Embed Size (px)
Citation preview
Il GPS nei rilievi Catastali Il rilievo topografico è, in realtà il primo aspetto dell’atto di aggiornamento catastale perché dalle misure assunte sul terreno discende la possibilità di determinare la forma e la posizione dell’immobile oggetto dell’aggiornamento. Le misure assunte sul terreno devono essere “consegnate” al catasto come una delle componenti fondamentali dell’atto di aggiornamento, vista anche la valenza civile delle stesse, nel caso di controversie relative ai confini. Rispetto a questo aspetto l’introduzione del “libretto delle misure” come documento fondamentale dell’atto di aggiornamento, prevista dalla circolare 2/88 non è una norma innovativa. La codifica del libretto delle misure e la prescrizione di una metodologia per il rilievo sono una novità rispetto al catasto pre-1988. La norma piu’importante per l’esecuzione dei rilievi è senz’altro la seguente:
“Sulla base delle norme appresso descritte, il professionista dovrà considerare l’immobile oggetto della misurazione, seppure compiutamente espresso nella forma e nella superficie, indipendente dall’ambito cartografico; dovrà comunque individuare e misurare la maglia dei punti fiduciali contenente l’oggetto del rilievo, fornendo solo le misure direttamente osservate e considerare i punti medesimi quali elementi topografici di raccordo tra i diversi rilievi, ignorandone cioè anche in questo caso, la loro posizione cartografica.”
Quindi il rilievo va eseguito impiegando strumenti e metodi di misura in grado di fornire le misure direttamente osservate. Nel caso di impiego di longimetri e goniometri le misure direttamente osservate sono distanze e direzioni (o angoli). Nel caso di metodi per la misura indiretta della distanza (angolo parallattico costante, distanziometri elettro-ottici o laser) si deve intendere per misura direttamente osservata il risultato dell’applicazione dello strumento, e non ad esempio le letture ai fili distanziometrici sulla stadia o la differenza di fase per i distanziometri elettro-ottici. Nel caso di misura GPS la misura direttamente osservata è costituita dalla “baseline”, cioè dalle componenti di un vettore libero espresse in un riferimento tridimensionale.
Allo scopo di predisporre gli atti di aggiornamento, ed anche di verificare la precisione conseguita nel rilievo, è stata predisposta dall’Amministrazione un procedura ad uso dei professionisti : Pregeo. E’ la stessa procedura che viene utilizzata negli uffici per il trattamento e la registrazione degli atti di aggiornamento. Quindi Pregeo per i Professionisti serve a predisporre gli atti catastali di aggiornamento. Gli atti catastali di aggiornamento comportano tre aspetti costituitivi: l’aggiornamento degli archivi topografici del catasto (le misure eseguite sul territorio), l’aggiornamento della mappa catastale (forma e posizione relativa delle particelle catastali), l’aggiornamento dell’archivio amministrativo censuario limitatamente, quest’ultimo, agli oggetti dell’archivio ( la superficie e la natura delle particelle catastali) e non ai soggetti (la proprietà). La forma e la posizione delle particelle catastali ha un grande importanza perché attiene alla definizione dei confini delle proprietà. E’ meno importante la posizione assoluta della particella (cioè rispetto ad un sistema riferimento che contenga la posizione di tutte le particelle) che però è in qualche modo necessaria se non altro ai fini puramente cartografici. In altri termini è necessario definire con una certa precisione la posizione dei confini di particella con riferimento alle particelle confinanti mentre è sufficiente una precisione inferiore nella posizione assoluta dei confini stessi. Questa particolarità del sistema catastale influenza tutte le metodologie del rilievo particellare, applicate sia nella fase di formazione della mappa catastale che nella prassi dell’aggiornamento della mappa stessa. In particolare vengono privilegiati i metodi di rilievo basati su misure dirette, con un certa preferenza verso le misure di distanza rispetto ad altre osservabili e con una concezione assolutamente locale del rilievo. Anche la riforma del rilievo catastale d’aggiornamento che ha introdotto la procedura Pregeo (Circolare 2 del 1988) ha salvaguardato in pieno l’esigenza di una maggiore precisione relativa nella determinazione della forma e della posizione delle particelle. Infatti ha definito una rete di punti individuabili sul territorio (Punti Fiduciali) ad altissima densità ( in media 300 metri di lunghezza dei lati della rete) rispetto ai quali devono essere riferiti con elevata precisione i confini delle particelle rilevate. Invece la posizione assoluta, cioè quella cartografica è determinata dalla conoscenza delle coordinate cartografiche (spesso grossolanamente approssimate) dei Punti Fiduciali riferiti dal rilievo.
Contemporaneamente è stato costituito un archivio topografico che conserva tutte le misure direttamente osservate sul territorio e fornite con gli atti di aggiornamento. Questo rende potenzialmente possibile la rideterminazione della posizione assoluta delle particelle rilevate quando (e se) verranno determinate con precisione maggiore le posizioni assolute dei Punti Fiduciali. Rispetto a questo meccanismo, perfettamente razionale e senz’altro utile anche nell’immediato ma già complesso di suo, e non privo di qualche contraddizione, l’avvento delle misure GPS ha creato qualche problema, concettuale e pratico. D’altra parte il catasto non poteva precludere la possibilità di utilizzare, ai fini dei rilievi d’aggiornamento, uno strumento, o meglio una metodologia così versatile, comoda per misurare e spesso anche conveniente da un punto di vista economico. Però il GPS, a ben guardare, produce una tipologia di misure che non hanno una grande affinità con le misure privilegiate per gli aggiornamenti cartografici.
1) Le misure GPS applicabili ai fini topografici e cartografici non sono mai misure dirette. 2) L’uso piu’comodo del GPS, e cioè quello di determinatore di posizioni, non è direttamente impiegabile nei
rilievi di aggiornamento. 3) Raramente il GPS può essere impiegato per il rilievo diretto, ad esempio, dei lati della rete dei Punti Fiduciali,
dovendo spesso ricorrere a determinazioni “fuori centro”. 4) L’estensione media dei rilievi di aggiornamento (300 m) sembra avere poca affinità con l’impiego di uno
strumento di misura con spiccate caratteristiche geodetiche. 5) Le grandi potenzialità del metodo “in tempo reale” in svariate applicazioni topografiche non comportano
benefici per il rilievo di aggiornamento per come è attualmente concepito. Ed in ultimo, ma non in ordine di importanza, l’impiego delle reti di stazioni permanenti, che di per se esalta la fruibilità e l’economicità del rilievo GPS, comportando misure rapide di basi “lunghe”, crea dei problemi di introducibilità cartografica e soprattutto di cattiva conformazione della rete dei vertici del rilievo di aggiornamento. Per contro l’uso delle sovrastrutture di stazioni permanenti è efficace nella determinazione della posizione assoluta dei vertici rilevati. Vediamo ora come viene recepita la metotodologia GPS nelle “norme” per il rilievo catastale di aggiornamento. In pratica possono essere usate solo le misure di baseline.
La baseline GPS : componenti, matrice di covarianza e dati accessori Nel libretto Pregeo le misure di singole baseline GPS vengono codificate con tre righe: un coppia di righe una di tipo 1 e la successiva di tipo 6 forniscono l’identificativo del vertice iniziale della base, le coordinate geocentriche approssimate, l’altezza del centro di fase (distanza verticale tra il picchetto ed il centro di fase) ed una eventuale nota; la riga di tipo 6 fornisce informazioni sulla modalità di misura e sulla data e la durata delle osservazioni (L1 o L2) data inizio stazione, data fine stazione, pdop medio nel periodo di osservazione. 1|1000|4810307.287,1370757.207,3944403.540|0|BASE| 6|L2|19042004-10:14|19042004-16:48|RTK|PDOP=3| identificativo 1000 geocentriche X=4810307.2,Y=1370757.20,Z=3944403.54 altezza=0 frequenza = L2 [o L1] data inizio stazione: 19/04/2004 alle ore 10,14 data fine stazione: 119/04/2004 alle ore 16:48 metodologia del rilievo RTK [BAS] nb RTK indica una metodologia di tipo cinematica, mentre BAS indica una metodologia di tipo statico Etichetta dell’Indice della configurazione satellitare con il relativo valore (media nel periodo) PDOP=n o GDOP=n La procedura utilizza le coordinate geocentriche della primo punto di riferimento citato nel libretto per la
determinazione del sistema riferimento (si tratta del sistema Eulerinao) rispetto al quale verranno determinate le
posizioni approssimate di tutti i punti rilevati. Per i punti di riferimento successivi al primo, nel caso di un rilievo
costituito da una concatenazione di baseline le coordinate geocentriche possono essere omesse (inserendo nella codifica
i valori convenzionali 0,0,0) poichè il procedimento di calcolo le determina automaticamente per trasporto.
Il riferimento Euleriano ha l’asse “z” coincidente (direzione e verso) con la normale all’ellissoide passane per il punto di riferimento, l’asse “y” tangente al meridiano per il punto ed orientato positivamente verso il polo Nord dell’ellissoide. L’asse “x” risulta determinato di conseguenza, perché il riferimento Euleriano è cartesiano ortogonale e levogiro.
Segue poi una riga di tipo 2 che contiene l’identificativo del punto corrispondente al vertice finale della baseline, le componenti geocentriche della baseline, la matrice di varianza-covarianza (oppure la matrice dei cofattori e l’rms) delle componenti, il pdop (o il gdop) medio registrato durante il periodo di acquisizione dei dati dall’apparato GPS in stazione sul punto e l’altezza del centro di fase (distanza verticale tra il picchetto ed il centro di fase dell’antenna GPS). 2|1001|543.922,-20.339,-644.757|0.419,0.142,0.15,0.091,0.044,0.084,0.008|PDOP=2|0|RECINZIONE IN CLS| identificativo 1001 componenti geocentriche DX=542.922,DY=-20.339,DZ=-644.757 matrice dei cofattori ed RMS rxx=0.419, rxy=0.142, rxz=0.091, ryy=0.044, ryz=0.088, RMS=0.008, Etichetta dell’Indice della configurazione satellitare con il relativo valore (media nel periodo) PDOP=n o GDOP=n altezza=0 Baseline indipendenti con un vertice in comune Qui si intendono indipendenti due (o più) baseline che siano state misurate non contemporaneamente, lasciando un ricevitore (il reference) nella posizione che costituisce il vertice iniziale comune alle due baseline e ponendo in stazione il secondo ricevitore (rover) successivamente sulle posizioni dei vertici finali delle baseline. In questo caso la codifica nel libretto delle misure avviene trascrivendo le due (o più) righe di tipo 2 successivamente alla coppia di righe di tipo 1 e di tipo 6 che individua il vertice iniziale comune alle baselines: esempio: 1|1000|4810307.287,1370757.207,3944403.540|0|BASE| 6|L2|19042004-10:14|22042004-16:48|RTK|PDOP=3| 2|1001|709.659,-1081.673,-481.953|0.059,0.027,0.039,0.029,0.032,0.071,0.002|PDOP=3|0|RECINZIONE IN CLS| 2|1002|727.405,-1073.705,-511.157|0.206,0.103,0.211,0.074,0.114,0.296,0.002|PDOP=3|0|PALINA| 2|1003|732.128,-1080.279,-513.802|0.131,0.066,0.135,0.047,0.072,0.189,0.002|PDOP=3|0|PALINA| Baseline indipendenti concatenate. Qui si intendono indipendenti due (o più) baseline che siano state misurate non contemporaneamente, alternando i ricevitori nella posizione che costituisce il vertice iniziale della prima baseline con la posizione che costituisce il vertice finale della baseline stessa ed il secondo ricevitore successivamente sulle posizioni dei vertici finali delle baseline, in modo tale da formare una catena. In questo caso la codifica nel libretto delle misure avviene trascrivendo le
due (o più) rcoppia di righe di tipo 1 e di tipo 6 che individuano il vertice iniziale di ciascuna delle baseline rispettivamente seguita dalle righe di tipo 2 che individuano i vertici finali delle baseline: esempio: 1|1000|4810307.287,1370757.207,3944403.540|0|BASE| 6|L2|19042004-10:14|19042004-16:48|RTK|PDOP=3| 2|2000|-169.766,180.821,145.639|0.205,-0.003,0.098,0.184,-0.044,0.473,0.007|PDOP=2|0|BORDO STRADA SX| 1|2000|0,0,0|0|BASE| 6|L2|23042004-09:46|23042004-15:57|RTK|PDOP=2| 2|3000|362.924,387.461,-571.551|0.041,0.02,0.022,0.024,0.025,0.053,0.004|PDOP=2|0|BORHIA SU POZZETTO| Se nella misura delle baseline si mantiene fissa la posizione di un ricevitore nel vertice comune a due baseline consecutive si ricade nel caso delle baseline indipendenti con un vertice in comune, e pertanto è preferibile utilizzare la codifica relativa. Si noti come le geocentriche del vertice “2000” sono poste uguali a zero, ciò è possibile perché la procedura di calcolo provvede automaticamente al calcolo delle coordinate dei vertici di baseline successive alla prima, sempre che la successione delle baseline sia connessa. Baseline Lunghe: trasformazioni per il calcolo delle baseline corte misurate indirettamente Qualora si utilizzi una stazione permanente ed il rilievo di aggiornamento sia posto a notevole distanza dalla stazione stessa è possibile utilizzare le basi misurate indirettamente, calcolandone la matrice di varianza-covarianza in maniera rigorosa con una semplice trasformazione. Per operare correttamente è necessario individuare un vertice finale di baseline posto vicino all’oggetto del rilievo che diventerà il primo vertice iniziale da citare nel libretto delle misure. Da esso possono essere calcolate le n-1 baseline indirette (se n è il numero di baseline effettivamente misurati). A queste basi può essere aggiunta la baseline lunga, con verso opposto a quella effettivamente misurata, per il collegamento alla stazione permanente. Di questa trasformazione è opportuno dare informazione nella relazione tecnica. Se individuiamo con l’indice “o” il nuovo punto di emanazione e con l’indice “s” la stazione fissa, le componenti geocentriche delle baseline misurate indirettamente si calcolano con le semplici differenze: DXoi= DXsi-DXso DYoi= DYsi-DYso DZoi = DZsi-DZso

La matrice di coovarianza della baseline misurata indirettamente è data dalla somma, elemento per elemento, delle matrici di covarianza delle baseline misurate direttamente (nel nostro caso σ so e σ si): |[σ2
sox + σ2six ] [σ soxy + σ sixy] [σ soxz + σ sixz]|
σ oi= |[σ soxy + σ sixy] [σ2soy + σ2
siy] [σ soyz + σ siyz]| |[σ soxz + σ sixz] [σ soyz + σ siyz ] [σ2
soz + σ2siz ]|
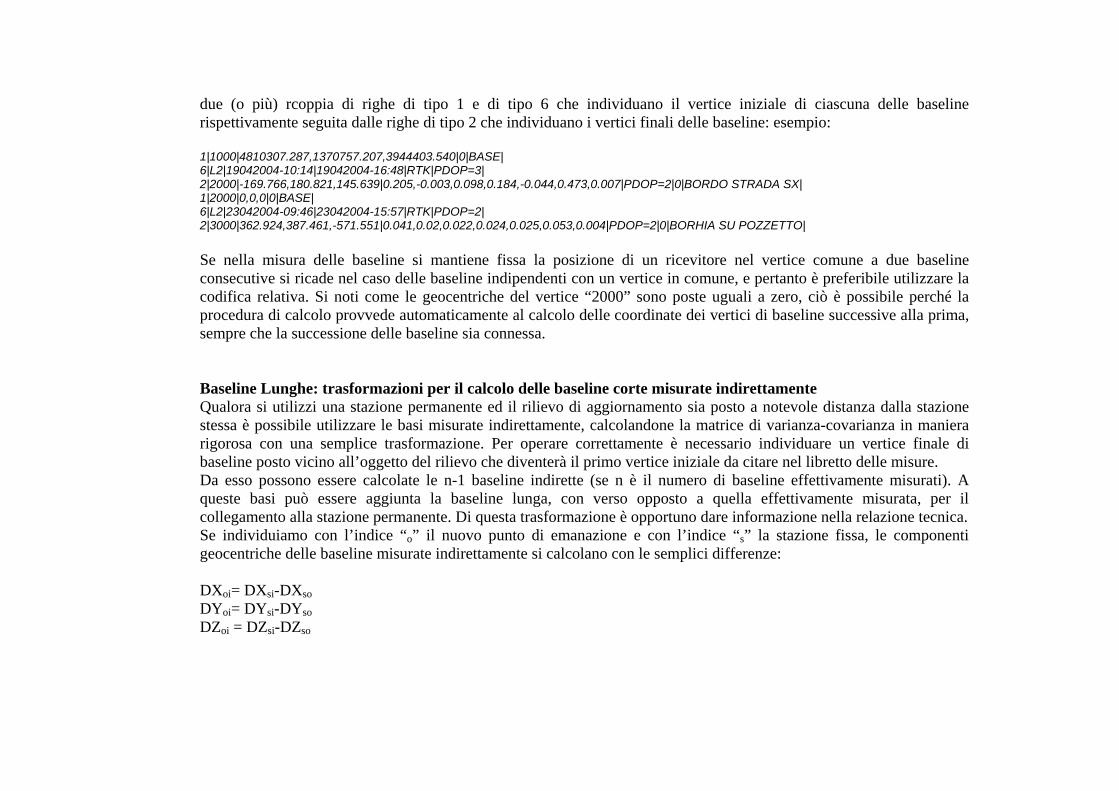
La matrice di covarianza della baseline non varia se si inverte semplicemente il verso positivo della baseline stessa. Ad esempio dalla configurazione (fig.1): 1|100|4429584.92,626326.21,4531541.74|0.000| 6|L2|12012005-14.19|12012005-14.38|BAS|PDOP=2| 2|PF02|-4533.670,12272.411,2570.202|0.000230722,0.000023211,0.000128552,0.000050525,0.000062886,0.000283335|PDOP=3|0.000| 2|200|-4467.999,12323.716,2497.364|0.000036144,0.000005667,0.000026864,0.000007714,0.000007199,0.000037076|PDOP=3|0.000| 2|PF03|-4393.694,12440.408,2402.995|0.000401847,0.000059790,0.000283345,0.000084523,0.000071235,0.000378298|PDOP=3|0.000| Risultati Elaborazione Compensazione Planimetrica Rilievo eseguito con un numero minimo di osservazioni Ellissi ed s.q.m.sono calcolati in funzione delle precisioni strumentali dichiarate s.q.m. dell'unita' di peso a priori 0.00715 s.q.m. dell'unita' di peso a posteriori 0.21857 s.q.m. dell'unita' di peso interna 0.00715 s.q.m. dell'unita' di peso esterna 30.56988 Numero di cicli di compensazione 4 Punti della Rete nome nord sqm est sqm semiasseMax semiasseMin inclinazione PF02 16022.412 +/-0.166 538.979 +/-0.262 0.310 0.007 36.052 PF03 15788.732 +/-0.160 684.333 +/-0.263 0.308 0.007 34.794 200 15919.618 +/-0.075 579.971 +/-0.031 0.081 0.007 75.087 100 12321.224 +/-28.936 -12268.973 +/-8.052 30.035 0.006 117.278
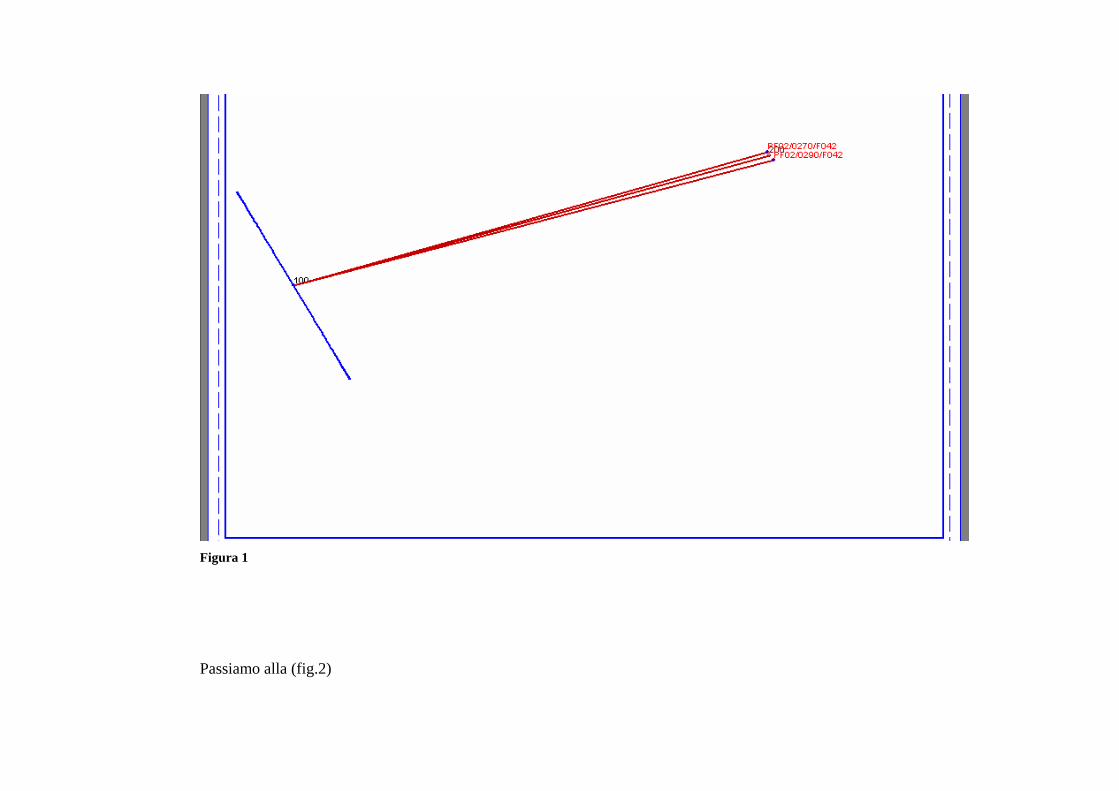
Figura 1
Passiamo alla (fig.2)

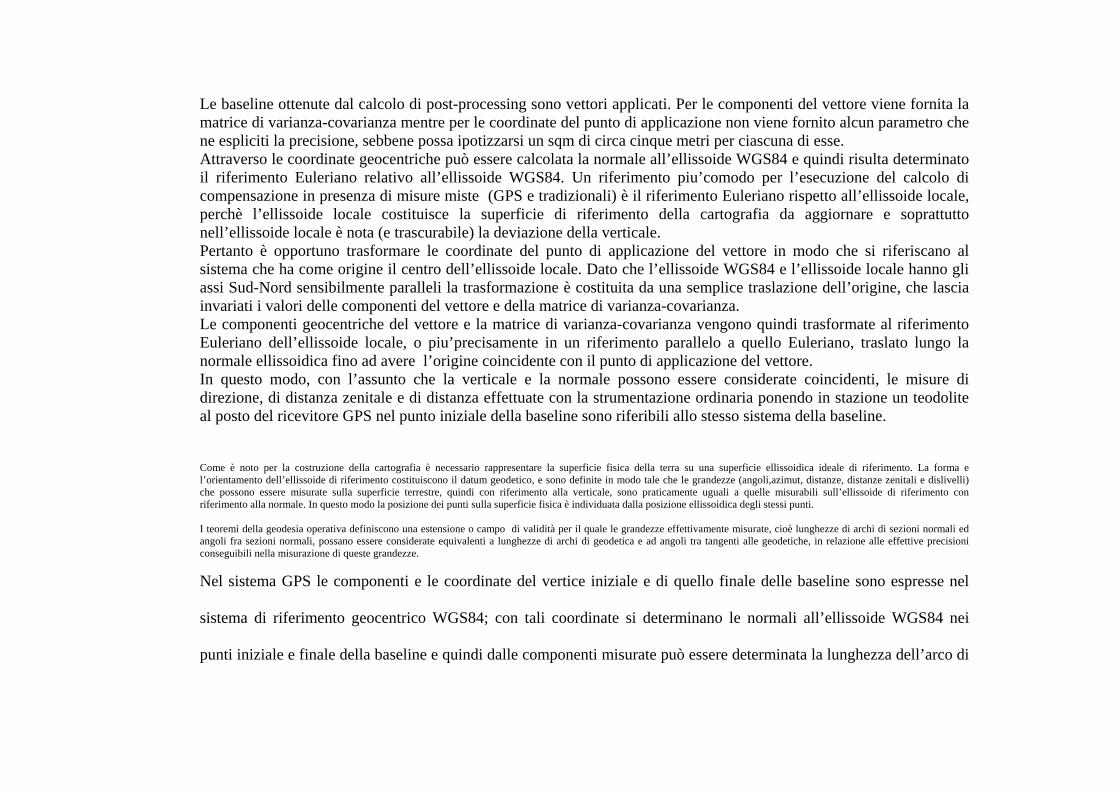
1|200|4425116.92,638649.92,4534039.10|2.000| 6|L2|12012005-14.28|12012005-14.29|BAS|PDOP=4| 2|100|4467.999,-12323.716,-2497.364|0.000036144,0.000005667,0.000026864,0.000007714,0.000007199,0.000037076|PDOP=3|0.000| 2|PF02|-65.670,-51.305,72.838|0.0002668660,0.0000288780,0.0001554160,0.0000582390,0.0000700850,0.0003204110|PDOP=3|0.000| 2|PF03|74.305,116.692,-94.370|0.0000661360,0.0000104050,0.0000493020,0.0000141320,0.0000132620,0.0000681940|PDOP=3|0.000| Risultati Elaborazione Compensazione Planimetrica Rilievo eseguito con un numero minimo di osservazioni Ellissi ed s.q.m.sono calcolati in funzione delle precisioni strumentali dichiarate s.q.m. dell'unita' di peso a priori 0.00717 s.q.m. dell'unita' di peso a posteriori 0.00370 s.q.m. dell'unita' di peso interna 0.00717 s.q.m. dell'unita' di peso esterna 0.51664 Numero di cicli di compensazione 3 Punti della Rete nome nord sqm est sqm semiasseMax semiasseMin inclinazione PF02/0270/F042 16022.411 +/-0.004 538.979 +/-0.003 0.005 0.000 135.425 !!! PF02/0290/F042 15788.733 +/-0.004 684.333 +/-0.003 0.005 0.000 135.425 200 15919.618 +/-0.006 579.971 +/-0.005 0.006 0.005 61.735 Punti di Dettaglio nome nord sqm est sqm semiasseMax semiasseMin inclinazione 100 12321.237 +/-0.491 -12268.972 +/-0.133 0.509 0.004 116.815
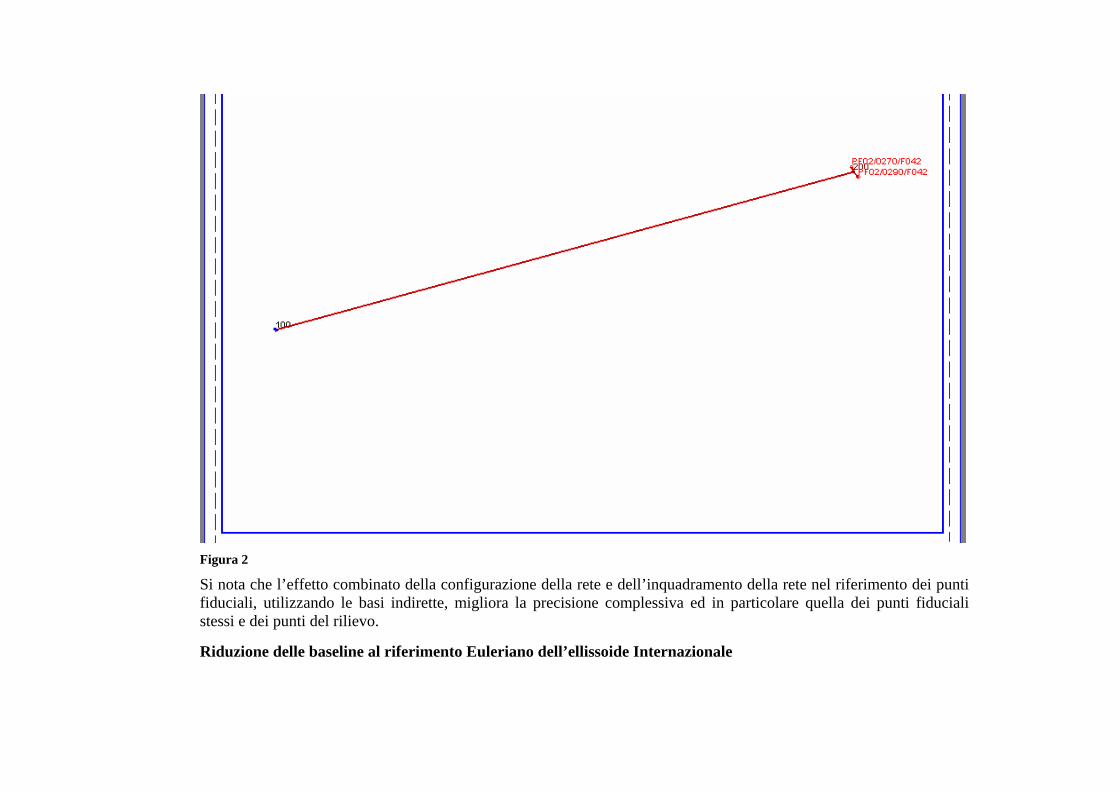
Figura 2
Si nota che l’effetto combinato della configurazione della rete e dell’inquadramento della rete nel riferimento dei punti fiduciali, utilizzando le basi indirette, migliora la precisione complessiva ed in particolare quella dei punti fiduciali stessi e dei punti del rilievo.
Riduzione delle baseline al riferimento Euleriano dell’ellissoide Internazionale
Le baseline ottenute dal calcolo di post-processing sono vettori applicati. Per le componenti del vettore viene fornita la matrice di varianza-covarianza mentre per le coordinate del punto di applicazione non viene fornito alcun parametro che ne espliciti la precisione, sebbene possa ipotizzarsi un sqm di circa cinque metri per ciascuna di esse. Attraverso le coordinate geocentriche può essere calcolata la normale all’ellissoide WGS84 e quindi risulta determinato il riferimento Euleriano relativo all’ellissoide WGS84. Un riferimento piu’comodo per l’esecuzione del calcolo di compensazione in presenza di misure miste (GPS e tradizionali) è il riferimento Euleriano rispetto all’ellissoide locale, perchè l’ellissoide locale costituisce la superficie di riferimento della cartografia da aggiornare e soprattutto nell’ellissoide locale è nota (e trascurabile) la deviazione della verticale. Pertanto è opportuno trasformare le coordinate del punto di applicazione del vettore in modo che si riferiscano al sistema che ha come origine il centro dell’ellissoide locale. Dato che l’ellissoide WGS84 e l’ellissoide locale hanno gli assi Sud-Nord sensibilmente paralleli la trasformazione è costituita da una semplice traslazione dell’origine, che lascia invariati i valori delle componenti del vettore e della matrice di varianza-covarianza. Le componenti geocentriche del vettore e la matrice di varianza-covarianza vengono quindi trasformate al riferimento Euleriano dell’ellissoide locale, o piu’precisamente in un riferimento parallelo a quello Euleriano, traslato lungo la normale ellissoidica fino ad avere l’origine coincidente con il punto di applicazione del vettore. In questo modo, con l’assunto che la verticale e la normale possono essere considerate coincidenti, le misure di direzione, di distanza zenitale e di distanza effettuate con la strumentazione ordinaria ponendo in stazione un teodolite al posto del ricevitore GPS nel punto iniziale della baseline sono riferibili allo stesso sistema della baseline. Come è noto per la costruzione della cartografia è necessario rappresentare la superficie fisica della terra su una superficie ellissoidica ideale di riferimento. La forma e l’orientamento dell’ellissoide di riferimento costituiscono il datum geodetico, e sono definite in modo tale che le grandezze (angoli,azimut, distanze, distanze zenitali e dislivelli) che possono essere misurate sulla superficie terrestre, quindi con riferimento alla verticale, sono praticamente uguali a quelle misurabili sull’ellissoide di riferimento con riferimento alla normale. In questo modo la posizione dei punti sulla superficie fisica è individuata dalla posizione ellissoidica degli stessi punti. I teoremi della geodesia operativa definiscono una estensione o campo di validità per il quale le grandezze effettivamente misurate, cioè lunghezze di archi di sezioni normali ed angoli fra sezioni normali, possano essere considerate equivalenti a lunghezze di archi di geodetica e ad angoli tra tangenti alle geodetiche, in relazione alle effettive precisioni conseguibili nella misurazione di queste grandezze. Nel sistema GPS le componenti e le coordinate del vertice iniziale e di quello finale delle baseline sono espresse nel
sistema di riferimento geocentrico WGS84; con tali coordinate si determinano le normali all’ellissoide WGS84 nei
punti iniziale e finale della baseline e quindi dalle componenti misurate può essere determinata la lunghezza dell’arco di
geodetica dell’ellissoide WGS84 sotteso dalle baseline, e l’azimut della tangente alla geodetica nei punti iniziale e
finale.
Questo è possibile perché sebbene la normale all’ellissoide e la verticale coincidono in un solo punto (il punto di orientamento) la loro divergenza (deviazione della verticale) punto per punto della superficie è una quantità piccola rispetto alla precisione conseguibile nella misura di direzioni e distanze. L’ellissoide WGS84 è geocentrico, e pertanto la normale ad esso non coincide con la verticale in nessun punto della superficie fisica (non ha un punto di orientamento). Questa caratteristica e la grande precisione ottenibile nella misura delle baseline GPS nonché la lunghezza delle stesse possono mettere in discussione le conclusioni dei teoremi della geodesia operativa. Una ultima considerazione attiene alle coordinate del vertice iniziale delle baseline. e WGS84 e nelle ordinarie applicazioni si assume che la normale così individuata coincida con quella dell’ellissoide locale, tenuto conto della bassa precisione delle coordinate stesse. Si consideri che la lunghezza dell’arco di geodetica sottesa da una baseline varia (sebbene in maniera modesta) con la posizione del vertice iniziale. Metodologia adottata per la combinazione delle baseline con le misure di direzione azimutale, direzione zenitale e distanze inclinate. La difficoltà che si incontra nel combinare le misure di baseline GPS con quelle di tipo tradizionale è costituita dalla diversità dei riferimenti nei quali si eseguono le due tipologie di misure. Come è noto, nelle misure tradizionali si opera sulla base di alcune assunzioni che derivano direttamente dalla Geodesia operativa: essendo molto semplice materializzare la direzione della verticale in ciascun punto della superficie fisica, la strumentazione tradizionale e i metodi di misura sono basati sulla conoscenza della verticale passante per i punti oggetto delle misure. Con il GPS ci si riferisce alla normale del riferimento ellissoidicoWGS84, che non è materializzabile sulla superficie fisica terrestre, è fornita con una scarsa precisione dal sistema GPS, e peraltro non è nota, se non in prima approssimazione, la relazione tra la normale WGS84 e la verticale per un punto della superficie terrestre. Sebbene i ricevitori GPS per il rilievo topografico sono dotati di piombi e livelle che consentono di riferire il centro di fase dell’antenna ad un punto della superficie fisica posto sulla stessa verticale, è chiaro che l’uso del filo a piombo e delle livelle sono una approssimazione nel procedimento di misura: in realtà il centro di fase dell’antenna dovrebbe essere posto sulla stessa normale al riferimento ellissoidico WGS84 del punto di misura.
Quindi mentre con il metodo e la strumentazione tradizionale si opera nell’ambito dell’assunzione della geodesia operativa, che consente di considerare le misure condotte con riferimento alla verticale come se riferite alla normale dell’ellissoide locale, nell’ambito delle precisioni conseguibili e della limitazione della zona nella quale si effettuano le misure (il campo geodetico), al contrario col GPS si opera direttamente sulla superficie di riferimento costituita dall’ellisoide WGS94 (che inoltre è globale e non locale). Occorrerebbe quindi una formulazione reciproca del teorema della geodesia operativa. Naturalmente tutte queste considerazioni sono relative al caso dei rilievi con finalità cartografiche. Senza questa premessa le due tipologie di misura possono essere combinate, con un po’ di fantasia e qualche osservazione in più, riferendo tutte le misure direttamente alla posizione dei punti nello spazio, senza considerare la verticale. Ad esempio se il rilievo viene condotto con riferimento ai centri di fase dei ricevitori, mettendo in stazione i goniometri in modo che il punto di intersezione degli assi dello strumento topografico coincida con il centro di fase dei ricevitori ed utilizzando distanziometri che effettuano le misure in asse il gioco è fatto. Basterà orientare anche il cerchio “verticale” dei goniometri con una osservazione di direzione verso un centro di fase oltre all’orientamento del cerchio “orizzontale” per eseguire le misure angolari nello stesso riferimento dei centri di fase GPS. In questo modo, considerando i vettori applicati nello spazio definiti dalle misure delle componenti, fornite dal GPS, e dalle misure di direzione e distanza ottenute dalla strumentazione ordinaria, possono essere ottenute le posizioni relative dei punti del rilievo, espresse in un riferimento cartesiano ortogonale a tre dimensioni. Solo al termine di questo processo potrebbe applicarsi la trasformazione analitica atta a ‘proiettare’ il rilievo su un qualsiasi riferimento superficiale, con la condizione che esso sia descritto da equazioni espresse nel medesimo riferimento. Questo metodo, sebbene sia molto adatto ad una risoluzione con procedure automatiche, comporta comunque la necessità di cambiare i procedimenti di misura ordinariamente impiegati dai topografi. La procedura di calcolo compresa in Pregeo 8.00, attua un compromesso tra l’approccio rigoroso sopra descritto e la prassi agnostica che viene spesso utilizzata.
Il compromesso consiste nel confondere la verticale fisica con la normale ellissoidica locale, come è ovvio nella geodesia ordinaria, e nel correggere la normale all’ellisoide WGS84 in modo che possa essere resa coincidente alla normale dell’ellisoide locale. La correzione viene calcolata avendo preventivamente collocato (in via approssimata) l’ellisoide locale nel riferimento geocentrico WGS84. La collocazione è stata effettuata impiegando le doppie coordinate dell’origine dell’ellisoide locale (M.Mario) ed è stata verificata sulle doppie coordinate di una serie di vertici IGM95. In questa fase la collocazione e’ effettuata in modo deterministico, sulla base delle definizioni teoriche dei due datum, e quindi, come tale “spiega” solo una parte delle discrepanze tra le grandezze collocate. Tenendo conto però che le posizioni GPS sono molto approssimate, ed anche delle finalità del rilievo catastale di aggiornamento, la precisione raggiunta dal metodo applicato è ampiamente sufficiente allo scopo. Il metodo applicato da Pregeo 8 consiste nel calcolare la direzione della normale all’ellisoide in corrispondenza di ciascuna posizione geocentrica definita da baseline GPS, impiegando le coordinate geocentriche del vertice iniziale di ciascuna baseline fornite nel libretto delle misure. In questo modo viene individuato un riferimento “euleriano” con origine nel vertice iniziale. In questo particolare riferimento vengono risolte le osservazioni tradizionali e vengono combinate con le baseline GPS, le componenti delle quali sono trasformate nel medesimo riferimento. Ai valori della matrice di varianza convarianza della baseline viene applicata una trasformazione “S” con gli stessi parametri impiegati per la trasformazione delle componenti geocentriche della baseline al riferimento euleriano ( e che dipendono solo dalla normale per il punto). Se φ λ sono i valori della latitudine e della longitudine della normale i coseni direttori degli assi t,n e b del riferimento euleriano si ottengono con le seguenti espressioni. t[0]=-sin(φ)*cos(λ); t[1]=-sin(φ)*sin(λ); t[2]=cos(φ); n[0]=cos(φ)*cos(λ); n[1]=cos(φ)*sin(λ); n[2]=sin(φ); b[0]=-sin(λ);
b[1]=cos(λ); b[2]=0; che ordinate in una matrice 3 per 3 [S] definiscono la trasformazione [x]=[S].[X] che consente di calcolare le componenti euleriane della base [x] a partire dalle componenti geocentriche [X]. Il prodotto [S]T[σ][S] trasforma la matrice di varianza covarianza delle componenti della baseline dal riferimento geocentrico a quello euleriano. Trasporto della quota ortometrica Il metodo applicato consente, tra l’altro di dividere il problema planimetrico da quello altimetrico, operando due distinti calcoli di compensazione. Per la parte altimetrica le assunzioni di Pregeo 8 sono molto semplificate. Il calcolo riguarda esclusivamente dislivelli ortometrici (o geoidici) misurati direttamente od indirettamente con i metodi topografici. I dislivelli ellisoidici forniti dalle baseline GPS vengono assimilati anch’essi a dislivelli ortometrici. Nelle prossime versioni verrà fornito un modello del geoide che consentirà di trasformare puntualmente i dislivelli ellissoidici in ortometrici, aumentando cosi’ la precisione del calcolo misto. Elaborazione delle misure Il calcolo di elaborazione attiva un procedimento complesso che è in grado di determinare la posizione e la precisione dei punti rilevati a partire dalle misure fornite e dal datum fornito contestualmente nel libretto delle misure. Il datum cartografico ed altimetrico. Le misure sono state gia’ illustrate, vediamo ora come si fornisce il datum. Il datum planoaltimetrico è costituito dalle coordinate cartografiche e dalle quote geoidiche di:
1. Un gruppo di due o piu’ Punti Fiduciali riferiti planimetricamente dal rilievo, con identificativi codificati in modalita’ standard e contenuti nell’archivio (TAF) di servizio per la procedura.
2. Un gruppo di uno o piu’ Punti Fiduciali riferiti planimetricamente ed altimetricamente dal rilievo, con identificativi codificati in modalita’ standard e contenuti nell’archivio (TAF) di servizio per la procedura.
3. Un gruppo di due o piu’ Punti Fiduciali riferiti planimetricamente dal rilievo, codificati in modalita’ standard e contenuti nel libretto stesso in righe di tipo 8.
4. Un gruppo di uno o piu’ Punti Fiduciali riferiti planimetricamente ed altimetricamente dal rilievo, codificati in modalita’ standard e contenuti nel libretto stesso in righe di tipo 8.
5. Un gruppo di due o piu’ Punti Utente riferiti plaltimetricamente dal rilievo, codificati liberamente e contenuti nel libretto stesso in righe di tipo 8.
6. Un gruppo di uno o piu’ Punti Utente riferiti planimetricamente ed altimetricamente dal rilievo, codificati liberamente e contenuti nel libretto stesso in righe di tipo 8.
In assenza degli elementi precedenti il datum è costituito da: 1. Una informazione grossolana sulla est media della rappresentazione cartografica della zona rilevata 2. Una informazione grossolana sulla quota geoidica media della della zona rilevata
Nel flusso del calcolo il sistema ricerca nell’archivio TAF le coordinate e le quote dei Punti Fiduciali riferiti dalle misure del libretto in termini di identificati di : Vertici iniziali o finali di vaseline GPS Stazioni celerimetriche o punti rilevati per celerimensura Origini di allineamenti o punti rilevati per progressive e squadri Punti estremi di livellazioni dal mezzo
Punti stazione di livellazioni da un estremo e punti osservati da livellazioni da un estremo.
Per i Punti Fiduciali che vengono trovati nell’archivio TAF il sistema costituisce una lista di righe 8 che vengono accodate al libretto delle misure. Questo accorgimento rende il documento “libretto delle misure” esaustivo per la risoluzione del rilievo a prescindere da qualsiasi archivio esterno. Cioe’ il libretto delle misure contenente le righe 8 è autoreferenziato cartograficamente . Se i Punti Fiduciali non vengono trovati nell’archivio TAF sono ricercati tra le eventuali righe 8 poste in coda al libretto delle misure. I Punti Utente vengono ricercati solo nelle righe 8 del libretto delle misure.
Se una o piu’ righe 8 contenute nel libretto si riferiscono a Punti Fiduciali o a Punti Utente non riferiti dal rilievo, queste vengono rimosse automaticamente dal libretto. Di conseguenza, al termine del processo di elaborazione nel libretto delle misure resteranno le sole righe 8 utili a definire il datum cartografico e dell’altimetria. Pregeo 8 fornisce una serie di funzioni di ausilio per la gestione del datum. E’ possibile importare nell’archivio locale il TAF dell’Agenzia del Territorio, reperibile sul sito internet dell’ Agenzia stessa e a copertura dell’intero territorio nazionale. E’ possibile consultare le monografie dei Punti Fiduciali sul sito dell’Agenzia ed esiste una funzione per la predisposizione delle monografie stesse allo scopo di presentarle all’ufficio dell’Agenzia. Infine esiste una maschera per l’acquisizione delle informazioni relative ai Punti Fiduciali ed ai Punti Utente che si intenda inserire direttamente nel libretto sotto forma di righe 8, o che si intenda archiviare nell’archivio TAF. La rete libera. Ora vediamo come il calcolo utilizza il datum cartografico e quello relativo all’altimetria. Le coordinate cartografiche dei Punti Fiduciali riferiti dal rilievo costituiscono gli elementi in base ai quali viene ricercato il minimo della traccia parziale della matrice normale nel calcolo di compensazione delle misure a “rete libera”. In altre parole la posizione e la precisione dei punti del rilievo viene calcolata con un procedimento di compensazione planimetrica rigorosa, senza condizioni. Il difetto di rango della matrice normale del sistema viene eliminato con la condizione aggiuntiva che sia minima la somma dei vettori differenza di posizione dei Punti Fiduciali determinati dal rilievo e quella determinata dalle coordinate cartografiche dei Punti Fiduciali stessi. Ancora meglio si puo’ dire che il calcolo di compensazione assolve contemporaneamente le funzione di minimizzare gli scarti tra le misure e determinare il piu’ probabile inquadramento cartografico del rilievo. Vediamo un esempio per illustrare il contributo del datum: Ecco un blocco di righe 8 contenuto in un libretto 8|PF20/B78C/H501C|-21702.655000|4458.002000|12|spigolo n. punto di confine con strada|
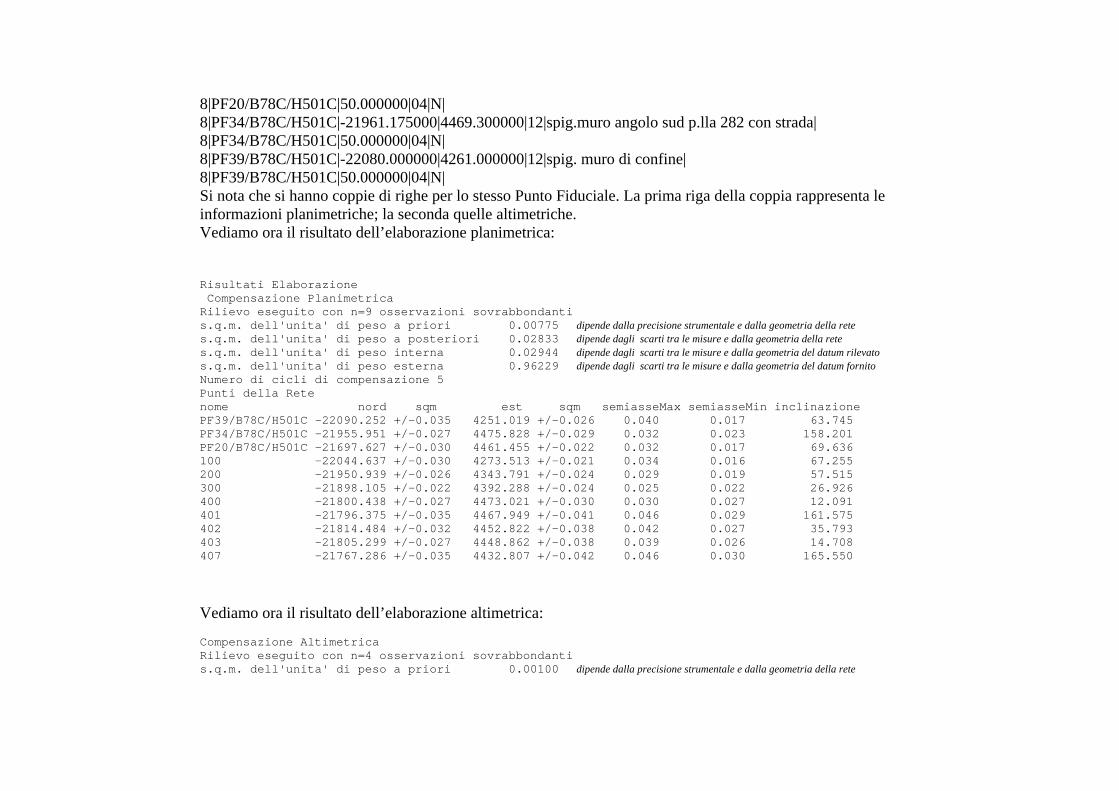
8|PF20/B78C/H501C|50.000000|04|N| 8|PF34/B78C/H501C|-21961.175000|4469.300000|12|spig.muro angolo sud p.lla 282 con strada| 8|PF34/B78C/H501C|50.000000|04|N| 8|PF39/B78C/H501C|-22080.000000|4261.000000|12|spig. muro di confine| 8|PF39/B78C/H501C|50.000000|04|N| Si nota che si hanno coppie di righe per lo stesso Punto Fiduciale. La prima riga della coppia rappresenta le informazioni planimetriche; la seconda quelle altimetriche. Vediamo ora il risultato dell’elaborazione planimetrica: Risultati Elaborazione Compensazione Planimetrica Rilievo eseguito con n=9 osservazioni sovrabbondanti s.q.m. dell'unita' di peso a priori 0.00775 dipende dalla precisione strumentale e dalla geometria della rete s.q.m. dell'unita' di peso a posteriori 0.02833 dipende dagli scarti tra le misure e dalla geometria della rete s.q.m. dell'unita' di peso interna 0.02944 dipende dagli scarti tra le misure e dalla geometria del datum rilevato s.q.m. dell'unita' di peso esterna 0.96229 dipende dagli scarti tra le misure e dalla geometria del datum fornito Numero di cicli di compensazione 5 Punti della Rete nome nord sqm est sqm semiasseMax semiasseMin inclinazione PF39/B78C/H501C -22090.252 +/-0.035 4251.019 +/-0.026 0.040 0.017 63.745 PF34/B78C/H501C -21955.951 +/-0.027 4475.828 +/-0.029 0.032 0.023 158.201 PF20/B78C/H501C -21697.627 +/-0.030 4461.455 +/-0.022 0.032 0.017 69.636 100 -22044.637 +/-0.030 4273.513 +/-0.021 0.034 0.016 67.255 200 -21950.939 +/-0.026 4343.791 +/-0.024 0.029 0.019 57.515 300 -21898.105 +/-0.022 4392.288 +/-0.024 0.025 0.022 26.926 400 -21800.438 +/-0.027 4473.021 +/-0.030 0.030 0.027 12.091 401 -21796.375 +/-0.035 4467.949 +/-0.041 0.046 0.029 161.575 402 -21814.484 +/-0.032 4452.822 +/-0.038 0.042 0.027 35.793 403 -21805.299 +/-0.027 4448.862 +/-0.038 0.039 0.026 14.708 407 -21767.286 +/-0.035 4432.807 +/-0.042 0.046 0.030 165.550
Vediamo ora il risultato dell’elaborazione altimetrica: Compensazione Altimetrica Rilievo eseguito con n=4 osservazioni sovrabbondanti s.q.m. dell'unita' di peso a priori 0.00100 dipende dalla precisione strumentale e dalla geometria della rete
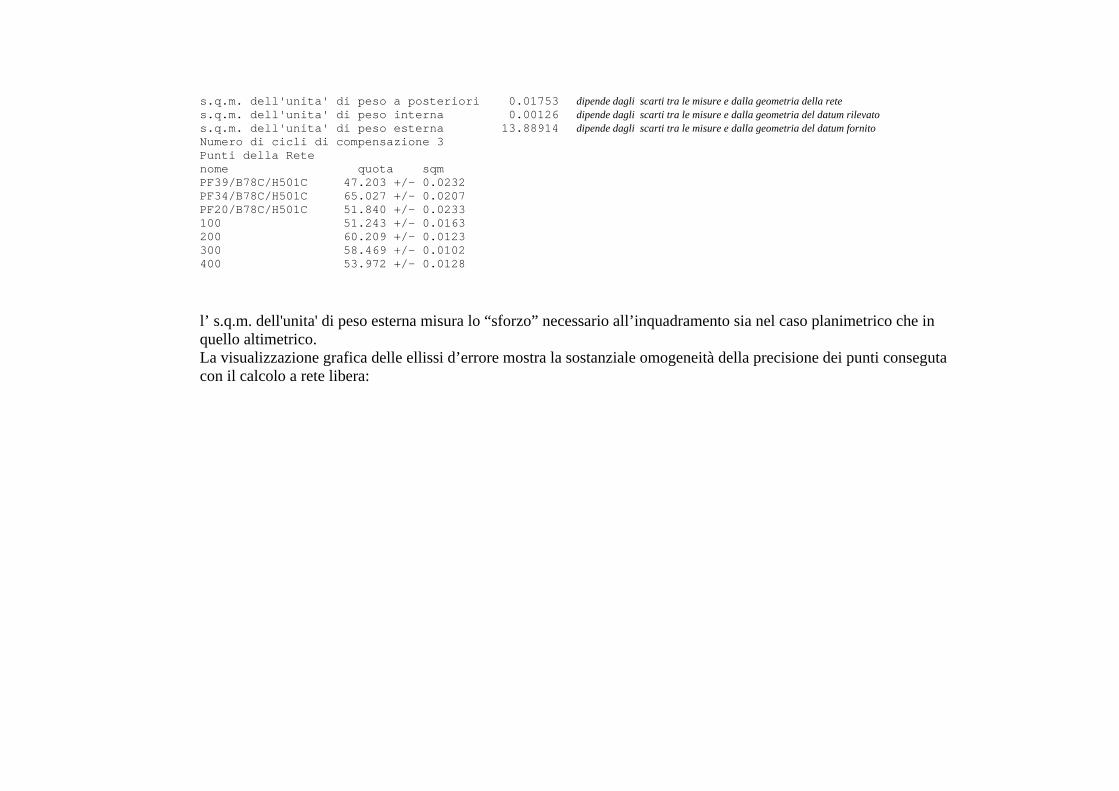
s.q.m. dell'unita' di peso a posteriori 0.01753 dipende dagli scarti tra le misure e dalla geometria della rete s.q.m. dell'unita' di peso interna 0.00126 dipende dagli scarti tra le misure e dalla geometria del datum rilevato s.q.m. dell'unita' di peso esterna 13.88914 dipende dagli scarti tra le misure e dalla geometria del datum fornito Numero di cicli di compensazione 3 Punti della Rete nome quota sqm PF39/B78C/H501C 47.203 +/- 0.0232 PF34/B78C/H501C 65.027 +/- 0.0207 PF20/B78C/H501C 51.840 +/- 0.0233 100 51.243 +/- 0.0163 200 60.209 +/- 0.0123 300 58.469 +/- 0.0102 400 53.972 +/- 0.0128
l’ s.q.m. dell'unita' di peso esterna misura lo “sforzo” necessario all’inquadramento sia nel caso planimetrico che in quello altimetrico. La visualizzazione grafica delle ellissi d’errore mostra la sostanziale omogeneità della precisione dei punti conseguta con il calcolo a rete libera:
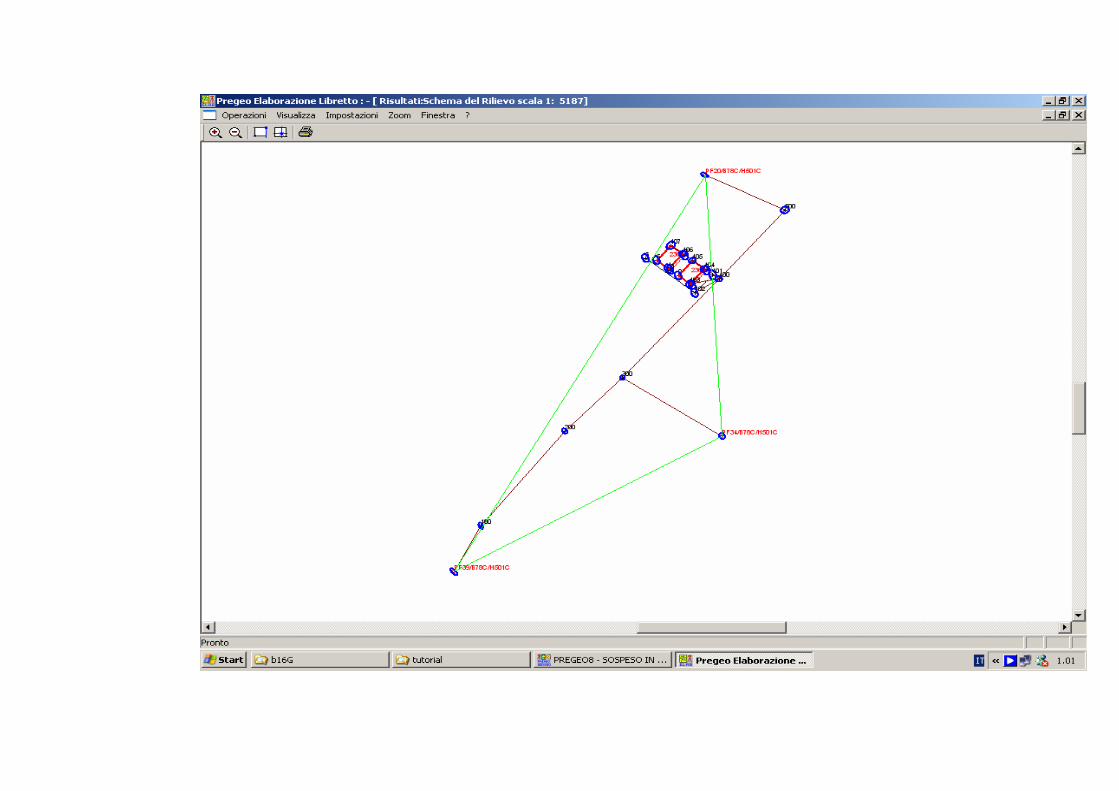
Il metodo della minimizzazione della traccia parziale ha il vantaggio di fornire immediatamente l’inquadramento “ottimo” senza distorcere la configurazione dei punti rilevati, pero’ puo’ fallire se le coordinate dei punti del datum sono in tutto od in parte molto difformi dalle posizioni rilevate. Il fallimento del calcolo viene evidenziato da valori elevatissimi dei semiassi delle ellissi standard d’errore. Si vuole infine osservare che il procedimento di calcolo segue un flusso “a rilassamento”: le coordinate approssimate dei punti rilevati vengono calcolate piu’volte a seguito dell’affinamento del calcolo delle quote approssimate. In questo modo la riduzione delle grandezze alla superficie di riferimento (e l’introduzione cartografica delle misure che viene calcolata contestualmente) è effettuata puntualmente e non sulla base della quota media. Infine se in un libretto delle misure il datum è completamente assente (caso escluso dalla norma) si applica la minimizzazione della traccia totale, determinando il migliore inquadramento della rete sulla posizione delle coordinate approssimate di tutti i vertici. Il trattamento delle Baseline GPS. Il modello di calcolo adottato consente di trattare rigorosamente le misure miste (GPS e tradizionali) a condizione che sia fornita la matrice di varianza-covarianza delle baselline GPS. Il metodo di rilassamento è particolarmente efficace quando nel rilievo ci sono baseline e punti a quota geoidica nota.
In Conclusione Bisogna dare atto ai funzionari dell’Agenzia del Territorio, di essere riusciti a recepire quasi pienamente le nuove tecnologie e metodologie di misura senza compromettere l’impostazione razionale e storica del sitema catastale.

Foese non ci si deve meravigliare eccessivamente poiché sebbene il sistema catastale è stato costituito nel 18-mo e 19-mo secolo, ad esso si sono applicati i Padri nobili della Geodesia e Cartografia.