Embed Size (px)
Citation preview

Instrumentacao e Controle
Aula 14
Finalizacao
Prof. Renato Watanabe
ESTO004-17

Onde estamos no curso
Sistema
Obtenção das Equações Diferenciais
que descrevem o comportamento
do sistema
Representação no Espaço de Estados
Transformadade
Laplace
Resposta natural
Resposta forçada
Análisede
Estabilidade
Sensores
Característicasde
Sensores
Comportamento dinâmicodos transdutores
Transdução demedidas
Condicionamento do sinal
Realimentação
Controle PID
Requisitosde Projeto
2 2
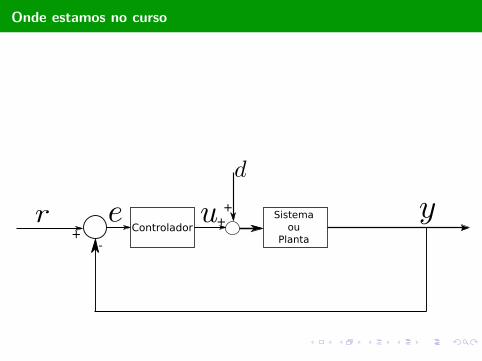
Onde estamos no curso
Sistema
ou
Planta+
-
Controlador+
+
3 3
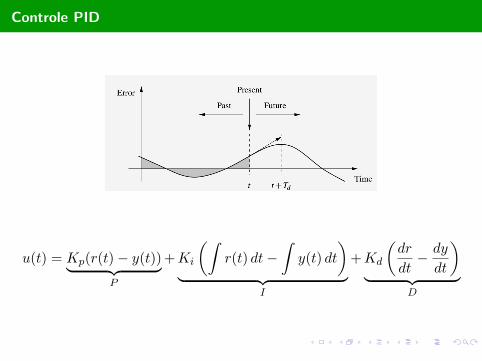
Controle PID
u(t) = Kp(r(t) − y(t))︸ ︷︷ ︸P
+Ki
(∫r(t) dt−
∫y(t) dt
)︸ ︷︷ ︸
I
+Kd
(dr
dt− dy
dt
)︸ ︷︷ ︸
D
4 4

Controle de nıvel de uma caixa d’agua
5 5

Regulador de Watt
Motor decombustão
Sistemade
transmissão
Velocidade angular
desejada+
-
Válvulade
combustível
Reguladorde Watt
Velocidadeangular
Mudança na carga
6 6
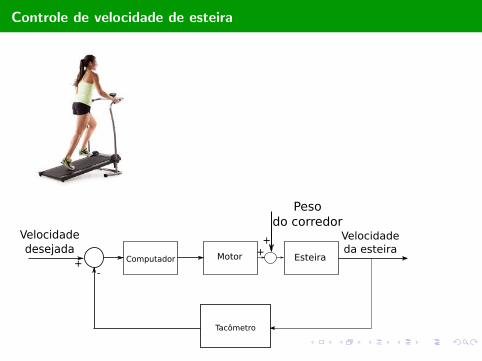
Controle de velocidade de esteira
Esteira
Tacômetro
Velocidadedesejada
+-
MotorComputador
Velocidadeda esteira+
+
Pesodo corredor
7 7

Controle de inflacao
Sistema nanceiro
IPCA
Metade in ação
+-
COPOMdo BC
In ação
Escassez de produto, instabilidadepolítica, etc
taxa dejuros
8 8
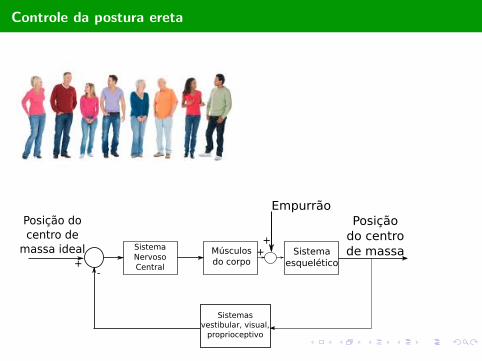
Controle da postura ereta
Sistema esquelético
Sistemasvestibular, visual,
proprioceptivo
Posição docentro de
massa ideal+
-
Músculosdo corpo
SistemaNervosoCentral
Posiçãodo centro de massa+
+
Empurrão
9 9

Outros exemplos
https://www.youtube.com/watch?v=M8YjvHYbZ9w
https://www.youtube.com/watch?v=ru4JIZ-x8yo
https://www.youtube.com/watch?v=ScjyYj7UdsM
10 10
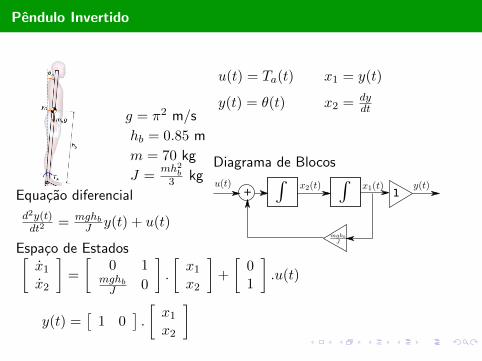
Pendulo Invertido
u(t) = Ta(t)
y(t) = θ(t)
x1 = y(t)
x2 = dydt
Equacao diferencial
d2y(t)dt2
= mghbJ y(t) + u(t)
Espaco de Estados[x1x2
]=
[0 1
mghbJ 0
].
[x1x2
]+
[01
].u(t)
y(t) =[
1 0].
[x1x2
]
Diagrama de Blocos
1+
g = π2 m/s
hb = 0.85 m
m = 70 kg
J =mh2
b3 kg
11 11

Caixa d’agua
u(t) = Qe(t)
y(t) = h(t)
d(t) = Qs(t)
dy(t)dt = − 1
Ad(t) + 1Au(t)
x1 = y(t)
Espaco de Estados
x1 = 0.x1 + 1A .u(t) − 1
Ad(t)
y(t) = 1.x1
Diagrama de Blocos
+ 1
12 12

Pendulo
Comprimento da barra:
Momento de inércia da barra:
Massa da barra:
u(t) = M(t)
y(t) = θ(t)
d2y(t)dt2
= −3g2l y(t) + 3
2ml2u(t)
x1 = y(t)
x2 = dydt
Espaco de Estados[x1x2
]=
[0 1
−3g2l 0
].
[x1x2
]+
[03
2ml2
].u(t)
y(t) =[
1 0].
[x1x2
]
Diagrama de Blocos
1+
g = π2 m/s
l = 2 m
m = 100 kg
13 13
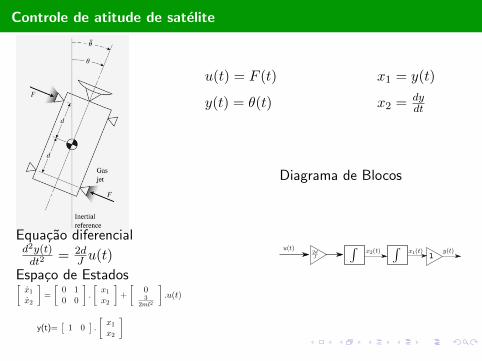
Controle de atitude de satelite
u(t) = F (t)
y(t) = θ(t)
Equacao diferenciald2y(t)dt2
= 2dJ u(t)
x1 = y(t)
x2 = dydt
Espaco de Estados[x1x2
]=
[0 10 0
].
[x1x2
]+
[03
2ml2
].u(t)
y(t)=[
1 0].
[x1x2
]
Diagrama de Blocos
1
14 14
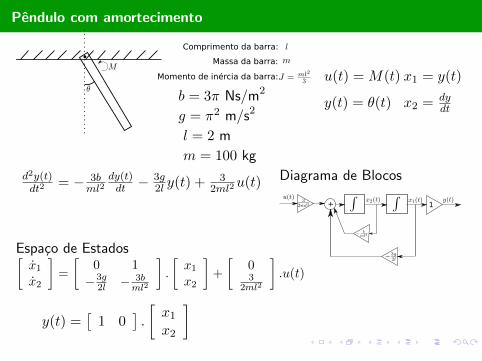
Pendulo com amortecimento
Comprimento da barra:
Momento de inércia da barra:
Massa da barra:
u(t) = M(t)
y(t) = θ(t)
d2y(t)dt2
= − 3bml2
dy(t)dt − 3g
2l y(t) + 32ml2
u(t)
x1 = y(t)
x2 = dydt
Espaco de Estados[x1x2
]=
[0 1
−3g2l − 3b
ml2
].
[x1x2
]+
[03
2ml2
].u(t)
y(t) =[
1 0].
[x1x2
]
Diagrama de Blocos
1+
b = 3π Ns/m2
g = π2 m/s2
l = 2 m
m = 100 kg
15 15

Pedidos em um servidor
Tempo T para a executar uma solicitacao.
u(t) = λ(t)
y(t) = Q(t)
dy(t)dt = − 1
T y(t) + u(t)
x1 = y(t)
Espaco de Estados
x1 = − 1T x1 + 1.u(t)
y(t) = 1.x1
Diagrama de Blocos
+ 1
16 16

Motor DC
u(t) = ea(t)
y(t) = ω(t)
Equacoes diferenciais:
dia(t)dt = −Ra
Laia(t) + Kb
Lay(t) + 1
Lau(t)
dy(t)dt = − b
J y(t) + KJ ia(t)
x1 = ia(t)
x2 = y(t)
Espaco de Estados[x1x2
]=
[−Ra
LaKbLa
KJ − b
J
].
[x1x2
]+
[ 1La0
].u(t)
y(t) =[
0 1].
[x1x2
]
Diagrama de Blocos
+ + 1
b = 0, 03 Ns/m2 J = 0, 01 kg.m2 Ra = 0, 5Ω
La = 0, 05 H K = 0, 05 N.m/A Kb = 0, 05 V.s/rad
17 17

Circuito diferenciador
u(t) = v(t)
y(t) = vR(t)
di(t)dt = − 1
RC i(t) + 1R
du(t)dt
y(t) = Ri(t)
x1 = i(t)
Espaco de Estados
x1 = − 1RCx1 + 1.u(t)
y(t) = − 1RC .x1 + 1.u
Diagrama de Blocos
+ +
18 18

Sistema massa-mola-amortecedor
Equacao diferencial:
d2y(t)dt2
= − kmy(t) − b
mdy(t)dt + k
mu(t) + bm
du(t)dt
u(t) = xi(t)
y(t) = xo(t)
x1 = y(t)
x2 = dydt
Espaco de Estados[x1x2
]=
[0 1
−Km − b
m
].
[x1x2
]+
[01
].u(t)
y(t) =[
Km
bm
].
[x1x2
]
Diagrama de Blocos
+ +
Utilizar k = 25 N/m, b = 300 Ns/m em = 1000kg
19 19

Circuito integrador
u(t) = v(t)
y(t) = vc(t)
Equacao Diferencial
di(t)dt = − 1
RC i(t) + 1R
du(t)dt
y(t) = 1C
∫ t−∞ i(t) dt
x1 = y(t)
Espaco de Estados
x1 = − 1RCx1 + 1
RCu(t)
y(t) = 1.x1
Diagrama de Blocos
1+
20 20
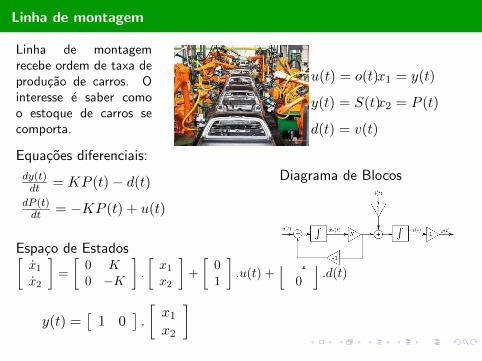
Linha de montagem
Linha de montagemrecebe ordem de taxa deproducao de carros. Ointeresse e saber comoo estoque de carros secomporta.
u(t) = o(t)
y(t) = S(t)
d(t) = v(t)
Equacoes diferenciais:
dy(t)dt = KP (t) − d(t)
dP (t)dt = −KP (t) + u(t)
x1 = y(t)
x2 = P (t)
Espaco de Estados[x1x2
]=
[0 K0 −K
].
[x1x2
]+
[01
].u(t) +
[−10
].d(t)
y(t) =[
1 0].
[x1x2
]
Diagrama de Blocos
+
21 21

Imunizacao
Uma fracao α de uma populacaosaudavel e infectada por uma doencapor dia. Entre a populacao infectada,uma fracao γ se recupera e setorna imune e uma outra fracao βfalece. Parte da populacao saudavel eimunizada a uma taxa v. O interessee saber como a populacao infectadaevolui ao longo do tempo.
u(t) = v(t)
y(t) = I(t)
Equacoes DiferenciaisdS(t)dt = −αS(t) − u(t)
dy(t)dt = αS(t) − (γ + β)y(t)
dIm(t)dt = u(t) + γy(t)
dM(t)dt = βy(t)
x1 = S(t)
x2 = y(t)
x3 = Im(t)
x4 = M(t)
Espaco de Estadosx1x2x3x4
=
−α 0 0 0α −(γ + β) 0 00 γ 0 00 β 0 0
.x1x2x3x4
+
−1010
.u(t)
y(t)=[
0 1 0 0].
x1x2x3x4
Diagrama de Blocos
+
+-1
+
22 22

Requisitos de projeto
EstabilidadePrincipal requisito, presente em todos os projetos de controle.Em sistemas lineares, deve-se garantir que as raızes do polinomiocaracterıstico esteja no lado esquerdo do plano imaginario.
23 23

Requisitos de projeto
Constante de tempo As constantes detempo de um sistemasao o inverso daparte real dasraızes do polinomiocaracterıstico (ouautovalores da matrizA). Deve-se garantirque a constantede tempo maislenta do sistemarealimentado satisfacaa necessidade.
24 24
Requisitos de projeto
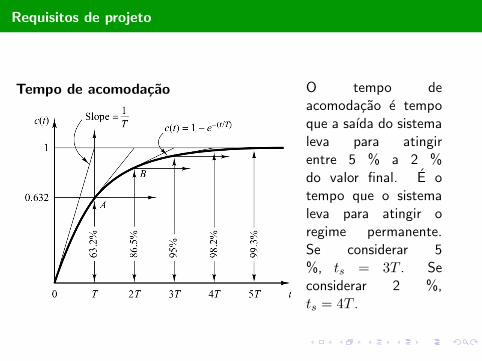
Tempo de acomodacao O tempo deacomodacao e tempoque a saıda do sistemaleva para atingirentre 5 % a 2 %do valor final. E otempo que o sistemaleva para atingir oregime permanente.Se considerar 5%, ts = 3T . Seconsiderar 2 %,ts = 4T .
25 25
Requisitos de projeto
Erro estacionarioA diferenca entre o valor de referencia e o valor final da saıda no regimepermanente.
26 26





























