Embed Size (px)
Citation preview
111 GGGÜÜÜÇÇÇ EEELLLEEEKKKTTTRRROOONNN
111...111 GGGRRR
Güç elektronii terimi, çok geni bir alanda elektronik devreleri içine alır ve buradaki amaç ise bir kaynaktan bir yüke giden elektrik gücünün kontrol edilmesidir. Bu kontrol çok deiik biçimlerde; örnein, sadece kaynaktan yüke giden gücün miktarı olabilir. Bunun yanında, kaynaktaki gücün özelliiyle karılatırıldıında yüke verilen gücün özelliinin de deitirilmesi gerekebilir. Buna örnek ise, bir AC kaynak frekansının yükün gereksinimi olan baka bir frekansa deitirilmesidir.
Bütün bu deiimlerde veya kaynaktan yüke aktarılan gücün kontrolünde, ilemin verimlilii önemlidir. Eer aktarılan güç büyük ve ilem verimsiz yapılmısa, büyük kayıplar oluur. Bu kayıpların ekonomik verimlilik üzerinde deerlendirilmesinin yapılması gerekir ve bu kayıpların, aırı ısınma sonucu elemanın korunması için elemandan uzaklatırılması gerekir.
Böyle bir kontrol, anahtarlama teknikleri kullanılarak yapılır: Bazı elektronik elemanlar açık veya kapalı durumlu bir anahtar olarak kullanılır. deal bir anahtar ile, kayıpları önleyecek bir kontrol yapılabilir. Gerçekte ise hiçbir eleman böyle bir ideal anahtar görevini yerine getiremez fakat ideal eleman olabilecek kullanılı elemanlar mevcuttur. Aaıda sıralanan elemanlar bunlara örnek olabilir:
• BJT (bipolar junction transistor = bipolar jonksiyon transistörü)
• MOSFET (metal-oxide semiconductor field-effect transistor = metal oksit yarı-iletken alan etkili transistörü)
• SIT (static induction transistor = statik indüksiyon transistörü)
• IGBT (insulated gate bipolar transistor = yalıtılmı kapılı bipolar transistör)
• SCR (silikon-controlled rectifier = silikon kontrollu dorultucu)
• TRIAK (bi-directional gate-controlled thyristors = çift yönlü kapı kontrollu tristörler)
• GTO (gate turnoff SCR = kapıdan kapanabilir SCR)
Yüksek verimlilik gereksinimleri için böyle elemanların güç katlarındaki elektronik elemanların dorusal operasyonu nadiren kullanılır.
Güç elektronii dönemi, balangıcını 1957’de SCR’nin tanıtılması ile yapmıtır. Civalı ark dorultucular gibi dier kontrol edilebilen dorultucuların uzun yıllar boyunca endüstride var olmasına ramen, böyle elemanlar çok büyük ve yardımcı elemanlara gereksinim duymular, düük ve orta gerilimlerde verimli olmamılardır. SCR’nin tanıtılması ile böylece, güç kontrolunun büyük oranda döner makinalardan ve statik manyetik yükselticilerden elektronik elemanlara kaydırılması periyodunun balangıcı olmutur. Bu periyodun balangıcında, güvenilirlik problemleri nedeniyle geliim yavaolmu fakat 1960’lı yılların baında SCR bir çok uygulamalarda kullanılmaya balanmıtır. O zamandan sonra, yukarıda bahsedilen anahtarlama elemanları gelitirilmitir, güç yarı-iletkenlerinin çeitlerindeki bu artı ile, verilen bir uygulama için en uygun güç yarı-iletkeninin seçilmesi gerekir.
111...222 KKKOOONNNTTTRRROOOLLL TTTPPPLLLEEERRR
Güç elektronii uygulamalarının çounluunda kullanılan dönütürme düzenlemeleri aaıda sıralanmıtır.
AC-DC: AC gerilim kaynaı, dorultularak tek yönlü bir kaynaa dönütürülür ve daha sonra bu kaynaın filtre edilmesiyle DC kaynaı elde edilir. DC çıkı gerilimi kontrollu dorultucu kullanılmak suretiyle ayarlı ekle getirilebilir. Ayarlı bu çıkı, DC motorunun hız kontrolünde bir kaynak olarak kullanılabilir.
DC-DC: Herhangi bir gerilimdeki DC, daha büyük veya küçük olarak, baka bir DC kaynaına dönütürülür. Bir sistemdeki böyle bir uygulama, anahtarlamalı güç dönüümü olarak adlandırılır. Bir uzay aracının güne pilleri çıkıının, uzay aracındaki deiik güç sistemlerinde kullanılmak üzere dönüümü buna ait bir uygulamadır.
DC-AC: Bir DC kaynaı, bir yüke AC gerilim salamak için anahtarlanır. Sinüsoidal olmayıp kare biçimli veya adımlı dalga biçimli bu inverter çıkıı, çıkı frekansının deitirilmesiyle AC motorunun hız ayarında kullanılıdır.
AC-AC: Ayarlı frekanslı AC çıkı gerilimi, istenilen çıkı dalga biçimini alabilmek için giriin uygun dalga elemanları ile birletirilir. Giri genellikle 3 fazlı kaynak ve çıkıfrekansı ise giri frekansından daha azdır. Bu gibi sistemler, teorik olarak cazip olmasına ramen, ticari olarak geni alanda kullanılmamaktadır. Çünkü bu sistemlerin düzgün bir ekilde fonksiyonunu yerine getirmesi için karmaık kontrol sistemleri gerekmektedir.
AC-AC: AC çıkı gerilimi, giriteki temel dalga frekansıyla aynı olarak, faz kontrollu alternatif çıkı gerilimi üretmek için, her yarım dalgada bir kere açılır ve kapanır. Çıkıgerilimi girie göre azalmaktadır. Böyle bir eleman kaynaktan yüke giden gücü kontrol etmektedir. Akkor flamanlı lambaların ıık younluunun kontrolu buna bir örnektir.
AC-DC-AC: Yukarıdaki metotların ikisinin birletirilmesiyle daha baka düzenlemeler yapılabilir. Normal olarak AC ebeke gerilimi, DC’ ye dönütürülür. Bu DC gerilimden inverter ile ayarlı frekanslı bir AC çıkıı elde edilir. Üretilen AC ise AC motorunun hız kontrolünde kullanılır.
111...333 VVVEEERRRMMM KKKAAAVVVRRRAAAMMMIII
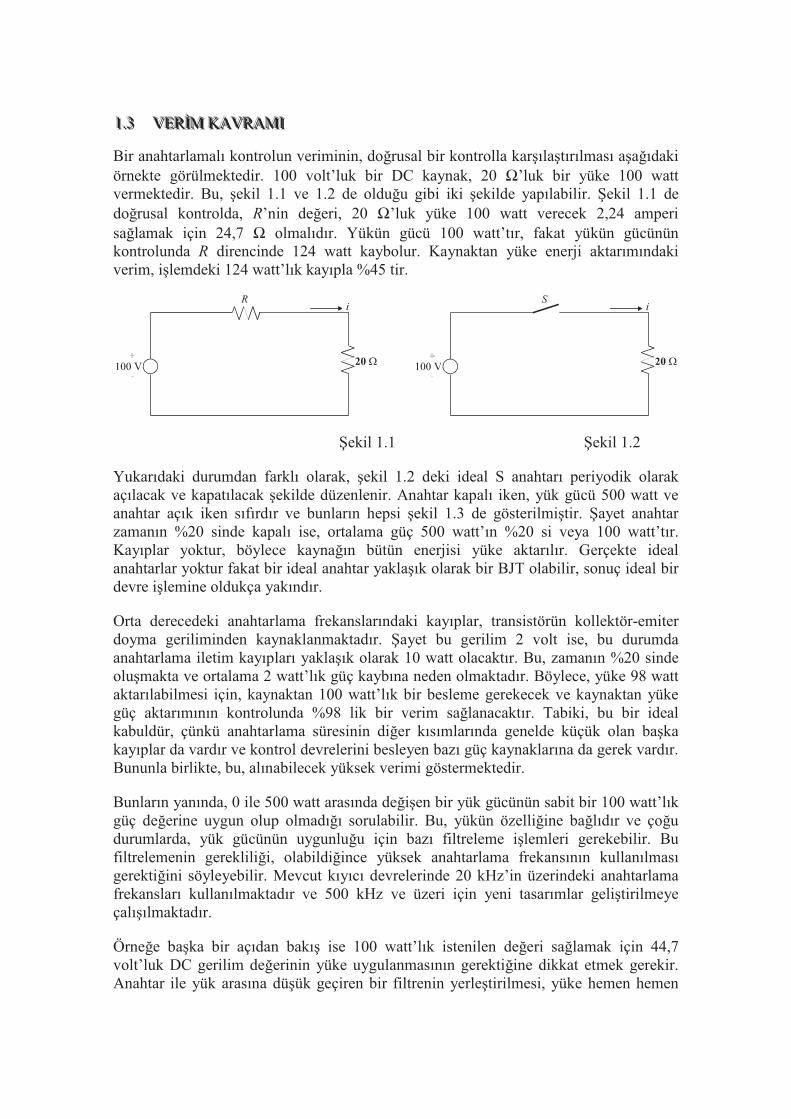
Bir anahtarlamalı kontrolun veriminin, dorusal bir kontrolla karılatırılması aaıdaki örnekte görülmektedir. 100 volt’luk bir DC kaynak, 20 Ω’luk bir yüke 100 watt vermektedir. Bu, ekil 1.1 ve 1.2 de olduu gibi iki ekilde yapılabilir. ekil 1.1 de dorusal kontrolda, R’nin deeri, 20 Ω’luk yüke 100 watt verecek 2,24 amperi salamak için 24,7 Ω olmalıdır. Yükün gücü 100 watt’tır, fakat yükün gücünün kontrolunda R direncinde 124 watt kaybolur. Kaynaktan yüke enerji aktarımındaki verim, ilemdeki 124 watt’lık kayıpla %45 tir.
ekil 1.1 ekil 1.2
Yukarıdaki durumdan farklı olarak, ekil 1.2 deki ideal S anahtarı periyodik olarak açılacak ve kapatılacak ekilde düzenlenir. Anahtar kapalı iken, yük gücü 500 watt ve anahtar açık iken sıfırdır ve bunların hepsi ekil 1.3 de gösterilmitir. ayet anahtar zamanın %20 sinde kapalı ise, ortalama güç 500 watt’ın %20 si veya 100 watt’tır. Kayıplar yoktur, böylece kaynaın bütün enerjisi yüke aktarılır. Gerçekte ideal anahtarlar yoktur fakat bir ideal anahtar yaklaık olarak bir BJT olabilir, sonuç ideal bir devre ilemine oldukça yakındır.
Orta derecedeki anahtarlama frekanslarındaki kayıplar, transistörün kollektör-emiter doyma geriliminden kaynaklanmaktadır. ayet bu gerilim 2 volt ise, bu durumda anahtarlama iletim kayıpları yaklaık olarak 10 watt olacaktır. Bu, zamanın %20 sinde olumakta ve ortalama 2 watt’lık güç kaybına neden olmaktadır. Böylece, yüke 98 watt aktarılabilmesi için, kaynaktan 100 watt’lık bir besleme gerekecek ve kaynaktan yüke güç aktarımının kontrolunda %98 lik bir verim salanacaktır. Tabiki, bu bir ideal kabuldür, çünkü anahtarlama süresinin dier kısımlarında genelde küçük olan baka kayıplar da vardır ve kontrol devrelerini besleyen bazı güç kaynaklarına da gerek vardır. Bununla birlikte, bu, alınabilecek yüksek verimi göstermektedir.
Bunların yanında, 0 ile 500 watt arasında deien bir yük gücünün sabit bir 100 watt’lık güç deerine uygun olup olmadıı sorulabilir. Bu, yükün özelliine balıdır ve çou durumlarda, yük gücünün uygunluu için bazı filtreleme ilemleri gerekebilir. Bu filtrelemenin gereklilii, olabildiince yüksek anahtarlama frekansının kullanılması gerektiini söyleyebilir. Mevcut kıyıcı devrelerinde 20 kHz’in üzerindeki anahtarlama frekansları kullanılmaktadır ve 500 kHz ve üzeri için yeni tasarımlar gelitirilmeye çalıılmaktadır.
Örnee baka bir açıdan bakı ise 100 watt’lık istenilen deeri salamak için 44,7 volt’luk DC gerilim deerinin yüke uygulanmasının gerektiine dikkat etmek gerekir. Anahtar ile yük arasına düük geçiren bir filtrenin yerletirilmesi, yüke hemen hemen
sabit bir gerilim salar. Böyle bir düzenleme, 7. Bölümde de görülecei gibi bir DC-DC konvertörün basitletirilmi biçimidir ve ekil 1.4 de görülmektedir. S anahtarının periyodundaki kapalılık çarpanı imdi % 44,7 olmalıdır.
ekil 1.3 ekil 1.4
111...444 AAANNNAAAHHHTTTAAARRRLLLAAAMMMAAA EEELLLEEEMMMAAANNNLLLAAARRRIIINNNIIINNN AAANNNMMMAAA DDDEEEEEERRRLLLEEERRR
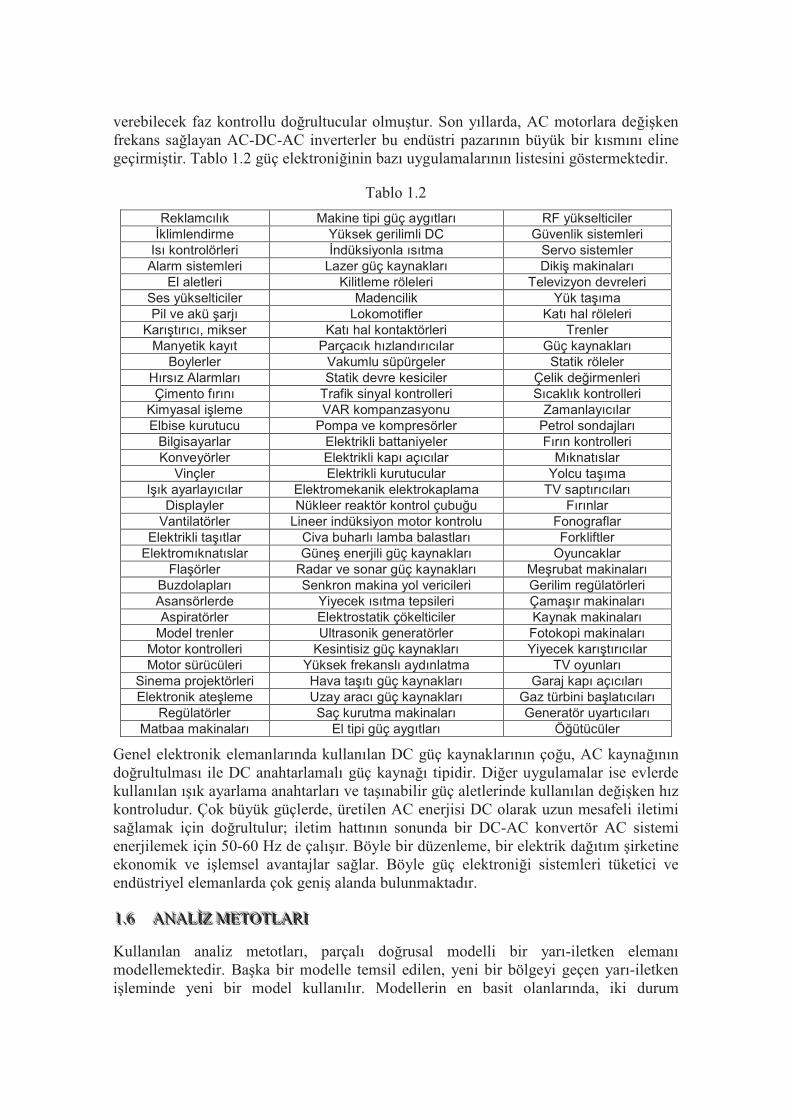
Güç yarı-iletkenleri ile belli miktardaki güçler kontrol edilebilir. Tablo 1.1, ticari olarak mevcut olan bazı elemanlar ile anahtarlanabilen akım ve gerilimlerin büyüklüklerini göstermektedir. Maksimum gerilim ve maksimum akım kapasitesinin ikisinin birden verilen bir eleman üzerinde aynı anda bulunması genelde mevcut olmamaktadır.
Tablo 1.1
Eleman Tipi Anma Gerilimi
(V)
Anma Akımı
(A)
Üst Frekans
(Hz)
Anahtarlamazamanı (µµµµs)
letim Direnci (ΩΩΩΩ)
Dorultucu Genel Amaçlı 5000 5000 1 k 100 0,16 m Yüksek Hızlı 3000 1000 10 k 2-5 1 m
Schottky 40 60 20 k 0,23 10 m
Kesime götürülen Tristörler
Ters Tıkama 5000 5000 1 k 200 0,25 m Yüksek Hızlı 1200 1500 10 k 20 0,47 m Ters Tıkama 2500 400 5 k 40 2,16 m Ters letim 2500 1000 5 k 40 2,1 m
GATT 1200 400 20 k 8 2,24 m Iık tetiklemeli 6000 1500 400 200-400 0,53 m
Triyaklar 1200 300 400 200-400 3,57 m Kendiliinden
kesilen tristörlerGTO 4500 3000 10 k 15 2,5 m SITH 4000 2200 20 k 6,5 5,75 m
Güç transistörleri Tek 400 250 20 k 9 4 m 400 40 20 k 6 31 m 630 50 25 k 1,7 15 m
Darlington 1200 400 10 k 30 10 m SIT 1200 300 100 k 0,55 1,2
Güç MOSFETleri Tek 500 8,6 100 k 0,7 0,6 1000 4,7 100 k 0,9 2
500 50 100 k 0,6 0,4 m IGBT Tek 1200 400 20 k 2,3 60 m MCT Tek 600 60 20 k 2,2 18 m
111...555 GGGÜÜÜÇÇÇ YYYAAARRRIII---LLLEEETTTKKKEEENNNLLLEEERRRNNNNNN KKKUUULLLLLLAAANNNIIIMMMIII
Aaıdaki bilgi güç elektroniinin büyüklüü ve önemi hakkında bir fikir vermektedir. Temel olarak, bütün deiken hızlı endüstriyel motor sürücüleri güç elektronii sisteminin belli bir biçimini kullanmaktadır. Uzun yıllar boyunca SCR’ler kullanılmıtır; bunlar deiken hız ilemi salamak için bir DC motora ayarlı gerilim
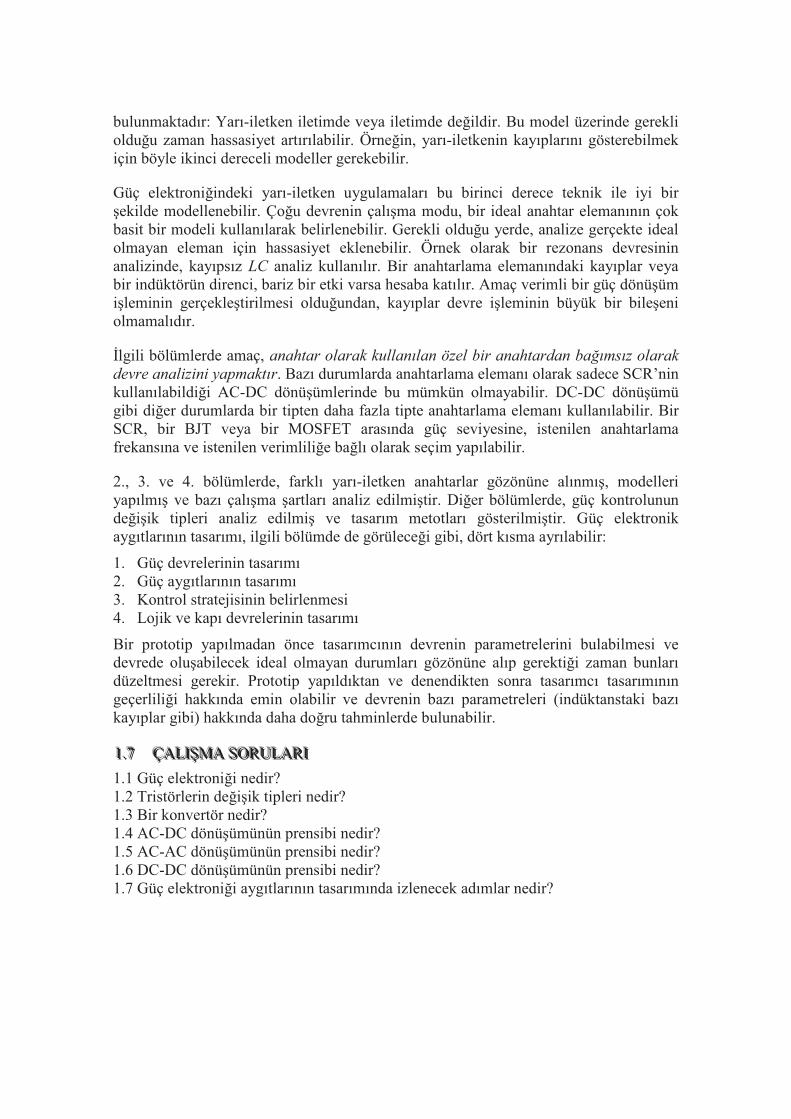
verebilecek faz kontrollu dorultucular olmutur. Son yıllarda, AC motorlara deiken frekans salayan AC-DC-AC inverterler bu endüstri pazarının büyük bir kısmını eline geçirmitir. Tablo 1.2 güç elektroniinin bazı uygulamalarının listesini göstermektedir.
Tablo 1.2
Reklamcılık Makine tipi güç aygıtları RF yükselticiler klimlendirme Yüksek gerilimli DC Güvenlik sistemleri
Isı kontrolörleri ndüksiyonla ısıtma Servo sistemler Alarm sistemleri Lazer güç kaynakları Diki makinaları
El aletleri Kilitleme röleleri Televizyon devreleriSes yükselticiler Madencilik Yük taıma Pil ve akü arjı Lokomotifler Katı hal röleleri
Karıtırıcı, mikser Katı hal kontaktörleri Trenler Manyetik kayıt Parçacık hızlandırıcılar Güç kaynakları
Boylerler Vakumlu süpürgeler Statik röleler Hırsız Alarmları Statik devre kesiciler Çelik deirmenleri Çimento fırını Trafik sinyal kontrolleri Sıcaklık kontrolleri
Kimyasal ileme VAR kompanzasyonu Zamanlayıcılar Elbise kurutucu Pompa ve kompresörler Petrol sondajları
Bilgisayarlar Elektrikli battaniyeler Fırın kontrolleri Konveyörler Elektrikli kapı açıcılar Mıknatıslar
Vinçler Elektrikli kurutucular Yolcu taıma Iık ayarlayıcılar Elektromekanik elektrokaplama TV saptırıcıları
Displayler Nükleer reaktör kontrol çubuu Fırınlar Vantilatörler Lineer indüksiyon motor kontrolu Fonograflar
Elektrikli taıtlar Civa buharlı lamba balastları Forkliftler Elektromıknatıslar Güne enerjili güç kaynakları Oyuncaklar
Flaörler Radar ve sonar güç kaynakları Merubat makinaları Buzdolapları Senkron makina yol vericileri Gerilim regülatörleri Asansörlerde Yiyecek ısıtma tepsileri Çamaır makinaları Aspiratörler Elektrostatik çökelticiler Kaynak makinaları
Model trenler Ultrasonik generatörler Fotokopi makinaları Motor kontrolleri Kesintisiz güç kaynakları Yiyecek karıtırıcılar Motor sürücüleri Yüksek frekanslı aydınlatma TV oyunları
Sinema projektörleri Hava taıtı güç kaynakları Garaj kapı açıcıları Elektronik ateleme Uzay aracı güç kaynakları Gaz türbini balatıcıları
Regülatörler Saç kurutma makinaları Generatör uyartıcıları Matbaa makinaları El tipi güç aygıtları Öütücüler
Genel elektronik elemanlarında kullanılan DC güç kaynaklarının çou, AC kaynaının dorultulması ile DC anahtarlamalı güç kaynaı tipidir. Dier uygulamalar ise evlerde kullanılan ıık ayarlama anahtarları ve taınabilir güç aletlerinde kullanılan deiken hız kontroludur. Çok büyük güçlerde, üretilen AC enerjisi DC olarak uzun mesafeli iletimi salamak için dorultulur; iletim hattının sonunda bir DC-AC konvertör AC sistemi enerjilemek için 50-60 Hz de çalıır. Böyle bir düzenleme, bir elektrik daıtım irketine ekonomik ve ilemsel avantajlar salar. Böyle güç elektronii sistemleri tüketici ve endüstriyel elemanlarda çok geni alanda bulunmaktadır.
111...666 AAANNNAAALLLZZZ MMMEEETTTOOOTTTLLLAAARRRIII
Kullanılan analiz metotları, parçalı dorusal modelli bir yarı-iletken elemanı modellemektedir. Baka bir modelle temsil edilen, yeni bir bölgeyi geçen yarı-iletken ileminde yeni bir model kullanılır. Modellerin en basit olanlarında, iki durum
bulunmaktadır: Yarı-iletken iletimde veya iletimde deildir. Bu model üzerinde gerekli olduu zaman hassasiyet artırılabilir. Örnein, yarı-iletkenin kayıplarını gösterebilmek için böyle ikinci dereceli modeller gerekebilir.
Güç elektroniindeki yarı-iletken uygulamaları bu birinci derece teknik ile iyi bir ekilde modellenebilir. Çou devrenin çalıma modu, bir ideal anahtar elemanının çok basit bir modeli kullanılarak belirlenebilir. Gerekli olduu yerde, analize gerçekte ideal olmayan eleman için hassasiyet eklenebilir. Örnek olarak bir rezonans devresinin analizinde, kayıpsız LC analiz kullanılır. Bir anahtarlama elemanındaki kayıplar veya bir indüktörün direnci, bariz bir etki varsa hesaba katılır. Amaç verimli bir güç dönüüm ileminin gerçekletirilmesi olduundan, kayıplar devre ileminin büyük bir bileeni olmamalıdır.
lgili bölümlerde amaç, anahtar olarak kullanılan özel bir anahtardan baımsız olarak
devre analizini yapmaktır. Bazı durumlarda anahtarlama elemanı olarak sadece SCR’nin kullanılabildii AC-DC dönüümlerinde bu mümkün olmayabilir. DC-DC dönüümü gibi dier durumlarda bir tipten daha fazla tipte anahtarlama elemanı kullanılabilir. Bir SCR, bir BJT veya bir MOSFET arasında güç seviyesine, istenilen anahtarlama frekansına ve istenilen verimlilie balı olarak seçim yapılabilir.
2., 3. ve 4. bölümlerde, farklı yarı-iletken anahtarlar gözönüne alınmı, modelleri yapılmı ve bazı çalıma artları analiz edilmitir. Dier bölümlerde, güç kontrolunun deiik tipleri analiz edilmi ve tasarım metotları gösterilmitir. Güç elektronik aygıtlarının tasarımı, ilgili bölümde de görülecei gibi, dört kısma ayrılabilir:
1. Güç devrelerinin tasarımı 2. Güç aygıtlarının tasarımı 3. Kontrol stratejisinin belirlenmesi 4. Lojik ve kapı devrelerinin tasarımı
Bir prototip yapılmadan önce tasarımcının devrenin parametrelerini bulabilmesi ve devrede oluabilecek ideal olmayan durumları gözönüne alıp gerektii zaman bunları düzeltmesi gerekir. Prototip yapıldıktan ve denendikten sonra tasarımcı tasarımının geçerlilii hakkında emin olabilir ve devrenin bazı parametreleri (indüktanstaki bazı kayıplar gibi) hakkında daha doru tahminlerde bulunabilir.
111...777 ÇÇÇAAALLLIIIMMMAAA SSSOOORRRUUULLLAAARRRIII
1.1 Güç elektronii nedir? 1.2 Tristörlerin deiik tipleri nedir? 1.3 Bir konvertör nedir? 1.4 AC-DC dönüümünün prensibi nedir? 1.5 AC-AC dönüümünün prensibi nedir? 1.6 DC-DC dönüümünün prensibi nedir? 1.7 Güç elektronii aygıtlarının tasarımında izlenecek adımlar nedir?
222 GGGÜÜÜÇÇÇ DDDYYYOOOTTTLLLAAARRRIII
Bu bölümde güç dorultucu diyotlarının ana karakteristiklerinden bahsedilmektedir. Schottky engel diyotlarının da belli bazı kullanım yerlerinin olmasına ramen, çok kullanılan diyotlar daha çok PN jonksiyon elemanları olmaktadır. Dinamik davranıına ek olarak büyük ilgi, diyotun temel modelleri üzerindedir ve ilerleyen kısımlarda bunlar üzerinde durulmaktadır.
222...111 PPPNNN---JJJOOONNNKKKSSSYYYOOONNN DDDYYYOOOTTTLLLAAARRRIII
En çok kullanılan güç-dorultma elemanı PN-jonksiyon diyotu’dur. Uygun bir akımın iletimi için, bir jonksiyon bir kılıfın içine yerletirilmitir. Bu elemanlarda, ileri iletim durumunda, jonksiyon elemanları arasında çok az bir gerilim düümü vardır. Geri (ters) çalıma durumunda ise çok az bir akım geçirirler.
PN-jonksiyonlu diyotlar, iletim ve tıkama durumlarında hızlı geçi özelliine sahiptirler. Birkaç mikro-saniyelik anahtarlama zamanlı diyotlar, 50 Hz gibi düük frekanslı gerilimleri dorultmada uygundur. Nano saniyenin onda biri civarında (10-10) anahtarlama kapasiteli diyotlar, akım ve gerilimin hızlı deitii devreler için uygundur. Hızlı iletimli diyotların fiyatı yava diyotlara göre pahalı olduundan, uygulama yerinin iyi seçilmesi gerekir.
222...111...111 SSSTTTAAATTTKKK DDDEEEVVVRRREEE MMMOOODDDEEELLLLLLEEERRR
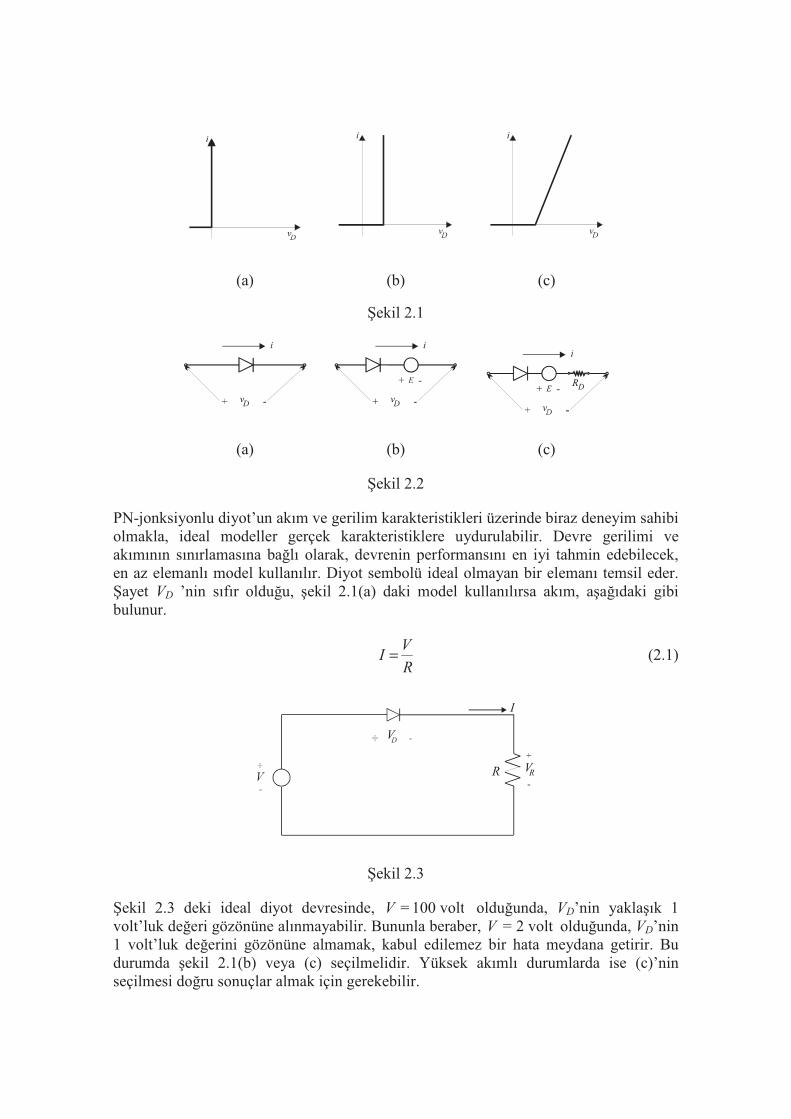
ekil 2.1(a) da görülen diyot devresi, ideal bir PN-jonksiyonlu diyotu temsil etmekte ve çou durumlar için yeterli dorulua sahiptir. Daha titiz ve karmaık modellemelerde (b) ve (c) durumları da gerekebilir. ekil 2.1’in (a), (b) ve (c) kısımları olabilecek, parçalı dorusal grafikleri gösterir ve dolayısiyle daha karmaık modellemelerde kullanılabilir.
ekil 2.1 de görülen karakteristiklerdeki devre modelleri, ekil 2.2 de verilmitir. ekildeki her diyot sembolü ideal bir diyotu temsil eder; (b) ve (c) durumlarında devre ideal devre elemanları ile yeniden düzenlenmitir. ayet diyot ekil 2.1 de görülen üç durumdan herhangi biri ile gösteriliyorsa devrenin analizi, parçalı dorusal devre analizi kullanılarak yapılabilir.
(a) (b) (c)
ekil 2.1
(a) (b) (c)
ekil 2.2
PN-jonksiyonlu diyot’un akım ve gerilim karakteristikleri üzerinde biraz deneyim sahibi olmakla, ideal modeller gerçek karakteristiklere uydurulabilir. Devre gerilimi ve akımının sınırlamasına balı olarak, devrenin performansını en iyi tahmin edebilecek, en az elemanlı model kullanılır. Diyot sembolü ideal olmayan bir elemanı temsil eder. ayet VD ’nin sıfır olduu, ekil 2.1(a) daki model kullanılırsa akım, aaıdaki gibi bulunur.
R
VI = (2.1)
ekil 2.3
ekil 2.3 deki ideal diyot devresinde, V = 100 volt olduunda, VD’nin yaklaık 1 volt’luk deeri gözönüne alınmayabilir. Bununla beraber, V = 2 volt olduunda, VD’nin 1 volt’luk deerini gözönüne almamak, kabul edilemez bir hata meydana getirir. Bu durumda ekil 2.1(b) veya (c) seçilmelidir. Yüksek akımlı durumlarda ise (c)’nin seçilmesi doru sonuçlar almak için gerekebilir.

Genel olarak PN-jonksiyonlu diyotlarda ters akım ihmal edilir, fakat bazı özel durumlarda, özellikle yüksek sıcaklıkta ters akım ihmal edilmeyebilir. Bu problem, model’e paralel eklenen bir dirençden bu ters akımın akıtılmasıyla giderilebilir. Direnç seçiminde ters gerilimin maksimum deeri dikkate alınır.
imdiye kadar bahsedilen statik modellere ek olarak, bazı dinamik etkiler eklenebilir. Bunlardan biri de jonksiyon kapasitesidir. Bu kapasite dorusal olmayıp ters gerilime balıdır. Çou durumlarda bu kapasitans, devrede mevcut baka kapasitörlere kıyasla ihmal edilebilir.
ÖRNEK 2.1
ekil 2.2 deki devrede 1N5402 diyotu kullanılmakta olup V = 100 volt ve R = 11 Ωdur. Devreden geçen akımı bulunuz.
ÇÖZÜM
ekil 2.1(a) daki model kullanıldıında,
I = =100
119 1, A
ekil 2.1(b) deki model kullanıldıında, VD’nin deeri gerekir. Bu dorultucunun bilgi-sayfası, 9,4 A ve 25 °C için, tipik ve maksimum olarak, 1 ve 1,2 V deerlerini verir. Tipik deer kullanıldıında,
I =−
=100 1
119A
Maksimum deer kullanıldıında,
I =−
=100 1 2
118 98
,, A
bulunur. Dorusal grafik koordinatları üzerinde, tipik 1N5402’nin bilgilerinin yeniden çizilmesi ile, E = 0,86 V ve RD = 0,0135 Ω olarak belirlenir.
IV E
R RD
=−
+=
−
+=
100 0 86
11 0 01359
,
, A
bulunur. Bu örnekte RD’nin eklenmesinin çok etkisi olmamıtır.
ÖRNEK 2.2
Örnek 2.2 deki kaynak gerilimi -200 volt olarak deitirilmitir. Bu elemanın -200 volt ters gerilimde, ters akımın bilgi-sayfasındaki deeri 500 µA dir (TJ=150°C). Aaıdakileri bulunuz:
a) Ters gerilim ilemini temsil eden bir devre modeli

b) Devre akımı c) VR’nin deeri
ÇÖZÜM
(a) 500 µA lik en kötü durum gözönüne alınırsa, ters akım, devrenin dier kısmı ile paralel 200/500 = 0,4 MΩ’luk bir dirençle temsil edilir. Devre, ekil 2.4 de görüldüü gibi olur.
ekil 2.4
(b) Ters akım, I =−
+ ×= − × −200
10 0 4 10500 106
6
, A olarak hesaplanır.
(c) VR’nin deeri I akımı kullanılarak hesaplanır: V IR = = −10 0 005, V. -200 voltluk
kaynak gerilimine kıyasla VR ihmal edilebilir. Kaynak geriliminin hemen hemen hepsi dorultucu uçlarında gözükür. Örnek 2.1 de hesaplanan ileri akıma kıyasla ters akım epeyce küçüktür ve ihmal edilebilir.
ÖRNEK 2.3
ekil 2.3 deki devrede kaynak gerilimi 5 V, R=0,2 Ω ve diyot tipi 1N3879 dur. 1N3879 diyotunun karakteristik erisi (TJ=150 °C) ekil 2.5 de gösterilmitir. ekil 2.2 de gösterilen her üç model için akımları bulunuz.
ekil 2.5

ÇÖZÜM
(a) Gerilim düümü sıfır olan ideal diyot ile:
I = =5
0 225
,A
(b) Gerilim düümü 1 volt olan ideal diyot ile:
I =−
=5 1
0 220
,A
(c) ekil 2.5 deki diyot karakteristiinin eiminin tersi, RD=0,0263 Ω olarak belirlenir. 1 volt’luk iç gerilim düümü, RD=0,0263 Ω’luk iç direnç ve ideal diyot ile:
I =−
+=
5 1
0 2 0 026317 67
, ,, A
Örnekteki üç kısım, tahmin edilen akımın deiik modellerdeki etkisini açıkça göstermektedir. Böyle düük kaynak geriliminde, birinci model devre akımını bulmak için doru deildir. Devre akımını bulmak için, üçüncü modeli kullanmada sarfedilen çaba gerekli olmayabilir. Eklenmi direnç elemanı ile bu model büyük diyot akımları için gerekebilir.
222...111...222 KKKEEESSSMMM DDDÖÖÖNNNÜÜÜÜÜÜMMMÜÜÜ
Ardıık ters polarlama gerilimi ile diyotun kesimi, ters gerilimi karılayabilecek bir deerde PN jonksiyonunun yüklenmesi için negatif eleman akımını gerektirir. Böyle bir yüklemeden sonra, ters akım bilgi-sayfasında belirtilen kararlı durum ters akım deerinin küçük bir deeri olur. Bu ters dönüüm akımı, devrenin toplam performansı üzerinde bariz etkiler oluturabilir.
Ters kesim aralıı süresince diyot akımının zamanla deiiminin bir grafii ekil 2.6 da görülmektedir. Bu grafikte, devre aksiyonu ve eleman deerleri, eleman akımının orijinal deerinden sıfıra dütüü oranı belirlemektedir. Akımın sıfır deerinden sonra, dıarıdaki devre akımın deiim oranını belirlemeyi sürdürür. Bu zaman süresince, diyot uçlarındaki gerilim temelde sıfırdır; bu deer devre davranıının modellenmesinde kullanılabilir. Diyot ters gerilimi henüz karılayabilecek durumda olmadıından, akımla zaman deiiminin eimi, akım sıfır olurken deimez. Sadece jonksiyon bölgesine yeterli yük salandıktan sonra jonksiyon ters gerilime karı gelmeye balar ve ters akım deerinin kararlı duruma azalmasına neden olur.
Ters akımın tepe deeri ve dönüüm yükü (gölgeli kısımla gösterilmi alan), balangıç akımı, sıcaklık ve kesim ilemi süresindeki akımın deiim oranı gibi deikenleri içeren çok sayıdaki deikenlerin fonksiyonlarıdır. PN elemanının dizaynına balı olarak, tepe deerinden sonra ters akımın deiim oranı tamamen ani veya yavaolabilir. 50-60 Hz ilemi için bu etki genel olarak ihmal edilebilir. Kaynak gerilimi yön deitirirken, akımın azalma oranı çok küçüktür, dorultucu deiimlerin oluum hızına

balı olarak bunu hemen karılar. Devreye ters gerilim uygulandıında ters akımın jonksiyonu yüklemesi gerekir, fakat normal dorultucu akımı ile karılatırıldıında bu deer genelde küçüktür. Düük frekanslı ilemler için kullanılan böyle elemanlar, genel olarak bu etki için karakterize edilmezler.
ekil 2.6
Ters akım deeri ve tersine dönüüm zaman deeri, bazı hızlı dorultucular için belirlenebilir. ekil 2.6 daki grafikten aaıdaki eitlikler yazılabilir:
Q I trr RM rr= 0 5, (2.2)
Idi
dttRM
D=
1 (2.3)
( )( )t
Q
di dt trr
rr
D
=2
1/ (2.4)
Eitliklerde, Qrr , ekil 2.6 da gölgeli alanla gösterilen yük, IRM ters akımın tepe deeri, trr tersine dönüüm zamanı ve t1 ve t2 ise trr zamanının alt bölümleridir. Yukarıdaki eitlikler trr ve IRM deerlerini bulmak için kullanılabilir. Sınırlayıcı iki durumun birincisinde, t2 trr ile karılatırıldıında ihmal edilebilir ve ani dönüüme karılık gelir; ikinci durumda, t2 trr’nin yarısıdır ve yumuak dönüüme karılık gelir. Birinci durumda, t2=0 ve t1 = trr , eitlikler aaıdaki gibi olur:
( )t
Q
di dtrr
rr
D
=
20 5
/
,
(2.5)
I Qdi
dtRM rr
D=
2
0 5,
(2.6)
kinci durumda, t ttrr
1 2 2= = , eitlikler aaıdaki gibi olur:

( )t
Q
di dtrr
rr
D
=
40 5
/
,
(2.7)
I Qdi
dtRM rr
D=
0 5,
(2.8)
Bu iki çözüm, gerçek bir durumda sınırları verir ve problem iki durum arasındaki bir yerde bulunabilir. Qrr deeri tamamen devreye balıdır ve bazı hızlı dorultucuların bilgi-sayfalarında bulunabilir.
ÖRNEK 2.4
Bir 1N3879 diyotu 100°C lik jonksiyon sıcaklıında 20 amperlik balangıç akımı ile çalımaktadır. Diyot, bir devrede akımın 20 amper/mikrosaniye (A/µs) oranında yön deitirdii tıkama kapasitesini karılayabilmektedir. trr ve IRM deerlerini bulunuz.
ÇÖZÜM
Bu elemanın bilgi-sayfasından, bu artlar için tipik Qrr deeri 0,22 mikrokulondur (µC). t2’nin ihmal edilebildii durum için çözüm aaıdaki gibi olur:
trr =×
×
= ×
−−2 0 22 10
20 10148 10
6
6
0 5
9( , ),
s
[ ]IRM = × × =−( )( , )( ) ,,
2 0 22 10 20 10 2 976 6 0 5A
kinci gurup varsayımlar için hesaplar yeniden yapıldıında çözüm aaıdaki gibi olur:
trr = × −210 10 9 s
IRM = 2 10, A
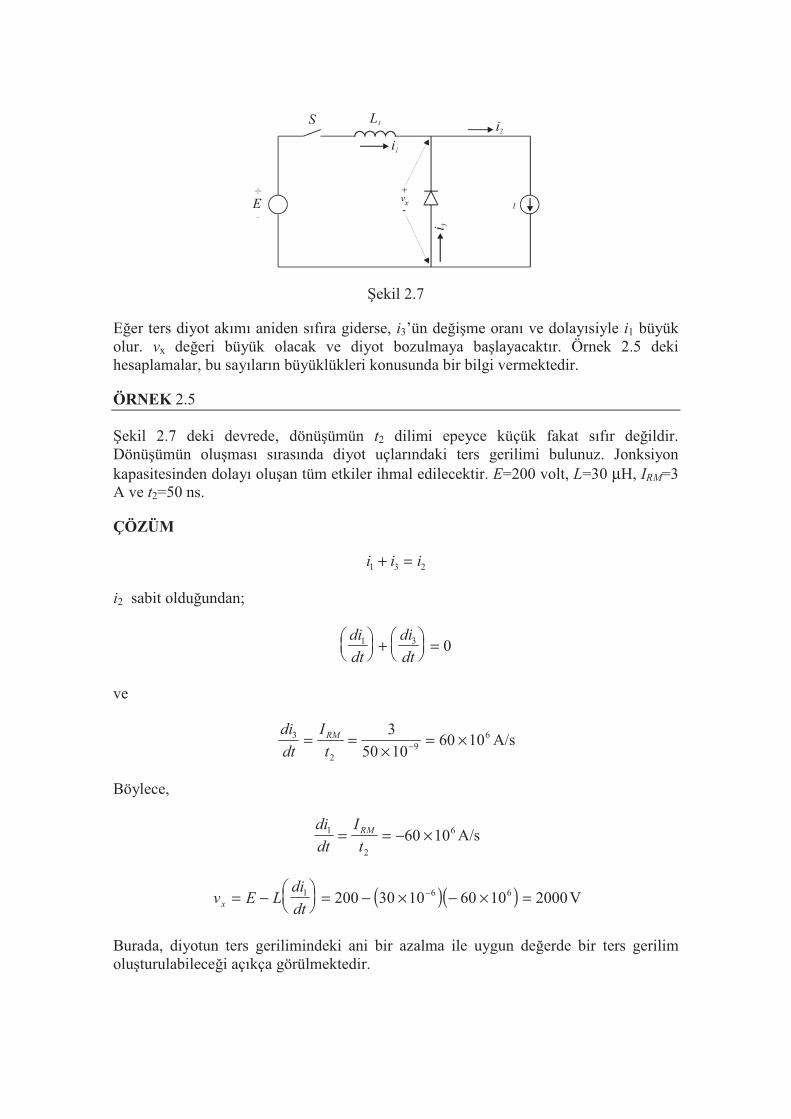
Ters akımın tepe deerindeki deime, özellikle t1 ile karılatırıldıında t2 nin küçük olduu durumda, bariz bir devre etkisine sahiptir. Bu etkiyi temsil edebilen bir devre ekil 2.7 de gösterilmektedir. Bu devrede, S anahtarı i1=0 ve i3=I balangıç artları ile kapanır. Anahtar kapandıktan sonra vx , i1 artarken ve i3 azalırken sıfır deerinde kalır. i1=I iken i3=0 ve diyot ters dönüüme balar. vx deeri sıfırda kalır ve i1, i3 ’ün ters tepe deerine kadar artıını sürdürür.
ekil 2.7
Eer ters diyot akımı aniden sıfıra giderse, i3’ün deime oranı ve dolayısiyle i1 büyük olur. vx deeri büyük olacak ve diyot bozulmaya balayacaktır. Örnek 2.5 deki hesaplamalar, bu sayıların büyüklükleri konusunda bir bilgi vermektedir.
ÖRNEK 2.5
ekil 2.7 deki devrede, dönüümün t2 dilimi epeyce küçük fakat sıfır deildir. Dönüümün oluması sırasında diyot uçlarındaki ters gerilimi bulunuz. Jonksiyon kapasitesinden dolayı oluan tüm etkiler ihmal edilecektir. E=200 volt, L=30 µH, IRM=3 A ve t2=50 ns.
ÇÖZÜM
i i i1 3 2+ =
i2 sabit olduundan;
di
dt
di
dt
1 3 0
+
=
ve
di
dt
I
t
RM3
29
63
50 1060 10= =
×= ×− A/s
Böylece,
di
dt
I
t
RM1
2
660 10= = − × A/s
( )( )v E Ldi
dtx = −
= − × − × =−1 6 6200 30 10 60 10 2000V
Burada, diyotun ters gerilimindeki ani bir azalma ile uygun deerde bir ters gerilim oluturulabilecei açıkça görülmektedir.
Aaıdakiler, örnek 2.5 de karılaılan problemlere bir çözüm olarak verilmektedir:
(a) daha yava dönüümlü bir diyot (b) diyota paralel bir (snubber) koruyucu devre (c) diyota paralel zener diyot gibi bir sıkıtırma elemanı (d) yukarıdakilerin bir kombinasyonu
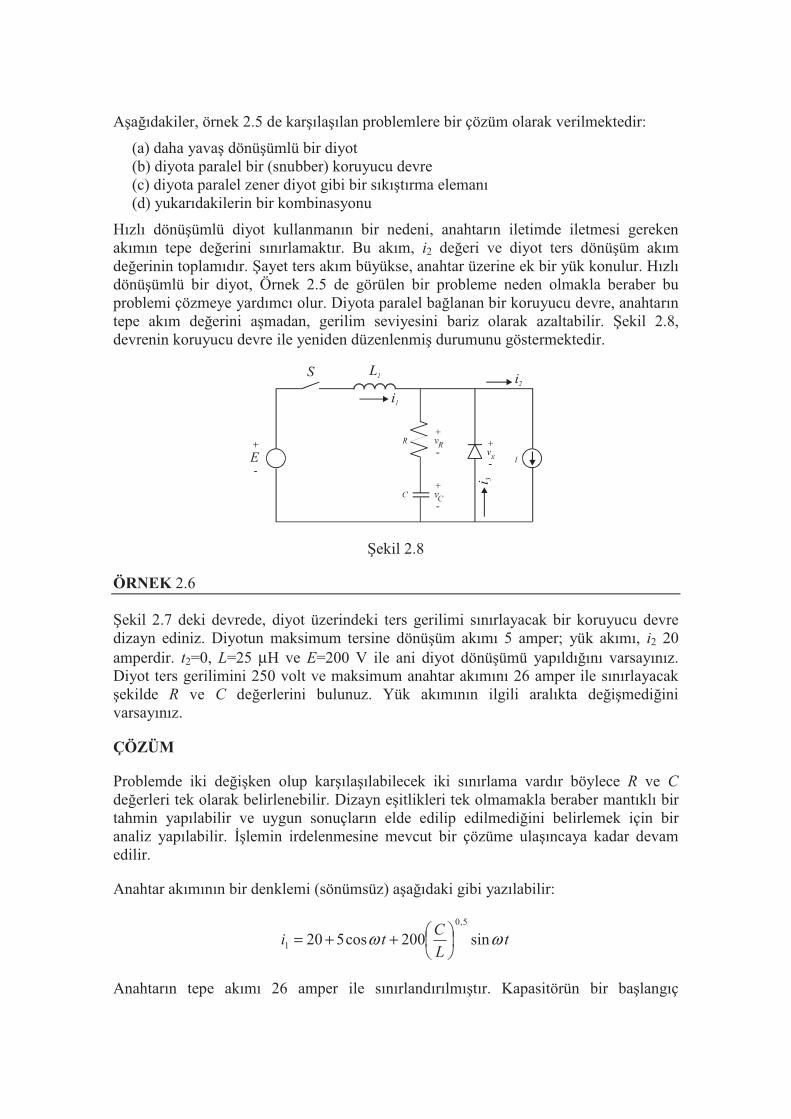
Hızlı dönüümlü diyot kullanmanın bir nedeni, anahtarın iletimde iletmesi gereken akımın tepe deerini sınırlamaktır. Bu akım, i2 deeri ve diyot ters dönüüm akım deerinin toplamıdır. ayet ters akım büyükse, anahtar üzerine ek bir yük konulur. Hızlı dönüümlü bir diyot, Örnek 2.5 de görülen bir probleme neden olmakla beraber bu problemi çözmeye yardımcı olur. Diyota paralel balanan bir koruyucu devre, anahtarın tepe akım deerini amadan, gerilim seviyesini bariz olarak azaltabilir. ekil 2.8, devrenin koruyucu devre ile yeniden düzenlenmi durumunu göstermektedir.
ekil 2.8
ÖRNEK 2.6
ekil 2.7 deki devrede, diyot üzerindeki ters gerilimi sınırlayacak bir koruyucu devre dizayn ediniz. Diyotun maksimum tersine dönüüm akımı 5 amper; yük akımı, i2 20 amperdir. t2=0, L=25 µH ve E=200 V ile ani diyot dönüümü yapıldıını varsayınız. Diyot ters gerilimini 250 volt ve maksimum anahtar akımını 26 amper ile sınırlayacak ekilde R ve C deerlerini bulunuz. Yük akımının ilgili aralıkta deimediini varsayınız.
ÇÖZÜM
Problemde iki deiken olup karılaılabilecek iki sınırlama vardır böylece R ve C
deerleri tek olarak belirlenebilir. Dizayn eitlikleri tek olmamakla beraber mantıklı bir tahmin yapılabilir ve uygun sonuçların elde edilip edilmediini belirlemek için bir analiz yapılabilir. lemin irdelenmesine mevcut bir çözüme ulaıncaya kadar devam edilir.
Anahtar akımının bir denklemi (sönümsüz) aaıdaki gibi yazılabilir:
tL
Cti ωω sin200cos520
5,0
1
++=
Anahtarın tepe akımı 26 amper ile sınırlandırılmıtır. Kapasitörün bir balangıç

deerinin seçimi, sinüs terimine keyfi bir deerin atanması ile yapılabilir. Dier terimlerle birlikte bu terimin kombinasyonu için 7 amperlik maksimum deer seçimi, i1=28,6 amperlik sönümlü olmayan bir tepe deeri üretir. Sönüm ile birlikte, tepe deer 28,6 amperden daha az olacaktır:
200 7C
L= A
Yukarıdaki terimin, kosinüs terimi, DC terim ve mevcut gerçek sönüm ile birlikte kombinasyonu, akımın tepe deer gereksinimini karılayabilir. Verilen indüktans deeri ile birlikte, mikrofarad cinsinden kapasitans bulunur:
C = 0 03, µF
Bu deerler kullanılarak, zayıflama (attenuation) olmadan kapasitör gerilimi aaıdaki gibi verilir.
tC
LtvC ωω sin5)cos1(200
5,0
+−=
)624,0cos(246200 +−= tvC ω
Direnç üzerindeki gerilimin geçici bir süre için ihmal edilmesiyle, 246 volt deeri, vC’nin 250 volttan daha büyük deerde olmaması için kosinüs teriminin tepe deerinde 50 volt’tan daha az dümelidir.
ω = = ×1
1155 106
LC, rad/s
Tepe deer, πω =+ )624,0( t deerinde oluur;
t = ×−
2 18 10 6, s
e t− = =α 50
2460 203,
α = =7310002
R
L
ve
R = 36 6, Ω
Böylece 03,0=C µF ve R=37 Ω deerleri ile bir balangıç dizaynı kullanılması gerekir.
Bu deerler kullanılarak tam bir çözüm
i e tt
d1 20 7 043 0 7814= + −, cos( , )α ω
v e tX
t
d= − +200 203 33 1 398, cos( , )α ω
dür. Formülde,
α = 660000 /s
ω d = 947490 rad/s
Maksimum i1, 0,1826 µs de oluur ve 25,12 amperdir.
Maksimum vX , 1,2 µs de oluur ve 275,7 volt’tur.
Bu sonuçlar tepe gerilim gereksinimini karılamamakta olup ikinci bir irdeleme gereklidir. Daha büyük bir kapasitör, devre sönümü kapasitör gerilimini azaltıncaya kadar gerilim birikimini geciktirebilirdi. 0,05 µF lık bir kapasitör deeri, 0,3 µs de i1=25,12 amper ve 1,5 µs de vX = 271,6 volt maksimum deerlerini verir. Bu sonuçlar temelde gereksinimleri karılar.
222...111...333 LLLEEERRR DDDÖÖÖNNNÜÜÜÜÜÜMMM
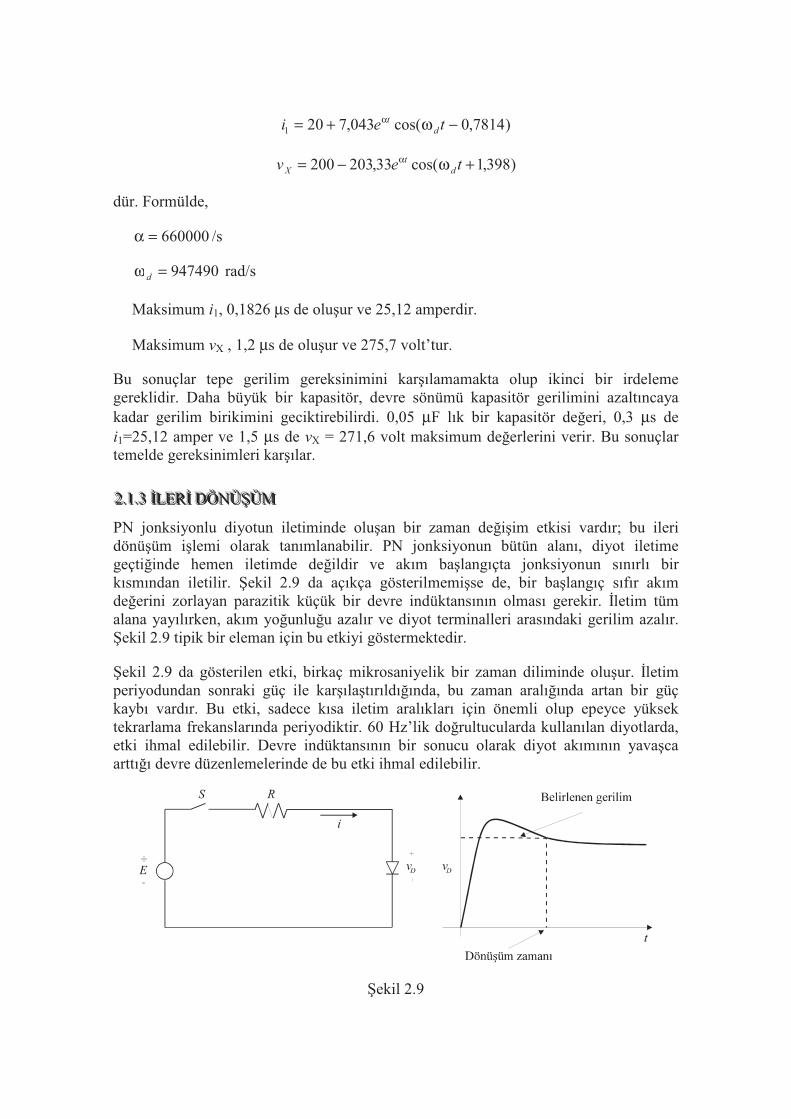
PN jonksiyonlu diyotun iletiminde oluan bir zaman deiim etkisi vardır; bu ileri dönüüm ilemi olarak tanımlanabilir. PN jonksiyonun bütün alanı, diyot iletime geçtiinde hemen iletimde deildir ve akım balangıçta jonksiyonun sınırlı bir kısmından iletilir. ekil 2.9 da açıkça gösterilmemise de, bir balangıç sıfır akım deerini zorlayan parazitik küçük bir devre indüktansının olması gerekir. letim tüm alana yayılırken, akım younluu azalır ve diyot terminalleri arasındaki gerilim azalır. ekil 2.9 tipik bir eleman için bu etkiyi göstermektedir.
ekil 2.9 da gösterilen etki, birkaç mikrosaniyelik bir zaman diliminde oluur. letim periyodundan sonraki güç ile karılatırıldıında, bu zaman aralıında artan bir güç kaybı vardır. Bu etki, sadece kısa iletim aralıkları için önemli olup epeyce yüksek tekrarlama frekanslarında periyodiktir. 60 Hz’lik dorultucularda kullanılan diyotlarda, etki ihmal edilebilir. Devre indüktansının bir sonucu olarak diyot akımının yavaca arttıı devre düzenlemelerinde de bu etki ihmal edilebilir.
ekil 2.9
ÖRNEK 2.7
Bir 1N3879 dorultucu, 50 amperlik ileri akımın 25 µs’lik periyodun %5’inde periyodik olduu bir devrede kullanılmaktadır. TJ = 25 °C dir.
(a) leri dönüüm zamanı nedir? (b) Bu etkiden dolayı diyotta oluan kaybı bulunuz.
ÇÖZÜM
(a) 1N3879’un bilgi-sayfasından 1,1 volt için tipik dönüüm zamanı 0,85 µs olarak okunabilir.
(b) Akımın yükselme zamanı üzerinde hiçbir bilgi olmadıından ve dönüümden önce dorultucu geriliminin büyüklüü ile ilgili bilgi olmadıından, bu soruya miktar olarak cevap verilemez. leri dönüüm zamanı 1,25 µs lik iletim zamanı ile karılatırıldıında bariz olmaktadır ve iletim kayıpları kararlı durum kayıplarından daha büyük olacaktır.
222...222 SSSCCCHHHOOOTTTTTTKKKYYY EEENNNGGGEEELLL DDDYYYOOOTTTLLLAAARRRIII
Schottky engel diyotları, bilinen PN jonksiyonları olmaksızın yapılmılardır ve azınlık yük taıyıcıları ile ilgili etkileri göstermezler. PN jonksiyonlu diyotta olduu gibi yük birikimi ve tersine dönüüm zamanı yoktur. Ters yönde, sadece dorusal olmayan bir kapasitör, elemanın dinamik davranılarını temsil etmek için kullanılabilir.
Schottky diyotlarının kullanılmasının bir nedeni, ileri akım iletimi süresinde gerilim düümünün oldukça düük olmasıdır. Daha düük ileri gerilim düümü, bir PN jonksiyon diyotuna göre normalden daha büyük ters sızıntı akımı eklinde dengelenebilir. Kullanılan özel bir engel metalinin, ilgili sızıntı akımında olduu kadar ileri gerilim düümüne de etkisi vardır. Kromdan yapılan engeller, düük ileri gerilim düümü ve yüksek ters akım salarlar. Tungstenden yapılan elemanlar ise büyük ileri gerilim düümü ve daha düük ters akım meydana getirirler. Molibden ve platin orta derecede sonuçlar verir.
Schottky diyotları, dorultma ileminin verimliliinin gelitirilmesi istenen düük gerilimli dorultucu devrelerinde kullanılırlar. Epeyce düük olan ters delinme gerilimleri, böyle düük gerilim uygulamalarında kabul edilebilir.
222...222...111 SSSTTTAAATTTKKK DDDEEEVVVRRREEE MMMOOODDDEEELLLLLLEEERRR
Statik devre modelleri, PN jonksiyonlu diyotta bulunan biçimlere benzemektedir. Farklılık modeldeki elemanların deerlerindedir. leri gerilim daha düüktür ve bunun sonucunda da düük iletim kayıpları olmaktadır. Ters sızıntı akımı ilgili PN jonksiyonlu diyota göre daha büyüktür.
ÖRNEK 2.8
Bir 1N5828 dorultucu, bir devrede 20 voltluk tepe deerli kare dalgalı alternatif kaynaını dorultmada kullanılmaktadır. ekil 2.10 da karakteristik gösterilmitir. Yük direnci 1 Ω ve TJ=100°C dir. Aaıdakileri bulunuz.
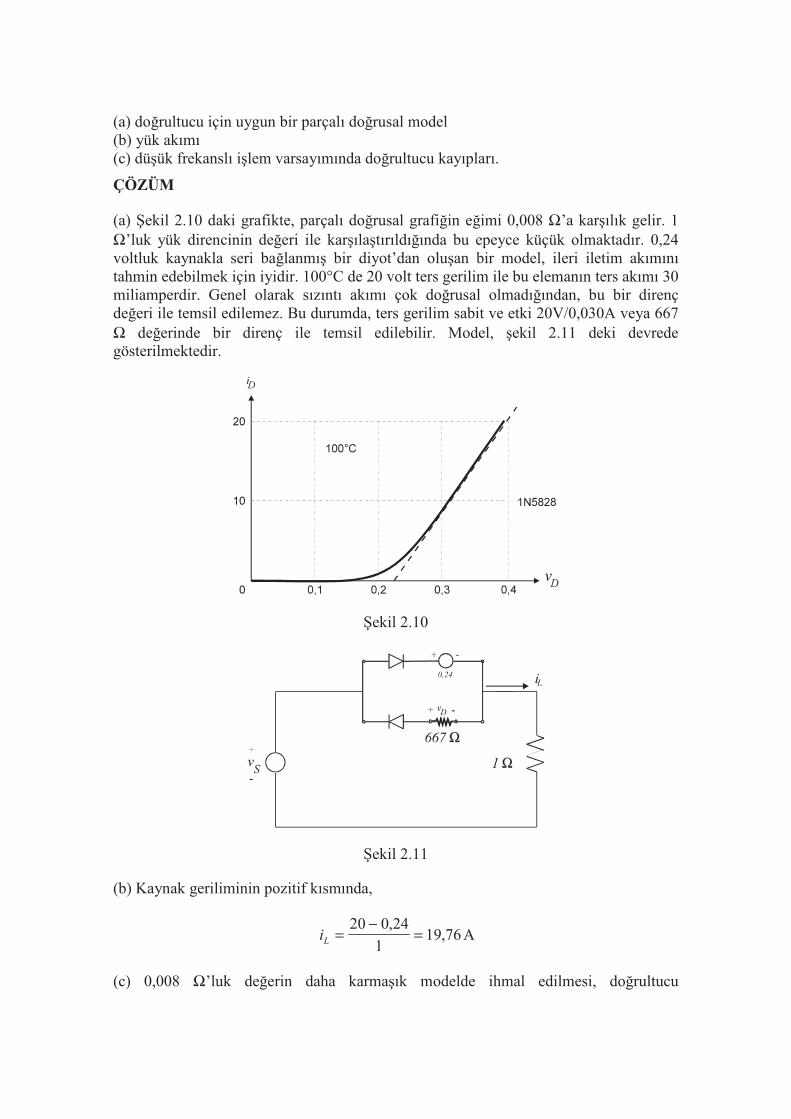
(a) dorultucu için uygun bir parçalı dorusal model (b) yük akımı (c) düük frekanslı ilem varsayımında dorultucu kayıpları.
ÇÖZÜM
(a) ekil 2.10 daki grafikte, parçalı dorusal grafiin eimi 0,008 Ω’a karılık gelir. 1 Ω’luk yük direncinin deeri ile karılatırıldıında bu epeyce küçük olmaktadır. 0,24 voltluk kaynakla seri balanmı bir diyot’dan oluan bir model, ileri iletim akımını tahmin edebilmek için iyidir. 100°C de 20 volt ters gerilim ile bu elemanın ters akımı 30 miliamperdir. Genel olarak sızıntı akımı çok dorusal olmadıından, bu bir direnç deeri ile temsil edilemez. Bu durumda, ters gerilim sabit ve etki 20V/0,030A veya 667 Ω deerinde bir direnç ile temsil edilebilir. Model, ekil 2.11 deki devrede gösterilmektedir.
ekil 2.10
ekil 2.11
(b) Kaynak geriliminin pozitif kısmında,
iL =−
=20 0 24
119 76
,, A
(c) 0,008 Ω’luk deerin daha karmaık modelde ihmal edilmesi, dorultucu
kayıplarında dikkate deer kayıplara öncülük eder. Örnein bu kısmı için, 0,008 Ω’luk direnç eklenmesiyle devre yeniden düzenlenir. leri iletimde,
iL =−
+=
20 0 24
1 0 00819 60
,
,, A
vD = + =0 24 19 60 0 008 0 376, ( , )( , ) , V
P v iD l= = =( )( ) ( , )( , ) ,0 376 19 60 7 78 W
Ters ilem süresince,
iL =−
+= −
20
667 10 030, A
v iD L= = −( )( ) ,667 19 97 V
P v iD l= = − − =( )( ) ( , )( , ) ,19 97 0 030 0 60 W
Yukarıdaki durumların her biri zamanın %50 sinde oluur, böylece diyot gücü bu iki deerin ortalamasıdır:
Port = + =12 7 78 0 60 4 19( , , ) , W
222...222...222 DDDNNNAAAMMMKKK PPPEEERRRFFFOOORRRMMMAAANNNSSS
Dinamik performansın temsilinde, statik modele paralel bir kondansatör eklenir. Bu kondansatörün deeri, ters gerilim deerinin dorusal olmayan bir fonksiyonudur. Deiimlerin çou, çok küçük ters gerilimlerde oluur. Bundan dolayı, ters gerilim çok büyükse, kabul edilebilir bir dorulukta sabit bir deer kullanılabilir. Aaıdaki örnek bu modelleme ilemini göstermektedir.
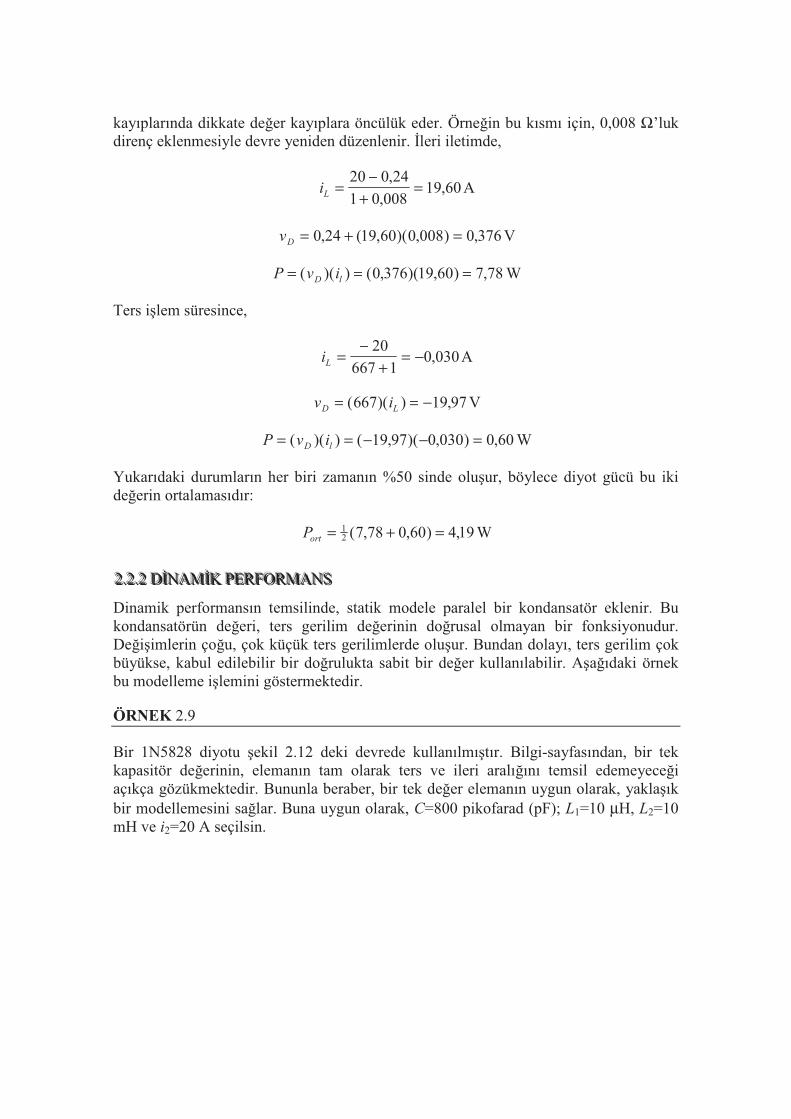
ÖRNEK 2.9
Bir 1N5828 diyotu ekil 2.12 deki devrede kullanılmıtır. Bilgi-sayfasından, bir tek kapasitör deerinin, elemanın tam olarak ters ve ileri aralıını temsil edemeyecei açıkça gözükmektedir. Bununla beraber, bir tek deer elemanın uygun olarak, yaklaık bir modellemesini salar. Buna uygun olarak, C=800 pikofarad (pF); L1=10 µH, L2=10 mH ve i2=20 A seçilsin.
ekil 2.12
(a) Anahtar kapandıktan ne kadar süre sonra diyot akımı sıfır olur? Bu kısım için, diyot ileri geriliminin sıfır olduu uygun bir deer. (b) Diyot ters geriliminin tepe deerini bulunuz.
ÇÖZÜM
(a) Bu aralık süresince devrenin denklemleri
10 10 0 206 1×
+ =− di
dt
i i i1 3 20 0 0 0 20( ) , ( ) ( )= = = A
ve
di
dt
1 62 10= × A/s
Balangıç aralıı süresince, L2’nin büyük deerinden dolayı i2 bariz bir deiim göstermez.
i i i1 3 2 20+ = = A
di
dt
di
dt3 1 62 10= − = − × A/s
Böylece
i t3620 2 10= − ×
ve i3 t = × −10 10 6 s de sıfır olur. Daha sonra, diyot kısmı ile ilgili olarak, i3 = 0. 800 pF deerindeki kapasitans ile (b) kısmı için eleman modellenir.
(b) L2 çok büyük olduundan, devre ekil 2.13 deki gibi modellenebilir.
Bu tam çözümlü bir temel LC rezonans devresidir. i2 akımı gerçekte akım kaynaı ile belirlenmez, fakat burada ilgili kısa bir zaman için geçerlidir.
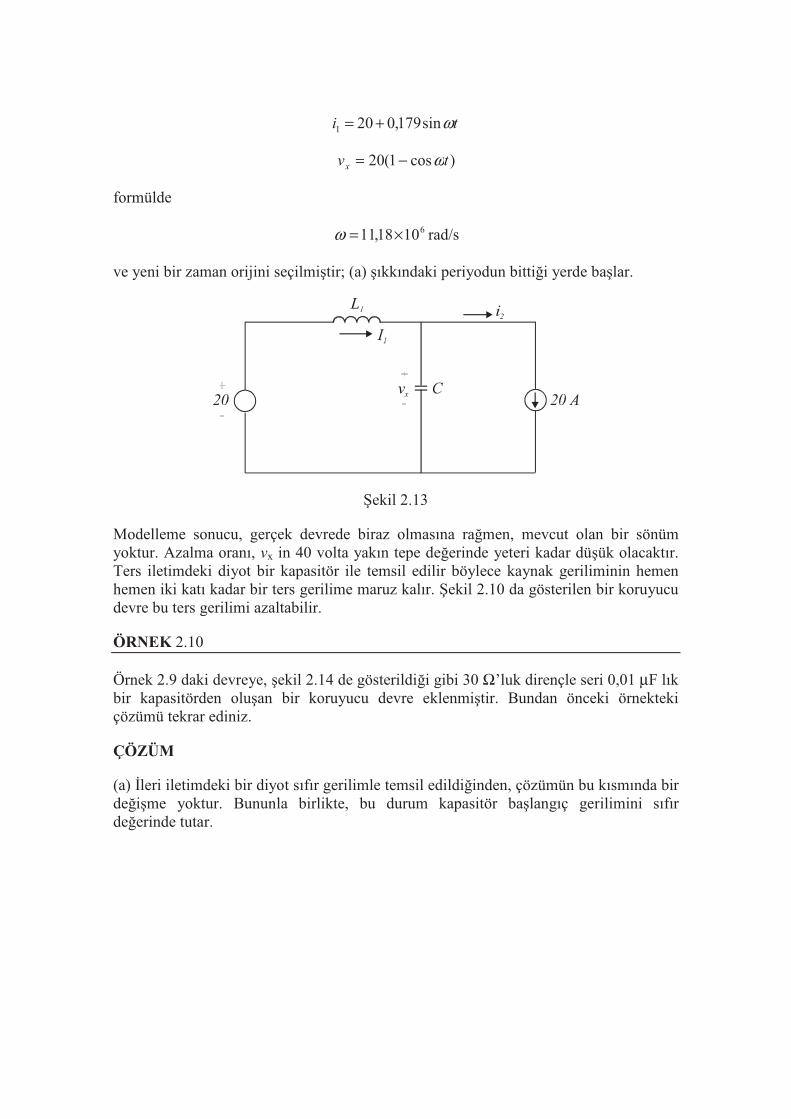
ti ωsin179,0201 +=
v tx = −20 1( cos )ω
formülde
61018,11 ×=ω rad/s
ve yeni bir zaman orijini seçilmitir; (a) ıkkındaki periyodun bittii yerde balar.
ekil 2.13
Modelleme sonucu, gerçek devrede biraz olmasına ramen, mevcut olan bir sönüm yoktur. Azalma oranı, vx in 40 volta yakın tepe deerinde yeteri kadar düük olacaktır. Ters iletimdeki diyot bir kapasitör ile temsil edilir böylece kaynak geriliminin hemen hemen iki katı kadar bir ters gerilime maruz kalır. ekil 2.10 da gösterilen bir koruyucu devre bu ters gerilimi azaltabilir.
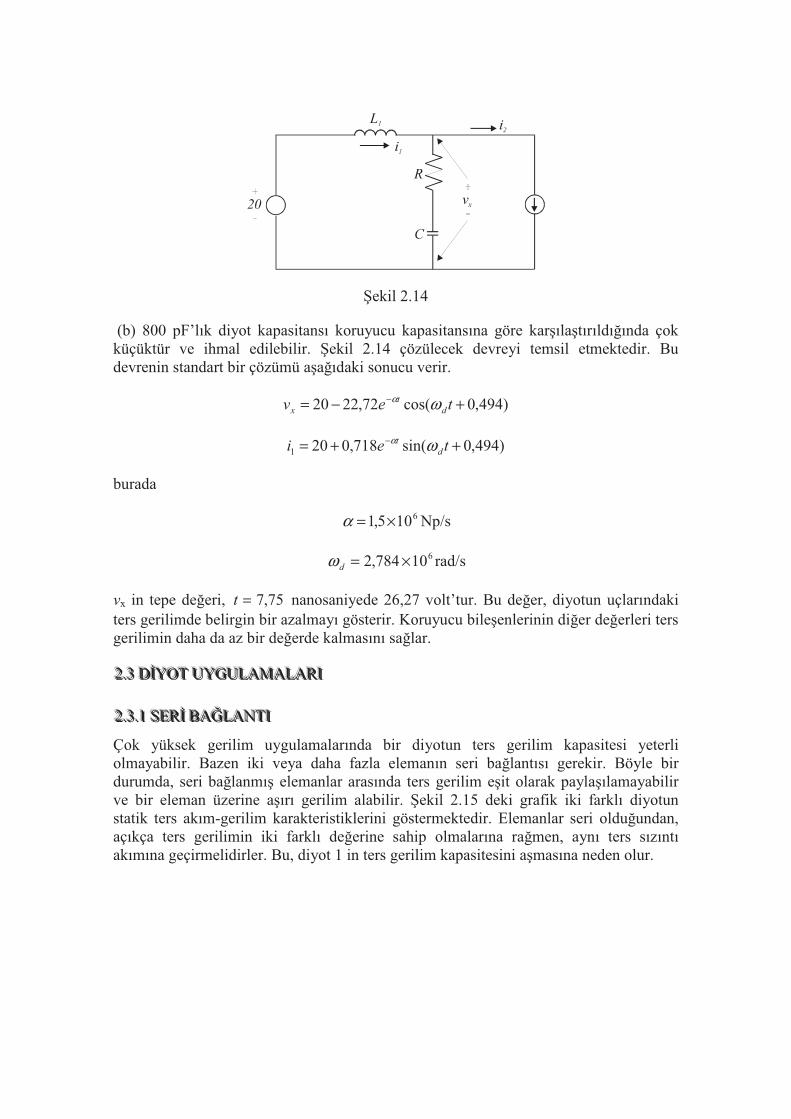
ÖRNEK 2.10
Örnek 2.9 daki devreye, ekil 2.14 de gösterildii gibi 30 Ω’luk dirençle seri 0,01 µF lık bir kapasitörden oluan bir koruyucu devre eklenmitir. Bundan önceki örnekteki çözümü tekrar ediniz.
ÇÖZÜM
(a) leri iletimdeki bir diyot sıfır gerilimle temsil edildiinden, çözümün bu kısmında bir deime yoktur. Bununla birlikte, bu durum kapasitör balangıç gerilimini sıfır deerinde tutar.
ekil 2.14
(b) 800 pF’lık diyot kapasitansı koruyucu kapasitansına göre karılatırıldıında çok küçüktür ve ihmal edilebilir. ekil 2.14 çözülecek devreyi temsil etmektedir. Bu devrenin standart bir çözümü aaıdaki sonucu verir.
)494,0cos(72,2220 +−= − tev d
t
x ωα
)494,0sin(718,0201 ++= − tei d
t ωα
burada
6105,1 ×=α Np/s
610784,2 ×=dω rad/s
vx in tepe deeri, t = 7 75, nanosaniyede 26,27 volt’tur. Bu deer, diyotun uçlarındaki ters gerilimde belirgin bir azalmayı gösterir. Koruyucu bileenlerinin dier deerleri ters gerilimin daha da az bir deerde kalmasını salar.
222...333 DDDYYYOOOTTT UUUYYYGGGUUULLLAAAMMMAAALLLAAARRRIII
222...333...111 SSSEEERRR BBBAAALLLAAANNNTTTIII
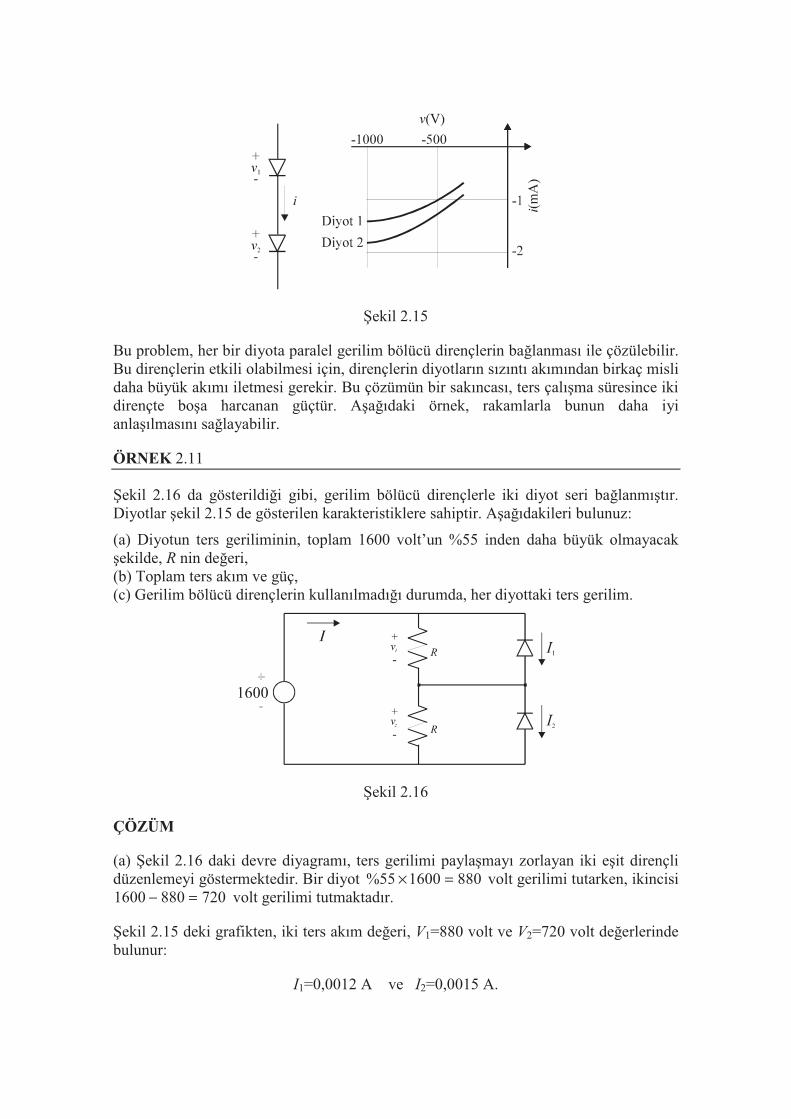
Çok yüksek gerilim uygulamalarında bir diyotun ters gerilim kapasitesi yeterli olmayabilir. Bazen iki veya daha fazla elemanın seri balantısı gerekir. Böyle bir durumda, seri balanmı elemanlar arasında ters gerilim eit olarak paylaılamayabilir ve bir eleman üzerine aırı gerilim alabilir. ekil 2.15 deki grafik iki farklı diyotun statik ters akım-gerilim karakteristiklerini göstermektedir. Elemanlar seri olduundan, açıkça ters gerilimin iki farklı deerine sahip olmalarına ramen, aynı ters sızıntı akımına geçirmelidirler. Bu, diyot 1 in ters gerilim kapasitesini amasına neden olur.
ekil 2.15
Bu problem, her bir diyota paralel gerilim bölücü dirençlerin balanması ile çözülebilir. Bu dirençlerin etkili olabilmesi için, dirençlerin diyotların sızıntı akımından birkaç misli daha büyük akımı iletmesi gerekir. Bu çözümün bir sakıncası, ters çalıma süresince iki dirençte boa harcanan güçtür. Aaıdaki örnek, rakamlarla bunun daha iyi anlaılmasını salayabilir.
ÖRNEK 2.11
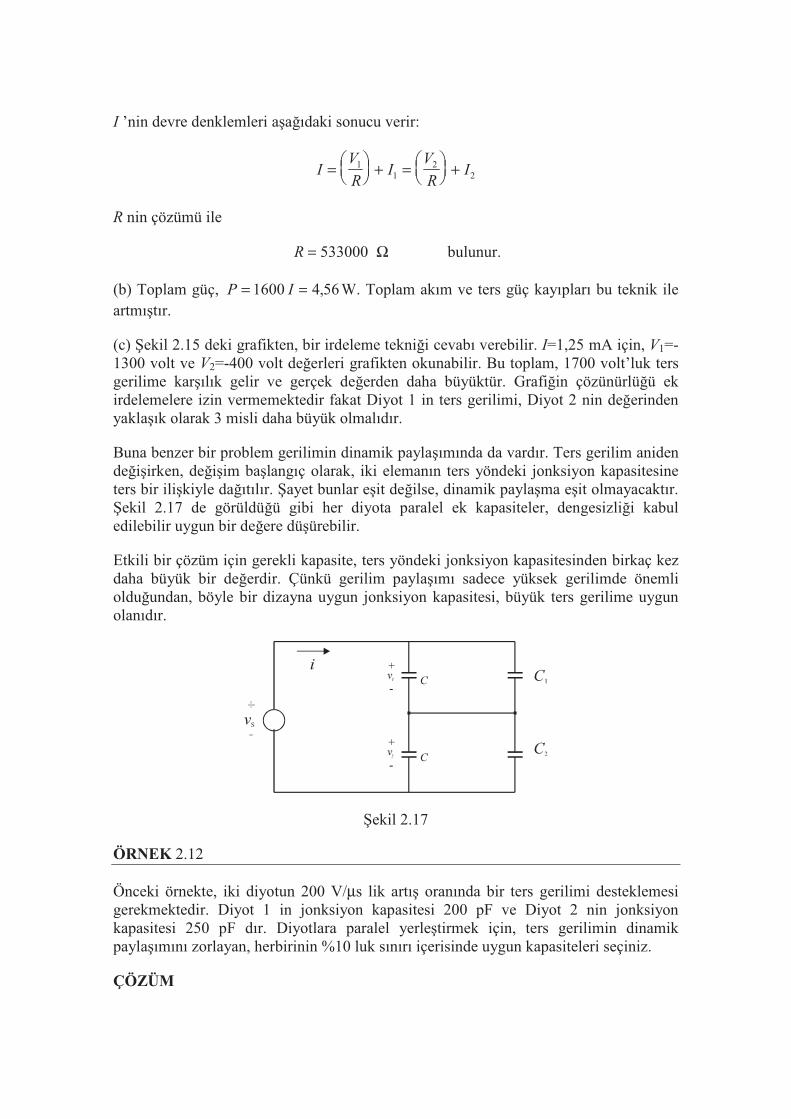
ekil 2.16 da gösterildii gibi, gerilim bölücü dirençlerle iki diyot seri balanmıtır. Diyotlar ekil 2.15 de gösterilen karakteristiklere sahiptir. Aaıdakileri bulunuz:
(a) Diyotun ters geriliminin, toplam 1600 volt’un %55 inden daha büyük olmayacak ekilde, R nin deeri, (b) Toplam ters akım ve güç, (c) Gerilim bölücü dirençlerin kullanılmadıı durumda, her diyottaki ters gerilim.
ekil 2.16
ÇÖZÜM
(a) ekil 2.16 daki devre diyagramı, ters gerilimi paylamayı zorlayan iki eit dirençli düzenlemeyi göstermektedir. Bir diyot %55 × =1600 880 volt gerilimi tutarken, ikincisi 1600 880 720− = volt gerilimi tutmaktadır.
ekil 2.15 deki grafikten, iki ters akım deeri, V1=880 volt ve V2=720 volt deerlerinde bulunur:
I1=0,0012 A ve I2=0,0015 A.
I ’nin devre denklemleri aaıdaki sonucu verir:
IV
RI
V
RI=
+ =
+1
12
2
R nin çözümü ile
R = 533000 Ω bulunur.
(b) Toplam güç, P I= =1600 4 56, W. Toplam akım ve ters güç kayıpları bu teknik ile
artmıtır.
(c) ekil 2.15 deki grafikten, bir irdeleme teknii cevabı verebilir. I=1,25 mA için, V1=-1300 volt ve V2=-400 volt deerleri grafikten okunabilir. Bu toplam, 1700 volt’luk ters gerilime karılık gelir ve gerçek deerden daha büyüktür. Grafiin çözünürlüü ek irdelemelere izin vermemektedir fakat Diyot 1 in ters gerilimi, Diyot 2 nin deerinden yaklaık olarak 3 misli daha büyük olmalıdır.
Buna benzer bir problem gerilimin dinamik paylaımında da vardır. Ters gerilim aniden deiirken, deiim balangıç olarak, iki elemanın ters yöndeki jonksiyon kapasitesine ters bir ilikiyle daıtılır. ayet bunlar eit deilse, dinamik paylama eit olmayacaktır. ekil 2.17 de görüldüü gibi her diyota paralel ek kapasiteler, dengesizlii kabul edilebilir uygun bir deere düürebilir.
Etkili bir çözüm için gerekli kapasite, ters yöndeki jonksiyon kapasitesinden birkaç kez daha büyük bir deerdir. Çünkü gerilim paylaımı sadece yüksek gerilimde önemli olduundan, böyle bir dizayna uygun jonksiyon kapasitesi, büyük ters gerilime uygun olanıdır.
ekil 2.17
ÖRNEK 2.12
Önceki örnekte, iki diyotun 200 V/µs lik artı oranında bir ters gerilimi desteklemesi gerekmektedir. Diyot 1 in jonksiyon kapasitesi 200 pF ve Diyot 2 nin jonksiyon kapasitesi 250 pF dır. Diyotlara paralel yerletirmek için, ters gerilimin dinamik paylaımını zorlayan, herbirinin %10 luk sınırı içerisinde uygun kapasiteleri seçiniz.
ÇÖZÜM

Diyot 1 in kapasitesi küçük olduundan Diyot 2 den daha büyük gerilim altındadır. ekil 2.17 de jonksiyon kapasitörleri C deerindeki kapasitelerle paralel balanmıtır. Her kısım, aaıdaki eitlikte gösterildii gibi aynı toplam akımlara sahip olmalıdır:
i C Cdv
dtC C
dv
dt= +
= +
( ) ( )1
12
2
Dinamik paylamanın belirlenen gereksinimini karılamak için,
dv
dt
dv
dt1 211= ,
ki eitliin çözümü aaıdaki sonucu verir.
C=300 pF
Not:
(a) Toplam gerilim 1600 volt olduunda, v1 deeri 838 volt ve v2 deeri 762 volt olur.
(b) ayet örnek 2.11 de olduu gibi, statik gerilim bölücü dirençler olsaydı, dinamik etkiyi zorlamadaki etkileri az olacaktı. Bu problemde i’nin deeri, örnek 2.11 deki 3 mA’e kıyasla 52 mA dir.
Bundan önceki kısımlarda tanımlanan ek direnç ve kapasitörler’in kullanılması istenilmez çünkü bunlar devrenin hem fiyatını ve hemde kayıpları artırırlar. Baka bir yaklaım, ters karakteristiklerinde diyotları eleyerek bu elemanları kullanma ihtiyacını azaltmaktır. Bu, oda sıcaklıında olduu kadar çalıma sıcaklıında da yapılabilir.
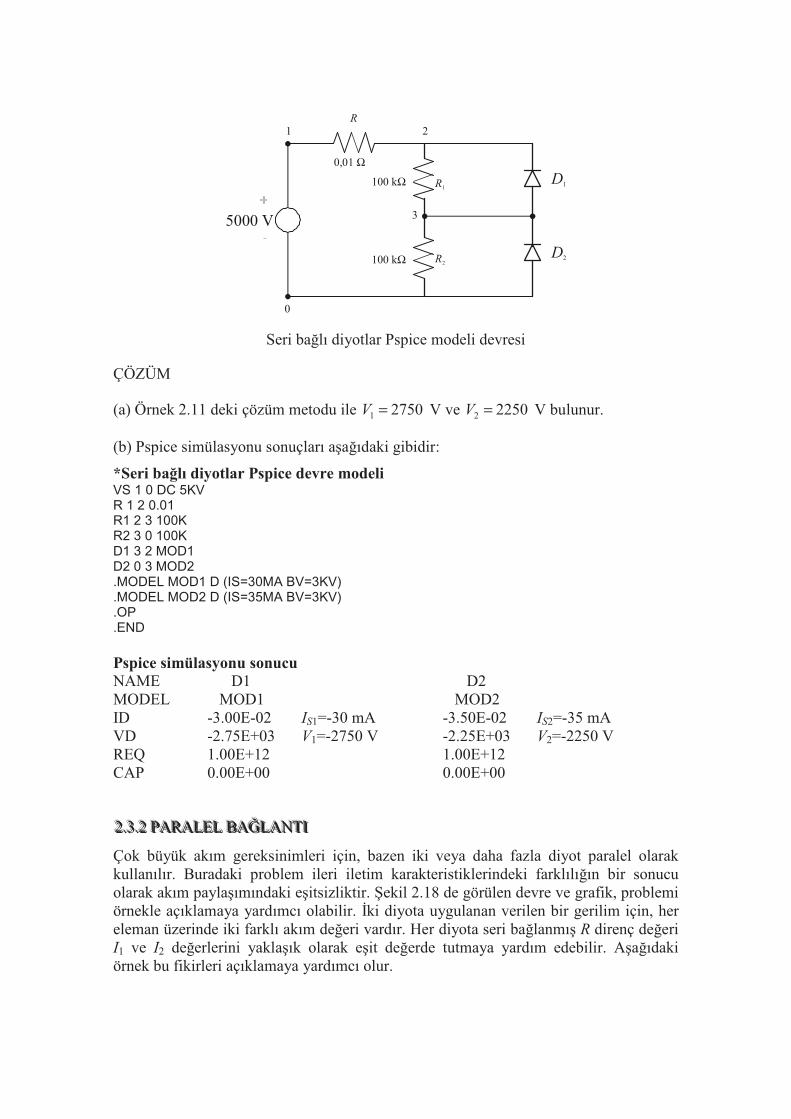
ÖÖÖRRRNNNEEEKKK SSSPPPIIICCCEEE SSSMMMÜÜÜLLLAAASSSYYYOOONNNUUU::: SSSEEERRR BBBAAALLLIII DDDYYYOOOTTTLLLAAARRR
Aaıdaki ekilde görüldüü gibi, seri balı diyotlar toplam 5000 V’u paylamaktadır. ki diyotun ters sızıntı akımları IS1=30 mA ve IS2=35 mA dir. Aaıdakileri bulunuz:
(a) ayet gerilim bölücü dirençler eit ise, 10021 === RRR kΩ, diyot gerilimlerini
bulunuz.
(b) a ıkkındaki sonuçları Pspice simülasyonunda bulunan sonuçlar ile karılatırınız.
R1
R2
R1
3
2
0
0,01 Ω
100 kΩ
100 kΩ
D1
D2
5000 V
Seri balı diyotlar Pspice modeli devresi
ÇÖZÜM
(a) Örnek 2.11 deki çözüm metodu ile 27501 =V V ve 22502 =V V bulunur.
(b) Pspice simülasyonu sonuçları aaıdaki gibidir:
*Seri balı diyotlar Pspice devre modeli VS 1 0 DC 5KV R 1 2 0.01 R1 2 3 100K R2 3 0 100K D1 3 2 MOD1 D2 0 3 MOD2 .MODEL MOD1 D (IS=30MA BV=3KV) .MODEL MOD2 D (IS=35MA BV=3KV) .OP .END
Pspice simülasyonu sonucu NAME D1 D2 MODEL MOD1 MOD2 ID -3.00E-02 IS1=-30 mA -3.50E-02 IS2=-35 mA VD -2.75E+03 V1=-2750 V -2.25E+03 V2=-2250 V REQ 1.00E+12 1.00E+12 CAP 0.00E+00 0.00E+00
222...333...222 PPPAAARRRAAALLLEEELLL BBBAAALLLAAANNNTTTIII
Çok büyük akım gereksinimleri için, bazen iki veya daha fazla diyot paralel olarak kullanılır. Buradaki problem ileri iletim karakteristiklerindeki farklılıın bir sonucu olarak akım paylaımındaki eitsizliktir. ekil 2.18 de görülen devre ve grafik, problemi örnekle açıklamaya yardımcı olabilir. ki diyota uygulanan verilen bir gerilim için, her eleman üzerinde iki farklı akım deeri vardır. Her diyota seri balanmı R direnç deeri I1 ve I2 deerlerini yaklaık olarak eit deerde tutmaya yardım edebilir. Aaıdaki örnek bu fikirleri açıklamaya yardımcı olur.

ÖRNEK 2.13
ekil 2.18 gösterilen iki diyot, toplam 100 A iletmektedir. Diyotun 55 A den daha fazla akım iletmemesi gerekir. Aaıdakileri bulunuz:
(a) bu durumu salamak için her bir diyota seri yerletirilecek eit iki direncin deeri, (b) direnç kayıpları, (c) düzenlemenin uçlarındaki gerilim.
ekil 2.18
ÇÖZÜM
(a) ekil 2.18 deki grafikten, I1=55 A ve I2=45 A deerleri kullanılabilir ve VD1 ve VD2
deerleri bulunabilir:
VD1 =1,5 V ve VD2= 1,8 V
V RI V RI VD D= + = +1 1 2 2
R R( ) , ( ) ,55 1 5 45 1 8+ = +
R = 0 03, Ω
(b) Bu dirençlerin herbirindeki güç hesaplanabilir:
PR1255 0 03 90 75= =( )( , ) , W
PR2245 0 03 60 75= =( )( , ) , W
(c) Düzenlemenin uçlarındaki gerilim
V RI V RI VD D= + = + = + = + =1 1 2 21 65 1 5 1 35 1 8 315, , , , , V
Akım bölücü dirençleri kullanmanın bir sakıncası düzenlemenin uçlarında artan gerilim ve iki dirençteki 151,5 W’lık kayıptır. Paralel düzenleme kullanmak kesinlikle gerekmiyorsa, uygun akım oranı ile tek eleman kullanmak daha iyidir.
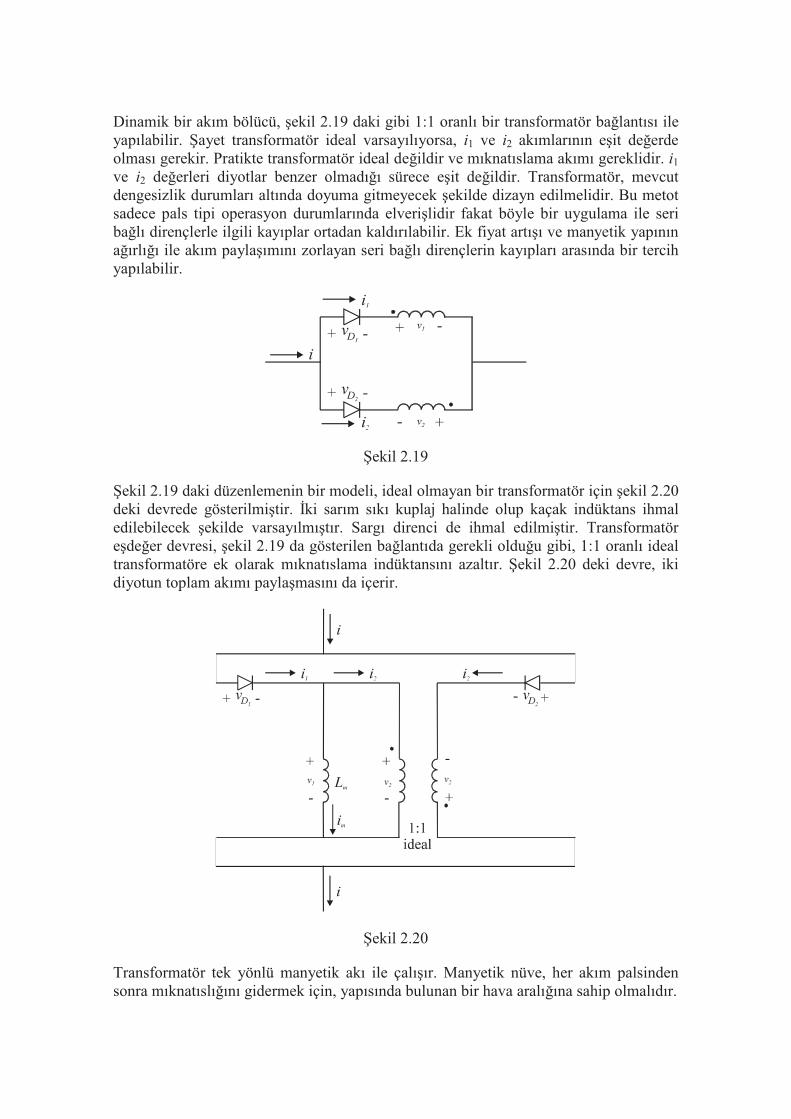
Dinamik bir akım bölücü, ekil 2.19 daki gibi 1:1 oranlı bir transformatör balantısı ile yapılabilir. ayet transformatör ideal varsayılıyorsa, i1 ve i2 akımlarının eit deerde olması gerekir. Pratikte transformatör ideal deildir ve mıknatıslama akımı gereklidir. i1
ve i2 deerleri diyotlar benzer olmadıı sürece eit deildir. Transformatör, mevcut dengesizlik durumları altında doyuma gitmeyecek ekilde dizayn edilmelidir. Bu metot sadece pals tipi operasyon durumlarında elverilidir fakat böyle bir uygulama ile seri balı dirençlerle ilgili kayıplar ortadan kaldırılabilir. Ek fiyat artıı ve manyetik yapının aırlıı ile akım paylaımını zorlayan seri balı dirençlerin kayıpları arasında bir tercih yapılabilir.
ekil 2.19
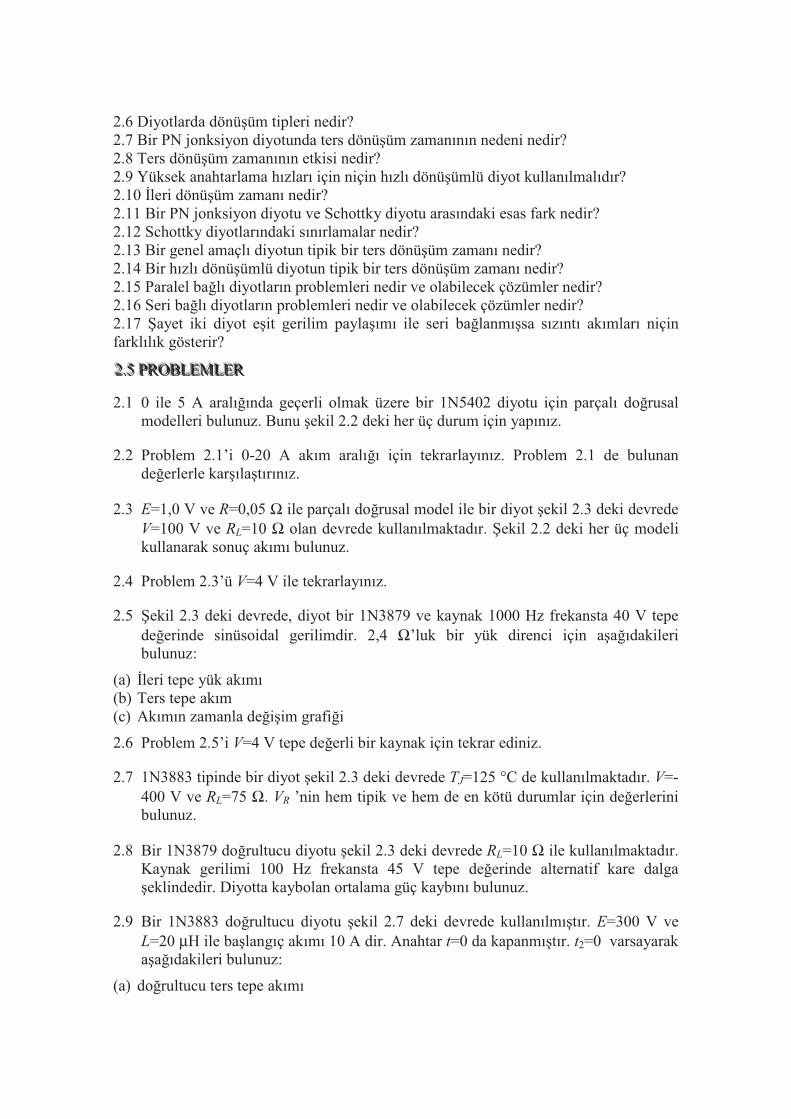
ekil 2.19 daki düzenlemenin bir modeli, ideal olmayan bir transformatör için ekil 2.20 deki devrede gösterilmitir. ki sarım sıkı kuplaj halinde olup kaçak indüktans ihmal edilebilecek ekilde varsayılmıtır. Sargı direnci de ihmal edilmitir. Transformatör edeer devresi, ekil 2.19 da gösterilen balantıda gerekli olduu gibi, 1:1 oranlı ideal transformatöre ek olarak mıknatıslama indüktansını azaltır. ekil 2.20 deki devre, iki diyotun toplam akımı paylamasını da içerir.
ekil 2.20
Transformatör tek yönlü manyetik akı ile çalıır. Manyetik nüve, her akım palsinden sonra mıknatıslıını gidermek için, yapısında bulunan bir hava aralıına sahip olmalıdır.

Aaıdaki denklemler bu devre için yazılabilir:
2211 vvvv DD −=+ (2.9)
v v1 2= (2.10)
21 iiim −= (2.11)
=
dt
diLv m
m1 (2.12)
eitliklerin çözümü aaıdaki sonucu verir:
)(5,0 121 vvv D −= (2.13)
)(
))((5,0
21
12
ii
tvvL DD
m−∆
∆−= (2.14)
formülde, ∆t diyotun iletim aralıı ve ∆( )i i1 2− iletim aralıının sonunda, i1 ve i2
arasındaki izin verilen farklılıktır.
ÖRNEK 2.14
ekil 2.19 daki devrede iki diyot paralel balanmıtır. 4 ms lik iletim aralıı ile toplam akım 200 A dir. ki diyotun iletim geriliminde 0,2 voltluk farklılık vardır. letim aralıının sonunda iki diyot arasındaki akım farkı 8 A’i geçmemelidir. Aaıdakileri bulunuz.
(a) kuplajlı iki indüktörün mıknatıslama indüktansı, Lm
(b) operasyon süresince transformatörün terminal uçlarındaki gerilim.
ÇÖZÜM
(a) 2.14 eitliinden,
Lm = =( , )( , )( , )
,0 5 0 2 0 004
80 000050 H
(b) 2.13 eitliinden,
v1 0 5 0 2 0 1= =( , )( , ) , V
222...444 ÇÇÇAAALLLIIIMMMAAA SSSOOORRRUUULLLAAARRRIII
2.1 Güç diyotlarının tipleri nedir? 2.2 Diyotun (ters) sızıntı akımı nedir? 2.3 Diyotun tersine dönüüm zamanı nedir? 2.4 Diyotun ters dönüüm akımı nedir? 2.5 Diyotun yumuaklık faktörü nedir?
2.6 Diyotlarda dönüüm tipleri nedir? 2.7 Bir PN jonksiyon diyotunda ters dönüüm zamanının nedeni nedir? 2.8 Ters dönüüm zamanının etkisi nedir? 2.9 Yüksek anahtarlama hızları için niçin hızlı dönüümlü diyot kullanılmalıdır? 2.10 leri dönüüm zamanı nedir? 2.11 Bir PN jonksiyon diyotu ve Schottky diyotu arasındaki esas fark nedir? 2.12 Schottky diyotlarındaki sınırlamalar nedir? 2.13 Bir genel amaçlı diyotun tipik bir ters dönüüm zamanı nedir? 2.14 Bir hızlı dönüümlü diyotun tipik bir ters dönüüm zamanı nedir? 2.15 Paralel balı diyotların problemleri nedir ve olabilecek çözümler nedir? 2.16 Seri balı diyotların problemleri nedir ve olabilecek çözümler nedir? 2.17 ayet iki diyot eit gerilim paylaımı ile seri balanmısa sızıntı akımları niçin farklılık gösterir?
222...555 PPPRRROOOBBBLLLEEEMMMLLLEEERRR
2.1 0 ile 5 A aralıında geçerli olmak üzere bir 1N5402 diyotu için parçalı dorusal modelleri bulunuz. Bunu ekil 2.2 deki her üç durum için yapınız.
2.2 Problem 2.1’i 0-20 A akım aralıı için tekrarlayınız. Problem 2.1 de bulunan deerlerle karılatırınız.
2.3 E=1,0 V ve R=0,05 Ω ile parçalı dorusal model ile bir diyot ekil 2.3 deki devrede V=100 V ve RL=10 Ω olan devrede kullanılmaktadır. ekil 2.2 deki her üç modeli kullanarak sonuç akımı bulunuz.
2.4 Problem 2.3’ü V=4 V ile tekrarlayınız.
2.5 ekil 2.3 deki devrede, diyot bir 1N3879 ve kaynak 1000 Hz frekansta 40 V tepe deerinde sinüsoidal gerilimdir. 2,4 Ω’luk bir yük direnci için aaıdakileri bulunuz:
(a) leri tepe yük akımı (b) Ters tepe akım (c) Akımın zamanla deiim grafii
2.6 Problem 2.5’i V=4 V tepe deerli bir kaynak için tekrar ediniz.
2.7 1N3883 tipinde bir diyot ekil 2.3 deki devrede TJ=125 °C de kullanılmaktadır. V=-400 V ve RL=75 Ω. VR ’nin hem tipik ve hem de en kötü durumlar için deerlerini bulunuz.
2.8 Bir 1N3879 dorultucu diyotu ekil 2.3 deki devrede RL=10 Ω ile kullanılmaktadır. Kaynak gerilimi 100 Hz frekansta 45 V tepe deerinde alternatif kare dalga eklindedir. Diyotta kaybolan ortalama güç kaybını bulunuz.
2.9 Bir 1N3883 dorultucu diyotu ekil 2.7 deki devrede kullanılmıtır. E=300 V ve L=20 µH ile balangıç akımı 10 A dir. Anahtar t=0 da kapanmıtır. t2=0 varsayarak aaıdakileri bulunuz:
(a) dorultucu ters tepe akımı
(b) tepe anahtar akımı
2.10 Problem 2.9’u 2
2rrt
t = varsayarak tekrarlayınız.
2.11 Bir 1N3883 diyotu ekil 2.7 deki devrede kullanılmıtır. t2’ nin 0,1 µs’lik sıfır olmayan bir deerde küçük olduunu varsayınız. E=200 V ve I=15 A. Ek B de diyot için 100 °C deki veriyi kullanarak;
(a) IRM’yi bulunuz. (b) i3’ün geri dönüümün balangıcında tepe deerinden sıfır deerine zamanla dorusal
olarak deitiini varsayarak, geri dönüüm esnasında ters diyot gerilimini bulunuz. Diyot kapasitansını ihmal ediniz.
(c) R=50 Ω ve C=0,04 µF’lık bir koruyucu (snubber) devre eklenmitir. Ters tepe gerilimini bulunuz.
2.12 ekil 2.8 deki gibi bir devrede, E=300 V, L1=200 µH, i2=30 A ve diyot bir 1N3883 tür. 40 A lik anahtar tepe akımı ile diyot tepe geri dönüüm gerilimini 400 V ile sınırlayan bir koruyucu devre tasarımlayınız.
2.13 Problem 2.11’i, E=150 V, I=20 A ve L1=10 µH ile tekrar ediniz. (c) ıkkı için, C=0,05 µF ve R=75 Ω kullanınız.
2.14 ekil 2.9 daki devrede, anahtar periyodik olarak 10 µs kapalı ve 15 µs açıktır. ayet diyot bir 1N3883, R=7,5 Ω ve E=300 V ise diyotun ileri geri dönüüm zamanını bulunuz. Bu zaman, diyotun ileri iletim zamanı ile karılatırıldıında önemli midir?
2.15 35 V tepe deerinde kare dalgalı düük frekanslı altenatif bir gerilim 3,5 Ωdeerinde bir yük direncinde bir 1N5828 diyotu ile dorultuluyor. TJ=100 °C. Dorultucunun güç kaybını bulunuz.
2.16 Bir Schottky diyotu (1N5828) ekil 2.12 deki devrede kullanılmıtır. L1=30 µH, L2=100 mH, E=25 V ve i2=15 A. S anahtarı t=0 da kapatılmıtır. Diyotun ters tepe gerilimini bulunuz.
2.17 Problem 2.16 için diyot ters tepe gerilimini 40 V ile sınırlayan bir koruyucu devre tasarlayınız.
2.18 ekil 2.15 deki karakteristiklere sahip iki diyot seri olarak balanmıtır. Toplam ters gerilim 2000 V’tur. Aaıdakileri bulunuz.
(a) Her diyotun ters gerilimi, (b) Her diyotta ters gerilimi 1100 V ile sınırlayan, diyotlara paralel balanmı direnç
deeri, (c) Gerilim bölücü dirençlerdeki güç kaybı.
2.19 Seri balanmı iki diyot 100 V/µs oranı ile artan bir ters gerilime maruz bırakılmıtır. Diyotların jonksiyon kapasitansları 500 pF ve 700 pF dir. Diyot 1’in ters geriliminin Diyot 2’nin ters geriliminden %10’dan daha büyük olmaması için, diyotlara paralel balanacak eit iki kapasitörün deerini bulunuz.
2.20 ekil 2.18 deki karakteristiklere sahip iki diyot paralel balanmı ve 100 A’lik bir ileri akımı iletmektedirler. Aaıdakileri bulunuz:
(a) Her diyottaki akım, (b) Düzenlemenin uçlarındaki gerilim.
2.21 (a) Problem 2.20 de, bir diyotun toplam akımın %60’ından fazlasını iletmemesi için akım bölücü dirençleri bulunuz. (b) Problem 2.20 de bulunan güç kaybına kıyasla ek güç kaybı nedir?
2.22 ekil 2.19 da görülen iki diyot, her diyotta 100 A ile 0,15 V ’luk gerilim farkı göstermektedir. 200 A’lik bir toplam akım için, iki akımın 3 A den daha fazla farklılık göstermemesi için, ekil 2.19 daki gibi kuplajlı indüktör tasarlayınız.
222...666 SSSEEEÇÇÇLLLMMM SSSIIINNNAAAVVV SSSOOORRRUUULLLAAARRRIII
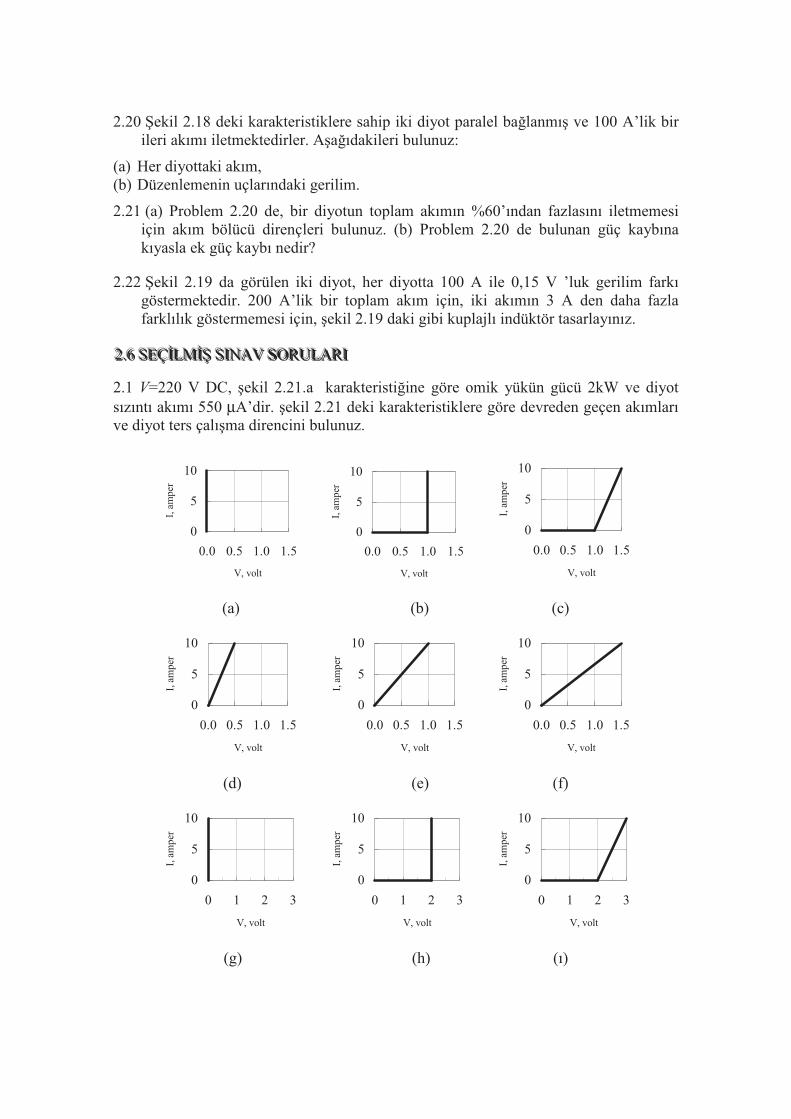
2.1 V=220 V DC, ekil 2.21.a karakteristiine göre omik yükün gücü 2kW ve diyot sızıntı akımı 550 µA’dir. ekil 2.21 deki karakteristiklere göre devreden geçen akımları ve diyot ters çalıma direncini bulunuz.
0
5
10
0.0 0.5 1.0 1.5
V, volt
I, a
mpe
r
0
5
10
0.0 0.5 1.0 1.5
V, volt
I, a
mpe
r
0
5
10
0.0 0.5 1.0 1.5
V, volt
I, a
mpe
r
(a) (b) (c)
0
5
10
0.0 0.5 1.0 1.5
V, volt
I, a
mpe
r
0
5
10
0.0 0.5 1.0 1.5
V, volt
I, a
mpe
r
0
5
10
0.0 0.5 1.0 1.5
V, volt
I, a
mpe
r
(d) (e) (f)
0
5
10
0 1 2 3
V, volt
I, a
mpe
r
0
5
10
0 1 2 3
V, volt
I, a
mpe
r
0
5
10
0 1 2 3
V, volt
I, a
mpe
r
(g) (h) (ı)
0
5
10
0.0 0.5 1.0 1.5
V, volt
I, a
mpe
r
0
5
10
0.0 0.5 1.0 1.5
V, volt
I, a
mpe
r
0
5
10
0.0 0.5 1.0 1.5
V, volt
I, a
mpe
r
(i) (j) (k)
ekil 2.21 Çeitli diyot karakteristikleri.
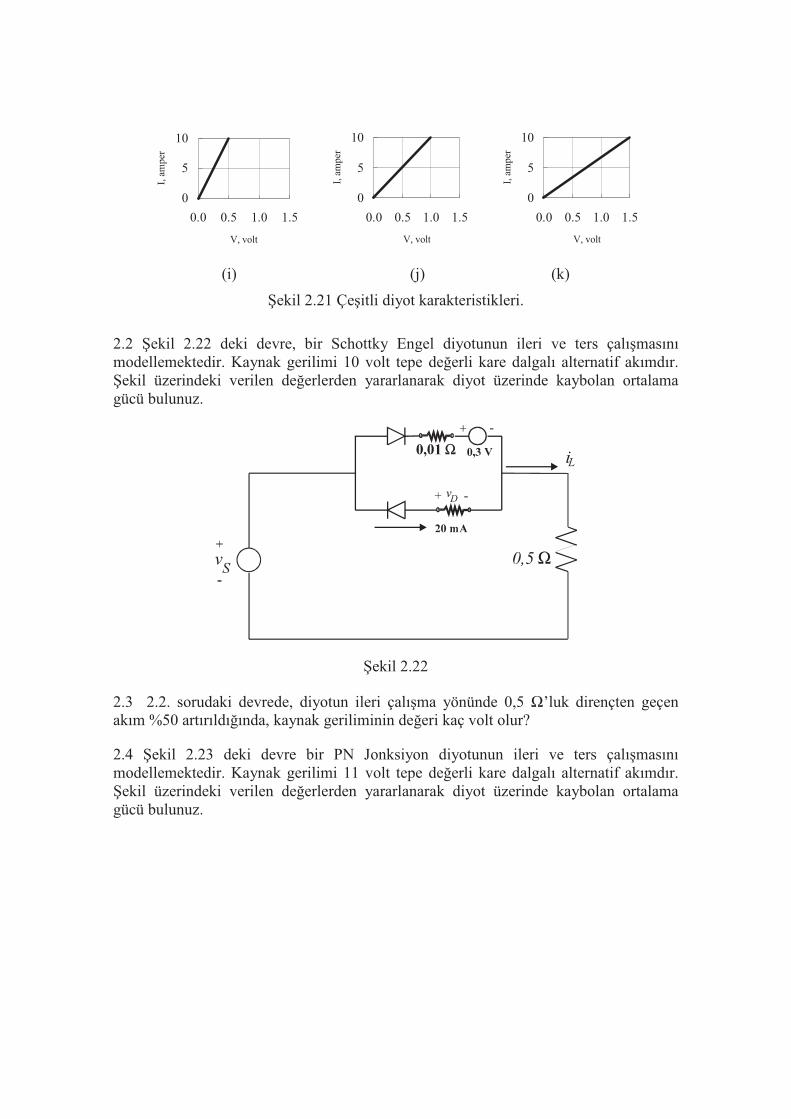
2.2 ekil 2.22 deki devre, bir Schottky Engel diyotunun ileri ve ters çalımasını modellemektedir. Kaynak gerilimi 10 volt tepe deerli kare dalgalı alternatif akımdır. ekil üzerindeki verilen deerlerden yararlanarak diyot üzerinde kaybolan ortalama gücü bulunuz.
ekil 2.22
2.3 2.2. sorudaki devrede, diyotun ileri çalıma yönünde 0,5 Ω’luk dirençten geçen akım %50 artırıldıında, kaynak geriliminin deeri kaç volt olur?
2.4 ekil 2.23 deki devre bir PN Jonksiyon diyotunun ileri ve ters çalımasını modellemektedir. Kaynak gerilimi 11 volt tepe deerli kare dalgalı alternatif akımdır. ekil üzerindeki verilen deerlerden yararlanarak diyot üzerinde kaybolan ortalama gücü bulunuz.
ekil 2.23
2.5 2.4. sorudaki devrede, diyotun ileri çalıma yönünde 1 Ω’luk dirençten geçen akım %50 artırıldıında, kaynak geriliminin deeri kaç volt olur?
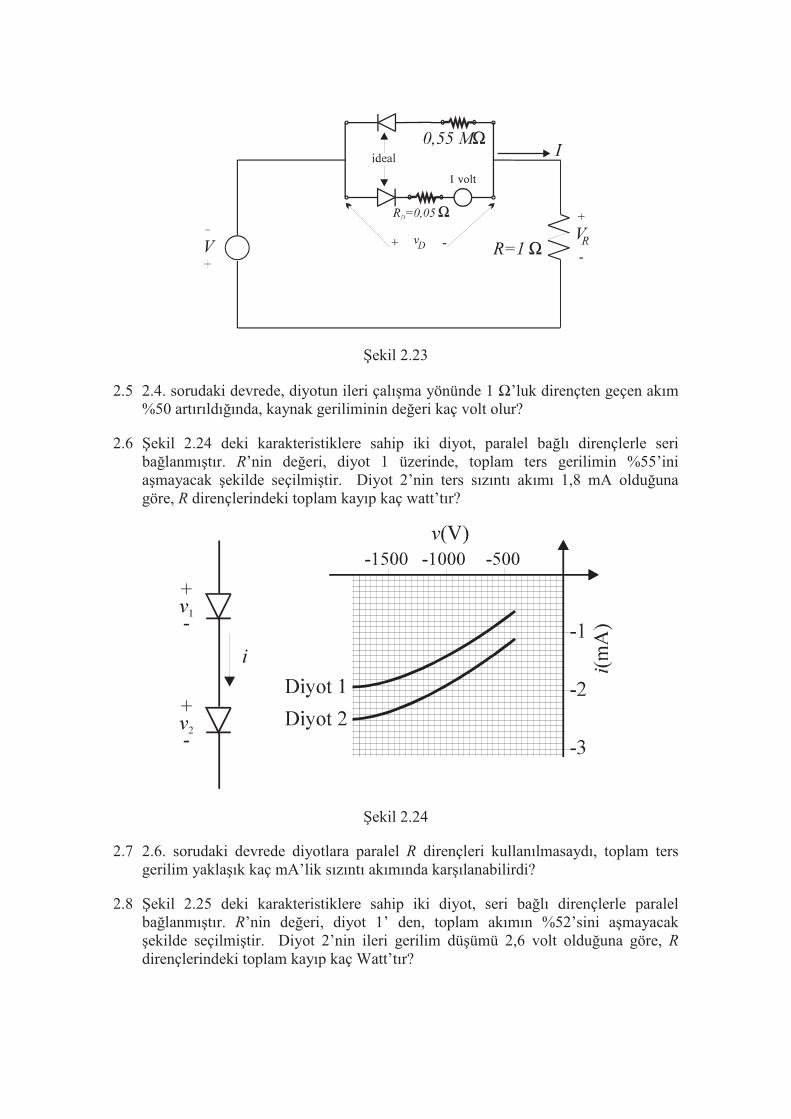
2.6 ekil 2.24 deki karakteristiklere sahip iki diyot, paralel balı dirençlerle seri balanmıtır. R’nin deeri, diyot 1 üzerinde, toplam ters gerilimin %55’ini amayacak ekilde seçilmitir. Diyot 2’nin ters sızıntı akımı 1,8 mA olduuna göre, R dirençlerindeki toplam kayıp kaç watt’tır?
ekil 2.24
2.7 2.6. sorudaki devrede diyotlara paralel R dirençleri kullanılmasaydı, toplam ters gerilim yaklaık kaç mA’lik sızıntı akımında karılanabilirdi?
2.8 ekil 2.25 deki karakteristiklere sahip iki diyot, seri balı dirençlerle paralel balanmıtır. R’nin deeri, diyot 1’ den, toplam akımın %52’sini amayacak ekilde seçilmitir. Diyot 2’nin ileri gerilim düümü 2,6 volt olduuna göre, R
dirençlerindeki toplam kayıp kaç Watt’tır?
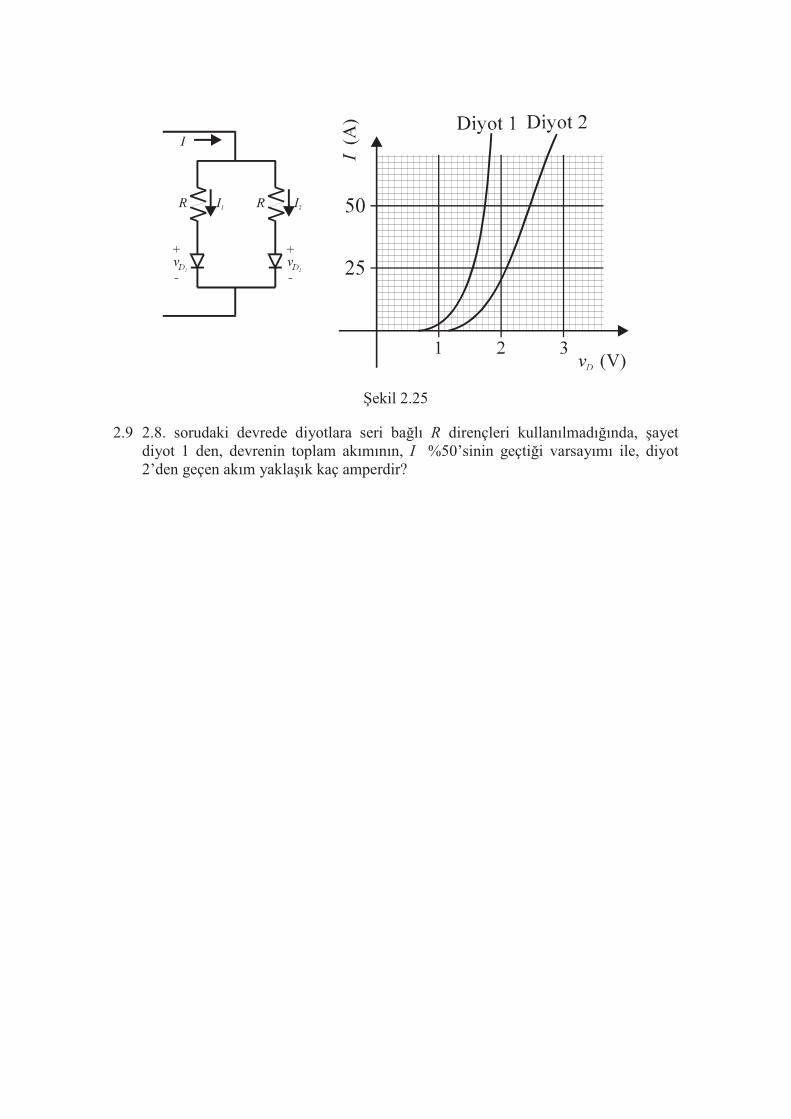
ekil 2.25
2.9 2.8. sorudaki devrede diyotlara seri balı R dirençleri kullanılmadıında, ayet diyot 1 den, devrenin toplam akımının, I %50’sinin geçtii varsayımı ile, diyot 2’den geçen akım yaklaık kaç amperdir?
333 TTTRRRSSSTTTÖÖÖRRRLLLEEERRR
Tristör, P ve N tipi silikondan oluan çok tabakalı bir yarı-iletkendir. Bu elemanlar iletim ve iletimde olmama durumu arasında anahtarlama yapabilirler. Tristör ailesinin çeitli üyeleri vardır; her biri, yarı-iletken tabakanın harici terminal tarafından ulaılabilirlii ile bir gurup içinde karakterize edilirler. Bu bölümde sadece çok kullanılan bazı tristörlerden bahsedilecektir.
333...111 SSSLLLKKKOOONNN KKKOOONNNTTTRRROOOLLLLLLUUU DDDOOORRRUUULLLTTTUUUCCCUUU
SCR (Silikon kontrollu dorultucu), özellikle yüksek gerilim ve yüksek akım durumlarında, bir anahtarlama elemanı olarak geni alanda kullanılır. leri yönde iletimde olduu zaman, SCR normal bir dorultucu ile aynı karakteristiklere sahiptir. Bu ileri akım, üçüncü veya kontrol terminaline bir giri kapı akımı ile eleman iletime geçirildiinde oluur. Dorultucu diyota benzer bir davranıla, SCR ters yöndeki akımı tıkama özelliine da sahiptir.
letimi balatmak için gerekli kapı akımı, periyodun sadece kısa bir zamanı için gereklidir. Daha sonra, eleman iletim durumunda kilitli kalır ve bundan sonra kapı akımına gerek kalmaz. SCR, kaynak geriliminin tersine yönelmesi veya SCR’nin kesime götürülmesi gibi harici devre deiiklii ile ters gerilim uygulanana kadar iletime devam eder. Az kullanılan baka bir kesime götürme metodu, kaynak gerilimini azaltarak veya yük direncini artırarak akımı belli bir deerin altına düürmektir. Böyle bir kesimin oluacaı minimum akım seviyesi, tutma akımı olarak adlandırılır.
333...111...111 LLLEEETTTMMM AAARRRTTTLLLAAARRRIII
ekil 3.1(a) da, J1, J2 ve J3 etiketli jonksiyonlarıyla gösterildii gibi, SCR dört tabakalı yarı-iletken yapısından oluur. ekil 3.1(b), SCR’nin devre sembolünü göstermektedir. A ve K terminalleri, iki terminalli dorultucunun anot ve katot terminallerinin karılııdır. Üçüncü bir terminal olan kapı, elemanın kontrolunu salar. SCR’nin tutma yapısını gösterebilen bir model, ekil 3.2 de gösterilmitir. Bu modelin, ekil 3.1(a)’daki kesik çizgili orta PN bölgesini böldüü açıkça görülmektedir.
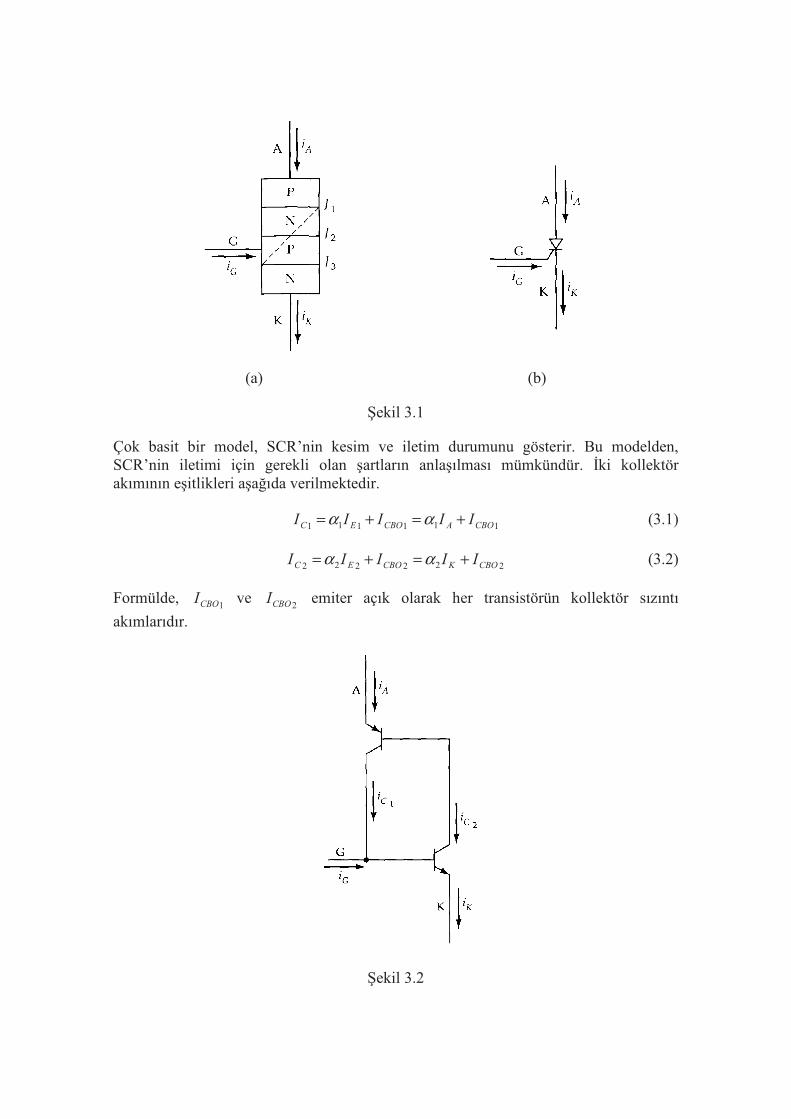
(a) (b)
ekil 3.1
Çok basit bir model, SCR’nin kesim ve iletim durumunu gösterir. Bu modelden, SCR’nin iletimi için gerekli olan artların anlaılması mümkündür. ki kollektör akımının eitlikleri aaıda verilmektedir.
111111 CBOACBOEC IIIII +=+= αα (3.1)
222222 CBOKCBOEC IIIII +=+= αα (3.2)
Formülde, ICBO1 ve ICBO2
emiter açık olarak her transistörün kollektör sızıntı
akımlarıdır.
ekil 3.2

Devredeki akımlarla ilgili iki devre ilikisi, 3.3 ve 3.4 eitliklerinde verilmitir:
I I IA C C= +1 2 (3.3)
I I IK A G= + (3.4)
3.1 - 3.4 eitliklerinin birletirilmesi ile, 3.7 eitlii elde edilir:
2211 CBOKCBOAA IIIII +++= αα (3.5)
2211 )( CBOKACBOAA IIIIII ++++= αα (3.6)
)1( 21
212
αα
α
+−
++= CBOCBOG
A
IIII (3.7)
SCR’nin kesim durumunda, sızıntı akımları küçük ve aynı ekilde α1 ve α2 deerleri de küçüktür. Transistörün beyz bölgelerindeki rekombinasyon barizdir ve küçük kollektör akımı, beyz bölgesine enjekte edilen taıyıcılar tarafından üretilir. Bundan dolayı, IA
eitliindeki payda, birim deerden (1) den çok küçük deil ve anot akımı büyük deildir. Sonuçta SCR kesim durumunda kalır.
SCR’yi iletim durumuna koymak için eleman akımının artırılması gerekir. ayet bu olursa α1 ve α2 artar; bunların toplamı birim (1) olursa, SCR iletime geçer ve iletim durumuna kilitlenmi kalır. Aaıdaki be metot, iletime neden olabilecek bir seviyede, anot’un kesim durumundaki akımını artırmak için kullanılabilir:
(a) IG, kapı akımını artırmak (b) TJ, elemanın jonksiyon sıcaklıını artırmak (c) VAK, anot-katot gerilimini artırmak (d) dvAK/dt, anot-katot geriliminin deiim oranını artırmak (e) optik metotla jonksiyonlara enerji enjekte etmek.
Normal bir SCR radyasyon enerjisi tarafından etkilenmeyen ve saydam olmayan bir paket içindedir. Bunun yanında, düük seviyeli sinyal elemanları (ııkla aktif hale getirilen SCR’ler-LASCR) da mevcut olup bunların incelenmesi bu ders notunun kapsamı dıında tutulmutur.
letim için dier metotlardan birincisi -kapı akımı kullanarak- genelde, elemanın iletimi için bilerek kullanılır. Dier üç metottan ise uygun bir dizaynda kaçınılır. Uygun SCR’lerin seçimi, anma anot-katot geriliminin aılmasını engeller. dtdvAK /
sınırlaması, genel olarak bir koruyucu devre ile yapılır.
ayet SCR akımı, tanımlanan metotlardan herhangi biri ile artarsa, bu durumda α1 ve α2
nin ikisi de birden artar. Bu ilem sürerken, α1 ve α2 nin toplamı birime (1) doru gider ve eitliin böleni IA için sıfır olur. Böylece IA artar ve eleman anot akımında sınırlama olmaksızın iletime geçer. ekil 3.3, anot akımı ile ilgili bu etkilerin nasıl bir ilikide olduunu göstermektedir.
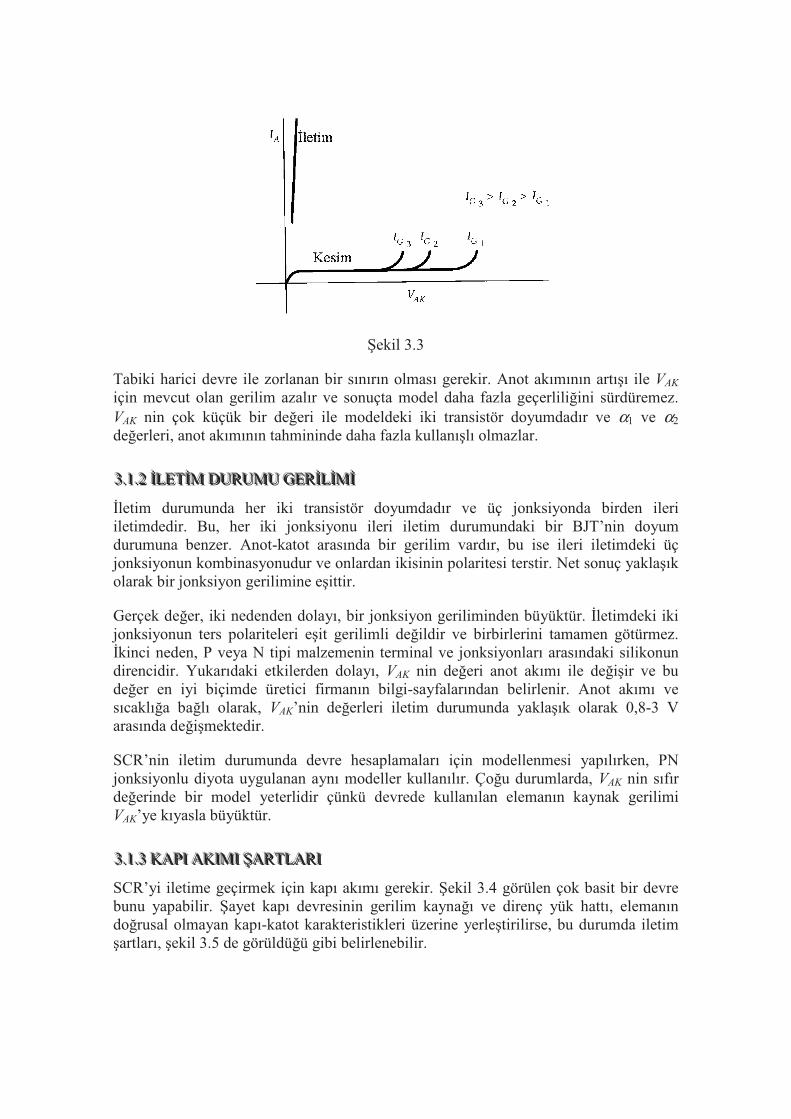
ekil 3.3
Tabiki harici devre ile zorlanan bir sınırın olması gerekir. Anot akımının artıı ile VAK
için mevcut olan gerilim azalır ve sonuçta model daha fazla geçerliliini sürdüremez. VAK nin çok küçük bir deeri ile modeldeki iki transistör doyumdadır ve α1 ve α2
deerleri, anot akımının tahmininde daha fazla kullanılı olmazlar.
333...111...222 LLLEEETTTMMM DDDUUURRRUUUMMMUUU GGGEEERRRLLLMMM
letim durumunda her iki transistör doyumdadır ve üç jonksiyonda birden ileri iletimdedir. Bu, her iki jonksiyonu ileri iletim durumundaki bir BJT’nin doyum durumuna benzer. Anot-katot arasında bir gerilim vardır, bu ise ileri iletimdeki üç jonksiyonun kombinasyonudur ve onlardan ikisinin polaritesi terstir. Net sonuç yaklaık olarak bir jonksiyon gerilimine eittir.
Gerçek deer, iki nedenden dolayı, bir jonksiyon geriliminden büyüktür. letimdeki iki jonksiyonun ters polariteleri eit gerilimli deildir ve birbirlerini tamamen götürmez. kinci neden, P veya N tipi malzemenin terminal ve jonksiyonları arasındaki silikonun direncidir. Yukarıdaki etkilerden dolayı, VAK nin deeri anot akımı ile deiir ve bu deer en iyi biçimde üretici firmanın bilgi-sayfalarından belirlenir. Anot akımı ve sıcaklıa balı olarak, VAK’nin deerleri iletim durumunda yaklaık olarak 0,8-3 V arasında deimektedir.
SCR’nin iletim durumunda devre hesaplamaları için modellenmesi yapılırken, PN jonksiyonlu diyota uygulanan aynı modeller kullanılır. Çou durumlarda, VAK nin sıfır deerinde bir model yeterlidir çünkü devrede kullanılan elemanın kaynak gerilimi VAK’ye kıyasla büyüktür.
333...111...333 KKKAAAPPPIII AAAKKKIIIMMMIII AAARRRTTTLLLAAARRRIII
SCR’yi iletime geçirmek için kapı akımı gerekir. ekil 3.4 görülen çok basit bir devre bunu yapabilir. ayet kapı devresinin gerilim kaynaı ve direnç yük hattı, elemanın dorusal olmayan kapı-katot karakteristikleri üzerine yerletirilirse, bu durumda iletim artları, ekil 3.5 de görüldüü gibi belirlenebilir.
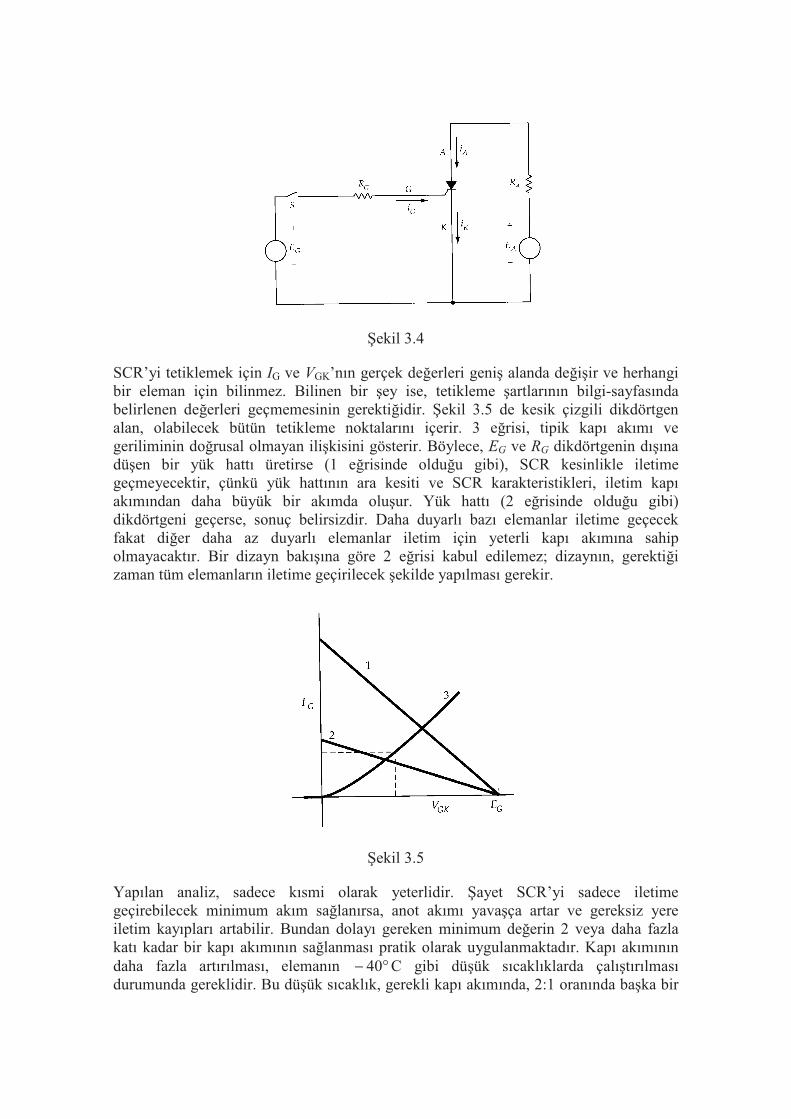
ekil 3.4
SCR’yi tetiklemek için IG ve VGK’nın gerçek deerleri geni alanda deiir ve herhangi bir eleman için bilinmez. Bilinen bir ey ise, tetikleme artlarının bilgi-sayfasında belirlenen deerleri geçmemesinin gerektiidir. ekil 3.5 de kesik çizgili dikdörtgen alan, olabilecek bütün tetikleme noktalarını içerir. 3 erisi, tipik kapı akımı ve geriliminin dorusal olmayan ilikisini gösterir. Böylece, EG ve RG dikdörtgenin dıına düen bir yük hattı üretirse (1 erisinde olduu gibi), SCR kesinlikle iletime geçmeyecektir, çünkü yük hattının ara kesiti ve SCR karakteristikleri, iletim kapı akımından daha büyük bir akımda oluur. Yük hattı (2 erisinde olduu gibi) dikdörtgeni geçerse, sonuç belirsizdir. Daha duyarlı bazı elemanlar iletime geçecek fakat dier daha az duyarlı elemanlar iletim için yeterli kapı akımına sahip olmayacaktır. Bir dizayn bakıına göre 2 erisi kabul edilemez; dizaynın, gerektii zaman tüm elemanların iletime geçirilecek ekilde yapılması gerekir.
ekil 3.5
Yapılan analiz, sadece kısmi olarak yeterlidir. ayet SCR’yi sadece iletime geçirebilecek minimum akım salanırsa, anot akımı yavaça artar ve gereksiz yere iletim kayıpları artabilir. Bundan dolayı gereken minimum deerin 2 veya daha fazla katı kadar bir kapı akımının salanması pratik olarak uygulanmaktadır. Kapı akımının daha fazla artırılması, elemanın °− 40 C gibi düük sıcaklıklarda çalıtırılması durumunda gereklidir. Bu düük sıcaklık, gerekli kapı akımında, 2:1 oranında baka bir
artıa neden olur.
ÖRNEK 3.1
Bir SCR bilgi-sayfası 30 mA lik maksimum bir kapı akımı ve 25°C de iletim için 2,5 volt’luk VGK deerini belirlemektedir. letim için 12 V’luk bir kaynak mevcuttur.
°− 40 C de gerekli olandan iki misli daha büyük kapı akımı salayan statik tetikleme devresi dizayn ediniz. Bilgi-sayfası °− 40 C de kapı akımı gereksinimi için 2:1 ek artıdaha belirlemektedir. Ortalama kapı gücü 0,5 W ile sınırlandırılmıtır. Maksimum 120 mA de -40°C de VGK 1,2 V’tur.
ÇÖZÜM
Bu bir dizayn problemi olduundan, sadece bir çözüm yoktur. -40°C de, mümkün olabilen bütün iletim noktaları (ekil 3.5 de olduu gibi) dikdörtgenin içinde yatar. Dikdörtgenin sa üst kenarı, aırı yükleme dahil edildiinde 120 mA ve 1,2 V koordinatlarına sahiptir. 1 erisi gibi bir yük hattı (EG=12 V ile dikdörtgenin köesinin dorultusunun IG eksenini kesmesi) mümkün olabilen bir çözümdür. Direnç deeri aaıdaki eitliklerden bulunur:
v RiGK G= −12
veya
Rv
i
GK
G
=−12
iG = 0 120, A ve vGK = 1 2, V
ile
R = 90 Ω
R nin 90 Ω dan daha az herhangi bir deeri iletim için yeterli kapı akımı salar. Dikdörtgenin köesinde, kapı gücü aaıdaki gibi belirlenir.
( )( )P v iG G K G= = =1 20 0 120 0 144, , , W
Bu 0,5 W sınırından daha küçüktür. R nin deerinin azalması bu gücü artıracaktır, böylece R nin keyfi olarak daha küçük yapılmaması gerekir.
Önceki tartıma, SCR’nin iletimine neden olacak gerekli kapı akım süresini tanımlayacak bir modeli salamaz. letim ilemi ani deil ve SCR nin büyüklüüne balı olarak, 1-10 µs süren bir kapı akım aralıı gereklidir.
Gerekli kapı akımını salamak için, ekil 3.4 de gösterilen devre marjinal olarak kullanılıdır. Sık kullanılan bir düzenleme, zamanın bir periyodunda bir kapasitörü yavaca doldurur ve daha sonra SCR’nin kapı terminaline kapasitörü aniden boaltır. Bu
düzenleme DC kaynaından sadece kapasitörü yüklemek için epeyce düük güç gerektirir ve SCR’nin güvenilir iletimi kısa süreli büyük güç mevcuttur. Bu metoda adapte edilebilecek anahtarlama karakteristiklerinde çeitli negatif direnç elemanları mevcuttur.
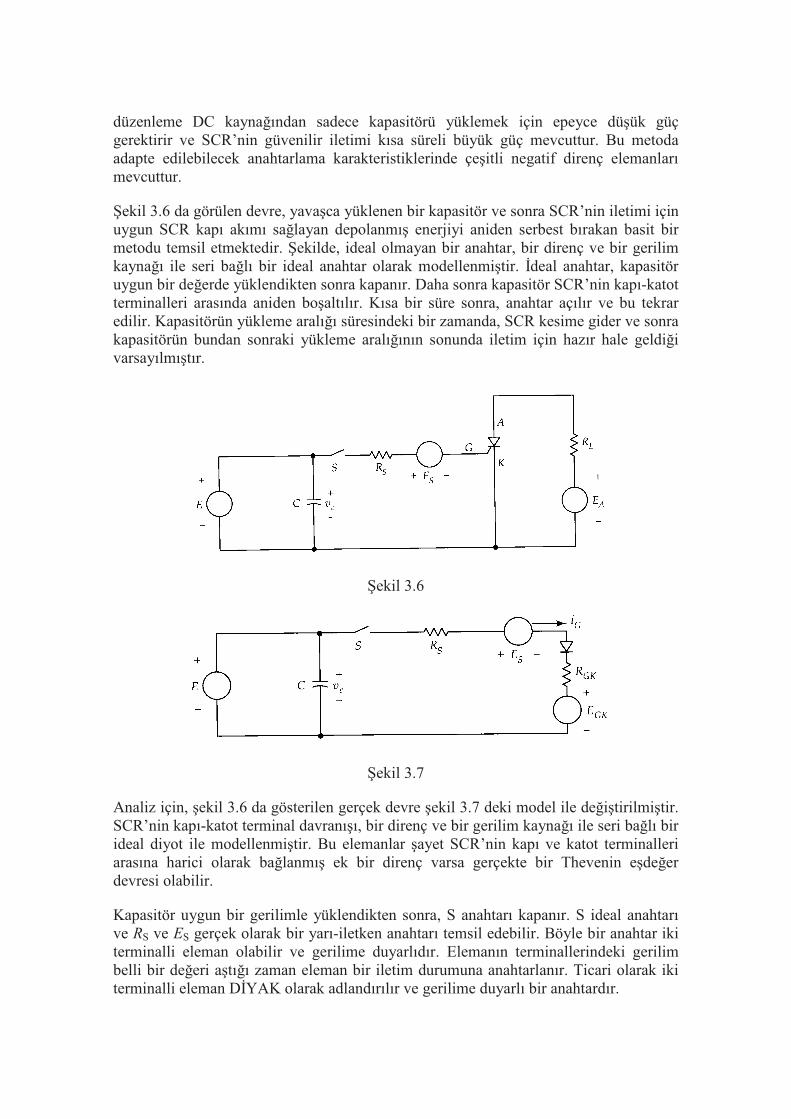
ekil 3.6 da görülen devre, yavaca yüklenen bir kapasitör ve sonra SCR’nin iletimi için uygun SCR kapı akımı salayan depolanmı enerjiyi aniden serbest bırakan basit bir metodu temsil etmektedir. ekilde, ideal olmayan bir anahtar, bir direnç ve bir gerilim kaynaı ile seri balı bir ideal anahtar olarak modellenmitir. deal anahtar, kapasitör uygun bir deerde yüklendikten sonra kapanır. Daha sonra kapasitör SCR’nin kapı-katot terminalleri arasında aniden boaltılır. Kısa bir süre sonra, anahtar açılır ve bu tekrar edilir. Kapasitörün yükleme aralıı süresindeki bir zamanda, SCR kesime gider ve sonra kapasitörün bundan sonraki yükleme aralıının sonunda iletim için hazır hale geldii varsayılmıtır.
ekil 3.6
ekil 3.7
Analiz için, ekil 3.6 da gösterilen gerçek devre ekil 3.7 deki model ile deitirilmitir. SCR’nin kapı-katot terminal davranıı, bir direnç ve bir gerilim kaynaı ile seri balı bir ideal diyot ile modellenmitir. Bu elemanlar ayet SCR’nin kapı ve katot terminalleri arasına harici olarak balanmı ek bir direnç varsa gerçekte bir Thevenin edeer devresi olabilir.
Kapasitör uygun bir gerilimle yüklendikten sonra, S anahtarı kapanır. S ideal anahtarı ve RS ve ES gerçek olarak bir yarı-iletken anahtarı temsil edebilir. Böyle bir anahtar iki terminalli eleman olabilir ve gerilime duyarlıdır. Elemanın terminallerindeki gerilim belli bir deeri atıı zaman eleman bir iletim durumuna anahtarlanır. Ticari olarak iki terminalli eleman DYAK olarak adlandırılır ve gerilime duyarlı bir anahtardır.
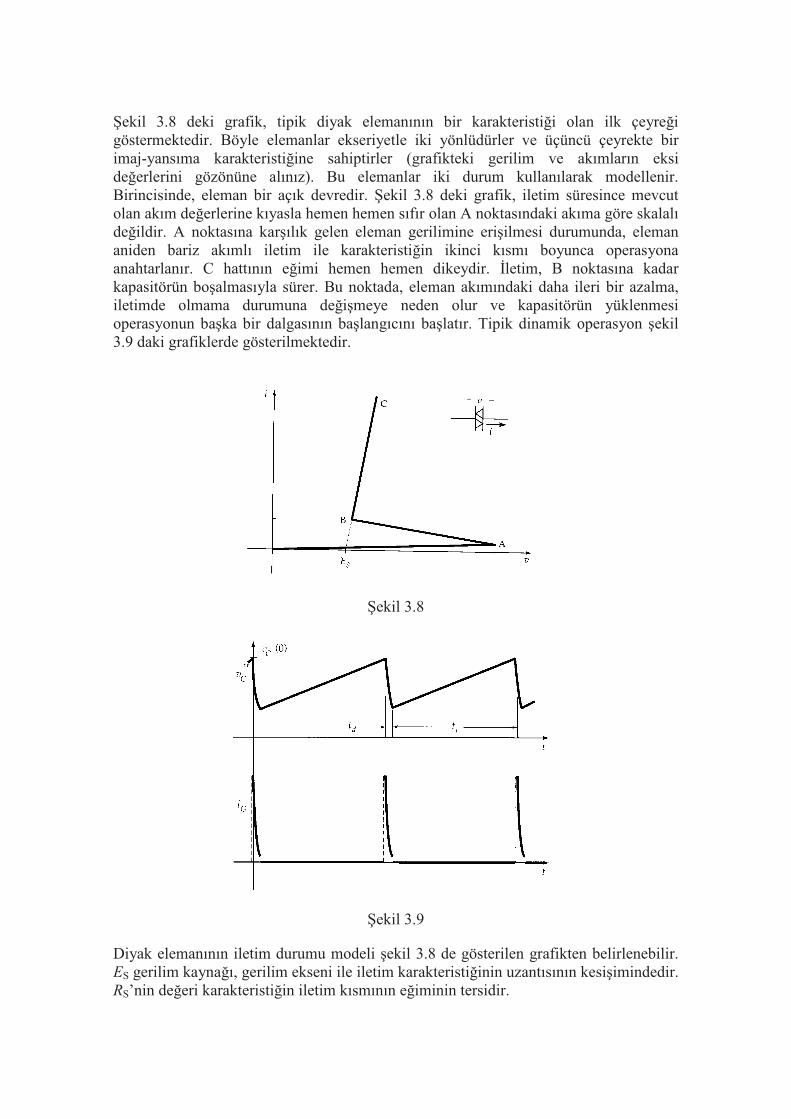
ekil 3.8 deki grafik, tipik diyak elemanının bir karakteristii olan ilk çeyrei göstermektedir. Böyle elemanlar ekseriyetle iki yönlüdürler ve üçüncü çeyrekte bir imaj-yansıma karakteristiine sahiptirler (grafikteki gerilim ve akımların eksi deerlerini gözönüne alınız). Bu elemanlar iki durum kullanılarak modellenir. Birincisinde, eleman bir açık devredir. ekil 3.8 deki grafik, iletim süresince mevcut olan akım deerlerine kıyasla hemen hemen sıfır olan A noktasındaki akıma göre skalalı deildir. A noktasına karılık gelen eleman gerilimine eriilmesi durumunda, eleman aniden bariz akımlı iletim ile karakteristiin ikinci kısmı boyunca operasyona anahtarlanır. C hattının eimi hemen hemen dikeydir. letim, B noktasına kadar kapasitörün boalmasıyla sürer. Bu noktada, eleman akımındaki daha ileri bir azalma, iletimde olmama durumuna deimeye neden olur ve kapasitörün yüklenmesi operasyonun baka bir dalgasının balangıcını balatır. Tipik dinamik operasyon ekil 3.9 daki grafiklerde gösterilmektedir.
ekil 3.8
ekil 3.9
Diyak elemanının iletim durumu modeli ekil 3.8 de gösterilen grafikten belirlenebilir. ES gerilim kaynaı, gerilim ekseni ile iletim karakteristiinin uzantısının kesiimindedir. RS’nin deeri karakteristiin iletim kısmının eiminin tersidir.

Anahtar kapandıktan sonra, zamanın bir fonksiyonu olarak kapı akımını belirlemek için dorusal devre analizi kullanılabilir. Sıkça kullanılan eleman deerleri öyle olabilir ki, sadece çok küçük bir hata ile bu boalma süresince gerilim kaynaının katkısı ihmal edilebilir. Tabiki böyle bir yaklaım mutlaka gerekli deildir.
ayet yukarıdaki yaklaım yapılırsa, kapı akımı ekil 3.7 deki devrenin seri kısmından belirlenebilir. Geçici akım için bu devrenin bir çözümü 3.8 ve 3.9 eitliklerinde verilmitir. 3.8 eitliinde, VC(0) anahtarın iletiminin balangıcındaki kapasitör gerilimidir.
( )dt
GKS
SGKCG e
RR
EEvti
τ/)0()( −
+
−−= (3.8)
))(( CRR GKSd +=τ (3.9)
ekil 3.7 de modellenen yarı-iletken anahtar, anahtar akımı B noktası ile gösterilen bir deere indii zaman akımın iletimini durdurur. 3.8 eitliinde bu akım deerinin yerine konulması ile iletimin sona erdii td zamanı bulunur. Kapı akımının tetikleme gereksinimi ile zamanın bir fonksiyonu olarak kapı akımının karılatırılması, iletim için SCR’nin yeterli kapı akımına sahip olup olmadıı belirlenir. Bu karılatırma, gerekli minimum kapı akım miktarının aılıp aılmadıının deerlendirilmesine de izin verir.
letim aralıının sonunda, kapasitör tamamen boalmamıtır. Kalan gerilim, anahtarın açılmadan tam önceki anı için, ekil 3.7 de gösterilen devrenin sadaki döngüsünden Kirof’un gerilim eitliinin bir çözümü ile belirlenebilir. 3.10 eitlii kapasitör geriliminin bu deerini belirlemek için gerekli olan ilikiyi ifade etmektedir.
[ ]))(()( GKSdGGKSdC RRtiEEtv +++= (3.10)
Bundan sonraki yükleme aralıı, önceki operasyonda belirlenen bir gerilim ile kapasitörün kısmi olarak yüklenmi olmasıyla balar. Bu yükleme aralıı, kapasitörün tamamen boalarak balanılan balangıç aralıı durumundakinden kısa olacaktır. S anahtarı açıkken ekil 3.7 deki devrenin sol kısmının kullanılması ile kapasitörün belirlenen gerilime yüklenmesi için gerekli zaman belirlenebilir. 3.11 eitlii bu yükleme aralıı süresince zamanın bir fonksiyonu olarak kapasitör gerilimini ifade etmektedir:
[ ] Ct
dCC etvEEtvτ/)()( −−−= (3.11)
burada
RCC =τ (3.12)
3.11 eitliinde vC(t) için vC(0) konulması ile 3.14 eitliinde belirlenecek yükleme zamanının bulunması mümkün olur. 3.13 eitlii için zaman orijini, yükleme aralıının balangıcından balayan yeni bir zaman orijinidir. Anahtarın iletimi zamanında, kapasitör gerilimi vC(0) dır:
[ ] CCt
dCC etvEEvτ/)()0( −−−= (3.13)
−
−=
)0(
)(ln
C
dCCC
vE
tvEt τ (3.14)
Anahtarın modelleme ve devre hesaplamalarının gösterimleri örnek 3.2 de verilmitir. Bir dizayn örnei 3.3 örneinde verilmitir.
ÖRNEK 3.2
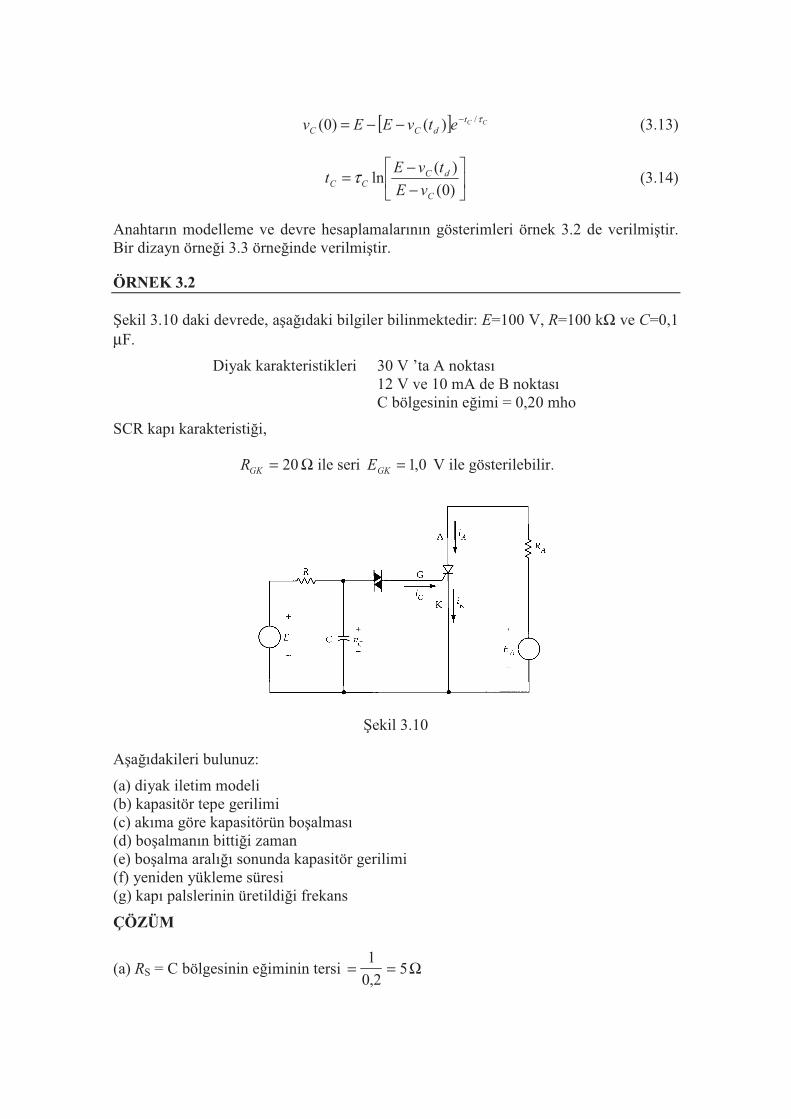
ekil 3.10 daki devrede, aaıdaki bilgiler bilinmektedir: E=100 V, R=100 kΩ ve C=0,1 µF.
Diyak karakteristikleri 30 V ’ta A noktası 12 V ve 10 mA de B noktası C bölgesinin eimi = 0,20 mho
SCR kapı karakteristii,
RGK = 20 Ω ile seri EGK = 1 0, V ile gösterilebilir.
ekil 3.10
Aaıdakileri bulunuz:
(a) diyak iletim modeli (b) kapasitör tepe gerilimi (c) akıma göre kapasitörün boalması (d) boalmanın bittii zaman (e) boalma aralıı sonunda kapasitör gerilimi (f) yeniden yükleme süresi (g) kapı palslerinin üretildii frekans
ÇÖZÜM
(a) RS = C bölgesinin eiminin tersi = =1
0 25
,Ω

ES = C bölgesinin eiminin gerilim eksenini kestii yer
ES = − =12 0 01 5 11 95( , )( ) , V
(b) Kapasitör tepe gerilimi = + = + =E EA GK 30 0 1 0 31, , V
(c) 3.8 ve 3.9 eitliklerinden:
ττ
//
722,0205
))(0,195,110,31()( t
t
G ee
tid
−−
=+
−−=
τd = + =( )( , ) ,5 20 0 1 2 5 µs
(d) i tG ( ) ,= 0 01 olduu zaman boalma durur:
0 01 0 722 2 5, , / ,= −e t
τd = 10 7, µs
(e) Boalma aralıının sonunda, kapasitör gerilimi 3.10 eitliindeki Kirof’un gerilim ilikisinden bulunabilir:
v i tC G= + + + =( ) ( ) , , ,20 5 11 95 1 0 13 2V
(f) 13,2 V balangıç deerinde kapasitörün yeniden dolması balar ve son deer 31 V dur. 3.13 ve 3.14 eitliklerinden:
31 100 100 13 2= − − −( , ) /e tC Cτ
vC = 13 2, V
tC = 0 002295, s
(g) Toplam periyod, dolma ve boalma zamanlarının toplamıdır:
T = + =0 002295 0 0000107 0 002306, , , s
Frekans = =1
433 7T
, Hz
ÖRNEK 3.3
1000 Hz’lik tekrarlama frekansı ile bir SCR’ye kapı pals’leri salayan bir diyak devresi dizayn ediniz. Her iletim ileminde 4 µs lik bir aralık süresince kapı akımının 25 mA’i geçmesi gerekmektedir. Diyak örnek 3.2 deki aynı karakteristiklere sahiptir. SCR deerleri, EGK=1,2V ve RGK=35 Ω; E=80 V.
ÇÖZÜM

Kapasitör tepe gerilimi EGK ve tepe diyak gerilimi veya 31,2 V’un toplamıdır. Kapı akımı 3.8 eitlii kullanılarak bulunabilir:
i t e eG
t td d( ), , ,
,/ /=− −
+
=− −31 2 11 95 1 2
5 350 451τ τ
t = 4 µs için iG’nin 0,025 A olması gerekir. Zaman sabiti, τd=1,383 µs olarak bulunabilir. Bu zaman sabitinden kapasitörün deeri bulunabilir:
CR R
d
GK S
=+
= =τ 1 383
400 035
,, µF
Diyak, akım 0,01 A oluncaya kadar kapasitörü boaltmaya devam eder. Toplam boalma zamanı 3.8 eitlii ile hesaplanabilir:
0 01 0 451, , /= −e td dτ
td = 5 27, µs
1000 µs lik toplam periyodun kalan kısmı kapasitörün doldurulması içindir. Kapasitör geriliminin en az deeri, boalma aralıının sonunda ekil 3.7 deki sa kısım için 3.10 eitliinden bulunabilir:
v tC d( ) , , , ( ) ,= + + + =11 95 1 2 0 01 5 35 13 55 V
t T tc d= − = − =1000 5 3 994 7, , µs
3.14 eitlii ile dolma zaman sabitinin deeri ve dolayısiyle R belirlenebilir:
−
−=
2,31100
55,13100ln7,994 cτ
4356=cτ µs
0,035 µF lık kapasitörle, R = 124,5 kΩ’dur.
Önceki örnekte kapasitörün boalmasındaki SCR kapı akımı büyüktür ve sabit olmamakla beraber, SCR’ye birkaç mikrosaniye için kapı akımı salayacak büyüklüktedir. Böylece, bu kapasitörün boalma düzenlemesinin saladıı kapı akımı, çou SCR’leri iletime geçirmek için yeterlidir. Bazı büyük elemanlar yukarıdaki örnekten daha büyük kapı akımına gereksinim duyarlar.
Yukarıdaki analiz için gerekli olan bilgi ekseriyetle mevcut deildir, fakat analiz, boalma ilemini iyi bir ekilde göstermektedir. Çou dizayn durumlarında, basitletirilmi metotlar kullanılır. Çünkü tetikleme için SCR’nin kapı akımında gerekli olan böyle çok geni deerler vardır, SCR’nin hassas modellenmesi çok kullanılı deildir. Gereinden birkaç kez daha büyük kapı akımının ve SCR’nin kapı-katot
modelinden baımsız akımın salanması tasarımcının sorumluluundadır. Tabiki herhangi bir hasarın görülmemesi için de bir üst sınırın konulması gereklidir.
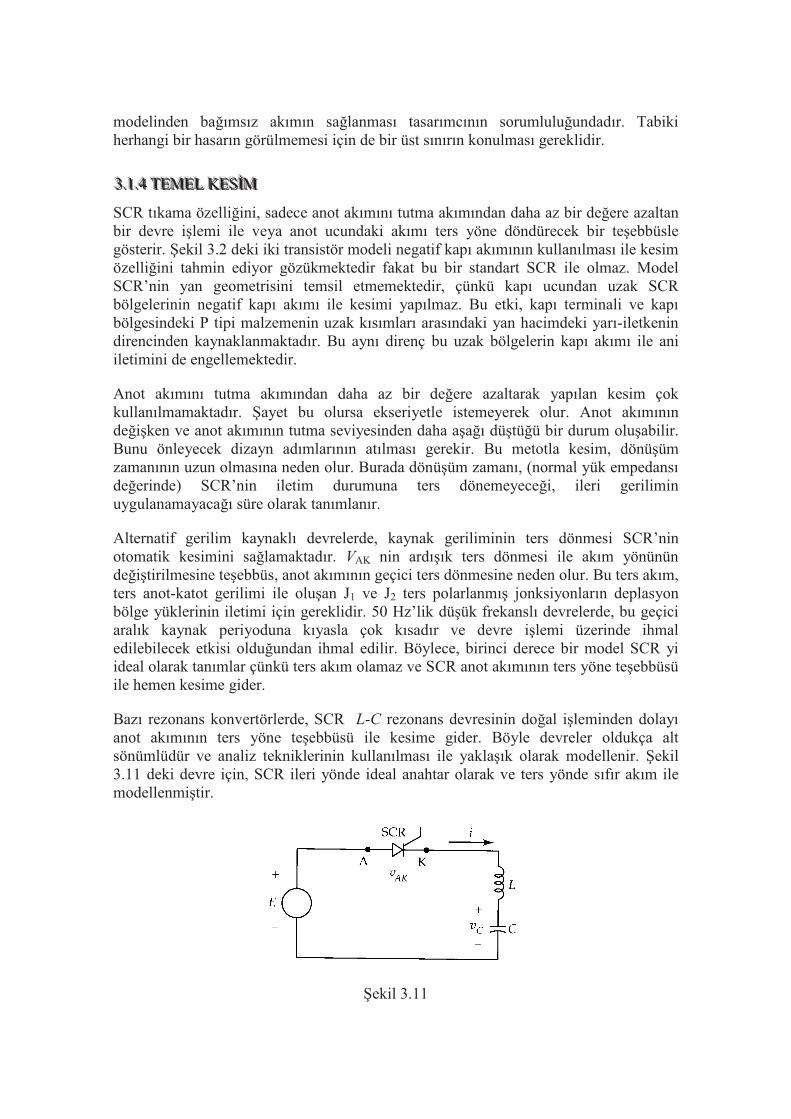
333...111...444 TTTEEEMMMEEELLL KKKEEESSSMMM
SCR tıkama özelliini, sadece anot akımını tutma akımından daha az bir deere azaltan bir devre ilemi ile veya anot ucundaki akımı ters yöne döndürecek bir teebbüsle gösterir. ekil 3.2 deki iki transistör modeli negatif kapı akımının kullanılması ile kesim özelliini tahmin ediyor gözükmektedir fakat bu bir standart SCR ile olmaz. Model SCR’nin yan geometrisini temsil etmemektedir, çünkü kapı ucundan uzak SCR bölgelerinin negatif kapı akımı ile kesimi yapılmaz. Bu etki, kapı terminali ve kapı bölgesindeki P tipi malzemenin uzak kısımları arasındaki yan hacimdeki yarı-iletkenin direncinden kaynaklanmaktadır. Bu aynı direnç bu uzak bölgelerin kapı akımı ile ani iletimini de engellemektedir.
Anot akımını tutma akımından daha az bir deere azaltarak yapılan kesim çok kullanılmamaktadır. ayet bu olursa ekseriyetle istemeyerek olur. Anot akımının deiken ve anot akımının tutma seviyesinden daha aaı dütüü bir durum oluabilir. Bunu önleyecek dizayn adımlarının atılması gerekir. Bu metotla kesim, dönüüm zamanının uzun olmasına neden olur. Burada dönüüm zamanı, (normal yük empedansı deerinde) SCR’nin iletim durumuna ters dönemeyecei, ileri gerilimin uygulanamayacaı süre olarak tanımlanır.
Alternatif gerilim kaynaklı devrelerde, kaynak geriliminin ters dönmesi SCR’nin otomatik kesimini salamaktadır. VAK nin ardıık ters dönmesi ile akım yönünün deitirilmesine teebbüs, anot akımının geçici ters dönmesine neden olur. Bu ters akım, ters anot-katot gerilimi ile oluan J1 ve J2 ters polarlanmı jonksiyonların deplasyon bölge yüklerinin iletimi için gereklidir. 50 Hz’lik düük frekanslı devrelerde, bu geçici aralık kaynak periyoduna kıyasla çok kısadır ve devre ilemi üzerinde ihmal edilebilecek etkisi olduundan ihmal edilir. Böylece, birinci derece bir model SCR yi ideal olarak tanımlar çünkü ters akım olamaz ve SCR anot akımının ters yöne teebbüsü ile hemen kesime gider.
Bazı rezonans konvertörlerde, SCR L-C rezonans devresinin doal ileminden dolayı anot akımının ters yöne teebbüsü ile kesime gider. Böyle devreler oldukça alt sönümlüdür ve analiz tekniklerinin kullanılması ile yaklaık olarak modellenir. ekil 3.11 deki devre için, SCR ileri yönde ideal anahtar olarak ve ters yönde sıfır akım ile modellenmitir.
ekil 3.11
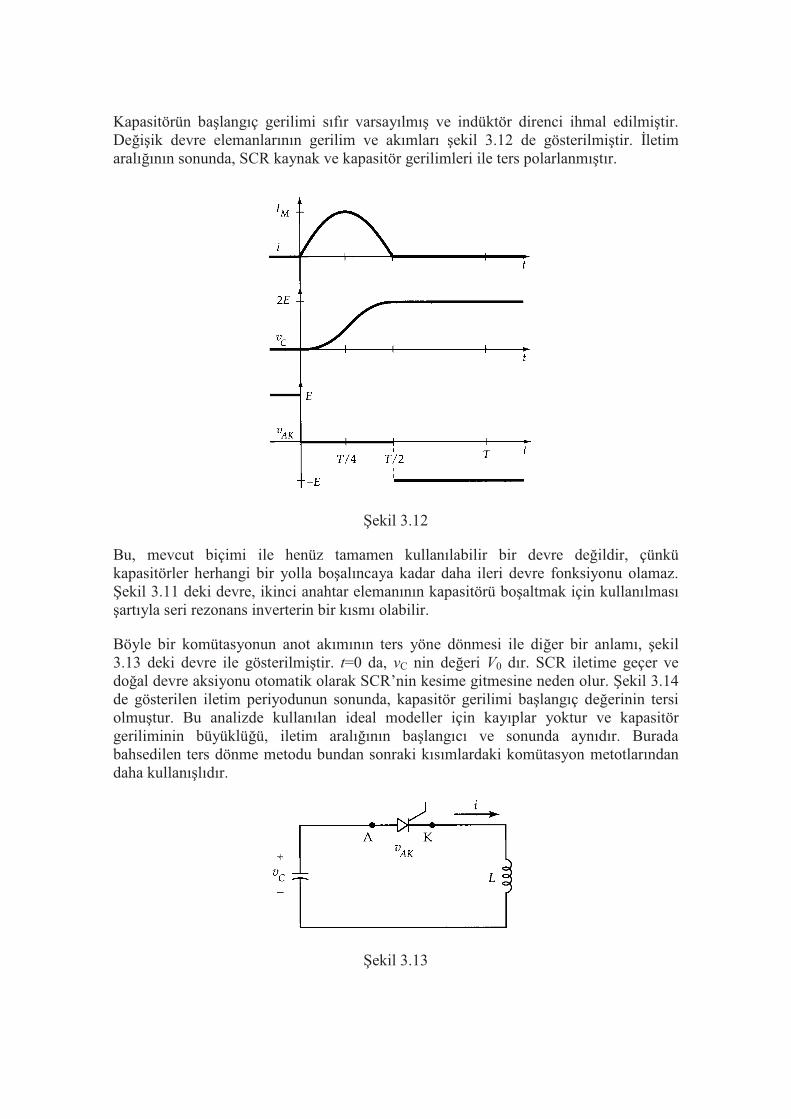
Kapasitörün balangıç gerilimi sıfır varsayılmı ve indüktör direnci ihmal edilmitir. Deiik devre elemanlarının gerilim ve akımları ekil 3.12 de gösterilmitir. letim aralıının sonunda, SCR kaynak ve kapasitör gerilimleri ile ters polarlanmıtır.
ekil 3.12
Bu, mevcut biçimi ile henüz tamamen kullanılabilir bir devre deildir, çünkü kapasitörler herhangi bir yolla boalıncaya kadar daha ileri devre fonksiyonu olamaz. ekil 3.11 deki devre, ikinci anahtar elemanının kapasitörü boaltmak için kullanılması artıyla seri rezonans inverterin bir kısmı olabilir.
Böyle bir komütasyonun anot akımının ters yöne dönmesi ile dier bir anlamı, ekil 3.13 deki devre ile gösterilmitir. t=0 da, vC nin deeri V0 dır. SCR iletime geçer ve doal devre aksiyonu otomatik olarak SCR’nin kesime gitmesine neden olur. ekil 3.14 de gösterilen iletim periyodunun sonunda, kapasitör gerilimi balangıç deerinin tersi olmutur. Bu analizde kullanılan ideal modeller için kayıplar yoktur ve kapasitör geriliminin büyüklüü, iletim aralıının balangıcı ve sonunda aynıdır. Burada bahsedilen ters dönme metodu bundan sonraki kısımlardaki komütasyon metotlarından daha kullanılıdır.
ekil 3.13
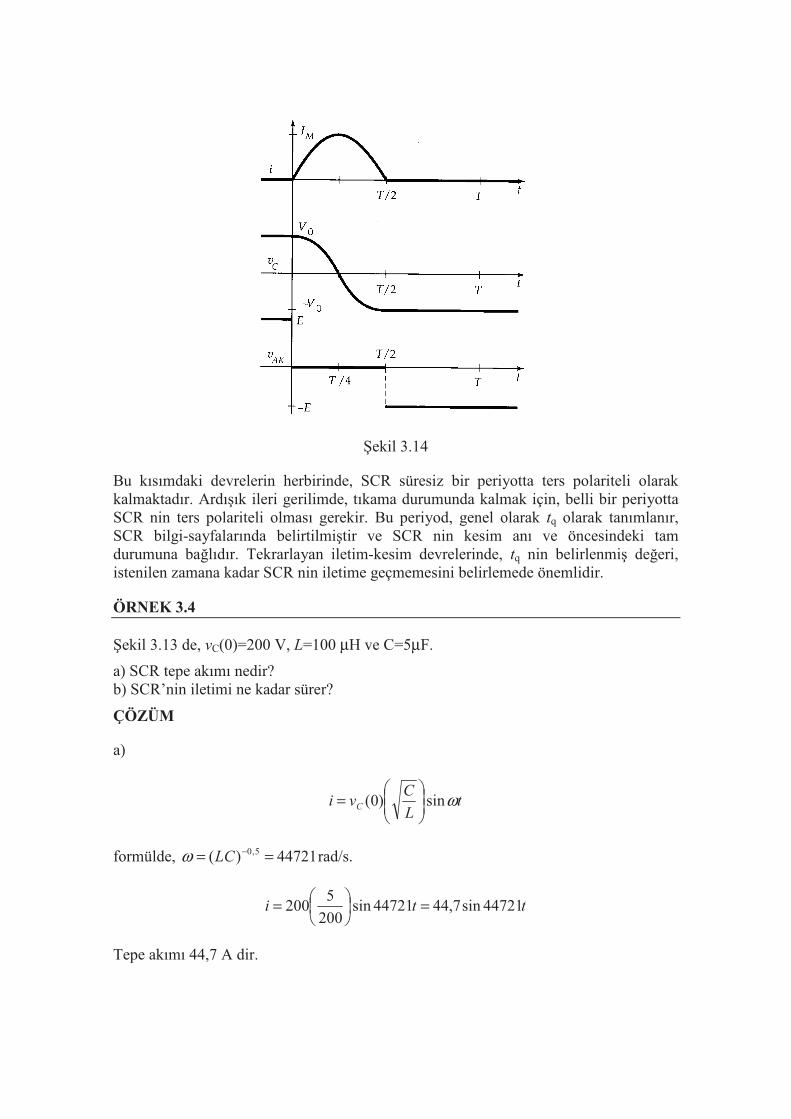
ekil 3.14
Bu kısımdaki devrelerin herbirinde, SCR süresiz bir periyotta ters polariteli olarak kalmaktadır. Ardıık ileri gerilimde, tıkama durumunda kalmak için, belli bir periyotta SCR nin ters polariteli olması gerekir. Bu periyod, genel olarak tq olarak tanımlanır, SCR bilgi-sayfalarında belirtilmitir ve SCR nin kesim anı ve öncesindeki tam durumuna balıdır. Tekrarlayan iletim-kesim devrelerinde, tq nin belirlenmi deeri, istenilen zamana kadar SCR nin iletime geçmemesini belirlemede önemlidir.
ÖRNEK 3.4
ekil 3.13 de, vC(0)=200 V, L=100 µH ve C=5µF.
a) SCR tepe akımı nedir? b) SCR’nin iletimi ne kadar sürer?
ÇÖZÜM
a)
tL
Cvi C ωsin)0(
=
formülde, 44721)( 5,0 == −LCω rad/s.
tti 44721sin7,4444721sin200
5200 =
=
Tepe akımı 44,7 A dir.
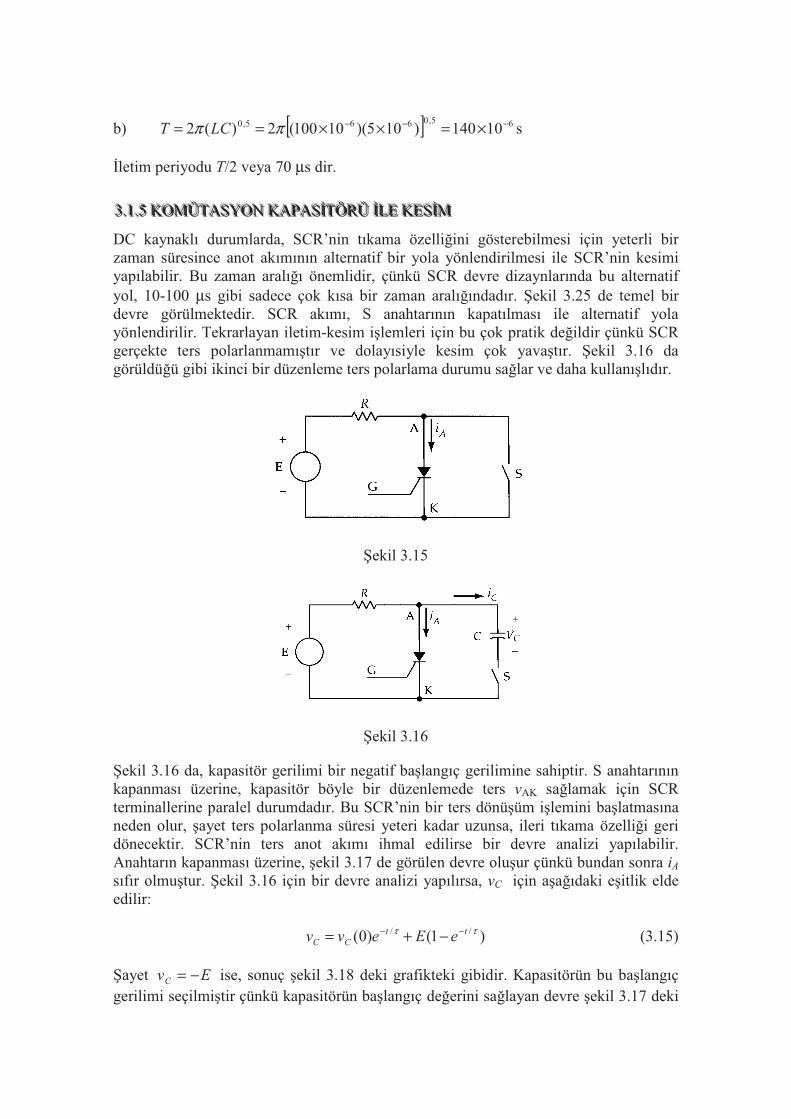
b) [ ] 65,0665,0 10140)105)(10100(2)(2 −−− ×=××== ππ LCT s
letim periyodu T/2 veya 70 µs dir.
333...111...555 KKKOOOMMMÜÜÜTTTAAASSSYYYOOONNN KKKAAAPPPAAASSSTTTÖÖÖRRRÜÜÜ LLLEEE KKKEEESSSMMM
DC kaynaklı durumlarda, SCR’nin tıkama özelliini gösterebilmesi için yeterli bir zaman süresince anot akımının alternatif bir yola yönlendirilmesi ile SCR’nin kesimi yapılabilir. Bu zaman aralıı önemlidir, çünkü SCR devre dizaynlarında bu alternatif yol, 10-100 µs gibi sadece çok kısa bir zaman aralıındadır. ekil 3.25 de temel bir devre görülmektedir. SCR akımı, S anahtarının kapatılması ile alternatif yola yönlendirilir. Tekrarlayan iletim-kesim ilemleri için bu çok pratik deildir çünkü SCR gerçekte ters polarlanmamıtır ve dolayısiyle kesim çok yavatır. ekil 3.16 da görüldüü gibi ikinci bir düzenleme ters polarlama durumu salar ve daha kullanılıdır.
ekil 3.15
ekil 3.16
ekil 3.16 da, kapasitör gerilimi bir negatif balangıç gerilimine sahiptir. S anahtarının kapanması üzerine, kapasitör böyle bir düzenlemede ters vAK salamak için SCR terminallerine paralel durumdadır. Bu SCR’nin bir ters dönüüm ilemini balatmasına neden olur, ayet ters polarlanma süresi yeteri kadar uzunsa, ileri tıkama özellii geri dönecektir. SCR’nin ters anot akımı ihmal edilirse bir devre analizi yapılabilir. Anahtarın kapanması üzerine, ekil 3.17 de görülen devre oluur çünkü bundan sonra iA
sıfır olmutur. ekil 3.16 için bir devre analizi yapılırsa, vC için aaıdaki eitlik elde edilir:
)1()0( // ττ tt
CC eEevv −− −+= (3.15)
ayet v EC = − ise, sonuç ekil 3.18 deki grafikteki gibidir. Kapasitörün bu balangıç
gerilimi seçilmitir çünkü kapasitörün balangıç deerini salayan devre ekil 3.17 deki
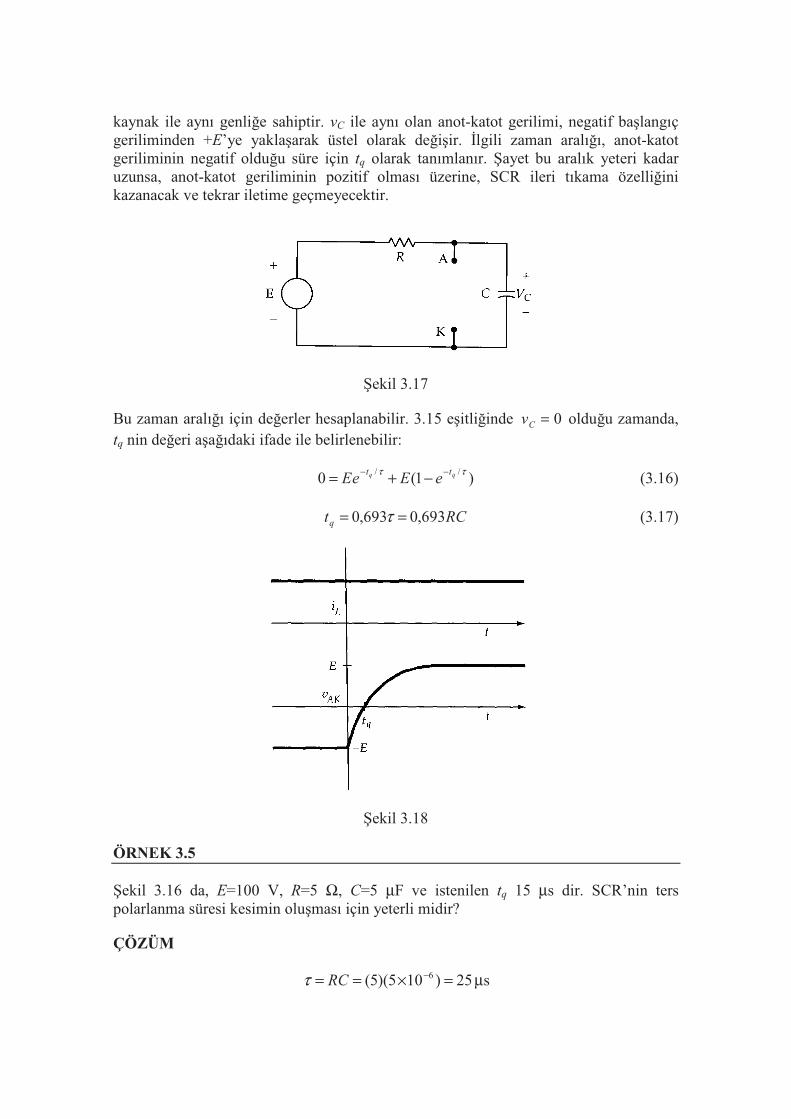
kaynak ile aynı genlie sahiptir. vC ile aynı olan anot-katot gerilimi, negatif balangıç geriliminden +E’ye yaklaarak üstel olarak deiir. lgili zaman aralıı, anot-katot geriliminin negatif olduu süre için tq olarak tanımlanır. ayet bu aralık yeteri kadar uzunsa, anot-katot geriliminin pozitif olması üzerine, SCR ileri tıkama özelliini kazanacak ve tekrar iletime geçmeyecektir.
ekil 3.17
Bu zaman aralıı için deerler hesaplanabilir. 3.15 eitliinde vC = 0 olduu zamanda,
tq nin deeri aaıdaki ifade ile belirlenebilir:
)1(0// ττ qq tt
eEeE−−
−+= (3.16)
RCtq 693,0693,0 == τ (3.17)
ekil 3.18
ÖRNEK 3.5
ekil 3.16 da, E=100 V, R=5 Ω, C=5 µF ve istenilen tq 15 µs dir. SCR’nin ters polarlanma süresi kesimin oluması için yeterli midir?
ÇÖZÜM
25)105)(5( 6 =×== −RCτ µs
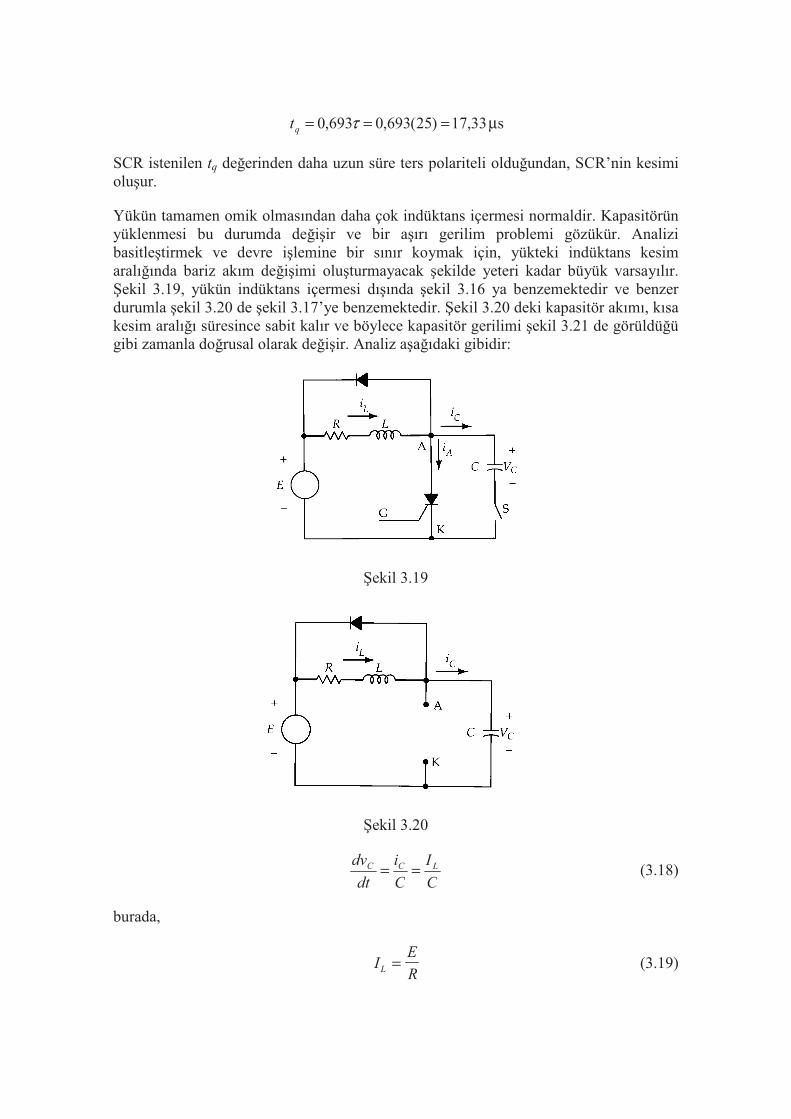
33,17)25(693,0693,0 === τqt µs
SCR istenilen tq deerinden daha uzun süre ters polariteli olduundan, SCR’nin kesimi oluur.
Yükün tamamen omik olmasından daha çok indüktans içermesi normaldir. Kapasitörün yüklenmesi bu durumda deiir ve bir aırı gerilim problemi gözükür. Analizi basitletirmek ve devre ilemine bir sınır koymak için, yükteki indüktans kesim aralıında bariz akım deiimi oluturmayacak ekilde yeteri kadar büyük varsayılır. ekil 3.19, yükün indüktans içermesi dıında ekil 3.16 ya benzemektedir ve benzer durumla ekil 3.20 de ekil 3.17’ye benzemektedir. ekil 3.20 deki kapasitör akımı, kısa kesim aralıı süresince sabit kalır ve böylece kapasitör gerilimi ekil 3.21 de görüldüü gibi zamanla dorusal olarak deiir. Analiz aaıdaki gibidir:
ekil 3.19
ekil 3.20
C
I
C
i
dt
dv LCC == (3.18)
burada,
IE
RL = (3.19)
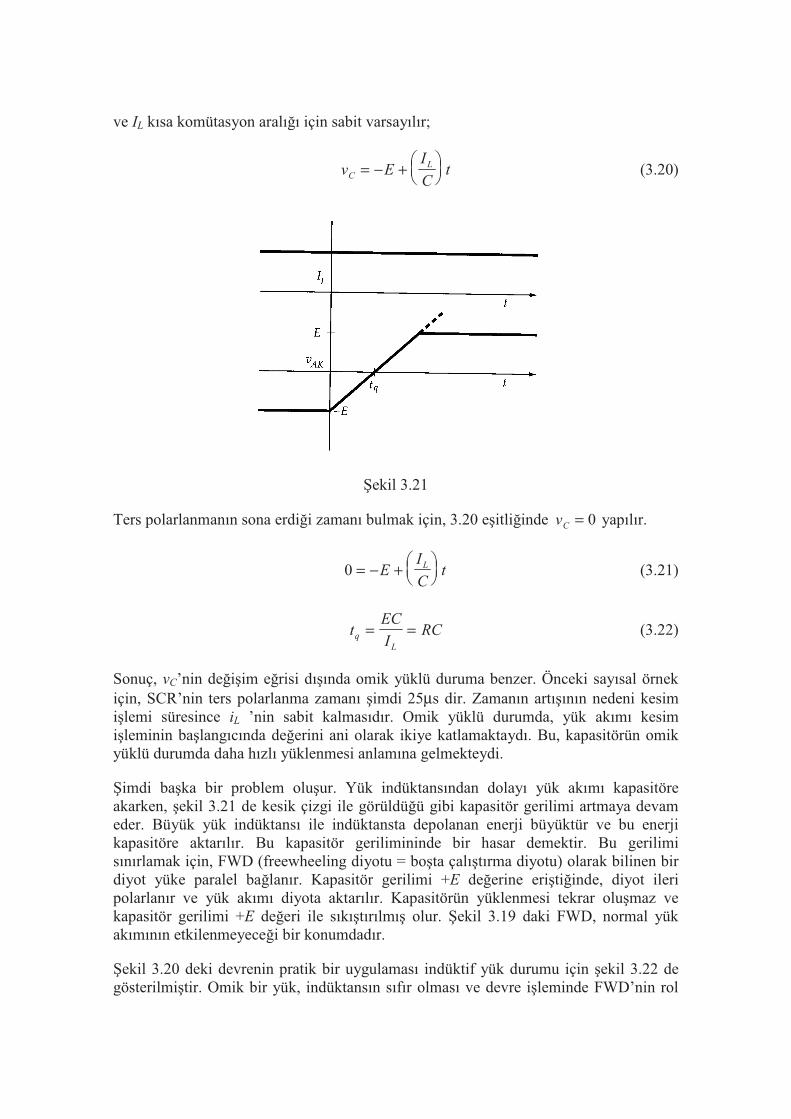
ve IL kısa komütasyon aralıı için sabit varsayılır;
v EI
CtC
L= − +
(3.20)
ekil 3.21
Ters polarlanmanın sona erdii zamanı bulmak için, 3.20 eitliinde vC = 0 yapılır.
0 = − +
E
I
Ct
L (3.21)
tEC
IRCq
L
= = (3.22)
Sonuç, vC’nin deiim erisi dıında omik yüklü duruma benzer. Önceki sayısal örnek için, SCR’nin ters polarlanma zamanı imdi 25µs dir. Zamanın artıının nedeni kesim ilemi süresince iL ’nin sabit kalmasıdır. Omik yüklü durumda, yük akımı kesim ileminin balangıcında deerini ani olarak ikiye katlamaktaydı. Bu, kapasitörün omik yüklü durumda daha hızlı yüklenmesi anlamına gelmekteydi.
imdi baka bir problem oluur. Yük indüktansından dolayı yük akımı kapasitöre akarken, ekil 3.21 de kesik çizgi ile görüldüü gibi kapasitör gerilimi artmaya devam eder. Büyük yük indüktansı ile indüktansta depolanan enerji büyüktür ve bu enerji kapasitöre aktarılır. Bu kapasitör gerilimininde bir hasar demektir. Bu gerilimi sınırlamak için, FWD (freewheeling diyotu = bota çalıtırma diyotu) olarak bilinen bir diyot yüke paralel balanır. Kapasitör gerilimi +E deerine eritiinde, diyot ileri polarlanır ve yük akımı diyota aktarılır. Kapasitörün yüklenmesi tekrar olumaz ve kapasitör gerilimi +E deeri ile sıkıtırılmı olur. ekil 3.19 daki FWD, normal yük akımının etkilenmeyecei bir konumdadır.
ekil 3.20 deki devrenin pratik bir uygulaması indüktif yük durumu için ekil 3.22 de gösterilmitir. Omik bir yük, indüktansın sıfır olması ve devre ileminde FWD’nin rol
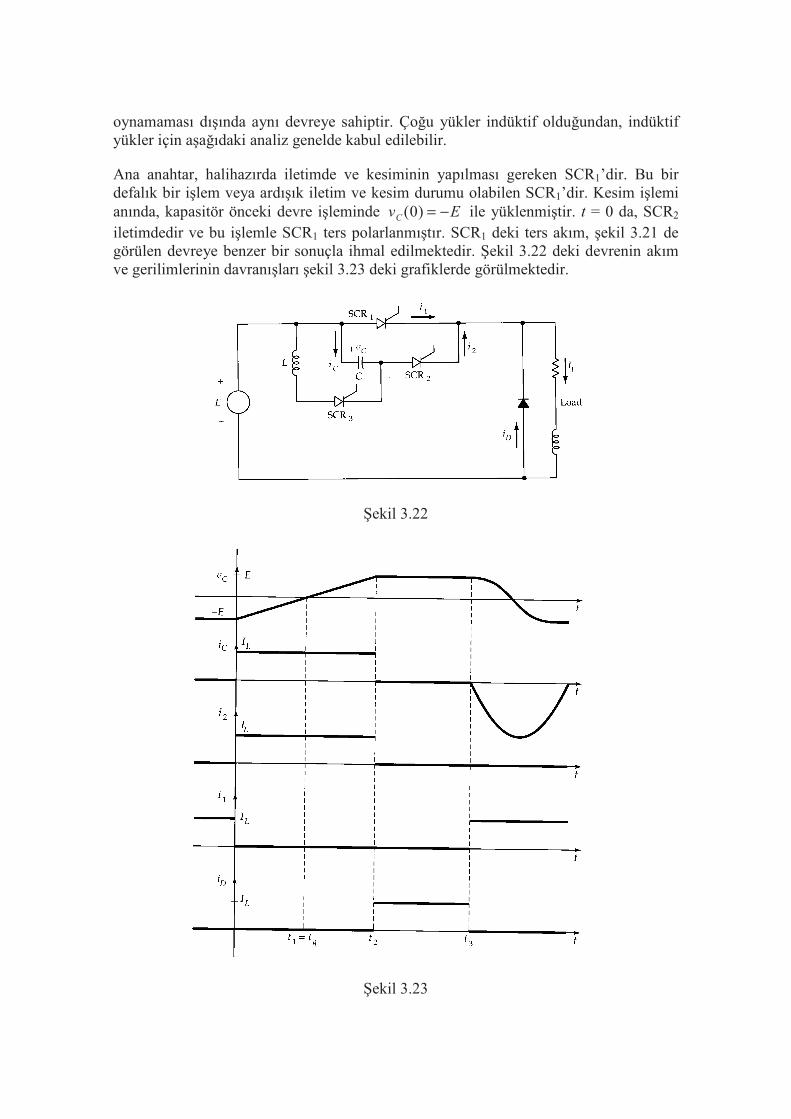
oynamaması dıında aynı devreye sahiptir. Çou yükler indüktif olduundan, indüktif yükler için aaıdaki analiz genelde kabul edilebilir.
Ana anahtar, halihazırda iletimde ve kesiminin yapılması gereken SCR1’dir. Bu bir defalık bir ilem veya ardıık iletim ve kesim durumu olabilen SCR1’dir. Kesim ilemi anında, kapasitör önceki devre ileminde v EC ( )0 = − ile yüklenmitir. t = 0 da, SCR2
iletimdedir ve bu ilemle SCR1 ters polarlanmıtır. SCR1 deki ters akım, ekil 3.21 de görülen devreye benzer bir sonuçla ihmal edilmektedir. ekil 3.22 deki devrenin akım ve gerilimlerinin davranıları ekil 3.23 deki grafiklerde görülmektedir.
ekil 3.22
ekil 3.23

t1 zamanında, SCR1 in anot-katot gerilimi pozitif olur. Bu ekil 3.21 deki tq ile aynıdır. Kesim ileminin gerçekleebilmesi için, SCR1 in ters polarlanma aralıı tıkama özelliini gösterebilmesi için yeteri kadar uzun olmalıdır.
FWD t2 de iletime baladıı zaman, SCR2 akımı sıfıra gider ve dönüüme balar. ayet SCR2 SCR1 in bundan sonraki iletimine kadar dönüümünü tamamen tamamlamamısa, SCR1 in iletim ilemi kapasitör üzerindeki gerilimden SCR2 üzerinde ters gerilime neden olur. Aynı zamanda SCR1 iletime geçer ve t3 de de SCR3 iletime geçirilebilir. L, C ve SCR3 den oluan devre, C üzerindeki gerilimi tersleme ilemi yapan bir rezonans devresidir. Bu gerilim tersleme, SCR1 in sonraki kesimi için gereklidir. Düzgün bir devre dizaynı ile bu tersleme ilemi SCR1 in sonraki kesiminden önce yerine getirilir. SCR1 in minimum zamanı bu tersleme ileminin ne kadar sürmesi gerektiini belirler.
ÖRNEK 3.6
ekil 3.22 de görülen bir devre düzenlemesi 400 V luk bir DC kaynaktan bir indüktif yüke 30 A beslemek için kullanılmaktadır. SCR1 için gereken tq deeri 30 µs dir. SCR1
in sonraki iletiminde, minimum 100 µs süre iletimde olacaktır. Aaıdakileri hesaplayarak kesim elemanlarını dizayn ediniz.
a) C kapasitörü b) L indüktörü c) SCR3 deki tepe akım
ÇÖZÜM
a) ekil 3.22 deki devre ve ekil 3.23 deki grafik burada uygulanacaından, C nin deeri 3.22 eitlii ile bulunabilir:
66
1025,2400
)30)(1030( −−
×=×
=
=
E
ItC
Lq F
b) L, C ve SCR3 den oluan devrenin C deki gerilimi 100 µs veya daha az zamanda terslemesi gerekir:
T
2100 10 6= × − s
C LC= = × −2 200 10 6π
L = × −450 10 6 H
c) SCR3 deki tepe akım:
I EC
Lp = =×
×=
−
−4002 10
450 1028 3
6
6
,25, A
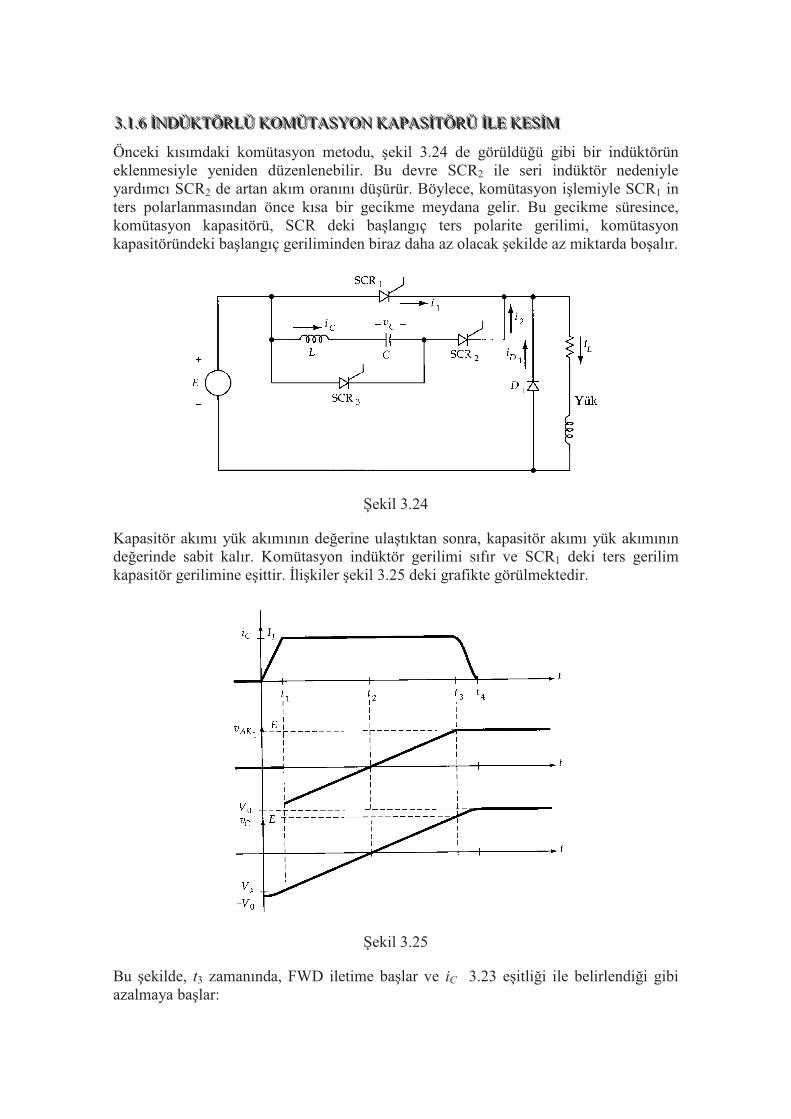
333...111...666 NNNDDDÜÜÜKKKTTTÖÖÖRRRLLLÜÜÜ KKKOOOMMMÜÜÜTTTAAASSSYYYOOONNN KKKAAAPPPAAASSSTTTÖÖÖRRRÜÜÜ LLLEEE KKKEEESSSMMM
Önceki kısımdaki komütasyon metodu, ekil 3.24 de görüldüü gibi bir indüktörün eklenmesiyle yeniden düzenlenebilir. Bu devre SCR2 ile seri indüktör nedeniyle yardımcı SCR2 de artan akım oranını düürür. Böylece, komütasyon ilemiyle SCR1 in ters polarlanmasından önce kısa bir gecikme meydana gelir. Bu gecikme süresince, komütasyon kapasitörü, SCR deki balangıç ters polarite gerilimi, komütasyon kapasitöründeki balangıç geriliminden biraz daha az olacak ekilde az miktarda boalır.
ekil 3.24
Kapasitör akımı yük akımının deerine ulatıktan sonra, kapasitör akımı yük akımının deerinde sabit kalır. Komütasyon indüktör gerilimi sıfır ve SCR1 deki ters gerilim kapasitör gerilimine eittir. likiler ekil 3.25 deki grafikte görülmektedir.
ekil 3.25
Bu ekilde, t3 zamanında, FWD iletime balar ve iC 3.23 eitlii ile belirlendii gibi azalmaya balar:

i I tC L= cosω (3.23)
3.23 eitliinde ω, L ve C komütasyon devresi ile belirlenir. Kapasitör akımının t4 de sıfır olduu anda, kapasitör gerilimi devrenin kaynak geriliminden büyüktür. Bu deer, kaynaktan beslenen enerjinin bilinmesi ile t3 ve t4 de L ve C de depolanan enerji eitlii ile hesaplanabilir. t = t3 de, depolanan enerji 3.24 eitlii ile verilir:
22
3 5,05,0 CELIW L += (3.24)
t = t4 de, depolanan enerji 3.25 eitlii ile verilir:
W CV4 020 5= , (3.25)
Kaynaktan beslenen enerji, kaynak gerilimi E ve t3-t4 arasında iC ile gösterilen yükün çarpımıdır. Bu aralıkta, iC T/4 süresince sinüsoidaldir; bu enerji 3.26 eitlii ile verilir:
4
2))()((
234
TEIEttIW LLS
ππ=−= (3.26)
W W WS4 3= + (3.27)
3.27 eitliinin 3.24-3.26 eitlikleri ile birletirilmesiyle 3.30 eitlii meydana gelir:
LCEILICEV LL
++=
2
25,05,05,0
222
0
π
π (3.28)
LCEIIC
LEV LL 2
222
0 +
+= (3.29)
V
E
I
E
L
C
L0 1= +
(3.30)
V0’ın deeri E’nin deerinden büyüktür ve uygun bir tasarım, komütasyon kapasitörü, SCR2 ve SCR3 ün bu gerilim oranlarını hesaba katmalıdır. SCR3, sonraki kesim ileminin hazırlanmasında komütasyon kapasitör geriliminin yönünün deitirilmesinde kullanılır.
ÖRNEK 3.7
ekil 3.24 de devrede, E=250 V, V0=375 V, IL=25 A, C=3 µF ve L=75 µH. Aaıdakileri bulunuz.
a) SCR1 in ters polarlanma zamanı b) komütasyon periyodunun sonunda kapasitör gerilimi (ekil 3.25 de t4)
ÇÖZÜM
a) vC ’nin balangıç deeri -375 V tur.

I EC
L
C
Lp = = =375 75 A
t t= 1 de,
340,075
25sin 1 =
= −θ rad
6,353cos0 −=−= θVVX V
3.22 eitliinden,
66
104,4225
)103)(6,353()0( −−
×=×
=−
=L
Xq
I
CVt s
b) 3.30 eitliinden,
V
E
06
6125
250
75 10
3 101 5= +
×
×=
−
− ,
V0 1 5 250 375= =( , )( ) V
Bu, vC nin balangıç deeri ile aynı deerdedir. Böylece, vC SCR3 ile yön deitirildiinde, sonraki kesim için balangıç artları salanmı olur.
ÖRNEK 3.8
ekil 3.24 deki bir devrenin komütasyon kısmını dizayn ediniz. Verilen deerler: E=400 V, IL=10 A ve tq=35 µs dir. Kapasitör gerilimi 500 V ile sınırlandırılmıtır.
a) L ve C deerlerini bulunuz. b) IL nin deeri 5 A e düürülürse, tq deki deiim ne kadar olur?
ÇÖZÜM
a) 3.30 eitliinden:
V
E
I
E
L
C
L
C
L0 500
4001 1
10
400= = +
= +
L
C= 100
I VC
Lp = = =( )0 5001
10050A
214,050
10sinsin 11 =
=
= −−
p
L
I
Iθ rad

[ ] 6,489)2014,0cos(500cos0 −=−=−= θVVX V
3.22 eitliinden:
6103550
))(6,489()0( −×==−
=C
I
CVt
L
Xq s
C = × −0 714 10 6, F
L C= = × −100 71 4 10 6, H
b) IL=5 A ise, V0 yeni bir deere deiir;
V
E
I
E
L
C
L0 1 15
400
71 4
0 7141125= +
= +
=
,
,,
V0 450= V
I VC
Lp = = =( ),714
,40 4500
7145 A
1113,045
5sin 1 =
= −θ rad
[ ] 2,447)1113,0cos(450cos0 −=−=−= θVVX V
tV C
Iq
X
L
=−
=×
= ×−
−( ) ( , )( , ),
0 447 2 0 714 10
563 86 10
66 s
Bu deer IL=10 A ile elde edilen deerden daha büyüktür.
3.8 örnei ile görüldüü gibi, ekil 3.24 deki SCR1 in ters polarlanma zamanı yük akımına balıdır. Bu ters polarlanma zamanı, ekil 3.26 da gösterildii gibi bir diyotun eklenmesiyle hemen hemen yük akımından baımsız yapılabilir. Sonuç devre ilemi, hemen hemen yük akımından baımsız, kısa bir süre için SCR1 uçlarında küçük bir ters gerilime neden olur.
Komütasyon aralıı süresince, ekil 3.27 deki t3 zamanına kadar SCR1 veya D2
iletimdedir. LC rezonans devresi, iC nin tepe deeri IL yi aacak ekilde dizayn edilir. iC
nin IL yi atıı zaman süresince, iC nin kısmı D2 ile bir yola sahip olan IL den büyüktür ve bu aralık için SCR1 ters polarlanmıtır. Ters polarlama gerilimi küçüktür ve gerekli tq
deeri bu yüzden büyük ters polarlama gerilimi durumuna kıyasla artar.
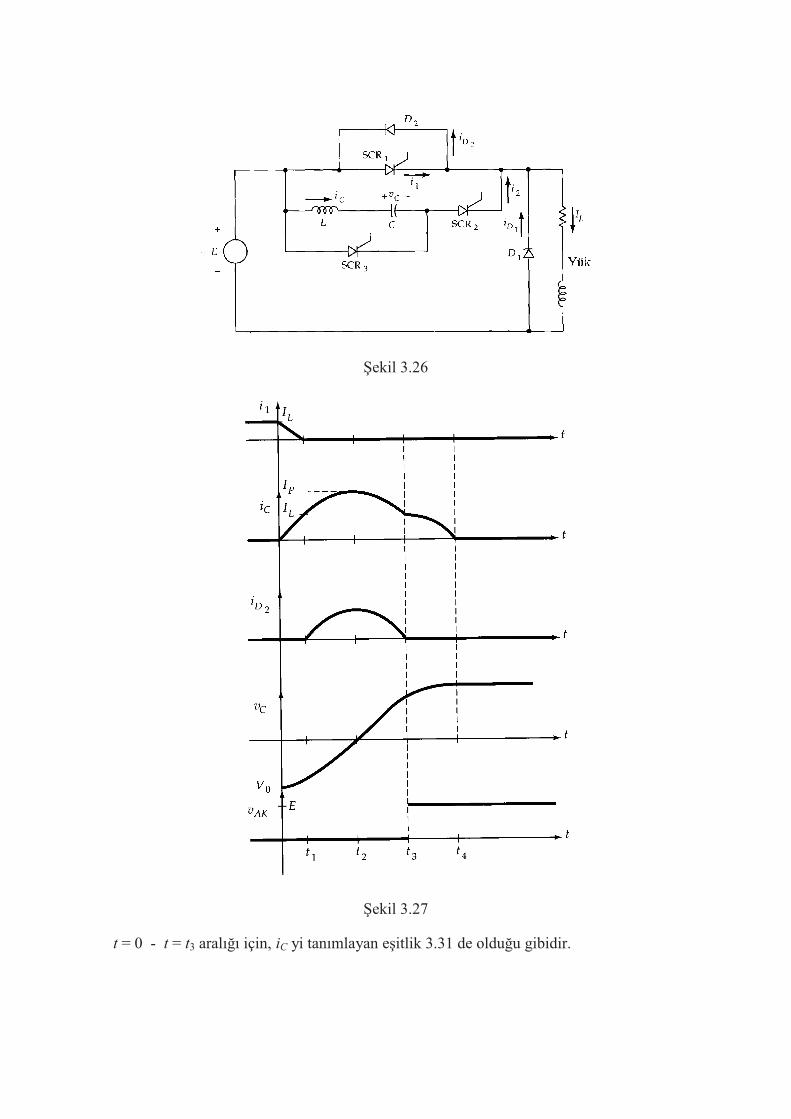
ekil 3.26
ekil 3.27
t = 0 - t = t3 aralıı için, iC yi tanımlayan eitlik 3.31 de olduu gibidir.

tItL
CVi pC ωω sinsin0 == (3.31)
SCR1 in ters polarlanma zamanı aaıda verilmitir.
t t tq = −3 1 (3.32)
Ttq
Θ−=
π
π
2
2 1 (3.33)
burada,
11 tω=Θ (3.34)
iC ’nin tepe deeri, yük akımının 1,5-2 katı büyük olacak ekilde dizayn edilir. Bundan sonraki örnek bu ilikilerin bazılarını göstermektedir.
ekil 3.26 ve 3.27 de t = t3 de, L ve C deki toplam depolanan enerji artları, t = 0 veya t = t1 ile aynıdır. t = 0 ve t = t3 arasındaki zaman süresince SCR terminallerindeki gerilim sıfırdı ve L ve C den net enerjinin girii veya çıkıı yapılmamıtı. t3 - t4
arasındaki zaman süresince, gerilim kaynaından LC devreye enerji gönderilir. vC nin son deeri böylece V0 ın balangıç genliinden büyüktür. Bu ilem, artan enerjinin gerilim kaynaına geri döndürülmesi için gerekli adımlar atılmadıı sürece her komütasyon dalgasında kapasitör gerilim deerinin artmasına neden olur. L
indüktöründe bu ilemi yerine getirmek için manyetik kuplajlı ek bir sarıma gerek vardır. Bu enerjinin geri dönüümü için devre düzenlemesi ekil 3.26 da gösterilmemitir.
ÖRNEK 3.9
ekil 3.26 daki bir devrede, SCR1 için 30 µs gerekmektedir. E=300 V ve V0=450 V.
a) IL=20 A ve Ip=40 A ile L ve C deerlerini dizayn ediniz. b) IL=10 A için tq nin yeni deerini bulunuz.
ÇÖZÜM
a) I VC
L
C
Lp = = =40 4500( ) C
L= × −7 90 10 3,
6)5,0(sinsin 11
1
πθ ==
= −−
p
L
I
Irad
61 10302
2 −×=
−= Ttq
π
θπs T LC= × =−90 10 26 π
LC = × −250 18 10 12,

L ve C ’nin iki eitliinin çözülmesi ile,
L = × −161 2 10 6, H
C = × −1 273 10 6, F
b) 450 V da V0 ın deimedii varsayımıyla, aaıdaki eitlikler bulunur:
2527,040
10sinsin 11
1 =
=
= −−
p
L
I
Iθ rad
661 108,37)1090(2
)2527,0(2
2
2 −− ×=×
−=
−=
π
π
π
θπTtq s
ekil 3.27 deki grafiklerde, SCR1 in gerilimi t = t3 de ideal bir süreksizlie sahiptir. Gerçek pratikte, bununla beraber, D2 nin sonlu dönüüm zamanı ve SCR1 in daıtılmıjonksiyon kapasitansından dolayı bu olumaz. Fakat SCR1 de vAK nin artı oranı SCR1’i istenilmeden iletime geçirmek için yeteri kadar büyüktür. Bunu engellemek için SCR1’e veya FWD’ye paralel bir koruyucu devrenin eklenilmesi gerekir.
333...111...777 SSSCCCRRR GGGEEERRRLLLMMM NNNNNN AAANNN DDDEEEMMMLLLEEERRR
ki çalıma durumu SCR için istenilmeyen durumlar meydana getirebilir. Bunların her ikisinden uygun bir dizayn ile korunulabilir ve korunulması gerekir. Birincisi, SCR’nin istenilmeyen iletimine ve SCR’de veya devrede bir hasara neden olabilecek dvAK/dt dir. kincisi, diA/dt nin çok büyük deerinden dolayı oluabilecek hasardır. letimden hemen sonra SCR anot akımı çok büyük olursa, eleman hasar görebilir çünkü SCR’nin enine kesitinin henüz tümü iletimde deildir. Anot akımı kapı bölgesine yakın bir bölgede yıılma gösterir ve SCR bozulabilir.
dvAK/dt probleminin çözümü, vAK nin deiebildii oranı kapasitörle düürmektir. Bazı komütasyon devreleri ileri gerilimin yeniden uygulanmasının oranını otomatik olarak sınırlar. Örnekler ekil 3.16 ve 3.19 daki devrelerde görülmektedir. Devrenin balangıçta enerjilenmesi anında vAK nin ani olarak yeniden uygulanmasını çok sınırlamayan bazı komütasyon devreleri vardır ve devrenin balangıçta enerjilenmesi üzerine vAK nin ani olarak uygulanmasını devrelerin hiç biri engellemez. Bu durumlar için, SCR’ye paralel bir koruyucu balanır. Bir koruyucu temelde bir kapasitördür fakat ekil 3.28 de olduu gibi kapasitöre iki eleman daha eklenir. vAK deki artılar için, diyot direnç ile bir yol bularak koruyucu kapasitörü etkili hale getirir. Sadece kapasitörün kullanıldıı durumda SCR’nin ardıık iletiminde, kapasitör çok hızlı olarak SCR üzerinden boalacaktır. Bu durumda SCR akımı çok büyük olacak ve SCR’nin diA/dtsınırını aacaktır. Koruyucu kapasitör ile seri direnç, SCR’nin iletiminde bu akımı sınırlar. Diyot, kapasitörün koruyucu fonksiyonunu yerine getirirken etkililiinin direnç tarafından azaltılmasını engeller.
Koruyucu dizaynının temeli, vAK nin deiebildii oranı sınırlayan bir kapasitör seçmektir. Bu, yük direnci veya indüktans gibi mevcut devre elemanları gözönünde

bulundurularak yapılır. SCR bilgi sayfaları, SCR’nin istenilmeyen iletimine neden olmaksızın vAK nin deiebildii maksimum oranı hakkında bilgi vermektedir. Bundan sonraki örnek koruyucu dizayn ileminin temelini göstermektedir.
ekil 3.28
ÖRNEK 3.10
ekil 3.29 da, SCR 50 V/s deerinde bir dvAK/dt ye dayanabilmekte ve koruyucu kapasitörünün balangıç boalması 3 A ile sınırlanmalıdır. S anahtarı vS sinüsoidal dalgasının herhangi bir deerinde devreyi enerjilemek için rasgele kapatılmaktadır; normal ilem durumuna benzer ekilde, SCR vS dalga biçiminin herhangi bir noktasında kapısından sürülebilmektedir. RL=20 Ω ise aaıdakileri bulunuz:
a) koruyucu kapasitör deeri b) koruyucu direnç deeri
ÇÖZÜM
a) S anahtarının kapanması üzerine, vS tepe deerinde ise, devre ekil 3.30 daki gibi olur. Diyot, ileri akım için sıfır gerilimli varsayılmıtır. vC gerilimi balangıçta sıfır ve böylece iC aaıdaki gibi bulunabilir:
iC ( ),4
,0339
2016 97= = A
dv
dt
i
C CC C= =
16 97,
dvC/dt nin 50×106 V/s ile sınırlanması gerekir:
50 1016 976× =
,
C
C = × −0 34 10 6, F
Koruyucu kapasitörü ve yük direncinin zaman sabiti 6,8 µs dir, böylece 15-20 µs içinde temel olarak SCR üzerinde tam gerilim meydana gelir. Bu, kaynak gerilimi tepe deerinden çok deimemi olarak yeterli kısa bir zamandır.
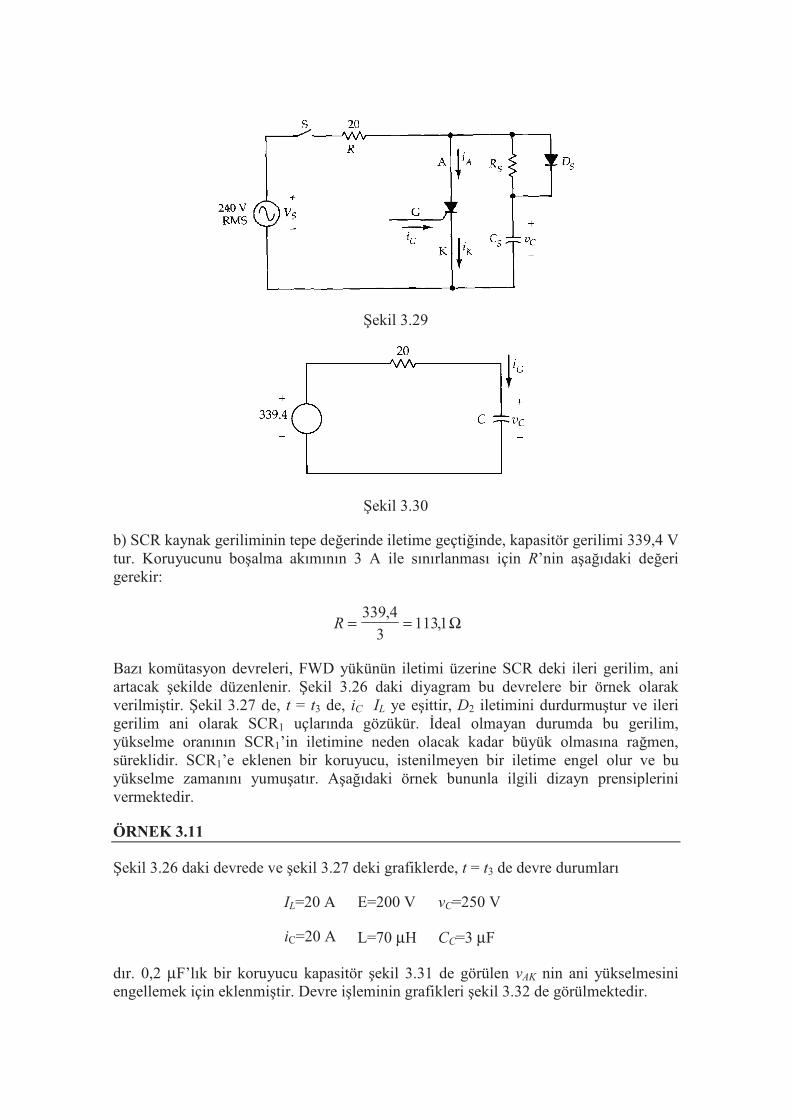
ekil 3.29
ekil 3.30
b) SCR kaynak geriliminin tepe deerinde iletime geçtiinde, kapasitör gerilimi 339,4 V tur. Koruyucunu boalma akımının 3 A ile sınırlanması için R’nin aaıdaki deeri gerekir:
R = =339 4
31131
,, Ω
Bazı komütasyon devreleri, FWD yükünün iletimi üzerine SCR deki ileri gerilim, ani artacak ekilde düzenlenir. ekil 3.26 daki diyagram bu devrelere bir örnek olarak verilmitir. ekil 3.27 de, t = t3 de, iC IL ye eittir, D2 iletimini durdurmutur ve ileri gerilim ani olarak SCR1 uçlarında gözükür. deal olmayan durumda bu gerilim, yükselme oranının SCR1’in iletimine neden olacak kadar büyük olmasına ramen, süreklidir. SCR1’e eklenen bir koruyucu, istenilmeyen bir iletime engel olur ve bu yükselme zamanını yumuatır. Aaıdaki örnek bununla ilgili dizayn prensiplerini vermektedir.
ÖRNEK 3.11
ekil 3.26 daki devrede ve ekil 3.27 deki grafiklerde, t = t3 de devre durumları
IL=20 A E=200 V vC=250 V
iC=20 A L=70 µH CC=3 µF
dır. 0,2 µF’lık bir koruyucu kapasitör ekil 3.31 de görülen vAK nin ani yükselmesini engellemek için eklenmitir. Devre ileminin grafikleri ekil 3.32 de görülmektedir.
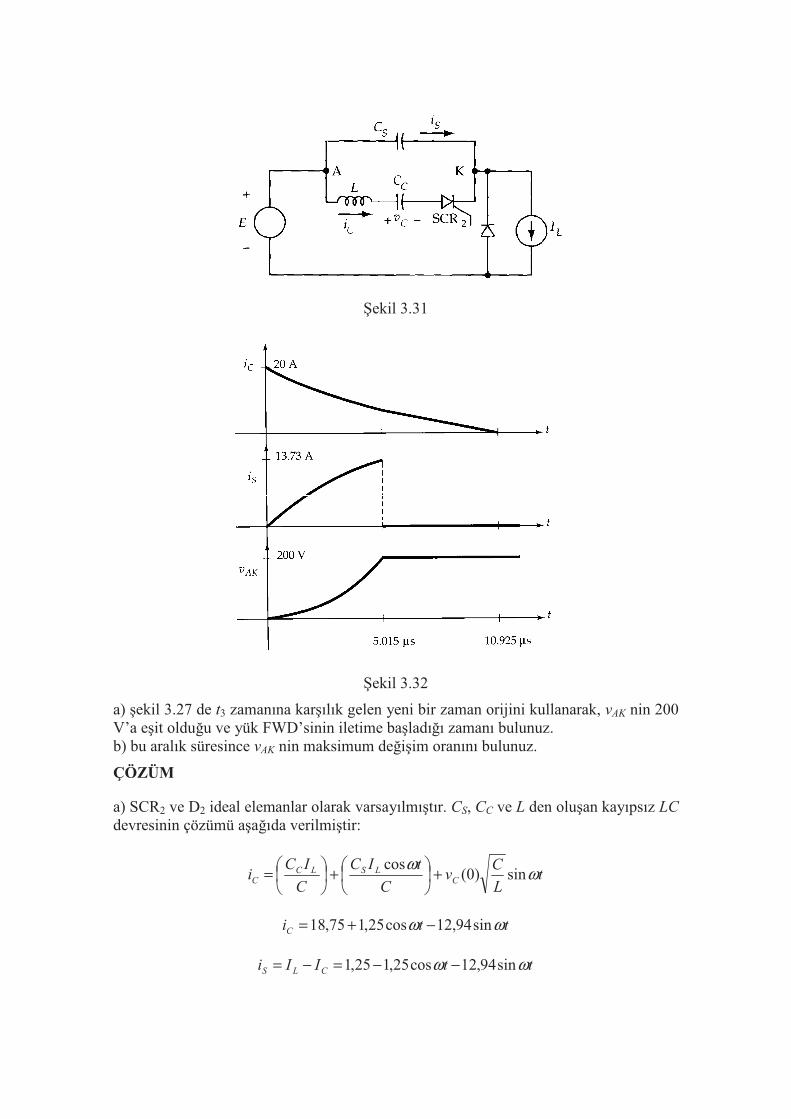
ekil 3.31
ekil 3.32
a) ekil 3.27 de t3 zamanına karılık gelen yeni bir zaman orijini kullanarak, vAK nin 200 V’a eit olduu ve yük FWD’sinin iletime baladıı zamanı bulunuz. b) bu aralık süresince vAK nin maksimum deiim oranını bulunuz.
ÇÖZÜM
a) SCR2 ve D2 ideal elemanlar olarak varsayılmıtır. CS, CC ve L den oluan kayıpsız LC
devresinin çözümü aaıda verilmitir:
tL
Cv
C
tIC
C
ICi C
LSLCC ω
ωsin)0(
cos+
+
=
ttiC ωω sin94,12cos25,175,18 −+=
ttIIi CLS ωω sin94,12cos25,125,1 −−=−=

CC C
C C
C S
C S
=+
= 0 1875, µF
ve
ω = =−LC 0 5 276000, rad/s
)cos1(4,234sin64,221025,61 6
0tttdti
Cv
t
S
S
AK ωω −+−×=
=
vAK =200 V için, bu denklemin irdelemeli bir çözümü ile t bulunur:
t = 5 015, µs
b) vAK ’nin maksimum deiim oranı, iS’nin maksimum olduu zaman veya t = 5 015, µs aralıının sonunda oluur. (a) dan,
ttiS ωω sin94,12cos25,125,1 −−=
)475,1cos(1325,1 +−= tiS ω
Maksimum
1)475,1cos( −=+tω
de veya
t = 6 04, µs
oluur. t’nin bu deeri aralıktaki t den daha büyük olduundan, vAK ’nin maksimum deiim oranı t = 5 015, µs de oluur. Bu zamanda,
iS = 13 74, A
dv
dt
i
C
AK S
S
= =×
= ×13 74
0 2 1068 68 106
6,
,, V/s
333...111...888 AAANNNOOOTTT AAAKKKIIIMMMIIINNNIIINNN LLLEEETTTMMMNNNNNN SSSIIINNNIIIRRRLLLAAANNNMMMAAASSSIII
letim zamanında SCR, sadece kapı uçlarına yakın bölgede hemen iletime geçer. letimin SCR’nin bütün jonksiyon alanına yayılması için belli bir zamanın geçmesi gerekir. SCR’nin hasar görmesini engellemek için, anot akımının belli bir sınır deeri amayacak akım younluunda aniden artmaması gerekir. Bunun ayarlanabilmesi için iletim ilemi süresince harici devre, diA/dt oranını sınırlayacak ekilde düzenlenmelidir.
Bu sınırlama, SCR’nin anot ucuna seri balı küçük bir indüktans eklenmesiyle yapılabilir. ekil 3.33 deki devrede, yük temelde omiktir ve anot akımı iletimde
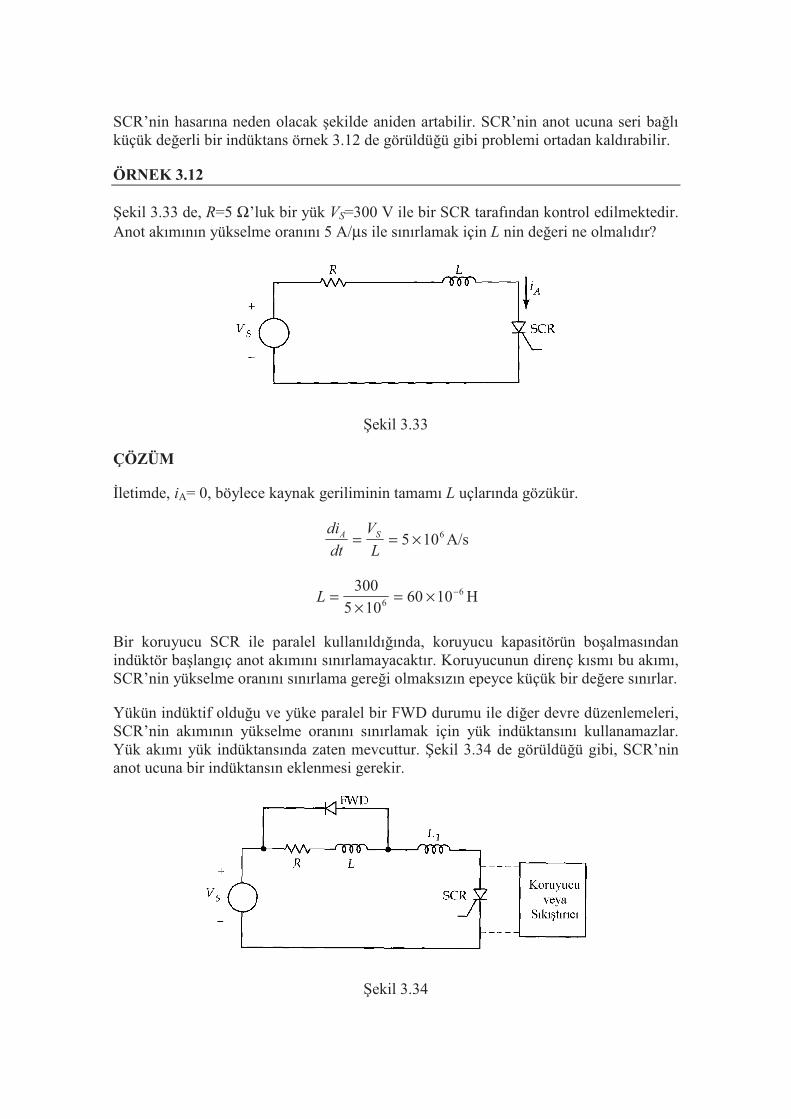
SCR’nin hasarına neden olacak ekilde aniden artabilir. SCR’nin anot ucuna seri balı küçük deerli bir indüktans örnek 3.12 de görüldüü gibi problemi ortadan kaldırabilir.
ÖRNEK 3.12
ekil 3.33 de, R=5 Ω’luk bir yük VS=300 V ile bir SCR tarafından kontrol edilmektedir. Anot akımının yükselme oranını 5 A/µs ile sınırlamak için L nin deeri ne olmalıdır?
ekil 3.33
ÇÖZÜM
letimde, iA= 0, böylece kaynak geriliminin tamamı L uçlarında gözükür.
di
dt
V
L
A S= = ×5 106 A/s
L =×
= × −300
5 1060 106
6 H
Bir koruyucu SCR ile paralel kullanıldıında, koruyucu kapasitörün boalmasından indüktör balangıç anot akımını sınırlamayacaktır. Koruyucunun direnç kısmı bu akımı, SCR’nin yükselme oranını sınırlama gerei olmaksızın epeyce küçük bir deere sınırlar.
Yükün indüktif olduu ve yüke paralel bir FWD durumu ile dier devre düzenlemeleri, SCR’nin akımının yükselme oranını sınırlamak için yük indüktansını kullanamazlar. Yük akımı yük indüktansında zaten mevcuttur. ekil 3.34 de görüldüü gibi, SCR’nin anot ucuna bir indüktansın eklenmesi gerekir.
ekil 3.34
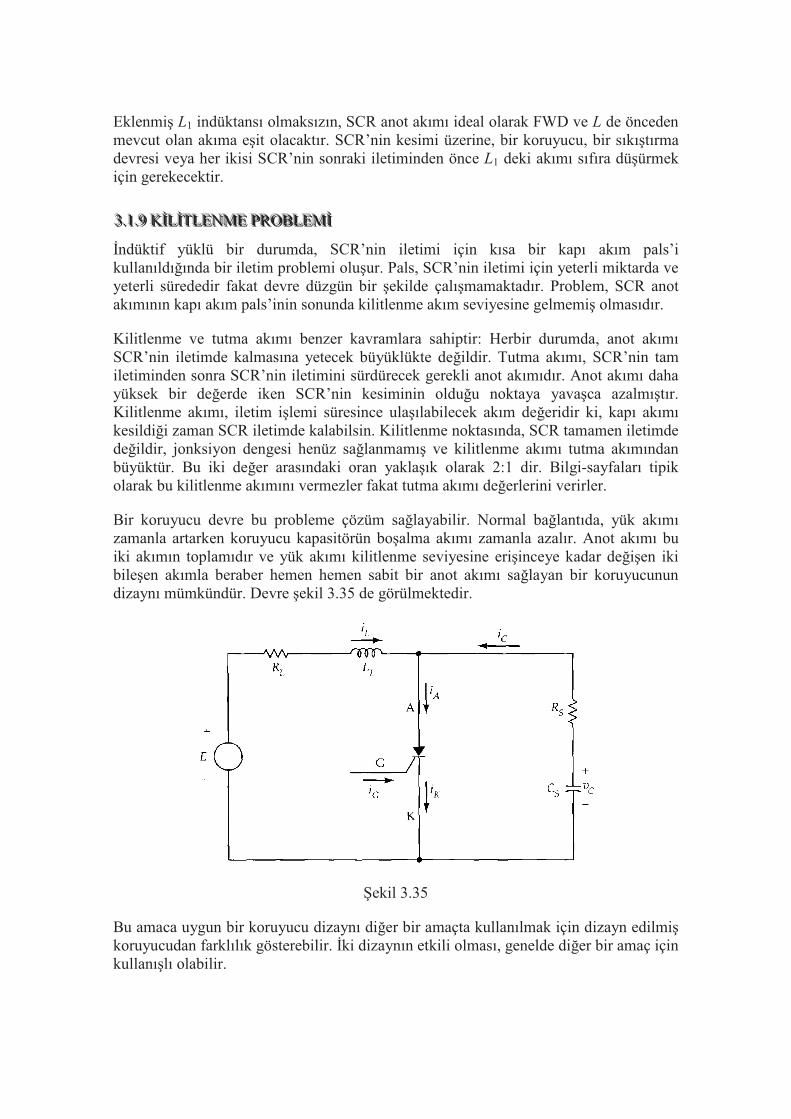
Eklenmi L1 indüktansı olmaksızın, SCR anot akımı ideal olarak FWD ve L de önceden mevcut olan akıma eit olacaktır. SCR’nin kesimi üzerine, bir koruyucu, bir sıkıtırma devresi veya her ikisi SCR’nin sonraki iletiminden önce L1 deki akımı sıfıra düürmek için gerekecektir.
333...111...999 KKKLLLTTTLLLEEENNNMMMEEE PPPRRROOOBBBLLLEEEMMM
ndüktif yüklü bir durumda, SCR’nin iletimi için kısa bir kapı akım pals’i kullanıldıında bir iletim problemi oluur. Pals, SCR’nin iletimi için yeterli miktarda ve yeterli sürededir fakat devre düzgün bir ekilde çalımamaktadır. Problem, SCR anot akımının kapı akım pals’inin sonunda kilitlenme akım seviyesine gelmemi olmasıdır.
Kilitlenme ve tutma akımı benzer kavramlara sahiptir: Herbir durumda, anot akımı SCR’nin iletimde kalmasına yetecek büyüklükte deildir. Tutma akımı, SCR’nin tam iletiminden sonra SCR’nin iletimini sürdürecek gerekli anot akımıdır. Anot akımı daha yüksek bir deerde iken SCR’nin kesiminin olduu noktaya yavaca azalmıtır. Kilitlenme akımı, iletim ilemi süresince ulaılabilecek akım deeridir ki, kapı akımı kesildii zaman SCR iletimde kalabilsin. Kilitlenme noktasında, SCR tamamen iletimde deildir, jonksiyon dengesi henüz salanmamı ve kilitlenme akımı tutma akımından büyüktür. Bu iki deer arasındaki oran yaklaık olarak 2:1 dir. Bilgi-sayfaları tipik olarak bu kilitlenme akımını vermezler fakat tutma akımı deerlerini verirler.
Bir koruyucu devre bu probleme çözüm salayabilir. Normal balantıda, yük akımı zamanla artarken koruyucu kapasitörün boalma akımı zamanla azalır. Anot akımı bu iki akımın toplamıdır ve yük akımı kilitlenme seviyesine eriinceye kadar deien iki bileen akımla beraber hemen hemen sabit bir anot akımı salayan bir koruyucunun dizaynı mümkündür. Devre ekil 3.35 de görülmektedir.
ekil 3.35
Bu amaca uygun bir koruyucu dizaynı dier bir amaçta kullanılmak için dizayn edilmikoruyucudan farklılık gösterebilir. ki dizaynın etkili olması, genelde dier bir amaç için kullanılı olabilir.
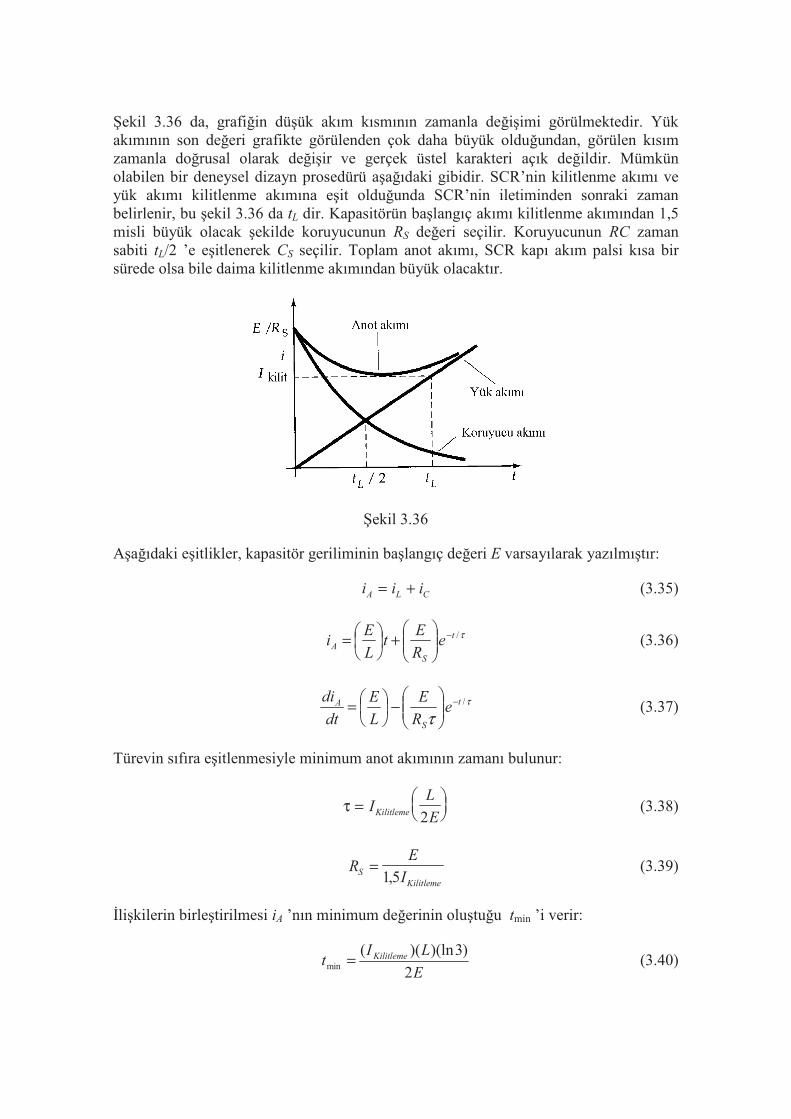
ekil 3.36 da, grafiin düük akım kısmının zamanla deiimi görülmektedir. Yük akımının son deeri grafikte görülenden çok daha büyük olduundan, görülen kısım zamanla dorusal olarak deiir ve gerçek üstel karakteri açık deildir. Mümkün olabilen bir deneysel dizayn prosedürü aaıdaki gibidir. SCR’nin kilitlenme akımı ve yük akımı kilitlenme akımına eit olduunda SCR’nin iletiminden sonraki zaman belirlenir, bu ekil 3.36 da tL dir. Kapasitörün balangıç akımı kilitlenme akımından 1,5 misli büyük olacak ekilde koruyucunun RS deeri seçilir. Koruyucunun RC zaman sabiti tL/2 ’e eitlenerek CS seçilir. Toplam anot akımı, SCR kapı akım palsi kısa bir sürede olsa bile daima kilitlenme akımından büyük olacaktır.
ekil 3.36
Aaıdaki eitlikler, kapasitör geriliminin balangıç deeri E varsayılarak yazılmıtır:
i i iA L C= + (3.35)
τ/t
S
A eR
Et
L
Ei −
+
= (3.36)
τ
τ/t
S
A eR
E
L
E
dt
di −
−
= (3.37)
Türevin sıfıra eitlenmesiyle minimum anot akımının zamanı bulunur:
τ =
I
L
EKilitleme 2 (3.38)
RE
IS
Kilitleme
=15,
(3.39)
likilerin birletirilmesi iA ’nın minimum deerinin olutuu tmin ’i verir:
E
LIt Kilitleme
2
)3)(ln)((min = (3.40)

Bu sonuç 3.36 eitliinde yerine konulursa, iL ’nin deeri 3.41 eitlii ile verilir:
i IA Kilitleme= 1,0493 (3.41)
ÖRNEK 3.13
ekil 3.35 deki devrede, kısa SCR akım palsinde kilitlenmenin oluup olumayacaını belirleyiniz. Koruyucu deerleri aaıdaki eitliklerle belirlenir; E = 200 V, LL = 0,5 H ve IKilitlenme = 0,04 A.
ÇÖZÜM
di
dt
L = =200
0 5400
,A/s
tI
di dL
Kilitleme
L t
= = =/
,0 04
400100 µs
E
RS
= =( , )( , ) ,1 5 0 04 0 06 A
RS = =200
0 063333
,Ω
502
=== LSS
tCRτ µs
CS =×
= ×−
−50 10
33330 015 10
66, F
Bu deerler kullanılarak, anot akımı
τ/06,0400 t
A eti −+=
ile verilir. Formülde 50=τ µs dir. iA’nın hesaplanan bazı deerleri aaıdaki gibidir.
t iA
0 0,0600 25 0,0464 50 0,0421 75 0,0434
100 0,0481 125 0,0549
Anot akımının kilitlenme akımından daima büyük olduu ve minimum akımın gereken kilitlenme akımından yaklaık %5 daha büyük olduu gözlenebilir
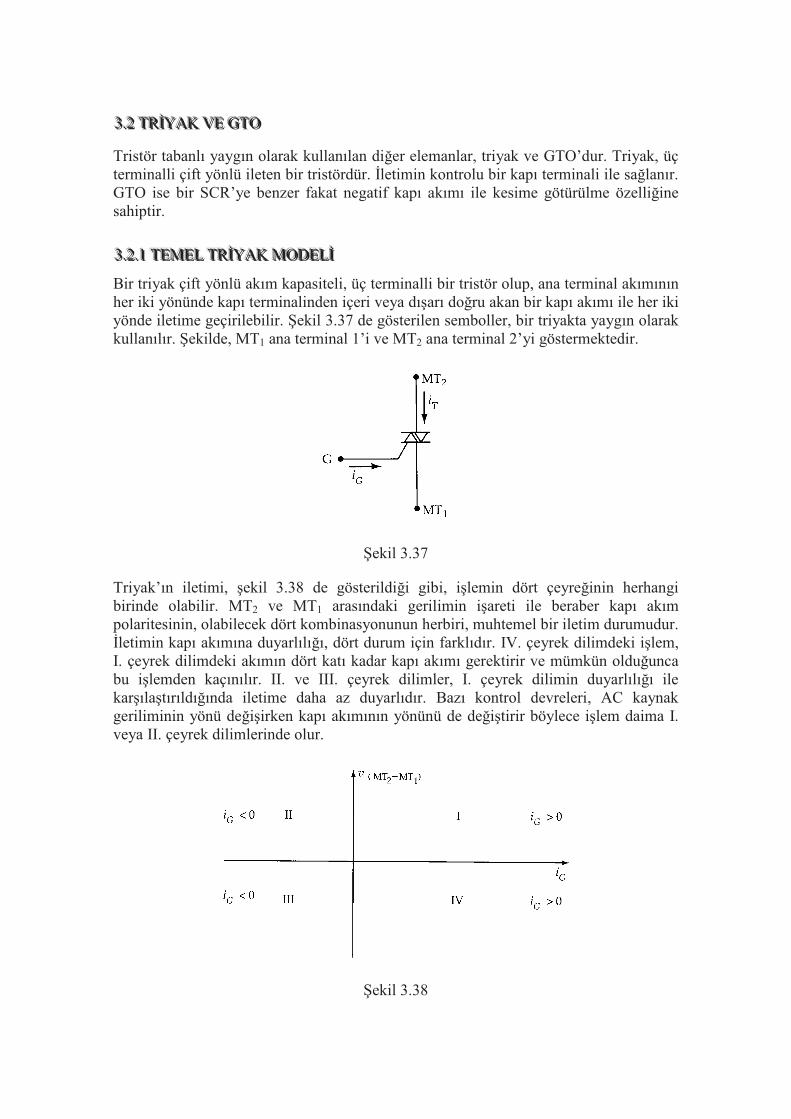
333...222 TTTRRRYYYAAAKKK VVVEEE GGGTTTOOO
Tristör tabanlı yaygın olarak kullanılan dier elemanlar, triyak ve GTO’dur. Triyak, üç terminalli çift yönlü ileten bir tristördür. letimin kontrolu bir kapı terminali ile salanır. GTO ise bir SCR’ye benzer fakat negatif kapı akımı ile kesime götürülme özelliine sahiptir.
333...222...111 TTTEEEMMMEEELLL TTTRRRYYYAAAKKK MMMOOODDDEEELLL
Bir triyak çift yönlü akım kapasiteli, üç terminalli bir tristör olup, ana terminal akımının her iki yönünde kapı terminalinden içeri veya dıarı doru akan bir kapı akımı ile her iki yönde iletime geçirilebilir. ekil 3.37 de gösterilen semboller, bir triyakta yaygın olarak kullanılır. ekilde, MT1 ana terminal 1’i ve MT2 ana terminal 2’yi göstermektedir.
ekil 3.37
Triyak’ın iletimi, ekil 3.38 de gösterildii gibi, ilemin dört çeyreinin herhangi birinde olabilir. MT2 ve MT1 arasındaki gerilimin iareti ile beraber kapı akım polaritesinin, olabilecek dört kombinasyonunun herbiri, muhtemel bir iletim durumudur. letimin kapı akımına duyarlılıı, dört durum için farklıdır. IV. çeyrek dilimdeki ilem, I. çeyrek dilimdeki akımın dört katı kadar kapı akımı gerektirir ve mümkün olduunca bu ilemden kaçınılır. II. ve III. çeyrek dilimler, I. çeyrek dilimin duyarlılıı ile karılatırıldıında iletime daha az duyarlıdır. Bazı kontrol devreleri, AC kaynak geriliminin yönü deiirken kapı akımının yönünü de deitirir böylece ilem daima I. veya II. çeyrek dilimlerinde olur.
ekil 3.38
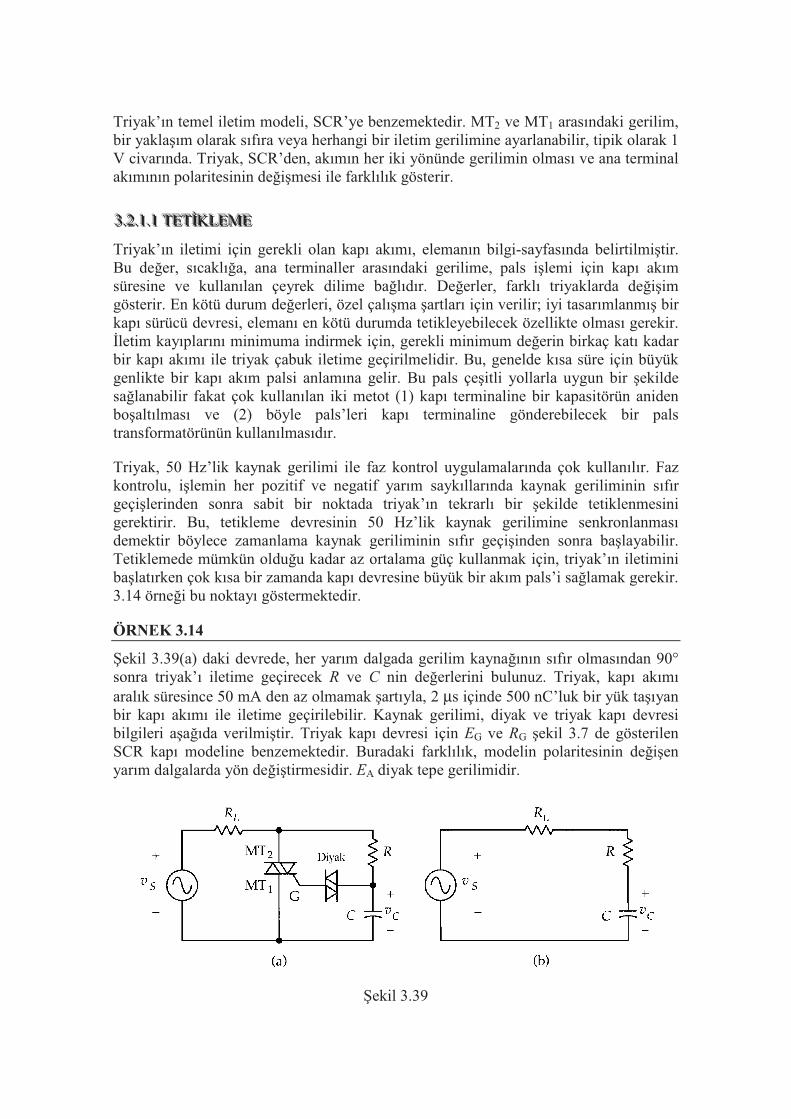
Triyak’ın temel iletim modeli, SCR’ye benzemektedir. MT2 ve MT1 arasındaki gerilim, bir yaklaım olarak sıfıra veya herhangi bir iletim gerilimine ayarlanabilir, tipik olarak 1 V civarında. Triyak, SCR’den, akımın her iki yönünde gerilimin olması ve ana terminal akımının polaritesinin deimesi ile farklılık gösterir.
333...222...111...111 TTTEEETTTKKKLLLEEEMMMEEE
Triyak’ın iletimi için gerekli olan kapı akımı, elemanın bilgi-sayfasında belirtilmitir. Bu deer, sıcaklıa, ana terminaller arasındaki gerilime, pals ilemi için kapı akım süresine ve kullanılan çeyrek dilime balıdır. Deerler, farklı triyaklarda deiim gösterir. En kötü durum deerleri, özel çalıma artları için verilir; iyi tasarımlanmı bir kapı sürücü devresi, elemanı en kötü durumda tetikleyebilecek özellikte olması gerekir. letim kayıplarını minimuma indirmek için, gerekli minimum deerin birkaç katı kadar bir kapı akımı ile triyak çabuk iletime geçirilmelidir. Bu, genelde kısa süre için büyük genlikte bir kapı akım palsi anlamına gelir. Bu pals çeitli yollarla uygun bir ekilde salanabilir fakat çok kullanılan iki metot (1) kapı terminaline bir kapasitörün aniden boaltılması ve (2) böyle pals’leri kapı terminaline gönderebilecek bir pals transformatörünün kullanılmasıdır.
Triyak, 50 Hz’lik kaynak gerilimi ile faz kontrol uygulamalarında çok kullanılır. Faz kontrolu, ilemin her pozitif ve negatif yarım saykıllarında kaynak geriliminin sıfır geçilerinden sonra sabit bir noktada triyak’ın tekrarlı bir ekilde tetiklenmesini gerektirir. Bu, tetikleme devresinin 50 Hz’lik kaynak gerilimine senkronlanması demektir böylece zamanlama kaynak geriliminin sıfır geçiinden sonra balayabilir. Tetiklemede mümkün olduu kadar az ortalama güç kullanmak için, triyak’ın iletimini balatırken çok kısa bir zamanda kapı devresine büyük bir akım pals’i salamak gerekir. 3.14 örnei bu noktayı göstermektedir.
ÖRNEK 3.14
ekil 3.39(a) daki devrede, her yarım dalgada gerilim kaynaının sıfır olmasından 90° sonra triyak’ı iletime geçirecek R ve C nin deerlerini bulunuz. Triyak, kapı akımı aralık süresince 50 mA den az olmamak artıyla, 2 µs içinde 500 nC’luk bir yük taıyan bir kapı akımı ile iletime geçirilebilir. Kaynak gerilimi, diyak ve triyak kapı devresi bilgileri aaıda verilmitir. Triyak kapı devresi için EG ve RG ekil 3.7 de gösterilen SCR kapı modeline benzemektedir. Buradaki farklılık, modelin polaritesinin deien yarım dalgalarda yön deitirmesidir. EA diyak tepe gerilimidir.
ekil 3.39

ES = 11,5 V RS = 11 Ω EG = 1,0 V RG = 15 Ω
VS = 120 V RMS f = 60 Hz RL = 10 Ω EA = 30 V
ÇÖZÜM
Kapasitörün boalması, 31 V (EA+EG)’luk tepe deerinden, iG=50 mA de mevcut olan gerilime dorudur. vC ’nin bu son deeri,
v E E i R RC S G G S G= + + + = + + + =( ) , , , ( )11 5 11 0 0 05 15 15 14 V
Bu gerilim deiimi için, kapasitörden yükün kaldırılması minimum kapasitör deerinin belirlenmesine izin verir. Bu deer, kapı akımının aaıdaki balangıcında 2 µs süresince en azından 50 mA olması artıyla yeterlidir.
( )31 14 500 10 9− = × −C
C = 0 029, µF
R’nin deeri, kaynak geriliminin sıfır olduu zamanın 90° ötesinde, kapasitör geriliminin 31 V’a yükselmesindeki gecikmesi ile belirlenir. ekil 3.39(b) deki devre modeli bu hesaplamada kullanılmıtır. Önceki yarım dalgada triyak’ın iletimi süresince, kapasitör geriliminin sıfıra gittii varsayılır. Böylece, bundan sonraki yarım dalganın balangıç noktası kapasitör geriliminin sıfıra eit olduu yerdir. Bu, gecikme açısını tetiklemenin bazı deerleri için problem olmayabilir.
ekil 3.29(b) de kapasitörün gerilim eitlii aaıdaki gibidir:
)cos(sin)(1)(1 2
/
2tRCt
RC
Ve
RC
RCVv mtm
C ωωωωω
ω τ −+
+
+= −
burada
vC ( )0 0=
tvS ωsin7,169=
πω 120=
RC=τ
2/πω =t de vC yi 31 V’a ayarlayan R’nin deeri, yukarıdaki ilikinin irdelemeli bir çözümünden belirlenebilir:
885,4=RCω
C’nin bilinen deeri ile R bulunabilir:
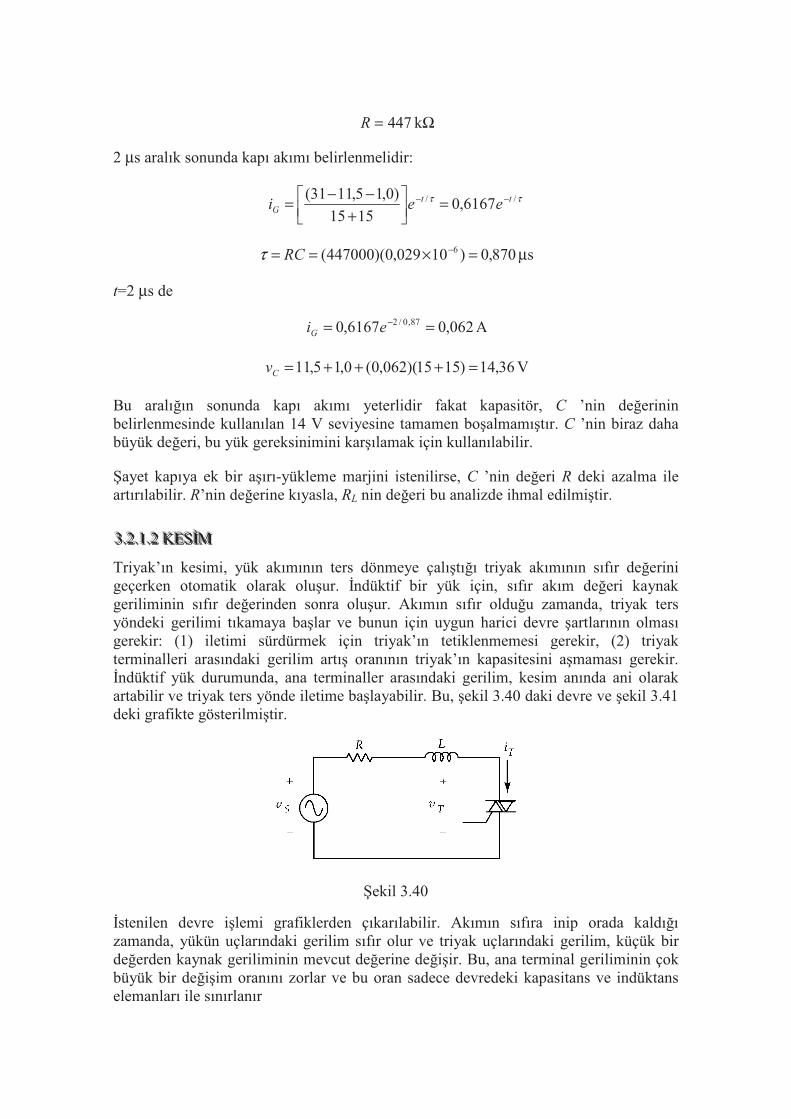
R = 447 kΩ
2 µs aralık sonunda kapı akımı belirlenmelidir:
ττ // 6167,01515
)0,15,1131( tt
G eei −− =
+
−−=
870,0)10029,0)(447000( 6 =×== −RCτ µs
t=2 µs de
062,06167,0 87,0/2 == −eiG A
36,14)1515)(062,0(0,15,11 =+++=Cv V
Bu aralıın sonunda kapı akımı yeterlidir fakat kapasitör, C ’nin deerinin belirlenmesinde kullanılan 14 V seviyesine tamamen boalmamıtır. C ’nin biraz daha büyük deeri, bu yük gereksinimini karılamak için kullanılabilir.
ayet kapıya ek bir aırı-yükleme marjini istenilirse, C ’nin deeri R deki azalma ile artırılabilir. R’nin deerine kıyasla, RL nin deeri bu analizde ihmal edilmitir.
333...222...111...222 KKKEEESSSMMM
Triyak’ın kesimi, yük akımının ters dönmeye çalıtıı triyak akımının sıfır deerini geçerken otomatik olarak oluur. ndüktif bir yük için, sıfır akım deeri kaynak geriliminin sıfır deerinden sonra oluur. Akımın sıfır olduu zamanda, triyak ters yöndeki gerilimi tıkamaya balar ve bunun için uygun harici devre artlarının olması gerekir: (1) iletimi sürdürmek için triyak’ın tetiklenmemesi gerekir, (2) triyak terminalleri arasındaki gerilim artı oranının triyak’ın kapasitesini amaması gerekir. ndüktif yük durumunda, ana terminaller arasındaki gerilim, kesim anında ani olarak artabilir ve triyak ters yönde iletime balayabilir. Bu, ekil 3.40 daki devre ve ekil 3.41 deki grafikte gösterilmitir.
ekil 3.40
stenilen devre ilemi grafiklerden çıkarılabilir. Akımın sıfıra inip orada kaldıı zamanda, yükün uçlarındaki gerilim sıfır olur ve triyak uçlarındaki gerilim, küçük bir deerden kaynak geriliminin mevcut deerine deiir. Bu, ana terminal geriliminin çok büyük bir deiim oranını zorlar ve bu oran sadece devredeki kapasitans ve indüktans elemanları ile sınırlanır
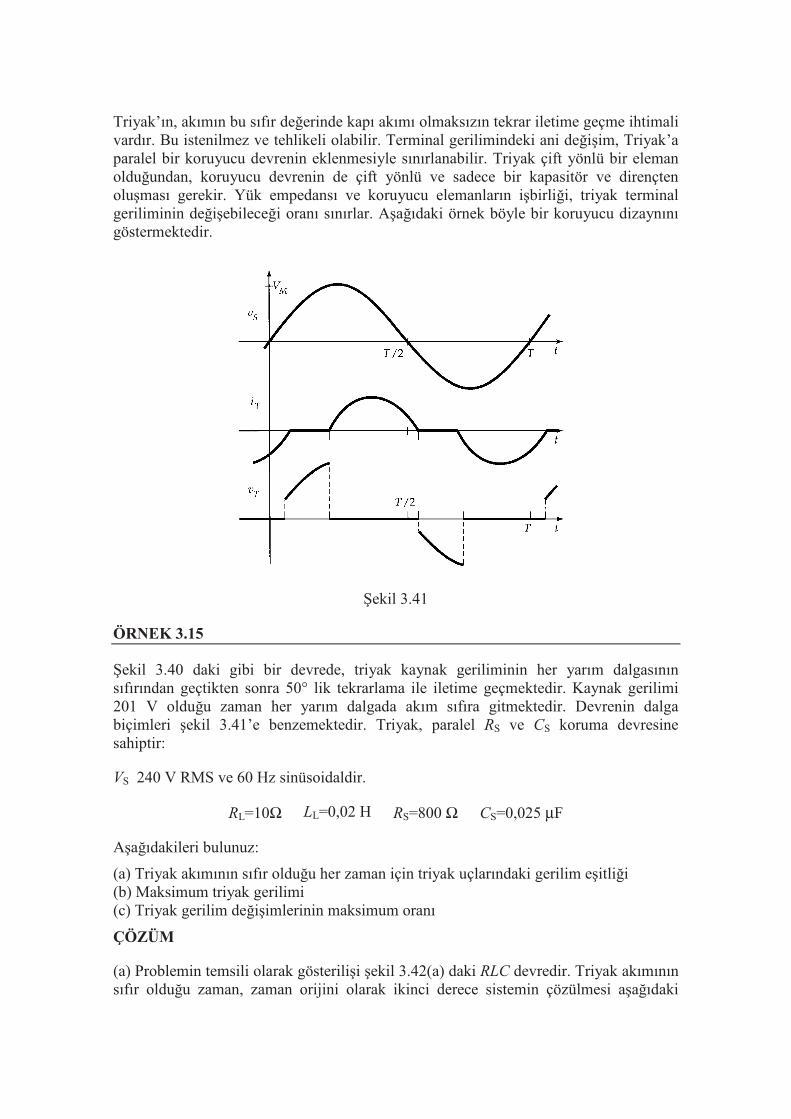
Triyak’ın, akımın bu sıfır deerinde kapı akımı olmaksızın tekrar iletime geçme ihtimali vardır. Bu istenilmez ve tehlikeli olabilir. Terminal gerilimindeki ani deiim, Triyak’a paralel bir koruyucu devrenin eklenmesiyle sınırlanabilir. Triyak çift yönlü bir eleman olduundan, koruyucu devrenin de çift yönlü ve sadece bir kapasitör ve dirençten oluması gerekir. Yük empedansı ve koruyucu elemanların ibirlii, triyak terminal geriliminin deiebilecei oranı sınırlar. Aaıdaki örnek böyle bir koruyucu dizaynını göstermektedir.
ekil 3.41
ÖRNEK 3.15
ekil 3.40 daki gibi bir devrede, triyak kaynak geriliminin her yarım dalgasının sıfırından geçtikten sonra 50° lik tekrarlama ile iletime geçmektedir. Kaynak gerilimi 201 V olduu zaman her yarım dalgada akım sıfıra gitmektedir. Devrenin dalga biçimleri ekil 3.41’e benzemektedir. Triyak, paralel RS ve CS koruma devresine sahiptir:
VS 240 V RMS ve 60 Hz sinüsoidaldir.
RL=10Ω LL=0,02 H RS=800 Ω CS=0,025 µF
Aaıdakileri bulunuz:
(a) Triyak akımının sıfır olduu her zaman için triyak uçlarındaki gerilim eitlii (b) Maksimum triyak gerilimi (c) Triyak gerilim deiimlerinin maksimum oranı
ÇÖZÜM
(a) Problemin temsili olarak gösterilii ekil 3.42(a) daki RLC devredir. Triyak akımının sıfır olduu zaman, zaman orijini olarak ikinci derece sistemin çözülmesi aaıdaki
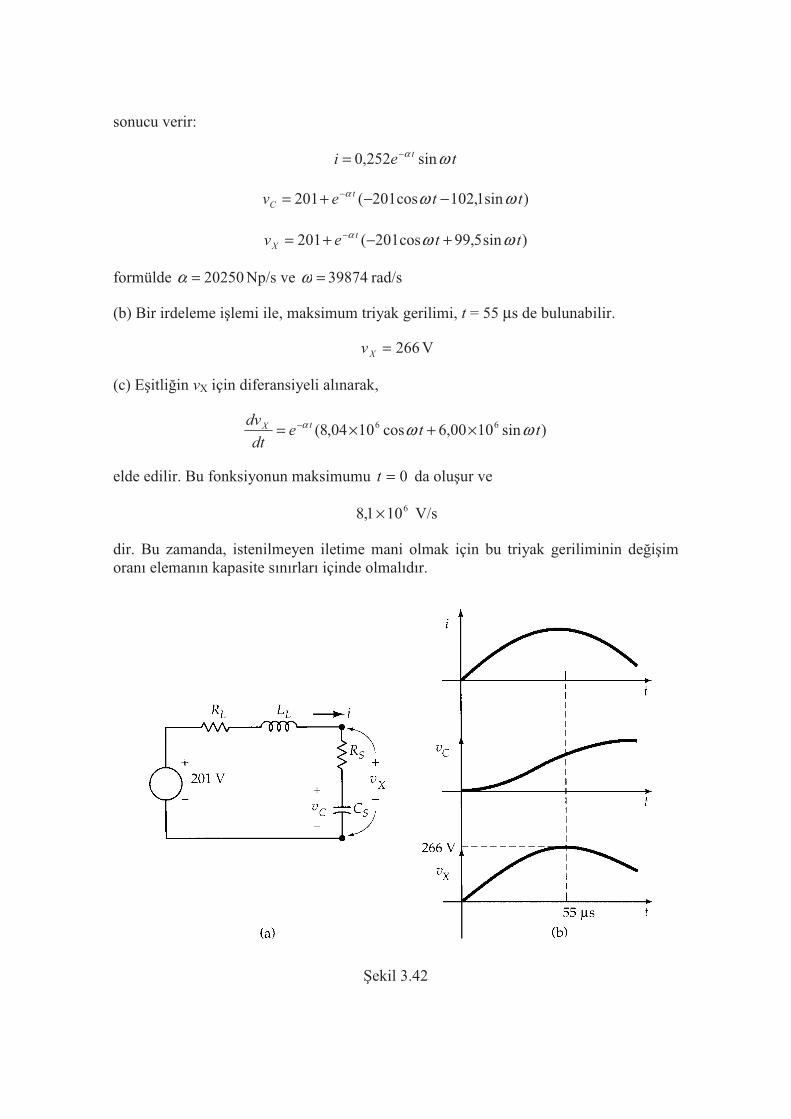
sonucu verir:
tei t ωα sin252,0 −=
)sin1,102cos201(201 ttev t
C ωωα −−+= −
)sin5,99cos201(201 ttev t
X ωωα +−+= −
formülde 20250=α Np/s ve 39874=ω rad/s
(b) Bir irdeleme ilemi ile, maksimum triyak gerilimi, t = 55 µs de bulunabilir.
v X = 266 V
(c) Eitliin vX için diferansiyeli alınarak,
)sin1000,6cos1004,8( 66 ttedt
dv tX ωωα ×+×= −
elde edilir. Bu fonksiyonun maksimumu t = 0 da oluur ve
8 1 106, × V/s
dir. Bu zamanda, istenilmeyen iletime mani olmak için bu triyak geriliminin deiim oranı elemanın kapasite sınırları içinde olmalıdır.
ekil 3.42
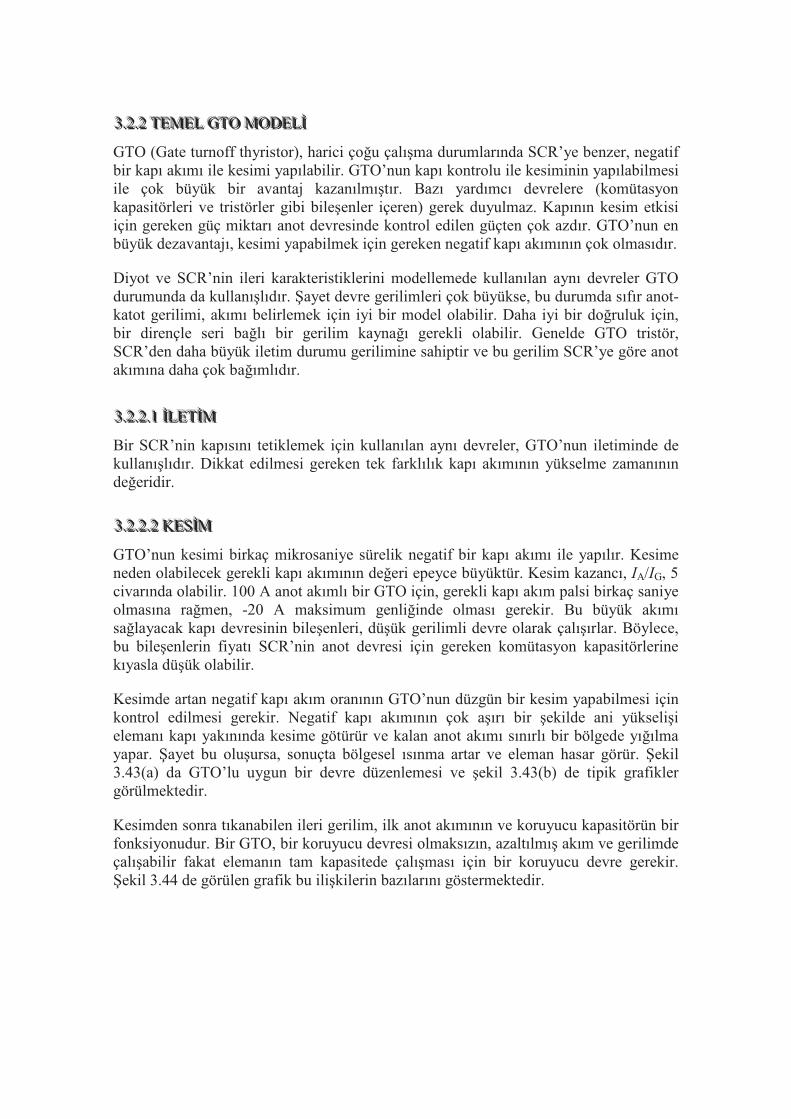
333...222...222 TTTEEEMMMEEELLL GGGTTTOOO MMMOOODDDEEELLL
GTO (Gate turnoff thyristor), harici çou çalıma durumlarında SCR’ye benzer, negatif bir kapı akımı ile kesimi yapılabilir. GTO’nun kapı kontrolu ile kesiminin yapılabilmesi ile çok büyük bir avantaj kazanılmıtır. Bazı yardımcı devrelere (komütasyon kapasitörleri ve tristörler gibi bileenler içeren) gerek duyulmaz. Kapının kesim etkisi için gereken güç miktarı anot devresinde kontrol edilen güçten çok azdır. GTO’nun en büyük dezavantajı, kesimi yapabilmek için gereken negatif kapı akımının çok olmasıdır.
Diyot ve SCR’nin ileri karakteristiklerini modellemede kullanılan aynı devreler GTO durumunda da kullanılıdır. ayet devre gerilimleri çok büyükse, bu durumda sıfır anot-katot gerilimi, akımı belirlemek için iyi bir model olabilir. Daha iyi bir doruluk için, bir dirençle seri balı bir gerilim kaynaı gerekli olabilir. Genelde GTO tristör, SCR’den daha büyük iletim durumu gerilimine sahiptir ve bu gerilim SCR’ye göre anot akımına daha çok baımlıdır.
333...222...222...111 LLLEEETTTMMM
Bir SCR’nin kapısını tetiklemek için kullanılan aynı devreler, GTO’nun iletiminde de kullanılıdır. Dikkat edilmesi gereken tek farklılık kapı akımının yükselme zamanının deeridir.
333...222...222...222 KKKEEESSSMMM
GTO’nun kesimi birkaç mikrosaniye sürelik negatif bir kapı akımı ile yapılır. Kesime neden olabilecek gerekli kapı akımının deeri epeyce büyüktür. Kesim kazancı, IA/IG, 5 civarında olabilir. 100 A anot akımlı bir GTO için, gerekli kapı akım palsi birkaç saniye olmasına ramen, -20 A maksimum genliinde olması gerekir. Bu büyük akımı salayacak kapı devresinin bileenleri, düük gerilimli devre olarak çalıırlar. Böylece, bu bileenlerin fiyatı SCR’nin anot devresi için gereken komütasyon kapasitörlerine kıyasla düük olabilir.
Kesimde artan negatif kapı akım oranının GTO’nun düzgün bir kesim yapabilmesi için kontrol edilmesi gerekir. Negatif kapı akımının çok aırı bir ekilde ani yükselii elemanı kapı yakınında kesime götürür ve kalan anot akımı sınırlı bir bölgede yıılma yapar. ayet bu oluursa, sonuçta bölgesel ısınma artar ve eleman hasar görür. ekil 3.43(a) da GTO’lu uygun bir devre düzenlemesi ve ekil 3.43(b) de tipik grafikler görülmektedir.
Kesimden sonra tıkanabilen ileri gerilim, ilk anot akımının ve koruyucu kapasitörün bir fonksiyonudur. Bir GTO, bir koruyucu devresi olmaksızın, azaltılmı akım ve gerilimde çalıabilir fakat elemanın tam kapasitede çalıması için bir koruyucu devre gerekir. ekil 3.44 de görülen grafik bu ilikilerin bazılarını göstermektedir.
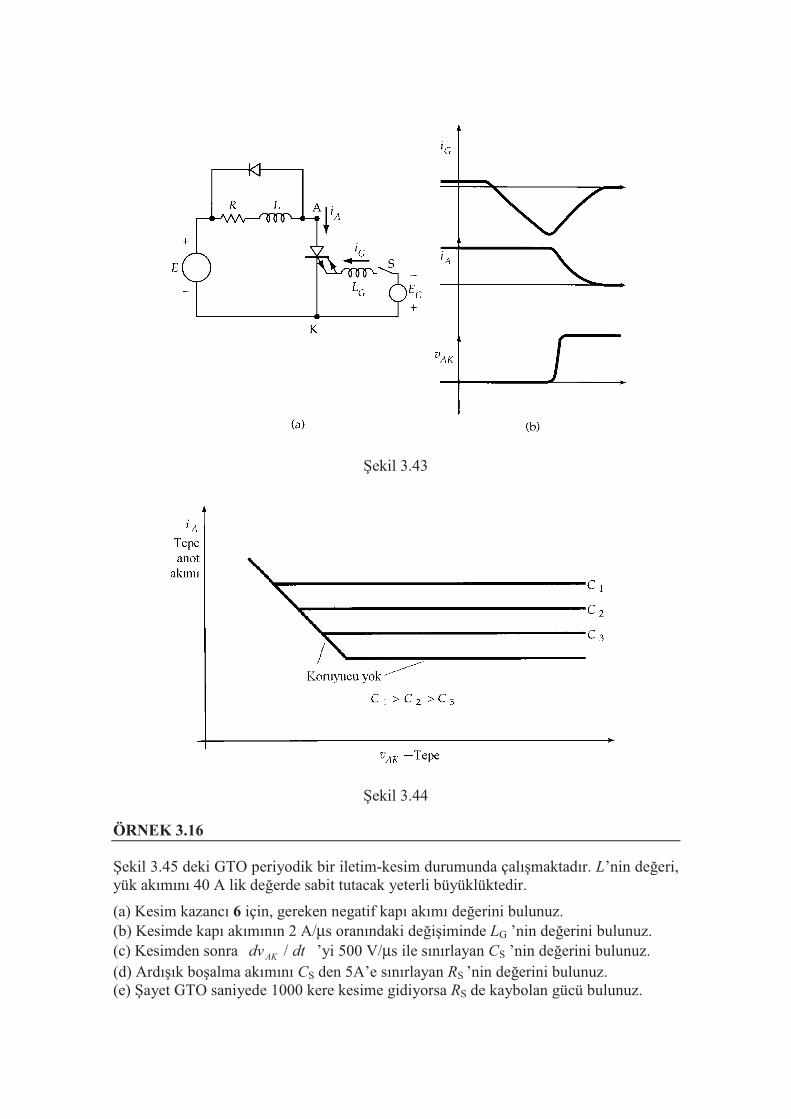
ekil 3.43
ekil 3.44
ÖRNEK 3.16
ekil 3.45 deki GTO periyodik bir iletim-kesim durumunda çalımaktadır. L’nin deeri, yük akımını 40 A lik deerde sabit tutacak yeterli büyüklüktedir.
(a) Kesim kazancı 6 için, gereken negatif kapı akımı deerini bulunuz. (b) Kesimde kapı akımının 2 A/µs oranındaki deiiminde LG ’nin deerini bulunuz. (c) Kesimden sonra dv dtAK / ’yi 500 V/µs ile sınırlayan CS ’nin deerini bulunuz.
(d) Ardıık boalma akımını CS den 5A’e sınırlayan RS ’nin deerini bulunuz. (e) ayet GTO saniyede 1000 kere kesime gidiyorsa RS de kaybolan gücü bulunuz.

ekil 3.45
ÇÖZÜM
(a) Kesimde, iA = 40 A, böylece kapı akımı belirlenebilir:
67,66
40
6−=
−=
−= A
G
ii A
Bu, negatif tepe kapı akımının minimum deeridir.
(b) Bu hesaplamada vGK nin deeri ihmal edilmitir:
di
dt L
G
G
=−
= −12
2 A/µs
LG = 6µH
(c) iS ’nin deeri, ihmal edilebilir zamanda GTO’nun kesime gittii varsayılırsa 40 A dir:
SS
SAK
CC
i
dt
dv 4010500 6 ==×=
CS = × −0 08 10 6, F
(d) FWD iletime baladıı zamanda kapasitör 600 V’a yüklenmitir. Böylece, GTO ’nun iletiminde, CS RS üzerinden boalır:
iRA
S
= =600
5A RS = 120 Ω
(e) GTO’nun iletimde olduu her zaman, CS de depolanan enerji RS de harcanır:
Enerji= 12
2 12
6 20 08 10 600 0 0144C vS C = × =−( , )( ) , J
Saniye baına böyle oluumların sayısına balı olarak sonuç güç:
4,14)0144,0)(1000()( ==
=
boalma
enerjifPort W
333...333 ÇÇÇAAALLLIIIMMMAAA SSSOOORRRUUULLLAAARRRIII
3.1 Tristörlerin v-i karakteristikleri nedir? 3.2 Tristörlerin kesim durumu artı nedir? 3.3 Tristörlerin iletim durumu artı nedir? 3.4 Tristörlerin kilitleme akımı nedir? 3.5 Tristörlerin tutma akımı nedir? 3.6 Tristörlerin iki transistör modeli nedir? 3.7 Tristörler nasıl iletime geçirilir? 3.8 Tristörlerin iletim zamanı nedir? 3.9 di/dt korumasının amacı nedir? 3.10 dv/dt korumasının yaygın metotları nedir? 3.11 Tristörlerin kesim zamanı nedir? 3.12 Tristörlerin tipleri nedir? 3.13 Bir SCR nedir? 3.14 Bir SCR ve triyak arasındaki fark nedir? 3.15 Tristörlerin kesim karakteristikleri nedir? 3.16 GTO ve tristörlerin kapı karakteristikleri arasındaki fark nedir? 3.17 GTO’nun kapı karakteristii nedir? 3.18 GTO’ların avantajları ve dezavantajları nedir?3.19 SITH’lerin avantajları ve dezavantajları nedir? 3.20 RCT’lerin avantajları ve dezavantajları nedir?3.21 LASCR’lerin avantajları ve dezavantajları nedir? 3.22 Bir koruyucu (snubber) devre nedir? 3.23 Koruyucu devrelerin tasarımı nasıl yapılır? 3.24 Seri balı tristörlerde gerilim paylaımının yaygın teknii nedir? 3.25 Paralel balı tristörlerde akım paylaımının yaygın teknii nedir? 3.26 Paralel balı tristörlerin geçici gerilimi paylaımında ters dönüüm zamanının etkisi nedir?
333...444 PPPRRROOOBBBLLLEEEMMMLLLEEERRR
3.1 ekil 3.4 deki devrede, SCR VGK=1,5 V ve IG=200 mA’lik maksimum zorunlu deerlere sahiptir. EG=20 V ve maksimum ortalama kapı gücü 1 W’tır. ayet 2:1 lik bir aırı yükleme gerekiyorsa R’nin uygun bir deerini bulunuz.
3.2 Problem 3.1’i VGK=1,3 V ve IG=300 mA ile tekrar ediniz. E=15 V ve maksimum ortalama kapı gücü 1,5 W’tır.
3.3 Problem 3.1’i 2N4170 SCR tipi ile tekrar ediniz. E=20 V ve TC=-40°C dir.
3.4 ekil 3.46 da görülen devrede bir SCR kullanılmıtır. SCR’yi güvenli olarak iletime geçirmek için, S kapandıktan sonra 2 µs içinde 40 nC’ luk toplam bir kapı yükü gerekmektedir. Kullanılacak GK (kapı katot) modeli 1,4 V ile seri 8 Ω dur. S anahtarı kapatıldıında kapasitör 15 V ile yüklenmektedir. SCR’nin iletimi için yeterli olacak R ve C ’nin deerini bulunuz. zin verilen maksimum kapı akımı 100 mA’dir.
3.5 ekil 3.10 daki gibi bir düzenlemede, E=70 V, R=50 kΩ ve C=0,25 µF dır. Diyak modeli örnek 3.2 ile aynıdır. GK (kapı katot) modeli 1,0 V ile seri 25 Ω dur.

(a) Tepe kapı akımını bulunuz, (b) Diyak iletiminin balangıcından sonra 3 µs içinde kapı terminalinden verilecek yükü
bulunuz, (c) Kapı palslerinin frekansını bulunuz.
ekil 3.46
3.6 ekil 3.10 daki gibi bir düzenleme kullanılarak bir SCR’nin iletimi yapılacaktır. Diyak modeli örnek 3.2 deki ile aynıdır. SCR’nin iletimi için kapı terminalinden 2,5 µs içinde 50 nC’luk yük verilmesi gerekmektedir. GK (kapı katot) devresi için SCR modeli 1,0 V ile seri 20 Ω’dur. E=80 V. 500 Hz’lik bir oranda SCR’yi tekrarlı olarak iletime götürebilecek devrenin kalan kısmını tasarlayınız.
3.7 ekil 3.16 daki gibi bir devrede, verilen artlar için tq’nün deerini bulunuz: E=300 V, R=20 Ω, C=2,0 µF ve vC(0)=-300 V.
3.8 Problem 3.7’yi vC(0)=-400 V ve E=300 V için tekrar ediniz.
3.9 ekil 3.19 daki gibi bir devrede, verilen artlar için tq’nün deerini bulunuz: E=300 V, R=20 Ω, C=3,0 µF ve vC(0)=-300 V. SCR iL’nin kararlı duruma gelmesi için yeteri kadar iletim durumunda bulunmutur.
3.10 E=200 V ile ekil 3.11 deki gibi bir devrede, 20 A’lik tepe akım ve 300 µA’lik iletim aralıını baarmak için, L ve C ’nin deerlerini seçiniz.
3.11 ekil 3.22 deki gibi bir devrede, SCR’nin tekrarlı olarak iletimi ve kesimi yapılmıtır; E=400 V ve IL=30 A.
(a) 30 µs’lik bir tq elde etmek için C’nin deerini bulunuz.
(b) vC’nin iaret deiiminin frekansının 5000 Hz olması için L’nin bir deerini seçiniz.
3.12 ekil 3.24 deki devrede, E=400 V ve IL=20 A. L=100 µH ve C=3 µF ile istenilenleri bulunuz:
(a) ekil 3.25 deki t1’in deerini bulunuz, (b) SCR1 in ters polarlanma aralıını bulunuz, (c) ekil 3.25 de, t=t4 den sonra C’deki gerilimi tersine döndürmek için gereken zaman, (d) V0’ın deeri.
3.13 ekil 3.24 deki gibi bir devrede, E=200 V ve IL=30 A. tq’nün gereken deeri 25
µs dir. Kapasitör gerilimi 275 V’u aamaz. L ve C’nin uygun deerlerini bulunuz.
3.14 Örnek 3.10 da, CS=0,5 µF, R=10 Ω, RS=25 Ω ve VS=460 V RMS.
(a) SCR’nin maruz kalacaı maksimum dvAK /dt ’yi bulunuz. (b) CS’nin boalma akımının maksimum deerini bulunuz.
3.15 ekil 3.29 daki devrede, VS=460 V RMS ve R=15 Ω. SCR 40 V/µs deki gerilim artıına dayanabilmektedir. CS’nin balangıç boalması, SCR’nin iletiminde 5 A ile sınırlanmalıdır. ayet S anahtarı giri dalga biçiminin herhangi bir noktasında kapanabiliyorsa koruyucu devrenin deerlerini tasarlayınız.
3.16 Problem 3.15’i 230 V kaynak ve R=10 Ω ile tekrarlayınız. Dier artlar aynı kalmaktadır.
3.17 ekil 3.33 deki devrede, VS=400 V RMS ve R=20 Ω. SCR’nin diA /dt ’sini 10 A/µs de sınırlayacak L’nin deerini bulunuz.
3.18 Bir SCR iletim durumuna kilitlenmek için 100 mA’lik bir akıma gerek duymaktadır. ekil 5.35 deki devrede, RL=10 Ω, E=400 V ve LL=0,1 H. ayet kapı akımı kısa süreli bir pals bile olsa kilitlenmenin oluabilecei bir koruyucu devre tasarlayınız.
3.19 ekil 3.39(a) daki devrede, RL=20 Ω, VS=400 V RMS sinüsoidaldir. Diyak karakteristikleri örnek 3.2 deki ile aynıdır. Her yarım saykılda iletimde triyak’ın 40° gecikmesine neden olacak R ve C’nin deerlerini bulunuz.
3.20 Problem 3.19’u VS=240 V RMS ile tekrarlayınız.
3.21 Örnek 3.14 de, her yarım saykılın sonunda kapasitörün tamamen boalmadıını varsayınız. Örnek 3.14 de hesaplanan tasarım deerlerindeki etkisini bulunuz.
3.22 ekil 3.40 da, triyak akımının sıfırı gerilimin sıfır deeriden 40° sonra olumaktadır. Kaynak 240 V RMS sinüsoidaldir. ekil 3.42 de olduu gibi triyak geriliminin artı oranını 10 V/µs ile sınırlayacak koruyucu devre deerlerini bulunuz. Triyak’ın iletimi α=80° de olumakta ve koruyucunun balangıç dearj akımının 3 A veya daha az deerde sınırlanması gerekmektedir. RL=20 Ω ve LL=0,045 H.
3.23 Problem 3.22’yi 480 V kaynak ile tekrarlayınız. Geriliminin artı oranı 15 V/µs ile sınırlanmıtır.
3.24 ekil 3.45 deki gibi bir devrede, E=800 V, RL=25 Ω, L=2,5 mH ve EG=-10 V.
(a) Bir kesim kazancı 5 için, negatif kapı akımının gereken tepe deerini bulunuz, (b) Kapı akım deiimini –1,5 A/µs ile sınırlayacak L’nin deerini bulunuz, (c) dvAK /dt ’yi kesimde 400 V/µs ile sınırlayacak CS ’nin deerini bulunuz, (d) Koruyucu tepe dearj akımını 4 A’de sınırlayacak RS ’nin deerini bulunuz, (e) ayet GTO saniyede 2000 kere kesime gidiyorsa RS ’de kaybolan gücü bulunuz.
444 GGGÜÜÜÇÇÇ TTTRRRAAANNNSSSSSSTTTÖÖÖRRRLLLEEERRR
Bu bölümde, transistör yarı-iletken elemanlarının daha sonraki bölümlerde geçen devre analizlerinde, ideal anahtar yaklaımı ile nasıl rol oynadıı bakı açısından bazı karakteristikleri üzerinde durulacaktır. Elemanların sıcaklık, akım ve gerilim sınırlamaları da bu bölümün kapsamındadır. Güç transistörleri dört kategoriye ayrılabilir:
• BJT (power bipolar junction transistor = Bipolar jonksiyon transistörü)
• MOSFET (metal-oxide semiconductor field-effect transistor = Metal oksit yarı-iletken alan etkili transistörü)
• SIT (Static induction transistor = Statik indüksiyon transistörü)
• IGBT (Insulated gate bipolar transistor = Yalıtılmı kapı bipolar transistörü)
444...111 BBBPPPOOOLLLAAARRR JJJOOONNNKKKSSSYYYOOONNN TTTRRRAAANNNSSSSSSTTTÖÖÖRRR (((BBBJJJTTT)))
Bipolar Jonksiyon Transistör (BJT), çok geni alanda kullanılan ve ideal anahtar yaklaımını gösteren anahtarlama elemanının bir güç versiyonudur. Bu kısımda, transistörün özellikleri incelenecek, transistör ideal anahtarla karılatırılacak ve transistörün basit modelleri üzerinde durulacaktır. BJT’nin dier kullanım yerlerinin tersine, anahtarlama amaçları için ilgi noktası normal aktif bölgedir. Kesim ve doyum durumları ilemin ilk bölgeleridir; bu iki durum ideal anahtar olma yaklaımında açık ve kapalı duruma karılık gelir. Dorusal bölgenin oldukça yüksek akım kazancı, bir anahtar olarak BJT’nin ileminde bariz deildir. ekil 4.1 eleman akımlarının referans yönlerini göstermektedir. Gerilimler çift indisli notasyonla gösterilmitir.
444...111...111 LLLEEETTTMMM DDDUUURRRUUUMMMUUU MMMOOODDDEEELLL
letim bölgesinde, transistör doyum durumunda veya doyuma yakın durumdadır. Dorusal bölgeden doyum durumuna geçi ani deildir, böylece kısmi doyum bölgesi mevcuttur, burada VCE beyz akımının artıı ile azalır ve akım kazancı kavramı geçerli
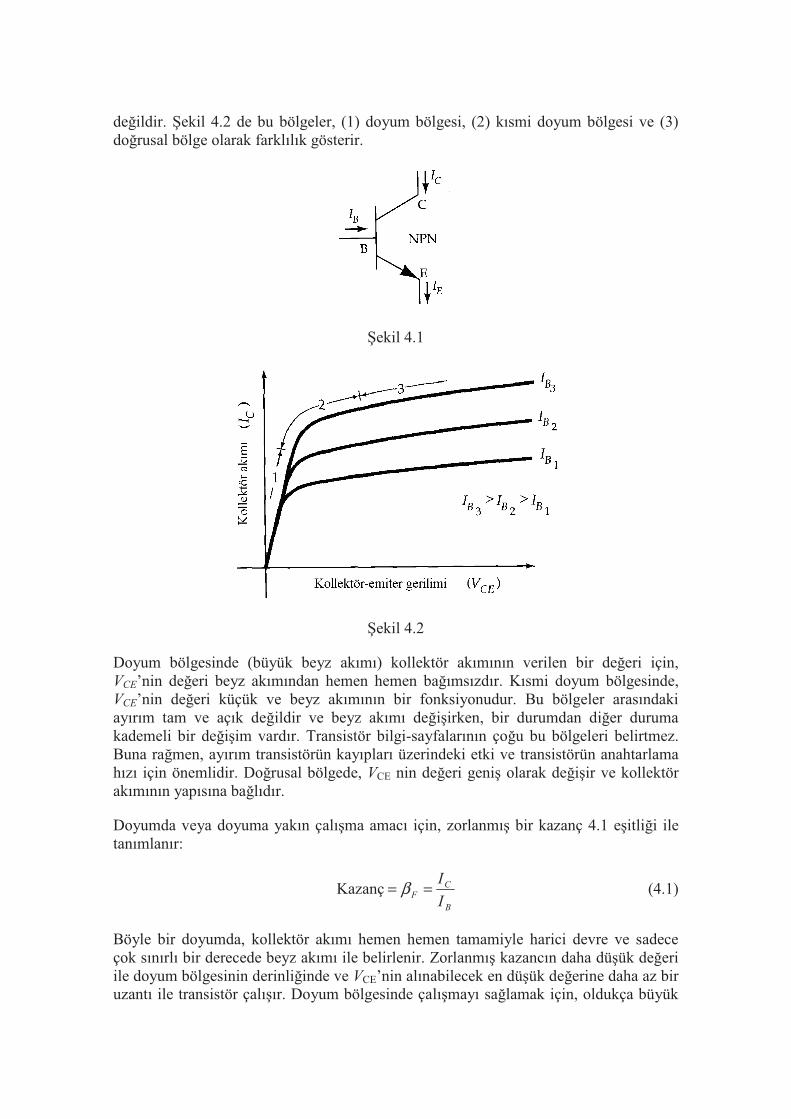
deildir. ekil 4.2 de bu bölgeler, (1) doyum bölgesi, (2) kısmi doyum bölgesi ve (3) dorusal bölge olarak farklılık gösterir.
ekil 4.1
ekil 4.2
Doyum bölgesinde (büyük beyz akımı) kollektör akımının verilen bir deeri için, VCE’nin deeri beyz akımından hemen hemen baımsızdır. Kısmi doyum bölgesinde, VCE’nin deeri küçük ve beyz akımının bir fonksiyonudur. Bu bölgeler arasındaki ayırım tam ve açık deildir ve beyz akımı deiirken, bir durumdan dier duruma kademeli bir deiim vardır. Transistör bilgi-sayfalarının çou bu bölgeleri belirtmez. Buna ramen, ayırım transistörün kayıpları üzerindeki etki ve transistörün anahtarlama hızı için önemlidir. Dorusal bölgede, VCE nin deeri geni olarak deiir ve kollektör akımının yapısına balıdır.
Doyumda veya doyuma yakın çalıma amacı için, zorlanmı bir kazanç 4.1 eitlii ile tanımlanır:
B
CF
I
I== βKazanç (4.1)
Böyle bir doyumda, kollektör akımı hemen hemen tamamiyle harici devre ve sadece çok sınırlı bir derecede beyz akımı ile belirlenir. Zorlanmı kazancın daha düük deeri ile doyum bölgesinin derinliinde ve VCE’nin alınabilecek en düük deerine daha az bir uzantı ile transistör çalıır. Doyum bölgesinde çalımayı salamak için, oldukça büyük

deerde bir beyz akımı gerekir, böyle zorlanmı kazanç normal olarak küçüktür ve 3-10 arasındadır. Küçük sinyal transistörlerinde elde edilebilecek 50-500 arasında bir akım kazancı düünüldüü zaman bu aırtıcı olabilir. 1 A den daha büyük akımların düünüldüünü de dikkat etmek gerekir. Transistörün kazancı, güç transistörlerinde artan kollektör akımı ile normal olarak bariz ekilde azalır.
ekil 4.3 deki devrede, transistör akımı aaıdaki devre eitliinden bulunabilir:
IV V
RC
CC CE=−
(4.2)
Kollektör akımı için bir ilk yaklaım VCE yi sıfıra eitlemekle yapılabilir. Beyz akımının bilinen bir deeri için, βF nin deeri hesaplanabilir. Transistörün karakteristiklerinden, VCE nin gerçek deeri belirlenebilir. Belkide bilgi-sayfası, transistörün kılıf sıcaklıında beyz ve kollektör akımlarının özel bir kombinasyonunda, kollektör-emiter gerilimi için 2 volt vermektedir. Böylece, VCE nin sıfır olan orijinal gerilimi hatalı olmakta ve kollektör akımının gerçek deeri ilk hesaplanan deerden küçük olacaktır. Bir ideal anahtar yaklaımı kollektör akımı deerinde küçük hataya neden olur (ve bunun kabulü sık yapılır).
ekil 4.3
Jonksiyon sıcaklıının güvenli olarak sınırlı olabilmesi için elemanda meydana gelen ısının uygun bir ekilde uzaklatırılması gerekir. Bariz güç kaybı seviyesinde çalıırken (oda sıcaklıında) kılıf sıcaklıının 25°C olarak devam etmesi de ihtimal dııdır. Bundan dolayı, 25°C deki bilgi-sayfası deerleri elemanın çalıtıı gerçek sıcaklık dikkate alınarak uygun bir ekilde düzeltilmelidir.
Kollektör bölgesine verilen güce ek olarak, gücün baka bir bileeni beyz akımı ve beyz-emiter gerilimi ile gösterilir. Transistörün toplam gücü 4.3 eitlii ile verilir:
BBECCE IVIVP += (4.3)
ÖRNEK 4.1
ekil 4.5 de gösterilen karakteristiklere sahip bir transistör ekil 4.4 deki devrede bir yük direncine akım salamak için kullanılmıtır. Çalıma artları RL=25Ω ve βF =5. Aaıdakileri bulunuz:
(a) VCE = 0 ile IC
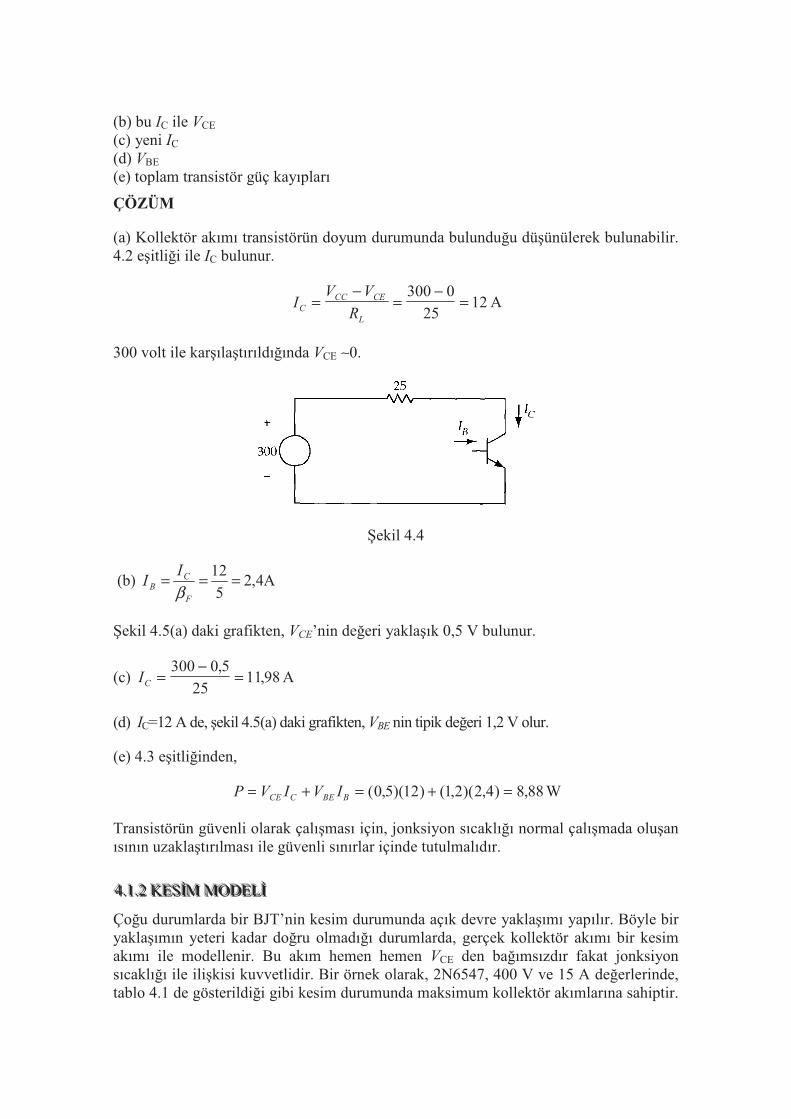
(b) bu IC ile VCE
(c) yeni IC
(d) VBE
(e) toplam transistör güç kayıpları
ÇÖZÜM
(a) Kollektör akımı transistörün doyum durumunda bulunduu düünülerek bulunabilir. 4.2 eitlii ile IC bulunur.
IV V
RC
CC CE
L
=−
=−
=300 0
2512 A
300 volt ile karılatırıldıında VCE ∼0.
ekil 4.4
(b) A4,25
12===
F
CB
II
β
ekil 4.5(a) daki grafikten, VCE’nin deeri yaklaık 0,5 V bulunur.
(c) IC =−
=300 0 5
2511 98
,, A
(d) IC=12 A de, ekil 4.5(a) daki grafikten, VBE nin tipik deeri 1,2 V olur.
(e) 4.3 eitliinden,
P V I V ICE C BE B= + = + =( , )( ) ( , )( , ) ,0 5 12 1 2 2 4 8 88 W
Transistörün güvenli olarak çalıması için, jonksiyon sıcaklıı normal çalımada oluan ısının uzaklatırılması ile güvenli sınırlar içinde tutulmalıdır.
444...111...222 KKKEEESSSMMM MMMOOODDDEEELLL
Çou durumlarda bir BJT’nin kesim durumunda açık devre yaklaımı yapılır. Böyle bir yaklaımın yeteri kadar doru olmadıı durumlarda, gerçek kollektör akımı bir kesim akımı ile modellenir. Bu akım hemen hemen VCE den baımsızdır fakat jonksiyon sıcaklıı ile ilikisi kuvvetlidir. Bir örnek olarak, 2N6547, 400 V ve 15 A deerlerinde, tablo 4.1 de gösterildii gibi kesim durumunda maksimum kollektör akımlarına sahiptir.
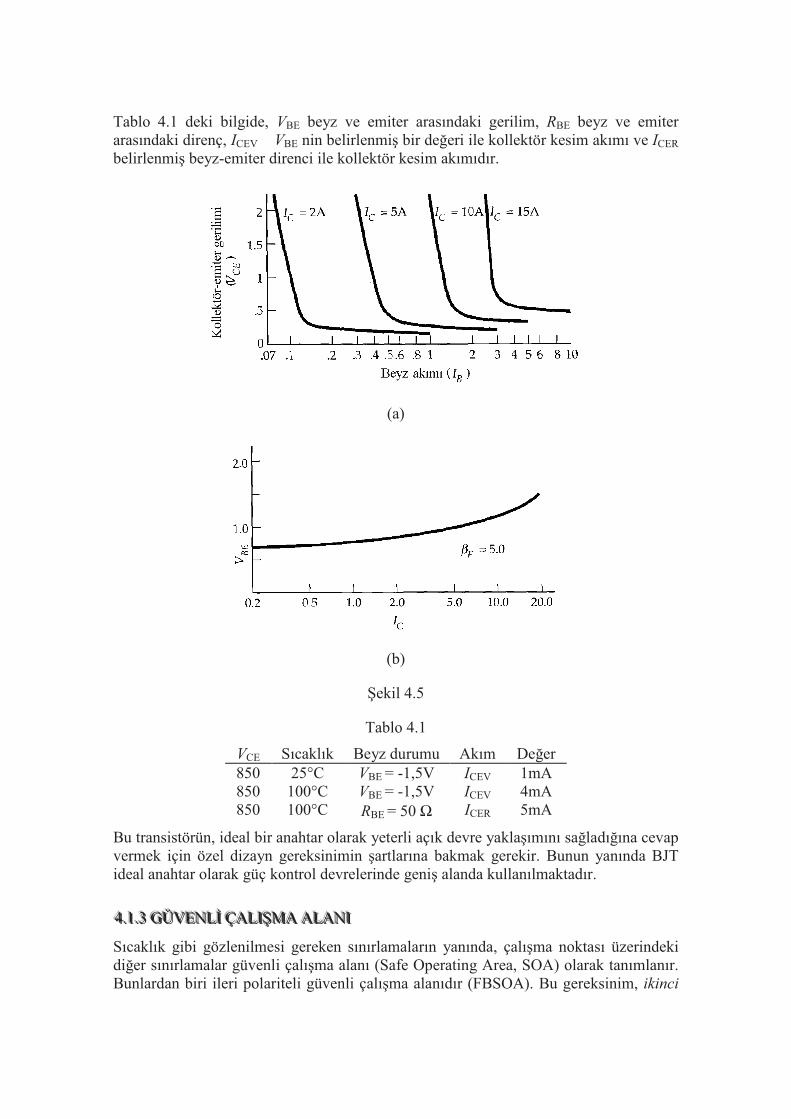
Tablo 4.1 deki bilgide, VBE beyz ve emiter arasındaki gerilim, RBE beyz ve emiter arasındaki direnç, ICEV VBE nin belirlenmi bir deeri ile kollektör kesim akımı ve ICER
belirlenmi beyz-emiter direnci ile kollektör kesim akımıdır.
(a)
(b)
ekil 4.5
Tablo 4.1
VCE Sıcaklık Beyz durumu Akım Deer 850 25°C VBE = -1,5V ICEV 1mA 850 100°C VBE = -1,5V ICEV 4mA 850 100°C RBE = 50 Ω ICER 5mA
Bu transistörün, ideal bir anahtar olarak yeterli açık devre yaklaımını saladıına cevap vermek için özel dizayn gereksinimin artlarına bakmak gerekir. Bunun yanında BJT ideal anahtar olarak güç kontrol devrelerinde geni alanda kullanılmaktadır.
444...111...333 GGGÜÜÜVVVEEENNNLLL ÇÇÇAAALLLIIIMMMAAA AAALLLAAANNNIII
Sıcaklık gibi gözlenilmesi gereken sınırlamaların yanında, çalıma noktası üzerindeki dier sınırlamalar güvenli çalıma alanı (Safe Operating Area, SOA) olarak tanımlanır. Bunlardan biri ileri polariteli güvenli çalıma alanıdır (FBSOA). Bu gereksinim, ikinci
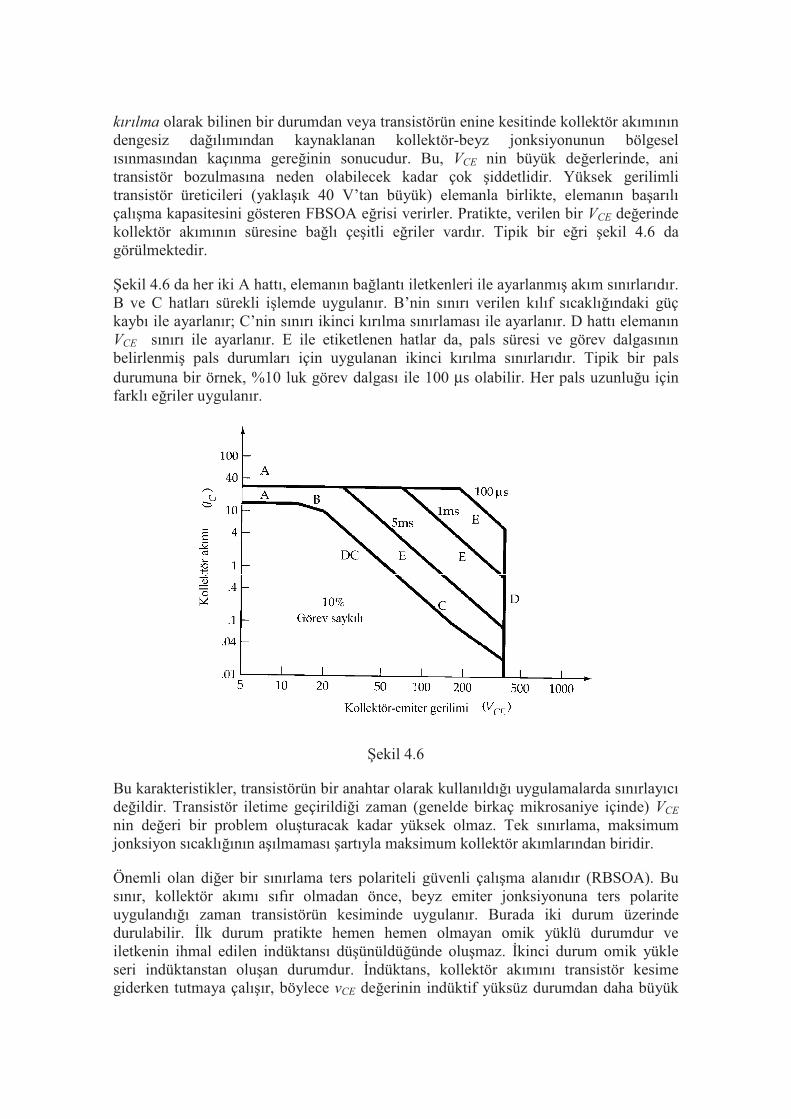
kırılma olarak bilinen bir durumdan veya transistörün enine kesitinde kollektör akımının dengesiz daılımından kaynaklanan kollektör-beyz jonksiyonunun bölgesel ısınmasından kaçınma gereinin sonucudur. Bu, VCE nin büyük deerlerinde, ani transistör bozulmasına neden olabilecek kadar çok iddetlidir. Yüksek gerilimli transistör üreticileri (yaklaık 40 V’tan büyük) elemanla birlikte, elemanın baarılı çalıma kapasitesini gösteren FBSOA erisi verirler. Pratikte, verilen bir VCE deerinde kollektör akımının süresine balı çeitli eriler vardır. Tipik bir eri ekil 4.6 da görülmektedir.
ekil 4.6 da her iki A hattı, elemanın balantı iletkenleri ile ayarlanmı akım sınırlarıdır. B ve C hatları sürekli ilemde uygulanır. B’nin sınırı verilen kılıf sıcaklıındaki güç kaybı ile ayarlanır; C’nin sınırı ikinci kırılma sınırlaması ile ayarlanır. D hattı elemanın VCE sınırı ile ayarlanır. E ile etiketlenen hatlar da, pals süresi ve görev dalgasının belirlenmi pals durumları için uygulanan ikinci kırılma sınırlarıdır. Tipik bir pals durumuna bir örnek, %10 luk görev dalgası ile 100 µs olabilir. Her pals uzunluu için farklı eriler uygulanır.
ekil 4.6
Bu karakteristikler, transistörün bir anahtar olarak kullanıldıı uygulamalarda sınırlayıcı deildir. Transistör iletime geçirildii zaman (genelde birkaç mikrosaniye içinde) VCE
nin deeri bir problem oluturacak kadar yüksek olmaz. Tek sınırlama, maksimum jonksiyon sıcaklıının aılmaması artıyla maksimum kollektör akımlarından biridir.
Önemli olan dier bir sınırlama ters polariteli güvenli çalıma alanıdır (RBSOA). Bu sınır, kollektör akımı sıfır olmadan önce, beyz emiter jonksiyonuna ters polarite uygulandıı zaman transistörün kesiminde uygulanır. Burada iki durum üzerinde durulabilir. lk durum pratikte hemen hemen olmayan omik yüklü durumdur ve iletkenin ihmal edilen indüktansı düünüldüünde olumaz. kinci durum omik yükle seri indüktanstan oluan durumdur. ndüktans, kollektör akımını transistör kesime giderken tutmaya çalıır, böylece vCE deerinin indüktif yüksüz durumdan daha büyük
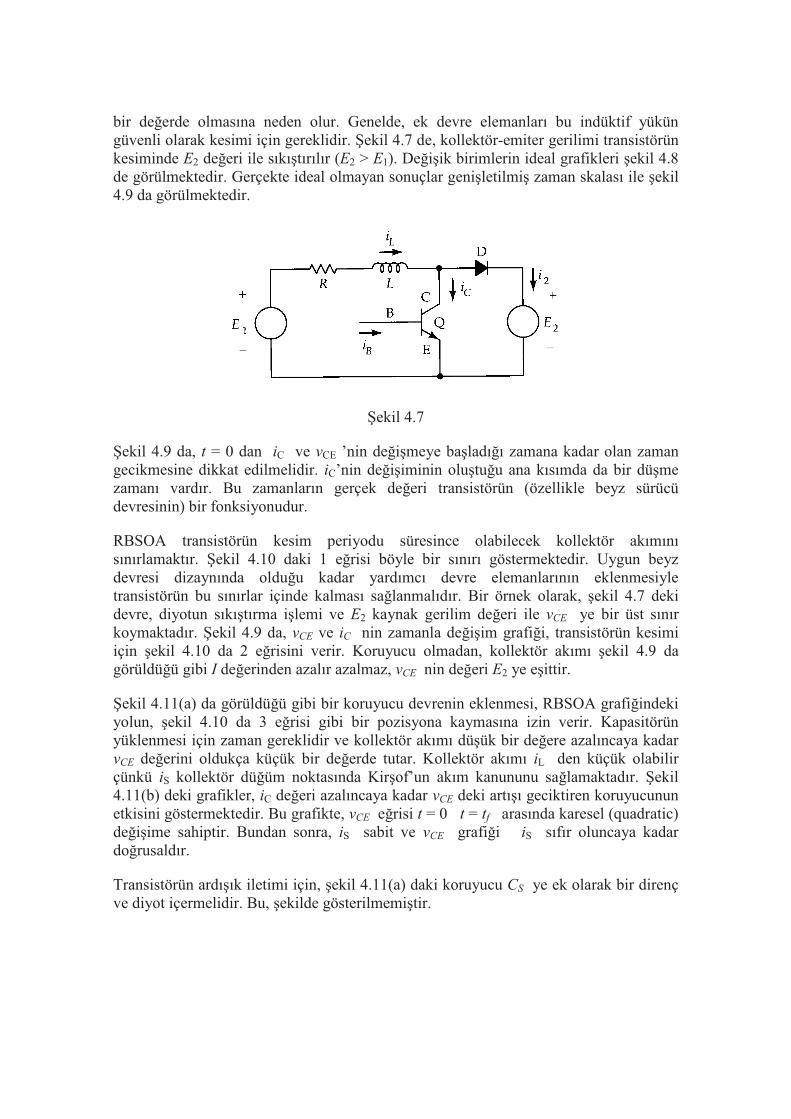
bir deerde olmasına neden olur. Genelde, ek devre elemanları bu indüktif yükün güvenli olarak kesimi için gereklidir. ekil 4.7 de, kollektör-emiter gerilimi transistörün kesiminde E2 deeri ile sıkıtırılır (E2 > E1). Deiik birimlerin ideal grafikleri ekil 4.8 de görülmektedir. Gerçekte ideal olmayan sonuçlar geniletilmi zaman skalası ile ekil 4.9 da görülmektedir.
ekil 4.7
ekil 4.9 da, t = 0 dan iC ve vCE ’nin deimeye baladıı zamana kadar olan zaman gecikmesine dikkat edilmelidir. iC’nin deiiminin olutuu ana kısımda da bir düme zamanı vardır. Bu zamanların gerçek deeri transistörün (özellikle beyz sürücü devresinin) bir fonksiyonudur.
RBSOA transistörün kesim periyodu süresince olabilecek kollektör akımını sınırlamaktır. ekil 4.10 daki 1 erisi böyle bir sınırı göstermektedir. Uygun beyz devresi dizaynında olduu kadar yardımcı devre elemanlarının eklenmesiyle transistörün bu sınırlar içinde kalması salanmalıdır. Bir örnek olarak, ekil 4.7 deki devre, diyotun sıkıtırma ilemi ve E2 kaynak gerilim deeri ile vCE ye bir üst sınır koymaktadır. ekil 4.9 da, vCE ve iC nin zamanla deiim grafii, transistörün kesimi için ekil 4.10 da 2 erisini verir. Koruyucu olmadan, kollektör akımı ekil 4.9 da görüldüü gibi I deerinden azalır azalmaz, vCE nin deeri E2 ye eittir.
ekil 4.11(a) da görüldüü gibi bir koruyucu devrenin eklenmesi, RBSOA grafiindeki yolun, ekil 4.10 da 3 erisi gibi bir pozisyona kaymasına izin verir. Kapasitörün yüklenmesi için zaman gereklidir ve kollektör akımı düük bir deere azalıncaya kadar vCE deerini oldukça küçük bir deerde tutar. Kollektör akımı iL den küçük olabilir çünkü iS kollektör düüm noktasında Kirof’un akım kanununu salamaktadır. ekil 4.11(b) deki grafikler, iC deeri azalıncaya kadar vCE deki artıı geciktiren koruyucunun etkisini göstermektedir. Bu grafikte, vCE erisi t = 0 t = tf arasında karesel (quadratic) deiime sahiptir. Bundan sonra, iS sabit ve vCE grafii iS sıfır oluncaya kadar dorusaldır.
Transistörün ardıık iletimi için, ekil 4.11(a) daki koruyucu CS ye ek olarak bir direnç ve diyot içermelidir. Bu, ekilde gösterilmemitir.
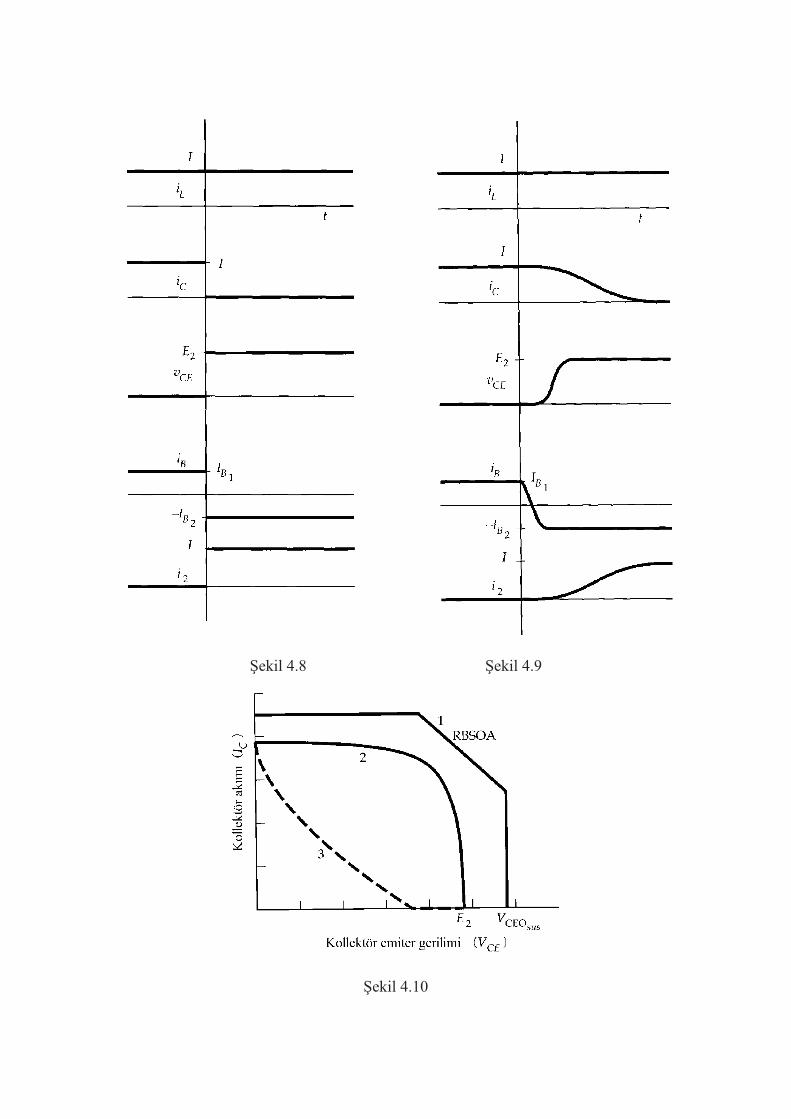
ekil 4.8 ekil 4.9
ekil 4.10
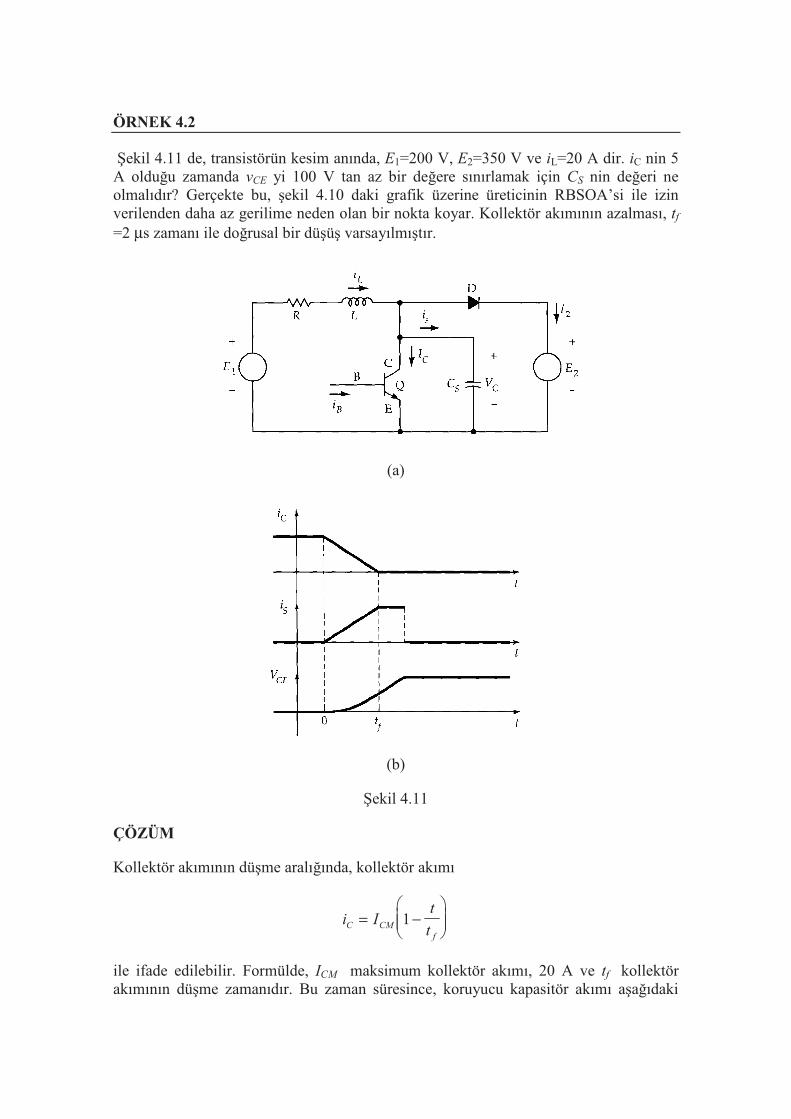
ÖRNEK 4.2
ekil 4.11 de, transistörün kesim anında, E1=200 V, E2=350 V ve iL=20 A dir. iC nin 5 A olduu zamanda vCE yi 100 V tan az bir deere sınırlamak için CS nin deeri ne olmalıdır? Gerçekte bu, ekil 4.10 daki grafik üzerine üreticinin RBSOA’si ile izin verilenden daha az gerilime neden olan bir nokta koyar. Kollektör akımının azalması, tf
=2 µs zamanı ile dorusal bir düü varsayılmıtır.
(a)
(b)
ekil 4.11
ÇÖZÜM
Kollektör akımının düme aralıında, kollektör akımı
i It
tC CM
f
= −
1
ile ifade edilebilir. Formülde, ICM maksimum kollektör akımı, 20 A ve tf kollektör akımının düme zamanıdır. Bu zaman süresince, koruyucu kapasitör akımı aaıdaki
eitlikte olduu gibi deiir:
iI t
tS
CM
f
=
iC=5 A için yukarıdaki eitlik çözülerek aaıdaki sonucu bulunur:
t = 1 5, µs
i t i tS C( ) ( )= − = − =20 20 5 15A
qS = × = ×− −12
6 615 1 5 10 11 25 10( )( , ) , C
burada qS , t = 1 5, µs de koruyucu kapasitördeki yüktür;
q v CS C S=
CS =×
= ×−
−11 25 10
1000 1125 10
66,
, F
444...111...444 DDDNNNAAAMMMKKK BBBEEEYYYZZZ AAAKKKIIIMMMIII GGGEEERRREEEKKKSSSNNN MMMLLLEEERRR
Bir BJT için idealletirilmi beyz akımı ekil 4.12(a)da görülmektedir. IB1 deerinde bir pozitif beyz akımı transistörü iletime geçirmek ve istenilen doyma seviyesine getirmek için gereklidir. Daha sonra transistörü kesime götürmek için, ekseriyetle kısa bir süre için beyz akımı ters yönde verilir. IB2 genliinin ters akımı, basitçe beyz akımının azaltılarak sıfır yapılmasından daha hızlı transistörün kesime gitmesine neden olur. Kollektör akımı, kesim denge artları salanıncaya kadar beyz akımının yön deitirmesinden sonra kısa bir süre daha devam eder.
IB1 ’in büyük bir deeri, kollektör akımının balangıç deerinden son deerine deimesi için gereken zamanı azaltır. Daha önce deinildii gibi, kollektör-emiter geriliminin doymu deeri de azalır. Bundan dolayı, transistör azalmı güç kaybı ile daha doymubir durumda çalıır. stenilmeyen etki ise transistörün kesimi için daha uzun zamanın gerekli olmasıdır. Özel olarak, depolama zamanı artar. Depolama zamanı, kollektör akımının temelde sabit kaldıı sürece beyz akımının ters yöne dönmesinden sonraki aralık olarak tanımlanır. Bir tasarım uyumazlıı vardır çünkü IB1 ’in büyük bir deeri depolama zamanındaki karı etkilerin dıında normal olarak kabul edilebilir. IB2 ’nin büyük bir deeri, beyz sürücü devresi için gereken artan gücün maliyetindeki artıla depolama zamanını azaltır.
Transistör kollektör akımını ilettii sürece, beyz-emiter jonksiyonu yaklaık olarak 1 V civarında bir gerilim kaynaı ile modellenebilir. Böylece, hem normal ve hem de ters beyz akımları harici beyz devresi ile büyükçe belirlenebilir. IB2 /IB1 oranı genel olarak 0,5-2,0 arasında seçilir. ekil 4.12(b) beyz akımının zamanla deiiminin sıfır olmayan yükselme zamanları ile gerçekçi bir grafiini göstermektedir.
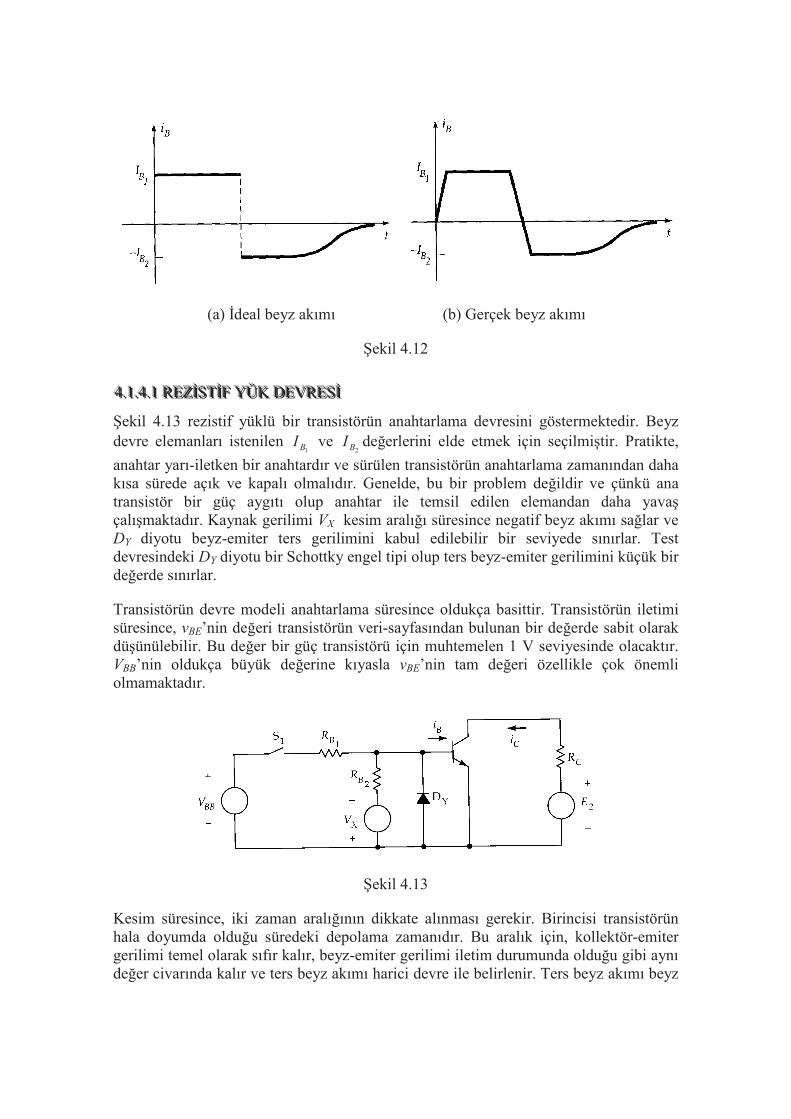
(a) deal beyz akımı (b) Gerçek beyz akımı
ekil 4.12
444...111...444...111 RRREEEZZZSSSTTTFFF YYYÜÜÜKKK DDDEEEVVVRRREEESSS
ekil 4.13 rezistif yüklü bir transistörün anahtarlama devresini göstermektedir. Beyz devre elemanları istenilen
1BI ve 2BI deerlerini elde etmek için seçilmitir. Pratikte,
anahtar yarı-iletken bir anahtardır ve sürülen transistörün anahtarlama zamanından daha kısa sürede açık ve kapalı olmalıdır. Genelde, bu bir problem deildir ve çünkü ana transistör bir güç aygıtı olup anahtar ile temsil edilen elemandan daha yavaçalımaktadır. Kaynak gerilimi VX kesim aralıı süresince negatif beyz akımı salar ve DY diyotu beyz-emiter ters gerilimini kabul edilebilir bir seviyede sınırlar. Test devresindeki DY diyotu bir Schottky engel tipi olup ters beyz-emiter gerilimini küçük bir deerde sınırlar.
Transistörün devre modeli anahtarlama süresince oldukça basittir. Transistörün iletimi süresince, vBE’nin deeri transistörün veri-sayfasından bulunan bir deerde sabit olarak düünülebilir. Bu deer bir güç transistörü için muhtemelen 1 V seviyesinde olacaktır. VBB’nin oldukça büyük deerine kıyasla vBE’nin tam deeri özellikle çok önemli olmamaktadır.
ekil 4.13
Kesim süresince, iki zaman aralıının dikkate alınması gerekir. Birincisi transistörün hala doyumda olduu süredeki depolama zamanıdır. Bu aralık için, kollektör-emiter gerilimi temel olarak sıfır kalır, beyz-emiter gerilimi iletim durumunda olduu gibi aynı deer civarında kalır ve ters beyz akımı harici devre ile belirlenir. Ters beyz akımı beyz
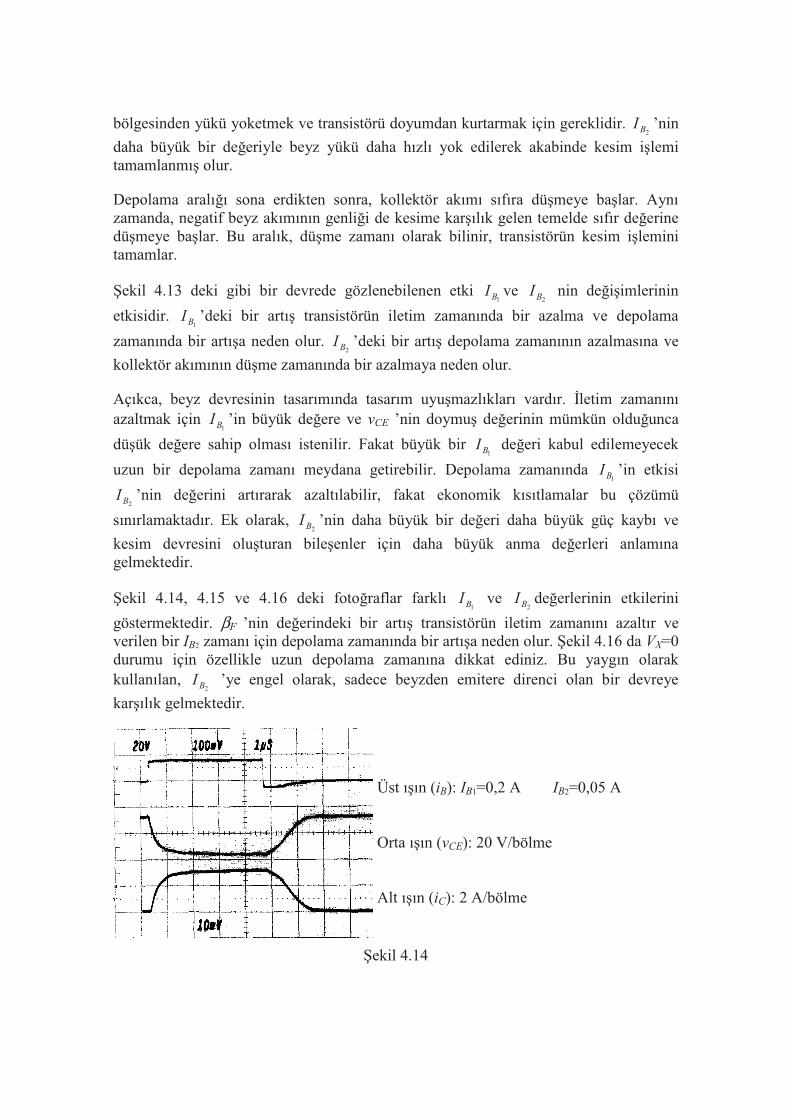
bölgesinden yükü yoketmek ve transistörü doyumdan kurtarmak için gereklidir. 2BI ’nin
daha büyük bir deeriyle beyz yükü daha hızlı yok edilerek akabinde kesim ilemi tamamlanmı olur.
Depolama aralıı sona erdikten sonra, kollektör akımı sıfıra dümeye balar. Aynı zamanda, negatif beyz akımının genlii de kesime karılık gelen temelde sıfır deerine dümeye balar. Bu aralık, düme zamanı olarak bilinir, transistörün kesim ilemini tamamlar.
ekil 4.13 deki gibi bir devrede gözlenebilenen etki 1BI ve
2BI nin deiimlerinin
etkisidir. 1BI ’deki bir artı transistörün iletim zamanında bir azalma ve depolama
zamanında bir artıa neden olur. 2BI ’deki bir artı depolama zamanının azalmasına ve
kollektör akımının düme zamanında bir azalmaya neden olur.
Açıkca, beyz devresinin tasarımında tasarım uyumazlıkları vardır. letim zamanını azaltmak için
1BI ’in büyük deere ve vCE ’nin doymu deerinin mümkün olduunca
düük deere sahip olması istenilir. Fakat büyük bir 1BI deeri kabul edilemeyecek
uzun bir depolama zamanı meydana getirebilir. Depolama zamanında 1BI ’in etkisi
2BI ’nin deerini artırarak azaltılabilir, fakat ekonomik kısıtlamalar bu çözümü
sınırlamaktadır. Ek olarak, 2BI ’nin daha büyük bir deeri daha büyük güç kaybı ve
kesim devresini oluturan bileenler için daha büyük anma deerleri anlamına gelmektedir.
ekil 4.14, 4.15 ve 4.16 deki fotoraflar farklı 1BI ve
2BI deerlerinin etkilerini
göstermektedir. βF ’nin deerindeki bir artı transistörün iletim zamanını azaltır ve verilen bir IB2 zamanı için depolama zamanında bir artıa neden olur. ekil 4.16 da VX=0 durumu için özellikle uzun depolama zamanına dikkat ediniz. Bu yaygın olarak kullanılan,
2BI ’ye engel olarak, sadece beyzden emitere direnci olan bir devreye
karılık gelmektedir.
Üst ıın (iB): IB1=0,2 A IB2=0,05 A
Orta ıın (vCE): 20 V/bölme
Alt ıın (iC): 2 A/bölme
ekil 4.14
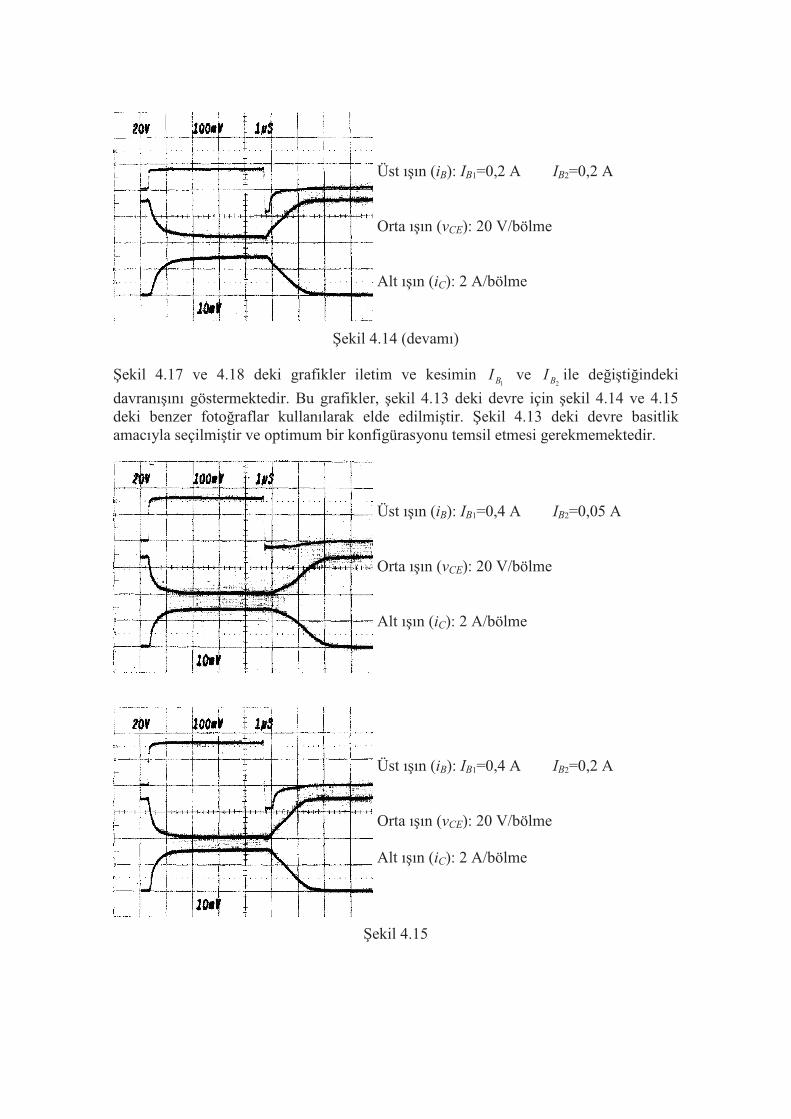
Üst ıın (iB): IB1=0,2 A IB2=0,2 A
Orta ıın (vCE): 20 V/bölme
Alt ıın (iC): 2 A/bölme
ekil 4.14 (devamı)
ekil 4.17 ve 4.18 deki grafikler iletim ve kesimin 1BI ve
2BI ile deitiindeki
davranıını göstermektedir. Bu grafikler, ekil 4.13 deki devre için ekil 4.14 ve 4.15 deki benzer fotoraflar kullanılarak elde edilmitir. ekil 4.13 deki devre basitlik amacıyla seçilmitir ve optimum bir konfigürasyonu temsil etmesi gerekmemektedir.
Üst ıın (iB): IB1=0,4 A IB2=0,05 A
Orta ıın (vCE): 20 V/bölme
Alt ıın (iC): 2 A/bölme
Üst ıın (iB): IB1=0,4 A IB2=0,2 A
Orta ıın (vCE): 20 V/bölme
Alt ıın (iC): 2 A/bölme
ekil 4.15
Üst ıın (iB): IB1=0,4 A IB2=0,05 A
Orta ıın (vCE): 20 V/bölme
Alt ıın (iC): 2 A/bölme
ekil 4.16
ekil 4.17 ekil 4.18
Gecikme zamanı + yükselme zamanı Depolama zamanı + düme zamanı
444...111...444...222 HHHIIIZZZLLLAAANNNDDDIIIRRRMMMAAA KKKAAAPPPAAASSSTTTÖÖÖRRRÜÜÜ
ekil 4.19
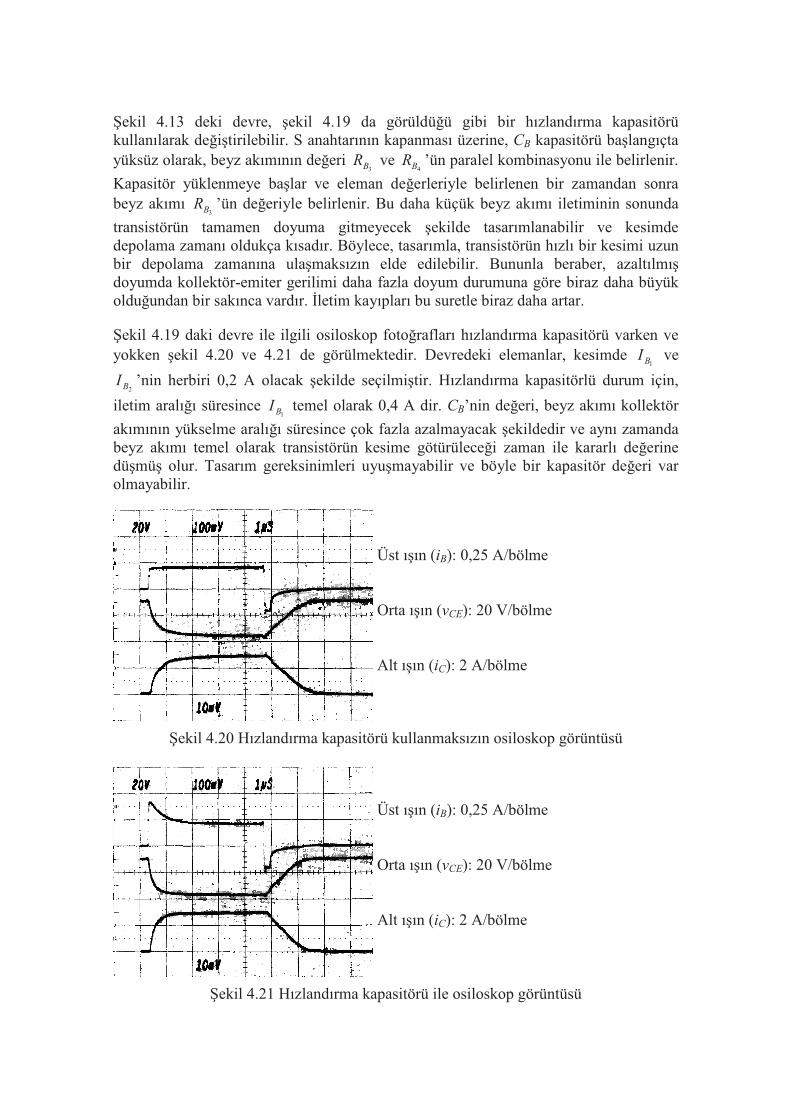
ekil 4.13 deki devre, ekil 4.19 da görüldüü gibi bir hızlandırma kapasitörü kullanılarak deitirilebilir. S anahtarının kapanması üzerine, CB kapasitörü balangıçta yüksüz olarak, beyz akımının deeri
3BR ve 4BR ’ün paralel kombinasyonu ile belirlenir.
Kapasitör yüklenmeye balar ve eleman deerleriyle belirlenen bir zamandan sonra beyz akımı
3BR ’ün deeriyle belirlenir. Bu daha küçük beyz akımı iletiminin sonunda
transistörün tamamen doyuma gitmeyecek ekilde tasarımlanabilir ve kesimde depolama zamanı oldukça kısadır. Böylece, tasarımla, transistörün hızlı bir kesimi uzun bir depolama zamanına ulamaksızın elde edilebilir. Bununla beraber, azaltılmıdoyumda kollektör-emiter gerilimi daha fazla doyum durumuna göre biraz daha büyük olduundan bir sakınca vardır. letim kayıpları bu suretle biraz daha artar.
ekil 4.19 daki devre ile ilgili osiloskop fotorafları hızlandırma kapasitörü varken ve yokken ekil 4.20 ve 4.21 de görülmektedir. Devredeki elemanlar, kesimde
1BI ve
2BI ’nin herbiri 0,2 A olacak ekilde seçilmitir. Hızlandırma kapasitörlü durum için,
iletim aralıı süresince 1BI temel olarak 0,4 A dir. CB’nin deeri, beyz akımı kollektör
akımının yükselme aralıı süresince çok fazla azalmayacak ekildedir ve aynı zamanda beyz akımı temel olarak transistörün kesime götürülecei zaman ile kararlı deerine dümü olur. Tasarım gereksinimleri uyumayabilir ve böyle bir kapasitör deeri var olmayabilir.
Üst ıın (iB): 0,25 A/bölme
Orta ıın (vCE): 20 V/bölme
Alt ıın (iC): 2 A/bölme
ekil 4.20 Hızlandırma kapasitörü kullanmaksızın osiloskop görüntüsü
Üst ıın (iB): 0,25 A/bölme
Orta ıın (vCE): 20 V/bölme
Alt ıın (iC): 2 A/bölme
ekil 4.21 Hızlandırma kapasitörü ile osiloskop görüntüsü

ekil 4.21 deki fotoraf 700 ns’lik bir yükselme zamanını göstermektedir. Bu zaman aralıı, 0,4 A’lik
1BI için ekil 4.17 deki grafikten elde edilenle aynıdır. Her iki 4.20 ve
4.21 ekillerinde, transistörün kesiminden hemen önce, 1BI 0,2 A’dir ve sonuç
depolama düme zamanı her durum için 1600 ns dir. Transistörün kesim hızında bariz bir etki yoktur. ayet beyz akımı iletim aralıı süresince 0,4 A de tutulsaydı, transistörün kesim zamanı daha uzun olurdu.
ÖRNEK 4.3
ekil 4.19 daki devrede, 0,8 µs’lik istenilen bir kollektör yükselme zamanını salamak için transistör bir βF=8 ’e gerek duymaktadır. βF=20 de transistör doyumda kalmaktadır. Transistörün toplam iletim zamanı 20 µs olup bundan sonra kesim balamaktadır. 5 A’lik bir kollektör akımı için ve kesimde
2BI /1BI =1 ile bu uygulama için mümkün
olabilecek bir devre tasarlayınız. Pozitif ve negatif 10 V’luk kaynaklar mevcuttur.
ÇÖZÜM
letimin balangıcında,
625,08
51
===F
CB
II
β A
letim aralıının sonunda,
25,020
521
====F
CBB
III
β A
ekil 4.22 deki devre kullanılarak, vBE=0,8 varsayılarak aaıdaki tasarım eitlikleri yazılabilir. Bu ekil balangıçta kapasitör gerilimi sıfıra eit olarak çizilmitir:
25,02
== BX Ii A
08,0102
=−−XB iR
2,432
=BR Ω
ekil 4.22
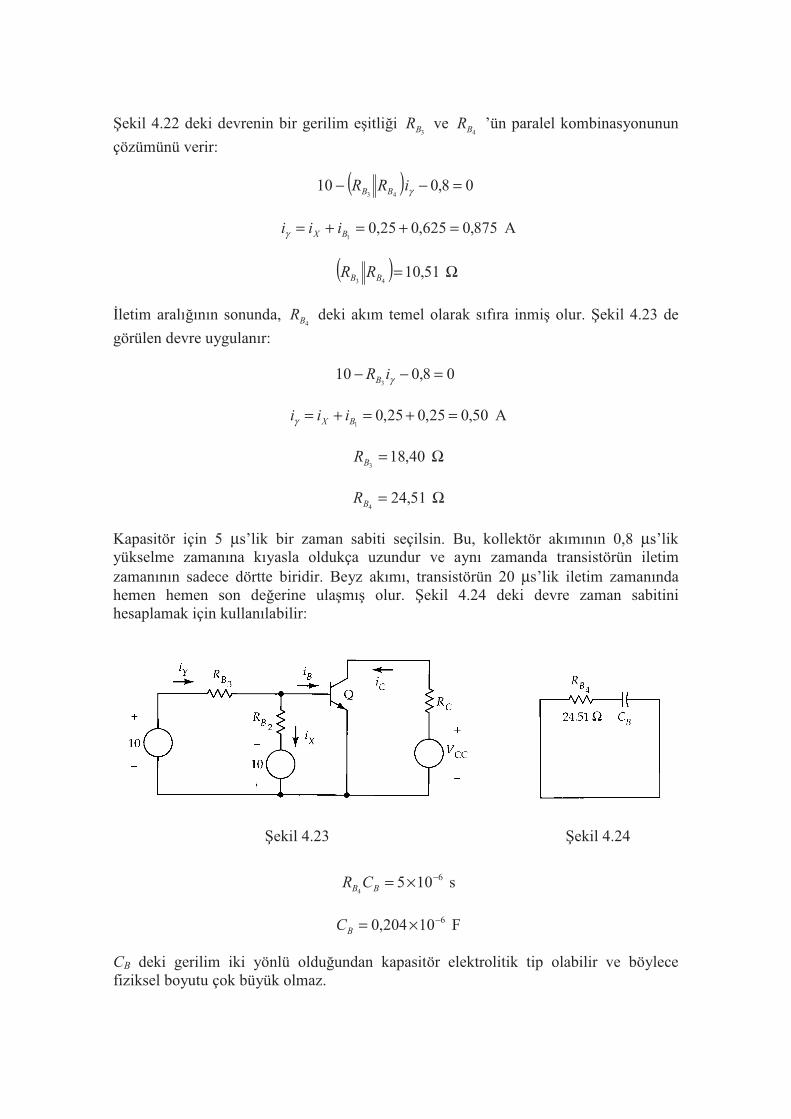
ekil 4.22 deki devrenin bir gerilim eitlii 3BR ve
4BR ’ün paralel kombinasyonunun
çözümünü verir:
( ) 08,01043
=−− γiRR BB
875,0625,025,01
=+=+= BX iiiγ A
( ) 51,1043
=BB RR Ω
letim aralıının sonunda, 4BR deki akım temel olarak sıfıra inmi olur. ekil 4.23 de
görülen devre uygulanır:
08,0103
=−− γiRB
50,025,025,01
=+=+= BX iiiγ A
40,183
=BR Ω
51,244
=BR Ω
Kapasitör için 5 µs’lik bir zaman sabiti seçilsin. Bu, kollektör akımının 0,8 µs’lik yükselme zamanına kıyasla oldukça uzundur ve aynı zamanda transistörün iletim zamanının sadece dörtte biridir. Beyz akımı, transistörün 20 µs’lik iletim zamanında hemen hemen son deerine ulamı olur. ekil 4.24 deki devre zaman sabitini hesaplamak için kullanılabilir:
ekil 4.23 ekil 4.24
61054
−×=BB CR s
610204,0 −×=BC F
CB deki gerilim iki yönlü olduundan kapasitör elektrolitik tip olabilir ve böylece fiziksel boyutu çok büyük olmaz.
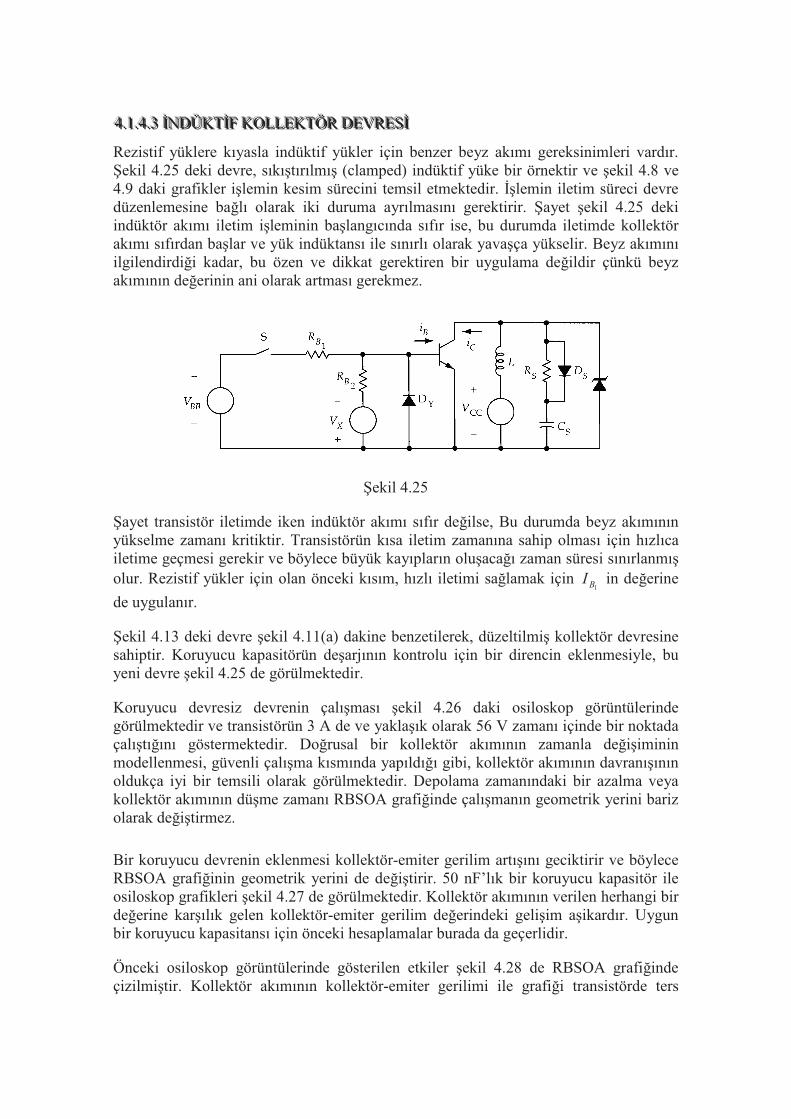
444...111...444...333 NNNDDDÜÜÜKKKTTTFFF KKKOOOLLLLLLEEEKKKTTTÖÖÖRRR DDDEEEVVVRRREEESSS
Rezistif yüklere kıyasla indüktif yükler için benzer beyz akımı gereksinimleri vardır. ekil 4.25 deki devre, sıkıtırılmı (clamped) indüktif yüke bir örnektir ve ekil 4.8 ve 4.9 daki grafikler ilemin kesim sürecini temsil etmektedir. lemin iletim süreci devre düzenlemesine balı olarak iki duruma ayrılmasını gerektirir. ayet ekil 4.25 deki indüktör akımı iletim ileminin balangıcında sıfır ise, bu durumda iletimde kollektör akımı sıfırdan balar ve yük indüktansı ile sınırlı olarak yavaça yükselir. Beyz akımını ilgilendirdii kadar, bu özen ve dikkat gerektiren bir uygulama deildir çünkü beyz akımının deerinin ani olarak artması gerekmez.
ekil 4.25
ayet transistör iletimde iken indüktör akımı sıfır deilse, Bu durumda beyz akımının yükselme zamanı kritiktir. Transistörün kısa iletim zamanına sahip olması için hızlıca iletime geçmesi gerekir ve böylece büyük kayıpların oluacaı zaman süresi sınırlanmıolur. Rezistif yükler için olan önceki kısım, hızlı iletimi salamak için
1BI in deerine
de uygulanır.
ekil 4.13 deki devre ekil 4.11(a) dakine benzetilerek, düzeltilmi kollektör devresine sahiptir. Koruyucu kapasitörün dearjının kontrolu için bir direncin eklenmesiyle, bu yeni devre ekil 4.25 de görülmektedir.
Koruyucu devresiz devrenin çalıması ekil 4.26 daki osiloskop görüntülerinde görülmektedir ve transistörün 3 A de ve yaklaık olarak 56 V zamanı içinde bir noktada çalıtıını göstermektedir. Dorusal bir kollektör akımının zamanla deiiminin modellenmesi, güvenli çalıma kısmında yapıldıı gibi, kollektör akımının davranıının oldukça iyi bir temsili olarak görülmektedir. Depolama zamanındaki bir azalma veya kollektör akımının düme zamanı RBSOA grafiinde çalımanın geometrik yerini bariz olarak deitirmez.
Bir koruyucu devrenin eklenmesi kollektör-emiter gerilim artıını geciktirir ve böylece RBSOA grafiinin geometrik yerini de deitirir. 50 nF’lık bir koruyucu kapasitör ile osiloskop grafikleri ekil 4.27 de görülmektedir. Kollektör akımının verilen herhangi bir deerine karılık gelen kollektör-emiter gerilim deerindeki geliim aikardır. Uygun bir koruyucu kapasitansı için önceki hesaplamalar burada da geçerlidir.
Önceki osiloskop görüntülerinde gösterilen etkiler ekil 4.28 de RBSOA grafiinde çizilmitir. Kollektör akımının kollektör-emiter gerilimi ile grafii transistörde ters
polarlama stresinin bir ölçüsüdür. kinci eri koruyucu kapasitörün etkisini göstermekte olup koruyucu kapasitörsüz durumdaki eriden önemli ölçüde farklıdır.
Üst ıın (iB): IB1=0,2 A IB2=0,2 A
Orta ıın (vCE): 20 V/bölme
Alt ıın (iC): 2 A/bölme
ekil 4.26
Üst ıın (iB): IB1=0,2 A IB2=0,2 A
Orta ıın (vCE): 20 V/bölme
Alt ıın (iC): 2 A/bölme
ekil 4.27
ekil 4.28
444...111...555 AAANNNAAAHHHTTTAAARRRLLLAAAMMMAAA KKKAAAYYYIIIPPPLLLAAARRRIII
Transistörün iletimi ve kesimi süresince, ihmal edilemeyecek bariz güç kayıpları vardır.
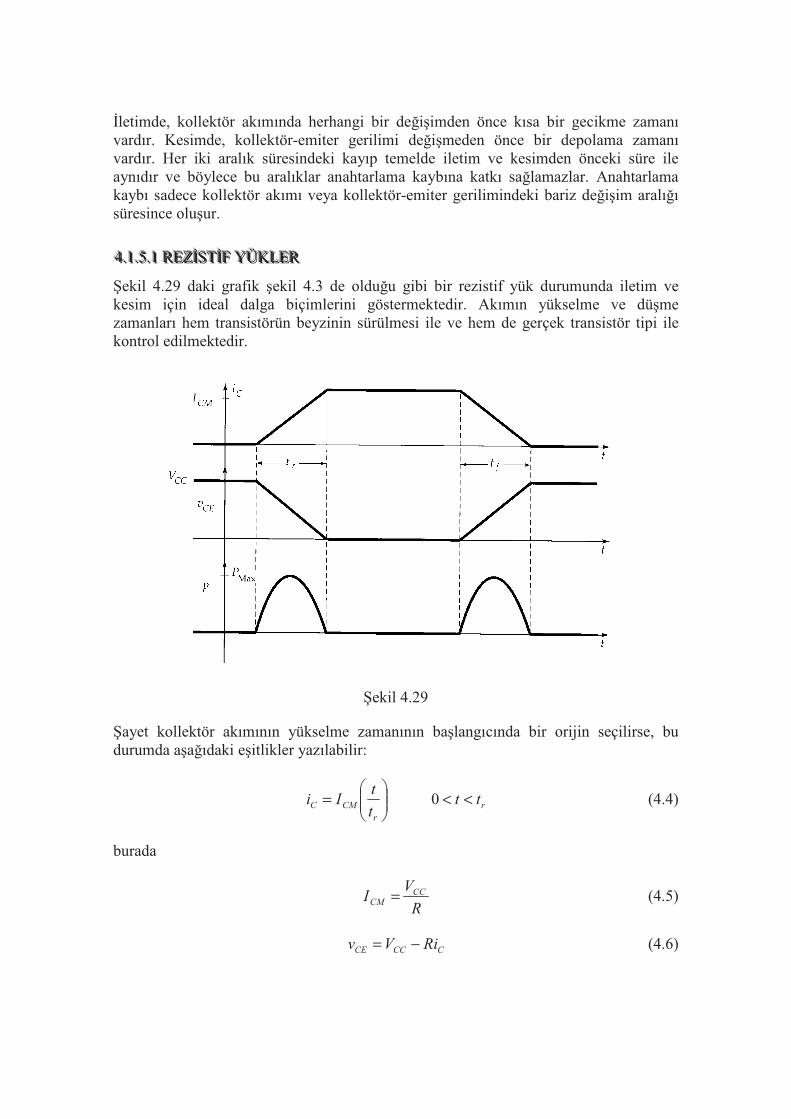
letimde, kollektör akımında herhangi bir deiimden önce kısa bir gecikme zamanı vardır. Kesimde, kollektör-emiter gerilimi deimeden önce bir depolama zamanı vardır. Her iki aralık süresindeki kayıp temelde iletim ve kesimden önceki süre ile aynıdır ve böylece bu aralıklar anahtarlama kaybına katkı salamazlar. Anahtarlama kaybı sadece kollektör akımı veya kollektör-emiter gerilimindeki bariz deiim aralıı süresince oluur.
444...111...555...111 RRREEEZZZSSSTTTFFF YYYÜÜÜKKKLLLEEERRR
ekil 4.29 daki grafik ekil 4.3 de olduu gibi bir rezistif yük durumunda iletim ve kesim için ideal dalga biçimlerini göstermektedir. Akımın yükselme ve düme zamanları hem transistörün beyzinin sürülmesi ile ve hem de gerçek transistör tipi ile kontrol edilmektedir.
ekil 4.29
ayet kollektör akımının yükselme zamanının balangıcında bir orijin seçilirse, bu durumda aaıdaki eitlikler yazılabilir:
r
r
CMC ttt
tIi <<
= 0 (4.4)
burada
R
VI CC
CM = (4.5)
CCCCE RiVv −= (4.6)

r
r
CCCE ttt
tVv <<
−= 01 (4.7)
Doyumdaki vCE’yi VCC ’ye kıyasla ihmal edilebilir varsayımı ile bu aralık süresince transistöre verilen ani güç
r
rr
CMCCCCE ttt
t
t
tIVivp <<
−
== 01 (4.8)
ile verilir. Yükselme zamanı süresince transistörde kaybolan enerji Wr , düme zamanı aralıı süresince gücün integrali ile aaıdaki sonuçta olduu gibi verilir:
= r
CMCCr t
IVW
3
2
4 (4.9)
Benzer ekilde, akımın düme zamanı süresince transistörde kaybolan enerji Wf (4.10) eitlii ile verilir.
= f
CMCCf t
IVW
3
2
4 (4.10)
ki enerji ifadesindeki ilk terim, yükselme veya düme zamanının ilk yarısında oluan tepe (maksimum) güçtür; anahtarlama zamanından baımsızdır. Çünkü bu çok önemli bir güç olduundan, anahtarlama enerji kaybını olabildiince sınırlı tutmak için yükselme veya düme zamanı süresini azaltmak önemlidir. Gerçek kollektör akımının zamanla deiiminin biçimi ekil 4.29 daki idealletirilmi dalga biçimi ile tam aynı olmayabilir. Bu yüzden, eitliklerdeki 2/3 faktörü biraz farklı olabilir, buna ramen yükselme ve düme zamanlarının azaltılması zorunluluu anahtarlama kayıplarını en aza indirmek için de geçerlidir.
ayet transistör periyodik bir davranıla iletim ve kesimde ise, bu anahtarlama kaybı her periyot için oluur. Bu anahtarlama ilemlerinin frekansına balı olarak sonuç ortalama güç:
))(( kayıpbaınailemfrekansPort = (4.11)
))(( frort WWfP += (4.12)
ÖRNEK 4.4
ekil 4.3 deki devrede, transistör 10 kHz’lik bir frekansta iletim ve kesimde bulunmaktadır. Kollektör akımının yükselme zamanı 0,8 µs ve düme zamanı 1,0 µs dir. VCC=400 V ve R=20Ω. Aaıdakileri bulunuz:
(a) Yükselme zamanı enerji kaybı (b) Düme zamanı enerji kaybı (c) Anahtarlama güç kaybı.

ÇÖZÜM
(a) 2020
400===
R
VI CC
CM A
4.9 eitliinden, yükselme zamanı enerji kaybı belirlenir:
00107,0)108,0(3
2
4
)20)(400( 6 =
×
= −
rW J
(b) 4.10 eitliinden, düme zamanı enerji kaybı belirlenir:
00133,0)101(3
2
4
)20)(400( 6 =
×
= −
fW J
(c) 00240,000133,000107,0 =+=+ fr WW J
4.11 eitliinden anahtarlama güç kaybı bulunur:
24)10000)(00240,0( ==ortP W
444...111...555...111 NNNDDDÜÜÜKKKTTT FFF YYYÜÜÜKKKLLLEEERRR
ndüktif yüklerde, anahtarlama kayıpları özel durumlara balıdır. ayet balangıç indüktör akımı sıfır ise, bu durumda transistörün iletiminin balangıcında kollektör akımı sıfırdır. Yük indüktif olduundan, iletim ileminin tamamı süresince kollektör akımı temel olarak sıfırdır ve anahtarlama gücü ihmal edilebilir derecede küçüktür. Böylece iletim kayıpları ihmal edilebilir.
ayet balangıç indüktör akımı sıfır deilse, durum tamamen farklıdır. ekil 4.7 deki devrede, balangıç indüktör akımı sıfır deildir ve ekil 4.30 daki idealletirilmigrafikler iletime uygulanır. Transistörün güç kaybı grafiinde, maksimum güç E2 ve ICM
nin çarpımıdır. Burada da yine anahtarlama zamanını azaltarak anahtarlama enerjisini en aza indirmek önemlidir.
ekil 4.30 daki grafikte, t1 ve t2 sırasıyla akımın yükselme zamanı ve gerilimin düme zamanını temsil etmektedir. letim esnasında transistöre verilen enerji gücün zamanla deiim erisinin altındaki alan ile temsil edilir. Bu enerji (4.13) eitlii ile verilir:
)( 21221 ttIEenerjisiletim CM += (4.13)
ndüktif bir yük’ün kesim’inde transistörün akım ve gerilim deiimleri, deiimlerin derecesi hariç iletimdekine benzemektedir. ekil 4.31 ilemin idealletirilmiversiyonlarını göstermektedir. Bu grafiklerde, t1 ve t2 sırasıyla gerilimin yükselme zamanı ve akımın düme zamanı temsil etmektedir. Bunların toplamları transistörün veri-sayfalarında tanımlanan sıfır durumundan geçi zamanına benzemektedir. Kesim enerji kaybı için eitlik iletimdeki ile aynıdır:
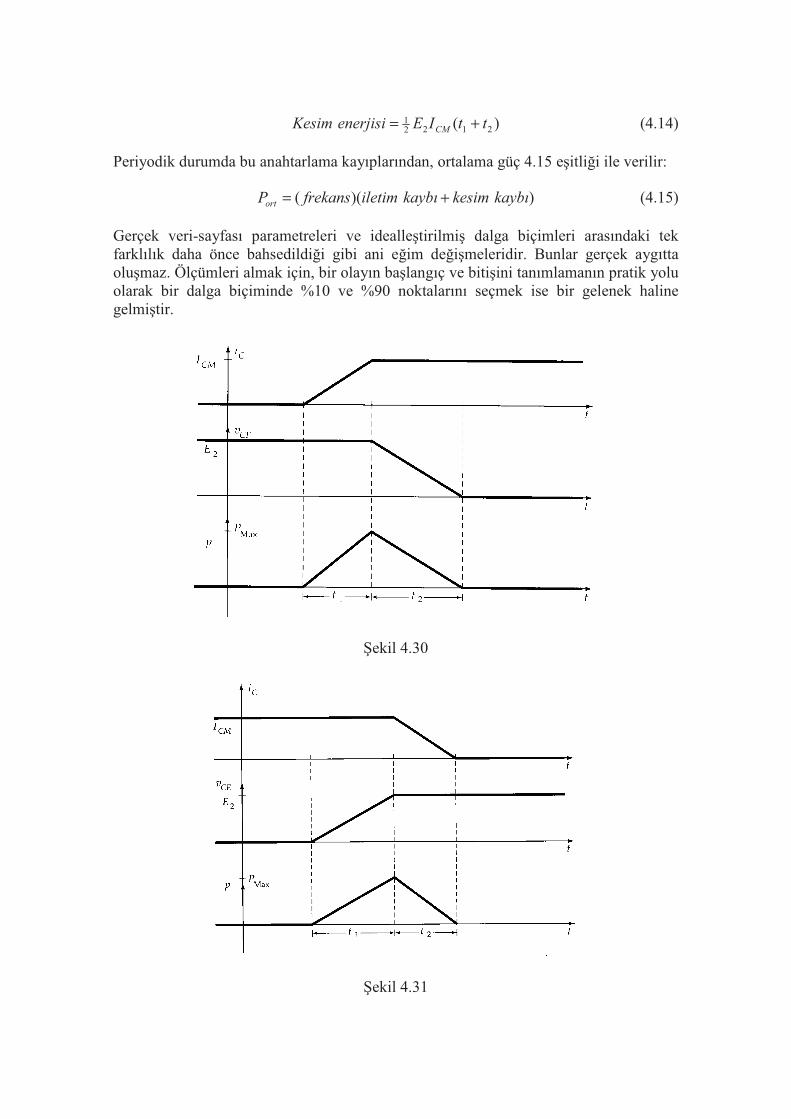
)( 21221 ttIEenerjisiKesim CM += (4.14)
Periyodik durumda bu anahtarlama kayıplarından, ortalama güç 4.15 eitlii ile verilir:
))(( kaybıkesimkaybıiletimfrekansPort += (4.15)
Gerçek veri-sayfası parametreleri ve idealletirilmi dalga biçimleri arasındaki tek farklılık daha önce bahsedildii gibi ani eim deimeleridir. Bunlar gerçek aygıtta olumaz. Ölçümleri almak için, bir olayın balangıç ve bitiini tanımlamanın pratik yolu olarak bir dalga biçiminde %10 ve %90 noktalarını seçmek ise bir gelenek haline gelmitir.
ekil 4.30
ekil 4.31

ÖRNEK 4.5
ekil 4.7 dekine benzer bir devrede, indüktör akımı 20 A ve anahtarlama aralıı süresince sabit varsayılmaktadır. VCC=200 V ve E2=400 V. letim süresince, t1=0,4 µs ve t2=0,2 µs. Kesim süresince, t1=0,1 µs ve t2=0,3 µs. Aaıdakileri bulunuz:
(a) letim süresince enerji kaybı (b) Kesim süresince enerji kaybı (c) 10 kHz frekansta toplam anahtarlama kaybı.
ÇÖZÜM
(a) 4.13 eitliinden:
0024,0)]10)(2,04,0)(20)(400[( 621 =+= −enerji J
(b) 4.14 eitliinden:
0016,0)]10)(3,01,0)(20)(400[( 621 =+= −enerji J
(c) Toplam enerji=0,00240+0,00160=0,0040 J
4.15 eitliinden:
Güç=(0,0040)(10000)=40 W
ÖRNEK 4.6
Örnek 4.5’de, uygun bir diyot ve 1000 Ω’luk bir direnç ile birlikte 0,0075 µF’lık bir koruyucu ekleyiniz. Kesimde kollektör akımının düme zamanında deiim olmadıını varsayınız. Kesimde gerilimin yükselmesi koruyucu kapasitör ile kontrol edilmektedir. Aaıdakileri bulunuz:
(a) letim süresince enerji kaybı (b) Kesim süresince enerji kaybı (c) Koruyucu direnci enerji kaybı (d) 10 kHz frekansta toplam anahtarlama kaybı.
ÇÖZÜM
(a) Örnek 4.5’e kıyasla iletimde temel olarak deiim yoktur. Transistörün koruyucuyu dearj etmesi için ek küçük bir akımı iletmesi gerekir. Bu akım 400/1000=0,4 A’i aamaz ve transistörün iletim kaybına az bir etkisi vardır:
letim enerjisi=0,0024 J
(b) Kesim süresince, koruyucu akımı 0 dan 20 A’e dorusal olarak artarken, kollektör akımı dorusal olarak 20 A den 0’a azalır. Bununla ilgili grafikler ekil 4.32 de görülmektedir.
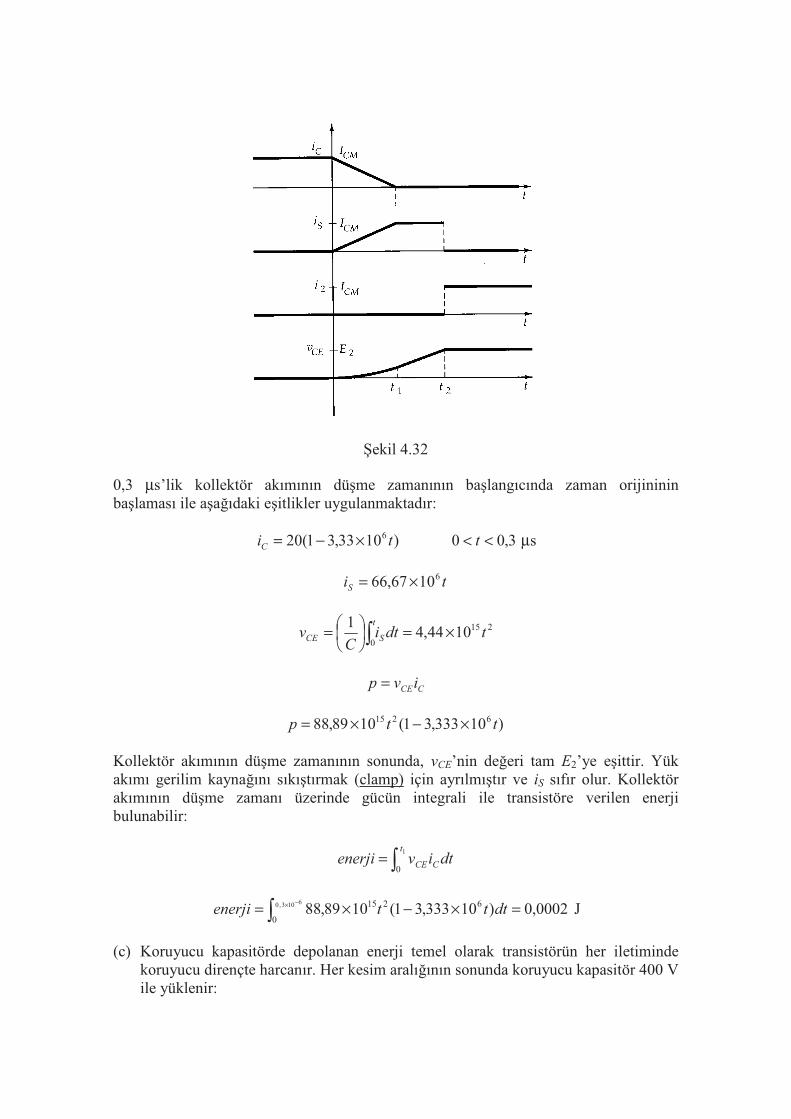
ekil 4.32
0,3 µs’lik kollektör akımının düme zamanının balangıcında zaman orijininin balaması ile aaıdaki eitlikler uygulanmaktadır:
3,00)1033,31(20 6 <<×−= ttiC µs
tiS
61067,66 ×=
215
01044,4
1tdti
Cv
t
SCE ×=
=
CCEivp =
)10333,31(1089,88 6215 ttp ×−×=
Kollektör akımının düme zamanının sonunda, vCE’nin deeri tam E2’ye eittir. Yük akımı gerilim kaynaını sıkıtırmak (clamp) için ayrılmıtır ve iS sıfır olur. Kollektör akımının düme zamanı üzerinde gücün integrali ile transistöre verilen enerji bulunabilir:
=1
0
t
CCE dtivenerji
0002,0)10333,31(1089,88 62
0
156103,0 =×−×= −× dtttenerji J
(c) Koruyucu kapasitörde depolanan enerji temel olarak transistörün her iletiminde koruyucu dirençte harcanır. Her kesim aralıının sonunda koruyucu kapasitör 400 V ile yüklenir:
0006,0)400)(100075,0( 26212
21 =×== −
CvCenerjidepolanan J
(d) (a), (b) ve (c) ıklarında meydana gelen üç enerji kaybı her saykılda oluur. Böylece, anahtarlama güç kaybı aaıda gibi verilir:
))(( frekanstoplamıınkayıplarıngüçPort =
32)10000)(0006,00002,00024,0( =++=ortP W
444...222 GGGÜÜÜÇÇÇ MMMOOOSSSFFFEEETTTLLLEEERRR
Güç MOSFET (Metal-Oxide Semiconductor Field-Effect Transistor = metal oksit yarı-iletken alan etkili transistör)’lerinin ortaya çıkması bazı uygulamalarda BJT’nin yerini almasına neden olmutur. Yüksek frekanslı anahtarlamanın gerektii durumlarda, MOSFET’ler, iletim kayıplarının daha büyük olmasına ramen, BJT’lerden daha az toplam kayıplara sahiptir. Ek olarak, MOSFET, BJT de ciddi bir problem olan ikinci kırılma etkilerine maruz deildir. ekil 4.33, MOSFET akımlarının referans yönlerini göstermektedir. Gerilimler Gate(Kapı), Source(Kaynak) ve Drain(Akaç) notasyonu eklinde gösterilmitir.
ekil 4.33
444...222...111 MMMOOOSSSFFFEEETTT’’’NNN MMMOOODDDEEELLLLLLEEENNNMMMEEESSS
Güç MOSFET’inin statik karakteristikleri, güç elemanı ile ilgili akım ve gerilim deerlerindeki artı haricinde, küçük sinyal MOSFET’lerine benzer. ekil 4.34 deki eriler, tipik bir güç MOSFET’ine aittir ve eik geriliminden daha az vGS deerleri için iD nin sıfır olması gibi eik gerilimi vGS yi göstermektedir. Büyük miktarda akaç akımına sahip bir eleman için, vGS eik geriliminden az olduunda, akaç akımı 1 mA den daha az bir deere düürülemez.
ekil 4.34(b) deki grafik, akaç akımını yaklaık olarak parçalı bir dorusal fonksiyon eklinde gösterir. VT den az vGS deerleri için, akaç akımı sıfırdır; VT den büyük vGS
deerleri için, akaç akımı vGS nin dorusal bir fonksiyonudur:
0=< DTGS iVv için (4.16)
)( TGSDTGS VvGiVv −=> için (4.17)
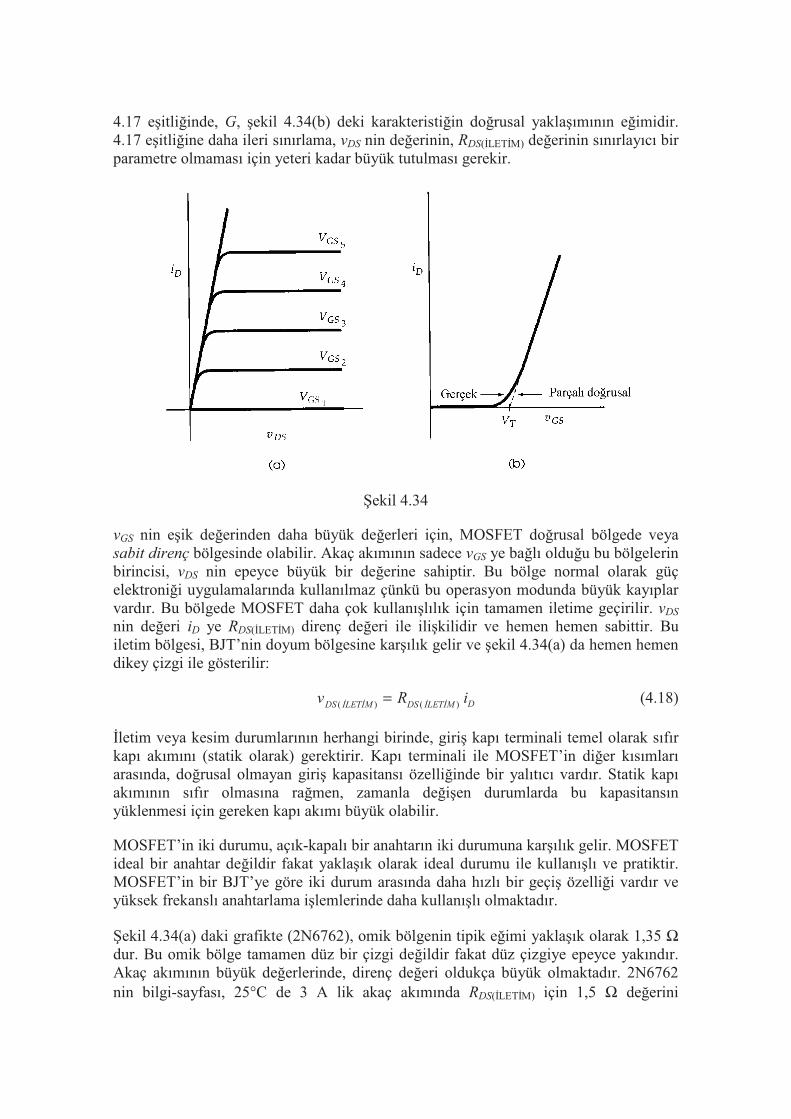
4.17 eitliinde, G, ekil 4.34(b) deki karakteristiin dorusal yaklaımının eimidir. 4.17 eitliine daha ileri sınırlama, vDS nin deerinin, RDS(LETM) deerinin sınırlayıcı bir parametre olmaması için yeteri kadar büyük tutulması gerekir.
ekil 4.34
vGS nin eik deerinden daha büyük deerleri için, MOSFET dorusal bölgede veya sabit direnç bölgesinde olabilir. Akaç akımının sadece vGS ye balı olduu bu bölgelerin birincisi, vDS nin epeyce büyük bir deerine sahiptir. Bu bölge normal olarak güç elektronii uygulamalarında kullanılmaz çünkü bu operasyon modunda büyük kayıplar vardır. Bu bölgede MOSFET daha çok kullanılılık için tamamen iletime geçirilir. vDS
nin deeri iD ye RDS(LETM) direnç deeri ile ilikilidir ve hemen hemen sabittir. Bu iletim bölgesi, BJT’nin doyum bölgesine karılık gelir ve ekil 4.34(a) da hemen hemen dikey çizgi ile gösterilir:
v R iDS LETM DS LETM D( ) ( )= (4.18)
letim veya kesim durumlarının herhangi birinde, giri kapı terminali temel olarak sıfır kapı akımını (statik olarak) gerektirir. Kapı terminali ile MOSFET’in dier kısımları arasında, dorusal olmayan giri kapasitansı özelliinde bir yalıtıcı vardır. Statik kapı akımının sıfır olmasına ramen, zamanla deien durumlarda bu kapasitansın yüklenmesi için gereken kapı akımı büyük olabilir.
MOSFET’in iki durumu, açık-kapalı bir anahtarın iki durumuna karılık gelir. MOSFET ideal bir anahtar deildir fakat yaklaık olarak ideal durumu ile kullanılı ve pratiktir. MOSFET’in bir BJT’ye göre iki durum arasında daha hızlı bir geçi özellii vardır ve yüksek frekanslı anahtarlama ilemlerinde daha kullanılı olmaktadır.
ekil 4.34(a) daki grafikte (2N6762), omik bölgenin tipik eimi yaklaık olarak 1,35 Ωdur. Bu omik bölge tamamen düz bir çizgi deildir fakat düz çizgiye epeyce yakındır. Akaç akımının büyük deerlerinde, direnç deeri oldukça büyük olmaktadır. 2N6762 nin bilgi-sayfası, 25°C de 3 A lik akaç akımında RDS(LETM) için 1,5 Ω deerini

göstermektedir. Akaç akımının bu deeri için, vDS nin deeri 4,5 V dan az veya eittir. vDS nin maksimum deeri olan 500 V ile karılatırıldıında, bu 4,5 V’luk iletim durumu deeri, maksimum deerin %1’inden daha azdır. Anahtar oldukça küçük iletim durumu gerilimine sahip fakat vDS nin sıfır olduu ideal bir anahtar deildir.
ÖRNEK 4.7
Bir MTM15N40 için, 15 A’e kadar akaç akımlarına uygun tipik VT, G ve RDS(LETM)
deerlerini bulunuz.
ÇÖZÜM
Ek B deki bilgi-sayfalarından, bu MOSFET’in transfer karakteristiklerine parçalı dorusal bir yaklaım, iD=18 A ve vGS=6 V dan geçen düz bir çizgi olabilir. Bu çizgi 3,8 V ekseninde vGS yi kesmektedir. Böylece,
VT = 3 8, V
G =−
=18
6 3 88 18
,, A / V
Bu bilgi-sayfasından, vGS=10 V kullanılarak bilgi-sayfasının ekil 1 deki karakteristiinin ölçülen eimi, 16A/3,2V=5 mho dur. Böylece, RDS(LETM) tipik bir deer olarak 0,2 Ω dur. Benzer artlar için maksimum bilgi-sayfası deeri 0,3 Ω dur.
444...222...222 MMMOOOSSSFFFEEETTT KKKAAAPPPAAASSSTTTAAANNNSSSIII
Mosfet’in iletim-kesim anahtarlamasında iki kapasitör önemlidir. Bunlar kapı ve kaynak arasındaki Cgs ve kapı ve akaç arasındaki Cgd dir. Her kapasitans, gerilimin dorusal olmayan bir fonksiyonudur. Cgs nin deeri sadece epeyce küçük bir deiime sahiptir fakat vDG deki deiim sıfırdan geçer ve barizdir. Bu deiimlerin ihmali, verilen çalıma artlarını oluturmak için gereken kapı yüklenmesinde bariz hata meydana getirir.
MTP8N60 bilgileri, aaıdaki ilikiler kullanılarak ve bilgiler vDG nin bir fonksiyonu olarak çizilerek, ekil 4.35 deki grafiklerde yeniden çizilmitir:
rssissgs CCC −= (4.19)
C Cgd rss= (4.20)
Formülde Ciss sıfır akaç-kaynak gerilimi ile kapı-kaynak arası küçük sinyal kapasitansı, Crss kapı-akaç arası küçük sinyal kapasitansıdır.
Gerçek, dorusal olmayan kapasitansa mantıklı bir yaklaım her kapasitans için iki deer kullanır. vDG > 0 ve vDG < 0 bölgelerinin baka bir deeri için uygun bir tahmini deer kullanılır. ekil 4.35 de, Cgs için 1000 pF ve 600 pF deerleri uygun olmaktadır. Cgd için ilgili deerler 150 pF ve 3600 pF tır.

Cgd deeri vDG > 0 için sıfırdır fakat akaç-kapı arası gerilimi kapı-kaynak arası gerilimine kıyasla büyüktür; böylece Cgd nin içerdii yük bariz olabilir.
ekil 4.35
444...222...333 LLLEEETTTMMM
Güç MOSFET devrelerinde, amaç anahtarlama kayıplarını en aza indirmek için mümkün olduu kadar çabuk MOSFET’i iletime geçirmektir. Bunu yapmak için, kapı sürücü devresinin kapı gerilimini istenilen seviyeye hızlıca artırmak için yeterli akımı verebilecek özellikte olması gerekir. letimde devre davranıını hesaplamak için, ilem belli sayıda zaman aralıklarına bölünür. ekil 4.36 daki devrenin analizi yapılacaktır. Zamana karı devre deikenlerinin grafikleri ekil 4.37 de gösterilmektedir.
ekil 4.36 da, iletim ilemi S anahtarının açılması ile balar. vGS VT ye ulaıncaya kadar akaç akımı yoktur. ekil 4.37 de t1 de akaç akımı balar t2 de I deerine ulaıncaya kadar artar. ekil 4.36 daki FWD bu aralık süresince iletimde kalır, akaç kaynak arası gerilimde deiim yoktur. Bu aralıklar süresince, Cgs ve Cgd gerilimdeki deiime paraleldir ve aaıdaki kapı akımı ile yüklenir:
i C Cdv
dtG gs gd
GS= +
( ) (4.21)
t > t2 için, FWD ters gerilimdedir ve akaç-kaynak arası gerilimi azalır. Akaç akımı sabittir ve vGS nin deeri sabit kalmalıdır. Bundan dolayı, bütün kapı akımı akaç-kaynak gerilimi azalırken Cgd yi yüklemek için yönlenir. t2 ve t3 arası aralık süresince, 4.21 eitlii 4.23 eitlii ile deitirilir. 4.22 eitliinde vGS nin sabit olduuna dikkat etmek gerekir.
i Cdv
dtC
dv
dt
dv
dtG gd
GD
gd
GS DS=
= −
(4.22)
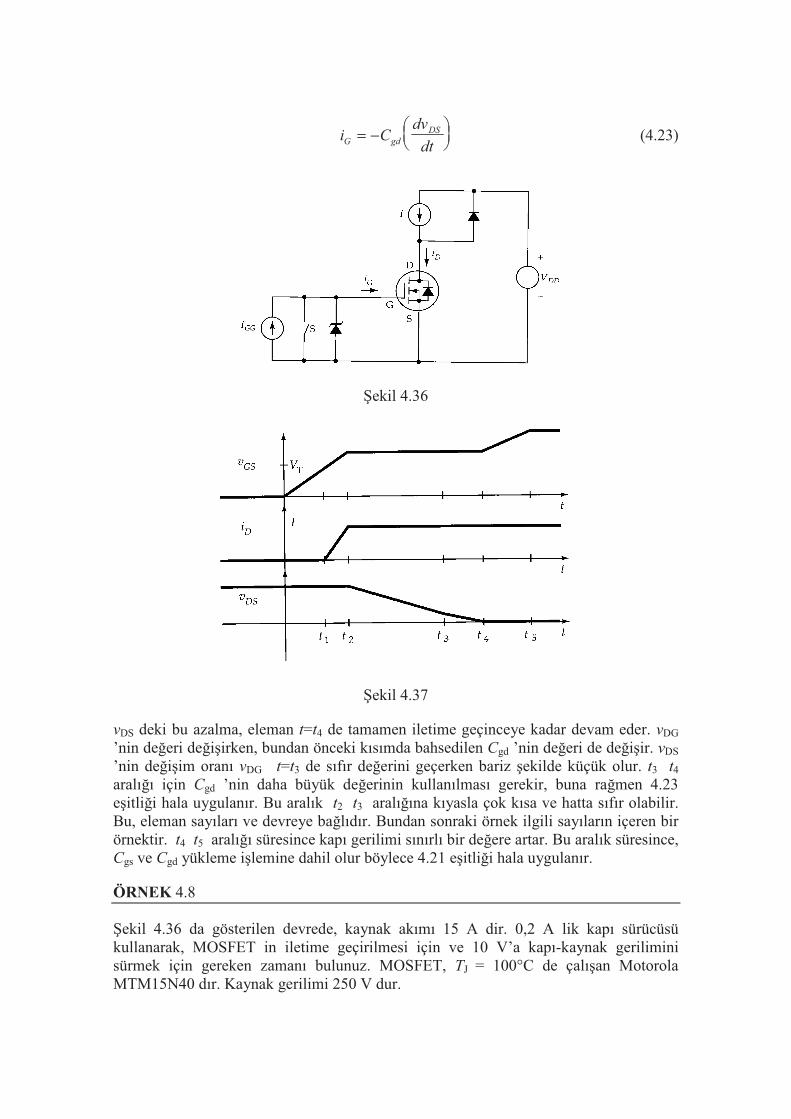
i Cdv
dtG gd
DS= −
(4.23)
ekil 4.36
ekil 4.37
vDS deki bu azalma, eleman t=t4 de tamamen iletime geçinceye kadar devam eder. vDG
’nin deeri deiirken, bundan önceki kısımda bahsedilen Cgd ’nin deeri de deiir. vDS
’nin deiim oranı vDG t=t3 de sıfır deerini geçerken bariz ekilde küçük olur. t3 t4aralıı için Cgd ’nin daha büyük deerinin kullanılması gerekir, buna ramen 4.23 eitlii hala uygulanır. Bu aralık t2 t3 aralıına kıyasla çok kısa ve hatta sıfır olabilir. Bu, eleman sayıları ve devreye balıdır. Bundan sonraki örnek ilgili sayıların içeren bir örnektir. t4 t5 aralıı süresince kapı gerilimi sınırlı bir deere artar. Bu aralık süresince, Cgs ve Cgd yükleme ilemine dahil olur böylece 4.21 eitlii hala uygulanır.
ÖRNEK 4.8
ekil 4.36 da gösterilen devrede, kaynak akımı 15 A dir. 0,2 A lik kapı sürücüsü kullanarak, MOSFET in iletime geçirilmesi için ve 10 V’a kapı-kaynak gerilimini sürmek için gereken zamanı bulunuz. MOSFET, TJ = 100°C de çalıan Motorola MTM15N40 dır. Kaynak gerilimi 250 V dur.
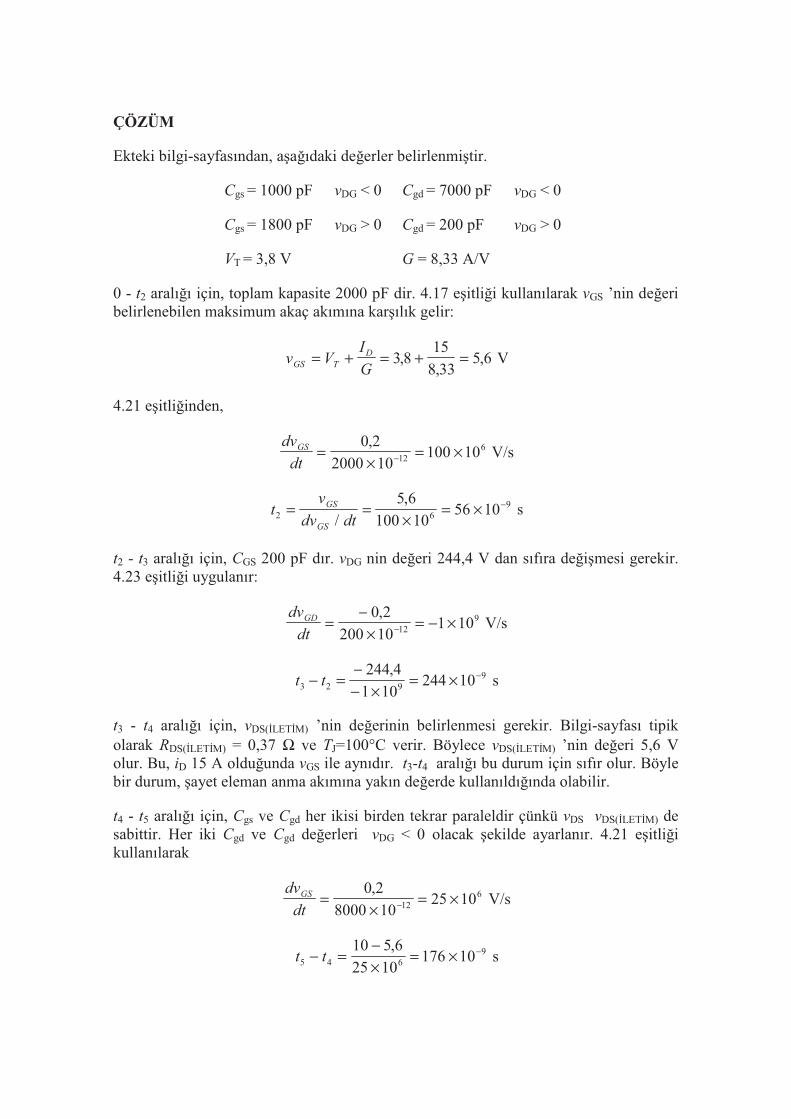
ÇÖZÜM
Ekteki bilgi-sayfasından, aaıdaki deerler belirlenmitir.
Cgs = 1000 pF vDG < 0 Cgd = 7000 pF vDG < 0
Cgs = 1800 pF vDG > 0 Cgd = 200 pF vDG > 0
VT = 3,8 V G = 8,33 A/V
0 - t2 aralıı için, toplam kapasite 2000 pF dir. 4.17 eitlii kullanılarak vGS ’nin deeri belirlenebilen maksimum akaç akımına karılık gelir:
v VI
GGS T
D= + = + =3 815
8 335 6,
,, V
4.21 eitliinden,
dv
dt
GS =×
= ×−
0 2
2000 10100 1012
6, V/s
tv
dv dt
GS
GS
2 695 6
100 1056 10= =
×= × −
/
, s
t2 - t3 aralıı için, CGS 200 pF dır. vDG nin deeri 244,4 V dan sıfıra deimesi gerekir. 4.23 eitlii uygulanır:
dv
dt
GD =−
×= − ×−
0 2
200 101 1012
9, V/s
t t3 2 99244 4
1 10244 10− =
−
− ×= × −,
s
t3 - t4 aralıı için, vDS(LETM) ’nin deerinin belirlenmesi gerekir. Bilgi-sayfası tipik olarak RDS(LETM) = 0,37 Ω ve TJ=100°C verir. Böylece vDS(LETM) ’nin deeri 5,6 V olur. Bu, iD 15 A olduunda vGS ile aynıdır. t3-t4 aralıı bu durum için sıfır olur. Böyle bir durum, ayet eleman anma akımına yakın deerde kullanıldıında olabilir.
t4 - t5 aralıı için, Cgs ve Cgd her ikisi birden tekrar paraleldir çünkü vDS vDS(LETM) de sabittir. Her iki Cgd ve Cgd deerleri vDG < 0 olacak ekilde ayarlanır. 4.21 eitlii kullanılarak
dv
dt
GS =×
= ×−
0 2
8000 1025 1012
6, V/s
t t5 4 6910 5 6
25 10176 10− =
−
×= × −,
s
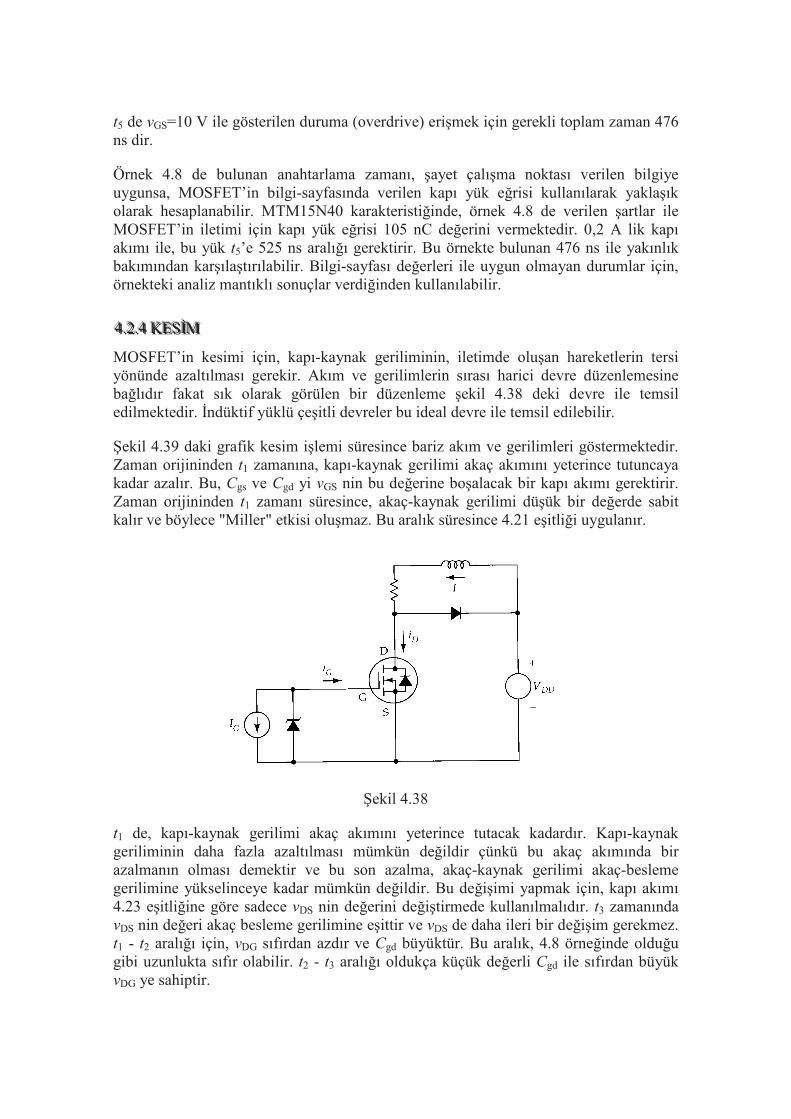
t5 de vGS=10 V ile gösterilen duruma (overdrive) erimek için gerekli toplam zaman 476 ns dir.
Örnek 4.8 de bulunan anahtarlama zamanı, ayet çalıma noktası verilen bilgiye uygunsa, MOSFET’in bilgi-sayfasında verilen kapı yük erisi kullanılarak yaklaık olarak hesaplanabilir. MTM15N40 karakteristiinde, örnek 4.8 de verilen artlar ile MOSFET’in iletimi için kapı yük erisi 105 nC deerini vermektedir. 0,2 A lik kapı akımı ile, bu yük t5’e 525 ns aralıı gerektirir. Bu örnekte bulunan 476 ns ile yakınlık bakımından karılatırılabilir. Bilgi-sayfası deerleri ile uygun olmayan durumlar için, örnekteki analiz mantıklı sonuçlar verdiinden kullanılabilir.
444...222...444 KKKEEESSSMMM
MOSFET’in kesimi için, kapı-kaynak geriliminin, iletimde oluan hareketlerin tersi yönünde azaltılması gerekir. Akım ve gerilimlerin sırası harici devre düzenlemesine balıdır fakat sık olarak görülen bir düzenleme ekil 4.38 deki devre ile temsil edilmektedir. ndüktif yüklü çeitli devreler bu ideal devre ile temsil edilebilir.
ekil 4.39 daki grafik kesim ilemi süresince bariz akım ve gerilimleri göstermektedir. Zaman orijininden t1 zamanına, kapı-kaynak gerilimi akaç akımını yeterince tutuncaya kadar azalır. Bu, Cgs ve Cgd yi vGS nin bu deerine boalacak bir kapı akımı gerektirir. Zaman orijininden t1 zamanı süresince, akaç-kaynak gerilimi düük bir deerde sabit kalır ve böylece "Miller" etkisi olumaz. Bu aralık süresince 4.21 eitlii uygulanır.
ekil 4.38
t1 de, kapı-kaynak gerilimi akaç akımını yeterince tutacak kadardır. Kapı-kaynak geriliminin daha fazla azaltılması mümkün deildir çünkü bu akaç akımında bir azalmanın olması demektir ve bu son azalma, akaç-kaynak gerilimi akaç-besleme gerilimine yükselinceye kadar mümkün deildir. Bu deiimi yapmak için, kapı akımı 4.23 eitliine göre sadece vDS nin deerini deitirmede kullanılmalıdır. t3 zamanında vDS nin deeri akaç besleme gerilimine eittir ve vDS de daha ileri bir deiim gerekmez. t1 - t2 aralıı için, vDG sıfırdan azdır ve Cgd büyüktür. Bu aralık, 4.8 örneinde olduu gibi uzunlukta sıfır olabilir. t2 - t3 aralıı oldukça küçük deerli Cgd ile sıfırdan büyük vDG ye sahiptir.

ekil 4.39
t3 den büyük zamanlar için, kapı-akaç gerilimi temelde sabittir ve kapı akımı kapı-kaynak gerilimini azaltmak için mevcuttur. t4 de, MOSFET eik gerilimindedir, akaç akımı temel olarak sıfırdır ve kesim ilemi tamamlanmıtır. t4 - t5 aralıında, kapı-kaynak gerilimi sıfıra doru veya herhangi bir kesim durumu gerilimine doru biraz daha azalmıtır. t3 - t5 aralıı için, 4.21 eitlii tekrar uygulanır.
ÖRNEK 4.9
4.8 örneindeki MOSFET in -0,1 A lik kapı akımı ile kesimi yapılacaktır. vGS nin sıfıra eit olduu son deer ile ekil 4.39 da gösterilen her aralık için zamanı bulunuz.
ÇÖZÜM
t1
12910 5 6 8000 10
0 1352 10=
− − ×
−= ×
−−( , )( )
,s
t t2 1
125 6 5 6 7000 10
0 10− =
− − ×
−=
−( , , )( )
,s
t t3 2
129250 5 6 200 10
0 1488 10− =
− − ×
−= ×
−−( , )( )
,s
t t4 3
1295 6 3 8 2000 10
0 136 10− =
− − ×
−= ×
−−( , , )( )
,s
t t5 4
1293 8 0 2000 10
0 176 10− =
− − ×
−= ×
−−( , )( )
,s
Bu örnekteki hesaplamalar t = t4 de MOSFET in kesimi için 876 ns lik toplam bir zamanı göstermektedir. Kapı-kaynak kapasitansı ile karılatırıldıı zaman gerçek kapasitansının küçük olmasına ramen, kapı-akaç kapasitansının ana etkisi açıkca
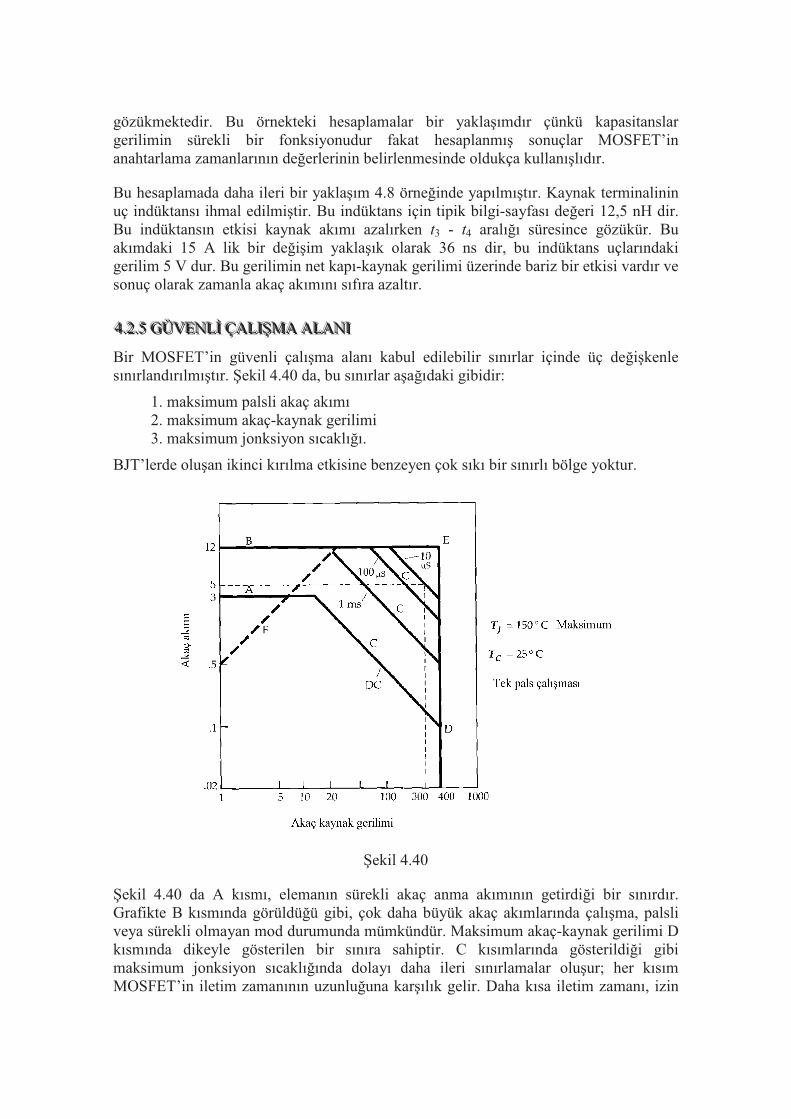
gözükmektedir. Bu örnekteki hesaplamalar bir yaklaımdır çünkü kapasitanslar gerilimin sürekli bir fonksiyonudur fakat hesaplanmı sonuçlar MOSFET’in anahtarlama zamanlarının deerlerinin belirlenmesinde oldukça kullanılıdır.
Bu hesaplamada daha ileri bir yaklaım 4.8 örneinde yapılmıtır. Kaynak terminalinin uç indüktansı ihmal edilmitir. Bu indüktans için tipik bilgi-sayfası deeri 12,5 nH dir. Bu indüktansın etkisi kaynak akımı azalırken t3 - t4 aralıı süresince gözükür. Bu akımdaki 15 A lik bir deiim yaklaık olarak 36 ns dir, bu indüktans uçlarındaki gerilim 5 V dur. Bu gerilimin net kapı-kaynak gerilimi üzerinde bariz bir etkisi vardır ve sonuç olarak zamanla akaç akımını sıfıra azaltır.
444...222...555 GGGÜÜÜVVVEEENNNLLL ÇÇÇAAALLLIIIMMMAAA AAALLLAAANNNIII
Bir MOSFET’in güvenli çalıma alanı kabul edilebilir sınırlar içinde üç deikenle sınırlandırılmıtır. ekil 4.40 da, bu sınırlar aaıdaki gibidir:
1. maksimum palsli akaç akımı 2. maksimum akaç-kaynak gerilimi 3. maksimum jonksiyon sıcaklıı.
BJT’lerde oluan ikinci kırılma etkisine benzeyen çok sıkı bir sınırlı bölge yoktur.
ekil 4.40
ekil 4.40 da A kısmı, elemanın sürekli akaç anma akımının getirdii bir sınırdır. Grafikte B kısmında görüldüü gibi, çok daha büyük akaç akımlarında çalıma, palsli veya sürekli olmayan mod durumunda mümkündür. Maksimum akaç-kaynak gerilimi D kısmında dikeyle gösterilen bir sınıra sahiptir. C kısımlarında gösterildii gibi maksimum jonksiyon sıcaklıında dolayı daha ileri sınırlamalar oluur; her kısım MOSFET’in iletim zamanının uzunluuna karılık gelir. Daha kısa iletim zamanı, izin

verilen daha çok güç kaybı demektir. Hatta yeterli bir kısa pals süresince, vDS ve iD nin maksimum deerleri ile E noktasında çalıma mümkündür. Sınırlamalar, bir BJT’ye göre MOSFET’te daha az problem olmaktadır.
F hattının solundaki yüksek akım bölgesi, mümkün olabilecek çalıma noktalarının bir bölgesini temsil etmez. RDS(LETM) deeri, iD nin her deeri için vDS ye bir alt sınır koyar ve bu bölgedeki noktalar vDS nin alt sınırından daha az deerleri temsil eder.
ÖRNEK 4.10
ekil 4.41 deki MOSFET, 5 A’lik akaç akımı ile tek palsli modda iletime geçirilmitir. MOSFET’in özellikleri ekil 4.40 da görüldüü gibidir. VDD=400 V, R=20 Ω ve iD=5 A. zin verilen maksimum jonksiyon sıcaklıını amadan MOSFET ne kadar süre iletim durumunda kalabilir?
ekil 4.41
ÇÖZÜM
vDS = − =400 5 20 300( )( ) V
Bu vDS ve iD deerlerine karılık gelen nokta pals uzunluunda 10 µs üzerine düer. Bu elemanın iletiminde maksimum güvenli süredir.
444...222...666 MMMOOOSSSFFFEEETTT KKKAAAYYYIIIPPPLLLAAARRRIII
Bir güç MOSFET’inin kayıpları, verilen bir anahtar için kullanılabilecek yarı-iletken tipleri arasından bir anahtarlama aygıtının seçiminde bir faktördür. Seçim basit deildir çünkü belirlenen bir akım deerinde bir MOSFET’in bir BJT’den daha az veya daha fazla kayıplara sahip olduu söylenemez. letim ve kesimde anahtarlama kayıpları, deerlendirmede önemli rol oynar. Anahtarlama frekansı özellikle önemlidir.
Sabit akaç akımında sürekli iletim durumunda, MOSFET kaybı basitçe )(2)( iletimDSD RI
hesaplanarak bulunur. letim ve kesim süresince kaybolan enerji kolaylıkla bulunmaz ve gerçekte hem akaç ve hem de kapı devre durumlarına balıdır. ekil 4.36 ve 4.38 de
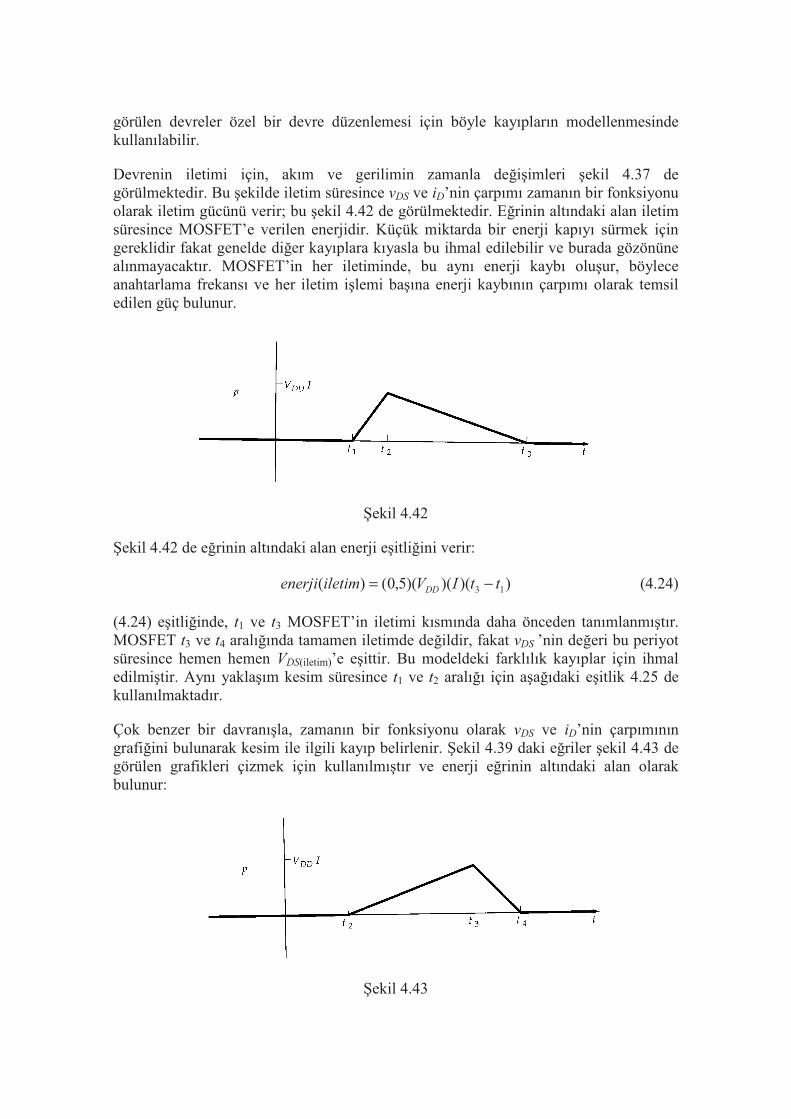
görülen devreler özel bir devre düzenlemesi için böyle kayıpların modellenmesinde kullanılabilir.
Devrenin iletimi için, akım ve gerilimin zamanla deiimleri ekil 4.37 de görülmektedir. Bu ekilde iletim süresince vDS ve iD’nin çarpımı zamanın bir fonksiyonu olarak iletim gücünü verir; bu ekil 4.42 de görülmektedir. Erinin altındaki alan iletim süresince MOSFET’e verilen enerjidir. Küçük miktarda bir enerji kapıyı sürmek için gereklidir fakat genelde dier kayıplara kıyasla bu ihmal edilebilir ve burada gözönüne alınmayacaktır. MOSFET’in her iletiminde, bu aynı enerji kaybı oluur, böylece anahtarlama frekansı ve her iletim ilemi baına enerji kaybının çarpımı olarak temsil edilen güç bulunur.
ekil 4.42
ekil 4.42 de erinin altındaki alan enerji eitliini verir:
))()()(5,0()( 13 ttIViletimenerji DD −= (4.24)
(4.24) eitliinde, t1 ve t3 MOSFET’in iletimi kısmında daha önceden tanımlanmıtır. MOSFET t3 ve t4 aralıında tamamen iletimde deildir, fakat vDS ’nin deeri bu periyot süresince hemen hemen VDS(iletim)’e eittir. Bu modeldeki farklılık kayıplar için ihmal edilmitir. Aynı yaklaım kesim süresince t1 ve t2 aralıı için aaıdaki eitlik 4.25 de kullanılmaktadır.
Çok benzer bir davranıla, zamanın bir fonksiyonu olarak vDS ve iD’nin çarpımının grafiini bulunarak kesim ile ilgili kayıp belirlenir. ekil 4.39 daki eriler ekil 4.43 de görülen grafikleri çizmek için kullanılmıtır ve enerji erinin altındaki alan olarak bulunur:
ekil 4.43
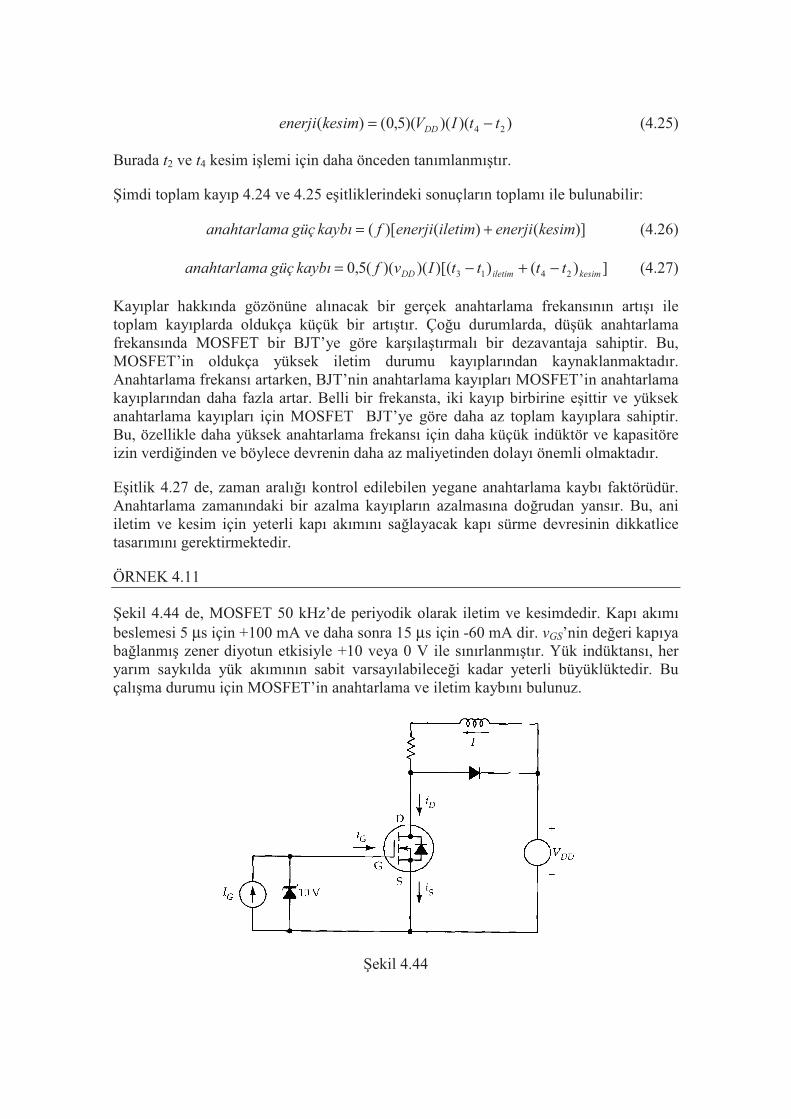
))()()(5,0()( 24 ttIVkesimenerji DD −= (4.25)
Burada t2 ve t4 kesim ilemi için daha önceden tanımlanmıtır.
imdi toplam kayıp 4.24 ve 4.25 eitliklerindeki sonuçların toplamı ile bulunabilir:
)]()()[( kesimenerjiiletimenerjifkaybıgüçaanahtarlam += (4.26)
])())[()()((5,0 2413 kesimiletimDD ttttIvfkaybıgüçaanahtarlam −+−= (4.27)
Kayıplar hakkında gözönüne alınacak bir gerçek anahtarlama frekansının artıı ile toplam kayıplarda oldukça küçük bir artıtır. Çou durumlarda, düük anahtarlama frekansında MOSFET bir BJT’ye göre karılatırmalı bir dezavantaja sahiptir. Bu, MOSFET’in oldukça yüksek iletim durumu kayıplarından kaynaklanmaktadır. Anahtarlama frekansı artarken, BJT’nin anahtarlama kayıpları MOSFET’in anahtarlama kayıplarından daha fazla artar. Belli bir frekansta, iki kayıp birbirine eittir ve yüksek anahtarlama kayıpları için MOSFET BJT’ye göre daha az toplam kayıplara sahiptir. Bu, özellikle daha yüksek anahtarlama frekansı için daha küçük indüktör ve kapasitöre izin verdiinden ve böylece devrenin daha az maliyetinden dolayı önemli olmaktadır.
Eitlik 4.27 de, zaman aralıı kontrol edilebilen yegane anahtarlama kaybı faktörüdür. Anahtarlama zamanındaki bir azalma kayıpların azalmasına dorudan yansır. Bu, ani iletim ve kesim için yeterli kapı akımını salayacak kapı sürme devresinin dikkatlice tasarımını gerektirmektedir.
ÖRNEK 4.11
ekil 4.44 de, MOSFET 50 kHz’de periyodik olarak iletim ve kesimdedir. Kapı akımı beslemesi 5 µs için +100 mA ve daha sonra 15 µs için -60 mA dir. vGS’nin deeri kapıya balanmı zener diyotun etkisiyle +10 veya 0 V ile sınırlanmıtır. Yük indüktansı, her yarım saykılda yük akımının sabit varsayılabilecei kadar yeterli büyüklüktedir. Bu çalıma durumu için MOSFET’in anahtarlama ve iletim kaybını bulunuz.
ekil 4.44
RDS(iletim)=0,5 Ω, IL=10 A, VT=3,8 V, VDD=200 V, G=4,0 mho
VDG >0 ile Cgs=1200 pF VDG >0 ile Cgd=50 pF
VDG <0 ile Cgs=500 pF VDG <0 ile Cgd=2000 pF
ÇÖZÜM
letim. Tam akaç akımında,
3,68,34
10=+
=GSv V
912
1 105,471,0
101250)8,3( −
−
×=×
=t s
912
12 103,311,0
)101250)(8,33,6( −−
×=×−
=− tt s
912
23 109,961,0
)1050)(3,6200( −−
×=×−
=− tt s
912
34 100,261,0
)102000)(0,53,6( −−
×=×−
=− tt s
912
45 105,921,0
)102500)(3,610( −−
×=×−
=− tt s
Kesim (yeni zaman orijini ile)
912
1 102,15406,0
)102500)(3,610( −−
×=×−
=t s
912
12 103,4306,0
)102000)(0,53,6( −−
×=×−
=− tt s
912
23 104,16106,0
)1050)(3,6200( −−
×=×−
=− tt s
912
34 101,5206,0
)101250)(8,33,6( −−
×=×−
=− tt s
912
45 102,7906,0
)101250)(08,3( −−
×=×−
=− tt s
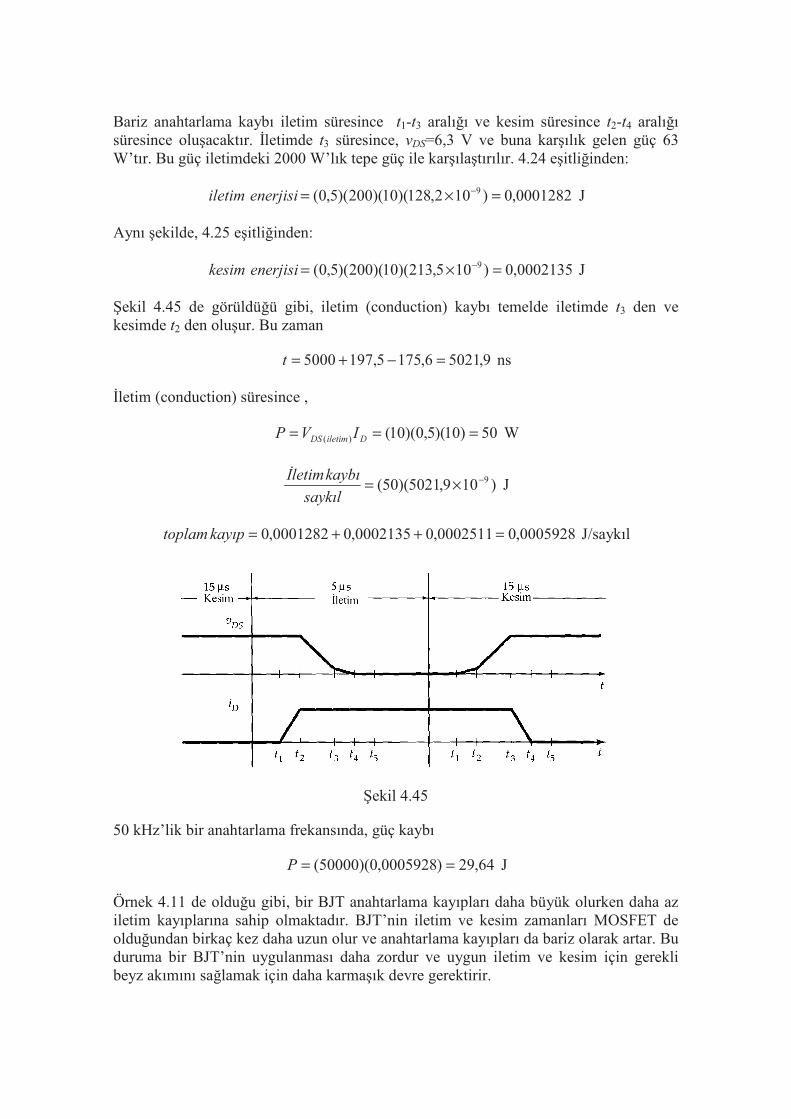
Bariz anahtarlama kaybı iletim süresince t1-t3 aralıı ve kesim süresince t2-t4 aralıı süresince oluacaktır. letimde t3 süresince, vDS=6,3 V ve buna karılık gelen güç 63 W’tır. Bu güç iletimdeki 2000 W’lık tepe güç ile karılatırılır. 4.24 eitliinden:
0001282,0)102,128)(10)(200)(5,0( 9 =×= −enerjisiiletim J
Aynı ekilde, 4.25 eitliinden:
0002135,0)105,213)(10)(200)(5,0( 9 =×= −enerjisikesim J
ekil 4.45 de görüldüü gibi, iletim (conduction) kaybı temelde iletimde t3 den ve kesimde t2 den oluur. Bu zaman
9,50216,1755,1975000 =−+=t ns
letim (conduction) süresince ,
50)10)(5,0)(10()( === DiletimDS IVP W
)109,5021)(50( 9−×=saykıl
kaybıletim J
0005928,00002511,00002135,00001282,0 =++=kayıptoplam J/saykıl
ekil 4.45
50 kHz’lik bir anahtarlama frekansında, güç kaybı
64,29)0005928,0)(50000( ==P J
Örnek 4.11 de olduu gibi, bir BJT anahtarlama kayıpları daha büyük olurken daha az iletim kayıplarına sahip olmaktadır. BJT’nin iletim ve kesim zamanları MOSFET de olduundan birkaç kez daha uzun olur ve anahtarlama kayıpları da bariz olarak artar. Bu duruma bir BJT’nin uygulanması daha zordur ve uygun iletim ve kesim için gerekli beyz akımını salamak için daha karmaık devre gerektirir.
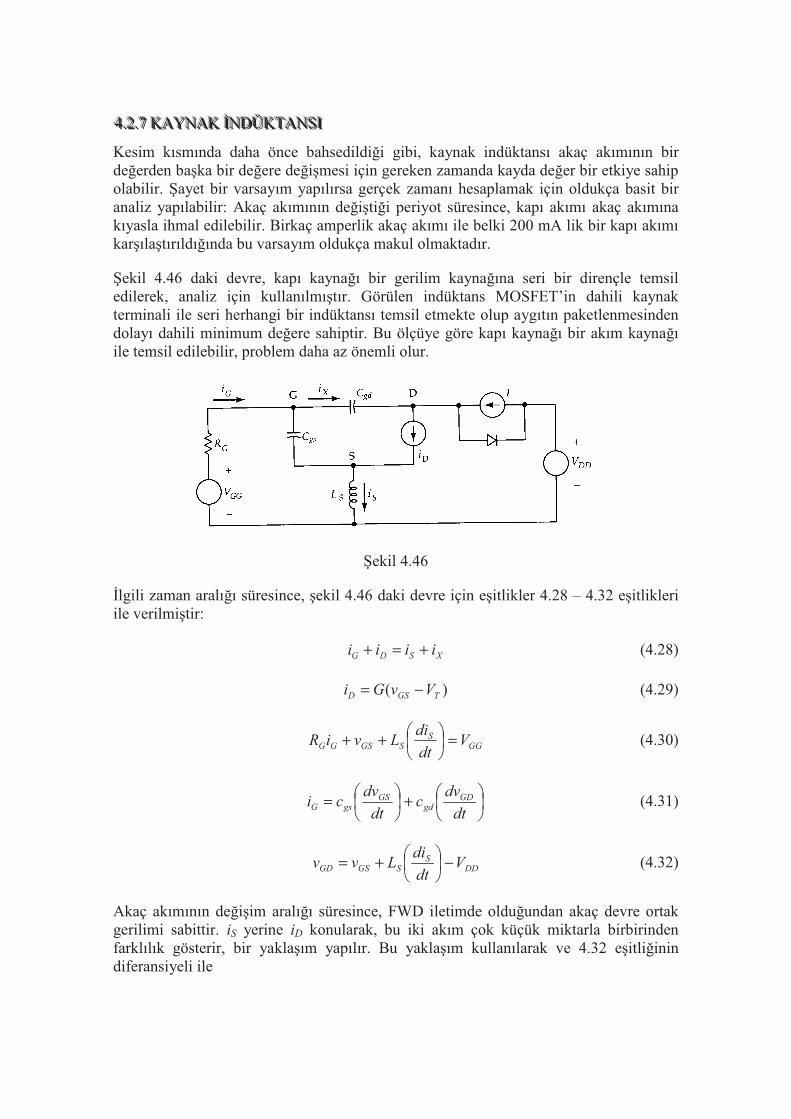
444...222...777 KKKAAAYYYNNNAAAKKK NNNDDDÜÜÜKKKTTTAAANNNSSSIII
Kesim kısmında daha önce bahsedildii gibi, kaynak indüktansı akaç akımının bir deerden baka bir deere deimesi için gereken zamanda kayda deer bir etkiye sahip olabilir. ayet bir varsayım yapılırsa gerçek zamanı hesaplamak için oldukça basit bir analiz yapılabilir: Akaç akımının deitii periyot süresince, kapı akımı akaç akımına kıyasla ihmal edilebilir. Birkaç amperlik akaç akımı ile belki 200 mA lik bir kapı akımı karılatırıldıında bu varsayım oldukça makul olmaktadır.
ekil 4.46 daki devre, kapı kaynaı bir gerilim kaynaına seri bir dirençle temsil edilerek, analiz için kullanılmıtır. Görülen indüktans MOSFET’in dahili kaynak terminali ile seri herhangi bir indüktansı temsil etmekte olup aygıtın paketlenmesinden dolayı dahili minimum deere sahiptir. Bu ölçüye göre kapı kaynaı bir akım kaynaı ile temsil edilebilir, problem daha az önemli olur.
ekil 4.46
lgili zaman aralıı süresince, ekil 4.46 daki devre için eitlikler 4.28 – 4.32 eitlikleri ile verilmitir:
XSDG iiii +=+ (4.28)
)( TGSD VvGi −= (4.29)
GGS
SGSGG Vdt
diLviR =
++ (4.30)
+
=
dt
dvc
dt
dvci GD
gdGS
gsG (4.31)
DDS
SGSGD Vdt
diLvv −
+= (4.32)
Akaç akımının deiim aralıı süresince, FWD iletimde olduundan akaç devre ortak gerilimi sabittir. iS yerine iD konularak, bu iki akım çok küçük miktarla birbirinden farklılık gösterir, bir yaklaım yapılır. Bu yaklaım kullanılarak ve 4.32 eitliinin diferansiyeli ile

+=
2
2
dt
idL
dt
dv
dt
dv DS
GSGD (4.33)
elde edilir. Önceki eitlikler, iD ve iG den kurtarılarak vGS de bir eitliin çözümü bulunur:
GGGSGSS
GGS
gdSG Vvdt
dvC
C
GLR
dt
vdCGLR =+
++
)()(
2
2
(4.34)
( ) GGGSGS
GGS
gdSG Vvdt
dvCRR
dt
vdCGLR =+
++
)(')(
2
2
(4.35)
burada
gdgs CCC += (4.36)
ve
C
GLR S=' (4.37)
4.35 eitliinde ikinci türev teriminin katsayısı, devre elemanlarının olaan deerlerinin kullanıldıı terimlere kıyasla ihmal edilebilir. Bu yaklaım ile, (4.35) eitlii (4.38) de ifade edildii gibi olur:
( ) GGGSGS
G Vvdt
dvCRR =+
+ )(' (4.38)
Eitlikteki balıca etki vGS ’nin zaman davranıını yönlendirmektir ki gerçek kapı sürme kaynak direnci ile seri edeer bir direnç eklemektedir. Etki, kapı-kaynak geriliminin artırılabildii oranı azaltmakta ve buradan akaç akımını bir deerden baka bir deere artırmak için gereken zamanı artırmaktadır. Aynı ilem, akaç akımının bir deerden baka bir deere azaltıldıı sürede zamanı artırmak için de çalıır. Bir akım kaynaı ile yakınlatırılan kapı sürme devresi için, kapı sürmeye seri olarak bu edeer direncin eklenmesinin devrenin performansına çok az etkisi olabilir.
ÖRNEK 4.12
ekil 4.47 deki devrede, kaynak indüktansı, LS hesaplamalara dahil edilmitir. Anahtar açıldıktan sonra t > 0 aralıı için zamanın bir fonksiyonu olarak akaç akımını bulunuz.
Cgs = 570 pF vDG > 0 Cgd = 30 pF vDG > 0 Cgs = 400 pF vDG < 0 Cgd = 600 pF vDG < 0 VT = 4 V RDS(iletim)=0,9 ΩVDD=300 V RG=200 ΩVGG=15 V I=6,5 A G = 3,5 mho LS=12,5 nH

ekil 4.47
ÇÖZÜM
t = 0 ve t = t1 aralıı süresince, iki kapasitör vDG > 0 eik deeri ile yüklenmektedir:
60060570 =+=+= gdgs CCC pF
912 10120)10600)(200( −− ×=×== CRGτ s
ve
)1(15 /τt
GS ev −−=
TGS Vv = için t1 zamanının önce bulunması gerekir:
)1(154 /1 τte−−=
2,371 =t ns
t1-t2 zamanı akaç akımının deitii süredeki aralıktır. 4.37 eitliinden,
12
9
10600
)4)(105,12('
−
−
×
×==
C
LGR
3,83'=R ns
6,5 A’lik bir akaç akımının son deeri aaıda hesaplandıı gibi bir kapı kaynak gerilimi gerektirir:
86,50,45,3
5,6=+
=+
= T
DGS V
G
iv V
Yeni, etkili zaman sabiti aaıdaki gibi bulunur:

912 100,170)10600)(3,83200()'( −− ×=×+=+= CRRGτ s
t1-t2 aralıı süresince kapı-kaynak geriliminin deeri 4,0 V’tan 5,86 V’a deiir, yukarıdaki zaman sabiti kullanılarak:
τ/)415(15 t
GS ev −−−=
τ/)( 12111586,5 tte −−−=
912 105,31 −×=− tt s
ayet kaynak indüktansı mevcut deilse, zaman sabiti 'R olmaksızın orijinal deer
olurdu. )( 12 tt − in deeri bu durumda 9102,22 −× saniye olurdu. Kaynak indüktansının
sonucu akımın yükselme zamanını 9,3 nanosaniye daha artırmaktır. Bu zaman çou devrelerde ihmal edilmekle beraber, çok yüksek performans gerektiren devrelerde etkinin dahil edilmesi gerekir.
(4.38) eitlii elde edilirken yapılan yaklaım bu örnekteki sayılar kullanılarak gözden geçirilebilir. 4.35 eitlii aaıdaki gibi olur:
151017010300 9
2
218 =+
×+
× −−
GSGSGS v
dt
dv
dt
vd
Karakteristik eitliin kökleri
61 107,560 ×−=s 6
2 1095,5 ×−=s
s1’nin deeri s2’e kıyasla çok büyüktür, çözümün ilgili kısımları ikinci kısma kıyasla çok hızlı olarak kaybolur. 4.38 eitlii bu yüzden bu yaklaımla küçük bir hata ile kullanılabilir.
letim ilemini tamamlamak için, akaç-kaynak geriliminin imdi vDS(iletim)’e indirilmesi gerekir. Bu deiim süresince, vGS 5.86 V’ta sabittir ve kapı akımı da sabittir:
0457,0200
86,515=
−=Gi A
ve
85,5)5,6)(9,0()()( === DiletimDSiletimDS iRv V
912
)(23 101,193
0457,0
)1030)(85,5300())((−
−
×=×−
=
−=−
G
gdiletimDSDD
i
CvVtt s
vDS(iletim)’in deeri bu akaç akımı için vGS temelde aynıdır; bu yüzden, t3-t4 aralıı sıfırdır. Toplam iletim zamanı dört aralık zamanlarının toplamıdır:
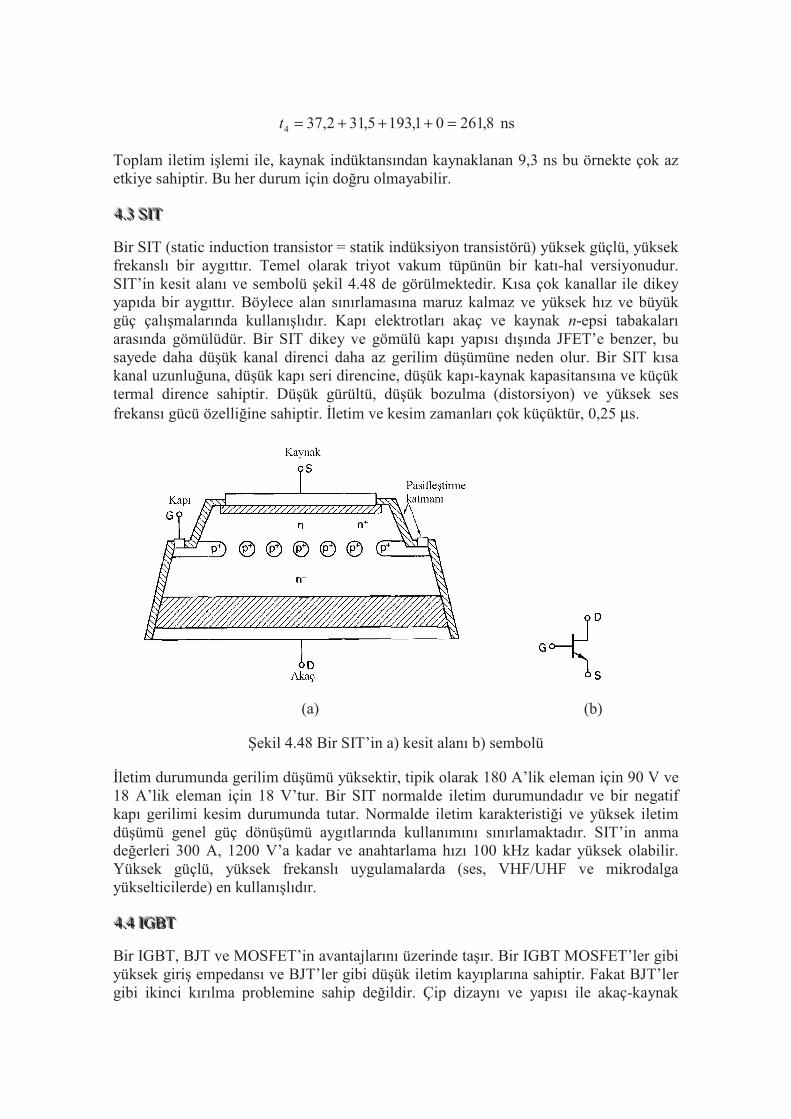
8,26101,1935,312,374 =+++=t ns
Toplam iletim ilemi ile, kaynak indüktansından kaynaklanan 9,3 ns bu örnekte çok az etkiye sahiptir. Bu her durum için doru olmayabilir.
444...333 SSSIIITTT
Bir SIT (static induction transistor = statik indüksiyon transistörü) yüksek güçlü, yüksek frekanslı bir aygıttır. Temel olarak triyot vakum tüpünün bir katı-hal versiyonudur. SIT’in kesit alanı ve sembolü ekil 4.48 de görülmektedir. Kısa çok kanallar ile dikey yapıda bir aygıttır. Böylece alan sınırlamasına maruz kalmaz ve yüksek hız ve büyük güç çalımalarında kullanılıdır. Kapı elektrotları akaç ve kaynak n-epsi tabakaları arasında gömülüdür. Bir SIT dikey ve gömülü kapı yapısı dıında JFET’e benzer, bu sayede daha düük kanal direnci daha az gerilim düümüne neden olur. Bir SIT kısa kanal uzunluuna, düük kapı seri direncine, düük kapı-kaynak kapasitansına ve küçük termal dirence sahiptir. Düük gürültü, düük bozulma (distorsiyon) ve yüksek ses frekansı gücü özelliine sahiptir. letim ve kesim zamanları çok küçüktür, 0,25 µs.
(a) (b)
ekil 4.48 Bir SIT’in a) kesit alanı b) sembolü
letim durumunda gerilim düümü yüksektir, tipik olarak 180 A’lik eleman için 90 V ve 18 A’lik eleman için 18 V’tur. Bir SIT normalde iletim durumundadır ve bir negatif kapı gerilimi kesim durumunda tutar. Normalde iletim karakteristii ve yüksek iletim düümü genel güç dönüümü aygıtlarında kullanımını sınırlamaktadır. SIT’in anma deerleri 300 A, 1200 V’a kadar ve anahtarlama hızı 100 kHz kadar yüksek olabilir. Yüksek güçlü, yüksek frekanslı uygulamalarda (ses, VHF/UHF ve mikrodalga yükselticilerde) en kullanılıdır.
444...444 IIIGGGBBBTTT
Bir IGBT, BJT ve MOSFET’in avantajlarını üzerinde taır. Bir IGBT MOSFET’ler gibi yüksek giri empedansı ve BJT’ler gibi düük iletim kayıplarına sahiptir. Fakat BJT’ler gibi ikinci kırılma problemine sahip deildir. Çip dizaynı ve yapısı ile akaç-kaynak
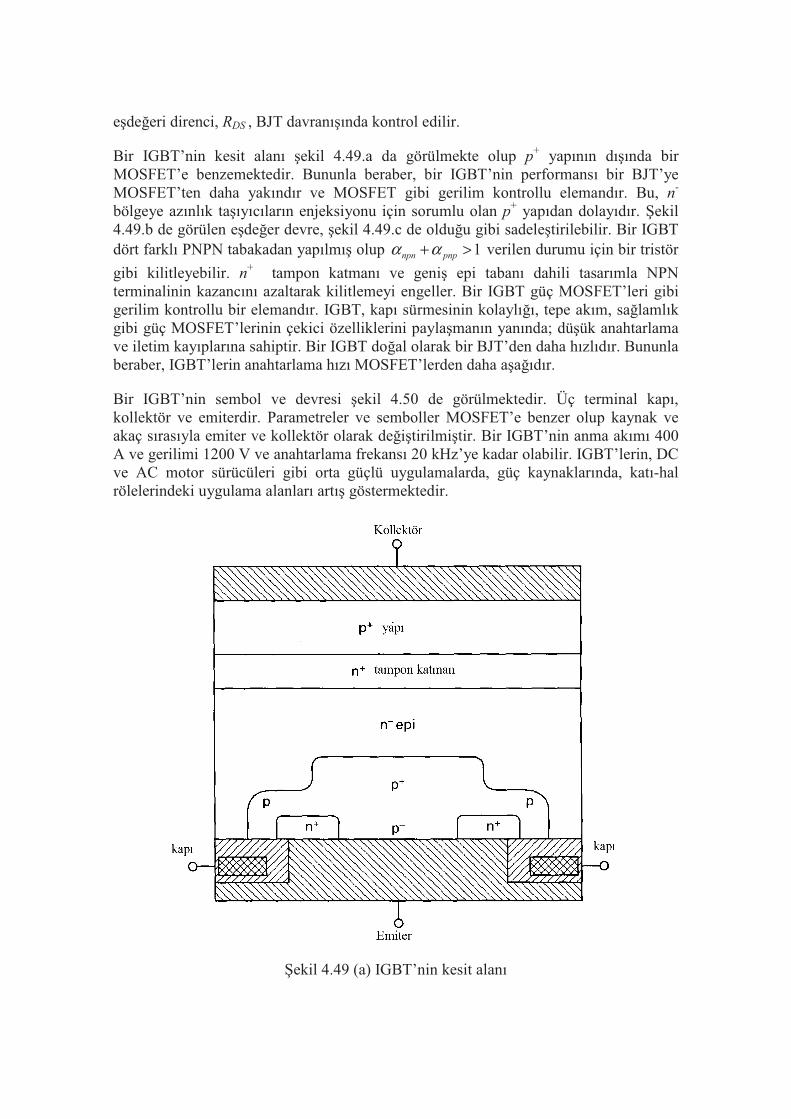
edeeri direnci, RDS , BJT davranıında kontrol edilir.
Bir IGBT’nin kesit alanı ekil 4.49.a da görülmekte olup p+ yapının dıında bir
MOSFET’e benzemektedir. Bununla beraber, bir IGBT’nin performansı bir BJT’ye MOSFET’ten daha yakındır ve MOSFET gibi gerilim kontrollu elemandır. Bu, n
-
bölgeye azınlık taıyıcıların enjeksiyonu için sorumlu olan p+ yapıdan dolayıdır. ekil 4.49.b de görülen edeer devre, ekil 4.49.c de olduu gibi sadeletirilebilir. Bir IGBT dört farklı PNPN tabakadan yapılmı olup 1>+ pnpnpn αα verilen durumu için bir tristör
gibi kilitleyebilir. n+ tampon katmanı ve geni epi tabanı dahili tasarımla NPN
terminalinin kazancını azaltarak kilitlemeyi engeller. Bir IGBT güç MOSFET’leri gibi gerilim kontrollu bir elemandır. IGBT, kapı sürmesinin kolaylıı, tepe akım, salamlık gibi güç MOSFET’lerinin çekici özelliklerini paylamanın yanında; düük anahtarlama ve iletim kayıplarına sahiptir. Bir IGBT doal olarak bir BJT’den daha hızlıdır. Bununla beraber, IGBT’lerin anahtarlama hızı MOSFET’lerden daha aaıdır.
Bir IGBT’nin sembol ve devresi ekil 4.50 de görülmektedir. Üç terminal kapı, kollektör ve emiterdir. Parametreler ve semboller MOSFET’e benzer olup kaynak ve akaç sırasıyla emiter ve kollektör olarak deitirilmitir. Bir IGBT’nin anma akımı 400 A ve gerilimi 1200 V ve anahtarlama frekansı 20 kHz’ye kadar olabilir. IGBT’lerin, DC ve AC motor sürücüleri gibi orta güçlü uygulamalarda, güç kaynaklarında, katı-hal rölelerindeki uygulama alanları artı göstermektedir.
ekil 4.49 (a) IGBT’nin kesit alanı
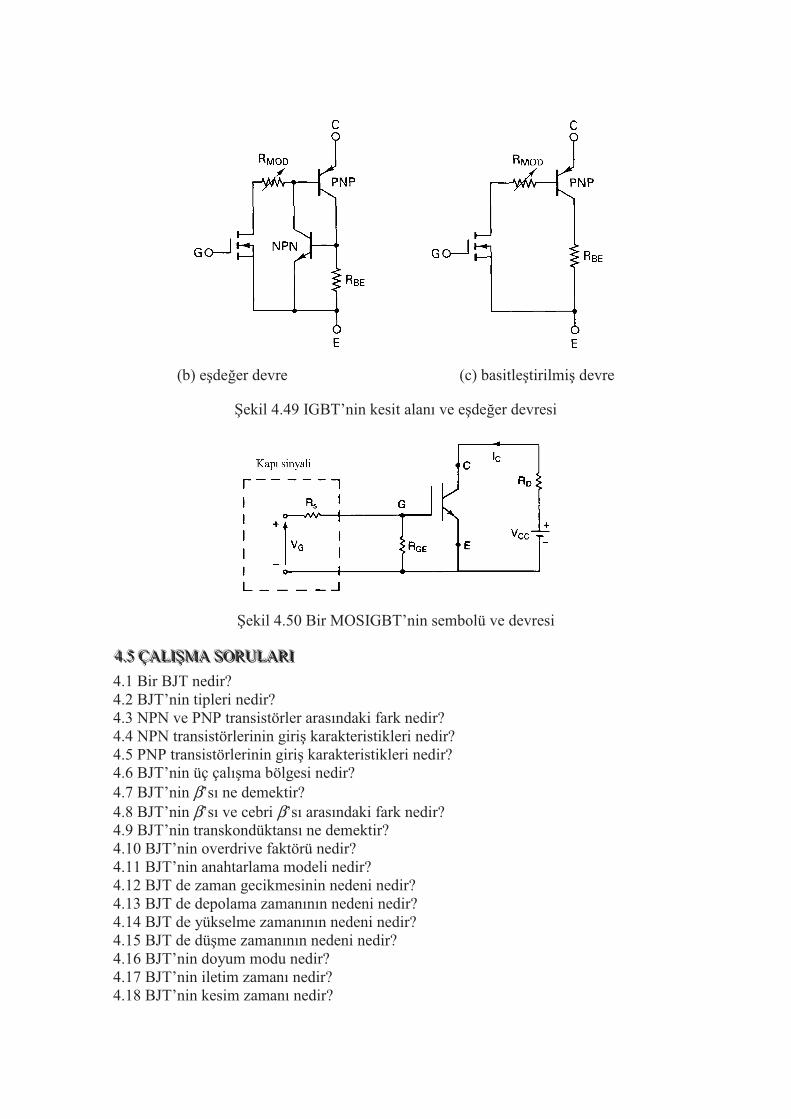
(b) edeer devre (c) basitletirilmi devre
ekil 4.49 IGBT’nin kesit alanı ve edeer devresi
ekil 4.50 Bir MOSIGBT’nin sembolü ve devresi
444...555 ÇÇÇAAALLLIIIMMMAAA SSSOOORRRUUULLLAAARRRIII
4.1 Bir BJT nedir? 4.2 BJT’nin tipleri nedir? 4.3 NPN ve PNP transistörler arasındaki fark nedir?4.4 NPN transistörlerinin giri karakteristikleri nedir? 4.5 PNP transistörlerinin giri karakteristikleri nedir? 4.6 BJT’nin üç çalıma bölgesi nedir? 4.7 BJT’nin β’sı ne demektir? 4.8 BJT’nin β’sı ve cebri β’sı arasındaki fark nedir? 4.9 BJT’nin transkondüktansı ne demektir? 4.10 BJT’nin overdrive faktörü nedir? 4.11 BJT’nin anahtarlama modeli nedir? 4.12 BJT de zaman gecikmesinin nedeni nedir? 4.13 BJT de depolama zamanının nedeni nedir? 4.14 BJT de yükselme zamanının nedeni nedir? 4.15 BJT de düme zamanının nedeni nedir? 4.16 BJT’nin doyum modu nedir? 4.17 BJT’nin iletim zamanı nedir? 4.18 BJT’nin kesim zamanı nedir?
4.19 BJT’nin FBSOA’sı nedir? 4.20 BJT’nin RBSOA’sı nedir? 4.21 kesim süresince BJT’nin ters polarlanması niçin gereklidir? 4.22 BJT de ikinci kırılma nedir? 4.23 BJT’nin artan anahtarlama hızları için beyz sürme teknikleri nedir? 4.24 BJT’nin doyumda olmayan kontrolu ne demektir? 4.25 BJT’lerin avantajları ve dezavantajları nedir?4.26 Bir MOSFET nedir? 4.27 MOSFET’lerin tipleri nedir? 4.28 MOSFET’in eik gerilimi nedir? 4.29 Bir MOSFET’in transkondüktansı nedir? 4.30 n-kanallı MOSFET’in anahtarlama modeli nedir? 4.31 MOSFET’lerin transfer karakteristikleri nedir?4.32 MOSFET’lerin çıkı karakteristikleri nedir? 4.33 MOSFET’lerin avantajları ve dezavantajları nedir? 4.34 Kesim süresince MOSFET’ler niçin negatif kapı gerilimi gerektirmezler? 4.35 BJT ve MOSFET’te doyum kavramı niçin farklılık gösterir? 4.36 Bir MOSFET’in iletim zamanı nedir? 4.37 Bir MOSFET’in kesim zamanı nedir? 4.38 Bir SIT nedir? 4.39 SIT’lerin avantajları ve dezavantajları nedir?4.40 Bir IGBT nedir? 4.41 IGBT’lerin çıkı karakteristikleri nedir? 4.42 IGBT’lerin transfer karakteristikleri nedir? 4.43 IGBT’lerin avantajları ve dezavantajları nedir? 4.44 MOSFET ve BJT arasındaki esas fark nedir? 4.45 Paralel çalıan BJT’lerin problemleri nedir? 4.46 Paralel çalıan MOSFET’lerin problemleri nedir? 4.47 Paralel çalıan IGBT’lerin problemleri nedir? 4.48 Seri çalıan BJT’lerin problemleri nedir? 4.49 Seri çalıan MOSFET’lerin problemleri nedir? 4.50 Seri çalıan IGBT’lerin problemleri nedir? 4.51 Transistörlerde paralel koruyucunun amacı nedir? 4.52 Transistörlerde seri koruyucunun amacı nedir? 4.53 Transformotorlu kapı yalıtımının avantaj ve dezavantajları nedir? 4.54 Opto-yalıtıcılı kapı yalıtımının avantaj ve dezavantajları nedir?
444...666 PPPRRROOOBBBLLLEEEMMMLLLEEERRR
4.1 ekil 4.3 de, R=15 Ω ve VCC=225 V. Transistör ekil 4.5 de görülen karakteristiklere sahiptir. βF=4 deerini kullanarak, aaıdakileri bulunuz:
(a) 0≈CEV ile IC,
(b) VCE, (c) IC’nin yeni deeri, (d) IB, (e) toplam transistör güç kaybı.
4.2 ekil 4.11 deki devrede çalıan bir transistör 1,8 µs’lik düme zamanlı bir kollektör akımına sahiptir; CS=0,075 µF, E2=350 V ve iC(0)=10 A. Aaıdakileri bulunuz:
(a) transistör kollektör akımının sıfır olduu zamanda vCE, (b) iS’nin sıfır olduu zaman.
4.3 ekil 4.11 deki devrede, transistör 1,2 µs’lik düme zamanlı bir kollektör akımına sahiptir; E2=350 V ve iC(0)=10 A.
(a) Kollektör akımının sıfır olduu zamanda vCE ’nin 200 V’u amaması için CS’nin deerini seçiniz.
(b) D’nin iletime baladıı zamanı bulunuz.
4.4 ekil 4.13 de, aaıdaki devre elemanları verilmitir: VCC=300 V, RB1=4,75 Ω, VBB=20 V, RC=10 Ω, RB2=8 Ω, VX=15 V. Hem transistör çalıması ve hem de kesimin balangıç aaması süresince VBE=1,0 V.
4.5 RB1 ve RB2 deerleri için ekil 4.13 deki gibi bir devre tasarlayınız. stenilen deerler, IB1=0,3 A ve IB2=0,45 A. VBB=15 V ve VX=10 V.
4.6 ekil 4.13 de, istenilen deerler, IB1=1 A ve IB2=0,75 A. VBB=20 V ve VX=12 V. RB1
ve RB2 deerlerini bulunuz.
4.7 letimde βF=10, iletimin sonunda βF=25, kesimde 5,1/12
=BB II ve CB’nin etkisi 15
µs’lik zaman sabiti olacak ekilde, ekil 4.19 daki gibi bir devre tasarlayınız. Kollektör akımı 10 A dir. Pozitif ve negatif kaynaklar mevcuttur.
4.8 ekil 4.3 deki devre düzenlemesinde, transistör 1,2 µs’lik bir yükselme zamanı ve 1,7 µs’lik bir düme zamanı elde etmektedir. Anahtarlama frekansı 5 kHz’dir. VCC=200 V, R=10 Ω. Aaıdakileri bulunuz:
(a) iletim kaybı, (b) kesim kaybı, (c) anahtarlama güç kaybı.
4.9 Problem 4.8 de, anahtarlama frekansı 10 kHz’ye deitirilmitir. Transistörün iletim durumunda, VCE=1,1 V. Her periyotta transistör 40 µs için tamamen iletimdedir. Aaıdakileri bulunuz:
(a) watt olarak anahtarlama kaybı, (b) watt olarak ortalama iletim kaybı.
4.10 ekil 4.7 de, E2=300 V, I=10 A ve anahtarlama frekansı 7,5 kHz dir. Akımın yükselme zamanı 100 ns ve akımın düme zamanı 900 ns dir. Gerilimin yükselme ve düme zamanları 500 ns dir. Aaıdakileri bulunuz:
(a) iletimde enerji kaybı, (b) kesimde enerji kaybı, (c) watt olarak toplam anahtarlama kaybı.
4.11 Problem 4.10 da, CS=0,05 µF ve RS=1000 Ω’luk polarize bir koruyucu devreye eklenmitir. Koruyucu dirençte kaybolan güçle beraber toplam anahtarlama kaybını bulunuz. Kollektör akımının yükselme ve düme zamanlarında deiim olmadıını

varsayınız.
4.12 Ek B’de verileri verilen bir MTM15N40 MOSFET’i için VDG>0 ve VDG<0 için uygun parçalı dorusal Cgs ve Cgd deerlerini bulunuz.
4.13 Örnek 4.8 deki devre 50 mA’lik bir kapı sürme akımı ile deitirilmitir. ndüktör akımı 8 A ve kapı gerilim sınırı 12 V’tur. letim ilemindeki be periyodun süresini bulunuz.
4.14 Problem 4.13 deki veriyi kullanarak kesim süresindeki be aralıı bulunuz. Kapı sürme akımı –75 mA ile deitirilmitir.
4.15 Örnek 4.11 deki MOSFET verisini kullanınız. letim için kapı akımı 75 mA ve kesim için –50 mA’dir. VDD=300 V ve IL=5 A. Aaıdakileri bulunuz:
(a) iletim enerji kaybı, (b) kesim enerji kaybı, (c) iletim güç kaybı,
(d) ayet kapı akımı periyodik olarak 20 µs için pozitif ve 30 µs için negatif ise ortalama MOSFET güç kaybı.
4.16 ekil 4.47 deki devre düzenlemesinde, aaıdaki veriler verilmitir:
Cgs = 600 pF vDG > 0 Cgd = 50 pF vDG > 0
Cgs = 450 pF vDG < 0 Cgd = 1000 pF vDG < 0
VT = 3,5 V RDS(iletim)=1 Ω VDD=200 V RG=50 Ω
VGG=12 V I=10 A G = 4 mho LS=15 nH
vDS’nin vDS(iletim)’e eit olması için gerekli zamanı bulunuz.
555 FFFAAAZZZ---KKKOOONNNTTTRRROOOLLLLLLUUU DDDOOORRRUUULLLTTTUUUCCCUUULLLAAARRR
Yaygın olarak kullanılan bir güç yarı-iletken elemanı faz kontrollu dorultuculardaki SCR dir. Bu gibi uygulamalarda, AC hat gerilimi dorultulur ve ayarlı çıkı gerilimi elde etmek için her yarım dalgada iletimin balangıcı geciktirilir. Ters tıkama özellii ve oldukça küçük palsli kapı akımları ile yüksek akımların kontrol edilebilme özellii, SCR lerin güç kontrol modunda kullanılmasını uygun hale getirmitir.
555...111 VVVAAARRRSSSAAAYYYIIIMMMLLLAAARRR
Bu bölümde güç-devre analizinde, temel devre davranıları vurgulanacaktır. SCR ve diyotlar, ideal kabul edilmemi yerlerin dıında ideal olarak varsayılacaktır. Aaıdaki varsayımlar, SCR devre karakteristikleri hakkında yapılmıtır.
(a) SCR, ihmal edilebilir küçük kapı-akım pals’i ile iletime geçirilebilir. (b) letim sıfır zamanda oluur. (c) letimde, anot-katot gerilimi sıfırdır. (d) Kesimde anot-katot gerilimi ters yönde olduu sürede, kısa geçici bir süre için de olsa ters anot akımı yoktur. (e) Kesim sıfır zamanda oluur. (f) Kesim durumunda anot akımı sıfırdır.
ekil 5.1 kararlı durum için bu ideal karakteristiklerin (c), (d) ve (f) durumlarını göstermektedir.
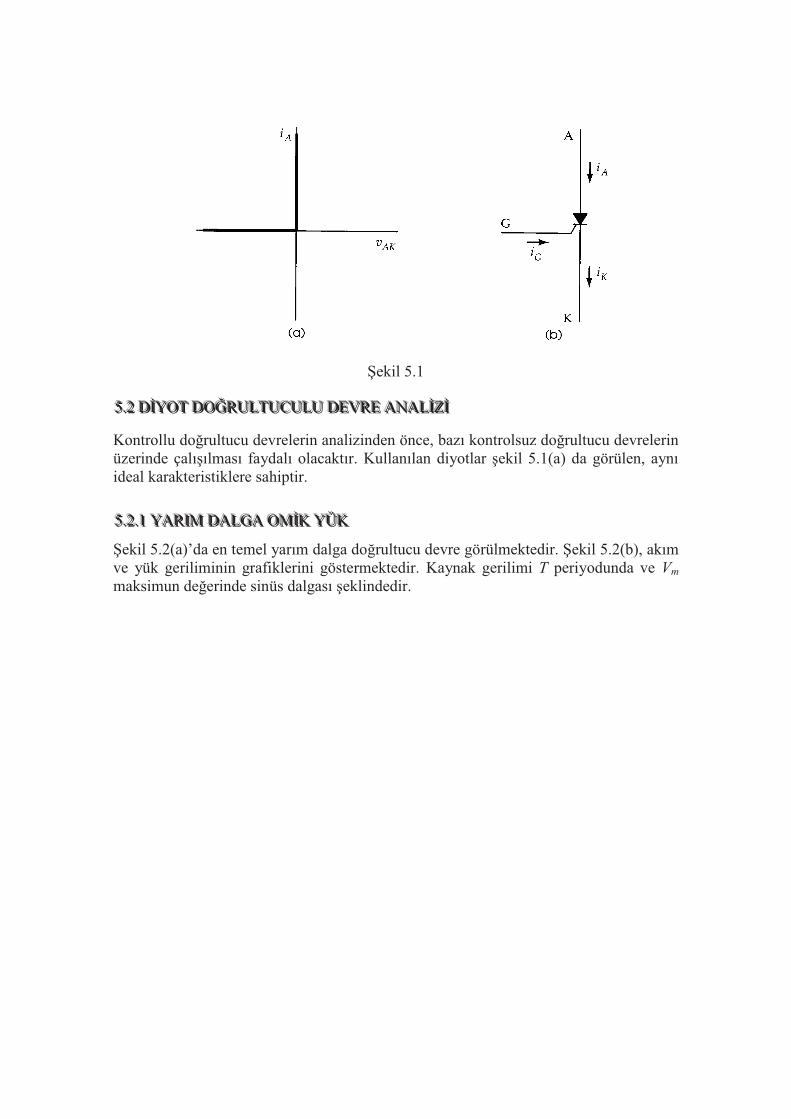
ekil 5.1
555...222 DDDYYYOOOTTT DDDOOORRRUUULLLTTTUUUCCCUUULLLUUU DDDEEEVVVRRREEE AAANNNAAALLLZZZ
Kontrollu dorultucu devrelerin analizinden önce, bazı kontrolsuz dorultucu devrelerin üzerinde çalıılması faydalı olacaktır. Kullanılan diyotlar ekil 5.1(a) da görülen, aynı ideal karakteristiklere sahiptir.
555...222...111 YYYAAARRRIIIMMM DDDAAALLLGGGAAA OOOMMMKKK YYYÜÜÜKKK
ekil 5.2(a)’da en temel yarım dalga dorultucu devre görülmektedir. ekil 5.2(b), akım ve yük geriliminin grafiklerini göstermektedir. Kaynak gerilimi T periyodunda ve Vm
maksimun deerinde sinüs dalgası eklindedir.
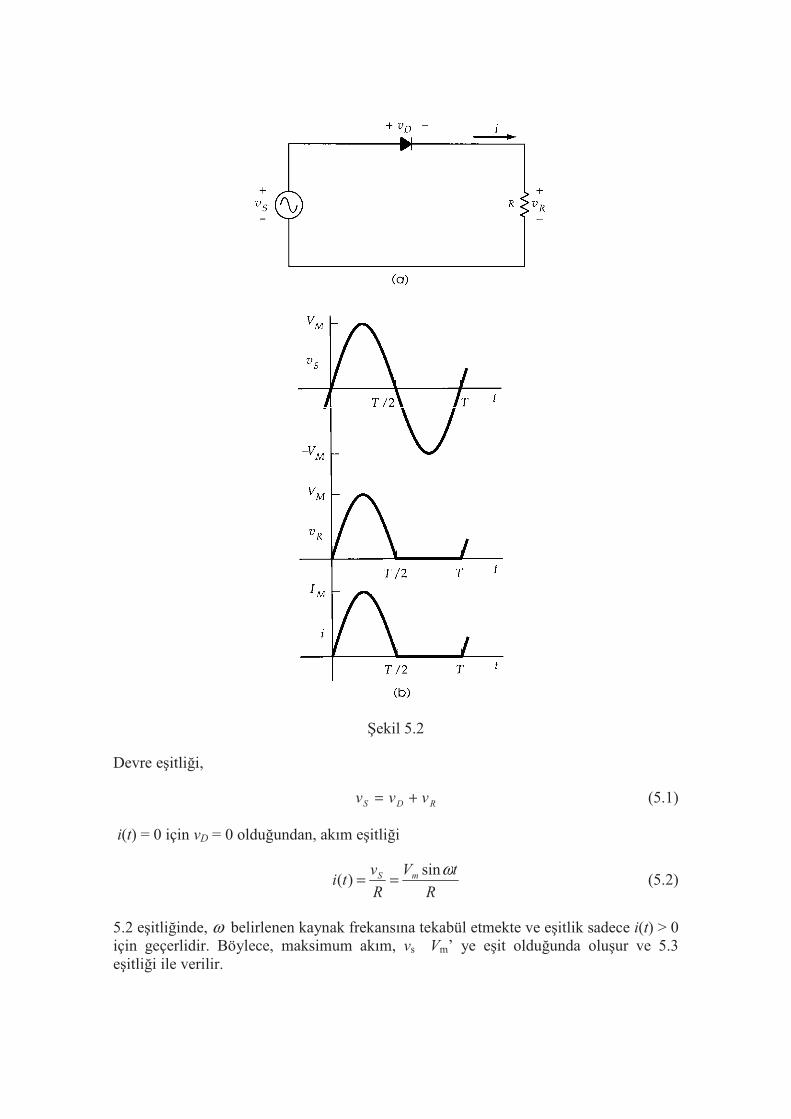
ekil 5.2
Devre eitlii,
v v vS D R= + (5.1)
i(t) = 0 için vD = 0 olduundan, akım eitlii
R
tV
R
vti mS ωsin)( == (5.2)
5.2 eitliinde, ω belirlenen kaynak frekansına tekabül etmekte ve eitlik sadece i(t) > 0 için geçerlidir. Böylece, maksimum akım, vs Vm’ ye eit olduunda oluur ve 5.3 eitlii ile verilir.

IV
Rm
m= (5.3)
letim süresince, vD=0, dolayısıyla
SR vvti => için0)( (5.4)
vS<0 iken yarım saykıl süresince, diyot ters polarlanmıtır. Akım sıfır ve vR sıfırdır. Bu yarım saykıl boyunca
v vD S= (5.5)
Bu devre için ilgili büyüklükler, ortalama yük akımı ve gerilimidir. Ortalama akım, dalga biçiminin periyodu üzerinde i(t)’ nin integrali ile bulunur.
dttiT
T
0 )(1
=ortI (5.6)
kinci yarım saykıl için i(t) = 0 olduundan, bu integral 0 - T/2 yarım periyodu üzerinde deerlendirilir.
dttIT
T
m2/
0sin
1ω=ortI (5.7)
burada
Tf /22 ππω ==
5.7 eitliinin integral ilemi 5.8 eitlii ile sonuçlanır ve yarım dalga devre karakteristiidir:
πmI
=ortI (5.8)
Gerilimin dalga ekli akımın dalga ekliyle aynı olduundan, ortalama yük gerilimi için 5.8 eitliine benzer iliki vardır.
πmV
=ortV (5.9)
Bazı durumlarda, akımın RMS deeri istenilir. Bu, RMS deerinin tanımından bulunur.
[ ]IT
i t dtRMS
T
=
1 2
0
0 5
( ),
( 5.10)
Burada da, integral yarım periyot üzerinden deerlendirilir:

( )IT
I t dtRMS m
T
=
1 2
0
20 5
sin/
,
ω (5.11)
II
RMS
m=2
(5.12)
5.12 eitliinin sonucu, yarım dalga devrenin dalga biçiminin karakteristiidir.
ekil 5.2(b) deki grafik, diyotun tepe kaynak gerilimine eit bir ters gerilimi tıkaması gerektiini gösterir. Bu deer verilen bir devre için uygun diyot dorultucu seçiminde de gereklidir.
ÖRNEK 5.1
ekil 5.2(a)’da görüldüü gibi omik yüklü bir yarım dalga dorultucu 20 Ω’luk bir yükü beslemekte ve kaynak gerilimi 240 V RMS, 60 Hz dir. Aaıdakileri bulunuz:
(a) tepe yük gerilimi (b) tepe yük akımı (c) ortalama yük gerilimi (d) ortalama yük akımı (e) RMS yük akımı (f) yükün gücü
ÇÖZÜM
a) Tepe yük gerilimi = V Vm RMS= = =1 414 1 414 240 339 4, ( , )( ) , V
b) Tepe yük akımı = V
Rm = =
339 4
2016 97
,, A
c) Ortalama yük gerilimi = Vm
π π= =
339 4108
,V
d) Ortalama yük akımı = Im
π π= =
16 975 4
,, A
e) RMS yük akımı = Im
2
16 97
28 48= =
,, A
f) Yükün gücü = ( ) , ( )I RRMS
2 28 48 20 1440= = W
555...222...222 YYYAAARRRIIIMMM DDDAAALLLGGGAAA NNNDDDÜÜÜKKKTTTFFF YYYÜÜÜKKK
ekil 5.2.deki yarım dalga devresi, ekil 5.3’de görüldüü gibi bir indüktif yükün eklenmesi ile deitirilmitir. Yük akımı, tüm periyodun yarısından daha fazla mevcut olabilir. Yükün indüktansının büyüklüü önemli olmayıp, iletim bütün periyot boyunca deildir; ayet öyle olsaydı diyot sürekli olarak iletimde kalacaktı, diyot uçlarındaki

gerilim tüm periyot boyunca sıfır olacaktı ve vS , vL deerleri birbirine eit olacaktı. Dorultma ilemi olmayıp akımın alternatif özellii sürdürülecekti. Bu durum çelikili bir durum olduundan, olması mümkün deildir. Yük akımının bazı aralıkta sıfır olması gerekir ki bu da yarım periyottan daha azdır.
Geçici yük akımının bir çözümü, aaıdaki gibidir. ekil 5.3’deki devrede, akım t=0 anında sıfırdır. Akım ilikisi 5.13 eitliinde verilmektedir.
[ ]τθθω /)(sin)sin( tm etZ
Vi −+−
= (5.13)
5.0222 )( LRZ ω+= (5.14)
= −
R
Lωθ 1tan (5.15)
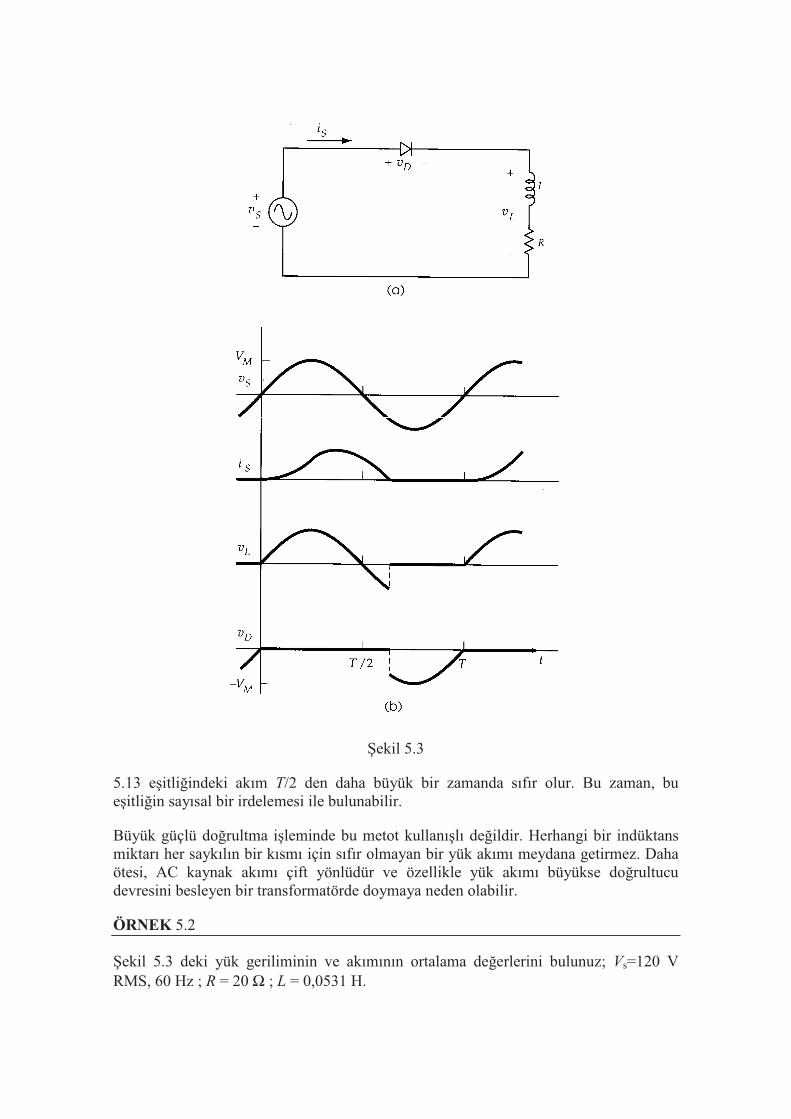
ekil 5.3
5.13 eitliindeki akım T/2 den daha büyük bir zamanda sıfır olur. Bu zaman, bu eitliin sayısal bir irdelemesi ile bulunabilir.
Büyük güçlü dorultma ileminde bu metot kullanılı deildir. Herhangi bir indüktans miktarı her saykılın bir kısmı için sıfır olmayan bir yük akımı meydana getirmez. Daha ötesi, AC kaynak akımı çift yönlüdür ve özellikle yük akımı büyükse dorultucu devresini besleyen bir transformatörde doymaya neden olabilir.
ÖRNEK 5.2
ekil 5.3 deki yük geriliminin ve akımının ortalama deerlerini bulunuz; Vs=120 V RMS, 60 Hz ; R = 20 Ω ; L = 0,0531 H.

ÇÖZÜM
5.13-5.15 eitliklerinin irdeleme ile çözümü, akımın sıfır olduu zamanı verir:
rad420
)0531,0)(120(tan 1 ππ
θ =
= −
Ω=+= 28,28])20()20[( 5.022Z
1tan == θωτ
+
−
= − ωτωπ
ω /5.0
707,04
sin28,28
)2)(120( teti
i=0 da ωt için irdelemeli çözüm sonucu, ωt=3,9407 rad olarak bulunur.
Yük gerilimi 0<ωt<3,9407 için kaynak gerilimi ile aynıdır ve dalganın kalan kısmında sıfırdır. vL nin ortalama deeri, deiken yerine açı deikeni konularak integral ile belirlenir:
84,45sin)414,1)(120(2
1 9407,3
0== θθ
πdVL V
Ortalama yük akımı, ortalama yük gerilimi ve dirençten bulunabilir.
IV
R
L= = =45 84
202 29
,, A
f x( ) = 0 eitliinin Newton metodu ile sayısal çözümünde
x x f x f xn n n n+ = −1 ( ) / ' ( ) n = 0,1,2,…
yeterli doruluk alınıncaya kadar irdeleme ilemine devam edilir. Örnek 5.2’ye göre burada, tx ω=
( ) xexxf −+−= 707,04/sin)( π ( ) xexxf −−−= 707,04/cos)(' π
ekil 5.3’ ün, ekil 5.4 de görüldüü gibi bir deiiklii ile oldukça küçük güç gerektiren yükler için kullanılı bir devre oluturulur. Devre yarım dalgalı olarak kaldıı halde, yük akımı imdi ilemin tüm periyodu boyunca mevcuttur. ekildeki grafikler, büyük yük indüktanslı varsayımla devre akımlarını ve gerilimlerini göstermektedir.
Yüke paralel diyot, FWD (freewheeling diyot: bota çalıma diyotu) olarak bilinir. Bu diyotun devre ilemi vL’yi negatif olmaktan korur. kinci yarım dalgada -kaynak gerilimi negatif iken- yük akımı FWD’ den geçer. FWD’ nin bu iletim aralıında, kaynak ile ana diyot arasındaki gerilim eitlii ana diyot’un ters polarlanmı olduunu gösterir ve böylece kaynak akımı bu yarım dalga için sıfırdır.
Yük gerilimi ve yük akımının ortalama deerleri, yarım dalga omik yük durumunda olan aynı özelliklere sahiptir. Her iki durum için grafiklerin karılatırılması, zamanın
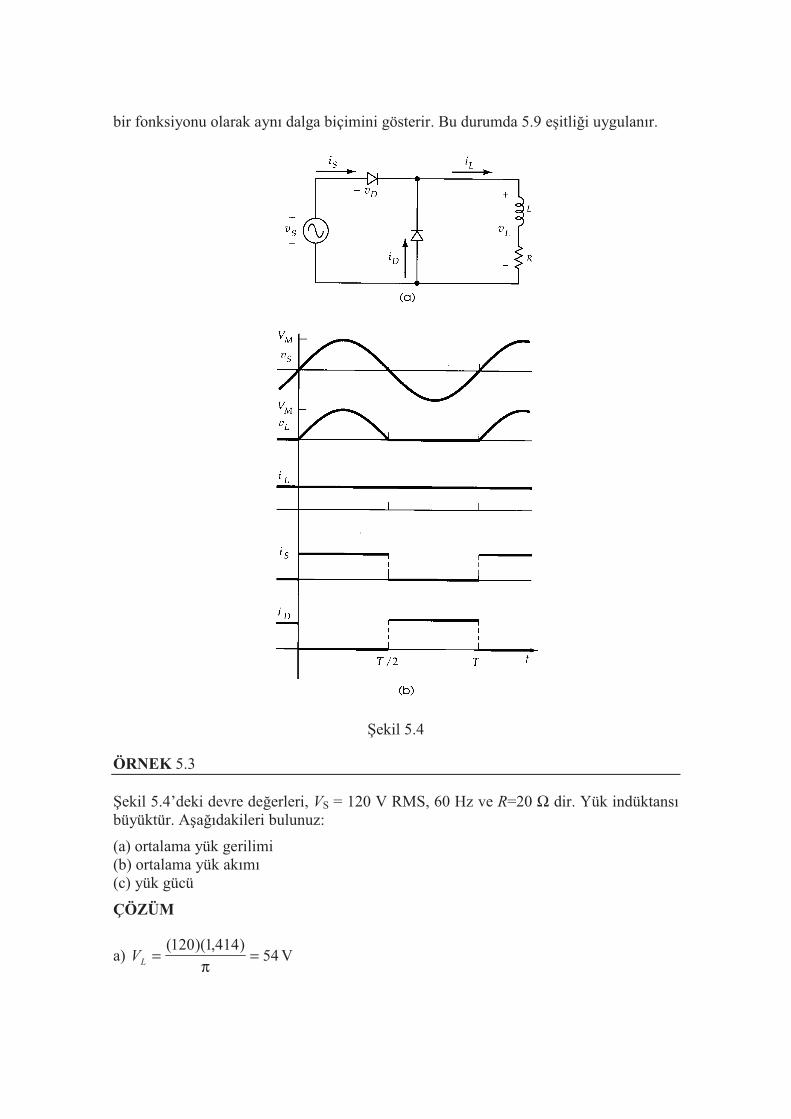
bir fonksiyonu olarak aynı dalga biçimini gösterir. Bu durumda 5.9 eitlii uygulanır.
ekil 5.4
ÖRNEK 5.3
ekil 5.4’deki devre deerleri, VS = 120 V RMS, 60 Hz ve R=20 Ω dir. Yük indüktansı büyüktür. Aaıdakileri bulunuz:
(a) ortalama yük gerilimi (b) ortalama yük akımı (c) yük gücü
ÇÖZÜM
a) VL = =( )( , )120 1 414
54π
V

b) IV
RL
L= = =54
202 7, A
c) P I RL= = =2 22 7 20 145 8( , ) ( ) , W
Yük indüktansının büyük deerinden dolayı, akım hemen hemen sabittir.
555...222...333 TTTAAAMMM DDDAAALLLGGGAAA OOOMMMKKK YYYÜÜÜKKK
Tam dalga fonksiyonu, bir köprü dorultucu veya sekonderi orta uçlu bir transformatör ile salanabilir. ekil 5.5(a)’daki devrede köprü dorultucu kullanılmaktadır. Yarım dalga durumunda olduu gibi, kaynak gerilimi ve yük direnci aynıdır. Tam dalga devresi, yarım dalgada olduu gibi devreden bir akım geçirir fakat yükteki akım ikinci yarım dalgada da vardır. Bu ikinci yarım saykıl kısmı birinci yarım dalgadaki akımla benzer olup sadece zaman ekseninde saa doru kaydırılmıtır. Diyot köprüsü akım yönlendirici modu içinde ilem yapar; böylece alternatif kaynak akımı is yük direncinde tek yönlü akıma dönüür. ekil 5.5(b)’de, eitlik 5.3’de verilen Im maksimum akımı ile uygun dalga ekilleri görülmektedir.
Ortalama ve RMS deerleri, yarım dalga durumuna benzer bir ekilde bulunabilir:
IT
i t dtort L
T
= 1
0( ) (5.16)
−+=
T
Tm
T
mort dttIdttIT
I2/
2/
0sinsin
1ωω (5.17)
I Imort =
2
π (5.18)
Burada, tam dalga ortalamasının yarım dalga ortalamasının iki katının olduuna dikkat edilmelidir. Bu durum, iki akım-zaman grafiklerinin incelenmesiyle rahatlıkla anlaılabilir. Benzer ekilde ortalama yük gerilimi aynı faktörle verilir, böylece:
mVV
=
π
2ort (5.19)
RMS akımı yine RMS tanımından bulunur :
[ ]5.0
0
2)(1
=
T
LRMS dttiT
I (5.20)
5.0
2/
22/
0
2 )sin(1
)sin(1
−+=
T
Tm
T
mRMS dttIT
dttIT
I ωω (5.21)
5.21 eitliinin incelenmesiyle, ikinci yarım saykılın negatif iaretinin bir farklılık
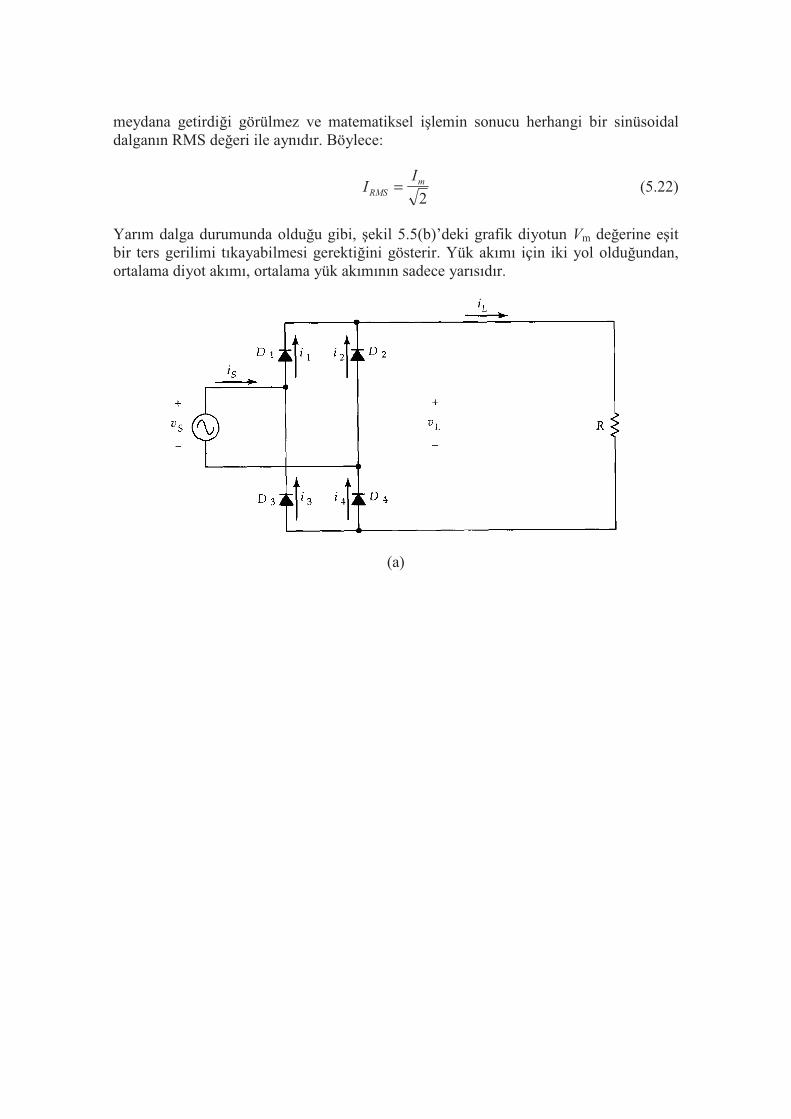
meydana getirdii görülmez ve matematiksel ilemin sonucu herhangi bir sinüsoidal dalganın RMS deeri ile aynıdır. Böylece:
II
RMS
m=2
(5.22)
Yarım dalga durumunda olduu gibi, ekil 5.5(b)’deki grafik diyotun Vm deerine eit bir ters gerilimi tıkayabilmesi gerektiini gösterir. Yük akımı için iki yol olduundan, ortalama diyot akımı, ortalama yük akımının sadece yarısıdır.
(a)
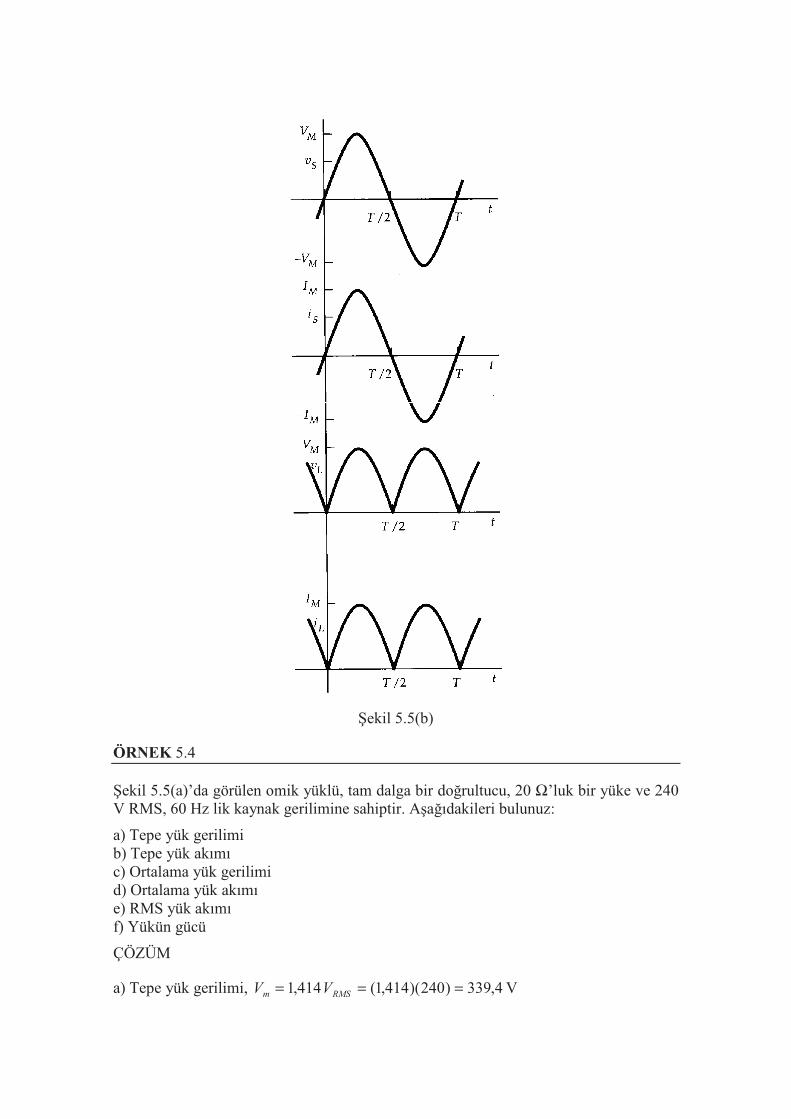
ekil 5.5(b)
ÖRNEK 5.4
ekil 5.5(a)’da görülen omik yüklü, tam dalga bir dorultucu, 20 Ω’luk bir yüke ve 240 V RMS, 60 Hz lik kaynak gerilimine sahiptir. Aaıdakileri bulunuz:
a) Tepe yük gerilimi b) Tepe yük akımı c) Ortalama yük gerilimi d) Ortalama yük akımı e) RMS yük akımı f) Yükün gücü
ÇÖZÜM
a) Tepe yük gerilimi, V Vm RMS= = =1 414 1 414 240 339 4, ( , )( ) , V
b) Tepe yük akımı=V
R
m = =339 4
2016 97
,, A
c) Ortalama yük gerilimi =2 2
339 4 216π π
=
=Vm , V
d) Ortalama yük akımı =2 2
16 97 10 8π π
=
=Im , , A
e) RMS yük akımı =Im
( )
,
( ). .2
16 97
2120 5 0 5= = A
f) Yükün gücü=( ) ( ) ( , ) ( )I RRMS
2 212 0 20 2880= = W
555...222...444 TTTAAAMMM DDDAAALLLGGGAAA NNNDDDÜÜÜKKKTTTFFF YYYÜÜÜKKK
Yük direncine seri indüktansın balanması akımın dalga eklini deitirir. Burada sadece tam dalga durumu göz önüne alınacaktır. ekil 5.6, ekil 5.5(a)’nın indüktif yükle yeniden çizilmi halidir. Analizi kolaylatırmak için sonlu bir yük indüktansı ile bir balangıç çözümü yapılır. Pratikte bunun manası, zamanla yük akımının deiiminde ihmal edilebilir dalgacık (ripple) salayabilecek yeteri kadar büyüklükte yük indüktansının olması demektir. Bundan sonraki örnekte de görülecei gibi, gerekli olan indüktans uygun olmayacak bir büyüklükte deildir.
Bu varsayımla, devre davranıı ekil 5.7’de gösterildii gibidir. Sabit yük akımı, alternatif yarım saykılda iki diyotun sabit akımı iletmesi ve dier diyotların dier alternatif yarım saykılda aynı sabit akımı iletmesi anlamına gelmektedir. Kaynak akımı kare biçimli alternatif akımıdır. Balantının deitii alternatif yarım dalgaların haricinde, yük daima kaynaa balıdır. Yük gerilimi, yine sinüs dalgasının tam dalga dorultulmu biçimidir.
Devre akımları ve gerilimleri kolaylıkla hesaplanabilir. Yükün ortalama gerilimi, omik yüklü durumla aynı deerdedir. Yük akımı temelde sabittir ve yük direnci ile ilikisinin bulunması gerekir. ekil 5.6 için anlık gerilim eitlii bunun belirlenmesine izin verir.
v v vL x R= + (5.23)
Bu eitliin bir periyot üzerinde integralinin sonucu ortalama gerilimlerin bir eitliidir.
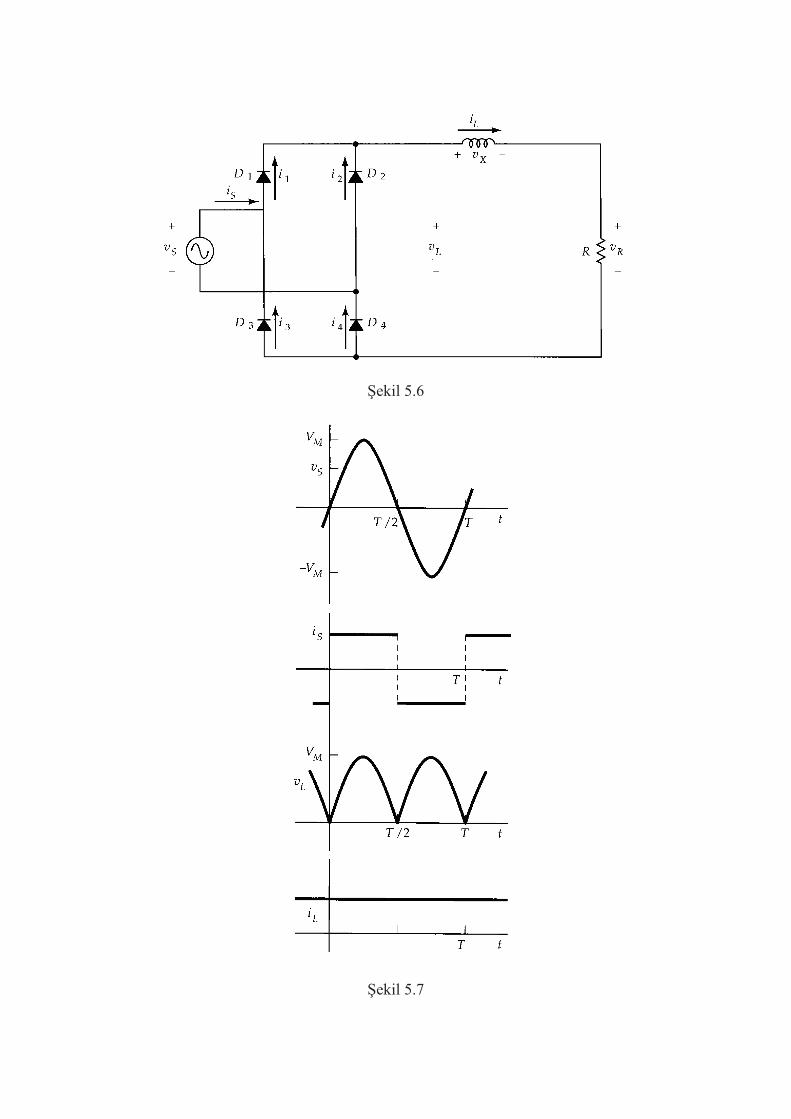
ekil 5.6
ekil 5.7

V V VL X Rort ort ort= + (5.24)
Vx’in ortalama deeri, ideal indüktör uçlarındaki ortalama gerilimdir. ayet indüktörde direnç varsa, bunun yük direncine eklenmesi gerektiine dikkat etmek gerekir. Böylece 5.24 eitliinden :
V V VR L mort ort= =
2
π (5.25)
ve
R
VI
R
ortort= (5.26)
veya
=
R
VI m
π
2ort (5.27)
Yük akımı sabit olduundan dolayı, RMS ve ortalama deerleri aynıdır.
ÖRNEK 5.5
ekil 5.6 daki gibi, indüktif yüklü tam dalga bir dorultucuda, yükün omik kısmı 20 Ω’a eit ve kaynak gerilimi 240 V RMS, 60 Hz. dir. Aaıdakileri bulunuz:
a) Tepe yük gerilimi b) Ortalama yük gerilimi c) Tepe yük akımı d) Ortalama yük akımı e) RMS yük akımı f) Yükün gücü g) Her diyotun ortalama akımı
ÇÖZÜM
a) Tepe yük gerilimi=V Vm RMS= = =1 414 1 414 240 339 4, ( , )( ) , V
b) Ortalama yük gerilimi=2 2
339 216π π
=
=Vm ,4 V
c) Tepe yük akımı = V
R
ort = =216
2010 80
,0, A
d) Ortalama yük akımı = Tepe yük akımı = 10,80 A
e) RMS yük akımı = Ortalama yük akımı = 10,80 A

f) Yükün gücü = ( ) ( ) ( . ) ( )I RRMS
2 21080 20 2334= = W
g) Her diyotun ortalama akımı = 12
10 8
25 4Iort = =
,, A
(g) deki ½ çarpanı, köprü dorultucudaki diyotların her alternatif yarım dalgada iletimde olmalarının sonucudur.
ÖÖÖRRRNNNEEEKKK SSSPPPIIICCCEEE SSSMMMÜÜÜLLLAAASSSYYYOOONNNUUU::: TTTAAAMMM DDDAAALLLGGGAAA KKKÖÖÖPPPRRRÜÜÜ DDDOOORRRUUULLLTTTUUUCCCUUU
Aaıdaki ekilde eleman deerleri verilmi olan tam dalga köprü dorultucu devresinin Pspice simülasyonunu yapınız. Devreye ait akım ve gerilim grafiklerini çizdiriniz.
L
2,5 Ω
10 V
6,5 mH
D1
D3
D2
D4
R
VX
Vy
VS
0
1
+
_
0 V
2
4
3
5
6
Tek fazlı tam dalga dorultucu Pspice modeli devresi
*Tek fazlı tam dalga köprü dorultucu Pspice devre modeli VS 1 0 SIN(0 169.7V 60HZ) L 5 6 6.5MH R 3 5 2.5 VX 6 4 DC 10V D1 2 3 DMOD D2 4 0 DMOD D3 0 3 DMOD D4 4 2 DMOD VY 1 2 DC 0V .MODEL DMOD D (IS=2.22E-15 BV=1800V) .TRAN 1US 32MS 16.667MS .PROBE .END
Pspice simülasyonu sonucu devreye ait akım ve gerilim grafikleri
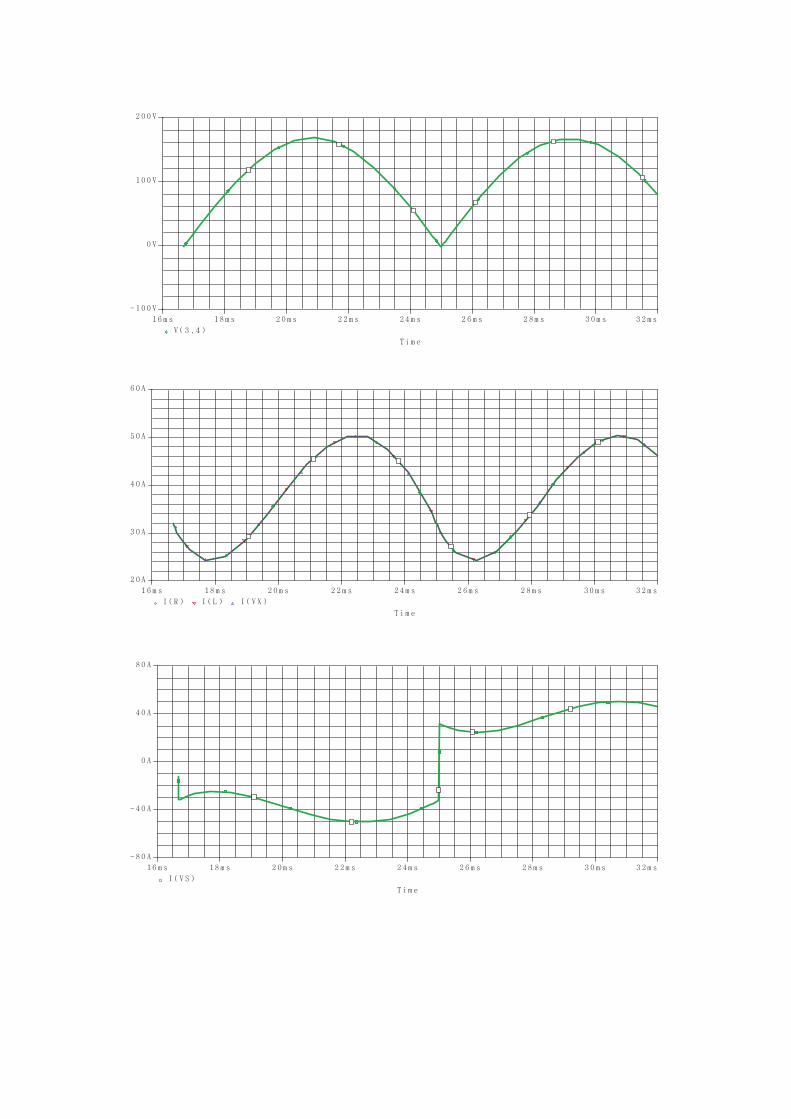
! " # $
% & # ' % ( # ' ) * # ' ) ) # ' ) + # ' ) & # ' ) ( # ' , * # ' , ) # '
- . , / + 0
1 % * * -
* -
% * * -
) * * -
! " # $
% & # ' % ( # ' ) * # ' ) ) # ' ) + # ' ) & # ' ) ( # ' , * # ' , ) # '
2 . 3 0 2 . 4 0 2 . - 5 0
) * 6
, * 6
+ * 6
7 * 6
& * 6
! " # $
% & # ' % ( # ' ) * # ' ) ) # ' ) + # ' ) & # ' ) ( # ' , * # ' , ) # '
2 . - 8 0
1 ( * 6
1 + * 6
* 6
+ * 6
( * 6
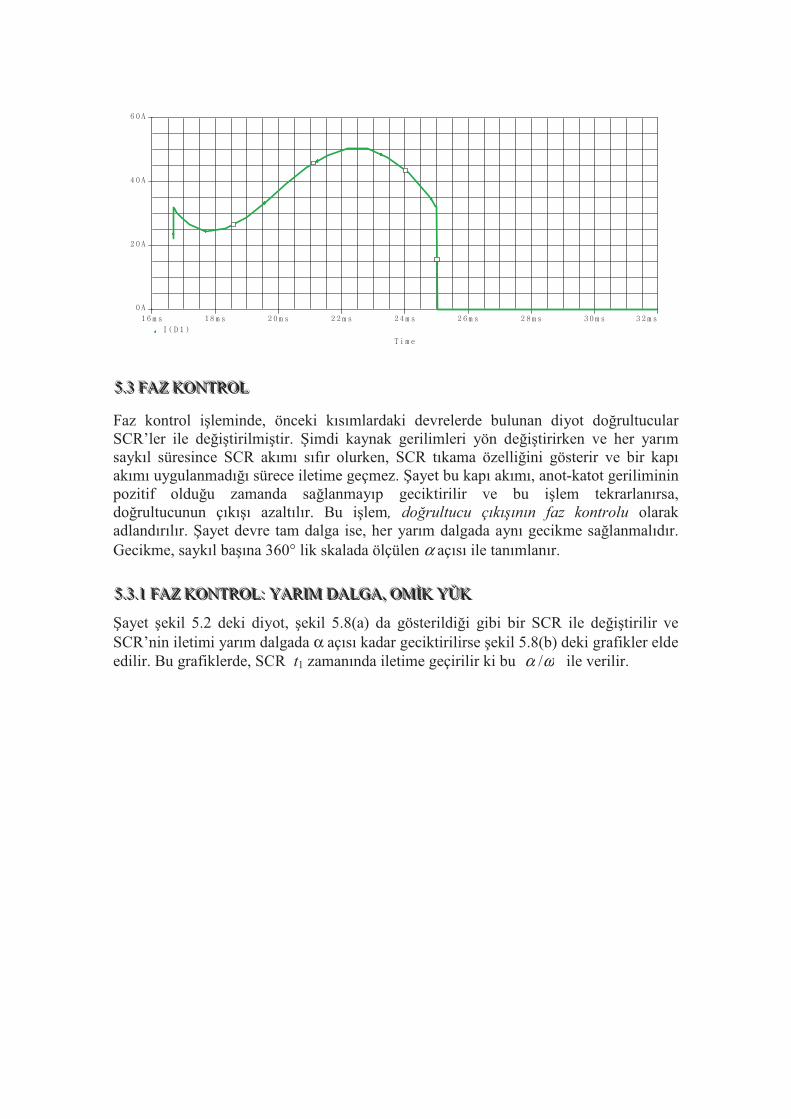
! " # $
% & # ' % ( # ' ) * # ' ) ) # ' ) + # ' ) & # ' ) ( # ' , * # ' , ) # '
2 . 9 % 0
* 6
) * 6
+ * 6
& * 6
555...333 FFFAAAZZZ KKKOOONNNTTTRRROOOLLL
Faz kontrol ileminde, önceki kısımlardaki devrelerde bulunan diyot dorultucular SCR’ler ile deitirilmitir. imdi kaynak gerilimleri yön deitirirken ve her yarım saykıl süresince SCR akımı sıfır olurken, SCR tıkama özelliini gösterir ve bir kapı akımı uygulanmadıı sürece iletime geçmez. ayet bu kapı akımı, anot-katot geriliminin pozitif olduu zamanda salanmayıp geciktirilir ve bu ilem tekrarlanırsa, dorultucunun çıkıı azaltılır. Bu ilem, dorultucu çıkıının faz kontrolu olarak adlandırılır. ayet devre tam dalga ise, her yarım dalgada aynı gecikme salanmalıdır. Gecikme, saykıl baına 360° lik skalada ölçülen α açısı ile tanımlanır.
555...333...111 FFFAAAZZZ KKKOOONNNTTTRRROOOLLL::: YYYAAARRRIIIMMM DDDAAALLLGGGAAA,,, OOOMMMKKK YYYÜÜÜKKK
ayet ekil 5.2 deki diyot, ekil 5.8(a) da gösterildii gibi bir SCR ile deitirilir ve SCR’nin iletimi yarım dalgada α açısı kadar geciktirilirse ekil 5.8(b) deki grafikler elde edilir. Bu grafiklerde, SCR t1 zamanında iletime geçirilir ki bu ωα / ile verilir.
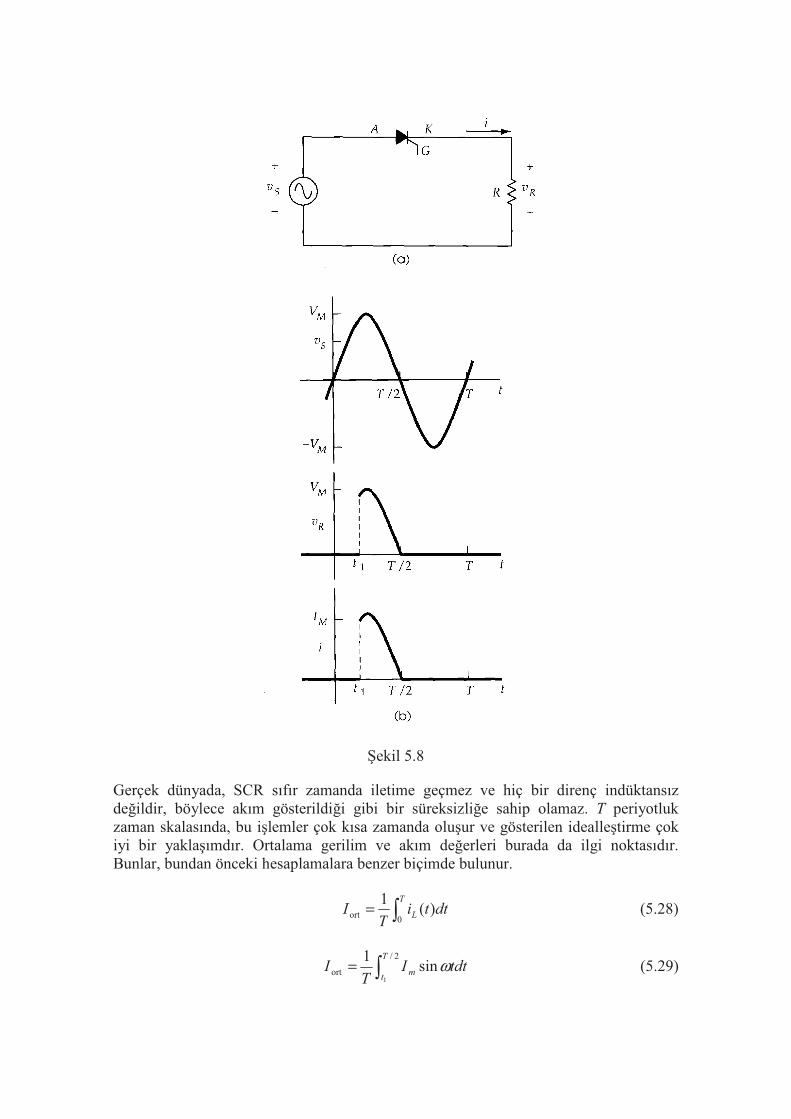
ekil 5.8
Gerçek dünyada, SCR sıfır zamanda iletime geçmez ve hiç bir direnç indüktansız deildir, böylece akım gösterildii gibi bir süreksizlie sahip olamaz. T periyotluk zaman skalasında, bu ilemler çok kısa zamanda oluur ve gösterilen idealletirme çok iyi bir yaklaımdır. Ortalama gerilim ve akım deerleri burada da ilgi noktasıdır. Bunlar, bundan önceki hesaplamalara benzer biçimde bulunur.
=T
L dttiT
I0ort )(
1 (5.28)
=2/
ort1
sin1 T
tm tdtI
TI ω (5.29)

5.29 eitliinde, integral t1 den balatılır çünkü akım sadece t1-T/2 için sıfır olmayan deerdedir.
).cos1(2
ort απ
+
= mI
I ( 5.30)
Aynı eitlik, Vm yerine Im konulmasıyla gerilim için de uygulanır :
)cos1(2
ort απ
+
= mV
V (5.31)
Yük akımının RMS deeri, temel tanımlar kullanılarak bulunur ve 5.32 eitliinde verilir.
5,02/
2
1
)sin(1
=
T
tmRMS dttI
TI ω ( 5.32)
Sadeletirme sonucu, sonuçta 5.33 eitlii bulunur:
5,0
2
2sin1
2
+
−
=
π
α
π
αmRMS
II (5.33)
ÖRNEK 5.6
ekil 5.8(a)’da gösterildii gibi omik yüklü yarım dalga faz kontrollu dorultucu, 20 Ω’luk yük ve 240 V RMS kaynak gerilimi, 60 Hz’e sahiptir. Devre α=40° ile çalımaktadır. Aaıdakileri bulunuz:
a) Tepe yük gerilimi b) Tepe yük akımı c) Ortalama yük gerilimi d) Ortalama yük akımı e) RMS yük akımı f) Yükün gücü
ÇÖZÜM
a) Tepe yük gerilimi = V Vm RMS= = =1 414 1 414 240 339 4, ( , )( ) , V
b) Tepe yük akımı = IV
Rm
m= = =339 4
2016 97
,, A
c) Ortalama yük gerilimi = Vm
21
339 4
21 40 95 4
πα
π
+ =
+ ° =( cos )
,( cos ) , V
d) Ortalama yük akımı = A77,4)40cos1(2
97,16)cos1(
2=°+
=+
πα
πmI
e) A20,82
80sin
180
401
2
96,16
2
2sin1
2
5,05,0
=
°+
−
=
+
−
=
ππ
α
π
αm
RMS
II
f) Yükün gücü = ( ) ( ) ( , ) ( )I RRMS
2 28 20 20 1345= = W
555...333...222 FFFAAAZZZ KKKOOONNNTTTRRROOOLLL::: TTTAAAMMM DDDAAALLLGGGAAA OOOMMM KKK YYYÜÜÜKKK
ekil 5.5(a)’daki diyotlar, SCR’ler ile deitirilmitir ve devre ekil 5.9’da görülmektedir. Tam dalga tipli faz kontrolü imdi mümkün olmaktadır.
ekil 5.9
SCR’ler α faz gecikme açısında çift olarak kontrol edilirler. Akım ve gerilimin dalga biçimleri ekil 5.10’da gösterildii gibi tam dalga olmutur, formülde, ωα /1 =t ve
t t T2 1 2= + / dir.
Akım ve gerilimin ortalama deerleri dalga eklinin incelenmesiyle bulunabilir. Çünkü tam dalga erilerinin altındaki alan yarım dalga durumunun iki katıdır. Böylece 5.30 ve 5.31 eitliklerinden;
)cos1(ort απ
+
= mI
I (5.34)
)cos1(ort απ
+
=
R
VI m (5.35)
ve
)cos1(ort απ
+
= mV
V (5.36)
Yük akımının RMS deeri, yarım dalga durumundaki 5.33 eitliinin yeniden
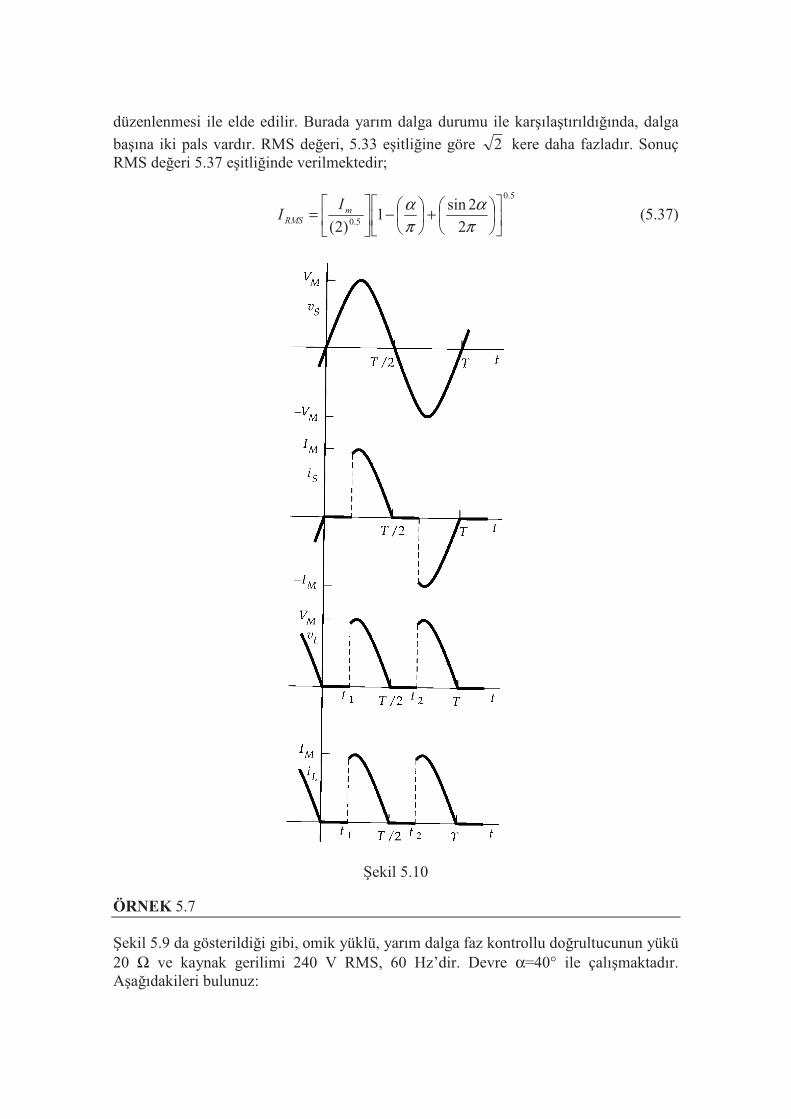
düzenlenmesi ile elde edilir. Burada yarım dalga durumu ile karılatırıldıında, dalga
baına iki pals vardır. RMS deeri, 5.33 eitliine göre 2 kere daha fazladır. Sonuç RMS deeri 5.37 eitliinde verilmektedir;
5.0
5.0 2
2sin1
)2(
+
−
=
π
α
π
αmRMS
II (5.37)
ekil 5.10
ÖRNEK 5.7
ekil 5.9 da gösterildii gibi, omik yüklü, yarım dalga faz kontrollu dorultucunun yükü 20 Ω ve kaynak gerilimi 240 V RMS, 60 Hz’dir. Devre α=40° ile çalımaktadır. Aaıdakileri bulunuz:
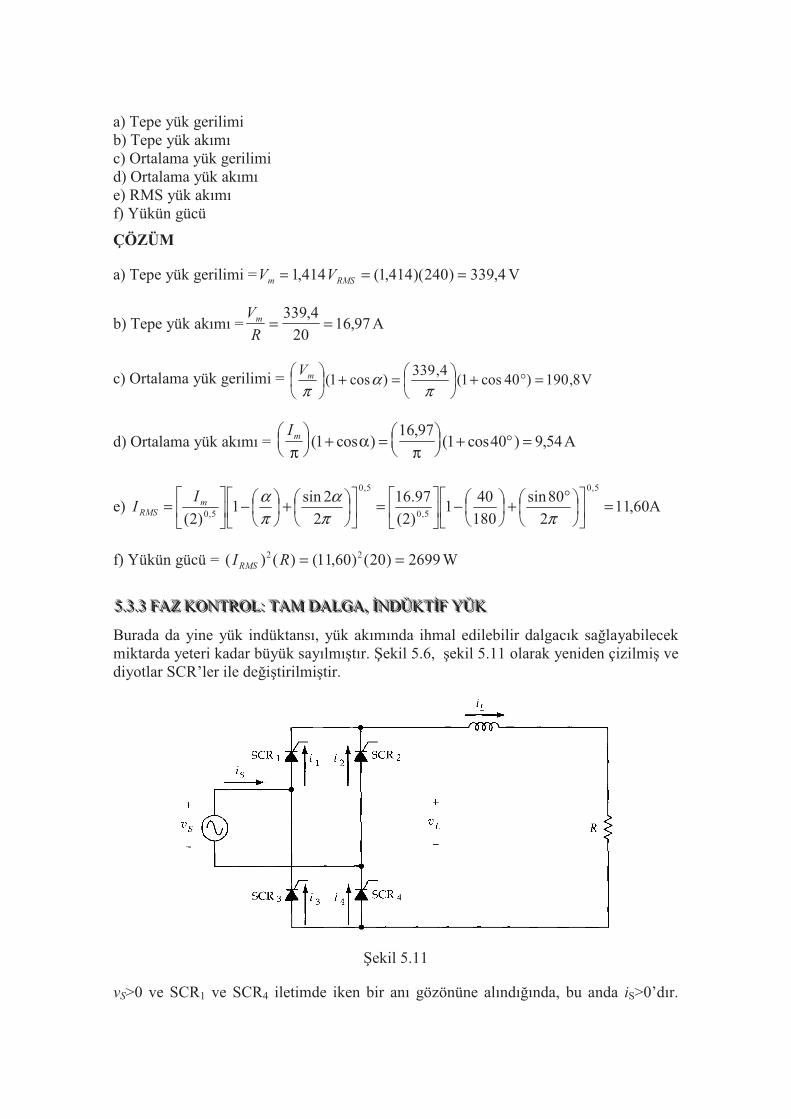
a) Tepe yük gerilimi b) Tepe yük akımı c) Ortalama yük gerilimi d) Ortalama yük akımı e) RMS yük akımı f) Yükün gücü
ÇÖZÜM
a) Tepe yük gerilimi =V Vm RMS= = =1 414 1 414 240 339 4, ( , )( ) , V
b) Tepe yük akımı =V
Rm = =
339 4
2016 97
,, A
c) Ortalama yük gerilimi = V8,190)40cos1(4,339
)cos1( =°+
=+
πα
πmV
d) Ortalama yük akımı = Im
πα
π
+ =
+ ° =( cos )
,( cos ) ,1
16 971 40 9 54A
e) A60,112
80sin
180
401
)2(
97.16
2
2sin1
)2(
5,0
5,0
5,0
5,0=
°+
−
=
+
−
=
ππ
α
π
αmRMS
II
f) Yükün gücü = ( ) ( ) ( , ) ( )I RRMS
2 211 60 20 2699= = W
555...333...333 FFFAAAZZZ KKKOOONNNTTTRRROOOLLL::: TTTAAAMMM DDDAAALLLGGGAAA,,, NNNDDDÜÜÜKKKTTTFFF YYYÜÜÜKKK
Burada da yine yük indüktansı, yük akımında ihmal edilebilir dalgacık salayabilecek miktarda yeteri kadar büyük sayılmıtır. ekil 5.6, ekil 5.11 olarak yeniden çizilmi ve diyotlar SCR’ler ile deitirilmitir.
ekil 5.11
vS>0 ve SCR1 ve SCR4 iletimde iken bir anı gözönüne alındıında, bu anda iS>0’dır.
ayet vs, SCR1 ve SCR2 döngüsü etrafında bir gerilim eitlii yazılırsa, aaıdaki eitlik elde edilir ;
v v vs AK AK= −1 2
(5.38)
SCR1 iletimde olduundan, vAK10= ve bundan dolayı
v vAK s20= − <( ) (5.39)
Bu, SCR2’nin ters polarlanmı olduu anlamına gelir.
vs, SCR1, yük ve SCR4 döngüsü etrafındaki bir gerilimin ifadesi aaıdaki eitlii verir.
v v v vS AK L AK= + +1 4 . (5.40)
Burada da yine, iletimdeki SCR’ler sıfır anot-katot gerilimine sahiptirler. Bundan dolayı,
v vL S= (5.41)
imdi, vs negatif deere deiirken, yukarıdaki eitlikler bazı birimlerin iaret deitirmesine ramen biçimini deitirmez. SCR2 ve SCR3 henüz kapılarından iletime geçirilmediklerinden, akım yolunda da deime olmadıını hatırlamak gerekir. vs<0 olduundan, vAK2
0= ve böylece SCR2 iletime geçirilmeye hazırdır fakat henüz
kapısından bir sinyal almamıtır. Bunun gibi SCR3’ de iletime hazırdır. Yük gerilimi, vs<0 olduundan negatiftir.
Bu ifadelerin sonucu, ekil 5.12’deki grafikte gösterilmitir. Bu durumların oluması süresindeki zaman t1 ve t2 arasıdır. t1 ve T/2 aralıı süresince yük gerilimi pozitif ve SCR2 ters polarlanmıtır. T/2 - t2 arası yük gerilimi negatif ve SCR2 ileri yöndedir ve henüz bir iletim sinyali almamıtır.
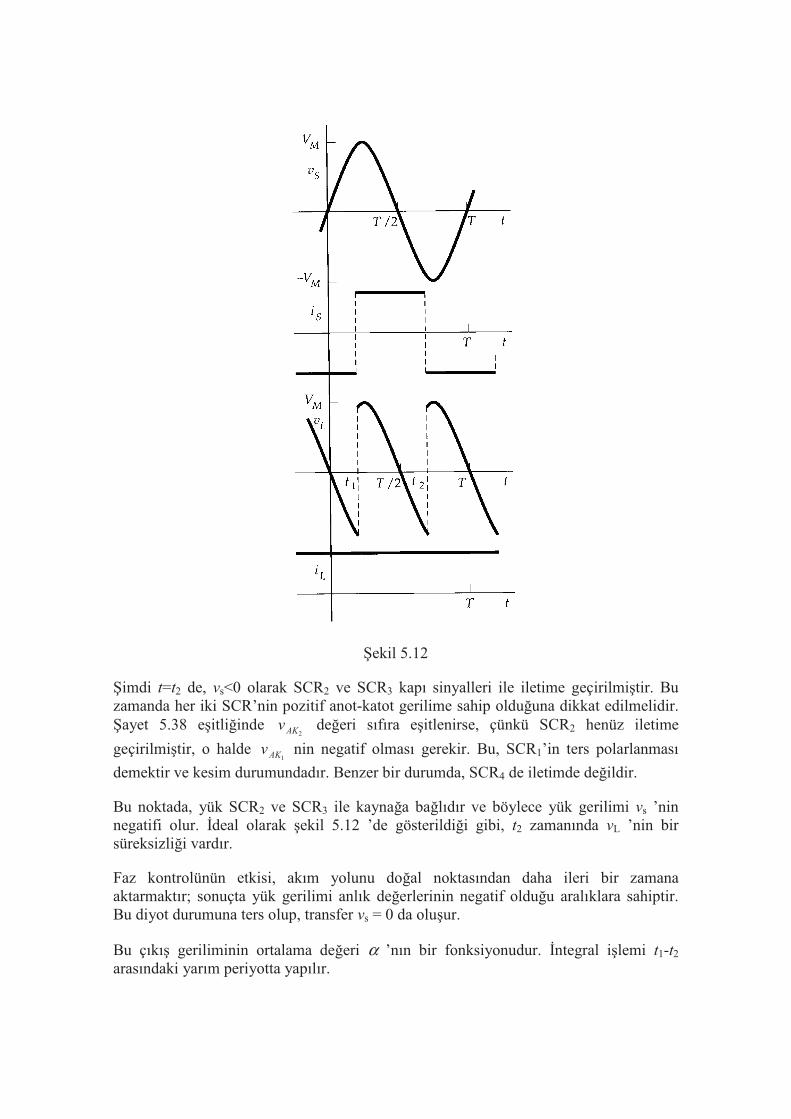
ekil 5.12
imdi t=t2 de, vs<0 olarak SCR2 ve SCR3 kapı sinyalleri ile iletime geçirilmitir. Bu zamanda her iki SCR’nin pozitif anot-katot gerilime sahip olduuna dikkat edilmelidir. ayet 5.38 eitliinde vAK2
deeri sıfıra eitlenirse, çünkü SCR2 henüz iletime
geçirilmitir, o halde vAK1 nin negatif olması gerekir. Bu, SCR1’in ters polarlanması
demektir ve kesim durumundadır. Benzer bir durumda, SCR4 de iletimde deildir.
Bu noktada, yük SCR2 ve SCR3 ile kaynaa balıdır ve böylece yük gerilimi vs ’nin negatifi olur. deal olarak ekil 5.12 ’de gösterildii gibi, t2 zamanında vL ’nin bir süreksizlii vardır.
Faz kontrolünün etkisi, akım yolunu doal noktasından daha ileri bir zamana aktarmaktır; sonuçta yük gerilimi anlık deerlerinin negatif olduu aralıklara sahiptir. Bu diyot durumuna ters olup, transfer vs = 0 da oluur.
Bu çıkı geriliminin ortalama deeri α ’nın bir fonksiyonudur. ntegral ilemi t1-t2arasındaki yarım periyotta yapılır.

=2
1
sin2
ort
t
tm tdtV
TV ω (5.42)
απ
cos2
ort mVV
= (5.43)
Ortalama akım hala Vort/R ’dir, böylece;
απ
cos2
ort
=
R
VI m (5.44)
α=0 için (faz kontrolu olmaksızın), yukarıdaki eitlikler sadeletirilerek diyot durumundakilere dönütürülebilir.
ÖRNEK 5.8
ekil 5.11 de gösterildii gibi indüktif yüklü tam dalga, faz kontrollu dorultucuda yükün omik kısmı 20 Ω’a eit ve kaynak gerilimi 240 V RMS, 60Hz’dir. Faz kontrol açısı 40° dir. Aaıdakileri bulunuz:
a) Tepe yük gerilimi b) Ortalama yük gerilimi c) Ortalama yük akımı d) Tepe yük akımı e) RMS yük akımı f) Yükün gücü g) Her bir SCR deki ortalama akım
ÇÖZÜM
a) Tepe yük gerilimi = V Vm RMS= = =1 414 1 414 240 339 4, ( , )( ) , V
b) Ortalama yük gerilimi = 2 2
339 4 40 165 5π
απ
=
° =Vm cos ( , )cos ) , V
c) Ortalama yük akımı = V
R
ort = =165 5
208 28
,, A
d) Tepe yük akımı = Ortalama akım = 8,28 A
e) RMS yük akımı = Ortalama akım = 8,28 A
f) Yükün gücü = ( ) ( ) ( , ) ( )I RRMS
2 28 28 20 1370= = W
g) Her bir SCR deki ortalama akım = 1
2
8 28
24 14Iort = =
,, A
(g) deki ½ çarpanı köprü balı SCR’lerin her alternatif yarım dalgada iletimde
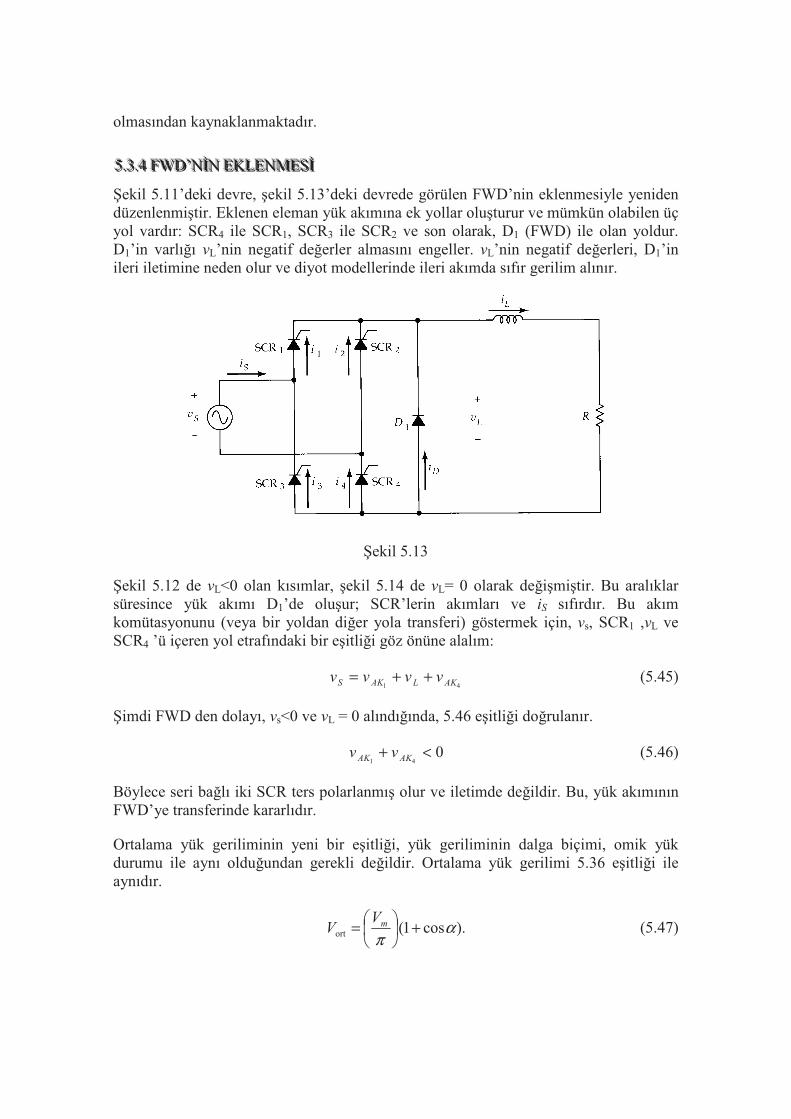
olmasından kaynaklanmaktadır.
555...333...444 FFFWWWDDD’’’NNNNNN EEEKKKLLLEEENNNMMMEEESSS
ekil 5.11’deki devre, ekil 5.13’deki devrede görülen FWD’nin eklenmesiyle yeniden düzenlenmitir. Eklenen eleman yük akımına ek yollar oluturur ve mümkün olabilen üç yol vardır: SCR4 ile SCR1, SCR3 ile SCR2 ve son olarak, D1 (FWD) ile olan yoldur. D1’in varlıı vL’nin negatif deerler almasını engeller. vL’nin negatif deerleri, D1’in ileri iletimine neden olur ve diyot modellerinde ileri akımda sıfır gerilim alınır.
ekil 5.13
ekil 5.12 de vL<0 olan kısımlar, ekil 5.14 de vL= 0 olarak deimitir. Bu aralıklar süresince yük akımı D1’de oluur; SCR’lerin akımları ve iS sıfırdır. Bu akım komütasyonunu (veya bir yoldan dier yola transferi) göstermek için, vs, SCR1 ,vL ve SCR4 ’ü içeren yol etrafındaki bir eitlii göz önüne alalım:
v v v vS AK L AK= + +1 4
(5.45)
imdi FWD den dolayı, vs<0 ve vL = 0 alındıında, 5.46 eitlii dorulanır.
v vAK AK1 40+ < (5.46)
Böylece seri balı iki SCR ters polarlanmı olur ve iletimde deildir. Bu, yük akımının FWD’ye transferinde kararlıdır.
Ortalama yük geriliminin yeni bir eitlii, yük geriliminin dalga biçimi, omik yük durumu ile aynı olduundan gerekli deildir. Ortalama yük gerilimi 5.36 eitlii ile aynıdır.
).cos1(ort απ
+
= mV
V (5.47)
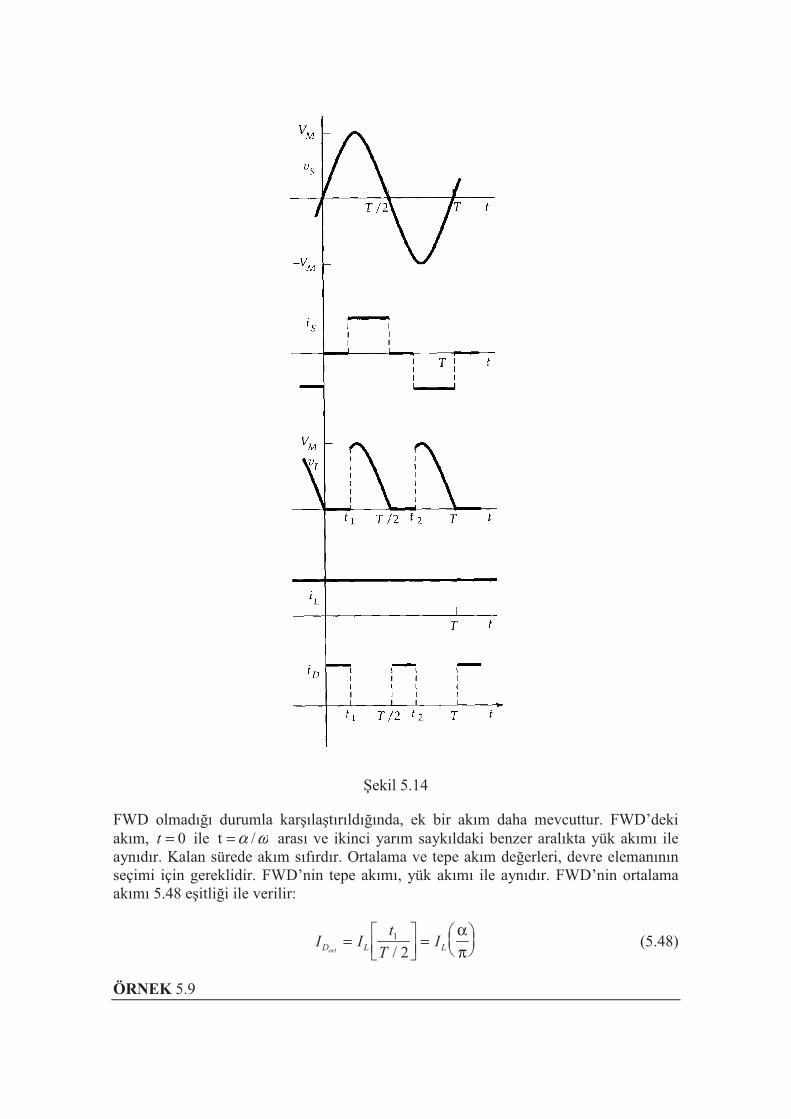
ekil 5.14
FWD olmadıı durumla karılatırıldıında, ek bir akım daha mevcuttur. FWD’deki akım, 0=t ile ωα /t = arası ve ikinci yarım saykıldaki benzer aralıkta yük akımı ile aynıdır. Kalan sürede akım sıfırdır. Ortalama ve tepe akım deerleri, devre elemanının seçimi için gereklidir. FWD’nin tepe akımı, yük akımı ile aynıdır. FWD’nin ortalama akımı 5.48 eitlii ile verilir:
I It
TID L Lort
=
=
1
2/
α
π (5.48)
ÖRNEK 5.9
FWD’li, tam dalga, faz kontrollu dorultucu, ekil 5.13’de gösterilen bir indüktif yükü beslemektedir. Yükün omik kısmı 20 Ω’a eittir. Kaynak gerilimi 240 RMS, 60Hz ve α= 40° dir. Aaıdakileri bulunuz:
a) Tepe yük gerilimi b) Ortalama yük gerilimi c) Ortalama yük akımı d) Tepe yük akımı e) RMS yük akımı f) Yükün gücü g) Her bir SCR deki ortalama akım h) FWD ortalama akımı
ÇÖZÜM
a) Tepe yük gerilimi = V Vm RMS= = =1 414 1 414 240 339 4, ( , )( ) , V
b) Ortalama yük gerilimi = V8,190)40cos1(4,339
)cos1( =°+
=+
πα
πmV
c) Ortalama yük akımı = V
Rort = 9 54, A
d) Tepe yük akımı = Ortalama yük akımı = 9,54 A
e) RMS yük akımı = Ortalama yük akımı = 9,54 A
f) Yükün gücü = ( ) ( ) ( , ) ( )I RRMS
2 29 54 20 1820= = W
g) Her bir SCR deki ortalama akım = ISCRort
140
3609 54 3 71
=( , ) , A
h) FWD ortalama akımı = IDort=
=
( , )( ),
9 54 40
1802 12 A
555...333...555 FFFAAAZZZ KKKOOONNNTTTRRROOOLLL DDDEEEVVVRRREEELLLEEERRRNNNDDDEEE TTTEEETTTKKKLLLEEEMMMEEE
Faz kontrollu dorultucularda SCR kapı palslerinin, AC kaynak geriliminin sıfır geçilerine göre geciktirilmesi gerekir. Bazı e zamanlama vasıtaları, sıfır geçilere göre kapı akım palslerinin rastgele olumasını önlemek için kullanılmalıdır. ayet böyle palsleri üretmek için bir kapasitör yüklenir ve sonra boaltılırsa, gerilim kaynaının her yarım saykılının sonunda kapasitörün boaltılması ile e zamanlama salanmı olur. Böylece, kapasitörün dolma aralıı için bilinen ve tekrar edebilen bir balangıç noktası vardır.
Çeitli, üç terminalli yarı-iletken elemanlar bu kapı-tetikleme fonksiyonunu yerine getirebilirler. Böyle bir eleman, programlanabilir uni-jonksiyon transistör (PUT) olup böyle elemanların kullanımını göstermek için (özellikle faz kontrol durumları altında
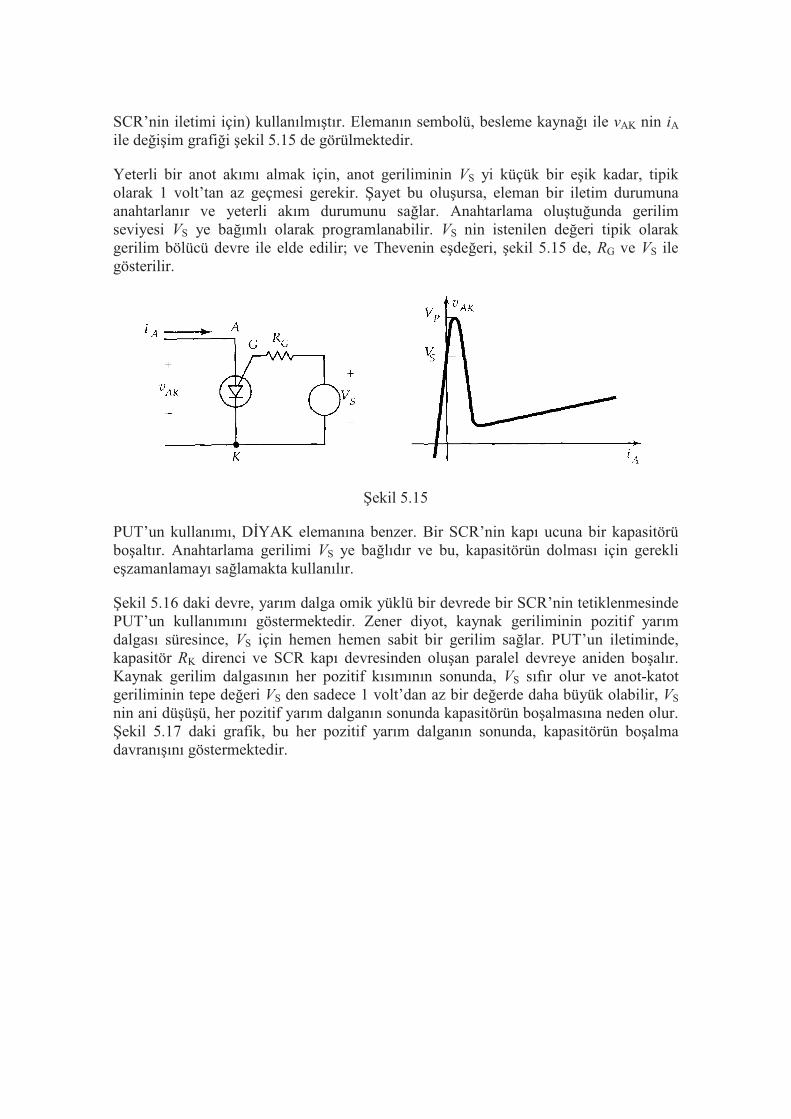
SCR’nin iletimi için) kullanılmıtır. Elemanın sembolü, besleme kaynaı ile vAK nin iAile deiim grafii ekil 5.15 de görülmektedir.
Yeterli bir anot akımı almak için, anot geriliminin VS yi küçük bir eik kadar, tipik olarak 1 volt’tan az geçmesi gerekir. ayet bu oluursa, eleman bir iletim durumuna anahtarlanır ve yeterli akım durumunu salar. Anahtarlama olutuunda gerilim seviyesi VS ye baımlı olarak programlanabilir. VS nin istenilen deeri tipik olarak gerilim bölücü devre ile elde edilir; ve Thevenin edeeri, ekil 5.15 de, RG ve VS ile gösterilir.
ekil 5.15
PUT’un kullanımı, DYAK elemanına benzer. Bir SCR’nin kapı ucuna bir kapasitörü boaltır. Anahtarlama gerilimi VS ye balıdır ve bu, kapasitörün dolması için gerekli ezamanlamayı salamakta kullanılır.
ekil 5.16 daki devre, yarım dalga omik yüklü bir devrede bir SCR’nin tetiklenmesinde PUT’un kullanımını göstermektedir. Zener diyot, kaynak geriliminin pozitif yarım dalgası süresince, VS için hemen hemen sabit bir gerilim salar. PUT’un iletiminde, kapasitör RK direnci ve SCR kapı devresinden oluan paralel devreye aniden boalır. Kaynak gerilim dalgasının her pozitif kısımının sonunda, VS sıfır olur ve anot-katot geriliminin tepe deeri VS den sadece 1 volt’dan az bir deerde daha büyük olabilir, VS
nin ani düüü, her pozitif yarım dalganın sonunda kapasitörün boalmasına neden olur. ekil 5.17 daki grafik, bu her pozitif yarım dalganın sonunda, kapasitörün boalma davranıını göstermektedir.
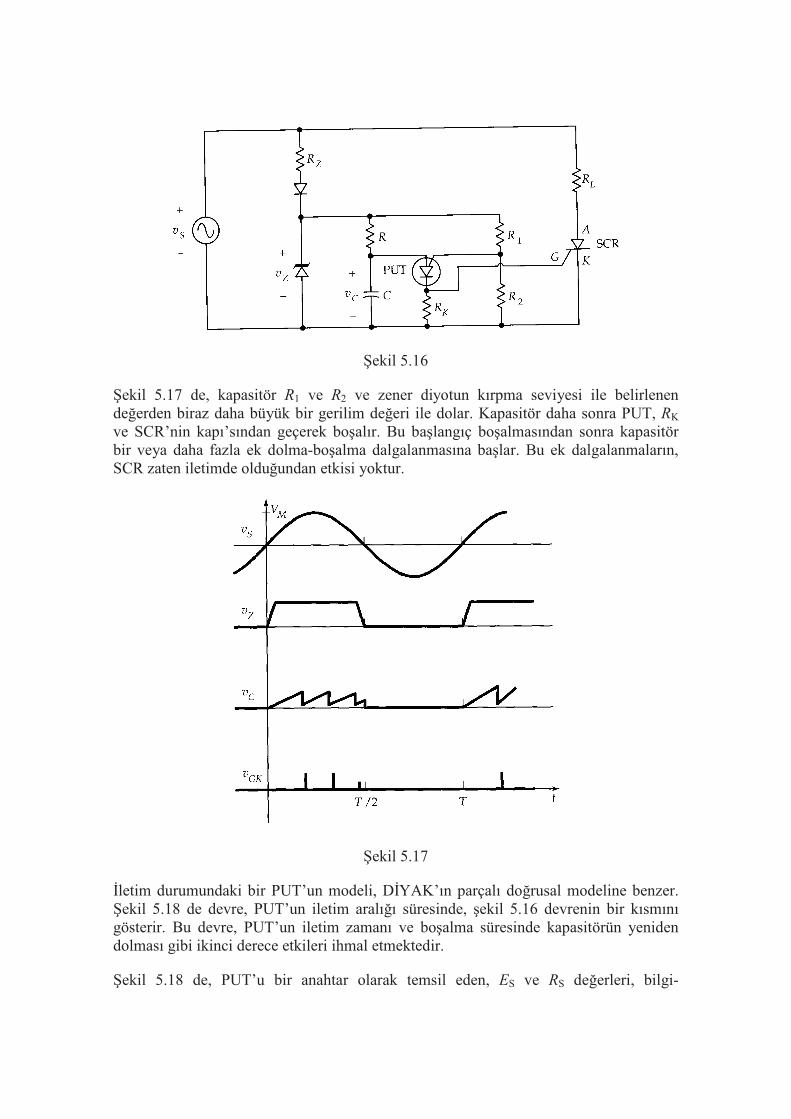
ekil 5.16
ekil 5.17 de, kapasitör R1 ve R2 ve zener diyotun kırpma seviyesi ile belirlenen deerden biraz daha büyük bir gerilim deeri ile dolar. Kapasitör daha sonra PUT, RK
ve SCR’nin kapı’sından geçerek boalır. Bu balangıç boalmasından sonra kapasitör bir veya daha fazla ek dolma-boalma dalgalanmasına balar. Bu ek dalgalanmaların, SCR zaten iletimde olduundan etkisi yoktur.
ekil 5.17
letim durumundaki bir PUT’un modeli, DYAK’ın parçalı dorusal modeline benzer. ekil 5.18 de devre, PUT’un iletim aralıı süresinde, ekil 5.16 devrenin bir kısmını gösterir. Bu devre, PUT’un iletim zamanı ve boalma süresinde kapasitörün yeniden dolması gibi ikinci derece etkileri ihmal etmektedir.
ekil 5.18 de, PUT’u bir anahtar olarak temsil eden, ES ve RS deerleri, bilgi-
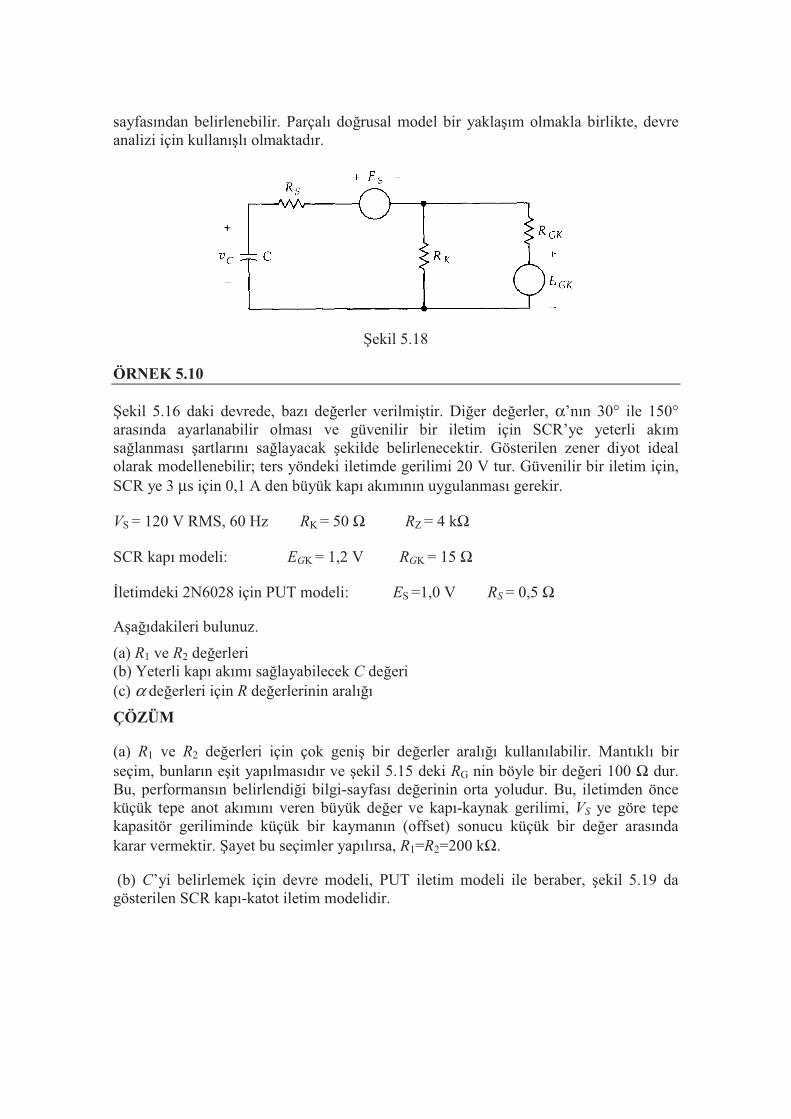
sayfasından belirlenebilir. Parçalı dorusal model bir yaklaım olmakla birlikte, devre analizi için kullanılı olmaktadır.
ekil 5.18
ÖRNEK 5.10
ekil 5.16 daki devrede, bazı deerler verilmitir. Dier deerler, α’nın 30° ile 150° arasında ayarlanabilir olması ve güvenilir bir iletim için SCR’ye yeterli akım salanması artlarını salayacak ekilde belirlenecektir. Gösterilen zener diyot ideal olarak modellenebilir; ters yöndeki iletimde gerilimi 20 V tur. Güvenilir bir iletim için, SCR ye 3 µs için 0,1 A den büyük kapı akımının uygulanması gerekir.
VS = 120 V RMS, 60 Hz RK = 50 Ω RZ = 4 kΩ
SCR kapı modeli: EGK = 1,2 V RGK = 15 Ω
letimdeki 2N6028 için PUT modeli: ES =1,0 V RS = 0,5 Ω
Aaıdakileri bulunuz.
(a) R1 ve R2 deerleri (b) Yeterli kapı akımı salayabilecek C deeri (c) α deerleri için R deerlerinin aralıı
ÇÖZÜM
(a) R1 ve R2 deerleri için çok geni bir deerler aralıı kullanılabilir. Mantıklı bir seçim, bunların eit yapılmasıdır ve ekil 5.15 deki RG nin böyle bir deeri 100 Ω dur. Bu, performansın belirlendii bilgi-sayfası deerinin orta yoludur. Bu, iletimden önce küçük tepe anot akımını veren büyük deer ve kapı-kaynak gerilimi, VS ye göre tepe kapasitör geriliminde küçük bir kaymanın (offset) sonucu küçük bir deer arasında karar vermektir. ayet bu seçimler yapılırsa, R1=R2=200 kΩ.
(b) C’yi belirlemek için devre modeli, PUT iletim modeli ile beraber, ekil 5.19 da gösterilen SCR kapı-katot iletim modelidir.
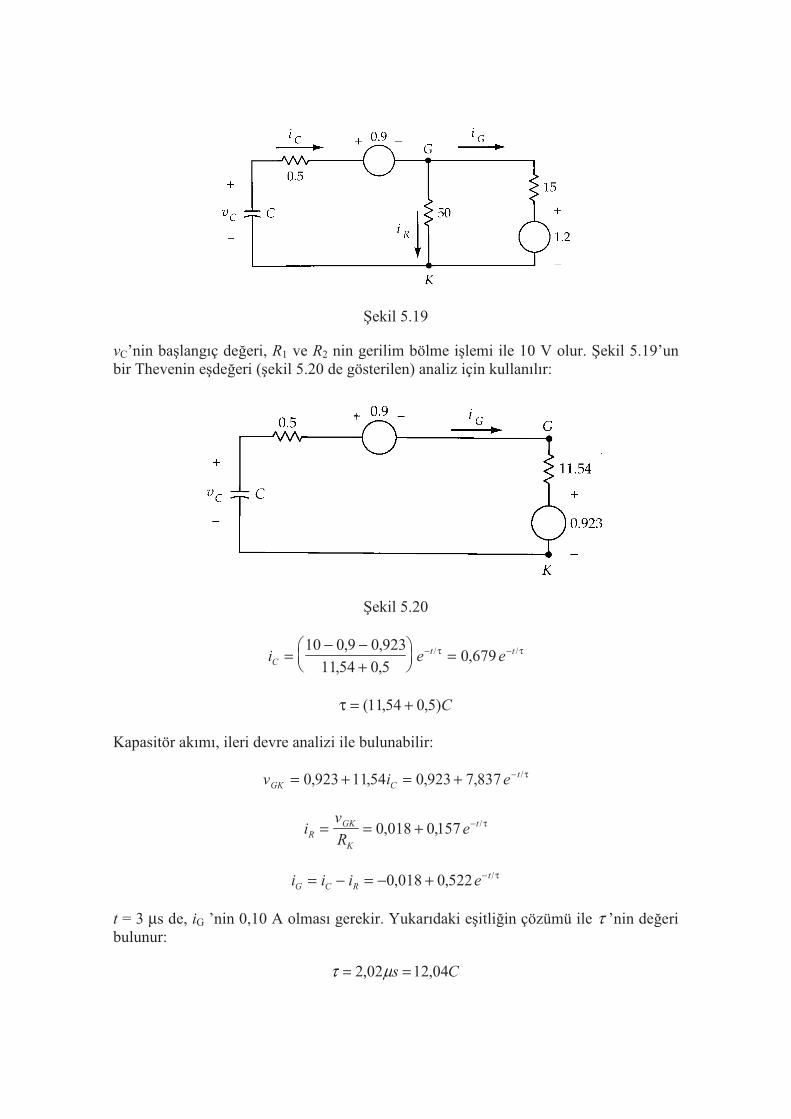
ekil 5.19
vC’nin balangıç deeri, R1 ve R2 nin gerilim bölme ilemi ile 10 V olur. ekil 5.19’un bir Thevenin edeeri (ekil 5.20 de gösterilen) analiz için kullanılır:
ekil 5.20
i e eC
t t=− −
+
=− −10 0 9 0 923
11 54 0 50 679
, ,
, ,,/ /τ τ
τ = +( , , )1154 0 5 C
Kapasitör akımı, ileri devre analizi ile bulunabilir:
v i eGK C
t= + = + −0 923 1154 0 923 7 837, , , , /τ
iv
ReR
GK
K
t= = + −0 018 0157, , /τ
i i i eG C R
t= − = − + −0 018 0 522, , /τ
t = 3 µs de, iG ’nin 0,10 A olması gerekir. Yukarıdaki eitliin çözümü ile τ ’nin deeri bulunur:
Cs 04,1202,2 == µτ
168,0=C µF
(c) Bu hesaplama için, zener diyotun uçlarındaki 20 V dan az olan balangıç gerilimi ihmal edilir. Özellikle α’nın küçük deerleri için, bunun direnç deerinde etkisi azdır.
α = 30 için, kapasitörün 1,39 ms içinde, 10 V dan 20 V kaynak gerilimine yüklenmesi gerekir:
)1(2010 /τte−−=
00,2=τ ms ( 168,0=C µF ve 94,11=R kΩ ile)
α = 150 için, kapasitörün 6,94 ms de yüklenmesi gerekir ve buna karılık gelen direnç deeri 59,65 Ω’dur.
555...444 GGGÜÜÜÇÇÇ FFFAAAKKKTTTÖÖÖRRRÜÜÜ
Bir AC kaynaa bir dorultucu ve yükün gösterdii güç faktörü iki durum için ekonomik öneme sahiptir. Enerjinin harcandıı bir uç sistemdeki büyük yükler sık olarak, harcanan gerçek enerji için olduu kadar düük güç faktörü için de ücretlendirilir. Genel olarak, dorultucu yükleri birimden daha düük güç faktörü gösterirler, bazı durumlarda güç faktörü oldukça düüktür. Ek olarak, güç faktörü, verilen bir yükü beslemek için gereken transformotorun büyüklüünü etkiler. Çok kullanılan tek fazlı, tam dalga durumlarına ait bir analizi aaıda verilmektedir. Genel olarak, yarım dalga dorultucu yükleri küçük ve kayda deer güç harcamasına sahip deillerdir; burada gözönüne alınmayacaklardır.
555...444...111 FFFAAAZZZ KKKOOONNNTTTRRROOOLLLLLLUUU RRREEEZZZSSSTTTFFF YYYÜÜÜKKK
Bir köprü dorultucu için ekil 5.10 daki AC kaynak akımının dalga biçimi 5.37 eitlii ile verilen yük akımı için olan aynı RMS deere sahiptir. RMS deer kareli bir fonksiyondur ve herhangibir akımın iaretinden baımsızdır. Köprünün hem AC ve hem de DC tarafındaki akımlar aynı RMS deere sahiptir.
Güç faktörü, verilen gücün RMS gerilimi ve RMS akımın çarpımına oranı olarak tanımlanır. Bu tanım, faz kontrollu bir rezistif yük için birimden daha küçük bir güç faktörü ile sonuçlanmaktadır.
RMS akımın 5.37 eitliindeki sonucu kullanılarak, güç faktörü aaıdaki gibi belirlenir: S, AC kaynak RMS akımı ve RMS geriliminin volt-amper çarpımı olarak tanımlanır; köprünün DC tarafında, güç 5.49 eitlii ile bulunur. Güç faktörünün tanımı kullanılarak, köprü dorultucunun AC tarafı için ek eitlikler yazılabilir:
RIP RMS
2)(= (5.49)
)(414,1
RMSm
RMSRMS IV
IVS
== (5.50)
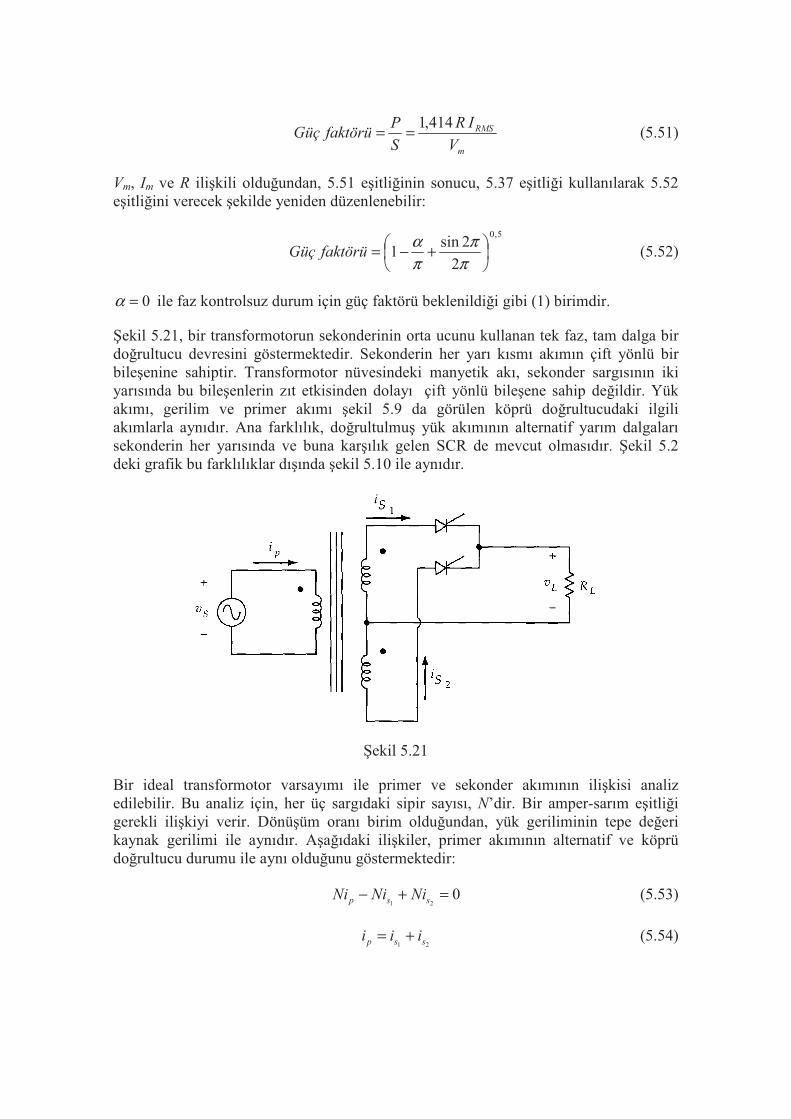
m
RMS
V
IR
S
PfaktörüGüç
414,1== (5.51)
Vm, Im ve R ilikili olduundan, 5.51 eitliinin sonucu, 5.37 eitlii kullanılarak 5.52 eitliini verecek ekilde yeniden düzenlenebilir:
5,0
2
2sin1
+−=
π
π
π
αfaktörüGüç (5.52)
0=α ile faz kontrolsuz durum için güç faktörü beklenildii gibi (1) birimdir.
ekil 5.21, bir transformotorun sekonderinin orta ucunu kullanan tek faz, tam dalga bir dorultucu devresini göstermektedir. Sekonderin her yarı kısmı akımın çift yönlü bir bileenine sahiptir. Transformotor nüvesindeki manyetik akı, sekonder sargısının iki yarısında bu bileenlerin zıt etkisinden dolayı çift yönlü bileene sahip deildir. Yük akımı, gerilim ve primer akımı ekil 5.9 da görülen köprü dorultucudaki ilgili akımlarla aynıdır. Ana farklılık, dorultulmu yük akımının alternatif yarım dalgaları sekonderin her yarısında ve buna karılık gelen SCR de mevcut olmasıdır. ekil 5.2 deki grafik bu farklılıklar dıında ekil 5.10 ile aynıdır.
ekil 5.21
Bir ideal transformotor varsayımı ile primer ve sekonder akımının ilikisi analiz edilebilir. Bu analiz için, her üç sargıdaki sipir sayısı, N’dir. Bir amper-sarım eitlii gerekli ilikiyi verir. Dönüüm oranı birim olduundan, yük geriliminin tepe deeri kaynak gerilimi ile aynıdır. Aaıdaki ilikiler, primer akımının alternatif ve köprü dorultucu durumu ile aynı olduunu göstermektedir:
021
=+− ssp NiNiNi (5.53)
21 ssp iii += (5.54)
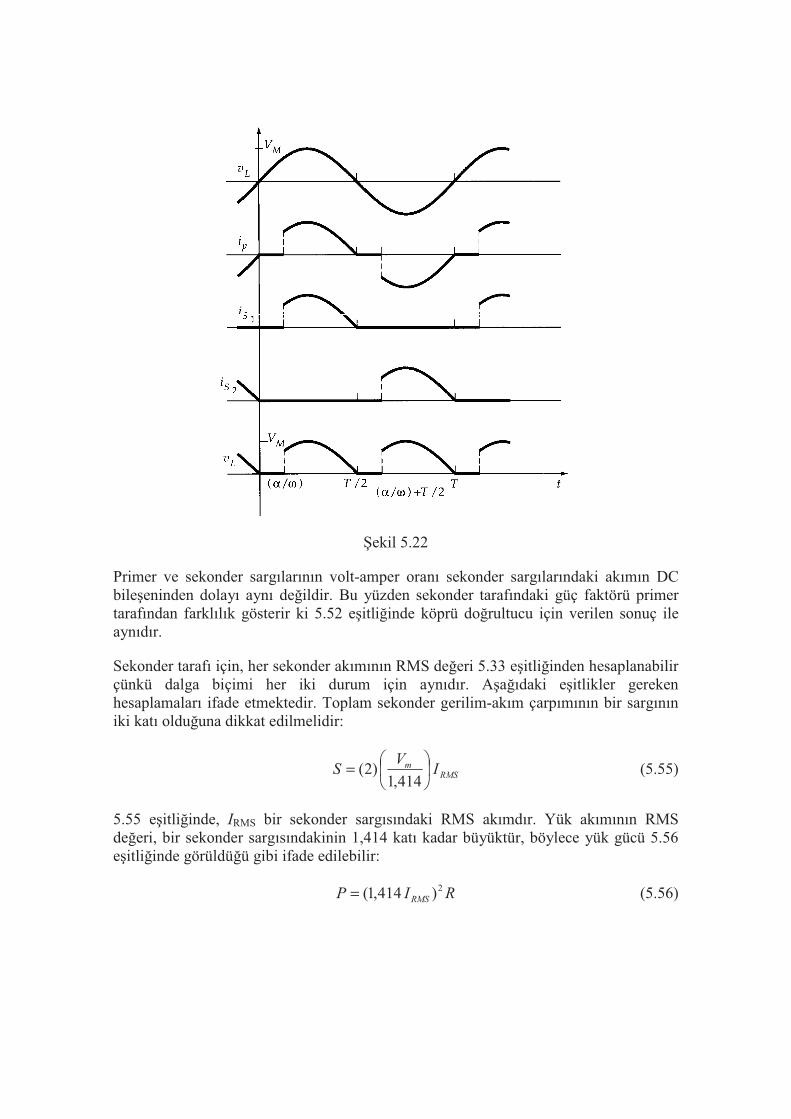
ekil 5.22
Primer ve sekonder sargılarının volt-amper oranı sekonder sargılarındaki akımın DC bileeninden dolayı aynı deildir. Bu yüzden sekonder tarafındaki güç faktörü primer tarafından farklılık gösterir ki 5.52 eitliinde köprü dorultucu için verilen sonuç ile aynıdır.
Sekonder tarafı için, her sekonder akımının RMS deeri 5.33 eitliinden hesaplanabilir çünkü dalga biçimi her iki durum için aynıdır. Aaıdaki eitlikler gereken hesaplamaları ifade etmektedir. Toplam sekonder gerilim-akım çarpımının bir sargının iki katı olduuna dikkat edilmelidir:
RMSm I
VS
=
414,1)2( (5.55)
5.55 eitliinde, IRMS bir sekonder sargısındaki RMS akımdır. Yük akımının RMS deeri, bir sekonder sargısındakinin 1,414 katı kadar büyüktür, böylece yük gücü 5.56 eitliinde görüldüü gibi ifade edilebilir:
RIP RMS
2)414,1(= (5.56)

5,0
22
2sin1
+−
== π
π
π
α
S
PfaktörüGüç (5.57)
Sekonder güç faktörü primer sargısından 0,707 faktörü ile daha azdır. Transformotorun, bir transformotorun bir köprü dorultucuyu beslerken ki durumundan daha büyük olması gerekmektedir.
ÖRNEK 5.11
Bir faz kontrollu dorultucudan bir rezistif yük beslenmektedir. Bir düürücü transformotor 480 V RMS, 60 Hz kaynaı dorultucuya balamaktadır. Yükteki sekonder tepe geriliminin 100 V olması gerekmektedir. Yük direnci 10 Ω dur. Faz kontrol açısının deeri 45°dir.
(a) Sekonder sargısına balanan bir köprü dorultucu için, primer ve sekonder güç faktörlerini bulunuz.
(b) Orta uçlu bir transformotor durumu için, transformotorun primer ve sekonder sargılarının volt-amper oranını bulunuz.
(c) Sekonder güç faktörünü bulunuz.
ÇÖZÜM
(a) 5.52 eitliinden, güç faktörü elde edilebilir:
9535,02
90sin
180
451
5,0
=
°+
°
°−=
πfaktörüGüç
(b) Her sekonder akımı 5.33 eitliinden elde edilen bir RMS deere sahiptir:
1010
100==mI A
767,42
90sin
180
451
2
105,0
=
°+
°
°−
=
πRMSI A
Sekonder sargıları için 5.55 eitlii kullanılarak,
674)767,4(414,1
100)2(2 =
=S VA
5.37 eitlii kullanılarak, primer sargı akımının RMS deeri bulunur. Primerdeki Im’nin deerinin dönüüm oranı ile ayarlanması gerekir:
473,1)414,1)(480(
100)10( =
=mI A

993,0)9535,0(414,1
473,1=
=RMSI A
477)993,0)(480(1 ==S VA
(c) Sekonder güç faktörü 5.57 eitliinden bulunur:
674,02
2
90sin
180
451
5,0
=
°+
°
°−
= πfaktörüGüç
555...444...222 FFFAAAZZZ KKKOOONNNTTTRRROOOLLLLLLUUU NNNDDDÜÜÜKKKTTTFFF YYYÜÜÜKKK
Dorultucudaki yük, yük akımının her saykıl boyunca sabit olacaı ekilde büyük bir indüktansla deitirilmitir. ekil 5.11 de görülen köprü dorultucu durumu için, aaıdaki gibi güç faktörü belirlenebilir (dorultulmu akımın sabit deeri IL olarak kaydedilmitir):
RIP L
2= (5.58)
)(414,1
Lm I
VS
= (5.59)
απ
cos2
=
R
VI m
L (5.60)
Bu üç eitliin birletirilmesiyle 5.61 eitlii elde edilir:
αcos900,0==S
PfaktörüGüç (5.61)
Bir diyot dorultucu kullanılarak faz kontrolu olmaksızın bile, yük indüktif olduunda güç faktörünün birimden daha düük olduuna dikkat edilmelidir.
ayet bir transformotor bir köprü dorultucuyu besliyorsa, akım ve gerilimin hem primer ve hemde sekonderdeki durumları, önceki eitlikte olduu gibi aynı ilikiye sahip olmaktadır. Bu yüzden hem primer ve hemde sekonder güç faktörleri 5.61 eitliinde ifade edilmektedir. Transformotorun volt-amper oranı, dorultucunun çıkıgücünden bir α deeri kadar büyük olmalıdır.
ayet dorultucu, sekonderi orta uçlu bir transformotor ile besleniyorsa, sekonder güç faktörü primerdekinden daha azdır. Burada da yine, IL DC yük akımı ve Vm iki sekonder sargısından birinin geriliminin tepe deeridir. ki sekonder sargısının birine ait akımın RMS deeri, bu akımın yarım periyot için IL’ye eit ve dier yarı için sıfır olduu dikkate alınarak hesaplanabilir. 5.62 eitlii bu ilikiyi ifade etmektedir:

414,1L
RMS
II = (5.62)
LmRMSm IVI
VS =
= )(
414,122 (5.63)
Yük gücü için 5.58 eitlii ve IL için 5.60 eitliindeki ifadeler kullanılarak, güç faktörü bulunabilir:
απ
cos2
2
==
S
PfaktörüGüç (5.64)
Primer güç faktörü köprü dorultucu durumunda aynı kalmaktadır.
ÖRNEK 5.12
Örnek 5.11 deki devre, yük direncine seri büyük bir indüktans içerecek ekilde deitirilmitir. Çözümü tekrar ediniz.
ÇÖZÜM
(a) 5.61 eitliinden,
6364,045cos900,0 =°=faktörüGüç
(b) 50,410
45cos)100(
2=
°
=
πLI A
Sekonder sargıları için 5.63 eitliinden,
450)5,4)(100(2 === Lm IVS VA
Primer akımı her yarım saykılda sabit deerli alternatif akımdır. Deeri, IL ve dönüüm oranı ile ilikilidir:
663,0)414,1)(480(
100)50,4(
1
2 =
=
=
N
NII Lp A
Primer sargısı için,
2,318)663,0)(480(1 ==S VA
(c) Sekonder güç faktörü, güç faktörünün tanımı kullanılarak bulunabilir:
5,202)10()50,4( 22 === RIP L W
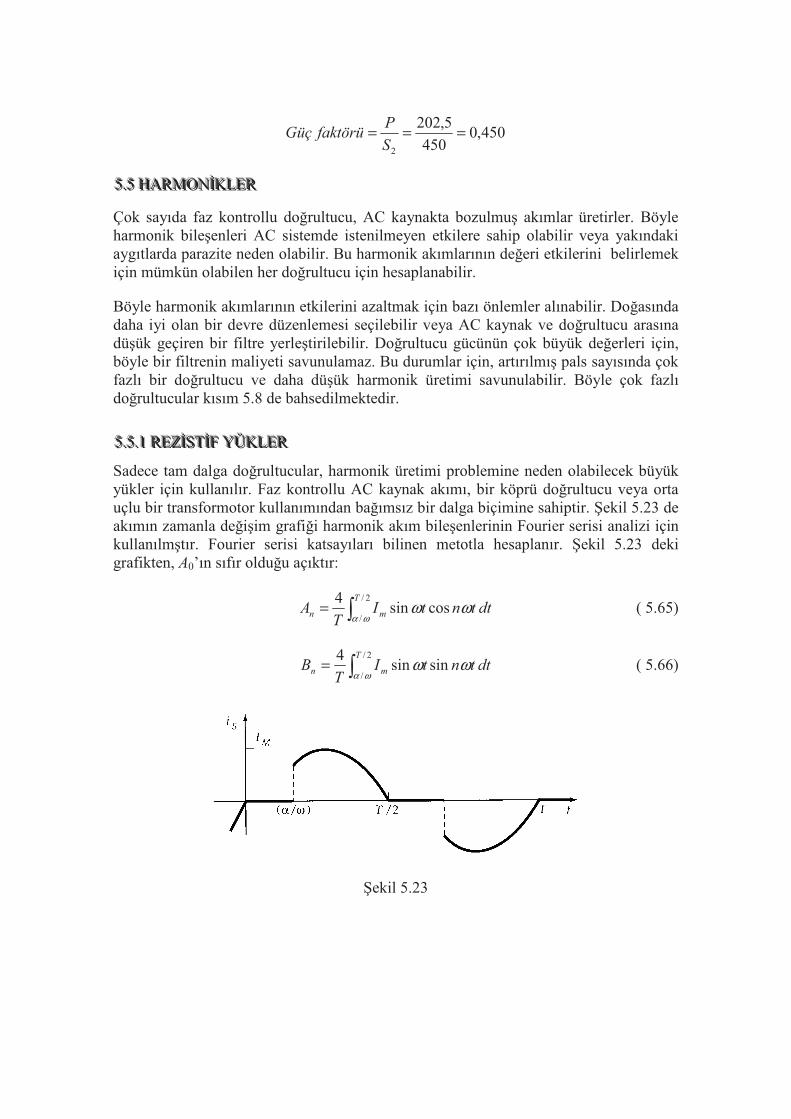
450,0450
5,202
2
===S
PfaktörüGüç
555...555 HHHAAARRRMMMOOONNNKKKLLLEEERRR
Çok sayıda faz kontrollu dorultucu, AC kaynakta bozulmu akımlar üretirler. Böyle harmonik bileenleri AC sistemde istenilmeyen etkilere sahip olabilir veya yakındaki aygıtlarda parazite neden olabilir. Bu harmonik akımlarının deeri etkilerini belirlemek için mümkün olabilen her dorultucu için hesaplanabilir.
Böyle harmonik akımlarının etkilerini azaltmak için bazı önlemler alınabilir. Doasında daha iyi olan bir devre düzenlemesi seçilebilir veya AC kaynak ve dorultucu arasına düük geçiren bir filtre yerletirilebilir. Dorultucu gücünün çok büyük deerleri için, böyle bir filtrenin maliyeti savunulamaz. Bu durumlar için, artırılmı pals sayısında çok fazlı bir dorultucu ve daha düük harmonik üretimi savunulabilir. Böyle çok fazlı dorultucular kısım 5.8 de bahsedilmektedir.
555...555...111 RRREEEZZZSSSTTTFFF YYYÜÜÜKKKLLLEEERRR
Sadece tam dalga dorultucular, harmonik üretimi problemine neden olabilecek büyük yükler için kullanılır. Faz kontrollu AC kaynak akımı, bir köprü dorultucu veya orta uçlu bir transformotor kullanımından baımsız bir dalga biçimine sahiptir. ekil 5.23 de akımın zamanla deiim grafii harmonik akım bileenlerinin Fourier serisi analizi için kullanılmtır. Fourier serisi katsayıları bilinen metotla hesaplanır. ekil 5.23 deki grafikten, A0’ın sıfır olduu açıktır:
=2/
/cossin
4 T
mn dttntIT
Aωα
ωω ( 5.65)
=2/
/sinsin
4 T
mn dttntIT
Bωα
ωω ( 5.66)
ekil 5.23
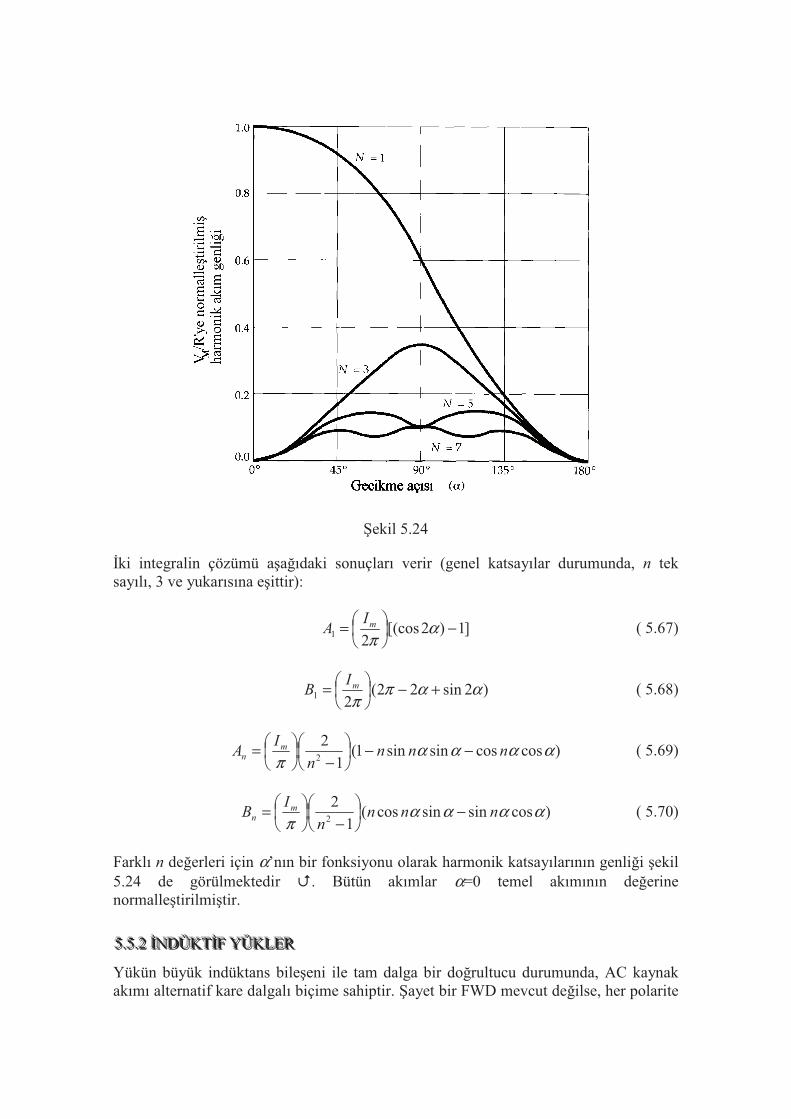
ekil 5.24
ki integralin çözümü aaıdaki sonuçları verir (genel katsayılar durumunda, n tek sayılı, 3 ve yukarısına eittir):
]1)2[(cos2
1 −
= α
πmI
A ( 5.67)
)2sin22(2
1 ααππ
+−
= mI
B ( 5.68)
)coscossinsin1(1
22
ααααπ
nnnn
IA m
n −−
−
= ( 5.69)
)cossinsincos(1
22
ααααπ
nnnn
IB m
n −
−
= ( 5.70)
Farklı n deerleri için α’nın bir fonksiyonu olarak harmonik katsayılarının genlii ekil 5.24 de görülmektedir . Bütün akımlar α=0 temel akımının deerine normalletirilmitir.
555...555...222 NNNDDDÜÜÜKKKTTT FFF YYYÜÜÜKKKLLLEEERRR
Yükün büyük indüktans bileeni ile tam dalga bir dorultucu durumunda, AC kaynak akımı alternatif kare dalgalı biçime sahiptir. ayet bir FWD mevcut deilse, her polarite
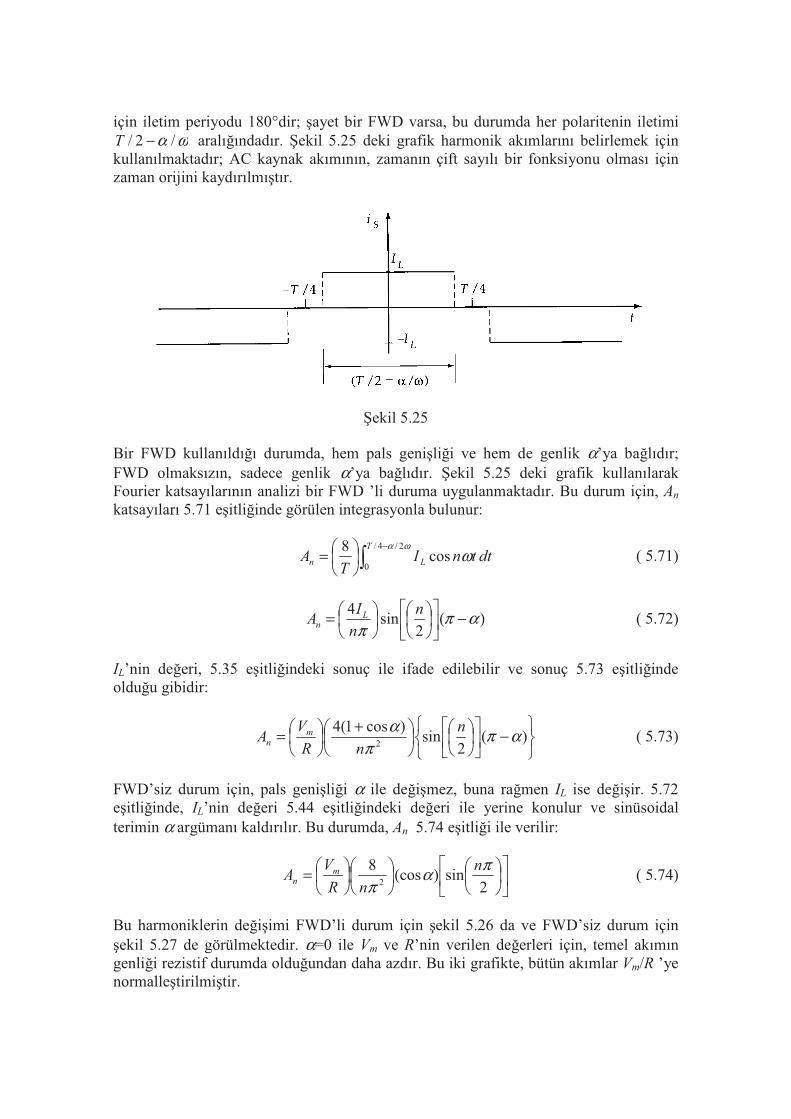
için iletim periyodu 180°dir; ayet bir FWD varsa, bu durumda her polaritenin iletimi ωα /2/ −T aralıındadır. ekil 5.25 deki grafik harmonik akımlarını belirlemek için
kullanılmaktadır; AC kaynak akımının, zamanın çift sayılı bir fonksiyonu olması için zaman orijini kaydırılmıtır.
ekil 5.25
Bir FWD kullanıldıı durumda, hem pals genilii ve hem de genlik α’ya balıdır; FWD olmaksızın, sadece genlik α’ya balıdır. ekil 5.25 deki grafik kullanılarak Fourier katsayılarının analizi bir FWD ’li duruma uygulanmaktadır. Bu durum için, An
katsayıları 5.71 eitliinde görülen integrasyonla bulunur:
−
=
ωα
ω2/4/
0cos
8 T
Ln dttnIT
A ( 5.71)
)(2
sin4
αππ
−
=
n
n
IA L
n ( 5.72)
IL’nin deeri, 5.35 eitliindeki sonuç ile ifade edilebilir ve sonuç 5.73 eitliinde olduu gibidir:
−
+
= )(
2sin
)cos1(42
αππ
α n
nR
VA m
n ( 5.73)
FWD’siz durum için, pals genilii α ile deimez, buna ramen IL ise deiir. 5.72 eitliinde, IL’nin deeri 5.44 eitliindeki deeri ile yerine konulur ve sinüsoidal terimin α argümanı kaldırılır. Bu durumda, An 5.74 eitlii ile verilir:
=
2sin)(cos
82
πα
π
n
nR
VA m
n ( 5.74)
Bu harmoniklerin deiimi FWD’li durum için ekil 5.26 da ve FWD’siz durum için ekil 5.27 de görülmektedir. α=0 ile Vm ve R’nin verilen deerleri için, temel akımın genlii rezistif durumda olduundan daha azdır. Bu iki grafikte, bütün akımlar Vm/R ’ye normalletirilmitir.
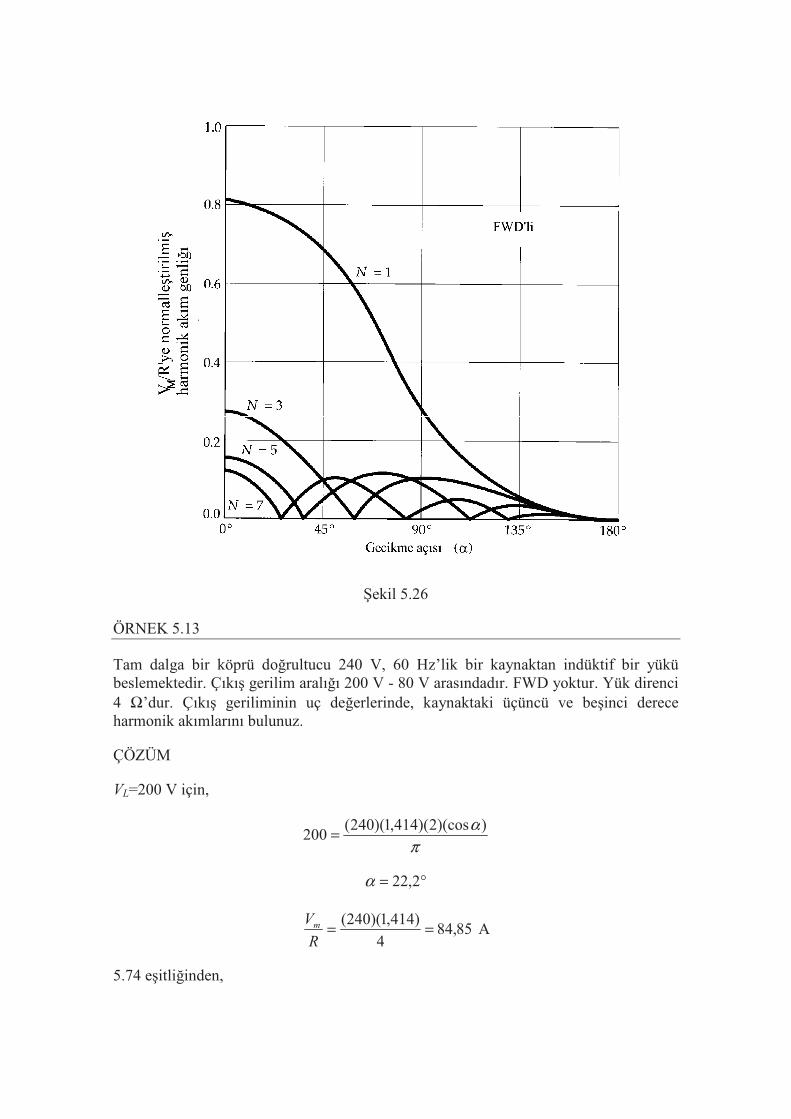
ekil 5.26
ÖRNEK 5.13
Tam dalga bir köprü dorultucu 240 V, 60 Hz’lik bir kaynaktan indüktif bir yükü beslemektedir. Çıkı gerilim aralıı 200 V - 80 V arasındadır. FWD yoktur. Yük direnci 4 Ω’dur. Çıkı geriliminin uç deerlerinde, kaynaktaki üçüncü ve beinci derece harmonik akımlarını bulunuz.
ÇÖZÜM
VL=200 V için,
π
α ))(cos2)(414,1)(240(200 =
°= 2,22α
85,844
)414,1)(240(==
R
Vm A
5.74 eitliinden,
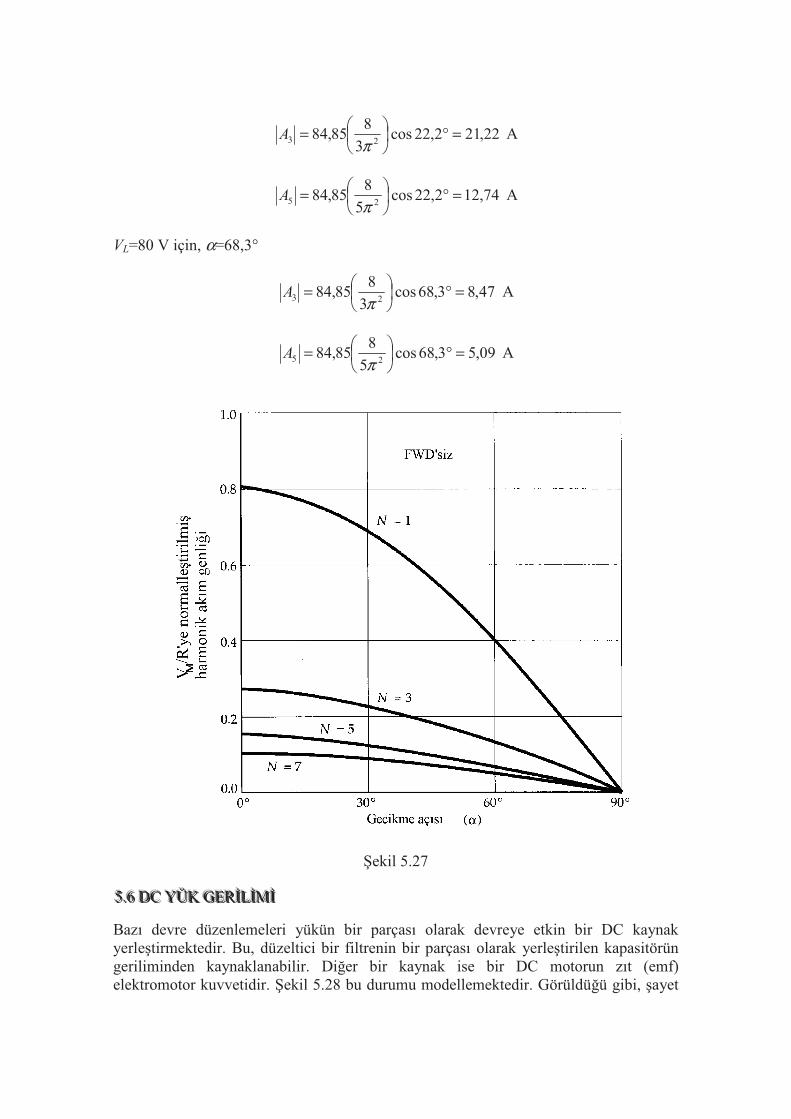
22,212,22cos3
885,84
23 =°
=
πA A
74,122,22cos5
885,84
25 =°
=
πA A
VL=80 V için, α=68,3°
47,83,68cos3
885,84
23 =°
=
πA A
09,53,68cos5
885,84
25 =°
=
πA A
ekil 5.27
555...666 DDDCCC YYYÜÜÜKKK GGGEEERRRLLLMMM
Bazı devre düzenlemeleri yükün bir parçası olarak devreye etkin bir DC kaynak yerletirmektedir. Bu, düzeltici bir filtrenin bir parçası olarak yerletirilen kapasitörün geriliminden kaynaklanabilir. Dier bir kaynak ise bir DC motorun zıt (emf) elektromotor kuvvetidir. ekil 5.28 bu durumu modellemektedir. Görüldüü gibi, ayet
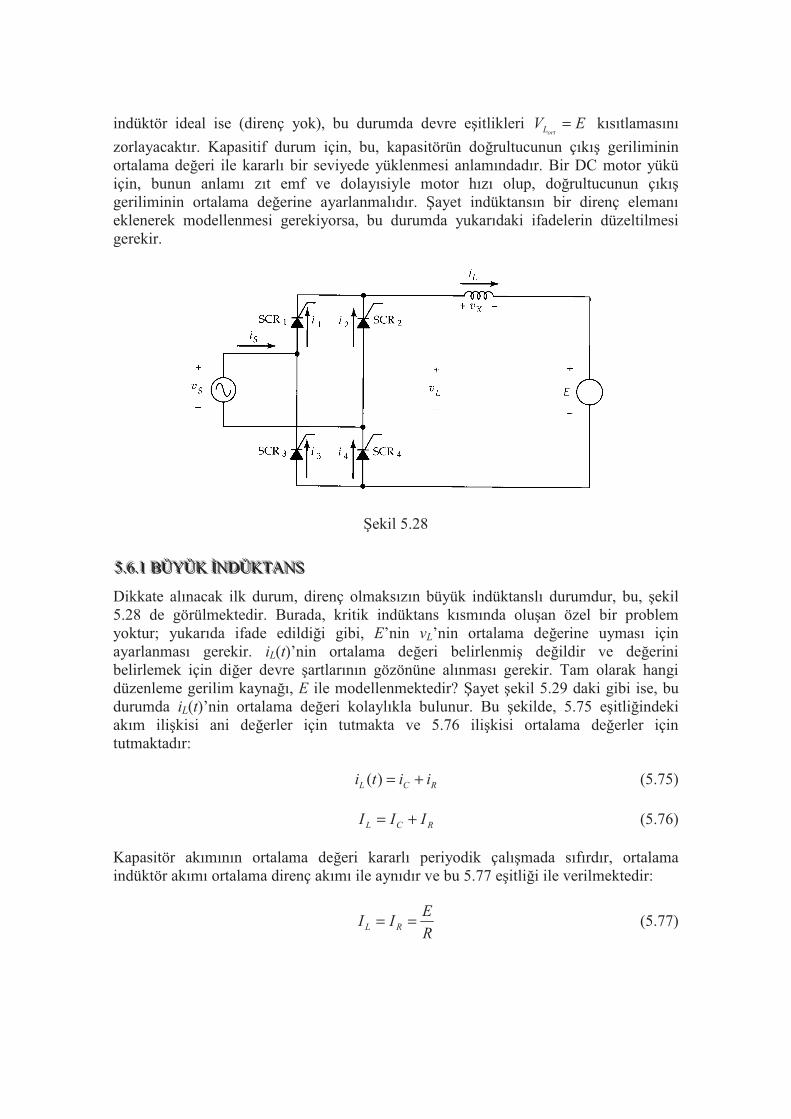
indüktör ideal ise (direnç yok), bu durumda devre eitlikleri EVortL = kısıtlamasını
zorlayacaktır. Kapasitif durum için, bu, kapasitörün dorultucunun çıkı geriliminin ortalama deeri ile kararlı bir seviyede yüklenmesi anlamındadır. Bir DC motor yükü için, bunun anlamı zıt emf ve dolayısiyle motor hızı olup, dorultucunun çıkıgeriliminin ortalama deerine ayarlanmalıdır. ayet indüktansın bir direnç elemanı eklenerek modellenmesi gerekiyorsa, bu durumda yukarıdaki ifadelerin düzeltilmesi gerekir.
ekil 5.28
555...666...111 BBBÜÜÜYYYÜÜÜKKK NNNDDDÜÜÜKKKTTTAAANNNSSS
Dikkate alınacak ilk durum, direnç olmaksızın büyük indüktanslı durumdur, bu, ekil 5.28 de görülmektedir. Burada, kritik indüktans kısmında oluan özel bir problem yoktur; yukarıda ifade edildii gibi, E’nin vL’nin ortalama deerine uyması için ayarlanması gerekir. iL(t)’nin ortalama deeri belirlenmi deildir ve deerini belirlemek için dier devre artlarının gözönüne alınması gerekir. Tam olarak hangi düzenleme gerilim kaynaı, E ile modellenmektedir? ayet ekil 5.29 daki gibi ise, bu durumda iL(t)’nin ortalama deeri kolaylıkla bulunur. Bu ekilde, 5.75 eitliindeki akım ilikisi ani deerler için tutmakta ve 5.76 ilikisi ortalama deerler için tutmaktadır:
RCL iiti +=)( (5.75)
RCL III += (5.76)
Kapasitör akımının ortalama deeri kararlı periyodik çalımada sıfırdır, ortalama indüktör akımı ortalama direnç akımı ile aynıdır ve bu 5.77 eitlii ile verilmektedir:
R
EII RL == (5.77)
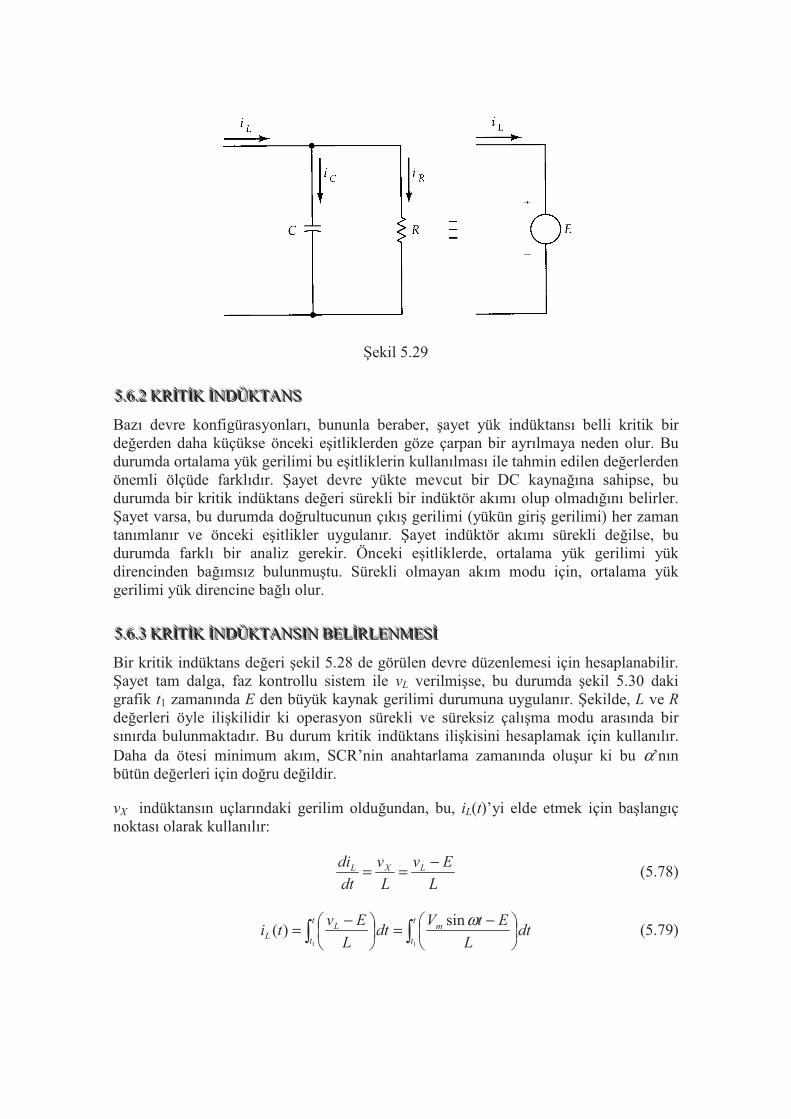
ekil 5.29
555...666...222 KKKRRRTTTKKK NNNDDDÜÜÜKKKTTTAAANNNSSS
Bazı devre konfigürasyonları, bununla beraber, ayet yük indüktansı belli kritik bir deerden daha küçükse önceki eitliklerden göze çarpan bir ayrılmaya neden olur. Bu durumda ortalama yük gerilimi bu eitliklerin kullanılması ile tahmin edilen deerlerden önemli ölçüde farklıdır. ayet devre yükte mevcut bir DC kaynaına sahipse, bu durumda bir kritik indüktans deeri sürekli bir indüktör akımı olup olmadıını belirler. ayet varsa, bu durumda dorultucunun çıkı gerilimi (yükün giri gerilimi) her zaman tanımlanır ve önceki eitlikler uygulanır. ayet indüktör akımı sürekli deilse, bu durumda farklı bir analiz gerekir. Önceki eitliklerde, ortalama yük gerilimi yük direncinden baımsız bulunmutu. Sürekli olmayan akım modu için, ortalama yük gerilimi yük direncine balı olur.
555...666...333 KKKRRRTTTKKK NNNDDDÜÜÜKKKTTTAAANNNSSSIIINNN BBBEEELLLRRRLLLEEENNNMMMEEESSS
Bir kritik indüktans deeri ekil 5.28 de görülen devre düzenlemesi için hesaplanabilir. ayet tam dalga, faz kontrollu sistem ile vL verilmise, bu durumda ekil 5.30 daki grafik t1 zamanında E den büyük kaynak gerilimi durumuna uygulanır. ekilde, L ve Rdeerleri öyle ilikilidir ki operasyon sürekli ve süreksiz çalıma modu arasında bir sınırda bulunmaktadır. Bu durum kritik indüktans ilikisini hesaplamak için kullanılır. Daha da ötesi minimum akım, SCR’nin anahtarlama zamanında oluur ki bu α’nın bütün deerleri için doru deildir.
vX indüktansın uçlarındaki gerilim olduundan, bu, iL(t)’yi elde etmek için balangıç noktası olarak kullanılır:
L
Ev
L
v
dt
di LXL −== (5.78)
−=
−=
t
t
mt
t
LL dt
L
EtVdt
L
Evti
11
sin)(
ω (5.79)

)()cos(cos)( 11 ttL
Ett
L
Vti m
L −
−−
= ωω
ω (5.80)
1tt = de 0)( =tiL olduundan, periyodik operasyon için iL(t) ’nin 2tt = de tekrar sıfır
olması gerektii grafikten açıkça görülmektedir.
ekil 5.30
iL(t)’nin ortalama deerinin uygun bir deer, yani E/R deeri olması için artın salanması gerekir. Daha da ötesi operasyon sürekli akım çalımasının sınırında olduundan, Vm ve ortalama dorultucu gerilimi E arasındaki iliki hala sürmektedir. iL(t) ’nin ortalama deeri integrasyonla belirlenir:
=2
1
)(2 t
tLort dtti
TI (5.81)
burada 2/)12 Ttt =− .
iL(t) eitlii ile integrasyon ilemi yapılarak, 5.82 eitlii sonuç olarak elde edilir:
−
+
=
L
E
L
Vi mort
ω
π
απ
αω
2)(
sin2
cos (5.82)
Bu durumda, REIort /= ve απ cos)/2( mVE = ilikisi kullanılarak, 5.83 eitliindeki
sonuç elde edilir:

αω
tan
=
RL (5.83)
Bu kritik deer operasyonun sürekli ve süreksiz modlarını ayırır. Kritik deerden aaı L için Vm ve α arasındaki ilikiyi elde etmenin bir gereksinimi hala devam etmektedir. Bu, daha sonraki süreksiz indüktör akımı kısmında incelenecektir.
Yapılan önceki analiz, minimum akımın anahtarlama noktasında olutuu durum içindi. Bunun olması için, akımın t > t1 için artırılması ve akabinde anahtarlama noktasında vL>E olması gerekir. Sınır, t1 zamanında vL=E için oluur. Buradaki iki iliki kullanılarak bir sınır artı elde edilir:
απ
cos2
mVE
= (5.84)
ve
αsinmL Vv = (5.85)
burada 1tωα = . vL ve E elenerek aaıdaki sonuç elde edilir:
ααπ
sincos2
mm VV =
(5.86)
πα
2tan = (5.87)
°= 48,32α (5.88)
ÖRNEK 5.14
60 Hz, 240 V RMS AC kaynaktan çalıan bir tam dalga dorultucu ekil 5.31 de görülen bir düzenleme ile 20 Ω’luk yüke ayarlı gerilim salamaktadır. Yük geriliminin 100 V ile 180 V arasında ayarlanabilmesi gerekmektedir. Aaıdakileri bulunuz:
(a) gereken α deeri (b) α’nın bütün deerleri için sürekli indüktör akımını sürdüren L deeri.
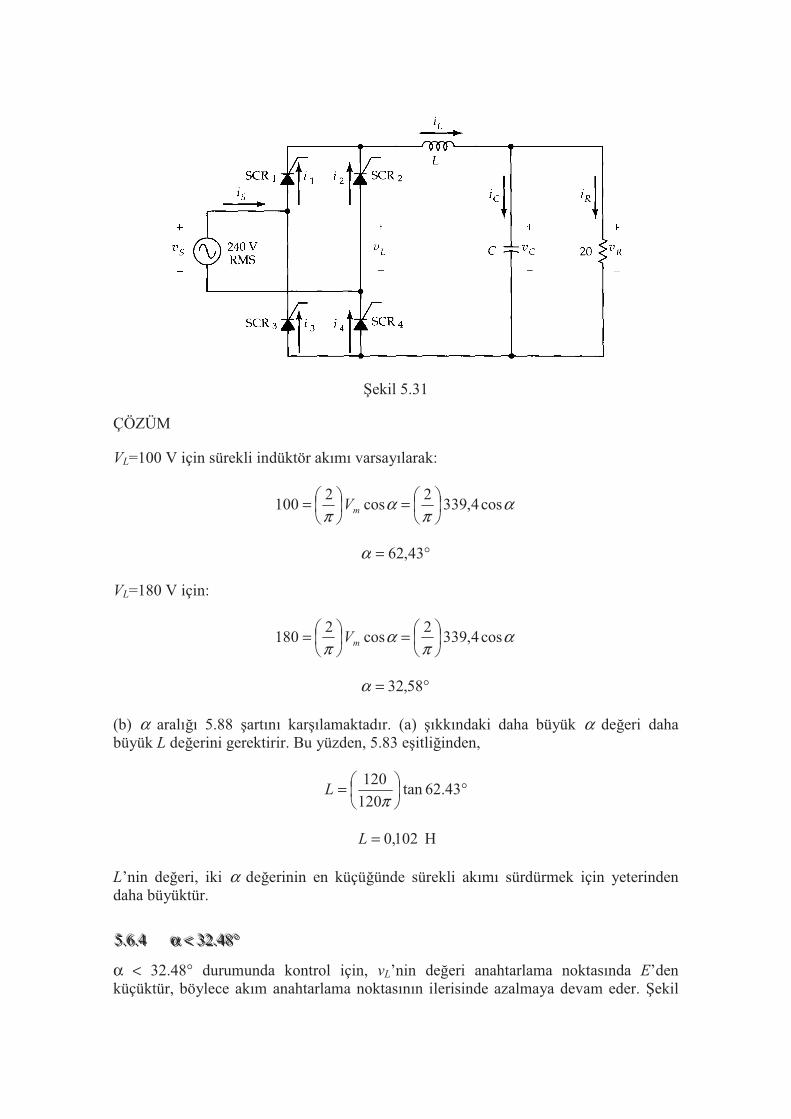
ekil 5.31
ÇÖZÜM
VL=100 V için sürekli indüktör akımı varsayılarak:
απ
απ
cos4,3392
cos2
100
=
= mV
°= 43,62α
VL=180 V için:
απ
απ
cos4,3392
cos2
180
=
= mV
°= 58,32α
(b) α aralıı 5.88 artını karılamaktadır. (a) ıkkındaki daha büyük α deeri daha büyük L deerini gerektirir. Bu yüzden, 5.83 eitliinden,
°
= 43.62tan
120
120
πL
102,0=L H
L’nin deeri, iki α deerinin en küçüünde sürekli akımı sürdürmek için yeterinden daha büyüktür.
555...666...444 ααα <<< 333222...444888°°°
α < 32.48° durumunda kontrol için, vL’nin deeri anahtarlama noktasında E’den küçüktür, böylece akım anahtarlama noktasının ilerisinde azalmaya devam eder. ekil
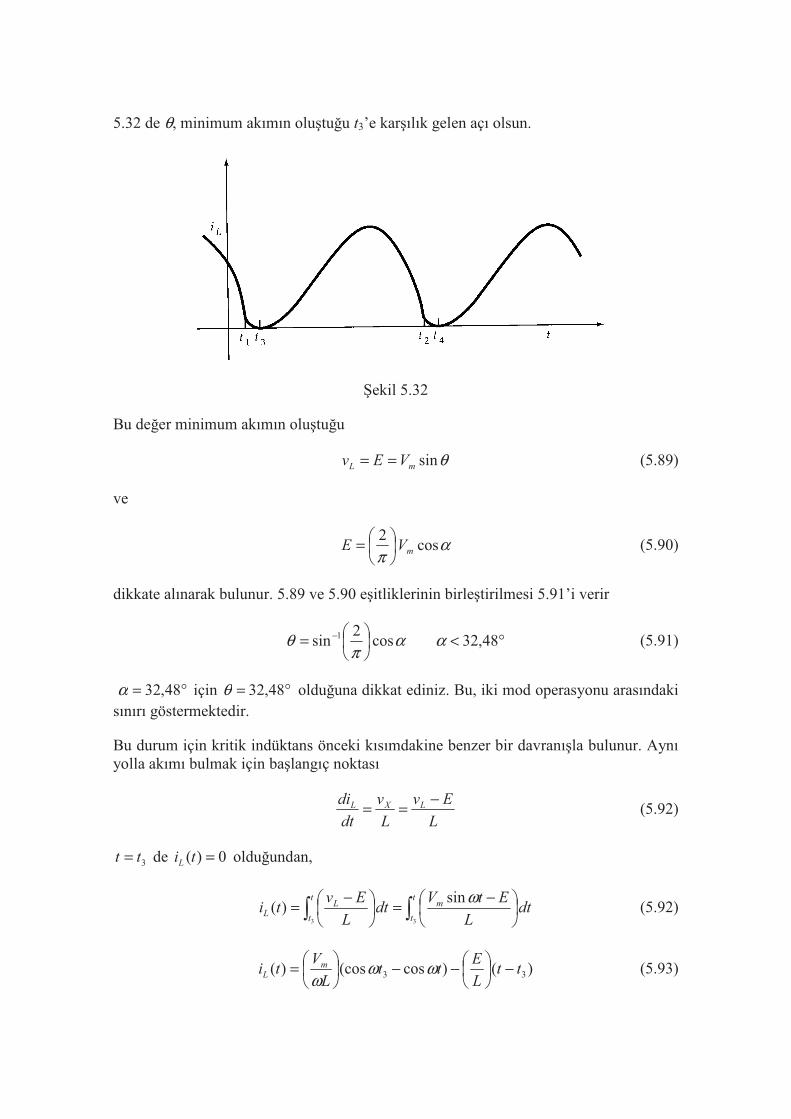
5.32 de θ, minimum akımın olutuu t3’e karılık gelen açı olsun.
ekil 5.32
Bu deer minimum akımın olutuu
θsinmL VEv == (5.89)
ve
απ
cos2
mVE
= (5.90)
dikkate alınarak bulunur. 5.89 ve 5.90 eitliklerinin birletirilmesi 5.91’i verir
°<
= − 48,32cos
2sin 1 αα
πθ (5.91)
°= 48,32α için °= 48,32θ olduuna dikkat ediniz. Bu, iki mod operasyonu arasındaki
sınırı göstermektedir.
Bu durum için kritik indüktans önceki kısımdakine benzer bir davranıla bulunur. Aynı yolla akımı bulmak için balangıç noktası
L
Ev
L
v
dt
di LXL −== (5.92)
3tt = de 0)( =tiL olduundan,
−=
−=
t
t
mt
t
LL dt
L
EtVdt
L
Evti
33
sin)(
ω (5.92)
)()cos(cos)( 33 ttL
Ett
L
Vti m
L −
−−
= ωω
ω (5.93)

Son eitlik t1 ve t2 anahtarlama noktası arasındaki aralık için uygulanmaktadır. Bu aralık üzerinde )(tiL ’nin integrali 5.95 eitlii ile verilir:
+
==ωπα
ωα
/)(
/)(
2)(
2 2
1
dttiT
dttiT
I L
t
tLort (5.95)
lemler yapılarak aaıdaki sonuç elde edilir:
+
−−
+
= α
π
παθα
πθ
ωsin
2
2)(cos
2cos
L
Vi mort (5.96)
Yukarıdaki matematiksel ilemlerde
απ
cos2
mVE
= (5.97)
Ortalama akım yük direnci ile ilikilidir, burada da yine
απ
cos2
==
R
V
R
EI m
ort (5.98)
ki iliki elenerek
+
−−
+= α
πα
παθ
πθ
αsin
2)(cos
2
2cos
cos4 f
RL (5.99)
5.91 eitliinde ifade edildii gibi, θ ’nın α ’nın bir fonksiyonu olduu bilinerek, yukarıdaki eitlik kritik indüktansın α ’nın bir fonksiyonu olduunu ifade etmektedir. ayet fonksiyon bu ekilde ifade edilirse hantal olduundan imdiki hali ile olduu gibi bırakıyoruz.
ayet kullanılacak α aralıının tamamı aratırılıyorsa, tüm aralık boyunca sürekli indüktör akımını sürdürecek L’nin deeri bulunabilir. ekil 5.33 sürekli indüktör akımını sürdürmek için gerekli kritik indüktansın α ile nasıl deitiini göstermektedir. α 90° ye yaklaırken, sürekli indüktör akımını sürdürmek için yeterli indüktansı salamak gittikçe zorlamaktadır. ekil 5.33 deki grafik, 5.83 ve 5.99 eitliklerindeki iki α aralıını birletirmektedir.
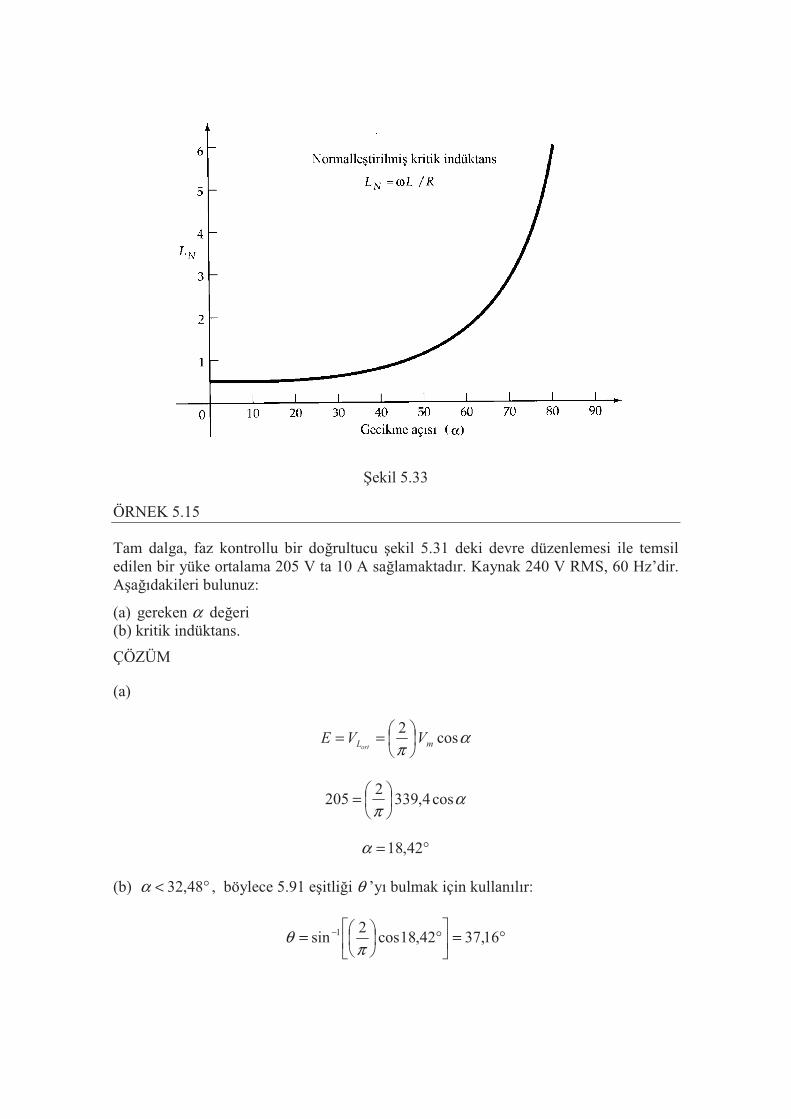
ekil 5.33
ÖRNEK 5.15
Tam dalga, faz kontrollu bir dorultucu ekil 5.31 deki devre düzenlemesi ile temsil edilen bir yüke ortalama 205 V ta 10 A salamaktadır. Kaynak 240 V RMS, 60 Hz’dir. Aaıdakileri bulunuz:
(a) gereken α deeri (b) kritik indüktans.
ÇÖZÜM
(a)
απ
cos2
mL VVEort
==
απ
cos4,3392
205
=
°= 42,18α
(b) °< 48,32α , böylece 5.91 eitlii θ ’yı bulmak için kullanılır:
°=
°
= − 16,3742,18cos
2sin 1
πθ
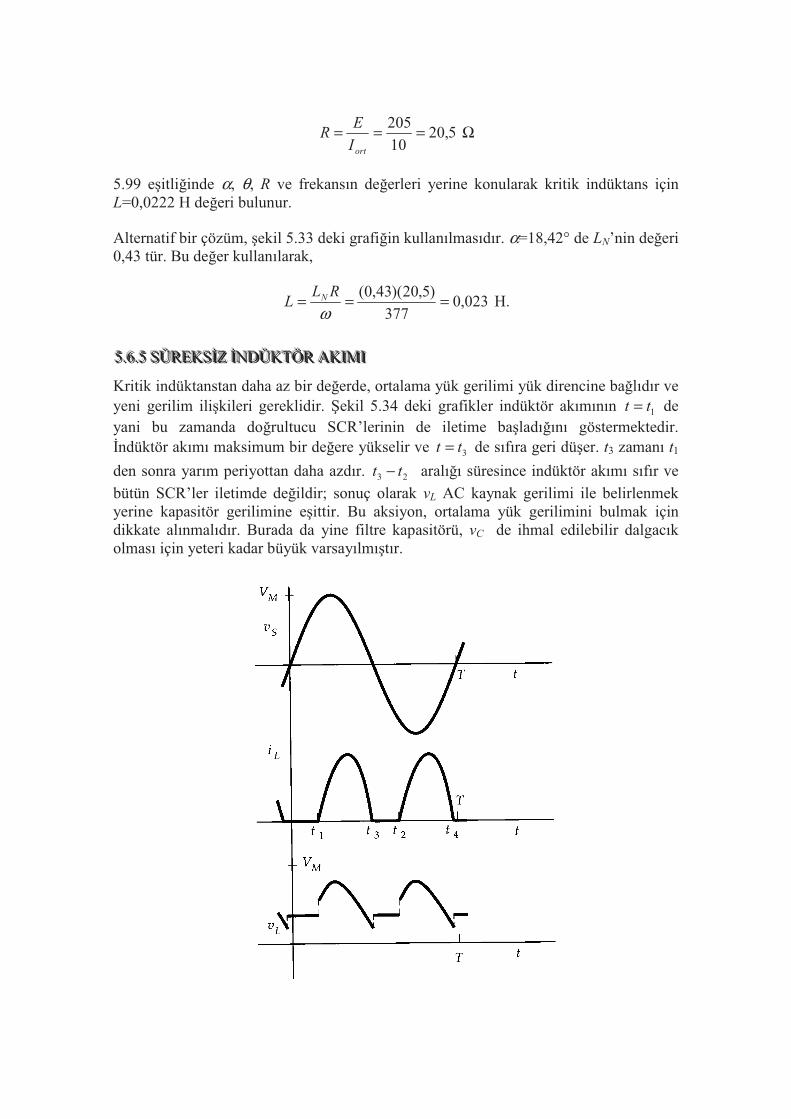
5,2010
205===
ortI
ER Ω
5.99 eitliinde α, θ, R ve frekansın deerleri yerine konularak kritik indüktans için L=0,0222 H deeri bulunur.
Alternatif bir çözüm, ekil 5.33 deki grafiin kullanılmasıdır. α=18,42° de LN’nin deeri 0,43 tür. Bu deer kullanılarak,
023,0377
)5,20)(43,0(===
ω
RLL N H.
555...666...555 SSSÜÜÜRRREEEKKKSSSZZZ NNNDDDÜÜÜKKKTTTÖÖÖRRR AAAKKKIIIMMMIII
Kritik indüktanstan daha az bir deerde, ortalama yük gerilimi yük direncine balıdır ve yeni gerilim ilikileri gereklidir. ekil 5.34 deki grafikler indüktör akımının 1tt = de
yani bu zamanda dorultucu SCR’lerinin de iletime baladıını göstermektedir. ndüktör akımı maksimum bir deere yükselir ve 3tt = de sıfıra geri düer. t3 zamanı t1
den sonra yarım periyottan daha azdır. 23 tt − aralıı süresince indüktör akımı sıfır ve
bütün SCR’ler iletimde deildir; sonuç olarak vL AC kaynak gerilimi ile belirlenmek yerine kapasitör gerilimine eittir. Bu aksiyon, ortalama yük gerilimini bulmak için dikkate alınmalıdır. Burada da yine filtre kapasitörü, vC de ihmal edilebilir dalgacık olması için yeteri kadar büyük varsayılmıtır.

ekil 5.34
ndüktör akımını bulmak için, ilgili diferansiyel eitlik çözülür. Önce, gerilim eitlii ekil 5.28 deki devre kullanılarak 31 tt − aralıı için yazılır
Evv XS += (5.100)
Edt
diLtV L
m +
=ωsin (5.101)
L
EtV
dt
di mL −=
ωsin (5.102)
−=
t
t
mL dt
L
EtVti
1
sin)(
ω (5.103)
)()coscos()( 11 ttL
Ett
L
Vti m
L −
−+−
= ωω
ω (5.104)
3tt = de )(tiL sıfıra gider. 5.104 eitliindeki akım sıfıra eitlenir ve 3t için bir ifade
bulunur:
)()coscos(0 1313 ttL
Ett
L
Vm −
−+−
= ωω
ω (5.105)
veya
)cos(cos 3113 ttE
Vtt m ωωωω −
=− (5.106)
1tω ’in deeri α açısıdır. 3tω ’ün deeri 5.107 eitliinde verildii gibi, β açısı olarak
saptanırsa:
)cos(cos βααβ −
=−
E
Vm (5.107)
Biraz daha sadeletirme için, γαβ =− yazılır ve normalletirme amacıyla mV
E
m
=
konulursa:
m
βαγ
coscos −= (5.108)
5.108 eitliindeki iliki sayısal olarak çözülebilir. Sonuçlar, olabilecek deiik çalıma artları ile ekil 5.35 de sunulmaktadır.
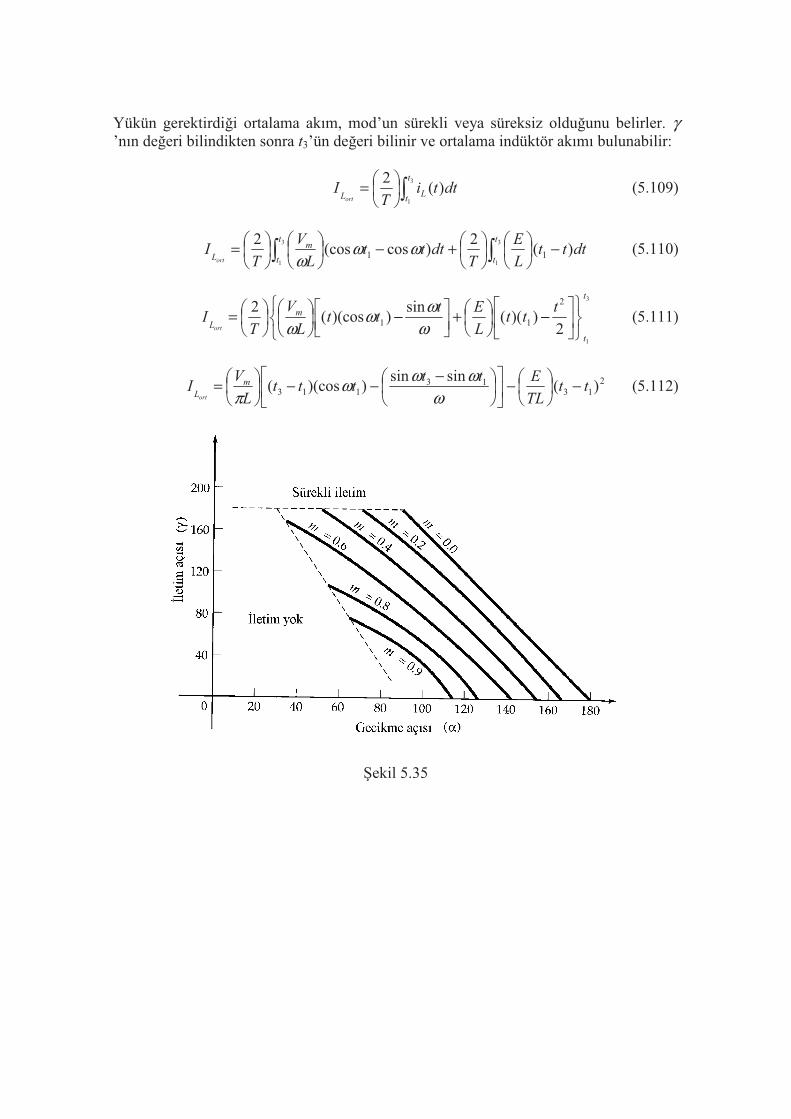
Yükün gerektirdii ortalama akım, mod’un sürekli veya süreksiz olduunu belirler. γ’nın deeri bilindikten sonra t3’ün deeri bilinir ve ortalama indüktör akımı bulunabilir:
=
3
1
)(2 t
tLL
dttiT
Iort
(5.109)
−
+−
=
3
1
3
1
)(2
)cos(cos2
11
t
t
t
t
m
Ldttt
L
E
Tdttt
L
V
TI
ort
ωωω
(5.110)
3
1
2))((
sin))(cos(
2 2
11
t
t
m
L
ttt
L
Ettt
L
V
TI
ort
−
+
−
=
ω
ωω
ω (5.111)
213
13113 )(
sinsin))(cos( tt
TL
Ettttt
L
VI m
Lort
−
−
−−−
=
ω
ωωω
π (5.112)
ekil 5.35
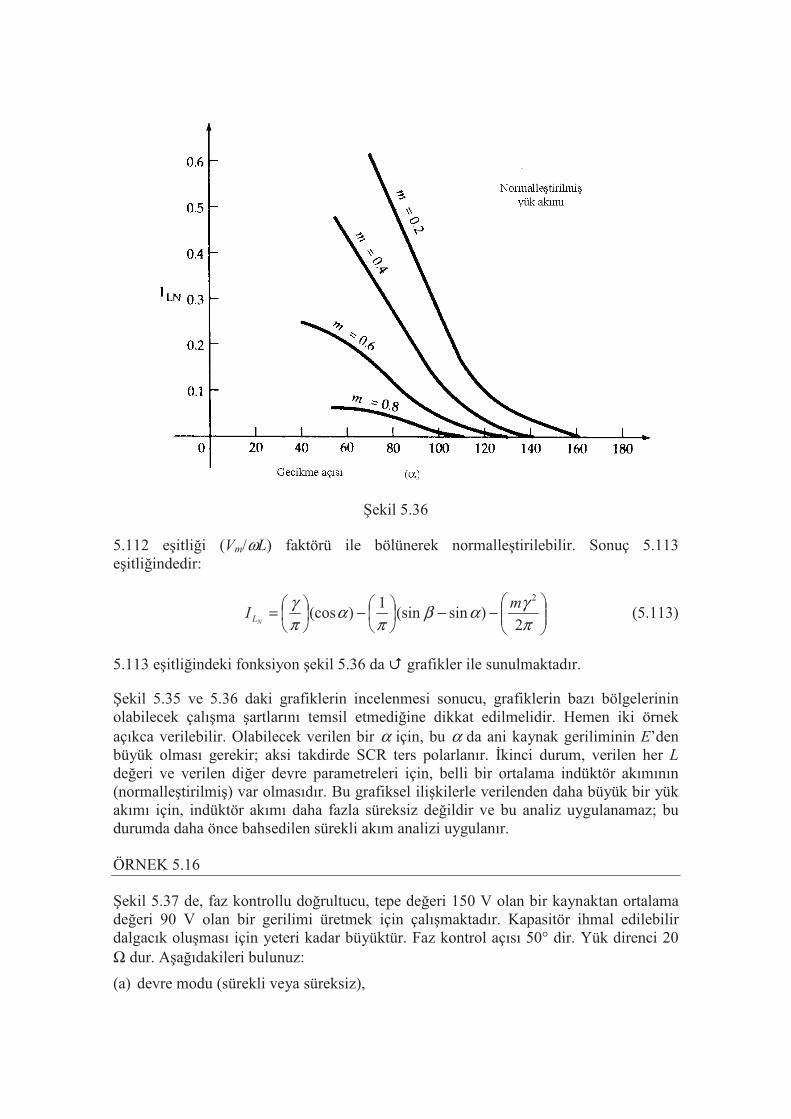
ekil 5.36
5.112 eitlii (Vm/ωL) faktörü ile bölünerek normalletirilebilir. Sonuç 5.113 eitliindedir:
−−
−
=
π
γαβ
πα
π
γ
2)sin(sin
1)(cos
2mI
NL (5.113)
5.113 eitliindeki fonksiyon ekil 5.36 da grafikler ile sunulmaktadır.
ekil 5.35 ve 5.36 daki grafiklerin incelenmesi sonucu, grafiklerin bazı bölgelerinin olabilecek çalıma artlarını temsil etmediine dikkat edilmelidir. Hemen iki örnek açıkca verilebilir. Olabilecek verilen bir α için, bu α da ani kaynak geriliminin E’den büyük olması gerekir; aksi takdirde SCR ters polarlanır. kinci durum, verilen her L
deeri ve verilen dier devre parametreleri için, belli bir ortalama indüktör akımının (normalletirilmi) var olmasıdır. Bu grafiksel ilikilerle verilenden daha büyük bir yük akımı için, indüktör akımı daha fazla süreksiz deildir ve bu analiz uygulanamaz; bu durumda daha önce bahsedilen sürekli akım analizi uygulanır.
ÖRNEK 5.16
ekil 5.37 de, faz kontrollu dorultucu, tepe deeri 150 V olan bir kaynaktan ortalama deeri 90 V olan bir gerilimi üretmek için çalımaktadır. Kapasitör ihmal edilebilir dalgacık oluması için yeteri kadar büyüktür. Faz kontrol açısı 50° dir. Yük direnci 20 Ω dur. Aaıdakileri bulunuz:
(a) devre modu (sürekli veya süreksiz),
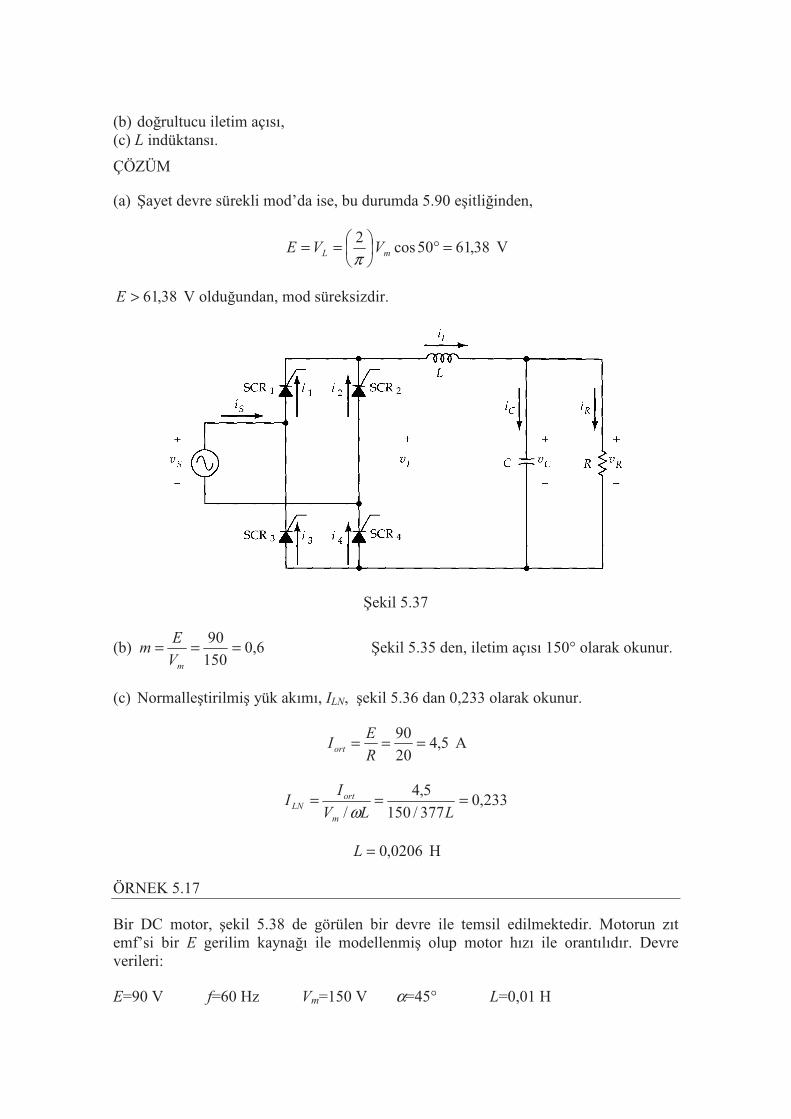
(b) dorultucu iletim açısı, (c) L indüktansı.
ÇÖZÜM
(a) ayet devre sürekli mod’da ise, bu durumda 5.90 eitliinden,
38,6150cos2
=°
== mL VVE
π V
38,61>E V olduundan, mod süreksizdir.
ekil 5.37
(b) 6,0150
90===
mV
Em ekil 5.35 den, iletim açısı 150° olarak okunur.
(c) Normalletirilmi yük akımı, ILN, ekil 5.36 dan 0,233 olarak okunur.
5,420
90===
R
EIort A
233,0377/150
5,4
/===
LLV
II
m
ortLN
ω
0206,0=L H
ÖRNEK 5.17
Bir DC motor, ekil 5.38 de görülen bir devre ile temsil edilmektedir. Motorun zıt emf’si bir E gerilim kaynaı ile modellenmi olup motor hızı ile orantılıdır. Devre verileri:
E=90 V f=60 Hz Vm=150 V α=45° L=0,01 H
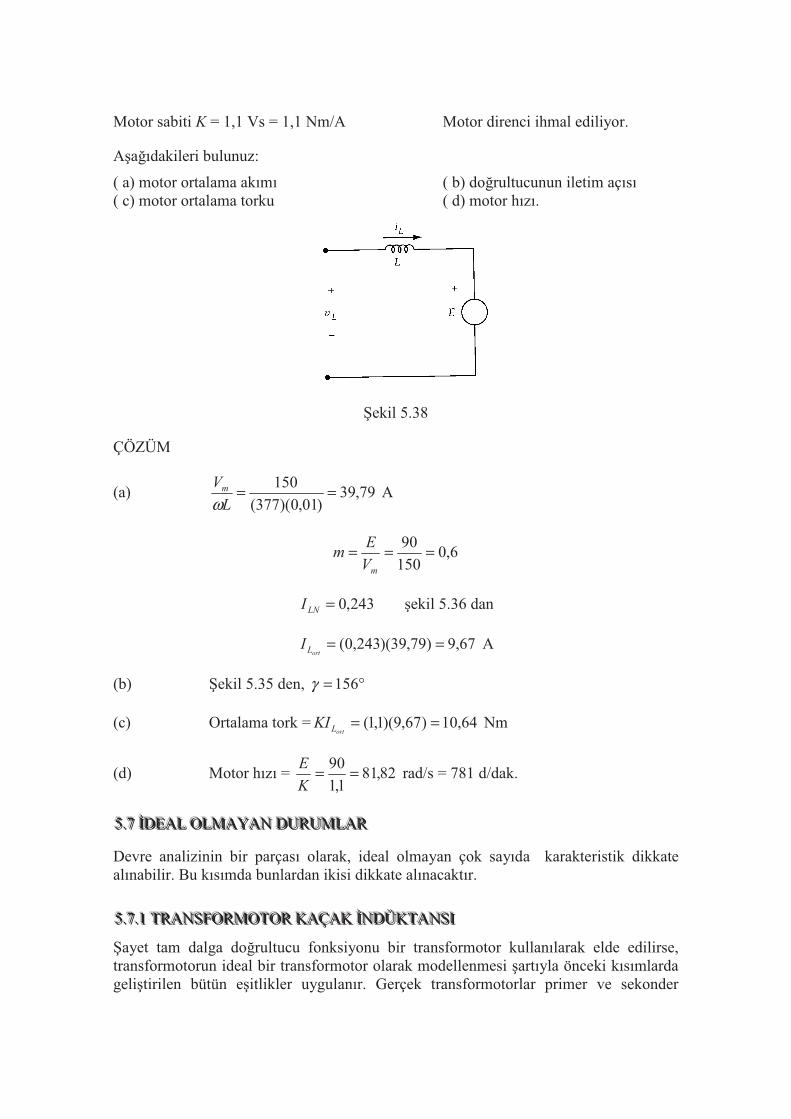
Motor sabiti K = 1,1 Vs = 1,1 Nm/A Motor direnci ihmal ediliyor.
Aaıdakileri bulunuz:
( a) motor ortalama akımı ( b) dorultucunun iletim açısı ( c) motor ortalama torku ( d) motor hızı.
ekil 5.38
ÇÖZÜM
(a) 79,39)01,0)(377(
150==
L
Vm
ω A
6,0150
90===
mV
Em
243,0=LNI ekil 5.36 dan
67,9)79,39)(243,0( ==ortLI A
(b) ekil 5.35 den, °= 156γ
(c) Ortalama tork = 64,10)67,9)(1,1( ==ortLKI Nm
(d) Motor hızı = 82,811,1
90==
K
E rad/s = 781 d/dak.
555...777 DDDEEEAAALLL OOOLLLMMMAAAYYYAAANNN DDDUUURRRUUUMMMLLLAAARRR
Devre analizinin bir parçası olarak, ideal olmayan çok sayıda karakteristik dikkate alınabilir. Bu kısımda bunlardan ikisi dikkate alınacaktır.
555...777...111 TTTRRRAAANNNSSSFFFOOORRRMMMOOOTTTOOORRR KKKAAAÇÇÇAAAKKK NNNDDDÜÜÜKKKTTTAAANNNSSSIII
ayet tam dalga dorultucu fonksiyonu bir transformotor kullanılarak elde edilirse, transformotorun ideal bir transformotor olarak modellenmesi artıyla önceki kısımlarda gelitirilen bütün eitlikler uygulanır. Gerçek transformotorlar primer ve sekonder
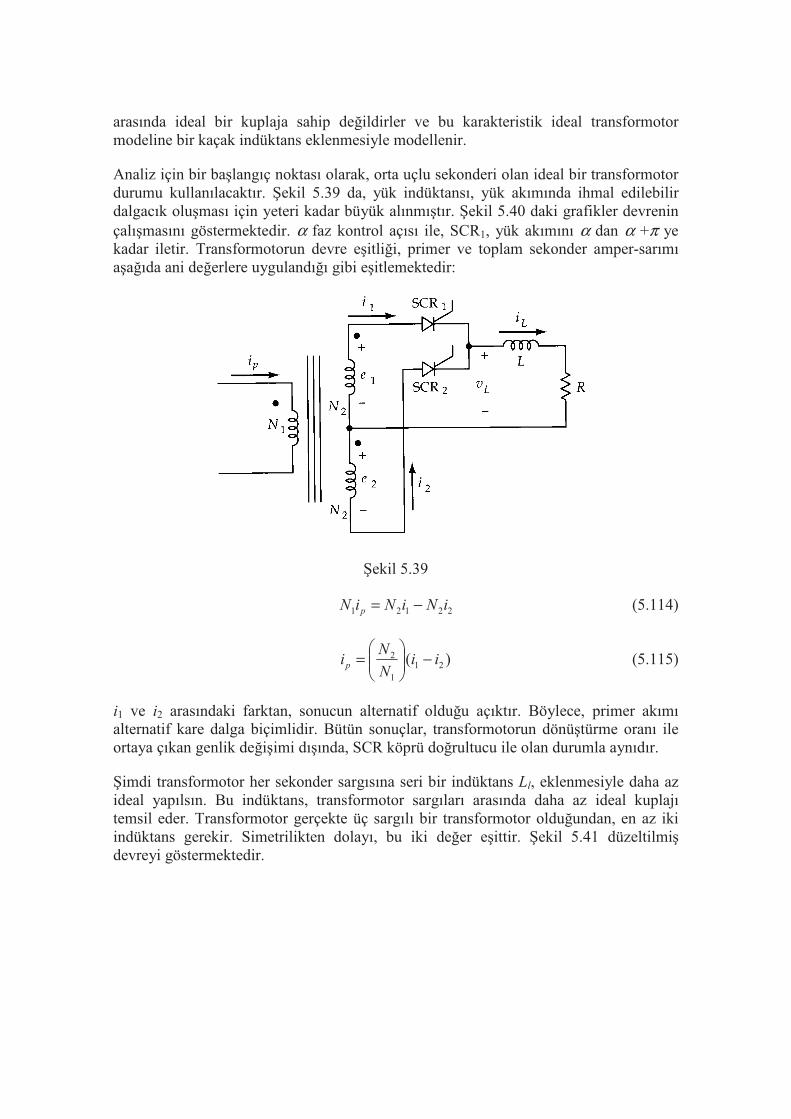
arasında ideal bir kuplaja sahip deildirler ve bu karakteristik ideal transformotor modeline bir kaçak indüktans eklenmesiyle modellenir.
Analiz için bir balangıç noktası olarak, orta uçlu sekonderi olan ideal bir transformotor durumu kullanılacaktır. ekil 5.39 da, yük indüktansı, yük akımında ihmal edilebilir dalgacık oluması için yeteri kadar büyük alınmıtır. ekil 5.40 daki grafikler devrenin çalımasını göstermektedir. α faz kontrol açısı ile, SCR1, yük akımını α dan α +π ye kadar iletir. Transformotorun devre eitlii, primer ve toplam sekonder amper-sarımı aaıda ani deerlere uygulandıı gibi eitlemektedir:
ekil 5.39
22121 iNiNiN p −= (5.114)
)( 21
1
2 iiN
Nip −
= (5.115)
i1 ve i2 arasındaki farktan, sonucun alternatif olduu açıktır. Böylece, primer akımı alternatif kare dalga biçimlidir. Bütün sonuçlar, transformotorun dönütürme oranı ile ortaya çıkan genlik deiimi dıında, SCR köprü dorultucu ile olan durumla aynıdır.
imdi transformotor her sekonder sargısına seri bir indüktans Ll, eklenmesiyle daha az ideal yapılsın. Bu indüktans, transformotor sargıları arasında daha az ideal kuplajı temsil eder. Transformotor gerçekte üç sargılı bir transformotor olduundan, en az iki indüktans gerekir. Simetrilikten dolayı, bu iki deer eittir. ekil 5.41 düzeltilmidevreyi göstermektedir.
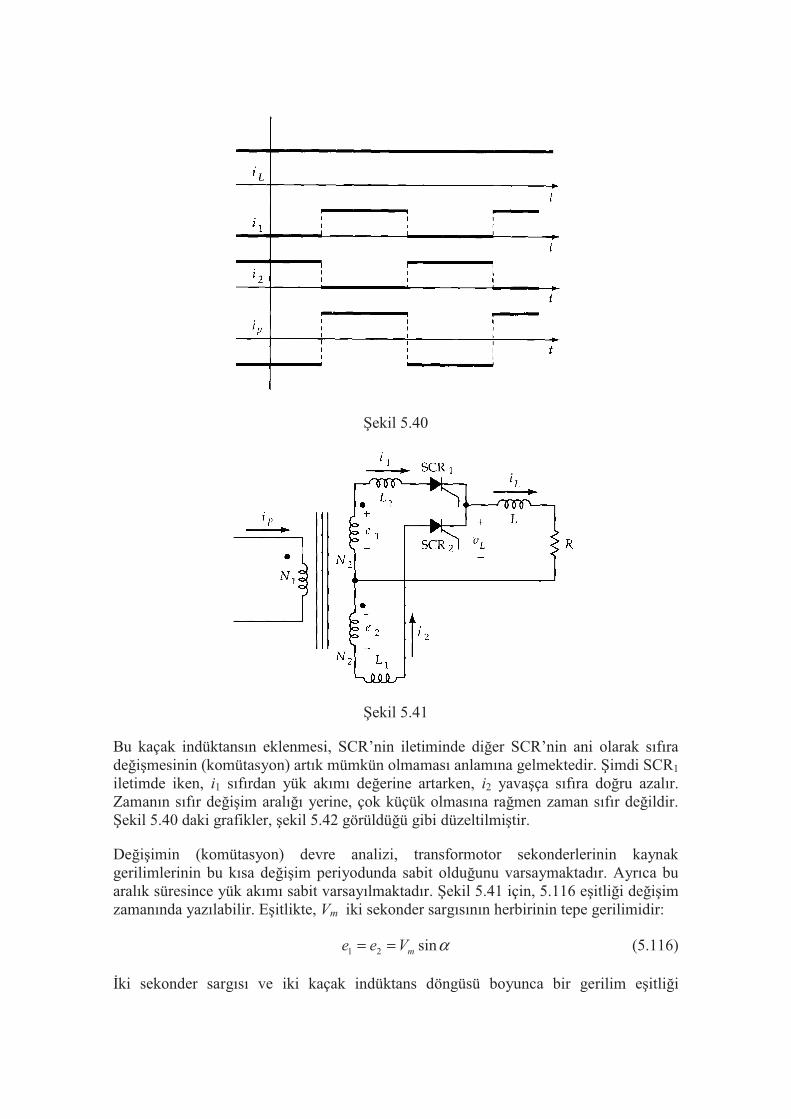
ekil 5.40
ekil 5.41
Bu kaçak indüktansın eklenmesi, SCR’nin iletiminde dier SCR’nin ani olarak sıfıra deimesinin (komütasyon) artık mümkün olmaması anlamına gelmektedir. imdi SCR1
iletimde iken, i1 sıfırdan yük akımı deerine artarken, i2 yavaça sıfıra doru azalır. Zamanın sıfır deiim aralıı yerine, çok küçük olmasına ramen zaman sıfır deildir. ekil 5.40 daki grafikler, ekil 5.42 görüldüü gibi düzeltilmitir.
Deiimin (komütasyon) devre analizi, transformotor sekonderlerinin kaynak gerilimlerinin bu kısa deiim periyodunda sabit olduunu varsaymaktadır. Ayrıca bu aralık süresince yük akımı sabit varsayılmaktadır. ekil 5.41 için, 5.116 eitlii deiim zamanında yazılabilir. Eitlikte, Vm iki sekonder sargısının herbirinin tepe gerilimidir:
αsin21 mVee == (5.116)
ki sekonder sargısı ve iki kaçak indüktans döngüsü boyunca bir gerilim eitlii
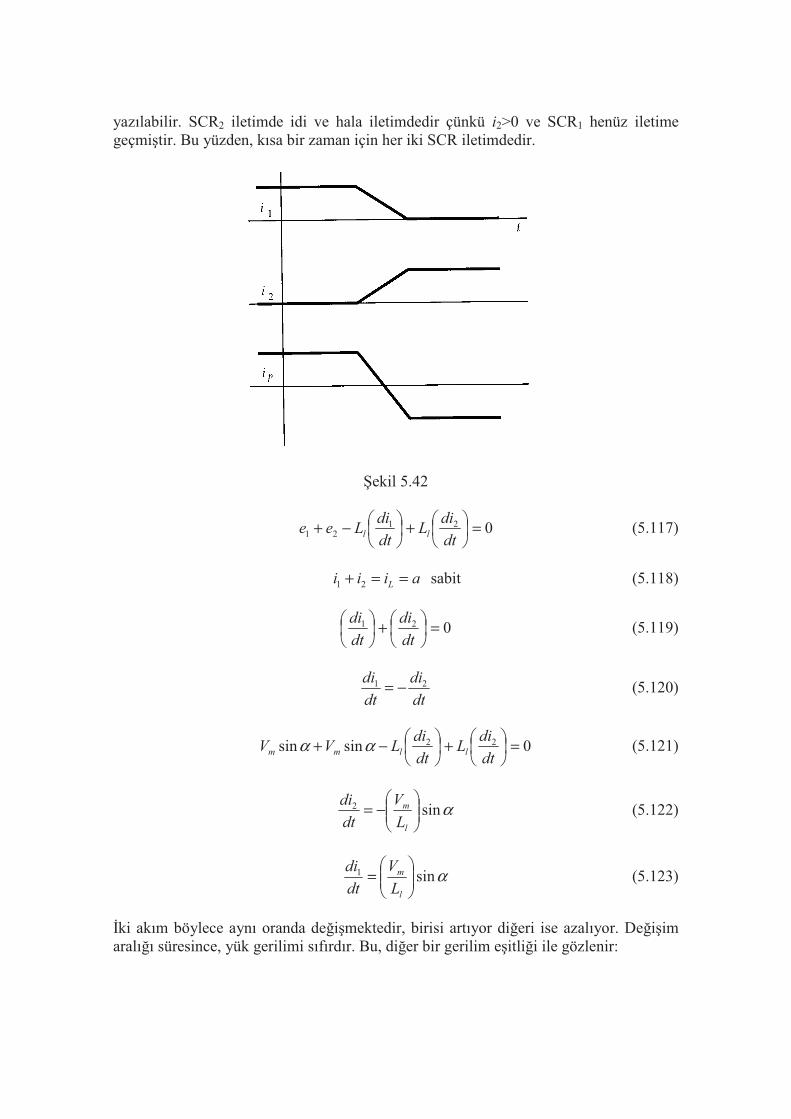
yazılabilir. SCR2 iletimde idi ve hala iletimdedir çünkü i2>0 ve SCR1 henüz iletime geçmitir. Bu yüzden, kısa bir zaman için her iki SCR iletimdedir.
ekil 5.42
02121 =
+
−+
dt
diL
dt
diLee ll (5.117)
aiii L ==+ 21 sabit (5.118)
021 =
+
dt
di
dt
di (5.119)
dt
di
dt
di 21 −= (5.120)
0sinsin 22 =
+
−+
dt
diL
dt
diLVV llmm αα (5.121)
αsin2
−=
l
m
L
V
dt
di (5.122)
αsin1
=
l
m
L
V
dt
di (5.123)
ki akım böylece aynı oranda deimektedir, birisi artıyor dieri ise azalıyor. Deiim aralıı süresince, yük gerilimi sıfırdır. Bu, dier bir gerilim eitlii ile gözlenir:

011 =+
− Ll v
dt
diLe (5.124)
dtdi /1 ’nin deeri yerine konularak, akımlar deiirken vL sıfır olarak bulunur. Bu
deiimin olutuu süredeki zaman aralıı, deiim zamanındaki yük akımına balıdır ve 5.125 eitlii ile verilir:
dtdi
It L
/1
=∆ (5.125)
αsinm
lL
V
LIt =∆ (5.126)
Net sonuç, vL zaman erisi altındaki alanın bir kısmının kaybolması ve ortalama yük geriliminin azalmasıdır. ekil 5.43 deki grafik bu etkiyi göstermektedir, anlaılması bakımından abartılı çizilmitir. Gölgeli alan kayıp alandır. Bunun net azalması 5.127 eitliinde verilmitir:
lLm LItVA =∆=∆ ))(sin( α (5.127)
ekil 5.43
Tam dalga durumu için ortalama gerilimdeki azalma 5.129 eitliinde verilmitir:
2/T
AVL
∆=∆ (5.128)
=∆
T
LIV ıL
L 2 (5.129)
Sonuç yük akımına balıdır, böylece ortalama gerilim aaı düen bir karakteristie sahiptir. Bu, devre modeline hiç direnç eklenmemi olsa bile kaynak direncinin etkisi ile aynıdır.
Benzer etki tam dalga bir köprü dorultucuyu besleyen iki sargılı bir transformotor

durumunda oluur. 5.129 eitlii, Ll primer ve sekonder sargıları arasındaki kaçak reaktans olarak, bu duruma da uygulanır.
ÖRNEK 5.18
Orta uçlu tam dalga bir dorultucu 60 Hz’lik bir kaynaktan α=40° de bir indüktif yüke 20 A vermektedir. Her sekonder sargısındaki kaçak indüktans 1 mH dir. Dorultucudaki tepe yük gerilimi 205 V tur. Aaıdakileri bulunuz:
(a) transformotorun kaçak indüktansından kaynaklanan çıkı gerilimindeki azalma, (b) çıkı gerilimi.
ÇÖZÜM
(a) 4,201667,0
)001,0)(20()2(2 ==
=∆
T
LIV ıL
L V
(b) deal olarak
100)40)(cos205(2
=°
=
πLV V
(a) ıkkındaki etki dahil edilince,
6,974,2100 =−=LV V
Bu yüzden, yüke ideal 100 V salamak yerine, gerçek yük gerilimi sadece 97,6 V’tur. Bu, bir kapalı döngü kontrol sisteminde α’nın deerinde küçük bir azalma ile düzeltilebilir.
555...777...222 NNNDDDÜÜÜKKKTTTÖÖÖRRR DDDRRREEENNNCCC
Önceki bütün analizlerde, indüktör ya ideal olarak veya yük direncine seri olarak gözönüne alındı, burada indüktör direnci de dahil edilebilirdi. Yüksek verim bakımından, indüktörler ekseriyetle küçük dirence sahip ve dolayısıyle küçük kayıplar ile tasarımlanırlar. Bu kısımda, bu direncin etkisi incelenmektedir.
ekil 5.44 analizi yapılacak devreyi göstermektedir. Sadece sürekli akım modu gözönüne alınmaktadır. Ani gerilim eitlii 5.130 eitliinde görüldüü gibi yazılabilir:
Evvv XRL ++= (5.130)
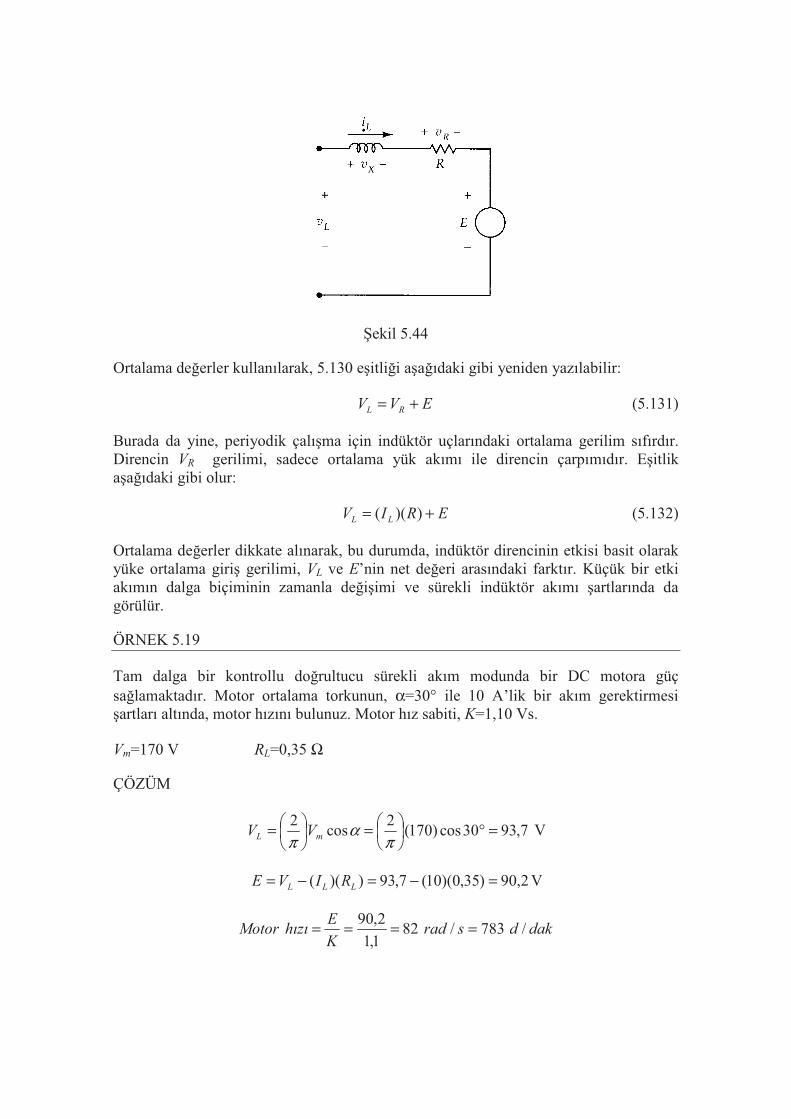
ekil 5.44
Ortalama deerler kullanılarak, 5.130 eitlii aaıdaki gibi yeniden yazılabilir:
EVV RL += (5.131)
Burada da yine, periyodik çalıma için indüktör uçlarındaki ortalama gerilim sıfırdır. Direncin VR gerilimi, sadece ortalama yük akımı ile direncin çarpımıdır. Eitlik aaıdaki gibi olur:
ERIV LL += ))(( (5.132)
Ortalama deerler dikkate alınarak, bu durumda, indüktör direncinin etkisi basit olarak yüke ortalama giri gerilimi, VL ve E’nin net deeri arasındaki farktır. Küçük bir etki akımın dalga biçiminin zamanla deiimi ve sürekli indüktör akımı artlarında da görülür.
ÖRNEK 5.19
Tam dalga bir kontrollu dorultucu sürekli akım modunda bir DC motora güç salamaktadır. Motor ortalama torkunun, α=30° ile 10 A’lik bir akım gerektirmesi artları altında, motor hızını bulunuz. Motor hız sabiti, K=1,10 Vs.
Vm=170 V RL=0,35 Ω
ÇÖZÜM
7,9330cos)170(2
cos2
=°
=
=
πα
πmL VV V
2,90)35,0)(10(7,93))(( =−=−= LLL RIVE V
dakdsradK
EhızıMotor /783/82
1,1
2,90====
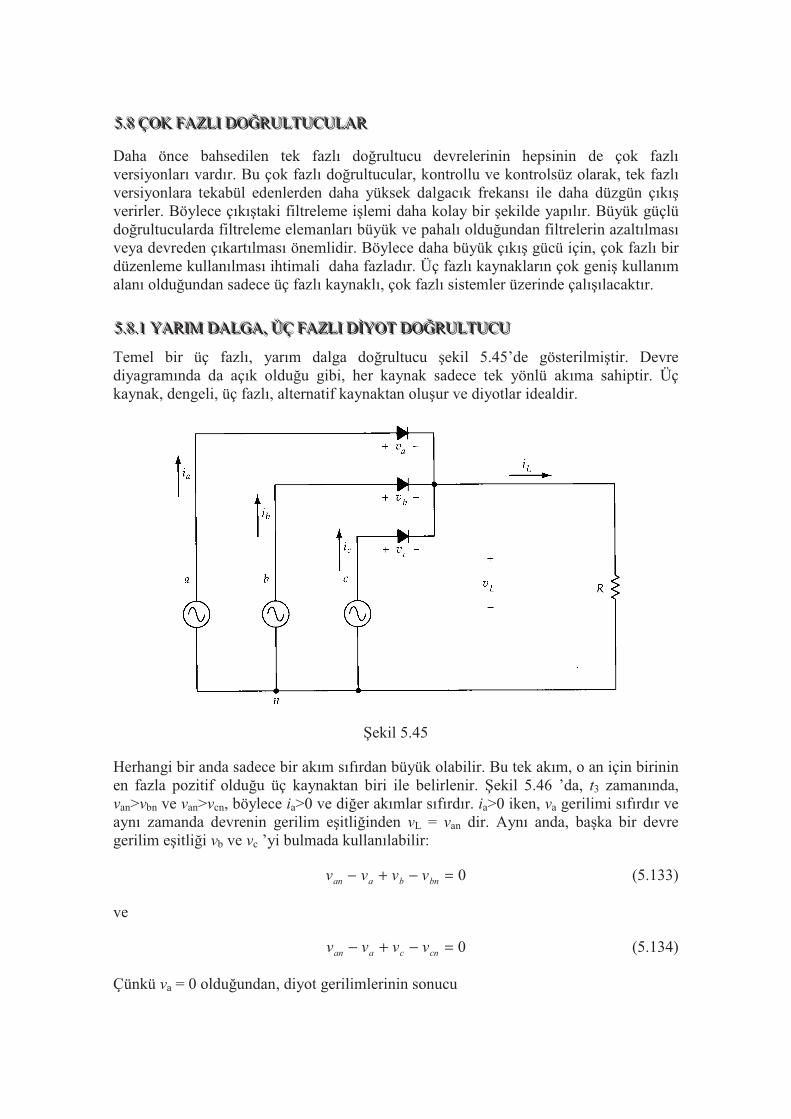
555...888 ÇÇÇOOOKKK FFFAAAZZZLLLIII DDDOOORRRUUULLLTTTUUUCCCUUULLLAAARRR
Daha önce bahsedilen tek fazlı dorultucu devrelerinin hepsinin de çok fazlı versiyonları vardır. Bu çok fazlı dorultucular, kontrollu ve kontrolsüz olarak, tek fazlı versiyonlara tekabül edenlerden daha yüksek dalgacık frekansı ile daha düzgün çıkıverirler. Böylece çıkıtaki filtreleme ilemi daha kolay bir ekilde yapılır. Büyük güçlü dorultucularda filtreleme elemanları büyük ve pahalı olduundan filtrelerin azaltılması veya devreden çıkartılması önemlidir. Böylece daha büyük çıkı gücü için, çok fazlı bir düzenleme kullanılması ihtimali daha fazladır. Üç fazlı kaynakların çok geni kullanım alanı olduundan sadece üç fazlı kaynaklı, çok fazlı sistemler üzerinde çalıılacaktır.
555...888...111 YYYAAARRRIIIMMM DDDAAALLLGGGAAA,,, ÜÜÜÇÇÇ FFFAAAZZZLLLIII DDDYYYOOOTTT DDDOOORRRUUULLLTTTUUUCCCUUU
Temel bir üç fazlı, yarım dalga dorultucu ekil 5.45’de gösterilmitir. Devre diyagramında da açık olduu gibi, her kaynak sadece tek yönlü akıma sahiptir. Üç kaynak, dengeli, üç fazlı, alternatif kaynaktan oluur ve diyotlar idealdir.
ekil 5.45
Herhangi bir anda sadece bir akım sıfırdan büyük olabilir. Bu tek akım, o an için birinin en fazla pozitif olduu üç kaynaktan biri ile belirlenir. ekil 5.46 ’da, t3 zamanında, van>vbn ve van>vcn, böylece ia>0 ve dier akımlar sıfırdır. ia>0 iken, va gerilimi sıfırdır ve aynı zamanda devrenin gerilim eitliinden vL = van dir. Aynı anda, baka bir devre gerilim eitlii vb ve vc ’yi bulmada kullanılabilir:
v v v van a b bn− + − = 0 (5.133)
ve
v v v van a c cn− + − = 0 (5.134)
Çünkü va = 0 olduundan, diyot gerilimlerinin sonucu
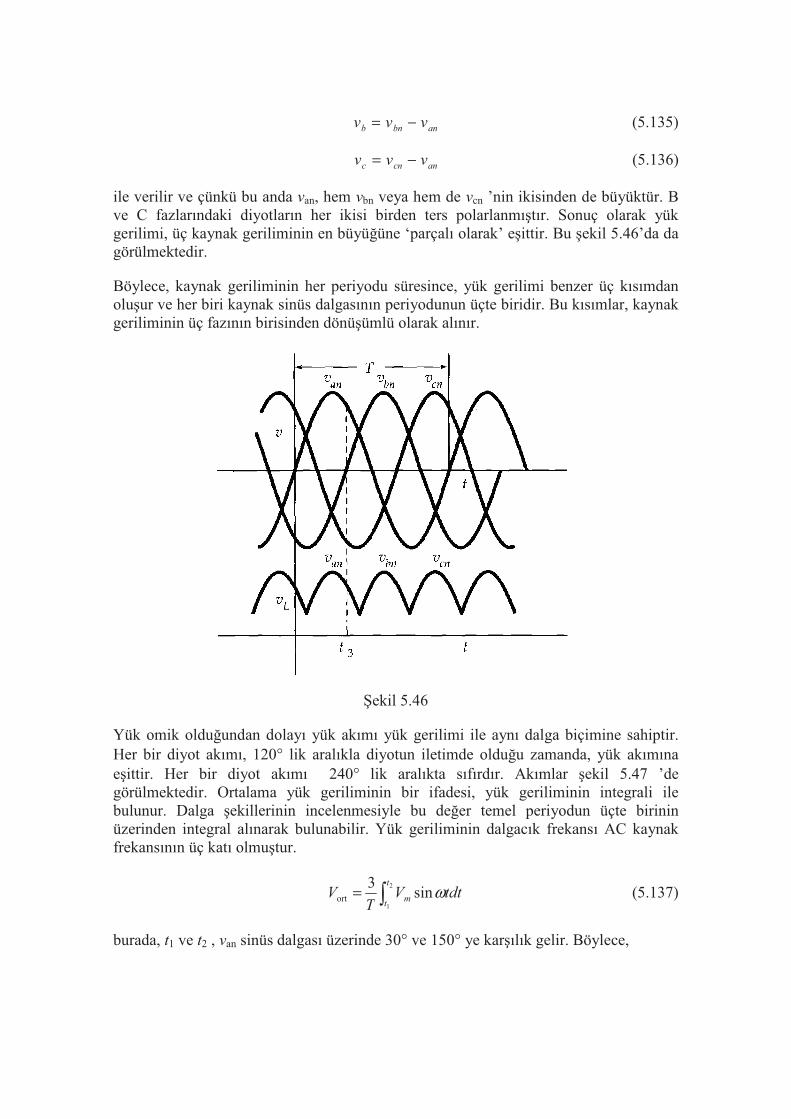
v v vb bn an= − (5.135)
v v vc cn an= − (5.136)
ile verilir ve çünkü bu anda van, hem vbn veya hem de vcn ’nin ikisinden de büyüktür. B ve C fazlarındaki diyotların her ikisi birden ters polarlanmıtır. Sonuç olarak yük gerilimi, üç kaynak geriliminin en büyüüne ‘parçalı olarak’ eittir. Bu ekil 5.46’da da görülmektedir.
Böylece, kaynak geriliminin her periyodu süresince, yük gerilimi benzer üç kısımdan oluur ve her biri kaynak sinüs dalgasının periyodunun üçte biridir. Bu kısımlar, kaynak geriliminin üç fazının birisinden dönüümlü olarak alınır.
ekil 5.46
Yük omik olduundan dolayı yük akımı yük gerilimi ile aynı dalga biçimine sahiptir. Her bir diyot akımı, 120° lik aralıkla diyotun iletimde olduu zamanda, yük akımına eittir. Her bir diyot akımı 240° lik aralıkta sıfırdır. Akımlar ekil 5.47 ’de görülmektedir. Ortalama yük geriliminin bir ifadesi, yük geriliminin integrali ile bulunur. Dalga ekillerinin incelenmesiyle bu deer temel periyodun üçte birinin üzerinden integral alınarak bulunabilir. Yük geriliminin dalgacık frekansı AC kaynak frekansının üç katı olmutur.
tdtVT
Vt
tm ωsin
3 2
1ort = (5.137)
burada, t1 ve t2 , van sinüs dalgası üzerinde 30° ve 150° ye karılık gelir. Böylece,
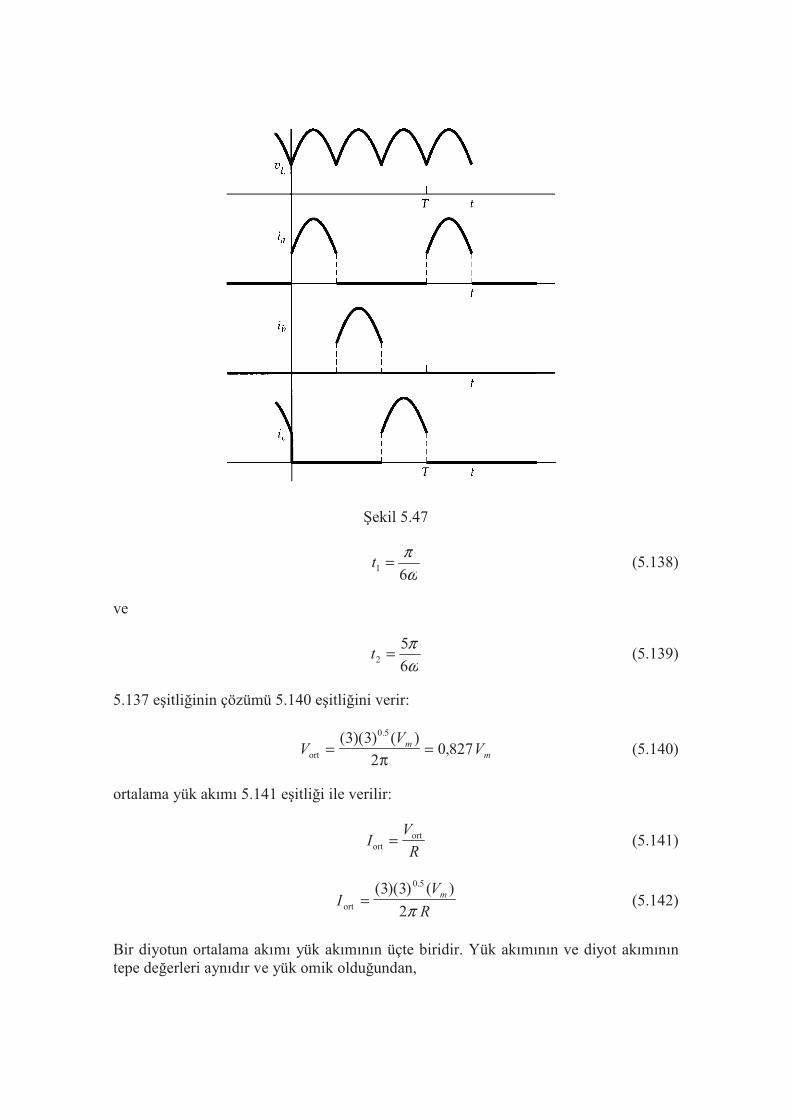
ekil 5.47
ω
π
61 =t (5.138)
ve
ω
π
6
52 =t (5.139)
5.137 eitliinin çözümü 5.140 eitliini verir:
VV
Vm
mort = =( )( ) ( )
,.3 3
20 827
0 5
π (5.140)
ortalama yük akımı 5.141 eitlii ile verilir:
IV
Rortort= (5.141)
IV
R
m
ort =( )( ) ( ).3 3
2
0 5
π (5.142)
Bir diyotun ortalama akımı yük akımının üçte biridir. Yük akımının ve diyot akımının tepe deerleri aynıdır ve yük omik olduundan,
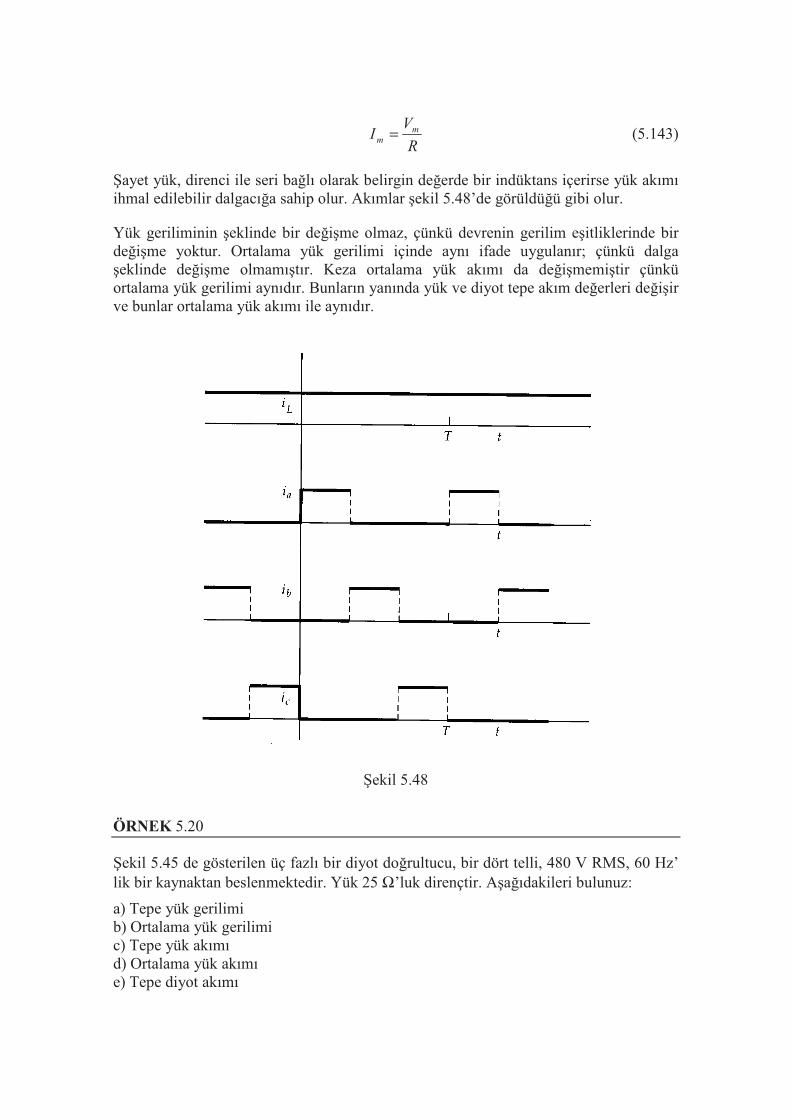
IV
Rm
m= (5.143)
ayet yük, direnci ile seri balı olarak belirgin deerde bir indüktans içerirse yük akımı ihmal edilebilir dalgacıa sahip olur. Akımlar ekil 5.48’de görüldüü gibi olur.
Yük geriliminin eklinde bir deime olmaz, çünkü devrenin gerilim eitliklerinde bir deime yoktur. Ortalama yük gerilimi içinde aynı ifade uygulanır; çünkü dalga eklinde deime olmamıtır. Keza ortalama yük akımı da deimemitir çünkü ortalama yük gerilimi aynıdır. Bunların yanında yük ve diyot tepe akım deerleri deiir ve bunlar ortalama yük akımı ile aynıdır.
ekil 5.48
ÖRNEK 5.20
ekil 5.45 de gösterilen üç fazlı bir diyot dorultucu, bir dört telli, 480 V RMS, 60 Hz’ lik bir kaynaktan beslenmektedir. Yük 25 Ω’luk dirençtir. Aaıdakileri bulunuz:
a) Tepe yük gerilimi b) Ortalama yük gerilimi c) Tepe yük akımı d) Ortalama yük akımı e) Tepe diyot akımı

f) Ters diyot tepe gerilimi g) Diyot ortalama akımı
ÇÖZÜM
a) Vm = maksimum faz-nötr gerilimi = ( , )( )
,,
1 414 480
1 732391 9= V
b) Ortalama yük gerilimi = 0 827 0 827 391 9 324 1, ( , )( , ) ,Vm = = V
c) Tepe yük akımı = IV
Rm
m= = =391 9
2515 68
,, A
d) Ortalama yük akımı = IV
Rortort= = =
324 1
2512 96
,, A
e) Tepe diyot akımı = Im = 15 68, A
f) Ters diyot tepe gerilimi, bir diyot iletimde iken oluur ve fazlar arası gerilimin tepe deeri, iletimdeki faz ve ters gerilimin hesaplanacaı faz arasında oluur:
Ters diyot tepe gerilimi = 678,8 V
Diyotun bu deerden daha fazla bir ters gerilime dayanma zorunluluu vardır. Standart deerler göz önüne alınarak bu deerin en az 800 V olması gerekir.
g) Ortalama diyot akımı =Iort
34 32= , A
ÖRNEK 5.21
Örnek 5.20 deki yüke, yük akımında ihmal edilebilecek dalgacık salayacak yeterli bir indüktans eklenmitir. Aaıdakileri bulunuz:
a) Tepe yük gerilimi b) Ortalama yük gerilimi c) Tepe yük akımı d) Ortalama yük akımı e) Tepe diyot akımı f) Ters diyot tepe gerilimi g) Diyot ortalama akımı
ÇÖZÜM
a) Tepe yük gerilimi, Örnek 5.20 ile aynı: 391,9 V
b) Ortalama yük gerilimi, Örnek 5.20 ile aynı: 324,1 V
c) Tepe yük akımı, Ortalama akım ile aynı çünkü dalgacık yok: 12,96 A

d) Ortalama yük akımı, Örnek 5.20 ile aynı: 12,96 A
e) Tepe diyot akımı, Örnek 5.20 ile aynı: 12,96 A
f) Ters diyot tepe gerilimi, Örnek 5.20 ile aynı: 678,8 V
g) Diyot ortalama akımı, Örnek 5.20 ile aynı: 4,32 A
Örnek 5.20 ve 5.21 üzerinde bir yorum: Yükün indüktif olduu devre dizaynındaki tek etki, diyot akımının tepe deerinin indüktans tarafından azaltılmasıdır. Ortalama akım, diyot dorultucu seçiminde önemli bir eleman olduundan, diyot dorultucu seçiminde indüktansın temel olarak etkisi yoktur. Büyük veya küçük hatta bilinmeyen bir deerdeki devrenin tam indüktansı pratik olarak devrenin dizaynına hiç bir etkisi yoktur.
ÖRNEK 5.22
Bu örnek için, yük akımında ihmal edilebilir dalgacık oluması için ne kadar indüktans gerekir? Örnek 5.20’deki verileri kullanınız.
ÇÖZÜM
Bu tam bir çözüm olmamakla birlikte, tasarımda kullanılı sonuçlar salar. (En düük dalgacık frekansında) ayet yük empedansının reaktans kısmı yük direncine karı büyük yapılırsa, bu durumda ihmal edilebilir dalgacık akımı vardır. Kabul edilebilir bir seçim, reaktansı, direncin 10 katı yapmaktır. En düük dalgacık frekansı 180 Hz’dir, böylece:
( )( ) ( )( ) ,2 180 10 25 0 221π L L H= =Ω
Gerçek yük geriliminin dalga biçiminin bir Fourier analizi, en düük dalgacık frekansının genlii için 0 207, Vm deerini verir. Bu frekansın tepe akımı:
IV
Z j3
3
3
0 207 391 9
25 3 60 2 0 2221
8112
251 20 323= =
+= =
( , )( , )
( )( )( )( ,
,
,,
πA
DC kısım veya ortalama akım 12,96 Amperdir. Böylece tepe dalgacık, ortalamanın % 2,5’u olmaktadır. Dalgacık sıfır deildir fakat oldukça küçüktür.
555...888...222 YYYAAARRRIIIMMM DDDAAALLLGGGAAA,,, ÜÜÜÇÇÇ FFFAAAZZZLLLIII KKKOOONNNTTTRRROOOLLLLLLUUU DDDOOORRRUUULLLTTTUUUCCCUUU
ekil 5.45 deki diyot dorultucular SCR’ler ile deitirilmitir. Burada gözönüne alınacak durumlar tek fazlı durumlara benzemektedir. lk olarak rezistif=omik yük durumu gözönüne alınacaktır. Her SCR normal zamanında sıra ile geciktirilir. ayet α<30 ise, bu durumda A fazındaki SCR, B fazındaki SCR iletime geçinceye kadar iletime devam eder. Yük gerilimi ve yük akımı hiç bir zaman sıfırdan küçük olmaz. Ortalama yük gerilimi α=0 durumuna kıyasla azalmıtır. ekil 5.49’daki grafik, zamanın bir fonksiyonu olarak gerilim ve akımları göstermektedir.

Buradada yine, ortalama yük gerilimi integral alınarak bulunur ;
dttVT
Vt
tm ωsin
3 2
1ort = (5.144)
t1 ve t2 zamanları sırasıyla (30° +α) ve (150° +α) ya karılık gelir.
( )[ ]ω
απ += 6
1t (5.145)
( )ω
απ += 6
5
2t (5.146)
5.145 ve 5.146 eitlikleri, 5.144’de yerine konularak ortalama gerilim aaıdaki gibi olur.
dttVT
V m ωωαπ
ωαπsin
3 /)6/5(
/)6/(ort +
+= (5.147)
αcos827,0ort mVV = (5.148)
Faz kontrolunun etkisi ile, 5.143 eitlikten farklı olarak, cosα teriminin eklendiine dikkat edilmelidir.
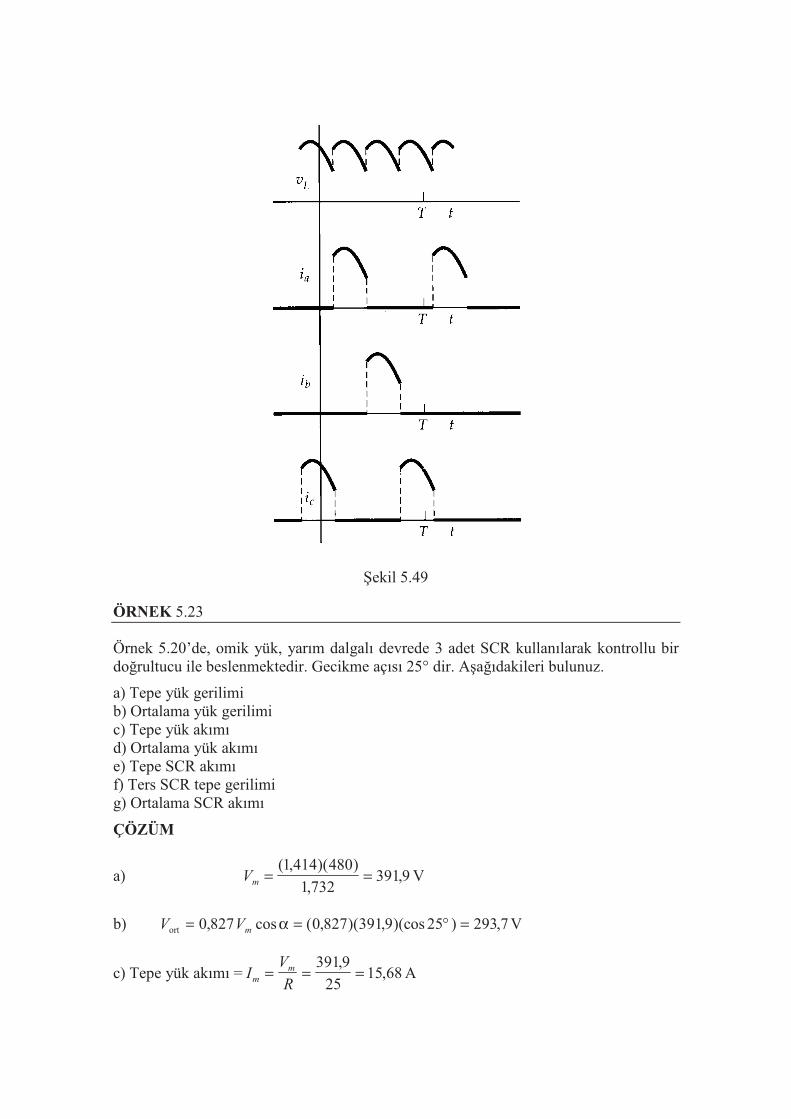
ekil 5.49
ÖRNEK 5.23
Örnek 5.20’de, omik yük, yarım dalgalı devrede 3 adet SCR kullanılarak kontrollu bir dorultucu ile beslenmektedir. Gecikme açısı 25° dir. Aaıdakileri bulunuz.
a) Tepe yük gerilimi b) Ortalama yük gerilimi c) Tepe yük akımı d) Ortalama yük akımı e) Tepe SCR akımı f) Ters SCR tepe gerilimi g) Ortalama SCR akımı
ÇÖZÜM
a) Vm = =( , )( )
,,
1 414 480
1 732391 9 V
b) V Vmort = = ° =0 827 0 827 391 9 25 293, cos ( , )( , )(cos ) ,7α V
c) Tepe yük akımı = IV
Rm
m= = =391 9
2515 68
,, A
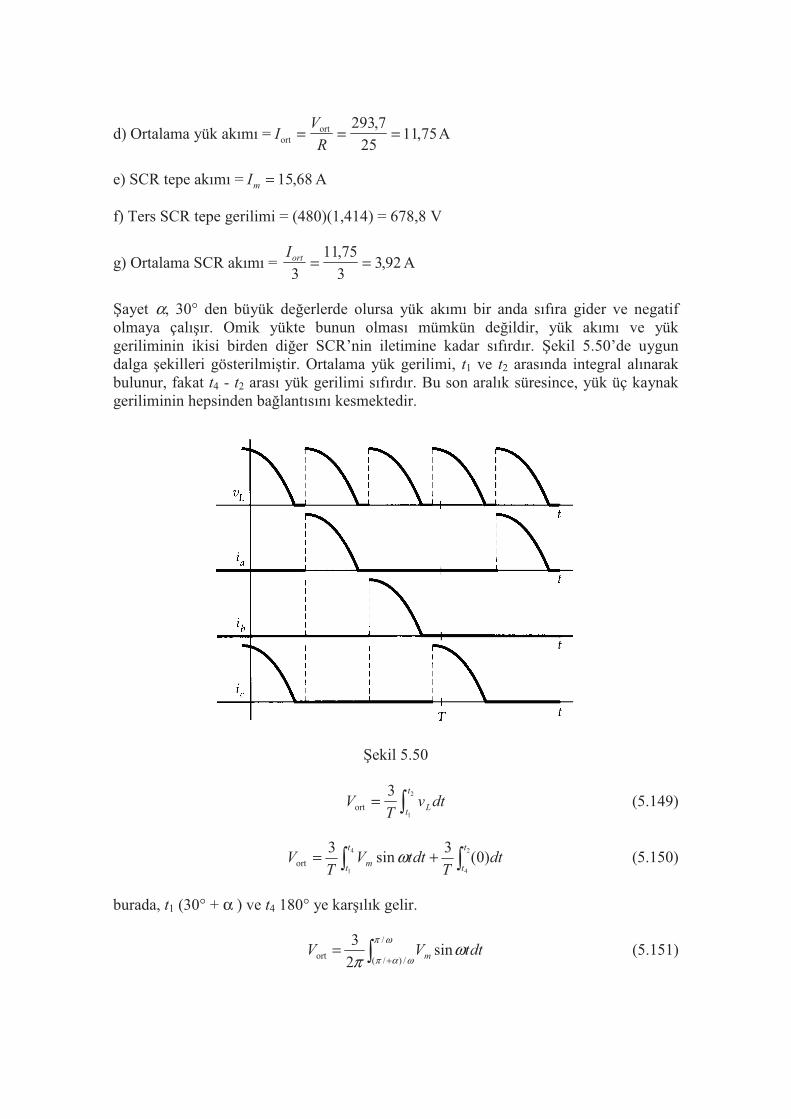
d) Ortalama yük akımı = IV
Rortort= = =
293 7
2511 75
,, A
e) SCR tepe akımı = Im = 15 68, A
f) Ters SCR tepe gerilimi = (480)(1,414) = 678,8 V
g) Ortalama SCR akımı = Iort
3
11 75
33 92= =
,, A
ayet α, 30° den büyük deerlerde olursa yük akımı bir anda sıfıra gider ve negatif olmaya çalıır. Omik yükte bunun olması mümkün deildir, yük akımı ve yük geriliminin ikisi birden dier SCR’nin iletimine kadar sıfırdır. ekil 5.50’de uygun dalga ekilleri gösterilmitir. Ortalama yük gerilimi, t1 ve t2 arasında integral alınarak bulunur, fakat t4 - t2 arası yük gerilimi sıfırdır. Bu son aralık süresince, yük üç kaynak geriliminin hepsinden balantısını kesmektedir.
ekil 5.50
VT
v dtLt
t
ort = 3
1
2
(5.149)
+=2
4
4
1
)0(3
sin3
ort
t
t
t
tm dt
TdttV
TV ω (5.150)
burada, t1 (30° + α ) ve t4 180° ye karılık gelir.
dttVV m ωπ
ωπ
ωαπsin
2
3 /
/)/(ort += (5.151)

)sin5,0cos866,01(2
3ort αα
π−+
= mV
V (5.152)
5.152 nolu eitlik, α’nın 30° ile 150° aralıında geçerlidir.
ÖRNEK 5.24
5.23 örneinde, gecikme açısı 80° olarak deitirilmitir. Yük omik kaldıından dolayı bu gecikme açısı, gerilim eitliklerinde bir deiimi gerektir. Aaıdakileri bulunuz:
a) Tepe yük gerilimi b) Ortalama yük gerilimi c) Tepe yük akımı d) Ortalama yük akımı e) Tepe SCR akımı f) Ters SCR tepe gerilimi g) Ortalama SCR akımı
ÇÖZÜM
a) SCR, kaynak geriliminin tepe deerinden sonra iletime geçtiinden, yük geriliminin tepe deeri Vm’ den daha azdır :
Tepe yük gerilimi = Vm sin( ) ( , )(sin ) ,α + ° = ° =30 391 9 110 368 3 V
b) 5.152 nolu eitlikten:
1,123)9,391)(314,0(314,080sin5,080cos866,01(2
3===°−°+
= m
m VV
Vπ
ort V
c)
73,1425
3,368)8030sin(9,391==
°+°==
RR
gerilimiyük TepeakımıyükTepe A
d) Ortalama yük akımı = IV
Rortort= = =
1231
254 92
,, A
e) Tepe SCR akımı = Tepe yük akımı = 14,73 A
f) Ters SCR tepe gerilimi = (480)(1,414) = 678,8 V
g) Ortalama SCR akımı = Iort
3
4 92
31 64= =
,, A
Bundan sonraki durum, FWD’siz indüktif yüklü olan durumdur. ndüktansın yeteri kadar büyük olduunu varsayalım ki yük akımı sadece sürekli olmayıp aynı zamanda sabit olsun. Yük gerilimi α’ nın bazı deerleri için negatif olabilir. α<30° için, yük gerilimi daima pozitiftir. Ve ortalama gerilim, omik durumla aynıdır. α>30° için durum

deiir, yük gerilimi her dalganın bir kısmı için negatif olur. Bu durum α=60° için ekil 5.51’de gösterilmitir.
Yine ortalama yük gerilimi t1 ve t2 arasında integral alınarak bulunur, burada t1
(α+π/6)’ya ve t2 ( α+5π/6 )’ ya karılık gelir.
tdtVT
Vt
tmort ωsin
3 2
1= (5.153)
ααπ
cos827,0cos2
)3)(3( 5.0
mmort VVV =
= (5.154)
ekil 5.51
Sonuç, α<30° ile sınırlandırılmasına ramen omik durumla aynıdır. Bundan önceki sınırlama, omik bir yükle α>30° için yük geriliminin eklindeki deimeden kaynaklanmıtı. Yük gerilimi imdi α>30° için sinüs dalgasının aynı parçası boyunca sürekliliini devam ettirir. Formüldeki sayısal deerden baka, α ile deiim buna karılık gelen tek fazlı durumla aynıdır.
ÖRNEK 5.25
480 V, dört telli, 3 fazlı kaynak, 3 SCR’li yarım dalga kontrollu dorultucu ile oldukça büyük bir indüktif yükü beslemektedir. FWD diyotu yoktur. Gecikme açısı 50° ve R=25 Ω dur. Aaıdakileri bulunuz.

a) Tepe yük gerilimi b) Ortalama yük gerilimi c) Tepe yük akımı d) Ortalama yük akımı e) Tepe SCR akımı f) Ters SCR tepe gerilimi g) Ortalama SCR akımı
ÇÖZÜM
a) SCR kaynak geriliminin tepe deerinden sonra iletime geçtii için, Vm tepe yük gerilimidir.
Vm =391,9 V
b) V Vmort = = ° =0 827 0 827 391 9 50 208 3, cos ( , )( , )(cos ) ,α V
c) Tepe yük akımı =Ortalama yük akımı = = =V
Rort 208 3
258 33
,, A
d) IV
Rortort= = =
208 3
258 33
,, A
e) SCR tepe akımı = Tepe yük akımı = 8,33 A
f) Ters SCR tepe gerilimi = (480)(1,414) = 678,8 V
g) SCR ortalama akımı = Iort
3
8 33
32 78= =
,, A
Son durum, FWD’li indüktif yüklü bir durumdur. Burada da yine negatif yük gerilimleri olmayabilir ve ortalama yük gerilimi için sonuç, omik yüklü durumla aynıdır. α<30° için, FWD’nin etkisi yoktur ve 5.154 eitlii uygulanır. α’nın daha büyük deerleri için, ortalama yük gerilimi, 30°<α<150° için 5.152 ile verilir. Faz kontrolünün bu aralıı için FWD, her dalgada üç aralık süresince yük akımını iletir. A fazı için bir SCR, ωt = (α+30°) ve 180° arasında iletimdedir. FWD 180° den sonra dier SCR’nin ωt = (α+150°) de iletime geçtii ana kadar iletimdedir. SCR ve FWD periyodu için toplam iletim zamanı 120° dir. α=75° durumu ekil 5.52 de görülmektedir.
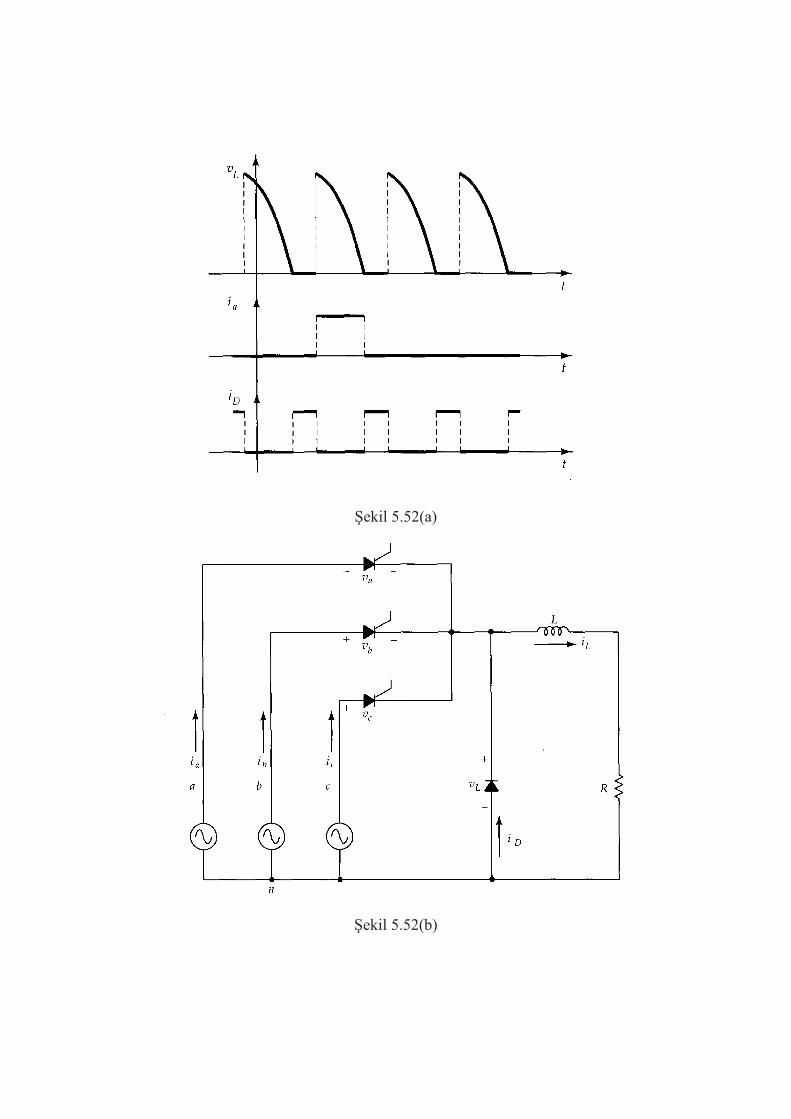
ekil 5.52(a)
ekil 5.52(b)
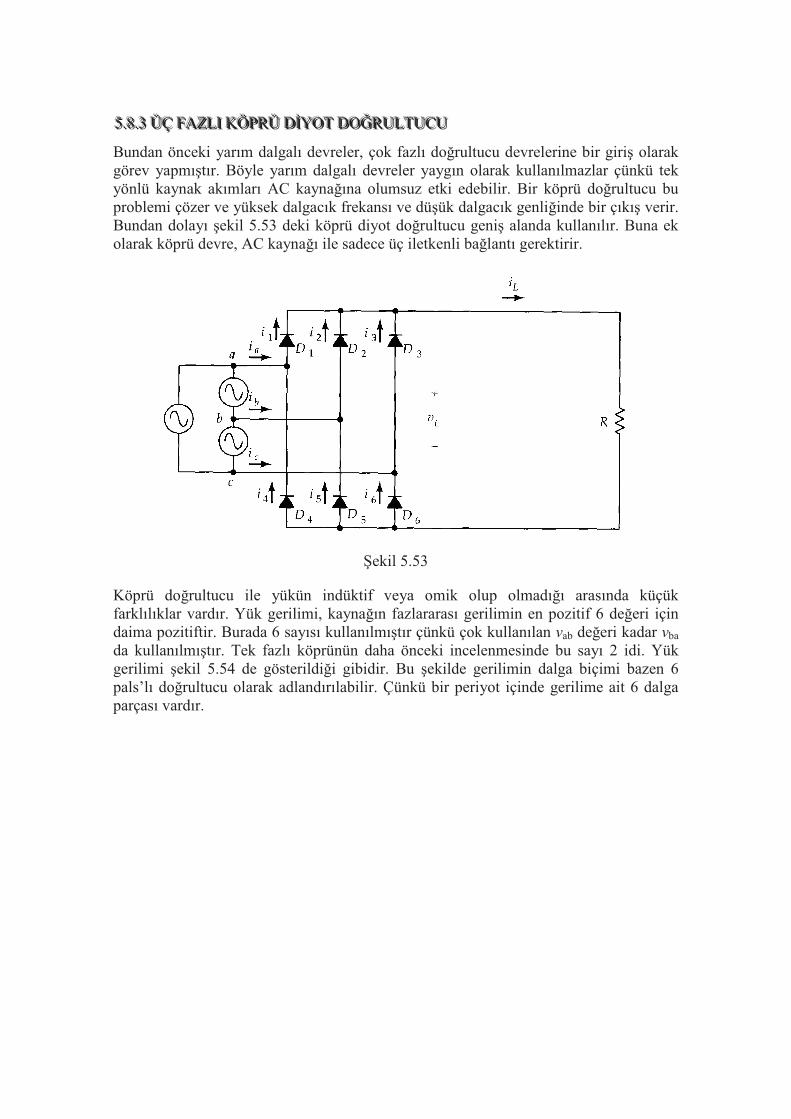
555...888...333 ÜÜÜÇÇÇ FFFAAAZZZLLLIII KKKÖÖÖPPPRRRÜÜÜ DDDYYYOOOTTT DDDOOORRRUUULLLTTTUUUCCCUUU
Bundan önceki yarım dalgalı devreler, çok fazlı dorultucu devrelerine bir giri olarak görev yapmıtır. Böyle yarım dalgalı devreler yaygın olarak kullanılmazlar çünkü tek yönlü kaynak akımları AC kaynaına olumsuz etki edebilir. Bir köprü dorultucu bu problemi çözer ve yüksek dalgacık frekansı ve düük dalgacık genliinde bir çıkı verir. Bundan dolayı ekil 5.53 deki köprü diyot dorultucu geni alanda kullanılır. Buna ek olarak köprü devre, AC kaynaı ile sadece üç iletkenli balantı gerektirir.
ekil 5.53
Köprü dorultucu ile yükün indüktif veya omik olup olmadıı arasında küçük farklılıklar vardır. Yük gerilimi, kaynaın fazlararası gerilimin en pozitif 6 deeri için daima pozitiftir. Burada 6 sayısı kullanılmıtır çünkü çok kullanılan vab deeri kadar vba
da kullanılmıtır. Tek fazlı köprünün daha önceki incelenmesinde bu sayı 2 idi. Yük gerilimi ekil 5.54 de gösterildii gibidir. Bu ekilde gerilimin dalga biçimi bazen 6 pals’lı dorultucu olarak adlandırılabilir. Çünkü bir periyot içinde gerilime ait 6 dalga parçası vardır.
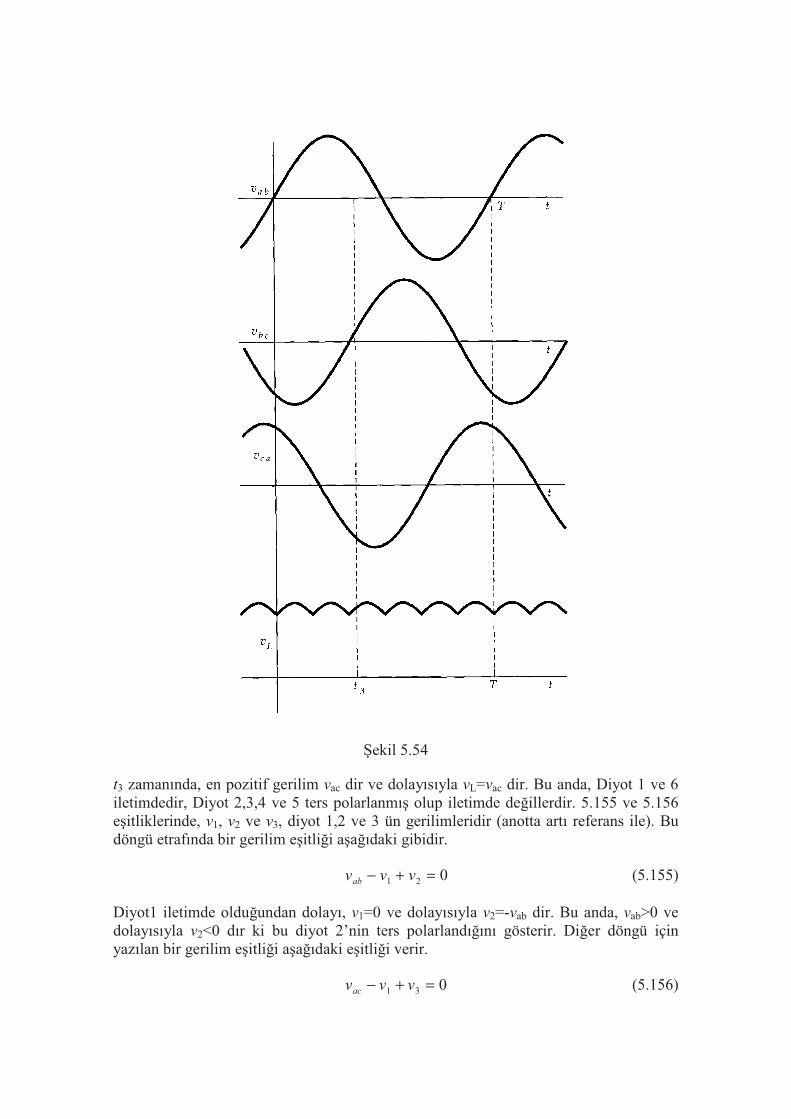
ekil 5.54
t3 zamanında, en pozitif gerilim vac dir ve dolayısıyla vL=vac dir. Bu anda, Diyot 1 ve 6 iletimdedir, Diyot 2,3,4 ve 5 ters polarlanmı olup iletimde deillerdir. 5.155 ve 5.156 eitliklerinde, v1, v2 ve v3, diyot 1,2 ve 3 ün gerilimleridir (anotta artı referans ile). Bu döngü etrafında bir gerilim eitlii aaıdaki gibidir.
v v vab − + =1 2 0 (5.155)
Diyot1 iletimde olduundan dolayı, v1=0 ve dolayısıyla v2=-vab dir. Bu anda, vab>0 ve dolayısıyla v2<0 dır ki bu diyot 2’nin ters polarlandıını gösterir. Dier döngü için yazılan bir gerilim eitlii aaıdaki eitlii verir.
v v vac − + =1 3 0 (5.156)
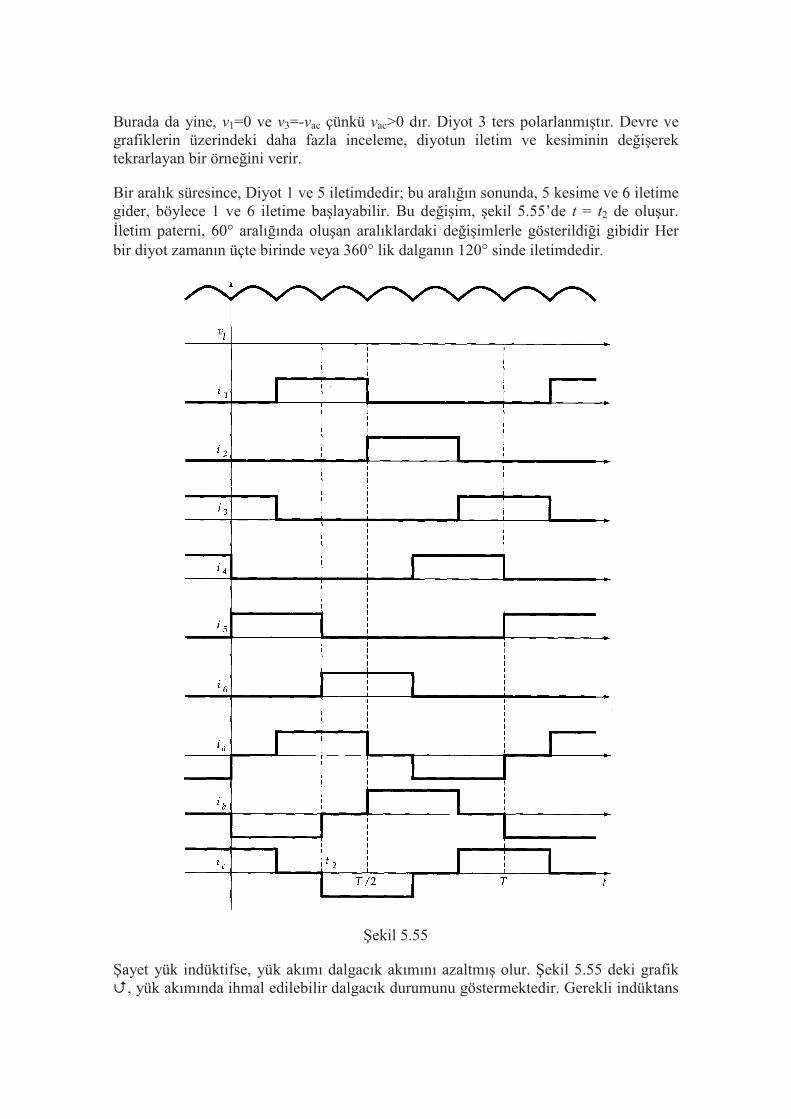
Burada da yine, v1=0 ve v3=-vac çünkü vac>0 dır. Diyot 3 ters polarlanmıtır. Devre ve grafiklerin üzerindeki daha fazla inceleme, diyotun iletim ve kesiminin deierek tekrarlayan bir örneini verir.
Bir aralık süresince, Diyot 1 ve 5 iletimdedir; bu aralıın sonunda, 5 kesime ve 6 iletime gider, böylece 1 ve 6 iletime balayabilir. Bu deiim, ekil 5.55’de t = t2 de oluur. letim paterni, 60° aralıında oluan aralıklardaki deiimlerle gösterildii gibidir Her bir diyot zamanın üçte birinde veya 360° lik dalganın 120° sinde iletimdedir.
ekil 5.55
ayet yük indüktifse, yük akımı dalgacık akımını azaltmı olur. ekil 5.55 deki grafik , yük akımında ihmal edilebilir dalgacık durumunu göstermektedir. Gerekli indüktans
büyük deildir, çünkü yük gerilimindeki dalgacık oldukça küçüktür. Üç faz akımının grafii, köprünün her giri uçlarında akım eitlii ile bulunur. ia faz akımı için, bu eitlik 5.157 dir:
i i ia = −1 4 (5.157)
ia grafii, böylece i1 ve i4 den kolaylıkla bulunur. Farklı miktarlarda tekrarlayan simetrinin büyük olduuna dikkat edilmelidir.
Ortalama yük gerilimi, bir fazlararası gerilimin 60° lik aralıı üzerinde integral alınarak bulunur. Bu gösterimde, vab 60°-120° aralıında kullanılmıtır:
=
3/2
3/sin
2
6 π
πθθ
πdVV mort (5.158)
.955,02
6mm VVV =
=
πort (5.159)
Bu integralde zaman deikeni yerine bir açı deikeni kullanıldıına dikkat edilmelidir.
ÖRNEK 5.26
3 fazlı, 460 V, 60 Hz’li bir sistem bir köprü dorultucuyu beslemektedir. Yük 100 Ω luk dirençtir. Aaıdakileri bulunuz.
a) Ortalama yük gerilimi b) Ortalama yük akımı c) Her diyotun iletmesi gereken ortalama akım d) Her diyotun maruz kaldıı ters tepe gerilimi e) Ortalama yük gücü
ÇÖZÜM
a) Vm = =( , )( )1 414 460 650 V
V VL mort= = =0 955 0 955 650 621, ( , )( ) V
b) IV
RLort= = =ort 621
1006 21, A
c) II
D
L= =ort
32 07, A
d) Ters tepe gerilimi bir diyot iletimde iken oluur, diyot 1 gibi. vab nin tepe deeri diyot 2’ye uygulanır. Böylece her diyot 650 V’luk bir ters gerilime maruz kalır. Güç sistemi üzerindeki geçici pik’lere izin vermek için, diyotun bu deerden daha büyük bir deere sahip olması gerekir. Sistemin koruyucu özelliklerine ve dalgalanmaların iddetine balı olarak, diyotun gerilim deeri en az 800 V olmalıdır.
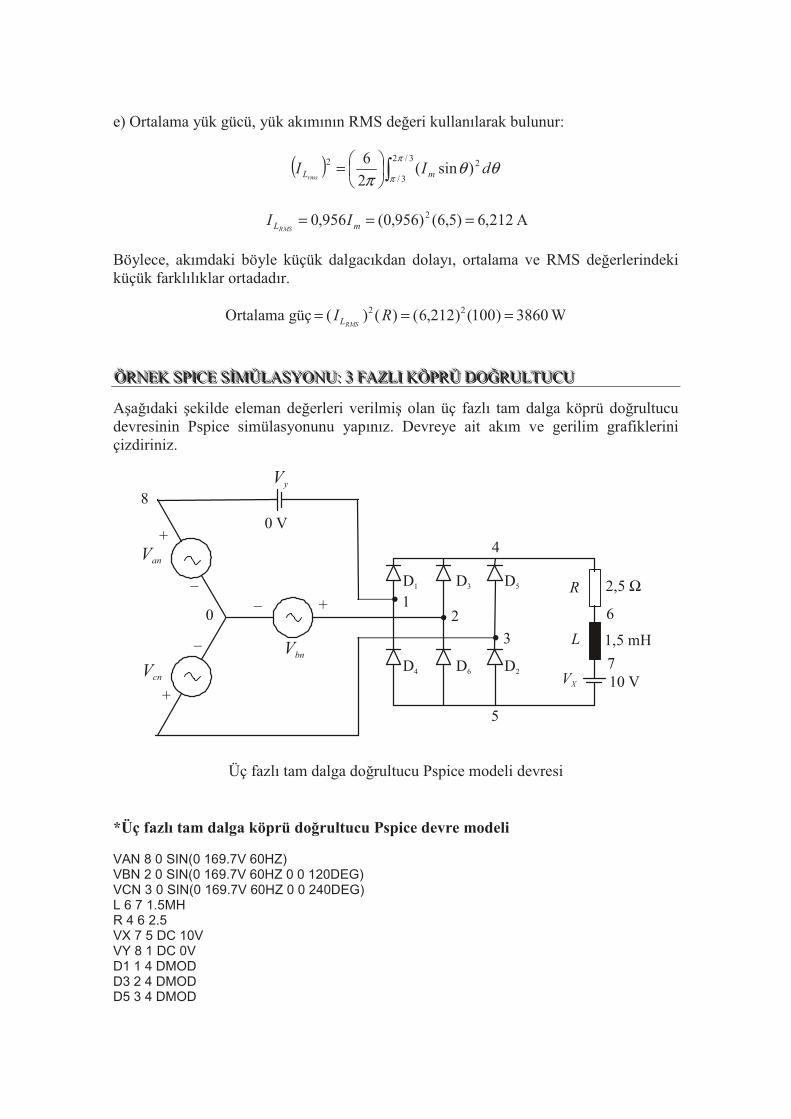
e) Ortalama yük gücü, yük akımının RMS deeri kullanılarak bulunur:
( ) θθπ
π
πdII mLrms
23/2
3/
2)sin(
2
6
=
212,6)5,6()956,0(956,0 2 === mL IIRMS
A
Böylece, akımdaki böyle küçük dalgacıkdan dolayı, ortalama ve RMS deerlerindeki küçük farklılıklar ortadadır.
Ortalama güç = = =( ) ( ) ( , ) ( )I RLRMS
2 26 212 100 3860 W
ÖÖÖRRRNNNEEEKKK SSSPPPIIICCCEEE SSSMMMÜÜÜLLLAAASSSYYYOOONNNUUU::: 333 FFFAAAZZZLLLIII KKKÖÖÖPPPRRRÜÜÜ DDDOOORRRUUULLLTTTUUUCCCUUU
Aaıdaki ekilde eleman deerleri verilmi olan üç fazlı tam dalga köprü dorultucu devresinin Pspice simülasyonunu yapınız. Devreye ait akım ve gerilim grafiklerini çizdiriniz.
L
2,5 Ω
10 V
1,5 mH
D3
D6
D5D1
D2D4
R
VX
Vy
Vbn
Vcn
Van
0
8
+
+
+
_
__
0 V
2
5
3
4
6
7
1
Üç fazlı tam dalga dorultucu Pspice modeli devresi
*Üç fazlı tam dalga köprü dorultucu Pspice devre modeli
VAN 8 0 SIN(0 169.7V 60HZ) VBN 2 0 SIN(0 169.7V 60HZ 0 0 120DEG) VCN 3 0 SIN(0 169.7V 60HZ 0 0 240DEG) L 6 7 1.5MH R 4 6 2.5 VX 7 5 DC 10V VY 8 1 DC 0V D1 1 4 DMOD D3 2 4 DMOD D5 3 4 DMOD
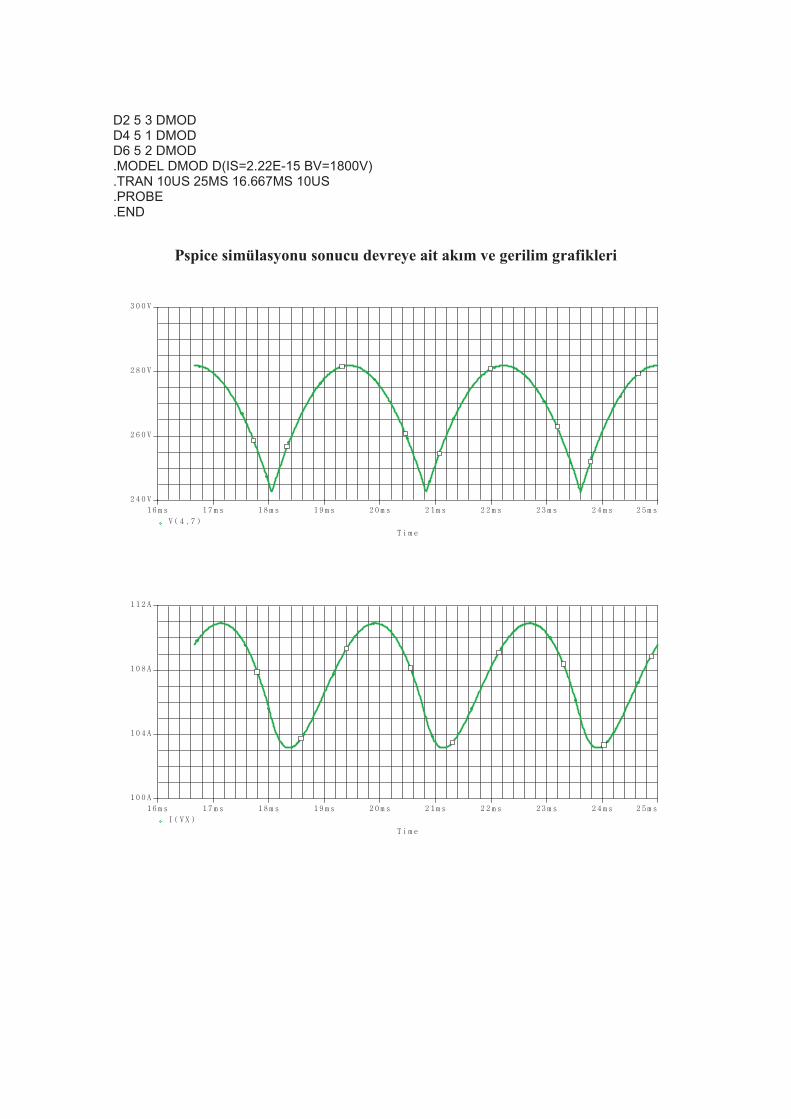
D2 5 3 DMOD D4 5 1 DMOD D6 5 2 DMOD .MODEL DMOD D(IS=2.22E-15 BV=1800V) .TRAN 10US 25MS 16.667MS 10US .PROBE .END
Pspice simülasyonu sonucu devreye ait akım ve gerilim grafikleri
! " # $
% & # ' % ( # ' % ) # ' % * # ' + , # ' + % # ' + + # ' + - # ' + . # ' + / # '
0 1 . 2 ( 3
+ . , 0
+ & , 0
+ ) , 0
- , , 0
! " # $
% & # ' % ( # ' % ) # ' % * # ' + , # ' + % # ' + + # ' + - # ' + . # ' + / # '
4 1 0 5 3
% , , 6
% , . 6
% , ) 6
% % + 6
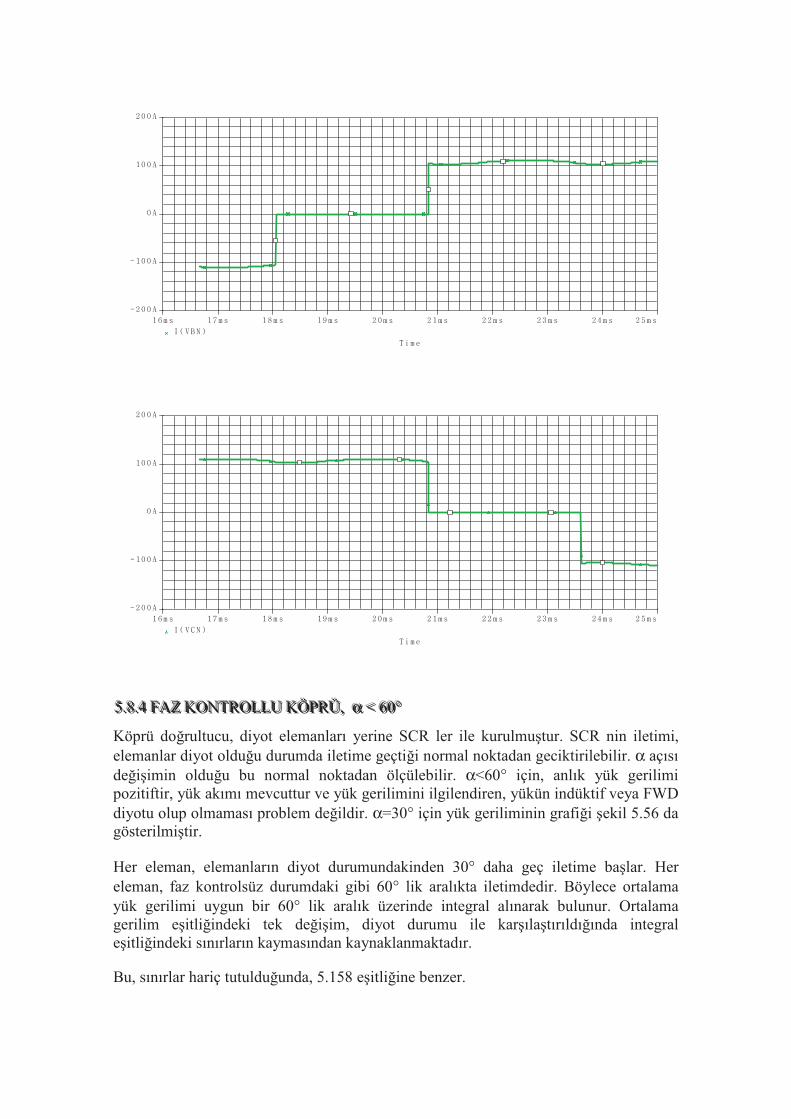
! " # $
% & # ' % ( # ' % ) # ' % * # ' + , # ' + % # ' + + # ' + - # ' + . # ' + / # '
4 1 0 7 8 3
9 + , , 6
9 % , , 6
, 6
% , , 6
+ , , 6
! " # $
% & # ' % ( # ' % ) # ' % * # ' + , # ' + % # ' + + # ' + - # ' + . # ' + / # '
4 1 0 : 8 3
9 + , , 6
9 % , , 6
, 6
% , , 6
+ , , 6
555...888...444 FFFAAAZZZ KKKOOONNNTTTRRROOOLLLLLLUUU KKKÖÖÖPPPRRRÜÜÜ,,, ααα <<< 666000°°°
Köprü dorultucu, diyot elemanları yerine SCR ler ile kurulmutur. SCR nin iletimi, elemanlar diyot olduu durumda iletime geçtii normal noktadan geciktirilebilir. α açısı deiimin olduu bu normal noktadan ölçülebilir. α<60° için, anlık yük gerilimi pozitiftir, yük akımı mevcuttur ve yük gerilimini ilgilendiren, yükün indüktif veya FWD diyotu olup olmaması problem deildir. α=30° için yük geriliminin grafii ekil 5.56 da gösterilmitir.
Her eleman, elemanların diyot durumundakinden 30° daha geç iletime balar. Her eleman, faz kontrolsüz durumdaki gibi 60° lik aralıkta iletimdedir. Böylece ortalama yük gerilimi uygun bir 60° lik aralık üzerinde integral alınarak bulunur. Ortalama gerilim eitliindeki tek deiim, diyot durumu ile karılatırıldıında integral eitliindeki sınırların kaymasından kaynaklanmaktadır.
Bu, sınırlar hariç tutulduunda, 5.158 eitliine benzer.
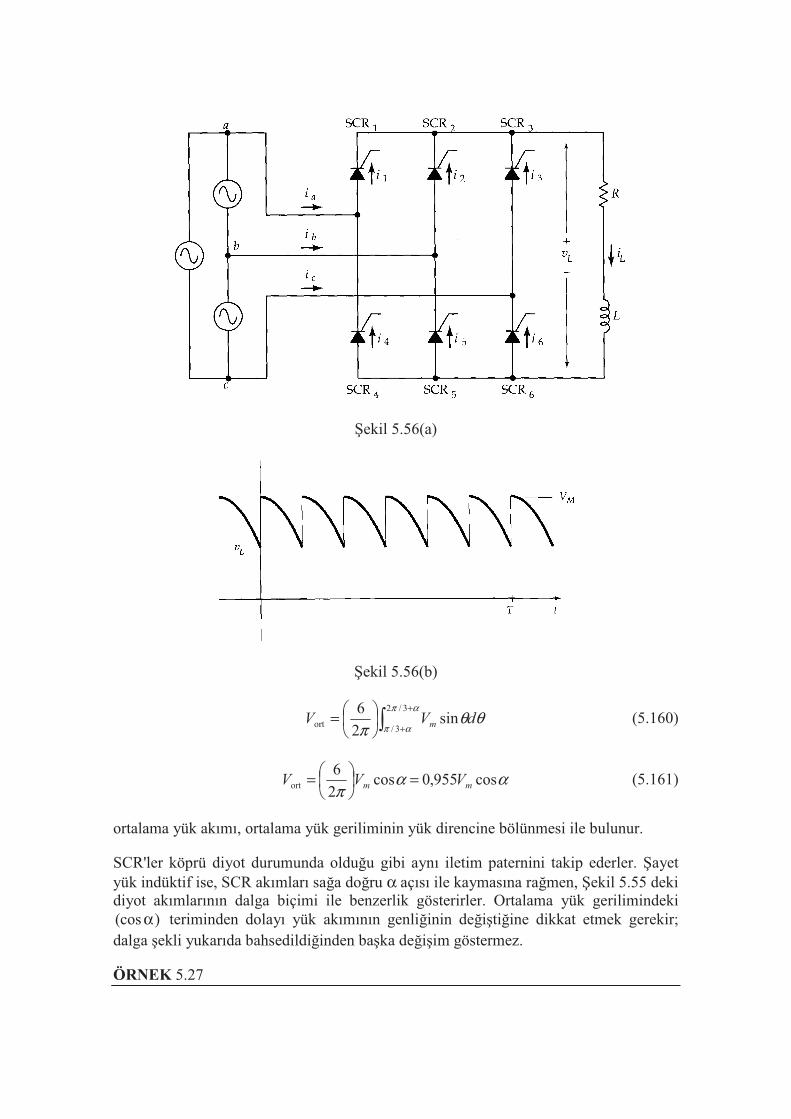
ekil 5.56(a)
ekil 5.56(b)
+
+
=
απ
απθθ
π
3/2
3/sin
2
6dVV mort (5.160)
ααπ
cos955,0cos2
6mm VVV =
=ort (5.161)
ortalama yük akımı, ortalama yük geriliminin yük direncine bölünmesi ile bulunur.
SCR'ler köprü diyot durumunda olduu gibi aynı iletim paternini takip ederler. ayet yük indüktif ise, SCR akımları saa doru α açısı ile kaymasına ramen, ekil 5.55 deki diyot akımlarının dalga biçimi ile benzerlik gösterirler. Ortalama yük gerilimindeki (cos )α teriminden dolayı yük akımının genliinin deitiine dikkat etmek gerekir;
dalga ekli yukarıda bahsedildiinden baka deiim göstermez.
ÖRNEK 5.27

Örnek 5.26 daki devre bir indüktif yük içermekte ve köprü diyotlar SCR’ler ile deitirilmitir. Gecikme açısı 45° dir. Aaıdakileri bulunuz.
a) Ortalama yük gerilimi b) Ortalama yük akımı c) Her SCR nin iletmesi gereken ortalama akım d) Her SCR nin maruz kaldıı ters tepe gerilimi e) Ortalama yük gücü
ÇÖZÜM
a) Bundan önceki örnekten Vm=650 V. 5.161 eitliinden,
V Vmort = = ° =0 955 0 955 650 45 439, cos ( , )( )(cos )α V
b) IV
RIRMSort
ort= = = =439
1004 39, A
c) Ortalama SCR akımı = Iort
3
4 39
31 46= =
,, A
d) Ters tepe gerilimi = Vm = 650 V
e) Ortalama güç = ( ) ( ) ( , ) ( )I RRMS
2 24 39 100 1930= = W
555...888...555 FFFAAAZZZ KKKOOONNNTTTRRROOOLLLLLLUUU KKKÖÖÖPPPRRRÜÜÜ,,, ααα >>> 666000°°°
α, 60° den daha büyük deerlere artırıldıında, anlık yük gerilimi her dalganın bir kısmında negatif olur. FWD yoksa, 5.161 eitlii hala uygulanabilir, SCR ve faz akımları eitliklerinde bu geçerlidir. FWD diyotu olduu durumda ortalama yük gerilimi eitlii deiir. ekil 5.57 deki grafik α=90° için dalga eklini göstermektedir.
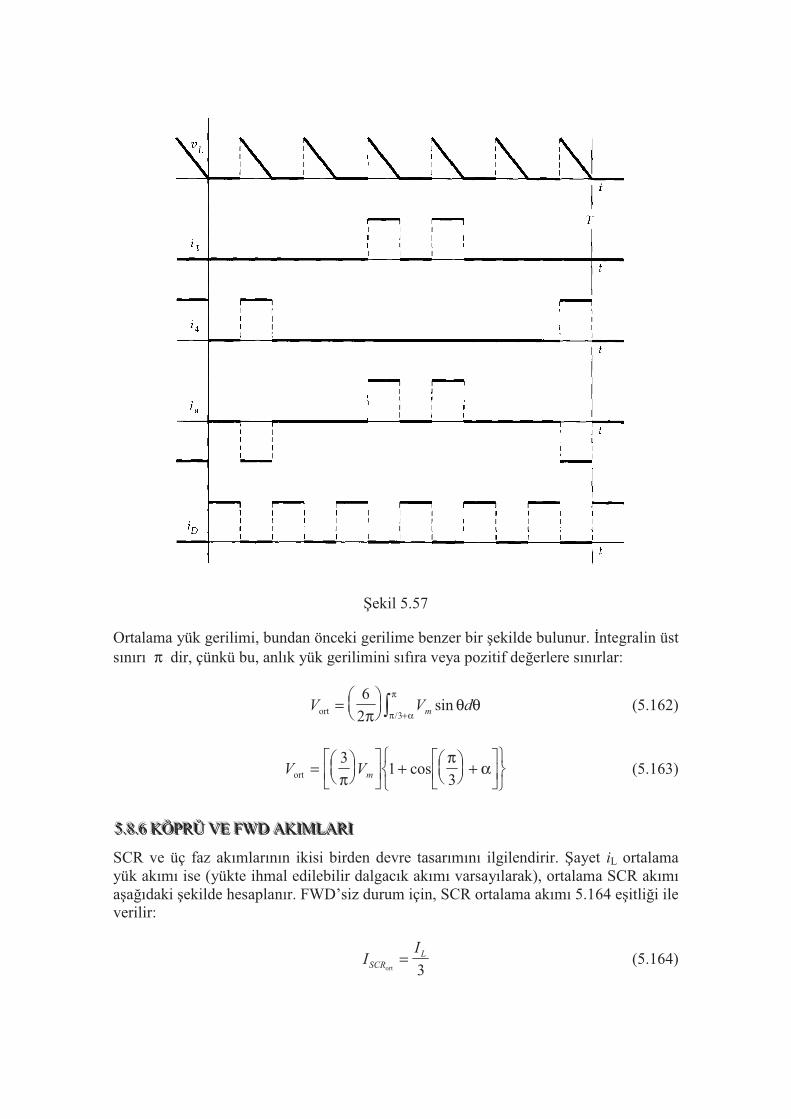
ekil 5.57
Ortalama yük gerilimi, bundan önceki gerilime benzer bir ekilde bulunur. ntegralin üst sınırı π dir, çünkü bu, anlık yük gerilimini sıfıra veya pozitif deerlere sınırlar:
V V dmort =
+6
2 3πθ θ
π α
π
sin/
(5.162)
V Vmort =
+
+
31
3π
παcos (5.163)
555...888...666 KKKÖÖÖPPPRRRÜÜÜ VVVEEE FFFWWWDDD AAAKKKIIIMMMLLLAAARRRIII
SCR ve üç faz akımlarının ikisi birden devre tasarımını ilgilendirir. ayet iL ortalama yük akımı ise (yükte ihmal edilebilir dalgacık akımı varsayılarak), ortalama SCR akımı aaıdaki ekilde hesaplanır. FWD’siz durum için, SCR ortalama akımı 5.164 eitlii ile verilir:
II
SCR
L
ort=
3 (5.164)

ayet α>60° ve FWD varsa, FWD (α-60°) açısında yük akımını 120° lik aralıkta iki kere iletir. Böylece SCR, α>π/3 artıyla [120°-2(α-60°)] veya (240°- 2α) aralıında iletimdedir. Ortalama SCR akımı 5.165 eitlii ile verilir:
I ISCR Lort=
−
240 2
360
α( ) (5.165)
I ISCR Lort=
−
120
180
α (5.166)
FWD’nin ortalama akımı aaıdaki gibi bulunur.
I I IFWD L Lort=
−
=
−
( )( )( )( ) ( )
3 2 60
360
60
60
α α (5.167)
5.167 eitliindeki 3 çarpanı, FWD’nin bota çalıma (FW) ileminin tüm periyot süresince iletiminden kaynaklanır; aynı ekilde 2 çarpanı FWD’nin her fazda dalga baına iki kere iletiminden gelir.
AC faz akımı, RMS deeri ile en iyi tanımlanır, çünkü bu sadece iletken ve sigorta boyutunu belirlemeyip aynı zamanda kaynaın anma akımını belirler. Bu, belki de dorultucu kaynaı olarak kullanılan transformatörün akım oranıdır.
α<60° veya FWD olmadıı durum için faz akımı 120° süresince yük akımına eit pozitif bir deer ve 120° süresince eit fakat negatif bir deerden oluur. Sıfır deeri için iki adet 60° lik aralık vardır. RMS deeri 5.168 eitliinde verilir:
I I IRMS L L=
=
120
1800 8162
0 5
( ) ,
.
(5.168)
α>60° ve FWD olduu durum için, faz akımının her dalgası, (120°-α) nın her iki süresince iki negatif parçadan oluur. Benzer iki negatif parça vardır. Kalan aralıklar sıfır deerlidir. RMS deeri 5.169 eitlii ile belirlenir:
I IRMS L=−
120
902
0 5α
( )
.
(5.169)
ÖRNEK 5.28
Üç fazlı 6 SCR’li bir köprü dorultucu, ayarlı gerilim ile bir indüktif yükü beslemektedir. Ortalama yük geriliminin 100 V ile 600 V arasında deimesi gerekmektedir. Bir FWD kullanılmıtır; RL=10 Ω ve VS =460 V RMS. Aaıdakileri bulunuz.
a) Gerekli olan α aralıı b) Yük akım aralıı c) SCR Ortalama akım oranı

d) SCR gerilim oranı e) Maksimum yük gücü f) FWD ortalama akım oranı
ÇÖZÜM
a) VL = 600 V için, 5.161 eitliinden
600 1 414 460 0 955
15 0
=
= °
( , )( )( , ) cos
,
α
α
VL = 100 V için, 5.163 eitliinden
[ ]1003
1 414 460 1 60
87 0
=
+ +
= °
πα
α
( , )( ) cos( )
,
b) VL = 600 V : IL = =600
1060 A
VL = 100V : IL = =100
1010 A
c) En büyük SCR akımı en büyük yük geriliminde oluur. 5.164 eitliinden.
ISCRort= =
60
320 A
d) SCR’nin sistemin tepe gerilimine veya daha büyük deere dayanması gereklidir.
Vm = (1,414)(460) = 650,5 V
Buna en yakın kabul edilebilen minimum SCR anma gerilimi ise 800 V’ tur.
e) α=15° ve indüktif yükte, yük akımı 60 amperde sabittir.
Pyük = =( ) ( )60 10 360002 W
f) FWD akımı 5.167 eitlii ile belirlenir. Bu akımın en büyük deeri belli deildir, çünkü iL α ’nın da bir fonksiyonudur. Bir irdeleme ilemi, α=75,2° de maksimum sonucu verir. α’nın bu deeri için,
VL =
+ + =
31 414 460 1 75 2 60 180 4
π( , )( )[ cos( , )] , V
IV
RL
L
L
= = 18 04, A
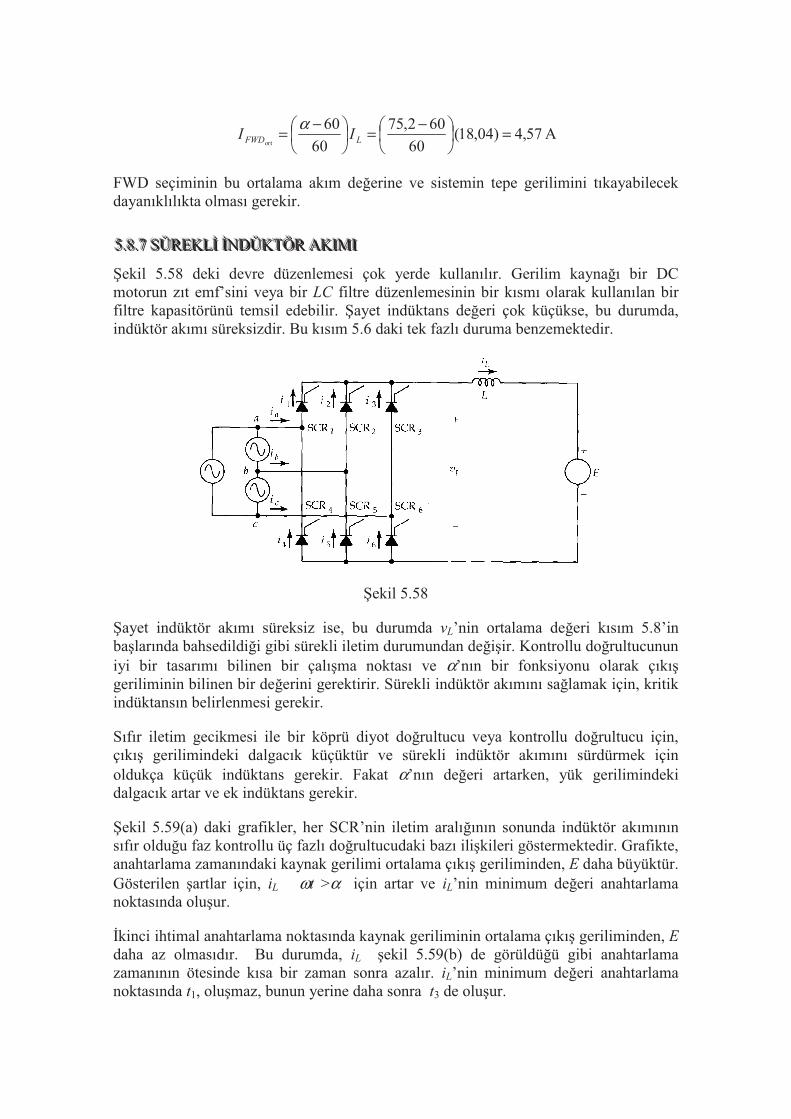
57,4)04,18(60
602,75
60
60=
−=
−= LFWD II
αort
A
FWD seçiminin bu ortalama akım deerine ve sistemin tepe gerilimini tıkayabilecek dayanıklılıkta olması gerekir.
555...888...777 SSSÜÜÜRRREEEKKKLLL NNNDDDÜÜÜKKKTTTÖÖÖRRR AAAKKKIIIMMMIII
ekil 5.58 deki devre düzenlemesi çok yerde kullanılır. Gerilim kaynaı bir DC motorun zıt emf’sini veya bir LC filtre düzenlemesinin bir kısmı olarak kullanılan bir filtre kapasitörünü temsil edebilir. ayet indüktans deeri çok küçükse, bu durumda, indüktör akımı süreksizdir. Bu kısım 5.6 daki tek fazlı duruma benzemektedir.
ekil 5.58
ayet indüktör akımı süreksiz ise, bu durumda vL’nin ortalama deeri kısım 5.8’in balarında bahsedildii gibi sürekli iletim durumundan deiir. Kontrollu dorultucunun iyi bir tasarımı bilinen bir çalıma noktası ve α’nın bir fonksiyonu olarak çıkıgeriliminin bilinen bir deerini gerektirir. Sürekli indüktör akımını salamak için, kritik indüktansın belirlenmesi gerekir.
Sıfır iletim gecikmesi ile bir köprü diyot dorultucu veya kontrollu dorultucu için, çıkı gerilimindeki dalgacık küçüktür ve sürekli indüktör akımını sürdürmek için oldukça küçük indüktans gerekir. Fakat α’nın deeri artarken, yük gerilimindeki dalgacık artar ve ek indüktans gerekir.
ekil 5.59(a) daki grafikler, her SCR’nin iletim aralıının sonunda indüktör akımının sıfır olduu faz kontrollu üç fazlı dorultucudaki bazı ilikileri göstermektedir. Grafikte, anahtarlama zamanındaki kaynak gerilimi ortalama çıkı geriliminden, E daha büyüktür. Gösterilen artlar için, iL ωt >α için artar ve iL’nin minimum deeri anahtarlama noktasında oluur.
kinci ihtimal anahtarlama noktasında kaynak geriliminin ortalama çıkı geriliminden, Edaha az olmasıdır. Bu durumda, iL ekil 5.59(b) de görüldüü gibi anahtarlama zamanının ötesinde kısa bir zaman sonra azalır. iL’nin minimum deeri anahtarlama noktasında t1, olumaz, bunun yerine daha sonra t3 de oluur.
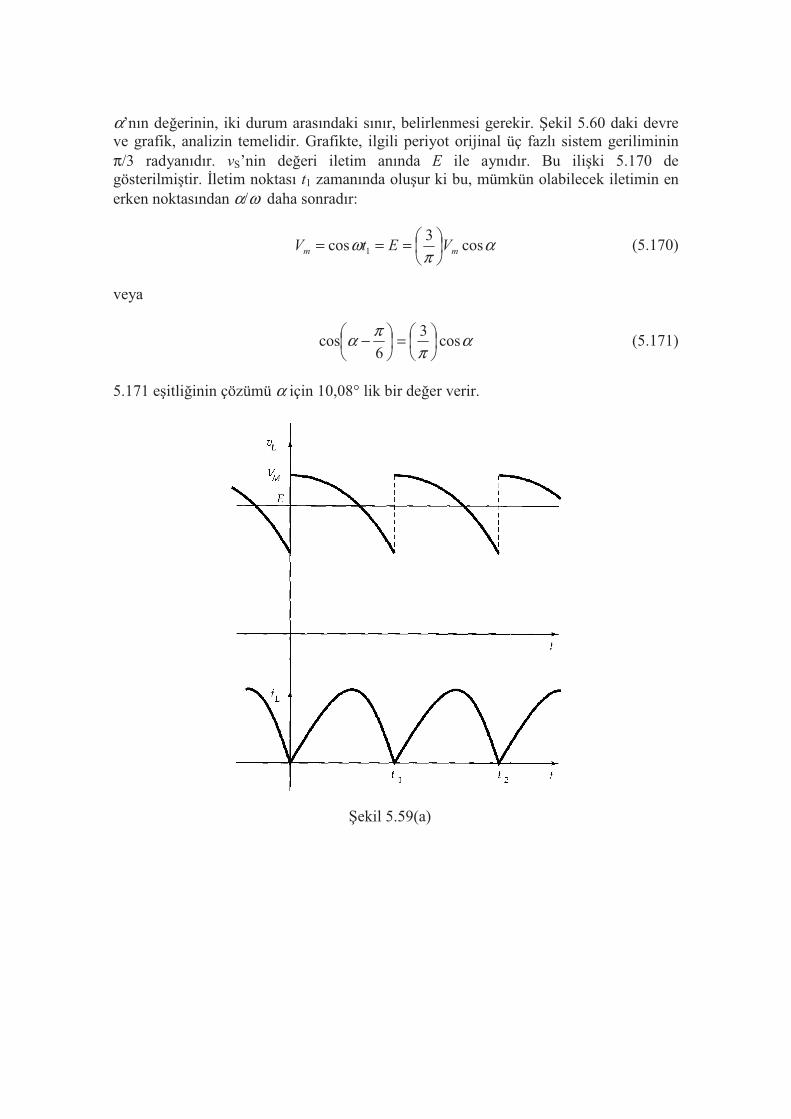
α’nın deerinin, iki durum arasındaki sınır, belirlenmesi gerekir. ekil 5.60 daki devre ve grafik, analizin temelidir. Grafikte, ilgili periyot orijinal üç fazlı sistem geriliminin π/3 radyanıdır. vS’nin deeri iletim anında E ile aynıdır. Bu iliki 5.170 de gösterilmitir. letim noktası t1 zamanında oluur ki bu, mümkün olabilecek iletimin en erken noktasından α/ω daha sonradır:
απ
ω cos3
cos 1 mm VEtV
=== (5.170)
veya
απ
πα cos
3
6cos
=
− (5.171)
5.171 eitliinin çözümü α için 10,08° lik bir deer verir.
ekil 5.59(a)
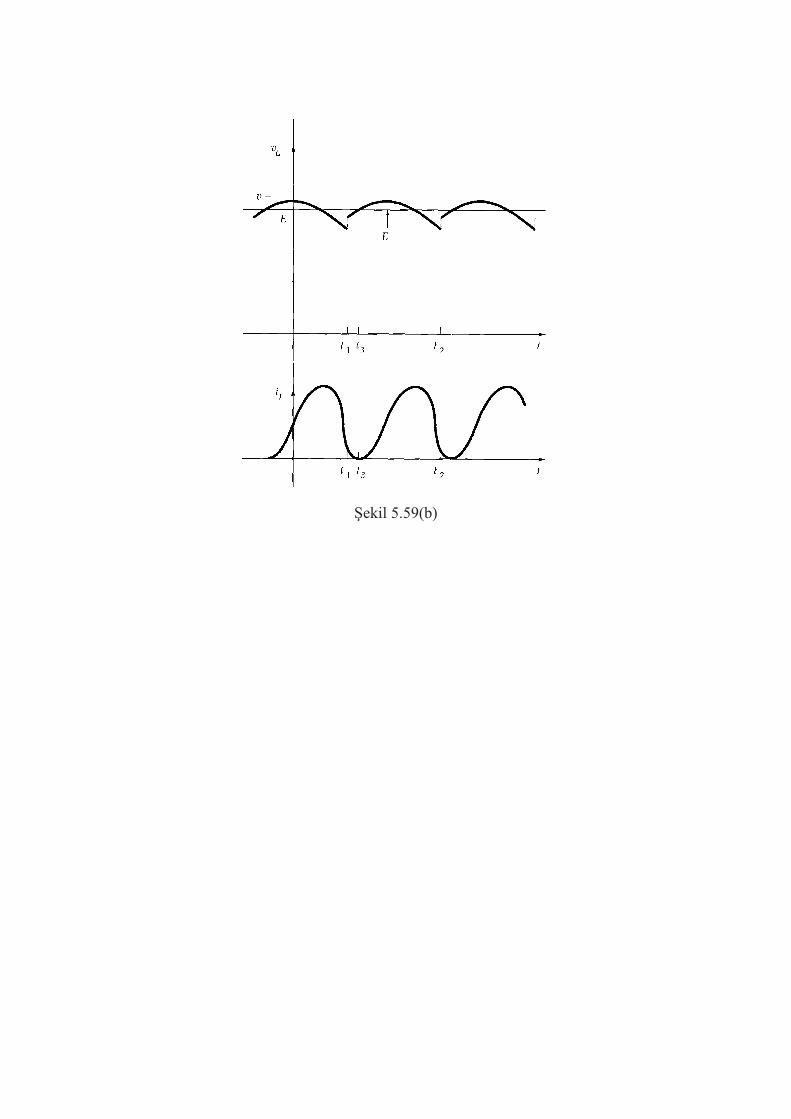
ekil 5.59(b)
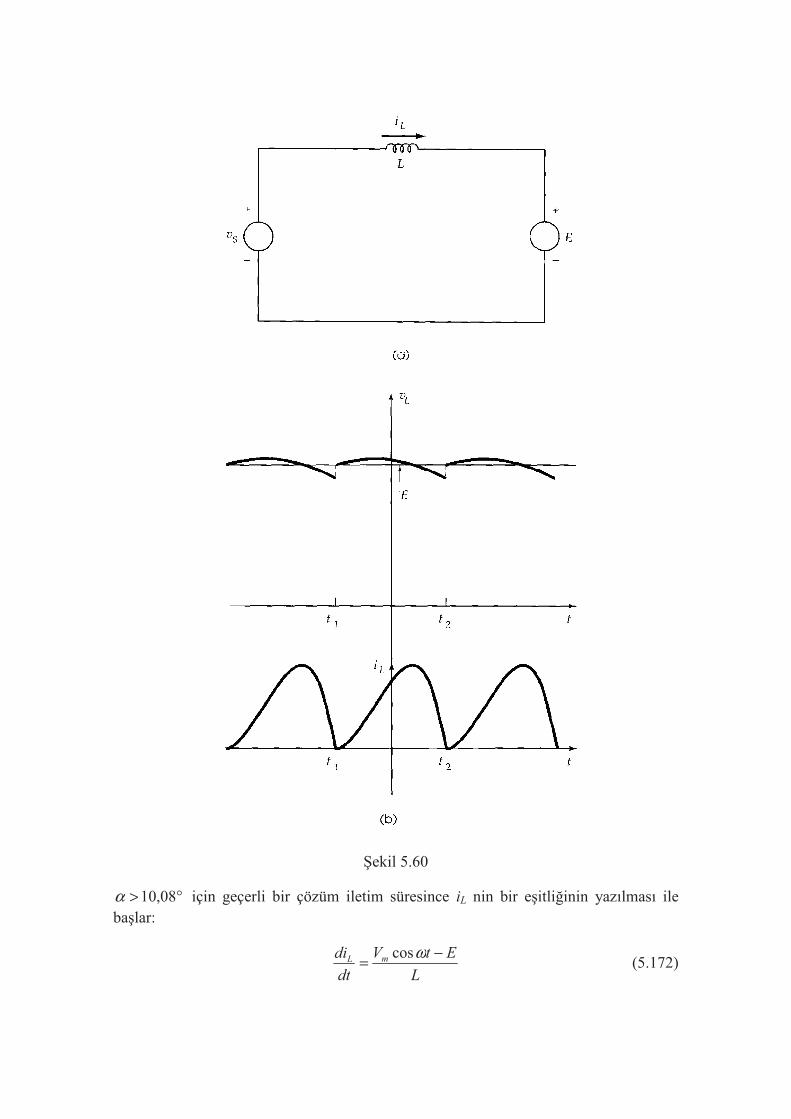
ekil 5.60
°> 08,10α için geçerli bir çözüm iletim süresince iL nin bir eitliinin yazılması ile
balar:
L
EtV
dt
di mL −=
ωcos (5.172)

iL’nin deeri ekil 5.59(a) da görüldüü gibi anahtarlama noktasında sıfırdır. 5.172 eitlii 5.174 eitliinde olduu gibi iL için çözülebilir:
−
=t
t
mL dt
L
EtVi
1
cosω (5.173)
[ ])()sin(sin1
11 ttEttVL
i mL ωωωωω
−−−
= (5.174)
ayet 5.161 eitlii E için kullanılırsa, bu durumda 5.175 eitliinin sonucu:
−
−−
= ))((cos
3sinsin 11 tttt
L
Vi mL ωωα
πωω
ω (5.175)
iL’nin deerinin t2 de sıfır olması gerekir ki bu, t1 den T/6 daha sonradır. )6/( 1 Ttt +=
yerine konularak bu durum dorulanır.
ωπα /)6/(1 −=t ve )6/( 1 Ttt += aralıı üzerinde iL’nin ortalama deeri 5.175
eitliinin integrasyonu ile bulunur:
dtttttL
V
TI
t
t
mL
−
−−
=
2
1
))((cos3
sinsin6
11 ωωαπ
ωωω
(5.176)
−
= α
π
πωsin
321
3
L
VI m
L (5.177)
ndüktör akımının ortalama deeri yük direnci veya yükü belirleyen edeer elemana balıdır:
R
V
R
EI
m
L
απ
cos3
== (5.178)
5.177 ve 5.178 eitliklerinin kullanımı kritik indüktansın normalletirilmi sonucunu verir:
αω
tan0931,0=R
L (5.179)
5.179 eitlii ve tek fazlı durum için olan 5.83 eitliklerinin karılatırılması çok fazlı bir dorultucu kullanımının önemini göstermektedir. Çok daha küçük bir indüktans deeri, çok fazlı durumda sürekli akımı sürdürmek için gereklidir. Akımdaki dalgacıkları istenilen seviyede düzeltmek için gerekli indüktans deeri, tek fazlı durumda gereken deere kıyasla üç fazlı köprü durumundan daha da küçüktür.
°< 08,10α durumu için, küçük farklılıkla bir analiz gereklidir. iL’nin sıfır olduu zaman

ekil 5.59(b) de görüldüü gibi anahtarlama noktasında deildir. 5.175 eitlii bu gerçei yansıtmak için t3 balangıç noktası ile 5.180 olarak yeniden yazılır:
−
−−
= ))((cos
3sinsin 33 tttt
L
Vi mL ωωα
πωω
ω (5.180)
iL’nin ortalama deeri, 5.176 eitliinde olduu gibi aynı aralık üzerinde bulunur. Sonuç 5.181 eitliinde görülmektedir:
dtttttL
V
TI
t
t
mL
−
−−
=
2
1
))((cos3
sinsin6
33 ωωαπ
ωωω
(5.181)
−+
−
= ααθθ
πα
πωcos)()(sin
3sin
3
L
VI m
L (5.182)
burada 3tωθ = . 5.178 eitliinin gereksinimi burada da uygulanır. 5.178 ve 5.182’nin
birletirilmesinin sonucu;
αθα
θπα
ω−+
−=
cos3
sintan
R
L (5.183)
5.183 eitliinde θ ’nın negatif bir deer olduuna dikkat edilmelidir. ekil 5.59(b) deki grafikte, kaynak gerilimi bir kosinüs fonksiyonu ile temsil edilir ve t3 mutlaka negatif zaman deerinde olumalıdır. t3 de aaıdaki eitlikler uygulanır:
απ
θω cos3
coscos mmm VVtV
== (5.184)
= − α
πθ cos
3cos 1 (5.185)
5.185 eitliinde, çift deerli ters kosinüs fonksiyonu için negatif iaret seçilmelidir.
ÖRNEK 5.29
Üç fazlı bir köprü dorultucu ihmal edilebilir armatür direnci ile bir DC motoru beslemektedir. Kaynak 240V RMS, 60 Hz’dir. Ortalama yük geriliminin 150 V ile 300 V arasında deimesi gerekmektedir. Herhangi bir yükte minimum ortalama yük akımı 10 A dir. Sürekli yük akımı zorunludur. Aaıdakileri bulunuz:
(a) gereken α aralıı, (b) sürekli motor akımı için gerekli indüktansın minimum deeri.
ÇÖZÜM
(a) 5.161 eitliinden, VL=100 V için:

( ) απ
cos2)240(3
100
=
257,10,72 =°=α rad
VL=300 V için:
( ) απ
cos2)240(3
300
=
388,024,22 =°=α rad
(b) Kontrol aralıının her iki ucunda, 5.177 eitlii uygulanır. IL’nin minimum deeri gereken indüktansı belirlemede kullanılabilir.
VL=100 V için:
°
−
== 0,72sin
321
)377(
)4,339)(3(10
π
π LIL
00761,0=L H
VL=300 V için:
°
−
== 24,22sin
321
)377(
)4,339)(3(10
π
π LIL
00303,0=L H
ki indüktans deerinden en büyüü, tüm kontrol aralıı boyunca sürekli akımın devamlılıı için seçilir.
555...888...888 GGGÜÜÜÇÇÇ FFFAAAKKKTTTÖÖÖRRRÜÜÜ
Çok fazlı kaynaklı büyük dorultucu yüklerinde, çounlukla, köprü dorultucu düzenlemesi kullanılır. Yük ekseriyetle indüktiftir ve böylece analiz amacı için DC akım sabit olarak düünülür. Bu kısımda, bir yükü besleyen bir köprü dorultucunun AC sisteme göre güç faktörünün analizi yapılmaktadır.
ekil 5.61 deki grafikler, üç fazlı bir köprü dorultucunun hat akımı ve iki kaynak gerilimini göstermektedir. Hat akımı FWD’siz bir dorultucu için bir α faz kontrol açısında çizilmitir.

ekil 5.61
ekil 5.61 deki grafikte, ayet faz kontrol açısı α sıfır ise, A fazının hat akımı van’nin sıfır geriliminden π/6 rad sonra balar. Genel durum için, A hat akımı ek bir α açısı ile faz geciktirmeli olarak gösterilmitir.
Güç faktörü analizi, faz baına temelinde yapılabilir. Faz baına ortalama güç, her yarım saykılın bir kısmı süresince akımın sıfır olduu sınırlar bilinerek bir integrasyonla belirlenir. ntegrasyon deiken olarak zaman yerine açı deikeni de kullanır:
θπ
θπ
πα
παd
VIP m
Lort
−
=
+
+ 6sin
3
13/
(5.186)
απ
cos
= Lm
ort
IVP (5.187)
A fazının hat akımının RMS deeri kolaylıkla belirlenir çünkü akım her yarım saykılda sabit ve yarım saykılın kalan kısmında sıfırdır. Faz-nötr geriliminin RMS deeri, Vm’yi fazlararası gerilimin tepe deeri olarak tanır:
LLRMS III 8165,03/2 == (5.188)
6m
RMS
VV = (5.189)
RMSRMS IVfazS =/ (5.190)

απ
cos3
==S
PfaktörüGüç ort (5.191)
AC hat akımı sinüsoidal olmadıından, dorultucunun ve yükün güç faktörü 0=α olsa bile birim olamaz.
FWD’li durum için, °≤ 60α için deiim yoktur. °> 60α için, FWD yük akımının bir kısmını iletir ve hat akımı ekil 5.57 de görüldüü gibi biçimini deitirir. ekil 5.61 ve 5.62 bu deiimleri yansıtmaktadır.
FWD varken, ani yük gerilimi negatif olamaz. A hat akımı, ekil 5.62 de πω =t de vab’nin sıfıra gittii zaman sıfır olur. A faz akımı απω += 3/2t da balayarak yine sıfır deildir. Bu akım, bir kaynak gerilimi Vca 3/4πω =t de sıfır olduunda da sıfır olur. Ortalama güç akımın sıfır olmadıı aralıklar üzerinde iki integralin toplamı ile bulunur:
−+
−
= ++
3/4
3/23/ 6sin
6sin
3
π
πα
π
παθ
πθθ
πθ
πdd
VIP mL
ort (5.192)
33cos1
πα
πα
π>
++
= Lm
ort
IVP (5.193)
Her yarım saykılda hat akımının iki palsinin iletim aralıı toplam )23/4( ππ − radyan
süreye sahiptir. RMS deer 5.194 eitliinde görüldüü gibi bulunabilir:
LRMS II
−=
π
απ 23/4 (5.194)
Fazlararası gerilimin RMS deeri 5.189 eitlii ile aynıdır. S ve güç faktörünün deeri önceki eitliklerinin bazılarının birletirilmesi ile belirlenebilir:
5,023/4
3cos1
6−
−
++
=
π
αππα
πfaktörüGüç (5.195)
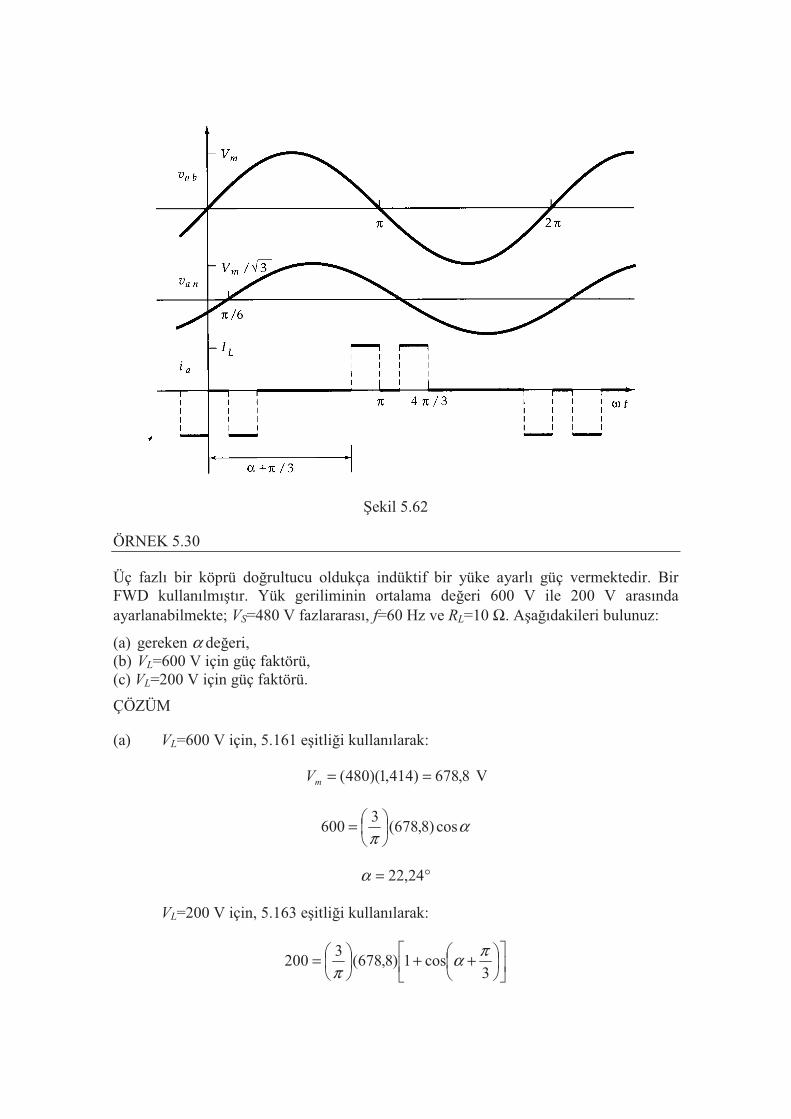
ekil 5.62
ÖRNEK 5.30
Üç fazlı bir köprü dorultucu oldukça indüktif bir yüke ayarlı güç vermektedir. Bir FWD kullanılmıtır. Yük geriliminin ortalama deeri 600 V ile 200 V arasında ayarlanabilmekte; VS=480 V fazlararası, f=60 Hz ve RL=10 Ω. Aaıdakileri bulunuz:
(a) gereken α deeri, (b) VL=600 V için güç faktörü, (c) VL=200 V için güç faktörü.
ÇÖZÜM
(a) VL=600 V için, 5.161 eitlii kullanılarak:
8,678)414,1)(480( ==mV V
απ
cos)8,678(3
600
=
°= 24,22α
VL=200 V için, 5.163 eitlii kullanılarak:
++
=
3cos1)8,678(
3200
πα
π

°= 75,73α
(b) °= 24,22α için, 5.191 eitlii kullanılarak:
884,024,22cos3
=°
=
πfaktörüGüç
(c) °= 75,73α için, 5.195 eitlii kullanılarak:
336,0180
5,147240)75,133cos1(
45,25,0
=
−°+
=
−
πfaktörüGüç
555...888...999 HHHAAARRRMMMOOONNNKKKLLLEEERRR
Çok fazlı kontrollu dorultucuların AC hat akımları kaynak frekansında harmonikler içerirler. Çeitli harmoniklerin büyüklüünün bilinmesi, dier aygıtlar üzerinde veya AC güç sisteminde bu harmoniklerin olabilecek zıt etkilerini belirlemek için yararlıdır.
Bu kısımda indüktif yüklü bir kontrollu dorultucu durumundaki harmonikler hesaplanacaktır. ekil 5.61 deki akımın dalga biçimi ayet FWD yok veya °≤ 60α ise geçerlidir. ayet bu ekildeki orijin uygun bir yere kaydırılırsa, hat akımının grafii ekil 5.63 de görüldüü gibi çift sayılı fonksiyon yapılabilir. Bu fonksiyon için sadece An terimleri mevcuttur, burada n bir tek tam sayıdır. Katsayılar 5.196 eitliinde görüldüü gibi belirlenebilir:
ekil 5.63
=
6/
0cos
8 T
Ln tdtnIT
A ω (5.196)
=
3sin
4 π
π
n
n
IA L
n (5.197)
5.197 eitliinde 3’ün katları olan n deerleri An’in sıfır olmasına neden olur. Üçüncü harmonik akımının katları, kaynaktan yüke üç iletken ile balanan böyle bir üç fazlı sistemde mevcut olamaz.
°> 60α deerleri için, FWD varken, AC hat akımları farklı biçim alır. ekil 5.62 deki grafik ekil 5.64 olarak yeniden çizilmitir böylece hat akımı zamanın çift sayılı bir

fonksiyonu olmaktadır. Bu dalga biçimi için, An katsayıları 5.198 eitliindeki integral ile hesaplanabilir.
−
−
=
2/)(
2/)3/(cos
4 απ
παθ dtnI
TA Ln (5.198)
−+
=
26sin
2cos
2sin
4 απαπ
πn
nn
n
IA L
n 3/πα > (5.199)
ekil 5.64
ÖRNEK 5.31
Üç fazlı kontrollu bir köprü dorultucu 240 V RMS, 60 Hz kaynaktan beslenmektedir. Yük oldukça indüktif ve bir FWD vardır. 30° ’lik faz kontrol açısı için ortalama yük gücü 20 kW’tır. Aaıdakileri bulunuz:
(a) yük direnci (b) AC hat temel ve beinci harmonik akımı (c) ayet α açısı 75° ye artırılırsa temel ve beinci harmonik akımı.
ÇÖZÜM
(a) °= 30α için FWD iletim yapmaz:
7,28030cos)414,1)(240(3
=°
=
πLV V
Yük çok fazla indüktif olduundan, yük gücü ortalama yük gerilimi ve akımının çarpımından bulunabilir:
25,717,280
20000==LI A
940,325,71
7,280==LR Ω

(b) FWD iletimde deildir ve 5.197 eitlii uygulanır:
56,783
sin)25,71)(4(
1 =
=
π
πA A
71,153
5sin
5
)25,71)(4(5 −=
=
π
πA A
(c) °= 75α için FWD iletim yapar. 5.163 eitliinden:
[ ] 93,94)7560cos(1)414,1)(240(3
ort =°+°+
=
πV V
09,2494,3
93,94===
L
L
LR
VI ort A
5.199 eitliinden,
( )[ ] 33,202
7530sin
2
75cos90sin
)09,24)(4(1 =
°−°+
°°
=
πA A
( )[ ] 82,92
75305sin
2
75)5cos(905sin
5
)09,24)(4(5 −=
°−°+
°°
=
πA A
555...888...111000 AAARRRTTTIIIRRRIIILLLMMMIII PPPAAALLLSSS SSSAAAYYYIIISSSIII
Büyük, çok fazlı dorultucularda, ekonomi 6 pals yerine artırılmı 12 pals kullanımını zorlayabilir. Bunun anlamı giriteki üç fazlı sistemin faz sayısının artırılmasıdır. Böyle artırılmı pals sayılı sistemlerin faydaları, DC çıkıında azaltılmı dalgacık gerilimi ve en düük dalgacık geriliminin artan frekansıdır. Yük akımında verilen dalga içeriini sürdürmek için daha az yük indüktansı gereklidir. Artırılmı pals sayısının dier bir faydası AC sistemin harmonik akımlarındaki azalma ve güç faktöründeki bir gelimedir.
Yukarıdaki hedefleri yerine getirmek için bazı devre düzenlemeleri kullanılabilir. Bu kısmın sınırlı amacı için, ekil 5.65 deki devre düzenlemesi bu metodu göstermektedir. Devrenin anlaılması oldukça kolaydır. Sistem birbirine balanmı iki köprü dorultucudan olumakta ve böylece DC çıkılar seri olduundan iki gerilim birbirine eklenmektedir. ki köprünün girileri, sırasıyla yıldız-üçgen ve üçgen-üçgen balanmıiki transformotor ile yalıtılmıtır. Transformotorlar iki balantı arasındaki faz kaymasının avantajını kullanmak için balanmılardır.
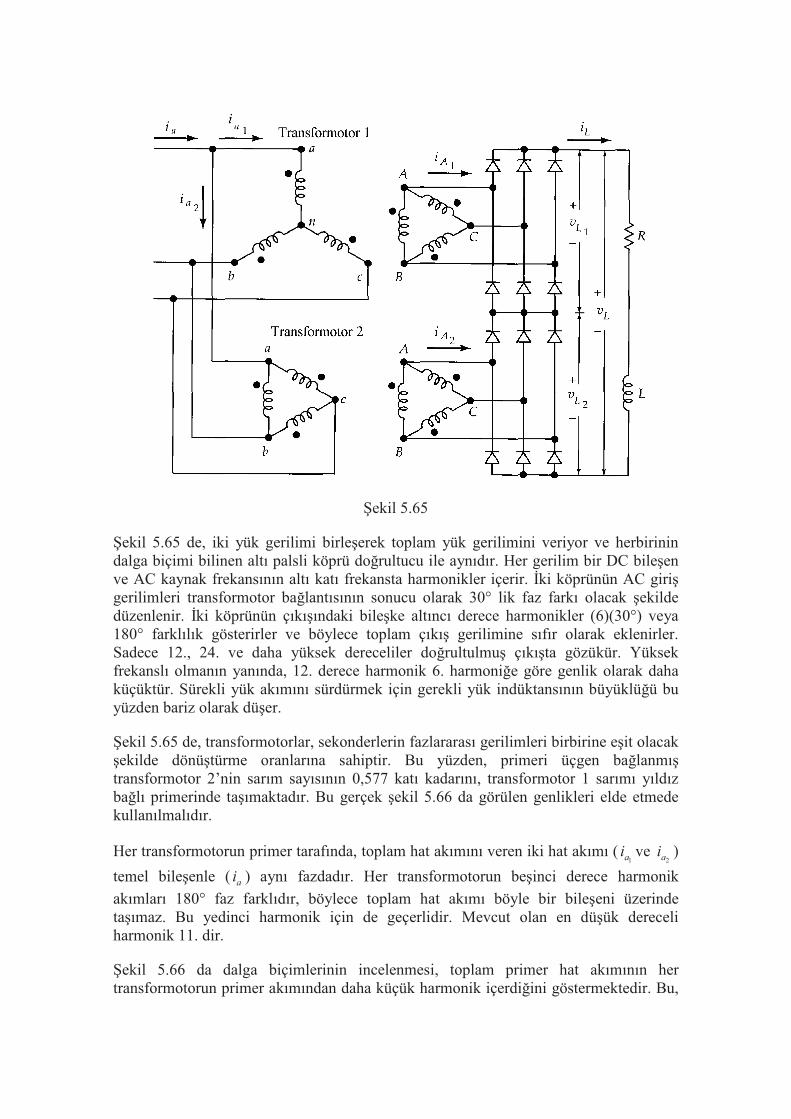
ekil 5.65
ekil 5.65 de, iki yük gerilimi birleerek toplam yük gerilimini veriyor ve herbirinin dalga biçimi bilinen altı palsli köprü dorultucu ile aynıdır. Her gerilim bir DC bileen ve AC kaynak frekansının altı katı frekansta harmonikler içerir. ki köprünün AC girigerilimleri transformotor balantısının sonucu olarak 30° lik faz farkı olacak ekilde düzenlenir. ki köprünün çıkıındaki bileke altıncı derece harmonikler (6)(30°) veya 180° farklılık gösterirler ve böylece toplam çıkı gerilimine sıfır olarak eklenirler. Sadece 12., 24. ve daha yüksek dereceliler dorultulmu çıkıta gözükür. Yüksek frekanslı olmanın yanında, 12. derece harmonik 6. harmonie göre genlik olarak daha küçüktür. Sürekli yük akımını sürdürmek için gerekli yük indüktansının büyüklüü bu yüzden bariz olarak düer.
ekil 5.65 de, transformotorlar, sekonderlerin fazlararası gerilimleri birbirine eit olacak ekilde dönütürme oranlarına sahiptir. Bu yüzden, primeri üçgen balanmıtransformotor 2’nin sarım sayısının 0,577 katı kadarını, transformotor 1 sarımı yıldız balı primerinde taımaktadır. Bu gerçek ekil 5.66 da görülen genlikleri elde etmede kullanılmalıdır.
Her transformotorun primer tarafında, toplam hat akımını veren iki hat akımı (1ai ve
2ai )
temel bileenle ( ai ) aynı fazdadır. Her transformotorun beinci derece harmonik
akımları 180° faz farklıdır, böylece toplam hat akımı böyle bir bileeni üzerinde taımaz. Bu yedinci harmonik için de geçerlidir. Mevcut olan en düük dereceli harmonik 11. dir.
ekil 5.66 da dalga biçimlerinin incelenmesi, toplam primer hat akımının her transformotorun primer akımından daha küçük harmonik içerdiini göstermektedir. Bu,
iki primer sargısındaki harmoniklerin eklenmesi üzerine harmonik akımlarının birbirini iptal etmesinin sonucudur. Harmonikler hakkında miktar olarak sonuçların salanması verilen eitliklerde görülecektir.
Transformotorların sekonder tarafında, 1Ai ve
2Ai 30° farklılık gösterir. Bu akımlar bu
fark dıında aynı Fourier serilerine sahiptir. ekil 5.66 da, 1Ai ’in grafii bir çift sayılı
fonksiyondur ve 5.197 eitlii ile verilen Fourier serileri katsayıları ile ifade edilebilir.
2Ai ’nin katsayıları bu faz kaymasının dıında aynıdır.
Hat akımları olarak primer tarafına yansıtıldıında, dönütürme oranı, her transformotorun primer tarafı hat akımlarında aynı harmonik bileen genliini verir. Oluan farklılık iki transformotorun düzenlemesindeki faz kaymasıdır. Transformotor 2 üçgen-üçgen ve primer akımları ve bütün harmonikleri, primer ve sekonder akımları arasında faz kaymasına sahip deildirler. Transformotor 2’nin primer hat akımı sekonder akımı ile aynı dalga biçimine sahiptir.
Transformotor 1, yıldız-üçgen balanmıtır, sekonderi ve primeri arasında bir faz kaymasına sahip olup çeitli harmonik akım bileenleri için farklıdır. ekil 5.65 de görülen referans yönleri için faz kaymasının bir analizi
1ai ’in temel bileeninin 1Ai ’in
temel bileeninden 30° ileride olduunu göstermektedir. Primerin beinci harmonii 30° geride ve yedinci harmonik 30° ileridedir. Yüksek dereceli harmonikler için bu örnek devam eder. Bu bilgi kullanılarak primer hat akımlarının eitlikleri yazılabilir.

ekil 5.66
5.197 eitlii çeitli akımların ifadesinde kullanılabilir:
⋅⋅⋅+++++= tAtAtAtAtAiA ωωωωω 13cos11cos7cos5coscos 13117511 (5.200)
⋅⋅⋅+
++
++
++
++
+=
613cos
611cos
67cos
65cos
6cos
1311
7512
πω
πω
πω
πω
πω
tAtA
tAtAtAiA
(5.201)

Transformotorun fazlararası dönüüm oranı birim (1) olduunda, primer akımları sekonder akımları ile ifade edilebilir:
⋅⋅⋅+
++
−+
++
−+
+=
613cos
611cos
67cos
65cos
6cos
1311
7511
πω
πω
πω
πω
πω
tAtA
tAtAtAia
(5.202)
⋅⋅⋅+
++
−+
++
++
+=
613cos
611cos
6
77cos
6
55cos
6cos
1311
7512
πω
πω
πω
πω
πω
tAtA
tAtAtAia
(5.203)
Toplam hat akımı transformotor hat akımlarının toplamından elde edilir:
⋅⋅⋅+
++
−+
+=
613cos2
611cos2
6cos2 13111
πω
πω
πω tAtAtAia (5.204)
Toplam hat akımında beinci ve yedinci harmonikler sıfırdır. Mevcut olan en düük dereceli harmonik 11.dir ki genlii, ayet altı palsli bir dorultucu kullanıldıı durumdaki beinci derece harmoniin genliinden daha küçük olurdu.
AC hat akımının hemen hemen sinüsoidal olması gerçei, altı palsli dorultucuya kıyasla bu akımın RMS deerini azaltmıtır. Bu azalma, güç faktöründe bir iyileme demektir.
ÖRNEK 5.32
ekil 5.65 deki gibi bir dorultucu RL=5 Ω ile indüktif bir yüke güç salamaktadır. Kaynak 240 V RMS, 60 Hz’dir. Transformotorlar ideal düünülebilir ve fazlararası gerilimlerine göre her üç fazlı transformotor 1:1 dönütürme oranına sahiptir. Aaıdakileri bulunuz:
(a) ortalama yük gerilimi, (b) yük gücü, (c) en düük dereceli harmonik hat akımının genlii, (d) hat akımının RMS deeri, (e) AC sisteme göre güç faktörü.
ÇÖZÜM
(a) Her köprü dorultucu toplam gerilimin yarısına katkı salar:
324)414,1)(240(3
21=
==
πLL VV V
648=LV V

(b) 6,1295
648===
L
LL
R
VI A
84== LL IVP kW
(c) 5.197 eitliinden:
99,123
11sin
11
)6,129)(4(11 −=
=
π
πA A
Her transformotorda bu harmonik için primer hat akımının genlii 12,99 A ve bu akımlar iki transformotorda aynı fazdadır. Toplam genlik bir transformotorun iki katı olup 25,98 A dir.
(d) RMS hat akımı ekil 5.66 da görülen toplam hat akımı için dalga biçiminin integrasyonundan belirlenebilir. ntegrasyon T/4 aralıı üzerinde yapılır. Akım her aralıkta sabit olduundan, integrasyon yerine aaıda görüldüü gibi bir çarpma ilemi kullanılır:
[ ]5,0
222 )577,0()577,1()155,2(3
1
++
= LRMS II
4,204)6,129)(577,1(577,1 === LRMS II A
(e) 84980)4,204)(240)(732,1( ==S VA
988,084980
84000===
S
PfaktörüGüç
555...999 ÇÇÇAAALLLIIIMMMAAA SSSOOORRRUUULLLAAARRRIII
5.1 Bir dorultucu nedir? 5.2 Bir kontrollu olmayan dorultucu nedir? 5.3 Bir kontrollu dorultucu nedir? 5.4 Faz kontrolunun amacı nedir? 5.5 FWD diyotu nasıl bir etki yapmaktadır? 5.6 Bir dorultucunun performans parametreleri nedir? 5.7 Bir dorultucunun dalgacık faktörünün önemi nedir? 5.8 Faz kontrol devrelerinde tetikleme nasıl yaplır? 5.9 Tam dalga ve yarım dalga dorultucu arasındaki fark nedir? 5.10 Tek fazlı yarım dalga bir dorultucunun dc çıkı gerilimi nedir? 5.11 Tek fazlı tam dalga bir dorultucunun dc çıkı gerilimi nedir? 5.12 Üç fazlı yarım dalga bir dorultucunun dc çıkı gerilimi nedir? 5.13 Üç fazlı tam dalga bir dorultucunun dc çıkı gerilimi nedir? 5.14 Tek fazlı yarım dalga bir dorultucunun çıkı geriliminin temel frekansı nedir? 5.15 Tek fazlı tam dalga bir dorultucunun çıkı geriliminin temel frekansı nedir?
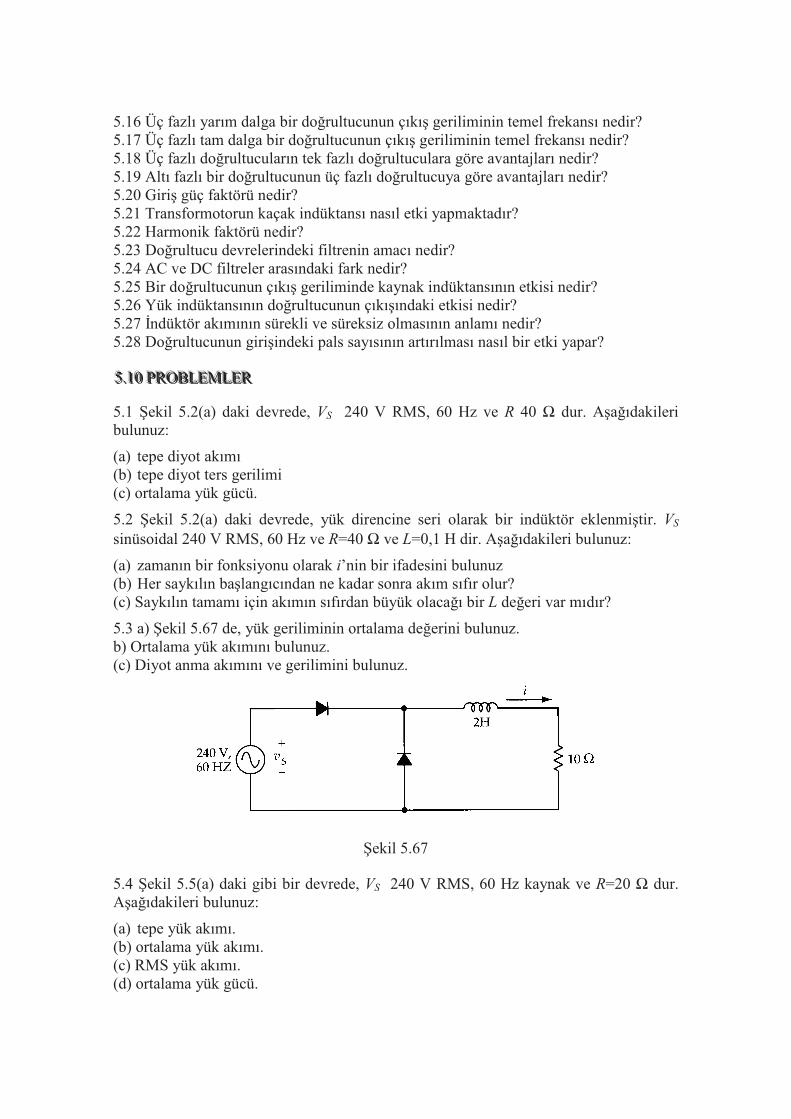
5.16 Üç fazlı yarım dalga bir dorultucunun çıkı geriliminin temel frekansı nedir? 5.17 Üç fazlı tam dalga bir dorultucunun çıkı geriliminin temel frekansı nedir? 5.18 Üç fazlı dorultucuların tek fazlı dorultuculara göre avantajları nedir? 5.19 Altı fazlı bir dorultucunun üç fazlı dorultucuya göre avantajları nedir? 5.20 Giri güç faktörü nedir? 5.21 Transformotorun kaçak indüktansı nasıl etki yapmaktadır? 5.22 Harmonik faktörü nedir? 5.23 Dorultucu devrelerindeki filtrenin amacı nedir? 5.24 AC ve DC filtreler arasındaki fark nedir? 5.25 Bir dorultucunun çıkı geriliminde kaynak indüktansının etkisi nedir? 5.26 Yük indüktansının dorultucunun çıkıındaki etkisi nedir? 5.27 ndüktör akımının sürekli ve süreksiz olmasının anlamı nedir? 5.28 Dorultucunun giriindeki pals sayısının artırılması nasıl bir etki yapar?
555...111000 PPPRRROOOBBBLLLEEEMMMLLLEEERRR
5.1 ekil 5.2(a) daki devrede, VS 240 V RMS, 60 Hz ve R 40 Ω dur. Aaıdakileri bulunuz:
(a) tepe diyot akımı (b) tepe diyot ters gerilimi (c) ortalama yük gücü.
5.2 ekil 5.2(a) daki devrede, yük direncine seri olarak bir indüktör eklenmitir. VS sinüsoidal 240 V RMS, 60 Hz ve R=40 Ω ve L=0,1 H dir. Aaıdakileri bulunuz:
(a) zamanın bir fonksiyonu olarak i’nin bir ifadesini bulunuz (b) Her saykılın balangıcından ne kadar sonra akım sıfır olur? (c) Saykılın tamamı için akımın sıfırdan büyük olacaı bir L deeri var mıdır?
5.3 a) ekil 5.67 de, yük geriliminin ortalama deerini bulunuz. b) Ortalama yük akımını bulunuz. (c) Diyot anma akımını ve gerilimini bulunuz.
ekil 5.67
5.4 ekil 5.5(a) daki gibi bir devrede, VS 240 V RMS, 60 Hz kaynak ve R=20 Ω dur. Aaıdakileri bulunuz:
(a) tepe yük akımı. (b) ortalama yük akımı. (c) RMS yük akımı. (d) ortalama yük gücü.
(e) ortalama diyot akımı. (f) tepe diyot ters gerilimi.
5.5 ekil 5.6 daki devre 240 V RMS, 60 Hz kaynaı dorultmak için kullanılmaktadır. Yük indüktansı büyüktür. Gereken yük gücü 6 kW’tır. Aaıdakileri bulunuz:
(a) ortalama yük akımı. (b) tepe yük akımı. (c) ortalama diyot akımı. (d) tepe diyot ters gerilimi.
5.6 ekil 5.8(a) daki gibi yarım dalga faz kontrollu bir devre 240 V RMS, 60 Hz kaynaktan 25 Ω’luk yüke güç vermektedir. Faz kontrol açısı 10° ile 125° arasında deiebilmektedir. Aaıdakileri bulunuz:
(a) yük gücünün aralıı, (b) tepe SCR akımı. (c) ters tepe SCR gerilimi. (d) α aralıında SCR ortalama akımının en büyük deeri.
5.7 ekil 5.9 daki gibi tam dalga faz kontrollu bir devre °= 50α de, 460 V RMS, 60 Hz kaynaktan ortalama 20 A salamaktadır. Aaıdakileri bulunuz:
(a) ortalama yük gücü. (b) yük direnci. (c) SCR ortalama akım oranı. (d) SCR tepe akımı. (e) SCR tepe ters gerilimi.
5.8 ekil 5.9 daki gibi bir devrede, yük 230 V RMS, 60 Hz kaynaktan beslenmektedir. Yük gücü 1,5 kW ile 8 kW arasında ayarlanabilmektedir. α’nın mümkün olabilecek en küçük deeri 10° dir. Aaıdakileri bulunuz:
(a) uygun α aralıı. (b) ilgili R deeri. (c) SCR akım ve gerilim oranları.
5.9 ekil 5.11 daki devrede, kaynak sinüsoidal 240 V RMS, 60 Hz dir. R=20 Ω ve α aralıı 15° ile 70° arasındadır. ndüktans büyüktür. Aaıdakileri bulunuz:
(a) α’nın her uç durumu için ortalama yük gücü. (b) SCR ortalama akım oranı. (c) SCR gerilim oranı.
5.10 Aaıdakileri bulunuz: °= 15α de 230 V RMS, 60 Hz kaynaktan bir yüke 40 A salamaktadır. Aaıdakileri bulunuz:
(a) °= 70α için ortalama yük gücü. (b) °= 15α de SCR ortalama akımı.
5.11 ekil 5.11 deki gibi tam dalga faz kontrollu bir devre 5 Ω’luk bir yüke 50 V ile 200 V arasında ortalama gerilim salamaktadır. Kaynak 240 V RMS, 60 Hz dir. Aaıdakileri bulunuz:
(a) gereken α aralıı

(b) SCR oranları (c) yükün ortalama güç aralıı.
5.12 ekil 5.13 deki devrede, VS sinüsoidal 460 V RMS, 60 Hz kaynak ve R=20 Ω. °= 100α . Aaıdakileri bulunuz:
(a) ortalama yük akımı (b) SCR ortalama akımı (c) FWD ortalama akımı (d) tepe SCR ileri ve geri gerilimi.
5.13 ekil 5.13 deki devreyi R=5 Ω’luk bir yüke ayarlı gerilim vermek için kullanınız. Kaynak 120 V RMS, 60 Hz. Yük gücü maksimum 2100 W ve minimum 500 W’tır. Aaıdakileri bulunuz:
(a) gereken α aralıı (b) SCR ortalama akım gereksinimi (c) FWD’nin akım oranı.
5.14 Faz kontrollu tam dalga bir dorultucu R=10 Ω’luk rezistif bir yüke güç salamaktadır. VS =460 V RMS, 60 Hz ve °= 75α . Aaıdakileri bulunuz:
(a) ortalama yük gücü (b) dorultucunun ve yükünün güç faktörü.
5.15 Problem 5.14 de, yük imdi yük akımının sabit olacaı bir indüktif elemana sahiptir. Problemi tekrar çözünüz.
5.16 ekil 5.21 deki devrede, kaynak gerilimi 480 V RMS, 60 Hz yük direnci R=10 Ωdur. Primer sargı sipir sayısının bir sekonder sargısına oranı 3:1 dir; °= 40α . Aaıdakileri bulunuz:
(a) Primer akımının RMS deeri (b) Primer sargısı için güç faktörü (c) Transformotorun primer ve sekonder sargıları için gereken volt-amper oranı.
5.17 Problem 5.16’yı bir indüktif yük için tekrar ediniz.
5.18 Faz kontrolu kullanan bir köprü dorultucu 240 V RMS, 60 Hz’lik tek fazlı bir kaynaktan beslenmektedir. DC yükü rezistif RL=10 Ω ve °= 40α . AC kaynaındaki temel ve üçüncü harmonik akımlarının genliini bulunuz.
5.19 Problem 5.18 de, yük bir indüktif olanla deitirilmitir. Problemi tekrar çözünüz.
5.20 Faz kontrollu bir köprü dorultucu bir indüktif yükü beslemektedir. Bir FWD kullanılmıtır; °= 36α , RL=15 Ω ve VS =460 V RMS, 60 Hz. Kaynak akımındaki üçüncü ve beinci harmonik bileenlerinin genliini bulunuz.
5.21 FWD’siz bir köprü dorultucu bir indüktif yüke güç vermektedir. AC kaynak akımının üçüncü ve beinci harmonik bileenlerinin genliini bulunuz. VS =230 V RMS, 60 Hz; RL=10 Ω ve °= 50α .
5.22 ekil 5.31 deki devrede, kaynak 460 V RMS, 60 Hz ve yük direnci 15 Ω dur. 300

V’luk bir çıkı gerilimi için, sürekli indüktör akımını sürdürmek için gereken minimum L deerini bulunuz.
5.23 Problem 5.22 de, yük gerilimi 200 V ile 400 V arasında ayarlanabilmektedir. Her durum için, sürekli indüktör akımını sürdürmek için gereken minimum L deerini bulunuz.
5.24 ekil 5.31 deki devrede, indüktans sürekli akımı sürdürmeye tam yeterlidir. VS=240 V RMS, 60 Hz; R=10 Ω ve °= 40α . Yükteki dalgacık gerilimi ihmal edilebilir fakat sıfır olmayacak ekilde kapasitör yeteri kadar büyüktür. (b) ıkkı için bir yaklaım olarak, indüktör akımı bir DC terim ve bir AC terimli Fourier serileri ile temsil edilmektedir. DC terim ortalama indüktör akımı ve AC terimin deiimi; toplam akım sıfır ile DC deerin iki katı arasında deiimi eklinde olmaktadır. Aaıdakileri bulunuz:
(a) zamanın bir fonksiyonu olarak indüktör akımı (b) yukarıdaki yaklaımı kullanarak iL’nin ikinci harmonik bileeninin genlii. (c) yük geriliminde 5V tepe deerli dalgacık ile sınırlayan C’nin deeri.
5.25 ekil 5.31 deki gibi bir devrede, kaynak gerilimi 240 V RMS, 60 Hz. Ortalama yük gücünün 3 kW ile 6 kW arasında ayarlanabilmesi gerekmektedir. α’nın deeri 10° den daha küçük olamamaktadır. ndüktör akımı sadece α’nın bir uç deerinde süreklidir. Aaıdakileri bulunuz:
(a) gereken α aralıı (b) L’nin gereken deeri (c) Köprü SCR’lerin akım oranı.
5.26 ekil 5.37 deki devrede, kaynak 240 V RMS, 60 Hz ve ortalama yük gerilim deeri 130 V’tur. RL=10 Ω ve °= 75α . Aaıdakileri bulunuz:
(a) dorultucunun iletim açısı (b) indüktans L.
5.27 ekil 5.41 deki gibi orta uçlu tam dalga bir dorultucu °= 40α ile bir yüke 40 A vermektedir. Transformotorun primer gerilimi 460 V RMS, 60 Hz ve 5,3/ 21 =NN .
Kaçak indüktans 4 mH dir. L’nin deeri büyüktür. Aaıdakileri bulunuz:
(a) VL’nin ideal ortalama deeri (b) kaçak indüktans tan kaynaklanan VL deki azalma (c) deiimin (komütasyon) olutuu her yarım saykıldaki zaman süresi.
5.28 Problem 5.27’yi 460 V RMS, 60 Hz kaynak ve 5,1/ 21 =NN ile tekrar ediniz.
Kaçak indüktans 5 mH’dir.
5.29 problem 5.27 de, primer sargının direnci 0,20 Ω ve her sekonder sargısının direnci 0,023 Ω dur. Dier artlar aynı kalmaktadır. Yükün ortalama gerilim deerini bulunuz.
5.30 ekil 5.45 deki gibi bir dorultucu 460 V RMS, 60 Hz kaynaktan 15 Ω’luk bir yükü beslemektedir. Aaıdakileri bulunuz:
(a) ortalama yük akımı (b) tepe yük akımı
(c) diyot akım oranı (d) diyot ters gerilim oranı.
5.31 Problem 5.30’u yük yük direncine seri büyük bir indüktans eklendii durumda tekrar ediniz.
5.32 ekil 5.45 deki diyotlar rezistif bir yükü kontrol etmek için SCR ler ile deitirilmitir. Kaynak ve yük problem 5.30 daki ile aynıdır. °= 70α . Aaıdakileri bulunuz:
(a) ortalama yük gerilimi (b) tepe yük akımı (c) ortalama yük akımı (d) ortalama SCR akımı (e) tepe SCR ileri gerilimi (f) tepe SCR ters gerilimi.
5.33 ekil 5.45 deki devrede, diyotlar SCR’ler ile deitirilmi ve yük büyük bir indüktans bileenine sahiptir. VS=460 V RMS, 60 Hz; R=20 Ω; α aralıı 20° ile 70° arasındadır. Aaıdakileri bulunuz:
(a) ortalama yük gerilim aralıı (b) ortalama yük gücü aralıı (c) gereken SCR akım oranı.
5.34 ekil 5.45 deki devrede, kaynak 460 V RMS, 60 Hz ve yük gücü 3 kW ile 1 kW arasında deimektedir. Diyotlar SCR’ler ile deitirilmitir. Yük büyük bir indüktans bileenine sahiptir. faz kontrol açısı 10° den daha az olamamaktadır. Aaıdakileri bulunuz:
(a) gereken α aralıı (b) tepe SCR akımı (c) ortalama SCR akımı (d) tepe SCR ileri veya geri gerilimi.
5.35 ekil 5.53 deki devrede, kaynak 460 V RMS, 60 Hz ve R=25 Ω. Yük indüktansı yoktur. Aaıdakileri bulunuz:
(a) ortalama yük gerilimi (b) ortalama yük akımı (c) ortalama yük gücü (d) ortalama diyot akımı (e) ters diyot tepe gerilimi.
5.36 ekil 5.53 de, yüke bir indüktör eklenmi ve yük akımı zamanla deimemektedir; VS=230 V RMS, 60 Hz; R=20 Ω. Hat akımının RMS deerini bulunuz.
5.37 ekil 5.56(a) da, °= 50α ve yük rezistiftir. VS=460 V RMS, 60 Hz; R=20 Ω. Aaıdakileri bulunuz:
(a) ortalama yük gerilimi (b) ortalama SCR akımı (c) ortalama yük gücü.
5.38 Problem 5.37 de, yük imdi indüktif olup yük akımı zamanla deimemektedir. Aaıdakileri bulunuz:
(a) ortalama SCR akımı (b) ortalama yük gücü (c) AC hat akımlarının RMS deeri (d) tepe SCR gerilimleri.
5.39 ekil 5.56(a) da, yük indüktif ve bir FWD eklenmitir. Yük gücü 4,5 kW ile 1,2 kW arasında ayarlanabilmektedir. VS=230 V RMS, 60 Hz; R=10 Ω. Aaıdakileri bulunuz:
(a) gereken α aralıı (b) en büyük SCR ortalama akımı (c) en büyük FWD ortalama akım deeri.
5.40 ekil 5.58 de, E bir yük direnci ve paralel büyük bir kapasitörü temsil etmektedir. 20 A’lik yük akımı, 230 V RMS, 60 Hz’lik kaynaktan °= 25α de verilmektedir. Sürekli indüktör akımını sürdürmek için gereken L deerini bulunuz.
5.41 ekil 5.58 de, kaynak gerilimi E deiken hızlı bir DC motoru temsil etmektedir. Minimum motor akımı ortalama 5 A’dir. °<<° 600 α için sürekli indüktör akımı sürdürülecektir. Kaynak gerilimi, 460 V RMS, 60 Hz dir. α ’nın her uç deeri için gereken L deerini bulunuz.
5.42 Problem 5.40 da, yükte ortalama gerilimin %2’si dalgacık gerilimi salamak için gereken C deerini tahmin ediniz. (Bu problemin amacı için, indüktör akımı bir DC bileen ve Fourier serilerinin birinci AC terimi ile temsil edilebilir. Böylece indüktör akımı sıfır ile DC bileenin iki katı arasında deiir.)
5.43 Üç fazlı köprü bir dorultucu bir indüktif yükü beslemektedir. AC kaynaı tarafındaki güç faktörünü bulunuz; VS= °= 75α ; RL=20 Ω ve P=15 kW.
5.44 Problem 5.43 de, bir FWD kullanılmıtır ve °= 75α . Güç faktörünü bulunuz.
5.45 Problem 5.43 de, imdi °= 40α ’ye deitirilmitir. AC hat akımlarındaki beinci ve yedinci derece harmoniklerin genliini bulunuz. Bu genlikleri temel AC hat akımı ile karılatırınız.
5.46 Bir köprü dorultucu 240 V RMS, 60 Hz üç fazlı bir kaynaktan 20 Ω’luk yük direnci ile indüktif bir yükü beslemektedir. Bir FWD kullanılmıtır. AC hat akımındaki beinci harmonik bileenini bulunuz.
5.47 ekil 5.65 deki gibi 12 palsli bir diyot dorultucu bir indüktif yüke dorultulmugüç vermektedir. Transformotorlar fazlararası gerilimde 2:1 azaltılmı dönütürme oranına sahiptirler. AC kaynak 480V RMS fazlararası, 60 Hz ve DC yük gücü 100 kW’tır. Aaıdakileri bulunuz:
(a) transformotorların volt-amper oranı (b) 11. harmonik hat akımının temel hat akımına oranı.
5.48 Problem 5.47 de, diyotlar SCR’ler ile deitirilmi ve °= 45α de çalımaktadır.
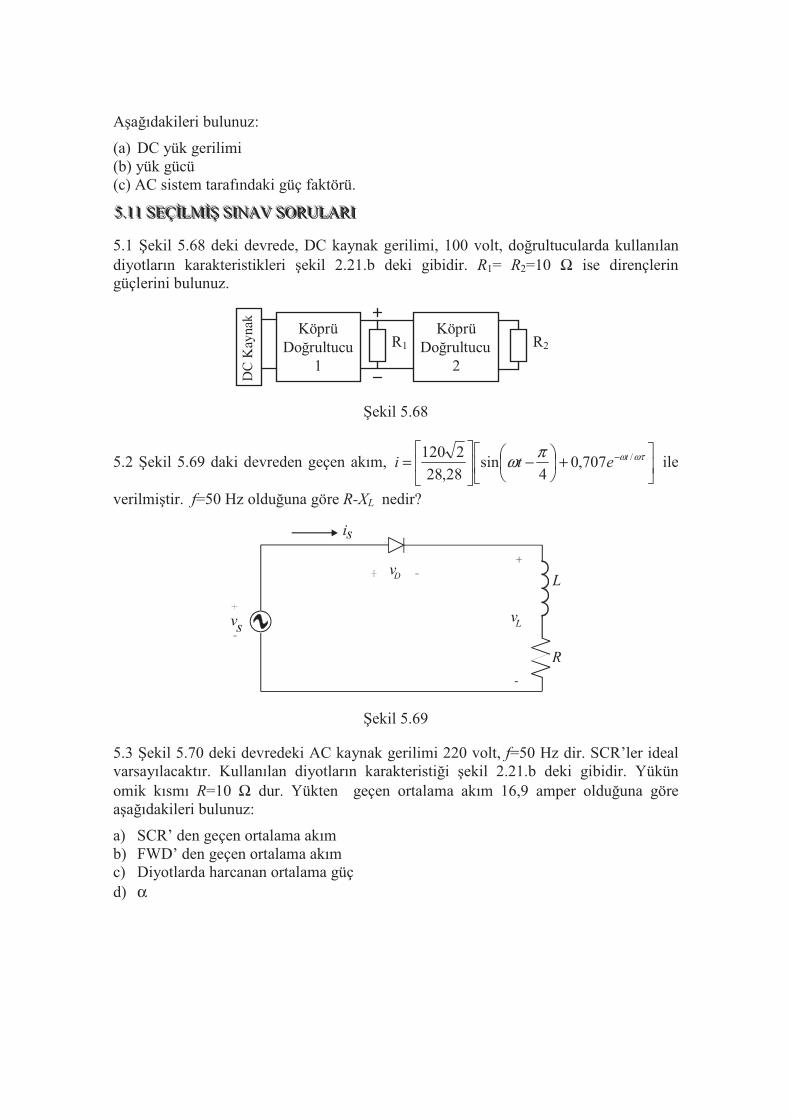
Aaıdakileri bulunuz:
(a) DC yük gerilimi (b) yük gücü (c) AC sistem tarafındaki güç faktörü.
555...111111 SSSEEEÇÇÇLLLMMM SSSIIINNNAAAVVV SSSOOORRRUUULLLAAARRRIII
5.1 ekil 5.68 deki devrede, DC kaynak gerilimi, 100 volt, dorultucularda kullanılan diyotların karakteristikleri ekil 2.21.b deki gibidir. R1= R2=10 Ω ise dirençlerin güçlerini bulunuz.
KöprüDorultucu
1
KöprüDorultucu
2
R1 R2
ekil 5.68
5.2 ekil 5.69 daki devreden geçen akım,
+
−
= − ωτωπ
ω /707,04
sin28,28
2120 teti ile
verilmitir. f=50 Hz olduuna göre R-XL nedir?
ekil 5.69
5.3 ekil 5.70 deki devredeki AC kaynak gerilimi 220 volt, f=50 Hz dir. SCR’ler ideal varsayılacaktır. Kullanılan diyotların karakteristii ekil 2.21.b deki gibidir. Yükün omik kısmı R=10 Ω dur. Yükten geçen ortalama akım 16,9 amper olduuna göre aaıdakileri bulunuz:
a) SCR’ den geçen ortalama akım b) FWD’ den geçen ortalama akım c) Diyotlarda harcanan ortalama güç d) α
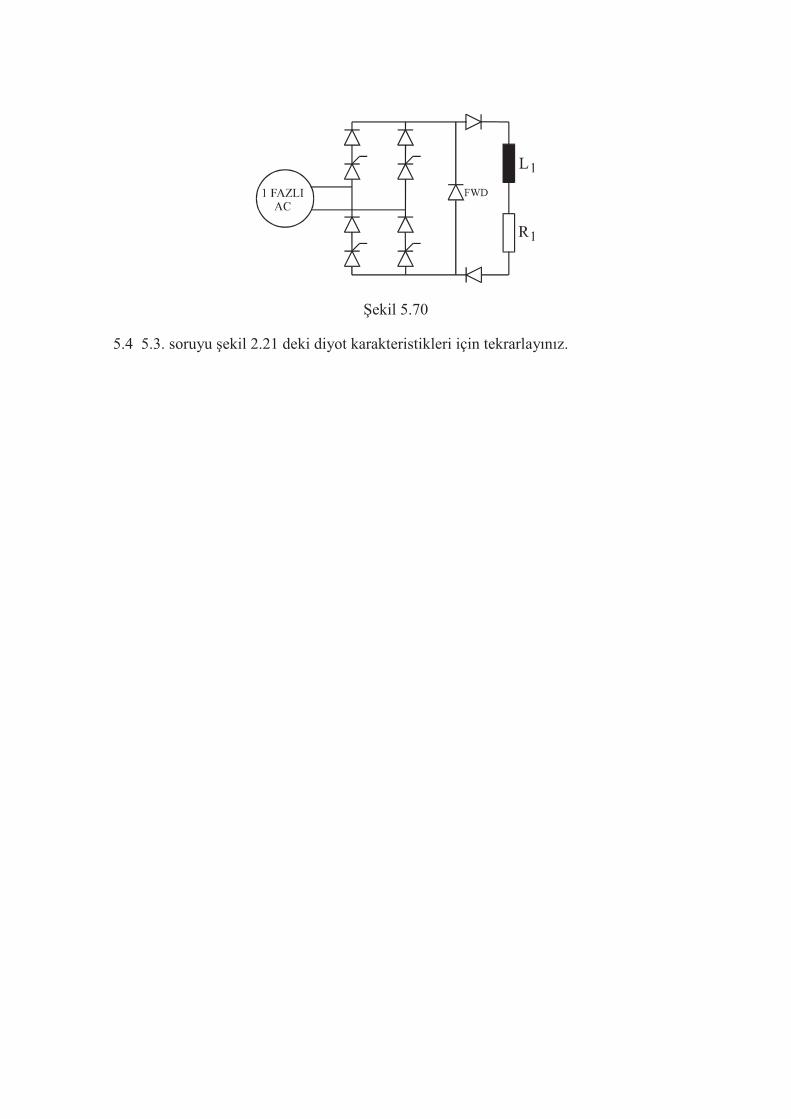
ekil 5.70
5.4 5.3. soruyu ekil 2.21 deki diyot karakteristikleri için tekrarlayınız.
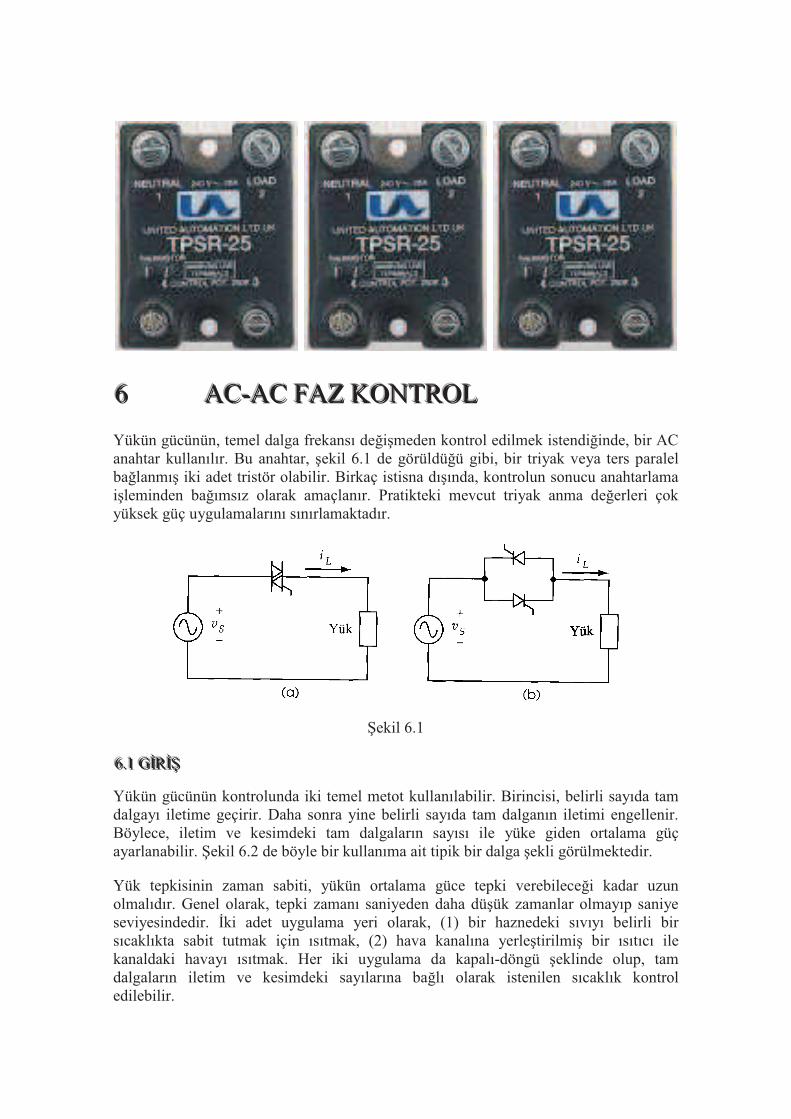
666 AAACCC---AAACCC FFFAAAZZZ KKKOOONNNTTTRRROOOLLL
Yükün gücünün, temel dalga frekansı deimeden kontrol edilmek istendiinde, bir AC anahtar kullanılır. Bu anahtar, ekil 6.1 de görüldüü gibi, bir triyak veya ters paralel balanmı iki adet tristör olabilir. Birkaç istisna dıında, kontrolun sonucu anahtarlama ileminden baımsız olarak amaçlanır. Pratikteki mevcut triyak anma deerleri çok yüksek güç uygulamalarını sınırlamaktadır.
ekil 6.1
666...111 GGGRRR
Yükün gücünün kontrolunda iki temel metot kullanılabilir. Birincisi, belirli sayıda tam dalgayı iletime geçirir. Daha sonra yine belirli sayıda tam dalganın iletimi engellenir. Böylece, iletim ve kesimdeki tam dalgaların sayısı ile yüke giden ortalama güç ayarlanabilir. ekil 6.2 de böyle bir kullanıma ait tipik bir dalga ekli görülmektedir.
Yük tepkisinin zaman sabiti, yükün ortalama güce tepki verebilecei kadar uzun olmalıdır. Genel olarak, tepki zamanı saniyeden daha düük zamanlar olmayıp saniye seviyesindedir. ki adet uygulama yeri olarak, (1) bir haznedeki sıvıyı belirli bir sıcaklıkta sabit tutmak için ısıtmak, (2) hava kanalına yerletirilmi bir ısıtıcı ile kanaldaki havayı ısıtmak. Her iki uygulama da kapalı-döngü eklinde olup, tam dalgaların iletim ve kesimdeki sayılarına balı olarak istenilen sıcaklık kontrol edilebilir.
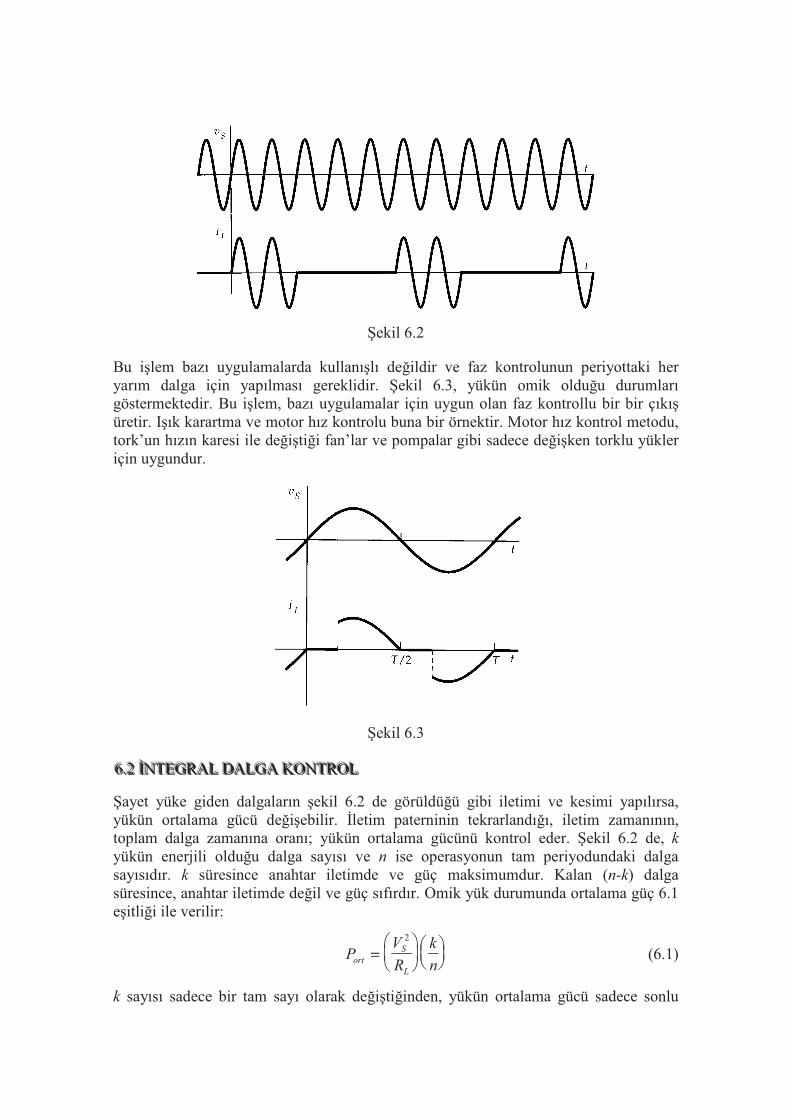
ekil 6.2
Bu ilem bazı uygulamalarda kullanılı deildir ve faz kontrolunun periyottaki her yarım dalga için yapılması gereklidir. ekil 6.3, yükün omik olduu durumları göstermektedir. Bu ilem, bazı uygulamalar için uygun olan faz kontrollu bir bir çıkıüretir. Iık karartma ve motor hız kontrolu buna bir örnektir. Motor hız kontrol metodu, tork’un hızın karesi ile deitii fan’lar ve pompalar gibi sadece deiken torklu yükler için uygundur.
ekil 6.3
666...222 NNNTTTEEEGGGRRRAAALLL DDDAAALLLGGGAAA KKKOOONNNTTTRRROOOLLL
ayet yüke giden dalgaların ekil 6.2 de görüldüü gibi iletimi ve kesimi yapılırsa, yükün ortalama gücü deiebilir. letim paterninin tekrarlandıı, iletim zamanının, toplam dalga zamanına oranı; yükün ortalama gücünü kontrol eder. ekil 6.2 de, k
yükün enerjili olduu dalga sayısı ve n ise operasyonun tam periyodundaki dalga sayısıdır. k süresince anahtar iletimde ve güç maksimumdur. Kalan (n-k) dalga süresince, anahtar iletimde deil ve güç sıfırdır. Omik yük durumunda ortalama güç 6.1 eitlii ile verilir:
PV
R
k
nort
S
L
=
2
(6.1)
k sayısı sadece bir tam sayı olarak deitiinden, yükün ortalama gücü sadece sonlu

kademelerde deiir. Ortalama gücün regülasyondaki mevcut adımlarının sayısı, tekrarlama paterni içerisindeki dalgaların toplam sayısına balıdır.
Kapalı bir döngü sistemi, k deerini ayarlanan bir noktada veya noktaya yakın tutmakta kullanılabilir. Böyle bir sistem, kontrolun tabiatından gelen açık ve kapalılıın bir sonucu olan deiimleri düzeltmek için kontrol edilen sistemde yeterli enerji depolamaya balıdır. Bu kontrol metodunun bir avantajı, omik yüklerde sıfır gerilimde anahtarlama olumasıdır. Yük akımının deiim oranı sistemin frekansı tarafından idare edilir ve bu deiim oranı, dier kontrollar ile elde edilen oranla karılatırıldıında küçük olabilir. Sonuçtaki elektriksel gürültü dier metodlara göre küçük olabilir.
ÖRNEK 6.1
Omik bir yük, yük gücünün bütün dalgalarda üretilmesi için kontrol edilecektir. Kaynak, 230 V RMS, 60 Hz dir. Yük gücünün 2-10 kW arası deimesi gerekmektedir. Tekrarlamanın maksimum aralıı 0,5 sn dir. RL=5,29 Ω. Aaıdakileri bulunuz:
(a) Anahtarın akım oranı (b) Maksimum gücü elde etmek için yükün enerjili olacaı zamanın yüzdesi (c) Minimum gücü elde etmek için n ve k deerleri (d) Yükteki mümkün olabilen en küçük artı nedir?
ÇÖZÜM
(a) Im = =( )( , )
,,
230 1 414
5 2961 5 A tepe deer
ILRMS= =
61 5
1 41443 5
,
,, A
(b) Anahtar devamlı iletimde olduu zaman, Port = =( )( , )230 43 5 10000 W. Anahtar,
maksimum gücü elde etmek için zamanın %100’ünde iletimde olmalıdır.
(c) P=2000 W için,
k
n= =
2000
100000 2,
ayet n = 30 dalga seçilirse,
k = (0,2)(30) = 6 dalga
(d) k’nın bir birim deiimi için, yükteki en küçük deiim,
∆P =
=
1
3010000 333 W
333 W’dan daha aaı bir çıkı güç deiimi için, k deerinin iki tam sayı arasında deitirilmesi gerekir.

666...333 OOOMMMKKK YYYÜÜÜKKKLLLEEERRR NNN FFFAAAZZZ KKKOOONNNTTTRRROOOLLLUUU
ekil 6.1 deki temel devre, omik bir yükün gücünü kontrol etmek için kullanılabilir. ekil 6.3 deki grafikler, ekil 5.8 deki omik yüklü tam dalga bir dorultucudakilere benzemektedirler. Buradaki farklılık, her ikinci yarım dalganın pozitif deerinin olmayıp negatif kısmının olmasıdır. Bununla birlikte, gücün bir kareli fonksiyon olmasından dolayı gerilimdeki negatif kısmın güç üzerinde azaltıcı bir etkisi yoktur.
Her yarım dalgadaki iletimin gecikmesi, α açısıdır ve 6.2 eitlii ile verilir.
1tωα = (6.2)
Bu, 5. bölümde verilen faz kontrol açısıdır. Yük akımının RMS deerinin eitlii de 5.37 eitlii ile aynıdır. Bu eitlik, omik yüklü AC faz kontrol durumu için 6.3 eitlii olarak yeniden ifade edilmitir:
5,0
5,0 2
2sin1
)2(
+
−
=
π
α
π
αmL
II
RMS (6.3)
Yük gücü 6.4 eitlii ile verilir:
( ) ( )P I Rort L LRMS=
2
(6.4)
Yük geriliminin RMS deeri, IL nin RMS deeri için 6.3 eitliinde verilen ifadesine benzemektedir. 6.3 eitlii RL ile çarpılarak 6.5 eitliindeki sonuç elde edilir:
5,0
5,0 2
2sin1
)2(
+
−
=
π
α
π
αmL
VV
SRM (6.5)
6.3 ve 6.4 eitliklerinin incelenmesi, yük gücünün 0 ile 180° arasındaki tüm aralık için α’nın deitirilmesi ile ayarlanabileceini gösterir. Verilen bu aralık için iletimin ayarlanmasını yapabilecek uygun tetikleme devreleri mevcuttur.
Akım sinüsoidal olmadıından dolayı, AC kaynaına yansıyan güç faktörü, yük omik bile olsa birim deerden daha azdır. Tanıma göre güç faktörü 6.6 eitliinde verilmitir:
Güç FaktörüOrtalama Güç
=V IRMS RMS
(6.6)
Bu tanımın, 6.3 ve 6.4 eitliklerindeki ifadeler kullanılarak deerlendirilmesi yapılır. 6.6 eitliindeki VRMS in deeri sinüsoidal kaynak gerilimidir. Bu eitliklerin birkaçı 6.7 eitliini oluturmak için birletirilebilir:
Güç Faktörü = −
+
1
2
2
0 5α
π
α
π
sin,
(6.7)
Sonuç güç faktörü, α sıfır olduu zaman 1 ve α sıfırdan artmaya baladıında ise azalır.
Kaynak geriliminin sıfır olduu aynı zamanda, anahtar akımı sıfır olur, çünkü yük

omiktir. Bundan dolayı, akımın sıfır olduu zaman anahtar tıkamaya baladıında, ihmal edilebilir kaynak gerilimi vardır. Kesim anındaki büyük dv/dt problemi yoktur ve elemanın terminal uçlarında gerilimin birikme oranını azaltmayı gerektiren bir koruyucu devreye gerek yoktur.
Yük omik olduundan dolayı, iletimde yük akımının artıında gecikme yoktur. ayet α=0° de anahtarın iletimi gerekmiyorsa, akımı tutabilmek için yeterli tutma akımını salama da bir problem deildir. Bu özellikle sınırlayıcı bir gereksinim deildir. α’nın çok küçük bir deeri için, yarı-iletken anahtarı iletim durumunda tutmaya neden olacak yeterli gerilim ve akım genelde bulunmaktadır.
α>90° deeri için, anahtarın iletiminden önce anahtar kaynak geriliminin tepe deerini tıkar. Böylece anahtarın minimum gerilim kapasitesi, kaynak geriliminin tepe deeridir. Aynı tıkama kapasitesi, tabiki, anahtarın SCR veya triyak uygulamalarının her iki yönü içinde gereklidir.
ÖRNEK 6.2
ekil 6.1 deki devrede, anahtar 460 V RMS, 60 Hz lik bir kaynaktan, omik bir yükün gücünü kontrol etmektedir. Yük direnci 20 Ω ve α=35° dir. Aaıdakileri bulunuz:
(a) tepe yük akımı (b) ortalama yük akımı (c) anahtar gerilim oranı (d) devrenin güç faktörü
ÇÖZÜM
(a) IV
Rm
m= = =( )( , )
,460 1 414
2032 53A
(b) 6.3 eitliinden,
48,222
70sin
180
351
2
53,325,0
=
+
−
=
π
SRMLI A
P ILRMS= =( )2 20 10105W
(c) Anahtarın, kaynak geriliminin tepe deeri olan 650 V’a dayanabilmesi gerekir. Bundan dolayı minimum anahtar anma gerilimi en azından 800 V olmalıdır.
(d) 6.7 eitliinden,
Güç Faktörü = −
+
=1
35
180
70
20 9773
0 5 sin
,
.
π
ÖRNEK 6.3
10 Ω’luk omik bir yük 240 V RMS lik bir kaynaa faz kontrollu bir anahtarla balanmıtır. Yükün gücünün 5 kW ile 2 kW arasında ayarlanması gerekmektedir. Aaıdakileri bulunuz:

(a) tepe yük akımı (b) α’nın her uç durumu için yük akımının RMS deeri (c) istenilen α aralıı (d) ekil 6.1(a) daki anahtar durumuna göre triyak akımının RMS deeri (e) ekil 6.1(b) deki anahtar durumuna göre iki SCR’nin her birinden geçen akımın ortalama deeri (f) anahtarın minimum tıkama gerilimi (g) en küçük güç için güç faktörü
ÇÖZÜM
(a) Vm = =( )( , ) ,240 1 414 339 4 V
IV
Rm
m
L
= = =339 4
1033 94
,, A
(b) P=5000 W için, ILRMS
= =5000
1022 36, A
P=2000 W için, ILRMS
= =2000
1014 14, A
(c) P=5000 W için, 6.3 eitlii kullanılarak,
22 3633 94
21
2
20 5
0 5
,,
( )
sin.
,
=
−
+
α
π
α
π α = 51 6,
P=2000 W için, 6.3 eitlii kullanılarak,
14 1433 94
21
2
20 5
0 5
,,
( )
sin.
,
=
−
+
α
π
α
π α = 104 0,
(d) IRMS yük akımı ile aynıdır = 22,36 A
(e) Her bir SCR den geçen ortalama akım, 5.30 eitlii ile bulunabilir:
II
ort
m=
+ =
+ =
21
33 94
21 51 6 8 76
πα
π( cos )
,( cos , ) , A
(f) Anahtarın kaynak geriliminin tepe deeri olan 339,4 voltu tıkaması veya dayanması gerekir. Bunun için kabul edilebilecek minimum gerilim 400 V tur. Bazı durumlar için bu yeterli olabilir.
(g) Güç faktörü = −
+
=1
104
180
208
20 590
0 5sin
,
,
π

666...444 HHHAAARRRMMMOOONNNKKKLLLEEERRR::: TTTEEEKKK FFFAAAZZZLLLIII OOOMMMKKK YYYÜÜÜKKKLLLEEERRR
ekil 6.3 deki akımın dalga biçimi, özellikle α’nın deeri artarken yüksek dereceli harmonikleri içerir. Harmonik içerii dalganın Fourier serilerinin analizi yapılarak belirlenir: Simetrik yarım periyottaki inceleme dalga biçiminin sadece tek sayılı harmonikleri içerdiini gösterir. Orijin kaydırılamadıından dolayı fonksiyon tek veya çift olur. Bundan dolayı An ve Bn terimlerinin ikiside birden mevcut olabilir.
Simetrik olma durumu ile T/2 aralıında integral alınarak katsayılar belirlenebilir. Formüllerde zaman yerine açı deikeni kullanılmıtır:
=
π
αθθθ
πdnIA mn cossin
2 (6.8)
=
π
αθθθ
πdnIB mn sinsin
2 (6.9)
6.8 ve 6.9 eitliklerinin çözümü ile aaıdaki sonuçlar elde edilir:
( )[ ]12cos2
1 −
= α
πmI
A (6.10)
( ) ( )[ ]ααππ
2sin22
1 +−
= mI
B (6.11)
( ) ( ) ( )[ ] ( ) ( )[ ] ααπ
1cos11cos1212
−+−+−+
−= nnnn
n
IA m
n (6.12)
( ) ( ) ( )[ ] ( ) ( )[ ] ααπ
1sin11sin112
−+−+−
−= nnnn
n
IB m
n (6.13)
ekil 6.4 deki grafik, α ile deien bazı harmoniklerin davranılarını göstermektedir. Her deer her bir harmoniin baıl genliidir ve A ve B katsayılarının bilinen yolla birletirilmesi ile elde edilir.
ÖRNEK 6.4
Tek fazlı omik bir yük 460 V RMS, 60 Hz lik bir kaynak tarafından bir faz kontrol anahtarı ile beslenmektedir. Faz kontrolsüz yükün gücü 15 kW tır. Aaıdakileri bulunuz:
(a) ortalama gücü 9 kW’a düürecek α deeri (b) α’nın bu deeri için akımın temel dalgasının tepe genlii (c) 3. ve 5. derece harmonik akımlarının tepe genlikleri
ÇÖZÜM
(a) α = 0 iken yük direncinin deeri bulunabilir:
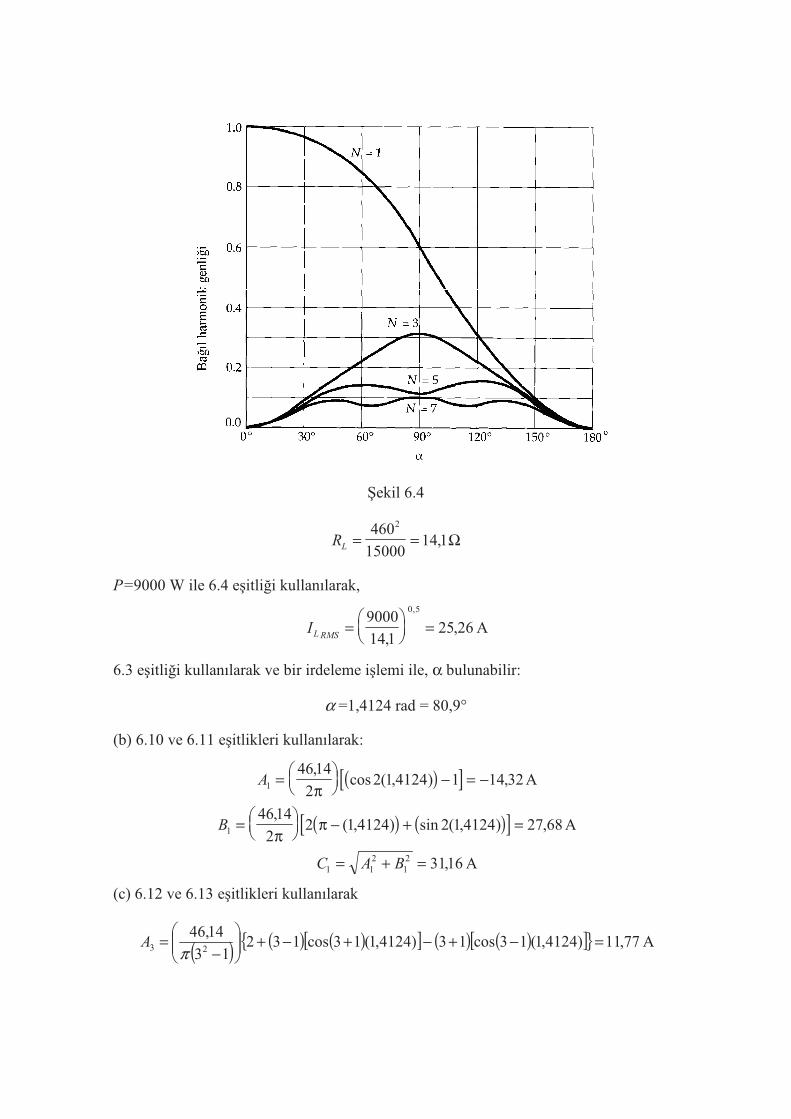
ekil 6.4
RL = =460
1500014 1
2
, Ω
P=9000 W ile 6.4 eitlii kullanılarak,
IL RMS=
=
9000
14 125 26
0 5
,,
,
A
6.3 eitlii kullanılarak ve bir irdeleme ilemi ile, α bulunabilir:
α =1,4124 rad = 80,9°
(b) 6.10 ve 6.11 eitlikleri kullanılarak:
( )[ ]A1
4614
22 1 1 14 32=
− = −
,cos ( ,4124) ,
πA
( ) ( )[ ]B1
4614
22 1 2 1 27=
− + =
,( ,4124) sin ( ,4124) ,68
ππ A
C A B1 12
12 3116= + = , A
(c) 6.12 ve 6.13 eitlikleri kullanılarak
( ) ( ) ( )[ ] ( ) ( )[ ] 77,11)4124,1(13cos13)4124,1(13cos13213
14,4623 =−+−+−+
−=
πA A
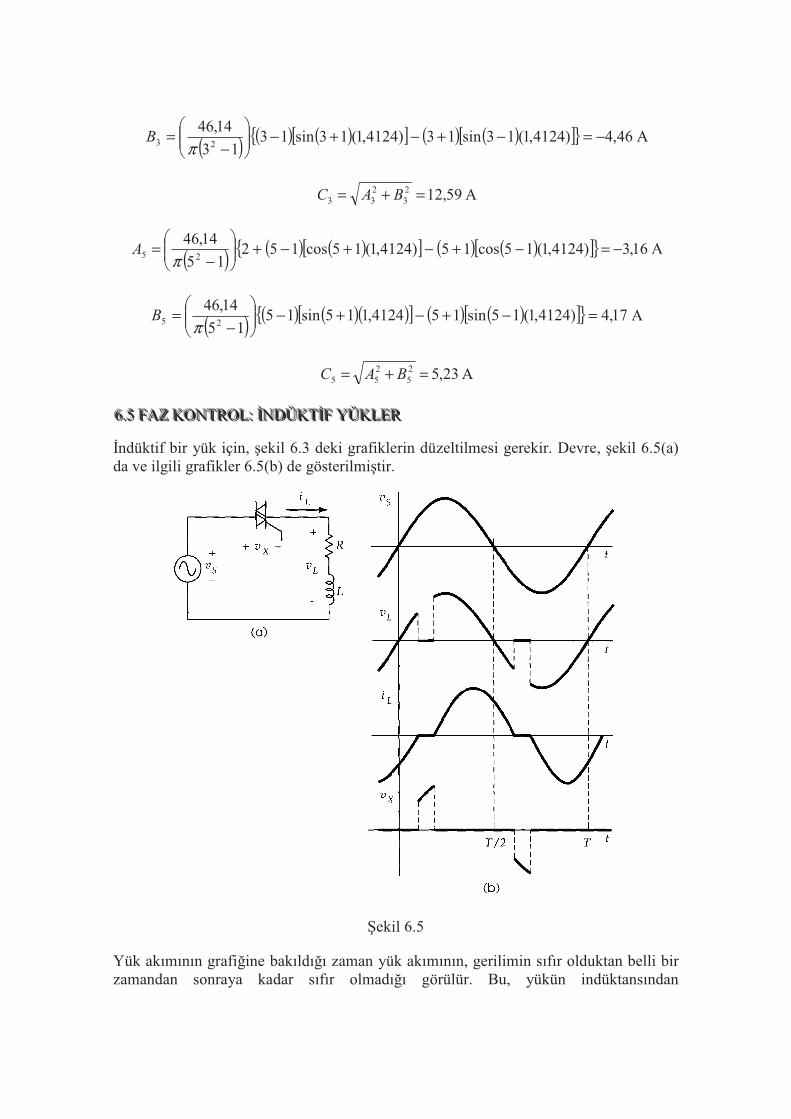
( )( ) ( )[ ] ( ) ( )[ ] 46,4)4124,1(13sin13)4124,1(13sin13
13
14,4623 −=−+−+−
−=
πB A
59,1223
233 =+= BAC A
( )( ) ( )[ ] ( ) ( )[ ] 16,3)4124,1(15cos15)4124,1(15cos152
15
14,4625 −=−+−+−+
−=
πA A
( )( ) ( )( )[ ] ( ) ( )[ ] 17,4)4124,1(15sin154124,115sin15
15
14,4625 =−+−+−
−=
πB A
23,525
255 =+= BAC A
666...555 FFFAAAZZZ KKKOOONNNTTTRRROOOLLL::: NNNDDDÜÜÜKKKTTTFFF YYYÜÜÜKKKLLLEEERRR
ndüktif bir yük için, ekil 6.3 deki grafiklerin düzeltilmesi gerekir. Devre, ekil 6.5(a) da ve ilgili grafikler 6.5(b) de gösterilmitir.
ekil 6.5
Yük akımının grafiine bakıldıı zaman yük akımının, gerilimin sıfır olduktan belli bir zamandan sonraya kadar sıfır olmadıı görülür. Bu, yükün indüktansından

kaynaklanmaktadır. Yük akımı sıfıra eriip kaldıı zaman, anahtar uçlarındaki gerilim ideal bir süreksizlie sahiptir. Bu, SCR ve triyak uçlarındaki gerilimde ani deimelerin sonucu iletim ihtimali ile 3. bölümde bahsedilmitir. Böyle bir durumda kutupsuz bir koruyucu devre, akım sıfır olduu zaman istenilmeyen bir iletimden korunmak için genel olarak istenilir.
ekil 6.5 deki yük akımı standart devre analizi metotları ile bulunabilir. ωα /=t da balanarak, akım 6.14 eitlii ile bulunabilir:
( )[ ]ωτωθω /sin tmL Aet
Z
Vi −+−= (6.14)
6.14 eitlii, sadece ekil 6.5(b) de gösterilen t t t1 2< < aralıı için geçerlidir, burada
ω
α=1t (6.15)
ω
β=2t (6.16)
LjRZ ω+= (6.17)
θω
ωτ tan==R
L (6.18)
)/(
)sin(ωτα
θα−
−−=
eA (6.19)
6.14 eitliinde akımın sıfır olduu t2 zamanının bulunmasıyla β açısı bulunabilir. Bu kapalı formda ifade edilemez fakat bir irdeleme ilemi ile kolaylıkla bulunabilir. β bir kere bulunduktan sonra, yük akımının RMS deeri ve yükün ortalama gücü belirlenebilir. Yük akımı için, 6.14 eitliindeki bütün terimler bilinmekte ve bir akımın RMS deeri 6.20 eitlii kullanılarak hesaplanabilir:
( )[ ]5,0
/
/
2/sin2
+−=
−ωβ
ωα
τθω dteAtTZ
VI tm
LRMS (6.20)
ntegral ileminin sonucu, akımın RMS deeri 6.21 eitliindeki gibidir:
( ) ( )
( )
( )[ ] ( ) ( )[ ]
( )[ ] ( ) ( )[ ]
5.0
2
/
2
/
/2/2
cossin1
4
cossin1
4
´
2
2sin
2
2sin
2
−+−
++
−+−
+−
−
−
−+
−−
−
=
−
−
−−
θαωτθαωτπ
ωτ
θβωτθβωτπ
ωτ
π
ω
π
θα
π
θβ
π
αβ
ωτα
ωτβ
ωταωτβ
eA
eA
eetA
Z
Vm
LIRMS
(6.21)
Yük akımının RMS deerinin bilinmesiyle yükün ortalama gücü kolaylıkla bulunur. Sonuç 6.22 eitliinde verilmitir.
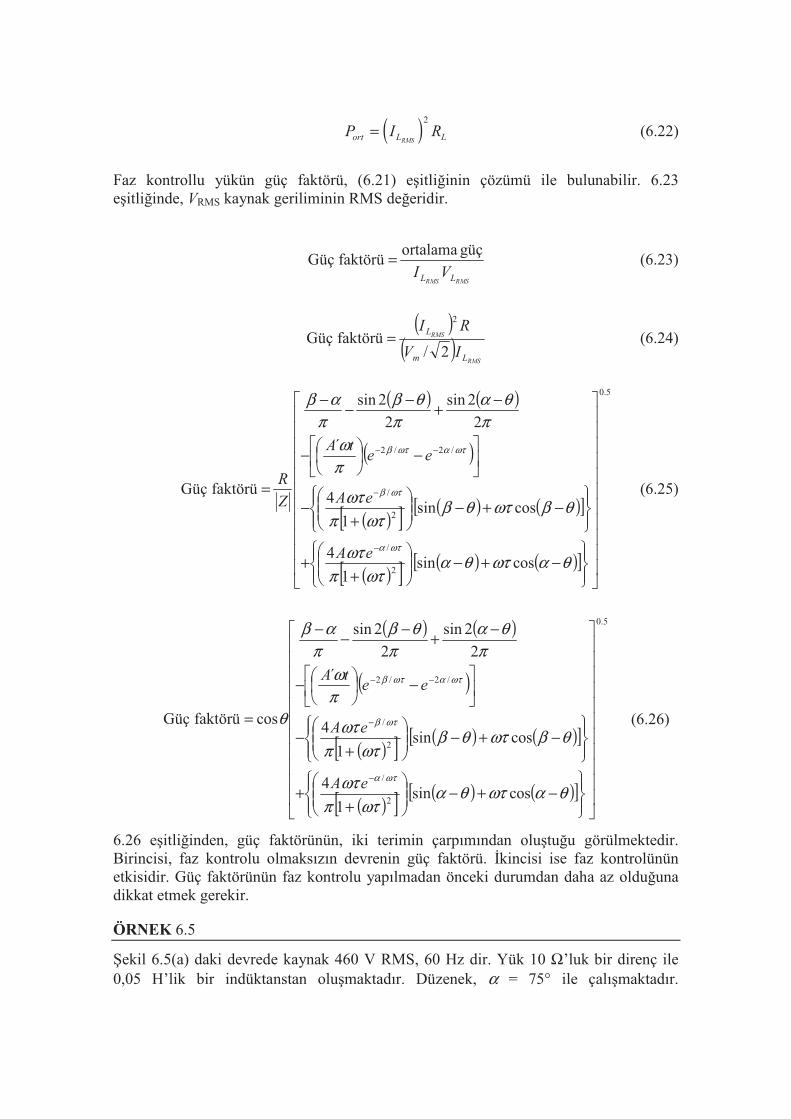
( )P I Rort L LRMS=
2
(6.22)
Faz kontrollu yükün güç faktörü, (6.21) eitliinin çözümü ile bulunabilir. 6.23 eitliinde, VRMS kaynak geriliminin RMS deeridir.
RMSRMS LL VI
güçortalamafaktörüGüç = (6.23)
( )( )
RMS
RMS
Lm
L
IV
RI
2/
2
=faktörüGüç (6.24)
( ) ( )
( )
( )[ ] ( ) ( )[ ]
( )[ ] ( ) ( )[ ]
5.0
2
/
2
/
/2/2
cossin1
4
cossin1
4
´
2
2sin
2
2sin
−+−
++
−+−
+−
−
−
−+
−−
−
=
−
−
−−
θαωτθαωτπ
ωτ
θβωτθβωτπ
ωτ
π
ω
π
θα
π
θβ
π
αβ
ωτα
ωτβ
ωταωτβ
eA
eA
eetA
Z
RfaktörüGüç (6.25)
( ) ( )
( )
( )[ ] ( ) ( )[ ]
( )[ ] ( ) ( )[ ]
5.0
2
/
2
/
/2/2
cossin1
4
cossin1
4
´
2
2sin
2
2sin
cos
−+−
++
−+−
+−
−
−
−+
−−
−
=
−
−
−−
θαωτθαωτπ
ωτ
θβωτθβωτπ
ωτ
π
ω
π
θα
π
θβ
π
αβ
θ
ωτα
ωτβ
ωταωτβ
eA
eA
eetA
faktörüGüç (6.26)
6.26 eitliinden, güç faktörünün, iki terimin çarpımından olutuu görülmektedir. Birincisi, faz kontrolu olmaksızın devrenin güç faktörü. kincisi ise faz kontrolünün etkisidir. Güç faktörünün faz kontrolu yapılmadan önceki durumdan daha az olduuna dikkat etmek gerekir.
ÖRNEK 6.5
ekil 6.5(a) daki devrede kaynak 460 V RMS, 60 Hz dir. Yük 10 Ω’luk bir direnç ile 0,05 H’lik bir indüktanstan olumaktadır. Düzenek, α = 75° ile çalımaktadır.

Aaıdakileri bulunuz:
(a) βωα << t arasında geçerli yük akımının denklemi
(b) β ’nın deeri (c) Yük akımının RMS deeri (d) Yükün ortalama gücü (e) faz kontrolunun etkili olduu α’nın minimum deeri (f) devrenin güç faktörü
ÇÖZÜM
(a) 6.14 eitlii kullanılarak, yük akımı aaıdaki gibi bulunur
Vm = =460 2 650V
Ω=+= 34,21LjRZ ω
rad083,162
4686,034,21
10cos
==
===
θ
θZ
R
rad309,175 == α
885,1tan === θω
ωτR
L
449,0)6275sin()sin(
)885,1/309,1()/(−=
−−=
−−=
−− eeA
ωτα
θα
( )[ ]885.1/449,0083,1sin34,21
650 t
L eti ωω −−−=
(b) (a) daki yük akımının deeri, 1757,4== βωt radyanda sıfır olur. Bu, bir irdeleme
ilemi ile bulunur. Açı olarak ifade edildii zaman β, 239° dir. Faz kontrolu yapılmaksızın tam iletimde, yük akımı (180+θ=) 242° de sıfır olacaktı.
(c) 6.21 eitlii kullanılarak, yük akımının RMS deeri bulunabilir:
68,18=RMSLI A
(d) Yük gücü 6.22 eitlii ve (c) deki akım kullanılarak bulunabilir:
P I RLRMSort = = =2 218 68 10 3491, W
(e) θ açısı 6.18 eitlii ile bulunur:
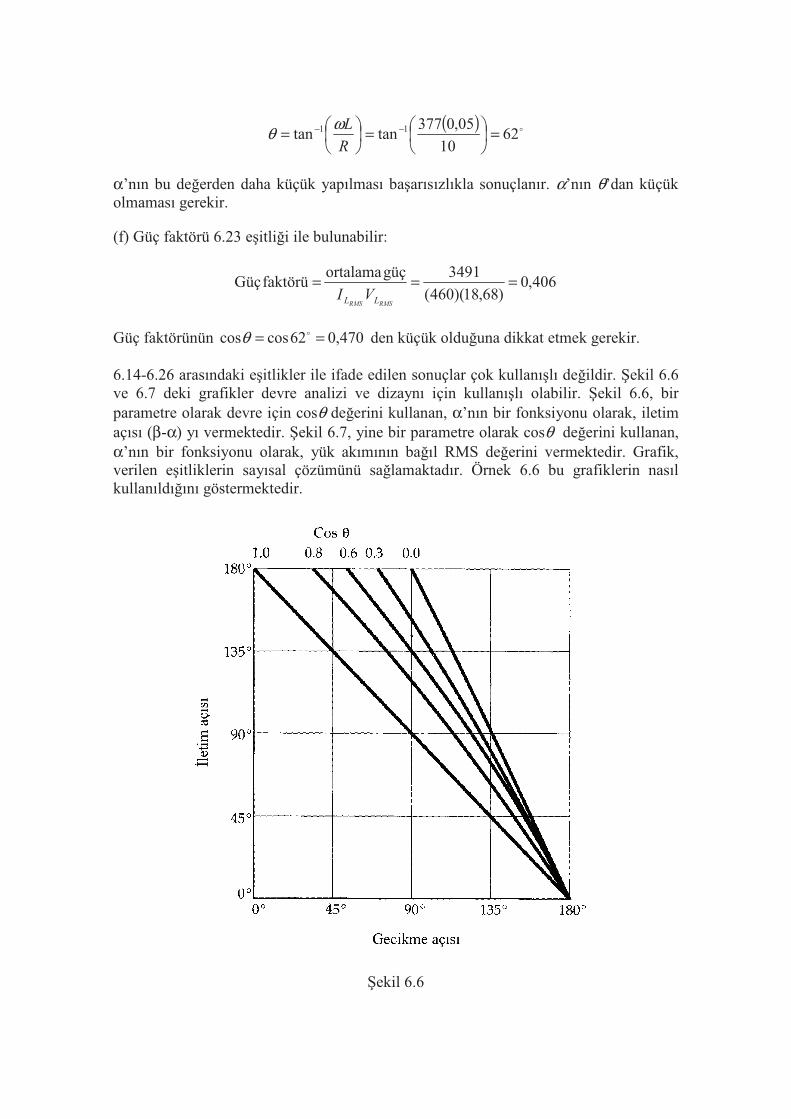
( ) 6210
05,0377tantan 11 =
=
= −−
R
Lωθ
α’nın bu deerden daha küçük yapılması baarısızlıkla sonuçlanır. α’nın θ’dan küçük olmaması gerekir.
(f) Güç faktörü 6.23 eitlii ile bulunabilir:
406,0)68,18)(460(
3491===
RMSRMS LL VI
güçortalamafaktörüGüç
Güç faktörünün 470,062coscos == θ den küçük olduuna dikkat etmek gerekir.
6.14-6.26 arasındaki eitlikler ile ifade edilen sonuçlar çok kullanılı deildir. ekil 6.6 ve 6.7 deki grafikler devre analizi ve dizaynı için kullanılı olabilir. ekil 6.6, bir parametre olarak devre için cosθ deerini kullanan, α’nın bir fonksiyonu olarak, iletim açısı (β-α) yı vermektedir. ekil 6.7, yine bir parametre olarak cosθ deerini kullanan, α’nın bir fonksiyonu olarak, yük akımının baıl RMS deerini vermektedir. Grafik, verilen eitliklerin sayısal çözümünü salamaktadır. Örnek 6.6 bu grafiklerin nasıl kullanıldıını göstermektedir.
ekil 6.6
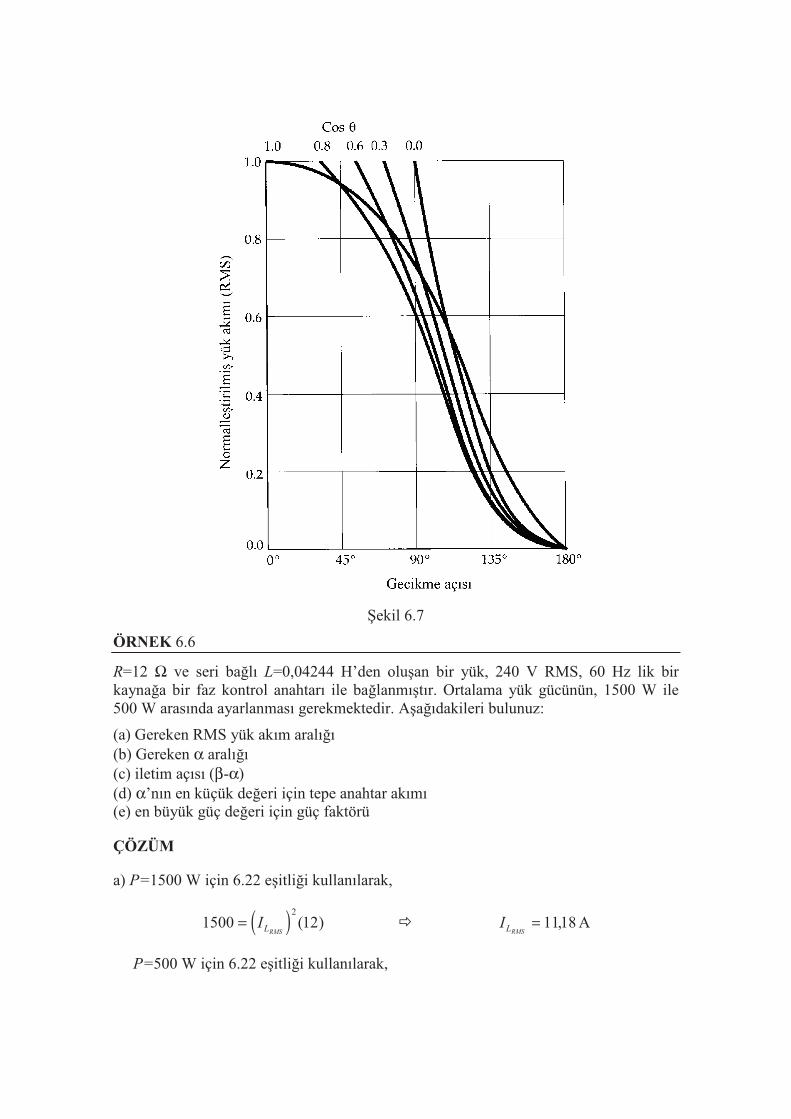
ekil 6.7
ÖRNEK 6.6
R=12 Ω ve seri balı L=0,04244 H’den oluan bir yük, 240 V RMS, 60 Hz lik bir kaynaa bir faz kontrol anahtarı ile balanmıtır. Ortalama yük gücünün, 1500 W ile 500 W arasında ayarlanması gerekmektedir. Aaıdakileri bulunuz:
(a) Gereken RMS yük akım aralıı (b) Gereken α aralıı (c) iletim açısı (β-α) (d) α’nın en küçük deeri için tepe anahtar akımı (e) en büyük güç deeri için güç faktörü
ÇÖZÜM
a) P=1500 W için 6.22 eitlii kullanılarak,
( )1500 122
= ILRMS( ) ILRMS
= 1118, A
P=500 W için 6.22 eitlii kullanılarak,
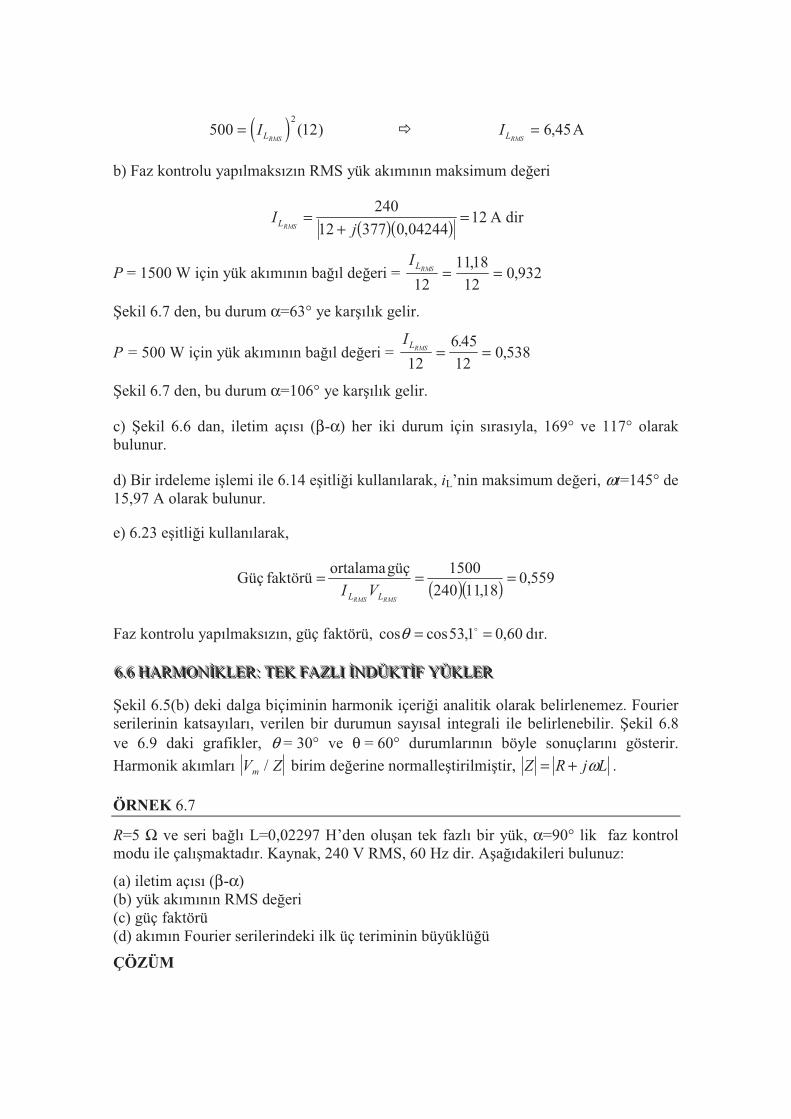
( )500 122
= ILRMS( ) ILRMS
= 6 45, A
b) Faz kontrolu yapılmaksızın RMS yük akımının maksimum deeri
( )( )I
jLRMS
=+
=240
12 377 0 0424412
,A dir
P = 1500 W için yük akımının baıl deeri = ILRMS
12
1118
120 932= =
,,
ekil 6.7 den, bu durum α=63° ye karılık gelir.
P = 500 W için yük akımının baıl deeri = ILRMS
12
6 45
120 538= =
.,
ekil 6.7 den, bu durum α=106° ye karılık gelir.
c) ekil 6.6 dan, iletim açısı (β-α) her iki durum için sırasıyla, 169° ve 117° olarak bulunur.
d) Bir irdeleme ilemi ile 6.14 eitlii kullanılarak, iL’nin maksimum deeri, ωt=145° de 15,97 A olarak bulunur.
e) 6.23 eitlii kullanılarak,
( )( )559,0
18,11240
1500===
RMSRMS LL VI
güçortalamafaktörüGüç
Faz kontrolu yapılmaksızın, güç faktörü, 60,01,53coscos == θ dır.
666...666 HHHAAARRRMMMOOONNNKKKLLLEEERRR::: TTTEEEKKK FFFAAAZZZLLLIII NNNDDDÜÜÜKKKTTTFFF YYYÜÜÜKKKLLLEEERRR
ekil 6.5(b) deki dalga biçiminin harmonik içerii analitik olarak belirlenemez. Fourier serilerinin katsayıları, verilen bir durumun sayısal integrali ile belirlenebilir. ekil 6.8 ve 6.9 daki grafikler, θ = 30° ve θ = 60° durumlarının böyle sonuçlarını gösterir.
Harmonik akımları V Zm / birim deerine normalletirilmitir, LjRZ ω+= .
ÖRNEK 6.7
R=5 Ω ve seri balı L=0,02297 H’den oluan tek fazlı bir yük, α=90° lik faz kontrol modu ile çalımaktadır. Kaynak, 240 V RMS, 60 Hz dir. Aaıdakileri bulunuz:
(a) iletim açısı (β-α) (b) yük akımının RMS deeri (c) güç faktörü (d) akımın Fourier serilerindeki ilk üç teriminin büyüklüü
ÇÖZÜM
(a) ekil 6.6 daki grafikten, iletim açısı (β-α) nın deeri 144° veya 2,513 rad olarak okunur.
(b) 6.17 - 6.21 eitlikleri ile akım belirlenebilir:
ekil 6.8
66,85 jLjRZ +=+= ω
605
66,8tantan 11 =
=
= −−
R
Lωθ
732,1tan === θω
ωτR
L
238,1)6090sin()sin(
)732,1/571,1()/(=
−−=
−−=
−− eeA
ωτα
θα
( )( )ILRMS= =24 0 810 19 45, , A
(c) 6.26 eitliinden, güç faktörü kolaylıkla bulunabilir ve iki kısımdan olumaktadır. Birisi (b) ıkkında ILRMS
için bulunmutur ve parantez içindeki 0,810 terimine eittir.
Dier kısım ise, cosθ = cos60° = 0,5 dir.
Güç faktörü = (cos60°)(0,810) = 0,405
(d) ekil 6.9 daki grafikten, Fourier katsayıları belirlenebilir:
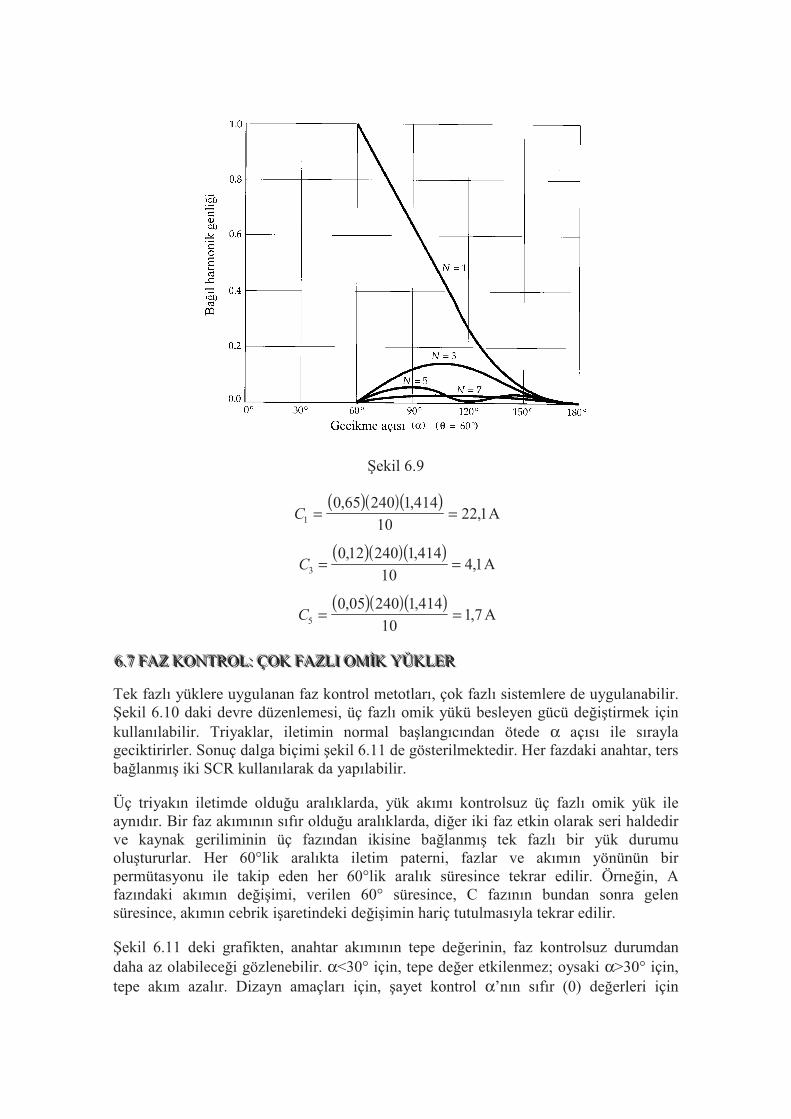
ekil 6.9
( )( )( )C1
0 65 240 1 414
1022 1= =
, ,, A
( )( )( )C3
0 12 240 1 414
104 1= =
, ,, A
( )( )( )C5
0 05 240 1 414
101 7= =
, ,, A
666...777 FFFAAAZZZ KKKOOONNNTTTRRROOOLLL::: ÇÇÇOOOKKK FFFAAAZZZLLLIII OOOMMMKKK YYYÜÜÜKKKLLLEEERRR
Tek fazlı yüklere uygulanan faz kontrol metotları, çok fazlı sistemlere de uygulanabilir. ekil 6.10 daki devre düzenlemesi, üç fazlı omik yükü besleyen gücü deitirmek için kullanılabilir. Triyaklar, iletimin normal balangıcından ötede α açısı ile sırayla geciktirirler. Sonuç dalga biçimi ekil 6.11 de gösterilmektedir. Her fazdaki anahtar, ters balanmı iki SCR kullanılarak da yapılabilir.
Üç triyakın iletimde olduu aralıklarda, yük akımı kontrolsuz üç fazlı omik yük ile aynıdır. Bir faz akımının sıfır olduu aralıklarda, dier iki faz etkin olarak seri haldedir ve kaynak geriliminin üç fazından ikisine balanmı tek fazlı bir yük durumu olutururlar. Her 60°lik aralıkta iletim paterni, fazlar ve akımın yönünün bir permütasyonu ile takip eden her 60°lik aralık süresince tekrar edilir. Örnein, A fazındaki akımın deiimi, verilen 60° süresince, C fazının bundan sonra gelen süresince, akımın cebrik iaretindeki deiimin hariç tutulmasıyla tekrar edilir.
ekil 6.11 deki grafikten, anahtar akımının tepe deerinin, faz kontrolsuz durumdan daha az olabilecei gözlenebilir. α<30° için, tepe deer etkilenmez; oysaki α>30° için, tepe akım azalır. Dizayn amaçları için, ayet kontrol α’nın sıfır (0) deerleri için
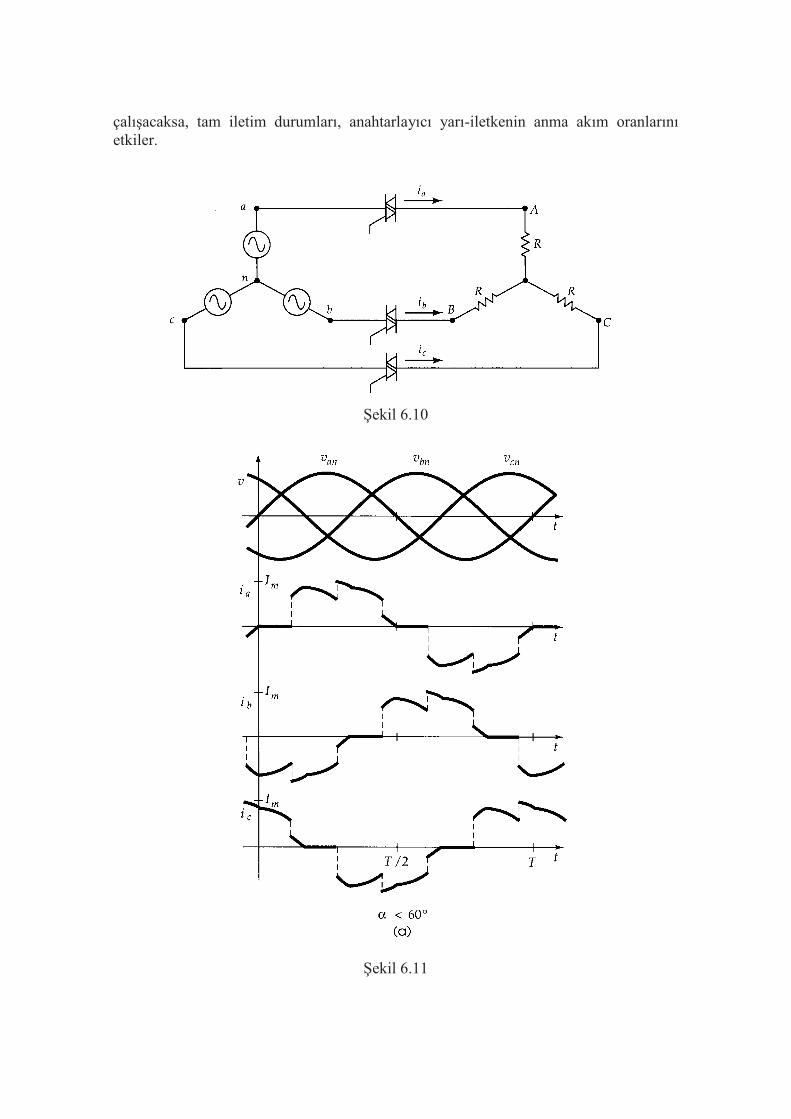
çalıacaksa, tam iletim durumları, anahtarlayıcı yarı-iletkenin anma akım oranlarını etkiler.
ekil 6.10
ekil 6.11
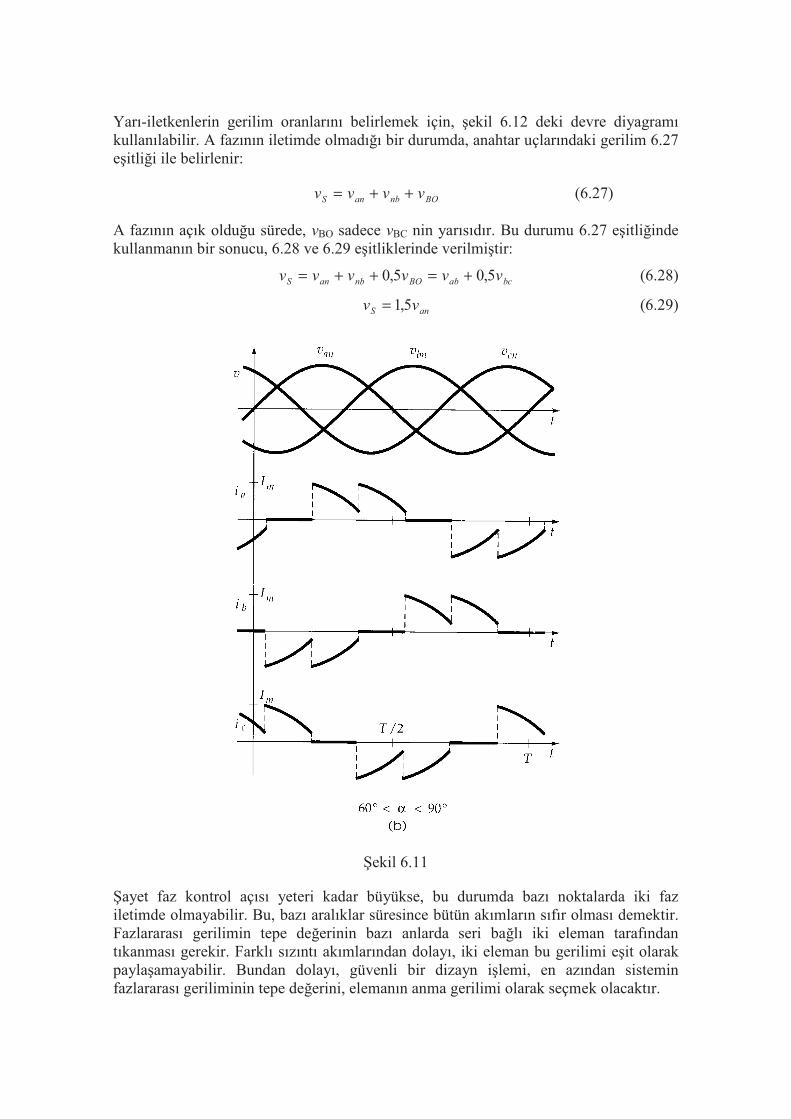
Yarı-iletkenlerin gerilim oranlarını belirlemek için, ekil 6.12 deki devre diyagramı kullanılabilir. A fazının iletimde olmadıı bir durumda, anahtar uçlarındaki gerilim 6.27 eitlii ile belirlenir:
v v v vS an nb BO= + + (6.27)
A fazının açık olduu sürede, vBO sadece vBC nin yarısıdır. Bu durumu 6.27 eitliinde kullanmanın bir sonucu, 6.28 ve 6.29 eitliklerinde verilmitir:
v v v v v vS an nb BO ab bc= + + = +0 5 0 5, , (6.28)
v vS an= 1 5, (6.29)
ekil 6.11
ayet faz kontrol açısı yeteri kadar büyükse, bu durumda bazı noktalarda iki faz iletimde olmayabilir. Bu, bazı aralıklar süresince bütün akımların sıfır olması demektir. Fazlararası gerilimin tepe deerinin bazı anlarda seri balı iki eleman tarafından tıkanması gerekir. Farklı sızıntı akımlarından dolayı, iki eleman bu gerilimi eit olarak paylaamayabilir. Bundan dolayı, güvenli bir dizayn ilemi, en azından sistemin fazlararası geriliminin tepe deerini, elemanın anma gerilimi olarak seçmek olacaktır.
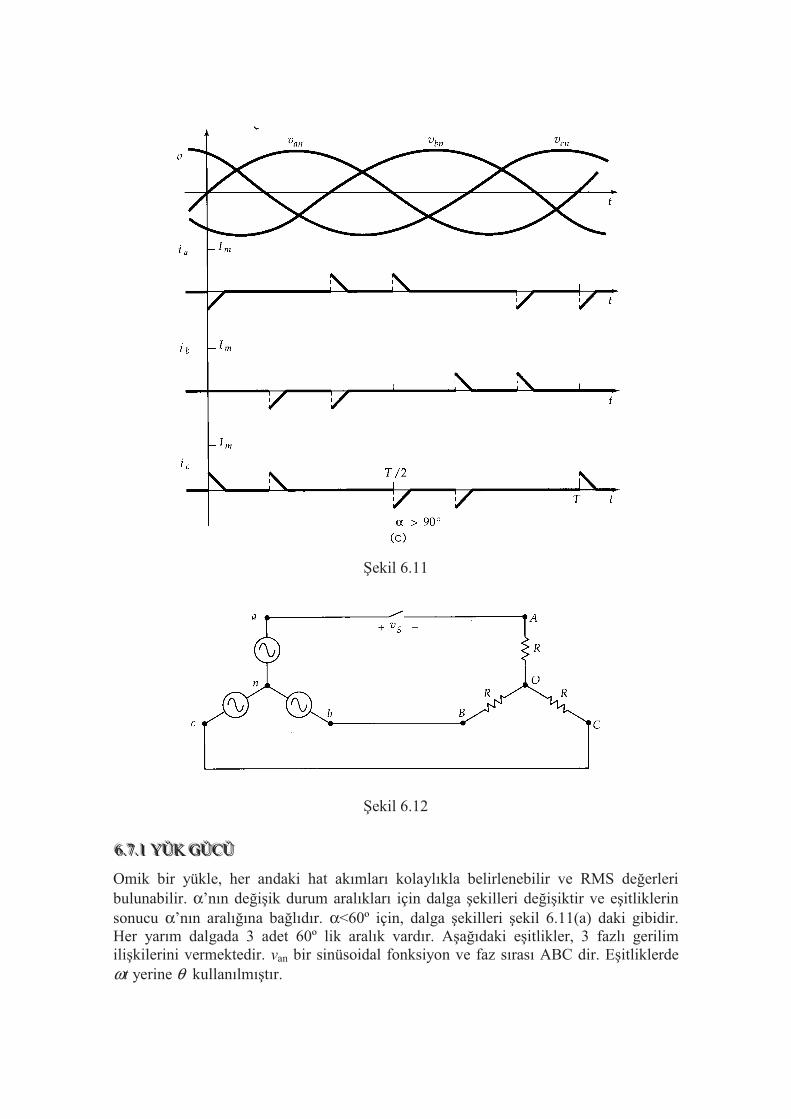
ekil 6.11
ekil 6.12
666...777...111 YYYÜÜÜKKK GGGÜÜÜCCCÜÜÜ
Omik bir yükle, her andaki hat akımları kolaylıkla belirlenebilir ve RMS deerleri bulunabilir. α’nın deiik durum aralıkları için dalga ekilleri deiiktir ve eitliklerin sonucu α’nın aralıına balıdır. α<60º için, dalga ekilleri ekil 6.11(a) daki gibidir. Her yarım dalgada 3 adet 60º lik aralık vardır. Aaıdaki eitlikler, 3 fazlı gerilim ilikilerini vermektedir. van bir sinüsoidal fonksiyon ve faz sırası ABC dir. Eitliklerde ωt yerine θ kullanılmıtır.

ia = 0 αθ <<0 (6.30)
iV
Ra
an=3
πθα <<
(6.31)
iV
Ra
ab=2
+<< α
πθ
π
33
(6.32)
iV
Ra
an=π
α θπ
3
2
3+
< <
(6.33)
iV
Ra
ac=2
+<< α
πθ
π
3
2
3
2 (6.34)
iV
Ra
an= πθαπ
<<
+
3
2 (6.35)
Akımın RMS deeri, sütundaki 6 eitliin, 6.36 eitliinde yerine konulmasıyla bulunur, sonuç 6.37 eitliinde verilmitir:
( )[ ]5,0
0
21
=
πθθ
πdiI aLRMS
(6.36)
( )ααππ
2sin75,05,12
1+−= mL II
RMS (6.37)
60º<α<90º için, dalga ekilleri ekil 6.11(b) deki gibidir. Akım ilikileri, 6.38, 6.39 ve 6.40 eitlikleri ile ifade edilir.
0=ai αθπ
α <<−3
(6.38)
R
Vi aba
2=
3
παθα +<<
(6.39)
R
Vi aca
2=
3
2
3
παθ
πα +<<+
(6.40)
Yukarıdaki ilikilerin 6.36 eitliinde yerine konulup, yeni sınırlardaki integralleri ile 6.41 eitlii bulunur:
++=
62sin866,0
34
3 πα
π
πmL II
RMS (6.41)
90º<α<150º için, verilen bir faz akımının iletim paterni 120º boyunca sürekli deildir, dalga ekilleri ekil 6.11(c) deki gibidir. letim B fazından C fazına anahtarlanırken, A fazının iletiminde bir boluk vardır. Anahtarın kapı terminalinin, bu ilemin oluması için sürekli uyartımda olması gerekir; iletimin balangıcındaki küçük bir pals yeterli deildir. Operasyonun bu mod’u için akımın RMS deeri, yarım periyot boyunca integral ile elde edilir. Akımlar aaıdaki eitliklerle ifade edilir.

ia = 0 αθπ
<<6
(6.42)
R
Vi aba
2=
6
5πθα <<
(6.43)
ia = 036
5 παθ
π+<<
(6.44)
R
Vi aca
2=
6
7
3
πθ
πα <<+
(6.45)
Yukarıdaki dört ilikinin, 6.36 eitliinde uygun sınırlar ile yerine konulmasıyla, 6.46 eitlii elde edilir:
++−=
32sin5,0
6
5
4
3 παα
π
πmL II
RMS (6.46)
ÖRNEK 6.8
Faz baına 20 Ω’luk bir yük, 460 V RMS, 60 Hz’lik 3 fazlı bir kaynaa yıldız balanmıtır. Yük gücünün, 9 kW ile 3 kW arasında, her fazda yük ile kaynak arasına balanmı bir faz kontrol anahtarı ile ayarlanabilir olması gerekmektedir. Aaıdakileri bulunuz:
(a) anahtar akımının tepe deeri (b) istenilen α aralıı (c) anahtar RMS anma akım deeri (d) anahtar gerilim oranı
ÇÖZÜM
(a) ( )( )
Im = =460
2018 78
23
0 5,
, A
α < 30° olduu sürece, anahtarın tepe akımı Im ile aynıdır. ayet, α > 30° ise, bu örnein ileri kısımlarında bulunduu gibi, tepe akımı 18,78 A den biraz azdır.
(b) 9 kW lık yük gücü için, RMS akımı bulunur:
( )( )ILRMS
=
=
9000
3 2012 24
0 5,
, A
6.37 eitlii kullanılarak, α’nın deeri, bir irdeleme ilemi ile 46,67° veya 0,8145 rad olarak hesaplanır.
3 kW lık yük gücü için, RMS akımı bulunur:
( )( )ILRMS
=
=
3000
3 207 07
0 5,
, A
6.46 eitlii kullanılarak ve α için bir çözüm, α = 90,8° veya 1,585 rad sonucunu verir.
(c) Anahtarın RMS anma akım deeri, en büyük yük akımının RMS deeri ile aynıdır.
(d) Anahtarın gerilim oranının, kaynaın fazlararası geriliminin tepe deerinden veya 460×1,414=650 V dan az olmaması gerekir. Pratikte, 800 V dan az olmayan bir anma deerinin kullanılması gerekir.
666...777...222 GGGÜÜÜÇÇÇ FFFAAAKKKTTTÖÖÖRRRÜÜÜ::: OOOMMMKKK YYYÜÜÜKKKLLLEEERRR
Burada da yine AC kaynaına yansıyan güç faktörü, faz kontrolu kullanıldıından dolayı birimden daha azdır. 6.6 eitliinde tanımlanan tek fazlı durum için güç
faktörünün tanımı, 3 fazlı duruma göre düzenlenebilir. Bu eitlikte VLN RMS nin kaynak
geriliminin genliinin olduuna dikkat etmek gerekir.
Güç Faktörüfaz baına ortalama güç)
=3
3
(
V ILN LRMS RMS
(6.47)
6.37, 6.41 veya 6.46 eitliklerini, 6.47 eitliinde yerine koyarak 6.48 eitlii elde edilir. Eitlikte parantez içindeki boluk, eitlik elde edilirken kullanılan ilikinin uygun terimini içerir:
Güç Faktörü = ( ) ( )2 (6.48)
ÖRNEK 6.9
Örnek 6.8 deki, her iki yük durumuna göre güç faktörünü bulunuz.
ÇÖZÜM
P=9 kW ve α=0,8145 rad için, 6.37 ve 6.48 eitlikleri kullanılarak:
( )Güç Faktörü = − + =21
21 5 0 8145 0 75 2 0 8145 0 922
ππ , ( , ) , sin ( , ) ,
P=3 kW ve α=1,585 rad için 6.46 ve 6.48 eitlikleri kullanılarak:
Güç Faktörü = − + +
=2
3
4
5
61 585 0 5 2 1 585
30 532
π
π π( , ) , sin ( , ) ,
666...888 FFFAAAZZZ KKKOOONNNTTTRRROOOLLLUUU::: ÇÇÇOOOKKK FFFAAAZZZLLLIII NNNDDDÜÜÜKKKTTTFFF YYYÜÜÜKKKLLLEEERRR
Yük indüktansı ile ekil 6.11 deki grafikler anahtarlama noktalarındaki akımın süreksizliini yok etmek için biraz düzeltilmitir. Akımlar artık kolaylıkla
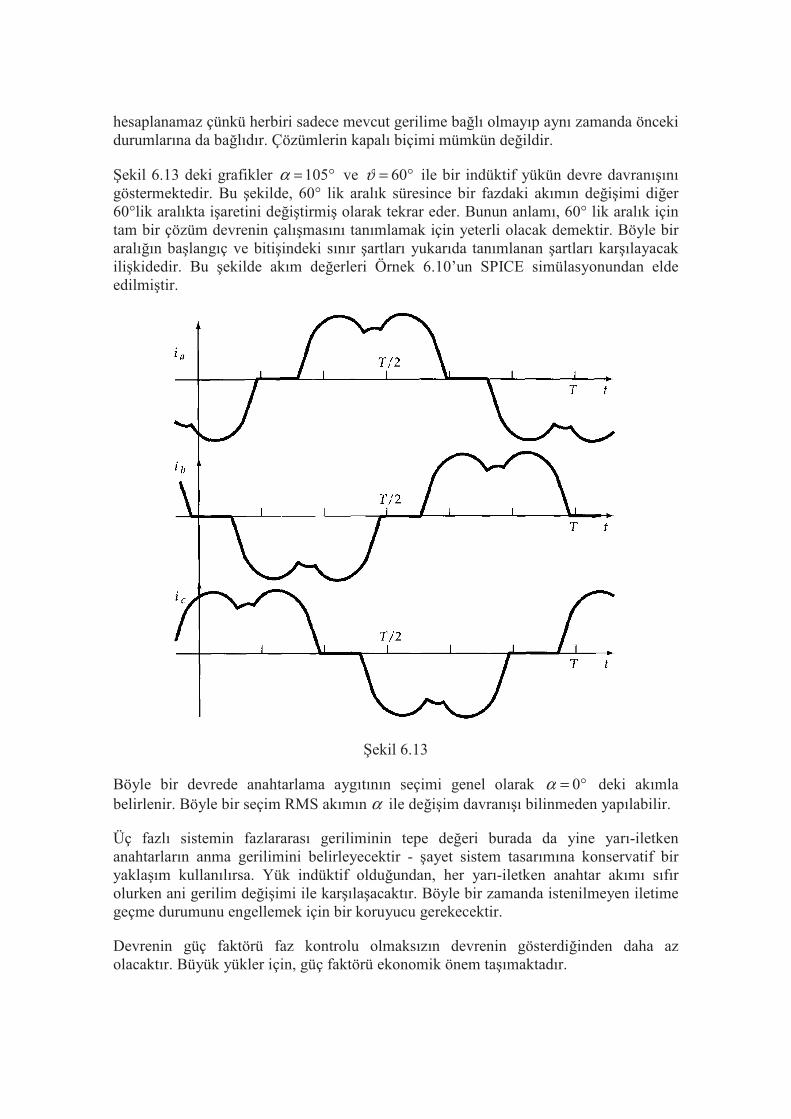
hesaplanamaz çünkü herbiri sadece mevcut gerilime balı olmayıp aynı zamanda önceki durumlarına da balıdır. Çözümlerin kapalı biçimi mümkün deildir.
ekil 6.13 deki grafikler °=105α ve °= 60ϑ ile bir indüktif yükün devre davranıını göstermektedir. Bu ekilde, 60° lik aralık süresince bir fazdaki akımın deiimi dier 60°lik aralıkta iaretini deitirmi olarak tekrar eder. Bunun anlamı, 60° lik aralık için tam bir çözüm devrenin çalımasını tanımlamak için yeterli olacak demektir. Böyle bir aralıın balangıç ve bitiindeki sınır artları yukarıda tanımlanan artları karılayacak ilikidedir. Bu ekilde akım deerleri Örnek 6.10’un SPICE simülasyonundan elde edilmitir.
ekil 6.13
Böyle bir devrede anahtarlama aygıtının seçimi genel olarak °= 0α deki akımla belirlenir. Böyle bir seçim RMS akımın α ile deiim davranıı bilinmeden yapılabilir.
Üç fazlı sistemin fazlararası geriliminin tepe deeri burada da yine yarı-iletken anahtarların anma gerilimini belirleyecektir - ayet sistem tasarımına konservatif bir yaklaım kullanılırsa. Yük indüktif olduundan, her yarı-iletken anahtar akımı sıfır olurken ani gerilim deiimi ile karılaacaktır. Böyle bir zamanda istenilmeyen iletime geçme durumunu engellemek için bir koruyucu gerekecektir.
Devrenin güç faktörü faz kontrolu olmaksızın devrenin gösterdiinden daha az olacaktır. Büyük yükler için, güç faktörü ekonomik önem taımaktadır.
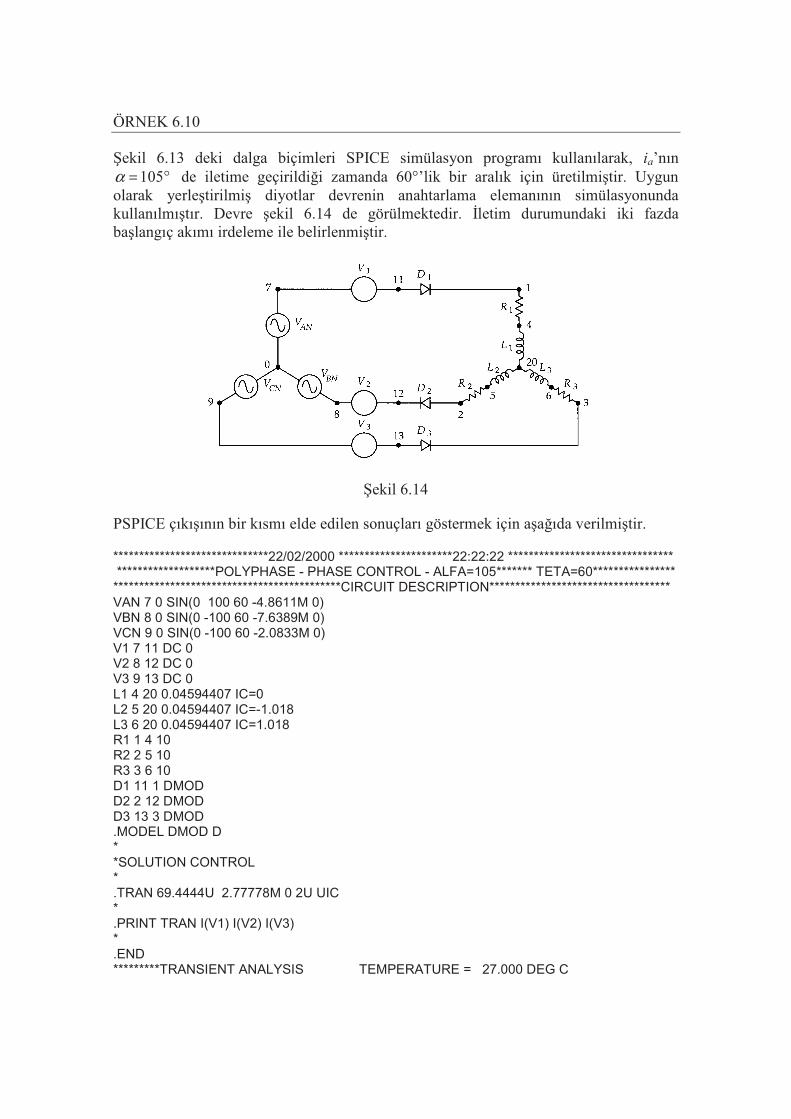
ÖRNEK 6.10
ekil 6.13 deki dalga biçimleri SPICE simülasyon programı kullanılarak, ia’nın °=105α de iletime geçirildii zamanda 60°’lik bir aralık için üretilmitir. Uygun
olarak yerletirilmi diyotlar devrenin anahtarlama elemanının simülasyonunda kullanılmıtır. Devre ekil 6.14 de görülmektedir. letim durumundaki iki fazda balangıç akımı irdeleme ile belirlenmitir.
ekil 6.14
PSPICE çıkıının bir kısmı elde edilen sonuçları göstermek için aaıda verilmitir.
******************************22/02/2000 **********************22:22:22 ******************************** *******************POLYPHASE - PHASE CONTROL - ALFA=105******* TETA=60**************** ********************************************CIRCUIT DESCRIPTION*********************************** VAN 7 0 SIN(0 100 60 -4.8611M 0) VBN 8 0 SIN(0 -100 60 -7.6389M 0) VCN 9 0 SIN(0 -100 60 -2.0833M 0) V1 7 11 DC 0 V2 8 12 DC 0 V3 9 13 DC 0 L1 4 20 0.04594407 IC=0 L2 5 20 0.04594407 IC=-1.018 L3 6 20 0.04594407 IC=1.018 R1 1 4 10 R2 2 5 10 R3 3 6 10 D1 11 1 DMOD D2 2 12 DMOD D3 13 3 DMOD .MODEL DMOD D * *SOLUTION CONTROL * .TRAN 69.4444U 2.77778M 0 2U UIC * .PRINT TRAN I(V1) I(V2) I(V3) * .END *********TRANSIENT ANALYSIS TEMPERATURE = 27.000 DEG C
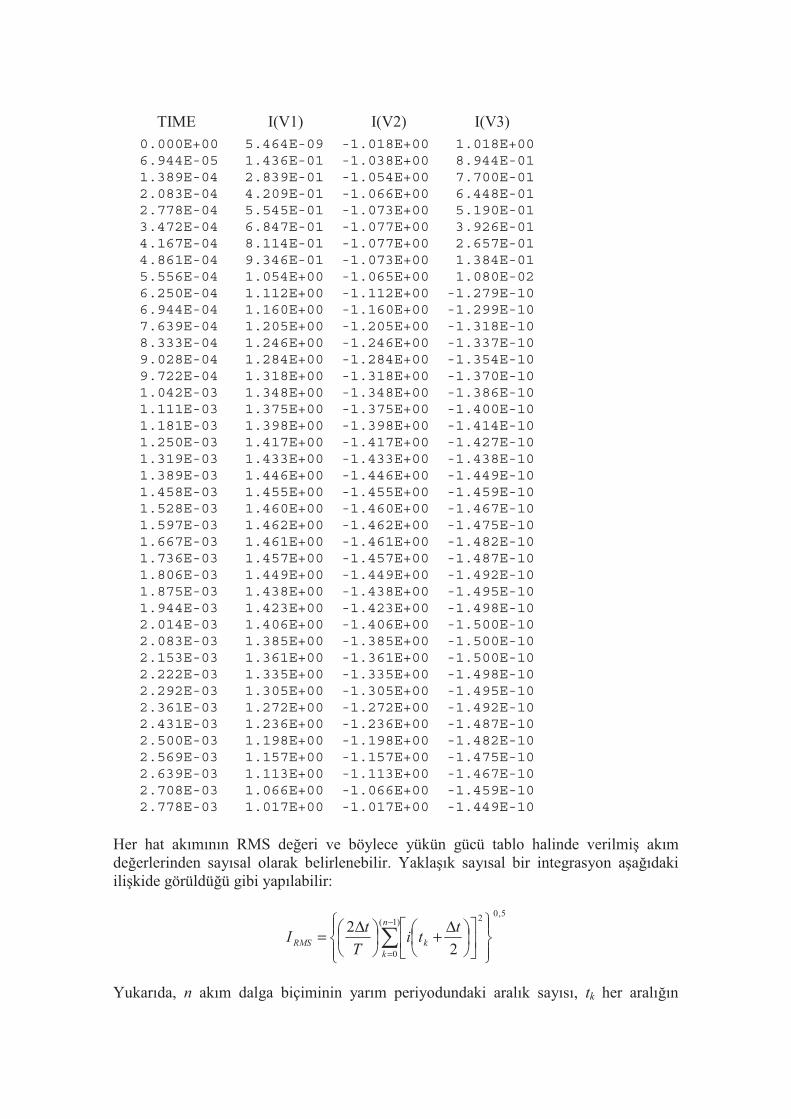
TIME I(V1) I(V2) I(V3)
0.000E+00 5.464E-09 -1.018E+00 1.018E+00
6.944E-05 1.436E-01 -1.038E+00 8.944E-01
1.389E-04 2.839E-01 -1.054E+00 7.700E-01
2.083E-04 4.209E-01 -1.066E+00 6.448E-01
2.778E-04 5.545E-01 -1.073E+00 5.190E-01
3.472E-04 6.847E-01 -1.077E+00 3.926E-01
4.167E-04 8.114E-01 -1.077E+00 2.657E-01
4.861E-04 9.346E-01 -1.073E+00 1.384E-01
5.556E-04 1.054E+00 -1.065E+00 1.080E-02
6.250E-04 1.112E+00 -1.112E+00 -1.279E-10
6.944E-04 1.160E+00 -1.160E+00 -1.299E-10
7.639E-04 1.205E+00 -1.205E+00 -1.318E-10
8.333E-04 1.246E+00 -1.246E+00 -1.337E-10
9.028E-04 1.284E+00 -1.284E+00 -1.354E-10
9.722E-04 1.318E+00 -1.318E+00 -1.370E-10
1.042E-03 1.348E+00 -1.348E+00 -1.386E-10
1.111E-03 1.375E+00 -1.375E+00 -1.400E-10
1.181E-03 1.398E+00 -1.398E+00 -1.414E-10
1.250E-03 1.417E+00 -1.417E+00 -1.427E-10
1.319E-03 1.433E+00 -1.433E+00 -1.438E-10
1.389E-03 1.446E+00 -1.446E+00 -1.449E-10
1.458E-03 1.455E+00 -1.455E+00 -1.459E-10
1.528E-03 1.460E+00 -1.460E+00 -1.467E-10
1.597E-03 1.462E+00 -1.462E+00 -1.475E-10
1.667E-03 1.461E+00 -1.461E+00 -1.482E-10
1.736E-03 1.457E+00 -1.457E+00 -1.487E-10
1.806E-03 1.449E+00 -1.449E+00 -1.492E-10
1.875E-03 1.438E+00 -1.438E+00 -1.495E-10
1.944E-03 1.423E+00 -1.423E+00 -1.498E-10
2.014E-03 1.406E+00 -1.406E+00 -1.500E-10
2.083E-03 1.385E+00 -1.385E+00 -1.500E-10
2.153E-03 1.361E+00 -1.361E+00 -1.500E-10
2.222E-03 1.335E+00 -1.335E+00 -1.498E-10
2.292E-03 1.305E+00 -1.305E+00 -1.495E-10
2.361E-03 1.272E+00 -1.272E+00 -1.492E-10
2.431E-03 1.236E+00 -1.236E+00 -1.487E-10
2.500E-03 1.198E+00 -1.198E+00 -1.482E-10
2.569E-03 1.157E+00 -1.157E+00 -1.475E-10
2.639E-03 1.113E+00 -1.113E+00 -1.467E-10
2.708E-03 1.066E+00 -1.066E+00 -1.459E-10
2.778E-03 1.017E+00 -1.017E+00 -1.449E-10
Her hat akımının RMS deeri ve böylece yükün gücü tablo halinde verilmi akım deerlerinden sayısal olarak belirlenebilir. Yaklaık sayısal bir integrasyon aaıdaki ilikide görüldüü gibi yapılabilir:
5,0)1(
0
2
2
2
∆+
∆=
−
=
n
k
kRMS
tti
T
tI
Yukarıda, n akım dalga biçiminin yarım periyodundaki aralık sayısı, tk her aralıın
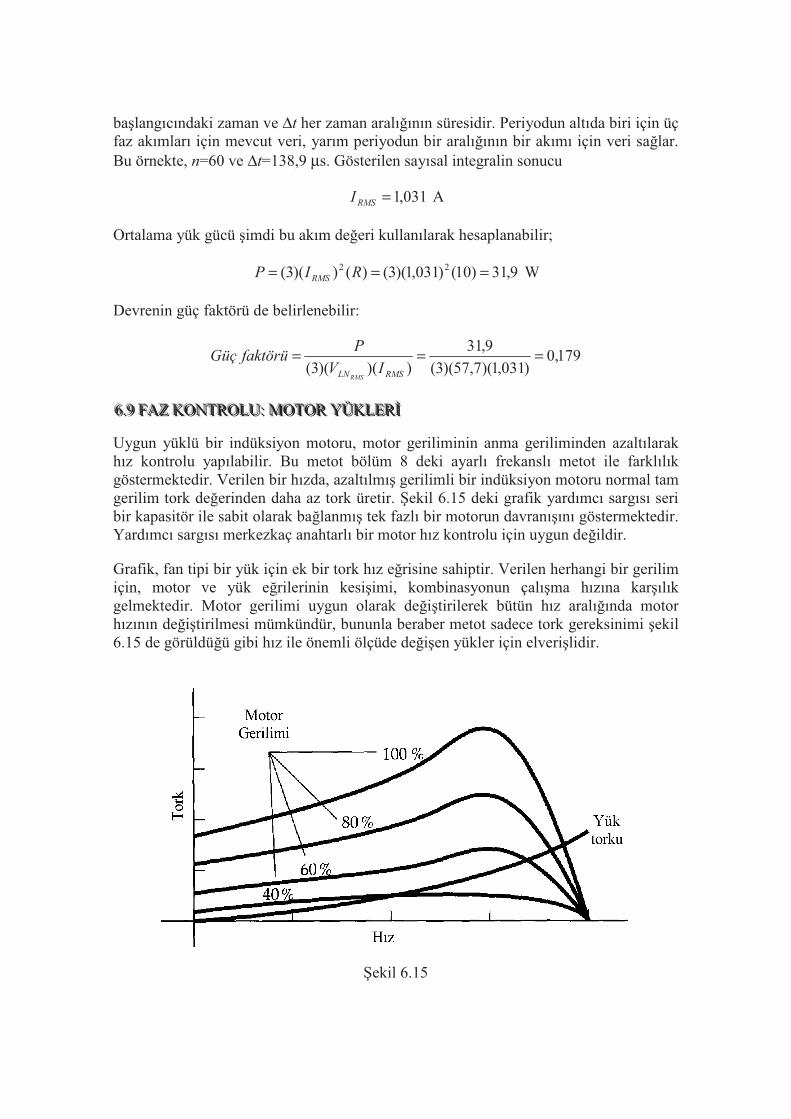
balangıcındaki zaman ve ∆t her zaman aralıının süresidir. Periyodun altıda biri için üç faz akımları için mevcut veri, yarım periyodun bir aralıının bir akımı için veri salar. Bu örnekte, n=60 ve ∆t=138,9 µs. Gösterilen sayısal integralin sonucu
031,1=RMSI A
Ortalama yük gücü imdi bu akım deeri kullanılarak hesaplanabilir;
9,31)10()031,1)(3()())(3( 22 === RIP RMS W
Devrenin güç faktörü de belirlenebilir:
179,0)031,1)(7,57)(3(
9,31
))()(3(===
RMSLN IV
PfaktörüGüç
RMS
666...999 FFFAAAZZZ KKKOOONNNTTTRRROOOLLLUUU::: MMMOOOTTTOOORRR YYYÜÜÜKKKLLLEEERRR
Uygun yüklü bir indüksiyon motoru, motor geriliminin anma geriliminden azaltılarak hız kontrolu yapılabilir. Bu metot bölüm 8 deki ayarlı frekanslı metot ile farklılık göstermektedir. Verilen bir hızda, azaltılmı gerilimli bir indüksiyon motoru normal tam gerilim tork deerinden daha az tork üretir. ekil 6.15 deki grafik yardımcı sargısı seri bir kapasitör ile sabit olarak balanmı tek fazlı bir motorun davranıını göstermektedir. Yardımcı sargısı merkezkaç anahtarlı bir motor hız kontrolu için uygun deildir.
Grafik, fan tipi bir yük için ek bir tork hız erisine sahiptir. Verilen herhangi bir gerilim için, motor ve yük erilerinin kesiimi, kombinasyonun çalıma hızına karılık gelmektedir. Motor gerilimi uygun olarak deitirilerek bütün hız aralıında motor hızının deitirilmesi mümkündür, bununla beraber metot sadece tork gereksinimi ekil 6.15 de görüldüü gibi hız ile önemli ölçüde deien yükler için elverilidir.
ekil 6.15
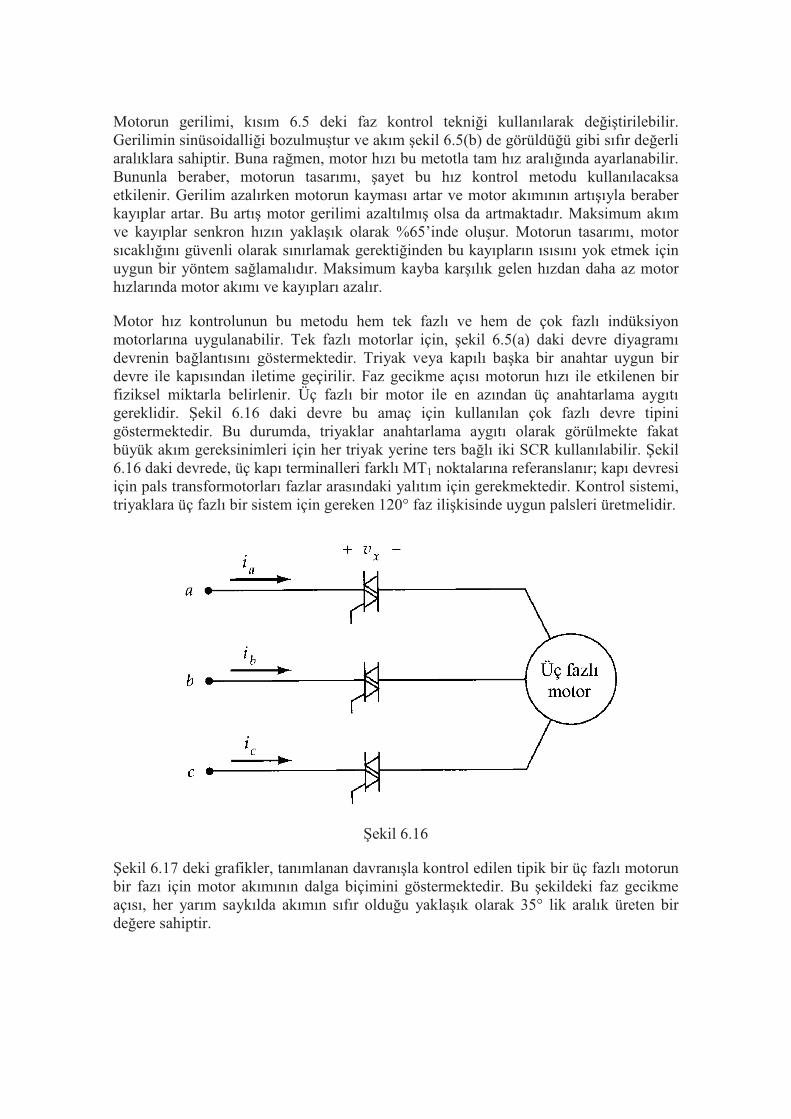
Motorun gerilimi, kısım 6.5 deki faz kontrol teknii kullanılarak deitirilebilir. Gerilimin sinüsoidallii bozulmutur ve akım ekil 6.5(b) de görüldüü gibi sıfır deerli aralıklara sahiptir. Buna ramen, motor hızı bu metotla tam hız aralıında ayarlanabilir. Bununla beraber, motorun tasarımı, ayet bu hız kontrol metodu kullanılacaksa etkilenir. Gerilim azalırken motorun kayması artar ve motor akımının artııyla beraber kayıplar artar. Bu artı motor gerilimi azaltılmı olsa da artmaktadır. Maksimum akım ve kayıplar senkron hızın yaklaık olarak %65’inde oluur. Motorun tasarımı, motor sıcaklıını güvenli olarak sınırlamak gerektiinden bu kayıpların ısısını yok etmek için uygun bir yöntem salamalıdır. Maksimum kayba karılık gelen hızdan daha az motor hızlarında motor akımı ve kayıpları azalır.
Motor hız kontrolunun bu metodu hem tek fazlı ve hem de çok fazlı indüksiyon motorlarına uygulanabilir. Tek fazlı motorlar için, ekil 6.5(a) daki devre diyagramı devrenin balantısını göstermektedir. Triyak veya kapılı baka bir anahtar uygun bir devre ile kapısından iletime geçirilir. Faz gecikme açısı motorun hızı ile etkilenen bir fiziksel miktarla belirlenir. Üç fazlı bir motor ile en azından üç anahtarlama aygıtı gereklidir. ekil 6.16 daki devre bu amaç için kullanılan çok fazlı devre tipini göstermektedir. Bu durumda, triyaklar anahtarlama aygıtı olarak görülmekte fakat büyük akım gereksinimleri için her triyak yerine ters balı iki SCR kullanılabilir. ekil 6.16 daki devrede, üç kapı terminalleri farklı MT1 noktalarına referanslanır; kapı devresi için pals transformotorları fazlar arasındaki yalıtım için gerekmektedir. Kontrol sistemi, triyaklara üç fazlı bir sistem için gereken 120° faz ilikisinde uygun palsleri üretmelidir.
ekil 6.16
ekil 6.17 deki grafikler, tanımlanan davranıla kontrol edilen tipik bir üç fazlı motorun bir fazı için motor akımının dalga biçimini göstermektedir. Bu ekildeki faz gecikme açısı, her yarım saykılda akımın sıfır olduu yaklaık olarak 35° lik aralık üreten bir deere sahiptir.
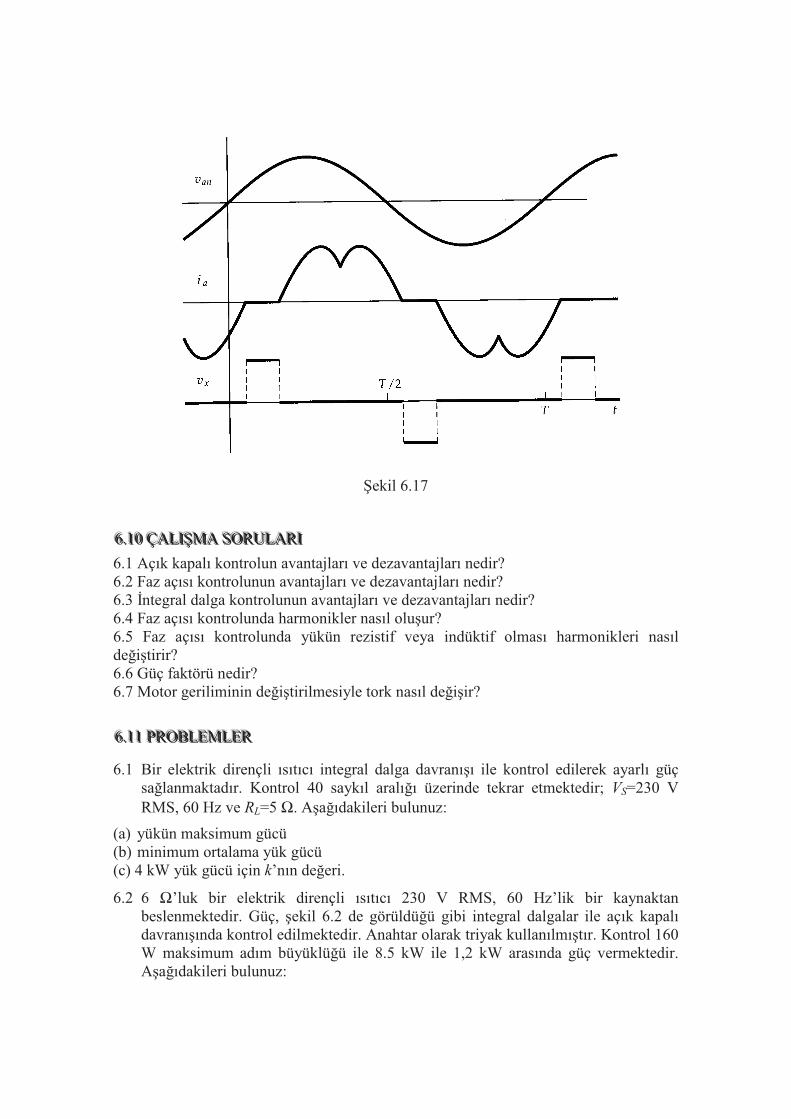
ekil 6.17
666...111000 ÇÇÇAAALLLIIIMMMAAA SSSOOORRRUUULLLAAARRRIII
6.1 Açık kapalı kontrolun avantajları ve dezavantajları nedir? 6.2 Faz açısı kontrolunun avantajları ve dezavantajları nedir? 6.3 ntegral dalga kontrolunun avantajları ve dezavantajları nedir? 6.4 Faz açısı kontrolunda harmonikler nasıl oluur? 6.5 Faz açısı kontrolunda yükün rezistif veya indüktif olması harmonikleri nasıl deitirir? 6.6 Güç faktörü nedir? 6.7 Motor geriliminin deitirilmesiyle tork nasıl deiir?
666...111111 PPPRRROOOBBBLLLEEEMMMLLLEEERRR
6.1 Bir elektrik dirençli ısıtıcı integral dalga davranıı ile kontrol edilerek ayarlı güç salanmaktadır. Kontrol 40 saykıl aralıı üzerinde tekrar etmektedir; VS=230 V RMS, 60 Hz ve RL=5 Ω. Aaıdakileri bulunuz:
(a) yükün maksimum gücü (b) minimum ortalama yük gücü (c) 4 kW yük gücü için k’nın deeri.
6.2 6 Ω’luk bir elektrik dirençli ısıtıcı 230 V RMS, 60 Hz’lik bir kaynaktan beslenmektedir. Güç, ekil 6.2 de görüldüü gibi integral dalgalar ile açık kapalı davranıında kontrol edilmektedir. Anahtar olarak triyak kullanılmıtır. Kontrol 160 W maksimum adım büyüklüü ile 8.5 kW ile 1,2 kW arasında güç vermektedir. Aaıdakileri bulunuz:
(a) uygun bir n deeri (b) gereken k aralıı (c) Triyakın RMS anma akımı
6.3 Problem 6.2’yi ekil 6.1(b) deki gibi iki SCR kullanarak tekrar ediniz. (c) ıkkı için her SCR’nin ortalama anma akımını bulunuz.
6.4 ekil 6.1 deki devre faz kontrolu için kullanılacaktır; VS=460 V RMS, 60 Hz, RL=12 Ω ve °= 45α . Aaıdakileri bulunuz:
(a) tepe yük akımı (b) ortalama yük gücü (c) anahtar akım oranı (d) güç faktörü.
6.5 Bir rezistif yükün gücü bir faz kontrol teknii ile kontrol edilecektir. Güç aralıı 2 kW ile 8 kW arasındadır; VS=230 V RMS, 60 Hz, RL=6 Ω. Aaıdakileri bulunuz:
(a) gereken α aralıı (b) bir triyak kullanıldıı durumda, anahtarın anma akımı ve gerilimi (c) en büyük güç seviyesinde güç faktörü.
6.6 ekil 6.1(b) deki devre, bir rezistif yükün gücünü kontrol etmek için kullanılmaktadır. Gücün 5 kW ile 40 kW arasında ayarlanabilmesi gerekmektedir; VS=460 V RMS, 60 Hz, RL=5 Ω. Aaıdakileri bulunuz:
(a) gereken α aralıı (b) SCR akım ve gerilim oranları (c) kaynak tarafındaki güç faktör aralıı.
6.7 Bir indüktif yüke VS=230 V RMS, 60 Hz’lik bir kaynaktan faz kontrolu yapılmaktadır; °= 80α , RL=15 Ω ve L=0,04 H. Aaıdakileri bulunuz:
(a) β ’nın deeri (b) yük akımının RMS deeri (c) yük gücü (d) tepe anahtar akımı (e) güç faktörü.
6.8 Problem 6.7 de verilen indüktif yük 1600 W ile 100 W arasında ortalama kontrol edilmektedir. Aaıdakileri bulunuz:
(a) gereken RMS akım deeri (b) gereken α aralıı (c) gereken β aralıı (d) ayet anahtar ekil 6.1(b) deki gibi ise ortalama SCR akımı.
6.9 ekil 6.1(a) daki indüktif yükün gücü 12 kW ile 2 kW arasında deiebilecek ekilde faz kontrolu yapılmaktadır. VS=460 V RMS, 60 Hz; RL=10 Ω ve L=0,015 H. Aaıdakileri bulunuz:
(a) gereken RMS akım aralıı (b) gereken α aralıı (c) gereken β aralıı
(d) tepe SCR akımı (e) 12 kW güç verilirken güç faktörü.
6.10 Dengeli üç fazlı, yıldız balı, faz baına 20 Ω’luk bir rezistif yük faz kontrol anahtarları ile 460 V 60 Hz üç fazlı bir kaynaa ekil 6.10 daki gibi balanmıtır.
°= 80α . Aaıdakileri bulunuz:
(a) tepe hat akımı (b) ortalama yük gücü (c) güç faktörü (d) her anahtarın anma gerilimi (c) anahtar akımının RMS deeri.
6.11 Dengeli üç fazlı, yıldız balı, faz baına 10 Ω’luk bir rezistif yük faz kontrol anahtarları ile 230 V 60 Hz üç fazlı bir kaynaa balanmıtır. Yük gücünün 4 kW ile 1 kW arasında ayarlanabilmesi gerekmektedir. Aaıdakileri bulunuz:
(a) gereken α aralıı (b) anahtar akım ve gerilim oranları (c) en büyük yük gücünde güç faktörü.

777 DDDCCC --- DDDCCC KKKOOONNNVVVEEERRRTTTÖÖÖRRRLLLEEERRR
Bu bölümün konusu, DC-DC konvertörler veya kıyıcı (chopper)’lardır. Bu konvertörlere ait devre konfigürasyonlarının çok olması ve olabilecek bütün devre düzenlemelerinden bahsetmek mümkün olmadıından, sınırlı sayıdaki temel devreler gözönüne alınacaktır.
777...111 KKKIIIYYYIIICCCIII DDDEEEVVVRRREEELLLEEERRRNNNNNN TTTPPPLLLEEERRR
Kıyıcı devreler devre fonksiyonu ile sınıflandırılırlar. Azaltan(Buck), Artıran(boost) veAzaltan-Artıran(buck-boost) düzenlemeleri, temel dorudan balanmı tiplerdir. Birinci kısımda gerilim azaltan kıyıcının basit bir tipinden bahsedilmitir. Bazı manyetik kuplajlı devreler de, azaltma ve artırma fonksiyonlarını yerine getirirler.
777...222 GGGEEERRRLLLMMM AAAZZZAAALLLTTTAAANNN KKKIIIYYYIIICCCIII
Temel azaltan kıyıcı, giri geriliminden daha az bir ortalama çıkı gerilimi verir. ekil 7.1’de çok pratik bir düzenleme görülmektedir.
ekil 7.1
ndüktör ve kapasitör, çıkı geriliminin sadece sınırlı bir dalgacıkta kalmasını salayan bir düzeltme hareketi meydana getirirler. Yükün durumuna balı olarak gereken filtre ilemi salanır. Yapılan filtreleme ileminin miktarı devre analizinin biçimini de etkiler çünkü ilemin iki modu devrenin indüktansının deerine balıdır. ayet indüktans yeteri kadar büyükse, indüktör akımı asla sıfır olmaz ve bu mod sürekli indüktör akımı olarak tanımlanır. ayet indüktans küçükse, her yarım dalganın bir kısmında indüktör akımı sıfır olur ve bu mod süreksiz indüktör akımı olarak tanımlanır. Her iki mod için ayrı bir analiz gerekir ve iki mod arasındaki sınırı belirleyen bir iliki bulunabilir.
777...222...111 GGGEEERRRLLLMMM LLLKKKSSS
ekil 7.1’deki devrede S anahtarı periyodik olarak açılır ve kapatılır. Toplam periyod T
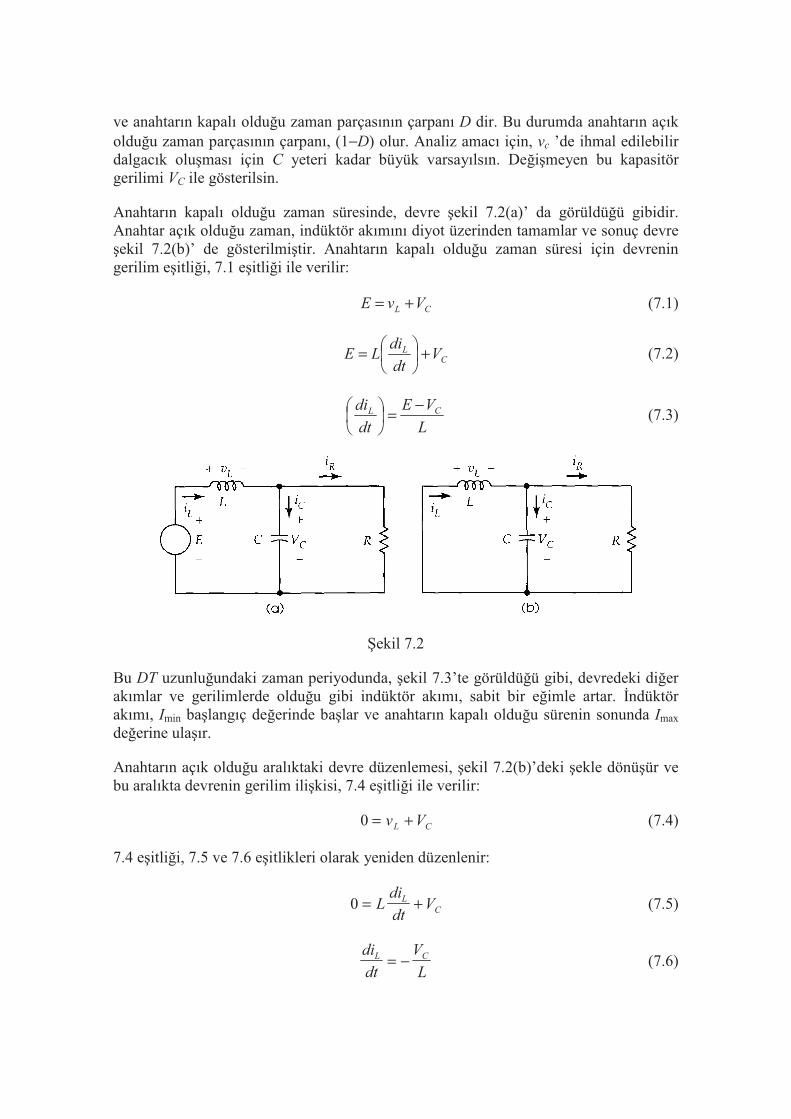
ve anahtarın kapalı olduu zaman parçasının çarpanı D dir. Bu durumda anahtarın açık olduu zaman parçasının çarpanı, (1−D) olur. Analiz amacı için, vc ’de ihmal edilebilir dalgacık oluması için C yeteri kadar büyük varsayılsın. Deimeyen bu kapasitör gerilimi VC ile gösterilsin.
Anahtarın kapalı olduu zaman süresinde, devre ekil 7.2(a)’ da görüldüü gibidir. Anahtar açık olduu zaman, indüktör akımını diyot üzerinden tamamlar ve sonuç devre ekil 7.2(b)’ de gösterilmitir. Anahtarın kapalı olduu zaman süresi için devrenin gerilim eitlii, 7.1 eitlii ile verilir:
CL VvE += (7.1)
CL V
dt
diLE +
= (7.2)
L
VE
dt
di CL −=
(7.3)
ekil 7.2
Bu DT uzunluundaki zaman periyodunda, ekil 7.3’te görüldüü gibi, devredeki dier akımlar ve gerilimlerde olduu gibi indüktör akımı, sabit bir eimle artar. ndüktör akımı, Imin balangıç deerinde balar ve anahtarın kapalı olduu sürenin sonunda Imax
deerine ulaır.
Anahtarın açık olduu aralıktaki devre düzenlemesi, ekil 7.2(b)’deki ekle dönüür ve bu aralıkta devrenin gerilim ilikisi, 7.4 eitlii ile verilir:
0 = +v VL C (7.4)
7.4 eitlii, 7.5 ve 7.6 eitlikleri olarak yeniden düzenlenir:
0 = +Ldi
dtVL
C (7.5)
di
dt
V
L
L C= − (7.6)
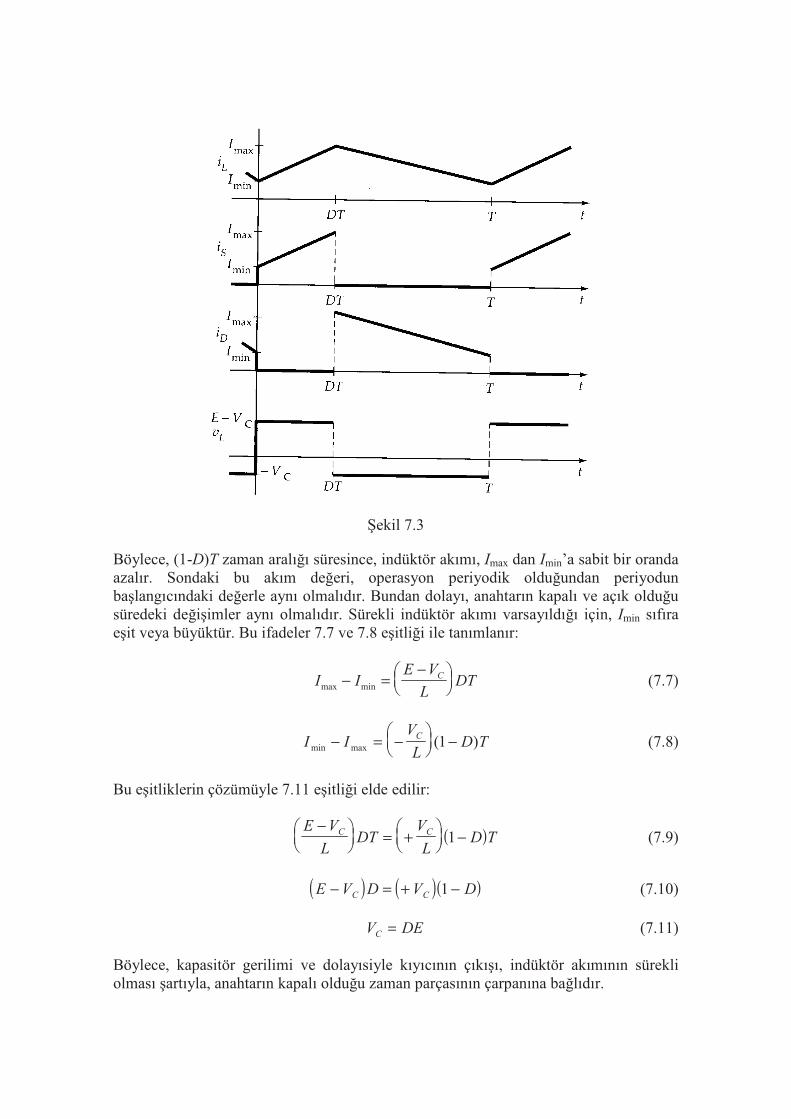
ekil 7.3
Böylece, (1-D)T zaman aralıı süresince, indüktör akımı, Imax dan Imin’a sabit bir oranda azalır. Sondaki bu akım deeri, operasyon periyodik olduundan periyodun balangıcındaki deerle aynı olmalıdır. Bundan dolayı, anahtarın kapalı ve açık olduu süredeki deiimler aynı olmalıdır. Sürekli indüktör akımı varsayıldıı için, Imin sıfıra eit veya büyüktür. Bu ifadeler 7.7 ve 7.8 eitlii ile tanımlanır:
I IE V
LDTC
max min− =−
(7.7)
I IV
LD T
C
min max ( )− = −
−1 (7.8)
Bu eitliklerin çözümüyle 7.11 eitlii elde edilir:
( )E V
LDT
V
LD T
C C−
= +
−1 (7.9)
( ) ( )( )E V D V DC C− = + −1 (7.10)
V DEC = (7.11)
Böylece, kapasitör gerilimi ve dolayısiyle kıyıcının çıkıı, indüktör akımının sürekli olması artıyla, anahtarın kapalı olduu zaman parçasının çarpanına balıdır.

777...222...222 DDDEEEVVVRRREEE AAAKKKIIIMMMLLLAAARRRIII
ekil 7.3’teki dalga biçiminin incelenmesiyle, indüktör akımının ortalama deeri kolaylıkla bulunabilir. Bu deer, 7.12 eitliinde verilir:
II I
L =+max min
2 (7.12)
Yük direncinin bir ucundaki akım denklemi, 7.13 eitlii ile verilir. Periyodik operasyon sonucu ortalama kapasitör akımı sıfır olduundan, bir periyot üzerindeki akım denklemi, 7.13 eitliindeki terimlerin ortalaması alınarak, 7.14 eitlii olarak yazılabilir:
i i iL C R= + (7.13)
I IL R= (7.14)
IR’nin deeri, 7.15 eitlii ile verilir. Bu eitliklerin kombinasyonu, 7.16 eitliinde I Imax min+ ’in çözümünü verir.
IV
RR
C= (7.15)
I IV
R
C
max min+ = 2 (7.16)
7.7 ve 7.16 eitliklerinin birletirilmesiyle, Imax ve Imin in çözümü elde edilir:
( )( )( )
I DER
D T
Lmax = +−
1 1
2 (7.17)
( )( )( )
I DER
D T
Lmin = −−
1 1
2 (7.18)
777...222...333 SSSÜÜÜRRREEEKKKLLL AAAKKKIIIMMM DDDUUURRRUUUMMMUUU
7.18 eitliinde, Imin’in sıfıra eitlenmesiyle, sürekli indüktör akımını salayan minimum devre indüktansı, 7.19 eitliinde verilir:
( )LTR
D=
−
21 (7.19)
ÖRNEK 7.1
ekil 7.1 deki devreyi kullanan bir azaltan kıyıcı, 6 Ω’luk bir yüke 30 volt’luk bir kaynaktan 12 volt salamaktadır. ndüktör akımı sürekli ve kıyıcının frekansı 5 kHz dir. Aaıdakileri bulunuz.

(a) D’nin deeri, (b) Gereken minimum L deeri, (c) L=1,5 mH ise, minimum ve maksimum iL deerleri, (d) Kaynaktan çekilen güç, (e) Yükün gücü.
ÇÖZÜM
(a) DV
E
C= = =12
300 4,
(b) ( )( )( )
( )LTR
D H=
− =
− =
21
0 0002 6
21 0 4 0 000360
,, ,
(c) ( )( )( )( )
( )Imin ,
, ,
,,= −
−
=0 4 30
1
6
1 0 4 0 0002
2 0 00151 52 A
( )( )( )( )
( )Imax ,
, ,
,,= +
−
=0 4 30
1
6
1 0 4 0 0002
2 0 00152 48 A
(d) Kaynaktan çekilen güç, kaynak gerilimi ve ortalama kaynak akımından bulunabilir.
II I
DSort=
+
=
+
=max min , ,
, ,2
2 48 1 52
20 4 0 8 A
( ) ( )( )P E IS Sort= = =30 0 8 24, W
(e) VC ’de dalgacık olmadıından yükün gücü basit bir DC ifadesi ile bulunabilir.
Yükün gücü = PV
RL
C= = =2 212
624 W
ÖRNEK 7.2
Bir azaltan kıyıcı, ayarlı bir dirence, ayarlı bir gerilim salamaktadır. stenilen gerilim aralıı, 15-25 volt ve yük direncinin aralıı 4-10 Ω arasındadır. Gerilim ve direncin her türlü kombinasyonunun oluabildii devrede, E=40 volt ve f=8 kHz dir. Aaıdakileri bulunuz.
(a) Gereken D aralıı, (b) Her durumdaki sürekli indüktör akımı için gereken L.
ÇÖZÜM
(a) VC=15 volt için, D = =15 40 0 375/ ,
VC=25 volt için, D = =25 40 0 625/ ,
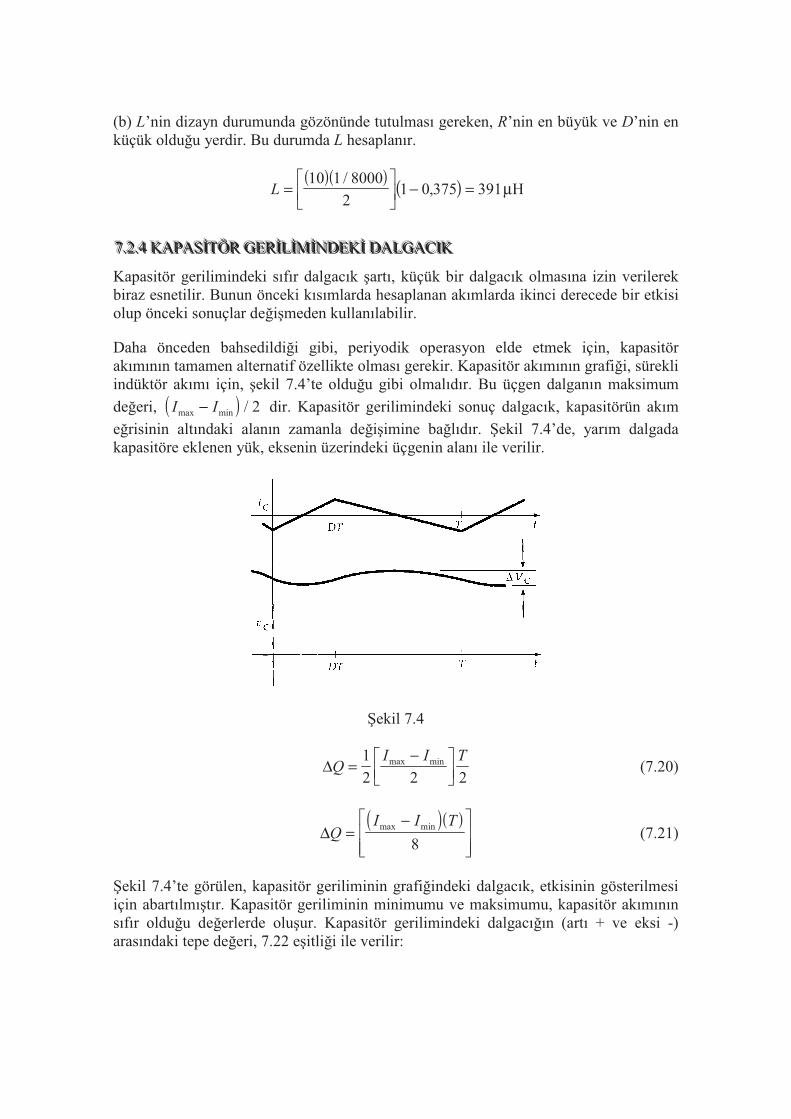
(b) L’nin dizayn durumunda gözönünde tutulması gereken, R’nin en büyük ve D’nin en küçük olduu yerdir. Bu durumda L hesaplanır.
( )( )( )L =
− =
10 1 8000
21 0 375 391
/, µH
777...222...444 KKKAAAPPPAAASSSTTTÖÖÖRRR GGGEEERRRLLLMMM NNNDDDEEEKKK DDDAAALLLGGGAAACCCIIIKKK
Kapasitör gerilimindeki sıfır dalgacık artı, küçük bir dalgacık olmasına izin verilerek biraz esnetilir. Bunun önceki kısımlarda hesaplanan akımlarda ikinci derecede bir etkisi olup önceki sonuçlar deimeden kullanılabilir.
Daha önceden bahsedildii gibi, periyodik operasyon elde etmek için, kapasitör akımının tamamen alternatif özellikte olması gerekir. Kapasitör akımının grafii, sürekli indüktör akımı için, ekil 7.4’te olduu gibi olmalıdır. Bu üçgen dalganın maksimum
deeri, ( )I Imax min /− 2 dir. Kapasitör gerilimindeki sonuç dalgacık, kapasitörün akım
erisinin altındaki alanın zamanla deiimine balıdır. ekil 7.4’de, yarım dalgada kapasitöre eklenen yük, eksenin üzerindeki üçgenin alanı ile verilir.
ekil 7.4
∆QI I T
=−
1
2 2 2max min (7.20)
( )( )∆Q
I I T=
−
max min
8 (7.21)
ekil 7.4’te görülen, kapasitör geriliminin grafiindeki dalgacık, etkisinin gösterilmesi için abartılmıtır. Kapasitör geriliminin minimumu ve maksimumu, kapasitör akımının sıfır olduu deerlerde oluur. Kapasitör gerilimindeki dalgacıın (artı + ve eksi -) arasındaki tepe deeri, 7.22 eitlii ile verilir:

( )( )∆
∆V
Q
C
I I T
CC = =−
max min
8 (7.22)
ÖRNEK 7.3
10 kHz’de çalıan bir azaltan kıyıcı, 20 volt’luk bir kaynaktan, 12 volt-100 watt’lık bir yükü beslemektedir. Aaıdakileri bulunuz.
(a) Sürekli indüktör akımı için indüktans,
(b) ( )I Imax min−
(c) ∆VC = 0,1 volt için gereken kapasitansın deeri.
ÇÖZÜM
(a) IR = =100
128 33, A, R = =
12
8 331 44
,, Ω D = =
12
200 6,
( )( )
( )LTR
D=
− =
− =
21
0 0001 1 44
21 0 6 0 0000288( )
, ,, , H
(b) 7.7 eitliinden,
( )( )( )I Imax min
, ,
,,− =
−
=
20 12 0 6 0 0001
0 000028816 667 A
(c) 7.22 eitliinden,
( )( )∆Q =
=
16 667 0 0001
80 000208
, ,, C
CQ
VC
= = = =∆
∆
0 000208
0 10 00208 2080
,
,, F µF
777...333 GGGEEERRRLLLMMM AAARRRTTTIIIRRRAAANNN KKKIIIYYYIIICCCIII
Azaltan kıyıcının 3 adet elemanı, ekil 7.5’te görüldüü gibi yeniden düzenlenirse, gerilim artıran kıyıcı elde edilir. Azaltan kıyıcıya benzer bir analiz, bu devrenin kararlı durum ilemindeki durumunu verir.
777...333...111 GGGEEERRRLLLMMM LLLKKKSSS
Anahtarın kapalı olduu zaman süresinde, indüktör akımı 7.23 eitliinde verilen türevle artar:
di
dt
E
L
L = (7.23)
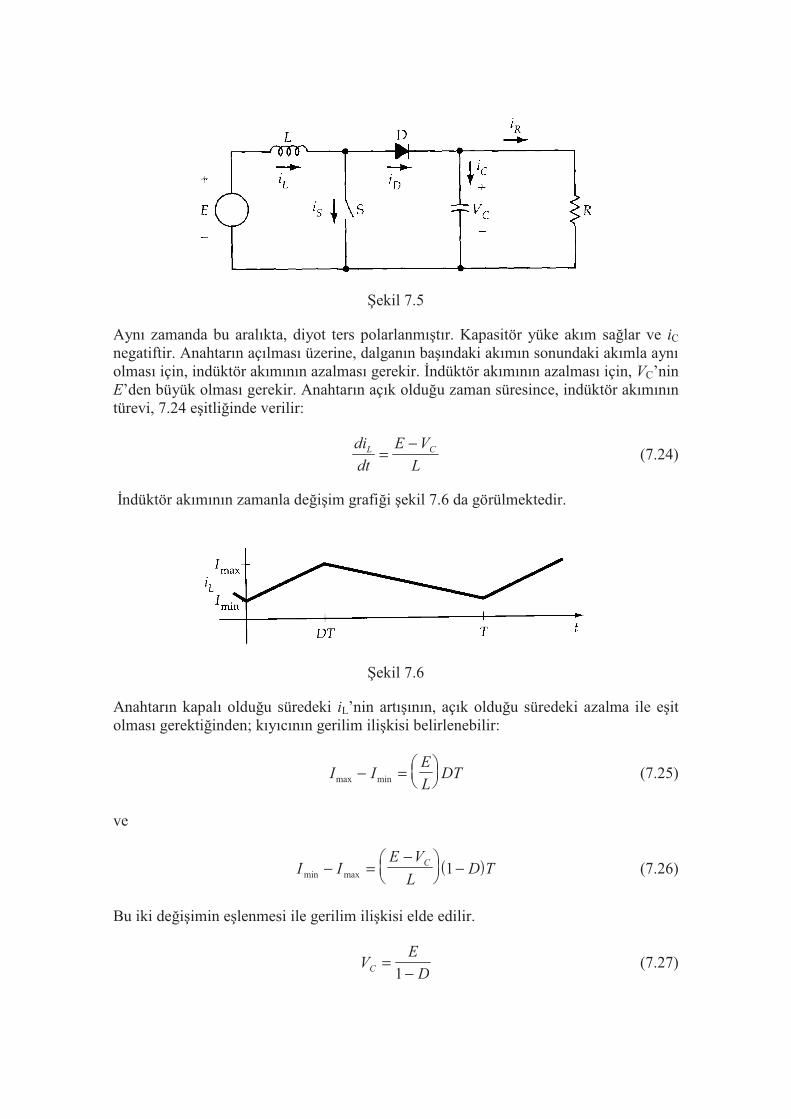
ekil 7.5
Aynı zamanda bu aralıkta, diyot ters polarlanmıtır. Kapasitör yüke akım salar ve iC
negatiftir. Anahtarın açılması üzerine, dalganın baındaki akımın sonundaki akımla aynı olması için, indüktör akımının azalması gerekir. ndüktör akımının azalması için, VC’nin E’den büyük olması gerekir. Anahtarın açık olduu zaman süresince, indüktör akımının türevi, 7.24 eitliinde verilir:
di
dt
E V
L
L C=−
(7.24)
ndüktör akımının zamanla deiim grafii ekil 7.6 da görülmektedir.
ekil 7.6
Anahtarın kapalı olduu süredeki iL’nin artıının, açık olduu süredeki azalma ile eit olması gerektiinden; kıyıcının gerilim ilikisi belirlenebilir:
I IE
LDTmax min− =
(7.25)
ve
( )I IE V
LD T
C
min max− =−
−1 (7.26)
Bu iki deiimin elenmesi ile gerilim ilikisi elde edilir.
VE
DC =−1
(7.27)
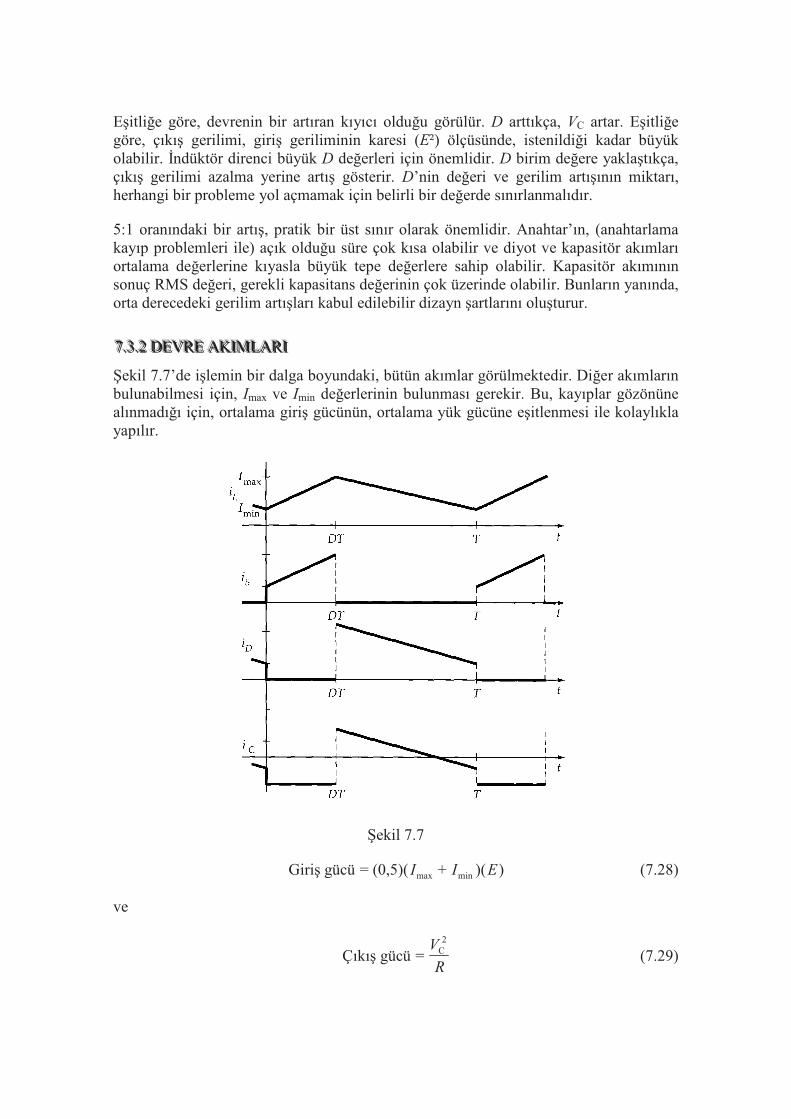
Eitlie göre, devrenin bir artıran kıyıcı olduu görülür. D arttıkça, VC artar. Eitlie göre, çıkı gerilimi, giri geriliminin karesi (E²) ölçüsünde, istenildii kadar büyük olabilir. ndüktör direnci büyük D deerleri için önemlidir. D birim deere yaklatıkça, çıkı gerilimi azalma yerine artı gösterir. D’nin deeri ve gerilim artıının miktarı, herhangi bir probleme yol açmamak için belirli bir deerde sınırlanmalıdır.
5:1 oranındaki bir artı, pratik bir üst sınır olarak önemlidir. Anahtar’ın, (anahtarlama kayıp problemleri ile) açık olduu süre çok kısa olabilir ve diyot ve kapasitör akımları ortalama deerlerine kıyasla büyük tepe deerlere sahip olabilir. Kapasitör akımının sonuç RMS deeri, gerekli kapasitans deerinin çok üzerinde olabilir. Bunların yanında, orta derecedeki gerilim artıları kabul edilebilir dizayn artlarını oluturur.
777...333...222 DDDEEEVVVRRREEE AAAKKKIIIMMMLLLAAARRRIII
ekil 7.7’de ilemin bir dalga boyundaki, bütün akımlar görülmektedir. Dier akımların bulunabilmesi için, Imax ve Imin deerlerinin bulunması gerekir. Bu, kayıplar gözönüne alınmadıı için, ortalama giri gücünün, ortalama yük gücüne eitlenmesi ile kolaylıkla yapılır.
ekil 7.7
Giri gücü = (0,5)( + )( )max minI I E (7.28)
ve
Çıkı gücü = C2V
R (7.29)
7.27 eitliindeki, giri çıkı gerilim ilikileri de kullanılarak, bu güç deerlerinin çözümü ile 7.30 eitlii elde edilir:
( )I I
E
R Dmax min+ =
−
2
12 (7.30)
7.26, 7.27 ve 7.30 eitliklerinin birletirilmesi ile 7.31 ve 7.32 eitlikleri elde edilir:
( )( )I
E
R D
E
LDTmin =
−−
1 22 (7.31)
( )( )I
E
R D
E
LDTmax =
−+
1 22 (7.32)
ÖRNEK 7.4
ekil 7.5’deki konfigürasyona sahip bir artıran kıyıcı, 40 volt’luk bir kaynaktan 25Ω’luk bir yüke 150 volt salamaktadır. L=200 µH ve T=200 µs dir. Kapasitör yeteri kadar büyük olup, yük uçlarındaki gerilimde ihmal edilebilecek dalgacık vardır. Aaıdakileri bulunuz.
(a) D’nin deeri, (b) Imin, (c) Imax, (d) Ortalama diyot akımı, (e) Kapasitör akımının RMS deeri.
ÇÖZÜM
(a) VE
DC =−1
15040
1=
− D D = 0 733,
Anahtar, DT = 0,733×200=146,7 µs kapalı ve
Anahtar, DT = 200-146,7=53,3 µs açıktır.
(b) 7.31 eitliinden:
( ) ( )( )Imin
, ,, , , ,= − = − =
40
25 0 267
40
2 0 00020 0001467 22 50 14 67 7 832 A
(c) 7.32 eitliinden:
( ) ( )( )Imax
, ,, , , ,= + = + =
40
25 0 267
40
2 0 00020 0001467 22 50 14 67 37 172 A
(d) Anahtarın açık olduu, 53,3 µs boyunca, diyot akımı, 37,17 A ile 7,83 A arasında dorusal olarak deiir. Böylece,

( )( )ID =
+
= =
53 3
200
37 17 7 83
20 267 22 50 6
, , ,, , A
Dikkatlice bir düünü, bu deerin bulunması için daha kolay bir yol gösterir. Kapasitörün ortalama akımının sıfır olması gerektiinden, ortalama diyot akımı, yük direncinin ortalama akımı (150/25 = 6 A) ile aynıdır.
(e) Kapasitör akımı, daha önceden hesaplanmı sayılarla, ekil 7.8 de olduu gibi deiir. Bu akımın RMS deeri RMS deerinin tanımından bulunur:
ekil 7.8
( ) ( )[ ] A87,107,14655,017,316200
12/1
200
7,146
27,146
0
2=
−−+−
= dttdtIC
Formülde ikinci integral kısmı, dalganın açık anahtar süresindeki akımın karesidir.
Örnek 7.4 ile ilgili bir yorum: Böyle bir kıyıcı dizaynında, bileenlerin elektriksel etkiye dayanabilecek ekilde seçilmesi gerekir. stenilen durumların bir tanesi, ilgili dalgacık akımı ile kapasitördür. ayet gerilimdeki dalgacıı onda bir volt seviyesinde tutabilecek uygun bir kapasitör deeri seçilirse, bu durumda örnekteki 10,87 amperlik dalgacık akımı, kapasitörün dalgacık akım oranını aabilir. Bu, ayet kapasitör oda sıcaklıının üzerinde çalıtıında geçerlidir. Çözüm ise, çok ekonomik olmamasına ramen gerekenden daha büyük bir kapasitör kullanmaktır.
777...333...333 SSSÜÜÜRRREEEKKKLLL AAAKKKIIIMMM DDDUUURRRUUUMMMUUU
Bundan önceki kısımlardaki ilikiler, sürekli indüktör akımı durumu altında gelitirilmiti. Bunun geçerli olmadıı durumlarda yeni ilikiler gerekir; özellikle çıkıgerilim ilikisi geçerli deildir. Sürekli akım durumu için sınır, Imin deeri sıfıra eitlenerek bulunur ve bu sürekli indüktör akımını devam ettirecek minimum indüktans deeridir. 7.31 eitlii kullanılarak, 7.33 eitlii elde edilir:
IE
R D
E
LDTmin ( )( )
=−
−
=
1 202 (7.33)
eitliin çözümü ile 7.34 eitlii bulunur.

( )LTR
D D=
−
21
2 (7.34)
ÖRNEK 7.5
ndüktans deerinden baka, Örnek 7.4’deki bütün bilgiler kullanılarak, sürekli indüktör akımını devam ettirecek kritik indüktans ne olur?
ÇÖZÜM
( )( )( )( )
( )( )LRT
D D=
− =
− =
21
25 0 0002
20 733 1 0 733 0 000130
2 2,, , , H
777...333...444 KKKAAAPPPAAASSSTTTÖÖÖRRR GGGEEERRRLLLMMM NNNDDDEEEKKK DDDAAALLLGGGAAACCCIIIKKK
ekil 7.7 deki kapasitörün akım grafiinden, kapasitör gerilimindeki dalgacık bulunabilir. Anahtar kapalı iken, kapasitör yük akımını sabit bir deerde tutar. Örnek 7.4 durumunda, anahtarın açık olduu sürede kapasitör akımı sıfırdan büyüktür. Bu zaman süresince kapasitörden alınan yük, 7.35 eitlii ile verilir:
( )∆QV
RDT
C=
(7.35)
Gerilimdeki dalgacık 7.36 eitlii ile verilir:
∆∆
VQ
CC = (7.36)
ÖRNEK 7.6
Örnek 7.4’deki bilgiler kullanılarak, gerilimdeki dalgacık deerini 0,5 volt ile sınırlayan kapasitör deeri nedir?
ÇÖZÜM
( )∆Q = =150
250 733 200 880, µC
CQ
VC
= = =∆
∆
880
0 51760
,µF
777...444 GGGEEERRRLLLMMM AAAZZZAAALLLTTTAAANNN---AAARRRTTTIIIRRRAAANNN KKKIIIYYYIIICCCIII
Devre elemanları üzerindeki yeni bir düzenleme, ekil 7.9 da gösterildii gibi azaltan-artıran fonksiyonlarının anlaılmasına yardımcı olur. Çıkı geriliminin genliinin deimesine ek olarak, çıkı geriliminin polaritesinin deimesi de bu durumda mümkündür.
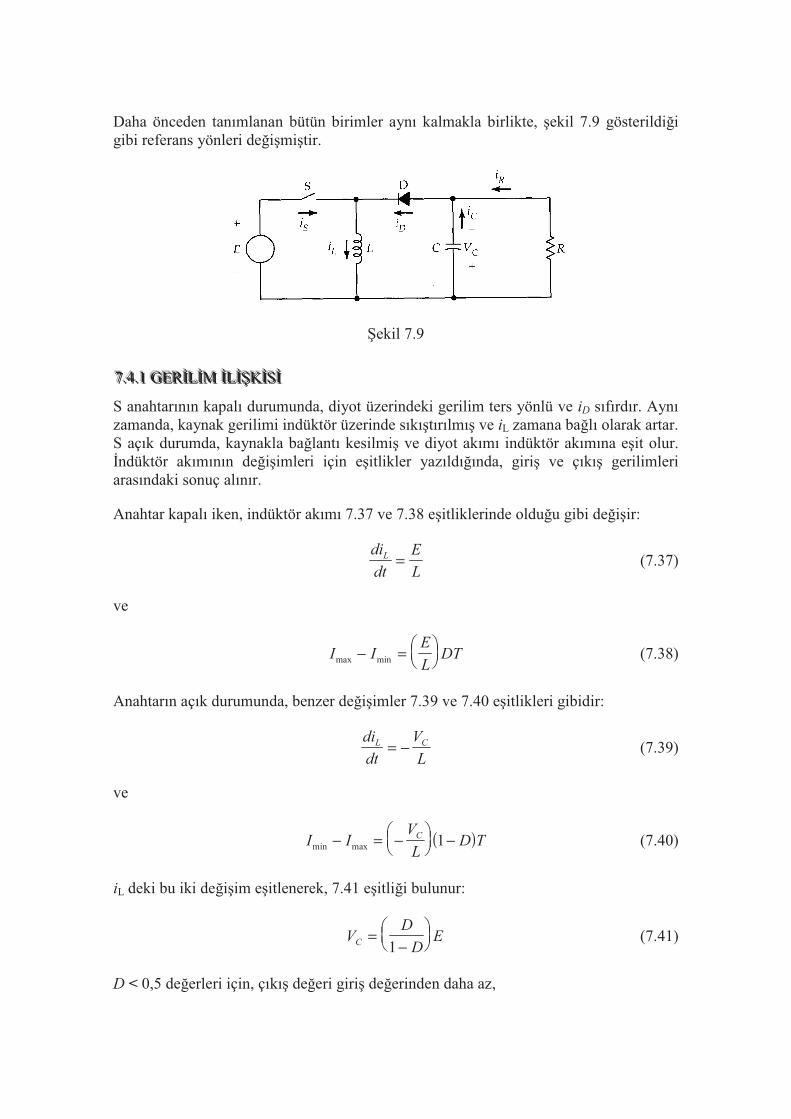
Daha önceden tanımlanan bütün birimler aynı kalmakla birlikte, ekil 7.9 gösterildii gibi referans yönleri deimitir.
ekil 7.9
777...444...111 GGGEEERRRLLLMMM LLLKKKSSS
S anahtarının kapalı durumunda, diyot üzerindeki gerilim ters yönlü ve iD sıfırdır. Aynı zamanda, kaynak gerilimi indüktör üzerinde sıkıtırılmı ve iL zamana balı olarak artar. S açık durumda, kaynakla balantı kesilmi ve diyot akımı indüktör akımına eit olur. ndüktör akımının deiimleri için eitlikler yazıldıında, giri ve çıkı gerilimleri arasındaki sonuç alınır.
Anahtar kapalı iken, indüktör akımı 7.37 ve 7.38 eitliklerinde olduu gibi deiir:
di
dt
E
L
L = (7.37)
ve
I IE
LDTmax min− =
(7.38)
Anahtarın açık durumunda, benzer deiimler 7.39 ve 7.40 eitlikleri gibidir:
di
dt
V
LL C= − (7.39)
ve
( )I IV
LD TC
min max− = −
−1 (7.40)
iL deki bu iki deiim eitlenerek, 7.41 eitlii bulunur:
VD
DEC =
−
1 (7.41)
D < 0,5 deerleri için, çıkı deeri giri deerinden daha az,
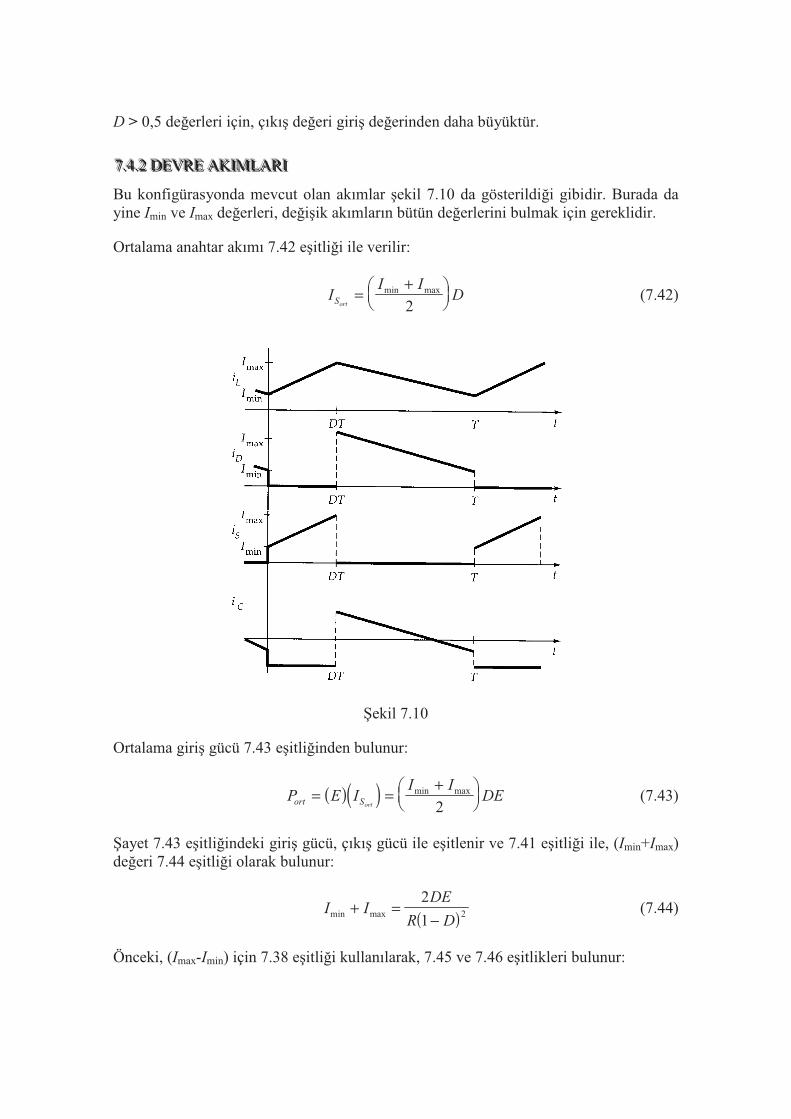
D > 0,5 deerleri için, çıkı deeri giri deerinden daha büyüktür.
777...444...222 DDDEEEVVVRRREEE AAAKKKIIIMMMLLLAAARRRIII
Bu konfigürasyonda mevcut olan akımlar ekil 7.10 da gösterildii gibidir. Burada da yine Imin ve Imax deerleri, deiik akımların bütün deerlerini bulmak için gereklidir.
Ortalama anahtar akımı 7.42 eitlii ile verilir:
II I
DSort=
+
min max
2 (7.42)
ekil 7.10
Ortalama giri gücü 7.43 eitliinden bulunur:
( )( )P E II I
DEort Sort= =
+
min max
2 (7.43)
ayet 7.43 eitliindeki giri gücü, çıkı gücü ile eitlenir ve 7.41 eitlii ile, (Imin+Imax) deeri 7.44 eitlii olarak bulunur:
( )I I
DE
R Dmin max+ =
−
2
12 (7.44)
Önceki, (Imax-Imin) için 7.38 eitlii kullanılarak, 7.45 ve 7.46 eitlikleri bulunur:
( )I
DE
R D
EDT
Lmin =−
−1 22 (7.45)
( )I
DE
R D
EDT
Lmax =−
+1 22 (7.46)
ÖRNEK 7.7
ekil 7.9 daki gibi bir azaltan-artıran kıyıcı, 35 V’luk bir kaynaktan, 50V-100W’lık bir omik yükü beslemektedir; T=200 µs ve L=700 µH. Aaıdakileri bulunuz:
(a) D’nin deeri, (b) Imin ve Imax
(c) Ortalama anahtar akımı, (d) Ortalama diyot akımı, (e) Kapasitör akımının RMS deeri.
ÇÖZÜM
(a) ( )VD
DE
D
DDC =
−
=
−
=
150
135 0 588,
(b) 7.45 ve 7.46 eitlikleri kullanılarak,
( )( )
( )( )( )( )
Imin
,
,
,, , ,=
−− = − =
0 588 35
25 1 0 588
35 0 588 200
2 7004 86 2 94 1 922 A
( )( )
( )( )( )( )
Imax
,
,
,, , ,=
−+ = + =
0 588 35
25 1 0 588
35 0 588 200
2 7004 86 2 94 7 802 A
(c) 7.42 eitlii kullanılarak,
( )II I
DSort=
+
=
+
=min max , ,
, ,2
7 80 1 92
20 588 2 86 A
(d) Ortalama diyot akımı, ortalama yük akımı ile aynıdır,
100 W/50 V = 2 A
(e) ekil 7.11 kapasitör akımının zamanla deiiminin grafiidir. Örnek 7.4 deki metottan daha basit bir metot, kapasitör akımının RMS deerini bulmak için kullanılabilir. Anahtar kapalı olduu sürede, balangıçta +2,94 ve sonda -2,94 üçgen kısım eklenmi olarak, kapasitör akımı 2,86 deerinde sabit olarak düünülebilir. Üçgen dalga biçimin RMS deeri, tepe deerin 1,732 ye bölünmesidir. Her dalganın dier kısmında, kapasitör akımı, -2 A sabittir. Böylece, bütün RMS deeri aaıdaki iliki ile bulunabilir:
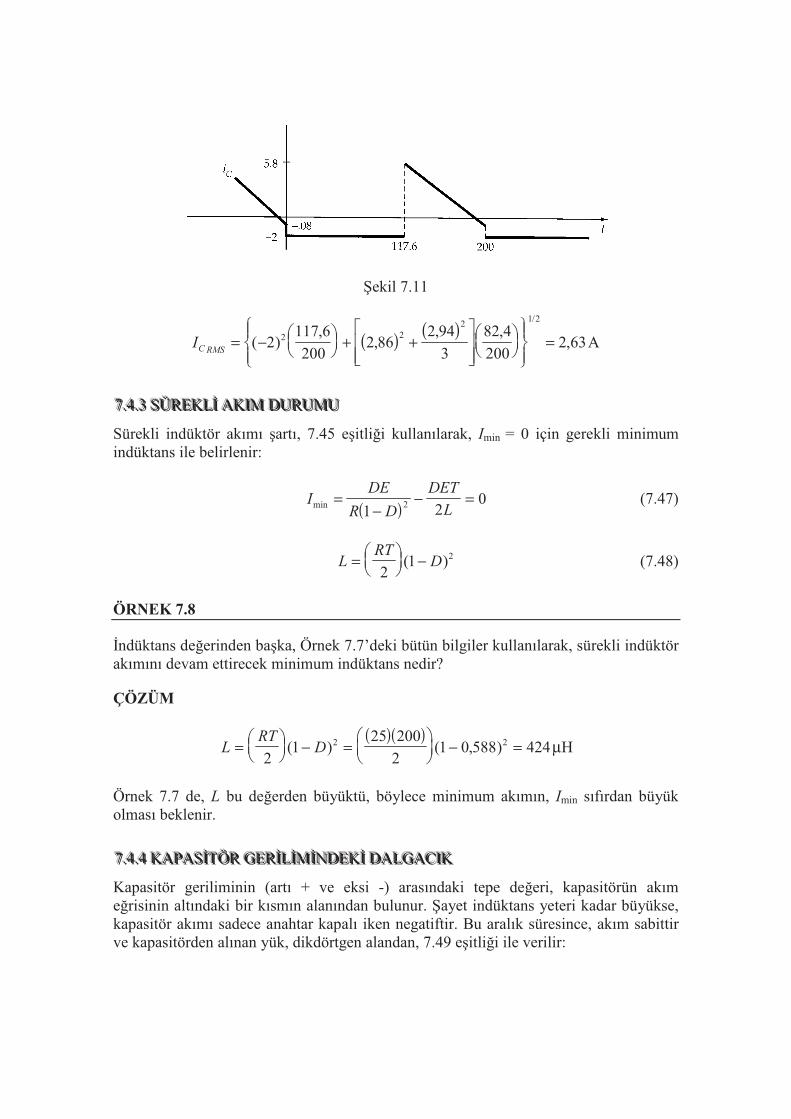
ekil 7.11
( )( )
IC RMS= −
+ +
=( )
,,
, ,,
/
2117 6
2002 86
2 94
3
82 4
2002 632 2
21 2
A
777...444...333 SSSÜÜÜRRREEEKKKLLL AAAKKKIIIMMM DDDUUURRRUUUMMMUUU
Sürekli indüktör akımı artı, 7.45 eitlii kullanılarak, Imin = 0 için gerekli minimum indüktans ile belirlenir:
( )I
DE
R D
DET
Lmin =−
− =1 2
02 (7.47)
LRT
D=
−
21 2( ) (7.48)
ÖRNEK 7.8
ndüktans deerinden baka, Örnek 7.7’deki bütün bilgiler kullanılarak, sürekli indüktör akımını devam ettirecek minimum indüktans nedir?
ÇÖZÜM
( )( )L
RTD=
− =
− =
21
25 200
21 0 588 4242 2( ) ( , ) µH
Örnek 7.7 de, L bu deerden büyüktü, böylece minimum akımın, Imin sıfırdan büyük olması beklenir.
777...444...444 KKKAAAPPPAAASSSTTTÖÖÖRRR GGGEEERRRLLLMMM NNNDDDEEEKKK DDDAAALLLGGGAAACCCIIIKKK
Kapasitör geriliminin (artı + ve eksi -) arasındaki tepe deeri, kapasitörün akım erisinin altındaki bir kısmın alanından bulunur. ayet indüktans yeteri kadar büyükse, kapasitör akımı sadece anahtar kapalı iken negatiftir. Bu aralık süresince, akım sabittir ve kapasitörden alınan yük, dikdörtgen alandan, 7.49 eitlii ile verilir:

( )∆ Q I DTV
RDTR
C= =
( ) (7.49)
∆∆
VQ
C
V
R
DT
CC
C= =
(7.50)
Örnek 7.7 deki gibi bazı devre durumları, oldukça büyük (Imax -Imin) deerine sahiptir ve kapasitör akımı anahtarın açık olduu zamanın bir kısmında da negatiftir. Bu durum, sonucu eitlik haline getirmekten daha çok sayısal bir örnekle en iyi anlaılır.
ÖRNEK 7.9
Örnek 7.7 ye devam ederek, gerilimdeki dalgacık deerini ±0,2 V ile sınırlayan kapasitör deeri ne olur?
ÇÖZÜM
ekil 7.11 de, kapasitör akımının sıfır olduu 200 µs yakınındaki zaman, benzer üçgenler metodu kullanılarak kolaylıkla bulunur. Bu zaman tx olsun:
5 80
117 6
0 08
200
,
,
,
t tx x−=
−
tx = 195 7, µs
iC nin zamanla deiim erisinin altındaki ∆Q yü temsil eden alanın negatif kısmında, bir dikdörtgen ve bir üçgen kısım vardır:
( )( )( )( )
∆Q = +−
=2 117 60 08 200 195 7
2235 37,
, ,, µC
∆VC = 0 2, V
CQ
VC
= = =∆
∆
235 37
0 21177
,
,µF
Bu örnekte, üçgen kısımların katkısı oldukça küçük ve ihmal edilebilir. Baka durumlarda, farklı sayısal deerlerle, üçgen kısımlar daha çok önemli olabilir.
777...555 MMMAAANNNYYYEEETTTKKK KKKUUUPPPLLLAAAJJJLLLIII KKKIIIYYYIIICCCIIILLLAAARRR
Önceki üç kısımda bahsedilen devre düzenlemeleri temel kıyıcı tipleridir ve elektriksel izolasyonun gerekmedii durumlarda ve çıkı geriliminin giri geriliminden çok büyük bir katsayı ile farklılık göstermedii durumlar için uygundur. Fakat yukarıdaki durumların hepsinin veya bir kısmının uygulanamadıı durumlarda, manyetik kuplajlı bir versiyon daha iyi bir seçim olmaktadır ve burada sadece birkaç devre dikkate alınacaktır. Manyetik kuplajlı devre düzenlemeleri aaıdaki gibi listelenebilir:
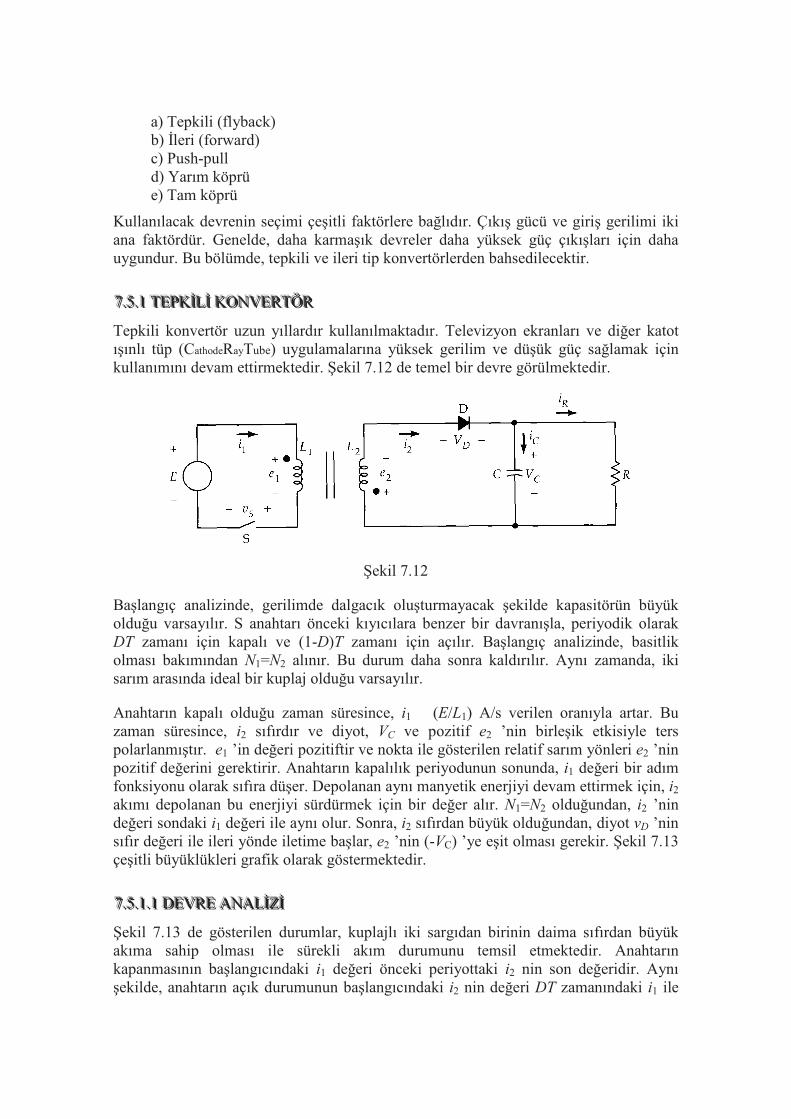
a) Tepkili (flyback) b) leri (forward) c) Push-pull d) Yarım köprü e) Tam köprü
Kullanılacak devrenin seçimi çeitli faktörlere balıdır. Çıkı gücü ve giri gerilimi iki ana faktördür. Genelde, daha karmaık devreler daha yüksek güç çıkıları için daha uygundur. Bu bölümde, tepkili ve ileri tip konvertörlerden bahsedilecektir.
777...555...111 TTTEEEPPPKKKLLL KKKOOONNNVVVEEERRRTTTÖÖÖRRR
Tepkili konvertör uzun yıllardır kullanılmaktadır. Televizyon ekranları ve dier katot ıınlı tüp (CathodeRayTube) uygulamalarına yüksek gerilim ve düük güç salamak için kullanımını devam ettirmektedir. ekil 7.12 de temel bir devre görülmektedir.
ekil 7.12
Balangıç analizinde, gerilimde dalgacık oluturmayacak ekilde kapasitörün büyük olduu varsayılır. S anahtarı önceki kıyıcılara benzer bir davranıla, periyodik olarak DT zamanı için kapalı ve (1-D)T zamanı için açılır. Balangıç analizinde, basitlik olması bakımından N1=N2 alınır. Bu durum daha sonra kaldırılır. Aynı zamanda, iki sarım arasında ideal bir kuplaj olduu varsayılır.
Anahtarın kapalı olduu zaman süresince, i1 (E/L1) A/s verilen oranıyla artar. Bu zaman süresince, i2 sıfırdır ve diyot, VC ve pozitif e2 ’nin birleik etkisiyle ters polarlanmıtır. e1 ’in deeri pozitiftir ve nokta ile gösterilen relatif sarım yönleri e2 ’nin pozitif deerini gerektirir. Anahtarın kapalılık periyodunun sonunda, i1 deeri bir adım fonksiyonu olarak sıfıra düer. Depolanan aynı manyetik enerjiyi devam ettirmek için, i2
akımı depolanan bu enerjiyi sürdürmek için bir deer alır. N1=N2 olduundan, i2 ’nin deeri sondaki i1 deeri ile aynı olur. Sonra, i2 sıfırdan büyük olduundan, diyot vD ’nin sıfır deeri ile ileri yönde iletime balar, e2 ’nin (-VC) ’ye eit olması gerekir. ekil 7.13 çeitli büyüklükleri grafik olarak göstermektedir.
777...555...111...111 DDDEEEVVVRRREEE AAANNNAAALLLZZZ
ekil 7.13 de gösterilen durumlar, kuplajlı iki sargıdan birinin daima sıfırdan büyük akıma sahip olması ile sürekli akım durumunu temsil etmektedir. Anahtarın kapanmasının balangıcındaki i1 deeri önceki periyottaki i2 nin son deeridir. Aynı ekilde, anahtarın açık durumunun balangıcındaki i2 nin deeri DT zamanındaki i1 ile
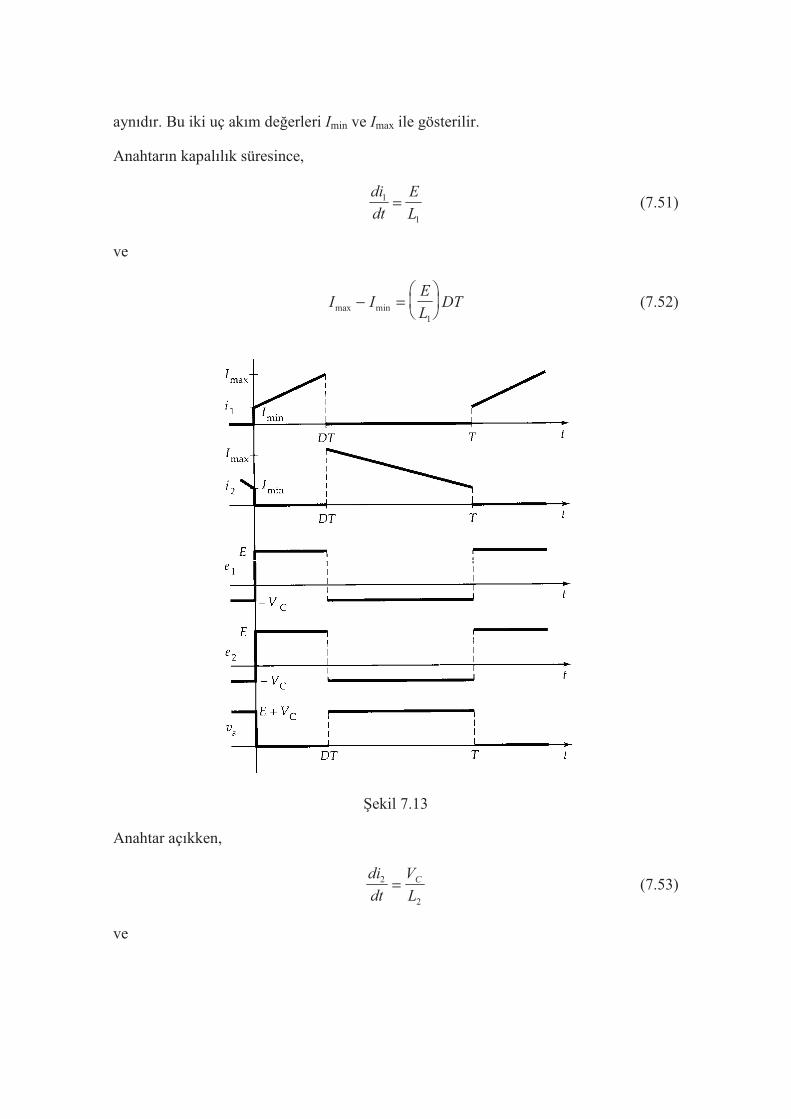
aynıdır. Bu iki uç akım deerleri Imin ve Imax ile gösterilir.
Anahtarın kapalılık süresince,
di
dt
E
L1
1
= (7.51)
ve
I IE
LDTmax min− =
1
(7.52)
ekil 7.13
Anahtar açıkken,
di
dt
V
L
C2
2
= (7.53)
ve

I IV
LD T
C
min max ( )− = −
−
2
1 (7.54)
Önceki dört eitlikte, N1=N2 olduundan L1=L2 dir. 7.51-7.54 eitliklerinin kullanılması 7.55 eitliindeki gerilim ilikisini verir:
VD
DEC =
−
1 (7.55)
Bu gerilim ilikisi, 7.41 eitliindeki azaltan-artıran kıyıcı ile tamamen aynıdır. Tek farklılık, elektriksel izolasyonun manyetik kuplaj ile yapılmı olmasıdır. Dier bir seçenek, N2 ’nin farklı bir deerinin kullanılması ile çıkı geriliminin deitirilmesidir; bu yolla gerilim sadece D ’nin kullanılmasından çok daha bariz ekilde deitirilebilir.
Çok kullanılan bir uygulama, standart 220 V RMS, 50 Hz lik kaynaktan regüleli 5 V’un üretilmesidir. Güvenlik nedenlerinden dolayı izolasyon gerekmektedir. Olabilecek metotlardan birinde, izolasyon ve gerilimin düürülmesi için standart 50 Hz transformatör ve daha sonra regülasyon için bir azaltan kıyıcıyı takipeden bir diyot dorultucu kullanılır. Daha iyi bir çözümde ilk önce dorultma ilemi yapılır ve sonra istenilen gerilimin azaltılması için N2 < N1’li manyetik kuplajlı kıyıcı kullanılır. kinci çözümde 50 Hz’lik transformatör devreden çıkarılıp yerine kıyıcı frekansında kullanılan bir çift kuplajlı indüktör kullanılır. Kıyıcının manyetik kısmı 60 Hz’lik bir transformatörden daha küçüktür.
777...555...111...222 SSSÜÜÜRRREEEKKKLLL AAAKKKIIIMMM DDDUUURRRUUUMMMUUU
Sürekli akım durumu, Imin deerinin çözümü ile bulunur. i1 in ortalama deeri öyle olmalıdır ki giriin ortalama gücü çıkıın ortalama gücüne eit olabilsin:
I I I Dort1
12= +( )min max (7.56)
Giri gücü = = +EI E I I Dort1
12 ( )min max (7.57)
Çıkı gücü =( )V
R
C
2
(7.58)
7.57 ve 7.58 eitlikleri ile 7.55 eitliindeki VC nin ifadesinin birletirilmesi ile:
I IE
R
D
Dmin max ( )+ =
−
2
1 2 (7.59)
bulunur. Daha önce, Imax-Imin eitlii 7.54 eitlii olarak elde edilmiti. imdi bu iki eitlik Imin ve Imax deerlerini bulmak için çözülebilir:
IE
R
D
D
E
LDTmin ( )
( )=
−
−
1 221
(7.60)

IE
R
D
D
E
LDTmax ( )
( )=
−
+
1 221
(7.61)
Burada da yine, Imin= 0 yapılarak sürekli akım durumu bulunur:
LRT
D12
21=
−( ) (7.62)
Bu sonuçlar, 7.7 kısmındaki azaltan-artıran kıyıcıya benzemektedir. Böylece, tepkili kıyıcı ve azaltan-artıran kıyıcı arasında çok yakın bir ilikinin olduu açıkca görülmektedir. Tepkili versiyon, bunların yanında, izolasyon özellii ile beraber ikinci sarımın sayısının deitirilmesi ile ayrı bir esneklie sahip olmaktadır.
ÖRNEK 7.10
1:1 sarım oranlı ideal bir tepkili konvertör, 10-40 V arasında ayarlı gerilim ile 5 Ω’luk bir yük direncini beslemektedir. Kaynak gerilimi 30 V’tur. Sürekli akım modu ilemi varsayılacaktır. T=100 µs. Aaıdakileri bulunuz:
a) istenilen D aralıı b) D’nin bütün deerleri için sürekli akım ileminde gereken indüktans L1 deeri c) tepe anahtar akımı d) anahtar açıkken anahtar terminallerindeki tepe gerilim
ÇÖZÜM
a) VC = 10 V için, 7.55 eitlii kullanılarak;
101
30=−
D
D D = 0 25,
VC = 40 V için,
401
30=−
D
D D = 0 571,
b) 7.62 eitlii kullanılarak, L1’in deeri bulunabilir. D’nin en küçük deeri L1’in en büyük deerini gerektirir böylece D = 0 25, deeri kullanılır:
LRT
D12 2
21
5 100
21 0 25 140 6=
− =
− =( )
( )( )( , ) , µH
Bu deer, D ’nin tam aralıında sürekli akım artını salayan L1’in en küçük deeridir.
c) D = 0 25, de
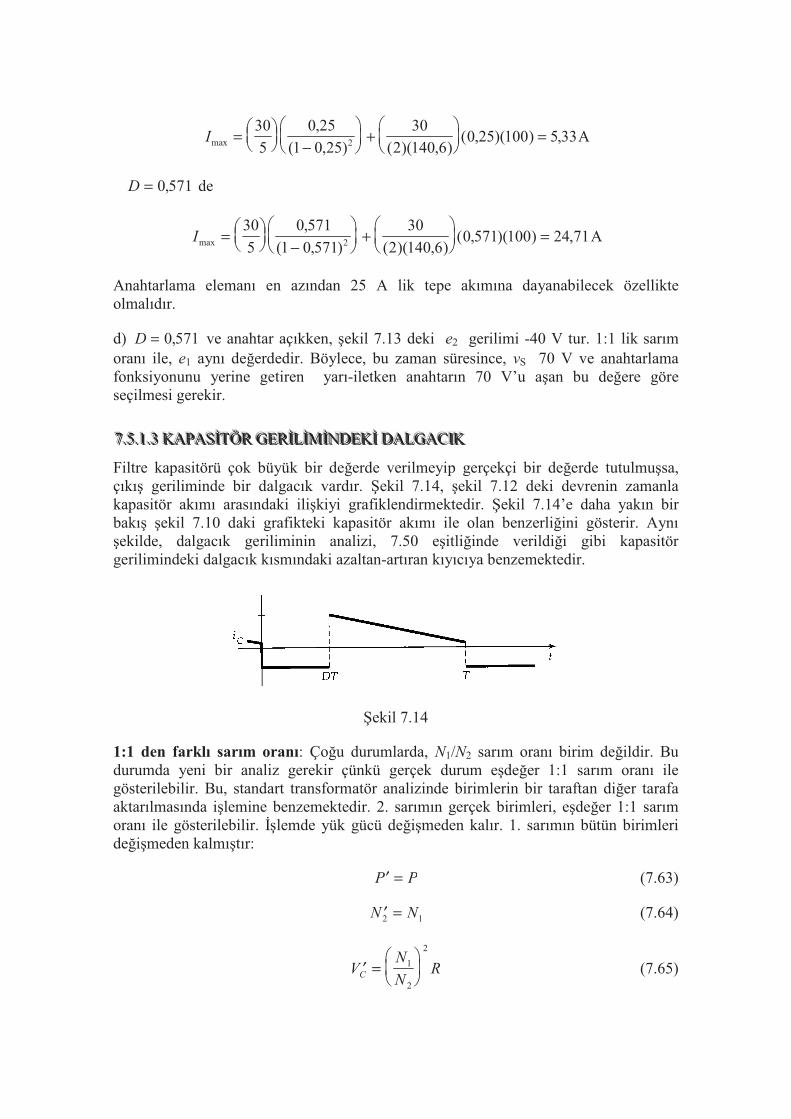
Imax
,
( , ) ( )( , )( , )( ) ,=
−
+
=
30
5
0 25
1 0 25
30
2 140 60 25 100 5 332 A
D = 0 571, de
Imax
,
( , ) ( )( , )( , )( ) ,=
−
+
=
30
5
0 571
1 0 571
30
2 140 60 571 100 24 712 A
Anahtarlama elemanı en azından 25 A lik tepe akımına dayanabilecek özellikte olmalıdır.
d) D = 0 571, ve anahtar açıkken, ekil 7.13 deki e2 gerilimi -40 V tur. 1:1 lik sarım oranı ile, e1 aynı deerdedir. Böylece, bu zaman süresince, vS 70 V ve anahtarlama fonksiyonunu yerine getiren yarı-iletken anahtarın 70 V’u aan bu deere göre seçilmesi gerekir.
777...555...111...333 KKKAAAPPPAAASSSTTTÖÖÖRRR GGGEEERRRLLLMMM NNNDDDEEEKKK DDDAAALLLGGGAAACCCIIIKKK
Filtre kapasitörü çok büyük bir deerde verilmeyip gerçekçi bir deerde tutulmusa, çıkı geriliminde bir dalgacık vardır. ekil 7.14, ekil 7.12 deki devrenin zamanla kapasitör akımı arasındaki ilikiyi grafiklendirmektedir. ekil 7.14’e daha yakın bir bakı ekil 7.10 daki grafikteki kapasitör akımı ile olan benzerliini gösterir. Aynı ekilde, dalgacık geriliminin analizi, 7.50 eitliinde verildii gibi kapasitör gerilimindeki dalgacık kısmındaki azaltan-artıran kıyıcıya benzemektedir.
ekil 7.14
1:1 den farklı sarım oranı: Çou durumlarda, N1/N2 sarım oranı birim deildir. Bu durumda yeni bir analiz gerekir çünkü gerçek durum edeer 1:1 sarım oranı ile gösterilebilir. Bu, standart transformatör analizinde birimlerin bir taraftan dier tarafa aktarılmasında ilemine benzemektedir. 2. sarımın gerçek birimleri, edeer 1:1 sarım oranı ile gösterilebilir. lemde yük gücü deimeden kalır. 1. sarımın bütün birimleri deimeden kalmıtır:
′ =P P (7.63)
′ =N N2 1 (7.64)
′ =
V
N
NRC
1
2
2
(7.65)

′ =
R
N
NR1
2
2
(7.66)
′ =
i
N
Ni2
2
12 (7.67)
′ =
=L
N
NL L2
1
2
2
2 1 (7.68)
′ =
C
N
NC2
1
2
(7.69)
ÖRNEK 7.11
Bir tepkili konvertör, 300 V luk bir DC kaynaktan 5 V ta 100 A beslemektedir. Kıyıcının frekansı 40 kHz dir. Gerçek konvertörde, azaltma sarım oranı N N1 2 60/ =
kullanılacaktır. Aaıdakileri bulunuz:
a) 1:1 sarım oranı için problemin yeniden tanımlanması b) istenilen D aralıı c) sürekli akım ilemi için L1 in deeri d) L2 nin gerçek deeri e) anahtarın tıkama gerilimi f) ayet L1, sadece anahtarın kapalı olduu zaman süresince kapasitör akımının negatif olmasına yetecek kadarsa, ∆VC = 0,05 V için C nin deeri
ÇÖZÜM
a)
′ = =VC ( )( )60 5 300 V
′ =
=R 60
5
1001802 Ω
′ = =P P 500 W
b) 7.55 eitliinden,
′ =−
V
D
DEC 1
3001
300=−
D
D
D = 0 5,

c) 7.62 eitliinden,
LRT
D12 2
21
180 25
21 0 5 563=
− =
− =( )
( )( )( , ) µH
d) 7.68 eitliinden,
LN
NL2
1
2
2
1
21
60563 0 156=
=
= , µH
e) Anahtar açıkken, e e1 2 300= ′ == V, böylece anahtarın minimum
vS = − − =300 300 600( ) V
gerilimi tıkaması gerekir.
f) bir tepkili konvertör için düzenlenmi 7.49 ve 7.50 eitliklerinden:
∆ ′ =
× = ×− −Q
300
1800 5 25 10 20 8 106 6( , )( ) , C
∆ ∆′ = =V VC C( )60 3V
′ =′
′=
×= ×
−−C
Q
VC
∆
∆
20 8 10
36 94 10
66,
, F
C C= ′ = × =−( ) ( )( , ) ,60 3600 6 94 10 0 0252 6 F
7.11 örnei, kontrollu olmayan bir dorultucu tarafından, dorudan güç devresinden beslenen bir konvertör örneidir. Anahtarlayıcı yarı-iletkenin çok bariz bir gerilimi tıkama özelliinde olması gerekir. Tipik olarak, bu deer tepe kaynak geriliminin iki katıdır, bu minimum bir gereksinimdir çünkü sarım oranı yaklaık olarak D = 0 5, deerindeki duruma göre ayarlanmıtır.
777...555...222 LLLEEERRR KKKOOONNNVVVEEERRRTTTÖÖÖRRR
kinci manyetik kuplajlı konvertör ekil 7.15 de görülen ileri konvertördür. Bu devrede tepkili konvertör durumunun tam tersine, anahtar kapalı iken enerji yüke, harici indüktöre ve depolama kapasitörüne verilir. Bunu yapmak için, nokta notasyonuna göre sarım balantıları tepkili durumunun tersi yönünde yapılmıtır. Analizde de görülecei gibi, D’nin deerinin anahtarın açık olduu zaman süresince, manyetik nüve akısının mıknatıslıını gidermesi için zamanın %50 sinden az olması gerekir.
777...555...222...111 DDDEEEVVVRRREEE AAANNNAAALLLZZZ
Üç sargının ideal manyetik kuplajlı, N1 = N2 = N3 = N ve her üç sargının öz indüktanslarının harici indüktör deeri L ’ye kıyasla büyük olduunu varsayalım. Bu
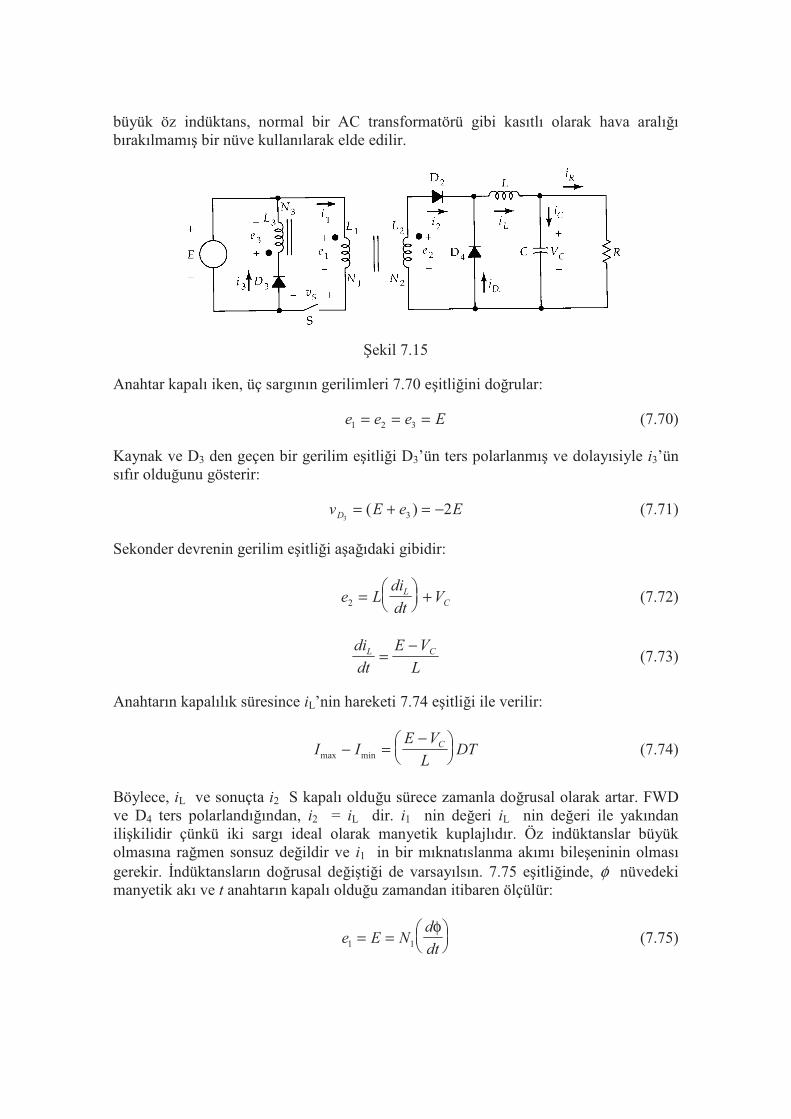
büyük öz indüktans, normal bir AC transformatörü gibi kasıtlı olarak hava aralıı bırakılmamı bir nüve kullanılarak elde edilir.
ekil 7.15
Anahtar kapalı iken, üç sargının gerilimleri 7.70 eitliini dorular:
e e e E1 2 3= = = (7.70)
Kaynak ve D3 den geçen bir gerilim eitlii D3’ün ters polarlanmı ve dolayısiyle i3’ün sıfır olduunu gösterir:
v E e ED3 3 2= + = −( ) (7.71)
Sekonder devrenin gerilim eitlii aaıdaki gibidir:
e Ldi
dtV
L
C2 =
+ (7.72)
di
dt
E V
L
L C=−
(7.73)
Anahtarın kapalılık süresince iL’nin hareketi 7.74 eitlii ile verilir:
I IE V
LDTC
max min− =−
(7.74)
Böylece, iL ve sonuçta i2 S kapalı olduu sürece zamanla dorusal olarak artar. FWD ve D4 ters polarlandıından, i2 = iL dir. i1 nin deeri iL nin deeri ile yakından ilikilidir çünkü iki sargı ideal olarak manyetik kuplajlıdır. Öz indüktanslar büyük olmasına ramen sonsuz deildir ve i1 in bir mıknatıslanma akımı bileeninin olması gerekir. ndüktansların dorusal deitii de varsayılsın. 7.75 eitliinde, φ nüvedeki manyetik akı ve t anahtarın kapalı olduu zamandan itibaren ölçülür:
e E Nd
dt1 1= =
φ (7.75)

φ =
E
Nt
1
(7.76)
7.77 ve 7.78 eitliklerinde görüldüü gibi, im i1 in mıknatıslanma bileeni olsun:
iN
L
N
L
E
Nt
E
Ltm =
=
=
1
1
1
1 1 1
φ (7.77)
i i im1 2= + (7.78)
S açıldıında, i1 ’in mıknatıslanma bileeni 1. sargıdan kalkar ve bunu 3. sargıya aktarır. Nüvede manyetik olarak depolanan enerji kaynaa geri döner. Bunlar olurken, e1 ve e2
deerinde olduu gibi e3’ün deeri -E ’ye eit olur.
Manyetik akı ve ilgili im (aynı zamanda i3) deeri sıfıra doru dorusal olarak azalmaya balar. N1 = N3 olduundan, nüveyi kurmak veya manyetik akıyı sıfıra indirmek için gereken zaman, anahtarın kapalı olduu zamanla aynıdır. Bu durum, D ’nin deeri üzerinde bir 0,5 üst sınırı koymaktadır.
Bu aynı aralık süresince, e2 = -E ile L indüktöründeki akım D4 diyotu ile boalır. 7.79 eitliine göre bu akım azalır. Bu indüktördeki akım sürekli veya süreksiz modda olabilir. Burada sürekli mod varsayılacaktır:
di
dt
V
L
L C= − (7.79)
Anahtarın açık olduu sürede oluan deiimler 7.80 eitlii ile verilir:
I IV
LD T
C
min max ( )− = −
−1 (7.80)
ki anahtar aralıı süresince iL deki deiimler için 7.74 ve 7.80 eitliklerinin birletirilmesi 7.81 eitliinde VC nin bir çözümünü verir:
V DEC = (7.81)
Böylece, ileri konvertörün temelde bir azaltan konvertör olduu görülebilir. Performansı, kısım 7.2 deki azaltan kıyıcı ile benzerlik göstermektedir. ekil 7.16 da bu konvertöre ait çeitli akım ve gerilimlerin grafikleri görülmektedir.
ÖRNEK 7.12
40 kHz de çalıan bir ileri konvertör 80 V’luk bir kaynaktan bir yüke 30 V’ta 500 W beslemektedir. Bu problem için, 0,01 H’lik indüktansla bütün sargılar aynı sipir sayısına sahiptir. Harici indüktör 25 µH dir. Aaıdakileri bulunuz:
a) D’nin deeri b) harici indüktördeki Imin ve Imax deerleri

c) tepe mıknatıslama akımı d) her dalga sonunda kaynaa geri dönen, manyetik nüve içinde depolanan enerjie) anahtar açıkken uçlarındaki gerilim, vS
ekil 7.16
ÇÖZÜM
a) DV
E
C= = =30
800 375,
D, 0,5 den küçük olduundan aranan artı salamaktadır.
b) Yükün ortalama akımı, ( ) /max minI I+ 2 dir:
I I P
VC
max min ,+
= = =2
500
3016 67 A
I Imax min ,+ = 33 33A
7.74 eitliinden:
I IE V
LDTC
max min ( , )( ) ,75− =−
=
−
=
80 30
250 375 25 18 A
Akımlardaki bu iki durumun çözülmesi Imin ve Imax deerlerini verir:
Imin ,= 7 29 A
Imax ,= 26 04 A
c) Tepe iE
LDTm =
=
× =−
1
680
0 010 375 25 10 0 075
,( , )( ) , A
i1 in tepe deeri i2 nin tepe deerinden 75 mA daha büyüktür. i1 in tepe deeri (26,04+0,075=) 26,115 A dir. Mıknatıslama akımından kaynaklanan farklılık küçüktür fakat bu, nüvenin yeniden kurulması için zaman veya im nin sıfıra gitmesine izin verilecei anlamına gelmediinden önemli deildir. D’nin üst sınırı olan 0,5’e dikkat edilmelidir.
d) Enerji = 12 1
2 12
2 60 01 0 075 28 1 10( )( ) ( , )( , ) ,L imtepe = = × − J
e) Anahtar açıkken, im sıfırdan büyük olduu sürece e3 ve e1 ’in herbiri -80 V’a eittir. Kaynak, e1 ve vS yolundaki bir gerilim eitlii ile aaıdaki gibi bulunur.
E e vS= +1
vS = − − =80 80 160( ) V
777...555...222...222 SSSÜÜÜRRREEEKKKLLL AAAKKKIIIMMM DDDUUURRRUUUMMMUUU
Sürekli indüktör akımı artı, sarım oranlarının 1:1:1 olmasıyla, kısım 7.2 deki azaltan kıyıcı ile benzerlik göstermektedir. ayet N2 deki deiimden dolayı baka bir sarım oranı kullanılırsa, bu durumda analiz edeer 1:1:1 problemi ile çözülmelidir.
777...555...222...333 KKKAAAPPPAAASSSTTTÖÖÖRRR GGGEEERRRLLLMMM NNNDDDEEEKKK DDDAAALLLGGGAAACCCIIIKKK
Bu miktar da, 7.2 deki azaltan kıyıcıdaki eitlik ile benzerlik göstermektedir.
777...666 SSSÜÜÜRRREEEKKKSSSZZZ AAAKKKIIIMMM AAANNNAAALLLZZZ
Süreksiz indüktör akımı durumunda, çıkı gerilim deeri her üç temel konvertör tipi için bir analiz gerektirir. Her durum için analiz farklılık göstermekle beraber temel ilem herbirinde aynıdır.
Analizde üç deiken deeri bilinmemektedir. ndüktör akımı burada sıfır olduundan dikkate alınmamaktadır. Bununla beraber indüktör akımının sııfır olduu zaman bilinmemektedir. ndüktör akımının zamanla deiim erisi yeni D2 deikeni ile ekil 7.17’de görülmektedir. Devredeki üç deiken imdi, VC , Imax ve D2 ’dir. Bu üç deikenin deerlerini çözmek için gereken eitlikler aaıdaki maddeler ile elde edilir:

(a) Anahtarın kapalı durumundaki devre eitliinden Imax bulunarak, (b) Anahtarın açık durum için devre eitliinden Imax bulunarak, (c) Bir periyot üzerinde ortalama kaynak gücünü, aynı periyotta yük üzerinde düen
güce eitleyerek.
ekil 7.17
777...666...111 AAAZZZAAALLLTTTAAANNN KKKIIIYYYIIICCCIII
Bu eitlikler yazılır ve farklı üç devrenin herbiri için çözülür. Azaltan kıyıcı için ekil 7.1 deki devre diyagramı ve ekil 7.17 deki notasyon kullanılarak aaıdaki eitlikler yazılabilir; ilk ikisi 7.7 ve 7.8 eitliklerinin yeniden düzenlenmi halidir:
DTL
VEI C
−=max (7.82)
TDDL
VI C )( 2max −
= (7.83)
Üçüncü eitlik, anahtarın kapalı olduu aralık süresince, yani DTt <<0 aralıında, iL
’nin dalga biçimi kullanılarak ortalama giri gücünü bulur. Bu ortalama güç 7.84 eitliinde çıkı gücü ile eitlenir:
(7.84)
Önceki üç eitlik, VC, D2 ve Imax için çözülebilir. Gerçek gerilim ve akım yerine boyutsuz )/( EVC ve )/( max ERI miktarlarını çözmek daha uygundur. Aynı zamanda
7.85 eitliinde görüldüü gibi sık gözüken terimlerin kombinasyonunu tanımlamak kullanılı olmaktadır:
L
RTDK
4
2
= (7.85)
Sonuçlar 7.85, 7.87 ve 7.88 eitliklerinde verilmitir:
++−=
5.02
11K
KE
VC (7.86)
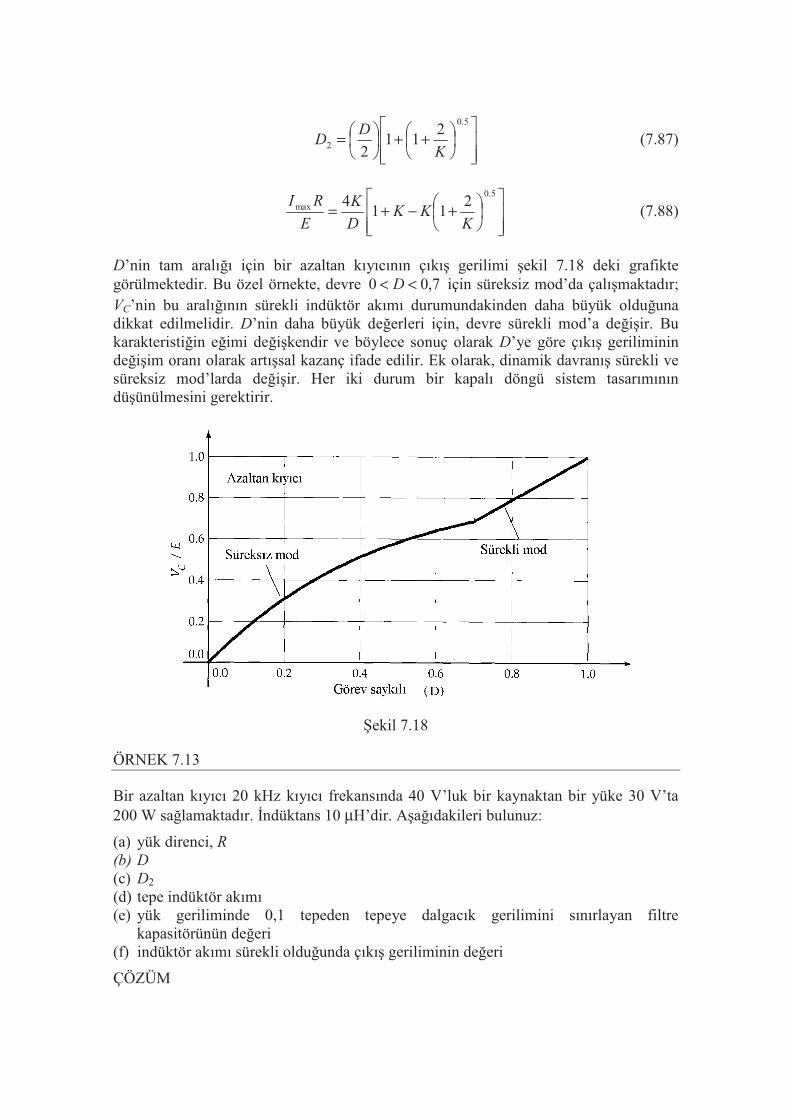
++
=
5.0
2
211
2 K
DD (7.87)
+−+=
5.0
max 211
4
KKK
D
K
E
RI (7.88)
D’nin tam aralıı için bir azaltan kıyıcının çıkı gerilimi ekil 7.18 deki grafikte görülmektedir. Bu özel örnekte, devre 7,00 << D için süreksiz mod’da çalımaktadır;
VC’nin bu aralıının sürekli indüktör akımı durumundakinden daha büyük olduuna dikkat edilmelidir. D’nin daha büyük deerleri için, devre sürekli mod’a deiir. Bu karakteristiin eimi deikendir ve böylece sonuç olarak D’ye göre çıkı geriliminin deiim oranı olarak artısal kazanç ifade edilir. Ek olarak, dinamik davranı sürekli ve süreksiz mod’larda deiir. Her iki durum bir kapalı döngü sistem tasarımının düünülmesini gerektirir.
ekil 7.18
ÖRNEK 7.13
Bir azaltan kıyıcı 20 kHz kıyıcı frekansında 40 V’luk bir kaynaktan bir yüke 30 V’ta 200 W salamaktadır. ndüktans 10 µH’dir. Aaıdakileri bulunuz:
(a) yük direnci, R (b) D
(c) D2 (d) tepe indüktör akımı (e) yük geriliminde 0,1 tepeden tepeye dalgacık gerilimini sınırlayan filtre
kapasitörünün deeri (f) indüktör akımı sürekli olduunda çıkı geriliminin deeri
ÇÖZÜM

(a) 5,4200
3022
===P
VR C Ω
(b) Sürekli indüktör akımı için ve 7.19 eitlii kullanılarak, L’nin istenilen deeri 28,13 µH olarak bulunur. L bu deerden daha küçük olduundan, mod süreksizdir. 7.85 ve 7.86 eitlikleri K ve D’nin bulunmasında kullanılır:
75,040
30==
E
VC
5.02
1175,0
++−=
K
125,1=K
)000010,0)(4(
)000050,0)(5,4(125,1
2D=
447,0=D
(c) D2’nin bulunmasında 7.87 eitlii kullanılır:
596,0125,1
211
2
447,05.0
2 =
++
=D
(d) 7.88 eitliinden:
36,22125,1
21125,1125,11
447,0
)125,1)(4(
5,4
405.0
max =
+−+
=I A
(e) 67,65,4
30===
R
VakımıyükOrtalama C A
ekil 7.19 daki grafik, kapasitör akımının zamanla deiimini göstermektedir. Imax’ın deeri ve 6,67 A’lik yük akımının deeri ekilden bulunur.
Sıfır geçi noktalarının hesaplanması 6,67 µs ve 29,80 µs deerlerini verir. Erinin üçgen parçası altında kalan alan ∆Q ’nün bulunması için kolaylıkla bulunur:
181)67,680,29)(69,15)(5,0( =−=∆Q µC
18101,0
181==
∆
∆=
CV
QC µF
(f) 7.19 ve 7.11 eitlikleri kullanılarak:
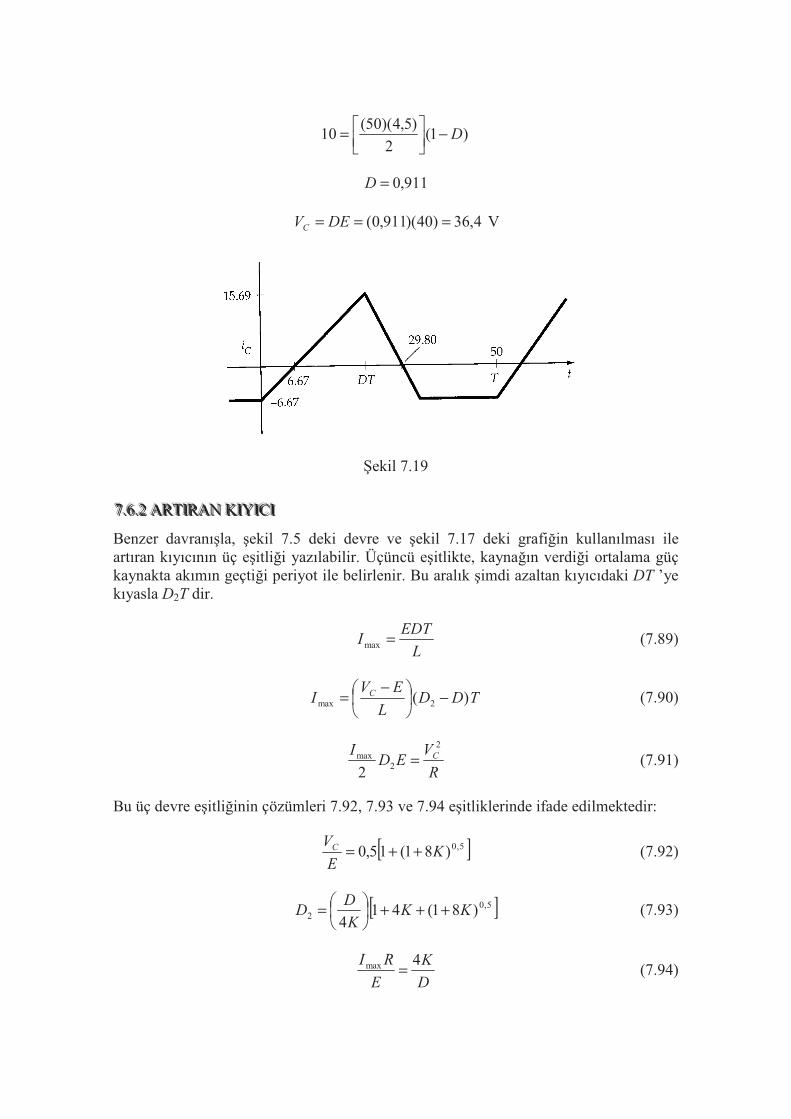
)1(2
)5,4)(50(10 D−
=
911,0=D
4,36)40)(911,0( === DEVC V
ekil 7.19
777...666...222 AAARRRTTTIIIRRRAAANNN KKKIIIYYYIIICCCIII
Benzer davranıla, ekil 7.5 deki devre ve ekil 7.17 deki grafiin kullanılması ile artıran kıyıcının üç eitlii yazılabilir. Üçüncü eitlikte, kaynaın verdii ortalama güç kaynakta akımın geçtii periyot ile belirlenir. Bu aralık imdi azaltan kıyıcıdaki DT ’ye kıyasla D2T dir.
L
EDTI =max (7.89)
TDDL
EVI C )( 2max −
−= (7.90)
R
VED
I C
2
2max
2= (7.91)
Bu üç devre eitliinin çözümleri 7.92, 7.93 ve 7.94 eitliklerinde ifade edilmektedir:
[ ]5,0)81(15,0 KE
VC ++= (7.92)
[ ]5,02 )81(41
4KK
K
DD +++
= (7.93)
D
K
E
RI 4max = (7.94)

Bir artıran kıyıcının çıkı gerilimi D’nin bir fonksiyonu olarak ekil 7.20 de grafik haline getirilmitir. Görülen örnekte, D’nin iki aralıı sürekli indüktör akımına sahipken orta aralık süreksiz mod’da bulunmaktadır. Süreksiz aralıkta, çıkı gerilimi sürekli indüktör akımı durumundakinden daha büyüktür. L’nin yeteri kadar büyük bir deeri süreksiz akım çalıma bölgesini yok eder.
ekil 7.20
ÖRNEK 7.14
10 Ω’luk rezistif bir yüke 25 V verecek bir artıran kıyıcı tasarlayınız. Tasarımın amacı 12 A’lik tepe akım deerini amadan mümkün olabilen en küçük indüktans deerini kullanmaktır. E=15 V ve f=50 kHz.
ÇÖZÜM
7.92 eitliinden:
[ ]5,0)81(15,015
25K
E
VC ++==
556,0=K
7.94 eitliinden:
DD
K )556,0)(4(4
10/15
12==
278,0=D
7.85 eitliinden:
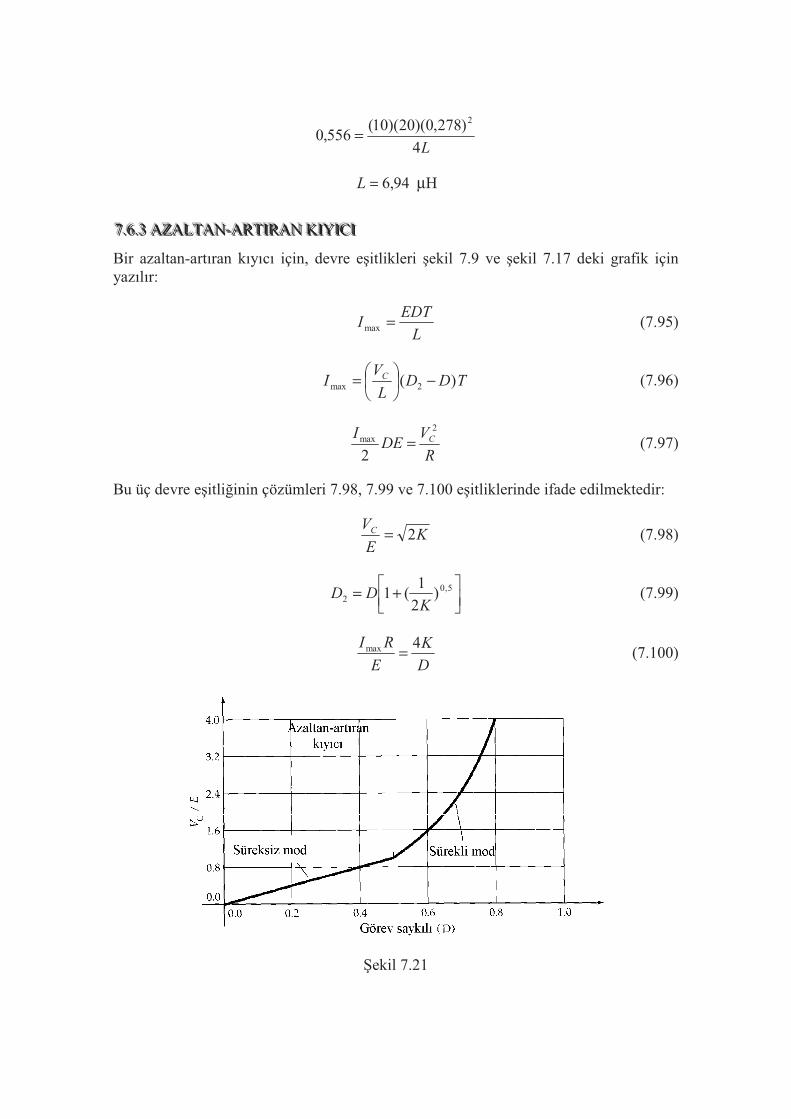
L4
)278,0)(20)(10(556,0
2
=
94,6=L µH
777...666...333 AAAZZZAAALLLTTTAAANNN---AAARRRTTTIIIRRRAAANNN KKKIIIYYYIIICCCIII
Bir azaltan-artıran kıyıcı için, devre eitlikleri ekil 7.9 ve ekil 7.17 deki grafik için yazılır:
L
EDTI =max (7.95)
TDDL
VI C )( 2max −
= (7.96)
R
VDE
I C
2max
2= (7.97)
Bu üç devre eitliinin çözümleri 7.98, 7.99 ve 7.100 eitliklerinde ifade edilmektedir:
KE
VC 2= (7.98)
+= 5,0
2 )2
1(1
KDD (7.99)
D
K
E
RI 4max = (7.100)
ekil 7.21

ekil 7.21 deki grafikler , D<0,5 için oluan süreksiz indüktör akımı ile bir azaltan-artıran kıyıcının çalımasını göstermektedir. Süreksiz mod’da, çıkı gerilimi D’nin dorusal bir fonksiyonu ve sürekli mod durumundan daha büyüktür. D>0,5 için kıyıcı sürekli akım modu’nda çalıır.
ÖRNEK 7.15
Bir azaltan-artıran kıyıcı 20 V’luk bir kaynaktan 15 Ω’luk bir rezistif yüke ayarlı gerilim vermektedir. 30 V ta çıkı gerilimi ile, indüktör akımı tam sürekli yani süreksiz ve süreklilik sınırındadır. f=50 kHz ve 15 V çıkıta çalıma artlarını bulunuz.
ÇÖZÜM
Sürekli iletim moduna karılık gelen L’nin deeri önce bulunmalıdır. 7.41 eitliinden:
−=
D
D
12030
6,0=D
7.48 eitliinden, L’nin deeri bulunabilir:
24)6,01(2
)20)(15( 2 =−
=L µH
15 V’luk bir çıkı için, K ’nın deeri 7.98 eitlii kullanılarak bulunabilir:
2)2(20
15K=
281,0=K
7.85 eitliinden, D ’nin deeri bulunabilir:
)24)(4(
)20)(15(281,0
2D=
30,0=D
7.99 eitliinden, D2’nin deeri bulunur:
7,0)281,0)(2(
113,0
5,0
2 =
+=D
Maksimum indüktör akım deeri 7.100 eitlii ile bulunur:
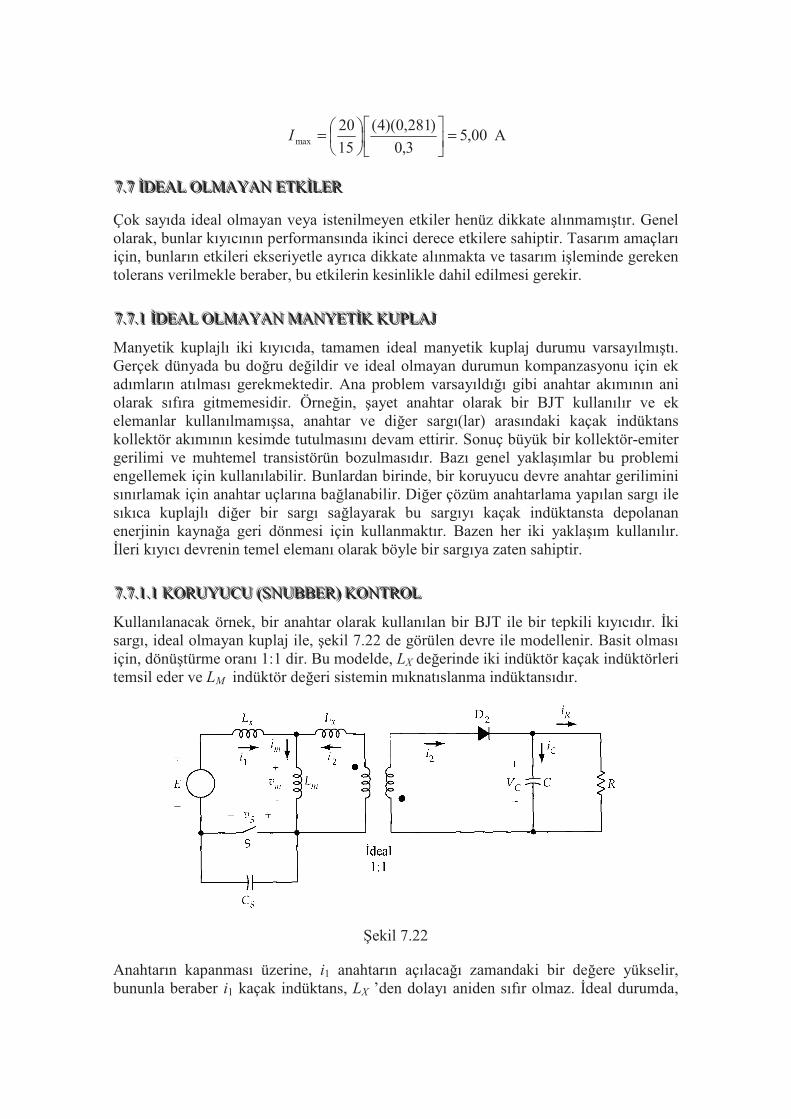
00,53,0
)281,0)(4(
15
20max =
=I A
777...777 DDDEEEAAALLL OOOLLLMMMAAAYYYAAANNN EEETTTKKKLLLEEERRR
Çok sayıda ideal olmayan veya istenilmeyen etkiler henüz dikkate alınmamıtır. Genel olarak, bunlar kıyıcının performansında ikinci derece etkilere sahiptir. Tasarım amaçları için, bunların etkileri ekseriyetle ayrıca dikkate alınmakta ve tasarım ileminde gereken tolerans verilmekle beraber, bu etkilerin kesinlikle dahil edilmesi gerekir.
777...777...111 DDDEEEAAALLL OOOLLLMMMAAAYYYAAANNN MMMAAANNNYYYEEETTTKKK KKKUUUPPPLLLAAAJJJ
Manyetik kuplajlı iki kıyıcıda, tamamen ideal manyetik kuplaj durumu varsayılmıtı. Gerçek dünyada bu doru deildir ve ideal olmayan durumun kompanzasyonu için ek adımların atılması gerekmektedir. Ana problem varsayıldıı gibi anahtar akımının ani olarak sıfıra gitmemesidir. Örnein, ayet anahtar olarak bir BJT kullanılır ve ek elemanlar kullanılmamısa, anahtar ve dier sargı(lar) arasındaki kaçak indüktans kollektör akımının kesimde tutulmasını devam ettirir. Sonuç büyük bir kollektör-emiter gerilimi ve muhtemel transistörün bozulmasıdır. Bazı genel yaklaımlar bu problemi engellemek için kullanılabilir. Bunlardan birinde, bir koruyucu devre anahtar gerilimini sınırlamak için anahtar uçlarına balanabilir. Dier çözüm anahtarlama yapılan sargı ile sıkıca kuplajlı dier bir sargı salayarak bu sargıyı kaçak indüktansta depolanan enerjinin kaynaa geri dönmesi için kullanmaktır. Bazen her iki yaklaım kullanılır. leri kıyıcı devrenin temel elemanı olarak böyle bir sargıya zaten sahiptir.
777...777...111...111 KKKOOORRRUUUYYYUUUCCCUUU (((SSSNNNUUUBBBBBBEEERRR))) KKKOOONNNTTTRRROOOLLL
Kullanılanacak örnek, bir anahtar olarak kullanılan bir BJT ile bir tepkili kıyıcıdır. ki sargı, ideal olmayan kuplaj ile, ekil 7.22 de görülen devre ile modellenir. Basit olması için, dönütürme oranı 1:1 dir. Bu modelde, LX deerinde iki indüktör kaçak indüktörleri temsil eder ve LM indüktör deeri sistemin mıknatıslanma indüktansıdır.
ekil 7.22
Anahtarın kapanması üzerine, i1 anahtarın açılacaı zamandaki bir deere yükselir, bununla beraber i1 kaçak indüktans, LX ’den dolayı aniden sıfır olmaz. deal durumda,
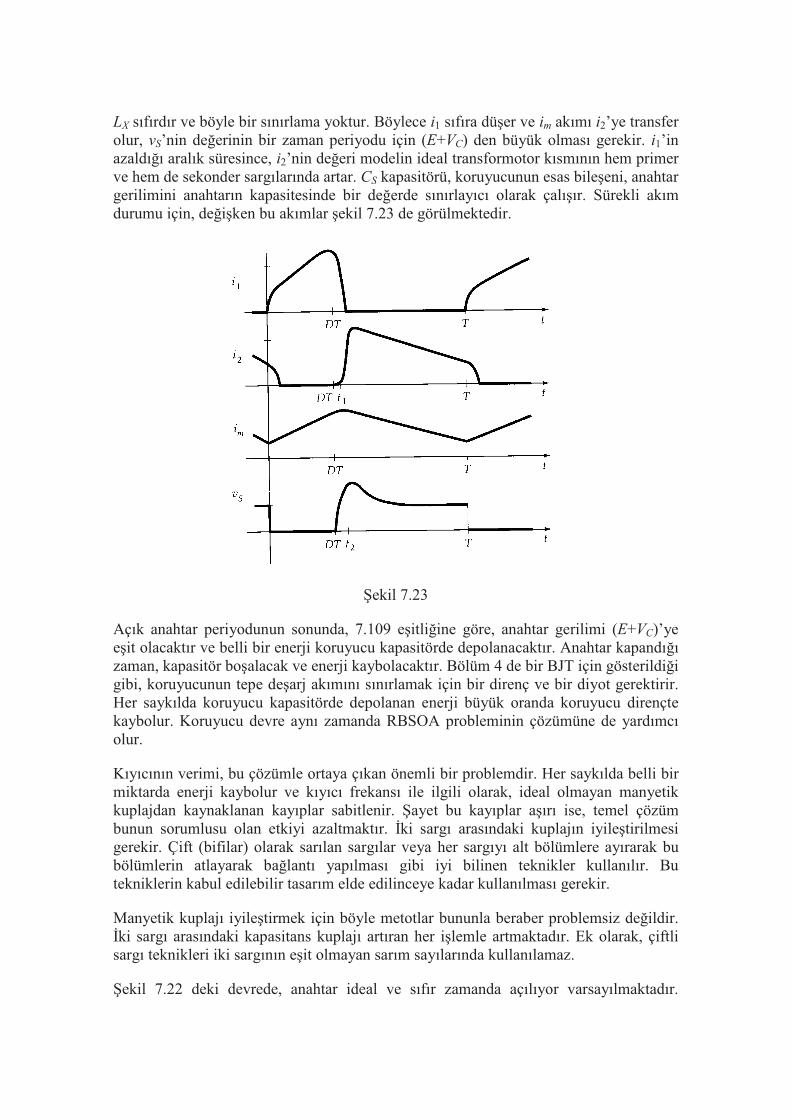
LX sıfırdır ve böyle bir sınırlama yoktur. Böylece i1 sıfıra düer ve im akımı i2’ye transfer olur, vS’nin deerinin bir zaman periyodu için (E+VC) den büyük olması gerekir. i1’in azaldıı aralık süresince, i2’nin deeri modelin ideal transformotor kısmının hem primer ve hem de sekonder sargılarında artar. CS kapasitörü, koruyucunun esas bileeni, anahtar gerilimini anahtarın kapasitesinde bir deerde sınırlayıcı olarak çalıır. Sürekli akım durumu için, deiken bu akımlar ekil 7.23 de görülmektedir.
ekil 7.23
Açık anahtar periyodunun sonunda, 7.109 eitliine göre, anahtar gerilimi (E+VC)’ye eit olacaktır ve belli bir enerji koruyucu kapasitörde depolanacaktır. Anahtar kapandıı zaman, kapasitör boalacak ve enerji kaybolacaktır. Bölüm 4 de bir BJT için gösterildii gibi, koruyucunun tepe dearj akımını sınırlamak için bir direnç ve bir diyot gerektirir. Her saykılda koruyucu kapasitörde depolanan enerji büyük oranda koruyucu dirençte kaybolur. Koruyucu devre aynı zamanda RBSOA probleminin çözümüne de yardımcı olur.
Kıyıcının verimi, bu çözümle ortaya çıkan önemli bir problemdir. Her saykılda belli bir miktarda enerji kaybolur ve kıyıcı frekansı ile ilgili olarak, ideal olmayan manyetik kuplajdan kaynaklanan kayıplar sabitlenir. ayet bu kayıplar aırı ise, temel çözüm bunun sorumlusu olan etkiyi azaltmaktır. ki sargı arasındaki kuplajın iyiletirilmesi gerekir. Çift (bifilar) olarak sarılan sargılar veya her sargıyı alt bölümlere ayırarak bu bölümlerin atlayarak balantı yapılması gibi iyi bilinen teknikler kullanılır. Bu tekniklerin kabul edilebilir tasarım elde edilinceye kadar kullanılması gerekir.
Manyetik kuplajı iyiletirmek için böyle metotlar bununla beraber problemsiz deildir. ki sargı arasındaki kapasitans kuplajı artıran her ilemle artmaktadır. Ek olarak, çiftli sargı teknikleri iki sargının eit olmayan sarım sayılarında kullanılamaz.
ekil 7.22 deki devrede, anahtar ideal ve sıfır zamanda açılıyor varsayılmaktadır.
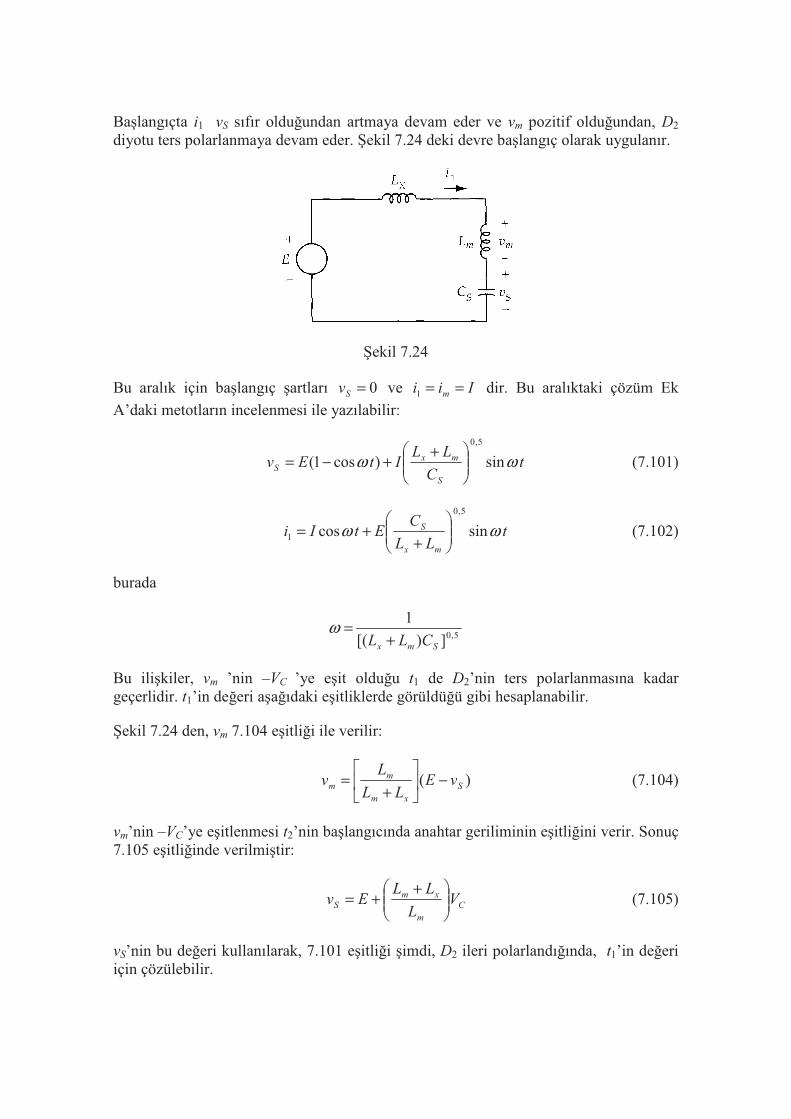
Balangıçta i1 vS sıfır olduundan artmaya devam eder ve vm pozitif olduundan, D2
diyotu ters polarlanmaya devam eder. ekil 7.24 deki devre balangıç olarak uygulanır.
ekil 7.24
Bu aralık için balangıç artları 0=Sv ve Iii m ==1 dir. Bu aralıktaki çözüm Ek
A’daki metotların incelenmesi ile yazılabilir:
tC
LLItEv
S
mxS ωω sin)cos1(
5,0
++−= (7.101)
tLL
CEtIi
mx
S ωω sincos
5,0
1
++= (7.102)
burada
5,0])[(
1
Smx CLL +=ω
Bu ilikiler, vm ’nin –VC ’ye eit olduu t1 de D2’nin ters polarlanmasına kadar geçerlidir. t1’in deeri aaıdaki eitliklerde görüldüü gibi hesaplanabilir.
ekil 7.24 den, vm 7.104 eitlii ile verilir:
)( S
xm
mm vE
LL
Lv −
+= (7.104)
vm’nin –VC’ye eitlenmesi t2’nin balangıcında anahtar geriliminin eitliini verir. Sonuç 7.105 eitliinde verilmitir:
C
m
xmS V
L
LLEv
++= (7.105)
vS’nin bu deeri kullanılarak, 7.101 eitlii imdi, D2 ileri polarlandıında, t1’in deeri için çözülebilir.
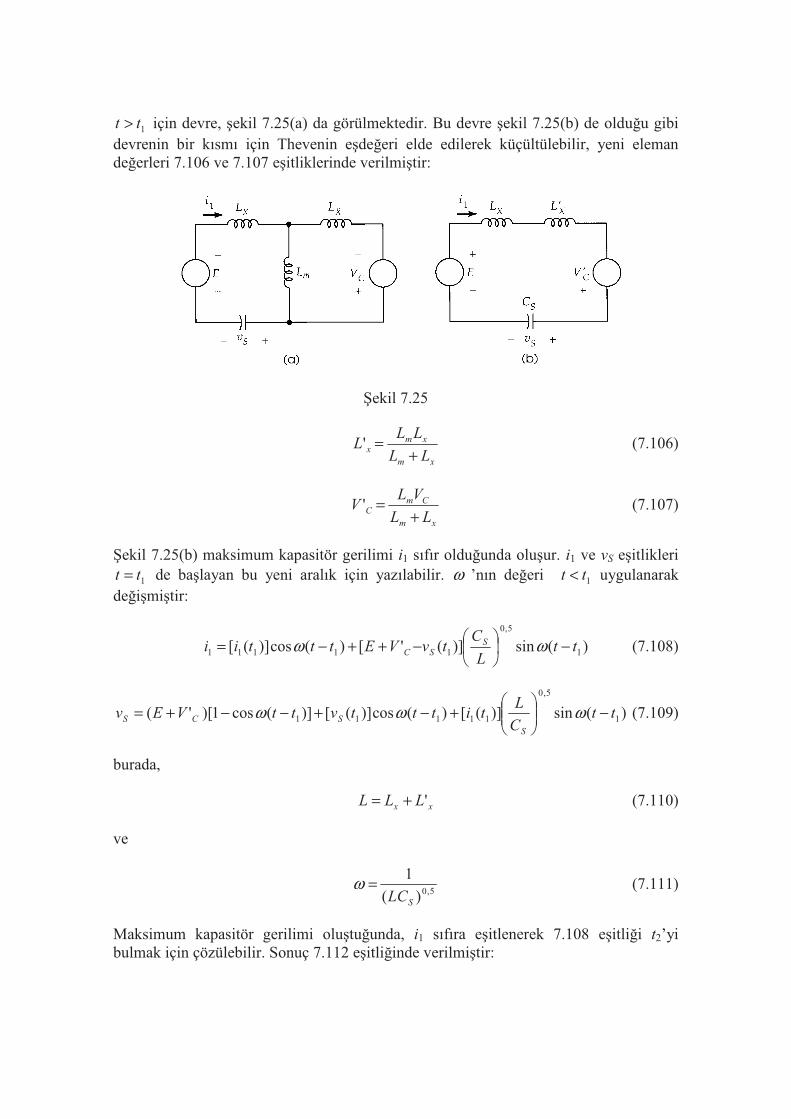
1tt > için devre, ekil 7.25(a) da görülmektedir. Bu devre ekil 7.25(b) de olduu gibi
devrenin bir kısmı için Thevenin edeeri elde edilerek küçültülebilir, yeni eleman deerleri 7.106 ve 7.107 eitliklerinde verilmitir:
ekil 7.25
xm
xmx
LL
LLL
+=' (7.106)
xm
CmC
LL
VLV
+=' (7.107)
ekil 7.25(b) maksimum kapasitör gerilimi i1 sıfır olduunda oluur. i1 ve vS eitlikleri
1tt = de balayan bu yeni aralık için yazılabilir. ω ’nın deeri 1tt < uygulanarak
deimitir:
)(sin)]('[)(cos)]([ 1
5,0
11111 ttL
CtvVEtttii S
SC −
−++−= ωω (7.108)
)(sin)]([)(cos)]([)](cos1)['( 1
5,0
11111 ttC
LtitttvttVEv
S
SCS −
+−+−−+= ωωω (7.109)
burada,
xx LLL '+= (7.110)
ve
5,0)(
1
SLC=ω (7.111)
Maksimum kapasitör gerilimi olutuunda, i1 sıfıra eitlenerek 7.108 eitlii t2’yi bulmak için çözülebilir. Sonuç 7.112 eitliinde verilmitir:

5,0
1
111
)]('[
)()(tan
−+
−=−
L
CtvVE
titt
SSC
ω (7.112)
7.109 eitlii 7.113 eitlii olarak yeniden yazılabilir:
])(cos[)()'( 15,02
22
1 θω +−+++= ttVVVEv CS (7.113)
Buradaki V1 ve V2 aaıdaki iki eitlikte verilmitir:
CS VEtvV ')( 11 −−= (7.114)
)( 11
5,0
2 tiC
LV
S
= (7.115)
vS ’nin maksimum deeri 7.113 eitliindeki kosinüs fonksiyonu birim olduunda oluur. Maksimum anahtar gerilimi 7.116 eitlii ile verilir:
5,022
21 )()'(
maxVVVEv CS +++= (7.116)
Koruyucu kapasitörde depolanan enerji kaynaa geri döner, yüke geri verilir veya koruyucu kapasitörde kaybolur. Anahtarın açık olduu t2 zamanının kalan süresince, koruyucu kapasitör tepe gerilimini )'( CVE + deerine doru dearj eder. Bu dearj,
koruyucu kapasitör CS ve transformotorun kaçak indüktansı yoluyla oluur. Koruyucu direncin yaygın kullanılan deerleri için, bu ilem oldukça sönümlüdür ve bir RC tipi dearjdır. Koruyucu dirençte kaybolan güç küçük fakat sıfır deildir. Anahtar iletime geçtii zamanda, koruyucu kapasitör ani olarak )'( CVE + deerinden sıfıra dearj olur.
Kalan kapasitör enerjisi bu durumda koruyucu dirençte kaybolur. Bir yaklaım olarak her dearjdaki enerji 7.117 eitlii ile verilir:
221 )'( CS VECEnerji += (7.117)
ÖRNEK 7.16
Bir tepkili kıyıcı 100 V’luk bir kaynaktan 80 V vermektedir. Balangıç tasarımı, ideal bir transformotor varsaymaktadır. Sargılar, sürekli akım modunu minimum olarak karılayacak yeterli indüktansa sahiptir; T=80 µs, R=75 Ω ve N1/N2=1. Aaıdakileri bulunuz:
(a) D’nin deeri (b) sargı öz indüktansı (c) Imax (d) CS=0,05 µF ve her Lx=10 µH ile t1’in deeri (d) i1(t1) (e) t2’nin deeri (f) maksimum anahtar gerilimi (h) yaklaık koruyucu direnci gücü.
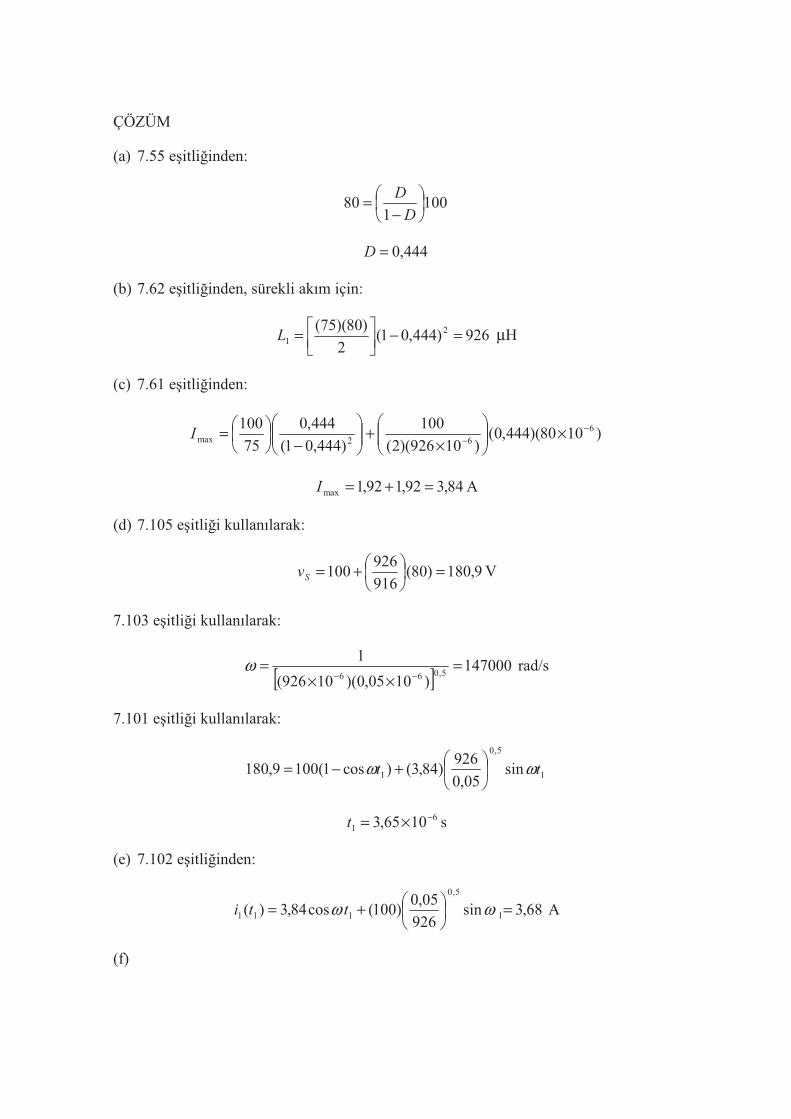
ÇÖZÜM
(a) 7.55 eitliinden:
1001
80
−=
D
D
444,0=D
(b) 7.62 eitliinden, sürekli akım için:
926)444,01(2
)80)(75( 21 =−
=L µH
(c) 7.61 eitliinden:
)1080)(444,0()10926)(2(
100
)444,01(
444,0
75
100 6
62max−
−×
×+
−
=I
84,392,192,1max =+=I A
(d) 7.105 eitlii kullanılarak:
9,180)80(916
926100 =
+=Sv V
7.103 eitlii kullanılarak:
[ ]147000
)1005,0)(10926(
15,066
=××
=−−
ω rad/s
7.101 eitlii kullanılarak:
1
5,0
1 sin05,0
926)84,3()cos1(1009,180 tt ωω
+−=
61 1065,3 −×=t s
(e) 7.102 eitliinden:
68,3sin926
05,0)100(cos84,3)( 1
5,0
111 =
+= ωω tti A
(f)

89,9926
)10)(916(' ==xL µH
89,19' =+= xx LLL µH
7.111 eitliinden:
[ ]6
5,06610003,1
)1005,0)(1089,19(
1×=
××=
−−ω rad/s
14,79926
)80)(916(' ==CV V
7.112 eitliinden:
2039,0
89,19
05,0)9,18014,79100(
68,3)(tan
5,012 −=
++
−=− ttω
941,2)( 12 =− ttω
93,212 =− tt µs
58,62 =t µs
(g) 7.114 ve 7.115 eitliklerinden:
76,114,791009,1801 =−−=V V
40,73)68,3(05,0
89,195,0
2 =
=V V
7.116 eitliinden:
6,252)40,7376,1()14,79100( 5,022
max=+++=Sv V
(h) Koruyucunun zaman sabitini yeteri kadar kısa varsayarak, gücün çou koruyucu kapasitörün 179,14 V’tan )'( CVE + 0 V’a dearjından gelmektedir. Koruyucunun
her dearjından enerji 7.117 eitlii ile bulunabilir.
000802,0)14,179)(1005,0)(5,0( 26 =×= −Enerji J
12,5 kHz anahtarlama frekansında,
0,10)12500)(000802,0( ==Güç W

777...777...111...222 GGGEEERRRLLLMMM SSSIIIKKKIIITTTIIIRRRMMMAAA (((CCCLLLAAAMMMPPP)))
Önceki örnekte koruyucu devre, kesimde anahtar gerilimini sınırlama fonksiyonu görmekte fakat sınırlama deerinde dorudan bir kontrol yoktur. Koruyucu kapasitörünün büyüklüü anahtar tepe geriliminin küçük olması anlamındadır. Daha da ötesi, kapasitansın artıı koruyucu dirençteki kayıpları artırarak bütün verimi etkiler.
Koruyucu devresine eklenen bir gerilim sıkıtırıcının iki amacı vardır. Birincisi, anahtar gerilimini, istenilen herhangi bir seviyeye ayarlanabilen sıkıtırma gerilimi ile sınırlar. Kaçak indüktans tam olarak bilinemeyebilir, bu durumda anahtar gerilimi kaçak indüktansa balı deiken olabilir. kincisi, gerilim sıkıtırma ile, koruyucu dirençteki kayıplar ile beraber koruyucu kapasitörün deeri de düürülebilir.
ekil 7.26
Böyle bir gerilim sıkıtırmanın etkisini göstermek için, aaıdaki analiz sadece gerilim sıkıtırıcı kullanmakta olup koruyucu kapasitör kullanılmamıtır. Anahtar t=0 zamanında sıfır zamanda açık varsayılmıtır. Kaynak akımı, i1, sürekli olmalıdır; bu yüzden, gerilim sıkıtırma hemen etkili olur ve anahtarın uçlarında VZ gerilimi meydana getirir. ekil 7.22 deki devre bu deiimleri göstermek için ekil 7.27 olarak yeniden çizilmitir. Etkin olması bakımından, D2 ’nin hemen iletime balayabilmesi için VZ ’nin yeteri kadar büyük olması gerekir.
ekil 7.27 deki devre ekil 7.28 de olduu gibi bir Thevenin edeerine sadeletirilmitir. Bu ekilde, xL' ve CV ' önceki kısımlardaki aynı tanımlara sahiptir.
Bu devrenin gerilim eitlii 7.118 eitliinde verilmitir:
ZCxx VVEdt
diLL ++=
+ ')'( 1 (7.118)
i1’in sıfır olması için gereken t1 zamanı 7.119 eitlii ile bulunur ve i1’in balangıç deerini I varsayarak:
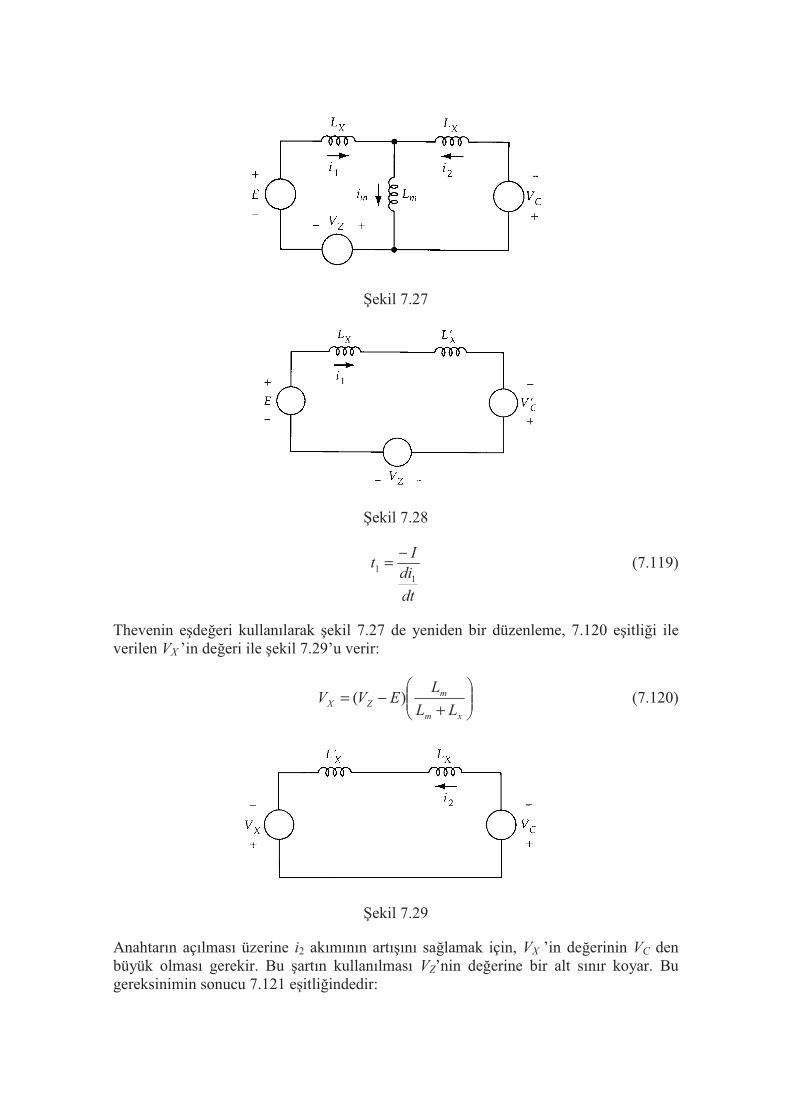
ekil 7.27
ekil 7.28
dt
di
It
11
−= (7.119)
Thevenin edeeri kullanılarak ekil 7.27 de yeniden bir düzenleme, 7.120 eitlii ile verilen VX ’in deeri ile ekil 7.29’u verir:
+−=
xm
mZX
LL
LEVV )( (7.120)
ekil 7.29
Anahtarın açılması üzerine i2 akımının artıını salamak için, VX ’in deerinin VC den büyük olması gerekir. Bu artın kullanılması VZ’nin deerine bir alt sınır koyar. Bu gereksinimin sonucu 7.121 eitliindedir:

C
m
xmZ V
L
LLEV
++> (7.121)
yi kuplajlı bir transformotor için, mxm LLL /)( + 1 den çok büyük deildir. VZ’nin
deerinin bu durumda (E+VC)’den çok büyük olması gerekmemektedir.
i2’nin tepe deeri i1’in sıfır olduu aynı zamanda oluur. ekil 7.29 daki devre i2’nin deiim oranı ve tepe deerinin eitliklerini çıkarmak için kullanılır:
xx
CX
LL
VV
dt
di
'2
+
−= (7.122)
)( 12
2 tdt
ditepei
= (7.123)
Gerilim sıkıtırıcıya verilen enerji kolaylıkla hesaplanır. i1’nin deeri t1 zamanında sıfıra doru dorusal olarak azalır. Enerji ve güç 7.124 ve 7.125 eitlikleri ile verilir:
ZVtIEnerji 15,0= (7.124)
fVtIGüç Z15,0= (7.125)
burada f anahtarlama frekansıdır.
ÖRNEK 7.17
1/ 21 =NN ile bir tepkili kıyıcı aaıdaki verilere sahiptir:
100=E V 10=xL µH 80=T µs 250=ZV V
990=mL µH 45,0=D 81=CV V
Akım modu tam süreklilik sınırındadır. VC’nin deeri 7.55 eitliindeki ideal durum ile tahmin edilenden bir miktar daha azdır. Aaıdakileri bulunuz:
(a) anahtarın kapalı olduu zamanın sonunda i1’in deeri (b) anahtar açıldıktan sonra i1’in sıfıra dümesi için gereken zaman (c) i2’in tepe deeri (d) anahtar gerilim sıkıtırıcının ortalama gücü
ÇÖZÜM
(a) Anahtarın kapalı olduu zaman süresince,
100000101000
1006
1 =×
=−dt
di A/s
Anahtar 36 µs için kapalıdır;
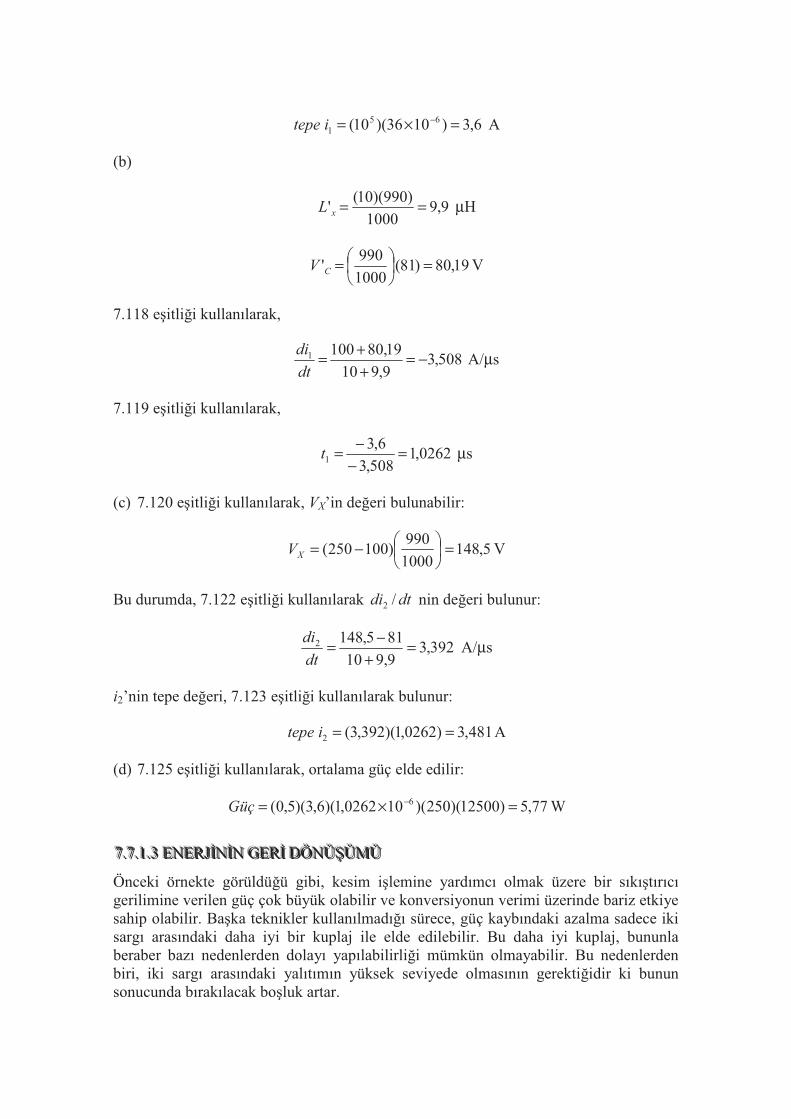
6,3)1036)(10( 651 =×= −itepe A
(b)
9,91000
)990)(10(' ==xL µH
19,80)81(1000
990' =
=CV V
7.118 eitlii kullanılarak,
508,39,910
19,801001 −=+
+=
dt
di A/µs
7.119 eitlii kullanılarak,
0262,1508,3
6,31 =
−
−=t µs
(c) 7.120 eitlii kullanılarak, VX’in deeri bulunabilir:
5,1481000
990)100250( =
−=XV V
Bu durumda, 7.122 eitlii kullanılarak dtdi /2 nin deeri bulunur:
392,39,910
815,1482 =+
−=
dt
di A/µs
i2’nin tepe deeri, 7.123 eitlii kullanılarak bulunur:
481,3)0262,1)(392,3(2 ==itepe A
(d) 7.125 eitlii kullanılarak, ortalama güç elde edilir:
77,5)12500)(250)(100262,1)(6,3)(5,0( 6 =×= −Güç W
777...777...111...333 EEENNNEEERRRJJJNNNNNN GGGEEERRR DDDÖÖÖNNNÜÜÜÜÜÜMMMÜÜÜ
Önceki örnekte görüldüü gibi, kesim ilemine yardımcı olmak üzere bir sıkıtırıcı gerilimine verilen güç çok büyük olabilir ve konversiyonun verimi üzerinde bariz etkiye sahip olabilir. Baka teknikler kullanılmadıı sürece, güç kaybındaki azalma sadece iki sargı arasındaki daha iyi bir kuplaj ile elde edilebilir. Bu daha iyi kuplaj, bununla beraber bazı nedenlerden dolayı yapılabilirlii mümkün olmayabilir. Bu nedenlerden biri, iki sargı arasındaki yalıtımın yüksek seviyede olmasının gerektiidir ki bunun sonucunda bırakılacak boluk artar.
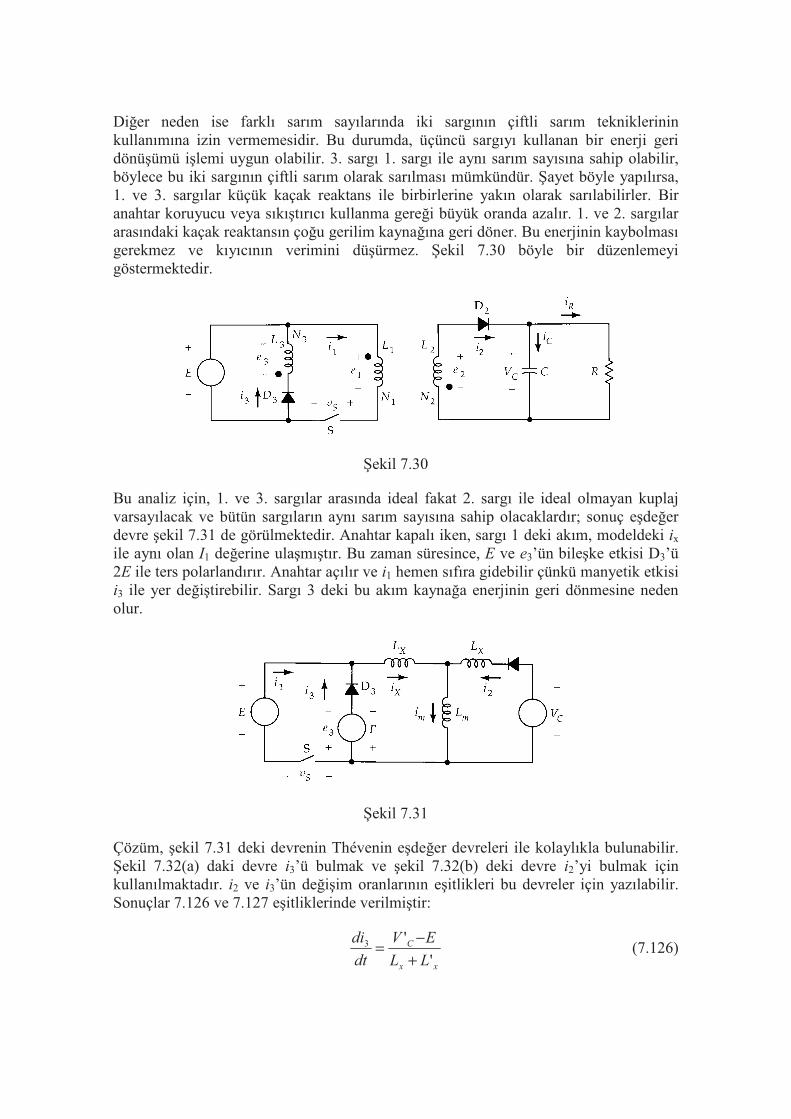
Dier neden ise farklı sarım sayılarında iki sargının çiftli sarım tekniklerinin kullanımına izin vermemesidir. Bu durumda, üçüncü sargıyı kullanan bir enerji geri dönüümü ilemi uygun olabilir. 3. sargı 1. sargı ile aynı sarım sayısına sahip olabilir, böylece bu iki sargının çiftli sarım olarak sarılması mümkündür. ayet böyle yapılırsa, 1. ve 3. sargılar küçük kaçak reaktans ile birbirlerine yakın olarak sarılabilirler. Bir anahtar koruyucu veya sıkıtırıcı kullanma gerei büyük oranda azalır. 1. ve 2. sargılar arasındaki kaçak reaktansın çou gerilim kaynaına geri döner. Bu enerjinin kaybolması gerekmez ve kıyıcının verimini düürmez. ekil 7.30 böyle bir düzenlemeyi göstermektedir.
ekil 7.30
Bu analiz için, 1. ve 3. sargılar arasında ideal fakat 2. sargı ile ideal olmayan kuplaj varsayılacak ve bütün sargıların aynı sarım sayısına sahip olacaklardır; sonuç edeer devre ekil 7.31 de görülmektedir. Anahtar kapalı iken, sargı 1 deki akım, modeldeki ix
ile aynı olan I1 deerine ulamıtır. Bu zaman süresince, E ve e3’ün bileke etkisi D3’ü 2E ile ters polarlandırır. Anahtar açılır ve i1 hemen sıfıra gidebilir çünkü manyetik etkisi i3 ile yer deitirebilir. Sargı 3 deki bu akım kaynaa enerjinin geri dönmesine neden olur.
ekil 7.31
Çözüm, ekil 7.31 deki devrenin Thévenin edeer devreleri ile kolaylıkla bulunabilir. ekil 7.32(a) daki devre i3’ü bulmak ve ekil 7.32(b) deki devre i2’yi bulmak için kullanılmaktadır. i2 ve i3’ün deiim oranlarının eitlikleri bu devreler için yazılabilir. Sonuçlar 7.126 ve 7.127 eitliklerinde verilmitir:
xx
C
LL
EV
dt
di
'
'3
+
−= (7.126)
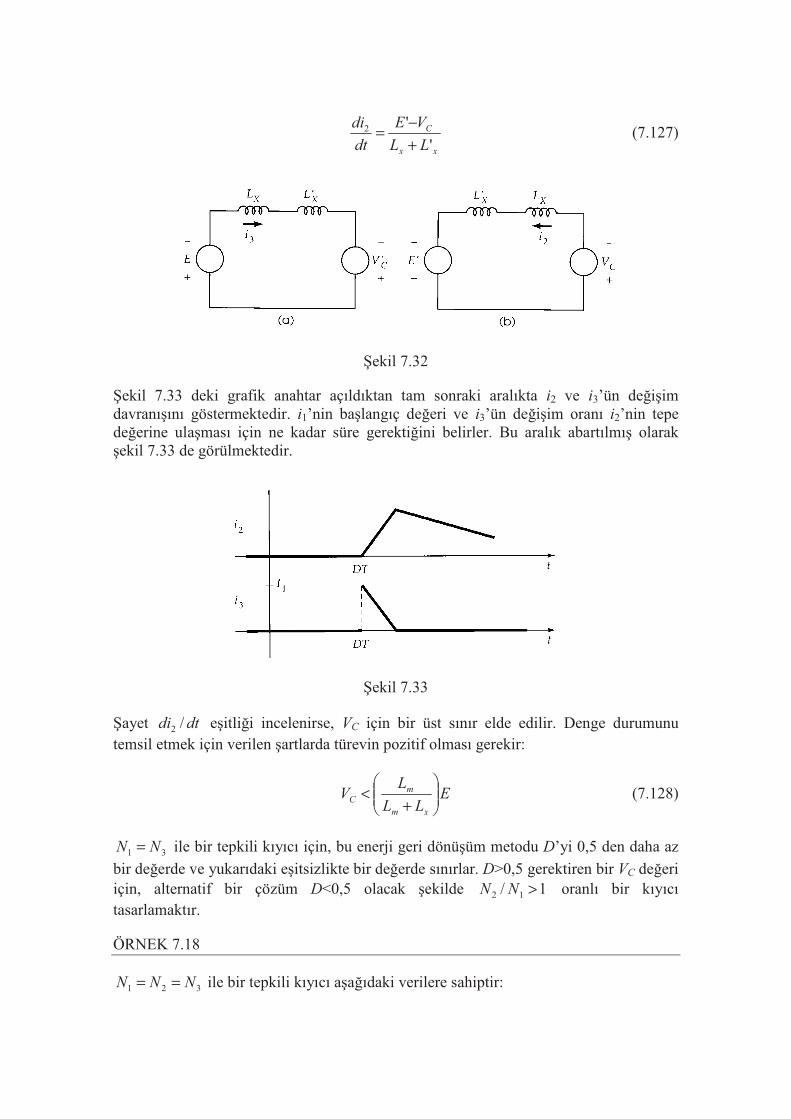
xx
C
LL
VE
dt
di
'
'2
+
−= (7.127)
ekil 7.32
ekil 7.33 deki grafik anahtar açıldıktan tam sonraki aralıkta i2 ve i3’ün deiim davranıını göstermektedir. i1’nin balangıç deeri ve i3’ün deiim oranı i2’nin tepe deerine ulaması için ne kadar süre gerektiini belirler. Bu aralık abartılmı olarak ekil 7.33 de görülmektedir.
ekil 7.33
ayet dtdi /2 eitlii incelenirse, VC için bir üst sınır elde edilir. Denge durumunu
temsil etmek için verilen artlarda türevin pozitif olması gerekir:
ELL
LV
xm
mC
+< (7.128)
31 NN = ile bir tepkili kıyıcı için, bu enerji geri dönüüm metodu D’yi 0,5 den daha az
bir deerde ve yukarıdaki eitsizlikte bir deerde sınırlar. D>0,5 gerektiren bir VC deeri için, alternatif bir çözüm D<0,5 olacak ekilde 1/ 12 >NN oranlı bir kıyıcı
tasarlamaktır.
ÖRNEK 7.18
321 NNN == ile bir tepkili kıyıcı aaıdaki verilere sahiptir:

100=E V 00002,0=xL H 200=T µs 67,29=R Ω
00098,0=mL µH 4,0=D 8,64=CV V
Akım modu tam süreklilik sınırındadır. Aaıdakileri bulunuz:
(a) i1’in tepe deeri (b) i3’ün sıfıra dümesi için gereken zaman (c) i2’nin tepe deeri (d) anahtarın her çalımasında kaynaa geri dönen enerji.
ÇÖZÜM
(a) Anahtar 80)20)(4,0( = µs için kapalıdır;
0,8)1080(001,0
100 61 =×
= −I A
(b) Anahtar açıldıktan sonra, dtdi /3 7.127 eitlii ile bulunur:
504,63)8,64(1000
980' =
=CV V
9216,06,1920
100504,633 −=+
−=
dt
diA/µs
68,8916,0
0,8==∆t µs
(c) 7.127 eitlii kullanılarak, dtdi /2 nin deeri bulunur;
98)100(1000
980' =
=E V
838,06,1920
8,64982 =+
−=
dt
diA/µs
28.7)68,8)(838,0()(22 ==∆
= t
dt
diitepe A
(d) 00347,0)1068,8)(100)(0,8())()(( 621
321 =×=∆= −tEtepeienerjiverilenKaynaa J
777...777...222 NNNDDDÜÜÜKKKTTTÖÖÖRRR DDDRRREEENNNCCC
Önceki kısımlarda, indüktör direnci ihmal edilmiti. Verimli bir kıyıcı sadece böyle bir direncin oldukça küçük tasarlanmasıyla mümkün olabileceinden bu ihmalin yapılması
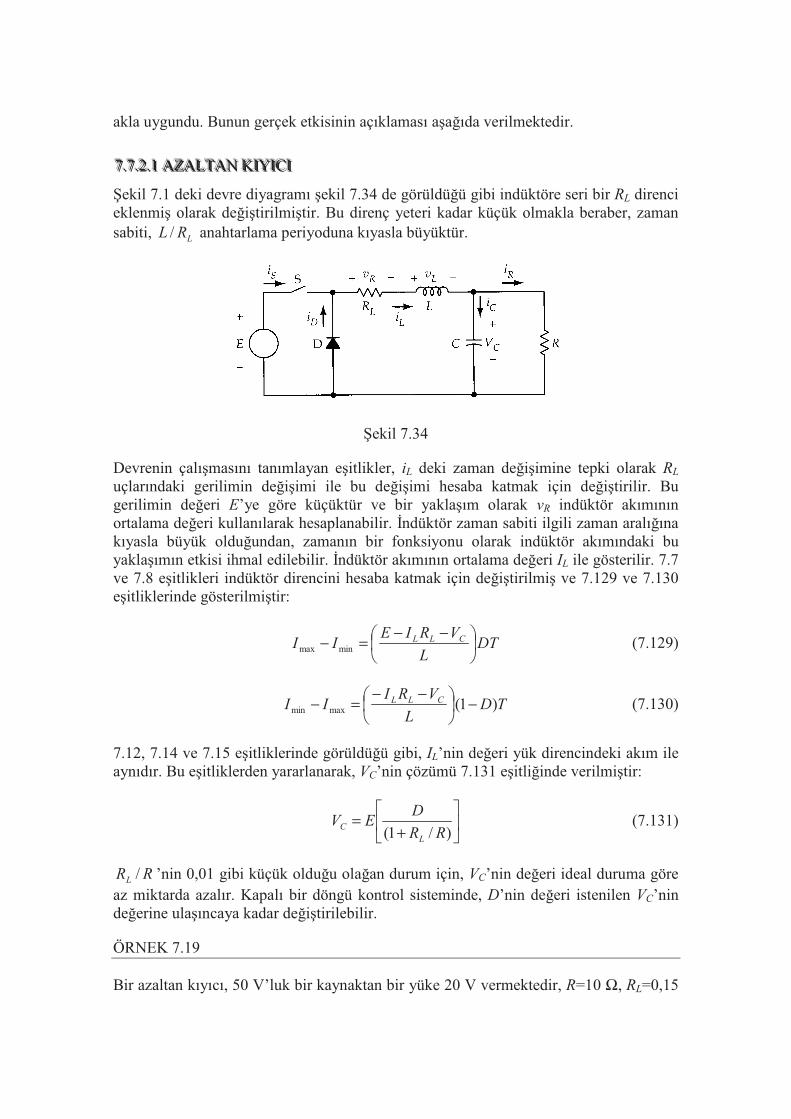
akla uygundu. Bunun gerçek etkisinin açıklaması aaıda verilmektedir.
777...777...222...111 AAAZZZAAALLLTTTAAANNN KKKIIIYYYIIICCCIII
ekil 7.1 deki devre diyagramı ekil 7.34 de görüldüü gibi indüktöre seri bir RL direnci eklenmi olarak deitirilmitir. Bu direnç yeteri kadar küçük olmakla beraber, zaman sabiti, LRL / anahtarlama periyoduna kıyasla büyüktür.
ekil 7.34
Devrenin çalımasını tanımlayan eitlikler, iL deki zaman deiimine tepki olarak RL
uçlarındaki gerilimin deiimi ile bu deiimi hesaba katmak için deitirilir. Bu gerilimin deeri E’ye göre küçüktür ve bir yaklaım olarak vR indüktör akımının ortalama deeri kullanılarak hesaplanabilir. ndüktör zaman sabiti ilgili zaman aralıına kıyasla büyük olduundan, zamanın bir fonksiyonu olarak indüktör akımındaki bu yaklaımın etkisi ihmal edilebilir. ndüktör akımının ortalama deeri IL ile gösterilir. 7.7 ve 7.8 eitlikleri indüktör direncini hesaba katmak için deitirilmi ve 7.129 ve 7.130 eitliklerinde gösterilmitir:
DTL
VRIEII CLL
−−=− minmax (7.129)
TDL
VRIII CLL )1(maxmin −
−−=− (7.130)
7.12, 7.14 ve 7.15 eitliklerinde görüldüü gibi, IL’nin deeri yük direncindeki akım ile aynıdır. Bu eitliklerden yararlanarak, VC’nin çözümü 7.131 eitliinde verilmitir:
+=
)/1( RR
DEV
L
C (7.131)
RRL / ’nin 0,01 gibi küçük olduu olaan durum için, VC’nin deeri ideal duruma göre
az miktarda azalır. Kapalı bir döngü kontrol sisteminde, D’nin deeri istenilen VC’nin deerine ulaıncaya kadar deitirilebilir.
ÖRNEK 7.19
Bir azaltan kıyıcı, 50 V’luk bir kaynaktan bir yüke 20 V vermektedir, R=10 Ω, RL=0,15
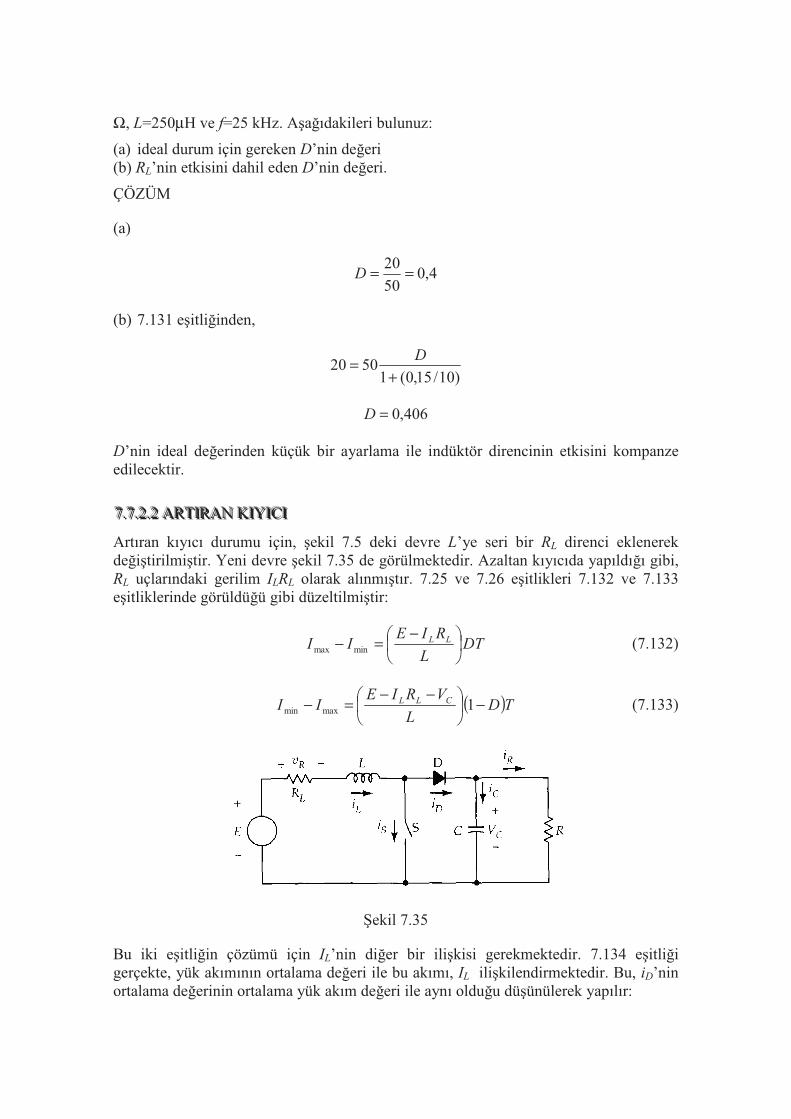
Ω, L=250µH ve f=25 kHz. Aaıdakileri bulunuz:
(a) ideal durum için gereken D’nin deeri (b) RL’nin etkisini dahil eden D’nin deeri.
ÇÖZÜM
(a)
4,050
20==D
(b) 7.131 eitliinden,
)10/15,0(15020
+=
D
406,0=D
D’nin ideal deerinden küçük bir ayarlama ile indüktör direncinin etkisini kompanze edilecektir.
777...777...222...222 AAARRRTTTIIIRRRAAANNN KKKIIIYYYIIICCCIII
Artıran kıyıcı durumu için, ekil 7.5 deki devre L’ye seri bir RL direnci eklenerek deitirilmitir. Yeni devre ekil 7.35 de görülmektedir. Azaltan kıyıcıda yapıldıı gibi, RL uçlarındaki gerilim ILRL olarak alınmıtır. 7.25 ve 7.26 eitlikleri 7.132 ve 7.133 eitliklerinde görüldüü gibi düzeltilmitir:
DTL
RIEII LL
−=− minmax (7.132)
( )TDL
VRIEII CLL −
−−=− 1maxmin (7.133)
ekil 7.35
Bu iki eitliin çözümü için IL’nin dier bir ilikisi gerekmektedir. 7.134 eitlii gerçekte, yük akımının ortalama deeri ile bu akımı, IL ilikilendirmektedir. Bu, iD’nin ortalama deerinin ortalama yük akım deeri ile aynı olduu düünülerek yapılır:
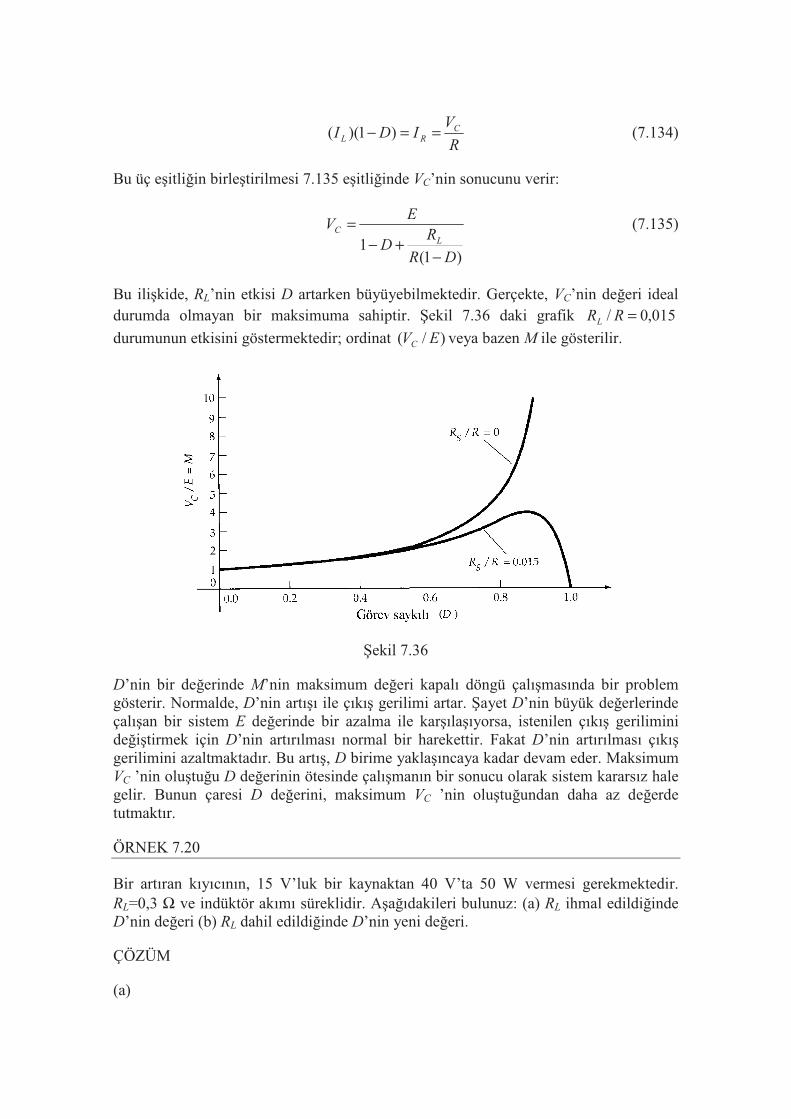
R
VIDI C
RL ==− )1)(( (7.134)
Bu üç eitliin birletirilmesi 7.135 eitliinde VC’nin sonucunu verir:
)1(1
DR
RD
EV
LC
−+−
= (7.135)
Bu ilikide, RL’nin etkisi D artarken büyüyebilmektedir. Gerçekte, VC’nin deeri ideal
durumda olmayan bir maksimuma sahiptir. ekil 7.36 daki grafik 015,0/ =RRL
durumunun etkisini göstermektedir; ordinat )/( EVC veya bazen M ile gösterilir.
ekil 7.36
D’nin bir deerinde M’nin maksimum deeri kapalı döngü çalımasında bir problem gösterir. Normalde, D’nin artıı ile çıkı gerilimi artar. ayet D’nin büyük deerlerinde çalıan bir sistem E deerinde bir azalma ile karılaıyorsa, istenilen çıkı gerilimini deitirmek için D’nin artırılması normal bir harekettir. Fakat D’nin artırılması çıkıgerilimini azaltmaktadır. Bu artı, D birime yaklaıncaya kadar devam eder. Maksimum VC ’nin olutuu D deerinin ötesinde çalımanın bir sonucu olarak sistem kararsız hale gelir. Bunun çaresi D deerini, maksimum VC ’nin olutuundan daha az deerde tutmaktır.
ÖRNEK 7.20
Bir artıran kıyıcının, 15 V’luk bir kaynaktan 40 V’ta 50 W vermesi gerekmektedir. RL=0,3 Ω ve indüktör akımı süreklidir. Aaıdakileri bulunuz: (a) RL ihmal edildiinde D’nin deeri (b) RL dahil edildiinde D’nin yeni deeri.
ÇÖZÜM
(a)
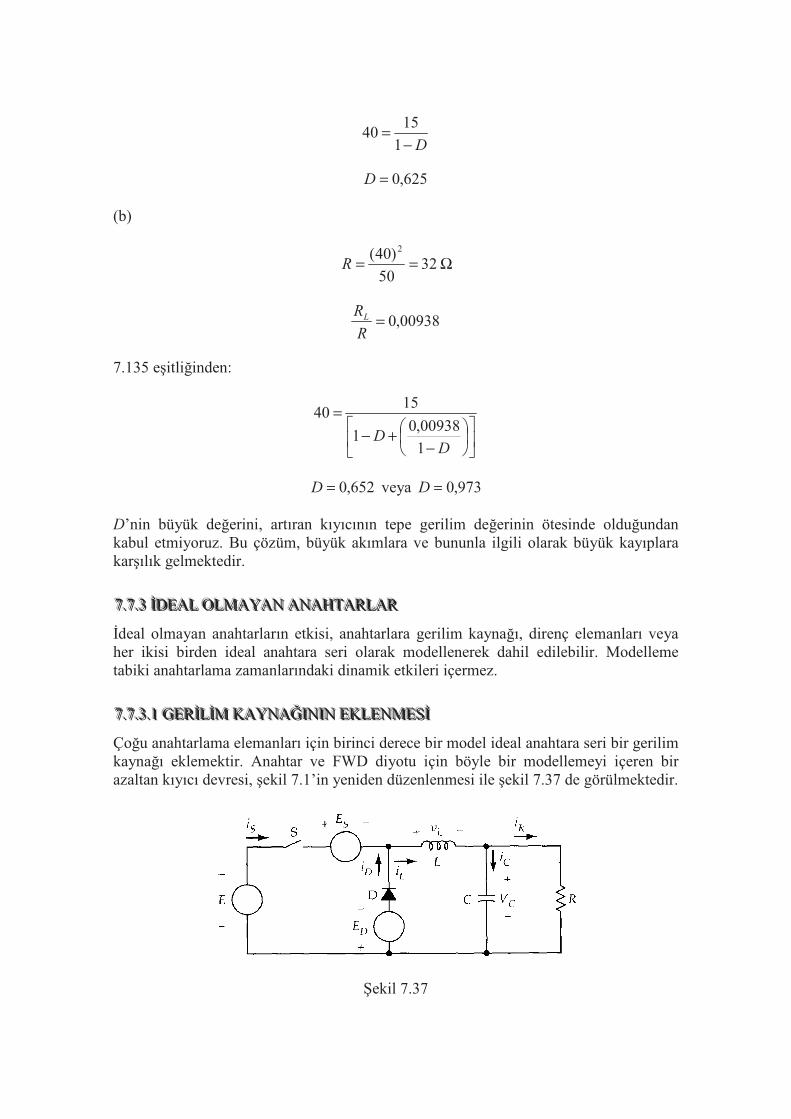
D−=
1
1540
625,0=D
(b)
3250
)40( 2
==R Ω
00938,0=R
RL
7.135 eitliinden:
−+−
=
DD
1
00938,01
1540
652,0=D veya 973,0=D
D’nin büyük deerini, artıran kıyıcının tepe gerilim deerinin ötesinde olduundan kabul etmiyoruz. Bu çözüm, büyük akımlara ve bununla ilgili olarak büyük kayıplara karılık gelmektedir.
777...777...333 DDDEEEAAALLL OOOLLLMMMAAAYYYAAANNN AAANNNAAAHHHTTTAAARRRLLLAAARRR
deal olmayan anahtarların etkisi, anahtarlara gerilim kaynaı, direnç elemanları veya her ikisi birden ideal anahtara seri olarak modellenerek dahil edilebilir. Modelleme tabiki anahtarlama zamanlarındaki dinamik etkileri içermez.
777...777...333...111 GGGEEERRRLLLMMM KKKAAAYYYNNNAAAIIINNNIIINNN EEEKKKLLLEEENNNMMMEEESSS
Çou anahtarlama elemanları için birinci derece bir model ideal anahtara seri bir gerilim kaynaı eklemektir. Anahtar ve FWD diyotu için böyle bir modellemeyi içeren bir azaltan kıyıcı devresi, ekil 7.1’in yeniden düzenlenmesi ile ekil 7.37 de görülmektedir.
ekil 7.37

Analiz kısım 7.2’ye benzer olup 7.7 ve 7.8 eitlikleri imdi yeniden düzenlenerek 7.136 ve 7.137 olmutur:
DTL
VEEII CS
−−=− minmax (7.136)
TDL
VEII CD )1(maxmin −
−−=− (7.137)
Bu iki eitliin çözümü D’nin bir fonksiyonu olarak VC’yi verir:
DDSC EEEEDV −+−= )( (7.139)
Etki küçüktür ve D’nin deerinde bir deiimle düzeltilebilir. Kapalı döngülü bir sistem D’nin deerini istenildii kadar ayarlayabilir. Artıran kıyıcı için benzer bir analiz 7.139 eitlii ile ifade edilen sonucu verir.
DS
C ED
DEEV −
−
−=
1 (7.139)
Burada da yine kapalı döngülü bir sistem, VC üzerinde ideal olmayan anahtarın etkisini kompanze edebilir.
ÖRNEK 7.21
Bir artıran kıyıcı 20 V’luk bir kaynaktan 40 V beslemek için çalımaktadır. Anahtarlar ideal deil ve ideal elemanlara seri bir gerilim kaynaı ile temsil edilebilmektedirler. ES=1,2 V, ED=0,9 V ve indüktör büyüktür. Aaıdakileri bulunuz:
(a) D’nin ideal deeri (b) ideal olmayan anahtarların etkisini kompanze etmek için D’nin deeri.
ÇÖZÜM
(a)
D−=
1
2040
5,0=D
(b)
9,01
2,12040 −
−
−=
D
D
526,0=D
D’nin ideal durumdan küçük bir artıı, ideal olmayan anahtarların etkisini kompanze edecektir.
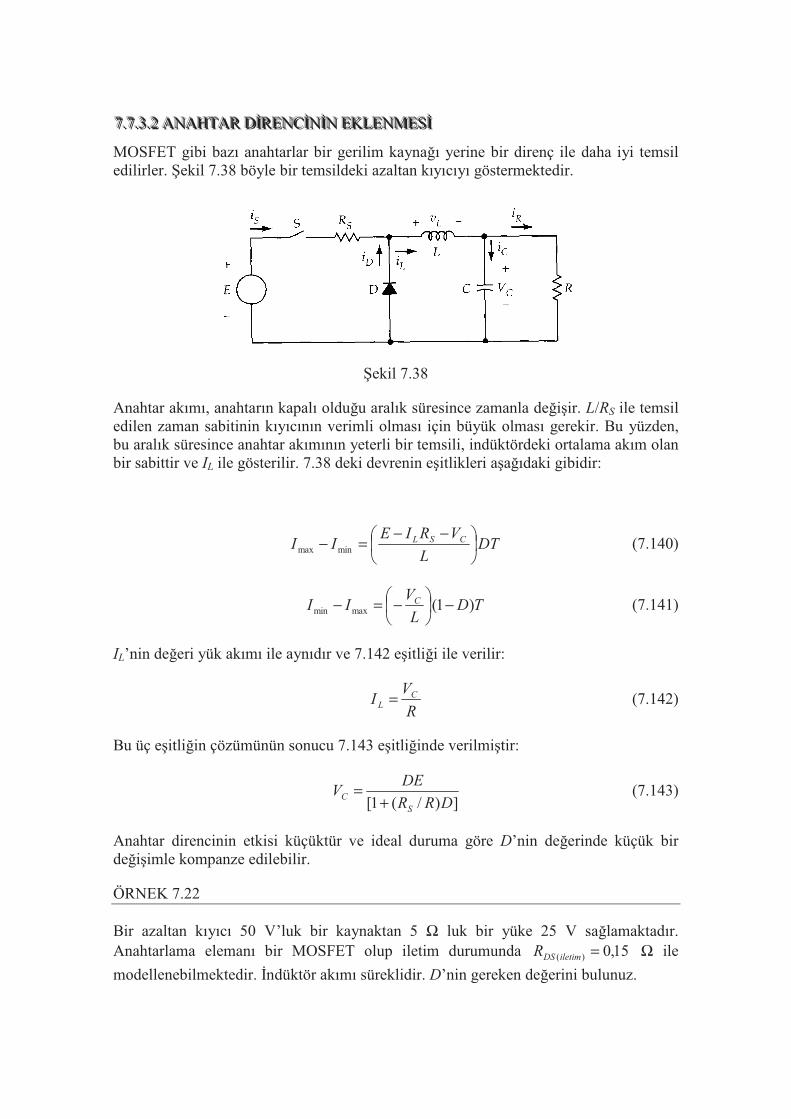
777...777...333...222 AAANNNAAAHHHTTTAAARRR DDDRRREEENNNCCCNNNNNN EEEKKKLLLEEENNNMMMEEESSS
MOSFET gibi bazı anahtarlar bir gerilim kaynaı yerine bir direnç ile daha iyi temsil edilirler. ekil 7.38 böyle bir temsildeki azaltan kıyıcıyı göstermektedir.
ekil 7.38
Anahtar akımı, anahtarın kapalı olduu aralık süresince zamanla deiir. L/RS ile temsil edilen zaman sabitinin kıyıcının verimli olması için büyük olması gerekir. Bu yüzden, bu aralık süresince anahtar akımının yeterli bir temsili, indüktördeki ortalama akım olan bir sabittir ve IL ile gösterilir. 7.38 deki devrenin eitlikleri aaıdaki gibidir:
DTL
VRIEII CSL
−−=− minmax (7.140)
TDL
VII C )1(maxmin −
−=− (7.141)
IL’nin deeri yük akımı ile aynıdır ve 7.142 eitlii ile verilir:
R
VI C
L = (7.142)
Bu üç eitliin çözümünün sonucu 7.143 eitliinde verilmitir:
])/(1[ DRR
DEV
S
C+
= (7.143)
Anahtar direncinin etkisi küçüktür ve ideal duruma göre D’nin deerinde küçük bir deiimle kompanze edilebilir.
ÖRNEK 7.22
Bir azaltan kıyıcı 50 V’luk bir kaynaktan 5 Ω luk bir yüke 25 V salamaktadır. Anahtarlama elemanı bir MOSFET olup iletim durumunda 15,0)( =iletimDSR Ω ile
modellenebilmektedir. ndüktör akımı süreklidir. D’nin gereken deerini bulunuz.
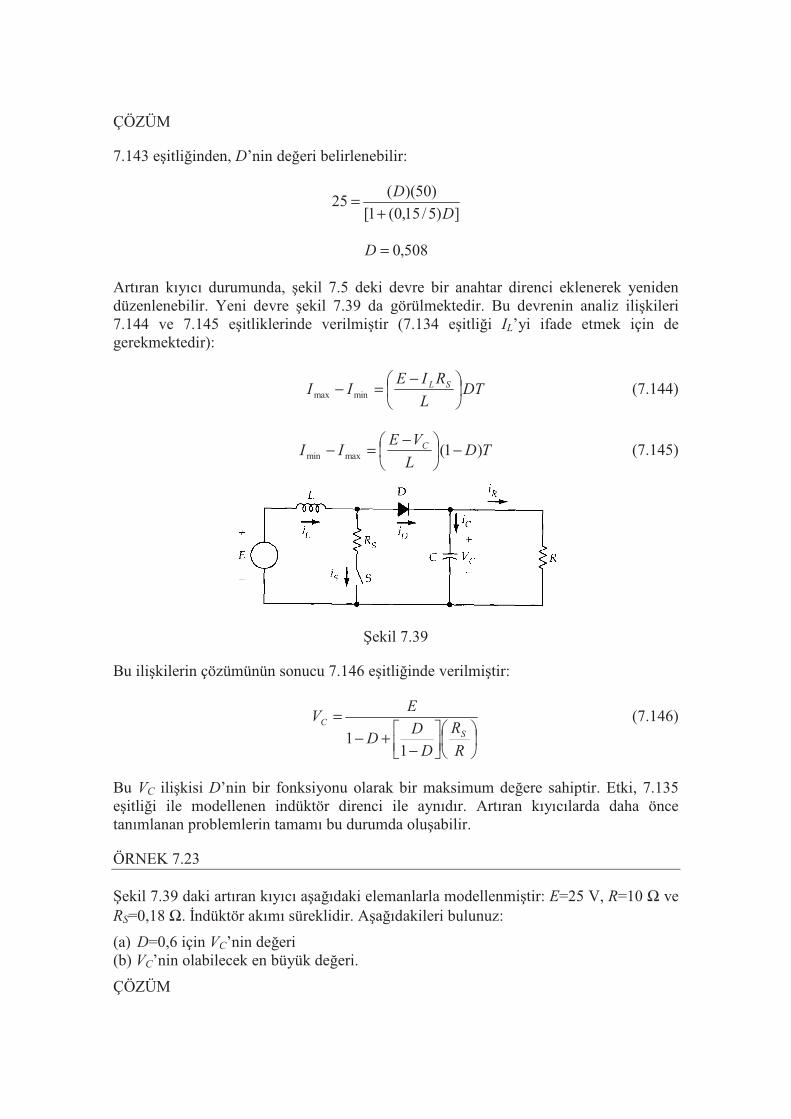
ÇÖZÜM
7.143 eitliinden, D’nin deeri belirlenebilir:
])5/15,0(1[
)50)((25
D
D
+=
508,0=D
Artıran kıyıcı durumunda, ekil 7.5 deki devre bir anahtar direnci eklenerek yeniden düzenlenebilir. Yeni devre ekil 7.39 da görülmektedir. Bu devrenin analiz ilikileri 7.144 ve 7.145 eitliklerinde verilmitir (7.134 eitlii IL’yi ifade etmek için de gerekmektedir):
DTL
RIEII SL
−=− minmax (7.144)
TDL
VEII C )1(maxmin −
−=− (7.145)
ekil 7.39
Bu ilikilerin çözümünün sonucu 7.146 eitliinde verilmitir:
−+−
=
R
R
D
DD
EV
S
C
11
(7.146)
Bu VC ilikisi D’nin bir fonksiyonu olarak bir maksimum deere sahiptir. Etki, 7.135 eitlii ile modellenen indüktör direnci ile aynıdır. Artıran kıyıcılarda daha önce tanımlanan problemlerin tamamı bu durumda oluabilir.
ÖRNEK 7.23
ekil 7.39 daki artıran kıyıcı aaıdaki elemanlarla modellenmitir: E=25 V, R=10 Ω ve RS=0,18 Ω. ndüktör akımı süreklidir. Aaıdakileri bulunuz:
(a) D=0,6 için VC’nin deeri (b) VC’nin olabilecek en büyük deeri.
ÇÖZÜM

(a) 7.146 eitliinden:
5,58
10
18,0
6,01
6,06,01
25=
−+−
=CV V
(b) VC’nin maksimum deeri 7.146 eitliinin paydasının minimum deeri bulunarak elde edilebilir. Bu, D’ye göre diferansiyel alınarak yapılır:
−+−=
R
R
D
DDf S
11
−+
−
+−=
2)1(1
11
D
D
DR
R
dD
df S
Türevi sıfıra eitlenerek ve RS/R=0,018 kullanılarak sonuç D=0,866 olarak bulunur. D’nin bu deeri için, VC’nin deeri 99,9 V’tur. deal durumda, bu D deeri VC=186,6 V’a karılık gelir.
ÖRNEK 7.24
Bir azaltan kıyıcı, anahtar direnci, indüktör direnci ve diyot gerilimi ile modellenmitir. ndüktans büyüktür; E=50 V, ED=0,9 V, VC=20 V, R=4 Ω, RS=0,08 Ω ve RL=0,06 Ω. Aaıdakileri bulunuz:
(a) ideal olmayan elemanlar ile VC, E ve D arasındaki bir iliki (b) D’nin gereken deeri (c) çıkı gücünün giri gücüne oranı (anahtar kaybı ihmal ediliyor).
ÇÖZÜM
(a) Birkaç etkinin bir ilikide birletirilmesi aaıdaki gibi indüktör akımındaki deiimi verir:
))(1(])([ CLLDCSLL VRIEDVRRIED −−−−−=−+−
+
+
−+=
R
RD
R
R
EEEDV
SL
DDC
1
)(
Bu eitlikteki ifadenin biçimi önceki sonuçlardan sezilebilirdi.
(b)
D
D
02,0015,01
9,0)9,050(20
++
−+=

420,0=D
(c)
54
20===
R
VI C
L A
Akım, anahtarlama saykılında bariz olarak deimez. Anahtarın kapalı olduu zaman süresince kaynak akımının ortalama deeri IL ile aynıdır:
10,2)5)(420,0( === LS DII A
105)10,2)(50( === SEIgücüGiri W
100)5)(20( === LC IVgücüÇıkı W
2,95%105
100==Verim
Bu hesaplama bazı kayıpları ihmal etmitir.
777...777...444 GGGRRR HHHAAARRRMMMOOONNNKKKLLLEEERRR
Çeitli kıyıcıların herbirinin giri akımı zamanla deien akım olarak bulunmutur. imdiye kadar kaynak gerilimi, beraber balı dier aygıtlar üzerinde zıt etkiler meydana getirmeyen bir akım salayacak özellikte, ideal bir gerilim kaynaı olarak modellenmiti. Gerçek dünyada kaynaklar böyle özelliklere sahip deildir. Giriakımının harmonik içeriinin hesaplanması zıt etkilerin oluup olumayacaını belirlemek için önemlidir. lgili dier alan ise kaynaktaki böyle harmonik akımlarının bastırılmasıdır; gösteri amaçlı olarak bir azaltan kıyıcı kullanılmıtır.
777...777...444...111 HHHAAARRRMMMOOONNNKKK AAAKKKIIIMMMLLLAAARRRIIINNNIIINNN HHHEEESSSAAAPPPLLLAAANNNMMMAAASSSIII
iS akımı için azaltan bir kıyıcının giri akımı, zamanın bir fonksiyonu olarak ekil 7.3 de görülmektedir. Böyle bir dalga biçiminin Fourier serilerinin belirlenmesi dorudan yapılabilir:
=
T
S dttiT
A00 )(
1 (7.147)
−+
=
DT
dtDT
tIII
TA
0
minmaxmin0
)(1 (7.148)
+=
2)( minmax0
DIIA (7.149)
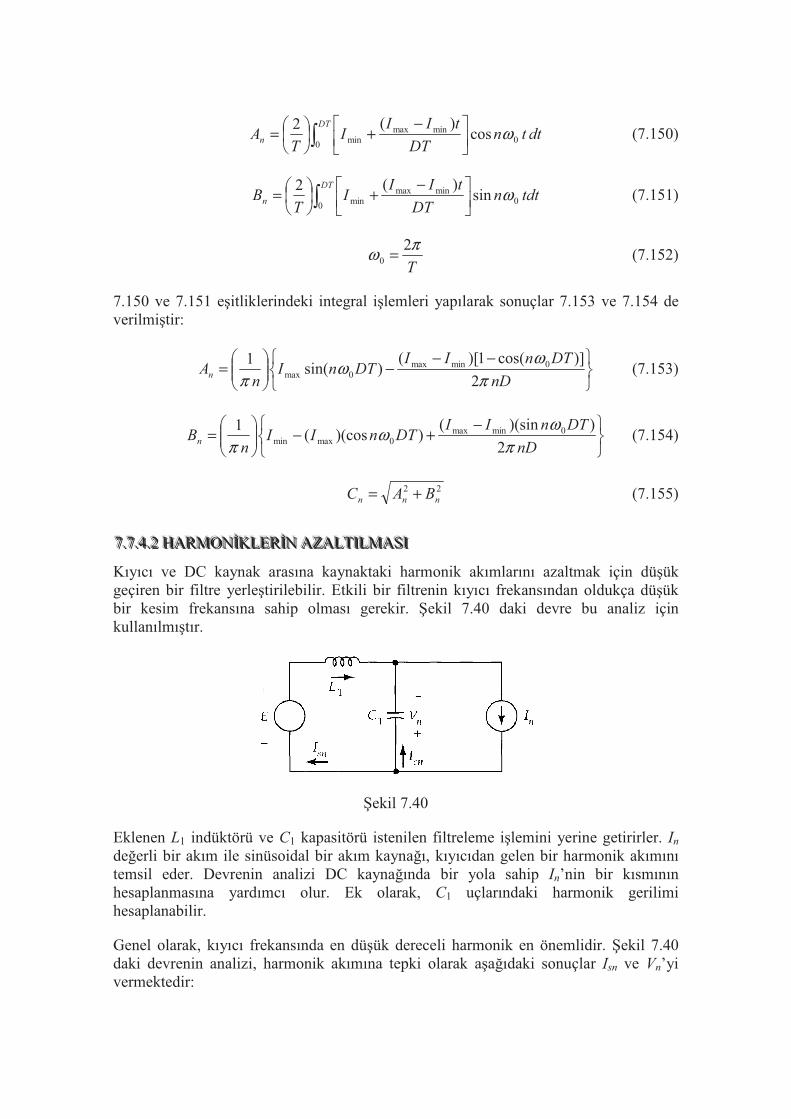
−+
=
DT
n dttnDT
tIII
TA
0 0minmax
min cos)(2
ω (7.150)
−+
=
DT
n tdtnDT
tIII
TB
0 0minmax
min sin)(2
ω (7.151)
T
πω
20 = (7.152)
7.150 ve 7.151 eitliklerindeki integral ilemleri yapılarak sonuçlar 7.153 ve 7.154 de verilmitir:
−−
−
=
nD
DTnIIDTnI
nAn
π
ωω
π 2
)]cos(1)[()sin(
1 0minmax0max (7.153)
−
+−
=
nD
DTnIIDTnII
nBn
π
ωω
π 2
))(sin())(cos(
1 0minmax0maxmin (7.154)
22nnn BAC += (7.155)
777...777...444...222 HHHAAARRRMMMOOONNNKKKLLLEEERRRNNN AAAZZZAAALLLTTTIIILLLMMMAAASSSIII
Kıyıcı ve DC kaynak arasına kaynaktaki harmonik akımlarını azaltmak için düük geçiren bir filtre yerletirilebilir. Etkili bir filtrenin kıyıcı frekansından oldukça düük bir kesim frekansına sahip olması gerekir. ekil 7.40 daki devre bu analiz için kullanılmıtır.
ekil 7.40
Eklenen L1 indüktörü ve C1 kapasitörü istenilen filtreleme ilemini yerine getirirler. In
deerli bir akım ile sinüsoidal bir akım kaynaı, kıyıcıdan gelen bir harmonik akımını temsil eder. Devrenin analizi DC kaynaında bir yola sahip In’nin bir kısmının hesaplanmasına yardımcı olur. Ek olarak, C1 uçlarındaki harmonik gerilimi hesaplanabilir.
Genel olarak, kıyıcı frekansında en düük dereceli harmonik en önemlidir. ekil 7.40 daki devrenin analizi, harmonik akımına tepki olarak aaıdaki sonuçlar Isn ve Vn’yi vermektedir:

1120
10
10
10
11
)()(
1
CL
I
LjCj
ILj
I n
n
snω
ωω
ω
−=
+
= (7.156)
1120
1120
10
10
10
11))((
CL
ICL
LjCj
ICjI nn
cnω
ω
ωω
ω
−−=
+
= (7.157)
10Cj
IV n
nω
= (7.158)
0ω ’ın deeri filtrenin L1 ve C1 ile belirlenen, kesim frekansına kıyasla genelde
büyüktür. Yukarıdaki eitliklerde mantıklı bir yaklaım paydadaki “1” teriminin ihmal edilmesidir. Bu durumda eitlik sadece miktarların genliklerini içerecek ekilde basitletirilebilir:
1120 CL
II n
snω
= (7.159)
10C
IV n
nω
= (7.160)
ÖRNEK 7.25
Bir azaltan kıyıcı 60 V’luk bir kaynaktan rezistif bir yüke 35 V salamaktadır. ndüktör sürekli indüktör akımına neden olacak deerinin iki katıdır. T=25 µs.
60 V’luk kaynak ve kıyıcı arasına balanacak bir filtre tasarlayınız. Filtrenin 40 kHz de tepe kaynak akımını 0,2 A de sınırlaması ve kıyıcının giriinde 40 kHz deki tepe gerilimi 0,5 V’u geçmeyecek ekilde sınırlaması gerekmektedir.
ÇÖZÜM
583,060
35==D
251300)40000)(2(0 == πω rad/s
Balangıçta Imax ve Imin deerleri gerekmektedir. Minimum indüktans ile, 0min =I ve
10)5)(2(max ==I A. ndüktans minimum deerin iki katı olduundan, 5,7max =I A ve
5,2min =I A.
7.153, 7.154 ve 7.155 eitliklerinden, en düük dereceli harmonik bileenleri belirlenebilir:

665,30 =TDω rad
004,2665,3
)]665,3cos(1)[5()665,3sin(5,7
11 −=
−
−
=
πA A
646,2665,3
)665,3sin()5()665,3cos(5,75,2
11 =
+−
=
πB A
319,322 =+= nnn BAC A
7.159 ve 7.160 eitlikleri kullanılarak, L1 ve C1 deerleri belirlenebilir:
)()251300(
319,32,0
112 CL
=
1)251300(
319,35,0
C=
4,261 =C µF
95,91 =L µH
777...888 DDDNNNAAAMMMKKK PPPEEERRRFFFOOORRRMMMAAANNNSSS
DC-DC konvertörlerin çou kapalı döngü modunda çalıtırılırlar. Çıkı gerilimi algılanarak istenilen çıkı gerilimi ile karılatırılır. stenilen çıkıı elde etmek için, iki gerilim arasındaki hata, görev saykıl’ı, D’yi ayarlamak için kullanılır. Yük deiimleri veya giri geriliminden dolayı çıkı gerilimindeki deiimler, böyle geri beslemeler kullanılarak azaltılabilir veya yok edilebilir.
Sistem kararlılıı veya geçici performans çalımasında konvertörü modellemek için, frekans domeninde konvertörü temsil edilmesinde bazı vasıtalara ihtiyaç vardır. Verilen bir anahtarlama frekansı ile, deneyimler göstermitir ki geri besleme döngüsünün kapatılması ve sıfır frekanstan anahtarlama frekansının bir kısmına karılık gelen belli bir frekansa kadar kabul edilebilir kapalı döngü frekans tepkisi elde edilmesi mümkündür.
Bu amaç için, küçük bir sinyal davranıında konvertörün temsil edilmesinde bir vasıtaya ihtiyaç vardır. Görev saykılı belli bir sabit deere ayarlanır ve sonra sabit deerin üzerinde ve altında sinüsoidal olarak az bir miktar deitirilir. Anahtarlama frekansına kıyasla, frekanstaki bu deiim küçük tutulur. Bu ilem karmaıktır çünkü her anahtarlama saykılı süresince devre iki veya daha fazla durum aldıından bunun sonucunda devrenin frekans tepkisini analiz etmek için birden fazla devre olumaktadır. Bu problemin çözümü için durum uzay ortalaması kullanılır. Konvertörün her durumu için devre, konvertörün verilen bu durumda kaldıı zamanın parçasına göre aırlıı dikkate alınır. lemin iyi bir ekilde gösterilmesi ise aaıdaki gibi özel bir düzenleme üzerinde yapılır.
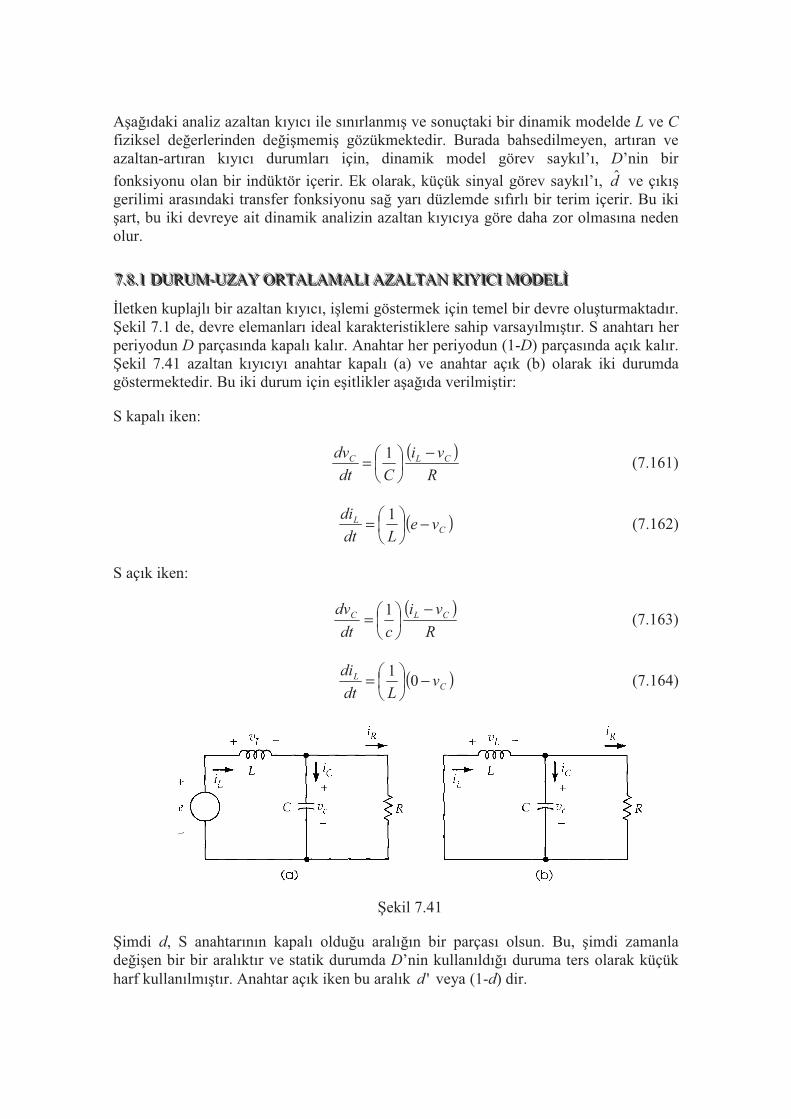
Aaıdaki analiz azaltan kıyıcı ile sınırlanmı ve sonuçtaki bir dinamik modelde L ve Cfiziksel deerlerinden deimemi gözükmektedir. Burada bahsedilmeyen, artıran ve azaltan-artıran kıyıcı durumları için, dinamik model görev saykıl’ı, D’nin bir
fonksiyonu olan bir indüktör içerir. Ek olarak, küçük sinyal görev saykıl’ı, d ve çıkıgerilimi arasındaki transfer fonksiyonu sa yarı düzlemde sıfırlı bir terim içerir. Bu iki art, bu iki devreye ait dinamik analizin azaltan kıyıcıya göre daha zor olmasına neden olur.
777...888...111 DDDUUURRRUUUMMM---UUUZZZAAAYYY OOORRRTTTAAALLLAAAMMMAAALLLIII AAAZZZAAALLLTTTAAANNN KKKIIIYYYIIICCCIII MMMOOODDDEEELLL
letken kuplajlı bir azaltan kıyıcı, ilemi göstermek için temel bir devre oluturmaktadır. ekil 7.1 de, devre elemanları ideal karakteristiklere sahip varsayılmıtır. S anahtarı her periyodun D parçasında kapalı kalır. Anahtar her periyodun (1-D) parçasında açık kalır. ekil 7.41 azaltan kıyıcıyı anahtar kapalı (a) ve anahtar açık (b) olarak iki durumda göstermektedir. Bu iki durum için eitlikler aaıda verilmitir:
S kapalı iken:
( )R
vi
Cdt
dv CLC −
=
1 (7.161)
( )CL ve
Ldt
di−
=
1 (7.162)
S açık iken:
( )R
vi
cdt
dv CLC −
=
1 (7.163)
( )CL v
Ldt
di−
= 0
1 (7.164)
ekil 7.41
imdi d, S anahtarının kapalı olduu aralıın bir parçası olsun. Bu, imdi zamanla deien bir bir aralıktır ve statik durumda D’nin kullanıldıı duruma ters olarak küçük harf kullanılmıtır. Anahtar açık iken bu aralık 'd veya (1-d) dir.

Bundan sonraki adım, devrenin bulunduu her duruma uygun olarak eitliklerin aırlıını koymaktır. 7.161 eitlii 7.165 eitliini elde etmek için d ile çarpılır. Benzer davranıla, 7.163 eitlii 'd ile çarpılarak 7.166 elde edilir:
−
=
R
vi
Cd
dt
dvd CLC 1
(7.165)
−
=
R
vi
Cd
dt
dvd CLC 1
'' (7.166)
ayet iki eitlik toplanır ve 1'=+ dd dikkate alınırsa, sonuç 7.167 eitliindeki gibidir:
−
=
R
vi
Cdt
dv CLC 1 (7.167)
7.162 ve 7.164 eitlikleri aynı ekilde 7.168 ve 7.169 eitliklerini elde etmek için yeniden düzenlenerek:
( )CL ve
Ld
dt
did −
=
1 (7.168)
( )CL v
Ld
dt
dvd −
=
0
1'' (7.169)
Bu iki eitlik 7.170 eitliini elde etmek için toplanır:
( )CL vde
Ldt
di−×
=
1 (7.170)
7.170 eitliindeki sonuç anahtarın görev saykılının fonksiyonudur; bu eitlik 7.168 eitlii ile çeliki göstermektedir ve d’ye balı deildir.
Gelitirme ilemindeki sonraki adım, sabit deere ek küçük bir sinyal parçası ile temsil edilen her deikene küçük bir sinyal bileenini eklemektir. Aaıdaki notasyonda “^” sembolü küçük sinyal parçasını temsil etmektedir.
eEe ˆ+=SSS iIi ˆ+=
LLL iIi ˆ+=
dt
id
dt
di LLˆ
=
CCC vVv ˆ+=
dt
vd
dt
dv CCˆ
=(7.171)
dDd ˆ+= CC ii ˆ0 +=
dDd ˆ)1(' −−= RRR iIi ˆ+=

7.171 eitliindeki ilikiler 7.167 ve 7.170 eitliklerinde yerine konulur. Sonuçlar 7.172 ve 7.173 eitliklerinde görülmektedir:
−−+
=
R
v
R
ViI
Cdt
vd CCLL
Cˆˆ1ˆ
(7.172)
[ ]CCL vVeEdD
Ldt
idˆ)ˆ)(ˆ(
1ˆ−−++
= (7.173)
Sıfır, birinci ve ikinci derece terimler eitliin sadeletirilmesine izin verir. ki küçük sinyal teriminin çarpımı olan ikinci derece terimler, baıl büyüklüklerine bakılarak düürülebilir. 7.172 ve 7.173 eitlikleri 7.174 ve 7.175 eitlikleri olur:
−+
−
=
R
vi
R
VcI
Cdt
vd CLL
Cˆˆ1ˆ
(7.174)
)ˆˆˆ(1ˆ
CCL veDdEVDE
Ldt
id−++−
= (7.175)
Bu eitlikler, iki eitlik grubuna ayrılabilir. Birincisi, eitliin sabit kısmını ve ikincisi küçük sinyal kısmını temsil eder. Sabit kısım 7.176 ve 7.177 eitlikleri ile verilmitir:
−
=
R
VI
C
CL
10 (7.176)
( )CVDEL
−
=
10 (7.177)
7.176 ve 7.177 eitlikleri D’nin sabit deeri için kısım 7.2 de gelitirilenler ile aynıdır. Küçük sinyal parçası için ikinci eitlik grubu 7.178 ve 7.179 eitlikleridir:
−
=
R
vI
Cdt
vd CL
Cˆ1ˆ
(7.178)
)ˆˆˆ(1ˆ
CL veDdE
Ldt
id−+
= (7.179)
Yukarıdaki eitliklerle temsil edilen devre modeli ekil 7.42 de gösterilmitir. Bu ekil, bundan önceki eitliklerdeki sıfır ve birinci derece terimleri e zamanlı olarak içerir.
Normal, sıfırdan farklı, alternatif frekanslarda olduu kadar sıfır frekansta da çalıma özelliinde genelletirilmi bir transformotor yapılması kullanılıdır. Genelletirilmi bu transformotor zamanla deien dönütürme oranına sahip olabilir. Bu, normal bir ideal transformotorun bütün akım ve gerilim ilikileriyle uyum salar. ekil 7.42 deki devre böyle bir transformotor içerecek ekilde deitirilmi ve ekil 7.43 de olduu gibi yeniden çizilmitir. Transformotor için kullanılan sembol teknik literatürde kabul edilmektedir.
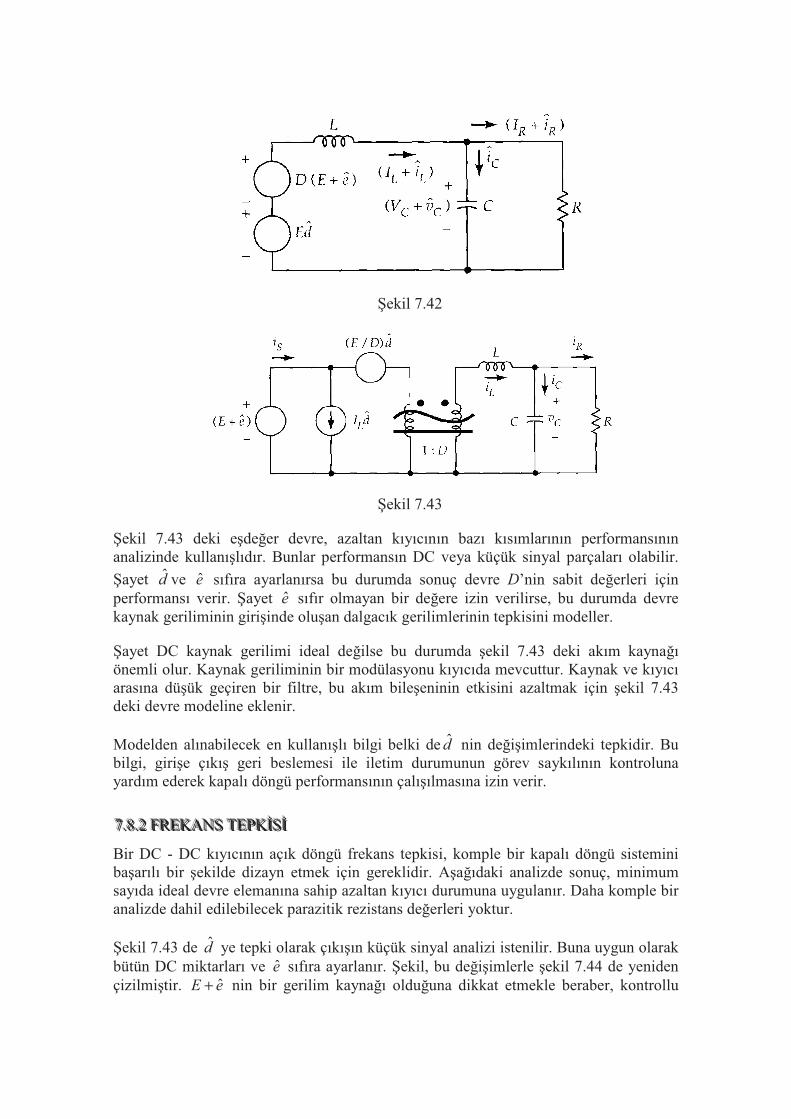
ekil 7.42
ekil 7.43
ekil 7.43 deki edeer devre, azaltan kıyıcının bazı kısımlarının performansının analizinde kullanılıdır. Bunlar performansın DC veya küçük sinyal parçaları olabilir.
ayet d ve e sıfıra ayarlanırsa bu durumda sonuç devre D’nin sabit deerleri için performansı verir. ayet e sıfır olmayan bir deere izin verilirse, bu durumda devre kaynak geriliminin giriinde oluan dalgacık gerilimlerinin tepkisini modeller.
ayet DC kaynak gerilimi ideal deilse bu durumda ekil 7.43 deki akım kaynaı önemli olur. Kaynak geriliminin bir modülasyonu kıyıcıda mevcuttur. Kaynak ve kıyıcı arasına düük geçiren bir filtre, bu akım bileeninin etkisini azaltmak için ekil 7.43 deki devre modeline eklenir.
Modelden alınabilecek en kullanılı bilgi belki de d nin deiimlerindeki tepkidir. Bu bilgi, girie çıkı geri beslemesi ile iletim durumunun görev saykılının kontroluna yardım ederek kapalı döngü performansının çalıılmasına izin verir.
777...888...222 FFFRRREEEKKKAAANNNSSS TTTEEEPPPKKKSSS
Bir DC - DC kıyıcının açık döngü frekans tepkisi, komple bir kapalı döngü sistemini baarılı bir ekilde dizayn etmek için gereklidir. Aaıdaki analizde sonuç, minimum sayıda ideal devre elemanına sahip azaltan kıyıcı durumuna uygulanır. Daha komple bir analizde dahil edilebilecek parazitik rezistans deerleri yoktur.
ekil 7.43 de d ye tepki olarak çıkıın küçük sinyal analizi istenilir. Buna uygun olarak bütün DC miktarları ve e sıfıra ayarlanır. ekil, bu deiimlerle ekil 7.44 de yeniden çizilmitir. eE ˆ+ nin bir gerilim kaynaı olduuna dikkat etmekle beraber, kontrollu
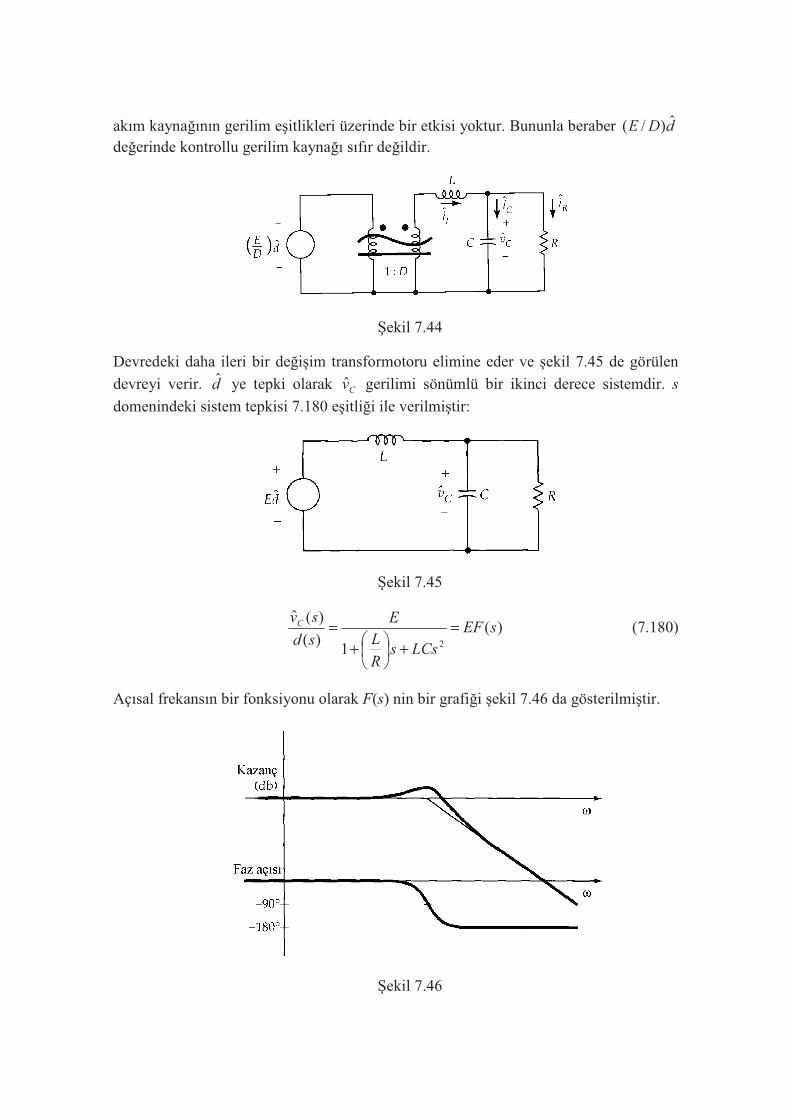
akım kaynaının gerilim eitlikleri üzerinde bir etkisi yoktur. Bununla beraber dDE ˆ)/(
deerinde kontrollu gerilim kaynaı sıfır deildir.
ekil 7.44
Devredeki daha ileri bir deiim transformotoru elimine eder ve ekil 7.45 de görülen
devreyi verir. d ye tepki olarak Cv gerilimi sönümlü bir ikinci derece sistemdir. s
domenindeki sistem tepkisi 7.180 eitlii ile verilmitir:
ekil 7.45
)(
1)(
)(ˆ
2
sEF
LCssR
L
E
sd
svC =
+
+
= (7.180)
Açısal frekansın bir fonksiyonu olarak F(s) nin bir grafii ekil 7.46 da gösterilmitir.
ekil 7.46

777...888...333 KKKAAAPPPAAALLLIII DDDÖÖÖNNNGGGÜÜÜ TTTEEEPPPKKKSSS
ayet kıyıcının çıkıı geri besleme olarak kullanılırsa, bu durumda çıkı giriin bazı komutunu takip edecek ekilde yapılabilir. Bir analiz, giri komutundaki bir adıma küçük sinyal tepkisini belirler. ekil 7.47 böyle bir sistem için tipik bir devredir. Bu düzenleme için, sistem hatası 7.181 eitlii ile verilir.
Cie vvv −= (7.181)
ekil 7.47
Görev saykıllı kıyıcı, sistem hatasını görev saykılı ile ilikilendirir. Bu örnekte, kıyıcı basit bir integratör olarak varsayılır. 7.182 eitlii istenilen ilikiyi ifade eder:
)()( Cie vvs
Kv
s
Kd −
=
= (7.182)
Bu iliki, DC kısım veya küçük sinyal kısmı gibi bütün miktarlar için geçerlidir. Bundan böyle, 7.183 eitlii küçük sinyal parçasını ifade eder.
)ˆˆ(ˆCi vv
s
Kd −
= (7.183)
7.183 ile 7.180 eitlii birletirilmesinin sonucu, 7.184 ve 7.185 eitliklerinde verilmitir:
[ ] )ˆˆ()(ˆ)(ˆCiC vv
s
KsEFdsEFv −
== (7.184)
==
s
KsEF
v
vG
e
C )(ˆ
ˆ (7.185)
Bu sonuçlar ekil 7.48 deki gibi blok diyagram gösteriminde birletirebilir.
7.184 eitlii 7.185 eitliinde gösterildii gibi bir açık döngü kazancı verir. Bu genel iliki ekil 7.49 daki grafikte gösterilmektedir. LC rezonans frekansında sistemin tepe kazancının döngü kararsızlıına neden olmaması için bütün kazancın ayarlanması gerekir. ayet tepe frekansı çıkarılırsa, tüm sistem kazancı artırılabilir ve sistem performansı iyiletirilebilir.
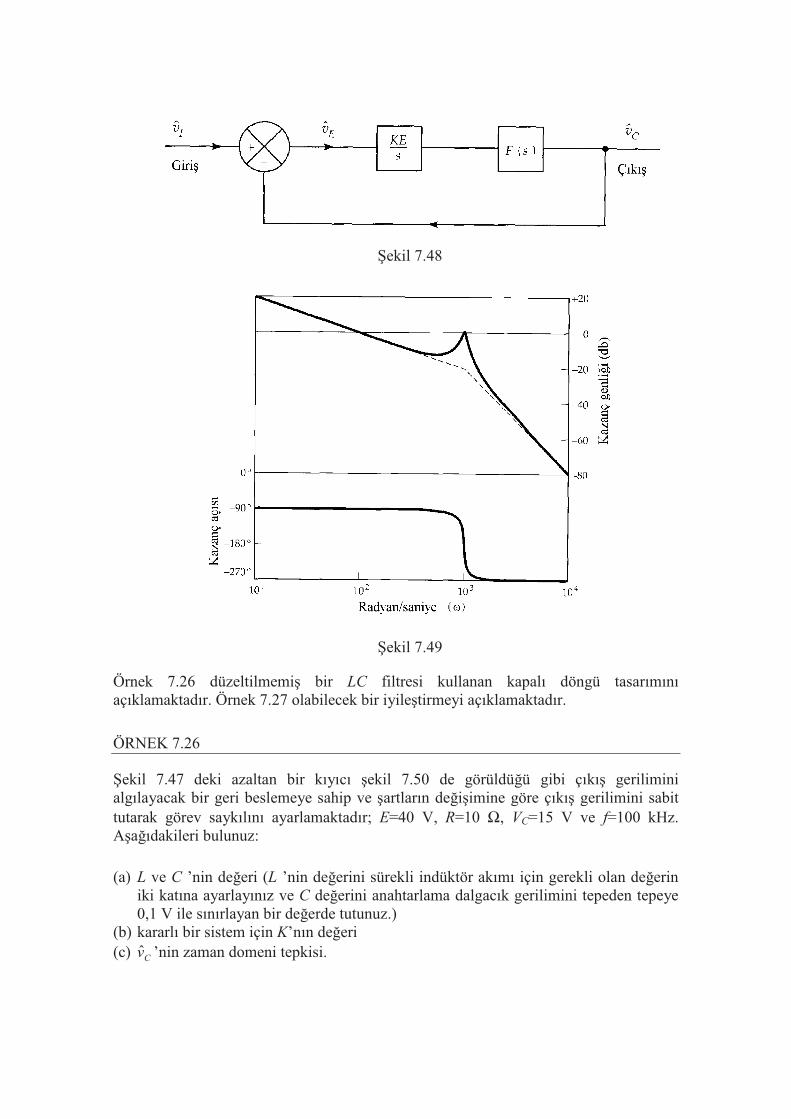
ekil 7.48
ekil 7.49
Örnek 7.26 düzeltilmemi bir LC filtresi kullanan kapalı döngü tasarımını açıklamaktadır. Örnek 7.27 olabilecek bir iyiletirmeyi açıklamaktadır.
ÖRNEK 7.26
ekil 7.47 deki azaltan bir kıyıcı ekil 7.50 de görüldüü gibi çıkı gerilimini algılayacak bir geri beslemeye sahip ve artların deiimine göre çıkı gerilimini sabit tutarak görev saykılını ayarlamaktadır; E=40 V, R=10 Ω, VC=15 V ve f=100 kHz. Aaıdakileri bulunuz:
(a) L ve C ’nin deeri (L ’nin deerini sürekli indüktör akımı için gerekli olan deerin iki katına ayarlayınız ve C deerini anahtarlama dalgacık gerilimini tepeden tepeye 0,1 V ile sınırlayan bir deerde tutunuz.)
(b) kararlı bir sistem için K’nın deeri (c) Cv ’nin zaman domeni tepkisi.
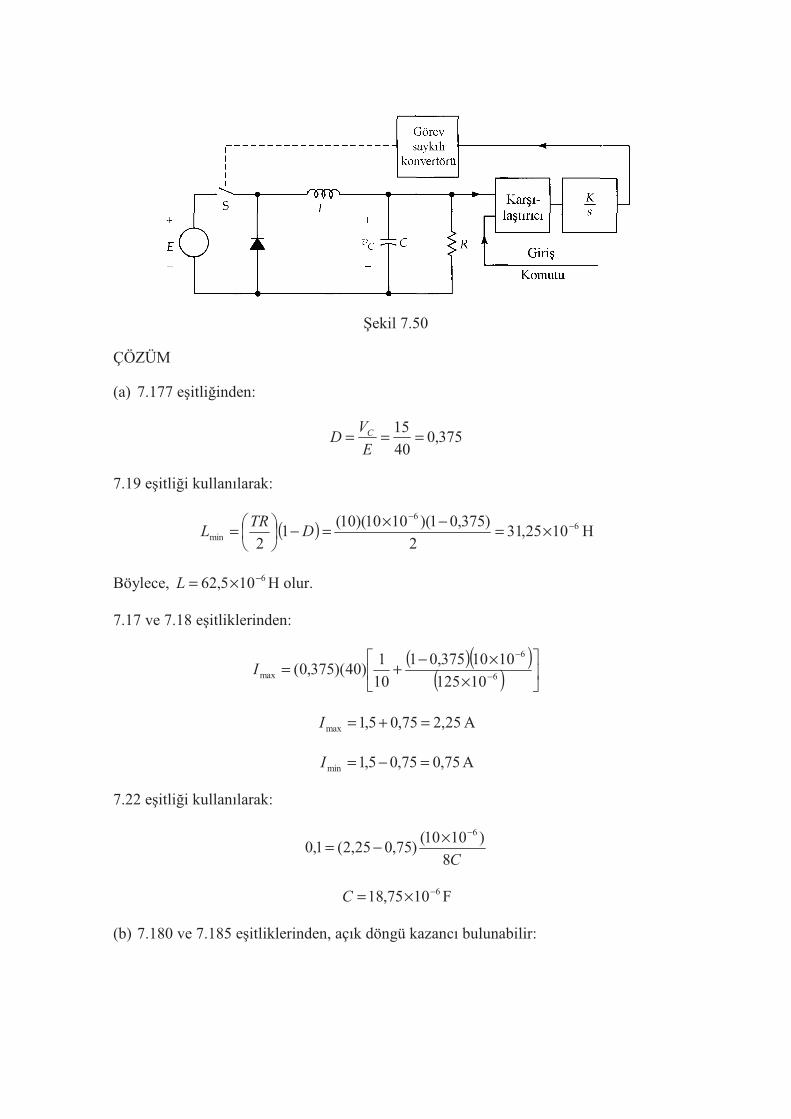
ekil 7.50
ÇÖZÜM
(a) 7.177 eitliinden:
375,040
15===
E
VD C
7.19 eitlii kullanılarak:
( ) 66
min 1025,312
)375,01)(1010)(10(1
2−
−
×=−×
=−
= D
TRL H
Böylece, 6105,62 −×=L H olur.
7.17 ve 7.18 eitliklerinden:
( )( )( )
×
×−+=
−
−
6
6
max10125
1010375,01
10
1)40)(375,0(I
25,275,05,1max =+=I A
75,075,05,1min =−=I A
7.22 eitlii kullanılarak:
C8
)1010()75,025,2(1,0
6−×−=
61075,18 −×=C F
(b) 7.180 ve 7.185 eitliklerinden, açık döngü kazancı bulunabilir:
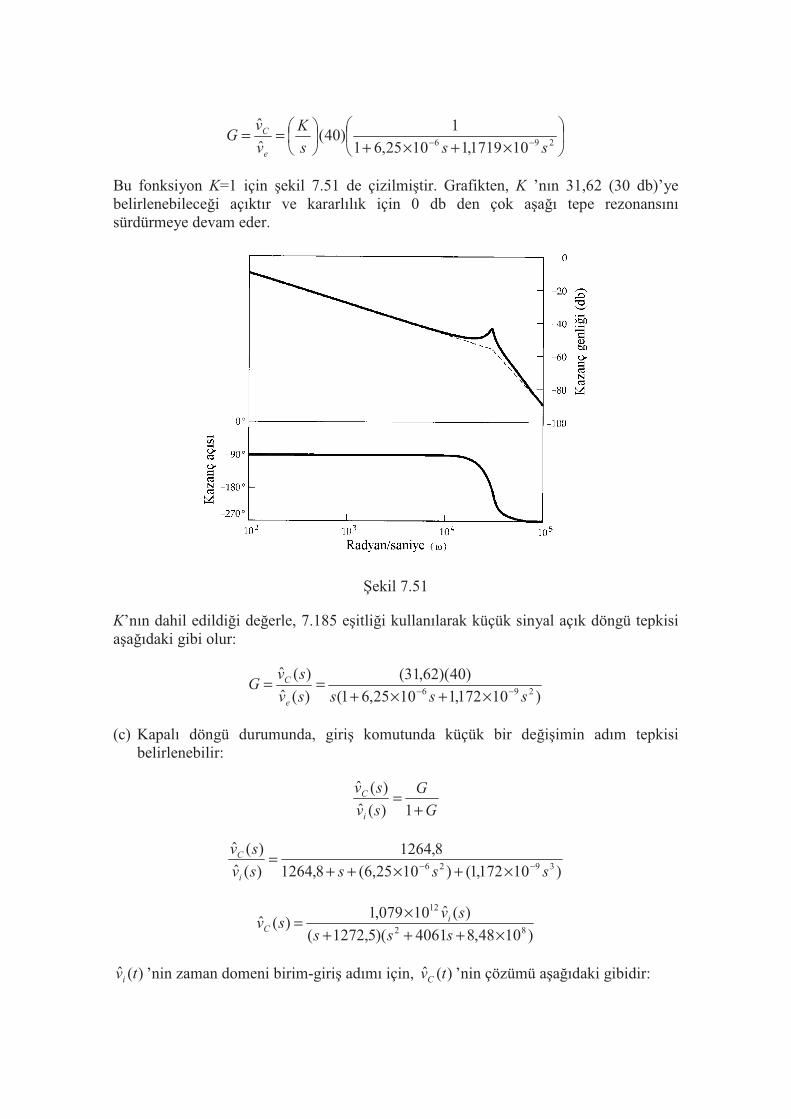
×+×+
==
−− 296 101719,11025,61
1)40(
ˆ
ˆ
sss
K
v
vG
e
C
Bu fonksiyon K=1 için ekil 7.51 de çizilmitir. Grafikten, K ’nın 31,62 (30 db)’ye belirlenebilecei açıktır ve kararlılık için 0 db den çok aaı tepe rezonansını sürdürmeye devam eder.
ekil 7.51
K’nın dahil edildii deerle, 7.185 eitlii kullanılarak küçük sinyal açık döngü tepkisi aaıdaki gibi olur:
)10172,11025,61(
)40)(62,31(
)(ˆ
)(ˆ296 ssssv
svG
e
C
−− ×+×+==
(c) Kapalı döngü durumunda, giri komutunda küçük bir deiimin adım tepkisi belirlenebilir:
G
G
sv
sv
i
C
+=
1)(ˆ
)(ˆ
)10172,1()1025,6(8,1264
8,1264
)(ˆ
)(ˆ3926 ssssv
sv
i
C
−− ×+×++=
)1048,84061)(5,1272(
)(ˆ10079,1)(ˆ
82
12
×+++
×=
sss
svsv i
C
)(ˆ tvi ’nin zaman domeni birim-giri adımı için, )(ˆ tvC ’nin çözümü aaıdaki gibidir:

)24,329052sin(0439,00042,10,1)(ˆ 20301273 −+−= −− teetv tt
C
Tepki bir sabit, bir üstel ve bir küçük sönümlü sinüsoidalden olumaktadır. Bu geçicilik gerçekte yaklaık olarak 3 veya 4 ms de tamamlanır. Bu örnein amacı optimum bir geri besleme tasarlama olmayıp sadece olabilirlii göstermektedir. Açık döngü tepkisinin daha ileri biçimlendirilmesiyle iyiletirilmi bir geçici tepki kullanılabilir.
Açık döngü tepkisinde tepe rezonans LC filtre devresindeki sönümün artırılmasıyla azaltılabilir. Sönümü artırmak için bir direncin dorudan eklenmesi sistemin kayıplarını artırır ve bundan dolayı çözüm için uygun deildir. Filtre kapasitörüne paralel yerletirilmi seri balı bir direnç ve kapasitör uygun bir cevap olabilir. ekil 7.52 deki devre olabilecek bir çözümü göstermektedir.
ekil 7.52
Bu devrenin tasarımı, LC rezonans frekansında R2’nin uygun bir sönüm salamasını gerektirir. C2 kapasitörü R2 akımındaki DC bileeni tıkar. Yük direnci, R bir miktar sönüm salamakla beraber etkisi küçüktür. Kıyıcı frekansını filtre etmeleri gereken L ve C daima öyle bir deerdedir ki yük direnci tepe rezonansın sönümünde etkili olması bakımından çok büyüktür.
C2’nin deeri, rezonans frekansında etkisinin küçük olması için yeteri kadar büyük olmalıdır. R ve R2’nin birletirilmesi sönüme daha fazla etki etmelidir. Tasarım için uygun bir iliki 7.186 eitliinde R2 yi eitlemektir:
CLR /2 = (7.186)
R ile beraber bu R2 deeri tepe rezonans tepkisini uygun bir tasarım seviyesine azaltır. ekil 7.52 deki devre kullanılarak, F(s)’nin yeni ifadesi 7.187 eitliinde görülmektedir:
322
222222
22
)(1
1)(
CLsCRsCRRCRCR
Ls
R
LCR
sCRsF
+++
+
++
+= (7.187)
ÖRNEK 7.27
Örnek 7.26 daki tepki, sistemin kazancının artmasına izin veren LC filtreye sönüm eklenerek iyiletirilebilir. Aaıdakileri bulunuz:

(a) tepkiyi gelitirmek için sönüm elemanları (b) sistem kazancının yeni deeri (c) zaman domenindeki yeni tepki.
ÇÖZÜM
(a) 7.186 eitlii kullanılarak, R2 seçilir:
83,175,18
5,62/2 === CLR Ω
R2’ye kıyasla önceki rezonans frekansında sadece ılımlı bir etkiye sahip olan C2 seçilir. Önceki rezonans frekansı 29,212 rad/s.
3
1 2
2
R
C=
ω
62 101,56 −×=C F
C2’nin hesaplanmasındaki 3 faktörü keyfi olarak seçilmitir.
(b) ekil 7.52 deki yeni devre düzenlemesi için F(s)’nin yeni ifadesi hesaplanır:
315296
6
)103,120()1032,5()109,108(1
)1066,102(1)(
sss
ssF
−−−
−
×+×+×+
×+=
Sistem kazancının yeni grafii K=1 için ekil 7.53 de çizilmitir. Önceki rezonans frekansına yakın tepe deeri hemen hemen kaybolmutur. Bu grafikten, K ’nın 41 db olabilecei açıktır ve tepe rezonansı hala 0 db ekseninin 15 db aaısında tutmaktadır. Bu, yaklaık olarak örnek 7.26 da kullanılan aynı kriterdir. ayet bu yapılırsa, )(ˆ svC
çözümü aaıdaki sonuçları verir:
15122634
615
1064,35)1097,11()10905(44217
)(ˆ)107,1021)(1064,35()(ˆ
×+×+×++
×+×=
−
ssss
svssv i
C
(c) ayet )(ˆ svi 1/s ’eitlenirse, )(ˆ tvC ’nin çözümü aaıdaki gibi olur:
)109,317426sin(444,0178,0807,01)(ˆ 7708248513950 −+−−= −−− teeetv ttt
C
Yukarıdaki üçüncü ve dördüncü terimler oldukça küçüktür ve birinci terime göre daha hızlı kaybolurlar. Çözüm temelde yaklaık olarak 250 µs zaman sabiti ile üsteldir. Bu, örnek 7.26 da 785 µs zaman sabiti ile karılatırılabilir. Geçicilik hemen hemen tam 1 ms içindedir. Bu örnekte kullanılan teknik sistem tepkisinde iyileme sonucu ile kazancın artmasına izin vermitir.
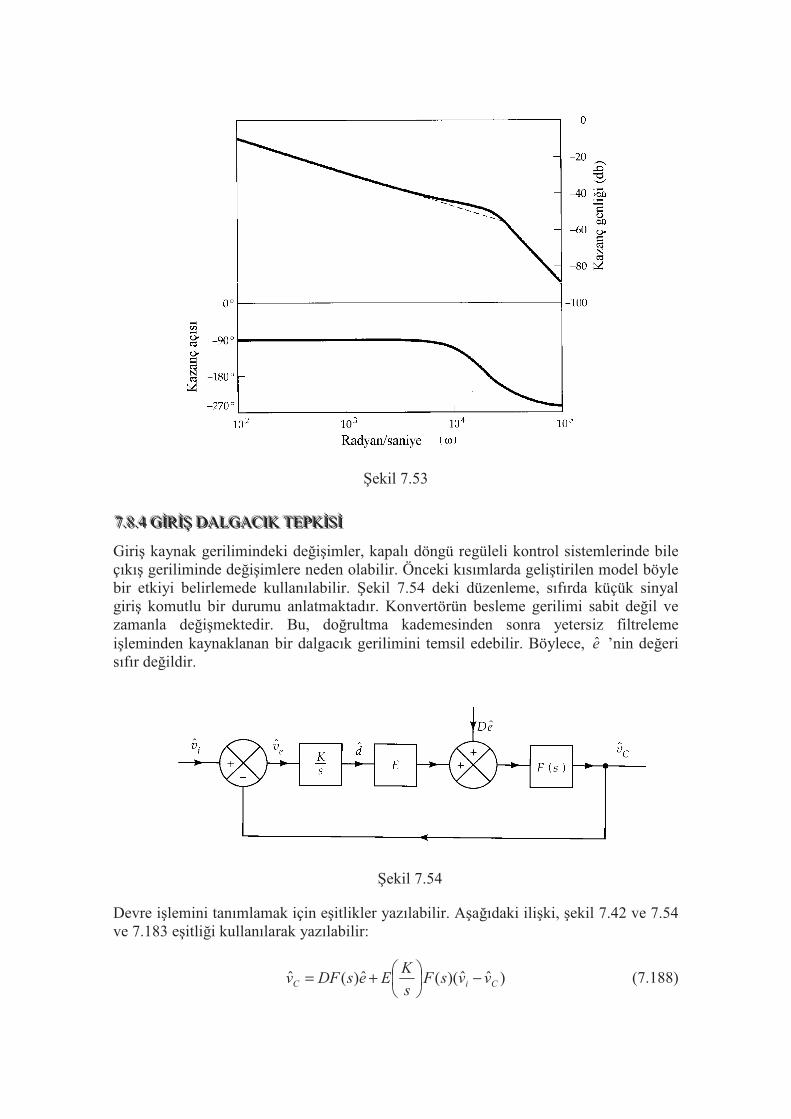
ekil 7.53
777...888...444 GGGRRR DDDAAALLLGGGAAACCCIIIKKK TTTEEEPPPKKKSSS
Giri kaynak gerilimindeki deiimler, kapalı döngü regüleli kontrol sistemlerinde bile çıkı geriliminde deiimlere neden olabilir. Önceki kısımlarda gelitirilen model böyle bir etkiyi belirlemede kullanılabilir. ekil 7.54 deki düzenleme, sıfırda küçük sinyal giri komutlu bir durumu anlatmaktadır. Konvertörün besleme gerilimi sabit deil ve zamanla deimektedir. Bu, dorultma kademesinden sonra yetersiz filtreleme ileminden kaynaklanan bir dalgacık gerilimini temsil edebilir. Böylece, e ’nin deeri sıfır deildir.
ekil 7.54
Devre ilemini tanımlamak için eitlikler yazılabilir. Aaıdaki iliki, ekil 7.42 ve 7.54 ve 7.183 eitlii kullanılarak yazılabilir:
)ˆˆ)((ˆ)(ˆCiC vvsF
s
KEesDFv −
+= (7.188)

7.188 eitliinde, iv sıfıra eitlenerek sonuçta 7.189 eitlii elde edilir:
)(
)(
)(ˆ
)(ˆ
sKEFs
ssDF
se
svC
+= (7.189)
Önceki kapalı döngü tepki eitlii, kıyıcının kaynak gerilimindeki deiimlerde istenilen her kararlı durum tepkisi için çözülebilir.
ÖRNEK 7.28
Örnek 7.27 deki kıyıcı, 15 V’luk bir çıkıa karılık gelen sabit bir giri komutu ile çalımaktadır. 40 V’luk giri kaynak gerilimi üzerine bindirilmi 1 V’luk bir dalgacık gerilimine (tepeden tepeye 2 V) sahiptir. Bu dalgacıın frekansı 120 Hz ve dorultucu kaynak geriliminin yetersiz bir filtreleme ileminden kaynaklanmaktadır. Kıyıcının çıkıgeriliminde 120 Hz’lik dalgacıın tepe deerini bulunuz.
ÇÖZÜM
Örnek 7.27 deki sonuçlar kullanılarak, aaıdaki deerler bilinmektedir:
K=112,2 D=0,375 E=40 V
315296
6
)103,120()1032,5()109,108(1
)107,102(1)(
sss
ssF
−−−
−
×+×+×+
×+=
)(ˆ svC için 7.189 eitliindeki deerler kullanılarak sonuç aaıdaki gibidir:
4153926
6
)103,120()1032,5()109,108(461,14488
)107,1021(375,0
)(ˆ
)(ˆ
ssss
ss
se
svC
−−−
−
×+×+×++
×+=
120 Hz’lik dalgacık gerilimi için, bu fonksiyon 754)2( jfjjs === πω de
hesaplanabilir.
062,0)(ˆ
)(ˆ=
ω
ω
je
jvC
Yaklaık olarak giriteki dalgacıın % 6 sı kıyıcının çıkıında gözükür, aırtıcı ekilde büyük bir dalgacık. Bunun iki nedeni vardır. Birincisi, çıkı LC filtresi 4650 Hz’lik bir rezonans frekansına sahiptir, bu yüzden 120 Hz frekansta etkisi azdır. LC filtre, sadece 100 kHz kıyıcı frekansında etkili olacaktır. kincisi, döngüde basit bir integratör vardır. Bu elbette tepkinin, açık döngü tepkisinin hemen hemen optimum biçimlendirilmesi kullanıldıı durumda olabildiinden daha yava olmasına neden olacaktır. Bu konu hakkında daha ileri inceleme amacın dıına tamaktadır.
777...999 ÇÇÇAAALLLIIIMMMAAA SSSOOORRRUUULLLAAARRRIII
7.1 Bir DC kıyıcı veya konvertör nedir? 7.2 Bir azaltan kıyıcının çalıma prensibi nedir?

7.3 Bir artıran kıyıcının çalıma prensibi nedir? 7.4 Bir azaltan-artıran kıyıcının çalıma prensibi nedir? 7.5 Yük dalgacık akımında kıyıcı frekansının etkisi nedir? 7.6 ki DC gerilim kaynaı arasındaki enerji transferinde kontrol edilebilen sınırlamalar nedir? 7.7 Bir kıyıcının performans parametreleri nedir? 7.8 Bir klasik kıyıcının minimum çıkı gerilimi niçin sınırlandırılmıtır? 7.9 Kaynak indüktansının etkisi nedir? 7.10 Bir kıyıcı tasarımındaki adımlar nedir? 7.11 Sürekli ve süreksiz indüktör akımı ne demektir? 7.12 Filtre tasarımında kıyıcı frekansının etkisi nedir? 7.13 Enerjinin geri dönüümü nasıl yapılır? 7.14 Harmonikler nasıl azaltılır? 7.15 Frekans tepkisi, kapalı döngü tepkisi, giri tepkisi ne demektir?
777...111000 PPPRRROOOBBBLLLEEEMMMLLLEEERRR
7.1 ekil 7.1 deki gibi bir azaltan kıyıcı aaıdaki verilere sahiptir: E=40 V, T=50 µs, L=250 µH, C=60 µF ve R=10Ω. Aaıdakileri bulunuz:
(a) sürekli indüktör akımı için gerekli L deeri (b) VC (c) Imax ve Imin (d) ∆VC.
7.2 ekil 7.1 deki gibi bir azaltan kıyıcının 60 V’luk bir kaynaktan 24 V çıkıgeriliminde 100 W’lık bir çıkı vermesi gerekmektedir. Anahtarlama frekansı 60 kHz dir. ∆VC nin izin verilen deeri 0,15 V’tur. L’nin sürekli indüktör akımı için gereken deerin 3 katı olduunu varsayarak D, L ve C deerlerini bulunuz.
7.3 Bir azaltan kıyıcı 50 V ile 70 V arasında deien bir kaynaktan çalımaktadır. Çıkı30 V ta 200 W’tır. 60 kHz’lik bir anahtarlama frekansı varsayarak, bütün artlar altında sürekli indüktör akımını tam sürdürecek ve ∆VC 0,1 V’u geçmeden devrenin dier elemanlarını tasarlayınız.
7.4 ekil 7.5 deki gibi bir artıran kıyıcı aaıdaki verilere sahiptir: E=18 V, T=15 µs, L=20 µH, C=200 µF, D=0,4 ve R=6 Ω. Aaıdakileri bulunuz:
(a) sürekli indüktör akımını sürdürmek için gereken L deeri (b) VC (c) Imax ve Imin (d) ∆VC .
7.5 ekil 7.5 deki gibi bir artıran kıyıcı 30 V’luk bir kaynaktan 100 W ve 40 V’luk bir yükü beslemektedir. Anahtarlama frekansı 25 kHz dir. L ve C deerlerini, tepe anahtar akımı 5 A’i ve ∆VC 1,0 V’u geçmeyecek ekilde tasarlayınız.
7.6 ekil 7.5 deki gibi bir artıran kıyıcı 20 V ile 30 V arası deien bir kaynaktan 200 W ve 50 V’luk bir yükü beslemektedir. Anahtarlama frekansı 60 kHz dir. L’nin öyle bir deerini bulunuz ki indüktör akımı asla süreksiz duruma geçmesin. En kötü durumda ∆VC 0,3 V olacak ekilde C’nin deerini bulunuz.
7.7 ekil 7.9 deki gibi bir azaltan-artıran kıyıcı 50 V’luk bir kaynaktan 100 Ω’luk bir yükü beslemektedir. T=25 µs, L=378 µH, C=20 µF, D=0,45. Aaıdakileri bulunuz:
(a) sürekli indüktör akımı için gerekli L deeri (b) VC (c) Imax ve Imin (d) ∆VC .
7.8 ekil 7.9 deki gibi bir azaltan-artıran kıyıcı 25 V’luk bir kaynaktan 35V ve 25 Ω’luk bir yükü beslemektedir. Anahtarlama frekansı 40 kHz dir. Aaıdakileri bulunuz: (a) sürekli indüktör akımı için gerekli L deeri (b) ∆VC 0,25 V için C’nin deeri (burada aıkkında bulunan L deerinin iki katını kullanınız).
7.9 ekil 7.9 deki gibi bir azaltan-artıran kıyıcı 24 V’luk bir kaynak gerilimine sahiptir. 10 Ω’luk bir yüke gerilimin 10 V ile 40 V arasında verilmesi gerekmektedir. Anahtarlama frekansı 60 kHz dir. L ve C deerlerini, sürekli indüktör akımını sürdürecek ve ∆VC ’yi 0,5 V’ta sınırlayacak ekilde tasarlayınız.
7.10 Bir tepkili kıyıcı aaıdaki veriye sahiptir: E=200 V, T=15 µs, L1= L2=600 µH, D=0,4, C=40 µF, 121 =NN / ve R=150 Ω . Aaıdakileri bulunuz:
(a) sürekli indüktör akımına neden olacak minimum indüktans deeri (b) VC (c) Imax ve Imin (d) ∆VC .
7.11 150 V’luk bir kaynaktan 200 Ω’luk bir yüke 160 V verecek bir tepkili kıyıcı tasarlayınız. Anahtarlama frekansı 40 kHz, indüktör akımı tam sürekli ve çıkı dalgacık gerilimi 0,5 V’u geçmemelidir. Kıyıcı transformotorunun dönütürme oranını 1:1 varsayınız.
7.12 250 V’luk bir kaynaktan 15 V’ta 2 A verebilecek bir kıyıcı tasarlayınız. Anahtarlama frekansı 40 kHz dir. ndüktör akımının sürekli olması ve ∆VC ’nin 0,05 V’u geçmemesi gerekir. Çözümün bir parçası olarak, uygun bir dönütürme oranı seçilmelidir.
7.13 ekil 7.15 deki gibi bir ileri kıyıcı aaıdaki karakteristiklere sahiptir: E=60 V, T=25 µs, L1= L2= L3=12 mH, L=50 µH, D=0,35, C=40 µF, 321 NNN == ve R=4 Ω.
Aaıdakileri bulunuz:
(a) Imax ve Imin (b) VC (c) ∆VC (d) im’nin tepe deeri (e) saykıl baına enerji ve 3. sargı tarafından kaynaa geri dönen güç.
7.14 Bir ileri kıyıcı 65 V’luk bir kaynaktan 25 V’ta 100 W vermektedir. Çalıma frekansı 50 kHz dir. ∆VC=0,5 V ile sürekli modda çalıacak bir kıyıcı tasarlayınız. im’nin deerini Imax ’ın %5’i ile sınırlayınız.
7.15 Bir ileri kıyıcı 230 V’luk bir kaynaktan 12 V’ta 150 W verecektir. 1. ve .2
sarımlara kıyasla 2. sargının uygun bir sarım sayısını seçiniz. Anahtarlama frekansı 50 kHz dir. ∆VC ’nin 0,12 V’u geçmemesi gerekir ve im’nin deerini Imax ’ın %5’ini geçmemesi gerekir. Çıkı indüktörünün sürekli modda çalıması gerekir.
7.16 letken olarak kuplajlı bir azaltan kıyıcı 24 V’luk bir kaynaktan bir yükü 12 V ta 5 A ile beslemektedir. f=50 kHz, L=8 µH, C=200 µF. Aaıdakileri bulunuz:
(a) çalıma modunun sürekli olup olmadıı (b) D (c) D2 (d) Imax (e) ∆VC
7.17 Bir azaltan kıyıcı olabildiince küçük bir indüktör ile süreksiz modda çalımak için tasarımlanmıtır. 60 V’luk bir kaynaktan 24 V’ta çıkı gücü 120 W’tır. Anahtarlama frekansı 100 kHz dir. Anahtar akımı 14 A’i geçmeyebilir. Aaıdakileri bulunuz:
(a) gereksinime uyan L ve D deerleri (b) ∆VC’yi 0,5 V ile sınırlayan C deeri
7.18 Bir artıran kıyıcı geni aralıklı bir çıkı geriliminde çalımaktadır; E=20 V, T=20 µs, L=19,2 µH, C=50 µF ve R=20 Ω. Aaıdakileri bulunuz:
(a) hem sürekli ve hem de süreksiz çalıma için D aralıı (b) D=0,4 için çıkı gerilimi (c) b ıkkı artında Imax (d) b ıkkı artında ∆VC’nin deeri.
7.19 Bir azaltan-artıran kıyıcı 16 V’luk bir kaynaktan 20 V’ta 25 Ω’luk rezistif bir yükü beslemektedir. Aaıdakileri bulunuz:
(a) D’nin deeri (b) Imax (c) ∆VC ’yi 0,15 V ile sınırlayan C deeri
7.20 Bir tepkili kıyıcı 150 V’luk bir kaynaktan bir yükü 150 V’ta beslemektedir. Balangıçta, ideal transformotor kuplajı varsayınız; T=75 µs, L1= L2=1 mH, L=50 µH,
121 =NN / ve R=50Ω. Aaıdakileri bulunuz:
(a) D’nin deeri (b) Imax (c) ayet transformotor ideal deilse t1’in deeri (Lx=5 µH ve CS=0,05 µF) (d) i1(t1) (e) t2’nin deeri (f) maksimum anahtar gerilimi.
7.21 Problem 7.21’i Lx=3 µH ile tekrar ediniz.
7.22 121 =NN / ile bir tepkili kıyıcı ekil 7.27 için aaıdaki verilere sahiptir. Akım
modu tam süreklidir. E=150 V, VZ=325 V, VC=99,3 V, Lx=4 µH, Lm=496 µH, T=40 µs, D=0,4. C ∆VC’nin ihmal edilebilecei kadar büyüktür.
(a) i1’in tepe deeri,

(b) t1’in deeri (c) i2’nin tepe deeri (d) gerilim sıkıtırıcının ortalama gücü (e) ortalama yük gücü.
7.23 Bir tepkili kıyıcı ekil 7.27 de görüldüü gibi edeer bir devre oluturan anahtar uçlarında bir gerilim sıkıtırıcı kullanmaktadır. Aaıdaki çalıma artları bilinmektedir:
121 =NN / , E=240 V, VZ=600 V, VC=110 V, Lx=5 µH, Lm=495 µH, T=50 µs, D=0,3.
C=100 µF. Aaıdakileri bulunuz:
(a) anahtar açıldıında i1’in tepe deeri, (b) i1’in sıfıra dümesi için zaman (c) i2’nin tepe deeri (d) i2’nin sıfıra dümesi için zaman (e) yük direnci (f) yük dalgacık gerilimi
7.24 ekil 7.30 daki düzenleme ile bir tepkili kıyıcı aaıdaki veriye sahiptir. ndüktör akımı tam süreklidir. 31 NN = , 521 =NN / , E=100 V, VC=13,2 V, Lx=5 µH, Lm=495
µH, T=50 µs, D=0,4, C büyüktür. Aaıdakileri bulunuz:
(a) anahtar açıldıında i3’ün sıfıra inmesi için gereken zaman, (b) yük direnci (c) her kesim ileminde kaynaa geri dönen enerji
7.25 Bir azaltan kıyıcı 50 V’luk bir kaynaktan bir yüke 30 V’ta 5 A vermektedir. ndüktör akımı tam süreklidir. RL=0,05 Ω. Dier devre elemanları idealdir. D’nin gereken deerini bulunuz.
7.26 Bir artıran kıyıcı 20 V’luk bir kaynaktan bir yüke 60 V’ta 5 A vermektedir. ndüktör akımı tam süreklidir. Dier devre elemanları idealdir. D’nin 0,71 deerini geçmemesi için maksimum indüktör direncini bulunuz.
7.27 Bir azaltan kıyıcının ideal olmayan anahtarları sürekli akım modu ile ES=1,5 V ve ED=1,0 V olarak temsil edilebilmektedir. RL=0,06 Ω, E=100 V, VC=60 V ve R=7,2 Ω. D’nin gereken deerini bulunuz.
7.28 Bir artıran kıyıcı bir MOSFET anahtar ile kontrol edilmektedir. ndüktör akımı süreklidir. E=35 V, VC=78 V, ED=1,4 V, R=27 Ω. D’nin 0,58’i geçmemesi için RS’nin deerini bulunuz.
7.29 Büyük indüktans deeri ile bir artıran kıyıcı aaıdaki veriye sahiptir: E=15 V, VC=35 V ve R=10 Ω, ED=1,1 V, RL=0,12 Ω, RS=0,15 Ω ve f=40 kHz. Aaıdakileri bulunuz:
(a) D’nin gereken deeri (b) giri akımı (c) her devre elemanındaki güç kaybı (d) çıkı gücünün giri gücüne oranı (anahtarlama kayıplarını ihmal ediniz).
7.30 Sürekli akım için minimum indüktansa sahip bir artıran kıyıcı 25 V’luk bir kaynaktan 50 V’ta 100 W’ı beslemektedir. Bütün anahtarlama elemanları ideal

düünülmektedir. T=25 µs. Kaynak ve kıyıcı arasına konulmak üzere, kaynak akımının 40 kHz bileenini 0,4 A tepe deerine düürecek bir düük geçiren filtre tasarlayınız. Kıyıcıda, gerilimin 40 kHz bileeni 0,5 V tepe deerini amamalıdır.
7.31 Bir azaltan kıyıcı aaıdaki eleman deerlerine sahiptir: E=50 V, VC=35 V, T=25 µs, L=30 µH, C=100 µF ve R=8 Ω. DC kaynak gerilimi ve kıyıcı arasına konulmak üzere bir filtre tasarlayınız. Kaynak akımının en düük frekanslı bileeni 0,2 A tepe deerini ve kıyıcıda en düük frekanslı gerilim bileeni 0,5 V tepe deerini geçmemelidir.
7.32 letken olarak kuplajlı bir azaltan kıyıcı 30 V’luk bir kaynaktan 6 Ω’luk bir yüke 12 V vermektedir. Anahtarlama frekansı 60 kHz dir. Aaıdakileri bulunuz:
(a) sürekli akım için gerekli olduunun iki katı deerinde olan L deeri ve ∆VC=0,05 V için gereken C deeri
(b) K=1 ile açık döngü transfer fonksiyonu (c) sistemin kabul edilebilir kazanç marjini ile kararlı olacaı bir K deerinin seçimi (d) çıkı gerilimi için küçük adım komutundaki tepkiyi deerlendiriniz
7.33 Problem 7.32 yi LC filtre tepkisini azaltmak için R2 ve C2 kullanarak tekrar ediniz.
7.34 Aaıdaki veri ile bir azaltan kıyıcı 50 V’luk DC kaynaının üzerinde 120 Hz frekansta %10 tepe dalgacık ile bir giri gerilimine sahiptir. ayet kabul edilebilir bir kapalı döngü kazancı seçilmise çıkıta 120 Hz gerilimin tepe deerini bulunuz. T=15 µs, L=80 µH, C=20 µF, R=10 Ω, D=0,35, R2=2,0 Ω ve C2=60 µF.
7.35 Problem 7.34 deki veri ve çözümü kullanarak, giri komutunda küçük bir adım için çıkı gerilimi zaman tepkisini bulunuz.

888 NNNVVVEEERRRTTTEEERRRLLLEEERRR
Bu bölümde, bir DC kaynaından AC çıkıı yapan inverterlerden bahsedilecektir. AC çıkıı anahtarlama ilemleri ile elde edilir ve elde edilen dalga ekli gerilim parçacıklarından oluur. Bu parçacıkların deeri pozitif, negatif veya sıfır olabilir fakat genel olarak sadece bir adet sıfır olmayan genlik vardır.
888...111 PPPAAARRRÇÇÇAAALLLIII KKKAAAYYYNNNAAAKKK::: YYYAAARRRIIIMMM---KKKÖÖÖPPPRRRÜÜÜ
ekil 8.1 deki devre direnç ve indüktanstan oluan bir yüke kare dalgalı AC gerilim salamak için kullanılabilir. DC kaynaı eit iki parçadan oluur ve parçalı kaynak olarak adlandırılır ve ekilde görüldüü gibi düzenlenebilir. Devre aynı zamanda yarım köprü olarak bilinir çünkü iki anahtar kullanılır (ekil 8.5 deki tam köprüde bunun tersine dört anahtarın kullanılması gerekir).
ekil 8.1 deki ideal anahtarlar alternatif olarak açılır ve kapanırlar, zamanın her %50’si için bir anahtar kapalı iken dieri açıktır. Anahtarlar, BJT, SCR veya MOSFET olabilir.
S1 anahtarının kapalı olduu aralıkta, S2 açılır, yukarıdaki döngünün devre eitlii Kirof’un gerilim kanununa göre, v EL = olur. Belli bir zaman sonra, S1 açılır ve S2
kapanır. Aaıdaki döngü için Kirof’un gerilim kanununa göre devre eitlii v EL = −
olur. Sonuç, ekil 8.2 de görüldüü gibi vL için kare dalgalı alternatif akım biçimidir. ekilde aynı zamanda akımın ekli de görülmektedir.
ekil 8.2 hakkında birkaç yorum: S1 anahtarının açılmadan tam önceki t T= / 2zamanında, iL pozitiftir. S1 anahtarının açılması ve S2 nin kapanması üzerine, vL nin iaretinin deimesine ramen, iL nin sürekli ve belli bir zaman için pozitif olması gerekir. Zamanın belirli bir periyodunda, S2 nin akım yönünü deitirmesiyle iL iaretini deitirmez. Bu durumda anahtar elemanı olarak örnein sadece bir BJT kullanılamaz. Buna ek olarak ters yöndeki akımı iletebilecek paralel bir diyot kullanılması gerekir. Devre ilemini daha iler hale getirmek için, ekil 8.1, S1 ve S2 parçaları yerine BJT’ler kullanılarak, ekil 8.3 de yeniden çizilmitir.
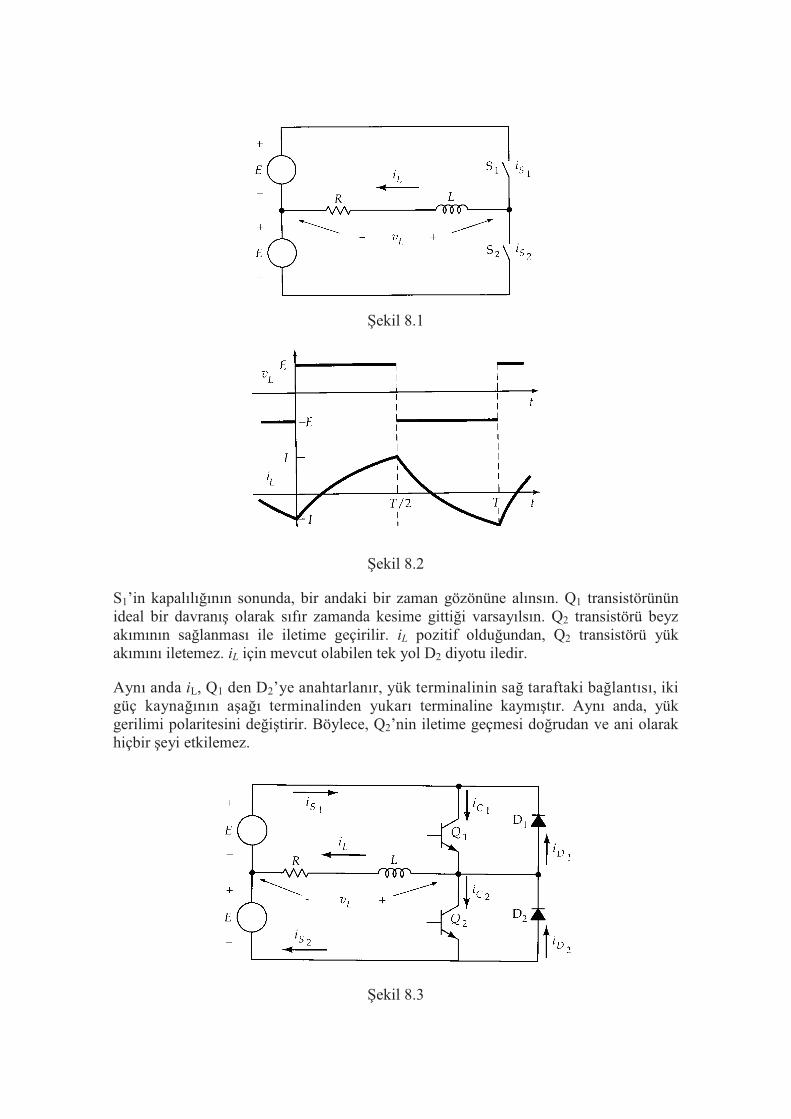
ekil 8.1
ekil 8.2
S1’in kapalılıının sonunda, bir andaki bir zaman gözönüne alınsın. Q1 transistörünün ideal bir davranı olarak sıfır zamanda kesime gittii varsayılsın. Q2 transistörü beyz akımının salanması ile iletime geçirilir. iL pozitif olduundan, Q2 transistörü yük akımını iletemez. iL için mevcut olabilen tek yol D2 diyotu iledir.
Aynı anda iL, Q1 den D2’ye anahtarlanır, yük terminalinin sa taraftaki balantısı, iki güç kaynaının aaı terminalinden yukarı terminaline kaymıtır. Aynı anda, yük gerilimi polaritesini deitirir. Böylece, Q2’nin iletime geçmesi dorudan ve ani olarak hiçbir eyi etkilemez.
ekil 8.3
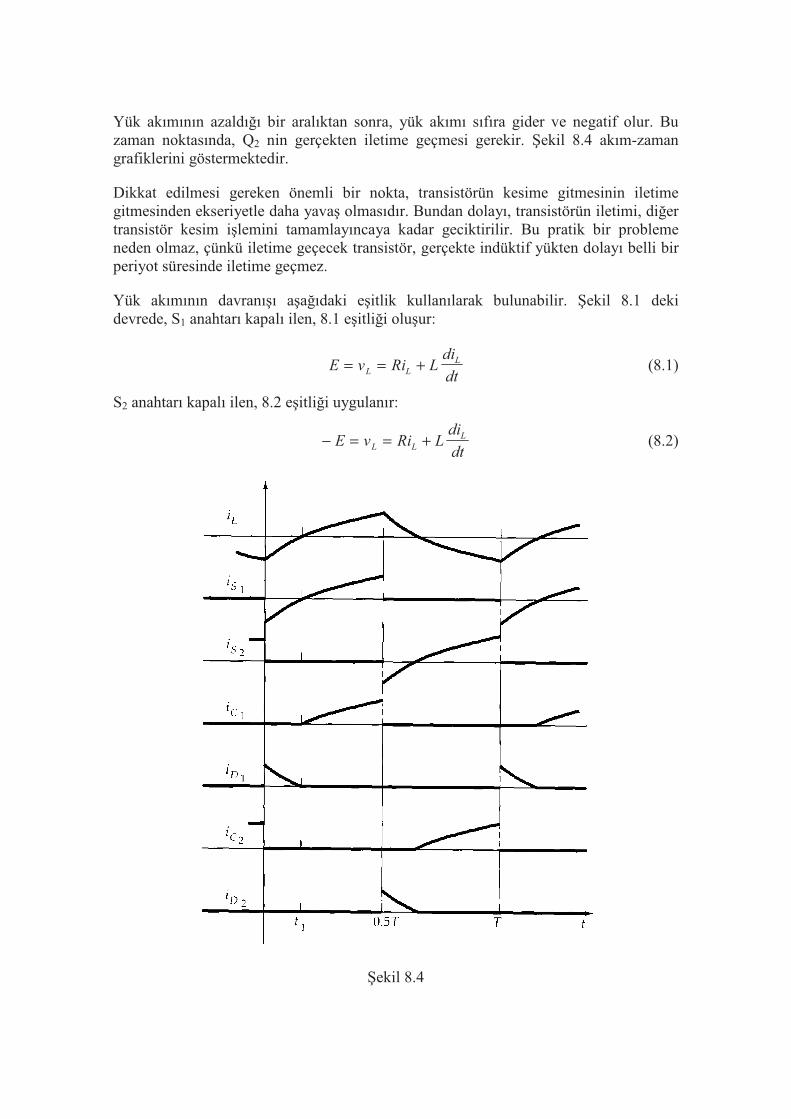
Yük akımının azaldıı bir aralıktan sonra, yük akımı sıfıra gider ve negatif olur. Bu zaman noktasında, Q2 nin gerçekten iletime geçmesi gerekir. ekil 8.4 akım-zaman grafiklerini göstermektedir.
Dikkat edilmesi gereken önemli bir nokta, transistörün kesime gitmesinin iletime gitmesinden ekseriyetle daha yava olmasıdır. Bundan dolayı, transistörün iletimi, dier transistör kesim ilemini tamamlayıncaya kadar geciktirilir. Bu pratik bir probleme neden olmaz, çünkü iletime geçecek transistör, gerçekte indüktif yükten dolayı belli bir periyot süresinde iletime geçmez.
Yük akımının davranıı aaıdaki eitlik kullanılarak bulunabilir. ekil 8.1 deki devrede, S1 anahtarı kapalı ilen, 8.1 eitlii oluur:
E v Ri Ldi
dtL L
L= = + (8.1)
S2 anahtarı kapalı ilen, 8.2 eitlii uygulanır:
− = = +E v Ri Ldi
dtL L
L (8.2)
ekil 8.4

8.1 eitliinin çözümü için sınır artları, t=T/2 anındaki akım t=0 anındaki akıma iaret deiimi dıında benzer. 8.1 eitliinde bu durum kullanılarak 8.3 eitlii bulunur:
iE
Re IeL
t t=
− −− −( )/ /1 τ τ (8.3)
burada,
IE
R
e
e
T
T=
−
+
−
−
1
1
2
2
/
/
τ
τ (8.4)
ve
τ =L
R (8.5)
ekil 8.4 de, bazı akımların balangıcı ve sonu iL sıfır iken oluur. Bu zaman, 8.6 eitliinde gösterildii gibi, 8.3 eitliinde iL sıfıra eitlenerek ve 8.4 eitlii kullanılarak bulunabilir:
te T1 2
2
1=
+
−τ τln / (8.6)
ekil 8.4 deki grafikten, anahtarın iki kısmındaki ortalama akım hesaplanabilir. Transistör akımı t1 ve t=T/2 arasında oluur ve periyodun dier kısmında sıfırdır. Diyot akımı t=0 ve t1 arasında oluur ve periyodun kalan kısmında sıfırdır. Ortalama akımlar 8.7 ve 8.8 eitlikleri ile verilir:
IT
i dtC Lt
T
=
1
1
2/
(8.7)
IT
i dtD L
t
=
−
10
1
(8.8)
ÖRNEK 8.1
ekil 8.3 de aaıdaki bilgiler verilmitir: E=300 V, R=10Ω, f=60 Hz ve L=0,05 H. Aaıdakileri bulunuz.
(a) tepe yük akımı (b) yarım dalganın balangıcından sonra akımın sıfırı geçtii zaman (c) ortalama transistör akımı (d) ortalama diyot akımı
ÇÖZÜM
(a) 8.5 eitliinden: 005,010
05,0===
R
Lτ sn
8.4 eitliinden:
47,201
1
10
300
1
101,0/01667,0
01,0/01667,0
2/
2/
=
+
−
=
+
−
=
−
−
−
−
e
e
e
e
R
Ei
T
T
L τ
τ
A
(b) 8.6 eitliinden:
00260,01
2ln)005,0(
01,0/01667,01 =
+=
−et sn
(c) 8.7 eitliinden:
18,4)47,5030(01667,0
11 00833,0
00260,0
005,0/2/
1
=−
=
=
− dtedtiT
I tT
tLC A
(d) 8.8 eitliinden:
46,1)47,5030(01667,0
11 0026,0
0
005,0/
0
1
=−−
=−
=
− dtedtiT
I tt
LD A
BJT uygulamalı durum için ekil 8.4 deki grafikler gösterir ki kollektör akımı Q1 0 < t < T/2 aralıında bir yerde balar. Genel olarak kesin zaman tam bilinmemektedir. Devrenin baarılı bir ekilde fonksiyonunu yerine getirmesi için, Q1 in beyz akımının uygun bir zamanda salanması gerekir. Bu problem, Q1 in beyz akımını, Q2 nin öncelikli olarak kesiminin tamamlanmasının garantiye alınması için gereken balangıçtaki kısa geciktirme haricinde, 0 - T/2 arasındaki tüm yarım periyot boyunca salanması ile çözülebilir.
Anahtar olarak SCR’nin kullanıldıı bir durumda, yarım periyotluk aralık süresince, sürekli kapı akımı uygulanabilir. SCR’nin kapı akımının kısa bir palsi ile iletimde kalabilmesine ramen, bu metot burada kullanılı deildir, çünkü bu palsi salamak için uygun bir zaman genel olarak bilinmemektedir. Alternatif bir iletim prosedürü, yarım periyotluk aralık süresinde eit aralıklı kısa kapı akım palsleri salar. SCR’nin iletimi için uygun devre artlarının salanması ile her pals SCR’yi iletimde tutmak için yeterlidir. ayet SCR’nin anot-katot gerilimi henüz pozitif deilse, bu durumda SCR iletime balamaz. Kısa bir zaman sonra, baka bir kapı akım palsi oluur ve SCR’nin anot-katot gerilimi imdi pozitifse, SCR iletime balar. Bu ilem, kapı akım palsi oluturulduu zaman SCR’nin anot-katot geriliminin pozitif olduu bir zamana kadar sürer. Kapı akım palsleri arasındaki boluk, iletimin oluabilecei bir aralıkta yeteri kadar kısa olmalıdır ve bariz devre etkileri oluturabilecek kadar uzun olmamalıdır. Bu metodun açık bir faydası, kapı akımını salayan devre elemanlarının boyutu ve fiyatındaki azalmadır.
ayet bir SCR anahtar yerine kullanılırsa, bu durumda 3. bölümde bahsi geçen komütasyon metodları ile her yarım dalganın sonunda SCR’nin kesimi salanmalıdır. Bu durum bir BJT veya MOSFET durumunda ise farklı olup sadece anahtarı iletime sürecek sürücü devre dıı bırakılır. Bu dizayn gereksinimleri, küçük ve orta güçlü aygıtlar için bir BJT veya MOSFET kullanımını zorlamaktadır. Çok büyük donanımlar için, komütasyon kapasitörlerinin kullanılması gerekmekle beraber, SCR lerin kullanılması savunulabilir. Bazı durumlarda, GTO bir inverter anahtarı olarak dizayn için seçilebilir. Yarı-iletken elemanların geliimi, özel inverter dizaynları için elemanların ekonomik seçimini etkilemeyi sürdürecektir.
888...222 KKKÖÖÖPPPRRRÜÜÜ NNNVVVEEERRRTTTEEERRR
Önceki devre düzenlemesi temel inverter kavramlarını sunmaktadır. Eit genlikteki iki kaynaa gerek duyulması, çou durumlarda bu çözümü istenilmez hale getirir. Bunun yerine, köprü inverter düzenlemesi kullanılabilir. Köprü inverterde bir kaynak kullanılır,
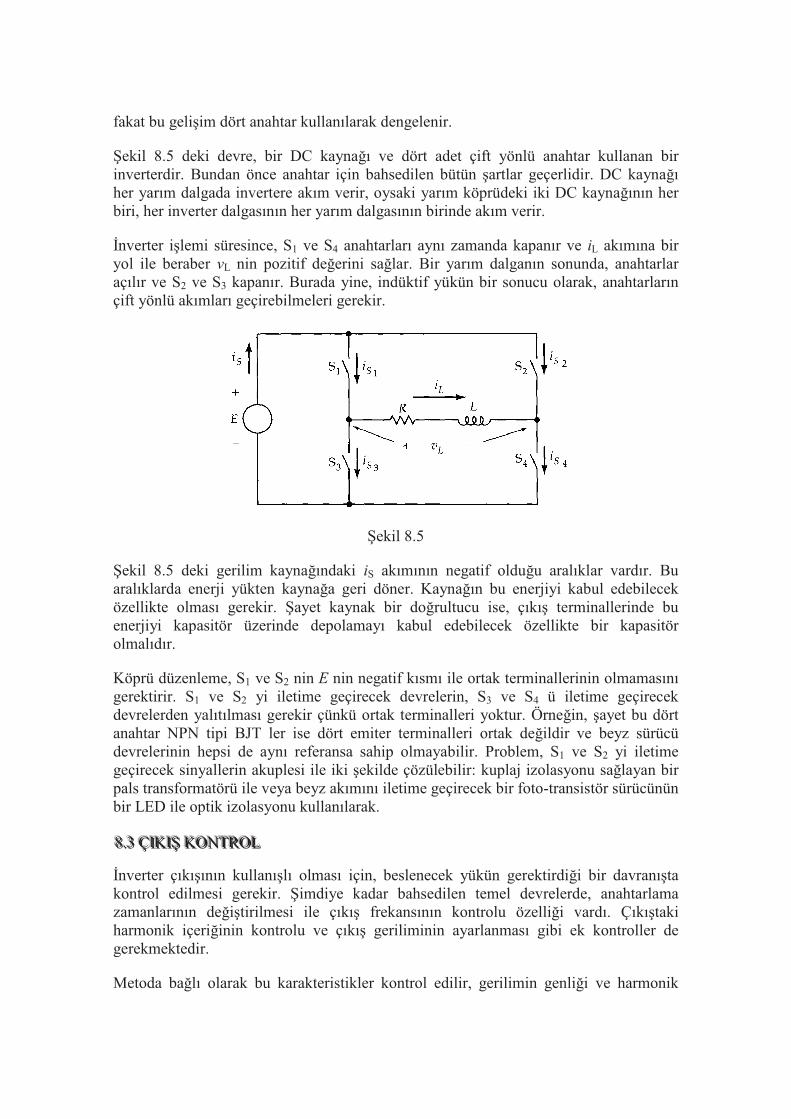
fakat bu geliim dört anahtar kullanılarak dengelenir.
ekil 8.5 deki devre, bir DC kaynaı ve dört adet çift yönlü anahtar kullanan bir inverterdir. Bundan önce anahtar için bahsedilen bütün artlar geçerlidir. DC kaynaı her yarım dalgada invertere akım verir, oysaki yarım köprüdeki iki DC kaynaının her biri, her inverter dalgasının her yarım dalgasının birinde akım verir.
nverter ilemi süresince, S1 ve S4 anahtarları aynı zamanda kapanır ve iL akımına bir yol ile beraber vL nin pozitif deerini salar. Bir yarım dalganın sonunda, anahtarlar açılır ve S2 ve S3 kapanır. Burada yine, indüktif yükün bir sonucu olarak, anahtarların çift yönlü akımları geçirebilmeleri gerekir.
ekil 8.5
ekil 8.5 deki gerilim kaynaındaki iS akımının negatif olduu aralıklar vardır. Bu aralıklarda enerji yükten kaynaa geri döner. Kaynaın bu enerjiyi kabul edebilecek özellikte olması gerekir. ayet kaynak bir dorultucu ise, çıkı terminallerinde bu enerjiyi kapasitör üzerinde depolamayı kabul edebilecek özellikte bir kapasitör olmalıdır.
Köprü düzenleme, S1 ve S2 nin E nin negatif kısmı ile ortak terminallerinin olmamasını gerektirir. S1 ve S2 yi iletime geçirecek devrelerin, S3 ve S4 ü iletime geçirecek devrelerden yalıtılması gerekir çünkü ortak terminalleri yoktur. Örnein, ayet bu dört anahtar NPN tipi BJT ler ise dört emiter terminalleri ortak deildir ve beyz sürücü devrelerinin hepsi de aynı referansa sahip olmayabilir. Problem, S1 ve S2 yi iletime geçirecek sinyallerin akuplesi ile iki ekilde çözülebilir: kuplaj izolasyonu salayan bir pals transformatörü ile veya beyz akımını iletime geçirecek bir foto-transistör sürücünün bir LED ile optik izolasyonu kullanılarak.
888...333 ÇÇÇIIIKKKIII KKKOOONNNTTTRRROOOLLL
nverter çıkıının kullanılı olması için, beslenecek yükün gerektirdii bir davranıta kontrol edilmesi gerekir. imdiye kadar bahsedilen temel devrelerde, anahtarlama zamanlarının deitirilmesi ile çıkı frekansının kontrolu özellii vardı. Çıkıtaki harmonik içeriinin kontrolu ve çıkı geriliminin ayarlanması gibi ek kontroller de gerekmektedir.
Metoda balı olarak bu karakteristikler kontrol edilir, gerilimin genlii ve harmonik
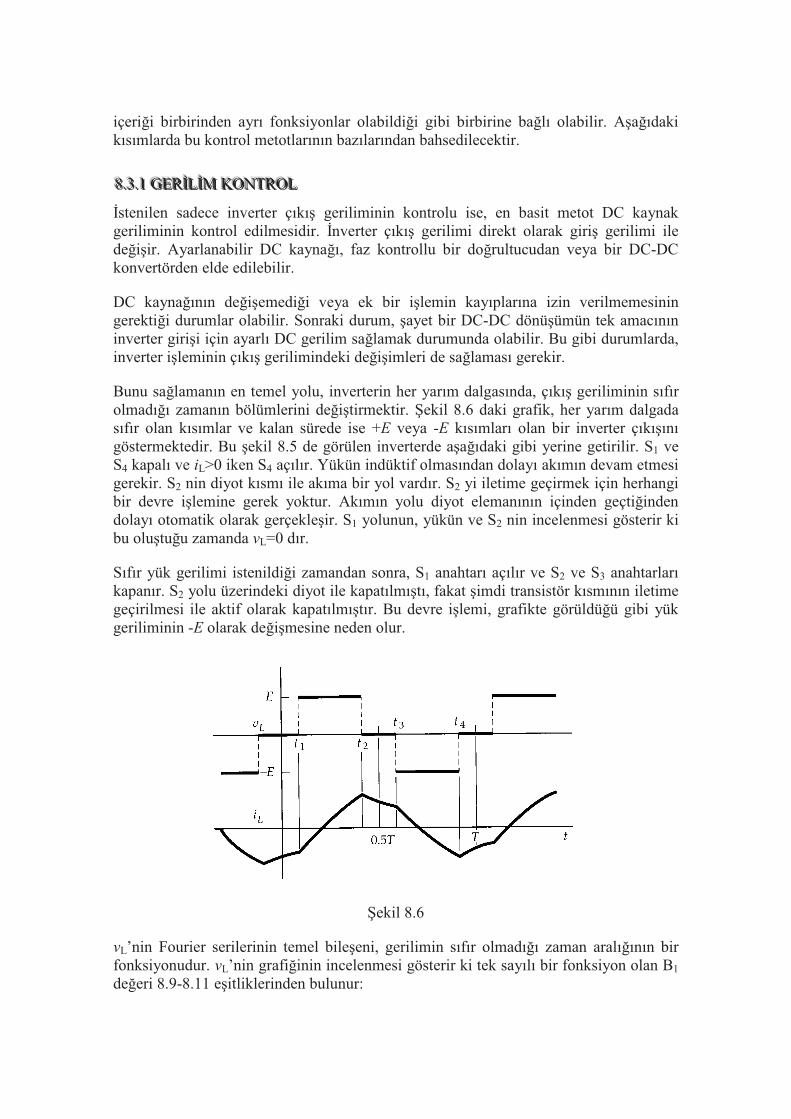
içerii birbirinden ayrı fonksiyonlar olabildii gibi birbirine balı olabilir. Aaıdaki kısımlarda bu kontrol metotlarının bazılarından bahsedilecektir.
888...333...111 GGGEEERRRLLLMMM KKKOOONNNTTTRRROOOLLL
stenilen sadece inverter çıkı geriliminin kontrolu ise, en basit metot DC kaynak geriliminin kontrol edilmesidir. nverter çıkı gerilimi direkt olarak giri gerilimi ile deiir. Ayarlanabilir DC kaynaı, faz kontrollu bir dorultucudan veya bir DC-DC konvertörden elde edilebilir.
DC kaynaının deiemedii veya ek bir ilemin kayıplarına izin verilmemesinin gerektii durumlar olabilir. Sonraki durum, ayet bir DC-DC dönüümün tek amacının inverter girii için ayarlı DC gerilim salamak durumunda olabilir. Bu gibi durumlarda, inverter ileminin çıkı gerilimindeki deiimleri de salaması gerekir.
Bunu salamanın en temel yolu, inverterin her yarım dalgasında, çıkı geriliminin sıfır olmadıı zamanın bölümlerini deitirmektir. ekil 8.6 daki grafik, her yarım dalgada sıfır olan kısımlar ve kalan sürede ise +E veya -E kısımları olan bir inverter çıkıını göstermektedir. Bu ekil 8.5 de görülen inverterde aaıdaki gibi yerine getirilir. S1 ve S4 kapalı ve iL>0 iken S4 açılır. Yükün indüktif olmasından dolayı akımın devam etmesi gerekir. S2 nin diyot kısmı ile akıma bir yol vardır. S2 yi iletime geçirmek için herhangi bir devre ilemine gerek yoktur. Akımın yolu diyot elemanının içinden geçtiinden dolayı otomatik olarak gerçekleir. S1 yolunun, yükün ve S2 nin incelenmesi gösterir ki bu olutuu zamanda vL=0 dır.
Sıfır yük gerilimi istenildii zamandan sonra, S1 anahtarı açılır ve S2 ve S3 anahtarları kapanır. S2 yolu üzerindeki diyot ile kapatılmıtı, fakat imdi transistör kısmının iletime geçirilmesi ile aktif olarak kapatılmıtır. Bu devre ilemi, grafikte görüldüü gibi yük geriliminin -E olarak deimesine neden olur.
ekil 8.6
vL’nin Fourier serilerinin temel bileeni, gerilimin sıfır olmadıı zaman aralıının bir fonksiyonudur. vL’nin grafiinin incelenmesi gösterir ki tek sayılı bir fonksiyon olan B1
deeri 8.9-8.11 eitliklerinden bulunur:

( )[ ]( )dtttvT
BT
L 001 sin2
ω
= (8.9)
−+
= dttEdttE
TB
t
t
t
t
4
3
2
1001 sinsin
2ωω (8.10)
( )11 cos4
απ
=
EB (8.11)
burada,
t tT
3 1 2= +
t tT
4 2 2= +
tT
t2 12= −
101 tωα =
T
πα
20 =
8.11 eitlii, inverter çıkıının temel bileeninin, her yarım dalga süresince, (t2-t1) iletim zamanının kontrol edilmesiyle deitirilebildiini gösterir. Fourier serilerinin dier terimleri belirlenmemitir fakat onlarda t1 deeri ile deitirilebilir. Daha genel bir analiz 8.12 eitliinde verilmitir:
( )1cos4
απ
nn
EBn
= (8.12)
Özel bir durum, 3010 =tω olduu bir durumdur. Temel harmonik gerilimi cos
30°=0,866 katsayısı ile azalır, üçüncü harmonik ise cos[(3)(30°)]=cos 90°=0 faktörü ile sıfır olur.
ÖRNEK 8.2
a) ekil 8.6 daki düzenlemede, E=250 V için vL nin temel bileeninin 50 V olması için, α1 deeri ne olmalıdır?
b) vL nin üçüncü harmonik bileeninin deeri nedir?
ÇÖZÜM
a) 8.11 nolu eitlikten, ( ) ( )1cos2504
50 απ
= α1 80 96= ,

b) 8.12 nolu eitlikten, ( ) ( )( ) V37,4896,803cos3
25043 −=
=
πB
En düük dereceli harmoniin bariz deerine dikkat edilmelidir. Bu ilemde, temel dalga ile benzer büyüklükte harmonik bileeninin oluması pahasına temel dalga azaltılmıtır.
Gerilimin genlik kontrolunun dier metotları, bütün inverterin iki veya daha fazla seri balı üniteden olutuu zaman kullanılabilir. Bazen bu, aygıtın büyüklüünün iki veya daha fazla ünitenin çıkılarının birletirilmesini gerektirdiinde, büyük bir aygıt içinde yapılır. Ayrı inverterler birbirlerinden transformatör ile izole edilmi ve AC tarafından seri balanmıtır. Her inverter, ekil 8.2 deki grafikte görüldüü gibi her yarım periyot için tam anahtarlama iletimi ile çalıır. Farklı inverterler çalıır böylece çıkı gerilimleri arasında faz kayması oluur. Toplam gerilim, ekil 8.6 daki dalga biçimine sahiptir. Çıkı gerilimi 8.11 ve 8.12 eitliklerindeki aynı davranıla kontrol edilir. Bu durumda α, iki inverterin çıkıları arasındaki gecikme açısının yarısıdır ve her inverter içinde iletim aralıının kontrolu mümkündür.
888...333...222 HHHAAARRRMMMOOONNNKKK KKKOOONNNTTTRRROOOLLL
Önceki kısımda bahsedilen anahtarlama ilemleri ile inverter çıkıının harmonikleri kontrol edilebilir veya azaltılabilir. Çok temel bir örnek, Örnek 8.2 de verilmiti. Her yarım dalgadaki anahtarlama ilemleri artırılarak, birden fazla harmonik kontrol edilebilir.
ki adet baımsız anahtarlama zamanının eklenmesiyle, iki harmonik deeri kontrol edilebilir veya yok edilebilir. Dalga eklinin simetrilii korunarak, fonksiyon tek sayılı olarak kalır ve tek sayılı harmonikler oluur. ekil 8.7 deki grafikte, anahtarlama noktaları, t1 ve t2 ve ilgili açılar 101 tωα = ve 202 tωα = dir.
Dalga eklinin simetriliinden, sadece tek sayılı sinüs terimleri vardır ve harmonikler periyodun ¼ ü üzerinde integral ile bulunurlar. Aaıdaki Fourier serilerinin genel terimi 8.14 eitliinde verilmitir. ntegral ileminde deiken olarak, t0ωθ =
alınmıtır:
+
= θθθθ
π
π
α
α
dnEdnEBn
2/
0 2
1
sinsin2
24 (8.13)
( )21 coscos14
ααπ
nnn
EBn +−
= (8.14)
ayet harmonik kontrolünün amacı, inverter çıkıındaki bazı harmoniklerin yok edilmesi ise, genellikle düük dereceli olanların yok edilmesi gerekir çünkü genlikleri büyük ve herhangi bir filtreleme ilemi ile yok edilmeleri çok zordur. Bundan dolayı, 3. ve 5. harmoniklerin yok edilmesini gözönüne alalım. Bu, B3 ve B5 in sıfıra eitlenmesi ile yapılabilir. Bu sınırlama ile aaıdaki iki durum oluur:
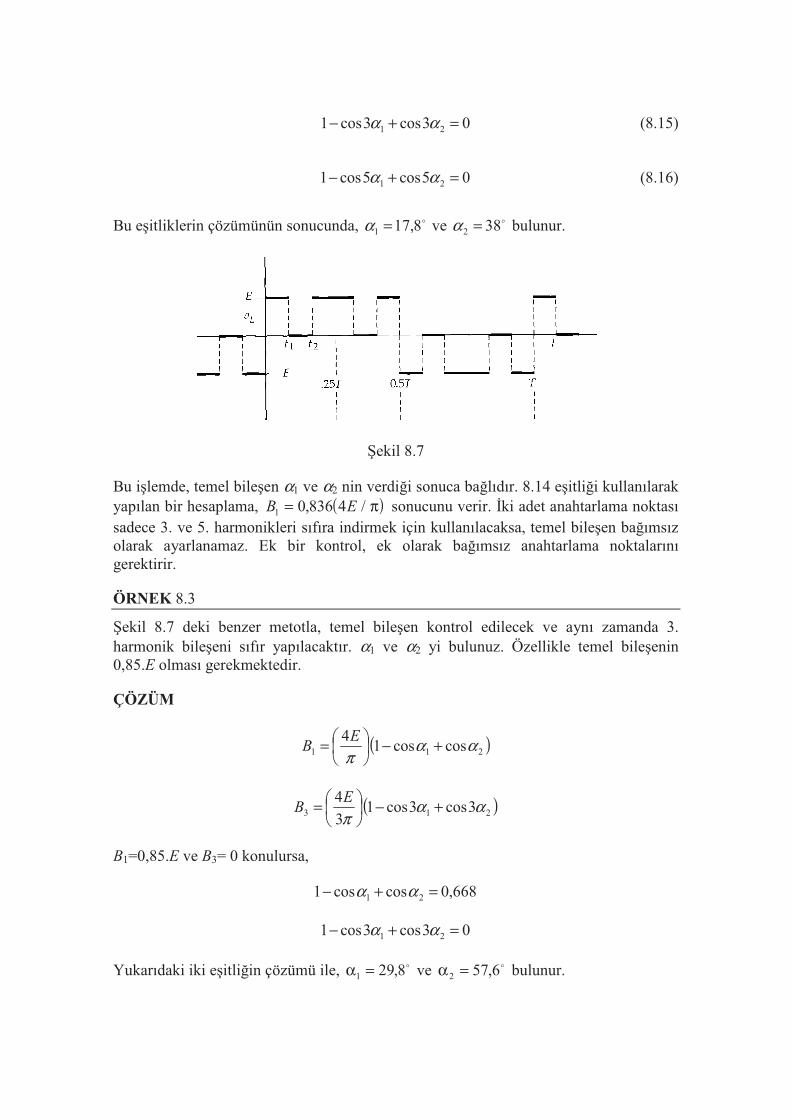
03cos3cos1 21 =+− αα (8.15)
05cos5cos1 21 =+− αα (8.16)
Bu eitliklerin çözümünün sonucunda, 8,171 =α ve 382 =α bulunur.
ekil 8.7
Bu ilemde, temel bileen α1 ve α2 nin verdii sonuca balıdır. 8.14 eitlii kullanılarak yapılan bir hesaplama, ( )B E1 0 836 4= , / π sonucunu verir. ki adet anahtarlama noktası
sadece 3. ve 5. harmonikleri sıfıra indirmek için kullanılacaksa, temel bileen baımsız olarak ayarlanamaz. Ek bir kontrol, ek olarak baımsız anahtarlama noktalarını gerektirir.
ÖRNEK 8.3
ekil 8.7 deki benzer metotla, temel bileen kontrol edilecek ve aynı zamanda 3. harmonik bileeni sıfır yapılacaktır. α1 ve α2 yi bulunuz. Özellikle temel bileenin 0,85.E olması gerekmektedir.
ÇÖZÜM
( )211 coscos14
ααπ
+−
=
EB
( )213 3cos3cos13
4αα
π+−
=
EB
B1=0,85.E ve B3= 0 konulursa,
668,0coscos1 21 =+− αα
03cos3cos1 21 =+− αα
Yukarıdaki iki eitliin çözümü ile, α1 29 8= , ve α2 57 6= , bulunur.
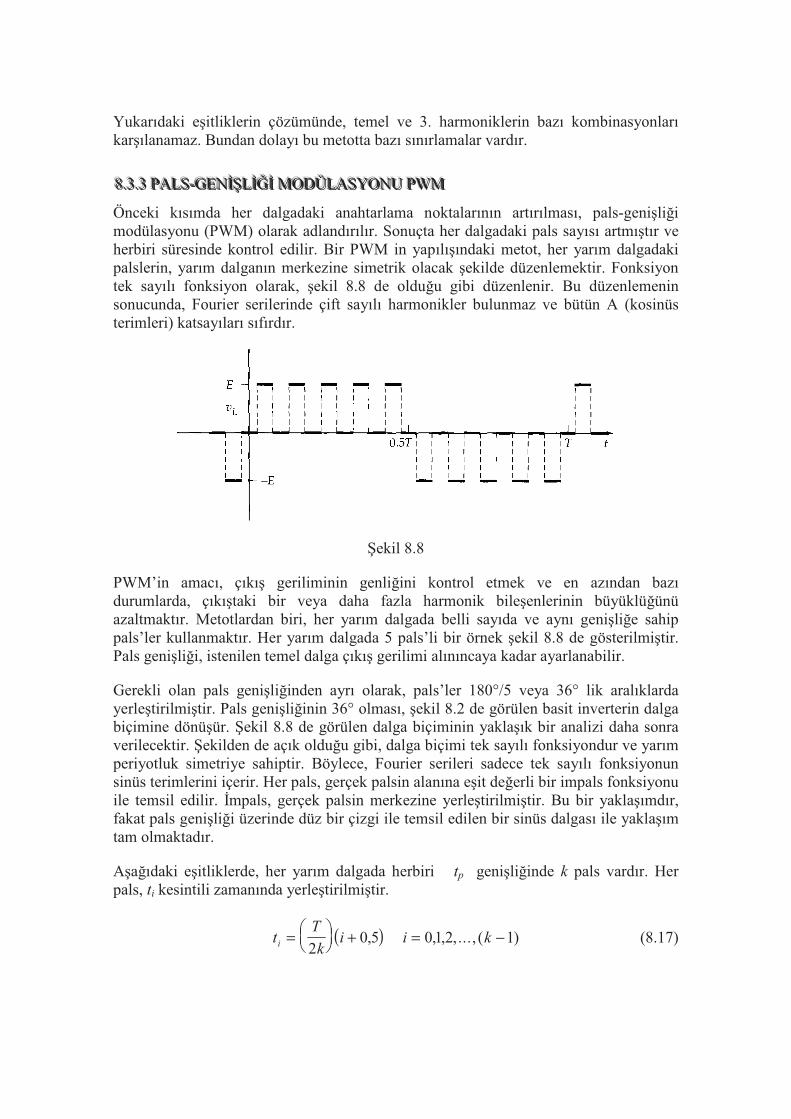
Yukarıdaki eitliklerin çözümünde, temel ve 3. harmoniklerin bazı kombinasyonları karılanamaz. Bundan dolayı bu metotta bazı sınırlamalar vardır.
888...333...333 PPPAAALLLSSS---GGGEEENNNLLL MMMOOODDDÜÜÜLLLAAASSSYYYOOONNNUUU PPPWWWMMM
Önceki kısımda her dalgadaki anahtarlama noktalarının artırılması, pals-genilii modülasyonu (PWM) olarak adlandırılır. Sonuçta her dalgadaki pals sayısı artmıtır ve herbiri süresinde kontrol edilir. Bir PWM in yapılıındaki metot, her yarım dalgadaki palslerin, yarım dalganın merkezine simetrik olacak ekilde düzenlemektir. Fonksiyon tek sayılı fonksiyon olarak, ekil 8.8 de olduu gibi düzenlenir. Bu düzenlemenin sonucunda, Fourier serilerinde çift sayılı harmonikler bulunmaz ve bütün A (kosinüs terimleri) katsayıları sıfırdır.
ekil 8.8
PWM’in amacı, çıkı geriliminin genliini kontrol etmek ve en azından bazı durumlarda, çıkıtaki bir veya daha fazla harmonik bileenlerinin büyüklüünü azaltmaktır. Metotlardan biri, her yarım dalgada belli sayıda ve aynı genilie sahip pals’ler kullanmaktır. Her yarım dalgada 5 pals’li bir örnek ekil 8.8 de gösterilmitir. Pals genilii, istenilen temel dalga çıkı gerilimi alınıncaya kadar ayarlanabilir.
Gerekli olan pals geniliinden ayrı olarak, pals’ler 180°/5 veya 36° lik aralıklarda yerletirilmitir. Pals geniliinin 36° olması, ekil 8.2 de görülen basit inverterin dalga biçimine dönüür. ekil 8.8 de görülen dalga biçiminin yaklaık bir analizi daha sonra verilecektir. ekilden de açık olduu gibi, dalga biçimi tek sayılı fonksiyondur ve yarım periyotluk simetriye sahiptir. Böylece, Fourier serileri sadece tek sayılı fonksiyonun sinüs terimlerini içerir. Her pals, gerçek palsin alanına eit deerli bir impals fonksiyonu ile temsil edilir. mpals, gerçek palsin merkezine yerletirilmitir. Bu bir yaklaımdır, fakat pals genilii üzerinde düz bir çizgi ile temsil edilen bir sinüs dalgası ile yaklaım tam olmaktadır.
Aaıdaki eitliklerde, her yarım dalgada herbiri tp geniliinde k pals vardır. Her pals, ti kesintili zamanında yerletirilmitir.
( )tT
ki i ki =
+ = −
20 5 0 1 2 1, , , , ..., ( ) (8.17)

tmT
kp =2
(8.18)
8.18 eitliinde, m mümkün olabilen maksimum pals genilii çarpanıdır. Bu durumların Fourier katsayılarının hesabında yerine konulması ile 8.19 ve 8.20 eitlikleri elde edilir. Bu ilemde, sonlu genilikteki her pals, uygun deerli bir impals fonksiyonu δ(ti) ile gösterilmitir.
[ ][ ]dttntEtT
Bk
i
T
ipn 0
)1(
0
2/
0sin)()2(
2ωδ
−
=
= (8.19)
=
−
=
)1(
00sin
4 k
i
ipn tnEtT
B ω (8.20)
k = 5 durumunda,
++++=
10
9sin
10
7sin
10
5sin
10
3sin
10sin4,0
πππππ nnnnnmEBn (8.21)
m = 0,2 için n ’nin deiik deerleri için, sonuçlar tablo 8.1 de verilmitir.
Katsayı Deer
Tablo 8.1
B1 0,2589 EB3 0,0989 EB5 0,0800 EB7 0,0989 EB9 0,2589 EB11 -0,2589 E
Önceki eitlikliklerle, m ’nin deitirilmesiyle temel genlik deerinin azaltılabilecei görülmektedir. Fakat temel dalgaya göre, harmonik içerii baıl olarak büyüktür. Daha da ötesi, harmoniin temel dalgaya oranı, pals genilii deitii halde, baıl olarak deimeden kalır. Bu teknik sadece gerilimin genliini deitirmek için kullanılıdır ve çok geni alanda kullanılmaz.
ayet bundan önceki PWM metodu dalga süresince, ayarlanabilir pals genilii yapılabilecek ekilde düzenlenirse, bu durumda gelitirilmi gerilimli dalga biçimi elde edilir. Her yarım dalgadaki pals sayısı öncekinde olduu gibi bir tam sayı olarak kalır fakat her palsin genilii yarım dalga içindeki pozisyonuna göre deiir veya modüle edilir. Pals geniliinin deiimi, ekil 8.9 da görüldüü gibi, açısal pozisyonun sinüsü ile orantılıdır. Her palsin gerçek genilii, istenilen çıkı geriliminin genlii ile de orantılıdır.
Fourier serilerinin katsayıları için yaklaık bir analiz aaıdaki gibi yapılabilir (farklı pals genilikleri tpi sembolü ile verilmitir):
k
Ttmt ipi
2)(sin 0ω= (8.22)
formülde k her yarım dalgadaki pals sayısı ve
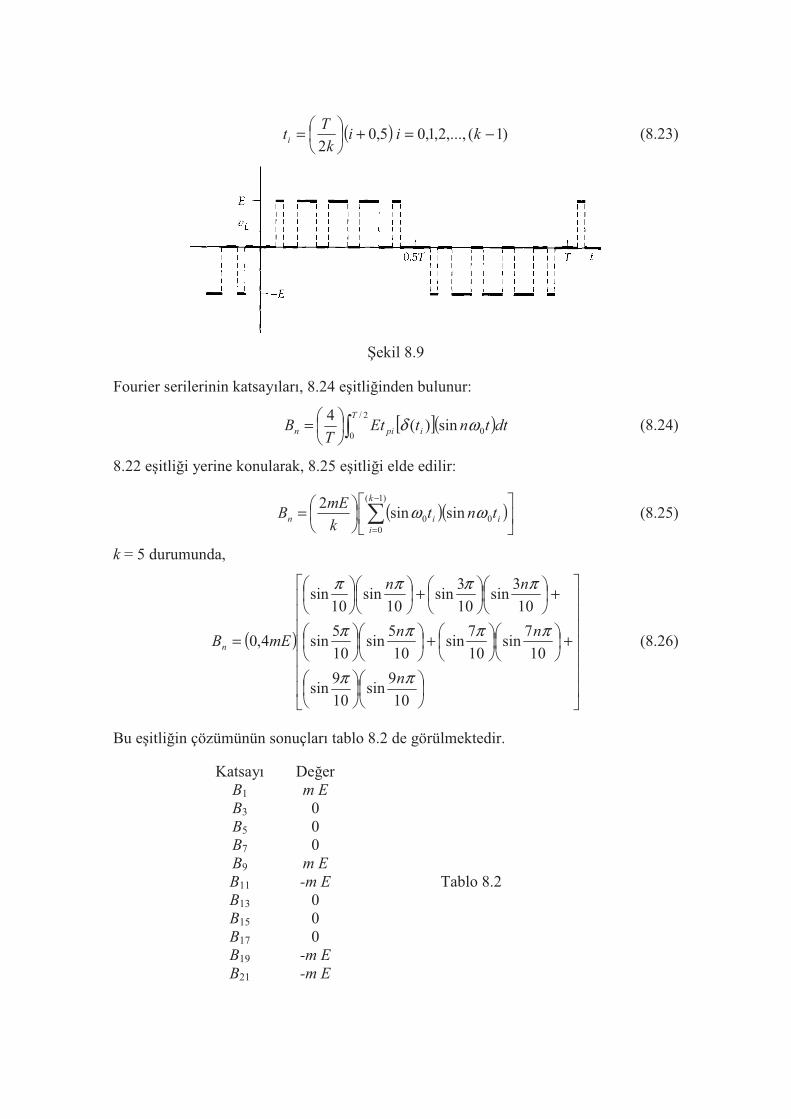
( ) )1(,...,2,1,05,02
−=+
= kii
k
Tti (8.23)
ekil 8.9
Fourier serilerinin katsayıları, 8.24 eitliinden bulunur:
[ ]( )dttntEtT
BT
ipin 0
2/
0sin)(
4ωδ
= (8.24)
8.22 eitlii yerine konularak, 8.25 eitlii elde edilir:
( )( )
=
−
=
)1(
000 sinsin
2 k
i
iin tntk
mEB ωω (8.25)
k = 5 durumunda,
( )
+
+
+
+
=
10
9sin
10
9sin
10
7sin
10
7sin
10
5sin
10
5sin
10
3sin
10
3sin
10sin
10sin
4,0
ππ
ππππ
ππππ
n
nn
nn
mEBn (8.26)
Bu eitliin çözümünün sonuçları tablo 8.2 de görülmektedir.
Katsayı Deer
Tablo 8.2
B1 m E
B3 0 B5 0 B7 0 B9 m E
B11 -m E
B13 0 B15 0 B17 0 B19 -m E
B21 -m E
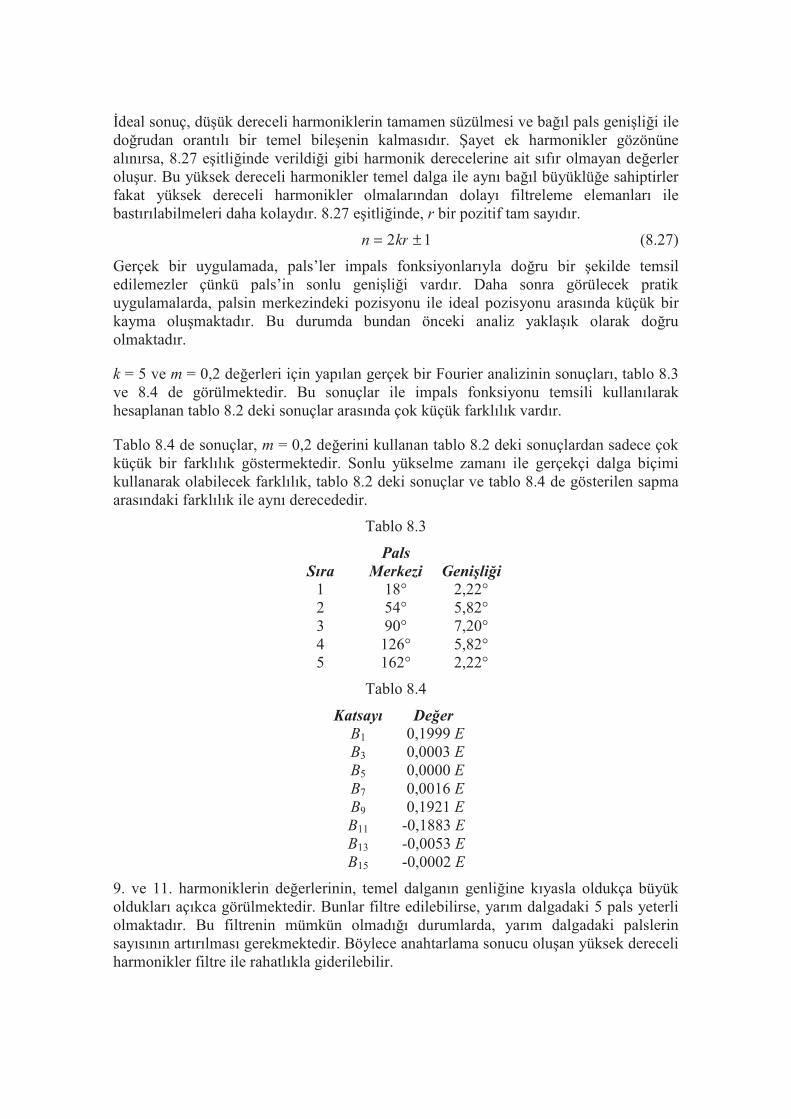
deal sonuç, düük dereceli harmoniklerin tamamen süzülmesi ve baıl pals genilii ile dorudan orantılı bir temel bileenin kalmasıdır. ayet ek harmonikler gözönüne alınırsa, 8.27 eitliinde verildii gibi harmonik derecelerine ait sıfır olmayan deerler oluur. Bu yüksek dereceli harmonikler temel dalga ile aynı baıl büyüklüe sahiptirler fakat yüksek dereceli harmonikler olmalarından dolayı filtreleme elemanları ile bastırılabilmeleri daha kolaydır. 8.27 eitliinde, r bir pozitif tam sayıdır.
n kr= ±2 1 (8.27)
Gerçek bir uygulamada, pals’ler impals fonksiyonlarıyla doru bir ekilde temsil edilemezler çünkü pals’in sonlu genilii vardır. Daha sonra görülecek pratik uygulamalarda, palsin merkezindeki pozisyonu ile ideal pozisyonu arasında küçük bir kayma olumaktadır. Bu durumda bundan önceki analiz yaklaık olarak doru olmaktadır.
k = 5 ve m = 0,2 deerleri için yapılan gerçek bir Fourier analizinin sonuçları, tablo 8.3 ve 8.4 de görülmektedir. Bu sonuçlar ile impals fonksiyonu temsili kullanılarak hesaplanan tablo 8.2 deki sonuçlar arasında çok küçük farklılık vardır.
Tablo 8.4 de sonuçlar, m = 0,2 deerini kullanan tablo 8.2 deki sonuçlardan sadece çok küçük bir farklılık göstermektedir. Sonlu yükselme zamanı ile gerçekçi dalga biçimi kullanarak olabilecek farklılık, tablo 8.2 deki sonuçlar ve tablo 8.4 de gösterilen sapma arasındaki farklılık ile aynı derecededir.
Tablo 8.3
Pals
Sıra Merkezi Genilii
1 18° 2,22° 2 54° 5,82° 3 90° 7,20° 4 126° 5,82° 5 162° 2,22°
Tablo 8.4
Katsayı Deer
B1 0,1999 EB3 0,0003 EB5 0,0000 EB7 0,0016 EB9 0,1921 EB11 -0,1883 EB13 -0,0053 EB15 -0,0002 E
9. ve 11. harmoniklerin deerlerinin, temel dalganın genliine kıyasla oldukça büyük oldukları açıkca görülmektedir. Bunlar filtre edilebilirse, yarım dalgadaki 5 pals yeterli olmaktadır. Bu filtrenin mümkün olmadıı durumlarda, yarım dalgadaki palslerin sayısının artırılması gerekmektedir. Böylece anahtarlama sonucu oluan yüksek dereceli harmonikler filtre ile rahatlıkla giderilebilir.
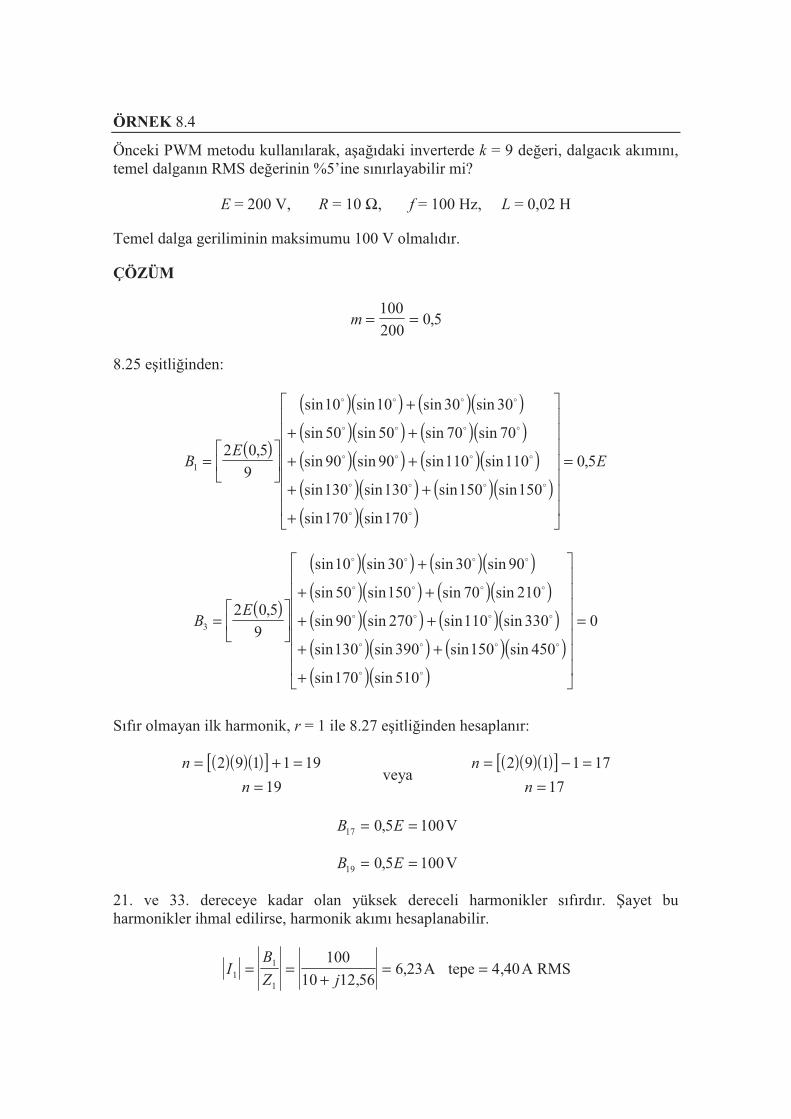
ÖRNEK 8.4
Önceki PWM metodu kullanılarak, aaıdaki inverterde k = 9 deeri, dalgacık akımını, temel dalganın RMS deerinin %5’ine sınırlayabilir mi?
E = 200 V, R = 10 Ω, f = 100 Hz, L = 0,02 H
Temel dalga geriliminin maksimumu 100 V olmalıdır.
ÇÖZÜM
m = =100
2000 5,
8.25 eitliinden:
( )
( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( )
BE
E1
2 0 5
9
10 10 30 30
50 50 70 70
90 90 110 110
130 130 150 150
170 170
0 5=
+
+ +
+ +
+ +
+
=,
sin sin sin sin
sin sin sin sin
sin sin sin sin
sin sin sin sin
sin sin
,
( )
( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( )
BE
3
2 0 5
9
10 30 30 90
50 150 70 210
90 270 110 330
130 390 150 450
170 510
0=
+
+ +
+ +
+ +
+
=,
sin sin sin sin
sin sin sin sin
sin sin sin sin
sin sin sin sin
sin sin
Sıfır olmayan ilk harmonik, r = 1 ile 8.27 eitliinden hesaplanır:
( )( )( )[ ]n
n
= + =
=
2 9 1 1 19
19 veya
( )( )( )[ ]n
n
= − =
=
2 9 1 1 17
17
B E17 0 5 100= =, V
B E19 0 5 100= =, V
21. ve 33. dereceye kadar olan yüksek dereceli harmonikler sıfırdır. ayet bu harmonikler ihmal edilirse, harmonik akımı hesaplanabilir.
IB
Z j11
1
100
10 12 566 23 4 40= =
+= =
,, ,A tepe A RMS
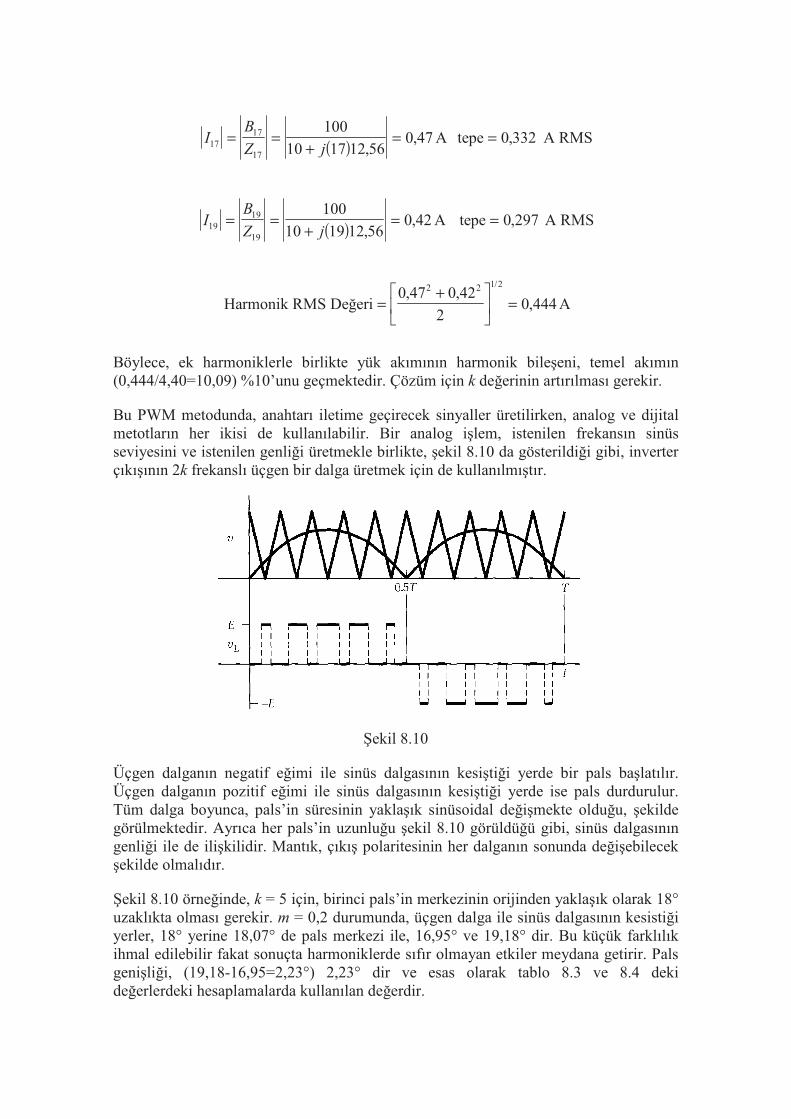
( )I
B
Z j1717
17
100
10 17 12 560 47 0 332= =
+= =
,, ,A tepe A RMS
( )I
B
Z j1919
19
100
10 19 12 560 42 0 297= =
+= =
,, ,A tepe A RMS
Harmonik RMS Deeri =+
=
0 47 0 42
20 444
2 2 1 2, ,
,
/
A
Böylece, ek harmoniklerle birlikte yük akımının harmonik bileeni, temel akımın (0,444/4,40=10,09) %10’unu geçmektedir. Çözüm için k deerinin artırılması gerekir.
Bu PWM metodunda, anahtarı iletime geçirecek sinyaller üretilirken, analog ve dijital metotların her ikisi de kullanılabilir. Bir analog ilem, istenilen frekansın sinüs seviyesini ve istenilen genlii üretmekle birlikte, ekil 8.10 da gösterildii gibi, inverter çıkıının 2k frekanslı üçgen bir dalga üretmek için de kullanılmıtır.
ekil 8.10
Üçgen dalganın negatif eimi ile sinüs dalgasının kesitii yerde bir pals balatılır. Üçgen dalganın pozitif eimi ile sinüs dalgasının kesitii yerde ise pals durdurulur. Tüm dalga boyunca, pals’in süresinin yaklaık sinüsoidal deimekte olduu, ekilde görülmektedir. Ayrıca her pals’in uzunluu ekil 8.10 görüldüü gibi, sinüs dalgasının genlii ile de ilikilidir. Mantık, çıkı polaritesinin her dalganın sonunda deiebilecek ekilde olmalıdır.
ekil 8.10 örneinde, k = 5 için, birinci pals’in merkezinin orijinden yaklaık olarak 18° uzaklıkta olması gerekir. m = 0,2 durumunda, üçgen dalga ile sinüs dalgasının kesistii yerler, 18° yerine 18,07° de pals merkezi ile, 16,95° ve 19,18° dir. Bu küçük farklılık ihmal edilebilir fakat sonuçta harmoniklerde sıfır olmayan etkiler meydana getirir. Pals genilii, (19,18-16,95=2,23°) 2,23° dir ve esas olarak tablo 8.3 ve 8.4 deki deerlerdeki hesaplamalarda kullanılan deerdir.
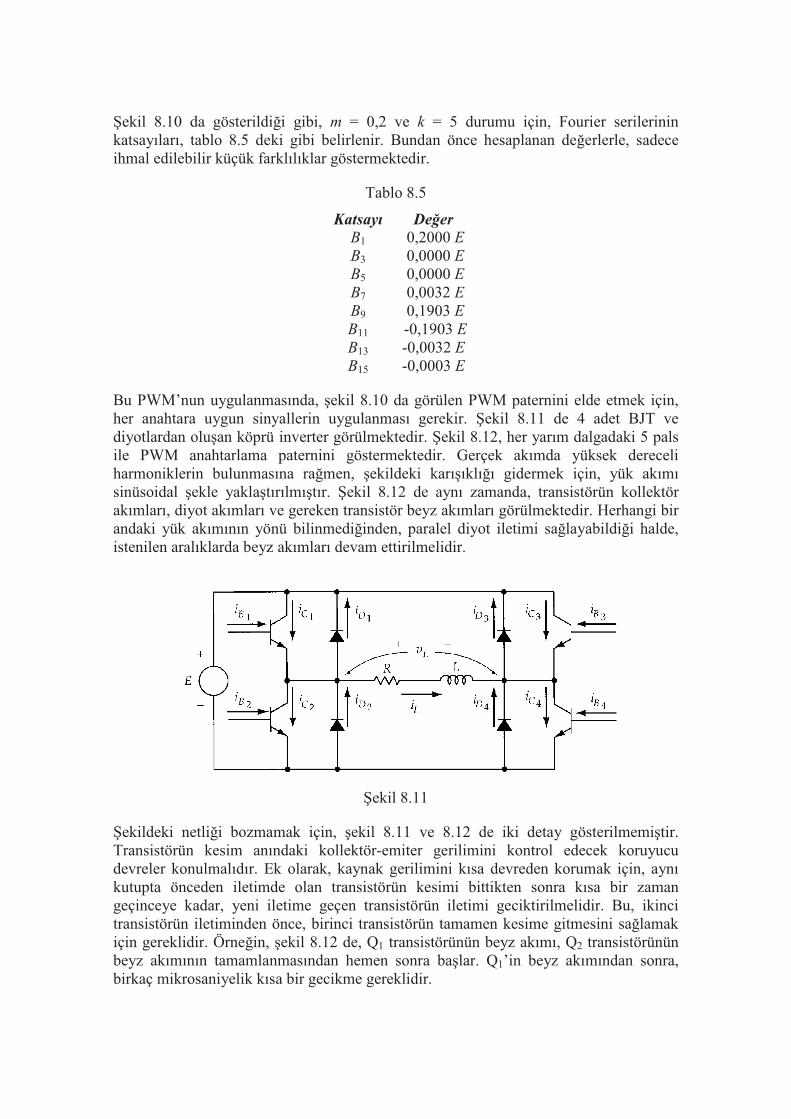
ekil 8.10 da gösterildii gibi, m = 0,2 ve k = 5 durumu için, Fourier serilerinin katsayıları, tablo 8.5 deki gibi belirlenir. Bundan önce hesaplanan deerlerle, sadece ihmal edilebilir küçük farklılıklar göstermektedir.
Tablo 8.5
Katsayı Deer
B1 0,2000 EB3 0,0000 EB5 0,0000 EB7 0,0032 EB9 0,1903 EB11 -0,1903 EB13 -0,0032 EB15 -0,0003 E
Bu PWM’nun uygulanmasında, ekil 8.10 da görülen PWM paternini elde etmek için, her anahtara uygun sinyallerin uygulanması gerekir. ekil 8.11 de 4 adet BJT ve diyotlardan oluan köprü inverter görülmektedir. ekil 8.12, her yarım dalgadaki 5 pals ile PWM anahtarlama paternini göstermektedir. Gerçek akımda yüksek dereceli harmoniklerin bulunmasına ramen, ekildeki karııklıı gidermek için, yük akımı sinüsoidal ekle yaklatırılmıtır. ekil 8.12 de aynı zamanda, transistörün kollektör akımları, diyot akımları ve gereken transistör beyz akımları görülmektedir. Herhangi bir andaki yük akımının yönü bilinmediinden, paralel diyot iletimi salayabildii halde, istenilen aralıklarda beyz akımları devam ettirilmelidir.
ekil 8.11
ekildeki netlii bozmamak için, ekil 8.11 ve 8.12 de iki detay gösterilmemitir. Transistörün kesim anındaki kollektör-emiter gerilimini kontrol edecek koruyucu devreler konulmalıdır. Ek olarak, kaynak gerilimini kısa devreden korumak için, aynı kutupta önceden iletimde olan transistörün kesimi bittikten sonra kısa bir zaman geçinceye kadar, yeni iletime geçen transistörün iletimi geciktirilmelidir. Bu, ikinci transistörün iletiminden önce, birinci transistörün tamamen kesime gitmesini salamak için gereklidir. Örnein, ekil 8.12 de, Q1 transistörünün beyz akımı, Q2 transistörünün beyz akımının tamamlanmasından hemen sonra balar. Q1’in beyz akımından sonra, birkaç mikrosaniyelik kısa bir gecikme gereklidir.
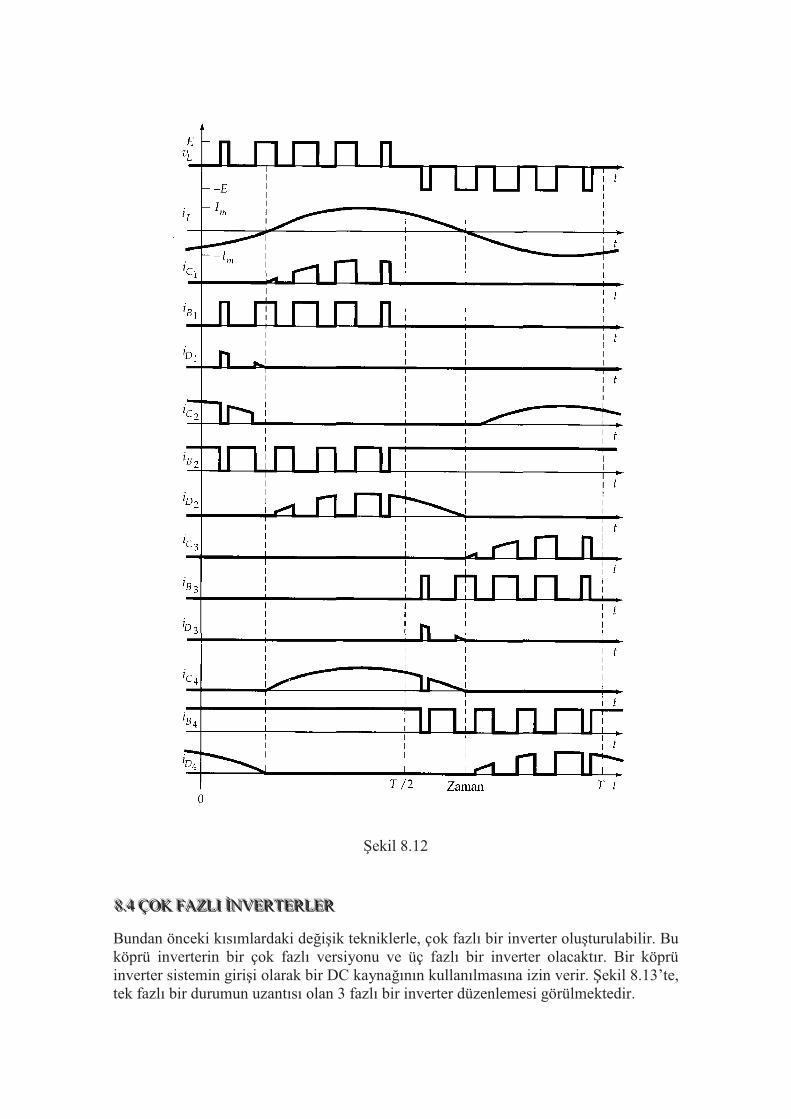
ekil 8.12
888...444 ÇÇÇOOOKKK FFFAAAZZZLLLIII NNNVVVEEERRRTTTEEERRRLLLEEERRR
Bundan önceki kısımlardaki deiik tekniklerle, çok fazlı bir inverter oluturulabilir. Bu köprü inverterin bir çok fazlı versiyonu ve üç fazlı bir inverter olacaktır. Bir köprü inverter sistemin girii olarak bir DC kaynaının kullanılmasına izin verir. ekil 8.13’te, tek fazlı bir durumun uzantısı olan 3 fazlı bir inverter düzenlemesi görülmektedir.
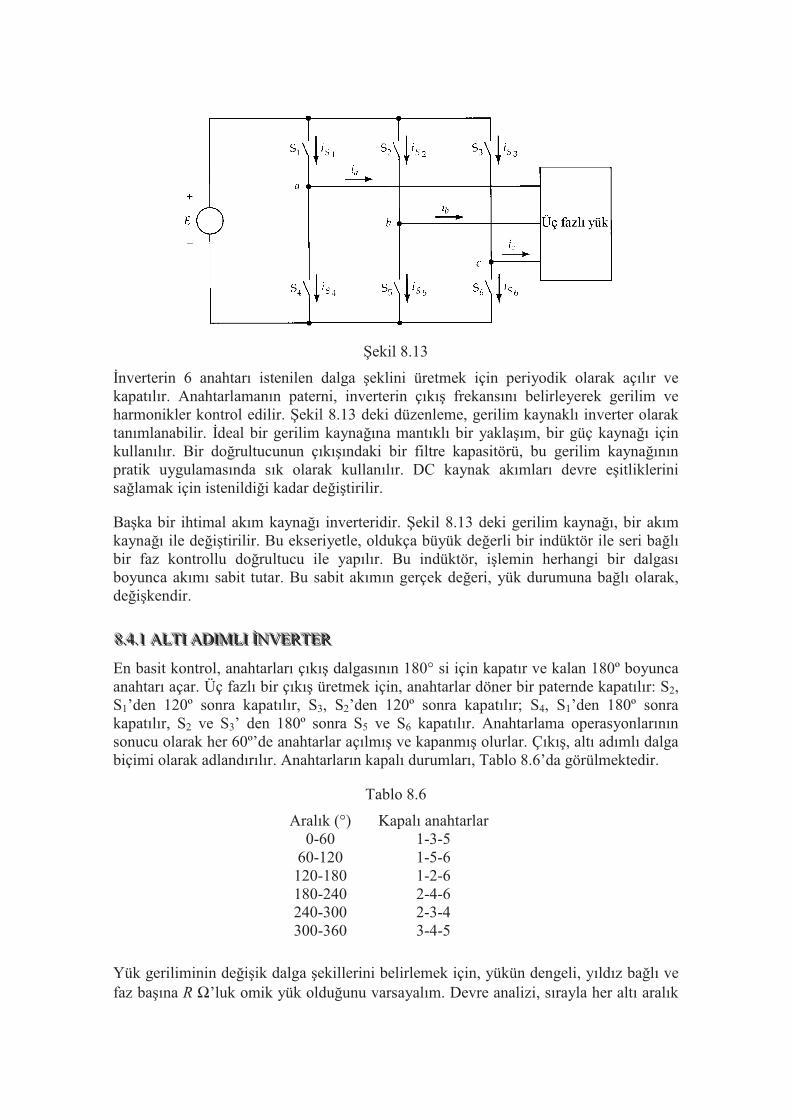
ekil 8.13
nverterin 6 anahtarı istenilen dalga eklini üretmek için periyodik olarak açılır ve kapatılır. Anahtarlamanın paterni, inverterin çıkı frekansını belirleyerek gerilim ve harmonikler kontrol edilir. ekil 8.13 deki düzenleme, gerilim kaynaklı inverter olarak tanımlanabilir. deal bir gerilim kaynaına mantıklı bir yaklaım, bir güç kaynaı için kullanılır. Bir dorultucunun çıkıındaki bir filtre kapasitörü, bu gerilim kaynaının pratik uygulamasında sık olarak kullanılır. DC kaynak akımları devre eitliklerini salamak için istenildii kadar deitirilir.
Baka bir ihtimal akım kaynaı inverteridir. ekil 8.13 deki gerilim kaynaı, bir akım kaynaı ile deitirilir. Bu ekseriyetle, oldukça büyük deerli bir indüktör ile seri balı bir faz kontrollu dorultucu ile yapılır. Bu indüktör, ilemin herhangi bir dalgası boyunca akımı sabit tutar. Bu sabit akımın gerçek deeri, yük durumuna balı olarak, deikendir.
888...444...111 AAALLLTTTIII AAADDDIIIMMMLLLIII NNNVVVEEERRRTTTEEERRR
En basit kontrol, anahtarları çıkı dalgasının 180° si için kapatır ve kalan 180º boyunca anahtarı açar. Üç fazlı bir çıkı üretmek için, anahtarlar döner bir paternde kapatılır: S2, S1’den 120º sonra kapatılır, S3, S2’den 120º sonra kapatılır; S4, S1’den 180º sonra kapatılır, S2 ve S3’ den 180º sonra S5 ve S6 kapatılır. Anahtarlama operasyonlarının sonucu olarak her 60º’de anahtarlar açılmı ve kapanmı olurlar. Çıkı, altı adımlı dalga biçimi olarak adlandırılır. Anahtarların kapalı durumları, Tablo 8.6’da görülmektedir.
Tablo 8.6
Aralık (°) Kapalı anahtarlar 0-60 1-3-5
60-120 1-5-6 120-180 1-2-6 180-240 2-4-6 240-300 2-3-4 300-360 3-4-5
Yük geriliminin deiik dalga ekillerini belirlemek için, yükün dengeli, yıldız balı ve faz baına R Ω’luk omik yük olduunu varsayalım. Devre analizi, sırayla her altı aralık
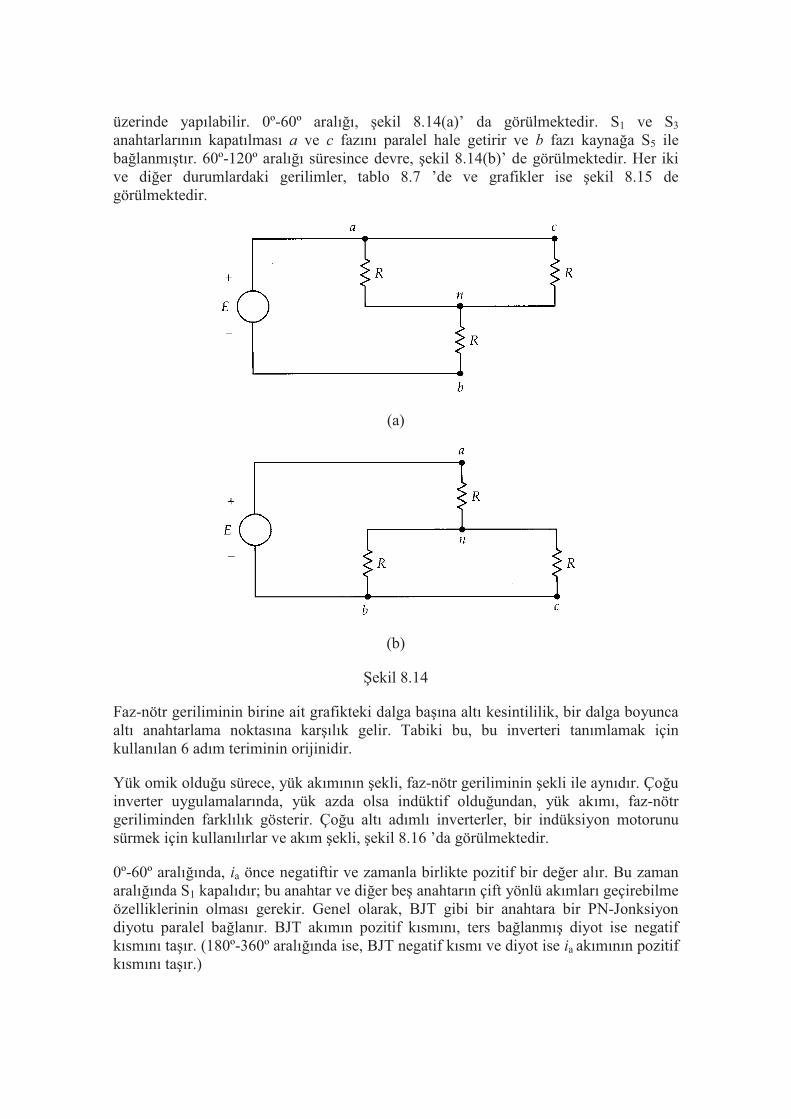
üzerinde yapılabilir. 0º-60º aralıı, ekil 8.14(a)’ da görülmektedir. S1 ve S3
anahtarlarının kapatılması a ve c fazını paralel hale getirir ve b fazı kaynaa S5 ile balanmıtır. 60º-120º aralıı süresince devre, ekil 8.14(b)’ de görülmektedir. Her iki ve dier durumlardaki gerilimler, tablo 8.7 ’de ve grafikler ise ekil 8.15 de görülmektedir.
(a)
(b)
ekil 8.14
Faz-nötr geriliminin birine ait grafikteki dalga baına altı kesintililik, bir dalga boyunca altı anahtarlama noktasına karılık gelir. Tabiki bu, bu inverteri tanımlamak için kullanılan 6 adım teriminin orijinidir.
Yük omik olduu sürece, yük akımının ekli, faz-nötr geriliminin ekli ile aynıdır. Çou inverter uygulamalarında, yük azda olsa indüktif olduundan, yük akımı, faz-nötr geriliminden farklılık gösterir. Çou altı adımlı inverterler, bir indüksiyon motorunu sürmek için kullanılırlar ve akım ekli, ekil 8.16 ’da görülmektedir.
0º-60º aralıında, ia önce negatiftir ve zamanla birlikte pozitif bir deer alır. Bu zaman aralıında S1 kapalıdır; bu anahtar ve dier be anahtarın çift yönlü akımları geçirebilme özelliklerinin olması gerekir. Genel olarak, BJT gibi bir anahtara bir PN-Jonksiyon diyotu paralel balanır. BJT akımın pozitif kısmını, ters balanmı diyot ise negatif kısmını taır. (180º-360º aralıında ise, BJT negatif kısmı ve diyot ise ia akımının pozitif kısmını taır.)

Anahtarlama elemanı üzerindeki gerilimler, bir anahtarlama noktası üzerinde detaylı durularak bulunabilir. ekil 8.16’da, t=0 ’a yakın bölge gözönüne alınsın. Bu bölge, ekil 8.17 üzerinde zaman skalası geniletilerek yeniden gösterilmitir. Zaman skalasının çok geniletildii varsayılırsa ia, anahtarlama ileminin 2 veya 3 saniyesi boyunca sabit kabul edilebilir. ekil 8.17’ deki gerilim, vag, S4 üzerindeki gerilimdir. ekil 8.18 ’de S4 yerine bir BJT ve PN-Jonksiyon diyotu kullanılmıtır.
Tablo 8.7
Aralık (°) Gerilim 0-60 60-120 120-180 180-240 240-300 300-360
van E/3 2E/3 E/3 -E/3 -2E/3 -E/3 vbn -2E/3 -E/3 E/3 2E/3 E/3 -E/3 vcn E/3 -E/3 -2E/3 -E/3 E/3 2E/3
vab E E 0 -E -E 0 vbc -E 0 E E 0 -Evca 0 -E -E 0 E E
Anahtarlama noktasından tam önce, Q4 ia ’yı kollektör akımı olarak iletmekteydi, (ia
negatiftir). Anahtarlama noktasında, Q4 kesime balar ve kollektör akımı ia’ nın genliinden azalmaya balar. Yük indüktif olduundan, ia akımının devam etmesi gerekir. Akımın iletilmesi için tek yol, a noktasından D1 diyotudur. D1 üzerindeki gerilim sıfıra gider ve vag gerilimi, E gerilimine eit olur. Bu, Q4 transistörünün, kollektör emiter gerilimi olarak E gerilimine ve aynı zamanda bariz bir kollektör akımına dayanabilmesi anlamına gelir. Böylece potansiyel bir ters yönde güvenli çalıma alanı (ReverseBiasedSafeOperatingArea) problemi oluur. nverter dizaynında, büyük kapasiteli transistör kullanılıyorsa, hiç problem olmayabilir; fakat transistör operasyon limitinde kullanılıyorsa bir problem olabilir. Transistörün yük hattını biçimlendirip, transistörü, RBSOA grafiinin güvenli sınırları içinde bulunduracak bir koruyucu devrenin kullanılması gerekir. Genel olarak, koruyucu devrelerinin fiyatı büyük transistör kullanmaya göre daha ucuzdur.
Bir koruyucu devre ile transistörün kollektör-emiter gerilimi aniden yükselmez ve transistör tamamen kesime gidinceye kadar yük akımının bir kısmı koruyucu tarafından taınır. Kollektör akımı sıfır veya hemen hemen sıfır olduktan sonra, kollektör-emiter tam gerilimine ulaır ve sonra dier anahtarın diyotu iletime balar. Bu davranı, bölüm 4 deki duruma benzemektedir ve ekil 8.19 da görüldüü gibidir.
Daha önce de bahsedildii gibi, 6 adımlı bir inverter, üç fazlı bir indüksiyon motorunu sürmek için kullanılır. Bu durumlarda, inverterin çıkı gerilimi ve frekansı, motorun maksimum akı younluundaki istenilmeyen deiikliklere karı beraber deitirilir. Motorun da, normal gerilim ve frekansta manyetik doyuma gitmeyecek özellikte dizayn edilmesi gerekir.
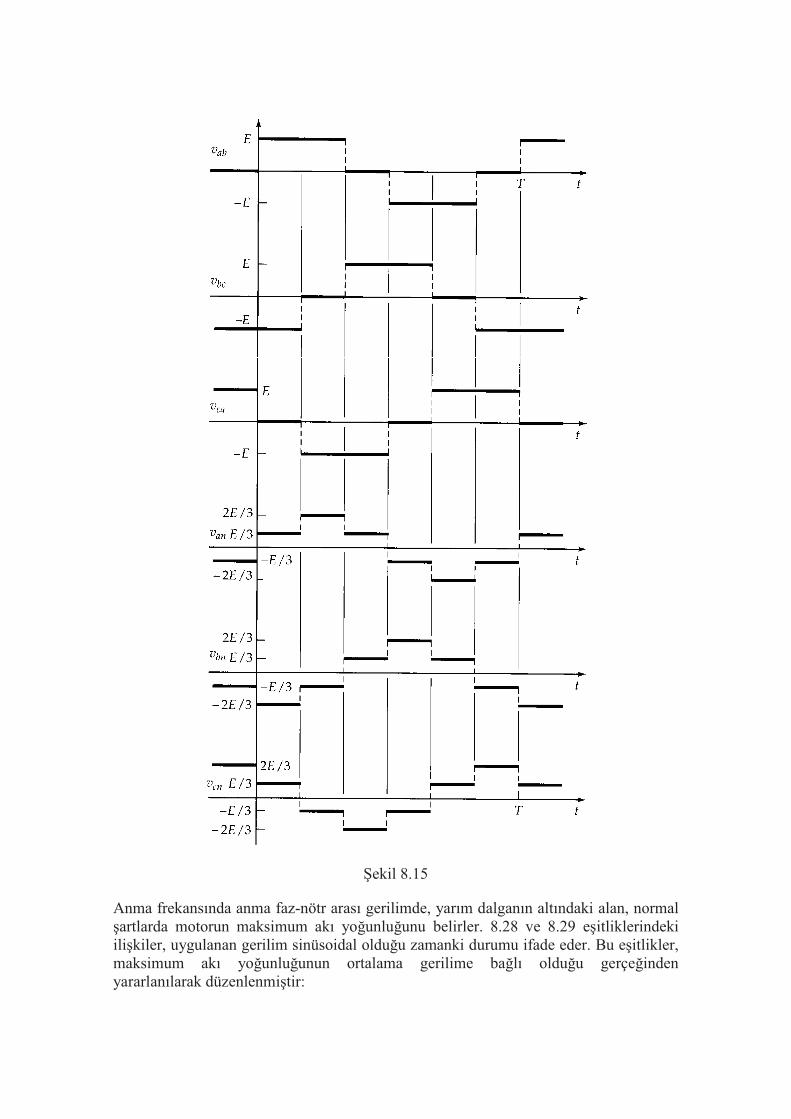
ekil 8.15
Anma frekansında anma faz-nötr arası gerilimde, yarım dalganın altındaki alan, normal artlarda motorun maksimum akı younluunu belirler. 8.28 ve 8.29 eitliklerindeki ilikiler, uygulanan gerilim sinüsoidal olduu zamanki durumu ifade eder. Bu eitlikler, maksimum akı younluunun ortalama gerilime balı olduu gerçeinden yararlanılarak düzenlenmitir:
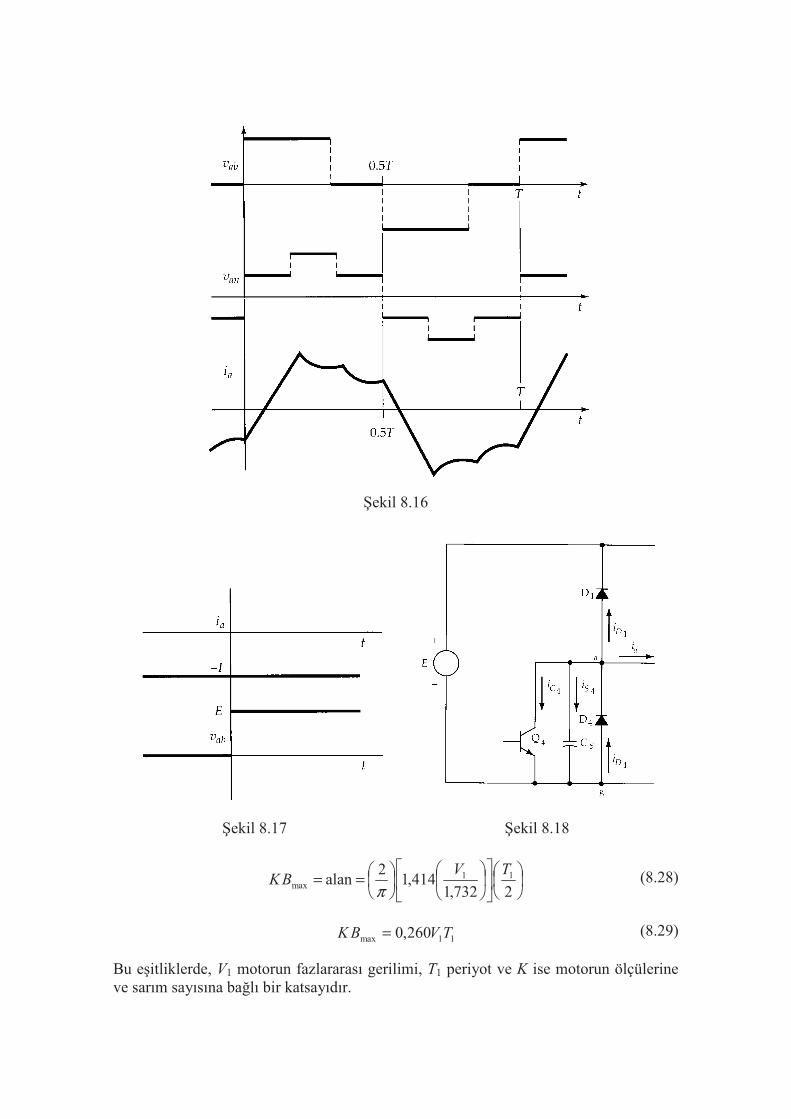
ekil 8.16
ekil 8.17 ekil 8.18
==
2732,1414,1
2 11max
TVBK
πalan (8.28)
11max 260,0 TVBK = (8.29)
Bu eitliklerde, V1 motorun fazlararası gerilimi, T1 periyot ve K ise motorun ölçülerine ve sarım sayısına balı bir katsayıdır.

ekil 8.19
Motora uygulanan 6 adımlı dalga biçiminin yarım dalgasının altındaki alan, 8.30 eitlii durumundaki deiken frekanslı duruma benzer ekilde maksimum akı younluu ile ilikilidir:
TETEEE
BK 222,0633
2
3max =
+
+
== alan (8.30)
ayet 8.30 eitliindeki maksimum akı younluu, normal sinüsoidal motor gerilimindeki aynı deerde belirlenirse, 8.29 ve 8.30 eitlikleri birletirilerek 8.31 eitlii oluur:
0 222 0 260 1 1, ,E T V T=
( )E V T f= 117 1 1, (8.31)
Burada, f, 6 adımlı inverterin ayarlı çıkı frekansıdır.
Sabit maksimum akı younluu için gereken DC bara gerilimi, çıkı frekansı ile orantılı olarak deimelidir. Böyle inverterler, 8.31 eitliini salayacak bir mod’da çalıtırılırlar. Genel olarak, bu "sabit volt/hertz" ilem modu olarak tanımlanır.
ayet motorun normal anma frekansının üzerinde çalıtırılması gerekirse, bu frekans aralıında inverterin dizaynı ekseriyetle, volt/hertz sabiti alınamayacak ekilde yapılır. DC bara geriliminin maksimum deeri, genel olarak operasyonun anma frekansında

veya yakın bir deerinde gerekir. Anma frekansının üzerinde, daha büyük taıma gerilimi mevcut deildir. Bundan dolayı motor anma maksimum akı younluunun altında çalıır ve düük frekanslı operasyonda olduu gibi aynı maksimum torku üretemez. Bu mod, maksimum çıkı gücünü sınırlar ve "sabit beygir gücü" operasyon modu olarak tanımlanır.
ÖRNEK 8.5
6 adımlı ayarlı frekanslı bir inverter üç fazlı, 230 V, 60 Hz’li bir indüksiyon motorunu, 230 V, 60 Hz’lik tek fazlı bir kaynaktan beslemektedir. Dorultucunun düzenlemesi, DC bara gerilimini, 300 V ile sınırlamaktadır. Aaıdakileri bulunuz:
(a) 10 Hz operasyonu için DC bara gerilimi (b) Motorun normal akı younluunu salayan en büyük frekans (c) 100 Hz’lik inverter çıkıında alınabilecek maksimum tork oranı
ÇÖZÜM
(a) 8.31 eitlii kullanılarak:
( )( ) ( )E =
=117 230
1
6010 44 9, , V
(b) 8.31 eitlii tekrar kullanılarak:
( )( ) ( )300 117 2301
60
66 9
=
=
,
,
f
f Hz
(c) 100 Hz için, motordaki maksimum akı younluu, E = 300 V ile sınırlandıından düer. E’nin deerinin
( )( ) ( )E =
=117 230
1
60100 448 5, , V
olması gerekir. Normal akı younluu oranı, istenilen ve gerçek gerilimlerin oranıdır:
%,
% ,Akı Younluu = =300
448 566 9
Bundan dolayı maksimum tork, anma durumundaki maksimum tork yerine, % 66,9 deerine dümütür.
888...444...222 PPPWWWMMM::: ÇÇÇOOOKKK FFFAAAZZZLLLIII NNNVVVEEERRRTTTEEERRR
Önceki kısımda bahsedilen 6 adımlı inverterde, kontrol basit olmasına ramen DC kaynak geriliminin ayarlanması gerekmektedir. ayet inverter PWM tipi ise, ayarlı bir DC kaynaına gerek yoktur. PWM ilemi, çıkıın harmonik içeriini kontrol etmekle beraber inverterin çıkı geriliminin genliini de kontrol eder.
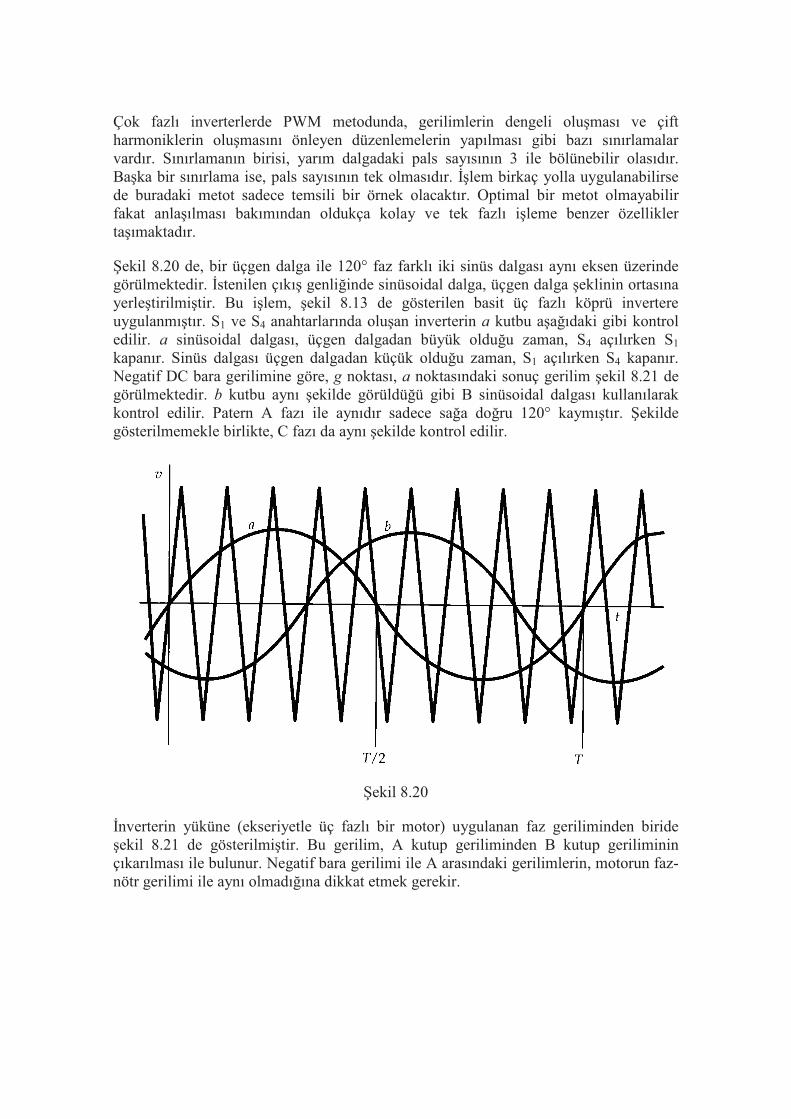
Çok fazlı inverterlerde PWM metodunda, gerilimlerin dengeli oluması ve çift harmoniklerin olumasını önleyen düzenlemelerin yapılması gibi bazı sınırlamalar vardır. Sınırlamanın birisi, yarım dalgadaki pals sayısının 3 ile bölünebilir olasıdır. Baka bir sınırlama ise, pals sayısının tek olmasıdır. lem birkaç yolla uygulanabilirse de buradaki metot sadece temsili bir örnek olacaktır. Optimal bir metot olmayabilir fakat anlaılması bakımından oldukça kolay ve tek fazlı ileme benzer özellikler taımaktadır.
ekil 8.20 de, bir üçgen dalga ile 120° faz farklı iki sinüs dalgası aynı eksen üzerinde görülmektedir. stenilen çıkı genliinde sinüsoidal dalga, üçgen dalga eklinin ortasına yerletirilmitir. Bu ilem, ekil 8.13 de gösterilen basit üç fazlı köprü invertere uygulanmıtır. S1 ve S4 anahtarlarında oluan inverterin a kutbu aaıdaki gibi kontrol edilir. a sinüsoidal dalgası, üçgen dalgadan büyük olduu zaman, S4 açılırken S1
kapanır. Sinüs dalgası üçgen dalgadan küçük olduu zaman, S1 açılırken S4 kapanır. Negatif DC bara gerilimine göre, g noktası, a noktasındaki sonuç gerilim ekil 8.21 de görülmektedir. b kutbu aynı ekilde görüldüü gibi B sinüsoidal dalgası kullanılarak kontrol edilir. Patern A fazı ile aynıdır sadece saa doru 120° kaymıtır. ekilde gösterilmemekle birlikte, C fazı da aynı ekilde kontrol edilir.
ekil 8.20
nverterin yüküne (ekseriyetle üç fazlı bir motor) uygulanan faz geriliminden biride ekil 8.21 de gösterilmitir. Bu gerilim, A kutup geriliminden B kutup geriliminin çıkarılması ile bulunur. Negatif bara gerilimi ile A arasındaki gerilimlerin, motorun faz-nötr gerilimi ile aynı olmadıına dikkat etmek gerekir.
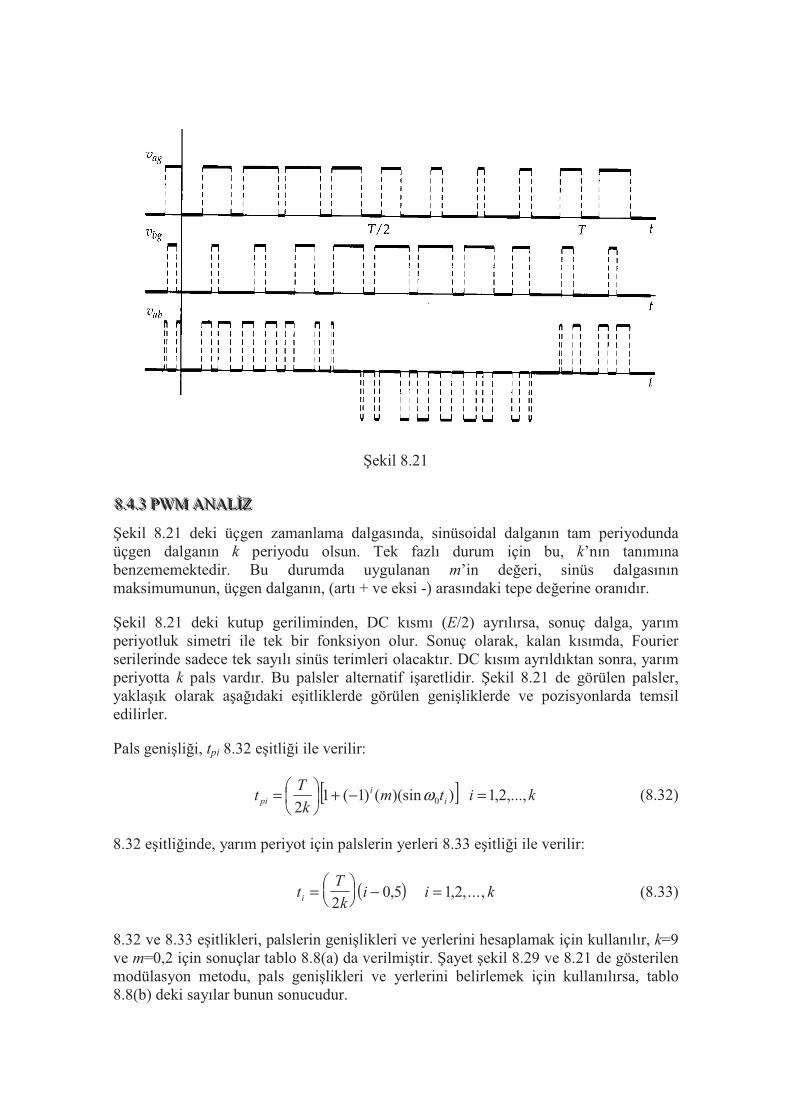
ekil 8.21
888...444...333 PPPWWWMMM AAANNNAAALLLZZZ
ekil 8.21 deki üçgen zamanlama dalgasında, sinüsoidal dalganın tam periyodunda üçgen dalganın k periyodu olsun. Tek fazlı durum için bu, k’nın tanımına benzememektedir. Bu durumda uygulanan m’in deeri, sinüs dalgasının maksimumunun, üçgen dalganın, (artı + ve eksi -) arasındaki tepe deerine oranıdır.
ekil 8.21 deki kutup geriliminden, DC kısmı (E/2) ayrılırsa, sonuç dalga, yarım periyotluk simetri ile tek bir fonksiyon olur. Sonuç olarak, kalan kısımda, Fourier serilerinde sadece tek sayılı sinüs terimleri olacaktır. DC kısım ayrıldıktan sonra, yarım periyotta k pals vardır. Bu palsler alternatif iaretlidir. ekil 8.21 de görülen palsler, yaklaık olarak aaıdaki eitliklerde görülen geniliklerde ve pozisyonlarda temsil edilirler.
Pals genilii, tpi 8.32 eitlii ile verilir:
[ ] kitmk
Tt i
i
pi ,...,2,1))(sin()1(12
0 =−+
= ω (8.32)
8.32 eitliinde, yarım periyot için palslerin yerleri 8.33 eitlii ile verilir:
( )tT
ki i ki =
− =
20 5 1 2, , ,..., (8.33)
8.32 ve 8.33 eitlikleri, palslerin genilikleri ve yerlerini hesaplamak için kullanılır, k=9 ve m=0,2 için sonuçlar tablo 8.8(a) da verilmitir. ayet ekil 8.29 ve 8.21 de gösterilen modülasyon metodu, pals genilikleri ve yerlerini belirlemek için kullanılırsa, tablo 8.8(b) deki sayılar bunun sonucudur.

Üçgen dalga ile sinüsoidal dalganın kesiimleri, uygun eitliklerin e zamanlı sayısal çözümleri ile belirlenir. Tablo 8.8 deki iki sütun, ideal pals genilii ve yerleri ile bunların pratik uygulaması arasındaki farklılıı göstermektedir.
Tablo 8.8 deki pals’ler tek sayılı palsler için negatif ve çift sayılı palsler için pozitif’dir.
8.32 ve 8.33 eitliklerindeki palslerin Fourier serilerinin katsayıları, yarım periyot üzerinde integral alınarak tanımlanır. Burada da her pals, edeerli impals fonksiyonu ile deitirilir:
[ ] tdtnttE
TB
T
i
i
pin 0
2/
0sin)()1(
2
22 ωδ −
= (8.34)
mpals fonksiyonunun özellikleri kullanılarak, yukarıdaki sonuç 8.35 eitlii ile ifade edilebilir:
( ) ( )( )
+−
=
==ii
k
i
i
k
i
i
n tntnmtnk
EB 00
10
1
sinsinsin1 ωωω (8.35)
lk toplam bütün n sayıları için sıfırdır, böylece sonuç 8.36 eitliine indirgenebilir:
( )( )ii
k
i
n tntmk
mEB 00
1
sinsin ωω=
= (8.36)
Tablo 8.8
(a) (b) Pals Pals
Sıra Yer Genilik Sıra Yer Genilik 1 10° 19,31° 1 9,67° 19,34° 2 30° 22,00° 2 30,33° 21,98° 3 50° 16,94° 3 49,81° 16,98° 4 70° 23,76° 4 70,14° 23,68° 5 90° 16,00° 5 90,00° 16,04° 6 110° 23,76° 6 109,86° 23,68° 7 130° 16,94° 7 130,19° 16,98° 8 150° 22,00° 8 149,67° 21,98° 9 170° 19,31° 9 170,33° 19,34°
Bu sonuç kutup gerilimindeki harmonikler içindir. Motorun faz gerilimi, 8.37 eitliinde olduu gibi, iki kutup gerilimi arasındaki farktan bulunur. Faz geriliminde bu farktan dolayı DC kısım bulunmaz.
v v vab ag bg= − (8.37)
Faz gerilimi, kutup geriliminde bulunan aynı harmoniklere sahiptir. Sadece 3’ün çarpanları olan harmonikler bulunmaz. Kutup gerilimleri arasında 120° faz farkı olduundan, 3’ün çarpanları olan harmoniklerde kutup gerilimi 360° farklılık gösterir. Kutup gerilimlerinin farkı alındıında, bu harmonikler fazlararası gerilimde gözükmez.
ÖRNEK 8.6
ekil 8.20 ve 8.21 deki grafiklerde, k=9 ve m=0,5 olsun. Fazlararası gerilimdeki harmoniklerin genliklerini bulunuz.
ÇÖZÜM
8.33 ve 8.36 eitlikleri kullanılarak, kutup gerilimindeki harmonikler aaıdaki sonucu verir:
B1 = 0,25E B11 = 0 B3 = 0 B13 = 0 B5 = 0 B15 = 0 B7 = 0 B17 = 0,25 EB9 = 0 B19 = 0,25 E
Gösterilen harmoniklere ek olarak, B35 ve B37 ve bazı yüksek dereceli harmonikler de sıfır deildir.
Fazlararası gerilimdeki harmoniklerin genlii 8.37 eitlii ile verilir:
( )( )B E E1 1 732 0 25 0 433= =, , ,
( )( )B E E17 1 732 0 25 0 433= =, , ,
( )( )B E E19 1 732 0 25 0 433= =, , ,
Yukarıdaki örnekte, m = 1 olsaydı, maksimum fazlararası gerilimin temel dalgasının genlii, 0,866 E olurdu. Bu modülasyon metodu ile mümkün olabilen en büyük deerdir. Aynı DC bara geriliminde, 6 adımlı metodun kullanılması halinde, bu deer 1,10E olmaktadır. Temel dalganın gerilimini artırmanın bir metodu, üçgen dalgayı geçecek ekilde, karılatırıcı sinüs dalgasının genliini artırmaktır. Bu, kutup geriliminde 90° ve 270° deki pals’leri yok eder. Harmonik içerii deimesine ramen, sonuç kabul edilebilir; bu sadece yüksek çıkı gerilimi ve frekansları için yapılır. Harmoniklerin bazıları, düük dereceli olmalarına ramen (11. ve 13. olabilir), mutlak frekansı büyüktür ve yük empedansı üzerinde filtreleme ilemi ile kabul edilebilir bir seviyeye düürülebilir.
888...444...444 DDDAAALLLGGGAAA BBBAAAIIINNNAAA PPPAAALLLSSS SSSAAAYYYIIISSSIII
Bir PWM inverterin normal çıkı frekansının üzerindeki operasyonunda, PWM’in faydaları gerçekletirilecekse, harmonik akımlarının genliini küçük bir deerde sınırlamak gerekir. nverterin çıkı frekansı, sıfıra doru azaltıldıı zaman, oldukça yüksek harmonik terimleri (17. gibi) küçük bir frekansa sahip olabilir. Bir örnek olarak, bu terimden oluan akımlar büyük olabilir. Bu problemi çözmek için, ekil 8.22 de görüldüü gibi frekans azalırken, dalga baına pals sayısının artırılması gerekir. Böylece çıkıtaki ek harmonik terimleri azaltılabilir.
Tam sayı veya üçe bölünebilir gibi dalga üzerindeki pals’lerin sayısında sınırlamalar olduundan, çıkı frekansının aralıındaki deiik noktalarda, kesikli adımlarda sayıyı artırmak pratikte uygulanır. En düük frekansta, dalga baına palslerin adedi, tipik olarak 100 den fazla olmalıdır. Motor operasyonu için bu deiimin oluacaı frekansta,
küçük bir frekans deiimi için dalga baına palslerin sayısında ileri-geri anahtarlama olabilir.
ekil 8.22
Bu problemi gidermek için, ekseriyetle az miktarda bir histerezis eklenir böylece anahtarlama pals sayısı azalan çıkı frekansı yerine artırılan çıkı frekansında farklı bir frekansta oluur.
888...555 ÇÇÇAAALLLIIIMMMAAA SSSOOORRRUUULLLAAARRRIII
8.1 Bir inverter nedir? 8.2 Bir inverterin çalıma prensibi nedir? 8.3 nverter tipleri nedir? 8.4 Yarım köprü ve tam köprü inverterler arasındaki fark nedir? 8.5 nverterlerin performans parametreleri nedir? 8.6 Üç fazlı çıkı gerilimi almak için inverterler nasıl düzenlenir? 8.7 Harmonik azaltma teknikleri nedir? 8.8 Düük dereceli harmonikleri yok etmenin etkisi nedir? 8.9 nverter frekansında tristörün kesim zamanının etkisi nedir? 8.10 Transistörlü ve tristörlü inverterler arasındaki avantajlar ve dezavantajlar endir? 8.11 nverter çıkıına bir filtre eklenmesinin amacı nedir? 8.12 AC ve DC filtreler arasındaki fark nedir?
888...666 PPPRRROOOBBBLLLEEEMMMLLLEEERRR
8.1 ekil 8.3 deki gibi bir inverter 0,05 H’lik bir indüktans ile seri 25 Ω’luk bir yükü beslemektedir; E=250 V ve T=8 ms. Aaıdakileri bulunuz:
(a) tepe anahtar akımı (b) BJT iletim zamanı (c) diyot iletim zamanı (d) ortalama diyot akımı
8.2 ekil 8.3 deki gibi bir inverterde aaıdaki veri bilinmektedir: E=150 V, R=20 Ω ve
T=10 ms.
(a) tepe yük akımı 5 A’i amayacak ekilde yük indüktansının deerini bulunuz. (b) ortalama diyot akımını bulunuz.
8.3 ekil 8.5 deki bir köprü inverter aaıdaki veriye sahiptir: E=200 V, R=30 Ω, L=0,16 H ve T=12,5 ms. Anahtarlar PN jonksiyon diyotları ve BJT’ler ile yapılmaktadır. Aaıdakilerl bulunuz:
(a) tepe anahtar akımı (b) her yarım saykılda BJT iletim zamanı (c) her yarım saykılda diyot iletim zamanı (d) ortalama kaynak akımı (e) ortalama yük akımı
8.4 ekil 8.6 daki teknii kullanan bir köprü inverterde, °= 251α ; E=100 V. Çıkıgeriliminin temel ve üçüncü harmonik bileenlerini bulunuz.
8.5 Problem 8.4 de, B1’in 110 V olması gerekmektedir.
(a) bunu yerine getirmek için 1α ’in deerini bulunuz.
(b) buna karılık gelen B3 deerini bulunuz.
8.6 ekil 8.7 deki anahtarlama metodu kullanılarak, bir inverterin beinci ve yedinci harmonik bileenlerini yoketmesi gerekmektedir.
(a) 1α ve 2α deerlerini bulunuz
(b) ayet E=100 V ise temel çıkı gerilimini bulunuz.
8.7 Bir inverter ekil 8.8 de görülen PWM metodunu kullanmaktadır; E=80 V, k=7, m=0,5 ve T=12,5 ms.
(a) her palsin geniliini bulunuz. (b) B1 B3 B5 deerlerini bulunuz.
8.8 Bir inverter ekil 8.9 da görülen sinüsoidal PWM metodunu kullanmaktadır; E=100 V, R=20 Ω, L=0,06 H, k=7, m=0,6 ve T=10 ms. Aaıdakileri bulunuz:
(a) yük akımının temel bileeni (b) sıfır olmayan ilk harmonik bileeninin numarası (c) 29. harmonik ile beraber sıfır olmayan bütün harmonikleri içeren yük akımının RMS deeri.
8.9 R=25 Ω ve seri L=0,1 H’lik bir yük 200 V’luk bir DC kaynaktan 100 V temel gerilim bileeni ile beslenmektedir. Modülasyon metodu ekil 8.9 daki gibi PWM dir. Toplam harmonik akımının temel RMS akım deerinin %8’ini amaması gerekir. Bu amacı karılayan k deerini seçiniz, f=100 Hz.
8.10 ekil 8.10 daki grafikleri ve k=5 deerini kullanarak, m=0,4 için B13 deerini hesaplayınız. Gerçek anahtarlama noktalarını da belirleyiniz.
8.11 Altı adımlı bir inverter ayarlı bir DC gerilimle beslenmektedir. Yük standart üç fazlı 460 V indüksiyon motorudur. DC gerilimin üst sınırı 550 V’tur.
(a) 40 Hz’lik bir çıkı frekansı için uygun DC bara gerilimini bulunuz.
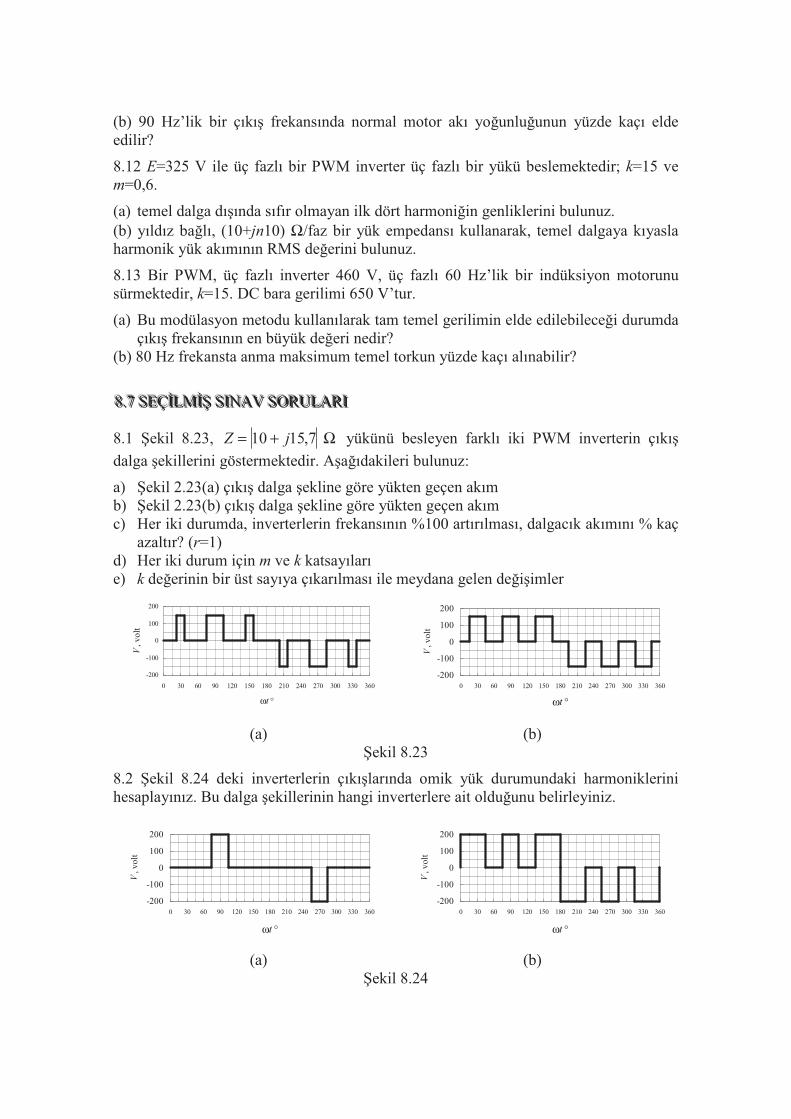
(b) 90 Hz’lik bir çıkı frekansında normal motor akı younluunun yüzde kaçı elde edilir?
8.12 E=325 V ile üç fazlı bir PWM inverter üç fazlı bir yükü beslemektedir; k=15 ve m=0,6.
(a) temel dalga dıında sıfır olmayan ilk dört harmoniin genliklerini bulunuz. (b) yıldız balı, (10+jn10) Ω/faz bir yük empedansı kullanarak, temel dalgaya kıyasla harmonik yük akımının RMS deerini bulunuz.
8.13 Bir PWM, üç fazlı inverter 460 V, üç fazlı 60 Hz’lik bir indüksiyon motorunu sürmektedir, k=15. DC bara gerilimi 650 V’tur.
(a) Bu modülasyon metodu kullanılarak tam temel gerilimin elde edilebilecei durumda çıkı frekansının en büyük deeri nedir?
(b) 80 Hz frekansta anma maksimum temel torkun yüzde kaçı alınabilir?
888...777 SSSEEEÇÇÇLLLMMM SSSIIINNNAAAVVV SSSOOORRRUUULLLAAARRRIII
8.1 ekil 8.23, Z j= +10 15 7, Ω yükünü besleyen farklı iki PWM inverterin çıkı
dalga ekillerini göstermektedir. Aaıdakileri bulunuz:
a) ekil 2.23(a) çıkı dalga ekline göre yükten geçen akım b) ekil 2.23(b) çıkı dalga ekline göre yükten geçen akım c) Her iki durumda, inverterlerin frekansının %100 artırılması, dalgacık akımını % kaç
azaltır? (r=1) d) Her iki durum için m ve k katsayıları e) k deerinin bir üst sayıya çıkarılması ile meydana gelen deiimler
-200
-100
0
100
200
0 30 60 90 120 150 180 210 240 270 300 330 360
ωt °
V, v
olt
-200
-100
0
100
200
0 30 60 90 120 150 180 210 240 270 300 330 360
ωt °
V, v
olt
(a) (b) ekil 8.23
8.2 ekil 8.24 deki inverterlerin çıkılarında omik yük durumundaki harmoniklerini hesaplayınız. Bu dalga ekillerinin hangi inverterlere ait olduunu belirleyiniz.
-200
-100
0
100
200
0 30 60 90 120 150 180 210 240 270 300 330 360
ωt °
V, v
olt
-200
-100
0
100
200
0 30 60 90 120 150 180 210 240 270 300 330 360
ωt °
V, v
olt
(a) (b) ekil 8.24
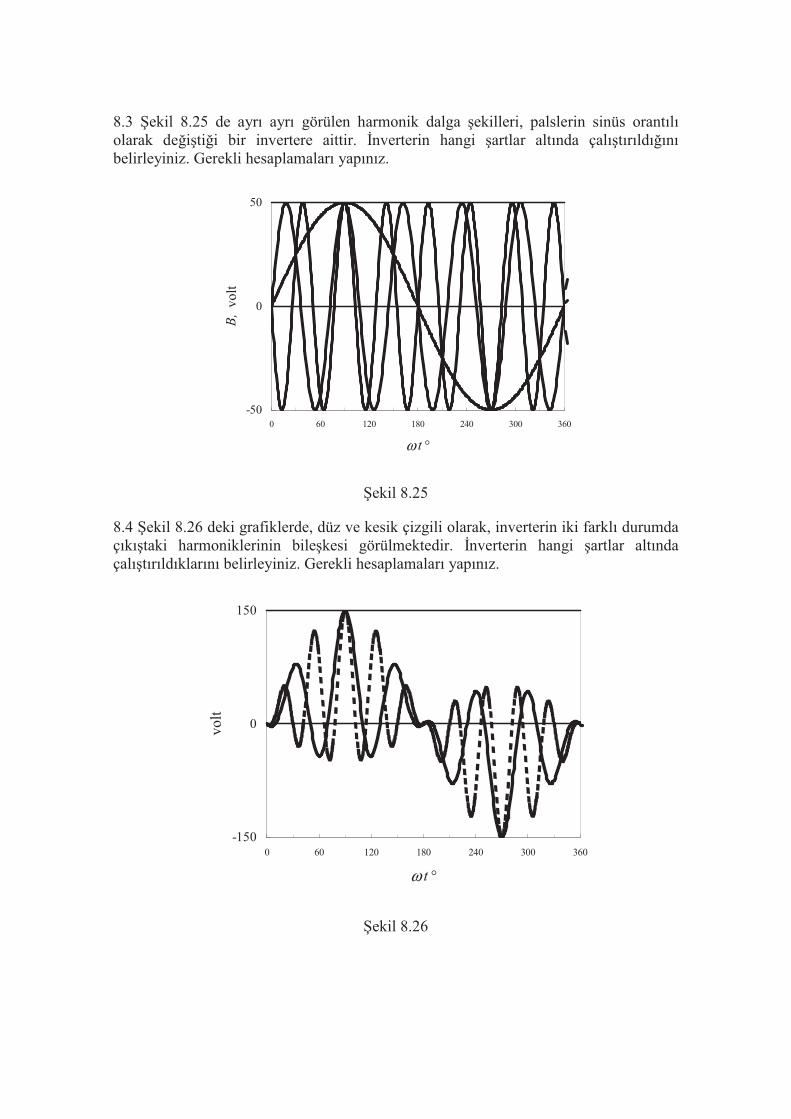
8.3 ekil 8.25 de ayrı ayrı görülen harmonik dalga ekilleri, palslerin sinüs orantılı olarak deitii bir invertere aittir. nverterin hangi artlar altında çalıtırıldıını belirleyiniz. Gerekli hesaplamaları yapınız.
-50
0
50
0 60 120 180 240 300 360
ω t °
B,
volt
ekil 8.25
8.4 ekil 8.26 deki grafiklerde, düz ve kesik çizgili olarak, inverterin iki farklı durumda çıkıtaki harmoniklerinin bilekesi görülmektedir. nverterin hangi artlar altında çalıtırıldıklarını belirleyiniz. Gerekli hesaplamaları yapınız.
-150
0
150
0 60 120 180 240 300 360
ω t °
volt
ekil 8.26
999 SSSTTTAAATTTKKK AAANNNAAAHHHTTTAAARRRLLLAAARRR
999...111 GGGRRR
Birkaç mikro saniye içinde iletimi ve kesimi yapılabilen tristörler, hızlı çalıan anahtarlar olarak mekanik ve elektromekanik devre kesicilerin yerine kullanılabilir. Düük güçlü DC uygulamaları için, güç transistörleri de anahtar olarak kullanılabilir. Statik anahtarlar, yüksek anahtarlama hızları, hareketli parçalarının olmaması ve kapanırken kontak bons’unun olumaması gibi çok avantajlara sahiptirler.
Statik anahtar uygulamalarına ek olarak, tristör veya transistör devreleri, zaman gecikmesi, kilitleme, düük veya yüksek akım ve gerilim dedeksiyonu salayacak ekilde tasarlanabilirler. Mekanik, elektriksel, pozisyon, yakınlık, vb., büyüklüklerin algılanmasında dönütürücüler, tristör veya transistör devrelerinin kapı veya kontrol sinyallerini üretebilirler.
Statik anahtarlar aaıdaki gibi sınıflandırılabilir.
STATK ANAHTARLAR
AC ANAHTARLAR DC ANAHTARLAR
TEK FAZLI ÜÇ FAZLI
999...222 TTTEEEKKK FFFAAAZZZLLLIII AAACCC AAANNNAAAHHHTTTAAARRRLLLAAARRR
Tek fazlı tam dalga anahtarın devre diyagramı ekil 9.1 de görülmektedir, devredeki tristörler birbirlerine ters paralel balanmıtır. T1 tristörü 0=tω da tetiklenir ve T2
tristörü πω =t de tetiklenir. Çıkı gerilimi giri gerilimi ile aynıdır. Giri gerilimi, çıkıgerilimi ve çıkı akımının dalga ekilleri, rezistif ve indüktif yüklü duruma göre ekil 9.1.b ve 9.1.c de görülmektedir. ekildeki iki tristör yerine ekil 9.2 de görüldüü gibi, bir triyak kullanıldıında da aynı sonuçlar elde edilir. Devrelerin nasıl tetiklendii, elemanlardan geçen akımlar ve elemanların seçimi ilgili bölümlerde anlatılmıtır (Bölüm 3 ve 6).
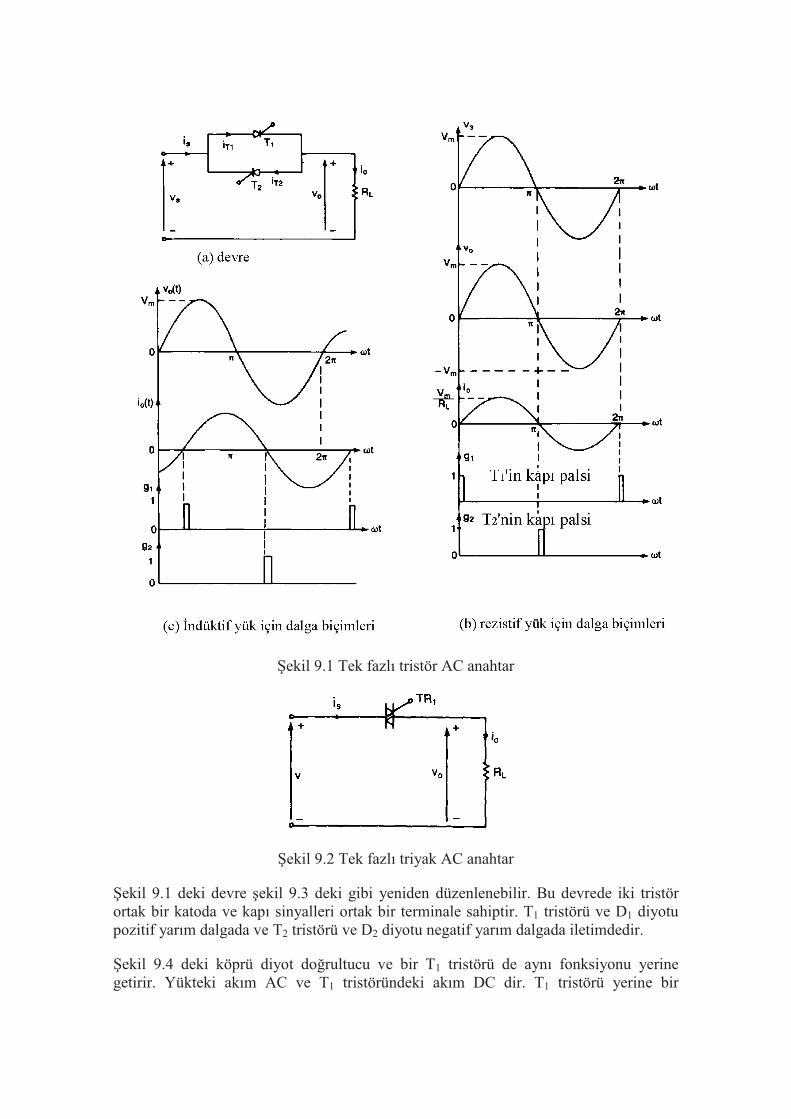
ekil 9.1 Tek fazlı tristör AC anahtar
ekil 9.2 Tek fazlı triyak AC anahtar
ekil 9.1 deki devre ekil 9.3 deki gibi yeniden düzenlenebilir. Bu devrede iki tristör ortak bir katoda ve kapı sinyalleri ortak bir terminale sahiptir. T1 tristörü ve D1 diyotu pozitif yarım dalgada ve T2 tristörü ve D2 diyotu negatif yarım dalgada iletimdedir.
ekil 9.4 deki köprü diyot dorultucu ve bir T1 tristörü de aynı fonksiyonu yerine getirir. Yükteki akım AC ve T1 tristöründeki akım DC dir. T1 tristörü yerine bir
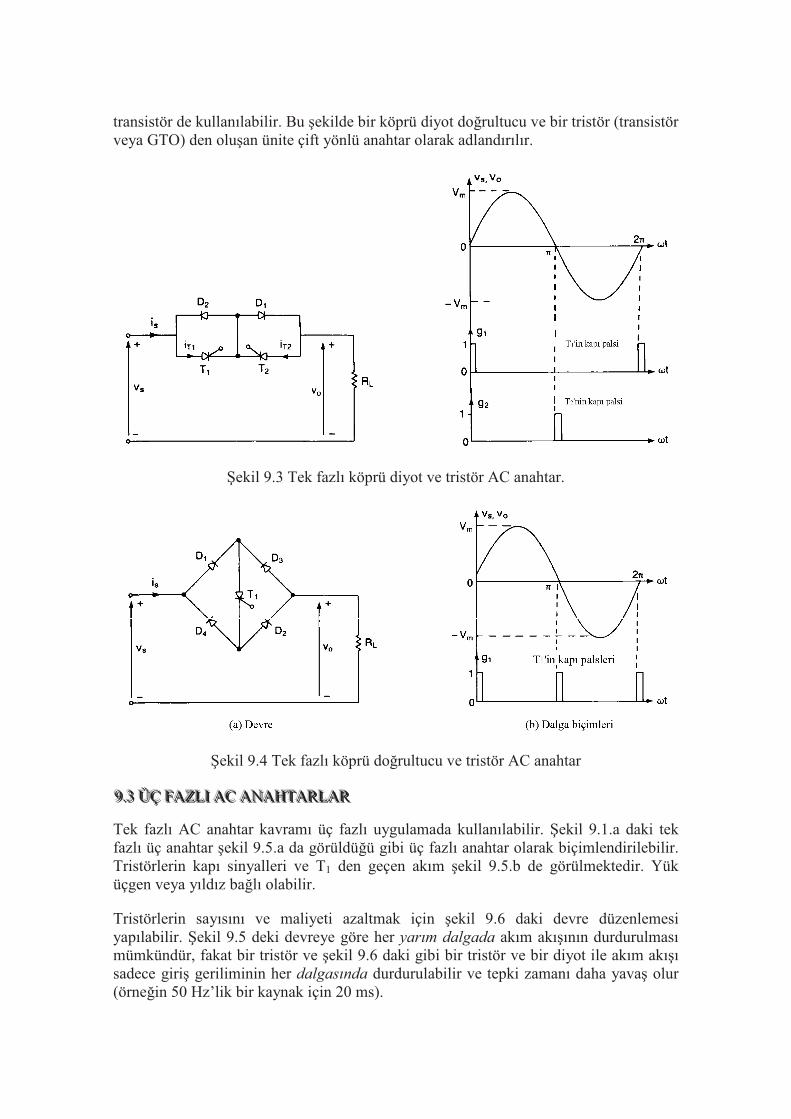
transistör de kullanılabilir. Bu ekilde bir köprü diyot dorultucu ve bir tristör (transistör veya GTO) den oluan ünite çift yönlü anahtar olarak adlandırılır.
ekil 9.3 Tek fazlı köprü diyot ve tristör AC anahtar.
ekil 9.4 Tek fazlı köprü dorultucu ve tristör AC anahtar
999...333 ÜÜÜÇÇÇ FFFAAAZZZLLLIII AAACCC AAANNNAAAHHHTTTAAARRRLLLAAARRR
Tek fazlı AC anahtar kavramı üç fazlı uygulamada kullanılabilir. ekil 9.1.a daki tek fazlı üç anahtar ekil 9.5.a da görüldüü gibi üç fazlı anahtar olarak biçimlendirilebilir. Tristörlerin kapı sinyalleri ve T1 den geçen akım ekil 9.5.b de görülmektedir. Yük üçgen veya yıldız balı olabilir.
Tristörlerin sayısını ve maliyeti azaltmak için ekil 9.6 daki devre düzenlemesi yapılabilir. ekil 9.5 deki devreye göre her yarım dalgada akım akıının durdurulması mümkündür, fakat bir tristör ve ekil 9.6 daki gibi bir tristör ve bir diyot ile akım akıı sadece giri geriliminin her dalgasında durdurulabilir ve tepki zamanı daha yava olur (örnein 50 Hz’lik bir kaynak için 20 ms).
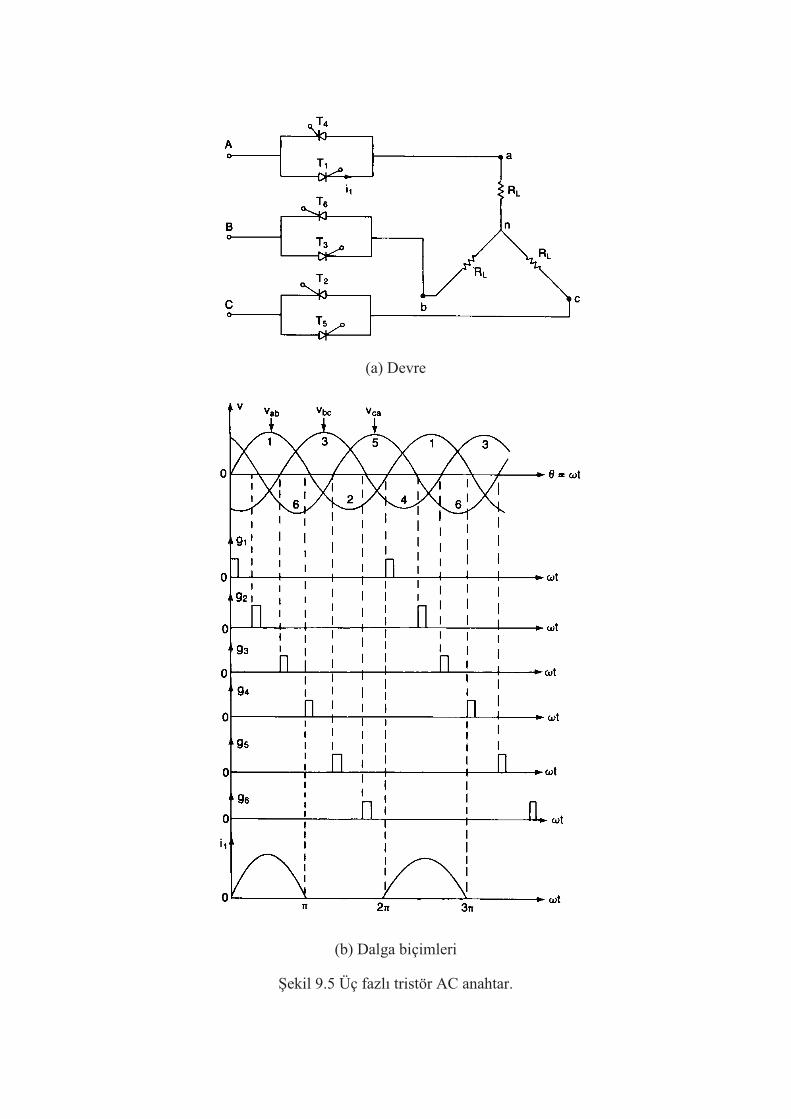
(a) Devre
(b) Dalga biçimleri
ekil 9.5 Üç fazlı tristör AC anahtar.
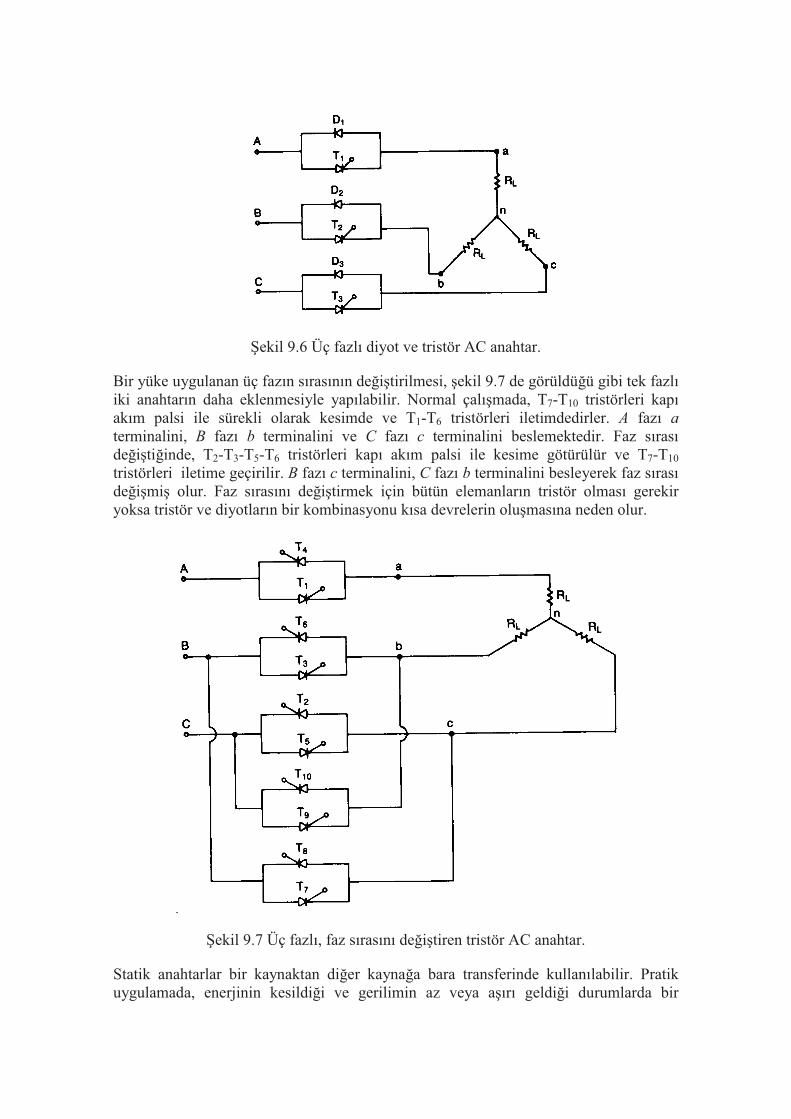
ekil 9.6 Üç fazlı diyot ve tristör AC anahtar.
Bir yüke uygulanan üç fazın sırasının deitirilmesi, ekil 9.7 de görüldüü gibi tek fazlı iki anahtarın daha eklenmesiyle yapılabilir. Normal çalımada, T7-T10 tristörleri kapı akım palsi ile sürekli olarak kesimde ve T1-T6 tristörleri iletimdedirler. A fazı a
terminalini, B fazı b terminalini ve C fazı c terminalini beslemektedir. Faz sırası deitiinde, T2-T3-T5-T6 tristörleri kapı akım palsi ile kesime götürülür ve T7-T10
tristörleri iletime geçirilir. B fazı c terminalini, C fazı b terminalini besleyerek faz sırası deimi olur. Faz sırasını deitirmek için bütün elemanların tristör olması gerekir yoksa tristör ve diyotların bir kombinasyonu kısa devrelerin olumasına neden olur.
ekil 9.7 Üç fazlı, faz sırasını deitiren tristör AC anahtar.
Statik anahtarlar bir kaynaktan dier kaynaa bara transferinde kullanılabilir. Pratik uygulamada, enerjinin kesildii ve gerilimin az veya aırı geldii durumlarda bir
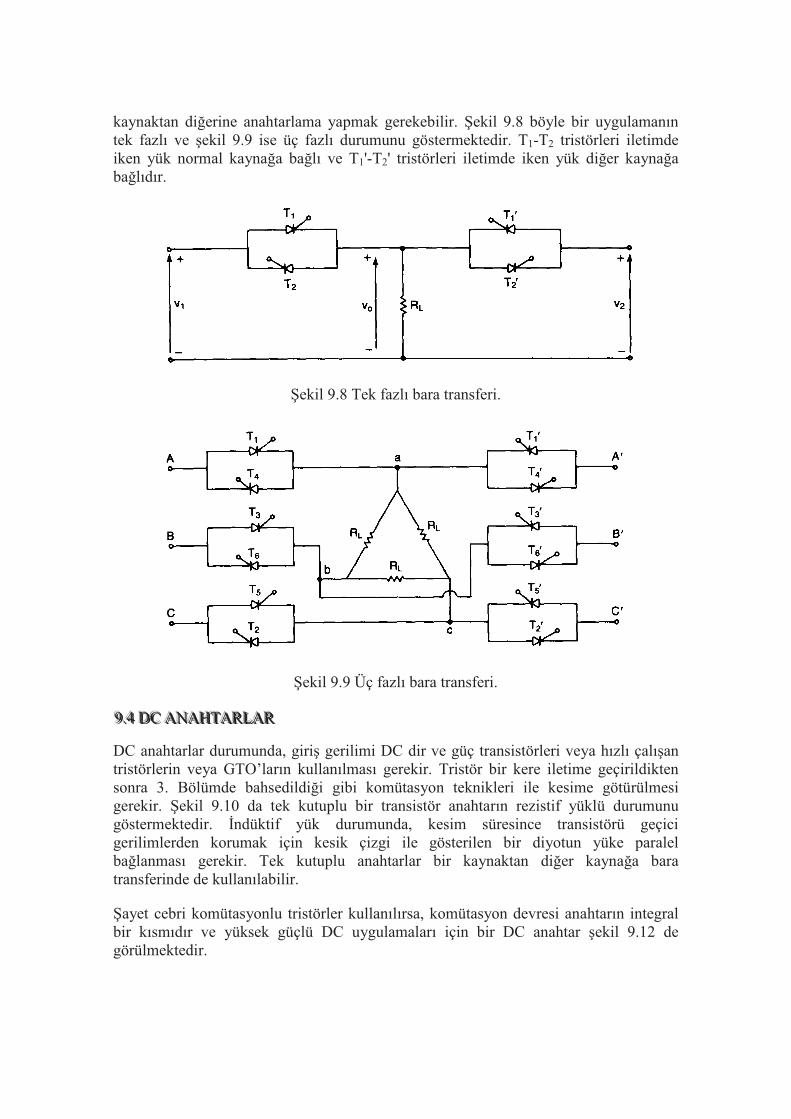
kaynaktan dierine anahtarlama yapmak gerekebilir. ekil 9.8 böyle bir uygulamanın tek fazlı ve ekil 9.9 ise üç fazlı durumunu göstermektedir. T1-T2 tristörleri iletimde iken yük normal kaynaa balı ve T1'-T2' tristörleri iletimde iken yük dier kaynaa balıdır.
ekil 9.8 Tek fazlı bara transferi.
ekil 9.9 Üç fazlı bara transferi.
999...444 DDDCCC AAANNNAAAHHHTTTAAARRRLLLAAARRR
DC anahtarlar durumunda, giri gerilimi DC dir ve güç transistörleri veya hızlı çalıan tristörlerin veya GTO’ların kullanılması gerekir. Tristör bir kere iletime geçirildikten sonra 3. Bölümde bahsedildii gibi komütasyon teknikleri ile kesime götürülmesi gerekir. ekil 9.10 da tek kutuplu bir transistör anahtarın rezistif yüklü durumunu göstermektedir. ndüktif yük durumunda, kesim süresince transistörü geçici gerilimlerden korumak için kesik çizgi ile gösterilen bir diyotun yüke paralel balanması gerekir. Tek kutuplu anahtarlar bir kaynaktan dier kaynaa bara transferinde de kullanılabilir.
ayet cebri komütasyonlu tristörler kullanılırsa, komütasyon devresi anahtarın integral bir kısmıdır ve yüksek güçlü DC uygulamaları için bir DC anahtar ekil 9.12 de görülmektedir.
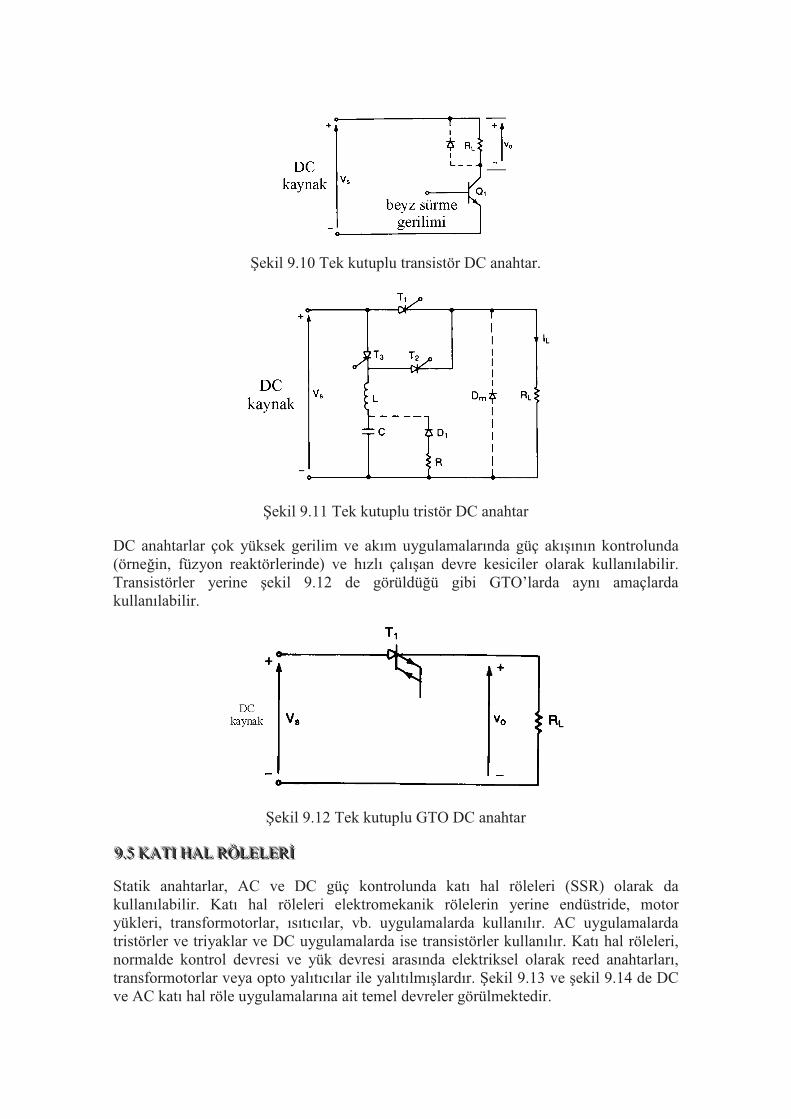
ekil 9.10 Tek kutuplu transistör DC anahtar.
ekil 9.11 Tek kutuplu tristör DC anahtar
DC anahtarlar çok yüksek gerilim ve akım uygulamalarında güç akıının kontrolunda (örnein, füzyon reaktörlerinde) ve hızlı çalıan devre kesiciler olarak kullanılabilir. Transistörler yerine ekil 9.12 de görüldüü gibi GTO’larda aynı amaçlarda kullanılabilir.
ekil 9.12 Tek kutuplu GTO DC anahtar
999...555 KKKAAATTTIII HHHAAALLL RRRÖÖÖLLLEEELLLEEERRR
Statik anahtarlar, AC ve DC güç kontrolunda katı hal röleleri (SSR) olarak da kullanılabilir. Katı hal röleleri elektromekanik rölelerin yerine endüstride, motor yükleri, transformotorlar, ısıtıcılar, vb. uygulamalarda kullanılır. AC uygulamalarda tristörler ve triyaklar ve DC uygulamalarda ise transistörler kullanılır. Katı hal röleleri, normalde kontrol devresi ve yük devresi arasında elektriksel olarak reed anahtarları, transformotorlar veya opto yalıtıcılar ile yalıtılmılardır. ekil 9.13 ve ekil 9.14 de DC ve AC katı hal röle uygulamalarına ait temel devreler görülmektedir.
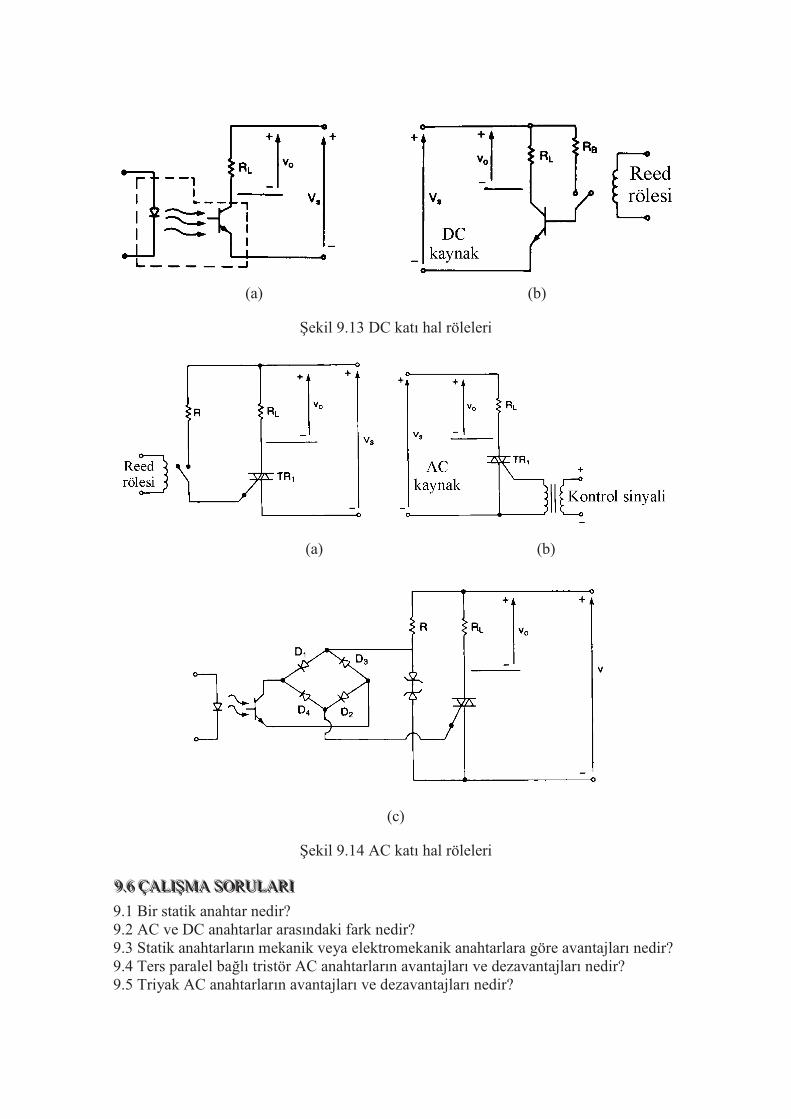
(a) (b)
ekil 9.13 DC katı hal röleleri
(a) (b)
(c)
ekil 9.14 AC katı hal röleleri
999...666 ÇÇÇAAALLLIIIMMMAAA SSSOOORRRUUULLLAAARRRIII
9.1 Bir statik anahtar nedir? 9.2 AC ve DC anahtarlar arasındaki fark nedir? 9.3 Statik anahtarların mekanik veya elektromekanik anahtarlara göre avantajları nedir? 9.4 Ters paralel balı tristör AC anahtarların avantajları ve dezavantajları nedir? 9.5 Triyak AC anahtarların avantajları ve dezavantajları nedir?

9.6 Diyot ve tristör AC anahtarların avantajları ve dezavantajları nedir? 9.7 Köprü dorultucu ve tristör AC anahtarların avantajları ve dezavantajları nedir? 9.8 AC anahtarlarda yükün indüktif olmasının kapı sürülmesine etkisi nedir? 9.9 Katı hal rölelerinin çalıma prensibi nedir? 9.10 Kontrol devresi ile yük devresi arasındaki yalıtım metotları nedir? 9.11 DC anahtarların tasarımını etkileyen faktörler nedir? 9.12 AC anahtarların tasarımını etkileyen faktörler nedir? 9.13 DC anahtarlar için hangi tür komütasyon gerekir? 9.14 AC anahtarlar için hangi tür komütasyon gerekir?

111000 GGGÜÜÜÇÇÇ KKKAAAYYYNNNAAAKKKLLLAAARRRIII
111000...111 GGGRRR
Endüstriyel uygulamalarda yaygın olarak kullanılan güç kaynakları aaıdaki özelliklerin çounu veya hepsini üzerlerinde taımaları gerekebilir:
Kaynak ve yük arasında yalıtım. Küçültülmü boyut ve aırlık için yüksek güç younluu. Güç akıının kontrollu yönü. Yüksek dönüüm verimi. Giri ve çıkı dalga biçimlerinde küçük filtreler ile düük toplam harmonik
bozulması. Kaynak bir AC gerilim ise kontrollu güç faktörü.
lgili bölümlerde bahsedilen tek kademeli AC-DC, AC-AC, DC-DC veya DC-AC konvertörler bu özelliklerin çounu karılamaz ve çok katlı konversiyonlar gereklidir. zin verilen komplekslik ve tasarım gereksinimlerine göre farklı çok katlı konversiyon topolojileri mümkündür. Burada temel topolojilerden bahsedilecektir. Güç kaynakları aaıdaki gibi sınıflandırılabilir:
GÜÇ KAYNAKLARI
DC GÜÇ KAYNAKLARI AC GÜÇ KAYNAKLARI
ANAHTARLAMALI MOD DC GÜÇ KAYNAKLARI
REZONANS DC GÜÇ KAYNAKLARI
ÇFT YÖNLÜ DC GÜÇ KAYNAKLARI
ANAHTARLAMALI MOD AC GÜÇ KAYNAKLARI
REZONANS AC GÜÇ KAYNAKLARI
ÇFT YÖNLÜ AC GÜÇ KAYNAKLARI
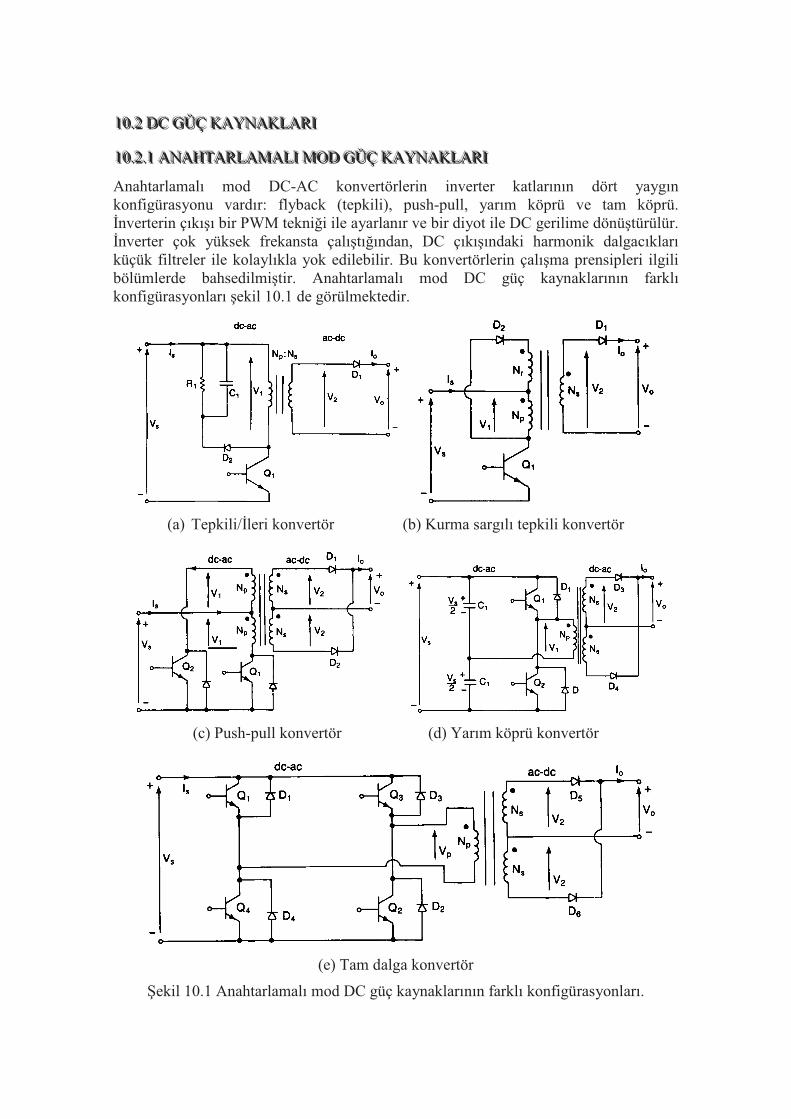
111000...222 DDDCCC GGGÜÜÜÇÇÇ KKKAAAYYYNNNAAAKKKLLLAAARRRIII
111000...222...111 AAANNNAAAHHHTTTAAARRRLLLAAAMMMAAALLLIII MMMOOODDD GGGÜÜÜÇÇÇ KKKAAAYYYNNNAAAKKKLLLAAARRRIII
Anahtarlamalı mod DC-AC konvertörlerin inverter katlarının dört yaygın konfigürasyonu vardır: flyback (tepkili), push-pull, yarım köprü ve tam köprü. nverterin çıkıı bir PWM teknii ile ayarlanır ve bir diyot ile DC gerilime dönütürülür. nverter çok yüksek frekansta çalıtıından, DC çıkıındaki harmonik dalgacıkları küçük filtreler ile kolaylıkla yok edilebilir. Bu konvertörlerin çalıma prensipleri ilgili bölümlerde bahsedilmitir. Anahtarlamalı mod DC güç kaynaklarının farklı konfigürasyonları ekil 10.1 de görülmektedir.
(a) Tepkili/leri konvertör (b) Kurma sargılı tepkili konvertör
(c) Push-pull konvertör (d) Yarım köprü konvertör
(e) Tam dalga konvertör
ekil 10.1 Anahtarlamalı mod DC güç kaynaklarının farklı konfigürasyonları.
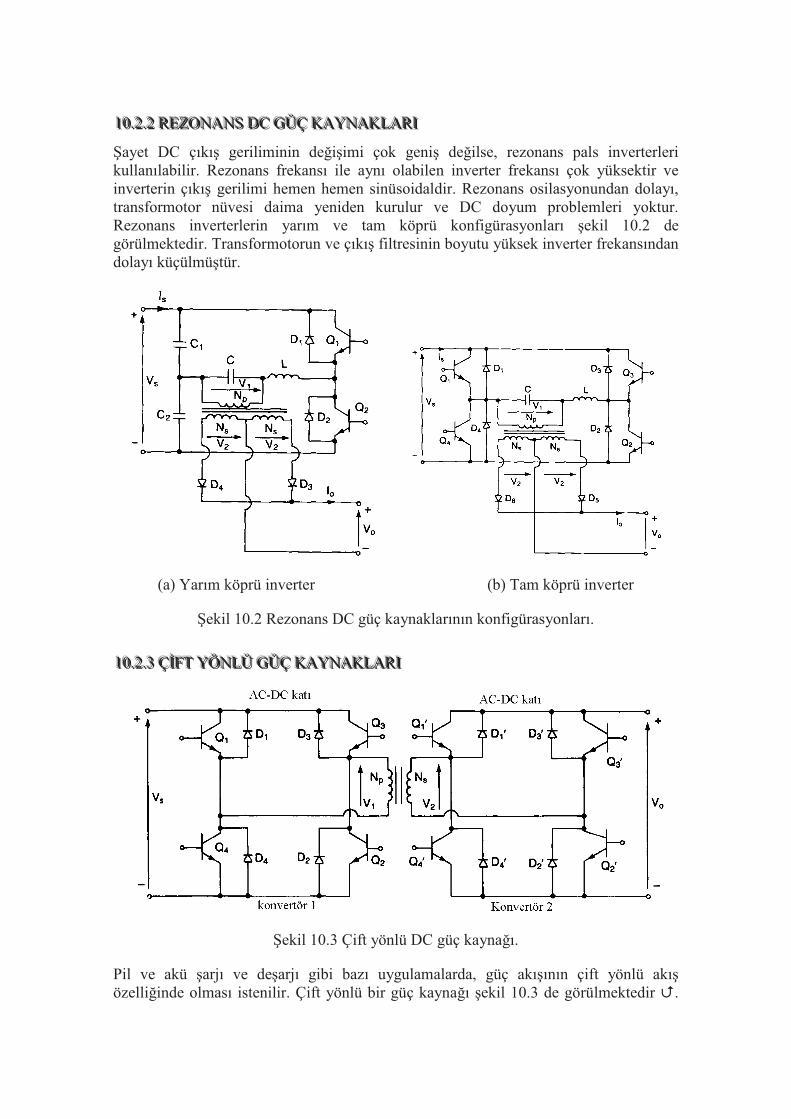
111000...222...222 RRREEEZZZOOONNNAAANNNSSS DDDCCC GGGÜÜÜÇÇÇ KKKAAAYYYNNNAAAKKKLLLAAARRRIII
ayet DC çıkı geriliminin deiimi çok geni deilse, rezonans pals inverterleri kullanılabilir. Rezonans frekansı ile aynı olabilen inverter frekansı çok yüksektir ve inverterin çıkı gerilimi hemen hemen sinüsoidaldir. Rezonans osilasyonundan dolayı, transformotor nüvesi daima yeniden kurulur ve DC doyum problemleri yoktur. Rezonans inverterlerin yarım ve tam köprü konfigürasyonları ekil 10.2 de görülmektedir. Transformotorun ve çıkı filtresinin boyutu yüksek inverter frekansından dolayı küçülmütür.
(a) Yarım köprü inverter (b) Tam köprü inverter
ekil 10.2 Rezonans DC güç kaynaklarının konfigürasyonları.
111000...222...333 ÇÇÇFFFTTT YYYÖÖÖNNNLLLÜÜÜ GGGÜÜÜÇÇÇ KKKAAAYYYNNNAAAKKKLLLAAARRRIII
ekil 10.3 Çift yönlü DC güç kaynaı.
Pil ve akü arjı ve dearjı gibi bazı uygulamalarda, güç akıının çift yönlü akıözelliinde olması istenilir. Çift yönlü bir güç kaynaı ekil 10.3 de görülmektedir .
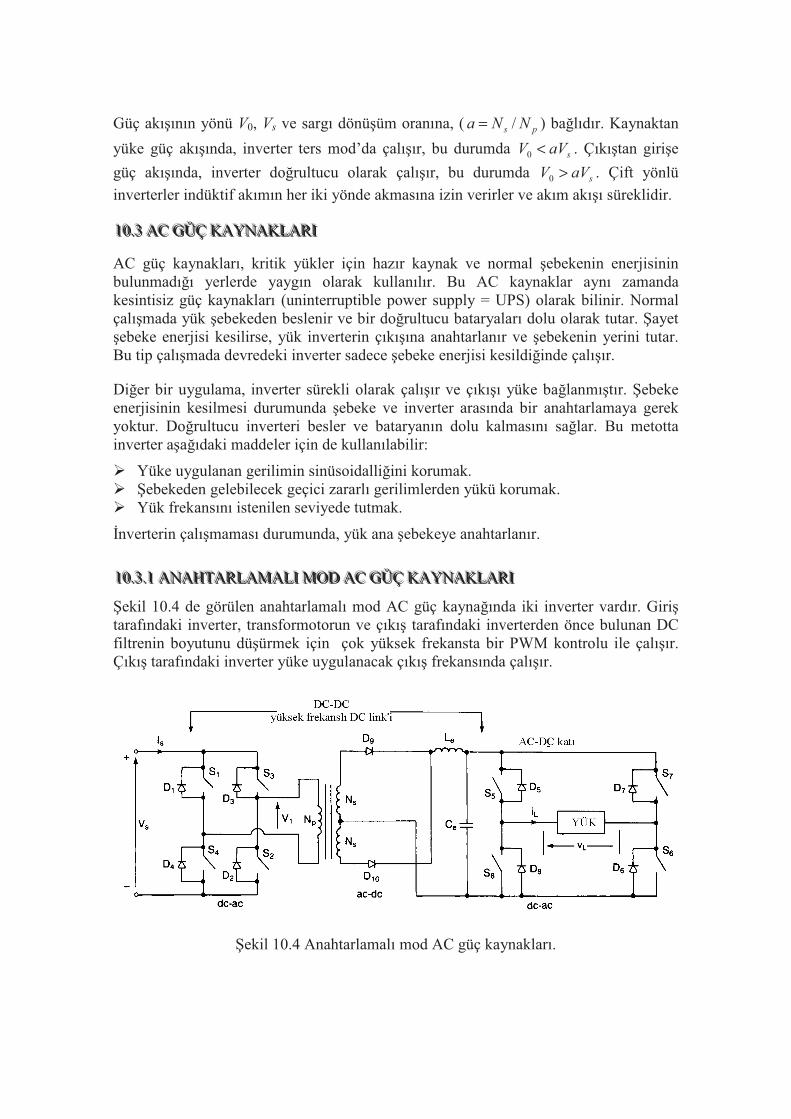
Güç akıının yönü V0, Vs ve sargı dönüüm oranına, ( ps NNa /= ) balıdır. Kaynaktan
yüke güç akıında, inverter ters mod’da çalıır, bu durumda saVV <0 . Çıkıtan girie
güç akıında, inverter dorultucu olarak çalıır, bu durumda saVV >0 . Çift yönlü
inverterler indüktif akımın her iki yönde akmasına izin verirler ve akım akıı süreklidir.
111000...333 AAACCC GGGÜÜÜÇÇÇ KKKAAAYYYNNNAAAKKKLLLAAARRRIII
AC güç kaynakları, kritik yükler için hazır kaynak ve normal ebekenin enerjisinin bulunmadıı yerlerde yaygın olarak kullanılır. Bu AC kaynaklar aynı zamanda kesintisiz güç kaynakları (uninterruptible power supply = UPS) olarak bilinir. Normal çalımada yük ebekeden beslenir ve bir dorultucu bataryaları dolu olarak tutar. ayet ebeke enerjisi kesilirse, yük inverterin çıkıına anahtarlanır ve ebekenin yerini tutar. Bu tip çalımada devredeki inverter sadece ebeke enerjisi kesildiinde çalıır.
Dier bir uygulama, inverter sürekli olarak çalıır ve çıkıı yüke balanmıtır. ebeke enerjisinin kesilmesi durumunda ebeke ve inverter arasında bir anahtarlamaya gerek yoktur. Dorultucu inverteri besler ve bataryanın dolu kalmasını salar. Bu metotta inverter aaıdaki maddeler için de kullanılabilir:
Yüke uygulanan gerilimin sinüsoidalliini korumak. ebekeden gelebilecek geçici zararlı gerilimlerden yükü korumak. Yük frekansını istenilen seviyede tutmak.
nverterin çalımaması durumunda, yük ana ebekeye anahtarlanır.
111000...333...111 AAANNNAAAHHHTTTAAARRRLLLAAAMMMAAALLLIII MMMOOODDD AAACCC GGGÜÜÜÇÇÇ KKKAAAYYYNNNAAAKKKLLLAAARRRIII
ekil 10.4 de görülen anahtarlamalı mod AC güç kaynaında iki inverter vardır. Giritarafındaki inverter, transformotorun ve çıkı tarafındaki inverterden önce bulunan DC filtrenin boyutunu düürmek için çok yüksek frekansta bir PWM kontrolu ile çalıır. Çıkı tarafındaki inverter yüke uygulanacak çıkı frekansında çalıır.
ekil 10.4 Anahtarlamalı mod AC güç kaynakları.
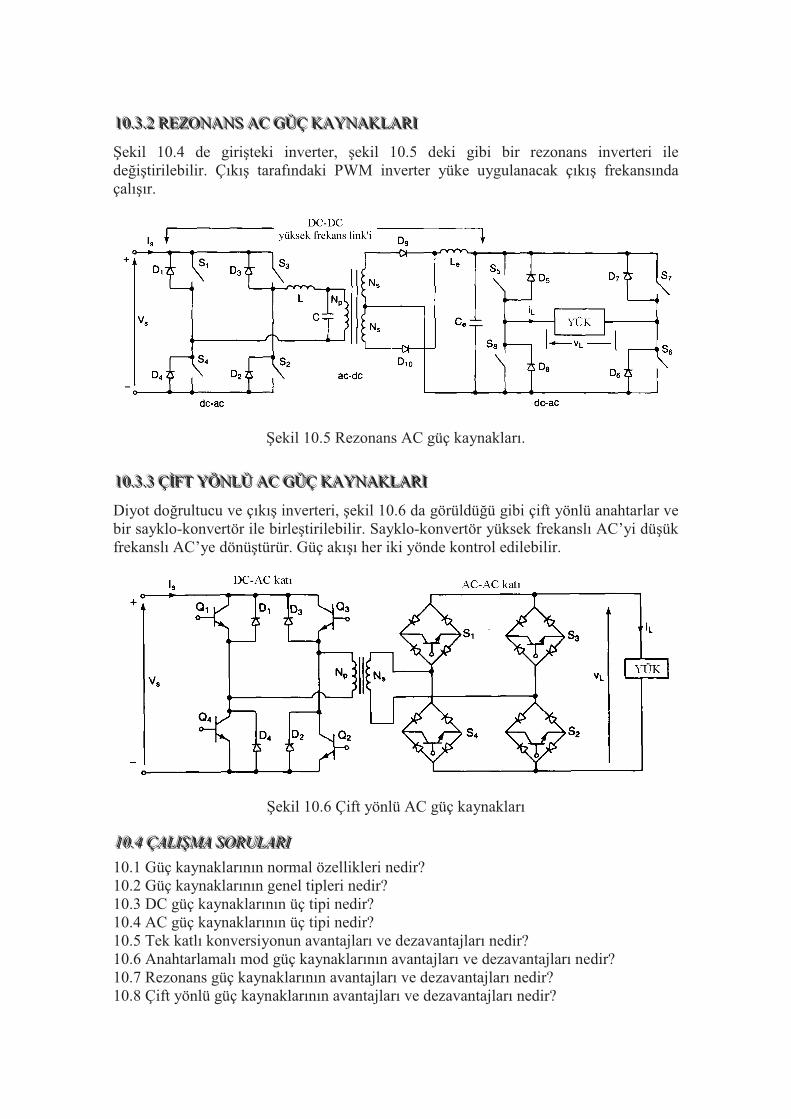
111000...333...222 RRREEEZZZOOONNNAAANNNSSS AAACCC GGGÜÜÜÇÇÇ KKKAAAYYYNNNAAAKKKLLLAAARRRIII
ekil 10.4 de giriteki inverter, ekil 10.5 deki gibi bir rezonans inverteri ile deitirilebilir. Çıkı tarafındaki PWM inverter yüke uygulanacak çıkı frekansında çalıır.
ekil 10.5 Rezonans AC güç kaynakları.
111000...333...333 ÇÇÇFFFTTT YYYÖÖÖNNNLLLÜÜÜ AAACCC GGGÜÜÜÇÇÇ KKKAAAYYYNNNAAAKKKLLLAAARRRIII
Diyot dorultucu ve çıkı inverteri, ekil 10.6 da görüldüü gibi çift yönlü anahtarlar ve bir sayklo-konvertör ile birletirilebilir. Sayklo-konvertör yüksek frekanslı AC’yi düük frekanslı AC’ye dönütürür. Güç akıı her iki yönde kontrol edilebilir.
ekil 10.6 Çift yönlü AC güç kaynakları
111000...444 ÇÇÇAAALLLIIIMMMAAA SSSOOORRRUUULLLAAARRRIII
10.1 Güç kaynaklarının normal özellikleri nedir? 10.2 Güç kaynaklarının genel tipleri nedir? 10.3 DC güç kaynaklarının üç tipi nedir? 10.4 AC güç kaynaklarının üç tipi nedir? 10.5 Tek katlı konversiyonun avantajları ve dezavantajları nedir? 10.6 Anahtarlamalı mod güç kaynaklarının avantajları ve dezavantajları nedir? 10.7 Rezonans güç kaynaklarının avantajları ve dezavantajları nedir? 10.8 Çift yönlü güç kaynaklarının avantajları ve dezavantajları nedir?

10.9 Tepkili konvertörlerin avantajları ve dezavantajları nedir? 10.10 Push-pull konvertörlerin avantajları ve dezavantajları nedir? 10.11 Yarım köprü konvertörlerin avantajları ve dezavantajları nedir? 10.12 Rezonans DC güç kaynaklarının farklı konfigürasyonları nedir? 10.13 Yüksek frekans linkli güç kaynaklarının avantajları ve dezavantajları nedir? 10.14 Kesintisiz güç kaynaklarının genel düzenlemesi nasıl yapılır? 10.15 Güç kaynaklarında transformotor kullanırken nelere dikkat edilmelidir?

111111 TTTAAASSSAAARRRIIIMMM VVVEEE KKKOOORRRUUUMMMAAA
Baarılı bir tasarımı gerçekletirmek için, yarı-iletken anahtarların bulundukları çevrede salam ve güvenli olarak kalabilmeleri gerekmektedir. Bu bölümde dikkate alınacak iki alan, aygıtın jonksiyon sıcaklıı ve akımın veya gerilimin aırı deerlerinin kontroludur. ayet bu alanlara gerekli itina gösterilmezse, anahtarların yerletirildii cihaz sık sık arızaya maruz kalacaktır.
111111...111 YYYAAARRRIII---LLLEEETTTKKKEEENNN JJJOOONNNKKKSSSYYYOOONNN SSSIIICCCAAAKKKLLLIIIIII
Bir yarı-iletkenin jonksiyon sıcaklıı, herhangi bir uygulamada aygıtın salam kalabilmesi ve ömrünü belirlemede çok önemlidir. Bundan dolayı jonksiyon sıcaklıının hesaplanması tasarım ileminin önemli bir kısmıdır.
Gerçek ısı akı ilemi üç boyutludur fakat yapılan deneyler bir boyutlu analizin çou amaçlar için yeterli olduunu göstermitir. Bu sadeletirme ile, aygıtın jonksiyonu ve ısı transfer yolunun dier kısımları arasındaki termal direnç zamanla deimeyen durumlar için jonksiyonun ısınma ileminin modellenmesinde kullanılabilir. Zamanla deien durumlar için, termal direnç geçici termal empedans ile deitirilir.
111111...111...111 KKKAAARRRAAARRRLLLIII DDDUUURRRUUUMMM JJJOOONNNKKKSSSYYYOOONNN SSSIIICCCAAAKKKLLLIIIIII
Kararlı durumda, jonksiyondaki sıcaklık hesaplamaları birkaç bileene sahip ve °C/W olarak ifade edilen bir termal dirençle modellenir. Bir soutucu üzerine monte edilmibir güç yarıiletkeni için genel olarak üç bileen gözönüne alınır. Birincisi aygıtın jonksiyonu ve yerletirildii kılıf arasındaki termal direnç, RJC olarak gösterilir; ikincisi soutucu ve aygıtın kılıfı arasındaki mükemmel olmayan ara yüzeyi modelleyen termal direnç, RCS ve son olarak çevre ortamına olan ısının engellenmesinin modellendii termal direnç, RSA.
Termal devrenin elektrik devresine benzerlii ekil 11.1 de görülmektedir. Bu kararlı durum ileminin çözümü 11.1 eitlii ile verilmektedir, burada P yarıiletken aygıtın jonksiyon bölgesinde üretilen ortalama güç, TA ortamın çevre sıcaklıı ve TJ jonksiyon sıcaklııdır:
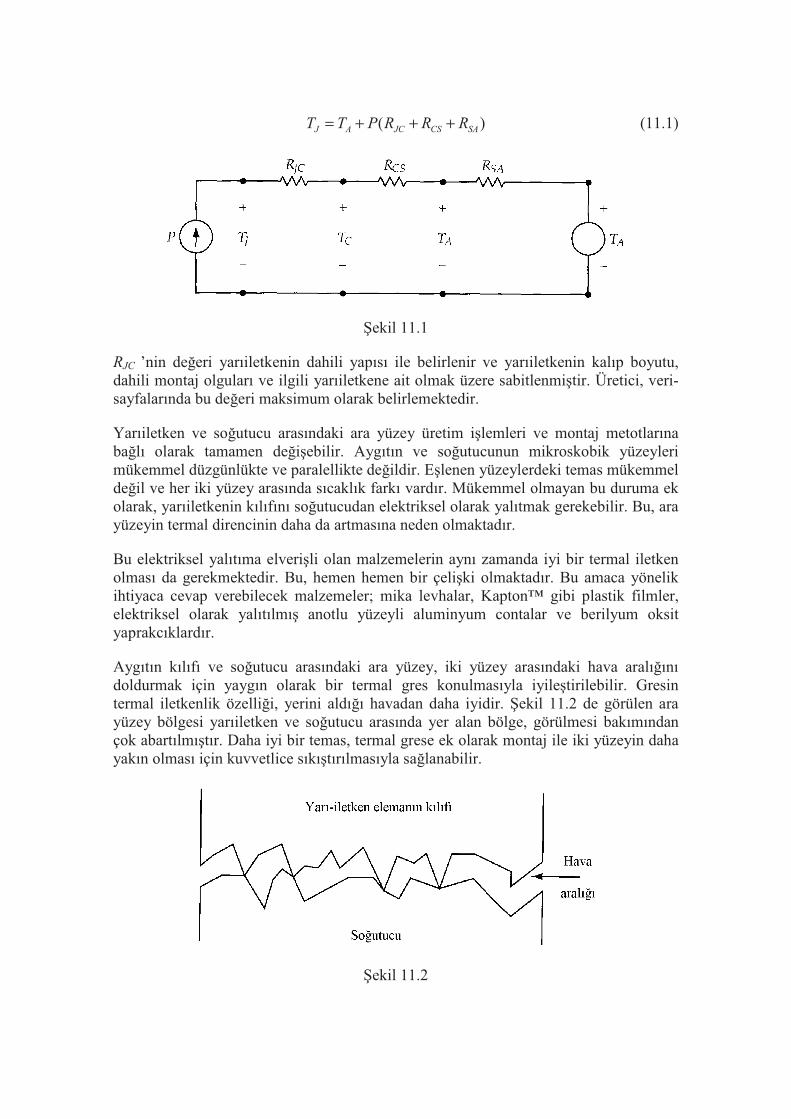
)( SACSJCAJ RRRPTT +++= (11.1)
ekil 11.1
RJC ’nin deeri yarıiletkenin dahili yapısı ile belirlenir ve yarıiletkenin kalıp boyutu, dahili montaj olguları ve ilgili yarıiletkene ait olmak üzere sabitlenmitir. Üretici, veri-sayfalarında bu deeri maksimum olarak belirlemektedir.
Yarıiletken ve soutucu arasındaki ara yüzey üretim ilemleri ve montaj metotlarına balı olarak tamamen deiebilir. Aygıtın ve soutucunun mikroskobik yüzeyleri mükemmel düzgünlükte ve paralellikte deildir. Elenen yüzeylerdeki temas mükemmel deil ve her iki yüzey arasında sıcaklık farkı vardır. Mükemmel olmayan bu duruma ek olarak, yarıiletkenin kılıfını soutucudan elektriksel olarak yalıtmak gerekebilir. Bu, ara yüzeyin termal direncinin daha da artmasına neden olmaktadır.
Bu elektriksel yalıtıma elverili olan malzemelerin aynı zamanda iyi bir termal iletken olması da gerekmektedir. Bu, hemen hemen bir çeliki olmaktadır. Bu amaca yönelik ihtiyaca cevap verebilecek malzemeler; mika levhalar, Kapton™ gibi plastik filmler, elektriksel olarak yalıtılmı anotlu yüzeyli aluminyum contalar ve berilyum oksit yaprakcıklardır.
Aygıtın kılıfı ve soutucu arasındaki ara yüzey, iki yüzey arasındaki hava aralıını doldurmak için yaygın olarak bir termal gres konulmasıyla iyiletirilebilir. Gresin termal iletkenlik özellii, yerini aldıı havadan daha iyidir. ekil 11.2 de görülen ara yüzey bölgesi yarıiletken ve soutucu arasında yer alan bölge, görülmesi bakımından çok abartılmıtır. Daha iyi bir temas, termal grese ek olarak montaj ile iki yüzeyin daha yakın olması için kuvvetlice sıkıtırılmasıyla salanabilir.
ekil 11.2
Bir termal gres kullanımının sayısal etkisi aaıda açıkça görülmektedir. Bir TO-204 kılıflı aygıt bir termal gres kullanılmaksızın monte edildiinde yaklaık olarak RCS=0,5°C/W deerine sahiptir. ki yüzey arasındaki bolukta termal gresin kullanılması termal direnci yaklaık olarak 0,15°C/W azaltır. ayet sert anotlu bir aluminyum conta yalıtıcı olarak kullanılırsa bu sayılar sırasıyla yaklaık olarak 1,2°C/W ve 0,3°C/W olacaktır. Bu sayılar yarıiletkenin jonksiyon sıcaklıını düürmek ve bunun sonucu olarak güvenilirlii gelitirmek için termal gresin kullanımını açıklamaktadır. Ek olarak, yarıiletken elemanın elektriksel yalıtımından kaynaklanan termal direnç deerinde bir artı olduu açıktır.
Soutucudan çevreye ısının iletimi öncelikle soutucunun yüzeyindeki havanın doal konveksiyon veya cebri hava hareketi ile havanın hareketi ile salanır. Soutucu ekseriyetle verilen bir hacim için yüzey alanını artırmada çoklu kanatcıklarla veya buna benzer dier yüzey artırıcılarla donatılır. Radyasyon ile ısı iletimi ekseriyetle ilemin çok küçük bir parçasıdır. Çou uygulamalar üreticileri tarafından belgelenmi ısı iletim karakteristiklerine sahiptir. Aygıt ve soutucu arasındaki ara yüzeyin termal karakteristikleri de salanmaktadır.
ÖRNEK 11.1
MTM8N60 tipinde bir MOSFET kararlı durum termal durumunda çalımakta ve 10 W kayıp meydana getirmektedir. RSA=2,5°C/W ile bir soutucuya monte edilmitir. Çevreleyen ortamın hava sıcaklıı 70°C dir. Aaıdakileri bulunuz:
(a) ayet eleman, (RCS=0,15°C/W) termal gresi kullanılarak dorudan bir soutucuya monte edilirse aygıtın jonksiyon sıcaklıı
(b) Herhangi bir termal gres kullanılmaksızın bir anodize aluminyum yalıtıcı conta (RCS=1,2°C/W) ile monte edildiinde aygıtın jonksiyon sıcaklıı.
ÇÖZÜM
(a) Ek B’den, bu aygıtın veri sayfası RJC=1,2°C/W vermektedir. 11.1 eitliinden,
8,104)5,215,083,0(1070 =+++=JT °C
(b) 11.1 eitliinde RCS’nin yeni deeri kullanılarak:
3,115)5,22,183,0(1070 =+++=JT °C
ÖRNEK 11.2
12 W’lık güç kaybı ile bir BJT 85°C ortam hava sıcaklıında bir soutucuya monte edilmitir. Yarıiletken aygıt bir TO-204 kılıfındadır; bir termal gres kullanılarak RCS
deeri 0,2°C/W’a düürülmütür. RJC’nin deeri 0,83 °C/W’tır. Jonksiyon sıcaklıı 175°C’yi amamalıdır. Uygun bir soutucu termal direnci bularak tasarımı tamamlayınız.
ÇÖZÜM
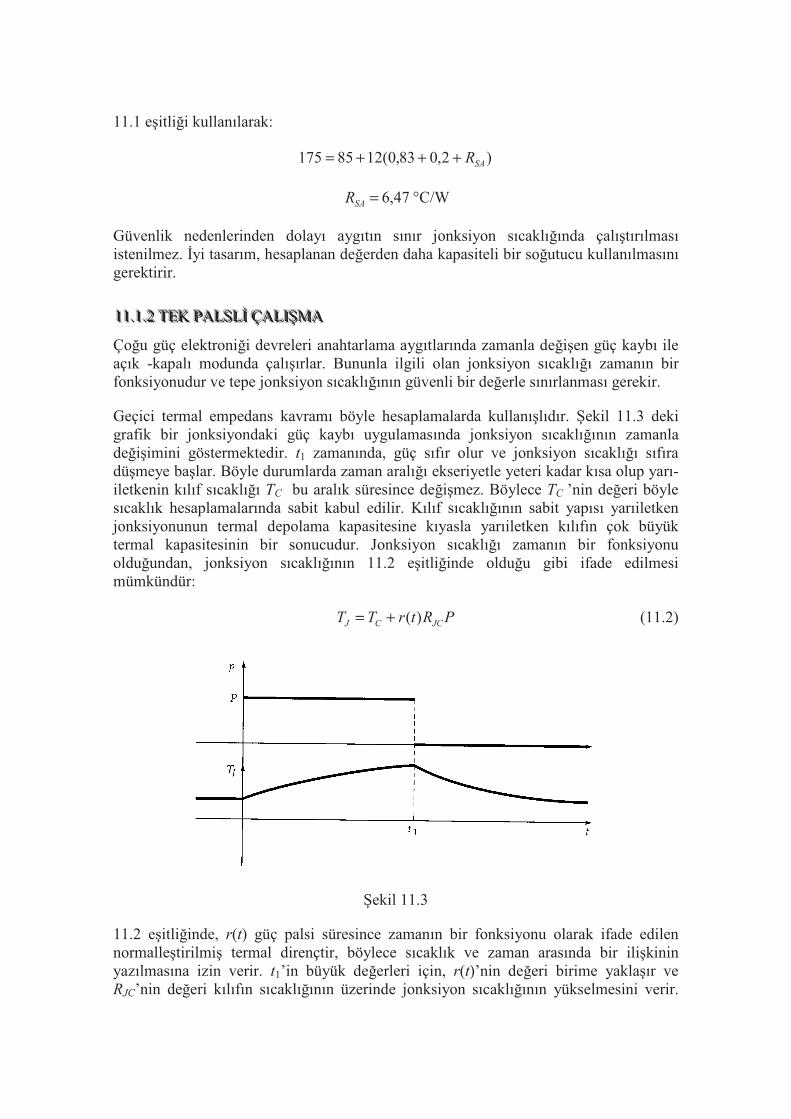
11.1 eitlii kullanılarak:
)2,083,0(1285175 SAR+++=
47,6=SAR °C/W
Güvenlik nedenlerinden dolayı aygıtın sınır jonksiyon sıcaklıında çalıtırılması istenilmez. yi tasarım, hesaplanan deerden daha kapasiteli bir soutucu kullanılmasını gerektirir.
111111...111...222 TTTEEEKKK PPPAAALLLSSSLLL ÇÇÇAAALLLIIIMMMAAA
Çou güç elektronii devreleri anahtarlama aygıtlarında zamanla deien güç kaybı ile açık -kapalı modunda çalıırlar. Bununla ilgili olan jonksiyon sıcaklıı zamanın bir fonksiyonudur ve tepe jonksiyon sıcaklıının güvenli bir deerle sınırlanması gerekir.
Geçici termal empedans kavramı böyle hesaplamalarda kullanılıdır. ekil 11.3 deki grafik bir jonksiyondaki güç kaybı uygulamasında jonksiyon sıcaklıının zamanla deiimini göstermektedir. t1 zamanında, güç sıfır olur ve jonksiyon sıcaklıı sıfıra dümeye balar. Böyle durumlarda zaman aralıı ekseriyetle yeteri kadar kısa olup yarı-iletkenin kılıf sıcaklıı TC bu aralık süresince deimez. Böylece TC ’nin deeri böyle sıcaklık hesaplamalarında sabit kabul edilir. Kılıf sıcaklıının sabit yapısı yarıiletken jonksiyonunun termal depolama kapasitesine kıyasla yarıiletken kılıfın çok büyük termal kapasitesinin bir sonucudur. Jonksiyon sıcaklıı zamanın bir fonksiyonu olduundan, jonksiyon sıcaklıının 11.2 eitliinde olduu gibi ifade edilmesi mümkündür:
PRtrTT JCCJ )(+= (11.2)
ekil 11.3
11.2 eitliinde, r(t) güç palsi süresince zamanın bir fonksiyonu olarak ifade edilen normalletirilmi termal dirençtir, böylece sıcaklık ve zaman arasında bir ilikinin yazılmasına izin verir. t1’in büyük deerleri için, r(t)’nin deeri birime yaklaır ve RJC’nin deeri kılıfın sıcaklıının üzerinde jonksiyon sıcaklıının yükselmesini verir.
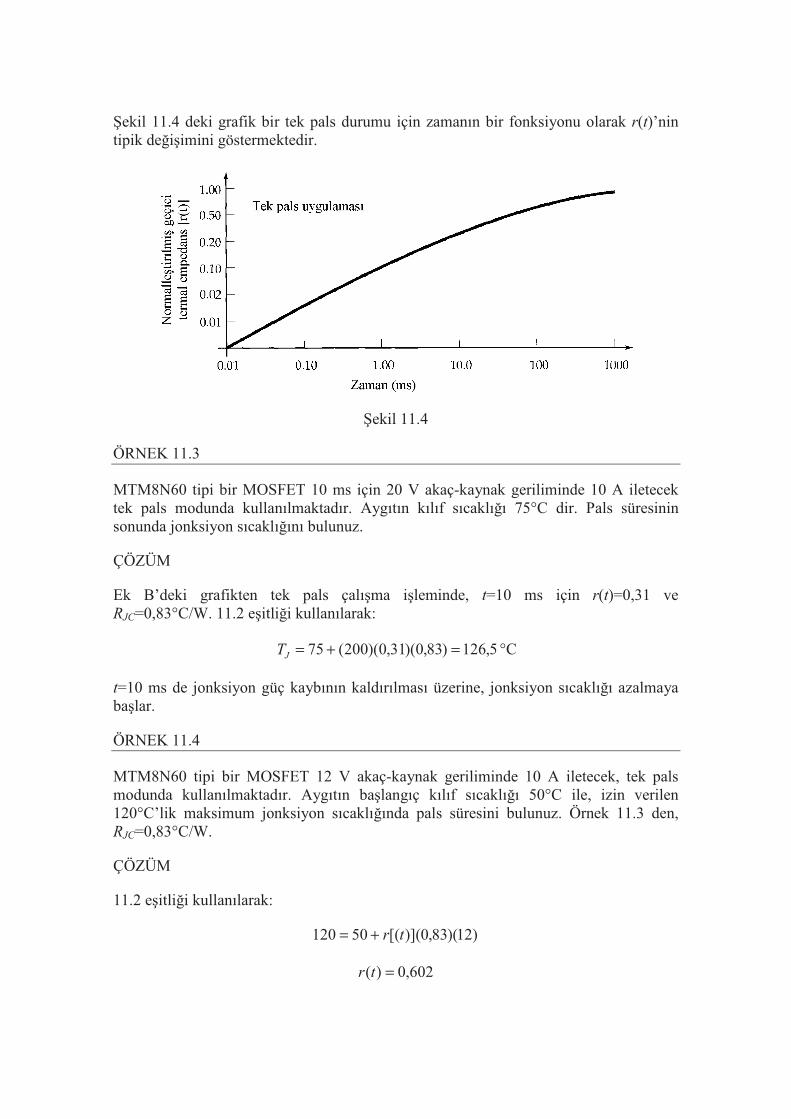
ekil 11.4 deki grafik bir tek pals durumu için zamanın bir fonksiyonu olarak r(t)’nin tipik deiimini göstermektedir.
ekil 11.4
ÖRNEK 11.3
MTM8N60 tipi bir MOSFET 10 ms için 20 V akaç-kaynak geriliminde 10 A iletecek tek pals modunda kullanılmaktadır. Aygıtın kılıf sıcaklıı 75°C dir. Pals süresinin sonunda jonksiyon sıcaklıını bulunuz.
ÇÖZÜM
Ek B’deki grafikten tek pals çalıma ileminde, t=10 ms için r(t)=0,31 ve RJC=0,83°C/W. 11.2 eitlii kullanılarak:
5,126)83,0)(31,0)(200(75 =+=JT °C
t=10 ms de jonksiyon güç kaybının kaldırılması üzerine, jonksiyon sıcaklıı azalmaya balar.
ÖRNEK 11.4
MTM8N60 tipi bir MOSFET 12 V akaç-kaynak geriliminde 10 A iletecek, tek pals modunda kullanılmaktadır. Aygıtın balangıç kılıf sıcaklıı 50°C ile, izin verilen 120°C’lik maksimum jonksiyon sıcaklıında pals süresini bulunuz. Örnek 11.3 den, RJC=0,83°C/W.
ÇÖZÜM
11.2 eitlii kullanılarak:
)12)(83,0)]([(50120 tr+=
602,0)( =tr
Veri sayfasından, )(tr ’nin deeri 65 ms’ye karılık gelmektedir.
111111...111...333 PPPEEERRRYYYOOODDD KKK PPPAAALLLSSSLLLEEERRR
Yarıiletken jonksiyona periyodik güç palsleri uygulandıında, sıcaklık da periyodik olur. Jonksiyonun termal kapasitesi jonksiyonun termal gezintisini, ayet tepe palslerin devam ettii durumda kazanılan en yüksek sıcaklıktan daha az bir deerde sınırlar. Yarıiletken veri sayfaları sık olarak tek palsli durumda olduu kadar bu durum için de normalletirilmi geçici termal empedans erileri içerirler. ekil 11.5 deki grafik, kullanılan terimlerin birkaçını tanımlamaktadır. Böyle bir çalıma modunda, T aralıı genel olarak kılıf sıcaklıının sabit düünülebilecei kadar kısadır.
ekil 11.5
Jonksiyon sıcaklıı ve zaman arasındaki iliki yine 11.2 eitlii ile ifade edilir. Bu durumda, r(t) 11.3 eitlii ile ifade edilen görev saykılının deerine balı olmakla beraber, t1’in deerine de balıdır:
T
tD 1= (11.3)
ekil 11.6 daki grafik t1 ve D’nin bir fonksiyonu olarak r(t)’nin tipik deerlerini göstermektedir.
Bu durumda, 11.2 eitlii geçerliliini sürdürür. ekil 11.6 daki bir grafikten elde edilen deerler her pals aralıının sonunda tepe jonksiyon sıcaklıını elde etmek için 11.2 eitliinde kullanılabilir. Örnek 11.5 böyle bir hesaplamayı göstermektedir.
ÖRNEK 11.5
Bir BJT 2 kHz’lik bir frekansta periyodik bir davranıla çalımaktadır. Her periyotta 100 µs için 100 W’lık bir güç kaybına ve her periyodun kalan kısmında sıfır kayba sahiptir. ekil 11.6 daki veriyi kullanınız; TA=65°C, RCS=0,4°C/W, RJC=1,2°C/W ve TJ=130°C. Aaıdakileri bulunuz:
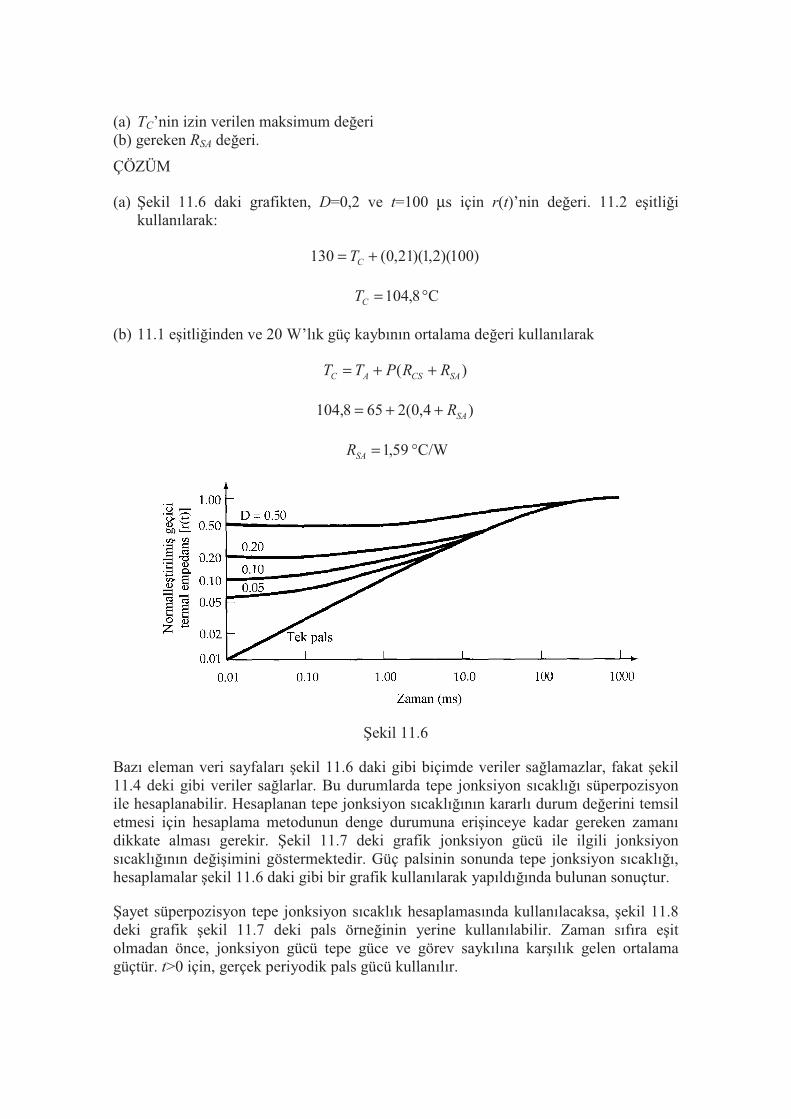
(a) TC’nin izin verilen maksimum deeri (b) gereken RSA deeri.
ÇÖZÜM
(a) ekil 11.6 daki grafikten, D=0,2 ve t=100 µs için r(t)’nin deeri. 11.2 eitlii kullanılarak:
)100)(2,1)(21,0(130 += CT
8,104=CT °C
(b) 11.1 eitliinden ve 20 W’lık güç kaybının ortalama deeri kullanılarak
)( SACSAC RRPTT ++=
)4,0(2658,104 SAR++=
59,1=SAR °C/W
ekil 11.6
Bazı eleman veri sayfaları ekil 11.6 daki gibi biçimde veriler salamazlar, fakat ekil 11.4 deki gibi veriler salarlar. Bu durumlarda tepe jonksiyon sıcaklıı süperpozisyon ile hesaplanabilir. Hesaplanan tepe jonksiyon sıcaklıının kararlı durum deerini temsil etmesi için hesaplama metodunun denge durumuna eriinceye kadar gereken zamanı dikkate alması gerekir. ekil 11.7 deki grafik jonksiyon gücü ile ilgili jonksiyon sıcaklıının deiimini göstermektedir. Güç palsinin sonunda tepe jonksiyon sıcaklıı, hesaplamalar ekil 11.6 daki gibi bir grafik kullanılarak yapıldıında bulunan sonuçtur.
ayet süperpozisyon tepe jonksiyon sıcaklık hesaplamasında kullanılacaksa, ekil 11.8 deki grafik ekil 11.7 deki pals örneinin yerine kullanılabilir. Zaman sıfıra eit olmadan önce, jonksiyon gücü tepe güce ve görev saykılına karılık gelen ortalama güçtür. t>0 için, gerçek periyodik pals gücü kullanılır.
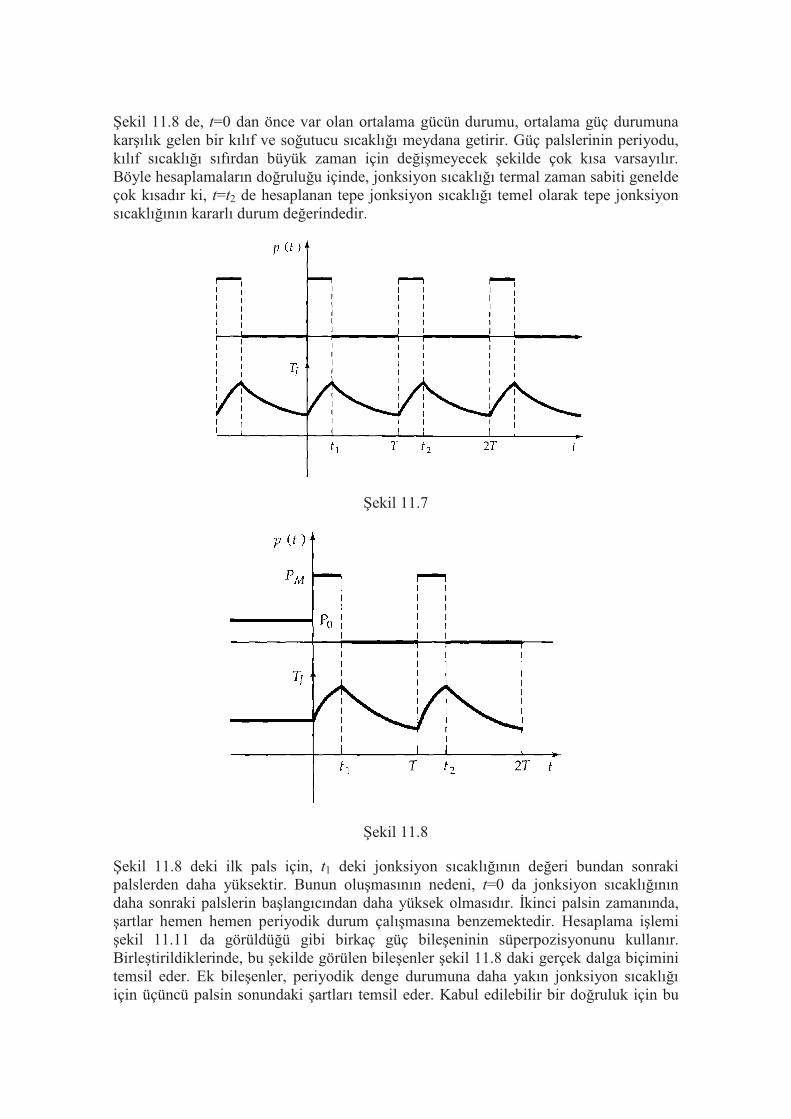
ekil 11.8 de, t=0 dan önce var olan ortalama gücün durumu, ortalama güç durumuna karılık gelen bir kılıf ve soutucu sıcaklıı meydana getirir. Güç palslerinin periyodu, kılıf sıcaklıı sıfırdan büyük zaman için deimeyecek ekilde çok kısa varsayılır. Böyle hesaplamaların doruluu içinde, jonksiyon sıcaklıı termal zaman sabiti genelde çok kısadır ki, t=t2 de hesaplanan tepe jonksiyon sıcaklıı temel olarak tepe jonksiyon sıcaklıının kararlı durum deerindedir.
ekil 11.7
ekil 11.8
ekil 11.8 deki ilk pals için, t1 deki jonksiyon sıcaklıının deeri bundan sonraki palslerden daha yüksektir. Bunun olumasının nedeni, t=0 da jonksiyon sıcaklıının daha sonraki palslerin balangıcından daha yüksek olmasıdır. kinci palsin zamanında, artlar hemen hemen periyodik durum çalımasına benzemektedir. Hesaplama ilemi ekil 11.11 da görüldüü gibi birkaç güç bileeninin süperpozisyonunu kullanır. Birletirildiklerinde, bu ekilde görülen bileenler ekil 11.8 daki gerçek dalga biçimini temsil eder. Ek bileenler, periyodik denge durumuna daha yakın jonksiyon sıcaklıı için üçüncü palsin sonundaki artları temsil eder. Kabul edilebilir bir doruluk için bu
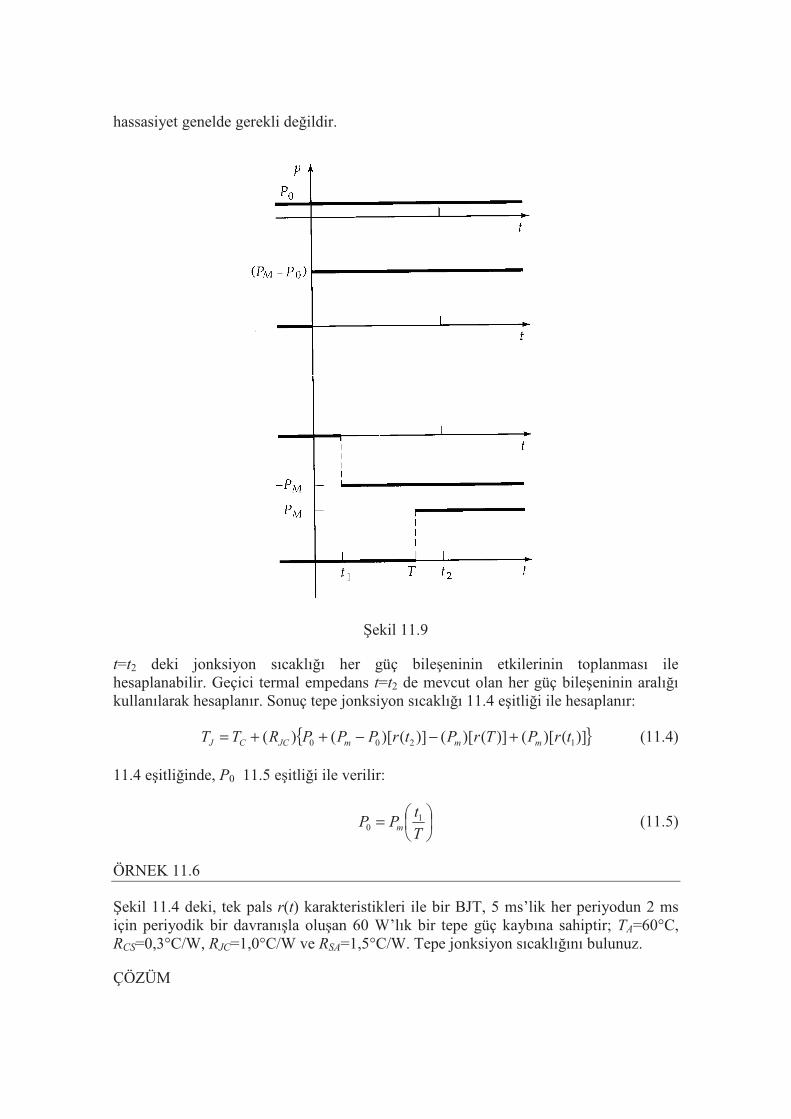
hassasiyet genelde gerekli deildir.
ekil 11.9
t=t2 deki jonksiyon sıcaklıı her güç bileeninin etkilerinin toplanması ile hesaplanabilir. Geçici termal empedans t=t2 de mevcut olan her güç bileeninin aralıı kullanılarak hesaplanır. Sonuç tepe jonksiyon sıcaklıı 11.4 eitlii ile hesaplanır:
)]()[()]()[()]()[()( 1200 trPTrPtrPPPRTT mmmJCCJ +−−++= (11.4)
11.4 eitliinde, P0 11.5 eitlii ile verilir:
=
T
tPP m
10 (11.5)
ÖRNEK 11.6
ekil 11.4 deki, tek pals r(t) karakteristikleri ile bir BJT, 5 ms’lik her periyodun 2 ms için periyodik bir davranıla oluan 60 W’lık bir tepe güç kaybına sahiptir; TA=60°C, RCS=0,3°C/W, RJC=1,0°C/W ve RSA=1,5°C/W. Tepe jonksiyon sıcaklıını bulunuz.
ÇÖZÜM
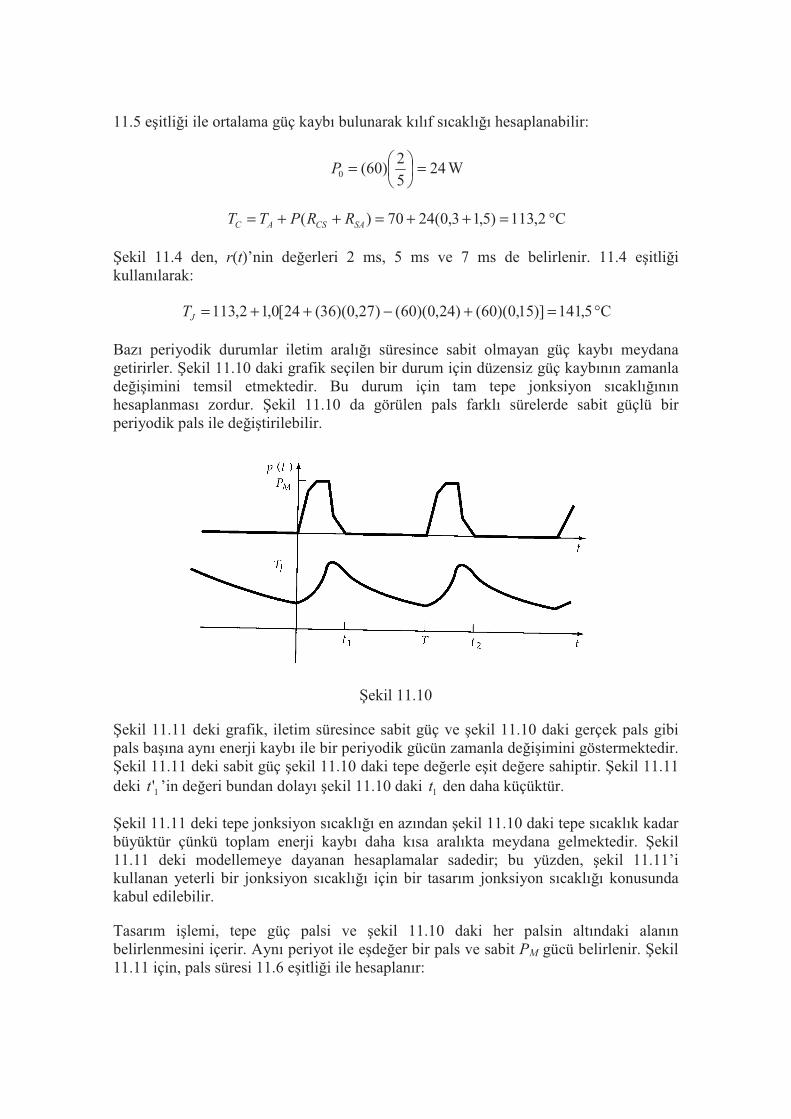
11.5 eitlii ile ortalama güç kaybı bulunarak kılıf sıcaklıı hesaplanabilir:
245
2)60(0 =
=P W
2,113)5,13,0(2470)( =++=++= SACSAC RRPTT °C
ekil 11.4 den, r(t)’nin deerleri 2 ms, 5 ms ve 7 ms de belirlenir. 11.4 eitlii kullanılarak:
5,141)]15,0)(60()24,0)(60()27,0)(36(24[0,12,113 =+−++=JT °C
Bazı periyodik durumlar iletim aralıı süresince sabit olmayan güç kaybı meydana getirirler. ekil 11.10 daki grafik seçilen bir durum için düzensiz güç kaybının zamanla deiimini temsil etmektedir. Bu durum için tam tepe jonksiyon sıcaklıının hesaplanması zordur. ekil 11.10 da görülen pals farklı sürelerde sabit güçlü bir periyodik pals ile deitirilebilir.
ekil 11.10
ekil 11.11 deki grafik, iletim süresince sabit güç ve ekil 11.10 daki gerçek pals gibi pals baına aynı enerji kaybı ile bir periyodik gücün zamanla deiimini göstermektedir. ekil 11.11 deki sabit güç ekil 11.10 daki tepe deerle eit deere sahiptir. ekil 11.11 deki 1't ’in deeri bundan dolayı ekil 11.10 daki 1t den daha küçüktür.
ekil 11.11 deki tepe jonksiyon sıcaklıı en azından ekil 11.10 daki tepe sıcaklık kadar büyüktür çünkü toplam enerji kaybı daha kısa aralıkta meydana gelmektedir. ekil 11.11 deki modellemeye dayanan hesaplamalar sadedir; bu yüzden, ekil 11.11’i kullanan yeterli bir jonksiyon sıcaklıı için bir tasarım jonksiyon sıcaklıı konusunda kabul edilebilir.
Tasarım ilemi, tepe güç palsi ve ekil 11.10 daki her palsin altındaki alanın belirlenmesini içerir. Aynı periyot ile edeer bir pals ve sabit PM gücü belirlenir. ekil 11.11 için, pals süresi 11.6 eitlii ile hesaplanır:
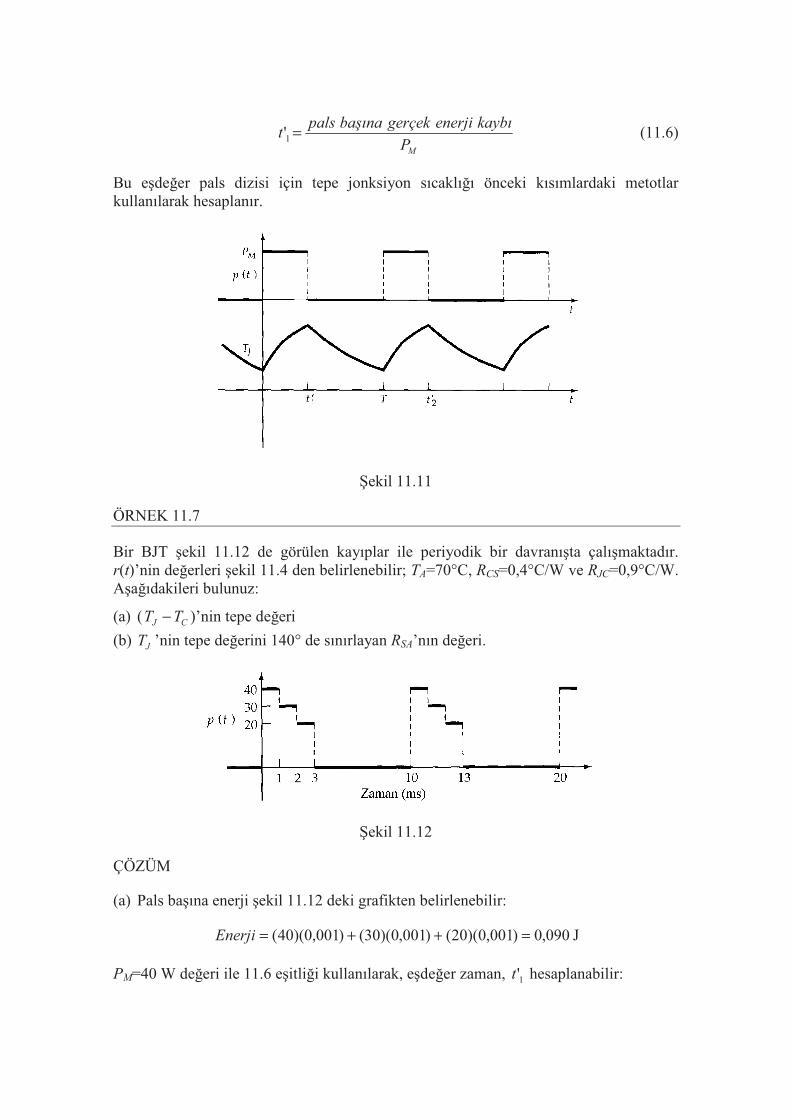
MP
kaybıenerjigerçekbaınapalst =1' (11.6)
Bu edeer pals dizisi için tepe jonksiyon sıcaklıı önceki kısımlardaki metotlar kullanılarak hesaplanır.
ekil 11.11
ÖRNEK 11.7
Bir BJT ekil 11.12 de görülen kayıplar ile periyodik bir davranıta çalımaktadır. r(t)’nin deerleri ekil 11.4 den belirlenebilir; TA=70°C, RCS=0,4°C/W ve RJC=0,9°C/W. Aaıdakileri bulunuz:
(a) ( CJ TT − )’nin tepe deeri
(b) JT ’nin tepe deerini 140° de sınırlayan RSA’nın deeri.
ekil 11.12
ÇÖZÜM
(a) Pals baına enerji ekil 11.12 deki grafikten belirlenebilir:
0900001020001030001040 ,),)((),)((),)(( =++=Enerji J
PM=40 W deeri ile 11.6 eitlii kullanılarak, edeer zaman, 1't hesaplanabilir:

00225040
09001 ,
,' ==t s
ekil 11.4 den, r(t)’nin deerleri 2,25 ms, 10 ms ve 12,25 ms zamanlarında belirlenir. Bu deerler sırasıyla (0,16), (0,31) ve (0,34) dür.
11.5 eitliinden, 0P hesaplanabilir:
910
252400 =
=
,)(P W
11.4 eitlii kullanılarak, CJ TT − deeri hesaplanabilir:
212160403104034031990 ,)],)((),)((),)(([, =+−+=− CJ TT °C
(b)
8127212140 ,, =−=CT °C
11.1 eitliinden:
)( SACSAC RRPTT ++=
),(, SAR++= 409708127
06,=SAR °C/W
111111...222 KKKOOORRRUUUMMMAAA
Güç elektronik cihazının dahili hatalara, harici hatalara ve harici düzensizliklere karı korunması gerekir. Örnein, bir SCR’nin kesim hatası gibi bir dahili hatanın dier elemanlara bir zarar vermemesi gerekir. Yükün harici kısa devresinin dahildeki elemanlara zarar vermemesi gerekir. Son olarak, giri güç hattındaki geçici bir elektriksel deimenin yarıiletkenin hasarına neden olmaması gerekir. Bunların herbirinden genel olarak uygun tasarımla kaçınılabilir. ayet mümkünse, koruyucu özelliin, problem giderildiinde normal çalımasına devam etmesine izin vermesi gerekir.
111111...222...333 AAAIIIRRRIII AAAKKKIIIMMM KKKOOORRRUUUMMMAAASSSIII
Aırı akım korumasının bir örnei, aırı bir akım ile yük direncinin azalması veya çıkıterminallerindeki bir kısa devre ile bir azaltan kıyıcı durumunda gösterilmitir. Filtre indüktör akımı bu yüzden ayarlanmı bir deerin üzerine çıkar. Koruma, çıkı akımı uygun bir deer aralıına gelinceye kadar görev saykılı, D’nin azaltılmasıyla yapılır. ekil 11.13 deki devre diyagramı yaygın olarak kullanılan bir koruma yolunu göstermektedir.
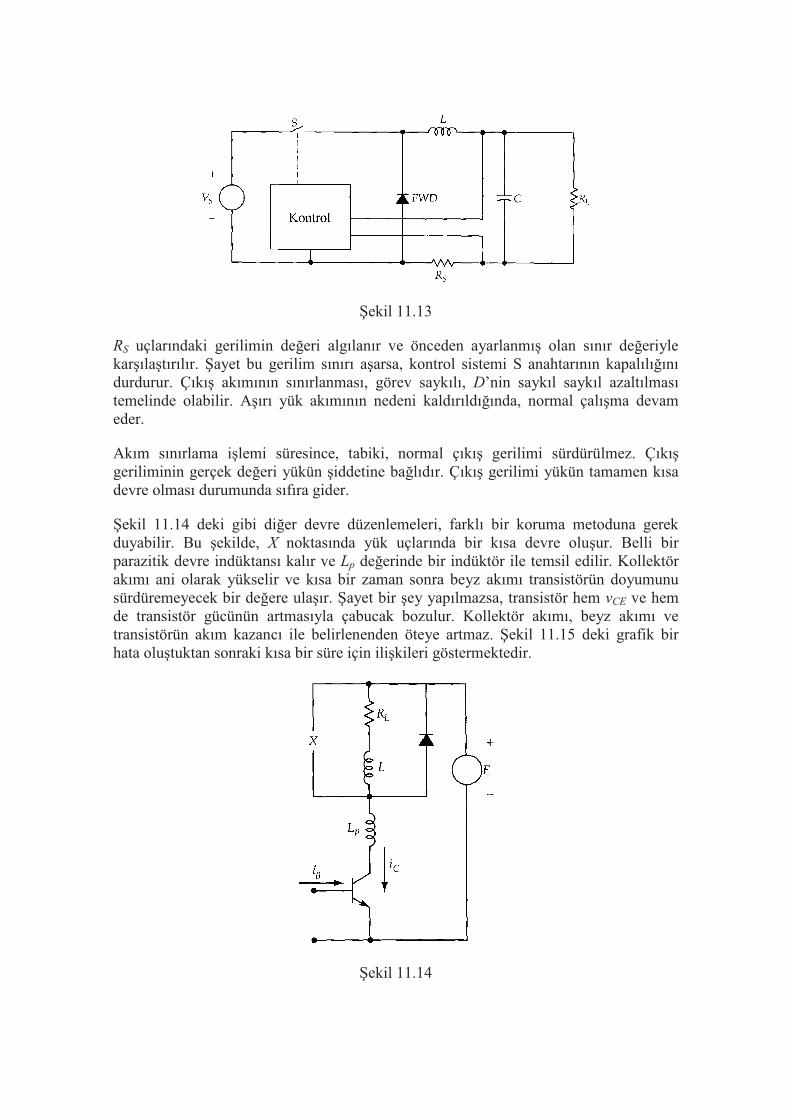
ekil 11.13
RS uçlarındaki gerilimin deeri algılanır ve önceden ayarlanmı olan sınır deeriyle karılatırılır. ayet bu gerilim sınırı aarsa, kontrol sistemi S anahtarının kapalılıını durdurur. Çıkı akımının sınırlanması, görev saykılı, D’nin saykıl saykıl azaltılması temelinde olabilir. Aırı yük akımının nedeni kaldırıldıında, normal çalıma devam eder.
Akım sınırlama ilemi süresince, tabiki, normal çıkı gerilimi sürdürülmez. Çıkıgeriliminin gerçek deeri yükün iddetine balıdır. Çıkı gerilimi yükün tamamen kısa devre olması durumunda sıfıra gider.
ekil 11.14 deki gibi dier devre düzenlemeleri, farklı bir koruma metoduna gerek duyabilir. Bu ekilde, X noktasında yük uçlarında bir kısa devre oluur. Belli bir parazitik devre indüktansı kalır ve Lp deerinde bir indüktör ile temsil edilir. Kollektör akımı ani olarak yükselir ve kısa bir zaman sonra beyz akımı transistörün doyumunu sürdüremeyecek bir deere ulaır. ayet bir ey yapılmazsa, transistör hem vCE ve hem de transistör gücünün artmasıyla çabucak bozulur. Kollektör akımı, beyz akımı ve transistörün akım kazancı ile belirlenenden öteye artmaz. ekil 11.15 deki grafik bir hata olutuktan sonraki kısa bir süre için ilikileri göstermektedir.
ekil 11.14
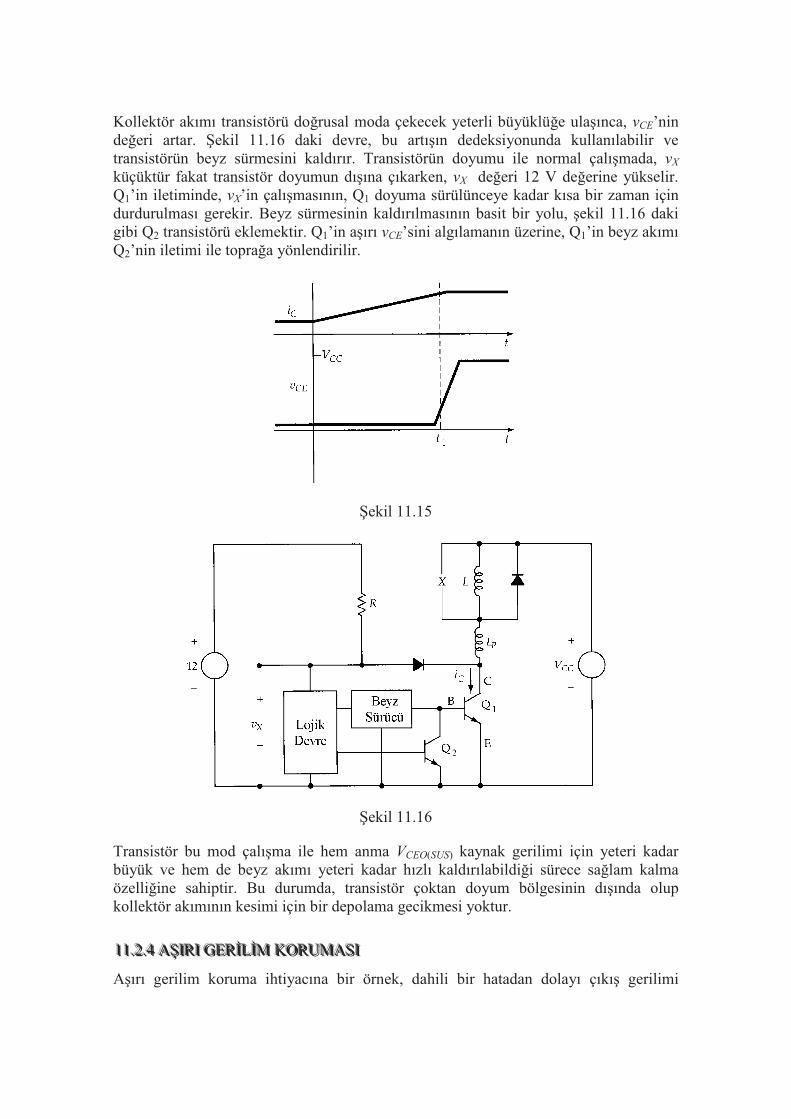
Kollektör akımı transistörü dorusal moda çekecek yeterli büyüklüe ulaınca, vCE’nin deeri artar. ekil 11.16 daki devre, bu artıın dedeksiyonunda kullanılabilir ve transistörün beyz sürmesini kaldırır. Transistörün doyumu ile normal çalımada, vX
küçüktür fakat transistör doyumun dıına çıkarken, vX deeri 12 V deerine yükselir. Q1’in iletiminde, vX’in çalımasının, Q1 doyuma sürülünceye kadar kısa bir zaman için durdurulması gerekir. Beyz sürmesinin kaldırılmasının basit bir yolu, ekil 11.16 daki gibi Q2 transistörü eklemektir. Q1’in aırı vCE’sini algılamanın üzerine, Q1’in beyz akımı Q2’nin iletimi ile topraa yönlendirilir.
ekil 11.15
ekil 11.16
Transistör bu mod çalıma ile hem anma VCEO(SUS) kaynak gerilimi için yeteri kadar büyük ve hem de beyz akımı yeteri kadar hızlı kaldırılabildii sürece salam kalma özelliine sahiptir. Bu durumda, transistör çoktan doyum bölgesinin dıında olup kollektör akımının kesimi için bir depolama gecikmesi yoktur.
111111...222...444 AAAIIIRRRIII GGGEEERRRLLLMMM KKKOOORRRUUUMMMAAASSSIII
Aırı gerilim koruma ihtiyacına bir örnek, dahili bir hatadan dolayı çıkı gerilimi
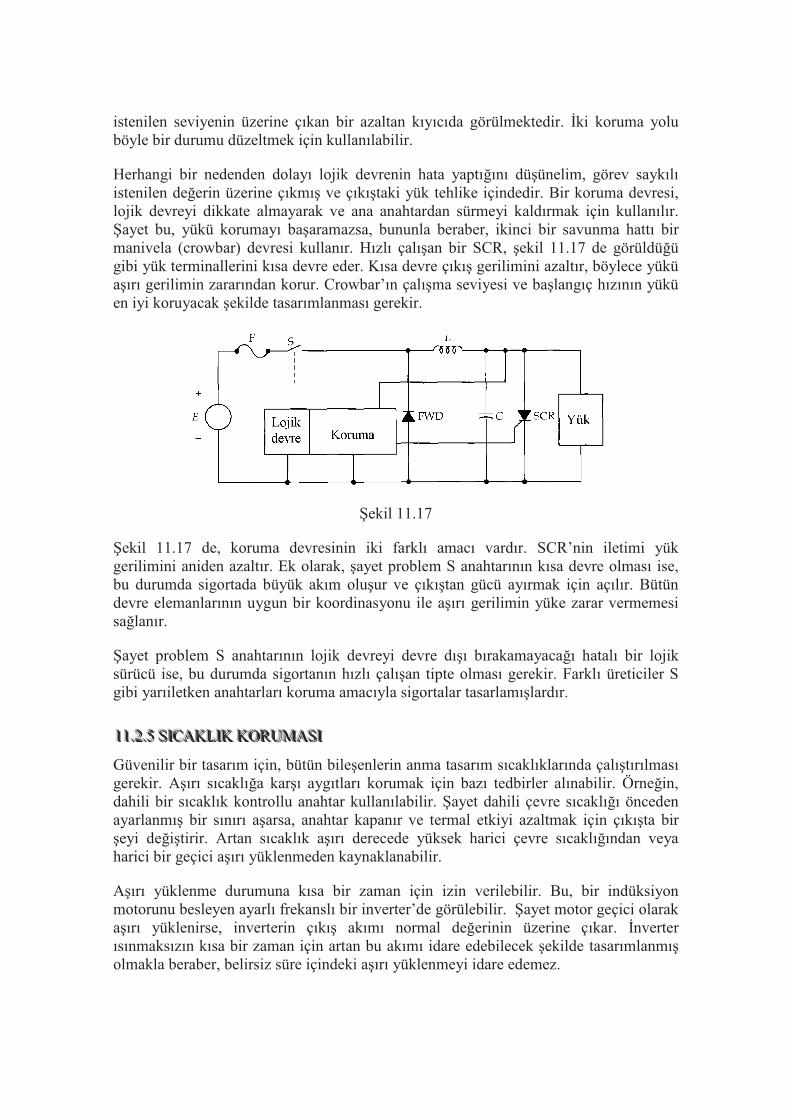
istenilen seviyenin üzerine çıkan bir azaltan kıyıcıda görülmektedir. ki koruma yolu böyle bir durumu düzeltmek için kullanılabilir.
Herhangi bir nedenden dolayı lojik devrenin hata yaptıını düünelim, görev saykılı istenilen deerin üzerine çıkmı ve çıkıtaki yük tehlike içindedir. Bir koruma devresi, lojik devreyi dikkate almayarak ve ana anahtardan sürmeyi kaldırmak için kullanılır. ayet bu, yükü korumayı baaramazsa, bununla beraber, ikinci bir savunma hattı bir manivela (crowbar) devresi kullanır. Hızlı çalıan bir SCR, ekil 11.17 de görüldüü gibi yük terminallerini kısa devre eder. Kısa devre çıkı gerilimini azaltır, böylece yükü aırı gerilimin zararından korur. Crowbar’ın çalıma seviyesi ve balangıç hızının yükü en iyi koruyacak ekilde tasarımlanması gerekir.
ekil 11.17
ekil 11.17 de, koruma devresinin iki farklı amacı vardır. SCR’nin iletimi yük gerilimini aniden azaltır. Ek olarak, ayet problem S anahtarının kısa devre olması ise, bu durumda sigortada büyük akım oluur ve çıkıtan gücü ayırmak için açılır. Bütün devre elemanlarının uygun bir koordinasyonu ile aırı gerilimin yüke zarar vermemesi salanır.
ayet problem S anahtarının lojik devreyi devre dıı bırakamayacaı hatalı bir lojik sürücü ise, bu durumda sigortanın hızlı çalıan tipte olması gerekir. Farklı üreticiler S gibi yarıiletken anahtarları koruma amacıyla sigortalar tasarlamılardır.
111111...222...555 SSSIIICCCAAAKKKLLLIIIKKK KKKOOORRRUUUMMMAAASSSIII
Güvenilir bir tasarım için, bütün bileenlerin anma tasarım sıcaklıklarında çalıtırılması gerekir. Aırı sıcaklıa karı aygıtları korumak için bazı tedbirler alınabilir. Örnein, dahili bir sıcaklık kontrollu anahtar kullanılabilir. ayet dahili çevre sıcaklıı önceden ayarlanmı bir sınırı aarsa, anahtar kapanır ve termal etkiyi azaltmak için çıkıta bir eyi deitirir. Artan sıcaklık aırı derecede yüksek harici çevre sıcaklıından veya harici bir geçici aırı yüklenmeden kaynaklanabilir.
Aırı yüklenme durumuna kısa bir zaman için izin verilebilir. Bu, bir indüksiyon motorunu besleyen ayarlı frekanslı bir inverter’de görülebilir. ayet motor geçici olarak aırı yüklenirse, inverterin çıkı akımı normal deerinin üzerine çıkar. nverter ısınmaksızın kısa bir zaman için artan bu akımı idare edebilecek ekilde tasarımlanmıolmakla beraber, belirsiz süre içindeki aırı yüklenmeyi idare edemez.
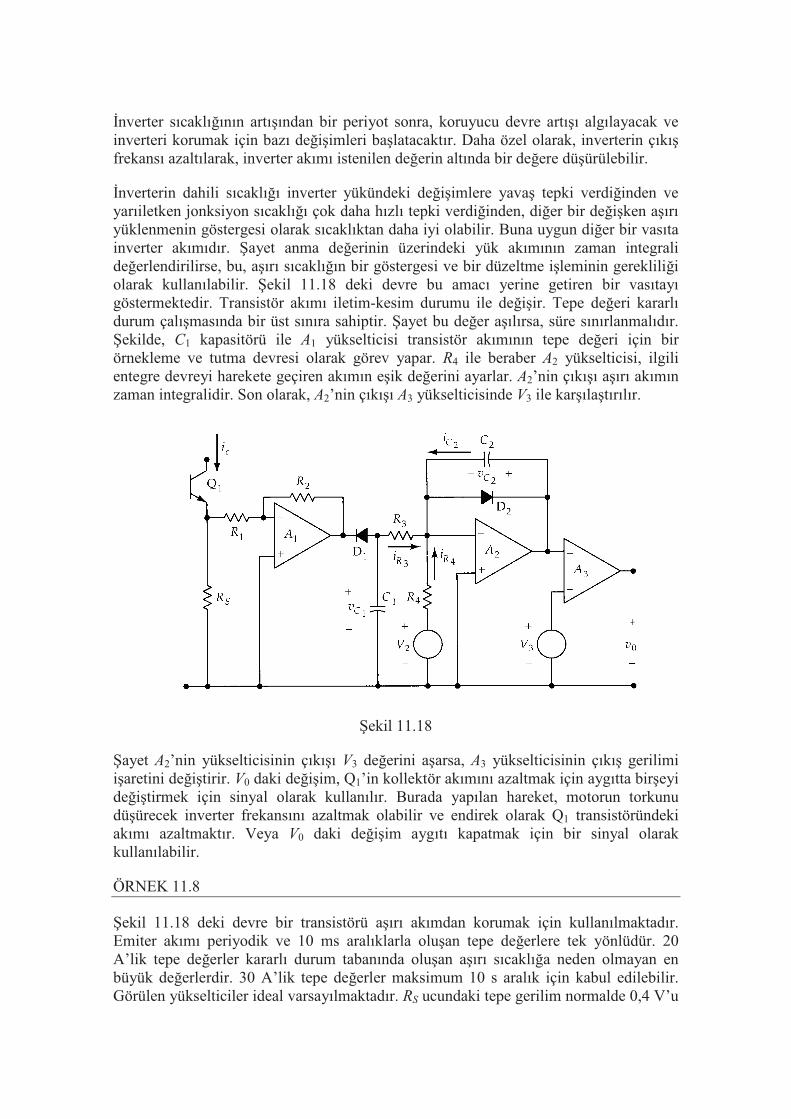
nverter sıcaklıının artıından bir periyot sonra, koruyucu devre artıı algılayacak ve inverteri korumak için bazı deiimleri balatacaktır. Daha özel olarak, inverterin çıkıfrekansı azaltılarak, inverter akımı istenilen deerin altında bir deere düürülebilir.
nverterin dahili sıcaklıı inverter yükündeki deiimlere yava tepki verdiinden ve yarıiletken jonksiyon sıcaklıı çok daha hızlı tepki verdiinden, dier bir deiken aırı yüklenmenin göstergesi olarak sıcaklıktan daha iyi olabilir. Buna uygun dier bir vasıta inverter akımıdır. ayet anma deerinin üzerindeki yük akımının zaman integrali deerlendirilirse, bu, aırı sıcaklıın bir göstergesi ve bir düzeltme ileminin gereklilii olarak kullanılabilir. ekil 11.18 deki devre bu amacı yerine getiren bir vasıtayı göstermektedir. Transistör akımı iletim-kesim durumu ile deiir. Tepe deeri kararlı durum çalımasında bir üst sınıra sahiptir. ayet bu deer aılırsa, süre sınırlanmalıdır. ekilde, C1 kapasitörü ile A1 yükselticisi transistör akımının tepe deeri için bir örnekleme ve tutma devresi olarak görev yapar. R4 ile beraber A2 yükselticisi, ilgili entegre devreyi harekete geçiren akımın eik deerini ayarlar. A2’nin çıkıı aırı akımın zaman integralidir. Son olarak, A2’nin çıkıı A3 yükselticisinde V3 ile karılatırılır.
ekil 11.18
ayet A2’nin yükselticisinin çıkıı V3 deerini aarsa, A3 yükselticisinin çıkı gerilimi iaretini deitirir. V0 daki deiim, Q1’in kollektör akımını azaltmak için aygıtta bireyi deitirmek için sinyal olarak kullanılır. Burada yapılan hareket, motorun torkunu düürecek inverter frekansını azaltmak olabilir ve endirek olarak Q1 transistöründeki akımı azaltmaktır. Veya V0 daki deiim aygıtı kapatmak için bir sinyal olarak kullanılabilir.
ÖRNEK 11.8
ekil 11.18 deki devre bir transistörü aırı akımdan korumak için kullanılmaktadır. Emiter akımı periyodik ve 10 ms aralıklarla oluan tepe deerlere tek yönlüdür. 20 A’lik tepe deerler kararlı durum tabanında oluan aırı sıcaklıa neden olmayan en büyük deerlerdir. 30 A’lik tepe deerler maksimum 10 s aralık için kabul edilebilir. Görülen yükselticiler ideal varsayılmaktadır. RS ucundaki tepe gerilim normalde 0,4 V’u

geçmemektedir. 10 V’luk V2 ve V3 gerilimleri mevcuttur. Aaıdakileri bulunuz:
(a) 20 A’lik tepe akımı için 41
−=Cv V normal deerini üreten R1, R2 ve RS deerleri
(b) transistör akımının ardıık pikleri arasında %1 den daha fazla azalmayan 1Cv gerilimi
olacak ekilde R3 ve C1 deerleri (c) ayet transistör akımı 10 s aralık süresince 30 A ise 10 s de
1Cv ’in iaret deiimine
neden olacak R4 ve C2 deerleri.
ÇÖZÜM
(a) RS ucundaki gerilimin üst sınır için, RS’nin deeri belirlenebilir:
02020
40,
,==SR Ω
A1 ile salanan kazanç verilen bilgilerden belirlenmi 10 s lik bir büyüklüe sahiptir. Bu kazanç 12 RR / oranını belirler. Gerçek deerlerin seçimi tamamen keyfidir:
101
2 =R
R
R2=50 K ve R1=5 K yeterli olacaktır. Bu hesaplamada, D1 uçlarındaki gerilim ihmal edilmitir.
(b) A2’nin eviren terminali topraktır, böylece R3 transistör akımının pikleri arasında C1’in dearjında görev yapar. 10 ms aralıı süresince %1’lik gereksinimi karılamak için R3C1 için 1 s zaman sabiti gerekir:
113 =CR
11 =C µF ve 13 =R MΩ deerlerinin seçimi gereken zaman sabitini karılayacaktır.
Çalıma süresince 3R deki küçük akım, giri polarlama akımına göre A2’yi seçerken
özel dikkat gerektirir.
(c) V2 ve R4 den giri, bu akım seviyesinde 2Cv ’nin deimemesi için 20 A’lik tepe
transistör akımında 3R deki akımı iptal etmelidir.
Transistör akımının 20 A olma durumu için:
41
−=Cv V
43
−=Ri µA
44
+=Ri µA
V2=10 V ile, R4 deki akım R4 için 2,5 MΩ’luk bir deer gerektirir. 30 A tepe transistör
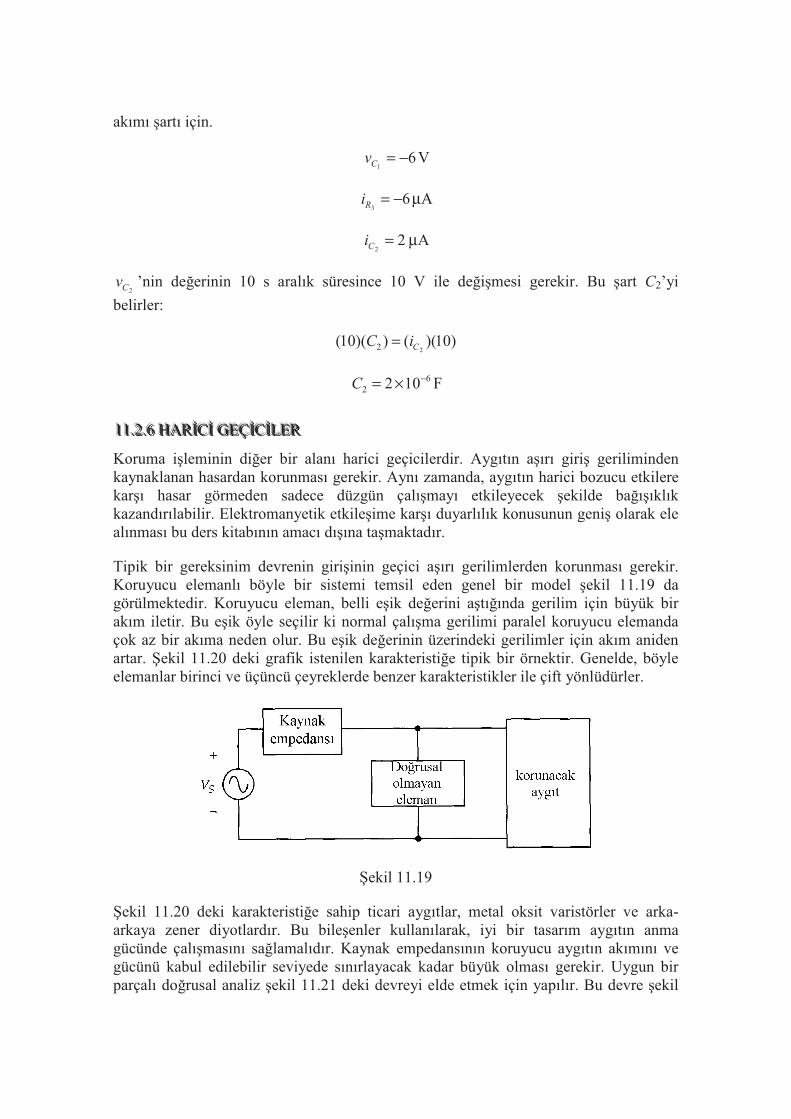
akımı artı için.
61
−=Cv V
63
−=Ri µA
22
=Ci µA
2Cv ’nin deerinin 10 s aralık süresince 10 V ile deimesi gerekir. Bu art C2’yi
belirler:
))(())(( 101022 CiC =
62 102 −×=C F
111111...222...666 HHHAAARRRCCC GGGEEEÇÇÇCCCLLLEEERRR
Koruma ileminin dier bir alanı harici geçicilerdir. Aygıtın aırı giri geriliminden kaynaklanan hasardan korunması gerekir. Aynı zamanda, aygıtın harici bozucu etkilere karı hasar görmeden sadece düzgün çalımayı etkileyecek ekilde baııklık kazandırılabilir. Elektromanyetik etkileime karı duyarlılık konusunun geni olarak ele alınması bu ders kitabının amacı dıına tamaktadır.
Tipik bir gereksinim devrenin giriinin geçici aırı gerilimlerden korunması gerekir. Koruyucu elemanlı böyle bir sistemi temsil eden genel bir model ekil 11.19 da görülmektedir. Koruyucu eleman, belli eik deerini atıında gerilim için büyük bir akım iletir. Bu eik öyle seçilir ki normal çalıma gerilimi paralel koruyucu elemanda çok az bir akıma neden olur. Bu eik deerinin üzerindeki gerilimler için akım aniden artar. ekil 11.20 deki grafik istenilen karakteristie tipik bir örnektir. Genelde, böyle elemanlar birinci ve üçüncü çeyreklerde benzer karakteristikler ile çift yönlüdürler.
ekil 11.19
ekil 11.20 deki karakteristie sahip ticari aygıtlar, metal oksit varistörler ve arka-arkaya zener diyotlardır. Bu bileenler kullanılarak, iyi bir tasarım aygıtın anma gücünde çalımasını salamalıdır. Kaynak empedansının koruyucu aygıtın akımını ve gücünü kabul edilebilir seviyede sınırlayacak kadar büyük olması gerekir. Uygun bir parçalı dorusal analiz ekil 11.21 deki devreyi elde etmek için yapılır. Bu devre ekil
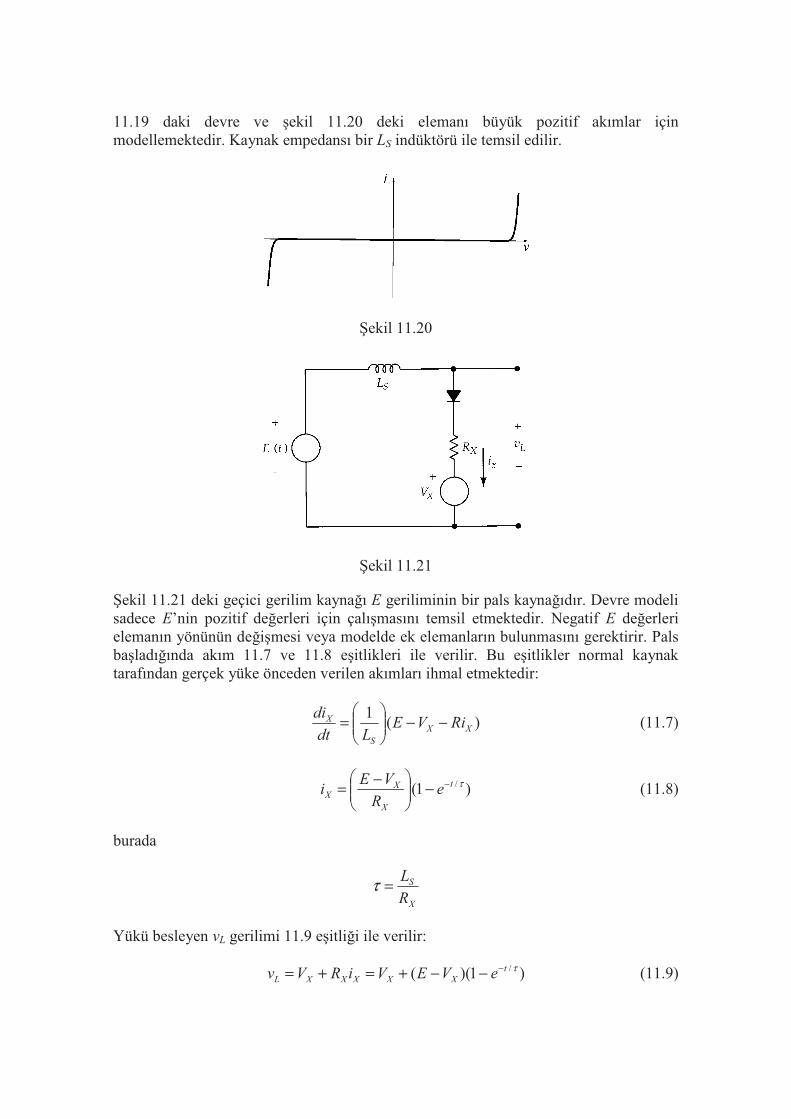
11.19 daki devre ve ekil 11.20 deki elemanı büyük pozitif akımlar için modellemektedir. Kaynak empedansı bir LS indüktörü ile temsil edilir.
ekil 11.20
ekil 11.21
ekil 11.21 deki geçici gerilim kaynaı E geriliminin bir pals kaynaıdır. Devre modeli sadece E’nin pozitif deerleri için çalımasını temsil etmektedir. Negatif E deerleri elemanın yönünün deimesi veya modelde ek elemanların bulunmasını gerektirir. Pals baladıında akım 11.7 ve 11.8 eitlikleri ile verilir. Bu eitlikler normal kaynak tarafından gerçek yüke önceden verilen akımları ihmal etmektedir:
)( XX
S
X RiVELdt
di−−
=
1 (11.7)
)( /τt
X
XX e
R
VEi −−
−= 1 (11.8)
burada
X
S
R
L=τ
Yükü besleyen vL gerilimi 11.9 eitlii ile verilir:
))(( /τt
XXXXXL eVEViRVv −−−+=+= 1 (11.9)

vL’nin deeri VX’in deerinde balar ve zamanla artar. ayet pals uzun sürmüse, bu durumda vL E’ye eit olur, fakat etkili bir tasarım için RX’in küçük olması gerekir. Beklenilen pals süresine göre zaman sabitinin uzun olması gerekir. Örnek 11.9 bununla ilgili sonuçları göstermektedir.
ÖRNEK 11.9
5 µs süren 5000 V’luk bir ani gerilim ekil 11.21 deki gibi modellenen bir devreyi etkilemektedir. vL’nin deeri 300 V tepe deerine sınırlandırılacaktır. Koruyucu eleman 280 V ile buna seri 1,5 Ω dirençle modellenebilmektedir. Normal kaynak geriliminin tepe deeri 280 V tan daha azdır. Aaıdakileri bulunuz:
(a) LS’nin minimum deeri (b) koruyucu elemana verilen enerji.
ÇÖZÜM
(a) 5 µs’lik palsin sonunda, vL’nin deeri 300 V’u geçemez. 11.9 eitlii kullanılarak, τ’nin deeri belirlenebilir:
))(( /τ512805000280300 −−−+= e
1180=τ µs
Bundan dolayı,
1770== τXS RL µH
(b) pals aralıı süresince iX 11.8 eitlii ile bulunur:
)(,
/τt
X ei −−
−= 1
51
2805000
5 µs’nin sonunda, iX ’in deeri 13,34 A dir. Bu aralık süresince, zaman sabitine kıyasla aralık çok kısa olduundan akım hemen hemen dorusal olarak deimitir. Böylece, vX
’in deeri de hemen hemen dorusal olarak deiir. Bu dorusal ilikiler aaıdaki gibidir:
ttiX
6
6106682
105
3413×=
×=
−,
,
XX iv 5,1280 +=
Enerji, Xv ve Xi çarpımının 5 µs aralık üzerinde integralinin sonucudur:
3105
01078,9)5,1280(
6
−×
×=+= −
dtiiEnerji XX J
Koruyucu elemanın enerji emme kapasitesinin 10 mJ dan fazla olması gerekir ki geçici ani gerilimler tarafından zarar görmesin.
111111...333 ÇÇÇAAALLLIIIMMMAAA SSSOOORRRUUULLLAAARRRIII
11.1 Bir soutucu nedir? 11.2 Bir güç yarıiletken aygıtının ısı iletiminin elektriksel benzerlii nedir? 11.3 Bir elemanı bir soutucuya monte ederken alınması gereken önlemler nedir? 11.4 Sulu soutmanın avantajları ve dezavantajları nedir? 11.5 Yalı soutmanın avantajları ve dezavantajları nedir? 11.6 Bir yarıiletkenin ani jonksiyon sıcaklıını belirlemek niçin gereklidir? 11.7 Kutuplu ve kutupsuz koruyucu nedir? 11.8 Bir RC koruyucunun tipik sönüm faktörü nedir? 11.9 Yük tarafındaki geçici gerilimlerin nedeni nedir? 11.10 Kaynak tarafındaki geçici gerilimlerin nedeni nedir? 11.11 Bir yarıiletkeni korumak için sigorta nasıl seçilir? 11.12 DC devrelerde sigortalama ileminin problemleri nedir?
111111...444 PPPRRROOOBBBLLLEEEMMMLLLEEERRR
11.1 TO-204 kılıfında bir BJT 15 W’lık kayıplar meydana getirmektedir; RJC=0,8°C/W, RSA=4°C/W ve TA=65°.
(a) ayet aygıt dorudan termal gres kullanmaksızın soutucuya monte edilmise, TJ ve TC deerlerini bulunuz; RCS=0,6°C/W.
(b) ayet termal gres kullanmadan bir yalıtıcı, kılıf ve soutucu arasında kullanılmısa aıkkını tekrar ediniz, RCS=1,5°C/W.
11.2 Problem 11.1’i her ıkta termal gres kullanıldıı durumda tekrar ediniz. a ıkkı için RCS=0,2°C/W ve b ıkkı için RCS=0,7°C/W.
11.3 Bir MOSFET 25 W’lık kayıp meydana getirmektedir. Jonksiyon sıcaklıını 125°C ile sınırlayacak bir soutucu tasarlayınız; RJC=0,83°C/W, RCS=0,2°C/W ve TA=50°.
11.4 Bir MOSFET bir devrede 20 A iletmek için kullanılmaktadır. TJ=120°C de 080,)( =iletimDSR Ω; RJC=0,9°C/W, RCS=0,15°C/W ve TA=40°. RSA’nın gereken
maksimum deerini bulunuz.
11.5 MTM8N60 tipi bir MOSFET 1 ms süre için tek palsli modda iletimde kullanılacaktır. Güç kaybı 100 W’tır. Palsin balangıcında, TC=100°C. Ek B’deki veriyi kullanarak, palsin sonunda jonksiyon sıcaklıını bulunuz.
11.6 MTM8N60 tipi bir MOSFET 10 ms süre için tek palsli modda akımı iletmektedir. Balangıçta, T=85°C. ayet uç jonksiyon sıcaklıı 100°C ile sınırlandırılırsa izin verilebilecek akımı bulunuz. Ek B deki veriyi kullanınız ve en kötü durumda
)(iletimDSR ’in tipik deerden %50 daha büyük olduunu varsayınız.
11.7 Bir 1N3880 dorultucu diyotu tek pals modunda 30 A akımın iletiminde kullanılmaktadır. ayet balangıç kılıf sıcaklıı 100°C ise, Ek B deki veri deerlerini kullanarak palsin maksimum süresini bulunuz. TJ=150°C ile sınırlanmıtır.
11.8 MTM8N60 tipi bir MOSFET 5 ms iletim ve 20 ms kesim ile periyodik iletim modunda çalımaktadır. letim süresince güç kaybı 80 W’tır; RCS=0,2°C/W, RSA=2°C/W ve TA=55°. Aaıdakileri bulunuz:

(a) kılıf sıcaklıı (b) tepe jonksiyon sıcaklıı
11.9 MJ10006 tipi bir BJT, iletimde 40 W’lık güç kaybı ile, 6 ms iletim ve 24 ms kesim ile periyodik iletim modunda çalımaktadır; RCS=0,5°C/W ve TA=60°. ayet TJ=140°C ile sınırlanmısa RSA’nın deerini bulunuz.
11.10 Bir 1N3880 dorultucu diyotu bir devrede periyodik olarak 100 µs için 35 A iletmek için kullanılmaktadır. Toplam periyot 1 ms dir; TA=60°, RSA=4,2°C/W ve RCS=0,8°C/W.
(a) TC’nin deerini bulunuz, (b) TJ’nin tepe deeri.
11.11 Bir 1N3880 dorultucu diyotu 200 µs’lik bir iletim periyotu süresince 30 A den 20 A’e dorusal olarak deien bir akımın iletiminde kullanılmaktadır. Diyot 800 µs’lik bir aralık süresince iletimde deildir. Periyodik olarak çalıma bu ekilde devam etmektedir; TA=70°, RSA=5°C/W ve RCS=0,8°C/W.
(a) hesaplamalar için kullanılabilecek edeer güç kaybının zamanla deiimini bulunuz.
(b) bu edeer kaybı kullanarak tepe jonksiyon sıcaklıını bulunuz.
11.12 MTM8N60 tipi bir MOSFET aaıda görüldüü gibi güç kaybı ile bir periyodik modda kullanılmaktadır:
Aralık (µs) Güç (W) 1000 << t 100 200100 << t 0 300200 << t 100
1000300 << t 0
Bu iletim örnei 1000 Hz frekansta tekrar etmektedir; RCS=0,4°C/W, TA=60° ve TJ=130°C.
(a) edeer periyodik güç kaybını bulunuz. (b) RSA’nın gereken deerini bulunuz.
11.13 ekil 11.21 deki gibi bir koruyucu eleman üzerine 4000 V genliinde geçici bir pals 2 µs süre ile etkilemektedir. letim durumunda, koruyucu eleman 200 V ve seri 1,0 Ω ile modellenebilir; LS=1 mH.
(a) tepe gerilimi bulunuz (b) koruyucu elemana verilen enerjiyi bulunuz.
11.14 ekil 11.21 deki gibi bir koruyucu devre tasarlanacaktır. Geçici gerilim 4 µs süre ve 5000 V ile modellenebilir. Mevcut sistemin kaynak empedansı 500 µH ile modellenebilir. Mevcut koruyucu eleman 250 V ve seri 1,5 Ω ile modellenebilir. Koruyucu eleman herhangi bir palste 20 mJ emebilir. Kaynak indüktansına eklenecek indüktans deerini bulunuz.
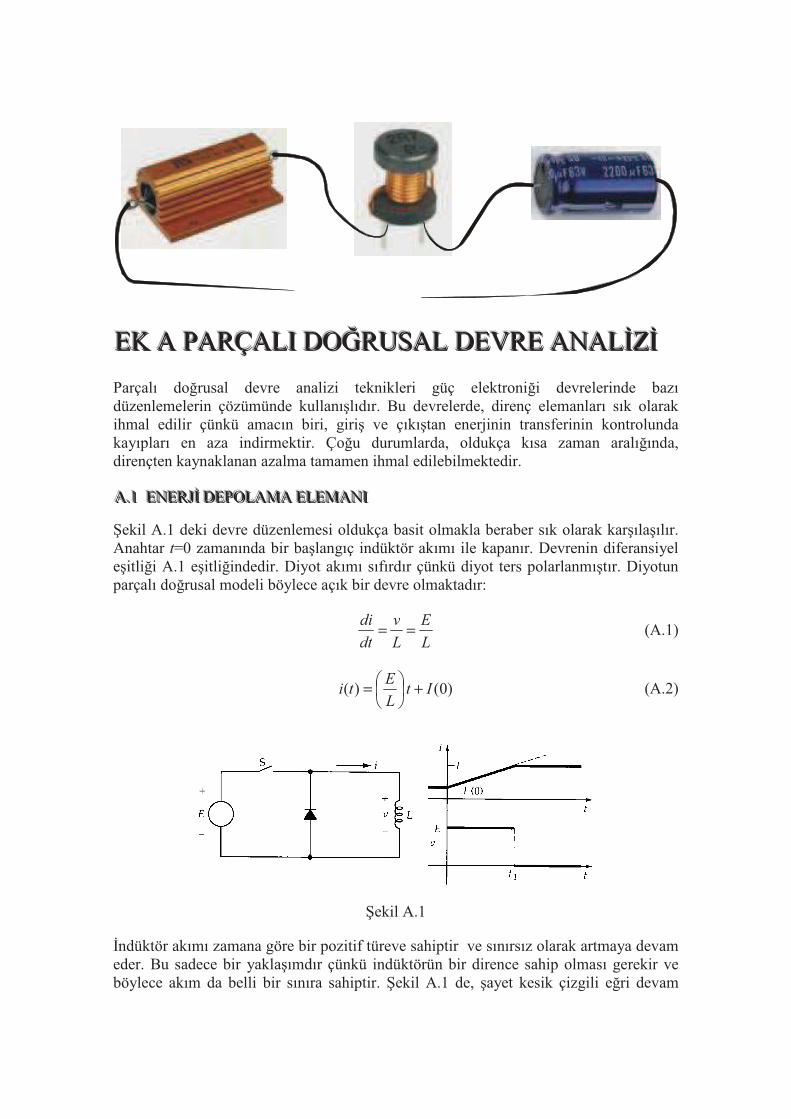
EEEKKK AAA PPPAAARRRÇÇÇAAALLLIII DDDOOORRRUUUSSSAAALLL DDDEEEVVVRRREEE AAANNNAAALLLZZZ
Parçalı dorusal devre analizi teknikleri güç elektronii devrelerinde bazı düzenlemelerin çözümünde kullanılıdır. Bu devrelerde, direnç elemanları sık olarak ihmal edilir çünkü amacın biri, giri ve çıkıtan enerjinin transferinin kontrolunda kayıpları en aza indirmektir. Çou durumlarda, oldukça kısa zaman aralıında, dirençten kaynaklanan azalma tamamen ihmal edilebilmektedir.
AAA...111 EEENNNEEERRRJJJ DDDEEEPPPOOOLLLAAAMMMAAA EEELLLEEEMMMAAANNNIII
ekil A.1 deki devre düzenlemesi oldukça basit olmakla beraber sık olarak karılaılır. Anahtar t=0 zamanında bir balangıç indüktör akımı ile kapanır. Devrenin diferansiyel eitlii A.1 eitliindedir. Diyot akımı sıfırdır çünkü diyot ters polarlanmıtır. Diyotun parçalı dorusal modeli böylece açık bir devre olmaktadır:
L
E
L
v
dt
di== (A.1)
)0()( ItL
Eti +
= (A.2)
ekil A.1
ndüktör akımı zamana göre bir pozitif türeve sahiptir ve sınırsız olarak artmaya devam eder. Bu sadece bir yaklaımdır çünkü indüktörün bir dirence sahip olması gerekir ve böylece akım da belli bir sınıra sahiptir. ekil A.1 de, ayet kesik çizgili eri devam

etseydi akımın zamanla deiiminin üstel yapısını gösterirdi. En son akım oldukça büyük olacaktı ve bu sınırı yakalamak için uzun bir zaman gerekecekti. Geçiciliin balangıcında çok kısa bir aralık için, direnç bundan dolayı küçük bir hata ile ihmal edilebilir.
Bir t1 aralıından sonra, ekil A.1 deki anahtar açılır. ndüktör akımının zamanın sürekli bir fonksiyonu olması gerekir ve diyot elemanı içinde varlıını sürdürür. ayet ideal diyot elemanı varsayılırsa, bu durumda v sıfır ve A.1 eitliinden, i’nin deiim oranı ekil A.1 de görüldüü gibi sıfır olur.
Gerçekte, 1tt > için, akımın yavaca azalması gerekir çünkü devre kayıpları tam olarak
sıfır olamaz. letim süresince diyot gerilimi küçük fakat sıfır deildir. Fakat t1 den sonra kısa bir aralık için, akım küçük bir hata ile sabit düünülebilir.
Gerilim kaynaı ve indüktör’ün devre çifti ekil A.2 de görülmektedir. A.3 eitlii bu devrenin ilgili diferansiyel eitliidir:
ekil A.2
C
I
C
i
dt
dv== (A.3)
)0()( VtC
Itv +
= (A.4)
0=t da, anahtar açılır ve kaynak akımı sabit bir oranda kapasitörü yükler. Bu durumda, kapasitörün kaçak direnci (paralel) ihmal edilir. Çou durumlarda bu, bir indüktörün seri direncinin ihmal edildii durumdan daha iyi bir yaklaımdır. Herhangi bir durumda, ekil A.2 deki dorusal grafik, çok büyük bir son deer ile bir üstel erinin ilk balangıcıdır.
1tt = de, anahtar kapanır ve kaynak akımı kapasitörden ayrılır. Kapasitör gerilimi sabit
kalır çünkü diyot imdi ters polarlanmı ve kapasitörün dearjı olumaz. Gerçekte, az bir miktar akım vardır fakat bu küçüktür ve kapasitör gerilimi yavaça azalır. Kapasitörün dielektriinin kaçak kondüktansı da kapasitörün geriliminin azalmasına katkıda bulunur, bununla beraber genelde oldukça küçüktür.

ÖRNEK A.1
200 µH’lik bir indüktör ekil A.1 de görüldüü gibi 5 V’luk bir kaynaa balanmıtır. 3 A’lik bir balangıç akımı vardır. Anahtar 100 µs için kapalı ve sonra açılmıtır. Aaıdakileri bulunuz:
(a) ideal indüktör varsayımı ile 100 µs sonra indüktör akımı (b) ayet indüktör direnci 0,01 Ω ise, t=100 µs deki akım (c) anahtar 100 µs açık kaldıktan sonra b ıkkı için indüktör akımı.
ÇÖZÜM
(a) A.1 eitliinden:
2500010200
56
=×
=−dt
di A/s
100 µs sonra, indüktör akımı sabit kalır. 100>t µs için:
5,50,3)25000)(10100( 6 =+×= −i
(b) Böyle bir RL devre için,
ττ // )0()1( tt eIeR
Ei −− +−
=
burada,
02,001,0
10200 6
=×
=−
τ s
100=t µs için sayılar yerine konulursa,
479,5985,2494,23)1(01,0
5 02,0/0001,002,0/0001,0 =+=+−
= −− eei A
(c) RL devrenin akım azalması için yeni bir zaman orijini ile balanılarak,
451,5479,5479,5 02,0/0001,0/ === −− eei t τ A
(b) ve (c) ıklarındaki sonuçlar (a) ıkkında bulunan deere çok yakındır.
ÖRNEK A.2
ekil A.2 deki kaynak akımı 20 ms süre ile kapasitörü yüklüyor ve sonra anahtar kapanıyor. Diyot, (a) ıkkında hesaplanan deerde bir ters gerilimde 1 µA’lik bir sızıntı akımına sahiptir; v(0)=50 V, C=16 µF ve I=0,1 A. Aaıdakileri bulunuz:
(a) yükleme aralıının sonunda kapasitör gerilimi
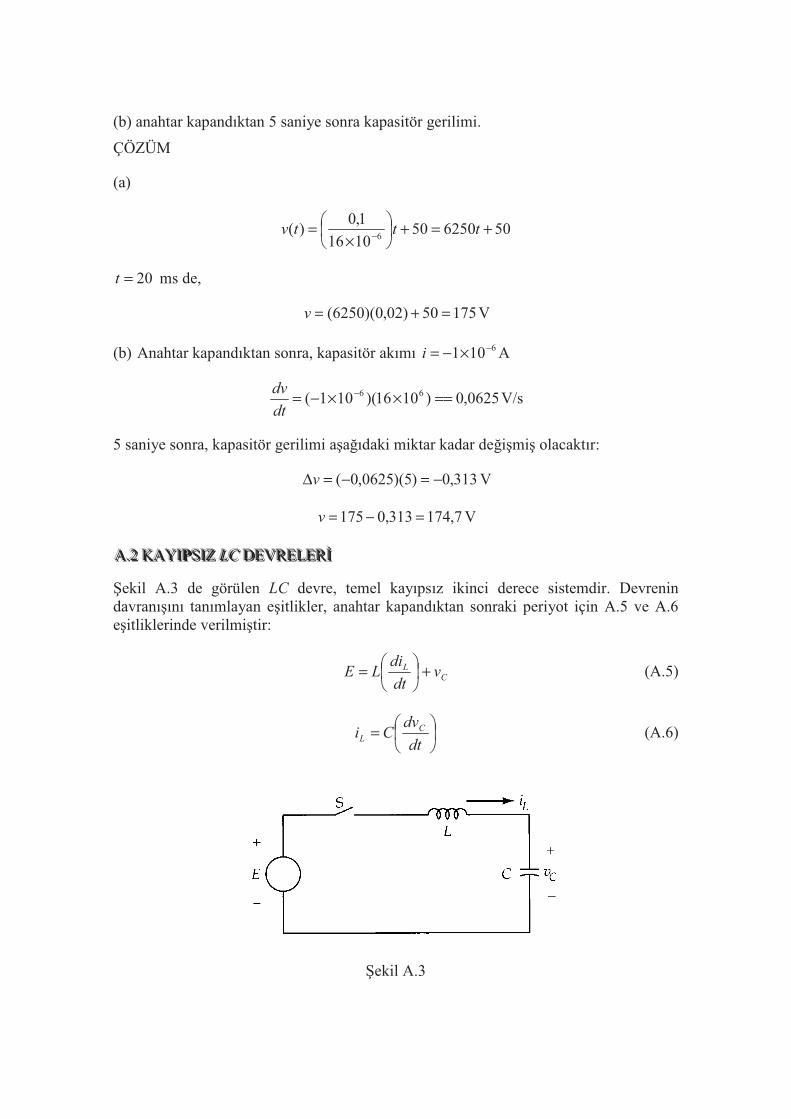
(b) anahtar kapandıktan 5 saniye sonra kapasitör gerilimi.
ÇÖZÜM
(a)
506250501016
1,0)(
6+=+
×=
−tttv
20=t ms de,
17550)02,0)(6250( =+=v V
(b) Anahtar kapandıktan sonra, kapasitör akımı 6101 −×−=i A
0625,0)1016)(101( 66 ==××−= −
dt
dvV/s
5 saniye sonra, kapasitör gerilimi aaıdaki miktar kadar deimi olacaktır:
313,0)5)(0625,0( −=−=∆v V
7,174313,0175 =−=v V
AAA...222 KKKAAAYYYIIIPPPSSSIIIZZZ LLLCCC DDDEEEVVVRRREEELLLEEERRR
ekil A.3 de görülen LC devre, temel kayıpsız ikinci derece sistemdir. Devrenin davranıını tanımlayan eitlikler, anahtar kapandıktan sonraki periyot için A.5 ve A.6 eitliklerinde verilmitir:
CL v
dt
diLE +
= (A.5)
=
dt
dvCi C
L (A.6)
ekil A.3
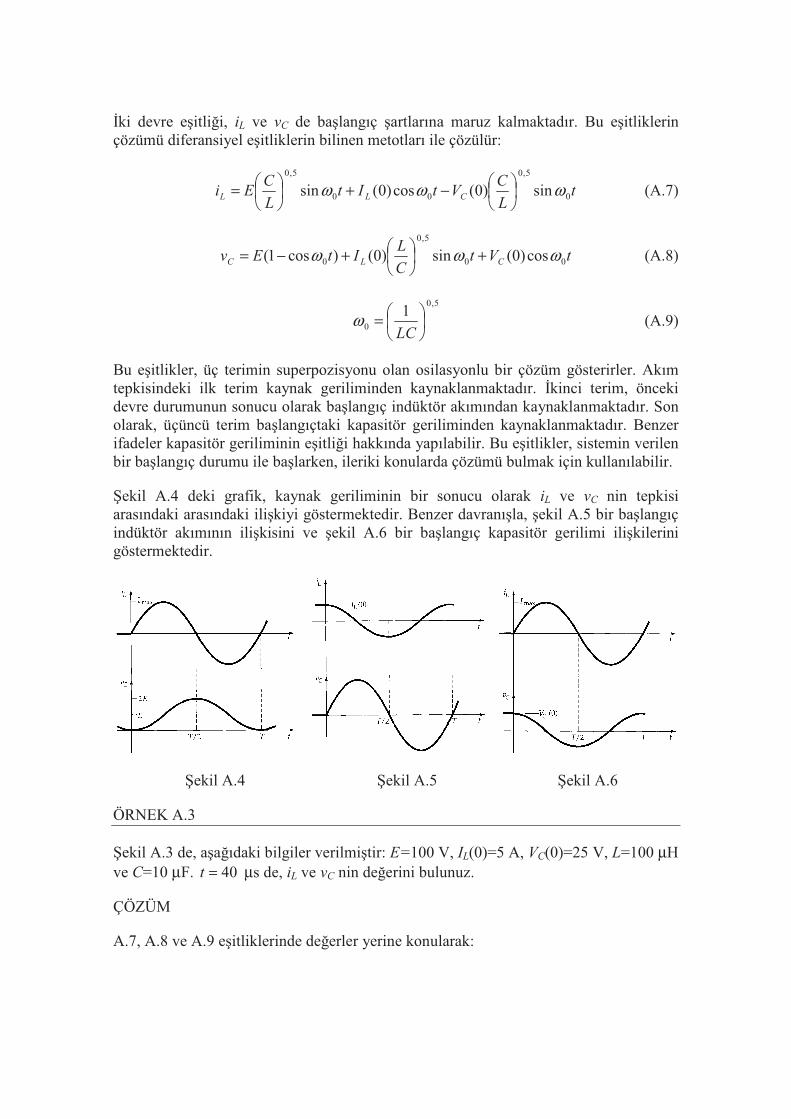
ki devre eitlii, iL ve vC de balangıç artlarına maruz kalmaktadır. Bu eitliklerin çözümü diferansiyel eitliklerin bilinen metotları ile çözülür:
tL
CVtIt
L
CEi CLL 0
5,0
00
5,0
sin)0(cos)0(sin ωωω
−+
= (A.7)
tVtC
LItEv CLC 00
5,0
0 cos)0(sin)0()cos1( ωωω +
+−= (A.8)
5,0
0
1
=
LCω (A.9)
Bu eitlikler, üç terimin superpozisyonu olan osilasyonlu bir çözüm gösterirler. Akım tepkisindeki ilk terim kaynak geriliminden kaynaklanmaktadır. kinci terim, önceki devre durumunun sonucu olarak balangıç indüktör akımından kaynaklanmaktadır. Son olarak, üçüncü terim balangıçtaki kapasitör geriliminden kaynaklanmaktadır. Benzer ifadeler kapasitör geriliminin eitlii hakkında yapılabilir. Bu eitlikler, sistemin verilen bir balangıç durumu ile balarken, ileriki konularda çözümü bulmak için kullanılabilir.
ekil A.4 deki grafik, kaynak geriliminin bir sonucu olarak iL ve vC nin tepkisi arasındaki arasındaki ilikiyi göstermektedir. Benzer davranıla, ekil A.5 bir balangıç indüktör akımının ilikisini ve ekil A.6 bir balangıç kapasitör gerilimi ilikilerini göstermektedir.
ekil A.4 ekil A.5 ekil A.6
ÖRNEK A.3
ekil A.3 de, aaıdaki bilgiler verilmitir: E=100 V, IL(0)=5 A, VC(0)=25 V, L=100 µH ve C=10 µF. 40=t µs de, iL ve vC nin deerini bulunuz.
ÇÖZÜM
A.7, A.8 ve A.9 eitliklerinde deerler yerine konularak:
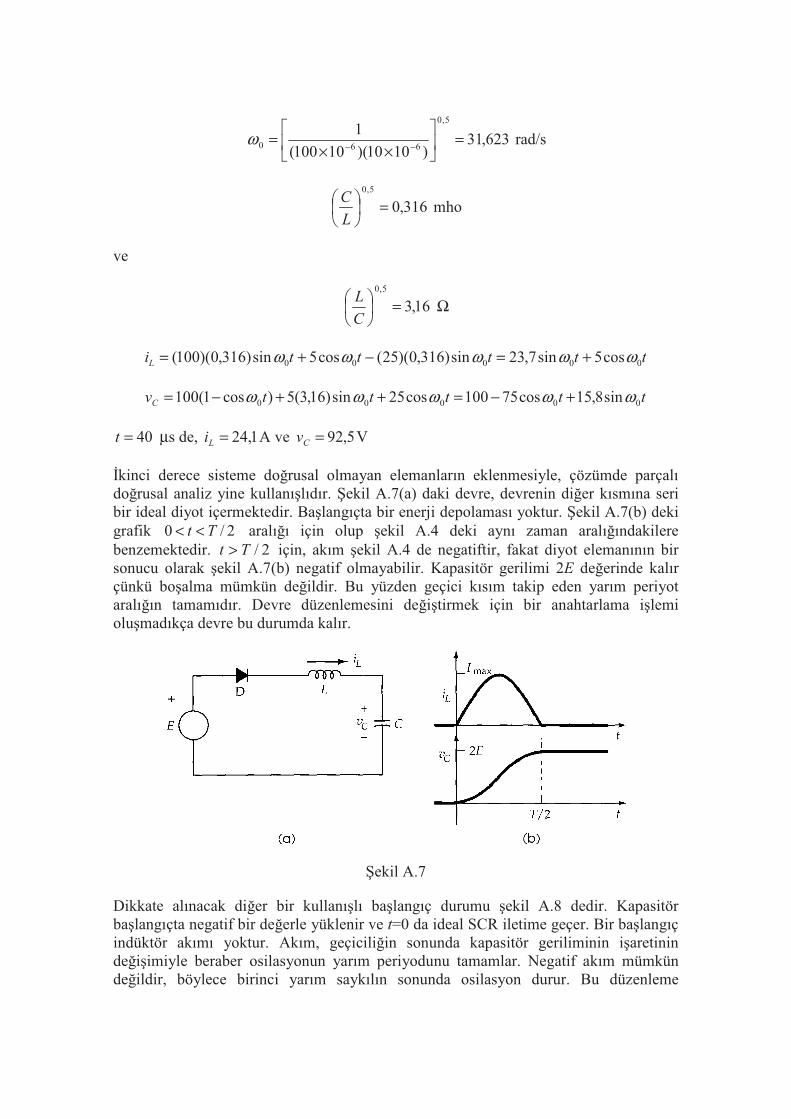
623,31)1010)(10100(
15,0
660 =
××=
−−ω rad/s
316,05,0
=
L
C mho
ve
16,35,0
=
C
LΩ
tttttiL 00000 cos5sin7,23sin)316,0)(25(cos5sin)316,0)(100( ωωωωω +=−+=
tttttvC 00000 sin8,15cos75100cos25sin)16,3(5)cos1(100 ωωωωω +−=++−=
40=t µs de, 1,24=Li A ve 5,92=Cv V
kinci derece sisteme dorusal olmayan elemanların eklenmesiyle, çözümde parçalı dorusal analiz yine kullanılıdır. ekil A.7(a) daki devre, devrenin dier kısmına seri bir ideal diyot içermektedir. Balangıçta bir enerji depolaması yoktur. ekil A.7(b) deki grafik 2/0 Tt << aralıı için olup ekil A.4 deki aynı zaman aralıındakilere benzemektedir. 2/Tt > için, akım ekil A.4 de negatiftir, fakat diyot elemanının bir sonucu olarak ekil A.7(b) negatif olmayabilir. Kapasitör gerilimi 2E deerinde kalır çünkü boalma mümkün deildir. Bu yüzden geçici kısım takip eden yarım periyot aralıın tamamıdır. Devre düzenlemesini deitirmek için bir anahtarlama ilemi olumadıkça devre bu durumda kalır.
ekil A.7
Dikkate alınacak dier bir kullanılı balangıç durumu ekil A.8 dedir. Kapasitör balangıçta negatif bir deerle yüklenir ve t=0 da ideal SCR iletime geçer. Bir balangıç indüktör akımı yoktur. Akım, geçiciliin sonunda kapasitör geriliminin iaretinin deiimiyle beraber osilasyonun yarım periyodunu tamamlar. Negatif akım mümkün deildir, böylece birinci yarım saykılın sonunda osilasyon durur. Bu düzenleme
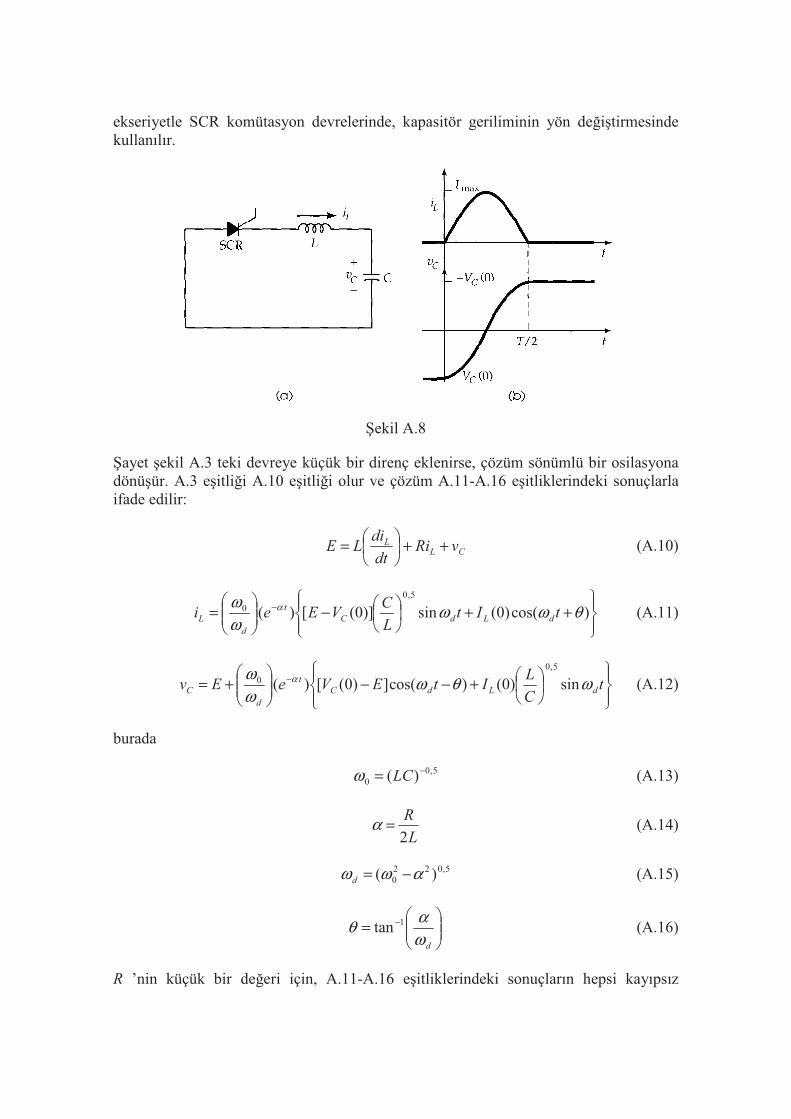
ekseriyetle SCR komütasyon devrelerinde, kapasitör geriliminin yön deitirmesinde kullanılır.
ekil A.8
ayet ekil A.3 teki devreye küçük bir direnç eklenirse, çözüm sönümlü bir osilasyona dönüür. A.3 eitlii A.10 eitlii olur ve çözüm A.11-A.16 eitliklerindeki sonuçlarla ifade edilir:
CLL vRi
dt
diLE ++
= (A.10)
++
−
= − )cos()0(sin)]0([)(
5,0
0 θωωω
ω α tItL
CVEei dLdC
t
d
L (A.11)
+−−
+= − t
C
LItEVeEv dLdC
t
d
C ωθωω
ω α sin)0()cos(])0([)(5,0
0 (A.12)
burada
5,00 )( −= LCω (A.13)
L
R
2=α (A.14)
5,0220 )( αωω −=d (A.15)
= −
dω
αθ 1tan (A.16)
R ’nin küçük bir deeri için, A.11-A.16 eitliklerindeki sonuçların hepsi kayıpsız

duruma göre çok az farklılık gösterir. Bundan sonraki örnek bu çok küçük etkiyi göstermektedir.
ÖRNEK A.4
ekil A.8 deki devrede, aaıdaki deerler verilmitir: L=100 µH, C=1,0 µF, VC(0)=-100 V ve IL(0)=0. Kapasitör gerilimi SCR’nin iletimi ile yön deitirmektedir. Aaıdakileri bulunuz:
(a) ideal bir yön deitirmeden sonra kapasitör gerilimi (b) tepe indüktör akımı (c) ayet 0,1 Ω’luk bir devre direnci varsa yön deitirmeden sonraki kapasitör gerilimi (d) ayet SCR iletim süresince 0,8 V’luk bir kaynak ile temsil ediliyorsa yön deitirmeden sonraki kapasitör gerilimi (bu kısım için devrede hiç direnç yoktur.)
ÇÖZÜM
(a)
Kapasitör geriliminin ideal bir yön deitirmeden sonra, deeri A.8 eitlii ile bulunur. Gerilim aynı genlie fakat zıt iarete sahiptir:
100cos)0(2
+==
πCC V
Tv V
(b) A.7 eitliinden:
10100
1)100(
5,0
=
−−=tepeI A
(c) A.11-A.16 eitlikleri kullanılarak, aaıdaki sonuçlar elde edilir:
500)10100)(2(
1,0
2 6=
×==
−L
Rα
100000)]101)(10100[()( 5.0665,00 =××== −−−LCω rad/s
7,99998])500()100000[()( 5,0225,0220 =−=−= αωωd rad/s
0050,07,99998
500tantan 11 =
=
= −−
dω
αθ rad
Kapasitör gerilimi 0=Li anında gerekir. Bu 2/Tt = anında oluur, dω kullanılarak:
610416,312
−×==d
T
ω
πs
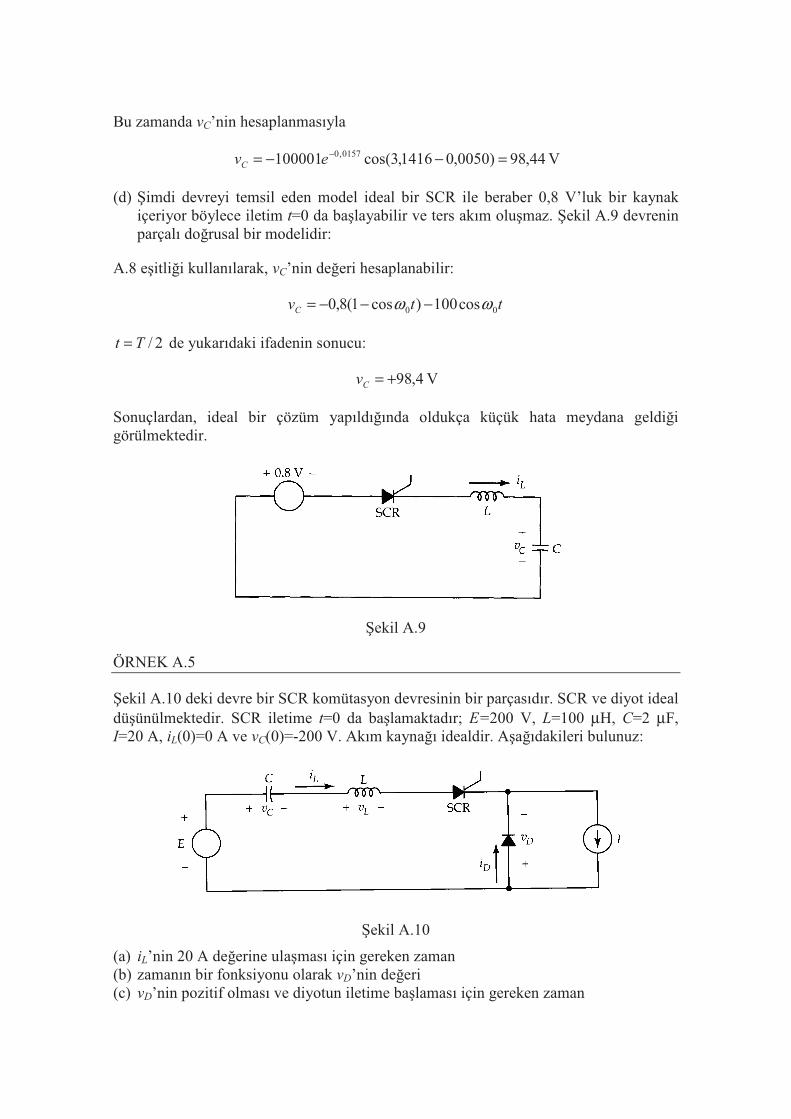
Bu zamanda vC’nin hesaplanmasıyla
44,98)0050,01416,3cos(100001 0157,0 =−−= −evC V
(d) imdi devreyi temsil eden model ideal bir SCR ile beraber 0,8 V’luk bir kaynak içeriyor böylece iletim t=0 da balayabilir ve ters akım olumaz. ekil A.9 devrenin parçalı dorusal bir modelidir:
A.8 eitlii kullanılarak, vC’nin deeri hesaplanabilir:
ttvC 00 cos100)cos1(8,0 ωω −−−=
2/Tt = de yukarıdaki ifadenin sonucu:
4,98+=Cv V
Sonuçlardan, ideal bir çözüm yapıldıında oldukça küçük hata meydana geldii görülmektedir.
ekil A.9
ÖRNEK A.5
ekil A.10 deki devre bir SCR komütasyon devresinin bir parçasıdır. SCR ve diyot ideal düünülmektedir. SCR iletime t=0 da balamaktadır; E=200 V, L=100 µH, C=2 µF, I=20 A, iL(0)=0 A ve vC(0)=-200 V. Akım kaynaı idealdir. Aaıdakileri bulunuz:
ekil A.10
(a) iL’nin 20 A deerine ulaması için gereken zaman (b) zamanın bir fonksiyonu olarak vD’nin deeri (c) vD’nin pozitif olması ve diyotun iletime balaması için gereken zaman

(d) diyot iletime baladıktan sonra iL’nin zamanla deiimi (e) iL’nin sıfır olduu zaman (f) son kapasitör gerilimi.
ÇÖZÜM
(a) Bu aralık için, diyot iletimdedir ve devre ekil A.11(a) daki gibi olur. Bu devre ekil A.3 deki gibi çalıır ve
ekil A.11
A.7, A.8 ve A.9 eitlikleri uygulanır:
70710)102)(10100(
15,0
660 =
××=
−−ω rad/s
2070710sin100
2)]200(200[
5,0
=
−= tiL A
61011,5 −×=t s
Bu zamanda, A.8 eitliinin çözümü vC’nin deerini verir:
2,174−=Cv V
(b) lk 5,11 µs aralık süresince, 20<Li A ve böylece 0>Di . Diyot iletimdedir ve
0=Dv . 20=Li A olduu zamandan sonra, 0=Di ve daha fazla sıfırla sınırlanmaz ve
negatif olabilir. 11,5>t µs için iL 20 A de sabittir ve 0=Lv . Bu aralık için yeni
model ekil A.11(b) de görülmektedir. vC’nin deeri, yeni bir zaman orijini kullanılarak, zamanla dorusal olarak deiir.
tC
vC
+−=
202,174
vD’nin deeri Kirof’un gerilim kanunundan elde edilir:
tvEv CD )1010(2,374 6×+−=+−=

(c) b ıkkından, 61042,37 −×=t de 0=Dv . Daha sonra ayet aynı model devam
ettirilecekse, Dv pozitif olurdu. Yeni bir modelin, diyotun iletiminin Dv ’nin sıfır
kalmasını gerektii gerçeini yansıtması gerekir.
(d) Diyotun iletimi baladıı zamanda, yeni bir parçalı dorusal model gerekir. Bu aynı zamanda ekil A.11(a) da da gösterilmitir. Bu modelde, yeni bir zaman orijini kullanılarak b ıkkındaki önceki çözümden 200)0( =Cv V ve 20)0( =Li A. Bu,
balangıç artlarında E ve vC(0)’ın eit olduu temel bir LC devresidir. Sonuç akım yalnızca, A.7 eitlii kullanılarak elde dilen balangıç akım deerinin bir sonucudur. Yeni bir zaman orijini ile, iL’nin ifadesi belirlenir:
tiL 0cos20 ω=
(e) 2/0 πω =t de indüktör akımı sıfır olur. Bu, t=22,21 µs de oluur. Üç aralık için
bütün ilem ekil A.12 de görülmektedir. lemin üç parçasının toplam zamanı 64,74 µs dir.
ekil A.12
(f) Üçüncü aralık süresince, E ve VC(0) birbirine eit olarak A.8 eitlii kullanılarak vC(t) bulunur:
tttvC 00
5,0
sin4,141200sin2
10020200)( ωω +=
+=
2/0 πω =t de, vC(t) 341,4 V’luk bir maksimum deerde olur ve daha sonra bu deerde
kalır.
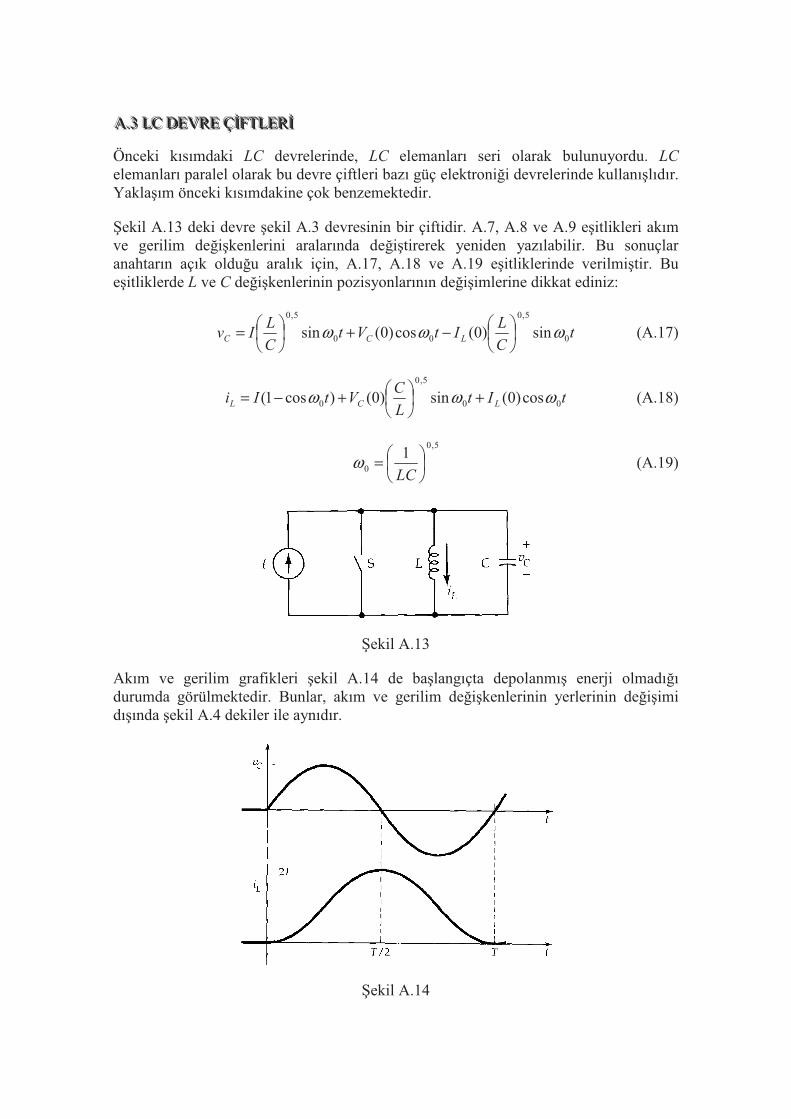
AAA...333 LLLCCC DDDEEEVVVRRREEE ÇÇÇFFFTTTLLLEEERRR
Önceki kısımdaki LC devrelerinde, LC elemanları seri olarak bulunuyordu. LC
elemanları paralel olarak bu devre çiftleri bazı güç elektronii devrelerinde kullanılıdır. Yaklaım önceki kısımdakine çok benzemektedir.
ekil A.13 deki devre ekil A.3 devresinin bir çiftidir. A.7, A.8 ve A.9 eitlikleri akım ve gerilim deikenlerini aralarında deitirerek yeniden yazılabilir. Bu sonuçlar anahtarın açık olduu aralık için, A.17, A.18 ve A.19 eitliklerinde verilmitir. Bu eitliklerde L ve C deikenlerinin pozisyonlarının deiimlerine dikkat ediniz:
tC
LItVt
C
LIv LCC 0
5,0
00
5,0
sin)0(cos)0(sin ωωω
−+
= (A.17)
tItL
CVtIi LCL 00
5,0
0 cos)0(sin)0()cos1( ωωω +
+−= (A.18)
5,0
0
1
=
LCω (A.19)
ekil A.13
Akım ve gerilim grafikleri ekil A.14 de balangıçta depolanmı enerji olmadıı durumda görülmektedir. Bunlar, akım ve gerilim deikenlerinin yerlerinin deiimi dıında ekil A.4 dekiler ile aynıdır.
ekil A.14
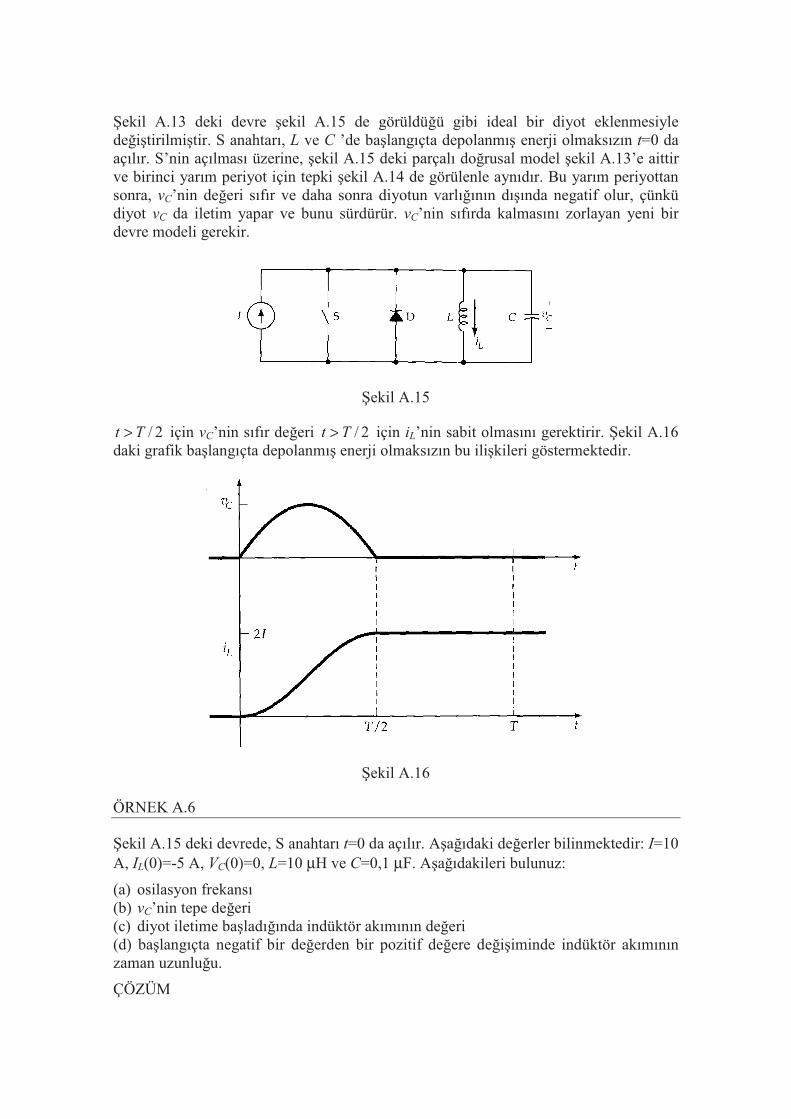
ekil A.13 deki devre ekil A.15 de görüldüü gibi ideal bir diyot eklenmesiyle deitirilmitir. S anahtarı, L ve C ’de balangıçta depolanmı enerji olmaksızın t=0 da açılır. S’nin açılması üzerine, ekil A.15 deki parçalı dorusal model ekil A.13’e aittir ve birinci yarım periyot için tepki ekil A.14 de görülenle aynıdır. Bu yarım periyottan sonra, vC’nin deeri sıfır ve daha sonra diyotun varlıının dıında negatif olur, çünkü diyot vC da iletim yapar ve bunu sürdürür. vC’nin sıfırda kalmasını zorlayan yeni bir devre modeli gerekir.
ekil A.15
2/Tt > için vC’nin sıfır deeri 2/Tt > için iL’nin sabit olmasını gerektirir. ekil A.16 daki grafik balangıçta depolanmı enerji olmaksızın bu ilikileri göstermektedir.
ekil A.16
ÖRNEK A.6
ekil A.15 deki devrede, S anahtarı t=0 da açılır. Aaıdaki deerler bilinmektedir: I=10 A, IL(0)=-5 A, VC(0)=0, L=10 µH ve C=0,1 µF. Aaıdakileri bulunuz:
(a) osilasyon frekansı (b) vC’nin tepe deeri (c) diyot iletime baladıında indüktör akımının deeri (d) balangıçta negatif bir deerden bir pozitif deere deiiminde indüktör akımının zaman uzunluu.
ÇÖZÜM
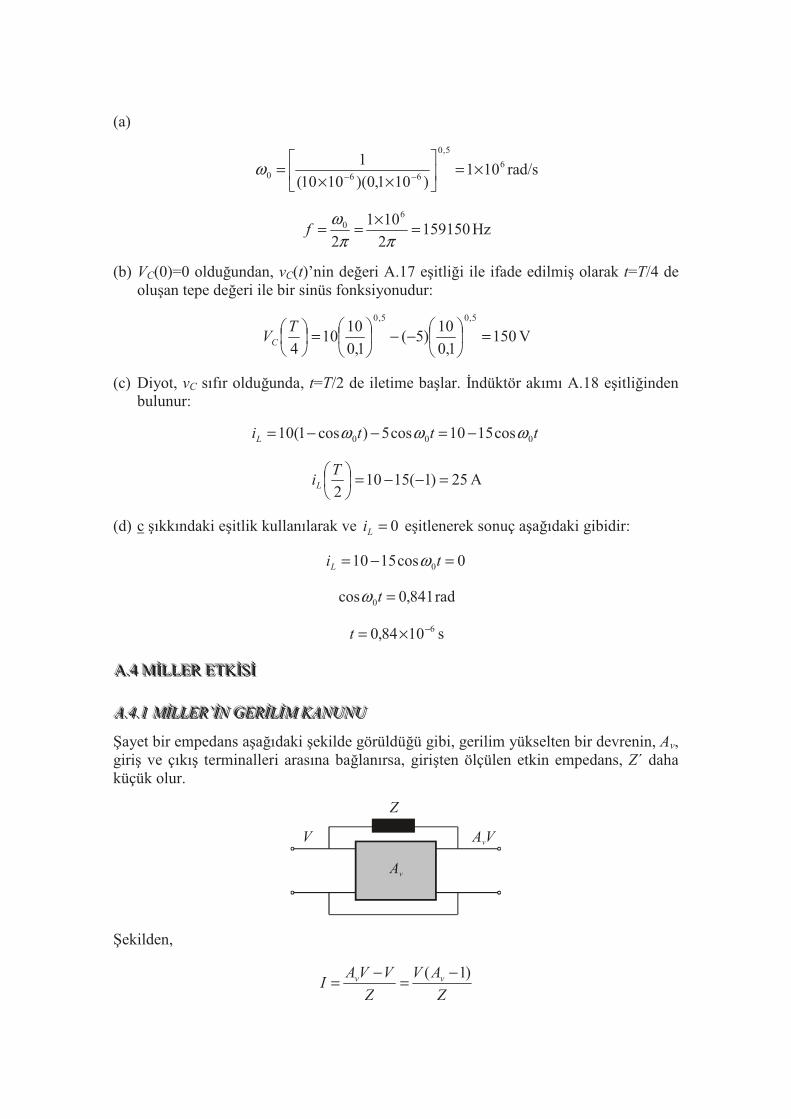
(a)
6
5,0
660 101)101,0)(1010(
1×=
××=
−−ω rad/s
1591502
101
2
60 =
×==
ππ
ωf Hz
(b) VC(0)=0 olduundan, vC(t)’nin deeri A.17 eitlii ile ifade edilmi olarak t=T/4 de oluan tepe deeri ile bir sinüs fonksiyonudur:
1501,0
10)5(
1,0
1010
4
5,05,0
=
−−
=
TVC V
(c) Diyot, vC sıfır olduunda, t=T/2 de iletime balar. ndüktör akımı A.18 eitliinden bulunur:
tttiL 000 cos1510cos5)cos1(10 ωωω −=−−=
25)1(15102
=−−=
TiL A
(d) c ıkkındaki eitlik kullanılarak ve 0=Li eitlenerek sonuç aaıdaki gibidir:
0cos1510 0 =−= tiL ω
841,0cos 0 =tω rad
61084,0 −×=t s
AAA...444 MMMLLLLLLEEERRR EEETTTKKKSSS
AAA...444...111 MMMLLLLLLEEERRR’’’NNN GGGEEERRRLLLMMM KKKAAANNNUUUNNNUUU
ayet bir empedans aaıdaki ekilde görüldüü gibi, gerilim yükselten bir devrenin, Av, giri ve çıkı terminalleri arasına balanırsa, giriten ölçülen etkin empedans, Z´ daha küçük olur.
Z
A VvV
Av
ekilden,
Z
AV
Z
VVAI vv )1( −
=−
=
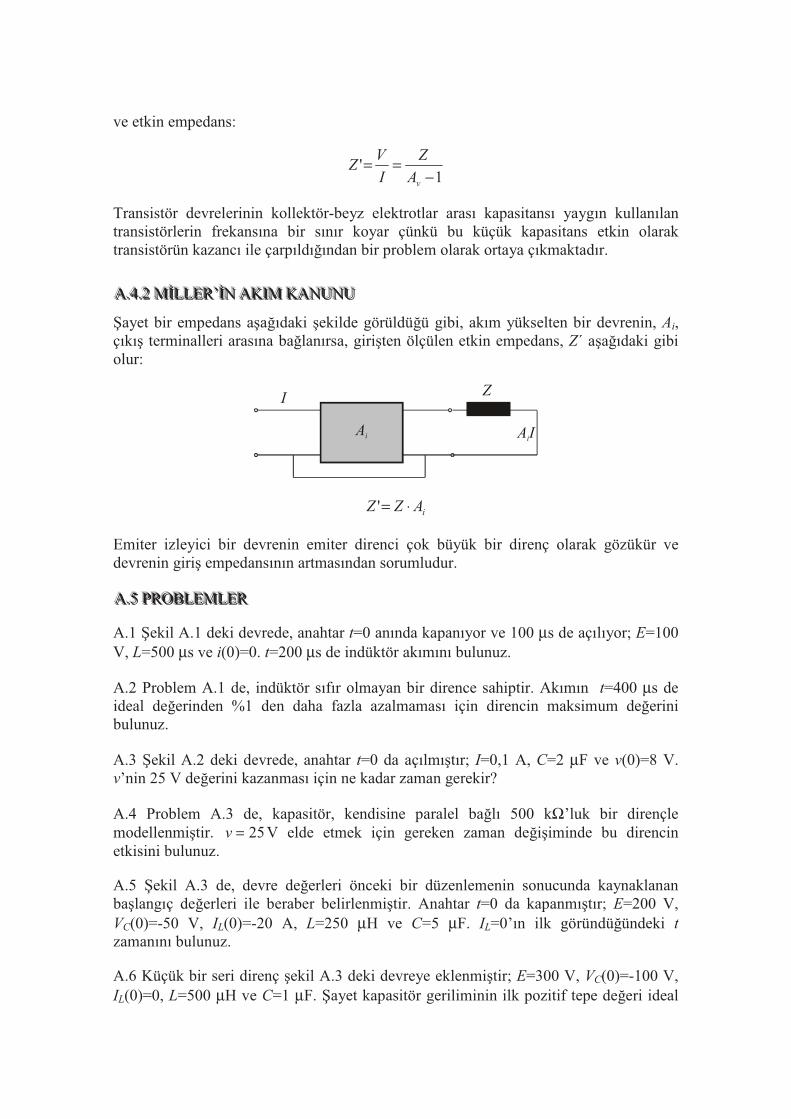
ve etkin empedans:
1'
−==
vA
Z
I
VZ
Transistör devrelerinin kollektör-beyz elektrotlar arası kapasitansı yaygın kullanılan transistörlerin frekansına bir sınır koyar çünkü bu küçük kapasitans etkin olarak transistörün kazancı ile çarpıldıından bir problem olarak ortaya çıkmaktadır.
AAA...444...222 MMMLLLLLLEEERRR’’’NNN AAAKKKIIIMMM KKKAAANNNUUUNNNUUU
ayet bir empedans aaıdaki ekilde görüldüü gibi, akım yükselten bir devrenin, Ai, çıkı terminalleri arasına balanırsa, giriten ölçülen etkin empedans, Z´ aaıdaki gibi olur:
Z
A Ii
I
Ai
iAZZ ⋅='
Emiter izleyici bir devrenin emiter direnci çok büyük bir direnç olarak gözükür ve devrenin giri empedansının artmasından sorumludur.
AAA...555 PPPRRROOOBBBLLLEEEMMMLLLEEERRR
A.1 ekil A.1 deki devrede, anahtar t=0 anında kapanıyor ve 100 µs de açılıyor; E=100 V, L=500 µs ve i(0)=0. t=200 µs de indüktör akımını bulunuz.
A.2 Problem A.1 de, indüktör sıfır olmayan bir dirence sahiptir. Akımın t=400 µs de ideal deerinden %1 den daha fazla azalmaması için direncin maksimum deerini bulunuz.
A.3 ekil A.2 deki devrede, anahtar t=0 da açılmıtır; I=0,1 A, C=2 µF ve v(0)=8 V. v’nin 25 V deerini kazanması için ne kadar zaman gerekir?
A.4 Problem A.3 de, kapasitör, kendisine paralel balı 500 kΩ’luk bir dirençle modellenmitir. 25=v V elde etmek için gereken zaman deiiminde bu direncin etkisini bulunuz.
A.5 ekil A.3 de, devre deerleri önceki bir düzenlemenin sonucunda kaynaklanan balangıç deerleri ile beraber belirlenmitir. Anahtar t=0 da kapanmıtır; E=200 V, VC(0)=-50 V, IL(0)=-20 A, L=250 µH ve C=5 µF. IL=0’ın ilk göründüündeki t
zamanını bulunuz.
A.6 Küçük bir seri direnç ekil A.3 deki devreye eklenmitir; E=300 V, VC(0)=-100 V, IL(0)=0, L=500 µH ve C=1 µF. ayet kapasitör geriliminin ilk pozitif tepe deeri ideal
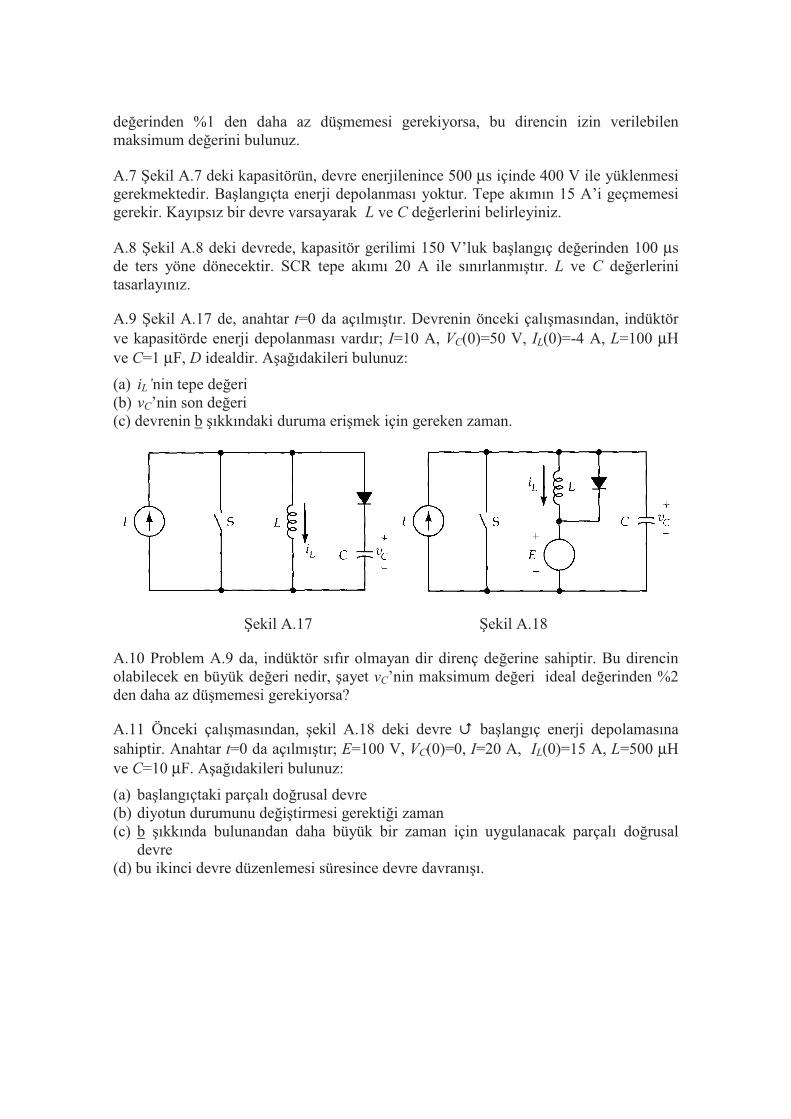
deerinden %1 den daha az dümemesi gerekiyorsa, bu direncin izin verilebilen maksimum deerini bulunuz.
A.7 ekil A.7 deki kapasitörün, devre enerjilenince 500 µs içinde 400 V ile yüklenmesi gerekmektedir. Balangıçta enerji depolanması yoktur. Tepe akımın 15 A’i geçmemesi gerekir. Kayıpsız bir devre varsayarak L ve C deerlerini belirleyiniz.
A.8 ekil A.8 deki devrede, kapasitör gerilimi 150 V’luk balangıç deerinden 100 µs de ters yöne dönecektir. SCR tepe akımı 20 A ile sınırlanmıtır. L ve C deerlerini tasarlayınız.
A.9 ekil A.17 de, anahtar t=0 da açılmıtır. Devrenin önceki çalımasından, indüktör ve kapasitörde enerji depolanması vardır; I=10 A, VC(0)=50 V, IL(0)=-4 A, L=100 µH ve C=1 µF, D idealdir. Aaıdakileri bulunuz:
(a) iL’nin tepe deeri (b) vC’nin son deeri (c) devrenin b ıkkındaki duruma erimek için gereken zaman.
ekil A.17 ekil A.18
A.10 Problem A.9 da, indüktör sıfır olmayan dir direnç deerine sahiptir. Bu direncin olabilecek en büyük deeri nedir, ayet vC’nin maksimum deeri ideal deerinden %2 den daha az dümemesi gerekiyorsa?
A.11 Önceki çalımasından, ekil A.18 deki devre balangıç enerji depolamasına sahiptir. Anahtar t=0 da açılmıtır; E=100 V, VC(0)=0, I=20 A, IL(0)=15 A, L=500 µH ve C=10 µF. Aaıdakileri bulunuz:
(a) balangıçtaki parçalı dorusal devre (b) diyotun durumunu deitirmesi gerektii zaman (c) b ıkkında bulunandan daha büyük bir zaman için uygulanacak parçalı dorusal
devre (d) bu ikinci devre düzenlemesi süresince devre davranıı.
EEEKKK BBB YYYAAARRRIII---LLLEEETTTKKKEEENNN BBBLLLGGG SSSAAAYYYFFFAAALLLAAARRRIII
EK B1 1N5400 1N5401 1N5402 1N5404 1N5406
EK B2
1N3879 1N3880 1N3881 1N3882 1N3883 MR1366
EK B3
1N5826 1N5827 1N5828
EK B4
2N4167 2N4174 2N4183 2N4190
EK B5
2N6546 2N6547
EK B6
MTH8N55 MTH8N60 MTM8N60
EK B7
MTM15N35 MTM15N40
EK B8
2N6027 2N6028
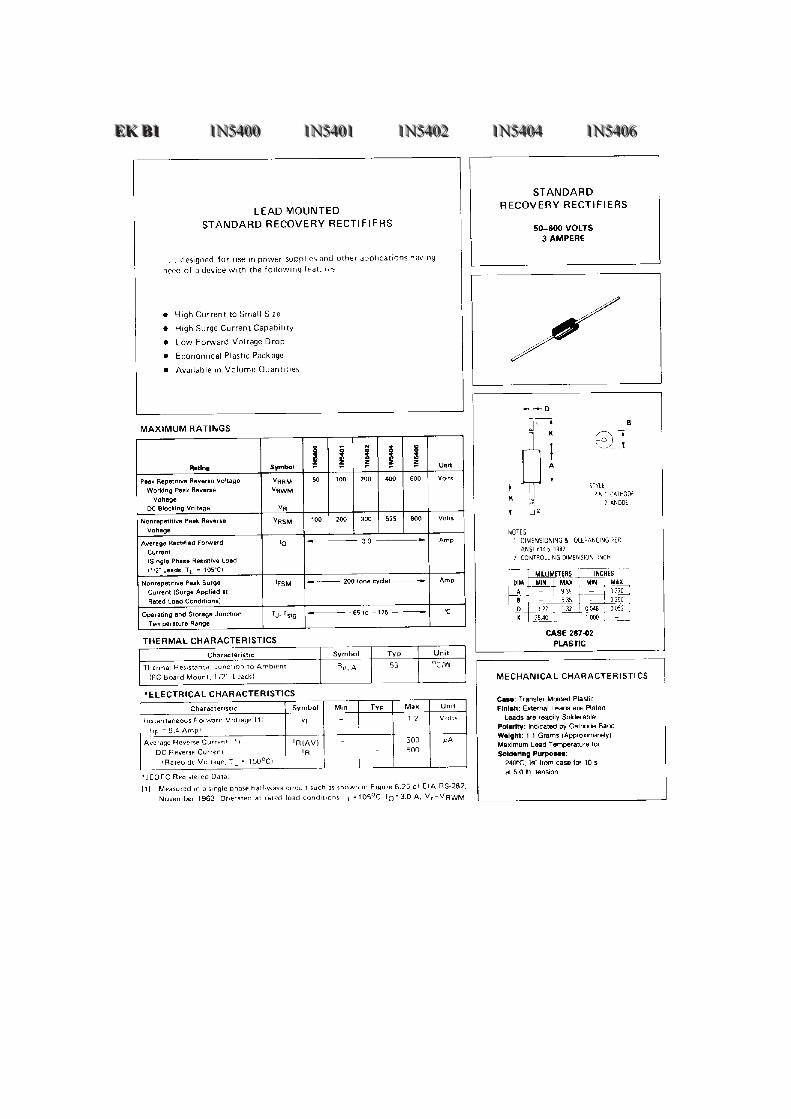
EEEKKK BBB111 111NNN555444000000 111NNN555444000111 111NNN555444000222 111NNN555444000444 111NNN555444000666
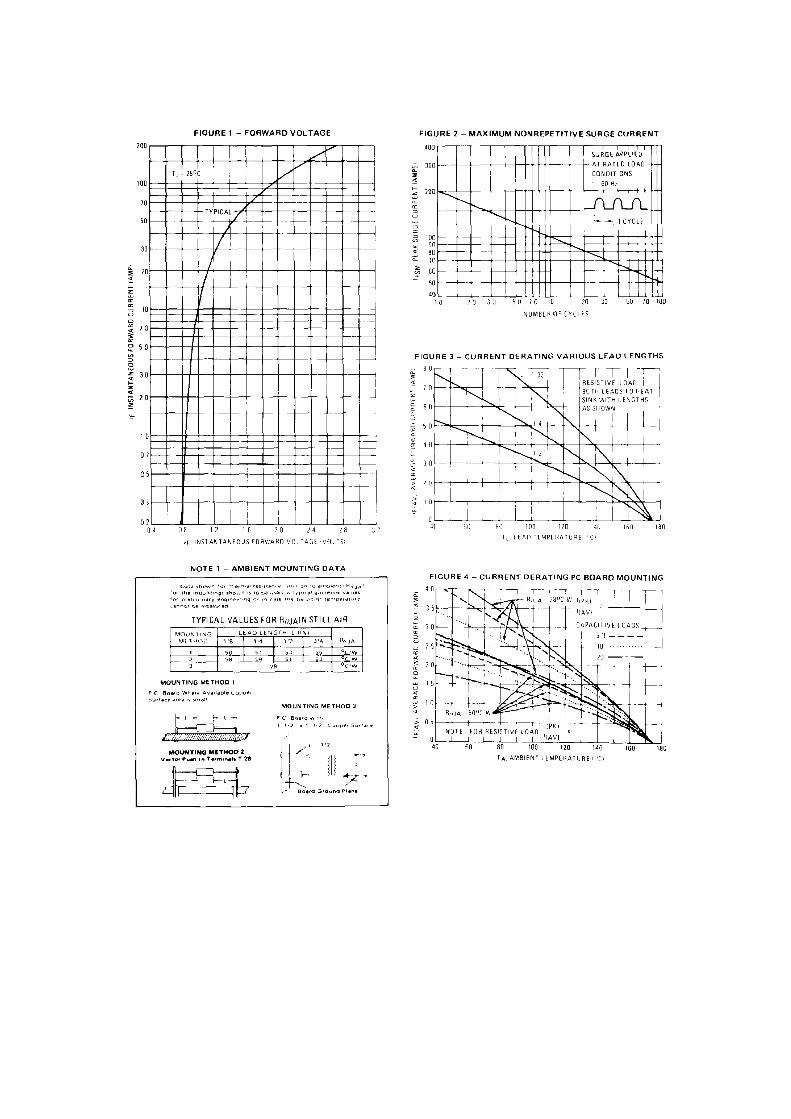
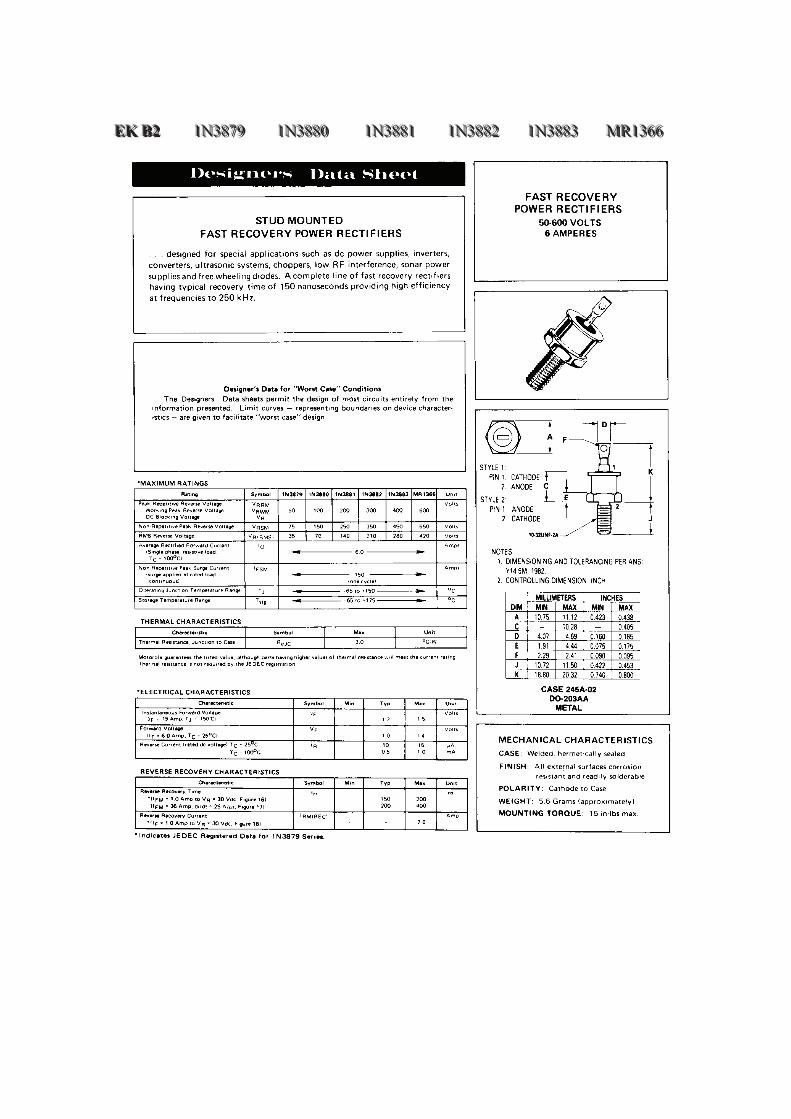
EEEKKK BBB222 111NNN333888777999 111NNN333888888000 111NNN333888888111 111NNN333888888222 111NNN333888888333 MMMRRR111333666666
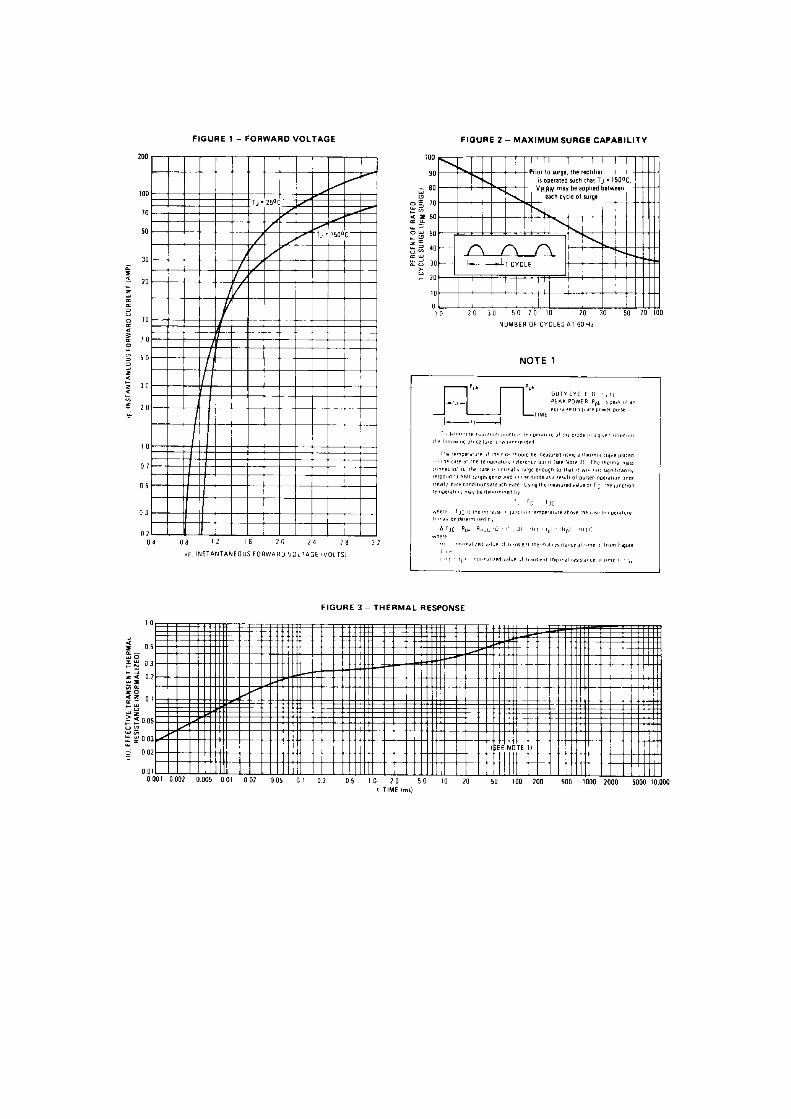

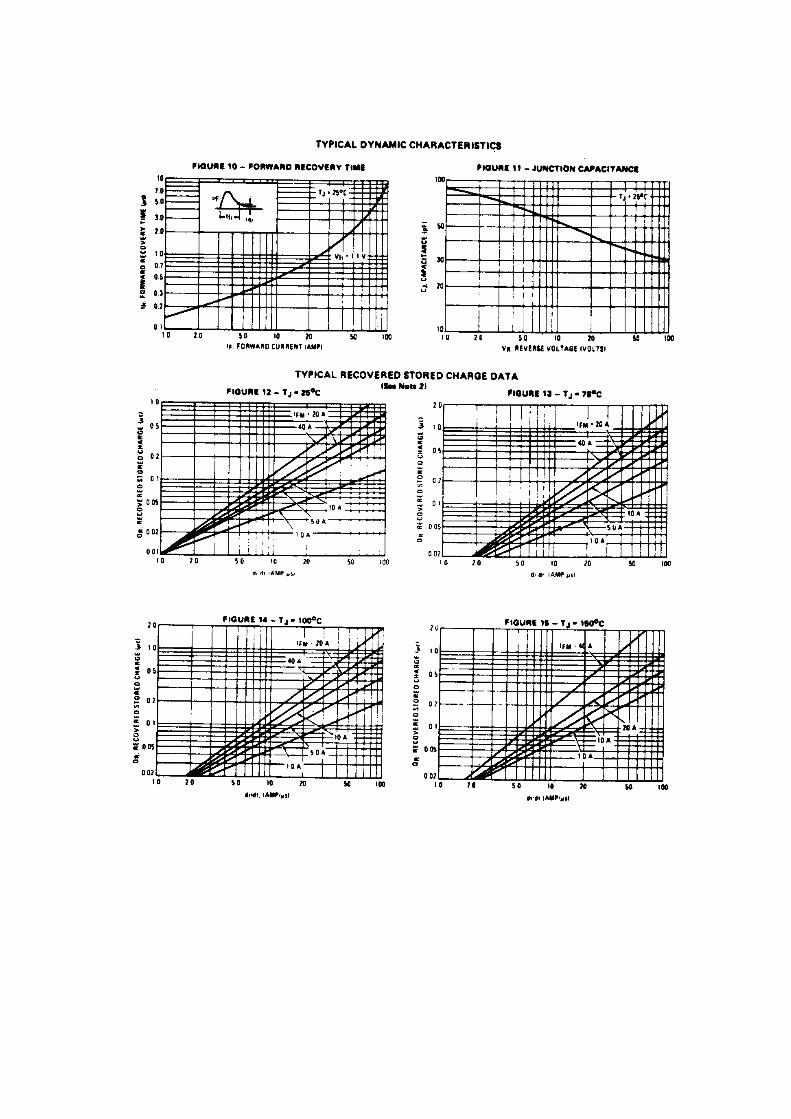

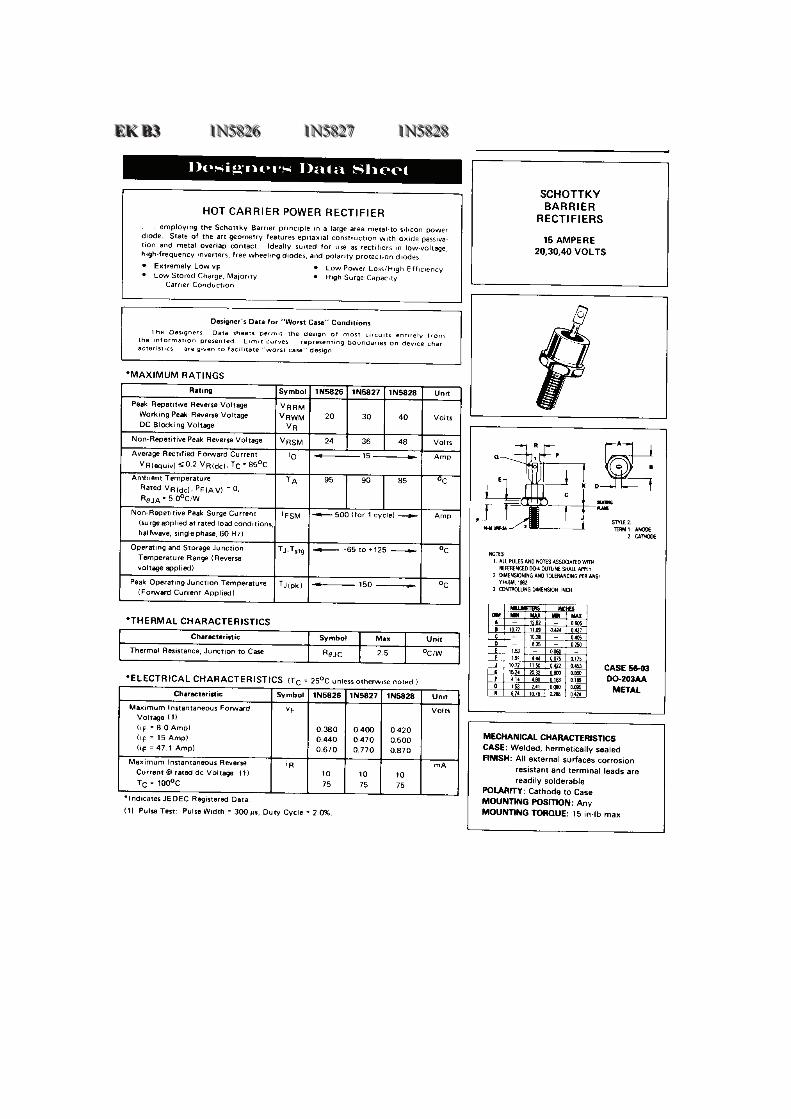
EEEKKK BBB333 111NNN555888222666 111NNN555888222777 111NNN555888222888
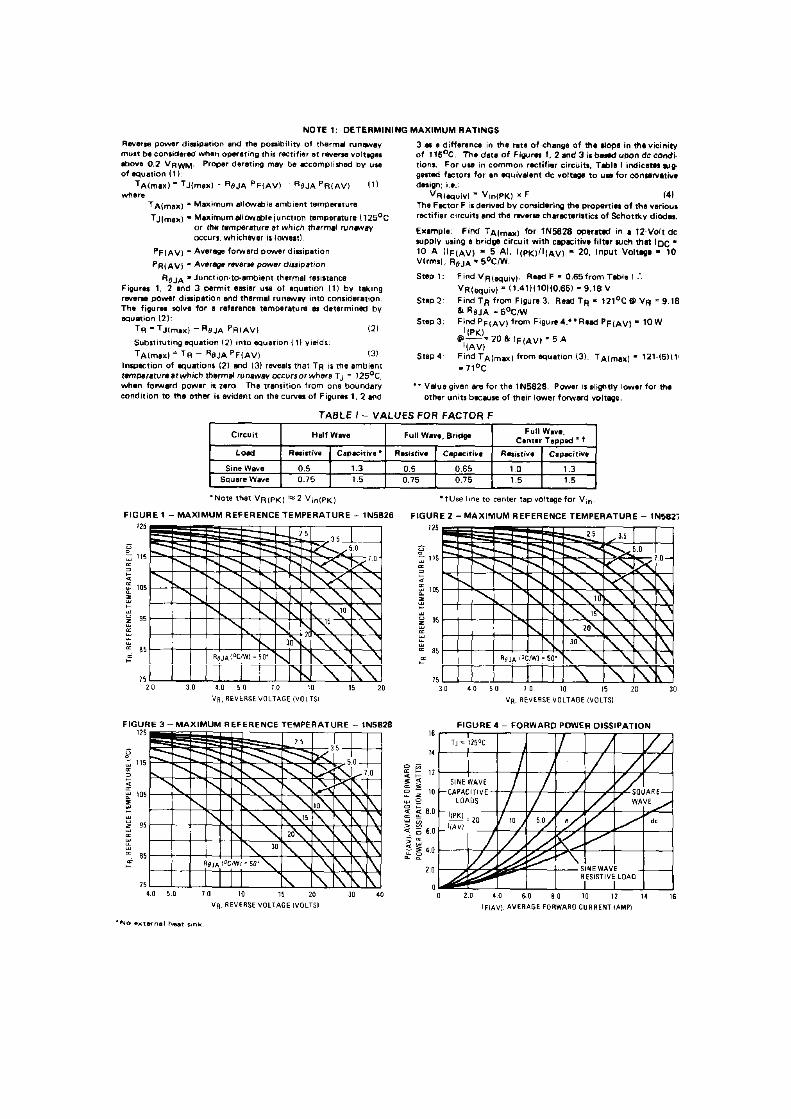
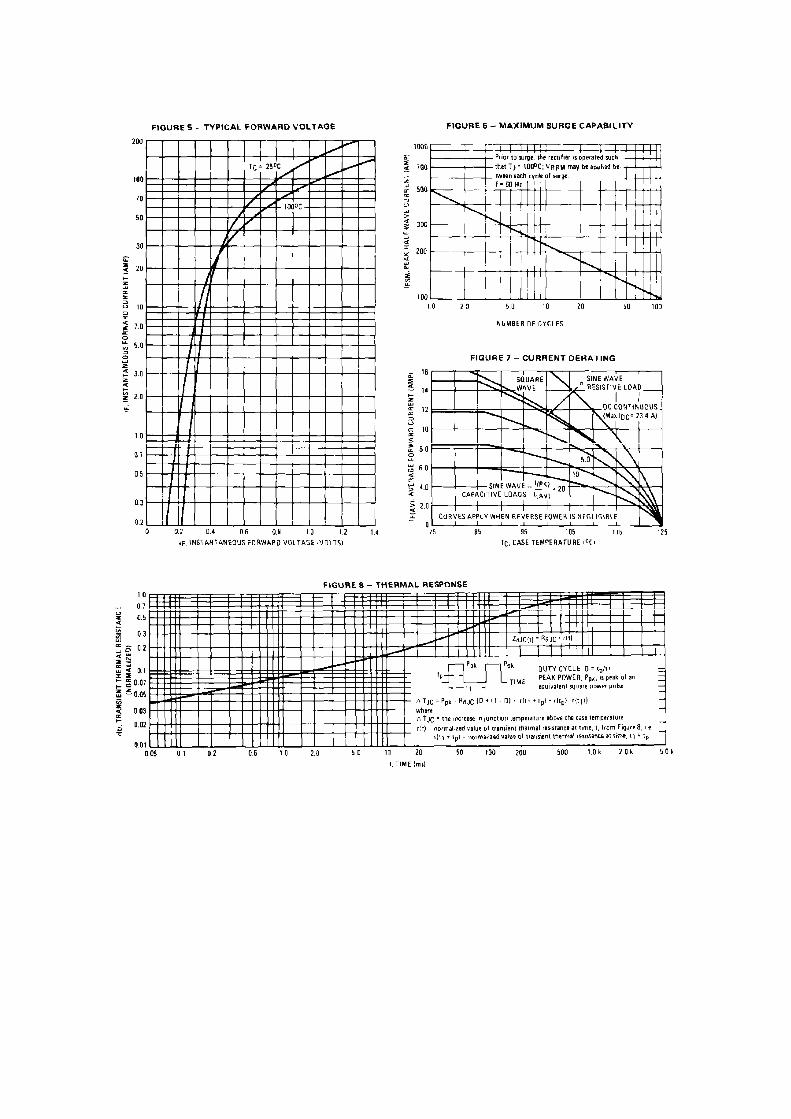
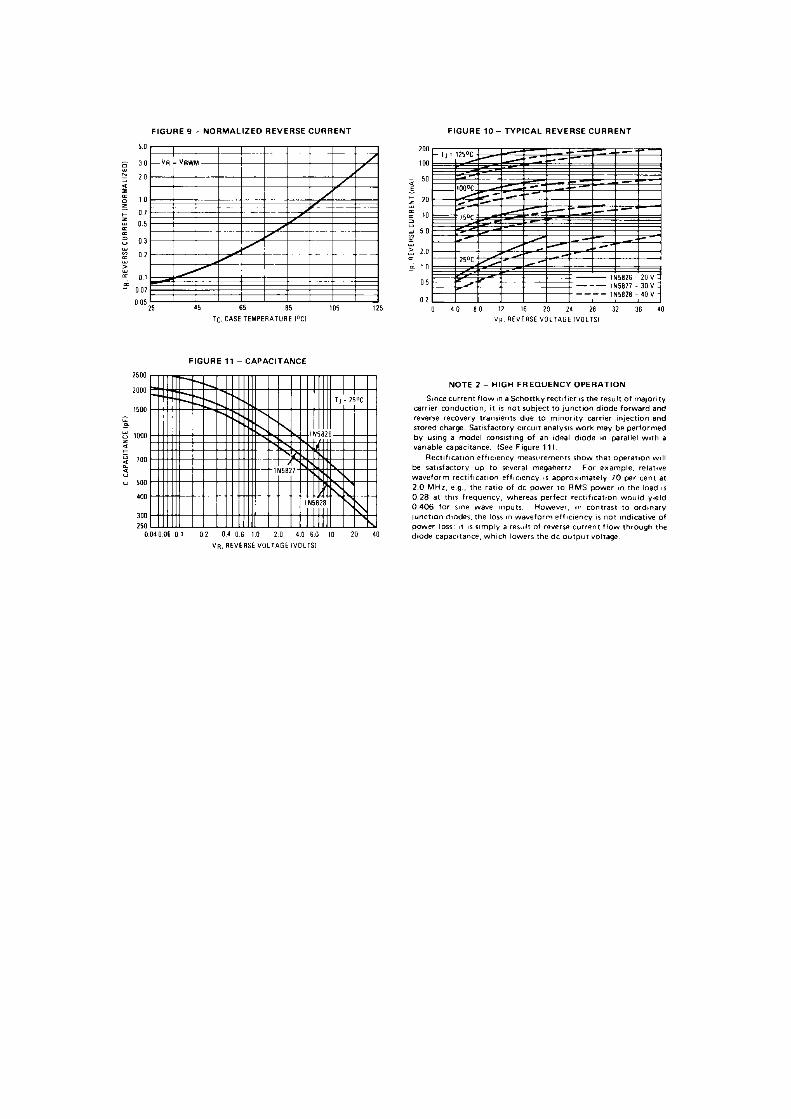
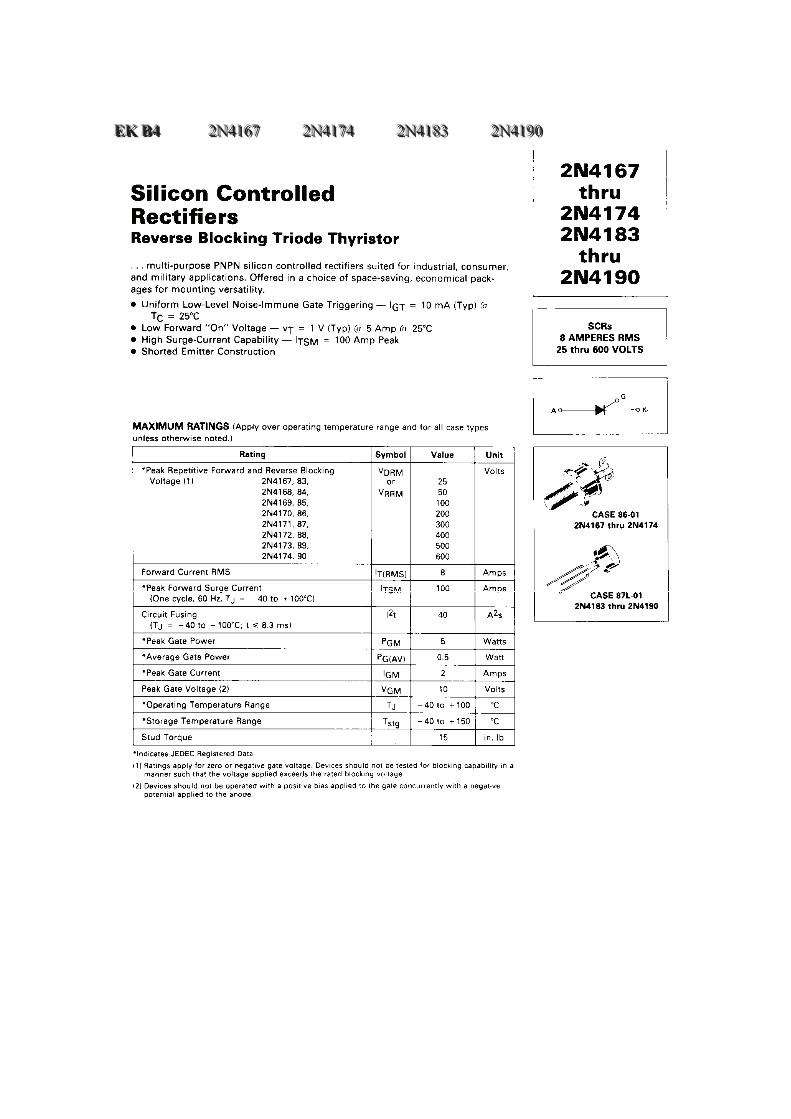
EEEKKK BBB444 222NNN444111666777 222NNN444111777444 222NNN444111888333 222NNN444111999000
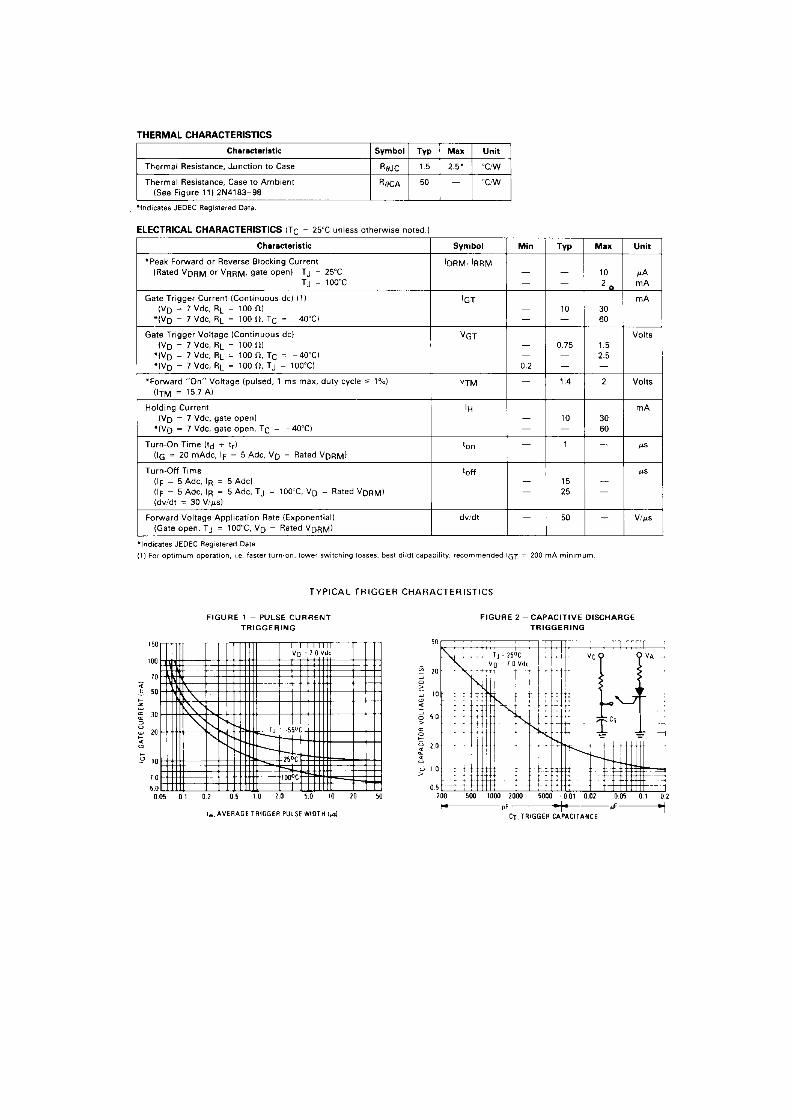
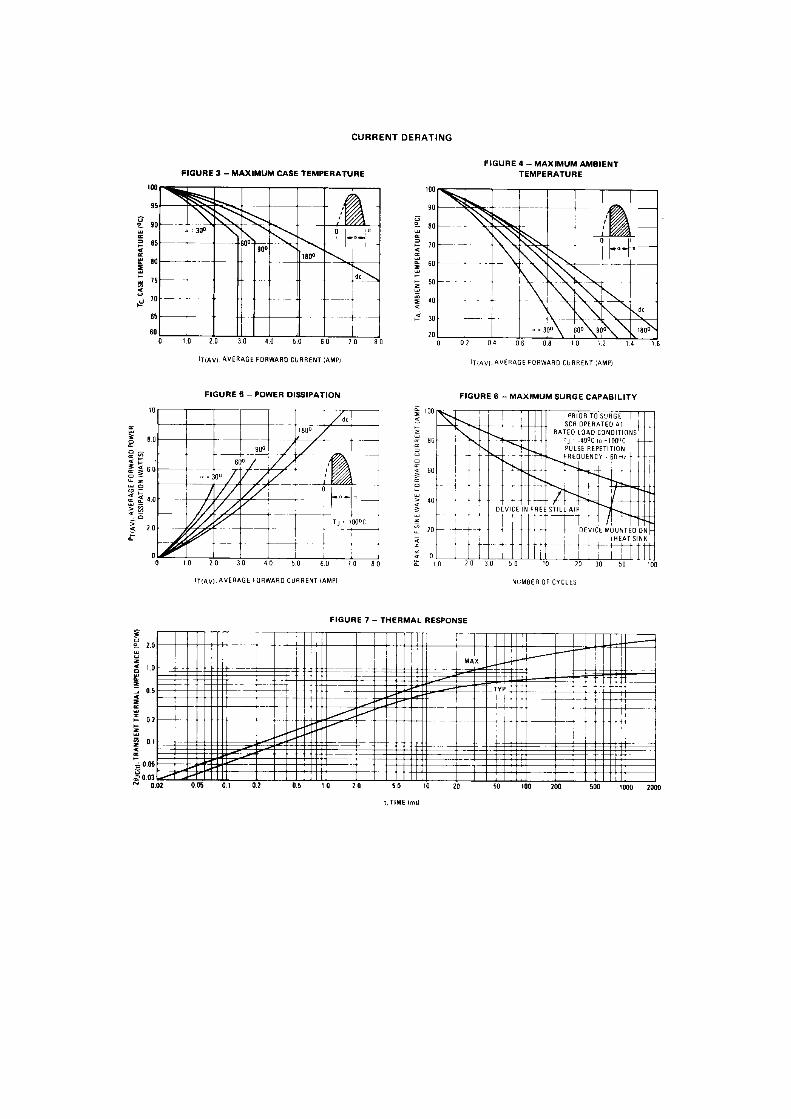
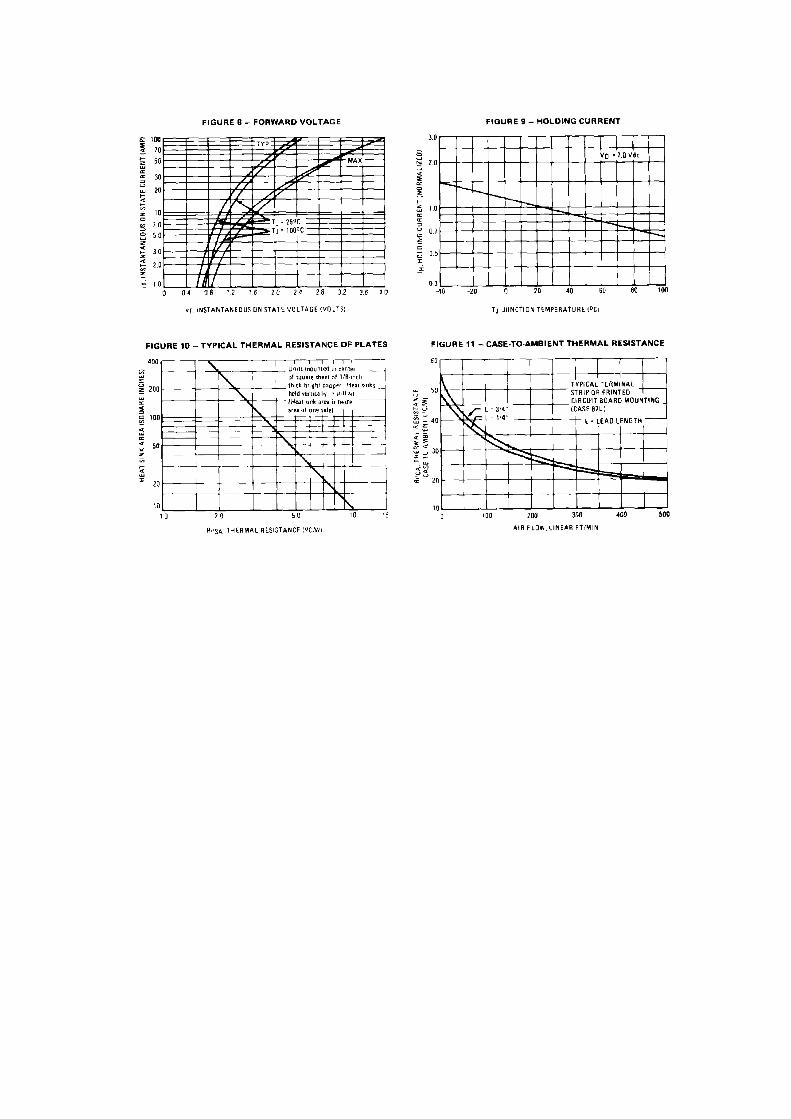
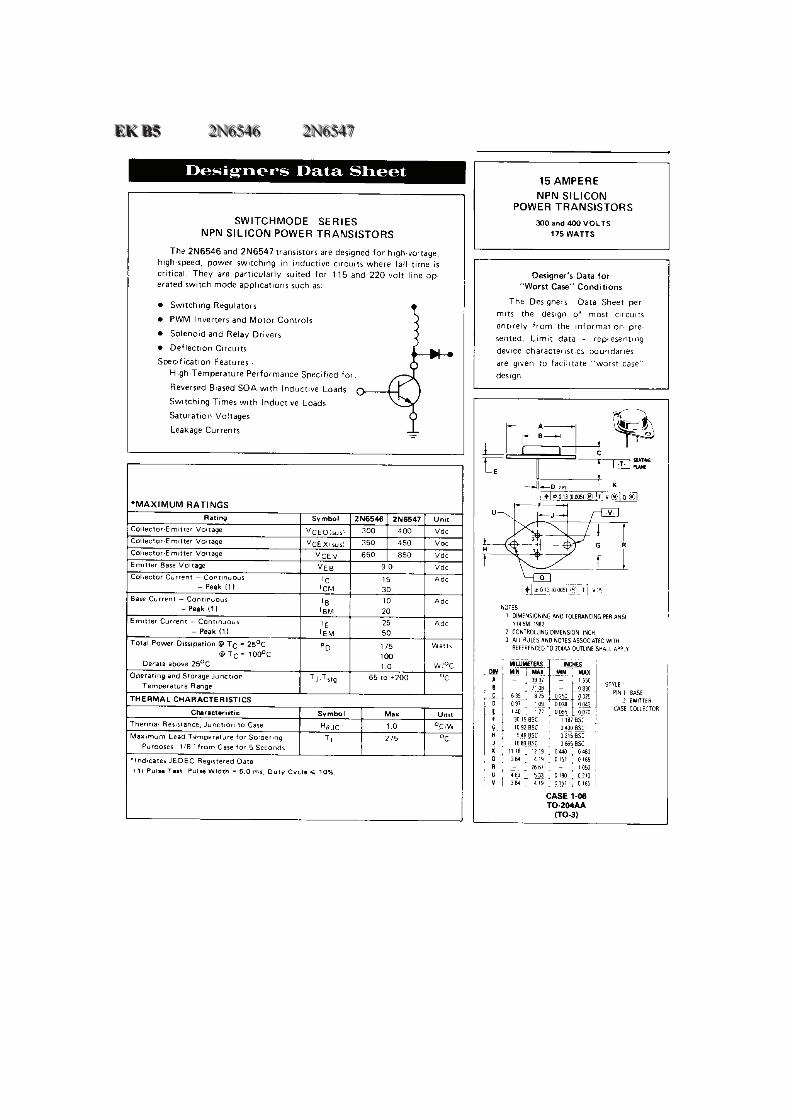
EEEKKK BBB555 222NNN666555444666 222NNN666555444777
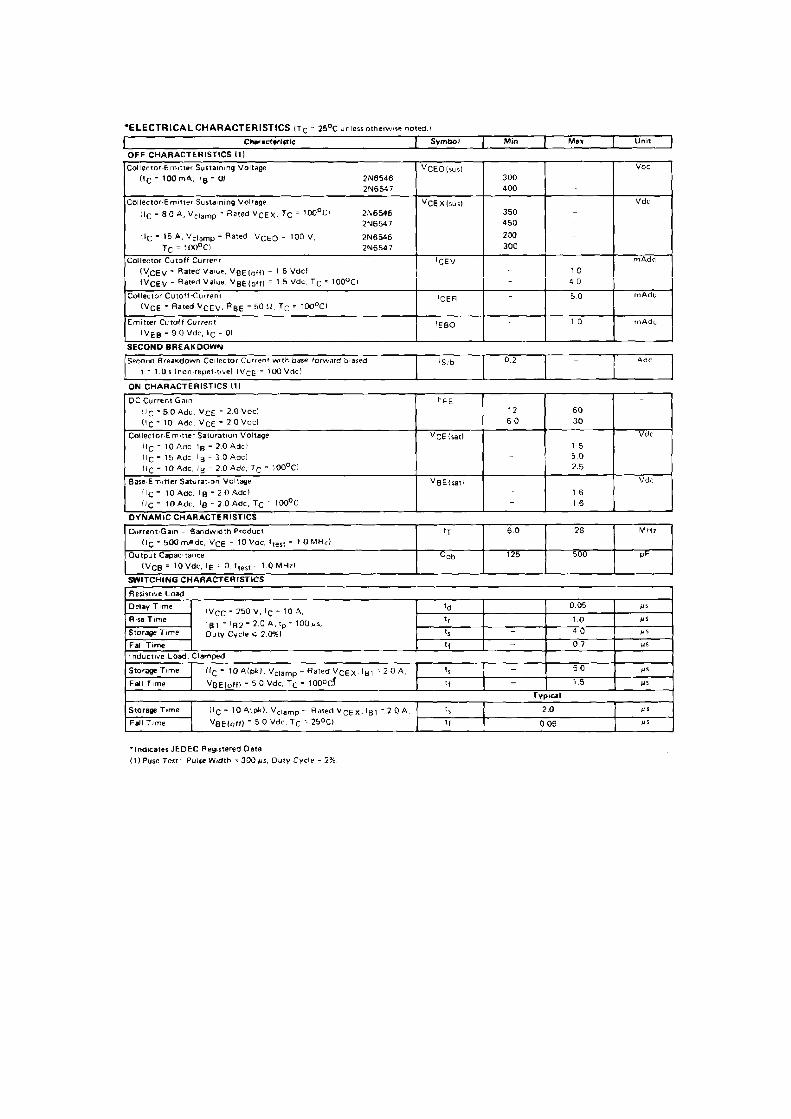
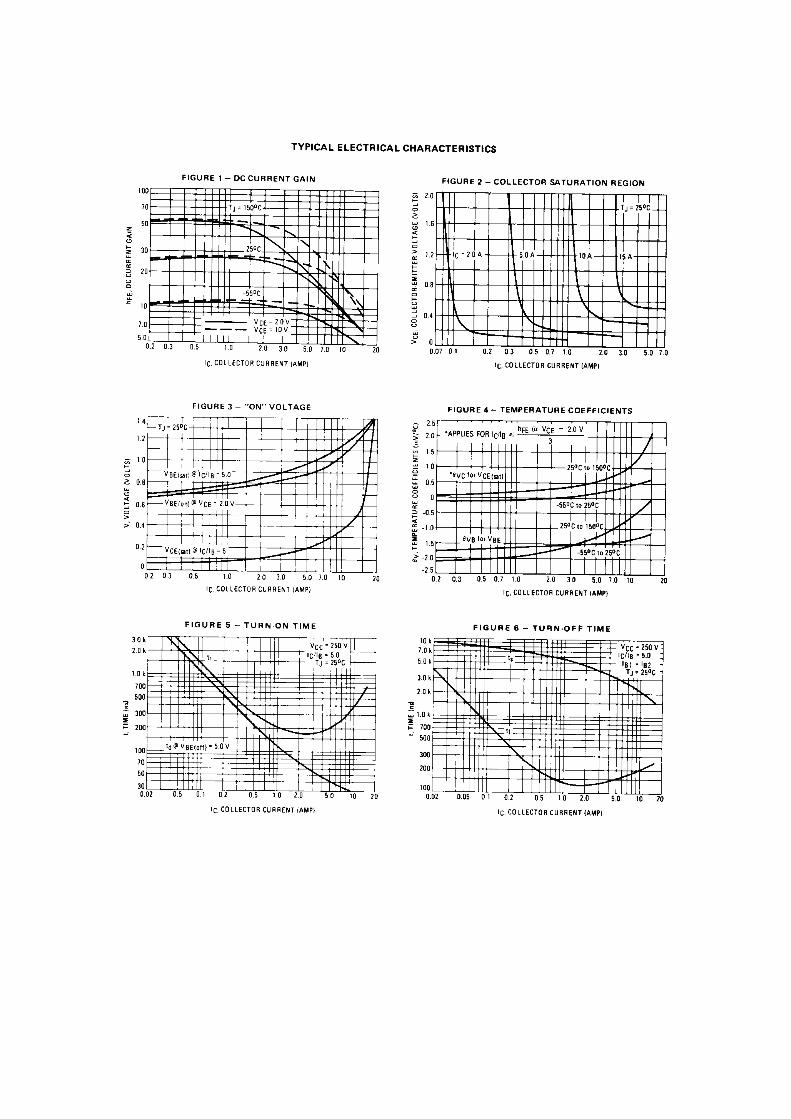
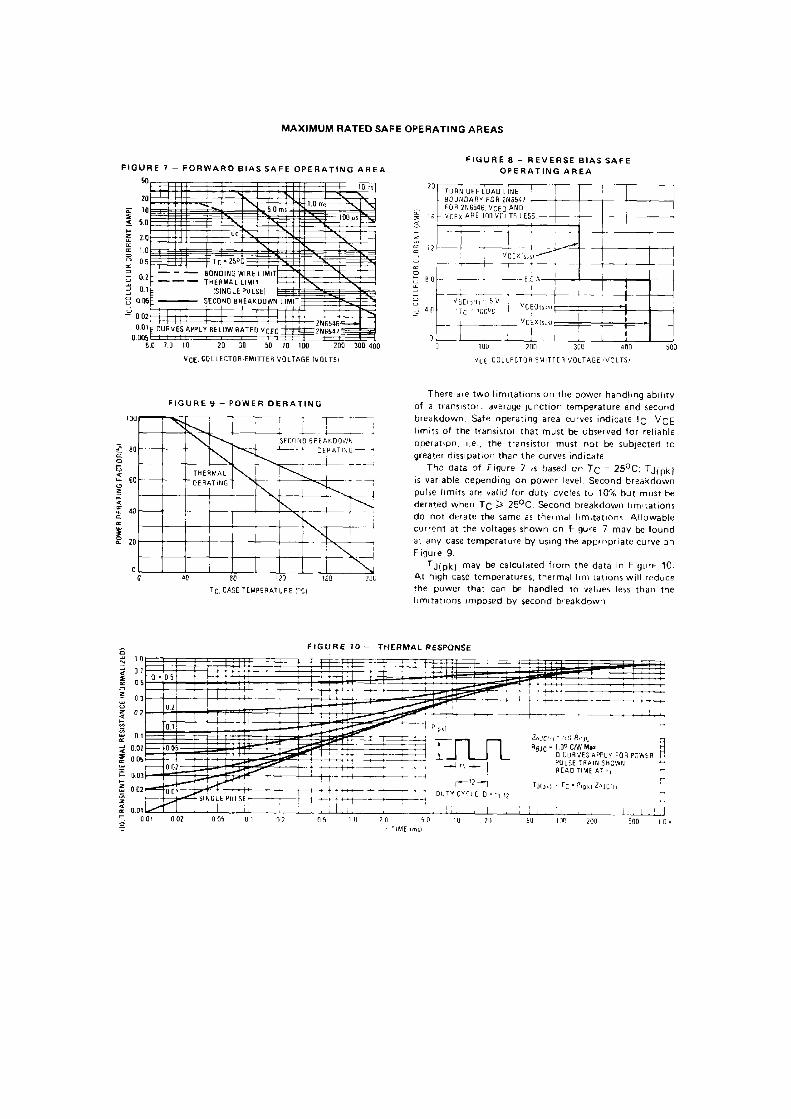
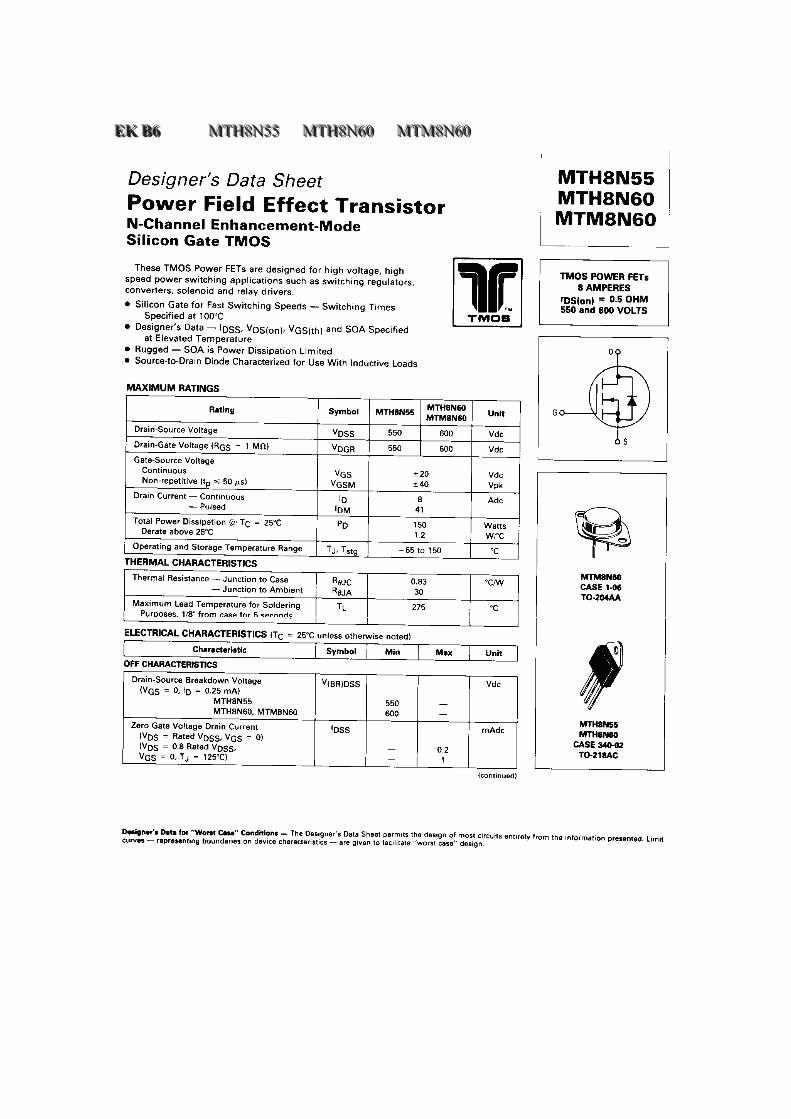
EEEKKK BBB666 MMMTTTHHH888NNN555555 MMMTTTHHH888NNN666000 MMMTTTMMM888NNN666000
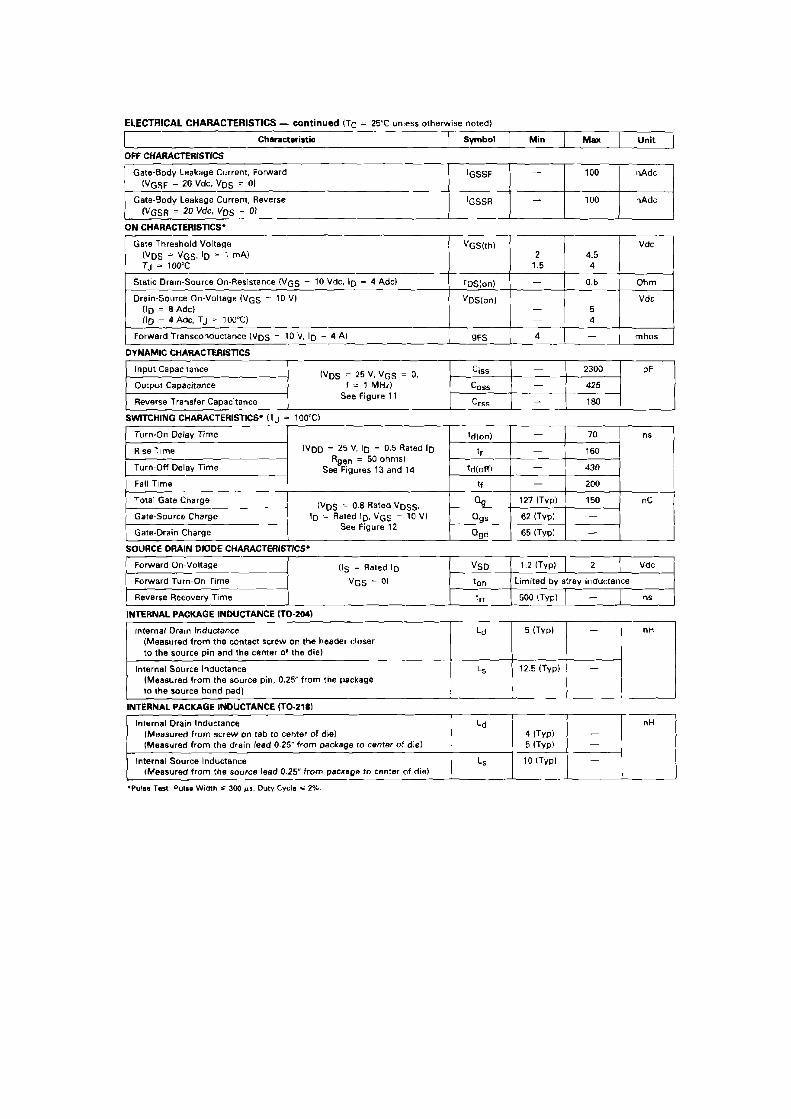
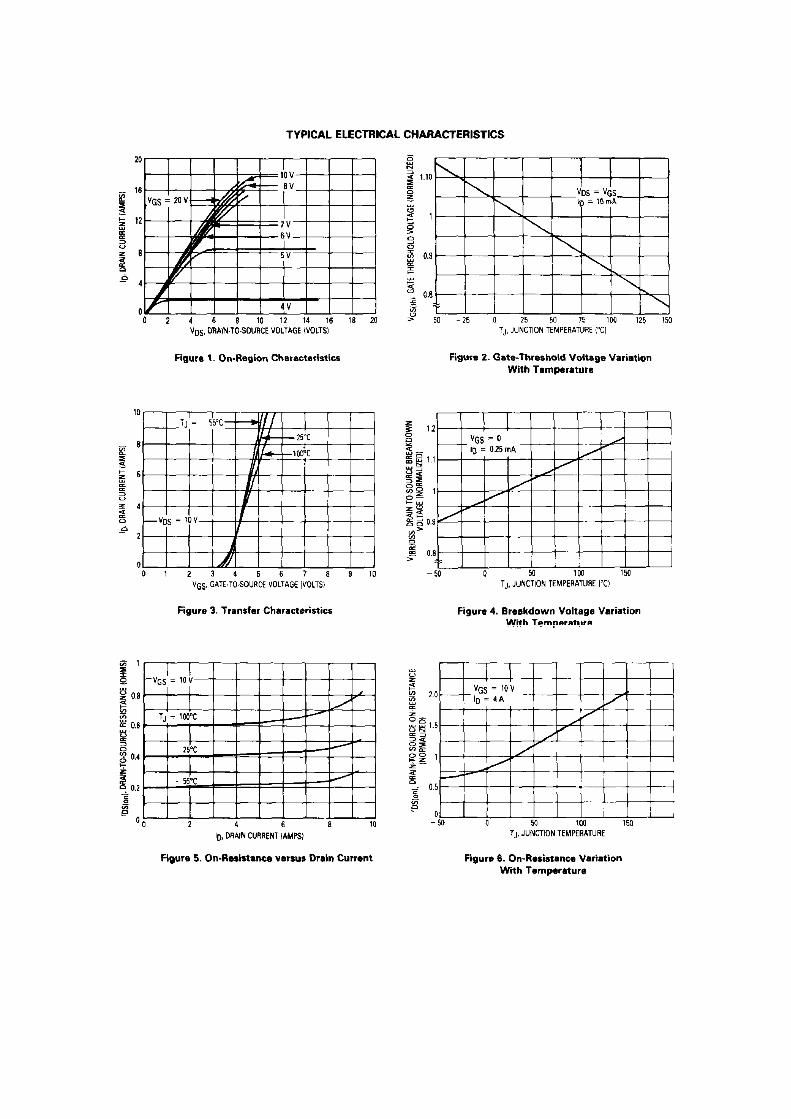
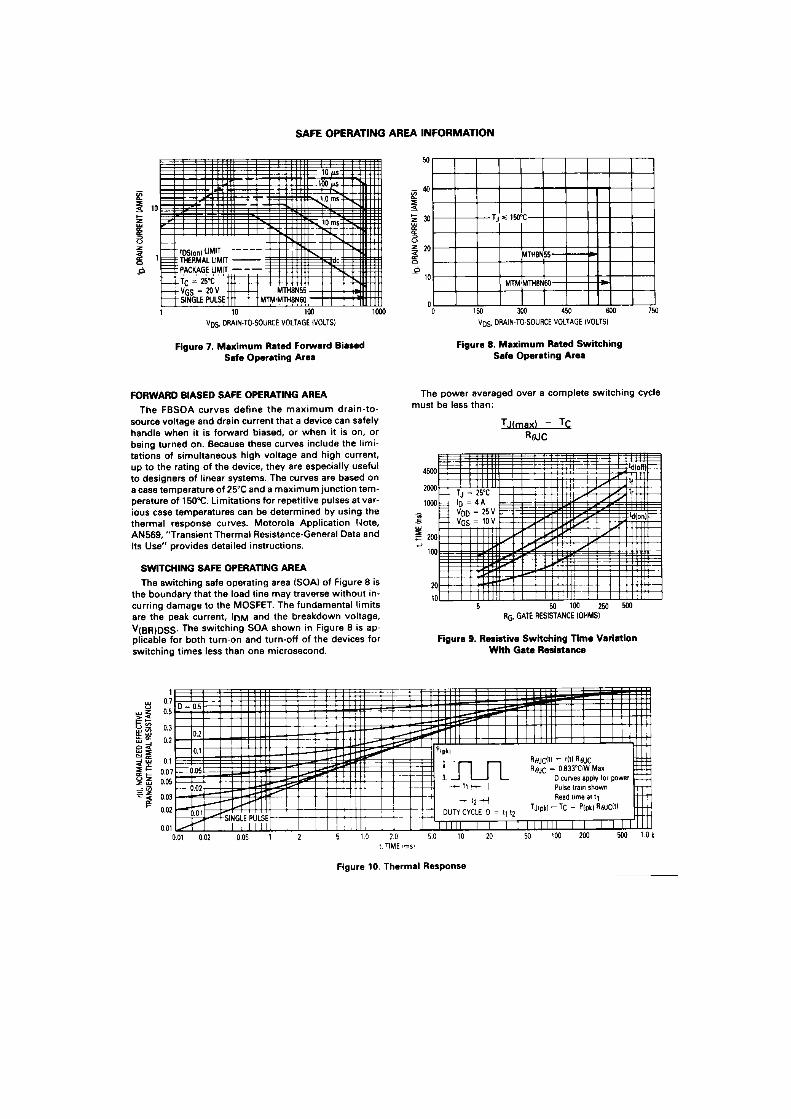
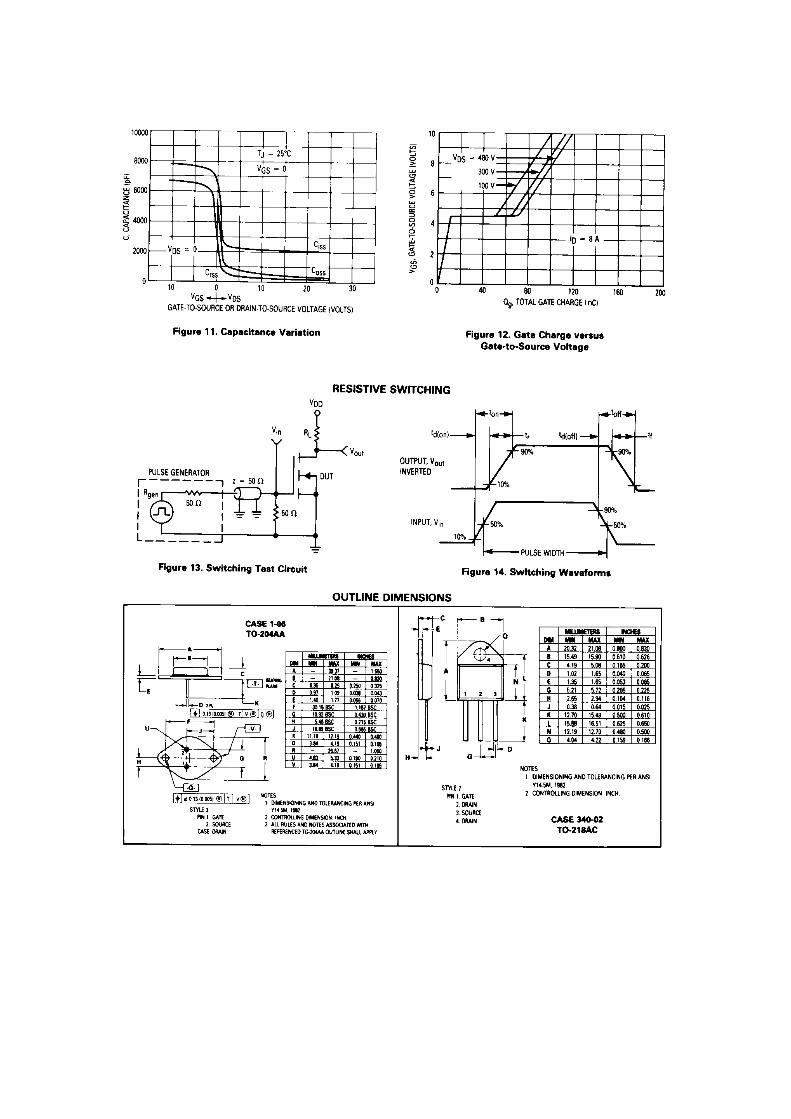
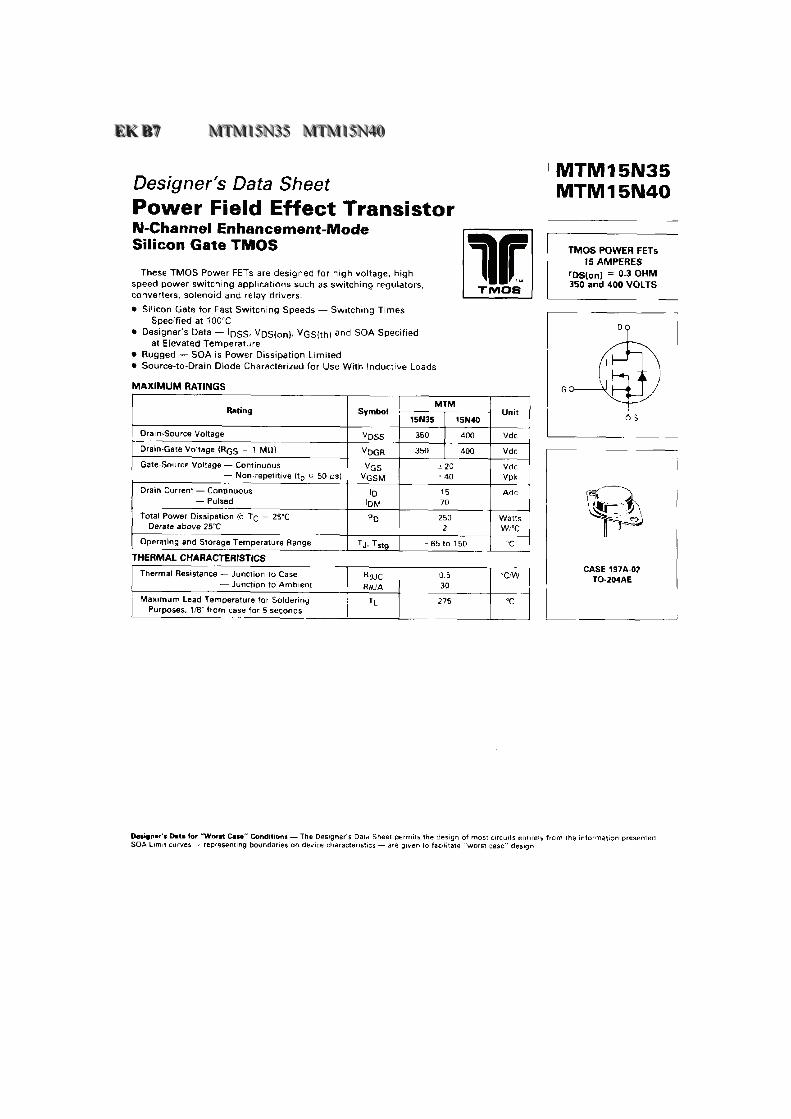
EEEKKK BBB777 MMMTTTMMM111555NNN333555 MMMTTTMMM111555NNN444000
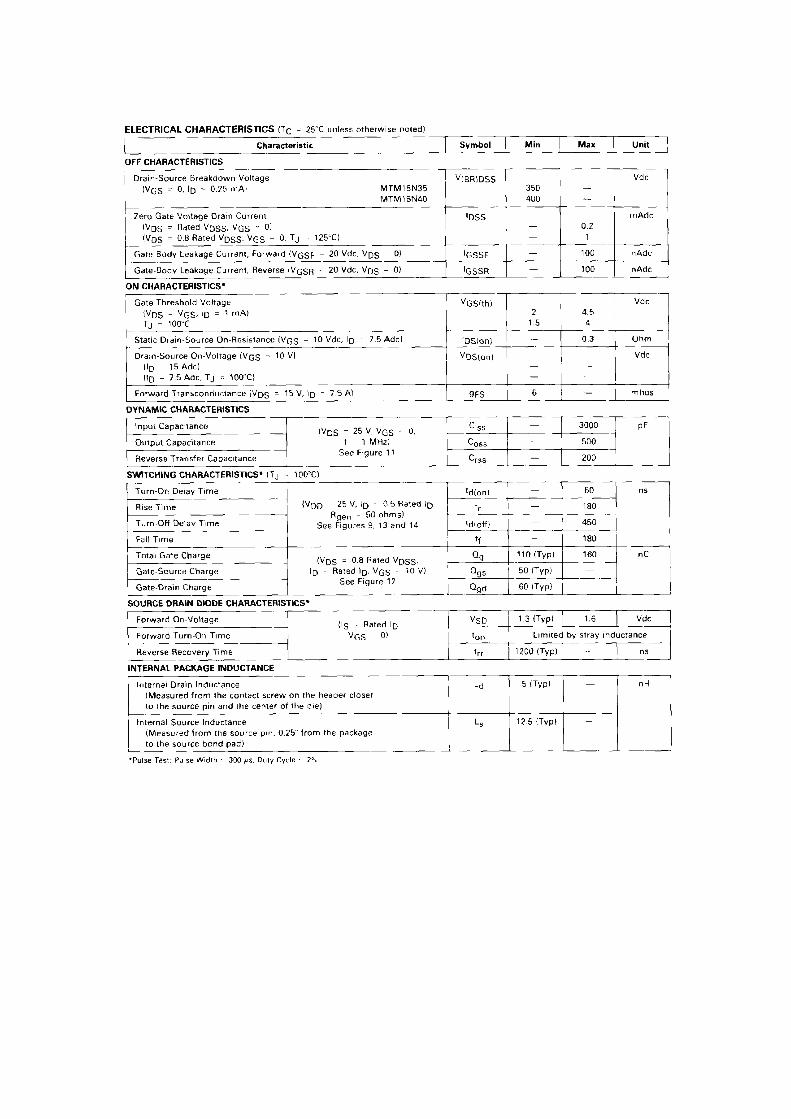
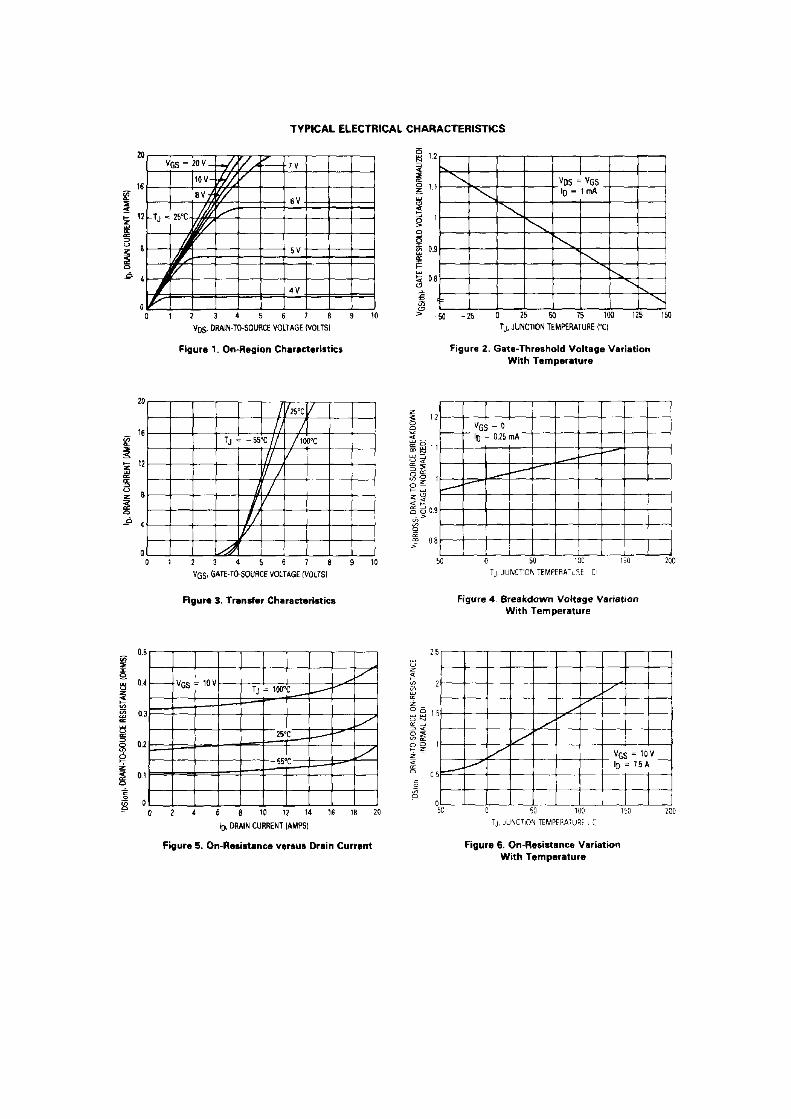
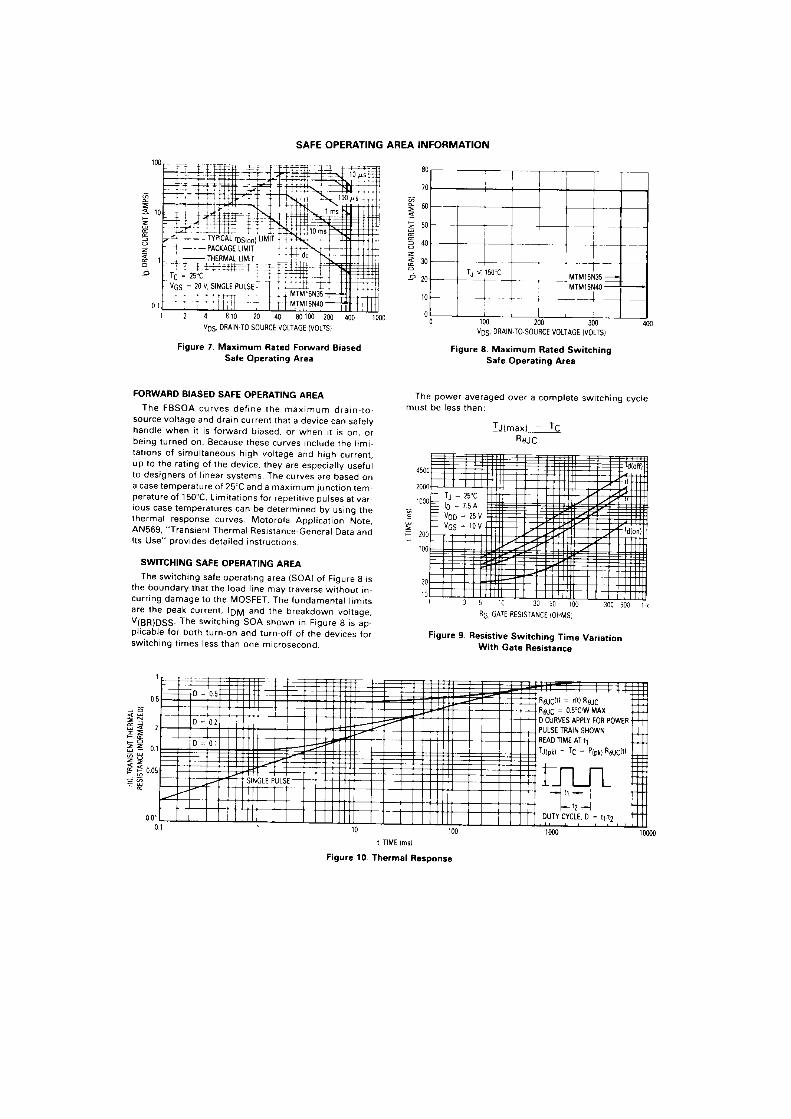
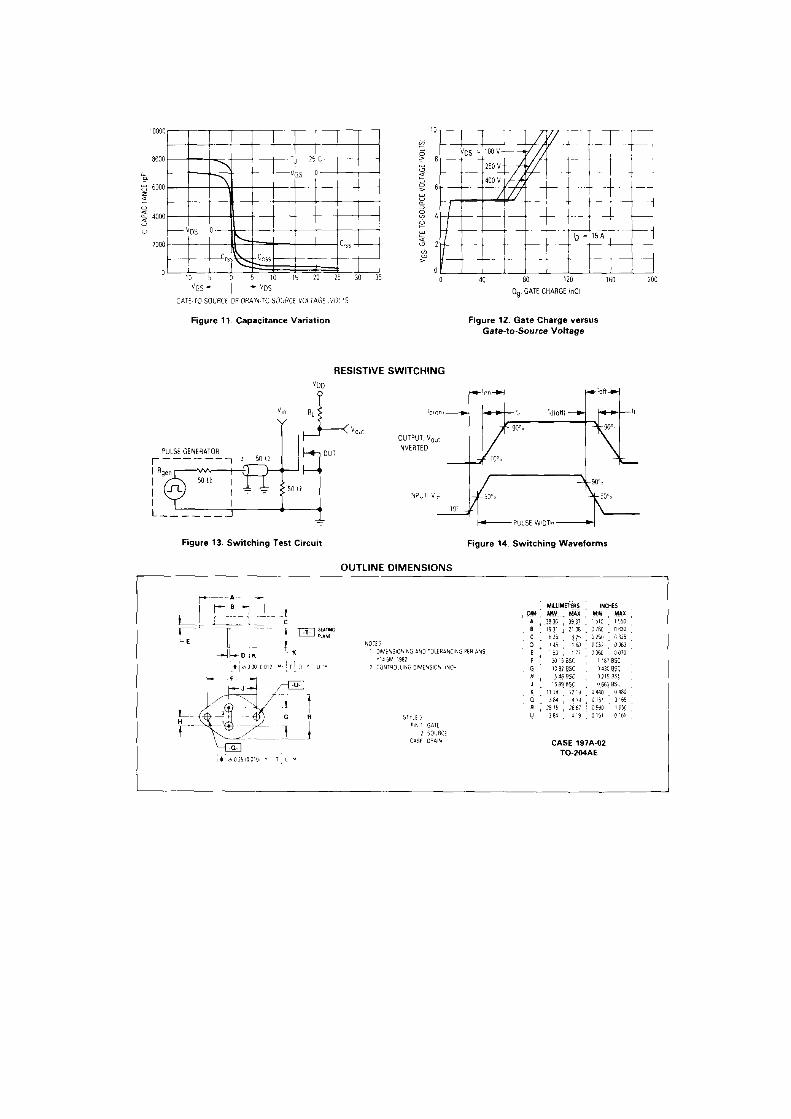
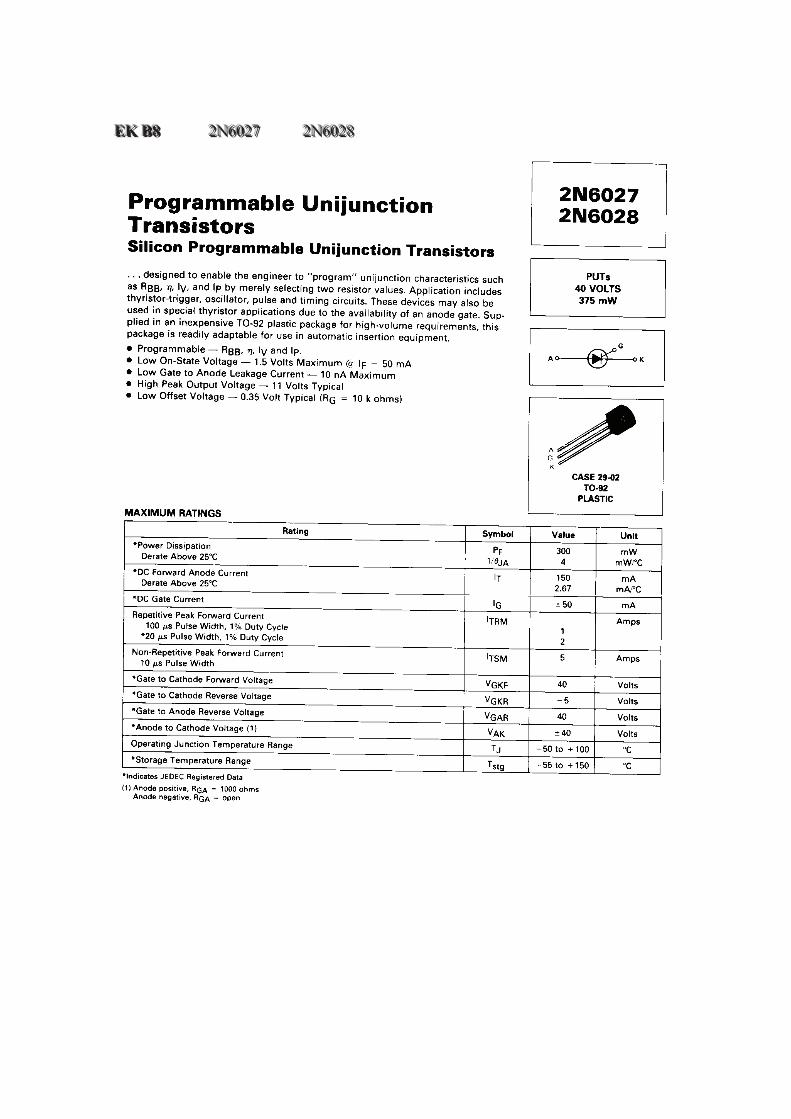
EEEKKK BBB888 222NNN666000222777 222NNN666000222888
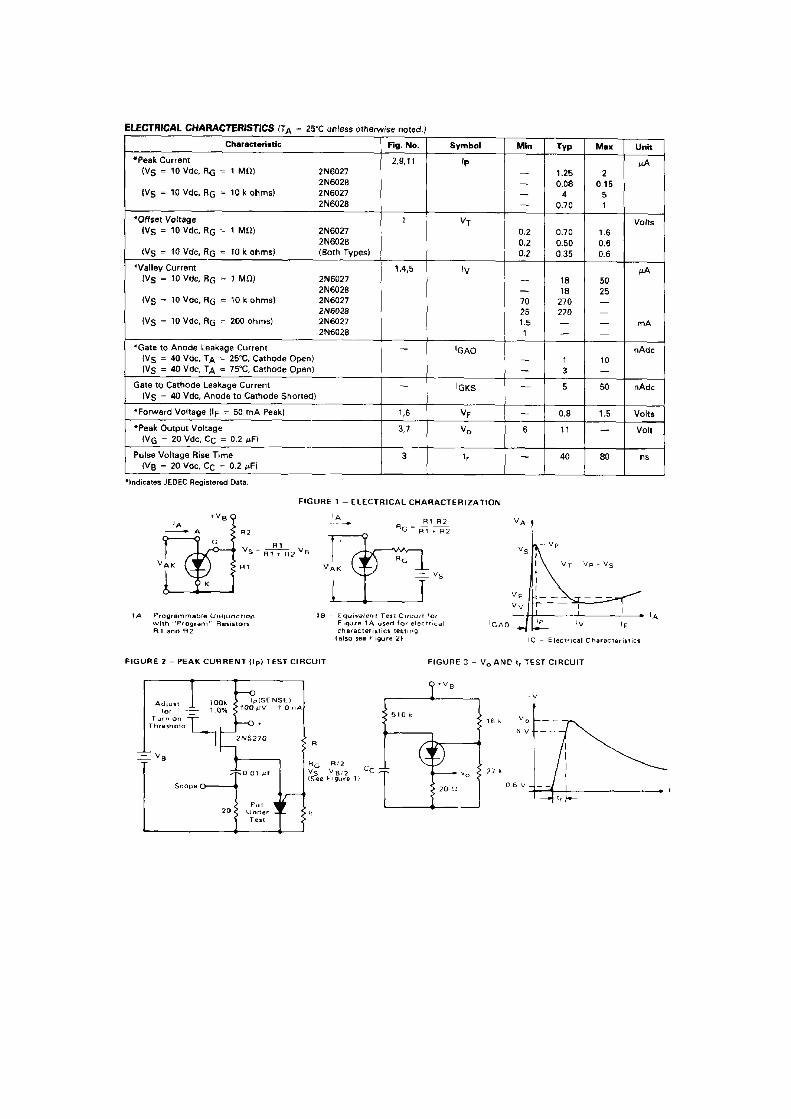
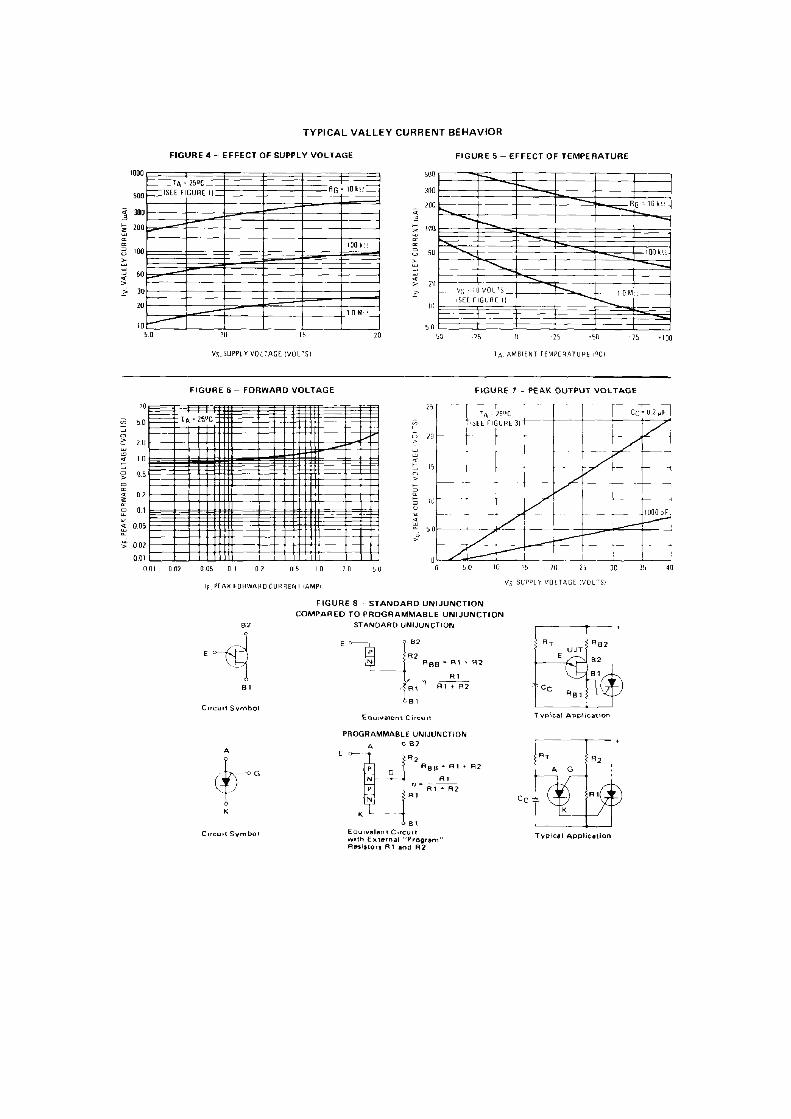

Ac anahtar AC-AC faz kontrol Ac güç kaynaı açık döngü kazancı Akım kaynaı inverteri Akım kazancı Akım sınırlayıcı altı adımlı dalga biçimi altı adımlı inverter anahtar direnci anahtar gerilimi anahtarlama kaybı anahtarlamalı mod ac güç kaynakları anahtarlamalı mod dc güç kaynakları anot akımının iletiminin sınırlandırılması Artıran kıyıcı Artıran kıyıcı aırı akım koruması aırı gerilim koruması aırı yük Azaltan-artıran kıyıcı azaltma bara transferi Beyz akımı βF
Bipolar jonksiyon transistörü bir fazlı birinci derece BJT bons cebri hava Çevre sıcaklıı çıkı gerilim genlii çıkı kontrol Çiftli sargı Çift yönlü a güç kaynakları Çift yönlü dc güç kaynakları çok fazlı dorultucu çok fazlı inverter dalgacık tepkisi dc anahtar dc güç kaynaı DC-DC konvertörler depolama zamanı devre kesici diA/dt
diAK/dt
dinamik beyz akımı
Diyak Seri balı Diyot paralel balı diyot PN jonksiyonlu diyot kesim dönüümü doal konveksiyon yarım dalga dorultucu üç fazlı dorultucu doyum durumu dönütürme oranı dönüüm yükü dönüüm zamanı durum uzay ortalaması düme zamanı düzensiz güç kaybı enerji depolama elemanı enerji geri dönüümü tam dalga faz kontrol yarım dalga faz kontrol indüktif yüklü faz kontrol motor yüklü faz kontrol faz kontrol: çok fazlı yük faz kontrol: çok fazlı rezistif yük faz kontrollu dorultucu faz kontrollu köprü FBSOA flyback konvertör Fourier serileri katsayıları frekans tepkisi FWD geçici termal empedans genelletirilmi transformotor gerilim genlik kontrolu gerilim kaynaı inverteri gerilim kontrol gerilim sıkıtırma gerilim-akım karakteristii temel GTO modeli güç faktörü güvenli çalıma alanı harici geçiciler harmonik kontrol harmonik bileenleri harmonikler hızlandırma kapasitörü hızlı dönüümlü diyotlar IB1
IB2
Imax
Imin
ısı transferi ideal olmayan anahtarlar ideal olmayan etkiler ideal olmayan manyetik kuplaj ikinci derece ikinci kırılma ileri dönüüm ileri konvertör letim açısı iletim durumu gerilimi impals fonksiyonu indüktif yük indüktif yük indüktör direnci integral dalga kontrol inverter çıkı dalgası inverter jonksiyon kapasitansı Kapalı döngü Kapasitör gerilim dalgacıı kapı akımı katı hal rölesi kayıpsız LC devreleri kaynak indüktansı Kesim akımı Kılıf sıcaklıı kısmi doyum kıyıcı çıkıı çok fazlı kontrollu dorultucu tek fazlı indüktif yük tek fazlı rezistif yük Kıyıcı kilitleme akımı Kollektör akımı Komütasyon kapasitörü Komütasyon Kontrollu dorultucu koruma koruyucu kapasitör koruyucu devre koruyucu direnci Köprü dorultucu Köprü inverter Kritik indüktans küçük sinyal LC devre çiftleri
Manivela (crowbar) devresi Manyetik kuplaj metal oksit varistörler Miller etkisi MOSFET kapasitansı güvenli çalıma alanı statik karakteristikler statik kapı akımı MOSFET anahtarlama kayıpları Ortalama akım Ortalama yük akımı Ortalama yük gerilimi Orta-uçlu sekonder pals genilii modülasyonu pals sayısı paralel balantı parçalı dorusal analiz dorusal model periyodik pals PN jonksiyon diyotu PUT PWM Qrr
RBSOA RCS
RDS(iletim)
Reed rölesi rezistif yük rezonans ac güç kaynakları rezonans dc güç kaynakları RJC
RMS akımı RMS deeri RSA
Sabit beygirgücü Sabit volt/hertz Schottky diyotu statik devre modeli SCR kapı akımı kapı palsi sıcaklık koruması sıfır derece SOA Sönüm Statik anahtar Sürekli akım süreksiz akım tam dalga
tek fazlı ac anahtar tek pals tepkili konvertör termal direnç termal zaman sabiti ters akım ters dönüüm akımı ters dönüüm zamanı tqtransformotor kaçak indüktansı tristör triyak trrtutma akımı üç fazlı ac anahtar üç fazlı diyot köprüsü verim yarım dalga dorultucu yarım dalga indüktif yük yarım dalga rezistif yük yarım köprü yükselme zamanı zorlanmı kazanç
KKKAAAYYYNNNAAAKKKLLLAAARRR
1. Osman Gürdal, Güç Elektronii, ANKARA, 1997 (Birinci Baskı)
2. Marvin J. Fisher, Power Electronics, PWS-Kent Publishing Company, Boston, 1991
3. Muhammed H. Rashid, Power Electronics Circuits, Devices and Applications,Prentice Hall, Inc. 1998
4. JMD Murphy & FD TurnBull, Power Electronic Control of AC Motors, Pergamon Press, Oxford, UK, 1989
5. Duncan A. Grant, John Gower, Power Mosfets Theory and Applications, John Wiley&Sons, Bristol, UK, 1989
6. Ned Mohan, Tore M. Undeland, William P. Robbins, Power Electronics Converters, Applications and Design, John Wiley & Sons, Canada, 1989
7. Gordon R. Slemon, Electric Machines and Drives, Addison Wesley Publishing Company, University of Toronto, 1992
8. Power Electronics and Motor Control, School of Electrical and Electronic Engineering, University of Bradford, Cambridge University Press, Cambridge, 1987
9. B. W. Williams, Power Electronics Devices, Drivers, Applications and Passive Components, MacMillan, Heriot-Watt University, Edinburgh, 1992
10. P. C. Sen, Principles of Electric Machines and Power Electronics, Queen’s University, John Wiley & Sons, Canada, 1989
11. Gottfried Möltgen, Converter Engineering An Introduction to Operation and Theory, John Wiley & Sons, 1984
12. Shepherd, Hulley&Liang, Power Electronic & Motor Control, Cambridge University Press, Cambridge, 1996
13. Cyril, W. Lander, Power Electronic, McGraw-Hill, UK, 1996
14. L. Tihanyi, Electromagnetic Compatibility in Power Electronics, Butterworth-Heinemann, 1996
15. Robert Boylestad, Louis Nashelsky, Elektronik Elemanlar ve Devre Teorisi, MEB Yayınları, 1994
16. B. K. Bose, Power Electronics and AC Drives, Prentice Hall, Inc., New Jersey, 1986
17. I. Boldea, S.A. Nasar, Vector Control of AC Drives, CRC Press, Florida, 1992
18. Jorge de Sousa Pires, Electronics Handbook, Chartwell-Bratt Ltd., Sweden, 1989
19. Erwin Kreyszig, Advanced Engineering Mathematics, John Wiley Sons, New York, 1988
20. Özer ., Sefa I., Bilgisayar Denetimli Güç Kaynaı, Erciyes Üniversitesi Fen Bilimleri Dergisi, 36-48, Cilt 11, sayı 1-2, Kayseri, Kasım 1995
21. BAL Güngör, Özel Elektrik Makinaları, ANKARA, 1997
22. Çetin Elmas, Ömer Faruk Bay, "Modelling and Operation of a Nonlinear Switched Reluctance Motor Drive Based on Fuzzy Logic", European Power Electronics and Applications Conference, pp. 3/592-3/597, 19-21 September 1995, Sevilla, Spain
23. W. McMurray, Optimum Snubbers for Power Semiconductors, IEEE Transactions on Industry Applications, Vol. IA8, No.5, 1972, pp.503-510.
24. Ömer Faruk Bay, Çetin Elmas, “Fuzzy Logic Based Modelling of Inductance Variation of the Switched Reluctance Motor”, IEEE Power Electronics Specialist Conference – PESC’96, Baveno, Italy
25. B. K. Bose, Recent Advances in Power Electronics, IEEE Transactions on Power Electronics, Vol. PE7, No.1, 1992, pp.2-16
26. Ömer Faruk Bay, Güngör Bal, “Fuzzy Control of a Vector Controlled Induction Motor”, Second International ICSC Symposia on Soft Computing-SOCO’97, 16-19 September 1997, Nimes, France
27. M. H. Rashid, SPICE for Circuits and Electronics Using Pspice, Englewood Cliffs, N.J.: Prentice Hall, 1990
28. Çetin Elmas, Ömer Faruk Bay ve M. Alçı, "Sayısal Sinyal lemcisi Kontrollu Anahtarlamalı Relüktans Motor Sürücüsü", Elektrik Mühendislii 6. Ulusal Kongresi, s.1003-1006, 11-17 Eylül 1995, Bursa, Türkiye
29. M. H. Rashid, SPICE for Power Electronics and Electric, Englewood Cliffs, N.J.: Prentice Hall, 1993
30. BAL, Güngör, GRANT D.M, “Parameter estimation of field-oriented controlled induction motor fed by CR-PWM via EKF using stator reference currents”, in Proceedings of the International Conference on Electrical Machines(ICEM), pp.597-601, 15th-17th September, UMIST, Manchester,UK., 1992
31. L. J. Giacoletto, Simple SCR and TRIAC PSPICE computer models, IEEE Transactions on Industrial Electronics, Vol. IE36, No. 3, pp. 451-455
32. BAL, Güngör ve GRANT D.M.,(1993), “Off-line parameter identification of an induction motor by an Extended Kalman Filter”, in Proceedings of the 28th
Universities Power Engineering Conference(UPEC), pp.973-976, 21-23 September, Staffordshire University, UK
33. P. Wood, Switching Power Converters, New York, Van Nostrand Reinhold Company, Inc., 1981
34. BAL Güngör, ELMAS Ç., ÇOLAK ., SEFA ., "Dynamic response of a simple resistance compensation for field-oriented induction motor", in Proceedings of the 29th Universities Power Engineering Conference, pp. 386-389, 14-16 September, IRELAND, 1996
35. R. E. Zuliski, A High Efficiency Self Regulated Class-E Power Inverter/Converter, IEEE Transactions on Industrial Electronics, Vol. IE33, 1986, pp. 340-342
36. BAL Güngör, ELMAS Çetin, ÇOLAK lhami, Ömer Faruk Bay, "Off-line testing of an EKF algorithm for rotor resistance estimation of induction motor drives",

in Proceedings of the 29th Universities Power Engineering Conference, pp. 501-504, 14-16 September, Ireland, 1994
37. P. F. Dawson, L. E. Lansing and S. B. Dewan, A Fast DC Circuit Breaker, IEEE Transactions on Industry Applications, Vol. IA21, No.5, 1985, pp. 1176-1181
38. BAL Güngör ve ÇOLAK lhami, "Sabit kondansatör - tristör kontrollu reaktör tipi reaktif güç kompansatörü”, Gazi Üniversitesi Fen Bilimleri Enstitüsü Dergisi, s.9-15, Cilt 8, No. 2, Haziran, 1995
39. E. D. Weichman, P. D. Ziogas and V. R. Stefanovic, A Novel Bilateral Power Conversion Scheme for Variable Frequency Static Power Supplies, IEEE Transactions on Industry Applications, Vol. IA21, No.5, 1985, pp. 1226-1233.
40. BAL Güngör, “Comparison of an Extended Kalman Filter and compensation methods for rotor resistance variation”, in Proceedings of the 30th Universities Power Engineering Conference (UPEC), 5-7 September, The University of Greenwich, UK, 1995
41. P. C. Sen, Electric Motor Drives and Control: Past, Present and Future, IEEE Transactions on Industry Electronics, Vol. IE37, No.6, 1990, pp. 562-575.
42. ÇOLAK lhami, BAL Güngör ve ELMAS Çetin, "Review of the testing methods for full-load temperature rise testing of induction machines", (EPE) European Power Electronics and Drives, pp.37-43, vol.6, No.1, May, 1996
43. B. K. Bose, Adjustable AC Drives, New York: IEEE Press, 1980.
44. Ömer Faruk Bay, BAL Güngör, DEMRBA evki, ”Fuzzy logic based control of a brushless dc servo motor drive”, 7th International Power Electronics and Motion Control Conference (PEMC’97), pp.3/448-452, 2-4 September, Budapest, HUNGARY, 1996
45. A. F. Howe, P. G. Newbery and N. P. Nurse, DC Fusing in Semiconductor Circuits, IEEE Transactions on Industry Applications, Vol. IA22, No.3, 1986, pp. 483-489.
ÖÖÖNNNSSSÖÖÖZZZ
Bu ders kitabının amacı, güç yarı-iletken anahtarları kullanılarak, elektronik metotla verimli enerji dönüümünün temel ilemlerini gösteren güç elektronii konularının tanıtılmasıdır. Enerji dönüüm ilemi elektrik kaynaının gerilim ve frekans gibi büyüklüklerinin deitirilmesi suretiyle olmaktadır. Bu deiime bir örnek, bir DC kaynak geriliminin bir deerinden baka bir deerine deitirilmesi ilemidir. deal bir anahtara yakın bir yarı-iletken anahtar kullanılarak bu ilem yüksek bir verimlilik ile yapılabilir. Böyle enerji dönüüm metotları, kullanılan gerçek yarı-iletken anahtardan baımsız olarak analiz edilmitir. Bazı özel devrelerde ise anahtara balı kalınarak konular ilenmitir. Örnein, faz kontrollu dorultucu durumunda, anahtarlama ilemi çounlukla SCR’ler ile yapılmaktadır.
Güç elektronii ilemini iyi anlamak için, örencilerin alt sınıflarda verilmekte olan derslerde (özellikle elektronik dersinde), elemanların tanıtıldıı temel konularda, PN-Jonksiyon diyotları ve BJT gibi elektronik elemanlar ve elektronik devrelerdeki analizleri gibi temel konularda iyi bilgi sahibi olmaları gerekmektedir. Bunlara ek olarak, devre analizleri, ikinci derece geçici sinyallerin devre analizi ve parçalı dorusal analiz metotlarının bilinmesi de faydalı olacaktır.
Bu ders kitabının içindeki konuların hepsi, bir sömestr içinde ilenemeyebilir, örencilerin ihtiyaçları dikkate alınarak bölümlerdeki en uygun kısımlar seçilebilir. Bu seçim, önceki yıllarda alınması zorunlu ilgili konuların alınıp alınmamasına balıdır. Yarı-iletkenler hakkında geni bilgiye sahip örenciler için 2., 3. ve 4. bölümlerdeki konular atlanılarak, kalan bölümler ise bir sömestr içinde ilenebilir.
lk bölümlerdeki konular, anahtar olarak kullanılan esas yarı-iletkenlerdir. lerleyen bölümlerde modellerin devre analizleri yapılmıtır. Anlatımda ve örnek problemlerde gerçek devre tasarım durumları da dikkate alınmıtır. Bu ders kitabı;
PN Jonksiyonlu ve Schottky engel diyotları bu diyotların karakteristikleri ile seri ve paralel balantıları,
SCR, Triyak, GTO, BJT ve MOSFET karakteristikleri,
1 ve 3 fazlı, yarım ve tam dalga, faz kontrollu ve kontrolsuz dorultucular,
Omik ve indüktif yüklerde AC-AC faz kontrol ile harmoniklerin incelenmesi,
DC-DC konvertörler,
Yarım ve tam dalga inverterler ile PWM inverterleri,
Statik anahtarlar,
AC ve DC güç kaynakları,
Güç elektronii devrelerinin tasarımında dikkat edilmesi gereken hususlardan
olumaktadır. Her konunun sonunda sayısal örneklerin ve çalıma sorularının verilmesi, konunun daha iyi anlaılması amacını taımaktadır. Ders kitabında hataları en aza indirmek için gerekli titizliin gösterilmesine çalıılmısa da olabilecek hataların tekrar etmemesi için tarafıma bildirilmesi büyük önem arz etmektedir. Bu konuda ilgililerin önerilerini bekliyorum.
Farnell irketi’nin hazırladıı, Güç Elektronii ile ilgili elemanları içeren katalog bölümleri kitabın sonuna ek olarak ilave edilmitir. Böylece teorik olarak üzerinde çalıılan, ilgili konularda bahsi geçen elemanların gerçek dünyada nasıl mevcut olduu ve teknik özellikleri hakkındaki bilgiler rahatlıkla alınabilecektir. Katalog bölümlerinin ve kitabın içindeki muhtelif yerlerde kullanılan resim, ekil ve verileri kullanma izni verdiinden dolayı Farnell irketi adına Mr. Zia Tariq’ a ayrıca teekkürü borç biliyorum.
Kitabın Ofis 2000 ortamında hazırlanmı bölümlerine ait dosyalarını (14 MB) edinmek isteyen öretim elemanları lütfen, ogurdal @ tef.gazi.edu.tr e-posta adresinden irtibat kurunuz. Böylece, kitabın ilgili kısımlarındaki formül, ekil, veri-sayfası, vb. malzemeleri kullanarak sınav sorusu hazırlama, slayt ve projeksiyon sunusu hazırlama, ders notu hazırlama, vb. çalımalarınızda sizlere zaman kazandıracaktır.
Bu ders kitabı, Gazi Üniversitesi Merkez Yayın Komisyonu ve Yönetim Kurulu’nun 15 Mayıs 1997 tarih ve 5 sayılı toplantısında alınan 97/85 sayılı karar uyarınca bastırılmasına izin verilmitir.
Bu ders kitabının bu alandaki bir ihtiyacı gidereceini ve faydalı olacaını ümit ediyorum.
Doç. Dr. Osman Gürdal Ankara, 2000