Embed Size (px)
Citation preview
1
Introduction to Geometric Algebra
L t 1
Introduction to Geometric Algebra
L t 1Lecture 1Why Geometric Algebra?
Lecture 1Why Geometric Algebra?
Professor Leandro Augusto Frata [email protected]
Lecture notes available inhttp://www.ic.uff.br/~laffernandes/teaching/2011.2/topicos_ag
Geometric ProblemsGeometric Problems
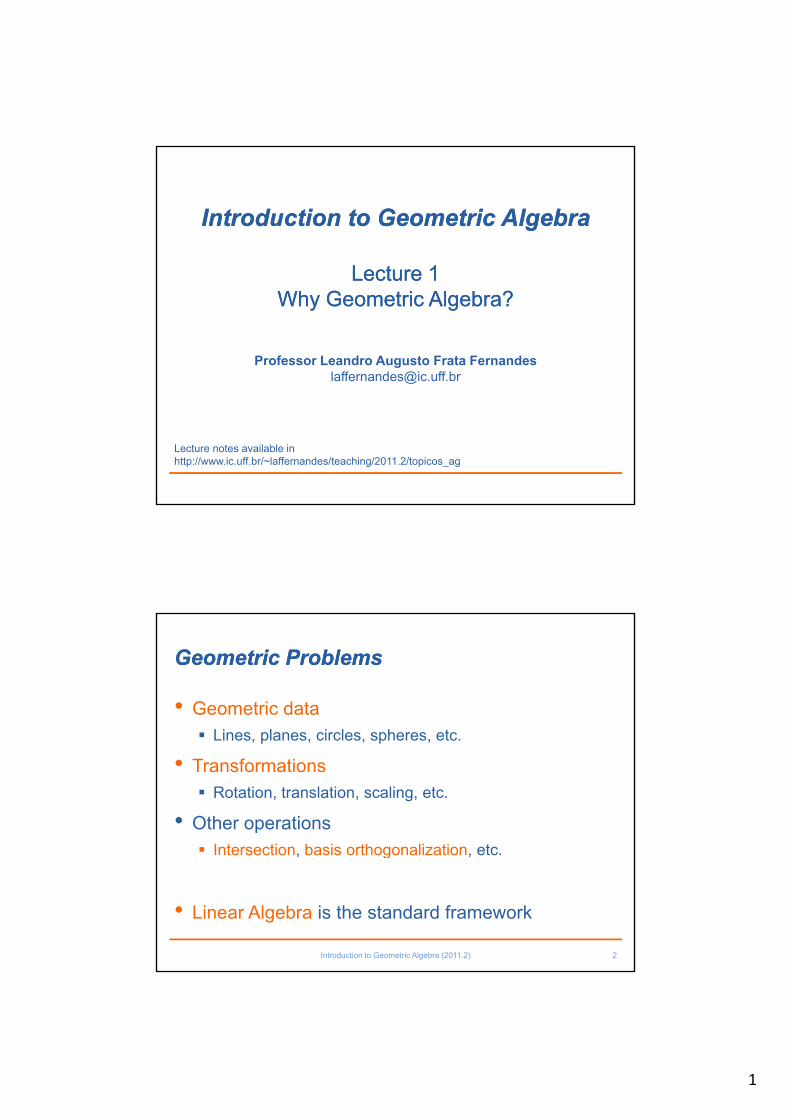
• Geometric dataLines planes circles spheres etc Lines, planes, circles, spheres, etc.
• Transformations Rotation, translation, scaling, etc.
• Other operations Intersection basis orthogonalization etcIntersection, basis orthogonalization, etc.
• Linear Algebra is the standard framework
2Introduction to Geometric Algebra (2011.2)
2
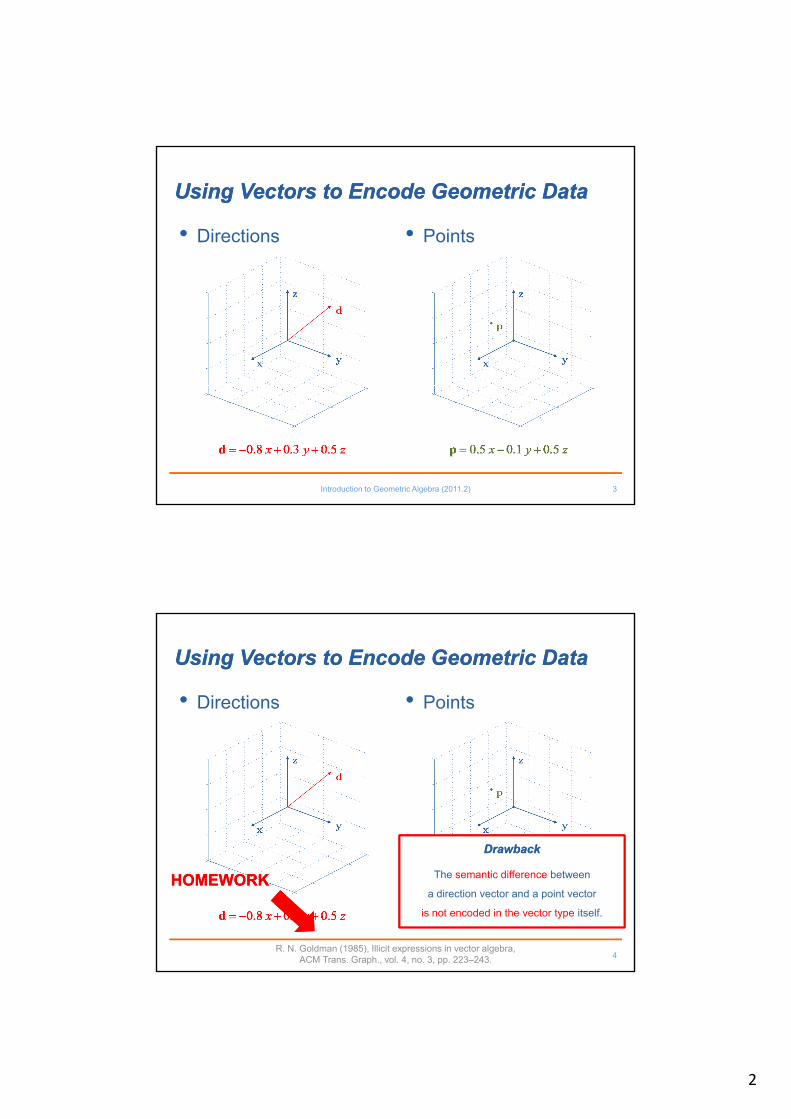
Using Vectors to Encode Geometric DataUsing Vectors to Encode Geometric Data
• Directions • Points
3Introduction to Geometric Algebra (2011.2)
Using Vectors to Encode Geometric DataUsing Vectors to Encode Geometric Data
• Directions • Points
DrawbackDrawback
4
DrawbackDrawback
The semantic difference between
a direction vector and a point vector
is not encoded in the vector type itself.
R. N. Goldman (1985), Illicit expressions in vector algebra,ACM Trans. Graph., vol. 4, no. 3, pp. 223–243.
HOMEWORKHOMEWORK
3
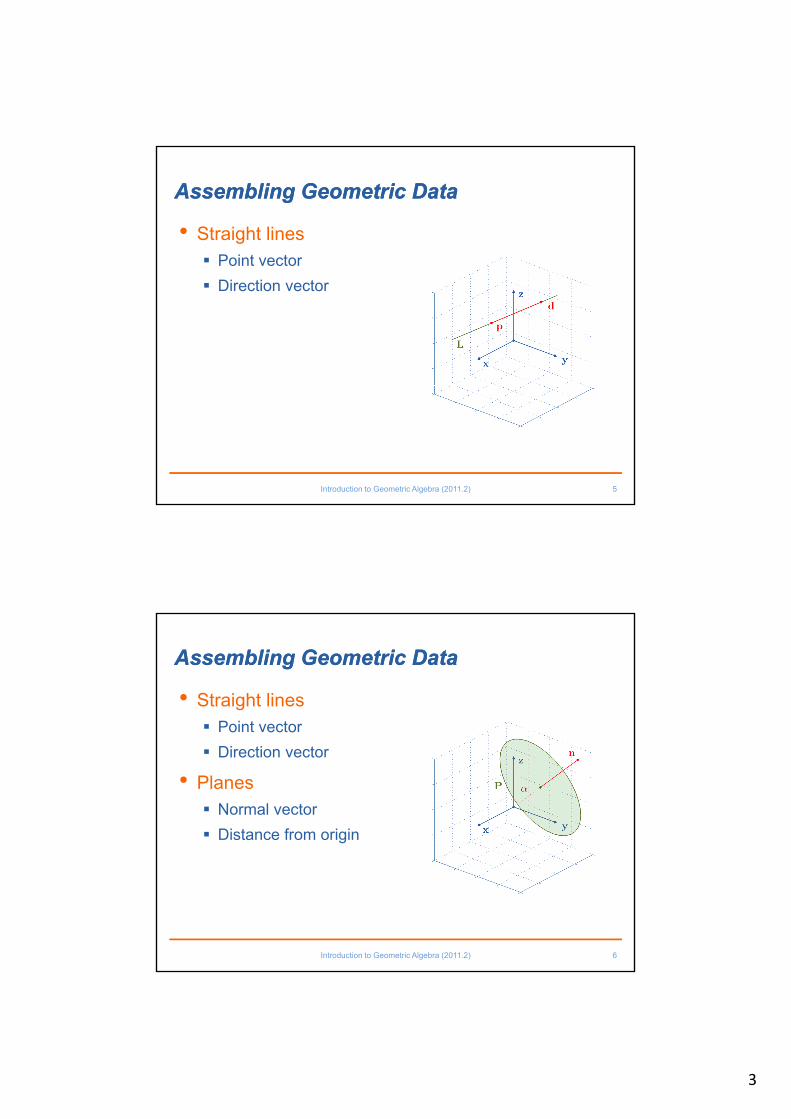
Assembling Geometric DataAssembling Geometric Data
• Straight lines Point vectoro ec o
Direction vector
• Planes Normal vector
Distance from origin
• Spheres Center point
Radius
5Introduction to Geometric Algebra (2011.2)
Assembling Geometric DataAssembling Geometric Data
• Straight lines Point vectoro ec o
Direction vector
• Planes Normal vector
Distance from origin
• Spheres Center point
Radius
6Introduction to Geometric Algebra (2011.2)
4
Assembling Geometric DataAssembling Geometric Data
• Straight lines Point vectoro ec o
Direction vector
• Planes Normal vector
Distance from origin
• Spheres Center point
Radius
7Introduction to Geometric Algebra (2011.2)
Assembling Geometric DataAssembling Geometric Data
• Straight lines Point vectoro ec o
Direction vector
• Planes Normal vector
Distance from origin
• Spheres Center point
Radius
8
DrawbackDrawback
The factorization of geometric elements
prevents their use as computing primitives.
Introduction to Geometric Algebra (2011.2)
5
Intersection of Two Geometric ElementsIntersection of Two Geometric Elements
• A specialized equation for each pair of elements Straight line × Straight line
Straight line × Plane
Straight line × Sphere
Plane × Sphere
etc.
• Special cases must be handled explicitly Straight line × Circle may return
o Empty set
o One point
o Points pair
9Introduction to Geometric Algebra (2011.2)
Intersection of Two Geometric ElementsIntersection of Two Geometric Elements
• A specialized equation for each pair of elements Straight line × Straight line
Straight line × Plane
Straight line × Sphere
Plane × Sphere
etc.
• Special cases must be handled explicitly
Linear Algebra Extension
Plücker CoordinatesPlücker Coordinates
Straight line × Circle may return
o Empty set
o One point
o Points pair
10J. Stolfi (1991) Oriented projective geometry. Academic Press Professional, Inc.
An alternative to represent flat geometric elements
Points, lines and planes as elementary types
Allow the development of more general solution
Not fully compatible with transformation matrices
6
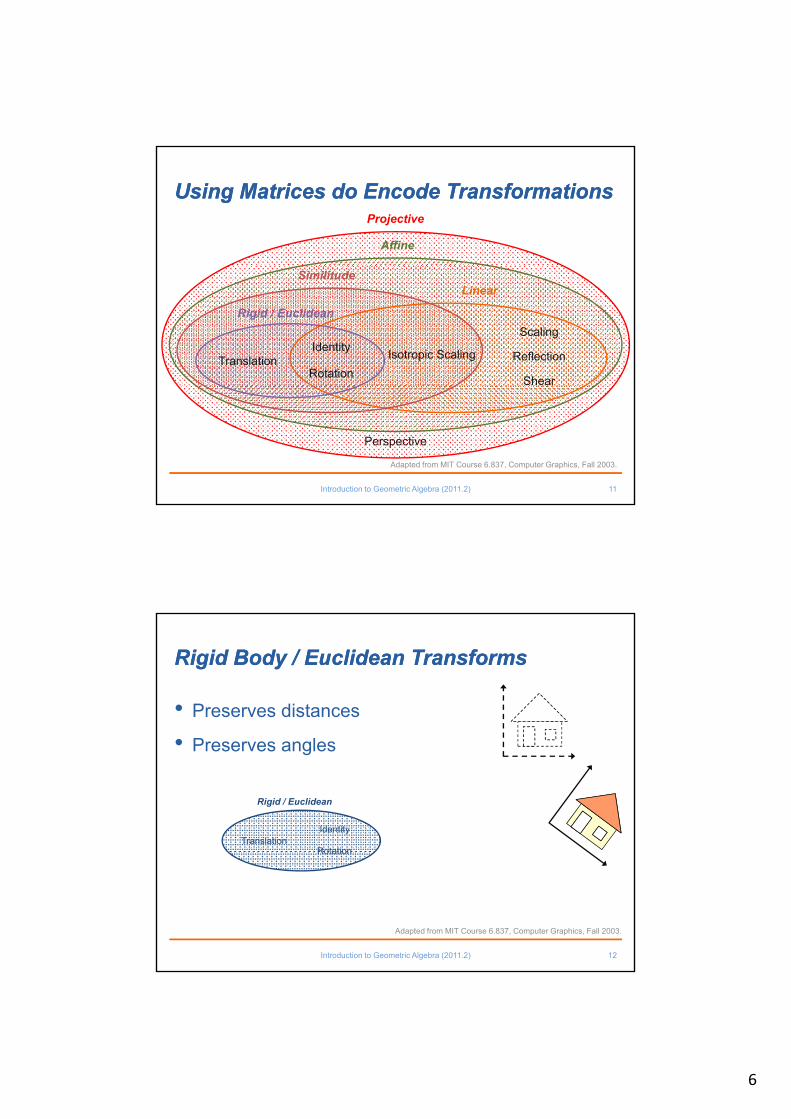
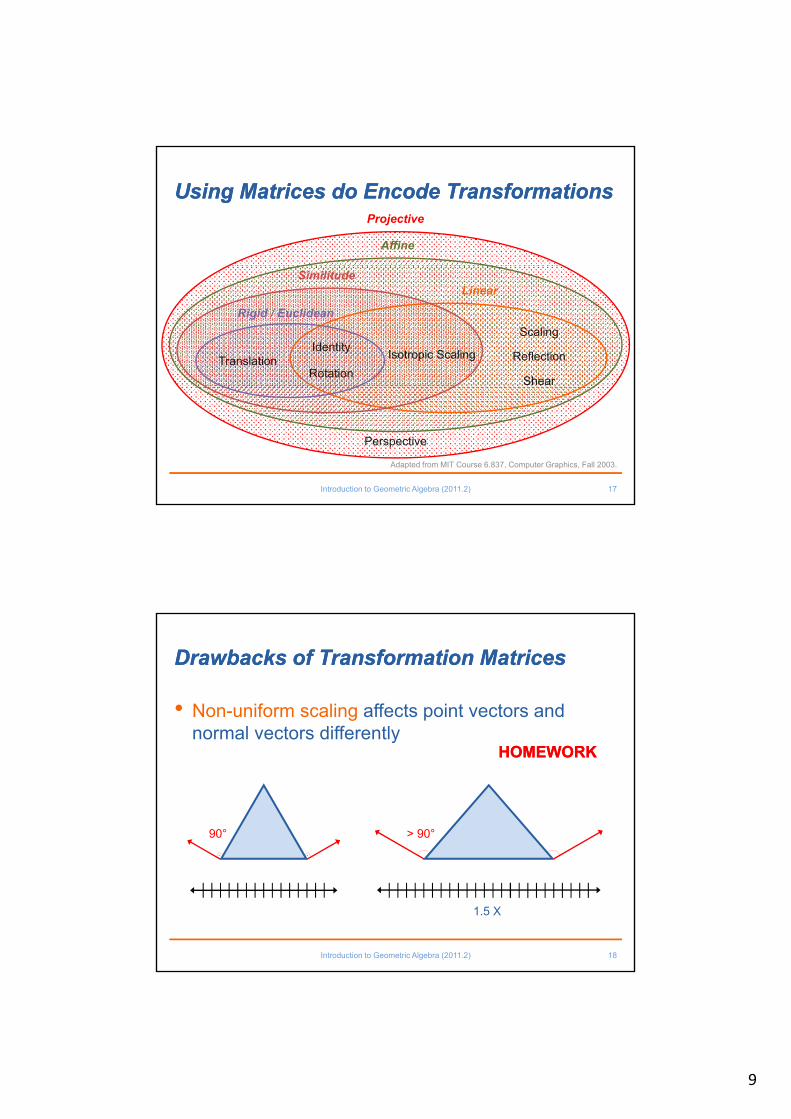
Using Matrices do Encode TransformationsUsing Matrices do Encode TransformationsProjective
Affine
LinearSimilitude
Rigid / Euclidean
Isotropic Scaling
Scaling
Reflection
Shear
TranslationIdentity
Rotation
Introduction to Geometric Algebra (2011.2) 11
Perspective
Adapted from MIT Course 6.837, Computer Graphics, Fall 2003.
Rigid Body / Euclidean TransformsRigid Body / Euclidean Transforms
• Preserves distances
• Preserves angles
TranslationIdentity
Rotation
Rigid / Euclidean
Adapted from MIT Course 6.837, Computer Graphics, Fall 2003.
Rotation
12Introduction to Geometric Algebra (2011.2)
7
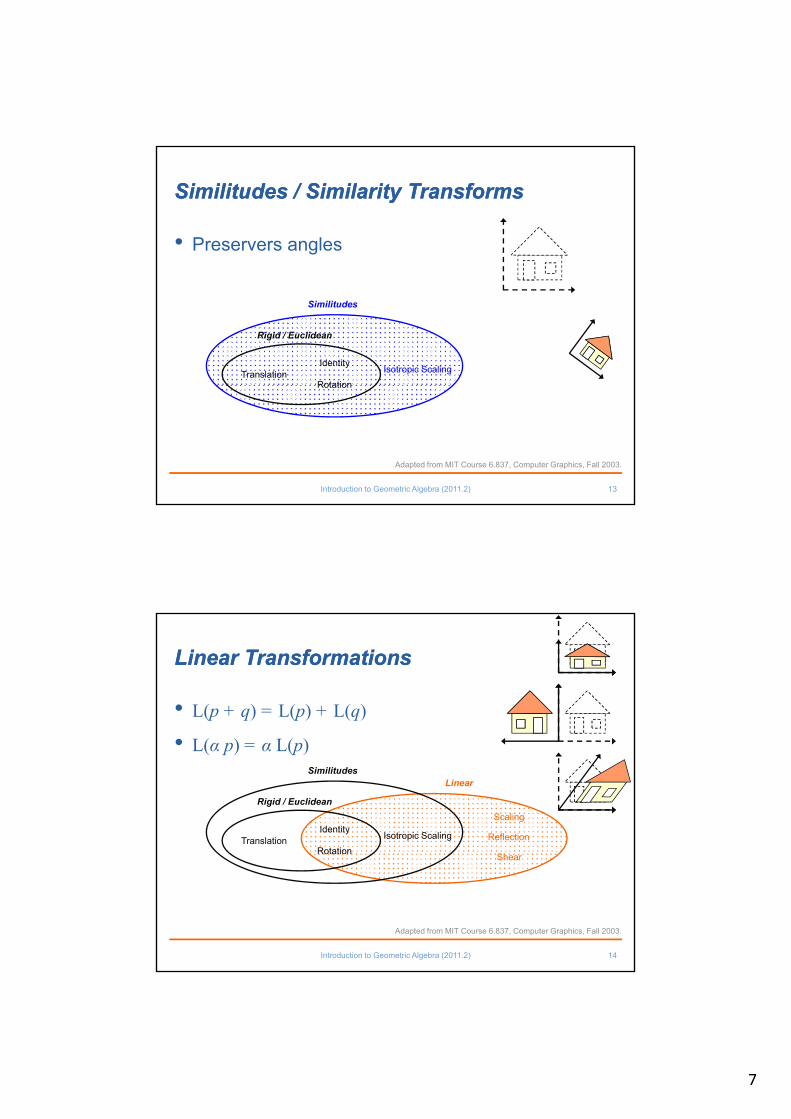
Similitudes / Similarity TransformsSimilitudes / Similarity Transforms
• Preservers angles
TranslationIdentity
Rotation
Rigid / Euclidean
Similitudes
Isotropic Scaling
Adapted from MIT Course 6.837, Computer Graphics, Fall 2003.
Rotation
13Introduction to Geometric Algebra (2011.2)
Linear TransformationsLinear Transformations
• L(p + q) = L(p) + L(q)
• L(α p) = α L(p)
TranslationIdentity
Rotation
Rigid / Euclidean
Similitudes
Isotropic Scaling
Scaling
Reflection
Linear
Adapted from MIT Course 6.837, Computer Graphics, Fall 2003.
RotationShear
14Introduction to Geometric Algebra (2011.2)
8
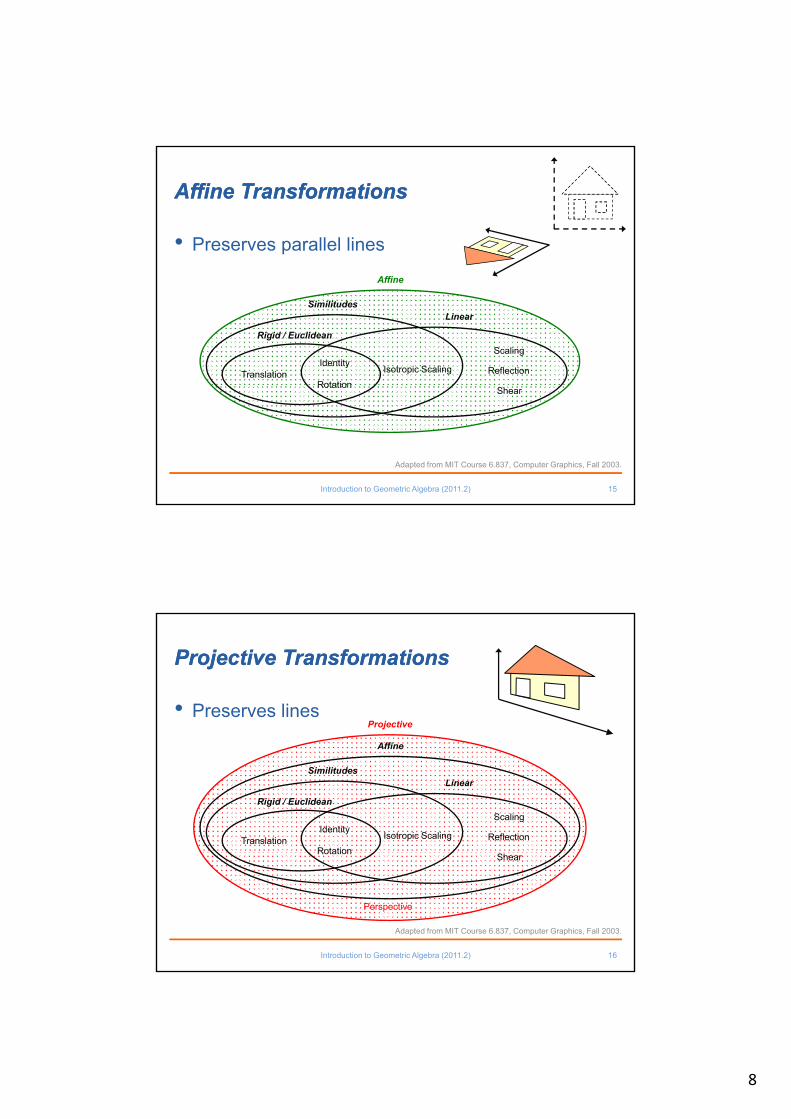
Affine TransformationsAffine Transformations
• Preserves parallel lines
TranslationIdentity
Rotation
Rigid / Euclidean
Similitudes
Isotropic Scaling
Scaling
Reflection
Linear
Affine
Adapted from MIT Course 6.837, Computer Graphics, Fall 2003.
RotationShear
15Introduction to Geometric Algebra (2011.2)
Projective TransformationsProjective Transformations
• Preserves linesProjective
TranslationIdentity
Rotation
Rigid / Euclidean
Similitudes
Isotropic Scaling
Scaling
Reflection
Linear
Affine
Adapted from MIT Course 6.837, Computer Graphics, Fall 2003.
RotationShear
Perspective
16Introduction to Geometric Algebra (2011.2)
9
Using Matrices do Encode TransformationsUsing Matrices do Encode TransformationsProjective
Affine
LinearSimilitude
Rigid / Euclidean
Isotropic Scaling
Scaling
Reflection
Shear
TranslationIdentity
Rotation
Introduction to Geometric Algebra (2011.2) 17
Perspective
Adapted from MIT Course 6.837, Computer Graphics, Fall 2003.
Drawbacks of Transformation MatricesDrawbacks of Transformation Matrices
• Non-uniform scaling affects point vectors andnormal vectors differentlynormal vectors differently
90° > 90°
HOMEWORKHOMEWORK
1.5 X
Introduction to Geometric Algebra (2011.2) 18
10
Drawbacks of Transformation MatricesDrawbacks of Transformation Matrices
• Non-uniform scaling affects point vectors andnormal vectors differentlynormal vectors differently
• Rotation matrices
Not suitable for interpolation
Encode the rotation axis and angle in a costly way
Introduction to Geometric Algebra (2011.2) 19
Drawbacks of Transformation MatricesDrawbacks of Transformation Matrices
• Non-uniform scaling affects point vectors andnormal vectors differentlynormal vectors differently
• Rotation matrices
Not suitable for interpolation
Encode the rotation axis and angle in a costly way
Linear Algebra Extension
QuaternionQuaternion
Represent and interpolate rotations consistently
Can be combined with isotropic scaling
Not well connected with other transformations
Not compatible with Plücker coordinates
Defined only in 3-D
W. R. Hamilton (1844) On a new species of imaginary quantities connected with thetheory of quaternions. In Proc. of the Royal Irish Acad., vol. 2, pp. 424-434. 20
11
Linear AlgebraLinear Algebra
• Standard language for geometric problems
W ll k li it ti• Well-known limitations
• Aggregates different formalisms to obtaincomplete solutions
Matrices
Plücker coordinates
Quaternion
• Jumping back and forth between formalisms requires custom and ad hoc conversions
Introduction to Geometric Algebra (2011.2) 21
Geometric AlgebraGeometric Algebra
• High-level framework for geometric operations
G t i l t i iti f t ti• Geometric elements as primitives for computation
• Naturally generalizes and integrates
Plücker coordinates
Quaternion
Complex numbers
• Extends the same solution to
Higher dimensions
All kinds of geometric elements
Introduction to Geometric Algebra (2011.2) 22
12
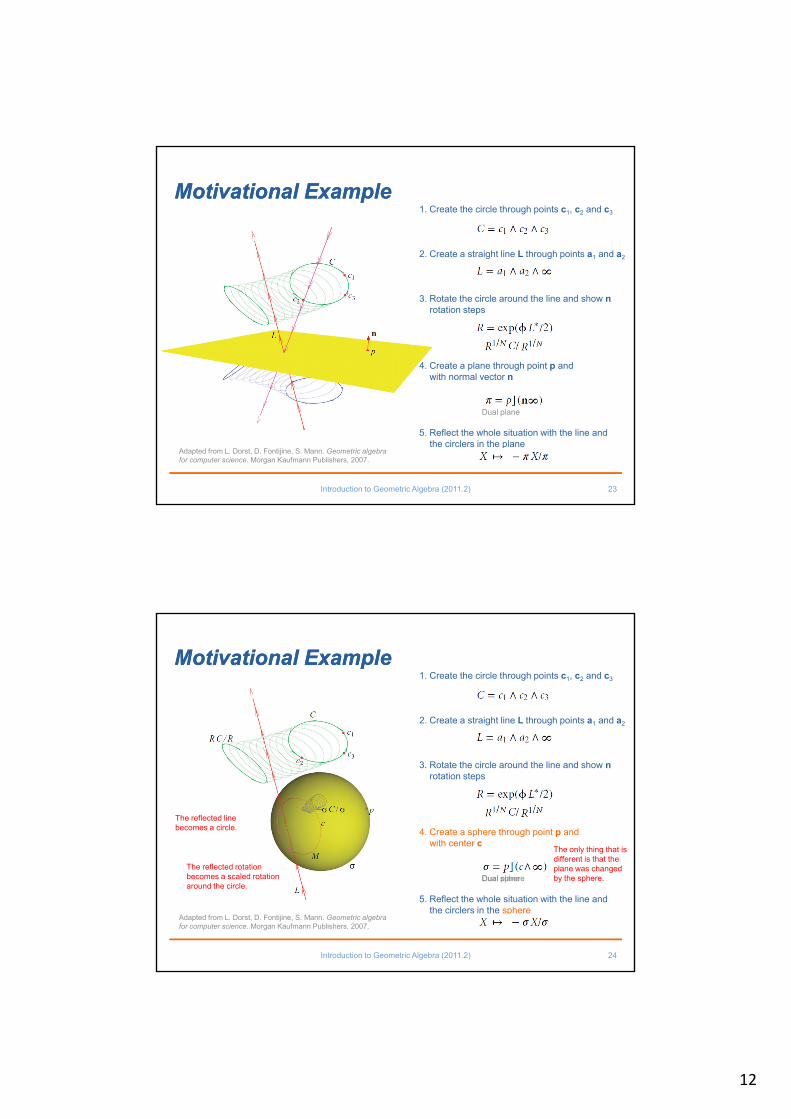
Motivational ExampleMotivational Example1. Create the circle through points c1, c2 and c3
2. Create a straight line L through points a1 and a2
3. Rotate the circle around the line and show nrotation steps
4. Create a plane through point p andwith normal vector n
23
Adapted from L. Dorst, D. Fontijine, S. Mann. Geometric algebrafor computer science. Morgan Kaufmann Publishers, 2007.
5. Reflect the whole situation with the line andthe circlers in the plane
Dual plane
Introduction to Geometric Algebra (2011.2)
1. Create the circle through points c1, c2 and c3
2. Create a straight line L through points a1 and a2
Motivational ExampleMotivational Example
3. Rotate the circle around the line and show nrotation steps
4. Create a plane through point p andwith normal vector n
4. Create a sphere through point p andwith center c
The only thing that is
The reflected linebecomes a circle.
5. Reflect the whole situation with the line andthe circlers in the plane
Dual plane
24
Adapted from L. Dorst, D. Fontijine, S. Mann. Geometric algebrafor computer science. Morgan Kaufmann Publishers, 2007.
5. Reflect the whole situation with the line andthe circlers in the sphere
The only thing that isdifferent is that theplane was changedby the sphere.
The reflected rotationbecomes a scaled rotationaround the circle.
Dual sphere
Introduction to Geometric Algebra (2011.2)
13
Why I never heard about GA before?Why I never heard about GA before?
• Geometric algebra is a “new” formalism
Paul Dirac(1902-1984)
25D. Hestenes (2001) Old wine in new bottles..., in Geometric algebra with
applications in science and engineering, chapter 1, pp. 3-17, Birkhäuser, Boston.
Hermann G. Grassmann(1809-1877)
William R. Hamilton(1805-1865)
William K. Clifford(1845-1879) Wolfgang E. Pauli
(1900-1958)
David O. Hestenes(1933-)
1920s18771840s 1878 1980s, 2001
Differences Between AlgebrasDifferences Between Algebras
• Clifford algebra Developed in nongeometric directionsDeveloped in nongeometric directions
Permits us to construct elements bya universal addition
Arbitrary multivectors may be important
• Geometric algebra The geometrically significant part of Clifford algebra
Only permits exclusively multiplicative constructions
o The only elements that can be added arescalars, vectors, pseudovectors, and pseudoscalars
Only blades and versors are important
Introduction to Geometric Algebra (2011.2) 26