Embed Size (px)
Citation preview
ĐẠI HỌC QUỐC GIA TP. HỒ CHÍ MINH
TRƢỜNG ĐẠI HỌC BÁCH KHOA
KHOA ĐIỆN – ĐIỆN TỬ
Bài giảng:
ĐIỀU KHIỂN SỐ HỆ THỐNG ĐIỆN CƠ
ĐIỀU KHIỂN MÁY ĐIỆN / ĐỘNG CƠ ĐIỆN
ĐIỀU KHIỂN BỘ BIẾN TẦN
Biên soạn: ThS. Trần Công Binh
TP. HỒ CHÍ MINH, THÁNG 1 NĂM 2014
(HTĐKS-ĐKCMĐ) TB
07/01/2014 2
GIỚI THIỆU MÔN HỌC
1. Tên môn học: ĐIỀU KHIỂN SỐ HỆ THỐNG ĐIỆN CƠ- ĐIỀU
KHIỂN CÁC MÁY ĐIỆN / ĐỘNG CƠ ĐIỆN / BỘ BIẾN TẦN 2. Mã số:
3. Phân phối giờ:
4. Số tín chỉ: 2(2.1.5) Bài tập: 30% Kiểm tra: 20%, Thi: 50%
5. Môn tiên quyết:
6. Môn song hành:
7. Giáo trình chính:
8. Tài liệu tham khảo:
[1] Trần Công Binh, “Điều khiển động cơ không đồng bộ dùng DSP
TMS320LF2407A”, 11/2004.
[2] Emil Levi, High Performance Drive, Liverpool John Moores
Univerity, 2002.
[3] Slobodan N.Vukosavic, “Digital Control of Electrical Drives”, Springer
2007.
[4] Bimal K.Bose, “Power Electronics and Motor Drivers”, Elsevier 2006.
9. Tóm tắc nội dung:
Phần Tiếng Việt:
Summary: Electrical Engineering
10. Đối tượng học: Sinh viên ngành Điện Năng, Hệ thống năng lượng, Kỹ thuật
điện – điện tử.
(HTĐKS-ĐKCMĐ) TB
07/01/2014 3
CHƢƠNG TRÌNH MÔN HỌC
HỆ THỐNG ĐIỀU KHIỂN SỐ - ĐIỀU KHIỂN CÁC MÁY ĐIỆN
Chương 1: Bộ nghịch lƣu ba pha và Vector không gian (4T)
Vector không gian.
Bộ nghịch lưu ba pha.
Chương 2: Hệ qui chiếu quay (2T)
Hệ qui chiếu quay.
Chuyển đổi hệ toạ độ abc dq (Biến đổi Park).
Chương 3: Mô hình ĐCKĐB 3 pha (), (dq) (9T)
Sơ đồ tương đương của động cơ và một số ký hiệu.
Mô hình động cơ trong HTĐ stator ().
Mô hình động cơ trong HTĐ từ thông rotor (r).
Chương 4: Điều khiển định hƣớng từ thông (FOC) ĐCKĐB (12T)
Điều khiển PID
Các phương pháp điều khiển vô hướng (Scalar Control).
Điều khiển độc lập moment và từ thông.
Điều khiển tiếp dòng.
Điều khiển tiếp áp.
Điều khiển FOC trực tiếp, gián tiếp.
Tính toán thiết kế bộ điều khiển FOC.
Mô phỏng điều khiển FOC.
Chương 5: Một số phƣơng pháp ƣớc lƣợng từ thông rotor (3T)
Từ m và ia, ib hồi tiếp.
Từ us và ia, ib hồi tiếp.
Từ và ia, ib hồi tiếp.
Ước lượng vị trí (góc) vector r.
Ước lượng (r) trong HTĐ dq.
Ước lượng từ thông rotor dùng khâu quan sát (observer)
Đáp ứng mô phỏng FOC.
Chương 6: Điều khiển động cơ đồng bộ nam châm vĩnh cửu (?T)
Điều khiển dòng trong HQC (): vòng trễ và so sánh.
Điều khiển dòng trong HQC (dq).
Chương 7: Các phƣơng pháp điều khiển dòng (3T)
Điều khiển dòng trong HQC (): vòng trễ và so sánh.
Điều khiển dòng trong HQC (dq).
Chương 8: Một số phƣơng pháp ƣớc lƣợng tốc độ động cơ (3T)
Ước lượng vận tốc vòng hở (2 pp).
Ước lượng vận tốc vòng kín (có hồi tiếp).
Điều khiển không dùng cảm biến (sensorless).
Chương 9: Bộ biến tần (6T)
Cấu trúc một hệ thống điều khiển động cơ.
Cảm biến đo lường
Một số ưu điểm khi sử dụng bộ điều khiển tốc độ động cơ
Hệ thống điều khiển số động cơ không đồng bộ ba pha
Bộ biến tần
(42 tiết)
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.1
Chương 1: VECTOR KHÔNG GIAN VÀ
BỘ NGHỊCH LƯU BA PHA
I. Vector không gian
I.1. Biểu diễn vector không gian cho các đại lượng ba pha
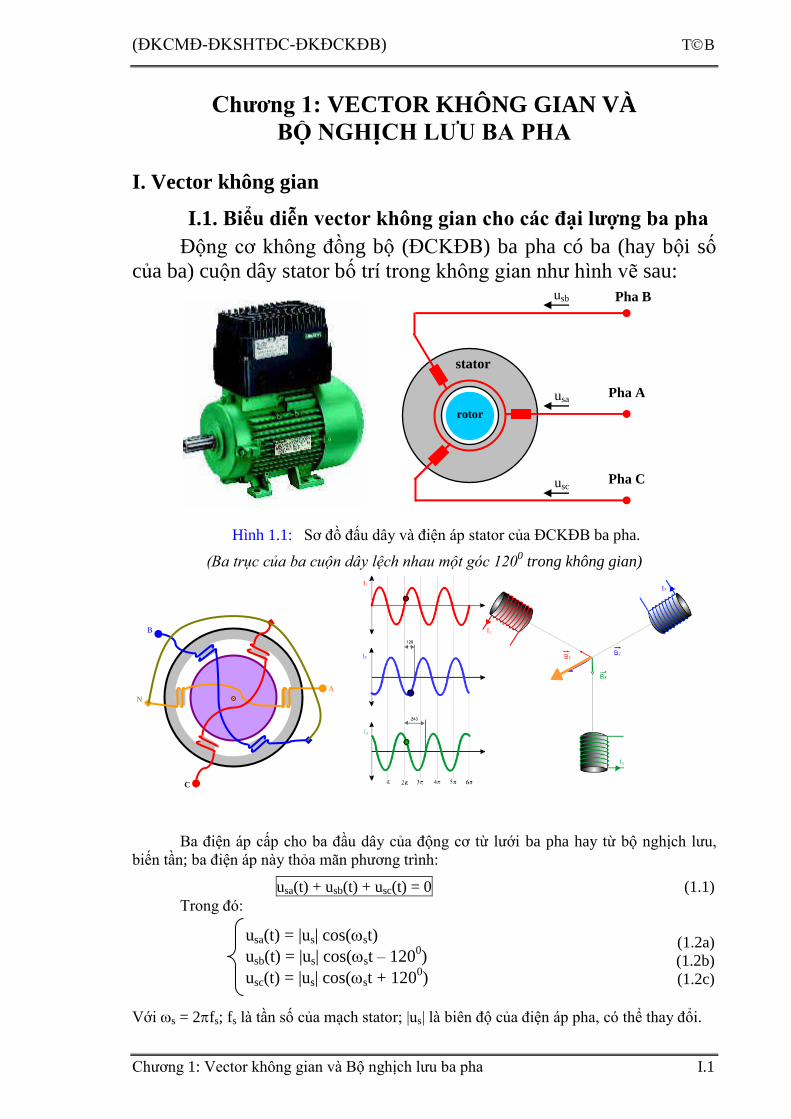
Động cơ không đồng bộ (ĐCKĐB) ba pha có ba (hay bội số
của ba) cuộn dây stator bố trí trong không gian như hình vẽ sau:
Hình 1.1: Sơ đồ đấu dây và điện áp stator của ĐCKĐB ba pha.
(Ba trục của ba cuộn dây lệch nhau một góc 1200 trong không gian)
Ba điện áp cấp cho ba đầu dây của động cơ từ lưới ba pha hay từ bộ nghịch lưu,
biến tần; ba điện áp này thỏa mãn phương trình:
usa(t) + usb(t) + usc(t) = 0 (1.1)
Trong đó:
(1.2a)
(1.2b)
(1.2c)
Với s = 2fs; fs là tần số của mạch stator; |us| là biên độ của điện áp pha, có thể thay đổi.
rotor
stator
Pha A
Pha B
Pha C usc
usa
usb
A
B
C
N
usa(t) = |us| cos(st)
usb(t) = |us| cos(st – 1200)
usc(t) = |us| cos(st + 1200)

(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.2
(điện áp pha là các số thực)
Vector không gian của điện áp stator được định nghĩa như sau:
)t(u)t(u)t(u3
2)t(u scsbsas
(1.3)
000 240j
sc
120j
sb
0j
sas e)t(ue)t(ue)t(u3
2)t(u
(mặt phẳng ba chiều với 3 vector đơn vị)
00 240120 )()()(3
2)( j
sc
j
sbsas etuetututu
(1.4)
(tương tự như vector trong mặt phẳng phức hai chiều với 2 vector đơn vị)
)t(u.a)t(u.a)t(u3
2)t(u sc
2
sbsas
với 0120jea
0eeeaa1000 240j120j0j2
Ví dụ 1.1: Chứng minh?
a) tsinjtcosutueu)t(u sssss
tj
sss
(1.6)
b)
csbscsbsass uujuuuu
2
3
2
35,05,0
3
2 (1.5)
)t(u)t(u)t(u3
2)t(u scsbsas
Hình 1.2: Vector không gian điện áp stator trong hệ tọa độ .
Theo hình vẽ trên, điện áp của từng pha chính là hình chiếu của vector điện áp
stator su
lên trục của cuộn dây tương ứng. Đối với các đại lượng khác của động cơ: dòng
điện stator, dòng rotor, từ thông stator và từ thông rotor đều có thể xây dựng các vector
không gian tương ứng như đối với điện áp stator ở trên.
I.2. Hệ tọa độ cố định stator
Vector không gian điện áp stator là một vector có modul xác định (|us|) quay trên
mặt phẳng phức với tốc độ góc s và tạo với trục thực (trùng với cuộn dây pha A) một góc
Re
Im
A
B
C
usa
s
usc
usb
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.3
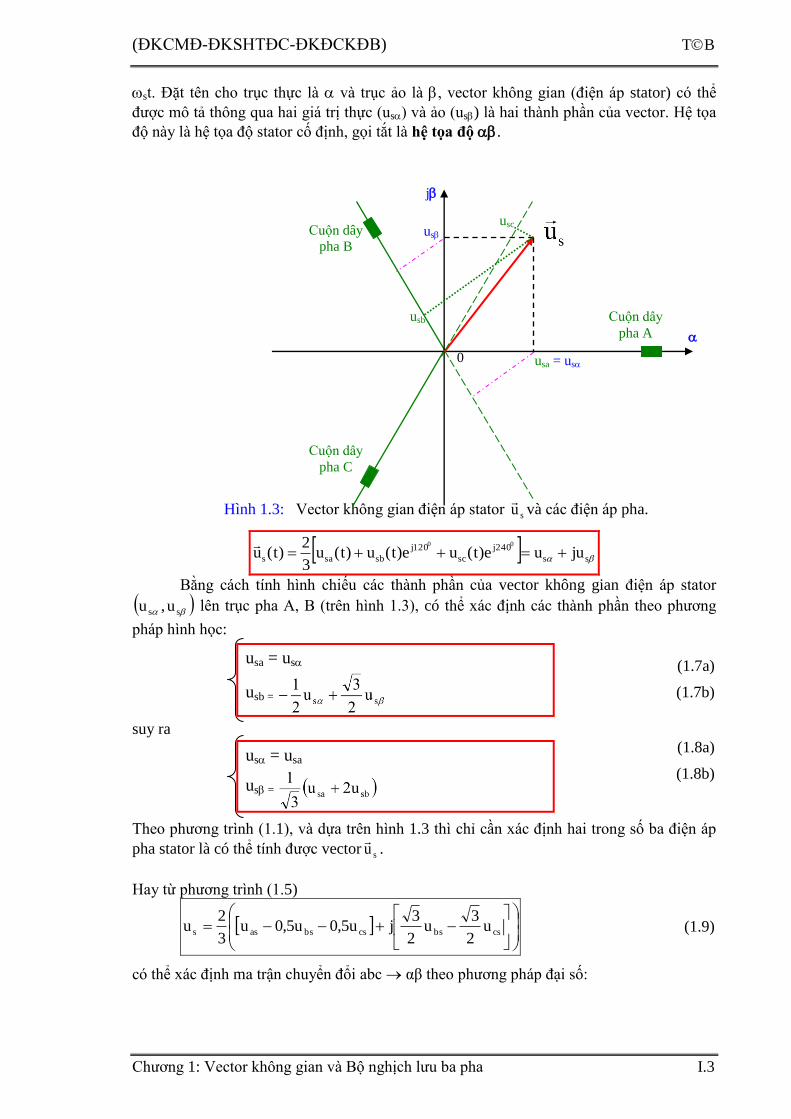
st. Đặt tên cho trục thực là và trục ảo là , vector không gian (điện áp stator) có thể
được mô tả thông qua hai giá trị thực (us) và ảo (us) là hai thành phần của vector. Hệ tọa
độ này là hệ tọa độ stator cố định, gọi tắt là hệ tọa độ .
Hình 1.3: Vector không gian điện áp stator su
và các điện áp pha.
ss
240j
sc
120j
sbsas juue)t(ue)t(u)t(u3
2)t(u
00
Bằng cách tính hình chiếu các thành phần của vector không gian điện áp stator
ss u,u lên trục pha A, B (trên hình 1.3), có thể xác định các thành phần theo phương
pháp hình học:
(1.7a)
(1.7b)
suy ra
(1.8a)
(1.8b)
Theo phương trình (1.1), và dựa trên hình 1.3 thì chỉ cần xác định hai trong số ba điện áp
pha stator là có thể tính được vector su
.
Hay từ phương trình (1.5)
csbscsbsass u
2
3u
2
3ju5,0u5,0u
3
2u (1.9)
có thể xác định ma trận chuyển đổi abc αβ theo phương pháp đại số:
us = usa
us =
usa = us
usb =
0
j
usa = us
us usc
usb Cuộn dây
pha A
Cuộn dây
pha B
Cuộn dây
pha C
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.4
cs
bs
as
s
s
s
s
u
u
u
2
3
2
30
2
1
2
11
3
2
u
u
(1.10)
Ví dụ 1.2: Chứng minh ma trận chuyển đổi hệ toạ độ αβ abc?
s
s
s
s
cs
bs
as
u
u
2
3
2
1
2
3
2
1
01
u
u
u
(1.11)
Ví dụ 1.3: Chứng minh:
Bằng cách tương tự như đối với vector không gian điện áp stator, các vector không
gian dòng điện stator, dòng điện rotor, từ thông stator và từ thông rotor đều có thể được
biểu diễn trong hệ tọa độ stator cố định (hệ tọa độ ) như sau:
(1.12a)
(1.12b)
(1.12c)
(1.12d)
(1.12e)
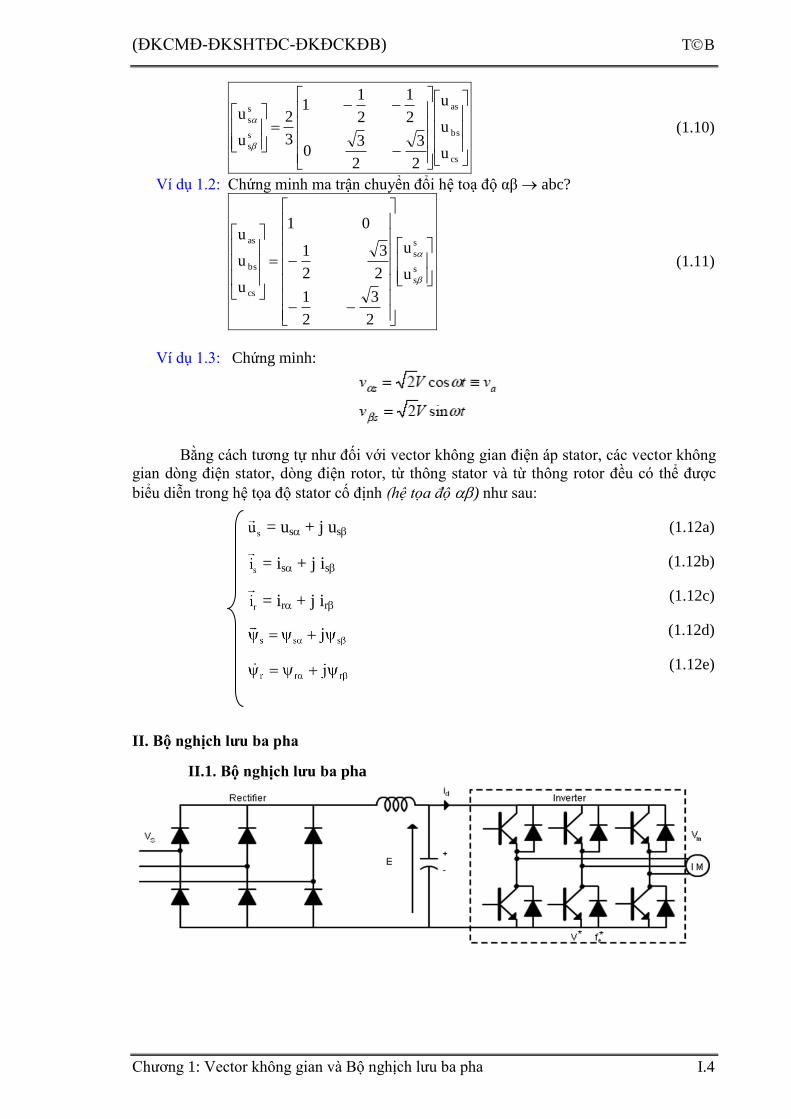
II. Bộ nghịch lưu ba pha
II.1. Bộ nghịch lưu ba pha
= us + j us
= is + j is
= ir + j ir
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.5
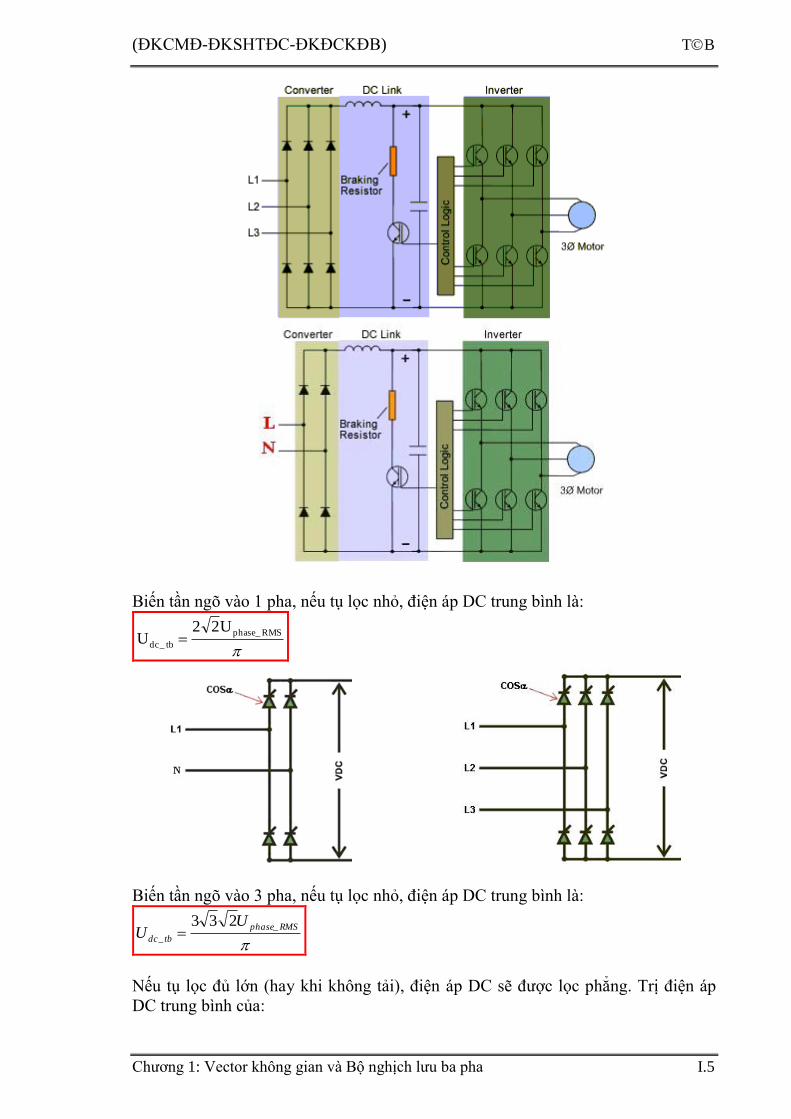
Biến tần ngõ vào 1 pha, nếu tụ lọc nhỏ, điện áp DC trung bình là:
RMS_phase
tb_dc
U22U
Biến tần ngõ vào 3 pha, nếu tụ lọc nhỏ, điện áp DC trung bình là:
RMSphase
tbdc
UU
_
_
233
Nếu tụ lọc đủ lớn (hay khi không tải), điện áp DC sẽ được lọc phẳng. Trị điện áp
DC trung bình của:
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.6
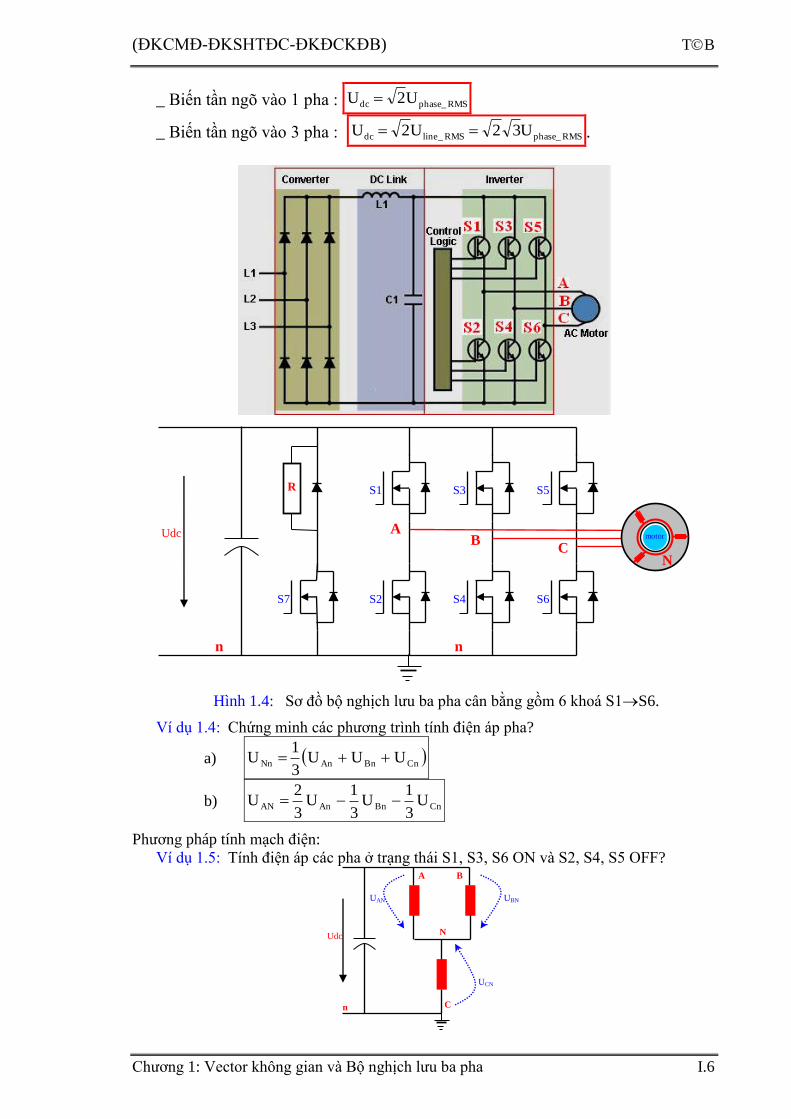
_ Biến tần ngõ vào 1 pha : RMS_phasedc U2U
_ Biến tần ngõ vào 3 pha : RMS_phaseRMS_linedc U32U2U .
Hình 1.4: Sơ đồ bộ nghịch lưu ba pha cân bằng gồm 6 khoá S1S6.
Ví dụ 1.4: Chứng minh các phương trình tính điện áp pha?
a) CnBnAnNn UUU3
1U
b) CnBnAnAN U3
1U
3
1U
3
2U
Phương pháp tính mạch điện:
Ví dụ 1.5: Tính điện áp các pha ở trạng thái S1, S3, S6 ON và S2, S4, S5 OFF?
A B
C Udc
S4
S3
S6
S5
S2
S1
S7
R
n n
motor
N
A B
C
Udc
n
N
UAN UBN
UCN
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.7
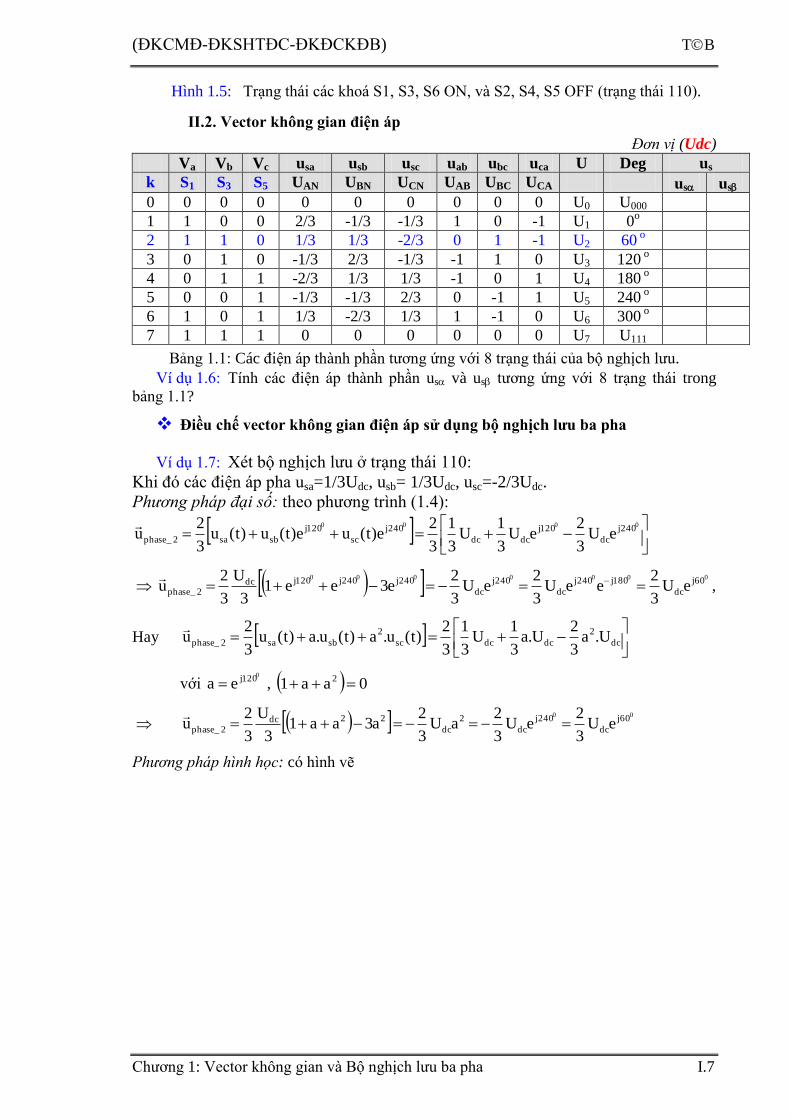
Hình 1.5: Trạng thái các khoá S1, S3, S6 ON, và S2, S4, S5 OFF (trạng thái 110).
II.2. Vector không gian điện áp
Đơn vị (Udc)
Va Vb Vc usa usb usc uab ubc uca U Deg us
k S1 S3 S5 UAN UBN UCN UAB UBC UCA us us
0 0 0 0 0 0 0 0 0 0 U0 U000
1 1 0 0 2/3 -1/3 -1/3 1 0 -1 U1 0o
2 1 1 0 1/3 1/3 -2/3 0 1 -1 U2 60 o
3 0 1 0 -1/3 2/3 -1/3 -1 1 0 U3 120 o
4 0 1 1 -2/3 1/3 1/3 -1 0 1 U4 180 o
5 0 0 1 -1/3 -1/3 2/3 0 -1 1 U5 240 o
6 1 0 1 1/3 -2/3 1/3 1 -1 0 U6 300 o
7 1 1 1 0 0 0 0 0 0 U7 U111
Bảng 1.1: Các điện áp thành phần tương ứng với 8 trạng thái của bộ nghịch lưu.
Ví dụ 1.6: Tính các điện áp thành phần us và us tương ứng với 8 trạng thái trong
bảng 1.1?
Điều chế vector không gian điện áp sử dụng bộ nghịch lưu ba pha
Ví dụ 1.7: Xét bộ nghịch lưu ở trạng thái 110:
Khi đó các điện áp pha usa=1/3Udc, usb= 1/3Udc, usc=-2/3Udc.
Phương pháp đại số: theo phương trình (1.4):
0000 240j
dc
120j
dcdc
240j
sc
120j
sbsa2_phase eU3
2eU
3
1U
3
1
3
2e)t(ue)t(u)t(u
3
2u
0000000 60j
dc
180j240j
dc
240j
dc
240j240j120jdc2_phase eU
3
2eeU
3
2eU
3
2e3ee1
3
U
3
2u
,
Hay
dc
2
dcdcsc
2
sbsa2_phase U.a3
2U.a
3
1U
3
1
3
2)t(u.a)t(u.a)t(u
3
2u
với 0120jea , 0aa1 2
00 60j
dc
240j
dc
2
dc
22dc2_phase eU
3
2eU
3
2aU
3
2a3aa1
3
U
3
2u
Phương pháp hình học: có hình vẽ
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.8
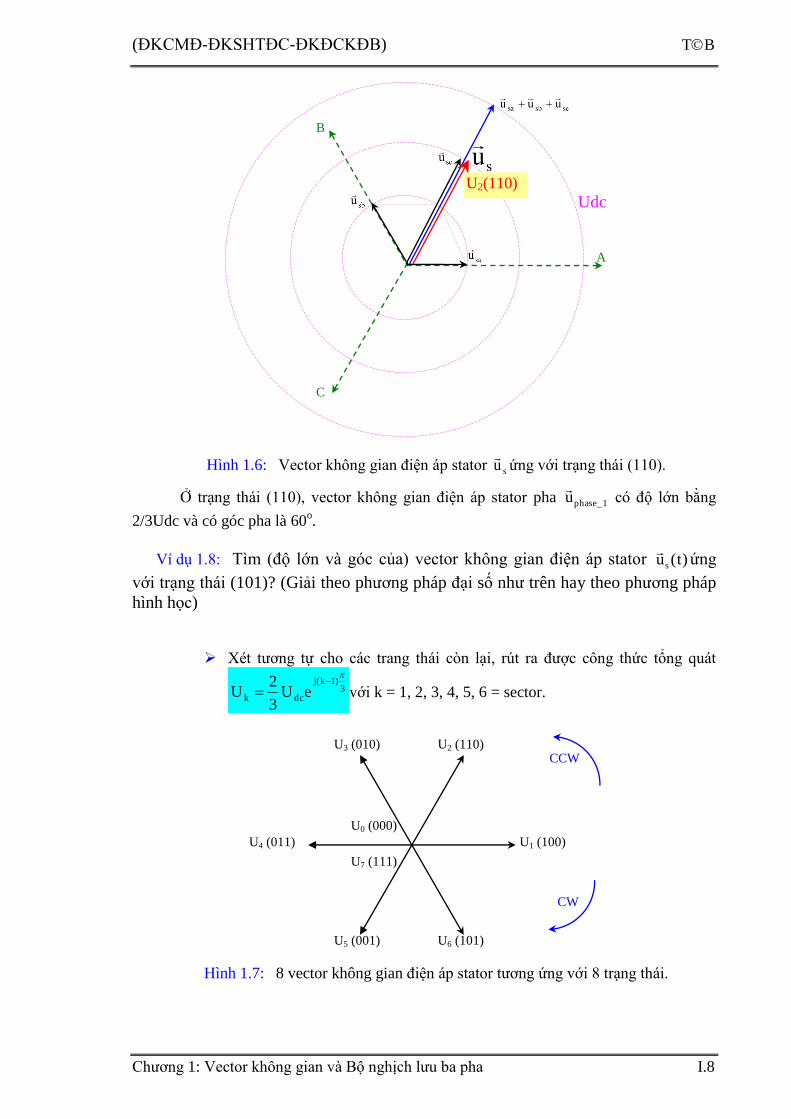
Hình 1.6: Vector không gian điện áp stator su
ứng với trạng thái (110).
Ở trạng thái (110), vector không gian điện áp stator pha 1_phaseu
có độ lớn bằng
2/3Udc và có góc pha là 60o.
Ví dụ 1.8: Tìm (độ lớn và góc của) vector không gian điện áp stator )t(us
ứng
với trạng thái (101)? (Giải theo phương pháp đại số như trên hay theo phương pháp
hình học)
Xét tương tự cho các trang thái còn lại, rút ra được công thức tổng quát
3)1k(j
dck eU3
2U
với k = 1, 2, 3, 4, 5, 6 = sector.
Hình 1.7: 8 vector không gian điện áp stator tương ứng với 8 trạng thái.
A
B
C
Udc
U2(110)
U1 (100)
U2 (110) U3 (010)
U6 (101) U5 (001)
U4 (011)
CCW
CW
U0 (000)
U7 (111)
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.9
3)1k(j
dck eU3
2U
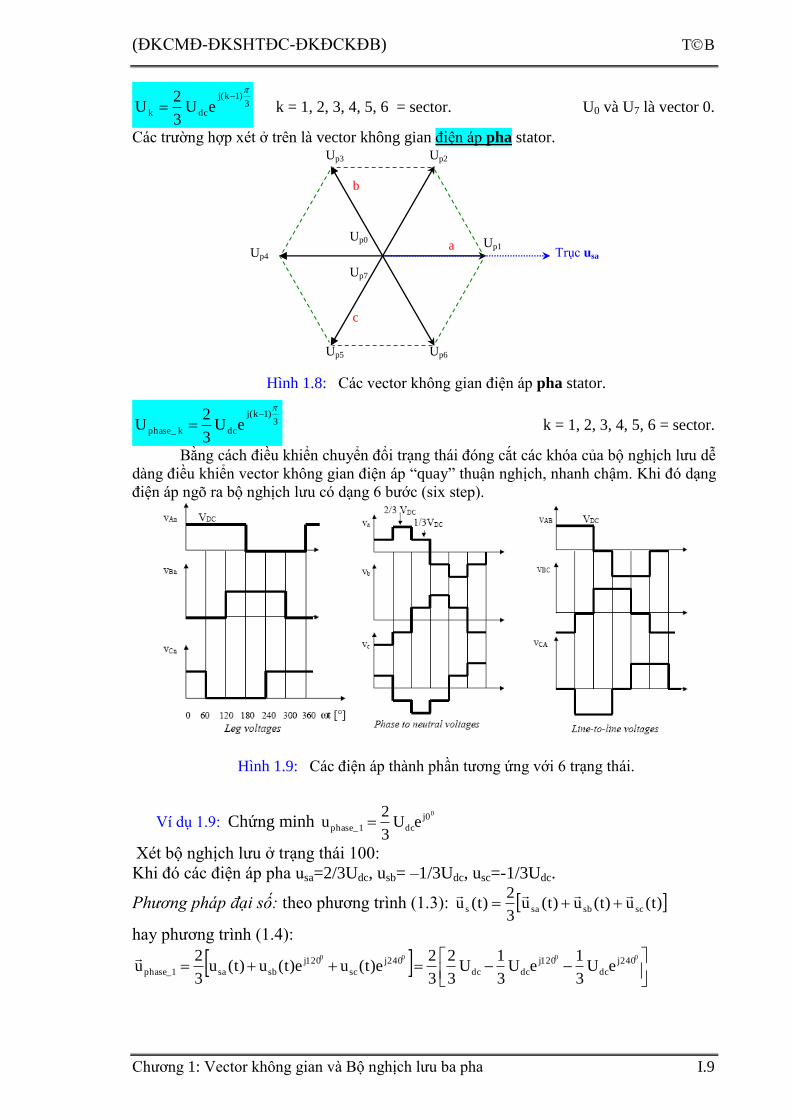
k = 1, 2, 3, 4, 5, 6 = sector. U0 và U7 là vector 0.
Các trường hợp xét ở trên là vector không gian điện áp pha stator.
Hình 1.8: Các vector không gian điện áp pha stator.
3)1k(j
dck_phase eU3
2U
k = 1, 2, 3, 4, 5, 6 = sector.
Bằng cách điều khiển chuyển đổi trạng thái đóng cắt các khóa của bộ nghịch lưu dễ
dàng điều khiển vector không gian điện áp “quay” thuận nghịch, nhanh chậm. Khi đó dạng
điện áp ngõ ra bộ nghịch lưu có dạng 6 bước (six step).
Hình 1.9: Các điện áp thành phần tương ứng với 6 trạng thái.
Ví dụ 1.9: Chứng minh 00j
dc1_phase eU3
2u
Xét bộ nghịch lưu ở trạng thái 100:
Khi đó các điện áp pha usa=2/3Udc, usb= –1/3Udc, usc=-1/3Udc.
Phương pháp đại số: theo phương trình (1.3): )t(u)t(u)t(u3
2)t(u scsbsas
hay phương trình (1.4):
0000 240j
dc
120j
dcdc
240j
sc
120j
sbsa1_phase eU3
1eU
3
1U
3
2
3
2e)t(ue)t(u)t(u
3
2u
Up1
Up2 Up3
Up6 Up5
Up4
Up0
Up7
Trục usa a
b
c
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.10
000 0j
dcdc
240j120jdc1_phase eU
3
2U
3
2ee13
3
U
3
2u
,
Hay
dc
2
dcdcsc
2
sbsa1_phase U.a3
1U.a
3
1U
3
2
3
2)t(u.a)t(u.a)t(u
3
2u
với 0120jea , 0aa1 2
00j
dcdc
2dc1_phase eU
3
2U
3
2aa13
3
U
3
2u
Phương pháp hình học: có hình vẽ
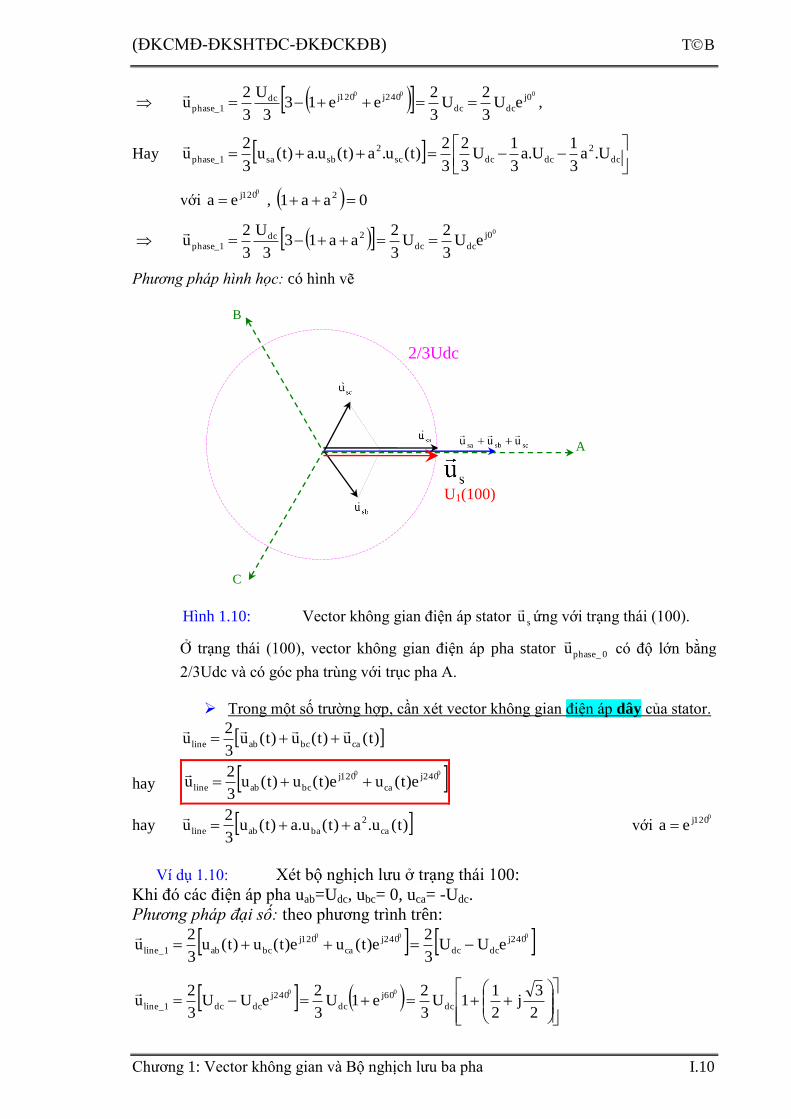
Hình 1.10: Vector không gian điện áp stator su
ứng với trạng thái (100).
Ở trạng thái (100), vector không gian điện áp pha stator 0_phaseu
có độ lớn bằng
2/3Udc và có góc pha trùng với trục pha A.
Trong một số trường hợp, cần xét vector không gian điện áp dây của stator.
)t(u)t(u)t(u3
2u cabcabline
hay 00 240j
ca
120j
bcabline e)t(ue)t(u)t(u3
2u
hay )t(u.a)t(u.a)t(u3
2u ca
2
baabline
với 0120jea
Ví dụ 1.10: Xét bộ nghịch lưu ở trạng thái 100:
Khi đó các điện áp pha uab=Udc, ubc= 0, uca= -Udc.
Phương pháp đại số: theo phương trình trên:
000 240j
dcdc
240j
ca
120j
bcab1_line eUU3
2e)t(ue)t(u)t(u
3
2u
2
3j
2
11U
3
2e1U
3
2eUU
3
2u dc
60j
dc
240j
dcdc1_line
00
A
B
C
2/3Udc
U1(100)
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.11
030j
dcdcdc1_line eU33
2
2
1j
2
3U3
3
2
2
3j
2
3U
3
2u
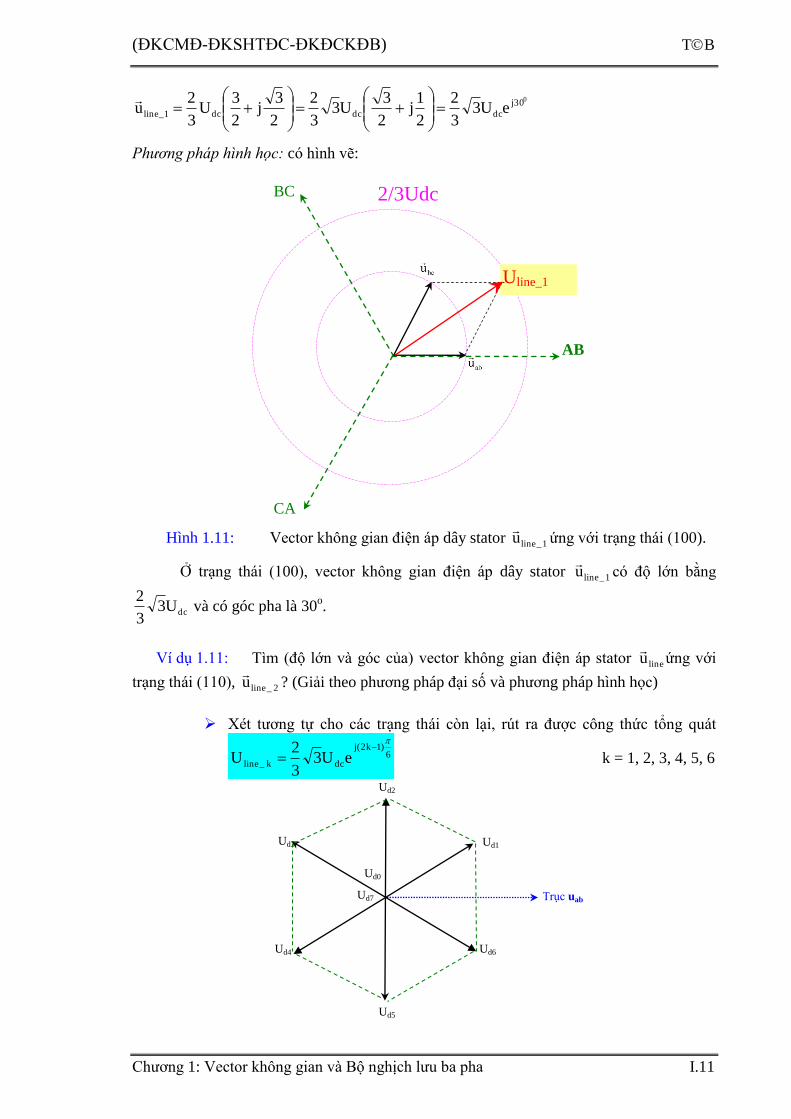
Phương pháp hình học: có hình vẽ:
Hình 1.11: Vector không gian điện áp dây stator 1_lineu
ứng với trạng thái (100).
Ở trạng thái (100), vector không gian điện áp dây stator 1_lineu
có độ lớn bằng
dcU33
2 và có góc pha là 30
o.
Ví dụ 1.11: Tìm (độ lớn và góc của) vector không gian điện áp stator lineu
ứng với
trạng thái (110), 2_lineu
? (Giải theo phương pháp đại số và phương pháp hình học)
Xét tương tự cho các trạng thái còn lại, rút ra được công thức tổng quát
6)1k2(j
dck_line eU33
2U
k = 1, 2, 3, 4, 5, 6
AB
BC
CA
2/3Udc
Uline_1
Ud1
Ud2
Ud3
Ud6
Ud5
Ud4
Ud0
Ud7 Trục uab
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.12
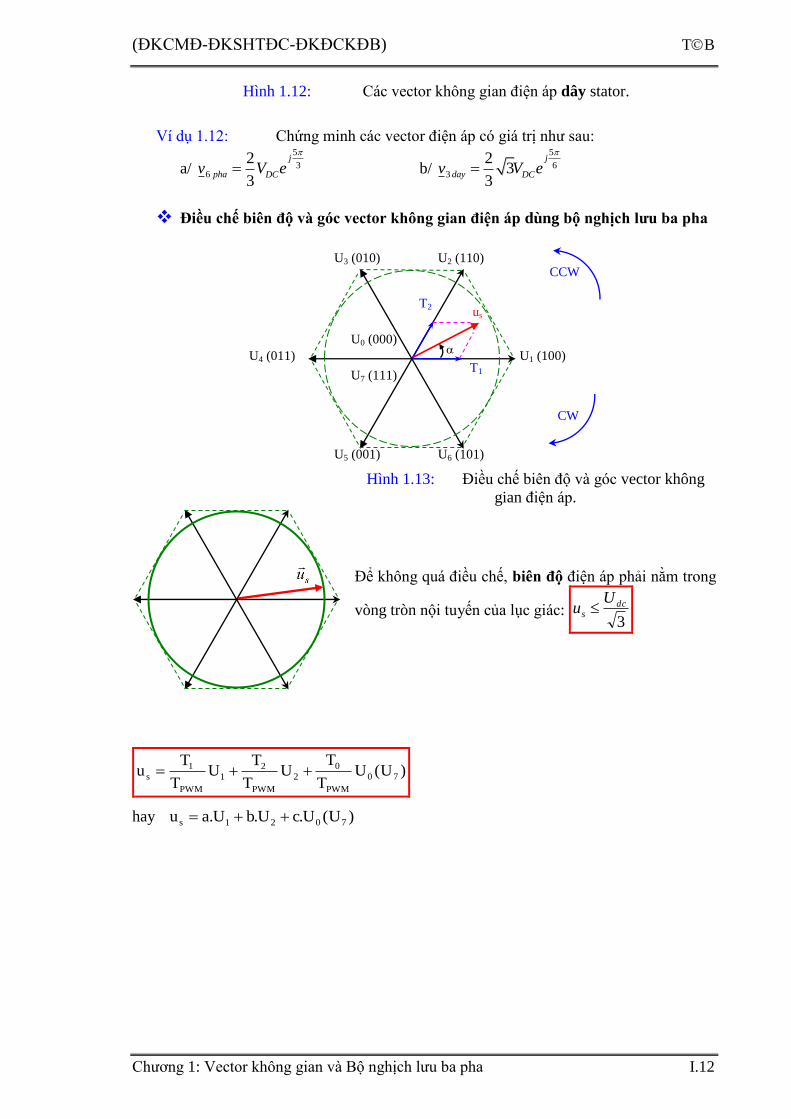
Hình 1.12: Các vector không gian điện áp dây stator.
Ví dụ 1.12: Chứng minh các vector điện áp có giá trị như sau:
a/
5
36
2
3
j
pha DCv V e
b/
5
63
23
3
j
day DCv V e
Điều chế biên độ và góc vector không gian điện áp dùng bộ nghịch lưu ba pha
Hình 1.13: Điều chế biên độ và góc vector không
gian điện áp.
Để không quá điều chế, biên độ điện áp phải nằm trong
vòng tròn nội tuyến của lục giác: 3
dcs
Uu
)U(UT
TU
T
TU
T
Tu 70
PWM
0
2
PWM
21
PWM
1s
hay )U(U.cU.bU.au 7021s
U1 (100)
us
T1
T2
U2 (110) U3 (010)
U6 (101) U5 (001)
U4 (011)
CCW
CW
U0 (000)
U7 (111)
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
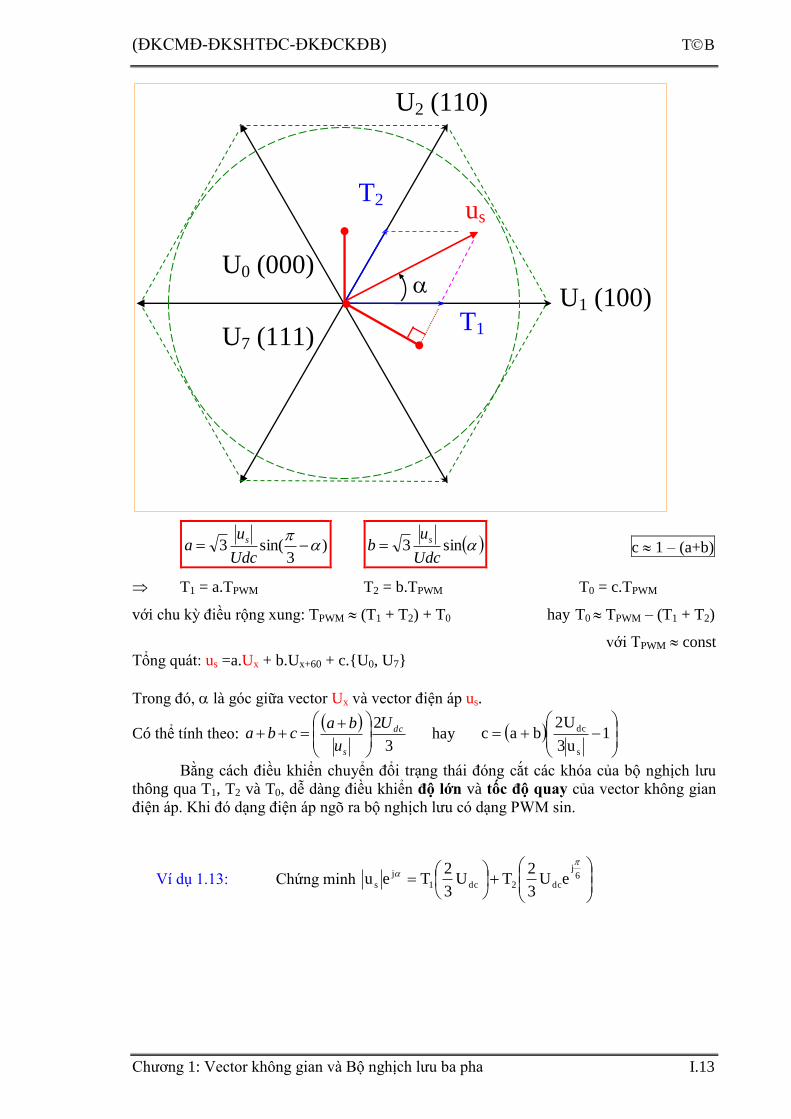
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.13
)3
sin(3
Udc
ua
s sin3
Udc
ub
s c 1 – (a+b)
T1 = a.TPWM T2 = b.TPWM T0 = c.TPWM
với chu kỳ điều rộng xung: TPWM (T1 + T2) + T0 hay T0 TPWM – (T1 + T2)
với TPWM const
Tổng quát: us =a.Ux + b.Ux+60 + c.U0, U7
Trong đó, là góc giữa vector Ux và vector điện áp us.
Có thể tính theo:
3
2 dc
s
U
u
bacba
hay
1
u3
U2bac
s
dc
Bằng cách điều khiển chuyển đổi trạng thái đóng cắt các khóa của bộ nghịch lưu
thông qua T1, T2 và T0, dễ dàng điều khiển độ lớn và tốc độ quay của vector không gian
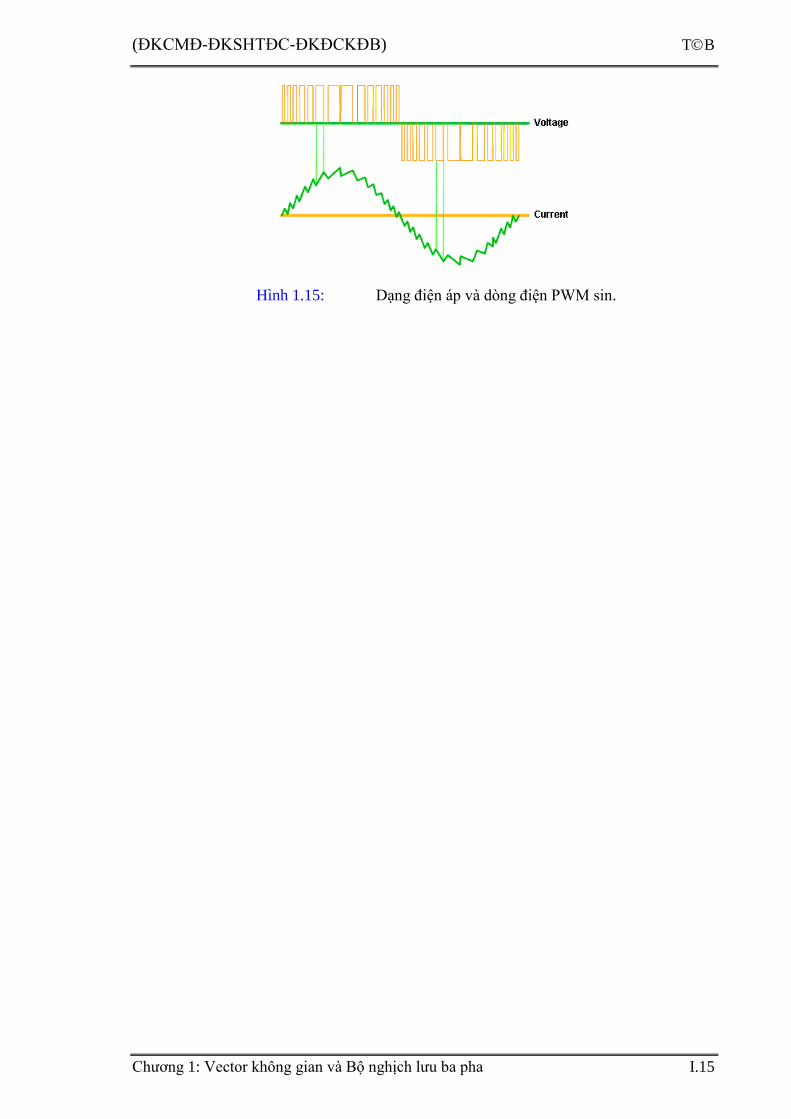
điện áp. Khi đó dạng điện áp ngõ ra bộ nghịch lưu có dạng PWM sin.
Ví dụ 1.13: Chứng minh
6
j
dc2dc1
j
s eU3
2TU
3
2Teu
U1 (100)
us
T1
T2
U2 (110)
U0 (000)
U7 (111)
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.14
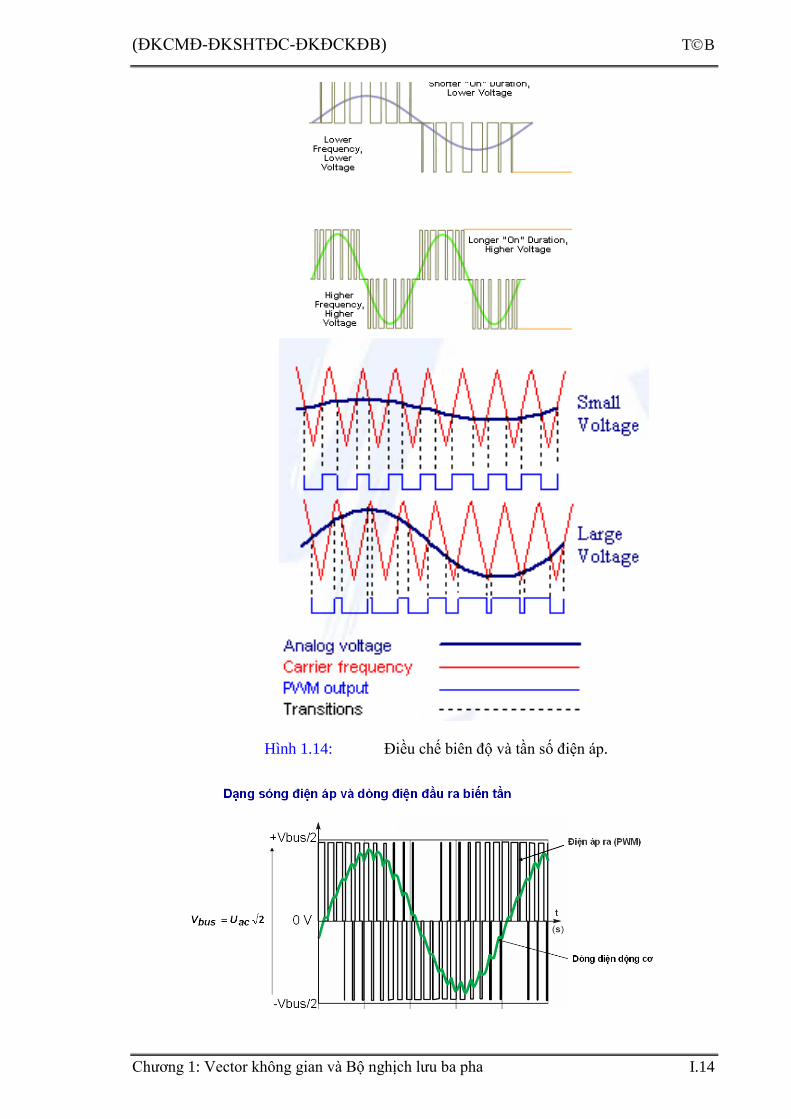
Hình 1.14: Điều chế biên độ và tần số điện áp.
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.15
Hình 1.15: Dạng điện áp và dòng điện PWM sin.
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.16
Bài tập 1.1. Chứng minh: 3
4j
dc5_phase eU3
2u
Bài tập 1.2. Chứng minh: 6
7j
dc4_line eU33
2u
Bài tập 1.3. Điện áp ba pha 380V, 50Hz. Tại thời điểm t = 6ms. Tính usa, usb, usc?
Từ đó tính us , us, |us| theo định nghĩa vector không gian?
Biết góc pha ban đầu của pha A là o = 0.
Bài tập 1.4. Lưới điện 3 pha 4 dây 380V. Tính Udc trung bình, Us max (trong vòng tròn nội
tiếp), Upha, Udây của biến tần:
a. 1 pha.
b. 3 pha.
Bài tập 1.5. Điện áp ba pha cấp cho bộ nghịch lưu là 380V, 50Hz. Tính điện áp pha lớn
nhất mà bộ nghịch lưu có thể cung cấp cho động cơ nối Y.
Bài tập 1.6. Điện áp một pha cấp cho bộ nghịch lưu là 220V, 50Hz. Tính điện áp dây lớn
nhất mà bộ nghịch lưu có thể cung cấp cho động cơ.
Bài tập 1.7. Bộ biến tần dùng ở Việt Nam, 3 pha 380V (ngõ vào). Được cấp nguồn 3 pha
380V, 50Hz.
a) Tụ lọc khá nhỏ:
_ Tính điện áp trung bình trên DC Link?
_ Tính biên độ điện áp pha lớn nhất (chưa quá điều chế)?
_ Tính điện áp hiệu dụng pha lớn nhất?
_ Tính điện áp hiệu dụng dây lớn nhất?
b) Tụ lọc đủ lớn: tính lại câu a).
Bài tập 1.8. Tính lại câu trên với biến tần 1 pha 220V (ngõ vào).
Bài tập 1.9. Bộ biến tần như hình vẽ trên được cấp điện 3 pha có điện áp dây 380V,
50Hz. Giả sử tụ C1 cuộn dây L1 rất nhỏ.
a. Tính giá trị điện áp một chiều trung bình Udc_tb trên ngõ ra của bộ chỉnh
lưu?
b. Tính trị hiệu dụng của điện áp dây UdRMS lớn nhất mà biến tần trên có thể
cấp cho động cơ 3 pha nối Y (khi chưa quá điều chế, su
như hình vẽ
trên)? Bài tập 1.10. Điện áp ba pha cấp cho bộ nghịch lưu là 380V, 50Hz. Điện áp pha bộ
nghịch lưu cấp cho đồng cơ là 150V và 50Hz. Tại thời điểm t = 6ms. Tính T1,
T2 và T0? Biết góc pha ban đầu o = 0 và tần số điều rộng xung là 20KHz.
Bài tập 1.11. Lập bảng và vẽ giản đồ vector các điện áp dây thành phần tương ứng với 8
trạng thái của bộ nghịch lưu.
Bài tập 1.12. Nêu các chức năng của khoá S7 và các diode ngược (mắc song song
với các khoá đóng cắt S1 –S6) trong bộ nghịch lưu?
Bài tập 1.13. Cho Udc = 309V, trạng thái các khoá như sau: S2, S3, S6: ON; và S1,
S4, S5: OFF. Tính các điện áp usa, usb, usc, UAB, UBC?
Bài tập 1.14. Khi tăng tần số điều rộng xung (PWM) của bộ nghịch lưu, đánh giá tác
động của sóng hài bậc cao lên dòng điện động cơ. Phương pháp điều
khiển nào có tần số PWM luôn thay đổi?
Bài tập 1.15. Biến tần (hình dưới) có thông số ngõ vào 3 pha 380Vrms, 50Hz; ngõ ra
380V, 0-400Hz, động cơ 2HP, nối , 380Vrms, 50Hz, hệ số công suất
PF=0,8. Biết tụ điện C đủ lớn để lọc phẳng điện áp DC. Ngõ vào biến
tần được cấp nguồn 3 pha 380Vrms, 50Hz. Ngõ ra biến tần cấp nguồn
cho động cơ không đồng bộ ba pha.
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.17
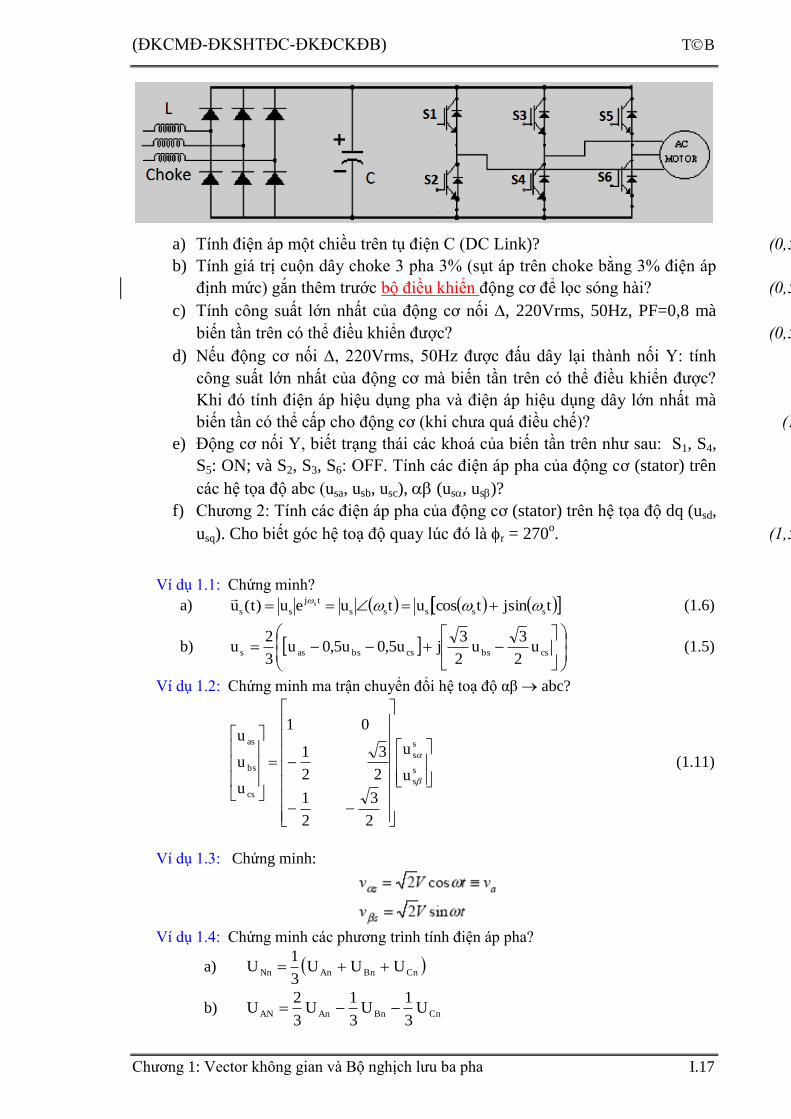
a) Tính điện áp một chiều trên tụ điện C (DC Link)? (0,5đ)
b) Tính giá trị cuộn dây choke 3 pha 3% (sụt áp trên choke bằng 3% điện áp
định mức) gắn thêm trước bộ điều khiển động cơ để lọc sóng hài? (0,5đ)
c) Tính công suất lớn nhất của động cơ nối , 220Vrms, 50Hz, PF=0,8 mà
biến tần trên có thể điều khiển được? (0,5đ)
d) Nếu động cơ nối , 220Vrms, 50Hz được đấu dây lại thành nối Y: tính
công suất lớn nhất của động cơ mà biến tần trên có thể điều khiển được?
Khi đó tính điện áp hiệu dụng pha và điện áp hiệu dụng dây lớn nhất mà
biến tần có thể cấp cho động cơ (khi chưa quá điều chế)? (1đ)
e) Động cơ nối Y, biết trạng thái các khoá của biến tần trên như sau: S1, S4,
S5: ON; và S2, S3, S6: OFF. Tính các điện áp pha của động cơ (stator) trên
các hệ tọa độ abc (usa, usb, usc), (us, us)?
f) Chương 2: Tính các điện áp pha của động cơ (stator) trên hệ tọa độ dq (usd,
usq). Cho biết góc hệ toạ độ quay lúc đó là r = 270o. (1,5đ)
Ví dụ 1.1: Chứng minh?
a) tsinjtcosutueu)t(u sssss
tj
sss
(1.6)
b)
csbscsbsass u
2
3u
2
3ju5,0u5,0u
3
2u (1.5)
Ví dụ 1.2: Chứng minh ma trận chuyển đổi hệ toạ độ αβ abc?
s
s
s
s
cs
bs
as
u
u
2
3
2
1
2
3
2
1
01
u
u
u
(1.11)
Ví dụ 1.3: Chứng minh:
Ví dụ 1.4: Chứng minh các phương trình tính điện áp pha?
a) CnBnAnNn UUU3
1U
b) CnBnAnAN U3
1U
3
1U
3
2U
(ĐKCMĐ-ĐKSHTĐC-ĐKĐCKĐB) TB
Chương 1: Vector không gian và Bộ nghịch lưu ba pha I.18
Ví dụ 1.5: Tính điện áp các pha ở trạng thái S1, S3, S6 ON và S2, S4, S5 OFF?
Ví dụ 1.6: Tính các điện áp thành phần us và us tương ứng với 8 trạng thái trong
bảng 1.1?
Ví dụ 1.7: Bộ nghịch lưu ở trạng thái 110, chứng minh 060j
dc1_phase eU3
2u
Ví dụ 1.8: Tìm (độ lớn và góc của) vector không gian điện áp stator )t(us
ứng với
trạng thái (101)? (Giải theo phương pháp đại số như trên hay theo phương
pháp hình học)
Ví dụ 1.9: Chứng minh 00j
dc0_phase eU3
2u
Ví dụ 1.10: Bộ nghịch lưu ở trạng thái 100, chứng minh 030j
dc1_line eU33
2u
Ví dụ 1.11: Tìm (độ lớn và góc của) vector không gian điện áp stator lineu
ứng với
trạng thái (110), 2_lineu
? (Giải theo phương pháp đại số và phương pháp hình học)
Ví dụ 1.12: Chứng minh các vector điện áp có giá trị như sau:
a/
5
36
2
3
j
pha DCv V e
b/
5
63
23
3
j
day DCv V e
Ví dụ 1.13: Chứng minh
6
j
dc2dc1
j
s eU3
2TU
3
2Teu
(HTĐKS-ĐKCMĐ) TB
Chương 2: Hệ qui chiếu quay II.1
Chương 2: HỆ QUI CHIẾU QUAY
I. Hệ qui chiếu quay
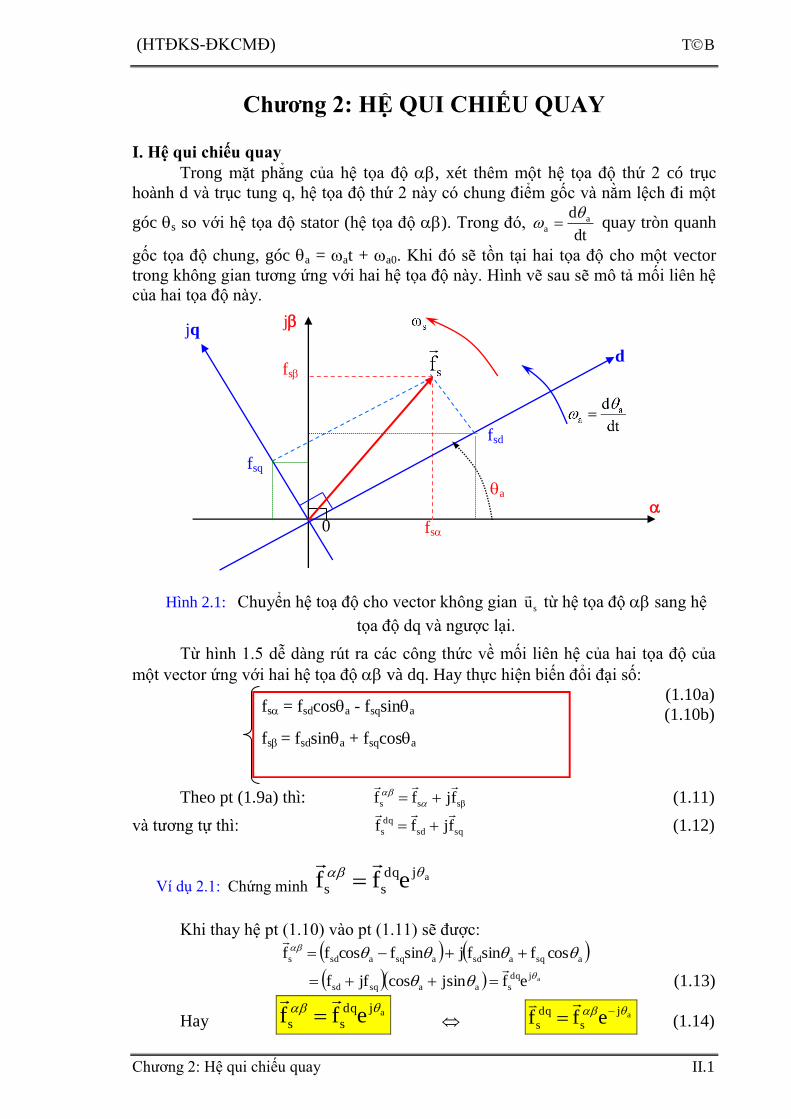
Trong mặt phẳng của hệ tọa độ , xét thêm một hệ tọa độ thứ 2 có trục
hoành d và trục tung q, hệ tọa độ thứ 2 này có chung điểm gốc và nằm lệch đi một
góc s so với hệ tọa độ stator (hệ tọa độ ). Trong đó, dt
d aa
quay tròn quanh
gốc tọa độ chung, góc a = at + a0. Khi đó sẽ tồn tại hai tọa độ cho một vector
trong không gian tương ứng với hai hệ tọa độ này. Hình vẽ sau sẽ mô tả mối liên hệ
của hai tọa độ này.
Hình 2.1: Chuyển hệ toạ độ cho vector không gian su
từ hệ tọa độ sang hệ
tọa độ dq và ngược lại.
Từ hình 1.5 dễ dàng rút ra các công thức về mối liên hệ của hai tọa độ của
một vector ứng với hai hệ tọa độ và dq. Hay thực hiện biến đổi đại số:
(1.10a)
(1.10b)
Theo pt (1.9a) thì: sβss fjff
(1.11)
và tương tự thì: sqsd
dq
s fjff
(1.12)
Ví dụ 2.1: Chứng minh ajdq
ss eff
Khi thay hệ pt (1.10) vào pt (1.11) sẽ được:
asqasdasqasds cosfsinfjsinfcosff
ajdq
saasqsd efsinjoscjff
(1.13)
Hay ajdq
ss eff
aj
s
dq
s eff
(1.14)
j
fs
0
fs
d
jq
fsd
fsq
a
fs = fsdcosa - fsqsina
fs = fsdsina + fsqcosa
(HTĐKS-ĐKCMĐ) TB
Chương 2: Hệ qui chiếu quay II.2
Ví dụ 2.2: Bộ biến tần được cấp nguồn vào từ nguồn ba pha 380V, 50Hz, chỉnh lưu
thành điện một chiều với tụ lọc khá lớn, rồi nghịch lưu thành điện ba pha 25Hz để
cấp nguồn cho động cơ với điện áp pha lớn nhất khi chưa quá điều chế. Biết góc
pha A ban đầu là 0o. Tại thời điểm t = 4ms:
i. Tính biên độ điện áp su
và usa, usb, usc, us , us?
ii. Tính thời gian chuyển mạch T1, T2 và T0? Biết tần số điều rộng xung là 20KHz.
iii. Biết góc hệ toạ độ quay lúc đó là a = 30o. Tính usd và usq?
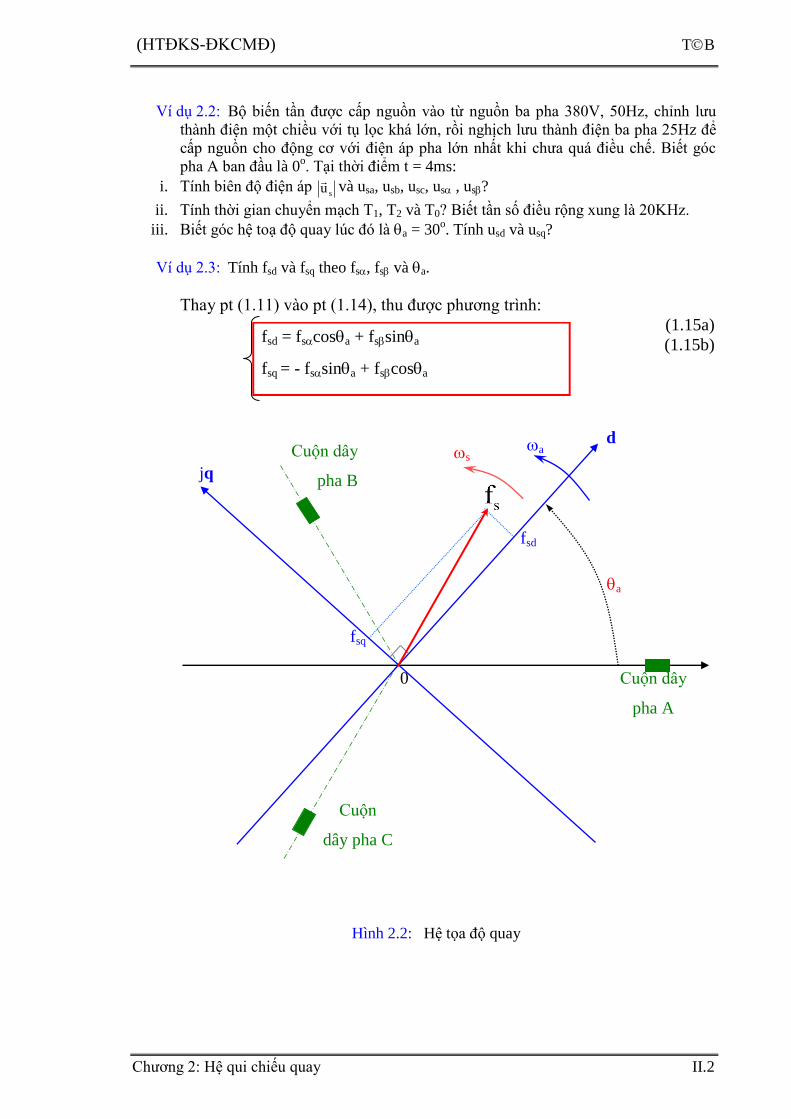
Ví dụ 2.3: Tính fsd và fsq theo fs, fs và a.
Thay pt (1.11) vào pt (1.14), thu được phương trình:
(1.15a)
(1.15b)
Hình 2.2: Hệ tọa độ quay
Cuộn dây
pha A
Cuộn dây
pha B
Cuộn
dây pha C
0
d
jq
fsd
fsq
a
a
s
fsd = fscosa + fssina
fsq = - fssina + fscosa
(HTĐKS-ĐKCMĐ) TB
Chương 2: Hệ qui chiếu quay II.3
Biến đổi Park:
XÉT KHI 0a
(HTĐKS-ĐKCMĐ) TB
Chương 2: Hệ qui chiếu quay II.4
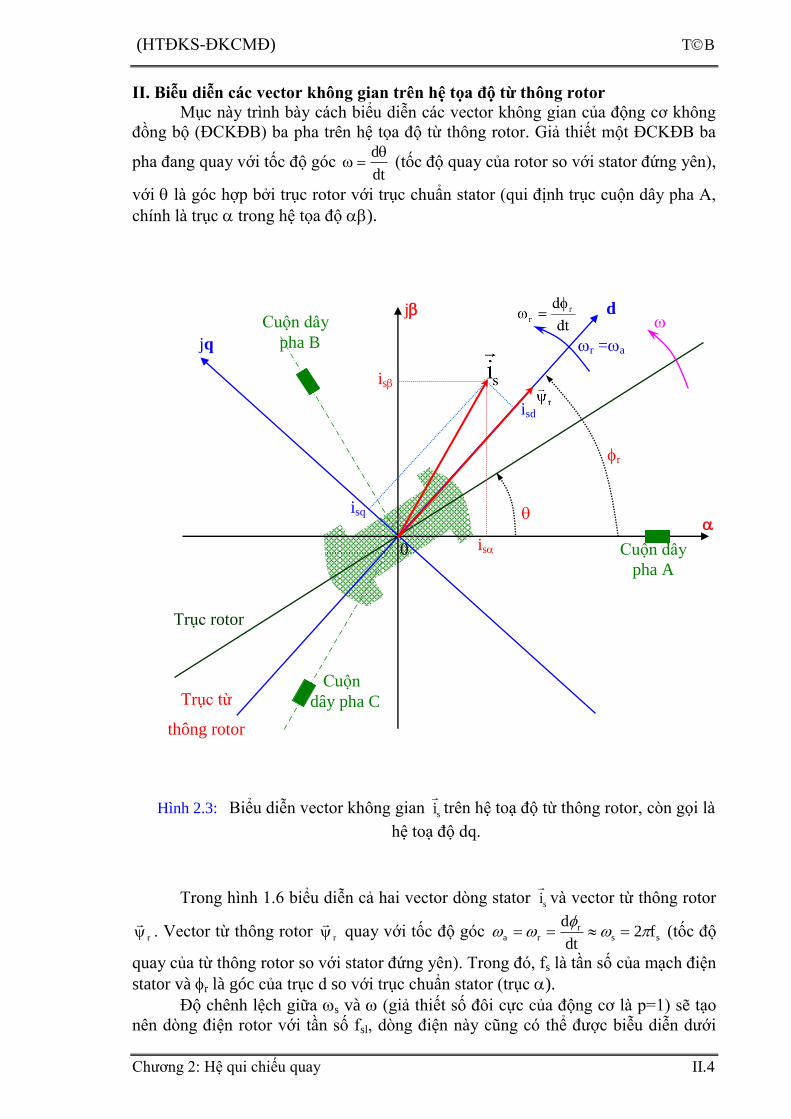
II. Biễu diễn các vector không gian trên hệ tọa độ từ thông rotor
Mục này trình bày cách biểu diễn các vector không gian của động cơ không
đồng bộ (ĐCKĐB) ba pha trên hệ tọa độ từ thông rotor. Giả thiết một ĐCKĐB ba
pha đang quay với tốc độ góc dt
d (tốc độ quay của rotor so với stator đứng yên),
với là góc hợp bởi trục rotor với trục chuẩn stator (qui định trục cuộn dây pha A,
chính là trục trong hệ tọa độ ).
Hình 2.3: Biểu diễn vector không gian si
trên hệ toạ độ từ thông rotor, còn gọi là
hệ toạ độ dq.
Trong hình 1.6 biểu diễn cả hai vector dòng stator si
và vector từ thông rotor
r
. Vector từ thông rotor r
quay với tốc độ góc ssr
ra f2dt
d
(tốc độ
quay của từ thông rotor so với stator đứng yên). Trong đó, fs là tần số của mạch điện
stator và r là góc của trục d so với trục chuẩn stator (trục ).
Độ chênh lệch giữa s và (giả thiết số đôi cực của động cơ là p=1) sẽ tạo
nên dòng điện rotor với tần số fsl, dòng điện này cũng có thể được biễu diễn dưới
is
Cuộn dây
pha A
Cuộn dây
pha B
Cuộn
dây pha C
0
is
d
jq
isd
isq
r =a
r
Trục từ
thông rotor
Trục rotor
j
(HTĐKS-ĐKCMĐ) TB
Chương 2: Hệ qui chiếu quay II.5
dạng vector ri
quay với tốc độ góc sl = 2fsl, (sl = s - r - ) so với vector
từ thông rotor r
.
Trong mục này ta xây dựng một hệ trục tọa độ mới có hướng trục hoành
(trục d) trùng với trục của vector từ thông rotor r
và có gốc trùng với gốc của hệ
tọa độ , hệ tọa độ này được gọi là hệ tọa độ từ thông rotor, hay còn gọi là hệ tọa
dq. Hệ tọa độ dq quay quanh điểm gốc chung với tốc độ góc r s, và hợp với hệ
tọa độ một góc r.
Vậy tùy theo quan sát trên hệ tọa độ nào, một vector trong không gian sẽ có
một tọa độ tương ứng. Qui định chỉ số trên bên phải của ký hiệu vector để nhận biết
vector đang được quan sát từ hệ tọa độ nào:
s: tọa độ (stator coordinates).
f: tọa độ dq (field coordinates).
Như trong hình 1.6, vector si
sẽ được viết thành:
s
si
: vector dòng stator quan sát trên hệ tọa độ .
f
si
: vector dòng stator quan sát trên hệ tọa độ dq.
Theo pt (1.8a) và pt (1.11) thì:
(1.16a)
(1.16b)
Nếu biết được góc r thì sẽ xác định được mối liên hệ:
(1.17a)
(1.17b)
Theo hệ pt (???) và pt (1.17b) thì có thể tính được vector dòng stator thông
qua các giá trị dòng ia và ib đo được (hình 1.7).
= is + j is
= isd + j isq
(HTĐKS-ĐKCMĐ) TB
Chương 2: Hệ qui chiếu quay II.6
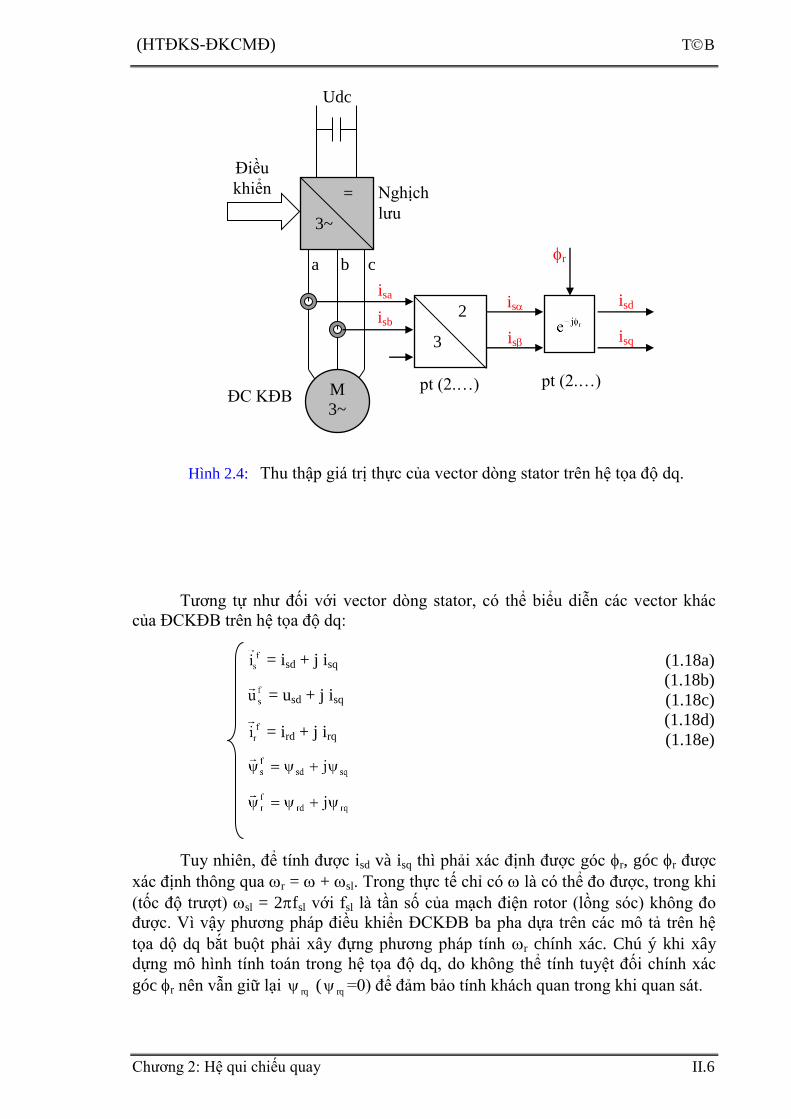
Hình 2.4: Thu thập giá trị thực của vector dòng stator trên hệ tọa độ dq.
Tương tự như đối với vector dòng stator, có thể biểu diễn các vector khác
của ĐCKĐB trên hệ tọa độ dq:
(1.18a)
(1.18b)
(1.18c)
(1.18d)
(1.18e)
Tuy nhiên, để tính được isd và isq thì phải xác định được góc r, góc r được
xác định thông qua r = + sl. Trong thực tế chỉ có là có thể đo được, trong khi
(tốc độ trượt) sl = 2fsl với fsl là tần số của mạch điện rotor (lồng sóc) không đo
được. Vì vậy phương pháp điều khiển ĐCKĐB ba pha dựa trên các mô tả trên hệ
tọa dộ dq bắt buột phải xây đựng phương pháp tính r chính xác. Chú ý khi xây
dựng mô hình tính toán trong hệ tọa độ dq, do không thể tính tuyệt đối chính xác
góc r nên vẫn giữ lại rq ( rq =0) để đảm bảo tính khách quan trong khi quan sát.
ĐC KĐB
==
3~
Udc
Điều
khiển
M
3~
a b c
Nghịch
lưu
2=
3
isa
isb is
is
isd
isq
r
pt (2.…) pt (2.…)
= isd + j isq
= usd + j isq
= ird + j irq
(HTĐKS-ĐKCMĐ) TB
Chương 2: Hệ qui chiếu quay II.7
III. Ưu điểm của việc mô tả động cơ không đồng bộ ba pha trên hệ tọa độ từ
thông rotor
Trong hệ tọa độ từ thông rotor (hệ tọa độ dq), các vector dòng stator f
si
và
vector từ thông rotor f
r
, cùng với hệ tọa độ dq quanh (gần) đồng bộ với nhau với
tốc độ r quanh điểm gốc, do đó các phần tử của vector f
si
(isd và isq) là các đại
lượng một chiều. Trong chế độ xác lập, các giá trị này gần như không đổi; trong quá
trình quá độ, các giá trị này có thể biến theo theo một thuật toán điều khiển đã được
định trước.
Hơn nữa, trong hệ tọa độ dq, rq=0 do vuông góc với vector f
r
(trùng với
trục d) nên f
r
=rd. (1.19)
Đối với ĐCKĐB 3 pha, trong hệ tọa độ dq, từ thông và mômen quay được
biểu diễn theo các phần tử của vector dòng stator:
(1.20a)
(1.20b)
(Hai phương trình trên sẽ được chứng minh trong chương sau).
với: Te momen quay (momen điện) của động cơ
Lr điện cảm rotor
Lm hỗ cảm giữa stator và rotor
p số đôi cực của động cơ
Tr hằng số thời gian của rotor
s toán tử Laplace
Phương trình (1.20a) cho thấy có thể điều khiển từ thông rotor rrd
thông qua điều khiển dòng stator isd. Đặc biệt mối quan hệ giữa hai đại lượng này là
mối quan hệ trễ bậc nhất với thời hằng Tr.
Nếu thành công trong việc áp đặt nhanh và chính xác dòng isd để điều khiển ổn
định từ thông rd tại mọi điểm làm việc của động cơ. Và thành công trong việc áp
đặt nhanh và chính xác dòng isq, và theo pt (1.20b) thì có thể coi isq là đại lượng
điều khiển của momen Te của động cơ.
Bằng việc mô tả ĐCKĐB ba pha trên hệ tọa độ từ thông rotor, không còn
quan tâm đến từng dòng điện pha riêng lẻ nữa, mà là toàn bộ vector không gian
dòng stator của động cơ. Khi đó vector si
sẽ cung cấp hai thành phần: isd để điều
khiển từ thông rotor r
, isq để điều khiển momen quay Te, từ đó có thể điều khiển
tốc độ của động cơ.
(1.21a)
(1.21b)
Khi đó, phương pháp mô tả ĐCKĐB ba pha tương quan giống như đối với
động cơ một chiều. Cho phép xây dựng hệ thống điều chỉnh truyền động ĐCKĐB
isd
isq Te
(HTĐKS-ĐKCMĐ) TB
Chương 2: Hệ qui chiếu quay II.8
ba pha tương tự như trường hợp sử dụng động cơ điện một chiều. Điều khiển tốc độ
ĐCKĐB ba pha thông qua điều khiển hai phần tử của dòng điện si
là isd và isq.
Bài tập 2.1. Chứng minh:
Bài tập 2.2. Cho điện áp ba pha:
usa = 540cos(100t) (V);
usb = 540cos(100t – 2/3) (V);
usc = 540cos(100t – 4/3) (V);
Tại thời điểm t = 0,004giây:
a) Tính usa, usb, usc, us , us và su
?
b) Biết góc hệ toạ độ quay lúc đó là r = s = 45o.
Tính usd và usq ?
Bài tập 2.3. Mô phỏng trên Matlab Simulink (7.0) các khối chuyển đổi hệ tọa độ:
abc dq
Bài tập 2.4. Điện áp ba pha 380Vrms và tần số fs = 50Hz.
usa(t) = |us| cos(st)
usb(t) = |us| cos(st – 2/3)
usc(t) = |us| cos(st + 2/3)
Với s = 2fs (rad/s)
Tại thời điểm t = 4ms = 0,004s,
a) Tính usa, usb, usc, us, us và biên độ điện áp su
?
t = 0.0040
usa = 96.1435
usb = 208.1846
usc = -304.3281
us_afa = 96.1435
us_bta = 295.8993
us = 311.1270
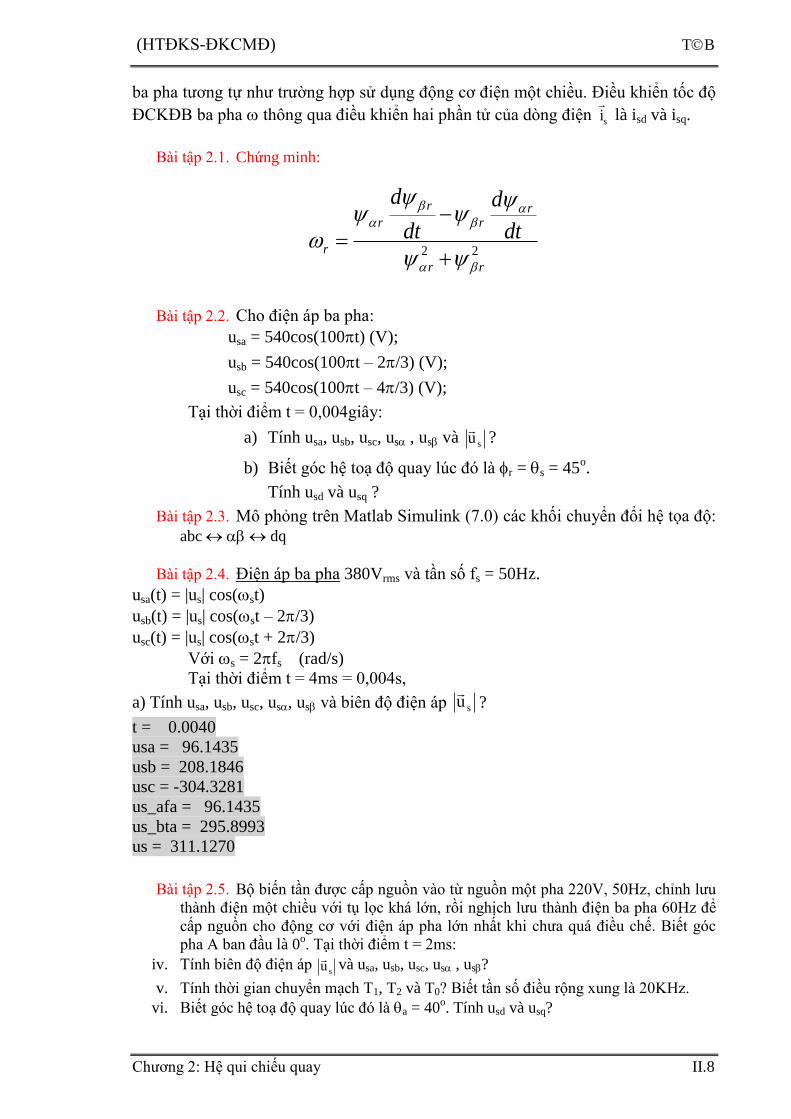
Bài tập 2.5. Bộ biến tần được cấp nguồn vào từ nguồn một pha 220V, 50Hz, chỉnh lưu
thành điện một chiều với tụ lọc khá lớn, rồi nghịch lưu thành điện ba pha 60Hz để
cấp nguồn cho động cơ với điện áp pha lớn nhất khi chưa quá điều chế. Biết góc
pha A ban đầu là 0o. Tại thời điểm t = 2ms:
iv. Tính biên độ điện áp su
và usa, usb, usc, us , us?
v. Tính thời gian chuyển mạch T1, T2 và T0? Biết tần số điều rộng xung là 20KHz.
vi. Biết góc hệ toạ độ quay lúc đó là a = 40o. Tính usd và usq?
2 2
r rr r
r
r r
d d
dt dt
(HTĐKS-ĐKCMĐ) TB
Chương 2: Hệ qui chiếu quay II.9
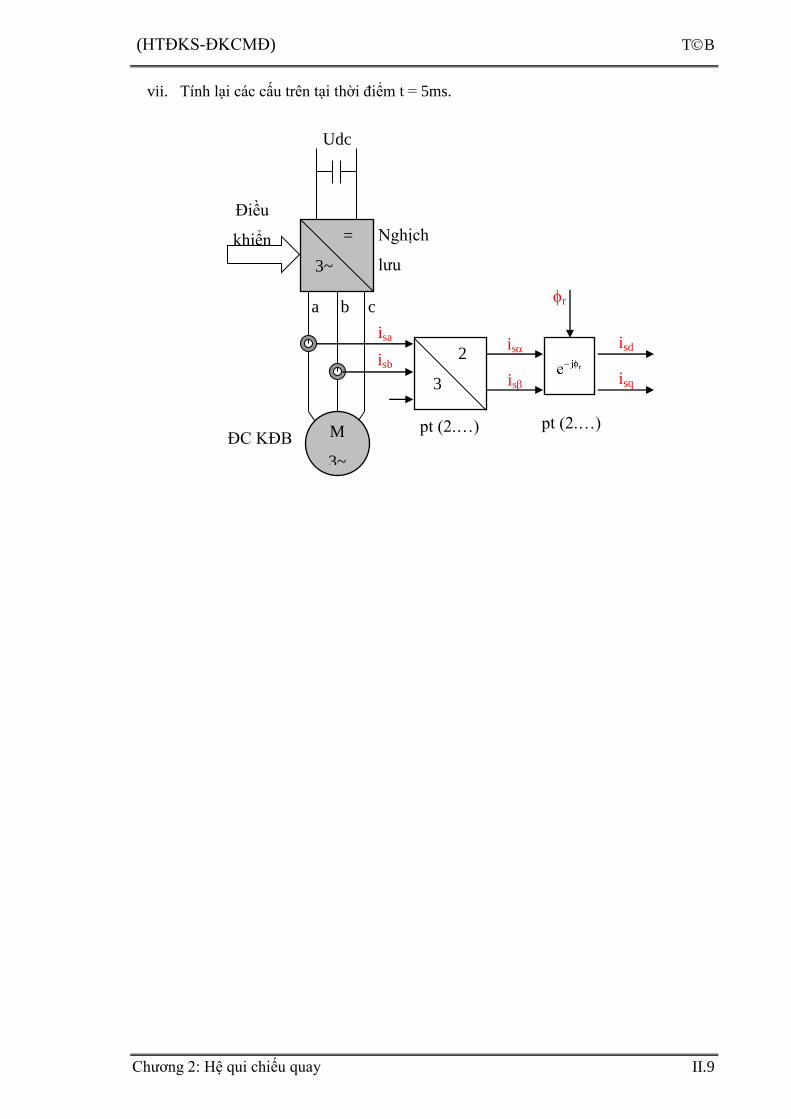
vii. Tính lại các cấu trên tại thời điểm t = 5ms.
ĐC KĐB
==
3~
Udc
Điều
khiển
M
3~
a b c
Nghịch
lưu
2=
3
isa
isb is
is
isd
isq
r
pt (2.…) pt (2.…)
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.1
Chương 3: MÔ HÌNH ĐCKĐB TRONG HỆ QUI CHIẾU QUAY
I. Một số khái niệm cơ bản của động cơ không đồng bộ ba pha
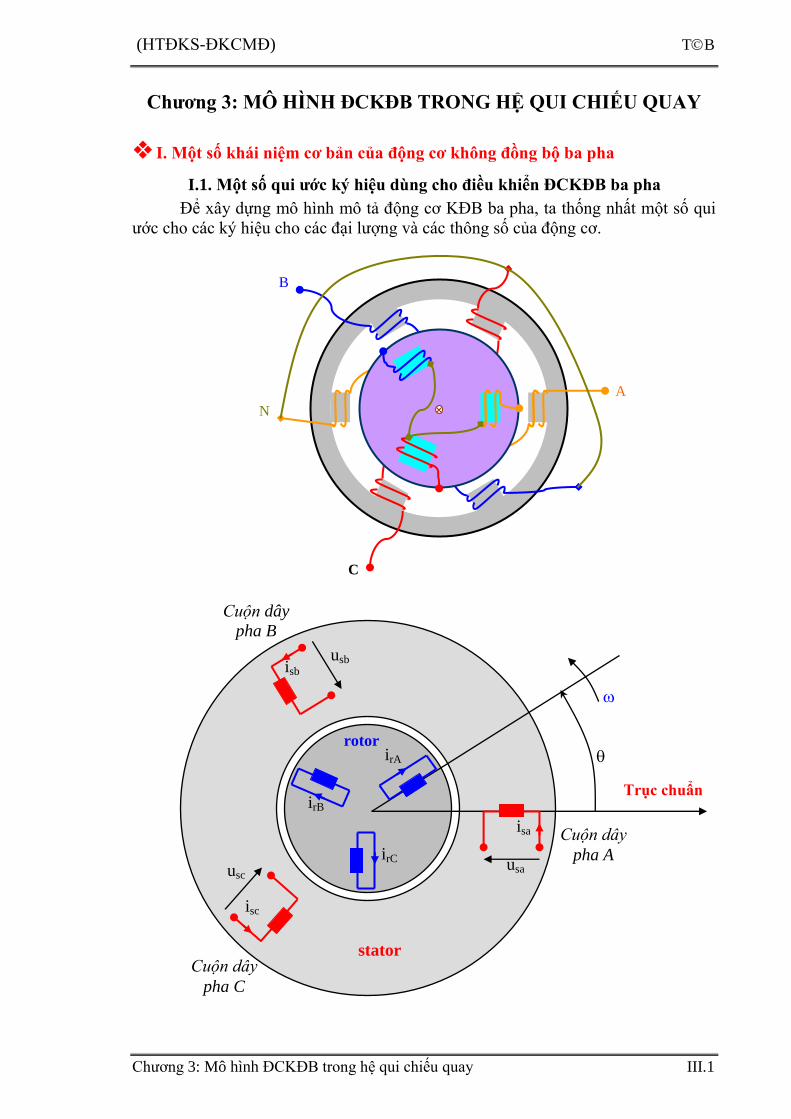
I.1. Một số qui ước ký hiệu dùng cho điều khiển ĐCKĐB ba pha
Để xây dựng mô hình mô tả động cơ KĐB ba pha, ta thống nhất một số qui
ước cho các ký hiệu cho các đại lượng và các thông số của động cơ.
A
B
C
N
stator
Cuộn dây
pha A
isa
usa
irA
isc
usc
isb usb
Cuộn dây
pha C
Cuộn dây
pha B
rotor
irC
irB
stator
Trục chuẩn
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.2
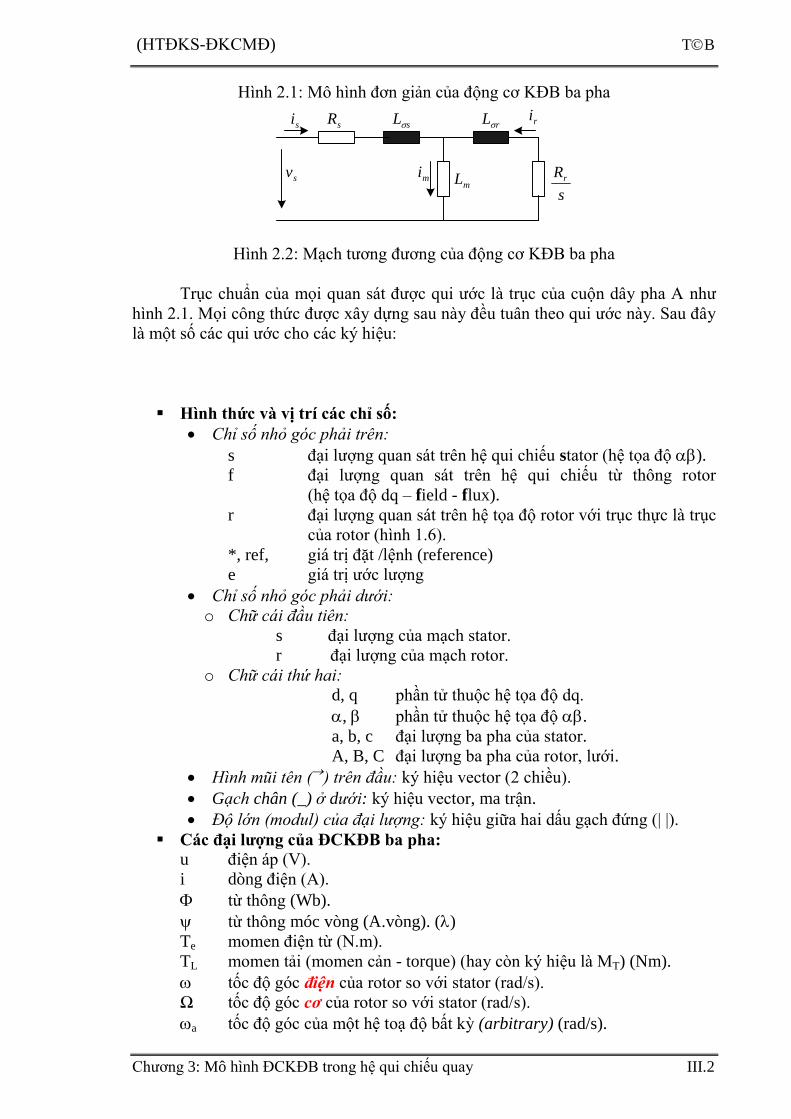
Hình 2.1: Mô hình đơn giản của động cơ KĐB ba pha
mLs
Rr
rLsLsR
sv
si ri
mi
Hình 2.2: Mạch tương đương của động cơ KĐB ba pha
Trục chuẩn của mọi quan sát được qui ước là trục của cuộn dây pha A như
hình 2.1. Mọi công thức được xây dựng sau này đều tuân theo qui ước này. Sau đây
là một số các qui ước cho các ký hiệu:
Hình thức và vị trí các chỉ số:
Chỉ số nhỏ góc phải trên:
s đại lượng quan sát trên hệ qui chiếu stator (hệ tọa độ ).
f đại lượng quan sát trên hệ qui chiếu từ thông rotor
(hệ tọa độ dq – field - flux).
r đại lượng quan sát trên hệ tọa độ rotor với trục thực là trục
của rotor (hình 1.6).
*, ref, giá trị đặt /lệnh (reference)
e giá trị ước lượng
Chỉ số nhỏ góc phải dưới:
o Chữ cái đầu tiên:
s đại lượng của mạch stator.
r đại lượng của mạch rotor.
o Chữ cái thứ hai:
d, q phần tử thuộc hệ tọa độ dq.
, phần tử thuộc hệ tọa độ .
a, b, c đại lượng ba pha của stator.
A, B, C đại lượng ba pha của rotor, lưới.
Hình mũi tên (
) trên đầu: ký hiệu vector (2 chiều).
Gạch chân (_) ở dưới: ký hiệu vector, ma trận.
Độ lớn (modul) của đại lượng: ký hiệu giữa hai dấu gạch đứng (| |).
Các đại lượng của ĐCKĐB ba pha:
u điện áp (V).
i dòng điện (A).
từ thông (Wb).
từ thông móc vòng (A.vòng). ()
Te momen điện từ (N.m).
TL momen tải (momen cản - torque) (hay còn ký hiệu là MT) (Nm).
tốc độ góc điện của rotor so với stator (rad/s).
Ω tốc độ góc cơ của rotor so với stator (rad/s).
a tốc độ góc của một hệ toạ độ bất kỳ (arbitrary) (rad/s).
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.3
s tốc độ góc của từ thông stator so với stator (s = + sl) (rad/s).
r tốc độ góc của từ thông rotor so với stator (r s) (rad/s).
sl tốc độ góc của từ thông rotor so với rotor (tốc độ trượt) (rad/s).
góc của trục rotor (cuộn dây pha A) trong hệ toạ độ (rad).
s góc của trục d (hệ toạ độ quay bất kỳ) trong hệ toạ độ (rad).
r góc của trục d (hệ toạ độ quay bất kỳ) so với trục rotor (rad).
s góc của từ thông stator trong hệ toạ độ (rad).
r góc của từ thông rotor trong hệ toạ độ (rad).
re góc của từ thông rotor ước lượng (estimated) trong hệ toạ độ (rad).
góc pha giữa điện áp so với dòng điện.
Các thông số của ĐCKĐB ba pha:
Rs điện trở cuộn dây pha của stator ().
Rr điện trở rotor đã qui đổi về stator ().
Lm hỗ cảm giữa stator và rotor (H).
Ls điện cảm tản của cuộn dây stator (H).
Lr điện cảm tản của cuộn dây rotor đã qui đổi về stator (H).
P số đôi cực của động cơ.
J momen quán tính cơ (Kg.m2).
Các thông số định nghĩa thêm:
Ls = Lm + Ls điện cảm stator.
Lr = Lm + Lr điện cảm rotor.
Ts = s
s
R
L hằng số thời gian stator.
Tr = r
r
R
L hằng số thời gian rotor.
= 1 – rs
2
m
LL
L hệ số từ tản tổng.
Tsamp chu kỳ lấy mẫu.
Cc đại lượng viết bằng chữ thường – chữ hoa:
Chữ thường: Đại lượng tức thời, biến thiên theo thời gian.
Đại lượng là các thành phần của các vector.
Chữ hoa: Đại lượng vector, module của vector, độ lớn.
I.2. Các phương trình cơ bản của ĐCKĐB ba pha
Các phương trình toán học của động cơ cần phải thể hiện rõ các đặc tính thời
gian của đối tượng. Việc xây dựng mô hình ở đây không nhằm mục đích mô phỏng
chính xác về mặc toán học đối tượng động cơ. Việc xây dựng mô hình ở đây chỉ
nhằm mục đích phục vụ cho việc xây dựng các thuật toán điều chỉnh. Điều đó cho
phép chấp nhận một số điều kiện giả định trong quá trình thiết lập mô hình, tất
nhiên sẽ tạo ra một số sai lệch nhất định giữa đối tượng và mô hình trong phạm vi
cho phép. Các sai lệch này phải được loại trừ bằng kỹ thuật điều chỉnh.
Đặc tính động của động cơ không đồng bộ được mô tả với một hệ phương
trình vi phân. Để xây dựng phương trình cho động cơ, giả định lý tưởng hóa kết cấu
dây quấn và mạch từ với các giả thuyết sau:
Các cuộn dây stator được bố trí đối xứng trong không gian.
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.4
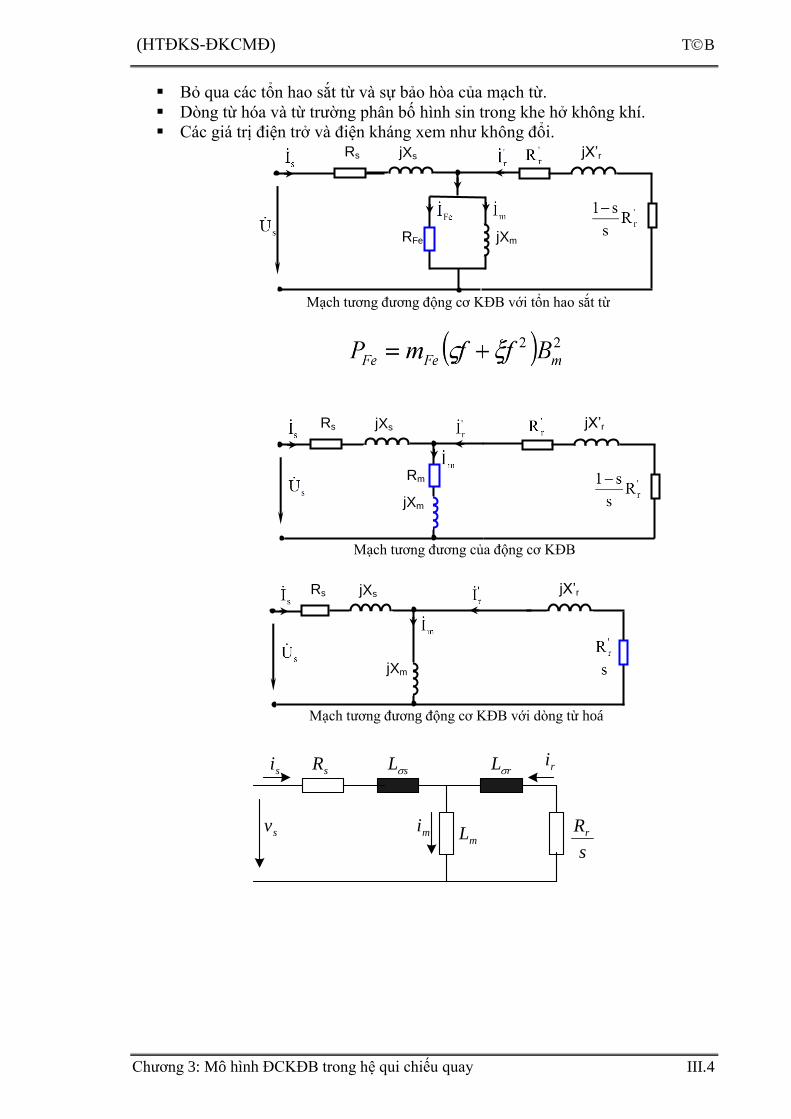
Bỏ qua các tổn hao sắt từ và sự bảo hòa của mạch từ.
Dòng từ hóa và từ trường phân bố hình sin trong khe hở không khí.
Các giá trị điện trở và điện kháng xem như không đổi.
mLs
Rr
rLsLsR
sv
si ri
mi
Rs jXs jX’r
Mạch tương đương động cơ KĐB với tổn hao sắt từ
RFe jXm
Rs jXs
Rm
jXm
jX’r
Mạch tương đương của động cơ KĐB
Rs
jXs
Mạch tương đương động cơ KĐB với dòng từ hoá
jXm
jX’r
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.5
r
rj
sR sL rLr
rR
s
*
sv mLmi*
r
r r
rv
si
Rr
Phương trình điện áp trên 3 cuộn dây stator:
usa(t) = Rsisa(t) + dt
)t(d sa (2.1a)
usb(t) = Rsisb(t) + dt
)t(d sb (2.1b)
usc(t) = Rsisc(t) + dt
)t(d sc (2.1c)
Biểu diễn điện áp theo dạng vector không gian:
00 240j
sc
120j
sbsa
s
s e)t(ue)t(u)t(u3
2)t(u
(2.2)
Thay các phương trình điện áp pha (2.1a),(2.1b),(2.1c) vào (2.2), ta được: Ví dụ 3.1: Chứng minh:
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.6
s
su
(t) = Rs. )t(i s
s
+
dt
)t(d s
s
(2.3)
Trong đó, tương tự như đối với điện áp:
00 240j
sc
120j
sbsa
s
s e)t(ie)t(i)t(i3
2)t(i
(2.4)
00 240j
sc
120j
sbsa
s
s e).t(e).t()t(3
2)t(
(2.5)
Tương tự, ta có phương trình điện áp của mạch stotor. Khi quan sát trên hệ qui
chiếu rotor (rotor ngắn mạch):
dt
tdtiR0)t(u
r
rr
rr
r
r
(2.6)
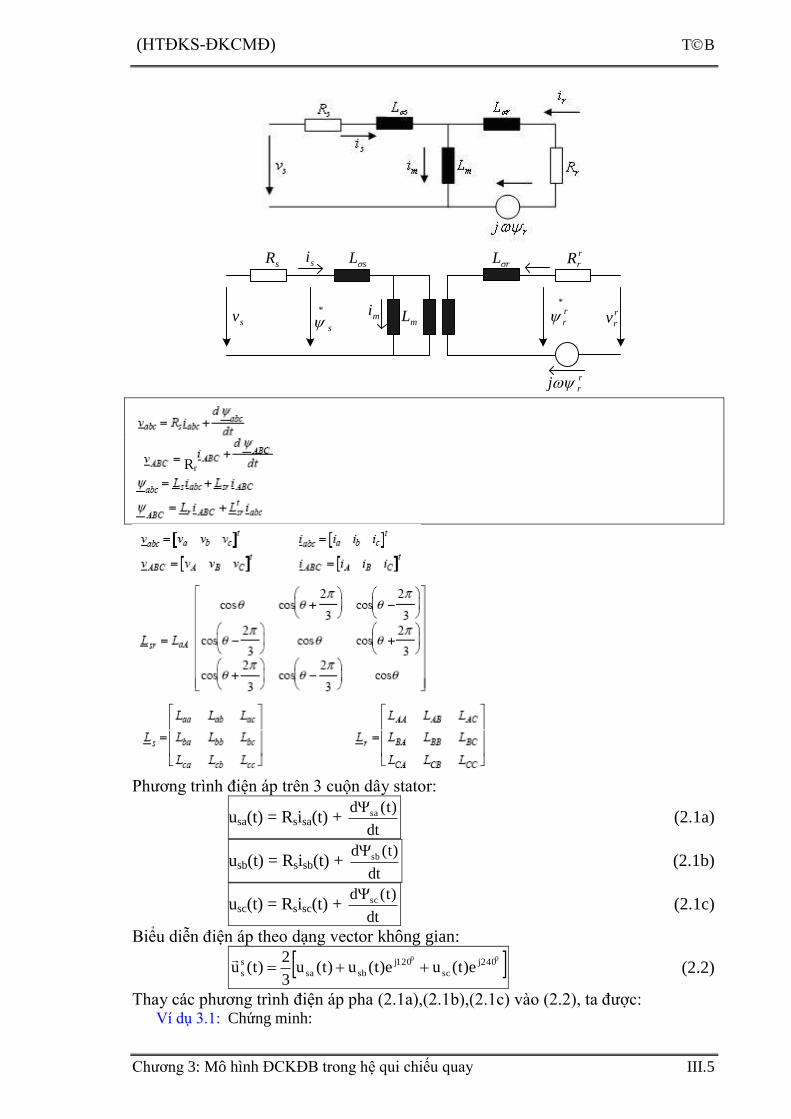
Các vector từ thông stator và rotor quan hệ với các dòng stator và rotor: Ví dụ 3.2: Chứng minh:
CM rmsss iLiL
(2.7a)
CM rrsmr iLiL
(2.7b)
với rsmmmm iiLiL
(2.7b)
smrmsss iLiL
rmrrsmr iLiL
Ví dụ 3.3: Chứng minh: Lm= 3/2LaA?
ĐCKĐB là một hệ điện cơ, có phương trình momen:
rrsse ixP2
3ixP
2
3T
(2.8)
Ví dụ 3.4: Chứng minh:
srmsmsr
r
me ixiPL
2
3ixP
2
3ix
L
LP
2
3T
và phương trình chuyển động:
Te = TL + dt
d
P
J = TL +
dJ
dt
(2.9)
Việc xây dựng các mô hình cho ĐCKĐB ba pha trong các phần sau đều phải
dựa trên các phương trình cơ bản trên đây của động cơ.
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.7
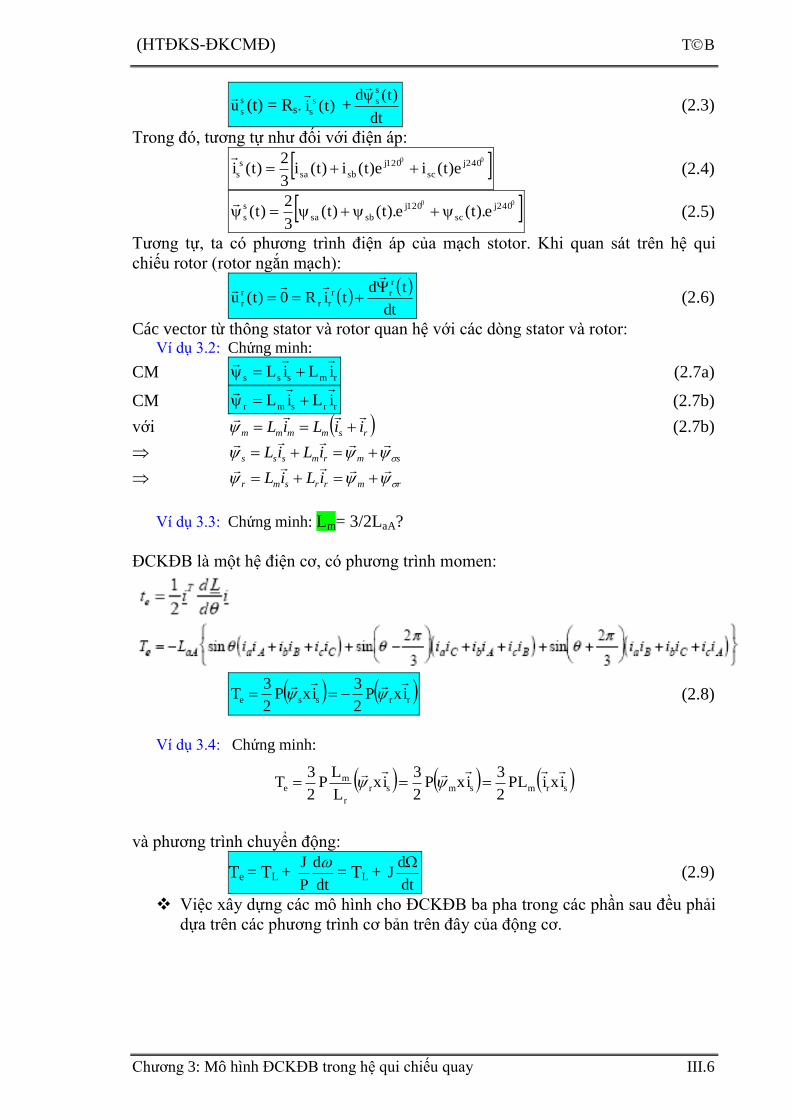
II. Mô hình liên tục của ĐCKĐB trên hệ tọa độ stator (toạ độ )
Tương tự như (1.13), từ hệ quy chiếu rotor quy về hệ quy chiếu stator theo các
phương trình:
Ví dụ 3.5: Chứng minh: js
r
r
r eii
(2.10)
Và js
r
r
r e
(2.11)
với
dt
d, trong đó là tốc độ quay của rotor (theo hình 2.3).
Thay pt (2.10) và pt (2.11) vào pt (2.6), qui pt (2.6) về hệ quy chiếu stator:
Ví dụ 3.6: Chứng minh: s
r
s
rs
rr jdt
diR0
(2.12)
Sơ đồ mạch điện tương đương của mô hình động của ĐCKĐB trong HTĐ stator
Vậy từ các pt (2.3), (2.7), (2.8), (2.9) và(2.12) ta có hệ phương trình:
s
su
= Rs.s
si
+dt
d s
s
(2.13a)
0 = Rrs
ri
+ dt
d s
r
- s
rj
(2.13b)
s
rm
s
ss
s
s iLiL
(2.13c)
s
rr
s
sm
s
r iLiL
(2.13d)
Te = 2
3p( s
x si
)= -2
3p( r
x ri
) (2.13e)
Te = TL + dt
d
p
J (2.13f)
Để xác định dòng điện stator và từ thông rotor, từ pt (2.13d) và pt (2.13c) có:
s
ri
= rL
1 s
sm
s
r iL
(2.14)
s
s = Ls. s
si + r
m
L
L s
sm
s
r iL (2.15)
Thay (2.14) và (2.15) vào (2.13a) và (2.13b), với các định nghĩa sau:
Ts = s
s
R
L : hằng số thời gian stator.
r
rr
R
LT : hằng số thời gian rotor.
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.8
rs
2
m
LL
L1 : hệ số từ tản tổng.
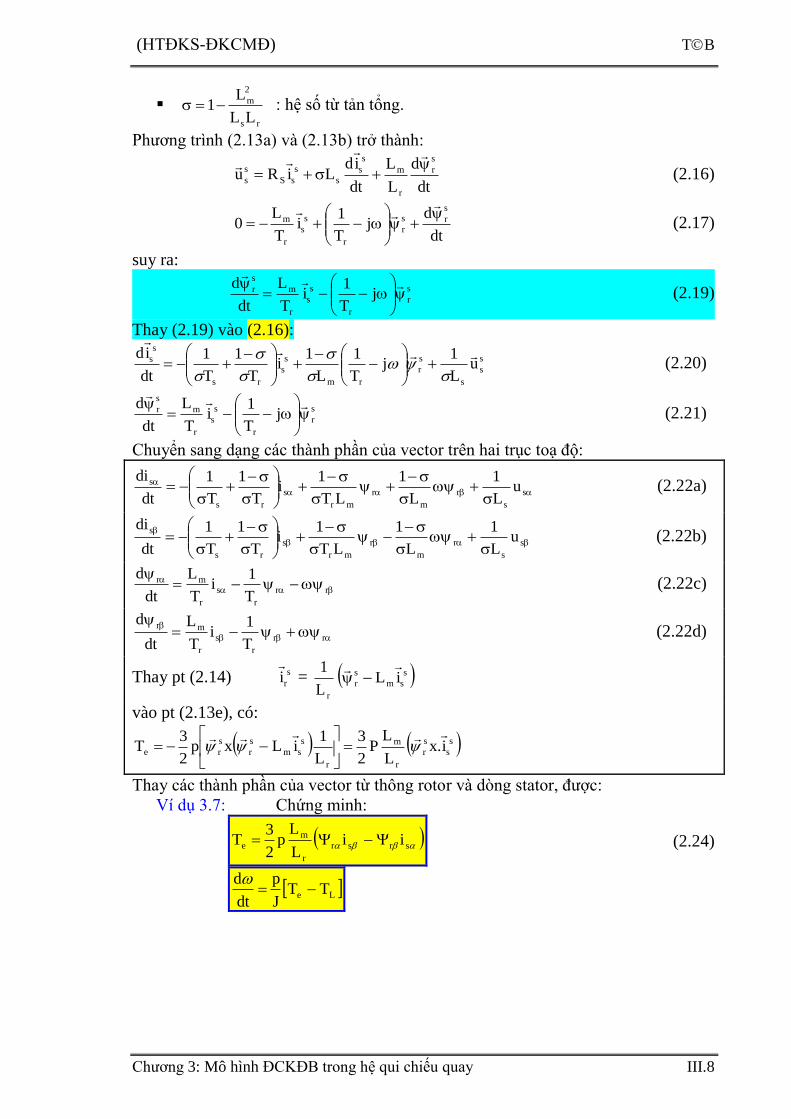
Phương trình (2.13a) và (2.13b) trở thành:
dt
d
L
L
dt
idLiRu
s
r
r
m
s
s
s
s
sS
s
s
(2.16)
dt
dj
T
1i
T
L0
s
rs
r
r
s
s
r
m
(2.17)
suy ra:
s
r
r
s
s
r
m
s
r jT
1i
T
L
dt
d
(2.19)
Thay (2.19) vào (2.16):
s
s
s
s
r
rm
s
s
rs
s
s uL
1j
T
1
L
1i
T
1
T
1
dt
id
(2.20)
s
r
r
s
s
r
m
s
r jT
1i
T
L
dt
d
(2.21)
Chuyển sang dạng các thành phần của vector trên hai trục toạ độ:
s
s
r
m
r
mr
s
rs
s uL
1
L
1
LT
1i
T
1
T
1
dt
di (2.22a)
s
s
r
m
r
mr
s
rs
su
L
1
L
1
LT
1i
T
1
T
1
dt
di (2.22b)
rr
r
s
r
mr
T
1i
T
L
dt
d (2.22c)
rr
r
s
r
mr
T
1i
T
L
dt
d (2.22d)
Thay pt (2.14) s
ri
= rL
1 s
sm
s
r iL
vào pt (2.13e), có:
s
s
s
r
r
m
r
s
sm
s
r
s
re i.xL
LP
2
3
L
1iLxp
2
3T
Thay các thành phần của vector từ thông rotor và dòng stator, được:
Ví dụ 3.7: Chứng minh:
srsr
r
m
e iiL
Lp
2
3T (2.24)
Le TTJ
p
dt
d
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.9
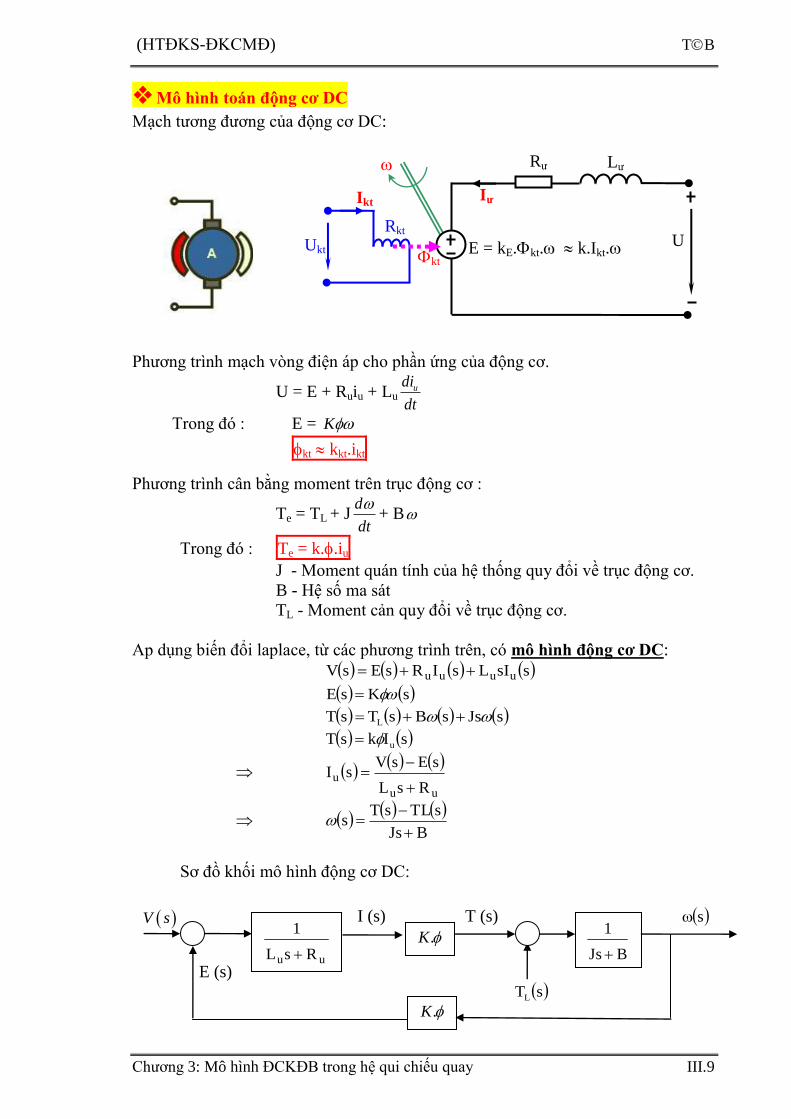
Mô hình toán động cơ DC
Mạch tương đương của động cơ DC:
Phương trình mạch vòng điện áp cho phần ứng của động cơ.
U = E + Ruiu + Luudi
dt
Trong đó : E = K
kt kkt.ikt
Phương trình cân bằng moment trên trục động cơ :
Te = TL + Jd
dt
+ B
Trong đó : Te = k..iu
J - Moment quán tính của hệ thống quy đổi về trục động cơ.
B - Hệ số ma sát
TL - Moment cản quy đổi về trục động cơ.
Ap dụng biến đổi laplace, từ các phương trình trên, có mô hình động cơ DC:
ssILsIRsEsV uuuu
sKsE
sJssBsTsT L
sIksT u
uu
uRsL
sEsVsI
BJs
sTLsTs
Sơ đồ khối mô hình động cơ DC:
uu RsL
1
.K
.K
BJs
1
s
T (s)
sTL
V s
I (s)
E (s)
Ikt
U
Rư
Iư
E = kE.kt. k.Ikt.
Rkt
Ukt
kt
Lư
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.10
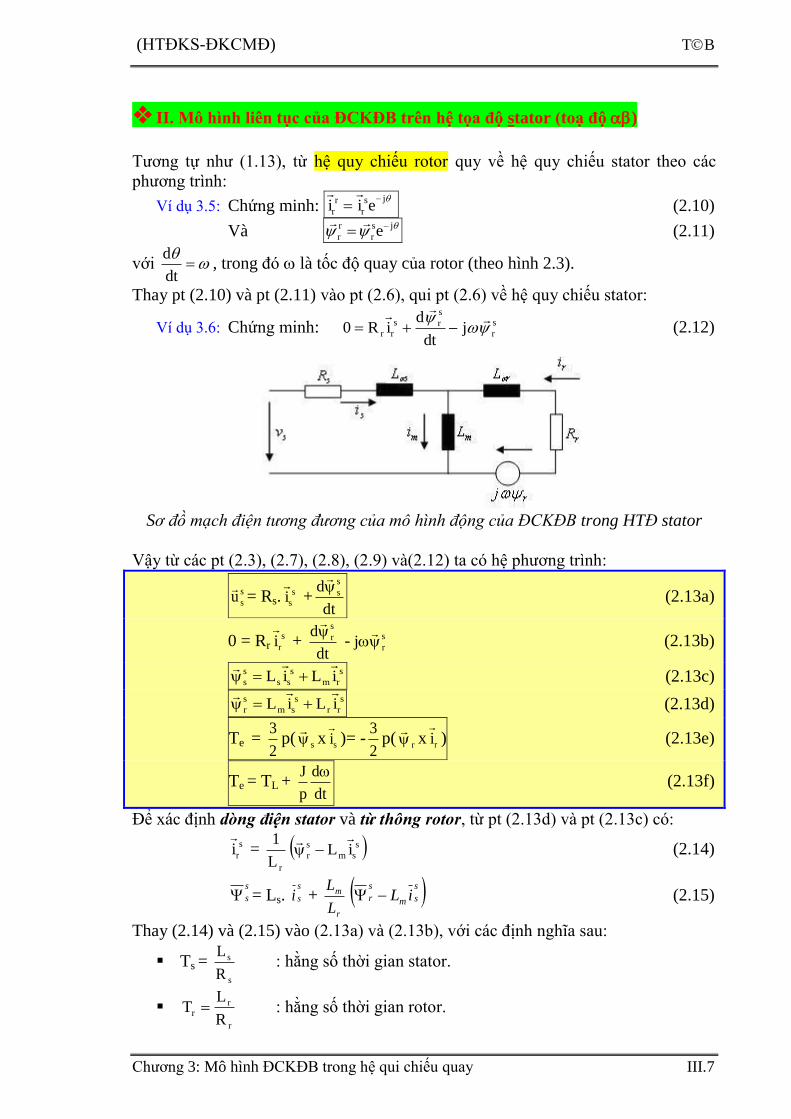
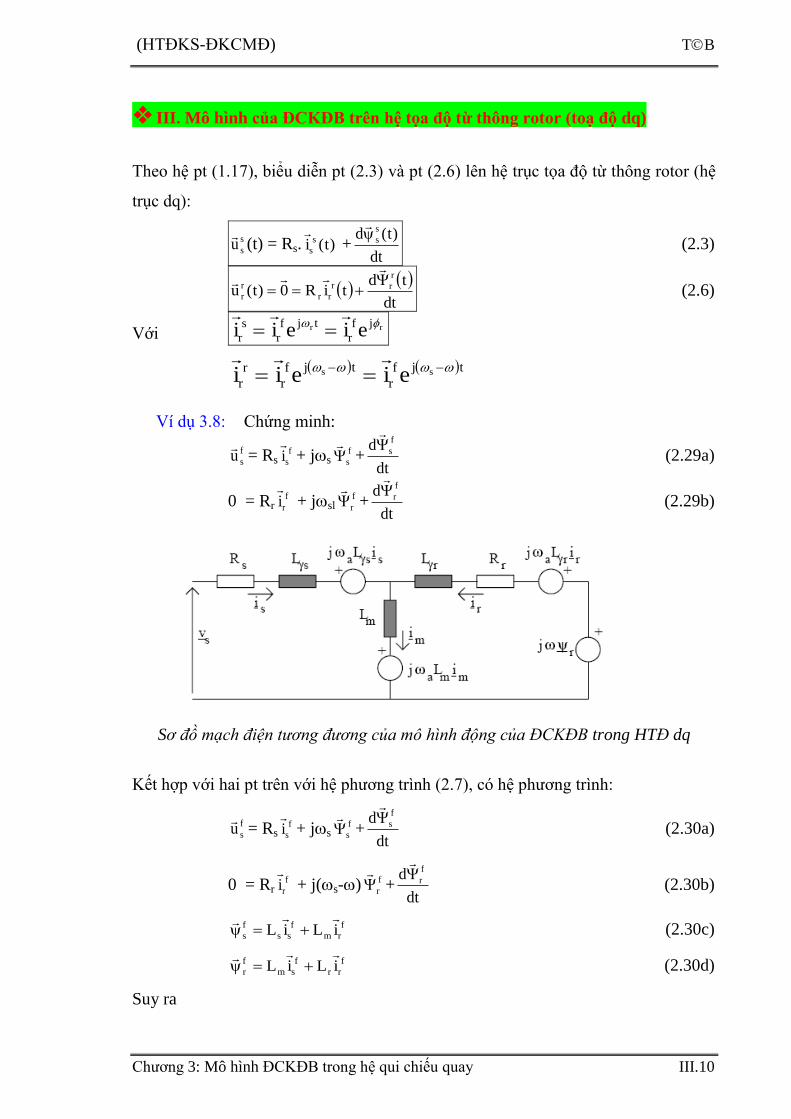
III. Mô hình của ĐCKĐB trên hệ tọa độ từ thông rotor (toạ độ dq)
Theo hệ pt (1.17), biểu diễn pt (2.3) và pt (2.6) lên hệ trục tọa độ từ thông rotor (hệ
trục dq):
s
su
(t) = Rs. )t(i s
s
+
dt
)t(d s
s
(2.3)
dt
tdtiR0)t(u
r
rr
rr
r
r
(2.6)
Với rr jf
r
tjf
r
s
r eieii
tjf
r
tjf
r
r
rss eieii
Ví dụ 3.8: Chứng minh:
f
su
= Rsf
si
+ jsf
s
+dt
d f
s
(2.29a)
0 = Rrf
ri
+ jslf
r
+dt
d f
r
(2.29b)
Sơ đồ mạch điện tương đương của mô hình động của ĐCKĐB trong HTĐ dq
Kết hợp với hai pt trên với hệ phương trình (2.7), có hệ phương trình:
f
su
= Rsf
si
+ jsf
s
+dt
d f
s
(2.30a)
0 = Rrf
ri
+ j(s-) f
r
+dt
d f
r
(2.30b)
f
rm
f
ss
f
s iLiL
(2.30c)
f
rr
f
sm
f
r iLiL
(2.30d)
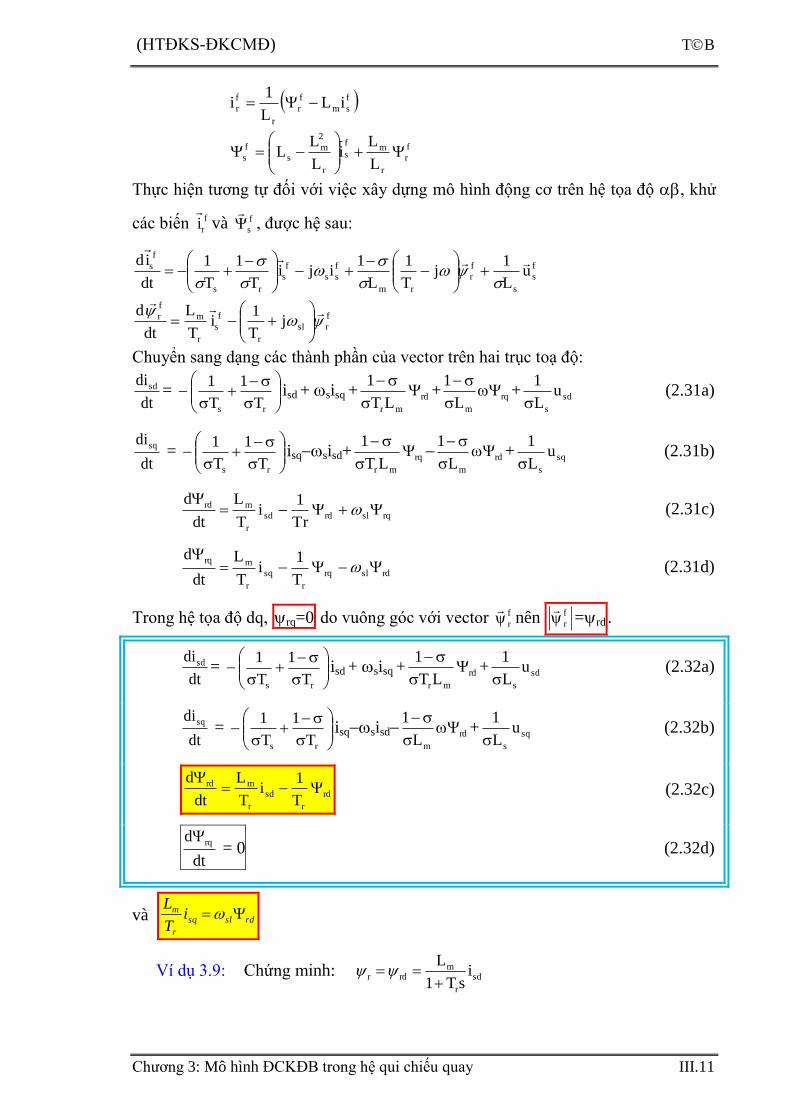
Suy ra
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.11
f
sm
f
r
r
f
r iLL
1i
f
r
r
mf
s
r
2
ms
f
sL
Li
L
LL
Thực hiện tương tự đối với việc xây dựng mô hình động cơ trên hệ tọa độ , khử
các biến f
ri
và f
s
, được hệ sau:
f
s
s
f
r
rm
f
ss
f
s
rs
f
s uL
1j
T
1
L
1iji
T
1
T
1
dt
id
f
rsl
r
f
s
r
m
f
r jT
1i
T
L
dt
d
Chuyển sang dạng các thành phần của vector trên hai trục toạ độ:
dt
disd =
rs T
1
T
1isd + sisq + rd
mrLT
1
+ rq
mL
1
+ sd
s
uL
1
(2.31a)
dt
disq =
rs T
1
T
1isqsisd+ rq
mrLT
1
rd
mL
1
+ sq
s
uL
1
(2.31b)
rqslrdsd
r
mrd
Tr
1i
T
L
dt
d
(2.31c)
rdslrq
r
sq
r
mrq
T
1i
T
L
dt
d
(2.31d)
Trong hệ tọa độ dq, rq=0 do vuông góc với vector f
r
nên f
r
=rd .
dt
disd =
rs T
1
T
1isd + sisq + rd
mrLT
1
+ sd
s
uL
1
(2.32a)
dt
disq =
rs T
1
T
1isqsisd rd
mL
1
+ sq
s
uL
1
(2.32b)
rd
r
sd
r
mrd
T
1i
T
L
dt
d
(2.32c)
dt
d rq = 0 (2.32d)
và rdslsq
r
m iT
L
Ví dụ 3.9: Chứng minh: sd
r
mrdr i
sT1
L
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.12
Ví dụ 3.10: Chứng minh: r
sq
r
msl
i
T
L
Phương trình moment:
Thay f
r
r
mf
s
r
2
ms
f
sL
Li
L
LL
(2.33)
Vào: f f f fm me s s r s rd sq rq sd
r r
3 3 L 3 LT P i P i P i i
2 2 L 2 L
(2.34)
có sdrqsqrd
r
me ii
L
Lp
2
3T (2.35)
với tốc độ trượt: sl = r – = r
m
T
L
rd
sqi
(2.36)
Ví dụ 3.11: Chứng minh: sdrqsqrd
r
me ii
L
LP
2
3T
Ví dụ 3.12:
Te = TL + dt
d
p
J hay
dt
d
p
J = Te - TL (2.37)
Trong hệ tọa độ từ thông rotor (hệ tọa độ dq), các vector dòng stator f
si
và
vector từ thông rotor f
r
, cùng với hệ tọa độ dq quanh (gần) đồng bộ với nhau với
tốc độ s quanh điểm gốc, do đó các phần tử của vector f
si
(isd và isq) là các đại
lượng một chiều. Trong chế độ xác lập, các giá trị này gần như không đổi; trong quá
trình quá độ, các giá trị này có thể biến theo theo một thuật toán điều khiển đã được
định trước.
Hơn nữa, trong hệ tọa độ dq, rq=0 do vuông góc với vector f
r
nên f
r
=rd.
Đối với ĐCKĐB 3 pha, trong hệ tọa độ dq, từ thông và mômen quay được
biểu diễn theo các phần tử của vector dòng stator:
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.13
(Hai phương trình trên được trình bày tựa theo phương trình (2.34c) và phương
trình (2.34d) trong chương II).
Phương trình trên cho thấy có thể điều khiển từ thông rotor rrd
thông
qua điều khiển dòng stator isd. Đặc biệt mối quan hệ giữa hai đại lượng này là mối
quan hệ trễ bậc nhất với thời hằng Tr.
Nếu thành công trong việc áp đặt nhanh và chính xác dòng isd để điều khiển ổn
định từ thông rd tại mọi điểm làm việc của động cơ. Và thành công trong việc áp
đặt nhanh và chính xác dòng isq, và theo pt (1.20b) thì có thể coi isq là đại lượng
điều khiển của momen Te của động cơ.
Bằng việc mô tả ĐCKĐB ba pha trên hệ tọa độ từ thông rotor, không còn
quan tâm đến từng dòng điện pha riêng lẻ nữa, mà là toàn bộ vector không gian
dòng stator của động cơ. Khi đó vector si
sẽ cung cấp hai thành phần: isd để điều
khiển từ thông rotor r
, isq để điều khiển momen quay Te, từ đó có thể điều khiển
tốc độ của động cơ.
()
()
Khi đó, phương pháp mô tả ĐCKĐB ba pha tương quan giống như đối với
động cơ một chiều. Cho phép xây dựng hệ thống điều chỉnh truyền động ĐCKĐB ba
pha tương tự như trường hợp sử dụng động cơ điện một chiều. Điều khiển tốc độ
ĐCKĐB ba pha thông qua điều khiển hai phần tử của dòng điện r
là isd và isq.
Ưu điểm khi của mô hình của ĐCKĐB trong HTĐ dq so với HTĐ :
1. Các đại lượng không biến thiên dạng sin theo thời gian.
2. Hệ phương trình đơn giản hơn (rq=0).
3. Phân ly điều khiển từ thông rotor r
và momen Te (tốc độ ).
4. Gần giống với điều khiển động cơ một chiều.
isd
isq Te
(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.14
Te = 2
3P( s
x si
)= -2
3P(
r
x ri
)= 2
3P(
m
x si
) ??? (2.8)
Bài tập 3.1. Nêu ý nghĩa của việc điều khiển từ thông trong điều khiển tốc độ động cơ
không đồng bộ ba pha?
Bài tập 3.2. Nêu nghĩa của phương pháp điều khiển V/f = const trong khiển khiển
tốc độ động cơ không đồng bộ ba pha. Nhận xét khi vận hành động cơ trên tần
số định mức với biến tần V/f = const? Biết biến tần bị giới hạn điện áp ngõ ra
luôn nhỏ hơn định mức?
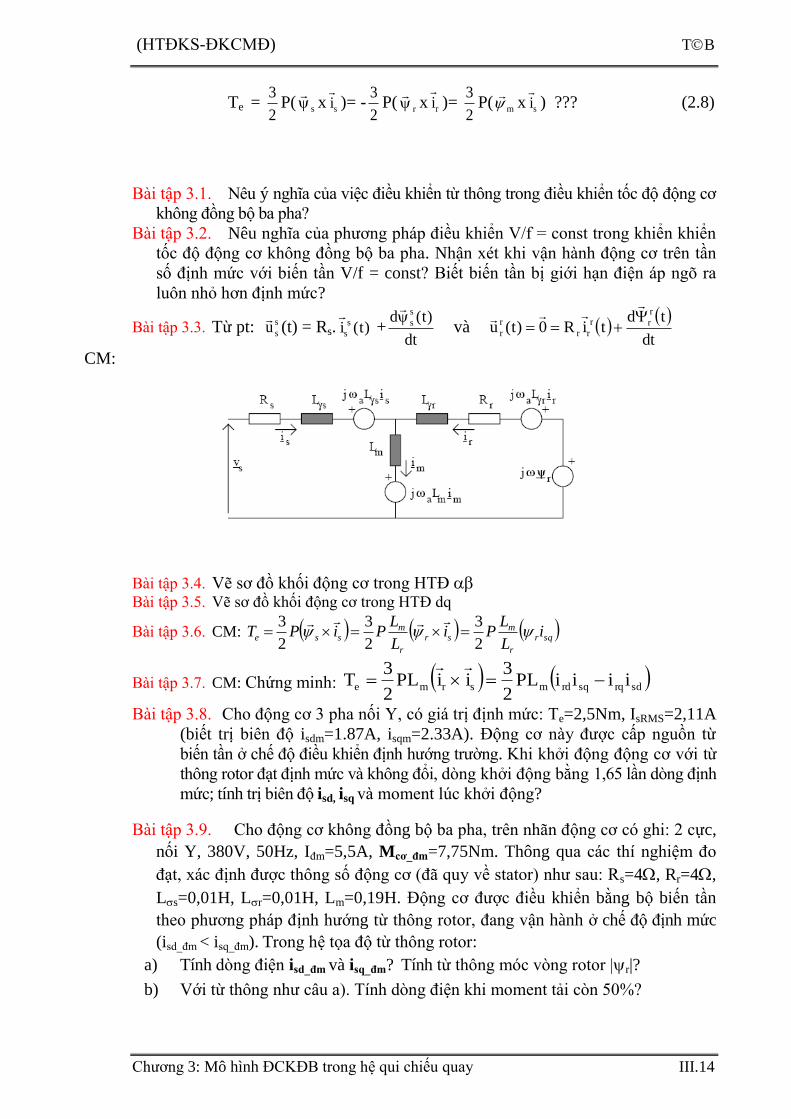
Bài tập 3.3. Từ pt: s
su
(t) = Rs. )t(i s
s
+
dt
)t(d s
s
và
dt
tdtiR0)t(u
r
rr
rr
r
r
CM:
Bài tập 3.4. Vẽ sơ đồ khối động cơ trong HTĐ
Bài tập 3.5. Vẽ sơ đồ khối động cơ trong HTĐ dq
Bài tập 3.6. CM: sqr
r
msr
r
msse i
L
LPi
L
LPiPT
2
3
2
3
2
3
Bài tập 3.7. CM: Chứng minh: sdrqsqrdmsrme iiiiPL
2
3iiPL
2
3T
Bài tập 3.8. Cho động cơ 3 pha nối Y, có giá trị định mức: Te=2,5Nm, IsRMS=2,11A
(biết trị biên độ isdm=1.87A, isqm=2.33A). Động cơ này được cấp nguồn từ
biến tần ở chế độ điều khiển định hướng trường. Khi khởi động động cơ với từ
thông rotor đạt định mức và không đổi, dòng khởi động bằng 1,65 lần dòng định
mức; tính trị biên độ isd, isq và moment lúc khởi động?
Bài tập 3.9. Cho động cơ không đồng bộ ba pha, trên nhãn động cơ có ghi: 2 cực,
nối Y, 380V, 50Hz, Iđm=5,5A, Mcơ_đm=7,75Nm. Thông qua các thí nghiệm đo
đạt, xác định được thông số động cơ (đã quy về stator) như sau: Rs=4, Rr=4,
Ls=0,01H, Lr=0,01H, Lm=0,19H. Động cơ được điều khiển bằng bộ biến tần
theo phương pháp định hướng từ thông rotor, đang vận hành ở chế độ định mức
(isd_đm < isq_đm). Trong hệ tọa độ từ thông rotor:
a) Tính dòng điện isd_đm và isq_đm? Tính từ thông móc vòng rotor |r|?
b) Với từ thông như câu a). Tính dòng điện khi moment tải còn 50%?

(HTĐKS-ĐKCMĐ) TB
Chương 3: Mô hình ĐCKĐB trong hệ qui chiếu quay III.15
c) Lúc khởi động động cơ, biết từ thông đạt định mức, moment bằng 2 lần
moment định mức. Tính dòng điện khởi động? So sánh với dòng định mức?
Bài tập 3.10. Một động cơ không đồng bộ có các thông
số (quy về stator) như sau:
Rs = 10, Rr = 6,3, Ls = Lr = 0,04H, Lm = 0,4H.
Động cơ 3 pha, 4 cực, cuộn dây stator nối Y, 50Hz, 380V, 1400rpm. Tính dòng
điện định mức isdn, isqn, từ thông định mức r n và dòng điện định mức Isn?
Bài tập 3.11. Điều khiển động cơ không đồng bộ ba pha
dùng bộ biến tần cài đặt ở chế độ điều khiển định hướng từ thông rotor:
a) Khi điều khiển động cơ đạt từ thông rotor ổn định, viết phương trình
chứng tỏ: (0,5 đ)
i) Biên độ từ thông rotor |r| có thể được điều khiển qua isd ?
ii) Moment cơ của động cơ Mcơ có thể được điều khiển qua isq ?
b) Biết động cơ ba pha nối Y, có giá trị định mức: Mcơ_đm =3,73Nm, Isđm_RMS
=2,69A (với trị biên độ isd_đm =1,79A, isq_đm =3,35A). Khi khởi động,
động cơ đạt từ thông rotor định mức và không đổi, và dòng khởi động được
cài đặt bằng 1,5 lần dòng định mức: tính trị biên độ dòng điện khởi động
isd_kđ, isq_kđ và moment khởi động Mcơ_kđ? Nhận xét? (1,5 đ)
c) Biến tần đang điều khiển động cơ trên vận hành với từ thông rotor định
mức. Lúc động cơ kéo tải có moment bằng 150% định mức, tính dòng điện
hiệu dụng của động cơ? (1 đ)
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.1
Chương 4:
ĐIỀU KHIỂN ĐỊNH HƯỚNG TỪ THÔNG ĐCKĐB
(FOC)
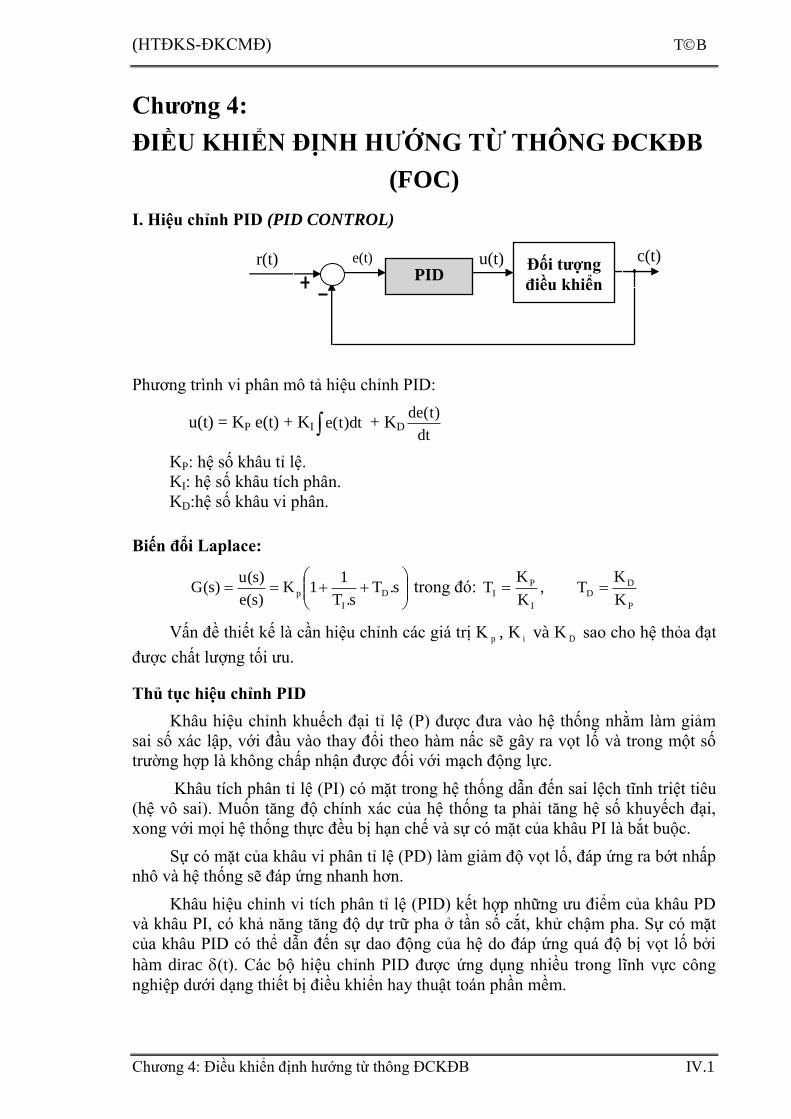
I. Hiệu chỉnh PID (PID CONTROL)
Phương trình vi phân mô tả hiệu chỉnh PID:
u(t) = KP e(t) + KI dt)t(e + KDdt
)t(de
KP: hệ số khâu tỉ lệ.
KI: hệ số khâu tích phân.
KD:hệ số khâu vi phân.
Biến đổi Laplace:
s.T
s.T
11K
)s(e
)s(u)s(G D
I
p trong đó: P
DD
I
PI
K
KT,
K
KT
Vấn đề thiết kế là cần hiệu chỉnh các giá trị K p , K i và K D sao cho hệ thỏa đạt
được chất lượng tối ưu.
Thủ tục hiệu chỉnh PID
Khâu hiệu chỉnh khuếch đại tỉ lệ (P) được đưa vào hệ thống nhằm làm giảm
sai số xác lập, với đầu vào thay đổi theo hàm nấc sẽ gây ra vọt lố và trong một số
trường hợp là không chấp nhận được đối với mạch động lực.
Khâu tích phân tỉ lệ (PI) có mặt trong hệ thống dẫn đến sai lệch tĩnh triệt tiêu
(hệ vô sai). Muốn tăng độ chính xác của hệ thống ta phải tăng hệ số khuyếch đại,
xong với mọi hệ thống thực đều bị hạn chế và sự có mặt của khâu PI là bắt buộc.
Sự có mặt của khâu vi phân tỉ lệ (PD) làm giảm độ vọt lố, đáp ứng ra bớt nhấp
nhô và hệ thống sẽ đáp ứng nhanh hơn.
Khâu hiệu chỉnh vi tích phân tỉ lệ (PID) kết hợp những ưu điểm của khâu PD
và khâu PI, có khả năng tăng độ dự trữ pha ở tần số cắt, khử chậm pha. Sự có mặt
của khâu PID có thể dẫn đến sự dao động của hệ do đáp ứng quá độ bị vọt lố bởi
hàm dirac (t). Các bộ hiệu chỉnh PID được ứng dụng nhiều trong lĩnh vực công
nghiệp dưới dạng thiết bị điều khiển hay thuật toán phần mềm.
e(t) u(t) PID
Đối tượng
điều khiển
c(t) r(t)
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.2
Tóm tắt Vai trò của mỗi khâu hiệu chỉnh (adjustment) trong bộ điều khiển PID:
Khâu khuếch đại tỉ lệ Kp (Proportional gain):
Khi Kp tăng
Sai số xác lập giảm
Vọt lố tăng
Thời gian lên nhanh
Khâu tích phân tỉ lệ Ki (Integral gain):
Khi Ki tăng
Sai lệch tĩnh giảm (triệt tiêu - vô sai với hàm nấc)
Thời gian đáp ứng chậm
Khâu vi phân tỉ lệ Kd (Derivative gain):
Khi Kd tăng
Vọt lố giảm
Thời gian đáp ứng nhanh
Bớt nhấp nhô (dao động)
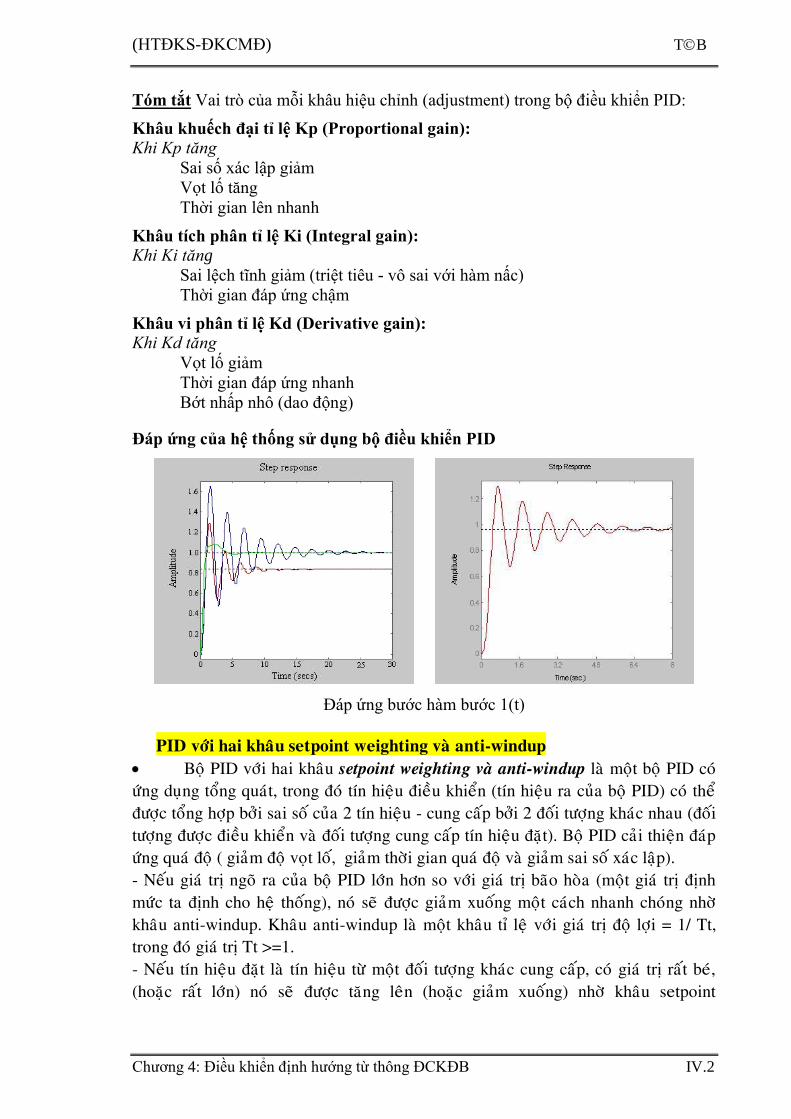
Đáp ứng của hệ thống sử dụng bộ điều khiển PID
Đáp ứng bước hàm bước 1(t)
PID vôùi hai khaâu setpoint weighting vaø anti-windup
Boä PID vôùi hai khaâu setpoint weighting vaø anti-windup laø moät boä PID coù
öùng duïng toång quaùt, trong ñoù tín hieäu ñieàu khieån (tín hieäu ra cuûa boä PID) coù theå
ñöôïc toång hôïp bôûi sai soá cuûa 2 tín hieäu - cung caáp bôûi 2 ñoái töôïng khaùc nhau (ñoái
töôïng ñöôïc ñieàu khieån vaø ñoái töôïng cung caáp tín hieäu ñaët). Boä PID caûi thieän ñaùp
öùng quaù ñoä ( giaûm ñoä voït loá, giaûm thôøi gian quaù ñoä vaø giaûm sai soá xaùc laäp).
- Neáu giaù trò ngoõ ra cuûa boä PID lôùn hôn so vôùi giaù trò baõo hoøa (moät giaù trò ñònh
möùc ta ñònh cho heä thoáng), noù seõ ñöôïc giaûm xuoáng moät caùch nhanh choùng nhôø
khaâu anti-windup. Khaâu anti-windup laø moät khaâu tæ leä vôùi giaù trò ñoä lôïi = 1/ Tt,
trong ñoù giaù trò Tt >=1.
- Neáu tín hieäu ñaët laø tín hieäu töø moät ñoái töôïng khaùc cung caáp, coù giaù trò raát beù,
(hoaëc raát lôùn) noù seõ ñöôïc taêng leân (hoaëc giaûm xuoáng) nhôø khaâu setpoint
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.3
weighting maø thöïc chaát laø moät khaâu tæ leä vôùi ñoä lôïi b. Ñieàu naøy nhaèm taêng toác ñoä
phaûn öùng trong quaù trình tæ leä.
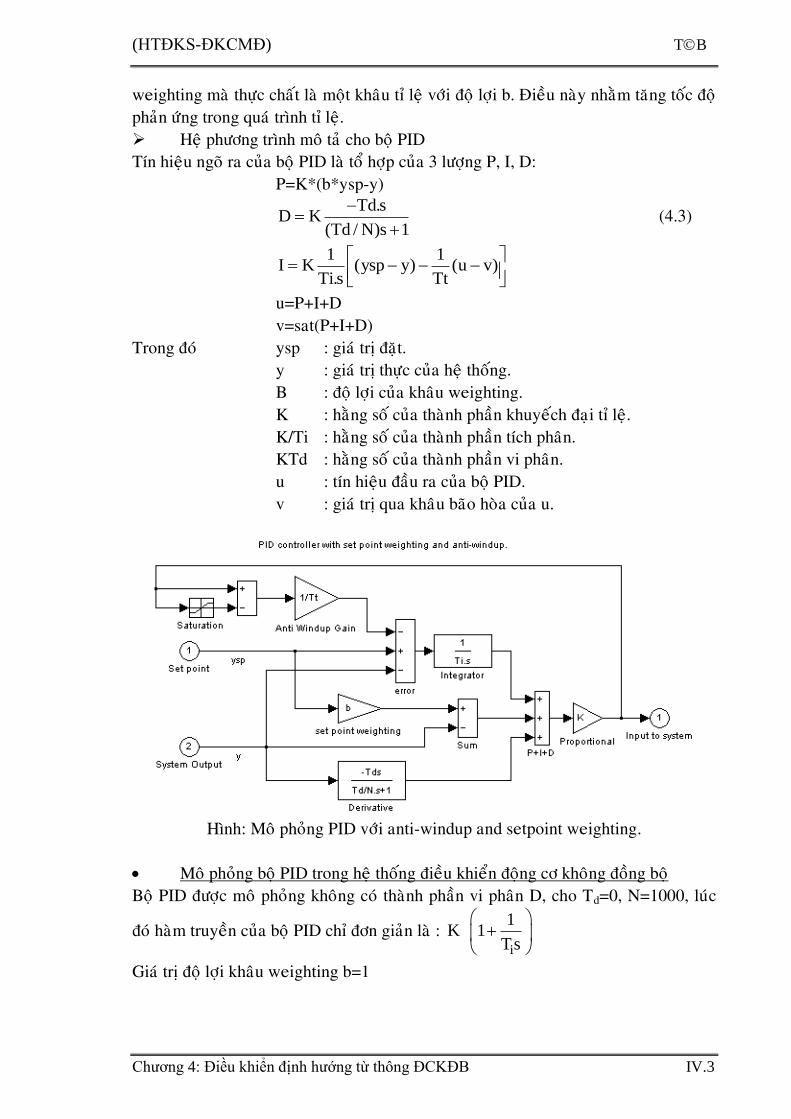
Heä phöông trình moâ taû cho boä PID
Tín hieäu ngoõ ra cuûa boä PID laø toå hôïp cuûa 3 löôïng P, I, D:
P=K*(b*ysp-y)
Td.sD K
(Td / N)s 1
(4.3)
1 1I K (ysp y) (u v)
Ti.s Tt
u=P+I+D
v=sat(P+I+D)
Trong ñoù ysp : giaù trò ñaët.
y : giaù trò thöïc cuûa heä thoáng.
B : ñoä lôïi cuûa khaâu weighting.
K : haèng soá cuûa thaønh phaàn khuyeách ñaïi tæ leä.
K/Ti : haèng soá cuûa thaønh phaàn tích phaân.
KTd : haèng soá cuûa thaønh phaàn vi phaân.
u : tín hieäu ñaàu ra cuûa boä PID.
v : giaù trò qua khaâu baõo hoøa cuûa u.
Hình: Moâ phoûng PID vôùi anti-windup and setpoint weighting.
Moâ phoûng boä PID trong heä thoáng ñieàu khieån ñoäng cô khoâng ñoàng boä
Boä PID ñöôïc moâ phoûng khoâng coù thaønh phaàn vi phaân D, cho Td=0, N=1000, luùc
ñoù haøm truyeàn cuûa boä PID chæ ñôn giaûn laø :
i
1K 1
T s
Giaù trò ñoä lôïi khaâu weighting b=1
(HTĐKS-ĐKCMĐ) TB
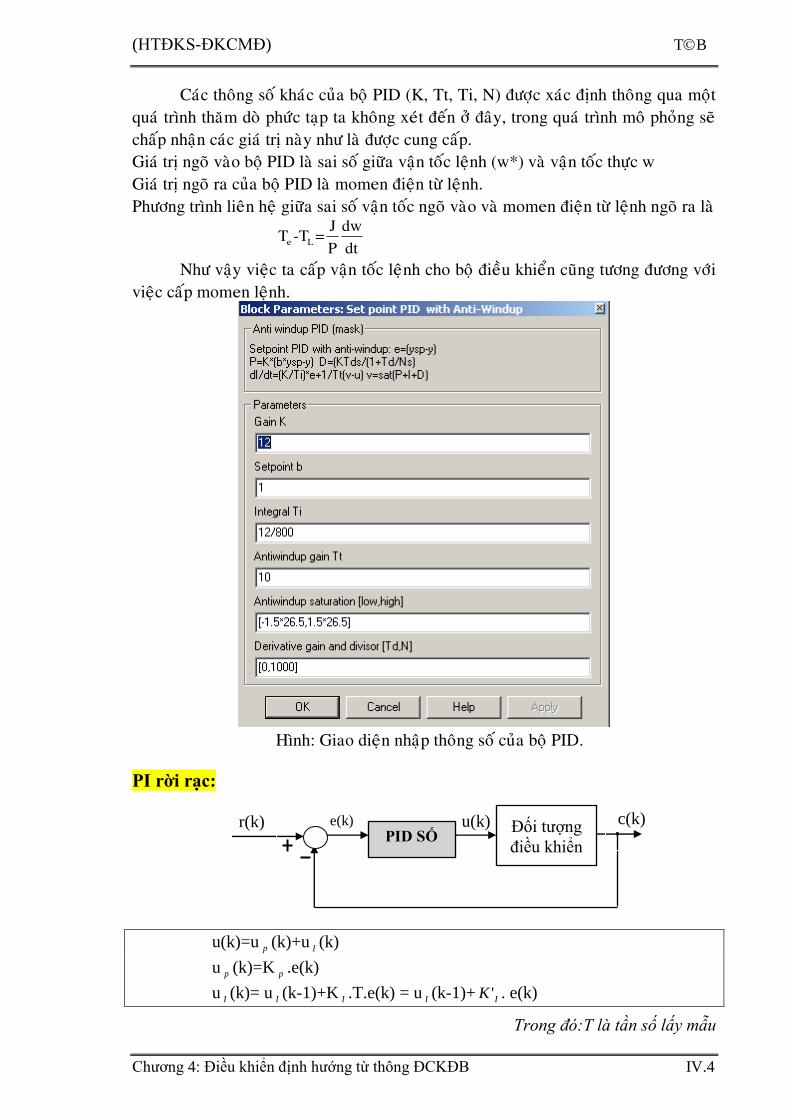
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.4
Caùc thoâng soá khaùc cuûa boä PID (K, Tt, Ti, N) ñöôïc xaùc ñònh thoâng qua moät
quaù trình thaêm doø phöùc taïp ta khoâng xeùt ñeán ôû ñaây, trong quaù trình moâ phoûng seõ
chaáp nhaän caùc giaù trò naøy nhö laø ñöôïc cung caáp.
Giaù trò ngoõ vaøo boä PID laø sai soá giöõa vaän toác leänh (w*) vaø vaän toác thöïc w
Giaù trò ngoõ ra cuûa boä PID laø momen ñieän töø leänh.
Phöông trình lieân heä giöõa sai soá vaän toác ngoõ vaøo vaø momen ñieän töø leänh ngoõ ra laø
e L
J dwT -T =
P dt
Nhö vaäy vieäc ta caáp vaän toác leänh cho boä ñieàu khieån cuõng töông ñöông vôùi
vieäc caáp momen leänh.
Hình: Giao dieän nhaäp thoâng soá cuûa boä PID.
PI rời rạc:
u(k)=u p (k)+u I (k)
u p (k)=K p .e(k)
u I (k)= u I (k-1)+K I .T.e(k) = u I (k-1)+ IK ' . e(k)
Trong đó:T là tần số lấy mẫu
e(k) u(k) PID SỐ
Đối tượng
điều khiển
c(k) r(k)

(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.5
void PID_Control(void) /*Khau PI*/
ss_n = n_dat - RPM; /* tinh sai so toc do hoi tiep ve*/
Up = Kp * ss_n; /* hieu chinh khau ti le (P)*/
Ui = Ui + Ki * Tsamp * ss_n; /* hieu chinh khau tich phan (I)*/
U_pt = Up + Ui;
if( U_pt < 0) /*Gioi han dien ap >= 0*/
U_pt= 0;
if( U_pt> 1.0) /*Gioi han dien ap <= 1.0*/
U_pt = 1.0;
DRX = (int)(U_pt*(float)T1PR); /*Do Rong Xung tich cuc muc cao */
T1CMPR = T1PR - DRX;
CMPR1 = T1PR - DRX;
PID số (Phương pháp 1):
dt
tdeKdtteKteKtu DIP
Rời rạc hóa:
kukukuku DIP
ke.Kku PP
ke.K1kuke.T.K1kuku '
IIIII
1kekeKT
1keke.Kku '
DDD
Trong đó:T là tần số lấy mẫu.hiể
Rời rạc hóa _ Phương pháp gần đúng (khâu I):
kukukuku DIP
keKku PP .
1. kekeKku II
1 kekeKku DD
PID số (Phương pháp 2):
Đạo hàm 2 vế:
2
2
dt
tedKteK
dt
tdeK
dt
tduDIP
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.6
kukuku
T
kukuDIP
1
1'1
.
kekeKT
kekeKku pPP
keKku II .
21*2'211
.
kekekeK
T
keke
T
kekeKku DDD
Hay: kukukukuku DIP '''1
1''' ' kekeKku pP
keKku II .''
21*2''' kekekeKku DD
Hay:
kukukukuku DIP 1
1. kekeKku PP
keKku II .
1' kukuKku PPDD
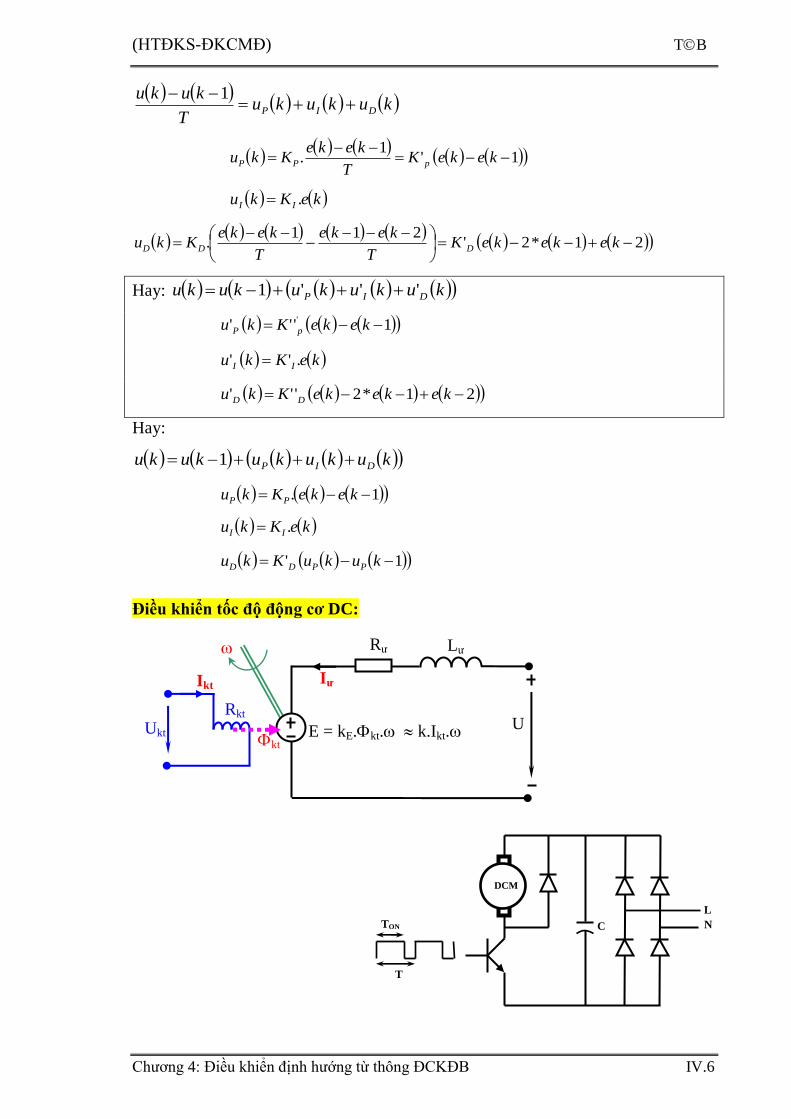
Điều khiển tốc độ động cơ DC:
Ikt
U
Rư
Iư
E = kE.kt. k.Ikt.
Rkt
Ukt
kt
Lư
TON
T
DCM
L
N C
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.7
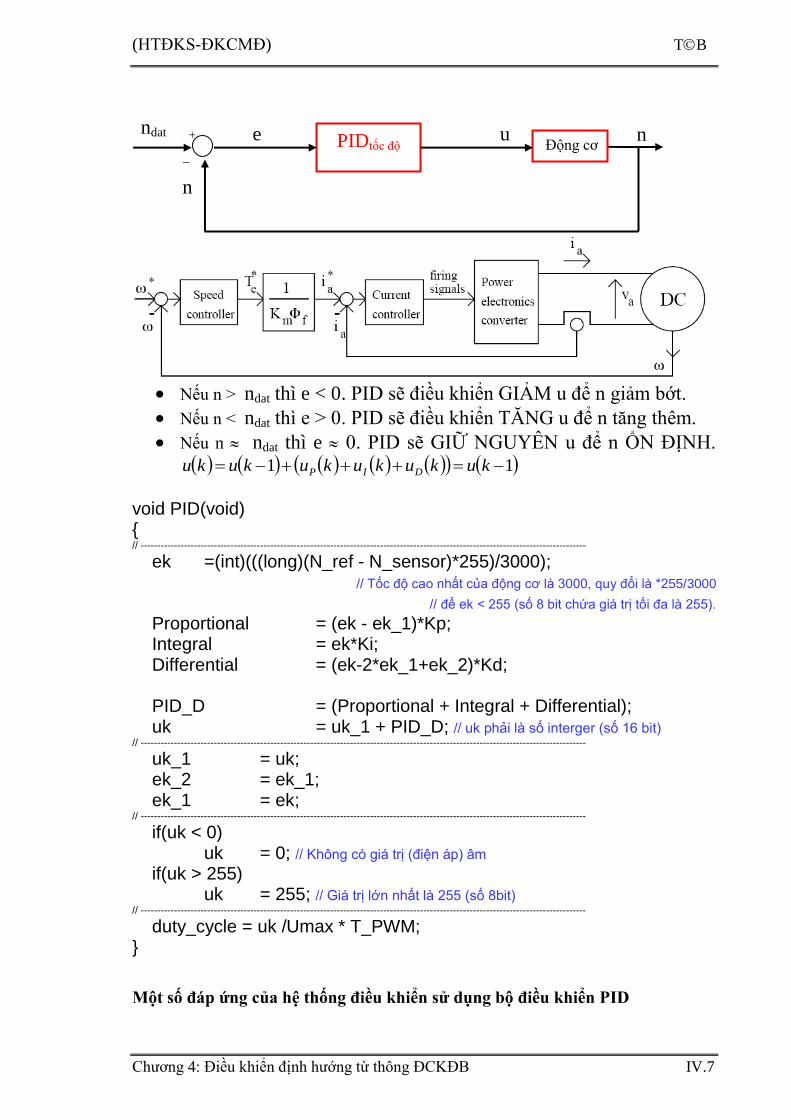
Nếu n > ndat thì e < 0. PID sẽ điều khiển GIẢM u để n giảm bớt.
Nếu n < ndat thì e > 0. PID sẽ điều khiển TĂNG u để n tăng thêm.
Nếu n ndat thì e 0. PID sẽ GIỮ NGUYÊN u để n ỔN ĐỊNH. 11 kukukukukuku DIP
void PID(void) // --------------------------------------------------------------------------------------------------------------------------------------
ek =(int)(((long)(N_ref - N_sensor)*255)/3000); // Tốc độ cao nhất của động cơ là 3000, quy đổi là *255/3000
// để ek < 255 (số 8 bit chứa giá trị tối đa là 255).
Proportional = (ek - ek_1)*Kp; Integral = ek*Ki; Differential = (ek-2*ek_1+ek_2)*Kd; PID_D = (Proportional + Integral + Differential); uk = uk_1 + PID_D; // uk phải là số interger (số 16 bit) // --------------------------------------------------------------------------------------------------------------------------------------
uk_1 = uk; ek_2 = ek_1; ek_1 = ek;
// --------------------------------------------------------------------------------------------------------------------------------------
if(uk < 0) uk = 0; // Không có giá trị (điện áp) âm if(uk > 255) uk = 255; // Giá trị lớn nhất là 255 (số 8bit) // --------------------------------------------------------------------------------------------------------------------------------------
duty_cycle = uk /Umax * T_PWM;
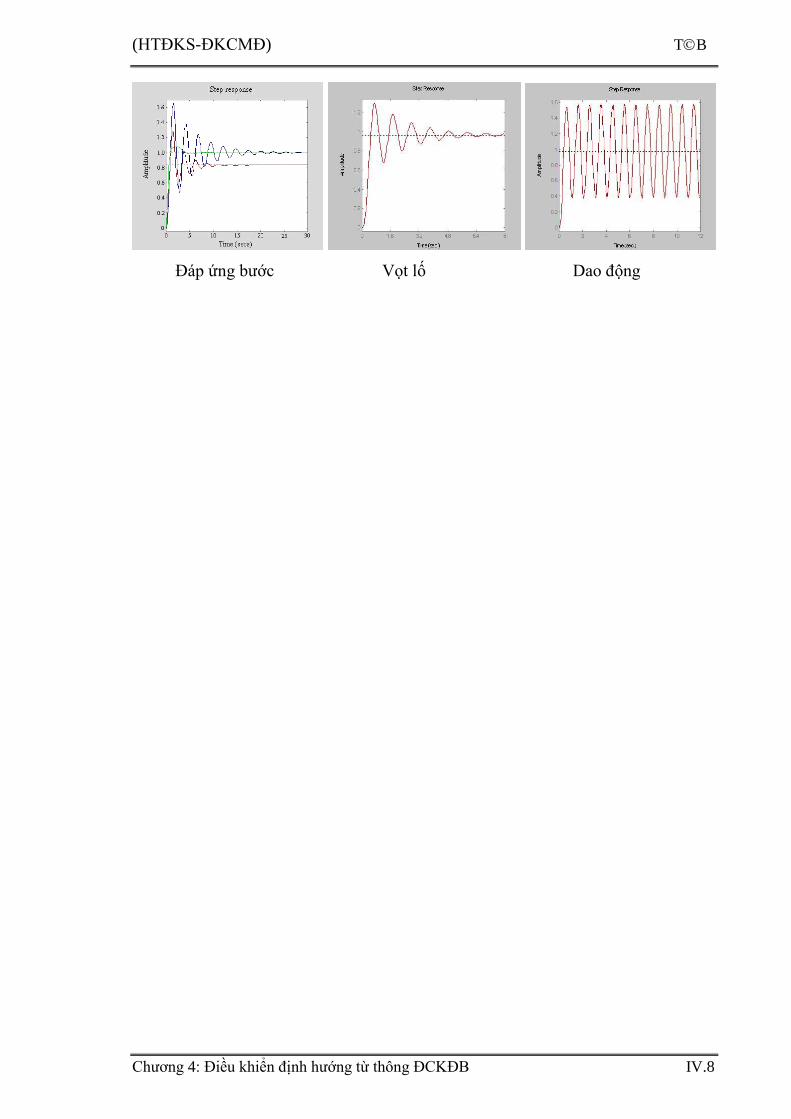
Một số đáp ứng của hệ thống điều khiển sử dụng bộ điều khiển PID
ndat Động cơ
+
u _
n
n
PIDtốc độ e
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.8
Đáp ứng bước Vọt lố Dao động
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.9
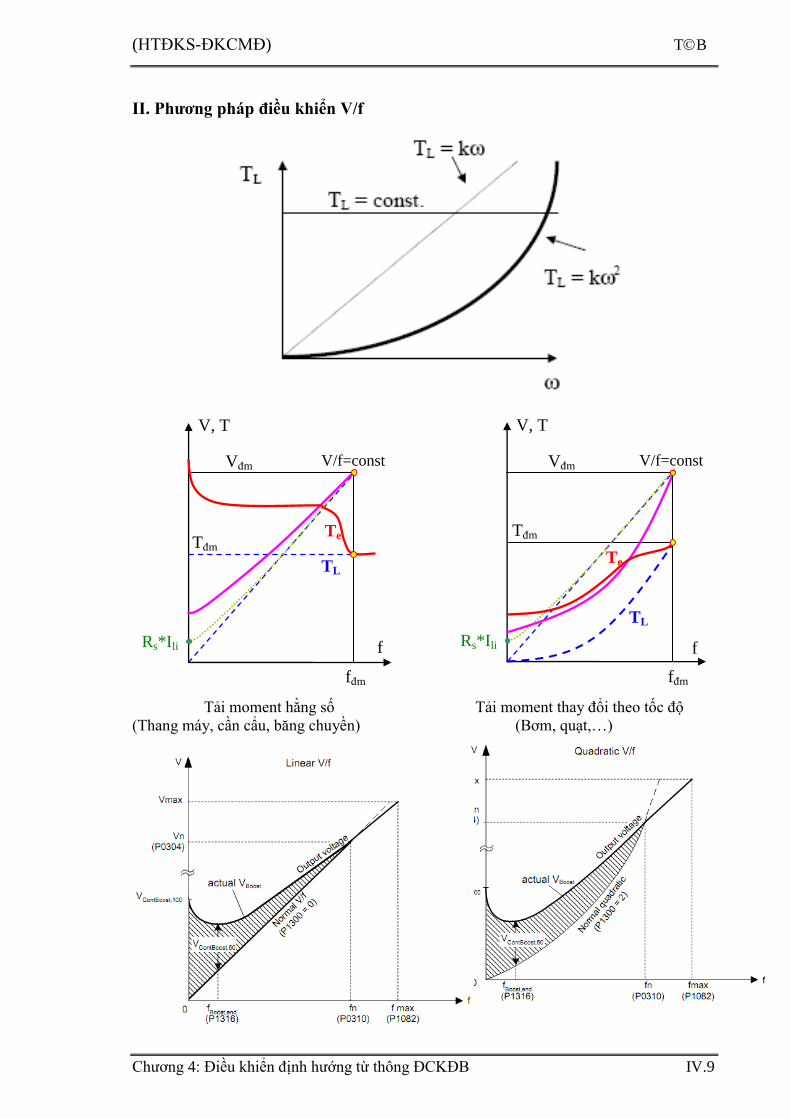
II. Phương pháp điều khiển V/f
Tải moment hằng số Tải moment thay đổi theo tốc độ
(Thang máy, cần cẩu, băng chuyền) (Bơm, quạt,…)
Rs*Ili
m
f
V, T
Te
TL
fđm
V/f=const Vđm
Tđm
V/f=const
f
V, T
Te
Rs*Ili
m
TL
fđm
Tđm
Vđm
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.10
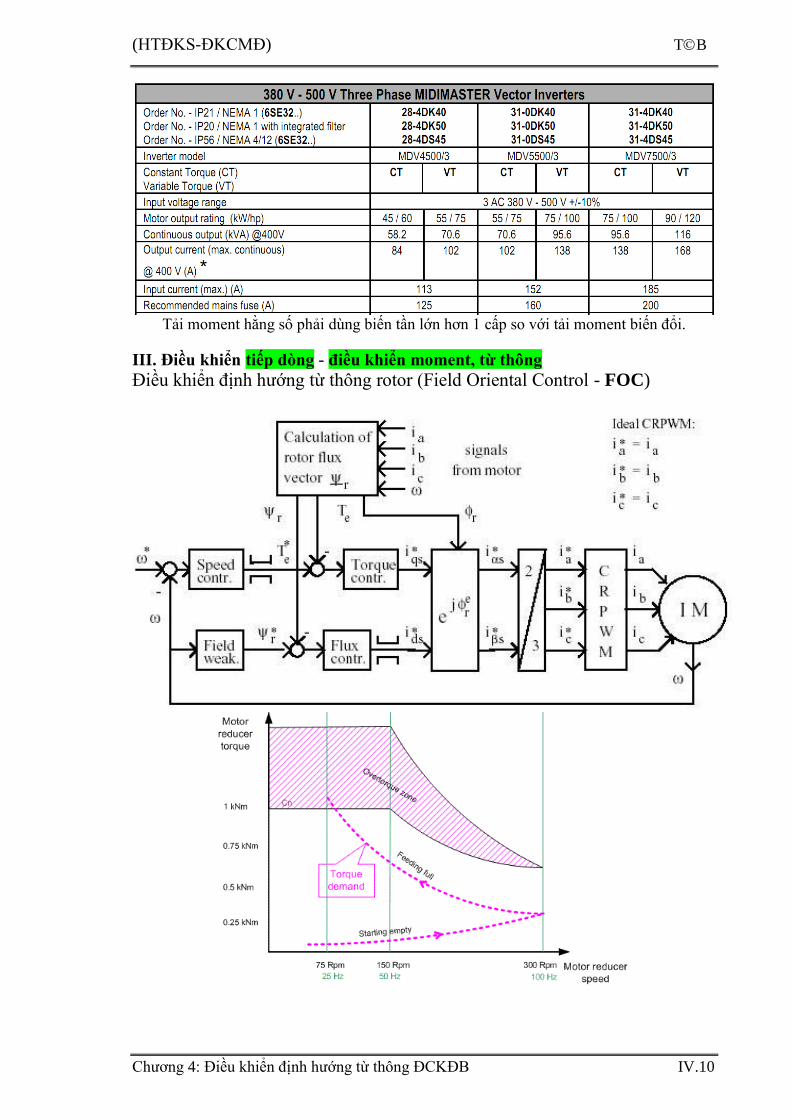
Tải moment hằng số phải dùng biến tần lớn hơn 1 cấp so với tải moment biến đổi.
III. Điều khiển tiếp dòng - điều khiển moment, từ thông
Điều khiển định hướng từ thông rotor (Field Oriental Control - FOC)
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.11
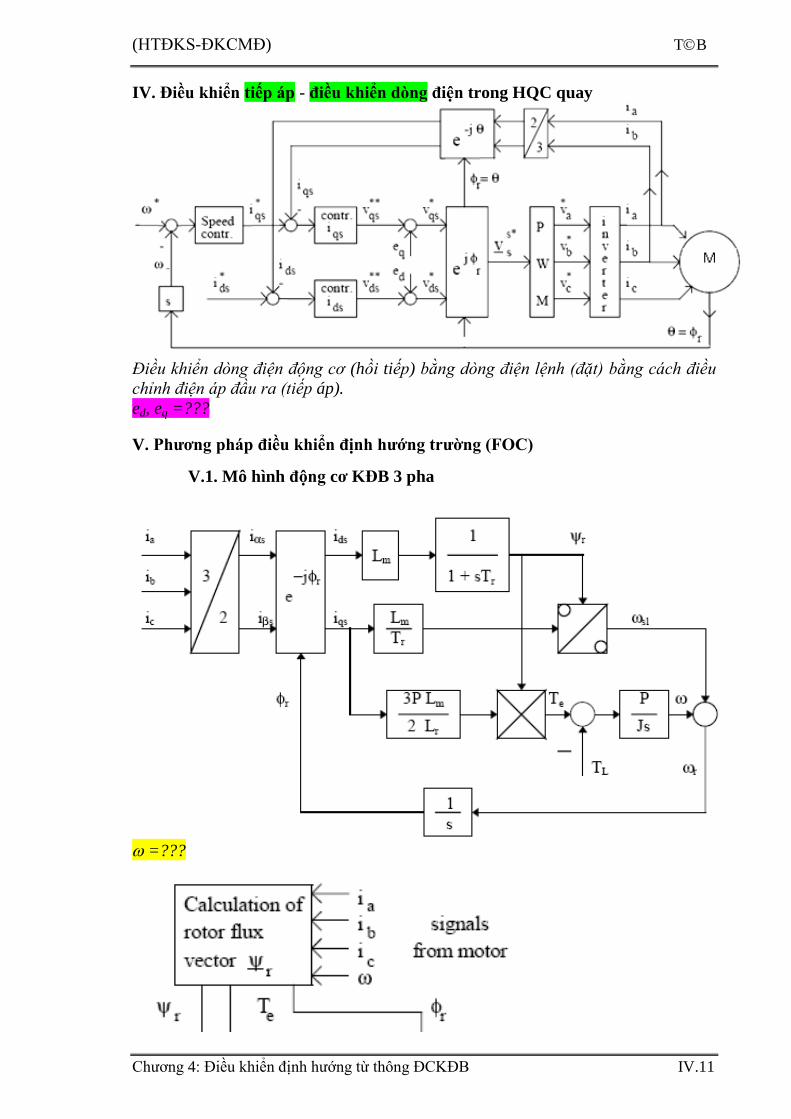
IV. Điều khiển tiếp áp - điều khiển dòng điện trong HQC quay
Điều khiển dòng điện động cơ (hồi tiếp) bằng dòng điện lệnh (đặt) bằng cách điều
chỉnh điện áp đầu ra (tiếp áp).
ed, eq =???
V. Phương pháp điều khiển định hướng trường (FOC)
V.1. Mô hình động cơ KĐB 3 pha
=???
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.12
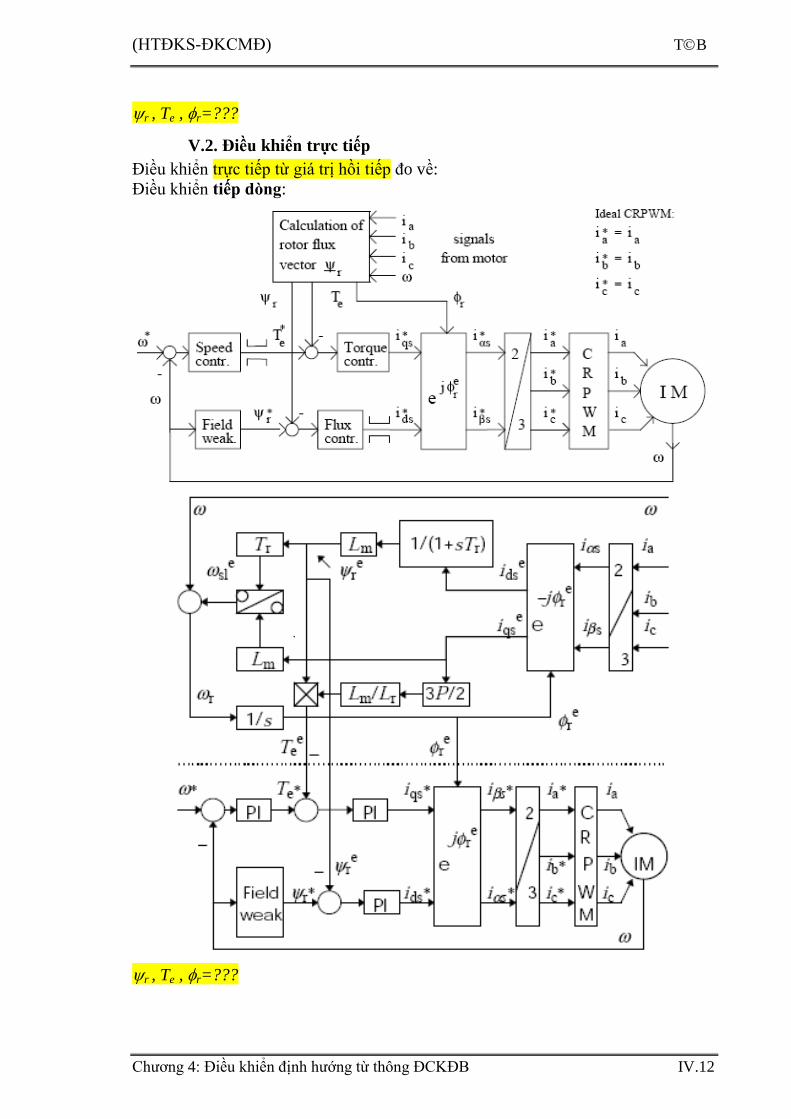
r , Te , r=???
V.2. Điều khiển trực tiếp
Điều khiển trực tiếp từ giá trị hồi tiếp đo về:
Điều khiển tiếp dòng:
r , Te , r=???
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.13
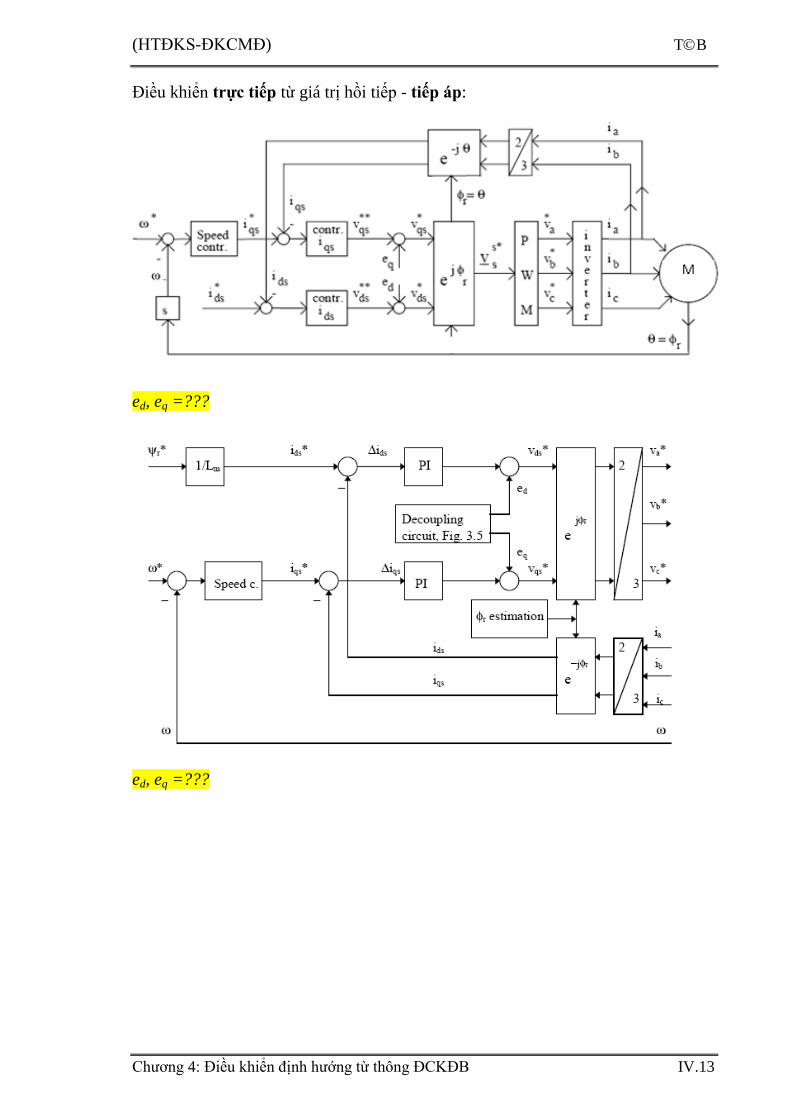
Điều khiển trực tiếp từ giá trị hồi tiếp - tiếp áp:
ed, eq =???
ed, eq =???
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.14
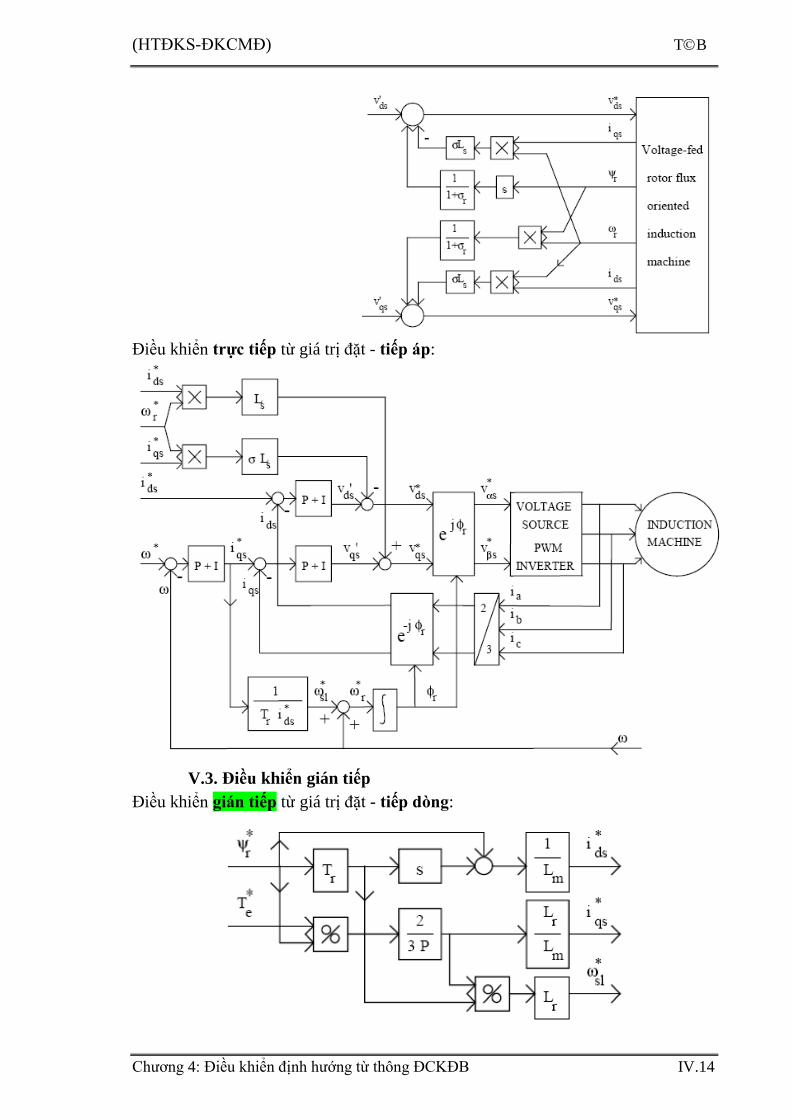
Điều khiển trực tiếp từ giá trị đặt - tiếp áp:
V.3. Điều khiển gián tiếp
Điều khiển gián tiếp từ giá trị đặt - tiếp dòng:
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.15
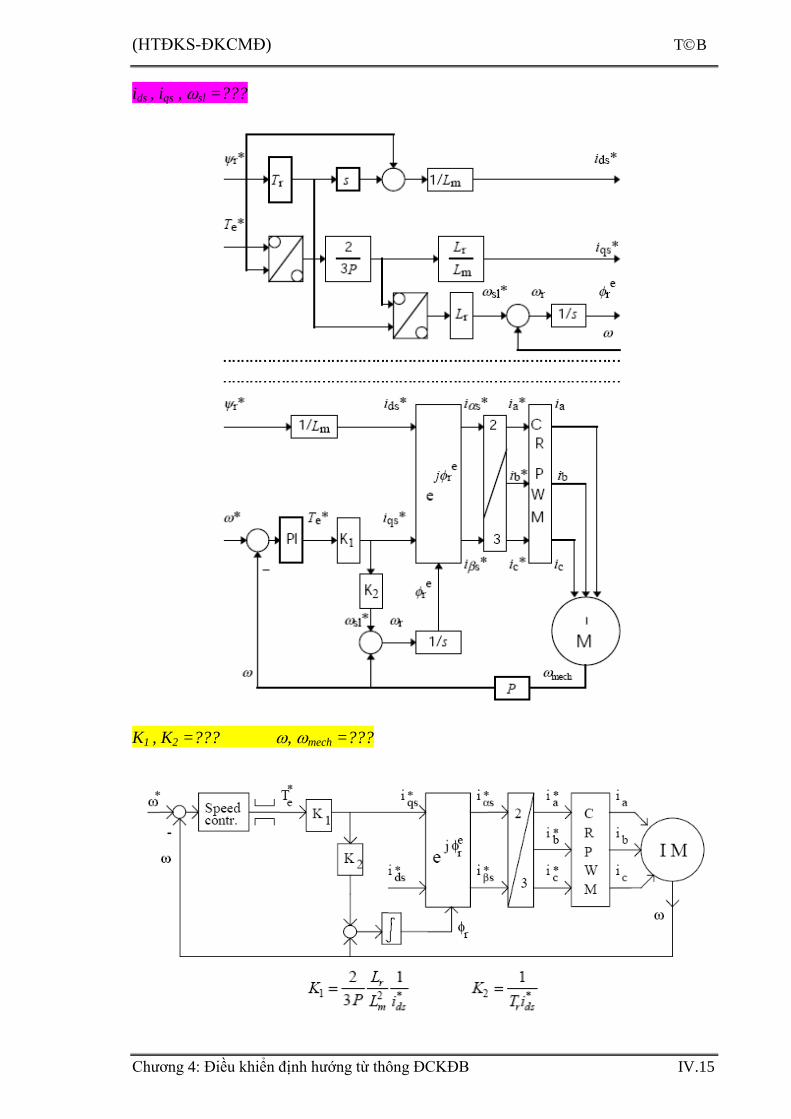
ids , iqs , sl =???
K1 , K2 =??? , mech =???
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.16
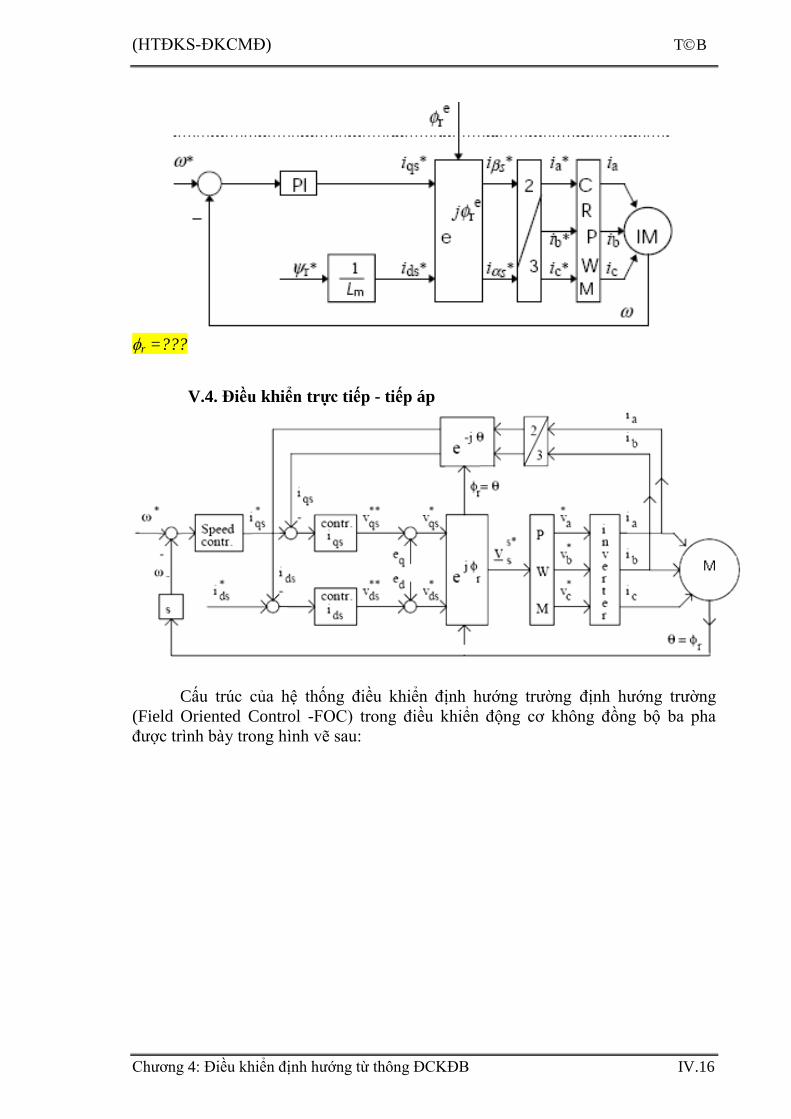
r =???
V.4. Điều khiển trực tiếp - tiếp áp
Cấu trúc của hệ thống điều khiển định hướng trường định hướng trường
(Field Oriented Control -FOC) trong điều khiển động cơ không đồng bộ ba pha
được trình bày trong hình vẽ sau:
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.17
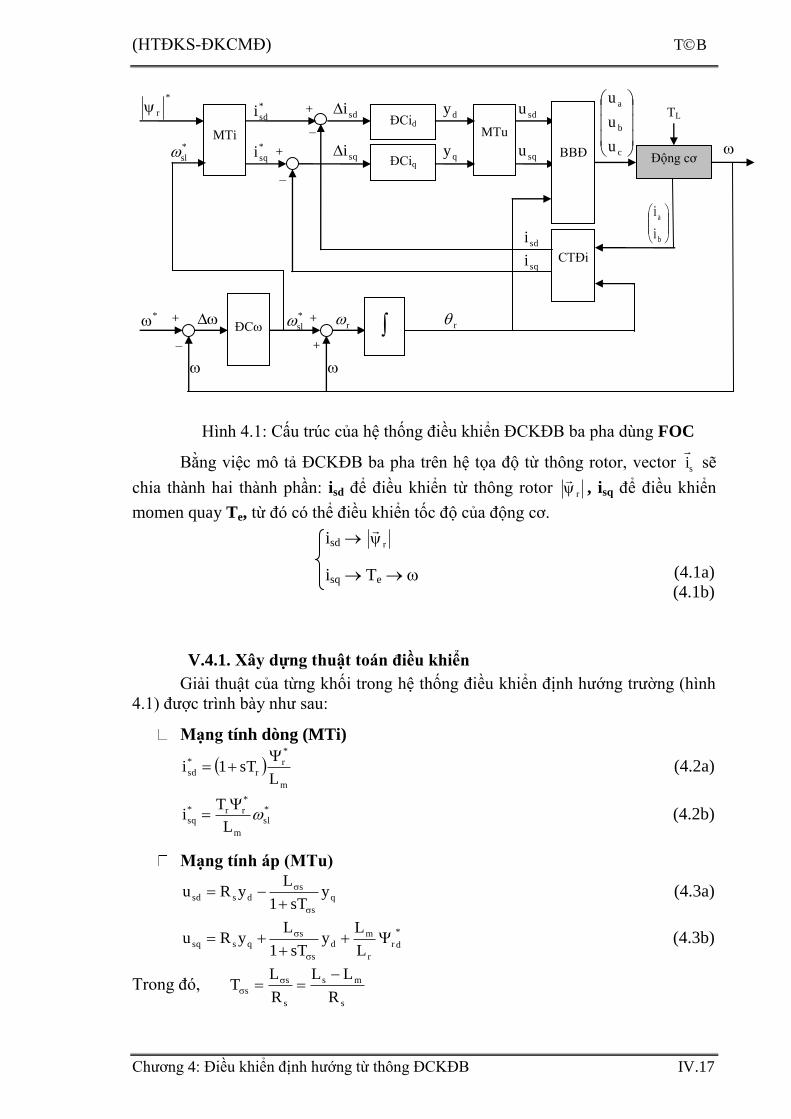
Hình 4.1: Cấu trúc của hệ thống điều khiển ĐCKĐB ba pha dùng FOC
Bằng việc mô tả ĐCKĐB ba pha trên hệ tọa độ từ thông rotor, vector si
sẽ
chia thành hai thành phần: isd để điều khiển từ thông rotor r
, isq để điều khiển
momen quay Te, từ đó có thể điều khiển tốc độ của động cơ.
(4.1a)
(4.1b)
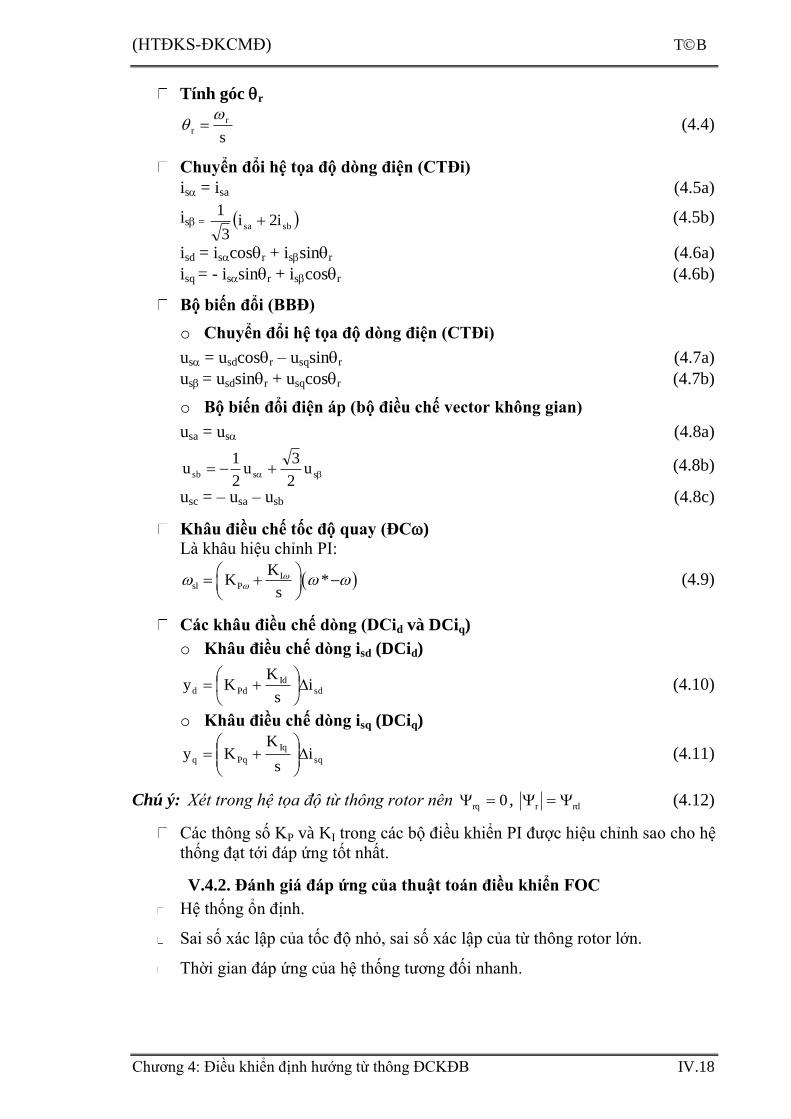
V.4.1. Xây dựng thuật toán điều khiển
Giải thuật của từng khối trong hệ thống điều khiển định hướng trường (hình
4.1) được trình bày như sau:
Mạng tính dòng (MTi)
m
*
rr
*
sdL
sT1i
(4.2a)
*
sl
m
*
rr*
sqL
Ti
(4.2b)
Mạng tính áp (MTu)
q
s
s
dssd ysT1
LyRu
(4.3a)
*
dr
r
md
s
s
qssqL
Ly
sT1
LyRu
(4.3b)
Trong đó, s
ms
s
s
sR
LL
R
LT
TL
b
a
i
i
MTu
BBĐ
c
b
a
u
u
u
Động cơ
–
*
sdi + ĐCid
MTu ĐCiq
MTu
MTi
–
+
*
r
CTĐi
ĐC
–
+
*
+
+
*
sl
*
sl
r r
*
sqi
sdi
sqi
sdi
sqi
dy
qy
sdu
squ
isd r
isq Te
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.18
Tính góc r
s
r
r
(4.4)
Chuyển đổi hệ tọa độ dòng điện (CTĐi)
is = isa (4.5a)
is = sbsa i2i3
1 (4.5b)
isd = iscosr + issinr (4.6a)
isq = - issinr + iscosr (4.6b)
Bộ biến đổi (BBĐ)
o Chuyển đổi hệ tọa độ dòng điện (CTĐi)
us = usdcosr – usqsinr (4.7a)
us = usdsinr + usqcosr (4.7b)
o Bộ biến đổi điện áp (bộ điều chế vector không gian)
usa = us (4.8a)
sssb u
2
3u
2
1u (4.8b)
usc = – usa – usb (4.8c)
Khâu điều chế tốc độ quay (ĐC)
Là khâu hiệu chỉnh PI:
Isl P
KK *
s
(4.9)
Các khâu điều chế dòng (DCid và DCiq)
o Khâu điều chế dòng isd (DCid)
sd
Id
Pdd is
KKy
(4.10)
o Khâu điều chế dòng isq (DCiq)
sq
Iq
Pqq is
KKy
(4.11)
Chú ý: Xét trong hệ tọa độ từ thông rotor nên 0rq , rdr (4.12)
Các thông số KP và KI trong các bộ điều khiển PI được hiệu chỉnh sao cho hệ
thống đạt tới đáp ứng tốt nhất.
V.4.2. Đánh giá đáp ứng của thuật toán điều khiển FOC
Hệ thống ổn định.
Sai số xác lập của tốc độ nhỏ, sai số xác lập của từ thông rotor lớn.
Thời gian đáp ứng của hệ thống tương đối nhanh.
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.19
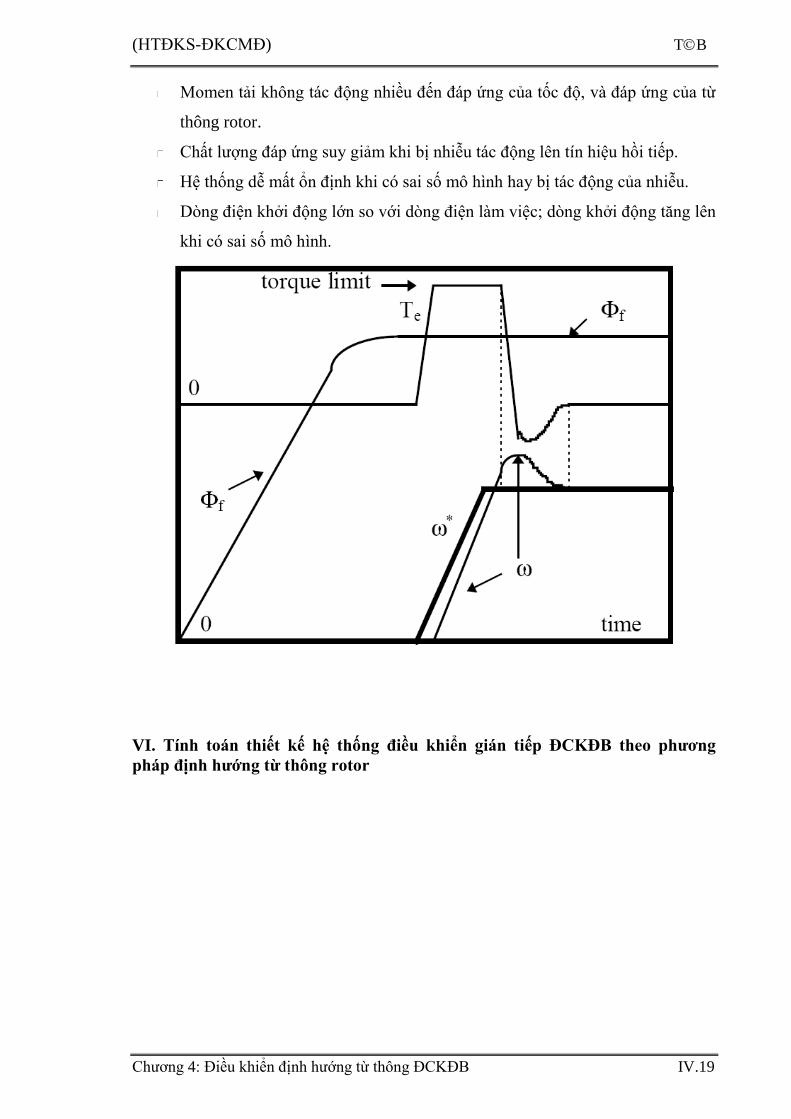
Momen tải không tác động nhiều đến đáp ứng của tốc độ, và đáp ứng của từ
thông rotor.
Chất lượng đáp ứng suy giảm khi bị nhiễu tác động lên tín hiệu hồi tiếp.
Hệ thống dễ mất ổn định khi có sai số mô hình hay bị tác động của nhiễu.
Dòng điện khởi động lớn so với dòng điện làm việc; dòng khởi động tăng lên
khi có sai số mô hình.
VI. Tính toán thiết kế hệ thống điều khiển gián tiếp ĐCKĐB theo phương
pháp định hướng từ thông rotor
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.20
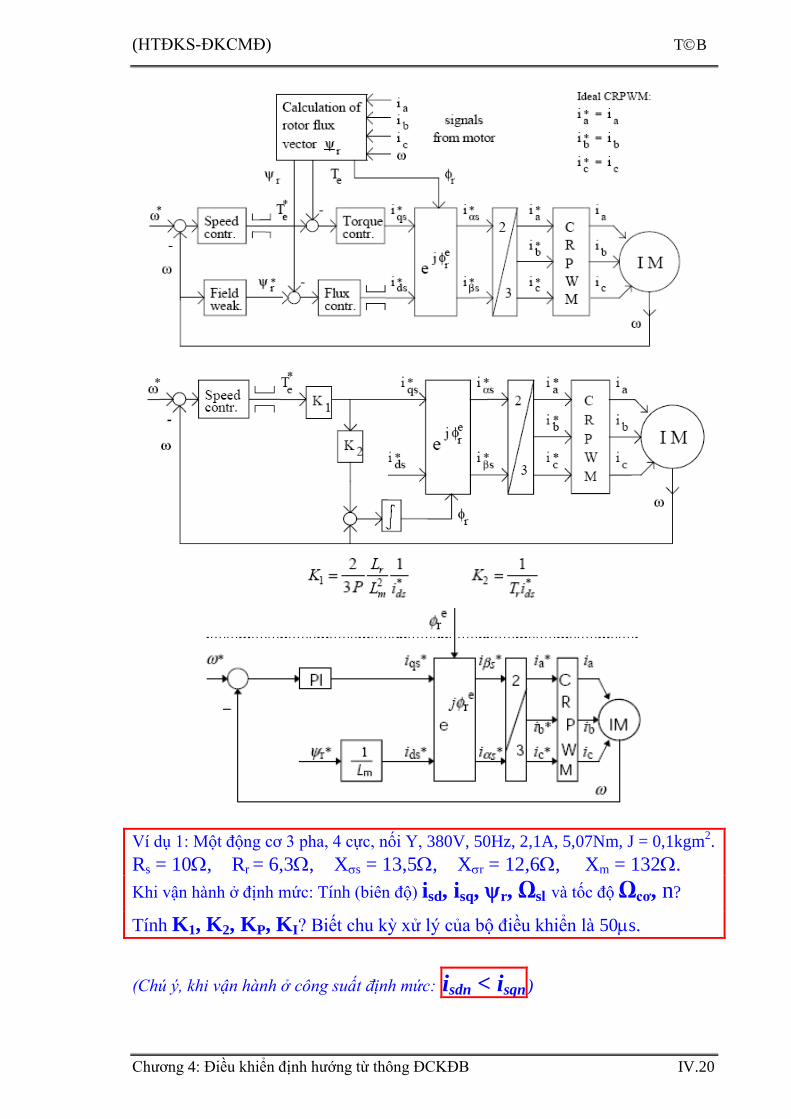
Ví dụ 1: Một động cơ 3 pha, 4 cực, nối Y, 380V, 50Hz, 2,1A, 5,07Nm, J = 0,1kgm2.
Rs = 10, Rr = 6,3, Xs = 13,5, Xr = 12,6, Xm = 132.
Khi vận hành ở định mức: Tính (biên độ) isd, isq, r, Ωsl và tốc độ Ωcơ, n?
Tính K1, K2, KP, KI? Biết chu kỳ xử lý của bộ điều khiển là 50s.
(Chú ý, khi vận hành ở công suất định mức: isdn < isqn )
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.21
f2
XL m
m
f2
XL s
s
sms LLL
s
ss
R
LT
f2
XL r
r
rmr LLL
r
r
rR
LT
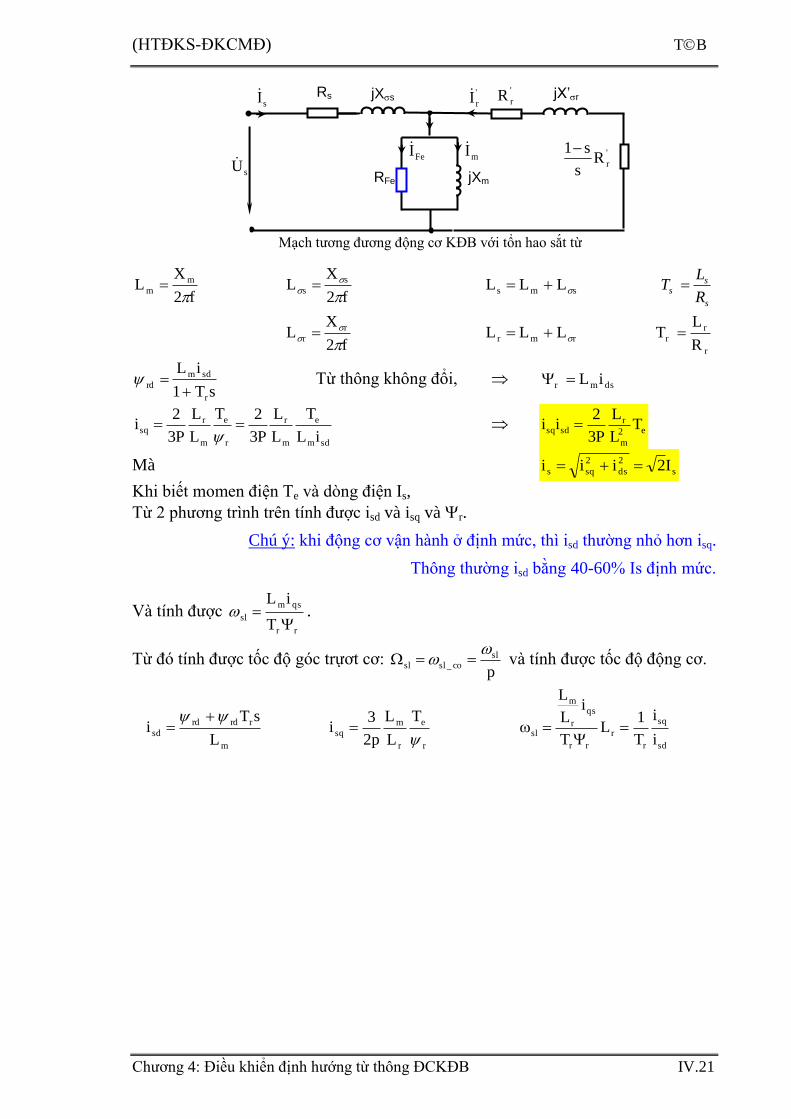
sT1
iL
r
sdm
rd
Từ thông không đổi, dsmr iL
sdm
e
m
r
r
e
m
rsq
iL
T
L
L
P3
2T
L
L
P3
2i
e2
m
rsdsq T
L
L
P3
2ii
Mà s
2
ds
2
sqs I2iii
Khi biết momen điện Te và dòng điện Is,
Từ 2 phương trình trên tính được isd và isq và r.
Chú ý: khi động cơ vận hành ở định mức, thì isd thường nhỏ hơn isq.
Thông thường isd bằng 40-60% Is định mức.
Và tính được rr
qsm
slT
iL
.
Từ đó tính được tốc độ góc trựơt cơ: p
slco_slsl
và tính được tốc độ động cơ.
m
rrdrd
sdL
sTi
r
e
r
m
sq
T
L
L
p2
3i
sd
sq
r
r
rr
qs
r
m
sli
i
T
1L
T
iL
L
Rs sI jXs
sU
'
rI '
rR jX’r
Mạch tương đương động cơ KĐB với tổn hao sắt từ
'
rRs
s1
RFe jXm
mI FeI
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.22
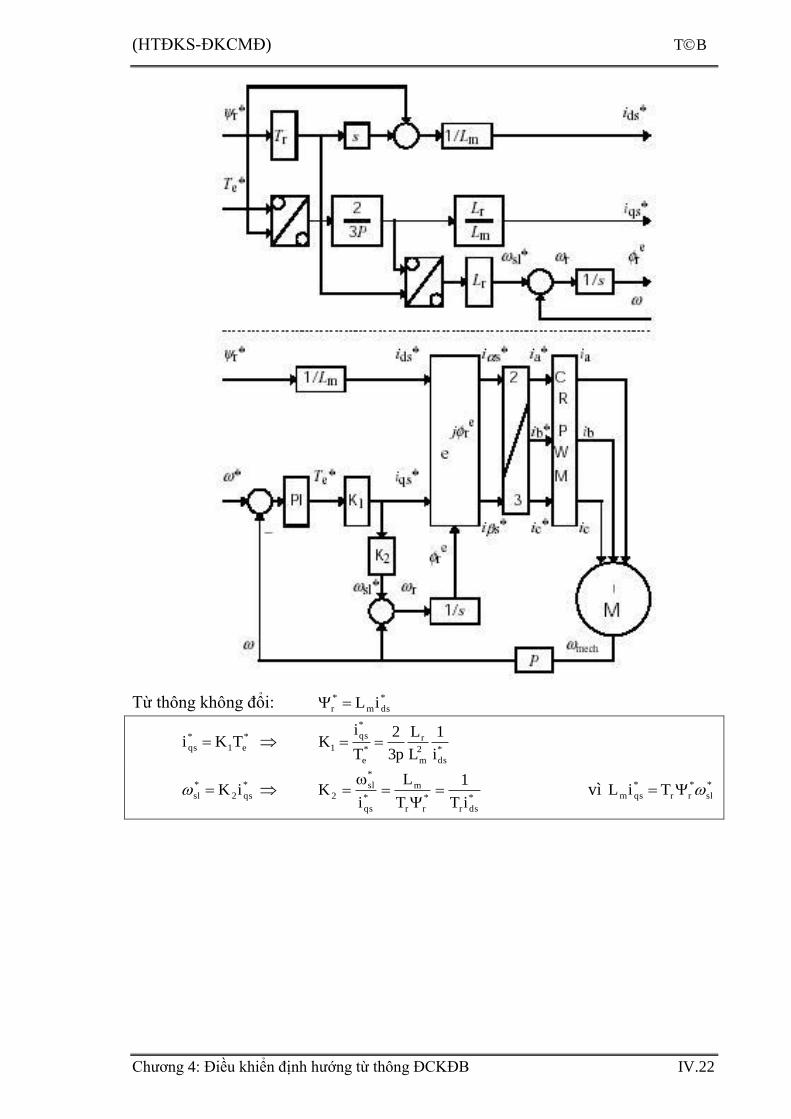
Từ thông không đổi: *
dsm
*
r iL
*
e1
*
qs TKi *
ds
2
m
r
*
e
*
qs
1i
1
L
L
p3
2
T
iK
*
qs2
*
sl iK *
dsr
*
rr
m
*
qs
*
sl
2iT
1
T
L
iK
vì *
sl
*
rr
*
qsm TiL
(HTĐKS-ĐKCMĐ) TB
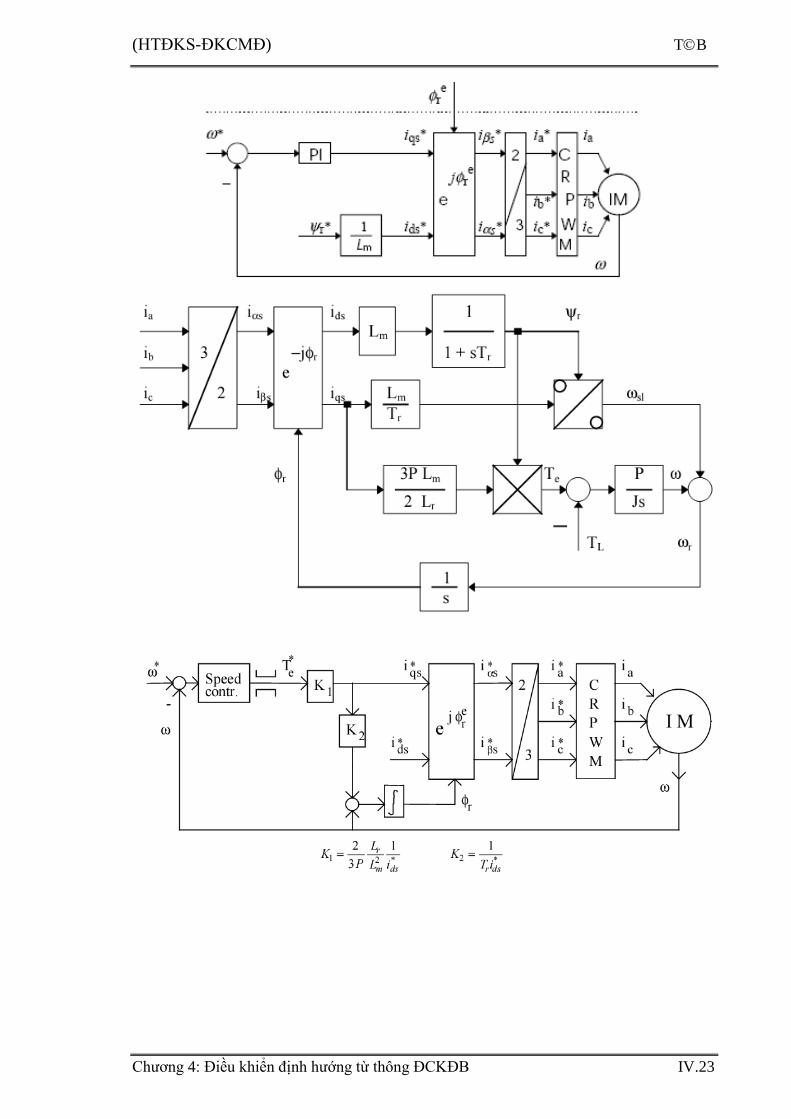
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.23
(HTĐKS-ĐKCMĐ) TB
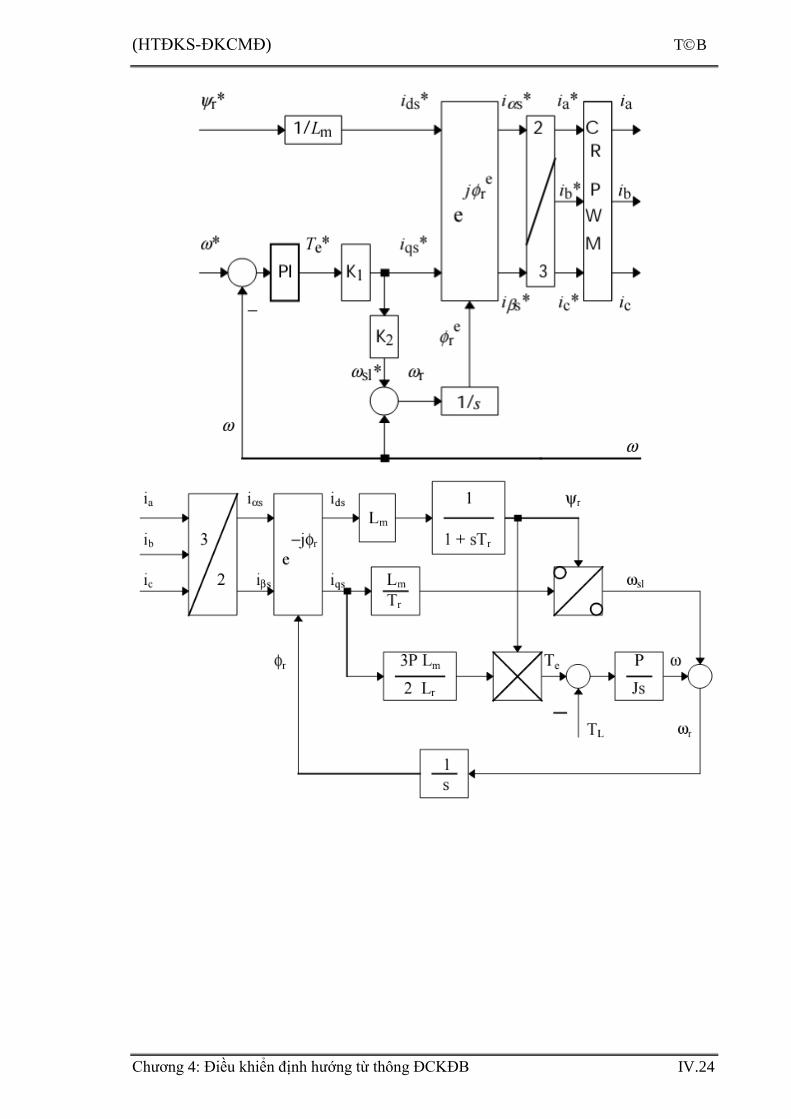
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.24
(HTĐKS-ĐKCMĐ) TB
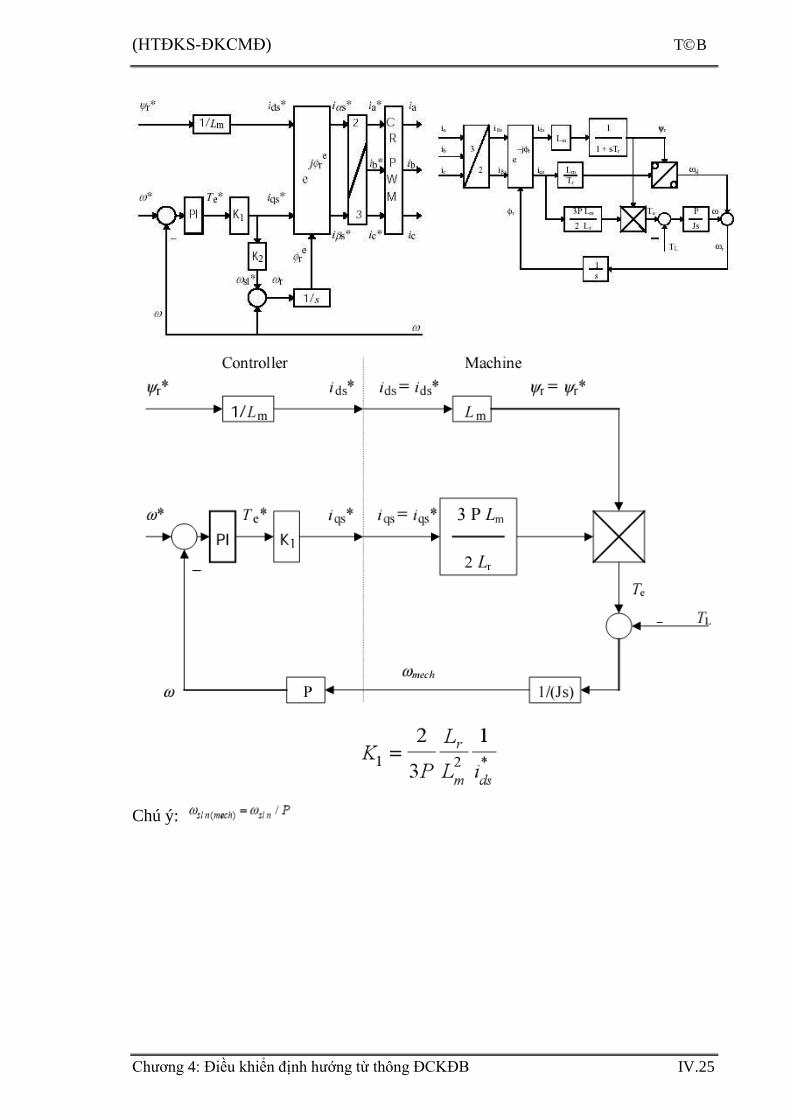
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.25
Chú ý:
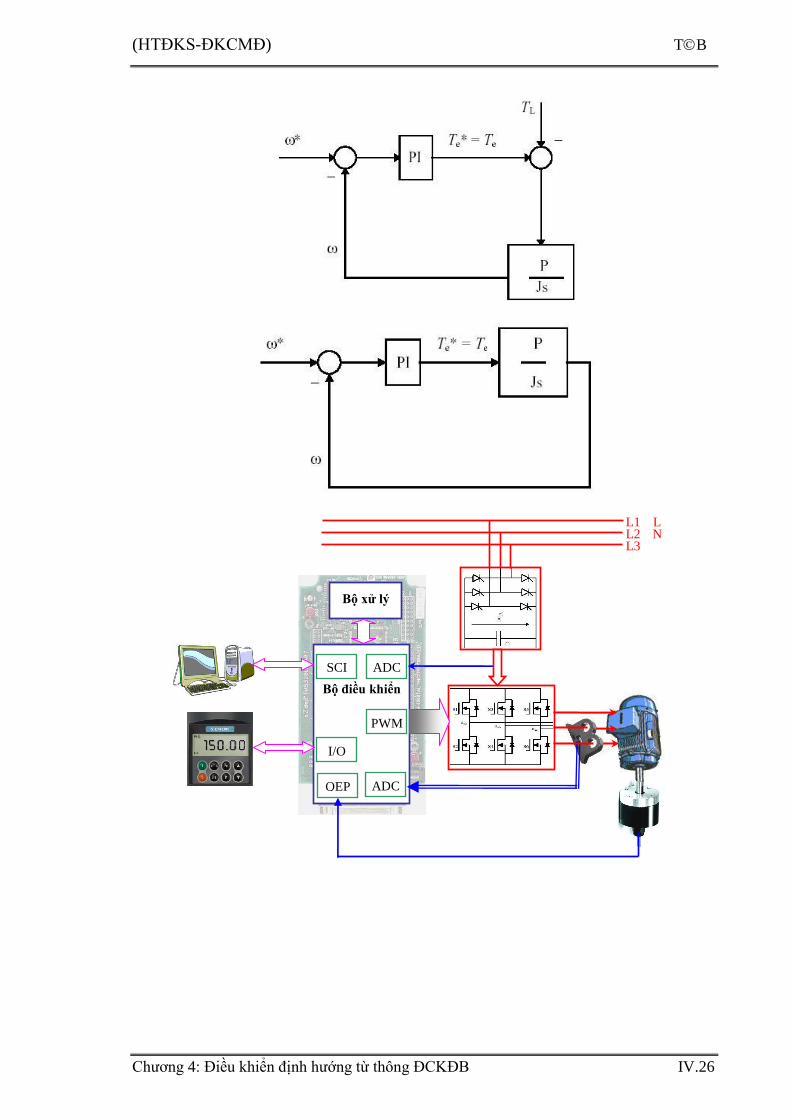
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.26
Bộ điều khiển
Bộ ử l
FOC
PWM
QEP ADC
SCI
I/O
ADC
L3 L2 L1
N L
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.27
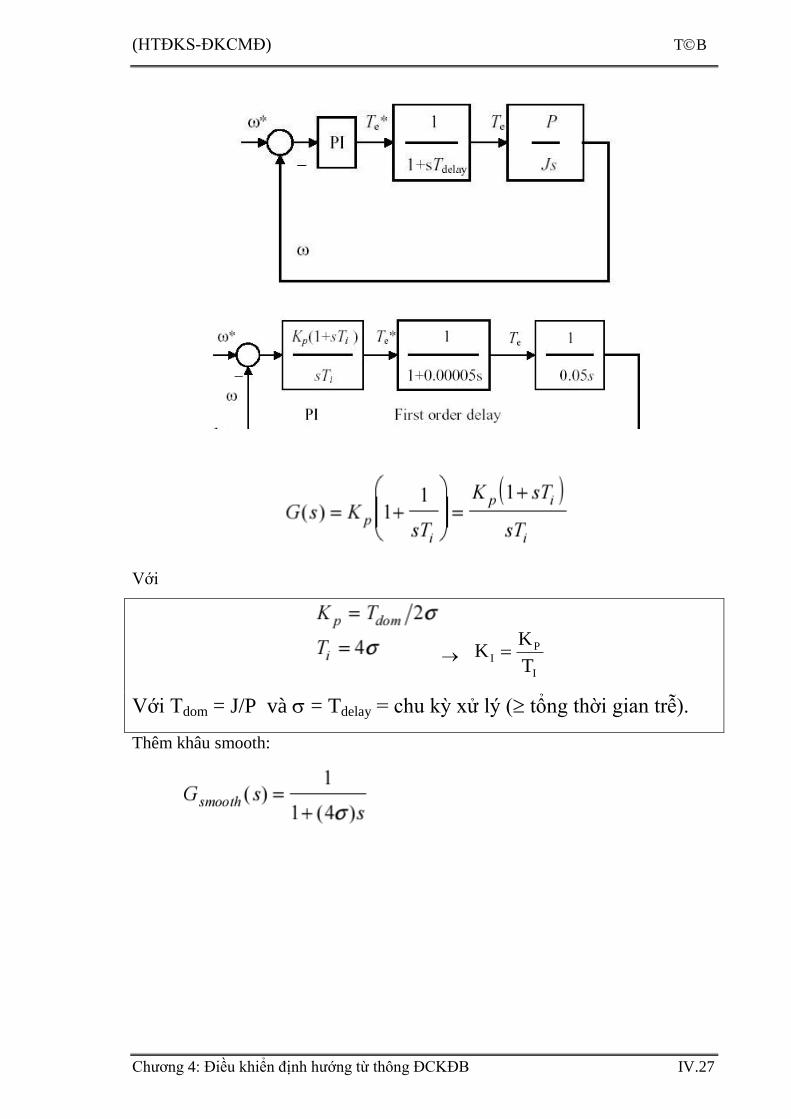
Với
I
PI
T
KK
Với Tdom = J/P và = Tdelay = chu kỳ xử lý ( tổng thời gian trễ).
Thêm khâu smooth:
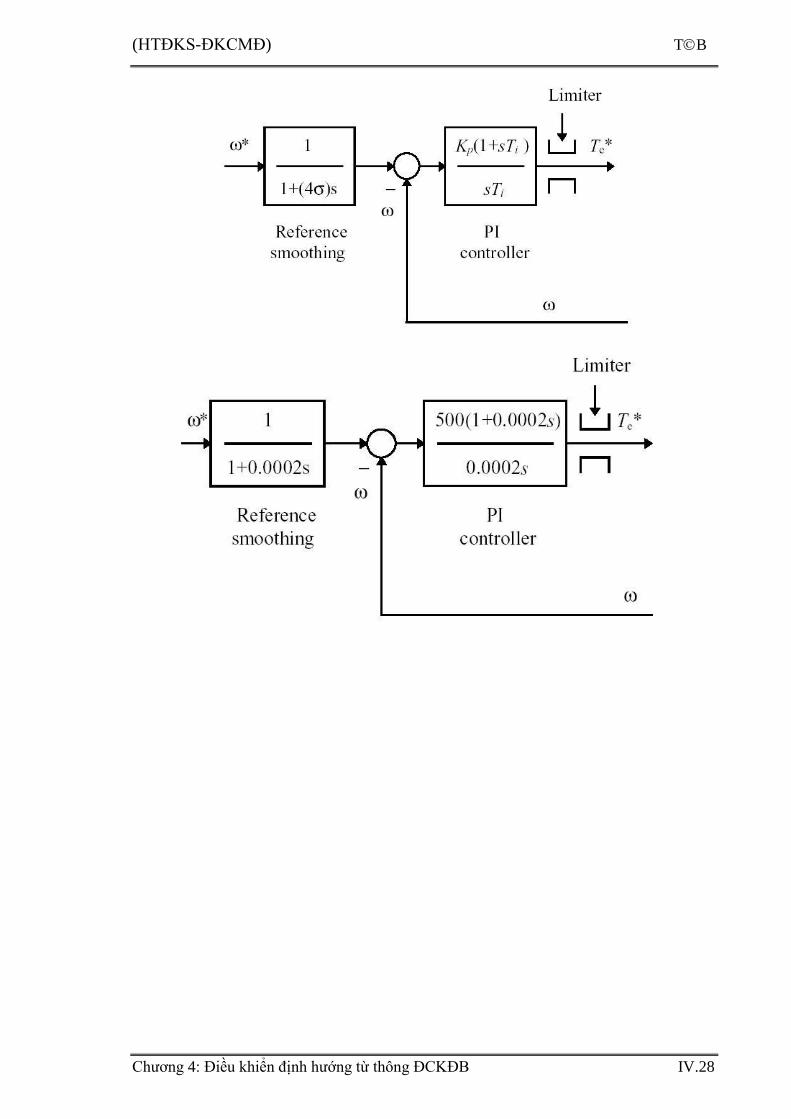
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.28
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.29
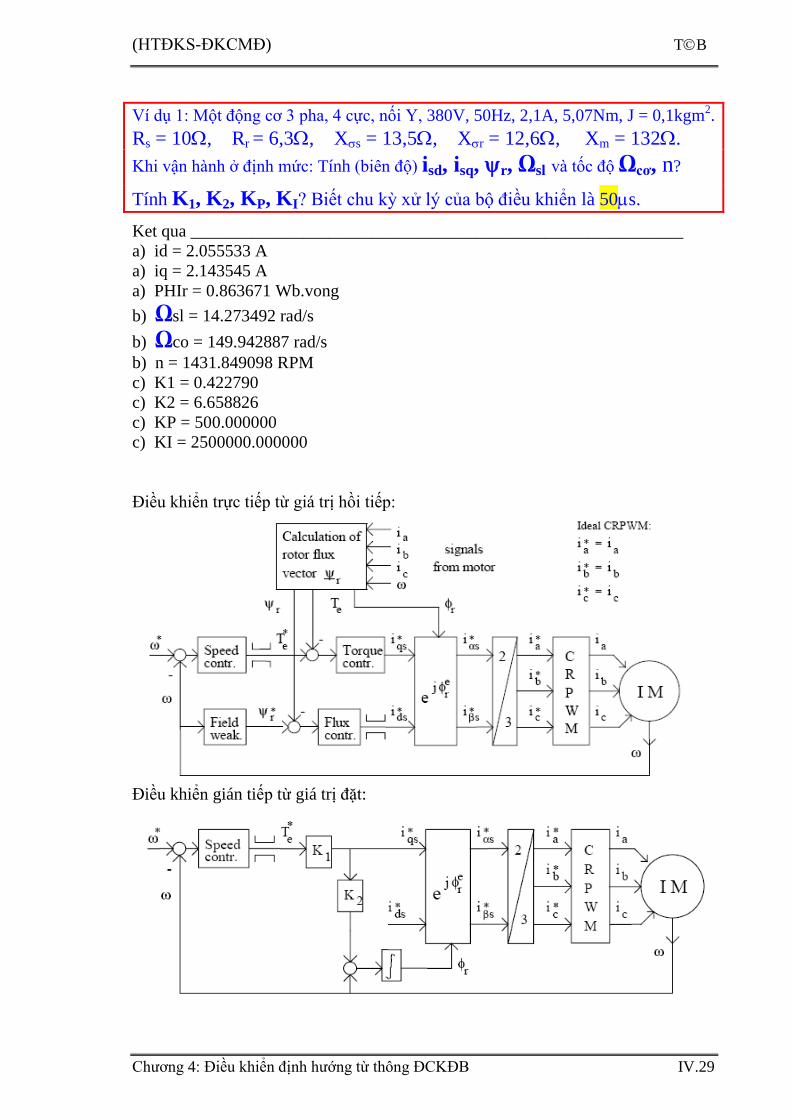
Ví dụ 1: Một động cơ 3 pha, 4 cực, nối Y, 380V, 50Hz, 2,1A, 5,07Nm, J = 0,1kgm2.
Rs = 10, Rr = 6,3, Xs = 13,5, Xr = 12,6, Xm = 132.
Khi vận hành ở định mức: Tính (biên độ) isd, isq, r, Ωsl và tốc độ Ωcơ, n?
Tính K1, K2, KP, KI? Biết chu kỳ xử lý của bộ điều khiển là 50s.
Ket qua _________________________________________________________
a) id = 2.055533 A
a) iq = 2.143545 A
a) PHIr = 0.863671 Wb.vong
b) Ωsl = 14.273492 rad/s
b) Ωco = 149.942887 rad/s
b) n = 1431.849098 RPM
c) K1 = 0.422790
c) K2 = 6.658826
c) KP = 500.000000
c) KI = 2500000.000000
Điều khiển trực tiếp từ giá trị hồi tiếp:
Điều khiển gián tiếp từ giá trị đặt:
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.30
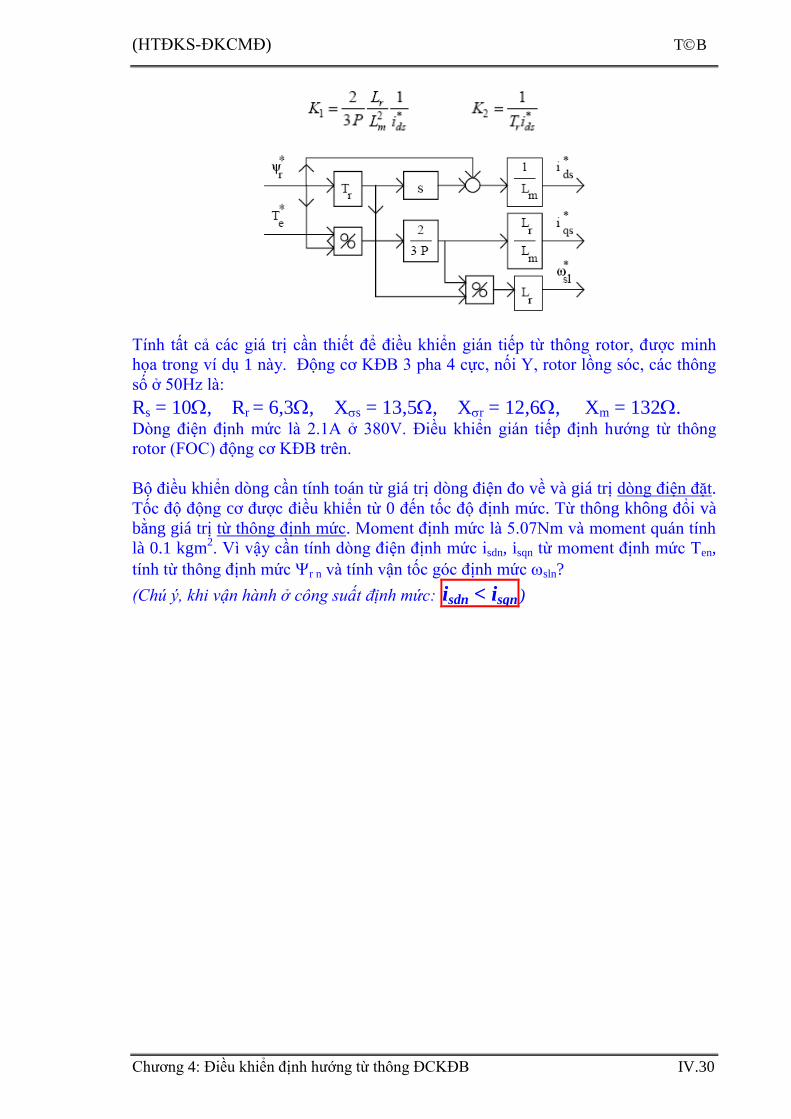
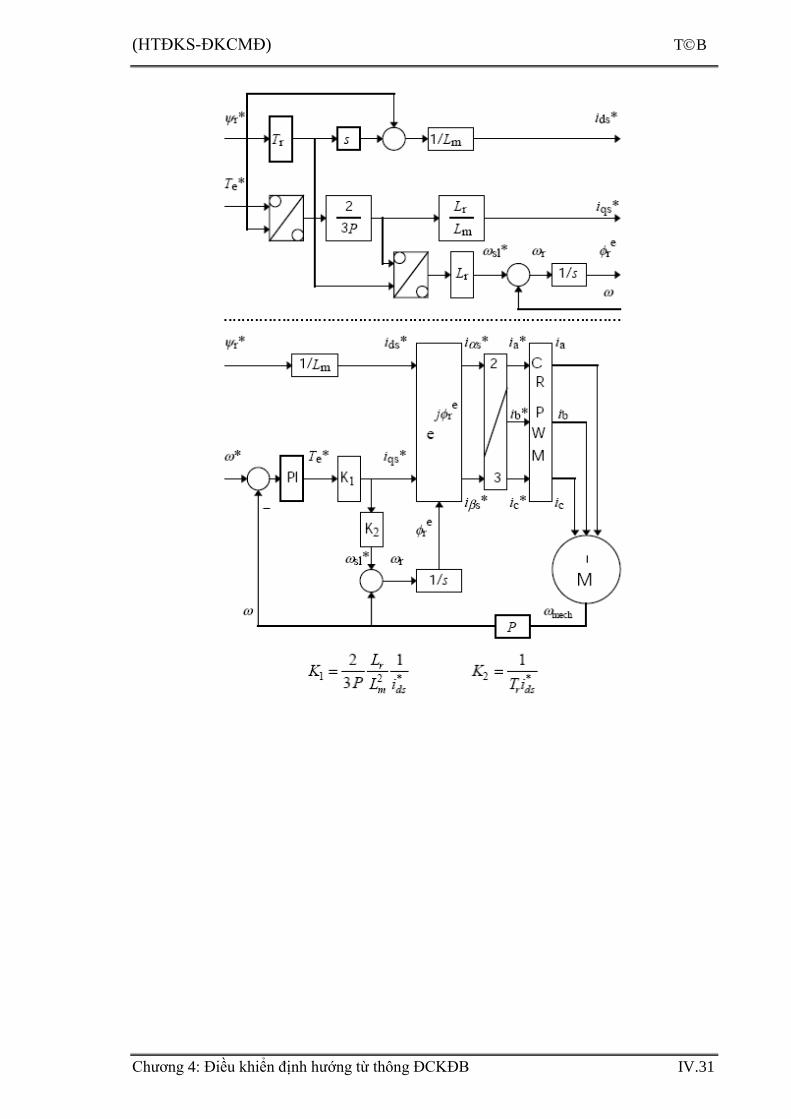
Tính tất cả các giá trị cần thiết để điều khiển gián tiếp từ thông rotor, được minh
họa trong ví dụ 1 này. Động cơ KĐB 3 pha 4 cực, nối Y, rotor lồng sóc, các thông
số ở 50Hz là:
Rs = 10, Rr = 6,3, Xs = 13,5, Xr = 12,6, Xm = 132. Dòng điện định mức là 2.1A ở 380V. Điều khiển gián tiếp định hướng từ thông
rotor (FOC) động cơ KĐB trên.
Bộ điều khiển dòng cần tính toán từ giá trị dòng điện đo về và giá trị dòng điện đặt.
Tốc độ động cơ được điều khiển từ 0 đến tốc độ định mức. Từ thông không đổi và
bằng giá trị từ thông định mức. Moment định mức là 5.07Nm và moment quán tính
là 0.1 kgm2. Vì vậy cần tính dòng điện định mức isdn, isqn từ moment định mức Ten,
tính từ thông định mức r n và tính vận tốc góc định mức sln?
(Chú ý, khi vận hành ở công suất định mức: isdn < isqn )
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.31
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.32
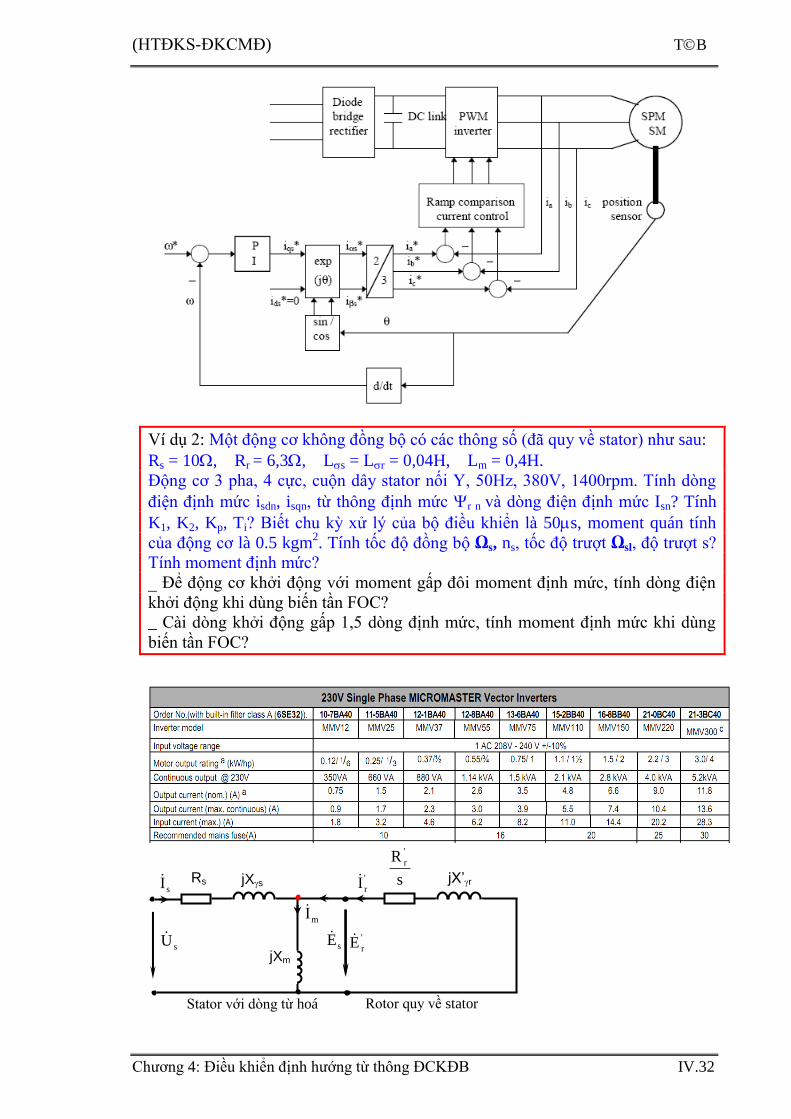
Ví dụ 2: Một động cơ không đồng bộ có các thông số (đã quy về stator) như sau:
Rs = 10, Rr = 6,3, Ls = Lr = 0,04H, Lm = 0,4H.
Động cơ 3 pha, 4 cực, cuộn dây stator nối Y, 50Hz, 380V, 1400rpm. Tính dòng
điện định mức isdn, isqn, từ thông định mức r n và dòng điện định mức Isn? Tính
K1, K2, Kp, Ti? Biết chu kỳ xử lý của bộ điều khiển là 50s, moment quán tính
của động cơ là 0.5 kgm2. Tính tốc độ đồng bộ Ωs, ns, tốc độ trượt Ωsl, độ trượt s?
Tính moment định mức?
_ Để động cơ khởi động với moment gấp đôi moment định mức, tính dòng điện
khởi động khi dùng biến tần FOC?
_ Cài dòng khởi động gấp 1,5 dòng định mức, tính moment định mức khi dùng
biến tần FOC?
Rs sI
jXs
sE
sU
Stator với dòng từ hoá
mI
jXm
s
R '
r jX’r
'
rE
'
rI
Rotor quy về stator
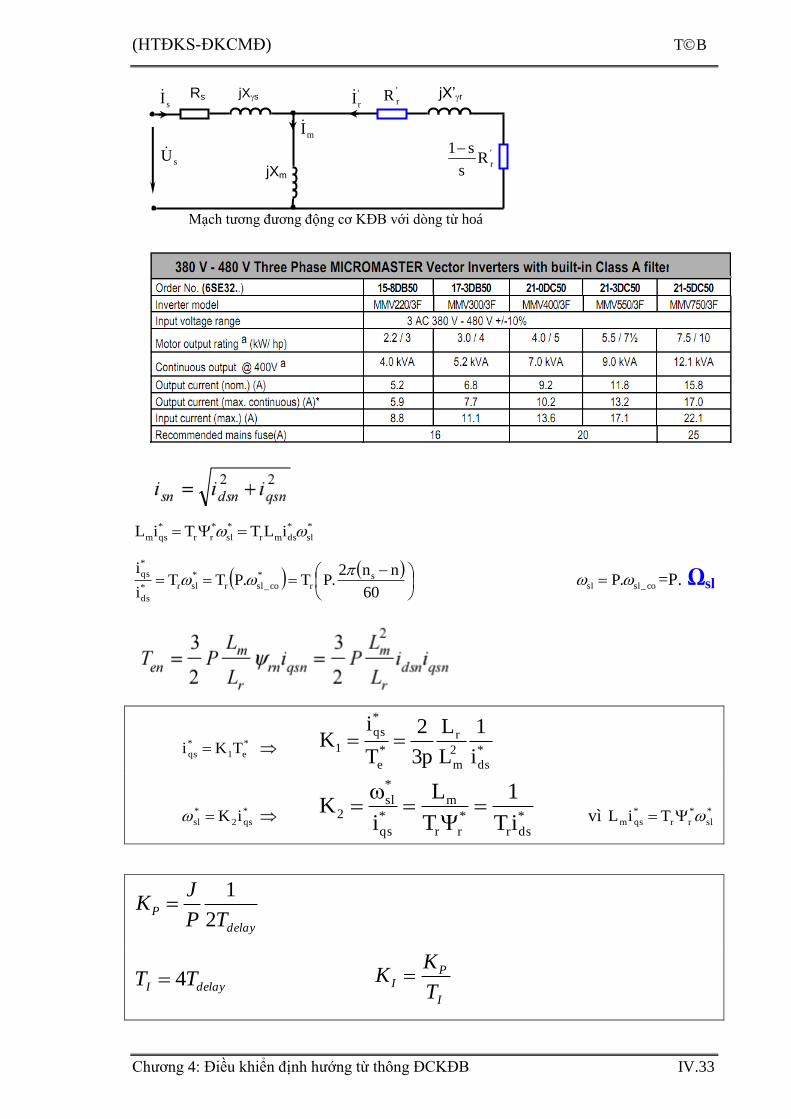
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.33
*
sl
*
dsmr
*
sl
*
rr
*
qsm iLTTiL
60
nn2.PT.PTT
i
is
r
*
co_slr
*
slr*
ds
*
qs co_slsl .P =P. Ωsl
*
e1
*
qs TKi *
ds
2
m
r
*
e
*
qs
1i
1
L
L
p3
2
T
iK
*
qs2
*
sl iK *
dsr
*
rr
m
*
qs
*
sl2
iT
1
T
L
iK
vì *
sl
*
rr
*
qsm TiL
delay
PTP
JK
2
1
delayI TT 4 I
PI
T
KK
Rs sI
jXs
sU
Mạch tương đương động cơ KĐB với dòng từ hoá
mI
jXm
jX’r '
rI '
rR
'
rRs
s1
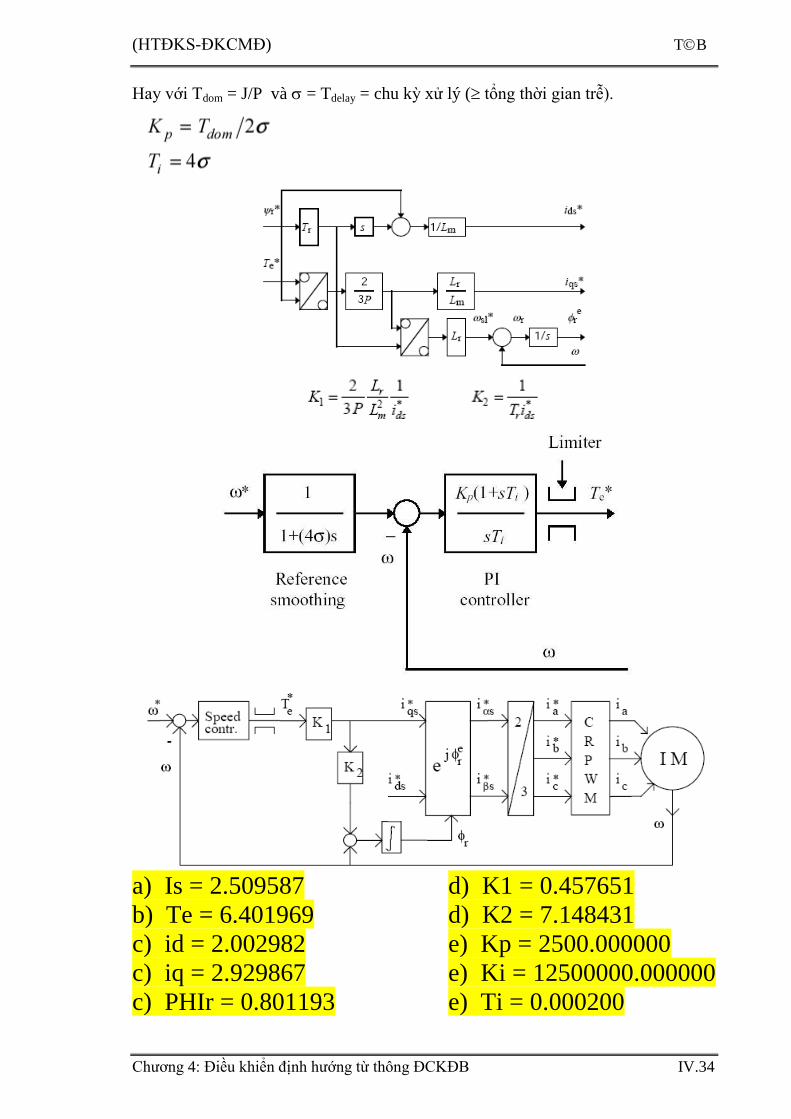
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.34
Hay với Tdom = J/P và = Tdelay = chu kỳ xử lý ( tổng thời gian trễ).
a) Is = 2.509587
b) Te = 6.401969
c) id = 2.002982
c) iq = 2.929867
c) PHIr = 0.801193
d) K1 = 0.457651
d) K2 = 7.148431
e) Kp = 2500.000000
e) Ki = 12500000.000000
e) Ti = 0.000200

(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.35
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.36
Bài tập 4.1. Khi điều khiển động cơ không đồng bộ ba pha, bộ biến tần có chế độ
constf/V :
a. Nêu nghĩa của chế độ khiển khiển này?
b. Động cơ ba pha, nối Y 380V, 50Hz được cấp nguồn từ bộ biến tần 380V,
50Hz. Khi động cơ chạy trên tốc độ định mức, đại lượng nào sẽ bị suy giảm
so với giá định mức (xét cho điện áp stator, dòng điện stator, độ lớn từ thông
rotor, tốc độ và moment)?
Bài tập 4.2. Điều khiển động cơ không đồng bộ ba pha dùng bộ biến tần cài đặt ở
chế độ điều khiển định hướng từ thông rotor:
a. Khi biến tần điều khiển động cơ đạt từ thông rotor ổn định, viết phương
trình chứng tỏ:
i) Biên độ từ thông rotor |r| có thể được điều khiển qua isd ?
ii) Moment cơ của động cơ Mcơ có thể được điều khiển qua isq ?
ii) Gia tốc động cơ dt
da
có thể được điều khiển qua isq ?
b. Động cơ ba pha nối Y, có giá trị định mức: Mcơ_đm =2,5Nm,
Isđm_RMS=2,11A (với trị biên độ isd_đm =1.87A, isq_đm =2.33A). Khi khởi
động, động cơ đạt từ thông rotor định mức và không đổi, và dòng khởi động
bằng 2 lần dòng định mức: tính trị biên độ isd_kđ, isq_kđ và moment Mcơ_kđ?
Tính tỷ lệ Mcơ_kđ/Mcơ_đm?
Bài tập 4.3. Động cơ có các thông số (quy về stator như hình vẽ sau) như sau:
Rs=0,105, Rr=0,081, Ls=0,58mH, Lr=0,87mH, Lm= 13,7mH (bỏ qua tổn hao
sắt từ).
a) Tính dòng điện định mức Is?
b) Tính moment điện từ định mức Te?
c) Tính từ thông định mức r?
d) Tính các hệ số K1, K2 ?
e) Tính các hệ số hiệu chỉnh của bộ điều khiển PI (như hình vẽ) là Kp và
Ki? Biết chu kỳ xử lý là 50s.
Bài tập 4.4. Cho động cơ không đồng bộ ba pha, 4 cực, 380V, 50Hz, nối Y, 2,1A,
moment quán tính 0.2 kgm2. Moment định mức là 4,** Nm (với ** là 2 số cuối
của mã số sinh viên). Động cơ có các thông số: Rs = 10, Rr = 6,3, Ls =
Rs is L
s
us
Lm
Lr Rr
rRs
s1
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.37
0,043H, Lr = 0,04H, Lm = 0,42H. Trong hệ tọa độ từ thông rotor, khi động cơ
vận hành ở định mức, tính:
a) Dòng điện isd và isq ? (Biết ở định mức, isd < isq).
b) Độ lớn từ thông rotor |r| ?
c) Tốc độ trượt sl và tốc độ động cơ n ?
d) Hệ số K1, K2 như hình vẽ?
e) Tính các hệ số hiệu chỉnh của bộ điều khiển PI (như hình vẽ) là Kp và Ki?
Biết chu kỳ xử lý là 50s.
Bài tập 4.5. Một động cơ không đồng bộ có các thông số (tất cả quy về stator) như
sau: Rs = 10, Rr = 6,3, Ls = 0,043H, Lr = 0,04H, Lm = 0,42H.
Động cơ 3 pha, 4 cực, cuộn dây stator nối Y, 50Hz, 380V, 1400rpm. Tính dòng
điện định mức Isn, dòng điện định mức isdn, isqn, từ thông định mức r n và moment
định mức Ten? Tính K1, K2, Kp, Ti? Biết chu kỳ xử lý của bộ điều khiển là 50s,
moment quán tính là 0.5 kgm2.
Bài tập 4.6. Cho động cơ không đồng bộ ba pha, 4 cực, 380V, 50Hz, nối Y, 2,1A.
Moment định mức là 4,** Nm (với ** là 2 số cuối của mã số sinh viên). Trong
hệ tọa độ từ thông rotor, khi động cơ vận hành ở định mức, tính:
a) Dòng điện isd và isq ? (Biết ở định mức, isd < isq).
b) Độ lớn từ thông rotor |r| ?
c) Tốc độ trượt sl và tốc độ động cơ n ?
d) Hệ số K1, K2 như hình vẽ?
Cho biết động cơ có các thông số:
Rs = 10, Rr = 6,3,
Ls = 0,043H, Lr = 0,04H,
Lm = 0,42H.
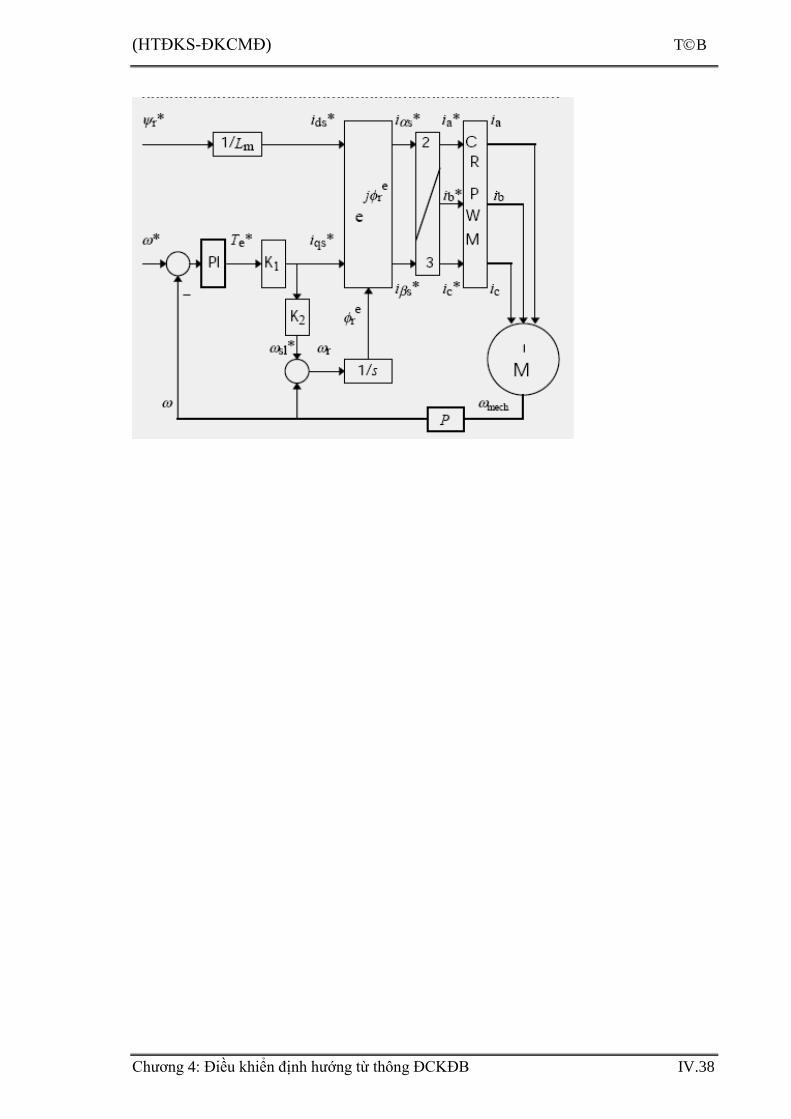
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.38
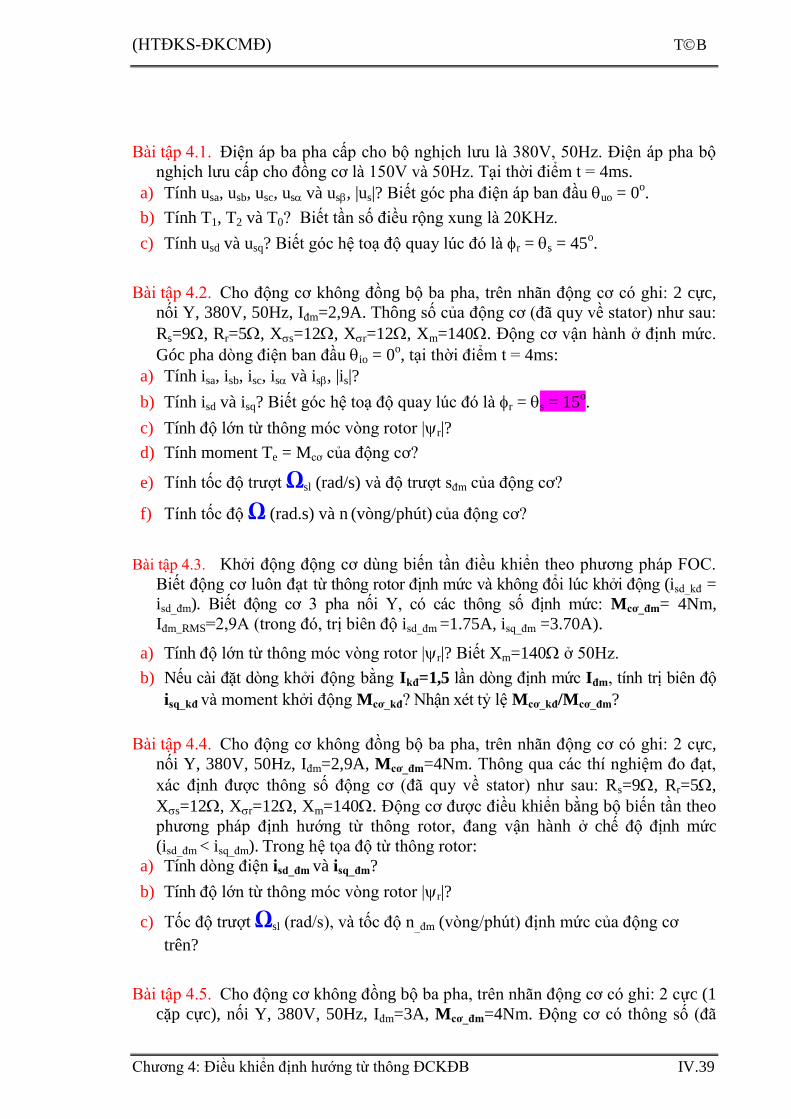
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.39
Bài tập 4.1. Điện áp ba pha cấp cho bộ nghịch lưu là 380V, 50Hz. Điện áp pha bộ
nghịch lưu cấp cho đồng cơ là 150V và 50Hz. Tại thời điểm t = 4ms.
a) Tính usa, usb, usc, us và us, |us|? Biết góc pha điện áp ban đầu uo = 0o.
b) Tính T1, T2 và T0? Biết tần số điều rộng xung là 20KHz.
c) Tính usd và usq? Biết góc hệ toạ độ quay lúc đó là r = s = 45o.
Bài tập 4.2. Cho động cơ không đồng bộ ba pha, trên nhãn động cơ có ghi: 2 cực,
nối Y, 380V, 50Hz, Iđm=2,9A. Thông số của động cơ (đã quy về stator) như sau:
Rs=9, Rr=5, Xs=12, Xr=12, Xm=140. Động cơ vận hành ở định mức.
Góc pha dòng điện ban đầu io = 0o, tại thời điểm t = 4ms:
a) Tính isa, isb, isc, is và is, |is|?
b) Tính isd và isq? Biết góc hệ toạ độ quay lúc đó là r = s = 15o.
c) Tính độ lớn từ thông móc vòng rotor |r|?
d) Tính moment Te = Mcơ của động cơ?
e) Tính tốc độ trượt Ωsl (rad/s) và độ trượt sđm của động cơ?
f) Tính tốc độ Ω (rad.s) và n (vòng/phút) của động cơ?
Bài tập 4.3. Khởi động động cơ dùng biến tần điều khiển theo phương pháp FOC.
Biết động cơ luôn đạt từ thông rotor định mức và không đổi lúc khởi động (isd_kđ =
isd_đm). Biết động cơ 3 pha nối Y, có các thông số định mức: Mcơ_đm= 4Nm,
Iđm_RMS=2,9A (trong đó, trị biên độ isd_đm =1.75A, isq_đm =3.70A).
a) Tính độ lớn từ thông móc vòng rotor |r|? Biết Xm=140 ở 50Hz.
b) Nếu cài đặt dòng khởi động bằng Ikđ=1,5 lần dòng định mức Iđm, tính trị biên độ
isq_kđ và moment khởi động Mcơ_kđ? Nhận xét tỷ lệ Mcơ_kđ/Mcơ_đm?
Bài tập 4.4. Cho động cơ không đồng bộ ba pha, trên nhãn động cơ có ghi: 2 cực,
nối Y, 380V, 50Hz, Iđm=2,9A, Mcơ_đm=4Nm. Thông qua các thí nghiệm đo đạt,
xác định được thông số động cơ (đã quy về stator) như sau: Rs=9, Rr=5,
Xs=12, Xr=12, Xm=140. Động cơ được điều khiển bằng bộ biến tần theo
phương pháp định hướng từ thông rotor, đang vận hành ở chế độ định mức
(isd_đm < isq_đm). Trong hệ tọa độ từ thông rotor:
a) Tính dòng điện isd_đm và isq_đm?
b) Tính độ lớn từ thông móc vòng rotor |r|?
c) Tốc độ trượt Ωsl (rad/s), và tốc độ n_đm (vòng/phút) định mức của động cơ
trên?
Bài tập 4.5. Cho động cơ không đồng bộ ba pha, trên nhãn động cơ có ghi: 2 cực (1
cặp cực), nối Y, 380V, 50Hz, Iđm=3A, Mcơ_đm=4Nm. Động cơ có thông số (đã
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.40
quy về stator) như sau: Rs=10, Rr=5, Xs=12, Xr=12, Xm=130. Động
cơ được điều khiển bằng bộ biến tần theo phương pháp định hướng từ thông
rotor (FOC), đang vận hành ở chế độ định mức (isd_đm < isq_đm). Trong hệ tọa độ
từ thông rotor:
a) Tính dòng điện isd_đm và isq_đm? (2 đ)
b) Tính từ thông móc vòng rotor |r|? (1 đ)
c) Tính tốc độ trượt Ωsl (rad/s và vòng/phút)? (1 đ)
d) Khi khởi động dùng biến tần ở chế độ FOC, động cơ luôn đạt từ thông rotor
bằng định mức (isd_kđ =isd_đm). Biết động cơ khởi động với Mcơ_kđ =2Mcơ_đm =8Nm,
tính dòng khởi động của động cơ Ikđ_RMS? Cho nhận xét? (1 đ)
Bài tập 4.6. Cho động cơ không đồng bộ ba pha 380 V, nối Y, 50Hz, rotor lồng
sóc, 4 cực, có các thông số quy đổi về stator như sau: Rs=2.5, Rr=2.5,
Xs=3.5, Xr=2.8, Xm=48, moment định mức 26.526Nm, moment quán
tính 0.2kgm2, dòng điện định mức là 9 A (rms). Động cơ vận hành ở chế độ định
mức, tính:
a) Dòng điện isd_đm và isq_đm? (2 đ)
b) Từ thông móc vòng rotor |r|? (1 đ)
c) Moment điện từ.
d) Tốc độ trượt Ωsl (rad/s và vòng/phút)? (1 đ)
e) Tốc độ rotor và độ trượt.
f) Các hệ số K1, K2 của hệ điều khiển định mức từ thông.
g) Tính các hệ số của bộ điều khiển vận tốc PI (KP, KI, TI). Biết Tsamp=50µs.
h) Khi khởi động dùng biến tần ở chế độ FOC, động cơ luôn đạt từ thông rotor
bằng định mức (isd_kđ =isd_đm). Biết động cơ khởi động với Mcơ_kđ =2Mcơ_đm, tính
dòng khởi động của động cơ Ikđ_RMS? Cho nhận xét? (1 đ)
Bài tập 4.7. Cho động cơ không đồng bộ ba pha, trên nhãn động cơ có ghi: 4 cực,
nối Y, 380 V, 50Hz, 1415 RPM. Thông số động cơ (đã quy về stator) như sau:
Rs=3,75 Ω; Rr=4,20 Ω; Ls=1,75 mH; Lr=17,5 mH; Lm=350 mH.
a) Tính dòng điện hiệu dụng và moment cơ khởi động? (1 đ)
b) Tính dòng điện hiệu dụng và tốc độ trượt định mức (rad/s)? (1 đ)
c) Từ kết quả câu b), trên hệ tọa độ từ thông móc vòng rotor, tính dòng điện
isd_đm và isq_đm, từ thông móc vòng rotor |r_đm|, moment cơ định mức? (3 đ)
d) Khi dùng biến tần ở chế độ FOC, lúc khởi động động cơ luôn đạt từ thông
rotor định mức và không đổi (isd_kđ = isd_đm). Để động cơ khởi động gấp đôi
moment định mức, tính dòng khởi động của động cơ cần cài đặt cho biến
tần? Mặc khác, nếu cài đặt dòng điện khởi động trên biến tần gấp đôi dòng
định mức, tính moment khởi động khi đó? (2 đ)
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.41
Bài tập lớn: Điện áp định mức: Uđm=380V, 50Hz, 5.5A, 7.75Nm. Động cơ nối Y.
% Model Parameter
Rs = 4; % dien tro stator
Rr = 4; % dien tro rotor
Ls = 0.20; % dien cam stator
Lr = 0.20; % dien cam rotor
Lm = 0.19; % ho cam
P = 1; % so doi cuc
J = 0.015; % momen quan tinh (kg.m^2)
Tsamp = 0.0001; % thoi gian lay mau (0.0001 sec)
TLr = 7.75; % momen co dinh muc (Nm)
TL = MSV; % momen tai co (Nm)
MSV = 5 + (tổng 3 số cuối MSSV)/6.
Bài tập 1. Trong hệ tọa độ , mô phỏng mô hình động cơ trên Matlab Simulink (7.x):
a) Mô phỏng điều khiển vòng hở tốc độ ở điện áp định mức, tải thay đổi (0%, 50%,
100%)TL. Vẽ các đáp ứng tốc độ đồng bộ, tốc độ động cơ, moment điện từ,
moment tải, từ thông, dòng điện. Nhận xét sự khác biệt khi tải thay đổi.
b) Mô phỏng điều khiển vòng hở tốc độ khi động cơ mang tải TL, điện áp thay đổi
(biên độ, tần số)=(100%, 100%), (100%, 50%), (50%, 100%), (50%, 50%). Vẽ các
đáp ứng tốc độ đồng bộ, tốc độ động cơ, moment điện từ, moment tải, từ thông,
dòng điện. Nhận xét sự khác biệt khi điện áp thay đổi.
Bài tập 2. Trong hệ tọa độ dq, mô phỏng mô hình động cơ trên Matlab Simulink (7.x):
a) Mô phỏng điều khiển vòng hở tốc độ ở điện áp định mức, tải thay đổi (0%, 50%,
50%)TL. Vẽ các đáp ứng tốc độ đồng bộ, tốc độ động cơ, moment điện từ, moment
tải, từ thông, dòng điện. Nhận xét sự khác biệt khi tải thay đổi.
b) Mô phỏng điều khiển vòng hở tốc độ khi động cơ mang tải TL, điện áp thay đổi
(biên độ, tần số)=(100%, 100%), (100%, 50%), (50%, 100%), (50%, 50%). Vẽ các
đáp ứng tốc độ đồng bộ, tốc độ động cơ, moment điện từ, moment tải, từ thông,
dòng điện. Nhận xét sự khác biệt khi điện áp thay đổi.
Bài tập 3. Mô phỏng trên Matlab Simulink (7.x) bộ điều khiển tốc độ động cơ KĐB 3 pha
dùng phương pháp FOC. Động cơ khởi động không tải, và mang tải TL sau khi tốc độ ổn
định. Yêu cầu điều khiển ổn định tốc độ khi moment tải thay đổi. Vẽ các đáp ứng tốc độ
đặt (= 50%, 100%) tốc độ định mức, tốc độ đáp ứng, moment điện từ, moment tải, từ
thông, dòng điện. Nhận xét thời gian đáp ứng, độ ổn định tốc độ, moment và dòng điện
khởi động của đông cơ:
a) Dùng điều khiển tiếp dòng, không có ước lượng từ thông.
b) Dùng điều khiển tiếp dòng, có bộ ước lượng từ thông.
c) Dùng điều khiển tiếp áp, có bộ ước lượng từ thông (không bắt buộc).
Đề thi HK2/2012: Cho động cơ không đồng bộ ba pha, trên nhãn động cơ có ghi: 4
cực, nối Y, 380 V, 50Hz, 10Nm, 3,155A. Thông số động cơ (đã quy về stator) như
sau: Rs=3,75Ω; Rr=4,20Ω; Xs=0,55Ω; Xr=0,55Ω; Xm=110Ω. Bỏ qua tổn hao sắt
và tổn hao cơ.
a) Tính dòng điện stator và moment cơ lúc khởi động? (1 đ)
b) Tính dòng điện stator và từ thông móc vòng rotor lúc không tải? (1 đ)
(HTĐKS-ĐKCMĐ) TB
Chương 4: Điều khiển định hướng từ thông ĐCKĐB IV.42
c) Khi động cơ vận hành ở định mức, trên hệ tọa độ từ thông rotor, tính dòng điện
isd_đm và isq_đm, từ thông móc vòng rotor |r_đm|, tốc độ trượt (rad/s) và tốc độ
động cơ (vòng/phút)? (2 đ)
d) Khi động cơ vận hành ở tốc độ 1450 vòng/phút, tính dòng điện làm việc của
động cơ? Khi đó, trên hệ tọa độ từ thông rotor, tính dòng điện isd và isq, từ
thông móc vòng rotor |r|, và moment điện từ của động cơ? (2 đ)
e) Khi dùng biến tần ở chế độ FOC, lúc khởi động động cơ luôn đạt từ thông
rotor định mức và không đổi (isd_kđ = isd_đm). Để động cơ khởi động gấp rưỡi
moment định mức, tính dòng khởi động của động cơ cần cài đặt cho biến tần?
Mặc khác, nếu cài đặt dòng điện khởi động trên biến tần gấp rưỡi dòng định mức,
tính moment khởi động khi đó? (1 đ)
f) Dùng cảm biến đo được tốc độ động cơ 1415 vòng/phút, dòng điện tức thời
isa=0,2217A và isb=3,9620A. Biết lúc đó góc của hệ tọa độ từ thông rotor là
r=300. Ước lượng giá trị từ thông móc vòng rotor |r|, moment cơ, và tốc độ
trượt (rad/s) của động cơ? (2 đ)
g) Điều khiển động cơ trên bằng phương pháp định hướng từ thông rotor FOC,
thời gian trễ của vòng điều khiển là 50s. Tính các hệ số của bộ điều khiển PI
điều khiển vận tốc động cơ (KP, KI, TI)? Biết moment quán tính lúc đó là 0.1
kgm2. (1 đ)
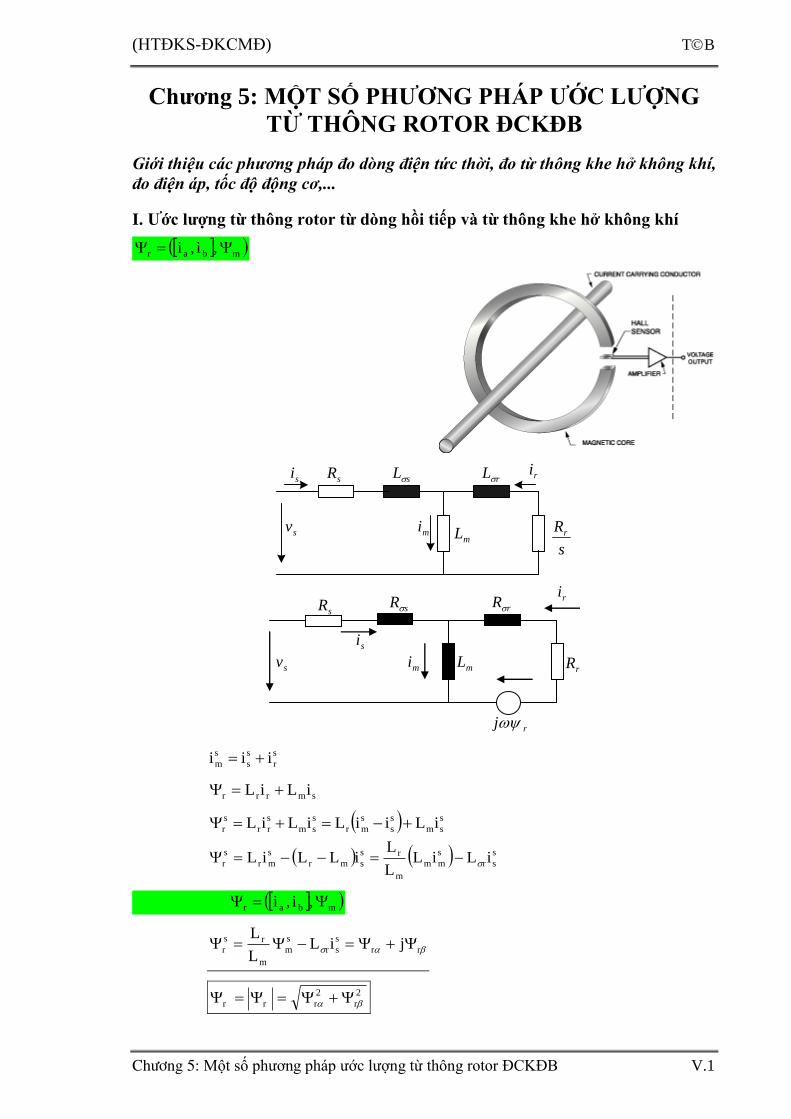
(HTĐKS-ĐKCMĐ) TB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.1
Chƣơng 5: MỘT SỐ PHƢƠNG PHÁP ƢỚC LƢỢNG
TỪ THÔNG ROTOR ĐCKĐB
Giới thiệu các phương pháp đo dòng điện tức thời, đo từ thông khe hở không khí,
đo điện áp, tốc độ động cơ,...
I. Ƣớc lƣợng từ thông rotor từ dòng hồi tiếp và từ thông khe hở không khí
mbar ,i,i
mLs
Rr
rLsLsR
sv
si ri
mi
sR sR rR
rRmL
rj
misi
ri
sv
s
r
s
s
s
m iii
smrrr iLiL
s
sm
s
s
s
mr
s
sm
s
rr
s
r iLiiLiLiL
s
sr
s
mm
m
rs
smr
s
mr
s
r iLiLL
LiLLiL
mbar ,i,i
rr
s
sr
s
m
m
rs
r jiLL
L
2
r
2
rrr
(HTĐKS-ĐKCMĐ) TB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.2
r
r
rr coscos
r
r
rr sinsin
hay
r
r
rr tgtg
r
rrr arctg
dt
d
srsr
r
me ii
L
Lp
2
3T
II. Ƣớc lƣợng từ thông rotor từ điện áp và dòng hồi tiếp
babar i,i,u,u
Ít chính xác ở tốc độ thấp do dùng phép tích phân!
Từ thông rotor được ước lượng từ từ thông stator và dòng stator:
rmsss iLiL
rrsmr iLiL
s
ss
s
s
m
s
r iLL
1i
s
s
m
rs
rs
2
ms
s
m
rs
ss
s
s
m
rs
smr iL
LL
LL
L1
L
LiL
L
LiL
s
s
m
rss
s
m
rs
r iL
LL
L
L
Trong đó, từ thông stator được ước lượng từ dòng stator và áp stator như sau:
dt
diRu
s
ss
ss
s
s
s
ss
s
s
s
s iRudt
d
Hay
dt
di
L
LL
dt
d
L
L
dt
ds
s
m
rs
s
s
m
r
s
r
dt
di
L
LLiRu
L
L
dt
ds
s
m
rss
ss
s
s
m
r
s
r
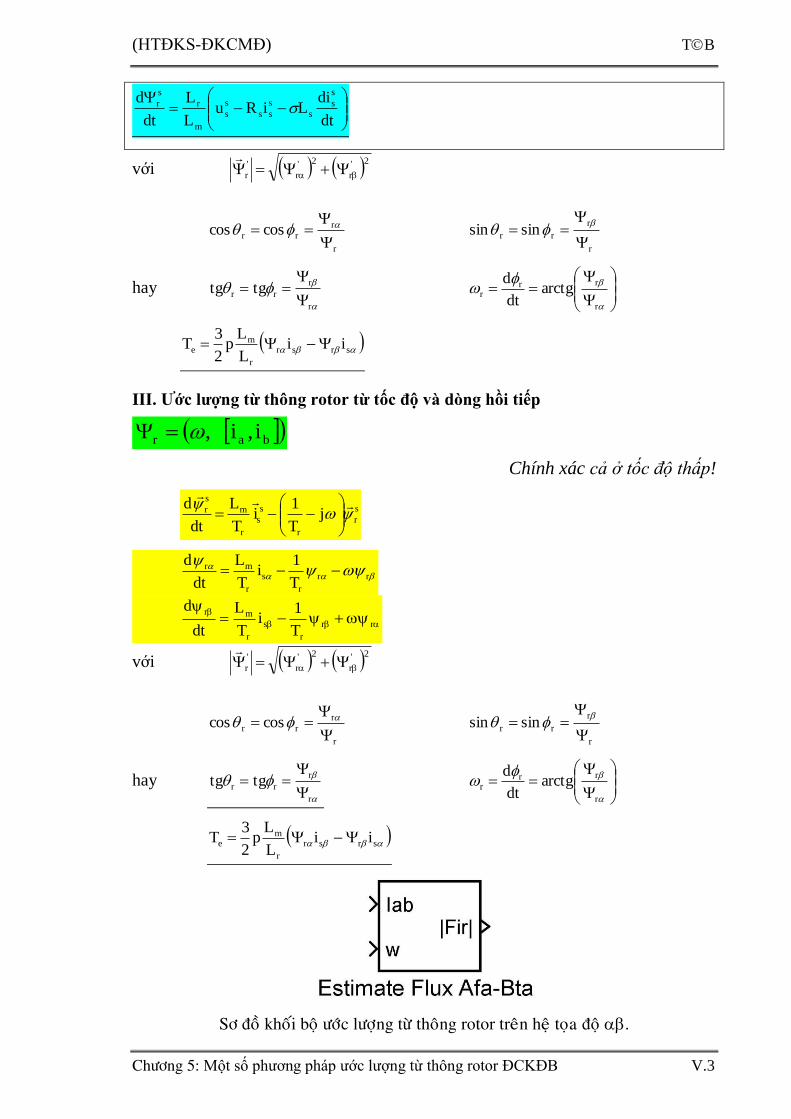
(HTĐKS-ĐKCMĐ) TB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.3
dt
diLiRu
L
L
dt
ds
s
s
s
ss
s
s
m
r
s
r
với 2'
r
2'
r
'
r
r
r
rr coscos
r
r
rr sinsin
hay
r
r
rr tgtg
r
rrr arctg
dt
d
srsr
r
me ii
L
Lp
2
3T
III. Ƣớc lƣợng từ thông rotor từ tốc độ và dòng hồi tiếp
bar i,i,
Chính xác cả ở tốc độ thấp!
s
r
r
s
s
r
m
s
r jT
1i
T
L
dt
d
rr
r
s
r
mr
T
1i
T
L
dt
d
rr
r
s
r
mr
T
1i
T
L
dt
d
với 2'
r
2'
r
'
r
r
r
rr coscos
r
r
rr sinsin
hay
r
r
rr tgtg
r
rrr arctg
dt
d
srsr
r
me ii
L
Lp
2
3T
Sô ñoà khoái boä öôùc löôïng töø thoâng rotor treân heä toïa ñoä .
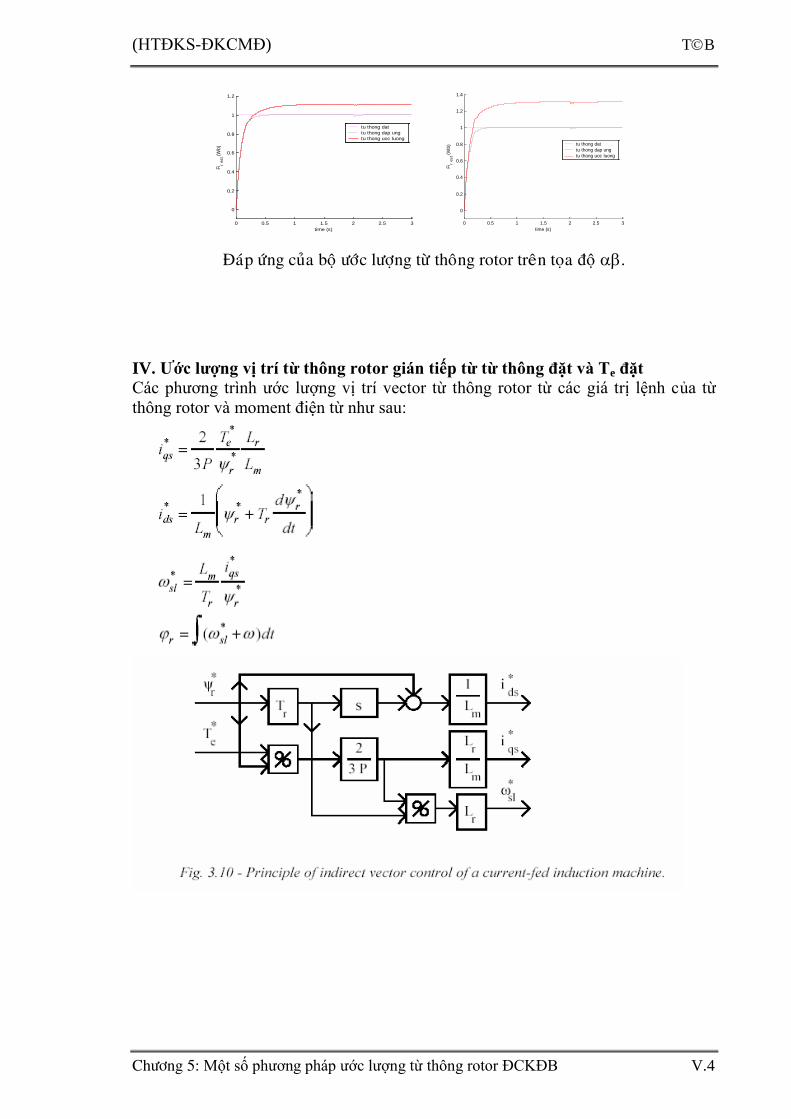
(HTĐKS-ĐKCMĐ) TB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.4
0 0.5 1 1.5 2 2.5 3
0
0.2
0.4
0.6
0.8
1
1.2
time (s)
Fi r e
st (
Wb)
tu thong dat
tu thong dap ung
tu thong uoc luong
0 0.5 1 1.5 2 2.5 3
0
0.2
0.4
0.6
0.8
1
1.2
1.4
time (s)
Fi r e
st (
Wb) tu thong dat
tu thong dap ung
tu thong uoc luong
Ñaùp öùng cuûa boä öôùc löôïng töø thoâng rotor treân toïa ñoä .
IV. Ƣớc lƣợng vị trí từ thông rotor gián tiếp từ từ thông đặt và Te đặt
Các phương trình ước lượng vị trí vector từ thông rotor từ các giá trị lệnh của từ
thông rotor và moment điện từ như sau:
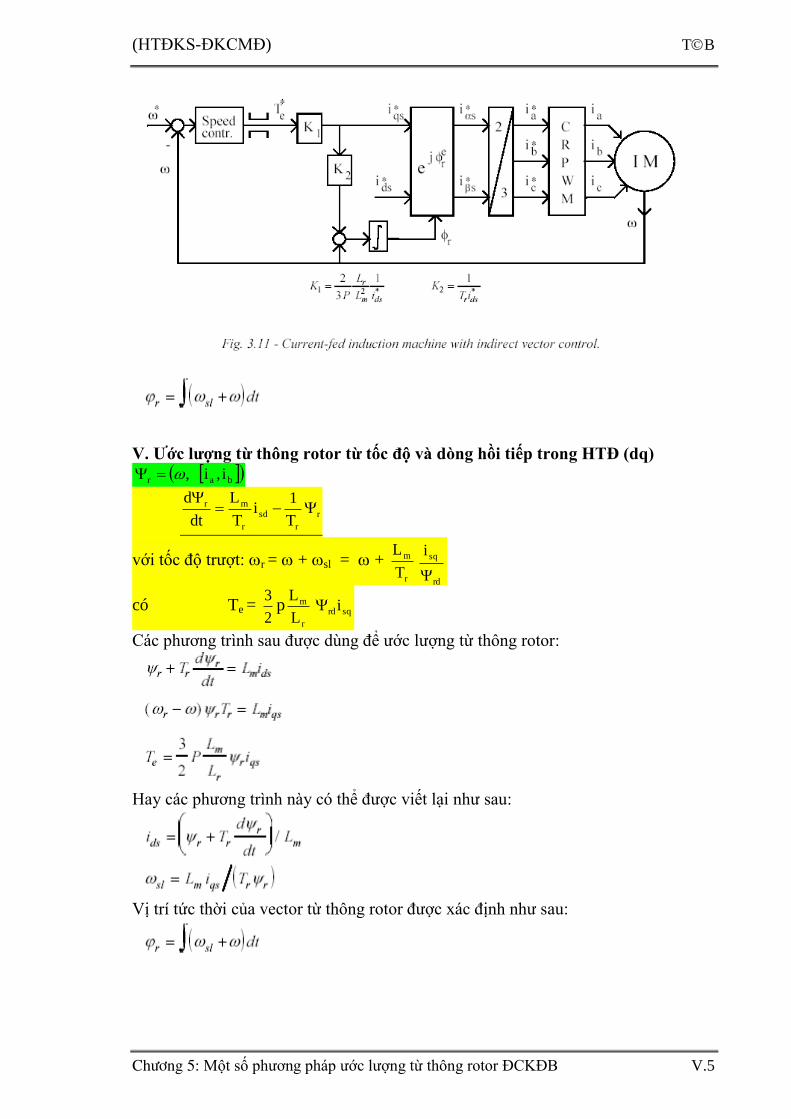
(HTĐKS-ĐKCMĐ) TB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.5
V. Ƣớc lƣợng từ thông rotor từ tốc độ và dòng hồi tiếp trong HTĐ (dq)
bar i,i,
r
r
sd
r
mr
T
1i
T
L
dt
d
với tốc độ trượt: r = + sl = + r
m
T
L
rd
sqi
có Te = 2
3p
r
m
L
Lsqrdi
Các phương trình sau được dùng để ước lượng từ thông rotor:
Hay các phương trình này có thể được viết lại như sau:
Vị trí tức thời của vector từ thông rotor được xác định như sau:

(HTĐKS-ĐKCMĐ) TB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.6
Sô ñoà khoái boä öôùc löôïng töø thoâng rotor treân heä toïa ñoä dq.
0 0.5 1 1.5 2 2.5 3
0
0.2
0.4
0.6
0.8
1
1.2
time (s)
Fi r e
st (
Wb)
tu thong dat
tu thong dap ung
tu thong uoc luong
0 0.5 1 1.5 2 2.5 3
0
0.2
0.4
0.6
0.8
1
1.2
1.4
time (s)
Fi r e
st (
Wb)
tu thong dat
tu thong dap ung
tu thong uoc luong
Ñaùp öùng cuûa boä öôùc löôïng töø thoâng rotor treân toïa ñoä dq.
VI. Ƣớc lƣợng từ thông rotor dùng khâu quan sát (observer)
Hình 5.1: Sơ đồ bộ ước lượng từ thông rotor dùng khâu quan sát.
Thuật toán ước lượng từ thông rotor cho ĐCKĐB ba pha dùng khâu quan sát
pt (5.1a)
pt (5.1b)
pt (5.1c)
pt (5.1d)
pt (5.1e)
s
s
s
si
r
pt (5.1f)
s
s
s
si
s
su
s
KK i
p ucomp
ucomp
pt (5.1h)
s
r
s
si
s
s
pt (5.1g)
s
r
s
si
r
s
su
s
r
(HTĐKS-ĐKCMĐ) TB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.7
isd = iscosr + issinr (5.1a)
rd
r
sd
r
mrd
T
1i
T
L
dt
d
(5.1b)
r = rdcoss (5.1c)
r = rdsins (5.1d)
s
r
r
ms
s
r
2
mrss
sL
Li
L
LLLˆ
(5.1e)
dt
d s
s
= s
su
– Rs.s
si
+ ucomp (5.1f)
s
s
s
si
pcompˆ
s
KKu
(5.1g)
s
s
m
2
mrss
s
r
ms
r iL
LLL
L
L (5.1h)
2r
2
rr
(5.1i)
VII. Đáp ứng điều khiển dộng cơ bằng FOC
Đáp ứng của bộ ước lượng từ thông rotor khi các thông số ĐCKĐB ba pha có sai số:
0 0.5 1 1.5 2 2.5 3
0
0.2
0.4
0.6
0.8
1
1.2
1.4
time (s)
Fi r e
st (
Wb) tu thong dat
tu thong dap ung
tu thong uoc luong
Hình 5.2: Đáp ứng của
bộ ước lượng từ thông
rotor từ tốc độ và dòng
hồi tiếp trên tọa độ .
0 0.5 1 1.5 2 2.5 3
0
0.2
0.4
0.6
0.8
1
1.2
1.4
time (s)
Fi r e
st (
Wb)
tu thong dat
tu thong dap ung
tu thong uoc luong
Hình 5.3: Đáp ứng của
bộ ước lượng từ thông
rotor từ tốc độ và dòng
hồi tiếp trên tọa độ dq.
0 0.5 1 1.5 2 2.5 3
0
0.2
0.4
0.6
0.8
1
1.2
time (s)
Fi r e
st (
Wb)
tu thong dat
tu thong dap ung
tu thong uoc luong
Hình 5.4: Đáp ứng của
bộ ước lượng từ thông
rotor dùng khâu quan
sát.
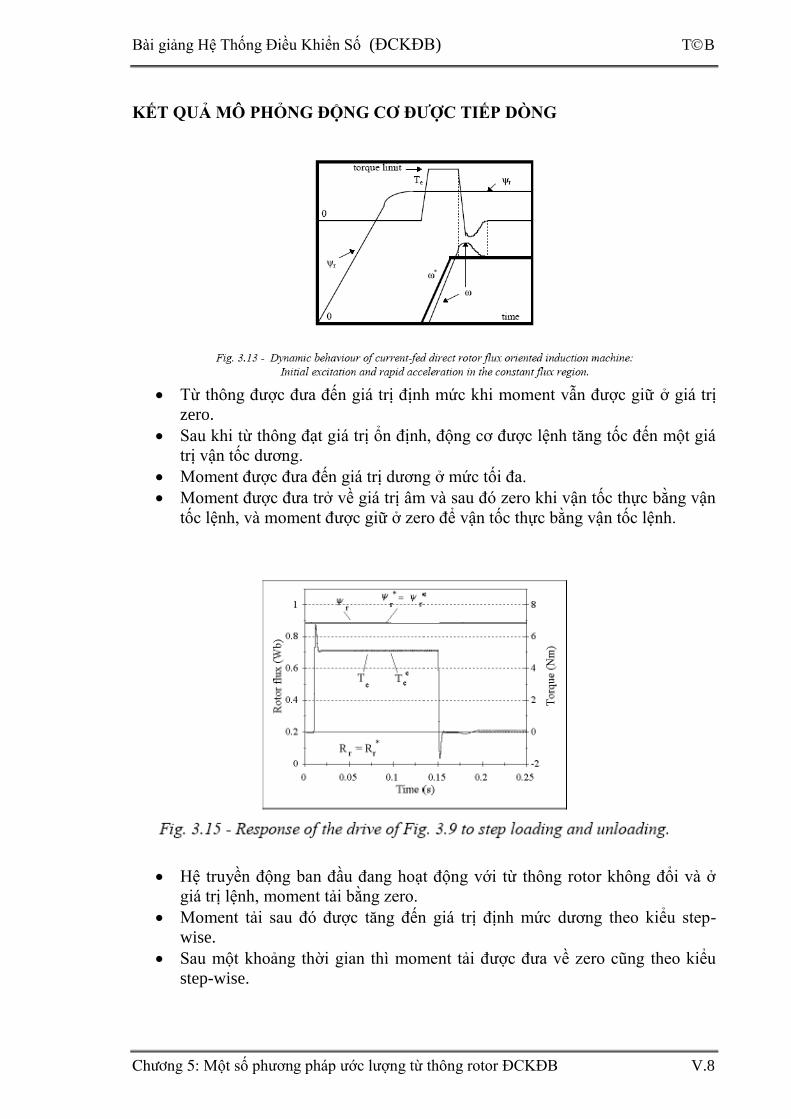
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) TB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.8
KẾT QUẢ MÔ PHỎNG ĐỘNG CƠ ĐƢỢC TIẾP DÒNG
Từ thông được đưa đến giá trị định mức khi moment vẫn được giữ ở giá trị
zero.
Sau khi từ thông đạt giá trị ổn định, động cơ được lệnh tăng tốc đến một giá
trị vận tốc dương.
Moment được đưa đến giá trị dương ở mức tối đa.
Moment được đưa trở về giá trị âm và sau đó zero khi vận tốc thực bằng vận
tốc lệnh, và moment được giữ ở zero để vận tốc thực bằng vận tốc lệnh.
Hệ truyền động ban đầu đang hoạt động với từ thông rotor không đổi và ở
giá trị lệnh, moment tải bằng zero.
Moment tải sau đó được tăng đến giá trị định mức dương theo kiểu step-
wise.
Sau một khoảng thời gian thì moment tải được đưa về zero cũng theo kiểu
step-wise.
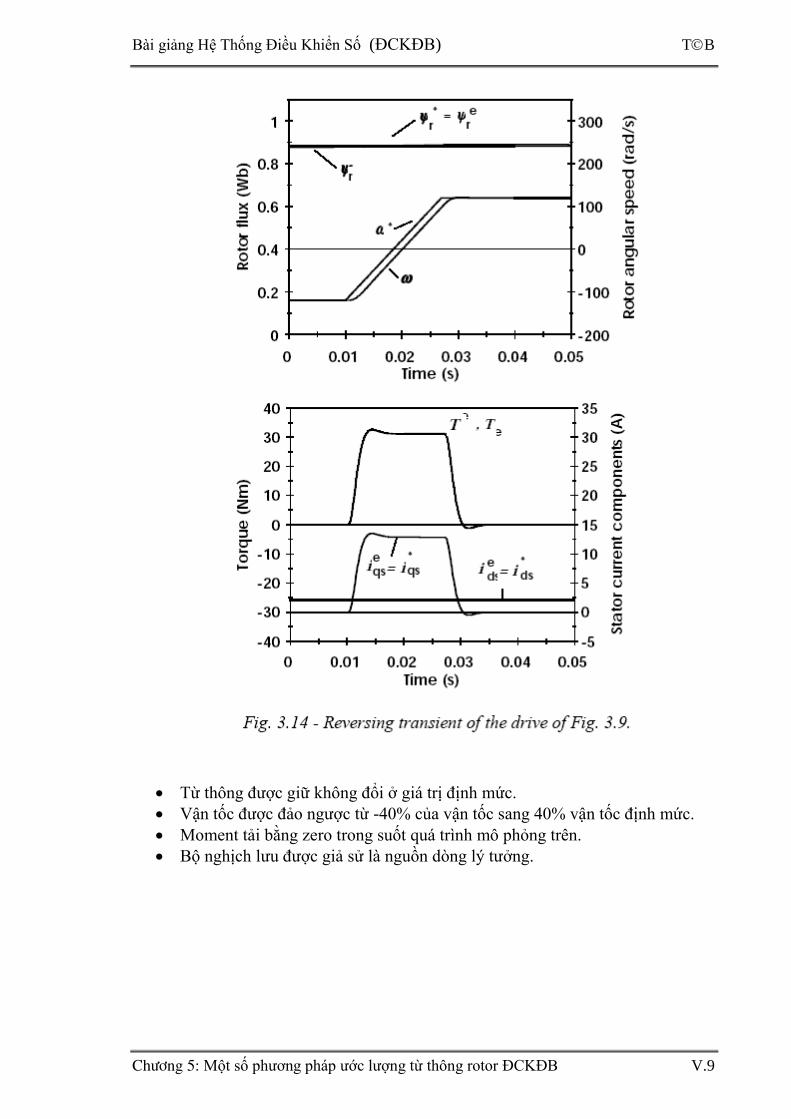
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) TB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.9
Từ thông được giữ không đổi ở giá trị định mức.
Vận tốc được đảo ngược từ -40% của vận tốc sang 40% vận tốc định mức.
Moment tải bằng zero trong suốt quá trình mô phỏng trên.
Bộ nghịch lưu được giả sử là nguồn dòng lý tưởng.
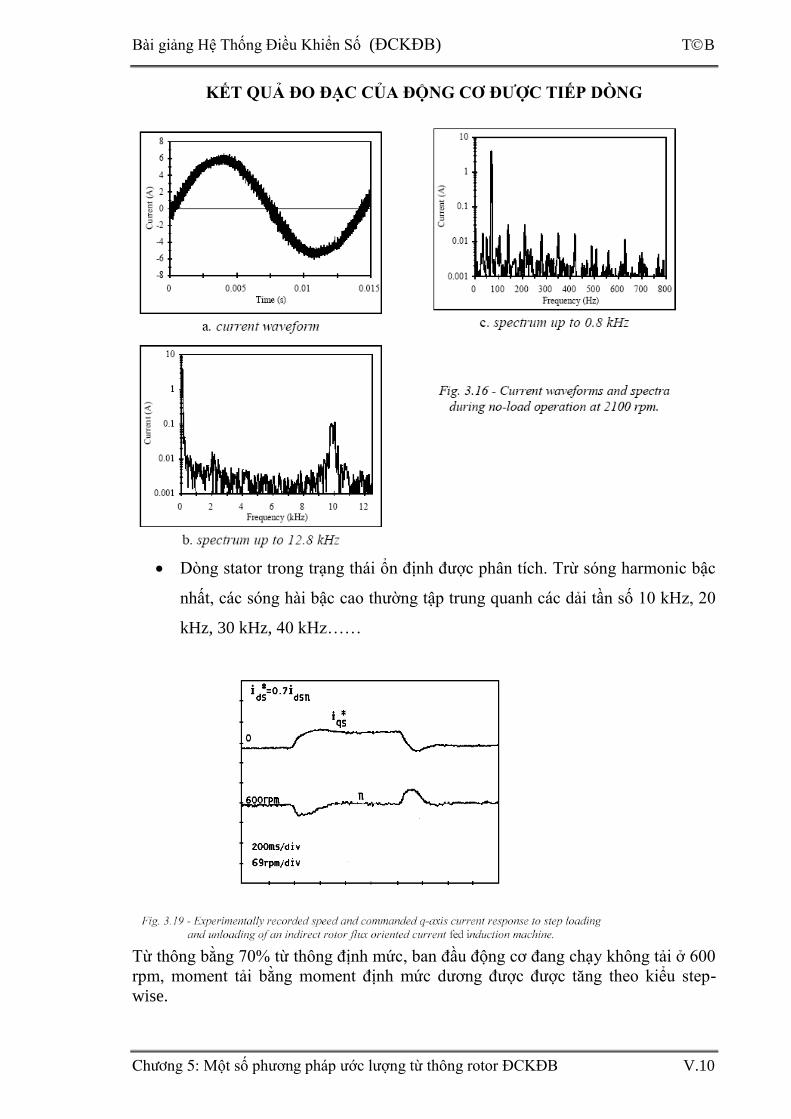
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) TB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.10
KẾT QUẢ ĐO ĐẠC CỦA ĐỘNG CƠ ĐƢỢC TIẾP DÒNG
Dòng stator trong trạng thái ổn định được phân tích. Trừ sóng harmonic bậc
nhất, các sóng hài bậc cao thường tập trung quanh các dải tần số 10 kHz, 20
kHz, 30 kHz, 40 kHz……
Từ thông bằng 70% từ thông định mức, ban đầu động cơ đang chạy không tải ở 600
rpm, moment tải bằng moment định mức dương được được tăng theo kiểu step-
wise.
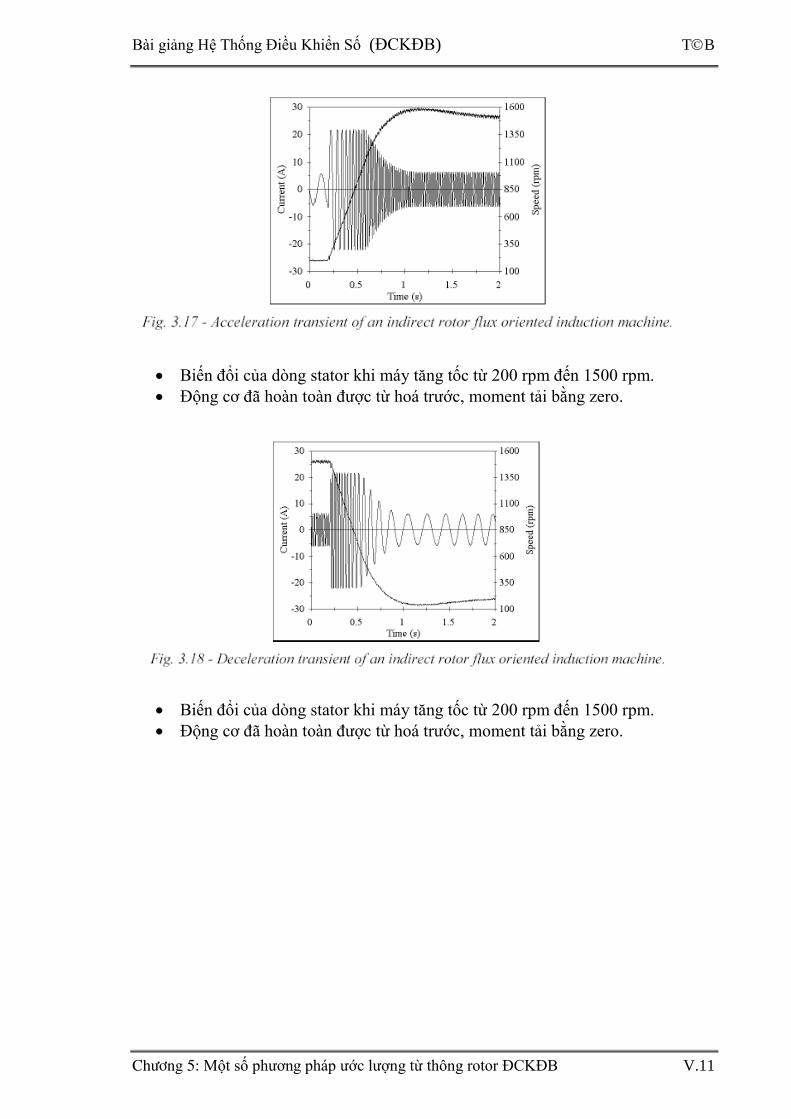
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) TB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.11
Biến đổi của dòng stator khi máy tăng tốc từ 200 rpm đến 1500 rpm.
Động cơ đã hoàn toàn được từ hoá trước, moment tải bằng zero.
Biến đổi của dòng stator khi máy tăng tốc từ 200 rpm đến 1500 rpm.
Động cơ đã hoàn toàn được từ hoá trước, moment tải bằng zero.
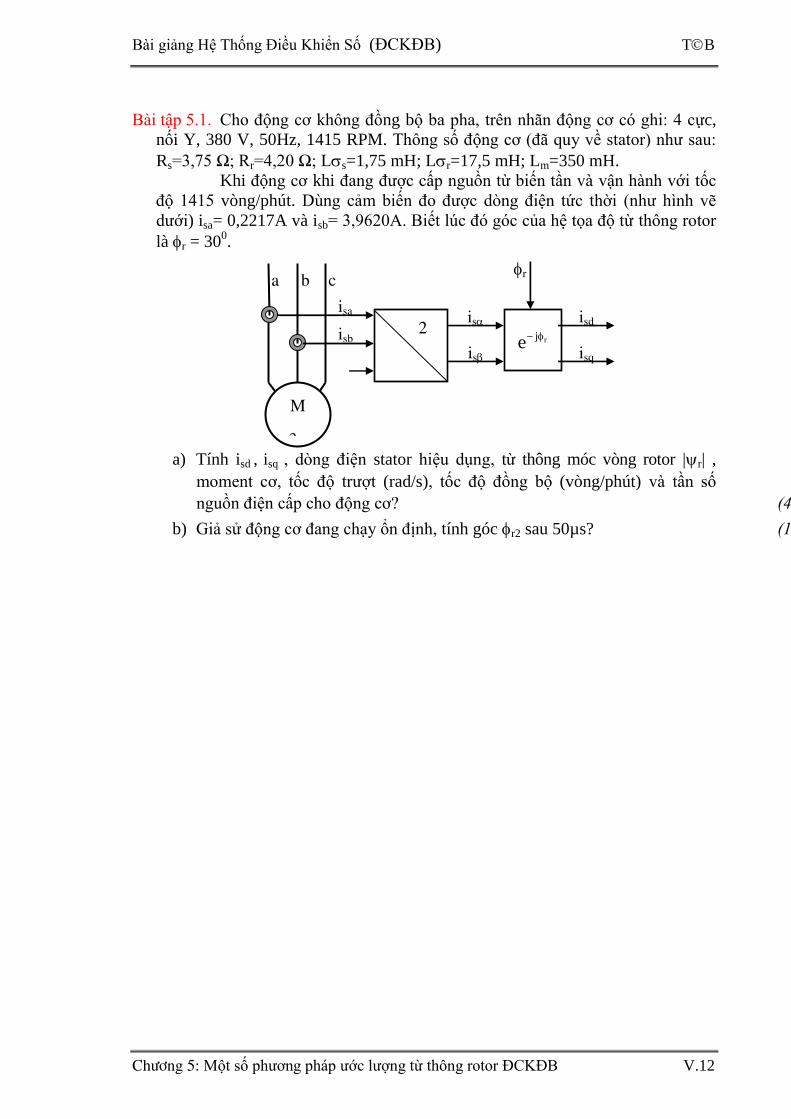
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) TB
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.12
Bài tập 5.1. Cho động cơ không đồng bộ ba pha, trên nhãn động cơ có ghi: 4 cực,
nối Y, 380 V, 50Hz, 1415 RPM. Thông số động cơ (đã quy về stator) như sau:
Rs=3,75 Ω; Rr=4,20 Ω; Ls=1,75 mH; Lr=17,5 mH; Lm=350 mH.
Khi động cơ khi đang được cấp nguồn từ biến tần và vận hành với tốc
độ 1415 vòng/phút. Dùng cảm biến đo được dòng điện tức thời (như hình vẽ
dưới) isa= 0,2217A và isb= 3,9620A. Biết lúc đó góc của hệ tọa độ từ thông rotor
là r = 300.
a) Tính isd , isq , dòng điện stator hiệu dụng, từ thông móc vòng rotor |r| ,
moment cơ, tốc độ trượt (rad/s), tốc độ đồng bộ (vòng/phút) và tần số
nguồn điện cấp cho động cơ? (4 đ)
b) Giả sử động cơ đang chạy ổn định, tính góc r2 sau 50µs? (1 đ)
M
3~
a b c
2=
3
isa
isb
is
is
rje
isd
isq
r
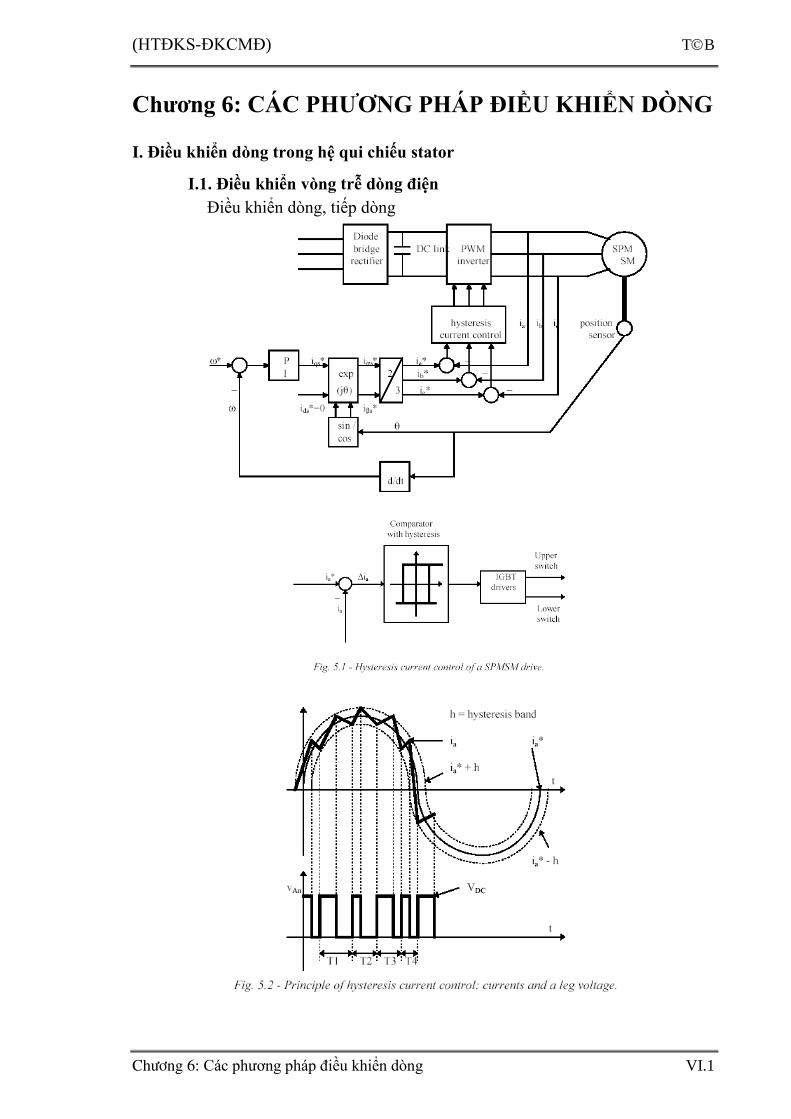
(HTĐKS-ĐKCMĐ) TB
Chöông 6: Các phương pháp điều khiển dòng VI.1
Chƣơng 6: CÁC PHƢƠNG PHÁP ĐIỀU KHIỂN DÒNG
I. Điều khiển dòng trong hệ qui chiếu stator
I.1. Điều khiển vòng trễ dòng điện
Điều khiển dòng, tiếp dòng
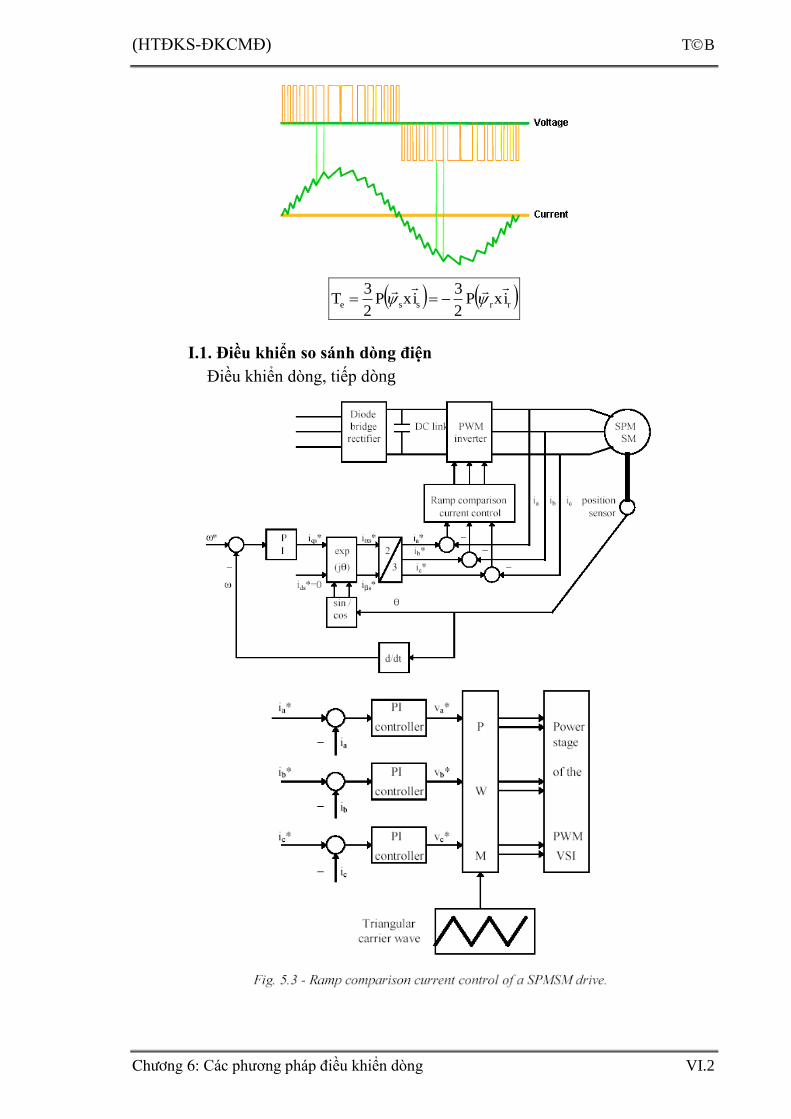
(HTĐKS-ĐKCMĐ) TB
Chöông 6: Các phương pháp điều khiển dòng VI.2
rrsse ixP2
3ixP
2
3T
I.1. Điều khiển so sánh dòng điện
Điều khiển dòng, tiếp dòng
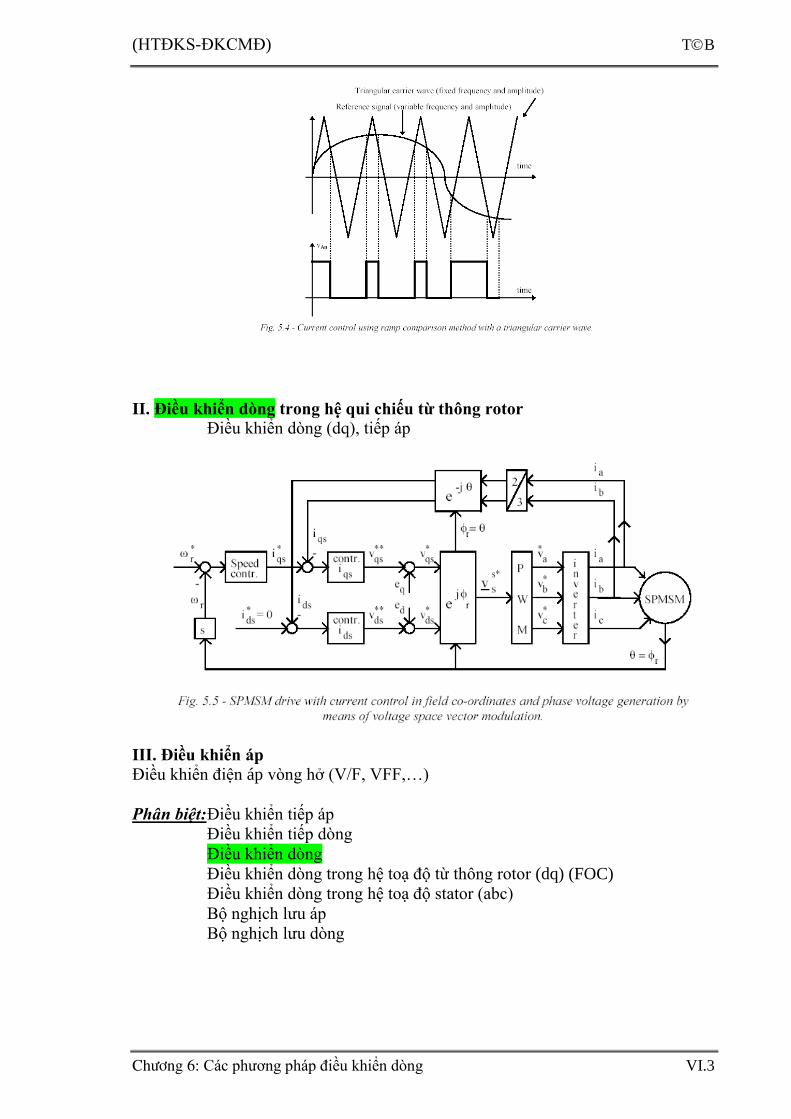
(HTĐKS-ĐKCMĐ) TB
Chöông 6: Các phương pháp điều khiển dòng VI.3
II. Điều khiển dòng trong hệ qui chiếu từ thông rotor
Điều khiển dòng (dq), tiếp áp
III. Điều khiển áp
Điều khiển điện áp vòng hở (V/F, VFF,…)
Phân biệt: Điều khiển tiếp áp
Điều khiển tiếp dòng
Điều khiển dòng
Điều khiển dòng trong hệ toạ độ từ thông rotor (dq) (FOC)
Điều khiển dòng trong hệ toạ độ stator (abc)
Bộ nghịch lưu áp
Bộ nghịch lưu dòng
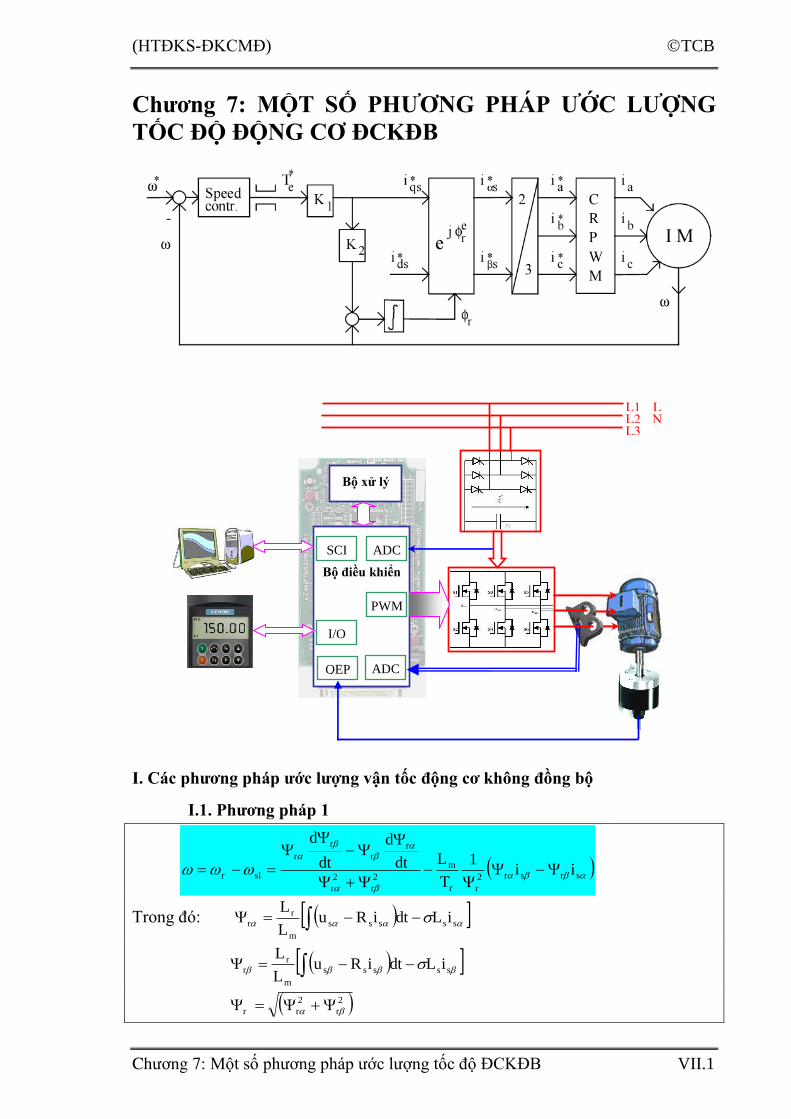
(HTĐKS-ĐKCMĐ) TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.1
Chƣơng 7: MỘT SỐ PHƢƠNG PHÁP ƢỚC LƢỢNG
TỐC ĐỘ ĐỘNG CƠ ĐCKĐB
I. Các phƣơng pháp ƣớc lƣợng vận tốc động cơ không đồng bộ
I.1. Phƣơng pháp 1
srsr2
rr
m
2
r
2
r
r
r
r
r
slr ii1
T
Ldt
d
dt
d
Trong đó: sssss
m
rr iLdtiRu
L
L
sssss
m
rr iLdtiRu
L
L
2
r
2
rr
Bộ đi u khi n
Bộ l
FOC
PWM
QEP ADC
SCI
I/O
ADC
L3
L2
L1
N
L
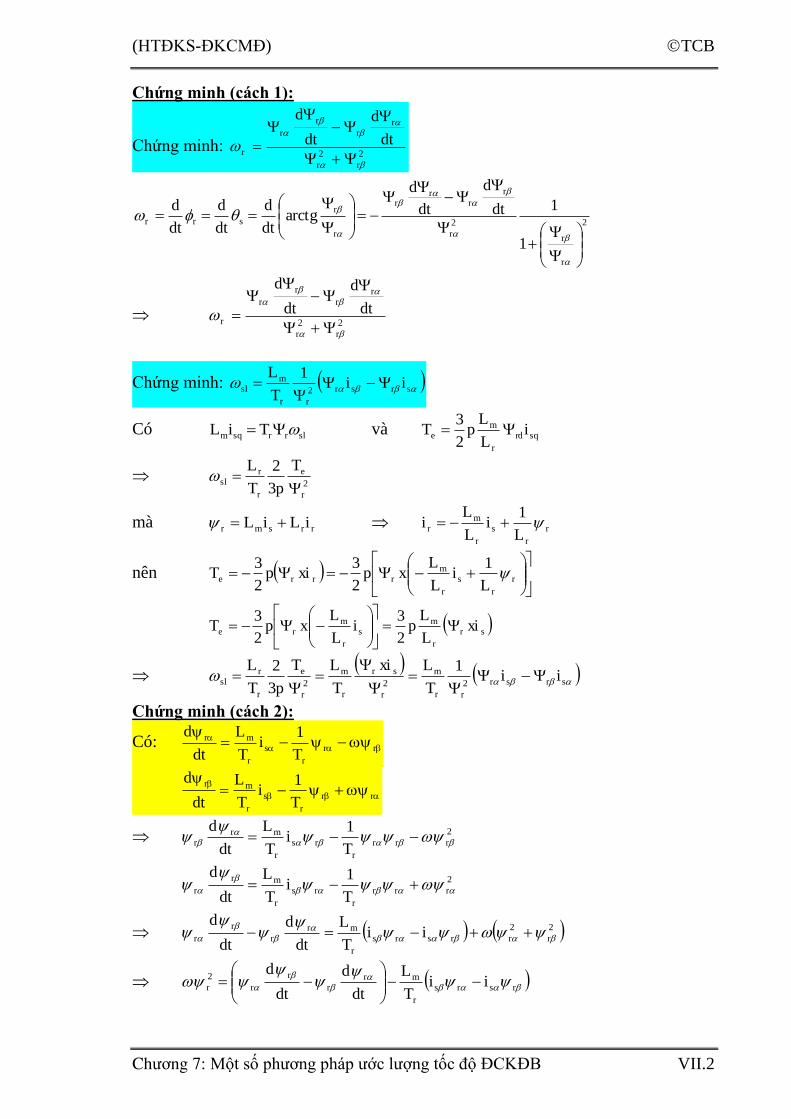
(HTĐKS-ĐKCMĐ) TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.2
Chứng minh (cách 1):
Chứng minh: 2
r
2
r
r
r
r
r
r
dt
d
dt
d
2
r
r
2
r
r
rr
r
r
r
srr
1
1dt
d
dt
d
arctgdt
d
dt
d
dt
d
2
r
2
r
r
r
r
r
r
dt
d
dt
d
Chứng minh: srsr2
rr
msl ii
1
T
L
Có slrrsqm TiL và sqrd
r
me i
L
Lp
2
3T
2
r
e
r
rsl
T
p3
2
T
L
mà rrsmr iLiL r
r
s
r
mr
L
1i
L
Li
nên
r
r
s
r
mrrre
L
1i
L
Lxp
2
3xip
2
3T
sr
r
ms
r
mre xi
L
Lp
2
3i
L
Lxp
2
3T
srsr2
rr
m
2
r
sr
r
m
2
r
e
r
rsl ii
1
T
Lxi
T
LT
p3
2
T
L
Chứng minh (cách 2):
Có:
rr
r
s
r
mr
T
1i
T
L
dt
d
rr
r
s
r
mr
T
1i
T
L
dt
d
2
rrr
r
rs
r
mr
rT
1i
T
L
dt
d
2
rrr
r
rs
r
mr
rT
1i
T
L
dt
d
2
r
2
rrsrs
r
mr
r
r
r iiT
L
dt
d
dt
d
rsrs
r
mr
r
r
r
2
r iiT
L
dt
d
dt
d
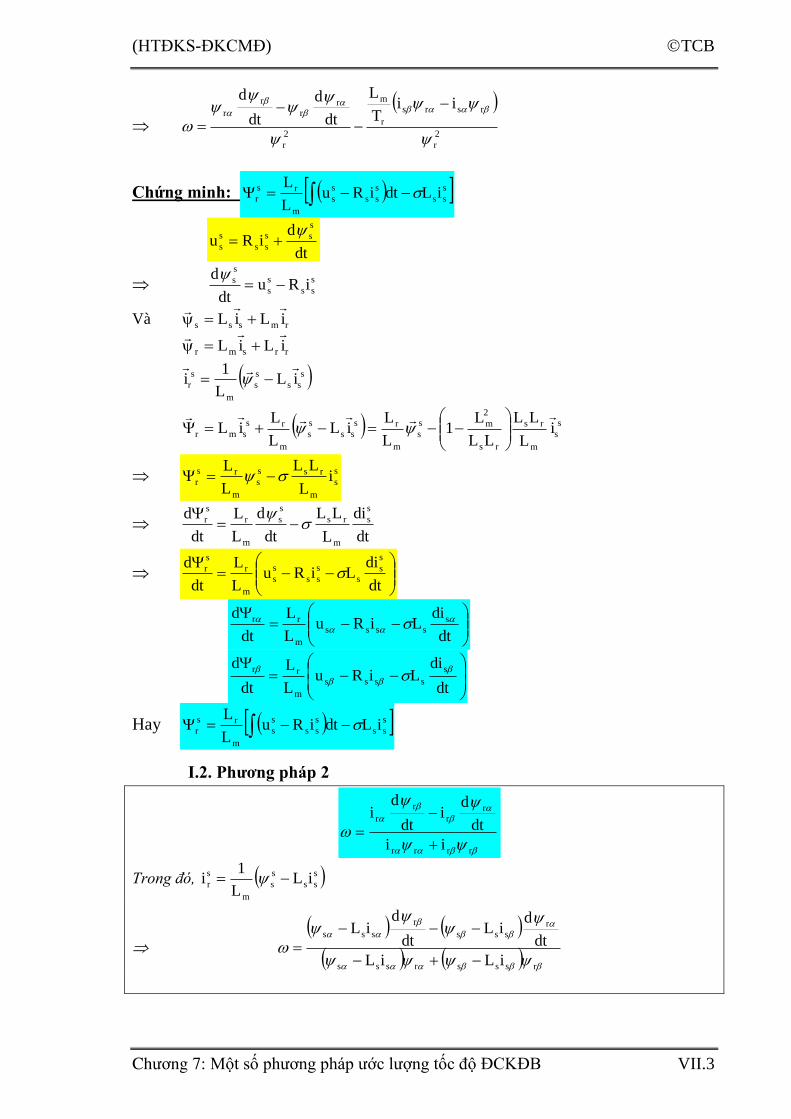
(HTĐKS-ĐKCMĐ) TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.3
2
r
rsrs
r
m
2
r
r
r
r
rii
T
L
dt
d
dt
d
Chứng minh: s
ss
s
ss
s
s
m
rs
r iLdtiRuL
L
dt
diRu
s
ss
ss
s
s
s
ss
s
s
s
s iRudt
d
Và rmsss iLiL
rrsmr iLiL
s
ss
s
s
m
s
r iLL
1i
s
s
m
rs
rs
2
ms
s
m
rs
ss
s
s
m
rs
smr iL
LL
LL
L1
L
LiL
L
LiL
s
s
m
rss
s
m
rs
r iL
LL
L
L
dt
di
L
LL
dt
d
L
L
dt
ds
s
m
rs
s
s
m
r
s
r
dt
diLiRu
L
L
dt
ds
s
s
s
ss
s
s
m
r
s
r
dt
diLiRu
L
L
dt
d s
ssss
m
rr
dt
diLiRu
L
L
dt
d s
ssss
m
rr
Hay s
ss
s
ss
s
s
m
rs
r iLdtiRuL
L
I.2. Phƣơng pháp 2
rrrr
r
r
r
r
ii
dt
di
dt
di
Trong đó, s
ss
s
s
m
s
r iLL
1i
rsssrsss
r
sss
r
sss
iLiL
dt
diL
dt
diL
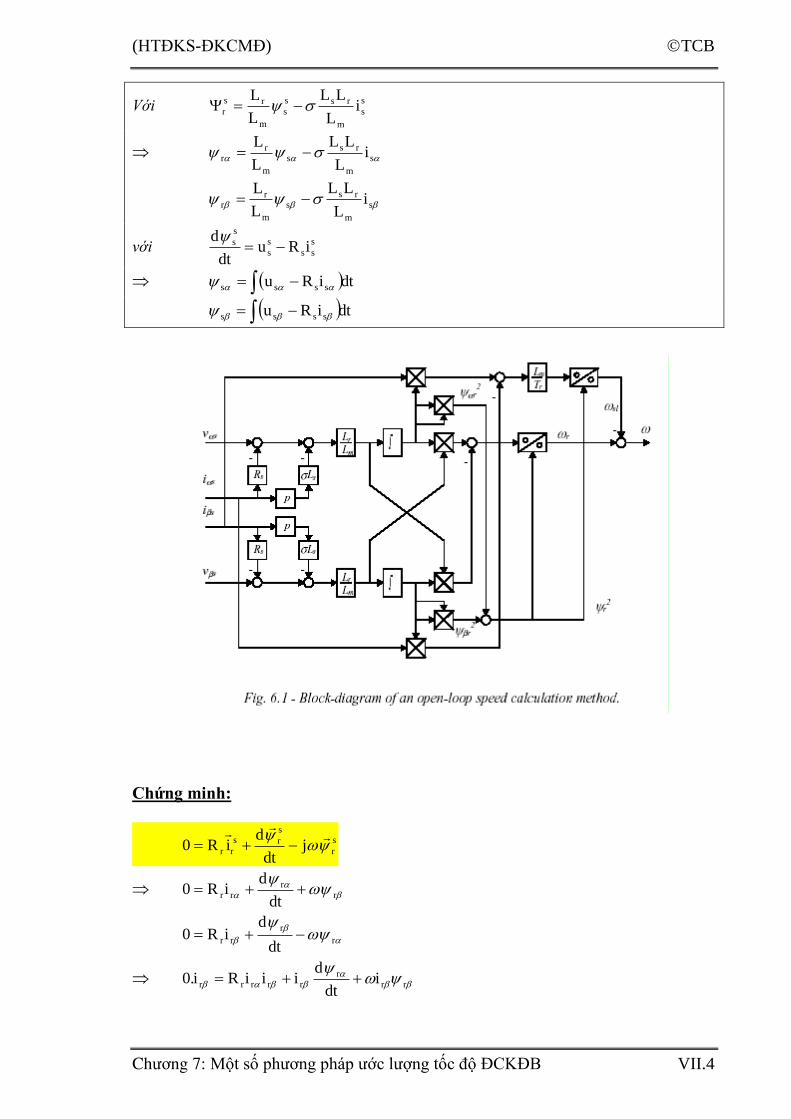
(HTĐKS-ĐKCMĐ) TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.4
Với s
s
m
rss
s
m
rs
r iL
LL
L
L
s
m
rs
s
m
rr i
L
LL
L
L
s
m
rs
s
m
rr i
L
LL
L
L
với s
ss
s
s
s
s iRudt
d
dtiRu ssss
dtiRu ssss
Chứng minh:
s
r
s
rs
rr jdt
diR0
r
r
rrdt
diR0
r
r
rrdt
diR0
rr
r
rrrrr idt
diiiRi.0
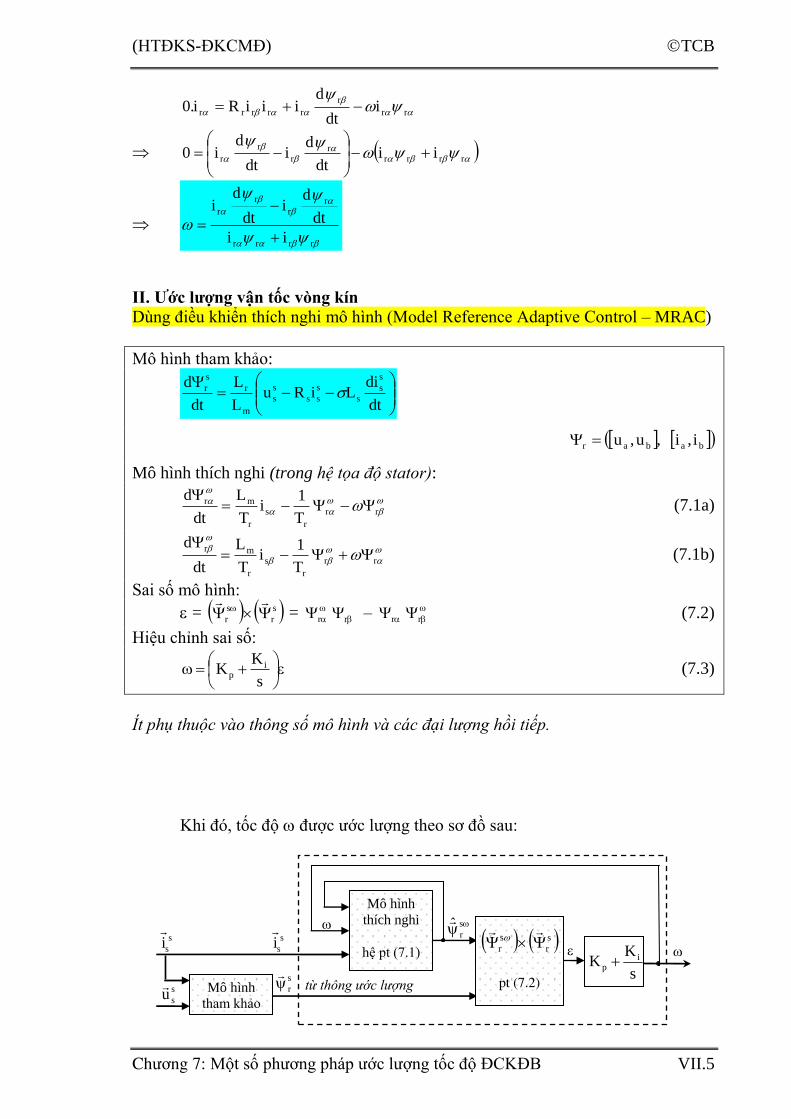
(HTĐKS-ĐKCMĐ) TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.5
rr
r
rrrrr idt
diiiRi.0
rrrr
r
r
r
r iidt
di
dt
di0
rrrr
r
r
r
r
ii
dt
di
dt
di
II. Ƣớc lƣợng vận tốc vòng kín
Dùng điều khiển thích nghi mô hình (Model Reference Adaptive Control – MRAC)
Mô hình tham khảo:
dt
diLiRu
L
L
dt
ds
s
s
s
ss
s
s
m
r
s
r
babar i,i,u,u
Mô hình thích nghi (trong hệ tọa độ stator):
rr
r
s
r
mr
T
1i
T
L
dt
d
(7.1a)
rr
r
s
r
mr
T
1i
T
L
dt
d
(7.1b)
Sai số mô hình:
= s
r
s
r
=
r r – r
r (7.2)
Hiệu chỉnh sai số:
s
KK i
p (7.3)
Ít phụ thuộc vào thông số mô hình và các đại lượng hồi tiếp.
Khi đó, tốc độ được ước lượng theo sơ đồ sau:
Mô hình
thích nghi
hệ pt (7.1)
s
r
s
KK i
p
s
r
s
r
pt (7.2)
từ thông ước lượng Mô hình
tham khảo
s
r
s
su
s
si
s
si
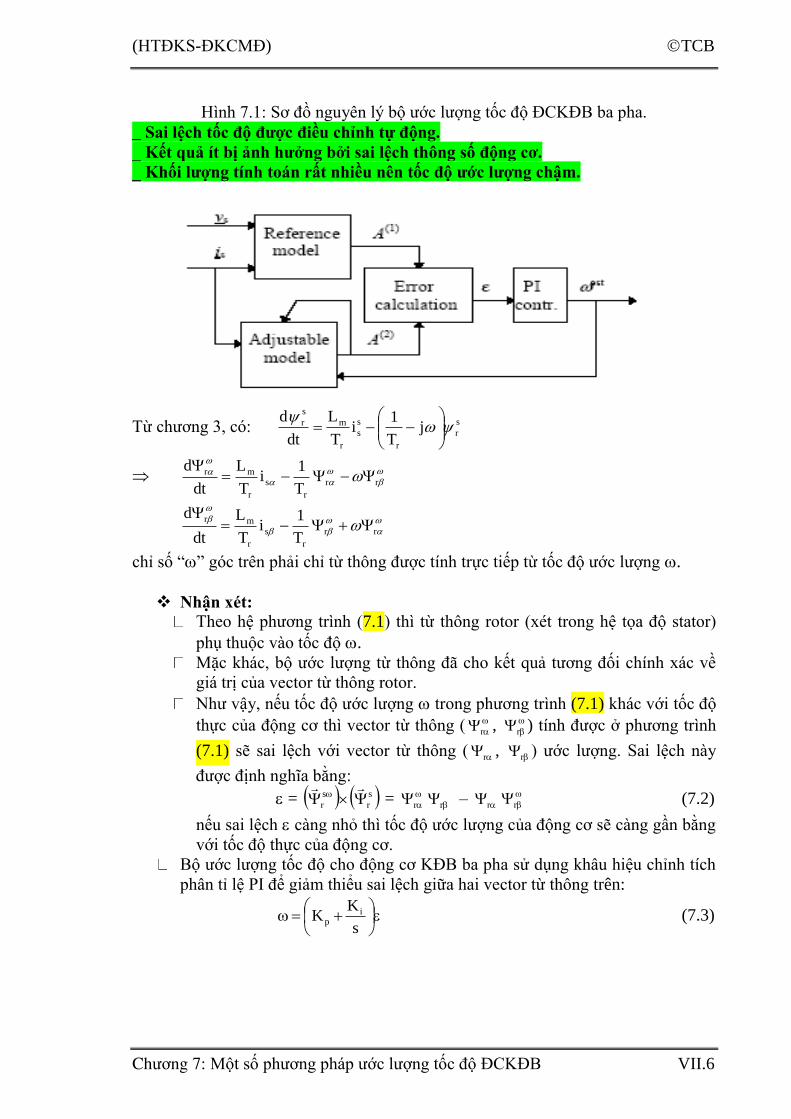
(HTĐKS-ĐKCMĐ) TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.6
Hình 7.1: Sơ đồ nguyên lý bộ ước lượng tốc độ ĐCKĐB ba pha.
_ Sai lệch tốc độ đƣợc đi u chỉnh tự động.
_ Kết quả ít bị ảnh hƣởng bởi sai lệch thông số động cơ.
_ Khối lƣợng tính toán rất nhi u nên tốc độ ƣớc lƣợng chậm.
Từ chương 3, có: s
r
r
s
s
r
m
s
r jT
1i
T
L
dt
d
rr
r
s
r
mr
T
1i
T
L
dt
d
rr
r
s
r
mr
T
1i
T
L
dt
d
chỉ số “” góc trên phải chỉ từ thông được tính trực tiếp từ tốc độ ước lượng .
Nhận ét: Theo hệ phương trình (7.1) thì từ thông rotor (xét trong hệ tọa độ stator)
phụ thuộc vào tốc độ .
Mặc khác, bộ ước lượng từ thông đã cho kết quả tương đối chính xác về
giá trị của vector từ thông rotor.
Như vậy, nếu tốc độ ước lượng trong phương trình (7.1) khác với tốc độ
thực của động cơ thì vector từ thông (
r ,
r ) tính được ở phương trình
(7.1) sẽ sai lệch với vector từ thông ( r , r ) ước lượng. Sai lệch này
được định nghĩa bằng:
= s
r
s
r
=
r r – r
r (7.2)
nếu sai lệch càng nhỏ thì tốc độ ước lượng của động cơ sẽ càng gần bằng
với tốc độ thực của động cơ.
Bộ ước lượng tốc độ cho động cơ KĐB ba pha sử dụng khâu hiệu chỉnh tích
phân tỉ lệ PI để giảm thiểu sai lệch giữa hai vector từ thông trên:
s
KK i
p (7.3)
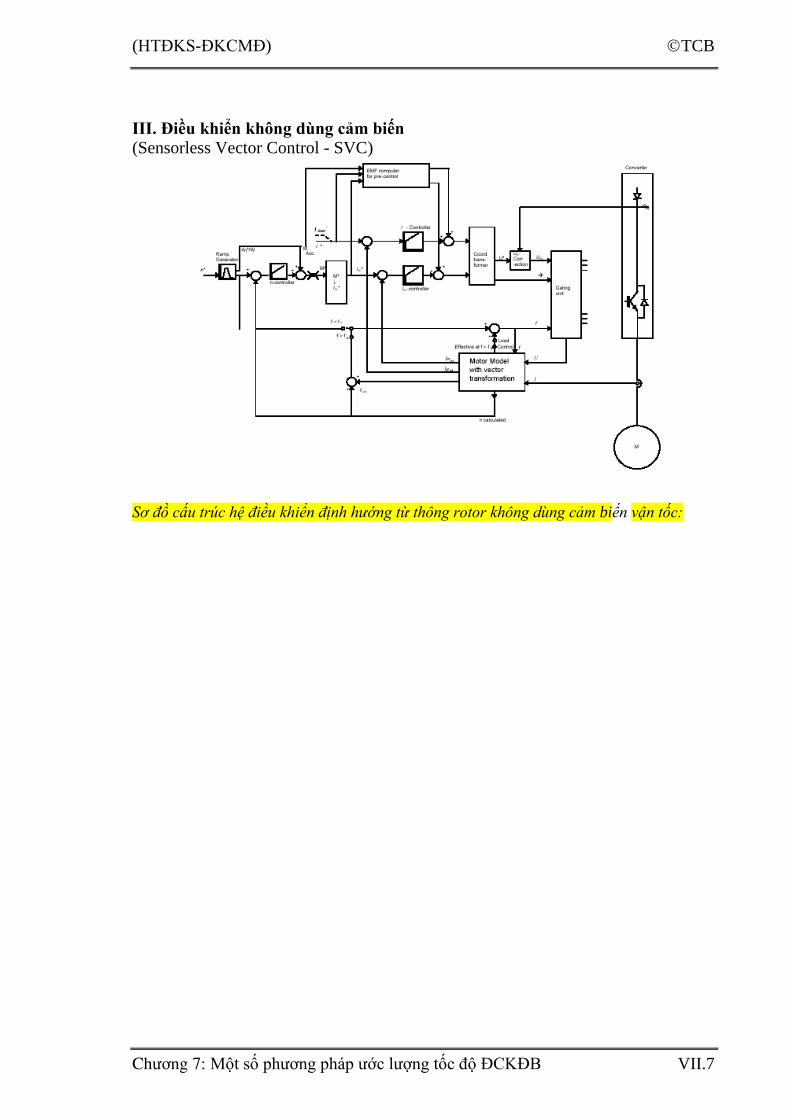
(HTĐKS-ĐKCMĐ) TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.7
III. Đi u khi n không dùng cảm biến
(Sensorless Vector Control - SVC)
Sơ đồ cấu trúc hệ điều khiển định hướng từ thông rotor không dùng cảm biến vận tốc:
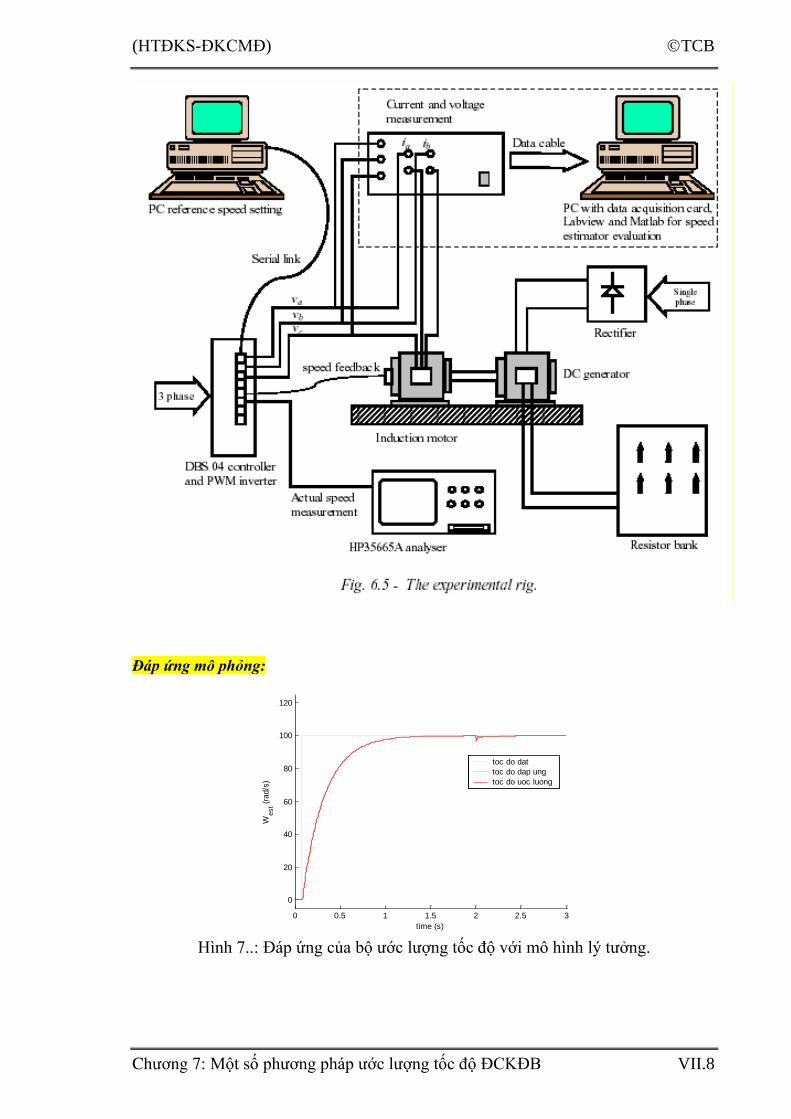
(HTĐKS-ĐKCMĐ) TCB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.8
Đáp ứng mô phỏng:
0 0.5 1 1.5 2 2.5 3
0
20
40
60
80
100
120
time (s)
West (
rad/s
)
toc do dat
toc do dap ung
toc do uoc luong
Hình 7..: Đáp ứng của bộ ước lượng tốc độ với mô hình lý tưởng.
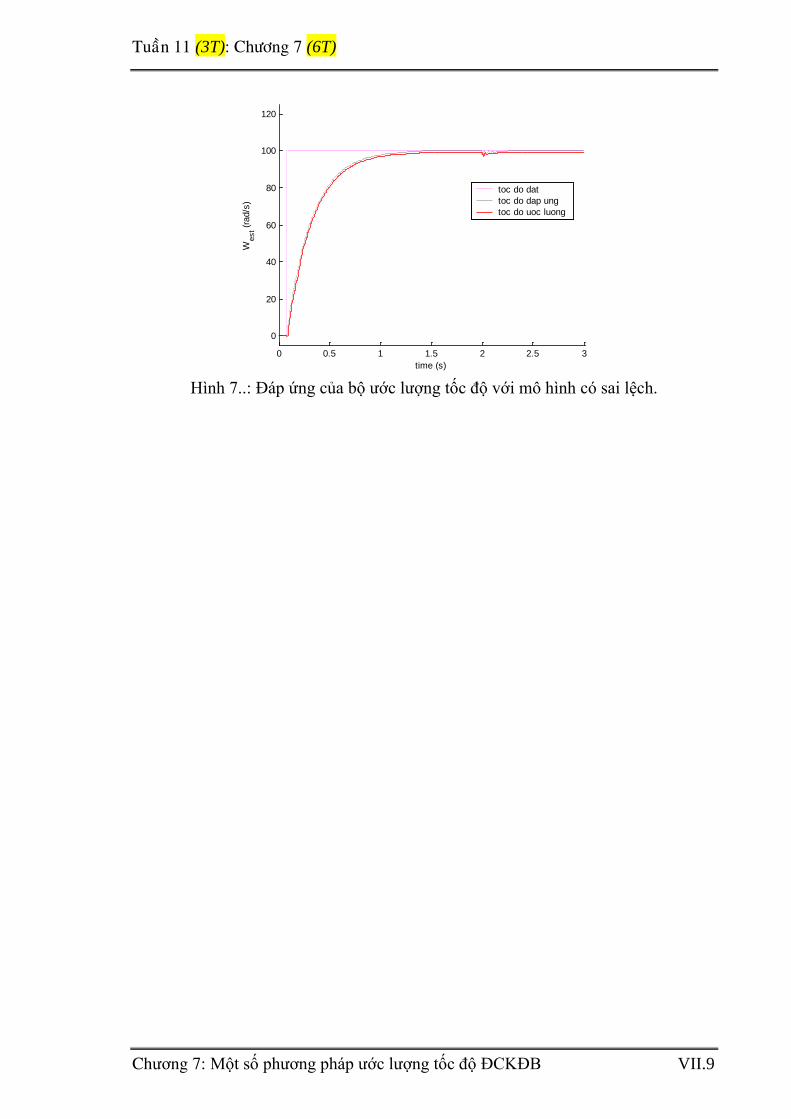
Tuaàn 11 (3T): Chöông 7 (6T)
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.9
0 0.5 1 1.5 2 2.5 3
0
20
40
60
80
100
120
time (s)
West (
rad/s
)
toc do dat
toc do dap ung
toc do uoc luong
Hình 7..: Đáp ứng của bộ ước lượng tốc độ với mô hình có sai lệch.
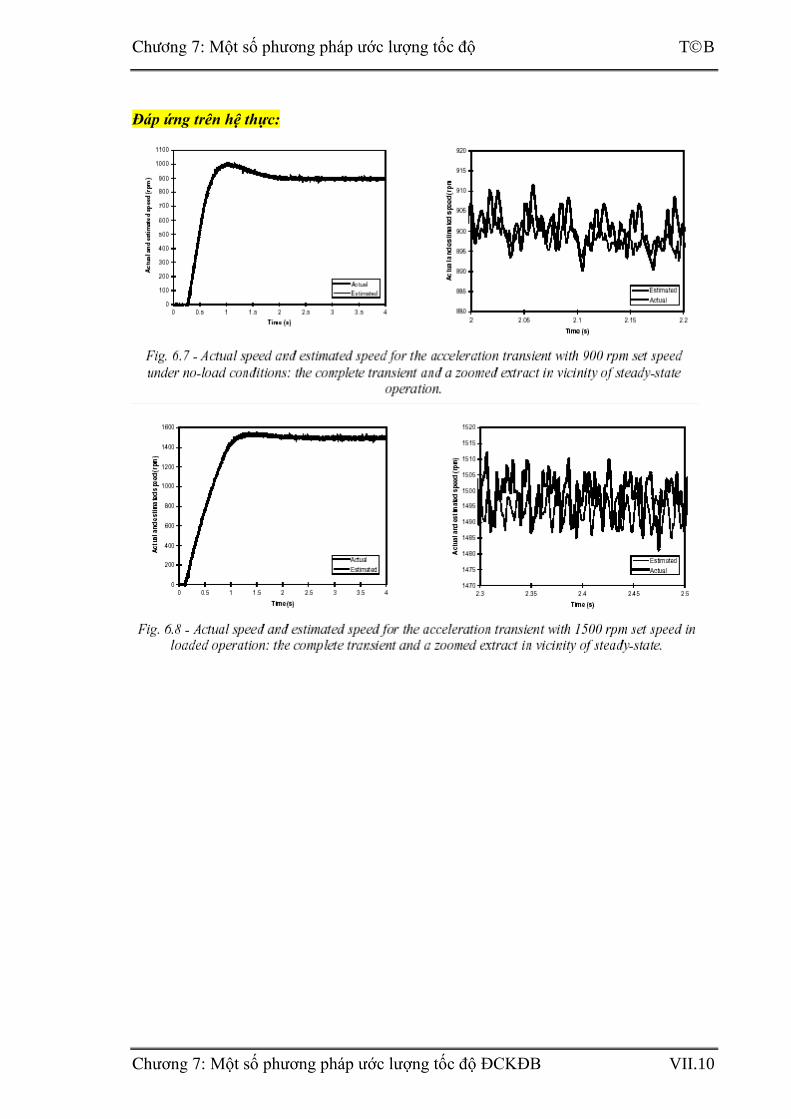
Chöông 7: Một số phương pháp ước lượng tốc độ TB
Chương 7: Một số phương pháp ước lượng tốc độ ĐCKĐB VII.10
Đáp ứng trên hệ thực:
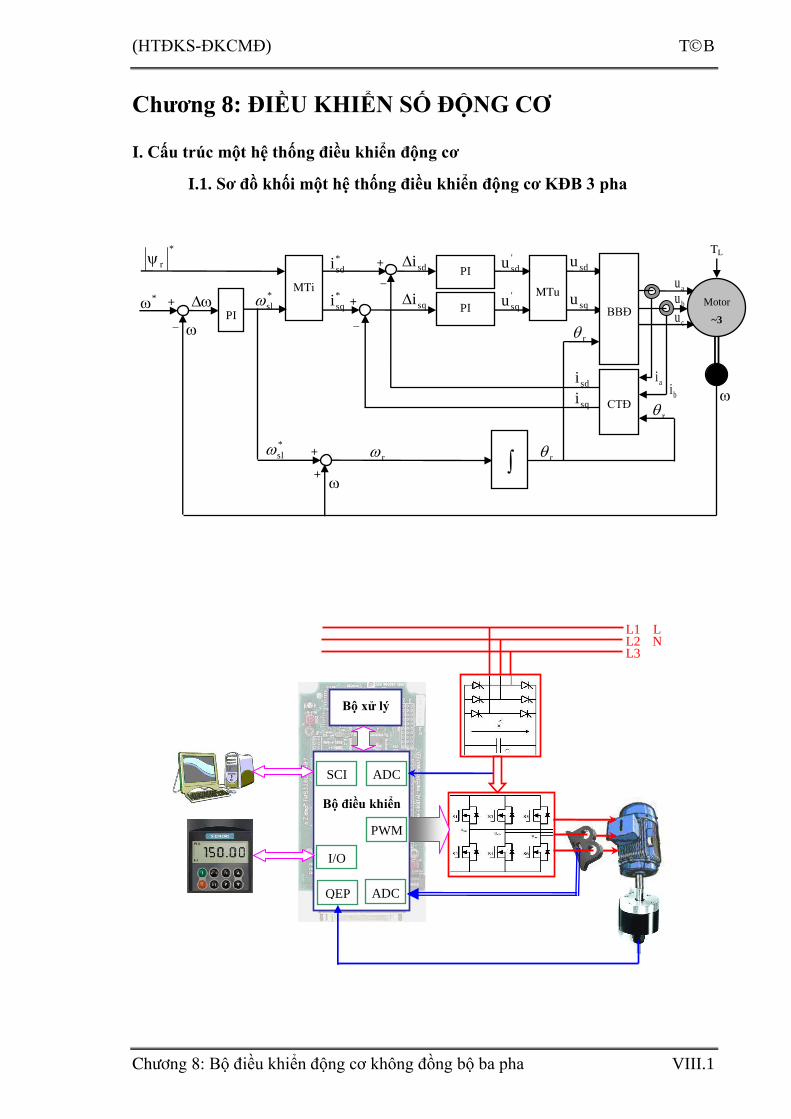
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.1
Chương 8: ĐIỀU KHIỂN SỐ ĐỘNG CƠ
I. Cấu trúc một hệ thống điều khiển động cơ
I.1. Sơ đồ khối một hệ thống điều khiển động cơ KĐB 3 pha
Bộ điều khiển
Bộ
FOC
PWM
QEP ADC
SCI
I/O
ADC
L3 L2 L1
N L
TL
ai
MTu
BBĐ
–
*
sdi
+
PI
MTu
PI
MTu
MTi
–
+
*
r
CTĐ
*
sl
r r
*
sqi
sdi
sqi
sdi
sqi
'
sdu
'
squ
sdu
squ
PI –
+ *
+
+ *
sl
bi
au
bu
cu
r
r
Motor
~3
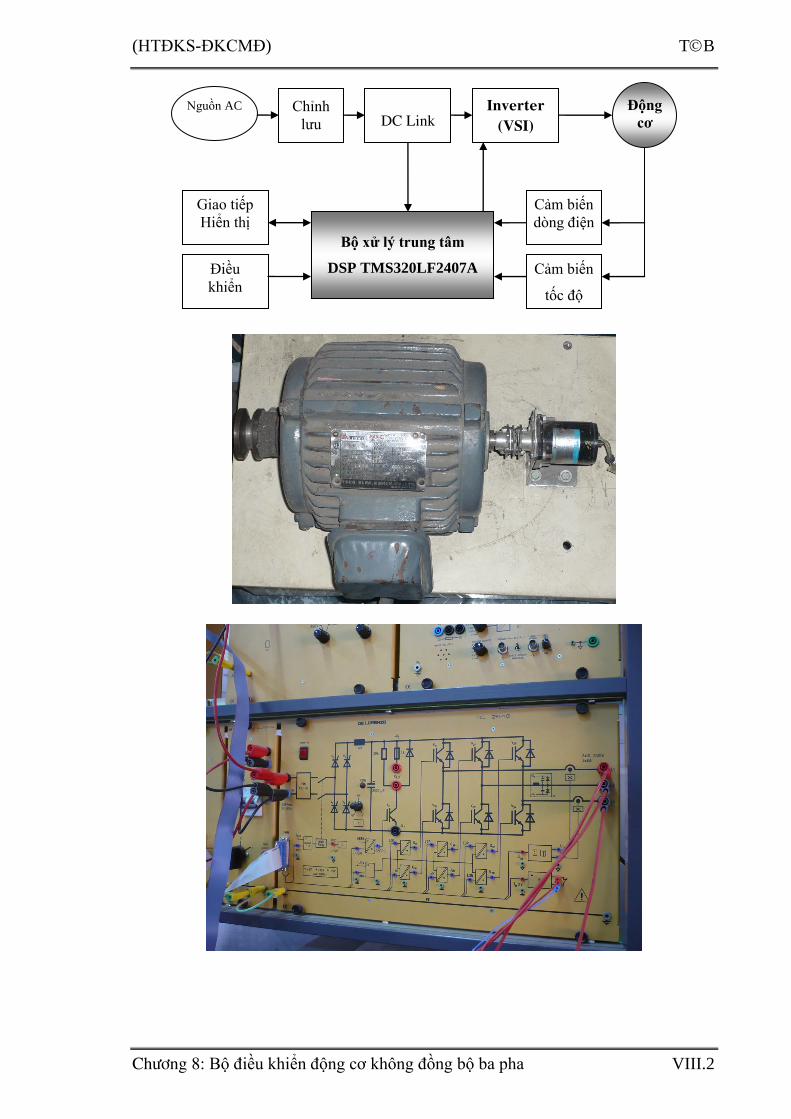
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.2
Bộ trung tâm
DSP TMS320LF2407A
Inverter
(VSI)
Chỉnh
lưu
DC Link
Nguồn AC Động
cơ
Cảm biến
dòng điện
Cảm biến
tốc độ
Giao tiếp
Hiển thị
Điều
khiển

(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.3
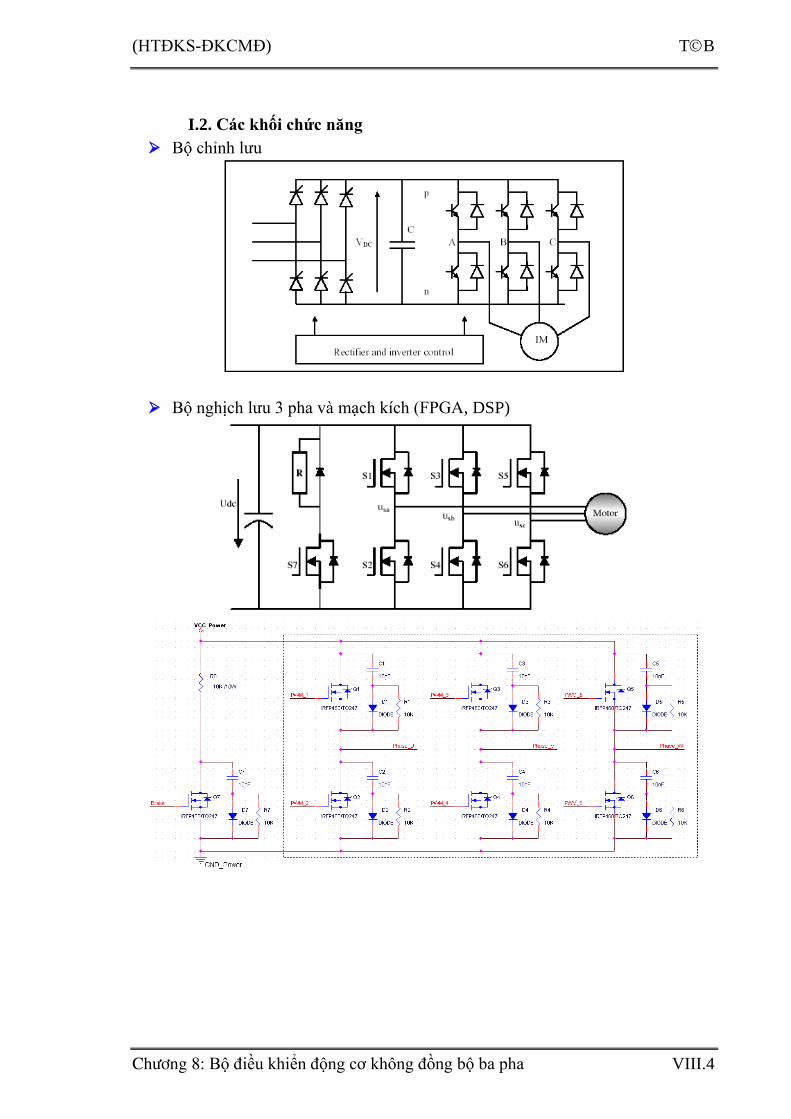
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.4
I.2. Các khối chức năng
Bộ chỉnh lưu
Bộ nghịch lưu 3 pha và mạch kích (FPGA, DSP)
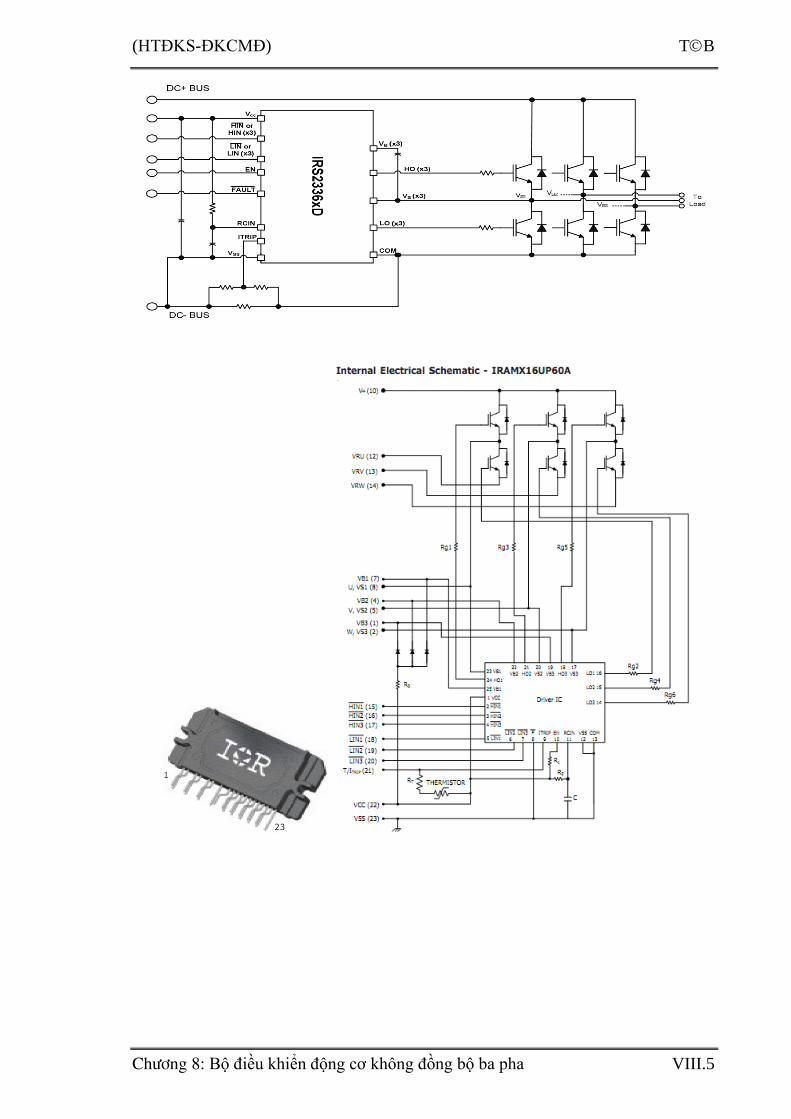
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.5
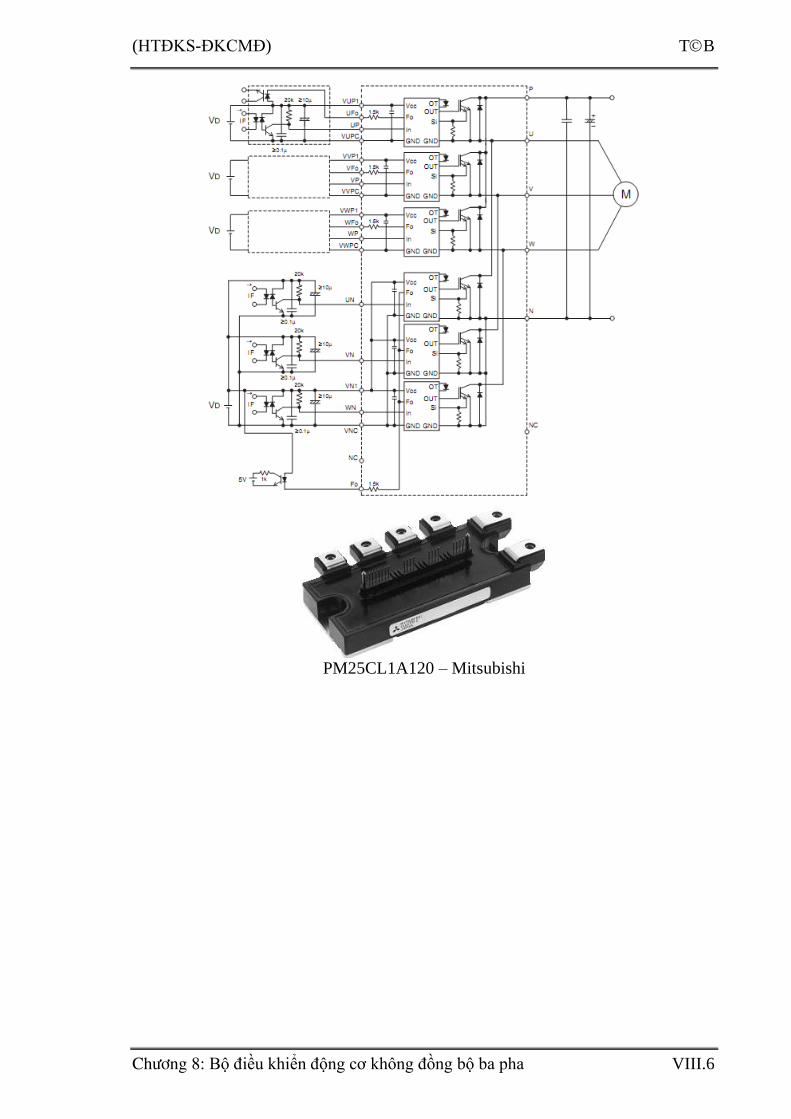
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.6
PM25CL1A120 – Mitsubishi
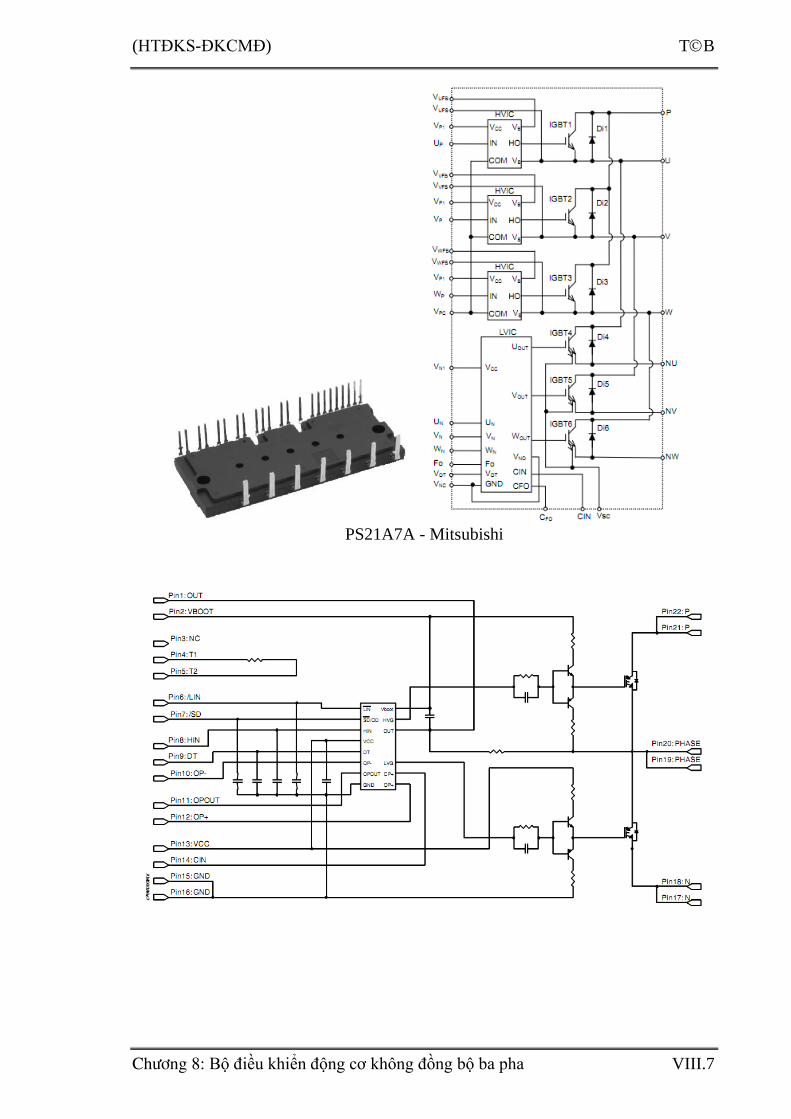
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.7
PS21A7A - Mitsubishi
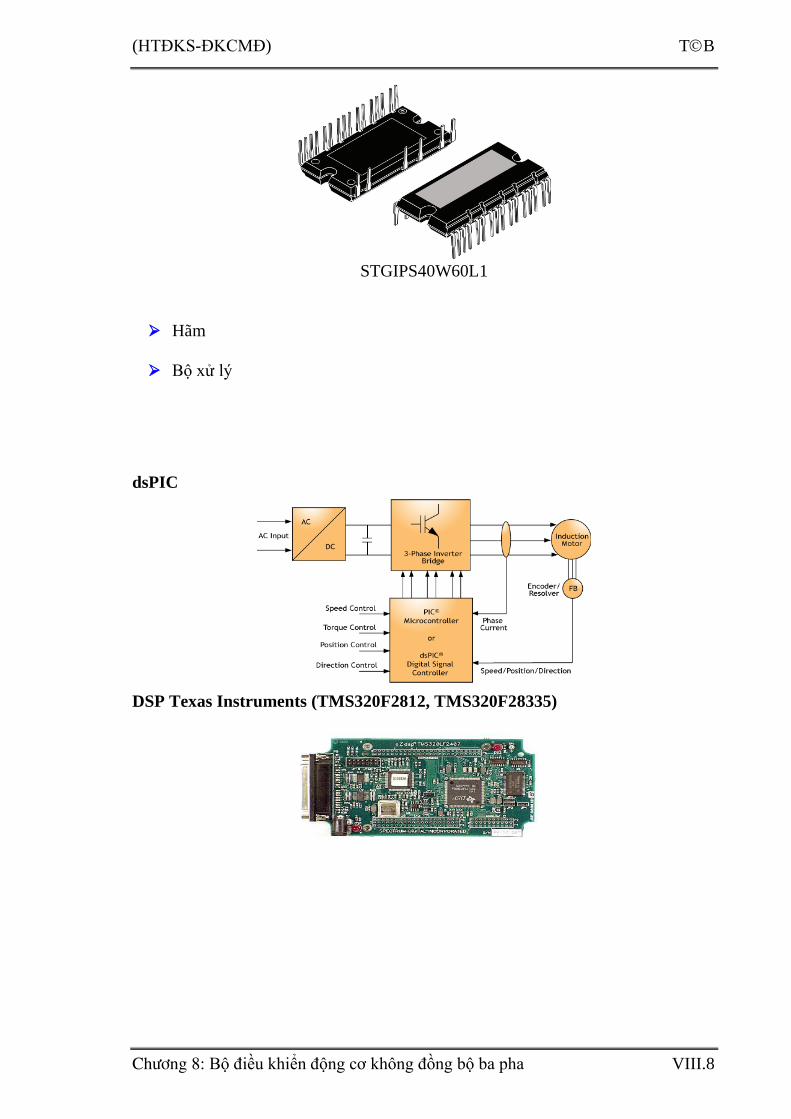
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.8
STGIPS40W60L1
Hãm
Bộ xử lý
dsPIC
DSP Texas Instruments (TMS320F2812, TMS320F28335)
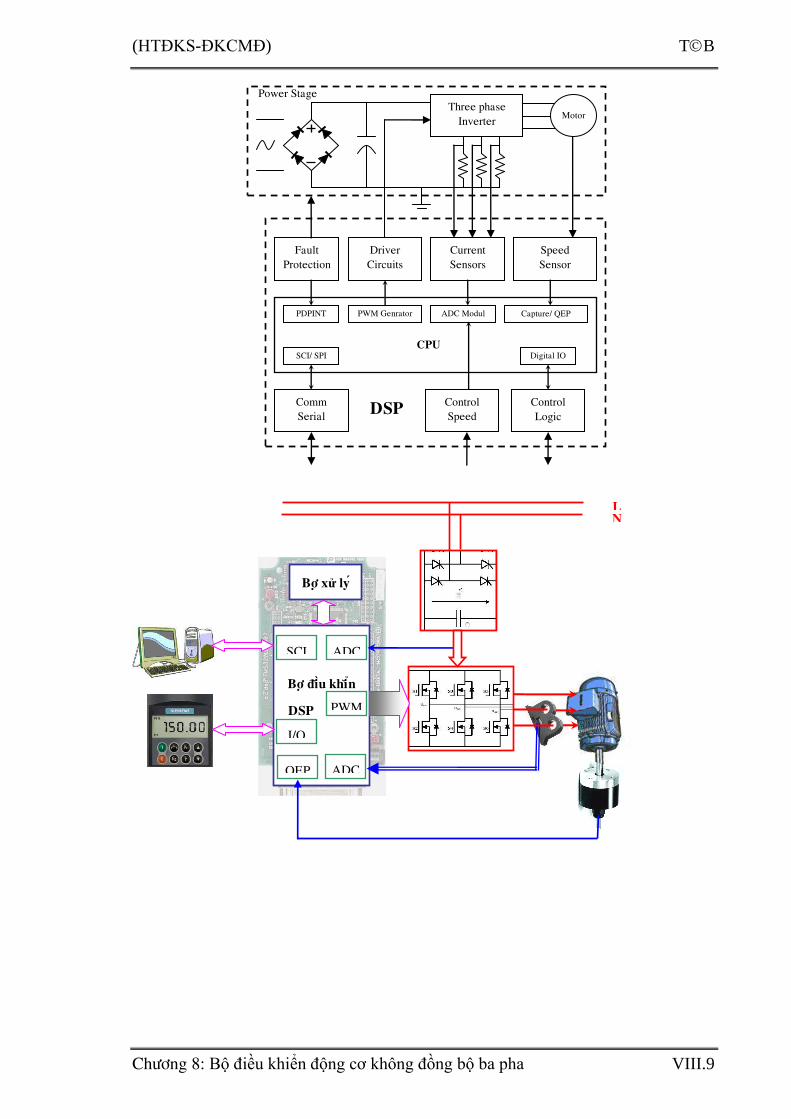
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.9
đ n
DSP
FOC
PWM
QEP ADC
SCI
I/O
ADC
L3
L2
L1
N
L
CPU
ADC Modul PWM Genrator Capture/ QEP PDPINT
SCI/ SPI Digital IO
Speed
Sensor
Driver
Circuits
Current
Sensors
Comm
Serial
Control
Logic
Fault
Protection
Motor
Three phase
Inverter
Power Stage
DSP Control
Speed
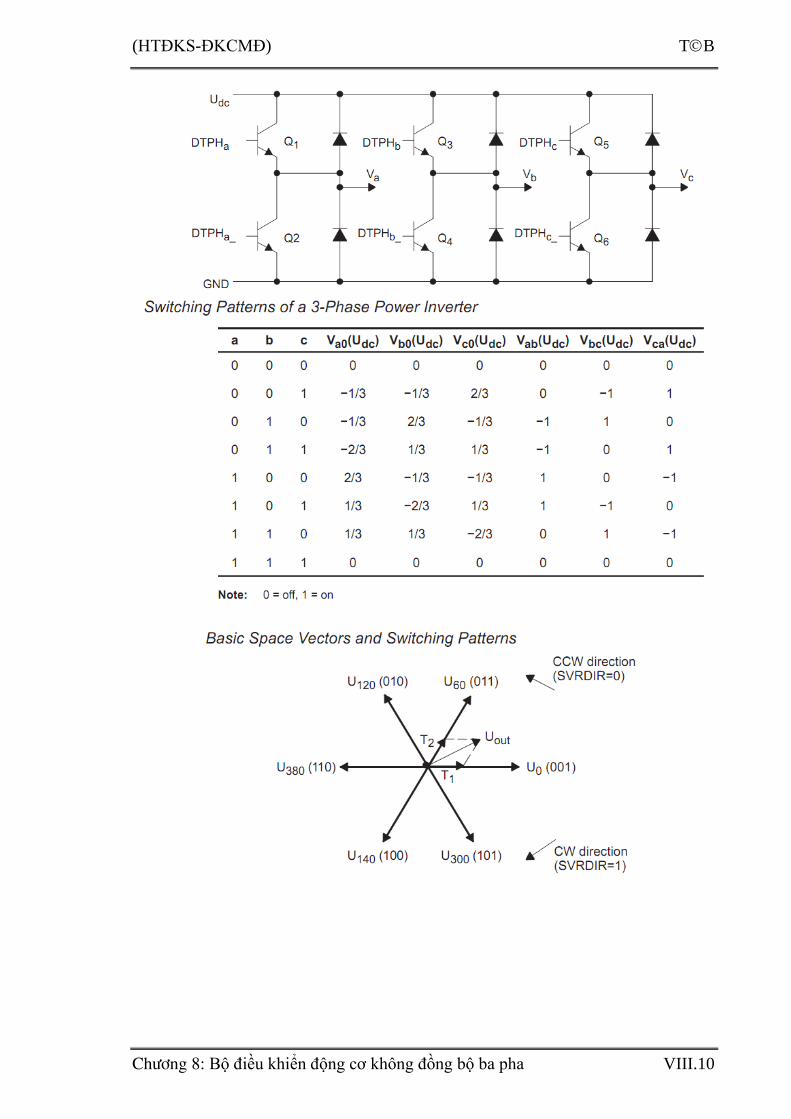
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.10
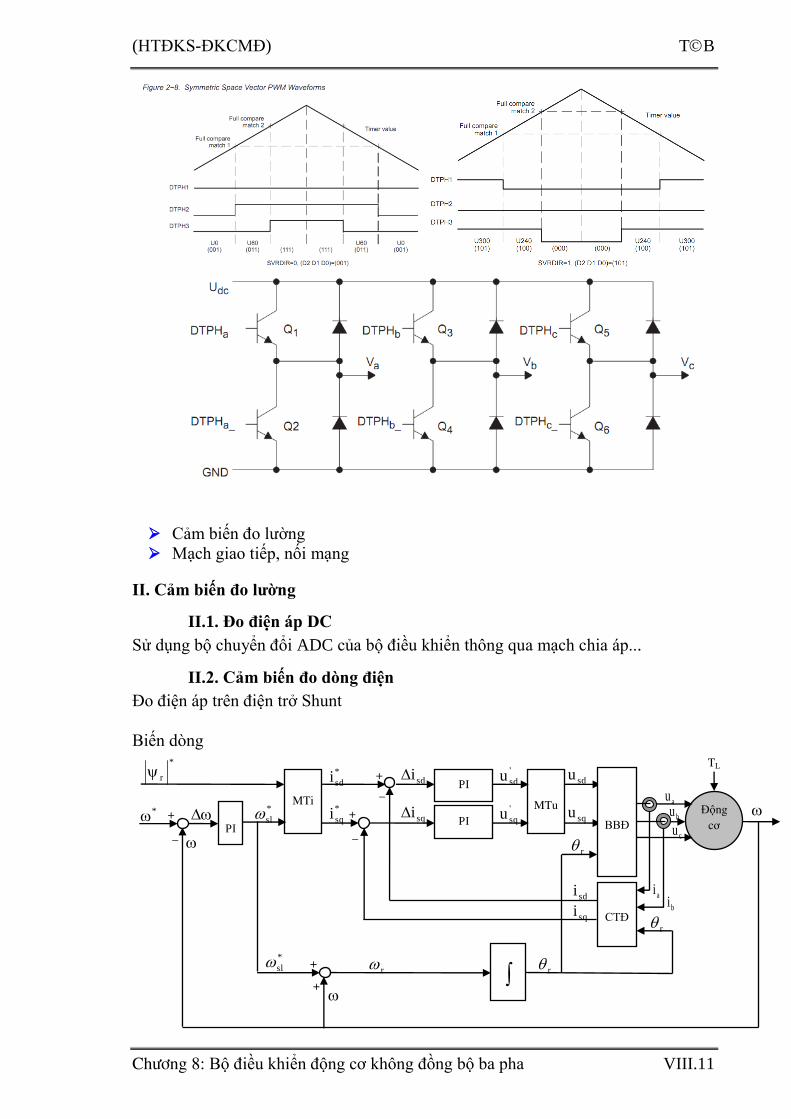
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.11
Cảm biến đo lường
Mạch giao tiếp, nối mạng
II. Cảm biến đo ường
II.1. Đo điện áp DC
Sử dụng bộ chuyển đổi ADC của bộ điều khiển thông qua mạch chia áp...
II.2. Cảm biến đo dòng điện
Đo điện áp trên điện trở Shunt
Biến dòng
TL
ai
MTu
BBĐ
–
*
sdi
+
PI
MTu
PI
MTu
MTi
–
+
*
r
CTĐ
*
sl
r r
*
sqi
sdi
sqi
sdi
sqi
'
sdu
'
squ
sdu
squ
PI –
+ *
+
+ *
sl
Động
cơ
bi
au
bu
cu
r
r
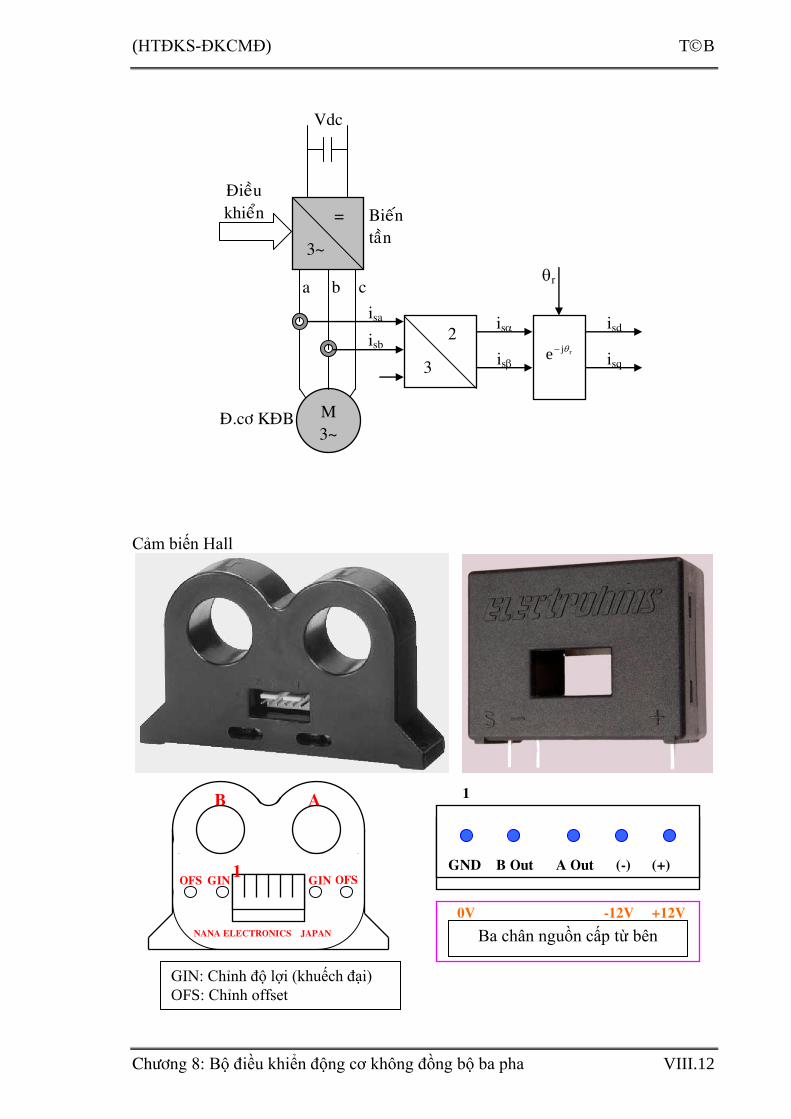
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.12
Cảm biến Hall
B A
OFS OFS GIN GIN 1
NANA ELECTRONICS JAPAN
GND B Out A Out (-) (+)
1
-12V +12V 0V
Ba chân nguồn cấp từ bên
ngoài GIN: Chỉnh độ lợi (khuếch đại)
OFS: Chỉnh offset
Ñ.cô KÑB
==
3~
Vdc
Ñieàu
khieån
M
3~
a b c
Bieán
taàn
2=
3
isa
isb
is
is rj
e
isd
isq
r
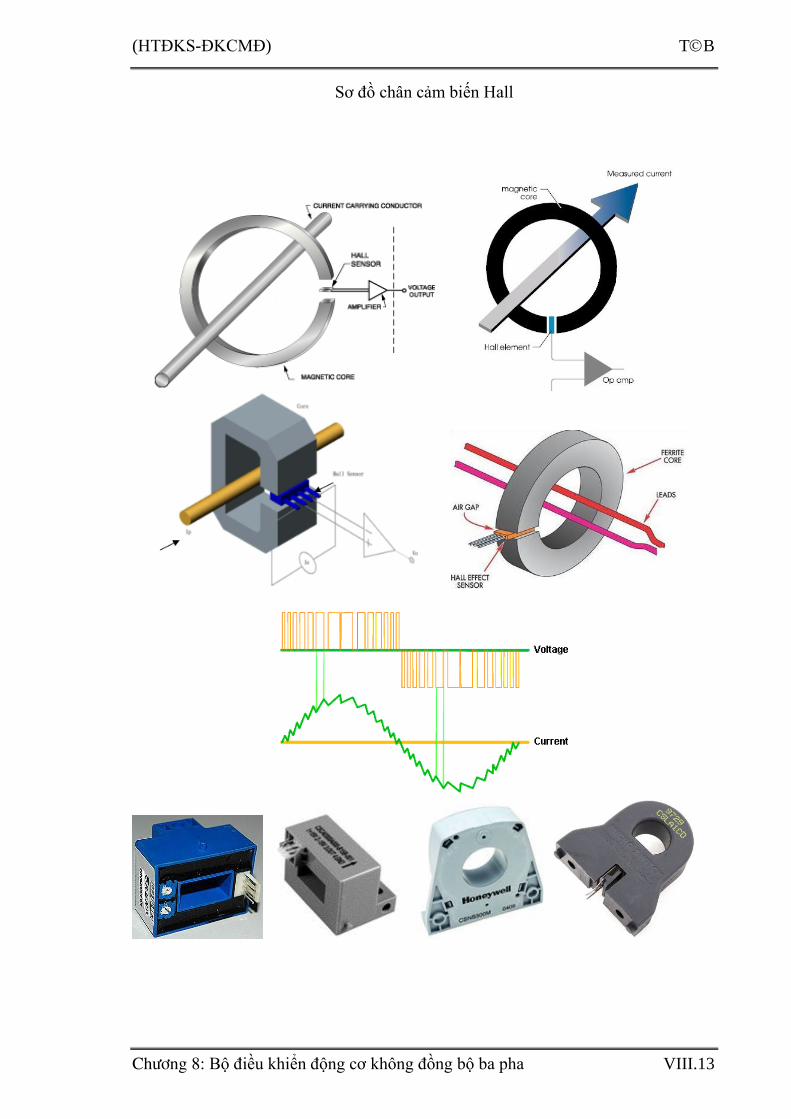
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.13
Sơ đồ chân cảm biến Hall
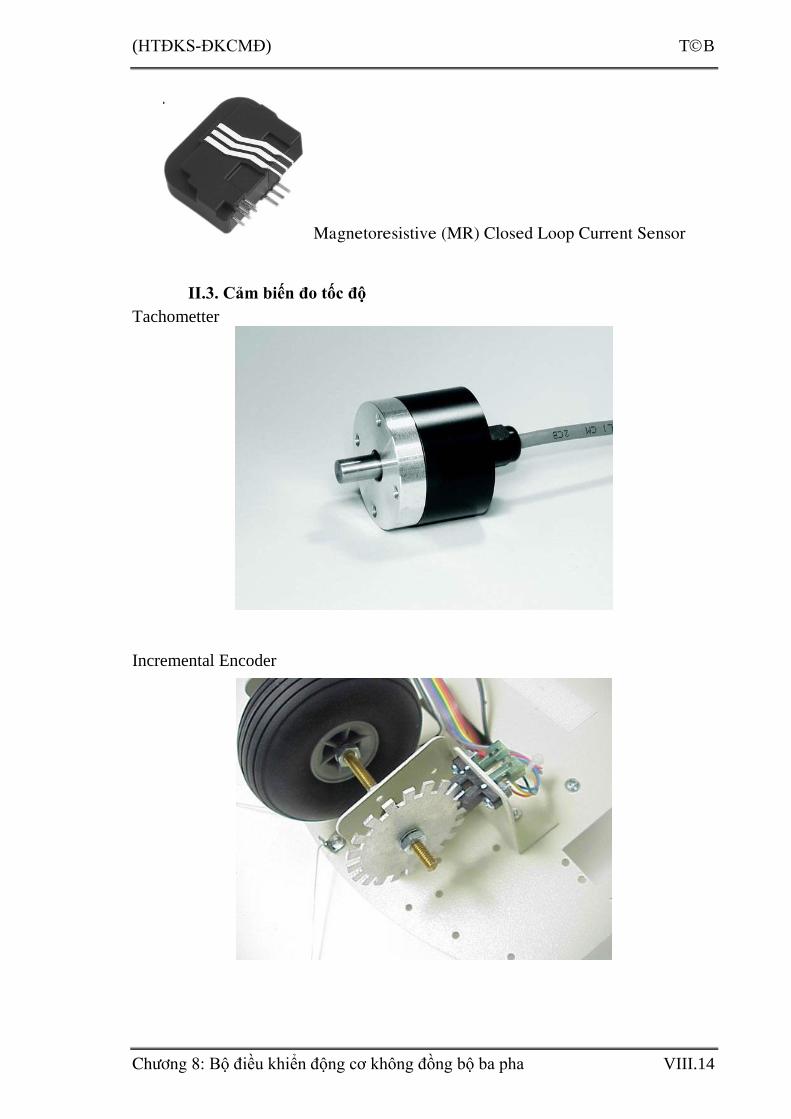
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.14
Magnetoresistive (MR) Closed Loop Current Sensor
II.3. Cảm biến đo tốc độ
Tachometter
Incremental Encoder
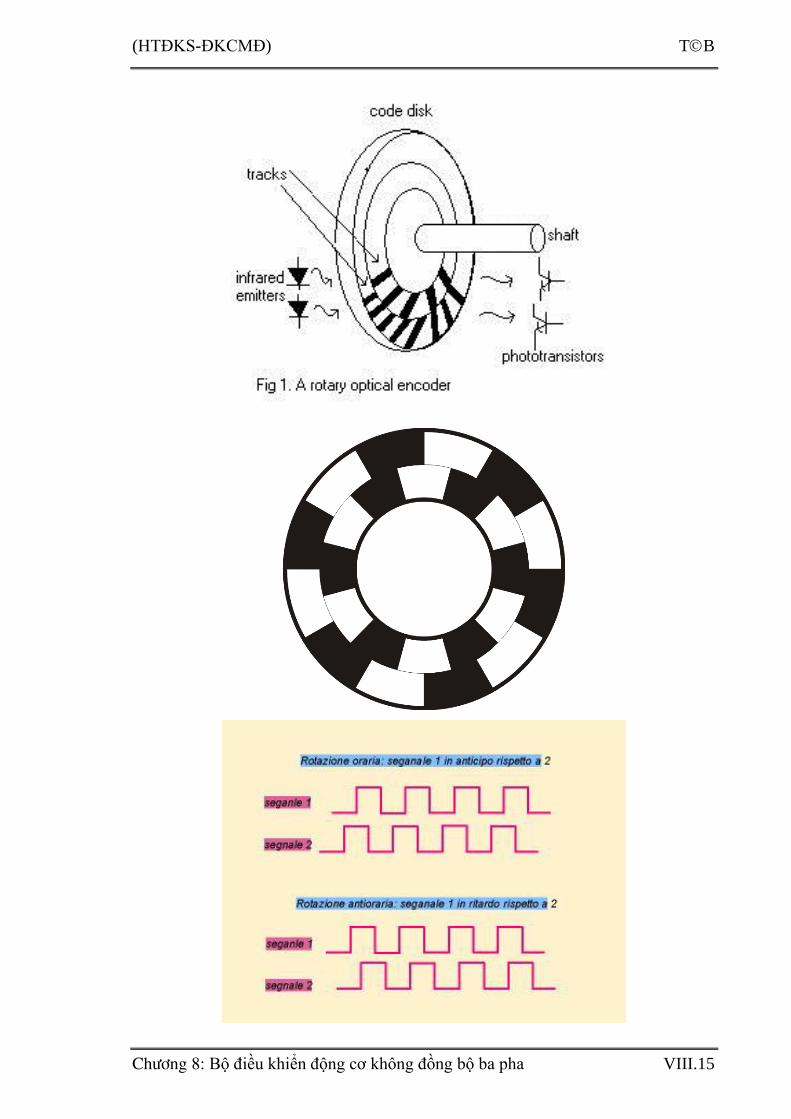
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.15
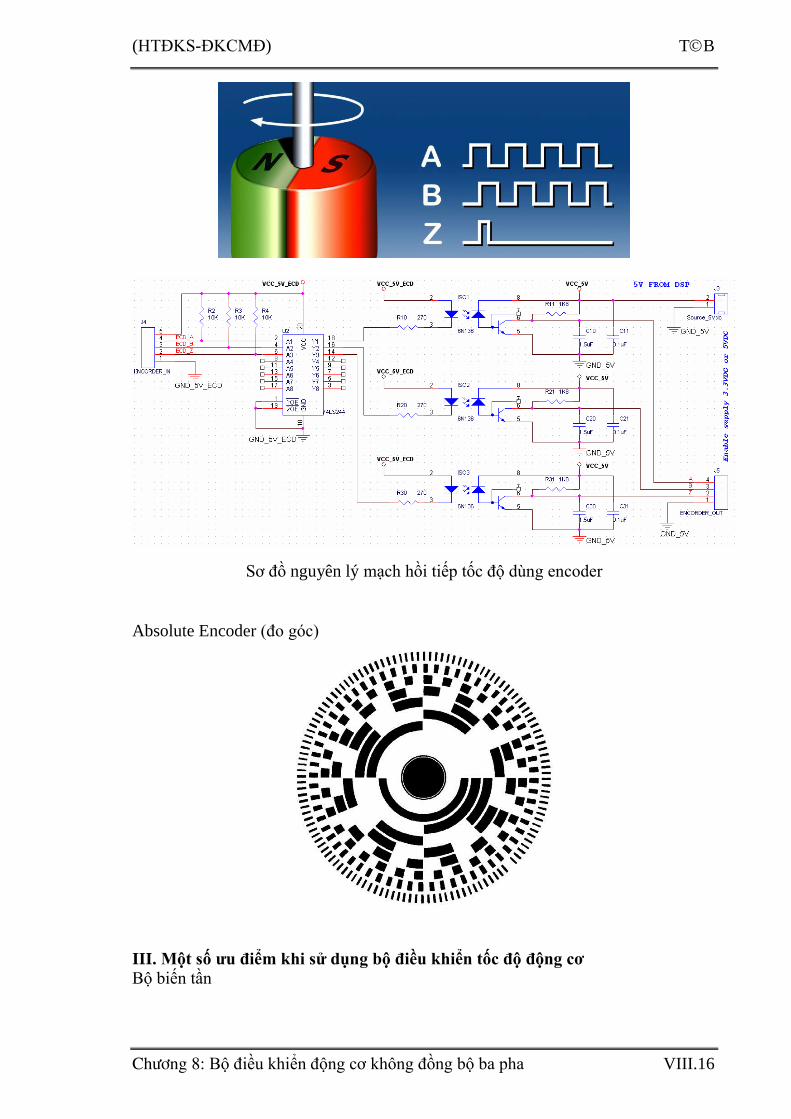
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.16
Sơ đồ nguyên lý mạch hồi tiếp tốc độ dùng encoder
Absolute Encoder (đo góc)
III. Một số ưu điểm khi s dụng bộ điều khiển tốc độ động cơ
Bộ biến tần

(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.17
Ưu điểm của bộ biến tần:
Giảm hệ thống cơ khí (rulo, xích, hộp số tăng giảm tốc,…)
Giảm tiếng ồn
Tiết kiệm năng lượng (tổn hao cơ và tổn hao nhiệt)
Thay đổi tốc độ dễ dàng
Khởi động mềm và dừng mềm
Ổn định tốc độ
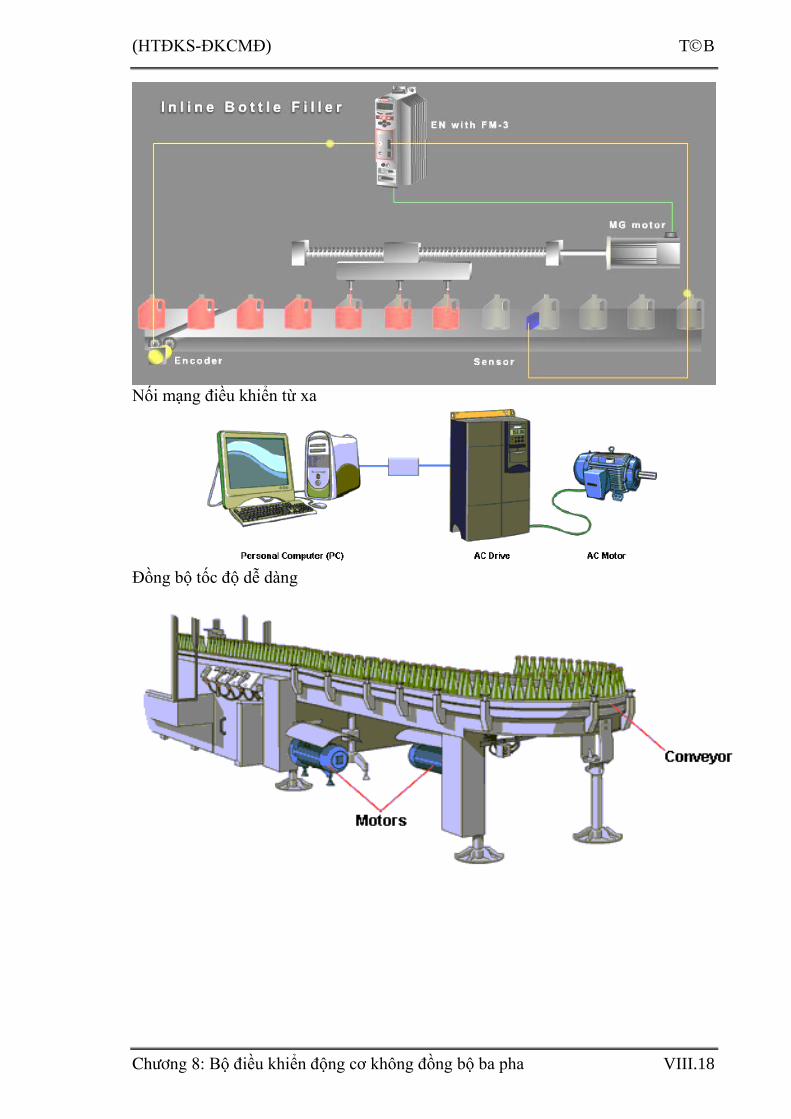
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.18
Nối mạng điều khiển từ xa
Đồng bộ tốc độ dễ dàng
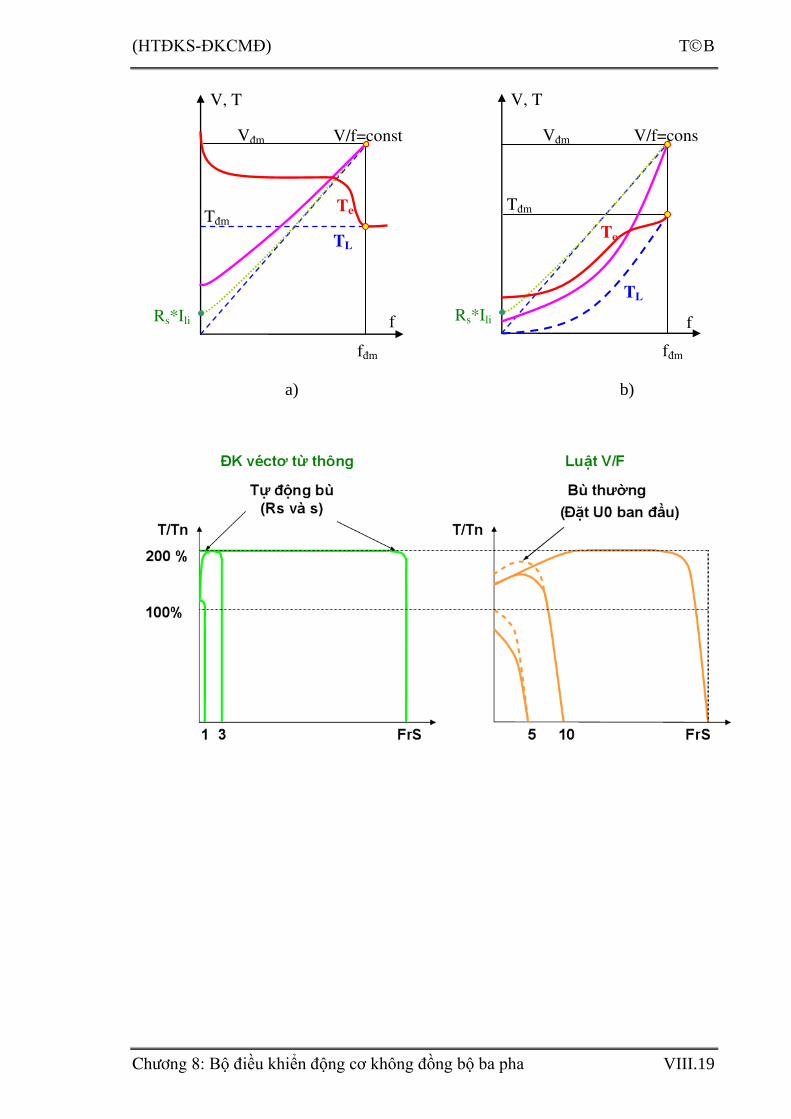
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.19
a) b)
f
V, T
Te
Rs*Ili
m
TL
fđm
V/f=cons
t
Vđm
Tđm
V/f=const
f
V, T
Te
Rs*Ili
m
TL
fđm
Tđm
Vđm
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.20
IV. Hệ thống điều khiển số động cơ không đồng bộ ba pha Phần cứng
Chỉnh lưu
Nghịch lưu
Cảm biến (Hall, Incremental - Absolute Encoder, Tachocometter, …)
Bộ điều khiển
Giao tiếp, I/O, Keypad, LED
Bộ Xử lý
Phần mềm
Thuật toán
Đáp ứng: điên áp sin xung, dòng sin xung.
V. Bộ biến tần Ưu điểm:
Điều chỉnh được tốc độ
Ổn định tốc độ
Giảm hệ thống cơ, giảm ồn
Tiết kiệm năng lượng (tổn hao cơ và tổn hao nhiệt)
Chọn biến tần
Sixstep
Một pha, Ba pha
Công suất (>=)
Điện áp (>=)
Chức năng, Nhãn hiệu
EMC
Cài đặt
Thông số động cơ
Thông số điều khiển, Tần số PWM
Chọn chế độ
Chế độ vòng hở (V/f, FFC)
Chế độ hồi tiếp (PID)
Chế độ điều khiển không cảm biến
Cách điều chỉnh
Chỉnh trên keypad
Chỉnh nhiều cấp tốc độ (giảm phần cơ: rulo, hộp số, curoa)
Chỉnh bằng biến trở
Chỉnh từ PLC, đồng bộ biến tần
Nối mạng đồng bộ
Sử dụng
Dây dẫn nối trước và sau biến tần
Nguồn động lực
Công suất động cơ
Quá tải, ngắn mạch
Cài đặt sai
Chế độ hiển thị
Bảo vệ nhiệt cho động cơ
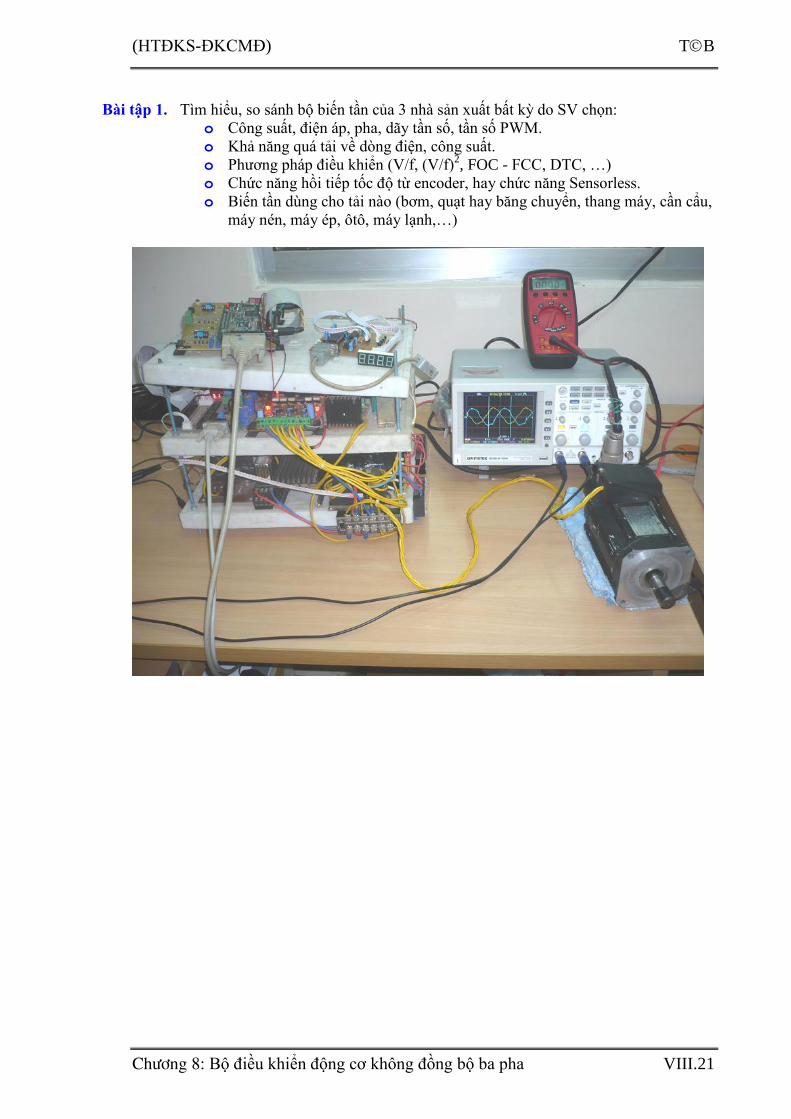
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.21
Bài tập 1. Tìm hiểu, so sánh bộ biến tần của 3 nhà sản xuất bất kỳ do SV chọn:
o Công suất, điện áp, pha, dãy tần số, tần số PWM.
o Khả năng quá tải về dòng điện, công suất.
o Phương pháp điều khiển (V/f, (V/f)2, FOC - FCC, DTC, …)
o Chức năng hồi tiếp tốc độ từ encoder, hay chức năng Sensorless.
o Biến tần dùng cho tải nào (bơm, quạt hay băng chuyển, thang máy, cần cẩu,
máy nén, máy ép, ôtô, máy lạnh,…)
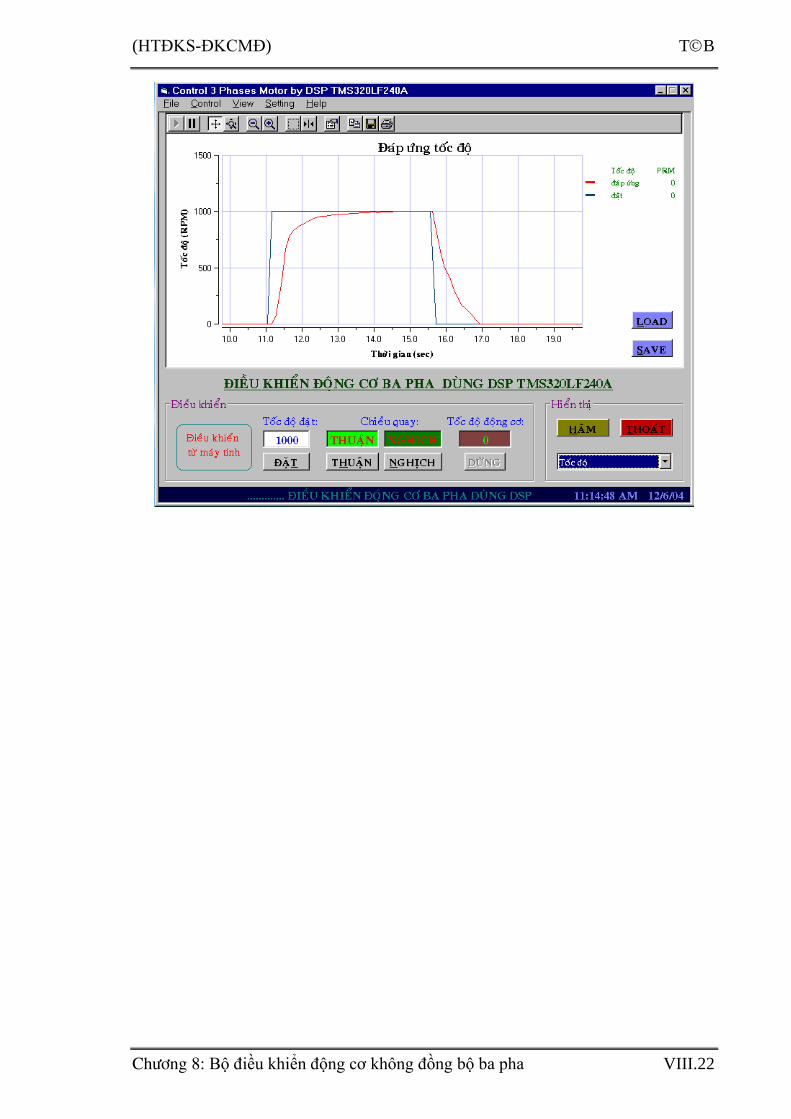
(HTĐKS-ĐKCMĐ) TB
Chöông 8: Bộ điều khiển động cơ không đồng bộ ba pha VIII.22
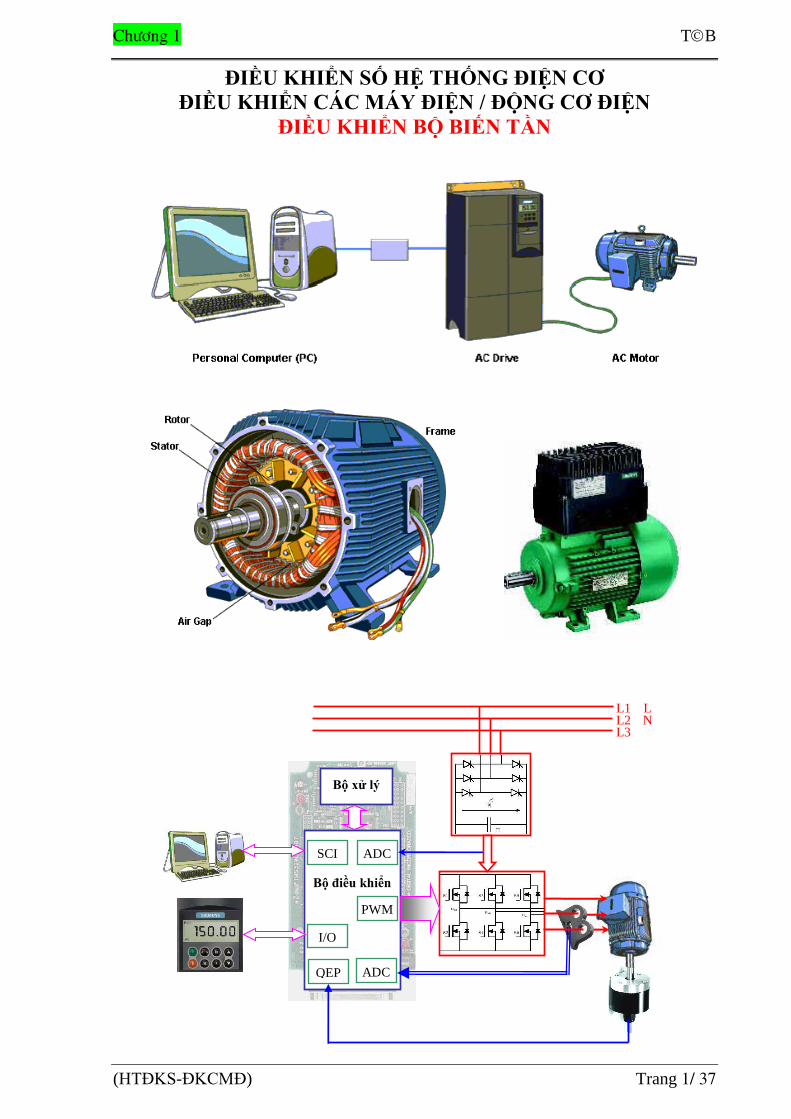
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 1/ 37
ĐIỀU KHIỂN SỐ HỆ THỐNG ĐIỆN CƠ
ĐIỀU KHIỂN CÁC MÁY ĐIỆN / ĐỘNG CƠ ĐIỆN
ĐIỀU KHIỂN BỘ BIẾN TẦN
Bô điêu khiên
Bô xư ly
FOC
PWM
QEP ADC
SCI
I/O
ADC
L3 L2 L1
N L
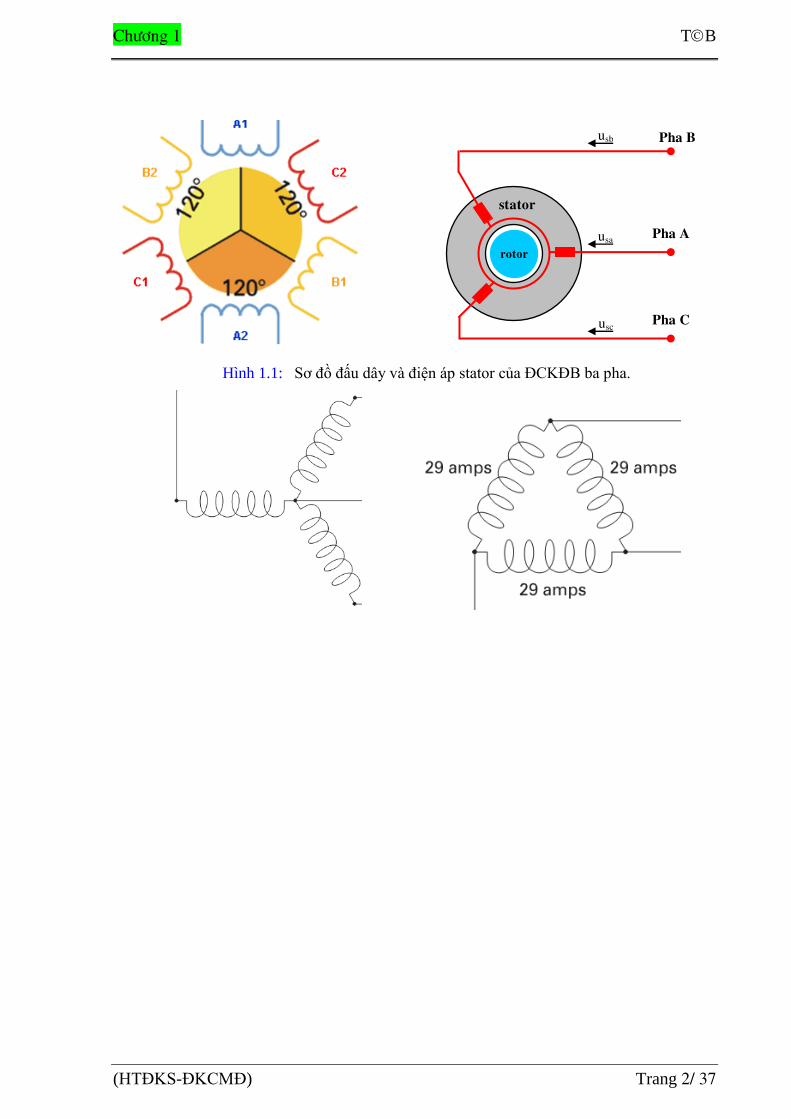
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 2/ 37
Hình 1.1: Sơ đồ đấu dây và điện áp stator của ĐCKĐB ba pha.
rotor
stator
Pha A
Pha B
Pha C usc
usa
usb
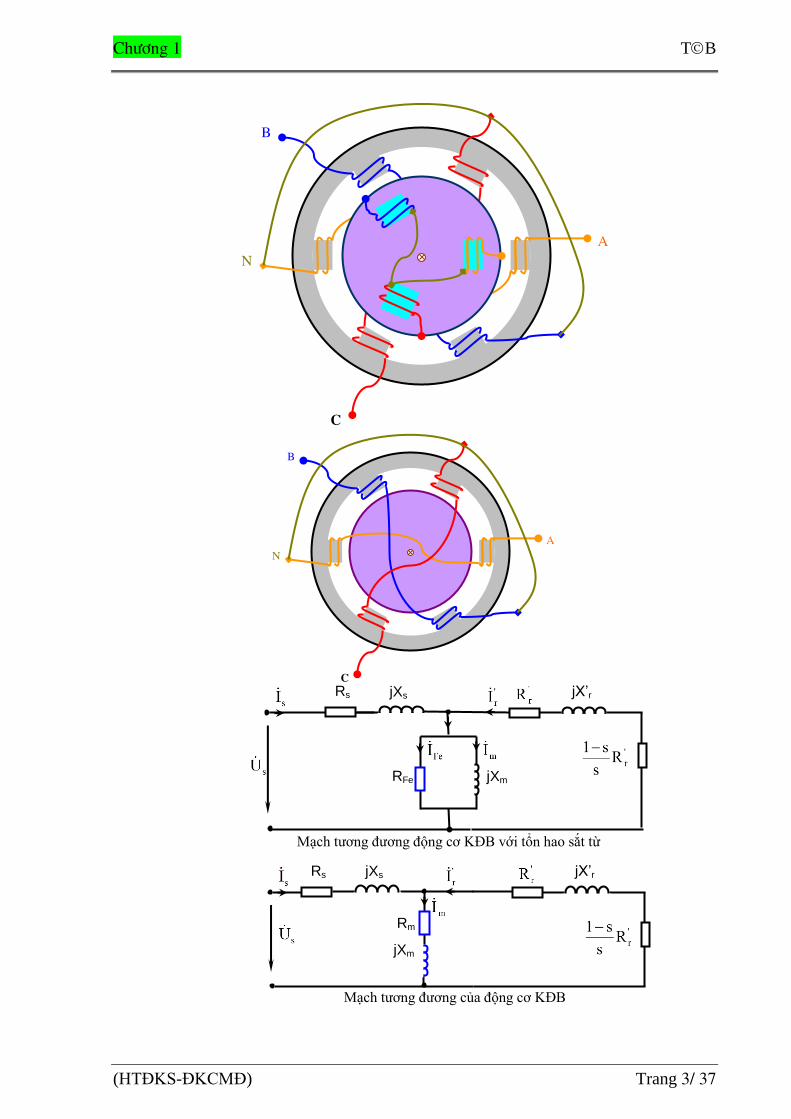
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 3/ 37
A
B
C
N
A
B
C
N
Rs
jXs
jX’r
Mạch tương đương động cơ KĐB với tổn hao sắt từ
RFe jXm
Rs
jXs
Rm
jXm
jX’r
Mạch tương đương của động cơ KĐB
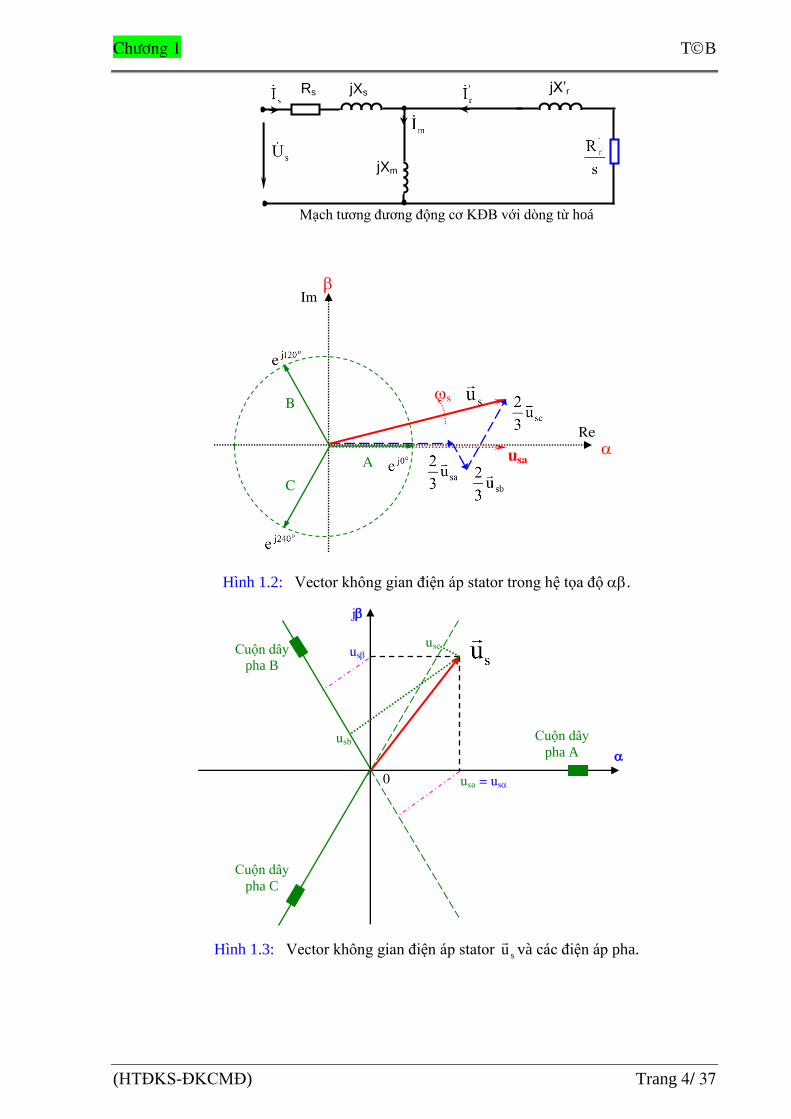
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 4/ 37
Hình 1.2: Vector không gian điện áp stator trong hệ tọa độ .
Hình 1.3: Vector không gian điện áp stator su
và các điện áp pha.
Rs
jXs
Mạch tương đương động cơ KĐB với dòng từ hoá
jXm
jX’r
Re
Im
A
B
C
usa
s
0
j
usa = us
us usc
usb Cuộn dây
pha A
Cuộn dây
pha B
Cuộn dây
pha C
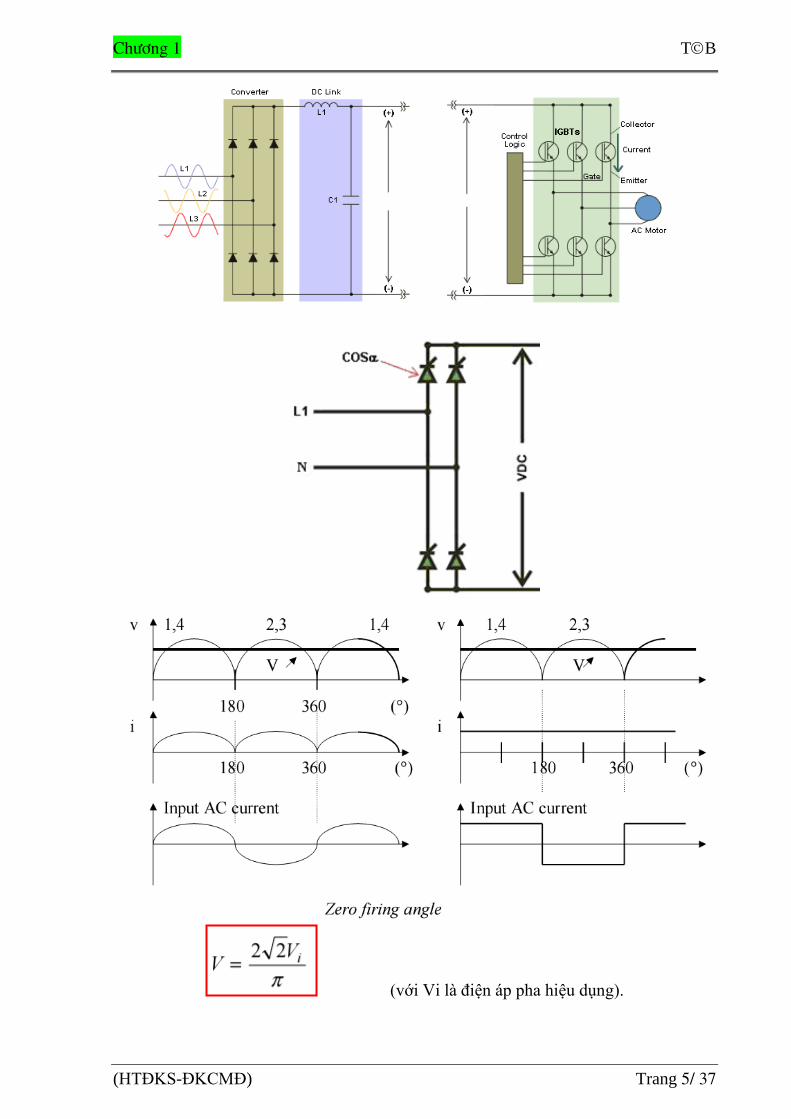
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 5/ 37
(với Vi là điện áp pha hiệu dụng).
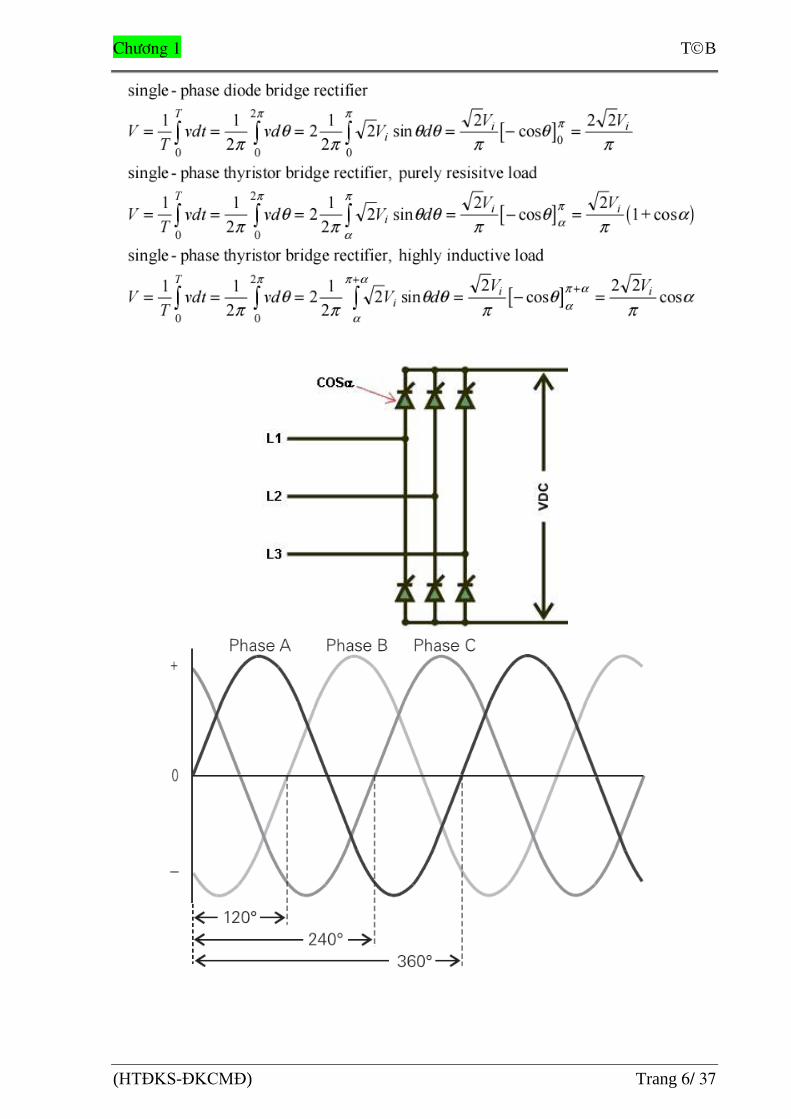
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 6/ 37
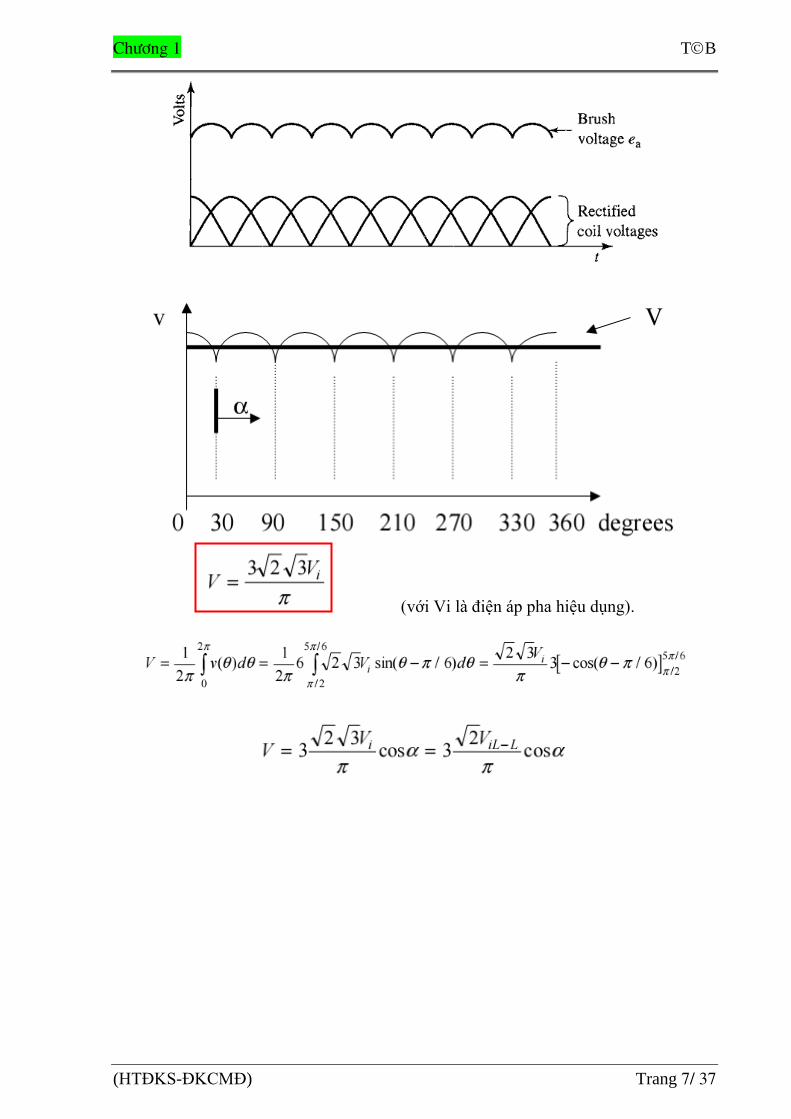
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 7/ 37
(với Vi là điện áp pha hiệu dụng).
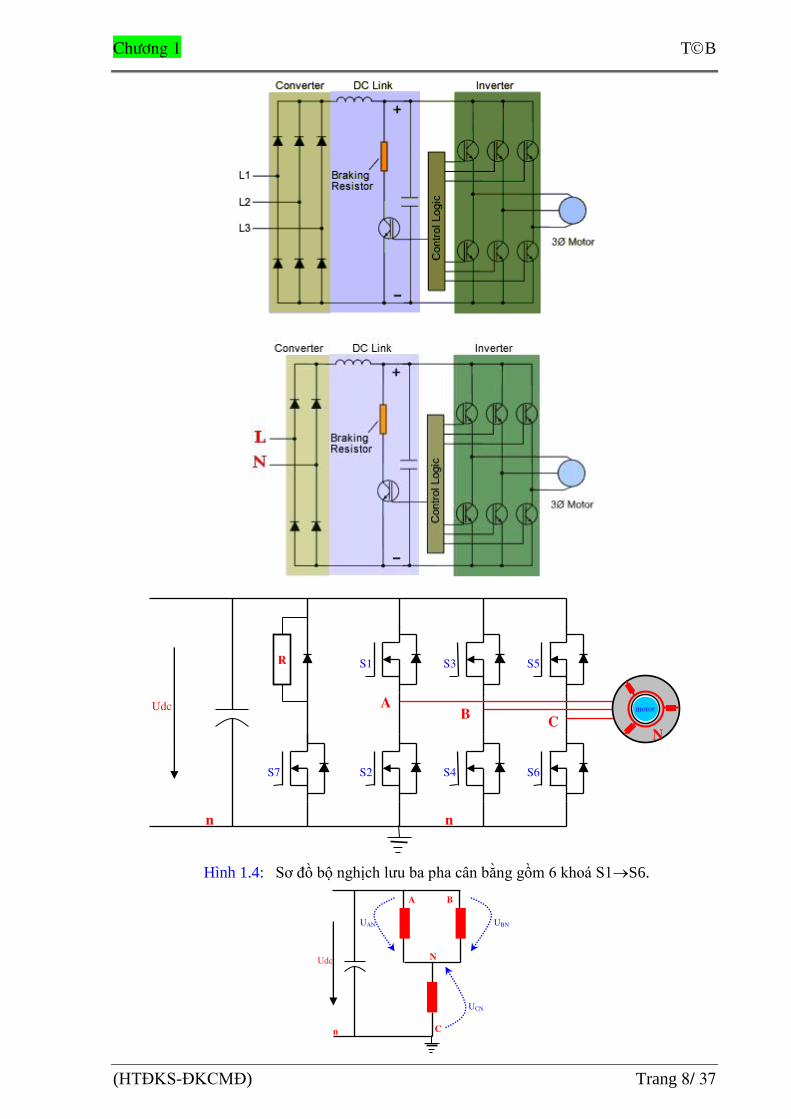
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 8/ 37
Hình 1.4: Sơ đồ bộ nghịch lưu ba pha cân bằng gồm 6 khoá S1S6.
A
B C
Udc
S4
S3
S6
S5
S2
S1
S7
R
n n
motor
N
A B
C
Udc
n
N
UAN UBN
UCN
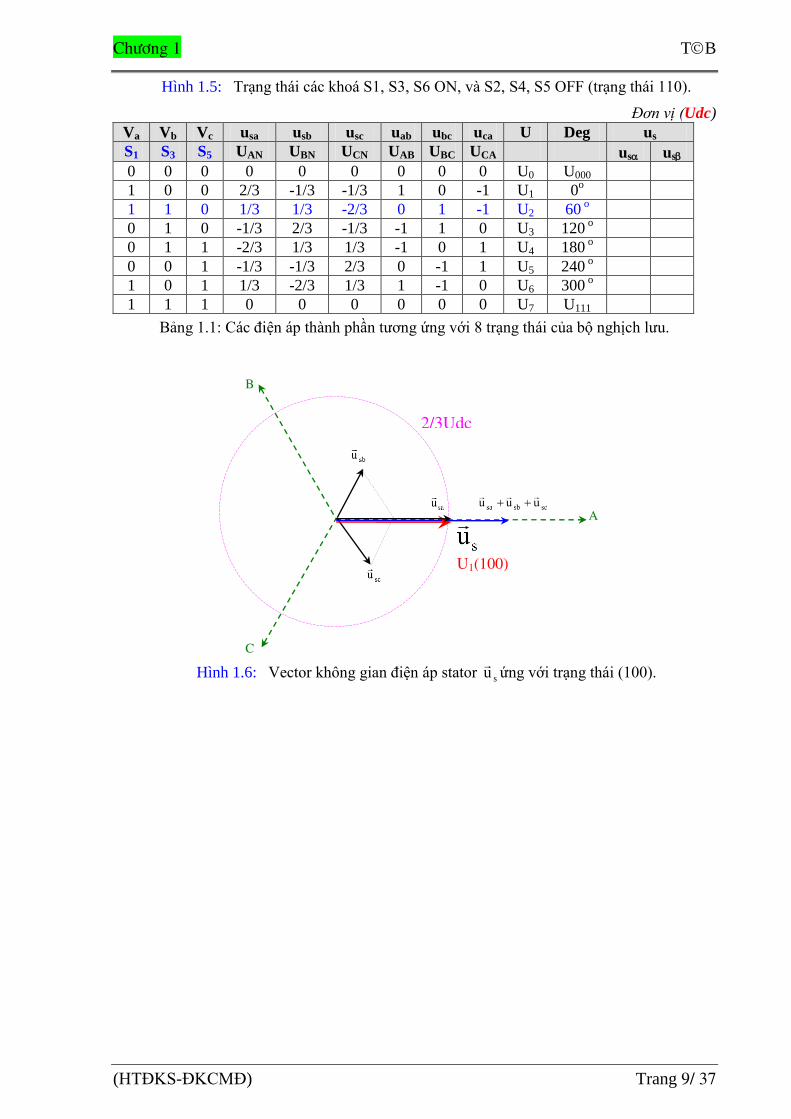
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 9/ 37
Hình 1.5: Trạng thái các khoá S1, S3, S6 ON, và S2, S4, S5 OFF (trạng thái 110).
Đơn vị (Udc)
Va Vb Vc usa usb usc uab ubc uca U Deg us
S1 S3 S5 UAN UBN UCN UAB UBC UCA us us
0 0 0 0 0 0 0 0 0 U0 U000
1 0 0 2/3 -1/3 -1/3 1 0 -1 U1 0o
1 1 0 1/3 1/3 -2/3 0 1 -1 U2 60 o
0 1 0 -1/3 2/3 -1/3 -1 1 0 U3 120 o
0 1 1 -2/3 1/3 1/3 -1 0 1 U4 180 o
0 0 1 -1/3 -1/3 2/3 0 -1 1 U5 240 o
1 0 1 1/3 -2/3 1/3 1 -1 0 U6 300 o
1 1 1 0 0 0 0 0 0 U7 U111
Bảng 1.1: Các điện áp thành phần tương ứng với 8 trạng thái của bộ nghịch lưu.
Hình 1.6: Vector không gian điện áp stator su
ứng với trạng thái (100).
A
B
C
2/3Udc
U1(100)
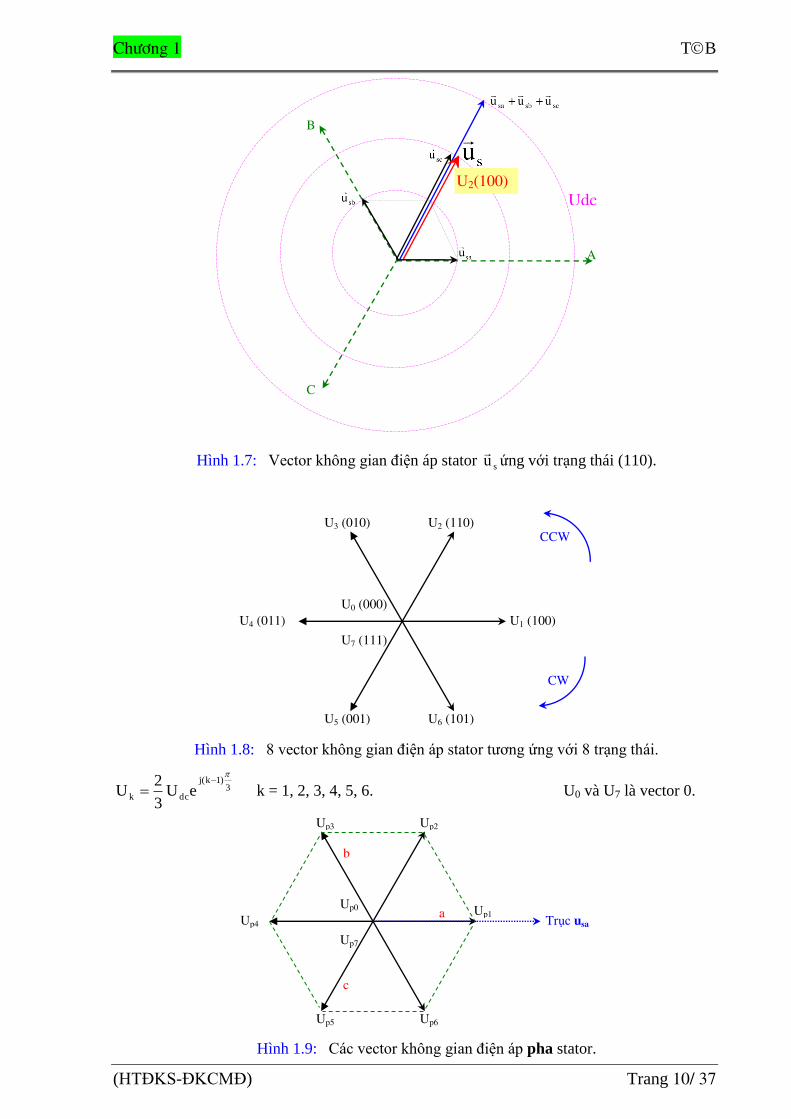
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 10/ 37
Hình 1.7: Vector không gian điện áp stator su
ứng với trạng thái (110).
Hình 1.8: 8 vector không gian điện áp stator tương ứng với 8 trạng thái.
3)1k(j
dck eU3
2U
k = 1, 2, 3, 4, 5, 6. U0 và U7 là vector 0.
Hình 1.9: Các vector không gian điện áp pha stator.
A
B
C
Udc
U2(100)
U1 (100)
U2 (110) U3 (010)
U6 (101) U5 (001)
U4 (011)
CCW
CW
U0 (000)
U7 (111)
Up1
Up2 Up3
Up6 Up5
Up4
Up0
Up7
Trục usa a
b
c
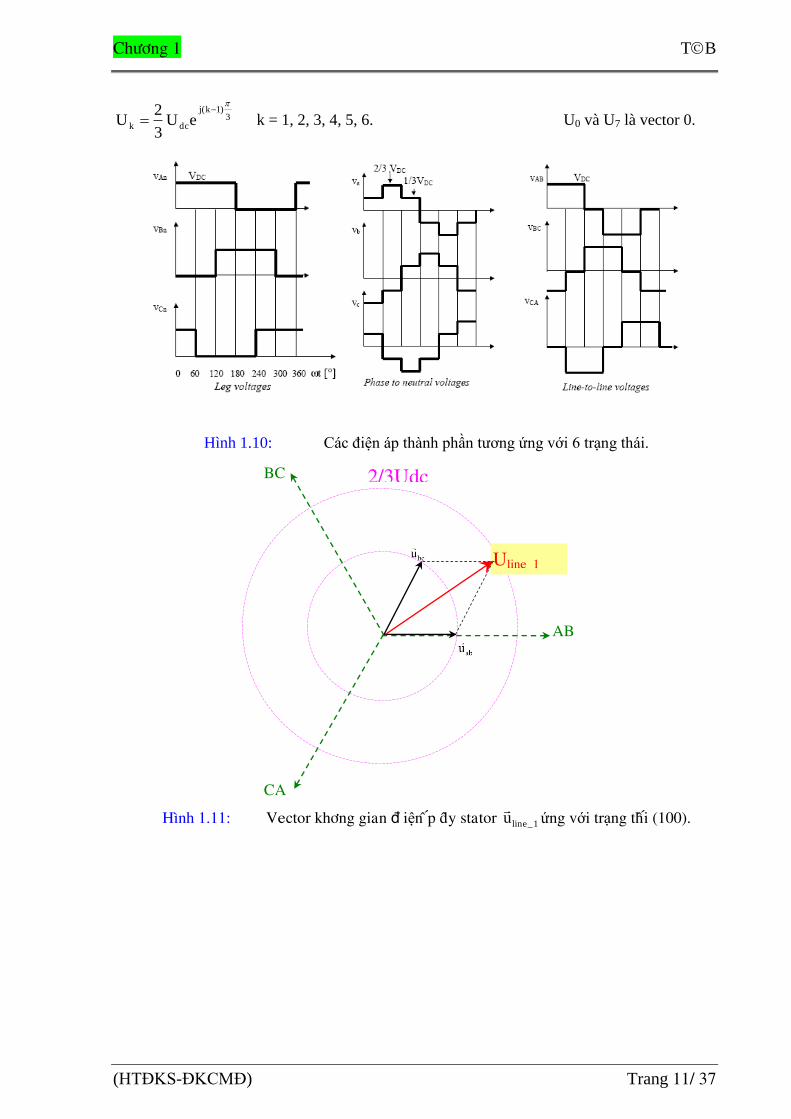
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 11/ 37
3)1k(j
dck eU3
2U
k = 1, 2, 3, 4, 5, 6. U0 và U7 là vector 0.
Hình 1.10: Các điện áp thành phần tương ứng với 6 trạng thái.
Hình 1.11: Vector không gian đ iện áp dây stator 1_lineu
ứng với trạng thái (100).
AB
BC
CA
2/3Udc
Uline_1
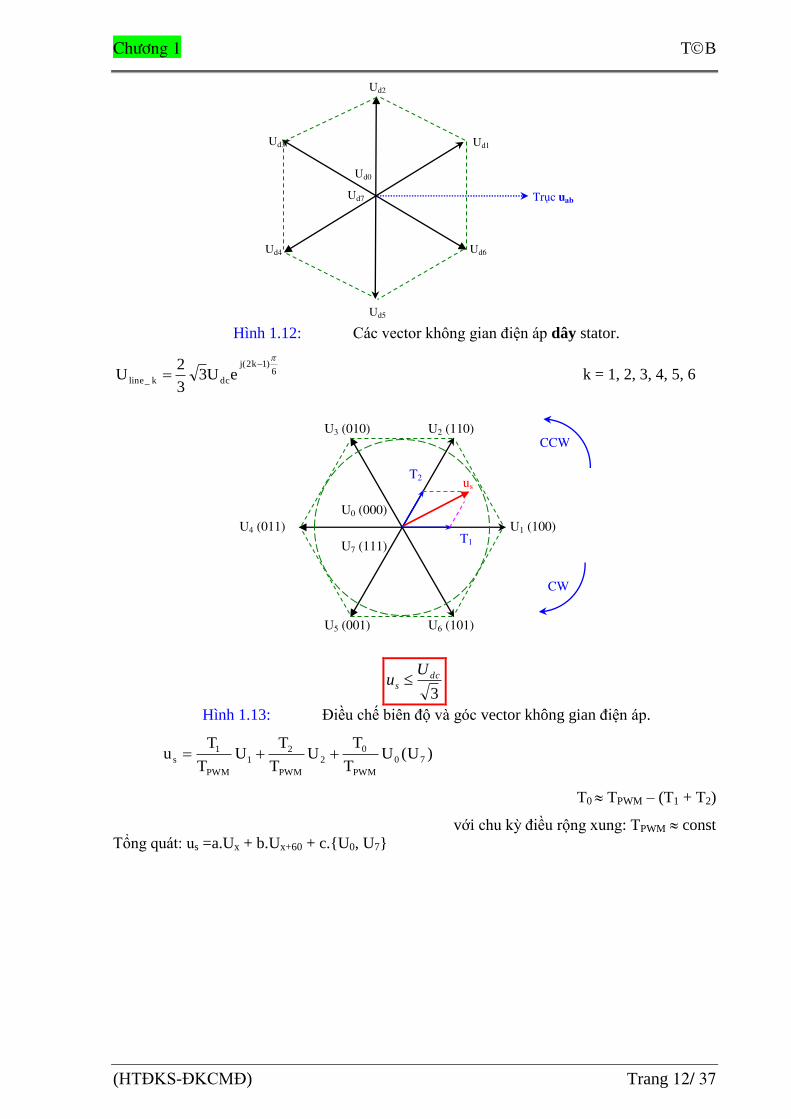
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 12/ 37
Hình 1.12: Các vector không gian điện áp dây stator.
6)1k2(j
dck_line eU33
2U
k = 1, 2, 3, 4, 5, 6
3
dcs
Uu
Hình 1.13: Điều chế biên độ và góc vector không gian điện áp.
)U(UT
TU
T
TU
T
Tu 70
PWM
0
2
PWM
21
PWM
1s
T0 TPWM – (T1 + T2)
với chu kỳ điều rộng xung: TPWM const
Tổng quát: us =a.Ux + b.Ux+60 + c.U0, U7
Ud1
Ud2
Ud3
Ud6
Ud5
Ud4
Ud0
Ud7 Trục uab
U1 (100)
us
T1
T2
U2 (110) U3 (010)
U6 (101) U5 (001)
U4 (011)
CCW
CW
U0 (000)
U7 (111)
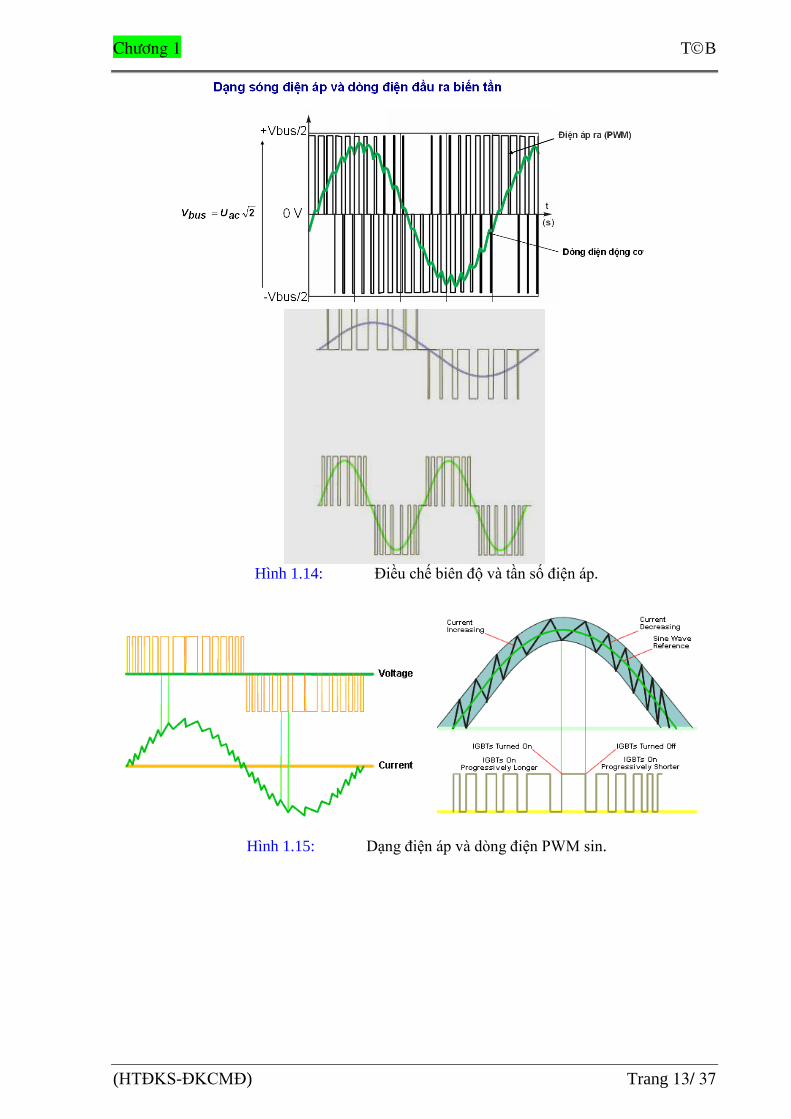
Chöông 1 TB
(HTĐKS-ĐKCMĐ) Trang 13/ 37
Hình 1.14: Điều chế biên độ và tần số điện áp.
Hình 1.15: Dạng điện áp và dòng điện PWM sin.
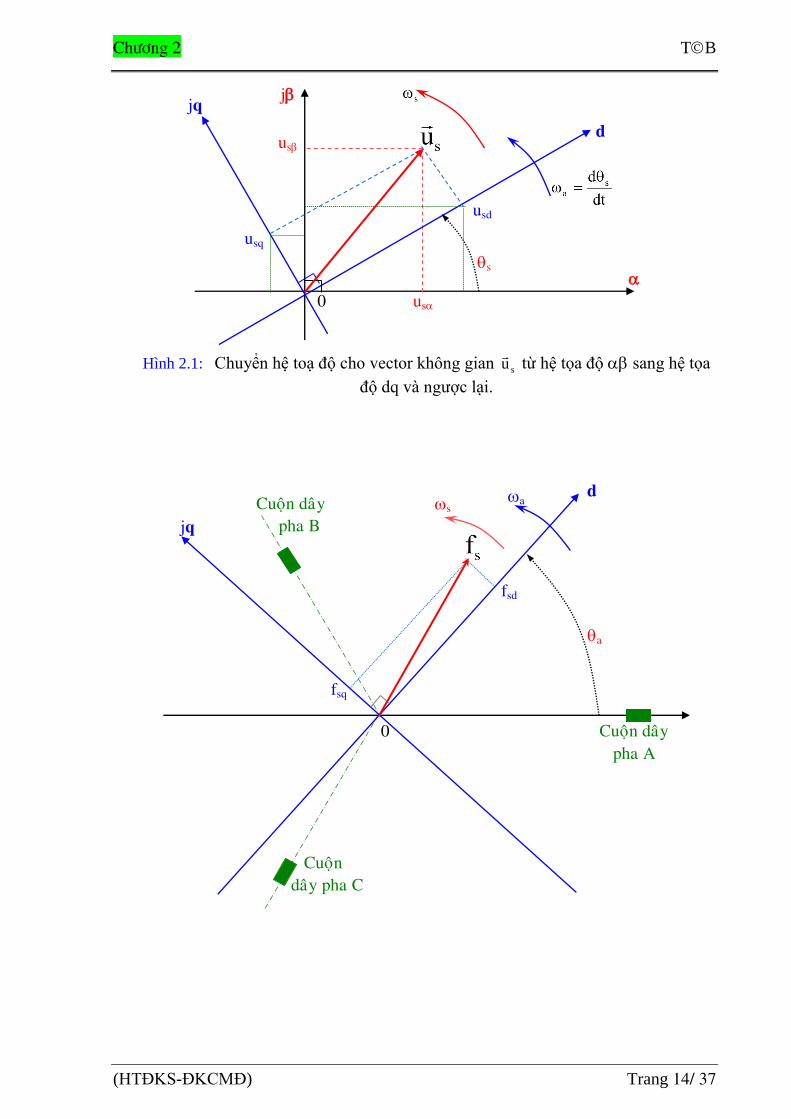
Chöông 2 TB
(HTĐKS-ĐKCMĐ) Trang 14/ 37
Hình 2.1: Chuyển hệ toạ độ cho vector không gian su
từ hệ tọa độ sang hệ tọa
độ dq và ngược lại.
j
us
0
us
d
jq
usd
usq
s
Cuoän daây
pha A
Cuoän daây
pha B
Cuoän
daây pha C
0
d
jq
fsd
fsq
a
a
s
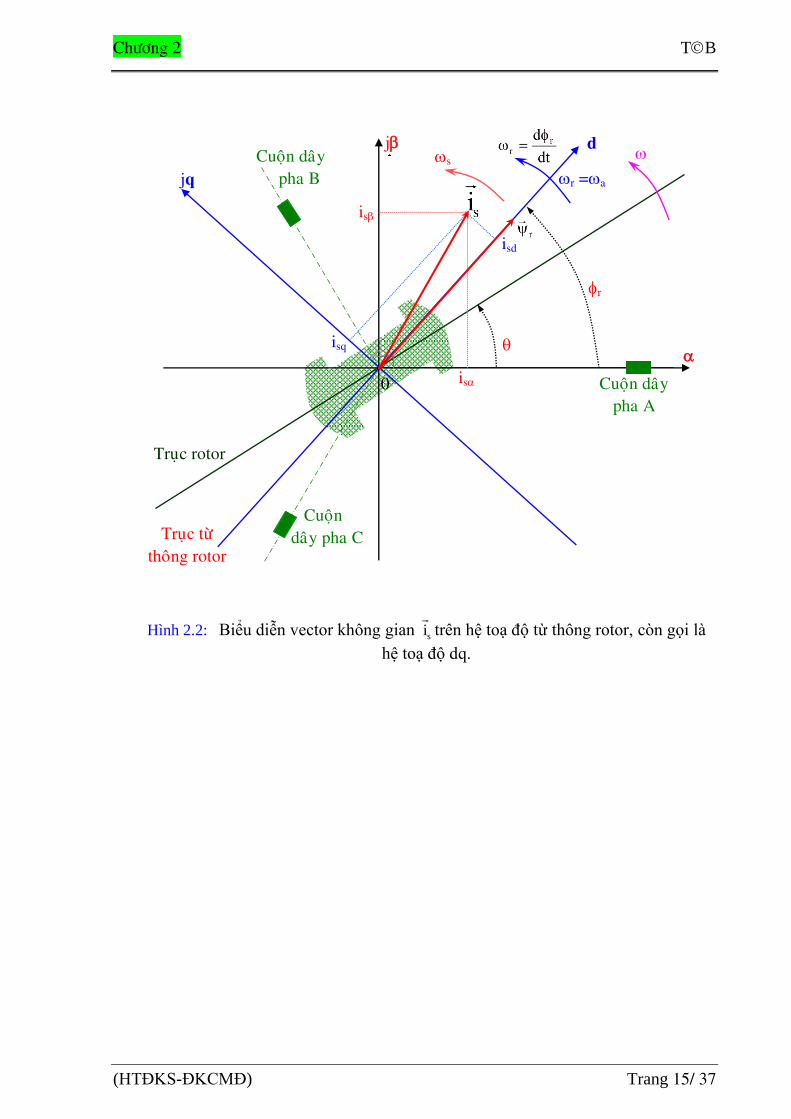
Chöông 2 TB
(HTĐKS-ĐKCMĐ) Trang 15/ 37
Hình 2.2: Biểu diễn vector không gian si
trên hệ toạ độ từ thông rotor, còn gọi là
hệ toạ độ dq.
is
Cuoän daây
pha A
Cuoän daây
pha B
Cuoän
daây pha C
0
is
d
jq
isd
isq
r =a
r
Truïc töø
thoâng rotor
Truïc rotor
j
s
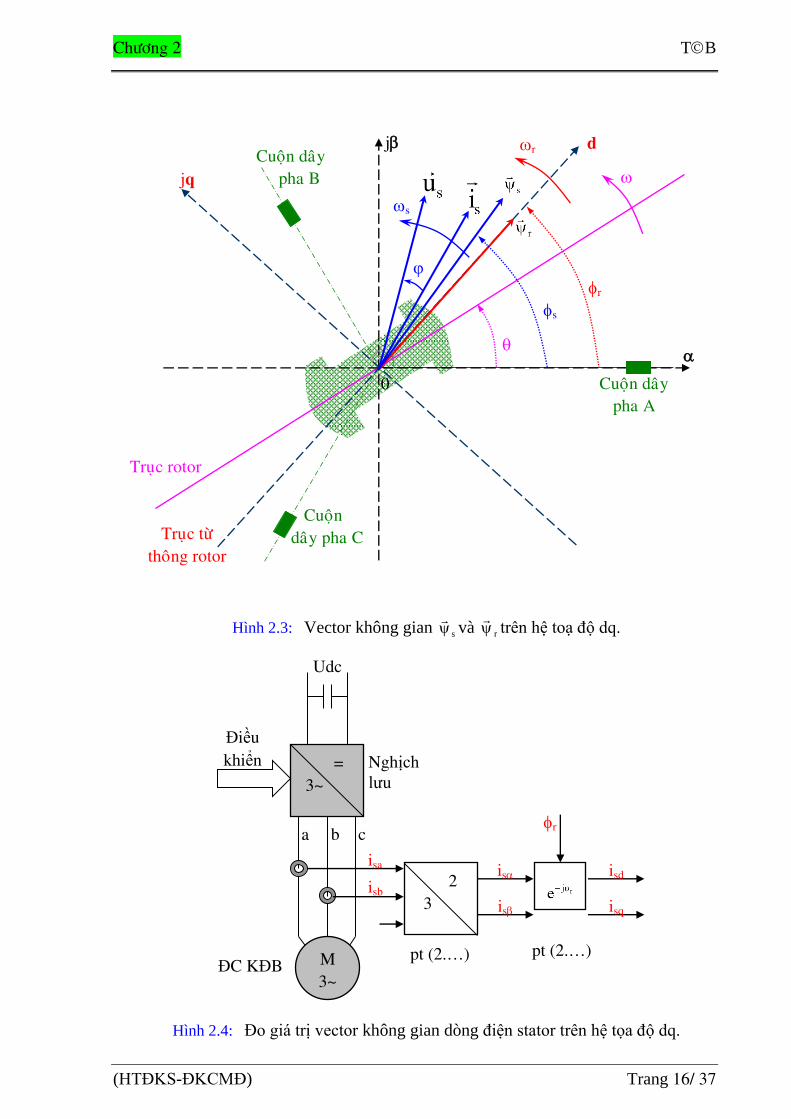
Chöông 2 TB
(HTĐKS-ĐKCMĐ) Trang 16/ 37
Hình 2.3: Vector không gian s
và r
trên hệ toạ độ dq.
Hình 2.4: Đo giá trị vector không gian dòng điện stator trên hệ tọa độ dq.
Cuoän daây
pha A
Cuoän daây
pha B
Cuoän
daây pha C
0
d
jq
r
r
Truïc töø
thoâng rotor
j
s
s
Truïc rotor
ĐC KĐB
==
3~
Udc
Điều
khiển
M
3~
a b c
Nghịch
lưu
2=
3
isa
isb
is
is
isd
isq
r
pt (2.…) pt (2.…)
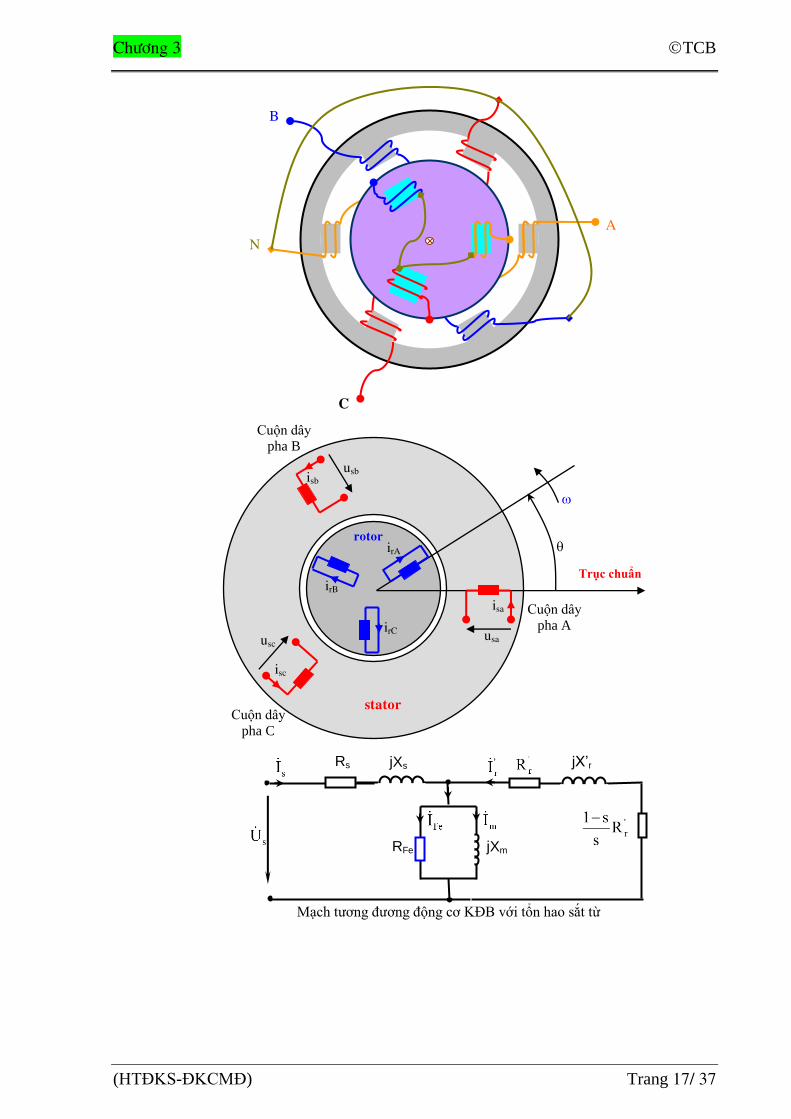
Chöông 3 TCB
(HTĐKS-ĐKCMĐ) Trang 17/ 37
A
B
C
N
stator
Cuộn dây
pha A
isa
usa
irA
isc
usc
isb usb
Cuộn dây
pha C
Cuộn dây
pha B
rotor
irC
irB
stator
Trục chuẩn
Rs
jXs
jX’r
Mạch tương đương động cơ KĐB với tổn hao sắt từ
RFe jXm
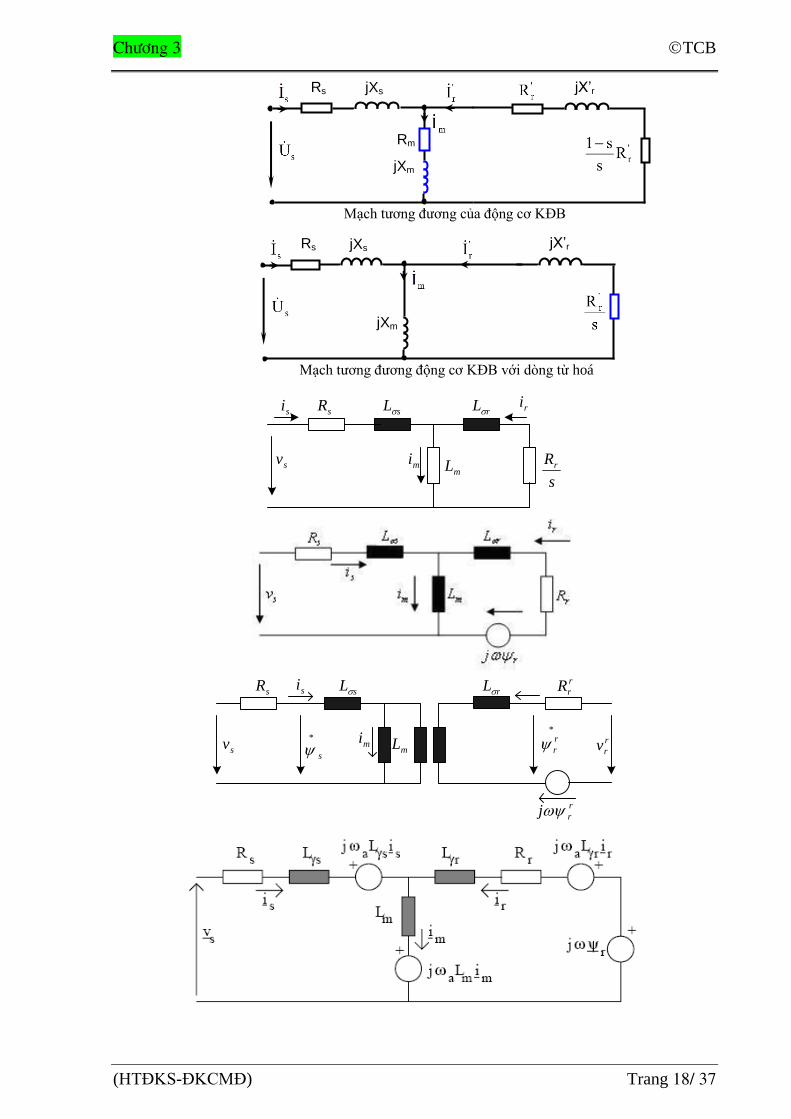
Chöông 3 TCB
(HTĐKS-ĐKCMĐ) Trang 18/ 37
mLs
Rr
rLsLsR
sv
si ri
mi
r
rj
sR sL rLr
rR
s
*
sv mLmi*
r
r r
rv
si
Rs
jXs
Rm
jXm
jX’r
Mạch tương đương của động cơ KĐB
Rs
jXs
Mạch tương đương động cơ KĐB với dòng từ hoá
jXm
jX’r
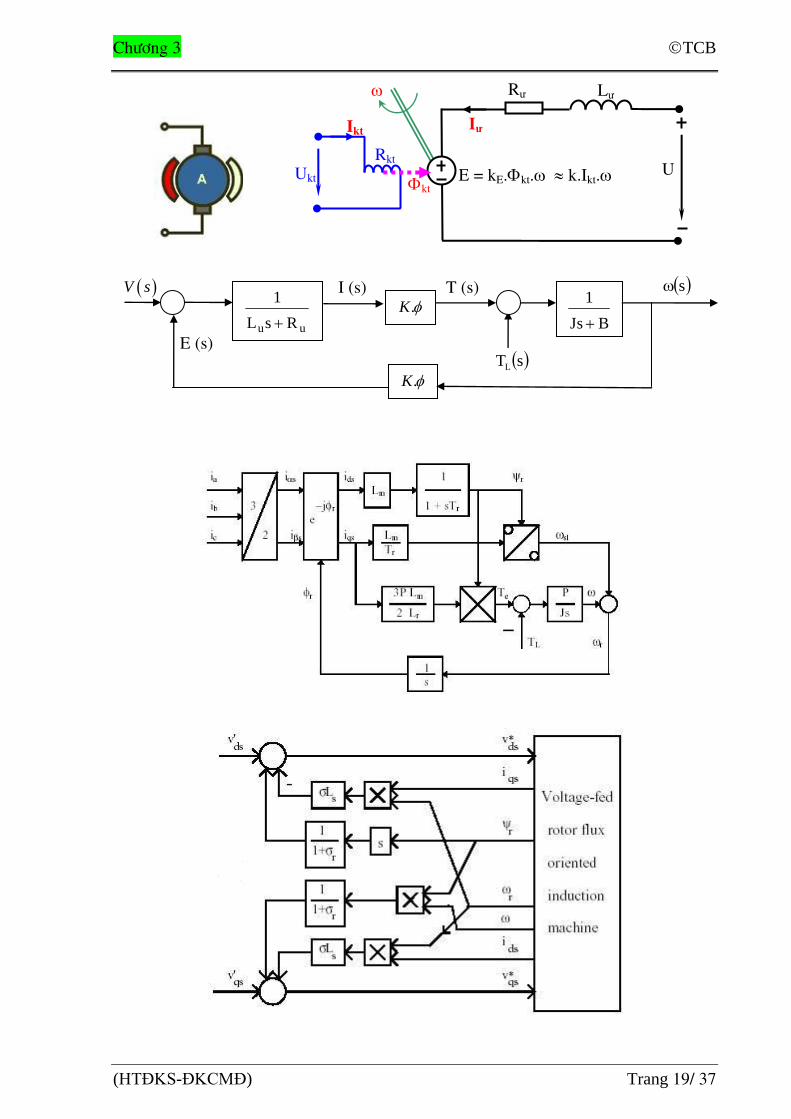
Chöông 3 TCB
(HTĐKS-ĐKCMĐ) Trang 19/ 37
uu RsL
1
.K
.K
BJs
1
s
T (s)
sTL
V s
I (s)
E (s)
Ikt
U
Rư
Iư
E = kE.kt. k.Ikt.
Rkt
Ukt
kt
Lư
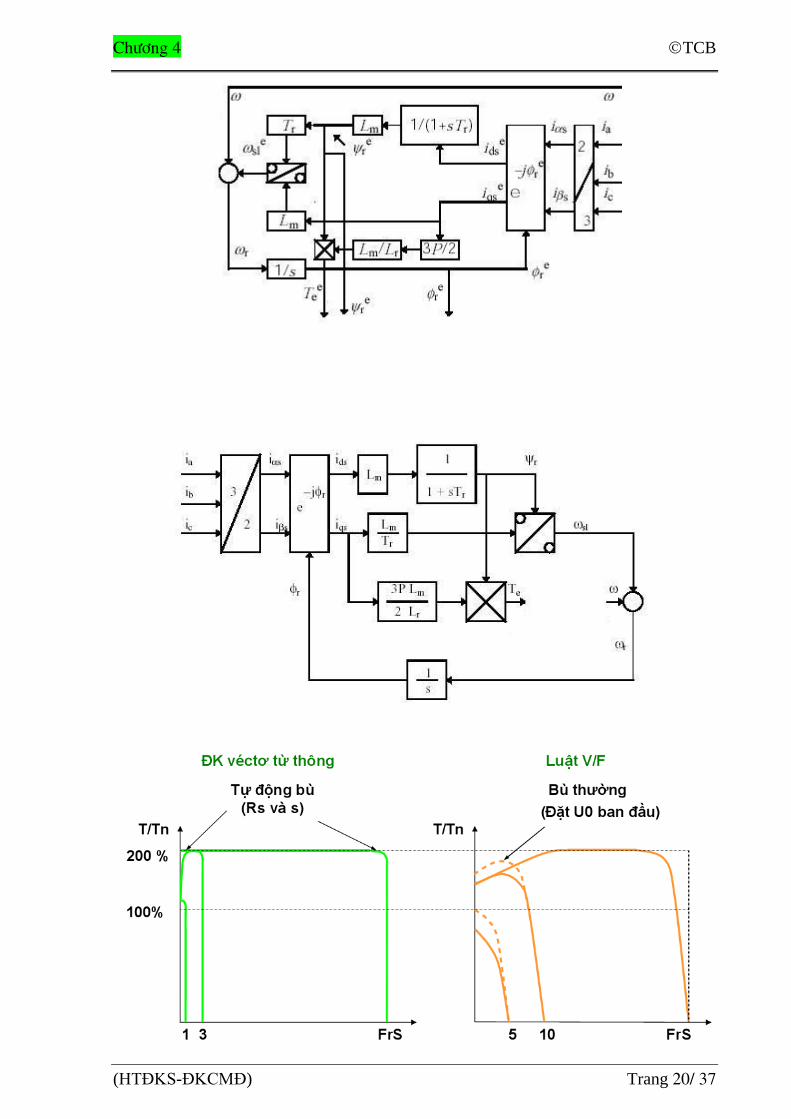
Chöông 4 TCB
(HTĐKS-ĐKCMĐ) Trang 20/ 37
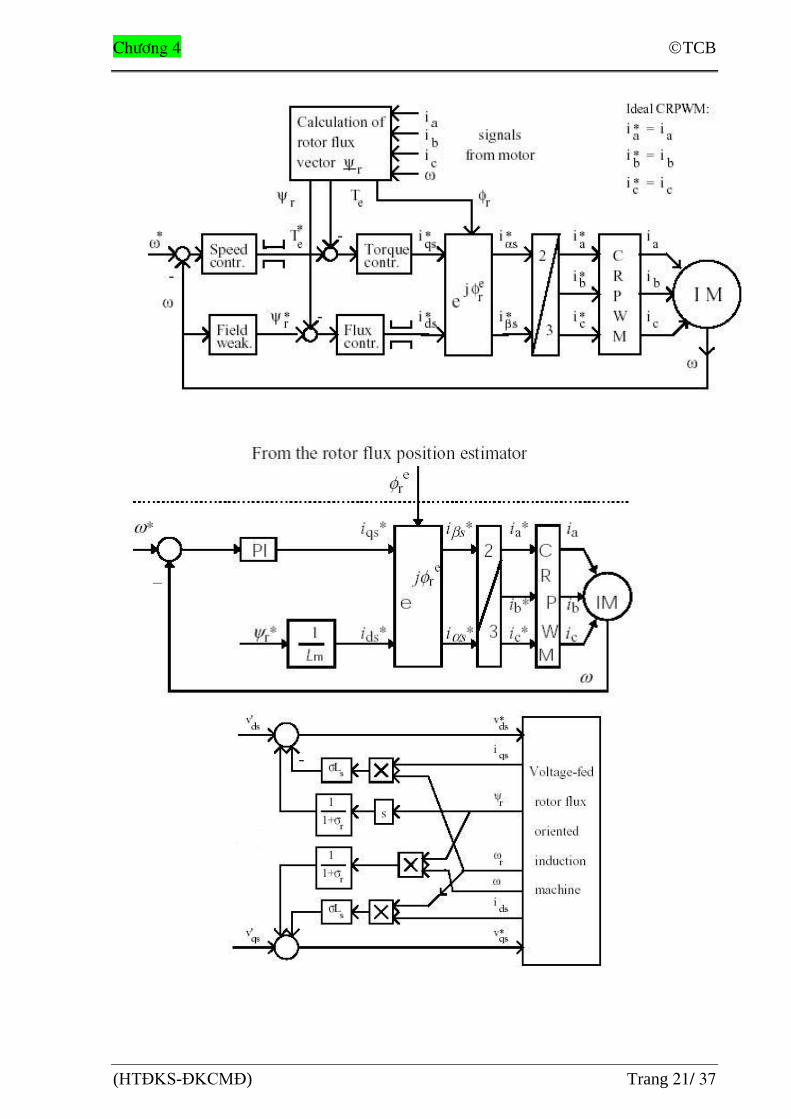
Chöông 4 TCB
(HTĐKS-ĐKCMĐ) Trang 21/ 37
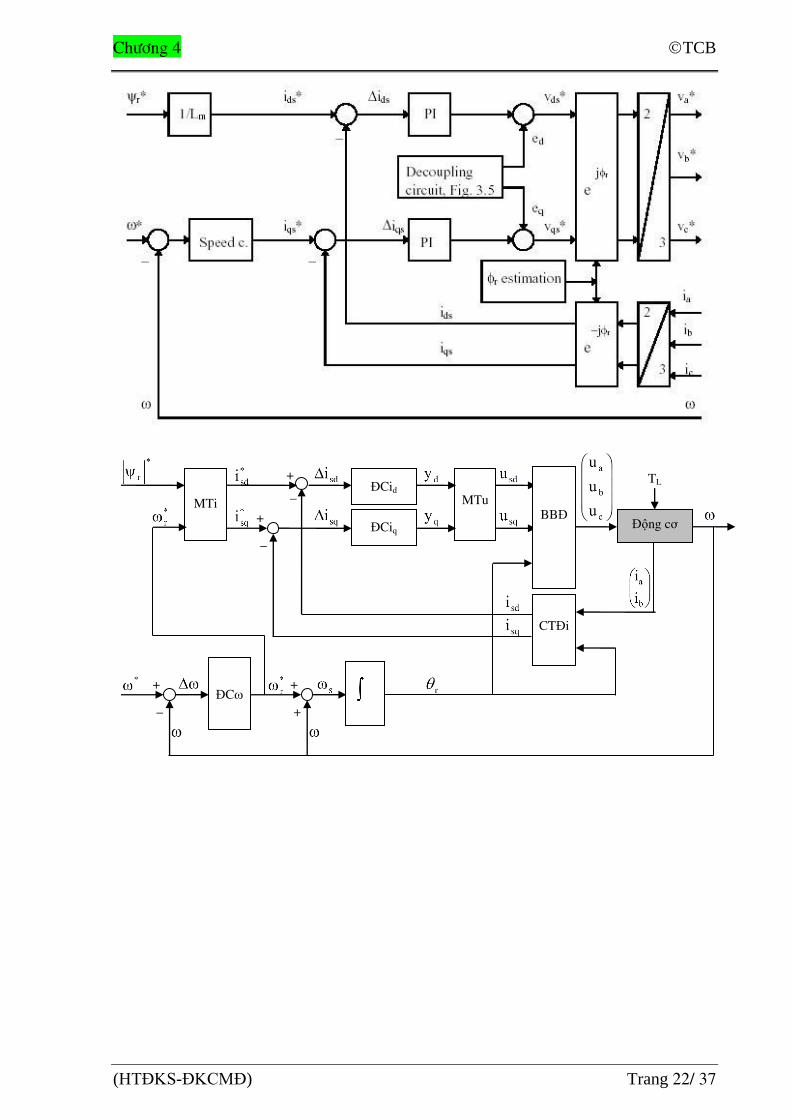
Chöông 4 TCB
(HTĐKS-ĐKCMĐ) Trang 22/ 37
TL
MTu
BBĐ
Động cơ
–
+
ĐCid
ĐCiq
MTi
–
+
CTĐi
ĐC
–
+
+
+
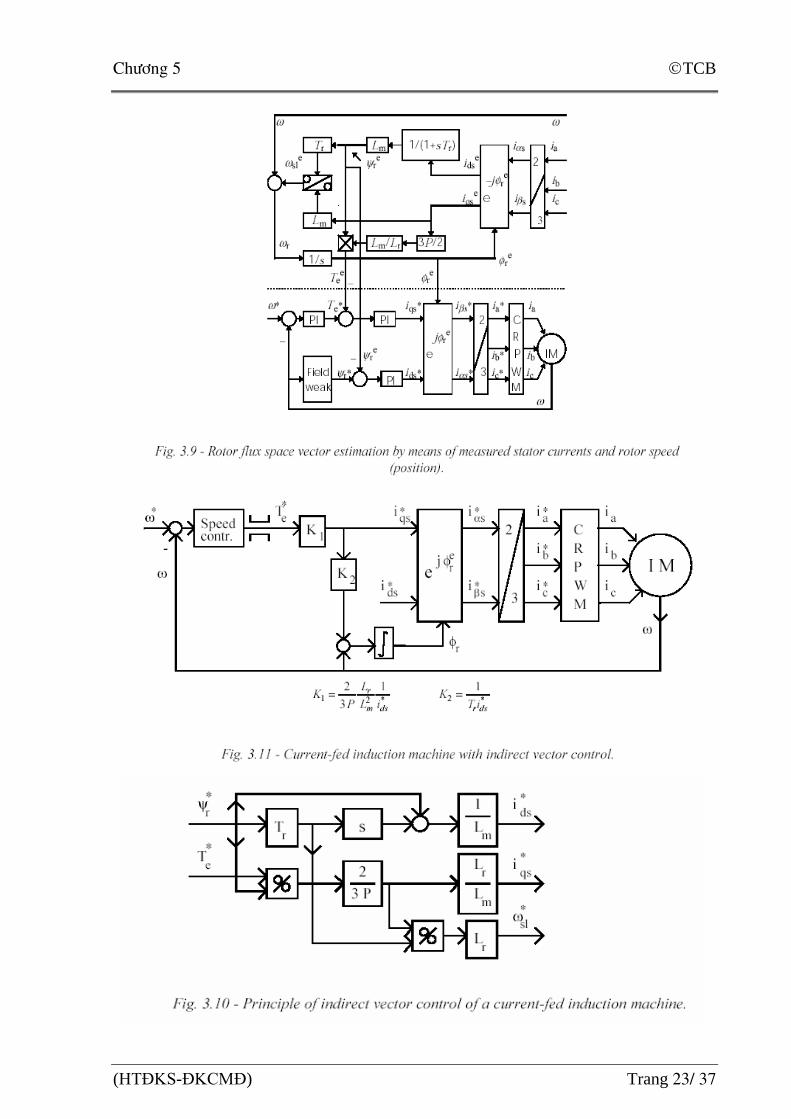
Chöông 5 TCB
(HTĐKS-ĐKCMĐ) Trang 23/ 37
C5
C5
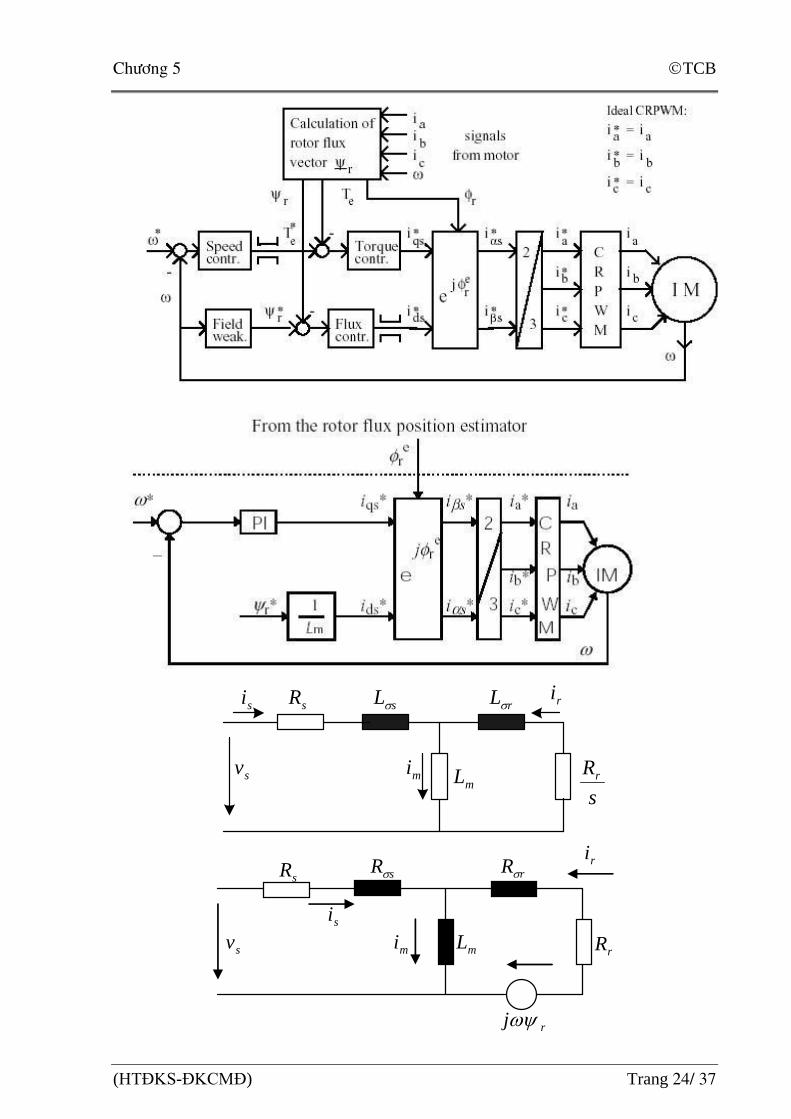
Chöông 5 TCB
(HTĐKS-ĐKCMĐ) Trang 24/ 37
mLs
Rr
rLsLsR
sv
si ri
mi
sR sR rR
rRmL
rj
misi
ri
sv
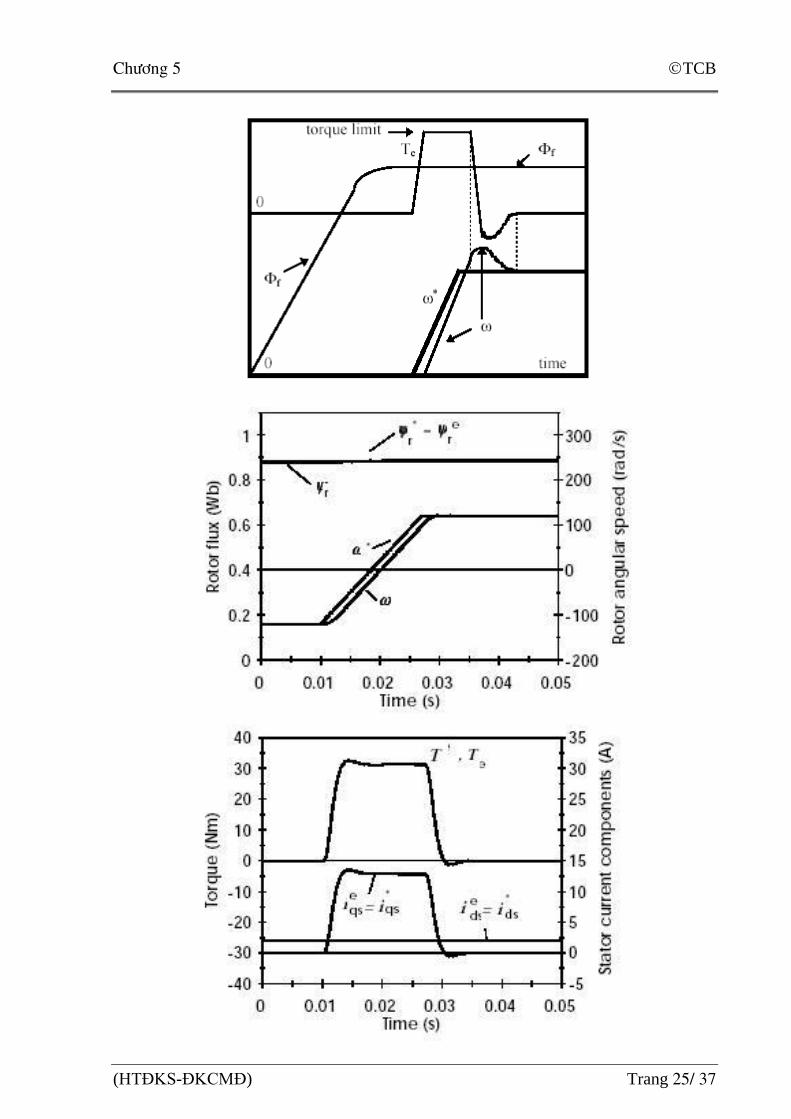
Chöông 5 TCB
(HTĐKS-ĐKCMĐ) Trang 25/ 37
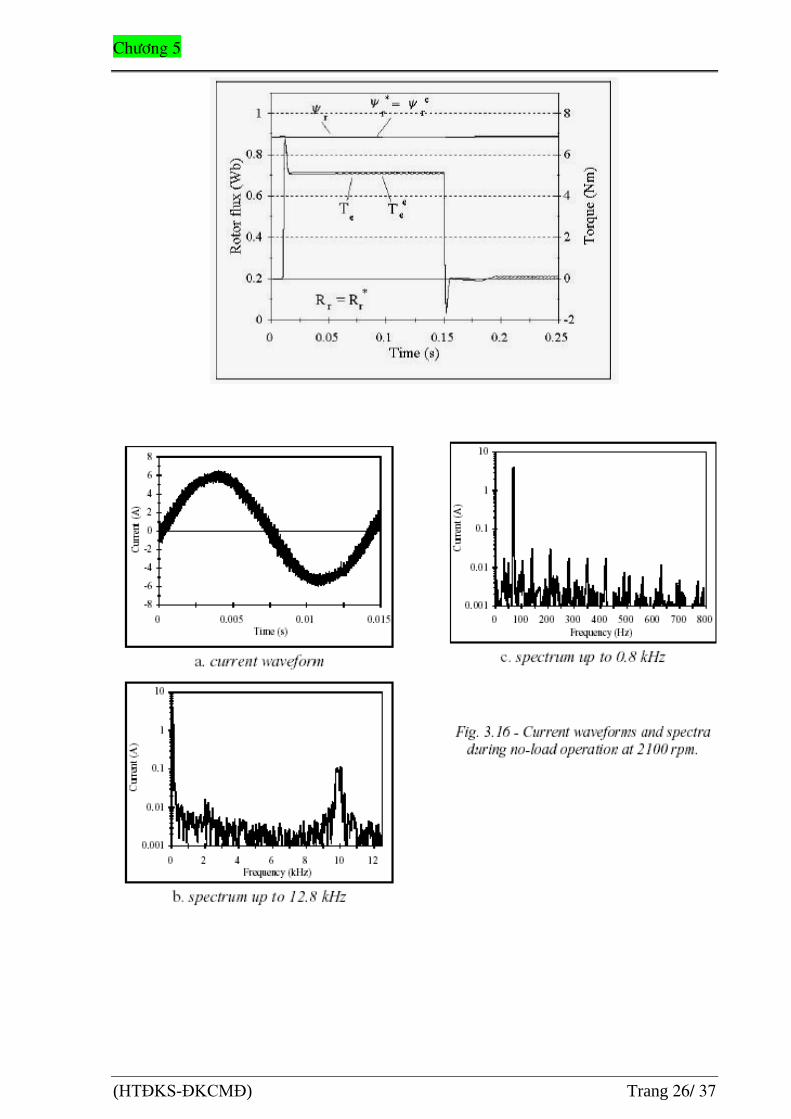
Chöông 5
(HTĐKS-ĐKCMĐ) Trang 26/ 37
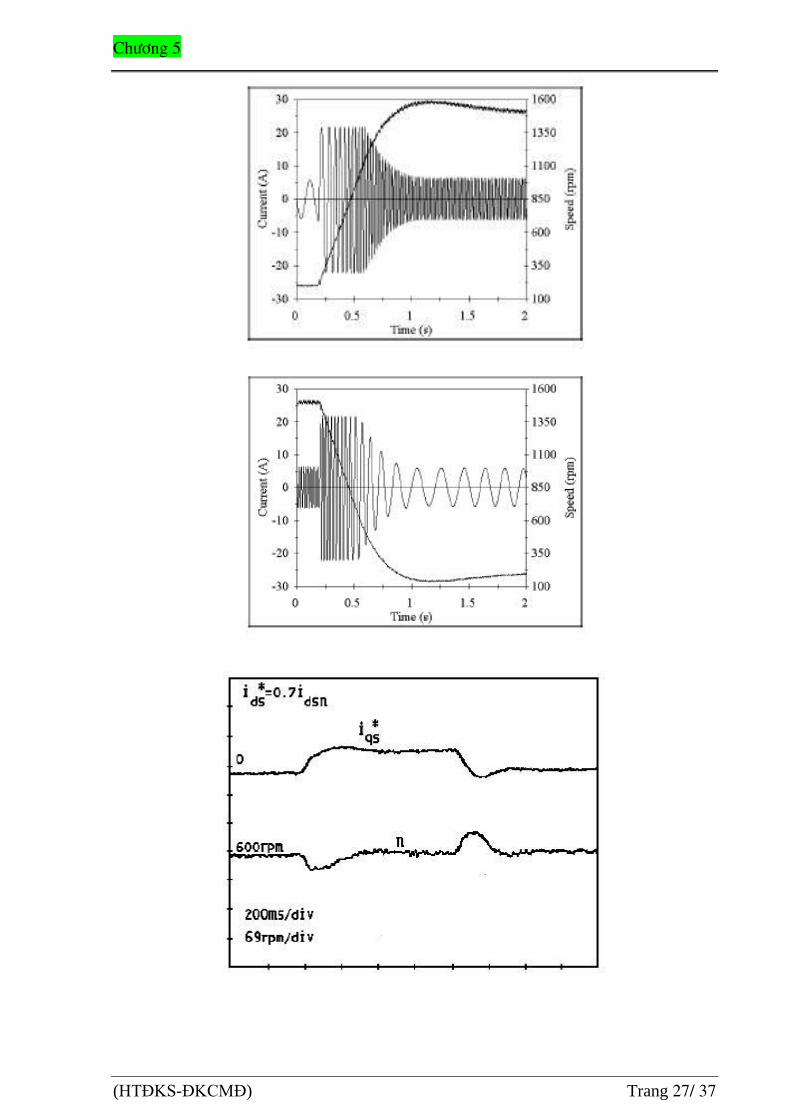
Chöông 5
(HTĐKS-ĐKCMĐ) Trang 27/ 37
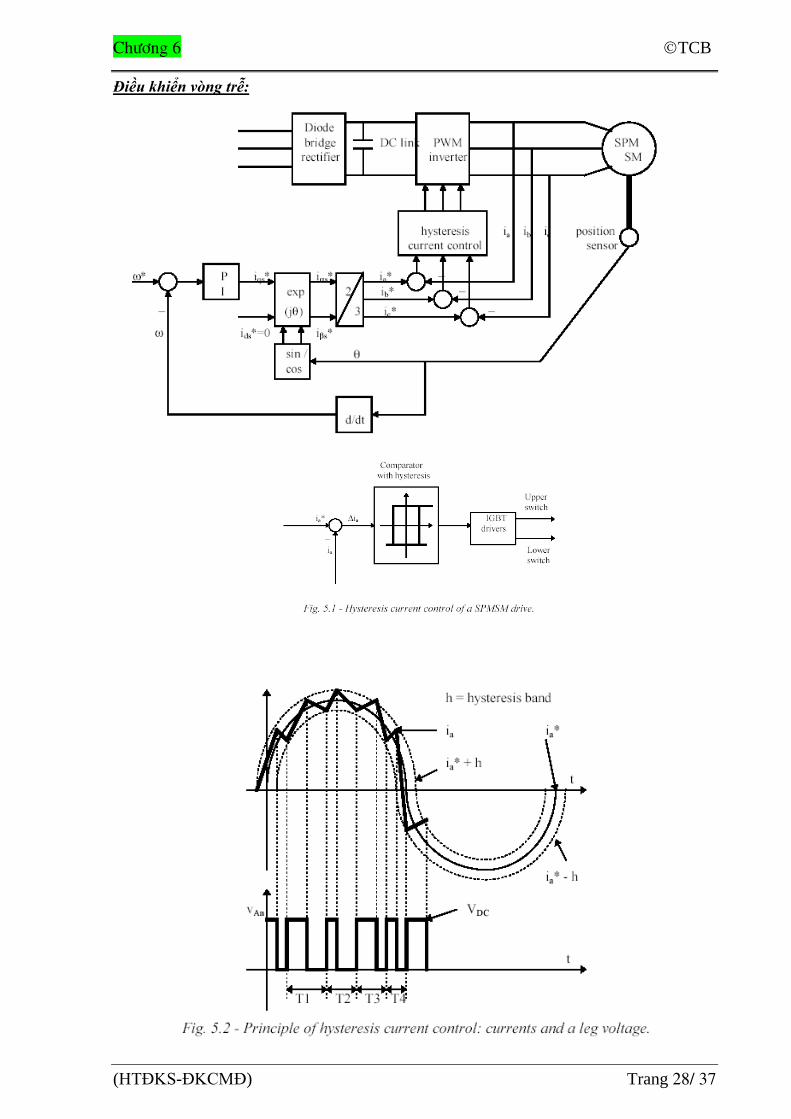
Chöông 6 TCB
(HTĐKS-ĐKCMĐ) Trang 28/ 37
Điều khiển vòng trễ:
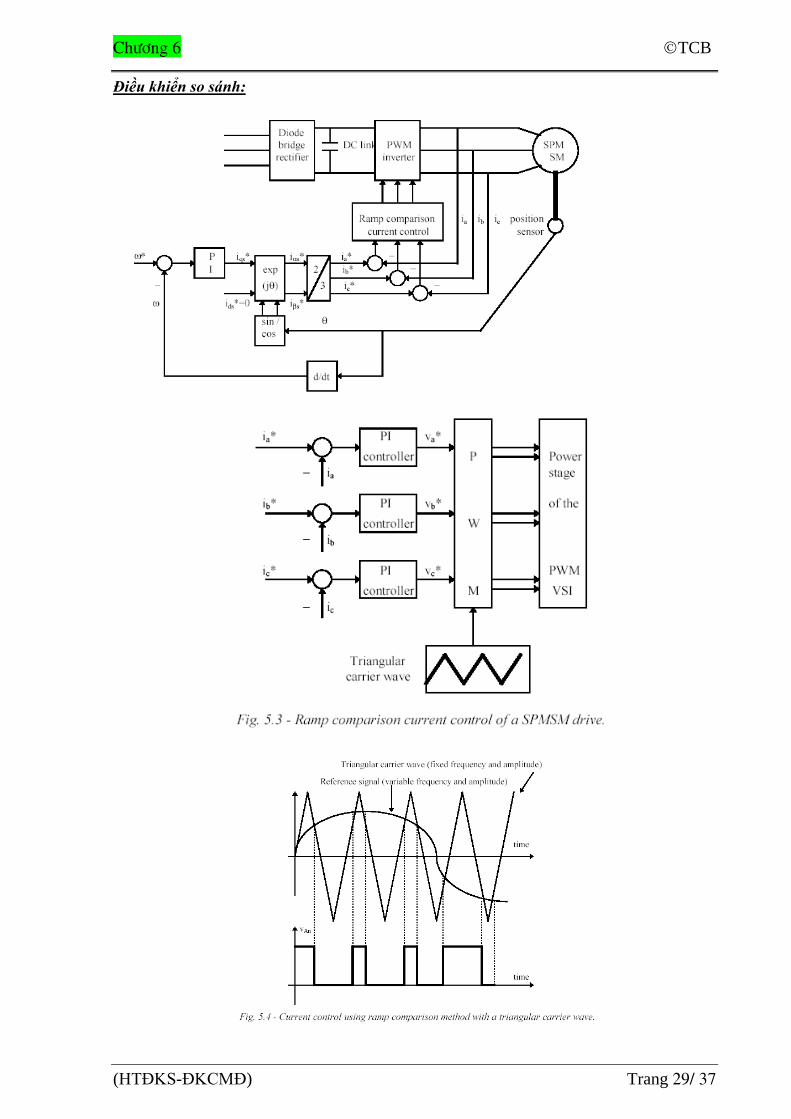
Chöông 6 TCB
(HTĐKS-ĐKCMĐ) Trang 29/ 37
Điều khiển so sánh:
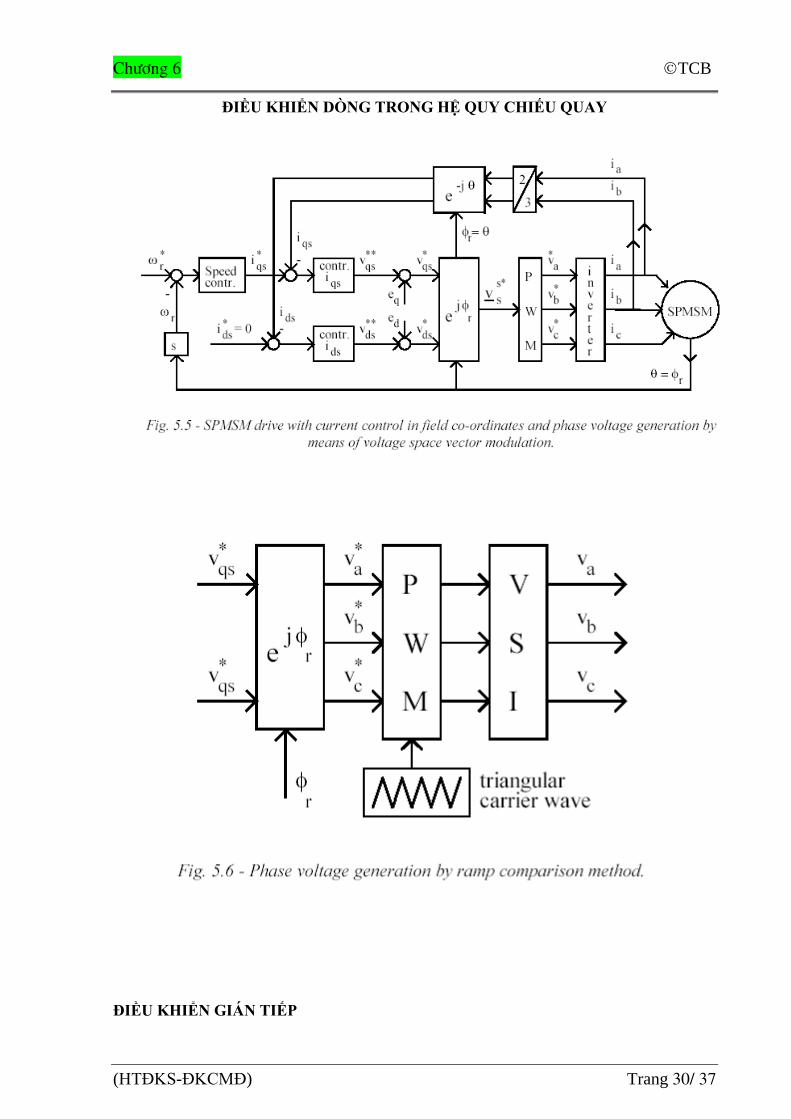
Chöông 6 TCB
(HTĐKS-ĐKCMĐ) Trang 30/ 37
ĐIỀU KHIỂN DÒNG TRONG HỆ QUY CHIẾU QUAY
ĐIỀU KHIỂN GIÁN TIẾP
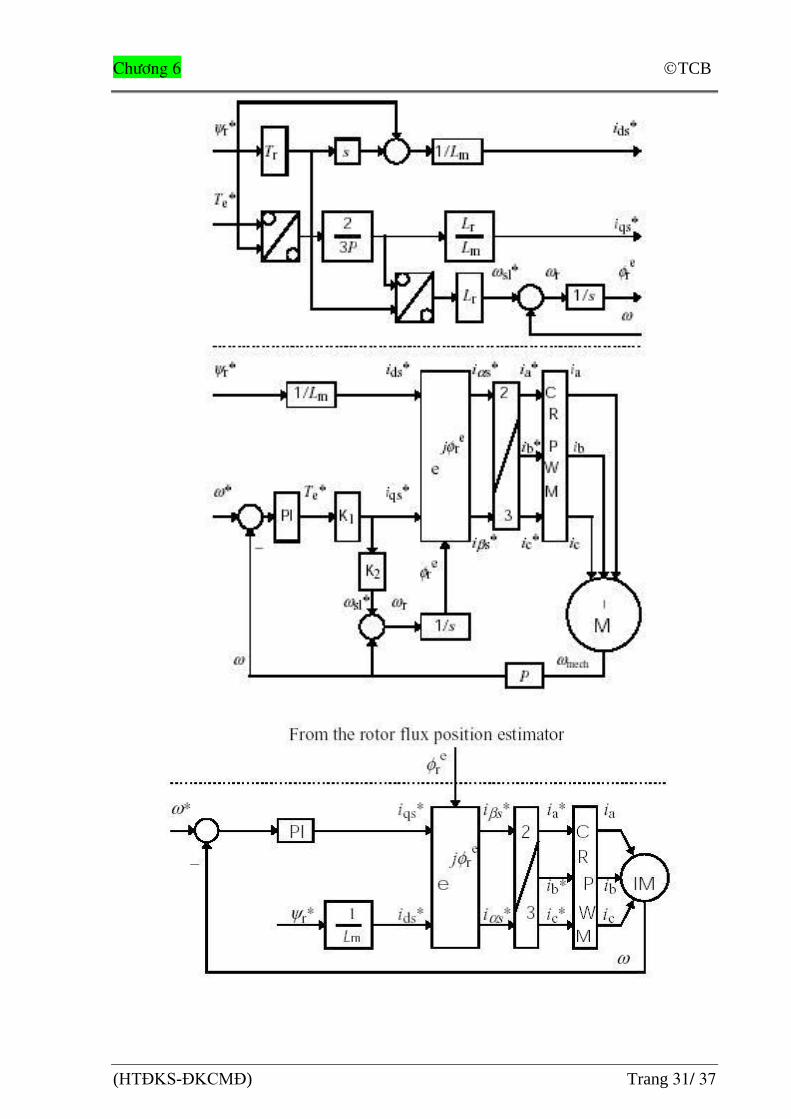
Chöông 6 TCB
(HTĐKS-ĐKCMĐ) Trang 31/ 37
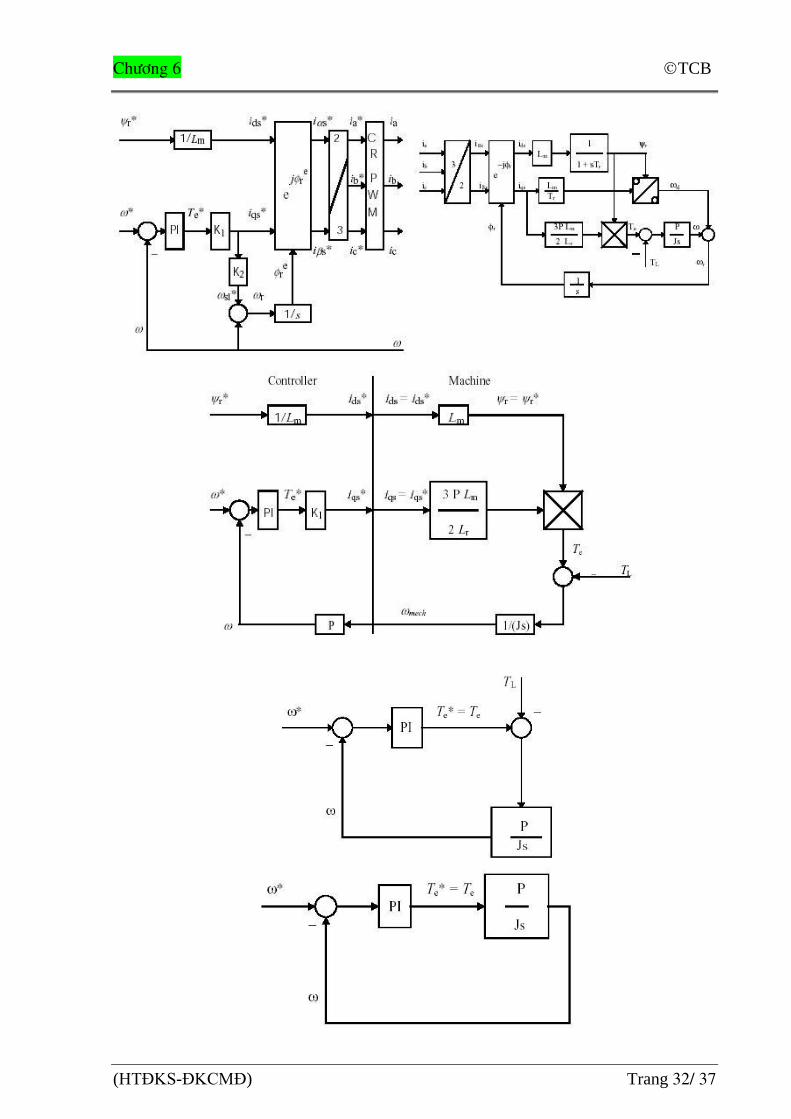
Chöông 6 TCB
(HTĐKS-ĐKCMĐ) Trang 32/ 37
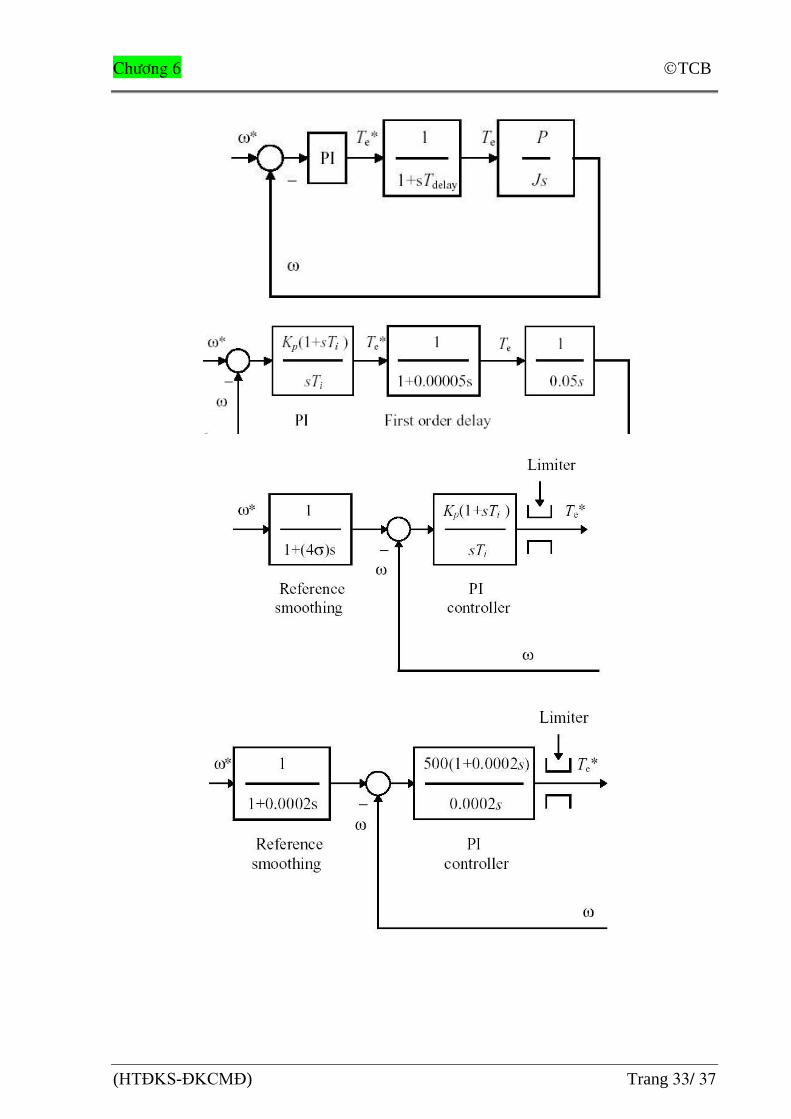
Chöông 6 TCB
(HTĐKS-ĐKCMĐ) Trang 33/ 37
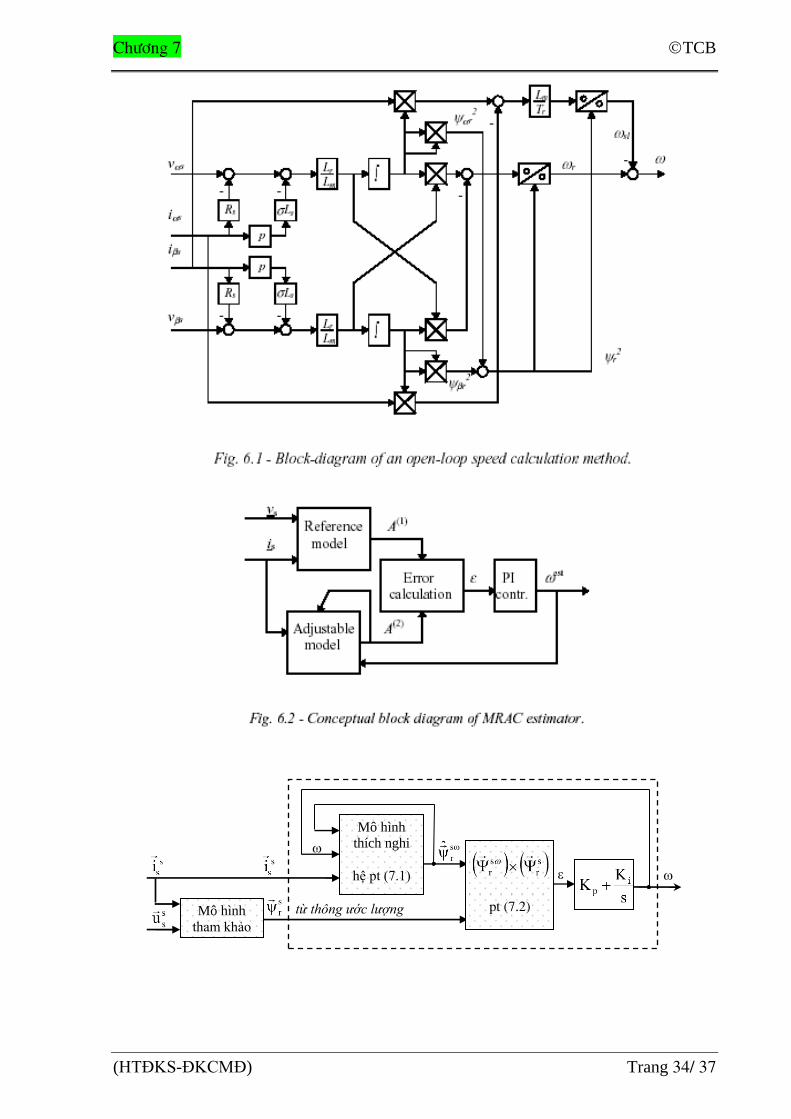
Chöông 7 TCB
(HTĐKS-ĐKCMĐ) Trang 34/ 37
Mô hình
thích nghi
hệ pt (7.1)
pt (7.2)
từ thông ước lượng Mô hình
tham khảo
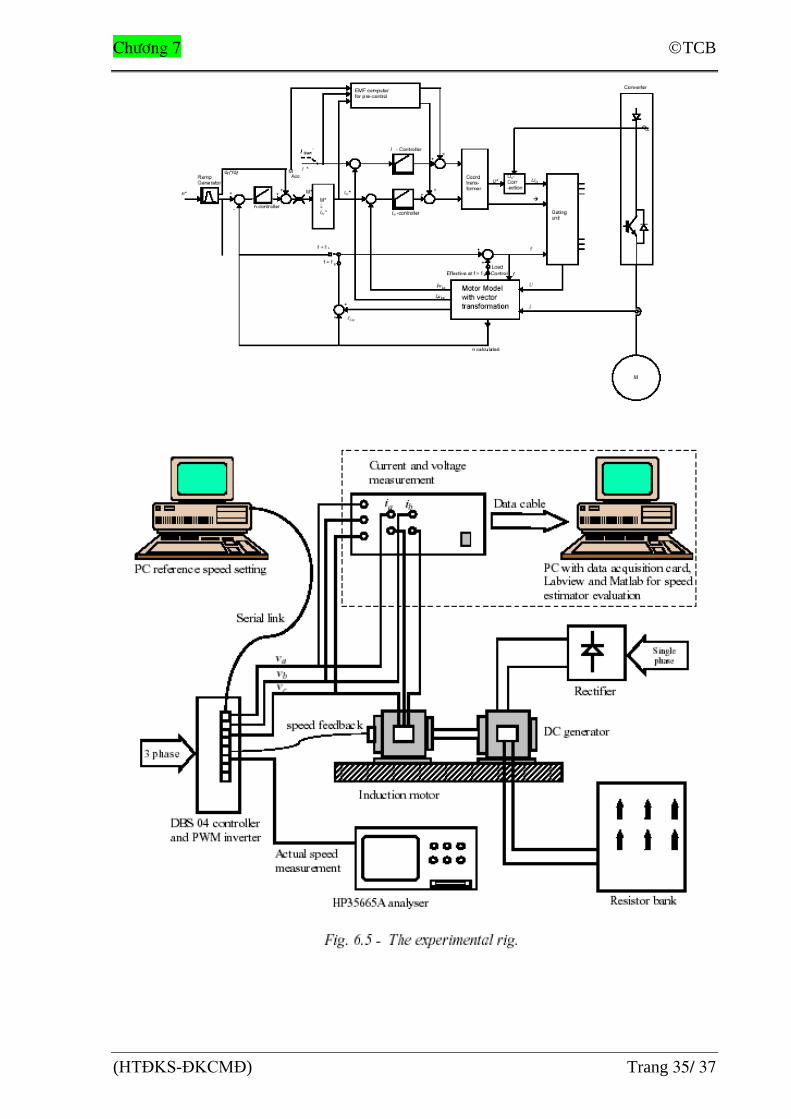
Chöông 7 TCB
(HTĐKS-ĐKCMĐ) Trang 35/ 37
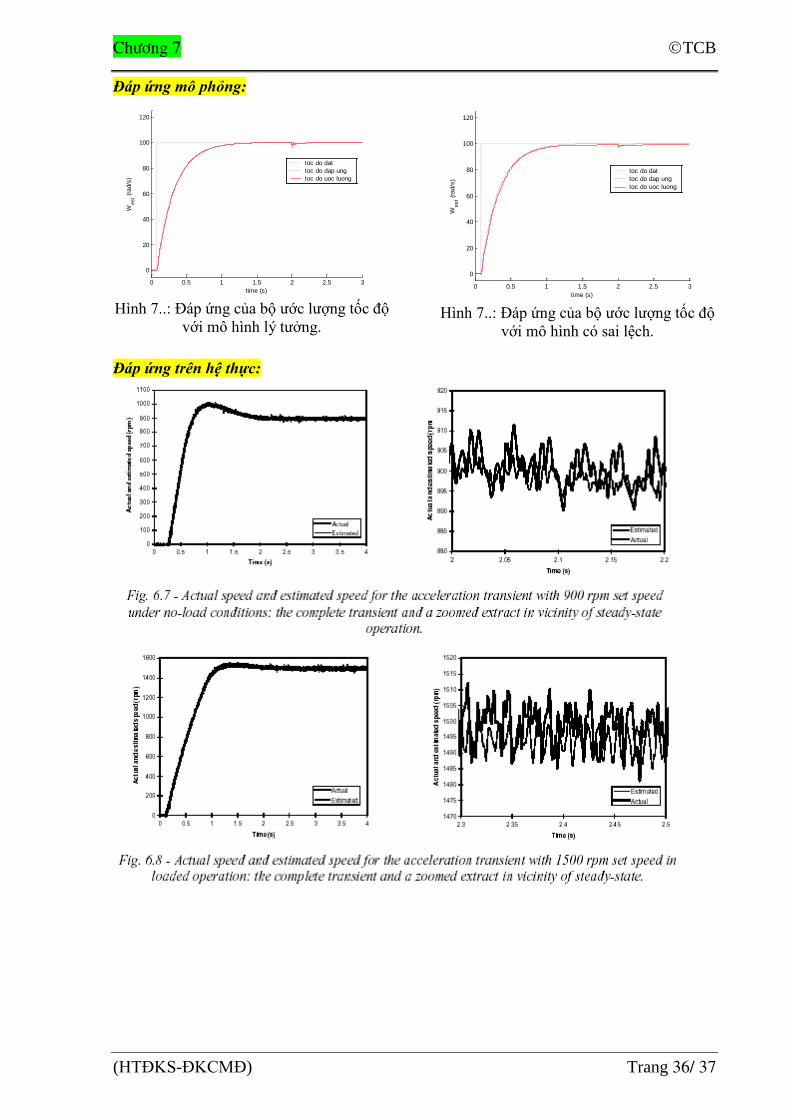
Chöông 7 TCB
(HTĐKS-ĐKCMĐ) Trang 36/ 37
Đáp ứng mô phỏng:
Hình 7..: Đáp ứng của bộ ước lượng tốc độ
với mô hình lý tưởng.
Hình 7..: Đáp ứng của bộ ước lượng tốc độ
với mô hình có sai lệch.
Đáp ứng trên hệ thực:
0 0.5 1 1.5 2 2.5 3
0
20
40
60
80
100
120
time (s)
West (
rad/s
)
toc do dat
toc do dap ung
toc do uoc luong
0 0.5 1 1.5 2 2.5 3
0
20
40
60
80
100
120
time (s)
West (
rad/s
)
toc do dat
toc do dap ung
toc do uoc luong

Tuaàn 13-14: Chöông 8 (6T) TCB
(HTĐKS-ĐKCMĐ) Trang 37/ 37
Xem bài giảng
Các công thức lượng giác:
2cos
2cos2coscos
2sin
2sin2coscos
2cos
2sin2sinsin
2sin
2cos2sinsin
coscos2
1cos.cos
sinsin2
1cos.sin
coscos2
1sin.sin
sinsin2
1sin.cos
sin.sincos.coscos
sin.coscos.sinsin
coscos
sinsin





























