-
8/10/2019 Hidrolik Asansr
1/15
105
HDROLK ASANSR TAHRK SSTEMLERNDE G GEREKSNM,VERMLLK, ISI
OLUUMUNUN NEDENLERVE NLEYC
YNTEMLER
Turhan ALTINRS, Makina MhendisiBucher Hidrolik Sistemleri Tic.
Ltd. ti. Tel:0.212.659 04 88
[email protected]
ZET
Hidrolik asansr tahrik sisteminin, teorilerin tek bana yeterli
olmadve deneylerletamamlanmas gerektiini gsteren en gzel fizik
rneklerinden biri olduuinancndaym. Burada fiziin, statik, kinetik,
akkanlar mekanii, termik, rezonans ve
ses gibi bir ok daln bir arada ve birbirleriyle balantl grmemiz
mmknolmaktadr. Bunun zellikle bu konularda eitim alan niversite
rencileri ya da bukonuda uzmanlamak isteyen meslektalarmz iin nemli
bir frsat yarattnainanyorum.Bu almada hidrolik sistemlerde oluan ve
zaman zaman nemli iletme sorunlarnave kayplara yol aan soluumlar,
oluma sebepleri ve bunlarn en aza indirilebilmesiiin
yaplabilecekler zerinde durulmutur.
GR
Bu almada hedeflenen, hidrolik asansrleri klasik halatlasansrler
ile belli ltlererevesinde kyaslamak ve birinin dierine olan stnln
ya da zayf taraflarnvurgulamak olmad, daha ok hidrolik asansrlerde
snn nasl olutuunu ortayakarmak ve snn oluumunu engellemek ya da
azaltmak hedefiyle yaplmasgerekenalmalara yn vermektir. Aynzamanda
enerji tketimi ile ilgili konular da kanlmazolarak gndeme
getirilecektir.
Hidrolik denince ilk akla gelen, sanayide kullanlan ve byk ve
esnek g aktarmlariin ngrlen bir tahrik sistemidir. En sk grlen
uygulamalarn da sektrdenoumuzun yakndan tandkesme, bkme, dzeltme
tezghlarile hidrolik presler veotomasyon sistemleri oluturmaktadr.
Bu sistemlerde kullanlan hidroliklerde genelde
yksek bas
n ve dk yadebisi uygulanmaktad
r. Dolay
s
yla tesisat kesitleri genelolarak DN16y (1/2) gemez. Is oluumu
hatlardaki olduka kk kesitlere veyksek basnlara ramen dk ya hz ve
hareket says nedeniyle soutucugerektirecek bir dzeye genelde
ulamaz.
Trkiyede, asansr sektrnde hidrolik kelimesiyle tanmamz ise
yaklak 1980liyllara dayanr. Asansr sektrnde alan insanlar olarak
kimimiz korkuyla, kimimizheyecanla ve cesaretle, ou zaman da
kulaktan dolma bilgi ve nasihatler eliindeyaklamzdr bu tr
projelere. Konuyla ilgili ne bir kurumdan, ne de bir bilimsel
veyateknik dokmandan ya da bu konuda uzman olduuna inandmz bir
kiidenfaydalanma ansmz olmamtr. Baarl olduumuzda hidrolik sistemi
gklere
karm, baarszlmzn sulusu olarak da genelde hidrolii
gstermiizdir.
-
8/10/2019 Hidrolik Asansr
2/15
106
Bu yaklak 25 sene iinde ok yol kat edip uzmanlaan meslektalarmz
olduu gibi,hala deneme yanlma metotlarile baarya ulamaya alan
asansrc arkadalarmznvarlnda inkr etmemiz mmkn deildir.
HDROLK ASANSRLERN KULLANIM ALANLARI
Hidrolik asansrlerin kullanm alanlar, genelde dk ve orta
irtifalyk asansrleri,hasta asansrleri ve makine dairesinin bodrum
katnn herhangi bir blgesinekonulabildii, ya da dier herhangi bir
katta olabildii, atda irkin grnml makinedairesinin istenmedii villa
ve apartmanlardan olumaktadr. Burada seimin hidrolikasansrden yana
kullanlmasnn nedeni, bilinen avantajlarnn yan sra,
kullanmyounluunun ok fazla olmayve de irtifann genelde 6-7
katgememesidir.
Hidrolik asansrler, enerji maliyetlerinin halatl asansrlere
oranla daha yksekolmasna karn, tesis maliyetlerinin, servis
giderlerinin ve de yedek para
gereksiniminin daha az olmasnedeniyle tercih
edilmektedirler.Youn iletmelerde ise hem enerji maliyetleri daha
belirgin bir ekilde artmakta ve dehidrolik yan arsnmassistemin
devre dkalmasna yol aabilmektedir.
UYGUN TAHRK SSTEMNN SEM
Son kullancy daha ok ilgilendiren, belirli bir ykn belirli bir
srede bir koddandier bir koda karlabilmesi iidir. Bunun ne ekilde
yaplaca daha ok konununuzman kii ve kurulular tarafndan belirlenir
ve mmkn olduunca alternatifli birekilde son kullancya nerilir.
Bu arada belki de hayatnda ilk kez asansr yaptran bir kiinin
teknik konulareksiksizbilmesi beklenemez. rnein, motor gcnn,
kaldrlacak toplam yk ve seyir hzyladz orantlarttgereinden yola
karak, belki de tesisteki kurulu g potansiyelinide dikkate alarak
kapasitenin ya da seyir hznn drlmesi, asansr yapmcstarafndan neri
olarak gndeme getirilebilir ve getirilmelidir.
En uygun sistemin seilmesi ardndan detaylhesaplar yaplarak,
deneylerle belirlenmiverimlilik, katsaylar, basn kayplar ve d
etkenler de dikkate alnarak sistemdekullanlacak elemanlarn fiziksel
zellikleri belirlenir.Bu ilemler genelde hidrolik sistemi reten
firmalarn hesaplama programlarnn
yard
m
yla yap
l
r ve asansrcye tahrik sisteminin seimi d
nda fazla bir tercih hakk
braklmaz. Bu nedenle asansrcnn tahrik sistemini semeden nce
asansrdenistenilen tm zellikleri ok iyi deerlendirip bu seimi
yapmas, ileride yaanabilecekolumsuzluklarn nlenmesi anlamna gelir.
Teknolojinin snrlarnn zorlanmasise oukez istenmeyen sonulara yol
amaktadr.
HDROLK ASANSR TAHRK SSTEMNN ALIMA PRENSB
G VE ENERJDNM
Belli bir ykn, belli bir ykseklie karlmas iin sisteme belli bir
enerji girii
salanmaldr. Bu enerji giriinin balang noktaselektrik motorudur
ve de enerji ekli
-
8/10/2019 Hidrolik Asansr
3/15
107
elektrik enerjisidir (1). Bu enerji, motorun kmilinde ya da
pompann vidasndamekanik enerjiye (2) dnr. Pompa knda ise elimizdeki
enerji ekli, belli bir
basnca sahip hidrolik enerjidir (3). Bu enerji eklide piston
kolunda (mil) yenidenmekanik enerjiye (4) dnr ve asansrn yukarynde
hareketini salar. (ekil-1)
DALMA
TP
SLNDR
2
M
1
V
G NTES
3
P0P
4
P.Q
4
P1 . q (10 N/m . m/s = W)
3 . U . IN . cos (W)
G ve ENERJAKTARIMI
5
4
3
P2 . q
F . V (N . m/s = W)
5 2
2
1
M . w (Nm/s =W)5
3
F.V
ekil-1
Bu enerji dnmleri srasnda enerji kayplaroluur. Bu kayplar daha
doru olarakenerjinin zellik deiikliine uramas olarak tanmlanabilir.
nk bilindii gibienerji yok olmaz ve ancak baka bir zellie dnr.
Elektrik enerjisi mekanik enerjiyeancak motorun verim orankadar
dnrken, kalan ksmdiren ve srtnme (elektrik,mekanik ve hidrolik)
sonucu sya dnr.
Aynekilde mekanik enerjinin hidrolik enerjisine dnmnde pompadaki
volmetrik(sznt) ve srtnme kayplarda gene solarak sistemdeki yerini
alr.
-
8/10/2019 Hidrolik Asansr
4/15
108
Daha sonra da srasyla valf blou, hortum ve rakorlar, boru krlma
valfi ve silindirde(zellikle kee/mil srtnmesi) oluan basn kayplarve
tayckarkas patenlerinde,kasnak mili ile yatak arasndaki srtnme
kayplar hidrolik enerjisinin s enerjisinednen blmn kapsar.
Buna gre, belli bir ykn, yer ekimi kuvvetine ters yndeki belli
bir ykseklietanmas iin sisteme verilen besleme enerjisinin belli
bir ksm i olarakkullanlmakta, ya da baka bir deyimle potansiyel
enerjiye dntrlmekte, kalan
blm ise senerjisine dnmektedir.
Enerji (E) ve(W) kavramlarnuekilde tanmlayabiliriz.
Enerji cismin o an ki potansiyelini aklar, ise bir eylemdir.
Enerji potansiyeliolan bir cisim ancak hareket ettii zaman
iretir.
Eelekt = W (Epot) + Es
Olarak tanmlanabilir.
Ya da bunu sistemin verimlilii dikkate alarak tanmlarsak:
W(Epot) = Eelekt .
eklinde yazabiliriz.
Burada:
W(Epot) = m.g.h
m: h yksekliine karlan arlklarn toplam [Kabindeki yk, kabin,
kap,tayckarkas, kasnak, halat, mil vs. gibi sabit arlklarn tamam(
sistemlerde milve kasnak arlnn yarsalnr)].g: yer ekimi ivmesi
W(Epot) ayn zamanda depolanm bir enerji olarak da tanmlanabilir
(potansiyelenerji)
Eelekt = Elektrik motoru besleme enerjisi
= Elektrik motoru dahil sistemin toplam verimlilii.
m.g.hEelekt . = m.g.h =
Eelekt
Buna gre sistemin toplam verimliliini hesaplamak ok da zor
deildir. lmemizgereken yalnzca tam ykte ve nominal hzdaki hareket
sresince elektrik motorunu
beslediimiz elektrik enerjisinin miktardr. Hareket sonunda elde
ettiimiz potansiyel
-
8/10/2019 Hidrolik Asansr
5/15
109
enerjinin bykln de bildiimize gre (mgh) sistemin toplam
verimliliinihesaplamak bir blme ileminden ibarettir.
Ancak bu almada ayrntlara da yer vererek konumuzu ve
problemimizin kaynan
daha net grmemiz, problemlerin zm asndan nemlidir.
a) Elektrik motoru
Elektrik motorunun verimi retici tarafndan bilinmektedir ve bu
deeri reticidenalmamz mmkndr. Ancak bunu motor reticisinin etiket
deerlerinden hesaplayarakda bulabiliriz. Tabi ki bu deer nominal
ykteki deerdir ve motorun az ya da ok yktealmasverimlilik deerini
az da olsa etkiler.
rnek (retici firma: ELMO):Etiket bilgileri: 16 kW, 2780
devir/dk, 400V, 35 A, cos= 0,86
Burada:UN = 400V, IN = 35A, Nominal devir nN = 2780 devir/dk, PN
= 16 kW motorunnominal mekanik gcdr.
Motorun elektrik gc: P1 = 3 U IN cos
P1 = 1,73 400 35 0,86 = 20,8 kW (1,73 = 3)
= PN / P1 = 16 / 20,8 = 0,77
Hidrolik asansrlerde kullanlan ya alt motorlarnn verimlilii
iletme basncna(yke) bal olarak 2550 bar aras basn deerlerinde 0,80
ile 0,75 arasoynamaktadr. Dk basnlarda motorun verimlilii az da
olsa artmaktadr.
Motorun mekanik gc: P2 = P1 Mot
Motorun elektrik gcnn sya dnen ksmise P1 - P2Ya da P1 (1- Mot)
olarak yazlabilir.
Bizim sorunumuz olan senerjisi iletme yann iinde oluan
senerjisidir. Paten/ray
srtnmesi, kasnak yata
/mil srtnmesi motor gc hesaplar
nda dikkate al
n
r, ancakshesaplarnda, bizim problemimizin kaynanoluturmadiin gz
ardedilebilir.
b) Pompa
Hidrolik asansrlerde kullanlan pompa tr vidal pompadr. Dk
verimliliinekarn bu pompann kullanlmasnn en nemli nedeni, bu tr
pompalarda pulzasyonseviyesinin son derece dk ve ses dzeyinin de
rnein dili pompalara kyasla okdaha az olmasdr.Verimlilie gelince
(volmetrik ve srtnme kayplar), bu pompalarda da motorlardaolduu
gibi basncn artmasyla birlikte azalr.
-
8/10/2019 Hidrolik Asansr
6/15
110
Bu deer, 2550 bar aras iletme basnc dikkate alndnda, 0,81 ile
0,77 arasndadeiir.
Elektrik motorunun mekanik gc, pompa knda pompann verimi orannda
azalarak
Ppompa = P2 pompaolur.
Bu aynzamanda pompann kbasncile debisinin arpmna eittir.
Ppompa = p q
ekil-2
c) Valf grubu
Valf gruplarnda, daha nce tanmladmz verimlilik yerine basn kayb
deerinikullanmamz daha doru olur. Bu deerin bykll valf grubunun
yapsyla ilgili
olmasnn yan sra byk lde de iletme yann o an ki viskozitesine ve
debisinebaldr. Viskozite zellikle yan snmasyla birlikte hzl bir
ekilde der.Asansrmzn de sabah saatlerinde ya da genel olarak yan
souk olduu saatlerdeok daha byk viskoziteli iletme ya ve buna bal
olarak daha byk basnkayplaryla almasyla birlikte, zaman zaman
asansr hareketinin ayarlanann dndaseyrettiine tank oluruz. Bu durum
dikkate alnarak iletme ya viskozitesi iletmeartlarna ve
olumasolasiletme scaklna uygun olarak belirlenmelidir.
Basn kayb deerleri ancak uzun sreli deneyler gerekletirilerek
retici firmalartarafndan saptanr ve rn teknik dokmanlarnda
s(viskozite) ve debi (akmiktar)deerlerine baml eriler olarak valf
tiplerine gre gsterilir. zellikle s, yanviskozitesini yksek
derecede etkiler. Yukardaki rnekte grld gibi, HLP 46 yan
-
8/10/2019 Hidrolik Asansr
7/15
111
viskozitesi 30C de 75 cSt iken 8C de 300 cSt olmaktad r. Buna
gre 8C scaklktakiyan i direnci, 30C scaklktaki yan i direncinin 4
katdr. Bu deerler yareticilerinin kataloglarndan temin
edilebilir.
MOTOR GCNN HESAPLANMA YNTEM
Her ne kadar motor gc de hesaplama programlartarafndan seiliyor
olsa da, motorgcnn hangi zelliklere gre belirlendiini bilmek ve de
bu ilemi herhangi bir
program kullanmadan yapabilmek sanrm her teknik eleman iin nemli
bir artpuandr.Seyir hzseildikten sonraki aama G hesabiin gerekli
kuvvetlerin saptanmasdr.
1. BLM: ASANSRN YUKARI YNDE HIZLANMA SREC
Asansr kabininin yukar ynde hzlanmas srecinde piston milinde
gerekli olan
aksiyon kuvvetini belirleyen en nemli reaksiyon kuvvetleri:
Baknz ekil 3 ve ekil 4.
1) yer ekimi kuvveti Fg = m . g(bu kuvvet harekette ve
durusrasnda etkendir.)
m = kabin, kap, tayckarkas, orannda halat, kasnak, milarlve
tanan yk toplam arl(kg)
g = yer ekimi ivmesi (9,81 m/s)
2) hzlanma srecinde ek olarak Fa = maa = hzlanma ivmesi
3) toplam srtnme kuvvetleri FR1 = FRray/paten + FRkasnak/mil
Burada en nemli reaksiyon kuvvetleri olarak:1) yer ekimi
kuvvetini, 2) hzlanma iin gerekli kuvveti sayabiliriz.
Fg + Fa = mg + ma = m (g+a)
Hzlanma ivmesinin insan asansrlerinde yaklak 0,60 m/s seildiini
varsayarsak:
Fg + Fa m 10,4 m/s olarak kabul edilebilir.
Buna gre Asansrn belirlenmiyk ve ivme ile hzlanmasiin Piston
milinde gerekliaksiyon kuvveti endirekt (1:2) sistemler iin:
Fmil = 2 (Fg + Fa + FR1)
-
8/10/2019 Hidrolik Asansr
8/15
112
=l
b
Fa
Fg
F
Y FR1
FR
FR1
Fr2
Y = KAPASTE (YK)
K= SABT AIRLIKLAR
m= Y+K
F
F
FRF
2F
K2 K2
K1
ekil 3FRray/paten
Ray Paten arasndaki srtnme kuvvetinin bykl, Patenler zerinden
raya etki edenkuvvetin byklne ve de srtnme katsaysna baldr. Srtnme
katsaysise, hemray yzeyinin yaps, hem kullanlan paten yann ve de
Paten olarak kullanlanmalzemenin zelliklerine baldr.
Burada srtnme kuvvetlerini azaltmak amacyla neden klavuz makara
kullanlmadsorusu akla gelebilir.
Klavuz makaralar maliyet asndan ok daha pahal olmalarnn yan sra
darbelerekarda son derece hassastrlar. Ayrca makara yzeyine yapan
bazparacklar seyirkonforunu son derece kt etkiler.
Kayma paten malzemesi olarak gelitirilen bazPE (Polietilen)
malzemeler son derecedk srtnme katsaylar (yal< 0,07) ve yksek
anma mukavemetleri sayesindetm olumsuzluklarbertaraf etmilerdir.Y =
Yk (kapasite)
-
8/10/2019 Hidrolik Asansr
9/15
113
K1= Deimez arlklar (kabin, kap, karkas).K1 hem motor gc, hem de
ray hesaplarnda dikkate alnr
K2 = Deimez arlklar ( orannda kasnak ve mil arlklar).K2 yalnzca
motor gc hesaplamasnda dikkate alnr
m = toplam arlk (kg)
Fg = m gFa = m aFR = Raya dik etki eden kuvvetFr1 = FR (paten
srtnme kuvveti)
FR = (Fa + Fg) b / lBurada Fr1 alt ve st patende olmak zere 2
kez etkilidir.
FRkasnak/mil-FRkasnak/halat
Kasnaklarda genelde rulmanlyatak kullanlr. Ancak darbeli alma
ihtimali varsa yada kusursuz ve srekli bir yalanma salanabiliyorsa
kayma yatak da kullanlabilir.Kayma yatak seeneinde oluan mil/yatak
srtnme kuvvetleri ou kez gz ardedilebilir dzeydedir.
Aynekilde kasnak yiv yzeyi ile halat arasnda oluan srtnme
kuvvetleri de gz ardedilebilir.
Ana konumuz dnda kalmalarnedeniyle bu srtnme kuvvetleri bu
almada dikkatealnmayacaklardr.2. BLM: ASANSRN YUKARI YNDE NOMNAL
HIZDA HAREKETSREC
Asansr kabininin nominal hzda yukarynde hareketinde reaksiyon
kuvvetleri:
1) yer ekimi kuvveti Fg = m . g(bu kuvvet hem hareket srecinde,
hem de asansr kabini katta beklerken etkendir.)m = kabin, kap,
tayckarkas, orannda halat, kasnak, mil
arlve tanan yk toplam arl(kg)
g = yer ekimi ivmesi (9,81 m/s)
2) toplam srtnme kuvvetleri FR1 = (FRray/paten +
FRkasnak/mil)
3. BLM: ASANSRN YUKARI YNDE YAVALAMA SREC
Asansr kabininin yukar ynde hzlanmas srecinde piston milinde
gerekli olanaksiyon kuvvetini belirleyen en nemli reaksiyon
kuvvetleri:
1) yer ekimi kuvveti Fg = m . g(bu kuvvet harekette ve
durusrasnda etkendir.)
m = kabin, kap, tayckarkas, orannda halat, kasnak, mil
-
8/10/2019 Hidrolik Asansr
10/15
114
arlve tanan yk toplam arl(kg)g = yer ekimi ivmesi (9,81 m/s)
2) yavalama srecinde ek olarak Fa = m.(-a)
a = yavalama ivmesi
3) toplam srtnme kuvvetleri FR1 = (FRray/paten +
FRkasnak/mil)
Burada en nemli reaksiyon kuvvetleri: 1) yer ekimi kuvveti, 2)
yavalamada oluanve ters ynde etki eden ters ivme kuvvettir.
Fg - Fa = mg ma = m (g-a)
Yavalama ivmesinin de insan asansrlerinde yaklak 0,60 m/s
seildiinivarsayarsak:
Fg - Fa m . 9,2 m/s olarak kabul edilebilir.
Buna gre Asansrn belirlenmi yk ve ivme ile yavalamas srasnda
Pistonmilindeki gerekli aksiyon kuvveti:
Fmil = 2 (Fg - Fa + FR1)
yavalama srecinde ters ynde olmak zere: Fa = m.aa = yavalama
ivmesi
Grld gibi asansrde gerekli en byk kuvvet yukarynde hzlanma
srecindedirve bu kuvvet motor gc hesaplamalarnda temel alnr.
Gerekli motor gcnn hesab:
Motor verimlilii burada 2. planda kalmaktadr. nk verilen Motor
gc, motorunmekanik gcdr ve kullanlabilecek gc gsterir.
Asansrn belli bir toplam ykte (Y) ve belli bir hzda (v) hareket
ettirilmesi iingerekli g
P = Fmil v :(pompa valf)
Fmil = 2 (Fg + Fa + FR1)
pompa: Vidalpompa verimlilii 0,77 0,81,valf: Kontrol Valfi
verimlilii 0,88 0,95 .
Bu deer hem yan viskozitesine, hem de ya debisi ve valf yapsna
gre deiir.Yan Viskozitesi ise hem seilen yan zelliklerine hem de
yan o anki ssna
baldr. Gerek verimlilii bulabilmek iin kataloglardaki valf
erilerine bakmak
gerekir. Ancak bu da yalnzca yaklak bir deeri vermektedir.
-
8/10/2019 Hidrolik Asansr
11/15
115
Bu erilerde verimlilik yerine basn kaybdeerleri verilmitir. Buna
gre maksimumykte hesaplanan iletme basncndan yola karak hesaplarmz
iin gerekli valfverimliliini yaklak olarak bulabiliriz.
rnek:
Asansr verileri:
Q = 400 kg, (kapasite)K = K1 + K2 = 600 kgv = 0,63 m/s (seyir
hz)
Fmil = 2 (Fg + Fa + FR1) = 2 (1000kg 10,4m/s + 40kg 10,4
m/s)
= 21.632 N
P = Fmil v :(pompavalf)
P = 21.632 N 0,63m/s : (0,80 0,90) 9,5 kW (yaklak gerekli motor
gc)
Bu hesaplamada normal artlarda sya ok fazla etkisi olmayan
hortum ya daborulardaki basn kayplarvalf verimliliinde dikkate
alnmtr. Ancak hortum ya daboru uzunluklar 4-5 metre zerine kmas
durumunda bu kayplarn da ek olarakdikkate alnmas nerilir. Ar uzun
hatlarda (> 10m) hortum ya da boru apnn
bytlmesi, bylece ya ak hznn ve dolaysyla basn kayplarnn
drlmesidoru bir yntem olacaktr.
Dikkat ekici baka bir konu ise verimlilik deerinin, motorun
verimliliinikapsamaddr. Elektrik motorunun mekanik gc yerine
besleme gc dikkatealndnda motorun verimlilii de hesaplamaya eklenir
ve toplam verimlilik 0,50 gibirktc rakamlara ulaabilir.
Bu durum, enerji tasarrufunu amalayan daha ne kadar ok almann
yaplmasgerektiini ak seik gstermektedir. zellikle hem artan enerji
tketimi ve fiyatlarvede tketime bal olarak artan kresel snma
hepimizi bu ynde almaya
zorlamaktad
r.
HDROLK YANEDEN VE NASIL ISINIR
Burada konumuzu 2 farkl blmde incelemek daha doru olacaktr. Daha
ncedetaylandrlan birinci blm motor, pompa ve valf grubunun verimi
dikkateAlndnda hesaplanan kayp enerji (daha dorusu senerjisi),
ikinci blm olarak dayukarynde hzlanma ve yavalama srelerinde oluan
senerjisi. Genel kan, yanyukar seyir srasnda, yani motor alt srece
snddr. Bu ancak ksmendorudur. Is, enerjinin bir eklidir ve snn
olumasancak baka bir enerji eklinin senerjisine dnmesiyle mmkn
olur. Asansrmzn hareketini detayl bir ekilde
-
8/10/2019 Hidrolik Asansr
12/15
116
izlersek, bamza zellikle yaz aylarnda dert olan bu snn nereden
geldiini de kolaybir ekilde analiz edebiliriz.
Hidrolik asansrlerde kullanlan tahrik motorlar sabit devirlidir
(nominal: yaklak
2780 d/dk) ve asansrn yalnzca yukarhareketinde alrlar. Motora
akuple edilmividal pompann devri de doal olarak motor devrine
eittir. Bir baka deyimle motorpompa grubunun rettii yadebisi yaklak
olarak sabittir.
Asansrmzn hzise hzlanma ve yavalama sreleri nedeniyle deikendir.
Bununanlam, hzlanma, yavalama ve 2. hz sresince motor-pompa
grubunun valf grubunagnderdii ya miktarnn bir ksm kullanlmayarak
yeniden ya tankna gerignderilmektedir (by pass). Buna gre de
motor-pompa grubunun kenerjisinin bir
blm, hzlanma, yavalama ve 2. Hz srelerinde asansrn hareketi
iinkullanlmakta, kullanlmayan genelde daha byk blm ise s enerjisi
olarak yatankna geri gnderilmektedir. En az soluumu asansrn
yukarynde ve tam hzda
seyri srasndadr.
Kullanlan elektrik enerjisinin byk blm potansiyel enerjiye dnr
(ortalama%50-60). Daha kk blm (yaklak %40-50) sistemin tamamnda
oluan srtnmeve basn kayplarn kapsar. Bu kayplar hem motor/pompa
grubunda, hem hidroliksistemde, hem de mekanik sistemin tamamnda
oluan kayplardr. Bu kayplarn byk
blm hidrolik sistemin bnyesinde kalan kayplardr ve bu da yan
snmassonucunu getirir.
Asansrn aaynde seyri, hem kabin ve taycsistemin, hem de tanacak
yk yada kiilerin arlklar ve yer ekimi ivmesi (sisteme yklenen
potansiyel enerji)sayesinde gerekleir. Motor altrlmaz. Valf
grubunun yapt tek ey, ya geikesitlerini kltmek ve bytmek suretiyle
belli bir basn kayb yaratarak asansrhznayarlamaktan ibarettir.
Asansrn aaynde seyri srasnda etkili olan tm arlklarn toplamndan
oluanpotansiyel enerji de valf grubu iinde yaratlan bu basn kaybve
yan bnyesindeki isrtnmeler de dahil olmak zere dinamik enerji
kayplar yoluyla tamamen senerjisine dntrlr.
Asansr kabininin balang noktasna geri dndnde Elektrik
motoruna
yklediimiz elektrik enerjisi neredeyse tamamen
s
enerjisine dntrlmolur.Kabin yk arttka soluumu da ona balolarak
artar. Baka bir deyimle, kabininyukar ynde olduu gibi aa ynde de bo
ya da dolu hareket etmesinin soluumunda etkisi vardr. Is
hesaplamalarnda ykn genel olarak %50 kadarnntand, seyir mesafesinin
de %70 orannda kullanldvarsaylabilir.
Konuya sistemin verimlilii asndan bakarsak, en dk verimlilik
yukarynde bokabinle seyreden bir asansrde, soluumu olarak bakarsak
da en youn soluumutam ykte ve birbirine en yakn 2 durak arasnda
yukarynde ve de tam ykte aaynde seyreden bir asansrde meydana
gelmektedir.
-
8/10/2019 Hidrolik Asansr
13/15
117
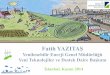
H A R E K E T E R S
HIZLANMA
B O T A A L I M A
NOM.
HIZ
SEYR
''h
''
YUKARI
' ' V ' '
H A R E K E T E N E R J S
I S I E N E R J S
AAI
YAVALAMA
B O T A A L I M A
ekil 4ekil 4te sistemin kullanlabilir (verimli) ksmgrlmektedir.
Yukarhareket srasndahzlanma ve yavalama srelerinde enerjinin bir
ksmsenerjisine, daha byk ksmise potansiyel enerjiye dnmektedir.
Aaynde ise, elimizdeki potansiyel enerji neredeyse tamamen sya
dntrlmolur.
Is oluumunun yan sra ses oluumu da ya debisinin yksek olduu
durumlardarahatszlk verici dzeye oluabilir. Isoluumunda olduu gibi,
yukarynde hzlanma,yavalama ve 2. hz srecinde, aaynde ise ana hz
srecinde ses younluu en stdzeyde hissedilir. Bu aynzamanda geri
dnyadebisiyle orantldr.
Buna gre hidrolik asansrlerde yaanabilen olumsuzluklar, soluumu,
ses dzeyi veenerji giderleri olarak sralamamz mmkn olabilir.
Enerji giderleri olarak yalnz sisteme yklenen enerjiyi deil,
soutma sistemleri iin
harcanan enerjiyi de hesaba katmak gerekir. Yani biz enerji
harcayarak nce ya
styoruz, daha sonra da aynyasoutmak iin yine enerji
kullanyoruz.
Eer amacmz sistemdeki s oluumunun belirlenmesi ise, bizi
ilgilendiren, kuvvetinbyklnden (Yk) daha ok, bu kuvvetin hangi hzda
(G) ve ne kadar youn(Enerji) uygulanmakta olduudur. Ya da baka bir
deyimle, tkettiimiz enerjimiktardr.
Hidrolik asansrlerde soluumunu azaltmak, klasik sistemlerde hz
ayarlarnoptimizeetmekle mmkndr. Ancak bu ekilde enerji tasarrufu
ancak snrlderecede salanr:
-
8/10/2019 Hidrolik Asansr
14/15
118
Hzlanma, yavalama ve 2. Hz mesafelerinin artmasyla birlikte s
oluumu da aynoranda artmaktadr. nk motor pompa grubu bu srete de
ayn debi ve basncretmektedir. Burada enerji tketimini drmek ve buna
paralel olarak soluumunuazaltmak, hzlanma ve yavalama ivmelerinin
daha dik (hzlanma ve yavalama yol ve
sreleri ksalr) ve de ikinci hz mesafesinin sfra yakn ayarlanmas
ilegerekletirilebilir.
Byk tahrik motorlarnn kullanldzellikle yk asansrlerinde
yukarynde katatamamlama (releveling) srasnda pompann rettii debinin
yalnzca %7-%10luk
blm asansrn hareketi iin kullanlmakta, kalan blm ise ya tankna
gerignderilmektedir. Bunun anlam%90-%93 ek sretimidir.
Bu tr asansr tahrik sistemlerine daha az gte (1-3kW) ve yalnzca
yukar katatamamlama amalalan bir ek tahrik sistemi ngrlmelidir. Bu
sayede:1) Hidrolik enerjinin tamam hareket iin kullanlr, dolaysyla
enerji kayb byk
lde nlenir,2) Kata getirme reaksiyon zamanok ksalr,3) Kata
getirme srecinde soluumu nlenir.
ENERJTASARRUFU AMALI YNTEMLER:
Bu yntemlerin banda yukar ynde hzlanma ve yavalama srecinde
elektrikmotorunun sistemin gereksinimi kadar mekanik enerji
retmesini salamakla
balamaktadr.
Frekans kontroll hidrolik tahrik sistemleri
Klasik hidrolik asansrlerde yaanan olumsuz durumun giderilmesi
tahrik sistemindekibazdeiikliklerle d mmkndr.
Frekans kontroll tahrik sistemleri, hidrolik asansrlerde
yaanabilen buolumsuzluklarn giderilmesi iin gelitirilmitir. Asansr
hz motor devri ile dzorantldr. Geri dn (By pass) ya miktar yok
denecek kadar azdr. Dolaysylayukarynde sve ses oluumu byk lde
ortadan kaldrlmtr. Buna balolarakda enerji sarfiyaten aza
indirgenmitir.
Aa ynde ise, silindirden tahliye olan iletme ya valf bloundan
geer ve yinepompa zerinden tanka dner. Ksaca, yukar harekette
izledii yolun neredeyseaynsn geri dnte izler. Geri dnen ya, pompay
ve ona akuple olan motoru danormal iletmedeki ynnn tersine dndrerek
motorun jeneratr olarak almasnsalar. retilen elektrik enerjisi
inverter kontrol ile bir diren grubu zerinde syadntrlr. Klasik
sistemde valf de basn kayb yaratarak kontrol altna aldmzaahareketi
bu kez inverter kontroll diren grubu ile yapmaktayz. Frekans
kontroll
bu tahrik sisteminde s, tank yerine diren grubunda olumas sonucu
soutucukullanmgereksiz hale gelir. Olanak salanmasdurumunda, diren
grubunda oluan s
baka bir sistemde stma amal kullanlabilir. Byk glerde ise
retilen enerjinin
dolaylekilde ebekeye geri verilmesi de dnlebilir.
-
8/10/2019 Hidrolik Asansr
15/15
119
Yan tanka serbest aknedeniyle oluan yksek ses dzeyi de en aza
indirgenir.Tesis maliyetinin yksek olmasna karn, enerji tasarrufu
sayesinde, orta younlukta
bir iletmede sistem kendini ortalama 4 senede amortize
etmektedir.
Sisteme yklenen enerjinin geri kazanlmas iin yaplan bir dier
uygulama ise, aayn hareketinde motorun gene ters dndrlmesi ve de
motorun arka miline akupledk debili bir yksek basn pompasnn tahrik
edilerek sisteme entegre edilmi birhidrolik akmlatr beslemesidir.
Burada biriktirilen basn enerjisi ise yukarharekette sisteme
yeniden verilerek tahrik motoruna katk salamaktadr. Bu
sistemi,halatlasansrlerdeki kararln hidrolik versiyonu olarak da
tanmlayabiliriz.
Bunlarn dnda halatlasansrlere benzer kararlklhidrolik sistemler
de (rneinekme silindirli sistem) senelerdir uygulanmaktadr.
KAYNAKLAR
1. Elektrotechnik, H. LINSE2. Hydromechanik, Heinrich RDEL,3.
Technische Strmungslehre, Wolfgang KALIDE,4. Kinematik und Kinetik,
HOLZMANN/MEYER/SCHUMPICH,5. Kinematik und Kinetik, Bruno ASSMANN6.
Akkanlar Mekanii, Frank M. WHITE7. Richard Von HOLZEN, BUCHER
A.G.