Embed Size (px)
Citation preview

Introduzione agli Spazi Curvi

Indice Indice........................................................................................................................................................... 2
Nota introduttiva ......................................................................................................................................... 4
Prerequisiti .................................................................................................................................................. 4
Spazi Euclidei ............................................................................................................................................... 5
Misura di Distanze e Superfici in Spazi Euclidei con metriche piatte ......................................................... 5
Alcuni esempi in due dimensioni .............................................................................................................. 6
Segmento su retta ................................................................................................................................ 6
Circonferenza ....................................................................................................................................... 6
Area del quadrato ................................................................................................................................ 6
Area del cerchio ................................................................................................................................... 7
Alcuni esempi in tre dimensioni ............................................................................................................... 7
Superficie della sfera ............................................................................................................................ 7
Sistemi Cartesiani e Coordinate curvilinee ................................................................................................... 7
Alcuni esempi di calcolo di metriche in coordinate curvilinee ................................................................... 8
Coordinate Cilindriche .......................................................................................................................... 8
Coordinate Sferiche.............................................................................................................................. 8
Simboli di Christoffel ................................................................................................................................ 9
Alcuni esempi di calcolo di simboli di Christoffel ...................................................................................... 9
Calcolo dei simboli di Christoffel e del laplaciano per coordinate Cilindriche ........................................ 9
Calcolo dei simboli di Christoffel e del laplaciano per coordinate Sferiche ...........................................10
Trasporto parallelo .................................................................................................................................11
Trasporto parallelo attorno a superficie infinitesima ...........................................................................11
Tensore di curvatura e Scalare di Kretschmann .......................................................................................12
Alcuni esempi di calcolo del tensore di curvatura ....................................................................................13
Calcolo del tensore di curvatura per coordinate Cilindriche .................................................................13
Calcolo del tensore di curvatura per coordinate Cilindriche restringendosi alla superficie del cilindro .13
Calcolo del tensore di curvatura per coordinate Sferiche .....................................................................13
Calcolo del tensore di curvatura per coordinate Sferiche restringendosi alla superficie del cilindro .....13
Tensore di Ricci e Curvatura Scalare ........................................................................................................14
Alcuni esempi di calcolo del tensore di Ricci e della Curvatura scalare .....................................................14
Calcolo del tensore di Ricci e della curvatura scalare sulla superficie della sfera ..................................14
Tensore di Einstein ..................................................................................................................................14
Alcuni esempi di calcolo del tensore di Einstein.......................................................................................15
Calcolo del tensore di Einstein sulla superficie della sfera ....................................................................15

Spazi di Minkowski......................................................................................................................................15
Metriche non definite positive ................................................................................................................15
Definizioni di indici Controvarianti e Covarianti .......................................................................................15
Spazi Curvi ..................................................................................................................................................16
Classificazione degli spazi ........................................................................................................................16
Equazione di Einstein ..............................................................................................................................17
Alcuni esempi di classificazione degli spazi ..............................................................................................17
Coordinate Cilindriche .........................................................................................................................17
Coordinate Sferiche.............................................................................................................................17
Sistema Ruotante ................................................................................................................................17
Superficie del cilindro ..........................................................................................................................17
Superficie della Sfera...........................................................................................................................17
Spazio a due dimensioni a curvatura negativa costante .......................................................................17
Metrica di Schwarzschild .....................................................................................................................18
Analisi delle singolarità della Metrica di Schwarzschild ........................................................................19
Metrica di Schwarzschild con costante cosmologica ............................................................................20
Metrica di Kerr ....................................................................................................................................21
Metrica di Reissner Nordstrom............................................................................................................22
Metrica di Kerr Newmann ...................................................................................................................23
Cosmologia .................................................................................................................................................23
Principio Cosmologico .............................................................................................................................23
Universi massimamente simmetrici.........................................................................................................24
Necessità di introduzione della Costante Cosmologica ............................................................................24
Esperimenti di verifica della Teoria della Relatività Generale.......................................................................25
Verifica del Principio di Equivalenza ........................................................................................................25
Redshift Gravitazionale .......................................................................................................................25
Verifica dell’Equazione di Einstein ...........................................................................................................25
Orbite Chiuse: precessione del Perielio ...............................................................................................25
Orbite Aperte: deflessione della luce ...................................................................................................28
Trasmissione: ritardo del segnale ........................................................................................................30
Verifica del Principio Cosmologico...........................................................................................................31
Correzione al primo ordine dell’equazione di Poisson..........................................................................32

Nota introduttiva Queste dispense non sono un corso di geometria differenziale né di relatività generale, vogliono solo spiegare in modo semplice alcuni semplici concetti sugli spazi curvi, introdurre i tensori più importanti attraverso diversi esempi.
Prerequisiti È consigliato avere le nozioni di spazio vettoriale, prodotto scalare, spazio metrico, metrica indotta da un prodotto scalare ed elementi di base di geometria differenziale, tuttavia non sono concetti essenziali.
È invece necessario conoscere il concetto di derivata parziale, vettore, sistema di riferimento cartesiano e non cartesiano, integrali, integrali multipli. È consigliabile anche avere un minimo di pratica col calcolo matriciale e con la convenzione di Einstein di somma sugli indici ripetuti.

Spazi Euclidei
Misura di Distanze e Superfici in Spazi Euclidei con metriche piatte Uno Spazio Euclideo è uno spazio vettoriale arricchito di alcune nozioni come distanza e angolo, e con una metrica indotta da un prodotto scalare definito positivo.
In parole più povere: prendiamo uno spazio o un piano (gli unici “spazi” che possiamo immaginare). Possiamo identificare i loro punti specificando un sistema di riferimento Cartesiano costituito dall’origine e da degli assi cartesiani, ed associando quindi ad ogni punto delle coordinate, che saranno le componenti di quelli che chiamiamo vettori. Tutte le caratteristiche geometriche del sistema saranno poi specificate da quello che si chiama tensore metrico. Esso è il tensore che specifica le lunghezze in ogni punto e direzione:
𝑑𝑙2 = 𝑔𝑖𝑗𝑑𝑥𝑖𝑑𝑥𝑗
Con questa espressione indichiamo quanto è lungo (𝑑𝑙) un tratto di curva nella direzione indicata dal vettore infinitesimo formato dalla componenti 𝑑𝑥𝑖: ogni componente riceve un “peso” in lunghezza dato dal tensore metrico 𝑔𝑖𝑗 . Per trovare la lunghezza di una curva basta prendere una parametrizzazione qualsiasi
𝑥𝑖 = 𝑥𝑖(𝑠), 𝑠 ∈ [𝑎, 𝑏]
Dove con 𝑥𝑖 indichiamo le singole componenti, ed integrare
𝑙 = �𝑑𝑙 = � �𝑔𝑖𝑗𝑑𝑥𝑖𝑑𝑥𝑗𝑐𝑢𝑟𝑣𝑎
= � �𝑔𝑖𝑗𝑑𝑥𝑖𝑑𝑠
𝑑𝑥𝑗𝑑𝑠
𝑑𝑠𝑏
𝑎
Usando il tensore metrico è anche possibile calcolare superfici, e più avanti quelle che chiameremo iper superfici, ovvero oggetti in uno spazio di dimensione n che hanno meno di n dimensioni. Nel caso delle superfici per esempio avremo
𝑥𝑖 = 𝑥𝑖(𝑠1, 𝑠2), 𝑠1 ∈ [𝑎, 𝑏] 𝑠2 ∈ [𝑐,𝑑]
E il tensore metrico che vale sulla superficie sarà
𝑔′𝑖𝑗 = 𝑔𝑙𝑚𝑑𝑥𝑙𝑑𝑠𝑖
𝑑𝑥𝑚𝑑𝑠𝑗
𝑑𝐴 = �𝐷𝑒𝑡�𝑔𝑖𝑗��𝑑�⃗�1𝑖 × 𝑑�⃗�2𝑗� = �𝐷𝑒𝑡�𝑔′𝑖𝑗�𝑑𝑠1𝑑𝑠2 = �𝐷𝑒𝑡 �𝑔𝑙𝑚𝑑𝑥𝑙𝑑𝑠𝑖
𝑑𝑥𝑚𝑑𝑠𝑗
� 𝑑𝑠1𝑑𝑠2
= �𝐷𝑒𝑡[𝑔𝑙𝑚]𝐷𝑒𝑡 �𝑑𝑥𝑙𝑑𝑠𝑖
� 𝑑𝑠1𝑑𝑠2
Dove l’ultimo passaggio vale solo se anche lo spazio di partenza è una superficie, e si ottiene (in questo caso)
𝐴 = � 𝑑𝑠1 � 𝑑𝑠2�𝐷𝑒𝑡�𝑔𝑖𝑗�𝐷𝑒𝑡 �𝑑𝑥𝑖𝑑𝑠𝑗
�𝑑𝑠1𝑑𝑠2𝑑
𝑐
𝑏
𝑎

Alcuni esempi in due dimensioni Lo spazio euclideo ha metrica cosiddetta “piatta”. La metrica in un piano è
𝑔𝑖𝑗 = �1 00 1�
Segmento su retta Per cui la lunghezza di un segmento su una retta di equazione
𝑦 = 𝑚𝑥 + 𝑛
di sui una parametrizzazione è
�𝑥 = 𝑠
𝑦 = 𝑚𝑠 + 𝑛
Da 𝑥 = 𝑎 a 𝑥 = 𝑏, estremi a cui corrisponde 𝑠 ∈ [𝑎, 𝑏]
è
𝑙 = �𝑑𝑙 = � �𝑔𝑖𝑗𝑑𝑥𝑖𝑑𝑥𝑗𝑐𝑢𝑟𝑣𝑎
= � �𝑔𝑖𝑗𝑑𝑥𝑖𝑑𝑠
𝑑𝑥𝑗𝑑𝑠
𝑑𝑠𝑏
𝑎= � �(1 𝑚) �1 0
0 1� �1𝑚�𝑑𝑠
𝑏
𝑎
= �1 + 𝑚2� 𝑑𝑠𝑏
𝑎= �1 + 𝑚2(𝑏 − 𝑎)
Possiamo fare il controllo calcolando semplicemente la distanza fra i due punti
𝐴 = (𝑎,𝑚𝑎 + 𝑛)𝐵 = (𝑏,𝑚𝑏 + 𝑛)
𝑙�(𝑏 − 𝑎)2 + (𝑚𝑏 + 𝑛 −𝑚𝑎 − 𝑛)2 = �1 + 𝑚2(𝑏 − 𝑎)
Circonferenza
�𝑥 = 𝑅𝐶𝑜𝑠(𝜃)𝑦 = 𝑅𝑆𝑖𝑛(𝜃) 𝜃 ∈ [0,2𝜋]
𝑙 = �𝑑𝑙 = � �𝑔𝑖𝑗𝑑𝑥𝑖𝑑𝑥𝑗𝑐𝑢𝑟𝑣𝑎
= � �𝑔𝑖𝑗𝑑𝑥𝑖𝑑𝑠
𝑑𝑥𝑗𝑑𝑠
𝑑𝑠2𝜋
0
= � �(−𝑅𝑆𝑖𝑛(𝜃) 𝑅𝐶𝑜𝑠(𝜃)) �1 00 1� �
−𝑅𝑆𝑖𝑛(𝜃)𝑅𝐶𝑜𝑠(𝜃) � 𝑑𝑠
2𝜋
0= � �𝑅2𝐶𝑜𝑠2(𝜃) + 𝑅2𝑆𝑖𝑛2(𝜃)𝑑𝑠
2𝜋
0
= 𝑅� 𝑑𝑠2𝜋
0= 2𝜋𝑅
Area del quadrato
�𝑥 = 𝑠1𝑦 = 𝑠2 𝑠1 ∈ [0, 𝑙]; 𝑠2 ∈ [0, 𝑙]
𝐴 = �𝑑𝐴 = � 𝑑𝑠1 � 𝑑𝑠2𝐷𝑒𝑡�𝑔𝑖𝑗�𝐷𝑒𝑡 �𝑑𝑥𝑖𝑑𝑠𝑗
�𝑙
0
𝑙
0= � 𝑑𝑠1 � 𝑑𝑠2𝐷𝑒𝑡 �
1 00 1�𝐷𝑒𝑡 �
1 00 1�
𝑙
0
𝑙
0

= � 𝑑𝑠1 � 𝑑𝑠2𝑙
0
𝑙
0= 𝑙2
Area del cerchio
�𝑥 = 𝑟𝐶𝑜𝑠(𝜃)𝑦 = 𝑟𝑆𝑖𝑛(𝜃) 𝑟 ∈ [0,𝑅],𝜃 ∈ [0,2𝜋]
𝐴 = � 𝑑𝑟� 𝑑𝜃𝐷𝑒𝑡�𝑔𝑖𝑗�𝐷𝑒𝑡 �𝑑𝑥𝑖𝑑𝑟𝑗
�2𝜋
0
𝑅
0= � 𝑑𝑟� 𝑑𝜃𝐷𝑒𝑡 �1 0
0 1�𝐷𝑒𝑡 �𝐶𝑜𝑠(𝜃) 𝑆𝑖𝑛(𝜃)−𝑟𝑆𝑖𝑛(𝜃) 𝑟𝐶𝑜𝑠(𝜃)�
2𝜋
0
𝑅
0
Dove con 𝑑𝑥𝑖𝑑𝑟𝑗
intendiamo le derivate rispetto alle due nuove coordinate
= � 𝑑𝑟� 𝑑𝜃𝑟2𝜋
0
𝑅
0= 𝜋𝑟2
Alcuni esempi in tre dimensioni La metrica è
𝑔𝑖𝑗 = �1 0 00 1 00 0 1
�
Superficie della sfera
�𝑥 = 𝑅𝑆𝑖𝑛(𝜃)𝐶𝑜𝑠(𝜑)𝑦 = 𝑅𝑆𝑖𝑛(𝜃)𝑆𝑖𝑛(𝜑)
𝑧 = 𝑅𝐶𝑜𝑠(𝜃) 𝜃 ∈ [0,𝜋],𝜑 ∈ [0,2𝜋]
𝐴 = � 𝑑𝜃� 𝑑𝜑�𝐷𝑒𝑡 �𝑔𝑖𝑗𝑑𝑥𝑖𝑑𝑥𝑙
𝑑𝑥𝑗𝑑𝑥𝑚
�2𝜋
0
𝜋
0
= � 𝑑𝜃� 𝑑𝜑�𝐷𝑒𝑡 ��𝑅𝐶𝑜𝑠(𝜃)𝐶𝑜𝑠(𝜑) −𝑅𝑆𝑖𝑛(𝜃)𝑆𝑖𝑛(𝜑) −𝑅𝑆𝑖𝑛(𝜃)
𝑅𝐶𝑜𝑠(𝜃)𝑆𝑖𝑛(𝜑) 𝑅𝑆𝑖𝑛(𝜃)𝐶𝑜𝑠(𝜑) 0 � �𝑅𝐶𝑜𝑠(𝜃)𝐶𝑜𝑠(𝜑) 𝑅𝐶𝑜𝑠(𝜃)𝑆𝑖𝑛(𝜑)−𝑅𝑆𝑖𝑛(𝜃)𝑆𝑖𝑛(𝜑) 𝑅𝑆𝑖𝑛(𝜃)𝐶𝑜𝑠(𝜑)
−𝑅𝑆𝑖𝑛(𝜃) 0��
2𝜋
0
𝜋
0
= � 𝑑𝜃� 𝑑𝜑�𝐷𝑒𝑡 �𝑅2 0
0 𝑅2𝑆𝑖𝑛2(𝜃)�2𝜋
0
𝜋
0= 2𝜋𝑅2 � 𝑑𝜃𝑆𝑖𝑛(𝜃)
𝜋
0= 4𝜋𝑅2
Sistemi Cartesiani e Coordinate curvilinee I cambiamenti di coordinate in questi due sistemi hanno delle importanti differenze:
1) Partendo da un sistema cartesiano in cui la metrica è piatta ovunque, passare a un altro sistema cartesiano comporta di usare delle trasformazioni lineari nelle coordinate, per cui si ottiene che la metrica è nuovamente ovunque piatta perché le matrici contenenti le derivate delle nuove coordinate rispetto alle vecchie sono indipendenti da 𝑥 in quanto le trasformazioni sono appunto lineari:
𝑔′𝑖𝑗 = 𝑔𝑙𝑚𝑑𝑥′𝑙𝑑𝑥𝑖
𝑑𝑥′𝑚𝑑𝑥𝑗

2) Mentre nei sistemi cartesiano gli assi sono fissi e non dipendono dal punto, nei sistemi curvilinei passando da un punto a un altro cambia anche l’orientamento degli assi, per cui per esempio per fare una derivata, dove è necessario fare la differenza fra due vettori in due diversi punti 𝑥 e 𝑥 + 𝑑𝑥 è prima necessario riscrivere il vettore in 𝑥 + 𝑑𝑥 in base agli assi usati in x, quindi fare la differenza e il limite ottenendo la derivata.
Alcuni esempi di calcolo di metriche in coordinate curvilinee
Coordinate Cilindriche Le nuove coordinate sono
�𝜌 = �𝑥2 + 𝑦2
𝜃 = 𝐴𝑟𝑐𝑇𝑎𝑛 �𝑦𝑥�
𝑧 = 𝑧
La matrice di trasformazione è
𝑑𝑥′𝑙𝑑𝑥𝑖
=
⎝
⎜⎛
𝑥�𝑥2 + 𝑦2
𝑦�𝑥2 + 𝑦2
0
−𝑦
𝑥2 + 𝑦2𝑥
𝑥2 + 𝑦20
0 0 1⎠
⎟⎞
= �
𝐶𝑜𝑠(𝜃) 𝑆𝑖𝑛(𝜃) 0
−1𝜌𝑆𝑖𝑛(𝜃)
1𝜌𝐶𝑜𝑠(𝜃) 0
0 0 1
�
La nuova metrica risulta essere:
𝑔′𝑖𝑗 = 𝑔𝑙𝑚𝑑𝑥′𝑙𝑑𝑥𝑖
𝑑𝑥′𝑚𝑑𝑥𝑗
=
⎝
⎜⎛𝐶𝑜𝑠(𝜃) −
1𝜌𝑆𝑖𝑛(𝜃) 0
𝑆𝑖𝑛(𝜃)1𝜌𝐶𝑜𝑠(𝜃) 0
0 0 1⎠
⎟⎞�
1 0 00 1 00 0 1
��
𝐶𝑜𝑠(𝜃) 𝑆𝑖𝑛(𝜃) 0
−1𝜌𝑆𝑖𝑛(𝜃)
1𝜌𝐶𝑜𝑠(𝜃) 0
0 0 1
�
= �1 0 00 𝜌2 00 0 1
�
Coordinate Sferiche Le nuove coordinate sono
⎩⎪⎨
⎪⎧ 𝜌 = �𝑥2 + 𝑦2 + 𝑧2
𝜃 = 𝐴𝑟𝑐𝐶𝑜𝑠 �𝑧
�𝑥2 + 𝑦2 + 𝑧2�
𝜑 = 𝐴𝑟𝑐𝑇𝑎𝑛 �𝑦𝑥�
La matrice di trasformazione è

𝑑𝑥′𝑙𝑑𝑥𝑖
=
⎝
⎜⎜⎜⎛
𝑥�𝑥2 + 𝑦2 + 𝑧2
𝑦�𝑥2 + 𝑦2 + 𝑧2
𝑧�𝑥2 + 𝑦2 + 𝑧2
𝑥𝑧(𝑥2 + 𝑦2 + 𝑧2)�𝑥2 + 𝑦2
𝑦𝑧(𝑥2 + 𝑦2 + 𝑧2)�𝑥2 + 𝑦2
−𝑥2 + 𝑦2
(𝑥2 + 𝑦2 + 𝑧2)�𝑥2 + 𝑦2
−𝑦
�𝑥2 + 𝑦2𝑥
�𝑥2 + 𝑦20
⎠
⎟⎟⎟⎞
=
⎝
⎜⎛
𝑆𝑖𝑛(𝜃)𝐶𝑜𝑠(𝜑) 𝑆𝑖𝑛(𝜃)𝑆𝑖𝑛(𝜑) 𝐶𝑜𝑠(𝜃)1𝑟𝐶𝑜𝑠(𝜃)𝐶𝑜𝑠(𝜑)
1𝑟𝐶𝑜𝑠(𝜃)𝑆𝑖𝑛(𝜑) −
1𝑟𝑆𝑖𝑛(𝜃)
−𝑆𝑖𝑛(𝜑)𝑟𝑆𝑖𝑛(𝜃)
𝐶𝑜𝑠(𝜑)𝑟𝑆𝑖𝑛(𝜃) 0 ⎠
⎟⎞
𝑔′𝑖𝑗 = 𝑔𝑙𝑚𝑑𝑥′𝑙𝑑𝑥𝑖
𝑑𝑥′𝑚𝑑𝑥𝑗
=
⎝
⎜⎜⎜⎛𝑆𝑖𝑛(𝜃)𝐶𝑜𝑠(𝜑)
1𝑟𝐶𝑜𝑠(𝜃)𝐶𝑜𝑠(𝜑) −
𝑆𝑖𝑛(𝜑)𝑟𝑆𝑖𝑛(𝜃)
𝑆𝑖𝑛(𝜃)𝑆𝑖𝑛(𝜑)1𝑟𝐶𝑜𝑠(𝜃)𝑆𝑖𝑛(𝜑)
𝐶𝑜𝑠(𝜑)𝑟𝑆𝑖𝑛(𝜃)
𝐶𝑜𝑠(𝜃) −1𝑟𝑆𝑖𝑛(𝜃) 0 ⎠
⎟⎟⎟⎞�
1 0 00 1 00 0 1
�
⎝
⎜⎛
𝑆𝑖𝑛(𝜃)𝐶𝑜𝑠(𝜑) 𝑆𝑖𝑛(𝜃)𝑆𝑖𝑛(𝜑) 𝐶𝑜𝑠(𝜃)1𝑟𝐶𝑜𝑠(𝜃)𝐶𝑜𝑠(𝜑)
1𝑟𝐶𝑜𝑠(𝜃)𝑆𝑖𝑛(𝜑) −
1𝑟𝑆𝑖𝑛(𝜃)
−𝑆𝑖𝑛(𝜑)𝑟𝑆𝑖𝑛(𝜃)
𝐶𝑜𝑠(𝜑)𝑟𝑆𝑖𝑛(𝜃) 0 ⎠
⎟⎞
= �1 0 00 𝑟2 00 0 𝑟2𝑆𝑖𝑛2(𝜃)
�
Simboli di Christoffel Per trasportare i vettori parallelamente e fare le derivate si usano degli oggetti detti “connessioni” o “Simboli di Christoffel”, così definiti:
Γ𝑎;𝑏𝑐 =12𝑔𝑎𝑑−1 �
𝜕𝜕𝑥𝑏
𝑔𝑑𝑐 +𝜕𝜕𝑥𝑐
𝑔𝑑𝑏 −𝜕𝜕𝑥𝑑
𝑔𝑏𝑐�
Come si può vedere le connessioni dipendono dalle derivate della metrica, sono quindi identicamente nulle in tutti i sistemi cartesiani.
Utilizzando le connessioni possiamo definire una derivata covariante per un vettore
𝐷𝑎𝑓𝑏 = �𝜕𝜕𝑥𝑎
𝛿𝑏𝑐 − Γ𝑐;𝑎𝑏�𝑓𝑐
I simboli di Christoffel possono essere usati per calcolare il laplaciano in coordinate curvilinee:
∇2= 𝑔𝑎𝑏−1𝐷𝑎𝜕𝜕𝑥𝑏
= 𝑔𝑎𝑏−1𝜕2
𝜕𝑥𝑎𝜕𝑥𝑏− 𝑔𝑎𝑏−1Γ𝑐;𝑎𝑏
𝜕𝜕𝑥𝑐
Alcuni esempi di calcolo di simboli di Christoffel
Calcolo dei simboli di Christoffel e del laplaciano per coordinate Cilindriche La metrica dipende solo da una coordinata, ed è diagonale, quindi possono essere non nulli solo connessioni con un indice uguale a 2:

Γ1;22 =12𝑔1𝑑−1 �
𝜕𝜕𝑥2
𝑔𝑑2 +𝜕𝜕𝑥2
𝑔𝑑2 −𝜕𝜕𝑥𝑑
𝑔22� =12𝑔11−1 �
𝜕𝜕𝑥2
𝑔12 +𝜕𝜕𝑥2
𝑔12 −𝜕𝜕𝑥1
𝑔22�
=12�−
𝜕𝜕𝜌
(𝜌2)� = −𝜌
Γ2;12 = Γ2;21 =12𝑔2𝑑−1 �
𝜕𝜕𝑥1
𝑔𝑑2 +𝜕𝜕𝑥2
𝑔𝑑1 −𝜕𝜕𝑥𝑑
𝑔12� =12𝑔22−1 �
𝜕𝜕𝑥1
𝑔22 +𝜕𝜕𝑥2
𝑔21 −𝜕𝜕𝑥2
𝑔12�
=12�
1𝜌2� �
𝜕𝜕𝜌
(𝜌2)� =1𝜌
Tutti gli altri simboli sono nulli.
∇2= 𝑔𝑎𝑏−1𝐷𝑎𝜕𝜕𝑥𝑏
= 𝑔𝑎𝑏−1𝜕2
𝜕𝑥𝑎𝜕𝑥𝑏− 𝑔𝑎𝑏−1Γ𝑐;𝑎𝑏
𝜕𝜕𝑥𝑐
=𝜕2
𝜕𝜌2+
1𝜌2
𝜕2
𝜕𝜃2+𝜕2
𝜕𝑧2−
1𝜌2
(−𝜌)𝜕𝜕𝜌
=𝜕2
𝜕𝜌2+
1𝜌2
𝜕2
𝜕𝜃2+𝜕2
𝜕𝑧2+
1𝜌𝜕𝜕𝜌
Calcolo dei simboli di Christoffel e del laplaciano per coordinate Sferiche
Γ1;22 =12𝑔1𝑑−1 �
𝜕𝜕𝑥2
𝑔𝑑2 +𝜕𝜕𝑥2
𝑔𝑑2 −𝜕𝜕𝑥𝑑
𝑔22� =12𝑔11−1 �
𝜕𝜕𝑥2
𝑔12 +𝜕𝜕𝑥2
𝑔12 −𝜕𝜕𝑥1
𝑔22�
=12�−
𝜕𝜕𝑟
(𝑟2)� = −𝑟
Γ1;33 =12𝑔1𝑑−1 �
𝜕𝜕𝑥3
𝑔𝑑3 +𝜕𝜕𝑥3
𝑔𝑑3 −𝜕𝜕𝑥𝑑
𝑔33� =12𝑔11−1 �
𝜕𝜕𝑥3
𝑔13 +𝜕𝜕𝑥3
𝑔13 −𝜕𝜕𝑥1
𝑔33�
=12�−
𝜕𝜕𝑟
(𝑟2𝑆𝑖𝑛2(𝜃))� = −𝑟𝑆𝑖𝑛2(𝜃)
Γ2;33 =12𝑔2𝑑−1 �
𝜕𝜕𝑥3
𝑔𝑑3 +𝜕𝜕𝑥3
𝑔𝑑3 −𝜕𝜕𝑥𝑑
𝑔33� =12𝑔22−1 �
𝜕𝜕𝑥3
𝑔23 +𝜕𝜕𝑥3
𝑔23 −𝜕𝜕𝑥2
𝑔33�
=1
2𝑟2�−
𝜕𝜕𝜃
(𝑟2𝑆𝑖𝑛2(𝜃))� = −𝐶𝑜𝑠(𝜃)𝑆𝑖𝑛(𝜃)
Γ2;12 = Γ2;21 =12𝑔2𝑑−1 �
𝜕𝜕𝑥1
𝑔𝑑2 +𝜕𝜕𝑥2
𝑔𝑑1 −𝜕𝜕𝑥𝑑
𝑔12� =12𝑔22−1 �
𝜕𝜕𝑥1
𝑔22 +𝜕𝜕𝑥2
𝑔21 −𝜕𝜕𝑥2
𝑔12�
=12�
1𝑟2� �
𝜕𝜕𝑟
(𝑟2)� =1𝑟
Γ3;13 = Γ3;31 =12𝑔3𝑑−1 �
𝜕𝜕𝑥1
𝑔𝑑3 +𝜕𝜕𝑥3
𝑔𝑑1 −𝜕𝜕𝑥𝑑
𝑔13� =12𝑔33−1 �
𝜕𝜕𝑥1
𝑔33 +𝜕𝜕𝑥3
𝑔31 −𝜕𝜕𝑥3
𝑔13�
=12�
1𝑟2𝑆𝑖𝑛2(𝜃)
� �𝜕𝜕𝑟
(𝑟2𝑆𝑖𝑛2(𝜃))� =1𝑟

Γ3;23 = Γ3;32 =12𝑔3𝑑−1 �
𝜕𝜕𝑥2
𝑔𝑑3 +𝜕𝜕𝑥3
𝑔𝑑2 −𝜕𝜕𝑥𝑑
𝑔23� =12𝑔33−1 �
𝜕𝜕𝑥2
𝑔33 +𝜕𝜕𝑥3
𝑔32 −𝜕𝜕𝑥3
𝑔23�
=12�
1𝑟2𝑆𝑖𝑛2(𝜃)
� �𝜕𝜕𝜃
(𝑟2𝑆𝑖𝑛2(𝜃))� =1
𝑇𝑎𝑛(𝜃)
Tutti gli altri simboli sono nulli
∇2= 𝑔𝑎𝑏−1𝐷𝑎𝜕𝜕𝑥𝑏
= 𝑔𝑎𝑏−1𝜕2
𝜕𝑥𝑎𝜕𝑥𝑏− 𝑔𝑎𝑏−1Γ𝑐;𝑎𝑏
𝜕𝜕𝑥𝑐
=𝜕2
𝜕𝑟2+
1𝑟2
𝜕2
𝜕𝜃2+
1𝑟2𝑆𝑖𝑛2(𝜃)
𝜕2
𝜕𝜑2−
1𝑟2
(−𝑟)𝜕𝜕𝑟
−1
𝑟2𝑆𝑖𝑛2(𝜃) (−𝑟𝑆𝑖𝑛2(𝜃))𝜕𝜕𝑟
−1
𝑟2𝑆𝑖𝑛2(𝜃) �−𝐶𝑜𝑠(𝜃)𝑆𝑖𝑛(𝜃)�
𝜕𝜕𝜃
=𝜕2
𝜕𝑟2+
1𝑟2
𝜕2
𝜕𝜃2+
1𝑟2𝑆𝑖𝑛2(𝜃)
𝜕2
𝜕𝜑2+
2𝑟𝜕𝜕𝑟
+1
𝑟2𝑇𝑎𝑛(𝜃)𝜕𝜕𝜃
Trasporto parallelo Come abbiamo detto, per fare una derivata dovremmo fare la differenza di due vettori in due punti dello spazio infinitamente vicini, tuttavia poiché cambiano gli assi da un punto all’altro, fare la differenza delle componenti è sbagliato. Ci serve uno strumento che riscriva le componenti del vettore nel punto B in funzione delle componenti nel punto A, e solo una volta fatto ciò fare la differenza con il vettore del punto A. Ci serve cioè uno strumento che trasporti parallelamente il vettore del punto B nel punto A.
Le connessioni sono appunto quello che ci serve:
Γ(x)𝑎;𝑏𝑐𝐴(𝑥)𝑏𝑑𝑥𝑐 = 𝐴𝑎(𝑥) − 𝐴𝑎𝑥→𝑥+𝑑𝑥(𝑥)
Γ(x)𝑎;𝑏𝑐𝐴(𝑥)𝑎𝑑𝑥𝑏 = 𝐴𝑐𝑥→𝑥+𝑑𝑥(𝑥) − 𝐴𝑐(𝑥)
Dove 𝐴𝑥→𝑥+𝑑𝑥(𝑥) indica il vettore del punto 𝑥 trasportato parallelamente in 𝑥 + 𝑑𝑥.
In questo modo la derivata covariante risulta definita come volevamo:
𝐷𝑎𝐴𝑏𝑑𝑥𝑎 = �𝜕𝜕𝑥𝑎
𝛿𝑏𝑐 − Γ𝑐;𝑎𝑏�𝐴𝑐𝑑𝑥𝑎 = �𝐴𝑏(𝑥 + 𝑑𝑥) − 𝐴𝑏(𝑥)� − �𝐴𝑏𝑥→𝑥+𝑑𝑥(𝑥) − 𝐴𝑏(𝑥)�
= 𝐴𝑏(𝑥 + 𝑑𝑥) − 𝐴𝑏𝑥→𝑥+𝑑𝑥(𝑥)
Trasporto parallelo attorno a superficie infinitesima I simboli di Christoffel servono a “compensare” il cambiamento che subiscono gli assi passando da un punto all’altro dello spazio, tuttavia la presenza di simboli non nulli non significa che siamo in uno spazio curvo, infatti tutti gli spazi considerati finora sono Euclidei e piatti, abbiamo solo effettuato un cambio di coordinate ma questo non varia certo la natura dello spazio.
Consideriamo ora una superficie infinitesima a forma di parallelogramma, di lati 𝑑𝑥 e 𝑑𝑦. Facciamo un trasporto parallelo attorno alla curva chiusa che delimita il bordo di tale superficie, e calcoliamo la variazione che subisce un vettore qualsiasi durante questo processo. Se tale variazione non è nulla diremo che lo spazio in questione è curvo. Il percorso sarà 𝑥−> 𝑥 + 𝑑𝑥−> 𝑥 + 𝑑𝑥 + 𝑑𝑦−> 𝑥 + 𝑑𝑦−> 𝑥.

𝛿𝐴𝑎 = 𝛿𝑥→𝑥+𝑑𝑥𝐴𝑎 + 𝛿𝑥+𝑑𝑥→𝑥+𝑑𝑥+𝑑𝑦𝐴𝑎 + 𝛿𝑥+𝑑𝑥+𝑑𝑦→𝑥+𝑑𝑦𝐴𝑎 + 𝛿𝑥+𝑑𝑦→𝑥𝐴𝑎
= 𝛿𝑥→𝑥+𝑑𝑥𝐴𝑎 + 𝛿𝑥+𝑑𝑥→𝑥+𝑑𝑥+𝑑𝑦𝐴𝑎 − 𝛿𝑥+𝑑𝑦→𝑥+𝑑𝑥+𝑑𝑦𝐴𝑎 − 𝛿𝑥→𝑥+𝑑𝑦𝐴𝑎
𝛿𝑥→𝑥+𝑑𝑥𝐴𝑎 = 𝐴𝑎𝑥→𝑥+𝑑𝑥(𝑥) − 𝐴𝑎(𝑥) = −Γ(x)𝑎;𝑏𝑐𝐴(𝑥)𝑏𝑑𝑥𝑐
𝛿𝑥→𝑥+𝑑𝑦𝐴𝑎 = 𝐴𝑎𝑥→𝑥+𝑑𝑦(𝑥) − 𝐴𝑎(𝑥) = −Γ(x)𝑎;𝑏𝑐𝐴(𝑥)𝑏𝑑𝑦𝑐
𝛿𝑥+𝑑𝑥→𝑥+𝑑𝑥+𝑑𝑦𝐴𝑎 = 𝐴𝑎[𝑥→𝑥+𝑑𝑥]→𝑥+𝑑𝑥+𝑑𝑦(𝑥) − 𝐴𝑎𝑥→𝑥+𝑑𝑥(𝑥) = −Γ(x + dx)𝑎;𝑏𝑐𝐴𝑏𝑥→𝑥+𝑑𝑥𝑑𝑦𝑐
= −�Γ(x)𝑎;𝑏𝑐 +𝜕𝜕𝑥𝑑
Γ(x)𝑎;𝑏𝑐𝑑𝑥𝑑� �𝐴𝑏(𝑥) − Γ(x)𝑏;𝑒𝑓𝐴(𝑥)𝑒𝑑𝑥𝑓�𝑑𝑦𝑐
≅ −Γ(x)𝑎;𝑏𝑐𝐴𝑏(𝑥)𝑑𝑦𝑐 −𝜕𝜕𝑥𝑑
Γ(x)𝑎;𝑏𝑐𝐴𝑏(𝑥)𝑑𝑥𝑑𝑑𝑦𝑐 + Γ(x)𝑎;𝑏𝑐Γ(x)𝑏;𝑒𝑓𝐴(𝑥)𝑒𝑑𝑥𝑓𝑑𝑦𝑐
𝛿𝑥+𝑑𝑦→𝑥+𝑑𝑥+𝑑𝑦𝐴𝑎 = 𝐴𝑎[𝑥→𝑥+𝑑𝑦]→𝑥+𝑑𝑥+𝑑𝑦(𝑥) − 𝐴𝑎
𝑥→𝑥+𝑑𝑦(𝑥) = −Γ(x + dy)𝑎;𝑏𝑐𝐴𝑏𝑥→𝑥+𝑑𝑦𝑑𝑥𝑐
= −�Γ(x)𝑎;𝑏𝑐 +𝜕𝜕𝑥𝑑
Γ(x)𝑎;𝑏𝑐𝑑𝑦𝑑� �𝐴𝑏(𝑥) − Γ(x)𝑏;𝑒𝑓𝐴(𝑥)𝑒𝑑𝑦𝑓�𝑑𝑥𝑐
≅ −Γ(x)𝑎;𝑏𝑐𝐴𝑏(𝑥)𝑑𝑥𝑐 −𝜕𝜕𝑥𝑑
Γ(x)𝑎;𝑏𝑐𝐴𝑏(𝑥)𝑑𝑦𝑑𝑑𝑥𝑐 + Γ(x)𝑎;𝑏𝑐Γ(x)𝑏;𝑒𝑓𝐴(𝑥)𝑒𝑑𝑦𝑓𝑑𝑥𝑐
𝛿𝐴𝑎 = �−Γ(x)𝑎;𝑏𝑐𝐴(𝑥)𝑏𝑑𝑥𝑐�
+ �−Γ(x)𝑎;𝑏𝑐𝐴𝑏(𝑥)𝑑𝑦𝑐 −𝜕𝜕𝑥𝑑
Γ(x)𝑎;𝑏𝑐𝐴𝑏(𝑥)𝑑𝑥𝑑𝑑𝑦𝑐 + Γ(x)𝑎;𝑏𝑐Γ(x)𝑏;𝑒𝑓𝐴(𝑥)𝑒𝑑𝑥𝑓𝑑𝑦𝑐�
− �−Γ(x)𝑎;𝑏𝑐𝐴𝑏(𝑥)𝑑𝑥𝑐 −𝜕𝜕𝑥𝑑
Γ(x)𝑎;𝑏𝑐𝐴𝑏(𝑥)𝑑𝑦𝑑𝑑𝑥𝑐 + Γ(x)𝑎;𝑏𝑐Γ(x)𝑏;𝑒𝑓𝐴(𝑥)𝑒𝑑𝑦𝑓𝑑𝑥𝑐�
− �−Γ(x)𝑎;𝑏𝑐𝐴(𝑥)𝑏𝑑𝑦𝑐�
=𝜕𝜕𝑥𝑑
Γ(x)𝑎;𝑏𝑐𝐴𝑏(𝑥)𝑑𝑦𝑑𝑑𝑥𝑐 −𝜕𝜕𝑥𝑑
Γ(x)𝑎;𝑏𝑐𝐴𝑏(𝑥)𝑑𝑥𝑑𝑑𝑦𝑐 + Γ(x)𝑎;𝑏𝑐Γ(x)𝑏;𝑒𝑓𝐴(𝑥)𝑒𝑑𝑥𝑓𝑑𝑦𝑐
− Γ(x)𝑎;𝑏𝑐Γ(x)𝑏;𝑒𝑓𝐴(𝑥)𝑒𝑑𝑦𝑓𝑑𝑥𝑐
= �𝜕𝜕𝑥𝑑
Γ(x)𝑎;𝑏𝑐 −𝜕𝜕𝑥𝑐
Γ(x)𝑎;𝑏𝑐 + Γ(x)𝑎;𝑒𝑑Γ(x)𝑒;𝑏𝑐 − Γ(x)𝑎;𝑒𝑐Γ(x)𝑒;𝑏𝑑�𝐴𝑏(𝑥)𝑑𝑥𝑐𝑑𝑦𝑑
= 𝑅𝑎;𝑏𝑐𝑑𝐴𝑏(𝑥)𝑑𝑥𝑐𝑑𝑦𝑑
Tensore di curvatura e Scalare di Kretschmann Il tensore che ci dice se uno spazio è curvo o no è il tensore di curvatura di Riemann così definito:
𝑅𝑎;𝑏𝑐𝑑 =𝜕𝜕𝑥𝑑
Γ𝑎;𝑏𝑐 −𝜕𝜕𝑥𝑐
Γ𝑎;𝑏𝑑 + Γ𝑎;𝑑𝑒Γ𝑒;𝑏𝑐 − Γ𝑎;𝑐𝑒Γ𝑒;𝑏𝑑
La presenza di elementi non nulli in questo tensore è indice che lo spazio è veramente curvo e non piatto.
Possiamo definire una versione più simmetrica di questo tensore come
𝑅𝑎𝑏𝑐𝑑 = 𝑔𝑎𝑘−1 �𝜕𝜕𝑥𝑑
Γ𝑘;𝑏𝑐 −𝜕𝜕𝑥𝑐
Γ𝑘;𝑏𝑑 + Γ𝑘;𝑑𝑒Γ𝑒;𝑏𝑐 − Γ𝑘;𝑐𝑒Γ𝑒;𝑏𝑑�

Tale tensore è antisimmetrico sui primi due indici e sugli ultimi due indici, è simmetrico per scambio dei primi due indici con i secondi due indici e rispetta l’Identità di Bianchi su una qualsiasi delle due coppie di indici.
Lo scalare di Kretschmann è definito come
𝐾 = 𝑅𝑎;𝑏𝑐𝑑𝑅𝑎;𝑏𝑐𝑑
Alcuni esempi di calcolo del tensore di curvatura
Calcolo del tensore di curvatura per coordinate Cilindriche
𝑅1;212 =𝜕𝜕𝑥2
Γ1;21 −𝜕𝜕𝑥1
Γ1;22 + Γ1;2𝑒Γ𝑒;21 − Γ1;1𝑒Γ𝑒;22 = −𝜕𝜕𝜌
Γ1;22 + Γ1;22Γ2;21 = 1− 1 = 0
Per le proprietà di simmetria del tensore di R. e per il fatto che tutte le terze componenti delle connessioni sono nulle questi erano gli ultimi elementi da controllare. Lo spazio piatto dopo aver cambiato coordinate è ancora piatto!
Calcolo del tensore di curvatura per coordinate Cilindriche restringendosi alla superficie del cilindro
𝑔𝑖𝑗 = �𝜌2 0
0 1�
Non cambia nulla rispetto al calcolo precedente, in quanto ora il tensore di R. contiene solo le componenti 2 e 3 e quindi l’unica componente indipendente 𝑅2;323 rimane nulla in quanto non dipende dalle derivate rispetto a 𝜌. Andando a calcolare le connessioni, anche queste sono tutte nulle. La superficie laterale di un cilindro non è uno spazio curvo! Infatti se la “tagliamo” possiamo “srotolare” il tale superficie e stenderla su un piano.
Calcolo del tensore di curvatura per coordinate Sferiche Il calcolo in questo caso è molto lungo e non lo riporto per brevità, dato che il risultato è che anche in questo caso che il tensore è identicamente nullo. Ancora una volta è logico che sia così dato che siamo partiti da uno spazio piatto.
Calcolo del tensore di curvatura per coordinate Sferiche restringendosi alla superficie del cilindro La metrica è
𝑔𝑖𝑗 = �𝑅2 0
0 𝑅2𝑆𝑖𝑛2(𝜃)�
Gli unici simboli di Christoffel non nulli sono quelli che dipendevano dalla derivate della coordinata radiale, che ora è fissa:
Γ2;33 =12𝑔2𝑑−1 �
𝜕𝜕𝑥3
𝑔𝑑3 +𝜕𝜕𝑥3
𝑔𝑑3 −𝜕𝜕𝑥𝑑
𝑔33� =12𝑔22−1 �
𝜕𝜕𝑥3
𝑔23 +𝜕𝜕𝑥3
𝑔23 −𝜕𝜕𝑥2
𝑔33�
=1
2𝑅2�−
𝜕𝜕𝜃
(𝑅2𝑆𝑖𝑛2(𝜃))� = −𝐶𝑜𝑠(𝜃)𝑆𝑖𝑛(𝜃)

Γ3;23 = Γ3;32 =12𝑔3𝑑−1 �
𝜕𝜕𝑥2
𝑔𝑑3 +𝜕𝜕𝑥3
𝑔𝑑2 −𝜕𝜕𝑥𝑑
𝑔23� =12𝑔33−1 �
𝜕𝜕𝑥2
𝑔33 +𝜕𝜕𝑥3
𝑔32 −𝜕𝜕𝑥3
𝑔23�
=12�
1𝑅2𝑆𝑖𝑛2(𝜃)
� �𝜕𝜕𝜃
(𝑅2𝑆𝑖𝑛2(𝜃))� =1
𝑇𝑎𝑛(𝜃)
𝑅2;323 =𝜕𝜕𝑥3
Γ2;32 −𝜕𝜕𝑥2
Γ2;33 + Γ2;3𝑒Γ𝑒;32 − Γ2;2𝑒Γ𝑒;33 = −𝜕𝜕𝜃
Γ2;33 + Γ2;33Γ3;32 = 𝑆𝑖𝑛2(𝜃)
Essendo questo elemento non nullo andiamo a calcolare anche l’altro elemento non nullo a lui proporzionale:
𝑅3;223 =𝜕𝜕𝑥3
Γ3;22 −𝜕𝜕𝑥2
Γ3;23 + Γ3;3𝑒Γ𝑒;22 − Γ3;2𝑒Γ𝑒;23 = −𝜕𝜕𝜃
Γ3;23 − Γ3;23Γ3;23 = −1
Abbiamo trovato il nostro primo spazio curvo, la superficie di una sfera!
Lo scalare di Kretschmann in questo caso vale
𝐾 =4𝑅2
Tensore di Ricci e Curvatura Scalare Il tensore di Ricci è una contrazione del tensore di curvatura:
𝑅𝑖𝑗 = 𝑅𝑎;𝑖𝑎𝑗
La curvatura scalare è la sua traccia
𝑆 = 𝑔𝑖𝑗−1𝑅𝑖𝑗
Ed è pari al doppio della curvatura gaussiana
Alcuni esempi di calcolo del tensore di Ricci e della Curvatura scalare
Calcolo del tensore di Ricci e della curvatura scalare sulla superficie della sfera 𝑅22 = 𝑅𝑎;2𝑎2 = 𝑅3;232 = −𝑅3;223 = 1
𝑅33 = 𝑅𝑎;3𝑎3 = 𝑅2;323 = 𝑆𝑖𝑛2(𝜃)
𝑅𝑖𝑗 = �1 00 𝑆𝑖𝑛2(𝜃)�
𝑆 = 𝑔22−1𝑅22 = +𝑔33−1𝑅33 =1𝑅2
+𝑆𝑖𝑛2(𝜃)𝑅2𝑆𝑖𝑛2(𝜃)
=2𝑅2
Infatti la curvatura gaussiana di una sfera è proprio 1𝑅2
Tensore di Einstein È definito come
𝐺𝑖𝑗 = 𝑅𝑖𝑗 −𝑆2𝑔𝑖𝑗

Alcuni esempi di calcolo del tensore di Einstein
Calcolo del tensore di Einstein sulla superficie della sfera
𝐺𝑖𝑗 = 𝑅𝑖𝑗 −𝑆2𝑔𝑖𝑗 = �1 0
0 𝑆𝑖𝑛2(𝜃)� −1𝑅2
�𝑅2 0
0 𝑅2𝑆𝑖𝑛2(𝜃)� = 0
Spazi di Minkowski
Metriche non definite positive Studiando teorie fisiche come la relatività speciale di Einstein, si possono incontrare spazi con metriche non definite positive. Un esempio classico è lo spazio di Minkowski, la cui metrica è
𝑔𝑖𝑗 = �1 00 −1
0 00 0
0 00 0
−1 00 −1
�
Vettori in tali spazi possono aver lunghezza nulla anche se non nulli. Nello spazio di Minkowski i quadrivettori di lunghezza (intervallo spazio temporale) nulla sono quelli fra due eventi separati da un segnale che si muove alla velocità della luce. Per questo motivo eventi con separazione spazio temporale negativa non possono essere l’uno causa dell’altro e non hanno alcuna relazione fra loro. È possibile anche dimostrare che in tale caso è sempre possibile trovare un sistema di riferimento in cui l’ordine temporale di tale eventi appare invertito: non è più definito il concetto di contemporaneità, prima e dopo per eventi con intervallo spazio-tempo negativo. Al contrario gli eventi con intervallo positivo conservano tutte le nozioni di contemporaneità, passato, futuro.
Definizioni di indici Controvarianti e Covarianti Precedentemente, almeno in coordinate cartesiane, potevamo “scordarci” che per fare il prodotto scalare era necessaria la metrica e contrarre direttamente due vettori, dato che la metrica era data dalla matrice identità.
(𝑎 𝑏) �1 00 1� �
𝑐𝑑� = (𝑎 𝑏) �𝑐𝑑�
L’esempio proposto usa uno spazio di dimensione 2 ma dovrebbe essere sufficientemente chiaro. Al contrario ora è necessario ricordarci sempre di usare la metrica. Un modo per ricordarsi di ciò è introdurre due tipi di indici. Gli indici in alto, detti contro varianti, daranno origine ai vettori contro varianti, che trasformano cioè come le quadri-coordinate, (o meglio come il loro differenziale).
Invece definiamo i vettori covarianti, che utilizzano indici in basso, come i vettori già contratti con la metrica e quindi pronti per essere contratti con un vettore contro variante.
𝐴𝑖 = 𝑔𝑖𝑗𝐴𝑗
Gli indici contratti, sempre a coppie di cui uno covariante e uno contro variante, “spariscono” e rimangono gli indici non contratti. La contrazione della metrica quindi in pratica “abbassa” un indice.
La stessa convenzione vale per tensori di ordine superiore. Questi possono avere alcuni indici di un tipo e altri di un altro.

Partendo dalla metrica (definita con gli indici in basso) si può ottenere la sua versione contro variante usando l’identità
𝑔𝑖𝑗 = 𝑔𝑖𝑗−1
In questo modo quando dobbiamo effettuare una contrazione fra indici di tensori, sappiamo se è necessario contrarre prima con la metrica oppure se si può effettuare direttamente la contrazione.
Una cosa importante da notare è che derivando rispetto a una coordinata contro variante si ottiene un indice covariante
𝜕𝑎 =𝜕𝜕𝑥𝑎
Spazi Curvi
Classificazione degli spazi In base a tutti i tensori finora definiti, che qui riassumiamo, usando la nuova notazione di indici covarianti e controvarianti
Γ𝑏𝑐𝑎 =12𝑔𝑎𝑑 �
𝜕𝜕𝑥𝑏
𝑔𝑑𝑐 +𝜕𝜕𝑥𝑐
𝑔𝑑𝑏 −𝜕𝜕𝑥𝑑
𝑔𝑏𝑐�
𝑅𝑏𝑐𝑑𝑎 =𝜕𝜕𝑥𝑑
Γ𝑏𝑐𝑎 −𝜕𝜕𝑥𝑐
Γ𝑏𝑑𝑎 + Γ𝑑𝑒𝑎 Γ𝑏𝑐𝑒 − Γ𝑐𝑒𝑎 Γ𝑏𝑑𝑒
𝑅𝑖𝑗 = 𝑅𝑖𝑎𝑗𝑎
𝑆 = 𝑔𝑖𝑗𝑅𝑖𝑗 = 𝑅𝑎𝑎
𝐺𝑖𝑗 = 𝑅𝑖𝑗 −𝑆2𝑔𝑖𝑗 = 𝑅𝑖𝑗 −
𝑅𝑎𝑎
2𝑔𝑖𝑗
Come potete vedere l’indice che avevamo “separato” con dei “;” era quello che in realtà era contro variante. Questo è il motivo della separazione, il fatto che a differenza degli altri indici (covarianti) lui era di tipo contro variante.
Possiamo ora classificare gli spazi in questo modo:
• Tensore di curvatura nullo: lo spazio è piatto • Tensore di curvatura non nullo, tensore di Ricci nullo: spazio piatto di Ricci • Tensore di curvatura non nullo, tensore di Ricci non nullo, la curvatura scalare è costante: Spazio a
curvatura costante. • Tensore di curvatura non nullo, tensore di ricci non nullo, curvatura scalare non nulla, tensore di
Einstein multiplo dell’identità: spazio di Einstein. • Se è possibile trovare una trasformazione che porta la metrica a essere un multiplo della metrica
piatta allora lo spazio è detto conforme a uno spazio piatto. Ogni spazio a curvatura costante è conformemente piatto. Ogni spazio a due dimensioni è conformemente piatto. Ogni spazio a tre dimensioni dove il Cotton tensor è identicamente nullo è conformemente piatto. Ogni spazio a più

di tre dimensioni con tensore di Weil identicamente nullo è conformemente piatto. Non riportiamo le espressioni di tali tensori per brevità.
Equazione di Einstein
𝑅𝑖𝑗 −𝑅𝑎𝑎
2𝑔𝑖𝑗 − Λ𝑔𝑖𝑗 =
8𝜋𝐺𝑐4
𝑇𝑖𝑗
Nota: contraendo si ottiene:
−𝑅𝑎𝑎 − 4Λ =8𝜋𝐺𝑐4
𝑇𝑎𝑎
Quindi ogni soluzione dell’omogenea con Λ = 0 ha curvatura scalare nulla.
Alcuni esempi di classificazione degli spazi
Coordinate Cilindriche Tensore di curvatura nullo. Spazio piatto.
Coordinate Sferiche Tensore di curvatura nullo. Spazio piatto.
Sistema Ruotante Usiamo coordinate cilindriche e applichiamo la trasformazione
�𝑡′ = 𝑡𝜌′ = 𝜌
𝜃′ = 𝜃 +𝜔𝑡𝑧′ = 𝑧
𝑔𝑖𝑗 = �1 − 𝜌2𝜔2 0
0 −1−𝜌2𝜔 0
0 0−𝜌2𝜔 0
0 0−𝜌2 0
0 −1
�
Tensore di curvatura nullo. Spazio Piatto.
Superficie del cilindro Tensore di curvatura nullo. Spazio piatto.
Superficie della Sfera Tensore di curvatura non nullo. Tensore di ricci non nullo. Curvatura scalare non nulla ma costante. Dimensione 2. Risulta quindi essere uno spazio curvo a curvatura costante conforme a spazio piatto.
Spazio a due dimensioni a curvatura negativa costante È stato il primo spazio infinito con curvatura non nulla scoperto, grazie a Gauss, Bolyai e Lobachevski. La sua scoperta ha dimostrato che è possibile costruire una geometria consistente senza il postulato delle parallele.
𝑔𝑖𝑗 =
⎝
⎜⎛
11− 𝑥2 − 𝑦2
0
01
1 − 𝑥2 − 𝑦2⎠
⎟⎞

Metrica di Schwarzschild È la soluzione dell’equazione di Einstein per uno spazio con una massa puntiforme non ruotante e non carica.
𝑔𝑖𝑗 =
⎝
⎜⎜⎜⎛
1 −2𝑀𝑟
0
0 −1
1− 2𝑀𝑟
0 00 0
0 00 0
−𝑟2 00 −𝑟2𝑆𝑖𝑛2(𝜃)⎠
⎟⎟⎟⎞
Tensore di curvatura non nullo. Tensore di Ricci nullo. Spazio piatto di Ricci.
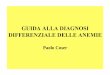
Lo scalare di Kretschmann vale
𝐾 =48𝑀2
𝑟6
È questa la funzione che ci mostrano plottata solitamente parlando dei buchi neri:

Analisi delle singolarità della Metrica di Schwarzschild La metrica sembra presentare due singolarità: 𝑟 = 0 e 𝑟 = 2𝑀. Gli invarianti di curvatura sono singolari in 𝑟 = 0, che quindi è una vera singolarità, ma sono regolari in 𝑟 = 2𝑀. Possiamo chiederci se allora questa singolarità apparente è dovuta alla scelta delle coordinate, ed in effetti è così. Scegliendo queste nuove coordinate:
⎩⎪⎨
⎪⎧𝑢 = �
𝑟2𝑀
− 1𝑒𝑟2𝑀𝐶𝑜𝑠ℎ �
𝑡2𝑀
�
𝑣 = �𝑟
2𝑀− 1𝑒
𝑟2𝑀𝑆𝑖𝑛ℎ �
𝑡2𝑀
�
𝑟 ≥ 2𝑀
⎩⎪⎨
⎪⎧𝑢 = �1−
𝑟2𝑀
𝑒𝑟2𝑀𝑆𝑖𝑛ℎ �
𝑡2𝑀
�
𝑣 = �1−𝑟
2𝑀𝑒𝑟2𝑀𝐶𝑜𝑠ℎ �
𝑡2𝑀
�
𝑟 ≤ 2𝑀
In questo modo il semipiano 𝑟 ≥ 0, 𝑡 và nel semipiano 𝑢 + 𝑣 ≥ 0, 𝑣2 − 𝑢2 ≤ 1.
In questo modo iperboli nel piano 𝑢, 𝑣 sono curve ad 𝑟 costante, mentre le rette con coefficiente angolare fra −1 e 1 sono curve a 𝑡 costante. L’iperbole degenere, cioè il cono 𝑣 = ±𝑢 è il luogo 𝑟 = 2𝑀 e l’iperbole 𝑣2 − 𝑢2 = 1 è il punto 𝑟 = 0. Il semipiano racchiuso dal cono 𝑟 = 2𝑀 contenente la parte positiva dell’asse 𝑣 è il buco nero, infatti il cono luce in ogni punto è 𝑑𝑣 ≥ ±𝑑𝑢, e in ogni punto di questa zona tale cono luce indica solo punti con 𝑟 minore dell’𝑟 del punto: ci si può solo avvicinare al centro del buco nero, non è possibile sfuggirne. La parte di piano delimitata dal cono 𝑟 = 2𝑀 e contenente la parte positiva dell’asse 𝑢 è invece lo spazio al di fuori del buco nero, infatti in questa zona il cono luce permette di andare sia ad 𝑟 maggiore che ad 𝑟 minore.

Metrica di Schwarzschild con costante cosmologica
𝑔𝑖𝑗 =
⎝
⎜⎜⎜⎛
1−2𝑀𝑟−𝑟2Λ
30
0 −1
1− 2𝑀𝑟 − 𝑟2Λ
3
0 00 0
0 00 0
−𝑟2 00 −𝑟2𝑆𝑖𝑛2(𝜃)⎠
⎟⎟⎟⎞
Tensore di curvatura non nullo. Tensore di Ricci non nullo.
𝑅𝑖𝑗 =
⎝
⎜⎜⎜⎛Λ
6M− 3r + Λr3
3r0
0 −3𝑟Λ
6M − 3r + Λr33r
0 00 0
0 00 0
𝑟2Λ 00 Λ𝑟2𝑆𝑖𝑛2(𝜃)⎠
⎟⎟⎟⎞
Curvatura scalare non nulla.
𝑆 = −4Λ
Tensore di Einstein non nullo.
𝐺𝑖𝑗 = 𝑅𝑖𝑗 −𝑆2𝑔𝑖𝑗
=
⎝
⎜⎜⎜⎛
1 −2𝑀𝑟−𝑟2Λ
30
0 −1
1 − 2𝑀𝑟 − 𝑟2Λ
3
0 00 0
0 00 0
−𝑟2 00 −𝑟2𝑆𝑖𝑛2(𝜃)⎠
⎟⎟⎟⎞
+ 2Λ
⎝
⎜⎜⎜⎛Λ
6M − 3r + Λr3
3r0
0 −3𝑟Λ
6M− 3r + Λr33r
0 00 0
0 00 0
𝑟2Λ 00 Λ𝑟2𝑆𝑖𝑛2(𝜃)⎠
⎟⎟⎟⎞
= �Λ 00 Λ
0 00 0
0 00 0
Λ 00 Λ
�
È quindi uno spazio di Einstein.
Lo scalare di Kretschmann vale
𝐾 =8(18𝑀2 + Λ2𝑟6)
3𝑟6

Metrica di Kerr Si applica a una massa puntiforme ruotante scarica.
Per questa metrica usiamo quelle che sono chiamate coordinate di Boyer-Lindquist in cui si effettua la trasformazione
�
𝑡′ = 𝑡𝑟′ = 𝑟
𝑥′ = 𝐶𝑜𝑠(𝜃)𝑧′ = 𝑧
𝑔𝑖𝑗 =
⎝
⎜⎜⎜⎜⎜⎛
1 −2𝑀𝑟
𝑟2 + 𝑎2𝑥20
0 −𝑟2 + 𝑎2𝑥2
𝑎2 − 2𝑀𝑟 + 𝑟2
02𝑎𝑀𝑟(1− 𝑥2)𝑟2 + 𝑎2𝑥2
0 0
0 02𝑎𝑀𝑟(1 − 𝑥2)𝑟2 + 𝑎2𝑥2
0
−𝑟2 + 𝑎2𝑥2
1− 𝑥20
0 −(1− 𝑥2)�𝑟2 + 𝑎2 +2𝑎𝑀𝑟(1− 𝑥2)𝑟2 + 𝑎2𝑥2
�⎠
⎟⎟⎟⎟⎟⎞
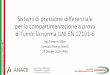
Tensore di curvatura non nullo. Tensore di Ricci nullo. Spazio piatto di Ricci.
Lo scalare di Kretschmann ha una espressione complicata riportiamo solo un plot per brevità.

Metrica di Reissner Nordstrom Si applica a una massa puntiforme carica non ruotante.
𝑔𝑖𝑗 =
⎝
⎜⎜⎜⎜⎛
1 −2𝑀𝑟−𝑄2
𝑟20
0 −1
1− 2𝑀𝑟 − 𝑄2
𝑟2
0 00 0
0 00 0
−𝑟2 00 −𝑟2𝑆𝑖𝑛2(𝜃)⎠
⎟⎟⎟⎟⎞
Tensore di curvatura non nullo. Tensore di Ricci non nullo.
𝑅𝑖𝑗 =
⎝
⎜⎜⎜⎜⎜⎛𝑄2
(𝑟2 − 2𝑟𝑀 + 𝑄2)𝑟6
0
0 −𝑄2
𝑟2(𝑟2 − 2𝑟𝑀 + 𝑄2)
0 00 0
0 00 0
𝑄2
𝑟20
0𝑄2
𝑟2𝑆𝑖𝑛2(𝜃)⎠
⎟⎟⎟⎟⎟⎞
Curvatura scalare nulla.
Lo scalare di Kretschmann vale
𝐾 =8(7𝑄4 − 12𝑀𝑄2 + 6𝑀2𝑟2)
𝑟8

Metrica di Kerr Newmann Si applica a una massa puntiforme carica ruotante.
𝑔𝑖𝑗 =
⎝
⎜⎜⎜⎜⎜⎛
𝑟2 + 𝑎2𝑥2 − 2𝑀𝑟 + 𝑄2
𝑟2 + 𝑎2𝑥20
0 −𝑟2 + 𝑎2𝑥2
𝑄2 + 𝑎2 − 2𝑀𝑟 + 𝑟2
0𝑎(2𝑀𝑟 − 𝑄2)(1 − 𝑥2)
𝑟2 + 𝑎2𝑥20 0
0 0𝑎(2𝑀𝑟 − 𝑄2)(1− 𝑥2)
𝑟2 + 𝑎2𝑥20
−𝑟2 + 𝑎2𝑥2
1− 𝑥20
0 −(1 − 𝑥2)�𝑟2 + 𝑎2 +𝑎(2𝑀𝑟 − 𝑄2)(1− 𝑥2)
𝑟2 + 𝑎2𝑥2�⎠
⎟⎟⎟⎟⎟⎞
Tutti i tensori risultano essere non nulli.
Cosmologia
Principio Cosmologico Il principio cosmologico assume che lo spazio sia omogeneo ed isotropo, e quindi la parte spaziale della metrica deve essere invariante per rotazioni e per traslazioni. Qualsiasi quantità deve essere costante nello spazio. La metrica deve quindi dipendere solo dal tempo, e la sua parte spaziale deve essere uno spazio a curvatura costante.

Universi massimamente simmetrici
Universo a curvatura positiva costante
𝑔𝑖𝑗 =
⎝
⎜⎜⎛
𝑎2(𝑡) 0
0 −1
1 − 𝑟𝑅
0 00 0
0 00 0
−𝑟2 00 −𝑟2𝑆𝑖𝑛2(𝜃)⎠
⎟⎟⎞
O, in coordinate angolari
𝑔𝑖𝑗 =
⎝
⎛𝑎2(𝑡) 0
0 −10 00 0
0 00 0
−𝑟2𝑆𝑖𝑛2(𝜒) 00 −𝑟2𝑆𝑖𝑛2(𝜒)𝑆𝑖𝑛2(𝜃)⎠
⎞
Universo piatto
𝑔𝑖𝑗 = �
𝑎2(𝑡) 00 −1
0 00 0
0 00 0
−𝑟2 00 −𝑟2𝑆𝑖𝑛2(𝜃)
�
Universo a curvatura negativa costante
𝑔𝑖𝑗 =
⎝
⎜⎜⎛
𝑎2(𝑡) 0
0 −1
1 + 𝑟𝑅
0 00 0
0 00 0
−𝑟2 00 −𝑟2𝑆𝑖𝑛2(𝜃)⎠
⎟⎟⎞
O, in coordinate angolari
𝑔𝑖𝑗 =
⎝
⎛𝑎2(𝑡) 0
0 −10 00 0
0 00 0
−𝑟2𝑆𝑖𝑛ℎ2(𝜒) 00 −𝑟2𝑆𝑖𝑛ℎ2(𝜒)𝑆𝑖𝑛2(𝜃)⎠
⎞
Necessità di introduzione della Costante Cosmologica L’equazione di Einstein, applicata alle metriche precedenti, porta a delle equazioni, e nei 3 casi abbiamo
⎩⎪⎨
⎪⎧
8𝜋𝐺3
𝜌 −1𝐻2 > 0 𝑠𝑒 𝑘 > 0
8𝜋𝐺3
𝜌 −1𝐻2 = 0 𝑠𝑒 𝑘 = 0
8𝜋𝐺3
𝜌 −1𝐻2 < 0 𝑠𝑒 𝑘 < 0
Dove 𝐻 è la costante di Hubble, e sia questa che la densità possono essere valutati a un qualsiasi istante temporale, basta che sia lo stesso per le due. Queste equazioni definiscono una densità critica

𝜌𝑐 =3
8𝜋𝐺𝐻2
Dalle osservazioni risulta 𝜌𝑀 ≅ 0.04𝜌𝑐 a cui si aggiunge una densità di materia oscura (che non osserviamo direttamente ma sappiamo che c’è per via degli effetti gravitazionali che comporta) 𝜌𝐷𝑀 ≅ 0.26𝜌𝑐, per un totale di circa 𝜌𝑡𝑜𝑡 ≅ 0.3𝜌𝑐. Eppure osserviamo che 𝑘 ≅ 0. Queste osservazioni sono compatibili solo se accettiamo che la costante cosmologica sia non nulla, di valore
Λ ≅ 0.7 ∙ 3𝐻2
Esperimenti di verifica della Teoria della Relatività Generale
Verifica del Principio di Equivalenza
Redshift Gravitazionale L’unico risultato basato sul principio di equivalenza è il fatto che il tempo proprio è
𝑑𝜏 = �𝑔𝑡𝑡𝑑𝑡
E la coordinata 𝑑𝑡 scorre uguale in ogni punto quindi le frequenze misurate in due punti diversi soddisferanno la relazione
𝜐2𝜐1
= �𝑔𝑡𝑡(𝑥2)𝑔𝑡𝑡(𝑥1)
Nel caso di campo gravitazionale uniforme, si può ottenere, senza introdurre metrica e connessione affine
Δ𝜐𝜐
=𝜙(𝑥2) −𝜙(𝑥1)
𝑐2
Ecco alcuni dati:
Δ𝜐𝜐
𝜙(𝑥2) − 𝜙(𝑥1)
𝑐2
Sole −(2.23 ± 0.11) ∙ 10−6 −2.12 ∙ 10−6 Eridiani B −(7 ± 1) ∙ 10−5 −(5.7 ± 1) ∙ 10−5 Pound and Rebka experiment (2.57 ± 0.26) ∙ 10−15 2.46 ∙ 10−15
Verifica dell’Equazione di Einstein
Orbite Chiuse: precessione del Perielio Usando la metrica di Schwarzschild le equazioni del moto, scegliendo come dati iniziali 𝜃 = 𝜋
2 e �̇� = 0, e
definendo 𝐵(𝑟) = 𝑔𝑡𝑡 e 𝐴(𝑟) = 𝑔𝑟𝑟 , sono:

⎩⎪⎪⎨
⎪⎪⎧ 𝑑2
𝑑𝜀2𝑡 +
𝐵′(𝑟)𝐵(𝑟)
𝑑𝑡𝑑𝜀𝑑𝑟𝑑𝜀
= 0
𝑑2
𝑑𝜀2𝑟 +
𝐴′(𝑟)2𝐴(𝑟) �
𝑑𝑟𝑑𝜀�2
−𝑟
𝐴(𝑟)�𝑑𝜑𝑑𝜀�2
+𝐵′(𝑟)2𝐴(𝑟)
�𝑑𝑡𝑑𝜀�2
= 0
𝑑2
𝑑𝜀2𝜑 +
2𝑟𝑑𝜑𝑑𝜀
𝑑𝑟𝑑𝜀
= 0
Dove 𝜀 è un parametro per descriver el’orbita. La prima equazione la usiamo per definire la sua normalizzazione, e otteniamo la quantità conservata:
𝑑𝑑𝜀�ln �
𝑑𝑡𝑑𝜀� + ln�𝐵(𝑟)�� = 0
𝑑𝑡𝑑𝜀
=1
𝐵(𝑟)
La terza equazione similmente ci da un’altra quantità conservata:
𝑑𝑑𝜀�ln �
𝑑𝜑𝑑𝜀�+ ln(𝑟2)� = 0
𝑑𝜑𝑑𝜀
=𝐽𝑟2
Dall’ultima, moltiplicando per 2𝐴(𝑟) 𝑑𝑟𝑑𝜀
si ottiene una terza quantità conservata
𝑑𝑑𝜀�𝐴(𝑟) �
𝑑𝑟𝑑𝜀�2
+𝐽𝑟2−
1𝐵(𝑟)
� = 0
𝐴(𝑟) �𝑑𝑟𝑑𝜀�2
+𝐽2
𝑟2−
1𝐵(𝑟)
= −𝐸2
Possiamo ora determinare la relazione fra il parametro della traiettoria e il tempo proprio:
𝑑𝜏2 = 𝐸2𝑑𝑡2
Quindi 𝐸 = 0 per la luce, ed è un parametro reale diverso da zero per la materia.
Troviamo ora la deflessione:
𝑑𝜑𝑑𝑟
=𝑑𝜑𝑑𝜀𝑑𝑟𝑑𝜀
=𝐽𝑟2 �𝐴(𝑟)
� 1𝐵(𝑟) − 𝐸2 − 𝐽2
𝑟2
La deflessione su un’orbita è pari al doppio che da perielio ed afelio, per simmetria:
∆𝜑 = �𝑑𝜑 = 2 � 𝑑𝑟𝐽𝑟2 �𝐴(𝑟)
� 1𝐵(𝑟) − 𝐸2 − 𝐽2
𝑟2
𝑟+
𝑟−
Dobbiamo ora eliminare i parametri 𝐸, 𝐽, usando le distanze di afelio e perielio:

𝑑𝑟𝑑𝜀
(𝑟±) = �1
𝐵(𝑟±)− 𝐸2 −
𝐽2
𝑟±2 = 0
Da cui
𝐽2 =
1𝐵(𝑟+) −
1𝐵(𝑟−)
1𝑟+2
− 1𝑟−2
𝐸2 =
𝑟+2𝐵(𝑟+) −
𝑟−2𝐵(𝑟−)
𝑟+2 − 𝑟−2
∆𝜑 = 2 � 𝑑𝑟
1𝑟2 �𝐴(𝑟)�
1𝐵(𝑟+) −
1𝐵(𝑟−)
1𝑟+2
− 1𝑟−2
�
� 1𝐵(𝑟) − �
𝑟+2𝐵(𝑟+) −
𝑟−2𝐵(𝑟−)
𝑟+2 − 𝑟−2�− 1
𝑟2 �
1𝐵(𝑟+) −
1𝐵(𝑟−)
1𝑟+2
− 1𝑟−2
�
𝑟+
𝑟−
Dopo un po’ di algebra si ottiene:
∆𝜑 = 2 � 𝑑𝑟�1 +
𝑟𝑔2𝑟� �1 +
𝑟𝑔𝐿�
𝑟2��1𝑟−− 1𝑟� �
1𝑟 −
1𝑟+�
𝑟+
𝑟−
= 2 �𝑑𝑟𝐿
1 +𝑟𝑔𝐿 +
𝑟𝑔𝐿𝐿
2𝑟𝑟2𝐿2 ��
𝐿𝑟−− 𝐿𝑟� �
𝐿𝑟 −
𝐿𝑟+�
𝑟+
𝑟−
= 2 �𝑑𝑟𝐿
1 + 𝑥 �1 + 𝐿2𝑟�
𝑟2𝐿2 ��
𝐿𝑟−− 𝐿𝑟� �
𝐿𝑟 −
𝐿𝑟+�
𝑟+
𝑟−
Il primo termine è quello di ordine 0, che da una rotazione di 2𝜋:
∆𝜑(0) = 2 �𝑑𝑟𝐿
1𝑟2𝐿2 ��
𝐿𝑟−− 𝐿𝑟� �
𝐿𝑟 −
𝐿𝑟+�
𝑟+
𝑟−
= 2�𝑑𝑦1
(1 + 𝑦)2�� 𝑘1 + 𝑘 −
11 + 𝑦� �
11 + 𝑦 −
11 + 𝑘�
𝑘
1𝑘
= 2�𝑑𝑥𝑥
1
�(1 − 𝑥)(𝑘𝑥 − 1)
1
1𝑘
= 2 �𝑑𝑧𝑧
1
��√𝑘 − 𝑧� �𝑧 − 1√𝑘�
√𝑘
1√𝑘
= 4�𝑑𝑡
√𝑘 + 1√𝑘
𝑡2
∞
0
= 4�𝑑𝑡
1 + 𝑡2
∞
0
= 2𝜋
Il termine lineare in 𝑥 è il primo termine dello sviluppo in serie:
∆𝜑(1) = 2𝑥 �𝑑𝑟𝐿
�1 + 𝐿2𝑟�
𝑟2𝐿2 ��
𝐿𝑟−− 𝐿𝑟� �
𝐿𝑟 −
𝐿𝑟+�
𝑟+
𝑟−
= 2𝑥 � 𝑑𝑦�1 + 1
1 + 𝑦�
(1 + 𝑦)2�� 𝑘1 + 𝑘 −
11 + 𝑦��
11 + 𝑦 −
11 + 𝑘�
𝑘
1𝑘

= 2𝑥�𝑑𝑥𝑥
�1 + 1𝑥
11 + 𝑘�
�(1 − 𝑥)(𝑘𝑥 − 1)
1
1𝑘
= 2𝑥 �𝑑𝑧𝑧
�1 + 1𝑧
1
√𝑘 + 1√𝑘
�
��√𝑘 − 𝑧� �𝑧 − 1√𝑘�
√𝑘
1√𝑘
= 4𝑥 �𝑑𝑡
√𝑘 + 1√𝑘
𝑡2
∞
0
�1 +1 + 𝑡2
√𝑘 + 1√𝑘
𝑡21
√𝑘 + 1√𝑘
� = 4𝑥� 𝑑𝑡 �32
1 + 𝑡2+ �
11 + 𝑘
−12�
1 − 𝑡2
(1 + 𝑡2)2�∞
0
= 3𝜋𝑥
=6𝜋𝐺𝑀𝐿
Ecco alcuni dati sperimentali:
Pianeta 6𝜋𝐺𝑀𝐿
𝑅𝑖𝑣𝑜𝑙𝑢𝑧𝑖𝑜𝑛𝑖𝑆𝑒𝑐𝑜𝑙𝑜
∆𝜑(1) ∆𝜑(1)𝑚𝑖𝑠𝑢𝑟𝑎𝑡𝑜
Mercurio 0.1038′′ 415 43.03′′ (43.11 ± 0.45)′′ Venere 0.058′′ 149 8.6′′ (8.4 ± 4.8)′′ Terra 0.038′′ 100 3.8′′ (5.0 ± 1.2)′′ Icaro 0.115′′ 89 10.3′′ (9.8 ± 0.8)′′
Orbite Aperte: deflessione della luce Usiamo la stessa formula ottenuta nel paragrafo precedente
∆𝜑 = �𝑑𝜑 = 2 � 𝑑𝑟𝐽𝑟2 �𝐴(𝑟)
� 1𝐵(𝑟) −
𝐽𝑟2
∞
𝑟0
Stavolta 𝐸 = 0 e quindi
𝐽2 =𝑟02
𝐵(𝑟0)
∆𝜑 = �𝑑𝜑 = 2 � 𝑑𝑟
1𝑟2 �𝐴(𝑟) 𝑟02
𝐵(𝑟0)
� 1𝐵(𝑟) −
1𝑟2
𝑟02𝐵(𝑟0)
∞
𝑟0
= 2 � 𝑑𝑟1𝑟
1
� 𝑟2𝐵(𝑟0)𝐵(𝑟)𝐴(𝑟)𝑟02
− 1𝐴(𝑟)
∞
𝑟0
= 2 � 𝑑𝑟1𝑟�
𝐵(𝑟)𝐴(𝑟)𝑟02
𝑟2𝐵(𝑟0) −𝐵(𝑟)𝑟02
∞
𝑟0
= 2 � 𝑑𝑟1𝑟�
𝑟02
𝑟2𝐵(𝑟0) −𝐵(𝑟)𝑟02
∞
𝑟0
Usando 𝐴(𝑟)𝐵(𝑟) = 1. Andando a sostituire 𝐴 e 𝐵 otteniamo:

= 2 � 𝑑𝑟1𝑟 �
𝑟02
𝑟2 �1−𝑟𝑔𝑟0� − �1−
𝑟𝑔𝑟 � 𝑟0
2
∞
𝑟0
≅ 2 � 𝑑𝑟1𝑟�
𝑟02
𝑟2 − 𝑟02
∞
𝑟0
�1 −�𝑟𝑔𝑟 𝑟0
2 −𝑟𝑔𝑟0𝑟2�
𝑟2 − 𝑟02𝑟02
𝑟02
≅ 2 �𝑑𝑟𝑟0𝑟0𝑟 �
1
� 𝑟𝑟0�2− 1
∞
𝑟0
�1−12
�𝑟𝑔𝑟 −
𝑟𝑔𝑟0𝑟2𝑟02
�
�� 𝑟𝑟0�2− 1�
�
E con un cambio di variabili 𝑦 = 𝑟𝑟0
e 𝑥 =𝑟𝑔𝑟0
= 2� 𝑑𝑦1𝑦�
1𝑦2 − 1
∞
1
�1 −12
�𝑥𝑦 − 𝑥𝑦2�
(𝑦2 − 1) � = 2� 𝑑𝑦1𝑦�
1𝑦2 − 1
∞
1
�1 −12𝑥(1− 𝑦3)𝑦(𝑦2 − 1)�
= 2� 𝑑𝑦1𝑦�
1𝑦2 − 1
∞
1
�1 +12𝑥(1 + 𝑦 + 𝑦2)𝑦(1 + 𝑦)
�
Il primo termine è quello di ordine 0, che da una deflessione di 𝜋:
∆𝜑(0) = 2� 𝑑𝑦1𝑦�
1𝑦2 − 1
∞
1
= 2� 𝑑𝑦1𝑦2 �
1
1 − 1𝑦2
∞
1
= −2�𝑑𝑠�1
1− 𝑠2
0
1
= 2[𝐴𝑟𝑐𝑆𝑖𝑛(𝑧)]01 = 𝜋
Il termine lineare in 𝑥 è il primo termine dello sviluppo in serie:
∆𝜑(1) = 𝑥 � 𝑑𝑦1𝑦�
1𝑦2 − 1
∞
1
(1 + 𝑦 + 𝑦2)𝑦(1 + 𝑦)
= 𝑥� 𝑑𝑦1𝑦2 �
1
1− 1𝑦2
∞
1
� 1𝑦2 + 1
𝑦 + 1�
1𝑦 ( 1𝑦2 + 1
𝑦)
= −𝑥�𝑑𝑠�1
1 − 𝑠2
0
1
(1 + 𝑠 + 𝑠2)𝑠(1 + 𝑠)
= 2𝑥 =4𝐺𝑀𝑟0
Per il sole quindi
∆𝜑(1)(𝑟0 = 𝑅𝑆𝑜𝑙𝑒) = 1.75′′
Ecco alcuni dati sperimentali:
Eclisse Numero di stelle osservate ∆𝜑(1)(𝑅𝑆𝑜𝑙𝑒) 29 maggio 1919 7 (1.98 ± 0.16)′′ 29 maggio 1919 5 (1.61 ± 0.40)′′ 21 settembre 1922 11-14 (1.77 ± 0.40)′′ 21 settembre 1922 18 (𝑑𝑎 1.42 𝑎 2.16)′′ 21 settembre 1922 62-85 (1.72 ± 0.15)′′

21 settembre 1922 145 (1.82 ± 0.20)′′ 9 maggio 1929 17-18 (2.24 ± 0.10)′′ 19 giugno 1936 16-29 (2.73 ± 0.31)′′ 19 giugno 1936 8 (𝑑𝑎 1.28 𝑎 2.13)′′ 25 febbraio 1952 51 (2.01 ± 0.27)′′ 25 febbraio 1952 9-11 (1.70 ± 0.10)′′
Trasmissione: ritardo del segnale Si usa ancora una volta le formule ricavate precedentemente:
𝑑𝑡𝑑𝑟
=𝑑𝑡𝑑𝜀𝑑𝑟𝑑𝜀
=
1𝐵(𝑟)�𝐴(𝑟)
� 1𝐵(𝑟) − 𝐸2 − 𝐽2
𝑟2
Parlando sempre di segnali elettromagnetici 𝐸 = 0 e 𝐽2 = 𝑟02
𝐵(𝑟0)
𝑑𝑡 =
�𝐴(𝑟)𝐵(𝑟) 𝑑𝑟
� 1𝐵(𝑟) −
1𝑟2
𝑟02𝐵(𝑟0)
=𝑑𝑟
𝐵(𝑟)�1 − 𝑟02𝑟2
𝐵(𝑟)𝐵(𝑟0)
∆𝑡 = �𝑑𝑡 = �𝑑𝑟
𝐵(𝑟)�1− 𝑟02𝑟2
𝐵(𝑟)𝐵(𝑟0)
≅𝑅
𝑟0
�𝑑𝑟
�1− 𝑟02𝑟2 ⎝
⎜⎛
1 +𝑟𝑔𝑟0�𝑟0𝑟
+𝑟0
2𝑟2 �1𝑟0
+ 1𝑟��
⎠
⎟⎞
𝑅
𝑟0
= 𝑟0 �
𝑑𝑟𝑟0
�1− 𝑟02𝑟2 ⎝
⎛1 +𝑟𝑔𝑟0�𝑟0𝑟
+𝑟0𝑟
2 � 𝑟𝑟0+ 1�
�
⎠
⎞𝑅
𝑟0
= 𝑟0 �𝑑𝑦
�1− 1𝑦2 ⎝
⎜⎛
1 + 𝑥�1𝑦
+
1𝑦
2(𝑦 + 1)�
⎠
⎟⎞
𝑅𝑟0
1
Con le solite sostituzioni. Il primo termine è quello di ordine 0, che da il tempo di percorrenza dell’orbita non perturbata:
∆𝑡(0) = 𝑟0 �𝑑𝑦
�1− 1𝑦2
𝑅𝑟0
1
= −𝑟0�1𝑧2
𝑑𝑧√1 − 𝑧2
𝑟0𝑅
1
= 𝑟0 �𝑑𝑥
𝑆𝑖𝑛(𝑥)2
1
𝐴𝑟𝑐𝑆𝑖𝑛�𝑟0𝑅 �
= 𝑟0�1− �𝑟0𝑅�
2
𝑟0𝑅
= 𝑅�1 − �𝑟0𝑅�2
Il termine lineare in 𝑥 è il primo termine dello sviluppo in serie:
∆𝑡(1) = 𝑥𝑟0 �𝑑𝑦
�1− 1𝑦2�
1𝑦
+
1𝑦
2(𝑦 + 1)�
𝑅𝑟0
1
= −𝑟𝑔 �𝑑𝑧
√1 − 𝑧2�
1𝑧
+1
2(1 + 𝑧)�
𝑟0𝑅
1

= 2𝑟𝑔 � 𝑑𝑡 �14
+1
1− 𝑡2�
�1−𝑟0𝑅1+𝑟0𝑅
0
=𝑟𝑔2�𝑅 − 𝑟0𝑅 + 𝑟0
+ 𝑟𝑔 ln�𝑅 +�𝑅2 − 𝑟02
𝑟0�
La verifica con i dati sperimentali è complicata in quanto solitamente si deve far rimbalzare il segnale su un pianeta, ma questo non è uno specchio perfetto, e si muove, quindi genera un effetto doppler. In ogni caso la teoria e le osservazioni finora fatte sono in buon accordo.
Verifica del Principio Cosmologico
Redshift Cosmologico Data la metrica generica nella forma
𝑑𝑠2 = 𝑎2(𝜇)(𝑑𝜇2 − 𝑑𝜀2 −⋯ )
Il cono luce è 𝑑𝜇 = ±𝑑𝜀 e la luce impiega ∆𝜇 = ∆𝜀 a spostarsi fra 2 punti. Per l’osservatore che riceve, il tempo impiegato è
∆𝑡𝑓 = 𝑎�𝜇𝑓�∆𝜇
Mentre per l’osservatore da cui è partito il raggio
∆𝑡𝑖 = 𝑎(𝜇𝑖)∆𝜇
Il rapporto fra le frequenze è quindi
𝜐𝑓𝜐𝑖
=∆𝑡𝑖∆𝑡𝑓
=𝑎(𝜇𝑖)∆𝜇𝑎�𝜇𝑓�∆𝜇
=𝑎(𝜇𝑖)𝑎�𝜇𝑓�
E per piccole distanze spaziali (e quindi temporali)
𝜐𝑓𝜐𝑖
=𝑎(𝜇𝑖)𝑎�𝜇𝑓�
≅𝑎�𝜇𝑓� − ∆𝜇 𝜕𝑎𝜕𝜇 �𝜇𝑓�
𝑎�𝜇𝑓�= 1 − ∆𝜇 ∙ 𝑎�𝜇𝑓�
𝜕𝑎𝜕𝜇 �𝜇𝑓�
𝑎2�𝜇𝑓�
Ma
∆𝜇 ∙ 𝑎�𝜇𝑓� = 𝑑�𝜇𝑓�
È la distanza (al momento attuale) fra i due punti, e
𝜕𝑎𝜕𝜇 �𝜇𝑓�
𝑎2�𝜇𝑓�= 𝐻�𝜇𝑓�
È la costante d Hubble, quindi
𝜐𝑓𝜐𝑖≅ 1− 𝑑 ∙ 𝐻

∆𝜐𝜐≅ −𝑑 ∙ 𝐻,
∆𝜆𝜆≅ +𝑑 ∙ 𝐻
Correzione al primo ordine dell’equazione di Poisson Facendo uno sviluppo in serie al primo ordine delle equazioni di Einstein troviamo la prima correzione all’equazione di Poisson dovuta all’introduzione della costante cosmologica:
∇2𝜑(𝑋)− 𝑐2Λ = −4𝜋𝑔𝜌(𝑋)
Vediamo che la costante cosmologica agisce come una sorgente di densità di massa negativa. Anche con questa equazione possiamo discriminare i tre possibili comportamenti dell’universo, a seconda che
⎩⎪⎨
⎪⎧Λ >
4𝜋𝑔𝜌𝑐2
Universo aperto
Λ =4𝜋𝑔𝜌𝑐2
Unverso statico
Λ <4𝜋𝑔𝜌𝑐2
Universo chiuso