合 (%) です。
0% 60% 100%
50%
45%
40%
35%
30%
25%
20%
15%
10%
5%
0%
80%20% 40%
以下の Bulletin 2094 電源モジュールに適用する。2094-BC01-MP5-M, 2094-BMP5-M, 2094-BC01-M01-M, 2094-BM01-M, 2094-BC02-M02-M, 2094-BM02-M, 2094-BC04-M03-M, 2094-BM03-M
最大
デュ
ーテ
ィサ
イク
ル(D
max
)
基底電流の割合 (%)(I Base /ICont)
例 (1)
I Pk = 150%
I Pk = 200%
I Pk = 250%
0% 60% 100%
50%
45%
40%
35%
30%
25%
20%
15%
10%
5%
0%
80%20% 40%
以下の Bulletin 2094 電源モジュールに適用する。2094-BC07-M05-M, 2094-BM05-M
最大
デュー
ティ
サイ
クル
(D m
ax)
基底電流の割合 (%)(I Base /ICont)
例 (1)
I Pk = 150%
I Pk = 200%
Pub.No. GMC-TD003C-JA-P - October 2012 27
Kinetixサーボドライブの仕様
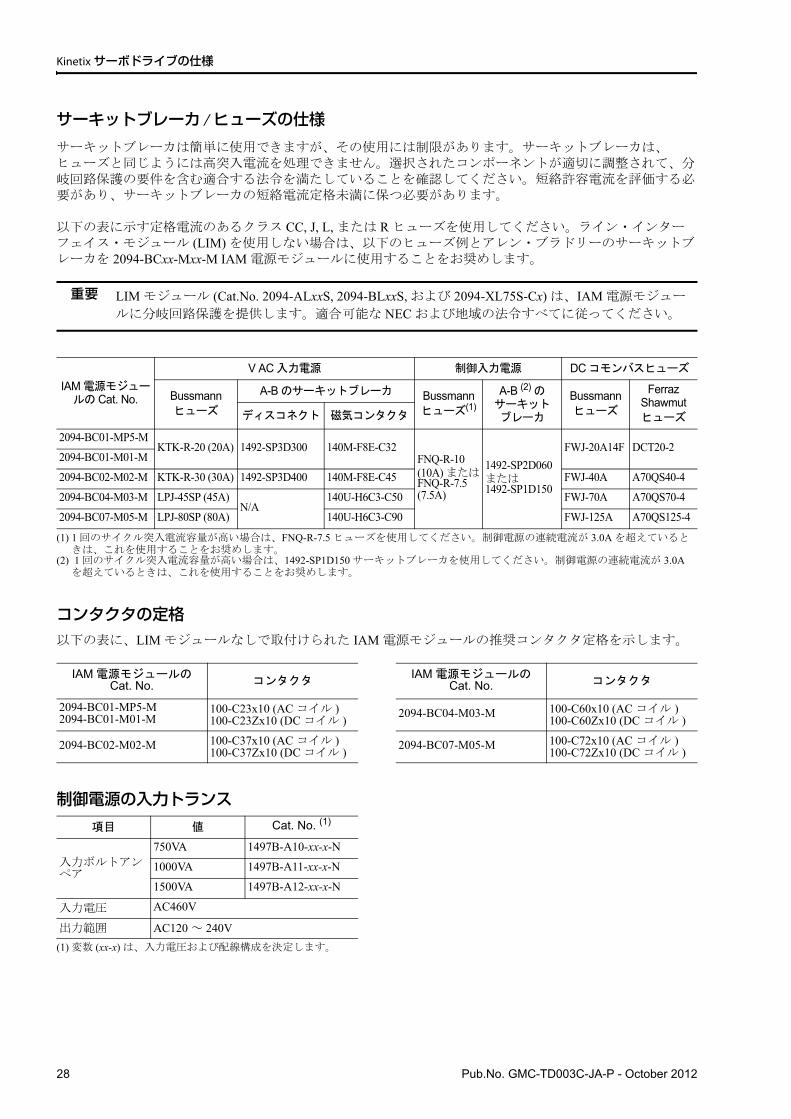
サーキットブレーカ /ヒューズの仕様サーキットブレーカは簡単に使用できますが、その使用には制限があります。サーキットブレーカは、ヒューズと同じようには高突入電流を処理できません。選択されたコンポーネントが適切に調整されて、分岐回路保護の要件を含む適合する法令を満たしていることを確認してください。短絡許容電流を評価する必要があり、サーキットブレーカの短絡電流定格未満に保つ必要があります。
以下の表に示す定格電流のあるクラス CC, J, L, または R ヒューズを使用してください。ライン・インターフェイス・モジュール (LIM) を使用しない場合は、以下のヒューズ例とアレン・ブラドリーのサーキットブレーカを 2094-BCxx-Mxx-M IAM 電源モジュールに使用することをお奨めします。
コンタクタの定格以下の表に、LIM モジュールなしで取付けられた IAM 電源モジュールの推奨コンタクタ定格を示します。
制御電源の入力トランス
重要 LIM モジュール (Cat.No. 2094-ALxxS, 2094-BLxxS, および 2094-XL75S-Cx) は、IAM 電源モジュー
ルに分岐回路保護を提供します。適合可能な NEC および地域の法令すべてに従ってください。
IAM 電源モジュールの Cat. No.
V AC 入力電源 制御入力電源 DC コモンバスヒューズ
Bussmannヒューズ
A-B のサーキットブレーカ Bussmannヒューズ(1)
(1) 1 回のサイクル突入電流容量が高い場合は、FNQ-R-7.5 ヒューズを使用してください。制御電源の連続電流が 3.0A を超えているときは、これを使用することをお奨めします。
A-B (2) のサーキットブレーカ
(2) 1 回のサイクル突入電流容量が高い場合は、1492-SP1D150 サーキットブレーカを使用してください。制御電源の連続電流が 3.0Aを超えているときは、これを使用することをお奨めします。
Bussmannヒューズ
Ferraz Shawmutヒューズディスコネクト 磁気コンタクタ
2094-BC01-MP5-MKTK-R-20 (20A) 1492-SP3D300 140M-F8E-C32
FNQ-R-10 (10A) またはFNQ-R-7.5 (7.5A)
1492-SP2D060 または1492-SP1D150
FWJ-20A14F DCT20-22094-BC01-M01-M
2094-BC02-M02-M KTK-R-30 (30A) 1492-SP3D400 140M-F8E-C45 FWJ-40A A70QS40-4
2094-BC04-M03-M LPJ-45SP (45A)N/A
140U-H6C3-C50 FWJ-70A A70QS70-4
2094-BC07-M05-M LPJ-80SP (80A) 140U-H6C3-C90 FWJ-125A A70QS125-4
IAM 電源モジュールのCat. No. コンタクタ
IAM 電源モジュールのCat. No. コンタクタ
2094-BC01-MP5-M2094-BC01-M01-M
100-C23x10 (AC コイル )100-C23Zx10 (DC コイル )
2094-BC04-M03-M 100-C60x10 (AC コイル )100-C60Zx10 (DC コイル )
2094-BC02-M02-M 100-C37x10 (AC コイル )100-C37Zx10 (DC コイル )
2094-BC07-M05-M 100-C72x10 (AC コイル )100-C72Zx10 (DC コイル )
項目 値 Cat. No. (1)
(1) 変数 (xx-x) は、入力電圧および配線構成を決定します。
入力ボルトアンペア
750VA 1497B-A10-xx-x-N
1000VA 1497B-A11-xx-x-N
1500VA 1497B-A12-xx-x-N
入力電圧 AC460V
出力範囲 AC120 ~ 240V
28 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
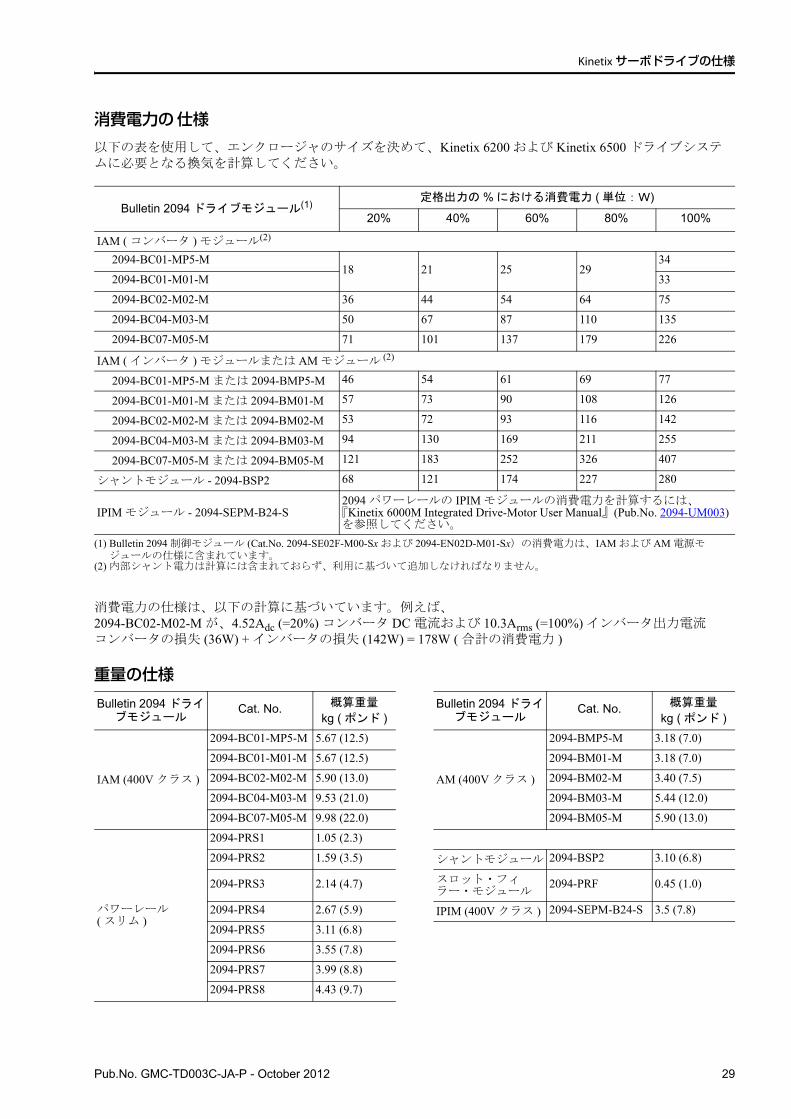
消費電力の 仕様以下の表を使用して、エンクロージャのサイズを決めて、Kinetix 6200 および Kinetix 6500 ドライブシステムに必要となる換気を計算してください。
消費電力の仕様は、以下の計算に基づいています。例えば、2094-BC02-M02-M が、4.52Adc (=20%) コンバータ DC 電流および 10.3Arms (=100%) インバータ出力電流コンバータの損失 (36W) + インバータの損失 (142W) = 178W ( 合計の消費電力 )
重量の仕様
Bulletin 2094 ドライブモジュール(1)
(1) Bulletin 2094 制御モジュール (Cat.No. 2094-SE02F-M00-Sx および 2094-EN02D-M01-Sx)の消費電力は、IAM および AM 電源モジュールの仕様に含まれています。
定格出力の % における消費電力 ( 単位:W)
20% 40% 60% 80% 100%
IAM ( コンバータ ) モジュール(2)
(2) 内部シャント電力は計算には含まれておらず、利用に基づいて追加しなければなりません。
2094-BC01-MP5-M18 21 25 29
34
2094-BC01-M01-M 33
2094-BC02-M02-M 36 44 54 64 75
2094-BC04-M03-M 50 67 87 110 135
2094-BC07-M05-M 71 101 137 179 226
IAM ( インバータ ) モジュールまたは AM モジュール (2)
2094-BC01-MP5-M または 2094-BMP5-M 46 54 61 69 77
2094-BC01-M01-M または 2094-BM01-M 57 73 90 108 126
2094-BC02-M02-M または 2094-BM02-M 53 72 93 116 142
2094-BC04-M03-M または 2094-BM03-M 94 130 169 211 255
2094-BC07-M05-M または 2094-BM05-M 121 183 252 326 407
シャントモジュール - 2094-BSP2 68 121 174 227 280
IPIM モジュール - 2094-SEPM-B24-S2094 パワーレールの IPIM モジュールの消費電力を計算するには、『Kinetix 6000M Integrated Drive-Motor User Manual』(Pub.No. 2094-UM003)を参照してください。
Bulletin 2094 ドライブモジュール
Cat. No. 概算重量
kg ( ポンド )Bulletin 2094 ドライ
ブモジュールCat. No. 概算重量
kg ( ポンド )
IAM (400V クラス )
2094-BC01-MP5-M 5.67 (12.5)
AM (400V クラス )
2094-BMP5-M 3.18 (7.0)
2094-BC01-M01-M 5.67 (12.5) 2094-BM01-M 3.18 (7.0)
2094-BC02-M02-M 5.90 (13.0) 2094-BM02-M 3.40 (7.5)
2094-BC04-M03-M 9.53 (21.0) 2094-BM03-M 5.44 (12.0)
2094-BC07-M05-M 9.98 (22.0) 2094-BM05-M 5.90 (13.0)
パワーレール( スリム )
2094-PRS1 1.05 (2.3)
2094-PRS2 1.59 (3.5) シャントモジュール 2094-BSP2 3.10 (6.8)
2094-PRS3 2.14 (4.7) スロット・フィラー・モジュール
2094-PRF 0.45 (1.0)
2094-PRS4 2.67 (5.9) IPIM (400V クラス ) 2094-SEPM-B24-S 3.5 (7.8)
2094-PRS5 3.11 (6.8)
2094-PRS6 3.55 (7.8)
2094-PRS7 3.99 (8.8)
2094-PRS8 4.43 (9.7)
Pub.No. GMC-TD003C-JA-P - October 2012 29
Kinetixサーボドライブの仕様
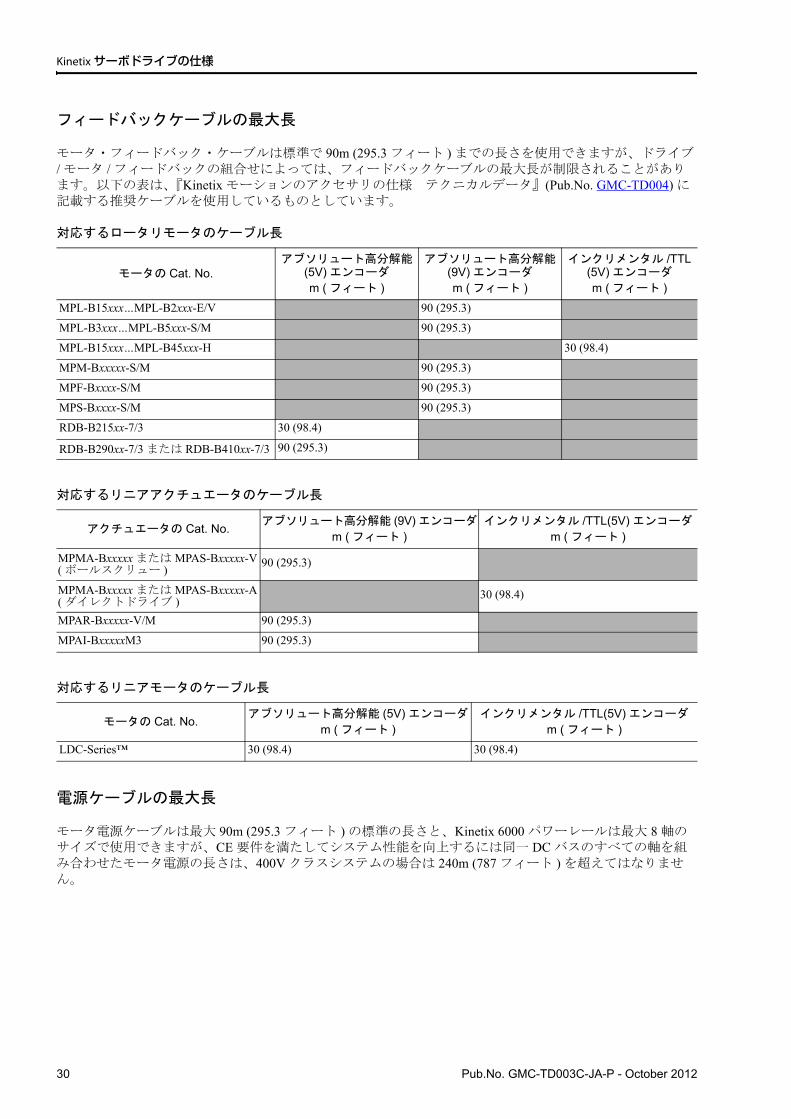
フィードバックケーブルの最大長
モータ・フィードバック・ケーブルは標準で 90m (295.3 フィート ) までの長さを使用できますが、ドライブ/ モータ / フィードバックの組合せによっては、フィードバックケーブルの最大長が制限されることがあります。以下の表は、『Kinetix モーションのアクセサリの仕様 テクニカルデータ』(Pub.No. GMC-TD004) に記載する推奨ケーブルを使用しているものとしています。
対応するロータリモータのケーブル長
対応するリニアアクチュエータのケーブル長
対応するリニアモータのケーブル長
電源ケーブルの最大長
モータ電源ケーブルは最大 90m (295.3 フィート ) の標準の長さと、Kinetix 6000 パワーレールは最大 8 軸のサイズで使用できますが、CE 要件を満たしてシステム性能を向上するには同一 DC バスのすべての軸を組み合わせたモータ電源の長さは、400V クラスシステムの場合は 240m (787 フィート ) を超えてはなりません。
モータの Cat. No.アブソリュート高分解能
(5V) エンコーダ
m ( フィート )
アブソリュート高分解能(9V) エンコーダ
m ( フィート )
インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
MPL-B15xxx…MPL-B2xxx-E/V 90 (295.3)
MPL-B3xxx…MPL-B5xxx-S/M 90 (295.3)
MPL-B15xxx…MPL-B45xxx-H 30 (98.4)
MPM-Bxxxxx-S/M 90 (295.3)
MPF-Bxxxx-S/M 90 (295.3)
MPS-Bxxxx-S/M 90 (295.3)
RDB-B215xx-7/3 30 (98.4)
RDB-B290xx-7/3 または RDB-B410xx-7/3 90 (295.3)
アクチュエータの Cat. No.アブソリュート高分解能 (9V) エンコーダ
m ( フィート )インクリメンタル /TTL(5V) エンコーダ
m ( フィート )
MPMA-Bxxxxx または MPAS-Bxxxxx-V( ボールスクリュー )
90 (295.3)
MPMA-Bxxxxx または MPAS-Bxxxxx-A( ダイレクトドライブ )
30 (98.4)
MPAR-Bxxxxx-V/M 90 (295.3)
MPAI-BxxxxxM3 90 (295.3)
モータの Cat. No.アブソリュート高分解能 (5V) エンコーダ
m ( フィート )インクリメンタル /TTL(5V) エンコーダ
m ( フィート )
LDC-Series™ 30 (98.4) 30 (98.4)
30 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
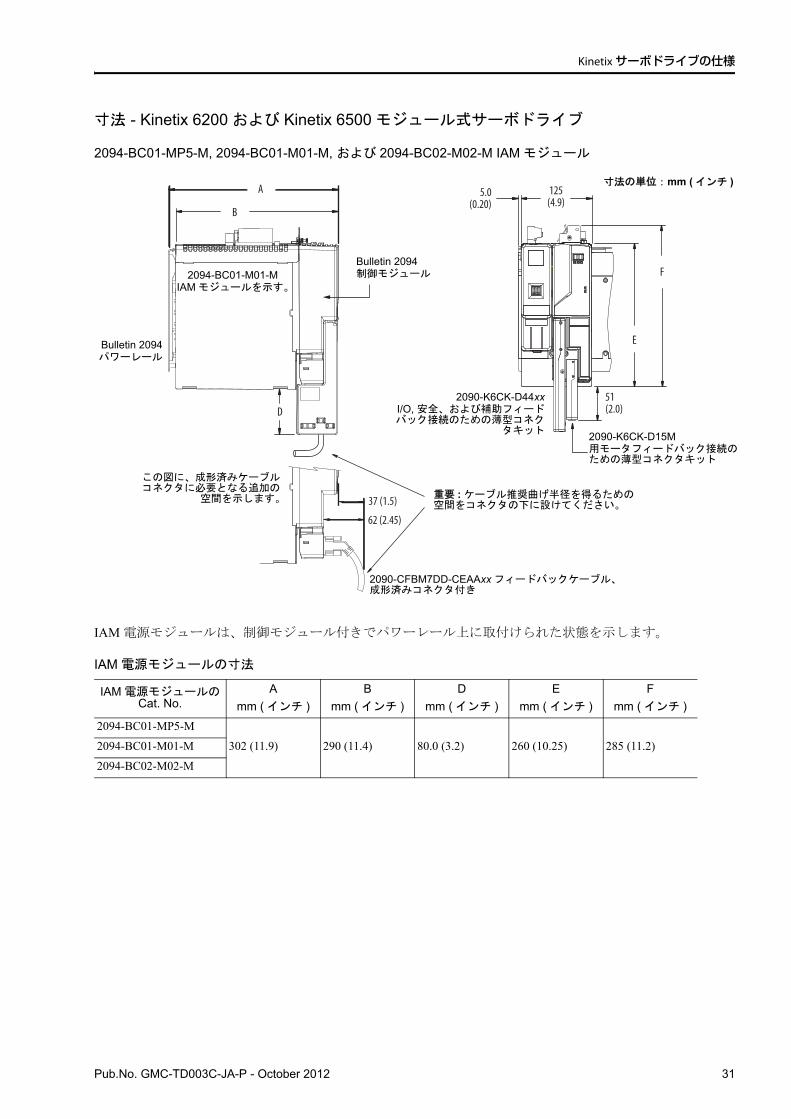
寸法 - Kinetix 6200 および Kinetix 6500 モジュール式サーボドライブ
2094-BC01-MP5-M, 2094-BC01-M01-M, および 2094-BC02-M02-M IAM モジュール
IAM 電源モジュールは、制御モジュール付きでパワーレール上に取付けられた状態を示します。
IAM 電源モジュールの寸法
IAM 電源モジュールのCat. No.
A
mm ( インチ )
B
mm ( インチ )
D
mm ( インチ )
E
mm ( インチ )
F
mm ( インチ )
2094-BC01-MP5-M
302 (11.9) 290 (11.4) 80.0 (3.2) 260 (10.25) 285 (11.2)2094-BC01-M01-M
2094-BC02-M02-M
125(4.9)
B
A
D
F
E
5.0(0.20)
51(2.0)
62 (2.45)
37 (1.5)
寸法の単位:mm ( インチ )
2094-BC01-M01-M IAM モジュールを示す。
Bulletin 2094制御モジュール
2090-K6CK-D44xxI/O, 安全、および補助フィードバック接続のための薄型コネク
タキット2090-K6CK-D15M用モータフィードバック接続のための薄型コネクタキット
Bulletin 2094パワーレール
重要 : ケーブル推奨曲げ半径を得るための空間をコネクタの下に設けてください。
2090-CFBM7DD-CEAAxx フィードバックケーブル、成形済みコネクタ付き
この図に、成形済みケーブルコネクタに必要となる追加の
空間を示します。
Pub.No. GMC-TD003C-JA-P - October 2012 31
Kinetixサーボドライブの仕様
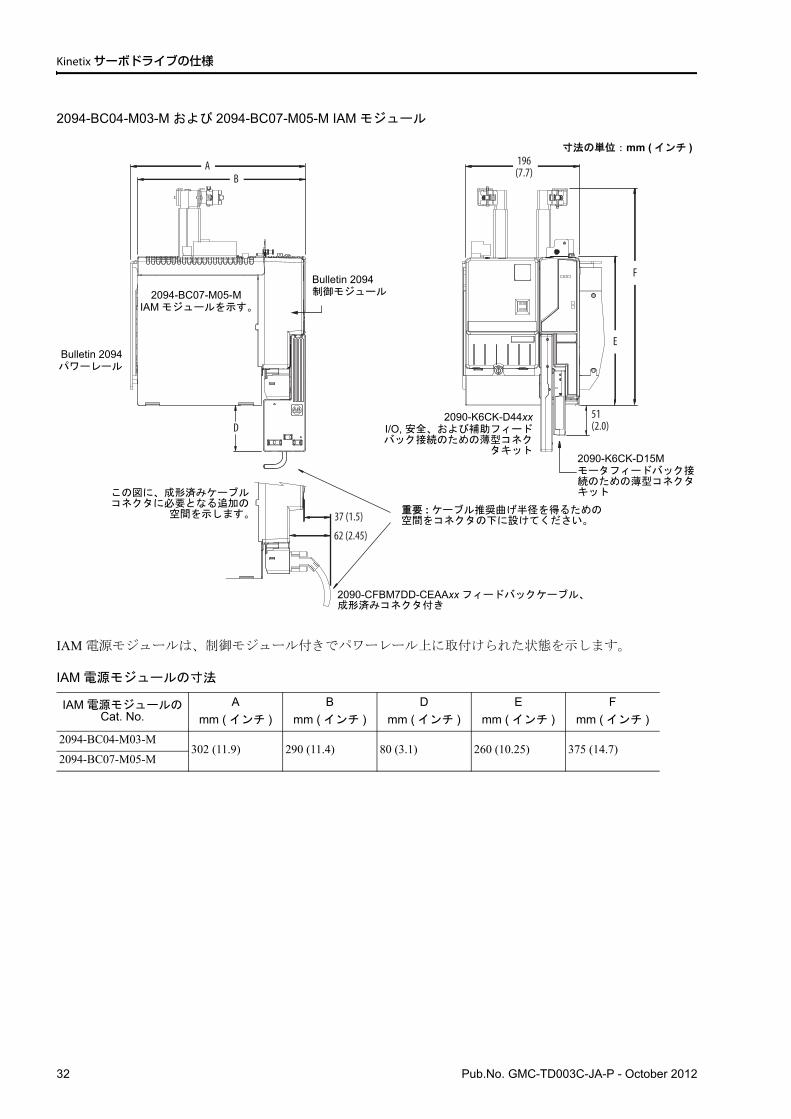
2094-BC04-M03-M および 2094-BC07-M05-M IAM モジュール
IAM 電源モジュールは、制御モジュール付きでパワーレール上に取付けられた状態を示します。
IAM 電源モジュールの寸法
IAM 電源モジュールのCat. No.
A
mm ( インチ )
B
mm ( インチ )
D
mm ( インチ )
E
mm ( インチ )
F
mm ( インチ )
2094-BC04-M03-M302 (11.9) 290 (11.4) 80 (3.1) 260 (10.25) 375 (14.7)
2094-BC07-M05-M
E
F
AB
196(7.7)
51(2.0)D
62 (2.45)
37 (1.5)
寸法の単位:mm ( インチ )
2094-BC07-M05-M IAM モジュールを示す。
Bulletin 2094制御モジュール
2090-K6CK-D44xxI/O, 安全、および補助フィードバック接続のための薄型コネク
タキット2090-K6CK-D15Mモータフィードバック接続のための薄型コネクタキット
Bulletin 2094パワーレール
重要 : ケーブル推奨曲げ半径を得るための空間をコネクタの下に設けてください。
2090-CFBM7DD-CEAAxx フィードバックケーブル、成形済みコネクタ付き
この図に、成形済みケーブルコネクタに必要となる追加の
空間を示します。
32 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
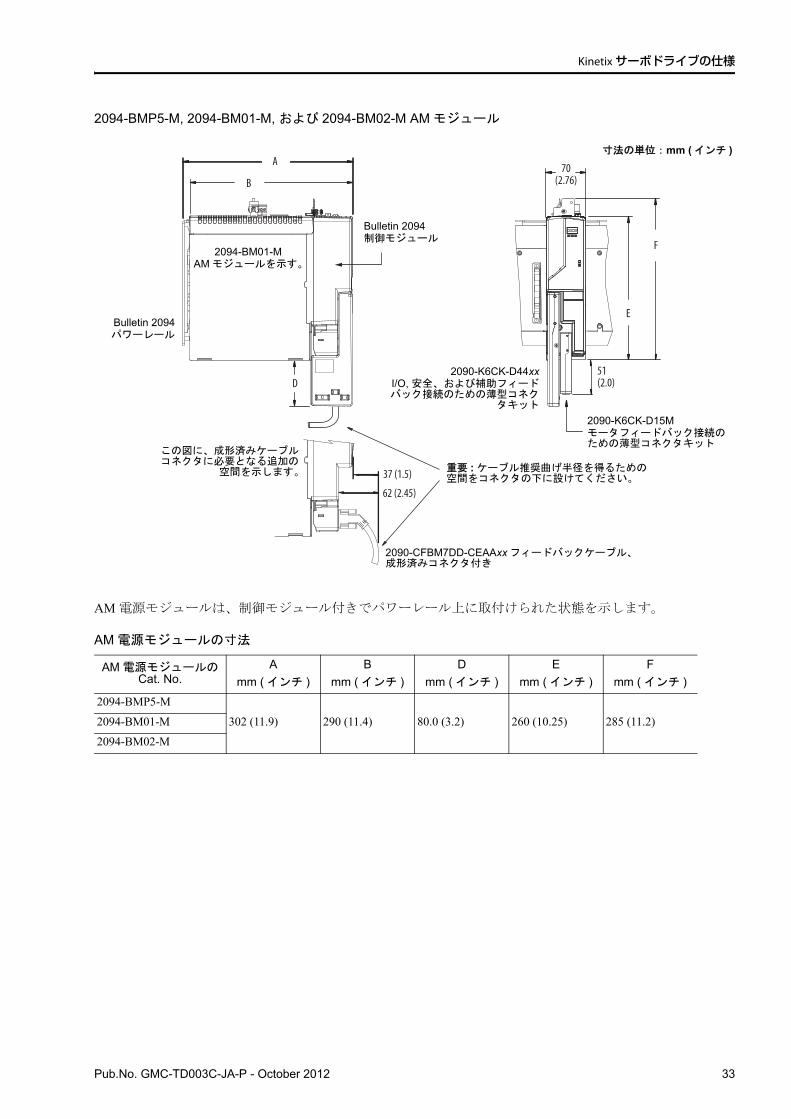
2094-BMP5-M, 2094-BM01-M, および 2094-BM02-M AM モジュール
AM 電源モジュールは、制御モジュール付きでパワーレール上に取付けられた状態を示します。
AM 電源モジュールの寸法
AM 電源モジュールのCat. No.
A
mm ( インチ )
B
mm ( インチ )
D
mm ( インチ )
E
mm ( インチ )
F
mm ( インチ )
2094-BMP5-M
302 (11.9) 290 (11.4) 80.0 (3.2) 260 (10.25) 285 (11.2)2094-BM01-M
2094-BM02-M
70(2.76)
A
D
F
E
B
51(2.0)
62 (2.45)
37 (1.5)
寸法の単位:mm ( インチ )
2094-BM01-M AM モジュールを示す。
Bulletin 2094制御モジュール
2090-K6CK-D44xxI/O, 安全、および補助フィードバック接続のための薄型コネク
タキット
2090-K6CK-D15Mモータフィードバック接続のための薄型コネクタキット
Bulletin 2094パワーレール
重要 : ケーブル推奨曲げ半径を得るための空間をコネクタの下に設けてください。
2090-CFBM7DD-CEAAxx フィードバックケーブル、成形済みコネクタ付き
この図に、成形済みケーブルコネクタに必要となる追加の
空間を示します。
Pub.No. GMC-TD003C-JA-P - October 2012 33
Kinetixサーボドライブの仕様
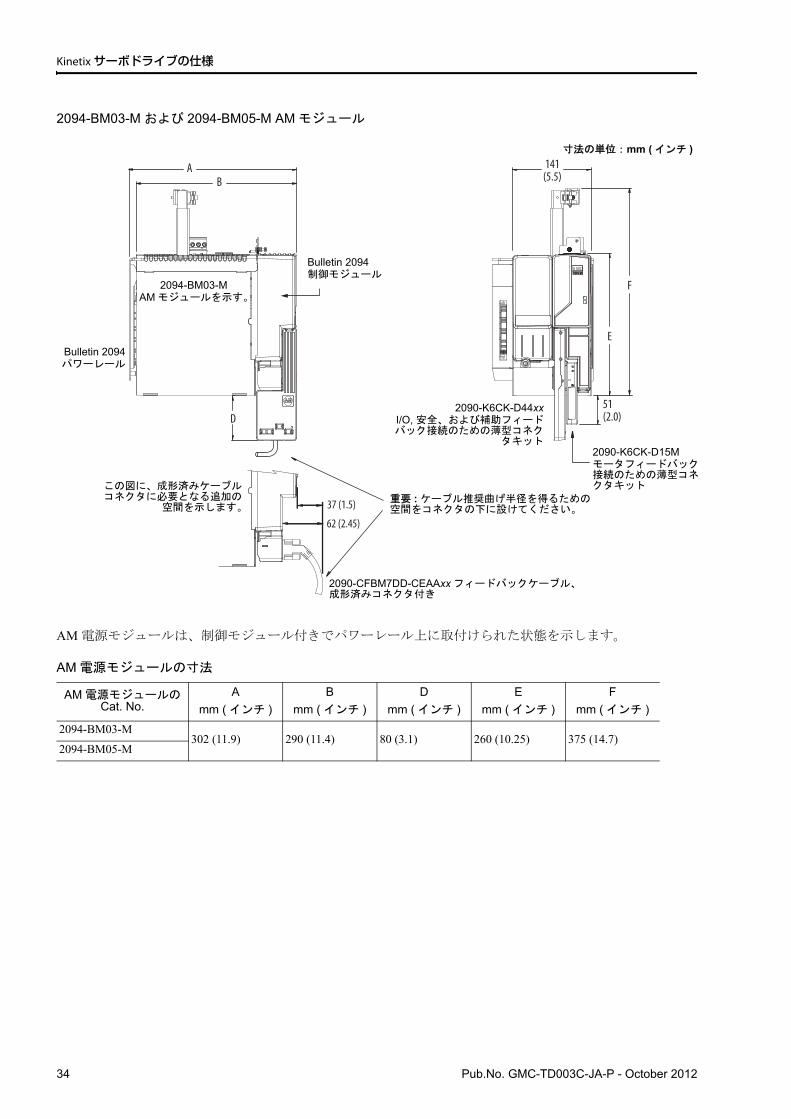
2094-BM03-M および 2094-BM05-M AM モジュール
AM 電源モジュールは、制御モジュール付きでパワーレール上に取付けられた状態を示します。
AM 電源モジュールの寸法
AM 電源モジュールのCat. No.
A
mm ( インチ )
B
mm ( インチ )
D
mm ( インチ )
E
mm ( インチ )
F
mm ( インチ )
2094-BM03-M302 (11.9) 290 (11.4) 80 (3.1) 260 (10.25) 375 (14.7)
2094-BM05-M
A
F
B
D
141(5.5)
E
51(2.0)
62 (2.45)
37 (1.5)
寸法の単位:mm ( インチ )
2090-K6CK-D44xxI/O, 安全、および補助フィードバック接続のための薄型コネク
タキット
Bulletin 2094パワーレール
2094-BM03-M AM モジュールを示す。
Bulletin 2094制御モジュール
2090-K6CK-D15Mモータフィードバック接続のための薄型コネクタキット
重要 : ケーブル推奨曲げ半径を得るための空間をコネクタの下に設けてください。
2090-CFBM7DD-CEAAxx フィードバックケーブル、成形済みコネクタ付き
この図に、成形済みケーブルコネクタに必要となる追加の
空間を示します。
34 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
環境条件 - Kinetix 6200 および Kinetix 6500 モジュール式サーボドライブ
認可 - Kinetix 6200 および Kinetix 6500 モジュール式サーボドライブ
項目 動作範囲 保管範囲 ( 非動作時 )
周囲温度 0 ~ 50°C (32 ~ 122°F) -40 ~ 70°C (-40 ~ 158F)
相対湿度 5 ~ 95% ( 結露なきこと ) 5 ~ 95% ( 結露なきこと )
高度1000m (3281 フィート )3000m (9843 フィート ) ディレーティング付き
3000m (9843 フィート ) ( 輸送時 )
振動0.35mm (0.014 インチ ) 二重振幅のとき 5 ~ 55Hz、連続変位、2.0G ピーク一定加速のとき 55 ~ 500Hz (3 つの相互に直角の方向で各方向に 10 スウィープ )
衝撃 15G, 11msec 正弦波の半周期パルス (3 つの相互に直角の方向で各方向に 3 パルス )
承認機関(1)
(1) 製品がマークされているときは、適合宣言書について http://www.ab.com を参照してください。
規格
c-UL-us (2)
(2) Underwriters Laboratories Inc. では、これらの製品のセーフオフ、安全トルクオフ、または安全速度モニタオプションを評価していません。
米国とカナダの安全規格に対して UL リスト (UL 508C File E59272)
ソリッドステートのモータ過負荷保護は、UL 508C (UL File E59272) を満たすように UL で調査されたモータのピーク定格に基づくピーク電流制限で、モータ定格の 110% に達したときにモータ電流の動的なフォルドバックを提供する。
CE
EU 2004/108/EC EMC 指令は、以下に準拠している。• EN 61800-3:2004: 可変速電力ドライブシステム - パート 3; • EMC 要件および特定のテスト方法
EU 2006/95/EC 低電圧指令は、以下に準拠している。• EN 61800-5-1:2007 - 可変速電力ドライブシステム• EN 50178:1997 - 電源取付けに使用する電気装置
機能安全
機能安全について TÜV 認可: EN 61800-5-2, EN 61508, および EN 62061 に従って SIL CL3 までEN ISO 13849-1 に従って安全遂行レベル PLe およびカテゴリ 4 まで
『Kinetix 6200 and Kinetix 6500 Safe Speed Monitoring Safety Reference Manual』 (Pub.No. 2094-RM001) および『Kinetix 6200 および Kinetix 6500 安全トルクオフ セーフティ・リファレンス・マニュアル』 (Pub.No. 2094-RM002) に説明するようにしている場合
C-Tick
オーストラリア無線通信法令は、以下に準拠している。• 無線通信法令 : 1992• 無線通信 ( 電磁適合性 ) 規格 : 1998• 無線通信 ( ラベリングの遵守 - 偶発的なエミッション ) 通知書 : 1998• AS/NZS CISPR 11: 2002 ( グループ 2, クラス A)
KC韓国の放送および通信機器の適合認証 / 登録は、以下に準拠している。• 電波法、第 3 条の第 58-2 項
• 登録番号:KCC-REM-RAA-2094
ODVA EtherNet/IP 適合がテスト済み
Pub.No. GMC-TD003C-JA-P - October 2012 35
Kinetixサーボドライブの仕様
Kinetix 6000 多軸サーボドライブ
Kinetix 6000 多軸サーボドライブは、最も過酷なアプリケーションであっても素早く簡単に、コスト効率よく処理できるようにパワフルで平易になっています。革新的な設計と取付け機能と共に高度な制御機能を使用することによって、Kinetix 6000ドライブはシステム性能を大幅に向上しながら、時間と費用をセーブできます。コンパクトなサイズ、配線が簡単で、使いやすいコンポーネントであるため、Kinetix 6000 ドライブは OEMとエンドユーザの両方にとって最適な選択になります。Kinetix 6000 ドライブのターゲットアプリケーションには、梱包、マテリアルハンドリング、加工、および組立があります。
Kinetix 6000 サーボドライブは、SERCOS Interface を介して統合モーション機能を提供し、Kinetix 6200 ドライブと互換性があるために、必要なときに必要な場所で拡張機能を正確に移植できます。
Kinetix 6000 サーボドライブは、Kinetix 6000M ドライブ・モータ一体型システムと互換性があります。
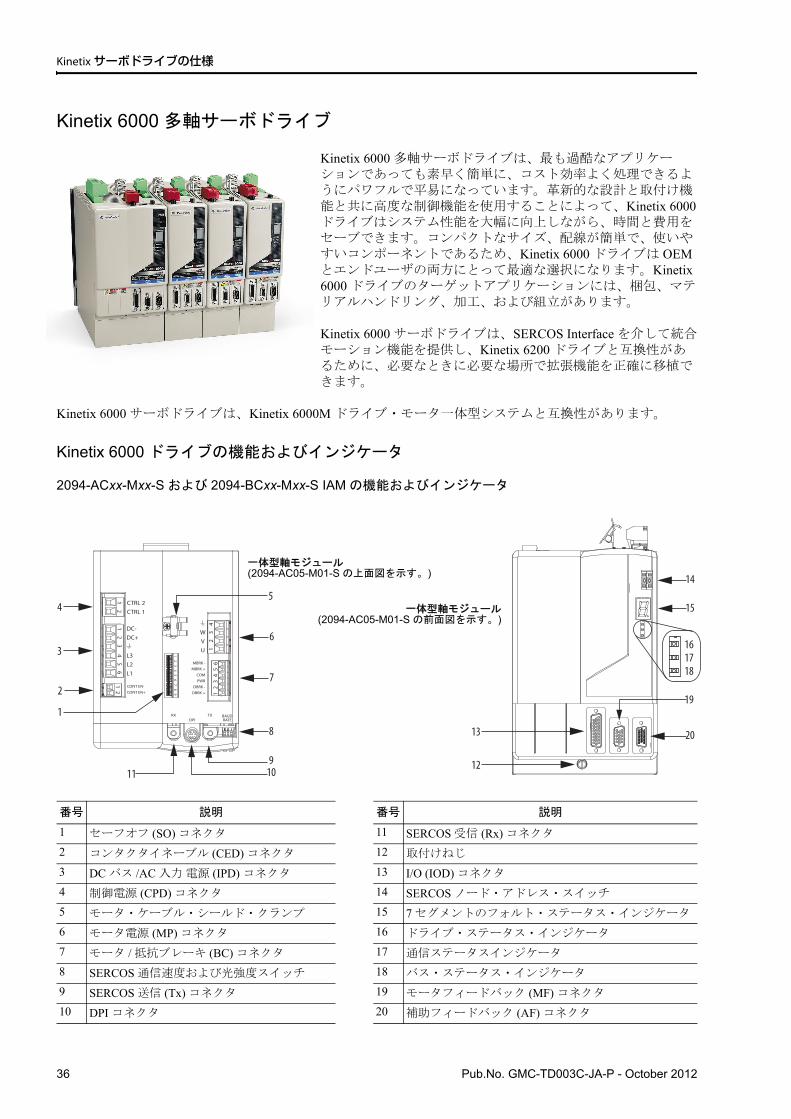
Kinetix 6000 ドライブの機能およびインジケータ
2094-ACxx-Mxx-S および 2094-BCxx-Mxx-S IAM の機能およびインジケータ
番号 説明 番号 説明
1 セーフオフ (SO) コネクタ 11 SERCOS 受信 (Rx) コネクタ
2 コンタクタイネーブル (CED) コネクタ 12 取付けねじ
3 DC バス /AC 入力 電源 (IPD) コネクタ 13 I/O (IOD) コネクタ
4 制御電源 (CPD) コネクタ 14 SERCOS ノード・アドレス・スイッチ
5 モータ・ケーブル・シールド・クランプ 15 7 セグメントのフォルト・ステータス・インジケータ
6 モータ電源 (MP) コネクタ 16 ドライブ・ステータス・インジケータ
7 モータ / 抵抗ブレーキ (BC) コネクタ 17 通信ステータスインジケータ
8 SERCOS 通信速度および光強度スイッチ 18 バス・ステータス・インジケータ
9 SERCOS 送信 (Tx) コネクタ 19 モータフィードバック (MF) コネクタ
10 DPI コネクタ 20 補助フィードバック (AF) コネクタ
BAUDRATE
TXRXDPI
DC-DC+
L3L2L1
CONT EN-CONT EN+
WVU
MBRK -MBRK +
COM PWR
DBRK -DBRK +
CTRL 2CTRL 1
1
2
3
41
2 3
4 5
6
1 2 1 2 3 4 5 6
1 2
1 2 3 4 5 6 7 8 9
910
6
7
8
2
3
4
1
5
19
14
15
161718
12
13 20
11
一体型軸モジュール(2094-AC05-M01-S の上面図を示す。)
一体型軸モジュール(2094-AC05-M01-S の前面図を示す。)
36 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
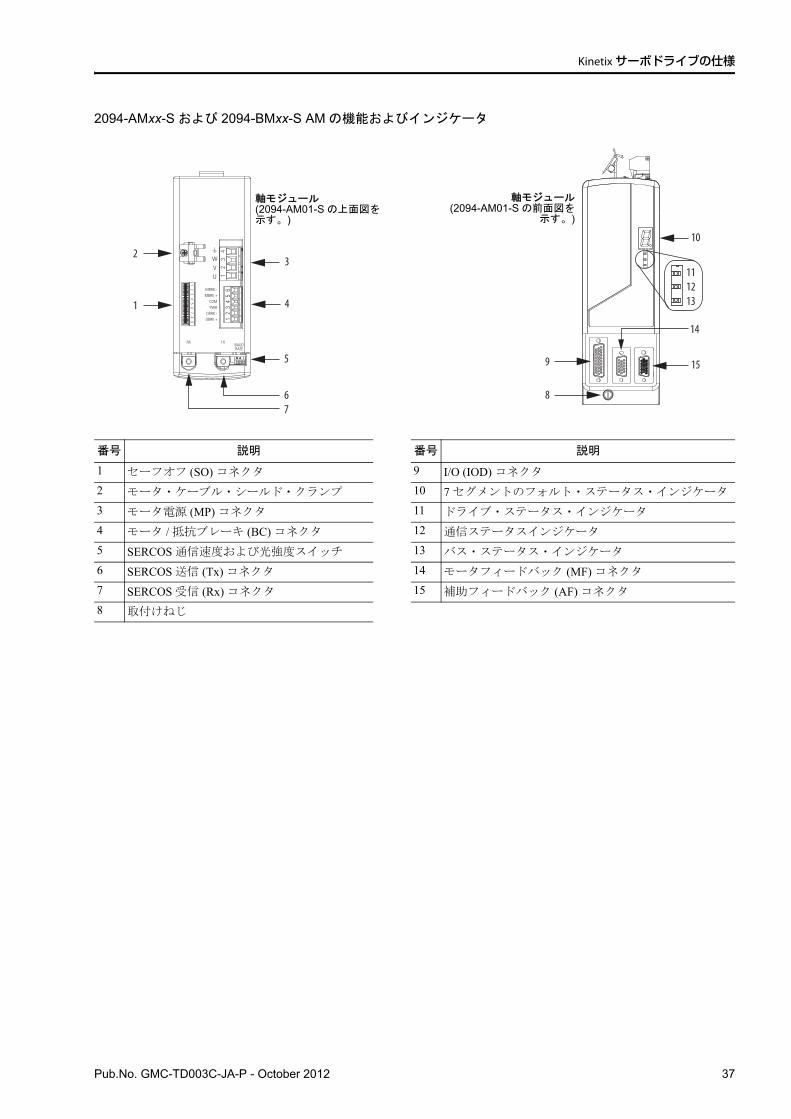
2094-AMxx-S および 2094-BMxx-S AM の機能およびインジケータ
番号 説明 番号 説明
1 セーフオフ (SO) コネクタ 9 I/O (IOD) コネクタ
2 モータ・ケーブル・シールド・クランプ 10 7 セグメントのフォルト・ステータス・インジケータ
3 モータ電源 (MP) コネクタ 11 ドライブ・ステータス・インジケータ
4 モータ / 抵抗ブレーキ (BC) コネクタ 12 通信ステータスインジケータ
5 SERCOS 通信速度および光強度スイッチ 13 バス・ステータス・インジケータ
6 SERCOS 送信 (Tx) コネクタ 14 モータフィードバック (MF) コネクタ
7 SERCOS 受信 (Rx) コネクタ 15 補助フィードバック (AF) コネクタ
8 取付けねじ
BAUDRATE
TXRX
WVU
MBRK -MBRK +
COM PWR
DBRK -DBRK +
1 2
3
41
2 3
4 5
6
1 2 3 4 5 6 7 8 9
1
23
4
5
67
14
10
111213
15
8
9
軸モジュール(2094-AM01-S の上面図を示す。)
軸モジュール(2094-AM01-S の前面図を
示す。)
Pub.No. GMC-TD003C-JA-P - October 2012 37
Kinetixサーボドライブの仕様
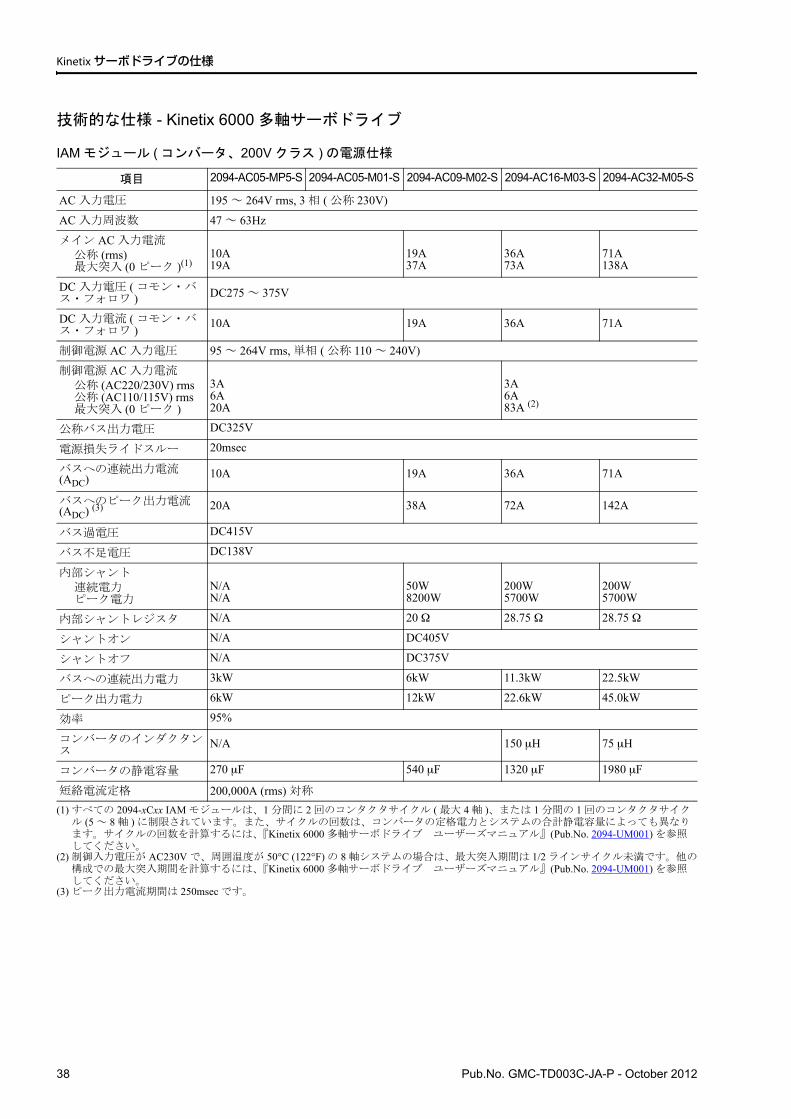
技術的な仕様 - Kinetix 6000 多軸サーボドライブ
IAM モジュール ( コンバータ、200V クラス ) の電源仕様
項目 2094-AC05-MP5-S 2094-AC05-M01-S 2094-AC09-M02-S 2094-AC16-M03-S 2094-AC32-M05-S
AC 入力電圧 195 ~ 264V rms, 3 相 ( 公称 230V)
AC 入力周波数 47 ~ 63Hz
メイン AC 入力電流公称 (rms)最大突入 (0 ピーク )(1)
(1) すべての 2094-xCxx IAM モジュールは、1 分間に 2 回のコンタクタサイクル ( 最大 4 軸 )、または 1 分間の 1 回のコンタクタサイクル (5 ~ 8 軸 ) に制限されています。また、サイクルの回数は、コンバータの定格電力とシステムの合計静電容量によっても異なります。サイクルの回数を計算するには、『Kinetix 6000 多軸サーボドライブ ユーザーズマニュアル』(Pub.No. 2094-UM001) を参照してください。
10A19A
19A37A
36A73A
71A138A
DC 入力電圧 ( コモン・バス・フォロワ ) DC275 ~ 375V
DC 入力電流 ( コモン・バス・フォロワ )
10A 19A 36A 71A
制御電源 AC 入力電圧 95 ~ 264V rms, 単相 ( 公称 110 ~ 240V)
制御電源 AC 入力電流公称 (AC220/230V) rms公称 (AC110/115V) rms最大突入 (0 ピーク )
3A6A20A
3A6A83A (2)
(2) 制御入力電圧が AC230V で、周囲温度が 50°C (122°F) の 8 軸システムの場合は、最大突入期間は 1/2 ラインサイクル未満です。他の構成での最大突入期間を計算するには、『Kinetix 6000 多軸サーボドライブ ユーザーズマニュアル』(Pub.No. 2094-UM001) を参照してください。
公称バス出力電圧 DC325V
電源損失ライドスルー 20msec
バスへの連続出力電流 (ADC) 10A 19A 36A 71A
バスへのピーク出力電流(ADC) (3)
(3) ピーク出力電流期間は 250msec です。
20A 38A 72A 142A
バス過電圧 DC415V
バス不足電圧 DC138V
内部シャント連続電力ピーク電力
N/AN/A
50W8200W
200W5700W
200W5700W
内部シャントレジスタ N/A 20 28.75 28.75
シャントオン N/A DC405V
シャントオフ N/A DC375V
バスへの連続出力電力 3kW 6kW 11.3kW 22.5kW
ピーク出力電力 6kW 12kW 22.6kW 45.0kW
効率 95%
コンバータのインダクタンス
N/A 150 H 75 H
コンバータの静電容量 270 F 540 F 1320 F 1980 F
短絡電流定格 200,000A (rms) 対称
38 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
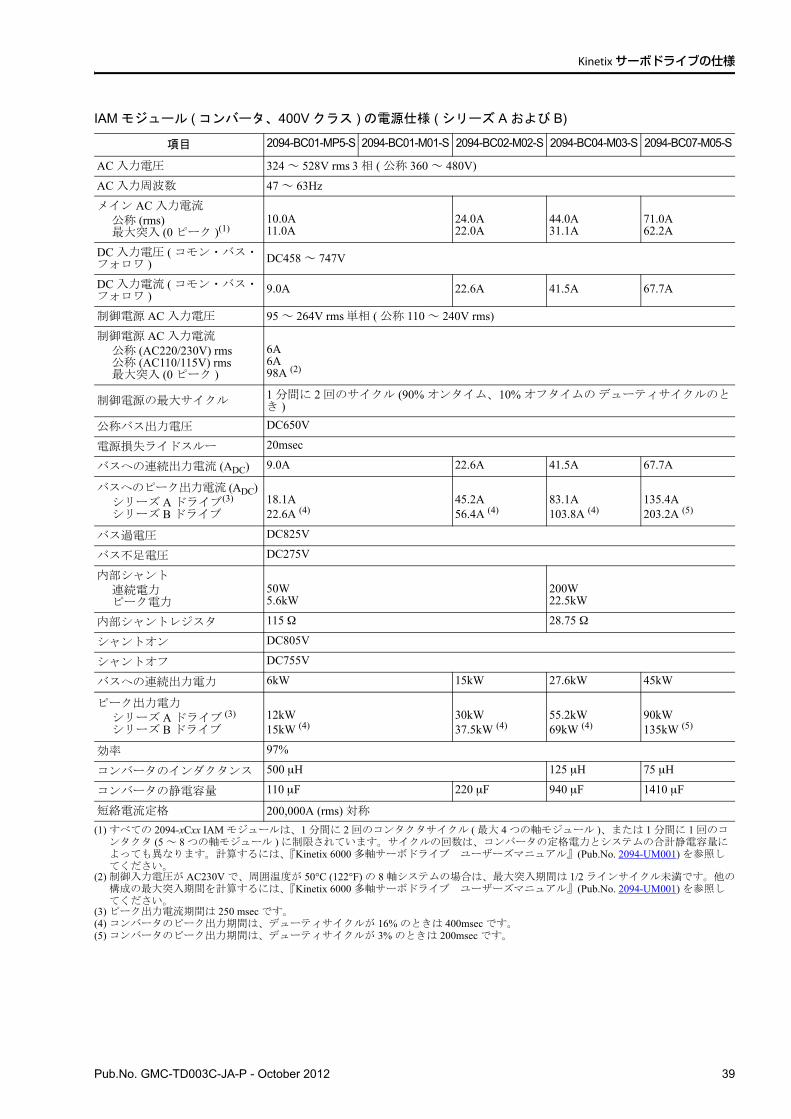
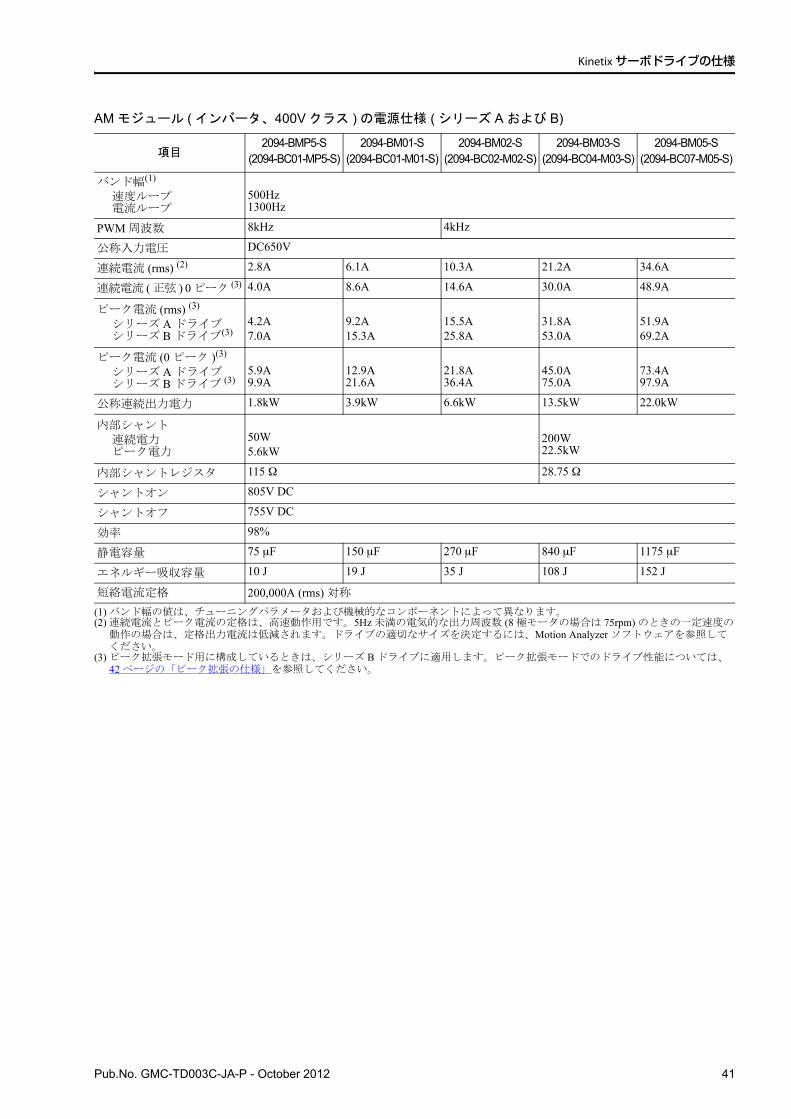
IAM モジュール ( コンバータ、400V クラス ) の電源仕様 ( シリーズ A および B)
項目 2094-BC01-MP5-S 2094-BC01-M01-S 2094-BC02-M02-S 2094-BC04-M03-S 2094-BC07-M05-S
AC 入力電圧 324 ~ 528V rms 3 相 ( 公称 360 ~ 480V)
AC 入力周波数 47 ~ 63Hz
メイン AC 入力電流公称 (rms) 最大突入 (0 ピーク )(1)
(1) すべての 2094-xCxx IAM モジュールは、1 分間に 2 回のコンタクタサイクル ( 最大 4 つの軸モジュール )、または 1 分間に 1 回のコンタクタ (5 ~ 8 つの軸モジュール ) に制限されています。サイクルの回数は、コンバータの定格電力とシステムの合計静電容量によっても異なります。計算するには、『Kinetix 6000 多軸サーボドライブ ユーザーズマニュアル』(Pub.No. 2094-UM001) を参照してください。
10.0A11.0A
24.0A22.0A
44.0A31.1A
71.0A62.2A
DC 入力電圧 ( コモン・バス・フォロワ ) DC458 ~ 747V
DC 入力電流 ( コモン・バス・フォロワ )
9.0A 22.6A 41.5A 67.7A
制御電源 AC 入力電圧 95 ~ 264V rms 単相 ( 公称 110 ~ 240V rms)
制御電源 AC 入力電流公称 (AC220/230V) rms公称 (AC110/115V) rms最大突入 (0 ピーク )
6A6A98A (2)
(2) 制御入力電圧が AC230V で、周囲温度が 50°C (122°F) の 8 軸システムの場合は、最大突入期間は 1/2 ラインサイクル未満です。他の構成の最大突入期間を計算するには、『Kinetix 6000 多軸サーボドライブ ユーザーズマニュアル』(Pub.No. 2094-UM001) を参照してください。
制御電源の最大サイクル1 分間に 2 回のサイクル (90% オンタイム、10% オフタイムの デューティサイクルのとき )
公称バス出力電圧 DC650V
電源損失ライドスルー 20msec
バスへの連続出力電流 (ADC) 9.0A 22.6A 41.5A 67.7A
バスへのピーク出力電流 (ADC)シリーズ A ドライブ(3)
シリーズ B ドライブ
(3) ピーク出力電流期間は 250 msec です。
18.1A22.6A (4)
(4) コンバータのピーク出力期間は、デューティサイクルが 16% のときは 400msec です。
45.2A56.4A (4)
83.1A103.8A (4)
135.4A203.2A (5)
(5) コンバータのピーク出力期間は、デューティサイクルが 3% のときは 200msec です。
バス過電圧 DC825V
バス不足電圧 DC275V
内部シャント連続電力ピーク電力
50W5.6kW
200W22.5kW
内部シャントレジスタ 115 28.75
シャントオン DC805V
シャントオフ DC755V
バスへの連続出力電力 6kW 15kW 27.6kW 45kW
ピーク出力電力 シリーズ A ドライブ (3)
シリーズ B ドライブ
12kW 15kW (4)
30kW37.5kW (4)
55.2kW69kW (4)
90kW135kW (5)
効率 97%
コンバータのインダクタンス 500 H 125 H 75 H
コンバータの静電容量 110 F 220 F 940 F 1410 F
短絡電流定格 200,000A (rms) 対称
Pub.No. GMC-TD003C-JA-P - October 2012 39
Kinetixサーボドライブの仕様
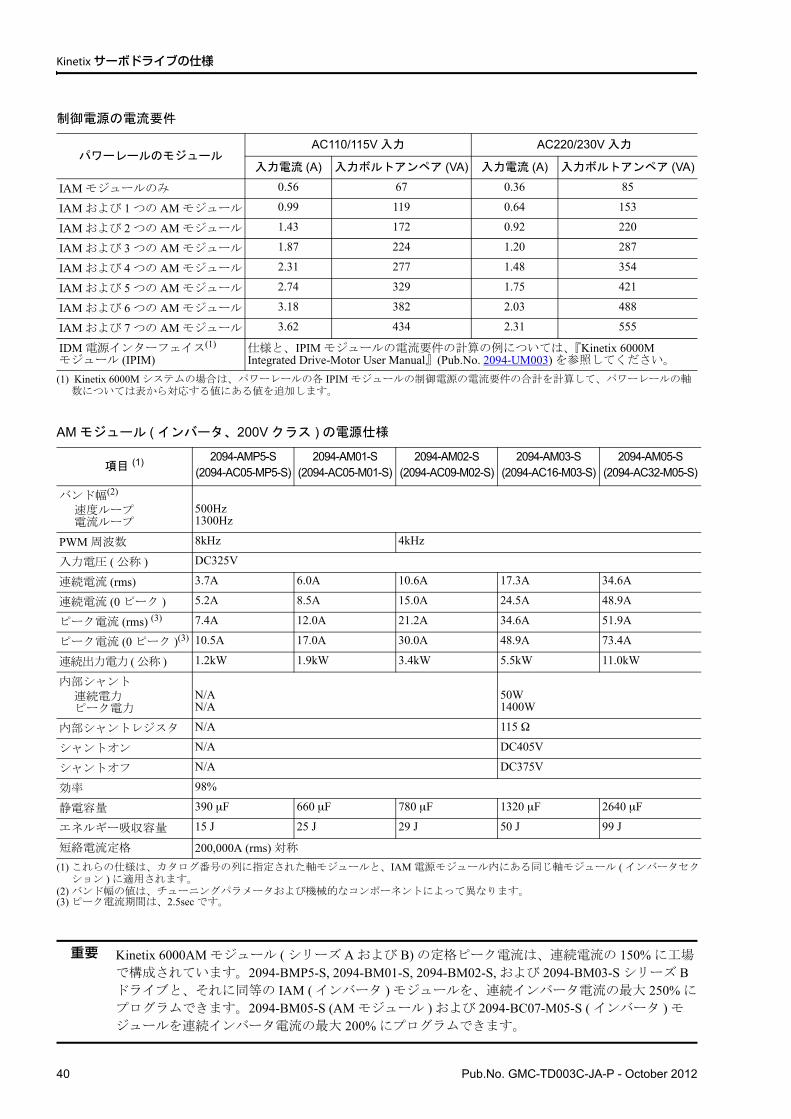
制御電源の電流要件
AM モジュール ( インバータ、200V クラス ) の電源仕様
パワーレールのモジュールAC110/115V 入力 AC220/230V 入力
入力電流 (A) 入力ボルトアンペア (VA) 入力電流 (A) 入力ボルトアンペア (VA)
IAM モジュールのみ 0.56 67 0.36 85
IAM および 1 つの AM モジュール 0.99 119 0.64 153
IAM および 2 つの AM モジュール 1.43 172 0.92 220
IAM および 3 つの AM モジュール 1.87 224 1.20 287
IAM および 4 つの AM モジュール 2.31 277 1.48 354
IAM および 5 つの AM モジュール 2.74 329 1.75 421
IAM および 6 つの AM モジュール 3.18 382 2.03 488
IAM および 7 つの AM モジュール 3.62 434 2.31 555
IDM 電源インターフェイス(1)
モジュール (IPIM)
(1) Kinetix 6000M システムの場合は、パワーレールの各 IPIM モジュールの制御電源の電流要件の合計を計算して、パワーレールの軸数については表から対応する値にある値を追加します。
仕様と、IPIM モジュールの電流要件の計算の例については、『Kinetix 6000M Integrated Drive-Motor User Manual』(Pub.No. 2094-UM003) を参照してください。
項目 (1)
(1) これらの仕様は、カタログ番号の列に指定された軸モジュールと、IAM 電源モジュール内にある同じ軸モジュール ( インバータセクション ) に適用されます。
2094-AMP5-S(2094-AC05-MP5-S)
2094-AM01-S(2094-AC05-M01-S)
2094-AM02-S(2094-AC09-M02-S)
2094-AM03-S(2094-AC16-M03-S)
2094-AM05-S(2094-AC32-M05-S)
バンド幅(2)
速度ループ電流ループ
(2) バンド幅の値は、チューニングパラメータおよび機械的なコンポーネントによって異なります。
500Hz1300Hz
PWM 周波数 8kHz 4kHz
入力電圧 ( 公称 ) DC325V
連続電流 (rms) 3.7A 6.0A 10.6A 17.3A 34.6A
連続電流 (0 ピーク ) 5.2A 8.5A 15.0A 24.5A 48.9A
ピーク電流 (rms) (3)
(3) ピーク電流期間は、2.5sec です。
7.4A 12.0A 21.2A 34.6A 51.9A
ピーク電流 (0 ピーク )(3) 10.5A 17.0A 30.0A 48.9A 73.4A
連続出力電力 ( 公称 ) 1.2kW 1.9kW 3.4kW 5.5kW 11.0kW
内部シャント連続電力ピーク電力
N/AN/A
50W1400W
内部シャントレジスタ N/A 115
シャントオン N/A DC405V
シャントオフ N/A DC375V
効率 98%
静電容量 390 F 660 F 780 F 1320 F 2640 F
エネルギー吸収容量 15 J 25 J 29 J 50 J 99 J
短絡電流定格 200,000A (rms) 対称
重要 Kinetix 6000AM モジュール ( シリーズ A および B) の定格ピーク電流は、連続電流の 150% に工場
で構成されています。2094-BMP5-S, 2094-BM01-S, 2094-BM02-S, および 2094-BM03-S シリーズ Bドライブと、それに同等の IAM ( インバータ ) モジュールを、連続インバータ電流の最大 250% に
プログラムできます。2094-BM05-S (AM モジュール ) および 2094-BC07-M05-S ( インバータ ) モジュールを連続インバータ電流の最大 200% にプログラムできます。
40 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
AM モジュール ( インバータ、400V クラス ) の電源仕様 ( シリーズ A および B)
項目2094-BMP5-S
(2094-BC01-MP5-S)2094-BM01-S
(2094-BC01-M01-S)2094-BM02-S
(2094-BC02-M02-S)2094-BM03-S
(2094-BC04-M03-S)2094-BM05-S
(2094-BC07-M05-S)
バンド幅(1)
速度ループ電流ループ
(1) バンド幅の値は、チューニングパラメータおよび機械的なコンポーネントによって異なります。
500Hz1300Hz
PWM 周波数 8kHz 4kHz
公称入力電圧 DC650V
連続電流 (rms) (2)
(2) 連続電流とピーク電流の定格は、高速動作用です。5Hz 未満の電気的な出力周波数 (8 極モータの場合は 75rpm) のときの一定速度の動作の場合は、定格出力電流は低減されます。ドライブの適切なサイズを決定するには、Motion Analyzer ソフトウェアを参照してください。
2.8A 6.1A 10.3A 21.2A 34.6A
連続電流 ( 正弦 ) 0 ピーク (3) 4.0A 8.6A 14.6A 30.0A 48.9A
ピーク電流 (rms) (3)
シリーズ A ドライブシリーズ B ドライブ(3)
(3) ピーク拡張モード用に構成しているときは、シリーズ B ドライブに適用します。ピーク拡張モードでのドライブ性能については、42 ページの「ピーク拡張の仕様」を参照してください。
4.2A7.0A
9.2A 15.3A
15.5A25.8A
31.8A 53.0A
51.9A69.2A
ピーク電流 (0 ピーク )(3)
シリーズ A ドライブシリーズ B ドライブ (3)
5.9A9.9A
12.9A21.6A
21.8A36.4A
45.0A75.0A
73.4A97.9A
公称連続出力電力 1.8kW 3.9kW 6.6kW 13.5kW 22.0kW
内部シャント連続電力ピーク電力
50W5.6kW
200W22.5kW
内部シャントレジスタ 115 28.75
シャントオン 805V DC
シャントオフ 755V DC
効率 98%
静電容量 75 F 150 F 270 F 840 F 1175 F
エネルギー吸収容量 10 J 19 J 35 J 108 J 152 J
短絡電流定格 200,000A (rms) 対称
Pub.No. GMC-TD003C-JA-P - October 2012 41

Kinetixサーボドライブの仕様
ピーク拡張の仕様ピーク拡張モードをサポートするドライブには、過負荷性能を大きくするために最大インバータのピーク電流を増加する機能があります。
ピーク拡張ソフトウェアおよびファームウェアの要件
Kinetix 6000 ピーク過負荷サポート
Kinetix 6000 ピーク電流定格
重要 ピーク拡張機能では、以下の表に示すような RSLogix™ 5000 ソフトウェアとドライブのファーム
ウェアを使用する必要があります。
IAM モジュールの Cat. No. AM モジュールの Cat. No.RSLogix 5000 ソフトウェア
バージョンKinetix 6000 ドライブの
ファームウェアリビジョン
2094-BC01-MP5-S 2094-BMP5-S 16 以降 1.111 以降
2094-BC01-M01-S 2094-BM01-S 16 以降 1.111 以降
2094-BC02-M02-S 2094-BM02-S 16 以降 1.111 以降
2094-BC04-M03-S 2094-BM03-S 17 以降 1.117 以降
2094-BC07-M05-S 2094-BM05-S 17 以降 1.117 以降
IAM/AM モジュールの Cat. No. モジュール セーフ・オフ・ドライブ シリーズ A シリーズ B
2094-BCxx-Mxx IAMセーフオフなし 標準 標準
2094-BMxx AM
2094-BCxx-Mxx-S IAMセーフオフ 標準
標準またはピーク拡張(1)
(1) デフォルトでは、下位互換性を保持するために標準モードが有効になっていますが、ピーク電流性能を増加するためにピーク拡張モードを有効にすることができます。ピーク拡張モードの有効については、『Kinetix 6000 多軸サーボドライブ ユーザーズマニュアル』(Pub.No. 2094-UM001) を参照してください。
2094-BMxx-S AM
IAM/AM モジュールの Cat. No.ピークインバータ定格電流 ピークコンバータ定格電流
標準 ピーク拡張 シリーズ A シリーズ B
2094-BC01-MP5-S 150% 250% 200% 250%
2094-BC01-M01-S 150% 250% 200% 250%
2094-BC02-M02-S 150% 250% 200% 250%
2094-BC04-M03-S 150% 250% 200% 250%
2094-BC07-M05-S 150% 200% 200% 300%
2094-BMP5-S 150% 250% N/A N/A
2094-BM01-S 150% 250% N/A N/A
2094-BM02-S 150% 250% N/A N/A
2094-BM03-S 150% 250% N/A N/A
2094-BM05-S 150% 200% N/A N/A
42 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
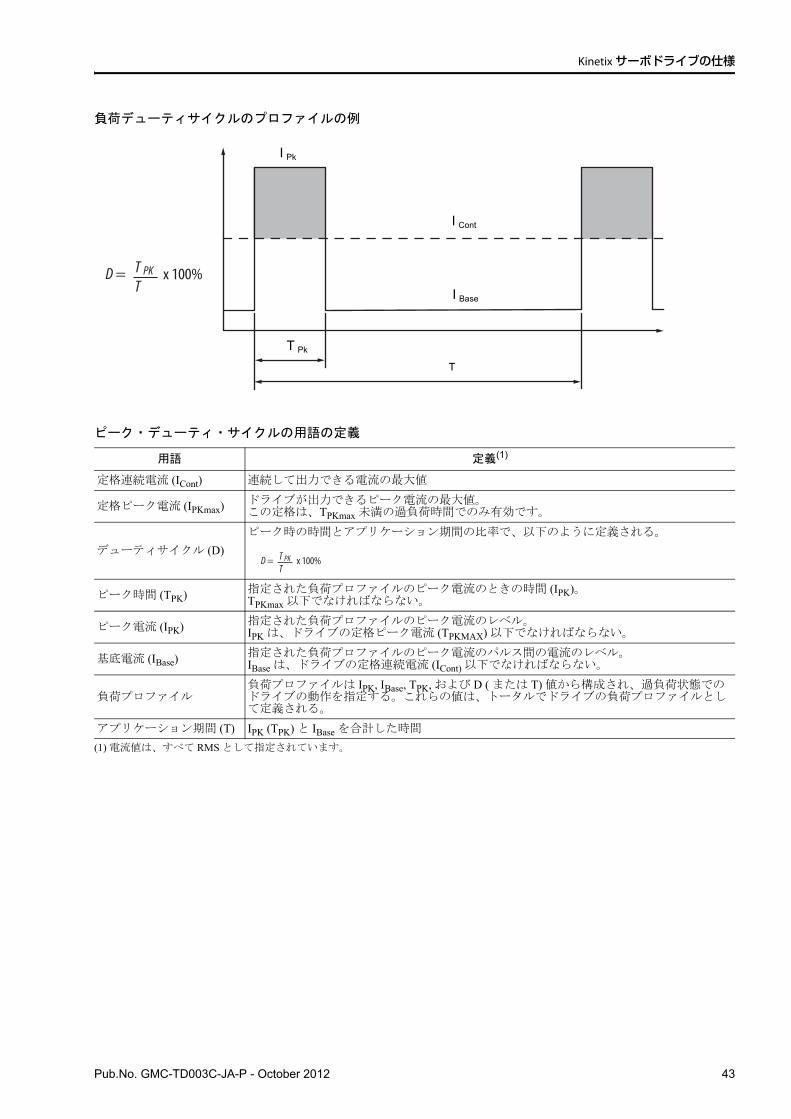
負荷デューティサイクルのプロファイルの例
ピーク・デューティ・サイクルの用語の定義
用語 定義(1)
(1) 電流値は、すべて RMS として指定されています。
定格連続電流 (ICont) 連続して出力できる電流の最大値
定格ピーク電流 (IPKmax) ドライブが出力できるピーク電流の最大値。この定格は、TPKmax 未満の過負荷時間でのみ有効です。
デューティサイクル (D)
ピーク時の時間とアプリケーション期間の比率で、以下のように定義される。
ピーク時間 (TPK) 指定された負荷プロファイルのピーク電流のときの時間 (IPK)。TPKmax 以下でなければならない。
ピーク電流 (IPK) 指定された負荷プロファイルのピーク電流のレベル。IPK は、ドライブの定格ピーク電流 (TPKMAX) 以下でなければならない。
基底電流 (IBase)指定された負荷プロファイルのピーク電流のパルス間の電流のレベル。IBase は、ドライブの定格連続電流 (ICont) 以下でなければならない。
負荷プロファイル負荷プロファイルは IPK, IBase, TPK, および D ( または T) 値から構成され、過負荷状態でのドライブの動作を指定する。これらの値は、トータルでドライブの負荷プロファイルとして定義される。
アプリケーション期間 (T) IPK (TPK) と IBase を合計した時間
D = TT
PK x 100%
I Pk
I Cont
I Base
T Pk
T
D = TT
PK x 100%
Pub.No. GMC-TD003C-JA-P - October 2012 43
Kinetixサーボドライブの仕様
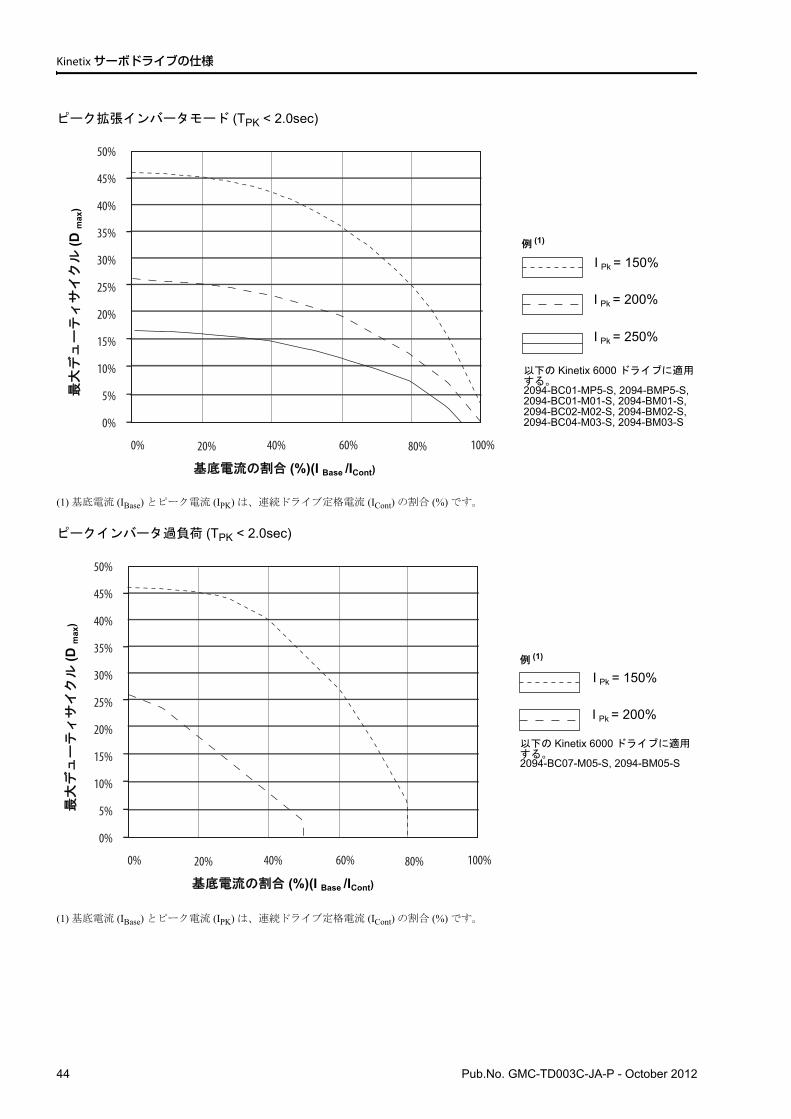
ピーク拡張インバータモード (TPK < 2.0sec)
(1) 基底電流 (IBase) とピーク電流 (IPK) は、連続ドライブ定格電流 (ICont) の割合 (%) です。
ピークインバータ過負荷 (TPK < 2.0sec)
(1) 基底電流 (IBase) とピーク電流 (IPK) は、連続ドライブ定格電流 (ICont) の割合 (%) です。
0% 60% 100%
50%
45%
40%
35%
30%
25%
20%
15%
10%
5%
0%
80%20% 40%
以下の Kinetix 6000 ドライブに適用する。2094-BC01-MP5-S, 2094-BMP5-S, 2094-BC01-M01-S, 2094-BM01-S, 2094-BC02-M02-S, 2094-BM02-S, 2094-BC04-M03-S, 2094-BM03-S
最大
デュ
ーテ
ィサ
イク
ル(D
max
)
基底電流の割合 (%)(I Base /ICont)
例 (1)
I Pk = 150%
I Pk = 200%
I Pk = 250%
0% 60% 100%
50%
45%
40%
35%
30%
25%
20%
15%
10%
5%
0%
80%20% 40%
以下の Kinetix 6000 ドライブに適用する。2094-BC07-M05-S, 2094-BM05-S
最大
デュ
ーテ
ィサ
イク
ル(D
max
)
基底電流の割合 (%)(I Base /ICont)
例 (1)
I Pk = 150%
I Pk = 200%
44 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
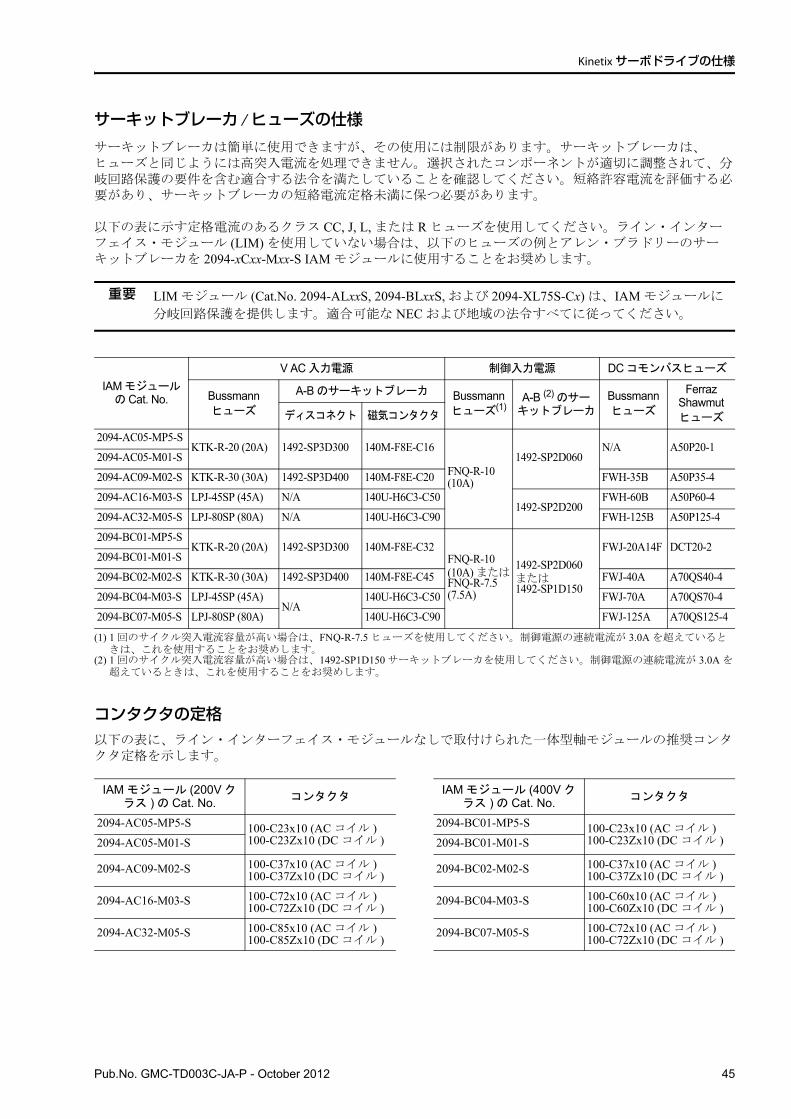
サーキットブレーカ /ヒューズの仕様サーキットブレーカは簡単に使用できますが、その使用には制限があります。サーキットブレーカは、ヒューズと同じようには高突入電流を処理できません。選択されたコンポーネントが適切に調整されて、分岐回路保護の要件を含む適合する法令を満たしていることを確認してください。短絡許容電流を評価する必要があり、サーキットブレーカの短絡電流定格未満に保つ必要があります。
以下の表に示す定格電流のあるクラス CC, J, L, または R ヒューズを使用してください。ライン・インターフェイス・モジュール (LIM) を使用していない場合は、以下のヒューズの例とアレン・ブラドリーのサーキットブレーカを 2094-xCxx-Mxx-S IAM モジュールに使用することをお奨めします。
コンタクタの定格以下の表に、ライン・インターフェイス・モジュールなしで取付けられた一体型軸モジュールの推奨コンタクタ定格を示します。
重要 LIM モジュール (Cat.No. 2094-ALxxS, 2094-BLxxS, および 2094-XL75S-Cx) は、IAM モジュールに
分岐回路保護を提供します。適合可能な NEC および地域の法令すべてに従ってください。
IAM モジュールの Cat. No.
V AC 入力電源 制御入力電源 DC コモンバスヒューズ
Bussmannヒューズ
A-B のサーキットブレーカ Bussmannヒューズ(1)
(1) 1 回のサイクル突入電流容量が高い場合は、FNQ-R-7.5 ヒューズを使用してください。制御電源の連続電流が 3.0A を超えているときは、これを使用することをお奨めします。
A-B (2) のサーキットブレーカ
(2) 1 回のサイクル突入電流容量が高い場合は、1492-SP1D150 サーキットブレーカを使用してください。制御電源の連続電流が 3.0A を超えているときは、これを使用することをお奨めします。
Bussmannヒューズ
Ferraz Shawmut ヒューズディスコネクト 磁気コンタクタ
2094-AC05-MP5-SKTK-R-20 (20A) 1492-SP3D300 140M-F8E-C16
FNQ-R-10 (10A)
1492-SP2D060N/A A50P20-1
2094-AC05-M01-S
2094-AC09-M02-S KTK-R-30 (30A) 1492-SP3D400 140M-F8E-C20 FWH-35B A50P35-4
2094-AC16-M03-S LPJ-45SP (45A) N/A 140U-H6C3-C501492-SP2D200
FWH-60B A50P60-4
2094-AC32-M05-S LPJ-80SP (80A) N/A 140U-H6C3-C90 FWH-125B A50P125-4
2094-BC01-MP5-SKTK-R-20 (20A) 1492-SP3D300 140M-F8E-C32
FNQ-R-10 (10A) またはFNQ-R-7.5 (7.5A)
1492-SP2D060 または1492-SP1D150
FWJ-20A14F DCT20-22094-BC01-M01-S
2094-BC02-M02-S KTK-R-30 (30A) 1492-SP3D400 140M-F8E-C45 FWJ-40A A70QS40-4
2094-BC04-M03-S LPJ-45SP (45A)N/A
140U-H6C3-C50 FWJ-70A A70QS70-4
2094-BC07-M05-S LPJ-80SP (80A) 140U-H6C3-C90 FWJ-125A A70QS125-4
IAM モジュール (200V クラス ) の Cat. No.
コンタクタIAM モジュール (400V ク
ラス ) の Cat. No.コンタクタ
2094-AC05-MP5-S 100-C23x10 (AC コイル )100-C23Zx10 (DC コイル )
2094-BC01-MP5-S 100-C23x10 (AC コイル )100-C23Zx10 (DC コイル )2094-AC05-M01-S 2094-BC01-M01-S
2094-AC09-M02-S 100-C37x10 (AC コイル )100-C37Zx10 (DC コイル )
2094-BC02-M02-S 100-C37x10 (AC コイル )100-C37Zx10 (DC コイル )
2094-AC16-M03-S 100-C72x10 (AC コイル )100-C72Zx10 (DC コイル )
2094-BC04-M03-S 100-C60x10 (AC コイル )100-C60Zx10 (DC コイル )
2094-AC32-M05-S 100-C85x10 (AC コイル )100-C85Zx10 (DC コイル )
2094-BC07-M05-S 100-C72x10 (AC コイル )100-C72Zx10 (DC コイル )
Pub.No. GMC-TD003C-JA-P - October 2012 45
Kinetixサーボドライブの仕様
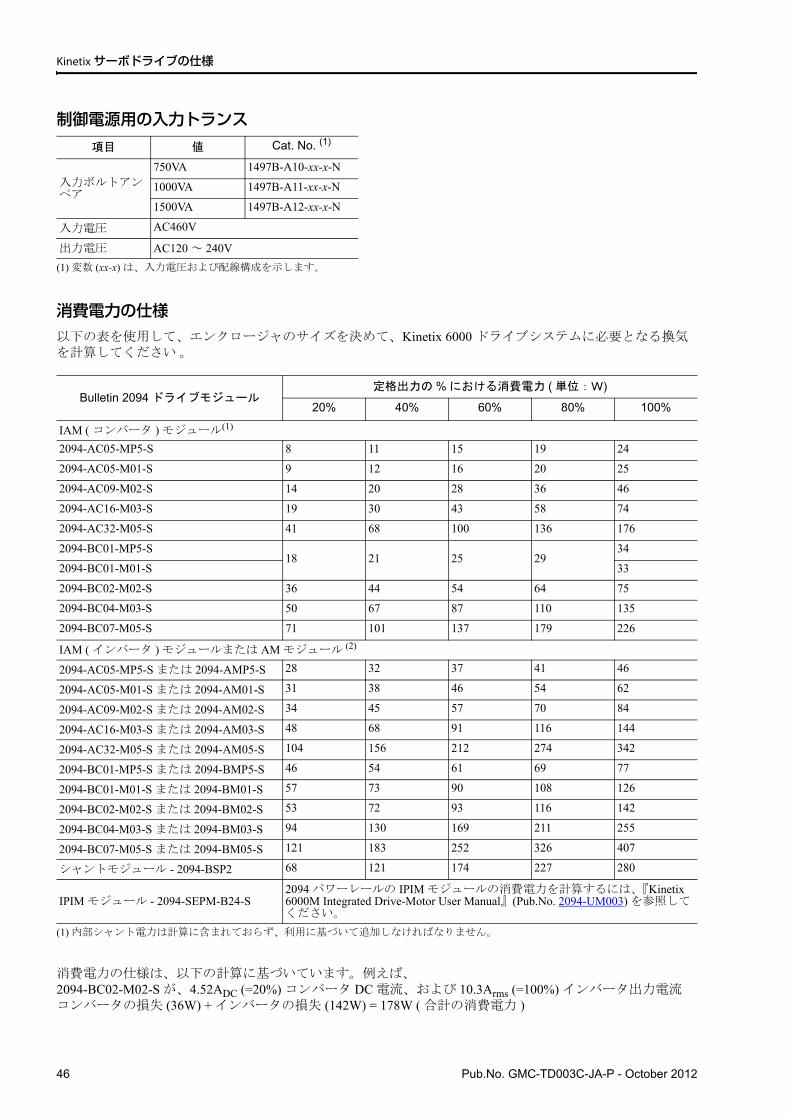
制御電源用の入力トランス
消費電力の仕様以下の表を使用して、エンクロージャのサイズを決めて、Kinetix 6000 ドライブシステムに必要となる換気を計算してください 。
消費電力の仕様は、以下の計算に基づいています。例えば、2094-BC02-M02-S が、4.52ADC (=20%) コンバータ DC 電流、および 10.3Arms (=100%) インバータ出力電流コンバータの損失 (36W) + インバータの損失 (142W) = 178W ( 合計の消費電力 )
項目 値 Cat. No. (1)
(1) 変数 (xx-x) は、入力電圧および配線構成を示します。
入力ボルトアンペア
750VA 1497B-A10-xx-x-N
1000VA 1497B-A11-xx-x-N
1500VA 1497B-A12-xx-x-N
入力電圧 AC460V
出力電圧 AC120 ~ 240V
Bulletin 2094 ドライブモジュール定格出力の % における消費電力 ( 単位:W)
20% 40% 60% 80% 100%
IAM ( コンバータ ) モジュール(1)
(1) 内部シャント電力は計算に含まれておらず、利用に基づいて追加しなければなりません。
2094-AC05-MP5-S 8 11 15 19 24
2094-AC05-M01-S 9 12 16 20 25
2094-AC09-M02-S 14 20 28 36 46
2094-AC16-M03-S 19 30 43 58 74
2094-AC32-M05-S 41 68 100 136 176
2094-BC01-MP5-S18 21 25 29
34
2094-BC01-M01-S 33
2094-BC02-M02-S 36 44 54 64 75
2094-BC04-M03-S 50 67 87 110 135
2094-BC07-M05-S 71 101 137 179 226
IAM ( インバータ ) モジュールまたは AM モジュール (2)
2094-AC05-MP5-S または 2094-AMP5-S 28 32 37 41 46
2094-AC05-M01-S または 2094-AM01-S 31 38 46 54 62
2094-AC09-M02-S または 2094-AM02-S 34 45 57 70 84
2094-AC16-M03-S または 2094-AM03-S 48 68 91 116 144
2094-AC32-M05-S または 2094-AM05-S 104 156 212 274 342
2094-BC01-MP5-S または 2094-BMP5-S 46 54 61 69 77
2094-BC01-M01-S または 2094-BM01-S 57 73 90 108 126
2094-BC02-M02-S または 2094-BM02-S 53 72 93 116 142
2094-BC04-M03-S または 2094-BM03-S 94 130 169 211 255
2094-BC07-M05-S または 2094-BM05-S 121 183 252 326 407
シャントモジュール - 2094-BSP2 68 121 174 227 280
IPIM モジュール - 2094-SEPM-B24-S2094 パワーレールの IPIM モジュールの消費電力を計算するには、『Kinetix 6000M Integrated Drive-Motor User Manual』(Pub.No. 2094-UM003) を参照してください。
46 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
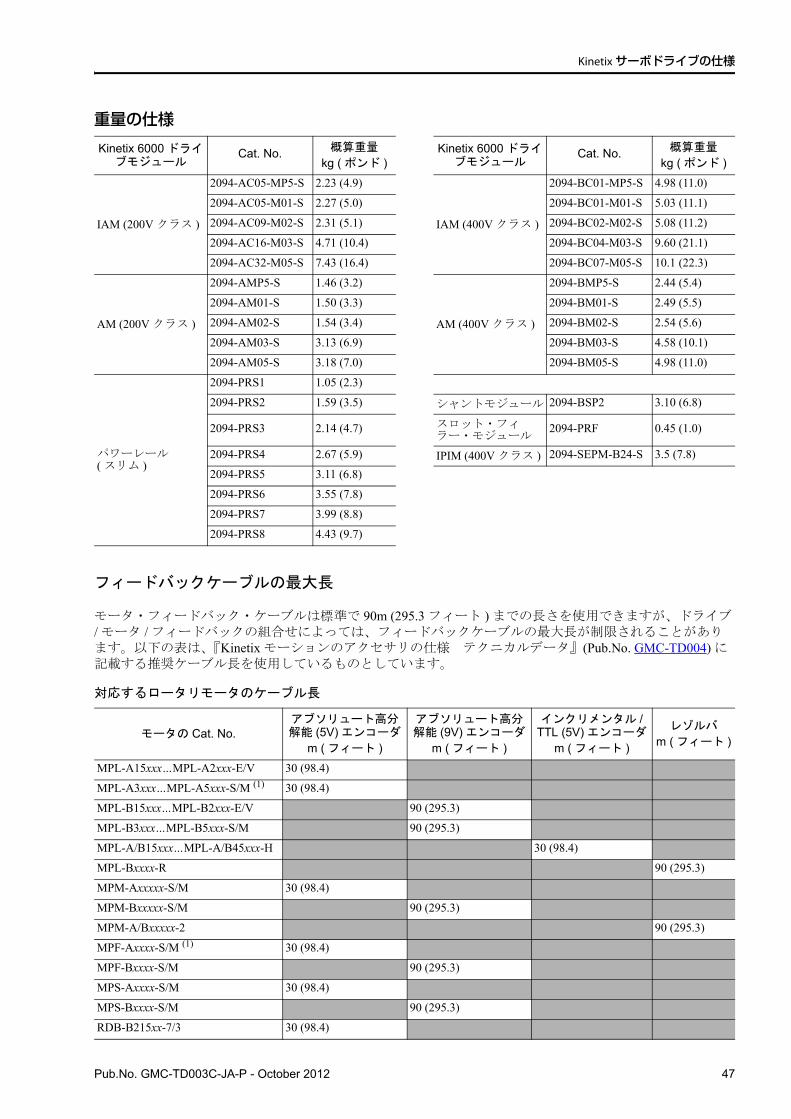
重量の仕様
フィードバックケーブルの最大長
モータ・フィードバック・ケーブルは標準で 90m (295.3 フィート ) までの長さを使用できますが、ドライブ/ モータ / フィードバックの組合せによっては、フィードバックケーブルの最大長が制限されることがあります。以下の表は、『Kinetix モーションのアクセサリの仕様 テクニカルデータ』(Pub.No. GMC-TD004) に記載する推奨ケーブル長を使用しているものとしています。
Kinetix 6000 ドライブモジュール
Cat. No. 概算重量
kg ( ポンド )Kinetix 6000 ドライ
ブモジュールCat. No. 概算重量
kg ( ポンド )
IAM (200V クラス )
2094-AC05-MP5-S 2.23 (4.9)
IAM (400V クラス )
2094-BC01-MP5-S 4.98 (11.0)
2094-AC05-M01-S 2.27 (5.0) 2094-BC01-M01-S 5.03 (11.1)
2094-AC09-M02-S 2.31 (5.1) 2094-BC02-M02-S 5.08 (11.2)
2094-AC16-M03-S 4.71 (10.4) 2094-BC04-M03-S 9.60 (21.1)
2094-AC32-M05-S 7.43 (16.4) 2094-BC07-M05-S 10.1 (22.3)
AM (200V クラス )
2094-AMP5-S 1.46 (3.2)
AM (400V クラス )
2094-BMP5-S 2.44 (5.4)
2094-AM01-S 1.50 (3.3) 2094-BM01-S 2.49 (5.5)
2094-AM02-S 1.54 (3.4) 2094-BM02-S 2.54 (5.6)
2094-AM03-S 3.13 (6.9) 2094-BM03-S 4.58 (10.1)
2094-AM05-S 3.18 (7.0) 2094-BM05-S 4.98 (11.0)
パワーレール( スリム )
2094-PRS1 1.05 (2.3)
2094-PRS2 1.59 (3.5) シャントモジュール 2094-BSP2 3.10 (6.8)
2094-PRS3 2.14 (4.7) スロット・フィラー・モジュール
2094-PRF 0.45 (1.0)
2094-PRS4 2.67 (5.9) IPIM (400V クラス ) 2094-SEPM-B24-S 3.5 (7.8)
2094-PRS5 3.11 (6.8)
2094-PRS6 3.55 (7.8)
2094-PRS7 3.99 (8.8)
2094-PRS8 4.43 (9.7)
対応するロータリモータのケーブル長
モータの Cat. No.アブソリュート高分解能 (5V) エンコーダ
m ( フィート )
アブソリュート高分解能 (9V) エンコーダ
m ( フィート )
インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
レゾルバ
m ( フィート )
MPL-A15xxx…MPL-A2xxx-E/V 30 (98.4)
MPL-A3xxx…MPL-A5xxx-S/M (1) 30 (98.4)
MPL-B15xxx…MPL-B2xxx-E/V 90 (295.3)
MPL-B3xxx…MPL-B5xxx-S/M 90 (295.3)
MPL-A/B15xxx…MPL-A/B45xxx-H 30 (98.4)
MPL-Bxxxx-R 90 (295.3)
MPM-Axxxxx-S/M 30 (98.4)
MPM-Bxxxxx-S/M 90 (295.3)
MPM-A/Bxxxxx-2 90 (295.3)
MPF-Axxxx-S/M (1) 30 (98.4)
MPF-Bxxxx-S/M 90 (295.3)
MPS-Axxxx-S/M 30 (98.4)
MPS-Bxxxx-S/M 90 (295.3)
RDB-B215xx-7/3 30 (98.4)
Pub.No. GMC-TD003C-JA-P - October 2012 47
Kinetixサーボドライブの仕様
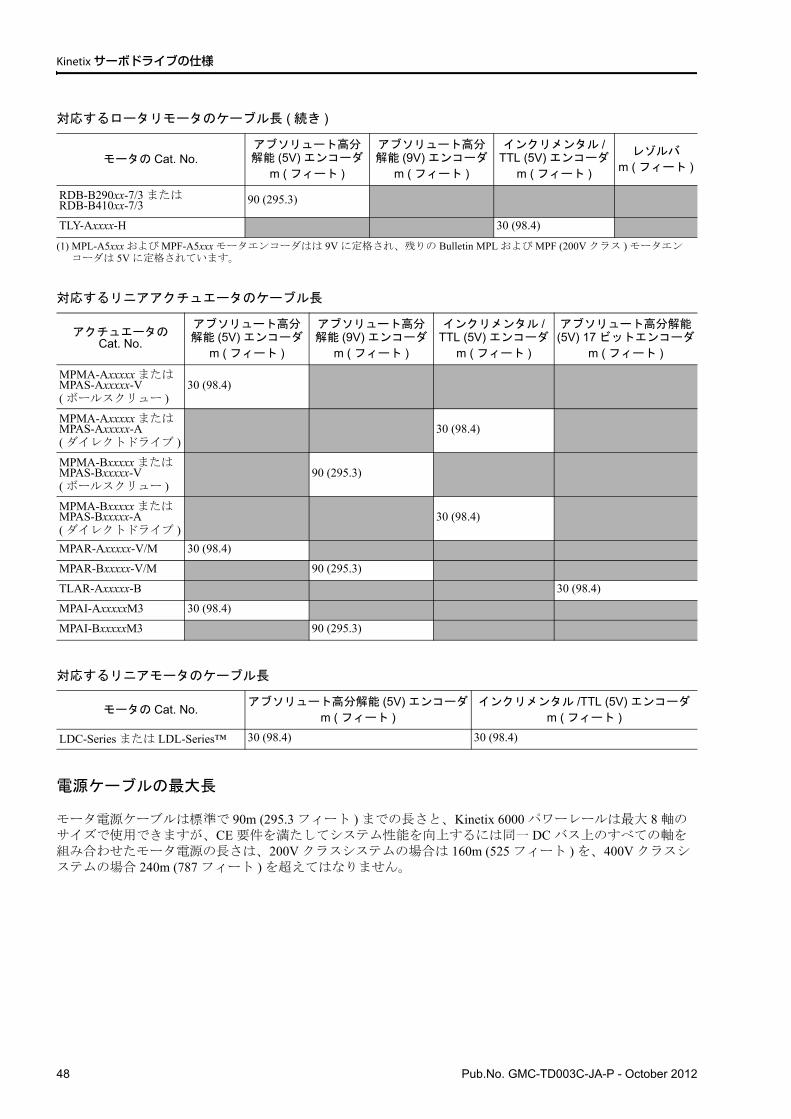
対応するリニアアクチュエータのケーブル長
対応するリニアモータのケーブル長
電源ケーブルの最大長
モータ電源ケーブルは標準で 90m (295.3 フィート ) までの長さと、Kinetix 6000 パワーレールは最大 8 軸のサイズで使用できますが、CE 要件を満たしてシステム性能を向上するには同一 DC バス上のすべての軸を組み合わせたモータ電源の長さは、200V クラスシステムの場合は 160m (525 フィート ) を、400V クラスシステムの場合 240m (787 フィート ) を超えてはなりません。
RDB-B290xx-7/3 またはRDB-B410xx-7/3 90 (295.3)
TLY-Axxxx-H 30 (98.4)
(1) MPL-A5xxx および MPF-A5xxx モータエンコーダはは 9V に定格され、残りの Bulletin MPL および MPF (200V クラス ) モータエンコーダは 5V に定格されています。
アクチュエータのCat. No.
アブソリュート高分解能 (5V) エンコーダ
m ( フィート )
アブソリュート高分解能 (9V) エンコーダ
m ( フィート )
インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
アブソリュート高分解能(5V) 17 ビットエンコーダ
m ( フィート )
MPMA-Axxxxx またはMPAS-Axxxxx-V ( ボールスクリュー )
30 (98.4)
MPMA-Axxxxx またはMPAS-Axxxxx-A ( ダイレクトドライブ )
30 (98.4)
MPMA-Bxxxxx またはMPAS-Bxxxxx-V ( ボールスクリュー )
90 (295.3)
MPMA-Bxxxxx またはMPAS-Bxxxxx-A( ダイレクトドライブ )
30 (98.4)
MPAR-Axxxxx-V/M 30 (98.4)
MPAR-Bxxxxx-V/M 90 (295.3)
TLAR-Axxxxx-B 30 (98.4)
MPAI-AxxxxxM3 30 (98.4)
MPAI-BxxxxxM3 90 (295.3)
モータの Cat. No.アブソリュート高分解能 (5V) エンコーダ
m ( フィート )インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
LDC-Series または LDL-Series™ 30 (98.4) 30 (98.4)
対応するロータリモータのケーブル長 ( 続き )
モータの Cat. No.アブソリュート高分解能 (5V) エンコーダ
m ( フィート )
アブソリュート高分解能 (9V) エンコーダ
m ( フィート )
インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
レゾルバ
m ( フィート )
48 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
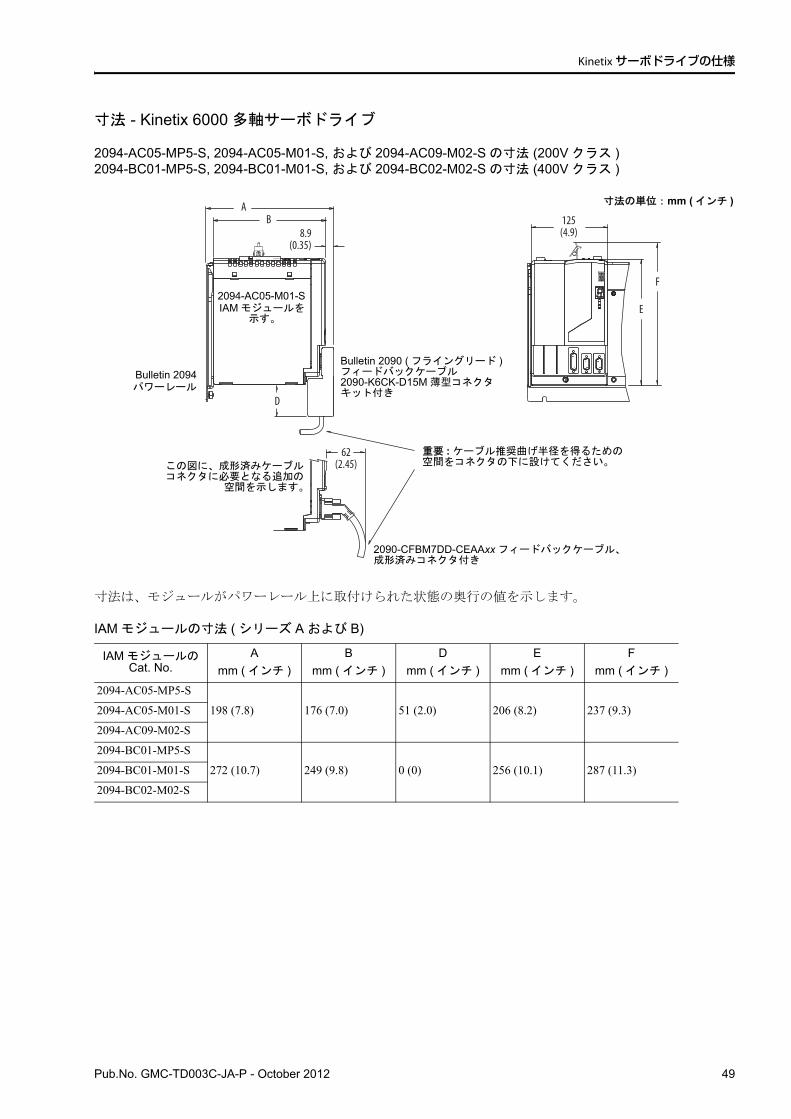
寸法 - Kinetix 6000 多軸サーボドライブ
2094-AC05-MP5-S, 2094-AC05-M01-S, および 2094-AC09-M02-S の寸法 (200V クラス )2094-BC01-MP5-S, 2094-BC01-M01-S, および 2094-BC02-M02-S の寸法 (400V クラス )
寸法は、モジュールがパワーレール上に取付けられた状態の奥行の値を示します。
IAM モジュールの寸法 ( シリーズ A および B)
IAM モジュールのCat. No.
A
mm ( インチ )
B
mm ( インチ )
D
mm ( インチ )
E
mm ( インチ )
F
mm ( インチ )
2094-AC05-MP5-S
198 (7.8) 176 (7.0) 51 (2.0) 206 (8.2) 237 (9.3)2094-AC05-M01-S
2094-AC09-M02-S
2094-BC01-MP5-S
272 (10.7) 249 (9.8) 0 (0) 256 (10.1) 287 (11.3)2094-BC01-M01-S
2094-BC02-M02-S
AB
D
E
F
8.9(0.35)
125(4.9)
62(2.45)
重要 : ケーブル推奨曲げ半径を得るための空間をコネクタの下に設けてください。
Bulletin 2090 ( フライングリード )フィードバックケーブル2090-K6CK-D15M 薄型コネクタキット付き
Bulletin 2094パワーレール
2094-AC05-M01-S IAM モジュールを
示す。
寸法の単位:mm ( インチ )
2090-CFBM7DD-CEAAxx フィードバックケーブル、成形済みコネクタ付き
この図に、成形済みケーブルコネクタに必要となる追加の
空間を示します。
Pub.No. GMC-TD003C-JA-P - October 2012 49
Kinetixサーボドライブの仕様
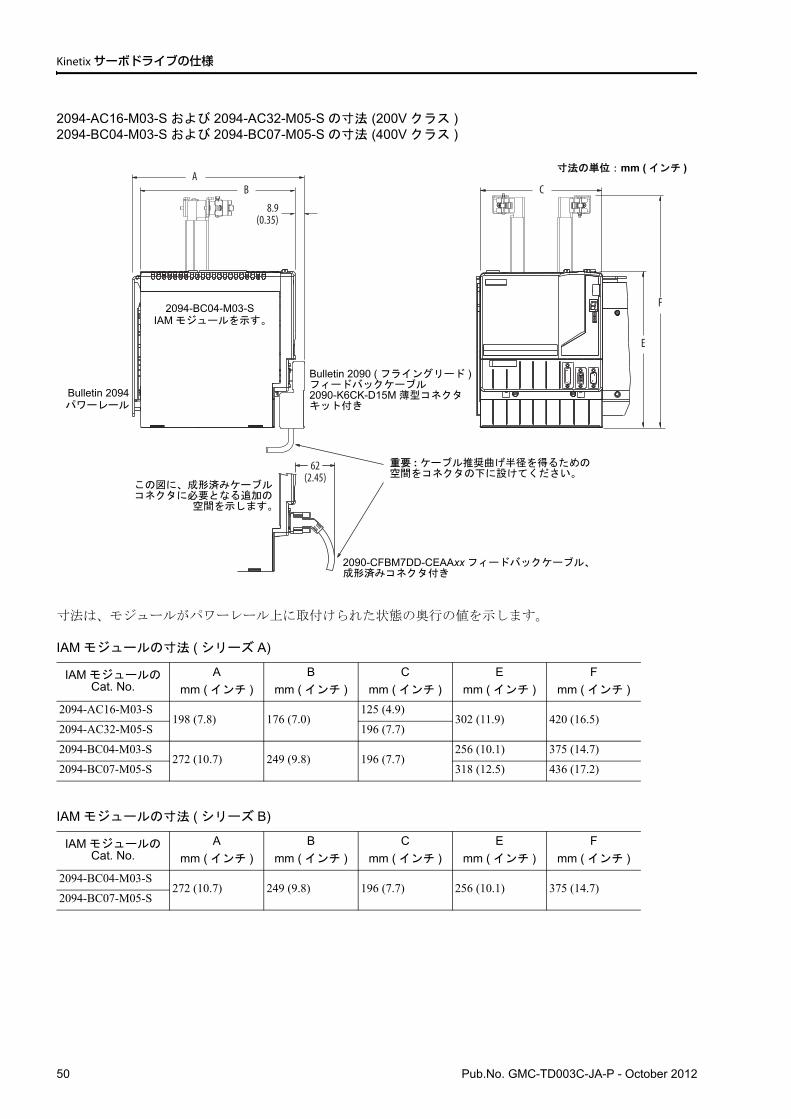
2094-AC16-M03-S および 2094-AC32-M05-S の寸法 (200V クラス )2094-BC04-M03-S および 2094-BC07-M05-S の寸法 (400V クラス )
寸法は、モジュールがパワーレール上に取付けられた状態の奥行の値を示します。
IAM モジュールの寸法 ( シリーズ A)
IAM モジュールの寸法 ( シリーズ B)
IAM モジュールのCat. No.
A
mm ( インチ )
B
mm ( インチ )
C
mm ( インチ )
E
mm ( インチ )
F
mm ( インチ )
2094-AC16-M03-S198 (7.8) 176 (7.0)
125 (4.9)302 (11.9) 420 (16.5)
2094-AC32-M05-S 196 (7.7)
2094-BC04-M03-S272 (10.7) 249 (9.8) 196 (7.7)
256 (10.1) 375 (14.7)
2094-BC07-M05-S 318 (12.5) 436 (17.2)
IAM モジュールのCat. No.
A
mm ( インチ )
B
mm ( インチ )
C
mm ( インチ )
E
mm ( インチ )
F
mm ( インチ )
2094-BC04-M03-S272 (10.7) 249 (9.8) 196 (7.7) 256 (10.1) 375 (14.7)
2094-BC07-M05-S
8.9(0.35)
AB C
E
F
62(2.45)
重要 : ケーブル推奨曲げ半径を得るための空間をコネクタの下に設けてください。
2094-BC04-M03-S IAM モジュールを示す。
Bulletin 2090 ( フライングリード ) フィードバックケーブル2090-K6CK-D15M 薄型コネクタキット付き
寸法の単位:mm ( インチ )
Bulletin 2094パワーレール
2090-CFBM7DD-CEAAxx フィードバックケーブル、成形済みコネクタ付き
この図に、成形済みケーブルコネクタに必要となる追加の
空間を示します。
50 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
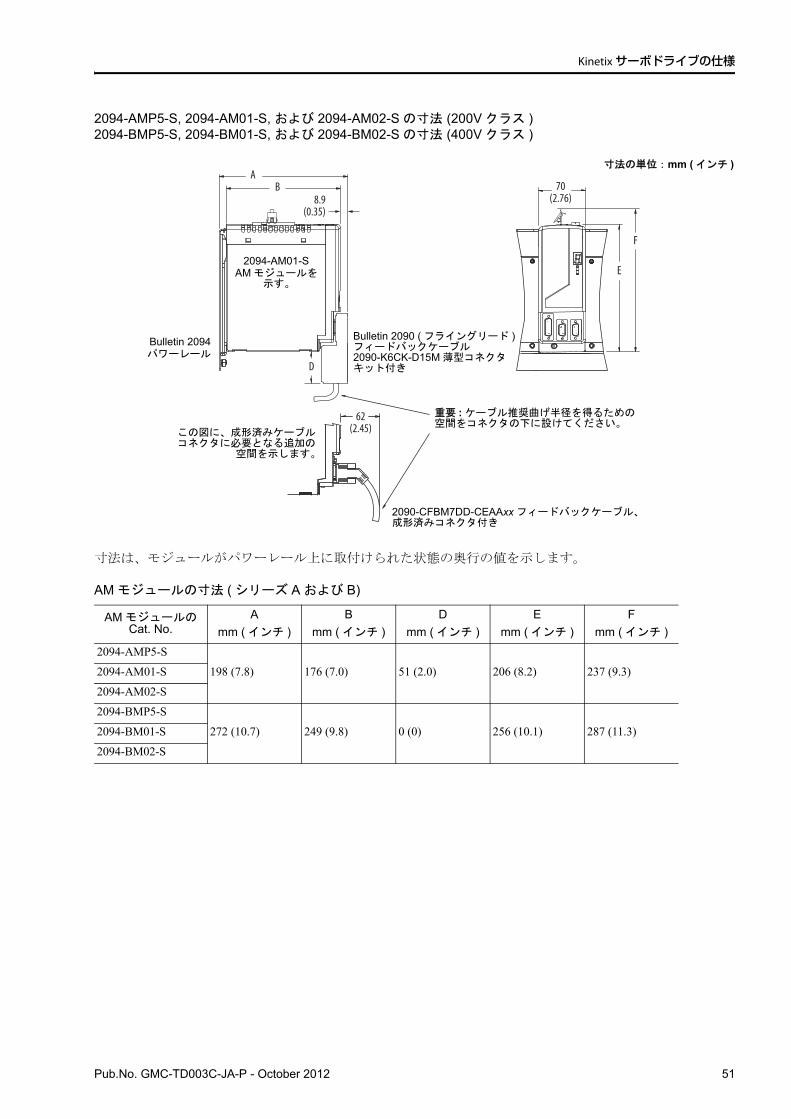
2094-AMP5-S, 2094-AM01-S, および 2094-AM02-S の寸法 (200V クラス )2094-BMP5-S, 2094-BM01-S, および 2094-BM02-S の寸法 (400V クラス )
寸法は、モジュールがパワーレール上に取付けられた状態の奥行の値を示します。
AM モジュールの寸法 ( シリーズ A および B)
AM モジュールのCat. No.
A
mm ( インチ )
B
mm ( インチ )
D
mm ( インチ )
E
mm ( インチ )
F
mm ( インチ )
2094-AMP5-S
198 (7.8) 176 (7.0) 51 (2.0) 206 (8.2) 237 (9.3)2094-AM01-S
2094-AM02-S
2094-BMP5-S
272 (10.7) 249 (9.8) 0 (0) 256 (10.1) 287 (11.3)2094-BM01-S
2094-BM02-S
8.9(0.35)
70(2.76)
AB
D
E
F
62(2.45)
2094-AM01-SAM モジュールを
示す。
Bulletin 2090 ( フライングリード )フィードバックケーブル2090-K6CK-D15M 薄型コネクタキット付き
重要 : ケーブル推奨曲げ半径を得るための空間をコネクタの下に設けてください。
寸法の単位:mm ( インチ )
Bulletin 2094パワーレール
2090-CFBM7DD-CEAAxx フィードバックケーブル、成形済みコネクタ付き
この図に、成形済みケーブルコネクタに必要となる追加の
空間を示します。
Pub.No. GMC-TD003C-JA-P - October 2012 51
Kinetixサーボドライブの仕様
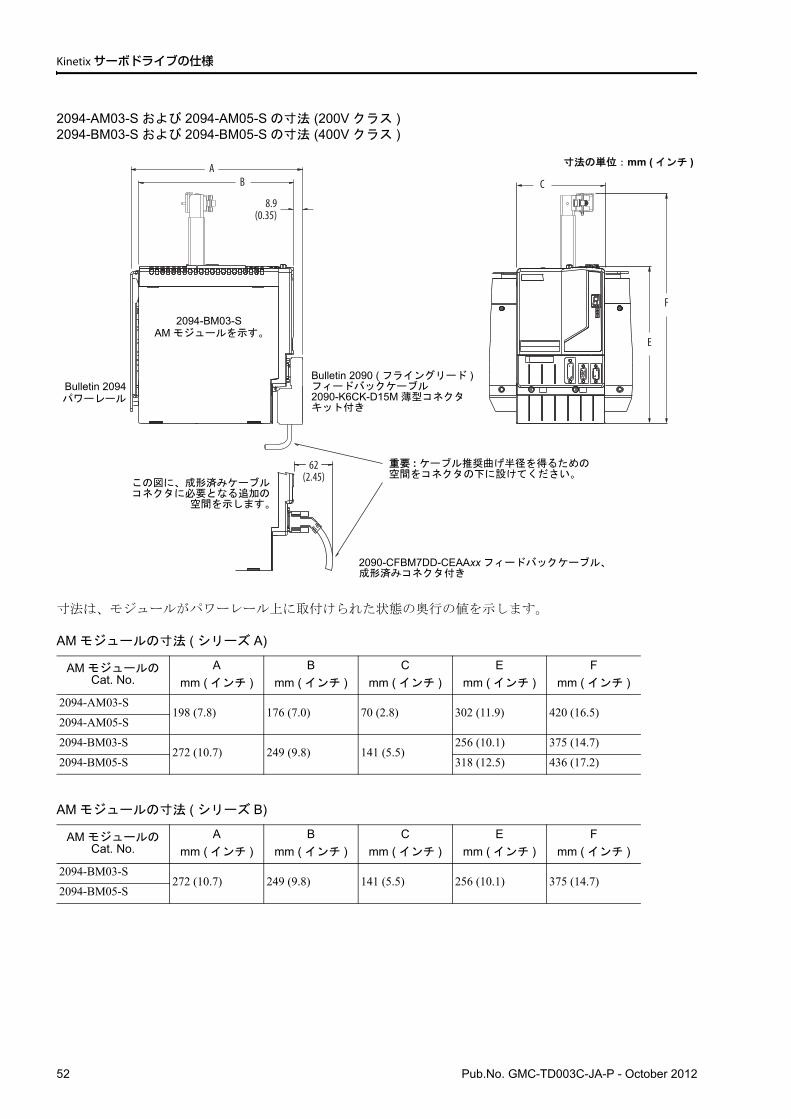
2094-AM03-S および 2094-AM05-S の寸法 (200V クラス )2094-BM03-S および 2094-BM05-S の寸法 (400V クラス )
寸法は、モジュールがパワーレール上に取付けられた状態の奥行の値を示します。
AM モジュールの寸法 ( シリーズ A)
AM モジュールの寸法 ( シリーズ B)
AM モジュールのCat. No.
A
mm ( インチ )
B
mm ( インチ )
C
mm ( インチ )
E
mm ( インチ )
F
mm ( インチ )
2094-AM03-S198 (7.8) 176 (7.0) 70 (2.8) 302 (11.9) 420 (16.5)
2094-AM05-S
2094-BM03-S272 (10.7) 249 (9.8) 141 (5.5)
256 (10.1) 375 (14.7)
2094-BM05-S 318 (12.5) 436 (17.2)
AM モジュールのCat. No.
A
mm ( インチ )
B
mm ( インチ )
C
mm ( インチ )
E
mm ( インチ )
F
mm ( インチ )
2094-BM03-S272 (10.7) 249 (9.8) 141 (5.5) 256 (10.1) 375 (14.7)
2094-BM05-S
8.9(0.35)
AB C
E
F
62(2.45)
2094-BM03-S AM モジュールを示す。
Bulletin 2090 ( フライングリード )フィードバックケーブル2090-K6CK-D15M 薄型コネクタキット付き
重要 : ケーブル推奨曲げ半径を得るための空間をコネクタの下に設けてください。
寸法の単位:mm ( インチ )
Bulletin 2094パワーレール
2090-CFBM7DD-CEAAxx フィードバックケーブル、成形済みコネクタ付き
この図に、成形済みケーブルコネクタに必要となる追加の
空間を示します。
52 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
環境条件 - Kinetix 6000 サーボドライブ
認可 - Kinetix 6000 サーボドライブ
項目 動作範囲 保管範囲 ( 非動作時 )
周囲温度 0 ~ 50°C (32 ~ 122°F) -40 ~ 70°C (-40 ~ 158F)
相対湿度 5 ~ 95% ( 結露なきこと ) 5 ~ 95% ( 結露なきこと )
高度1000m (3281 フィート )3000m (9843 フィート ) ディレーティング付き
3000m (9843 フィート ) ( 輸送時 )
振動0.35mm (0.014 インチ ) 二重振幅のとき 5 ~ 55Hz、連続変位、2.0G ピーク一定加速のとき 55 ~ 500Hz (3つの相互に直角の方向で各方向に 10 スウィープ )
衝撃 15G, 11msec 正弦波の半周期パルス (3 つの相互に直角の方向で各方向に 3 パルス )
承認機関(1)
(1) 製品がマークされているときは、適合宣言書について http://www.ab.com を参照してください。
規格
c-UL-us (2)
(2) Underwriters Laboratories Inc. では、これらの製品のセーフオフ機能を評価していません。
米国とカナダの安全規格に対して UL リスト (UL 508C File E59272)
ソリッドステートのモータ過負荷保護は、UL 508C (UL File E59272) を満たすように UL で調査されたモータのピーク定格に基づくピーク電流制限で、モータ定格の 110% に達したときにモータ電流の動的なフォルドバックを提供する。
CE
EU 2004/108/EC EMC 指令は、以下の準拠する。• EN 61800-3:2004: 可変速電力ドライブシステム - パート 3; • EMC 要件および特定のテスト方法
EU 2006/95/EC 低電圧指令は、以下の準拠する。• EN 61800-5-1:2007 - 可変速電力ドライブシステム• EN 50178:1997 - 電源取付けに使用する電気装置
機能安全• EN 60204-1:2006 - 機械安全 - 機械の電気装置• IEC 61508: パート 1-7:2000 - 電気 / 電子 / プログラム可能な電子安全関連システムの機能安全• EN ISO 13849-1:2008 - 機械安全、制御システムの安全関連部分。パート 1: 設計のための一般原則
C-Tick
オーストラリア無線通信法令は、以下の準拠する。• 無線通信法令 : 1992• 無線通信 ( 電磁適合性 ) 規格 : 1998• 無線通信 ( ラベリングの遵守 - 偶発的なエミッション ) 通知書 : 1998• AS/NZS CISPR 11: 2002 ( グループ 2, クラス A)
KC韓国の放送および通信機器の適合認証 / 登録は、以下の準拠する。• 電波法、第 3 条の第 58-2 項
• 登録番号:KCC-REM-RAA-2094
Pub.No. GMC-TD003C-JA-P - October 2012 53

Kinetixサーボドライブの仕様
Kinetix 300 および Kinetix 350 EtherNet/IP サーボドライブ
Kinetix 300 EtherNet/IP インデキシングドライブは、軸数の少ないモーション・コントロール・アプリケーションのためにコスト効率のよい 1 軸ソリューションを提供します。マシン全体 ( モーション、制御、I/O, および HMI を含む ) に 1 つの標準 Ethernet/IP ネットワークを使用して、配線を簡略化し、パネルレイアウトのコストを低減して、製造と企業のシステムに簡単に統合できるようにします。さらに、安全トルクオフ機能によって、マシンの生産性を向上しながら人員を保護できます。
Kinetix 350 1 軸 EtherNet/IP サーボドライブは、1 つのネットワーク上の制御ソリューション全体の統合を簡略化にすることで、モーション・コントロール・システムにスケーラビリティを提供するように開発されました。 Kinetix 350 サーボドライブは、EtherNet/IP ネットワーク上の統合モーションをサポートする ControlLogix® コントローラで制御および動作するように設計されています。これらはシステムとして組み合わせることで、今日の産業に求められている高性能とスケーラビリティをもたらすコスト効率のよいモーションソリューションを提供できます。コンパクトな設計であるため、Kinetix 350 はあまりパネルスペースを必要とせず、簡単に接続できます。さらに、マシンポートフォリオ全体を通じて統合された製品間でコードを再利用することで、取付けと立上げにかかる時間を短縮できます。
Kinetix 300サーボドライブ
Kinetix 350サーボドライブ
54 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
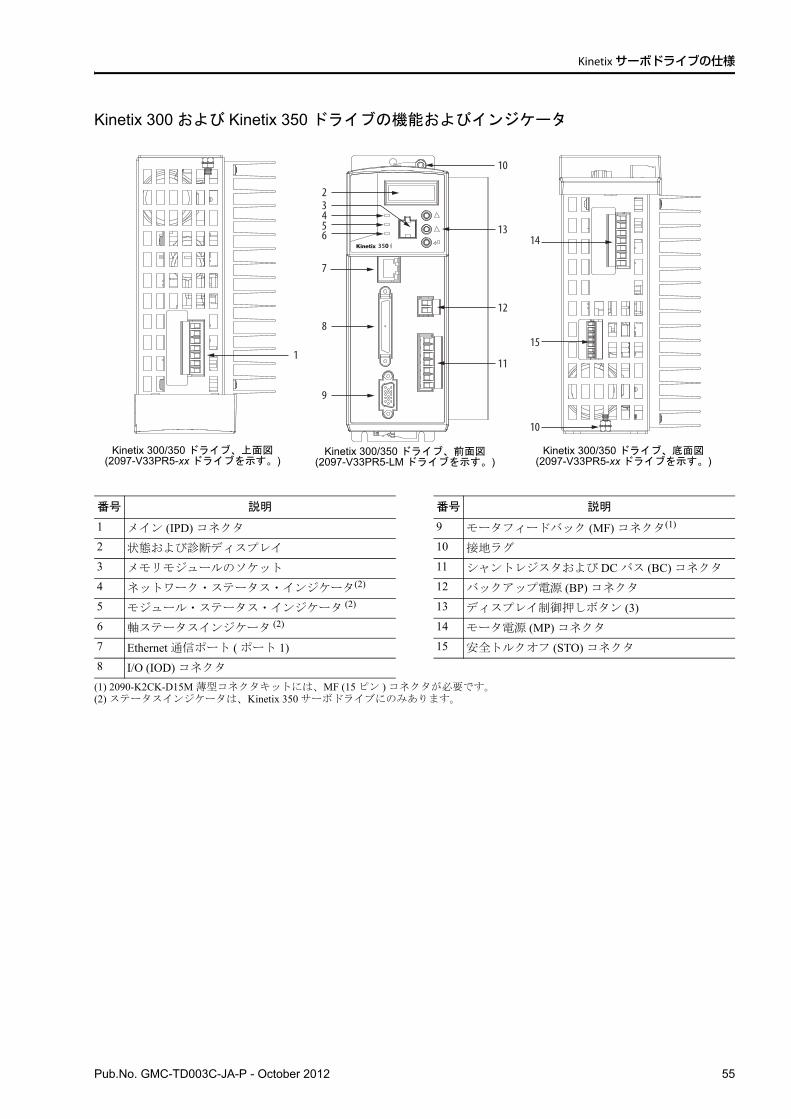
Kinetix 300 および Kinetix 350 ドライブの機能およびインジケータ
番号 説明 番号 説明
1 メイン (IPD) コネクタ 9 モータフィードバック (MF) コネクタ(1)
(1) 2090-K2CK-D15M 薄型コネクタキットには、MF (15 ピン ) コネクタが必要です。
2 状態および診断ディスプレイ 10 接地ラグ
3 メモリモジュールのソケット 11 シャントレジスタおよび DC バス (BC) コネクタ
4 ネットワーク・ステータス・インジケータ(2)
(2) ステータスインジケータは、Kinetix 350 サーボドライブにのみあります。
12 バックアップ電源 (BP) コネクタ
5 モジュール・ステータス・インジケータ (2) 13 ディスプレイ制御押しボタン (3)
6 軸ステータスインジケータ (2) 14 モータ電源 (MP) コネクタ
7 Ethernet 通信ポート ( ポート 1) 15 安全トルクオフ (STO) コネクタ
8 I/O (IOD) コネクタ
10
34
2
56
7
9
8
1
12
13
11
14
15
10
0350
Kinetix 300/350 ドライブ、前面図(2097-V33PR5-LM ドライブを示す。)
Kinetix 300/350 ドライブ、底面図(2097-V33PR5-xx ドライブを示す。)
Kinetix 300/350 ドライブ、上面図(2097-V33PR5-xx ドライブを示す。)
Pub.No. GMC-TD003C-JA-P - October 2012 55
Kinetixサーボドライブの仕様
技術的な仕様 - Kinetix 300 および Kinetix 350 サーボドライブ
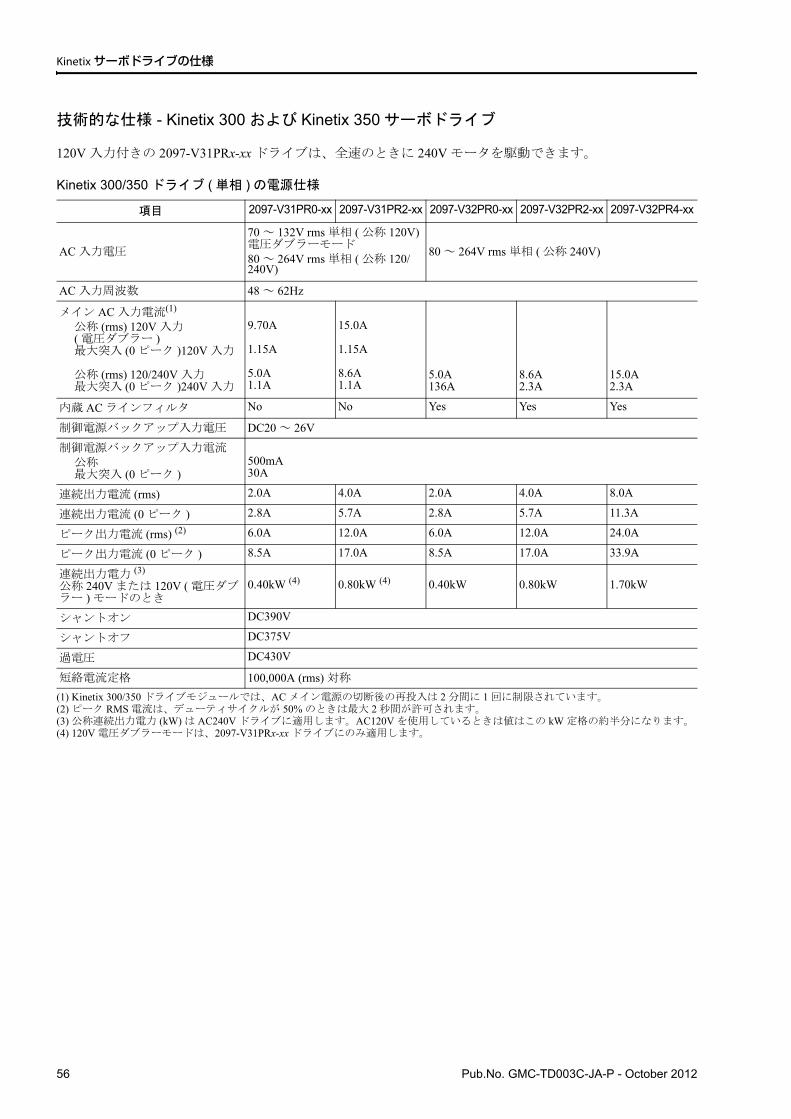
120V 入力付きの 2097-V31PRx-xx ドライブは、全速のときに 240V モータを駆動できます。
Kinetix 300/350 ドライブ ( 単相 ) の電源仕様
項目 2097-V31PR0-xx 2097-V31PR2-xx 2097-V32PR0-xx 2097-V32PR2-xx 2097-V32PR4-xx
AC 入力電圧
70 ~ 132V rms 単相 ( 公称 120V) 電圧ダブラーモード80 ~ 264V rms 単相 ( 公称 120/240V)
80 ~ 264V rms 単相 ( 公称 240V)
AC 入力周波数 48 ~ 62Hz
メイン AC 入力電流(1)
公称 (rms) 120V 入力( 電圧ダブラー )最大突入 (0 ピーク )120V 入力
公称 (rms) 120/240V 入力最大突入 (0 ピーク )240V 入力
(1) Kinetix 300/350 ドライブモジュールでは、AC メイン電源の切断後の再投入は 2 分間に 1 回に制限されています。
9.70A
1.15A
5.0A1.1A
15.0A
1.15A
8.6A1.1A
5.0A136A
8.6A2.3A
15.0A2.3A
内蔵 AC ラインフィルタ No No Yes Yes Yes
制御電源バックアップ入力電圧 DC20 ~ 26V
制御電源バックアップ入力電流公称最大突入 (0 ピーク )
500mA30A
連続出力電流 (rms) 2.0A 4.0A 2.0A 4.0A 8.0A
連続出力電流 (0 ピーク ) 2.8A 5.7A 2.8A 5.7A 11.3A
ピーク出力電流 (rms) (2)
(2) ピーク RMS 電流は、デューティサイクルが 50% のときは最大 2 秒間が許可されます。
6.0A 12.0A 6.0A 12.0A 24.0A
ピーク出力電流 (0 ピーク ) 8.5A 17.0A 8.5A 17.0A 33.9A
連続出力電力 (3)
公称 240V または 120V ( 電圧ダブラー ) モードのとき
(3) 公称連続出力電力 (kW) は AC240V ドライブに適用します。AC120V を使用しているときは値はこの kW 定格の約半分になります。
0.40kW (4)
(4) 120V 電圧ダブラーモードは、2097-V31PRx-xx ドライブにのみ適用します。
0.80kW (4) 0.40kW 0.80kW 1.70kW
シャントオン DC390V
シャントオフ DC375V
過電圧 DC430V
短絡電流定格 100,000A (rms) 対称
56 Pub.No. GMC-TD003C-JA-P - October 2012
Kinetixサーボドライブの仕様
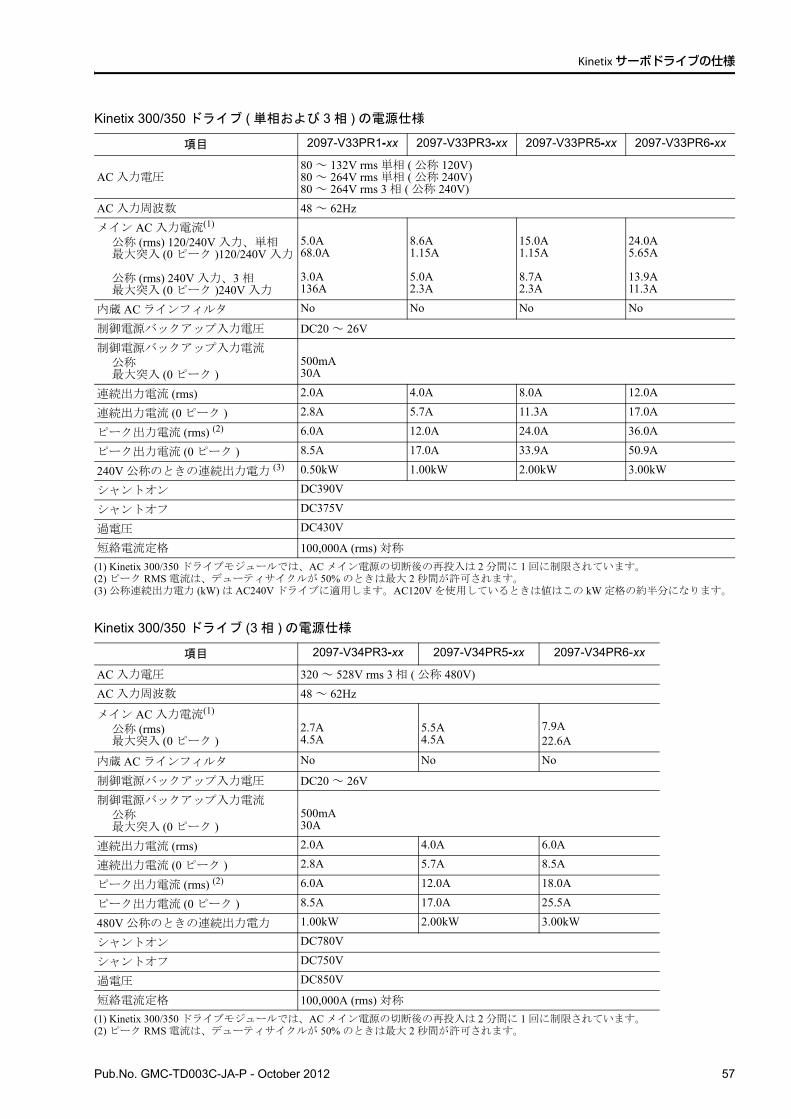
Kinetix 300/350 ドライブ ( 単相および 3 相 ) の電源仕様
Kinetix 300/350 ドライブ (3 相 ) の電源仕様
項目 2097-V33PR1-xx 2097-V33PR3-xx 2097-V33PR5-xx 2097-V33PR6-xx
AC 入力電圧80 ~ 132V rms 単相 ( 公称 120V)80 ~ 264V rms 単相 ( 公称 240V)80 ~ 264V rms 3 相 ( 公称 240V)
AC 入力周波数 48 ~ 62Hz
メイン AC 入力電流(1)
公称 (rms) 120/240V 入力、単相最大突入 (0 ピーク )120/240V 入力
公称 (rms) 240V 入力、3 相最大突入 (0 ピーク )240V 入力
(1) Kinetix 300/350 ドライブモジュールでは、AC メイン電源の切断後の再投入は 2 分間に 1 回に制限されています。
5.0A68.0A
3.0A136A
8.6A1.15A
5.0A2.3A
15.0A1.15A
8.7A2.3A
24.0A5.65A
13.9A11.3A
内蔵 AC ラインフィルタ No No No No
制御電源バックアップ入力電圧 DC20 ~ 26V
制御電源バックアップ入力電流公称最大突入 (0 ピーク )
500mA30A
連続出力電流 (rms) 2.0A 4.0A 8.0A 12.0A
連続出力電流 (0 ピーク ) 2.8A 5.7A 11.3A 17.0A
ピーク出力電流 (rms) (2)
(2) ピーク RMS 電流は、デューティサイクルが 50% のときは最大 2 秒間が許可されます。
6.0A 12.0A 24.0A 36.0A
ピーク出力電流 (0 ピーク ) 8.5A 17.0A 33.9A 50.9A
240V 公称のときの連続出力電力 (3)
(3) 公称連続出力電力 (kW) は AC240V ドライブに適用します。AC120V を使用しているときは値はこの kW 定格の約半分になります。
0.50kW 1.00kW 2.00kW 3.00kW
シャントオン DC390V
シャントオフ DC375V
過電圧 DC430V
短絡電流定格 100,000A (rms) 対称
項目 2097-V34PR3-xx 2097-V34PR5-xx 2097-V34PR6-xx
AC 入力電圧 320 ~ 528V rms 3 相 ( 公称 480V)
AC 入力周波数 48 ~ 62Hz
メイン AC 入力電流(1)
公称 (rms)最大突入 (0 ピーク )
(1) Kinetix 300/350 ドライブモジュールでは、AC メイン電源の切断後の再投入は 2 分間に 1 回に制限されています。
2.7A4.5A
5.5A4.5A
7.9A22.6A
内蔵 AC ラインフィルタ No No No
制御電源バックアップ入力電圧 DC20 ~ 26V
制御電源バックアップ入力電流公称最大突入 (0 ピーク )
500mA30A
連続出力電流 (rms) 2.0A 4.0A 6.0A
連続出力電流 (0 ピーク ) 2.8A 5.7A 8.5A
ピーク出力電流 (rms) (2)
(2) ピーク RMS 電流は、デューティサイクルが 50% のときは最大 2 秒間が許可されます。
6.0A 12.0A 18.0A
ピーク出力電流 (0 ピーク ) 8.5A 17.0A 25.5A
480V 公称のときの連続出力電力 1.00kW 2.00kW 3.00kW
シャントオン DC780V
シャントオフ DC750V
過電圧 DC850V
短絡電流定格 100,000A (rms) 対称
Pub.No. GMC-TD003C-JA-P - October 2012 57
Kinetixサーボドライブの仕様
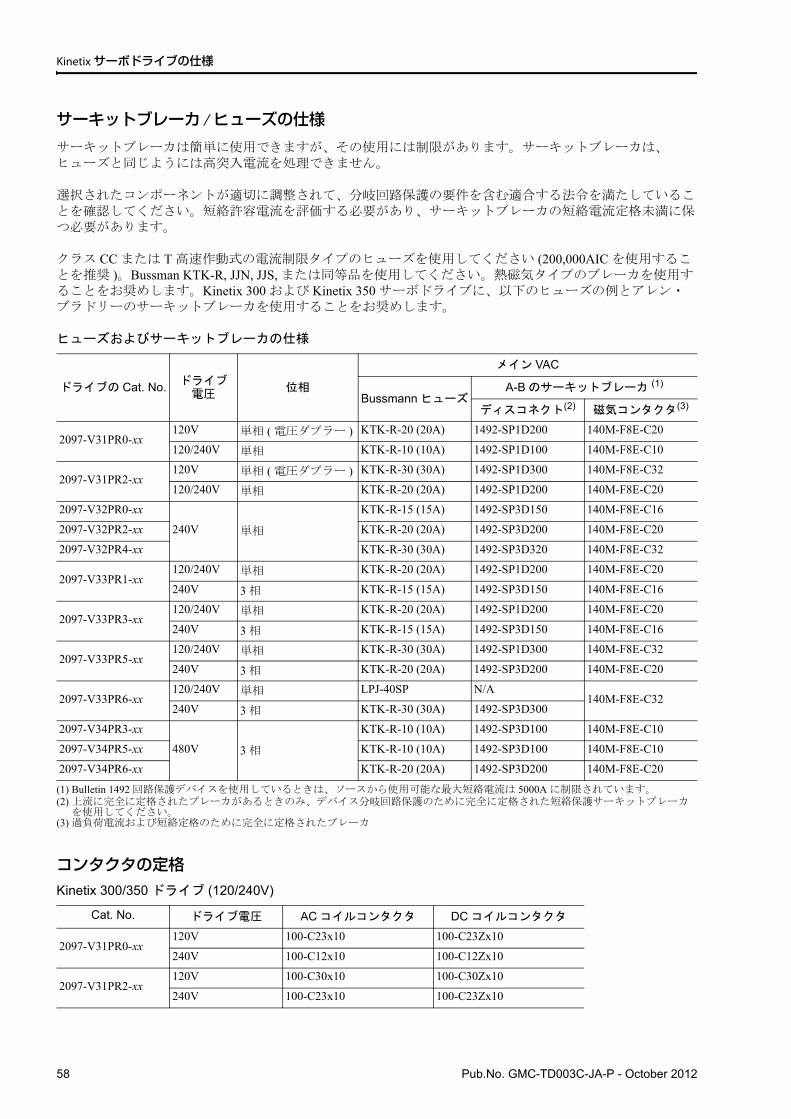
サーキットブレーカ /ヒューズの仕様サーキットブレーカは簡単に使用できますが、その使用には制限があります。サーキットブレーカは、ヒューズと同じようには高突入電流を処理できません。
選択されたコンポーネントが適切に調整されて、分岐回路保護の要件を含む適合する法令を満たしていることを確認してください。短絡許容電流を評価する必要があり、サーキットブレーカの短絡電流定格未満に保つ必要があります。
クラス CC または T 高速作動式の電流制限タイプのヒューズを使用してください (200,000AIC を使用することを推奨 )。Bussman KTK-R, JJN, JJS, または同等品を使用してください。熱磁気タイプのブレーカを使用することをお奨めします。Kinetix 300 および Kinetix 350 サーボドライブに、以下のヒューズの例とアレン・ブラドリーのサーキットブレーカを使用することをお奨めします。
ヒューズおよびサーキットブレーカの仕様
コンタクタの定格Kinetix 300/350 ドライブ (120/240V)
ドライブの Cat. No.ドライブ電圧
位相
メイン VAC
Bussmann ヒューズA-B のサーキットブレーカ (1)
(1) Bulletin 1492 回路保護デバイスを使用しているときは、ソースから使用可能な最大短絡電流は 5000A に制限されています。
ディスコネクト(2)
(2) 上流に完全に定格されたブレーカがあるときのみ、デバイス分岐回路保護のために完全に定格された短絡保護サーキットブレーカを使用してください。
磁気コンタクタ(3)
(3) 過負荷電流および短絡定格のために完全に定格されたブレーカ
2097-V31PR0-xx120V 単相 ( 電圧ダブラー ) KTK-R-20 (20A) 1492-SP1D200 140M-F8E-C20
120/240V 単相 KTK-R-10 (10A) 1492-SP1D100 140M-F8E-C10
2097-V31PR2-xx120V 単相 ( 電圧ダブラー ) KTK-R-30 (30A) 1492-SP1D300 140M-F8E-C32
120/240V 単相 KTK-R-20 (20A) 1492-SP1D200 140M-F8E-C20
2097-V32PR0-xx
240V 単相
KTK-R-15 (15A) 1492-SP3D150 140M-F8E-C16
2097-V32PR2-xx KTK-R-20 (20A) 1492-SP3D200 140M-F8E-C20
2097-V32PR4-xx KTK-R-30 (30A) 1492-SP3D320 140M-F8E-C32
2097-V33PR1-xx120/240V 単相 KTK-R-20 (20A) 1492-SP1D200 140M-F8E-C20
240V 3 相 KTK-R-15 (15A) 1492-SP3D150 140M-F8E-C16
2097-V33PR3-xx120/240V 単相 KTK-R-20 (20A) 1492-SP1D200 140M-F8E-C20
240V 3 相 KTK-R-15 (15A) 1492-SP3D150 140M-F8E-C16
2097-V33PR5-xx120/240V 単相 KTK-R-30 (30A) 1492-SP1D300 140M-F8E-C32
240V 3 相 KTK-R-20 (20A) 1492-SP3D200 140M-F8E-C20
2097-V33PR6-xx120/240V 単相 LPJ-40SP N/A
140M-F8E-C32240V 3 相 KTK-R-30 (30A) 1492-SP3D300
2097-V34PR3-xx
480V 3 相
KTK-R-10 (10A) 1492-SP3D100 140M-F8E-C10
2097-V34PR5-xx KTK-R-10 (10A) 1492-SP3D100 140M-F8E-C10
2097-V34PR6-xx KTK-R-20 (20A) 1492-SP3D200 140M-F8E-C20
Cat. No. ドライブ電圧 AC コイルコンタクタ DC コイルコンタクタ
2097-V31PR0-xx120V 100-C23x10 100-C23Zx10
240V 100-C12x10 100-C12Zx10
2097-V31PR2-xx120V 100-C30x10 100-C30Zx10
240V 100-C23x10 100-C23Zx10
58 Pub.No. GMC-TD003C-JA-P - October 2012
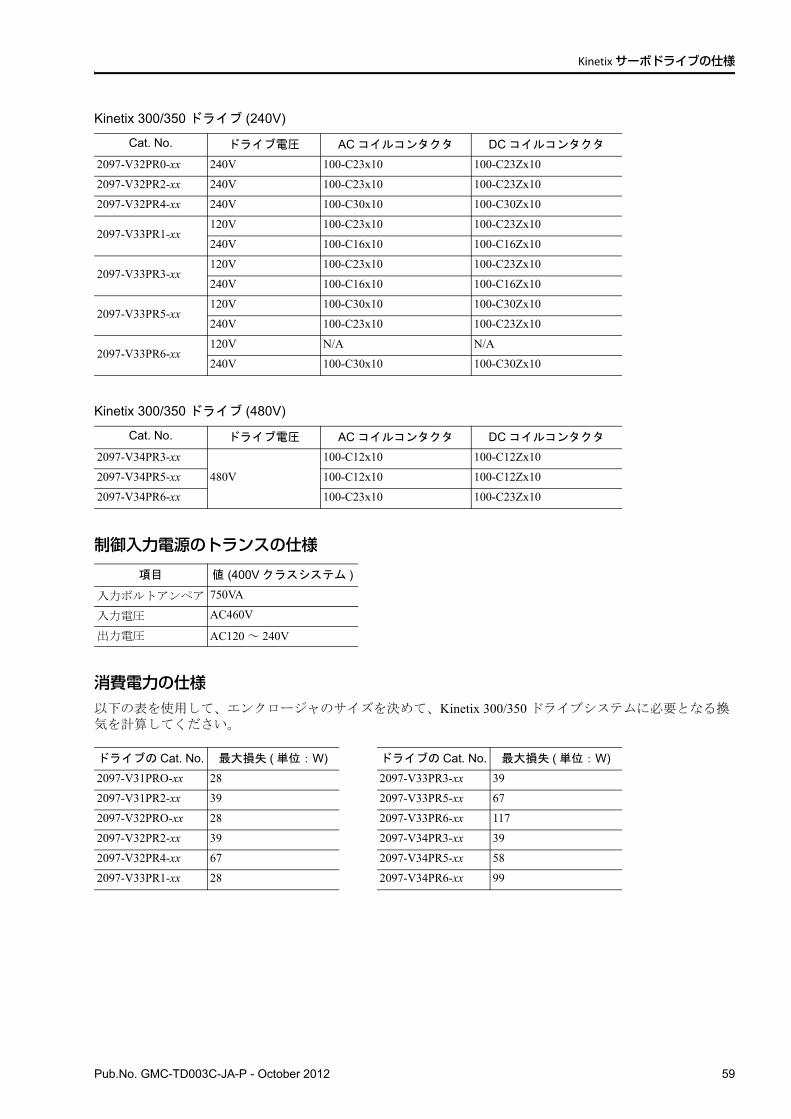
Kinetixサーボドライブの仕様
Kinetix 300/350 ドライブ (240V)
Kinetix 300/350 ドライブ (480V)
制御入力電源のトランスの仕様
消費電力の仕様以下の表を使用して、エンクロージャのサイズを決めて、Kinetix 300/350 ドライブシステムに必要となる換気を計算してください。
Cat. No. ドライブ電圧 AC コイルコンタクタ DC コイルコンタクタ
2097-V32PR0-xx 240V 100-C23x10 100-C23Zx10
2097-V32PR2-xx 240V 100-C23x10 100-C23Zx10
2097-V32PR4-xx 240V 100-C30x10 100-C30Zx10
2097-V33PR1-xx120V 100-C23x10 100-C23Zx10
240V 100-C16x10 100-C16Zx10
2097-V33PR3-xx120V 100-C23x10 100-C23Zx10
240V 100-C16x10 100-C16Zx10
2097-V33PR5-xx120V 100-C30x10 100-C30Zx10
240V 100-C23x10 100-C23Zx10
2097-V33PR6-xx120V N/A N/A
240V 100-C30x10 100-C30Zx10
Cat. No. ドライブ電圧 AC コイルコンタクタ DC コイルコンタクタ
2097-V34PR3-xx
480V
100-C12x10 100-C12Zx10
2097-V34PR5-xx 100-C12x10 100-C12Zx10
2097-V34PR6-xx 100-C23x10 100-C23Zx10
項目 値 (400V クラスシステム )
入力ボルトアンペア 750VA
入力電圧 AC460V
出力電圧 AC120 ~ 240V
ドライブの Cat. No. 最大損失 ( 単位:W) ドライブの Cat. No. 最大損失 ( 単位:W)
2097-V31PRO-xx 28 2097-V33PR3-xx 39
2097-V31PR2-xx 39 2097-V33PR5-xx 67
2097-V32PRO-xx 28 2097-V33PR6-xx 117
2097-V32PR2-xx 39 2097-V34PR3-xx 39
2097-V32PR4-xx 67 2097-V34PR5-xx 58
2097-V33PR1-xx 28 2097-V34PR6-xx 99
Pub.No. GMC-TD003C-JA-P - October 2012 59
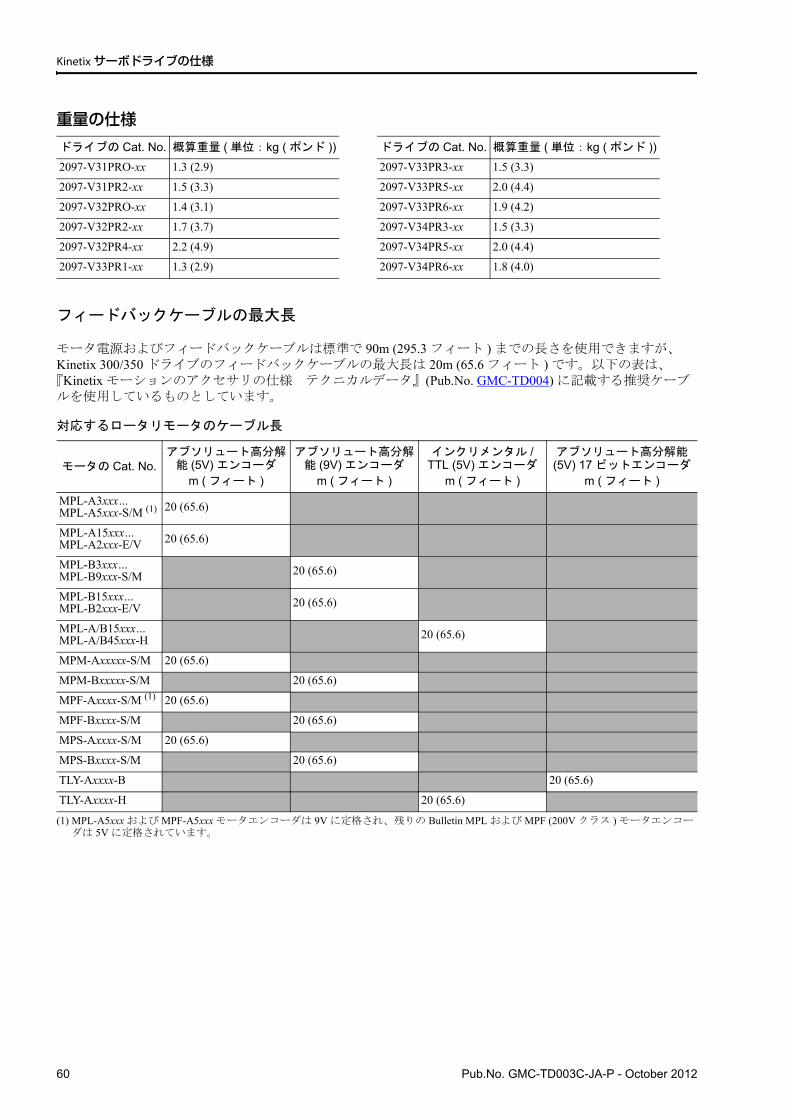
Kinetixサーボドライブの仕様
重量の仕様
フィードバックケーブルの最大長
モータ電源およびフィードバックケーブルは標準で 90m (295.3 フィート ) までの長さを使用できますが、Kinetix 300/350 ドライブのフィードバックケーブルの最大長は 20m (65.6 フィート ) です。以下の表は、『Kinetix モーションのアクセサリの仕様 テクニカルデータ』(Pub.No. GMC-TD004) に記載する推奨ケーブルを使用しているものとしています。
ドライブの Cat. No. 概算重量 ( 単位:kg ( ポンド )) ドライブの Cat. No. 概算重量 ( 単位:kg ( ポンド ))
2097-V31PRO-xx 1.3 (2.9) 2097-V33PR3-xx 1.5 (3.3)
2097-V31PR2-xx 1.5 (3.3) 2097-V33PR5-xx 2.0 (4.4)
2097-V32PRO-xx 1.4 (3.1) 2097-V33PR6-xx 1.9 (4.2)
2097-V32PR2-xx 1.7 (3.7) 2097-V34PR3-xx 1.5 (3.3)
2097-V32PR4-xx 2.2 (4.9) 2097-V34PR5-xx 2.0 (4.4)
2097-V33PR1-xx 1.3 (2.9) 2097-V34PR6-xx 1.8 (4.0)
対応するロータリモータのケーブル長
モータの Cat. No.アブソリュート高分解能 (5V) エンコーダ
m ( フィート )
アブソリュート高分解能 (9V) エンコーダ
m ( フィート )
インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
アブソリュート高分解能(5V) 17 ビットエンコーダ
m ( フィート )
MPL-A3xxx…MPL-A5xxx-S/M (1)
(1) MPL-A5xxx および MPF-A5xxx モータエンコーダは 9V に定格され、残りの Bulletin MPL および MPF (200V クラス ) モータエンコーダは 5V に定格されています。
20 (65.6)
MPL-A15xxx…MPL-A2xxx-E/V 20 (65.6)
MPL-B3xxx…MPL-B9xxx-S/M 20 (65.6)
MPL-B15xxx…MPL-B2xxx-E/V 20 (65.6)
MPL-A/B15xxx…MPL-A/B45xxx-H 20 (65.6)
MPM-Axxxxx-S/M 20 (65.6)
MPM-Bxxxxx-S/M 20 (65.6)
MPF-Axxxx-S/M (1) 20 (65.6)
MPF-Bxxxx-S/M 20 (65.6)
MPS-Axxxx-S/M 20 (65.6)
MPS-Bxxxx-S/M 20 (65.6)
TLY-Axxxx-B 20 (65.6)
TLY-Axxxx-H 20 (65.6)
60 Pub.No. GMC-TD003C-JA-P - October 2012
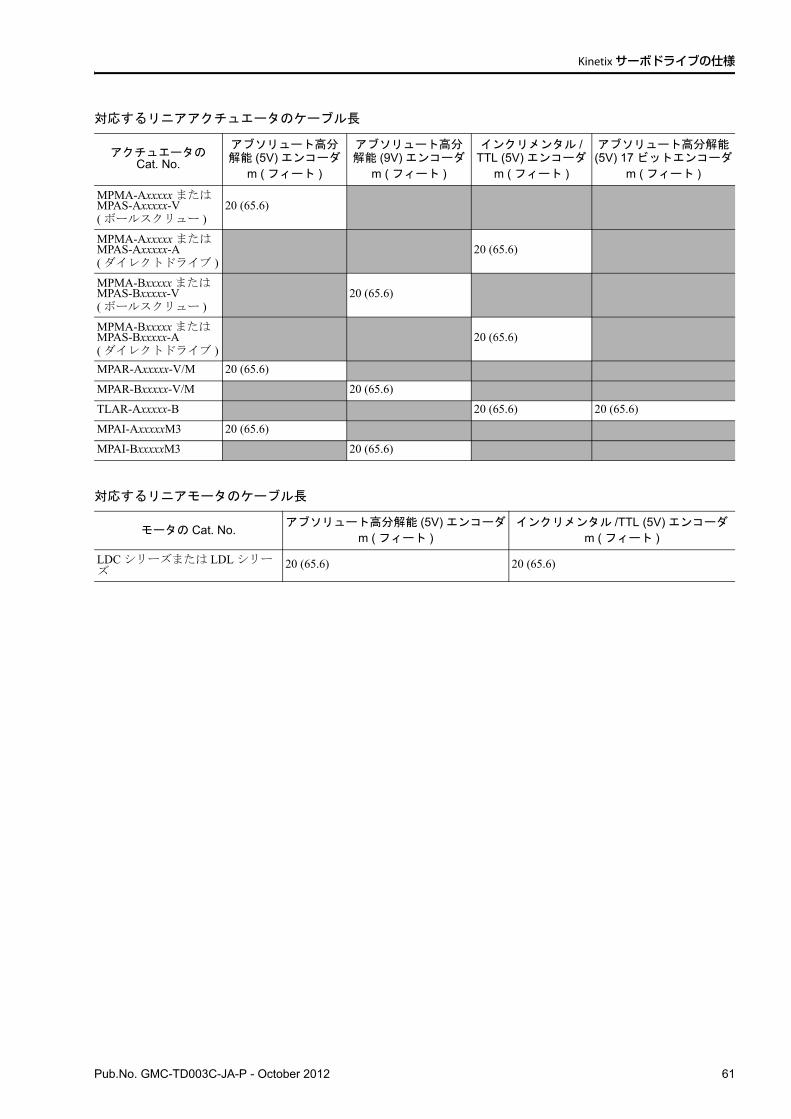
Kinetixサーボドライブの仕様
対応するリニアアクチュエータのケーブル長
対応するリニアモータのケーブル長
アクチュエータのCat. No.
アブソリュート高分解能 (5V) エンコーダ
m ( フィート )
アブソリュート高分解能 (9V) エンコーダ
m ( フィート )
インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
アブソリュート高分解能(5V) 17 ビットエンコーダ
m ( フィート )
MPMA-Axxxxx またはMPAS-Axxxxx-V ( ボールスクリュー )
20 (65.6)
MPMA-Axxxxx またはMPAS-Axxxxx-A ( ダイレクトドライブ )
20 (65.6)
MPMA-Bxxxxx またはMPAS-Bxxxxx-V( ボールスクリュー )
20 (65.6)
MPMA-Bxxxxx またはMPAS-Bxxxxx-A ( ダイレクトドライブ )
20 (65.6)
MPAR-Axxxxx-V/M 20 (65.6)
MPAR-Bxxxxx-V/M 20 (65.6)
TLAR-Axxxxx-B 20 (65.6) 20 (65.6)
MPAI-AxxxxxM3 20 (65.6)
MPAI-BxxxxxM3 20 (65.6)
モータの Cat. No.アブソリュート高分解能 (5V) エンコーダ
m ( フィート )インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
LDC シリーズまたは LDL シリーズ
20 (65.6) 20 (65.6)
Pub.No. GMC-TD003C-JA-P - October 2012 61
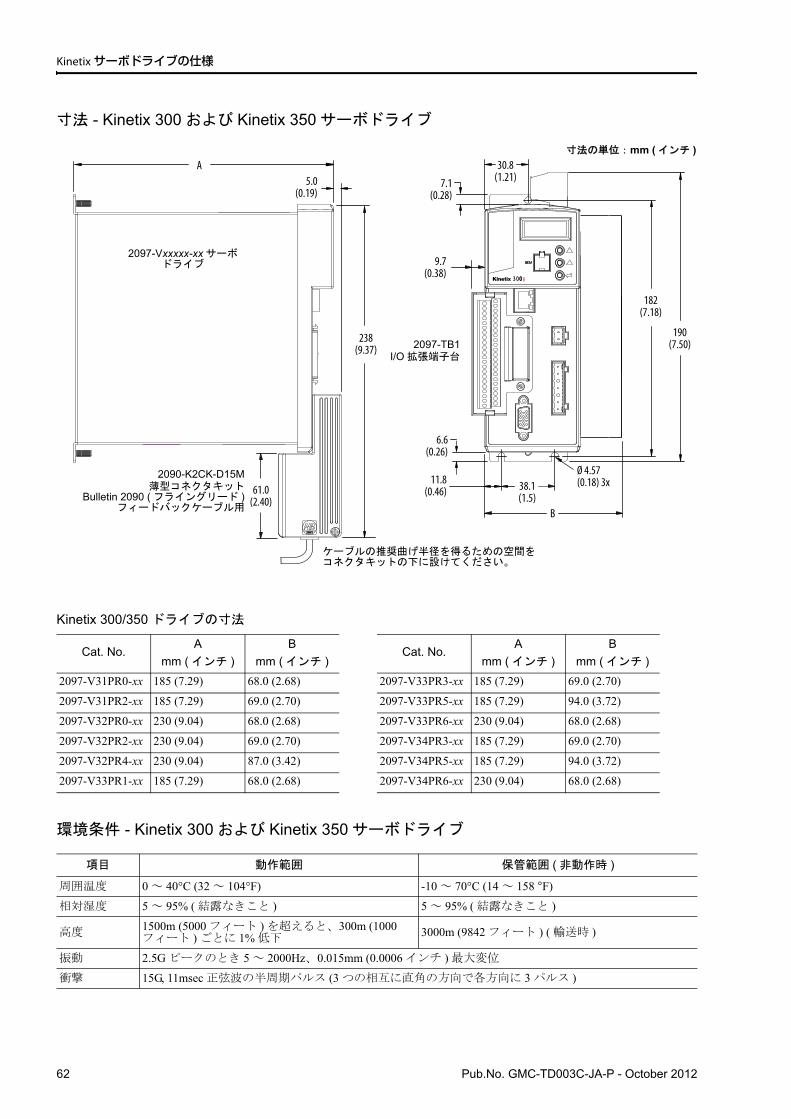
Kinetixサーボドライブの仕様
寸法 - Kinetix 300 および Kinetix 350 サーボドライブ
Kinetix 300/350 ドライブの寸法
環境条件 - Kinetix 300 および Kinetix 350 サーボドライブ
Cat. No.A
mm ( インチ )
B
mm ( インチ )Cat. No.
A
mm ( インチ )
B
mm ( インチ )
2097-V31PR0-xx 185 (7.29) 68.0 (2.68) 2097-V33PR3-xx 185 (7.29) 69.0 (2.70)
2097-V31PR2-xx 185 (7.29) 69.0 (2.70) 2097-V33PR5-xx 185 (7.29) 94.0 (3.72)
2097-V32PR0-xx 230 (9.04) 68.0 (2.68) 2097-V33PR6-xx 230 (9.04) 68.0 (2.68)
2097-V32PR2-xx 230 (9.04) 69.0 (2.70) 2097-V34PR3-xx 185 (7.29) 69.0 (2.70)
2097-V32PR4-xx 230 (9.04) 87.0 (3.42) 2097-V34PR5-xx 185 (7.29) 94.0 (3.72)
2097-V33PR1-xx 185 (7.29) 68.0 (2.68) 2097-V34PR6-xx 230 (9.04) 68.0 (2.68)
項目 動作範囲 保管範囲 ( 非動作時 )
周囲温度 0 ~ 40°C (32 ~ 104°F) -10 ~ 70°C (14 ~ 158F)
相対湿度 5 ~ 95% ( 結露なきこと ) 5 ~ 95% ( 結露なきこと )
高度1500m (5000 フィート ) を超えると、300m (1000フィート ) ごとに 1% 低下
3000m (9842 フィート ) ( 輸送時 )
振動 2.5G ピークのとき 5 ~ 2000Hz、0.015mm (0.0006 インチ ) 最大変位
衝撃 15G, 11msec 正弦波の半周期パルス (3 つの相互に直角の方向で各方向に 3 パルス )
11.8(0.46)
6.6(0.26)
7.1(0.28)
B
38.1 (1.5)
182(7.18)
190(7.50)
30.8(1.21)
Ø 4.57(0.18) 3x
03 0
A
238(9.37)
9.7(0.38)
5.0(0.19)
0
61.0(2.40)
寸法の単位:mm ( インチ )
ケーブルの推奨曲げ半径を得るための空間をコネクタキットの下に設けてください。
2090-K2CK-D15M薄型コネクタキット
Bulletin 2090 ( フライングリード )フィードバックケーブル用
2097-Vxxxxx-xx サーボドライブ
2097-TB1I/O 拡張端子台
62 Pub.No. GMC-TD003C-JA-P - October 2012
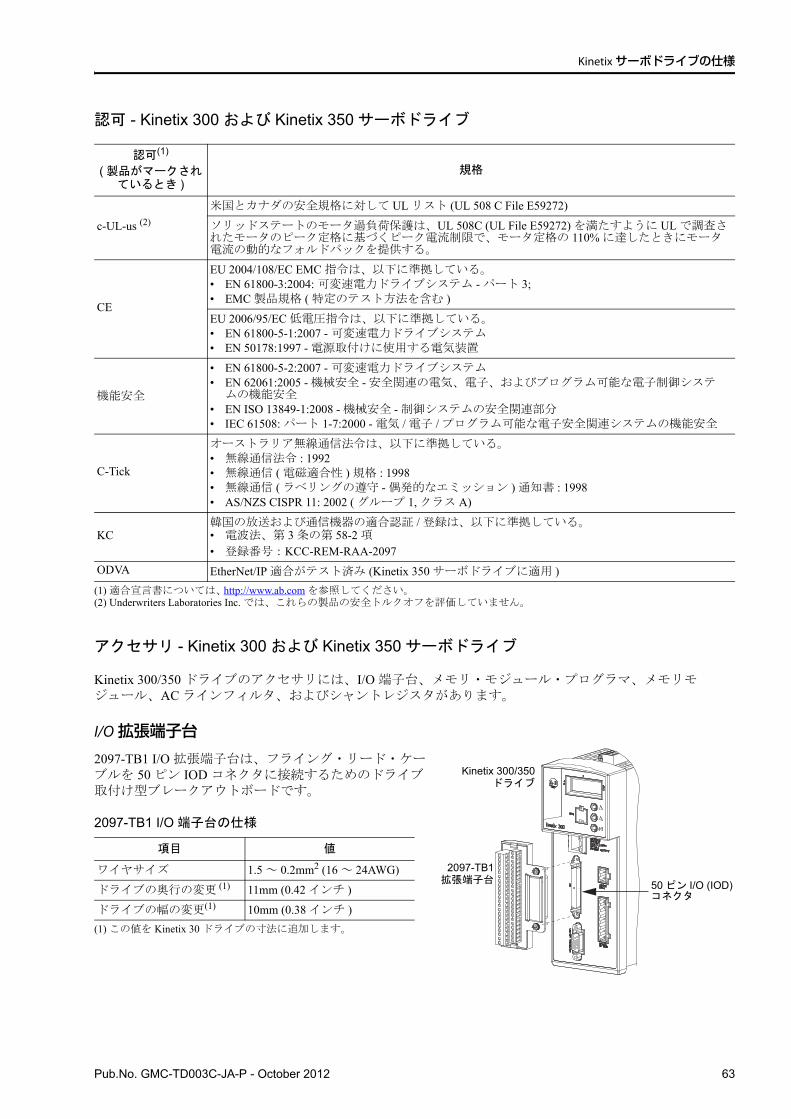
Kinetixサーボドライブの仕様
認可 - Kinetix 300 および Kinetix 350 サーボドライブ
アクセサリ - Kinetix 300 および Kinetix 350 サーボドライブ
Kinetix 300/350 ドライブのアクセサリには、I/O 端子台、メモリ・モジュール・プログラマ、メモリモジュール、AC ラインフィルタ、およびシャントレジスタがあります。
I/O拡張端子台2097-TB1 I/O 拡張端子台は、フライング・リード・ケーブルを 50 ピン IOD コネクタに接続するためのドライブ取付け型ブレークアウトボードです。
2097-TB1 I/O 端子台の仕様
認可(1)
( 製品がマークされているとき )
(1) 適合宣言書については、 http://www.ab.com を参照してください。
規格
c-UL-us (2)
(2) Underwriters Laboratories Inc. では、これらの製品の安全トルクオフを評価していません。
米国とカナダの安全規格に対して UL リスト (UL 508 C File E59272)
ソリッドステートのモータ過負荷保護は、UL 508C (UL File E59272) を満たすように UL で調査されたモータのピーク定格に基づくピーク電流制限で、モータ定格の 110% に達したときにモータ電流の動的なフォルドバックを提供する。
CE
EU 2004/108/EC EMC 指令は、以下に準拠している。• EN 61800-3:2004: 可変速電力ドライブシステム - パート 3; • EMC 製品規格 ( 特定のテスト方法を含む )
EU 2006/95/EC 低電圧指令は、以下に準拠している。• EN 61800-5-1:2007 - 可変速電力ドライブシステム• EN 50178:1997 - 電源取付けに使用する電気装置
機能安全
• EN 61800-5-2:2007 - 可変速電力ドライブシステム• EN 62061:2005 - 機械安全 - 安全関連の電気、電子、およびプログラム可能な電子制御システ
ムの機能安全• EN ISO 13849-1:2008 - 機械安全 - 制御システムの安全関連部分• IEC 61508: パート 1-7:2000 - 電気 / 電子 / プログラム可能な電子安全関連システムの機能安全
C-Tick
オーストラリア無線通信法令は、以下に準拠している。• 無線通信法令 : 1992• 無線通信 ( 電磁適合性 ) 規格 : 1998• 無線通信 ( ラベリングの遵守 - 偶発的なエミッション ) 通知書 : 1998• AS/NZS CISPR 11: 2002 ( グループ 1, クラス A)
KC韓国の放送および通信機器の適合認証 / 登録は、以下に準拠している。• 電波法、第 3 条の第 58-2 項
• 登録番号:KCC-REM-RAA-2097
ODVA EtherNet/IP 適合がテスト済み (Kinetix 350 サーボドライブに適用 )
項目 値
ワイヤサイズ 1.5 ~ 0.2mm2 (16 ~ 24AWG)
ドライブの奥行の変更 (1) 11mm (0.42 インチ )
ドライブの幅の変更(1)
(1) この値を Kinetix 30 ドライブの寸法に追加します。
10mm (0.38 インチ )
Kinetix 300/350ドライブ
2097-TB1拡張端子台 50 ピン I/O (IOD)
コネクタ
Pub.No. GMC-TD003C-JA-P - October 2012 63

Kinetixサーボドライブの仕様
メモリ・モジュ-ル・プログラマ2097-PGMR メモリ・モジュール・プログラマはKinetix 300/350 ドライブ構成を複製するための携帯型型装置で、ダウンタイムとトラブルシューティングに要する時間を短縮できます。
2097-PGMR メモリ・モジュール・プログラマの仕様
メモリモジュール 12パック2097-MEM メモリモジュールは EEPROM テクノロジを使用して、Kinetix 300/350 ドライブ構成を安全ガードするための保護と耐久性のためにプラスチック製のケースに収納されています。
2097-MEM メモリモジュールを使用して、簡単に自動デバイス置き換え (ADR) を行なえるようにドライブ構成をバックアップしています。
項目 値
DC 電源リチウムバッテリ
DC+ 6V, 最小 150mA 供給
4 モノセル ( タイプ D), それぞれ DC1.5V
外部電源ユニット DC+ 6V, 300mA, 安定化
ディスプレイ
タイプ LCD
表示形式 テキスト
行 x 文字 1 x 16
コントラスト設定 メニューから設定
メモリ データメモリ最大 120 パラメータファイル ( インバータ・ドライブ・コントローラ用 )
シリアルインターフェイス
DB9 コネクタ RS-232
重量 2097-PGMR 1.3kg (2.87 ポンド )、バッテリ付き
4.0(0.16)
105(4.1)
76(3.0)
155(6.1)
寸法の単位:mm ( インチ )
2097-PGMR メモリ・モジュール・プログラマ
2097-MEM メモリモジュール
前面図 背面図
64 Pub.No. GMC-TD003C-JA-P - October 2012
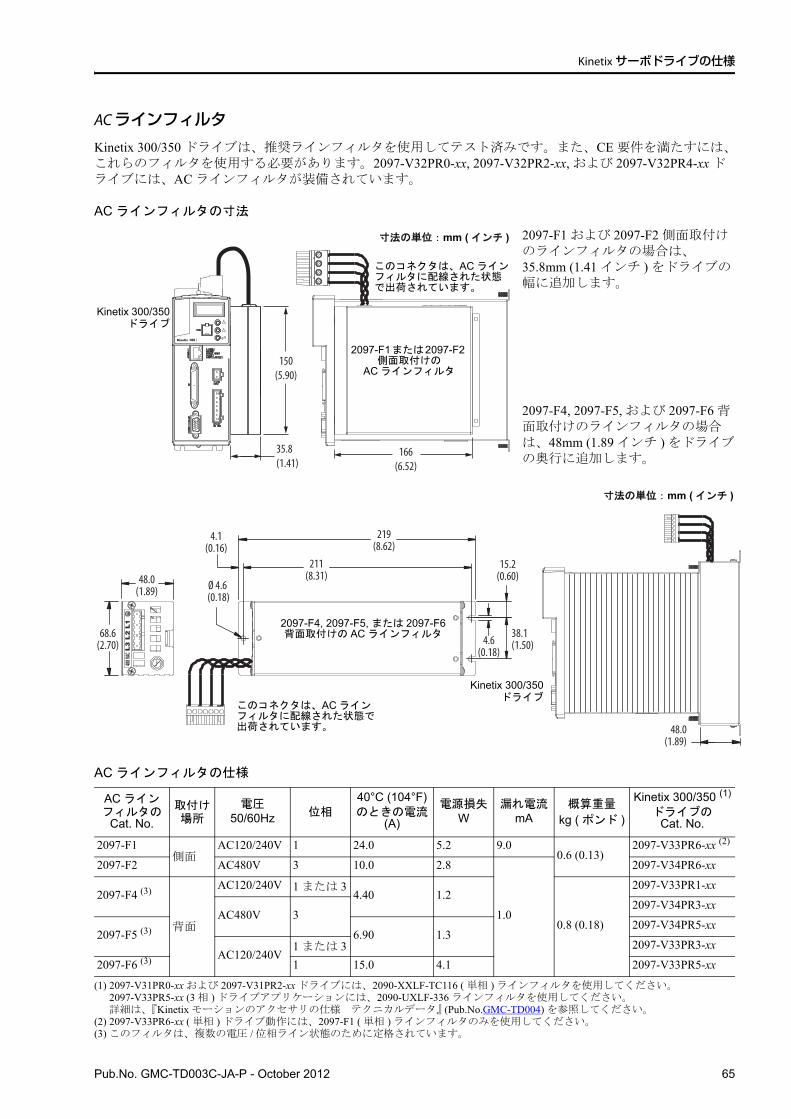
Kinetixサーボドライブの仕様
AC ラインフィルタKinetix 300/350 ドライブは、推奨ラインフィルタを使用してテスト済みです。また、CE 要件を満たすには、これらのフィルタを使用する必要があります。2097-V32PR0-xx, 2097-V32PR2-xx, および 2097-V32PR4-xx ドライブには、AC ラインフィルタが装備されています。
AC ラインフィルタの寸法
2097-F1 および 2097-F2 側面取付けのラインフィルタの場合は、35.8mm (1.41 インチ ) をドライブの幅に追加します。
2097-F4, 2097-F5, および 2097-F6 背面取付けのラインフィルタの場合は、48mm (1.89 インチ ) をドライブの奥行に追加します。
AC ラインフィルタの仕様
AC ラインフィルタの
Cat. No.
取付け場所
電圧50/60Hz 位相
40°C (104°F)のときの電流
(A)
電源損失W
漏れ電流mA
概算重量
kg ( ポンド )
Kinetix 300/350 (1)
ドライブのCat. No.
(1) 2097-V31PR0-xx および 2097-V31PR2-xx ドライブには、2090-XXLF-TC116 ( 単相 ) ラインフィルタを使用してください。2097-V33PR5-xx (3 相 ) ドライブアプリケーションには、2090-UXLF-336 ラインフィルタを使用してください。詳細は、『Kinetix モーションのアクセサリの仕様 テクニカルデータ』 (Pub.No.GMC-TD004) を参照してください。
2097-F1側面
AC120/240V 1 24.0 5.2 9.00.6 (0.13)
2097-V33PR6-xx (2)
(2) 2097-V33PR6-xx ( 単相 ) ドライブ動作には、2097-F1 ( 単相 ) ラインフィルタのみを使用してください。
2097-F2 AC480V 3 10.0 2.8
1.0
2097-V34PR6-xx
2097-F4 (3)
(3) このフィルタは、複数の電圧 / 位相ライン状態のために定格されています。
背面
AC120/240V 1 または 34.40 1.2
0.8 (0.18)
2097-V33PR1-xx
AC480V 32097-V34PR3-xx
2097-F5 (3) 6.90 1.32097-V34PR5-xx
AC120/240V1 または 3 2097-V33PR3-xx
2097-F6 (3) 1 15.0 4.1 2097-V33PR5-xx
00300
35.8(1.41)
150(5.90)
166(6.52)
2097-F1または2097-F2 側面取付けの
AC ラインフィルタ
Kinetix 300/350ドライブ
寸法の単位:mm ( インチ )
このコネクタは、AC ラインフィルタに配線された状態で出荷されています。
4.1(0.16)
219(8.62)
Ø 4.6 (0.18)
4.6(0.18)
68.6(2.70)
48.0(1.89)
38.1(1.50)
15.2(0.60)
211(8.31)
48.0(1.89)
2097-F4, 2097-F5, または 2097-F6背面取付けの AC ラインフィルタ
Kinetix 300/350ドライブ
寸法の単位:mm ( インチ )
このコネクタは、AC ラインフィルタに配線された状態で出荷されています。
Pub.No. GMC-TD003C-JA-P - October 2012 65
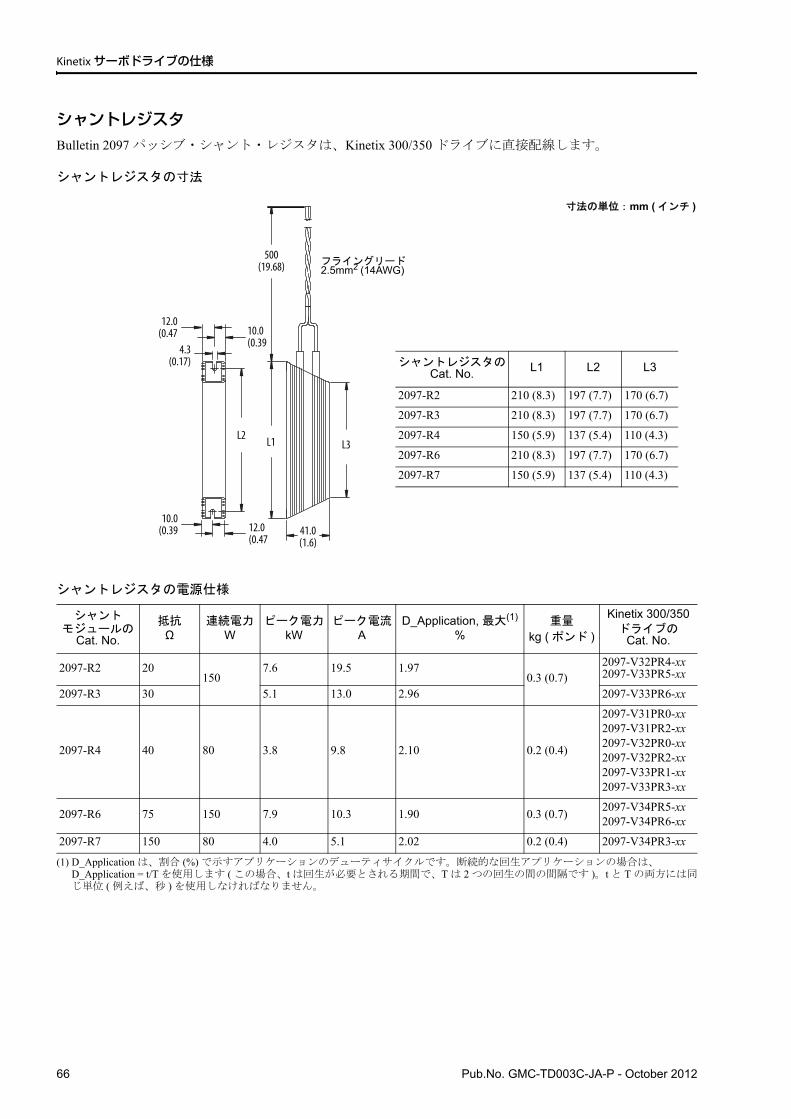
Kinetixサーボドライブの仕様
シャントレジスタBulletin 2097 パッシブ・シャント・レジスタは、Kinetix 300/350 ドライブに直接配線します。
シャントレジスタの寸法
シャントレジスタの電源仕様
シャントモジュールの
Cat. No.
抵抗Ω
連続電力W
ピーク電力kW
ピーク電流A
D_Application, 最大(1)
%
(1) D_Application は、割合 (%) で示すアプリケーションのデューティサイクルです。断続的な回生アプリケーションの場合は、D_Application = t/T を使用します ( この場合、t は回生が必要とされる期間で、T は 2 つの回生の間の間隔です )。t と T の両方には同じ単位 ( 例えば、秒 ) を使用しなければなりません。
重量
kg ( ポンド )
Kinetix 300/350ドライブの
Cat. No.
2097-R2 20150
7.6 19.5 1.970.3 (0.7)
2097-V32PR4-xx2097-V33PR5-xx
2097-R3 30 5.1 13.0 2.96 2097-V33PR6-xx
2097-R4 40 80 3.8 9.8 2.10 0.2 (0.4)
2097-V31PR0-xx2097-V31PR2-xx2097-V32PR0-xx2097-V32PR2-xx2097-V33PR1-xx2097-V33PR3-xx
2097-R6 75 150 7.9 10.3 1.90 0.3 (0.7)2097-V34PR5-xx2097-V34PR6-xx
2097-R7 150 80 4.0 5.1 2.02 0.2 (0.4) 2097-V34PR3-xx
10.0(0.39
L2
12.0(0.47
4.3(0.17)
L3L1
41.0(1.6)
500(19.68)
10.0(0.39 12.0
(0.47
寸法の単位:mm ( インチ )
シャントレジスタのCat. No. L1 L2 L3
2097-R2 210 (8.3) 197 (7.7) 170 (6.7)
2097-R3 210 (8.3) 197 (7.7) 170 (6.7)
2097-R4 150 (5.9) 137 (5.4) 110 (4.3)
2097-R6 210 (8.3) 197 (7.7) 170 (6.7)
2097-R7 150 (5.9) 137 (5.4) 110 (4.3)
フライングリード2.5mm2 (14AWG)
66 Pub.No. GMC-TD003C-JA-P - October 2012

Kinetixサーボドライブの仕様
Kinetix 3 コンポーネント・サーボ・ドライブ
Kinetix 3 コンポーネント・サーボ・ドライブは、小型で軸数の少ないアプリケーションのためにコスト効率のよいモーションコントロールのソリューションを提供します。ダウンロード可能な構成ソフトウェアおよび 自動モータ認識によってアプリケーションに適切なレベルの制御を適用する機能を提供できるため、Kinetix 3 サーボドライブは最初のコストで使いやすいモーションソリューションを実現できます。そのコンパクトなサイズととより小さな電力範囲によって、インデキシングテーブル、医療用の製造、ラボラトリーオートメーション機器、および半導体製造を含む幅広いアプリケーションに適しています。
Kinetix 3 ドライブの機能およびインジケータ
1
2
3
4
6
5
7
8
9
10
11
12
13
14
15 番号 説明
1 左 / 右および下 / 上矢印キー
2 アナログ出力 (A.out)
3 RS-485 通信中断スイッチ
4 入力電源 (IPD) コネクタ
5 メイン電源ステータスインジケータ
6 シャント電源 (BC) コネクタ
7 モータ電源 (MP) コネクタ
8 接地ラグ
9 モータフィードバック (MF) コネクタ
10 I/O (IOD) コネクタ
11 シリアルインターフェイス (Comm0B) ダウン
12 シリアルインターフェイス (Comm0A) アップ
13 Enter キー
14 モード / 設定キー
15 7 セグメントのステータスインジケータ
Pub.No. GMC-TD003C-JA-P - October 2012 67
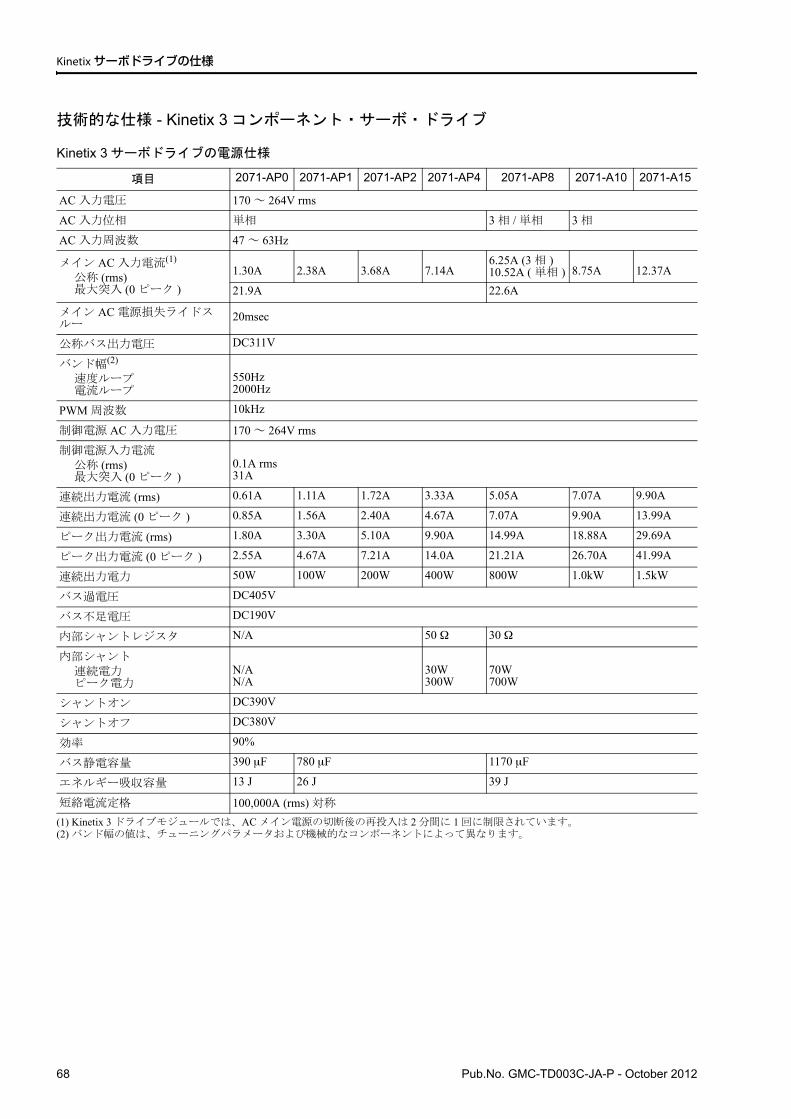
Kinetixサーボドライブの仕様
技術的な仕様 - Kinetix 3 コンポーネント・サーボ・ドライブ
Kinetix 3 サーボドライブの電源仕様
項目 2071-AP0 2071-AP1 2071-AP2 2071-AP4 2071-AP8 2071-A10 2071-A15
AC 入力電圧 170 ~ 264V rms
AC 入力位相 単相 3 相 / 単相 3 相
AC 入力周波数 47 ~ 63Hz
メイン AC 入力電流(1)
公称 (rms) 最大突入 (0 ピーク )
(1) Kinetix 3 ドライブモジュールでは、AC メイン電源の切断後の再投入は 2 分間に 1 回に制限されています。
1.30A 2.38A 3.68A 7.14A6.25A (3 相 )10.52A ( 単相 ) 8.75A 12.37A
21.9A 22.6A
メイン AC 電源損失ライドスルー
20msec
公称バス出力電圧 DC311V
バンド幅(2)
速度ループ電流ループ
(2) バンド幅の値は、チューニングパラメータおよび機械的なコンポーネントによって異なります。
550Hz2000Hz
PWM 周波数 10kHz
制御電源 AC 入力電圧 170 ~ 264V rms
制御電源入力電流公称 (rms) 最大突入 (0 ピーク )
0.1A rms31A
連続出力電流 (rms) 0.61A 1.11A 1.72A 3.33A 5.05A 7.07A 9.90A
連続出力電流 (0 ピーク ) 0.85A 1.56A 2.40A 4.67A 7.07A 9.90A 13.99A
ピーク出力電流 (rms) 1.80A 3.30A 5.10A 9.90A 14.99A 18.88A 29.69A
ピーク出力電流 (0 ピーク ) 2.55A 4.67A 7.21A 14.0A 21.21A 26.70A 41.99A
連続出力電力 50W 100W 200W 400W 800W 1.0kW 1.5kW
バス過電圧 DC405V
バス不足電圧 DC190V
内部シャントレジスタ N/A 50 30
内部シャント連続電力ピーク電力
N/AN/A
30W300W
70W700W
シャントオン DC390V
シャントオフ DC380V
効率 90%
バス静電容量 390 F 780 F 1170 F
エネルギー吸収容量 13 J 26 J 39 J
短絡電流定格 100,000A (rms) 対称
68 Pub.No. GMC-TD003C-JA-P - October 2012
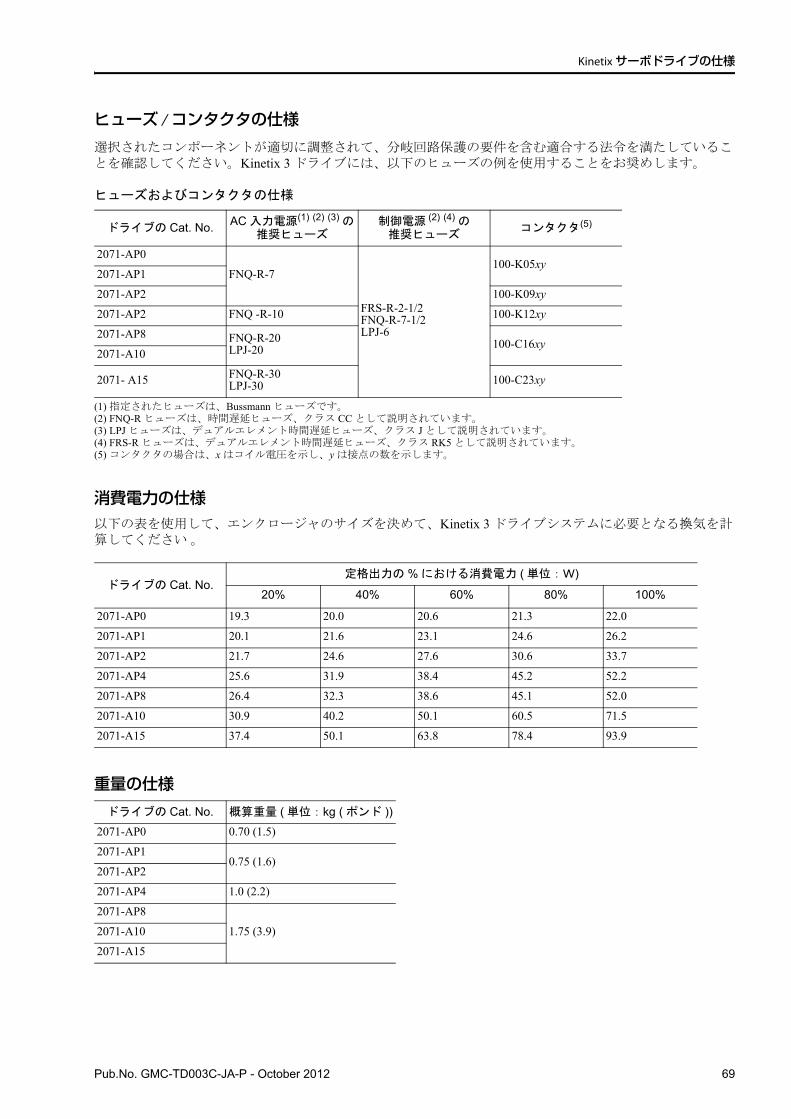
Kinetixサーボドライブの仕様
ヒューズ /コンタクタの仕様選択されたコンポーネントが適切に調整されて、分岐回路保護の要件を含む適合する法令を満たしていることを確認してください。Kinetix 3 ドライブには、以下のヒューズの例を使用することをお奨めします。
ヒューズおよびコンタクタの仕様
消費電力の仕様以下の表を使用して、エンクロージャのサイズを決めて、Kinetix 3 ドライブシステムに必要となる換気を計算してください 。
重量の仕様
ドライブの Cat. No. AC 入力電源(1) (2) (3) の推奨ヒューズ
(1) 指定されたヒューズは、Bussmann ヒューズです。(2) FNQ-R ヒューズは、時間遅延ヒューズ、クラス CC として説明されています。(3) LPJ ヒューズは、デュアルエレメント時間遅延ヒューズ、クラス J として説明されています。
制御電源 (2) (4) の推奨ヒューズ
(4) FRS-R ヒューズは、デュアルエレメント時間遅延ヒューズ、クラス RK5 として説明されています。
コンタクタ(5)
(5) コンタクタの場合は、x はコイル電圧を示し、y は接点の数を示します。
2071-AP0
FNQ-R-7
FRS-R-2-1/2 FNQ-R-7-1/2 LPJ-6
100-K05xy 2071-AP1
2071-AP2 100-K09xy
2071-AP2 FNQ -R-10 100-K12xy
2071-AP8 FNQ-R-20 LPJ-20 100-C16xy
2071-A10
2071- A15 FNQ-R-30LPJ-30 100-C23xy
ドライブの Cat. No.定格出力の % における消費電力 ( 単位:W)
20% 40% 60% 80% 100%
2071-AP0 19.3 20.0 20.6 21.3 22.0
2071-AP1 20.1 21.6 23.1 24.6 26.2
2071-AP2 21.7 24.6 27.6 30.6 33.7
2071-AP4 25.6 31.9 38.4 45.2 52.2
2071-AP8 26.4 32.3 38.6 45.1 52.0
2071-A10 30.9 40.2 50.1 60.5 71.5
2071-A15 37.4 50.1 63.8 78.4 93.9
ドライブの Cat. No. 概算重量 ( 単位:kg ( ポンド ))
2071-AP0 0.70 (1.5)
2071-AP10.75 (1.6)
2071-AP2
2071-AP4 1.0 (2.2)
2071-AP8
1.75 (3.9)2071-A10
2071-A15
Pub.No. GMC-TD003C-JA-P - October 2012 69
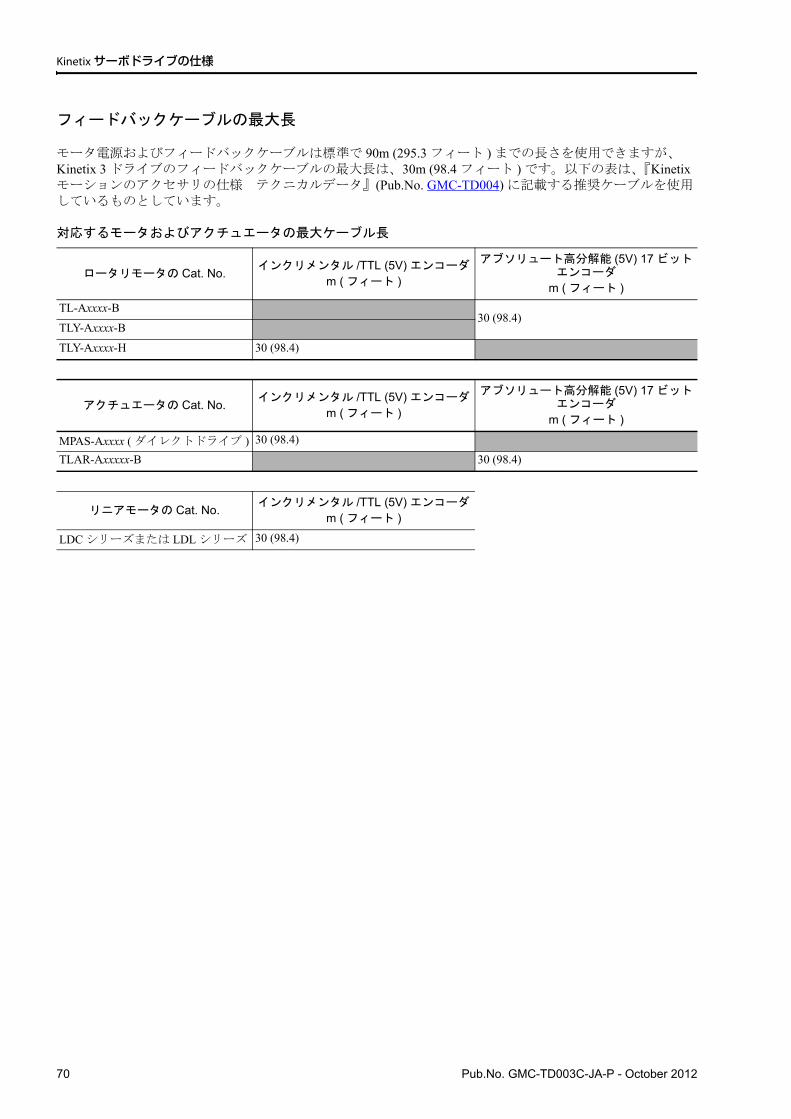
Kinetixサーボドライブの仕様
フィードバックケーブルの最大長
モータ電源およびフィードバックケーブルは標準で 90m (295.3 フィート ) までの長さを使用できますが、Kinetix 3 ドライブのフィードバックケーブルの最大長は、30m (98.4 フィート ) です。以下の表は、『Kinetixモーションのアクセサリの仕様 テクニカルデータ』(Pub.No. GMC-TD004) に記載する推奨ケーブルを使用しているものとしています。
対応するモータおよびアクチュエータの最大ケーブル長
ロータリモータの Cat. No.インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
アブソリュート高分解能 (5V) 17 ビットエンコーダ
m ( フィート )
TL-Axxxx-B30 (98.4)
TLY-Axxxx-B
TLY-Axxxx-H 30 (98.4)
アクチュエータの Cat. No.インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
アブソリュート高分解能 (5V) 17 ビットエンコーダ
m ( フィート )
MPAS-Axxxx ( ダイレクトドライブ ) 30 (98.4)
TLAR-Axxxxx-B 30 (98.4)
リニアモータの Cat. No.インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
LDC シリーズまたは LDL シリーズ 30 (98.4)
70 Pub.No. GMC-TD003C-JA-P - October 2012
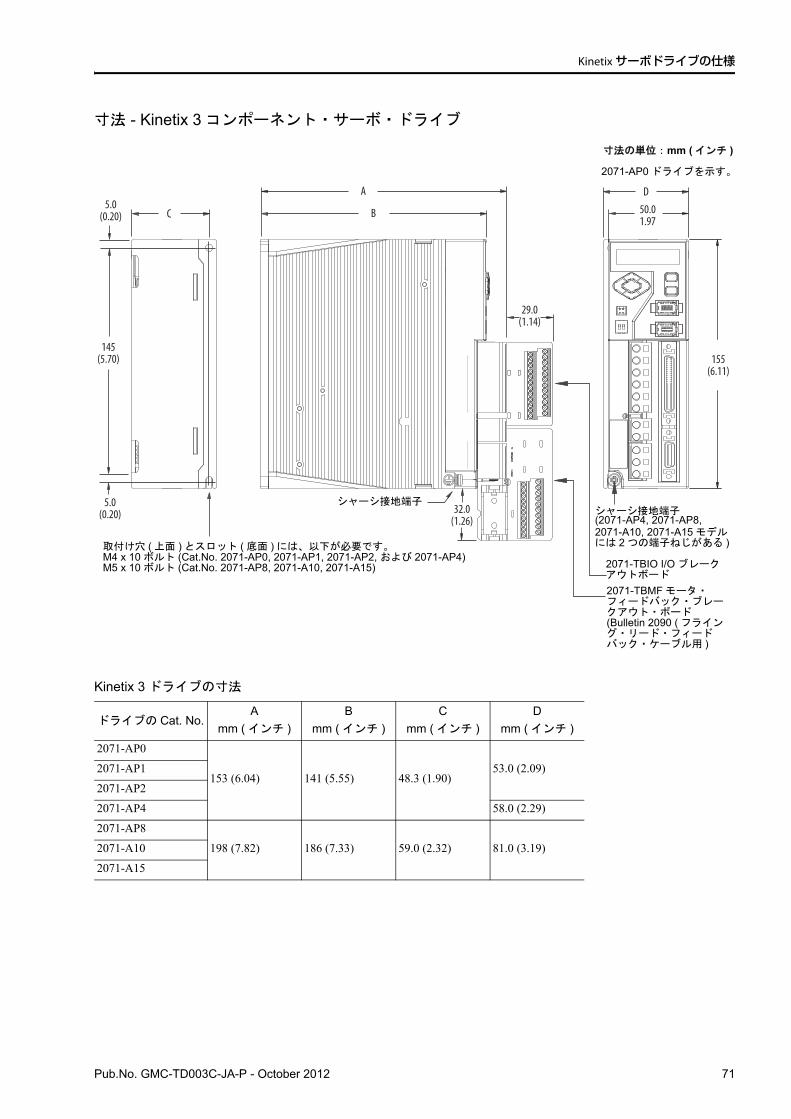
Kinetixサーボドライブの仕様
寸法 - Kinetix 3 コンポーネント・サーボ・ドライブ
Kinetix 3 ドライブの寸法
ドライブの Cat. No.A
mm ( インチ )
B
mm ( インチ )
C
mm ( インチ )
D
mm ( インチ )
2071-AP0
153 (6.04) 141 (5.55) 48.3 (1.90)53.0 (2.09)2071-AP1
2071-AP2
2071-AP4 58.0 (2.29)
2071-AP8
198 (7.82) 186 (7.33) 59.0 (2.32) 81.0 (3.19)2071-A10
2071-A15
5.0(0.20)
155(6.11)
145(5.70)
A
B
D
5.0(0.20)
50.01.97
C
29.0(1.14)
32.0(1.26)
寸法の単位:mm ( インチ )
2071-AP0 ドライブを示す。
取付け穴 ( 上面 ) とスロット ( 底面 ) には、以下が必要です。M4 x 10 ボルト (Cat.No. 2071-AP0, 2071-AP1, 2071-AP2, および 2071-AP4)M5 x 10 ボルト (Cat.No. 2071-AP8, 2071-A10, 2071-A15)
シャーシ接地端子(2071-AP4, 2071-AP8, 2071-A10, 2071-A15 モデルには 2 つの端子ねじがある )
シャーシ接地端子
2071-TBIO I/O ブレークアウトボード
2071-TBMF モータ・フィードバック・ブレークアウト・ボード(Bulletin 2090 ( フライング・リード・フィードバック・ケーブル用 )
Pub.No. GMC-TD003C-JA-P - October 2012 71
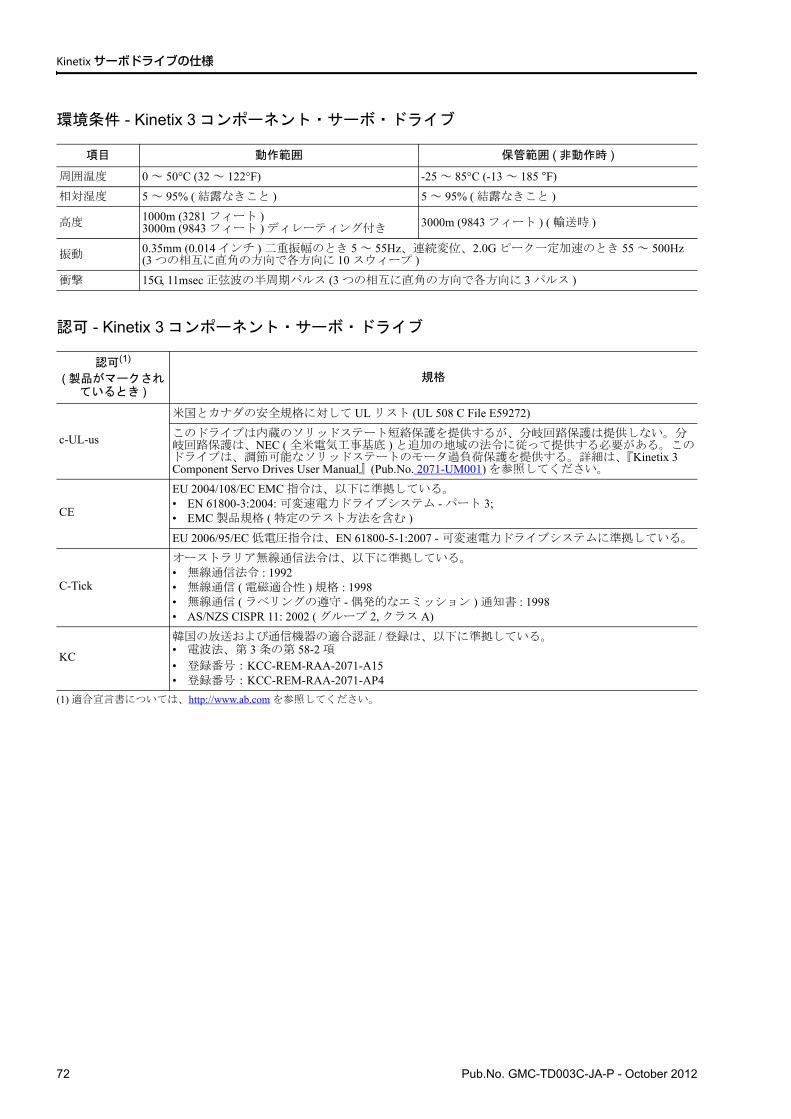
Kinetixサーボドライブの仕様
環境条件 - Kinetix 3 コンポーネント・サーボ・ドライブ
認可 - Kinetix 3 コンポーネント・サーボ・ドライブ
項目 動作範囲 保管範囲 ( 非動作時 )
周囲温度 0 ~ 50°C (32 ~ 122°F) -25 ~ 85°C (-13 ~ 185F)
相対湿度 5 ~ 95% ( 結露なきこと ) 5 ~ 95% ( 結露なきこと )
高度1000m (3281 フィート ) 3000m (9843 フィート ) ディレーティング付き
3000m (9843 フィート ) ( 輸送時 )
振動0.35mm (0.014 インチ ) 二重振幅のとき 5 ~ 55Hz、連続変位、2.0G ピーク一定加速のとき 55 ~ 500Hz (3 つの相互に直角の方向で各方向に 10 スウィープ )
衝撃 15G, 11msec 正弦波の半周期パルス (3 つの相互に直角の方向で各方向に 3 パルス )
認可(1)
( 製品がマークされているとき )
(1) 適合宣言書については、http://www.ab.com を参照してください。
規格
c-UL-us
米国とカナダの安全規格に対して UL リスト (UL 508 C File E59272)
このドライブは内蔵のソリッドステート短絡保護を提供するが、分岐回路保護は提供しない。分岐回路保護は、NEC ( 全米電気工事基底 ) と追加の地域の法令に従って提供する必要がある。このドライブは、調節可能なソリッドステートのモータ過負荷保護を提供する。詳細は、『Kinetix 3 Component Servo Drives User Manual』(Pub.No. 2071-UM001) を参照してください。
CE
EU 2004/108/EC EMC 指令は、以下に準拠している。• EN 61800-3:2004: 可変速電力ドライブシステム - パート 3;• EMC 製品規格 ( 特定のテスト方法を含む )
EU 2006/95/EC 低電圧指令は、EN 61800-5-1:2007 - 可変速電力ドライブシステムに準拠している。
C-Tick
オーストラリア無線通信法令は、以下に準拠している。• 無線通信法令 : 1992• 無線通信 ( 電磁適合性 ) 規格 : 1998• 無線通信 ( ラベリングの遵守 - 偶発的なエミッション ) 通知書 : 1998• AS/NZS CISPR 11: 2002 ( グループ 2, クラス A)
KC
韓国の放送および通信機器の適合認証 / 登録は、以下に準拠している。• 電波法、第 3 条の第 58-2 項
• 登録番号:KCC-REM-RAA-2071-A15• 登録番号:KCC-REM-RAA-2071-AP4
72 Pub.No. GMC-TD003C-JA-P - October 2012
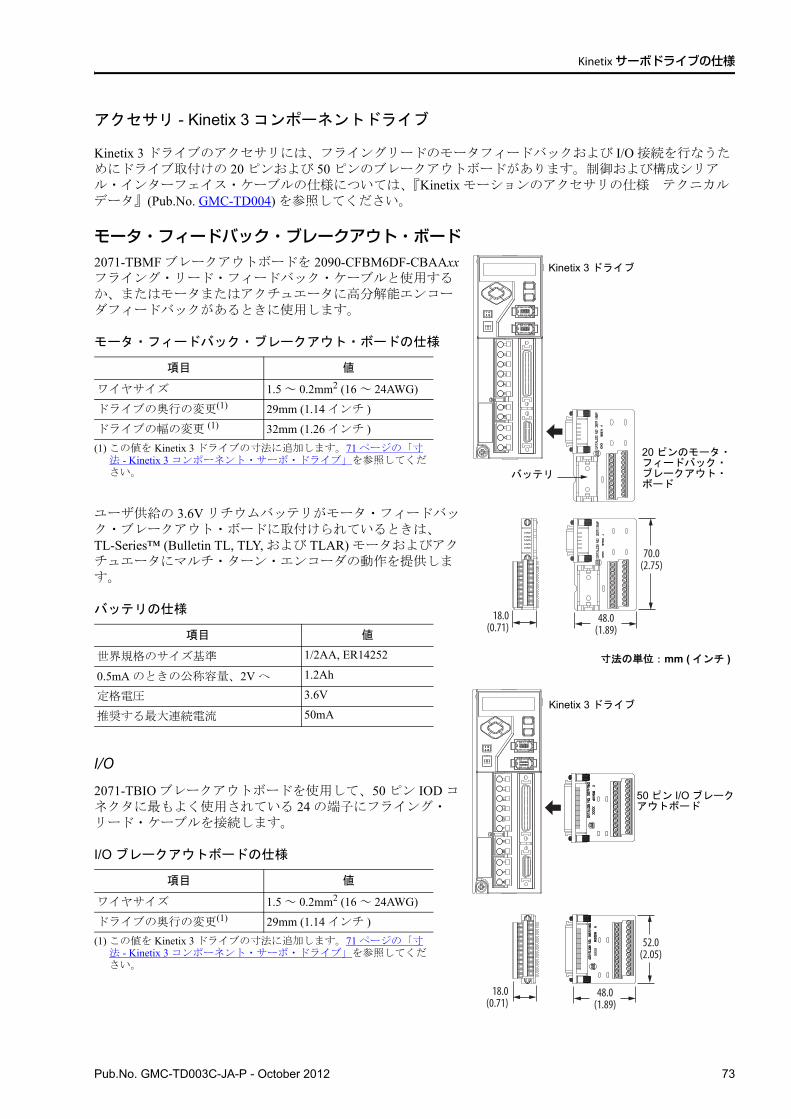
Kinetixサーボドライブの仕様
アクセサリ - Kinetix 3 コンポーネントドライブ
Kinetix 3 ドライブのアクセサリには、フライングリードのモータフィードバックおよび I/O 接続を行なうためにドライブ取付けの 20 ピンおよび 50 ピンのブレークアウトボードがあります。制御および構成シリアル・インターフェイス・ケーブルの仕様については、『Kinetix モーションのアクセサリの仕様 テクニカルデータ』(Pub.No. GMC-TD004) を参照してください。
モータ・フィードバック・ブレークアウト・ボード2071-TBMF ブレークアウトボードを 2090-CFBM6DF-CBAAxxフライング・リード・フィードバック・ケーブルと使用するか、またはモータまたはアクチュエータに高分解能エンコーダフィードバックがあるときに使用します。
モータ・フィードバック・ブレークアウト・ボードの仕様
ユーザ供給の 3.6V リチウムバッテリがモータ・フィードバック・ブレークアウト・ボードに取付けられているときは、TL-Series™ (Bulletin TL, TLY, および TLAR) モータおよびアクチュエータにマルチ・ターン・エンコーダの動作を提供します。
バッテリの仕様
I/O
2071-TBIO ブレークアウトボードを使用して、50 ピン IOD コネクタに最もよく使用されている 24 の端子にフライング・リード・ケーブルを接続します。
I/O ブレークアウトボードの仕様
項目 値
ワイヤサイズ 1.5 ~ 0.2mm2 (16 ~ 24AWG)
ドライブの奥行の変更(1)
(1) この値を Kinetix 3 ドライブの寸法に追加します。71 ページの「寸法 - Kinetix 3 コンポーネント・サーボ・ドライブ」を参照してください。
29mm (1.14 インチ )
ドライブの幅の変更 (1) 32mm (1.26 インチ )
項目 値
世界規格のサイズ基準 1/2AA, ER14252
0.5mA のときの公称容量、2V へ 1.2Ah
定格電圧 3.6V
推奨する最大連続電流 50mA
項目 値
ワイヤサイズ 1.5 ~ 0.2mm2 (16 ~ 24AWG)
ドライブの奥行の変更(1)
(1) この値を Kinetix 3 ドライブの寸法に追加します。71 ページの「寸法 - Kinetix 3 コンポーネント・サーボ・ドライブ」を参照してください。
29mm (1.14 インチ )
52.0(2.05)
48.0(1.89)
18.0(0.71)
70.0(2.75)
48.0(1.89)
18.0(0.71)
Kinetix 3 ドライブ
20 ピンのモータ・フィードバック・ブレークアウト・ボード
50 ピン I/O ブレークアウトボード
バッテリ
寸法の単位:mm ( インチ )
Kinetix 3 ドライブ
Pub.No. GMC-TD003C-JA-P - October 2012 73
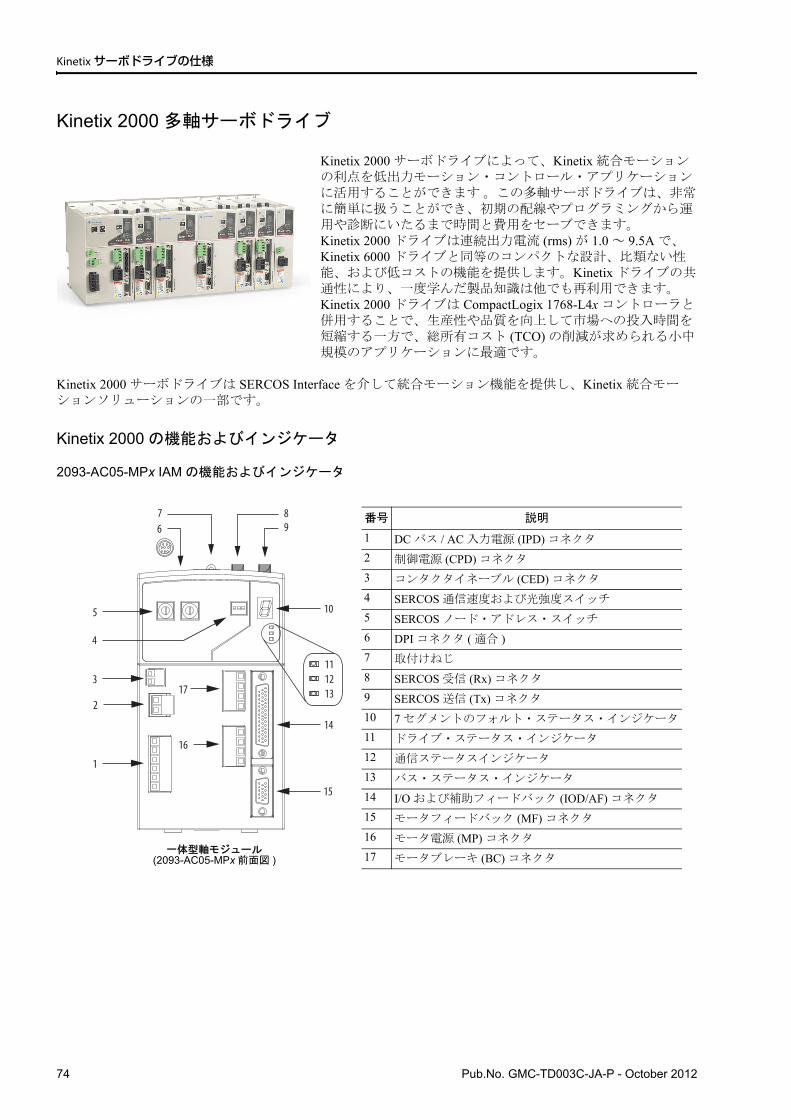
Kinetixサーボドライブの仕様
Kinetix 2000 多軸サーボドライブ
Kinetix 2000 サーボドライブによって、Kinetix 統合モーションの利点を低出力モーション・コントロール・アプリケーションに活用することができます 。この多軸サーボドライブは、非常に簡単に扱うことができ、初期の配線やプログラミングから運用や診断にいたるまで時間と費用をセーブできます。Kinetix 2000 ドライブは連続出力電流 (rms) が 1.0 ~ 9.5A で、Kinetix 6000 ドライブと同等のコンパクトな設計、比類ない性能、および低コストの機能を提供します。Kinetix ドライブの共通性により、一度学んだ製品知識は他でも再利用できます。Kinetix 2000 ドライブは CompactLogix 1768-L4x コントローラと併用することで、生産性や品質を向上して市場への投入時間を短縮する一方で、総所有コスト (TCO) の削減が求められる小中規模のアプリケーションに最適です。
Kinetix 2000 サーボドライブは SERCOS Interface を介して統合モーション機能を提供し、Kinetix 統合モーションソリューションの一部です。
Kinetix 2000 の機能およびインジケータ
2093-AC05-MPx IAM の機能およびインジケータ
1 2
1 2
3 4
1 2 3 4 5 61 2
1 2
3 4
5
67 8
9
111213
3
2
1
17
16
15
14
10
4
一体型軸モジュール(2093-AC05-MPx 前面図 )
番号 説明
1 DC バス / AC 入力電源 (IPD) コネクタ
2 制御電源 (CPD) コネクタ
3 コンタクタイネーブル (CED) コネクタ
4 SERCOS 通信速度および光強度スイッチ
5 SERCOS ノード・アドレス・スイッチ
6 DPI コネクタ ( 適合 )
7 取付けねじ
8 SERCOS 受信 (Rx) コネクタ
9 SERCOS 送信 (Tx) コネクタ
10 7 セグメントのフォルト・ステータス・インジケータ
11 ドライブ・ステータス・インジケータ
12 通信ステータスインジケータ
13 バス・ステータス・インジケータ
14 I/O および補助フィードバック (IOD/AF) コネクタ
15 モータフィードバック (MF) コネクタ
16 モータ電源 (MP) コネクタ
17 モータブレーキ (BC) コネクタ
74 Pub.No. GMC-TD003C-JA-P - October 2012
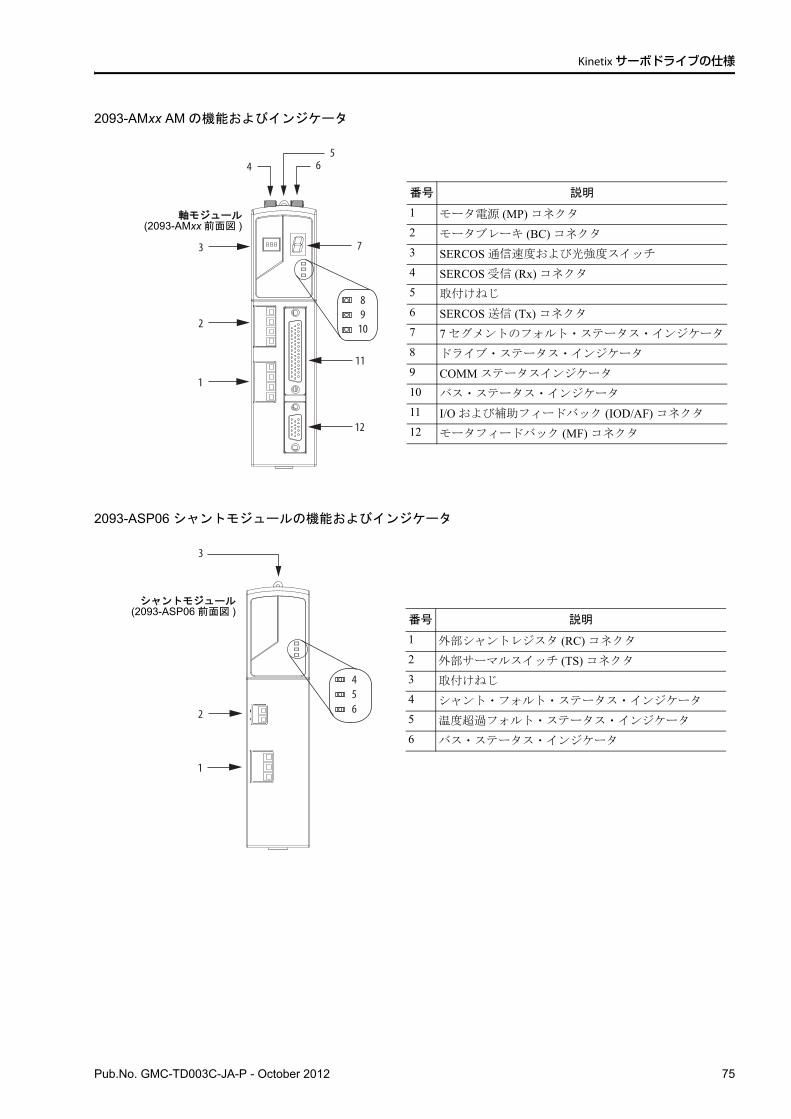
Kinetixサーボドライブの仕様
2093-AMxx AM の機能およびインジケータ
2093-ASP06 シャントモジュールの機能およびインジケータ
1 2
3 4
1 2
3 4
45
6
89
102
1
12
11
73
軸モジュール(2093-AMxx 前面図 )
番号 説明
1 モータ電源 (MP) コネクタ
2 モータブレーキ (BC) コネクタ
3 SERCOS 通信速度および光強度スイッチ
4 SERCOS 受信 (Rx) コネクタ
5 取付けねじ
6 SERCOS 送信 (Tx) コネクタ
7 7 セグメントのフォルト・ステータス・インジケータ
8 ドライブ・ステータス・インジケータ
9 COMM ステータスインジケータ
10 バス・ステータス・インジケータ
11 I/O および補助フィードバック (IOD/AF) コネクタ
12 モータフィードバック (MF) コネクタ
1 2
1 2
3
2
1
456
3
シャントモジュール(2093-ASP06 前面図 )
番号 説明
1 外部シャントレジスタ (RC) コネクタ
2 外部サーマルスイッチ (TS) コネクタ
3 取付けねじ
4 シャント・フォルト・ステータス・インジケータ
5 温度超過フォルト・ステータス・インジケータ
6 バス・ステータス・インジケータ
Pub.No. GMC-TD003C-JA-P - October 2012 75
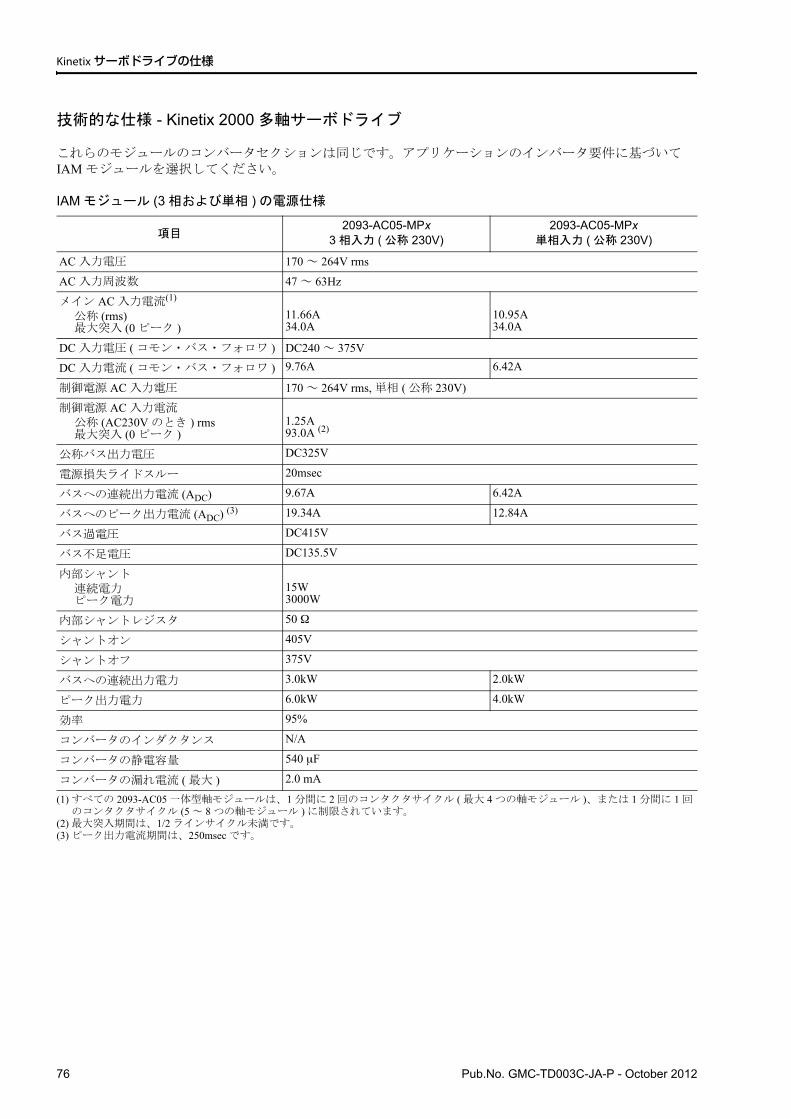
Kinetixサーボドライブの仕様
技術的な仕様 - Kinetix 2000 多軸サーボドライブ
これらのモジュールのコンバータセクションは同じです。アプリケーションのインバータ要件に基づいてIAM モジュールを選択してください。
IAM モジュール (3 相および単相 ) の電源仕様
項目2093-AC05-MPx
3 相入力 ( 公称 230V)2093-AC05-MPx
単相入力 ( 公称 230V)
AC 入力電圧 170 ~ 264V rms
AC 入力周波数 47 ~ 63Hz
メイン AC 入力電流(1)
公称 (rms)最大突入 (0 ピーク )
(1) すべての 2093-AC05 一体型軸モジュールは、1 分間に 2 回のコンタクタサイクル ( 最大 4 つの軸モジュール )、または 1 分間に 1 回のコンタクタサイクル (5 ~ 8 つの軸モジュール ) に制限されています。
11.66A34.0A
10.95A34.0A
DC 入力電圧 ( コモン・バス・フォロワ ) DC240 ~ 375V
DC 入力電流 ( コモン・バス・フォロワ ) 9.76A 6.42A
制御電源 AC 入力電圧 170 ~ 264V rms, 単相 ( 公称 230V)
制御電源 AC 入力電流公称 (AC230V のとき ) rms最大突入 (0 ピーク )
1.25A93.0A (2)
(2) 最大突入期間は、1/2 ラインサイクル未満です。
公称バス出力電圧 DC325V
電源損失ライドスルー 20msec
バスへの連続出力電流 (ADC) 9.67A 6.42A
バスへのピーク出力電流 (ADC) (3)
(3) ピーク出力電流期間は、250msec です。
19.34A 12.84A
バス過電圧 DC415V
バス不足電圧 DC135.5V
内部シャント連続電力ピーク電力
15W3000W
内部シャントレジスタ 50
シャントオン 405V
シャントオフ 375V
バスへの連続出力電力 3.0kW 2.0kW
ピーク出力電力 6.0kW 4.0kW
効率 95%
コンバータのインダクタンス N/A
コンバータの静電容量 540 F
コンバータの漏れ電流 ( 最大 ) 2.0 mA
76 Pub.No. GMC-TD003C-JA-P - October 2012
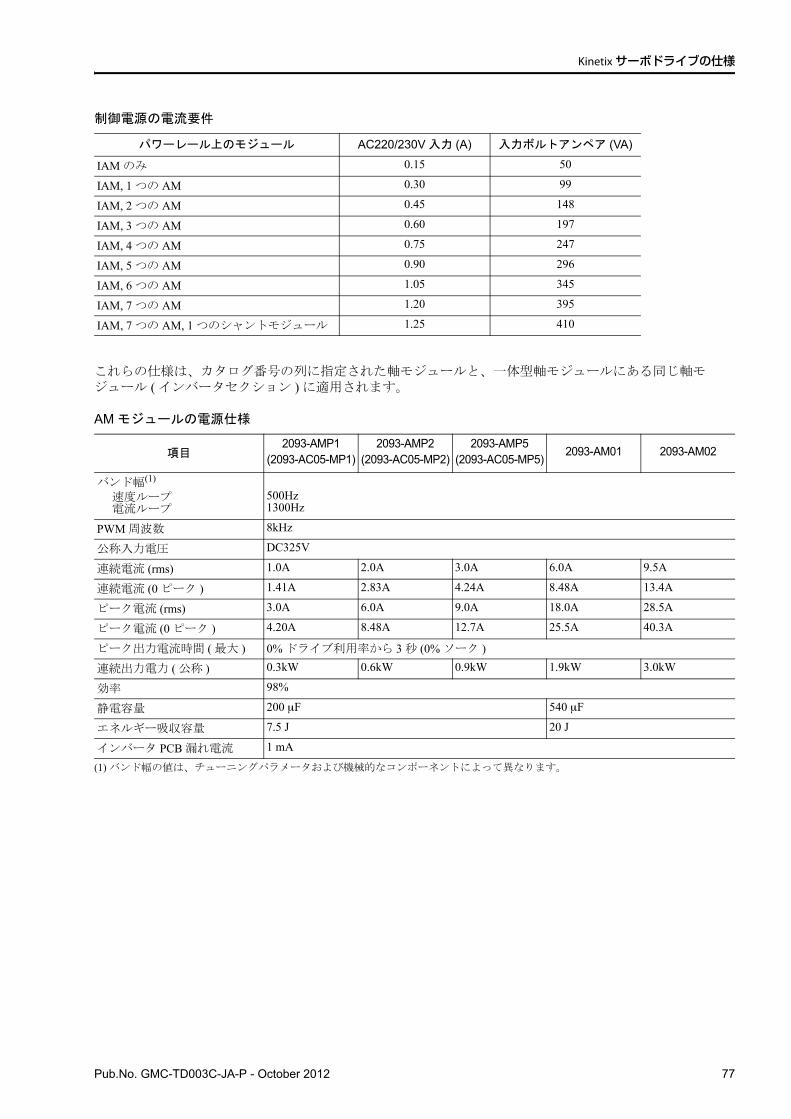
Kinetixサーボドライブの仕様
制御電源の電流要件
これらの仕様は、カタログ番号の列に指定された軸モジュールと、一体型軸モジュールにある同じ軸モジュール ( インバータセクション ) に適用されます。
AM モジュールの電源仕様
パワーレール上のモジュール AC220/230V 入力 (A) 入力ボルトアンペア (VA)
IAM のみ 0.15 50
IAM, 1 つの AM 0.30 99
IAM, 2 つの AM 0.45 148
IAM, 3 つの AM 0.60 197
IAM, 4 つの AM 0.75 247
IAM, 5 つの AM 0.90 296
IAM, 6 つの AM 1.05 345
IAM, 7 つの AM 1.20 395
IAM, 7 つの AM, 1 つのシャントモジュール 1.25 410
項目2093-AMP1
(2093-AC05-MP1)2093-AMP2
(2093-AC05-MP2)2093-AMP5
(2093-AC05-MP5)2093-AM01 2093-AM02
バンド幅(1)
速度ループ電流ループ
(1) バンド幅の値は、チューニングパラメータおよび機械的なコンポーネントによって異なります。
500Hz1300Hz
PWM 周波数 8kHz
公称入力電圧 DC325V
連続電流 (rms) 1.0A 2.0A 3.0A 6.0A 9.5A
連続電流 (0 ピーク ) 1.41A 2.83A 4.24A 8.48A 13.4A
ピーク電流 (rms) 3.0A 6.0A 9.0A 18.0A 28.5A
ピーク電流 (0 ピーク ) 4.20A 8.48A 12.7A 25.5A 40.3A
ピーク出力電流時間 ( 最大 ) 0% ドライブ利用率から 3 秒 (0% ソーク )
連続出力電力 ( 公称 ) 0.3kW 0.6kW 0.9kW 1.9kW 3.0kW
効率 98%
静電容量 200 F 540 F
エネルギー吸収容量 7.5 J 20 J
インバータ PCB 漏れ電流 1 mA
Pub.No. GMC-TD003C-JA-P - October 2012 77
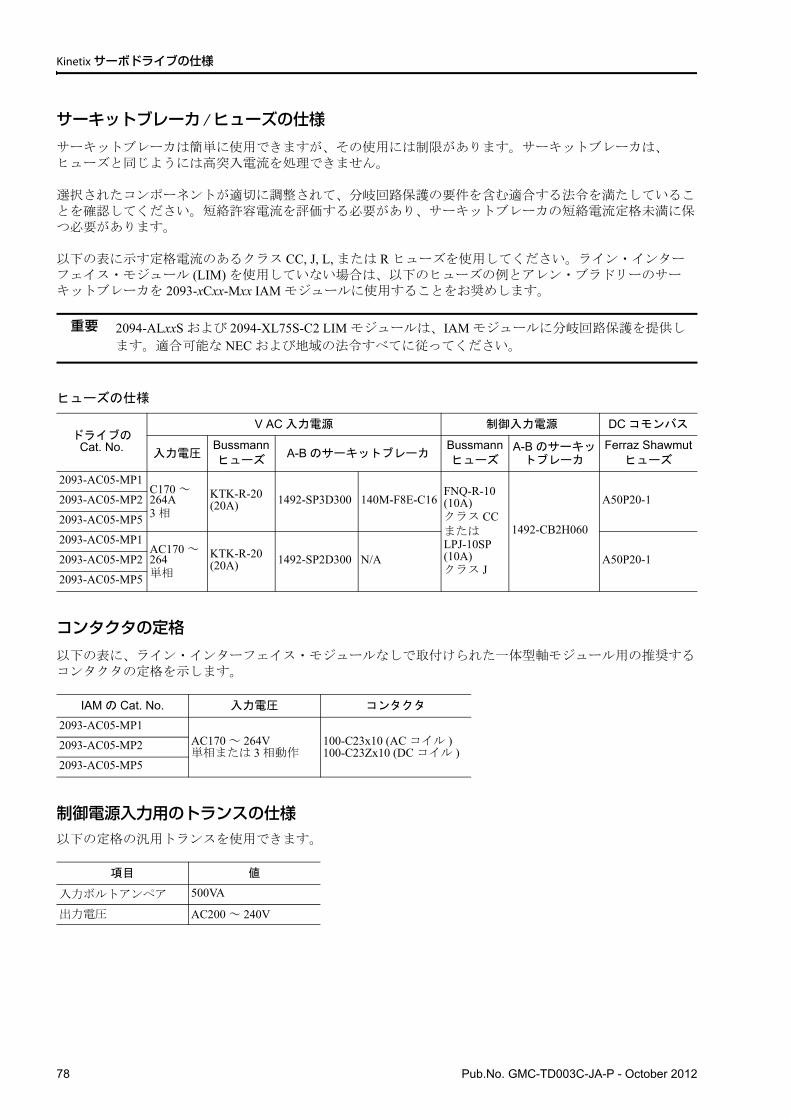
Kinetixサーボドライブの仕様
サーキットブレーカ /ヒューズの仕様サーキットブレーカは簡単に使用できますが、その使用には制限があります。サーキットブレーカは、ヒューズと同じようには高突入電流を処理できません。
選択されたコンポーネントが適切に調整されて、分岐回路保護の要件を含む適合する法令を満たしていることを確認してください。短絡許容電流を評価する必要があり、サーキットブレーカの短絡電流定格未満に保つ必要があります。
以下の表に示す定格電流のあるクラス CC, J, L, または R ヒューズを使用してください。ライン・インターフェイス・モジュール (LIM) を使用していない場合は、以下のヒューズの例とアレン・ブラドリーのサーキットブレーカを 2093-xCxx-Mxx IAM モジュールに使用することをお奨めします。
ヒューズの仕様
コンタクタの定格
以下の表に、ライン・インターフェイス・モジュールなしで取付けられた一体型軸モジュール用の推奨するコンタクタの定格を示します。
制御電源入力用のトランスの仕様以下の定格の汎用トランスを使用できます。
重要 2094-ALxxS および 2094-XL75S-C2 LIM モジュールは、IAM モジュールに分岐回路保護を提供し
ます。適合可能な NEC および地域の法令すべてに従ってください。
ドライブのCat. No.
V AC 入力電源 制御入力電源 DC コモンバス
入力電圧Bussmannヒューズ
A-B のサーキットブレーカBussmannヒューズ
A-B のサーキットブレーカ
Ferraz Shawmutヒューズ
2093-AC05-MP1C170 ~264A3 相
KTK-R-20 (20A) 1492-SP3D300 140M-F8E-C16
FNQ-R-10 (10A)クラス CCまたはLPJ-10SP (10A)クラス J
1492-CB2H060
A50P20-12093-AC05-MP2
2093-AC05-MP5
2093-AC05-MP1AC170 ~264単相
KTK-R-20 (20A) 1492-SP2D300 N/A A50P20-12093-AC05-MP2
2093-AC05-MP5
IAM の Cat. No. 入力電圧 コンタクタ
2093-AC05-MP1AC170 ~ 264V単相または 3 相動作
100-C23x10 (AC コイル )100-C23Zx10 (DC コイル )
2093-AC05-MP2
2093-AC05-MP5
項目 値
入力ボルトアンペア 500VA
出力電圧 AC200 ~ 240V
78 Pub.No. GMC-TD003C-JA-P - October 2012
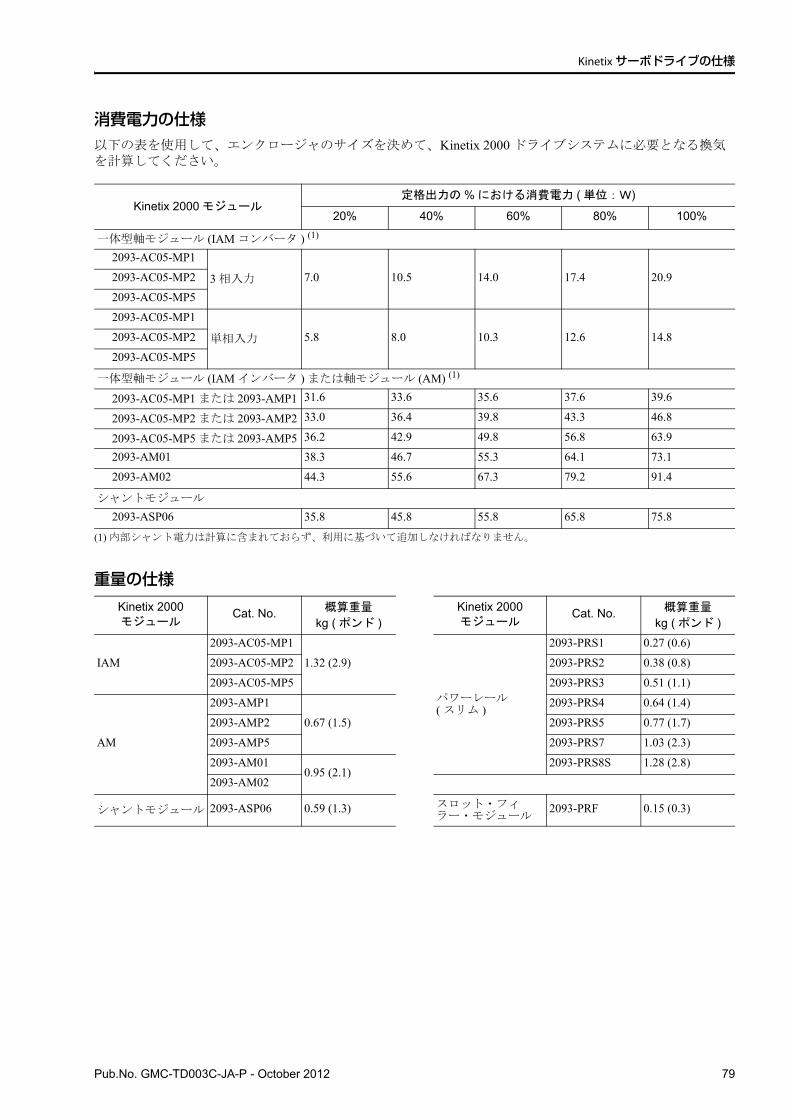
Kinetixサーボドライブの仕様
消費電力の仕様以下の表を使用して、エンクロージャのサイズを決めて、Kinetix 2000 ドライブシステムに必要となる換気を計算してください。
重量の仕様
Kinetix 2000 モジュール定格出力の % における消費電力 ( 単位:W)
20% 40% 60% 80% 100%
一体型軸モジュール (IAM コンバータ ) (1)
(1) 内部シャント電力は計算に含まれておらず、利用に基づいて追加しなければなりません。
2093-AC05-MP1
3 相入力 7.0 10.5 14.0 17.4 20.92093-AC05-MP2
2093-AC05-MP5
2093-AC05-MP1
単相入力 5.8 8.0 10.3 12.6 14.82093-AC05-MP2
2093-AC05-MP5
一体型軸モジュール (IAM インバータ ) または軸モジュール (AM) (1)
2093-AC05-MP1 または 2093-AMP1 31.6 33.6 35.6 37.6 39.6
2093-AC05-MP2 または 2093-AMP2 33.0 36.4 39.8 43.3 46.8
2093-AC05-MP5 または 2093-AMP5 36.2 42.9 49.8 56.8 63.9
2093-AM01 38.3 46.7 55.3 64.1 73.1
2093-AM02 44.3 55.6 67.3 79.2 91.4
シャントモジュール
2093-ASP06 35.8 45.8 55.8 65.8 75.8
Kinetix 2000モジュール
Cat. No. 概算重量
kg ( ポンド )Kinetix 2000モジュール
Cat. No. 概算重量
kg ( ポンド )
IAM
2093-AC05-MP1
1.32 (2.9)
パワーレール( スリム )
2093-PRS1 0.27 (0.6)
2093-AC05-MP2 2093-PRS2 0.38 (0.8)
2093-AC05-MP5 2093-PRS3 0.51 (1.1)
AM
2093-AMP1
0.67 (1.5)
2093-PRS4 0.64 (1.4)
2093-AMP2 2093-PRS5 0.77 (1.7)
2093-AMP5 2093-PRS7 1.03 (2.3)
2093-AM010.95 (2.1)
2093-PRS8S 1.28 (2.8)
2093-AM02
シャントモジュール 2093-ASP06 0.59 (1.3) スロット・フィラー・モジュール
2093-PRF 0.15 (0.3)
Pub.No. GMC-TD003C-JA-P - October 2012 79
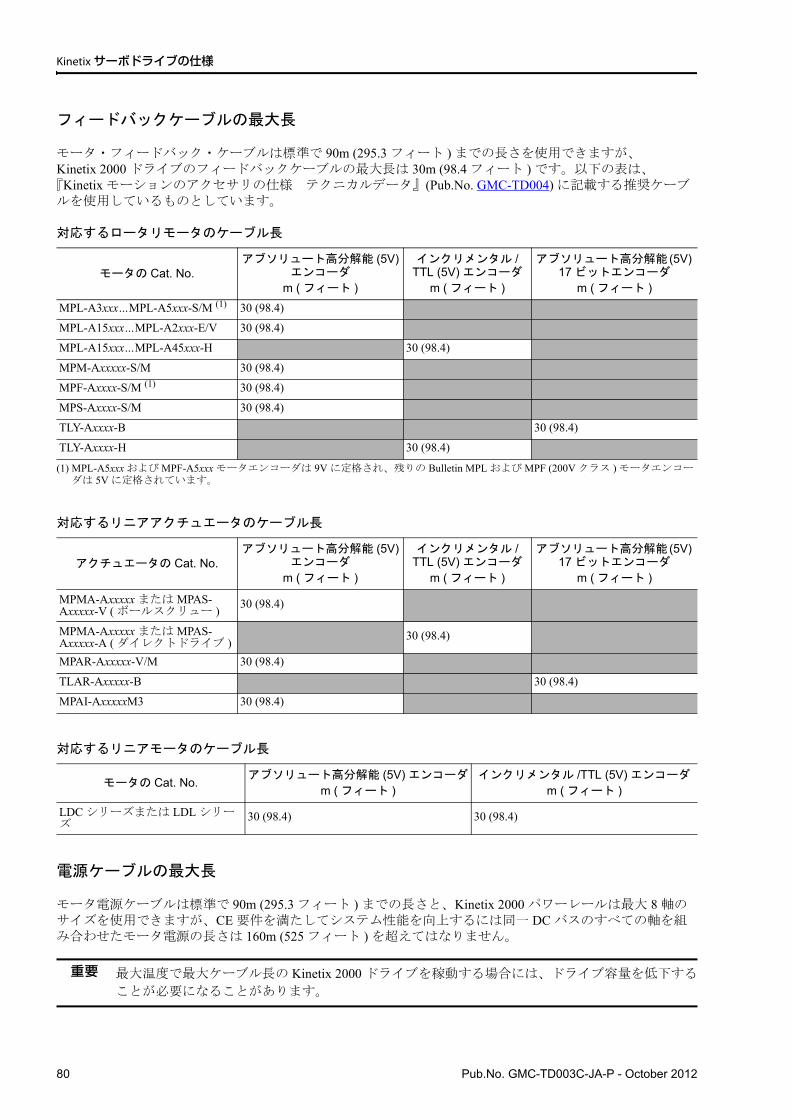
Kinetixサーボドライブの仕様
フィードバックケーブルの最大長
モータ・フィードバック・ケーブルは標準で 90m (295.3 フィート ) までの長さを使用できますが、Kinetix 2000 ドライブのフィードバックケーブルの最大長は 30m (98.4 フィート ) です。以下の表は、『Kinetix モーションのアクセサリの仕様 テクニカルデータ』(Pub.No. GMC-TD004) に記載する推奨ケーブルを使用しているものとしています。
対応するロータリモータのケーブル長
対応するリニアアクチュエータのケーブル長
対応するリニアモータのケーブル長
電源ケーブルの最大長
モータ電源ケーブルは標準で 90m (295.3 フィート ) までの長さと、Kinetix 2000 パワーレールは最大 8 軸のサイズを使用できますが、CE 要件を満たしてシステム性能を向上するには同一 DC バスのすべての軸を組み合わせたモータ電源の長さは 160m (525 フィート ) を超えてはなりません。
モータの Cat. No.アブソリュート高分解能 (5V)
エンコーダ
m ( フィート )
インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
アブソリュート高分解能 (5V) 17 ビットエンコーダ
m ( フィート )
MPL-A3xxx…MPL-A5xxx-S/M (1)
(1) MPL-A5xxx および MPF-A5xxx モータエンコーダは 9V に定格され、残りの Bulletin MPL および MPF (200V クラス ) モータエンコーダは 5V に定格されています。
30 (98.4)
MPL-A15xxx…MPL-A2xxx-E/V 30 (98.4)
MPL-A15xxx…MPL-A45xxx-H 30 (98.4)
MPM-Axxxxx-S/M 30 (98.4)
MPF-Axxxx-S/M (1) 30 (98.4)
MPS-Axxxx-S/M 30 (98.4)
TLY-Axxxx-B 30 (98.4)
TLY-Axxxx-H 30 (98.4)
アクチュエータの Cat. No.アブソリュート高分解能 (5V)
エンコーダ
m ( フィート )
インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
アブソリュート高分解能 (5V) 17 ビットエンコーダ
m ( フィート )
MPMA-Axxxxx または MPAS-Axxxxx-V ( ボールスクリュー )
30 (98.4)
MPMA-Axxxxx または MPAS-Axxxxx-A ( ダイレクトドライブ )
30 (98.4)
MPAR-Axxxxx-V/M 30 (98.4)
TLAR-Axxxxx-B 30 (98.4)
MPAI-AxxxxxM3 30 (98.4)
モータの Cat. No.アブソリュート高分解能 (5V) エンコーダ
m ( フィート )インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
LDC シリーズまたは LDL シリーズ
30 (98.4) 30 (98.4)
重要 最大温度で最大ケーブル長の Kinetix 2000 ドライブを稼動する場合には、ドライブ容量を低下する
ことが必要になることがあります。
80 Pub.No. GMC-TD003C-JA-P - October 2012
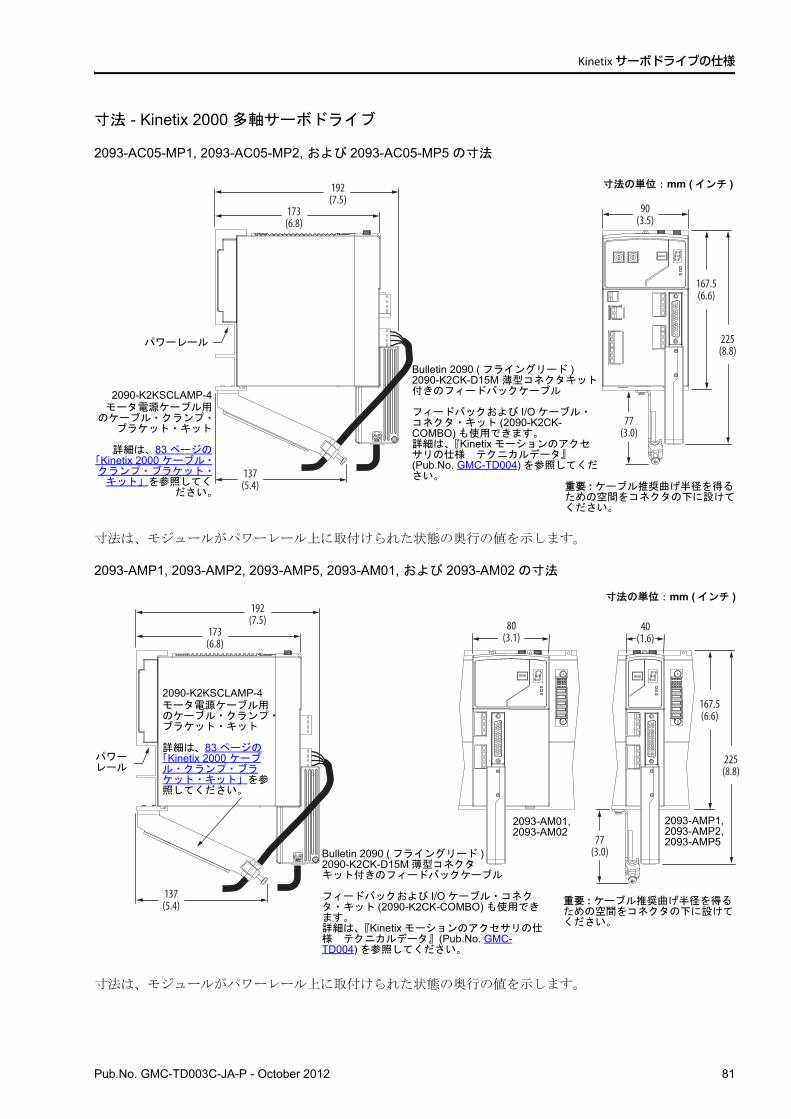
Kinetixサーボドライブの仕様
寸法 - Kinetix 2000 多軸サーボドライブ
2093-AC05-MP1, 2093-AC05-MP2, および 2093-AC05-MP5 の寸法
寸法は、モジュールがパワーレール上に取付けられた状態の奥行の値を示します。
2093-AMP1, 2093-AMP2, 2093-AMP5, 2093-AM01, および 2093-AM02 の寸法
寸法は、モジュールがパワーレール上に取付けられた状態の奥行の値を示します。
173(6.8)
192(7.5)
137(5.4)
167.5(6.6)
90(3.5)
225(8.8)
77(3.0)
寸法の単位:mm ( インチ )
パワーレール
重要 : ケーブル推奨曲げ半径を得るための空間をコネクタの下に設けてください。
2090-K2KSCLAMP-4モータ電源ケーブル用
のケーブル・クランプ・ブラケット・キット
詳細は、83 ページの「Kinetix 2000 ケーブル・クランプ・ブラケット・キット」を参照してく
ださい。
Bulletin 2090 ( フライングリード ) 2090-K2CK-D15M 薄型コネクタキット付きのフィードバックケーブル
フィードバックおよび I/O ケーブル・コネクタ・キット (2090-K2CK-COMBO) も使用できます。詳細は、『Kinetix モーションのアクセサリの仕様 テクニカルデータ』(Pub.No. GMC-TD004) を参照してください。
173(6.8)
192(7.5)
137(5.4)
167.5(6.6)
40(1.6)
225(8.8)
80(3.1)
77(3.0)
寸法の単位:mm ( インチ )
パワーレール
重要 : ケーブル推奨曲げ半径を得るための空間をコネクタの下に設けてください。
2093-AM01,2093-AM02
2093-AMP1,2093-AMP2,2093-AMP5
Bulletin 2090 ( フライングリード ) 2090-K2CK-D15M 薄型コネクタキット付きのフィードバックケーブル
フィードバックおよび I/O ケーブル・コネクタ・キット (2090-K2CK-COMBO) も使用できます。詳細は、『Kinetix モーションのアクセサリの仕様 テクニカルデータ』(Pub.No. GMC-TD004) を参照してください。
2090-K2KSCLAMP-4モータ電源ケーブル用のケーブル・クランプ・ブラケット・キット
詳細は、83 ページの「Kinetix 2000 ケーブル・クランプ・ブラケット・キット」を参照してください。
Pub.No. GMC-TD003C-JA-P - October 2012 81
Kinetixサーボドライブの仕様
環境条件 - Kinetix 2000 多軸サーボドライブ
認可 - Kinetix 2000 多軸サーボドライブ
項目 動作範囲 保管範囲 ( 非動作時 )
周囲温度 0 ~ 50°C (32 ~ 122°F) -40 ~ 85°C (-40 ~ 185F)
相対湿度 5 ~ 95% ( 結露なきこと ) 5 ~ 95% ( 結露なきこと )
高度1000m (3281 フィート )3000m (9843 フィート ) ディレーティング付き
3000m (9843 フィート ) ( 輸送時 )
振動0.35mm (0.014 インチ ) 二重振幅のとき 5 ~ 55Hz、連続変位、2.0G ピーク一定加速のとき 55 ~ 500Hz (3 つの相互に直角の方向で各方向に 10 スウィープ )
衝撃 15G, 11msec 正弦波の半周期パルス (3 つの相互に直角の方向で各方向に 3 パルス )
承認機関(1)
(1) 製品がマークされているときは、適合宣言書については http://www.ab.com を参照してください。
規格
c-UL-us 米国とカナダの安全規格に対して UL リスト (UL 508C File E59272)
CE
EU 2004/108/EC EMC 指令は、以下に準拠している。• EN 61800-3:2004: 可変速電力ドライブシステム - パート 3; • EMC 製品規格 ( 特定のテスト方法を含む )
EU 2006/95/EC 低電圧指令は、EN 50178:1997 - 電源取付けに使用する電気装置に準拠している。
C-Tick
オーストラリア無線通信法令は、以下に準拠している。• 無線通信法令 : 1992• 無線通信 ( 電磁適合性 ) 規格 : 1998• 無線通信 ( ラベリングの遵守 - 偶発的なエミッション ) 通知書 : 1998• AS/NZS CISPR 11: 2002 ( グループ 2, クラス A)
KC
韓国の放送および通信機器の適合認証 / 登録は、以下に準拠している。• 電波法、第 3 条の第 58-2 項
• 登録番号:KCC-REM-RAA-2093-AC05-MP5• 登録番号:KCC-REM-RAA-2093-ASP06
82 Pub.No. GMC-TD003C-JA-P - October 2012
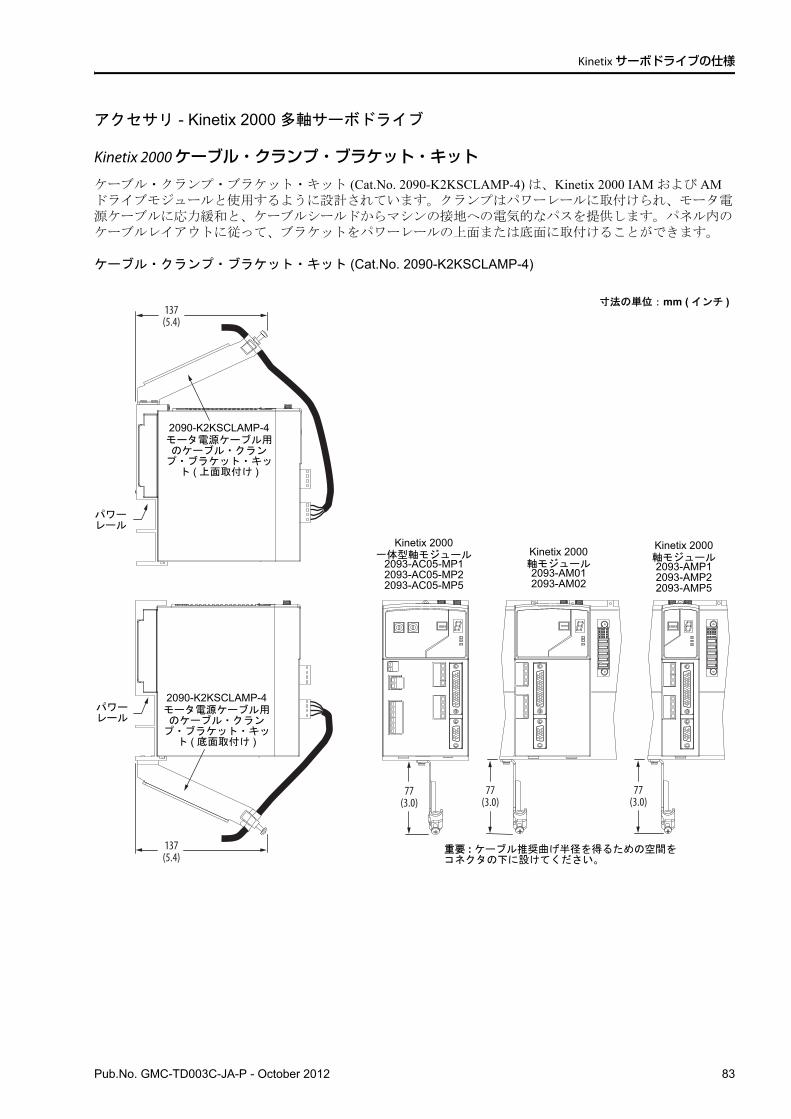
Kinetixサーボドライブの仕様
アクセサリ - Kinetix 2000 多軸サーボドライブ
Kinetix 2000 ケーブル・クランプ・ブラケット・キットケーブル・クランプ・ブラケット・キット (Cat.No. 2090-K2KSCLAMP-4) は、Kinetix 2000 IAM および AMドライブモジュールと使用するように設計されています。クランプはパワーレールに取付けられ、モータ電源ケーブルに応力緩和と、ケーブルシールドからマシンの接地への電気的なパスを提供します。パネル内のケーブルレイアウトに従って、ブラケットをパワーレールの上面または底面に取付けることができます。
ケーブル・クランプ・ブラケット・キット (Cat.No. 2090-K2KSCLAMP-4)
77(3.0)
77(3.0)
77(3.0)
137(5.4)
137(5.4)
寸法の単位:mm ( インチ )
パワーレール
重要 : ケーブル推奨曲げ半径を得るための空間をコネクタの下に設けてください。
Kinetix 2000軸モジュール2093-AMP12093-AMP22093-AMP5
Kinetix 2000軸モジュール2093-AM012093-AM02
2090-K2KSCLAMP-4モータ電源ケーブル用のケーブル・クランプ・ブラケット・キッ
ト ( 上面取付け )
Kinetix 2000一体型軸モジュール
2093-AC05-MP12093-AC05-MP22093-AC05-MP5
2090-K2KSCLAMP-4モータ電源ケーブル用のケーブル・クラン
プ・ブラケット・キット ( 底面取付け )
パワーレール
Pub.No. GMC-TD003C-JA-P - October 2012 83
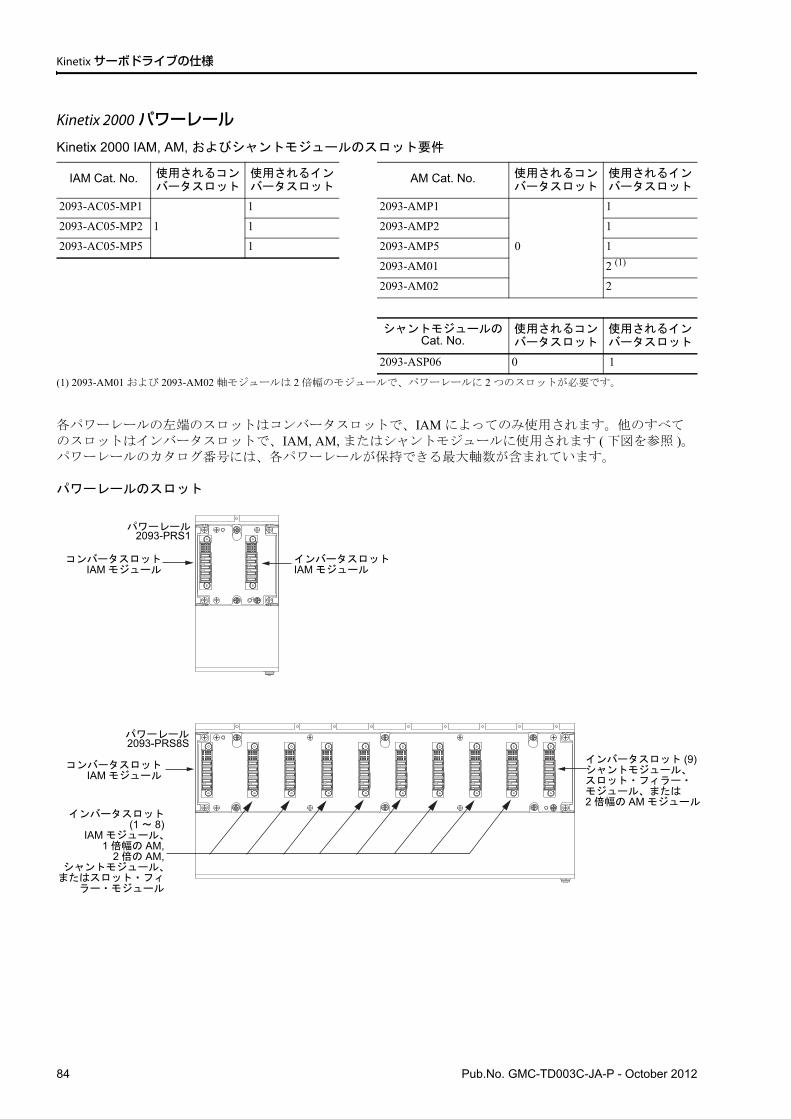
Kinetixサーボドライブの仕様
Kinetix 2000パワーレールKinetix 2000 IAM, AM, およびシャントモジュールのスロット要件
各パワーレールの左端のスロットはコンバータスロットで、IAM によってのみ使用されます。他のすべてのスロットはインバータスロットで、IAM, AM, またはシャントモジュールに使用されます ( 下図を参照 )。パワーレールのカタログ番号には、各パワーレールが保持できる最大軸数が含まれています。
パワーレールのスロット
IAM Cat. No. 使用されるコンバータスロット
使用されるインバータスロット
AM Cat. No. 使用されるコンバータスロット
使用されるインバータスロット
2093-AC05-MP1
1
1 2093-AMP1
0
1
2093-AC05-MP2 1 2093-AMP2 1
2093-AC05-MP5 1 2093-AMP5 1
2093-AM01 2 (1)
(1) 2093-AM01 および 2093-AM02 軸モジュールは 2 倍幅のモジュールで、パワーレールに 2 つのスロットが必要です。
2093-AM02 2
シャントモジュールのCat. No.
使用されるコンバータスロット
使用されるインバータスロット
2093-ASP06 0 1
インバータスロットIAM モジュール
インバータスロット (9)シャントモジュール、スロット・フィラー・モジュール、または2 倍幅の AM モジュール
インバータスロット(1 ~ 8)
IAM モジュール、1 倍幅の AM,
2 倍の AM,シャントモジュール、またはスロット・フィ
ラー・モジュール
コンバータスロットIAM モジュール
コンバータスロットIAM モジュール
パワーレール2093-PRS1
パワーレール2093-PRS8S
84 Pub.No. GMC-TD003C-JA-P - October 2012
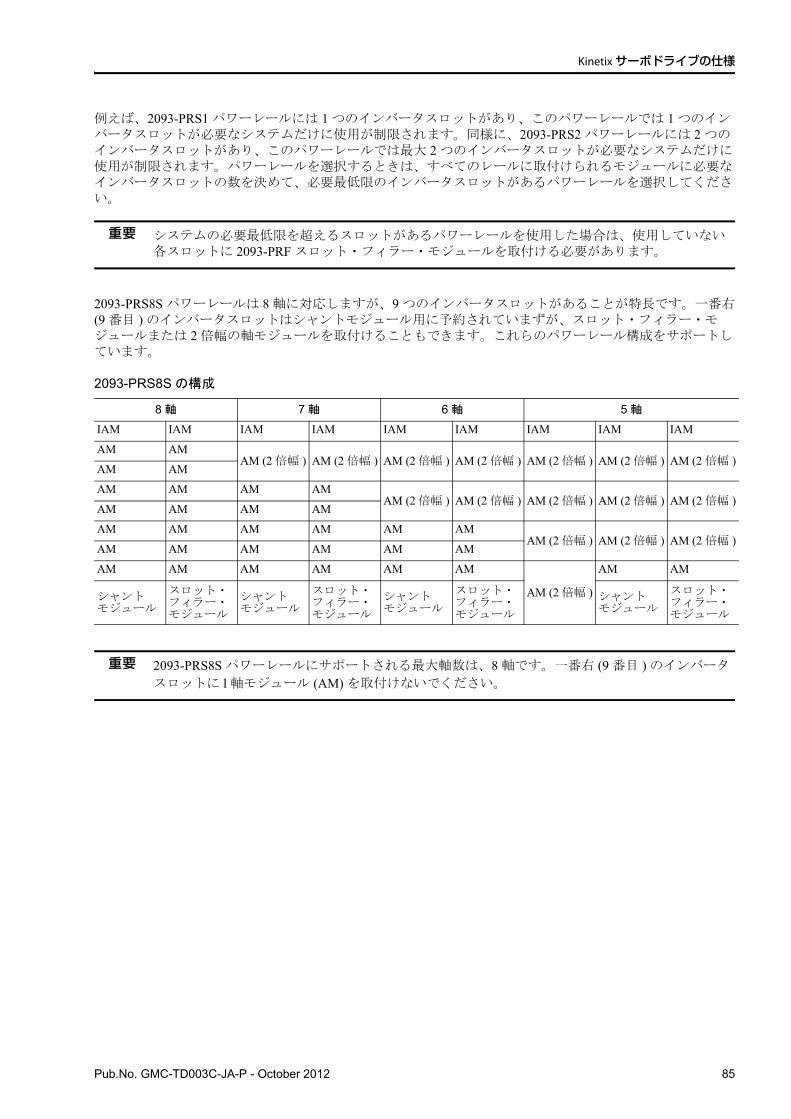
Kinetixサーボドライブの仕様
例えば、2093-PRS1 パワーレールには 1 つのインバータスロットがあり、このパワーレールでは 1 つのインバータスロットが必要なシステムだけに使用が制限されます。同様に、2093-PRS2 パワーレールには 2 つのインバータスロットがあり、このパワーレールでは最大 2 つのインバータスロットが必要なシステムだけに使用が制限されます。パワーレールを選択するときは、すべてのレールに取付けられるモジュールに必要なインバータスロットの数を決めて、必要最低限のインバータスロットがあるパワーレールを選択してください。
2093-PRS8S パワーレールは 8 軸に対応しますが、9 つのインバータスロットがあることが特長です。一番右(9 番目 ) のインバータスロットはシャントモジュール用に予約されていまずが、スロット・フィラー・モジュールまたは 2 倍幅の軸モジュールを取付けることもできます。これらのパワーレール構成をサポートしています。
2093-PRS8S の構成
重要 システムの必要最低限を超えるスロットがあるパワーレールを使用した場合は、使用していない各スロットに 2093-PRF スロット・フィラー・モジュールを取付ける必要があります。
8 軸 7 軸 6 軸 5 軸
IAM IAM IAM IAM IAM IAM IAM IAM IAM
AM AMAM (2 倍幅 ) AM (2 倍幅 ) AM (2 倍幅 ) AM (2 倍幅 ) AM (2 倍幅 ) AM (2 倍幅 ) AM (2 倍幅 )
AM AM
AM AM AM AMAM (2 倍幅 ) AM (2 倍幅 ) AM (2 倍幅 ) AM (2 倍幅 ) AM (2 倍幅 )
AM AM AM AM
AM AM AM AM AM AMAM (2 倍幅 ) AM (2 倍幅 ) AM (2 倍幅 )
AM AM AM AM AM AM
AM AM AM AM AM AM
AM (2 倍幅 )
AM AM
シャントモジュール
スロット・フィラー・モジュール
シャントモジュール
スロット・フィラー・モジュール
シャントモジュール
スロット・フィラー・モジュール
シャントモジュール
スロット・フィラー・モジュール
重要 2093-PRS8S パワーレールにサポートされる最大軸数は、8 軸です。一番右 (9 番目 ) のインバータ
スロットに l 軸モジュール (AM) を取付けないでください。
Pub.No. GMC-TD003C-JA-P - October 2012 85
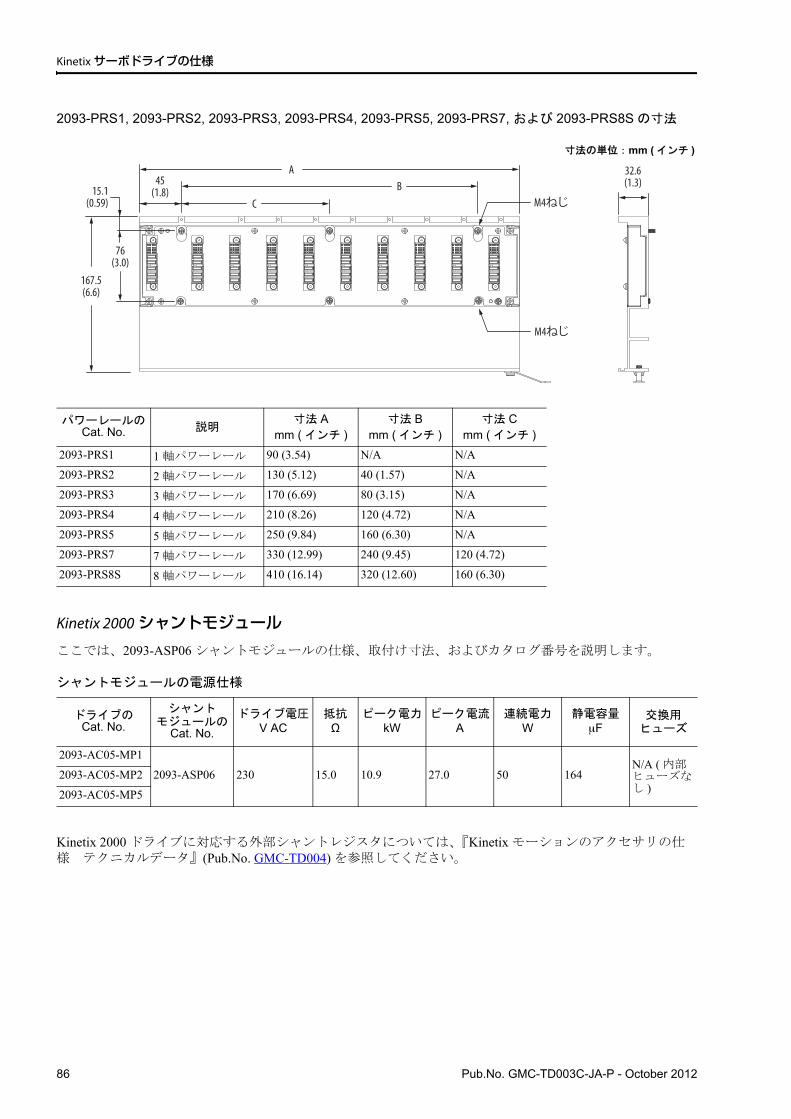
Kinetixサーボドライブの仕様
2093-PRS1, 2093-PRS2, 2093-PRS3, 2093-PRS4, 2093-PRS5, 2093-PRS7, および 2093-PRS8S の寸法
Kinetix 2000シャントモジュールここでは、2093-ASP06 シャントモジュールの仕様、取付け寸法、およびカタログ番号を説明します。
シャントモジュールの電源仕様
Kinetix 2000 ドライブに対応する外部シャントレジスタについては、『Kinetix モーションのアクセサリの仕様 テクニカルデータ』(Pub.No. GMC-TD004) を参照してください。
パワーレールのCat. No. 説明
寸法 Amm ( インチ )
寸法 Bmm ( インチ )
寸法 Cmm ( インチ )
2093-PRS1 1 軸パワーレール 90 (3.54) N/A N/A
2093-PRS2 2 軸パワーレール 130 (5.12) 40 (1.57) N/A
2093-PRS3 3 軸パワーレール 170 (6.69) 80 (3.15) N/A
2093-PRS4 4 軸パワーレール 210 (8.26) 120 (4.72) N/A
2093-PRS5 5 軸パワーレール 250 (9.84) 160 (6.30) N/A
2093-PRS7 7 軸パワーレール 330 (12.99) 240 (9.45) 120 (4.72)
2093-PRS8S 8 軸パワーレール 410 (16.14) 320 (12.60) 160 (6.30)
ドライブのCat. No.
シャントモジュールの
Cat. No.
ドライブ電圧V AC
抵抗Ω
ピーク電力kW
ピーク電流A
連続電力W
静電容量F
交換用ヒューズ
2093-AC05-MP1
2093-ASP06 230 15.0 10.9 27.0 50 164N/A ( 内部ヒューズなし )
2093-AC05-MP2
2093-AC05-MP5
A45
(1.8)C
B
76(3.0)
15.1(0.59)
167.5(6.6)
M4ねじ
M4ねじ
32.6(1.3)
寸法の単位:mm ( インチ )
86 Pub.No. GMC-TD003C-JA-P - October 2012
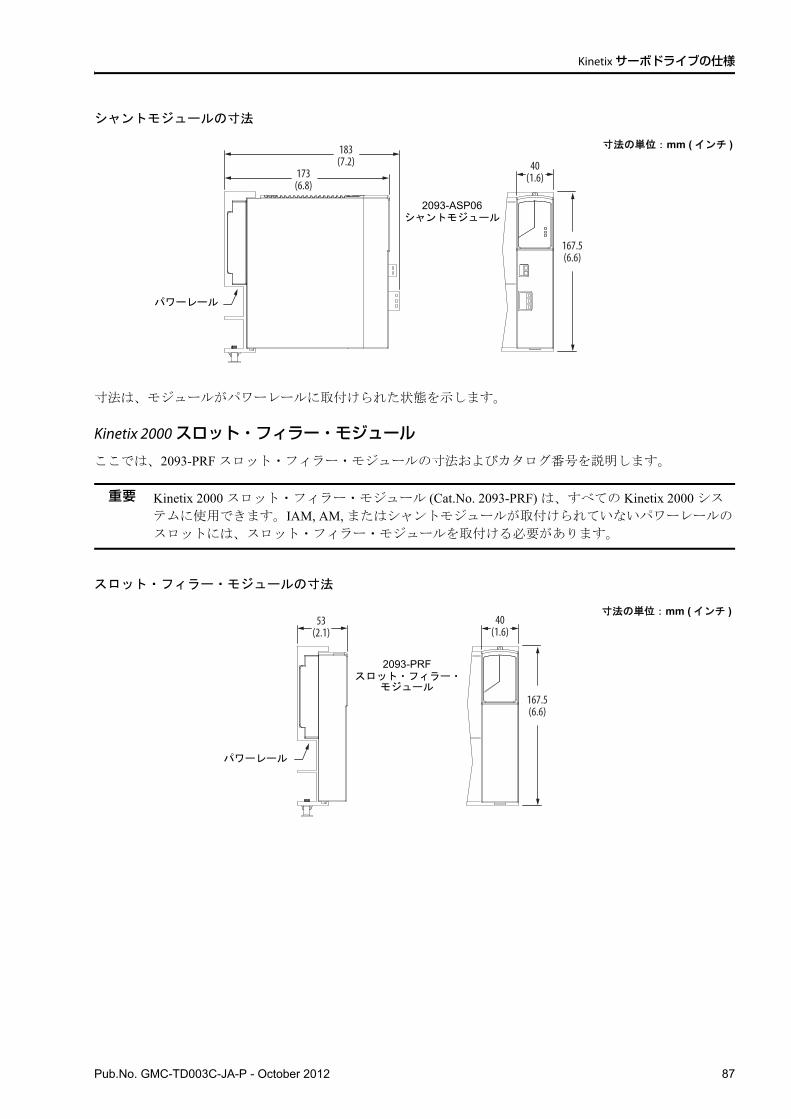
Kinetixサーボドライブの仕様
シャントモジュールの寸法
寸法は、モジュールがパワーレールに取付けられた状態を示します。
Kinetix 2000スロット・フィラー・モジュールここでは、2093-PRF スロット・フィラー・モジュールの寸法およびカタログ番号を説明します。
スロット・フィラー・モジュールの寸法
重要 Kinetix 2000 スロット・フィラー・モジュール (Cat.No. 2093-PRF) は、すべての Kinetix 2000 シス
テムに使用できます。IAM, AM, またはシャントモジュールが取付けられていないパワーレールの
スロットには、スロット・フィラー・モジュールを取付ける必要があります。
167.5(6.6)
40(1.6)
183(7.2)
173(6.8)
寸法の単位:mm ( インチ )
パワーレール
2093-ASP06シャントモジュール
167.5(6.6)
40(1.6)
53(2.1)
寸法の単位:mm ( インチ )
パワーレール
2093-PRFスロット・フィラー・
モジュール
Pub.No. GMC-TD003C-JA-P - October 2012 87
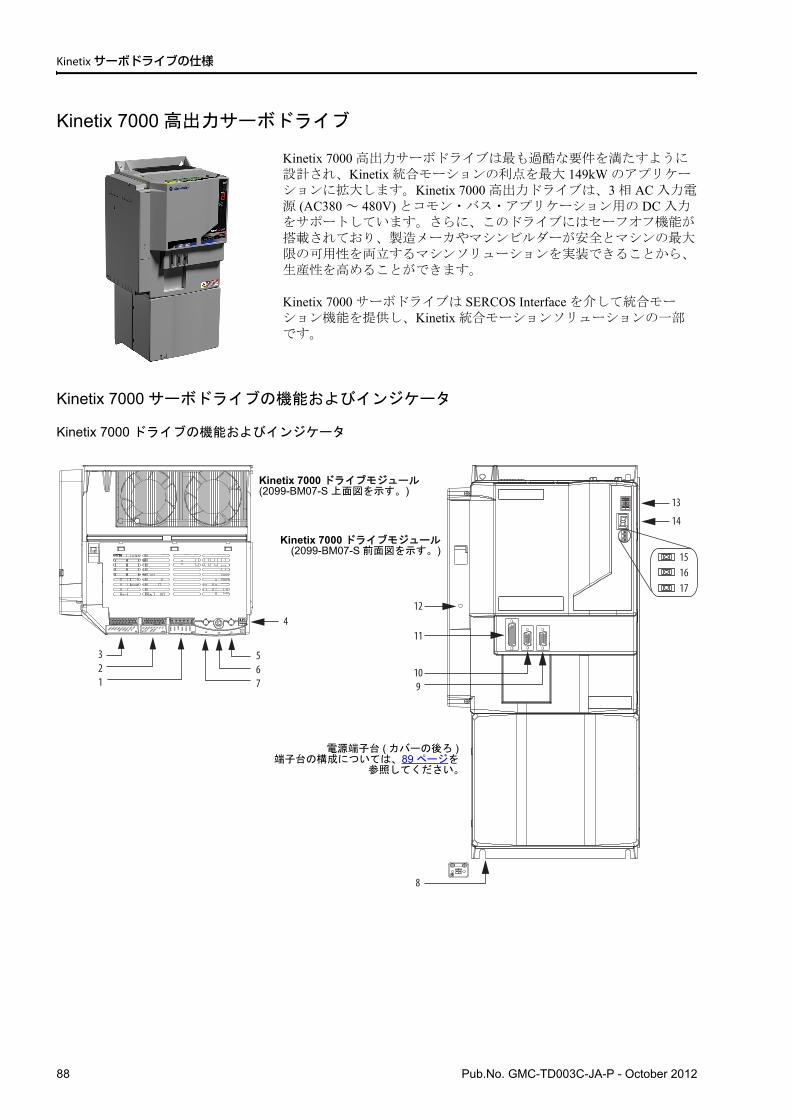
Kinetixサーボドライブの仕様
Kinetix 7000 高出力サーボドライブ
Kinetix 7000 高出力サーボドライブは最も過酷な要件を満たすように設計され、Kinetix 統合モーションの利点を最大 149kW のアプリケーションに拡大します。Kinetix 7000 高出力ドライブは、3 相 AC 入力電源 (AC380 ~ 480V) とコモン・バス・アプリケーション用の DC 入力をサポートしています。さらに、このドライブにはセーフオフ機能が搭載されており、製造メーカやマシンビルダーが安全とマシンの最大限の可用性を両立するマシンソリューションを実装できることから、生産性を高めることができます。
Kinetix 7000 サーボドライブは SERCOS Interface を介して統合モーション機能を提供し、Kinetix 統合モーションソリューションの一部です。
Kinetix 7000 サーボドライブの機能およびインジケータ
Kinetix 7000 ドライブの機能およびインジケータ
151617
13
14
4
321
567
12
8
11
109
Kinetix 7000 ドライブモジュール(2099-BM07-S 上面図を示す。)
Kinetix 7000 ドライブモジュール(2099-BM07-S 前面図を示す。)
電源端子台 ( カバーの後ろ )端子台の構成については、89 ページを
参照してください。
88 Pub.No. GMC-TD003C-JA-P - October 2012
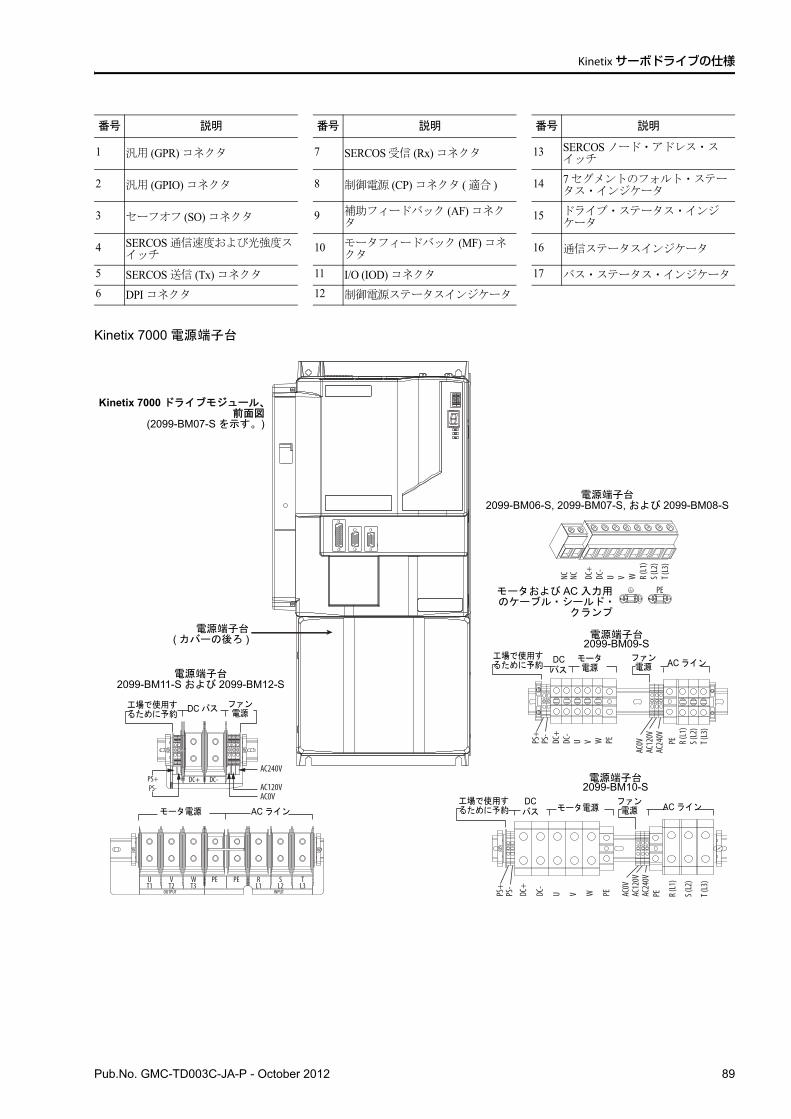
Kinetixサーボドライブの仕様
Kinetix 7000 電源端子台
番号 説明 番号 説明 番号 説明
1 汎用 (GPR) コネクタ 7 SERCOS 受信 (Rx) コネクタ 13 SERCOS ノード・アドレス・スイッチ
2 汎用 (GPIO) コネクタ 8 制御電源 (CP) コネクタ ( 適合 ) 14 7 セグメントのフォルト・ステータス・インジケータ
3 セーフオフ (SO) コネクタ 9 補助フィードバック (AF) コネクタ
15 ドライブ・ステータス・インジケータ
4 SERCOS 通信速度および光強度スイッチ
10 モータフィードバック (MF) コネクタ
16 通信ステータスインジケータ
5 SERCOS 送信 (Tx) コネクタ 11 I/O (IOD) コネクタ 17 バス・ステータス・インジケータ
6 DPI コネクタ 12 制御電源ステータスインジケータ
DC+
DC-
U V W PE PE R (L
1)
S (L
2)
T (L
3)
DC+
DC-
U V W PE PE R (L
1)
S (L
2)
T (L
3)
NC
NC
DC+
DC-
U V W R (L
1)
S (L
2)
T (L
3)
UT1
VT2
WT3
RL1
SL2
INPUTOUTPUT
TL3
PE PE
DC-DC+PS+
PS-
AC240V
AC120VAC0V
AC0V
AC12
0VAC
240V
PS+
PS-
PS+
PS-
AC0V
AC12
0VAC
240V
PE
Kinetix 7000 ドライブモジュール、前面図
(2099-BM07-S を示す。)
電源端子台( カバーの後ろ )
電源端子台2099-BM06-S, 2099-BM07-S, および 2099-BM08-S
電源端子台2099-BM09-S
電源端子台2099-BM10-S
電源端子台2099-BM11-S および 2099-BM12-S
モータおよび AC 入力用のケーブル・シールド・
クランプ
工場で使用するために予約
工場で使用するために予約
工場で使用するために予約
DC バス
DCバス
DCバス
AC ライン AC ライン
AC ラインファン電源
ファン電源
モータ電源
ファン電源
モータ電源モータ電源
Pub.No. GMC-TD003C-JA-P - October 2012 89
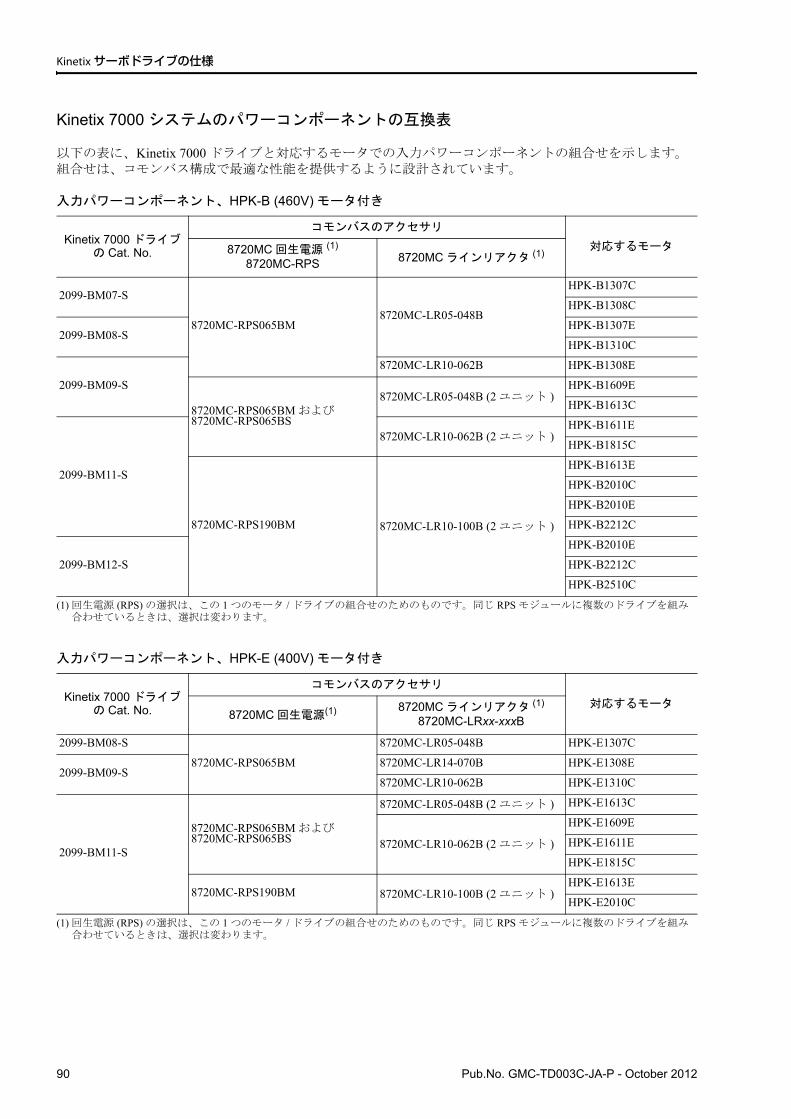
Kinetixサーボドライブの仕様
Kinetix 7000 システムのパワーコンポーネントの互換表
以下の表に、Kinetix 7000 ドライブと対応するモータでの入力パワーコンポーネントの組合せを示します。組合せは、コモンバス構成で最適な性能を提供するように設計されています。
入力パワーコンポーネント、HPK-B (460V) モータ付き
入力パワーコンポーネント、HPK-E (400V) モータ付き
Kinetix 7000 ドライブの Cat. No.
コモンバスのアクセサリ
対応するモータ8720MC 回生電源 (1)
8720MC-RPS
(1) 回生電源 (RPS) の選択は、この 1 つのモータ / ドライブの組合せのためのものです。同じ RPS モジュールに複数のドライブを組み合わせているときは、選択は変わります。
8720MC ラインリアクタ (1)
2099-BM07-S
8720MC-RPS065BM8720MC-LR05-048B
HPK-B1307C
HPK-B1308C
2099-BM08-SHPK-B1307E
HPK-B1310C
2099-BM09-S
8720MC-LR10-062B HPK-B1308E
8720MC-RPS065BM および8720MC-RPS065BS
8720MC-LR05-048B (2 ユニット )HPK-B1609E
HPK-B1613C
2099-BM11-S
8720MC-LR10-062B (2 ユニット )HPK-B1611E
HPK-B1815C
8720MC-RPS190BM 8720MC-LR10-100B (2 ユニット )
HPK-B1613E
HPK-B2010C
HPK-B2010E
HPK-B2212C
2099-BM12-S
HPK-B2010E
HPK-B2212C
HPK-B2510C
Kinetix 7000 ドライブの Cat. No.
コモンバスのアクセサリ
対応するモータ8720MC 回生電源(1)
(1) 回生電源 (RPS) の選択は、この 1 つのモータ / ドライブの組合せのためのものです。同じ RPS モジュールに複数のドライブを組み合わせているときは、選択は変わります。
8720MC ラインリアクタ (1)
8720MC-LRxx-xxxB
2099-BM08-S
8720MC-RPS065BM
8720MC-LR05-048B HPK-E1307C
2099-BM09-S8720MC-LR14-070B HPK-E1308E
8720MC-LR10-062B HPK-E1310C
2099-BM11-S
8720MC-RPS065BM および8720MC-RPS065BS
8720MC-LR05-048B (2 ユニット ) HPK-E1613C
8720MC-LR10-062B (2 ユニット )
HPK-E1609E
HPK-E1611E
HPK-E1815C
8720MC-RPS190BM 8720MC-LR10-100B (2 ユニット )HPK-E1613E
HPK-E2010C
90 Pub.No. GMC-TD003C-JA-P - October 2012
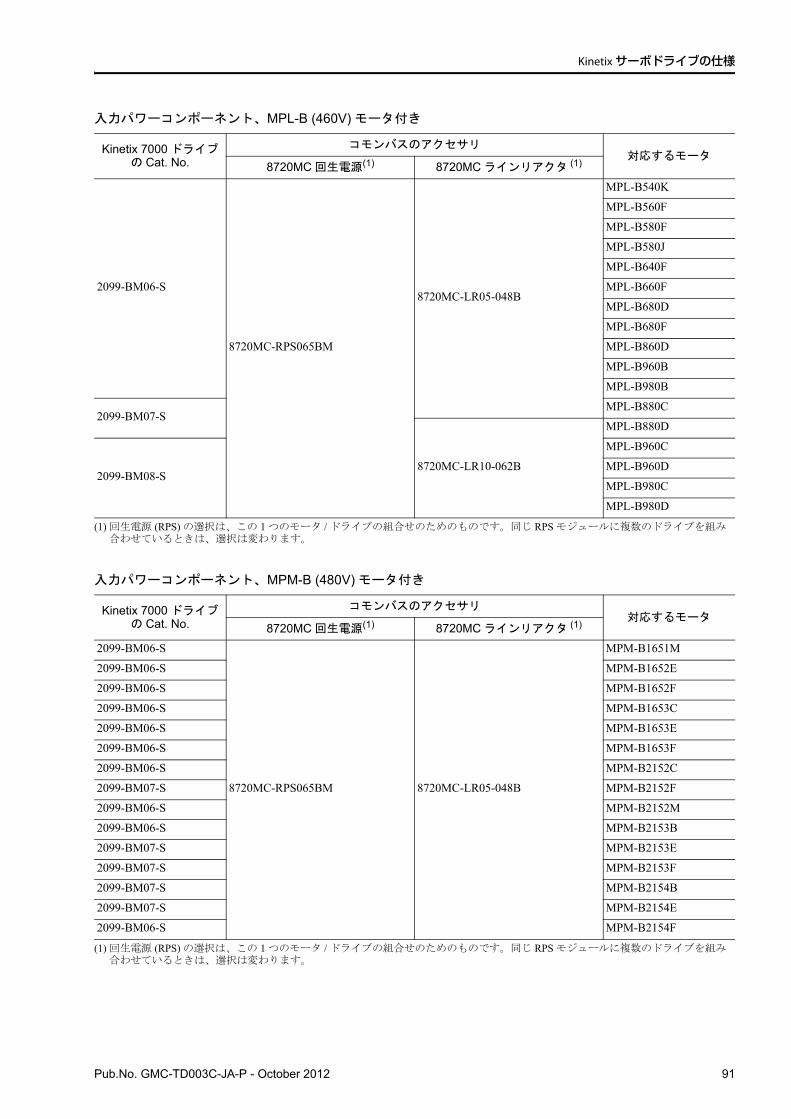
Kinetixサーボドライブの仕様
入力パワーコンポーネント、MPL-B (460V) モータ付き
入力パワーコンポーネント、MPM-B (480V) モータ付き
Kinetix 7000 ドライブの Cat. No.
コモンバスのアクセサリ対応するモータ
8720MC 回生電源(1)
(1) 回生電源 (RPS) の選択は、この 1 つのモータ / ドライブの組合せのためのものです。同じ RPS モジュールに複数のドライブを組み合わせているときは、選択は変わります。
8720MC ラインリアクタ (1)
2099-BM06-S
8720MC-RPS065BM
8720MC-LR05-048B
MPL-B540K
MPL-B560F
MPL-B580F
MPL-B580J
MPL-B640F
MPL-B660F
MPL-B680D
MPL-B680F
MPL-B860D
MPL-B960B
MPL-B980B
2099-BM07-SMPL-B880C
8720MC-LR10-062B
MPL-B880D
2099-BM08-S
MPL-B960C
MPL-B960D
MPL-B980C
MPL-B980D
Kinetix 7000 ドライブの Cat. No.
コモンバスのアクセサリ対応するモータ
8720MC 回生電源(1)
(1) 回生電源 (RPS) の選択は、この 1 つのモータ / ドライブの組合せのためのものです。同じ RPS モジュールに複数のドライブを組み合わせているときは、選択は変わります。
8720MC ラインリアクタ (1)
2099-BM06-S
8720MC-RPS065BM 8720MC-LR05-048B
MPM-B1651M
2099-BM06-S MPM-B1652E
2099-BM06-S MPM-B1652F
2099-BM06-S MPM-B1653C
2099-BM06-S MPM-B1653E
2099-BM06-S MPM-B1653F
2099-BM06-S MPM-B2152C
2099-BM07-S MPM-B2152F
2099-BM06-S MPM-B2152M
2099-BM06-S MPM-B2153B
2099-BM07-S MPM-B2153E
2099-BM07-S MPM-B2153F
2099-BM07-S MPM-B2154B
2099-BM07-S MPM-B2154E
2099-BM06-S MPM-B2154F
Pub.No. GMC-TD003C-JA-P - October 2012 91
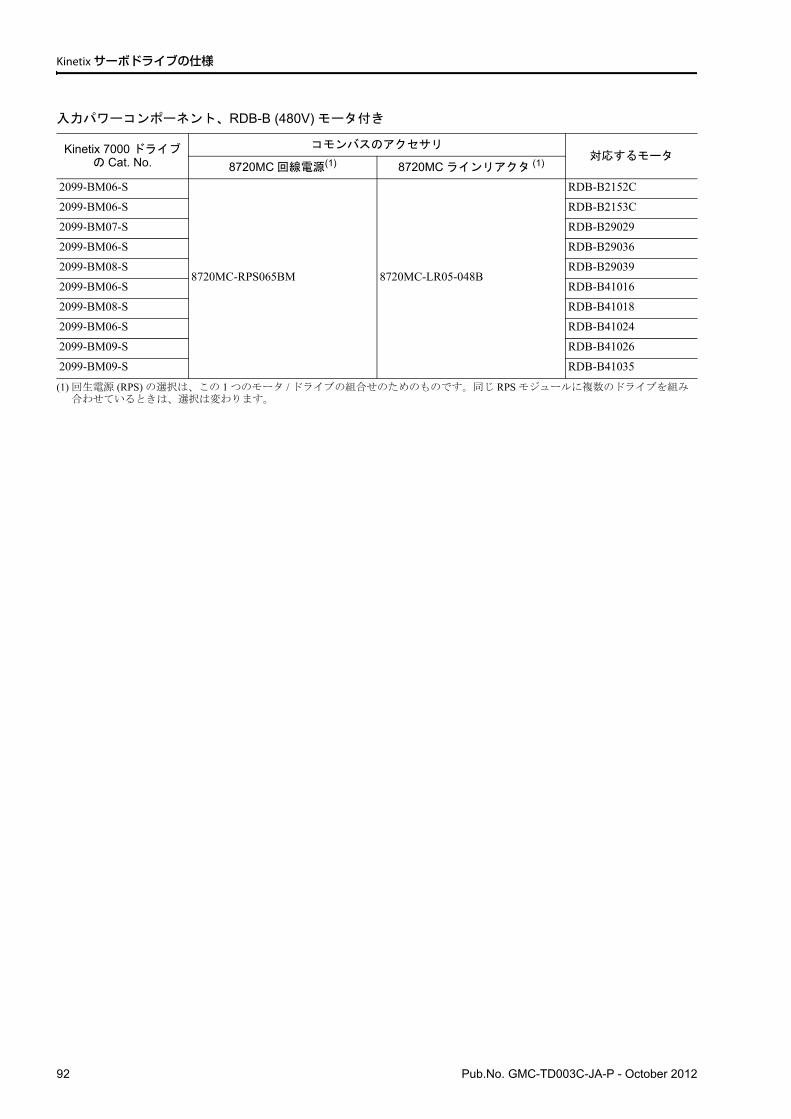
Kinetixサーボドライブの仕様
入力パワーコンポーネント、RDB-B (480V) モータ付き
Kinetix 7000 ドライブの Cat. No.
コモンバスのアクセサリ対応するモータ
8720MC 回線電源(1)
(1) 回生電源 (RPS) の選択は、この 1 つのモータ / ドライブの組合せのためのものです。同じ RPS モジュールに複数のドライブを組み合わせているときは、選択は変わります。
8720MC ラインリアクタ (1)
2099-BM06-S
8720MC-RPS065BM 8720MC-LR05-048B
RDB-B2152C
2099-BM06-S RDB-B2153C
2099-BM07-S RDB-B29029
2099-BM06-S RDB-B29036
2099-BM08-S RDB-B29039
2099-BM06-S RDB-B41016
2099-BM08-S RDB-B41018
2099-BM06-S RDB-B41024
2099-BM09-S RDB-B41026
2099-BM09-S RDB-B41035
92 Pub.No. GMC-TD003C-JA-P - October 2012
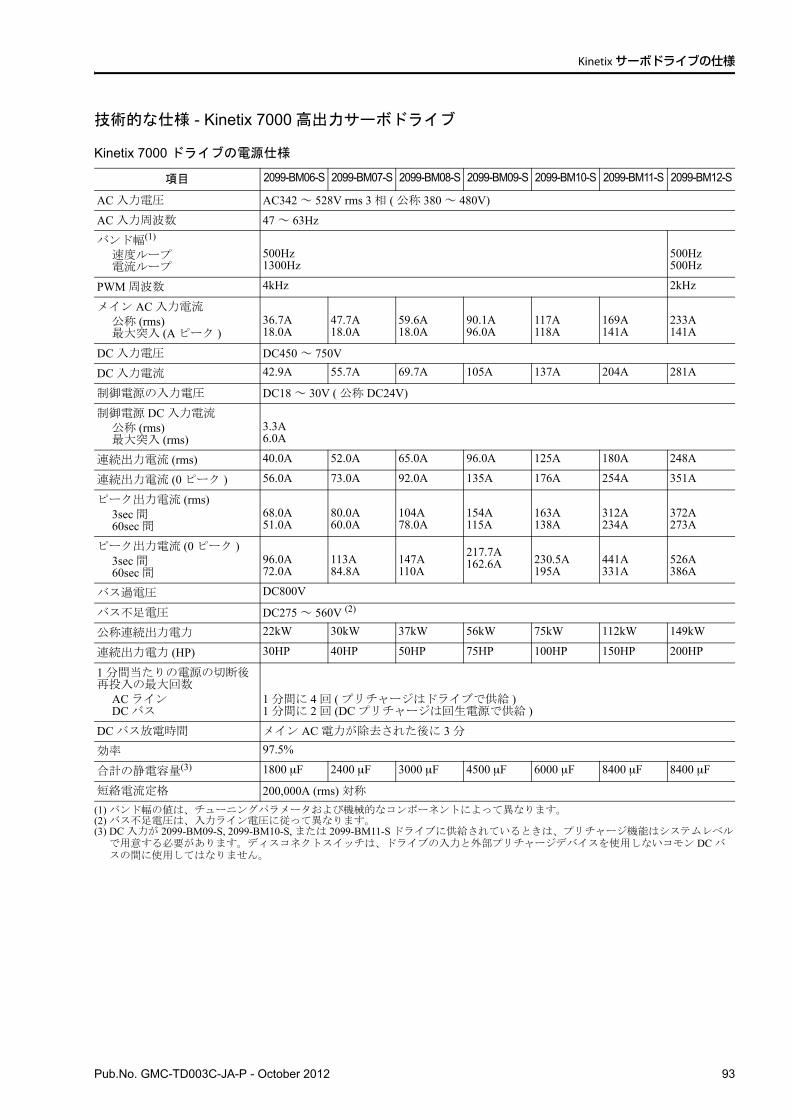
Kinetixサーボドライブの仕様
技術的な仕様 - Kinetix 7000 高出力サーボドライブ
Kinetix 7000 ドライブの電源仕様
項目 2099-BM06-S 2099-BM07-S 2099-BM08-S 2099-BM09-S 2099-BM10-S 2099-BM11-S 2099-BM12-S
AC 入力電圧 AC342 ~ 528V rms 3 相 ( 公称 380 ~ 480V)
AC 入力周波数 47 ~ 63Hz
バンド幅(1)
速度ループ電流ループ
(1) バンド幅の値は、チューニングパラメータおよび機械的なコンポーネントによって異なります。
500Hz1300Hz
500Hz500Hz
PWM 周波数 4kHz 2kHz
メイン AC 入力電流公称 (rms)最大突入 (A ピーク )
36.7A18.0A
47.7A18.0A
59.6A18.0A
90.1A96.0A
117A118A
169A141A
233A141A
DC 入力電圧 DC450 ~ 750V
DC 入力電流 42.9A 55.7A 69.7A 105A 137A 204A 281A
制御電源の入力電圧 DC18 ~ 30V ( 公称 DC24V)
制御電源 DC 入力電流公称 (rms)最大突入 (rms)
3.3A6.0A
連続出力電流 (rms) 40.0A 52.0A 65.0A 96.0A 125A 180A 248A
連続出力電流 (0 ピーク ) 56.0A 73.0A 92.0A 135A 176A 254A 351A
ピーク出力電流 (rms)3sec 間60sec 間
68.0A51.0A
80.0A60.0A
104A78.0A
154A115A
163A138A
312A234A
372A273A
ピーク出力電流 (0 ピーク )3sec 間60sec 間
96.0A72.0A
113A84.8A
147A110A
217.7A162.6A 230.5A
195A441A331A
526A386A
バス過電圧 DC800V
バス不足電圧 DC275 ~ 560V (2)
(2) バス不足電圧は、入力ライン電圧に従って異なります。
公称連続出力電力 22kW 30kW 37kW 56kW 75kW 112kW 149kW
連続出力電力 (HP) 30HP 40HP 50HP 75HP 100HP 150HP 200HP
1 分間当たりの電源の切断後再投入の最大回数
AC ラインDC バス
1 分間に 4 回 ( プリチャージはドライブで供給 )1 分間に 2 回 (DC プリチャージは回生電源で供給 )
DC バス放電時間 メイン AC 電力が除去された後に 3 分
効率 97.5%
合計の静電容量(3)
(3) DC 入力が 2099-BM09-S, 2099-BM10-S, または 2099-BM11-S ドライブに供給されているときは、プリチャージ機能はシステムレベルで用意する必要があります。ディスコネクトスイッチは、ドライブの入力と外部プリチャージデバイスを使用しないコモン DC バスの間に使用してはなりません。
1800 F 2400 F 3000 F 4500 F 6000 F 8400 F 8400 F
短絡電流定格 200,000A (rms) 対称
Pub.No. GMC-TD003C-JA-P - October 2012 93
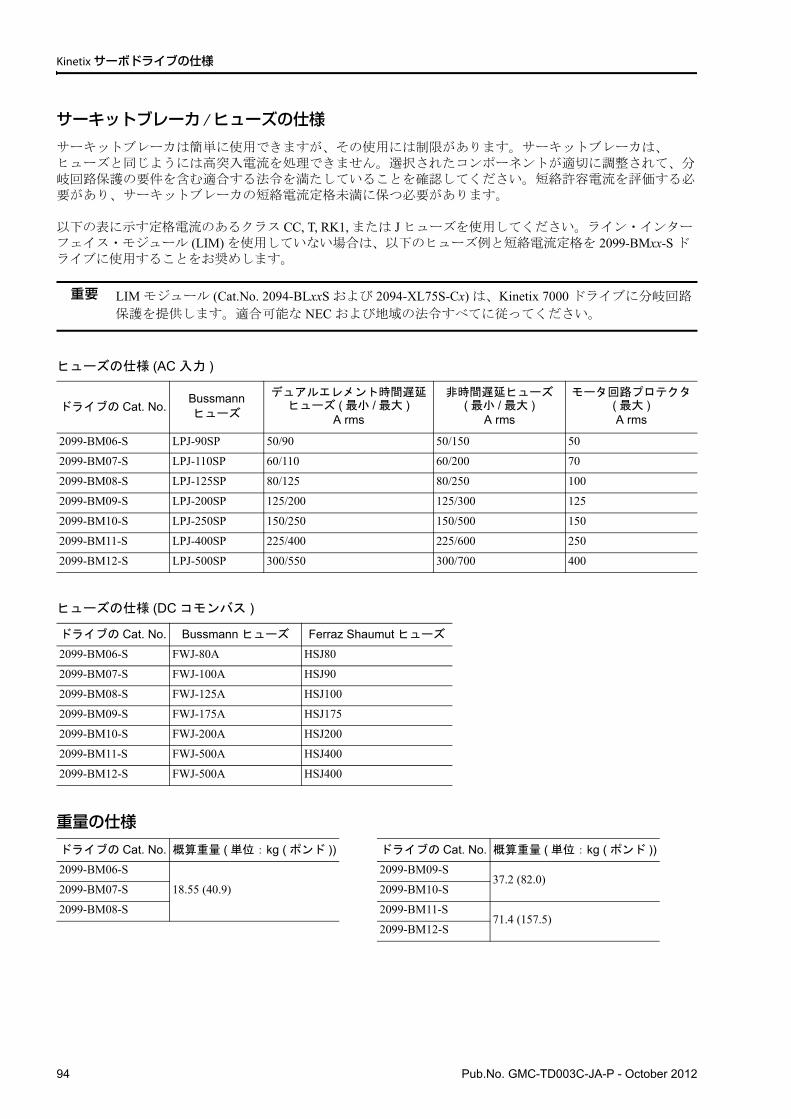
Kinetixサーボドライブの仕様
サーキットブレーカ /ヒューズの仕様サーキットブレーカは簡単に使用できますが、その使用には制限があります。サーキットブレーカは、ヒューズと同じようには高突入電流を処理できません。選択されたコンポーネントが適切に調整されて、分岐回路保護の要件を含む適合する法令を満たしていることを確認してください。短絡許容電流を評価する必要があり、サーキットブレーカの短絡電流定格未満に保つ必要があります。
以下の表に示す定格電流のあるクラス CC, T, RK1, または J ヒューズを使用してください。ライン・インターフェイス・モジュール (LIM) を使用していない場合は、以下のヒューズ例と短絡電流定格を 2099-BMxx-S ドライブに使用することをお奨めします。
ヒューズの仕様 (AC 入力 )
ヒューズの仕様 (DC コモンバス )
重量の仕様
重要 LIM モジュール (Cat.No. 2094-BLxxS および 2094-XL75S-Cx) は、Kinetix 7000 ドライブに分岐回路
保護を提供します。適合可能な NEC および地域の法令すべてに従ってください。
ドライブの Cat. No.Bussmannヒューズ
デュアルエレメント時間遅延ヒューズ ( 最小 / 最大 )
A rms
非時間遅延ヒューズ( 最小 / 最大 )
A rms
モータ回路プロテクタ( 最大 )A rms
2099-BM06-S LPJ-90SP 50/90 50/150 50
2099-BM07-S LPJ-110SP 60/110 60/200 70
2099-BM08-S LPJ-125SP 80/125 80/250 100
2099-BM09-S LPJ-200SP 125/200 125/300 125
2099-BM10-S LPJ-250SP 150/250 150/500 150
2099-BM11-S LPJ-400SP 225/400 225/600 250
2099-BM12-S LPJ-500SP 300/550 300/700 400
ドライブの Cat. No. Bussmann ヒューズ Ferraz Shaumut ヒューズ
2099-BM06-S FWJ-80A HSJ80
2099-BM07-S FWJ-100A HSJ90
2099-BM08-S FWJ-125A HSJ100
2099-BM09-S FWJ-175A HSJ175
2099-BM10-S FWJ-200A HSJ200
2099-BM11-S FWJ-500A HSJ400
2099-BM12-S FWJ-500A HSJ400
ドライブの Cat. No. 概算重量 ( 単位:kg ( ポンド )) ドライブの Cat. No. 概算重量 ( 単位:kg ( ポンド ))
2099-BM06-S
18.55 (40.9)
2099-BM09-S37.2 (82.0)
2099-BM07-S 2099-BM10-S
2099-BM08-S 2099-BM11-S71.4 (157.5)
2099-BM12-S
94 Pub.No. GMC-TD003C-JA-P - October 2012
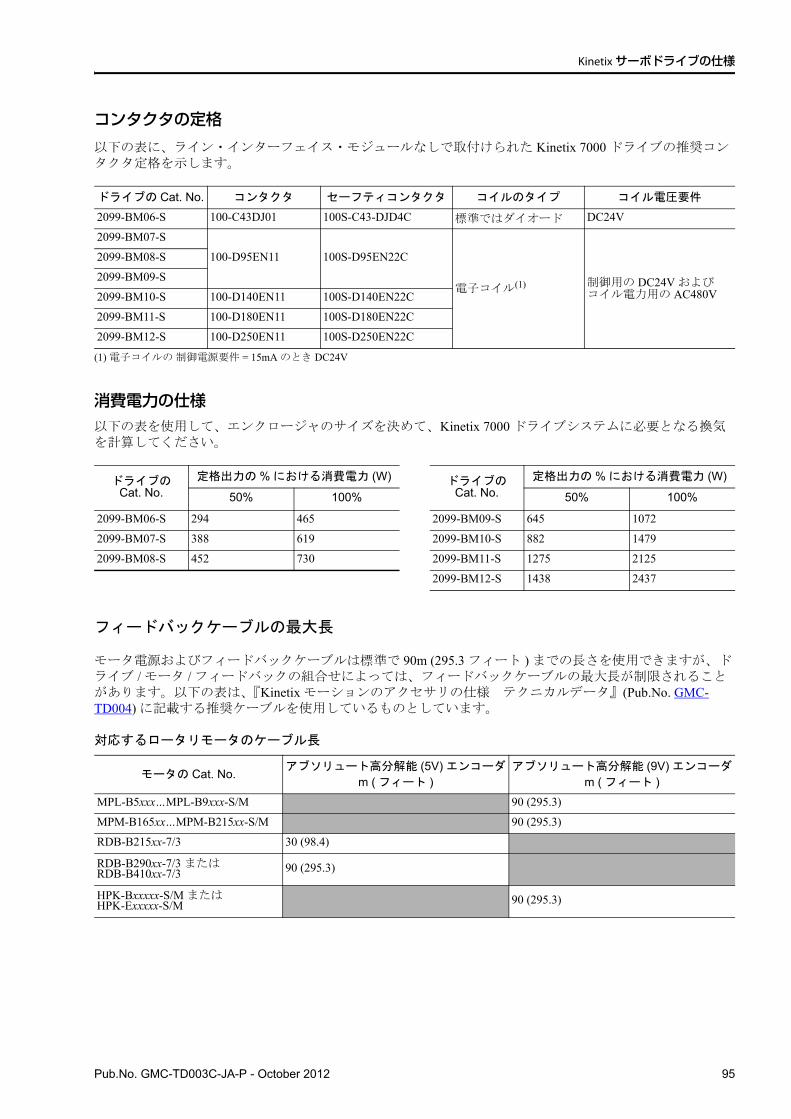
Kinetixサーボドライブの仕様
コンタクタの定格
以下の表に、ライン・インターフェイス・モジュールなしで取付けられた Kinetix 7000 ドライブの推奨コンタクタ定格を示します。
消費電力の仕様以下の表を使用して、エンクロージャのサイズを決めて、Kinetix 7000 ドライブシステムに必要となる換気を計算してください。
フィードバックケーブルの最大長
モータ電源およびフィードバックケーブルは標準で 90m (295.3 フィート ) までの長さを使用できますが、ドライブ / モータ / フィードバックの組合せによっては、フィードバックケーブルの最大長が制限されることがあります。以下の表は、『Kinetix モーションのアクセサリの仕様 テクニカルデータ』(Pub.No. GMC-TD004) に記載する推奨ケーブルを使用しているものとしています。
対応するロータリモータのケーブル長
ドライブの Cat. No. コンタクタ セーフティコンタクタ コイルのタイプ コイル電圧要件
2099-BM06-S 100-C43DJ01 100S-C43-DJD4C 標準ではダイオード DC24V
2099-BM07-S
100-D95EN11 100S-D95EN22C
電子コイル(1)
(1) 電子コイルの 制御電源要件 = 15mA のとき DC24V
制御用の DC24V およびコイル電力用の AC480V
2099-BM08-S
2099-BM09-S
2099-BM10-S 100-D140EN11 100S-D140EN22C
2099-BM11-S 100-D180EN11 100S-D180EN22C
2099-BM12-S 100-D250EN11 100S-D250EN22C
ドライブのCat. No.
定格出力の % における消費電力 (W) ドライブのCat. No.
定格出力の % における消費電力 (W)
50% 100% 50% 100%
2099-BM06-S 294 465 2099-BM09-S 645 1072
2099-BM07-S 388 619 2099-BM10-S 882 1479
2099-BM08-S 452 730 2099-BM11-S 1275 2125
2099-BM12-S 1438 2437
モータの Cat. No.アブソリュート高分解能 (5V) エンコーダ
m ( フィート )アブソリュート高分解能 (9V) エンコーダ
m ( フィート )
MPL-B5xxx…MPL-B9xxx-S/M 90 (295.3)
MPM-B165xx…MPM-B215xx-S/M 90 (295.3)
RDB-B215xx-7/3 30 (98.4)
RDB-B290xx-7/3 またはRDB-B410xx-7/3 90 (295.3)
HPK-Bxxxxx-S/M またはHPK-Exxxxx-S/M 90 (295.3)
Pub.No. GMC-TD003C-JA-P - October 2012 95
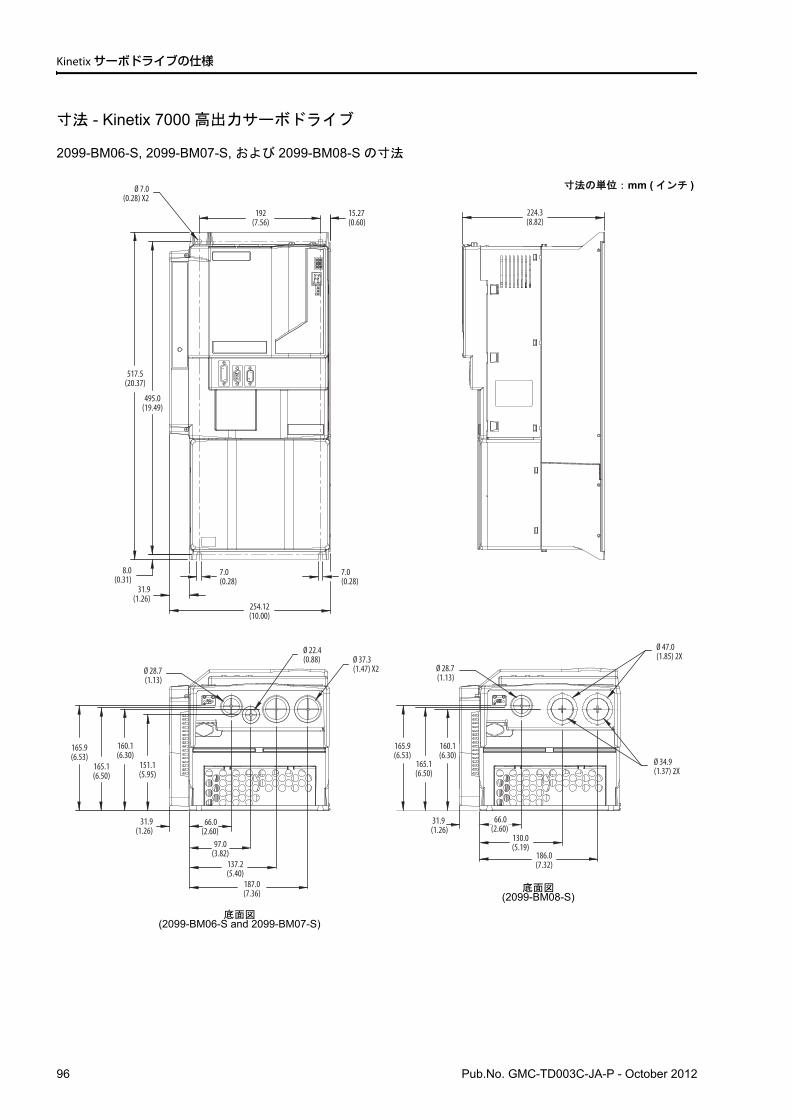
Kinetixサーボドライブの仕様
寸法 - Kinetix 7000 高出力サーボドライブ
2099-BM06-S, 2099-BM07-S, および 2099-BM08-S の寸法
224.3(8.82)
7.0(0.28)
31.9(1.26)
517.5(20.37)
495.0(19.49)
254.12(10.00)
192(7.56)
15.27(0.60)
7.0(0.28)
8.0(0.31)
Ø 7.0(0.28) X2
66.0(2.60)
97.0(3.82)
137.2(5.40)
187.0(7.36)
31.9(1.26)
151.1(5.95)
165.1(6.50)
160.1(6.30)
165.9(6.53)
Ø 37.3(1.47) X2
Ø 22.4(0.88)
Ø 28.7(1.13)
66.0(2.60)
130.0(5.19)
186.0(7.32)
31.9(1.26)
Ø 28.7(1.13)
Ø 47.0(1.85) 2X
Ø 34.9(1.37) 2X
165.9(6.53)
165.1(6.50)
160.1(6.30)
寸法の単位:mm ( インチ )
底面図(2099-BM06-S and 2099-BM07-S)
底面図(2099-BM08-S)
96 Pub.No. GMC-TD003C-JA-P - October 2012
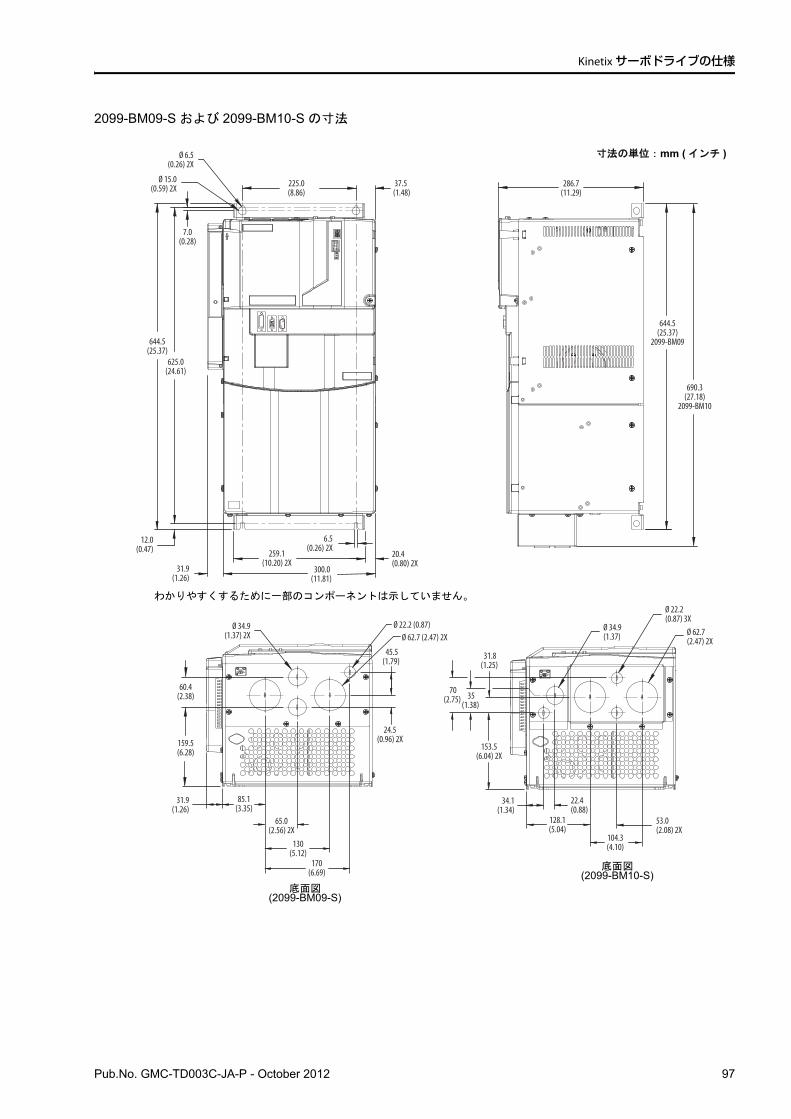
Kinetixサーボドライブの仕様
2099-BM09-S および 2099-BM10-S の寸法
286.7(11.29)
644.5(25.37)
2099-BM09
6.5(0.26) 2X
31.9(1.26)
20.4(0.80) 2X
300.0(11.81)
259.1(10.20) 2X
Ø 15.0(0.59) 2X 225.0
(8.86) 37.5(1.48)
Ø 6.5(0.26) 2X
12.0(0.47)
644.5(25.37)
7.0(0.28)
625.0(24.61)
690.3(27.18)
2099-BM10
Ø 34.9(1.37) 2X
60.4(2.38)
159.5(6.28)
31.9(1.26)
85.1(3.35)
65.0(2.56) 2X
130(5.12)
170(6.69)
24.5(0.96) 2X
45.5(1.79)
Ø 22.2 (0.87) Ø 62.7 (2.47) 2X
70(2.75) 35
(1.38)
31.8(1.25)
153.5(6.04) 2X
Ø 34.9(1.37)
Ø 22.2(0.87) 3X
Ø 62.7(2.47) 2X
34.1(1.34)
22.4(0.88)
128.1(5.04)
53.0(2.08) 2X
104.3(4.10)
寸法の単位:mm ( インチ )
わかりやすくするために一部のコンポーネントは示していません。
底面図(2099-BM09-S)
底面図(2099-BM10-S)
Pub.No. GMC-TD003C-JA-P - October 2012 97
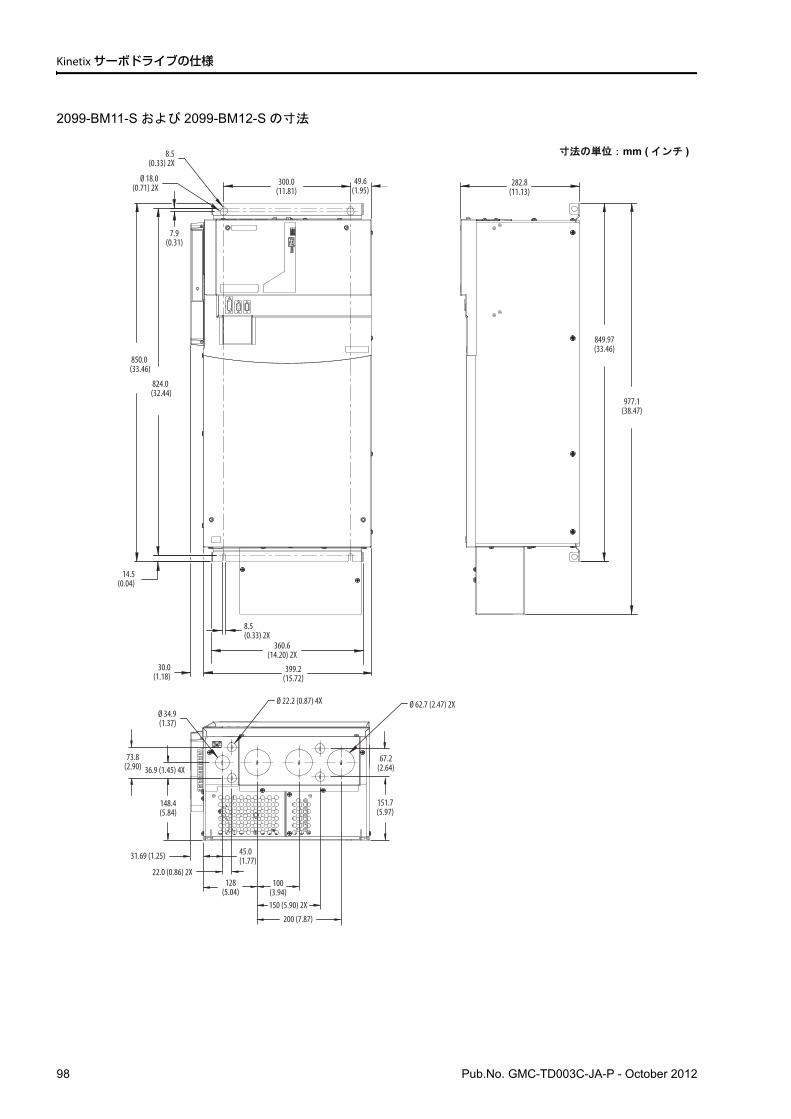
Kinetixサーボドライブの仕様
2099-BM11-S および 2099-BM12-S の寸法
Ø 18.0(0.71) 2X
8.5(0.33) 2X
849.97(33.46)
300.0(11.81)
49.6(1.95)
7.9(0.31)
850.0(33.46)
824.0(32.44)
14.5(0.04)
30.0(1.18)
360.6(14.20) 2X
8.5(0.33) 2X
399.2(15.72)
282.8(11.13)
977.1(38.47)
Ø 34.9(1.37)
Ø 22.2 (0.87) 4X Ø 62.7 (2.47) 2X
73.8(2.90) 36.9 (1.45) 4X
148.4(5.84)
31.69 (1.25) 45.0(1.77)
22.0 (0.86) 2X128
(5.04)100
(3.94)150 (5.90) 2X
200 (7.87)
151.7(5.97)
67.2(2.64)
寸法の単位:mm ( インチ )
98 Pub.No. GMC-TD003C-JA-P - October 2012
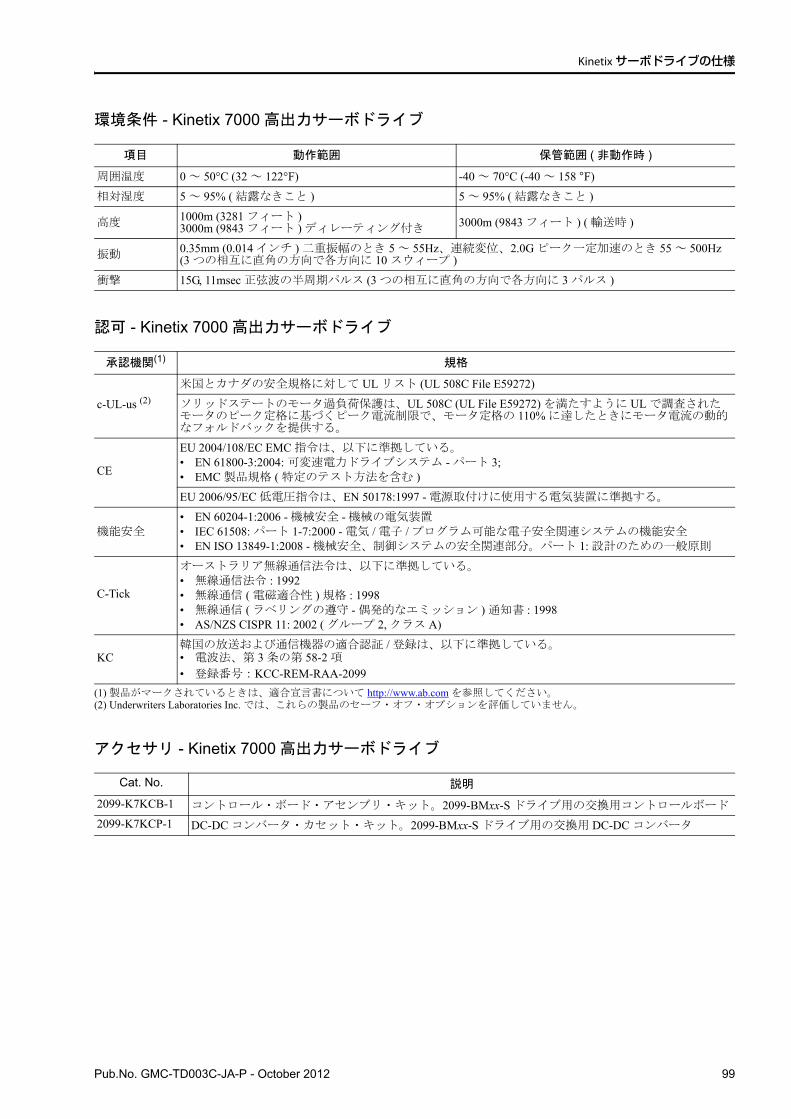
Kinetixサーボドライブの仕様
環境条件 - Kinetix 7000 高出力サーボドライブ
認可 - Kinetix 7000 高出力サーボドライブ
アクセサリ - Kinetix 7000 高出力サーボドライブ
項目 動作範囲 保管範囲 ( 非動作時 )
周囲温度 0 ~ 50°C (32 ~ 122°F) -40 ~ 70°C (-40 ~ 158F)
相対湿度 5 ~ 95% ( 結露なきこと ) 5 ~ 95% ( 結露なきこと )
高度1000m (3281 フィート )3000m (9843 フィート ) ディレーティング付き
3000m (9843 フィート ) ( 輸送時 )
振動0.35mm (0.014 インチ ) 二重振幅のとき 5 ~ 55Hz、連続変位、2.0G ピーク一定加速のとき 55 ~ 500Hz (3 つの相互に直角の方向で各方向に 10 スウィープ )
衝撃 15G, 11msec 正弦波の半周期パルス (3 つの相互に直角の方向で各方向に 3 パルス )
承認機関(1)
(1) 製品がマークされているときは、適合宣言書について http://www.ab.com を参照してください。
規格
c-UL-us (2)
(2) Underwriters Laboratories Inc. では、これらの製品のセーフ・オフ・オプションを評価していません。
米国とカナダの安全規格に対して UL リスト (UL 508C File E59272)
ソリッドステートのモータ過負荷保護は、UL 508C (UL File E59272) を満たすように UL で調査されたモータのピーク定格に基づくピーク電流制限で、モータ定格の 110% に達したときにモータ電流の動的なフォルドバックを提供する。
CE
EU 2004/108/EC EMC 指令は、以下に準拠している。• EN 61800-3:2004: 可変速電力ドライブシステム - パート 3; • EMC 製品規格 ( 特定のテスト方法を含む )
EU 2006/95/EC 低電圧指令は、EN 50178:1997 - 電源取付けに使用する電気装置に準拠する。
機能安全• EN 60204-1:2006 - 機械安全 - 機械の電気装置• IEC 61508: パート 1-7:2000 - 電気 / 電子 / プログラム可能な電子安全関連システムの機能安全• EN ISO 13849-1:2008 - 機械安全、制御システムの安全関連部分。パート 1: 設計のための一般原則
C-Tick
オーストラリア無線通信法令は、以下に準拠している。• 無線通信法令 : 1992• 無線通信 ( 電磁適合性 ) 規格 : 1998• 無線通信 ( ラベリングの遵守 - 偶発的なエミッション ) 通知書 : 1998• AS/NZS CISPR 11: 2002 ( グループ 2, クラス A)
KC韓国の放送および通信機器の適合認証 / 登録は、以下に準拠している。• 電波法、第 3 条の第 58-2 項• 登録番号:KCC-REM-RAA-2099
Cat. No. 説明
2099-K7KCB-1 コントロール・ボード・アセンブリ・キット。2099-BMxx-S ドライブ用の交換用コントロールボード
2099-K7KCP-1 DC-DC コンバータ・カセット・キット。2099-BMxx-S ドライブ用の交換用 DC-DC コンバータ
Pub.No. GMC-TD003C-JA-P - October 2012 99
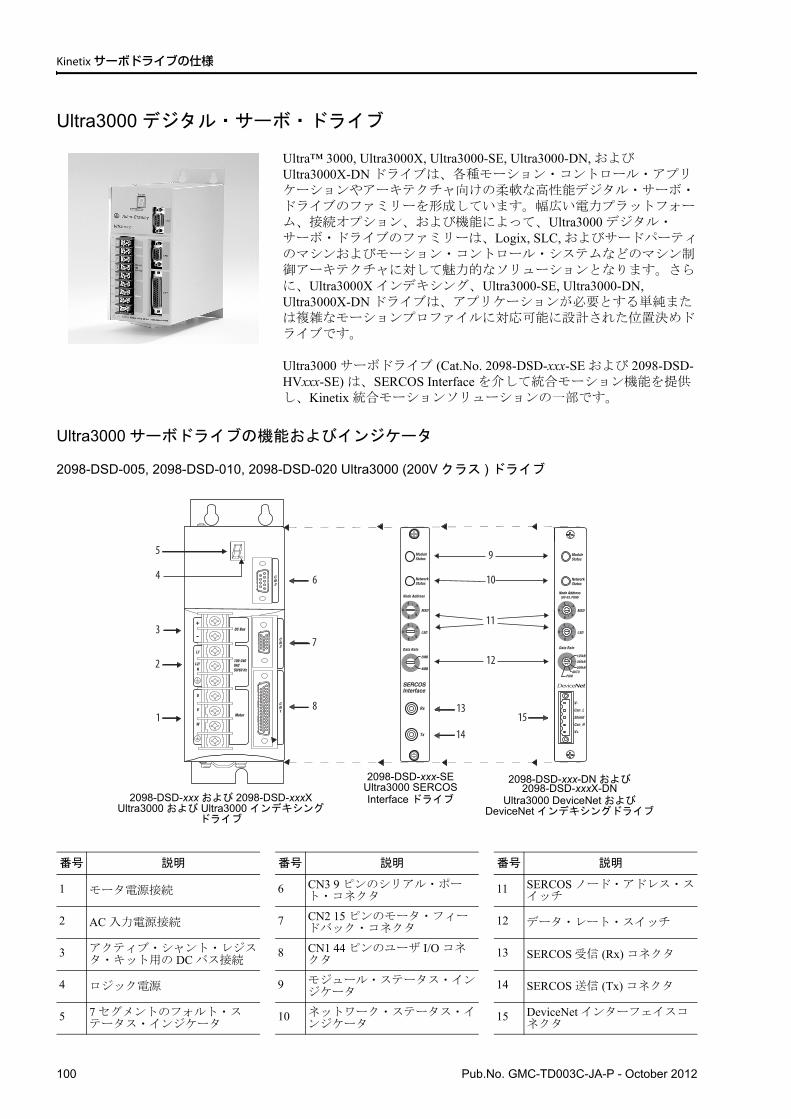
Kinetixサーボドライブの仕様
Ultra3000 デジタル・サーボ・ドライブ
Ultra™ 3000, Ultra3000X, Ultra3000-SE, Ultra3000-DN, およびUltra3000X-DN ドライブは、各種モーション・コントロール・アプリケーションやアーキテクチャ向けの柔軟な高性能デジタル・サーボ・ドライブのファミリーを形成しています。幅広い電力プラットフォーム、接続オプション、および機能によって、Ultra3000 デジタル・サーボ・ドライブのファミリーは、Logix, SLC, およびサードパーティのマシンおよびモーション・コントロール・システムなどのマシン制御アーキテクチャに対して魅力的なソリューションとなります。さらに、Ultra3000X インデキシング、Ultra3000-SE, Ultra3000-DN, Ultra3000X-DN ドライブは、アプリケーションが必要とする単純または複雑なモーションプロファイルに対応可能に設計された位置決めドライブです。
Ultra3000 サーボドライブ (Cat.No. 2098-DSD-xxx-SE および 2098-DSD-HVxxx-SE) は、SERCOS Interface を介して統合モーション機能を提供し、Kinetix 統合モーションソリューションの一部です。
Ultra3000 サーボドライブの機能およびインジケータ
2098-DSD-005, 2098-DSD-010, 2098-DSD-020 Ultra3000 (200V クラス ) ドライブ
番号 説明 番号 説明 番号 説明
1 モータ電源接続 6 CN3 9 ピンのシリアル・ポート・コネクタ
11 SERCOS ノード・アドレス・スイッチ
2 AC 入力電源接続 7 CN2 15 ピンのモータ・フィードバック・コネクタ
12 データ・レート・スイッチ
3 アクティブ・シャント・レジスタ・キット用の DC バス接続
8 CN1 44 ピンのユーザ I/O コネクタ
13 SERCOS 受信 (Rx) コネクタ
4 ロジック電源 9 モジュール・ステータス・インジケータ
14 SERCOS 送信 (Tx) コネクタ
5 7 セグメントのフォルト・ステータス・インジケータ
10 ネットワーク・ステータス・インジケータ
15 DeviceNet インターフェイスコネクタ
1
2
3
4
5
6
7
8
9
10
11
12
1315
14
2098-DSD-xxx および 2098-DSD-xxxXUltra3000 および Ultra3000 インデキシング
ドライブ
2098-DSD-xxx-SEUltra3000 SERCOS Interface ドライブ
2098-DSD-xxx-DN および2098-DSD-xxxX-DN
Ultra3000 DeviceNet およびDeviceNet インデキシングドライブ
100 Pub.No. GMC-TD003C-JA-P - October 2012
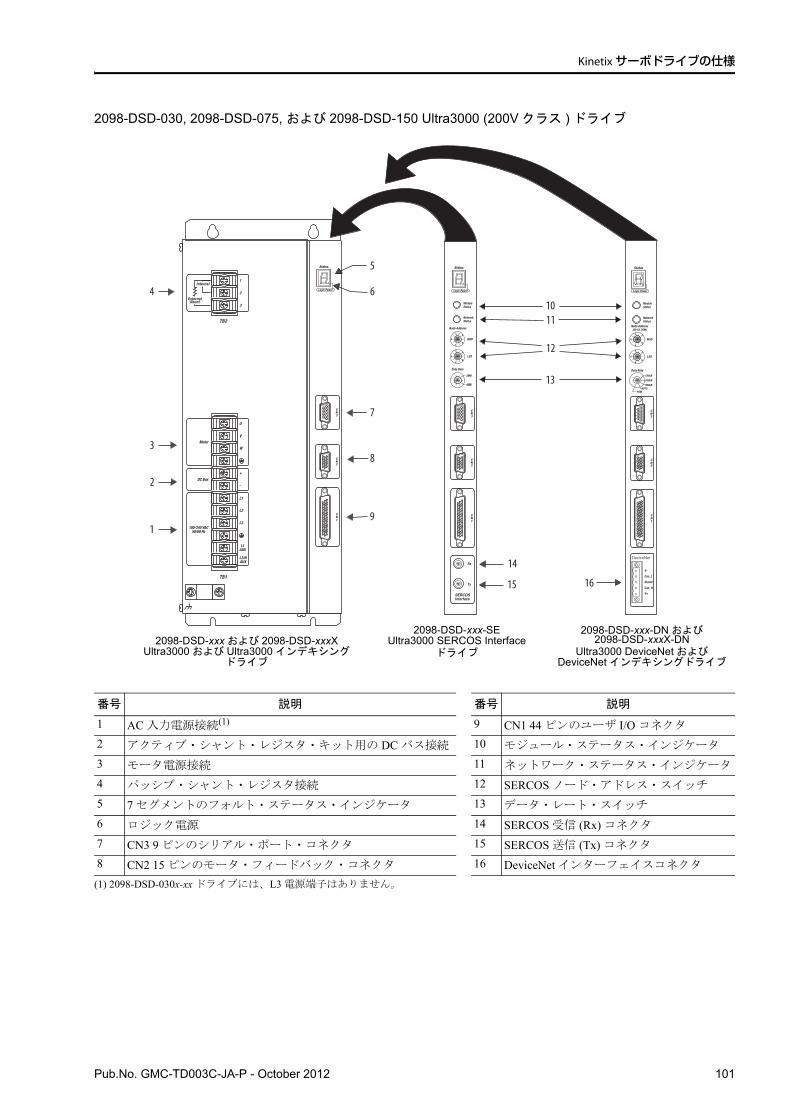
Kinetixサーボドライブの仕様
2098-DSD-030, 2098-DSD-075, および 2098-DSD-150 Ultra3000 (200V クラス ) ドライブ
番号 説明 番号 説明
1 AC 入力電源接続(1)
(1) 2098-DSD-030x-xx ドライブには、L3 電源端子はありません。
9 CN1 44 ピンのユーザ I/O コネクタ
2 アクティブ・シャント・レジスタ・キット用の DC バス接続 10 モジュール・ステータス・インジケータ
3 モータ電源接続 11 ネットワーク・ステータス・インジケータ
4 パッシブ・シャント・レジスタ接続 12 SERCOS ノード・アドレス・スイッチ
5 7 セグメントのフォルト・ステータス・インジケータ 13 データ・レート・スイッチ
6 ロジック電源 14 SERCOS 受信 (Rx) コネクタ
7 CN3 9 ピンのシリアル・ポート・コネクタ 15 SERCOS 送信 (Tx) コネクタ
8 CN2 15 ピンのモータ・フィードバック・コネクタ 16 DeviceNet インターフェイスコネクタ
V-
Can_L
Shield
Can_H
V+
DeviceNet
U
V
W
+
-
L1
L2
L3
L1AUX
L2/NAUX
Motor
DC Bus
100-240 VAC50/60 Hz
Internal
ExternalShunt
1
2
3
TB2
TB1
1
2
3
4
5
6
7
8
9
1011
12
13
14
1615
2098-DSD-xxx および 2098-DSD-xxxXUltra3000 および Ultra3000 インデキシング
ドライブ
2098-DSD-xxx-SEUltra3000 SERCOS Interface
ドライブ
2098-DSD-xxx-DN および2098-DSD-xxxX-DN
Ultra3000 DeviceNet およびDeviceNet インデキシングドライブ
Pub.No. GMC-TD003C-JA-P - October 2012 101
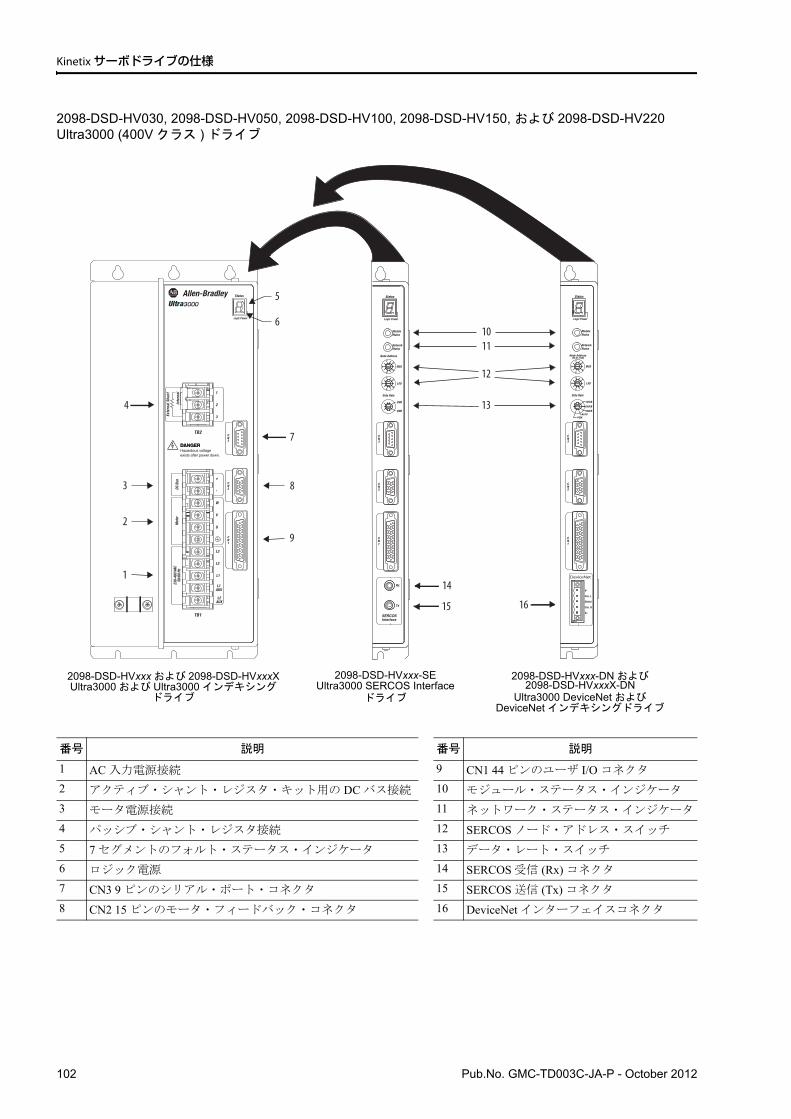
Kinetixサーボドライブの仕様
2098-DSD-HV030, 2098-DSD-HV050, 2098-DSD-HV100, 2098-DSD-HV150, および 2098-DSD-HV220 Ultra3000 (400V クラス ) ドライブ
番号 説明 番号 説明
1 AC 入力電源接続 9 CN1 44 ピンのユーザ I/O コネクタ
2 アクティブ・シャント・レジスタ・キット用の DC バス接続 10 モジュール・ステータス・インジケータ
3 モータ電源接続 11 ネットワーク・ステータス・インジケータ
4 パッシブ・シャント・レジスタ接続 12 SERCOS ノード・アドレス・スイッチ
5 7 セグメントのフォルト・ステータス・インジケータ 13 データ・レート・スイッチ
6 ロジック電源 14 SERCOS 受信 (Rx) コネクタ
7 CN3 9 ピンのシリアル・ポート・コネクタ 15 SERCOS 送信 (Tx) コネクタ
8 CN2 15 ピンのモータ・フィードバック・コネクタ 16 DeviceNet インターフェイスコネクタ
W
V
U
+
-
L3
L2
L1
L1AUX
L2AUX
Mot
orDC
Bus
230-
480
VAC
50/6
0 Hz
Inte
rnal
Exte
rnal
Shu
nt 1
2
3
TB2
DANGERDANGERHazardous voltageexists after power down.
TB1
Can_H
V+
500kB
250kB
125kB
AUTOPGM
V-
Can_L
Shield
(00-63, PGM)
DeviceNet
14
1615
1
2
3
9
8
7
6
5
4
12
1110
13
2098-DSD-HVxxx および 2098-DSD-HVxxxXUltra3000 および Ultra3000 インデキシング
ドライブ
2098-DSD-HVxxx-SEUltra3000 SERCOS Interface
ドライブ
2098-DSD-HVxxx-DN および2098-DSD-HVxxxX-DN
Ultra3000 DeviceNet およびDeviceNet インデキシングドライブ
102 Pub.No. GMC-TD003C-JA-P - October 2012
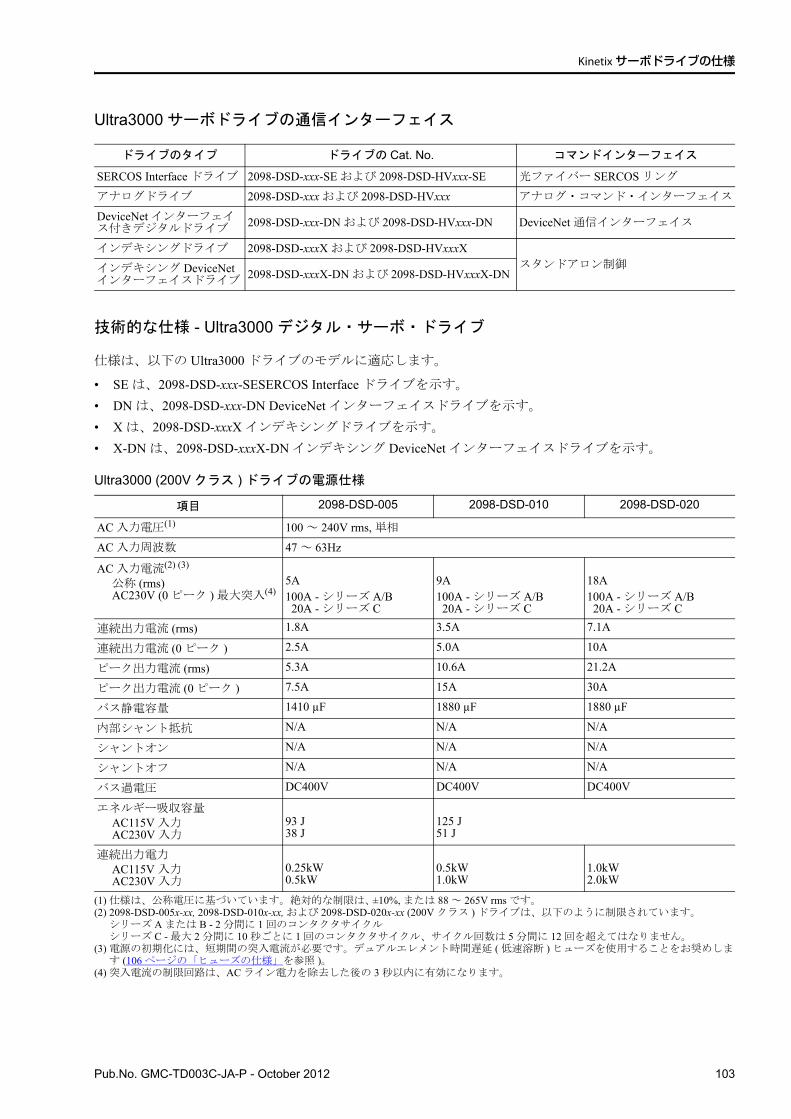
Kinetixサーボドライブの仕様
Ultra3000 サーボドライブの通信インターフェイス
技術的な仕様 - Ultra3000 デジタル・サーボ・ドライブ
仕様は、以下の Ultra3000 ドライブのモデルに適応します。
• SE は、2098-DSD-xxx-SESERCOS Interface ドライブを示す。
• DN は、2098-DSD-xxx-DN DeviceNet インターフェイスドライブを示す。
• X は、2098-DSD-xxxX インデキシングドライブを示す。
• X-DN は、2098-DSD-xxxX-DN インデキシング DeviceNet インターフェイスドライブを示す。
Ultra3000 (200V クラス ) ドライブの電源仕様
ドライブのタイプ ドライブの Cat. No. コマンドインターフェイス
SERCOS Interface ドライブ 2098-DSD-xxx-SE および 2098-DSD-HVxxx-SE 光ファイバー SERCOS リング
アナログドライブ 2098-DSD-xxx および 2098-DSD-HVxxx アナログ・コマンド・インターフェイス
DeviceNet インターフェイス付きデジタルドライブ
2098-DSD-xxx-DN および 2098-DSD-HVxxx-DN DeviceNet 通信インターフェイス
インデキシングドライブ 2098-DSD-xxxX および 2098-DSD-HVxxxXスタンドアロン制御インデキシング DeviceNet
インターフェイスドライブ2098-DSD-xxxX-DN および 2098-DSD-HVxxxX-DN
項目 2098-DSD-005 2098-DSD-010 2098-DSD-020
AC 入力電圧(1)
(1) 仕様は、公称電圧に基づいています。絶対的な制限は、 ±10%, または 88 ~ 265V rms です。
100 ~ 240V rms, 単相
AC 入力周波数 47 ~ 63Hz
AC 入力電流(2) (3)
公称 (rms)AC230V (0 ピーク ) 最大突入(4)
(2) 2098-DSD-005x-xx, 2098-DSD-010x-xx, および 2098-DSD-020x-xx (200V クラス ) ドライブは、以下のように制限されています。シリーズ A または B - 2 分間に 1 回のコンタクタサイクルシリーズ C - 最大 2 分間に 10 秒ごとに 1 回のコンタクタサイクル、サイクル回数は 5 分間に 12 回を超えてはなりません。
(3) 電源の初期化には、短期間の突入電流が必要です。デュアルエレメント時間遅延 ( 低速溶断 ) ヒューズを使用することをお奨めします (106 ページの「ヒューズの仕様」を参照 )。
(4) 突入電流の制限回路は、AC ライン電力を除去した後の 3 秒以内に有効になります。
5A100A - シリーズ A/B
20A - シリーズ C
9A100A - シリーズ A/B20A - シリーズ C
18A100A - シリーズ A/B20A - シリーズ C
連続出力電流 (rms) 1.8A 3.5A 7.1A
連続出力電流 (0 ピーク ) 2.5A 5.0A 10A
ピーク出力電流 (rms) 5.3A 10.6A 21.2A
ピーク出力電流 (0 ピーク ) 7.5A 15A 30A
バス静電容量 1410 µF 1880 µF 1880 µF
内部シャント抵抗 N/A N/A N/A
シャントオン N/A N/A N/A
シャントオフ N/A N/A N/A
バス過電圧 DC400V DC400V DC400V
エネルギー吸収容量 AC115V 入力AC230V 入力
93 J38 J
125 J51 J
連続出力電力AC115V 入力AC230V 入力
0.25kW0.5kW
0.5kW1.0kW
1.0kW2.0kW
Pub.No. GMC-TD003C-JA-P - October 2012 103
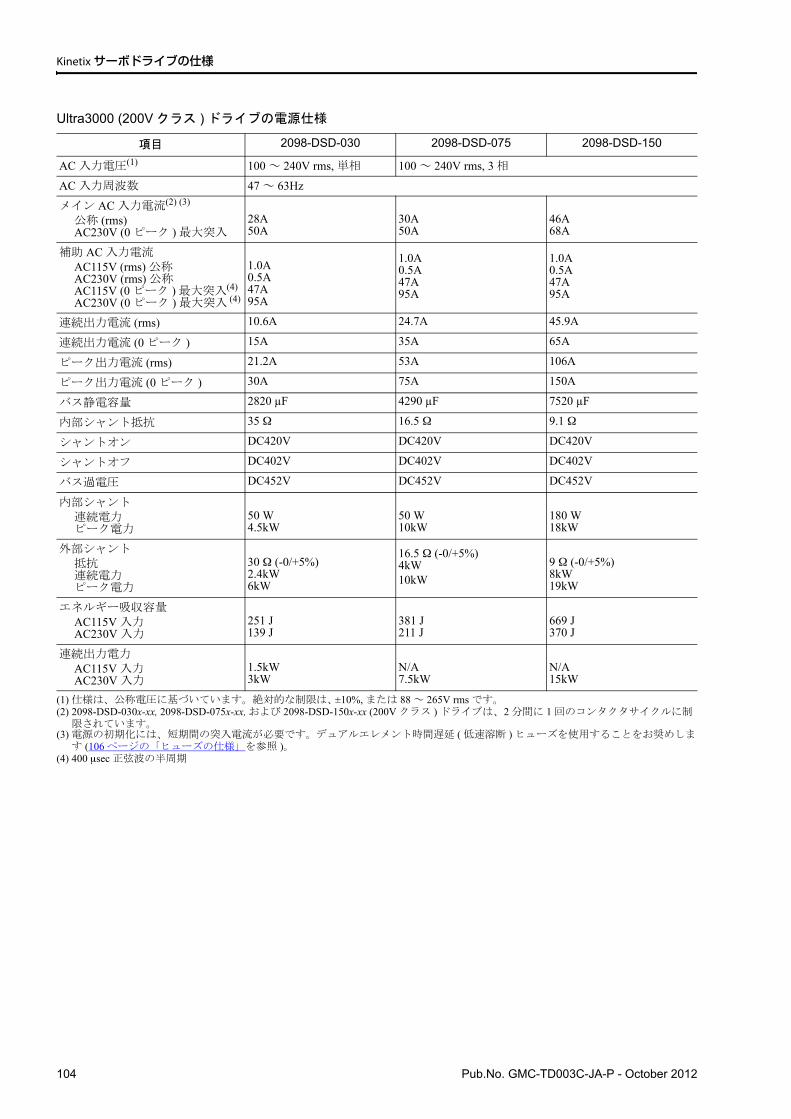
Kinetixサーボドライブの仕様
Ultra3000 (200V クラス ) ドライブの電源仕様
項目 2098-DSD-030 2098-DSD-075 2098-DSD-150
AC 入力電圧(1)
(1) 仕様は、公称電圧に基づいています。絶対的な制限は、 ±10%, または 88 ~ 265V rms です。
100 ~ 240V rms, 単相 100 ~ 240V rms, 3 相
AC 入力周波数 47 ~ 63Hz
メイン AC 入力電流(2) (3)
公称 (rms)AC230V (0 ピーク ) 最大突入
(2) 2098-DSD-030x-xx, 2098-DSD-075x-xx, および 2098-DSD-150x-xx (200V クラス ) ドライブは、2 分間に 1 回のコンタクタサイクルに制限されています。
(3) 電源の初期化には、短期間の突入電流が必要です。デュアルエレメント時間遅延 ( 低速溶断 ) ヒューズを使用することをお奨めします (106 ページの「ヒューズの仕様」を参照 )。
28A50A
30A50A
46A68A
補助 AC 入力電流AC115V (rms) 公称AC230V (rms) 公称AC115V (0 ピーク ) 最大突入(4)
AC230V (0 ピーク ) 最大突入 (4)
(4) 400 sec 正弦波の半周期
1.0A0.5A47A95A
1.0A0.5A47A95A
1.0A0.5A47A95A
連続出力電流 (rms) 10.6A 24.7A 45.9A
連続出力電流 (0 ピーク ) 15A 35A 65A
ピーク出力電流 (rms) 21.2A 53A 106A
ピーク出力電流 (0 ピーク ) 30A 75A 150A
バス静電容量 2820 µF 4290 µF 7520 µF
内部シャント抵抗 35 16.5 9.1
シャントオン DC420V DC420V DC420V
シャントオフ DC402V DC402V DC402V
バス過電圧 DC452V DC452V DC452V
内部シャント連続電力ピーク電力
50 W4.5kW
50 W10kW
180 W18kW
外部シャント抵抗連続電力ピーク電力
30 (-0/+5%)2.4kW6kW
16.5 (-0/+5%)4kW10kW
9 (-0/+5%)8kW19kW
エネルギー吸収容量AC115V 入力AC230V 入力
251 J139 J
381 J211 J
669 J370 J
連続出力電力AC115V 入力AC230V 入力
1.5kW3kW
N/A7.5kW
N/A15kW
104 Pub.No. GMC-TD003C-JA-P - October 2012
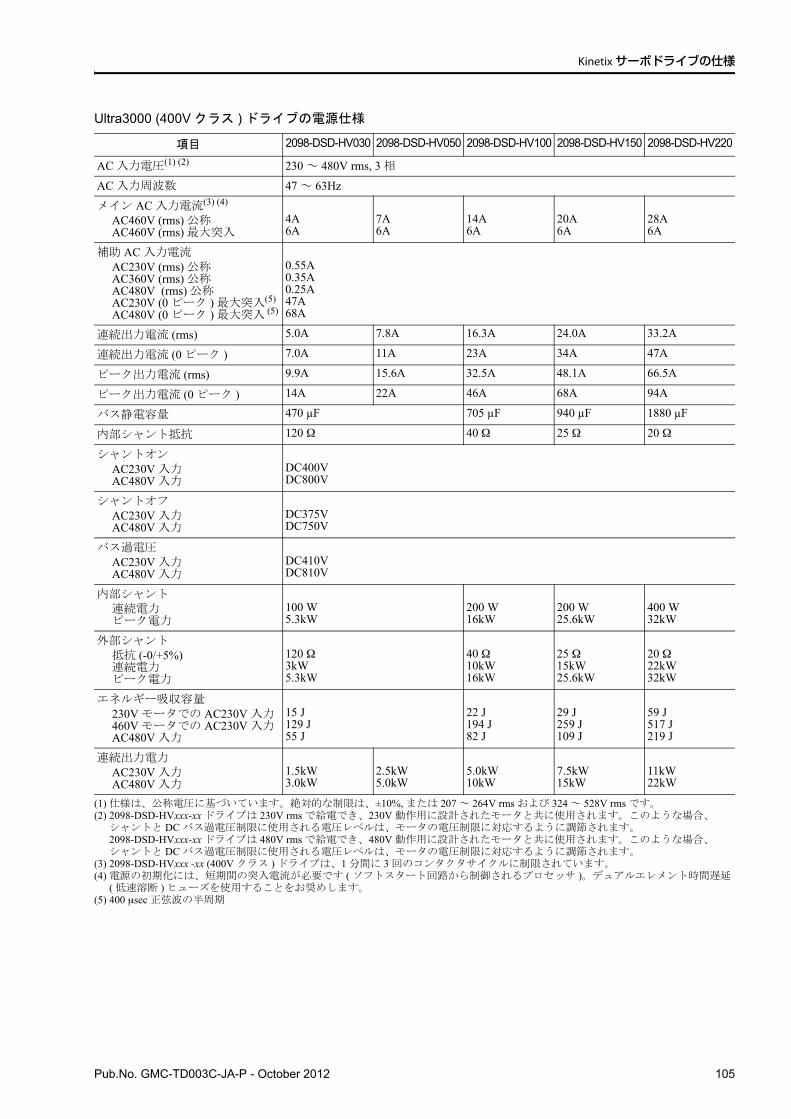
Kinetixサーボドライブの仕様
Ultra3000 (400V クラス ) ドライブの電源仕様
項目 2098-DSD-HV030 2098-DSD-HV050 2098-DSD-HV100 2098-DSD-HV150 2098-DSD-HV220
AC 入力電圧(1) (2)
(1) 仕様は、公称電圧に基づいています。絶対的な制限は、±10%, または 207 ~ 264V rms および 324 ~ 528V rms です。(2) 2098-DSD-HVxxx-xx ドライブは 230V rms で給電でき、230V 動作用に設計されたモータと共に使用されます。このような場合、
シャントと DC バス過電圧制限に使用される電圧レベルは、モータの電圧制限に対応するように調節されます。2098-DSD-HVxxx-xx ドライブは 480V rms で給電でき、480V 動作用に設計されたモータと共に使用されます。このような場合、シャントと DC バス過電圧制限に使用される電圧レベルは、モータの電圧制限に対応するように調節されます。
230 ~ 480V rms, 3 相
AC 入力周波数 47 ~ 63Hz
メイン AC 入力電流(3) (4)
AC460V (rms) 公称AC460V (rms) 最大突入
(3) 2098-DSD-HVxxx -xx (400V クラス ) ドライブは、1 分間に 3 回のコンタクタサイクルに制限されています。(4) 電源の初期化には、短期間の突入電流が必要です ( ソフトスタート回路から制御されるプロセッサ )。デュアルエレメント時間遅延
( 低速溶断 ) ヒューズを使用することをお奨めします。
4A6A
7A6A
14A6A
20A6A
28A6A
補助 AC 入力電流AC230V (rms) 公称AC360V (rms) 公称AC480V (rms) 公称AC230V (0 ピーク ) 最大突入(5)
AC480V (0 ピーク ) 最大突入 (5)
(5) 400 sec 正弦波の半周期
0.55A0.35A0.25A47A68A
連続出力電流 (rms) 5.0A 7.8A 16.3A 24.0A 33.2A
連続出力電流 (0 ピーク ) 7.0A 11A 23A 34A 47A
ピーク出力電流 (rms) 9.9A 15.6A 32.5A 48.1A 66.5A
ピーク出力電流 (0 ピーク ) 14A 22A 46A 68A 94A
バス静電容量 470 µF 705 µF 940 µF 1880 µF
内部シャント抵抗 120 40 25 20
シャントオンAC230V 入力AC480V 入力
DC400VDC800V
シャントオフAC230V 入力AC480V 入力
DC375VDC750V
バス過電圧AC230V 入力AC480V 入力
DC410VDC810V
内部シャント連続電力ピーク電力
100 W5.3kW
200 W16kW
200 W25.6kW
400 W32kW
外部シャント抵抗 (-0/+5%)連続電力ピーク電力
120 3kW5.3kW
40 10kW16kW
25 15kW25.6kW
20 22kW32kW
エネルギー吸収容量230V モータでの AC230V 入力460V モータでの AC230V 入力AC480V 入力
15 J129 J55 J
22 J194 J82 J
29 J259 J109 J
59 J517 J219 J
連続出力電力AC230V 入力AC480V 入力
1.5kW3.0kW
2.5kW5.0kW
5.0kW10kW
7.5kW15kW
11kW22kW
Pub.No. GMC-TD003C-JA-P - October 2012 105
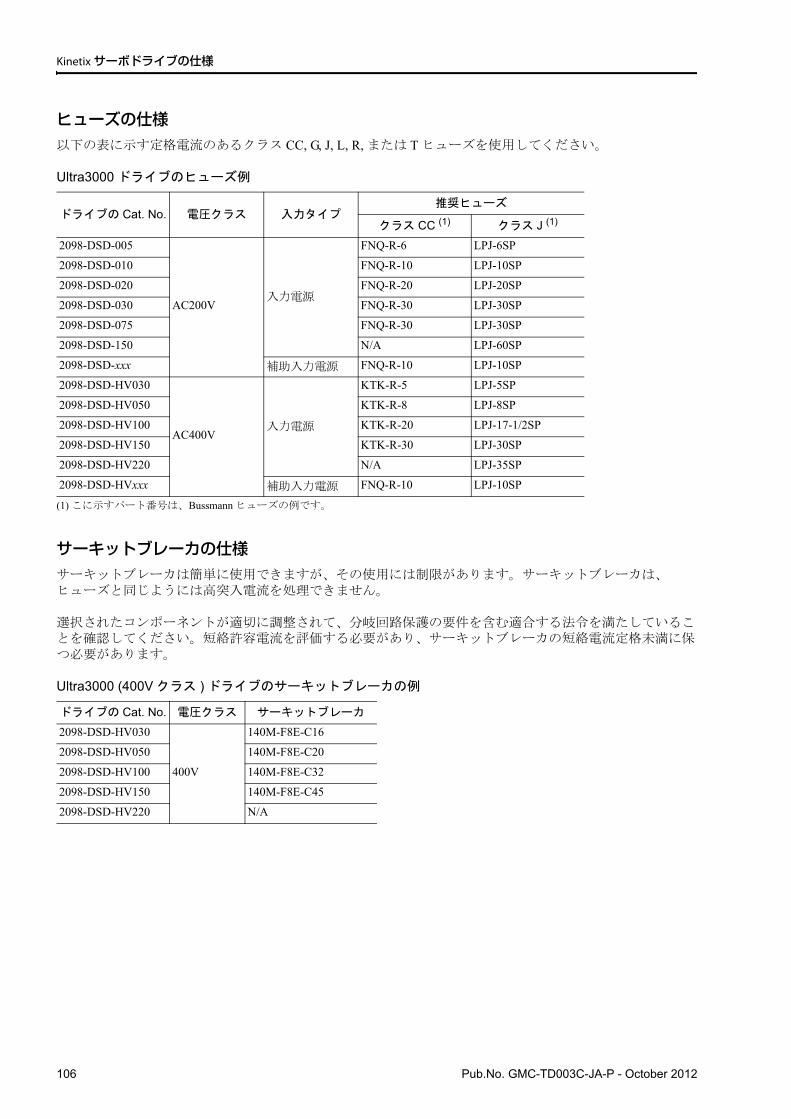
Kinetixサーボドライブの仕様
ヒューズの仕様以下の表に示す定格電流のあるクラス CC, G, J, L, R, または T ヒューズを使用してください。
Ultra3000 ドライブのヒューズ例
サーキットブレーカの仕様サーキットブレーカは簡単に使用できますが、その使用には制限があります。サーキットブレーカは、ヒューズと同じようには高突入電流を処理できません。
選択されたコンポーネントが適切に調整されて、分岐回路保護の要件を含む適合する法令を満たしていることを確認してください。短絡許容電流を評価する必要があり、サーキットブレーカの短絡電流定格未満に保つ必要があります。
Ultra3000 (400V クラス ) ドライブのサーキットブレーカの例
ドライブの Cat. No. 電圧クラス 入力タイプ推奨ヒューズ
クラス CC (1)
(1) こに示すパート番号は、Bussmann ヒューズの例です。
クラス J (1)
2098-DSD-005
AC200V入力電源
FNQ-R-6 LPJ-6SP
2098-DSD-010 FNQ-R-10 LPJ-10SP
2098-DSD-020 FNQ-R-20 LPJ-20SP
2098-DSD-030 FNQ-R-30 LPJ-30SP
2098-DSD-075 FNQ-R-30 LPJ-30SP
2098-DSD-150 N/A LPJ-60SP
2098-DSD-xxx 補助入力電源 FNQ-R-10 LPJ-10SP
2098-DSD-HV030
AC400V入力電源
KTK-R-5 LPJ-5SP
2098-DSD-HV050 KTK-R-8 LPJ-8SP
2098-DSD-HV100 KTK-R-20 LPJ-17-1/2SP
2098-DSD-HV150 KTK-R-30 LPJ-30SP
2098-DSD-HV220 N/A LPJ-35SP
2098-DSD-HVxxx 補助入力電源 FNQ-R-10 LPJ-10SP
ドライブの Cat. No. 電圧クラス サーキットブレーカ
2098-DSD-HV030
400V
140M-F8E-C16
2098-DSD-HV050 140M-F8E-C20
2098-DSD-HV100 140M-F8E-C32
2098-DSD-HV150 140M-F8E-C45
2098-DSD-HV220 N/A
106 Pub.No. GMC-TD003C-JA-P - October 2012

Kinetixサーボドライブの仕様
コンタクタの定格
消費電力の仕様
重量の仕様
ドライブの Cat. No. 電圧クラス コンタクタ
2098-DSD-HV030
400V
100-C23x10 (AC コイル )100-C23Zx10 (DC コイル )
2098-DSD-HV050 100-C30x10 (AC コイル )100-C30Zx10 (DC コイル )
2098-DSD-HV100 100-C37x10 (AC コイル )100-C37Zx10 (DC コイル )
2098-DSD-HV150 100-C43x10 (AC コイル )100-C43Zx10 (DC コイル )
2098-DSD-HV220 100-C60x10 (AC コイル )100-C60Zx10 (DC コイル )
ドライブの Cat. No. 最大損失 ( 単位:W) ドライブの Cat. No. 最大損失 ( 単位:W)
2098-DSD-005 48 2098-DSD-HV030 175 + シャントの消費電力
2098-DSD-010 48 2098-DSD-HV050 175 + シャントの消費電力
2098-DSD-020 50 2098-DSD-HV100 350 + シャントの消費電力
2098-DSD-030 150 + シャントの消費電力 2098-DSD-HV150 350 + シャントの消費電力
2098-DSD-075 300 + シャントの消費電力 2098-DSD-HV220 600 + シャントの消費電力
2098-DSD-150 500 + シャントの消費電力
ドライブの Cat. No. 概算重量:kg ( ポンド ) ドライブの Cat. No. 概算重量:kg ( ポンド )
2098-DSD-0052098-DSD-0102098-DSD-0202098-DSD-0302098-DSD-0752098-DSD-150
1.80kg2.10kg2.10kg6.20kg9.30kg14.1kg
(4.1 ポンド )(4.6 ポンド )(4.6 ポンド )(13.6 ポンド )(20.6 ポンド )(31.0 ポンド )
2098-DSD-HV0302098-DSD-HV0502098-DSD-HV1002098-DSD-HV1502098-DSD-HV220
8.55kg8.55kg10.44kg10.44kg14.1kg
(18.8 ポンド )(18.8 ポンド )(22.9 ポンド )(22.9 ポンド )(31.0 ポンド )
Pub.No. GMC-TD003C-JA-P - October 2012 107
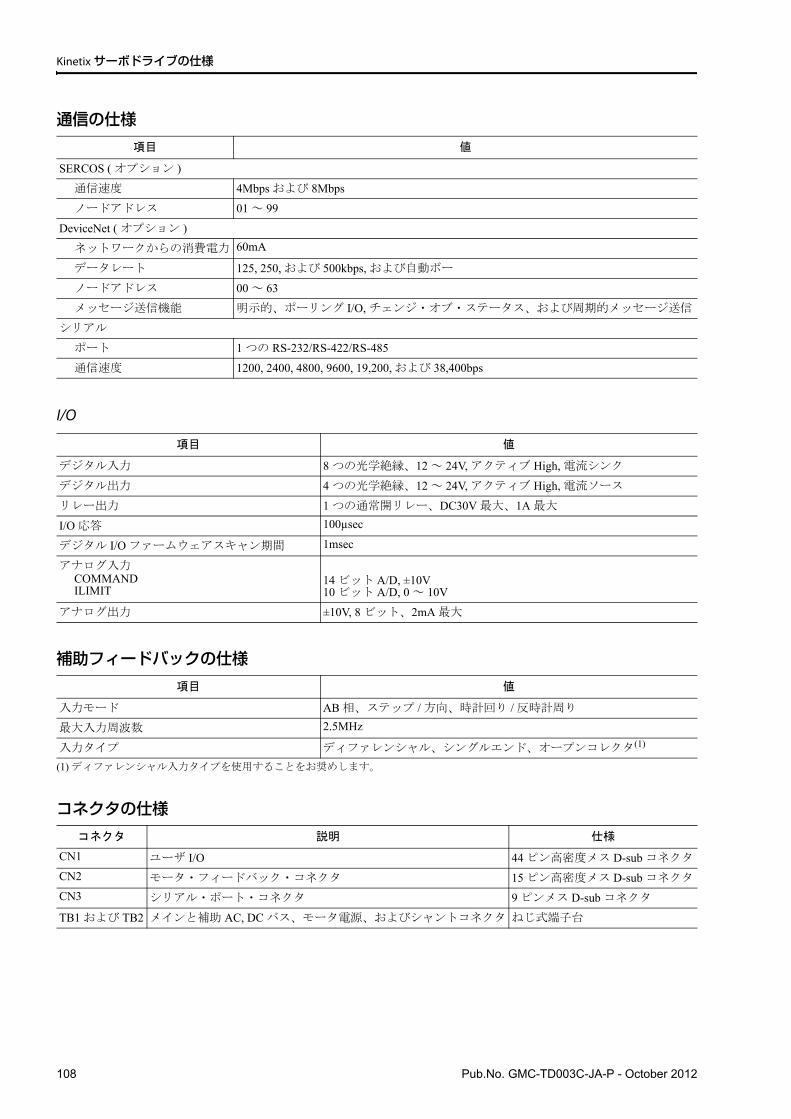
Kinetixサーボドライブの仕様
通信の仕様
I/O
補助フィードバックの仕様
コネクタの仕様
項目 値
SERCOS ( オプション )
通信速度 4Mbps および 8Mbps
ノードアドレス 01 ~ 99
DeviceNet ( オプション )
ネットワークからの消費電力 60mA
データレート 125, 250, および 500kbps, および自動ボー
ノードアドレス 00 ~ 63
メッセージ送信機能 明示的、ポーリング I/O, チェンジ・オブ・ステータス、および周期的メッセージ送信
シリアル
ポート 1 つの RS-232/RS-422/RS-485
通信速度 1200, 2400, 4800, 9600, 19,200, および 38,400bps
項目 値
デジタル入力 8 つの光学絶縁、12 ~ 24V, アクティブ High, 電流シンク
デジタル出力 4 つの光学絶縁、12 ~ 24V, アクティブ High, 電流ソース
リレー出力 1 つの通常開リレー、DC30V 最大、1A 最大
I/O 応答 100µsec
デジタル I/O ファームウェアスキャン期間 1msec
アナログ入力COMMANDILIMIT
14 ビット A/D, ±10V10 ビット A/D, 0 ~ 10V
アナログ出力 ±10V, 8 ビット、2mA 最大
項目 値
入力モード AB 相、ステップ / 方向、時計回り / 反時計周り
最大入力周波数 2.5MHz
入力タイプ ディファレンシャル、シングルエンド、オープンコレクタ(1)
(1) ディファレンシャル入力タイプを使用することをお奨めします。
コネクタ 説明 仕様
CN1 ユーザ I/O 44 ピン高密度メス D-sub コネクタ
CN2 モータ・フィードバック・コネクタ 15 ピン高密度メス D-sub コネクタ
CN3 シリアル・ポート・コネクタ 9 ピンメス D-sub コネクタ
TB1 および TB2 メインと補助 AC, DC バス、モータ電源、およびシャントコネクタ ねじ式端子台
108 Pub.No. GMC-TD003C-JA-P - October 2012
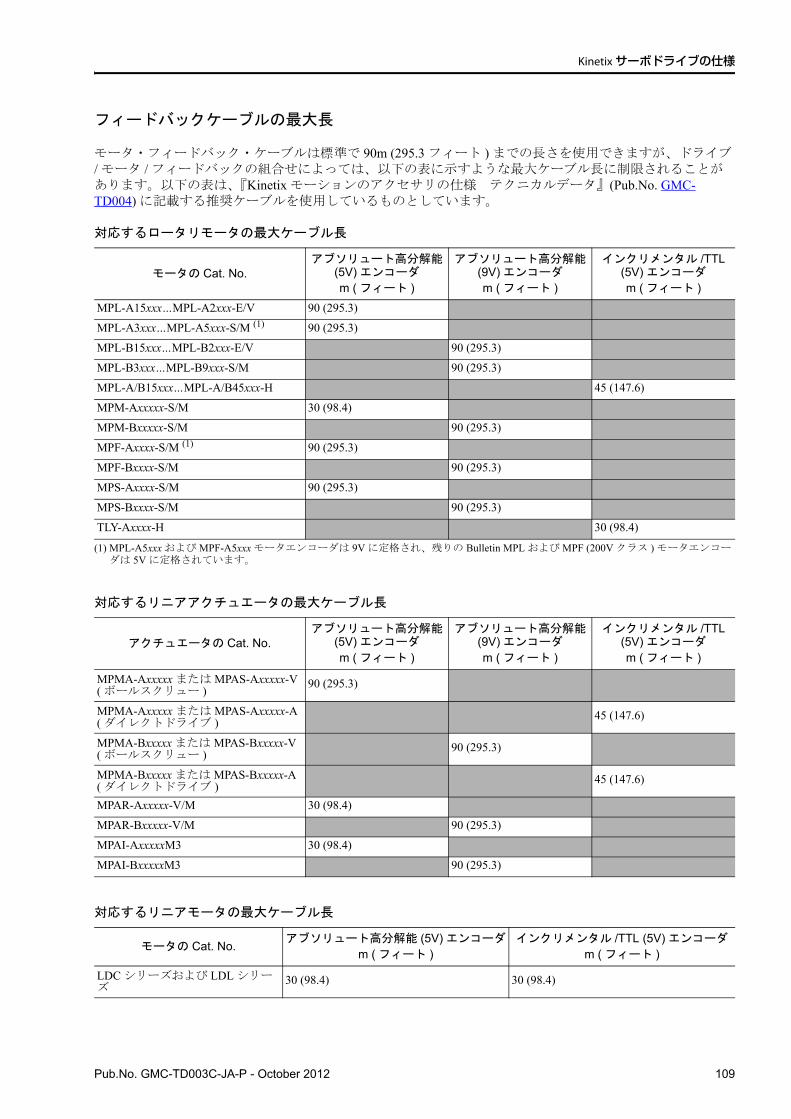
Kinetixサーボドライブの仕様
フィードバックケーブルの最大長
モータ・フィードバック・ケーブルは標準で 90m (295.3 フィート ) までの長さを使用できますが、ドライブ/ モータ / フィードバックの組合せによっては、以下の表に示すような最大ケーブル長に制限されることがあります。以下の表は、『Kinetix モーションのアクセサリの仕様 テクニカルデータ』(Pub.No. GMC-TD004) に記載する推奨ケーブルを使用しているものとしています。
対応するロータリモータの最大ケーブル長
対応するリニアアクチュエータの最大ケーブル長
対応するリニアモータの最大ケーブル長
モータの Cat. No.アブソリュート高分解能
(5V) エンコーダ
m ( フィート )
アブソリュート高分解能(9V) エンコーダ
m ( フィート )
インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
MPL-A15xxx…MPL-A2xxx-E/V 90 (295.3)
MPL-A3xxx…MPL-A5xxx-S/M (1)
(1) MPL-A5xxx および MPF-A5xxx モータエンコーダは 9V に定格され、残りの Bulletin MPL および MPF (200V クラス ) モータエンコーダは 5V に定格されています。
90 (295.3)
MPL-B15xxx…MPL-B2xxx-E/V 90 (295.3)
MPL-B3xxx…MPL-B9xxx-S/M 90 (295.3)
MPL-A/B15xxx…MPL-A/B45xxx-H 45 (147.6)
MPM-Axxxxx-S/M 30 (98.4)
MPM-Bxxxxx-S/M 90 (295.3)
MPF-Axxxx-S/M (1) 90 (295.3)
MPF-Bxxxx-S/M 90 (295.3)
MPS-Axxxx-S/M 90 (295.3)
MPS-Bxxxx-S/M 90 (295.3)
TLY-Axxxx-H 30 (98.4)
アクチュエータの Cat. No.アブソリュート高分解能
(5V) エンコーダ
m ( フィート )
アブソリュート高分解能(9V) エンコーダ
m ( フィート )
インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
MPMA-Axxxxx または MPAS-Axxxxx-V ( ボールスクリュー )
90 (295.3)
MPMA-Axxxxx または MPAS-Axxxxx-A ( ダイレクトドライブ )
45 (147.6)
MPMA-Bxxxxx または MPAS-Bxxxxx-V ( ボールスクリュー )
90 (295.3)
MPMA-Bxxxxx または MPAS-Bxxxxx-A ( ダイレクトドライブ )
45 (147.6)
MPAR-Axxxxx-V/M 30 (98.4)
MPAR-Bxxxxx-V/M 90 (295.3)
MPAI-AxxxxxM3 30 (98.4)
MPAI-BxxxxxM3 90 (295.3)
モータの Cat. No.アブソリュート高分解能 (5V) エンコーダ
m ( フィート )インクリメンタル /TTL (5V) エンコーダ
m ( フィート )
LDC シリーズおよび LDL シリーズ
30 (98.4) 30 (98.4)
Pub.No. GMC-TD003C-JA-P - October 2012 109
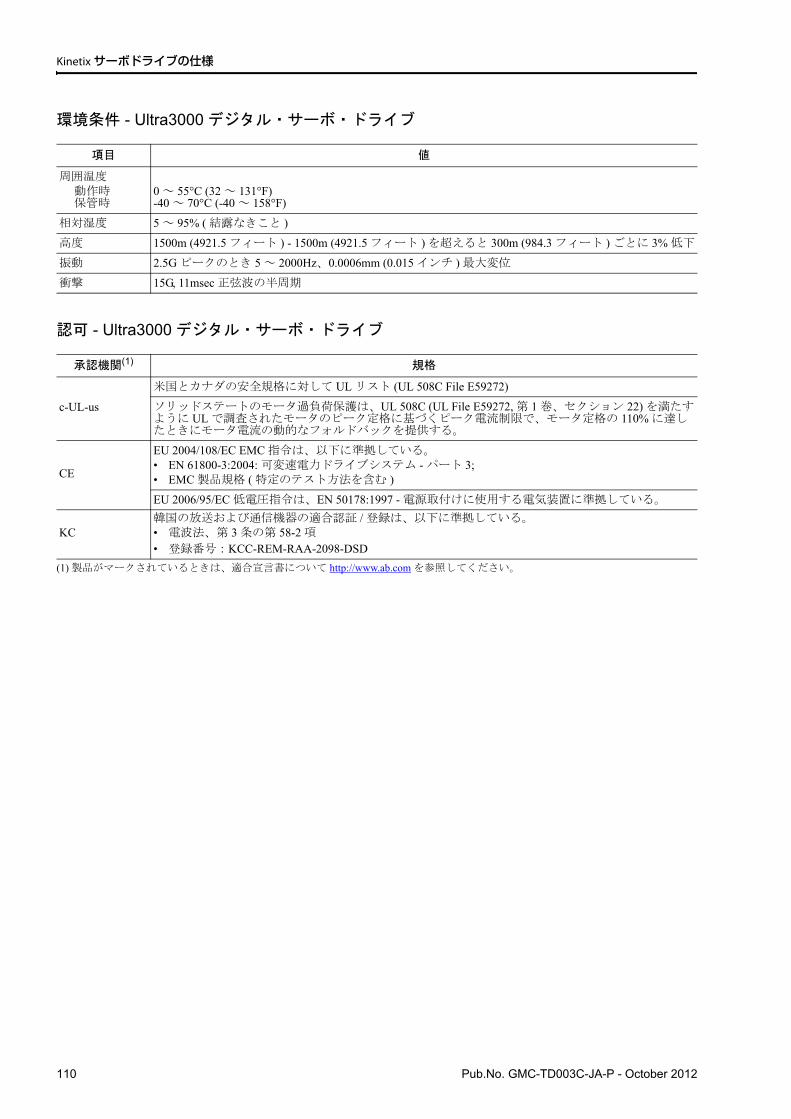
Kinetixサーボドライブの仕様
環境条件 - Ultra3000 デジタル・サーボ・ドライブ
認可 - Ultra3000 デジタル・サーボ・ドライブ
項目 値
周囲温度動作時保管時
0 ~ 55°C (32 ~ 131°F)-40 ~ 70°C (-40 ~ 158°F)
相対湿度 5 ~ 95% ( 結露なきこと )
高度 1500m (4921.5 フィート ) - 1500m (4921.5 フィート ) を超えると 300m (984.3 フィート ) ごとに 3% 低下
振動 2.5G ピークのとき 5 ~ 2000Hz、0.0006mm (0.015 インチ ) 最大変位
衝撃 15G, 11msec 正弦波の半周期
承認機関(1)
(1) 製品がマークされているときは、適合宣言書について http://www.ab.com を参照してください。
規格
c-UL-us
米国とカナダの安全規格に対して UL リスト (UL 508C File E59272)
ソリッドステートのモータ過負荷保護は、UL 508C (UL File E59272, 第 1 巻、セクション 22) を満たすように UL で調査されたモータのピーク定格に基づくピーク電流制限で、モータ定格の 110% に達したときにモータ電流の動的なフォルドバックを提供する。
CE
EU 2004/108/EC EMC 指令は、以下に準拠している。• EN 61800-3:2004: 可変速電力ドライブシステム - パート 3; • EMC 製品規格 ( 特定のテスト方法を含む )
EU 2006/95/EC 低電圧指令は、EN 50178:1997 - 電源取付けに使用する電気装置に準拠している。
KC韓国の放送および通信機器の適合認証 / 登録は、以下に準拠している。• 電波法、第 3 条の第 58-2 項
• 登録番号:KCC-REM-RAA-2098-DSD
110 Pub.No. GMC-TD003C-JA-P - October 2012
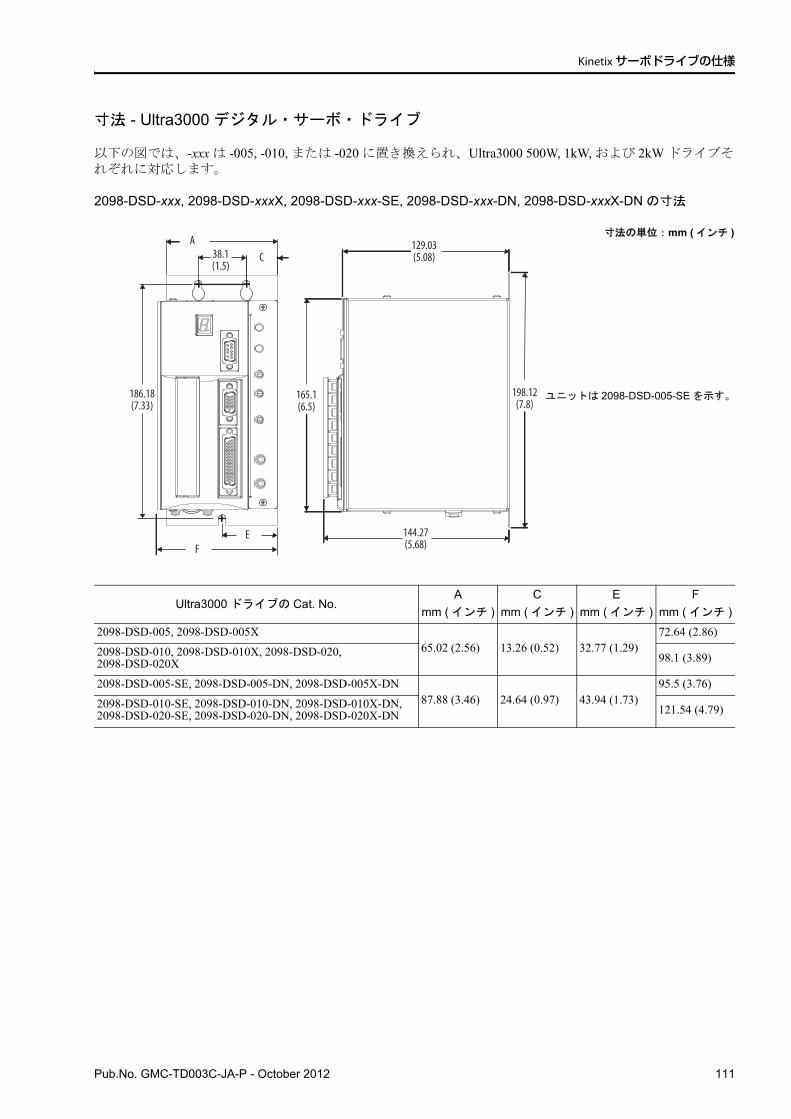
Kinetixサーボドライブの仕様
寸法 - Ultra3000 デジタル・サーボ・ドライブ
以下の図では、-xxx は -005, -010, または -020 に置き換えられ、Ultra3000 500W, 1kW, および 2kW ドライブそれぞれに対応します。
2098-DSD-xxx, 2098-DSD-xxxX, 2098-DSD-xxx-SE, 2098-DSD-xxx-DN, 2098-DSD-xxxX-DN の寸法
Ultra3000 ドライブの Cat. No.A
mm ( インチ )
C
mm ( インチ )
E
mm ( インチ )
F
mm ( インチ )
2098-DSD-005, 2098-DSD-005X65.02 (2.56) 13.26 (0.52) 32.77 (1.29)
72.64 (2.86)
2098-DSD-010, 2098-DSD-010X, 2098-DSD-020, 2098-DSD-020X 98.1 (3.89)
2098-DSD-005-SE, 2098-DSD-005-DN, 2098-DSD-005X-DN87.88 (3.46) 24.64 (0.97) 43.94 (1.73)
95.5 (3.76)
2098-DSD-010-SE, 2098-DSD-010-DN, 2098-DSD-010X-DN, 2098-DSD-020-SE, 2098-DSD-020-DN, 2098-DSD-020X-DN 121.54 (4.79)
129.03(5.08)
198.12(7.8)
144.27(5.68)
165.1(6.5)
AC
E
186.18(7.33)
38.1(1.5)
F
寸法の単位:mm ( インチ )
ユニットは 2098-DSD-005-SE を示す。
Pub.No. GMC-TD003C-JA-P - October 2012 111
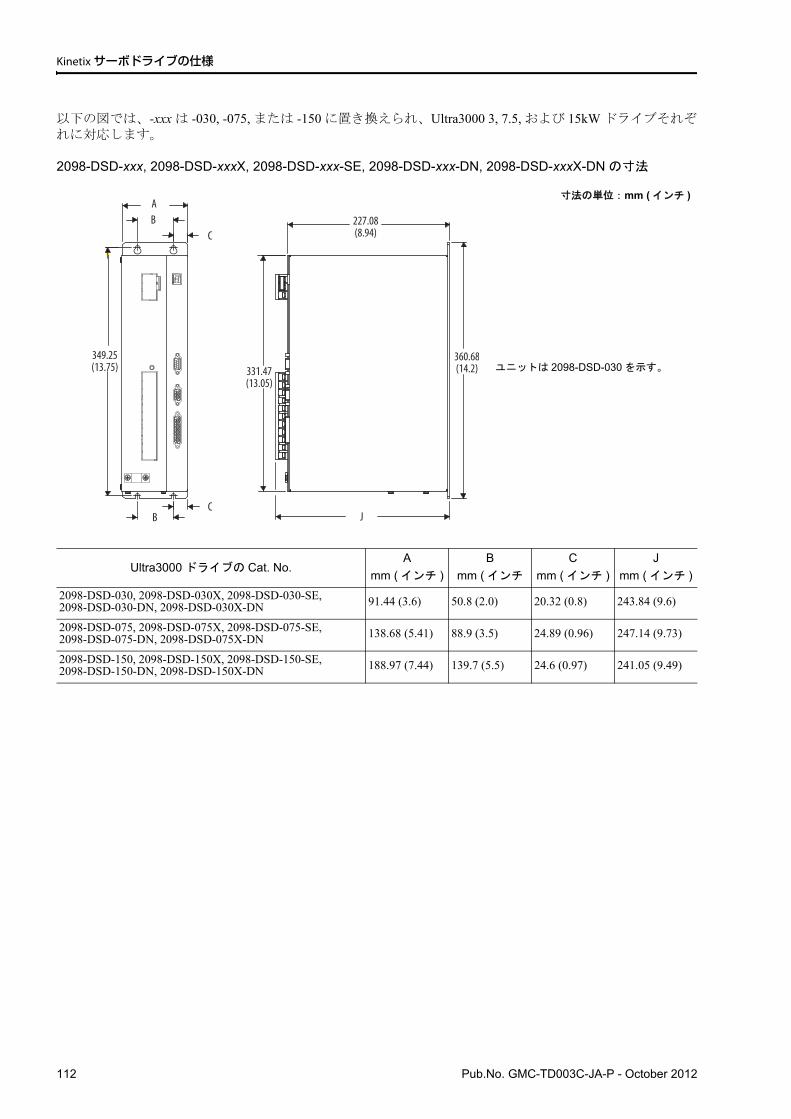
Kinetixサーボドライブの仕様
以下の図では、-xxx は -030, -075, または -150 に置き換えられ、Ultra3000 3, 7.5, および 15kW ドライブそれぞれに対応します。
2098-DSD-xxx, 2098-DSD-xxxX, 2098-DSD-xxx-SE, 2098-DSD-xxx-DN, 2098-DSD-xxxX-DN の寸法
Ultra3000 ドライブの Cat. No.A
mm ( インチ )
B
mm ( インチ
C
mm ( インチ )
J
mm ( インチ )
2098-DSD-030, 2098-DSD-030X, 2098-DSD-030-SE, 2098-DSD-030-DN, 2098-DSD-030X-DN 91.44 (3.6) 50.8 (2.0) 20.32 (0.8) 243.84 (9.6)
2098-DSD-075, 2098-DSD-075X, 2098-DSD-075-SE, 2098-DSD-075-DN, 2098-DSD-075X-DN 138.68 (5.41) 88.9 (3.5) 24.89 (0.96) 247.14 (9.73)
2098-DSD-150, 2098-DSD-150X, 2098-DSD-150-SE, 2098-DSD-150-DN, 2098-DSD-150X-DN 188.97 (7.44) 139.7 (5.5) 24.6 (0.97) 241.05 (9.49)
C
A
349.25(13.75)
360.68(14.2)331.47
(13.05)
B
JC
B
227.08(8.94)
寸法の単位:mm ( インチ )
ユニットは 2098-DSD-030 を示す。
112 Pub.No. GMC-TD003C-JA-P - October 2012
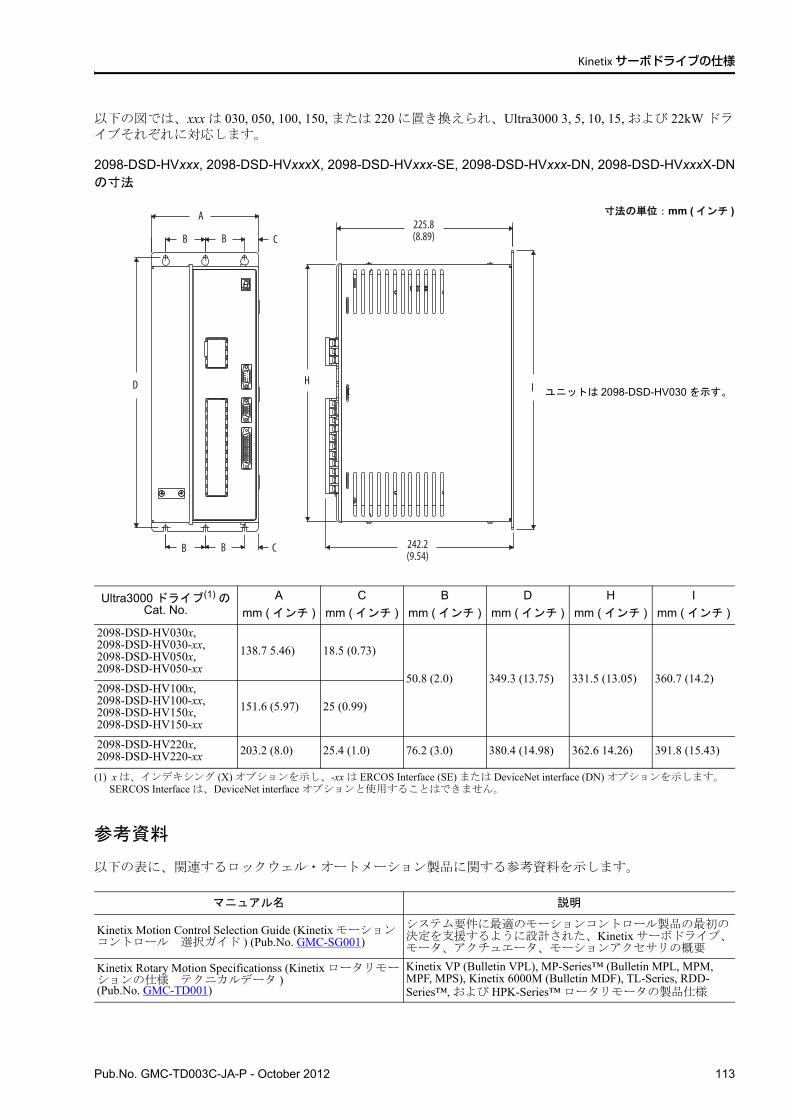
Kinetixサーボドライブの仕様
以下の図では、xxx は 030, 050, 100, 150, または 220 に置き換えられ、Ultra3000 3, 5, 10, 15, および 22kW ドライブそれぞれに対応します。
2098-DSD-HVxxx, 2098-DSD-HVxxxX, 2098-DSD-HVxxx-SE, 2098-DSD-HVxxx-DN, 2098-DSD-HVxxxX-DNの寸法
参考資料
以下の表に、関連するロックウェル・オートメーション製品に関する参考資料を示します。
Ultra3000 ドライブ(1) のCat. No.
(1) x は、インデキシング (X) オプションを示し、-xx は ERCOS Interface (SE) または DeviceNet interface (DN) オプションを示します。SERCOS Interface は、DeviceNet interface オプションと使用することはできません。
A
mm ( インチ )
C
mm ( インチ )
B
mm ( インチ )
D
mm ( インチ )
H
mm ( インチ )
I
mm ( インチ )
2098-DSD-HV030x, 2098-DSD-HV030-xx, 2098-DSD-HV050x, 2098-DSD-HV050-xx
138.7 5.46) 18.5 (0.73)
50.8 (2.0) 349.3 (13.75) 331.5 (13.05) 360.7 (14.2)2098-DSD-HV100x, 2098-DSD-HV100-xx, 2098-DSD-HV150x, 2098-DSD-HV150-xx
151.6 (5.97) 25 (0.99)
2098-DSD-HV220x, 2098-DSD-HV220-xx 203.2 (8.0) 25.4 (1.0) 76.2 (3.0) 380.4 (14.98) 362.6 14.26) 391.8 (15.43)
マニュアル名 説明
Kinetix Motion Control Selection Guide (Kinetix モーションコントロール 選択ガイド ) (Pub.No. GMC-SG001)
システム要件に最適のモーションコントロール製品の最初の決定を支援するように設計された、Kinetix サーボドライブ、モータ、アクチュエータ、モーションアクセサリの概要
Kinetix Rotary Motion Specificationss (Kinetix ロータリモーションの仕様 テクニカルデータ )(Pub.No. GMC-TD001)
Kinetix VP (Bulletin VPL), MP-Series™ (Bulletin MPL, MPM, MPF, MPS), Kinetix 6000M (Bulletin MDF), TL-Series, RDD-Series™, および HPK-Series™ ロータリモータの製品仕様
225.8(8.89)
A
CBB
D IH
242.2(9.54)
CBB
寸法の単位:mm ( インチ )
ユニットは 2098-DSD-HV030 を示す。
Pub.No. GMC-TD003C-JA-P - October 2012 113
Kinetixサーボドライブの仕様
以下の Web サイトから表示するかまたはダウンロードしてください:http://www.rockwellautomation.com/literature/印刷された技術資料を購入するには、当社または代理店にお問い合わせさい。
Kinetix Linear Motion Specifications (Kinetix リニアモーションの仕様 テクニカルデータ ) (Pub.No. GMC-TD002)
Bulletin MPAS および MPMA リニアステージ、Bulletin MPAR, MPAI, および TLAR 電動シリンダおよび LDC シリーズと LDL シリーズのリニアモータの製品仕様
Kinetix Motion Accessories Specifications (Kinetix モーションのアクセサリの仕様 テクニカルデータ ) (Pub.No. GMC-TD004)
Bulletin 2090 モータおよびインターフェイスケーブル、薄型コネクタキット、ドライブ・パワー・コンポーネント、および他のサーボドライブのアイテムの製品仕様
Kinetix 6000 and Kinetix 6200/6500 Drive Systems (Kinetix 6000 および Kinetix 6200/6500 ドライブシステム 設計ガイド ) (Pub.No. GMC-RM003)
ドライブおよびモータ / アクチュエータのモーション・コントロール・システムのために必要な ( ドライブ固有 ) ドライブモジュール、パワーのアクセサリ、コネクタキット、モータケーブル、およびインターフェイスケーブルのカタログ番号を決定して選択するためのシステム設計ガイド。モーションアプリケーションのためのシステム性能仕様およびトルク/ 速度曲線 ( ロータリモーション ) と力 / 速度曲線 ( リニアモーション ) も記載する。
Kinetix 300/350 Drive Systems (Kinetix 300/350 ドライブシステム 設計ガイド ) (Pub.No. GMC-RM004)
Kinetix 3 Drive Systems (Kinetix 3 ドライブシステム 設計ガイド ) (Pub.No. GMC-RM005)
Kinetix 2000 Drive Systems (Kinetix 2000 ドライブシステム 設計ガイド ) (Pub.No. GMC-RM006)
Kinetix 7000 Drive Systems (Kinetix 7000 ドライブシステム 設計ガイド ) (Pub.No. GMC-RM007)
Ultra3000 Drive Systems (Ultra3000 ドライブシステム 設計ガイド ) (Pub.No. GMC-RM008)
Kinetix 5500 Drive Systems (Kinetix 5500 ドライブシステム 設計ガイド ) (Pub.No. GMC-RM009)
Kinetix 6200 and Kinetix 6500 Safe Speed Monitoring Servo Drives Safety Reference Manual(Pub.No. 2094-RM001)
Kinetix 6200 および Kinetix 6500 ドライブの安全速度機能の配線、構成、トラブルシューティングに関する情報
Kinetix 6200 and Kinetix 6500 Safe Torque-off Servo Drives Safety Reference Manual(Pub.No. 2094-RM002)
Kinetix 6200 および Kinetix 6500 ドライブの安全トルクオフ機能の配線、構成、トラブルシューティングに関する情報
Kinetix Safe-off Feature Safety Reference Manual (Kinetixセーフオフ機能 セーフティ・リファレンス・マニュアル ) (Pub.No. GMC-RM002)
Kinetix 6000 および Kinetix 7000 サーボドライブの配線およびトラブルシューティングに関する情報
System Design for Control of Electrical Noise Reference Manual (Pub.No. GMC-RM001) 電気ノイズによって発生するシステムの故障を最小化するた
めの情報、例、およびテクニックEMC Noise Management DVD (Pub.No. GMC-SP004)
ControlLogix Selection Guide (ControlLogix 選択ガイド ) (Pub.No. 1756-SG001)
アプリケーションに適合する ControlLogix® コントローラを決定するための情報、および ControlLogix システムを設計し、適切なコンポーネントを選択するための製品仕様
CompactLogix Selection Guide (CompactLogix 選択ガイド ) (Pub.No. 1769-SG001)
アプリケーションに適合するCompactLogix™コントローラを決定するための情報、および CompactLogix システムを設計し、適切なコンポーネントを選択するための製品仕様
Integrated Architecture Recommended Literature Reference Manual (Pub.No. IASIMP-RM001)
この資料には、統合アーキテクチャ製品の技術資料のリストを記載している。これらのリストはすべてを含んでいるわけではないが、頻繁に使用される関連製品資料を含んでいる。
Industrial Ethernet Media Brochure (Pub.No. 1585-BR001)アプリケーションに適合する Bulletin 1585 Ethernet ケーブルを決定するための情報、および適切なコンポーネントを選択するための製品仕様
Motion Analyzer ソフトウェアをダウンロードする Web サイト:http://www.ab.com/motion/software/analyzer.html
Kinetix モーション・コントロール・システムの分析、最適化、選択、および妥当性確認に使用される包括的なモーションアプリケーションのサイズ決定ツール
Rockwell Automation Configuration and Selection Tools のWeb サイト:http://www.ab.com
AutoCad (DXF) 図面を含む、オンライン製品選択およびシステム構成ツール
マニュアル名 説明
114 Pub.No. GMC-TD003C-JA-P - October 2012

Kinetixサーボドライブの仕様
Pub.No. GMC-TD003C-JA-P - October 2012 115
AM
R
P
PAEA
w
お
ソ器充し置l
本プめロは
本てめま
本社
製
重
重
本
llen-Bradley, CompactLogix, ControlLogix, Integrated Architecture, HPK-Series, Kinetix, LDC-Series, LDL-Series, LISTEN. THINK. SOLVE, P-Series, RDD-Series, RSLogix, TL-Series, Ultra, Rockwell Software, および Rockwell Automation は、Rockwell Automation, Inc. の商標です。
ockwell Automation に属さない商標は、それぞれの企業に所有権があります。
ublication GMC-TD003C-JA-P - October 2012 Copyright © 2012 Rockwell Automation, Inc. All rights reserved. Printed in the U.S.A.
ower, Control and Information Solutions Headquartersmericas: Rockwell Automation, 1201 South Second Street, Milwaukee, WI 53204-2496 USA, Tel: (1) 414.382.2000, Fax: (1) 414.382.4444urope/Middle East/Africa: Rockwell Automation NV, Pegasus Park, De Kleetlaan 12a, 1831 Diegem, Belgium, Tel: (32) 2 663 0600, Fax: (32) 2 663 0640sia Pacific: Rockwell Automation, Level 14, Core F, Cyberport 3, 100 Cyberport Road, Hong Kong, Tel: (852) 2887 4788, Fax: (852) 2508 1846
ww.rockwel lautomation.com
客様へのご注意
リッドステート機器はエレクトロメカニカル機器とは動作特性が異なります。さらにソリッドステート機はいろいろな用途に使われることからも、この機器の取扱責任者はその使用目的が適切であるかどうかを分確認してください。この機器の使用によって何らかの損害が生じても当社は一切責任を負いません。詳くは、パブリケーション・ナンバー SGI-1.1『ソリッド・ステート・コントロール ソリッドステート装のアプリケーション、設置、および保守のための安全ガイドライン』( 当社の営業所または http://
iterature.rockwellautomation.com からオンラインで入手可能 ) を参照してください。
書に説明する製品はさまざまな用途に使用できるため、アプリケーションや製品を使用する場合に、各アリケーションや使用に対して適合する法令や規格を含むすべてのパフォーマンスと安全要件に適合するたに行なうべきすべての手順を責任をもって行なわなければなりません。これが行なわれていない場合は、ックウェル・オートメーションは、これらの製品の使用やアプリケーションによって発生する、間接また結果としての損傷には責任を負いません。
書で示す図表やプログラム例は本文を容易に理解できるように用意されているものであり、その結果としの動作を保証するものではありません。個々の用途については数値や条件が変わってくることが多いた、当社では図表などで示したアプリケーションを実際の作業で使用した場合の結果については責任を負いせん。
書に記載されている情報、回路、機器、装置、ソフトウェアの利用に関して特許上の問題が生じても、当は一切責任を負いません。
品改良のため、仕様などを予告なく変更することがあります。
要:ソフトウェアをご利用の場合は、データの消失が考えられますので、適当な媒体にアプリケーションプログラムのバックアップをとることをお奨めします。
要:本製品を日本国外に輸出する際、日本国政府の許可が必要な場合がありますので、事前に当社までご相談ください。
版は、GMC-TD003C-EN-P - October, 2012 の和訳です。GMC-TD003C-EN-P を正文といたします。





























