Embed Size (px)
Citation preview

Institut für Photogrammetrie und GeoInformation
Leibniz Universität Hannover
Bachelorarbeit
Genauigkeitsuntersuchung von digitalen
Oberflächenmodellen aus
Bildzuordnungsverfahren in Stadtgebieten
von
Stefanie Arand
Hannover 2010

Eidesstattliche Erklärung
Hiermit erkläre ich, dass ich diese Bachelorarbeit selbstständig verfasst habe und keine anderen als die
angegebenen Quellen und Hilfsmittel benutzt habe.
Hannover, 21. Oktober 2010 ___________________________
Stefanie Arand

I
Inhaltsverzeichnis
1 Einleitung ........................................................................................................................... 1
2 Digitale Oberflächenmodelle ............................................................................................ 2
2.1 Erzeugung digitaler Oberflächenmodelle ..................................................................... 2
2.1.1 Digitale Bildzuordnung .......................................................................................... 2
2.1.1.1 Kreuzkorrelation ............................................................................................... 4
2.1.1.2 Kleinste Quadrate Zuordnung (LSM) .............................................................. 5
2.1.1.3 Semiglobal Matching (SGM) ........................................................................... 7
2.1.2 Laserscanning ....................................................................................................... 10
2.1.3 Vergleich digitale Bildzuordnung - Laserscanning .............................................. 12
2.2 Folgeprodukte ............................................................................................................. 13
3 Generierung der digitalen Oberflächenmodelle .......................................................... 15
3.1 Auswahl der Testgebiete und Erzeugung der Punktwolken ....................................... 15
3.1.1 Punktwolke aus Luftbildern ................................................................................. 18
3.2 Erzeugung digitaler Oberflächenmodelle ................................................................... 18
4 Genauigkeitsuntersuchung der digitalen Oberflächenmodelle .................................. 19
4.1 Qualitative Untersuchung ........................................................................................... 19
4.2 Quantitative Untersuchung ......................................................................................... 28
4.3 Gebäudeextraktion ...................................................................................................... 35
5 Zusammenfassung ........................................................................................................... 41
Literaturverzeichnis ............................................................................................................... 43

1
1 Einleitung
Die dreidimensionale Darstellung von Stadtgebieten erlangt immer mehr an Bedeutung. Anwendung finden
Stadtmodelle beispielsweise in der Planung für Funknetze, Simulationen für die Stadtplanung, für virtuelle
Touristen-Informationssysteme oder auch für dreidimensionale Navigationssysteme [Brenner, 2000]. Eine
wichtige Datengrundlage sind dabei digitale Oberflächenmodelle (DOM), da diese im Gegensatz zu digitalen
Geländemodellen (DGM) die auf der Oberfläche befindlichen Objekte wie Gebäude oder Vegetation
wiedergeben. Neben der direkten Erfassung durch flugzeuggestützte Laserscanner können DOM auch aus Luft-
oder Satellitenbildern abgeleitet werden. Dafür werden mindestens zwei Aufnahmen, welche die Oberfläche aus
verschiedenen Richtungen wiedergeben, benötigt. Aus diesen Stereobildern können anschließend Bildpunkte, die
demselben Objekt entsprechen durch Bildzuordnung (image matching) einander zugeordnet werden. Es
existieren verschiedene Methoden zur Suche nach diesen homologen Punkten. Für die Erstellung eines DOM in
Stadtgebieten scheinen globale und semi-globale Algorithmen besonders geeignet, da diese im Gegensatz zu
lokalen Verfahren Höhensprünge wie Gebäudegrenzen präzise darstellen. Neben den vielen Höhensprüngen, die
in Stadtgebieten durch die unterschiedlichen Gebäude auftreten, ergeben sich im dicht bebauten Bereich
Probleme durch Verdeckungen, in denen durch Bildzuordnung keine homologen Punkte zugeordnet werden
können und die somit zu Datenlücken im DOM führen.
Im Rahmen dieser Bachelorarbeit werden digitale Oberflächenmodelle durch Semiglobal Matching
[Hirschmüller, 2008] erzeugt und untersucht. Dabei werden DOM aus Luftbildern für verschiedene stadttypische
Testgebiete generiert und mit DOM aus Laserscannerdaten bezüglich ihrer Genauigkeit verglichen. Dieser
Vergleich erfolgt visuell, quantitativ und anhand des Potenzials für die Gebäudeextraktion.

2
2 Digitale Oberflächenmodelle
2.1 Erzeugung digitaler Oberflächenmodelle
Wird die Oberfläche der Erde samt der sich darauf befindenden künstlichen Bebauung und Vegetation
dargestellt, spricht man von einem digitalen Oberflächenmodell. Zur Generierung von DOM wird eine Vielzahl
von dreidimensionalen Punkten benötigt. Diese Punktwolke kann durch digitale Bildzuordnung (digital image
matching) oder durch Laserscanning erstellt werden. Die Darstellung erfolgt über ein regelmäßiges Raster,
wobei die Höhenwerte der Gitterpunkte interpoliert werden müssen, über Dreiecksvermaschung, oder über ein
hybrides Raster, welches eine Kombination aus rasterförmigen DOM und lokaler Dreiecksvermaschung ist,
[Heipke, 2009].
2.1.1 Digitale Bildzuordnung
Um Objektkoordinaten von Punkten aus digitalen Bildern zu bestimmen, sind homologe Punkte aus mindestens
zwei Aufnahmen verschiedener Richtungen nötig. Diese homologen Punkte werden mittels digitaler
Bildzuordnung durch Bestimmung von Disparitäten bestimmt. Anschließend können aus den Bildkoordinaten in
einem Bild und den Disparitäten die Objektkoordinaten durch räumlichen Vorwärtsschnitt berechnet werden.
Disparität bezeichnet im Computer Vision die Differenz zwischen den Koordinaten zwei korrespondierender
Punkte in zwei Bildern und entspricht dem in der Photogrammetrie gebräuchlichen Begriff Parallaxe [Cyganek
& Siebert, 2009].
Da eine Suche, die sich über den ganzen Bildbereich erstreckt, nicht eindeutig ist und um die Laufzeit zu
verringern kann der Suchbereich im zweiten Bild eingeschränkt werden. Eine Möglichkeit ist dabei die Nutzung
der Epipolargeometrie [Heipke, 2009]. Bei bekannter relativer Orientierung und einem Bildpunkt P' im linken
Bild kann hierbei der Suchbereich auf eine Epipolarlinie beschränkt werden. Die durch die Projektionszentren
der beiden Bilder gebildete Basis b und ein beliebiger Punkt im Objektraum definieren eine Epipolarebene.
Diese schneidet die zwei Bilder und erzeugt die Epipolarlinien e' und e''. Da sich der Bildpunkt P'' im rechten
Bild auf e'' befindet, wird der Suchbereich auf eine Dimension beschränkt (siehe Abbildung 2.1). Weiterhin kann
der Suchbereich in Richtung von e'' durch Näherungswerte und durch die minimale und maximale Disparität,
welche man aus Informationen über die minimale und maximale Höhe erhält, eingeschränkt werden [Heipke,
2009].
Die Epipolargeometrie bildet die Basis für Epipolarbilder [Heipke, 2009]. Nötig für die Erstellung von
Epipolarbildern sind die Parameter der relativen Orientierung von zwei Bildern. Diese werden auf eine
gemeinsame Ebene entzerrt, so dass die Epipolarlinien parallel sind und mit den Bildzeilen koinzidieren
[Schmidt, 2009]. Das dafür erforderliche Koordinatensystem hat seinen Ursprung im Projektionszentrum des

3
linken Bildes. Dabei verläuft die x-Achse in Richtung der Basis b und die z-Achse in Richtung der
Aufnahmerichtung des linken Bildes, senkrecht zur x-Achse.
Der große Vorteil von Epipolarbildern ist, dass der Suchbereich auf eine Zeile beschränkt wird und somit
Berechnungen schneller durchgeführt werden können. Es können jedoch immer nur zwei Epipolarbilder erzeugt
werden, da sich die Verwendung der Epipolargeometrie auf zwei Bilder beschränkt [Heipke, 2009].
Abbildung 2.1: Prinzip Epipolargeometrie [Heipke, 2009]
Eine weitere Möglichkeit zur Einschränkung des Suchbereichs ist die Verwendung von Bildpyramiden, welche
die Bildinformationen in unterschiedlichen Auflösungsniveaus enthalten. Die Bildzuordnung wird zunächst in
der gröbsten Auflösung durchgeführt. Das Ergebnis wird dann als Näherungswert im nächsten
Pyramidennniveau verwendet. Auf diese Weise wird vom Niveau mit der geringsten Auflösung bis zum
Originalbild der Suchbereich sequentiell verkleinert.
Bei der digitalen Bildzuordnung kann zwischen drei Gruppen von Verfahren unterschieden werden. Bei dem
flächenbasierten Verfahren erfolgt die Zuordnung durch Vergleich der Grauwerte der Aufnahmen, wogegen bei
der merkmalsbasierten Zuordnung zunächst Merkmale wie Punkte oder Kanten extrahiert und anschließend in
dem zweiten Bild zugeordnet werden. Das dritte Verfahren ist das relationenbasierte Verfahren, bei dem nicht
nur Merkmale, sondern auch gegenseitige Relationen zwischen den Strukturen verwendet werden [Heipke,
2009].
Im Folgenden werden drei Bildzuordnungsmethoden näher beschrieben.

4
2.1.1.1 Kreuzkorrelation
Eine Zuordnungsmethode, die zu den flächenbasierten Verfahren zählt, ist die Zuordnung mittels
Kreuzkorrelation. Hierbei läuft eine Referenzmatrix bzw. Mustermatrix aus dem linken Bild, welche den im
zweiten Bild zu bestimmenden Punkt im Zentrum enthält, Pixel für Pixel über eine Suchmatrix, die sich im
rechten Bild befindet. Da die genaue Position des im rechten Bild zu bestimmenden Punktes nicht bekannt ist, ist
die Suchmatrix größer als die Mustermatrix. Für jede Position des Musterfensters im Suchfenster wird der
Kreuzkorrelationskoeffizient ρ ermittelt. Dieser ist ein Maß für die Ähnlichkeit der betrachteten Ausschnitte und
wird aus den Standardabweichungen der Grauwerte des linken und rechten Bildes und aus der Kovarianz
zwischen den Grauwerten der zwei Bilder bestimmt [Kraus, 2004], [Heipke, 2009].
Kreuzkorrelationskoeffizient ρ:
mit: = Grauwert an Stelle (x,y) in Mustermatrix
= Mittlerer Grauwert der Mustermatrix
= Grauwert an Stelle (x,y) in Suchmatrix
= Mittlerer Grauwert der Suchmatrix
Durch Subtraktion des Mittelwertes ist ρ unempfindlich gegenüber Helligkeitsunterschieden. Die
Normalisierung im Nenner führt außerdem zur Unabhängigkeit von Kontrastunterschieden.
Es wird nicht jedes einzelne Pixel betrachtet, sondern immer nur ein Fenster der Größe (X,Y). Der
Kreuzkorrelationskoeffizient kann einen Wert von 1 bis -1 annehmen. Für 1 sind die beiden Ausschnitte linear
abhängig, für -1 invers zueinander und für Werte bei null existiert keinerlei Ähnlichkeit. Die maximale
Ähnlichkeit ist somit an der Position mit dem größten Korrelationskoeffizienten definiert. Für eine gute
Zuordnung kann ein Schwellwert für ρ mit 0,7 festgelegt werden. Die Stelle mit dem größten
Kreuzkorrelationskoeffizienten entspricht der gesuchten Position. Aber auch für große Werte können falsche
Zuordnungen entstehen, zum Beispiel auf Grund repetitiver Textur, durch hohes Rauschen oder durch
Verdeckungen. Auch werden mit der Kreuzkorrelation, außer der Verschiebung, keine weiteren geometrischen
Unterschiede wie Maßstabsunterschiede, Rotationen und Verzerrungen zwischen den beiden Bildern
kompensiert [Heipke, 2009]. Die Zuordnung mittels Kreuzkorrelation ist für Stadtgebiete weniger geeignet, da

5
durch unterschiedliche Aufnahmerichtungen Objekte unterschiedlich abgebildet werden. Flächen, die in einer
Aufnahme zu sehen sind können in der anderen verdeckt sein. Enthält das Musterfenster solche Bereiche, wird
die erfolgreiche Zuordnung eingeschränkt.
2.1.1.2 Kleinste Quadrate Zuordnung (LSM)
Ein weiteres flächenbasiertes Verfahren ist die Bildzuordnung nach der Methode der kleinsten Quadrate (least
squares matching, LSM) [Förstner, 1982], [Ackermann, 1984]. Hierbei wird die Suchmatrix geometrisch mittels
Transformation, beispielsweise durch Affintransformation, auf die Mustermatrix angepasst. Parameter dieser
geometrischen Transformation sind zwei Translationen, zwei Maßstäbe, sowie eine Rotation und eine Scherung.
(2.2)
Ausgangspunkt des LSM ist die Annahme, dass an korrespondierenden Bildstellen, bis auf Helligkeits- und
Kontrastunterschiede, derselbe Grauwert auftritt:
(2.3)
In (2.3) sind und Parameter für Kontrast und Helligkeit. Da und über (2.2)
zusammenhängen, wird zwischen der Muster- und der Suchmatrix eine Ausgleichung mit Minimierung der
Grauwertdifferenzen mit acht Unbekannten durchgeführt.
Beobachtungsgleichung:
(2.4)
Verbesserungsgleichung:
(2.5)
Da meist keine ganzzahligen Werte sind, müssen die zugehörigen Grauwerte interpoliert werden.

6
Abbildung 2.2: Bildzuordnung nach Methode der kleinsten Quadrate [Heipke, 2009]
Der Vorteil von LSM ist, dass sehr hohe Genauigkeiten erreicht werden können. Das Genauigkeitspotential liegt
bei 0,1 Pixel, in der Praxis werden jedoch zwischen 0,3 und 0,5 Pixel erreicht [Heipke, 2009]. Geometrische
Unterschiede wie Drehung und Scherung werden im Gegensatz zur Kreuzkorrelation mit modelliert. Außerdem
können Genauigkeits- und Zuverlässigkeitsmaße abgeleitet werden. Aufgrund der Nichtlinearität des
Ausgleichungsansatzes sind allerdings sehr genaue Näherungswerte, welche beispielsweise mittels
Kreuzkorrelation bestimmt werden können, für eine Zuordnung notwendig.
Wie auch bei der Zuordnung mittels Kreuzkorrelation ist das Verfahren nach der Methode der kleinsten
Quadrate für die Verwendung in Stadtgebieten nicht geeignet, da auch hier durch teilweise Verdeckungen die
Zuordnung eingeschränkt werden kann (siehe Abbildung 2.3).
Abbildung 2.3: Einschränkung der Bildzuordnung, da Musterfenster Bereich enthält, der im linken Bild
verdeckt ist.

7
2.1.1.3 Semiglobal Matching (SGM)
Das im Rahmen dieser Arbeit verwendete Bildzuordnungsverfahren zur Erzeugung von DOM ist das Semiglobal
Matching [Hirschmüller, 2008], bei dem Grauwerte der einzelnen Pixel untersucht werden (pixelbasierte
Punktzuordnung). Sowohl in Hirschmüller [2009], als auch für diese Arbeit werden Epipolarbilder verwendet.
Bei Epipolarbildern gilt mit dem linken Bild als Referenzbild und dem rechten als Vergleichsbild :
mit der Disparität d. Hierbei müssen also gleiche Objektpunkte nur entlang der
gleichen Zeile y gesucht werden.
Durch die Bildgröße von und der angegebenen minimalen und maximalen Disparität wird der Disparitätsraum
(Disparitätsbild) als Quader bestimmt. Jedes Voxel entspricht einem Punktpaar und daher
einem Objektpunkt. Mit Hilfe einer Kostenfunktion werden pixelweise die Kosten C zwischen dem Referenzbild
und dem Vergleichsbild bestimmt. Als Kostenfunktion kann dabei beispielsweise die Summe der absoluten
Differenzen der Grauwerte (SAD) für und oder Mutual Information (MI) verwendet werden
[Hirschmüller, 2008], [Cyganek & Siebert, 2009]. Eine weitere Möglichkeit zur Bestimmung der Vergleichs-
kosten ist die Berechnung mittels der in Abschnitt 2.1.1.2 vorgestellten Kreuzkorrelation.
Für die Summe der absoluten Differenzen wird für jedes Pixel die Differenz der Grauwerte der beiden Bilder
gebildet. Da bei SAD jedoch nur die Grauwertunterschiede betrachtet werden, ist es empfindlich gegenüber
Aufzeichnungs- und Beleuchtungsänderungen zwischen den Bildpaaren [Hirschmüller, 2008].
MI gibt für jede Grauwertkombination die Stärke des statistischen Zusammenhangs an und ergibt sich aus der
Entropie H (Informationsgehalt) des jeweiligen Bildes und der gemeinsamen Entropie der zwei Bilder [Viola &
Wells, 1997]:
(2.6)
Zur Bestimmung der gemeinsamen Entropie wird ein Histogramm erzeugt, in dem die Häufigkeiten der
korrespondierenden Grauwerte der beiden Bilder geschrieben werden. Um aus dem diskreten Histogramm
die Wahrscheinlichkeitsfunktion zu erhalten, wird anschließend eine Parzen-Fenster-Methode [Parzen, 1962],
realisiert durch einen zweidimensionalen Gauß-Filter (dargestellt mit ), durchgeführt. Mit Hilfe des
Logarithmus (siehe Formel 2.7) und anschließender Aufsummierung der einzelnen Terme erhält man die
gemeinsame Entropie (siehe Formel 2.8) [Hirschmüller, 2008].
(2.7)
(2.8)

8
Die Anzahl der Pixel des sich überlappenden Bildbereichs wird mit n bezeichnet. Das Histogramm der
korrespondierenden Grauwerte wird durch den Operator T definiert. Dieser ist 1 wenn sein Argument
wahr ist, und andernfalls 0 [Hirschmüller, 2008]:
(2.9)
Die Bestimmung der Entropien erfolgt analog zur gemeinsamen Entropie [Hirschmüller, 2008]:
(2.10)
(2.11)
Der Vorteil von MI ist, dass beliebige radiometrische Transformationen möglich sind, bei denen die lokale
Abfolge der Grauwerte erhalten bleibt.
Da in vielen Fällen, z.B. durch Rauschen, falsche Korrespondenzen niedrigere Vergleichskosten haben können
als korrekte, wird beim SGM eine Glattheitsbedingung eingeführt. Hierbei werden gleiche Disparitäten
gegenüber Disparitätsunterschieden in benachbarten Pixeln bevorzugt. Die pixelweise Berechnung der Kosten C
und die Glattheitsbedingung werden durch eine vom Disparitätsbild D abhängige Energiefunktion (siehe Formel
2.12) ausgedrückt [Hirschmüller, 2008].
(2.12)
Hierbei beschreibt der erste Term die Vergleichskosten C. Die zusätzlichen Kostenfaktoren P1 und P2 im
zweiten und dritten Term bestrafen Disparitätssprünge, wobei kleine Disparitätssprünge, d.h. , mit
P1bestraft werden und Disparitätssprünge die größer als 1 Pixel sind mit P2 bestraft werden. Durch die Nutzung
einer geringeren Bestrafung P1 für kleine Veränderungen können geneigte oder kurvige Oberflächen angepasst
werden. Die Größe von P2 ist abhängig vom Grauwertgradienten in Richtung der Pfade, jedoch muss immer
gelten [Hirschmüller, 2008]:
(2.13)
Für (2.12) muss der Pfad durch das Disparitätsbild D gefunden werden, welches E(D) minimiert. Dies geschieht
semiglobal durch verschiedene eindimensionale Pfade entlang verschiedener Richtungen (siehe Abbildung 2.4).

9
Abbildung 2.4: Berechnung der Pfadkosten im Disparitätsraum [Hirschmüller, 2008]
Die durch den Disparitätsraum in Richtung r verlaufenden Pfadkosten lassen sich wie folgt berechnen:
(2.14)
Der erste Term enthält die Vergleichskosten C. Der zweite Term addiert die minimalen Pfadkosten des
vorherigen Pixels – , unter Berücksichtigung von Disparitätssprüngen mit P1 und P2. Durch den letzten
Term werden die minimalen Pfadkosten des vorherigen Pixels abgezogen, um zu verhindern, dass (2.14) entlang
des Pfades kontinuierlich ansteigt.
Die Pfadkosten werden aus mehreren Richtungen zu jedem Pixel, wie in Abbildung 2.5 dargestellt, berechnet
und anschließend aufsummiert, woraus sich die Summenkosten S ergeben [Hirschmüller, 2008]:
(2.15)
Abbildung 2.5: Berechnung der Pfadkosten aus 16 Richtungen [Hirschmüller, 2008]

10
Das Disparitätsbild ergibt sich, indem für jedes Pixel die Disparität mit den minimalen Summenkosten
ausgewählt wird. Anhand der bestimmten Disparitäten kann für jede Position im
linken Bild die Position des korrespondierenden Punktes im rechten Bild
bestimmt werden.
Durch eine Links/Rechts-Kontrolle kann überprüft werden, ob die Disparitäten aus beiden Bildern für einen
gleichen Objektpunkt identisch sind, und es können Verdeckungen oder falsche Zuordnungen bestimmt werden.
Dazu muss das SGM zweimal durchgeführt werden. Zum einen mit dem linken Bild als Referenz- und dem
rechten Bild als Vergleichsbild und zum anderen umgekehrt. Für jede Position wird der Disparitätswert
im Referenzbild und der Disparitätswert an der korrespondierenden Position im Vergleichsbild
untersucht. Ist bzw. sind die Disparitäten richtig und die
korrespondierenden Punkte werden als Punktpaar verwendet, andernfalls könnte die Position in einem Bild
verdeckt sein, weshalb das Punktpaar nicht verwendet wird [Hirschmüller, 2008].
Durch die Verwendung von Epipolarbildern wird vorausgesetzt, dass die Disparitäten nur entlang
korrespondierender Zeile vorkommen. Ein Vorteil von SGM ist jedoch, dass nicht nur entlang dieser Zeile nach
den minimalen Summenkosten gesucht wird, sondern entlang mehrerer Pfade aus unterschiedlichen Richtungen,
wodurch die Beziehung zu den umliegenden Zeilen berücksichtigt wird. Fehler an Höhensprüngen werden
verringert, da zwischen kleinen Disparitätsunstetigkeiten und großen Disparitätssprüngen mit Hilfe von P1 und
P2 unterschieden wird und P2 abhängig vom Grauwertgradienten entlang des Pfades ist. Da dadurch Kanten wie
z.B. Gebäuderänder präzise dargestellt werden und nicht, wie bei den lokalen Verfahren, verwischte Kanten
entstehen, eignet sich SGM besonders für die Generierung von DOM in Stadtgebieten. Durch die Verwendung
von MI als Kostenfunktion ist SGM tolerant gegenüber radiometrischen Veränderungen. Durch
Subpixelschätzung können mit SGM Genauigkeiten im Subpixelbereich erreicht werden.
2.1.2 Laserscanning
Während bei der Erzeugung von DOM durch digitale Bildzuordnung mindestens zwei Aufnahmen nötig sind,
wird beim Airborne Laserscanning (ALS) nur eine Aufnahmerichtung benötigt.
Beim ALS werden die Koordinaten der Punktwolke auf Grund von Winkel- und Streckenmessungen bestimmt.
Wichtige Komponenten sind neben dem Laserscannersystem das Positionierungssystem (GPS) und die inertiale
Messeinrichtung (IMU) (siehe Abbildung 2.6). Durch differentielles GPS wird der Ursprung der sich laufend
fortbewegenden GPS-Antenne bestimmt. Da sich zusätzlich auch die Orientierung des Systems ändert, wird
durch ein Inertiales Navigationssystem (INS) die eigene Position, Lage und Geschwindigkeit des Laserscanners
gemessen. Laserscanner, GPS und INS werden miteinander kalibriert und im Mikrosekundenbereich
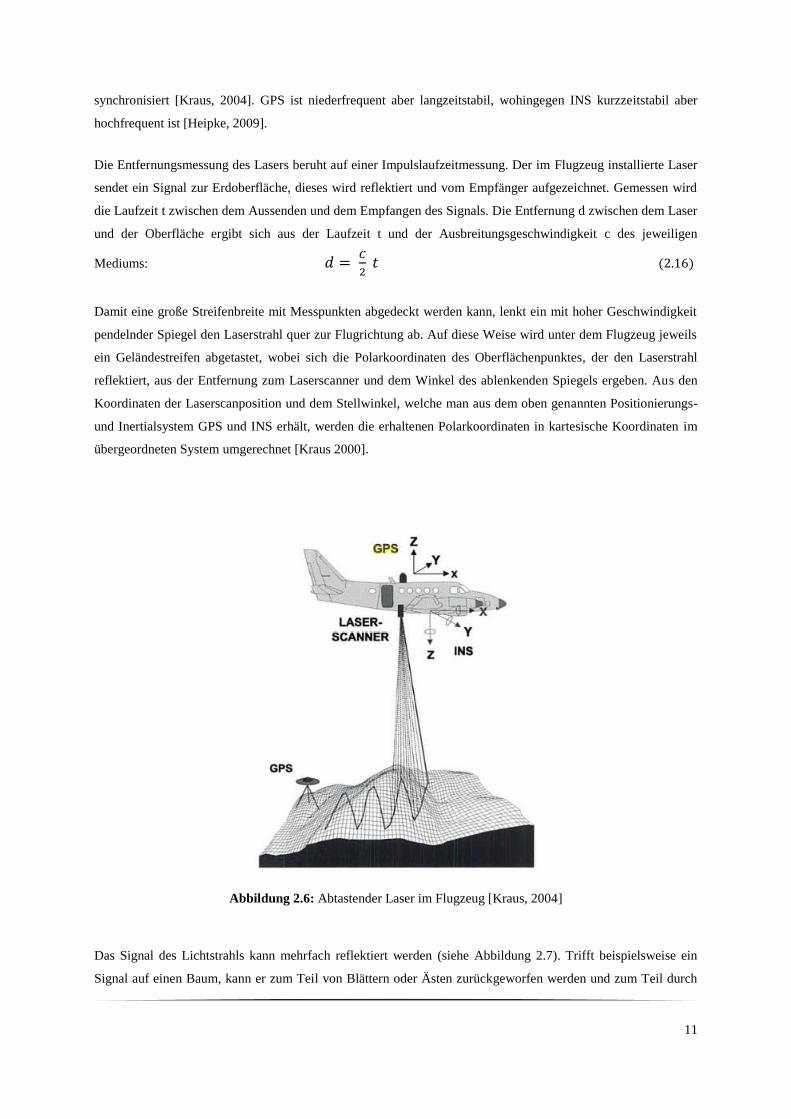
11
synchronisiert [Kraus, 2004]. GPS ist niederfrequent aber langzeitstabil, wohingegen INS kurzzeitstabil aber
hochfrequent ist [Heipke, 2009].
Die Entfernungsmessung des Lasers beruht auf einer Impulslaufzeitmessung. Der im Flugzeug installierte Laser
sendet ein Signal zur Erdoberfläche, dieses wird reflektiert und vom Empfänger aufgezeichnet. Gemessen wird
die Laufzeit t zwischen dem Aussenden und dem Empfangen des Signals. Die Entfernung d zwischen dem Laser
und der Oberfläche ergibt sich aus der Laufzeit t und der Ausbreitungsgeschwindigkeit c des jeweiligen
Mediums:
(2.16)
Damit eine große Streifenbreite mit Messpunkten abgedeckt werden kann, lenkt ein mit hoher Geschwindigkeit
pendelnder Spiegel den Laserstrahl quer zur Flugrichtung ab. Auf diese Weise wird unter dem Flugzeug jeweils
ein Geländestreifen abgetastet, wobei sich die Polarkoordinaten des Oberflächenpunktes, der den Laserstrahl
reflektiert, aus der Entfernung zum Laserscanner und dem Winkel des ablenkenden Spiegels ergeben. Aus den
Koordinaten der Laserscanposition und dem Stellwinkel, welche man aus dem oben genannten Positionierungs-
und Inertialsystem GPS und INS erhält, werden die erhaltenen Polarkoordinaten in kartesische Koordinaten im
übergeordneten System umgerechnet [Kraus 2000].
Abbildung 2.6: Abtastender Laser im Flugzeug [Kraus, 2004]
Das Signal des Lichtstrahls kann mehrfach reflektiert werden (siehe Abbildung 2.7). Trifft beispielsweise ein
Signal auf einen Baum, kann er zum Teil von Blättern oder Ästen zurückgeworfen werden und zum Teil durch

12
Lücken bis zum Boden durchdringen und von dort reflektiert werden. Objekte, die sich näher an dem
Laserscanner befinden, werden auf Grund ihres kürzeren Weges zuerst vom Empfänger aufgezeichnet. Dieses
registrierte Signal bezeichnet man als first pulse. Signale, die von der Erdoberfläche reflektiert werden, gelangen
als letztes zum Empfänger, weshalb sie als last pulse bezeichnet werden [Maas, 1999].
.
Abbildung 2.7: Schema einer Mehrfachreflexion [Quelle: forst-ingenieur.de]
Die Genauigkeit der mittels ALS bestimmten Höhenkomponente wird von der Genauigkeit der
Laserdistanzmessung und der Genauigkeit der Höhenbestimmung durch GPS und INS beeinflusst. Auch hat die
Flughöhe über Grund einen Einfluss auf die Höhengenauigkeit, da mit steigender Höhe vom Laserimpuls ein
längerer Weg durch die Atmosphäre zurück gelegt werden muss und der Abtastfleck immer größer wird,
wodurch die durch INS registrierte Richtung der Polarkoordinaten und der Objektpunkt geringer
übereinstimmen. Die Genauigkeit der Lagekomponente wird beeinflusst von der durch GPS bestimmten
Position, der Genauigkeit der Orientierung durch INS und der Genauigkeit der Registrierung des Stellwinkels
[Kraus, 2004].
2.1.3 Vergleich digitale Bildzuordnung - Laserscanning
Da durch digitale Bildzuordnung nur solche Objektpunkte dreidimensional bestimmt werden können, die in
beiden Aufnahmen zu sehen sind, kommt es gerade in Stadtgebieten zu Schwierigkeiten, da die dichte Bebauung
zu Verdeckungen führen kann. Beim ALS werden Polarkoordinaten aus Strecken- und Richtungsmessungen
bestimmt, weshalb der Objektpunkt nur aus einer Aufnahmerichtung zu sehen sein muss. Außerdem wird beim
ALS meist ein schmalerer Öffnungswinkel verwendet, wodurch weniger Verdeckungen auftreten. Die Tatsache,
dass das Stereobildpaar aus unterschiedlichen Richtungen aufgenommen wird, führt zu unterschiedlichen
Beleuchtungs- und Reflexionsverhältnissen, was eine Identifizierung von homologen Punktpaaren ebenfalls
erschwert [Kraus, 2000].

13
Auch der Schattenwurf von hohen Gebäuden schränkt die Bildzuordnung ein, da bei schlechter Textur keine
Zuordnung erfolgen kann. Mittels Laserscanning werden auch Koordinaten von Gebieten mit geringer oder
repetitiver Textur wie Wüsten oder hellen Betonflächen erzielt. An sehr glatten Oberflächen kann es jedoch zu
gerichteter Reflexion kommen, wodurch der ausgesendete Impuls nicht zurück kommt. Ebenfalls kann es zu
Multi-Path-Effekten durch mehrfache Reflexion kommen, was zu falschen Entfernungsmessungen führt. Von
Wasser oder nassen Oberflächen wird der Laserstrahl absorbiert, wodurch die zurückgeworfene
Strahlungsenergie zu gering für eine Entfernungsmessung ist. ALS benötigt also eine raue Oberfläche, die den
Laserstrahl diffus reflektiert [Kraus, 2000].
Da die Photogrammetrie ein passives Aufnahmesystem ist, wird zur digitalen Bildzuordnung ausreichend
Beleuchtung benötigt. Die dreidimensionale Punktbestimmung mittels ALS ist unabhängig von
Beleuchtungsverhältnissen, da aktiv Laser-Impulse ausgesendet werden. Die aufgenommenen Luftbilder sind bei
gleicher Auflösung billiger als Laserscanneraufnahmen. Geht man von der gleichen Flughöhe aus, werden beim
ALS aufgrund des schmaleren Öffnungswinkels wesentlich mehr Flugstreifen als mit dem Verfahren der
Photogrammetrie benötigt [Kraus, 2004].
2.2 Folgeprodukte
Mit Hilfe Digitaler Oberflächenmodelle kann eine Vielzahl von Folgeprodukten abgeleitet werden. Es können
Einzelpunkthöhen und Isolinien abgeleitet, Längs- und Querprofile erstellt oder auch Sichtbarkeitsanalysen und
Standortplanungen durchgeführt werden.
Anhand eines DOMs und Luftbildern kann durch Entzerrung ein Orthophoto erzeugt werden. Bei der Aufnahme
eines Luftbildes entstehen Verzerrungen aufgrund von Höhenunterschieden und Zentralprojektion der
Aufnahme. Um ein entzerrtes und lagerichtiges Bild, ein Orthophoto, zu erhalten, ist ein DOM notwendig für die
lagerichtige Abbildung von Objekten mit unterschiedlichen Höhen [Heipke, 2009].
Ein weiteres Verfahren für das ein DOM notwendig ist, ist die Gebäudeextraktion. Hierbei kann man zwischen
der Erkennung von Gebäuden und der 3D-Rekonstruktion der Gebäude unterscheiden. Im Rahmen dieser Arbeit
wird die Gebäudeerkennung nach [Rottensteiner et al., 2007] mit der Software Barista1 durchgeführt. Dabei wird
zunächst aus dem digitalen Oberflächenmodell durch morphologische Operatoren ein genähertes digitales
Geländemodell (DGM) abgeleitet. Morphologische Operatoren sind Filter, die Formmerkmale mit Hilfe eines
Strukturelements durch Erosion und Dilatation unterdrücken oder hervorheben [Luhmann, 2000]. Durch
Hintereinanderführen von Erosion und Dilatation ergeben sich die Operationen Opening und Closing, wobei eine
Erosion gefolgt von einer Dilatation dem Opening entspricht und eine Dilatation gefolgt von einer Erosion dem
1 www.baristasoftware.com.au

14
Closing. Durch Opening wird alles was kleiner als das vorgegebene Strukturelement ist entfernt, wodurch
Konturen geglättet werden. Durch Closing werden kleine Lücken im Objekt geschlossen.
Zur Gebäudeerkennung wird morphologisches Grauwert-Opening durchgeführt [Rottensteiner et al., 2007]. Wie
in Abbildung 2.8 dargestellt, verläuft dabei ein Strukturelement entlang des DOMs. Dabei wird immer der
höchste Punkt markiert, der vom Strukturelement berührt wird. Diese Punkte bilden schließlich das genäherte
DGM. Das Strukturelement besitzt die Form eines flachen Rechtecks und sollte größer als das größte zu
extrahierende Gebäude sein, da sonst große Gebäude nicht erodiert werden und sich dadurch weiterhin im DGM
befinden.
Abbildung 2.8: Ableitung eines DGM aus DOM durch morphologische Operationen
(aus Brenner [2000] abgeändert).
Wird vom DOM das erhaltene DGM subtrahiert erhält man ein normalisiertes DOM (nDOM), welches die durch
Opening vom DOM entfernten Objekte enthält. Das genäherte DGM sollte eine gute Approximation des
Geländes sein, damit das nDOM die vorhandenen Gebäudehöhen enthält [Rottensteiner et al., 2007]. Das nDOM
kann verfälscht werden, wenn das Gelände kleine Hügel aufweist, die kleiner als das Strukturelement sind oder
wenn Bergspitzen „abgeschnitten“ werden [Rottensteiner et al., 2007]. Durch eine Dempster-Shafer
Klassifikation [Rottensteiner et al., 2007] werden anschließend die Gebäude detektiert. Für die Erkennung aus
den ALS-Daten werden hierzu ein nDOM und ein Parameter für die Oberflächenrauhigkeit benötigt. Zur
Erkennung aus den Luftbildern wird zusätzlich der NDVI (Normalized Difference Vegetation Index)
verwendet. Der NDVI wird zur Detektion von Vegetation genutzt und aus den Kanälen Rot und Nahes Infrarot
berechnet, weshalb er nicht für die ALS-Daten, sondern nur für die Luftbilder vorhanden ist. Die
Oberflächenrauhigkeit wird in Prozent angegeben und ist abhängig von der Variation der Normalvektoren auf
der Oberfläche. Große Variationen treten vor allem in Bereichen auf, wo eine große Anzahl an Bäumen besteht.
Die detektierten Gebäude werden anschließend noch durch den Douglas-Peucker-Algorithmus geglättet
[Douglas & Peucker, 1973].

15
3 Generierung der digitalen Oberflächenmodelle
Verwendet werden Testdaten, die von der Deutschen Gesellschaft für Photogrammetrie, Fernerkundung und
Geoinformation (DGPF) zum Test von digitalen photogrammetrischen Luftbildkamerasystemen aufgenommen
wurden [Cramer, 2010]. Für unterschiedliche Testgebiete werden digitale Oberflächenmodelle aus flugzeug-
gestützten Laserscannerdaten und aus Luftbildern mittels Semiglobal Matching erstellt. Als Testdatensatz stehen
Luftbilder von Vaihingen an der Enz zur Verfügung, welche am 24.07.2008 durch eine DMC (Digital Mapping
Camera), mit einer Auflösung von 8 cm und einer Kammerakonstante von 120 mm, aufgenommen wurden. Die
Flughöhe über Grund beträgt ca. 890 m. Die Bildblöcke besitzen eine Längsüberdeckung von 80% und einer
Querüberdeckung von 60% [Cramer, 2010].
Als Vergleichsdatensatz dienen Laserscandaten eines ALS50 Systems, mit einer Punktdichte von 5 Punkte/m²
und einem Punktabstand von ca. 70 cm in Flugrichtung und 45 cm senkrecht zur Flugrichtung. Die Daten-
erfassung erfolgte am 21.8.2008 [Cramer, 2010]. Nach einer Ausgleichung können Genauigkeiten in der Höhe
von 3 cm erreicht werden, die Genauigkeit in der Lage ist um den Faktor 2 schlechter [Haala et al., 2010]. Die
ALS-Daten liegen bereits in dreidimensionalen Objektkoordinaten vor. Für die Generierung eines DOMs müssen
lediglich noch die Punkte ausgewählt werden die sich in dem zu untersuchenden Gebiet befinden. Dazu wird das
Programm las2las.exe genutzt, welches von der UNC (University of North Carolina) im Internet zur Verfügung
gestellt wird.2 Das Programm erstellt eine Punktwolke aus den Laserscannerpunkten die sich in einer
vorgegebenen Bounding Box befinden.
3.1 Auswahl der Testgebiete und Erzeugung der Punktwolken
Um die Genauigkeit der aus SGM erzeugten digitalen Oberflächenmodelle im städtischen Bereich zu
untersuchen, werden folgende für Stadtgebiet typische Testgebiete ausgewählt:
Mischgebiet: Ein Gebiet mit unterschiedlicher Bebauung und Nutzung, teilweise eng bebaut
(Abbildung 3.1).
Enge Bebauung: Ein Gebiet, das nur aus eng bebauten Gebäuden mit unterschiedlichen
Größen besteht (Abbildung 3.2).
Wohngebiet: Ein Gebiet, das ausschließlich dem Wohnen dient (reines Wohngebiet), aus
freistehenden Ein- und Mehrfamilienhäusern besteht und eine grüne Außengestaltung aufweist
(Abbildung 3.3).
Parkanlage: Ein Gebiet mit einem hohen Grad an Vegetation (Abbildung 3.4).
2 http://www.cs.unc.edu/~isenburg/lastools/

16
Gewerbe: Ein Gebiet mit teilweise flächenhaften Gebäuden mit Flachdächern, Parkplätzen
und einem großen Anteil an Betonfläche (Abbildung 3.5).
Abbildung 3.1: Luftbildausschnitt Mischgebiet Abbildung 3.2: Luftbildausschnitt enge Bebauung
Abbildung 3.3: Luftbildausschnitt Wohngebiet Abbildung 3.4: Luftbildausschnitt Parkanlage

17
Abbildung 3.5: Luftbildausschnitt Gewerbe
Aus welchen Bildern die Ausschnitte der einzelnen Testgebiete erstellt werden, sowie die aus der
Aufnahmegeometrie resultierende erwartete Lage- und Höhengenauigkeit sind in der Tabelle 3.1 aufgelistet.
Lagegenauigkeit:
(3.1) Höhengenauigkeit:
(3.2)
(3.1) und (3.2) setzen sich zusammen aus der Flughöhe über Grund , der Kammerakonstante c=120 mm,
welche bei einer Pixelgröße von 12 µm 10000 Pixeln entspricht, und der Standardabweichung der Bild-
koordinate bzw. der Disparität, die mit bzw. angenommen werden. Die
Höhengenauigkeit wird zusätzlich noch vom Höhen-Basis-Verhältnis
beeinflusst.
Tabelle 3.1: erwartete Lage- und Höhengenauigkeiten
Mischgebiet 61_62 888 245 0,09 0,32
enge Bebauung 83_84 910 248 0,09 0,33
Wohngebiet 61_62 888 245 0,09 0,32
Parkanlage 61_62 888 245 0,09 0,32
Gewerbe 61_83 899 419 0,09 0,19

18
3.1.1 Punktwolke aus Luftbildern
Die aus den Luftbildern generierten Punktwolken werden durch Semiglobal Matching erzeugt, wobei als
Kostenfunktion Mutual Information verwendet wird. Um den Suchbereich zu begrenzen, wird die größte und
kleinste Disparität des Epipolarbildpaares bestimmt. Außerdem werden die Kostenfaktoren P1 und P2
angegeben, welche im Rahmen dieser Arbeit mit P1=10 und P2=20 festgelegt wurden. Näherungen werden
durch Bildpyramiden erhalten. SGM liefert das Disparitätsbild (siehe Abbildung 3.6) des Bildpaares und die
berechneten Disparitäten in Subpixelgenauigkeit. Da man für jedes Pixel einen Punkt erhält entspricht die
erhaltene Auflösung gleich der des Bildes. Durch räumlichen Vorwärtsschnitt können dann bei gegebener
innerer und äußerer Orientierung die dreidimensionalen Objektkoordinaten berechnet werden.
Abbildung 3.6: Durch SGM erzeugte Disparitätsbilder für Mischgebiet (links) und enge Bebauung (rechts).
3.2 Erzeugung digitaler Oberflächenmodelle
Zur quantitativen Untersuchung der Oberflächenmodelle werden die Punktwolken durch Interpolation in ein
regelmäßiges Raster (Grid) abgeleitet. Verwendet wird dabei die Software SCOP++, die vom Institut für
Photogrammetrie und Fernerkundung der Technischen Universität Wien und der INPHO GmbH Stuttgart
entwickelt wurde. Die Interpolation erfolgt über die Methode der gleitenden Schrägebene (moving planes)
[Kraus, 2000] mit einer Rasterweite von 50cm für die Laserscannerdaten und 10cm für die aus SGM erhaltenen
Punkte. Es muss jedoch beachtet werden, dass die Interpolation an Höhensprüngen einen Genauigkeitsverlust
des Oberflächenmodells bewirken kann. Für die Generierung der DOM aus ALS werden first und last-pulse
Daten verwendet.

19
4 Genauigkeitsuntersuchung der digitalen Oberflächenmodelle
Für die Evaluierung der mit Hilfe von Semiglobal Matching generierten digitalen Oberflächenmodelle werden
diese qualitativ und quantitativ für jedes Testgebiet mit den DOM aus den Vergleichsdaten des ALS verglichen.
Außerdem wird das Potenzial der Oberflächenmodelle aus SGM für die Gebäudeerkennung untersucht.
4.1 Qualitative Untersuchung
Für den visuellen Vergleich der erzeugten Punktwolken aus SGM und ALS-Daten werden zum Einen die mit
SCOP++ interpolierten Oberflächenmodelle betrachtet und zum Anderen die Punkte mit der Software GVE
(Graphics Viewer/Editor) und dem FugroViewer (3D Geospatial Data Viewer) eingelesen und direkt dargestellt.
Beim GVE können diese zusätzlich wie bei SCOP++ in einem Raster interpoliert werden, was Repräsentationen
wie eine schattierte Darstellung zulässt.
Betrachtet man die Verteilung der Punkte der gematchten Punktwolke fallen die durch Verdeckungen
entstehenden Datenlücken auf, aber auch die sehr viel höhere Punktdichte als beim ALS, wodurch mehr
Informationen erfasst werden können (siehe Abbildung 4.1).
Abbildung 4.1: erfasste Punkte durch SGM (links) und aus ALS (rechts) für einen Ausschnitt aus Mischgebiet
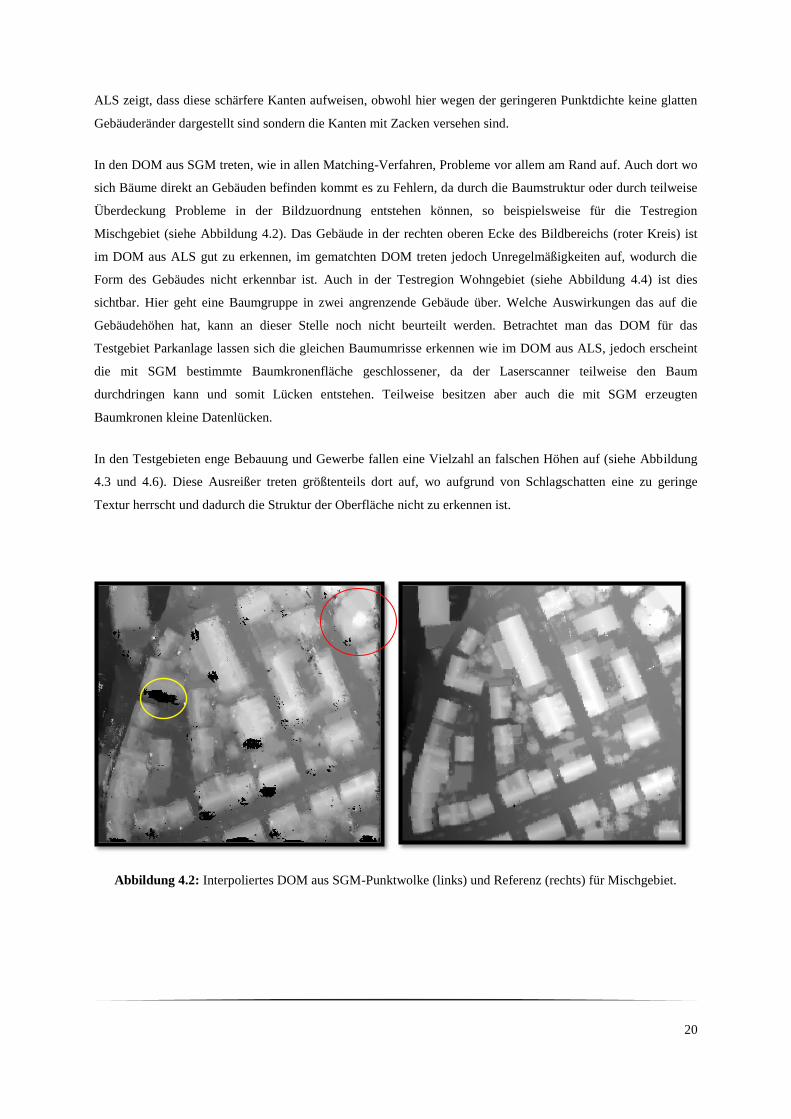
In Abbildung 4.2–4.6 sind die interpolierten DOM dargestellt. In dem durch SGM erzeugten DOM sind die
Umrisse der Gebäude gut erkennbar, jedoch treten gerade in stark bebauten Gebieten wie in Mischgebiet (siehe
Abbildung 4.2, gelber Kreis) größere Datenlücken auf. Diese entstehen durch Verdeckungen aufgrund von
Gebäuden, da dadurch dort keine korrespondierenden Punkte abgebildet sind und somit auch keine Disparitäten
berechnet werden können. Die Gebäuderänder wirken meist verschwommen. Ein Vergleich mit den DOM aus
20
ALS zeigt, dass diese schärfere Kanten aufweisen, obwohl hier wegen der geringeren Punktdichte keine glatten
Gebäuderänder dargestellt sind sondern die Kanten mit Zacken versehen sind.
In den DOM aus SGM treten, wie in allen Matching-Verfahren, Probleme vor allem am Rand auf. Auch dort wo
sich Bäume direkt an Gebäuden befinden kommt es zu Fehlern, da durch die Baumstruktur oder durch teilweise
Überdeckung Probleme in der Bildzuordnung entstehen können, so beispielsweise für die Testregion
Mischgebiet (siehe Abbildung 4.2). Das Gebäude in der rechten oberen Ecke des Bildbereichs (roter Kreis) ist
im DOM aus ALS gut zu erkennen, im gematchten DOM treten jedoch Unregelmäßigkeiten auf, wodurch die
Form des Gebäudes nicht erkennbar ist. Auch in der Testregion Wohngebiet (siehe Abbildung 4.4) ist dies
sichtbar. Hier geht eine Baumgruppe in zwei angrenzende Gebäude über. Welche Auswirkungen das auf die
Gebäudehöhen hat, kann an dieser Stelle noch nicht beurteilt werden. Betrachtet man das DOM für das
Testgebiet Parkanlage lassen sich die gleichen Baumumrisse erkennen wie im DOM aus ALS, jedoch erscheint
die mit SGM bestimmte Baumkronenfläche geschlossener, da der Laserscanner teilweise den Baum
durchdringen kann und somit Lücken entstehen. Teilweise besitzen aber auch die mit SGM erzeugten
Baumkronen kleine Datenlücken.
In den Testgebieten enge Bebauung und Gewerbe fallen eine Vielzahl an falschen Höhen auf (siehe Abbildung
4.3 und 4.6). Diese Ausreißer treten größtenteils dort auf, wo aufgrund von Schlagschatten eine zu geringe
Textur herrscht und dadurch die Struktur der Oberfläche nicht zu erkennen ist.
Abbildung 4.2: Interpoliertes DOM aus SGM-Punktwolke (links) und Referenz (rechts) für Mischgebiet.

21
Abbildung 4.3: Interpoliertes DOM aus SGM-Punktwolke (links) und Referenz (rechts) für enge Bebauung.
Abbildung 4.4: Interpoliertes DOM aus SGM-Punktwolke (links) und Referenz (rechts) für Wohngebiet.

22
Abbildung 4.5: Interpoliertes DOM aus SGM-Punktwolke (links) und Referenz (rechts) für Parkanlage.
Abbildung 4.6: Interpoliertes DOM aus SGM-Punktwolke (links) und Referenz (rechts) für Gewerbe.
Die Abbildungen 4.7-4.9 zeigen die für die Punktwolken abgeleiteten Konturlinien, die mit dem GVE in einem
Intervall von 1m interpoliert wurden. Im Vergleich zum DOM aus ALS weisen die Gebäudekanten des
gematchten DOM unregelmäßige Höhenlinien auf, da diese teilweise in die Gebäude einfallen oder von den
Gebäuden weg verlaufen. Auch die Dachkonturen weisen diese Unregelmäßigkeiten auf, lassen aber die Struktur
der Satteldächer gut erkennen. Grund hierfür ist der viel größere Informationsgehalt aufgrund der höheren
Punktdichte, weshalb das DOM aus SGM wesentlich mehr Details wiedergibt. Die einzelnen Gebäude sind, wie
auch im DOM aus ALS, eindeutig erkennbar. Auffällig sind wieder die Ausreißer in Form von Höhenspitzen
(siehe Abbildung 4.7).

23
Abbildung 4.7: Höhenlinien des DOM aus SGM (links) und DOM aus ALS (rechts) für enge Bebauung.
Die Höhenlinien von Gewerbe (siehe Abbildung 4.8) zeigen, dass Flachdächer ohne grobe Fehler generiert
werden. In schattigen Bereichen (Bildbereich unten rechts) oder Bereichen mit viel Vegetation (linker
Bildbereich) sind Mängel durch Fehler in der Bildzuordnung erkennbar.
Abbildung 4.8: Höhenlinien des DOM aus SGM (links) und DOM aus ALS (rechts) für Gewerbe.
Abbildung 4.9 macht den Übergang von Bäumen in Gebäude sichtbar. Während im DOM aus ALS Bäume und
Gebäude klar voneinander abgegrenzt sind, laufen sie im DOM aus SGM teilweise ineinander über, da in den
Luftbildern der Abstand zwischen Baum und Gebäude schlecht zu sehen ist oder diese sich teilweise, abhängig
von der Aufnahmerichtung, überdecken (vgl. Abbildung 3.3). Wie zu erkennen ist, werden durch diesen
Übergang die Höhen an den Gebäuderändern verfälscht.

24
Abbildung 4.9: Höhenlinien des DOM aus SGM (links) und DOM aus ALS (rechts) für Wohngebiet.
Um die Qualität der Modellierung zu bewerten, werden die DOM als schattierte Schrägdarstellungen betrachtet
(siehe Abbildung 4.10-4.11). Die aus Luftbildern generierten DOM lassen die Gebäude erkennen, jedoch
bestehen viele grobe Fehler, die als Spitzen aus dem DOM heraus ragen (siehe Abbildung 4.10). Abgesehen von
diesen Ausreißern lassen sich die einzelnen Gebäude jedoch gut voneinander unterscheiden, die Erkennbarkeit
der Bebauungsstruktur ist vergleichbar mit der aus ALS-Daten. Auffällig ist, dass die Dachflächen im DOM aus
ALS viel glatter sind, da hier kleine Details gar nicht erfasst werden konnten und somit auch nicht dargestellt
sind.
Abbildung 4.10: Schattierte Darstellung der DOM aus SGM (links) und aus ALS (rechts) für einen Ausschnitt
aus enge Bebauung.

25
Die DOM aus SGM wurden, um die auftretenden Ausreißer zu glätten, mit einem 5x5 Median-Filter geglättet.
Durch eine größere Maske werden die Ausreißer verringert, jedoch wird auch das DOM stärker geglättet,
wodurch wiederrum Details verloren gehen und Kanten abgerundet werden (siehe Abbildung 4.11).
Abbildung 4.11: DOM aus SGM, das mit einem 7x7 Median-Filter (links) bzw. einem 13x13 Median-Filter
geglättet wurde.
Das DOM aus SGM für Gewerbe (siehe Abbildung 4.12) zeigt, dass flache Gebäude mit einer guten Qualität
abgebildet werden. Scharfe Kanten sind dargestellt und aufgrund der hohen Punktdichte sind kleine Details
erkennbar. Gebäude mit Satteldächern wurden im Vergleich zur Referenz schlechter modelliert, jedoch sind
Dachfirst und Gebäudeform gut zu erkennen. Die vielen Ausreißer in einigen Bereichen treten meist dort auf, wo
sich viel Vegetation oder großflächig Schatten befindet. Durch die Struktur der Bäume und die fehlende oder
schlechte Textur im Schatten ergeben sich fehlerhafte Ergebnisse in der Bildzuordnung.
Abbildung 4.12: Schattierte Darstellung der DOM aus SGM (links) und aus ALS (rechts) für einen Ausschnitt
aus Gewerbe.

26
Der Übergang vom Gelände zum Gebäude und die Modellierung der Dächer lassen sich zusätzlich durch
Querschnittsprofile der Punktwolken betrachten, welche mit dem GVE erstellt werden.
Abbildung 4.13: Profil durch ein Gebäude mit Satteldach aus Wohngebiet für DOM aus SGM (links) und DOM
aus ALS (rechts).
Abbildung 4.14: Profil durch ein Gebäude mit Pultdach aus Gewerbe für DOM aus SGM (links) und DOM aus
ALS (rechts).
Abbildung 4.15: Profillinie durch Gebäude aus Wohngebiet (links) und Gebäude aus Gewerbe (rechts).

27
Abbildung 4.13 zeigt das Profil für ein Gebäude mit Satteldach aus Wohngebiet. Es ist deutlich zu erkennen,
dass durch SGM die Gebäudekanten besser wiedergegeben sind. Durch die geringere Punktdichte von ALS und
aufgrund der Interpolation werden die Gebäudekanten im DOM aus ALS abgerundet dargestellt. Auch der
Dachfirst ist im DOM aus SGM spitzer modelliert. Wegen Datenlücken auf der rechten Seite ist die
Gebäudewand aufgrund der Interpolation jedoch nicht senkrecht dargestellt, sondern fällt schräg ab. Die Höhen
für den Dachfirst unterscheiden sich in den beiden DOM um 1cm.
In Abbildung 4.14 ist das Profil für ein Gebäude mit Pultdach zu sehen. Die Höhen des Gebäudes sind nahezu
identisch. Das Dach ist glatt abgebildet und lässt keine Ausreißer erkennen. Die Ecken des Gebäudes sind auch
hier wegen der höheren Punktdichte besser wiedergegeben als beim DOM aus ALS und auch Gebäudewände
sind weniger geneigt dargestellt.
Ebenfalls wird die Modellierung von kleinen Objekten, wie z.B. einem Schornstein, untersucht (siehe Abbildung
4.16), wobei der Unterschied zwischen den Punktdichten von ALS und SGM deutlich wird. Da der Laserscanner
das obere Ende des Schornsteins nur mit einem Punkt aufgenommen hat, wird dieser im DOM als Spitze
dargestellt. Anders im DOM aus SGM. Wegen der höheren Punktdichte wird der Schornstein vollkommen
erfasst. Auf der linken Seite kommt es jedoch wieder wegen Datenlücken und Interpolation zu einer fehlerhaften
Modellierung. Insgesamt betrachtet, wird hier aber eine viel bessere Darstellung erzielt, als durch ALS.
Abbildung 4.16: Profil entlang eines Schornsteins aus Wohngebiet für DOM aus SGM (links) und DOM aus
ALS (rechts).

28
Abbildung 4.17: Profillinie entlang eines Schornsteins (links) und Luftbildausschnitt (rechts) für Gebäude aus
Wohngebiet.
4.2 Quantitative Untersuchung
Für den quantitativen Vergleich mit der durch ALS erzeugten Punktwolke werden die Differenzen zwischen dem
DOM aus SGM und dem DOM aus Laserscannerdaten gebildet. Hierfür werden die mit SCOP++ interpolierten
Oberflächenmodelle verwendet. Das resultierende Differenzbild besitzt eine Auflösung von 10 cm. Zur
Evaluierung werden verschiedene Objektklassen gebildet und untersucht.
Die Untersuchung erfolgt mit der Software ERDAS IMAGINE. Für die verschiedenen Objektklassen werden
Polygone in den DOM definiert (siehe Abbildung 4.18), wobei zwischen den Klassen Dachfläche, Baumkrone
und Untergrund, wie Straßen, Rasenflächen oder Parkflächen, unterschieden wird. Dachflächen werden
außerdem noch unterteilt in von der Sonne beleuchtete Flächen und Flächen im Schatten.
Zum einen werden Polygone definiert, bei denen nur beachtet wird, dass die Flächen der jeweiligen Objektklasse
entsprechen („alle Polygone“), wodurch auch Ausreißer in die Genauigkeitsbetrachtung mit eingehen (siehe
Abbildung 4.18). Jedoch enthalten die Polygone keine Höhensprünge wie Gebäuderänder, da dort durch
Interpolation falsche Höhen entstehen, und auch der Randbereich der DOM fließt nicht in die Untersuchung mit
ein, da dieser schlecht repräsentiert und daher auch schlecht interpoliert ist.
Große Differenzen entstehen durch grobe Fehler, die als Höhenspitzen aus dem DOM heraus ragen, durch die
unterschiedliche Punktdichte zwischen SGM und ALS und durch Messrauschen. Grobe Fehler weisen große
Unterschiede zu den restlich bestimmten Höhen auf und waren im Abschnitt 4.1 durch Höhenspitzen sichtbar.
Durch diese Ausreißer entstehen große Höhendifferenzen zum ALS-DOM, wodurch das DOM aus SGM
schlechtere Genauigkeiten erreicht. Aufgrund der unterschiedlichen Punktdichte enthält das DOM aus SGM
wesentlich mehr Details, wie bei Schornsteinen oder an Dachgauben, die durch ALS mit einer Punktdichte von 5

29
Punkte/m² mit zu wenigen Punkten oder gar nicht erfasst werden können und somit Differenzen zwischen den
Oberflächenmodellen im Meterbereich auftreten. Um ein Ergebnis zu erhalten, was von diesen Faktoren
weitestgehend nicht beeinflusst wird, werden zusätzlich nur sehr gute Polygone definiert und untersucht. Dabei
werden einzelne Flächen rausgesucht, die keine sichtbaren Ausreißer aufweisen und keine kleinen Details
enthalten, die im DOM aus ALS nicht enthalten sind. Zur Auswahl der Polygone werden die Punktwolken
gemeinsam im FugroViewer betrachtet, da hier sehr gut zu erkennen ist ob im DOM aus ALS Details wesentlich
schlechter oder gar nicht erfasst worden sind. Die Untersuchung erfolgt für vier der fünf Testgebiete für alle
Objektklassen bis auf Baumfläche, da für diese, aufgrund der teilweisen Durchdringung des Laserstrahls, keine
sehr guten Polygone definiert werden können.
Abbildung 4.18: Objektklasse Dachfläche für allgemeine Polygone (rechts) und sehr gut definierte Polygone
(links) im Testgebiet Mischgebiet .
Aus dem berechneten Differenzmodell mit den Höhendifferenzen werden innerhalb der
Test-Polygone folgende statistische Maße abgeleitet:
Mittelwert: =
Median:
quadratisches Mittel (root mean square) als Maß für den Unterschied zwischen den Höhen aus
SGM und der Referenz:
Standardabweichung als Maß für die Streuung der Werte um ihren Mittelwert:
maximale positive und maximale negative Höhendifferenz:
30
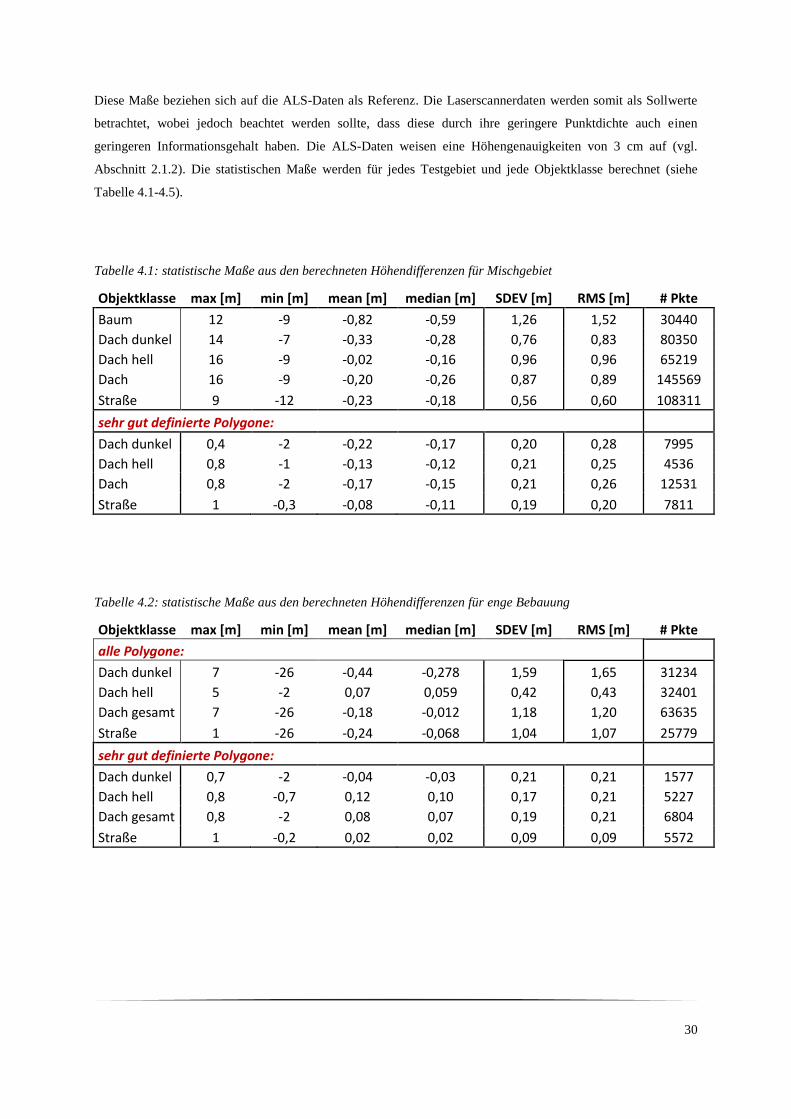
Diese Maße beziehen sich auf die ALS-Daten als Referenz. Die Laserscannerdaten werden somit als Sollwerte
betrachtet, wobei jedoch beachtet werden sollte, dass diese durch ihre geringere Punktdichte auch einen
geringeren Informationsgehalt haben. Die ALS-Daten weisen eine Höhengenauigkeiten von 3 cm auf (vgl.
Abschnitt 2.1.2). Die statistischen Maße werden für jedes Testgebiet und jede Objektklasse berechnet (siehe
Tabelle 4.1-4.5).
Tabelle 4.1: statistische Maße aus den berechneten Höhendifferenzen für Mischgebiet
Objektklasse max [m] min [m] mean [m] median [m] SDEV [m] RMS [m] # Pkte
Baum 12 -9 -0,82 -0,59 1,26 1,52 30440
Dach dunkel 14 -7 -0,33 -0,28 0,76 0,83 80350
Dach hell 16 -9 -0,02 -0,16 0,96 0,96 65219
Dach 16 -9 -0,20 -0,26 0,87 0,89 145569
Straße 9 -12 -0,23 -0,18 0,56 0,60 108311
sehr gut definierte Polygone:
Dach dunkel 0,4 -2 -0,22 -0,17 0,20 0,28 7995
Dach hell 0,8 -1 -0,13 -0,12 0,21 0,25 4536
Dach 0,8 -2 -0,17 -0,15 0,21 0,26 12531
Straße 1 -0,3 -0,08 -0,11 0,19 0,20 7811
Tabelle 4.2: statistische Maße aus den berechneten Höhendifferenzen für enge Bebauung
Objektklasse max [m] min [m] mean [m] median [m] SDEV [m] RMS [m] # Pkte
alle Polygone: Dach dunkel 7 -26 -0,44 -0,278 1,59 1,65 31234
Dach hell 5 -2 0,07 0,059 0,42 0,43 32401
Dach gesamt 7 -26 -0,18 -0,012 1,18 1,20 63635
Straße 1 -26 -0,24 -0,068 1,04 1,07 25779
sehr gut definierte Polygone:
Dach dunkel 0,7 -2 -0,04 -0,03 0,21 0,21 1577
Dach hell 0,8 -0,7 0,12 0,10 0,17 0,21 5227
Dach gesamt 0,8 -2 0,08 0,07 0,19 0,21 6804
Straße 1 -0,2 0,02 0,02 0,09 0,09 5572

31
Tabelle 4.3: statistische Maße aus den berechneten Höhendifferenzen für Wohngebiet
Objektklasse max [m] min [m] mean [m] median [m] SDEV [m] RMS [m] # Pkte
alle Polygone: Baum 13 -14 -1,19 -0,65 2,14 2,45 44739
Dach dunkel 7 -11 -0,02 0,01 0,65 0,65 30257
Dach hell 5 -5 0,00 0,00 0,33 0,33 46112
Dach gesamt 7 -11 -0,01 0,01 0,48 0,48 76369
Untergrund 0,3 -4 -0,10 0,03 0,39 0,41 41335
sehr gut definierte Polygone:
Dach dunkel 0,9 -1 0,01 0,02 0,20 0,20 3333
Dach hell 0,6 -1 -0,01 0,03 0,21 0,21 3537
Dach gesamt 0,9 -1 0,00 0,02 0,20 0,20 6870
Untergrund 1 -0,3 0,06 0,06 0,08 0,09 7136
Tabelle 4.4: statistische Maße aus den berechneten Höhendifferenzen für Parkanlage
Objektklasse max [m] min [m] mean [m] median [m] SDEV [m] RMS [m] # Pkte
alle Polygone: Baum 17 -16 -0,96 -0,58 1,71 1,96 231780
Dach dunkel 3 -13 0,06 0,19 1,42 1,43 6010
Dach hell 2 -7 0,00 0,00 0,44 0,45 11780
Dach gesamt 3 -13 0,00 -0,82 0,90 0,90 17790
Tabelle 4.5: statistische Maße aus den berechneten Höhendifferenzen für Gewerbe
Objektklasse max [m] min [m] mean [m] median [m] SDEV [m] RMS [m] # Pkte
alle Polygone: Dach dunkel 8 -17 0,05 -0,02 0,91 0,91 11233
Dach hell 9 -18 -0,06 -0,06 0,94 0,94 55757
Dach gesamt 9 -18 -0,04 -0,06 0,94 0,94 66990
Untergrund 1 -24 -0,05 -0,02 0,69 0,69 91361
sehr gut definierte Polygone:
Dach dunkel 1 -1 -0,05 -0,07 0,33 0,33 625
Dach hell 0 -3 -0,24 -0,19 0,36 0,43 545
Flachdach 0,2 -0,4 0,00 -0,01 0,03 0,03 27018
Untergrund 4 0,2 0,05 0,03 0,15 0,16 13685

32
Mit den maximalen Abweichungen kann man keine Aussage über die Qualität der DOM treffen,
da man nicht sagen kann, ob diese Abweichungen durch Ausreißer in Form von einzelnen Pixeln entstehen, oder
in unterschiedlichen Oberflächen begründet sind. Es kann jedoch für die Testreihe „alle Polygone“ festgestellt
werden, dass in jedem Testgebiet und in jeder Objektklassen Abweichungen im Dezimeterbereich bestehen.
Keine Objektklasse der verschiedenen Testgebiete enthält ausschließlich Höhendifferenzen, die sich lediglich im
Meterbereich befinden. Für die sehr gut definierten Polygone werden erwartungsgemäß bessere Ergebnisse für
erreicht, da sich die Werte hier größtenteils um 1m bewegen.
Mit Mittelwert und Median können eventuelle systematische Fehler aufgedeckt werden. Da es jedoch dazu
kommen kann, dass sich positive und negative Abweichungen ausgleichen, können kleine Werte entstehen, die
nicht repräsentativ für die Genauigkeit der DOM sind [Raguse, 2000]. Ein DOM welches sowohl große positive
als auch große negative Abweichungen besitzt kann einen sehr geringen Mittelwert oder Median aufweisen und
somit als genauer erscheinen als ein DOM mit größerem Mittelwert oder Median aber geringeren
Höhendifferenzen. Der Median lässt erkennen, ob das DOM aus SGM überwiegend zu geringe Höhen besitzt
(überwiegend positive Höhendifferenzen) oder überwiegend größere Höhenwerte als die Referenz aufweist
(überwiegend negative Höhendifferenzen). Für die Testreihe „alle Polygone“ besitzen die meisten Objektklassen
der Testgebiete einen negativen Median, was bedeutet, dass die im DOM aus SGM bestimmten Höhen
überwiegend zu groß sind. Ein negativer Median kann aber auch durch die geringere Punktdichte der Referenz
entstehen, wodurch kleine Strukturen durch ALS nicht erfasst werden und dadurch die Höhen aus SGM als zu
groß erscheinen. Lediglich in der Testregion Wohngebiet tritt überwiegend ein positiver Median auf.
Unterschiedliche Vorzeichen von Mittelwert und Median können entstehen, wenn in positiver oder negativer
Richtung sehr hohe Abweichungen bestehen, die den Mittelwert verfälschen.
Für die Bewertung der Genauigkeit der generierten DOM werden die Standardabweichung SDEV und das
quadratische Mittel RMS der Höhenabweichungen betrachtet. Die Standardabweichung beschreibt die Streuung
der Höhendifferenzen um ihren Mittelwert, wohingegen das quadratische Mittel die Abweichung von Null, also
die Abweichung von der Referenz, beschreibt. Die Objektklassen, die sich auf den Untergrund beziehen,
erreichen neben der Klasse helle Dachflächen für „alle Polygone“ mit die geringsten Abweichungen von 40 cm
für Wohngebiet und bis 1 m für enge Bebauung. Auch bei den sehr gut definierten Polygonen werden für
Objektklassen, die sich auf den Untergrund beziehen, gute Ergebnisse erzielt. Hier sind die Abweichungen bei
Wohngebiet und enge Bebauung kleiner als 10 cm, wohingegen die Ergebnisse für die anderen Klassen bei
20 cm liegen. Dass die geringsten Abweichungen für flache Strukturen wie Straße und Untergrund erreicht
werden, zeigt die zusätzliche Definition Flachdach für sehr gut definierte Polygone bei Gewerbe. Die ebenen
Dächer wurden bei den allgemeinen Polygonen zur Klasse helle Dachfläche zugezählt. Eine differenzierte
Betrachtung zeigt jedoch den Genauigkeitsunterschied von Satteldächern und Flachdächern. Während für
Satteldächer (Objektklasse Dach dunkel, Dach hell) hier Abweichungen zwischen 30 und 40cm erreicht werden,
wird für die Klasse Flachdach ein RMS von nur 3cm erreicht.

33
Es wird erwartet, dass helle Dachflächen aufgrund der besseren Textur eine höhere Genauigkeit erreichen als
dunkle Dachflächen, was jedoch für die Testreihe „alle Polygone“ bei Mischgebiet und Gewerbe nicht der Fall
ist (siehe blaues Rechteck). Auch die Betrachtung der Punktwolke im FugroViewer bestätigt, dass die hellen
Dachflächen schlechter modelliert sind (siehe Abbildung 4.19, roter Kreis). Die Ergebnisse der sehr gut
definierten Polygone zeigen, dass für helle Dachflächen insgesamt keine besseren Matching-Ergebnisse erhalten
werden als für dunkle Dachflächen, wobei der Grund für diese Ergebnisse nicht festgestellt werden konnte. Für
die Objektklasse Baum werden die schlechtesten Ergebnisse erreicht (RMS zwischen 1,5m und 2,5m), was darin
begründet ist, dass der Laserscanner teilweise den Baum durchdringt wohingegen sich die digitale
Bildzuordnung nur auf die sichtbare Baumkrone bezieht.
Abbildung 4.19: Ausschnitt aus der Darstellung der mit SGM erzeugten Punktwolke für Mischgebiet.
Vergleicht man die Testregionen, wurde für „alle Polygone“ das beste Ergebnis für Wohngebiet erreicht. Hier
beträgt der RMS für helle Dachflächen 33cm, dunkle Dachflächen erreichen 65cm und die Objektklasse
Untergrund 41cm. Die Abweichungen bei den Dachflächen entstehen größtenteils durch die direkt angrenzenden
Bäume, wodurch, wie in Abschnitt 4.1 durch Konturlinien gezeigt (vgl. Abbildung 4.9), die Höhen im DOM aus
SGM verfälscht werden. Außerdem sind in den Flächen vereinzelt Ausreißer enthalten, wodurch ein hoher RMS
entsteht. Auch bei den sehr gut definierten Polygonen bestehen für Wohngebiet im Vergleich zu den anderen
Testregionen die geringsten Abweichungen. Grund hierfür kann die gleichmäßige Bebauungsstruktur des
Testgebiets sein. Da hier keine zusammenhängende oder dicht bebaute Gebäude auftreten, entstehen bei der
Gebäudemodellierung keine Fehler durch Schattenwurf oder unregelmäßige Gebäudestrukturen.
Die Testregionen Mischgebiet und Gewerbe erreichen für „alle Polygone“ ähnliche Ergebnisse. Hier beträgt der
RMS für Dachflächen bei beiden Gebieten knapp 1 m. Für den Untergrund wird ein RMS von 60 cm bei Misch-
gebiet und von 69 cm bei Gewerbe erzielt. Obwohl im Testgebiet Gewerbe größtenteils große, frei stehende
Gebäude vorkommen, werden hier Abweichungen für Untergrund und Dachflächen zwischen 70 cm und 1 m
erreicht. Diese werden stark von Ausreißern beeinflusst, die, wie in Abschnitt 4.1 bereits gezeigt, im DOM von
Gewerbe vermehrt vorkommen.

34
Das Testgebiet Parkanlage weist mit 45 cm ein vergleichbar gutes Ergebnis auf, wobei hier jedoch im Hinblick
auf die anderen Testgebiete nur eine sehr kleine Fläche für diese Objektklasse mit hinein zählt. Das schlechteste
Ergebnis in der Testreihe „alle Polygone“ erreicht das Gebiet enge Bebauung, welches die komplexeste
Bebauungsstruktur aufweist und auch hier vermehrt Ausreißer aufgetreten sind (vgl. Abschnitt 4.1). Die
Abweichungen liegen hier für dunkle Dachflächen bei 1,60 m, für helle Dachflächen bei 40 cm und für Straßen-
flächen bei 1 m. Für die sehr gut definierten Polygone werden für enge Bebauung jedoch bessere Ergebnisse als
für Mischgebiet erzielt. Hierbei muss aber beachtet werden, dass bei enge Bebauung viele schmale Gebäude mit
vielen Details dicht aneinander gefügt sind, die der Laserscanner zu ungenau erfasst hat. Dadurch konnte eine
große Anzahl an Punkten nicht in die Untersuchung mit eingebracht werden. Vergleicht man die Anzahl der
untersuchten Punkte, gehen bei Mischgebiet 12531 Punkte in die Untersuchung mit ein, wohin gegen bei enge
Bebauung nur 6804 Punkte betrachtet werden.
Durch diese Ergebnisse wird sichtbar, dass mit SGM durchaus DOM mit Genauigkeiten von 10 und 20 cm
erreicht werden können. Für ebene Flächen, ohne komplexe Strukturen können sogar noch bessere Ergebnisse
erzielt werden (vgl. Tabelle 4.5, Klasse Flachdach). Das DOM aus SGM enthält, wie in Abbildung 4.20 sichtbar,
viele Details, die mit dem Laserscanner nicht erfasst werden konnten. Probleme treten jedoch dort auf, wo
angrenzende Bäume das Matching-Ergebnis beeinflussen. Einzelne Ausreißer verfälschen die erreichbaren
Genauigkeiten, wobei diese im Rahmen einer Nachbearbeitung entfernt werden können [Hirschmüller, 2008].
Ein Vergleich mit den in Tabelle 3.1 dargestellten Höhengenauigkeiten zeigt, dass die erreichten Abweichungen
zur Referenz für sehr gut definierte Polygone in Mischgebiet den erwarteten Genauigkeiten von 30 cm in der
Höhe entsprechen. Für die Testgebiete enge Bebauung und Wohngebiet wurden 20 cm Abweichungen erzielt,
welche somit unter der erwarteten Genauigkeit liegen. Für das Testgebiet Gewerbe beträgt die erwartete
Höhengenauigkeit 20 cm. Während hier für die Klassen Untergrund und Flachdach geringeren Abweichungen
erreicht wurden, liegen die Dachflächen mit 33 und 43 cm Abweichung über der erwarteten Genauigkeit.
Abbildung 4.20: Darstellung der aus SGM erzeugten Punktwolke (links) für ein freistehendes Wohnhaus aus
Mischgebiet (rechts).

35
4.3 Gebäudeextraktion
Für die Extraktion von Gebäuden in Stadtgebieten sind sehr komplexe Daten auszuwerten. Zur Untersuchung
des Potenzials der erzeugten DOM für die Gebäudeextraktion werden mit der Software Barista die Gebäude für
jedes Testgebiet, abgesehen vom Gebiet Parkanlage, extrahiert. Für die Wahl der Parameter werden
verschiedene Einstellungen getestet und anschließend das beste Ergebnis verwendet. Das Ergebnis wird im
jeweiligen Oberflächenmodell dargestellt (siehe Abbildung 4.21-4.24).
Abbildung 4.21: Ergebnis der Gebäudeextraktion für DOM aus Luftbildern (rechts) und ALS (links) für
Mischgebiet (Oberflächenrauhigkeit: 35%).
Abbildung 4.22: Ergebnis der Gebäudeextraktion für DOM aus Luftbildern (rechts) und ALS (links) für enge
Bebauung (Oberflächenrauhigkeit: 45%).

36
Abbildung 4.23: Ergebnis der Gebäudeextraktion für DOM aus Luftbildern (rechts) und ALS (links) für
Wohngebiet (Oberflächenrauhigkeit: 35%).
Abbildung 4.24: Ergebnis der Gebäudeextraktion für DOM aus Luftbildern (rechts) und ALS (links) für
Gewerbe (Oberflächenrauhigkeit: 30%).
Die Ergebnisse zeigen, dass der Großteil der Gebäude erkannt wird. Zusammenhängende Gebäude werden meist
als ein Gebäude extrahiert, da die Gebäudegrenzen kaum zu sehen sind. Im Gegensatz zum DOM aus ALS sind
die Gebäude, die aus dem DOM aus SGM erkannt werden, mehr fehlerbehaftet und geben nicht die geraden
Gebäudekanten wieder, was teilweise auch durch Datenlücken begründet ist (siehe Abbildung 4.23). Für die

37
Evaluierung der Gebäudeextraktion werden Gebäudegrundrisse aus Orthophotos als Referenz digitalisiert, in
Barista eingelesen und mit den extrahierten Gebäuden verglichen. Unter Verwendung der Konfusionsmatrix
werden die Pixel in folgende Klassen unterteilt [Rutzinger et al., 2009]:
True Positive (TP): Gebäudepixel das als Gebäudepixel erkannt wurde
False Negative (FN): Gebäudepixel das als Hintergrundpixel erkannt wurde
False Positive (FP): Hintergrundpixel das als Gebäudepixel erkannt wurde
Daraus können die Maße Completeness (Comp) und Correctness (Corr) abgeleitet werden. Completeness
entspricht der Producer´s Accuracy und ist ein Maß für den Anteil der korrekt klassifizierten Pixel aus den
gesamten Pixeln, die dieser Klasse entsprechen. Correctness entspricht der User´s Accuracy und beschreibt, wie
sehr die richtig klassifizierten Pixel einer Klasse mit den Referenzdaten übereinstimmen [Rutzinger et al., 2009].
Eine gute Klassifikation sollte eine hohe Completeness und eine hohe Correctness aufweisen. Weiterhin kann die
Qualität der Ergebnisse durch das Maß Quality beschrieben werden [Rutzinger, Rottensteiner & Pfeifer, 2009]:
Die erzielten Ergebnisse in den verschiedenen Testgebiete für das DOM aus SGM und aus ALS sind in den
Tabellen 4.10-4.11 und in den Abbildungen 4.25-4.28 dargestellt.
Tabelle 4.10: Evaluierung der Gebäudeextraktion für DOM aus SGM (Angaben in %)
Mischgebiet enge Bebauung Wohngebiet Gewerbe
Completeness 85,3 83,1 76,1 85,7
Correctness 78,6 83,2 83,5 79,7
Quality 69,3 71,2 66,1 70,3
Tabelle 4.11: Evaluierung der Gebäudeextraktion für DOM aus ALS (Angaben in %)
Mischgebiet enge Bebauung Wohngebiet Gewerbe
Completeness 89,0 83,0 88,9 87,5
Correctness 89,4 87,7 90,5 89,3
Quality 80,5 74,4 81,3 79,2

38
Abbildung 4.25: Darstellung der TP (gelb), FP (rot) und FN (blau) für Gebäudeextraktion aus DOM aus SGM
(links) und ALS (rechts) für Mischgebiet.
Abbildung 4.26: Darstellung der TP (gelb), FP (rot) und FN (blau) für Gebäudeextraktion aus DOM aus SGM
(links) und ALS (rechts) für enge Bebauung.

39
Abbildung 4.27: Darstellung der TP (gelb), FP (rot) und FN (blau) für Gebäudeextraktion aus DOM aus SGM
(links) und ALS (rechts) für Wohngebiet.
Abbildung 4.28: Darstellung der TP (gelb), FP (rot) und FN (blau) für Gebäudeextraktion aus DOM aus SGM
(links) und ALS (rechts) für Gewerbe.
Die mittels SGM abgeleiteten DOM erreichen Maße für Completeness und Correctness zwischen 76 und 86 %.
Für Gewerbe wurden mit einer Completeness von 85,7 % die meisten Objektpixel richtig zugeordnet, für Wohn-
gebiet mit 76,1 % die wenigsten, da kleine Gebäude am Rand oder Anbauten teilweise nicht erkannt werden und
diese bei einer vergleichbar geringen Gesamtanzahl von Gebäudepixeln stärker ins Gewicht fallen. Allerdings
sind die Maße, da es sich bei diesem Verfahren um eine pixelbasierte Klassifikation handelt, stark durch Fehler

40
an Gebäudekanten beeinflusst, die durch Interpolation entstehen [Rutzinger et al., 2009]. Außerdem muss
beachtet werden, dass Gebäude auftreten können, die im DOM nur teilweise abgebildet werden, da sie sich am
Rand befinden. Sind diese in der Referenz komplett vorhanden, entstehen FNs, die das Ergebnis verfälschen
(siehe Abbildung 4.27). Vergleicht man die Abbildungen 4.25 und 4.26 miteinander fällt auf, dass Mischgebiet
und enge Bebauung die größte Anzahl von nicht erkannten Gebäuden aufweisen. Diese sind vor allem flachere
Anbauten, die von ihrer Textur her sich nicht stark vom Untergrund unterscheiden oder wenig Textur durch
Schatten aufweisen. Die Gebäude, die bei Gewerbe (siehe Abbildung 4.28) einen großen Anteil an nicht
erkannten Gebäudepixeln aufweisen (blau), befinden sich direkt an Bäumen, die teilweise mit als Gebäude
klassifiziert werden oder durch Überdeckungen Gebäudepixel nicht als solche erkennen lassen. Insgesamt
betrachtet erreichen enge Bebauung und Gewerbe mit einer Quality von 71,2 und 70,3 % die besten Klassifi-
kationsergebnisse, da hier sowohl gute Maße für Completeness, als auch für Correctness erreicht wurden. Das
schlechteste Ergebnis in dieser Testreihe erreicht Mischgebiet (Quality = 69,3 %), da hier die meisten Fehl-
klassifikationen durch flache Gebäude oder Bäume entstanden sind.
Im Vergleich mit den Ergebnissen der DOM aus ALS weisen die Resultate für DOM aus SGM mehr Fehler auf,
da Gebäudekanten nicht so glatt generiert, und daher Gebäudeumrisse auch nicht so glatt wie bei ALS erkannt
werden. Teilweise werden auch Bäume am Rand von Gebäuden mit extrahiert oder ganz als ein Gebäude erkannt
(siehe Abbildung 4.25), da sich die Höhen der Baumkrone im DOM aus SGM auf einem Höhenniveau befinden.
Andererseits ist das Verfahren mit dem die Gebäude extrahiert wurden, noch nicht darauf optimiert, die
Gebäuderänder gut darzustellen. Dennoch hat ein aus SGM abgeleitetes Oberflächenmodell Potenzial für die
Gebäudeextraktion, da sich die Ergebnisse für Quality zwischen SGM und ALS lediglich um Werte zwischen 3
und 15 % unterscheiden. Besonders für enge Bebauung existiert bezüglich Quality mit 71,2 % für SGM und
74,4 % für ALS kein erheblicher Unterschied, da in diesem Testgebiet nur sehr wenig Bäume bestehen, die die
Extraktion beeinflussen.

41
5 Zusammenfassung
Im Rahmen dieser Arbeit wurde die Genauigkeit von digitalen Oberflächenmodellen, welche aus Stereobildern
durch Semiglobal Matching bestimmt wurden, untersucht. Hierzu wurden zum Vergleich aus Laserscannerdaten
abgeleitete DOM verwendet. Die Untersuchung wurde in fünf Testgebieten, separat für verschiedene
Objektklassen vorgenommen.
Der Vergleich mit den DOM aus ALS erfolgte einerseits qualitativ durch visuelle Betrachtung. Hier wurde
festgestellt, dass die Gebäudekanten im DOM aus SGM glatter dargestellt sind als im DOM aus ALS. Befinden
sich diese jedoch in unmittelbarer Nähe von Bäumen, beeinflussen diese die Modellierung der Gebäude und
führen zu Unregelmäßigkeiten der Gebäuderänder in Höhe und Form, wodurch diese verschwommen
erscheinen. Auch schattige Bereiche erschweren das Matching, was zu Ausreißern führt. Da in verdeckten
Bereichen kein Matching erfolgen kann, treten gerade in stark bebauten Gebieten Datenlücken durch
Verdeckungen auf.
Eine quantitative Untersuchung wurde durch Differenzbildung zwischen dem ALS-DOM und dem DOM aus
SGM vorgenommen. Für jedes Testgebiet wurden statistische Maße für die verschiedenen Objektklassen
berechnet, wobei zwischen den Klassen helle und dunkle Dachflächen, Untergrund und Baumkrone
unterschieden wurde. Dabei wurden zum einen in einer Testreihe „alle Polygone“ betrachtet und zum Anderen,
in einer weiteren Testreihe, „sehr gut definierte Polygone“ untersucht. Diese sind, im Gegensatz zur ersten
Testreihe, weitestgehend frei von Ausreißern und werden nicht aufgrund der viel geringeren Punktdichte des
ALS im Ergebnis beeinflusst. Für die Testreihe „alle Polygone“ wurde für die berechnete Standardabweichung
und das quadratische Mittel meist Werte zwischen 0,5 und 1 m erreicht. Die geringsten Abweichungen zum
ALS-DOM wurden dabei für die Objektklassen helle Dachflächen und Untergrund, zu der Straßenflächen,
Parkflächen und auch Rasenflächen zählen, erzielt. Bei den Klassen für Dachflächen hat überrascht, dass für
helle und dunkle Dachflächen teilweise erstaunliche Unterschiede in den Abweichungen vorkommen. Die
größten Abweichungen entstanden für die Klasse Baumkrone, da hier der Laserpuls des Scanners teilweise die
Baumstruktur durchdringt. Bezogen auf die Testgebiete wurde das beste Ergebnis für die Region Wohngebiet
erzielt, da dieses Gebiet eine gleichmäßige Bebauungsstruktur, ohne zusammenhängende oder dicht bebaute
Gebäude aufweist, wodurch keine Fehler bei der Gebäudemodellierung durch Schattenwurf oder unregelmäßige
Gebäudestrukturen auftreten. Nur die vorhandenen Bäume beeinflussen teilweise das Ergebnis. Die Testregion
Mischgebiet, welche Gebäude in verschiedenen Größen und teilweise eine dichte Bebauung aufweist, erreicht
ein ähnliches Ergebnis wie das Testgebiet Gewerbe. Für das Gebiet mit der dichtesten Bebauung und der
komplexesten Bebauungsstruktur, enge Bebauung, wurden auch die größten Abweichungen zum DOM aus ALS
festgestellt. Die Untersuchung der sehr gut definierten Polygone zeigte, dass durch Semiglobal Matching ein
DOM erzeugt werden kann, bei dem Genauigkeiten zwischen 10 und 20 cm erreicht werden können, was bei
einer Auflösung von 8cm 1-2 Pixeln entspricht. Auch hier wurde das beste Ergebnis für Wohngebiet erreicht und
es bestätigte sich, dass flache Strukturen wie Untergrund oder Flachdächer am besten modelliert werden.

42
Desweiteren wurde das Potenzial der DOM aus SGM für die Gebäudeextraktion im Vergleich zu den
Laserscannerdaten untersucht. Die aus SGM erzeugten DOM liefern extrahierte Gebäude, die meist nicht die
tatsächliche Gebäudestruktur erkennen lassen. Im Vergleich zum Ergebnis des DOM aus ALS sind die
Gebäudekanten unregelmäßiger und die Strukturen fehlerbehafteter. Probleme treten überwiegend dort auf, wo
flache Anbauten bestehen, die eine zu geringe Textur aufweisen. Auch angrenzende Bäume beeinflussen das
Ergebnis, da sie im DOM aus SGM teilweise in die Gebäude überlaufen und daher mit als Gebäude klassifiziert
werden. Durch die Berechnung der Qualitätsmaße Completeness und Correctness konnte die Qualität der
Gebäudeextraktion durch Quality beschrieben werden, wodurch das Potenzial der durch SGM erzeugten DOM
für die Gebäudeextraktion sichtbar wurde. Die Ergebnisse für Quality zwischen SGM und ALS unterscheiden
sich nur um Werte zwischen 3 bis 15 %, wobei beachtet werden sollte, dass diese Maße stark durch Fehler an
den Gebäudekanten beeinflusst werden. Besonders dort wo sehr wenige Bäume bestehen, welche die Gebäude
im DOM beeinflussen, ist für Quality kein erheblicher Unterschied zum Ergebnis des DOM aus ALS zu
erkennen.
Zusammenfassend lässt sich sagen, dass für digitale Oberflächenmodelle von Stadtgebieten, die durch
Semiglobal Matching erzeugt werden, Genauigkeiten von 2 Pixeln erzielt werden können. Probleme treten
allerdings durch angrenzende Baumstrukturen oder Schattenbereiche auf, was sich durch ineinanderlaufende
Höhen oder Ausreißer äußert. Um diese Fehler zu minimieren, werden in Hirschmüller [2008] noch einige
Nachbearbeitungsschritte durchgeführt, die im Rahmen dieser Arbeit nicht vorgenommen wurden. Die
Gebäudeformen und Bebauungsstruktur sind jedoch gut zu erkennen und durch SGM werden sehr viel mehr
Details wiedergegeben als durch ALS. Gerade in Stadtgebieten treten viele kleine Strukturen auf, die in einem
DOM auch enthalten sein sollten. Es hat sich gezeigt, dass diese kleinen Details durch ALS schlecht oder gar
nicht modelliert werden, wohingegen diese durch SGM detailreicher erfasst werden. Auch bei der Modellierung
der Gebäudekanten bewirkt die höhere Punktdichte eine bessere Darstellung der Kanten.
Bezüglich der Gebäudeextraktion werden durch DOM aus SGM fast alle Gebäude erkannt. Befinden sich keine
Bäume in unmittelbare Nähe, werden sogar Qualitätsmaße erreicht, die sich nicht stark vom DOM aus ALS
unterscheiden. Die extrahierten Formen der Gebäude entsprechen jedoch teilweise nicht der Realität und
Gebäuderänder werden unregelmäßig und fehlerhaft dargestellt, weshalb eine Nachbearbeitung der
Gebäudeumrisse nötig ist. Sollen also anhand von DOM die Gebäudeformen extrahiert werden, sind DOM aus
ALS deutlich besser geeignet.
Im Hinblick auf die Ergebnisse hat die Erzeugung von Oberflächenmodellen in Stadtgebieten durch Semiglobal
Matching durchaus Potenzial. Bei vergleichbarer Auflösung können die DOM aus SGM kostengünstiger erstellt
werden als durch Airborne Laserscanning. Nachteilig sind jedoch die Datenlücken die durch Verdeckungen
entstehen und somit in Stadtgebieten nicht vermieden werden können. Sind die Genauigkeitsansprüche sehr
hoch, sollten, angesichts der auftretenden Ausreißer und teilweisen fehlerhaften Modellierung, zur Generierung
eines DOMs ALS-Daten verwendet werden, dessen Punktdichte klein genug ist, um wesentliche Details gut
wiederzugeben.

43
Literaturverzeichnis
Ackermann, F., 1984: Digital Image Correlation: Performance and Potential Application in Photogrammetry,
Photogrammetric Record, (11) 64, 429-439.
Albertz, J., 1991: Grundlagen der Interpretation von Luft- und Satellitenbildern – Eine Einführung in die
Fernerkundung, Wissenschaftliche Buchgesellschaft, Darmstadt.
Brenner, C., 2000: Dreidimensionale Gebäuderekonstruktion aus digitalen Oberflächenmodellen und
Grundrissen, Dissertation Universität Stuttgart, Fakultät für Bauingenieur- und Vermessungswesen.
Cramer, M., 2010: The DGPF-Test on Digital Airborne Camera Evaluation – Overview and Test Design, PFG
Photogrammetrie, Fernerkundung, Geoinformation Jahrgang 2010, Heft 2, 73-82, E. Schweizerbart’sche
Verlagsbuchhandlung, Stuttgart.
Cyganek B., J.P. Siebert, 2009: An Introduction to 3D Computer Vision Techniques and Algorithms, John Wiley
and Sons, New York.
Douglas, D., D. Peucker, 1973: Algorithms for the Reduction of the Number of Points Required to Represent a
Digitized Line or its Caricature, Cartographica: The International Journal for Geographic Information and
Geovisualization, University of Toronto Press, 10 (2), 112-122.
Förstner, W., 1982: On the Geometric Precision of Digital Correlation, IntArchPhRS, (24) 3, 176-189.
Haala, N., 1996: Gebäuderekonstruktion durch Kombination von Bild- und Höhendaten, Dissertation Universität
Stuttgart, Institut für Photogrammetrie, Deutsche Geodätische Kommission, C 460.
Haala, N., K. Wolff, 2009: Digitale photogrammetrische Luftbildkamerasysteme – Evaluation der automatischen
Generierung von Höhenmodellen, DGPF Tagungsband 18/2009, Jahrestagung DGPF Jena.
Haala, N., H. Hastedt, K. Wolf, C. Ressl, S. Baltrusch, 2010: Digital Photogrammetric Camera Evaluation –
Generation of Digital Elevation Models, PFG Photogrammetrie, Fernerkundung, Geoinformation Jahrgang 2010,
Heft 2, 99-115, E. Schweizerbart’sche Verlagsbuchhandlung, Stuttgart.
Heipke, C., 2009: Skript zu den Lehrveranstaltungen Photogrammetrie und Fernerkundung I-III, Leibniz
Universität Hannover, Institut für Photogrammetrie und Geoinformation.
Hirschmüller, H., 2008: Stereo Processing by Semi-Global Matching and Mutual Information, IEEE Trans. on
Pattern Analysis and Machine Intelligence, (30) 2, 328-341.
Kraus, K., 2000: Photogrammetrie Band 3: Topographische Informationssysteme, Dümmler, Köln.

44
Kraus, K., 2004: Photogrammetrie Band 1: Geometrische Informationen aus Photographien und
Laserscanneraufnahmen, Walter de Gruyter, Berlin.
Luhmann, T., 2000: Nahbereichsphotogrammetrie: Grundlagen, Methoden und Anwendungen, Wichmann
Verlag, Heidelberg.
Maas, H. G., 1999: The Potential of Height Texture Measures for the Segmentation of Airborne Laserscanner
Data, Delft University of Technology, Faculty of Civil Engineering and Geosciences Section of Photogrammetry
and Remote Sensing.
Mosch, M., 2005: 3D-Gebäudeextraktion aus Satellitenbildern suburbaner Regionen, Dissertation Universität
Freiburg, Fakultät für Forst- und Umweltwissenschaften.
Parzen, E., 1962: On Estimation of a Probability Density Function and Mode, The Annals of Mathematical
Statistics, 33 (3), 1065-1076.
Raguse, K., 2000: Automatische Generierung von Höhenmodellen und ihre Auswirkung auf Orthophotos,
Diplomarbeit Universität Hannover, Institut für Photogrammetrie und Ingenieurvermessung.
Rottensteiner, F., J. Trinder, S. Clode, K. Kubik, 2004: Building Detection by Dempster-Shafer Fusion of
LIDAR Data and Multispectral Aerial Imagery, Proc. 17th International Conference on Pattern Recognition, Vol.
2, 339-342.
Rottensteiner, F., J. Trinder, S. Clode, K. Kubik, 2007: Building Detection by Fusion of Airborne Laserscanner
Data and Multi-Spectral Images: Performance Evaluation and Sensitivity Analysis, ISPRS Journal of
Photogrammetry and Remote Sensing, 62 (2), 135-149.
Rutzinger, M., F. Rottensteiner, N. Pfeifer, 2009: A Comparison of Evaluation Techniques for Building
Extraction From Airborne Laser Scanning, IEEE Journal of Selected Topics in Applied Earth Observations and
Remote Sensing, 2 (1), 11-20.
Schmidt, R., 2008: Automatische Bestimmung von Verknüpfungspunkten für HRSC-Bilder der Mars Express-
Mission, Dissertation Universität Hannover, Fakultät für Bauingenieurwesen und Geodäsie.
Schmidt, R., 2009: Skript zur Lehrveranstaltung Moderne Methoden in Photogrammetrie und Fernerkundung,
Leibniz Universität Hannover, Institut für Photogrammetrie und Geoinformation.
Sui, L., 2002: Analyse von Laserscannerdaten mit digitalen Bildverarbeitungsmethoden, Dissertation Technische
Universität Berlin, Fakultät für Bauingenieurwesen und Angewandte Geowissenschaften.

45
Viola, P., W. M. Wells, 1997: Alignment by Maximization of Mutual Information, International Journal of
Computer Vision, 24 (2), 137-154.





























