-
7/24/2019 kontrol Fuzzy keseimbangan pesawat
1/8
KONTROL LOGIKA FUZZY AKTUATOR AILERONKEMIRINGAN
KECEPATAN ANGIN
MIKRO KONTROLLER
Sensor gyro
Sensor anemometer
Nama : Muh. Azhari Aminudin
NIM : 12041001
Tugas : Neuro Fuzzy pd Inst. Ela
1. !esain "istem #ontrol #eseim$angan "ayap %esa&at
Keseimbangan sayap sebuah pesawat saat mengudara diatur oleh
naik
turunnya aileron pada sayap kiri dan kanan. Pada pengaturan
keseimbangan
pesawat ini digunakan dua parameter input yaitu sudut kemiringan
pesawat dan
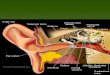
kecepatan angin. Gambar 1 menunjukkan desain sistem secara
keseluruhan. Untuk
mengamati kemiringan pesawat sensor gyro dan untuk kecepatan
angin digunakandan sensor anemometer. Gambar 2 menunjukkan gambaran
plant.
'am$ar 1 : (lo diagram sistem eseim$angan sayap pesa&at
'am$ar 2 : )an*ang $angun sistem eseim$angan pesa&at
Dalam plant ini aileron sayap kiri dan aileron kanan bergerak
dengan arah
berlawanan dengan sudut yang sama. Jika aileron sayap kiri naik
maka aileron
sayap kanan turun begitu pula sebaliknya jika aileron sayap kiri
turun maka
aileron sayap kanan akan naik.
1
-
7/24/2019 kontrol Fuzzy keseimbangan pesawat
2/8
NEGATIF
BESAR
NEGATIF
KECILNOL
P
1
0.5
-40 -20 0
2. Fungsi #eanggotaan Fuzzy #ontrol #eseim$angan %esa&at
de dasar dari pengontrolan kemiringan pesawat telah
dijelaskan
sebelumnya! dengan mengatur perubahan naik turunnya aileron
sayap kiri dan
kanan kontrol untuk mendapatkan sudut kemiringan pesawat yang
konstan pada
titik tengah.
Untuk mengatur kestabilan kemiringan pesawat! in"erensi yang
digunakan
adalah sugeno dengan model dua input dan dua output. Parameter
input yang
digunakan adalah sudut kemiringan dan kecepatan angin.
Keanggotaan dari input
ditunjukikan pada gambar # dan $! sedangkan output ditunjukkan
dalam gambar %
dan &.
'am$ar + : Mem$ership Fun*tion input emiringan
'am$ar 4 : Mem$ership Fun*tion input e*epatan angin
2
-
7/24/2019 kontrol Fuzzy keseimbangan pesawat
3/8
TURUN
MIN
NAIK
MIN
ETIMBANG
TURUN
MIN
NAIK
MIN
SETIMBANG
'am$ar , : Mem$ership Fun*tion output sayap iri
'am$ar - : Mem$ership Fun*tion output sayap anan
+. Aturan Fuzzy #ontrol #eseim$angan %esa&at
Kemiringan pesawat merujuk pada keanggotaan input 'lihat gambar
# dan $(
untuk kemudian diproses secara sugeno untuk menghasilkan output
yang sesuai
dengan keanggotaan keluaran 'Gambar % dan &(! diwakili pada
proses. )abel 1 dan
tabel 2 menunjukkan *ule +,aluation sebagai aturan kontrol
"u--y.
KEMIRINGAN +G/)0
+/*
+G/)0
K+34
5
4
P5)
0
K+34
P5)
0
+/*
KECEPATAN ANGIN
*+D/6 1 7.8# 7.% 7.## 7
+D/G 1 7.&9 7.% 7.## 7
)GG 7.8# 7.&9 7.% 7.19 7.19
Ta$el 1 : )ule Ealuation output aileron iri
KEMIRINGAN +G/)0
+/*
+G/)0
K+34
5
4
P5)
0
K+34
P5)
0
+/*
KECEPATAN ANGIN
*+D/6 7 7.## 7.% 7.8# 1
+D/G 7 7.19 7.% 7.8# 1
)GG 7.19 7.19 7.% 7.&9 7.8#
0.670.33
0.670.33
-
7/24/2019 kontrol Fuzzy keseimbangan pesawat
4/8
Ta$el 1 : )ule Ealuation output aileron anan
4. Model Matemati
Dari masing:masing *U4+ yang telah dibuat dapat die,aluasi pada
masing:
masing *U4+ akan menghasilkan nilai bobot 'a( dan output "u--y
'-(.
;odel matematik untuk input Gyro ?
x
xx
x
xNB
( )
=
$7=1
$727=27
$7
27=7
>?
x
xx
x
xPB
( )
+
=
727=27
27$7=27
$7
727=7
>?
xx
xx
xataux
xNK
( )
=
$727=27
$7
277=27
277=7
>?
xx
xx
xataux
xPK
( )
( )
+
=
277=27
27
727=%7
27
2727=7
>?
xx
xx
xataux
xNOL
;odel matematik untuk input /nemometer ?
x
xx
x
xR
( )
( )
=
87%7=#7
87
%727=#7
%7
8727=7
>?
xx
xx
xataux
xS
( )
=
87=1
87%7=#7
87
%7=7
>?
x
xx
x
xPB
;odel matematik untuk rule output