Embed Size (px)
Citation preview

Technická univerzita v Liberci
Fakulta přírodovědně-humanitní a pedagogická
Katedra matematiky a didaktiky matematiky
KŘIVKY
Pomocný učební text
Petra Pirklová
Liberec, leden 2014

2
V tomto textu si budeme všímat všech křivek obecně a v závěru se zaměříme na jednu
speciální křivku – šroubovici, kterou budeme také zobrazovat v nám známých zobrazovacích
metodách.
V tomto textu budeme křivkou rozumět dráhu pohybujícího se bodu. Je to tedy množina
nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat
jednoparametrickou množinou bodů.
Zavedeme-li si souřadnicový systém {0, x, y, z} pak můžeme křivku definovat pomocí
vektorové funkce.
Vektorovou funkcí jedné reálné proměnné rozumíme takovou funkci, která každému číslu t
z intervalu T ⊂ R jednoznačně přiřazuje vektor , jehož počátečním bodem je počátek soustavy
souřadnic 0 a koncovým bodem je bod na křivce. Píšeme .
x
y
z
M(t)
r(t)0
Vektorová funkce
Můžeme psát ⊂ . Reálné funkce x(t), y(t), z(t) proměnné
t jsou pak souřadnicemi proměnného vektoru . A předpokládáme, že mají v definičním
oboru derivace všech řádů. Rovnice jsou parametrické rovnice
křivky, kde t je parametr.
VZÁJEMNÁ POLOHA PŘÍMKY A KŘIVKY
Máme dánu křivku a na ní si zvolíme bod T a v jeho
okolí bod A. Pokud spojíme body AT do přímky, získáme
sečnu křivky. Přibližujeme-li bod A k bodu T tak dlouho, až
tyto dva body splynou, pak získáme tečnu křivky v bodě T
a bod T je bodem dotyku tečny.
Tečna a sečna křivky
Směrovým vektorem tečny je první derivace vektorové funkce křivky. Tečnou křivky je
tedy přímka určená bodem křivky a tečným vektorem. Píšeme X = T +s , kde = (x´(t), y´(t),
z´(t)), je tečný vektor a T[T1, T2, T3] dotykový bod.
TA s
t

3
Úsečka na sečně, která je omezena dvěma body na
křivce, je tětiva. Kolmice, která je sestrojená v bodě dotyku na
tečnu, se nazývá normála křivky.
Tečna, která se dotýká křivky v nevlastním bodě (v
nekonečnu), je asymptotou křivky.
Normála křivky
KLASIFIKACE BODŮ NA KŘIVCE
1. Rozdělení bodů, v nichž má křivka jedinou tečnu.
Nech´t je dána křivka, na ní bod T a v bodě T je dána tečna t ke křivce. V okolí bodu T
zvolíme bod křivky A. Pokud se bod A pohybuje ke křivce, pak se také pohybuje sečna křivky AT.
Splyne-li bod A s bodem T, splývá sečna s tečnou. Bod A se při pohybu po křivce, pohybuje také
po sečně (přímce).
TA s
t
Regulární bod křivky
Pokud se nemění smysl pohybu bodu A, ani přímky AT, pak se bod A nazývá regulární.
Pokud se mění smysl pohybu bodu A po křivce, nebo se mění smysl pohybu přímky AT,
příp. obojího, pak bod A se nazývá singulární.
Singulární body dělíme na:
a) inflexní bod – bod A se pohybuje do bodu T a poté do bodu A´. Přitom se přímka AT
pohybuje po směru hodinových ručiček až do polohy tečny v bodě T ke křivce a poté se
pohybuje do polohy A´T proti směru hodinových ručiček
T
As=s´
t
A´
Inflexní bod
T
t
n

4
b) bod vratu 1. druhu – bod A se pohybuje po křivce do bodu T a ten poté do bodu A´. Při
tomto pohybu se změní směr jeho pohybu. Sečna s přejde do polohy tečny t a pak do
polohy sečny s´, přičemž se směr pohybu nezmění.
A
T
A´s
t
s´
Bod vratu 1. druhu
c) bod vratu 2. druhu – směr pohybu bodu A po křivce do bodu A´ i směr pohybu sečny
s do polohy sečny s´ se mění
T
A
A´
s
t
s´
Bod vratu 2. druhu
2. Body v nichž má křivka více tečen.
Takové body se nazývají vždy singulární. Typy dvojnásobných bodů (křivka má v tomto
bodě dvě tečny)jsou následující:
a) uzlový bod
t
t´
Uzlový bod
b) bod vratu 1. druhu – v bodě je jedna dvojnásobná tečna
c) izolovaný dvojnásobný bod – v bodě jsou dvě komplexně
sdružené tečny
Izolovaný dvojnásobný bod

5
Další typy vícenásobných bodů: např. trojnásobný bod, taknodální bod (křivka se v něm dotýká
sama sebe).
Trojnásobný bod Taknodální bod
Souřadnice singulárního bodu vypočteme tak, že souřadnice první derivace vektorové
funkce ⊂ položíme rovnu nule
.
PRŮVODNÍ TROJHRAN KŘIVKY
Prvky průvodního trojhranu křivky ⊂ v jejím regulárním
bodě křivky jsou tři přímky: tečna t, binormála b, hlavní normála n a tři roviny: normální
rovina , oskulační rovina a rektifikační rovina
t
n
b
T
Průvodní trojhran křivky
Normální rovina je kolmá v bodě T k tečně křivky. Každá přímka, která leží v této
rovině, se nazývá normála křivky. Normála, která leží zároveň v oskulační rovině, se nazývá
hlavní normála . Normála, která je k oskulační rovině kolmá, je binormála .
Tečný vektor spočítáme jako první derivaci: . Vektor binormály určíme jako
vektorový součin první a druhé derivace a vektor hlavní normály jako
vektorový součin binormálového a tečného vektoru .
Pokud je křivka rovinná, pak její rovina je zároveň oskulační rovinou této křivky. Tedy, je-
li křivka rovinná, pak leží v oskulační rovině, která je pro všechny její body stejná.

6
KŘIVOST
Křivost křivky udává velikost jejího zakřivení v bodě a definujeme ji tedy limitou:
,
kde φ je úhel tečny v daném bodě a tečny v bodě dosti blízkém danému bodu, s je délkou
oblouku křivky ohraničeného zmíněnými body. Tedy první křivost je mírou rychlosti změny
směru tečny při pohybu po křivce.
M
M
1
2
tt
12
Křivost křivky
Převrácená hodnota této křivosti
v regulárním bodě křivky je poloměr oskulační kružnice ρ, který se nazývá poloměr křivosti.
První křivost křivky vyjádřené parametricky ⊂ je dána
vzorcem:
.
OSKULAČNÍ KRUŽNICE
Křivky v malém okolí jejího regulárního bodu lze nahradit tzv. oskulační kružnicí (kružnicí
křivosti), jejím poloměrem je poloměr křivosti a středem střed křivosti.
Střed křivosti v bodě T křivky lze sestrojit tak, že v bodě T určíme tečnu t a v okolí bodu T
na křivce bod B. Kružnice, která prochází body B, T a zároveň, aby tečna t ke křivce byla také její
tečnou, je jediná. Střed takové kružnice leží na normále křivky v bodě T. Pokud se bod B bude
limitně přibližovat k bodu T, pak na normále v bodě T určíme střed oskulační kružnice.
tT
n
S
B
Oskulační kružnice

7
Pokud je křivka dána vektorovou funkcí ⊂ , pak
souřadnice středu oskulační kružnice v bodě křivky určíme pomocí tohoto vzorce:
,
kde jsou souřadnice bodu, je poloměr křivosti kružnice a je jednotkový vektor
hlavní normály v daném bodě.
Evoluta křivky je množina všech středů oskulačních kružnic (středů křivosti) dané křivky.
U kuželoseček jsme se již setkali s pojmem oskulačních kružnic v jejich vrcholech.
Nazývali jsme je také hyperoskulačními kružnicemi, protože mají s kuželosečkou v jejím vrcholu
čtyřbodový styk.
ROVINNÉ KŘIVKY
Křivka je rovinná, pokud všechny její body leží v jedné (oskulační) rovině.
Máme-li zadánu rovinnou křivku, kterou nelze popsat rovnicí (nebo její rovnici neznáme),
lze získat její tečnu v bodě T křivky následující přibližnou konstrukcí.
l
k
T
PP
P
1
2
p
P
P ´ t
k´
k´
Konstrukce tečny v bodě křivky
Zvolíme si kružnici se středem v bodě T křivky k a s libovolným poloměrem. Bodem T
vedeme přímku p, která protne křivku v bodě P a kružnici protne v P1 a P2. Na přímce p pak
určíme body P´ a P´´ tak, že , . Tuto konstrukci
několikrát opakujeme. Body P´ pak leží na křivce k´ a body P´´ na křivce k´´. Průsečíky těchto
křivek k´ a k´´ s kružnicí l prochází tečna ke křivce v bodě T.
Křivky k´, k´´ sestrojené způsobem popsaným výše (nebo sestrojené pomocí rozdílu
úseček) se nazývají kisoidy.
Chceme-li sestrojit k nějaké křivce tečnu z daného bodu, pak z tohoto bodu sestrojujeme
sečny na křivce. Křivka, která spojuje středy tětiv, jež vytínají zmíněné sečny, prochází bodem T
na křivce. Bod T je hledaným bodem dotyku tečny spuštěné na křivku z daného bodu.

8
T
A
k
Konstrukce tečny ke křivce
Nyní popíšeme přibližnou konstrukci normály křivky v daném bodě B, který na křivce
neleží. Ze středu B rýsujeme kružnice o různých poloměrech. Poté nalezneme středy oblouků,
které na křivce vytíná křivka. Křivka, která prochází těmito středy oblouků, protíná křivku v bodě
N, kterým prochází hledaná normála.
B
k
n
N
Konstrukce normály v bodě křivky
Máme-li dánu soustavu rovinných křivek, pak křivka, která se dotýká všech daných křivek, se nazývá obálka soustavy křivek. Např.: kuželosečka je obálka ramen pravého úhlu, jehož druhé rameno prochází ohniskem a vrchol se pohybuje po vrcholové kružnici, popř. po vrcholové přímce.
v
SA F
BE
C
D
Elipsa jako obálka ramen pravého úhlu Křivky jako obálky soustavy kružnic
NĚKTERÉ ROVINNÉ KŘIVKY:
a) Archimédova spirála – vznikne složením dvou rovnoměrných pohybů. Bod se
rovnoměrně vzdaluje od zvoleného bodu na přímce, která se kolem bodu otáčí.

9
31 2 4 5
Archimédova spirála
b) Cykloida – vznikne jako dráha bodu, který je pevně spojenou s kružnicí k, která se kotálí po jiné kružnici k´ nebo po přímce
Pevná křivka je kružnice:
B
k
k´
k´
k
B
k
k´
B
Vznik epicykloidy Vznik pericykloidy Vznik hypocykloidy
1. Epicykloida – jsou-li kružnice vně sebe (pokud jsou poloměry kružnic shodné, nazýváme tuto epicykloidu kardioida, jsou-li v poměru 1:2, nazýváme jí nefroida)
Kardioida Nefroida
2. Pericykloida – leží-li pevná kružnice uvnitř pohybující se kružnice
3. Hypocykloida – leží-li pohybující se kružnice uvnitř pevné kružnice (jsou-li poloměry kružnic v poměru 1:4, nazýváme jí asteroida)
Asteroida
Je-li pevná křivka přímka:
1. Prostá cykloida – vznikne, když její tvořící bod leží přímo na pohybující se kružnici

10
Prostá cykloida1
2. Zkrácená cykloida – tvořící bod leží uvnitř kružnice
Zkrácená cykloida1
3. Prodloužená cykloida – tvořící bod leží vně kružnice
Prodloužená cykloida2
c) Strofoida – ta je popsána pouze způsobem, kterým je vytvořena. Máme-li dány dvě kolmé přímky x, y a na přímce x je bod A, pak bodem A vedeme přímky, na které nanášíme od jejich průsečíku 1 s přímkou y vzdálenost tohoto průsečíku od průsečíku O přímek x, y.
x
y
A
1
O
Strofoida
d) …
1 cs.wikipedia.org 2 cs.wikipedia.org

11
REKTIFIKACE
Rektifikace oblouku křivky znamená, že tento oblouk nahradíme úsečkou, která má
stejnou délku jako zmiňovaný oblouk křivky.
Při rozvinutí (rektifikaci) oblouku křivky na ní zvolíme
vhodný počet bodů a nahradíme oblouk lomenou čarou.
Samozřejmě, čím větší počet bodů zvolíme, tím přesnější
rektifikace bude. Nikdy však nebude úplně přesná.
Rektifikace křivky
Nejčastěji je třeba rozvinout kružnici popřípadě její oblouk. K tomuto účelu používáme
přibližné konstrukce.
a) Kochaňského rektifikace – slouží ke zjištění délky půlkružnice
.
b) Sobotkova rektifikace – je vhodná pouze pro oblouky do 30°
.
c) d´Ocagnova rektifikace – používá se pro středové úhly do 90°
.
A
T
30°
M B
rp
r
r r r
r
r
r
S
A
BA B
S
P
QRM
Kochaňského rektifikace Sobotkova rektifikace d`Ocagnova rektifikace
PRŮMĚT PROSTOROVÉ KŘIVKY
Věta: Průmětem křivky je vždy křivka.
Je-li křivka rovinná a střed promítání leží v její rovině, pak průmětem křivky je přímka.
Mezi body rovinné křivky a jejím průmětem platí středová kolineace, jejímž středem je střed
promítání.
Věta: Regulární (singulární) bod se zobrazí do regulárního (singulárního) bodu.

12
Pokud vedeme bodem v prostoru rovnoběžky s tečnami prostorové křivky, pak dostaneme kuželovou plochu, které říkáme řídící kuželová plocha. Pokud je křivka konstantního
spádu ( = spád křivky je konstantní, je odchylka tečny v bodě křivky od zvolené roviny), potom řídící kuželová plocha je rotační.
B
k
Řídící kuželová plocha křivky

13
ŠROUBOVICE
Jednou z nejvýznamnějších prostorových křivek je šroubovice. Parametrickými rovnicemi
ji můžeme popsat takto:
Podle těchto rovnic můžeme vidět, že šroubovice vzniká šroubovým pohybem bodu.
Šroubový pohyb je složením rovnoměrného otáčivého pohybu kolem přímky (po
kružnici) a rovnoměrného posuvného pohybu ve směru této přímky. Pevná přímka se nazývá osa
šroubového pohybu.
Osa šroubového pohybu pro šroubovici se nazývá osa šroubovice.
Podle definice šroubového pohybu bodu můžeme říct, že šroubovice leží na rotační
válcové ploše, která vznikne rotací přímky rovnoběžné s osou šroubového pohybu kolem této
osy. Osa válcové plochy o je totožná s osou šroubovice a její poloměr r je rovný vzdálenosti
tvořícího bodu šroubovice od osy o.
Šroubový pohyb je dvojího druhu, levotočivý a pravotočivý. Stejně tak šroubovice je
pravotočivá a levotočivá, podle toho zda otáčení bodu při šroubovém pohybu je po (levotočivá)
nebo proti (pravotočivá) směru chodu hodinových ručiček.
o
Pravotočivý pohyb (+)
o
Levotočivý pohyb (-)
Poznámka: Šipkou budeme v půdorysu vyznačovat směr stoupání šroubovice.
Pokud se bod při šroubovém pohybu otočí o 360° (2) pak se posune ve směru osy o
výšku v, kterou nazýváme výškou závitu. Při otočení o 1 rad se bod posune o výšku b, kterou
nazýváme redukovanou výškou závitu.
Z výše napsaného je zřejmé, že šroubový pohyb je určen osou, směrem otáčení
(pravotočivý/levotočivý) a redukovanou výškou závitu.
Protože tečny šroubovice svírají s její osou konstantní úhel, šroubovice je křivkou
konstantního spádu. Proto je také řídící kuželová plocha tečen šroubovice rotační. Za její řídící
kružnici volíme řídící kružnici válcové plochy šroubovice. Vrchol řídící kuželové plochy je od
roviny řídící kružnice vzdálen o redukovanou výšku závitu b.
Rozvineme-li část válcové plochy, na které je jeden závit BB´ šroubovice, pak řídicí
kružnice válcové plochy (šroubovice) můžeme rozvinout do úsečky BB´1 délky 2 ·r (obvod řídicí
kružnice) a šroubovice se rozvine rovněž do úsečky BB´, která je přeponou pravoúhlého

14
trojúhelníka s odvěsnami, které jsou tvořeny úsečkami BB´1 a v = B´1B´. Pravoúhlý trojúhelník
BB´1B´ nazýváme charakteristický trojúhelník šroubovice.
O
B=B´
B´
B´
B´
b
v
z=o
yx
v
r
1
r
B
2 r
1
Charakteristický trojúhelník šroubovice
Charakteristický trojúhelník šroubovice se užívá v úlohách o šroubovici, které jsou
uvedeny dále.

15
ZOBRAZENÍ ŠROUBOVICE V MONGEOVĚ PROMÍTÁNÍ
Pro jednoduchost konstrukcí budeme umísťovat šroubovici tak, že její osa bude kolmá
k půdorysně. V takovém případě se v Mongeově promítání zobrazí šroubovice v půdorysu jako
kružnice a v nárysu jako sinusoida.
Příklad: Sestrojte jeden závit pravotočivé šroubovice, je-li dán bod šroubovice A, výška závitu v a
osa šroubovice je kolmá k půdorysně.
Půdorysem šroubovice je kružnice se středem v o1 a procházející bodem A1. Tuto kružnici
od bodu A rozdělíme po 30° na 12 bodů (1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12). Každý z těchto bodů
vznikne otočením o 30° od bodu předchozího a posunutím ve směru stoupání o 1/12 výšky závitu
v, která přísluší otočení o 360°.
A
A
2
3
3
4
4
5
5
6
6
7
78
8
9
9
10
10
11
11
12
12 = o
o
y
1 1
2
2
2
1,2
v
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2
2
2
2
2
2
2
2
2
2
2
2
Sestrojení závitu šroubovice - řešení

16
Příklad: Pravotočivá šroubovice je dána osou o, redukovanou výškou závitu b a bodem M.
Nalezněte nárys bodu X šroubovice, je-li dán jeho půdorys X1.
M
M
X
X
o
o
r
b
1
1
1
2
2
2
y1,2
r
z
z
r
r
r
MBX1
X
Nalezení nárysu bodu šroubovice v Mongeově promítání
Nejdříve sestrojíme charakteristický trojúhelník. Pomocí rektifikace Sobotkovou
rektifikací oblouku M1X1 kružnice sestrojíme bod X1 na polopřímce MB tak, aby velikost úsečky
MX1 byla rovna velikosti oblouku M1X1 kružnice. Velikost úsečky XX1 je velikost posunutí z
příslušného k otočení o úhel .
Úlohu lze také formulovat jako nalezení posunutí, které přísluší otočení o určitý úhel,
nebo jako sestrojení průsečíků šroubovice s rovinou α ∥ o.

17
Příklad: Pravotočivá šroubovice je dána osou o, redukovanou výškou závitu b a bodem M.
Najděte její průsečík X s rovinou α o.
Bod X leží v rovině α, proto víme, jaké je jeho posunutí z vůči bodu M. Opět musíme
sestrojit charakteristický trojúhelník MBV. Po nanesení posunutí z do charakteristického
trojúhelníka nalezneme otočení příslušné k posunutí , dané vztahem .
Úsečku MX1 z trojúhelníku MXX1 navineme na kružnici v půdorysu (pomocí Sobotkovy
rektifikace) a získáme půdorys X1. Nárys X2 leží na nárysné stopě roviny a na ordinále z bodu X1.
M
M
X
X
o
o
r
r
b
M B
VX
X
z
z
1
1
1
2
2
2
1
y1,2
2
Průsečík šroubovice s rovinou rovnoběžnou s půdorysnou v Mongeově promítání
Poznámka: Stejné řešení má také úloha „k danému posunutí najděte příslušné otočení“.

18
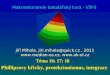
Příklad: V bodě B šroubovice sestrojte průvodní trojhran šroubovice. Pravotočivá šroubovice je
dána osou o, redukovanou výškou závitu b a bodem B.
Tečna: Půdorys tečny t1 v bodě B1 je tečna kružnice. Řídící kuželovou plochu (vrchol)
umístíme do bodu na ose, který je od půdorysny vzdálen o vzdálenost b. Půdorys této řídící
kuželové plochy (kružnice) splývá s půdorysem šroubovice.
Půdorys: Vrcholem řídící kuželové plochy (splývá s o1) vedeme rovnoběžku t´1 s tečnou t1 (viz
obrázek). Půdorysný stopník P1 leží na podstavě řídící kuželové plochy. Určíme jeho polohu podle
stoupání šroubovice.
Nárys: Nárysem půdorysného stopníku P2 a nárysem vrcholu řídící kuželové plochy vedeme
přímku t´2. S touto přímkou je rovnoběžná tečna t2, která prochází bodem B2.
Hlavní normála: Hlavní normála šroubovice je vždy kolmá na osu a vždy ji protíná.
Půdorys: Vždy je n1 kolmý na tečnu t1 a prochází o1. Nárys: n2 je rovnoběžná se základnicí y1,2.
Binormála: Binormála je přímka kolmá na oskulační rovinu, která je určena tečnou a
hlavní normálou. Tedy půdorys a nárys binormály jsou kolmé na půdorysnou a nárysnou stopu
oskulační roviny, kterou sestrojíme pomocí stopníků tečny a hlavní normály. Půdorys binormály
vždy splývá s půdorysem tečny.
B
b
o
o
t
y
1
1
1
2
2
1,2t1
1P
P2
t2
t2
= b 1
B
n1
n2
n2
b2
Průvodní trojhran šroubovice v Mongeově promítání

19
ZOBRAZENÍ ŠROUBOVICE V PRAVOÚHLÉ AXONOMETRII
Příklad: Zobrazte jeden závit pravotočivé šroubovice, jejíž osa splývá s osou z. Šroubovice je dána
výškou závitu v, redukovanou výškou závitu b a tvořícím bodem M.
Axonometrickým půdorysem šroubovice je elipsa a jejím axonometrickým průmětem je
křivka. Axonometrický průmět sestrojíme jako axonometrické průměty dvanácti bodů šroubovice
postupným otáčením bodu M o 30°. Posunutí těchto bodů při příslušném otáčení určíme
z charakteristického trojúhelníka. Vždy však musíme zjistit v otočení pomocných průměten do
průmětny axonometrické, jak se skutečné vzdálenosti zkreslí.
xy
z
O
(O)
(O)
(x)
(z)
(y)M
M´
(v)
b
M
M´
b
X
X
1
z
I
B
V
v
v/12
v/12
(b)
(M)
(v/12)
Mr
Šroubovice v pravoúhlé axonometrii

20
ÚLOHY O ŠROUBOVICI V PRAVOÚHLÉ AXONOMETRII
Příklad: Pravotočivá šroubovice je dána osou o, redukovanou výškou závitu b a bodem M.
Nalezněte axonometrický průmět bodu X šroubovice, je-li dán jeho axonometrický půdorys X1.
V otočení půdorysny do axonometrické průmětny určíme řídící kružnici a na ní bod (X),
tím zjistíme úhel otočení půdorysu bodu X vůči bodu M. Poté sestrojíme charakteristický
trojúhelník. Pomocí rektifikace oblouku (M)(X) v otočení do půdorysny sestrojíme bod X na
polopřímce MB tak, aby velikost úsečky MX byla rovna velikosti oblouku (M)(X) tj. r. Velikost
úsečky XX1 je velikost posunutí Δz, příslušného k otočení o úhel . Velikost (Δz) naneseme na
otočenou osu (z), čímž získáme velikost Δz posunutí bodu X1 ve směru osy z.
xy
z
O
(O)
(O)
(x)
(z)
(y)
M
b
X
X
1
z
M
M1
(M)
X1
X
( z )
zz
r
I
B
V
(X )1
Nalezení nárysu bodu šroubovice v pravoúhlé axonometrii
Poznámka: Úlohu lze formulovat také jako „nalezení posunutí Δz, které přísluší otočení o úhel “
nebo „sestrojení průsečíků šroubovice s rovinou α‖o“.

21
Příklad: Pravotočivá šroubovice je dána osou o, redukovanou výškou závitu b a bodem M.
Sestrojte její průsečík X s rovinou .
Zadaný bod M leží v rovině ‖ (sestrojíme ji pomocí hlavních přímek procházejících
bodem M, víme-li, že rovina α‖π) a bod X leží v rovině , posunuté o Δz od roviny α. Nyní
nalezneme skutečnou velikost (Δz) posunutí na (z).
Sestrojíme charakteristický trojúhelník a na něm zjistíme velikost otočení příslušné
k posunutí Δz, r = . Velikost MX1 navineme pomocí Sobotkovy rektifikace na řídící kružnici
šroubovice otočenou do axonometrické průmětny a získáme bod (X1). Poté pomocí afinity mezi
otočenými axonometrickými půdorysy do axonometrické průmětny a axonometrickými půdorysy
získáme axonometrický půdorys X1 a posléze pomocí posunutí o Δz axonometrický průmět X.
xy
z
O
(O)
(O)
(x)
(z )
(y)
M
b
X
X
1
z
M
(M)
(X )
X1
X
( z )
zz
m
n
mn
z
M1
B
V
1
r
Průsečík šroubovice s rovinou rovnoběžnou s půdorysnou v pravoúhlé axonometrii
Poznámka: Tato úloha má stejné řešení jako úloha: „k danému posunutí nalezněte příslušné
otočení“.

22
Příklad: V bodě X šroubovice sestrojte její tečnu. Pravotočivá šroubovice je dána osou o,
redukovanou výškou závitu b a bodem X
Otočený axonometrický půdorys (t1) tečny v bodě (X1) je tečnou k otočené kružnici.
Pomocí afinity získáme axonometrický půdorys t1.
Otočeným půdorysem osy šroubovice (O) (otočeným vrcholem řídící kuželové plochy
šroubovice) vedeme rovnoběžku (t´1) s přímkou (t1). Její otočený půdorysný stopník (P) leží na
řídící kružnici, pomocí afinity najdeme jeho axonometrický průmět P. Tento bod P pak spojíme
s vrcholem řídící kuželové plochy šroubovice, který leží na ose šroubovice ve vzdálenosti b od
půdorysny (pomocí sklopení osy z musíme nalézt zkrácenou délku b). Tím vznikne axonometrický
průmět t´ přímky, která je rovnoběžná s hledanou tečnou t šroubovice v bodě X.
xy
z
O
(O)
(O)
(x)
(z)
(y)b
(b)X
X
(X )
1
(t )
t1
t
1
(P)
(t´ )1
1
P
t
t1
Tečna ke šroubovice v pravoúhlé axonometrii
Poznámka: Všechny úlohy jsou řešeny pro pravotočivou šroubovici. Řešení pro levotočivou jsou
obdobná, proveďte si je jako cvičení samostatně.

23
ZOBRAZENÍ ŠROUBOVICE V KOSOÚHLÉM PROMÍTÁNÍ
V kosoúhlém promítání se zobrazí šroubovice jako křivky. Je-li její osa kolmá
k půdorysně, pak jejím kosoúhlým průmětem je elipsa.
Při sestrojování šroubovice a při řešení úloh o šroubovici v kosoúhlém promítání
postupujeme obdobně jako v pravoúhlé axonometrii, pouze musíme přihlédnout k příslušným
rozdílům, mezi těmito zobrazovacími metodami.
Příklad: Sestrojte jeden závit pravotočivé šroubovice v kosoúhlém promítání ( = 135°, q = 2/3).
Poloměr řídící kružnice je r, osa šroubovice splývá s osou z a výška závitu je v.
Nejdříve sestrojíme kosoúhlý půdorys s1k šroubovice, kterým je elipsa se středem
v počátku soustavy souřadnic. Použijeme afinitu mezi kosoúhlými půdorysy a půdorysy bodů.
Řídící kružnici s1 rozdělíme na dvanáct dílů. V sestrojených bodech vztyčíme kolmice
(rovnoběžky s osou z). Výšku závitu v rozdělíme na 12 dílů a vždy při otočení o 30° se posuneme
ve směru osy o 1/12 výšky závitu v. Takto sestrojíme 12 bodů na jednom závitu šroubovice.
ss
11k
Ok
r v
s k
x
y
z
k
x1
Šroubovice v kosoúhlém promítání
POUŽITÁ LITERATURA:
1. Urban, A.: Deskriptivní geometrie II, SNTL, Praha 1965