Embed Size (px)
Citation preview

Forsch Ingenieurwes (2014) 78:59–67DOI 10.1007/s10010-014-0173-y
O R I G I NA LA R B E IT E N / O R I G I NA L S
Kontaktwechselwirkung einer Rohrleitung mit derReparaturbandage aus einem Kompositwerkstoff
Holm Altenbach · Dmitriy A. Beschetnikov · Gennadiy I. Lvov · Konstantin Naumenko ·Vladimir G. Sukiasov
Eingegangen: 30. Oktober 2013 / Online publiziert: 12. April 2014© Springer-Verlag Berlin Heidelberg 2014
Zusammenfassung In der vorliegenden Arbeit wird dieKontaktaufgabe über die Wechselwirkung einer langenZylinderschale mit einer koaxialen zylindrischen Bandageaus einem Verbundwerkstoff untersucht. Der Verbundw-erkstoff wird als ein homogenes orthotropes Material mitbekannten effektiven elastischen Eigenschaften modelliert.Basierend auf der klassischen Schalentheorie werden dieGrundgleichungen für die Kontaktaufgabe sowie allgemeineLösungen für die Durchbiegungen und Schnittgrößen for-muliert. Die unbekannten Integrationskonstanten sowie dieKontaktfläche werden numerisch mit Hilfe des Programm-pakets Maple ermittelt. Drei charakteristische Längen derBandage, bei denen der Übergang von einem Kontaktschemader Wechselwirkung zu einem anderen erfolgt, wurden er-mittelt. Es wurde festgestellt, dass die Änderung des In-nendrucks nicht zum Übergang von einem Kontaktschemazu einem anderen führt. Der Charakter der Kontaktwechsel-wirkung wird durch geometrische Parameter der Verbindungund elastische Materialeigenschaften der Schale und derBandage bestimmt.
Contact interaction of a pipe with the repair wrap froma composite material
Abstract In the present work the contact interaction of along cylindrical shell with a coaxial cylindrical wrap made
H. Altenbach (�) · K. NaumenkoInstitut für Mechanik, Otto-von-Guericke-Universität Magdeburg,PF 4120, 39016 Magdeburg, DeutschlandE-Mail: [email protected]
D. A. Beschetnikov · G. I. Lvov · V. G. SukiasovLehrstuhl Dynamik und Festigkeit von Maschinen, „KharkoverPolytechnisches Institut“, Nationale Technische Universität,ul. Frunze 21, 61002 Kharkov, Ukraine
of a composite material is investigated. The composite mate-rial is modeled as a homogeneous orthotropic medium withknown effective elastic properties. Based on the classicalshell theory governing equations for the contact problemsand general solutions to the deflections and internal forcesare formulated. The unknown integration constants and thecontact surface area are determined numerically using thesoftware package Maple. Three characteristic lengths of thewrap, for which the transition from one contact mode to an-other takes place, have been determined. It was found thatthe change in the internal pressure does not affect the tran-sition between the contact modes. The nature of the contactinteraction is determined by the geometric parameters of thecontact pair and elastic material properties of the shell andthe repair wrap.
Formelzeichen
cij Komponenten des SteifigkeitstensorsD Biegesteifigkeit der SchaleDb Biegesteifigkeit der BandageE Elastizitätsmodulh Dicke der Schalehb Dicke der BandageL Länge der BandageL∗ Kritische Länge des ersten KontaktschemasL∗∗ Kritische Länge des zweiten Kontaktschemasl Länge der KontaktflächeM Biegemomentp Innendruckpk KontaktdruckQ QuerkraftR Radius der SchalenmittelflächeRb Radius der Bandagenmittelflächew Durchbiegung der Schale
60 H. Altenbach et al.
wb Durchbiegung der Bandageν Querkontraktionszahlρ Krümmungsradius
1 Einleitung
Die Installation von lokalen Bandagen ist derzeit eine dereffektivsten Möglichkeiten der zerstörungsfreien Reparaturvon Rohrleitungen. Dadurch können Schadstellen beseit-igt werden, wobei der Betrieb der Leitung während derReparatur aufrechterhalten bleibt [15]. Als Materialienfür Reparaturbandagen sollten Verbundstoffe auf Poly-merbasis (Kompositwerkstoffe) wegen ihrer ausgezeich-neten physikalischen und mechanischen Eigenschaften undder Verfügbarkeit der Technologie verwendet werden, waseine schnelle Wiederherstellung des Betriebszustandes vonRohrleitungen ohne Stilllegung des beschädigten Bere-ichs ermöglicht. Die Perspektive dieser Methode bestimmtdie Notwendigkeit einer umfassenden theoretischen Unter-suchung der Zuverlässigkeit von Verbindungen. Eine Über-sicht über die Anwendung von Verbundwerkstoffen beider Reparatur von Rohrleitungen ist in [16] angegeben.Der sichere Langzeitbetrieb des reparierten Systems er-fordert optimale Dimensionierung der Reparaturbandage fürgegebene Betriebsbeanspruchungen. Die Anforderungen fürdie Auslegung von Reparatursystemen sind beispielsweisein [2] diskutiert. Für die Festigkeitsbewertung können dieFinite-Elemente-Methode sowie spannungs- oder verzer-rungsbasierte Versagenskriterien eingesetzt werden [1].
Ein wichtiger Aspekt einer Reparaturverbindung istdie Kontaktwechselwirkung der Rohrleitung mit der Ban-dage. Von praktischer Bedeutung ist dabei die Integritätder Kontaktverbindung [2], wobei die Länge und dieWerkstoffeigenschaften der Bandage die wesentlichen Ein-flussgrößen sind. Im Rahmen der vorliegenden Arbeit ste-ht die elastische Wechselwirkung der Rohrleitung mit derReparaturbandage für zwei koaxiale Zylinderschalen imMittelpunkt. Dabei ist u.a. die Belastbarkeit der Bandagezu untersuchen. Andere Fragestellungen, wie z. B. dieDichtigkeit der Reparaturverbindung, werden im Rahmendieser Untersuchung nicht behandelt. Die Berechnung derVerformungs- und Spannungszustände von elastischen Kör-pern im statischen oder dynamischen Kontakt ist im Rah-men der Mechanik als Kontaktaufgabe bekannt [11, 12]. Fürderen Behandlung sind nachfolgend analytische Lösungender klassischen Schalentheorie einzusetzen mit dem Ziel, dieGleichungen für die optimalen Abmaße und Werkstoffeigen-schaften der Bandage herzuleiten.
Die Aufgaben über die Wechselwirkung von dünnenSchalen mit absolut starren Bandagen wurden in einer Rei-he von wissenschaftlichen Arbeiten [9, 10, 12, 14, 18] be-handelt. Zu beachten ist, dass für die Untersuchung von
R
Lhbh
pO x
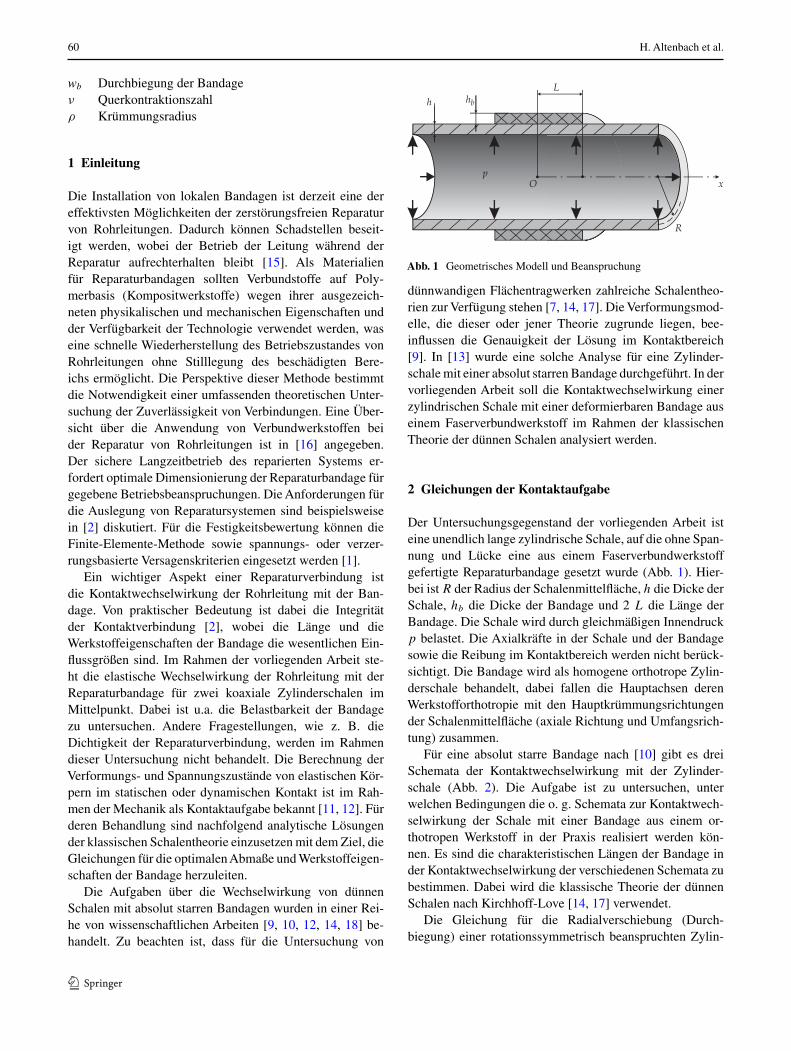
Abb. 1 Geometrisches Modell und Beanspruchung
dünnwandigen Flächentragwerken zahlreiche Schalentheo-rien zur Verfügung stehen [7, 14, 17]. Die Verformungsmod-elle, die dieser oder jener Theorie zugrunde liegen, bee-influssen die Genauigkeit der Lösung im Kontaktbereich[9]. In [13] wurde eine solche Analyse für eine Zylinder-schale mit einer absolut starren Bandage durchgeführt. In dervorliegenden Arbeit soll die Kontaktwechselwirkung einerzylindrischen Schale mit einer deformierbaren Bandage auseinem Faserverbundwerkstoff im Rahmen der klassischenTheorie der dünnen Schalen analysiert werden.
2 Gleichungen der Kontaktaufgabe
Der Untersuchungsgegenstand der vorliegenden Arbeit isteine unendlich lange zylindrische Schale, auf die ohne Span-nung und Lücke eine aus einem Faserverbundwerkstoffgefertigte Reparaturbandage gesetzt wurde (Abb. 1). Hier-bei ist R der Radius der Schalenmittelfläche, h die Dicke derSchale, hb die Dicke der Bandage und 2 L die Länge derBandage. Die Schale wird durch gleichmäßigen Innendruckp belastet. Die Axialkräfte in der Schale und der Bandagesowie die Reibung im Kontaktbereich werden nicht berück-sichtigt. Die Bandage wird als homogene orthotrope Zylin-derschale behandelt, dabei fallen die Hauptachsen derenWerkstofforthotropie mit den Hauptkrümmungsrichtungender Schalenmittelfläche (axiale Richtung und Umfangsrich-tung) zusammen.
Für eine absolut starre Bandage nach [10] gibt es dreiSchemata der Kontaktwechselwirkung mit der Zylinder-schale (Abb. 2). Die Aufgabe ist zu untersuchen, unterwelchen Bedingungen die o. g. Schemata zur Kontaktwech-selwirkung der Schale mit einer Bandage aus einem or-thotropen Werkstoff in der Praxis realisiert werden kön-nen. Es sind die charakteristischen Längen der Bandage inder Kontaktwechselwirkung der verschiedenen Schemata zubestimmen. Dabei wird die klassische Theorie der dünnenSchalen nach Kirchhoff-Love [14, 17] verwendet.
Die Gleichung für die Radialverschiebung (Durch-biegung) einer rotationssymmetrisch beanspruchten Zylin-

Kontaktwechselwirkung einer Rohrleitung mit der Reparaturbandage aus einem Kompositwerkstoff 61
a
b
c
Abb. 2 Kontaktwechselwirkung der Schale mit einer Bandage: a Kon-takt auf zwei Linien; b Kontakt auf drei Linien; c Kontakt auf zweiLinien und der Oberfläche
derschale aus einem homogenen isotropen Material mit demElastizitätsmodul E und der Querkontraktionszahl ν kannwie folgt formuliert werden [14, 17]
d4w
dx4+ 4β4w = p
D, D = Eh3
12(1 − ν2), 4β4 = Eh
R2D,
(1)
wobei w die Radialverschiebung (Durchbiegung), D dieBiegesteifigkeit, h die Wandstärke, R der Radius derSchalenmittelfläche und p der Druck sind. Für die Bandageals zylindrische Schale aus einem orthotropen Material lässtsich die Gleichung wie folgt angeben
d4w
dx4+ 4β4
b w = p
Db
, β4b = 3
c11c22 − c212
c211h
2bR
2b
,
Db = c11h3b
12(2)
In Gl. 2 und nachfolgend werden mit den Indizes 1 und 2jeweils die axiale Richtung und die Umfangsrichtung beze-ichnet. Die Komponenten c11, c22, c12 des Steifigkeitsten-sors können für die gegebenen Werkstoffkennwerte wie folgtberechnet werden [6]
c11 = E21
E1 − ν212E2
, c12 = E1E2ν12
E1 − ν212E2
, c22 = E1E2
E1 − ν212E2
,
wobei E1, E2 die Elastizitätsmoduli und ν12 die Querkon-traktionszahl des orthotropen Werkstoffs sind.
Für die Bestimmung der charakteristischen Länge derBandage sollen nachfolgend drei Kontaktaufgaben gelöstwerden. Dabei werden folgende Parameter der Verbindung
R = 505 mm, h = 10 mm, hb = 20 mm, p = 6 MPa
festgelegt. Die für die Analyse vorausgesetzten Werkstof-fkennwerte sind in Tab. 1 angegeben.
Tab. 1 Werkstoffkennwerte
Schale (Stahl) Bandage(Glasfaserverstärkter Kunststoff)
E, GPa 200 E1, GPa 18,6 ν12 0,15 G12, GPa 4ν 0,3 E2, GPa 24,6 ν13 0,42 G13, GPa 3
3 Lösungen der Kontaktaufgaben
3.1 Kontakt auf zwei Linien
Für eine kurze Bandage erfolgt der Kontakt mit der Schaleauf zwei Linien an den Rändern der Bandage (Abb. 2a). DieGleichungen für zweiAbschnitte der Schale und der BandageI (0 ≤ x ≤ L) und II (x ≥ L) können wie folgt formuliertwerden
I : 0 ≤ x ≤ L, d4wI
dx4 + 4β4wI = p
D,
d4wb
dx4 + 4β4b wb = 0,
II : x ≥ L, d4wII
dx4 + 4β4wII = p
D, (3)
wobei wb die Durchbiegung der Bandage, und wI , wII dieDurchbiegung der Schale im ersten und zweiten Abschnittsind. Die allgemeine Lösung der Gl. 3 lässt sich wie folgtangeben
wI = e−βx (C1 cos βx + C2 sin βx)
+ eβx (C3 cos βx + C4 sin βx) + p
4β4D,
wII = e−βx (C5 cos βx + C6 sin βx) + p
4β4D,
wb = e−βbx (C7 cos βbx + C8 sin βbx)
+ eβbx (C9 cos βbx + C10 sin βbx) . (4)
Die unbekannten Integrationskonstanten Ci werden ausden folgenden Symmetrie- und Übergangsbedingungen bes-timmt
x = 0 :dwI
dx= 0,
d3wI
dx3= 0,
dwb
dx= 0,
d3wb
dx3= 0,
x = L : wI = wII = wb, M1b= 0,
dwI
dx= dwII
dx,
MI1 = MII
1 , QI1 − QII
1 = −Q1b, (5)
wobei M1 und Q1 das axiale Biegemoment und die Querkraftsind, die sich jeweils auf die 2. und 3. Ableitung der Durch-biegung beziehen [14, 17]. Die Bedingung 52 im Abschnittx = L folgt aus der Wechselwirkung der Schale mit demRand der Bandage (Abb. 3), wobei der Sprung der QuerkraftQ1 in der Schale auf den Wert der Kraft der Wechselwirkungmit der Bandage Q1b
zu beachten ist. Basierend auf den Gl. 4
62 H. Altenbach et al.
O
p
x
L
Q1b
QI1
QII1
Abb. 3 Wechselwirkung der Schale mit dem Rand der Bandage
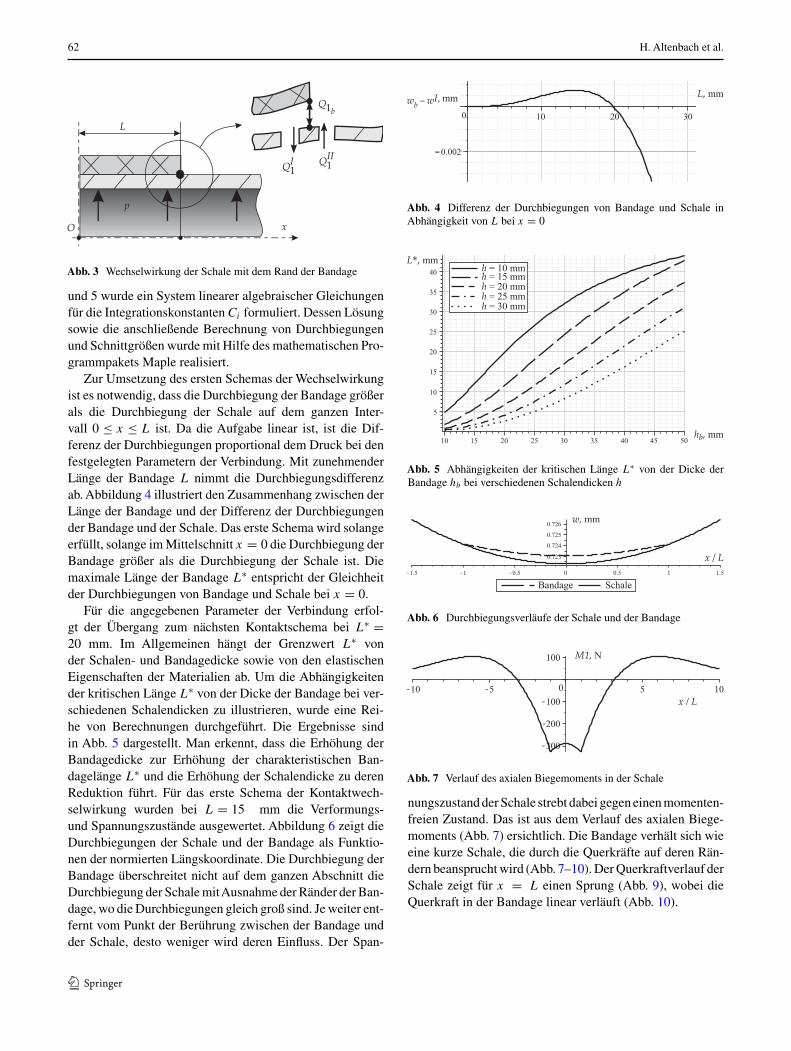
und 5 wurde ein System linearer algebraischer Gleichungenfür die Integrationskonstanten Ci formuliert. Dessen Lösungsowie die anschließende Berechnung von Durchbiegungenund Schnittgrößen wurde mit Hilfe des mathematischen Pro-grammpakets Maple realisiert.
Zur Umsetzung des ersten Schemas der Wechselwirkungist es notwendig, dass die Durchbiegung der Bandage größerals die Durchbiegung der Schale auf dem ganzen Inter-vall 0 ≤ x ≤ L ist. Da die Aufgabe linear ist, ist die Dif-ferenz der Durchbiegungen proportional dem Druck bei denfestgelegten Parametern der Verbindung. Mit zunehmenderLänge der Bandage L nimmt die Durchbiegungsdifferenzab. Abbildung 4 illustriert den Zusammenhang zwischen derLänge der Bandage und der Differenz der Durchbiegungender Bandage und der Schale. Das erste Schema wird solangeerfüllt, solange im Mittelschnitt x = 0 die Durchbiegung derBandage größer als die Durchbiegung der Schale ist. Diemaximale Länge der Bandage L∗ entspricht der Gleichheitder Durchbiegungen von Bandage und Schale bei x = 0.
Für die angegebenen Parameter der Verbindung erfol-gt der Übergang zum nächsten Kontaktschema bei L∗ =20 mm. Im Allgemeinen hängt der Grenzwert L∗ vonder Schalen- und Bandagedicke sowie von den elastischenEigenschaften der Materialien ab. Um die Abhängigkeitender kritischen Länge L∗ von der Dicke der Bandage bei ver-schiedenen Schalendicken zu illustrieren, wurde eine Rei-he von Berechnungen durchgeführt. Die Ergebnisse sindin Abb. 5 dargestellt. Man erkennt, dass die Erhöhung derBandagedicke zur Erhöhung der charakteristischen Ban-dagelänge L∗ und die Erhöhung der Schalendicke zu derenReduktion führt. Für das erste Schema der Kontaktwech-selwirkung wurden bei L = 15 mm die Verformungs-und Spannungszustände ausgewertet. Abbildung 6 zeigt dieDurchbiegungen der Schale und der Bandage als Funktio-nen der normierten Längskoordinate. Die Durchbiegung derBandage überschreitet nicht auf dem ganzen Abschnitt dieDurchbiegung der Schale mitAusnahme der Ränder der Ban-dage, wo die Durchbiegungen gleich groß sind. Je weiter ent-fernt vom Punkt der Berührung zwischen der Bandage undder Schale, desto weniger wird deren Einfluss. Der Span-
wb – wI, mm L, mm
-
Abb. 4 Differenz der Durchbiegungen von Bandage und Schale inAbhängigkeit von L bei x = 0
L*, mm
hb, mm
h = 10 mmh = 15 mmh = 20 mmh = 25 mmh = 30 mm
Abb. 5 Abhängigkeiten der kritischen Länge L∗ von der Dicke derBandage hb bei verschiedenen Schalendicken h
w, mm
x / L
SchaleBandage
Abb. 6 Durchbiegungsverläufe der Schale und der Bandage
M1, N
x / L
Abb. 7 Verlauf des axialen Biegemoments in der Schale
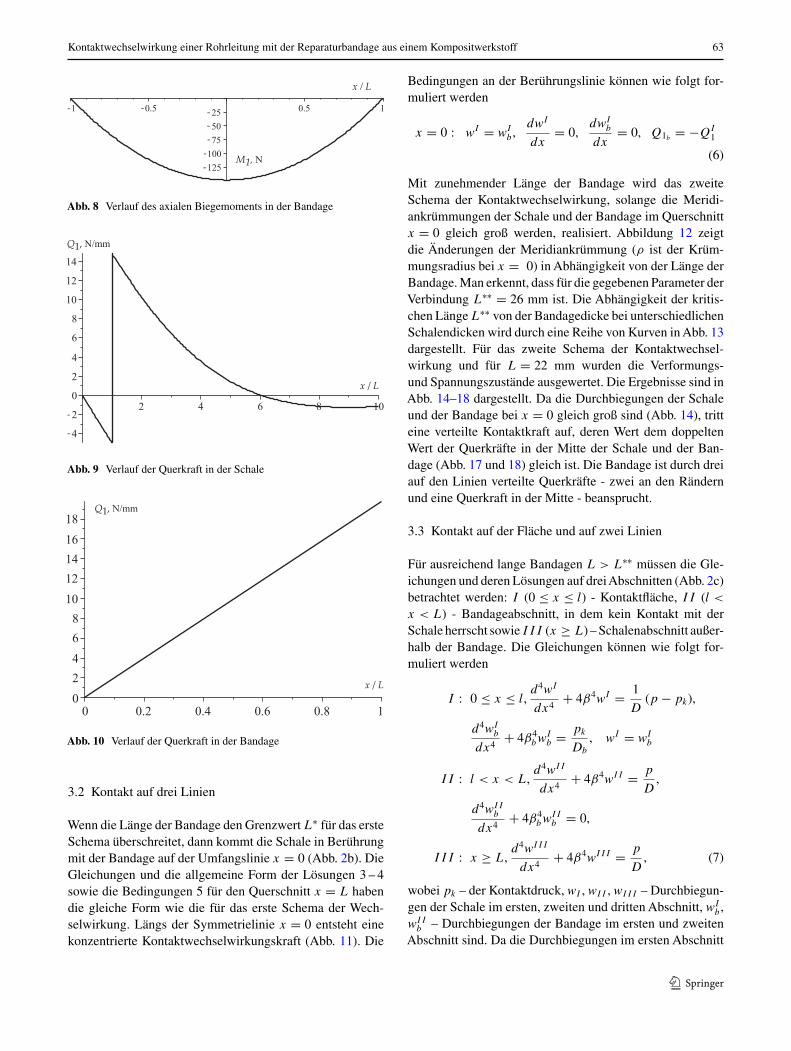
nungszustand der Schale strebt dabei gegen einen momenten-freien Zustand. Das ist aus dem Verlauf des axialen Biege-moments (Abb. 7) ersichtlich. Die Bandage verhält sich wieeine kurze Schale, die durch die Querkräfte auf deren Rän-dern beansprucht wird (Abb. 7–10). Der Querkraftverlauf derSchale zeigt für x = L einen Sprung (Abb. 9), wobei dieQuerkraft in der Bandage linear verläuft (Abb. 10).
Kontaktwechselwirkung einer Rohrleitung mit der Reparaturbandage aus einem Kompositwerkstoff 63
M1, N
x / L
Abb. 8 Verlauf des axialen Biegemoments in der Bandage
Q1, N/mm
x / L
Abb. 9 Verlauf der Querkraft in der Schale
Q1, N/mm
x / L
Abb. 10 Verlauf der Querkraft in der Bandage
3.2 Kontakt auf drei Linien
Wenn die Länge der Bandage den Grenzwert L∗ für das ersteSchema überschreitet, dann kommt die Schale in Berührungmit der Bandage auf der Umfangslinie x = 0 (Abb. 2b). DieGleichungen und die allgemeine Form der Lösungen 3 – 4sowie die Bedingungen 5 für den Querschnitt x = L habendie gleiche Form wie die für das erste Schema der Wech-selwirkung. Längs der Symmetrielinie x = 0 entsteht einekonzentrierte Kontaktwechselwirkungskraft (Abb. 11). Die
Bedingungen an der Berührungslinie können wie folgt for-muliert werden
x = 0 : wI = wIb ,
dwI
dx= 0,
dwIb
dx= 0, Q1b
= −QI1
(6)
Mit zunehmender Länge der Bandage wird das zweiteSchema der Kontaktwechselwirkung, solange die Meridi-ankrümmungen der Schale und der Bandage im Querschnittx = 0 gleich groß werden, realisiert. Abbildung 12 zeigtdie Änderungen der Meridiankrümmung (ρ ist der Krüm-mungsradius bei x = 0) in Abhängigkeit von der Länge derBandage. Man erkennt, dass für die gegebenen Parameter derVerbindung L∗∗ = 26 mm ist. Die Abhängigkeit der kritis-chen Länge L∗∗ von der Bandagedicke bei unterschiedlichenSchalendicken wird durch eine Reihe von Kurven in Abb. 13dargestellt. Für das zweite Schema der Kontaktwechsel-wirkung und für L = 22 mm wurden die Verformungs-und Spannungszustände ausgewertet. Die Ergebnisse sind inAbb. 14–18 dargestellt. Da die Durchbiegungen der Schaleund der Bandage bei x = 0 gleich groß sind (Abb. 14), tritteine verteilte Kontaktkraft auf, deren Wert dem doppeltenWert der Querkräfte in der Mitte der Schale und der Ban-dage (Abb. 17 und 18) gleich ist. Die Bandage ist durch dreiauf den Linien verteilte Querkräfte - zwei an den Rändernund eine Querkraft in der Mitte - beansprucht.
3.3 Kontakt auf der Fläche und auf zwei Linien
Für ausreichend lange Bandagen L > L∗∗ müssen die Gle-ichungen und deren Lösungen auf dreiAbschnitten (Abb. 2c)betrachtet werden: I (0 ≤ x ≤ l) - Kontaktfläche, II (l <
x < L) - Bandageabschnitt, in dem kein Kontakt mit derSchale herrscht sowie III (x ≥ L) – Schalenabschnitt außer-halb der Bandage. Die Gleichungen können wie folgt for-muliert werden
I : 0 ≤ x ≤ l,d4wI
dx4+ 4β4wI = 1
D(p − pk),
d4wIb
dx4+ 4β4
b wIb = pk
Db
, wI = wIb
I I : l < x < L,d4wII
dx4+ 4β4wII = p
D,
d4wIIb
dx4+ 4β4
b wIIb = 0,
III : x ≥ L,d4wIII
dx4+ 4β4wIII = p
D, (7)
wobei pk – der Kontaktdruck, wI , wII , wIII – Durchbiegun-gen der Schale im ersten, zweiten und dritten Abschnitt, wI
b ,wII
b – Durchbiegungen der Bandage im ersten und zweitenAbschnitt sind. Da die Durchbiegungen im ersten Abschnitt
64 H. Altenbach et al.
O
px
L Q1b
QI1
Q / 2Q
Abb. 11 Wechselwirkung der Schale mit der Bandage im Querschnitt x = 0
BandageSchale
L, mm
ρ , mm –11–
Abb. 12 Krümmungen der Bandage und der Schale im Querschnittx = 0 in Abhängigkeit von L
h = 10 mmh = 15 mmh = 20 mmh = 25 mmh = 30 mm
L**, mm
hb, mm
Abb. 13 Abhängigkeiten der kritischen Länge L∗ von der Dicke derBandage hb bei verschiedenen Schalendicken h
gleich groß sind, kann der unbekannte Kontaktdruck pk ausden Gleichungen eliminiert werden. Damit können die dreiGl. 71 des ersten Abschnitts durch die folgende Gleichung
I : 0 ≤ x ≤ l,d4wI
dx4+ 4β4
modwI = p
Dmod
, (8)
mit
β4mod = β4D + β4
bDb
Dmod
, Dmod = D + Db
ersetzt werden. Die allgemeinen Lösungen der gewöhnlichenDifferentialgleichungen vierter Ordnung lassen sich ähnlich
x / L
w, mm
SchaleBandage
Abb. 14 Durchbiegungsverläufe der Schale und Bandage
M1, N
x / L
Abb. 15 Verlauf des axialen Biegemoments in der Schale
den Gl. 4 angeben. Wegen den drei Lösungsabschnitten sinddabei 14 Integrationskonstanten zu bestimmen. Ferner stelltdie Länge der Kontaktfläche l eine zusätzliche Unbekanntedar. Für die Berechnung stehen folgende Rand- und Über-gangsbedingungen zur Verfügung
x = 0 :dwI
dx= 0, QI
1 = 0, (9)
x = l : wI = wII = wIIb ,
dwI
dx= dwII
dx= dwII
b
dx,
MI1 = MII
1 , MI1b
= MII1b
,
QI1 + QI
1b= QII
1b+ QII
1 , (10)
x = L : wII = wIII = wIIb , MII
1b= 0,
dwII
dx= dwIII
dx,
MII1 = MIII
1 , QII1 − QIII
1 = −QII1b
(11)
Die letzte Bedingung (11) folgt aus der Kontaktwechsel-wirkung der Schale mit der Bandage im Querschnitt x = l
(Abb. 19). Die Gl. 7–10 bilden ein nichtlineares System, weill eine unbekannte Größe ist.
Kontaktwechselwirkung einer Rohrleitung mit der Reparaturbandage aus einem Kompositwerkstoff 65
M1, N
x / L
Abb. 16 Verlauf des axialen Biegemoments in der Bandage
Q1, N/mm
x / L
Abb. 17 Verlauf der Querkraft in der Schale
Q1, N/mm
x / L
Abb. 18 Verlauf der Querkraft in der Bandage
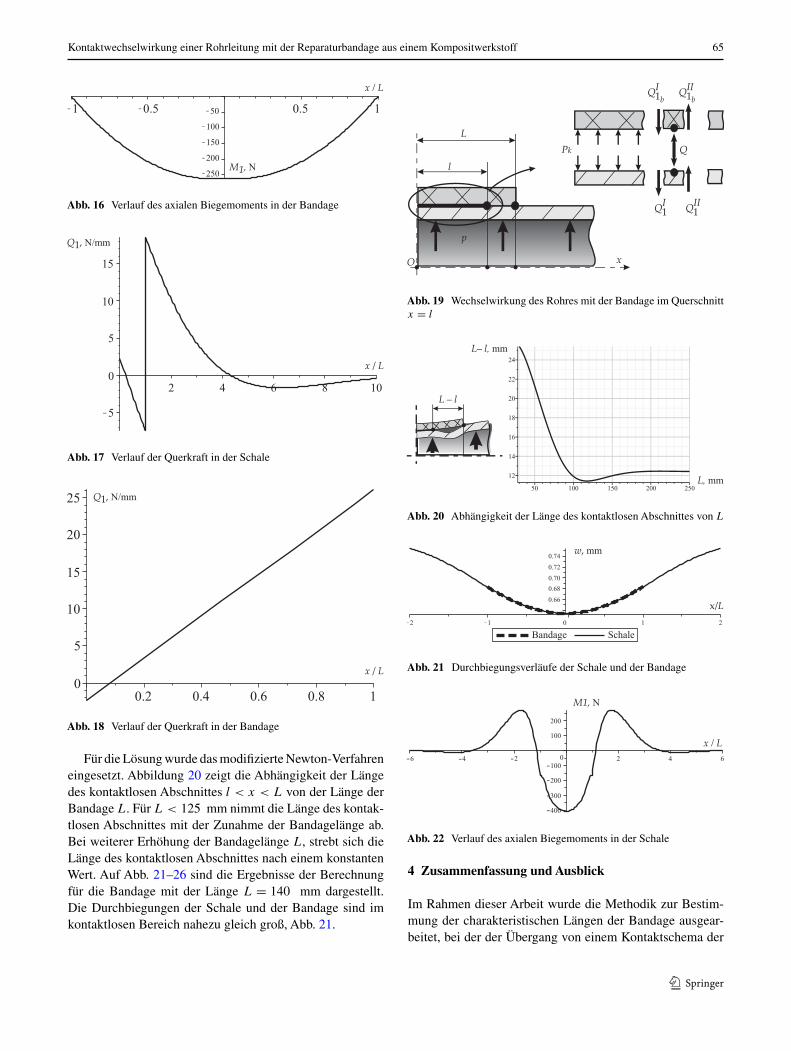
Für die Lösung wurde das modifizierte Newton-Verfahreneingesetzt. Abbildung 20 zeigt die Abhängigkeit der Längedes kontaktlosen Abschnittes l < x < L von der Länge derBandage L. Für L < 125 mm nimmt die Länge des kontak-tlosen Abschnittes mit der Zunahme der Bandagelänge ab.Bei weiterer Erhöhung der Bandagelänge L, strebt sich dieLänge des kontaktlosen Abschnittes nach einem konstantenWert. Auf Abb. 21–26 sind die Ergebnisse der Berechnungfür die Bandage mit der Länge L = 140 mm dargestellt.Die Durchbiegungen der Schale und der Bandage sind imkontaktlosen Bereich nahezu gleich groß, Abb. 21.
O
p
x
l
L
QI1b
QII1b
QI1
QPk
QII1
Abb. 19 Wechselwirkung des Rohres mit der Bandage im Querschnittx = l
L– l, mm
L, mm
L – l
Abb. 20 Abhängigkeit der Länge des kontaktlosen Abschnittes von L
Bandage Schale
x/L
w, mm
Abb. 21 Durchbiegungsverläufe der Schale und der Bandage
M1, N
x / L
Abb. 22 Verlauf des axialen Biegemoments in der Schale
4 Zusammenfassung und Ausblick
Im Rahmen dieser Arbeit wurde die Methodik zur Bestim-mung der charakteristischen Längen der Bandage ausgear-beitet, bei der der Übergang von einem Kontaktschema der
66 H. Altenbach et al.
M1, N
x / L
Abb. 23 Verlauf des axialen Biegemoments in der Bandage
x / L
Q1, N/mm
Abb. 24 Verlauf der Querkraft in der Schale
x / L
Q1, N/mm
Abb. 25 Verlauf der Querkraft in der Schale
Wechselwirkung zu einem anderen erfolgt. Basierend aufder klassischen Schalentheorie wurden die Gleichungen fürKontaktaufgaben sowie allgemeine Lösungen für die Durch-biegungen und Schnittgrößen formuliert. Für die Ermittlungunbekannter Integrationskonstanten sowie der Kontaktflächewurde das Programmpaket Maple eingesetzt.
Die Lösungen zeigen die Möglichkeit der praktischenVer-wendung von dreiArten der topologisch verschiedenen Mod-elle der Wechselwirkung. Ferner wurde festgestellt, dass dieÄnderung des Innendrucks nicht zum Übergang von einem
x /L
Pk, MPa
Abb. 26 Kontaktdruckverteilung entlang der Achse der Schale
Kontaktschema zu einem anderen führt. Der Charakter derKontaktwechselwirkung wird durch die geometrischen Pa-rameter der Verbindung und die elastischen Materialeigen-schaften der Schale und der Bandage bestimmt.
Im Rahmen der Untersuchungen wurde festgestellt, dassdie Erhöhung der Bandagedicke zur Erhöhung der charak-teristischen Bandagelänge, die Erhöhung der Schalendickejedoch zu deren Reduktion führt. Von praktischer Bedeutungist die Tatsache, dass der vollständige Kontakt entlang dergesamten Länge zwischen der Bandage und der Schale selb-st bei einer unbegrenzten Erhöhung der Länge der Bandagenicht auftritt.
Die Analyse des Verformungs- und Spannungszustandshat gezeigt, dass je mehr die Kontaktfläche beim Übergangvon einem Kontaktschema der Wechselwirkung zu einemanderen ist, desto geringer ist die Beanspruchung des ban-dagierten Abschnitts der Schale infolge der Umlagerung derBelastung zwischen der Schale und der Bandage. Die Ergeb-nisse der Untersuchungen ermöglichen, die geometrischenParameter der Bandage und elastische Eigenschaften des Ma-terials gezielt zu wählen, um die gewünschte Konfigurationder Kontakte zu garantieren.
Die Ergebnisse dieser Arbeit basieren auf der An-nahme, dass sich sowohl die Schale als auch die Ban-dage linear-elastisch verhalten. Für eine genauere Bewer-tung der Kontaktwechselwirkung ist zukünftig die inelastis-che Strukturmechanik [8] sowie die Schädigungsmechanikvon Flächentragwerken [3–5] einzusetzen.
Danksagung Die Arbeit wurde durch das Leonhard-Euler-Programm(D. A. Beschetnikov) und das Programm Ostpartnerschaften (V. G.Sukiasov) des DAAD gefördert.
Literatur
1. Alexander C (2008) Strain-based design methods for composite re-pair systems. In: Proc. of IPC2008, IPC2008-64076, ASME, Cal-gary, S 1–15
2. Alexander C, Bedoya J (2011) An updated perspective on usingcomposite materials to reinforce offshore pipelines and risers. In:Proc. of IOPF 2011, IOPF2011-7002, ASME, Houston, S 1–18

Kontaktwechselwirkung einer Rohrleitung mit der Reparaturbandage aus einem Kompositwerkstoff 67
3. Altenbach H, Naumenko K (1997) Creep bending of thin-walledshells and plates by consideration of finite deflections. ComputMech 19(6):490–495
4. Altenbach H, Kushnevsky V, Naumenko K (2001) On the use ofsolid- and shell-type finite elements in creep-damage predictionsof thinwalled structures. Arch Appl Mech 71:164–181
5. Altenbach H, Huang C, Naumenko K (2002) Creep damage predic-tions in thin-walled structures by use of isotropic and anisotropicdamage models. J Strain Anal Eng 37(3):265–275
6. Altenbach H, Altenbach J, Kissing W (2004) Mechanics of com-posite structural elements. Springer, Berlin
7. Altenbach H, Naumenko K, Zhilin PA (2005) A direct approachto the formulation of constitutive equations for rods and shells.In: Pietraszkiewicz W, Szymczak C (Hrsg) Shell structures: theoryand applications, Taylor & Francis, Leiden, S 87–90
8. Altenbach H, GorashY, Naumenko K (2008) Steady-state creep ofa pressurized thick cylinder in both the linear and the power lawranges. Acta Mechanica 195(1–4):263–274
9. Blokh M (1977) Choice of the model in problems of contact be-tween thin-walled bodies. Sov Appl Mech 13:449–455
10. Detinko F, Fastovskii V (1975) Fitting a belt on a cylindrical shell.Sov Appl Mech 11:212–214
11. Grigolyuk E, Tolkachev V (1987) Contact problems in the theoryof plates and shells. Mir, Moscow
12. Kikuchi N, Oden J (1987) Contact problems in elasticity: a studyof variational inequalities and finite element methods. Society forIndustrial and Applied Mathematics, Philadelphia
13. Lvov GI, Tkachuk AN (2006) O vliyanii kinematicheskikhgipotez na kharakter kontaktnogo vzaimodeistviya tsilindricheskoiobolochki s bandazhem (einfluss kinematischer hypothesen auf diekontaktwechselwirkung einer zylinderschale mit der bandage, inruss.). Vestnik NTU KhPI 32:98–104
14. Novozhilov V (1964) The theory of thin shells. P. Noordhoff,Groningen
15. Rehberg T, Schad M (2009) Nicht-Metallische Reparatursystemeführ Rohre- und Rohrleitungen. 3R international 48:212–214
16. Shamsuddoha M, Islam MM, Aravinthan T, Manalo A, Lau K(2013) Effectiveness of using fibre-reinforced polymer compositesfor underwater steel pipeline repairs. Compos Struct 100:40–54
17. Timoshenko S, Woinowsky-Krieger S (1959) Theory of plates andshells. McGraw-Hill, New York
18. VasilenkoA, Emel’yanov I (1993) Contact interaction of anisotrop-ic cylindrical shells with elastic and rigid bodies. Int Appl Mech29:200–203



![Business...[90 Pipe] - 90 pipe section, with bend inner pipe spring supports and welded outer pipe. [Assembly of outer pipe] - When the inner pipe is welded finished and X-ray checked](https://img.pdfslide.tips/doc/110x75/5e3dfc284ee69b37c9083315/-90-pipe-90-pipe-section-with-bend-inner-pipe-spring-supports-and-welded.jpg)

























