Embed Size (px)
Citation preview
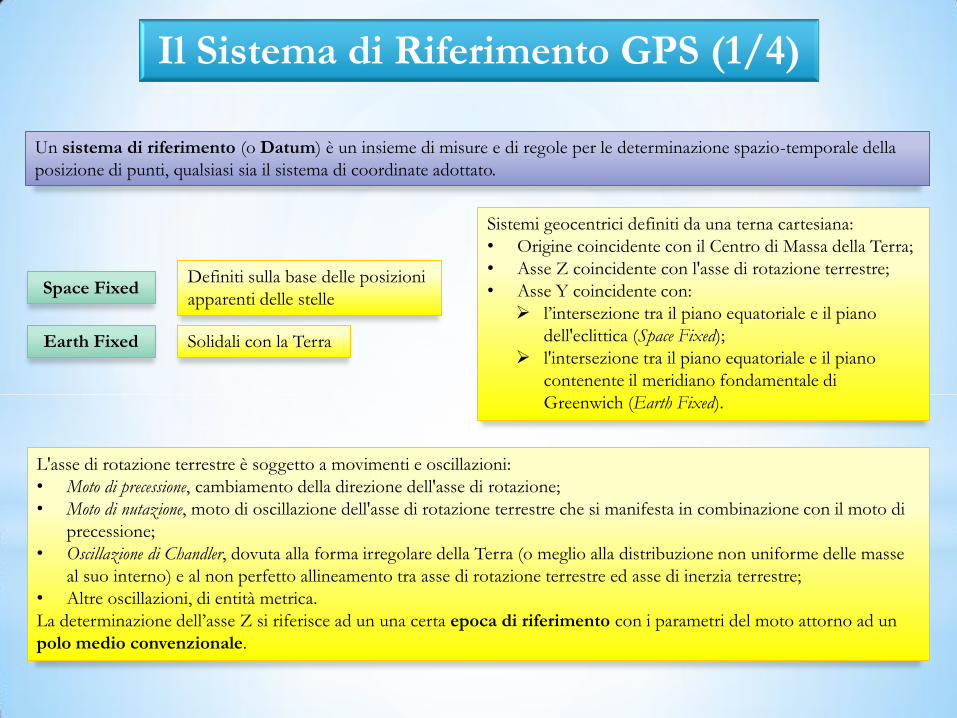
Il Sistema di Riferimento GPS (1/4)
Un sistema di riferimento (o Datum) è un insieme di misure e di regole per le determinazione spazio-temporale della
posizione di punti, qualsiasi sia il sistema di coordinate adottato.
Space Fixed
Earth Fixed
Definiti sulla base delle posizioni
apparenti delle stelle
Solidali con la Terra
Sistemi geocentrici definiti da una terna cartesiana:
• Origine coincidente con il Centro di Massa della Terra;
• Asse Z coincidente con l'asse di rotazione terrestre;
• Asse Y coincidente con:
l’intersezione tra il piano equatoriale e il piano
dell'eclittica (Space Fixed);
l'intersezione tra il piano equatoriale e il piano
contenente il meridiano fondamentale di
Greenwich (Earth Fixed).
L'asse di rotazione terrestre è soggetto a movimenti e oscillazioni:
• Moto di precessione, cambiamento della direzione dell'asse di rotazione;
• Moto di nutazione, moto di oscillazione dell'asse di rotazione terrestre che si manifesta in combinazione con il moto di
precessione;
• Oscillazione di Chandler, dovuta alla forma irregolare della Terra (o meglio alla distribuzione non uniforme delle masse
al suo interno) e al non perfetto allineamento tra asse di rotazione terrestre ed asse di inerzia terrestre;
• Altre oscillazioni, di entità metrica.
La determinazione dell’asse Z si riferisce ad un una certa epoca di riferimento con i parametri del moto attorno ad un
polo medio convenzionale.

WGS84
World Geodetic System 1984
• È determinato sulla base di osservazioni geodetiche effettuate da più di 1500
siti terrestri a partire dal 1987.
• È utilizzato come sistema di riferimento standard nel GPS e ad esso è associato
l'ellissoide WGS84 con i suoi parametri.
• È aggiornato nel tempo dal DMA (Defense Mapping Agency, USA).
• Le coordinate delle effermeridi (broadcast) dei satelliti sono espresse
direttamente nel sistema di riferimento GPS, per cui le coordinate di punti e le
componenti delle baseline ricavabili da un rilievo GPS sono automaticamente
espresse in tale sistema.
Il Sistema di Riferimento GPS (2/4)
• Un Sistema di Riferimento Terrestre Convenzionale (CTRS, Conventional Terrestrial Reference System) è definito in
maniera convenzionale individuando un polo medio ed un equatore medio in un certo periodo ed una direzione
convenzionale delle origini delle longitudini.
• La Realizzazione di un Sistema di Riferimento Terrestre (TRF, Terrestrial Reference Frame) consiste in un set di punti
fisici la cui posizione è determinata con una certa precisione in un particolare sistema di coordinate.
ITRF
International Terrestrial Reference Frame
• Determinato dallo IERS (International Earth Rotation Service), attraverso misure
di geodesia spaziale (SLR, Satellite Laser Ranging; VLBI, Very Long Baseline
Interferometry; LLR, Lunar Laser Ranging; GPS; DORIS, Doppler Orbitography and
Radiopositioning Integrated by Satellite).
• È intrinsecamente più accurato del WGS84 per cui è utilizzato come sistema
geodetico di riferimento nell’analisi di dati GPS per usi scientifici o comunque
nelle indagini che richiedono accuratezza millimetrica nella definizione delle
coordinate dei punti.
• Esistono varie realizzazioni denominate ITRFXX dove XX è l'epoca di
realizzazione.

Un Sistema di Riferimento (e la sua realizzazione) può essere definito anche su scala locale, a seconda degli scopi cui è
destinato.
• Si definisce un punto P (punto di emanazione) dove:
Le coordinate ellissoidiche e geografiche coincidono;
Si annullano (o sono convenzionalmente note) l'ondulazione del geoide e la deviazione della verticale.
• Si definisce un azimut geodetico imponendolo uguale ad un azimut ottenuto con misure astronomiche.
ETRF
European Terrestrial Reference Frame
• È determinato sulla base di osservazioni provenienti dalla rete di stazioni
GNSS permanenti EUREF (EUropean REFerence network), le cui coordinate
sono depurate dei valori di spostamento legati alla placca europea.
• Esistono varie realizzazioni denominate ETRFXX dove XX è l'epoca di
realizzazione.
Il Sistema di Riferimento GPS (3/4)
In Italia esistono due realizzazioni del sistema di riferimento GPS:
• IGM95, costituita da una rete di vertici materializzati e sparsi sul territorio nazionale, inquadrata nel sistema
ETRF89. È una rete "statica" in quanto le coordinate dei vertici sono state determinate una sola volta e mai più
aggiornate (non sono disponibili le velocità), per cui per utilizzare tali vertici è necessario stazionare nuovamente con
la strumentazione;
• RDN (Rete Dinamica Nazionale), costituita da stazioni permanenti sparse sul territorio nazionale, inquadrata nel
sistema ETRF2000. Di fatto ha sostituito la rete IGM95 diventando la realizzazione ufficiale.
Roma40
• È il sistema di riferimento nazionale da cui si origina la cartografia ufficiale italiana.
• È definito dall'ellissoide di Hayford, avente come punto di emanazione il vertice trigonometrico di
Roma Monte Mario ed orientamento sul vertice di Roma Monte Soratte.
• È realizzato dalla rete trigonometrica del primo ordine.

Rete Dinamica Nazionale (http://87.30.244.175/index.php)
International Terrestrial Reference Frame (http://itrf.ensg.ign.fr)
European Terrestrial Reference Frame (http://www.epncb.oma.be/)
Il Sistema di Riferimento GPS (4/4)

Trasformazione tra Sistemi di Riferimento (1/2)
Z1
Z2
Y2
X2
Y1
X1
P O
X0
RX
RY
RZ
Il generale la trasformazione tra sistemi geodetici passa attraverso una roto-traslazione con variazione di scala che,
quando viene applicata alle coordinate geocentriche, prende il nome di trasformazione di Helmert (o trasformazione a 7
parametri).
• La trasformazione può rendersi necessaria quando si conoscono le
coordinate di un punto in un sistema di riferimento e sia necessario, per
motivi vari, conoscerle in un altro.
• Il posizionamento con il GPS, per esempio, fornisce le coordinate dei punti
nel sistema WGS84 che però non è riportato nella cartografia ufficiale
italiana basata sui sistemi Roma40 e dove sono anche riportati i sistemi
ED50 (Europeo) ed ETRF89 (nella cartografia più recente).
1
1
1
0
0
0
2
2
2
102 11
Z
Y
X
Z
Y
X
Z
Y
X
RRSSS Modello di Helmert
1
1
1
100
0cossin
0sincos
cos0sin
010
sin0cos
cossin0
sincos0
001
XY
XZ
YZ
ZX
XZ
YX
YY
XX
XXZYX
RR
RR
RR
RR
RR
RR
RR
RR
RR
RRRR
Matrice
di
Rotazione
Per piccole rotazioni sinR R e cosR 1
Vettore Traslazioni
Fattore di Scala
Matrice Rotazioni
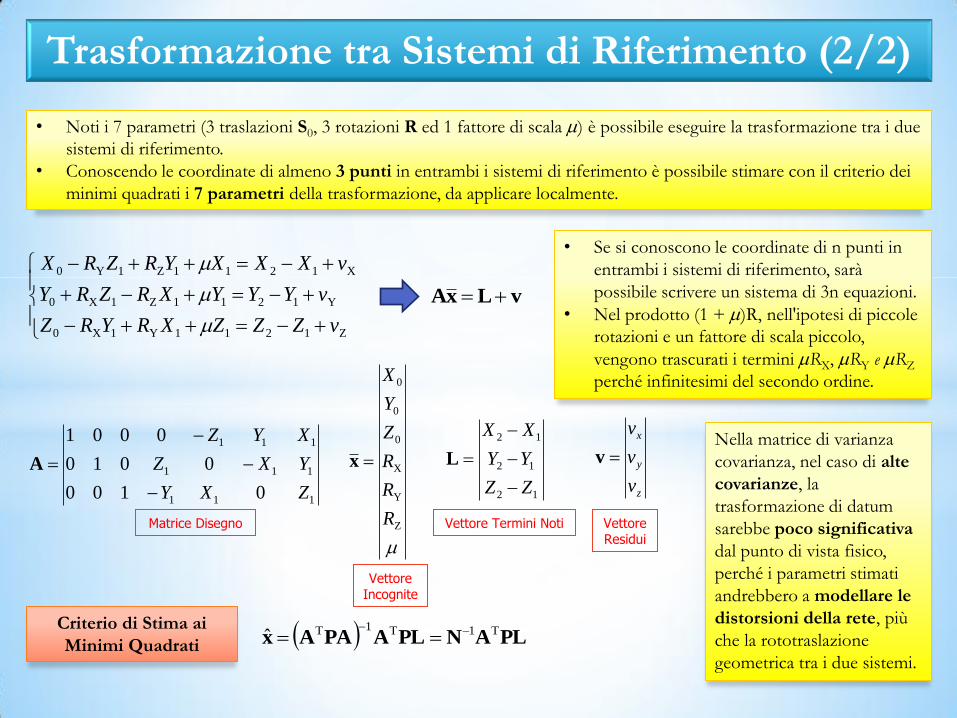
Trasformazione tra Sistemi di Riferimento (2/2)
• Noti i 7 parametri (3 traslazioni S0, 3 rotazioni R ed 1 fattore di scala ) è possibile eseguire la trasformazione tra i due
sistemi di riferimento.
• Conoscendo le coordinate di almeno 3 punti in entrambi i sistemi di riferimento è possibile stimare con il criterio dei
minimi quadrati i 7 parametri della trasformazione, da applicare localmente.
Z1211Y1X0
Y1211Z1X0
X1211Z1Y0
vZZZXRYRZ
vYYYXRZRY
vXXXYRZRX
111
111
111
0100
0010
0001
ZXY
YXZ
XYZ
A
Z
Y
X
0
0
0
R
R
R
Z
Y
X
x
• Se si conoscono le coordinate di n punti in
entrambi i sistemi di riferimento, sarà
possibile scrivere un sistema di 3n equazioni.
• Nel prodotto (1 + )R, nell'ipotesi di piccole
rotazioni e un fattore di scala piccolo,
vengono trascurati i termini RX, RY e RZ
perché infinitesimi del secondo ordine.
vLxA
12
12
12
ZZ
YY
XX
L
z
y
x
v
v
v
v
Matrice Disegno
Vettore Incognite
Vettore Termini Noti Vettore Residui
Criterio di Stima ai
Minimi Quadrati PLANPLAPAAxT1T1Tˆ
Nella matrice di varianza
covarianza, nel caso di alte
covarianze, la
trasformazione di datum
sarebbe poco significativa
dal punto di vista fisico,
perché i parametri stimati
andrebbero a modellare le
distorsioni della rete, più
che la rototraslazione
geometrica tra i due sistemi.

Trasformazione tra Sistemi di Coordinate
(N, E, h)1
(φ, λ, h)1
(X, Y, Z)1
Rototraslazione a 7 Parametri
(N, E, h)2
(φ, λ, h)2
(X, Y, Z)2
Coordinate Cartografiche
Coordinate Geografiche
Coordinate Geocentriche





























