Embed Size (px)
Citation preview
Grundlagen der Digitaltechnik
Grundlagen der Informatik 2Grundlagen der Informatik 2Grundlagen der DigitaltechnikGrundlagen der Digitaltechnik
6. Automaten und Schaltwerke6. Automaten und Schaltwerke
Prof. Dr.Prof. Dr.--Ing. Jürgen TeichIng. Jürgen TeichDr.Dr.--Ing. Christian Ing. Christian HaubeltHaubelt
Lehrstuhl für HardwareLehrstuhl für Hardware--SoftwareSoftware--CoCo--DesignDesign
Grundlagen der Digitaltechnik 2
Automaten Automaten -- MotivationMotivation
• Schaltnetze: Bilden Ausgangsgrößen unmittelbar aus (als Funktion von) Eingangsgrößen
• Nachteil: Keine Zustände darstellbar
• Notwendig: ein neues Konzept, welches die Möglichkeit hat, Zustände zu speichern und die Ausgabe abhängig vom Zustand des Systems zu beschreiben
• Dieses Konzept basiert auf dem Modell von Automaten, deren Realisierungen wir als Schaltwerk bezeichnen.
Grundlagen der Digitaltechnik 3
Beispiel: GetränkeautomatBeispiel: Getränkeautomat
• Ein dümmlicher Getränkeautomat erwartet, dass man im ersten Schritt einen Euro einwirft und dann im zweiten Schritt eines von zwei möglichen Getränken auswählt.
• Verhält man sich anders, zeigt der Automat keine Reaktion.
• Man kann aber auf den Rückgabeknopf drücken.
• Dann gibt der Automat das Geld zurück, für das er keine Ware geliefert hat.
Grundlagen der Digitaltechnik 4
Automaten Automaten -- AllgemeinAllgemein
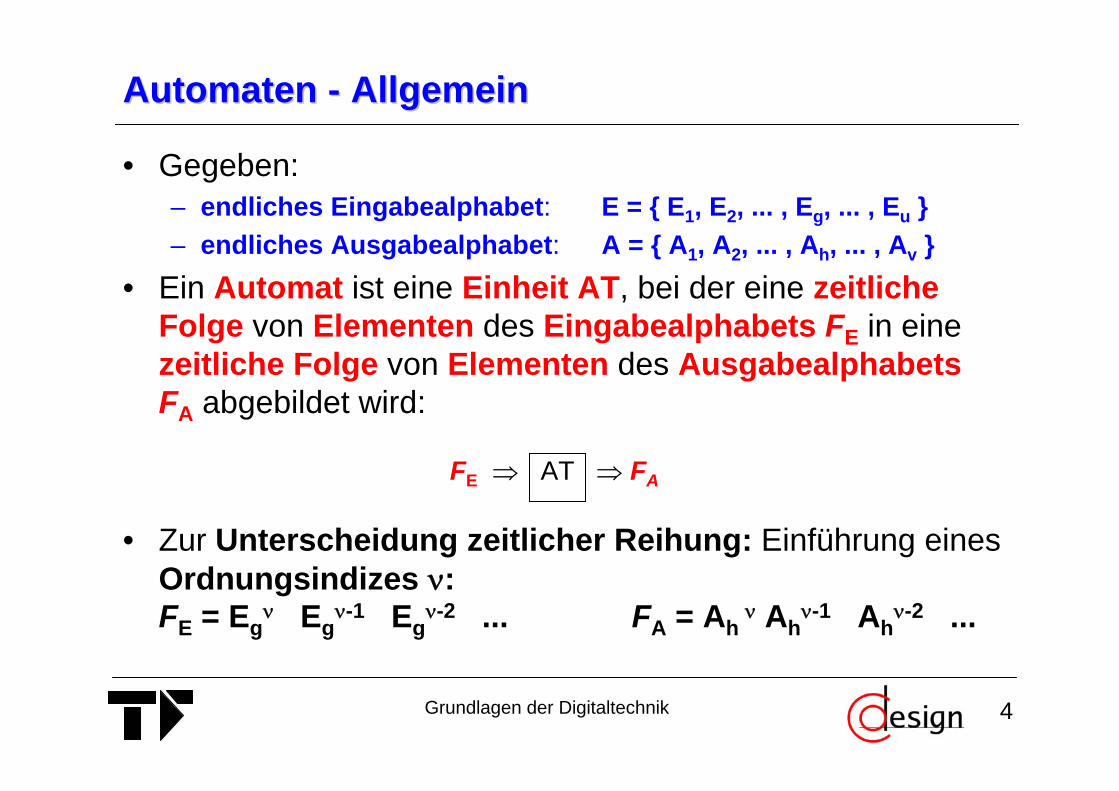
• Gegeben:– endliches Eingabealphabet: E = { E1, E2, ... , Eg, ... , Eu }– endliches Ausgabealphabet: A = { A1, A2, ... , Ah, ... , Av }
• Ein Automat ist eine Einheit AT, bei der eine zeitliche Folge von Elementen des Eingabealphabets FE in eine zeitliche Folge von Elementen des Ausgabealphabets FA abgebildet wird:
• Zur Unterscheidung zeitlicher Reihung: Einführung eines Ordnungsindizes ν: FE = Eg
ν Egν-1 Eg
ν-2 ... FA = Ahν Ah
ν-1 Ahν-2 ...
FE ⇒ AT ⇒ FA
Grundlagen der Digitaltechnik 5
Beispiel: GetränkeautomatBeispiel: Getränkeautomat
• Eingabealphabet: E = { m (Euro einwerfen),
w1 (Sorte 1 wählen), w2 (Sorte 2 wählen), r (Geldrückgabe
anfordern)}• Ausgabealphabet:
A = { g (Geld zurück), k (keine Reaktion), a1 (Sorte 1 ausgeben), a2 (Sorte 2 ausgeben)}
Grundlagen der Digitaltechnik 6
Automaten Automaten -- AllgemeinAllgemein
• Für die neue Einheit AT muss gelten:
Ahν = f ( Eg
ν, Egν-1, Eg
ν-2, ... , Egν-α )
– insgesamt werden α+1 Elemente des Eingabealphabets beobachtet– α ist die zeitliche Tiefe der Verarbeitung
Grundlagen der Digitaltechnik 7
Automaten Automaten -- AllgemeinAllgemein
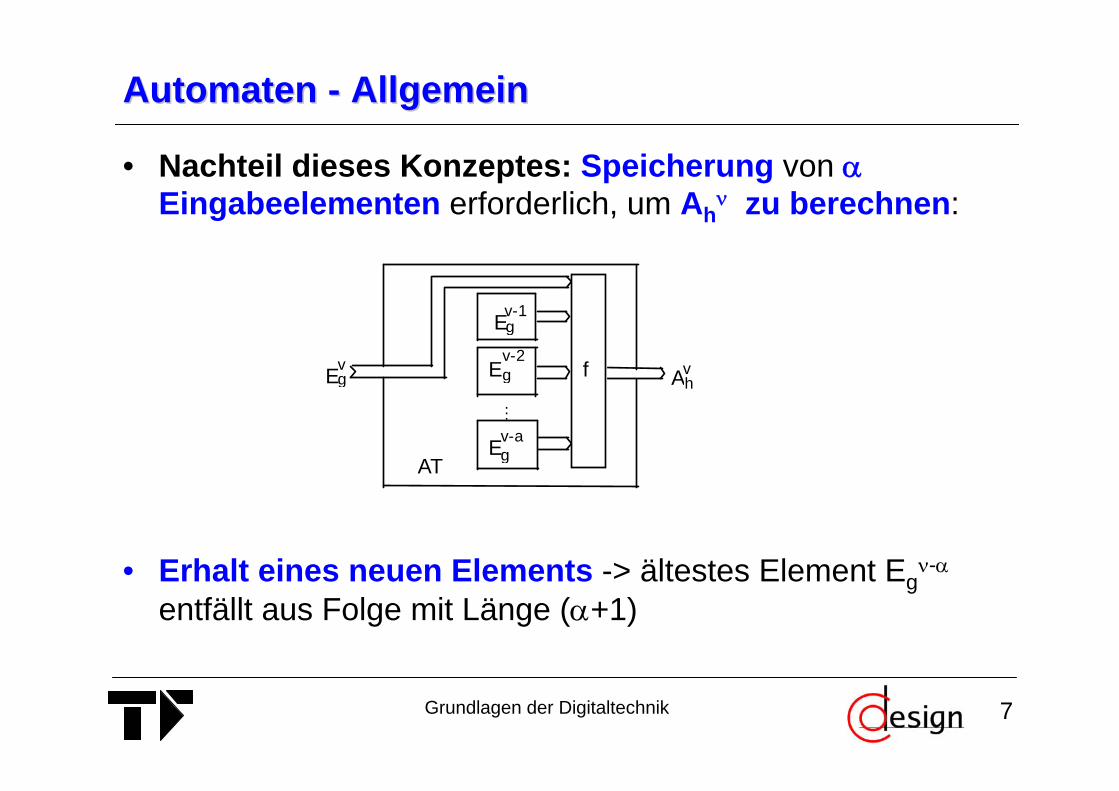
• Nachteil dieses Konzeptes: Speicherung von αEingabeelementen erforderlich, um Ah
ν zu berechnen:
• Erhalt eines neuen Elements -> ältestes Element Egν-α
entfällt aus Folge mit Länge (α+1)
vgE v
hA
AT
...
gEv-1
gE
v-agE
fv-2
Grundlagen der Digitaltechnik 8
Automaten Automaten -- AllgemeinAllgemein
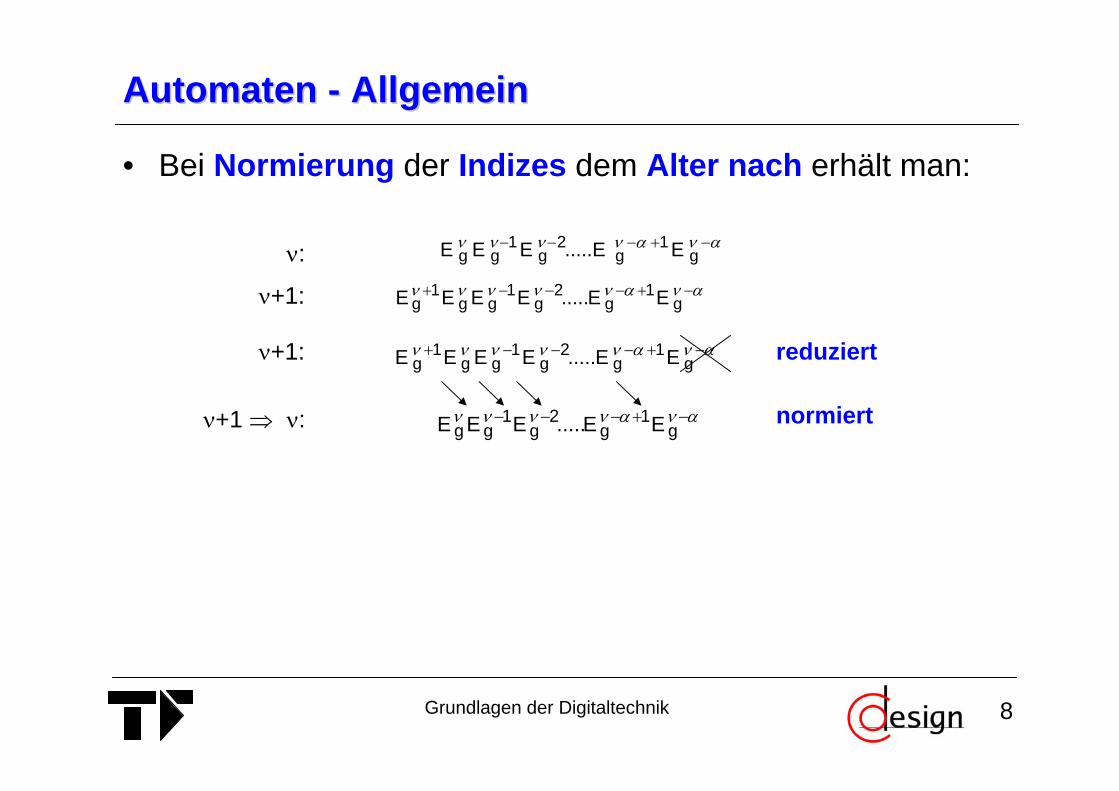
• Bei Normierung der Indizes dem Alter nach erhält man:
ανανννν −+−−− g
1 g
2g
1gg E .....E E E E
αναννννν −+−−−+ g
1 g
2 g
1 gg
1 g E E ..... E E E E
αναννννν −+−−−+ g
1 g
2 g
1 gg
1 g E E ..... E E E E
ανανννν −+−−− g
1 g
2 g
1 gg E E ..... E E Eν+1 ⇒ ν:
ν:
ν+1:
ν+1: reduziert
normiert
Grundlagen der Digitaltechnik 9
Automaten Automaten -- AllgemeinAllgemein
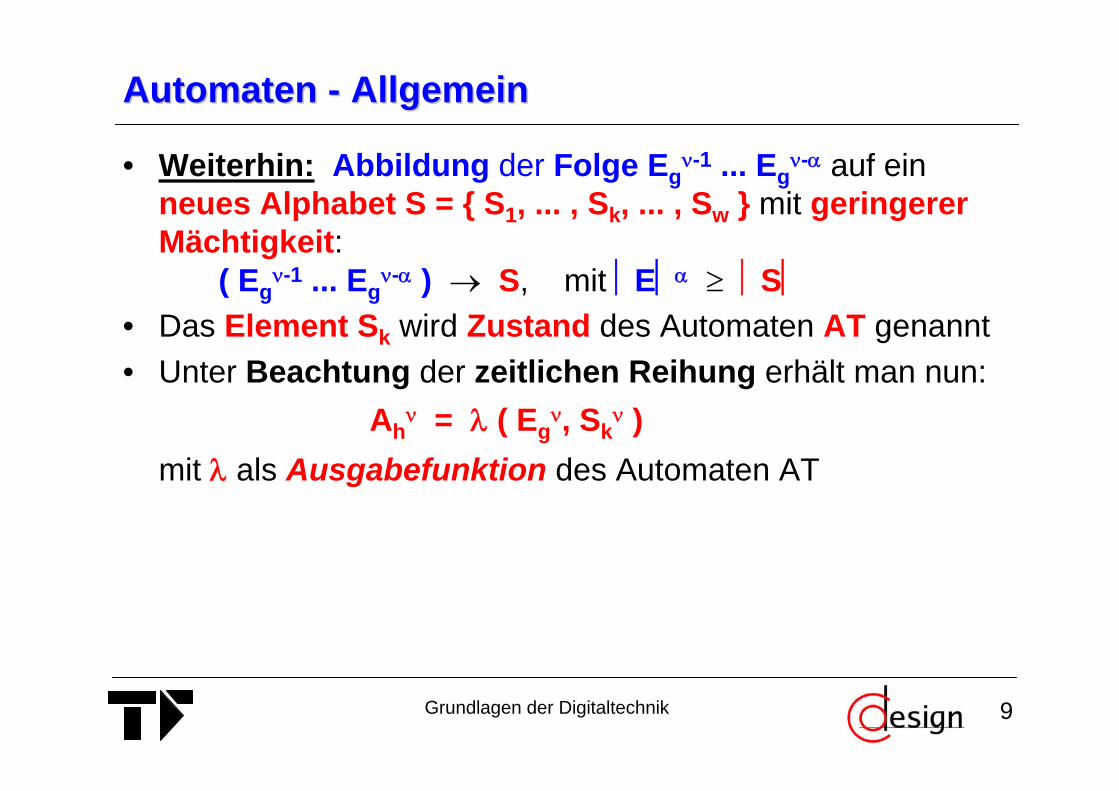
• Weiterhin: Abbildung der Folge Egν-1 ... Eg
ν-α auf ein neues Alphabet S = { S1, ... , Sk, ... , Sw } mit geringerer Mächtigkeit:
( Egν-1 ... Eg
ν-α ) → S, mit ⏐E⏐α ≥ ⏐S⏐• Das Element Sk wird Zustand des Automaten AT genannt• Unter Beachtung der zeitlichen Reihung erhält man nun:
Ahν = λ ( Eg
ν, Skν )
mit λ als Ausgabefunktion des Automaten AT
Grundlagen der Digitaltechnik 10
Automaten Automaten -- AllgemeinAllgemein
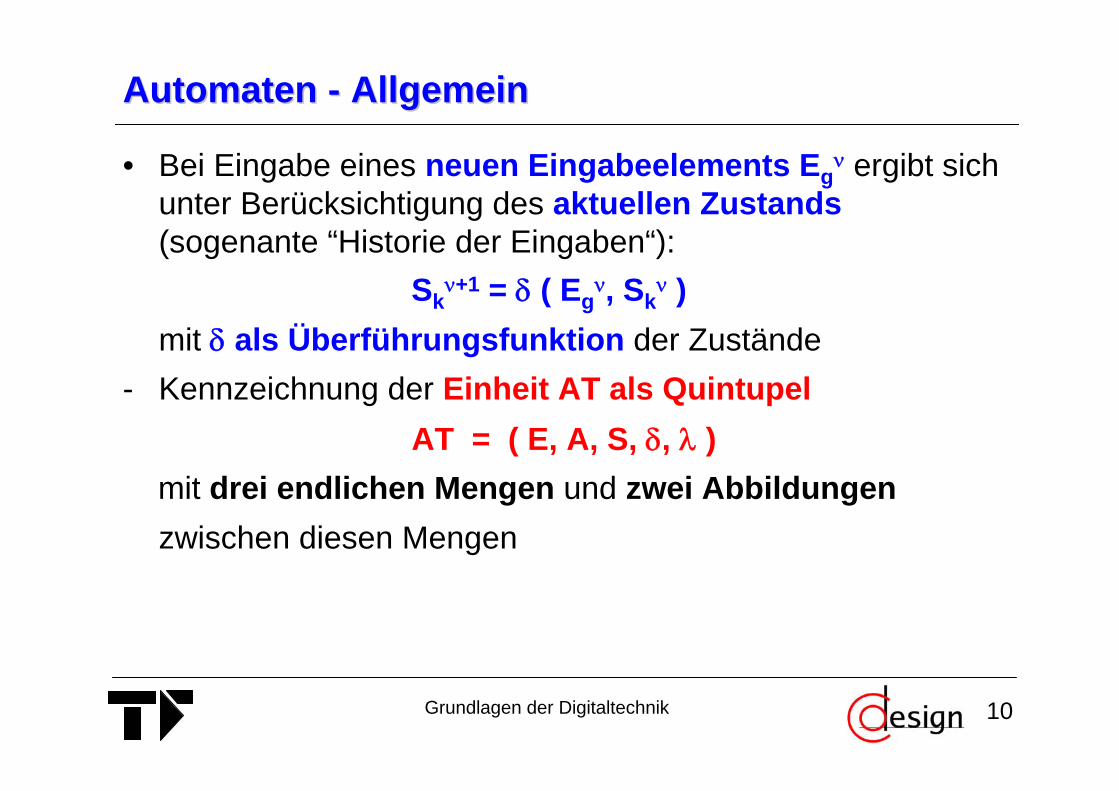
• Bei Eingabe eines neuen Eingabeelements Egν ergibt sich
unter Berücksichtigung des aktuellen Zustands(sogenante “Historie der Eingaben“):
Skν+1 = δ ( Eg
ν, Skν )
mit δ als Überführungsfunktion der Zustände- Kennzeichnung der Einheit AT als Quintupel
AT = ( E, A, S, δ, λ )mit drei endlichen Mengen und zwei Abbildungenzwischen diesen Mengen
Grundlagen der Digitaltechnik 11
Beispiel: GetränkeautomatBeispiel: Getränkeautomat
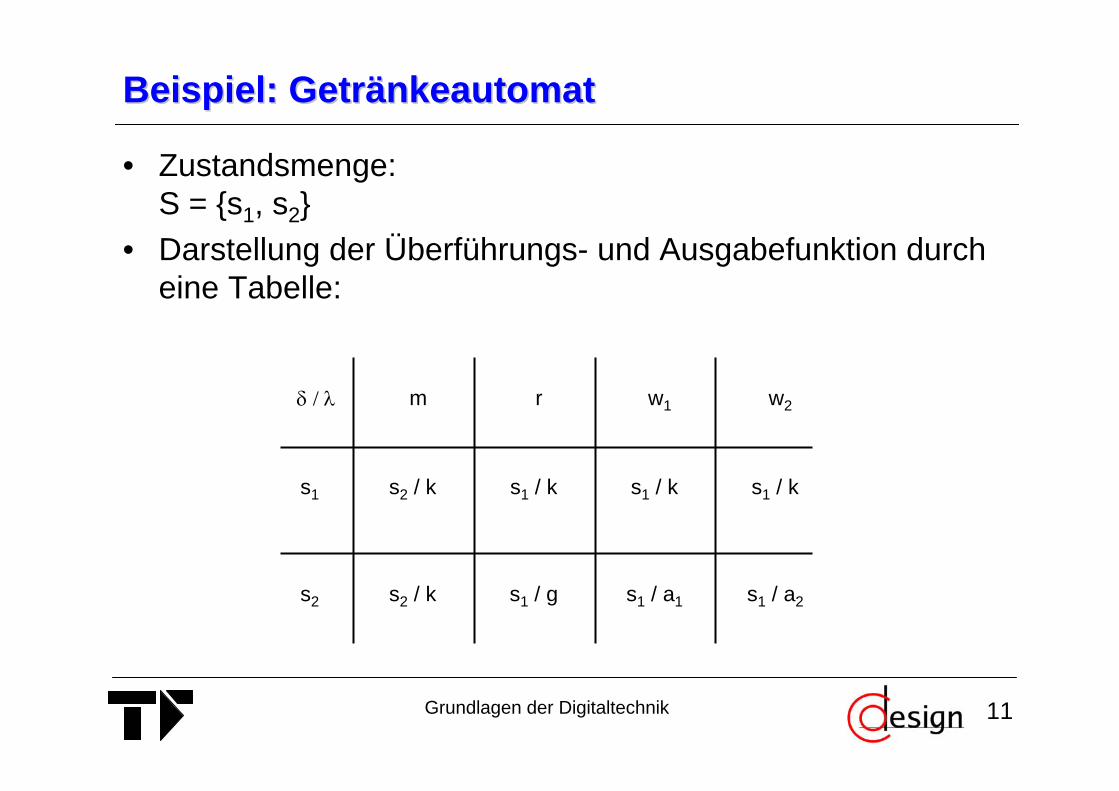
• Zustandsmenge:S = {s1, s2}
• Darstellung der Überführungs- und Ausgabefunktion durch eine Tabelle:
δ / λ
s2 / k s1 / k s1 / ks1
w1rm
s2 / k s1 / g s1 / a1s2
s1 / k
w2
s1 / a2
Grundlagen der Digitaltechnik 12
Automaten Automaten -- AllgemeinAllgemein
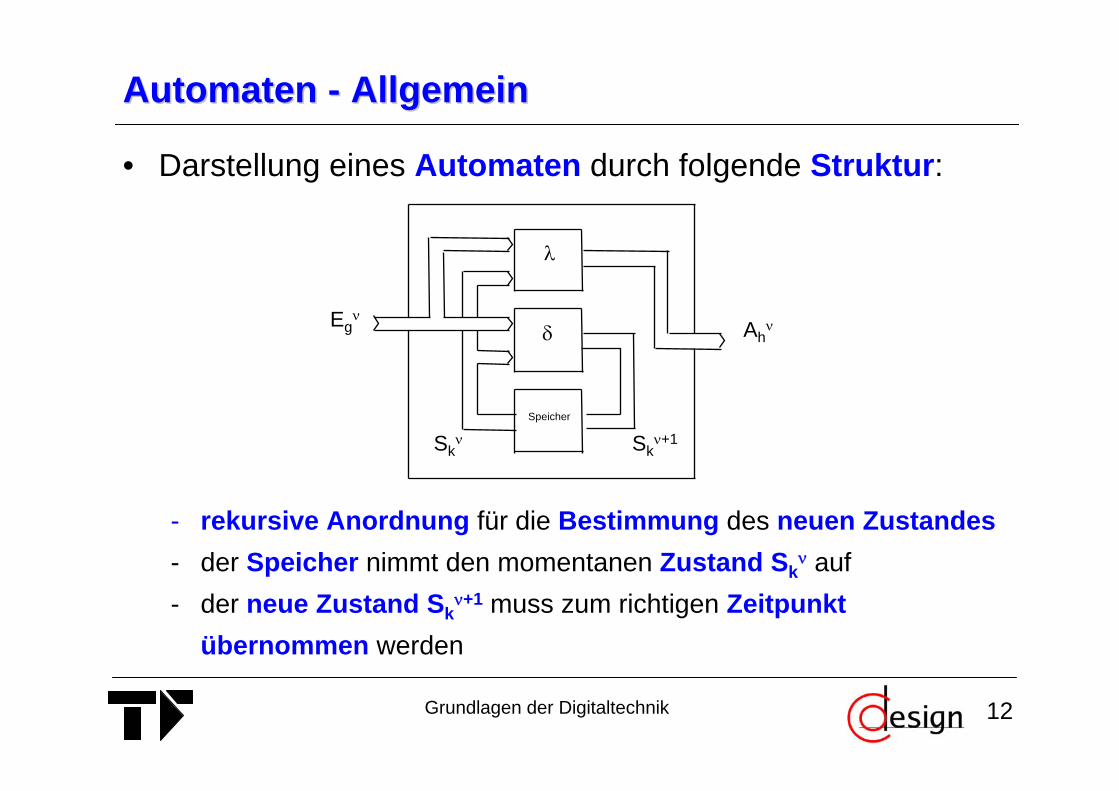
• Darstellung eines Automaten durch folgende Struktur:
- rekursive Anordnung für die Bestimmung des neuen Zustandes- der Speicher nimmt den momentanen Zustand Sk
ν auf- der neue Zustand Sk
ν+1 muss zum richtigen Zeitpunkt übernommen werden
Skν+1Sk
ν
Egν
Ahν
λ
δ
Speicher
Grundlagen der Digitaltechnik 13
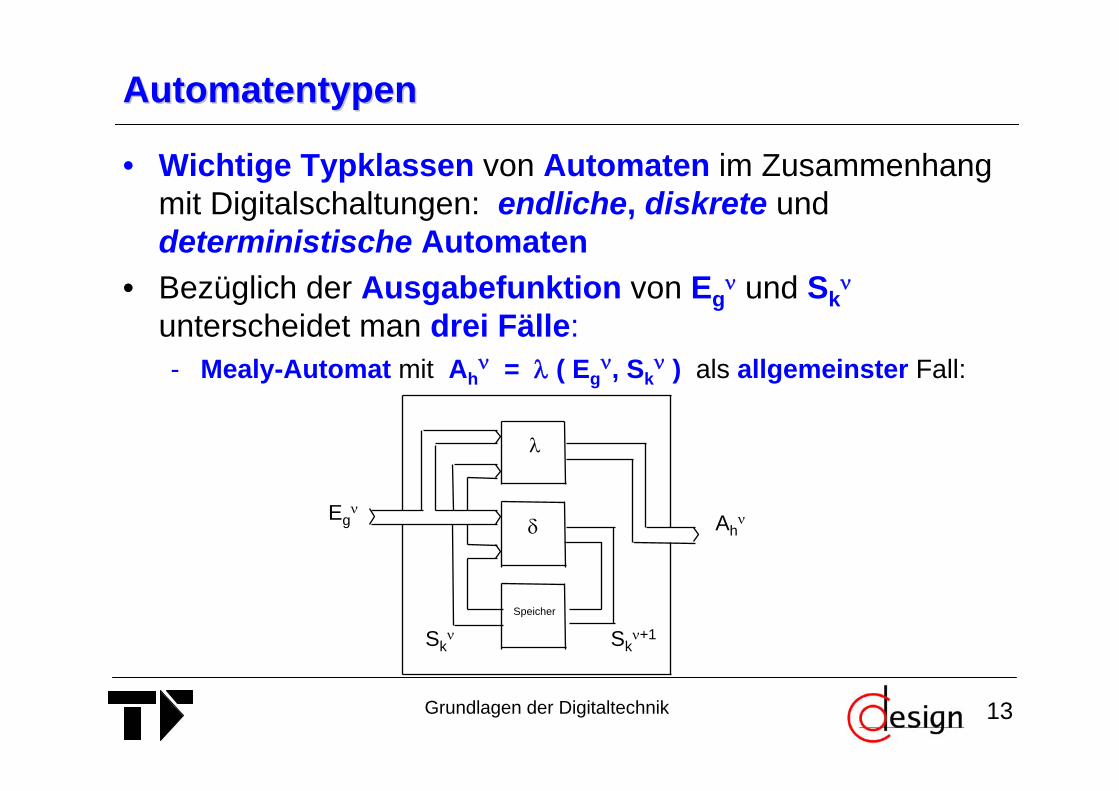
AutomatentypenAutomatentypen
• Wichtige Typklassen von Automaten im Zusammenhang mit Digitalschaltungen: endliche, diskrete und deterministische Automaten
• Bezüglich der Ausgabefunktion von Egν und Sk
ν
unterscheidet man drei Fälle: - Mealy-Automat mit Ah
ν = λ ( Egν, Sk
ν ) als allgemeinster Fall:
Skν+1Sk
ν
Egν
Ahν
λ
δ
Speicher
Grundlagen der Digitaltechnik 14
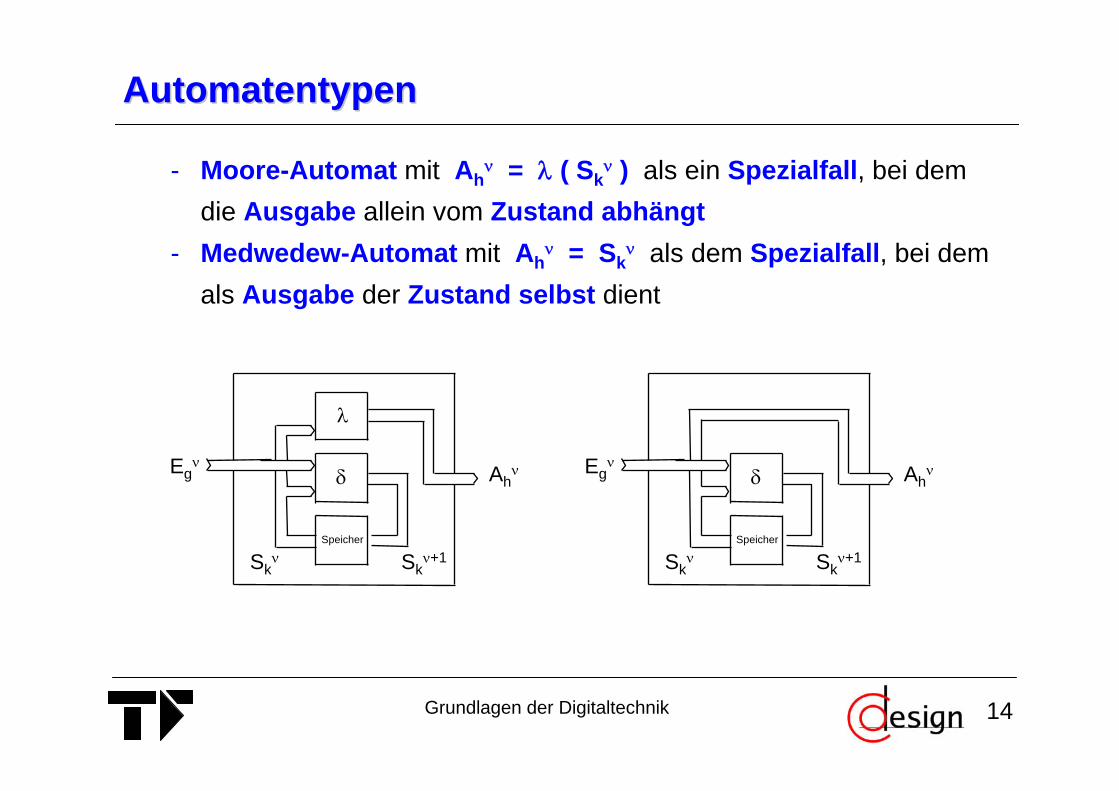
AutomatentypenAutomatentypen
- Moore-Automat mit Ahν = λ ( Sk
ν ) als ein Spezialfall, bei dem die Ausgabe allein vom Zustand abhängt
- Medwedew-Automat mit Ahν = Sk
ν als dem Spezialfall, bei dem als Ausgabe der Zustand selbst dient
Skν+1Sk
ν
Egν
Ahν
λ
δ
Speicher
Skν+1Sk
ν
Egν
Ahνδ
Speicher
Grundlagen der Digitaltechnik 15
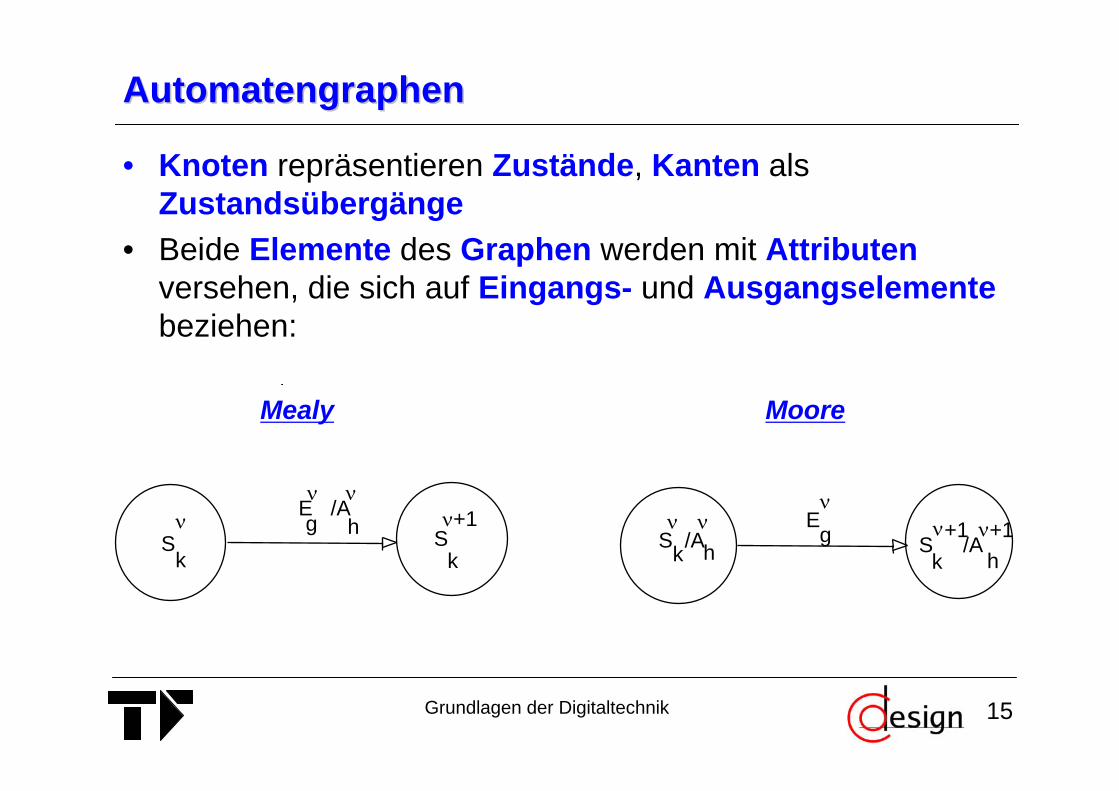
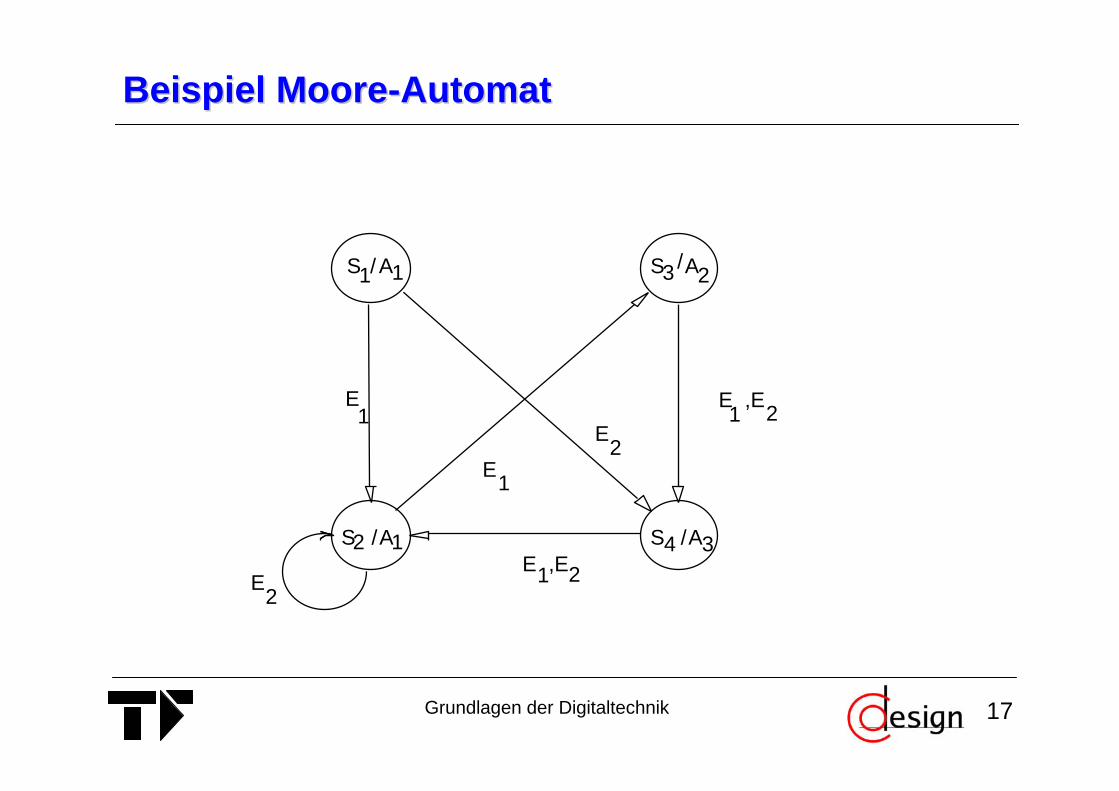
AutomatengraphenAutomatengraphen
• Knoten repräsentieren Zustände, Kanten als Zustandsübergänge
• Beide Elemente des Graphen werden mit Attributenversehen, die sich auf Eingangs- und Ausgangselementebeziehen:
Mealy
Sν E /A
ν ν
Sν+1
k k
g h
Moore
Eν
+1νS /A
+1νννS /Ak k
ghh
Grundlagen der Digitaltechnik 16
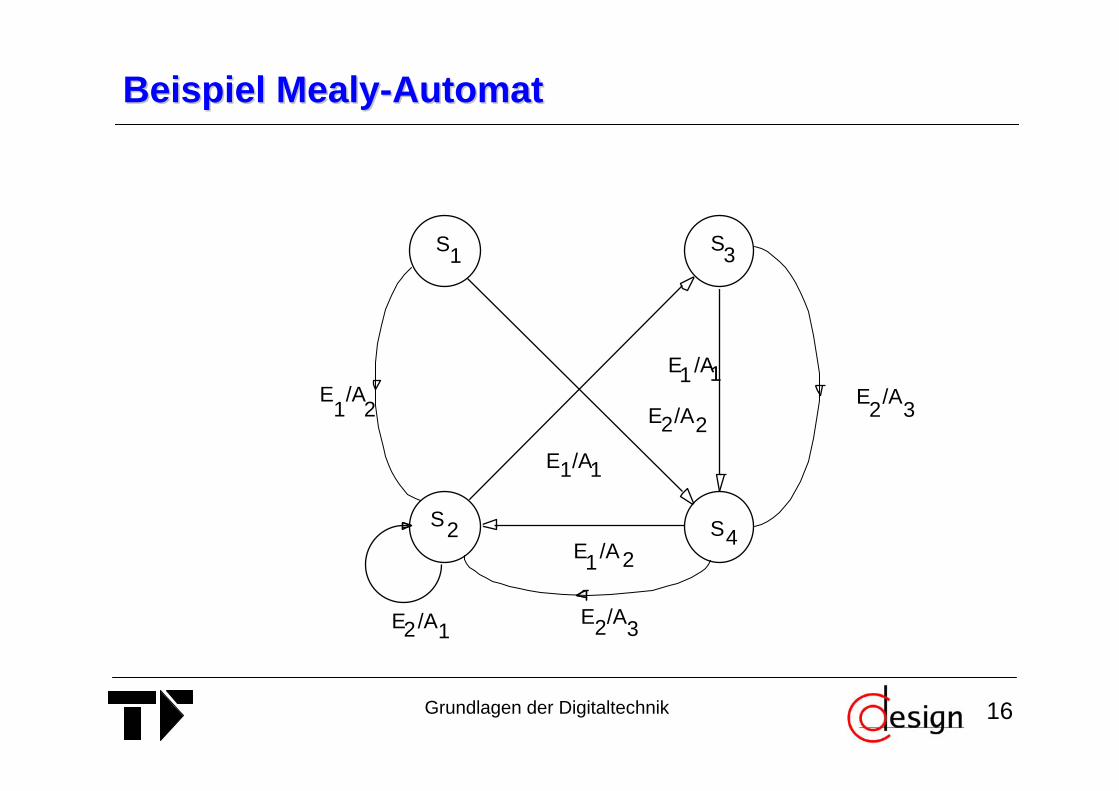
Beispiel Beispiel MealyMealy--AutomatAutomat
E /A2 1
E /A1 2 E /A2 2
E /A11E /A2
E /A2 3
E /A1 2
3S
4SS2
1S
E /A1 1
3
Grundlagen der Digitaltechnik 17
Beispiel MooreBeispiel Moore--AutomatAutomat
E ,E1 2
E1
E1
E2
E ,E212 1S A/
/1S 1A /3S 2A
4 3S A/
E2
Grundlagen der Digitaltechnik 18
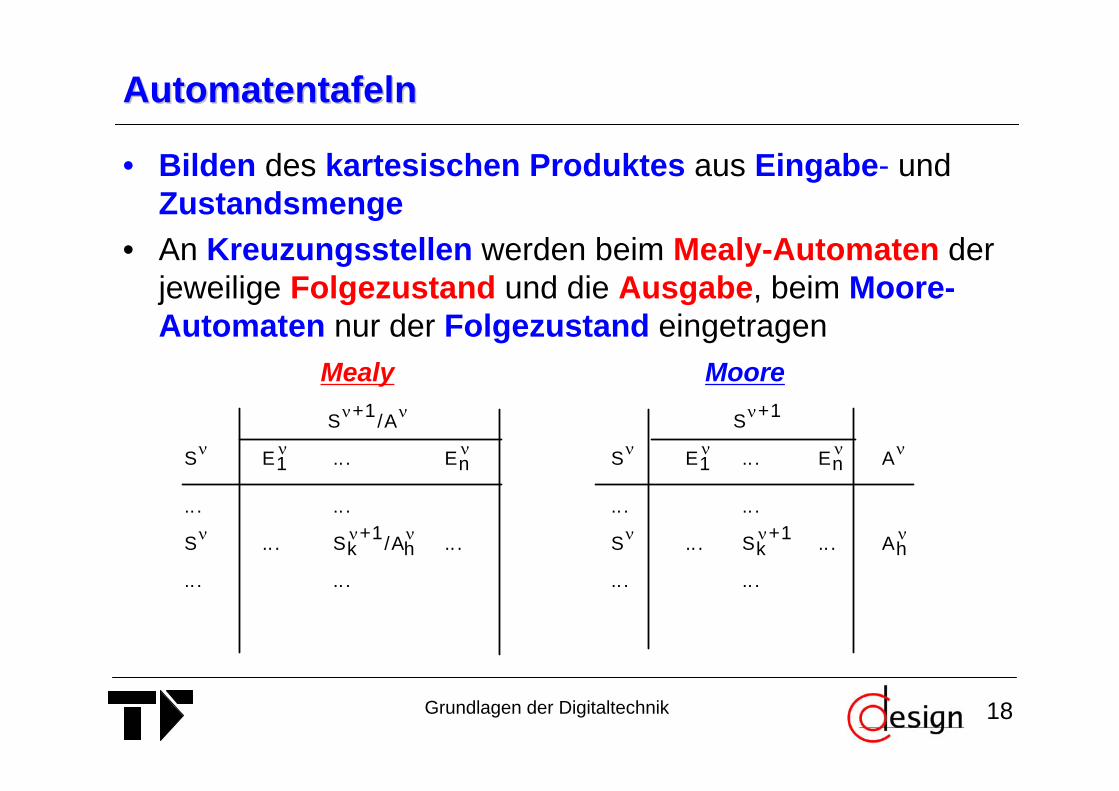
AutomatentafelnAutomatentafeln
• Bilden des kartesischen Produktes aus Eingabe- und Zustandsmenge
• An Kreuzungsstellen werden beim Mealy-Automaten der jeweilige Folgezustand und die Ausgabe, beim Moore-Automaten nur der Folgezustand eingetragen
Mealy
Moore
Sν+1/Aν Sν+1
Sν E1ν .. . En
ν Sν E1ν .. . En
ν Aν
.. . .. . .. . .. .
Sν .. . Skν+1/Ah
ν .. . Sν .. . Skν+1 .. . Ah
ν
.. . .. . .. . .. .
Moore
Grundlagen der Digitaltechnik 19
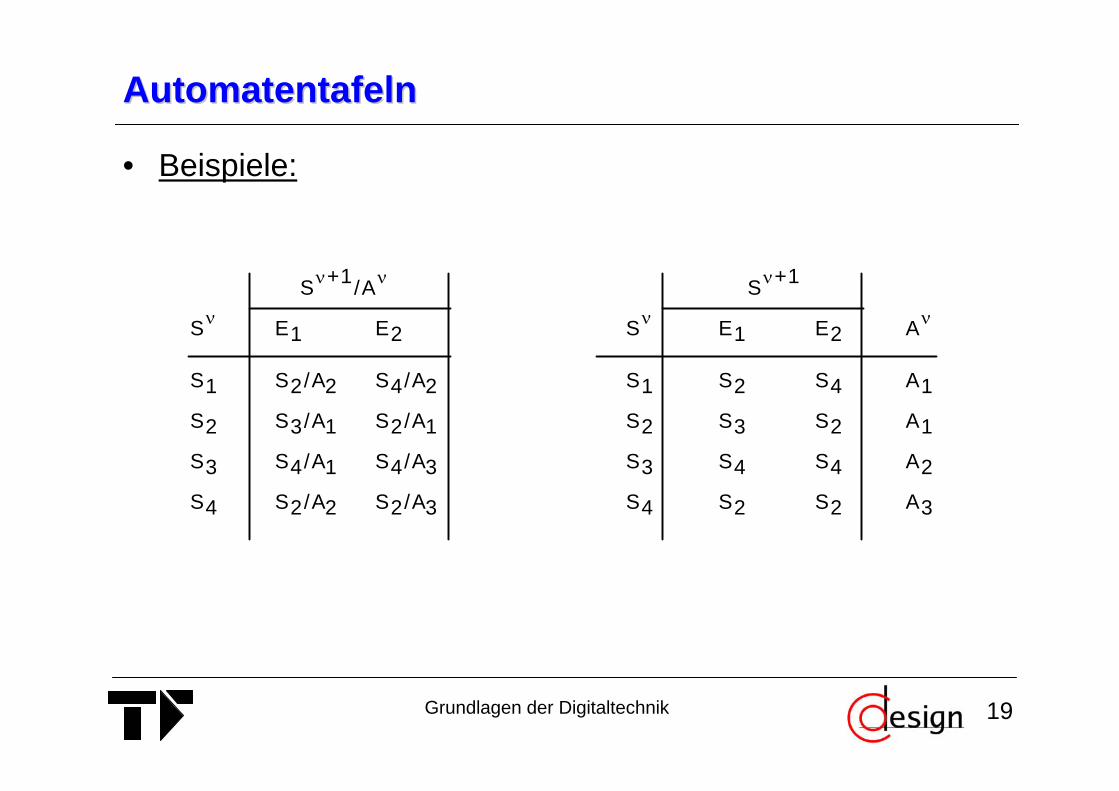
AutomatentafelnAutomatentafeln
• Beispiele:
Sν+1/Aν Sν+1
Sν E1 E2 Sν E1 E2 Aν
S1 S2/A2 S4/A2 S1 S2 S4 A1
S2 S3/A1 S2/A1 S2 S3 S2 A1
S3 S4/A1 S4/A3 S3 S4 S4 A2
S4 S2/A2 S2/A3 S4 S2 S2 A3
Grundlagen der Digitaltechnik 20
SchaltwerkeSchaltwerke
• Die technische Realisierung eines endlichen, diskreten und deterministischen Automaten wird Schaltwerkgenannt (im Gegensatz zum “gedächtnislosen“ Schaltnetz)
• Unterscheidung zwischen Mealy-, Moore- und Medwedew-Schaltwerken beim Übergang vom Automaten zum Schaltwerk ist eine eineindeutige Abbildung der Automatenelemente in binäre Größen (Bit-Leitungen) erforderlich:
E ↔ { Xj } mit ⏐E⏐ ≤ 2n bei X = ( xn, ... , x1 )A ↔ { Yi } mit ⏐A⏐ ≤ 2m bei Y = ( ym, ... , y1 )
Grundlagen der Digitaltechnik 21
SchaltwerkeSchaltwerke
• Neu: Eineindeutige Abbildung der Zustände Sk der Menge S in die Menge der Belegungen eines weiteren Binärvektors, des Zustandvektors Q:
S ↔ { Qk } mit ⏐S⏐ ≤ 2r bei Q = ( qr, ... , q1 )• Zustandskodierung, λ und δ werden als Schaltnetze
abgebildet• Spezifikation von Schaltwerken:
Automatengraphen und Automatentafeln-> entsprechende Automatenelemente werden durch ihre
binäre Äquivalente ersetzt
Grundlagen der Digitaltechnik 22
SchaltwerkeSchaltwerke
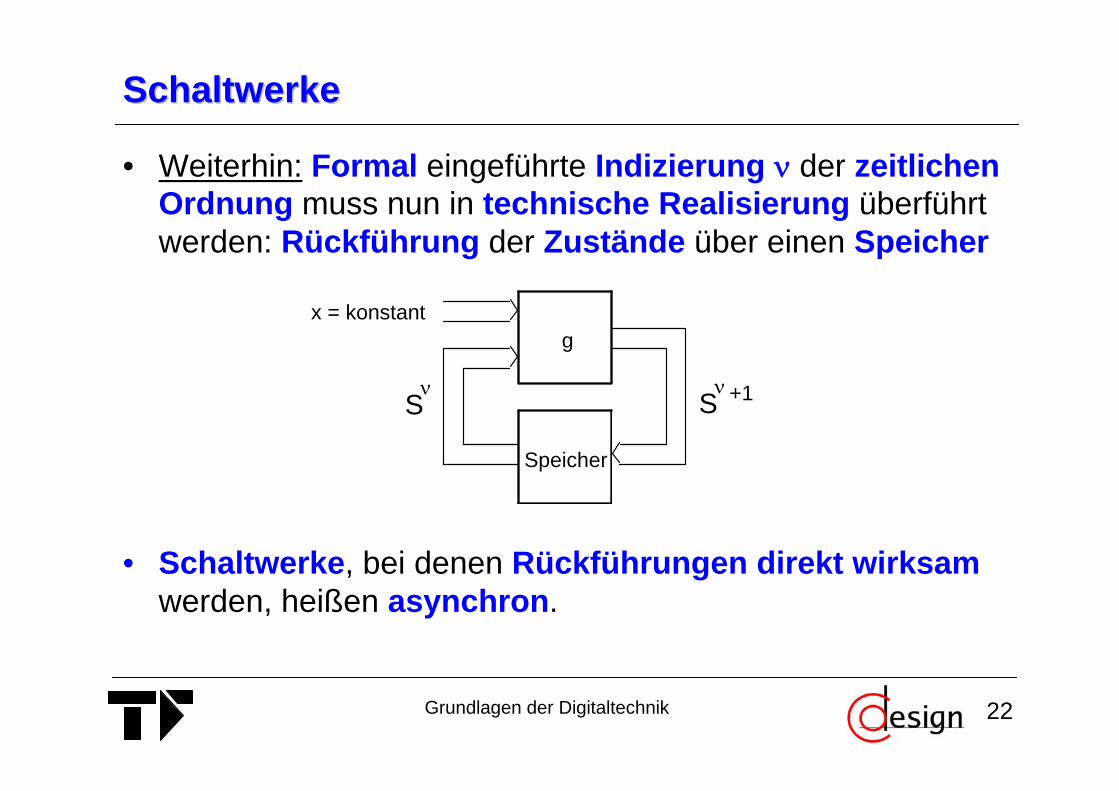
• Weiterhin: Formal eingeführte Indizierung ν der zeitlichen Ordnung muss nun in technische Realisierung überführt werden: Rückführung der Zustände über einen Speicher
• Schaltwerke, bei denen Rückführungen direkt wirksamwerden, heißen asynchron.
Speicher
g
Sν
S +1ν
x = konstant
Grundlagen der Digitaltechnik 23
SchaltwerkeSchaltwerke
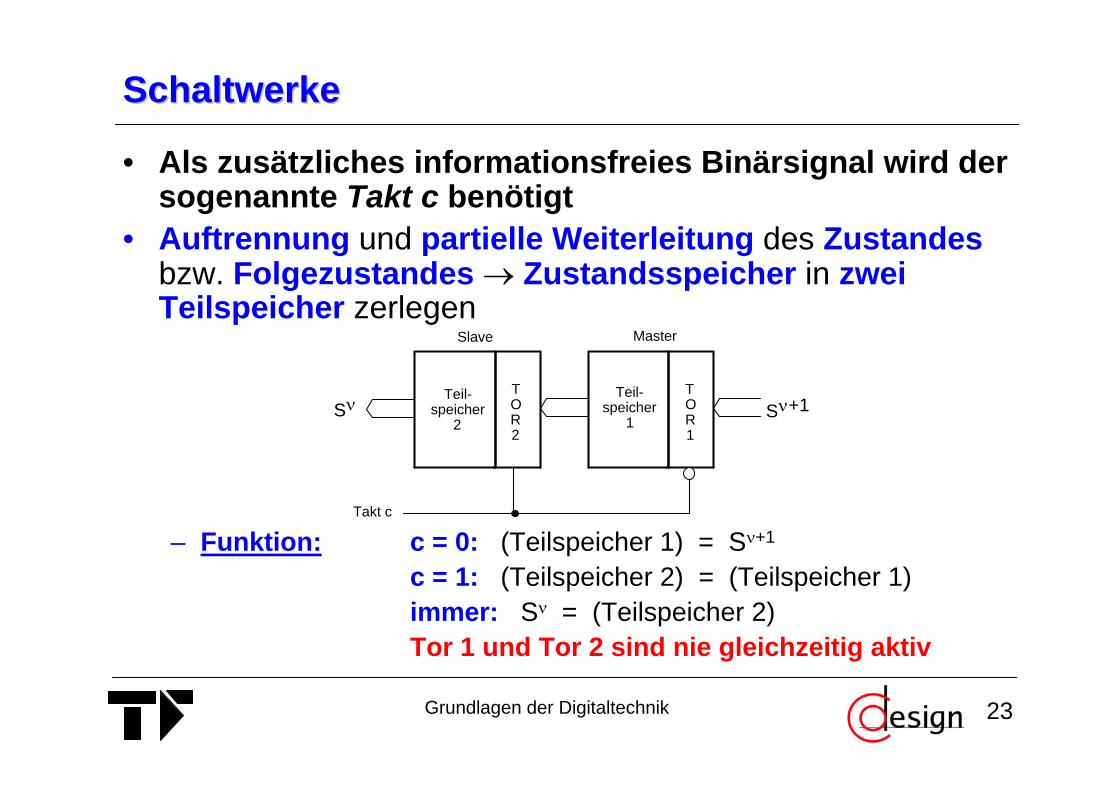
• Als zusätzliches informationsfreies Binärsignal wird der sogenannte Takt c benötigt
• Auftrennung und partielle Weiterleitung des Zustandesbzw. Folgezustandes → Zustandsspeicher in zwei Teilspeicher zerlegen
– Funktion: c = 0: (Teilspeicher 1) = Sν+1
c = 1: (Teilspeicher 2) = (Teilspeicher 1)immer: Sν = (Teilspeicher 2)Tor 1 und Tor 2 sind nie gleichzeitig aktiv
Teil- speicher
1
Teil- speicher
2
T O R 1
T O R 2
MasterSlave
Sν+1Sν
Takt c
Grundlagen der Digitaltechnik 24
SchaltwerkeSchaltwerke
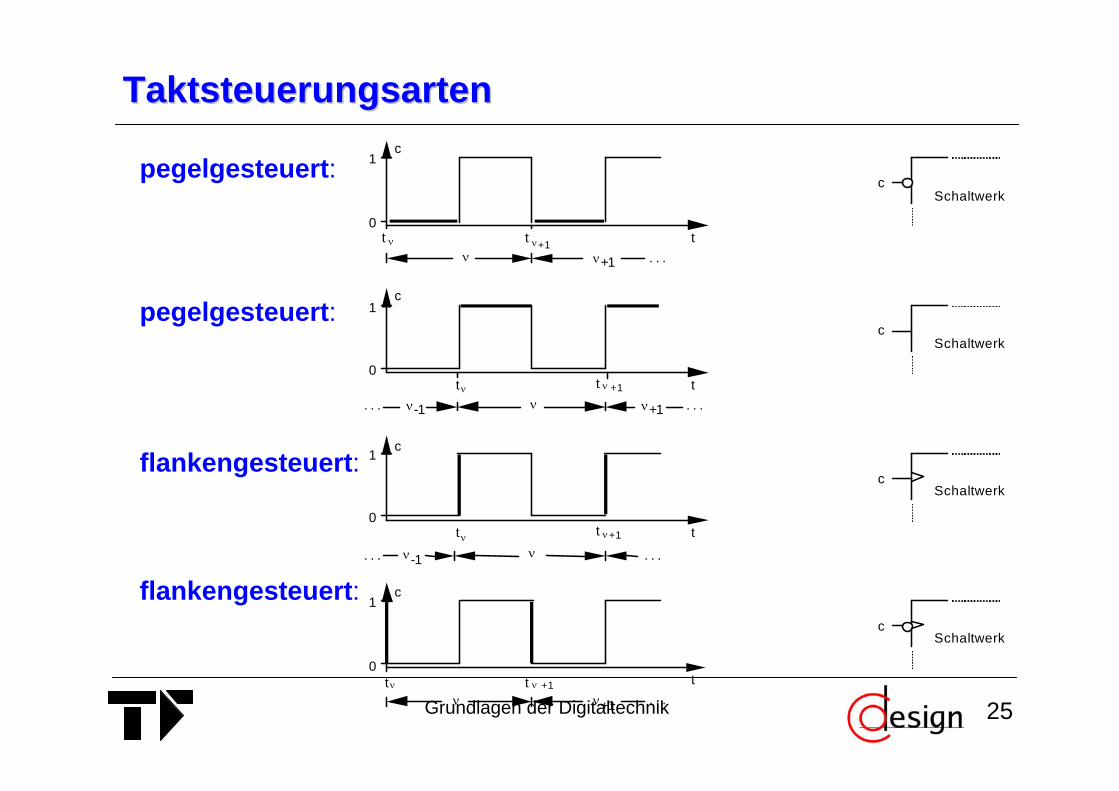
• Schaltwerke mit taktgesteuerten Speichern werden getaktet betrieben genannt
• Ist der Takt an allen Schaltungsteilen gleichzeitig aktiv,spricht man von einem synchronen Schaltwerk
• Mealy-Automat: Änderung der Eingabe bewirkt asynchrone Ausgabenberechnung.
• Die Zählung des Indexes ν muss aus dem Taktsignal abgeleitet werden
Grundlagen der Digitaltechnik 25
TaktsteuerungsartenTaktsteuerungsarten
ν
t
νt
t
νt
t
. . .νν-1
ν+1 . . .
ν+1 . . .
. . .
ν-1. . . ν +1 . . .
1
0
Schaltwerk c
c
Schaltwerk c
Schaltwerk c
Schaltwerk c
1
0
1
0
1
0
t ν t +1ν
tν
t +1 νν
t ν +1
tν t +1ν
c
c
c
pegelgesteuert:
pegelgesteuert:
flankengesteuert:
flankengesteuert:
Grundlagen der Digitaltechnik 26
Binärspeicher (Flipflops) Binärspeicher (Flipflops) -- WiederholungWiederholung
• Binärspeicher werden zur Speicherung von Zuständender Schaltwerke benötigt
• Ist ⏐S⏐ die Zahl der Zustände, berechnet sich die Größedes Binärvektors Q zu r = ⎡ld⏐S⏐⎤ mit Q = ( qr, ... , qk, ... , q1 ) mit qk einer beliebigen Zustandsvariable des Zustandsvektors- einzelne Zustandsvariablen qk werden rekursiv mit δ berechnet- eine zwei Werte speichernde Einheit wird als Binärspeicher
bezeichnet: FlipFlop- ein Speicher mit r FlipFlops kann 2r unterschiedliche Zustände
speichern
Grundlagen der Digitaltechnik 27
Binärspeicher (Flipflops) Binärspeicher (Flipflops) -- WiederholungWiederholung
• Grundsätzliche Funktionen eines Binärspeichers:– muss wahlweise eine 0 oder 1 eingespeichern können
(schreiben)– der Wert im Speicher muss extern zur Verfügung stehen (lesen)– Vorhandensein eines Taktes: Rekursion (ν+1 => ν) muss vom
Binärspeicher unter Einwirkung des Taktes verwirklicht werden
• Wir kennen: verschiedene Varianten der Binärspeichermit verschiedenen Ansteuerfunktionen
Grundlagen der Digitaltechnik 28
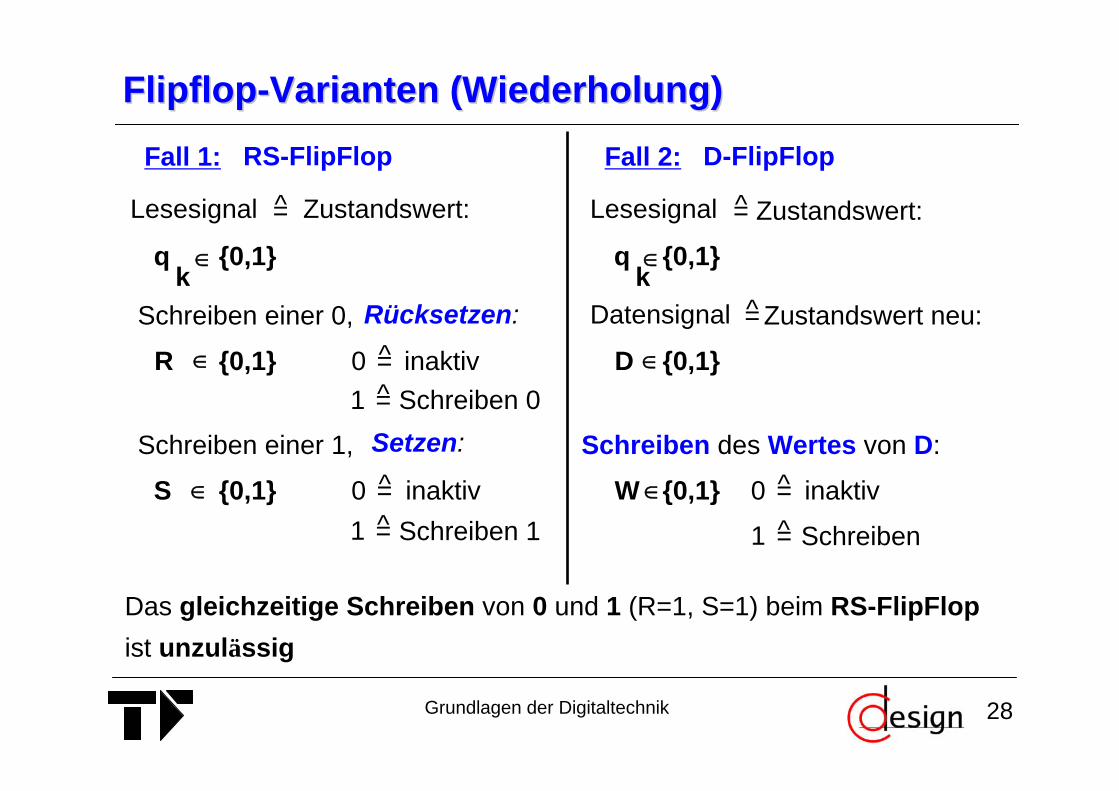
FlipflopFlipflop--Varianten (Wiederholung)Varianten (Wiederholung)Fall 1: RS-FlipFlop
Lesesignal =̂ Zustandswert:
qk
∈ {0,1}
Schreiben einer 0, Rücksetzen:
R {0,1} 0 =̂ inaktiv 1 =̂ Schreiben 0
Schreiben einer 1, Setzen:
S {0,1} 0 =̂ inaktiv1 =̂ Schreiben 1
∈
∈
Fall 2: D-FlipFlop
Lesesignal =̂ Zustandswert:
qk
{0,1}
Datensignal =̂ Zustandswert neu:
D {0,1}
Schreiben des Wertes von D:
W {0,1} 0 =̂ inaktiv
1 =̂ Schreiben
∈
∈
∈
Das gleichzeitige Schreiben von 0 und 1 (R=1, S=1) beim RS-FlipFlopist unzulässig
Grundlagen der Digitaltechnik 29
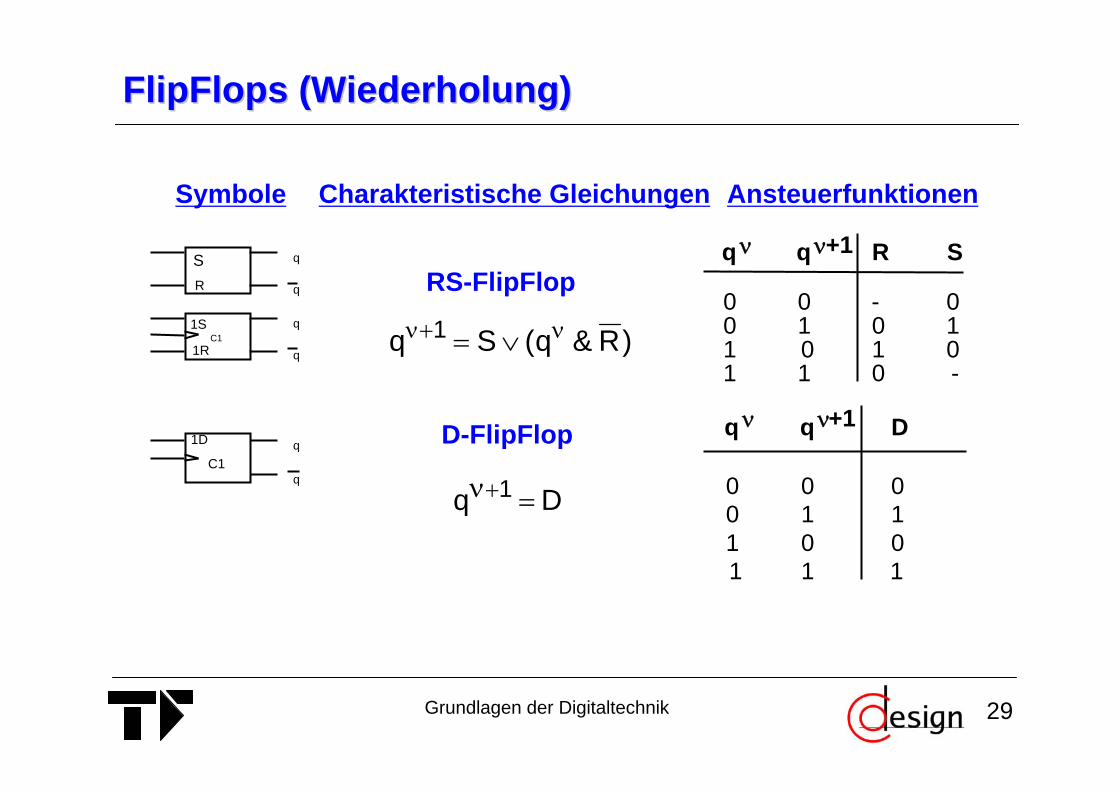
FlipFlopsFlipFlops (Wiederholung)(Wiederholung)
Dq 1 =ν+
Symbole
q
qR
S
q
q1R
1SC1
q
q
1D
C1
Charakteristische Gleichungen Ansteuerfunktionen
qν qν+1 R S
0 0 - 0 0 1 0 1 1 0 1 0 1 1 0 -
qν qν+1 D
0 0 0 0 1 1 1 0 0 1 1 1
RS-FlipFlop
D-FlipFlop
)R&q(Sq 1 ν+ν ∨=
Grundlagen der Digitaltechnik 30
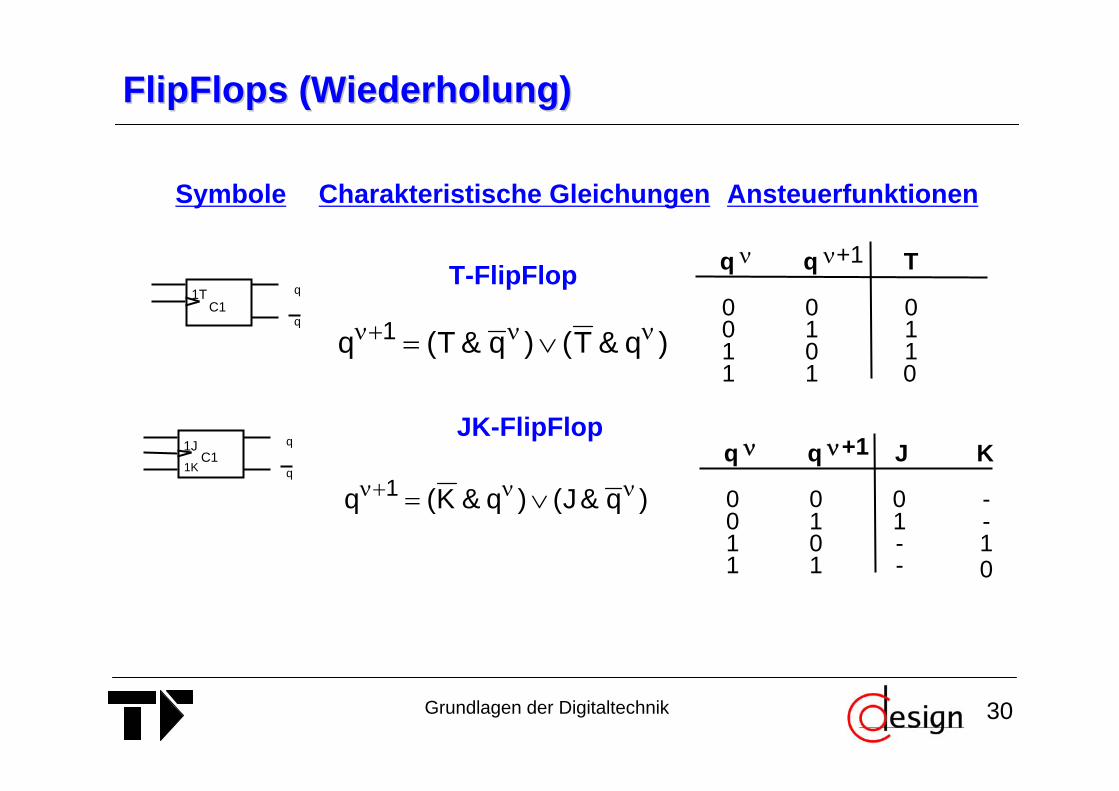
FlipFlopsFlipFlops (Wiederholung)(Wiederholung)
)q&T()q&T(q 1 νν+ν ∨=
Symbole Charakteristische Gleichungen Ansteuerfunktionen
q
q
1J1K
C1
q
q
1TC1
q ν q ν+1 J K
0 0 0 -0 1 1 -1 0 -
01 1 -
q ν q ν+1 T
0 0 0 0 1 1 1 0 1 1 1 0
T-FlipFlop
JK-FlipFlop
)q&J()q&K(q 1 νν+ν ∨=
1
Grundlagen der Digitaltechnik 31
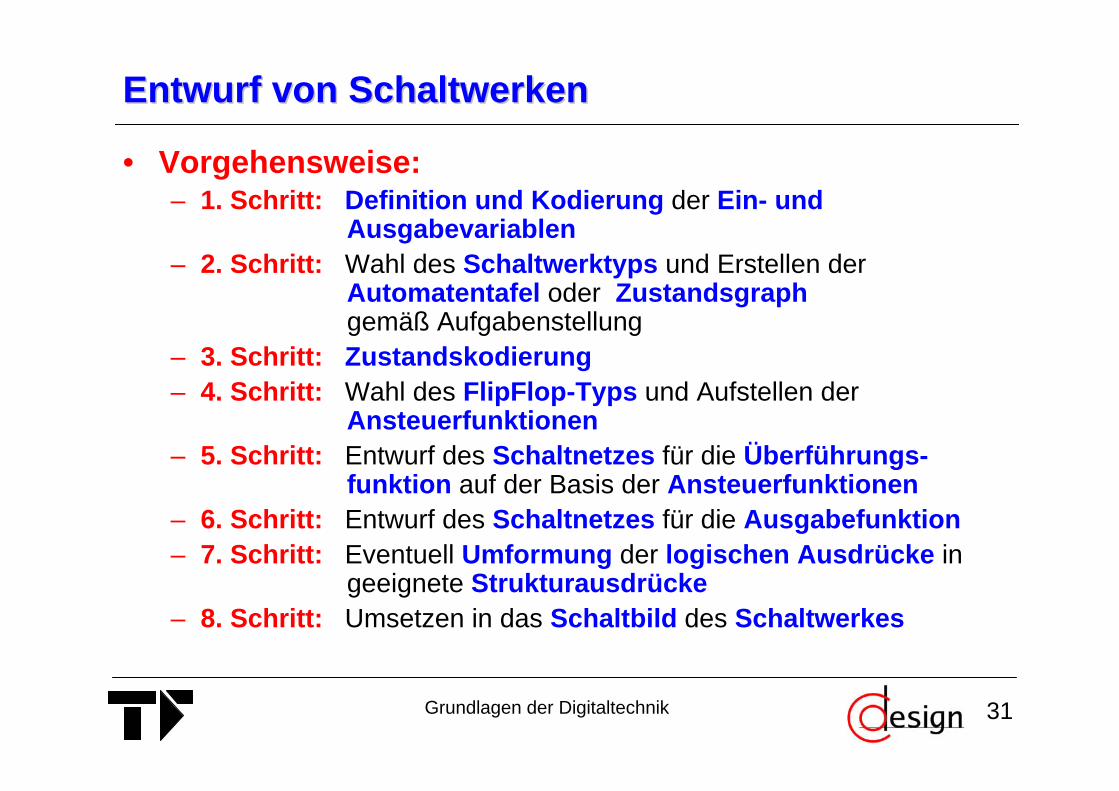
Entwurf von SchaltwerkenEntwurf von Schaltwerken
• Vorgehensweise:– 1. Schritt: Definition und Kodierung der Ein- und
Ausgabevariablen– 2. Schritt: Wahl des Schaltwerktyps und Erstellen der
Automatentafel oder Zustandsgraphgemäß Aufgabenstellung
– 3. Schritt: Zustandskodierung– 4. Schritt: Wahl des FlipFlop-Typs und Aufstellen der
Ansteuerfunktionen– 5. Schritt: Entwurf des Schaltnetzes für die Überführungs-
funktion auf der Basis der Ansteuerfunktionen– 6. Schritt: Entwurf des Schaltnetzes für die Ausgabefunktion– 7. Schritt: Eventuell Umformung der logischen Ausdrücke in
geeignete Strukturausdrücke– 8. Schritt: Umsetzen in das Schaltbild des Schaltwerkes
Grundlagen der Digitaltechnik 33
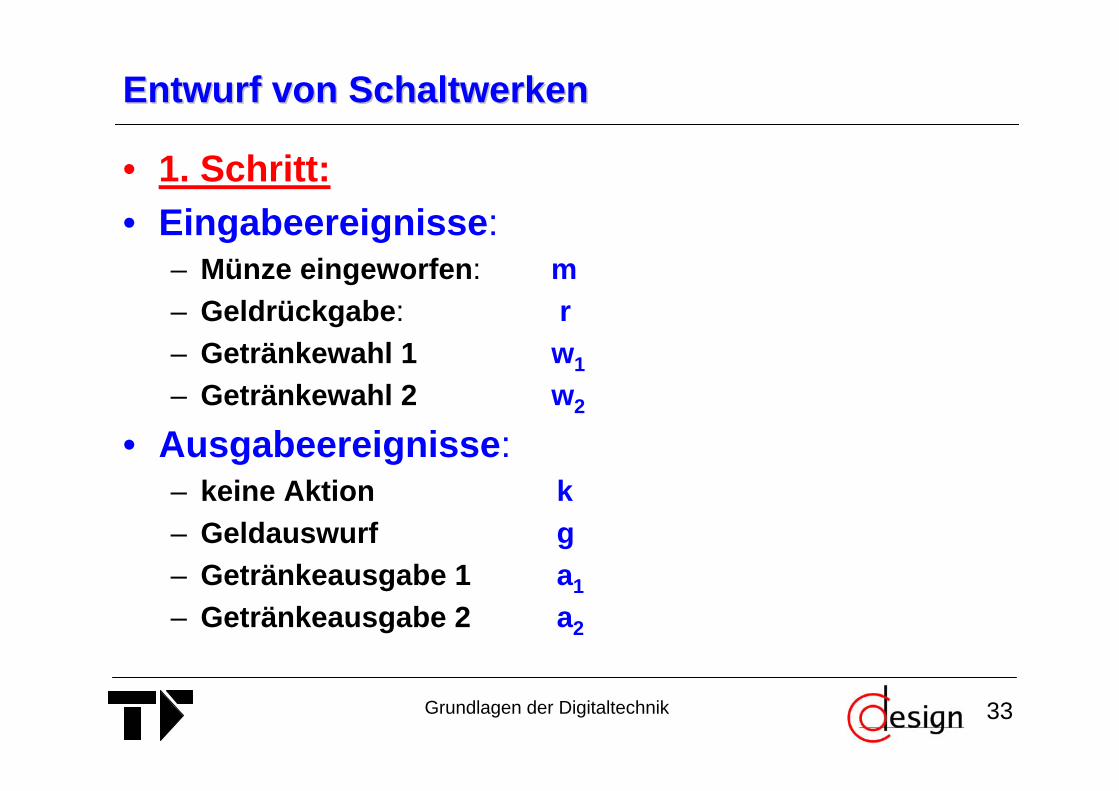
Entwurf von SchaltwerkenEntwurf von Schaltwerken
• 1. Schritt:• Eingabeereignisse:
– Münze eingeworfen: m– Geldrückgabe: r– Getränkewahl 1 w1– Getränkewahl 2 w2
• Ausgabeereignisse:– keine Aktion k– Geldauswurf g– Getränkeausgabe 1 a1– Getränkeausgabe 2 a2
Grundlagen der Digitaltechnik 34
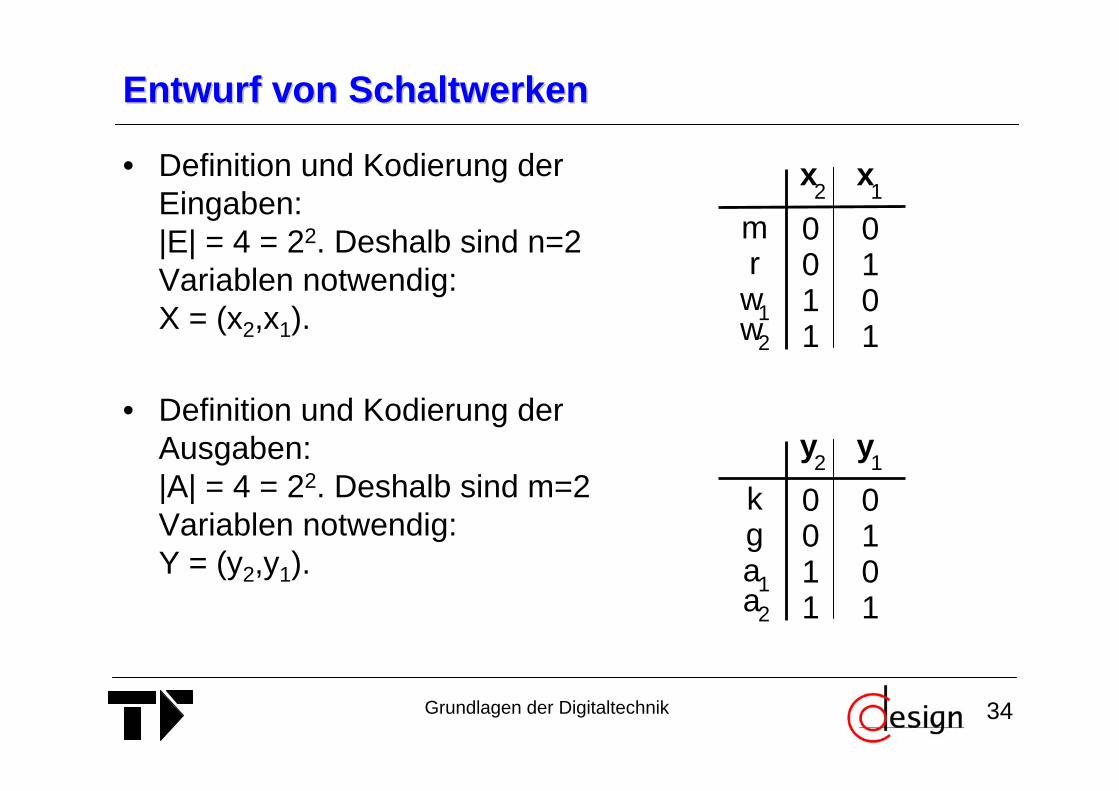
Entwurf von SchaltwerkenEntwurf von Schaltwerken
• Definition und Kodierung der Eingaben: |E| = 4 = 22. Deshalb sind n=2 Variablen notwendig:X = (x2,x1).
• Definition und Kodierung der Ausgaben:|A| = 4 = 22. Deshalb sind m=2 Variablen notwendig:Y = (y2,y1).
y2 y1
0 0011
101
kga1a2
x2 x1
0 0011
101
mr
w1w2
Grundlagen der Digitaltechnik 35
Entwurf von SchaltwerkenEntwurf von Schaltwerken
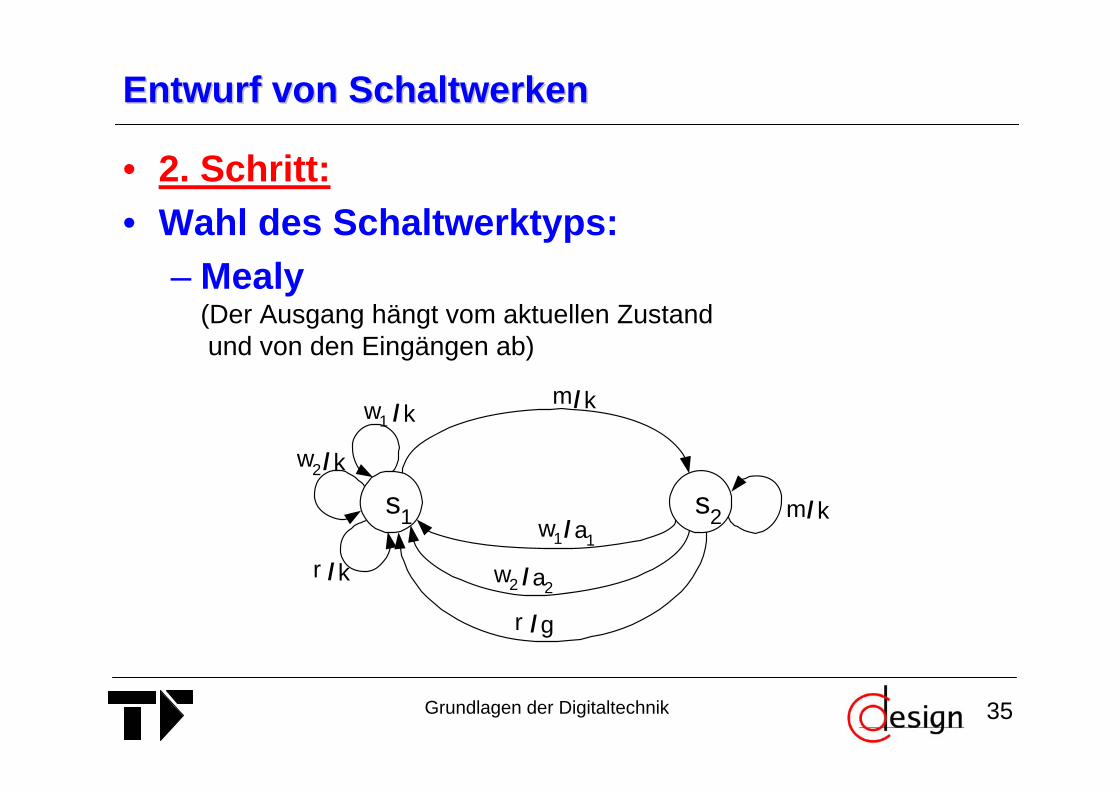
• 2. Schritt:• Wahl des Schaltwerktyps:
– Mealy(Der Ausgang hängt vom aktuellen Zustand und von den Eingängen ab)
s1 s2
m/ k
m/ kw1/ a1
w2 / a2
r / g
w1 / k
w2/ k
r / k
Grundlagen der Digitaltechnik 36
Entwurf von SchaltwerkenEntwurf von Schaltwerken
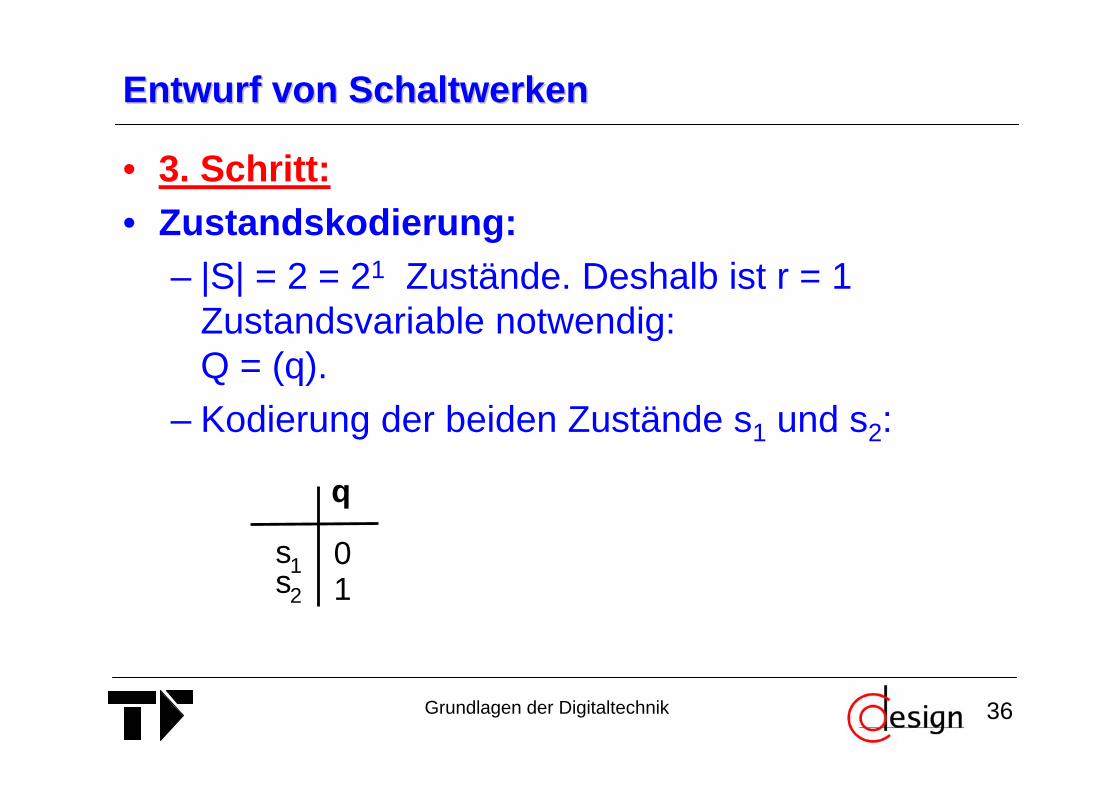
• 3. Schritt:• Zustandskodierung:
– |S| = 2 = 21 Zustände. Deshalb ist r = 1 Zustandsvariable notwendig: Q = (q).
– Kodierung der beiden Zustände s1 und s2:
q
01
s1s2
Grundlagen der Digitaltechnik 37
Entwurf von SchaltwerkenEntwurf von Schaltwerken
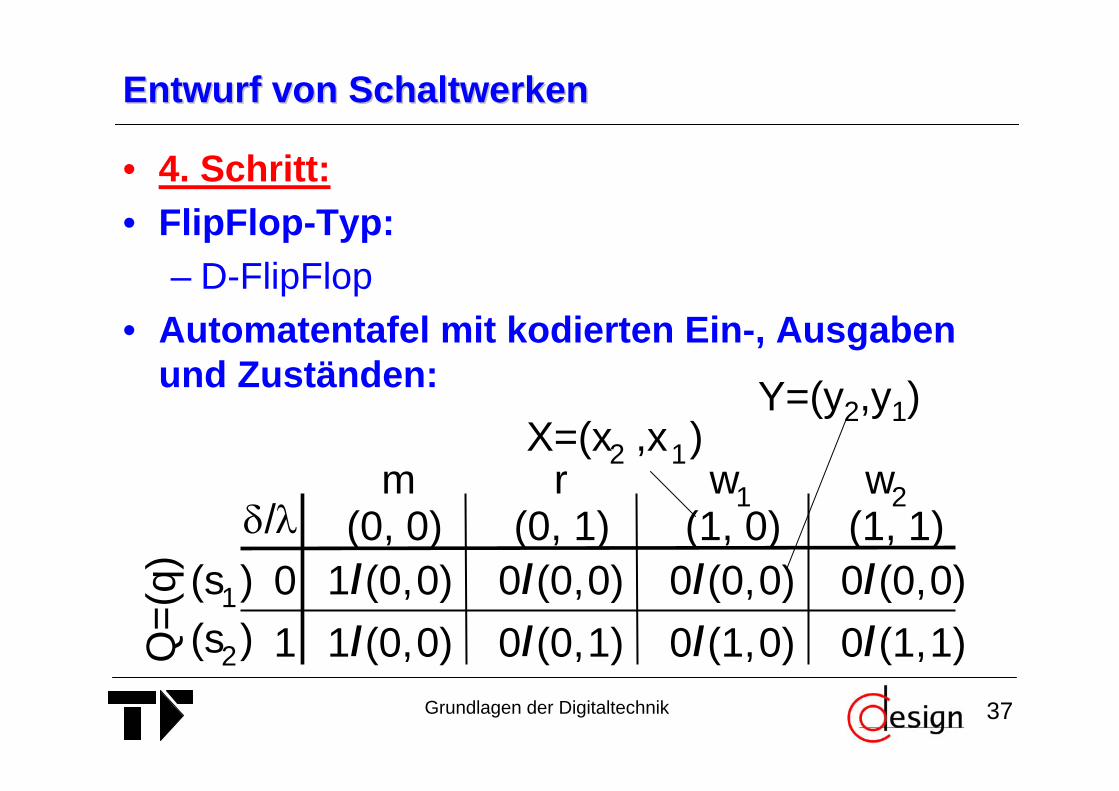
• 4. Schritt:• FlipFlop-Typ:
– D-FlipFlop• Automatentafel mit kodierten Ein-, Ausgaben
und Zuständen:X=(x2 ,x1)
1/(0,0) 0/(0,0) 0/(0,0) 0/(0,0)1/(0,0) 0/(0,1) 0/(1,0) 0/(1,1)1
0(0, 0) (0, 1) (1, 0) (1, 1)
m r w1 w2δ/λ
(s1)(s2)Q
=(q)
Y=(y2,y1)
Grundlagen der Digitaltechnik 38
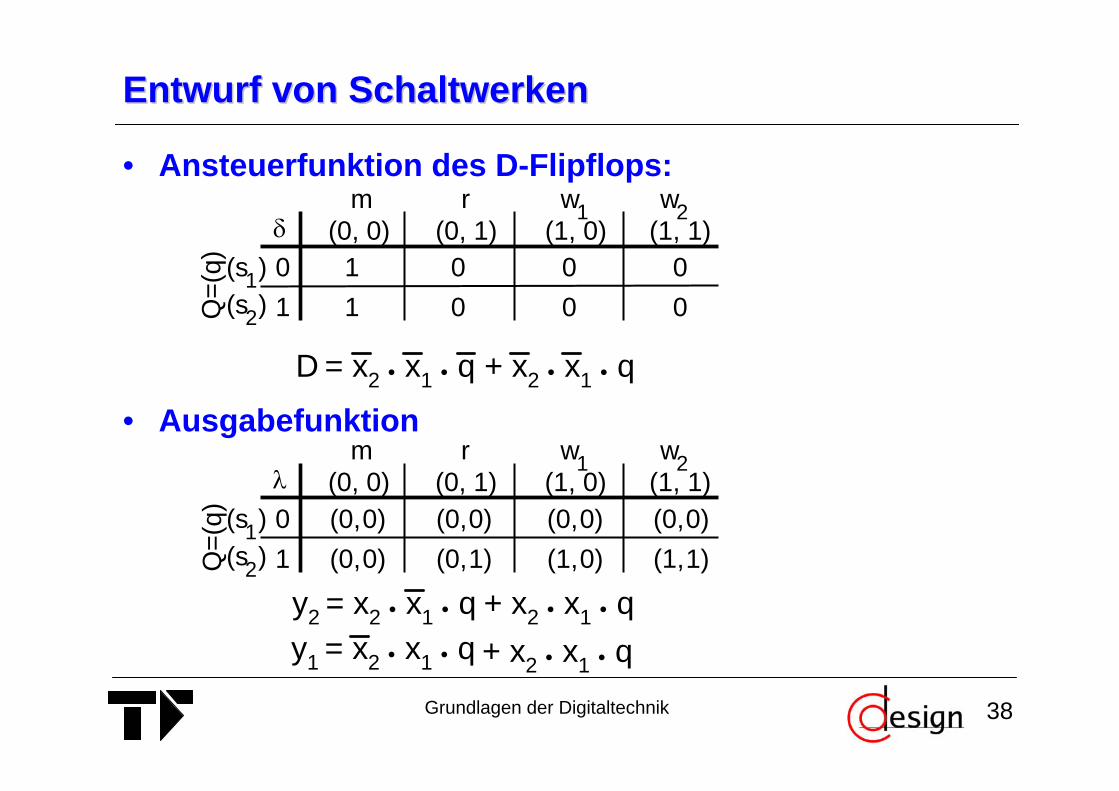
Entwurf von SchaltwerkenEntwurf von Schaltwerken
• Ansteuerfunktion des D-Flipflops:
+ x2 • x1 • q
1 0 0 01 0 0 01
0(0, 0) (0, 1) (1, 0) (1, 1)
m r w1 w2δ
(s1)(s2)Q
=(q)
(0,1) (1, (1,1)(0,0) (0,0) (0,0) (0,0)(0,0) 0)1
0(0, 0) (0, 1) (1, 0) (1, 1)
m r w1 w2λ
(s1)(s2)Q=(
q)
• Ausgabefunktion D = x2 • x1 • q
+ x2 • x1 • q y2 = x2 • x1 • q y1 = x2 • x1 • q + x2 • x1 • q
Grundlagen der Digitaltechnik 39
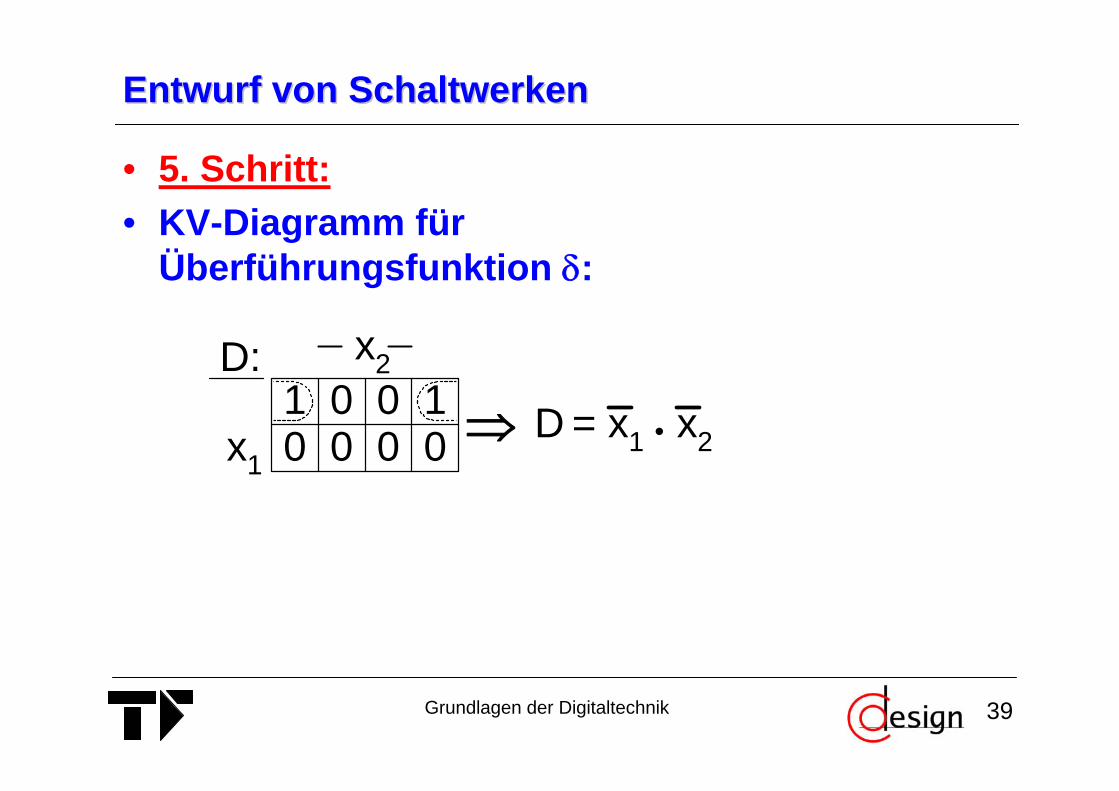
Entwurf von SchaltwerkenEntwurf von Schaltwerken
• 5. Schritt:• KV-Diagramm für
Überführungsfunktion δ:
x21 0 0 1
0000x1
D:
⇒ D = x1 • x2
Grundlagen der Digitaltechnik 40
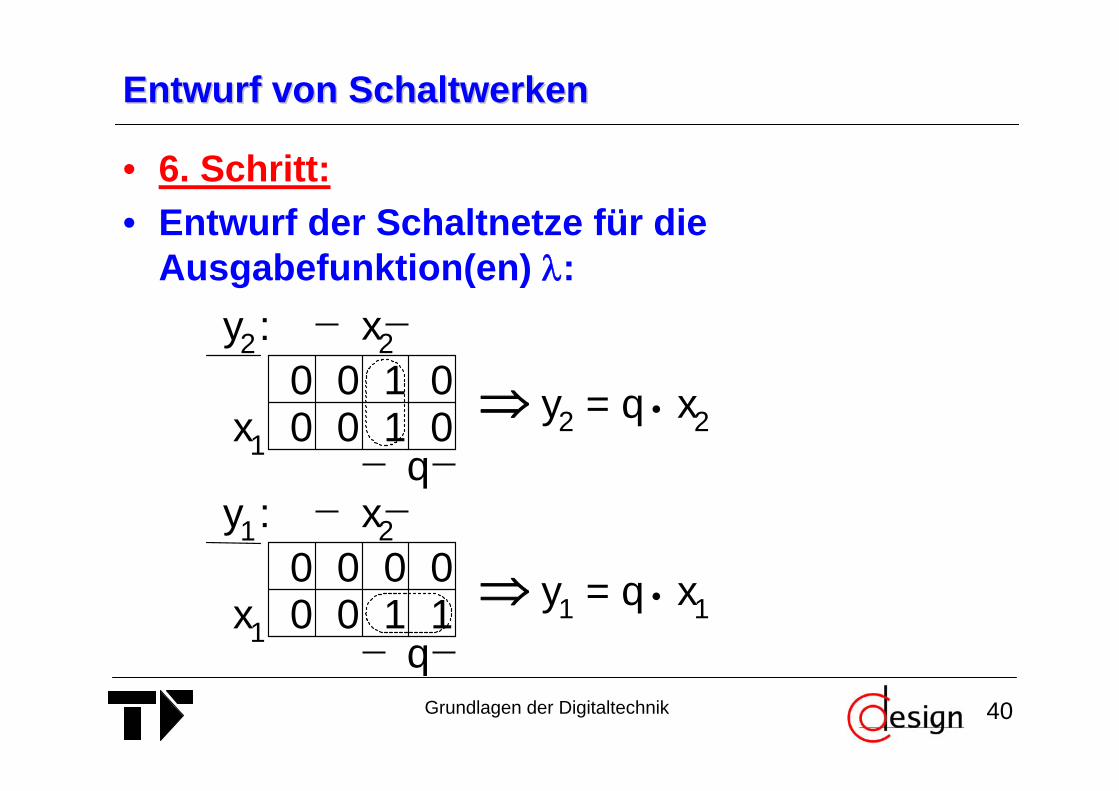
Entwurf von SchaltwerkenEntwurf von Schaltwerken
• 6. Schritt:• Entwurf der Schaltnetze für die
Ausgabefunktion(en) λ:
x20 0 0 0
1100q
x1
y1:
y1 = q • x1⇒
x20 0 1 0
0100q
x1
y2:
y2 = q • x2⇒
Grundlagen der Digitaltechnik 41
λ
δ
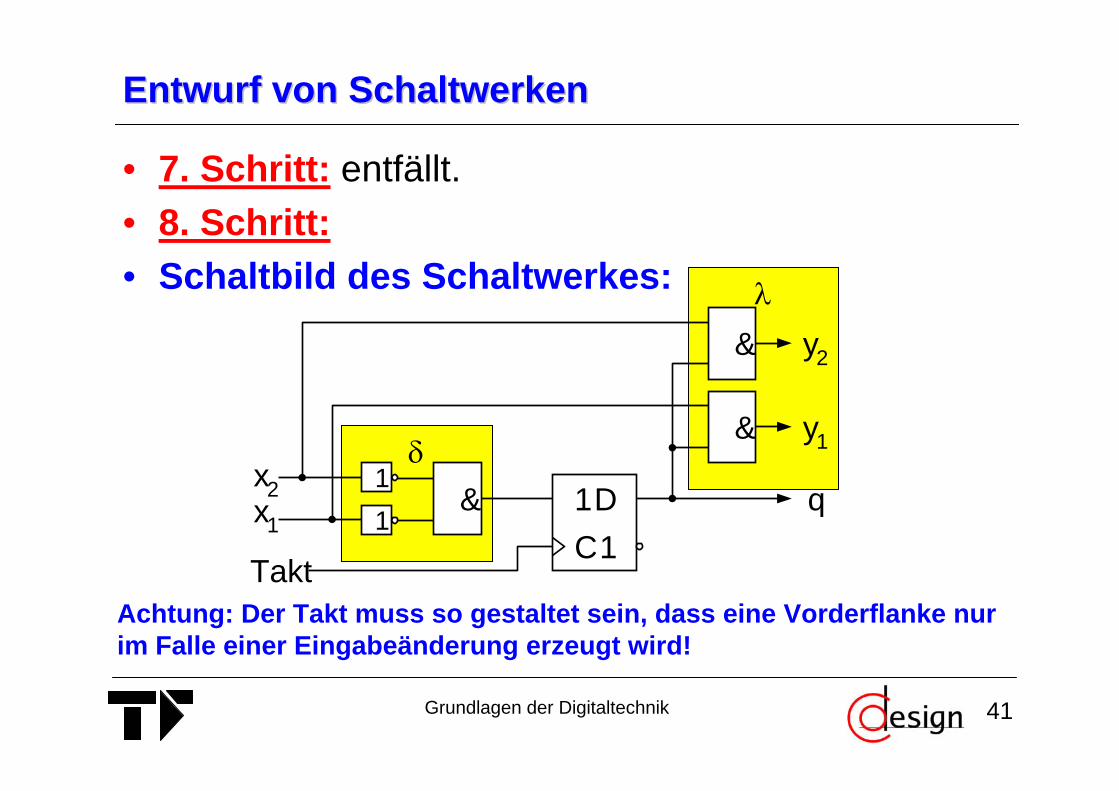
Entwurf von SchaltwerkenEntwurf von Schaltwerken
• 7. Schritt: entfällt.• 8. Schritt:• Schaltbild des Schaltwerkes:
Achtung: Der Takt muss so gestaltet sein, dass eine Vorderflanke nur im Falle einer Eingabeänderung erzeugt wird!
11
1D& qx2x1
C1
&
&
Takt
y2
y1
Grundlagen der Digitaltechnik 43
Spezielle SchaltwerkeSpezielle Schaltwerke
• Zähler– Zähler-Schaltwerke dienen dazu, auf einer speziellen
Signalleitung beobachtete Ereignisse zu zählen– Das Zählen entspricht einer Abbildung in den
Zustandsraum, so dass ein Zählcode entsteht– Wie bei mechanischen Zählern können noch weitere
Eingriffmöglichkeiten eingebaut werden:• Überlaufmeldung• Nullstellungsmeldung• Rückstellmöglichkeit auf 0
Grundlagen der Digitaltechnik 44
DualzählerDualzähler
• Beispiel:– Es soll ein Zähler als Schaltwerk realisiert werden, der...
• dual zyklisch von 0 bis 7 zählt• eine Rückstellmöglichkeit auf 0 besitzt• bei dem Wert 7 das Überlaufsignal auf 1 setzt• auf den Wechsel der Zählervariablen Z von 0 auf 1 reagiert
– Zur Realisierung sollen JK-Flipflops mit 0/1-Flankensteuerung verwendet werden
Grundlagen der Digitaltechnik 45
DualzählerDualzähler
• Beispiel:– Eingangsvariable:
N = 1: Rückstellen auf 0N = 0: sonst
– Ausgangsvariable:Ü = 1: Zählerstand ist 7Ü = 0: sonst
– Bei Zählern wird die Zählervariable Z häufig nicht als Eingangsvariable, sondern direkt als Taktsignal angeschlossen
– Das Zählereignis „Wechsel von 0 auf 1“ kann so direkt mit einem synchronen Schaltwerk mit positiver Flankensteuerungrealisiert werden
Grundlagen der Digitaltechnik 46
DualzählerDualzähler
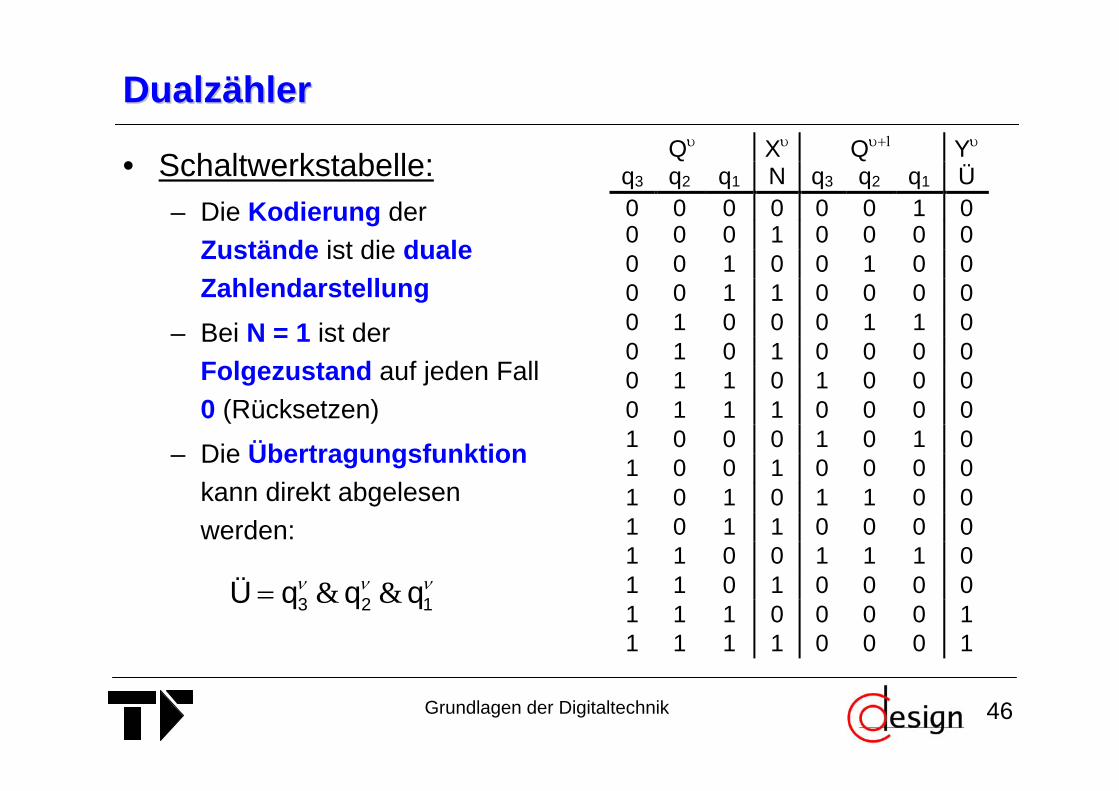
• Schaltwerkstabelle:– Die Kodierung der
Zustände ist die duale Zahlendarstellung
– Bei N = 1 ist der Folgezustand auf jeden Fall0 (Rücksetzen)
– Die Übertragungsfunktionkann direkt abgelesen werden:
Qυ Xυ Qυ+1 Yυ
q3 q2 q1 N q3 q2 q1 Ü0 0 0 0 0 0 1 00 0 0 1 0 0 0 00 0 1 0 0 1 0 00 0 1 1 0 0 0 00 1 0 0 0 1 1 00 1 0 1 0 0 0 00 1 1 0 1 0 0 00 1 1 1 0 0 0 01 0 0 0 1 0 1 01 0 0 1 0 0 0 01 0 1 0 1 1 0 01 0 1 1 0 0 0 01 1 0 0 1 1 1 01 1 0 1 0 0 0 01 1 1 0 0 0 0 11 1 1 1 0 0 0 1
ννν123 qqqÜ &&=
Grundlagen der Digitaltechnik 47
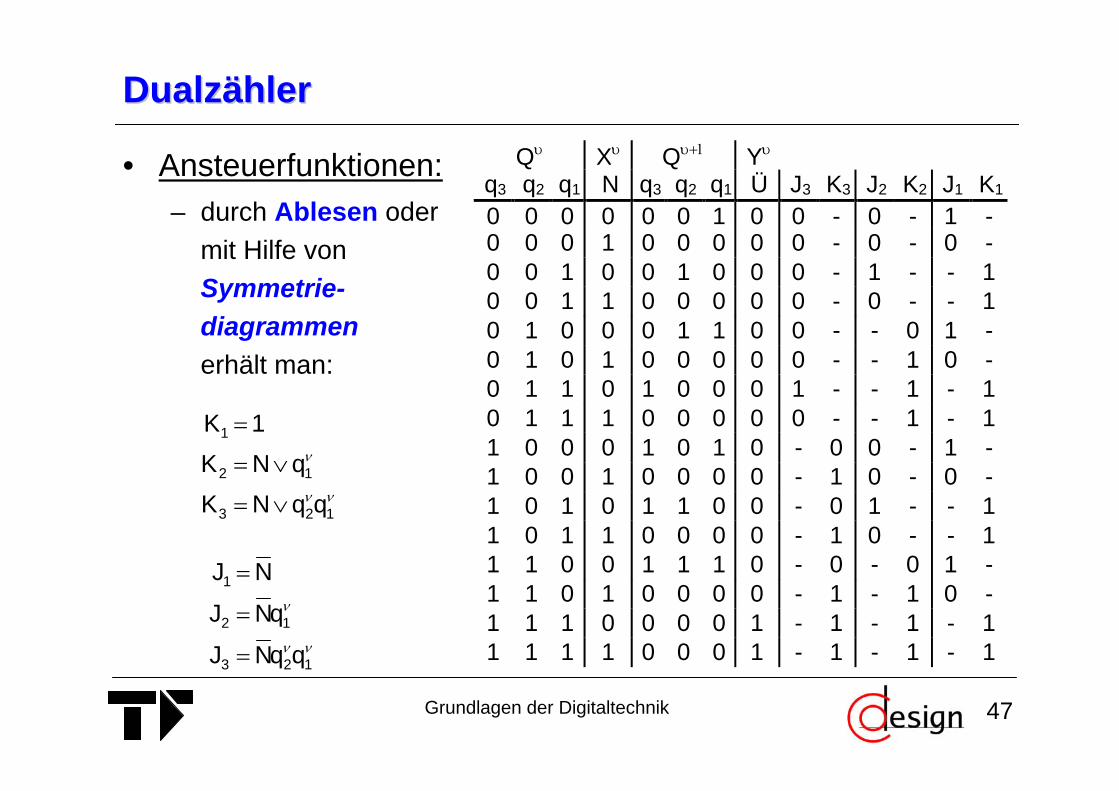
DualzählerDualzählerQυ Xυ Qυ+1 Yυ
q3 q2 q1 N q3 q2 q1 Ü J3 K3 J2 K2 J1 K1
0 0 0 0 0 0 1 0 0 - 0 - 1 -0 0 0 1 0 0 0 0 0 - 0 - 0 -0 0 1 0 0 1 0 0 0 - 1 - - 10 0 1 1 0 0 0 0 0 - 0 - - 10 1 0 0 0 1 1 0 0 - - 0 1 -0 1 0 1 0 0 0 0 0 - - 1 0 -0 1 1 0 1 0 0 0 1 - - 1 - 10 1 1 1 0 0 0 0 0 - - 1 - 11 0 0 0 1 0 1 0 - 0 0 - 1 -1 0 0 1 0 0 0 0 - 1 0 - 0 -1 0 1 0 1 1 0 0 - 0 1 - - 11 0 1 1 0 0 0 0 - 1 0 - - 11 1 0 0 1 1 1 0 - 0 - 0 1 -1 1 0 1 0 0 0 0 - 1 - 1 0 -1 1 1 0 0 0 0 1 - 1 - 1 - 11 1 1 1 0 0 0 1 - 1 - 1 - 1
• Ansteuerfunktionen:– durch Ablesen oder
mit Hilfe von Symmetrie-diagrammenerhält man:
νν
ν
123
12
1
qqNKqNK
1K
∨=
∨=
=
νν
ν
123
12
1
qqNJ
qNJ
NJ
=
=
=
Grundlagen der Digitaltechnik 48
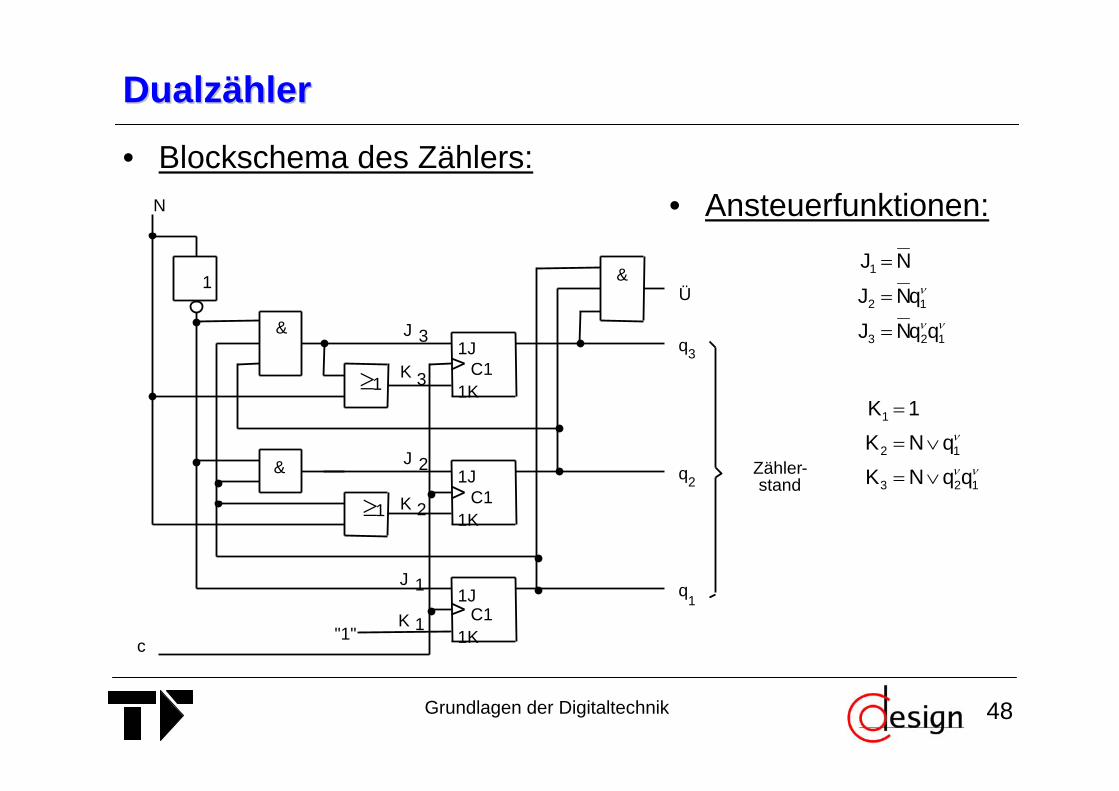
• Blockschema des Zählers:
≥1
1
&
&
≥1
C11K
1J
C11K
1J
C11K
1J
&Ü
N
q3
q2
q1
"1"
Zähler-stand
J 1
K 1
J 2
K 2
K 3
J 3
c
νν
ν
123
12
1
qqNKqNK
1K
∨=
∨=
=
νν
ν
123
12
1
qqNJ
qNJ
NJ
=
=
=
• Ansteuerfunktionen:
DualzählerDualzähler
Grundlagen der Digitaltechnik 49
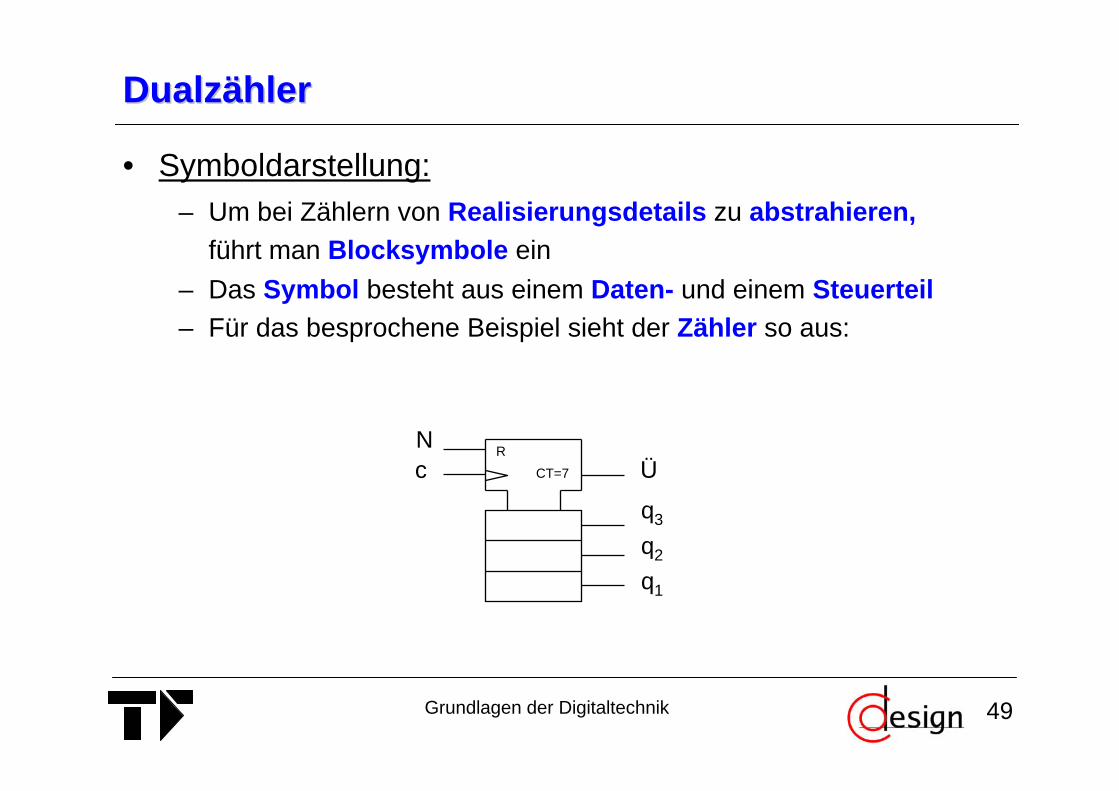
DualzählerDualzähler
• Symboldarstellung:– Um bei Zählern von Realisierungsdetails zu abstrahieren,
führt man Blocksymbole ein– Das Symbol besteht aus einem Daten- und einem Steuerteil– Für das besprochene Beispiel sieht der Zähler so aus:
RCT=7 Ü
Nc
q3
q2
q1
Grundlagen der Digitaltechnik 50
DualzählerDualzähler
• Eigenschaften:– Hier noch die wichtigsten Merkmale von Zählern:
• Art des Zählcodes-> Dualzahlen, 1-aus-n-Code, BCD-Code,...
• Art des Zählerreignisses-> 0->1, 1->0, Auftreten von Werten, ...
• Steuersignal für Zählen/Anhalten
• Steuersignal für Zählrichtung (aufwärts/abwärts)
• Synchrone oder asynchrone Rückstellmöglichkeit
• Steuersignal für Zählen/Laden eines Anfangswertes









![Grundlagen der Pneumatik Grundlagen der · 2018. 3. 6. · Grundlagen der Pneumatik Grollius € 25,00 [D] | € 25,70 [A] ISBN 978-3-446-44636-6 Horst-W. Grollius Grundlagen der](https://img.pdfslide.tips/doc/110x75/60ce50858583ea61fb07a7a9/grundlagen-der-pneumatik-grundlagen-2018-3-6-grundlagen-der-pneumatik-grollius.jpg)



















![Grundlagen der Digitaltechnik - Buch.de · PDF fileWöstenkühler Grundlagen der Digitaltechnik Gerd Wöstenkühler Grundlagen der Digitaltechnik € 29,90 [D] | € 30,80 [A] ISBN](https://img.pdfslide.tips/doc/110x75/5a79c8fc7f8b9a99188bfce9/grundlagen-der-digitaltechnik-buchde-wstenkhler-grundlagen-der-digitaltechnik.jpg)