Embed Size (px)
DESCRIPTION
HEDEF PROGRAMLAMA. Hedef Programlama. Yaşadığımız dünyada kaynakların azlığı ve eldeki bilgilerin yetersizliği nedeniyle, her zaman karar vericilerin tercihlerini temsil eden, güvenilir matematiksel modelleri kurmak çoğu zaman olanaksızdır. Hedef Programlama. - PowerPoint PPT Presentation
Citation preview
HEDEF PROGRAMLAMA
2
Yaşadığımız dünyada kaynakların azlığı ve eldeki bilgilerin yetersizliği nedeniyle, her zaman karar vericilerin tercihlerini temsil eden, güvenilir matematiksel modelleri kurmak çoğu zaman olanaksızdır.
Hedef ProgramlamaHedef Programlama
3
Bazı şirket yönetimlerinin toplam kârın maksimumu veya toplam maliyetin minimumu gibi tek amaçtan ziyade çok farklı amaçlar üzerine odaklandığı durumlarda, çok ölçütlü (kriterli) karar verme yaklaşımı gerekir.
Hedef ProgramlamaHedef Programlama
4
Çok ölçütlü karar vermede kayda değer sayıda teknikler geliştirilmiş olup, bunlardan en ilgi çekenlerden birisi HEDEF PROGRAMLAMA’dır.
Hedef ProgramlamaHedef Programlama
5
Karar vericiler için bu tekniğin en önemli özelliği; her bir tercihe veya nitelendirmeye doyurucu bir hedef değerini atayabilmesidir.
Hedef programlama ile istenmeyen sapma değişkenleri fonksiyonu minimum kılınır.
Hedef ProgramlamaHedef Programlama
6
Her bir amaç için spesifik sayısal hedef sağlamak maksadıyla, her amacın fonksiyonu formüle edilir ve bu amaçları kaçırmadan, doğan toplam cezayı minimum kılan bir çözüm aranır.
Bu toplam ceza, amaç fonksiyonlarının her birinin hedeflerinden sapmalarının ağırlıklı toplamını ifade eder.
Hedef ProgramlamaHedef Programlama
7
1. Tek taraflı hedefin altına düşülmek istenmediğinde (fakat üstüne çıkılmasının iyi olduğu) hedef için aşağı bir sınır değeri konur ve amaç fonksiyonu bu hedefin altına düşerse bir ceza takdir edilir.
Hedeflerin Olanaklı TürleriHedeflerin Olanaklı Türleri
8
2. Tek taraflı hedefin üstüne çıkmak istenmediğinde hedefin üst sınır değeri konur ve bu uygun amaç fonksiyonu hedefi aşarsa (sınırın altına düşmek iyi olmakta) bir ceza verilir.
Hedeflerin Olanaklı TürleriHedeflerin Olanaklı Türleri
9
3. Her iki tarafta da bir kayıp istenmediğinde spesifik bir hedef konulur ve uygun amaç fonksiyonu her iki yönde de (altında veya üstünde) konulan bu hedeften saparsa bir ceza verilir.
Hedeflerin Olanaklı TürleriHedeflerin Olanaklı Türleri
10
İş dünyasında yöneticiler sıkça kararlarında tek ölçüt yerine çoklu ölçütler kullanır, bir bakıma birden fazla hedefin gerçekleşmesini isterler.
Tüm bu hedeflerin aynı anda gerçekleşmesi güçtür. Bu yüzden yönetim, problemdeki istek düzeyleri kümesini en iyi doyuran çözümü elde etmeye çalışır.
Hedef ProgramlamaHedef Programlama

11
Hedef programlama böyle bir doyuran çözümü bulmak için kullanılabilir. Dolayısı ile hedef programlama optimaliteden ziyade doyuma ulaşmayı sağlar.
Hedef ProgramlamaHedef Programlama
12
Karar verici öncelikle ilgi hedefleri ve bu hedefler için kabul edilen öncelikleri belirler. Genellikle hedefler sıralandırılır ve her öncelik düzeyindeki hedeflere öncelikli ağırlıklar verilir.
Bu öncelikli ağırlıklar, sayısal değer veya kodlar verilerek yapılır.
Hedef ProgramlamaHedef Programlama
13
Yüksek öncelikli hedefler daha düşük öncelikli hedeflerden önce doyurulur.
Hedef programlama, problem kısıtlayıcılarına bağlı olarak önceliklendirilen hedeflerden sapmaları minimum kılar.
Hedef ProgramlamaHedef Programlama
14
Geleneksel tek amaç fonksiyonlu doğrusal programlamanın karşılayamadığı kısıtlara ilişkin hedef sapmalarını, hedeflere ilişkin öncelikleri belirlediği gibi, amaç fonksiyonundaki değişkenlerin aynı ölçü biriminde olması koşulunu da aramamaktadır.
Hedef ProgramlamaHedef Programlama
15
Doğrusal hedef programlamada en önemli durum, tüm amaç fonksiyonları ve kısıtlayıcı fonksiyonlarının doğrusal fonksiyon olmasıdır.
Dolayısıyla doğrusal hedef programlama modelinin, klasik doğrusal programlama modeli gibi tekrar formüle edilmesi olanaklı olup, böyle bir modeli çözmek için de Simpleks Yöntem kullanılabilir.
Hedef ProgramlamaHedef Programlama
16
Hedef programlama, çok amaçlı karar verme problemlerini çözmek için karar vericilere doyurucu bir çözüm kümesini sağlayan önemli bir teknik olduğu gibi, karar vericinin her bir nitelendirmesine de doyurucu bir hedef değerini atayabilmektedir.
Hedef Programlamanın Tanımı Hedef Programlamanın Tanımı
17
Hedef programlama, verilen kısıtlayıcılar altında amaç ölçütünü doğrudan maksimum veya minimum kılmaktan ziyade hedeflerin kendi içindeki sapmaları minimum kılmaya odaklanan bir tekniktir.
Hedef Programlamanın Tanımı Hedef Programlamanın Tanımı
18
Hedef programlama, hedefler ve onların istenilen düzeyleri arasındaki sapmaları minimum kılan bir tekniktir.
Hedef programlama, çok ölçütlü karar problemlerinin çözümü için uygulanan bir tekniktir.
Hedef Programlamanın Tanımı Hedef Programlamanın Tanımı
19
Hedef programlama, çok alt hedefi olan çok hedefli problemler gibi çok alt hedefli tek bir hedefi amaçlayan karar problemlerinin çözümünde kullanılan doğrusal programlamanın genişletilmiş özel bir durumudur. Hedef programlamada, doğrusal programlamada olduğu gibi amaç fonksiyonunun boyutsal bir kısıtlaması yoktur.
Hedef Programlamanın Tanımı Hedef Programlamanın Tanımı
20
Hedef programlama, ilk önce 1950’lerin başında Charnes ve Cooper tarafından doğrusal programlamanın çok amaçlı ve esnek kısıtlamalı problemlerin çözümündeki yetersizliğini göz önüne alarak ortaya atılmıştır.
Hedef Programlamanın Tarihsel Gelişimi Hedef Programlamanın Tarihsel Gelişimi
21
Hedef programlama, daha sonra Ignizio, Lee, Tamiz, Romero ve diğerleri tarafından geliştirilmeye devam edilmiştir.
Ignizio 1970’lerin başında doğrusal hedef programlamaya dualite kavramını katmıştır.
Hedef Programlamanın Tarihsel Gelişimi Hedef Programlamanın Tarihsel Gelişimi
22
Matematiksel programlama türlerine göre;- Doğrusal Programlama
- Tam Sayılı Programlama
- Doğrusal Olmayan Hedef Programlama şeklinde sınıflandırılmaktadır.
Ayrıca çeşitli Bulanık Hedef Programlama Modelleri de literatürde yer almıştır.
Hedef Programlamanın Tarihsel Gelişimi Hedef Programlamanın Tarihsel Gelişimi
23
Alışılagelmiş doğrusal programlamanın;
- Toplanabilirlik,
- Bölünebilirlik,- Oransallık,- Belirlilik varsayımlarına,
Hedeflere ilişkin önceliklerin karar verici tarafından belirlenmesi varsayımı eklenebilir.
Ayrıca tüm değişkenlerin pozitif olma koşulunun da aranması gerekmektedir.
Hedef Programlamanın Varsayımları Hedef Programlamanın Varsayımları
24
Hedef Programlamada;
- Karar değişkenleri,
- Sapma değişkenleri,
- Sistem kısıtlayıcıları,
- Amaç fonksiyonu bulunur.
Hedef Programlamanın Bileşenleri Hedef Programlamanın Bileşenleri
25
Doğrusal programlamada tanımlanan değişkenlerin aynısıdır.
(Üretilecek ürün miktarı, yatırım yapılacak para miktarı, istihdam edilecek işçi sayısı, girdi miktarı vb.)
Karar Değişkenleri Karar Değişkenleri
26
Hedeflerin üstünde veya altındaki miktarı gösteren değişkenlerdir.
Klasik hedef programlama modellerinde karar verici tarafından belirlenen hedef değerlerindeki istenmeyen sapmalar kabul edilebilen bir çözüme ulaşmak için minimum kılınır.
Her bir hedef için belirlenen istenmeyen değişkenler pozitif ve negatif sapma değişkenleri kullanılarak ölçülür ve onlar hedefin başarısını veya başarısızlığını gösterir.
Sapma Değişkenleri Sapma Değişkenleri
27
Hedef programlamada sapma değişkenleri genellikle di ve di simgesiyle gösterilir.
Sapma değişkenleri negatif değerli olamazlar ve bir hedefin hem üstünde ve hem altında bir anda olunamayacağından, bunlardan birinin değeri de daima sıfır olur.
Sapma Değişkenleri Sapma Değişkenleri
+ -
28
Yöneticinin aylık X model gömlek üretim hedefi en az 20500 olsun. Hedef programlama modelin çözümünde X modelin üretim miktarı 22000 ise;
di = 22000 – 20500 = 1500 ve di = 0 ‘dır.
Aylık gömlek üretim miktarı 20000 ise;
di = 20500 – 20000 = 500 ve di = 0’dır.
X modelin aylık üretim hedefi tam 20500 ise;
Belirlenen hedef gerçekleştiğinden di = 0 ve di = 0 olacaktır.
ÖRNEKÖRNEK
+ -
+
- +
-
29
Hedef kısıtlayıcılarına bağlı olarak sapma değişkenleri istenen veya istenmeyen değişken olarak da adlandırılır.
Hedef kısıtlayıcısı ≥ yönde ise di istenen değişken, di ise istenmeyen sapma değişkenidir.
Hedef kısıtlayıcısı ≤ yönde ise di istenen, di ise istenmeyen sapma değişkenidir.
Hedef kısıtlayıcısı = ise di ve di her ikisi de istenmeyen sapma değişkenleridir.
Sapma Değişkenleri Sapma Değişkenleri
+
-
+
+
-
-
30
Teknolojik, yapısal veya sistem kısıtlayıcıları, probleme ilişkin geliştirilen hedef programlamada tam olarak sağlanması gereken ve hiçbir sapmaya izin verilmeyen kısıtlayıcılardır.
Örneğin;10 x1 + 20 x2 ≤ 4000 ise, karar değişkenleri x1 ve x2 nin çözüm değerleri kesinlikle bu eşitsizliği sağlamalıdır.
Sistem kısıtlayıcısı ancak zaman içinde veya problemin yeniden modellenmesi söz konusu olduğunda değişebilir.
Sistem Kısıtlayıcıları Sistem Kısıtlayıcıları
31
Karar vericinin ulaşmayı istediği veya gerekli gördüğü hedefler, hedef programlamaya hedef kısıtlayıcıları ile aktarılır.
Bu kısıtlayıcılar sistem kısıtlayıcılara göre daha esnektir.
Ayrıca hedeflenen değere hedef kısıtlayıcısı ile ulaşılmaya çalışılır.
Hedef Kısıtlayıcıları Hedef Kısıtlayıcıları
32
Hedef programlamada amaç fonksiyonunun optimal değeri, sistem ve hedef kısıtlayıcılarının belirlediği çözüm alanı içinde aranır.
Sapma değişkenleri hem amaç fonksiyonunda, hem de hedef kısıtlayıcılarında bulunur. Bunun anlamı, hedeflerin en iyi şekilde sağlanması gerektiğidir.
Ayrıca, amaç fonksiyonundaki istenen erişim değerleri karar verici tarafından belirlenmelidir.
Amaç Fonksiyonu Amaç Fonksiyonu
33
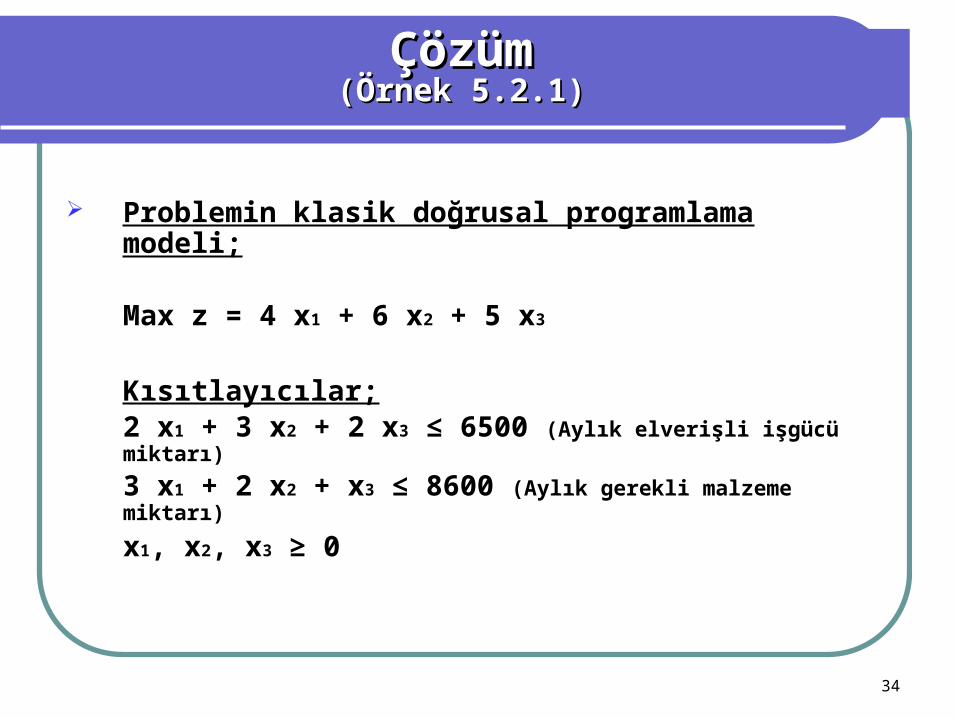
Bir şirket 3 model ayakkabı üretmektedir. Bu modellerin her birisi için gereken işgücü miktarı sırasıyla 2, 3 ve 2 saattir. Yine bunların üretimi için gerekli malzeme miktarları da sırasıyla 3, 2 ve 1 kg/çift olarak belirlenmiştir. Şirketin elinde aylık 6500 saat işgücü ile 8600 kg. malzeme bulunmaktadır. Şirket model-1 ayakkabı çiftinden 4 milyon TL, model-2 ayakkabı çiftinden 6 milyon TL ve model-3 ayakkabı çiftinden de 5 milyon TL kâr etmektedir. Yönetici aylık en az 15 milyar TL kârı ve model-2 ayakkabıdan da en az aylık 860 çift üretmeyi hedeflemektedir.
Örnek ProblemÖrnek Problem (Örnek 5.2.1)(Örnek 5.2.1)
34
Problemin klasik doğrusal programlama modeli;
Max z = 4 x1 + 6 x2 + 5 x3
Kısıtlayıcılar;2 x1 + 3 x2 + 2 x3 ≤ 6500 (Aylık elverişli işgücü miktarı)
3 x1 + 2 x2 + x3 ≤ 8600 (Aylık gerekli malzeme miktarı)
x1, x2, x3 ≥ 0
ÇözümÇözüm (Örnek 5.2.1)(Örnek 5.2.1)
35
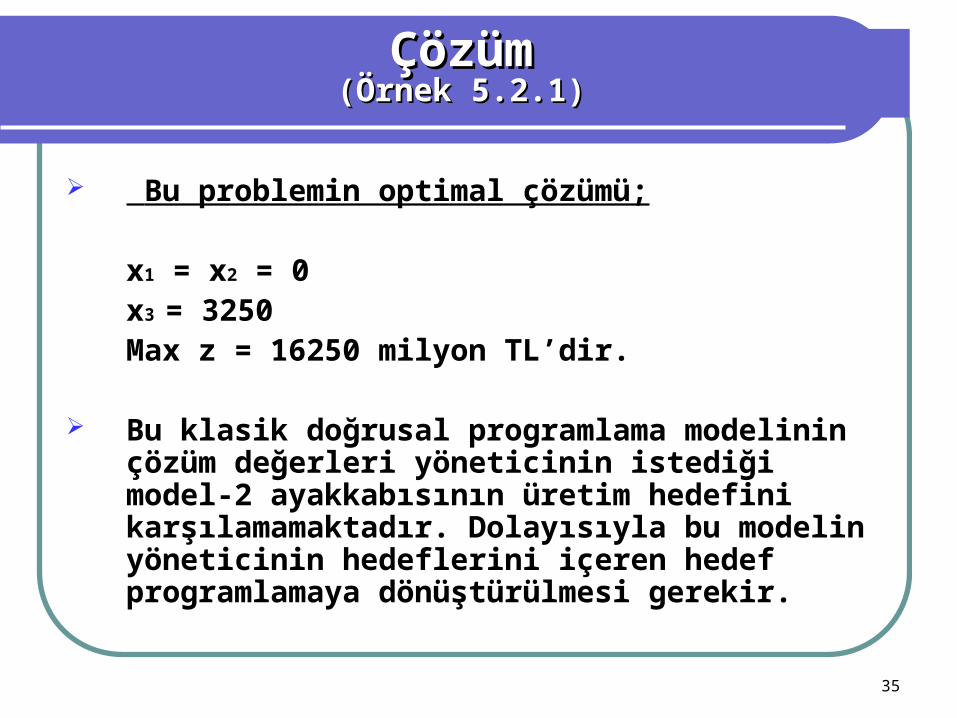
Bu problemin optimal çözümü;
x1 = x2 = 0x3 = 3250Max z = 16250 milyon TL’dir.
Bu klasik doğrusal programlama modelinin çözüm değerleri yöneticinin istediği model-2 ayakkabısının üretim hedefini karşılamamaktadır. Dolayısıyla bu modelin yöneticinin hedeflerini içeren hedef programlamaya dönüştürülmesi gerekir.
ÇözümÇözüm (Örnek 5.2.1)(Örnek 5.2.1)
36
İlk önce modele hedef kısıtlayıcılarının eklenmesi gerekir.
Yöneticinin iki hedefi vardır;- Aylık kârının en az 15 milyar TL olması,- Model-2’den en az 860 çift ayakkabı üretilmesi.
ÇözümÇözüm (Örnek 5.2.1)(Örnek 5.2.1)
37
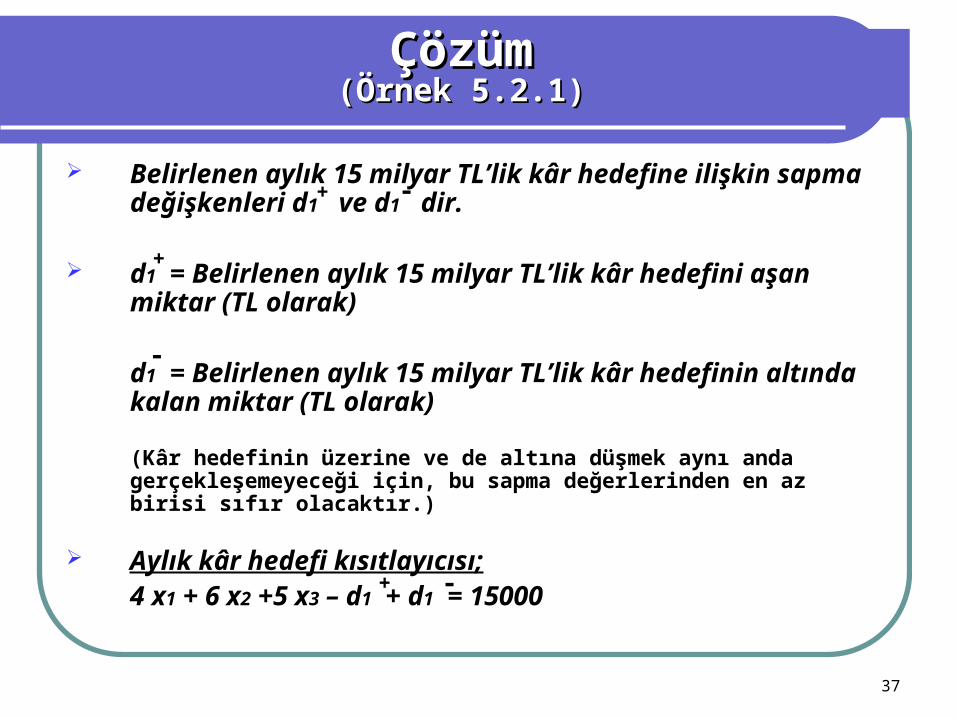
Belirlenen aylık 15 milyar TL’lik kâr hedefine ilişkin sapma değişkenleri d1 ve d1 dir.
d1 = Belirlenen aylık 15 milyar TL’lik kâr hedefini aşan miktar (TL olarak)
d1 = Belirlenen aylık 15 milyar TL’lik kâr hedefinin altında kalan miktar (TL olarak)
(Kâr hedefinin üzerine ve de altına düşmek aynı anda gerçekleşemeyeceği için, bu sapma değerlerinden en az birisi sıfır olacaktır.)
Aylık kâr hedefi kısıtlayıcısı;4 x1 + 6 x2 +5 x3 – d1 + d1 = 15000
ÇözümÇözüm (Örnek 5.2.1)(Örnek 5.2.1)
+
-
+ -
+ -
38
Model-2 ayakkabıdan aylık en az 860 çift üretim hedefine ilişkin sapma değişkenleri d2 ve d2 dir.
d2 = Belirlenen aylık model-2 ayakkabı hedefini aşan miktar
d2 = Belirlenen aylık model-2 ayakkabı hedefinin altında kalan miktar
Üretim hedefi kısıtlayıcısı;x2 – d2 + d2 = 860
ÇözümÇözüm (Örnek 5.2.1)(Örnek 5.2.1)
+ -
+ -
+
-
39
Hedef programlamada, sapma değişkenlerini içermeyen kısıtlayıcılar sistem kısıtlayıcılarıdır.
Bu problemde işgücü ve malzeme kısıtlayıcıları sistem kısıtlayıcılarıdır.
Karar verici, sistem kısıtlayıcıları için bir hedef koyar ise elbette bu kısıtlayıcılar da sapma değişkenlerini içerecektir.
ÇözümÇözüm (Örnek 5.2.1)(Örnek 5.2.1)
40
Hedef amaç fonksiyonunu oluşturmak için istenen iki hedefin ele alınması gerekir.
İlk hedef için amaç fonksiyonu; (aylık en az 15 milyar TL kâr elde etmek)
Min z = d1
(Burada d1 istenmeyen sapma değişkeni olduğu için amaç fonksiyonuna alınır ve bu değişkenin değeri enküçüklenmeye çalışılır.)
İkinci hedef; model-2’den aylık en az 860 çift üretmek
Buna göre bu iki hedefin oluşturduğu hedef programlamanın amaç fonksiyonu;
Min z = d1 + d2
ÇözümÇözüm (Örnek 5.2.1)(Örnek 5.2.1)
-
-
- -
41
Bu fonksiyonun iki sapma değişkeninden oluşan çok değişkenli bir fonksiyon olduğu görülmektedir.
Ayrıca sapma değişkenlerinin ölçü birimleri ilk hedef için TL, ikinci hedef için ise ayakkabı çiftinin sayısıdır. Bu nedenle, problem çözümünün sonucunda ulaşılan amaç fonksiyonunun toplam değerini yorumlarken ekonomik anlam aramak hatalı olacaktır. Bunun yerine amaç fonksiyonunu oluşturan bileşenlerin ayrı ayrı değerlendirilmesi gerekir.
İşte bu sakıncayı önlemek için bazı kaynaklarda değişkenler arasına virgül konularak amaç fonksiyonunun ifade edildiği görülebilmektedir. Yani örnekteki amaç fonksiyonu;
Min z = ( d1 , d2 ) şeklinde de ifade edilebilir.
ÇözümÇözüm (Örnek 5.2.1)(Örnek 5.2.1)
- -
42
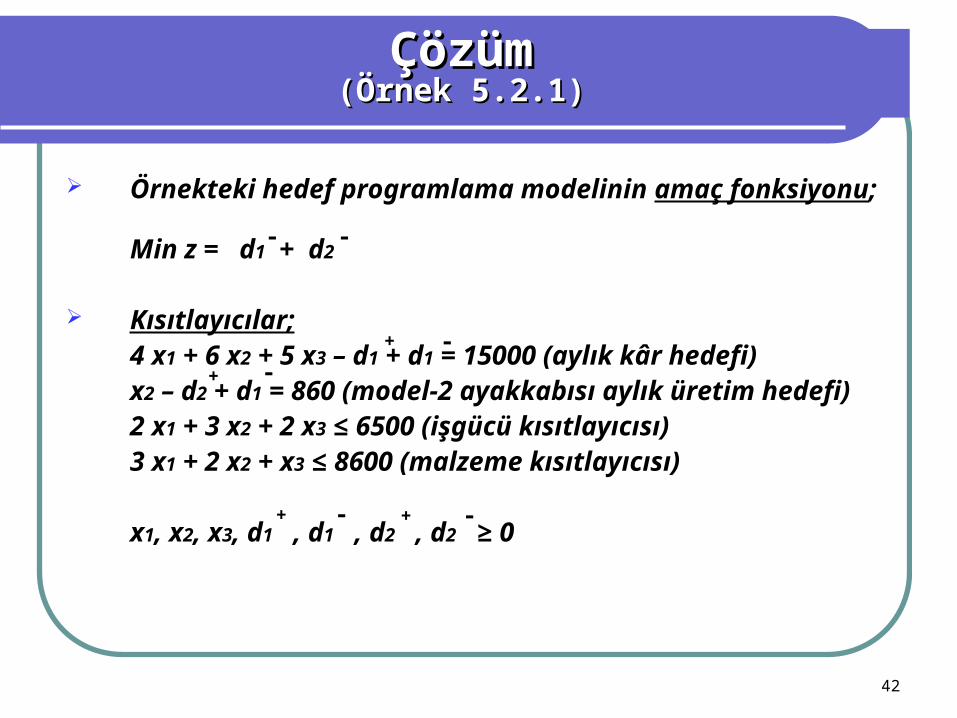
Örnekteki hedef programlama modelinin amaç fonksiyonu;
Min z = d1 + d2
Kısıtlayıcılar;4 x1 + 6 x2 + 5 x3 – d1 + d1 = 15000 (aylık kâr hedefi)x2 – d2 + d1 = 860 (model-2 ayakkabısı aylık üretim hedefi)2 x1 + 3 x2 + 2 x3 ≤ 6500 (işgücü kısıtlayıcısı)3 x1 + 2 x2 + x3 ≤ 8600 (malzeme kısıtlayıcısı)
x1, x2, x3, d1 , d1 , d2 , d2 ≥ 0
ÇözümÇözüm (Örnek 5.2.1)(Örnek 5.2.1)
- -
+ --
--
+
+
+
43
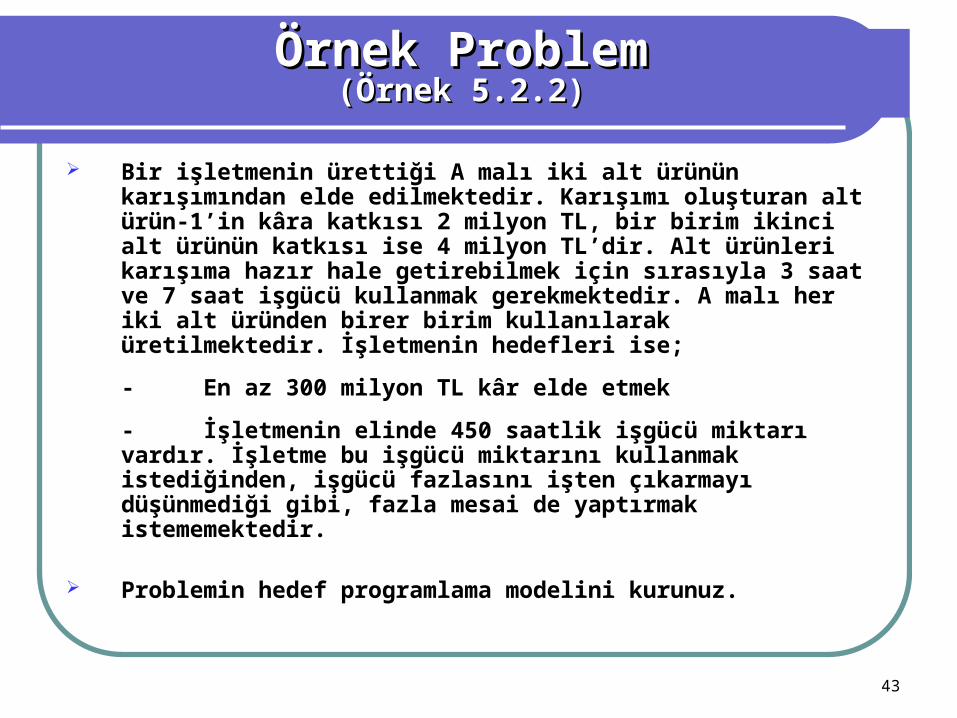
Bir işletmenin ürettiği A malı iki alt ürünün karışımından elde edilmektedir. Karışımı oluşturan alt ürün-1’in kâra katkısı 2 milyon TL, bir birim ikinci alt ürünün katkısı ise 4 milyon TL’dir. Alt ürünleri karışıma hazır hale getirebilmek için sırasıyla 3 saat ve 7 saat işgücü kullanmak gerekmektedir. A malı her iki alt üründen birer birim kullanılarak üretilmektedir. İşletmenin hedefleri ise;
- En az 300 milyon TL kâr elde etmek
- İşletmenin elinde 450 saatlik işgücü miktarı vardır. İşletme bu işgücü miktarını kullanmak istediğinden, işgücü fazlasını işten çıkarmayı düşünmediği gibi, fazla mesai de yaptırmak istememektedir.
Problemin hedef programlama modelini kurunuz.
Örnek ProblemÖrnek Problem (Örnek 5.2.2)(Örnek 5.2.2)
44
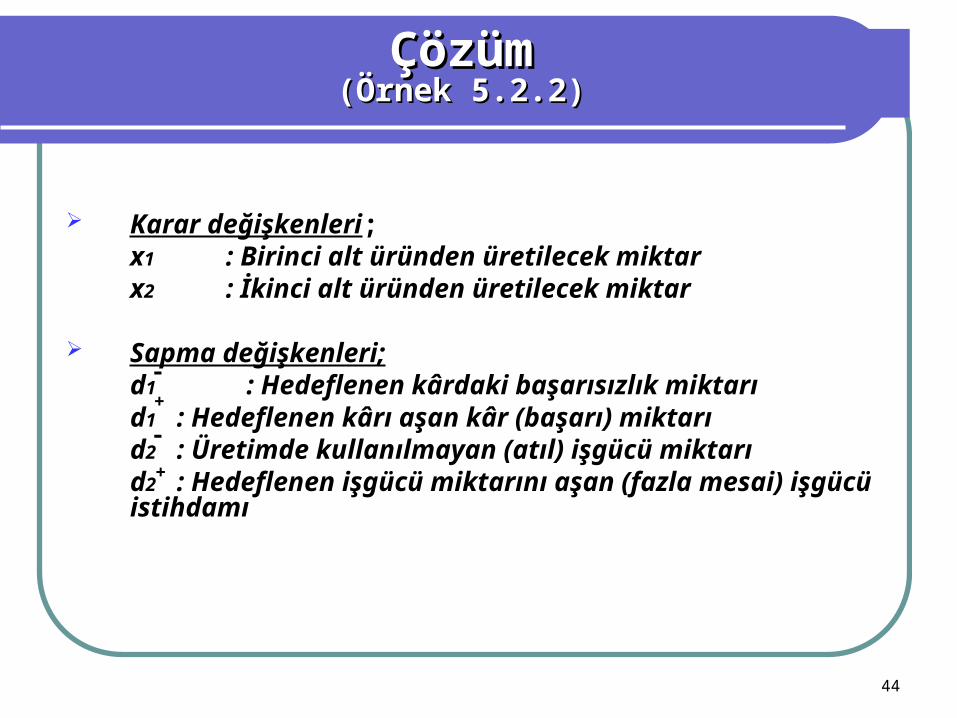
Karar değişkenleri;x1 : Birinci alt üründen üretilecek miktarx2 : İkinci alt üründen üretilecek miktar
Sapma değişkenleri;d1 : Hedeflenen kârdaki başarısızlık miktarıd1 : Hedeflenen kârı aşan kâr (başarı) miktarıd2 : Üretimde kullanılmayan (atıl) işgücü miktarıd2 : Hedeflenen işgücü miktarını aşan (fazla mesai) işgücü istihdamı
ÇözümÇözüm (Örnek 5.2.2)(Örnek 5.2.2)
-+
-
+
45
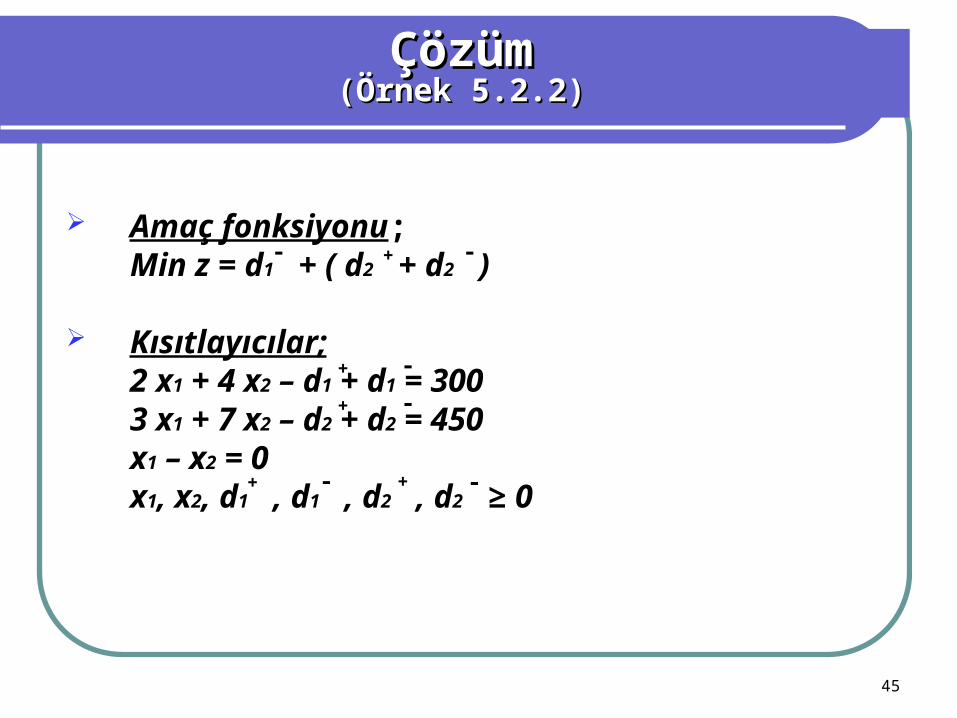
Amaç fonksiyonu;Min z = d1 + ( d2 + d2 )
Kısıtlayıcılar;2 x1 + 4 x2 – d1 + d1 = 3003 x1 + 7 x2 – d2 + d2 = 450x1 – x2 = 0x1, x2, d1 , d1 , d2 , d2 ≥ 0
ÇözümÇözüm (Örnek 5.2.2)(Örnek 5.2.2)
- + -
+ -
-
- -
+
+ +
46
Amaç fonksiyonunda görüldüğü üzere, kâr hedefinden başarısızlık istenmediğini gösteren d1 nin değeri enküçüklenmeye çalışılır.
İşgücünün hedefi ise 450 saat işgücünü kullanmaktır. Dolayısı ile buradaki amacımız hedeflerdeki her iki yönde olan sapmayı enküçüklemektir. Bu yüzden bu hedef kısıtlayıcısına ilişkin her iki sapma değişkeni de amaç fonksiyonunda yer almıştır.
ÇözümÇözüm (Örnek 5.2.2)(Örnek 5.2.2)
-
47
Ayrıca dikkat edilmesi gereken bir nokta, karar değişkenlerinin amaç fonksiyonunda yer almamasıdır.
Öte yandan sapma değişkenleri de sistem kısıtlayıcılarında yer almazlar.
Fakat sistem kısıtlayıcılarına ilişkin hedefler verilirse, bu durumda onlar hedef kısıtlayıcıları olacaklar ve bunlara ilişkin sapma değişkenleri de amaç fonksiyonunda yer alacaktır.
ÇözümÇözüm (Örnek 5.2.2)(Örnek 5.2.2)
48
Hedef programlama, geliştirilen amaç fonksiyon yapısına bağlı olarak şu şekilde sınıflandırılabilir;
- Tek hedefli programlama
- Eşit ağırlıklı çok hedefli programlama
- Ağırlıklı çok hedefli programlama
- Öncelikli çok hedefli programlama
- Ağırlıklı – öncelikli çok hedefli programlama
Hedef Programlama Türleri Hedef Programlama Türleri
49
Ele alınan problemin tek hedefi olduğundan, karar vericinin istediği bu hedefe ulaşmaktır.
Tek hedefli problemler, modelin kurulması ve çözümü açısından ele alındığında en basit hedef programlama problemleridir.
Tek Hedefli ProgramlamaTek Hedefli Programlama
50
Bir marangoz işletmesinde kapı ve pencere üretilmektedir. Bir kapı üretimi için 8 saat işgücü ve 4 saat makine kullanılmaktadır. Bir pencere üretimi için de 4 saat işgücü ve 6 saat makine kullanılmaktadır. Marangozun elindeki günlük işgücü kapasitesi 96 saat ve makine kapasitesi de 120 saattir.Marangozun bir kapı satışından elde ettiği kâr 15 milyon TL ve bir pencere satışından elde ettiği kâr da 13 milyon TL’dir. Marangozun tek hedefi günlük kârının en az 280 milyon TL olmasıdır.
Örnek ProblemÖrnek Problem (Örnek 5.2.3)(Örnek 5.2.3)
51
Karar değişkenleri;x1 : Üretilecek günlük kapı miktarıx2 : Üretilecek günlük pencere miktarı
Sapma değişkenleri;d1 : Hedeflenen 280 milyon TL kârın altında kalan kâr miktar (TL)d1 : Hedeflenen 280 milyon TL kârı aşan miktar (TL)
ÇözümÇözüm (Örnek 5.2.3)(Örnek 5.2.3)
-
+
52
Amaç fonksiyonu;Min z = d1
Hedef Kısıtlayıcısı;15 x1 + 13 x2 + d1 - d1 = 280
Yapısal kısıtlayıcılar;8 x1 + 4 x2 ≤ 964 x1 + 6 x2 ≤ 120
Pozitif kısıtlayıcı;x1 ≥ 0, x2 ≥ 0, d1 ≥ 0, d1 ≥ 0
ÇözümÇözüm (Örnek 5.2.3)(Örnek 5.2.3)
-
+-
- +
53
Grafik Tekniği ile ÇözümGrafik Tekniği ile Çözüm (Örnek 5.2.3)(Örnek 5.2.3)
A (0, 24)
F (0, 21.5)
C (0, 20)
O (0, 0) B (12, 0) G (18.6, 0) D (30, 0)
E (3, 18)
UygunÇözümBölgesi
Hedef kısıtlayıcı
X1
X2
54
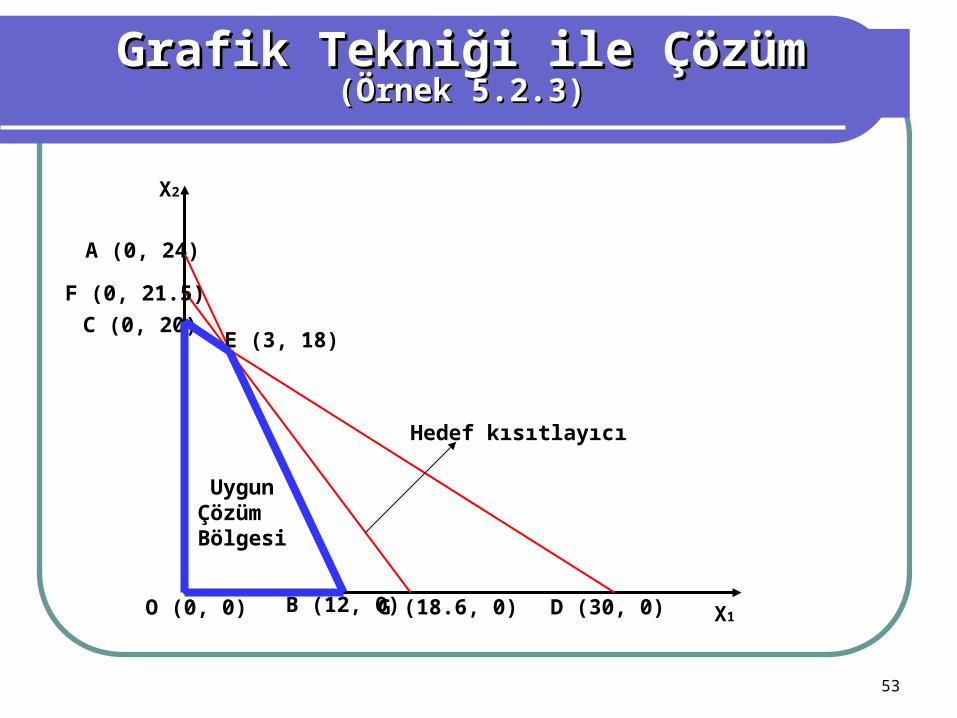
Şekilde görüldüğü üzere, FG hedef kısıtlayıcı doğrusu yapısal kısıtlayıcıların oluşturduğu OBEC uygun çözüm bölgesinin dışındadır.
Hedef kısıtlayıcısı uygun çözüm bölgesinin dışında değer almamak koşulu ile yukarıya veya aşağıya doğru hareket edebilmektedir.
Dolayısı ile problemin en iyi çözümü, hedef kısıtlayıcısı doğrusunun optimum çözüm bölgesine değdiği E noktasında olacaktır.
Grafik Tekniği ile ÇözümGrafik Tekniği ile Çözüm(Örnek 5.2.3)(Örnek 5.2.3)
55
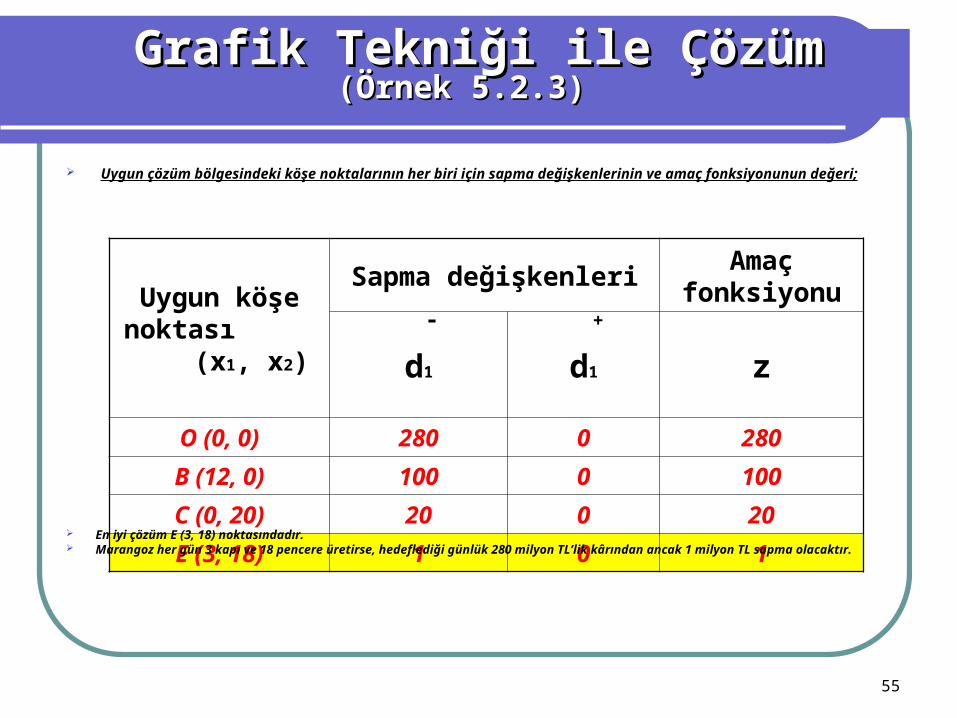
Uygun çözüm bölgesindeki köşe noktalarının her biri için sapma değişkenlerinin ve amaç fonksiyonunun değeri;
Grafik Tekniği ile ÇözümGrafik Tekniği ile Çözüm(Örnek 5.2.3)(Örnek 5.2.3)
Uygun köşe noktası
(x1, x2)
Sapma değişkenleriAmaç
fonksiyonu
d1 d1 z
O (0, 0) 280 0 280
B (12, 0) 100 0 100
C (0, 20) 20 0 20
E (3, 18) 1 0 1
+-
En iyi çözüm E (3, 18) noktasındadır. Marangoz her gün 3 kapı ve 18 pencere üretirse, hedeflediği günlük 280 milyon TL’lik kârından ancak 1 milyon TL sapma olacaktır.
56
Tek hedefli doğrusal programlama (DP) problemlerinin çözümü, klasik DP problemlerinin çözümüne benzer. Sadece başlangıç simpleks tablosunda, hedef kısıtlayıcısına karşılık gelen temel değişken olarak d1 alınır.
Sistem (yapısal) kısıtlayıcılara karşılık gelen temel değişkenler ise klasik DP çözümünde kullanılanların aynılarıdır.
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.3)(Örnek 5.2.3)
-
57
Tek hedefli problemin çözümünde simpleks yöntemini uygulamak için önce problem standart biçime dönüştürülür.
Min z = d1 + 0 s1 + 0 s2
Kısıtlayıcılar;15 x1 + 13 x2 + d1 - d1 = 2808 x1 + 4 x2 + s1 = 964 x1 + 6 x2 + s2 = 120
x1, x2, s1, s2, d1 , d1 ≥ 0
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.3)(Örnek 5.2.3)
-
-
- +
+
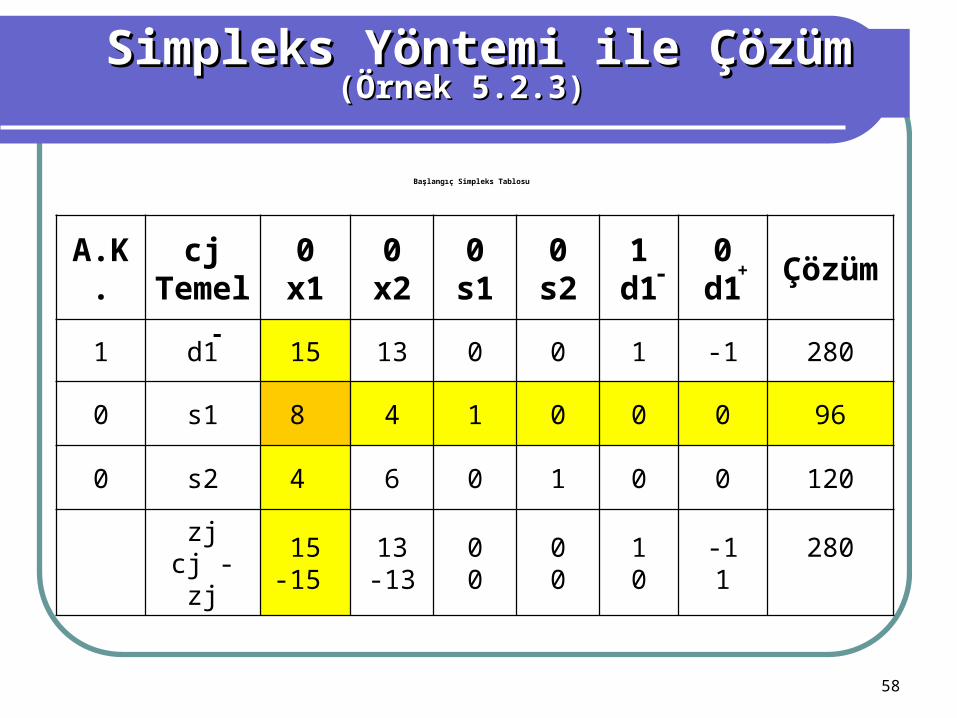
58
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.3)(Örnek 5.2.3)
A.K.cj
Temel0
x10
x20
s10
s21
d10
d1Çözüm
1 d1 15 13 0 0 1 -1 280
0 s1 8 4 1 0 0 0 96
0 s2 4 6 0 1 0 0 120
zj
cj - zj15
-15 13-13
00
00
10
-11
280
Başlangıç Simpleks Tablosu
- +
-
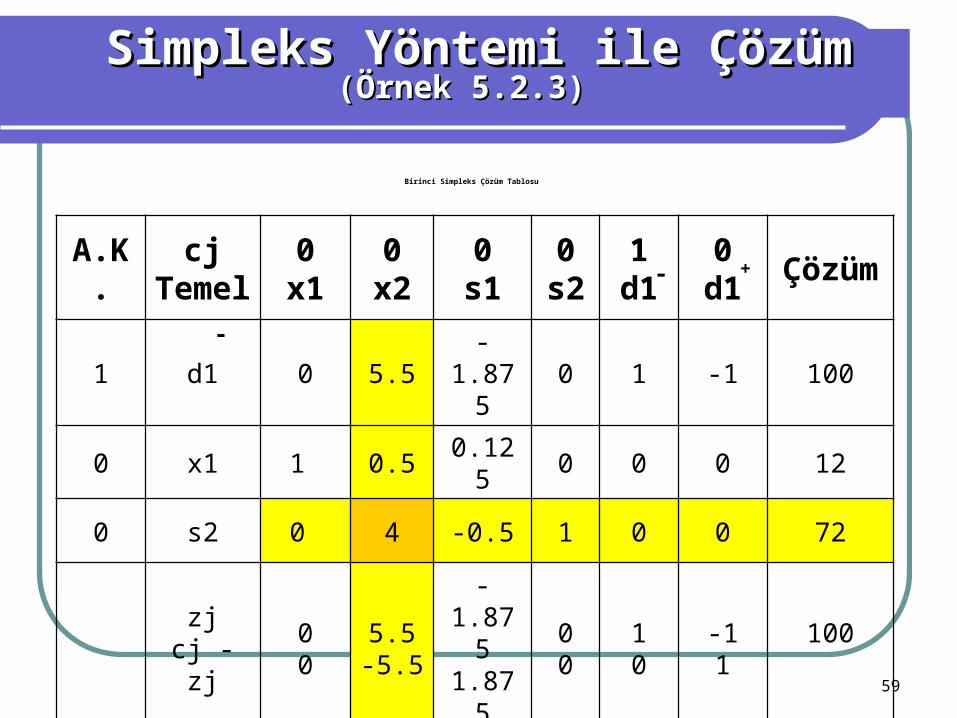
59
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.3)(Örnek 5.2.3)
A.K.cj
Temel0
x10
x20
s10
s21
d10
d1Çözüm
1 d1 0 5.5 -1.875 0 1 -1 100
0 x1 1 0.5 0.125 0 0 0 12
0 s2 0 4 -0.5 1 0 0 72
zj
cj - zj0 0
5.5-5.5
-1.8751.875
00
10
-11
100
Birinci Simpleks Çözüm Tablosu
-
-
+
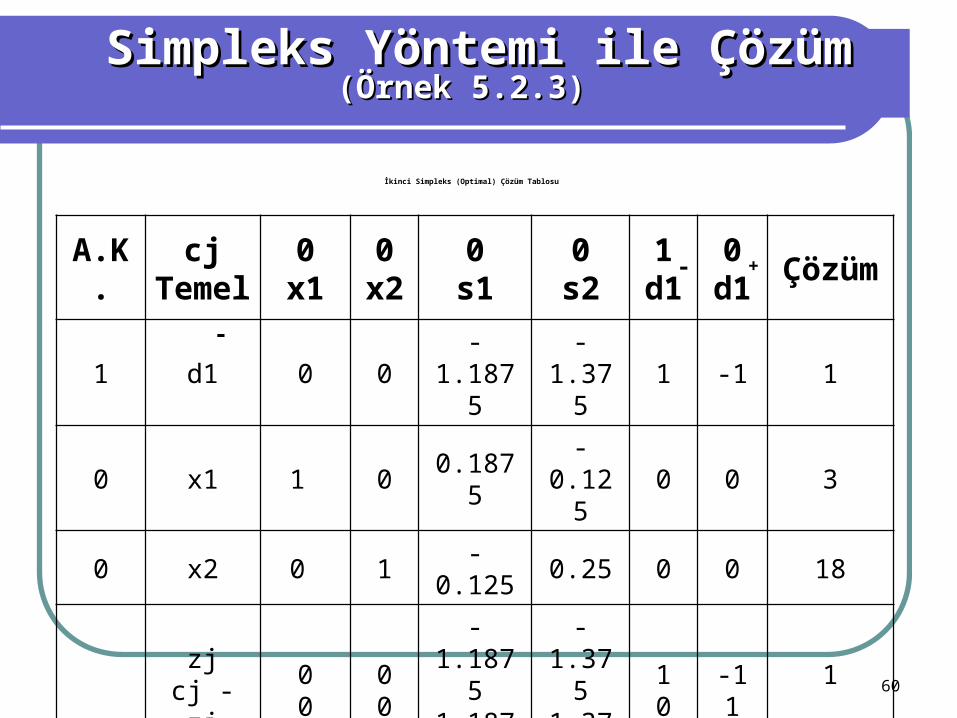
60
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.3)(Örnek 5.2.3)
A.K.cj
Temel0
x10
x20
s10
s21
d10
d1Çözüm
1 d1 0 0 -1.1875 -1.375 1 -1 1
0 x1 1 0 0.1875 -0.125 0 0 3
0 x2 0 1 -0.125 0.25 0 0 18
zj
cj - zj0 0
00
-1.18751.1875
-1.3751.375
10
-11
1
İkinci Simpleks (Optimal) Çözüm Tablosu
-
-
+
61
Probleme ilişkin hedefler eşit önemli (ağırlıklı) ise, istenmeyen sapma değişkenlerin toplamı biçiminde ifade edilen amaç fonksiyonu minimum kılınmaya çalışılır.Bu biçimdeki amaç fonksiyonunun anlamlı olabilmesi, sapma değişkenlerinin aynı birimde olmasına bağlıdır.
Eşit Ağırlıklı Çok Hedefli ProgramlamaEşit Ağırlıklı Çok Hedefli Programlama
62
Min z = d1 + d2 + d3
Şeklindeki amaç fonksiyonunun anlamlı olabilmesi için üç sapma değişkeninin de aynı ölçü birimiyle değerlendirilmesi gerekir. Yoksa amaç fonksiyonunun değeri bir anlam ifade etmez.
Böyle bir durumda, amaç fonksiyonunun yorumlanması için her bir sapma değişkeninin ayrı ayrı ele alınması ve yorumlanması gerekir.
Bu durumdan kaçınmak için yapılacak işlem, sapma değişkenlerinin ölçü birim farklılığını giderecek her bir değişkene ağırlık verilmesidir.
Eşit Ağırlıklı Çok Hedefli ProgramlamaEşit Ağırlıklı Çok Hedefli Programlama
-+ +
63
Daha önce ele alınan tek hedefli marangoz probleminde, bir kapı üretebilmek için 5 milyon TL’lik, bir pencere üretebilmek için de 3 milyon TL’lik keresteye ihtiyaç duyulmaktadır. Marangozun hammadde için ayırabildiği günlük bütçesi ise 200 milyon TL’dir.
Örnek ProblemÖrnek Problem
64
Bu durumda marangozun yeni ek hedefi, elindeki bütçeden daha fazla miktardaki parayı kereste için ayırmamak olacaktır.
Böylece ek hedef kısıtlayıcısı;5 x1 + 3 x2 + d2 - d2 =200
Yeni amaç fonksiyonu;Min z = d1 + d2 olacaktır.
(Burada d2 istenmeyen sapma değişkeni olup hedeflenen (elde edilebilen) kereste tutarını aşan kısmı göstermekte, d2 ise pozitif değer almasında bir sakınca görülmeyen sapma değişkenini göstermektedir.)
- +
Örnek ProblemÖrnek Problem(Çözüm)(Çözüm)
+-
-+
65
Bir firma su emişli ve hava emişli olmak üzere iki tür elektrik süpürgesi üretmektedir. Her iki ürünün üretimi için iki işlem gerekir. Bir birim su emişli süpürgenin üretimi için işlem-1’de 6 saat, işlem-2’de ise 3 saat gereklidir. Birim hava emişli süpürge üretimi için her iki işlemde de ayrı ayrı 3 saat gereklidir. Firmanın elindeki işlem zamanı ise işlem-1’de 120 saat, işlem-2’de 90 saattir.Firma yöneticisinin istediği en az 15 tane su emişli ve 15 tane hava emişli süpürgeyi eşit öncelikli olarak üretmektir.Bu bilgiler ışığında problemin hedef programlama modelini kurunuz.
Örnek ProblemÖrnek Problem (Örnek 5.2.4)(Örnek 5.2.4)
66
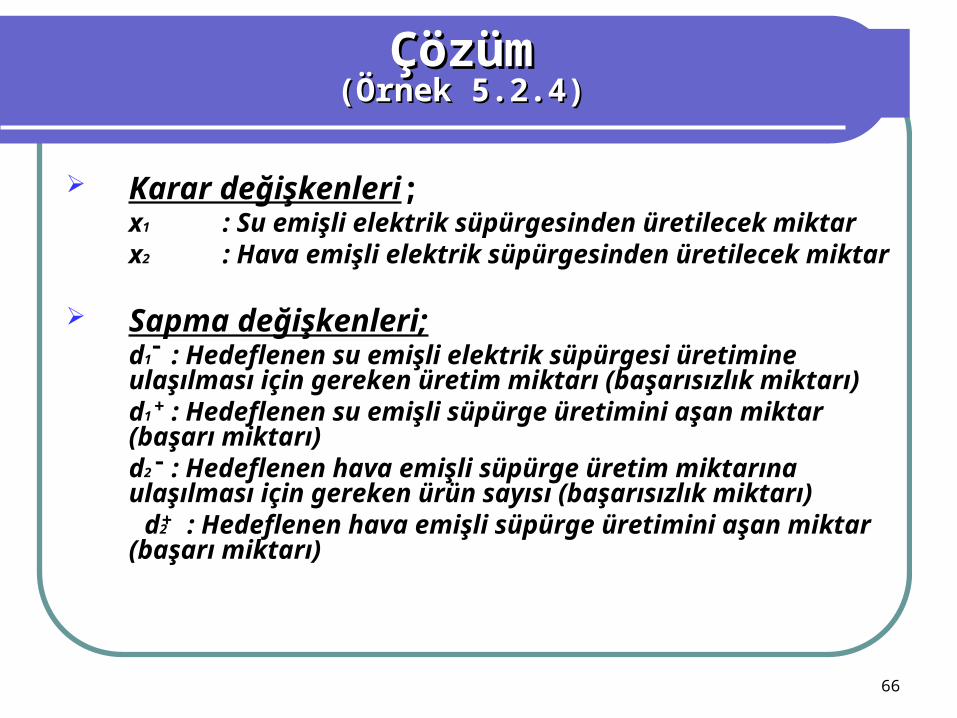
Karar değişkenleri;x1 : Su emişli elektrik süpürgesinden üretilecek miktarx2 : Hava emişli elektrik süpürgesinden üretilecek miktar
Sapma değişkenleri;d1 : Hedeflenen su emişli elektrik süpürgesi üretimine ulaşılması için gereken üretim miktarı (başarısızlık miktarı)d1 : Hedeflenen su emişli süpürge üretimini aşan miktar (başarı miktarı)d2 : Hedeflenen hava emişli süpürge üretim miktarına ulaşılması için gereken ürün sayısı (başarısızlık miktarı) d2 : Hedeflenen hava emişli süpürge üretimini aşan miktar (başarı miktarı)
ÇözümÇözüm (Örnek 5.2.4)(Örnek 5.2.4)
-
+
-
+

67
Amaç fonksiyonu;Min z = d1 + d2
Kısıtlayıcılar;x1 + d1 – d1 = 15 (Hedef Kısıtlayıcısı-1)x2 + d2 – d2 = 15 (Hedef Kısıtlayıcısı-2)6 x1 + 3 x2 ≤ 1203 x1 + 3 x2 ≤ 90
x1, x2, d1 , d1 , d2 , d2 ≥ 0
ÇözümÇözüm (Örnek 5.2.4)(Örnek 5.2.4)
-
+
-
-
+-
+- +-
68
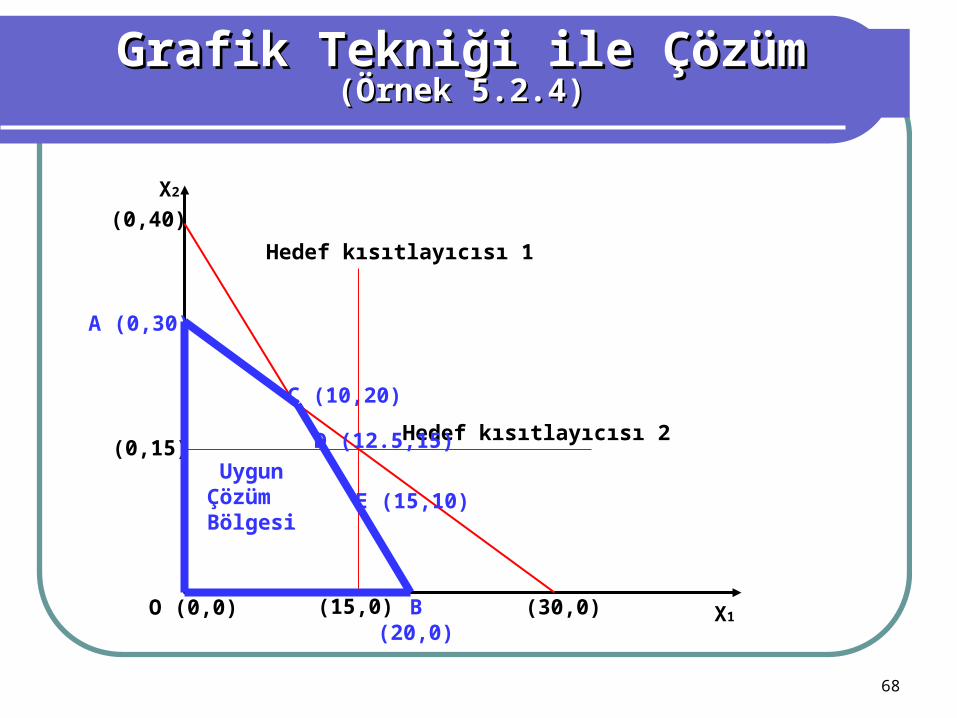
Grafik Tekniği ile ÇözümGrafik Tekniği ile Çözüm (Örnek 5.2.4)(Örnek 5.2.4)
(0,40)
A (0,30)
(0,15)
O (0,0) (15,0) B (20,0)
(30,0)
C (10,20)
UygunÇözümBölgesi
Hedef kısıtlayıcısı 2
X1
X2
Hedef kısıtlayıcısı 1
D (12.5,15)
E (15,10)
69
Şekil incelendiğinde hedef kısıtlayıcılarının uygun çözüm bölgesinde kesişmediği görülmektedir. Bunun anlamı hedeflerin tam olarak karşılanmadığıdır.
Hangi hedeften ne miktarda sapma olacağını belirleyebilmek için, çözüm bölgesindeki tüm köşe noktalarda amaç fonksiyonunun değerlerinin belirlenmesi gerekir.
Grafik Tekniği ile ÇözümGrafik Tekniği ile Çözüm(Örnek 5.2.4)(Örnek 5.2.4)
70
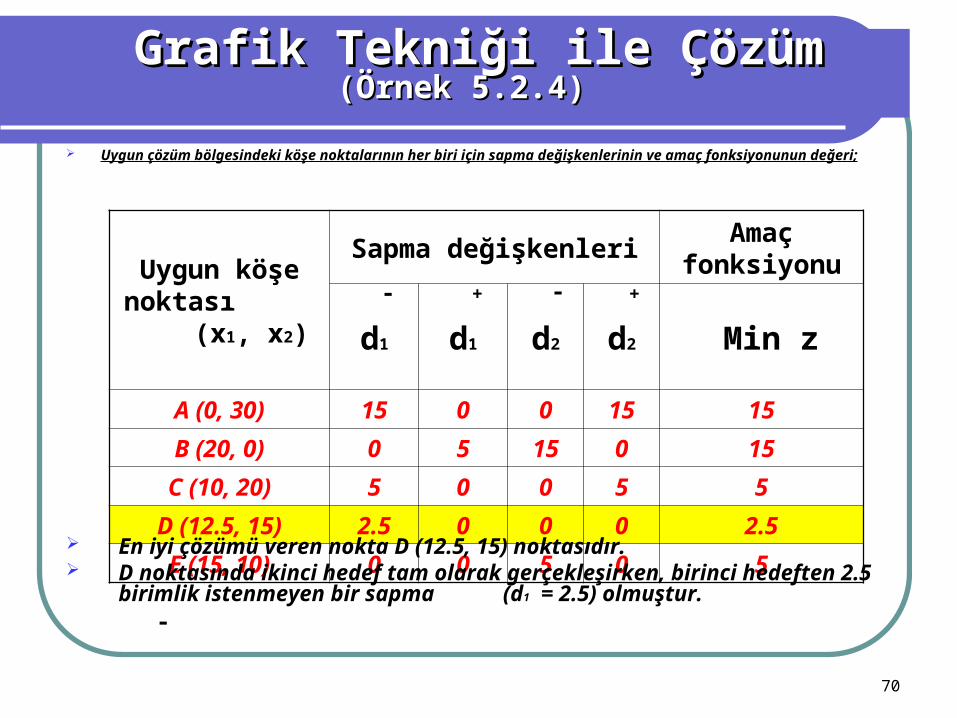
Uygun çözüm bölgesindeki köşe noktalarının her biri için sapma değişkenlerinin ve amaç fonksiyonunun değeri;
Grafik Tekniği ile ÇözümGrafik Tekniği ile Çözüm(Örnek 5.2.4)(Örnek 5.2.4)
Uygun köşe noktası
(x1, x2)
Sapma değişkenleriAmaç
fonksiyonu
d1 d1 d2 d2 Min z
A (0, 30) 15 0 0 15 15
B (20, 0) 0 5 15 0 15
C (10, 20) 5 0 0 5 5
D (12.5, 15) 2.5 0 0 0 2.5
E (15, 10) 0 0 5 0 5
+-
En iyi çözümü veren nokta D (12.5, 15) noktasıdır. D noktasında ikinci hedef tam olarak gerçekleşirken, birinci hedeften
2.5 birimlik istenmeyen bir sapma (d1 = 2.5) olmuştur.
+-
-
71
Dikkat edilmesi gereken iki nokta;1. Hedeflerin gerçekleştirilme önceliğin
hedeflere ilişkin ölçü birimlerine bağlı büyüklüklerden kolayca etkilenmesi,
2. Hedeflerin ölçü birimi büyüklüğünden doğrudan etkilenen amaç fonksiyonunun yorumlanması.
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.4)(Örnek 5.2.4)
72
Tek hedefli problemin çözümünde simpleks yöntemini uygulamak için önce problem standart biçime dönüştürülür.
Min z = d1 + d2 + 0 s1 + 0 s2
Kısıtlayıcılar;x1 + d1 - d1 = 15x2 + d2 - d2 = 156 x1 + 3 x2 + s1 = 1203 x1 + 3 x2 + s2 = 90
x1, x2, s1, s2, d1 , d1 , d2 , d2 ≥ 0
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.4)(Örnek 5.2.4)
-
-
- +
+
-
- +
- +
73
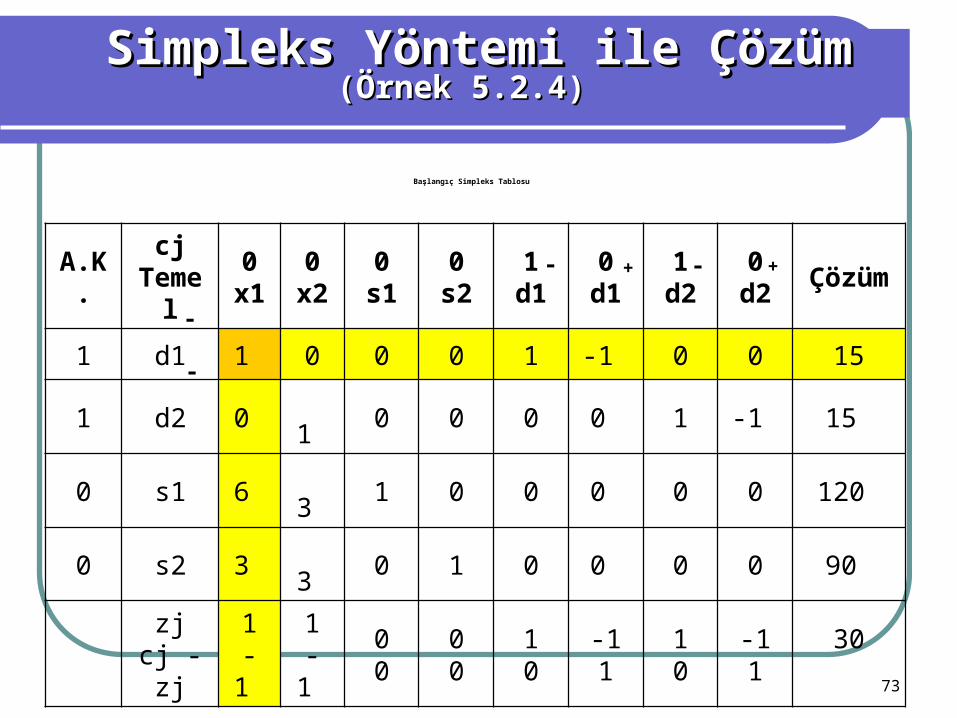
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.4)(Örnek 5.2.4)
Başlangıç Simpleks Tablosu
A.K.cj
Temel0
x10
x20
s10
s21
d10
d11
d20
d2Çözüm
1 d1 1 0 0 0 1 -1 0 0 15
1 d2 0 1 0 0 0 0 1 -1 15
0 s1 6 3 1 0 0 0 0 0 120
0 s2 3 3 0 1 0 0 0 0 90
zj
cj - zj1
-1 1
-1 0 0
0 0
1 0
-1 1
1 0
-1 1
30
- + - +
-
-

74
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.4)(Örnek 5.2.4)
Birinci Simpleks Çözüm Tablosu
A.K.cj
Temel0
x10
x20
s10
s21
d10
d11
d20
d2Çözüm
0 x1 1 0 0 0 1 -1 0 0 15
1 d2 0 1 0 0 0 0 1 -1 15
0 s1 0 3 1 0 -6 6 0 0 30
0 s2 0 3 0 1 -3 3 0 0 45
zj
cj - zj0 0
1-1
0 0
0 0
01
00
1 0
-1 1
15
- + - +
-

75
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.4)(Örnek 5.2.4)
Üçüncü Simpleks (Optimal) Çözüm Tablosu
A.K.cj
Temel0
x10
x20
s10
s21
d10
d11
d20
d2Çözüm
0 x1 1 0 1/6 0 0 0 -1/2 1/2 12.5
1 d1 0 0 -1/6 0 1 -1 1/2 -1/2 2.5
0 x2 0 1 0 0 0 0 1 -1 15
0 s2 0 0 -1/2 1 0 0 -3/2 3/2 7.5
zj
cj - zj0 0
00
-1/61/6
00
10
-11
1/21/2
-1/21/2
2.5
- + - +
-
Tüm cj – zj ≥ 0 olduğundan bu tablo optimal çözüm tablosudur.
76
Bu tür problemlerin amaç fonksiyonundaki sapma değişkenlerine ağırlık değeri verilir ve hedeflerden sapmaların ağırlıklı toplamı minimum kılınır.Hedeflerin göreli önemi ilgili sapmaların ağırlıkları ile ifade edilir.
Ağırlıklı Çok Hedefli ProgramlamaAğırlıklı Çok Hedefli Programlama

77
Genellikle böyle bir yaklaşım, eşit ağırlıklı çok hedefli problemlerin sapma değişkenlerinin ölçü birimleri farklı olduğunda ve hedeflerin göreli önemi sayılandırılabildiğinde tercih edilir.
Ayrıca, karar verici hedefler arasındaki önemini belirtmek için de ağırlıklandırma yoluna başvurabilir.
Fakat ağırlıkların belirlenmesi karar verici için hiç de kolay değildir. Çünkü ağırlıklandırma genel olarak karar vericinin tercih yapısına, birkaç faktör ile karar alanı ve amaçlar arasındaki ilişkilere bağlıdır.
Ağırlıklı Çok Hedefli ProgramlamaAğırlıklı Çok Hedefli Programlama
78
Daha önce Örnek 5.2.4’de ele alınan firma yöneticisi, birinci hedefin ikinci hedeften üç kat daha önemli olduğunu düşünüyorsa, yeni modelin simpleks yöntemi ile optimal çözümünü bulunuz.
Örnek ProblemÖrnek Problem (Örnek 5.2.5)(Örnek 5.2.5)
79
Amaç fonksiyonu;Min z = 3 d1 + d2
Kısıtlayıcılar;x1 + d1 – d1 = 15x2 + d2 – d2 = 156 x1 + 3 x2 ≤ 1203 x1 + 3 x2 ≤ 90
x1, x2, d1 , d1 , d2 , d2 ≥ 0
ÇözümÇözüm (Örnek 5.2.5)(Örnek 5.2.5)
-
+
-
-
+-
+- +-
80
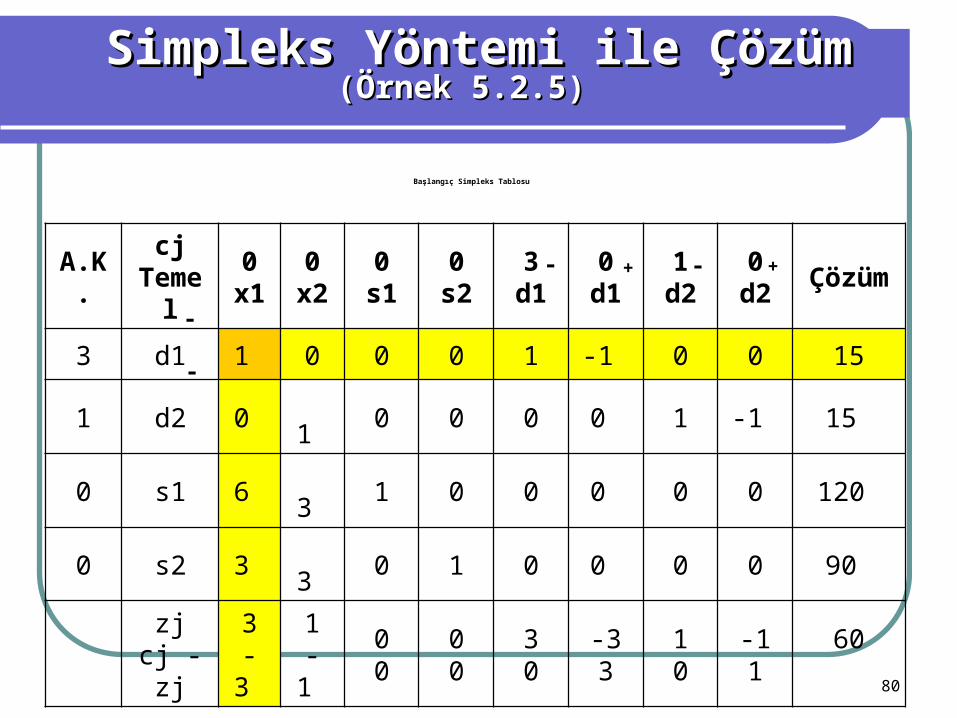
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.5)(Örnek 5.2.5)
Başlangıç Simpleks Tablosu
A.K.cj
Temel0
x10
x20
s10
s23
d10
d11
d20
d2Çözüm
3 d1 1 0 0 0 1 -1 0 0 15
1 d2 0 1 0 0 0 0 1 -1 15
0 s1 6 3 1 0 0 0 0 0 120
0 s2 3 3 0 1 0 0 0 0 90
zj
cj - zj3
-3 1
-1 0 0
0 0
3 0
-3 3
1 0
-1 1
60
- + - +
-
-

81
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.5)(Örnek 5.2.5)
Birinci Simpleks Çözüm Tablosu
A.K.cj
Temel0
x10
x20
s10
s23
d10
d11
d20
d2Çözüm
0 x1 1 0 0 0 1 -1 0 0 15
1 d2 0 1 0 0 0 0 1 -1 15
0 s1 0 3 1 0 -6 6 0 0 30
0 s2 0 3 0 1 -3 3 0 0 45
zj
cj - zj0 0
1-1
0 0
0 0
03
00
1 0
-1 1
15
- + - +
-
82
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.5)(Örnek 5.2.5)
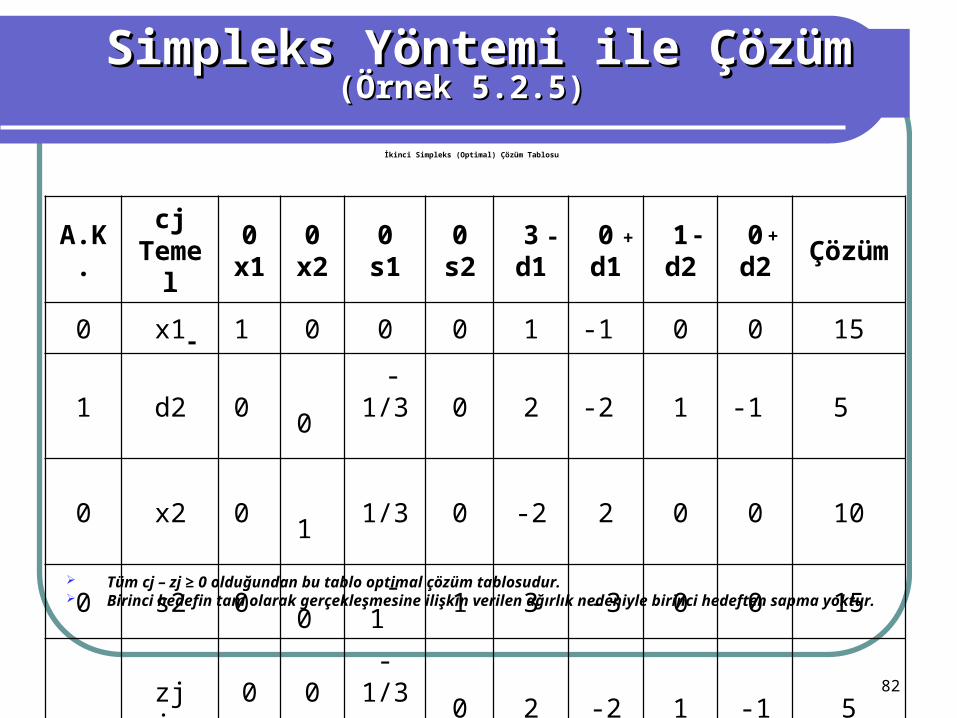
İkinci Simpleks (Optimal) Çözüm Tablosu
A.K.cj
Temel0
x10
x20
s10
s23
d10
d11
d20
d2Çözüm
0 x1 1 0 0 0 1 -1 0 0 15
1 d2 0 0 -1/3 0 2 -2 1 -1 5
0 x2 0 1 1/3 0 -2 2 0 0 10
0 s2 0 0 -1 1 3 -3 0 0 15
zj
cj - zj0 0
0 0
-1/3 1/3
0 0
21
-22
1 0
-1 1
5
- + - +
-
Tüm cj – zj ≥ 0 olduğundan bu tablo optimal çözüm tablosudur. Birinci hedefin tam olarak gerçekleşmesine ilişkin verilen ağırlık nedeniyle birinci hedeften sapma
yoktur.
83
Bir karar verici matematiksel optimizasyon modellerini kullanırken amaç fonksiyonunu optimum kılan pek çok seçenekli çözümlerin birini seçme durumu ile karşılaşabilir. Karar ikinci derecede, üçüncü derecede veya daha yüksek derecede olabilir.
Böyle karara ilişkin problemler öncelikli hedef programlama ile çözülür.
Öncelikli hedef programlama hedefler arasındaki önceliklerin sıralanmasına dayanır.
Öncelikli Çok Hedefli ProgramlamaÖncelikli Çok Hedefli Programlama
84
Öncelikli hedef programlama yönteminde, amaç fonksiyonunu oluşturmak için ulaşılması gereken hedeflerin hiyerarşik bir yapıda verilmesi gerekir.
Karar verici, tercihini kullanarak hedeflerin en önemliden daha az önemliye doğru sıralamasını yapar.
Bu sıralama işlemi sayısal veya sözel yapılabilir.
Öncelikli Çok Hedefli ProgramlamaÖncelikli Çok Hedefli Programlama
85
Birinci öncelikli hedef tam olarak gerçekleştirilmeden ikinci öncelikli hedefe, ikinci öncelikli hedef gerçekleştirilmeden üçüncü öncelikli hedefe geçilmez.
Matematiksel olarak ifade edecek olursak;
p1 >> p2 ≥ p3 ≥≥ … ≥≥ pn
(Burada p1 hedefinin p2 hedefinden çok daha büyük önemli olduğu belirtilmektedir. Dolayısıyla, p1 hedefinde istenilen sonuç alınmadan p2 hedefine, p2 hedefinde istenilen sonuca ulaşılmadan hiçbir zaman p3 hedefinin gerçeklenilmesine çalışılmaz. p3’ü izleyen tüm hedefler için de aynı koşul geçerlidir.)
Öncelikli Çok Hedefli ProgramlamaÖncelikli Çok Hedefli Programlama
86
Hedeflerin önceliklerinin sıralanması hedefler arasındaki ilişkilere verilen ağırlık ile de yapılabilir.
Çünkü p1 >> pn gösteriminde ilgili sapma değişkenlerinin k > 0 olma koşuluyla, bir sayı ile çarpılacağı anlamı vardır.
Ancak bu çarpılacak sayı ne kadar büyük olursa olsun, p1’in önemi p2’den her zaman daha fazla olacaktır.
Öncelikli Çok Hedefli ProgramlamaÖncelikli Çok Hedefli Programlama
87
Öncelikli hedef programlamada amaç fonksiyonu;
Min z = p1d1 + p2d2 + p3d3 + …
şeklinde yazılabilir.
Öncelikli Çok Hedefli ProgramlamaÖncelikli Çok Hedefli Programlama
- ++
88
Hedeflerin tümünde istenilen düzeyde bir doyuma her zaman ulaşılamayabilir. Önemli olan, karar vericinin istediği istediği öncelikli hedeflerden başlanarak istenilen doyumlara ulaşılmaya çalışılmasıdır.
Hedeflerin öncelikleri değiştirilebilindiği gibi, bu değişikliğin çözüm üzerindeki etkisi de belirlenebilir.
Öncelikli Çok Hedefli ProgramlamaÖncelikli Çok Hedefli Programlama
89
Öncelikli yapıyı kullanan çok hedefli problemlerin modellenmesi aşağıdaki nedenlerden dolayı karar vericiler için gerçekçi olmayabilir;
Karar vericiler kesin hiyerarşi düzeylerini oldukça zor belirleyebilmektedirler. Çünkü bazen farklı düzeyler arasında belirsiz değiş tokuş olabilmektedir.
Kullanılan sıralı çözüm tekniği çözüm bölgesinin bazı kısımlarını atabilmekte fakat bu kısımlar ise karar vericiyi ilgilendirebilmektedir.
Öncelikli Çok Hedefli ProgramlamaÖncelikli Çok Hedefli Programlama
90
Karar vericiler hedeflerin önceliklerini tam olarak belirleyebildikleri durumlarda ağırlıklı hedef programlama yerine öncelikli hedef programlamayı kullanmalıdırlar.
Öncelikli Çok Hedefli ProgramlamaÖncelikli Çok Hedefli Programlama
91
Öncelikli hedef programlama problemi, sadece iki karar değişkeni içerdiğinde optimal çözüme grafik çözüm tekniği ile de ulaşılabilir.
Ayrıca problemi çözen kişinin elinde iyi bir bilgisayar paket programı var ise, hedeflere yüklenen önceliklere farklı düzenlemeler yaparak çok sayıda çözüm üretilebilir. Böylece karar verici de bu çözümler arasından kendince en uygun olduğuna inandığı bir çözümü seçebilir.
Öncelikli Çok Hedefli ProgramlamaÖncelikli Çok Hedefli Programlama
92
Öncelikli hedef programlama simpleksi ile klasik simpleks yöntemi arasında farklar vardır.
Minimizasyon problemlerinin çözümünde kullanılacak öncelikli hedef programlama simpleksi beş adımdan oluşmaktadır.
Öncelikli Hedef Programlamada Simpleks YöntemiÖncelikli Hedef Programlamada Simpleks Yöntemi
93
Problemin başlangıç simpleks tablosu oluşturulur.
Bu tabloda her pi önceliği için n tane cj – zj satırı yer alırken, klasik simpleks tablosunda ise sadece bir tek cj – zj satırı bulunur.
Burada pi satırlarındaki öncelik sırası p1, p2, p3, … şeklindedir.
Yani ilk olarak p1 öncelikli amaç fonksiyonu satırından başlanır ve daha sonra Adım-2’ye geçilir.
Adım-1Adım-1
94
Hedef programlama simpleksinde çözüme girecek değişken belirlenirken öncelikle pi öncelikli amaç satırındaki cj – zj değerine bakılır.
En küçük negatif değerli (veya mutlak değerce en büyük olan) değerli cj – zj değişken çözüme (temel) girer.
Bu işlem amaç fonksiyonunun değerini azaltarak birinci hedefin sağlanmasını sağlar.
Pozitif cj – zj değerli değişkenin çözüme girmesinin ise yüksek öncelikli hedeften sapmayı artıracağı bilinmelidir.
Adım-2Adım-2
95
Çözümden veya temelden çıkacak değişken içinde bilinen ölçüt (en küçük bi/aij) kullanılır ve sonra da temel sıra işlemleri ile her satır için yeni sıralar bulunur.
Klasik simpleks yönteminde yaptığımız işlemlerin aynısı yapılarak birinci simpleks çözüm tablosu oluşturulur.
Adım-3Adım-3
96
Birinci hedef öncelikli amaç satırının cj – zj elemanlarına bakılır, eğer negatif elemanlar var ise Adım-2 ve Adım-3 işlemleri yapılarak tüm cj – zj ≥ 0 oluncaya kadar işlemlere devam edilir.
Adım-4Adım-4
97
Tüm pi’ler için cj – zj ≥ 0 oluncaya kadar Adım-2 ve Adım-3’deki işlemler yapılır. Böylece, tüm hedeflerde doyuma ulaşıldığında optimum çözüme ulaşılmış olur.
Ancak düşük düzeyli bir öncelik satırında negatif cj – zj değeri var ve onun altındaki yüksek öncelikli hedefin sütununun değeri pozitif ise cj – zj değeri negatif olmasına rağmen çözüme girmez. Bu durumda çözüm yine optimaldir. Çünkü ondan öncelikli olan hedefin sapmasını artıracağından amaç fonksiyonunun değerini azaltır.
Adım-5Adım-5
98
Min z = p1d1 + p2d2 + p3d3 + p4d4
Kısıtlayıcılar;4 x1 + 8 x2 + d1 – d1 = 326 x1 + 3 x2 + d2 – d2 = 12x1 + 4 x2 + d3 – d3 = 8x1 + d4 – d4 = 8
x1, x2, d1 , d1 , d2 , d2 , d3 , d3 , d4 , d4 ≥ 0
Örnek ProblemÖrnek Problem (Örnek 5.2.6)(Örnek 5.2.6)
- + -
+-
+- +-
+
+-
+-
+-
+- +-

99
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.6)(Örnek 5.2.6)
Başlangıç Simpleks Tablosu
A.K.cj
Temel0
x10
x21
d10
d10
d21
d20
d31
d31
d40
d4Çözüm
1 d1 4 8 1 -1 0 0 0 0 0 0 32
0 d2 6 3 0 0 1 -1 0 0 0 0 12
0 d3 1 4 0 0 0 0 1 -1 0 0 8
1 d4 1 0 0 0 0 0 0 0 1 -1 8
p4 cj - zj -1 0 1 0 0 1 0 1 0 1
p3 cj - zj 0 0 1 0 0 1 0 1 1 0
p2 cj - zj 0 0 1 0 0 1 0 1 1 0
p1 cj - zj -4 -8 0 1 0 1 0 1 1 0
+- +- +- +-
-
-
-
-

100
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.6)(Örnek 5.2.6)
Birinci Simpleks Çözüm Tablosu
A.K.cj
Temel0
x10
x21
d10
d10
d21
d20
d31
d31
d40
d4Çözüm
1 d1 2 0 1 -1 0 0 -2 2 0 0 16
0 d2 5.25 0 0 0 1 -1 -0.75 0.75 0 0 6
0 x2 0.25 1 0 0 0 0 0.25 -0.25 0 0 2
1 d4 1 0 0 0 0 0 0 0 1 -1 8
p4 cj - zj -1 0 1 0 0 1 0 1 0 1
p3 cj - zj 0 0 1 0 0 1 0 1 1 0
p2 cj - zj 0 0 1 0 0 1 0 1 1 0
p1 cj - zj -2 0 0 1 0 1 2 -1 1 0
+- +- +- +-
-
-
-

101
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.6)(Örnek 5.2.6)
İkinci Simpleks Çözüm Tablosu
A.K.cj
Temel0
x10
x21
d10
d10
d21
d20
d31
d31
d40
d4Çözüm
1 d1 0 0 1 -1 -0.38 0.38 -1.71 1.71 0 0 13.71
0 x1 1 0 0 0 0.19 -0.19 -0.14 0.14 0 0 1.14
0 x2 0 1 0 0 -0.08 0.08 0.29 -0.29 0 0 1.17
1 d4 0 0 0 0 -0.19 0.19 0.14 -0.14 1 -1 6.86
p4 cj - zj 0 0 1 0 0.19 0.81 -0.14 1.14 0 1
p3 cj - zj 0 0 1 0 0 1 0 1 1 0
p2 cj - zj 0 0 1 0 0 1 0 1 1 0
p1 cj - zj 0 0 0 1 0.38 0.62 1.71 -0.71 1 0
+- +- +- +-
-
-

102
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.6)(Örnek 5.2.6)
Üçüncü Simpleks (Optimal) Çözüm Tablosu
A.K.cj
Temel0
x10
x21
d10
d10
d21
d20
d31
d31
d40
d4Çözüm
1 d3 0 0 0.58 -0.58 -0.22 0.22 -1 1 0 0 8.02
0 x1 1 0 -0.08 0.08 0.22 -0.22 0 0 0 0 0.02
0 x2 0 1 0.17 -0.17 -0.14 0.14 0 0 0 0 4.04
1 d4 0 0 0.08 -0.08 -0.22 0.22 0 0 1 -1 7.98
p4 cj - zj 0 0 0.92 0.08 0.22 0.78 0 1 0 1
p3 cj - zj 0 0 0.42 0.58 0.22 0.78 1 0 1 0
p2 cj - zj 0 0 1 0 0 1 0 1 1 0
p1 cj - zj 0 0 1 0 0 1 0 1 1 0
+- +- +- +-
+
-
103
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.6)(Örnek 5.2.6)
Öncelik satırlarındaki (p1, p2, p3, p4) tüm cj – zj değerleri sıfıra eşit veya sıfırdan büyük olduğu için Üçüncü Simpleks Çözüm Tablosunda optimal çözüme ulaşılmıştır.
Bu problemde;- Hedef-1 ve Hedef-2’ye ulaşılmıştır. Çünkü;
Min z1 = p1 . d1 = p1 . 0 = 0Min z2 = p2 . d2 = p2 . 0 = 0’dır.
- Hedef-3 ve Hedef-4 tam olarak karşılanamamıştır.
Hedef-3’de 8,02 birim aşılırken,Hedef-4’te ise 7,98 birim açık verilmiştir.
+
-
104
Bazı hedef programlama problemlerinde aynı hedefe ilişkin iki veya daha fazla sapma değişkeni, aynı öncelik düzeyinde amaç fonksiyonunda yer alabilir.
Böyle bir durumda, sapma değişkenlerinin önceliği aynı (pi) ise, bu sapma değişkenlerde ağırlıklar kullanılarak hangi sapmanın daha önemli olduğu belirlenir.
Ağırlıklı - Öncelikli Çok Hedefli ProgramlamaAğırlıklı - Öncelikli Çok Hedefli Programlama
105
Amaç fonksiyonu;Min z = p1d1 + p2d2 + p32d3 + p3d3 + p4d4
Biçiminde verildiğinde, üçüncü hedefin negatif sapmalı değişkeninin pozitif sapmalı değişkeninden 2 kat daha önemli olduğu anlaşılır.
Ağırlıklı - Öncelikli Çok Hedefli ProgramlamaAğırlıklı - Öncelikli Çok Hedefli Programlama
+ - +- -
106
Böyle bir durum, birden fazla hedefin aynı öncelik düzeyinde bulunmasında da söz konusu olabilir.
Örneğin;
Min z = p1d1 + p2(3d2 + 2d3 + 4d4 + d4 + 5 d5 + 2 d5 )
Bu amaç fonksiyonunda, ikinci değişkenden beşinci değişkene kadar olan sapmalı değişkenler aynı öncelik düzeyli (p2) fakat aralarında önem farklılığı vardır.
Ağırlıklar ile belirtilen önem farklılığına göre, ikinci öncelikli hedef değişkenlerinin önem sırası;
d5 , d4 , d2 , (d3 = d5 ) ve d4 biçimindedir.
Ağırlıklı - Öncelikli Çok Hedefli ProgramlamaAğırlıklı - Öncelikli Çok Hedefli Programlama
+- - - + - +
- +- - + +
107
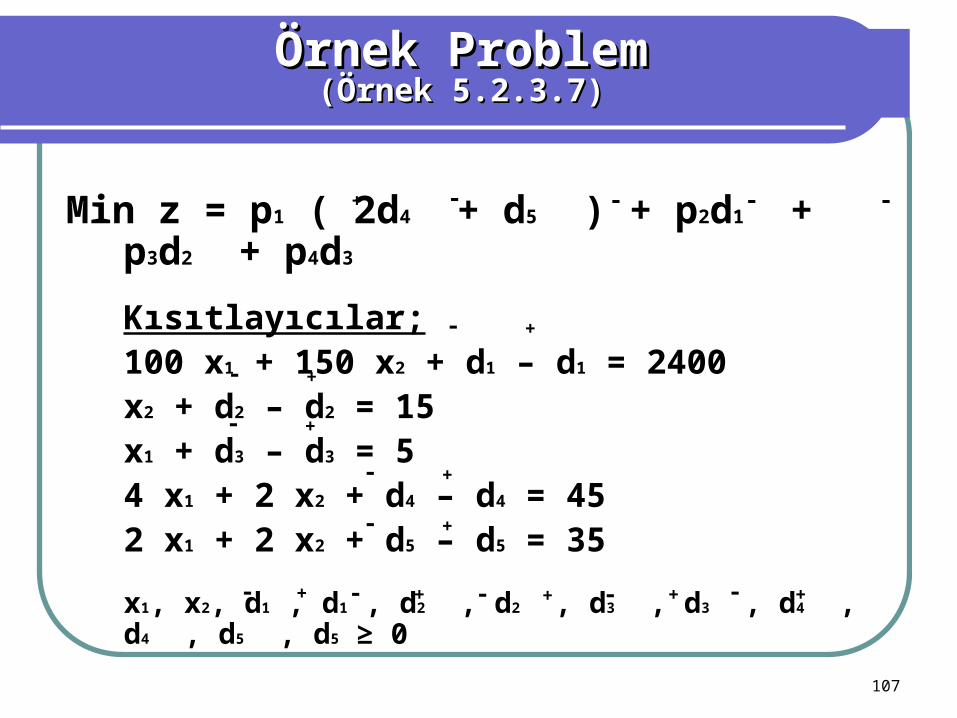
Min z = p1 ( 2d4 + d5 ) + p2d1 + p3d2 + p4d3
Kısıtlayıcılar;100 x1 + 150 x2 + d1 – d1 = 2400x2 + d2 – d2 = 15x1 + d3 – d3 = 54 x1 + 2 x2 + d4 – d4 = 452 x1 + 2 x2 + d5 – d5 = 35
x1, x2, d1 , d1 , d2 , d2 , d3 , d3 , d4 , d4 , d5 , d5 ≥ 0
Örnek ProblemÖrnek Problem (Örnek 5.2.3.7)(Örnek 5.2.3.7)
-+
+-
+- +- +- +-
- - -
+-
+-
+-
+-
+-
108
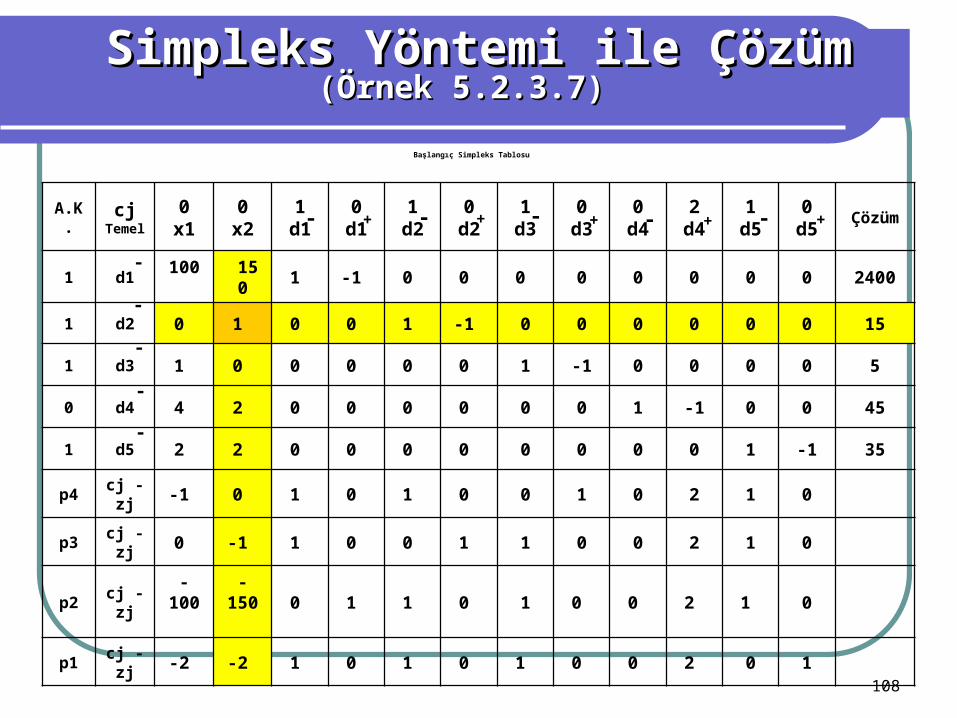
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.3.7)(Örnek 5.2.3.7)
Başlangıç Simpleks Tablosu
A.K. cjTemel
0x1
0x2
1d1
0d1
1d2
0d2
1d3
0d3
0d4
2d4
1d5
0d5
Çözüm
1 d1 100 150 1 -1 0 0 0 0 0 0 0 0 2400
1 d2 0 1 0 0 1 -1 0 0 0 0 0 0 15
1 d3 1 0 0 0 0 0 1 -1 0 0 0 0 5
0 d4 4 2 0 0 0 0 0 0 1 -1 0 0 45
1 d5 2 2 0 0 0 0 0 0 0 0 1 -1 35
p4 cj - zj -1 0 1 0 1 0 0 1 0 2 1 0
p3 cj - zj 0 -1 1 0 0 1 1 0 0 2 1 0
p2 cj - zj -100 -150 0 1 1 0 1 0 0 2 1 0
p1 cj - zj -2 -2 1 0 1 0 1 0 0 2 0 1
-
-
-
-
-
+- +- +- +- +-

109
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.3.7)(Örnek 5.2.3.7)
Birinci Simpleks Çözüm Tablosu
A.K. cjTemel
0x1
0x2
1d1
0d1
1d2
0d2
1d3
0d3
0d4
2d4
1d5
0d5
Çözüm
1 d1 100 0 1 -1 -150 150 0 0 0 0 0 0 150
0 x2 0 1 0 0 1 -1 0 0 0 0 0 0 15
1 d3 1 0 0 0 0 0 1 -1 0 0 0 0 5
0 d4 4 0 0 0 -2 2 0 0 1 -1 0 0 15
1 d5 2 0 0 0 -2 2 0 0 0 0 1 -1 5
p4 cj - zj -1 0 1 0 1 0 0 1 0 2 1 0
p3 cj - zj 0 0 1 0 1 0 1 0 0 2 1 0
p2 cj - zj -100 0 0 1 151 -150 1 0 0 2 1 0
p1 cj - zj -2 0 1 0 3 -2 1 0 0 2 1 0
-
-
-
-
+- +- +- +- +-

110
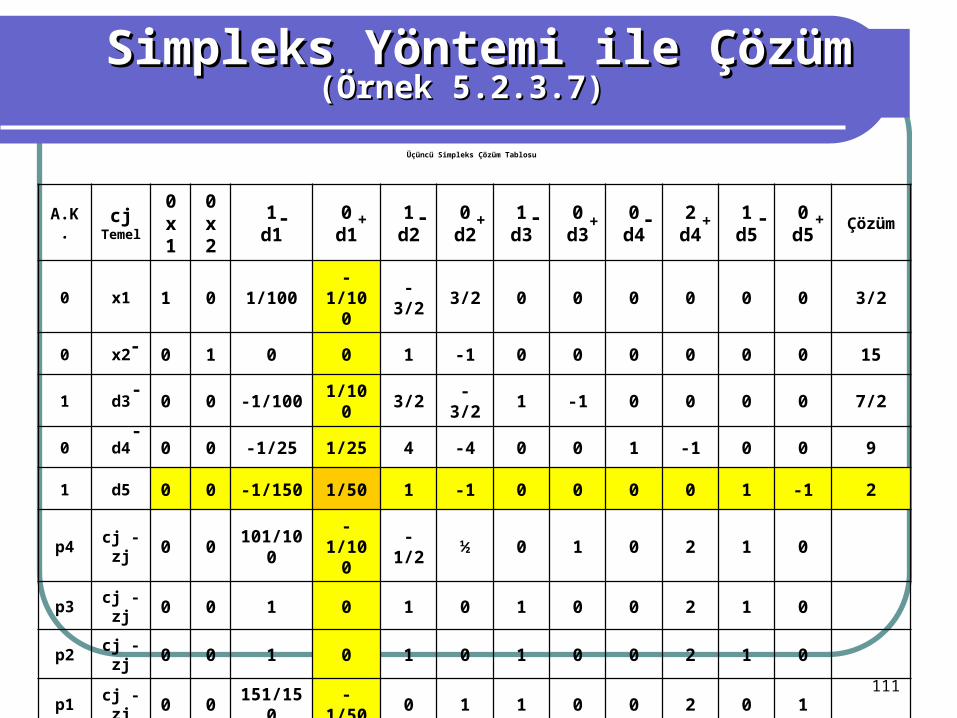
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.3.7)(Örnek 5.2.3.7)
İkinci Simpleks Çözüm Tablosu
A.K. cjTemel
0x1
0x2
1d1
0d1
1d2
0d2
1d3
0d3
0d4
2d4
1d5
0d5
Çözüm
0 d2 2/3 0 1/150 -1/150 -1 1 0 0 0 0 0 0 1
0 x2 2/3 1 1/150 -1/150 0 0 0 0 0 0 0 0 16
1 d3 1 0 0 0 0 0 1 -1 0 0 0 0 5
0 d4 8/3 0 -1/75 1/75 0 0 0 0 1 -1 0 0 13
1 d5 2/3 0 -1/75 1/75 0 0 0 0 0 0 1 -1 3
p4 cj - zj -1 0 1 0 1 0 0 1 0 2 1 0
p3 cj - zj 0 0 1 0 1 0 1 0 0 2 1 0
p2 cj - zj 0 0 1 0 1 0 1 0 0 2 1 0
p1 cj - zj -2/3 0 1 -1/75 1 0 1 0 0 2 0 1
+
-
-
-
+- +- +- +- +-
111
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.3.7)(Örnek 5.2.3.7)
Üçüncü Simpleks Çözüm Tablosu
A.K. cjTemel
0x1
0x2
1d1
0d1
1d2
0d2
1d3
0d3
0d4
2d4
1d5
0d5
Çözüm
0 x1 1 0 1/100 -1/100 -3/2 3/2 0 0 0 0 0 0 3/2
0 x2 0 1 0 0 1 -1 0 0 0 0 0 0 15
1 d3 0 0 -1/100 1/100 3/2 -3/2 1 -1 0 0 0 0 7/2
0 d4 0 0 -1/25 1/25 4 -4 0 0 1 -1 0 0 9
1 d5 0 0 -1/150 1/50 1 -1 0 0 0 0 1 -1 2
p4 cj - zj 0 0 101/100 -1/100 -1/2 ½ 0 1 0 2 1 0
p3 cj - zj 0 0 1 0 1 0 1 0 0 2 1 0
p2 cj - zj 0 0 1 0 1 0 1 0 0 2 1 0
p1 cj - zj 0 0 151/150 -1/50 0 1 1 0 0 2 0 1
-
-
-
+- +- +- +- +-
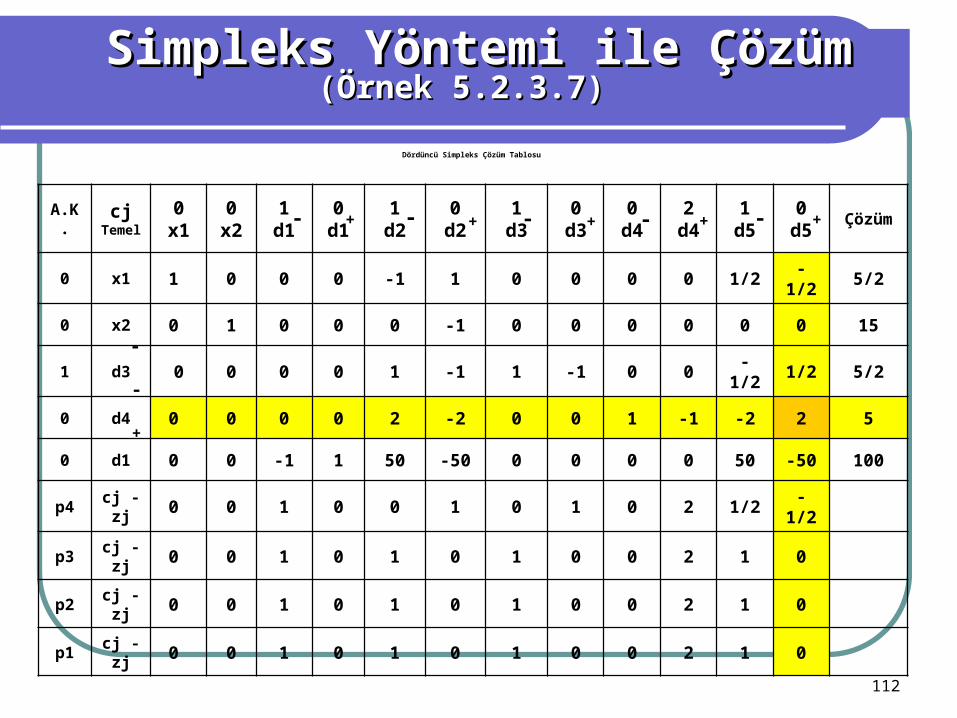
112
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.3.7)(Örnek 5.2.3.7)
Dördüncü Simpleks Çözüm Tablosu
A.K. cjTemel
0x1
0x2
1d1
0d1
1d2
0d2
1d3
0d3
0d4
2d4
1d5
0d5
Çözüm
0 x1 1 0 0 0 -1 1 0 0 0 0 1/2 -1/2 5/2
0 x2 0 1 0 0 0 -1 0 0 0 0 0 0 15
1 d3 0 0 0 0 1 -1 1 -1 0 0 -1/2 1/2 5/2
0 d4 0 0 0 0 2 -2 0 0 1 -1 -2 2 5
0 d1 0 0 -1 1 50 -50 0 0 0 0 50 -50 100
p4 cj - zj 0 0 1 0 0 1 0 1 0 2 1/2 -1/2
p3 cj - zj 0 0 1 0 1 0 1 0 0 2 1 0
p2 cj - zj 0 0 1 0 1 0 1 0 0 2 1 0
p1 cj - zj 0 0 1 0 1 0 1 0 0 2 1 0
-
-
+- +- +- +- +-
+

113
Simpleks Yöntemi ile ÇözümSimpleks Yöntemi ile Çözüm(Örnek 5.2.3.7)(Örnek 5.2.3.7)
Beşinci Simpleks (Optimal) Çözüm Tablosu
A.K. cjTemel
0x1
0x2
1d1
0d1
1d2
0d2
1d3
0d3
0d4
2d4
1d5
0d5
Çözüm
0 x1 1 0 0 0 -1/2 1/2 0 0 1/4 -1/4 0 0 75/20
0 x2 0 1 0 0 1 -1 0 0 0 0 0 0 15
1 d3 0 0 0 0 1/2 -1/2 1 -1 -1/4 1/4 1/2 0 25/20
0 d5 0 0 0 0 1 -1 0 0 1/2 -1/2 -1 1 2.5
0 d1 0 0 -1 1 100 -100 0 0 25 -25 0 0 225
p4 cj - zj 0 0 1 0 1/2 1/2 0 1 1/4 7/4 1 0
p3 cj - zj 0 0 1 0 1 0 1 0 0 2 1 0
p2 cj - zj 0 0 1 0 1 0 1 0 0 2 1 0
p1 cj - zj 0 0 1 0 1 0 1 0 0 2 1 0
-
+- +- +- +- +-
+
+
114
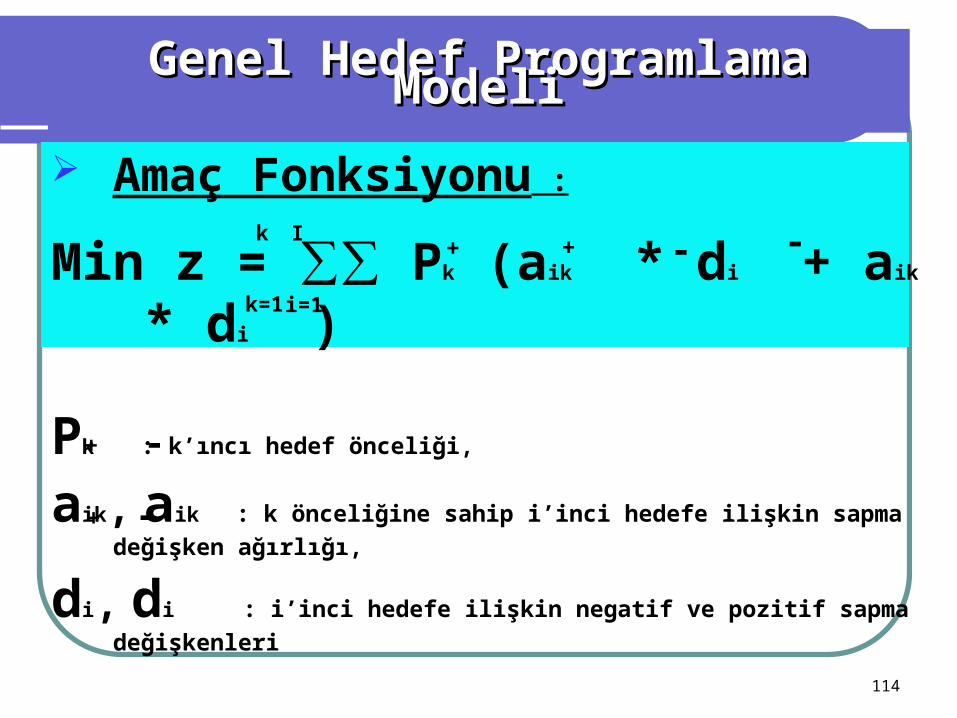
Amaç Fonksiyonu :
Min z = ∑∑ Pk (aik * di + aik * di )
Pk : k’ıncı hedef önceliği,
aik, aik : k önceliğine sahip i’inci hedefe ilişkin sapma değişken ağırlığı,
di, di : i’inci hedefe ilişkin negatif ve pozitif sapma değişkenleri
Genel Hedef Programlama ModeliGenel Hedef Programlama Modeli
+
k=1
-i=1
k I+ -
+ -
+ -
115
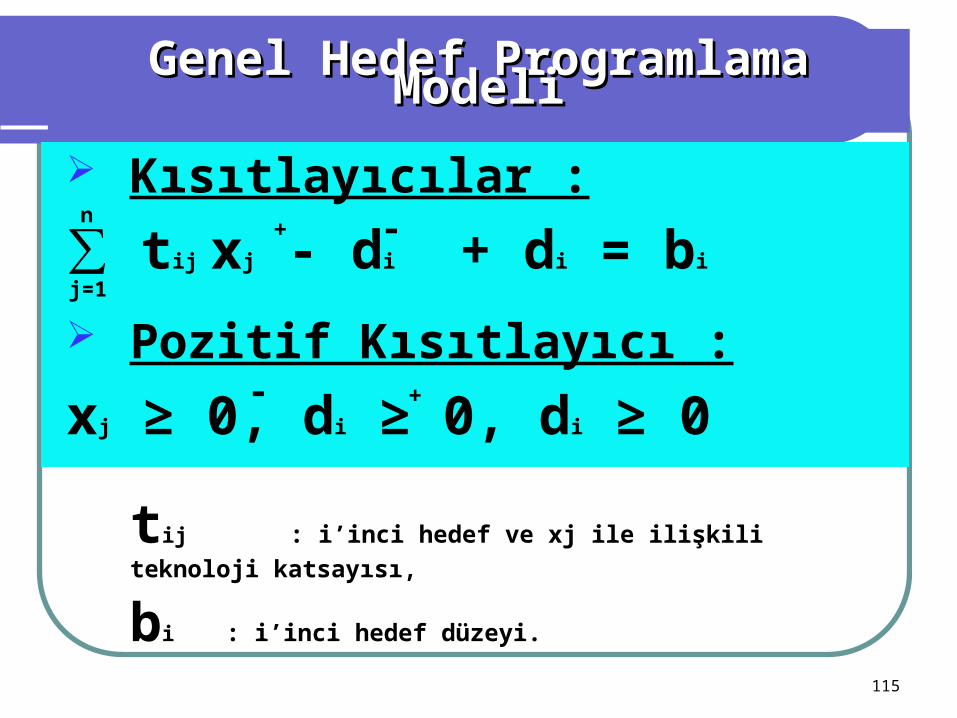
Kısıtlayıcılar :
∑ tij xj - di + di = bi
Pozitif Kısıtlayıcı :
xj ≥ 0, di ≥ 0, di ≥ 0
tij : i’inci hedef ve xj ile ilişkili teknoloji katsayısı,
bi : i’inci hedef düzeyi.
Genel Hedef Programlama ModeliGenel Hedef Programlama Modeli
- +
j=1
n -+
116
Genel Hedef Programlama Modelinin ÖzellikleriGenel Hedef Programlama Modelinin Özellikleri
1. Amaç fonksiyonu, sapma değişkenler toplamını en küçüklemek için oluşturulur. Bu fonksiyonun yapısı, modelin türünü (tek değişkenli, çok değişkenli, sapmalı değişkenlerin eşit ağırlıklı, ağırlıklı, öncelikli ve ağırlıklı-öncelikli gibi) belirler.
2. Hedef ulaşmadaki başarı ve başarısızlığı ifade eden sapma değişkenleri tüm hedef kısıtlayıcılarında bulunur.
117
Genel Hedef Programlama Modelinin ÖzellikleriGenel Hedef Programlama Modelinin Özellikleri
3. Sapma değişkenlerini içermeyen yapısal kısıtlayıcılar, klasik DP modelinde yapmış olduğu işlevi yerine getirir.
4. Yönetimin hedefleri kısıtlayıcılar ile modele taşınır.
5. Modelde bulunan tüm değişkenler, ya sıfır ya da sıfırdan büyük değer alabilirler.
118
Genel Hedef Programlama Modelinin ÖzellikleriGenel Hedef Programlama Modelinin Özellikleri
Bu temel özelliklere ek olarak bazı hedef programlama modellerinde karşılaşılabilecek bir özel durum daha vardır. Bu durumda, bazı modellerde hedefin tamamının karşılanması yerine gk ile bir alt sınır hedefi veya üst sınır hedefi tanımlanabilmesidir.
119
Genel Hedef Programlama Modelinin ÖzellikleriGenel Hedef Programlama Modelinin Özellikleri
gk alt sınır hedefi ise;
∑ tjk * xj ≥ gk eşitsizliği kullanılır.
Bunun anlamı hedef gk’dan büyük olan her miktar kabul edilebilir. Ancak hedef gk’dan küçük olan tüm sapmalardan mümkün olduğunca sakınılmalıdır.
Bu durumda amaç fonksiyonunda yer alan dk ‘ları çıkartmak gerekir. Çünkü yalnızca dk sapma değişkeni enküçüklenmek istenmektedir. Bununla birlikte dk ve dk ‘lerin her ikisi de gk hedefi kısıtlayıcılarında yer alacağından, her iki sapma değişkeni de değer alabilecektir.
j=1
n
-+
-+
120
Genel Hedef Programlama Modelinin ÖzellikleriGenel Hedef Programlama Modelinin Özellikleri
gk üst sınır hedefi ise;∑ tjk * xj ≤ gk eşitsizliği kullanılır.
Bunun anlamı hedef gk’dan daha küçük her değerin kabul edilmesine karşın, gk’dan daha büyük miktarlardan mümkün olduğunca kaçınılmalıdır.
Bu amaçla amaç fonksiyonundan yer alan dk sapma değişkenini çıkartmak gerekir. Çünkü bu durumda yalnızca dk sapma değişkeni enküçüklenecektir. Bununla birlikte dk ve dk ‘lerin her ikisi de gk hedefi kısıtlayıcılarında yer alacağından, her iki sapma değişkeni de modelin bütününe bağlı olarak değer alabilecektir.
Ancak burada dikkat edilmesi gereken nokta, hedeften aynı anda iki yönlü sapma olamayacağından, söz konusu sapma değişkenlerinden birinin değerinin otomatik olarak sıfır olmasıdır.
j=1
n
-
+
-+
121
Kent şekerleme fabrikasının üretim müdürü, iki üretim ekibi arasında iş saatinin dağılımını planlamaktadır. Bu konudaki bilgiler;
Ekip-1 saatte 40 birim, Ekip-2 ise saatte 35 birim üretmektedir. Her ekip haftada 40 saat çalışmaktadır. Yönetici, gelecek hafta üretimin aksamaması için aşağıdaki
hedefleri sırasıyla önceliklendirmiştir;
h1 : Haftalık üretim düzeyi 4500 birimin altına düşmemelidir.h2 : Ekip-1’in fazla çalışma saati 5 saati geçmemelidir.h3 : Ekip-1’in haftalık çalışma saati 40 saatin altında olmamalıdır.h4 : Ekip-2’nin haftalık çalışma saati 40 saatin altına düşmemelidir.h5 : Ekip-2’nin fazla çalışma saati 10 saati geçmemelidir.
Yöneticinin bu öncelikli hedeflerini karşılayan hedef programlama modelini kurunuz.
Örnek Problem (İşgücü Planlaması)Örnek Problem (İşgücü Planlaması)(Örnek 5.2.5.1)(Örnek 5.2.5.1)
122
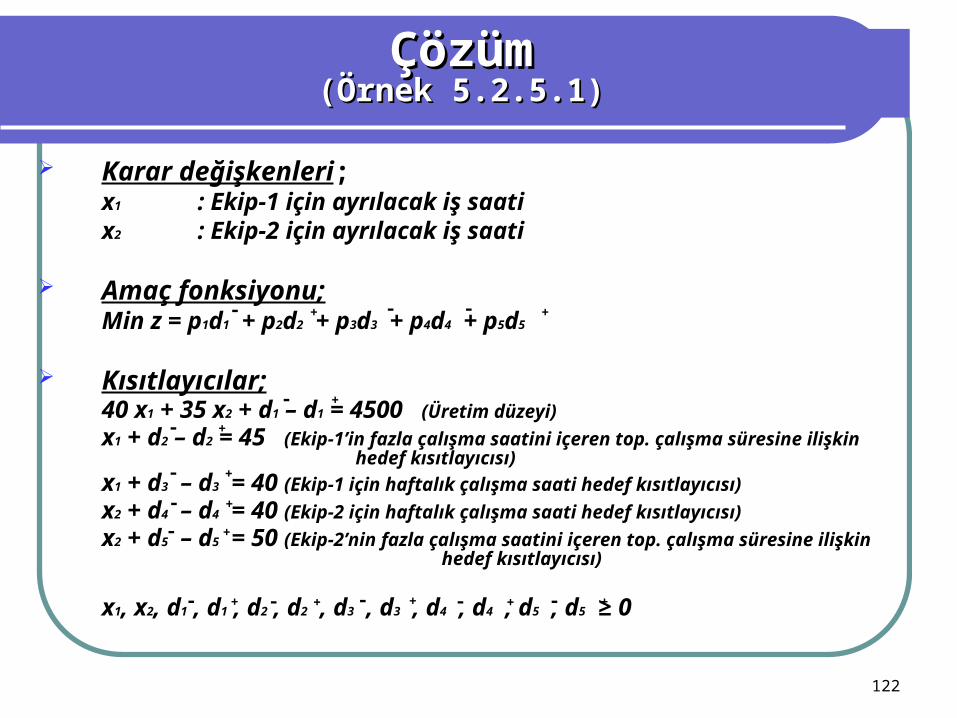
Karar değişkenleri;x1 : Ekip-1 için ayrılacak iş saatix2 : Ekip-2 için ayrılacak iş saati
Amaç fonksiyonu;Min z = p1d1 + p2d2 + p3d3 + p4d4 + p5d5
Kısıtlayıcılar;40 x1 + 35 x2 + d1 – d1 = 4500 (Üretim düzeyi)
x1 + d2 – d2 = 45 (Ekip-1’in fazla çalışma saatini içeren top. çalışma süresine ilişkin hedef kısıtlayıcısı)
x1 + d3 – d3 = 40 (Ekip-1 için haftalık çalışma saati hedef kısıtlayıcısı)
x2 + d4 – d4 = 40 (Ekip-2 için haftalık çalışma saati hedef kısıtlayıcısı)
x2 + d5 – d5 = 50 (Ekip-2’nin fazla çalışma saatini içeren top. çalışma süresine ilişkin hedef kısıtlayıcısı)
x1, x2, d1 , d1 , d2 , d2 , d3 , d3 , d4 , d4 , d5 , d5 ≥ 0
ÇözümÇözüm (Örnek 5.2.5.1)(Örnek 5.2.5.1)
- + - - +
- +
- +
- +
- +
- +
- + - + - + - + - +
123
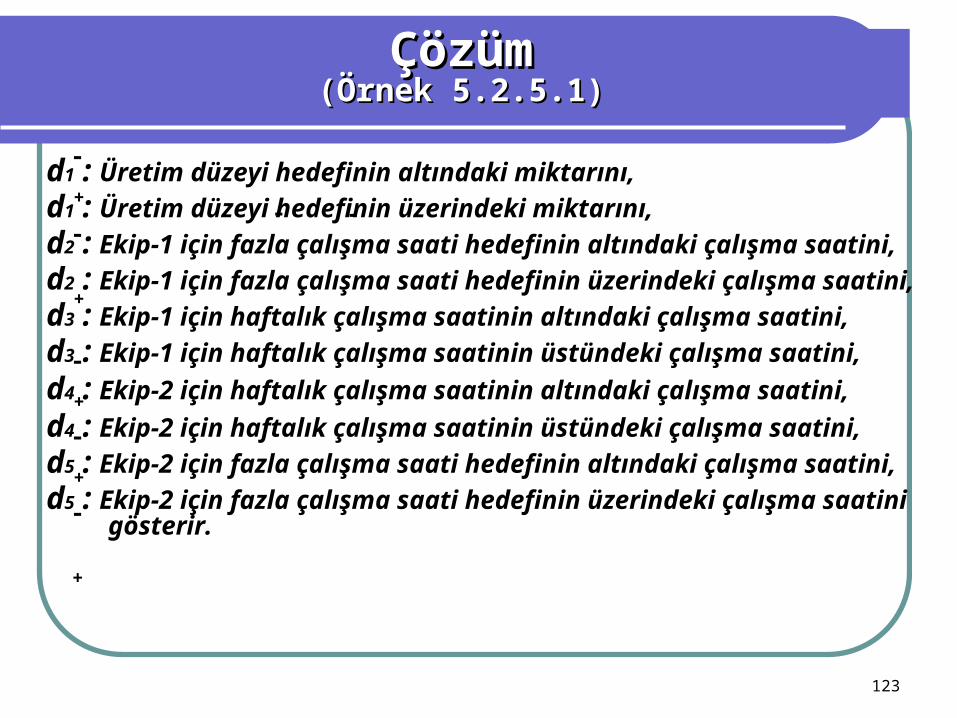
d1 : Üretim düzeyi hedefinin altındaki miktarını,
d1 : Üretim düzeyi hedefinin üzerindeki miktarını,
d2 : Ekip-1 için fazla çalışma saati hedefinin altındaki çalışma saatini,
d2 : Ekip-1 için fazla çalışma saati hedefinin üzerindeki çalışma saatini,
d3 : Ekip-1 için haftalık çalışma saatinin altındaki çalışma saatini,
d3 : Ekip-1 için haftalık çalışma saatinin üstündeki çalışma saatini,
d4 : Ekip-2 için haftalık çalışma saatinin altındaki çalışma saatini, d4 : Ekip-2 için haftalık çalışma saatinin üstündeki çalışma saatini, d5 : Ekip-2 için fazla çalışma saati hedefinin altındaki çalışma saatini,
d5 : Ekip-2 için fazla çalışma saati hedefinin üzerindeki çalışma saatini gösterir.
ÇözümÇözüm (Örnek 5.2.5.1)(Örnek 5.2.5.1)
-+
-
-
+
-
+
-
+
-
+
-
124
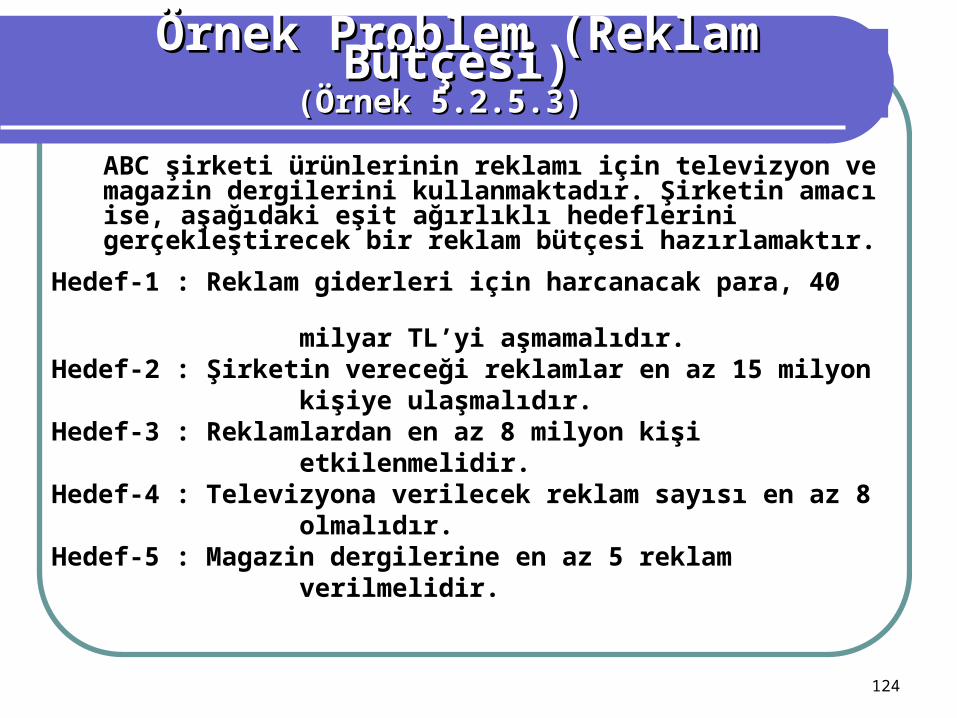
ABC şirketi ürünlerinin reklamı için televizyon ve magazin dergilerini kullanmaktadır. Şirketin amacı ise, aşağıdaki eşit ağırlıklı hedeflerini gerçekleştirecek bir reklam bütçesi hazırlamaktır.
Hedef-1 : Reklam giderleri için harcanacak para, 40 milyar TL’yi aşmamalıdır.Hedef-2 : Şirketin vereceği reklamlar en az 15 milyon kişiye ulaşmalıdır.Hedef-3 : Reklamlardan en az 8 milyon kişi etkilenmelidir.Hedef-4 : Televizyona verilecek reklam sayısı en az 8 olmalıdır.Hedef-5 : Magazin dergilerine en az 5 reklam verilmelidir.
Örnek Problem (Reklam Bütçesi)Örnek Problem (Reklam Bütçesi)(Örnek 5.2.5.3)(Örnek 5.2.5.3)
125
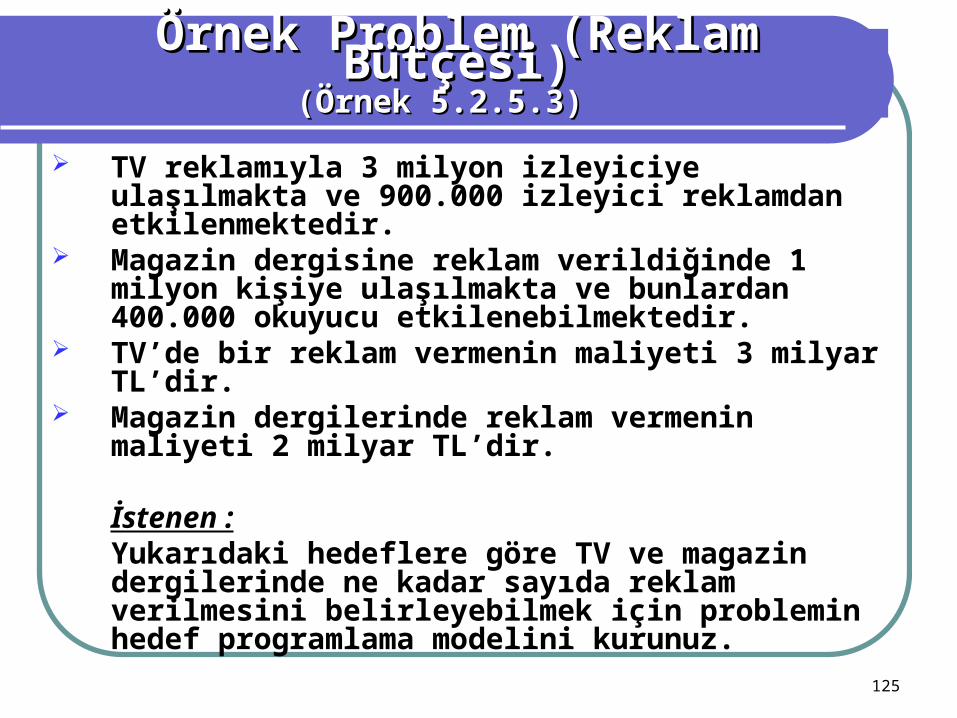
TV reklamıyla 3 milyon izleyiciye ulaşılmakta ve 900.000 izleyici reklamdan etkilenmektedir.
Magazin dergisine reklam verildiğinde 1 milyon kişiye ulaşılmakta ve bunlardan 400.000 okuyucu etkilenebilmektedir.
TV’de bir reklam vermenin maliyeti 3 milyar TL’dir. Magazin dergilerinde reklam vermenin maliyeti 2
milyar TL’dir.
İstenen :Yukarıdaki hedeflere göre TV ve magazin dergilerinde ne kadar sayıda reklam verilmesini belirleyebilmek için problemin hedef programlama modelini kurunuz.
Örnek Problem (Reklam Bütçesi)Örnek Problem (Reklam Bütçesi)(Örnek 5.2.5.3)(Örnek 5.2.5.3)
126
Karar değişkenleri;x1 : TV’de verilecek reklam sayısıx2 : Magazin dergisinde verilecek reklam sayısı
Amaç fonksiyonu;Min z = d1 + d2 + d3 + d4 + d5
Hedef Kısıtlayıcısı;3 x1 + 2 x2 + d1 – d1 = 40 (Bütçe kısıtlayıcısı)
3.000.000 x1 + 1.000.000 x2 + d2 – d2 = 15.000.000 (Ulaşılması istenen kişi kısıtlayıcısı)
900.000 x1 + 400.000 x2 + d3 – d3 = 8.000.000 (Reklamdan etkilenen kişi kısıtlayıcısı)
x1 + d4 – d4 = 8 (TV’de verilecek reklam sayısı)
x2 + d5 – d5 = 5 (Magazinde verilecek reklam sayısı)
x1, x2, d1 , d1 , d2 , d2 , d3 , d3 , d4 , d4 , d5 , d5 ≥ 0
ÇözümÇözüm (Örnek 5.2.5.3)(Örnek 5.2.5.3)
-+
- + - + - + - + - +
- - -
- +
- +
- +
- +
- +





























