Embed Size (px)
Citation preview

INSTRUKCJA MONTAŻOWA
Siłownik elektryczny wieloobrotowy w wykonaniu
przeciwwybuchowym SO 2-Ex
SO 2-Ex 1
Przed przystąpieniem do montażu i podłączenia siłownika
należy koniecznie przeczytać tę instrukcję montażową siłownika! Środki zapobiegawcze i ochronne realizowane w tym produkcie nie mogą zapewnić wymaganego poziomu ochrony, chyba, że produkt i jego systemy ochronne są stosowane w opisany poniżej sposób, i jeśli instalacja i obsługa techniczna jest przeprowadzana zgodnie z odpowiednimi zasadami i przepisami prawa! Spis treści 1. Zastosowanie .............................................................................................................................. 2 1.1 Zastosowanie i przeznaczenie wyrobu ............................................................................................... 2 1.2 Instrukcje bezpieczeństwa ................................................................................................................. 2 1.3 Serwis gwarancyjny i pogwarancyjny ................................................................................................. 3 1.4 Warunki pracy .................................................................................................................................... 3 1.5 Pakowanie, transport, składowanie .................................................................................................... 5 1.6 Opis wyrobu i opakowania, recykling .................................................................................................. 6 2. Opis, funkcje i parametry techniczne ........................................................................................... 6 2.1 Opis i funkcje ..................................................................................................................................... 6 2.2 Parametry techniczne ........................................................................................................................ 8 3. Montaż i demontaż siłownika ..................................................................................................... 12 3.1 Montaż............................................................................................................................................. 12 3.2 Demontaż ........................................................................................................................................ 14 4. Ustawianie................................................................................................................................. 14 4.1 Ustawianie jednostki momentowej .................................................................................................... 14 4.2 Ustawianie jednostki położeniowo-sygnalizacyjnej (rys. 3) ................................................................ 15 4.3 Ustawianie nadajnika potencjometrycznego (rys. 4) ........................................................................ 17 4.4 Ustawianie elektronicznego nadajnika położenia z przetwornika R/I(EPV) ........................................ 18 4.5 Ustawianie pojemnościowego nadajnika położenia CPT1/A ............................................................. 19 4.6 Ustawianie regulatora położednia (rys. 9) ......................................................................................... 21 5. Obsługa, konserwacja, awarie i ich usuwanie ............................................................................ 23 5.1 Obsługa ........................................................................................................................................... 23 5.2 Konserwacja – zakres i regularność przeglądów .............................................................................. 23 5.3 Utrzymanie dla zagwarantowania przeciwwybuchowości .................................................................. 23 5.4 Awarie i ich usuwanie....................................................................................................................... 24 6. Wyposażenie ............................................................................................................................. 24 7. Dodatki ...................................................................................................................................... 25 7.1 Schematy podłączeń siłownika SO 2-Ex bez regulatora położenia ................................................... 25 7.2 Schematy podłączeń siłownika SO 2-Ex z regulatorem położenia .................................................... 26 7.3 Rysunki wymiarowe ......................................................................................................................... 29
Wydanie: 04/2009, dodatek, część C Producent zastrzega sobie prawo do zmian
Numer ewidencyjny dokumentu:74 0868 01 Dodatek, część C
2 SO 2-Ex
II 2G
Instrukcja montażu, obsługi i konserwacji urządzenia jest przygotowywana zgodnie z wymogami odpowiednich przepisów ustawowych i wykonawczych rządu zgodnie z jego rozporządzeniami. Ma na
celu zapewnienie bezpieczeństwa i zdrowia i życia użytkownika w celu uniknięcia szkody i aby zapobiec zanieczyszczeniu środowiska naturalnego.
1. Zastosowanie
1.1 Zastosowanie i przeznaczenie wyrobu Przeciwwybuchowe siłowniki elektryczne (dalej SE) wieloobrotowe typu SO 2-Ex lub SOR 2-Ex z regulatorem położenia są urządzeniami elektromechanicznymi dużej mocy produkowanymi w wersji przeciwwybuchowej EEx de IIB T5. Jest to kombinacja odporności “d“ i spełniająca wymagania “e“ w środowisku zagrożenia wybuchem IIB (gazy, pary, pyły), kategoria 2G i temperaturą T5 (max. dozwolona temperatura otoczenia +100°C) stosowane max. w 1 strefie (do atmosfery wybuchowej tworzonej przez pyły, opary lub wybuchowej atmosfery tworzonej przez gazy, oparami lub mgłą, w zakresie ciśnień od 0,8 do 1,1 bar. Strefy dla zastosowania przeciwwybuchowych SE definiowane są w normie EN 60079-10. Przeciwwybuchowe SE typu SO 2-Ex, SOR 2-Ex są przeznaczone do zdalnego sterowania urządzeń ruchem zwrotnym wieloobrotowym w obydwu kierunkach. Konstruowane są dla prostego montażu do sterowania armaturami zamykającymi lub regulacyjnymi. Stosowane w ciepłownictwie, energetyce, gazownictwie, klimatyzacji i innych. Przyłącza zgodne z normą ISO 5210 lub DIN 3210, DIN 3338.
1. Zabronione jest używanie siłowników, jako podnośników! 2. Możliwość sterowania siłownika za pośrednictwem półprzewodnikowych sterowników należy skonsultować z producentem. 3. W siłownikach z regulatorem położenia w położeniach krańcowych nie można szczelnie zamknąć armatury za pośrednictwem sygnału sterującego.
1.2 Instrukcje bezpieczeństwa Charakterystyka produktu z punktu widzenia zagrożenia SE typu SO 2-Ex lub SOR 2-Ex jest wykonany z przeznaczeniem zastosowania w środowiskach z wysokim stopniem zagrożenia. Dotyczy to sterowania elektrycznego grupy A, z możliwością stosowania w środowiskach wg STN EN 61010-1+A2 z instalacją kategorii (kategoria przepięcia) II. Wpływ urządzenia na otoczenie Elektromagnetyczna kompatybilność (EMC): produkt odpowiada wymogom Rady Europy 89/336/EEC, 92/31/EEC, 93/68/EEC i 98/13/EC Elektromagnetyczna kompatybilność i normom EN 55014-1, Część 1 Elektromagnetyczna kompatybilność ogólna norma dotycząca promieniowania i EN 55014-2, Część 2 Elektromagnetyczna kompatybilność ogólna norma dotycząca odporności EN 61000-3-2 Wibracje wywołane produktem: wpływ produktu jest niezauważalny. Poziom hałasu: poziom hałasu A w miejscu obsługi max. 78 dB (A). Uwagi do bezpiecznego używania siłownika: Siłowniki SO 2-Ex i SOR 2-Ex nie mają własnej ochrony obwodów zasilania silnika i grzałki przeciw zwarciu. Dlatego do obwodu zasilania siłownika musi być podłączony bezpiecznik, który służy także, jako główny wyłącznik zasilania w przypadku awarii. Typ podłączenia elektrycznego: Podłączenie trwałe. Klasyfikacja środowiska i produktu: 1. Urządzenia są przystosowane do pracy w środowisku, w którym występują gazy, pary i mgły, w zakresie temperatur 25 °C do + 55 °C; w zakresie ciśnienia 0,8 do 1,1 bar. Może być
umieszczone max w strefie 1. Chodzi przy tym o urządzenia: - grupa II (tj. elektryczne urządzenia dla środowisk z niebezpieczeństwem wybuchu); - środowiska typu G (gazy, pary i mgły); - kategoria 2 - podgrupa B - termiczna klasa T5

SO 2-Ex 3
2. Urządzenia konstruowane są zgodnie z wymogami norm dla urządzeń elektrycznych i nieelektrycznych przystosowanych dla środowisk z niebezpieczeństwem wybuchu: - dla elektrycznej części: EN 60079-0, EN 60079-1 i EN 60079-7; - dla nieelektrycznej części: EN 1127-1, EN 13463-1 i EN 13463-5
3. Max. temperatura powierzchni produktu dla danej grupy T5 nie może przekroczyć wartości +
100°C 4. Jeśli serwonapęd umieszczony jest w miejscu, które reguluje medium o temperaturze wyższej niż + 55°C, należy zabezpieczyć urządzenie dodatkową konstrukcją tak, aby była zachowana
temperatura otoczenia max. + 55°C i aby temperatura nie przenosiła się przez dodatkowe komponenty!
5. Zaślepki przepustów stosowane są tylko do transportu i magazynowania tj. do momentu zabudowy a następnie przepusty muszą być zabezpieczone kablami z uszczelnieniem! 6. W przypadku niewykorzystania niektórych przepustów dla wprowadzenie kabla, muszą być one zgodnie z certyfikatem Ex zaślepione zatyczką. 7. Przed zdjęciem pokrywy napędu należy odczekać ok. 30 minut. Produkt jest z zewnętrznej strony opatrzony napisem „ Uwaga! Pokrywę zdjąć po upływie 30 min. od odłączenia zasilania!“ 1.3 Serwis gwarancyjny i pogwarancyjny Serwis gwarancyjny wykonują przeszkoleni przez firmę Regada pracownicy – wykaz u autoryzowanych przedstawicieli firmy Regada, na podstawie pisemnej reklamacji wystawionej przez użytkownika siłownika.
Przy reklamacji należy podać: Podstawowe parametry (typ) siłownika podany na tabliczce znamionowej (typ, numer fabryczny) Opis występującego uszkodzenia
Każda nieautoryzowana naprawa grozi utratą gwarancji! Firma Regada zapewnia również serwis pogwarancyjny wszystkich produkowanych przez siebie siłowników elektrycznych.
1.4 Warunki pracy
1.4.1 Instalacja siłownika i położenie robocze Siłowniki SO 2-Ex, SOR 2-Ex można instalować na obiektach przemysłowych bez regulacji temperatury i wilgotności powietrza z ochroną przed bezpośrednim działaniem warunków atmosferycznych (powinien pracować pod zadaszeniem) takich jak opady deszczu i śniegu oraz promieniami słonecznymi również w środowisku z zagrożeniem wybuchu gorących gazów i par, oznaczonych, jako strefa 2 i 1 tj. w środowisku, w którym może powstać wybuchowa gazowa atmosfera w czasie normalnej pracy (zgodnie z normą EN 60079-10).
Ex e T5 Ex d IIB T5
c IIB T5

4 SO 2-Ex
Ostrzeżenie: Przy montażu siłownika na wolnym powietrzu powinien on być zabezpieczony jakimś zadaszeniem przed bezpośrednim działaniem warunków atmosferycznych szczególnie przed promieniami słonecznymi. Przy montażu w pomieszczeniach z zadaszeniem z wilgotnością ponad 80%, należy podłączyć grzałkę z pominięciem termostatu tak, aby grzałka pracowała bez przerwy.
1.4.2 Parametry pracy
Środowisko robocze Zgodnie z normą IEC 60 721-2-1 siłowniki elektryczne są produkowane w niżej podanych wersjach: 1. “Standard” - dla grupy klimatycznej wąskiej (R) + obowiązuje dla typu klimatu umiarkowanego (WT), gorącego suchego (MWDr) i bardzo gorącego i suchego (EWDr) o temperaturach -25°C do +55°C. Kategoria umiejscowienia - wersja “standard” jest przeznaczona do pracy w pomieszczeniach zadaszonych (kat. 2) Typ atmosfery - wersja “standard” jest przeznaczona do pracy w atmosferze typu II - przemysłowa
1.4.3 Środowisko robocze zgodne z normą IEC 60364-3:1993 Siłowniki SO 2-Ex i SO 2-Ex z regulatorem muszą wytrzymywać warunki zewnętrzne i sprawnie funkcjonować w warunkach zewnętrznych określonych, jako: - umiarkowane do gorącego z temperaturą od -25°C do +55°C.................................................AA 7* - z wilgotność względna od 10 do 100%, z kondensacją, z maksymalną zawartością wody 0, 028 kg/kg wody w 1 kg suchego powietrza w temperaturze od -25°C do +55°C................AB 7* - na wysokości do 2 000 m n.p.m. z ciśnieniem atmosferycznym od 86 do 108 kPa................ AC 1* - na działanie pryskającej wody ze wszystkich kierunków (stopień krycia IP x4)...................... AD 4* - z płytkim zanurzeniem (stopień krycia IP x7)……………………………………........................ AD 7* - ze średnim zapyleniem - z możliwością występowania niepalnego, nieprzewodzącego, niewybuchowego pyłu; średnia warstwa pyłu; opad pyłu większy, niż 350 ale nie więcej niż 1000 mg/m2 dziennie (wyrób o stopniu krycia IP 5x)…………………………...........................AE 5* - z silnym zapyleniem - z możliwością występowania niepalnego, nieprzewodzącego, niewybuchowego pyłu; średnia warstwa pyłu; opad pyłu większy, niż 35 ale nie więcej niż 350 mg/m2, lub 350 do 500 mg/m2 dziennie (wyrób o stopniu krycia IP 6x)...........................AE 6* - z występowaniem substancji korodujących lub zanieczyszczających w atmosferze; obecność substancji korodujących jest znacząca....................................................................AF 2* - z możliwością wystąpienia wstrząsów: średnich sinusowych wibracji z częstotliwością z zakresie 10 do 150 Hz, z amplitudą posuwu 0,15 mm dla f<fp i z amplitudą przyspieszenia 19,6 m/s2 dla f>fp; (częstotliwość przejściowa fp wynosi 57 do 62 Hz).........................................................................................AH 2* - wstrząsy średnie w normalnych wydziałach przemysłowych...................................................AG 2* - poważne niebezpieczeństwo wyrastania roślin i pleśni............................................................AK 2* - poważne niebezpieczeństwo występowania zwierząt (owadów, ptaków itp.)..........................AL 2* - ze szkodliwym działaniem promieniowania: wpływy szkodliwych prądów błądzących................................................................................. AM 2* - z natężeniem pola magnetycznego (jednokierunkowego i zmiennej częstotliwości sieciowej) do 400 A.m-1 średniego promieniowania słonecznego o natężeniu >500 i 700 W/m2.........AN 2* - wpływów średniej działalności sejsmicznej; przyspieszenie >300 Gal 600 Gal....................AP 3* - z pośrednim zagrożeniem wyładowaniami atmosferycznymi...................................................AQ 2* - z silnym działaniem wiatru..............................................................................................AR 3, AS 3* - ze zdolnościami osób technicznie przygotowanych elektrotechników............................................................................................................BA 4, BA 5* - z częstym dotykaniem osób z potencjałem ziemi; osoby często dotykają części przewodzących lub osoby stoją na podkładzie przewodzącym...............................................BC 3* - bez występowanie niebezpiecznych substancji na obiekcie.....................................................BE 1* * Oznaczenia zgodne z normami IEC 60 364-3:1993 (mod. IEC 60 364-3:1993).
!
SO 2-Ex 5
1.4.4 Zasilanie i reżim pracy Napięcie zasilania: dla typu silnika ES 8645-2LL-RL/T (120 W, 230 VAC, 8 F, 1 A – z hamulcem).230 V lub 220 V AC10% sterowanie…...........................................................................................................230/220 V AC 10% dla typu silnika SA 2460, 65 W, 24 V DC, (z hamulcem) ………………………….. 24 V AC/DC 10% sterowanie............................................................................................................... 24 V AC/DC 10% nadajnik potencjometryczny ...................................................................................... PxR V DC/AC nadajnik elektroniczny bez zasilacza .......................................................... 15 ÷ 30 V DC lub 24 V DC nadajnik pojemnościowy bez zasilacza ........................................................................... 18 ÷ 28 V DC
Częstotliwość napięcia zasilania ................................................................... 50 Hz lub 60 Hz 2 % Uwaga: Przy częstotliwości 60Hz czas przestawienia skróci się 1,2x. Reżim pracy: (wg EN 60 034-1, 8): ES SO 2-Ex przystosowany jest do zdalnego sterowania: - praca krótkotrwała S2-10 min. - praca przerywana S4-25, max. 90 cykli/godz. ES SOR 2-Ex z regulatorem przystosowany do pracy automatycznej: - praca przerywana S4-25, 90 ÷ 1200 cykli/godz. Uwaga:
1. Reżim pracy zależy od wielkości obciążenia i ilości cykli. 2. W siłowniku SOR 2-Ex z regulatorem położenia maksymalny moment obciążenia wynosi 0,8 wartości maksymalnego momentu obciążenia siłownika
Ostrzeżenie: W przypadku nieprzestrzegania reżimu pracy może dojść do przegrzania się silnika elektrycznego w siłowniku i zadziałania zabezpieczenia termicznego wbudowanego w silnik i wyłączenie
1.5 Pakowanie, transport, składowanie Siłowniki SO 2-Ex dostarczane są w sztywnych kartonach, spełniających wymogi normy EN 60 654. Wyrób pakowany w karton. Kartony można pakować na palety. Na zewnętrznej części kartonu znajduje się naklejka z danymi siłownika:
- oznaczeniem wyrobu, - nazwa i typ wyrobu, - ilość sztuk, - pozostałe parametry.
Firma transportowa powinna zabezpieczyć kartony podczas transportu przed przemieszczaniem się i ochroną przed zewnętrznymi wpływami warunków atmosferycznych. Transport powinien odbywać się w odpowiednich warunkach temperaturowych: - temperatura: -25 C do +70 C, (z wyjątkiem wykonań siłowników przeznaczonych do pracy w temperaturze-45 C do +45 C) - wilgotność: 5 do 100 %, z maksymalną zawartością wody 0.028 kg/kg suchego powietrza - ciśnienia atmosferyczne 86 do 108 kPa
Po otrzymaniu siłownika należy sprawdzić czy nie doszło do żadnych uszkodzeń podczas transportu. Siłownik przed montażem i podłączeniem powinien osiągnąć temperaturę pomieszczenia, w którym będzie instalowany.
SE przechowywać w pomieszczeniach suchych, dobrze przewietrzanych, chroniących przed nieczystościami i szkodliwym wpływem czynników atmosferycznych oraz chemicznych w temperaturze otoczenia –10 +50C i wilgotności względnej powietrza max. 80%.
Niedopuszczalne jest przechowywanie siłownika na zewnątrz lub w miejscach narażonych na bezpośrednie działanie warunków atmosferycznych!
!
6 SO 2-Ex
Wszelkie uszkodzenia powierzchni zewnętrznej siłownika należy natychmiast usunąć - aby zapobiec uszkodzeniu w wyniku korozji. Przy składowaniu wyrobu dłużej niż rok, należy przed montażem skontrolować smar w siłowniku. Siłowniki przechowywane dłużej powinny być również zabezpieczone przed wpływem warunków atmosferycznych.. Po instalacji siłownika na wolnym powietrzu, w wilgotnych pomieszczeniach lub pomieszczeniach ze zmienną temperaturą należy koniecznie podłączyć grzałkę w siłowniku. Zapobiega to skraplaniu się wody pod obudową siłownika – zabezpieczając jego części elektryczne przed skapującą wodą, zwiększając żywotność siłownika.
1.6 Ocena/opis wyrobu i opakowania – recykling
Wyrób został wyprodukowany materiałów, które można poddać recyklingowi - metalowych(stal, aluminium, mosiądz, brąz, miedź), plastikowych (PP, PA, PC) i wyrobów z gumy.
Karton i wyrób po zakończeniu jego żywotności można rozebrać i wszystkie jego części dostarczyć do punktów zajmujących się zbirem surowców wtórnych. Wyrób i jego opakowanie nie są źródłem zanieczyszczenia środowiska i nie zawierają odpadów niebezpiecznych.
2. Opis, funkcje i parametry techniczne
2.1 Opis i funkcje SE SO 2-Ex mają kompaktową konstrukcję z nielicznymi dodatkowymi modułami. Składają się z dwóch podstawowych zespołów.
- Zespół siłowy tworzy przekładnia umieszczona w dolnej części korpusu z przyłączem do armatury i mechanizmem napędowym do zespołu sterującego znajdującego się po przeciwnej stronie.
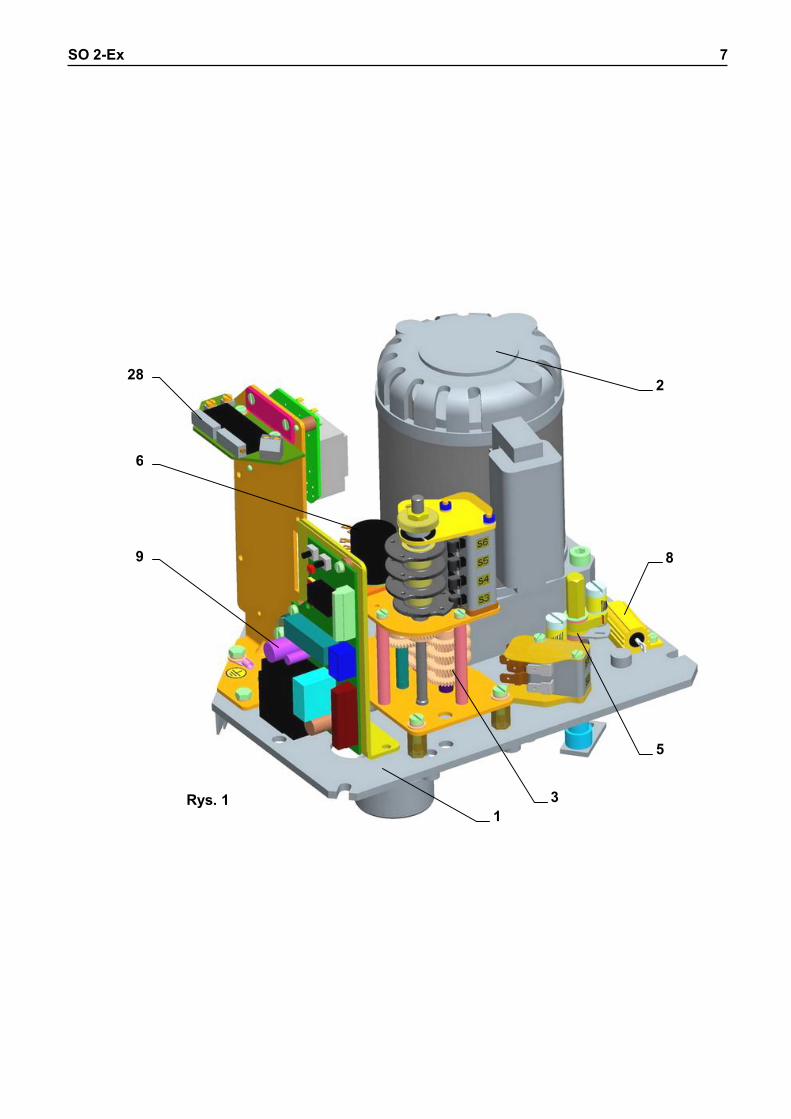
- Zespół sterujący (rys. 1) jest umiejscowiony na płycie sterowniczej (1), która zawiera:
- silnik elektryczny (2) jednofazowy z kondensatorem
- jednostkę momentową (5) sterowaną pływającym ślimakiem
- jednostkę położeniowo-sygnalizacyjną (3) z nadajnikiem położenia (6) - potencjometrycznym,
pojemnościowym lub elektronicznym (28)
- grzałka (8) z wyłącznikiem termicznym
- regulator położenia (9)
Listwa zaciskowa znajduje się w oddzielnej skrzynce z 2 przepustami kablowymi i podłączona z modułem sterującym siłownik 21-żyłowym podłączeniem, izolowanym od skrzynki sterowniczej przepustem zalanym żywicą.
Dodatkowo wyposażone: Sterowanie ręczne - tworzy koło ręczne połączone przez pływający ślimak z przekładnią planetarną. W wersji siłownika SOR 2-Ex zabudowany jest w środku regulator położenia (9). Regulator położenia umożliwia automatyczne ustawienie położenia części wyjściowej siłownika w zależności od wejściowego sygnału sterującego oraz ustawianie parametrów sterujących siłownikiem, strefa nieczułości, zapis stanów alarmowych i błędów w pracy.
SO 2-Ex 7
1
28
9
6
3
5
8
2
Rys. 1

8 SO 2-Ex
2.2 Parametry techniczne
Podstawowe parametry techniczne siłownika: podane są w tabeli nr. 1.
Tabela nr. 1: Podstawowe parametry techniczne
Typ/
N
umer
typu
Prędkość przestawienia
10[%]
Zakres obrotów
roboczych
Maksymalny moment
obciążenia
Moment wyłączający 10 [%] W
aga
Silnik elektryczny 3)
Napięcie zasilania
Parametry Pojemność
kondensatora Moc obroty prąd
[ot/min] [obroty] [Nm] [Nm] [kg] [V] [W] [1/min] [A] [μF/V]
1 2 3 5 6 7 8 9 10 11 12 13
SO 2
-Ex
Num
er ty
pu 0
42
40
3,12
5 ÷
320
10 7,5 ÷ 2
16,0
– 2
0,0
Jedn
ofaz
owe
230/220 60 2750 0,7 7/400 20 22 15 ÷ 25
12,5 34 24 ÷ 40 10 42 30 ÷ 50
40 10 7,5 ÷12
AC
lub
DC
24 65 2800 7,0 -
20 22 15 ÷ 25 12,5 34 24 ÷ 40 10 42 30 ÷ 50
SOR
2-E
x z
regu
lato
rem
40
3,12
5 ÷
320
8 7,5 ÷12
Jedn
ofaz
owe
230/220 60 2750 0,7 7/400 20 17 15 ÷ 25
12,5 27 24 ÷ 40 10 68 30 ÷ 50
40 8 7,5 ÷12
AC
lub
DC
24 65 2800 7,0 - 20 17 15 ÷ 25
12,5 27 24 ÷ 40 10 34 30 ÷ 50
1) Dla automatycznej regulacji (reżim pracy S4-25, 90 ÷ 1200 cykli/godz.) maksymalny moment obrotowy wynosi 0,8 wartości maksymalnego momentu obciążenia podanego w tabeli (reżim pracy S2-10 min. lub S4-25, max. 90 cykli/godz.). 2) Odchyłki prędkości przestawienia: ±10% przy 230 V (lub 220 V) AC –50 ÷ +30% w zależności od obciążenia przy zasilaniu 24 V AC/DC 3) Wyłączniki półprzewodnikowe dla różnego charakteru obciążenia precyzuje norma EN 60 947-4-1.
Pozostałe parametry techniczne: Stopień krycia: ................................................................................................................... IP 67 ( EN 60 529) Odporność mechaniczna:
Wibracje sinusoidalne z częstotliwością w zakresie 10÷150 Hz ......... z amplitudą posuwu 0,15 mm dla f fp z amplitudą przyspieszenia 19,6 m/s2 dla f fp, (Częstotliwość przejściowa fp w zakresie 57÷62 Hz) odporność na wstrząsy...................................................................... .... 300 z przyspieszeniem 5 m.s-2 odporność sejsmiczna ........................................................................................... 6 stopni w skali Richtera Samohamowność: ............................................................................................... SE nie jest samohamowny Ochrona silnika elektrycznego: .................................................................... ............ ...wyłącznik termiczny Hamowanie SE: ................................................................................... ........... hamulec elektromagnetyczny Luz wału wyjściowego: ............... ............ max.5° przy obciążeniu 5% wartością maksymalnego momentu

SO 2-Ex 9
Sterowanie elektryczne: - Siłownik SO 2 jest sterowany napięciem zasilania, inne napięcie sterowania po uzgodnieniu z producentem lub wejściowym zunifikowanym sygnałem sterującym – siłownik SOR 2. Ustawienie wyłączników położeniowych: Położenia krańcowe są nastawiane z dokładnością ....... skok roboczy ± 5% z max. ustawionego skoku Wyłączniki sygnalizacyjne są ustawione ............................ ok. 1 obrót przed położeniami krańcowymi. Histerez wyłączników położeniowych............................................. max. 5% z max. ustawionego skoku Kiedy w zamówieniu nie podamy wartości obrotów roboczych w fabryce ustawia się wartość obrotów według 3 stopnia ustawionego skoku – patrz Tabelka nr. 2.
Ustawienie wyłączników momentowych: Moment wyłączający, dopóki nie jest to inaczej wyspecyfikowane nastawiany jest na maksymalną wartość danego zakresu z tolerancją ±10 %
Wyłączniki momentowe – standard wersja D38:
napięcie zasilania ..................... 250 V(AC); 50/60 Hz; 6(4) A; cos =0,6, lub 24 V (DC); T=L/R=3ms minimalny prąd 100mA
Wyłączniki z pozłacanymi kontaktami D41: Napięcie zasilania....... 0,1(0,05) A, max. 250 V AC; 0,1 – 24 V DC; T=L/R=3ms; minimalny prąd 5mA Grzałka (E1)
Rezystor grzewczy – napięcie zasilania: ...... zgodne z napięciem zasiania silnika elektr. (max. 250 V AC); Moc grzałki: ............................................................................................................................. ok.20 W/55°C
Termostat grzałki (F2) Napięcie zasilania: ................................. zgodne z napięciem zasiania silnika elektr. (max. 250 V AC, 5 A) Temperatura załączenia: .................... +20C 3 °C Temperatura wyłączenia:.................... +30C 4 °C
Sterowanie ręczne: - Obracając kołem zgodnie z ruchem wskazówek zegara przestawiamy siłownik w kierunku „Z“ - zamyka. Sterowanie elektryczne: - sterowanie zdalne (ruch wału wyjściowego jest sterowany napięciem zasilania) Nadajniki położenia Potencjometryczny: Wartość rezystancji - pojedynczy B1 ............................................................................. 100; 2 000 Wartość rezystancji - podwójny B2 ......................................................................... 2x100; 2x2 000 Żywotność nadajnika ......................................................................................................... 1.106 cykli Obciążalność .......................................................................... 0,5 W przy 40C, (0 W/125 C) Prąd obciążenia ślizgacza ................................................................................................. max.35 mA Maksymalne napięcie zasilania................................................................................. PxR V DC/AC Odchyłka liniowości nadajnika ............................................................................................. 2,5 [%]1) Histereza nadajnika ............................................................................................ max. 5 [%]1) Wartość rezystancji w położeniach krańcowych: dla SO 2 . ... ...................“O“...... 93%, ”Z“....... 5%
dla SOR 2......“O”...85% i 95%, “Z“ ....3% i 7%
10 SO 2-Ex
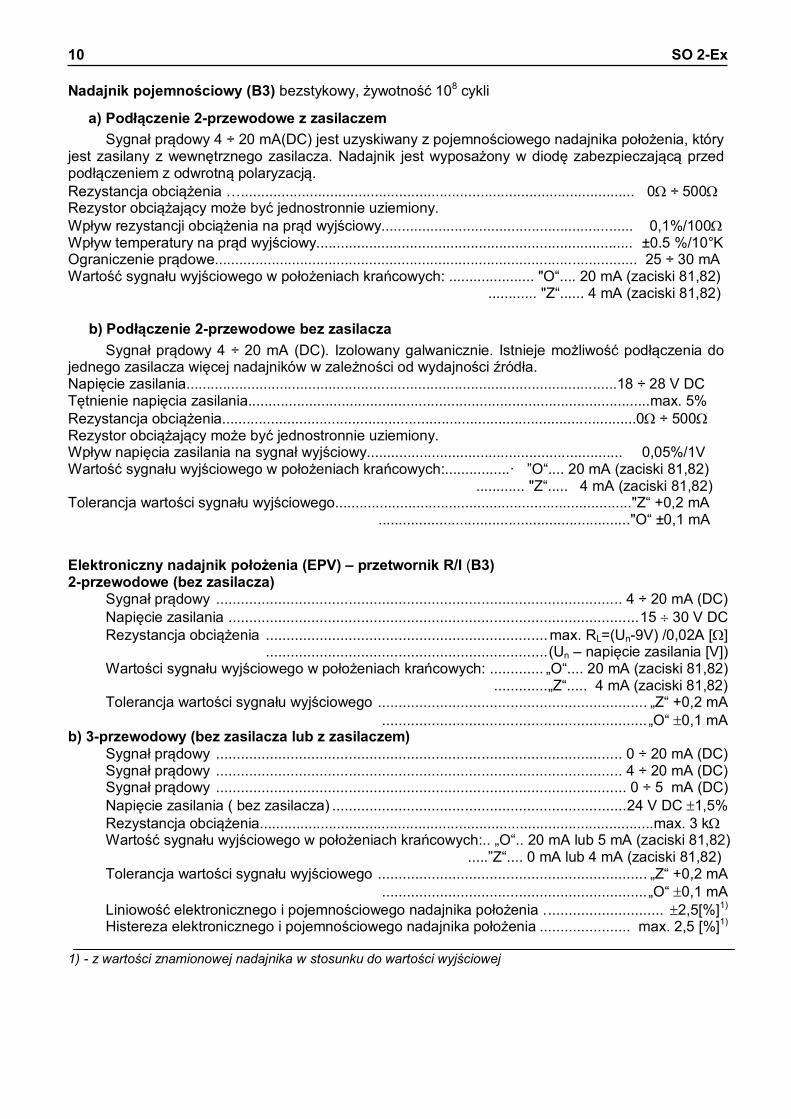
Nadajnik pojemnościowy (B3) bezstykowy, żywotność 108 cykli
a) Podłączenie 2-przewodowe z zasilaczem Sygnał prądowy 4 ÷ 20 mA(DC) jest uzyskiwany z pojemnościowego nadajnika położenia, który jest zasilany z wewnętrznego zasilacza. Nadajnik jest wyposażony w diodę zabezpieczającą przed podłączeniem z odwrotną polaryzacją. Rezystancja obciążenia …................................................................................................. 0 ÷ 500 Rezystor obciążający może być jednostronnie uziemiony. Wpływ rezystancji obciążenia na prąd wyjściowy.............................................................. 0,1%/100 Wpływ temperatury na prąd wyjściowy.............................................................................. ±0.5 %/10°K Ograniczenie prądowe........................................................................................................ 25 ÷ 30 mA Wartość sygnału wyjściowego w położeniach krańcowych: ..................... "O“.... 20 mA (zaciski 81,82) ............ "Z“...... 4 mA (zaciski 81,82) b) Podłączenie 2-przewodowe bez zasilacza Sygnał prądowy 4 ÷ 20 mA (DC). Izolowany galwanicznie. Istnieje możliwość podłączenia do jednego zasilacza więcej nadajników w zależności od wydajności źródła. Napięcie zasilania..........................................................................................................18 ÷ 28 V DC Tętnienie napięcia zasilania...................................................................................................max. 5% Rezystancja obciążenia......................................................................................................0 ÷ 500 Rezystor obciążający może być jednostronnie uziemiony. Wpływ napięcia zasilania na sygnał wyjściowy............................................................... 0,05%/1V Wartość sygnału wyjściowego w położeniach krańcowych:................· ”O“.... 20 mA (zaciski 81,82) ............ "Z“..... 4 mA (zaciski 81,82) Tolerancja wartości sygnału wyjściowego........................................................................."Z“ +0,2 mA .............................................................."O“ ±0,1 mA Elektroniczny nadajnik położenia (EPV) – przetwornik R/I (B3) 2-przewodowe (bez zasilacza) Sygnał prądowy .................................................................................................. 4 ÷ 20 mA (DC) Napięcie zasilania ................................................................................................... 15 30 V DC Rezystancja obciążenia .................................................................... max. RL=(Un-9V) /0,02A [] .................................................................... (Un – napięcie zasilania [V]) Wartości sygnału wyjściowego w położeniach krańcowych: ............. „O“.... 20 mA (zaciski 81,82) ............. „Z“..... 4 mA (zaciski 81,82) Tolerancja wartości sygnału wyjściowego ................................................................. „Z“ +0,2 mA ................................................................ „O“ 0,1 mA b) 3-przewodowy (bez zasilacza lub z zasilaczem) Sygnał prądowy .................................................................................................. 0 ÷ 20 mA (DC) Sygnał prądowy .................................................................................................. 4 ÷ 20 mA (DC) Sygnał prądowy ................................................................................................... 0 ÷ 5 mA (DC) Napięcie zasilania ( bez zasilacza) ....................................................................... 24 V DC 1,5% Rezystancja obciążenia.................................................................................................max. 3 k Wartość sygnału wyjściowego w położeniach krańcowych:.. „O“.. 20 mA lub 5 mA (zaciski 81,82) .....”Z“.... 0 mA lub 4 mA (zaciski 81,82) Tolerancja wartości sygnału wyjściowego ................................................................. „Z“ +0,2 mA ................................................................ „O“ 0,1 mA Liniowość elektronicznego i pojemnościowego nadajnika położenia . ............................ 2,5[%]1) Histereza elektronicznego i pojemnościowego nadajnika położenia ...................... max. 2,5 [%]1) 1) - z wartości znamionowej nadajnika w stosunku do wartości wyjściowej

SO 2-Ex 11
Elektroniczny regulator położenia (N) Programowanie regulatora Funkcje i parametry:
funkcje programowania: przy pomocy mikrowyłączników SW1, SW2 i diod LED D3, D4 na regulatorze przy pomocy PC lub terminalu z oprogramowaniem poprzez RS 232
programowane parametry: sygnał sterujący charakterystyka sygnału wyjściowego (rosnąca / malejąca) typ sygnału zwrotnego – nadajnik położenia odpowiedź na sygnał SYS – TEST sposób regulacji nieczułość położenie krańcowe SE (za pomocą PC i programu)
B) Stany pracy regulatora Zgłaszanie stanów awaryjnych: (przy pomocy diod LED lub RS 232 i PC)
- błąd sygnału sterującego lub jego awaria - wartość sygnału sterującego poniżej 3,5 mA - obecność sygnału SYS – TEST - sygnalizacja zadziałania wyłączników - awaria sygnału zwrotnego
Statystyka: (tylko za pomocą PC i programu) ilość godzin pracy ilość załączeń w kierunku „O“ ilość załączeń w kierunku „Z“ Napięcie zasilania: zaciski 61(L1)-1(N) ....................................... 230 V AC lub 24 V AC/DC, ± 10 % Częstotliwość: ............................................................................................................. 50/60 Hz 2 % Sygnały wejściowe – analogowe: (SE otwiera przy sygnale rosnącym): ............................... 0 20 mA ................................ 4 20 mA ................................... 0 10 V Liniowość regulatora: .................................................................................................................. 0,5 % Nieczułość regulatora: ................................................................. 1 10 % ( ustawiana programowo) Sygnał zwrotny (nadajnik położenia): potencjometryczny ............................................ 100 10 000 prądowy ..................................................................... 4 20 mA Wyjścia siłowe: ................................................................................................ 2x przekaźnik 5 A/250V Wyjścia cyfrowe: ...... 5x LED (zasilanie; “OK.“; awaria; programowanie; ”O“ – “Z“ – dwukolorowa LED) Stan gotowości “OK.“: ...................................................................... kontakt kontrolki 24 V, 2 W – POR Stan awaryjny: ................................................................................. kontakt kontrolki 24 V, 2 W – POR Reakcja na awarię lub błąd(awaria) nadajnika:................................................................- miganie LED Błąd lub awaria sygnału sterującego:...............................................................................- miganie LED Reżim SYS ...... ………………………………………………………………………………… - miganie LED Sygnał wyjściowy .............................................................................. 4-20 mA, obciążalność max. 200 Elementy do programowania: ............................................. - moduł komunikacyjny RS 232 – przez PC 2 przyciski do ustawiania parametrów Smarowanie: Smar HF 401/0 (GLEIT-)
2.2.1 Przyłącze mechaniczne - kołnierzowe (ISO 5210, DIN 3338, OST 26-07-763)
12 SO 2-Ex
Główne wymiary przyłączy podane są na rysunkach wymiarowych.
2.2.2 Podłączenie elektryczne Na listę zaciskową (X): - max. 21 zacisków dla przekroju przewodu 1,5 mm2
- 2 przepusty kablowe dla rozmiaru przewodów 9 do 13 mm Zacisk ochronny: - wewnętrzny i zewnętrzny wzajemnie połączone i oznaczone symbolem uziemienia. Podłączenie elektryczne: - zgodnie ze schematami podłączenia. 3. Montaż i demontaż siłownika
3.1 Montaż
Uwaga: Ponownie należy sprawdzić czy miejsce montażu odpowiada warunkom przedstawionym w rozdziale „Warunki użytkowania”. Jeśli warunki są inne należy skontaktować się z producentem.
Przed rozpoczęciem montażu siłownika na armaturze: Sprawdzić czy siłownik nie uległ uszkodzeniu w czasie transportu. Sprawdzić z tabliczką znamionową na siłowniku zgodność ustawionego kąta pracy i rozmiarów
przyłączeniowych siłownika z parametrami przyłączeniowymi armatury.
3.1.1 Podłączenie mechaniczne siłownika w wersji kołnierzowej. - Płaszczyzny przyłączeniowe SE armatury/przekładni dokładnie oczyścić;
- Wał wyjściowy armatury/przekładni natrzeć smarem; - SE i armaturę przestawić w położenie krańcowe "Z" - zamknięte - SE nałoży na armaturę tak, aby wał wyjściowy dobrze zasprzęglił się z trzpieniem armatury/przekładni; - Przy pomocy kółka ręcznego obracać SE, aby pasowały otwory mocujące w SE i armaturze; - Skontrolować czy kołnierz SE przylega do armatury/przekładni; - Przyłącza skręcić czterema śrubami i za kontrować; - Po zakończeniu montażu dokonać poprawności montażu obracając kółkiem ręcznym. Uwaga:
1. Minimalna wytrzymałość mechaniczna śrub - 8G. 2. Skontrolować ustawienie fabryczne jednostki położeniowo-sygnalizacyjną i nadajnika położenia,
ewentualnie skorygować.
3.1.2 Podłączenie elektryczne, kontrola funkcji Następnie wykonujemy podłączenie elektryczne siłownika do systemu sterowniczego
1. Przy podłączaniu siłownika należy przestrzegać przepisów BHP 2. Przewody do listwy zaciskowej przekładamy przez przepusty kablowe!! 3. Przed podłączeniem siłownika do zasilania należy podłączyć zacisk uziemienia! 4. Przewody doprowadzone do siłownika powinny być przymocowane do stałej konstrukcji najdalej 150 mm od siłownika. 5. Przewody sygnałowe powinny oddzielone od przewodów zasilnia, najlepiej ekranowane! 7. W celu uszczelnienia wnętrza siłownika, należy po podłączeniu wszystkich przewodów w siłowniku,
dokręcić przepusty kablowe i uszczelnić je dodatkowo silikonem. Podłączenie do systemu sterującego: Sterować siłownikiem można za pośrednictwem: - napięcia zasilania
!

SO 2-Ex 13
- zabudowanego regulatora położenia - zewnętrznego regulatora położenia
Kiedy siłownik będzie sterowany zewnętrznym regulatorem położenia z potencjometrycznym? sprzężeniem i 2-przewodowym podłączeniem koniecznie musimy podłączyć obwód nadajnika na uziemienie współpracującego z nim regulatorem położenia!. 1. Podłączenie może być wykonane w jednym miejscu w dowolnej części pętli poza siłownikiem! 2. Elektronika 2-przewodowych nadajników jest galwanicznie izolowana, dlatego zewnętrzny zasilacz może być zastosowany do zasilania wielu nadajników (ich ilość zależy od poboru prądu,
który zasilacz może dostarczyć!
Podłączenie siłownika na listwie zaciskowej - zdjąć pokrywę i skontrolować zgodność parametrów napięcia i częstotliwości zasilania z danymi
na silniku elektrycznym. - podłączenia elektrycznego dokonać wg schematu zamieszczonego na wewnętrznej ścianie pokrywy listwy zaciskowej siłownik - fazę L1 i przewód N podłączyć na odpowiednie zaciski listwy poprzez przepusty kablowe - na zaciski ochronne podłączyć przewód ochronny - nałożyć i przykręcić pokrywę górną. Przepusty kablowe skręcić po zamontowaniu pokrywy. - Dokręcić i uszczelnić przepusty kablowe, tylko wtedy mamy zagwarantowany stopień krycia siłownika
Uwagi: 1. W siłowniku są zastosowane szczelne przepusty kablowe, które przy prawidłowym zamontowaniu
i ułożeniu w nich przewodów zabezpieczają stopień krycia IP 68. Należy wtedy użyć uszczelek odpowiadających rozmiarowi zastosowanych przewodów.
2. Przy montażu przewodów w przepustach należy uważać, żeby nie uszkodzić uszczelek w przepustach. Wyprowadzone kable powinny być przymocowane do stałej konstrukcji najdalej 150 mm od przepustów w siłowniku.
3. Przy podłączaniu przewodów nadajnika położenia zaleca się przewody ekranowane. 4. Uszczelki obudowy górnej siłownika najlepiej posmarować wazeliną. 5. Rewersacja siłownika jest gwarantowana wtedy, gdy czasowy interwał między włączeniem i wyłączeniem
napięcia zasilania w odwrotnym kierunku wynosi minimum 50 ms. 6. Opóźnienie po wyłączeniu tj. czas reakcji wyłączników, podczas kiedy silnik jest bez napięcia może być
max. 20 ms. 7. Zaleca się, aby odpowiedni kierunek pracy siłownika był wyłączany bezpośrednio przez
odpowiednie wyłączniki położeniowe lub siłowe. Sprawdźcie u producenta armatury, w jaki sposób należy zamykać produkowany przez nich zawór czy szczelnie (wyłączanie od momentu) czy wystarczą wyłączniki położeniowe!
Po podłączeniu elektrycznym należy wykonać funkcję kontrolną: Kontrola działania SE:
- Po podłączeniu elektrycznym, należy sprawdzić poprawność działania wyłączników S1÷ S6, a w razie potrzeby poprawić - Armaturę przestawić ręcznie w położenie pośrednie. - Doprowadzić napięcie zasilania dla ruchu SE w kierunku "O“ i obserwować kierunek obrotu trzpienia wału wyjściowego na płycie sterowniczej siłownika. - Jeśli działanie SE jest nieprawidłowe, należy sprawdzić podłączenie wyłączników zgodnie ze schematem elektrycznym.
!

14 SO 2-Ex
!
W wersji siłownika SOR 2-Ex z wbudowanym regulatorem położenia (Rys.8) należy przeprowadzić proces autokalibracji dla zapisania zaprogramowanych parametrów. Sposób postępowania przy autokalibracji siłownika regulacyjnego SOR 2-Ex: - Siłownik przestawić w międzypołożenie (wyłącznik krańcowe i siłowe muszą być rozwarte) - Nacisnąć przycisk SW1 na ok. 2 sek. (tj. do czasu rozświecenia diody D3) a po ok. 2 sek. ponownie nacisnąć SW1 na ok. 2 sek. przestawiamy regulator w reżim autokalibracji. W czasie tego procesu regulator wykonuje kontrolę sygnału zwrotnego nadajnika i kierunek obrotów, przestawi siłownik w położenie "O" i "Z", wykona pomiar masy bezwładnościowej w kierunku "O“ i "Z“ i wykona układanie parametrów ustawionych i wpisanych do pamięci EEPROM. W przypadku, gdy podczas inicjacji powstał błąd (np. w podłączeniu lub ustawieniu) przebieg inicjalizacji będzie przerwany i regulator za pośrednictwem D4 poda zawiadomienie o rodzaju usterki. W odwrotnym przypadku po skończeniu procesu inicjacyjnego regulator automatycznie przejdzie w reżim regulacyjny.
3.2 Demontaż Przed demontażem SE należy odłączyć zasilanie!
Odłączyć zasilanie SE. Odłączyć przewody z listew zaciskowych i wysunąć z przepustów kablowych. Wykręcić śruby z przyłącza i sprzęgła SE i SE oddzielić od armatury. Przy wysyłce do naprawy odpowiednio zabezpieczyć siłownik przed uszkodzeniem.
4. Ustawianie Siłowniki z zakładu produkcyjnego są ustawione zgodnie z zamówieniem, a parametry podane są na tabliczce znamionowej umiejscowionej z boku napędu. Ustawianie należy prowadzić na serwonapędzie zamontowanym na armaturze według parametrów wyspecyfikowanych w tabelce specyfikacyjnej. Rozmieszczenie elementów regulacyjnych płyty sterowniczej pokazuje rys.1. W tym rozdziale opisujemy jak samemu ustawić siłowniki na parametry podane w zamówieniu, gdyby przypadkowo doszło rozregulowania tych parametrów.
4.1 Ustawianie jednostki momentowej Fabrycznie wyłączniki momentowe S1("O") i S2("Z") ustawione są zgodnie z zamówieniem, z tolerancją ±10 %. Jeśli moment nie jest określony w zamówieniu, SE ustawiony jest na maksymalną wartość. Ustawienie i przestawienie jednostki momentowej na inną wartość, możliwe jest przy pomocy śrub regulacyjnych pokazanych na rys.2. Momenty obrotowe można tylko obniżać, obracając śruby wyskalowane wg znacznika na ramieniu jednostki momentowej. Ustawienie na najdłuższą kreskę, oznacza ustawienie momentu wyłączającego na maksymalną wartość. Ustawienie na krótszą kreskę, oznacza obniżenie momentu wyłączającego.
ŚRUBA USTAWIANIAWYŁĄCZNIKAMOMENTOWEGO S2
ŚRUBA USTAWIANIAWYŁĄCZNIKAMOMENTOWEGO S1
Rys. 2
SO 2-Ex 15
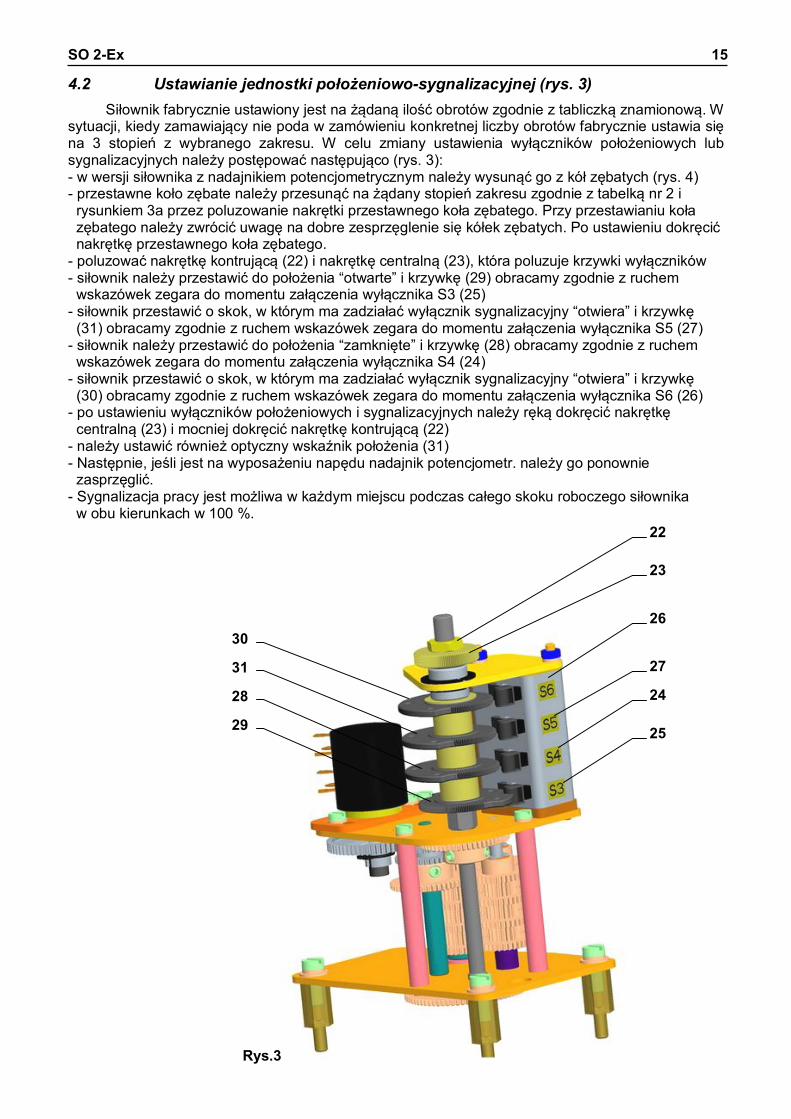
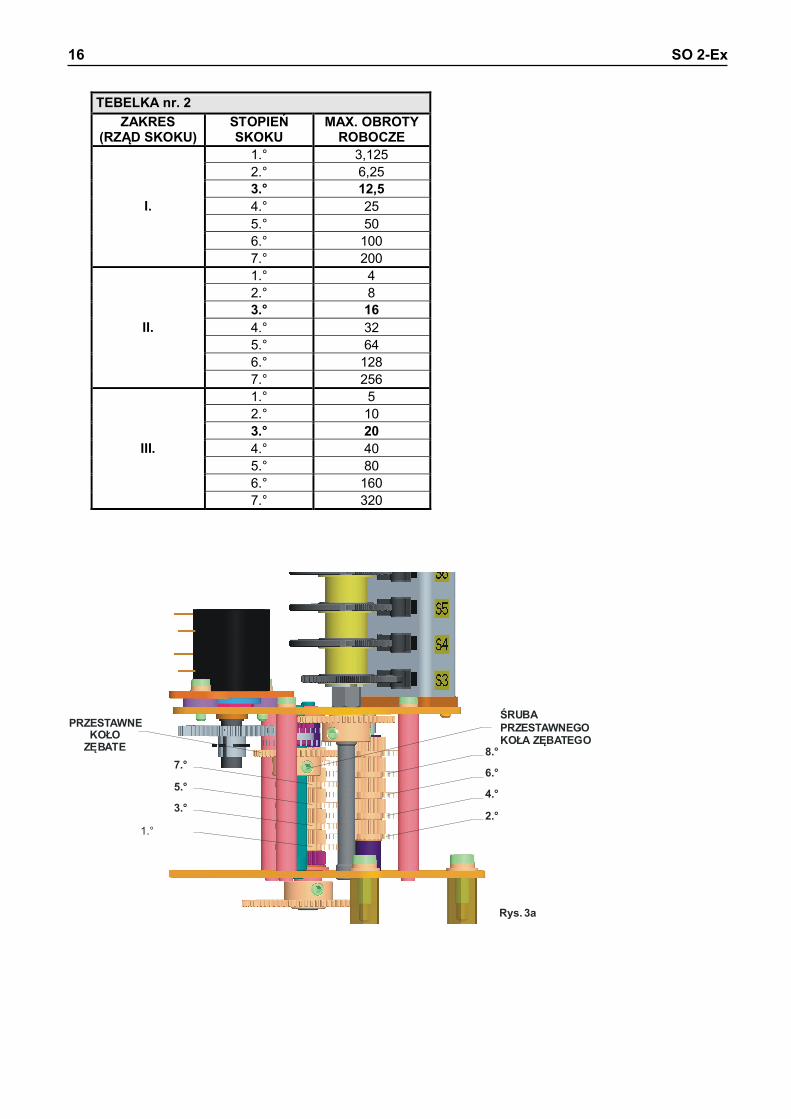
4.2 Ustawianie jednostki położeniowo-sygnalizacyjnej (rys. 3) Siłownik fabrycznie ustawiony jest na żądaną ilość obrotów zgodnie z tabliczką znamionową. W sytuacji, kiedy zamawiający nie poda w zamówieniu konkretnej liczby obrotów fabrycznie ustawia się na 3 stopień z wybranego zakresu. W celu zmiany ustawienia wyłączników położeniowych lub sygnalizacyjnych należy postępować następująco (rys. 3): - w wersji siłownika z nadajnikiem potencjometrycznym należy wysunąć go z kół zębatych (rys. 4) - przestawne koło zębate należy przesunąć na żądany stopień zakresu zgodnie z tabelką nr 2 i rysunkiem 3a przez poluzowanie nakrętki przestawnego koła zębatego. Przy przestawianiu koła zębatego należy zwrócić uwagę na dobre zesprzęglenie się kółek zębatych. Po ustawieniu dokręcić nakrętkę przestawnego koła zębatego. - poluzować nakrętkę kontrującą (22) i nakrętkę centralną (23), która poluzuje krzywki wyłączników - siłownik należy przestawić do położenia “otwarte” i krzywkę (29) obracamy zgodnie z ruchem wskazówek zegara do momentu załączenia wyłącznika S3 (25) - siłownik przestawić o skok, w którym ma zadziałać wyłącznik sygnalizacyjny “otwiera” i krzywkę (31) obracamy zgodnie z ruchem wskazówek zegara do momentu załączenia wyłącznika S5 (27) - siłownik należy przestawić do położenia “zamknięte” i krzywkę (28) obracamy zgodnie z ruchem wskazówek zegara do momentu załączenia wyłącznika S4 (24) - siłownik przestawić o skok, w którym ma zadziałać wyłącznik sygnalizacyjny “otwiera” i krzywkę (30) obracamy zgodnie z ruchem wskazówek zegara do momentu załączenia wyłącznika S6 (26) - po ustawieniu wyłączników położeniowych i sygnalizacyjnych należy ręką dokręcić nakrętkę centralną (23) i mocniej dokręcić nakrętkę kontrującą (22) - należy ustawić również optyczny wskaźnik położenia (31) - Następnie, jeśli jest na wyposażeniu napędu nadajnik potencjometr. należy go ponownie zasprzęglić. - Sygnalizacja pracy jest możliwa w każdym miejscu podczas całego skoku roboczego siłownika w obu kierunkach w 100 %.
26
27
24
25
23
22
30
28
29
31
Rys.3
16 SO 2-Ex
TEBELKA nr. 2
ZAKRES (RZĄD SKOKU)
STOPIEŃ SKOKU
MAX. OBROTY ROBOCZE
I.
1.° 3,125 2.° 6,25 3.° 12,5 4.° 25 5.° 50 6.° 100 7.° 200
II.
1.° 4 2.° 8 3.° 16 4.° 32 5.° 64 6.° 128 7.° 256
III.
1.° 5 2.° 10 3.° 20 4.° 40 5.° 80 6.° 160 7.° 320
1.°
3.°
2.°
4.°
6.°
8.°
Rys. 3a
5.°
7.°
ŚRUBAPRZESTAWNEGOKOŁA ZĘBATEGO
PRZESTAWNE KOŁOZĘBATE
SO 2-Ex 17
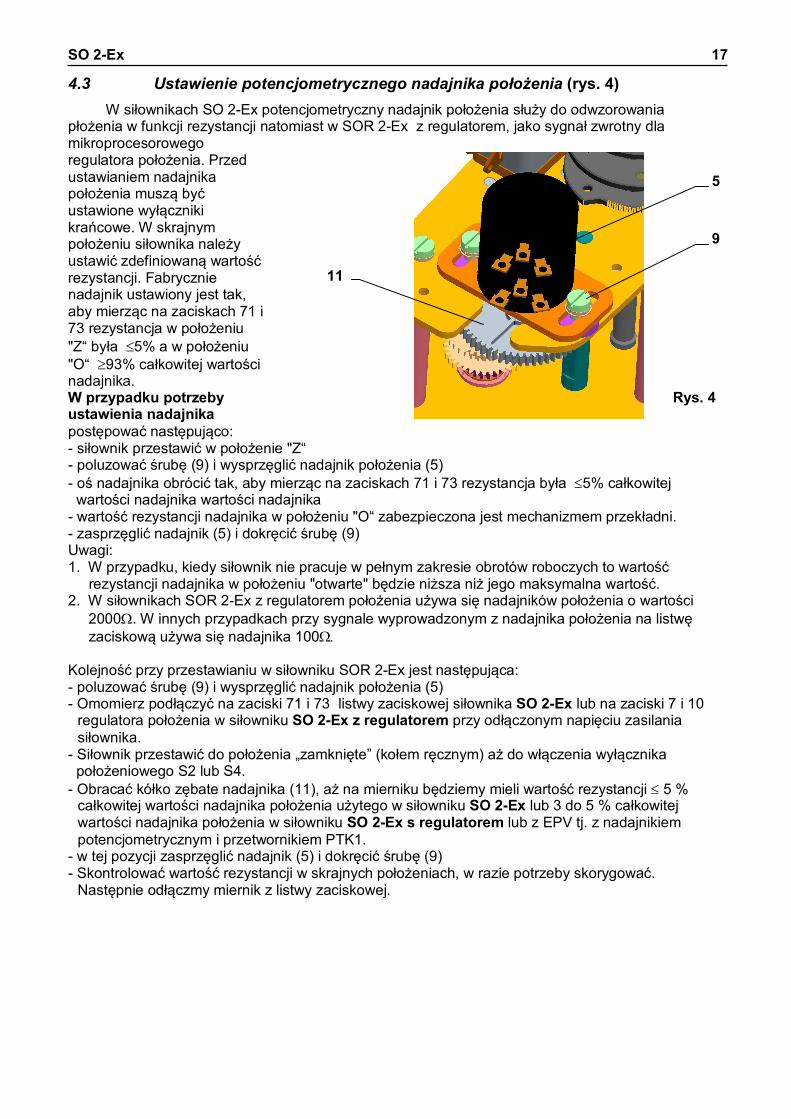
4.3 Ustawienie potencjometrycznego nadajnika położenia (rys. 4) W siłownikach SO 2-Ex potencjometryczny nadajnik położenia służy do odwzorowania płożenia w funkcji rezystancji natomiast w SOR 2-Ex z regulatorem, jako sygnał zwrotny dla mikroprocesorowego regulatora położenia. Przed ustawianiem nadajnika położenia muszą być ustawione wyłączniki krańcowe. W skrajnym położeniu siłownika należy ustawić zdefiniowaną wartość rezystancji. Fabrycznie nadajnik ustawiony jest tak, aby mierząc na zaciskach 71 i 73 rezystancja w położeniu "Z“ była 5% a w położeniu "O“ 93% całkowitej wartości nadajnika. W przypadku potrzeby ustawienia nadajnika postępować następująco: - siłownik przestawić w położenie "Z“ - poluzować śrubę (9) i wysprzęglić nadajnik położenia (5) - oś nadajnika obrócić tak, aby mierząc na zaciskach 71 i 73 rezystancja była 5% całkowitej wartości nadajnika wartości nadajnika - wartość rezystancji nadajnika w położeniu "O“ zabezpieczona jest mechanizmem przekładni. - zasprzęglić nadajnik (5) i dokręcić śrubę (9) Uwagi: 1. W przypadku, kiedy siłownik nie pracuje w pełnym zakresie obrotów roboczych to wartość rezystancji nadajnika w położeniu "otwarte" będzie niższa niż jego maksymalna wartość. 2. W siłownikach SOR 2-Ex z regulatorem położenia używa się nadajników położenia o wartości 2000. W innych przypadkach przy sygnale wyprowadzonym z nadajnika położenia na listwę zaciskową używa się nadajnika 100 Kolejność przy przestawianiu w siłowniku SOR 2-Ex jest następująca: - poluzować śrubę (9) i wysprzęglić nadajnik położenia (5) - Omomierz podłączyć na zaciski 71 i 73 listwy zaciskowej siłownika SO 2-Ex lub na zaciski 7 i 10
regulatora położenia w siłowniku SO 2-Ex z regulatorem przy odłączonym napięciu zasilania siłownika.
- Siłownik przestawić do położenia „zamknięte” (kołem ręcznym) aż do włączenia wyłącznika położeniowego S2 lub S4. - Obracać kółko zębate nadajnika (11), aż na mierniku będziemy mieli wartość rezystancji 5 %
całkowitej wartości nadajnika położenia użytego w siłowniku SO 2-Ex lub 3 do 5 % całkowitej wartości nadajnika położenia w siłowniku SO 2-Ex s regulatorem lub z EPV tj. z nadajnikiem potencjometrycznym i przetwornikiem PTK1.
- w tej pozycji zasprzęglić nadajnik (5) i dokręcić śrubę (9) - Skontrolować wartość rezystancji w skrajnych położeniach, w razie potrzeby skorygować.
Następnie odłączmy miernik z listwy zaciskowej.
11
Rys. 4
9
5
18 SO 2-Ex
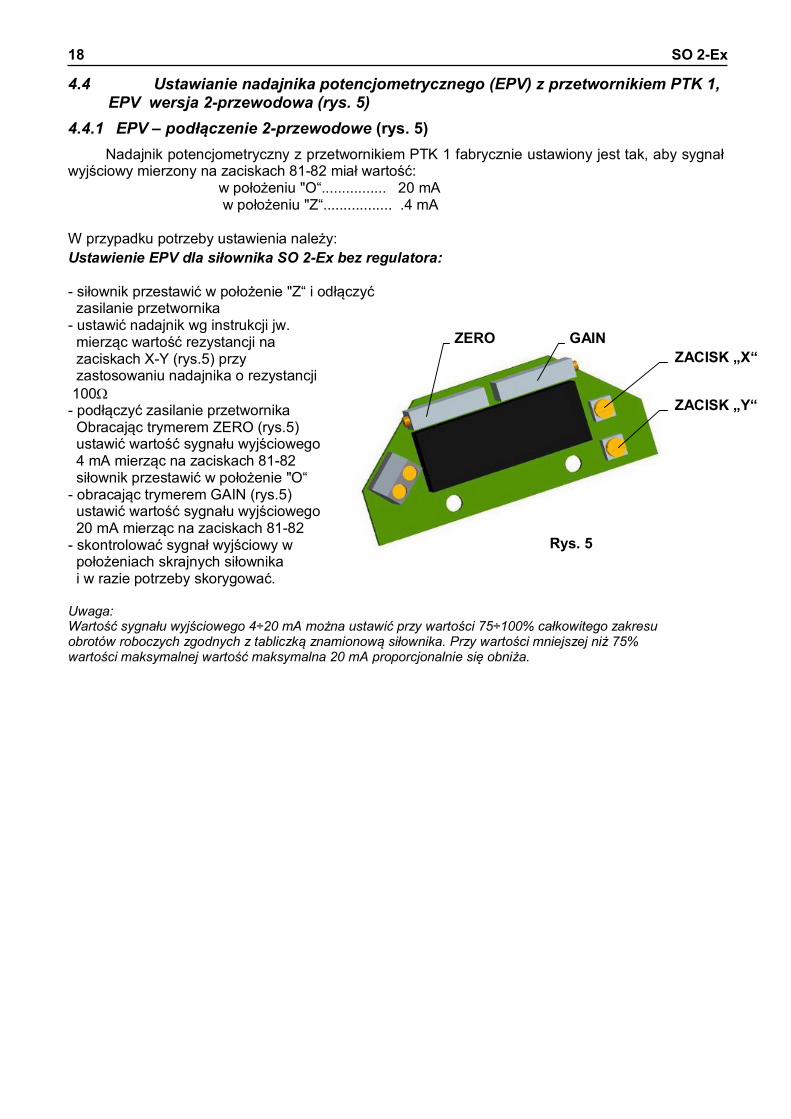
4.4 Ustawianie nadajnika potencjometrycznego (EPV) z przetwornikiem PTK 1, EPV wersja 2-przewodowa (rys. 5) 4.4.1 EPV – podłączenie 2-przewodowe (rys. 5) Nadajnik potencjometryczny z przetwornikiem PTK 1 fabrycznie ustawiony jest tak, aby sygnał wyjściowy mierzony na zaciskach 81-82 miał wartość: w położeniu "O“................ 20 mA w położeniu "Z“................. .4 mA W przypadku potrzeby ustawienia należy: Ustawienie EPV dla siłownika SO 2-Ex bez regulatora: - siłownik przestawić w położenie "Z“ i odłączyć zasilanie przetwornika - ustawić nadajnik wg instrukcji jw. mierząc wartość rezystancji na zaciskach X-Y (rys.5) przy zastosowaniu nadajnika o rezystancji 100 - podłączyć zasilanie przetwornika Obracając trymerem ZERO (rys.5) ustawić wartość sygnału wyjściowego 4 mA mierząc na zaciskach 81-82 siłownik przestawić w położenie "O“ - obracając trymerem GAIN (rys.5) ustawić wartość sygnału wyjściowego 20 mA mierząc na zaciskach 81-82 - skontrolować sygnał wyjściowy w położeniach skrajnych siłownika i w razie potrzeby skorygować. Uwaga: Wartość sygnału wyjściowego 4÷20 mA można ustawić przy wartości 75÷100% całkowitego zakresu obrotów roboczych zgodnych z tabliczką znamionową siłownika. Przy wartości mniejszej niż 75% wartości maksymalnej wartość maksymalna 20 mA proporcjonalnie się obniża.
Rys. 5
ZACISK „X“
ZACISK „Y“
GAIN ZERO
SO 2-Ex 19
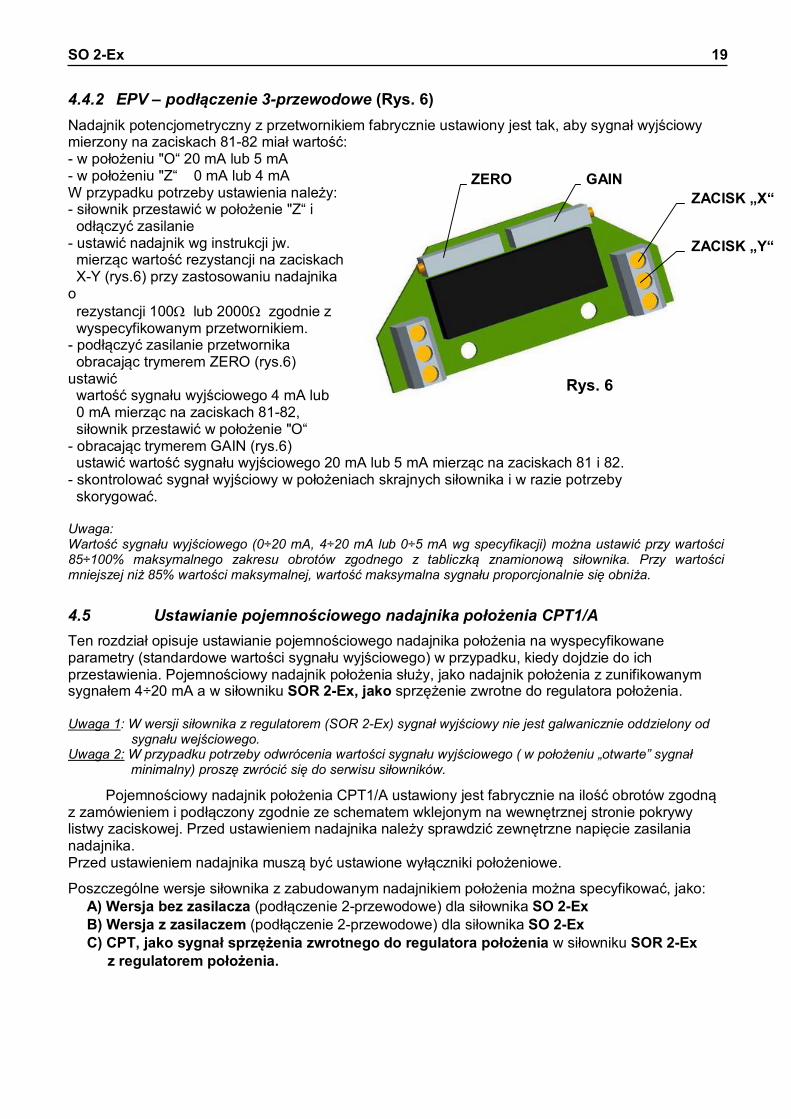
4.4.2 EPV – podłączenie 3-przewodowe (Rys. 6) Nadajnik potencjometryczny z przetwornikiem fabrycznie ustawiony jest tak, aby sygnał wyjściowy mierzony na zaciskach 81-82 miał wartość: - w położeniu "O“ 20 mA lub 5 mA - w położeniu "Z“ 0 mA lub 4 mA W przypadku potrzeby ustawienia należy: - siłownik przestawić w położenie "Z“ i odłączyć zasilanie - ustawić nadajnik wg instrukcji jw. mierząc wartość rezystancji na zaciskach X-Y (rys.6) przy zastosowaniu nadajnika o rezystancji 100 lub 2000 zgodnie z wyspecyfikowanym przetwornikiem. - podłączyć zasilanie przetwornika obracając trymerem ZERO (rys.6) ustawić wartość sygnału wyjściowego 4 mA lub 0 mA mierząc na zaciskach 81-82, siłownik przestawić w położenie "O“ - obracając trymerem GAIN (rys.6) ustawić wartość sygnału wyjściowego 20 mA lub 5 mA mierząc na zaciskach 81 i 82. - skontrolować sygnał wyjściowy w położeniach skrajnych siłownika i w razie potrzeby skorygować. Uwaga: Wartość sygnału wyjściowego (0÷20 mA, 4÷20 mA lub 0÷5 mA wg specyfikacji) można ustawić przy wartości 85÷100% maksymalnego zakresu obrotów zgodnego z tabliczką znamionową siłownika. Przy wartości mniejszej niż 85% wartości maksymalnej, wartość maksymalna sygnału proporcjonalnie się obniża.
4.5 Ustawianie pojemnościowego nadajnika położenia CPT1/A Ten rozdział opisuje ustawianie pojemnościowego nadajnika położenia na wyspecyfikowane parametry (standardowe wartości sygnału wyjściowego) w przypadku, kiedy dojdzie do ich przestawienia. Pojemnościowy nadajnik położenia służy, jako nadajnik położenia z zunifikowanym sygnałem 4÷20 mA a w siłowniku SOR 2-Ex, jako sprzężenie zwrotne do regulatora położenia. Uwaga 1: W wersji siłownika z regulatorem (SOR 2-Ex) sygnał wyjściowy nie jest galwanicznie oddzielony od sygnału wejściowego. Uwaga 2: W przypadku potrzeby odwrócenia wartości sygnału wyjściowego ( w położeniu „otwarte” sygnał minimalny) proszę zwrócić się do serwisu siłowników.
Pojemnościowy nadajnik położenia CPT1/A ustawiony jest fabrycznie na ilość obrotów zgodną z zamówieniem i podłączony zgodnie ze schematem wklejonym na wewnętrznej stronie pokrywy listwy zaciskowej. Przed ustawieniem nadajnika należy sprawdzić zewnętrzne napięcie zasilania nadajnika. Przed ustawieniem nadajnika muszą być ustawione wyłączniki położeniowe.
Poszczególne wersje siłownika z zabudowanym nadajnikiem położenia można specyfikować, jako: A) Wersja bez zasilacza (podłączenie 2-przewodowe) dla siłownika SO 2-Ex B) Wersja z zasilaczem (podłączenie 2-przewodowe) dla siłownika SO 2-Ex C) CPT, jako sygnał sprzężenia zwrotnego do regulatora położenia w siłowniku SOR 2-Ex z regulatorem położenia.
Rys. 6
ZACISK „X“
ZACISK „Y“
GAIN ZERO

20 SO 2-Ex
A.) Ustawienie pojemnościowego nadajnika położenia bez zabudowanego zasilacza: Przed podłączeniem skontrolować zasilacz. Napięcie zasilania musi być w zakresie 18 ÷ 28 V DC
Napięcie zasilania nie może pod żadnym pozorem przekroczyć wartości 30 V DC. Po przekroczeniu tej wartości napięcia zasilania może dojść to trwałego uszkodzenia nadajnika!!!
Przy kontroli lub ustawiania sygnału wyjściowego 4÷20 mA (4 mA "Z“, 20 mA "O“) należy: - szeregowo z nadajnikiem ("-“ zacisk 82) podłączyć miliamperomierz klasy 0,5 (np. cyfrowy) i rezystancji obciążenia niższej niż 500 - przestawić siłownik w położenie "Z“ (sygnał powinien maleć) - skontrolować wartość sygnału (4 mA + 0,2 mA) - zluzować śruby (15) mocujące nadajnik (10) (rys.7) i obracając go ustawić wartość 4 mA ± 0,2 mA, po czym śruby zakontrować - siłownik przestawić w położenie "O“ (sygnał powinien rosnąć) - skontrolować wartość sygnału wyjściowy w położeniu "O“ (20 mA ± 0,1 mA), - obracając trymerem (20) ustawić wartość 20 mA - ponownie skontrolować wartość sygnału wyjściowego w położeniu "Z“ i w położeniu "O“ regulację prowadzić do momentu uzyskania wartości 4 mA i 20 mA z błędem mniejszym niż 0,5 % - odłączyć miliamperomierz i zabezpieczyć śruby B.) Ustawianie pojemnościowego nadajnika położenia z zasilaczem: - Skontrolować napięcie zasilania: 230 V AC 10% na zaciskach 1(60) i 61 - Przy kontroli lub ustawianiu sygnału wyjściowego 4÷20 mA należy: - Na zaciski 81,82 podłączyć miliamperomierz klasy 0,5 i rezystancji obciążenia niższej niż 500 - Dalej postępować podobnie jak w punkcie A. C.) Ustawienie pojemnościowego nadajnika położenia, jako sprzężenie zwrotne do regulatora położenia Przy kontroli lub ustawieniu sygnału wyjściowego 4÷20 mA należy: - Rozłączyć obwód wyprowadzony na zaciski 81 i 82 zdejmując zworkę. - Podłączyć napięcie zasilania na zaciski 1 i 61 - Odłączyć sygnał sterujący z zacisków 86/87 i 88 - Siłownik przestawić do położenia "OTWARTE" lub "ZAMKNIĘTE“ kołem ręcznym lub podając zasilanie na zaciski 1 i 20 w kierunku "OTWIERA“ lub 1 i 24 w kierunku "ZAMYKA“ - Na zaciski 81,82 podłączyć miliamperomierz klasy 0,5 i rezystancji obciążenia niższej niż 500 - Dalej postępować podobnie jak w punkcie A. - Po przeprowadzonych regulacjach założyć zworę na zaciski 81 i 82 w przypadku, kiedy nie będziemy używali sygnału zwrotnego, zaciski 81 i 82 muszą być zwarte. - Podłączyć sygnał sterujący na zaciski 86/87 i 88 Uwaga: 1. Użytkownik powinien zabezpieczyć podłączenie wspólnej masy dwuprzewodowej pętli
nadajnika położenia i sterownika. Podłączenie musi być dokonane tylko w jednym punkcie w dowolnej części obwodu sterowania. 2. W wersji siłownika z regulatorem (SOR 2-Ex) sygnał wyjściowy nie jest galwanicznie
!
rys. 7
15
20
10
!

SO 2-Ex 21
oddzielony od sygnału wejściowego Uwaga: Przy pomocy trymera (20) można nastawić zunifikowany wyjściowy sygnał z pojemnościowego nadajnika położenia na dowolną wartość obrotów roboczych od ok. 50% do 100% maksymalnych obrotów roboczych na danym stopniu.
4.6 Podłączenie regulatora położenia (rys. 9) Zabudowany regulator położenia REGADA służy do sterowania siłownika sygnałem analogowym. Regulator wykorzystuje szerokie możliwości procesora dla zabezpieczenia wszystkich funkcji tego regulatora. Jednocześnie umożliwia w sposób ciągły autodiagnostykę systemu oraz zgłasza ewentualne zakłócenia. W czasie pracy siłownika regulator rejestruje w pamięci zakłócenia i informacje dla diagnostyki, takie jak liczba załączeń przekaźnika i liczbę godzin pracy siłownika. Podaniem sygnału na wejściowe zaciski 86/87 (GND, -) i 88(+) sterujemy pracą siłownika. Informacje z pamięci można odczytać za pomocą komputera PC lub terminalu z odpowiednim programem. Odpowiednie parametry i funkcje można programować za pomocą przycisków SW1-SW2 i diod LED D3-D4 bezpośrednio na regulatorze wg tabelki 3.
4.6.1 Programowanie regulatora Mikroprocesorowa jednostka regulatora zaprogramowana jest fabrycznie na parametry zamieszczone w tabeli nr 3 ( uwaga 2). Ustawienie regulatora przeprowadza się za pomocą mikroprzycisków i diod LED. Przed przystąpieniem do programowania regulatora muszą być ustawione wyłączniki położeniowe, siłowe oraz nadajnik położenia, a SE musi być ustawiony w położeniu pośrednim (wyłączniki położeniowe i siłowe nie mogą być załączone).
Rozmieszczenie elementów regulacyjnych i sygnalizacyjnych na płytce regulatora REGADA rys.9:
rys. 9 Tabela nr 3
Dioda D3 (żółta) - ilość mignięć Menu Dioda D4 (czerwona)
- ilość mignięć Ustawiany parametr
1 mignięcie Sygnał sterujący 1 mignięcie 0 - 20 mA 2 mignięcia 4 - 20 mA (*) (**) 3 mignięcia 0 - 10 V DC
2 mignięcia Odpowiedź na sygnał SYS - TEST
1 mignięcie SE otwiera 2 mignięcia SE zamyka 3 mignięcia SE nie reaguje (*)
3 mignięcia Charakterystyka (rosnąca/ malejąca)
1 mignięcie SE ZAMYKA przy rosnącym sygnale sterującym
2 mignięcia SE OTWIERA przy rosnącym sygnale (*)
4 mignięcia Nieczułość regulatora 110 mignięć 1 10 % nieczułość regulatora (nastawiona
fabrycznie 3% (*))
5 mignięć Sposób regulacji
1 mignięcie wąska od siły 2 mignięcia wąska od położenia (*) 3 mignięcia Szeroka od siły 4 mignięcia Szeroka od położenia
Legenda: Przycisk SW1
uruchamia inicjalizację i umożliwia listowanie w menu
Przycisk SW2
ustawianie parametrów w wybranym menu
Dioda D1 sygnalizacja zasilania regulatora
Dioda D2 Sygnalizacja pracy SE w kierunku „O“ (zielona) – „Z“ (czerwona)
Dioda D3 (żółta) ilość mignięć sygnalizuje wybrane menu
Dioda D4 (czerwona) ilość mignięć sygnalizuje ustawiony lub ustawiany parametr w wybranym menu

22 SO 2-Ex
Uwagi: 1. regulator podczas autokalibracji automatycznie ustawi typ sygnału zwrotnego – rezystancyjny/prądowy 2. (*) – parametr, ustawiany fabrycznie o ile zamawiający nie wyspecyfikuje inaczej 3. (**) – sygnał wejściowy 4 mA - położenie „Z“ 20 mA – położenie „O“
Ustawienie fabryczne regulatora (Programowy RESET regulatora): – w przypadku problemów z ustawieniem parametrów regulatora można przywrócić ustawienie fabryczne naciskając jednocześnie mikroprzyciski SW1 i SW2 i załączyć zasilanie. Mikroprzyciski należy zwolnić po rozświeceniu się żółtej diody LED.
Sposób przestawienia regulatora:
- Siłownik przestawić w międzypołożenie. Proces programowania przeprowadza się przy załączonym regulatorze przez wciśnięcie przycisku SW1 na ok. 2 sek. (tj. do momentu rozświecenia się diody D3). Po zwolnieniu przycisku wejdziemy w opcję menu (zwykle sygnał sterujący), co zamonituje 1 mignięcie diody D3 i ustawiany parametr (zwykle sygnał sterujący 4 – 20 mA) monitowany 2 mignięciami diody D4. Następnie można ustawiać żądane parametry wg tabeli nr 2: - krótkim naciśnięciem SW1 listowanie menu monitowane ilością mignięć diody D3 - krótkim naciśnięciem SW2 ustawianie parametrów monitowane ilością D4 Po ustawieniu żądanych parametrów wcisnąć SW1 na ok. 2 sek. (tj. do momentu rozświecenia się diody D3) wprowadzając regulator w proces autokalibracji. W czasie tego procesu regulator skontroluje sygnał zwrotny nadajnika położenia i kierunek obrotów SE, przestawi siłownik w płożenie „O“ i „Z“, pomierzy wartość masy bezwładnościowej w kierunku „O“ i „Z“ i zapisze ustawione parametry do pamięci EEPROM. W przypadku, kiedy w procesie autokalibracji wystąpi błąd, proces zostanie przerwany a dioda D4 zacznie migać monitując rodzaj błędu. W przeciwnym razie regulator zakończy proces autokalibracji i przejdzie w reżim regulacji.
Zgłaszanie błędów regulatora za pomocą diody D4 przy inicjacji: 4 mignięcia - źle podłączone wyłączniki momentów 5 mignięć - źle podłączony nadajnik położenia 8 mignięć - zły kierunek obrotów siłownika lub odwrotnie podłączony nadajnik położenia Zgłaszanie stanów pracy i awaryjnych regulatora Stany robocze sygnalizowane są za pomocą diod LED: - regulator reguluje (stan pośredni) – trwale świeci dioda D3 (zielona) - odchyłka regulacyjna w zakresie pasma nieczułości – SE stoi – trwale świeci dioda D3 (zielona)
b.) Stan awaryjny sygnalizowany za pomocą diody LED D3 (miganiem), (D4 trwale świeci)
1 mignięcie: sygnalizacja reżimu TEST – SE przestawi się w położenie wg ustawienia sygnału w menu TEST (zwarte zaciski 66 i 86)
2 mignięcia: błąd sygnału sterującego – SE przestawi się w położenie wg ustawienia sygnału w menu TEST
4 mignięcia: sygnalizacja zadziałania wyłącznika siłowego (SE wyłączony wyłącznikiem siłowym w położeniu pośrednim)
5 mignięć: błąd sygnału nadajnika – SE przestawi się w położenie wg ustawienia sygnału w menu TEST
7 mignięć: sygnał sterujący w zakresie 4 – 20 mA – mniejszy niż 4 mA (3,5 mA)
SO 2-Ex 23
5. Obsługa, eksploatacja, awarie i ich usuwanie
5.1 Obsługa - Siłownik SO 2-Ex nie wymaga specjalnej obsługi. - Siłownik można sterować zdalnie oraz ręcznie w miejscu instalacji. Sterowanie ręczne odbywa się za pomocą kółka. - Obsługa musi dbać, aby SE podczas eksploatacji był chroniony przed wpływem szkodliwych
czynników środowiska. - należy dbać o to, żeby w czasie pracy nie dochodziło do nadmiernego nagrzewania obudowy siłownika, do przekraczania maksymalnych parametrów pracy podanych na tabliczce znamionowej oraz nadmiernym wibracjom. Sterowanie ręczne:
- W przypadku sterowania ręcznego (ustawianie, kontrola działania, awaria zasilania itp.) Obsługa może przesterować SE ręcznie za pomocą kółka. Przy obracaniu kółka ręcznego w kierunku zgodnym z kierunkiem ruchu wskazówek zegara, wał wyjściowy obraca się w kierunku "ZAMYKA".
5.2 Konserwacja – zakres i regularność przeglądów Eksploatacja W czasie eksploatacji, należy dociągnąć śruby i nakrętki oraz przepusty kablowe, które mają wpływ na szczelność i krycie oraz sprawdzić czy nie ma ubytków smaru. Wymiana lub uzupełnienie smaru w pierwszych latach użytkowania, nie jest potrzebne. W czasie dalszych przeglądów konserwacyjnych, należy uzupełnić lub wymienić smar, o ile zachodzi taka potrzeba. Co sześć miesięcy skontrolować poprawność pracy i ustawienia siłownika a także sprawdzić i dociągnąć śruby mocujące siłownik do armatury. Smarowanie - smar HF 401/0 (GLEIT- m.) lub GLEITMO 585 K.
Smarowanie wrzeciona armatury przeprowadzać nie zależnie od konserwacji siłownika!
Po każdych 6 miesiącach zalecamy wykonać kontrolne przesterowanie siłownika i sprawdzenie ustawioną ilość obrotów. W razie potrzeby poprawić ustawienia.
Jeśli w przepisach nie jest powiedziane inaczej raz w roku w siłowniku sprawdzamy i dociągamy śruby mocujące siłownik do armatury.
Sprawdzamy szczelność przewodów w przepustach kablowych.
5.3 Gwarancja utrzymania przeciwwybuchowości 1. Minimalnie 30 min. przed otwarciem SE odłączyć przewody elektryczne zasilania! Schłodzić rezystor grzewczy i silnik elektryczny do temperatury poniżej T5 (100°C).
2. Przy ponownym montażu zwrócić uwagę, aby były użyte właściwe śruby w pełnej ilości, z podkładkami sprężystymi i właściwie dociągnięte! 3. SE z uszkodzonymi płaszczyznami gwarantującymi szczelność (np. rysy, pęknięcia, szczeliny
itp.) nie mogą być oczywiście dopuszczone do eksploatacji! 4. Sprawdzamy uszczelki na przepustach kablowych, uszkodzone wymieniamy na oryginalne. 5. Na siłownikach nie powinien zalegać kurz, ani pył. 6. Naprawy siłownika, wymiany uszkodzonych części może wykonywać tylko autoryzowany serwis producenta.
!

24 SO 2-Ex
Płaszczyzny gwarantujące szczelność: Miejsce styku obudowy górnej z dolną (1) Walcowa część kołnierza sterowania ręcznego (2) Walcowa część obudowy dolnej i walcowa część kołnierza sterowania ręcznego (3) Walcowa część obudowy dolnej i walcowa część wkładki przyłączeniowej (4) Walcowa część wkładki przyłączeniowej i trzpień sygnalizacji (5)
5.4 Awarie i ich usuwanie - W przypadku zaniku napięcia zasilania siłownik pozostaje w pozycji, w której się znajdował przed zanikiem napięcia. W razie potrzeby można siłownik przesterować kołem ręcznym. Po pojawieniu się z powrotem napięcia zasilania siłownik jest gotowy do dalszej pracy. - W przypadku uszkodzenia jakiejś części siłownika istnieje możliwość jej wymiany na nową w serwisie lub we własnym zakresie. - Przy regulatorze położenia zastosowano bezpiecznik DPS, F1,6 A lub F2A, 250 V, typ Siba 164 050.1,6 , MSF 250 a w zasilaczu regulatora DB, M160 mA, 250V, Siba lub MSF 250. - Firma Regada zapewnia serwis gwarancyjny i pogwarancyjny na produkowane przez siebie siłowniki. Awaria Przyczyna awarii Usuwanie awarii Przy naciśnięciu przycisków sterujących silnik nie pracuje
1.Niepodłączone napięcie zasilania na listwę zaciskową
Skontrolować podłączenie i obecność napięcia zasilania na listwie zaciskowej
2. Brak napięcia sterowania Sprawdzić podłączenie sterowania Siłownik nie zatrzymuje się w położeniach krańcowych
1. Rozregulowane ustawienie wyłączników położeniowych
Ponownie ustawić
2. Uszkodzony mikrowyłącznik Wymienić mikrowyłącznik na nowy
Siłownik zatrzymuje się w międzypołożeniu
Zablokowana armatura Przesterować siłownik na przemian w przeciwnych kierunkach, jeśli awaria nie ustąpi należy sprawdzić armaturę.
W położeniach krańcowych brak wskazania osiągniętego położenia.
1. uszkodzona kontrolka sygnalizacji Wymienić uszkodzoną kontrolkę sygnalizacji 2. Rozregulowane ustawienie wyłączników sygnalizacyjnych
Ponownie ustawić
W przypadku, kiedy nie uda się nam usunąć awarii należy skontaktować się z serwisem siłowników.
UWAGA: W przypadku potrzeby zdemontowania siłownika należy postępować wg opisu w punkcie "Demontaż". Wszystkich napraw siłownika mogą dokonywać osoby do tego uprawnione, które przeszły szkolenie w serwisie fabrycznym firmy REGADA.
6. Wyposażenie Jako wyposażenie do siłownika dodawane jest koło sterowania ręcznego.
SO 2-Ex 25
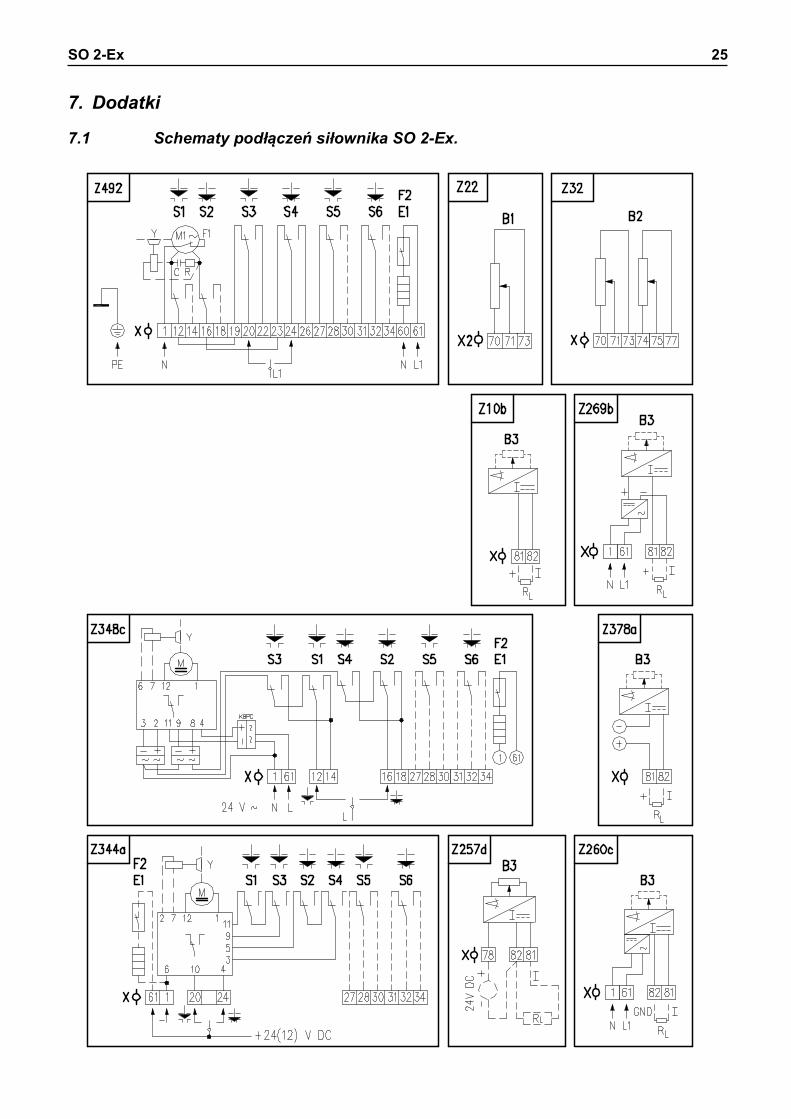
7. Dodatki
7.1 Schematy podłączeń siłownika SO 2-Ex.

26 SO 2-Ex
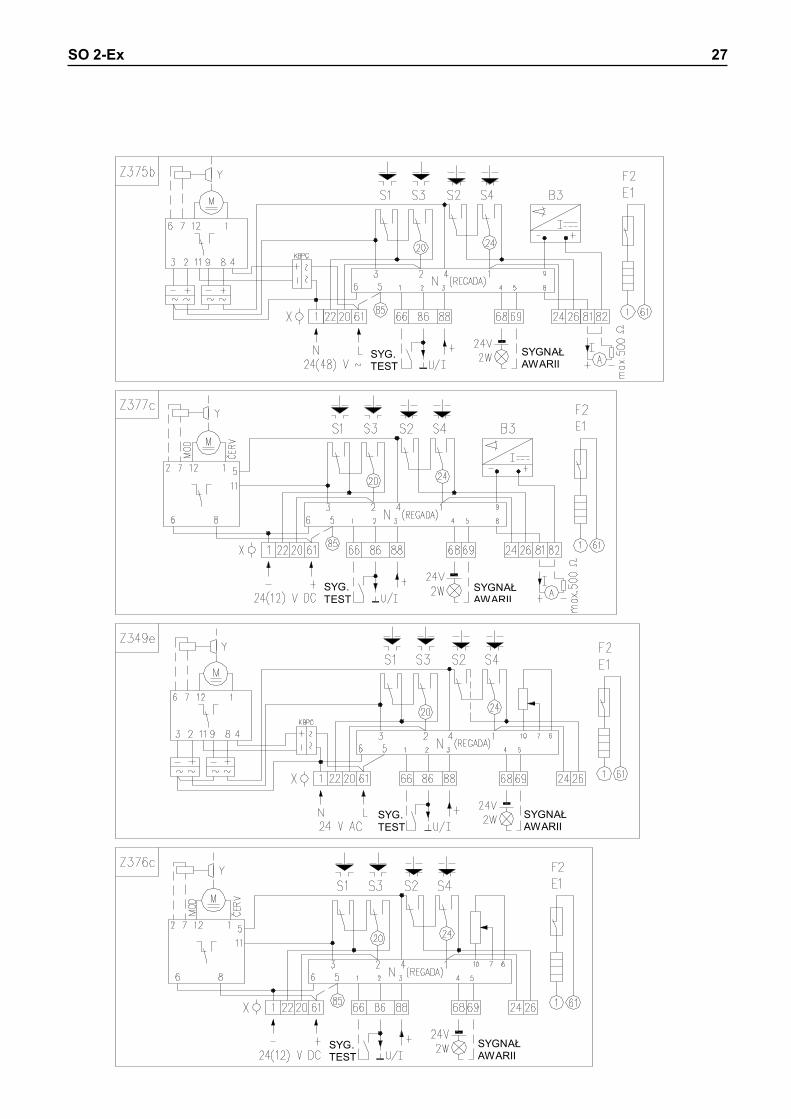
7.2 Schematy podłączeń siłownika SOR 2-Ex z regulatorem położenia
SYGNAŁ AWARII
SYG. TEST
SYG. TEST
SYGNAŁ AWARII
SO 2-Ex 27
SYGNAŁ
AWARII
SYGNAŁ AWARII
SYG. TEST
SYG. TEST
SYGNAŁ AWARII
SYG. TEST
SYG. TEST
SYGNAŁ AWARII
28 SO 2-Ex
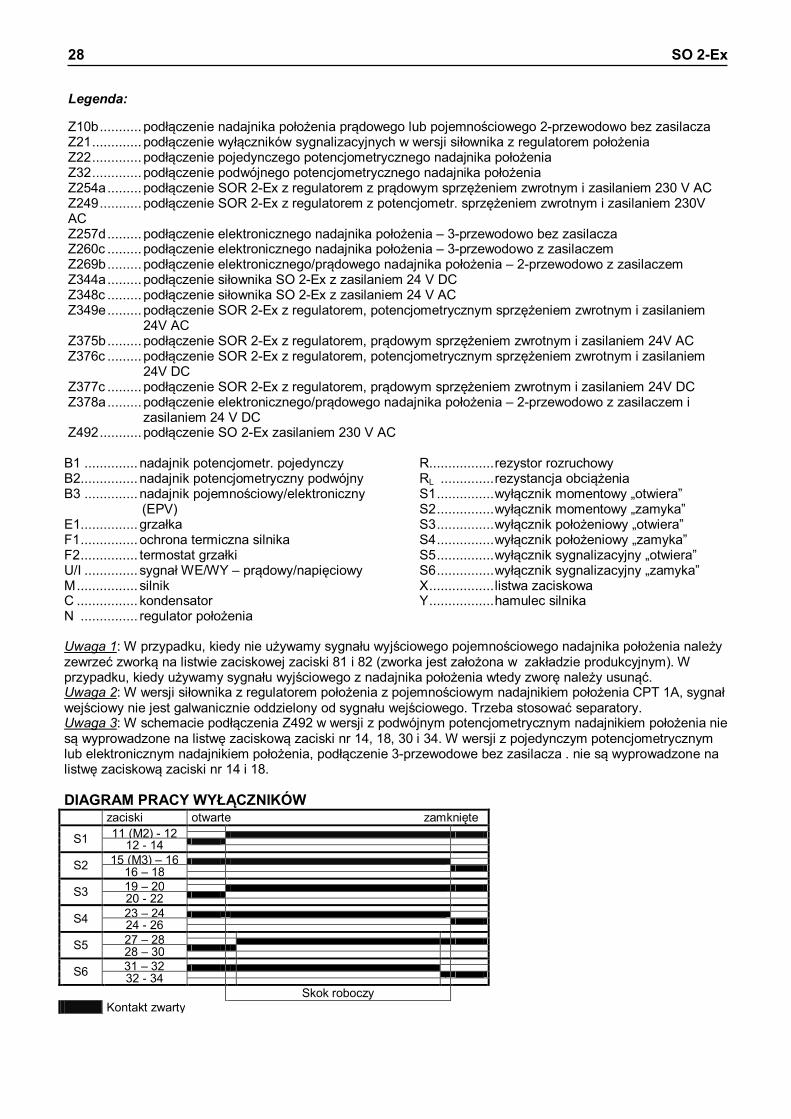
Legenda: Z10b ........... podłączenie nadajnika położenia prądowego lub pojemnościowego 2-przewodowo bez zasilacza Z21 ............. podłączenie wyłączników sygnalizacyjnych w wersji siłownika z regulatorem położenia Z22 ............. podłączenie pojedynczego potencjometrycznego nadajnika położenia Z32 ............. podłączenie podwójnego potencjometrycznego nadajnika położenia Z254a ......... podłączenie SOR 2-Ex z regulatorem z prądowym sprzężeniem zwrotnym i zasilaniem 230 V AC Z249 ........... podłączenie SOR 2-Ex z regulatorem z potencjometr. sprzężeniem zwrotnym i zasilaniem 230V AC Z257d ......... podłączenie elektronicznego nadajnika położenia – 3-przewodowo bez zasilacza Z260c ......... podłączenie elektronicznego nadajnika położenia – 3-przewodowo z zasilaczem Z269b ......... podłączenie elektronicznego/prądowego nadajnika położenia – 2-przewodowo z zasilaczem Z344a ......... podłączenie siłownika SO 2-Ex z zasilaniem 24 V DC Z348c ......... podłączenie siłownika SO 2-Ex z zasilaniem 24 V AC Z349e ......... podłączenie SOR 2-Ex z regulatorem, potencjometrycznym sprzężeniem zwrotnym i zasilaniem
24V AC Z375b ......... podłączenie SOR 2-Ex z regulatorem, prądowym sprzężeniem zwrotnym i zasilaniem 24V AC Z376c ......... podłączenie SOR 2-Ex z regulatorem, potencjometrycznym sprzężeniem zwrotnym i zasilaniem
24V DC Z377c ......... podłączenie SOR 2-Ex z regulatorem, prądowym sprzężeniem zwrotnym i zasilaniem 24V DC Z378a ......... podłączenie elektronicznego/prądowego nadajnika położenia – 2-przewodowo z zasilaczem i
zasilaniem 24 V DC Z492 ........... podłączenie SO 2-Ex zasilaniem 230 V AC
B1 .............. nadajnik potencjometr. pojedynczy B2............... nadajnik potencjometryczny podwójny B3 .............. nadajnik pojemnościowy/elektroniczny (EPV) E1............... grzałka F1 ............... ochrona termiczna silnika F2 ............... termostat grzałki U/I .............. sygnał WE/WY – prądowy/napięciowy M ................ silnik C ................ kondensator N ............... regulator położenia
R................. rezystor rozruchowy RL .............. rezystancja obciążenia S1 ............... wyłącznik momentowy „otwiera” S2 ............... wyłącznik momentowy „zamyka” S3 ............... wyłącznik położeniowy „otwiera” S4 ............... wyłącznik położeniowy „zamyka” S5 ............... wyłącznik sygnalizacyjny „otwiera” S6 ............... wyłącznik sygnalizacyjny „zamyka” X ................. listwa zaciskowa Y ................. hamulec silnika
Uwaga 1: W przypadku, kiedy nie używamy sygnału wyjściowego pojemnościowego nadajnika położenia należy zewrzeć zworką na listwie zaciskowej zaciski 81 i 82 (zworka jest założona w zakładzie produkcyjnym). W przypadku, kiedy używamy sygnału wyjściowego z nadajnika położenia wtedy zworę należy usunąć. Uwaga 2: W wersji siłownika z regulatorem położenia z pojemnościowym nadajnikiem położenia CPT 1A, sygnał wejściowy nie jest galwanicznie oddzielony od sygnału wejściowego. Trzeba stosować separatory. Uwaga 3: W schemacie podłączenia Z492 w wersji z podwójnym potencjometrycznym nadajnikiem położenia nie są wyprowadzone na listwę zaciskową zaciski nr 14, 18, 30 i 34. W wersji z pojedynczym potencjometrycznym lub elektronicznym nadajnikiem położenia, podłączenie 3-przewodowe bez zasilacza . nie są wyprowadzone na listwę zaciskową zaciski nr 14 i 18. DIAGRAM PRACY WYŁĄCZNIKÓW zaciski otwarte zamknięte
S1 11 (M2) - 12 12 - 14 S2 15 (М3) – 16 16 – 18 S3 19 – 20 20 - 22 S4 23 – 24 24 - 26 S5 27 – 28 28 – 30 S6 31 – 32 32 - 34 Skok roboczy
Kontakt zwarty

SO 2-Ex 29
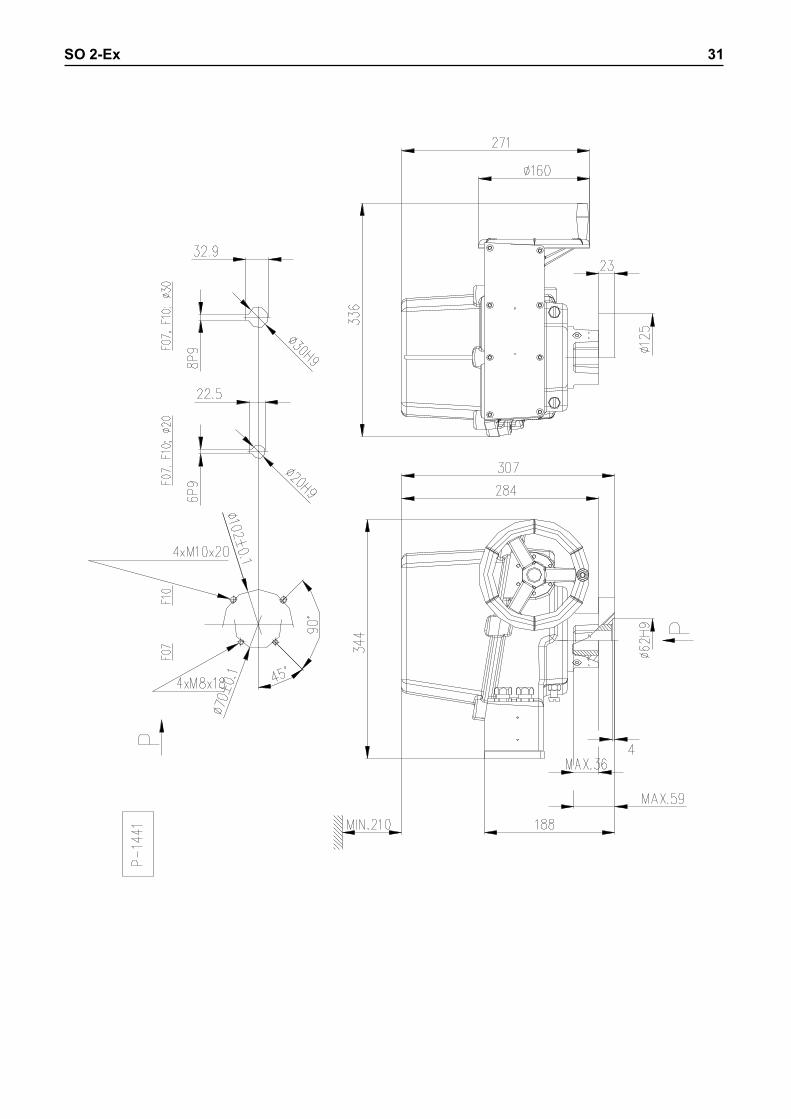
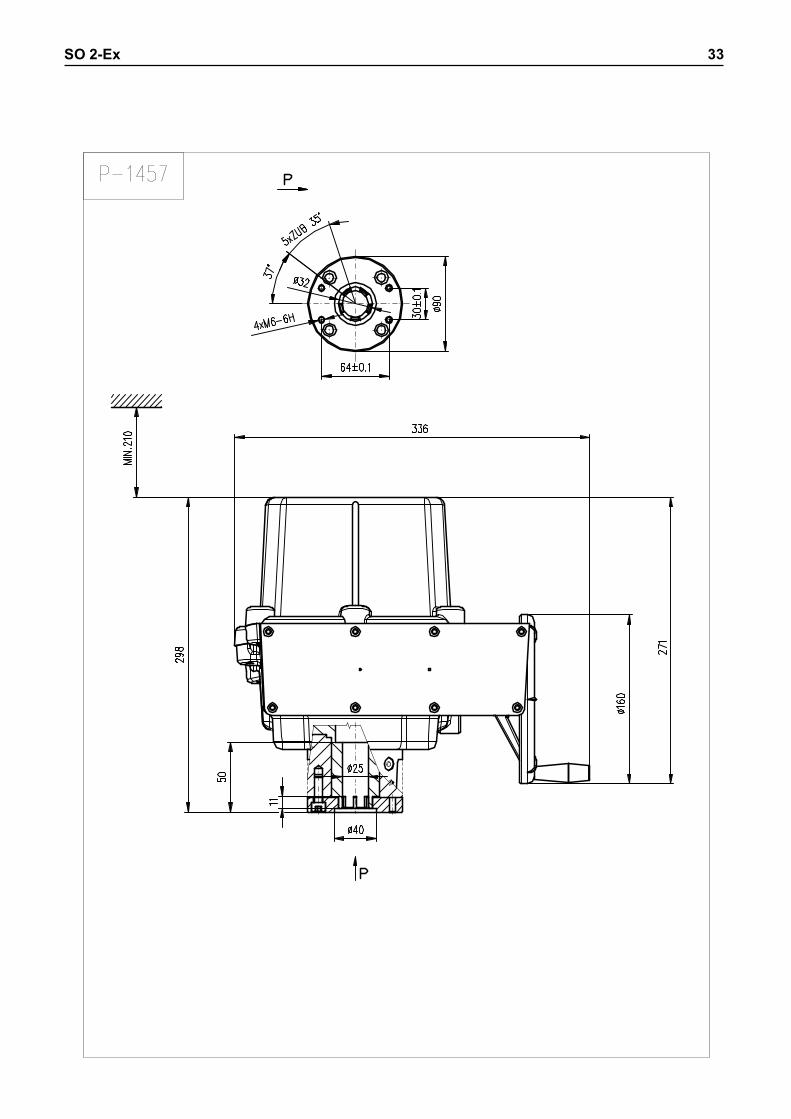
7.3 Rysunki wymiarowe

30 SO 2-Ex
ISO
521
0, F
10
NIE
STAN
DAR
DO
WE
P
– 14
40/B
60
NIE
STAN
DAR
D.
NIE
STAN
DAR
D.
P –
1440
/A
70
ISO
521
0, B
3
I
SO 3
338,
C
RYS
UN
EK
D
PR
ZYŁĄ
CZE
WED
ŁUG
NO
RM
Y
DIN
333
8, C
N
IEST
AND
ARD
OW
E
ISO
521
0, B
3 N
IEST
AND
ARD
OW
E
SO 2-Ex 31

32 SO 2-Ex
SO 2-Ex 33

34 SO 2-Ex
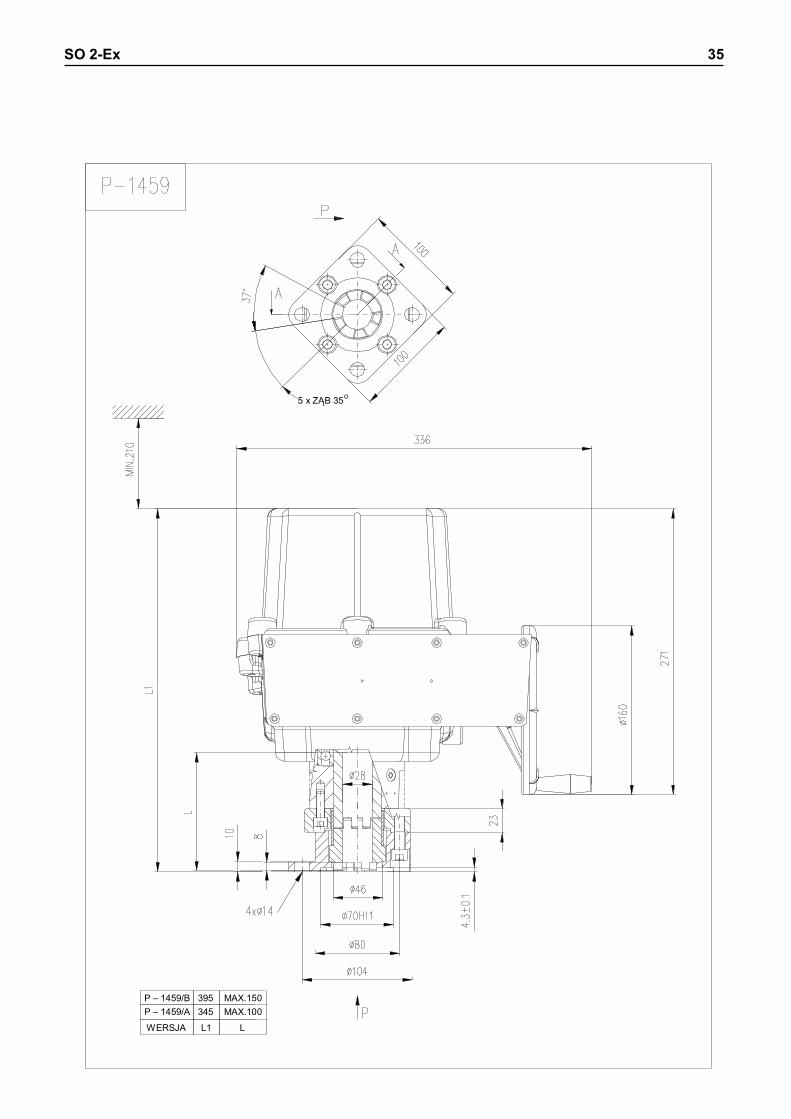
SO 2-Ex 35
5 x ZĄB 35°
P – 1459/B 395 MAX.150 P – 1459/A 345 MAX.100
WERSJA L1 L





























