Embed Size (px)
Citation preview
Institute of Systems, Control and Information Engineers
NII-Electronic Library Service
工nstitute of Systems , Control and 工nformation Engineers
174 シ ス テ ム /制御1情報,voL 55, No ,5, pp.174−180,2011
IIIill[1 lil[III1 lll 1し1 II旨ll1ト1し11111 liレlillllllll IEIil 1旨1】llll1Elillillll111 11111111111111111111[1しIIII1トlil11旨1旨1[i11111111111111 lil1ト11illll}111illili[1LI Illlli1EIトIIII1 1 1しilil[lll11ilトIIl1111旨1[1]レ1111レ1 111ilヒ1し11】ilヒIllllllレ1 11し111旨ll「IEI「1 「1「1「「1FI「「i「1「「1「1「1「」「1ト「1「IEr」「「d「」「t」
讎灘灘攤礁飜盤齷齷攤鬮韈羅藩灘覊 bve 攤 鑓畷躍蠶纈 解 説
二 乗和に基づ く制御系解析 ・ 設計
市原 裕之 *
lEltll11 1[1亅[1トI III III1ト111 lllll11 illト1しト lll 1旨L]1「il[1111[1[I I[lil111[] 11111 1ilil lil1し1II 「ilillilil ト111[11111 ヒ[1ト1旨Illil11 11」[1 111il l lil[111トIIIIIIII IIIili1し1[lllll1 1 II IIIIIIILI[1111111[1 lllll l1LII IIIil L1[1[1し1il llli[1il IIII 1LII 1ヒIEIhl旨1 11111 111111ト1[1illll1ト1レlllll l 1 111111 1[lil11111 1L
L は じめに
制御系 の 解析や 設 計に お い て,線形行列不等式(LMI :
Lilleaエ Matrix Inequality)[1]が 強力 な 道具 で あ る こ と
は 広 くしられ て い る.2000 年頃か ら,こ の LMI を用
い た新 し い 話題 が議論さ れ始め た.二 乗和 (SOS : Su皿
of Squares)[21は,そ れ まで の LMI の 成果 で は扱 い に
くか っ た非線形性の 強 い 問題 を扱え る 可 能性を広げた.
簡単 に い えば,すべ て の 実変数 に対 して 非負 に な ら ない
実多項式 の 存在 を半正定値計画問題 (SDP :Semidefinite
Programming ),すなわち LMI を解 い て確認 で きる こ
とが示さ れ た .ゆ え に,制御系の 解析や 設計 の 問題 を実
多項式 が 非負 で あ る よ うな条件 で 表 し, 対応す る LMI
の 可解性を調べ れ ば よ い .
二 乗和 の 計算を す る た め に は,二 乗和条件 を LMI に
変換す る SOS パー
サと,変換 された LMI を解 くた め
の SDP ソ ル バ が 必要 に な る. MATLAB 用 SOS パー
サ に は,SOSTOOLS [31,
YALMIP [4]な どが あ る.こ の
うち,YALMIP は, SOSTOOI 、S に 比べ ,パー
サ と し
て の処 理 が 高速 で ある.ま た,LMI や行列値の 二乗和に
も対応して い る た め ,複雜な解析条件や 設計仕様を記述
しやす い ,しか し一
方 で ,二 乗和 の 考え方をあ る程度 正
確に 理 解 して い な い と,意 図 した 計算 は で きな い .
二 乗和 に 関す る解説 は す で に 数多くあ る [5−IOI.本稿
で は ,こ れ らとは趣 きを変え,YALMIP を用 い て 実際
に計算する こ とを 目標 とする.そ の 中で,二乗和と LMI
の 関係 ,二 乗和 の 性質,行列値 の :二乗和 につ い て ,制御
系解析 お よ び 設 計 で の 例 を交 えなが ら紹介す る .
2. 線形行列不等式
準備と して,つ ぎの LMI を考え よ う.
h
雌 ξ)=MD + Σξ幽 とO i=1
(1)
・ だ ・,・M ・ (・一・,.翔 嫐 ・ 対称槲 ξ一[ξ・
… ξ・]T
は未知 の 変数 (決定変数)と す る.(/)式に含まれ る等
号条件 は,取 り除い て 書 くこ ともで きる1,い ま,(1)式
に対 し て,新た な 決 定 変 数 と して M と 同 じサ イ ズ の 対
称行列 Q を導入すれば, 以下 の 問題 に書 き直す こ とがで
きる.
Q ≧:0,M (ξ)=(〜 (2)
*明治大 学 理 工 学部
Kev womb : suln of squares, linear matrix inequalityl
cQntrol applications ,
こ の 問題 で は,ξお よ び G が 決定変数に な る.こ こ で心
に留め て お きた い の は,LMI は,決定変数に
「半正定値拘束」お よ び「線形等式拘束」
を課 して い る こ とで あ る2,
制御に お い て 二乗和を扱うと きに よ く使わ れ る MAT −
LAB 用 SDP ソ ル バ に は, LMILAB [//], SeDuMi [12],
SDPT3 [13】などが あ る.大まか に い えば, LMI を(1)式
の 形 で扱 うの が LMILAB ,(2)式 の 形 で扱 うの が Se−
DuMi や SDPT3 と思 っ て よ い ,ソ ル バ に よ る LMI の
表現 の 違 い は,YAI 、MIP で 吸収さ れ る の で ,ふ だ ん は
意識する必要 は な い .本稿 で は,SeDuMi を使うこ と を
前提 と し て 話 をすす め る .
3. 二 乗和 とは
実変数 Xl ,M2 に対 して , あ る実多項式
xl 十4甜 1物 十 5略
を考え よ う.こ の 多項式 は, (Xl + 2x2 )
2+魂 と二 乗項 の
和に分解 して 書け る の で,x’1, x2 に どん な実数を代 入 し
て も負の 値をとる こ とは ない .ml + 2m2 と x2 の そ れ ぞ
れ の 二 乗 は負 に な らず,そ れ ら の 和も負 に な ら な い .こ
の よ うに, 多項式 の 二 乗項 の 和 で 表現 で き る 多項式 を 二
乗和多項式 (SOS polynomial )と よぶ .その 最 も著 しい
性質 は,任意の 実数に対 し て多項式 が負に な ら な い こ と
で あ る,
と こ ろ で ,例 に あげて い る多項式 は,二 乗和 か ら ある
二 次形式 に書 き直す こ とが で きる .
1十分小 さ な正 数 ε を用い て,(1)式 の M (ξ)をM (ξ〉一 εf
で 置 き換 えれ ば,Af (ξ)} εJ >−O と 書け る.
2
(2)式 に お ける ξの よ うに,半正 定値 に拘束 させ ない 変
数 は あ っ て もよ い .実 際,ξ1,ξ2 ≧ o お よ び ξ・・ξ1一ξ2
を 導入 し,ξを ξ1 ,ξ2 に 置 き換 え る と き,すべ て の 決
走変数を半正 定値 に 拘 束す る形 で 書 くこ とがで きる.
/6 一
N 工工一Eleotronio Library
Institute of Systems, Control and Information Engineers
NII-Electronic Library Service
工nstitute of Systems , Control and 工nformation Engineers
市 原 :二 乗和 に 基づ く制御系解析 ・設計 175
(・ ・・ ・…2・ =3− [
一 [ 一[ 一[
鼎亂爿ゴ北 ]
2
剛
1[二 次形式 を構成す る対称行列 の 固有値 は 0.1716と 5.8284
なの で ,正定値行列 で あ る こ とが わ か る .二 次形式 に よ
る表現 か ら も,こ の 多項式 は任 意 の 実変 数 に対 して 非 負
で あ る とい える.
こ れ ら多項式 の 非負性 に 関す る 二 つ の 事実 は等価 で あ
る こ とが し られ て い る.つ ま り,ある多項式が 二乗和に
分解 で きれ ば,半正 定値行列 で 構成 さ れ る 二 次形式が存
在す る .逆 も成立 し,つ ぎの よ うに ま とめ られ る .
【定理 1】 [2] x ∈ Rn の 多項式
P (x )一ΣP ・x
α
,x
α
… xrxg2 …鵄
・
α ∈∫
(3)
が 二 乗和 で ある ため の 必要十分条件 は, あ る 半正定値行
列 Q お よ び m の 単項 式 ベ ク トル x (x )に つ い て,
P(x )= x (m )Tc2x
(x ) (4)
が すべ て の x に つ い て 成 り立 つ こ とで あ る .た だ し,pα
は 単項式の 係数,F は 単項式に 関す る イ ン デ ッ ク ス を
表す.
単項式 ベ ク トル と半正定値行列を使 っ た二 次形式 で表
せ る多項式 は 二乗和 とわか っ た の で ,今度 は,二次形式
の 方か ら多項式が 二乗和に 分解で きる こ と を確認 して み
よ う.LMI に よ る 計算 に は こ ち らの 方 が 向い て い る .多
項式
P(x )=2mi十3瓢 晝x3 −十一2xlx塁十4x茎
が 二 乗和 に分解 で きる か ど うか 調べ る た め,
魂網 iill]とお く.こ こ で,(4)式 が すべ て の 実数 XI , x2 に つ い て
成 り立 つ た め に は ,(4)式 を恒等式 と考え,両 辺 の 各単
項式 の 係数 同 士 が等し くな る必 要が あ る.つ ま り,以 下
の Q に 関 す る 線形方程式 が 成 り立 て ば よい .
g1=2,2q2=O, α3 十 2q4 =3
,2q5 =2
, q6=4 (5)
Q は 半 正 定値行 列 な の で ,こ の 問題 は 2.で 述 べ た 「半
正 定値拘束 」 お よ び 「線形等式拘束」 が 課 さ れ て お り,
LMI で ある.こ れ を解 い て 実行可能解 を求 め る こ とがで
きれ ば,p が二 乗和多項式 で あ る こ と を確認 で き る.以
上 の こ と は,一般的に まとめ る こ とが で きる.
【定理 2】 [21 多項式 (3)が 二次形式(4)で表さ れ る
た め の 必要十分条件 は,つ ぎの LMI が実行可能解を も
つ こ とで あ る.
find Q s.t. Q と 07 tr(A α(?)= Pa α ∈ ∫
ただし,A αは z(x )z (x )
T ;Σα∈ アAaX α
を満 た す.
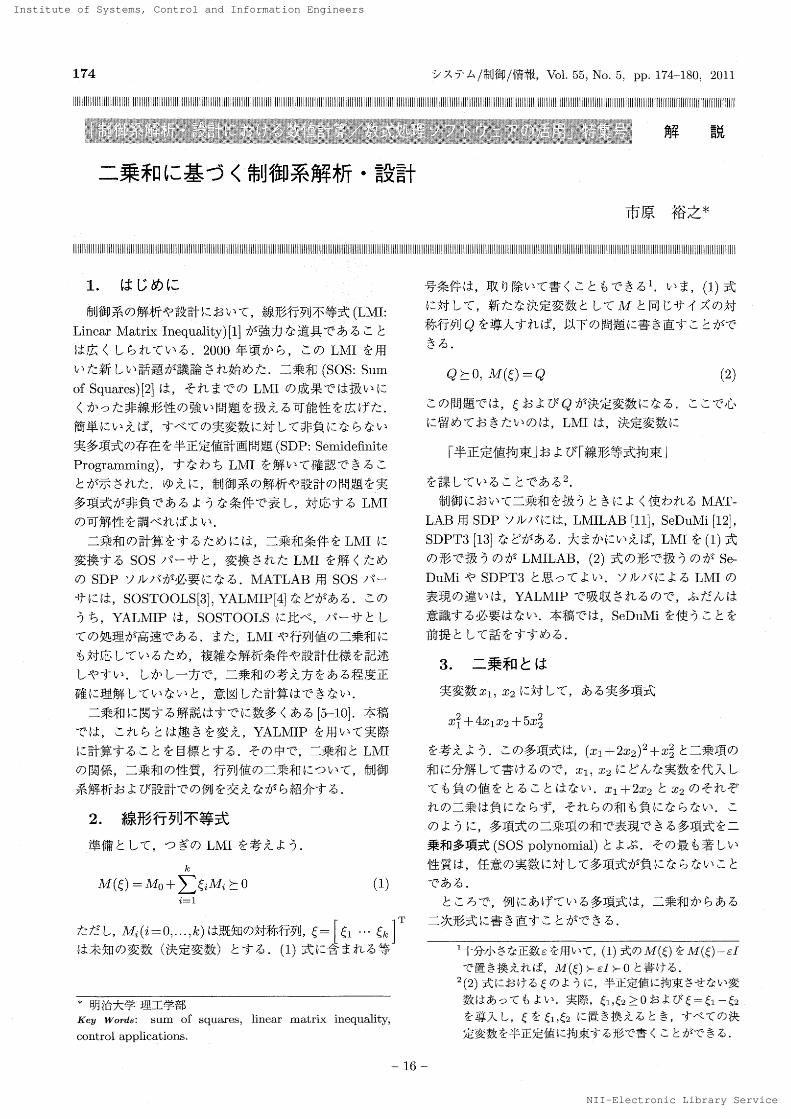
計算 の 準備 で 意 外 と手間 が か か る の は,(4)式の 両 辺
の 単項式 の 係数を取 り出 し, 線形方程式 (5)を 導 く作業
であろ う.計算機で は,数値的 よ りもむ しろ数式的な処
理 とい える.こ の 処理 を含め 二 乗和に基づ く LMI を解
くため の コー
ドを示す.
艦灘擁嬲嬲
搬
ー
灘轗
律ー
糶
懇
飜
飜轢
馨・
戀獵
韈
飜
驪懸
韈
−灘鑵難驚
働「露
炉
鰈
.聽懇覊
韆聾
.灘鑾
講.
灘
,
鑢韈驪
齦
濘
嚀
嚀
磯嬲
、灘
灘’,
2行 目で 多項式 p,3行 目で 単項式ベ ク トル z ,4行 目で 対称
行列 Q をそれ ぞ れ定義して い る.5行目で coefficients
を使 い ,(4〕式 の 両辺 の 単項式 の 係数 を取 り出す処理を
行 っ て い る ,YALMIP は SOSTOOLS に比べ ,こ の 処
理が 高速で あ る こ とに特徴が あ る,さ らに,6 行目で Qに 半正 定値拘束 を課 し
,7行 目で LMI を解 い て い る .
こ の コー
ドは ,SOS Module の コ マ ン ドを使えぱ,つ
ぎの ように,よ り簡潔に書ける.
鏃
戀鯔鱗黼驪
叢覊韈難難鑼
鞴驪羅鏃
鑿瞬
饗榊欝伊 鍵脇
嬲覊
萋
霧
覊鸞ー
榊
鑠
嬲 脚鸛翻轟戮
3 行目の sos で, p が 二 乗和 で あ る た め の 条件 が 二 次形
式 を 通 し て LMI に 書 き下 さ れ る .こ の と き内部で , Qに相当す る 変数が定義さ れ半正定値拘束が課 され る.4
行 目の s 。lvesos で , LMI が ソ ル バ に渡され 解 か れ て
い る.実行後,つ ぎに 示す ように sol .pr 。ble 皿 が 0 で
あ れ ば,LMI は 可解 で あ る
1,
>> so1 ・proble皿
en5 =
o
Q の 最小固有値が 非負 で あ る こ と も確認 して お こ う.
〉> 皿 in (eig (Q{t}))
ans =
1sol .problem が 0 とな る と き,“LMI は可 解
”と書 く
こ とに す る.
一17 一
N 工工一Eleotronio Library
Institute of Systems, Control and Information Engineers
NII-Electronic Library Service
工nstitute of Systems , Control and 工nformation Engineers
176 シ ス テ ム /制 御1情 報 第 55 巻 第 5 号 (2011)
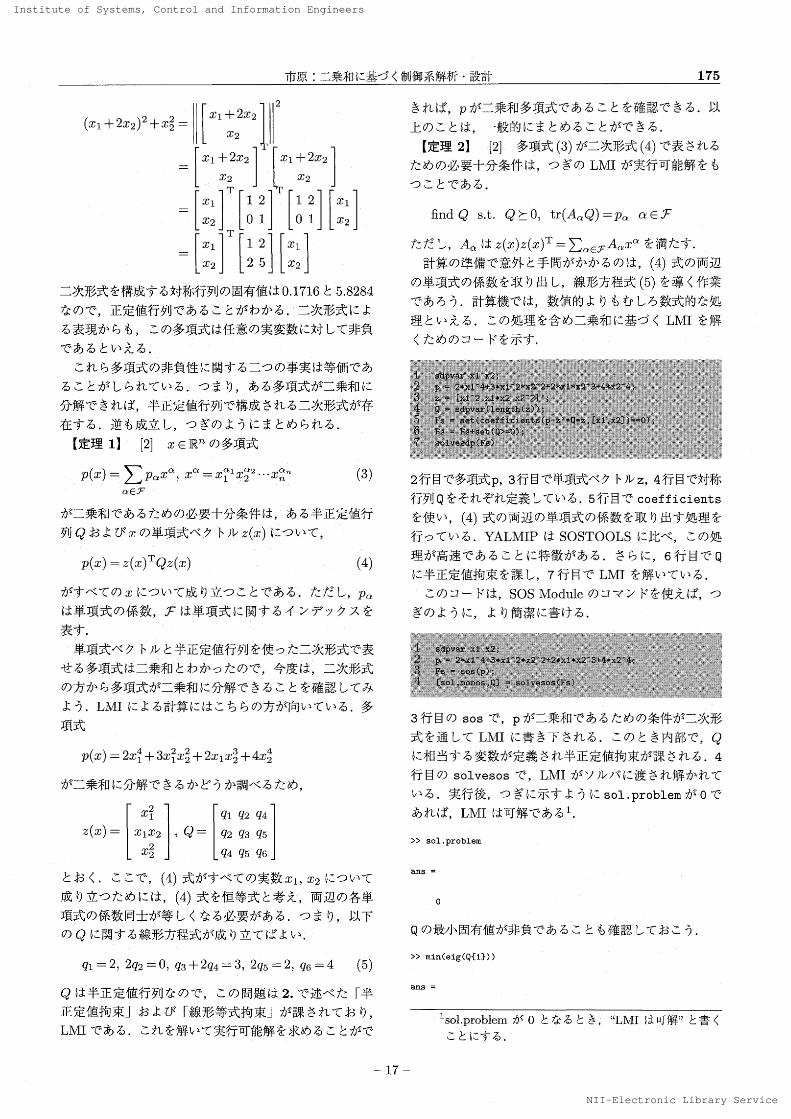
こ の 条件を計算す る ため に は, 事前 に
1.9340
注 目したい の は,こ の コ ードで は a に関する情報を与え
て い ない こ とで あ る,実際 に計算で 使 わ れ た x は,つ ぎ
の よ うに 確認 で き る .
〉> sdisplay (m 。n 。 s{1})
a皿 S 昌
,x2 −2,,x1 * x2 ン,x1 冖2,
順序 は違 うが,は じめ の コー
ドの 3 行 目で 与 えた z と同
じ単項式 で構成 され て い る.機械 的 に z を 構成 す る に は,
p の 最高次数 の 半分 を x の 最高次数 と し, そ の 次数以 下
の すべ て の組合せ の単項式を z にすれ ば よ い .こ の 例だ
と,以下 の 6個 の単項式が考えられ る.
1,Xb x2 ,・xl , x 、x2 ,姥
SOS Module で は,こ の 中か ら
2 2Z1 ,XIX27 富2
の 3個の単項式を選択する処理 を して い る.もちろ ん,6
個 の 単項式か ら LMI を構成 して も可解性に影響は ない .
し か し,x の サ イズ を低 く抑 え る こ と が で きれ ば, LMI
の サ イ ズ が 小 さ く な り, 計算 を速 く実行で き る.こ こ で
の 処理 は, 多項式が同次で あ る こ と を利用 して もわ か る
単純な もの だが ,SOS Module に は ,い くつ か の有用な
単項式の 削減 (reduction )手法 [14]が 実装 され て い る,
理解 をさ ら に深 め る た め に ,二 乗和 の た め に 構成 した
二 次形式 (4)に 現 れ る半正定値行列 Q の 自由度 に つ い て
観察 し よう.さ きほ ど の 例 で は,Q に 関す る線形方程式
(5)は, 5 つ の 方程武 に対 して 変数 は 6 つ な の で ,解 に
は 1 つ の 自由度があ る.たとえ ば,q3をそ の 自由度 と す
れ ば,Q は つ ぎの よ うに 2 つ の 行列の 和で表すこ とが で
きる ,
・ 一 期 一 鬩 慨 詐p が二 乗和 で あ る た め に は,こ の 表現 の 中 か らQ を半 正
定値 に す る q3 を見 つ けれ ば よ い . q3 は一意 と は 限 ら な
い の で ,1 つ の :二 乗和多項式 を 表す複数 の 二 次形式表現
が 存在 す る こ とが わ か る.
こ の 事実を 陽 に表した 二 乗和 の 計算条件 も早 くか らし
られ て い る {15 ,16
,10】.一
般 に は,定理 2 の LMI の 代 わ
りに,つ ぎの 問題 の 可解性を確認すれ ば よ い .
P(x )一・ (x )Tθ宛 ),
θ一sT (6)
を満 た す 5 の 具体的な表現が 1 つ 必要 に な る.たとえば,
S を求め る 問題 を線形計画問題 (LP ;Linear Progran1−
ming )に帰着させ る こ とが で きる1.つ ま り,(6)武の 両 セ
辺 の 係数 を比較す る こ とで 線形方程式 を導出 し,そ の 解
の 1 つ を探せ ば よ い .こ の 方針 に 従 っ て S を求め,続 い
て p が 二 乗和 で ある こ と を確認す るた め の コ ードを示す.
偶然 に採 用 し た 8 の 表現 の 違 い に よ っ て, 最後 に 解 く
LMI の 可解性が変わ る こ とはな い .
4. 二 乗和の 非線形 シス テ ム 解.析 へ の応用
4 .1 非負多項式
変数に任意の実数を代入 して も負に な らな い 多項式は
非負多項式 (nonnegative polynollよial)あ る い は正多項
式 (positive polynomial )とよ ばれ る.こ れまで の 話か
ら,
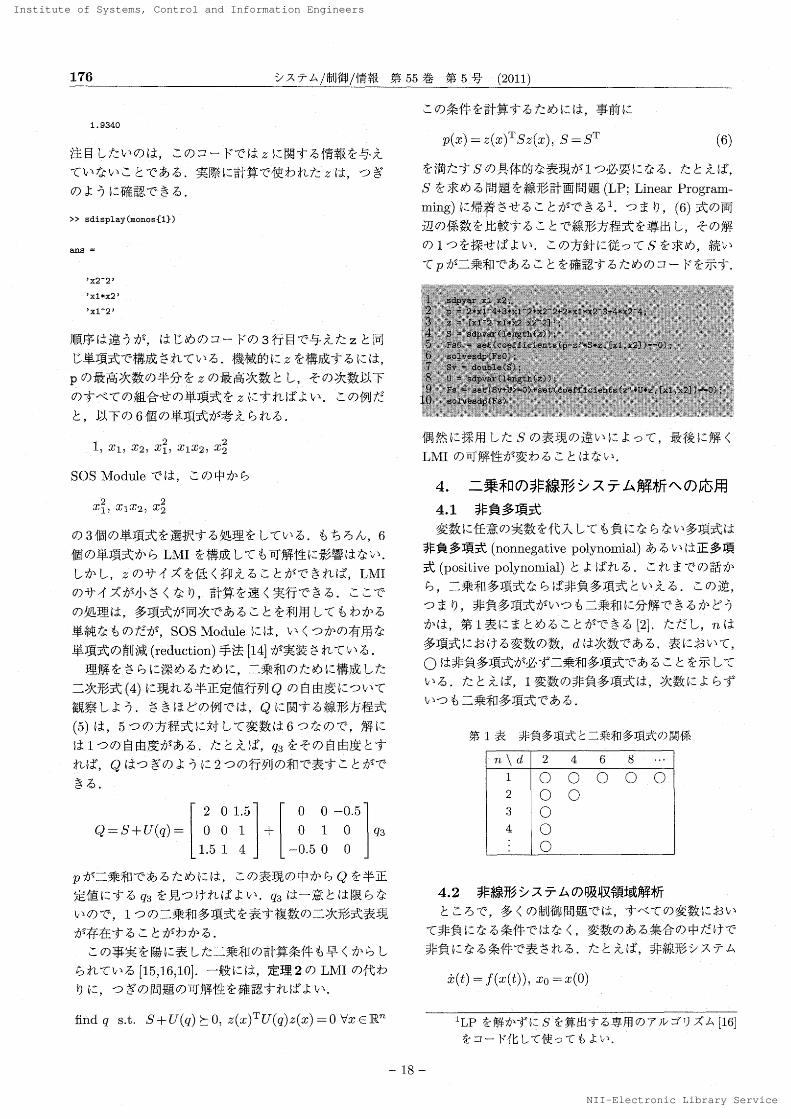
二 乗和多項式な ら ば 非負多項式 とい え る.こ の 逆 ,つ ま り, 非負多項式が い つ も二 乗和 に 分解 で き る か ど う
か は,第 1表に まとめ る こ とが で きる [2].ただ し,n は
多項式にお ける 変数の数,d は次数で あ る.表にお い て,
○ は非負多項式 が 必ず 二 乗和多項式 で あ る こ と を示 して
い る.たとえば,1変数 の 非負多項式 は ,次数 に よ らず
い つ も二 乗 和 多項式 で あ る.
第 1 表 非負多項 式 と二 乗和多項式の 関係
旭 42 4 6 8 …
1 ○ ○ ○ ○ ○
2 ○ ○3 ○
4 ○
○
find(1 s.t, 5 十 σ(のと0, x(x
’)Tσ(q)z (m );0 ∀x ∈ Rn
4 .2 非線形シ ス テ ム の 吸収領域解析
と こ ろ で, 多 くの 制御 問題 で は,す べ て の 変数 に お い
て 非負に な る条件 で は なく, 変数 の あ る集合の 中だ けで
非負に なる条件 で表され る.た と えば, 非線形 シ ス テ ム
雄 );f(x (t)),灘o置欝 (0)
ILPを解 かず に 3 を算出 する 専用 の ア ル ゴ リズ ム [16]
をコー
ド化 し て 使 っ て も よい .
18 一
N 工工一Eleotronio Library
Institute of Systems, Control and Information Engineers
NII-Electronic Library Service
工nstitute of Systems , Control and 工nformation Engineers
市原 二 乗和 に 基 づ く制御 系解析 ・設 計 177
の 吸収領域推定問題 [9]を考えよ う.た だ し,
一 圍,… 一レ.認二、司とする,こ の シ ス テ ム は ,x ;O が唯
一の 平衡点 で あ り,
そ の 付近 で 局所的 に漸近安定な シ ス テ ム で あ る.吸収
領域 と は,こ の 平衡点か ら離 れ た と こ ろ に初期値 Xe を
置 い た と.き,解軌道が平衡点 に 戻 る こ と が で きる 状態
空 閲上 の 集合 を 意 味す る.こ こ で は ,こ の 吸 収領 域 を 内
側 か ら推定す る こ と を考 え る.この 推定 に は, 局所的な
Lyapunov関数 V (x )の レ ベ ル 集合
n − {xER2 v (x )≦ ッ }
を用 い る こ とが で きる [17].V (x )が与 えられて い る と
き,7(> 0)が 大きけれ ば,推定領域 ∫2が広 くな る.で
きる だけ広 い Ω を得 る こ と に 工 学的 な 意味 が あ る.この
推定 問 題が満 た す べ き条件 は ,つ ぎの よ うに 表せ る .
吻 一∂
器)ノ(x )・ ・ ∀ ・ ∈ 9 \{・} (・)
こ こで,\は差集合を表す.∫2\{0}は,集合 9 か ら原点
0 を除 い た 集合 で あ る .こ の よ うに, あ る 集合 (こ の 場
合,O \{0})の 中 で多項式 の 符号 が定ま る よ うな条件 の
記述 に二 乗和 が 利用 で きる.
対応す る 二 乗和条件 は ,つ ぎの ように書け る.
∂y @) ノ(= )
− 51 @)(ツーv (m )〉
∂x
一ε宀 一 β。@)∀ 毋 ∈ R2 (8)
こ こ で ,So,
ε1 は 二 乗和 多項式 を表 して お り, So (0)=
Sl (0)=0 を満 た す とす る.こ れ らの 二 乗 和多項 式 の 係数
が 決定変数と な る.一・方,V に加 えて,7,ε もあ らか
じめ与 えられ て い る とす る.ε は 十分小 さな正数 で ある.
(8)式を書き換え,
∂
琶1コP)f(の=s 。(x )+ 8 、@)(・一咄 励
とす れ ば,x ∈ ∫2\{0}にお い て (∂V (X)/∂X)f(tl)< 0 が
成 り立 つ こ と が容易 に わ か る .つ ま り,(8)式 は (7)式
の 十 分 条件で あ る.
具体 的 に計算す る た め に は,51 を構成 す る単項式 ベ ク
トル を決 め て お く必要があ る.それ に 伴 っ て s が必然
的 に決まる,以上の計算を実現する コー
ドを示す.た だ
し,7 = 1,0,V (x )= 1.5x子一xlx2 十 x 曇,ε ;1.Ox10 6
を与 えて い る、また ,Sl の 次数を 2 とす る,
こ の コ ードで ,ユ ーザが定義す る sdpvar 変数 は,
シ ス
テ ム の 状態 を表す x と二 乗和多項式 sl の 係数 で あ る. x
は二 乗和条件 に おける多項式 の 変数で あ る一方 ,
sl の 係
数は決定変数で あ る こ とを ソ ル バ に理解させ なければ な
ら ない .こ こ で は,1 つ の テ ク ニ ッ ク を試み た,計算に
用 い る 条件は ,6 行目の Fs に まと め ら れ て い る が ,こ
の 中 に は通常,こ こ まで に現 れ た sdpvar 変数に 関する
情報 がすべ て 含 まれ て い る.そ こ で ,7 行 目で,Fs の
中か ら x 以外 の sdpvar 変数 を取 り出 し, paralnsと し
て い る.こ の 処理で ,決定変数が 自動的 に選ばれ る1.8
行 目の solvesos で こ の 情報 を受 け取 り,二 乗和多項式
So の 係数に相当する変数を内部で 生成 しLMI を構成 し
た後,ソ ル バ が 解 い た 結果 を提示す る.3 行目で 7(ga皿 )
を 1.O に して い る が,2.3044まで 大 きくして も LMI は
可解で あ る.
ま た,4 行 目の polynomiaユ の 使 い 方 に も注意が 必要
と なる ,こ こ で は,単項式ベ ク トル z が [Xl x2 ITで あ
る二 乗和多項式を (4)式と矛盾が な い ように コ ード化し
た い .その た め,最高次数,最低次数 と もに 2 と指定 し
て い る .仮 に polyn 。mia1 (x ,2)とす る と,定数項 まで
含 む多項式と な り, 意図 した もの と若干異 な る.
こ の よ うな個別の ケー
ス に 対す る 配慮 が 必要 に な る た
め ,polyn 。 mial の 代 わ りに,単項式ベ ク トル を 引数と
し ,二 次形式か ら多項式 を生成す る簡単 な関数 m フ ァ
イル を準備す る こ とを勧め る.たとえば,付録 1.に示
す qf_polynomia1 を使 え ば,4 行 目は
,つ ぎの ように
書 くこ と が で きる.
獵韈鑼韆鸚驪,韈韆鸚鸚懸鑼こ の よ うに して お けば,z1 を書き換え る こ とで ,意図
した 二 乗和多項式を簡単に 記述 で きる.
多項式 で 表され る 有限個 の 等式や不等式を満たす集合
を半代数集合 とよぶ .一般 に,半代数集合上 で非負に し
た い ,ある い は 非負 で ある こ とを 確認 した い 多項式 が あ
る と き , そ の 条件 を 二 乗和 を介 し て LMI を解 くこ と で
確認で きる [5].すで に述 べ た よ うに,二 乗和条件 (8)は,
も との安定解析条件 (7)に 対す る 十分条件で ある が ,新
た に 導入 した 二 乗和多項式 Sl の 次数を上げ て い けば,必
要条件 に近 づ くこ とが 知 ら れ て い る.s1 の 次数を上 げ る
と は,具体 的 に は,新 た に書 い た 4 行 目の z1 に,
よ り
高次 の 単項式 を加えて い くこ とを意味す る.こ の 例 で は,
次数を上げて も7 が 2.0344 よ り大きな値で LMI が 可解
と な る こ と は な い た め ,固定 さ れ た Lyapuriov 関数 に対
して は,必要条件 に もな っ て い る と見なす こ とが で きる.
た だ し,次数 を上 げ る ほ ど,最終的 に 解 く LMI の サ イ
ズ が 大 きくな り, 実行速度 や メ モ リの 関係で ,実行可 能
解 を得 る こ とが 難 し くな っ て い く.1複雑な問 題 を扱う場合,こ の 書 き方 は コ ードの ミ ス を
減 らすた め に 有効 と考え られ る.
一19 一
N 工工一Eleotronio Library
Institute of Systems, Control and Information Engineers
NII-Electronic Library Service
工nstitute of Systems , Control and 工nformation Engineers
178 シ ス テ ム /制御/情報 窮 55 巻 第 5 号 (2011)
5. 二 乗和 の ロ バ ス ト性解析 へ の 応用
5.1 行列値の 二 乗和
二 乗和 の 考 え 方 は, 対称行列値 の 多項式 に も拡張され
て い る [18−20].い くつ かの 行列多項式とそ れ らの転置
の積の和で書ける対称行列多項式は ,二 乗和 で あ る.よ
り簡潔に は,つ ぎの よ うに 1 つ の 行列多項式 G とその 転
置 と の 積 で 表 せ れ ば よ い .
P @)一Σ碗 )T碗 )=・・G (i )
Tσ(a;)
i;1
こ こ で ,G (X )=[Gl (= )T
,_
,(み(の
TIT で あ る .こ の 定
義の もと に,行列 二 乗和多項式 は,行列 に 拡張 され た 二
次形式 で 等価 に書 くこ とが で きる.こ の 場合 も,LMI を
解 くこ とで 行列 二 乗和多項式 の 存在を確認で きる.
【定理 3】 [20] x の 対称行列多項式
P (m )一Σ 恥α
α∈∫
(9)
が二 乗和で あ る ため の 必要十分条件は,あ る半正定値行
列 9 お よ び x の 単項式ベ ク トル z (a;)に つ い て,
P (m )一(lmXz (x ))TQ
(lm 姻 ) (/0)
が すべ て の x に つ い て 成 り立 つ こ と で あ る.
【定理 4】 [191 行列多項式 (9)が (10)式 で 表 され
る た め の 必 要 十 分 条件 は ,つ ぎの LMI が 実行 可 能解 を
もつ こ とで ある.
find ⊆≧ s.t.2 ≧:Oi trm ((Jfn X Aα )9)=Pa α ∈ f
た だ し,M ∈RP ’nXP ’n, M
(切∈ RPXP に対 して,
一 惚 ::∴ …xm
で あ る.
5.2 ロ バ ス ト安定性解析
行列値 の 二 乗和 と 4.の 考え方 を用 い れ ば,不確か な パ
ラ メー
タ を有す る ロ バ ス ト制御系解析問題 を扱うこ とが
で きる.つ ぎの パ ラ メー
タ 依存線形 シ ス テ ム を考え よ う,
±・・A (θ).T
ただ し,θ;[θ1 θ2 ]T は時不変 な パ ラ メータ,
A ・…一「轡1(譜副こ の と き,
パ ラ メータ θ1 お よ び θ2 の 範囲を
n − {θ∈ R2 ・ 9i(θi)一α2 一θ孑≧ O
,・i− 1
,2 }
で表され る正 方形 の 集合 と し,シ ス テ ム が 漸近安定 な範
囲で α (> 0)をで きる だ け大 きくす る ロ バ ス ト安定解析問
題 を考える.その ため に,パ ラ メー
タ依存の Lyapunov
関数
v (x ,θ)=・・ xTp (o)x
を導入 す る .こ の とき,つ ぎの パ ラ メータ 依存 LMI
(PDLMI ;Parameter−Dependent LMI )が 成 り立 つ よ う
な LyapunOv 変数P (θ)が 存在す れ ば,シ ス テ ム は 漸近
安定とな る.
He {P (θ)A (θ)}一くO, P (θ)〉
−0 ∀θ∈ S2 (11)
こ こ で ,正方行列X に対 し,He {X }は X +XT を表す.
P (θ)を 行列多項式 に 限定す れ ば,(11)式 に対応す る 二
乗和条件 は,つ ぎの よ うに書け る.
一He {P (θ)・4(θ)}− 3。 ・(θ)9・(θ)− 3。 2(θ)92(θ)
一・∬− 3
。 。(θ)∀θ∈ R2
P (θ)− Sb1(θ)91(θ)TSb2 (θ)92(θ)
一ε∫ = 3b (θ) ∀θ∈ R2
こ こ で ,SCti,5δ痘 =O,1,2)は行列二 乗和多項式,ε は微
小 な正数とす る.(11)式 に 対 して,条件 が 成立す る た め
の θの 集合 が ∫2か ら R2 に な っ て い る ,こ の ように,二
乗和多項式 を導入 し, すべ て の パ ラ メータ変数 θで 成 り
立 つ 等式条件 に 書 き直 せ ば,コー
ド化 しや す い ,
前章 の 安定解析 と異な る の は,Lya .punov 関数 を 決定変
数 に して い る こ と で あ る,と くに,Lyapunov 変数を パ
ラ メー
タ θ に依存 させ る た め ,まず 9 行 目で ,依存さ せ
た い 単項式 を生成す る .関数 mn 。list に パ ラ メー
タ 変
数と次数を引数と して 渡せ ば ,指定 し た 次数 以 下 の すべ
て の 組合せ の 単項式を返値とす る .こ れ を zp と し,10
行 目 で パ ラ メ ータ依存 Lyapunov 変数 を生成す る .こ
こ で は ,付録 2.に 示 し た 関数 s 皿 一p 。lyn 。mial を用 い
一20一
N 工工一Eleotronio Library
Institute of Systems, Control and Information Engineers
NII-Electronic Library Service
工nstitute of Systems , Control and 工nformation Engineers
市原 ;二 乗和 に 基づ く制御系解析・設計 179
て ,P を th に 関す る ア フ ィ ン な対称行列多項式 と して
い る、monolist に指定する次数を増 や せ ば,簡単に高
次 の パ ラ メータ依存 Lyapunov 変数 を 生 成 で きる.ま
た,行列二 乗和多項式 Sa1な どに つ い て は,13 行 目か ら
qf−polynomial に単項式 と行列 の サイズ を引数 として
渡す こ とで 生 成 す る.そ の ほ か の 記 述 は,前章 の 例 と 同
様 で あ る.こ の コ ードで は
,6行 目で α (alpha )を 1.O と
して い る が ,2.0453 まで LM1 が 可 解 とな る.また,パ
ラ メータ に 関す る高次の Lyapunov 変数や 高次の 行列 二
乗和多項式 Sai:Sbiを用 い る こ と で
,さ ら に集合 9 を広
げ ら れ る こ とが あ る が ,こ の 例 で は 変化 は な か っ た.
比 較 の た め に,Lyapunov 変数 P をパ ラ メ ータ依存
と しな い 二 次安定条件 を文献 [21]に よ る multi −convex
(MC )の 考え方を適用 して α を最大化 した,二 乗和 の 結
果とともに第 2表に 示す.MC は,基本的 に はパ ラ メー
タ に 関 して 2 次 に 依存す る PDLMI ま で しか 扱 えない .
A (θ)が すで に θに 関 して 2 次 に 依存 して い る の で ,(11)式に お い て,P を パ ラ メータ依存に す る こ とが で きない .
これ に対 して ,二 乗和 に基 づ く方法 は
,パ ラ メ
ータ の 非
線形依存度 の 制約を簡単 に越え る こ とが で きる.
第 2 表 (解析手法,P の θ依存次数) に よる α の 最大値
(MC , 0次) (SOS , 0次) (SOS,ユ次) (SOS , 2 次 )
こ こで,
ε は微小 な正 数,S.i は行列 二 乗和多項式で ある.
M2 に 関す る PDI 、MI は, ρ と 戸に 関す る 二 乗和行列多
項式を用 い て,つ ぎの 二 乗和条件と して もよ い ,
ハd2(ξ,ρ,ρ)− 91(ρ)Sbl(ρ,ρ)
− 92(ρ)Sb2(ρ,ρ)
− 93 θわ3(ρ,ρ)
一ε1 =Sb
。 (ρ,ρ)∀(ρ,ρ)∈ RxR
む しろ,こ の 方がい ままで の 話か らすれ ば 自然 で ある が,
対 応 す る LMI の サ イ ズ が 過 大 に な る.こ の 場 合, M2,
g2793 は, すべ て bに ア フ ィ ン に 依存す る.その た め
,は
じめ に 示 した二 乗和条件 の よ うに,Sb1, Sb2, Sb3をρに
依存させ な けれ ば,SbOの 中で βに 関す る二乗和を構成す
る必要が な くな る.こ の と き,ア フ ィ ン項が相殺され る
よ う に,Sb2,3b3が 調整 さ れ る [23 ,
24].さ らに, Schur
補題 国 の 性質を使い ,Sa’1,
S。1 の 行列サ イズ を低 く抑え
る こ とで, 計算量 の 削減を行 うこ とがで きる [24 ,25i.こ
の 設計例 で は,Lyapunov 変数をパ ラ メ ータ ρ に 1次ま
で に依存させ る ように すれ ば,コ ス トの 上 界値Atは 168
で ,2 次 まで に 依存 させ る よ う にす れ ば 148 で ,そ れ ぞ
れ 可 解 とな る.
6. お わ りに
0.7386 0.7386 2,0453 2,0453
5.3 ゲイ ン ス ケジューリン グ制御系設計
こ の 章 の 最後 に,アーム 型倒立振子 に対す るゲイ ン ス
ケジ ュー
リ ン グ に よ る コ ス ト保証制御系の 設計に つ い て
述べ る.制御対象お よ び設計仕様の 詳細 は ,本特集 [22]の 4 .2 を参照い た だ きた い .まず,時変パ ラ メ
ータ p,そ
の 変化率 p, p の 初期値 を表す変数 ρo につ い て,そ れ ぞ
れ の 範囲を表す集合 を定義す る.
9 ・一 {ρ∈ R ・ 9・(ρ)= ・
・P(ρ一
ρ〉≧0 }.9 ・
一{ρ∈ R’・ 9・ (ρ)一δ一P≧0 }
03={1う∈ R : 93(ρ)=δ十ρ≧ 0 }O ・
= {ρ・∈Rl 9・(ρ・)一ρ・(P・一
ρ。)≧0 }
こ の と き,以 下 の PDLMI を満 た す決定変数ξを探せ ば
よ い ,
M1 (ξ,ρ)〉−0 ∀ρ∈ ρ1
M2 (ξ,ρ,P)〉一 O ∀(ρ,ρ)∈ n ・ × (n2 ∩ 93)
M3 (ξ,ρo)〉−0 ∀ρo ∈ 04
そ の た め に,こ れ ら を二乗和条件へ と書 き直す.
M1 (ξ,ρ)− 91(ρ)Sa1(ρ)一ε∬==SaO(ρ) ∀ρ ∈R
M2 (ξ,ρ,P)− 91(ρ)Sbl(ρ)− 92(ρ)Sb2(ρ)
− 93(P)Sh3(ρ)一εJ ;SbO(ρ) ∀(ρ,ρ)∈ RxR
ハ43(ξ,ρ0)− 94(ρO)Scl(ρ0)一ε∫=ScO(ρ0)∀ρ0 ∈ R
本稿 で は ,二 乗和 の 基礎 と制 御 で の 使 い 方 の 例 を
YALMIP の コー
ドを通 して 紹介 し た,うまく使 い こ な
す こ とが で きれば,多くの 制御問題を二乗和条件に定式化
で き, 実際 に 計算す る こ とが で き る.また
,SOSTOOLS
は YALMIP ほ ど広範な問題 に対応 しや すくは ない が,
記述 が簡素な優れ た パ ーサ で あ る こ と を付け加えて お く.
本解説が 従来 の 解説 まで の 橋渡 しとな り,二 乗和が制御
工 学 の 多 くの 応用分野で 活用 され る こ とを期待して い る.
な お,本解 説 に 関す る コ ードは,http://www .maizuru −
ct.ac .jp/control !kawata/iscie/iscie.html で 公開す る .
(2011年 1 月 31 日受付)
参 考 文 献
[1]S,Boyd et aL : Linear Matmb Inequalities in Sgystem
and Control Theorgll SIAM (1994)
[21P . Parrilo: Structured Semidefinite Programs and
Semialgebraic Geornetry Methods in RQbustness and
Optimization, PhD Thesis at Calif{〕rnia Institute of
Technology, Pasadena , CA (2000)
[3]S.Prajna, A , Papachristodoulou
, P . Seiler and P. A .
Parrilo : SOSTOOLS : Sum of squ αres optimization
toolboxメo?「MATL /4B (2004)
[4]J. L6fberg ; YALM 工P :A toolbox for modeling and op −
timization in MATLABi Proceedings of the CACSD
Conf.(2004 )
[5]P.A . Parrilo and S. Lall: Semidefinite programming
relax ations and algebraic optimizatiQn in control ;Eu −
ropaan Journal of Controll Vol.9, No .2−3
, pp .307−
321 (2003)
[6]増 淵,小原 :ロ バ ス ト行列 不 等式 の シ ス テ ム 制御 へ の 応
一21
N 工工一Eleotronio Library
Institute of Systems, Control and Information Engineers
NII-Electronic Library Service
工nstitute of Systems , Control and 工nformation Engineers
180 シス テ ム /制御 /情 報 第 55 巻 第 5 号 (2011)
用 ;計測 と制 御,VoL 44 , No .8, pp,561.−567 (2005)
[71C ・W . Scherer,抄 訳 増淵 :How to cons 七ruct asymp −
totically Exact relaxations in robust contro1 ?;計 狽旺と
需[lif], Vol.44, No ,8, pp,519−533 (2005)
[8]大石 :2乗和多項式に 基づ くロ バ ス ト制 御系設 計 ;SICE
セ ミ ナー一
実践的な制御系設 計一
テキ ス ト,pp .71−88
(2007)
[91A . Packard, U Topcu
, P. Seiler and G . Balas: Help
oll SOS ;JEEE Controt S宮ste γrt5 Maga2inel PP .18−23
(2010)
[10】G.Chesi ;LMI techniques f{)r ept −imization over poly−
nornials iIl contr 1: asurve }厂ヨ刀EE ’E 7}tans . on Auto −
matic Control, V61.55, No.11, pp,2500
−2510 (2010)
[11]P.Gahinet, A , Nemirovski, A .」. Laub and M .
Chilali: LMI Control Toolbox for Use with MA TL 4B,
The MathWbrks (1995 )
[121J . F . Sturm: SeDuMi : Using SeDuMi 1.D2, a MAT −
LAB toolbox f()r op 七imization over symmetric cones
(updated for version 1,05); 0や扼 甜α翻o η Methods
and SofltUare, Vbl.11 , No .1, pp .625−653 (1999 )
[13]1〈.C . Toh , M .」, Tbdd and R ,且. TettincU: SDPT3 −
aMATLAB sQftware package for semide 丘nite pro−
gramming , versien 1.3; Optimigatton Methods αnd
5〔)flwate, V61.11
, NQ .1
, pp.545−581 (1999)
[14}J.L6fberg: P τe− a皿 d post−processing sum −of −squares
programs in practice;IEEE 7}ansacti ρ ns on Auto −
matic Oontrol, Vol.54, No .5, pp.1007−1011 (2009)
[15]G .Chesi et al.: On convexification of some min −
imuIII distance problelns ; Pro :. Eubopean Cont.rol
(]orりf.(1999)[16i G , Chesi, A . Garulli, A , Tesi and A . Vicino:
HomogeneOUS Poiynomd α l ForTrbSノ’or RobustneSS
A・nalys 乞s of Uncertain Sy,stemsT Springer−Verlag
(2009)
[17]H ,K . Khalil: Nonlinear Systems,3rd edi 七ion
, Pren−
tice Hall (2000
[18]MKojima : Sulns of Squares Relaxa七ions of Po 五y−
nomial Semidefinite Programs , Tokyo Instituite of
Technology, REsearch Report B −397 (2003 >
[19]C,W .」. Hol and C . W , Scherer: Sum of squares re −
laxa七ion for polアnomial se 皿 i−de且nite pr(>gramming ;
Proe.魏 ム Symp . on Ma ,them “tical TheOTy of Net−
v丿orks and Systems (2004)
[20]C .W . Scherer and C , W .」, Hol : Matrix surn −of−
squares relaxations fヒ)r robust serni −definite progra皿 sl
M αth. Program . Ser, B , Vol.107, NQ.1・.2, pp .189 −
211 (2006 )
[21]P,Gahinet, P. Apkarian alld M , Chiiali: AMne
parameter−dependent Lyapunov fu矼ction8 and real
parametric uncel’tainty; IEEE Transactions on Au −
tomat ’ic Oontrol, Vol.41, No ,3, pp .436−442 (1996)
[22i 川 田,蛯原 :LMI に 基 づ く制 御 系 解析 ・設 計 ;シ ス テ
ム /制御/情報,Vol.55, No ,5, pp,165 −173 (2011 )
[23]青木,高見 大石 :2 乗和多項式 に 基づ くク レー
ン の ゲ
イ ン ス ケ ジ ュー
リ ン グ 制御 ;計測自動剃御学会論文集, Vol,45, No ,4, pp ,208 −214 (2009)
[24]市原,川 田 :SOS に 基 づ くア ク u ポ ッ トの ゲ イ ン ス ケ
ジ ュー
リ ン グ 制御一
姿 勢 制御 実 験 に よ る 検 証一;計 測 自
動制御学会論文集,Vol.46, No .7, pp ,373−382 (2010)
[25]H .Ichihara:.Optimal control foT poLyno皿 ial sys −
tems using rlatrix surn of squares relax &tiollsi fEEE
Tb’ansactions on Automatic Control, Vol.54,
No .5, pp,1050−−1055 (2009)
付 録
付録 1,qf.polynomiaLm
1 ; functio 且 S 署 qf噂poly【Lo皿 ia ユ(z ,di 皿 )
2: if nargin ==
1
3 : di 皿 =1 ;
4 ; eロd5
: R = sdpvar (]ength (z )* di 皿 )1
6:S = kron (eアe (di皿)卿z )
,* R *kron (eye (dim).z);
付録 2. sm .polynomial .m
ユ: function P =sm −polynomial(z ,dim )
2 : 1z 呂1ength (z )置
3 : P = zeros (di 皿 );
4 : for k 召 1 ;1 :1z
5 : Pk 互sdpvar (dim );
6 : P=P+Pk * z (k );
7 ; end
妨
原鴨
市
著 者 略 歴
ひろ ゆき
裕 之 (正会員)
2000 年明治大学大学院理 工 学研究科機
械工 学 專 攻博士 後期課程修 了,同年 4 月,同大 学 理工 学部助 手 (任 期 制 ),2001 年 7
月 茨 城大 学 大 学 院理 工 学研 究科 SVBL 研
究 員,2002 年 4 月九 州工 業 大学情報 工 学
部助 手,2007 年 4 月 岡助 教 ,2008 年 4
月同大学大学院情報工 学研究院助教,2010 年 4 月明治大学
理工 学部専 任 講師 とな り,現在に 至 る.制御理論 お よ びその
応用 に 関す る 研究に 従事.博・.lt(工 学).計測 自動 制御学会,
IEEE な ど の 会 員,
一22一
N 工工一Eleotronio Library