Embed Size (px)
Citation preview
Insegnamento di Teoria delle Strutture
Brevi note sull’Elasticita Lineare
A.A. 2017∼2018
Versione 1.1
Indice
1 Sistema di Riferimento 31.1 Cambio di base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2 Cambio della base di Lin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Formula di Eulero-Rodrigues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Esempio 2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Richiami di cinematica 62.1 Moto e traiettoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2 Velocita di saggio & spostamento virtuale . . . . . . . . . . . . . . . . . . . . . . 72.3 I funzionali potenza e lavoro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3 Elasticita Lineare 3D 103.1 Equazioni di Congruenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2 Relazione Costitutiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2.1 Deformazione Elastica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2.2 Materiale Elastico Lineare . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2.3 Energia Elastica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4 Equazioni di Bilancio 154.1 Il Principio di Bilancio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154.2 Equazioni locali di Bilancio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5 La Formulazione del Problema Elastico Lineare 16
6 Materiali Isotropi 176.1 Decomposizione Sferica-Deviatorica . . . . . . . . . . . . . . . . . . . . . . . . . . 176.2 Risposta Isotropa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176.3 Sollecitazione termiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
7 Materiali Anisotropi. 207.0.1 Risposta Ortotropa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207.0.2 Risposta Trasversalmente Isotropa . . . . . . . . . . . . . . . . . . . . . . 227.0.3 Cambio di Base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247.0.4 Esempio: Cambio di Base . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.1 Materiali Incompressibili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1
8 Materiali Viscoelastici 278.1 Trazione a controllo di spostamento . . . . . . . . . . . . . . . . . . . . . . . . . 288.2 Trazione a controllo di tensione . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
z z z
2

1 Sistema di Riferimento
Un sistema di riferimento per uno spazio ambiente 3D e costituito da un punto privilegiato dellospazio E , detto origine e indicato con ‘o’, e da una base dello spazio vettoriale V che indicheremocon α = {ei}; la base e formata da una terna di versori ei ortogonali tra loro:
versore: ‖ei‖ = 1 , ortogonalita: ei · ej = δij .
Tale sistema viene indicato con {o ; ei , i = 1, 2, 3}; nel seguito, ometteremo di scrivere ognivolta i = 1, 2, 3. Una volta fissato un sistema di riferimento, possiamo:
1. Rappresentare ogni vettore v ∈ V tramite le sue componenti, ossia, tramite le proiezionidi v sui vettori della base ei:
Componenti di v nella base {ei}: vi = v · ei , ⇔ v = vi ei .
2. Rappresentare i punti dello spazio tramite il vettore posizione r = x − o, ovvero, tramitele coordinate:
x− o = x1e1 + x2e2 + x3e3 ⇒ x ≡ (x1, x2, x3) .
3. Costruire una base per Lin, le applicazioni lineari che agiscono su V:
Base di V: {ei} ⇒ Base di Lin: {ei ⊗ ej}
I tensori semplici ei ⊗ ej agiscono sui vettori v nel seguente modo:
(ei ⊗ ej) v = (ej · v) ei . (1) tensor_product
4. Rappresentare ogni tensore A ∈ Lin tramite le sue componenti, ossia, tramite le proiezionidi A sui tensori della base ei ⊗ ej
Componenti di A nella base {ei ⊗ ej}: Aij = A · ei ⊗ ej , ⇔ A = Aij ei ⊗ ej .
5. Rappresentare l’azione di un tensore A sul vettore v tramite prodotti tra le loro compo-nenti:
v = vh eh , A = Aij ei⊗ej , ⇒ A v = (Aij ei⊗ej) vh eh = Aij vh (ej ·eh) ei = Aij vj ei .
In breve, possiamo scrivere: u = A v⇒ ui = Aij vj .
Vettori e tensori si possono anche rappresentare tramite matrici; in questo caso, la base presceltaviene indicata con il pedice α. Per i vettori abbiamo:
|e1|α =
100
α
, |e2|α =
010
α
, |e3|α =
001
α
; v = vi ei ⇒ |v|α =
v1v2v3
α
.
Una cosa analoga avviene per i tensori; ad esempio:
|e1 ⊗ e2|α =
0 1 00 0 00 0 0
α
, |A|α =
A11 A12 A13
A21 A22 A23
A31 A32 A33
α
.
3

Attenzione: la base prescelta andrebbe sempre dichiarata quando si usa la rappresentazionematriciale; spesso questa indicazione viene omessa (ad esempio quando si usa sempre una stessabase), ma bisogna ricordare che quando si cambia base, cambia anche la matrice che rappresentai vettori o i tensori. La rappresentazione matriciale e scomoda dal punto di vista tipografico,ma puo essere comoda per altri motivi; in particolare, l’azione di un tensore A sul vettore v sirappresenta tramite prodotto righe per colonne
|A|α |v|α =
A11 A12 A13
A21 A22 A23
A31 A32 A33
α
v1v2v3
α
=
A11 v1 +A12 v2 +A13 v3A21 v1 +A22 v2 +A23 v3A31 v1 +A32 v2 +A33 v3
α
.
Si noti che e proprio la definizione (1) a far si che l’azione di A su v sia esprimibile come unprodotto righe per colonne tra le matrici che rappresentano il tensore ed il vettore dato.
1.1 Cambio di base
Consideriamo due basi di V: α = {ei} e β = {bi}; le due basi sono relate da un’applicazionelineare Q, detta cambiamento di base. Poiche le basi hanno vettori unitari e ortogonali traloro, l’applicazione Q deve essere una rotazione, ossia, un’applicazione che mantiene invariatala lunghezza dei vettori, preserva gli angoli tra due vettori qualsiasi, e mantiene l’orientamento(una base destrorsa viene trasformata in una base destrorsa). Dunque Q−1 = QT , e det Q = 1,e possiamo scrivere:
bi = Q ei , ei = QT bi . (2) cambio_base
Usiamo ora la rappresentazione matriciale per scrivere le relazioni (2). Il primo vettore b1 dellabase β si ottiene ruotando il primo vettore e1 della base α; abbiamo:
|b1|α = |Q| |e1|α =
Q11 Q12 Q13
Q21 Q22 Q23
Q31 Q32 Q33
100
α
=
Q11
Q21
Q31
α
.
Dunque, la prima colonna di |Q| e composta dalle componenti del primo versore b1 rispetto labase α, e cosı via per le altre colonne:
|Q| =[|b1|α |b2|α |b3|α
]; (3)
in forma compatta, possiamo scrivere:
bi = Q1i e1 +Q2i e2 +Q3i e3 = Qji ej . (4) cambio_base2
Analogamente, per il cambio di base bi 7→ ei, possiamo scrivere:
|e1| = |QT | |b1|β =
Q11 Q21 Q31
Q12 Q22 Q32
Q13 Q23 Q33
100
=
Q11
Q12
Q13
β
⇒ ei = Qij bj = (Qji)T bj .
Dato un vettore v, e importante sapere come cambiano le sue componenti a seguito di un cambiodi base; usando la (4), abbiamo:
v = vi bi = viQji ej = vj ej ⇒ vj = Qji vi .
In notazione matriciale, possiamo scrivere
|v|β =
v1v2v3
β
, |v|α =
v1v2v3
α
⇒ |v|α =
v1v2v3
α
=
Q11 Q12 Q13
Q21 Q22 Q23
Q31 Q32 Q33
v1v2v3
β
= |Q| |v|β .
4

1.2 Cambio della base di Lin
Abbiamo visto come la base per Lin si costruisca a partire dalla base di V; allo stesso modo,la relazione che definisce il cambio di base per i tensori viene dedotta da quella utilizzata peri vettori. Consideriamo due basi di Lin: a = {ei ⊗ ej} e b = {bi ⊗ bj}; utilizzando la (2),abbiamo la seguente formula per il cambio di base
bi ⊗ bj = (Q ei)⊗ (Q ej) = Q (ei ⊗ ej) QT , ei ⊗ ej = QT (bi ⊗ bj) Q ; (5) cambio_base3
ovvero, in forma matriciale
|bi ⊗ bj |α = |Q| |ei ⊗ ej |α |QT | , |ei ⊗ ej |β = |QT | |bi ⊗ bj |β |Q| . (6) cambio_base4
Dato un tensore A, e importante sapere come cambiano le sue componenti a seguito di uncambio di base; usando la (5), abbiamo:
A = Aij bi ⊗ bj = Aij (Qhi eh)⊗ (Qkj ek) = Ahk eh ⊗ ek ⇒ Ahk = Qhi Aij QTkj .
In notazione matriciale possiamo scrivere:
|A|α = |Q| |A|β |QT | , |A|β = |QT | |A|α |Q| .
Riassumendo il tutto, abbiamo:
Q : base α 7→ base β ⇒
|bi|α = |Q| |ei|α ,
|ei|β = |QT | |bi|β ,
|v|α = |Q| |v|β ,
|v|β = |QT | |v|α ,
|A|α = |Q| |A|β |QT | ,
|A|β = |QT | |A|α |Q| .
(7)
1.3 Formula di Eulero-Rodrigues
La formula di Eulero-Rodrigues fornisce una semplice ed efficiente rappresentazione delle rota-zioni in 3D. La formula e basata dal fatto che le rotazioni 3D possono essere rappresentate daun vettore: il modulo del vettore indica l’angolo di rotazione, mentre il versore definisce l’assedi rotazione. Dato un vettore v, abbiamo:
v = ϕa ⇔ angolo: ϕ = ‖v‖ , asse: a =v
ϕ, (8)
ossia, le tre componenti del vettore v sono usate per definire in modo univoco una rotazione.Possiamo ora scrivere la formula di Eulero-Rodrigues che consente di calcolare la rotazione diun vettore: dato un vettore u, la sua immagine urot, ruotata attorno all’asse a dell’angolo ϕ, edata da
urot = cos(α) u + sin(ϕ) a× u + (1− cos(ϕ)) (u · a) a , with ‖a‖ = 1. (9)
5

La formula di Eulero-Rodrigues fornisce anche la matrice di rotazione Q = Q(a, ϕ) associataall’asse a ed all’angolo ϕ:
Q(a, ϕ) = I + sin(ϕ) W + (1− cos(ϕ)) W2 , with |W|α =
0 −a3 a2a3 0 −a1−a2 a1 0
α
, (10)
dove ai = a · ei sono le componenti di a nella base α.
1.4 Esempio 2D
Consideriamo il cambio di base da una base cartesiana α = {e1 e2} ad una polare β = {b1 , b2};la base β e ruotata rispetto ad α di un angolo ϕ (positivo se antiorario).
La matrice che descrive un tale cambio di base e data da (ricordiamo che in 2D le rotazionihanno un solo parametro invece dei tre necessari in 3D)
Q : base α 7→ base β ⇒ |Q| =[
cosϕ − sinϕsinϕ cosϕ
].
Il problema tipico che si presenta e il seguente: note le componenti cartesiane di v e A, qualisono le loro componenti polari? Per quanto riguarda il vettore, posto v = vi ei = vj bj , abbiamo
|v|α =
[v1v2
]⇒ |v|β =
[v1v2
]=
[cosϕ sinϕ− sinϕ cosϕ
] [v1v2
]=
[cosϕv1 + sinϕv2− sinϕv1 + cosϕv2
].
Per quanto riguarda il tensore, posto A = Ahk eh ⊗ ek = Aij bi ⊗ bj , abbiamo
|A|β =
[A11 A12
A21 A22
]β
=
[cosϕ sinϕ− sinϕ cosϕ
] [A11 A12
A21 A22
]α
[cosϕ − sinϕsinϕ cosϕ
].
2 Richiami di cinematica
2.1 Moto e traiettoria
Il moto del corpo e descritto da un’applicazione che associa ad ogni punto sostanziale s ∈ B ead ogni istante τ ∈ T dell’intervallo temporale, una posizione x ∈ E nello spazio ambiente
p : B × T → E(s, τ) 7→ x = p(s, τ) .
(11) moto
Dato un moto p si considerano le seguenti applicazioni:
u(s, τ) := p(s, τ)− s : B × T → V , spostamento del punto s,
p(s, ·) : T → E , legge oraria del punto s,
p(·, τ) : B → E , configurazione al tempo τ . (12)
Inoltre, dato il moto p, si considerano i seguenti sottoinsiemi di E :
p(s, T ) ⊂ E traiettoria del punto s,
p(B, τ) ⊂ E forma al tempo τ . (13)
6
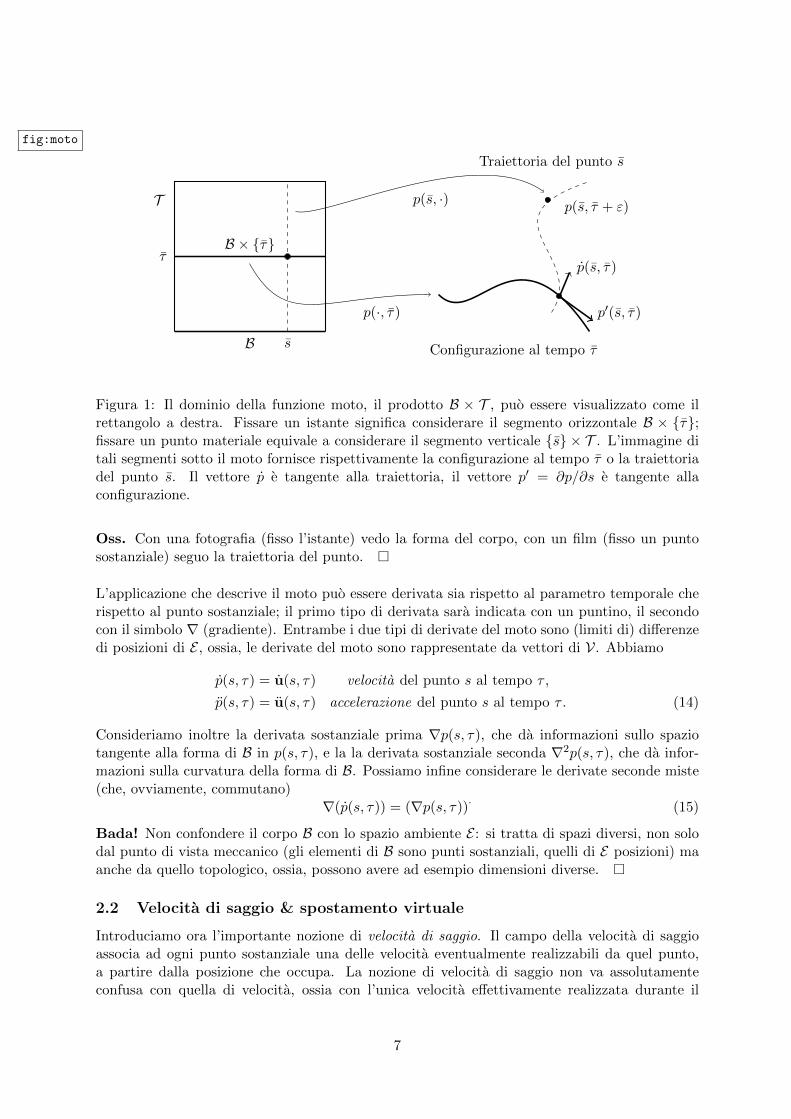
fig:moto
sB
B × {τ}τ
T
p′(s, τ)
Configurazione al tempo τ
p(s, τ)
Traiettoria del punto s
p(·, τ)
p(s, ·)p(s, τ + ε)
Figura 1: Il dominio della funzione moto, il prodotto B × T , puo essere visualizzato come ilrettangolo a destra. Fissare un istante significa considerare il segmento orizzontale B × {τ};fissare un punto materiale equivale a considerare il segmento verticale {s} × T . L’immagine ditali segmenti sotto il moto fornisce rispettivamente la configurazione al tempo τ o la traiettoriadel punto s. Il vettore p e tangente alla traiettoria, il vettore p′ = ∂p/∂s e tangente allaconfigurazione.
Oss. Con una fotografia (fisso l’istante) vedo la forma del corpo, con un film (fisso un puntosostanziale) seguo la traiettoria del punto. �
L’applicazione che descrive il moto puo essere derivata sia rispetto al parametro temporale cherispetto al punto sostanziale; il primo tipo di derivata sara indicata con un puntino, il secondocon il simbolo ∇ (gradiente). Entrambe i due tipi di derivate del moto sono (limiti di) differenzedi posizioni di E , ossia, le derivate del moto sono rappresentate da vettori di V. Abbiamo
p(s, τ) = u(s, τ) velocita del punto s al tempo τ ,
p(s, τ) = u(s, τ) accelerazione del punto s al tempo τ . (14)
Consideriamo inoltre la derivata sostanziale prima ∇p(s, τ), che da informazioni sullo spaziotangente alla forma di B in p(s, τ), e la la derivata sostanziale seconda ∇2p(s, τ), che da infor-mazioni sulla curvatura della forma di B. Possiamo infine considerare le derivate seconde miste(che, ovviamente, commutano)
∇(p(s, τ)) = (∇p(s, τ))· (15)
Bada! Non confondere il corpo B con lo spazio ambiente E : si tratta di spazi diversi, non solodal punto di vista meccanico (gli elementi di B sono punti sostanziali, quelli di E posizioni) maanche da quello topologico, ossia, possono avere ad esempio dimensioni diverse. �
2.2 Velocita di saggio & spostamento virtuale
Introduciamo ora l’importante nozione di velocita di saggio. Il campo della velocita di saggioassocia ad ogni punto sostanziale una delle velocita eventualmente realizzabili da quel punto,a partire dalla posizione che occupa. La nozione di velocita di saggio non va assolutamenteconfusa con quella di velocita, ossia con l’unica velocita effettivamente realizzata durante il
7

moto. Dunque, assumendo che il corpo B sia libero di muoversi in E , e che la sua mobilita siadescritta dalla funzione p(s, τ) = s+ u(s, τ), abbiamo
u : B × T → VE velocita effettiva;(s, τ) 7→ u(s, τ)
u : B × T → VE velocita di saggio.(s, τ) 7→ u(s, τ)
(16) vtest
Chiariamo con un esempio questa importante distinzione. Se consideriamo un corpo puntiformevincolato a muoversi lungo una curva, una velocita di saggio in una determinata posizione edata da un qualsiasi vettore tangente alla curva nella posizione considerata, mentre la velocitaeffettivamente realizzata e un ben preciso vettore tangente alla curva. Dunque, l’insieme dellevelocita di saggio e costituito dalla retta tangente alla traiettoria (nella posizione considerata);ovviamente, su tale retta vi sara anche la velocita effettiva.
Per un corpo puntiforme vincolato a muoversi su di una superfice, una velocita di saggioin una determinata posizione sara data da un qualsiasi vettore tangente alla superfice nellaposizione considerata; in tal caso, l’insieme delle velocita di saggio e costituito dal piano tangentealla superficie, mentre la velocita effettivamente realizzata sara un ben preciso vettore del pianotangente. L’insieme costituito da tutti i campi di velocita di saggio (16) dotati di opportune
fig:vel_saggio
xu
u
u x u
u
u
u
Figura 2: A destra abbiamo un punto x vincolato a muoversi su una curva; nell’istante con-siderato, la velocita e il vettore u tangente alla curva in x, mentre la velocita di saggio e unqualsiasi vettore u della retta tangente alla curva in x. A sinistra abbiamo un punto x vincolatoa muoversi nel piano; in questo caso la velocita di saggio e un qualsiasi vettore u tangente alpiano in x.
proprieta di regolarita viene detto Spazio delle velocita di saggio U . A partire dalla definizionedi velocita di saggio, introduciamo anche il campo degli spostamenti virtuali, da non confonderecon il campo degli spostamenti elementari:
du = u dτ spostamento elementare;
du = u dτ spostamento virtuale.(17)
2.3 I funzionali potenza e lavoro
Tra le nozioni fondamentali della meccanica vi e quella di potenza. Tale nozione e una nozioneistantanea, ossia, considera il corpo ad un dato istante, e coinvolge simultaneamente sia il motodel corpo che le “azioni” che agiscono su di esso.E utile ricordare a questo punto la nozione di funzionale. Senza entrare nei dettagli, definiamofunzionale un’applicazione il cui dominio e costituito da uno spazio di applicazioni, ed a valorenell’insieme dei reali:
8
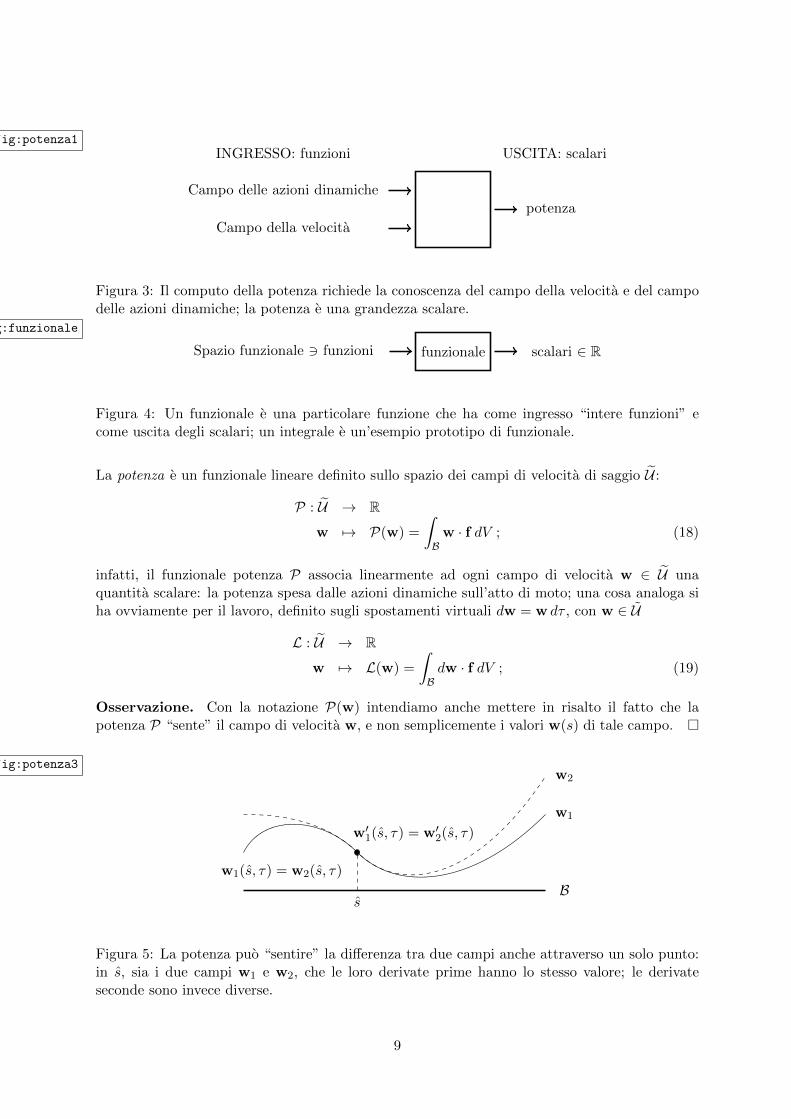
fig:potenza1INGRESSO: funzioni USCITA: scalari
Campo della velocita
Campo delle azioni dinamiche
potenza
Figura 3: Il computo della potenza richiede la conoscenza del campo della velocita e del campodelle azioni dinamiche; la potenza e una grandezza scalare.
fig:funzionale
Spazio funzionale 3 funzioni funzionale scalari ∈ R
Figura 4: Un funzionale e una particolare funzione che ha come ingresso “intere funzioni” ecome uscita degli scalari; un integrale e un’esempio prototipo di funzionale.
La potenza e un funzionale lineare definito sullo spazio dei campi di velocita di saggio U :
P : U → R
w 7→ P(w) =
∫B
w · f dV ; (18)
infatti, il funzionale potenza P associa linearmente ad ogni campo di velocita w ∈ U unaquantita scalare: la potenza spesa dalle azioni dinamiche sull’atto di moto; una cosa analoga siha ovviamente per il lavoro, definito sugli spostamenti virtuali dw = w dτ , con w ∈ U
L : U → R
w 7→ L(w) =
∫Bdw · f dV ; (19)
Osservazione. Con la notazione P(w) intendiamo anche mettere in risalto il fatto che lapotenza P “sente” il campo di velocita w, e non semplicemente i valori w(s) di tale campo. �
fig:potenza3
s
w′1(s, τ) = w′2(s, τ)
w1(s, τ) = w2(s, τ)
w1
w2
B
Figura 5: La potenza puo “sentire” la differenza tra due campi anche attraverso un solo punto:in s, sia i due campi w1 e w2, che le loro derivate prime hanno lo stesso valore; le derivateseconde sono invece diverse.
9

3 Elasticita Lineare 3D
La teoria dell’elasticita lineare e basata sull’ipotesi che sia lo spostamento u che il suo gradiente∇u siano piccoli; in tal caso, non si fa piu distinzione tra la configurazione di riferimento e quellaassunta durante il moto: p(B, τ) ' B. Il corpo B e una regione 3D dello spazio ambiente E , e isuoi punti saranno indicati con il simbolo X; lo stato del corpo e descritto dal moto x = f(X, t),ovvero dal campo di spostamento u(X, t) = f(X, t)−X
u : B × T → V(X, τ) 7→ u = u(X, τ) .
(20) moto
Nel seguito, per alleggerire la notazione, la dipendenza dal tempo non sara indicata. La frontiera∂B del corpo viene divisa in due parti: ∂B = ∂uB ∪ ∂tB; su ∂uB sono assegnate condizionicinematiche, su ∂tB sono assegnate condizioni dinamiche. La teoria della elasticita ha comevariabile di stato il campo vettoriale dello spostamento u (3 componenti), e coinvolge altri duecampi, entrambe tensoriali e simmetrici (6 componenti): la deformazione E e la tensione S.Fissata una base ortonormale α = {ei}, abbiamo
|u|α =
u1u2u3
α
=
uvw
α
, |E|α =
E11 E12 E13
E12 E22 E23
E13 E23 E33
α
, |S|α =
S11 S12 S13S12 S22 S23S13 S23 S33
α
.
I tre campi suddetti sono legati tra loro da tre gruppi di equazioni:
1. Equazioni di congruenza: sono una relazione tra 3 spostamenti e 6 deformazioni;
2. Equazioni costitutive: sono una relazione tra 6 tensioni e 6 deformazioni;
3. Equazioni di bilancio: sono una relazione tra 3 forze e 6 tensioni.
Nelle sezioni seguenti saranno brevemente illustrati questi tre gruppi di equazioni.Osservazione. La deformazione e la tensione pur avendo la stessa struttura (sono entrambetensori simmetrici), hanno una natura molto diversa: la deformazione E(X) ci dice come sideforma un cubo elementare con vertice in X; la tensione S(X) ci dice quale e la forza agentesu una superficie passante per X e di normale n.
3.1 Equazioni di Congruenza
Le equazioni di congruenza sono due, una valida nel corpo, l’altra sul bordo, e riguardano ilcampo di spostamento u e la deformazione E
E = sym (∇u) , suB × T ; u = u , su ∂uB × T . (21) eq_congruenza
Attenzione: in tali equazioni l’incognita e il campo di spostamento, e per tale motivo non sonoin genere risolvibili: sono troppe! Abbiamo sei equazioni, le sei componenti di E, per sole treincognite, le componenti di u.
La definizione (21) della deformazione E ha la seguente motivazione. Si voglia confrontarelo spostamento di punti vicini X e X + ε e, separati dal vettore ε e; lo sviluppo in serie al primoordine del campo di spostamento fornisce
u(X + ε e)− u(X) = ε∇u(X) e + o(ε) . (22)
10
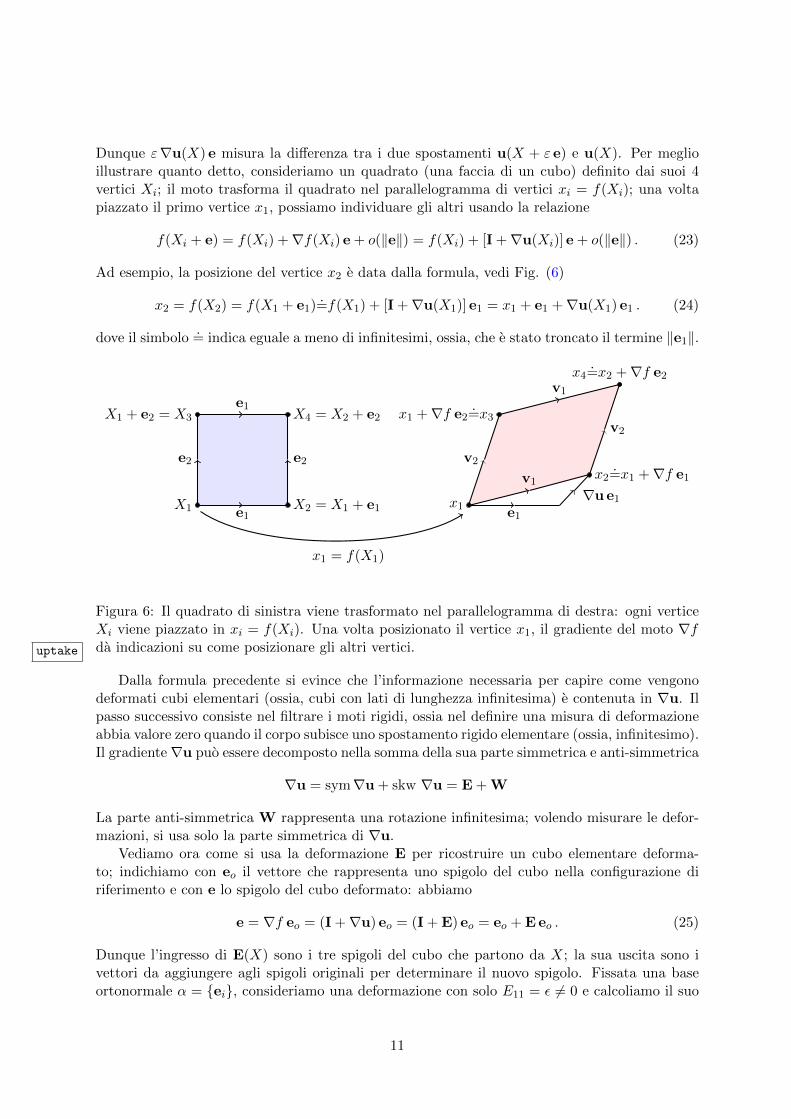
Dunque ε∇u(X) e misura la differenza tra i due spostamenti u(X + ε e) e u(X). Per meglioillustrare quanto detto, consideriamo un quadrato (una faccia di un cubo) definito dai suoi 4vertici Xi; il moto trasforma il quadrato nel parallelogramma di vertici xi = f(Xi); una voltapiazzato il primo vertice x1, possiamo individuare gli altri usando la relazione
f(Xi + e) = f(Xi) +∇f(Xi) e + o(‖e‖) = f(Xi) + [I +∇u(Xi)] e + o(‖e‖) . (23)
Ad esempio, la posizione del vertice x2 e data dalla formula, vedi Fig. (6)
x2 = f(X2) = f(X1 + e1)=f(X1) + [I +∇u(X1)] e1 = x1 + e1 +∇u(X1) e1 . (24)
dove il simbolo = indica eguale a meno di infinitesimi, ossia, che e stato troncato il termine ‖e1‖.
x1 = f(X1)
X1 X2 = X1 + e1
X1 + e2 = X3 X4 = X2 + e2
e1
e2
e1
e2
x1
x2=x1 +∇f e1
x1 +∇f e2=x3
x4=x2 +∇f e2
v1
e1
∇u e1
v2
v1
v2
Figura 6: Il quadrato di sinistra viene trasformato nel parallelogramma di destra: ogni verticeXi viene piazzato in xi = f(Xi). Una volta posizionato il vertice x1, il gradiente del moto ∇fda indicazioni su come posizionare gli altri vertici.uptake
Dalla formula precedente si evince che l’informazione necessaria per capire come vengonodeformati cubi elementari (ossia, cubi con lati di lunghezza infinitesima) e contenuta in ∇u. Ilpasso successivo consiste nel filtrare i moti rigidi, ossia nel definire una misura di deformazioneabbia valore zero quando il corpo subisce uno spostamento rigido elementare (ossia, infinitesimo).Il gradiente∇u puo essere decomposto nella somma della sua parte simmetrica e anti-simmetrica
∇u = sym∇u + skw ∇u = E + W
La parte anti-simmetrica W rappresenta una rotazione infinitesima; volendo misurare le defor-mazioni, si usa solo la parte simmetrica di ∇u.
Vediamo ora come si usa la deformazione E per ricostruire un cubo elementare deforma-to; indichiamo con eo il vettore che rappresenta uno spigolo del cubo nella configurazione diriferimento e con e lo spigolo del cubo deformato: abbiamo
e = ∇f eo = (I +∇u) eo = (I + E) eo = eo + E eo . (25)
Dunque l’ingresso di E(X) sono i tre spigoli del cubo che partono da X; la sua uscita sono ivettori da aggiungere agli spigoli originali per determinare il nuovo spigolo. Fissata una baseortonormale α = {ei}, consideriamo una deformazione con solo E11 = ε 6= 0 e calcoliamo il suo
11

effetto su un cubo con gli spigoli paralleli ai versori della base α; abbiamo ε 0 00 0 00 0 0
α
100
α
=
ε00
α
,
ε 0 00 0 00 0 0
α
010
α
OR
001
α
=
000
α
.
Dunque, il cubo costruito sugli spigoli (1, 0, 0), (0, 1, 0), (0, 0, 1) viene trasformato nel parallele-pipedo di spigoli (1+ε, 0, 0), (0, 1, 0), (0, 0, 1) e le facce del parallelepipedo rimangono ortogonalitra loro; un effetto analogo si ottiene con deformazioni E che abbiano tutte le componenti fuoridiagonale nulle: la lunghezza degli spigoli viene variata, mentre le facce rimangono ortogonalitra loro. L’effetto di una deformazione che abbia solo E12 = γ 6= 0 e molto diverso; abbiamo 0 γ 0
γ 0 00 0 0
α
100
α
=
0γ0
α
,
0 γ 0γ 0 00 0 0
α
010
α
=
γ00
α
.
In questo caso, il cubo costruito sugli spigoli (1, 0, 0), (0, 1, 0), (0, 0, 1) viene trasformato nelparallelepipedo di spigoli (1, γ, 0), (γ, 1, 0), (0, 0, 1): la lunghezza degli spigoli viene conservata,mentre le facce non rimangono ortogonali tra loro.
Per tali motivi, le componenti delle deformazione sulla diagonale vengono chiamate allunga-menti, mentre quelle fuori diagonale scorrimenti angolari.
Attenzione: la stessa deformazione E ha effetti molto diversi su cubi orientati in mododiverso. Consideriamo la deformazione precedente e calcoliamo l’effetto su un cubo ruotato diπ/4 attorno ad e3; per gli spigoli a e b di componenti (1/
√2, 1/√
2, 0)α, (−1/√
2, 1/√
2, 0)αabbiamo: 0 γ 0
γ 0 00 0 0
α
1/√
2
1/√
20
α
= γ
1/√
2
1/√
20
α
,
0 γ 0γ 0 00 0 0
α
−1/√
2
1/√
20
α
= −γ
−1/√
2
1/√
20
α
.
In questo caso i due spigoli considerati sono degli autovettori della deformazione, a cui corri-sponde l’autovalore γ
E a = γ a , E b = −γ b . (26)
Dunque, per un cubo orientato in questo modo gli spigoli paralleli ad a si allungano, quelliparalleli a b si accorciano, mentre le facce rimangono ortogonali tra loro.
3.2 Relazione Costitutiva
La relazione costitutiva descrive la relazione tra le 6 componenti delle deformazione e le 6 dellatensione. Prima di specificare le relazioni costitutive tipiche dell’elasticita lineare, introduciamol’importante nozione di distorsione, descritta dal campo tensoriale simmetrico Eo: il campodella distorsione descrive lo stato rilassato locale, ossia, Eo(X) descrive la deformazione chel’elemento di volume attorno ad X vorrebbe avere. L’esempio piu noto e semplice di distorsionee quella termica: quando scaldiamo un pezzo di metallo, il suo volume vorrebbe aumentare. Inquesto caso abbiamo Eo = α(T ) I, ossia, la distorsione termica e sferica, e l’unico parametroscalare α, detto coefficiente di dilatazione termica, dipende dalla temperatura α = α(T ).
12

3.2.1 Deformazione Elastica
La deformazione elastica Ee e la differenza tra la deformazione E e la distorsione Eo:
Ee = E−Eo . (27) def_elastica
La deformazione elastica si annulla quando E = Eo, ossia, solo quando esiste un campo di spo-stamento u che soddisfa le condizioni al contorno e tale che sym (∇u) = Eo. Questa condizionee analoga alla equazione di congruenza (21): data una qualsiasi distorsione (sei componenti), cisi chiede se esista uno spostamento (tre componenti) le cui derivate consentano di ricostruire ladistorsione data. Abbiamo dunque:
Eo e realizzabile ⇔ esiste u tale che: sym (∇u) = Eo , suB ; u = u , su ∂uB .
Una distorsione non realizzabile produce uno stato tensionale che puo essere molto elevato: molticomponenti strutturali si rompono a causa delle distorsioni e non a causa dei carichi. Si notiche una distorsione puo non essere realizzata sia perche sym∇u 6= Eo, oppure, perche u 6= u su∂uB, ovvero, per entrambe i motivi.
3.2.2 Materiale Elastico Lineare
La relazione costitutiva per i materiali elastici lineari prescrive una relazione lineare tra latensione S e la deformazione elastica Ee:
S = CEe = C (E−Eo) . (28) eq_costi
Il tensore del quarto ordine C e chiamato tensore elastico, ovvero, rigidezza; tale tensore einvertibile, e la sua inversa F = C−1 si chiama flessibilita:
Ee = E−Eo = FS . (29) eq_costi2
Dalla relazione costitutiva (28) discende immediatamente il fatto che una distorsione realizzabileproduce una tensione nulla:
Eo = sym (∇u) = E ⇔ Ee = E−Eo = 0 ⇔ S = CEe = 0 ;
al contrario, se Eo 6= sym (∇u) la tensione sara diversa da zero, a prescindere dai carichi. Iltensore elastico opera sui tensori del secondo ordine (la deformazione) e restituisce tensori delsecondo ordine (la tensione): e dunque un tensore del quarto ordine, al quale si richiede di esseresimmetrico in modo da garantire l’esistenza dell’energia elastica.
E’ importante ricordare che la nozione di rigidezza e una nozione locale, ossia, la rigidezzavaria da punto a punto; quando la rigidezza e la stessa in ogni punto il materiale viene dettoomogeneo. Fissata una base α = {ai}, la relazione (28) si rappresenta come segue
Sij(X) = Cijhk(X)Eehk(X) ; (30) eq_costi2
Notiamo che C e definito solo sui tensori simmetrici (la deformazione elastica e simmetrica) erestituisce solo tensori simmetrici (la tensione e simmetrica); inoltre e simmetrico lui stesso: pertali motivi valgono le seguenti eguaglianze:
Cijhk = Chkij , simmetrie maggiori; Cijhk = Cjihk ,Cijhk = Cjikh , simmetrie minori.
13

La relazione costitutiva ammette una rappresentazione semplificata che coinvolge solo le 6 com-ponenti strette di S e Ee. Dalla relazione originale (30) risulta che ad ogni componente dellatensione contribuiscono tutte le componenti della deformazione e dunque, in virtu delle simme-trie minori di C, le deformazioni miste vanno considerate due volte con lo stesso coefficiente: adesempio
Sij = Cij11Ee11 + Cij22Ee22 + Cij33Ee33+ Cij12Ee12 + Cij21Ee21 + Cij13Ee13 + Cij31Ee31 + Cij23Ee23 + Cij32Ee32= Cij11Ee11 + Cij22Ee22 + Cij33Ee33 + Cij12 2Ee12 + Cij13 2Ee13 + Cij23 2Ee23 .
(31)
In questo modo, ogni componente della tensione risulta combinazione lineare delle sole 6 com-ponenti strette della deformazione: possiamo allora rappresentare tensione e deformazione convettori colonne a 6 componenti, e la matrice di rigidezza con una matrice 6x6 che indicheremocon il simbolo D:
S11
S22
S33
S12
S23
S13
α
=
Dα11 Dα12 Dα13 Dα14 Dα15 Dα16
Dα12 Dα22 Dα23 Dα24 Dα25 Dα26
Dα13 Dα23 Dα33 Dα34 Dα35 Dα36
Dα14 Dα24 Dα34 Dα44 Dα45 Dα46
Dα15 Dα25 Dα35 Dα45 Dα55 Dα56
Dα16 Dα26 Dα36 Dα46 Dα56 Dα66
α
Ee11Ee22Ee33
2Ee122Ee232Ee13
α
; (32) costi_sta
BADA: si noti il fattore 2 nelle componenti miste della deformazione, spiegato delle precedenticonsiderazioni. Esaminando la (32), si puo notare che la rappresentazione della matrice dirigidezza per il tramite della D coinvolge 21 componenti indipendenti, dette rigidezze, che sonole componenti strette della matrice simmetrica 6x6: abbiamo la seguente corrispondenza:
Tensore del quarto ordinecon simmetrie minori e maggiori
}C ⇔ D Tensore simmetrico del secondo ordine
Si ha una corrispondenza analoga per le matrici di flessibilita
Tensore di Flessibilita F = C−1 ⇔ G = D−1 Matrice di flessibilita.
La rappresentazione (32) e detta ‘standard’; una rappresentazione alternativa, detta alla Voigt,prevede una diversa ordinazione delle componenti di S e E, e quindi un diverso significato dialcune componenti Dαij
S11
S22
S33
S23
S13
S23
α
=
Dα11 Dα12 Dα13 Dα14 Dα15 Dα16
Dα12 Dα22 Dα23 Dα24 Dα25 Dα26
Dα13 Dα23 Dα33 Dα34 Dα35 Dα36
Dα14 Dα24 Dα34 Dα44 Dα45 Dα46
Dα15 Dα25 Dα35 Dα45 Dα55 Dα56
Dα16 Dα26 Dα36 Dα46 Dα56 Dα66
α
Ee11Ee22Ee33
2Ee122Ee132Ee23
α
; (33) costi_voigt
Nel seguito seguiremo sempre la rappresentazione (32).
14

3.2.3 Energia Elastica
La relazione costitutiva (28) sotto intende l’esistenza della energia elastica, ossia, di una funzionescalare φ, la cui derivata rispetto al tempo eguaglia l’opposto della potenza interna P i spesadalla tensione sulla velocita di deformazione:
Energia elastica: φ =1
2CEe ·Ee ⇔ φ = CEe · E = S · E = −P i(u) : Potenza interna. (34) ene_elastica
Dalla (34) consegue che
S =∂φ
∂Ee= CEe .
4 Equazioni di Bilancio
Nella definizione di un modello meccanico e utile considerare tre distinte categorie di azionidinamiche: le azioni interne, dette tensioni o sollecitazioni ; le azioni esterne, ad esempio, leforze applicate; le azioni d’inerzia. Conseguentemente, si considerano tre tipi di potenza:
P i(w) :=
∫B−S ·∇w dV , potenza interna, (35)
Pe(w) :=
∫B
f ·w dV +
∫∂B
t ·w dA , potenza esterna, (36)
P ine(w) :=
∫Bρ u ·w dV , potenza d’inerzia, (37)
dove: w e il campo della velocita di saggio; S e il tensore delle tensioni; f e t sono i vettoridei carichi applicati all’interno e sul bordo del corpo; ρ e la densita del corpo e ρ u e la forzad’inerzia.
4.1 Il Principio di Bilancio
Il principio di bilancio richiede che, in ogni istante e per ogni velocita di saggio, la potenza spesadalle forze d’ineriza debba essere uguale alla somma della potenza interna e di quella esterna:
P ine(w) = P i(w) + Pe(w) , ∀w . (38) bala_prin
In alcuni testi meno recenti il principio di bilancio viene formulato in termini di lavoro anziche dipotenza: il lavoro compiuto dalle azioni d’inerzia Line(dw) deve eguagliare la somma di quellointerno Li(dw) e di quello esterno Le(dw), per ogni spostamento virtuale dw e per ogni istantetemporale:
Line(dw) = Li(dw) + Le(dw) , ∀ dw . (39) PLV
La (39) viene comunemente detta Principio dei Lavori Virtuali. Si noti che le due formulazionidel principio di bilancio sono formalmente identiche: la (38) diventa la (39) se valutiamo ilfunzionale P sugli spostamenti virtuali invece che sugli atti di moto di saggio, Nel caso diproblemi stazionari, con potenza delle azioni d’inerzia nulle, il principio di bilancio si scrive nelseguente modo ∫
B−S ·∇w dV︸ ︷︷ ︸
potenza virtuale interna
+
∫B
f ·w dV +
∫∂B
t ·w dA︸ ︷︷ ︸potenza virtuale esterna
= 0 , ∀w (40)
15

4.2 Equazioni locali di Bilancio
Le equazioni locali di bilancio sono due, una valida nel corpo, l’altra sul bordo, e sono una direttaconseguenza del principio di bilancio. Per dedurre tali equazioni a partire dalla (38) facciamouso di due relazioni, valide per ogni campo vettoriale del tipo AT v, costruito moltiplicando iltensore A con il vettore v. La prima relazione e la formula per la derivazione del prodotto difunzioni:
div (AT v) = div (A) · v + A · ∇v ;
la seconda relazione e il teorema della divergenza per un campo vettoriale:∫B
div (AT v) dV =
∫∂B
A m · v da ,
con m la normale al bordo di B. Allora, la potenza interna si riscrive come segue:
P i(w) =
∫B−S ·∇w dV =
∫B
[ div (S) ·w−div (ST w) ] dV =
∫B
div (S) ·w dV −∫∂B
S m ·w dA .
Usando la rappresentazione appena trovata della potenza interna, il principio di bilancio si puoriscrivere mettendo a fattor comune il campo della velocita di saggio w:∫
B[−ρ u + div (S) + f ] ·w dV +
∫∂B
[ t− S m ] ·w dA = 0 , ∀w . (41) eq_bilancio0
Dovendo valere per ogni w, le somme tra parentesi quadre devono essere nulle, sia quelle nelcorpo, sia quelle sul bordo, e dunque:
ρ u = div (S) + f , suB × T ; S m = t , su ∂tB × T . (42) eq_bilancio
Attenzione: tali equazioni riguardano S, ossia, l’incognita e il campo di tensione, e per talemotivo non sono in genere risolvibili: sono poche! Abbiamo tre equazioni scalari, ognuna per letre componenti dei carichi, ma ben sei incognite, le componenti di S.
E’ importante ricordare che l’ingresso di S(X) e un versore n che individua la superficie perX di normale n; la sua uscita e la forza che agisce su tale superficie. Ad esempio, usando unarappresentazione matriciale, abbiamo: S11 S12 S13
S12 S22 S23S13 S23 S33
α
100
α
=
S11S12S13
α
.
5 La Formulazione del Problema Elastico Lineare
Il tipico problema elastico lineare viene formulato in termini di spostamenti utilizzando tuttie tre i gruppi di equazioni che abbiamo appena introdotti nei paragrafi precedenti, e si basasulla riscrittura in termini di spostamento delle equazioni di bilancio. Il problema viene cosıformulato: dati i carichi f(X, τ) e i carichi al bordo t(X, τ), trovare il campo di spostamentou(X, τ) che verifica le equazioni di bilancio negli spostamenti, le condizioni al contorno (c.c)dinamiche e cinematiche, e le condizioni iniziali:
ρ u(X, τ) = div [C(X)(sym (∇u(X, τ))−Eo(X)] + f(X, τ) ,bilancio su B × T ;
C(X)(sym (∇u(X, τ))−Eo(X)) m = t(X, τ) ,bilancio su ∂tB × T , c.c. dinamiche;
u = u , su ∂uB × T , c.c. cinematiche;
u(s, 0) = uo , u(s, 0) = vo , su B × {0}, condizioni iniziali.
(43) eq_bala_sposta
16

Attenzione: le equazioni di bilancio riscritte in questa forma sono risolvibili: abbiamo tre equa-zioni in tre incognite. Nella maggior parte dei casi pero, il problema elastico non e risolvibilein forma esplicita, ma solo attraverso tecniche numeriche. La terna (u , E , S) che soddisfa leequazioni di bilancio, congruenza e costitutive e detta stato elastico del sistema.
6 Materiali Isotropi
La risposta elastica viene classificata secondo due importanti categorie: risposta isotropa eanisotropa.
6.1 Decomposizione Sferica-Deviatorica
Ogni tensore A puo essere decomposto nella somma di due componenti, la parte sferica As, ossia,proporzionale ad I, e la parte deviatorica Ad, ossia, a traccia nulla, che risultano ortogonali traloro:
A = Ad + As , As =1
3tr(A) I ; Ad = A−As , ⇒ tr(Ad) = 0 , As ·Ad = 0 . (44) S-D
Tale decomposizione e molto importante sia per la deformazione che per la tensione, in quantoparte sferica e deviatorica hanno un notevole significato meccanico. Per quanto riguarda ladeformazione Ee, la parte deviatorica Ee
d misura le variazioni di forma e la parte sferica Ees,
misura le variazioni di volume:
Ee = Eed + Ee
s = Eed +
1
3εv I , Ee
s =1
3tr(Ee) I ; εv = tr(Ee) ; (45) dev_sphe
In particolare, e proprio la traccia che misura la variazione di volume e per tale motivo e chiamatadeformazione volumetrica ed indicata con il simbolo εv. Per quanto riguarda la tensione S, laparte sferica Ss misura la pressione, definita come l’opposto della componente sferica dellatensione:
S = Sd + Ss = Sd − p I , Ss =1
3tr(S) I ; p = −1
3tr(S) ; (46) dev_sphe
Come vedremo, la relazione costitutiva per i materiali isotropi si rappresenta in modo sempliceusando la decomposizione sferica-deviatorica per tensione e deformazione.
6.2 Risposta Isotropa
Un materiale e detto isotropo quando la relazione tensione-deformazione e la stessa in ognidirezione. In questo caso la risposta elastica e rappresentata da due soli parametri elastici. Frale molte coppie di parametri in uso, scegliamo le seguenti: costanti di Lame (µ, λ); modulo diYoung e di Poisson (Y , ν); modulo di taglio e di compressione (G, k). Tali parametri sono legatitra loro dalle seguenti relazioni:
µ =Y
2 (1 + ν), λ =
ν Y
(1 + ν) (1− 2 ν), k = λ+
2
3µ =
Y
3 (1− 2 ν), (47) elasticmoduli
ν =λ
2 (µ+ λ), Y =
µ (2µ+ 3λ)
(µ+ λ). (48) elasticmoduli_bis
Le relazioni S = CEe e Ee = FS si scrivono in termini di (µ, λ) nel seguente modo:
S = 2µEe + λ tr(Ee) I , Ee =1
2µ
(S− λ
2µ+ 3λtr(S) I
). (49) costi_iso
17

Le stesse relazioni si riscrivono in termini di (Y, ν) nel seguente modo:
S =Y
1 + νEe +
ν Y
(1 + ν) (1− 2 ν)tr(Ee) I , Ee =
1
Y
((1 + ν) S− ν tr(S) I
). (50) costi_iso2
Per scrivere la terza rappresentazione della risposta isotropa, quella in termini di (G, k), oc-corre utilizzare la decomposizione sferico-deviatorico nella (49), che evidenzia un altro termineproporzionale alla traccia, la parte sferica di Ee
s:
S = 2µ (Eed + Ee
s) + λ tr(Ee) I = 2µEed +
(2µ
3+ λ
)tr(Ee) I = GEe
d + k tr(Ee) I . (51) costi_iso3
Questa ultima espressione mette in luce il fatto che il parametro G pesa solo le deformazionideviatoriche, ossia, le variazioni di forma; per tale motivo e chiamato modulo di taglio. Ilparametro k = 2µ/3 + λ pesa solo le variazioni di volume, ed e detto modulo di compressionevolumetrica. La relazione (51) va notata anche perche mostra che la parte deviatorica dellatensione dipende solo dalla parte deviatorica della deformazione, e analogamente la parte sfericadi S dipende solo dalla parte sferica di Ee:
Sd = GEed , Ss = k tr(Ee) I = 3 kEe
s , ossia p = −k εv . (52) costi_iso3b
L’energia elastica isotropa ha la seguente semplice espressione:
φ = µEe ·Ee +1
2λ tr(Ee)2 = µEe
d ·Eed +
1
2k tr(Ee)2 . (53) ene_iso
Si noti che nello scrivere la seconda uguaglianza della (53) abbiamo usato la seguente relazione,conseguenza della ortogonalita tra parte sferica e deviatorica:
Ee ·Ee = (Eed + Es) · (Ee
d + Ees) = Ee
d ·Eed + Ee
s ·Ees = Ee
d ·Eed +
1
3tr(Ee)2 .
I parametri elastici µ, λ e k non possono assumere un valore qualsiasi, in quanto l’energia elasticaφ deve essere sempre positiva, qualunque sia la deformazione elastica Ee = Ee
d+Ees. La seconda
delle rappresentazioni (53) contiene due contributi deformativi tra loro ortogonali, entrambi alquadrato, ossia, positivi; ne consegue che l’energia e positiva solo se µ > 0 e k > 0. Questarichiesta, inserita nella (47), limita anche i valori di λ, Y e ν:
µ > 0 , k > 0 , ⇒ λ > −2
3µ , Y > 0 , −1 < ν < 1/2 . (54)
Diamo anche una rappresentazione matriciale della relazione costitutiva, ossia, una rappresen-tazione mediata dalla scelta di una base. Ricordiamo che la risposta isotropa e la stessa intutte le direzioni, e dunque la sua rappresentazione matriciale sara la stessa in tutte le basi;nonostante questo, scrivere questa rappresentazione e utile per almeno due motivi: 1) mette inluce a colpo d’occhio le dipendenze tra le varie componenti di tensione e deformazione; 2) mettein evidenza le differenze profonde rispetto alla risposta anisotropa che vedremo nella prossimasezione. Fissata una base qualsiasi, abbiamo in componenti:
S = Sij ei ⊗ ej = 2µEeij ei ⊗ ej + λ (E11 + E22 + E33) δij .
18

La corrispondente rappresentazione matriciale in termini della matrice 6x6 D e:
S11
S22
S33
S12
S23
S13
=
2µ+ λ λ λ 0 0 0
λ 2µ+ λ λ 0 0 0
λ λ 2µ+ λ 0 0 0
0 0 0 µ 0 0
0 0 0 0 µ 0
0 0 0 0 0 µ
Ee11Ee22Ee33
2Ee122Ee232Ee13
. (55) iso_ciccio1
Le linee verticali ed orizzontali evidenziano gli accoppiamenti: le componenti Sii della tensionedipendono solo dalle componenti Eeii delle deformazione; analogamente, le componenti miste Sij ,con i 6= j, dipendono solo dalle Eeij . Scriviamo anche la relazione inversa, Ee = FS, in termini
dei moduli (Y, ν), sempre usando la rappresentazione matriciale standard in termini di D−1:
Ee11Ee22Ee33
2Ee122Ee232Ee13
=
1
Y
1 −ν −ν 0 0 0
−ν 1 −ν 0 0 0
−ν −ν 1 0 0 0
0 0 0 2 (1 + ν) 0 0
0 0 0 0 2 (1 + ν) 0
0 0 0 0 0 2 (1 + ν)
S11
S22
S33
S12
S23
S13
. (56) costi_iso4
La (56) mostra chiaramente cosa si intende per risposta isotropa, ossia, uguale in ogni direzione.Ad esempio, nel caso di sollecitazione uniassiale, con una sola componente di tensione diversada zero, qualunque sia la direzione e di sollecitazione, la risposta in termini di deformazione hasempre la stessa forma:
S = σ e⊗ e︸ ︷︷ ︸tensione ‖ e
⇒ E =σ
Ye⊗ e︸ ︷︷ ︸
deformazione ‖ e
− σ ν
Y(I− e⊗ e)︸ ︷︷ ︸
deformazione ⊥ e
, ∀direzione e .
Analogamente, qualunque sollecitazione di taglio di assi a,b, con |a| = |b| = 1, a ·b = 0 generauna deformazione di taglio lungo gli stessi assi:
S = σ a⊗ b ⇒ E =σ (1 + ν)
Ya⊗ b , ∀ coppia a ,b .
Riscriviamo per comodita la relazione (55) in termini dei moduli di Young e Poisson:
S11
S22
S33
S12
S23
S13
= Y
1− ν ν ν 0 0 0
ν 1− ν ν 0 0 0
ν ν 1− ν 0 0 0
0 0 0 (1− 2 ν)/2 0 0
0 0 0 0 (1− 2 ν)/2 0
0 0 0 0 0 (1− 2 ν)/2
Ee11Ee22Ee33
2Ee122Ee232Ee13
,
(57) iso_ciccio2
con
Y =Y
(1 + ν) (1− 2 ν).
19

6.3 Sollecitazione termiche
Consideriamo il seguente esempio: un parallelepipedo con il lati paralleli ai versori della baseα = {ei} avente le due facce di normale e1 vincolate nella direzione e1, e sottoposto ad unadistorsione termica Eo = α I. Possiamo calcolare lo stato di tensione a partire dai seguentidati: i vincoli impediscono la dilatazione nella direzione e1 e dunque E11 = 0; inoltre, poiche evincolato il solo spostamento nella direzione e1 abbiamo S11 6= 0 e S12 = S13 = 0; le facce dinormale e2, e3 sono scariche e dunque S22 = S23 = S33 = 0; tutte le deformazioni di scorrimentosono nulle e le uniche grandezze diverse da zero da calcolare sono S11, E22 e E33. La (49)permette di scrivere
S11 = 2µ (0− α) + λ (0 + E22 + E33 − 3α) , (58)
S22 = 2µ (E22 − α) + λ (0 + E22 + E33 − 3α) = 0 , (59)
S33 = 2µ (E33 − α) + λ (0 + E22 + E33 − 3α) = 0 . (60)
Dalla seconda e terza equazione si ricava
E22 = E33 = α3λ+ 2µ
2 (λ+ µ)= α (1 + ν) . (61)
Inserendo questo risultato nella prima equazione, si ottiene
S11 = −αµ 3λ+ 2µ
λ+ µ= −αY . (62)
Quindi il parallelepipedo sara in uno stato di compressione uniassiale la cui intensita e data dalprodotto della dilatazione termica α per il modulo di Young Y .
7 Materiali Anisotropi.
Un materiale e detto anisotropo quando la relazione tensione-deformazione cambia a secondadella direzione. In questo caso la risposta elastica e rappresentata da molti parametri elastici;qui consideriamo solo due classi di risposte anisotrope.
7.0.1 Risposta Ortotropa
La prima classe e quella dei materiali ortotropi, materiali che presentano tre piani di simme-tria fra loro ortogonali, la cui risposta elastica e descritta da 9 parametri. Per ottenere unarappresentazione semplice del tensore elastico occorre scegliere una base i cui tre versori sia-no ortogonali ai tre piani di simmetria: sia β = {bi} la base prescelta, detta base locale o dilaboratorio, che descrive la risposta locale, ossia, in un punto.
In questa base la matrice di rigidezza D ha comunque una rappresentazione poco intuitiva,mentre la matrice di flessibilita G = D−1 ha una interpretazione immediata; in particolare, i 9moduli elastici che caratterizzano G per i materiali ortotropi sono:
• 3 moduli di Young Yi, lungo le tre direzioni bi;
• 3 moduli di Poisson ν12, ν13, ν23;
• 3 moduli di taglioG12, G13, G23, relativi agli scorrimenti nei tre piani coordinati span(bi ,bj).
20

In forma matriciale standard la relazione in termini di flessibilita G si scrive:
Ee11
Ee22
Ee33
2Ee12
2Ee23
2Ee13
β
=
1/Y1 −ν12/Y1 −ν13/Y1 0 0 0
−ν12/Y1 1/Y2 −ν23/Y2 0 0 0
−ν13/Y1 −ν23/Y2 1/Y3 0 0 0
0 0 0 1/G12 0 0
0 0 0 0 1/G23 0
0 0 0 0 0 1/G13
β
S11
S22
S33
S12
S23
S13
β
. (63) costi_orto3
Si osservi che la matrice di flessibilita e composta da due blocchi 3x3 simmetrici e altri dueblocchi 3x3 nulli: tale fatto semplifica molto il calcolo della sua inversa, ossia, della matrice dirigidezza D = G−1; definiamo (eliminando il pedice β per semplificare la notazione):
GY =
1/Y1 −ν12/Y1 −ν13/Y1
−ν12/Y1 1/Y2 −ν23/Y2
−ν13/Y1 −ν23/Y2 1/Y3
, GG =
1/G12 0 0
0 1/G23 0
0 0 1/G13
, (64) costi_orto4
allora
G =
[GY 0
0 GG
], ⇒ D = G−1 =
[G−1Y 0
0 G−1G
]; (65) costi_orto5
inoltre, il calcolo di G−1G e immediato in quanto GG e diagonale. Si noti anche che la sotto matricedi flessibilita GY puo essere scritta facendo comparire altri tre moduli di Poisson (ν21, ν31, ν32)nel seguente modo
GY =
1/Y1 −ν21/Y2 −ν31/Y3
−ν12/Y1 1/Y2 −ν32/Y3
−ν13/Y1 −ν23/Y2 1/Y3
. (66) costi_orto6
I tre nuovi moduli di Poisson non aggiungono ulteriori parametri elastici, ma sono determinatida gli altri: poiche GY e simmetrica, deve essere ν12/Y1 = ν21/Y2, ν13/Y1 = ν31/Y3, ν23/Y2 =ν32/Y3. La matrice di rigidezza D si ricava a partire dalle (64,65); abbiamo:
S11
S22
S33
S12
S23
S13
β
=
Dβ11 Dβ12 Dβ13 0 0 0
Dβ12 Dβ22 Dβ23 0 0 0
Dβ13 Dβ23 Dβ33 0 0 0
0 0 0 G12 0 0
0 0 0 0 G23 0
0 0 0 0 0 G13
β
Ee11Ee22Ee33
2Ee122Ee232Ee13
β
; (67) costi_orto
il pedice β alle componenti del tensore elastico allude al fatto che tali componenti sono relativealla base locale indicata con β; tali componenti possono essere riscritte in termini di tre moduli
21
di Young Yi, 3 moduli di Poisson ν12, ν13, ν23
Dβ11 =Y 21 (Y3 ν
223 − Y2)
Dβ, Dβ12 = −Y1 Y2 (Y3 ν23 ν13 + Y2 ν12
Dβ,
Dβ13 = −Y1 Y2 Y3 (ν12 ν23 + ν13Dβ
, Dβ22 =Y 22 (Y3 ν
213 − Y1)
Dβ,
Dβ23 = −Y2 Y3 (Y2 ν12 ν13 + Y1 ν23Dβ
, Dβ33 =Y2 Y3 (Y2 ν
212 − Y1)
Dβ,
(68) costi_orto2
doveDβ = Y2 Y3 ν
213 − Y1 Y2 + 2 ν12 ν23 ν13 Y2 Y3 + Y1 Y3 ν
223 + Y 2
2 ν212 .
7.0.2 Risposta Trasversalmente Isotropa
fig:costi_tiso1
b1
b2
b3
b1
b2
b3
b1
b2
b3
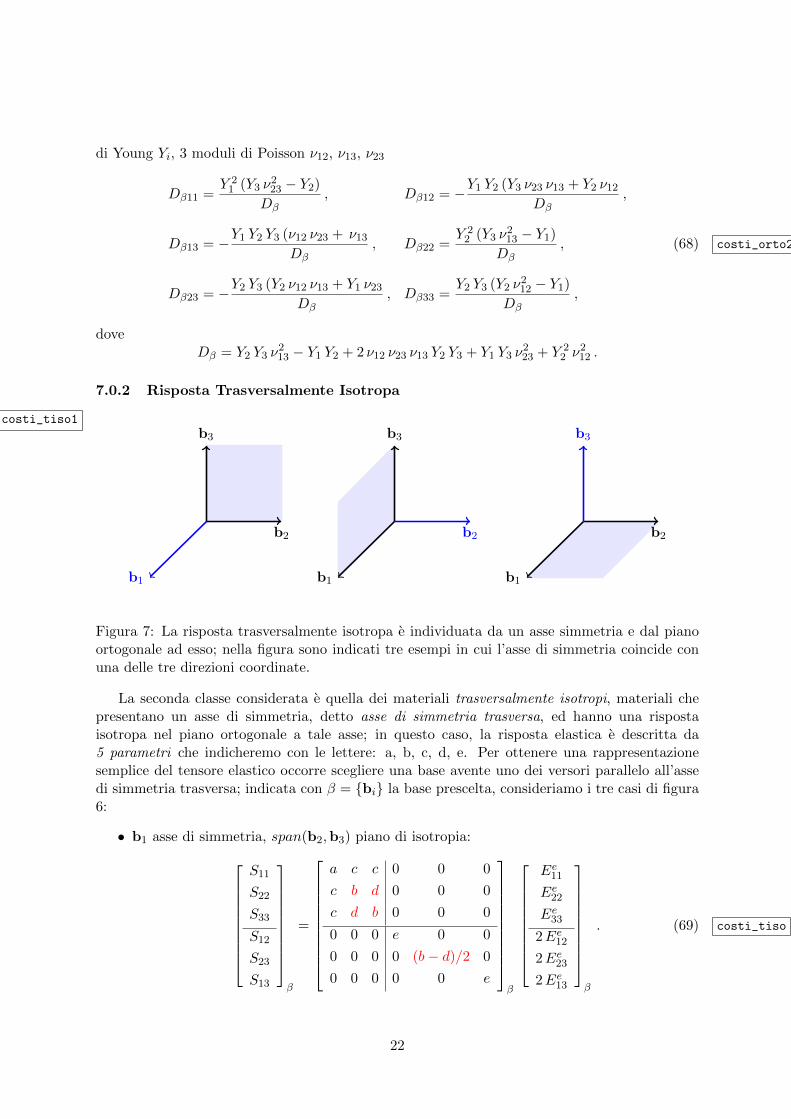
Figura 7: La risposta trasversalmente isotropa e individuata da un asse simmetria e dal pianoortogonale ad esso; nella figura sono indicati tre esempi in cui l’asse di simmetria coincide conuna delle tre direzioni coordinate.
La seconda classe considerata e quella dei materiali trasversalmente isotropi, materiali chepresentano un asse di simmetria, detto asse di simmetria trasversa, ed hanno una rispostaisotropa nel piano ortogonale a tale asse; in questo caso, la risposta elastica e descritta da5 parametri che indicheremo con le lettere: a, b, c, d, e. Per ottenere una rappresentazionesemplice del tensore elastico occorre scegliere una base avente uno dei versori parallelo all’assedi simmetria trasversa; indicata con β = {bi} la base prescelta, consideriamo i tre casi di figura6:
• b1 asse di simmetria, span(b2,b3) piano di isotropia:
S11
S22
S33
S12
S23
S13
β
=
a c c 0 0 0
c b d 0 0 0
c d b 0 0 0
0 0 0 e 0 0
0 0 0 0 (b− d)/2 0
0 0 0 0 0 e
β
Ee11Ee22Ee33
2Ee122Ee232Ee13
β
. (69) costi_tiso
22

• b2 asse di simmetria; span(b1,b3) piano di isotropia:
S11
S22
S33
S12
S23
S13
β
=
b c d 0 0 0
c a c 0 0 0
d c b 0 0 0
0 0 0 e 0 0
0 0 0 e 0
0 0 0 0 0 (b− d)/2
β
Ee11Ee22Ee33
2Ee122Ee232Ee13
β
. (70) costi_tiso
• b3 asse di simmetria; span(b1,b2) piano di isotropia:
S11
S22
S33
S12
S23
S13
β
=
b d c 0 0 0
d b c 0 0 0
c c a 0 0 0
0 0 0 (b− d)/2 0 0
0 0 0 0 e 0
0 0 0 0 0 e
β
Ee11Ee22Ee33
2Ee122Ee232Ee13
β
. (71) costi_tiso
Anche in questo caso il pedice β allude al fatto che tale rappresentazione e relativa alla baselocale β; le componenti della flessibilita D−1 assumono una espressione semplice in termini di:
• due moduli di Young Ya, Yp, relativi all’asse e al piano di simmetria,
• due moduli di Poisson νp, νap relativi ai rapporti di estensione nel piano di isotropia e trale direzioni asse-piano,
• un modulo di taglio Gap:
Scriviamo la matrice G = D−1 nel caso in cui b1 sia l’asse di simmetria:,
Ee11
Ee22
Ee33
2Ee12
2Ee23
2Ee13
β
=
1/Ya −νap/Ya −νap/Ya 0 0 0
−νap/Ya 1/Yp −νp/Yp 0 0 0
−νap/Ya −νp/Yp 1/Yp 0 0 0
0 0 0 1/Gap 0 0
0 0 0 0 2 (1 + νp)/Yp 0
0 0 0 0 0 1/Gap
β
S11
S22
S33
S12
S23
S13
β
.
(72) costi_tiso2
23

Le cinque rigidezze a, b, c, d, e della matrice D si possono ricavare in termini dei moduli elasticiinvertendo la (72); si ottiene:
a =(−1 + νp)Y
2a
δ, b =
Yp (−Ya + ν2ap Yp)
δ (1 + νp), (73)
c = −νap Ya Ypδ
, d = −Yp (νp Ya + ν2ap Yp)
δ (1 + νp), (74)
e = Gap , (b− d)/2 =Yp
2 (1 + νp), δ = (−1 + νp)Ya + 2 ν2ap Yp . (75)
7.0.3 Cambio di Base
Le rappresentazioni di laboratorio, o locali, della matrice di rigidezza C sono mediate dalla baseβ, e vanno adattate al problema in esame; ad esempio, nel caso di materiale non omogeneo, icui piani di simmetria variano da punto a punto, e necessario rappresentare il legame elastico inuna base globale che sia valida per tutto il corpo. Sia α = {ei} la base globale e β(X) = {bi}quella locale; le due basi sono relate da un’applicazione lineare Q = Q(X), detta cambiamentodi base che agisce come visto in (2) che riscriviamo per comodita:
bi = Q ei , ei = QT bi . (76) cambio_base_bis
Abbiamo visto come per Lin, sia la base, che la regola per il cambiamento di base, si costruiscanoa partire dalle regole messe a punto per i vettori; allo stesso modo, per Sym sia la base chela relazione che definisce il cambio di base vengono dedotti dalla regole utilizzate per Lin.Ricordiamo come agisce il cambio di base su A ∈ Lin; in notazione matriciale possiamo scrivere:
|A|α = |Q| |A|β |QT | , |A|β = |QT | |A|α |Q| .
Allora, unendo le tre relazioni
|S|α = |Q| |S|β |QT | , |S|β = |C|β |Ee|β , |Ee|β = |QT | |Ee|α |Q| ,
possiamo scrivere
|S|α = |Q|[|C|β (|QT | |Ee|α |Q| )
]|QT | , ⇒ |S|α = |C|α |Ee|α .
Si noti come per determinare |C|α il cambio di base Q agisca quattro volte.
7.0.4 Esempio: Cambio di Base
Data la base globale α = {e1}, consideriamo un provino trasversalmente isotropo il cui asse diisotropia trasversa b1 sia ottenuto ruotando e1 attorno ad e3 di un angolo ϕ; per un caso comequesto occorre adattare la rappresentazione di C alla base globale utilizzando la relazione
|S|α = |Q|[|C|β (|QT | |Ee|α |Q| )
]|QT | , con |Q| =
cos(ϕ) − sin(ϕ) 0sin(ϕ) cos(ϕ) 0
0 0 1
. (77) esempio_tiso
24

fig:costi_tiso
σ σ
b1b2
base locale
e1
e2
base globale
Figura 8: Provino sottoposto a trazione uniassiale parallela al lato orizzontale; la direzionedell’asse di isotropia trasversa e indicata con le linee trattegiate e dunque parallela a b1.
La relazione costitutiva nella base locale e data da:
S11
S22
S33
S12
S23
S13
β
=
a c c 0 0 0
c b d 0 0 0
c d b 0 0 0
0 0 0 e 0 0
0 0 0 0 (b− d)/2 0
0 0 0 0 0 e
β
Ee11Ee22Ee33
2Ee122Ee232Ee13
β
. (78) costi_tiso_es
La stessa relazione costitutiva, rappresentata nella base globale per mezzo della (77), presentaalcuni accoppiamenti in piu:
S11
S22
S33
S12
S23
S13
α
=
Dα11 Dα12 Dα13 Dα14 0 0
Dα12 Dα22 Dα23 Dα24 0 0
Dα13 Dα23 Dα33 Dα34 0 0
Dα14 Dα24 Dα34 Dα44 0 0
0 0 0 0 Dα44 Dα56
0 0 0 0 Dα56 Dα44
α
Ee11Ee22Ee33
2Ee122Ee232Ee13
α
. (79) costi_tiso_es
7.1 Materiali Incompressibili
La variazione di volume relativa, definita come il rapporto tra elemento di volume deformato(dv) e elemento di volume di riferimento (dV), e misurata dal determinante del gradiente dellospostamento:
dv
dV= det (I +∇u) = 1 + tr(∇u) + o(‖∇u‖) . (80) volume
Quindi, nel regime di piccole deformazioni, la variazione di volume e misurata dalla traccia delgradiente tr(∇u) = tr(E); questo risultato viene usato per caratterizzare i moti isocori, ossia, imoti a volume costante. Un corpo soggetto solo a moti isocori e detto incompressibile, e per talicorpi la relazione costitutiva va rivista; si noti che, dalla (50) segue:
tr(E) =1− 2 ν
Ytr(S) ; (81)
25

quindi, a parita di tensione, la variazione di volume diventa sempre piu piccola al tendere di νverso 1/2; inoltre, dato il legame tra k e ν, anche il modulo k tende all’infinito:
limν→1/2
tr(E)
tr(S)= 0 , lim
ν→1/2k =∞ . (82)
Ne risulta che per ν = 1/2, le relazioni costitutive (49, 50, 51), cosı come l’energia elastica (53),sono mal definite. L’energia elastica isotropa di un materiale incompressibile e data da
φ = µEed ·Ee
d , & tr(Ee) = 0 . (83) ene_iso_inco
In questo caso la tensione e composta da due termini, uno e un termine elastico che si deducedall’energia, l’altro e una reazione vincolare, e si deduce dal vincolo cinematico tr(Ee) = 0 nelseguente modo: calcoliamo la derivata temporale della (80), ricordando che tr(∇u) = ∇u · I
∂
∂tdv/dV = ∇u · I , ⇒ Volume = costante ⇔ ∇u · I = E · I = div (u) = 0 . (84) dotvol
Tale risultato ci dice che nei moti isocori la velocita di deformazione E ha traccia nulla, ossia,e ortogonale ai tensori sferici. Ne consegue che possiamo sommare alla tensione S un qualsiasicontributo sferico senza modificare la potenza interna; tale termine e chiamato tensione reattivain quanto ha il ruolo di una reazione vincolare: e la tensione che serve a mantenere il volumecostante. Abbiamo
tr(E) = 0 ⇒ S · E = (S + Sreact) · E , per ogni Sreact ∝ I . (85)
Nel caso in esame di vincolo isocoro, la parte reattiva della tensione e una pressione, e vienedenotata con
Sreact = −p I , parte reattiva della tensione.
Segue che per un materiale incompressibile, la relazione costitutiva per la tensione e data da:
S =∂φ
∂Ee+ Sreact = 2µEe
d − p I , & tr(Ee) = 0; (86) inco
inoltre, la relazione che lega pressione e variazione di volume diventa indefinita:
p = −k tr(Ee) =∞ × 0 .
La relazione costitutiva (86) puo essere ricavata utilizzando una energia elastica modificata,detta rilassata, che tenga conto del vincolo
φr = φ− p I ·E ⇒ φr =( ∂φ
∂Ee− p I︸ ︷︷ ︸
tensione
)· E− I ·E︸︷︷︸
vincolo
p . (87)
Il termine che spende potenza su E rappresenta la tensione; quello che spende potenza su prappresenta il vincolo di moto isocoro.
26

8 Materiali Viscoelastici
Molti materiali mostrano una relazione tensione-deformazione che varia nel tempo; ad esempio, ledeformazioni aumentano nel tempo anche quando il carico rimane costante, oppure, le tensionidiminuiscono anche se la deformazione rimane invariata. Per modellare tale comportamentoviene usato un modello, detto viscoelastico, basato sulle seguenti ipotesi.
1. Nel modello viscoleastico vengono considerate deformazioni e distorsioni dipendenti daltempo; inoltre, si assume che solo la parte deviatorica della distorsione sia importante. Talidistorsioni saranno indicate con il simbolo Ev
d, dove l’apice ‘v’ allude al termine viscositae il pedice ‘d’ ricorda che si tratta di un tensore deviatorico.
2. La distorsione viscosa Evd va considerata come una nuova variabile di stato, corredata di
una sua legge di evoluzione. Il modello di materiale viscoelastico avra dunque 3+5 variabilidi stato, le 3 componenti dello spostamento u = u(t), che saranno anche loro funzioni deltempo, e le 5 componenti della distorsione Ev
d = Evd(t). Si ricordi che le componenti
indipendenti di un tensore simmetrico e deviatorico sono appunto 5.
3. Per descrivere il cambiamento di rigidezza che si osserva negli esperimenti viene usatauna relazione costitutiva con due rigidezze; si assume inoltre che la tensione sia la sommadi una parte elastica ed una viscosa, indicata con Sv; questa seconda parte dipende dalladifferenza tra deformazione elastica Ee
d e distorsione viscosa Evd e sara dunque una tensione
deviatorica: indicando esplicitamente le dipendenze dal tempo, abbiamo
S(t) = Ce Ee(t) + Sv(t) , Sv(t) = Cv (Eed(t)−Ev
d(t)) .
Materiali di questo tipo vengono detti viscoelastici ; la relazione costitutiva per tali materiali,nel semplice caso di risposta isotropa, e rappresentata da (omettiano di indicare il tempo)
S = Ce Ee + Cv (Eed −Ev
d) = 2µe Eed + k tr (Ee) + 2µv (Ee
d −Evd) . (88) visco1
Si noti che appaiono due moduli di taglio, µe e µv, ed un solo modulo volumetrico k. Per quantoriguarda le equazioni di bilancio, abbiamo l’equazione di bilancio delle forze (3 equazioni) e leequazioni che descrivono l’evoluzione della distorsione viscosa (5 equazioni):
div [Ce Ee + Cv (Eed −Ev
d) ] + f = 0 , piu condizioni al contorno , (89)
τ Evd = Ee
d −Evd , [τ ] = T , piu condizioni iniziali (90)
Il parametro τ rappresenta un tempo caratteristico e regola la scala dei tempi del fenomenoviscoso. Per illustrare i fenomeni che tale modello e in grado di descrivere esaminiamo due provetipiche che danno origine ad una sollecitazione uniassiale del tipo
[S] =
σ 0 00 0 00 0 0
. (91)
Consideriamo un provino a forma di parallelepipedo; una base e vincolata con un carrello cheimpedisce gli spostamenti ortogonali alla base stessa; indichiamo con e1 il versore ortogonalealla base vincolata. Il problema e descritto dalle due equazioni:
σ(t) = Ye εe(t) + Yv (εe(t)− εv(t)) = (Ye + Yv) ε
e(t)− Yv εv(t) , (92)
τ εv(t) = εe(t)− εv(t) , con le condizioni iniziali: εe(0) = εeo , εv(0) = εvo . (93)
27

La prima equazione e l’unica parte interessante della relazione costitutiva (88) riscritta in terminedei moduli di Young; la seconda e l’unica parte interessante della (89)2.
8.1 Trazione a controllo di spostamento
Al provino viene imposta una deformazione costante εe tramite un carrello agente sulla baseopposta alla base vincolata. L’equazione di bilancio (89)1 e soddisfatta banalmente: div S = 0.Il problema e descritto dalle (92); in entrambe le equazioni la deformazione elastica non dipendedal tempo: εe = εeo = cost. Abbiamo
σ(t) = (Ye + Yv) εeo − Yv εv(t) , (94)
τ εv(t) = εeo − εv(t) , εv(0) = εvo . (95)
L’equazione di evoluzione ha come soluzione
εv(t) = εeo + (εvo − εe) exp(−t/τ) . (96)
Inserendo questa soluzione nella (94)1 ricaviamo l’andamento della tensione nel tempo
σ(t) = Ye εeo − Yv (εvo − εeo) exp(−t/τ) . (97)
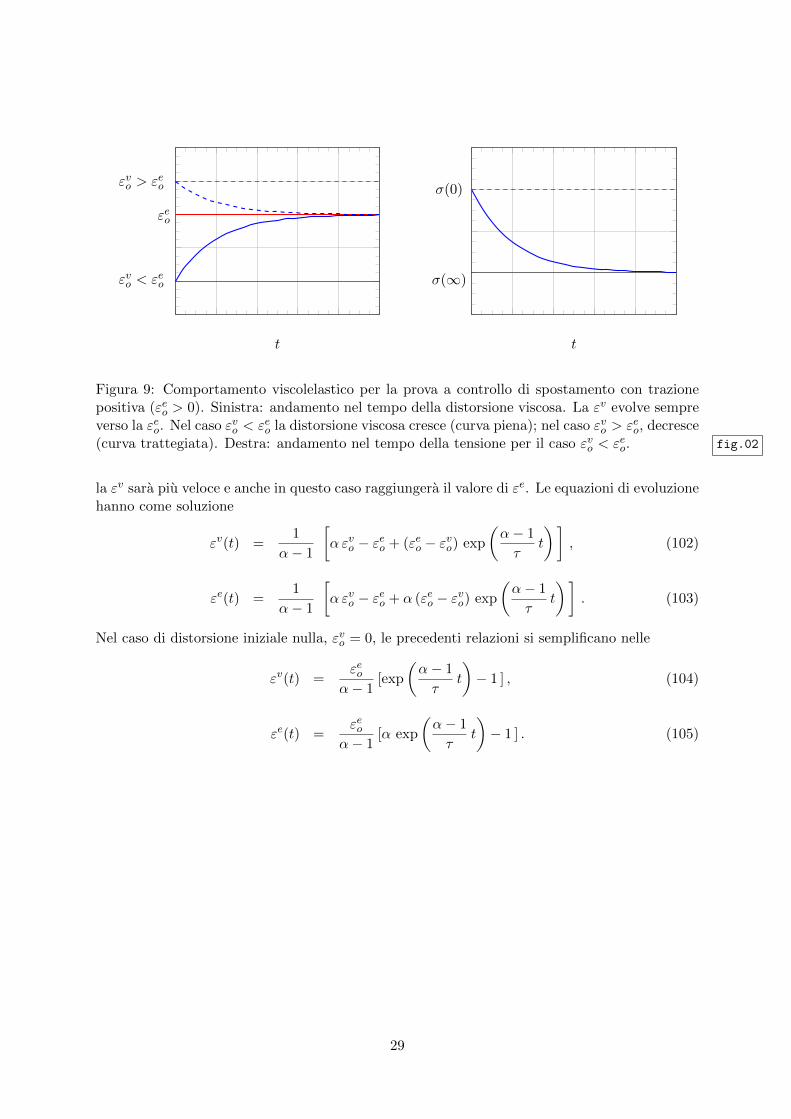
Se all’istante iniziale la deformazione elastica e maggiore di quella viscosa, εeo > εvo, si avraεv > 0: la distorsione viscosa crescera fino ad eguagliare εeo; ad esempio, in caso di deformazionepositiva (trazione del provino) e distorsione viscosa inizialmente nulla, εv = 0, abbiamo
t = 0 , ⇒ σ = (Ye + Yv) εeo , (98)
t =∞ , ⇒ εv = εeo , σ = Ye εeo , (99)
Dalle precedenti relazioni si vede che il modulo elastico Ye descrive la rigidezza asintotica, mentrela somma Ye + Yv quella istantanea. I due casi di evoluzione a partire da distorsioni minori omaggiori di εe sono riportati in figura 9In questo esperimento a controllo di spostamento la tensione σ diminuisce nel tempo e dunquediminuisce anche la reazione vincolare richiesta per mantenere la deformazione εeo costante.
8.2 Trazione a controllo di tensione
Al provino viene imposta una tensione costante σ tramite un carrello agente sulla base oppostaalla base vincolata. L’equazione di bilancio (89)1 e soddisfatta banalmente: div S = 0. Inquesto caso anche la deformazione elastica dipende dal tempo, εe = εe(t), e la formula chedescrive questa evoluzione si ricava derivando rispetto al tempo la relazione costitutiva (92).Abbiamo dunque due equazioni di evoluzione che riscriviamo nel seguente modo
εv(t) =1
τ[εe(t)− εv(t) ] , εv(0) = εvo , (100)
εe(t) =α
τ[εe(t)− εv(t) ] , εe(0) = εeo , α =
YvYe + Yv
. (101)
La deformazione εe e la distorsione viscosa εv evolvono con la stessa legge, ma con tempi carat-teristici diversi; essendo α < 1, il tempo caratteristico con cui evolve εe e piu grande e dunque,
28
t
εvo < εeo
εvo > εeo
εeo
t
σ(0)
σ(∞)
Figura 9: Comportamento viscolelastico per la prova a controllo di spostamento con trazionepositiva (εeo > 0). Sinistra: andamento nel tempo della distorsione viscosa. La εv evolve sempreverso la εeo. Nel caso εvo < εeo la distorsione viscosa cresce (curva piena); nel caso εvo > εeo, decresce(curva trattegiata). Destra: andamento nel tempo della tensione per il caso εvo < εeo. fig.02
la εv sara piu veloce e anche in questo caso raggiungera il valore di εe. Le equazioni di evoluzionehanno come soluzione
εv(t) =1
α− 1
[α εvo − εeo + (εeo − εvo) exp
(α− 1
τt
)], (102)
εe(t) =1
α− 1
[α εvo − εeo + α (εeo − εvo) exp
(α− 1
τt
)]. (103)
Nel caso di distorsione iniziale nulla, εvo = 0, le precedenti relazioni si semplificano nelle
εv(t) =εeo
α− 1[exp
(α− 1
τt
)− 1 ] , (104)
εe(t) =εeo
α− 1[α exp
(α− 1
τt
)− 1 ] . (105)
29










![Algoritmi e Strutture Dati - Strutture Elementari - UniCam03]strutture.pdf · Strutture Dati Astratte Strutture Elementari Algoritmi e Strutture Dati Strutture Elementari Maria Rita](https://img.pdfslide.tips/doc/110x75/5a7923507f8b9a07628cacb4/algoritmi-e-strutture-dati-strutture-elementari-03strutturepdfstrutture-dati.jpg)


















