Embed Size (px)
Citation preview
Anže Hohnjec
KRMILNIK ZA FOTOVOLTAIČNI SLEDILNIK SONCU
Diplomsko delo
Maribor, september 2012
I
KRMILNIK ZA FOTOVOLTAIČNI SLEDILNIK SONCU
Diplomsko delo
Študent: Anže Hohnjec
Študijski program: UN ŠP Elektrotehnika
Smer: Avtomatika in robotika
Mentor(ica): izr. prof. dr. Aleš Hace
Somentor(ica): prof.dr. Miro Milanovic
II
III
ZAHVALA
Zahvaljujem se mentorju dr. Alešu Hacetu za
pomoč in vodenje pri opravljanju diplomskega dela.
Prav tako se zahvaljujem somentorju dr. Mirotu
Milanovicu. Zahvaljujem pa se tudi osebju
laboratorija za robotiko.
Posebna zahvala velja staršem, ki so mi omogočili
študij ter Ani za podporo.
IV
KRMILNIK ZA FOTOVOLTAIČNI SLEDILNIK SONCU
Ključne besede: fotovoltaika, dvoprostostni sledilnik soncu, krmilnik, ARM
mikrokrmilnik LM3S8962 , PŠM gonilnik DRV-8412
UDK: 621.311.2(043.2)
Povzetek
Diplomsko delo vsebuje opise in prikaze postopkov za izgradnjo krmilnika za fotovoltaični
sledilnik in rezultate. Sledenje soncu smo izvajali po dveh prostostnih stopnjah, s čimer
lahko dosežemo celodnevno optimalno orientacijo sončnega panela. Krmilnik je bil
zgrajen z ARM mikrokrmilnikom LM3S8962. Implementirani algoritmi omogočajo
sledenje soncu s svetlobnimi senzorji ali s solarnim algoritmom, ki določa gibanje sonca za
vsako točko na zemeljski obli z vpisom zemljepisne širine in dolžine. Krmilniku smo
dodali še PŠM gonilnik DRV8412 z dvema H-mostičema za električni pogon sledilnika.
Krmilnik smo preizkusili, tako naloga vsebuje tudi eksperimentalne meritve.
V
CONTROLER FOR PHOTOVOLTAIC SOLAR TRACKER
Key words: photovoltaic, two axis solar tracker, controller, ARM microcontroller
LM3S8962 , PWM driver DRV-8412
UDK: 621.311.2(043.2)
Abstract
Diploma thesis consists of descriptions and demonstrations of procedures for the
construction of controller for photovoltaic solar tracker and the results. We have
followed the sun by two degrees freedom levels with which we can reach an all-day
optimal orientation of the solar panel. Controller was built with ARM
microcontroller LM3S8962. Implemented algorithms enable following the sun with the
light sensors or with solar algorithm that provide the sun movement for every point on the
globe by entering latitude and longitude. To controller we have also added PWM
driver DRV8412 with two H-bridge for the electrical power of the tracker. We have tested
the contoller so the thesis also consists of experimental measurements.
VI
KAZALO
1 UVOD ........................................................................................................................... 1
1.1 OPIS PROBLEMA ...................................................................................................... 1
1.2 CILJI ....................................................................................................................... 2
2 SLEDENJE S SOLARNIM ALGORITMOM .......................................................... 4
2.1 OSNOVNE SOLARNE GEOMETRIJE ............................................................................ 4
2.2 DEKLINACIJA .......................................................................................................... 6
2.3 REKTASCENZIJA ..................................................................................................... 8
2.4 UNIVERZALNI IN LOKALNI ČAS ............................................................................... 8
2.4.1 Časovni pasi ...................................................................................................... 8
2.4.2 Popravek lokalnega časa ................................................................................. 10
2.4.3 Izračun prestopnega leta ................................................................................. 10
2.5 ZEMLJEPISNA ŠIRINA IN DOLŽINA ......................................................................... 10
2.6 ALTITUDA (ELEVACIJA) ........................................................................................ 11
2.7 AZIMUT SONCA .................................................................................................... 11
2.8 SONČNA POT ......................................................................................................... 12
2.9 KOLIČINA SEVANJA IN SLEDENJE SONCU ............................................................... 13
2.10 FAKTOR ZRAČNE MASE, AM ................................................................................. 15
3 SLEDENJE S SENZORJI ........................................................................................ 16
4 OPIS STROJNE OPREME ...................................................................................... 18
4.1 RAZVOJNA PLOŠČA Z LM3S8962 MIKROKRMILNIKOM ......................................... 18
4.1.1 Cortex-M3 processor ....................................................................................... 20
4.1.2 Hibernacijski modul ........................................................................................ 23
4.1.3 Splošni vhodi/izhodi ......................................................................................... 24
4.1.4 Časovniki ......................................................................................................... 24
4.1.5 I2C vmesnik ..................................................................................................... 25
4.1.6 Pulzno širinska modulacija (PŠM) .................................................................. 25
4.1.7 Kvadraturni enkoder ....................................................................................... 27
4.1.8 UART vmesnik ................................................................................................. 28
VII
4.2 SVETLOBNI FOTO SENZOR APDS-9301 ................................................................. 30
4.2.1 I2C protokol ..................................................................................................... 32
4.2.2 I2C komunikacija z APDS-9301 ...................................................................... 33
4.3 RAZVOJNO ORODJE EZ430-RF2500-SEH ............................................................. 34
4.3.1 SimpliciTI ........................................................................................................ 35
4.4 DRV8412 GONILNIK ZA MOTORJE ........................................................................ 37
4.4.1 Zaščita DRV8412 ............................................................................................. 39
4.4.2 Ponovni zagon naprave ................................................................................... 40
4.4.3 Način delovanja ............................................................................................... 40
4.4.4 Zaščita pred kratkim stikom oziroma prehitrim skokom toka ......................... 41
4.4.5 Dodatne komponente ....................................................................................... 42
4.5 LEGO NXT MINDSTORMS ..................................................................................... 43
5 OPIS PROGRAMSKE OPREME ........................................................................... 45
5.1 ALTIUM DESIGNER ................................................................................................ 45
5.2 IAR RAZVOJNO OKOLJE ....................................................................................... 46
5.3 LABVIEW .............................................................................................................. 47
6 LABORATORIJSKI SLEDILNIK SONCU ........................................................... 48
6.1 NAČRTOVANJE ELEKTRIČNIH SKLOPOV ................................................................ 51
6.1.1 Gonilnik za motorja ......................................................................................... 51
6.1.2 Povezovalna plošča ......................................................................................... 54
6.1.3 Svetlobna senzorja ........................................................................................... 56
6.2 IMPLEMENTACIJA ALGORITMOV NA LM3S8962 ................................................... 58
6.2.1 Izračun solarnih koordinat .............................................................................. 60
6.2.2 Meritev osvetljenosti ........................................................................................ 62
6.2.3 Regulator ......................................................................................................... 63
6.2.4 Uporabniški vmesnik ....................................................................................... 68
6.2.5 Komunikacijski vmesnik .................................................................................. 68
6.3 SISTEM ZA ZBIRANJE ENERGIJE IN EZ430-RF2500 ................................................ 70
6.4 SLEDILNI MEHANIZEM .......................................................................................... 72
7 LABVIEW .................................................................................................................. 73
8 EKSPERIMENTALNI REZULTATI ..................................................................... 75
VIII
9 SKLEP ........................................................................................................................ 78
10 VIRI, LITERATURA ................................................................................................ 80
11 PRILOGE ................................................................................................................... 82
11.1 NASLOV ŠTUDENTA .............................................................................................. 82
11.2 KRATEK ŽIVLJENJEPIS........................................................................................... 82
IX
KAZALO SLIK
Slika 1: Solarni sledilnik ....................................................................................................... 3
Slika 2: Kroženje Zemlje okoli Sonca ................................................................................... 4
Slika 3: Navidezno gibanje Sonca okoli Zemlje ................................................................... 5
Slika 4: Ekvatorialni koordinatni sistem ............................................................................... 6
Slika 5: Časovni pasi in poldnevniki ..................................................................................... 9
Slika 6: Nebesnih koordinat v horizontalnem koordinatnem sistemu (Altitudo(Alt) in
azimuta (AZ)) .............................................................................................................. 11
Slika 7: Prikaz azimuta skozi dan in razlike altidude skozi leto ......................................... 12
Slika 8: Sevanje na nagnjeno površino ................................................................................ 14
Slika 9: Sledenje Soncu ....................................................................................................... 14
Slika 10: Izguba moči na poti skozi atmosfero ................................................................... 15
Slika 11: Postavitev senzorjev na solarnem panelu ............................................................. 16
Slika 12: Primer nepravilne in pravilne orientacije solarnega panela ................................. 16
Slika 13: Oblačno nebo ....................................................................................................... 17
Slika 14: Direktna in difuzna svetloba ................................................................................ 17
Slika 15: Stellaris LM3S8962 razvojna plošča ................................................................... 18
Slika 16: Blokovni diagram LM3S8962 mikrokrmilnika ................................................... 19
Slika 17: Zgradba Cortex – M3 procesorja ......................................................................... 20
Slika 18: Blokovni diagram povezave razhroščevalnika in sledilnika ................................ 21
Slika 19: Blokovni diagram HIB modula ............................................................................ 23
Slika 20: Blokovni diagram časovnikov .............................................................................. 24
Slika 21: Blokovni diagram I2C modula ............................................................................. 25
Slika 22: Blokovni diagram PŠM modula ........................................................................... 26
Slika 23: Blokovni diagram QEI modula ............................................................................ 27
X
Slika 24: Blokovni diagram UART modula ........................................................................ 28
Slika 25: UART podatkovni okvir ...................................................................................... 29
Slika 26: Blokovna shema senzorja ..................................................................................... 30
Slika 27: Normalizirana občutljivost v odvisnosti od spektralne občutljivostjo ................. 31
Slika 28: Shema povezave gospodarja in treh vozlišč sužnjev ........................................... 32
Slika 29: Protokol pisanja .................................................................................................... 33
Slika 30: Protokol branja ..................................................................................................... 33
Slika 31: Zbiralni modul (SEH) in eZ430-RF2500 ............................................................. 34
Slika 32: Blokovni diagram zbiralnega modula (SEH) ....................................................... 34
Slika 33: eZ430-RF2500 ..................................................................................................... 35
Slika 34: Delovanje SimplicitiTI ......................................................................................... 36
Slika 35: Prevajalno razmerje je enako 50% ....................................................................... 37
Slika 36: Prevajalno razmerje ni enako ............................................................................... 37
Slika 37: Poenostavljen aplikacijski diagram ...................................................................... 38
Slika 38: Primer aplikacijskega diagrama (dvakrat celotni H-mostič) ................................ 41
Slika 39: Pametna kocka s senzorji in motorji .................................................................... 43
Slika 40: Lego NXT motor .................................................................................................. 44
Slika 41: Altium designer .................................................................................................... 45
Slika 42: IAR Embedded Workbench ................................................................................. 46
Slika 43: Blokovni diagram ................................................................................................. 47
Slika 44: Model procesorskega okolja ................................................................................ 48
Slika 45: Končni rezultat ..................................................................................................... 50
Slika 46: Shematski primer ................................................................................................. 51
Slika 47: Shema gonilnika za motorje Altum designer ....................................................... 53
Slika 48: Gonilnik za motorje (obe strani plošče) ............................................................... 53
Slika 49: Shema povezovalne plošče................................................................................... 54
XI
Slika 50: Povezovalna plošča .............................................................................................. 55
Slika 51: Shema senzorjev ................................................................................................... 57
Slika 52: Namestitev senzorjev na sledilniku ...................................................................... 57
Slika 53: Kontekstni diagram .............................................................................................. 58
Slika 54: Diagram toka podatkov ........................................................................................ 59
Slika 55:Diagram prehajanja stanj ....................................................................................... 59
Slika 56: Diagram poteka .................................................................................................... 61
Slika 57: I2C komunikacija med gospodarjem in sužnji ..................................................... 63
Slika 58: Regulacijsko shema (solarni algoritem) ............................................................... 64
Slika 59: Regulacijska shema (senzorji) .............................................................................. 64
Slika 60: Povprečna vrednost .............................................................................................. 65
Slika 61: Izhodni pšm signal ............................................................................................... 67
Slika 62: Primer generiranja PŠM-a v UP/DOWN načinu ................................................. 67
Slika 63: UART paket podatkov ......................................................................................... 68
Slika 64: Tok podatkov med končno napravo in dostopno točko ....................................... 70
Slika 65: Sledilni mehanizem .............................................................................................. 72
Slika 66: Glavna čelna plošča .............................................................................................. 73
Slika 67: Čelna plošča za spremljanje solarnega algoritma ................................................ 74
Slika 68: Čelna plošča za spremljanje regulacije s senzorji ................................................ 74
Slika 69: Časovna prekinitev ............................................................................................... 75
Slika 70: Interval izvajanja prekinitev ................................................................................. 76
Slika 71: Čas preračuna regulatorja ..................................................................................... 76
Slika 72: Branje prvega in zadnjega senzorja ...................................................................... 77
Slika 73: Čas branja enega senzorja .................................................................................... 77
Slika 74: Interval branja senzorjev ...................................................................................... 77
XII
UPORABLJENI SIMBOLI
δ – deklinacija
n – zaporeden dan v letu
γ – rektascenzija
ΔTutc – razlika v časovnih pasih do univerzalnega koordinatnega časa
h – ura
φ - zemljepisna širina
λ - zemljepisna dolžina
α – altituda
Φ - azimut sonca
β – naklon ploskve (vpadni kot = 90°)
u – izhod iz regulatorja
U – maksimalna vrednost izhoda
δ – prevajalno razmerje
S – sevalna moč
XIII
UPORABLJENE KRATICE
LSČP – lokalni čas solarnega poldnevnika
ČP – časovni popravek v minutah
EČ – enačba časa
LSČ – lokalni solarni čas
LČ – lokalni čas
AM – faktor zračne mase
PWM – ang. pulse width modulation
RTC – ura realnega časa (ang. real time clock)
QEI – ang. Quadrature encoder interface
HIB – ang. Hibernation
USB – ang. Universal serial bus
UART – ang.Universal asynchronous receiver – transmitter
OLED – ang. Organic light emitting diode
I2C – ang. Inter-Integrated Circuit
GPIO – ang. General purpose input/output
ETM – ang. Embedded Trace Macrocell
NVIC – ang. Nested vector interrupt controller
Krmilnik za fotovoltaični sledilnik socu
1
1 UVOD
1.1 Opis problema
Začetki fotovoltaike segajo že več kot 160 let v preteklost, ko je mlad francoski fizik
Alexandre Edmond Becquerel med eksperimentom s kovinskima elektrodama in
elektrolitom opazil fizični pojav, ki omogoča pretvorbo iz svetlobne v električno energijo.
Vendar pa je fotovoltaika pravi razcvet doživela šele v 20. stoletju, najprej z obrazložitvijo
fotovoltaičnega pojava (Albert Einstein), odkritjem metode za pridobivanje
monokristalnega silicija (Jan Czohralski) in naposled z izdelavo prve komercialne sončne
celice, ki so jo razvili v Bellovih laboratorijih. Sprva je zaradi visoke cene in slabih
izkoristkov bilo področje omejeno le na vesoljsko tehniko, v sedemdesetih letih pa so se
začele raziskave za širšo komercialno uporabo.
Danes se fotovoltaika zaradi svojih lastnosti, kot so ekološka sprejemljivost, obnovljivost
energetskega vira ter dostopnosti tovrstnega načina pridobivanja energije, vse bolj
uveljavlja. Sončni paneli direktno pretvarjajo sončno energijo v električno in so v osnovi
tokovni izvori. Grobo rečeno gre za foto-diode večjih razsežnosti. Za generiranje električne
energije izkoriščajo fotovoltaični pojav, kjer se v polprevodniškem materialu energija
fotonov sončne svetlobe pretvarja v električno napetost.
Energija svetlobe z določeno valovno dolžino, ki pade na kristalno mrežo polprevodnika
izbije elektrone, kar povzroči nastanek vrzeli. Pod vplivom električnega polja v zaporni
plasti se elektroni pomikajo v smeri N-tip polprevodnika, vrzeli pa v smeri P-tipa. S
kopičenjem teh se pojavijo presežki, kar se odraža v napetosti med priključnima sponkama.
Če pa te sklenemo z bremenom, bo skozi breme stekel električni tok. S konstantnim
obsevanjem tako dobimo konstantni enosmerni vir energije.
Sončni paneli največji izkoristek dosežejo tedaj, ko so optimalno orientirani proti viru. V
praksi to pomeni, da je površina solarnega modula pravokotna proti soncu. Položaj sonca
in posledično vpadni kot sončnih žarkov se spreminja tako dnevno kot tudi sezonsko,
Krmilnik za fotovoltaični sledilnik socu
2
hkrati pa je odvisen tudi od zemljepisne lege. Zato je za najboljši celodnevni izkoristek
potrebno slediti soncu, saj le tako zagotavljamo vseskozi optimalno orientacijo panela.
1.2 Cilji
Cilj diplomske naloge je narediti krmilnik za pozicioniranje dvoosnega solarnega
sledilnika in doseči celodnevno orientacijo solarnega panela v točki z najvišjim
energetskim potencialom. Ta cilj bomo skušali doseči s položajno regulacijo solarnega
sledilnika. Želeni položaj bomo določali na dva različna načina:
pri prvem ga bomo preračunali s solarnim algoritmom ter sledili teoretično
energetskemu maksimalnemu položaju. Preračunati ga želimo za dani trenutek za
določeno lokacijo na Zemlji,
pri drugem načinu nam bo referenčni položaj pomenil točko z največjim
energetskim potencialom. Določali jo bomo z meritvami jakosti obsevanja. Meritve
bomo izvajali s svetlobnimi senzorji, fizično nameščenimi na samem sledilniku.
Za izgradnjo fotovoltaičnega krmilnika in preizkus sledilnih algoritmov bomo uporabili
naslednje elemente:
razvojna plošča z LM3S8962 mikrokrmilnikom, ki je glava fotovoltaičnega
krmilnika, na katerem tečeta oba sledilna algoritma. Krmilnik še sestavljajo
gonilnik za motorje DRV8412, ki ojači krmilni PŠM signal in dostopna točka RF
omrežja.
maketo dvoosnega fotovoltaičnega sledilnika, smo izdelali iz Lego Mindstorm
NXT komponent. Pozicioniramo ga z Lego NXT motorji, ki jih krmilimo z PŠM
signalom. Motorji vsebujejo tudi inkrementalni dajalnik, kateri nam daje dejanski
položaj za regulacijo.
energijo zbiramo na posebej prilagojenem fotovoltaičnem modulu, ki vsebuje tudi
sistem za nadzorovanje zbrane energije. Prav tako je prilagojen za zbiranje v
zaprtih prostorih. Nadzor nad zbrano energijo pa teče preko dveh eZ430-RF2500
RF naprav.
meritve obsevanja izvajamo z APDS-9301 svetlobnimi senzorji.
Krmilnik za fotovoltaični sledilnik socu
3
Metode za določevanje teoretičnega maksimuma so predstavljene v drugem poglavju, v
tretjem pa način za sledenje točki z najvišjim energetskim potencialom. Vso uporabljeno
stojno opremo opisujemo v četrtem poglavju, v petem pa opisujemo programsko opremo.
Rezultate, ki smo jih dosegli so predstavljeni v šestem poglavju. To poglavje zajema:
načrtovanje električnih sklopov, implementacija algoritmov in izgradnjo makete sledilnik.
Implementirane algoritme, ki jih vsebuje solarni sledilnik bomo predstavili z
Yourdon/DeMarco [11] strukturno metodo. V poglavje sedem in osem pa so predstavljene
meritve, ki smo jih izvedli.
Slika 1: Solarni sledilnik

Krmilnik za fotovoltaični sledilnik socu
4
2 SLEDENJE S SOLARNIM ALGORITMOM
2.1 Osnovne solarne geometrije
Najboljše izkoristke pri sončnih elektrarnah dosegamo, ko je vpadni kot sončnih žarkov
pravokoten na površino. Žal pa se vpadni kot žarkov glede na točko na Zemlji spreminja
tako dnevno kot tudi sezonsko. Povezavo med točko na Zemlji in Soncem opisujejo
zemljepisna širina, zemljepisna dolžina, deklinacija in rektascenzija. Izpeljanke iz tega so
zenitni kot, višina sonca in azimut sonca ter naklon ploskve, azimut ploskve in vpadni kot.
Zemlja kroži okoli Sonca po tirnici v obliki elipse v ravnini, ki jo imenujemo ekliptika. Za
svojo pot okoli Sonca, kar imenujemo tudi kroženje, potrebuje 365,24219 dni. Zemljina os
skozi leto ne kaže vedno v isto smer, njen nagib pa se spreminja v obdobju 41.000 let med
22,1° in 24,5°. Tako trenutno seka zemljina ekliptika ravnino nebesnega (sončevega)
ekvatorja pod kotom 23° 26", ki je enak nagibu vrtilne osi Zemlje (slika 2).
Slika 2: Kroženje Zemlje okoli Sonca
Kroženje Zemlje okoli Sonca lahko uprizorimo z različnimi koordinatnimi sistemi, katerih
ime pogosto izhaja iz ravnin, ki jih vzamemo kot osnovno ploskev. Na slika 2 je tako
prikazano kroženje zmelje okoli sonca, v ekvatorialnem koordinatnem sistemu.
23° 26"
Kot med ekliptiko in
nebesnim
ekvatorjem Nebesni ekvator
Ekliptika
Krmilnik za fotovoltaični sledilnik socu
5
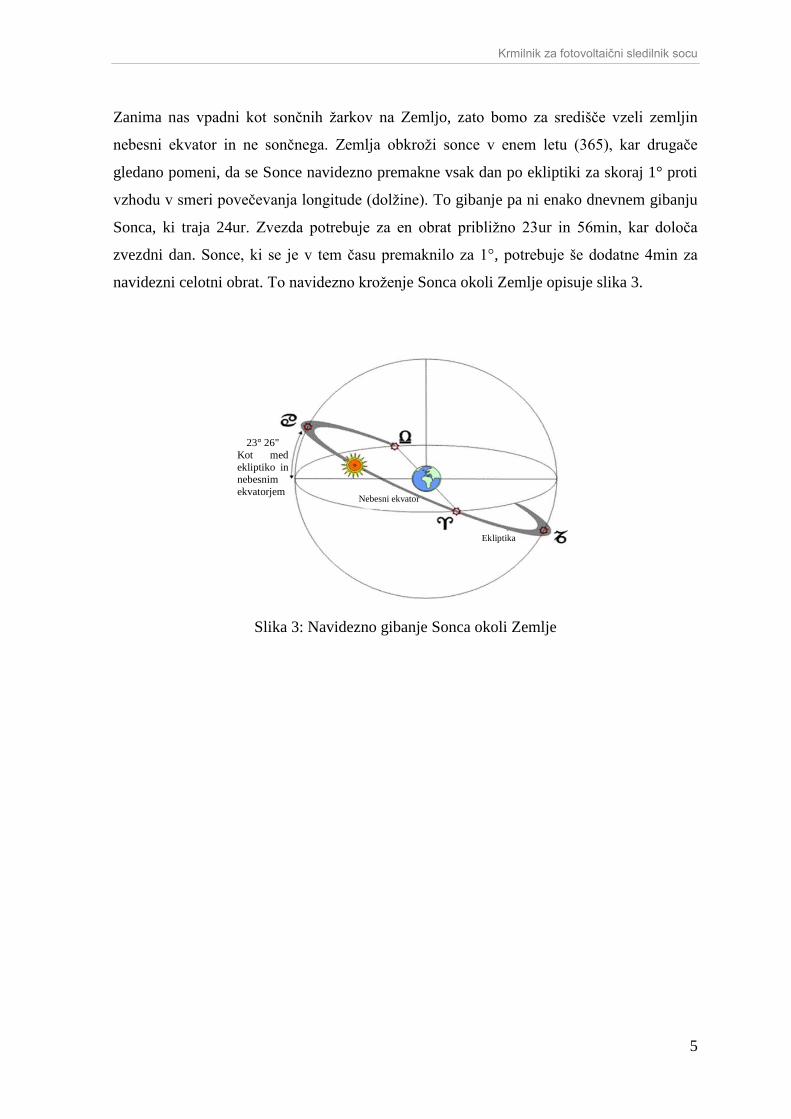
Zanima nas vpadni kot sončnih žarkov na Zemljo, zato bomo za središče vzeli zemljin
nebesni ekvator in ne sončnega. Zemlja obkroži sonce v enem letu (365), kar drugače
gledano pomeni, da se Sonce navidezno premakne vsak dan po ekliptiki za skoraj 1° proti
vzhodu v smeri povečevanja longitude (dolžine). To gibanje pa ni enako dnevnem gibanju
Sonca, ki traja 24ur. Zvezda potrebuje za en obrat približno 23ur in 56min, kar določa
zvezdni dan. Sonce, ki se je v tem času premaknilo za 1°, potrebuje še dodatne 4min za
navidezni celotni obrat. To navidezno kroženje Sonca okoli Zemlje opisuje slika 3.
Slika 3: Navidezno gibanje Sonca okoli Zemlje
Nebesni ekvator
Ekliptika
23° 26"
Kot med
ekliptiko in nebesnim
ekvatorjem

Krmilnik za fotovoltaični sledilnik socu
6
2.2 Deklinacija
Deklinacija je kot med ekliptiko in ravnino nebesnega ekvatorja (slika 4) in približno
opisuje pas stožca (graf 1). Deklinacija Sonca se spreminja skozi leto. Za telesa nad
nebesnim ekvatorjem ima pozitivni predznak, za telesa pod nebesnim ekvatorjem pa
negativni. Ekliptika prečka nebesni ekvator dvakrat letno (okoli 20. marca in 22.
septembra), v času severnega pomladnega in jesenskega ekvinokcija. V trenutku pa ko se
zgodi ekvinokcij, gre za astronomski pojav, kjer je ekvator pravokoten z zenitom oziroma
žarki pravokotno padajo na Zemljo. Takrat so deklinacija (δ), rektascenzija in ekliptična
longituda enaki nič.
Slika 4: Ekvatorialni koordinatni sistem
Prav tako dosežemo dvakrat letno solsticij. To je pojav, kadar doseže vpadni kot Sončnih
žarkov na ravnino Zemljinega ekvatorja največjo vrednost 23° 26 ". Tedaj je deklinacija
(δ) enaka +23 ° 26 " ob severnem poletnem solsticiju (tabela 1) in −23 ° 26" ob južnem
poletnem solsticiju (tabela 1).
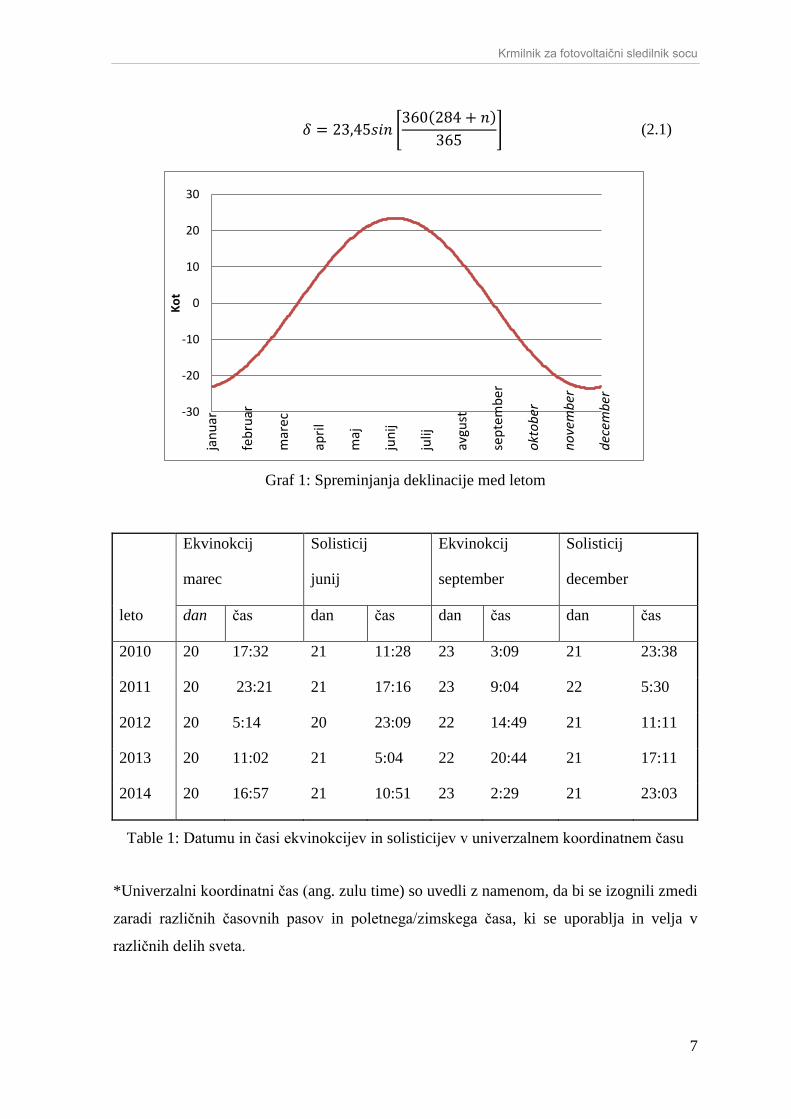
Deklinacijo za določen dan v letu lahko izračunamo z enačbo (2.1).
Časovna
krožnica
δ
Krmilnik za fotovoltaični sledilnik socu
7
[ ( )
] (2.1)
Graf 1: Spreminjanja deklinacije med letom
Ekvinokcij
marec
Solisticij
junij
Ekvinokcij
september
Solisticij
december
leto dan čas dan čas dan čas dan čas
2010 20 17:32 21 11:28 23 3:09 21 23:38
2011 20 23:21 21 17:16 23 9:04 22 5:30
2012 20 5:14 20 23:09 22 14:49 21 11:11
2013 20 11:02 21 5:04 22 20:44 21 17:11
2014 20 16:57 21 10:51 23 2:29 21 23:03
Table 1: Datumu in časi ekvinokcijev in solisticijev v univerzalnem koordinatnem času
*Univerzalni koordinatni čas (ang. zulu time) so uvedli z namenom, da bi se izognili zmedi
zaradi različnih časovnih pasov in poletnega/zimskega časa, ki se uporablja in velja v
različnih delih sveta.
-30
-20
-10
0
10
20
30
Ko
t
jan
uar
fe
bru
ar
mar
ec
apri
l m
aj
jun
ij
julij
av
gust
se
pte
mb
er
okt
ob
er
no
vem
ber
d
ecem
ber
Krmilnik za fotovoltaični sledilnik socu
8
2.3 Rektascenzija
Rektascenzija je druga koordinata zraven deklinacije na nebesni sferi (slika 4). Lahko jo
poimenujemo tudi urin kot. Označujemo jo z γ in je kot loka nebesnega ekvatorja merjen
od točke pomladišča do časovne krožnice nebesnega telesa.
Pomladišče je ena izmed točk na nebesni krogli, v kateri se sekata ekliptika in nebesni
ekvator. Natančneje gre za točko, ki ji drugače rečemo severni pomladni ekvinokcij (okoli
21.marca).
Njena vrednost na nebesnem ekvaturju se vsako uro poveča za 15°, oziroma vsake 4min za
1°. Tako se v enem dnevu spremeni od 0° do 360°.
Pri izračunu pa je potrebno biti pozoren, da upoštevamo lokalni solarni čas, ker se ta
razlikuje od standardnega.
2.4 Univerzalni in lokalni čas
Univerzalni koordinatni čas (ang. zulu time) so uvedli z namenom, da bi se izognili zmedi
zaradi različnih časovnih pasov in poletnega/zimskega časa, ki se uporablja in velja v
različnih delih sveta. Uporablja se tudi pri izračunu rektascenzije in ostalih solarnih
koordinat.
2.4.1 Časovni pasi
Uvedli so jih za lažje usklajevanje aktivnosti na Zemlji. Obstaja štiriindvajset časovnih
pasov, v razmiku 15°. Vsak časovni pas se razteza ob svojem poldnevniku (LSČP lokalni
solarni čas poldnevnika). Definiran pa je z začetnim poldnevnikom (Greenwich), ki je tudi
osnova za druge astronomske funkcije.
Idealno bi bilo, da se bi časovni pasi raztezali za 7,5° na vsako stran poldnevnika, vendar
pa v realnosti pride do odstopanja, predvsem zaradi političnih razlogov.
Krmilnik za fotovoltaični sledilnik socu
9
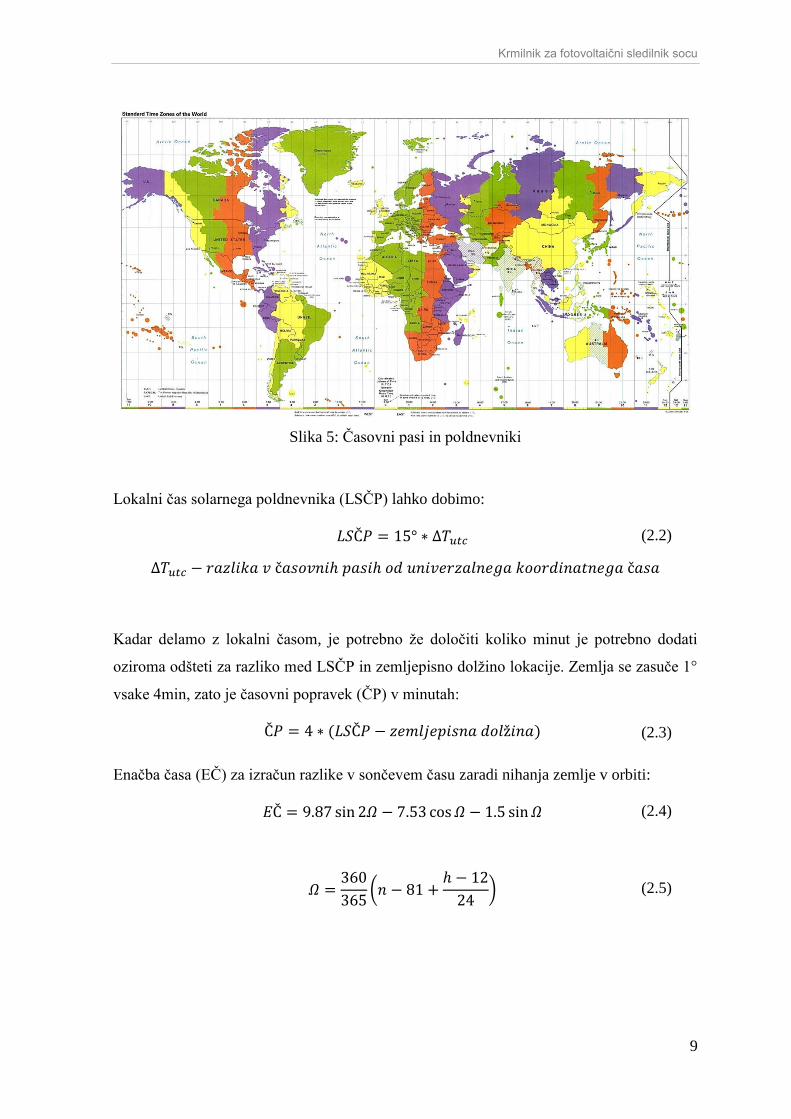
Slika 5: Časovni pasi in poldnevniki
Lokalni čas solarnega poldnevnika (LSČP) lahko dobimo:
(2.2)
Kadar delamo z lokalni časom, je potrebno že določiti koliko minut je potrebno dodati
oziroma odšteti za razliko med LSČP in zemljepisno dolžino lokacije. Zemlja se zasuče 1°
vsake 4min, zato je časovni popravek (ČP) v minutah:
( ) (2.3)
Enačba časa (EČ) za izračun razlike v sončevem času zaradi nihanja zemlje v orbiti:
(2.4)
(
) (2.5)

Krmilnik za fotovoltaični sledilnik socu
10
2.4.2 Popravek lokalnega časa
Tako dobimo popravek lokalnega časa zaradi enačbe časa in popravka zaradi zemljepisne
dolžine.
( ) (2.6)
Iz česar lahko izračunamo rektascenzijo (γ) oziroma urin kot iz lokalnega časa:
( ) (2.7)
2.4.3 Izračun prestopnega leta
Prestopno leto je leto ki ima 366 dni, medtem ko ima navadno 365dni. To pomeni, da
prestopno vsebuje tudi 29. februar. Pravilo za preračun prestopnega leta je sledeče:
leto je prestopno kadar je deljivo s 4 in ni deljivo s 100, razen v primeru če je deljivo s 400.
2.5 Zemljepisna širina in dolžina
Zemljepisna širina in dolžina sta sferni koordinati, ki opisujeta lego kraja na Zemlji.
Vrednost zemljepisne širine in dolžine podajamo v stopinjah (°), minutah (′), sekundah (″).
Zemljepisna širina (φ) je sferna koordinata, ki opisuje zemljepisno širino krajev severno
in južno od ekvatorja. Koti za kraje, ki ležijo severno od ekvatorja (0°) so po dogovoru
pozitivni, južno pa negativni. Tako se severni tečaj nahaja na +90°, južni tečaj na -90°.
Zemljepisna dolžina (λ) je sferna koordinata, ki opisuje lego krajev (kot) vzhodno ali
zahodno od Greenwicha (glavni poldnevnik). Zajema kote, ki ležijo od 0° (Greenwich) do
+180° na zahodni polobli, od 0° do -180° na vzhodni polobli.

Krmilnik za fotovoltaični sledilnik socu
11
2.6 Altituda (elevacija)
Altituda (slika 6) podaja kot oddaljenost, od ravnine horizonta. Za kote nad horizontom se
spreminja v mejah med 0°in 90° (zenit). Torej je ob vzhodu α enak nič, v primeru pa, ko se
nahaja direktno nad nami je α enak 90°. Izračunamo ga lahko za vsako dano lokacijo in
čas. Spreminja se glede na letni čas v odvisnosti od zemljepisne širine in letnega časa.
( ) (2.8)
2.7 Azimut Sonca
Azimut Sonca (slika 6) je kot na izbrani ravnini med točkama. Definiran je kot kot med
smerjo in najpogosteje severom. V tem primeru se povečuje v smeri urinega kazalca in
zavzame naslednje vrednost: sever v smeri 0° oz 360°, vzhod v smeri 90°, jug v smeri
180 in zahod v smeri 270°. V preteklosti se je azimut meril proti jugu.
Slika 6: Nebesnih koordinat v horizontalnem koordinatnem sistemu (Altitudo(Alt) in
azimuta (AZ))
Azimut sonca (Φ) pa je kot med projekcijo sončnega žarka direktnega sevanja v smeri
severa.
(
) (2.9)
Krmilnik za fotovoltaični sledilnik socu
12
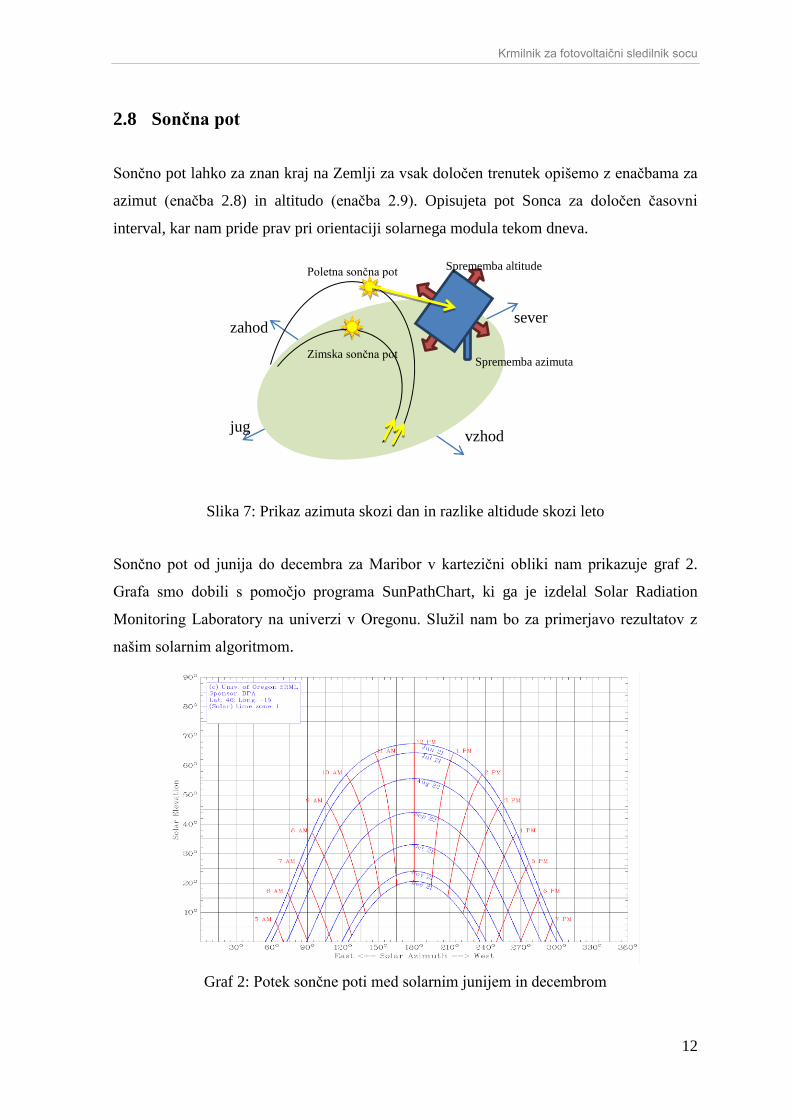
2.8 Sončna pot
Sončno pot lahko za znan kraj na Zemlji za vsak določen trenutek opišemo z enačbama za
azimut (enačba 2.8) in altitudo (enačba 2.9). Opisujeta pot Sonca za določen časovni
interval, kar nam pride prav pri orientaciji solarnega modula tekom dneva.
Slika 7: Prikaz azimuta skozi dan in razlike altidude skozi leto
Sončno pot od junija do decembra za Maribor v kartezični obliki nam prikazuje graf 2.
Grafa smo dobili s pomočjo programa SunPathChart, ki ga je izdelal Solar Radiation
Monitoring Laboratory na univerzi v Oregonu. Služil nam bo za primerjavo rezultatov z
našim solarnim algoritmom.
Graf 2: Potek sončne poti med solarnim junijem in decembrom
jug vzhod
zahod sever
Poletna sončna pot
Zimska sončna pot Sprememba azimuta
Sprememba altitude

Krmilnik za fotovoltaični sledilnik socu
13
Podaja vrednosti azimuta in elevacije za tipičen datum in uro v letu, za določeno
zemljepisno dolžino in zemljepisno širino. Čas je podan v lokalnem času, zato je potrebno
določiti tudi časovni pas.
Iz grafa je razvidna pot Sonca za posamezni časovni interval. Na x osi imamo podan
solarni Azimut, na y osi Altitudo. Prav tako pa so podani podatki o uri in dnevu v mesecu.
Iz teh podatkov lahko razberemo, kdaj v posameznem mesecu je sončni vzhod oziroma
zahod, in po kakšni poti se Sonce premika med njima.
Graf 3: Potek sončne poti med solarnim decembrom in junijem
2.9 Količina sevanja in sledenje soncu
Izkoristek solarnega modula ni odvisna samo od njegovih karakteristik, ampak tudi od kota
med modulom in soncem. Največji izkoristek je takrat, ko je absorpcijska površina
pravokotna na vpadni kot sončnih žarkov. Vendar pa se kot med Soncem in fiksno
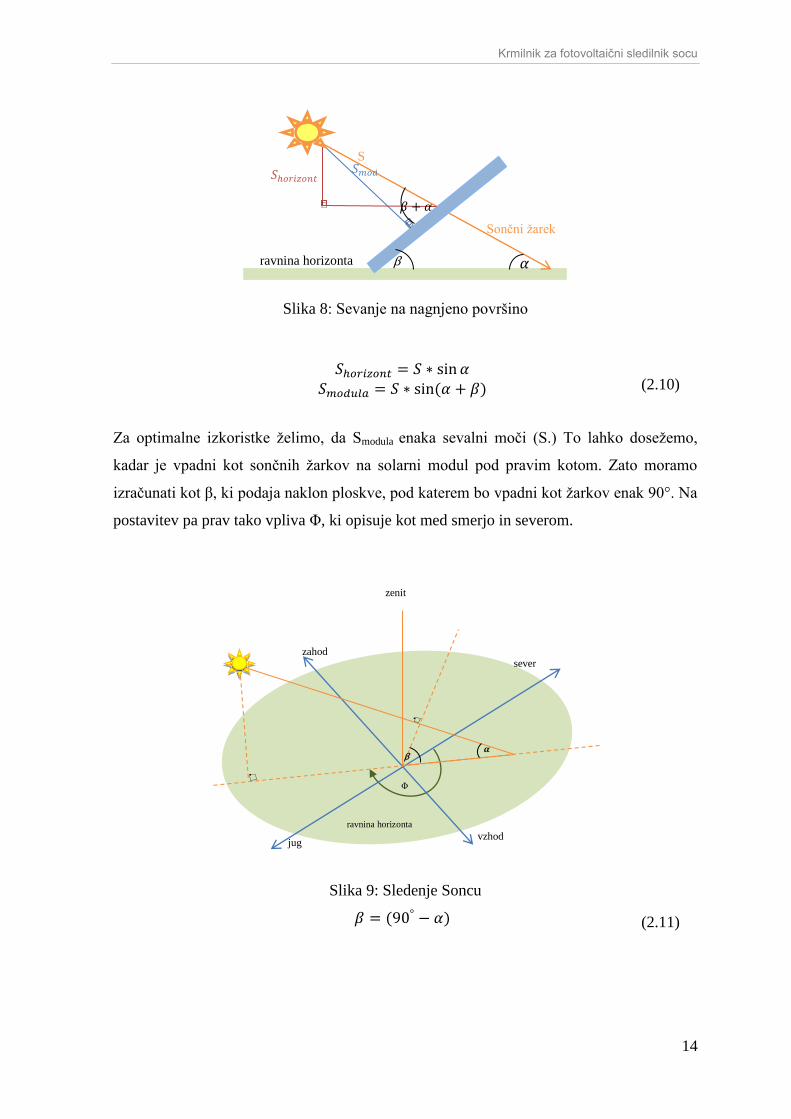
površino nenehno spreminja. Slika 8 prikazuje kako izračunati količino sevanja na
nagnjeni površini modula.
Krmilnik za fotovoltaični sledilnik socu
14
Slika 8: Sevanje na nagnjeno površino
( ) (2.10)
Za optimalne izkoristke želimo, da Smodula enaka sevalni moči (S.) To lahko dosežemo,
kadar je vpadni kot sončnih žarkov na solarni modul pod pravim kotom. Zato moramo
izračunati kot β, ki podaja naklon ploskve, pod katerem bo vpadni kot žarkov enak 90°. Na
postavitev pa prav tako vpliva Φ, ki opisuje kot med smerjo in severom.
Slika 9: Sledenje Soncu
( ) (2.11)
ravnina horizonta β 𝛼
𝛽 𝛼
Sončni žarek
S 𝑆𝑚𝑜𝑑𝑢𝑙𝑎 𝑆 𝑜𝑟𝑖𝑧𝑜𝑛𝑡
·
β 𝜶
Φ ·
jug vzhod
zahod
sever
ravnina horizonta
zenit
Krmilnik za fotovoltaični sledilnik socu
15
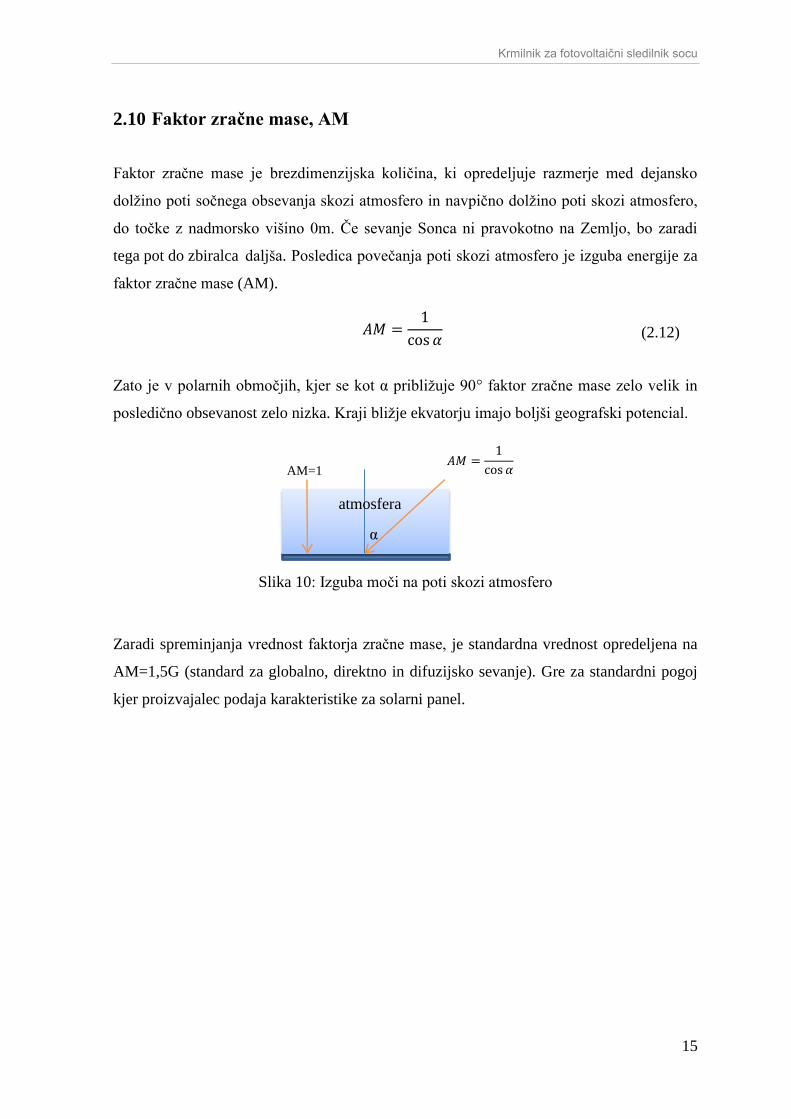
2.10 Faktor zračne mase, AM
Faktor zračne mase je brezdimenzijska količina, ki opredeljuje razmerje med dejansko
dolžino poti sočnega obsevanja skozi atmosfero in navpično dolžino poti skozi atmosfero,
do točke z nadmorsko višino 0m. Če sevanje Sonca ni pravokotno na Zemljo, bo zaradi
tega pot do zbiralca daljša. Posledica povečanja poti skozi atmosfero je izguba energije za
faktor zračne mase (AM).
(2.12)
Zato je v polarnih območjih, kjer se kot α približuje 90° faktor zračne mase zelo velik in
posledično obsevanost zelo nizka. Kraji bližje ekvatorju imajo boljši geografski potencial.
Slika 10: Izguba moči na poti skozi atmosfero
Zaradi spreminjanja vrednost faktorja zračne mase, je standardna vrednost opredeljena na
AM=1,5G (standard za globalno, direktno in difuzijsko sevanje). Gre za standardni pogoj
kjer proizvajalec podaja karakteristike za solarni panel.
AM=1 𝐴𝑀
𝛼
atmosfera
α

Krmilnik za fotovoltaični sledilnik socu
16
3 SLEDENJE S SENZORJI
Pri drugem načinu bomo poskusili določiti optimalno točko osvetlitve, oziroma slediti
sončevi poti s senzorji. To bomo poskusili doseči z dvema paroma senzorjev, med katere
bomo namestili oviro. Nato bomo lahko iz odčitane diferencialne razlike med njima pričeli
s korekcijo položaja do optimalne točke postavitve. Korekcija položaja se bo izvajala
toliko časa, da bo diferencialna razlika med njima enaka nič, oziroma bo vpadni kot
sončnih žarkov pod pravim kotom.
Slika 11: Postavitev senzorjev na solarnem panelu
Prvi par senzorjev bo služil sledenju sončnčnemu kotu altituda (elevacija), drugi par pa
kotu azimuta za določen časovni trenutek.
Slika 12: Primer nepravilne in pravilne orientacije solarnega panela
Krmilnik za fotovoltaični sledilnik socu
17
Iz slike je razvidno, da ob nepravi orientaciji (vpadni kot je različen od 90°), ovira med
parom senzorjev senči enega iz med njiju. Vrednost osvetlitve S1 je tako manjša od
vrednosti S2 in njuna diferencialna razlika je različna od nič. V drugem primeru je solarni
panel pravokotno orientiran na vpadni kot žarkov in je vrednost senzorjev S1 in S2 enaka
(diferencialna vrednost je enaka nič).
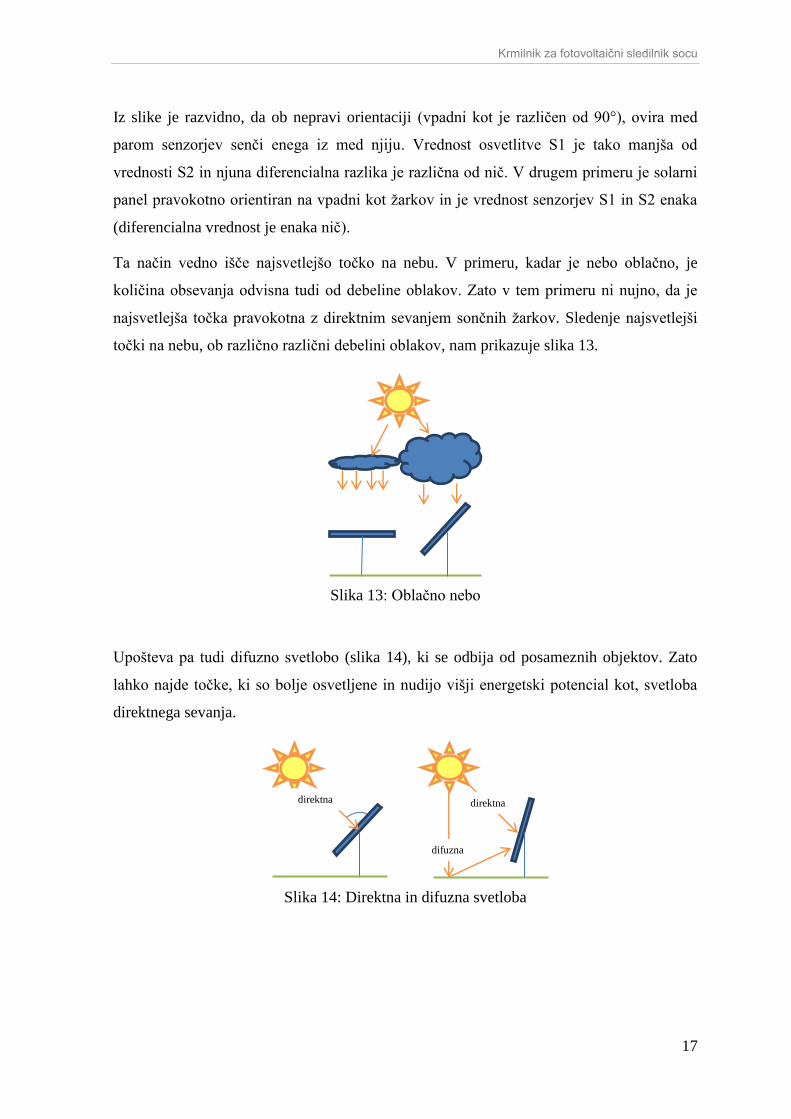
Ta način vedno išče najsvetlejšo točko na nebu. V primeru, kadar je nebo oblačno, je
količina obsevanja odvisna tudi od debeline oblakov. Zato v tem primeru ni nujno, da je
najsvetlejša točka pravokotna z direktnim sevanjem sončnih žarkov. Sledenje najsvetlejši
točki na nebu, ob različno različni debelini oblakov, nam prikazuje slika 13.
Slika 13: Oblačno nebo
Upošteva pa tudi difuzno svetlobo (slika 14), ki se odbija od posameznih objektov. Zato
lahko najde točke, ki so bolje osvetljene in nudijo višji energetski potencial kot, svetloba
direktnega sevanja.
Slika 14: Direktna in difuzna svetloba
difuzna
direktna direktna
Krmilnik za fotovoltaični sledilnik socu
18
4 OPIS STROJNE OPREME
4.1 Razvojna plošča z LM3S8962 mikrokrmilnikom
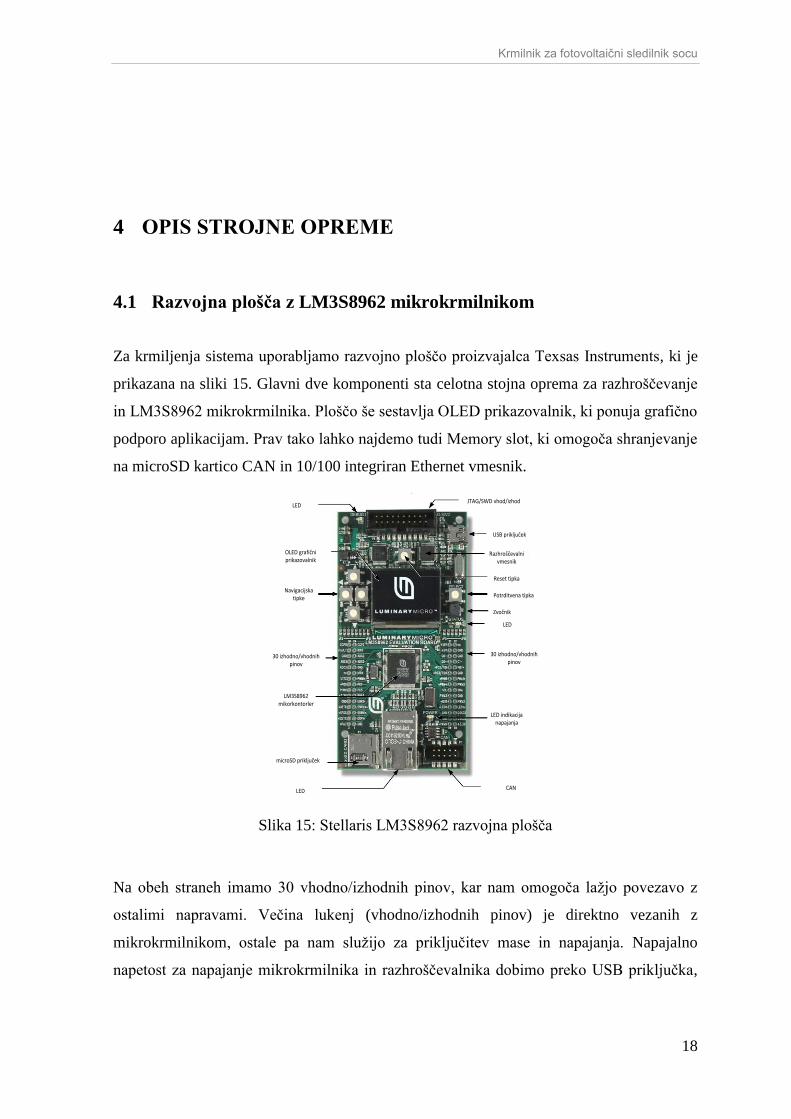
Za krmiljenja sistema uporabljamo razvojno ploščo proizvajalca Texsas Instruments, ki je
prikazana na sliki 15. Glavni dve komponenti sta celotna stojna oprema za razhroščevanje
in LM3S8962 mikrokrmilnika. Ploščo še sestavlja OLED prikazovalnik, ki ponuja grafično
podporo aplikacijam. Prav tako lahko najdemo tudi Memory slot, ki omogoča shranjevanje
na microSD kartico CAN in 10/100 integriran Ethernet vmesnik.
Reset tipka
OLED grafičniprikazovalnik
JTAG/SWD vhod/izhod
USB priključek
Zvočnik
LED indikacija napajanja
LM3S8962mikorkontorler
Navigacijska tipke Potrditvena tipka
LED
LED
Razhroščevalnivmesnik
CAN LED
30 izhodno/vhodnih pinov
30 izhodno/vhodnih pinov
microSD priključek
Slika 15: Stellaris LM3S8962 razvojna plošča
Na obeh straneh imamo 30 vhodno/izhodnih pinov, kar nam omogoča lažjo povezavo z
ostalimi napravami. Večina lukenj (vhodno/izhodnih pinov) je direktno vezanih z
mikrokrmilnikom, ostale pa nam služijo za priključitev mase in napajanja. Napajalno
napetost za napajanje mikrokrmilnika in razhroščevalnika dobimo preko USB priključka,
Krmilnik za fotovoltaični sledilnik socu
19
ki je 5V. Potrebujemo pa tudi druge nivoje (3.3V in 15V), ki jih zagotovijo vgrajeni
napetostni pretvorniki.
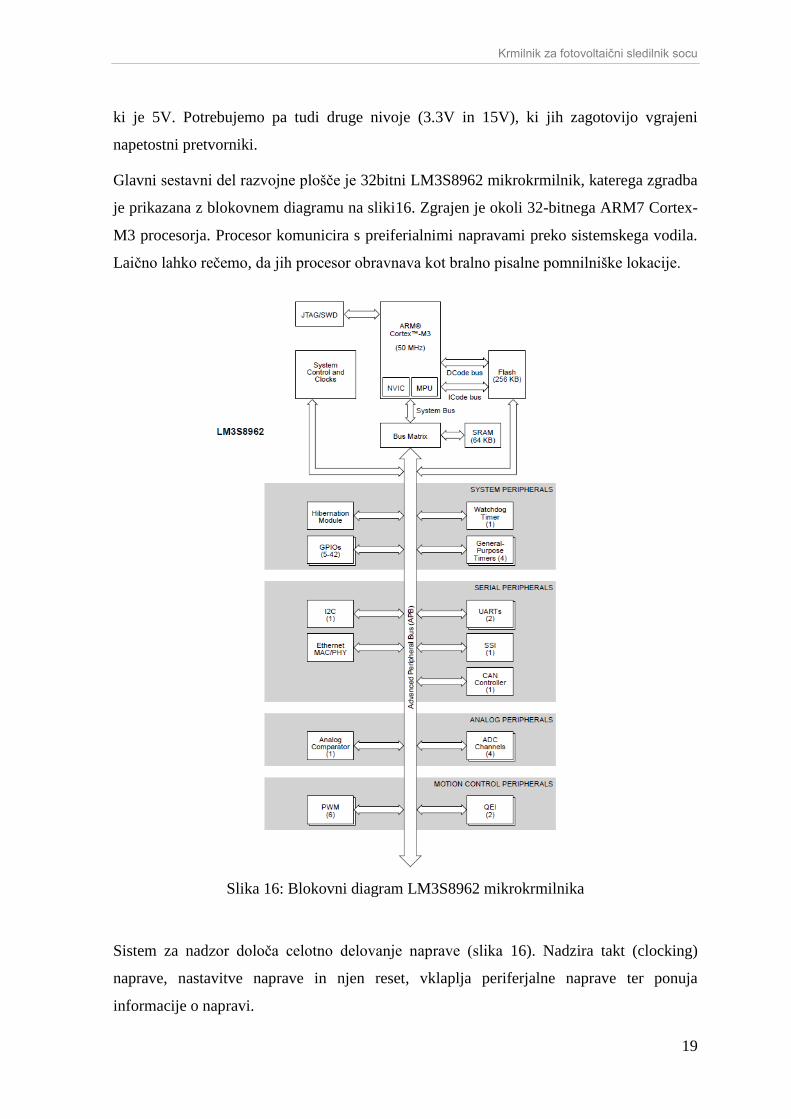
Glavni sestavni del razvojne plošče je 32bitni LM3S8962 mikrokrmilnik, katerega zgradba
je prikazana z blokovnem diagramu na sliki16. Zgrajen je okoli 32-bitnega ARM7 Cortex-
M3 procesorja. Procesor komunicira s preiferialnimi napravami preko sistemskega vodila.
Laično lahko rečemo, da jih procesor obravnava kot bralno pisalne pomnilniške lokacije.
Slika 16: Blokovni diagram LM3S8962 mikrokrmilnika
Sistem za nadzor določa celotno delovanje naprave (slika 16). Nadzira takt (clocking)
naprave, nastavitve naprave in njen reset, vklaplja periferjalne naprave ter ponuja
informacije o napravi.

Krmilnik za fotovoltaični sledilnik socu
20
Mikorkrmilnik vsebuje dva pomnilnika, 256-KB Flasha in 64Kb SRAMa. Vrednost Flash
pomnilnika se ne spreminja tekom delovanja. Namenjen je za shranjevanje programa.
SRAM pa nam služi, kot podatkovni pomnilnik med delovanjem. Do njiju dostopamo
preko podatkovnih vodil.
Ostale pomembnejše sklope, bomo opisali v sledečih podpoglavjih.
4.1.1 Cortex-M3 processor
LM3S8962 mikrokrmilnik je zgrajen okoli ARM procesorja, ki temelji na Harvardski
arhitekturi. Vsebuje ARM cortex M jedro, ki je narejeno za cenovno občutljivejše
aplikacije in omogoča hitro izgradnjo programov.
Cortex-M3 procesor (slika 17), ki ga vsebuje LM3S8962, je prvi procesor zasnovan na
ARM7v-M arhitekturi in je namenjen za mikrokontrolerje, industrijske kontrolerje in
avtomobilske sisteme.
Slika 17: Zgradba Cortex – M3 procesorja
Je 32biten in zmore delovati do frekvence 50MHz. Frekvenco pa je potrebno izbrati
smiselno, saj z višanjem povečujemo porabo procesorja (0.19mW/MHz).

Krmilnik za fotovoltaični sledilnik socu
21
Ima ločeno ukazno in podatkovno vodilo, kar omogoča, da lahko dela veliko operacij
paralelno, kar se odraža pri hitrosti. Jedrni cevovod ima tri stanja: naloži instrukcijo iz
spomina, odkodiranje instrukcije in izvršitev instrukcije. Ko se naloži podoben ukaz, ima
dekoder naložitveno funkcijo, s katero lahko pridemo do idealno hitre izvršitve instrukcije
(v enem ciku). Cortex – M3 vsebuje dekoder za Thumb in nove Thumb-2 ukaze, kar nam
omogoča da dele kode shranimo kod 16bitne. Dekoder pa jo bo zaznal in dekodiral in s
tem omogočil nemoteno delovanje.
Je 32 bitni procesor, z 32 bitno podatkovno potjo, registersko banko in spominski vmesnik.
Vsebuje tudi notranjo 32 bitna aritmetična enoto, ki omogoča stojno deljenje in množenje v
enem ciklu.
Slika 18: Blokovni diagram povezave razhroščevalnika in sledilnika
Slika 18 nam prikazuje, kako je strojno implementiran razhroščevalnik in ETM. ETM je
sledilna makro enota, ki omogoča rekonstrukcijo programskega ukaza in njegovo sledenje
na računalniku. Dizajniran je kot zelo hitro razhroščevalno orodje, ki služi za podporo
ukaznemu sledenju (trace). Do njega lahko dostopamo preko zunanjega pina SWO.
Enota za varovanje spomina pa se nahaja blizu jedra Cortex-M3 procesorja in določa
pogoje za dostop do regij v spominu. Definiramo lahko do osem spominskih regij. Vsaka
regija ima svoj naslov in velikost. Regija je lahko nastavljena za samo branje,
branje/pisanje. Kadar zazna kršitev dostopa do regije, sproži zastavico.
Cortex-M3 procesor vsebuje tudi naslednjo sistemsko periferijo NVIC in Sys Tick.
Krmilnik za fotovoltaični sledilnik socu
22
4.1.1.1 Sys Tick
Je preprost časovnik, ki je del NVIC kontrolorja v Cortex-M3 mikroprocesorju. Gre za 24-
bitni odštevalni (count-down timer) časovnik, ki se lahko uporablja kot Real-Time
Operating System (RTOS) pulzni časovnik ali kot preprost časovnik. Sprožitev in brisanje
prekinitve se izvaja samodejno.
4.1.1.2 Vektorski nadzor prekinitev (NVIC)
Cortex-M3 procesor omogoča vektorski nadzor prekinitev oziroma NVIC (ang. Nested
Vectored Interrupt). NVIC je tesno povezan s procesorjem. Ta verzija Stellaris-ove družine
vsebuje 32 prekinitev z 8 prioritetnimi ravnmi in ravnmi sprožitve.
Ko se procesor odzove na prekinitev, mu NVIC posreduje naslov funkcije, ki skrbi za delo
s prekinitvijo na procesorju. Ob sprožitvi prekinitve se najprej preveri ali je prekinitev
programsko omogočena. Nato se vrednosti iz cevovoda prepišejo na stek, program pa
prične z branjem in obdelovanjem delovanjem ukazov, ki so v flash-u določeni za to
prekinitev. Ko konča z delom, ki ga določa prekinitev, ponovno naloži vrednosti iz stacka
v cevovod. S tem vrnemo program v stanje, v katerem je bil pred sprožitvijo prekinitve.
Prioritete prekinitev je mogoče programsko nastavljati (od 0 do 7), kar omogoča, da se
prekinitve z višjo prioriteto izvedejo pred nižjimi. V primeru, kadar se sprožita dve
prekinitvi s programsko nastavljeno isto prioriteto, se bo najprej izvedla prekinitev z nižjo
prekinitveno vrednostjo.
Krmilnik za fotovoltaični sledilnik socu
23
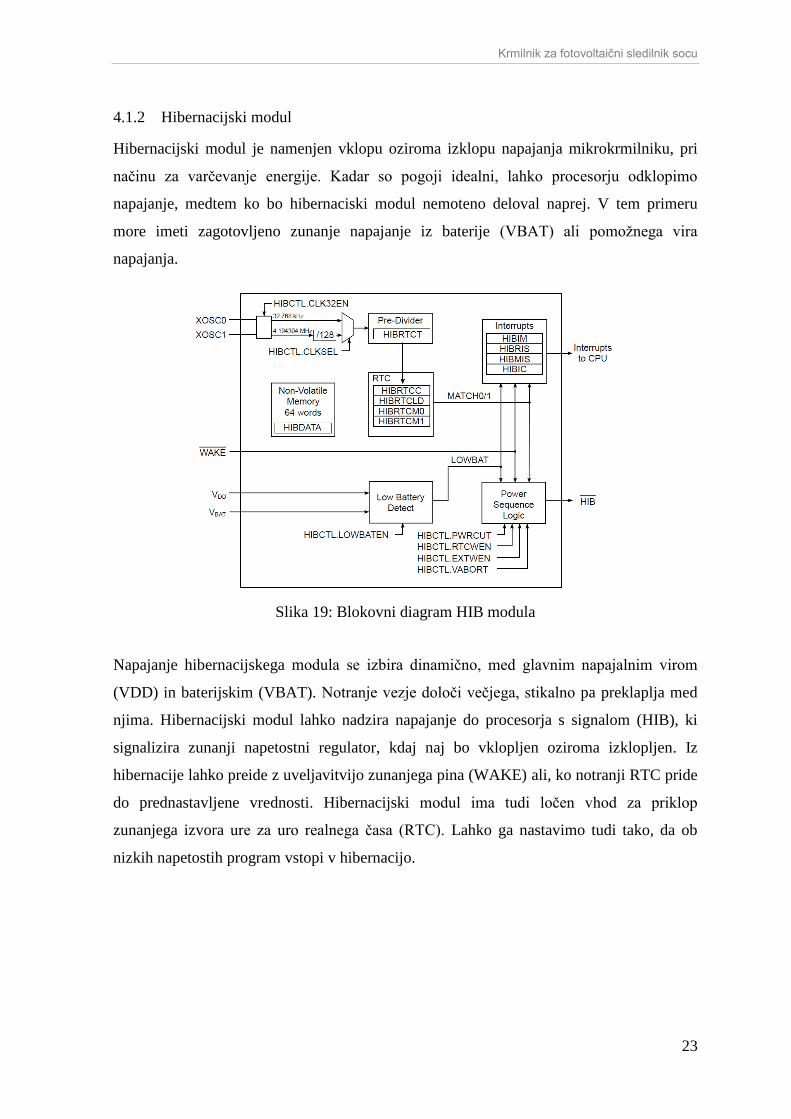
4.1.2 Hibernacijski modul
Hibernacijski modul je namenjen vklopu oziroma izklopu napajanja mikrokrmilniku, pri
načinu za varčevanje energije. Kadar so pogoji idealni, lahko procesorju odklopimo
napajanje, medtem ko bo hibernaciski modul nemoteno deloval naprej. V tem primeru
more imeti zagotovljeno zunanje napajanje iz baterije (VBAT) ali pomožnega vira
napajanja.
Slika 19: Blokovni diagram HIB modula
Napajanje hibernacijskega modula se izbira dinamično, med glavnim napajalnim virom
(VDD) in baterijskim (VBAT). Notranje vezje določi večjega, stikalno pa preklaplja med
njima. Hibernacijski modul lahko nadzira napajanje do procesorja s signalom (HIB), ki
signalizira zunanji napetostni regulator, kdaj naj bo vklopljen oziroma izklopljen. Iz
hibernacije lahko preide z uveljavitvijo zunanjega pina (WAKE) ali, ko notranji RTC pride
do prednastavljene vrednosti. Hibernacijski modul ima tudi ločen vhod za priklop
zunanjega izvora ure za uro realnega časa (RTC). Lahko ga nastavimo tudi tako, da ob
nizkih napetostih program vstopi v hibernacijo.
Krmilnik za fotovoltaični sledilnik socu
24
4.1.3 Splošni vhodi/izhodi
GPIO modul sestavlja sedem fizičnih GPIO blokov (PortA , portB…). Vsak GPIO blok
nadzira do osem GPIO pinov. Njihovi naslovi so določeni z imenom bloka in številko pina
na posameznem modulu. Programsko jih lahko določimo, kot vhode oziroma izhode. Ob
resetu naprave so prevzeto določeni kot vhodi. Kadar so konfigurirani kot vhodi, jih lahko
nastavimo, da generirajo prekinitve na high level, low level, rising edge, falling edge, or
both edges. Izhodom lahko določimo krmilni tok (drive strength) in weak pull-up or pull-
down resistors.
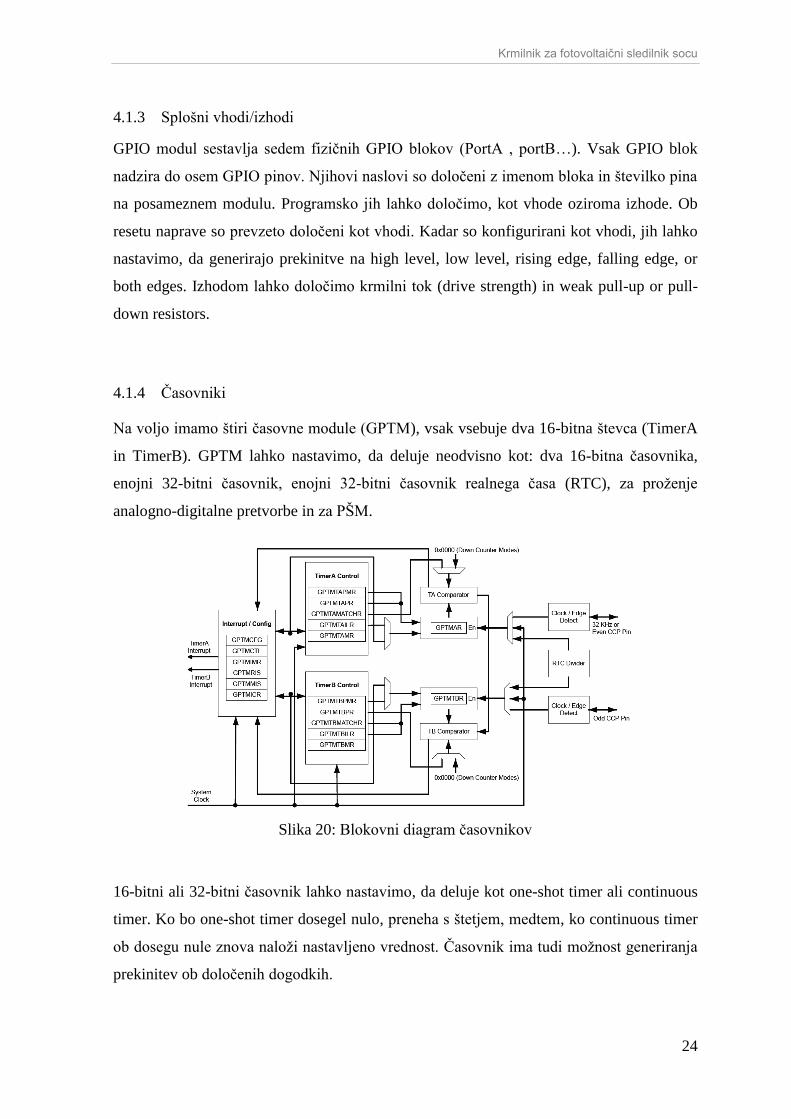
4.1.4 Časovniki
Na voljo imamo štiri časovne module (GPTM), vsak vsebuje dva 16-bitna števca (TimerA
in TimerB). GPTM lahko nastavimo, da deluje neodvisno kot: dva 16-bitna časovnika,
enojni 32-bitni časovnik, enojni 32-bitni časovnik realnega časa (RTC), za proženje
analogno-digitalne pretvorbe in za PŠM.
Slika 20: Blokovni diagram časovnikov
16-bitni ali 32-bitni časovnik lahko nastavimo, da deluje kot one-shot timer ali continuous
timer. Ko bo one-shot timer dosegel nulo, preneha s štetjem, medtem, ko continuous timer
ob dosegu nule znova naloži nastavljeno vrednost. Časovnik ima tudi možnost generiranja
prekinitev ob določenih dogodkih.
Krmilnik za fotovoltaični sledilnik socu
25
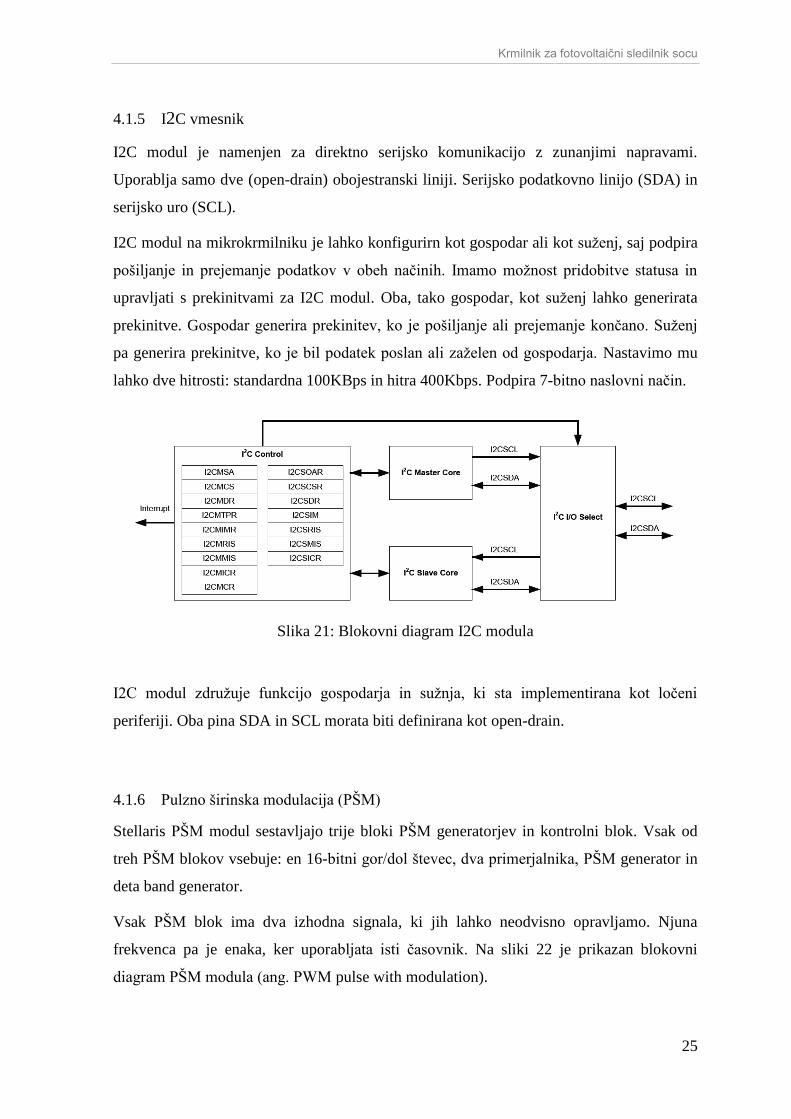
4.1.5 I2C vmesnik
I2C modul je namenjen za direktno serijsko komunikacijo z zunanjimi napravami.
Uporablja samo dve (open-drain) obojestranski liniji. Serijsko podatkovno linijo (SDA) in
serijsko uro (SCL).
I2C modul na mikrokrmilniku je lahko konfigurirn kot gospodar ali kot suženj, saj podpira
pošiljanje in prejemanje podatkov v obeh načinih. Imamo možnost pridobitve statusa in
upravljati s prekinitvami za I2C modul. Oba, tako gospodar, kot suženj lahko generirata
prekinitve. Gospodar generira prekinitev, ko je pošiljanje ali prejemanje končano. Suženj
pa generira prekinitve, ko je bil podatek poslan ali zaželen od gospodarja. Nastavimo mu
lahko dve hitrosti: standardna 100KBps in hitra 400Kbps. Podpira 7-bitno naslovni način.
Slika 21: Blokovni diagram I2C modula
I2C modul združuje funkcijo gospodarja in sužnja, ki sta implementirana kot ločeni
periferiji. Oba pina SDA in SCL morata biti definirana kot open-drain.
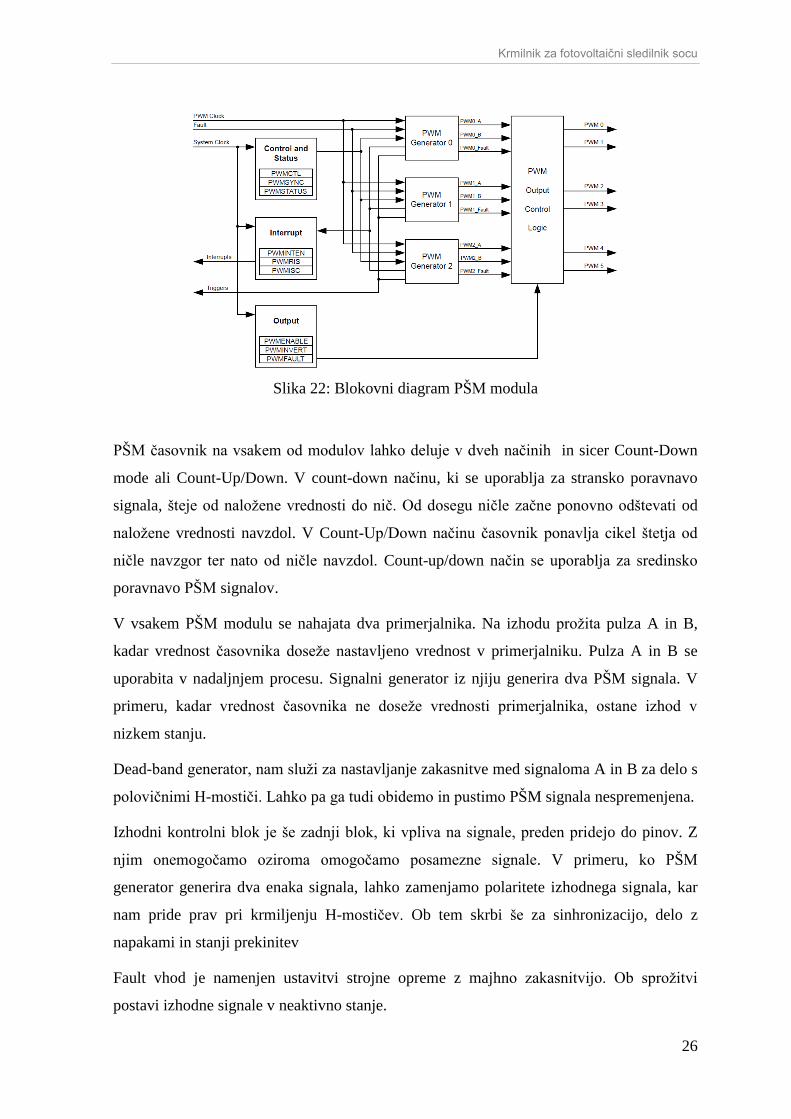
4.1.6 Pulzno širinska modulacija (PŠM)
Stellaris PŠM modul sestavljajo trije bloki PŠM generatorjev in kontrolni blok. Vsak od
treh PŠM blokov vsebuje: en 16-bitni gor/dol števec, dva primerjalnika, PŠM generator in
deta band generator.
Vsak PŠM blok ima dva izhodna signala, ki jih lahko neodvisno opravljamo. Njuna
frekvenca pa je enaka, ker uporabljata isti časovnik. Na sliki 22 je prikazan blokovni
diagram PŠM modula (ang. PWM pulse with modulation).
Krmilnik za fotovoltaični sledilnik socu
26
Slika 22: Blokovni diagram PŠM modula
PŠM časovnik na vsakem od modulov lahko deluje v dveh načinih in sicer Count-Down
mode ali Count-Up/Down. V count-down načinu, ki se uporablja za stransko poravnavo
signala, šteje od naložene vrednosti do nič. Od dosegu ničle začne ponovno odštevati od
naložene vrednosti navzdol. V Count-Up/Down načinu časovnik ponavlja cikel štetja od
ničle navzgor ter nato od ničle navzdol. Count-up/down način se uporablja za sredinsko
poravnavo PŠM signalov.
V vsakem PŠM modulu se nahajata dva primerjalnika. Na izhodu prožita pulza A in B,
kadar vrednost časovnika doseže nastavljeno vrednost v primerjalniku. Pulza A in B se
uporabita v nadaljnjem procesu. Signalni generator iz njiju generira dva PŠM signala. V
primeru, kadar vrednost časovnika ne doseže vrednosti primerjalnika, ostane izhod v
nizkem stanju.
Dead-band generator, nam služi za nastavljanje zakasnitve med signaloma A in B za delo s
polovičnimi H-mostiči. Lahko pa ga tudi obidemo in pustimo PŠM signala nespremenjena.
Izhodni kontrolni blok je še zadnji blok, ki vpliva na signale, preden pridejo do pinov. Z
njim onemogočamo oziroma omogočamo posamezne signale. V primeru, ko PŠM
generator generira dva enaka signala, lahko zamenjamo polaritete izhodnega signala, kar
nam pride prav pri krmiljenju H-mostičev. Ob tem skrbi še za sinhronizacijo, delo z
napakami in stanji prekinitev
Fault vhod je namenjen ustavitvi strojne opreme z majhno zakasnitvijo. Ob sprožitvi
postavi izhodne signale v neaktivno stanje.
Krmilnik za fotovoltaični sledilnik socu
27
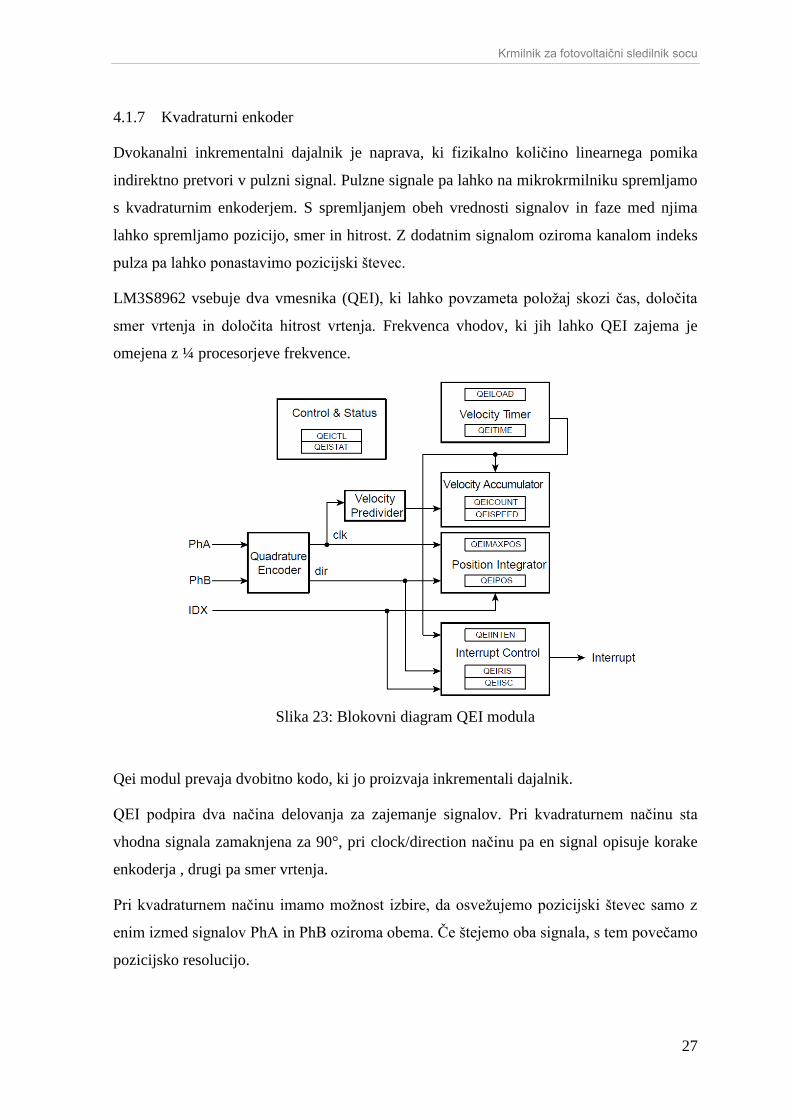
4.1.7 Kvadraturni enkoder
Dvokanalni inkrementalni dajalnik je naprava, ki fizikalno količino linearnega pomika
indirektno pretvori v pulzni signal. Pulzne signale pa lahko na mikrokrmilniku spremljamo
s kvadraturnim enkoderjem. S spremljanjem obeh vrednosti signalov in faze med njima
lahko spremljamo pozicijo, smer in hitrost. Z dodatnim signalom oziroma kanalom indeks
pulza pa lahko ponastavimo pozicijski števec.
LM3S8962 vsebuje dva vmesnika (QEI), ki lahko povzameta položaj skozi čas, določita
smer vrtenja in določita hitrost vrtenja. Frekvenca vhodov, ki jih lahko QEI zajema je
omejena z ¼ procesorjeve frekvence.
Slika 23: Blokovni diagram QEI modula
Qei modul prevaja dvobitno kodo, ki jo proizvaja inkrementali dajalnik.
QEI podpira dva načina delovanja za zajemanje signalov. Pri kvadraturnem načinu sta
vhodna signala zamaknjena za 90°, pri clock/direction načinu pa en signal opisuje korake
enkoderja , drugi pa smer vrtenja.
Pri kvadraturnem načinu imamo možnost izbire, da osvežujemo pozicijski števec samo z
enim izmed signalov PhA in PhB oziroma obema. Če štejemo oba signala, s tem povečamo
pozicijsko resolucijo.
Krmilnik za fotovoltaični sledilnik socu
28
Pozicijski števec se poveča, kadar prehiteva signal PhA signal PhB, v nasprotnem primeru
pa zmanjša. Ponastavimo pa ga lahko z dvema različnima načinoma: spremljanjem
indeksnega pulza ali dosežkom maksimalne nastavljene vrednosti.
Vhodna signala (PhA in PhB) lahko zamenjamo pred obdelavo in s tem spremenimo
pomen smeri vrtenja.
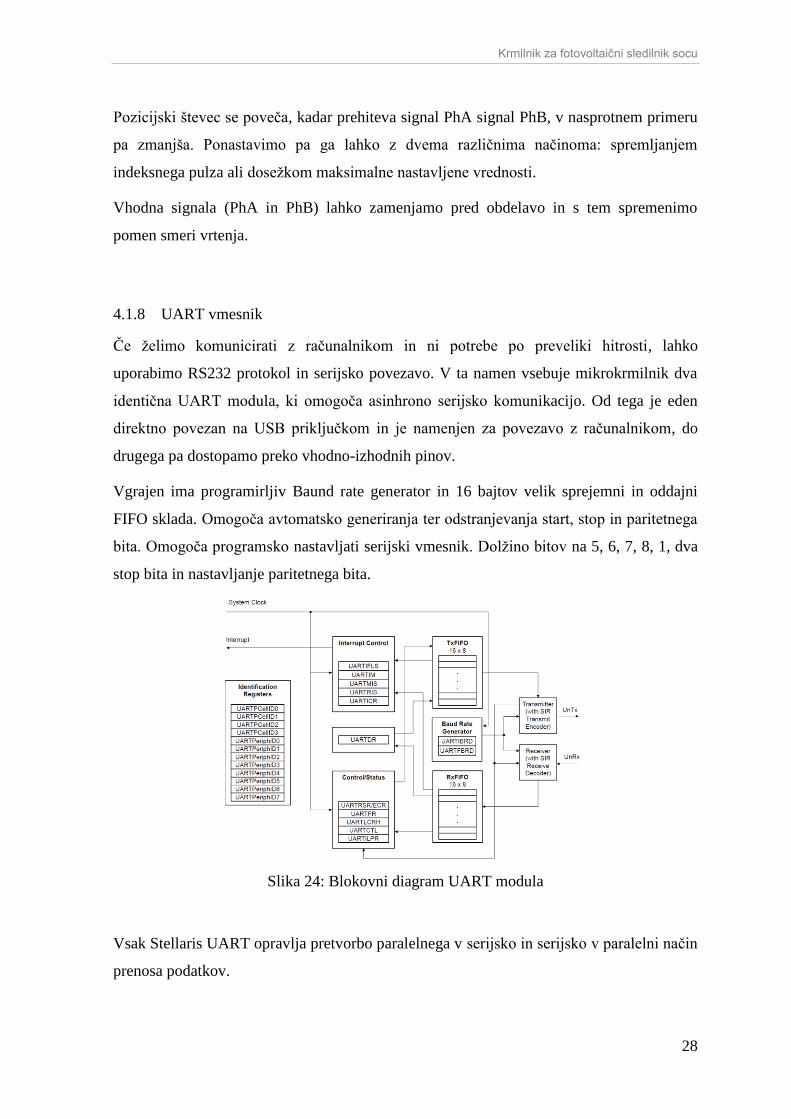
4.1.8 UART vmesnik
Če želimo komunicirati z računalnikom in ni potrebe po preveliki hitrosti, lahko
uporabimo RS232 protokol in serijsko povezavo. V ta namen vsebuje mikrokrmilnik dva
identična UART modula, ki omogoča asinhrono serijsko komunikacijo. Od tega je eden
direktno povezan na USB priključkom in je namenjen za povezavo z računalnikom, do
drugega pa dostopamo preko vhodno-izhodnih pinov.
Vgrajen ima programirljiv Baund rate generator in 16 bajtov velik sprejemni in oddajni
FIFO sklada. Omogoča avtomatsko generiranja ter odstranjevanja start, stop in paritetnega
bita. Omogoča programsko nastavljati serijski vmesnik. Dolžino bitov na 5, 6, 7, 8, 1, dva
stop bita in nastavljanje paritetnega bita.
Slika 24: Blokovni diagram UART modula
Vsak Stellaris UART opravlja pretvorbo paralelnega v serijsko in serijsko v paralelni način
prenosa podatkov.
Krmilnik za fotovoltaični sledilnik socu
29
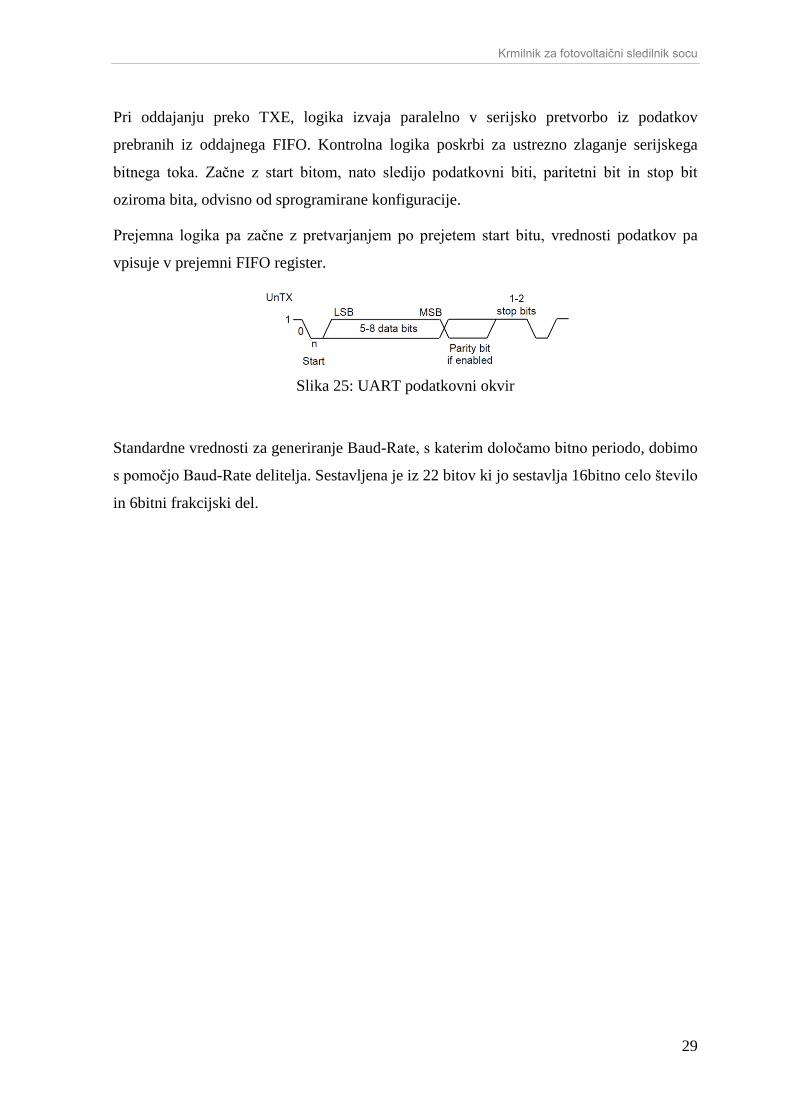
Pri oddajanju preko TXE, logika izvaja paralelno v serijsko pretvorbo iz podatkov
prebranih iz oddajnega FIFO. Kontrolna logika poskrbi za ustrezno zlaganje serijskega
bitnega toka. Začne z start bitom, nato sledijo podatkovni biti, paritetni bit in stop bit
oziroma bita, odvisno od sprogramirane konfiguracije.
Prejemna logika pa začne z pretvarjanjem po prejetem start bitu, vrednosti podatkov pa
vpisuje v prejemni FIFO register.
Slika 25: UART podatkovni okvir
Standardne vrednosti za generiranje Baud-Rate, s katerim določamo bitno periodo, dobimo
s pomočjo Baud-Rate delitelja. Sestavljena je iz 22 bitov ki jo sestavlja 16bitno celo število
in 6bitni frakcijski del.
Krmilnik za fotovoltaični sledilnik socu
30
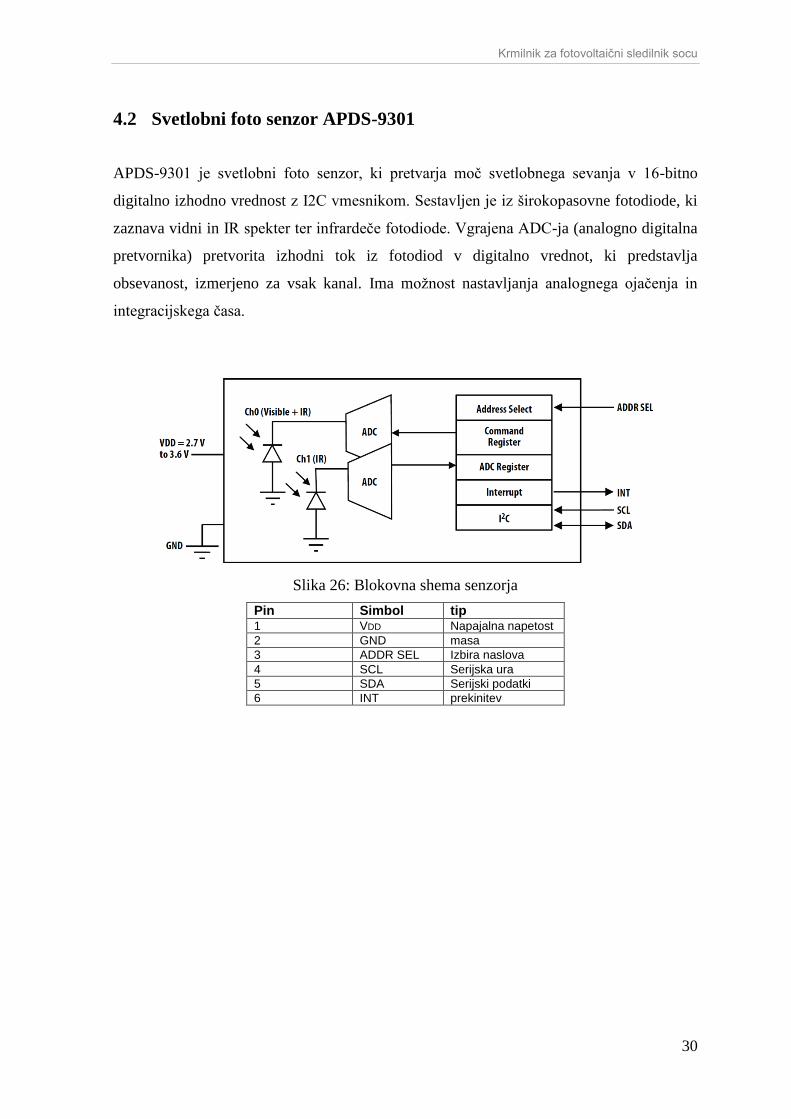
4.2 Svetlobni foto senzor APDS-9301
APDS-9301 je svetlobni foto senzor, ki pretvarja moč svetlobnega sevanja v 16-bitno
digitalno izhodno vrednost z I2C vmesnikom. Sestavljen je iz širokopasovne fotodiode, ki
zaznava vidni in IR spekter ter infrardeče fotodiode. Vgrajena ADC-ja (analogno digitalna
pretvornika) pretvorita izhodni tok iz fotodiod v digitalno vrednot, ki predstavlja
obsevanost, izmerjeno za vsak kanal. Ima možnost nastavljanja analognega ojačenja in
integracijskega časa.
Slika 26: Blokovna shema senzorja
Pin Simbol tip 1 VDD Napajalna napetost
2 GND masa
3 ADDR SEL Izbira naslova
4 SCL Serijska ura
5 SDA Serijski podatki
6 INT prekinitev
Krmilnik za fotovoltaični sledilnik socu
31
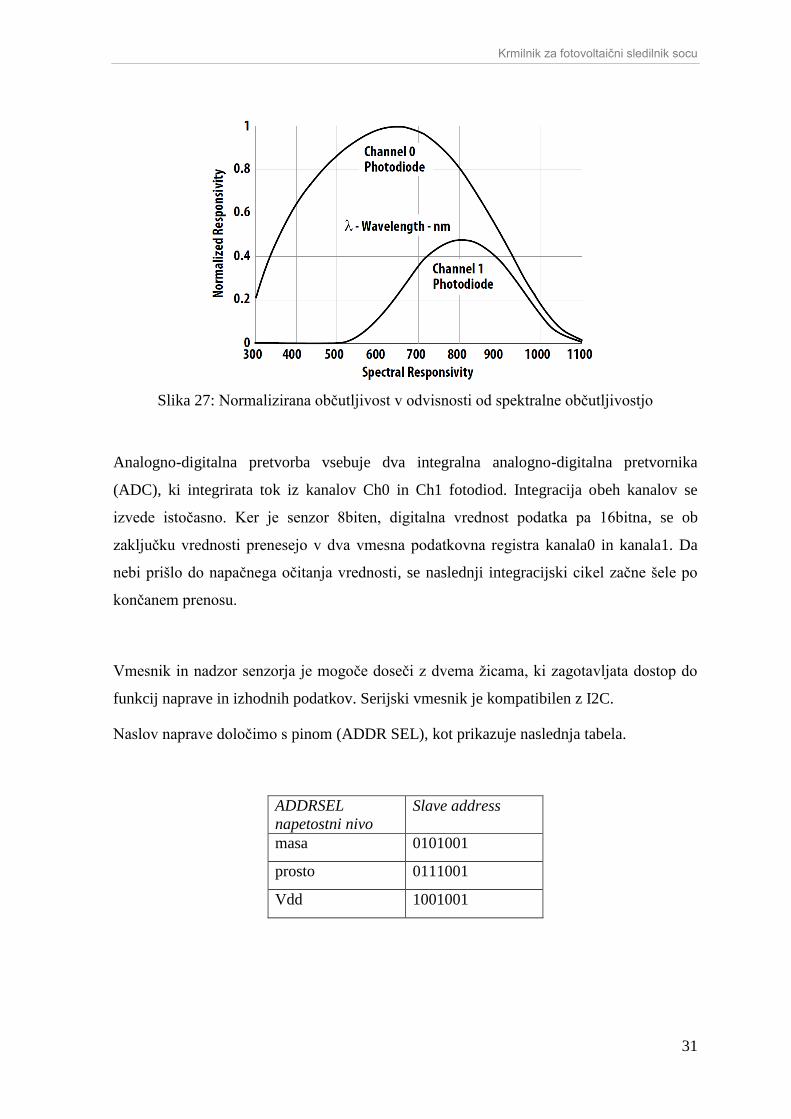
Slika 27: Normalizirana občutljivost v odvisnosti od spektralne občutljivostjo
Analogno-digitalna pretvorba vsebuje dva integralna analogno-digitalna pretvornika
(ADC), ki integrirata tok iz kanalov Ch0 in Ch1 fotodiod. Integracija obeh kanalov se
izvede istočasno. Ker je senzor 8biten, digitalna vrednost podatka pa 16bitna, se ob
zaključku vrednosti prenesejo v dva vmesna podatkovna registra kanala0 in kanala1. Da
nebi prišlo do napačnega očitanja vrednosti, se naslednji integracijski cikel začne šele po
končanem prenosu.
Vmesnik in nadzor senzorja je mogoče doseči z dvema žicama, ki zagotavljata dostop do
funkcij naprave in izhodnih podatkov. Serijski vmesnik je kompatibilen z I2C.
Naslov naprave določimo s pinom (ADDR SEL), kot prikazuje naslednja tabela.
ADDRSEL
napetostni nivo
Slave address
masa 0101001
prosto 0111001
Vdd 1001001
Krmilnik za fotovoltaični sledilnik socu
32
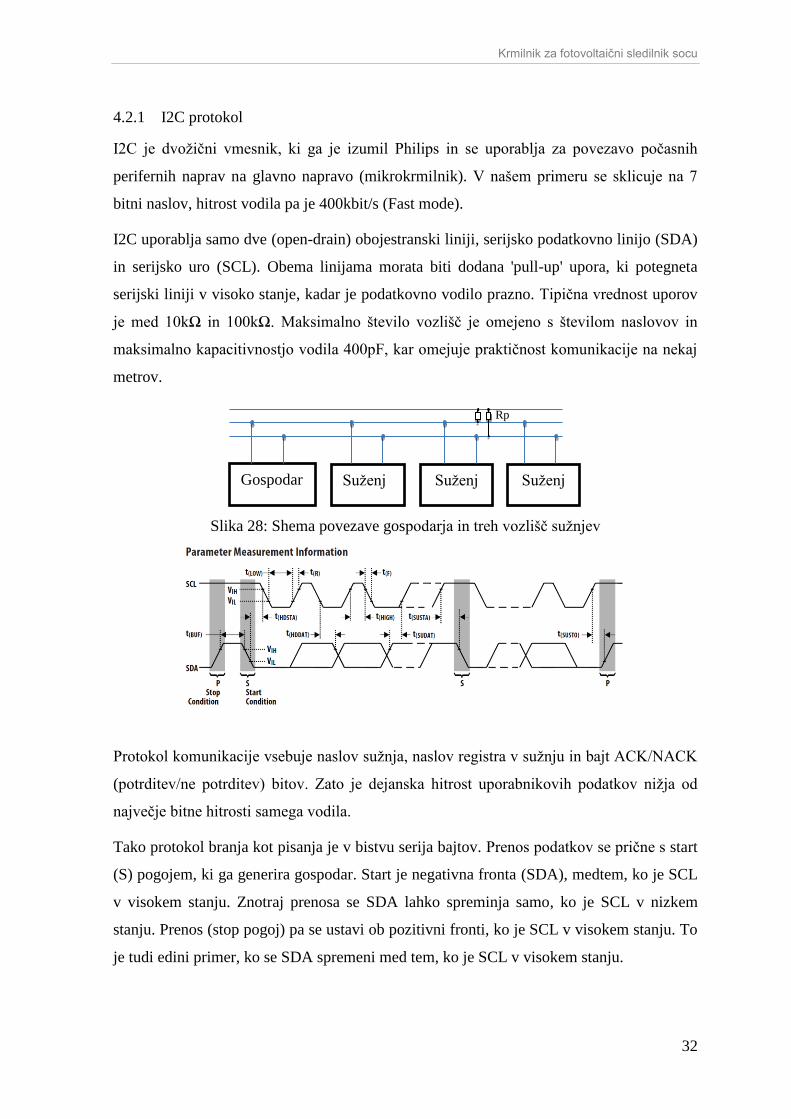
4.2.1 I2C protokol
I2C je dvožični vmesnik, ki ga je izumil Philips in se uporablja za povezavo počasnih
perifernih naprav na glavno napravo (mikrokrmilnik). V našem primeru se sklicuje na 7
bitni naslov, hitrost vodila pa je 400kbit/s (Fast mode).
I2C uporablja samo dve (open-drain) obojestranski liniji, serijsko podatkovno linijo (SDA)
in serijsko uro (SCL). Obema linijama morata biti dodana 'pull-up' upora, ki potegneta
serijski liniji v visoko stanje, kadar je podatkovno vodilo prazno. Tipična vrednost uporov
je med 10kΩ in 100kΩ. Maksimalno število vozlišč je omejeno s številom naslovov in
maksimalno kapacitivnostjo vodila 400pF, kar omejuje praktičnost komunikacije na nekaj
metrov.
Slika 28: Shema povezave gospodarja in treh vozlišč sužnjev
Protokol komunikacije vsebuje naslov sužnja, naslov registra v sužnju in bajt ACK/NACK
(potrditev/ne potrditev) bitov. Zato je dejanska hitrost uporabnikovih podatkov nižja od
največje bitne hitrosti samega vodila.
Tako protokol branja kot pisanja je v bistvu serija bajtov. Prenos podatkov se prične s start
(S) pogojem, ki ga generira gospodar. Start je negativna fronta (SDA), medtem, ko je SCL
v visokem stanju. Znotraj prenosa se SDA lahko spreminja samo, ko je SCL v nizkem
stanju. Prenos (stop pogoj) pa se ustavi ob pozitivni fronti, ko je SCL v visokem stanju. To
je tudi edini primer, ko se SDA spremeni med tem, ko je SCL v visokem stanju.
Gospodar Suženj Suženj Suženj
Rp

Krmilnik za fotovoltaični sledilnik socu
33
4.2.2 I2C komunikacija z APDS-9301
Prenos podatkov s senzorjem APDS-9301 pričnemo tako, da gospodar generira START
pogoj. Nato pošlje sužnju naslednjih 8 bitov: 7bitni naslov s katerim izberemo s kom
želimo komunicirati in 8. bit za izbiro načina nadaljevanja komunikacije (Wr-pisanje). Po
opravljenem pošiljanju čakamo sužnja, da odgovori z potrditvijo (A), kar sproži
nadaljevanje komunikacije. Gospodar nato pošlje 8bitno ukazno kodo, s katero izberemo
sužnjev register, s katerim bomo komunicirali.
Pri izbranem protokolu za pisanje (slika 29) in po prejeti potrditvi (A) od sužnja, gospodar
pošlje podatkovni bajt in po ponovni prejeti potrditvi (A), prekine (P) komunikacijo.
Če pa želimo brati iz sužnja (slika 30), mora gospodar po prejeti potrditvi (A) ponovno
poslati start (Sr) pogoj, 7bitni naslov in 8 bit, ki mora biti v visokem stanju (Rd branje).
Nato čaka na podatek iz registra sužnja, ki smo ga predhodno izbrali. Po prejeti potrditvi
(A) in podatkovnem bajtu od sužnja, gospodar ustavi komunikacijo.
gospodar - sužnju
suženj - gospodarju
1 7 1 1 8 1 8 1 1
S Naslov sužnja Wr A Ukazna koda A Podatkovni bajt A P
Slika 29: Protokol pisanja
1 7 1 1 8 1 1 1 1 8 1 1
S Naslov sužnja Wr A Ukazna koda A Sr Naslov sužnja Rd A Podatkovni bajt A P
Slika 30: Protokol branja
A potrditev (lahko je 0 za ne potrditev ali 1 za potrditev)
P Stop pogoj
Rd Branje (bit vrednosti 1)
S Start pogoj
Sr Ponovljen start pogoj
Wr Pisanje (bit vrednosti 0)
Krmilnik za fotovoltaični sledilnik socu
34
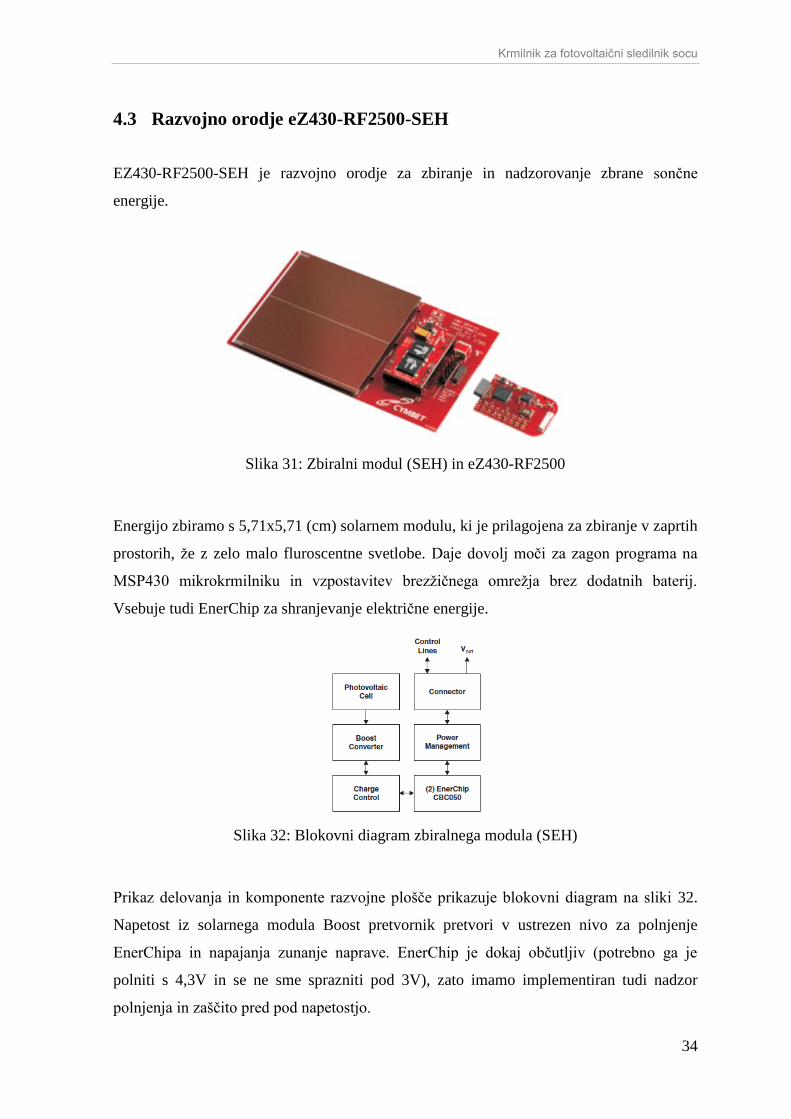
4.3 Razvojno orodje eZ430-RF2500-SEH
EZ430-RF2500-SEH je razvojno orodje za zbiranje in nadzorovanje zbrane sončne
energije.
Slika 31: Zbiralni modul (SEH) in eZ430-RF2500
Energijo zbiramo s 5,71x5,71 (cm) solarnem modulu, ki je prilagojena za zbiranje v zaprtih
prostorih, že z zelo malo fluroscentne svetlobe. Daje dovolj moči za zagon programa na
MSP430 mikrokrmilniku in vzpostavitev brezžičnega omrežja brez dodatnih baterij.
Vsebuje tudi EnerChip za shranjevanje električne energije.
Slika 32: Blokovni diagram zbiralnega modula (SEH)
Prikaz delovanja in komponente razvojne plošče prikazuje blokovni diagram na sliki 32.
Napetost iz solarnega modula Boost pretvornik pretvori v ustrezen nivo za polnjenje
EnerChipa in napajanja zunanje naprave. EnerChip je dokaj občutljiv (potrebno ga je
polniti s 4,3V in se ne sme sprazniti pod 3V), zato imamo implementiran tudi nadzor
polnjenja in zaščito pred pod napetostjo.
Krmilnik za fotovoltaični sledilnik socu
35
Ob zbiranju in shranjevanju imamo še možnost nadzorovanja energije. To omogoča
razvojna plošča z MSP430 mikrokrmilnikom in CC2500 2.4 GHz brezžičnim
sprejemnikom oziroma oddajnikom.
Slika 33: eZ430-RF2500
4.3.1 SimpliciTI
Texas Instruments SimpliciTI brezžični protokol, nam omogoča hitro postavitev malega
preprostega RF omrežje. Primeren je za preproste senzorske aplikacije. Deluje med dvema
ali več enakima eZ430-RF2500 napravama. Podpira peer-to-peer brezžično tehnologijo, z
možnostjo shranjevanja in prepošiljanja podatkov ter samodejno širitev omrežja do osem
naprav.
Dostopna točka (AP) oziroma sprejemnik je vedno vklopljena in komunicira z eno ali več
končnimi napravami (ED). Končna naprava je namenjena merjenju veličin in je večina
časa v stanju nizke porabe. Zbudi se enkrat na sekundo, izmeri vrednosti in jih pošlje preko
RF omrežja dostopni točki. Ko dostopna točka sprejem podatke od ene izmed končnih
naprav, jih pošlje preko UART aplikacije drugi napravi (npr. PC).
Končna naprava ob vklopu najprej prične z iskanjem dostopne točke. Režim delovanja
končne naprave lahko spremljamo preko zelene in rdeče led diode. Kadar vzpostavlja
omrežje, vidimo konstantno preklapljanje led diod. Ko se vklopi v omrežje, se vklopi rdeča
led in gre v stanje nizke porabe. Zelena led pa utripa samo, kadar končna naprava pošilja
podatke.

Krmilnik za fotovoltaični sledilnik socu
36
Dostopna točka vseskozi deluje in posluša. Ko dostopna točka prejme podatek od končne
naprave, se sproži prekinitev, kjer preveri njen naslov in postavi zastavico. Če je različen
od nič, se podatki prepišejo v zalogovnik. Na sliki 34 je prikazano, kako se izvaja program
v odvisnosti od zastavice, ki jo določi prekinitev (pridružitev oziroma prepošiljanje).
START
Pridružitev,podatek ali
sekundni interval
Določi naslov končni napravi
Pridružitevkončne naprave
Branje in pošiljanjeSvojih podatkov
preko UART
sekunde ++
Beri iz zalogovnikaPrepošlji podatke
preko UART
Prispel podatek končne naprave
Slika 34: Delovanje SimplicitiTI
Končna naprava pošlje vrednost nič, kadar se želi povezati. Dostopna točka lahko
komunicira samo z osmimi končnimi napravami. V primeru, če je število končnih naprav
manjše kot osem, jim dostopna točka določi in pošlje naslov.
V primeru, kadar pa je število različno od nič in program pride do funkcije za branje in
prepošiljanje, izvede branje iz zalogovnika in pošlje podatke preko UART. V funkciji
ostane tako dolgo, dokler niso prebrane in odposlane vse vrednosti iz končnih naprav preko
UART.
Delo z ostalimi funkcijami končne naprave, na primer branje svoje temperature in njeno
pošiljanje preko UART, pa se izvaja v eno sekundnem intervalu.
Krmilnik za fotovoltaični sledilnik socu
37
4.4 DRV8412 gonilnik za motorje
Za krmiljenje motorjev bomo uporabili PŠM signal, ki ga generira mikrokrmilnik. Vendar
pa so njegovi izhodi omejeni s tokom. Izhodi zmorejo do 20mA, kar pa ne zadostuje
tokovnim potrebam servo motorjev. Zato potrebujemo ojačevalno vezje, kot je H-mostič.
V ta namen bomo uporabili DRV8412 gonilnik za motorje s štirimi polovičnimi H-mostiči,
proizvajalca Texas instrument.
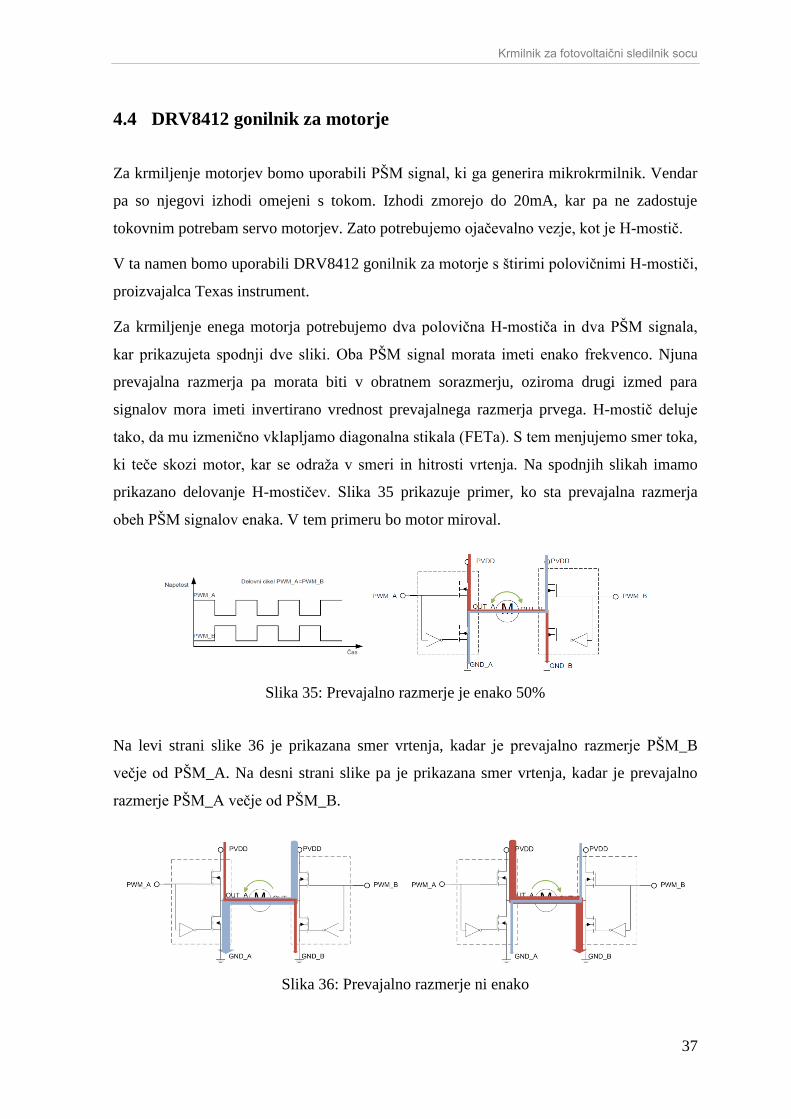
Za krmiljenje enega motorja potrebujemo dva polovična H-mostiča in dva PŠM signala,
kar prikazujeta spodnji dve sliki. Oba PŠM signal morata imeti enako frekvenco. Njuna
prevajalna razmerja pa morata biti v obratnem sorazmerju, oziroma drugi izmed para
signalov mora imeti invertirano vrednost prevajalnega razmerja prvega. H-mostič deluje
tako, da mu izmenično vklapljamo diagonalna stikala (FETa). S tem menjujemo smer toka,
ki teče skozi motor, kar se odraža v smeri in hitrosti vrtenja. Na spodnjih slikah imamo
prikazano delovanje H-mostičev. Slika 35 prikazuje primer, ko sta prevajalna razmerja
obeh PŠM signalov enaka. V tem primeru bo motor miroval.
Slika 35: Prevajalno razmerje je enako 50%
Na levi strani slike 36 je prikazana smer vrtenja, kadar je prevajalno razmerje PŠM_B
večje od PŠM_A. Na desni strani slike pa je prikazana smer vrtenja, kadar je prevajalno
razmerje PŠM_A večje od PŠM_B.
Slika 36: Prevajalno razmerje ni enako

Krmilnik za fotovoltaični sledilnik socu
38
Kot smo že zapisali, je DRV8412 zgrajen tako, da vsebuje štiri neodvisne enake polovične
mostiče, ki so označeni s črkami A, B, C in D. Vsak polovični mostič ima svoje ločeno
napajanje (GVDD), močnostni priključek (PVDD), maso in priključek za pulzno širinsko
moduliran signal (PŠM), kar omogoča povezavo različnih motorjev z različnimi
napetostnimi zahtevami.
Slika 37: Poenostavljen aplikacijski diagram
DRV8412 deluje z napajalno napetostjo 12V (GVDD in VDD). Notranji napetostni
regulatorji poskrbijo za ustrezne napetostne nivoje za digitalne in analogne komponente.
Prilagojen je za Stellaris-ove mikrokrmilnike. Tu gre predvsem za napetostne nivoje
(3.3V) komunikacijskih linij.
Priporočena maksimalna izhodna obremenitev pri maksimalni stikalni frekvenci 500kHz je
50V s stalnim tokom 2x3A ter kratkotrajna obremenitev do 70V in 2×6A.
DRV8412 pa vsebuje tudi zaščito pred neželenimi dogodki, ki bi ga lahko poškodovali.
Kot so zaščita pred kratkim stikom, nastavljivim prevelikim tokom, temperaturna zaščita in
zaščita pred podnapetostjo.

Krmilnik za fotovoltaični sledilnik socu
39
4.4.1 Zaščita DRV8412
Kadar nepravilno stanje sproži enega izmed zaščit in izklopi DRV, se kontroli izhod
FAULT postavi iz visokega v nizko stanje.
Prvi razlog je ob sprožitvi ene izmed dveh napetostnih zaščit, ki se sproži, kadar vhodna
napetost pade pod 8.5V. Tedaj se izhodi vseh polovičnih H-mostičev postavijo v visoko
impedančno stanje. Ko pa napajalna napetost ponovno doseže želeni nivo, samodejno
nadaljuje z operacijami.
V primeru, kadar naprava deluje pri nizki stikalni frekvenci (pod 10kHz) in uporabljamo
100nF bootstrap kondenzatorje, napetost na njih morda ne bo dovolj velika, da bi
zagotovila primeren napetostni level za high-side gate driver. Zato, kadar je bootstrap
napetost v kondenzatorju prenizka za potrebe varnega delovanja, DRV sproži ponovno
polnjenje bootstrap kondenzatorjev (izklopi high side FET za kratek čas), dokler niso
primerno nabiti za varno nadaljevanje. Za nižje frekvence se lahko uporabi 1µF
kondenzator, vendar je priporočljivo dodati 5Ω upor za zmanjšanje polnilnega toka za
bootstrap kondenzatorje.
Tokovno zaščito lahko nastavimo kot tokovno omejitveno ali tokovno zaščitno.
Omejitvena tokovna zaščita deluje za vsak cikel posebej in prepričuje dvig toka preko
praga. Tako lahko učinkovito omejimo vklopne tokove ob zagonu ali ob prehodih brez
poškodovanja naprave. V primeru kratkega stika pa omejitveno tokovno zaščitno vezje
morda ne bo moglo omejiti toka na nastavljeni ravni. V tem primeru je bolje izbrati
tokovno zaščito, ki sproži zaustavitev naprave in postavi izhode v visoko impedančno
stanje. Prag tokovnih zaščit lahko nastavimo z definiranimi vrednostmi zunanjih uporov
(R5).
Vsebuje tudi zaščito pred previsoko temperaturo, katere delovanje lahko spremljamo s
OTW izhodnim pinom. OTW gre iz visokega v nizko stanje, kadar temperatura spoja
naprave preseže 125°C. V primeru, da temperatura še narašča in preseže 150°C, se sproži
izklop naprave. Takrat se izhodi postavijo v visoko impedančno stanje, signalni FAULT
pin pa v nizko stanje.
Krmilnik za fotovoltaični sledilnik socu
40
4.4.2 Ponovni zagon naprave
Dva reset (RESET_AB in RESET_CD) pina sta predvidena za neodvisni nadzor
polovičnih mostičev A/B in C/D.
Nizko stanje reseta rahlo potegne izhode polovičnih mostičev proti masi (weak-pulldown)
in s tem zadostimo zahtevo po bootstrap polnjenju pred začetkom preklapljanja.
Za tem rising-edge na vhodu reseta omogoči ponastavitev in nadaljevanje delovanja po
ustavitvi zaradi napake. Na primer, ko se B polovični H-mostič izklopi zaradi previsokega
toka, prehod iz nizkega v visoko stanje RESET_AB odpravi napako in ponastavi FAULT
pin.
4.4.3 Način delovanja
Pini M1, M2 in M3 služijo za izbiro načina delovanja. V skladu z zahtevami lahko
izbiramo med različnimi zaščitami in načini povezave polovičnih H-mostičev. V našem
primeru uporabljamo štiri polovične H-mostiče, povezane v dva celotna, s pretokovno
zaščito. Če katerega izmed mostičev ne uporabljamo, je želeno, da njegov vhod vežemo na
maso.
Postavitev pinov Izhodna
konfiguracija Opis
M3 M2 M1
0 0 0 2FB ali 4HB Dva celotna H-mostiča (dva PŠM za vhoda vsak celotni H-
mostič) pragovna tokovna omejitev za vsak cikel
0 0 1 2FB ali 4HB Dva celotna H-mostiča (dva PŠM za vhoda vsak celotni H-
mostič) pretokovna zaščita
0 1 0 1PFB Vzporedni celotni mostič z tokovna omejitvijo za vsak cikel
0 1 1 2FB Dva celotna H-mostiča ( en PŠM vhod za vsak polni H-mostič
z dopolnilnem PŠM-om na drugem mostiču) pragovna
tokovna omejitev za vsak cikel
Krmilnik za fotovoltaični sledilnik socu
41
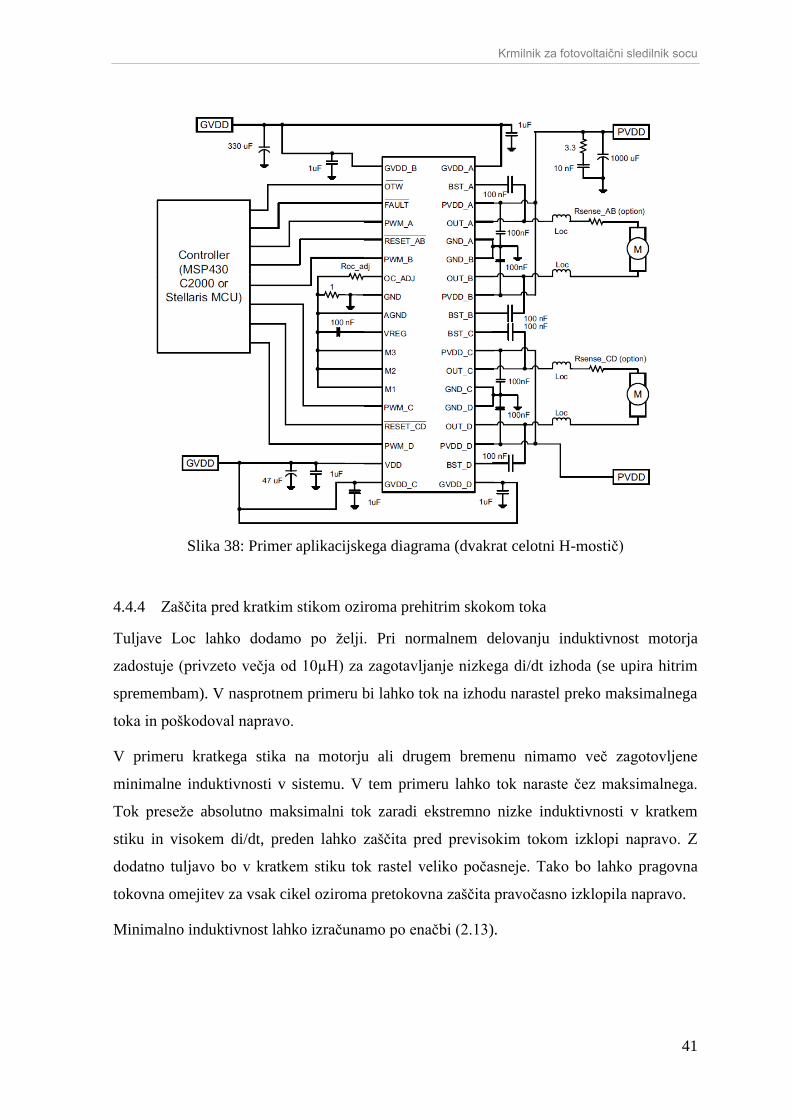
Slika 38: Primer aplikacijskega diagrama (dvakrat celotni H-mostič)
4.4.4 Zaščita pred kratkim stikom oziroma prehitrim skokom toka
Tuljave Loc lahko dodamo po želji. Pri normalnem delovanju induktivnost motorja
zadostuje (privzeto večja od 10µH) za zagotavljanje nizkega di/dt izhoda (se upira hitrim
spremembam). V nasprotnem primeru bi lahko tok na izhodu narastel preko maksimalnega
toka in poškodoval napravo.
V primeru kratkega stika na motorju ali drugem bremenu nimamo več zagotovljene
minimalne induktivnosti v sistemu. V tem primeru lahko tok naraste čez maksimalnega.
Tok preseže absolutno maksimalni tok zaradi ekstremno nizke induktivnosti v kratkem
stiku in visokem di/dt, preden lahko zaščita pred previsokim tokom izklopi napravo. Z
dodatno tuljavo bo v kratkem stiku tok rastel veliko počasneje. Tako bo lahko pragovna
tokovna omejitev za vsak cikel oziroma pretokovna zaščita pravočasno izklopila napravo.
Minimalno induktivnost lahko izračunamo po enačbi (2.13).
Krmilnik za fotovoltaični sledilnik socu
42
(2.13)
( )
4.4.5 Dodatne komponente
Zaradi prehodnih tokov, ki so dosti višji od povprečnih, je potrebno med VDD in maso
namestiti kondenzatorje med 22µF in 47µF zraven 100nF do 1µF kondenzatorjev, da
zagotovimo konstantno napetost med prehodi.
Za odpravo valovitosti izhodne napetosti iz H-mostičev se lahko dodajo še dodatne dušilke
in kondenzatorji. Ti morajo biti v skladu s tokovnimi, napetostnimi in temperaturnimi
pogoji.
Krmilnik za fotovoltaični sledilnik socu
43
4.5 Lego NXT Mindstorms
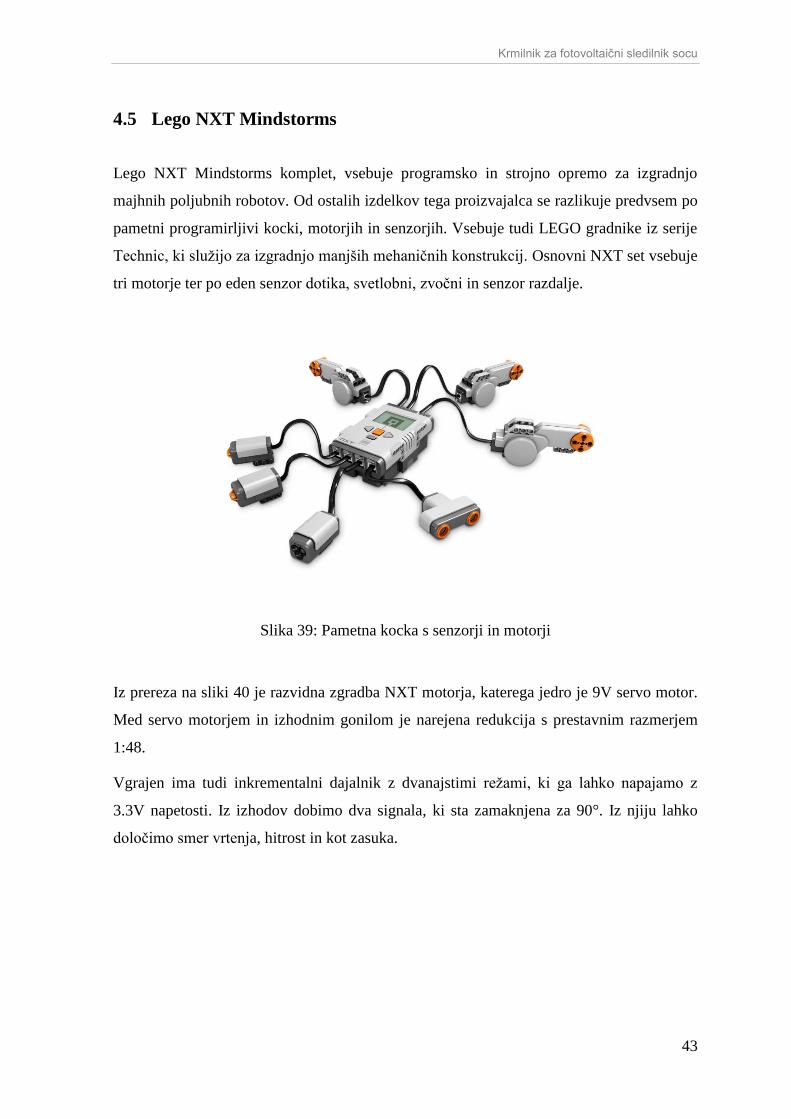
Lego NXT Mindstorms komplet, vsebuje programsko in strojno opremo za izgradnjo
majhnih poljubnih robotov. Od ostalih izdelkov tega proizvajalca se razlikuje predvsem po
pametni programirljivi kocki, motorjih in senzorjih. Vsebuje tudi LEGO gradnike iz serije
Technic, ki služijo za izgradnjo manjših mehaničnih konstrukcij. Osnovni NXT set vsebuje
tri motorje ter po eden senzor dotika, svetlobni, zvočni in senzor razdalje.
Slika 39: Pametna kocka s senzorji in motorji
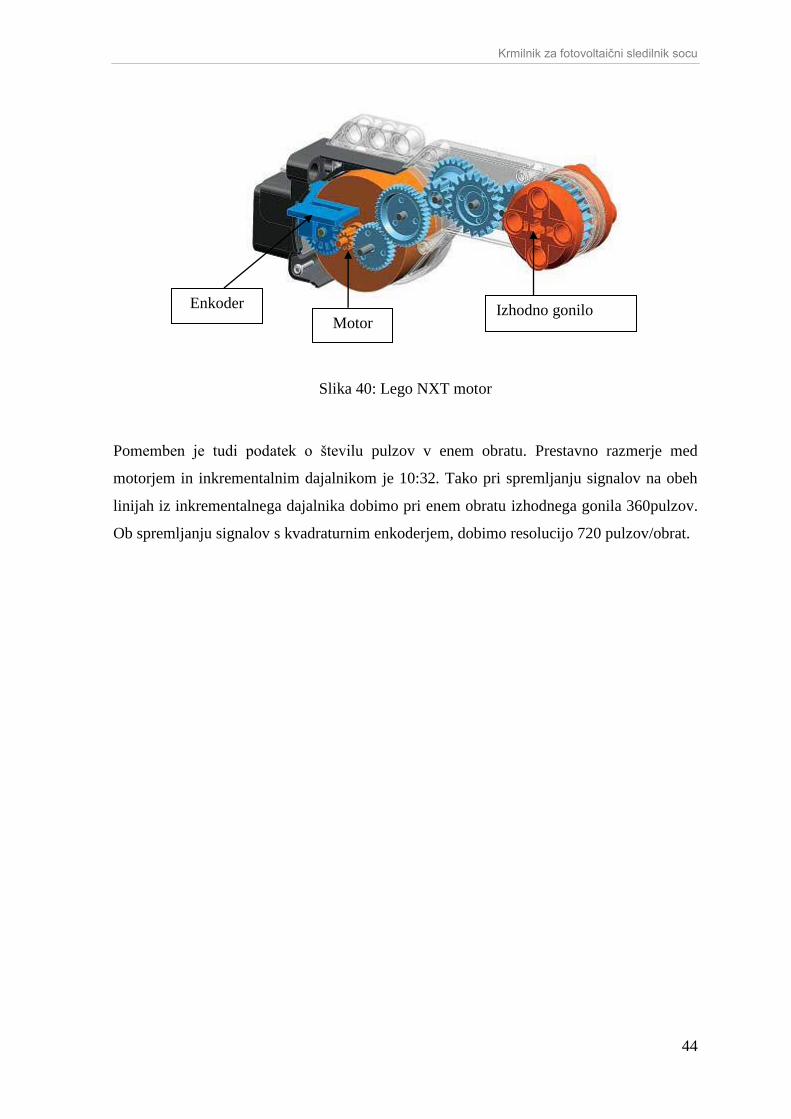
Iz prereza na sliki 40 je razvidna zgradba NXT motorja, katerega jedro je 9V servo motor.
Med servo motorjem in izhodnim gonilom je narejena redukcija s prestavnim razmerjem
1:48.
Vgrajen ima tudi inkrementalni dajalnik z dvanajstimi režami, ki ga lahko napajamo z
3.3V napetosti. Iz izhodov dobimo dva signala, ki sta zamaknjena za 90°. Iz njiju lahko
določimo smer vrtenja, hitrost in kot zasuka.
Krmilnik za fotovoltaični sledilnik socu
44
Slika 40: Lego NXT motor
Pomemben je tudi podatek o številu pulzov v enem obratu. Prestavno razmerje med
motorjem in inkrementalnim dajalnikom je 10:32. Tako pri spremljanju signalov na obeh
linijah iz inkrementalnega dajalnika dobimo pri enem obratu izhodnega gonila 360pulzov.
Ob spremljanju signalov s kvadraturnim enkoderjem, dobimo resolucijo 720 pulzov/obrat.
Enkoder
Motor Izhodno gonilo
Krmilnik za fotovoltaični sledilnik socu
45
5 OPIS PROGRAMSKE OPREME
5.1 Altium designer
Za načrtovanje tiskanih vezij sem uporabil Altium designer. To je aplikacija, ki pokriva
celoten proces projektiranja tiskanih vezij. Za večjo preglednost in lažje načrtovanje
omogoča podporo za več monitorjev, več kanalno projektiranje, več variant tiskanih vezij,
navigacijo, verifikacijo, sinhronizacijo in integrirane knjižnice komponent.
Pri risanju sheme si pomagamo s simboli, ki jih program vsebuje v svojih knjižnicah.
Elementom se lahko nastavljajo potrebni parametri, kot so velikost, razdalje med priključki
in vrednosti. Če pa ne najdemo ustreznih, ali pa nam ustrezajo le delno, imamo na voljo
možnost, da si jih sami izrišemo, nato pa jih po potrebi uporabimo.
Nato lahko pretvorimo shemo v PCB. Elemente povežemo sami ali pa uporabimo Auto
route. Če uporabimo možnost Auto route, je potrebno, preden poženemo to rutino, nastaviti
parametre, kot je na primer debeline povezav. Če povezave povezujemo sami, pa lahko
določene nastavitve sproti prilagajamo.
Slika 41: Altium designer
Krmilnik za fotovoltaični sledilnik socu
46
5.2 IAR Razvojno okolje
Za delo s Stellaris EKI-LM3S8962 razvojnim orodjem, se uporablja razvojno orodje IAR
Embedded Workbench za ARM krmilnike. Primerno je za velike in male aplikacije,
večinoma na osnovi 8-, 16- in 32-bitnih mikrokrmilnike, predvsem na področjih
industrijske avtomatizacije, medicinske tehnologije, potrošniške elektronike in
avtomobilske industrije. Omogoča programiranje aplikacij v C/C++ programskem jeziku,
organizacijo projektov, razhroščevanje aplikacij ter njihovo zapisovanje na krmilnik.
To orodje je močno podprto s Texasove strani, saj lahko najdemo velik nabor že spisanih
knjižnic za njihove krmilnike. Te omogočajo lažje in hitrejše programiranje. Napisanih pa
je tudi nekaj lažjih programov, ki začetniku omogočijo hitro učenje in osvajanje osnovnih
principov programiranja v tem okolju.
Slika 42: IAR Embedded Workbench
Krmilnik za fotovoltaični sledilnik socu
47
5.3 Labview
Labview je grafični programski jezik proizvajalca National Instruments. Omogoča grafično
programiranje z bloki, ki jih povežemo s podatkovnimi linijami. Te določajo na kakšen
način naj se generira programska koda.
Omogoča nam hitro izgradnjo aplikacij in spremljanje rezultatov na čelni plošči, ki jo
oblikujemo po želji. V našem primeru bomo uporabljali LabVIEW za izgradnjo
uporabniškega vmesnika, ki komunicira preko serijske komunikacije z mikrokrmilnikom.
Koncept serijske komunikacije je preprost. Preko serijskih vrat pošiljamo zaporedno po en
bit naenkrat. Čeprav je ta način počasnejši od vzporedne serijske komunikacije, ki
omogoča prenos celotnega bajta naenkrat, jo lahko uporabljamo na daljših razdaljah.
Omogoča nam zaporedni prenos ASCІІ znakov z uporabo treh linij, podatkovnega prenosa
in sprejema ter mase. Pomembne lastnosti so serijska hitrost, število podatkovnih bitov,
stop bit in paritetna bita.
Slika 43: Blokovni diagram
Krmilnik za fotovoltaični sledilnik socu
48
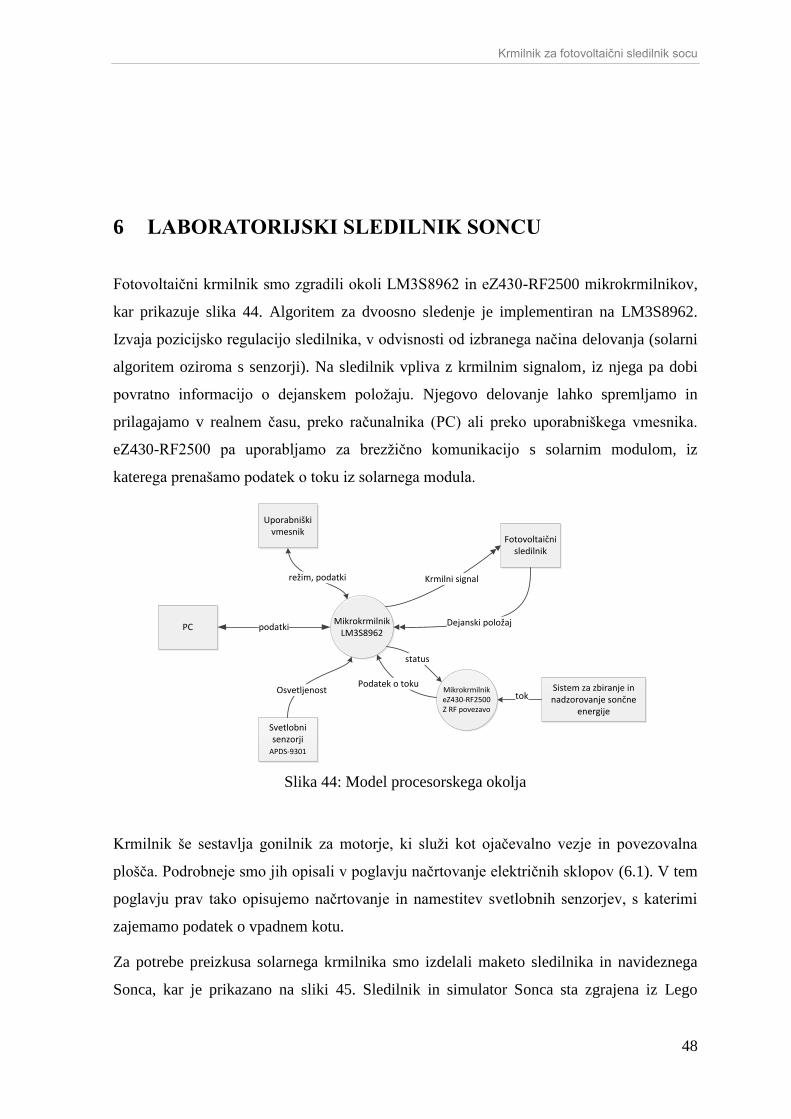
6 LABORATORIJSKI SLEDILNIK SONCU
Fotovoltaični krmilnik smo zgradili okoli LM3S8962 in eZ430-RF2500 mikrokrmilnikov,
kar prikazuje slika 44. Algoritem za dvoosno sledenje je implementiran na LM3S8962.
Izvaja pozicijsko regulacijo sledilnika, v odvisnosti od izbranega načina delovanja (solarni
algoritem oziroma s senzorji). Na sledilnik vpliva z krmilnim signalom, iz njega pa dobi
povratno informacijo o dejanskem položaju. Njegovo delovanje lahko spremljamo in
prilagajamo v realnem času, preko računalnika (PC) ali preko uporabniškega vmesnika.
eZ430-RF2500 pa uporabljamo za brezžično komunikacijo s solarnim modulom, iz
katerega prenašamo podatek o toku iz solarnega modula.
MikrokrmilnikLM3S8962
Uporabniški vmesnik
Svetlobni senzorji
APDS-9301
Fotovoltaični sledilnik
Dejanski položaj
Osvetljenost Sistem za zbiranje in nadzorovanje sončne
energije
tokPodatek o toku
Krmilni signalrežim, podatki
PC podatki
MikrokrmilnikeZ430-RF2500 Z RF povezavo
status
Slika 44: Model procesorskega okolja
Krmilnik še sestavlja gonilnik za motorje, ki služi kot ojačevalno vezje in povezovalna
plošča. Podrobneje smo jih opisali v poglavju načrtovanje električnih sklopov (6.1). V tem
poglavju prav tako opisujemo načrtovanje in namestitev svetlobnih senzorjev, s katerimi
zajemamo podatek o vpadnem kotu.
Za potrebe preizkusa solarnega krmilnika smo izdelali maketo sledilnika in navideznega
Sonca, kar je prikazano na sliki 45. Sledilnik in simulator Sonca sta zgrajena iz Lego

Krmilnik za fotovoltaični sledilnik socu
49
mindstorm gradnikov. Za premikanje sledilnega mehanizma uporabljamo Lego NXT
motor, ki vsebuje inkrementalni dajalnik. Na sledilni mehanizem pa smo namestili sistem
za zbiranje in nadzorovanje sončne energije ter dva para svetlobnih senzorjev. Prav tako je
na sledilniku nameščena končna naprava RF povezave in vezje za merjenje toka.
Na sliki 45 je prikazan končni izdelek in pisna ponazoritev posameznih sklopov. Z zeleno
barvo označujemo dele, ki sestavljajo fotovoltaični krmilnik. Oranžna barva označuje dele,
ki sestavljajo simulator Sonca, oziroma predstavljajo izvor svetlobe za preizkus sledenja s
senzorji. Z modro barvo pa uprizarjamo mesta, kjer se izvajajo meritve. Posamezni deli so
podrobneje opisani v naslednjih poglavjih.
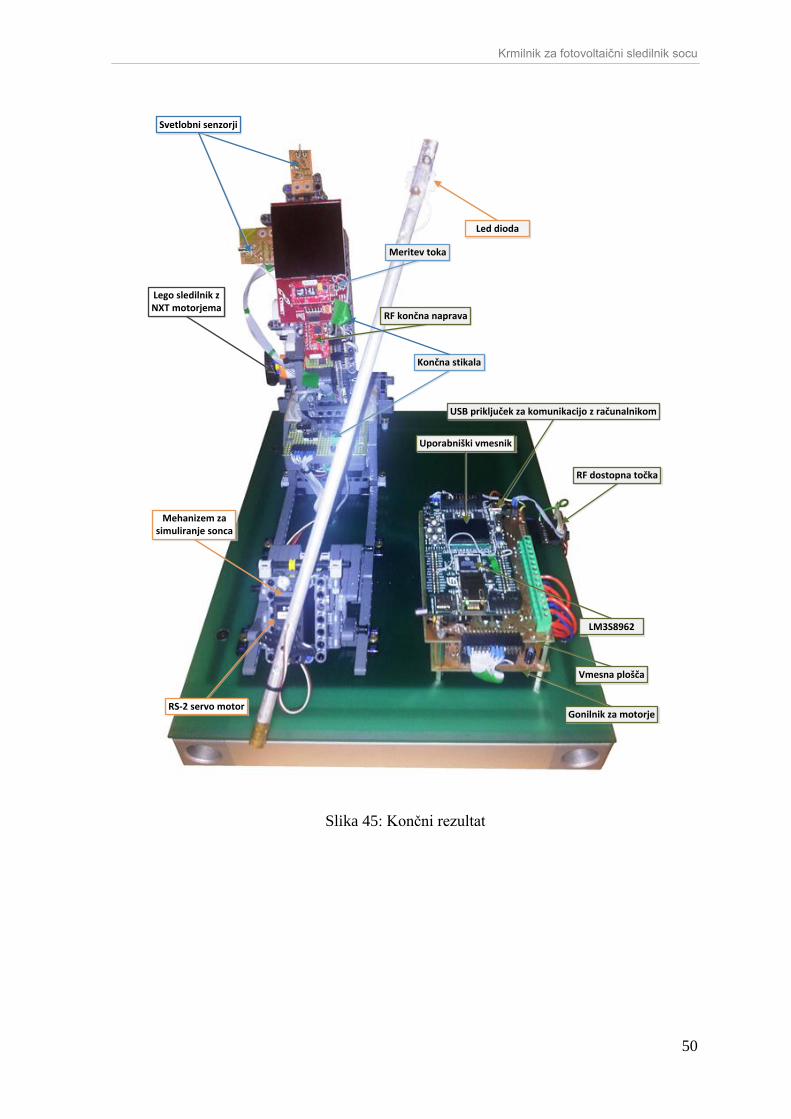
Krmilnik za fotovoltaični sledilnik socu
50
RS-2 servo motor
Mehanizem za simuliranje sonca
RF dostopna točka
USB priključek za komunikacijo z računalnikom
Uporabniški vmesnik
Gonilnik za motorje
Vmesna plošča
LM3S8962
Svetlobni senzorji
Lego sledilnik zNXT motorjema
Led dioda
Meritev toka
RF končna naprava
Končna stikala
Slika 45: Končni rezultat
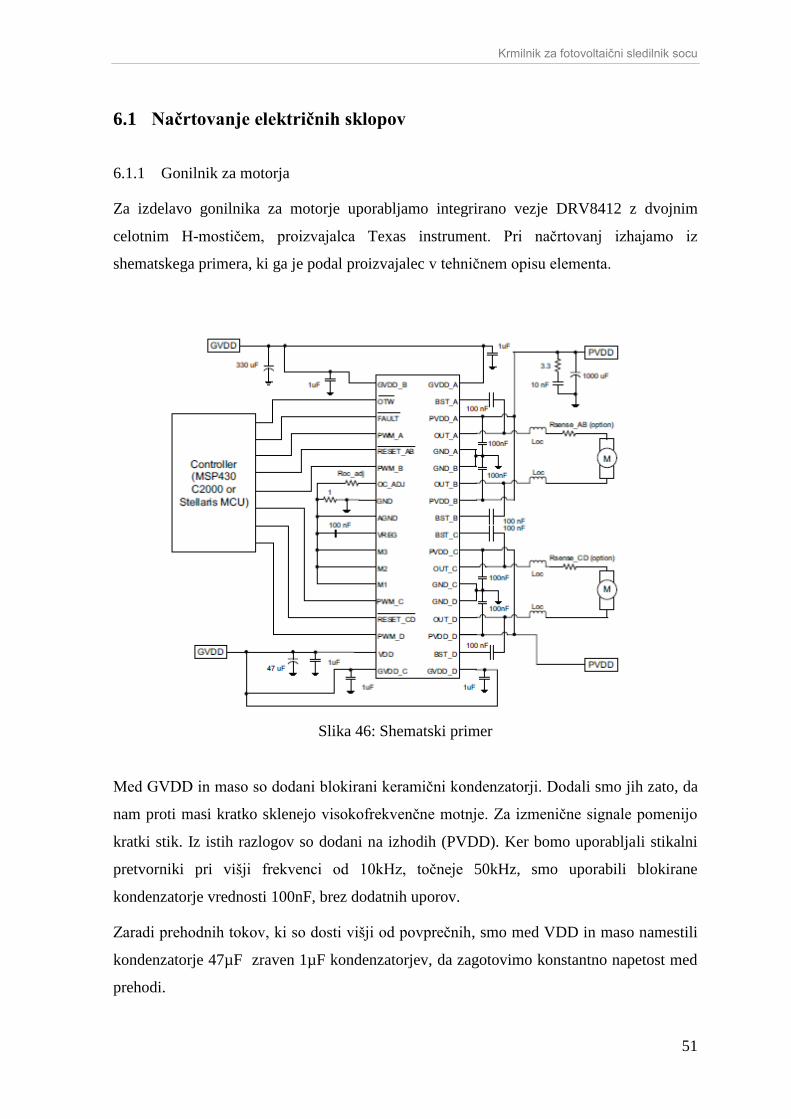
Krmilnik za fotovoltaični sledilnik socu
51
6.1 Načrtovanje električnih sklopov
6.1.1 Gonilnik za motorja
Za izdelavo gonilnika za motorje uporabljamo integrirano vezje DRV8412 z dvojnim
celotnim H-mostičem, proizvajalca Texas instrument. Pri načrtovanj izhajamo iz
shematskega primera, ki ga je podal proizvajalec v tehničnem opisu elementa.
Slika 46: Shematski primer
Med GVDD in maso so dodani blokirani keramični kondenzatorji. Dodali smo jih zato, da
nam proti masi kratko sklenejo visokofrekvenčne motnje. Za izmenične signale pomenijo
kratki stik. Iz istih razlogov so dodani na izhodih (PVDD). Ker bomo uporabljali stikalni
pretvorniki pri višji frekvenci od 10kHz, točneje 50kHz, smo uporabili blokirane
kondenzatorje vrednosti 100nF, brez dodatnih uporov.
Zaradi prehodnih tokov, ki so dosti višji od povprečnih, smo med VDD in maso namestili
kondenzatorje 47µF zraven 1µF kondenzatorjev, da zagotovimo konstantno napetost med
prehodi.

Krmilnik za fotovoltaični sledilnik socu
52
Za zaščito vezja pred kratim stikom, smo dodali na izhode zaščitne tuljave. Slednje
zagotovijo minimalno induktivnost v kratkem stiku in s tem zmanjšajo di/dt. Vrednost
njihove induktivnosti je načrtovana za napetosti do 50V in maksimalne tokove 6A.
Uporabili smo približek vrednosti in sicer tuljave 4,7µH/8,7A.
Za odpravo valovitosti izhodne napetosti iz H-mostičev se lahko dodajo še dodatne dušilke
in kondenzatorji, ki morajo biti v skladu s tokovnimi, napetostnimi in temperaturnimi
pogoji.
DRV841 vsebuje nastavljivo tokovno omejitveno in tokovno zaščitno vezje. Uporabili smo
tokovno zaščitno vezje. Na želeno raven smo ga nastavili z uporom R5, na sliki 47.
Izberemo ga tabelarno iz podatkov tabele, ki jih ponuja proizvajalec v tehničnem opisu
naprave. Ker naprava zmore kratkotrajno obremenitev 2×6A, smo nastavili prag tokovne
zaščite na 5,8A. Vrednost upora tako znaša 47kΩ.
Vhode PWM od A do B priklopimo na krmilnik. Po njih pripeljemo pulzno moduliran
signal, s katerim krmilimo polovične H-mostiče. Vhode RESET_AB in RESET_CD je
dobro med vklopom držati na nizkem nivoju, medtem ko morata biti med delovanjem na
visokem. Pina FAULT in OTV sta nizko napetostna izhoda. Ko sta oba na visokem nivoju
(logična 1) naprava normalno deluje. Če pa se temperatura poveča nad 125°C, se OTW
postavi na logično 0. FAULT pa se postavi na logično 0, kadar se naprava zaustavi zaradi
napak.
Za načrtovaje tiskanega vezja smo uporabil Altium designer. Izrisali smo malo razširjeno
shemo, ki ima dodane indikatorje in nekaj komponent za izbiro med načini delovanja.

Krmilnik za fotovoltaični sledilnik socu
53
Slika 47: Shema gonilnika za motorje Altum designer
Stikala S1 in S2 nam omogočajo, da hardversko resetiramo sitem. Dodali smo tudi letvico
P2, na kateri s prestavljanjem mostičkov izbiramo različne načine delovanja. Led dioda D1
se vklopi, ko je vezje pod napetostjo 12 V, D4 pa če deluje napetostni regulator 3,3V. Led
dioda D2 je indikator za OTW, D3 pa za FAULT.
Slika 48: Gonilnik za motorje (obe strani plošče)
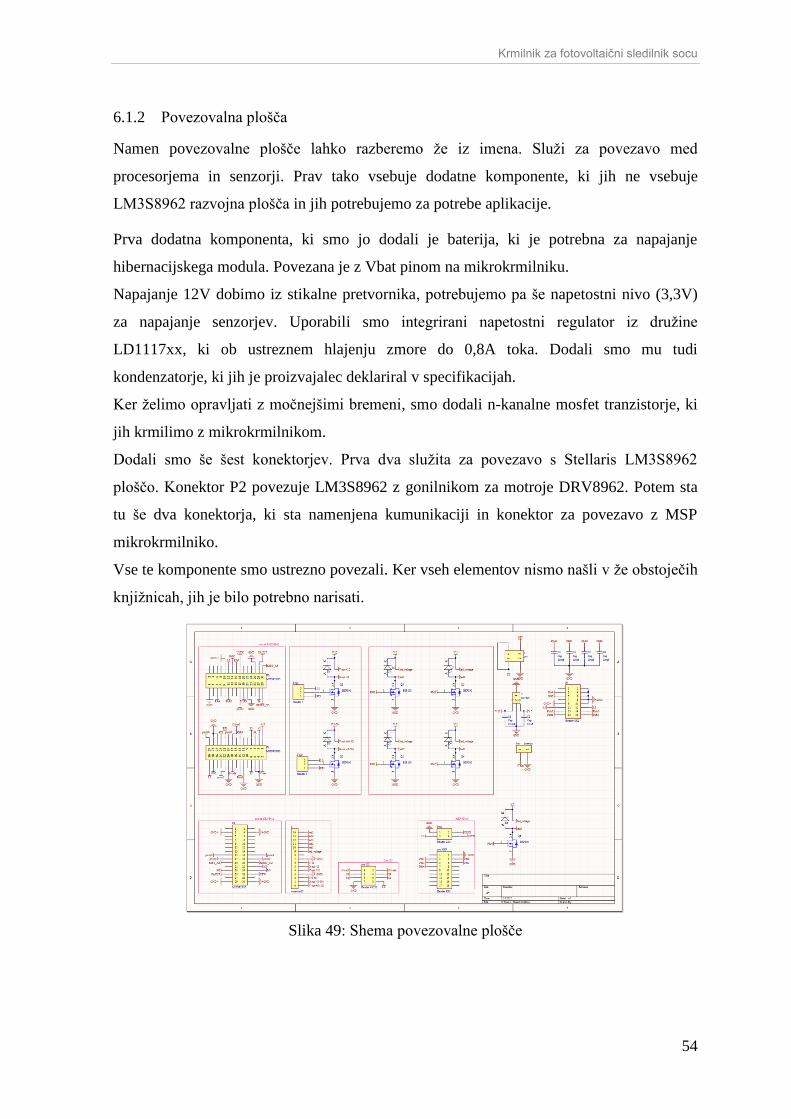
Krmilnik za fotovoltaični sledilnik socu
54
6.1.2 Povezovalna plošča
Namen povezovalne plošče lahko razberemo že iz imena. Služi za povezavo med
procesorjema in senzorji. Prav tako vsebuje dodatne komponente, ki jih ne vsebuje
LM3S8962 razvojna plošča in jih potrebujemo za potrebe aplikacije.
Prva dodatna komponenta, ki smo jo dodali je baterija, ki je potrebna za napajanje
hibernacijskega modula. Povezana je z Vbat pinom na mikrokrmilniku.
Napajanje 12V dobimo iz stikalne pretvornika, potrebujemo pa še napetostni nivo (3,3V)
za napajanje senzorjev. Uporabili smo integrirani napetostni regulator iz družine
LD1117xx, ki ob ustreznem hlajenju zmore do 0,8A toka. Dodali smo mu tudi
kondenzatorje, ki jih je proizvajalec deklariral v specifikacijah.
Ker želimo opravljati z močnejšimi bremeni, smo dodali n-kanalne mosfet tranzistorje, ki
jih krmilimo z mikrokrmilnikom.
Dodali smo še šest konektorjev. Prva dva služita za povezavo s Stellaris LM3S8962
ploščo. Konektor P2 povezuje LM3S8962 z gonilnikom za motroje DRV8962. Potem sta
tu še dva konektorja, ki sta namenjena kumunikaciji in konektor za povezavo z MSP
mikrokrmilniko.
Vse te komponente smo ustrezno povezali. Ker vseh elementov nismo našli v že obstoječih
knjižnicah, jih je bilo potrebno narisati.
Slika 49: Shema povezovalne plošče
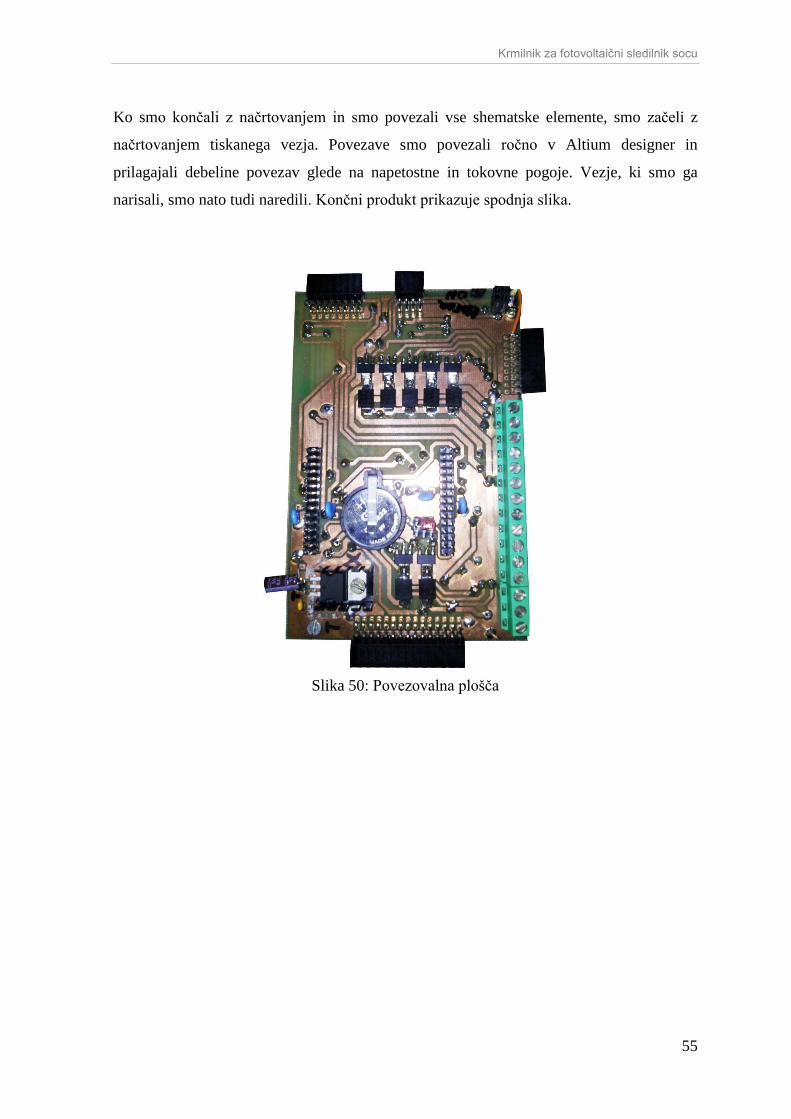
Krmilnik za fotovoltaični sledilnik socu
55
Ko smo končali z načrtovanjem in smo povezali vse shematske elemente, smo začeli z
načrtovanjem tiskanega vezja. Povezave smo povezali ročno v Altium designer in
prilagajali debeline povezav glede na napetostne in tokovne pogoje. Vezje, ki smo ga
narisali, smo nato tudi naredili. Končni produkt prikazuje spodnja slika.
Slika 50: Povezovalna plošča

Krmilnik za fotovoltaični sledilnik socu
56
6.1.3 Svetlobna senzorja
Meritev osvetljenosti izvajamo s pomočjo štirih APDS-9301 svetlobnih foto senzorjev, ki
vsak posebej pretvarjajo moč svetlobnega sevanja v 16-bitno digitalno izhodno vrednost.
Komunikacija s senzorji pa teče preko I2C povezave. Pri načrtovanju vezja, katerega smo
izrisali v Altium designer-ju, smo izhajali iz sheme, ki jo je podal proizvajalec v tehničnem
opisu elementa. Strojno delo s samimi senzorji ni zahtevno.
Naslov naprave določimo s pinom ADDR SEL, ki lahko ima tri različna stanja. Naslove
senzorjev bomo določevali programsko. Pin vsakega senzorja bomo povezali s pinom
mikrokrmilnika, katerega bomo definirali kot izhod. Zato imamo štiri dodatne linije.
Vsakemu senzorju je treba zagotoviti napajanje. Priporočljivo je dodati, med napajanje in
maso blizu senzorja, 0.1µF kondenzator za glajenje napetosti.
I2C povezava teče preko SDA in SCL linije, na katere povežemo senzorje kot prikazuje
slika 28. Na obe liniji, podatkovno in serijsko uro, smo dodali 'pull-up' upore. V primeru,
kadar je podatkovno vodilo prazno, potegnejo liniji v visoko stanje. Uporabili smo upora
vrednosti 10kΩ.
Maksimalno število vozlišč je omejeno s številom naslovov in maksimalno kapacitivnostjo
vodila 400pF, kar omejuje praktičnost komunikacije na nekaj metrov. Priporočljivo pa je
imeti kar se da kratke povezave.
Slika 51 prikazuje shemo dveh senzorjev, ki jih bomo namestili na sledilnik. Med seboj jih
povežemo preko konektorjev_6, konektor_8 pa služi za povezavo z mikrokrmilnikom.
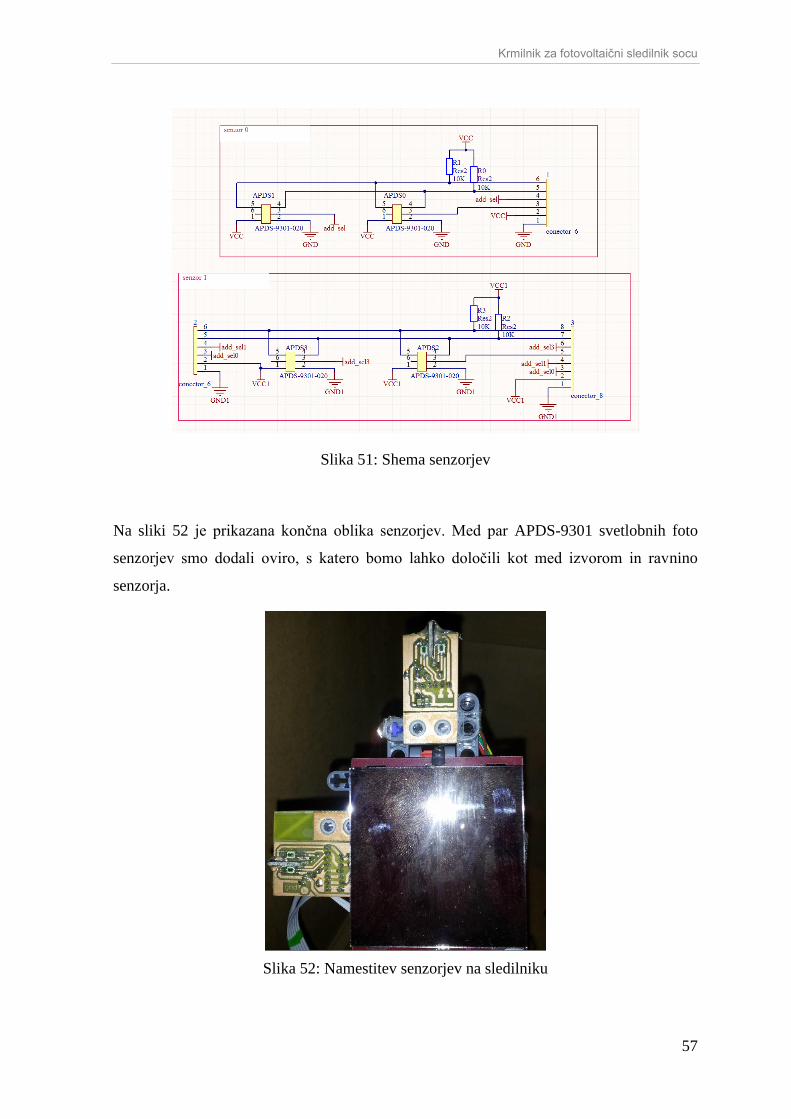
Krmilnik za fotovoltaični sledilnik socu
57
Slika 51: Shema senzorjev
Na sliki 52 je prikazana končna oblika senzorjev. Med par APDS-9301 svetlobnih foto
senzorjev smo dodali oviro, s katero bomo lahko določili kot med izvorom in ravnino
senzorja.
Slika 52: Namestitev senzorjev na sledilniku
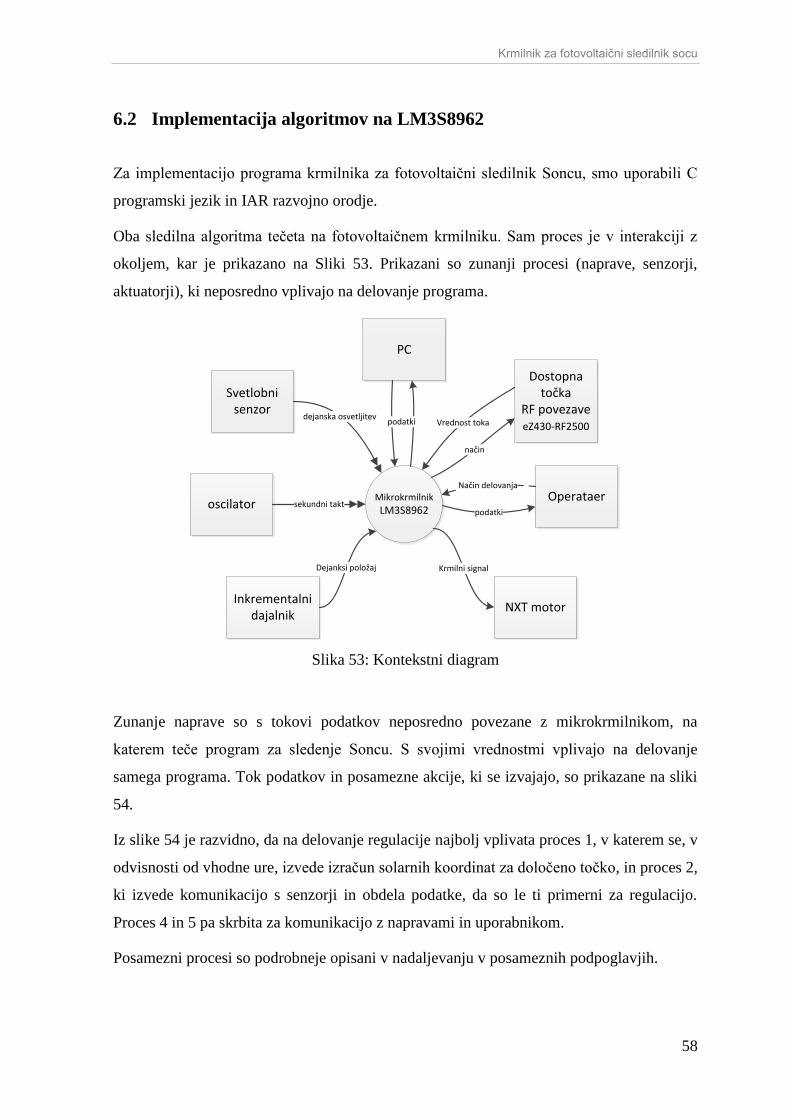
Krmilnik za fotovoltaični sledilnik socu
58
6.2 Implementacija algoritmov na LM3S8962
Za implementacijo programa krmilnika za fotovoltaični sledilnik Soncu, smo uporabili C
programski jezik in IAR razvojno orodje.
Oba sledilna algoritma tečeta na fotovoltaičnem krmilniku. Sam proces je v interakciji z
okoljem, kar je prikazano na Sliki 53. Prikazani so zunanji procesi (naprave, senzorji,
aktuatorji), ki neposredno vplivajo na delovanje programa.
Svetlobni senzor
oscilator
Inkrementalnidajalnik
PC
Dostopna točka
RF povezaveeZ430-RF2500
Operataer
NXT motor
Mikrokrmilnik
LM3S8962
dejanska osvetljitevVrednost toka
Dejanksi položaj Krmilni signal
sekundni takt
način
Način delovanja
podatki
podatki
Slika 53: Kontekstni diagram
Zunanje naprave so s tokovi podatkov neposredno povezane z mikrokrmilnikom, na
katerem teče program za sledenje Soncu. S svojimi vrednostmi vplivajo na delovanje
samega programa. Tok podatkov in posamezne akcije, ki se izvajajo, so prikazane na sliki
54.
Iz slike 54 je razvidno, da na delovanje regulacije najbolj vplivata proces 1, v katerem se, v
odvisnosti od vhodne ure, izvede izračun solarnih koordinat za določeno točko, in proces 2,
ki izvede komunikacijo s senzorji in obdela podatke, da so le ti primerni za regulacijo.
Proces 4 in 5 pa skrbita za komunikacijo z napravami in uporabnikom.
Posamezni procesi so podrobneje opisani v nadaljevanju v posameznih podpoglavjih.
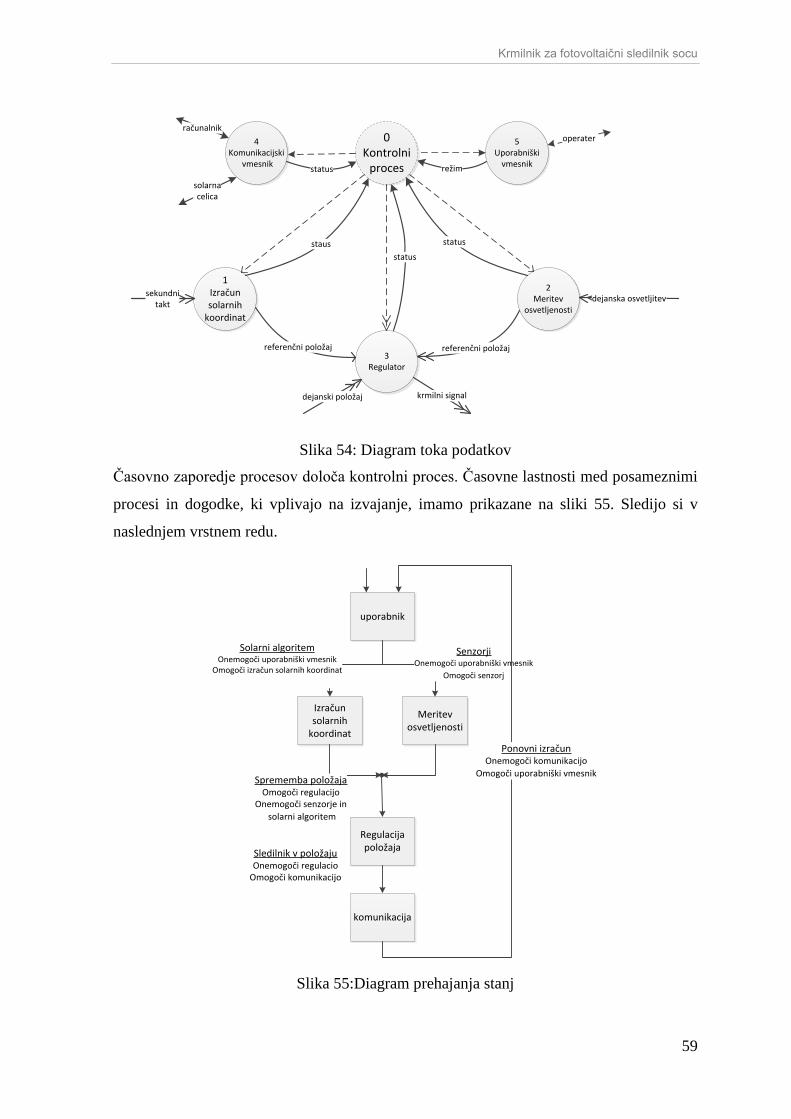
Krmilnik za fotovoltaični sledilnik socu
59
0Kontrolni
proces
1Izračun solarnih
koordinat
staus
2Meritev
osvetljenosti
3Regulator
referenčni položaj referenčni položaj
dejanska osvetljitev
dejanski položaj
status
krmilni signal
5Uporabniški
vmesnik
operater4Komunikacijski
vmesnik
računalnik
solarnacelica
status
status režim
sekundnitakt
Slika 54: Diagram toka podatkov
Časovno zaporedje procesov določa kontrolni proces. Časovne lastnosti med posameznimi
procesi in dogodke, ki vplivajo na izvajanje, imamo prikazane na sliki 55. Sledijo si v
naslednjem vrstnem redu.
uporabnik
Izračun solarnih
koordinat
Meritevosvetljenosti
Solarni algoritemOnemogoči uporabniški vmesnik
Omogoči izračun solarnih koordinat
SenzorjiOnemogoči uporabniški vmesnik
Omogoči senzorj
Regulacija položaja
komunikacija
Ponovni izračunOnemogoči komunikacijo
Omogoči uporabniški vmesnikSprememba položaja
Omogoči regulacijoOnemogoči senzorje in
solarni algoritem
Sledilnik v položajuOnemogoči regulacio
Omogoči komunikacijo
Slika 55:Diagram prehajanja stanj
Krmilnik za fotovoltaični sledilnik socu
60
Na delovanje programa najprej vpliva uporabnik, ki določi izvor referenčnega položaja,
kar neposredno vpliva na regulacijo. Regulacija oziroma sledenje Soncu se tako izvaja na
dva različna načina. Pri prvem načinu preračunavamo referenčni položaj za določeno točko
na Zemlji v odvisnosti od časa. Kot izhod pa dobimo vpadni kot v stopinjah. Pri drugem
načinu pa referenčni položaj določa meritev osvetljenosti. Komunikacijski vmesnik, nam
omogoča spremljanje in spreminjanje vrednosti preko serijske komunikacije v realnem
času.
6.2.1 Izračun solarnih koordinat
Za dvoosno sledenje Soncu potrebujemo vrednosti azimuta in altitude (solarnih koordinat)
ob določenem časovnem trenutku.
Vrednost solarnih koordinat je neposredno odvisna od zemljepisne lege. Opisujeta jo sferni
koordinati zemljepisna širina (φ) in zemljepisna dolžina (λ), ki so opisane na strani 10.
Prav tako je potrebno določiti časovni pas v katerem se nahajamo. Kot primer, Maribor se
nahaja: +15° 39' 12" (zemljepisna dolžina), +46° 33' 39" (zemljepisna širina) in +1
(časovni pas). Zemljepisno širino in časovni pas predpostavljamo kot zahodno negativno,
zemljepisno širino pa kot južno negativno.
Naslednji pomemben podatek je ura realnega časa (RTC). Štetje sekundnih pulzov, se
izvaja v hibernate modulu (HIB). Kot izvor ure uporabljamo zunanji oscilator, ki je
priključen na vhod. Za pravilno delovanje ure je potrebno nastaviti register predhodnega
delilnika. Ta zunanji signal 32.768-kHz ustrezno deli tako, da dosežemo sekundne pulze za
števec ure realnega časa. Število sekundnih pulzov beleži RTC števec. Točno vrednost
števca lahko preberemo iz rtc_count registra.
// Omogočitev RTC
HibernateRTCEnable();
// Branje vredsnoti RTC registra
HibernateRTCGet();
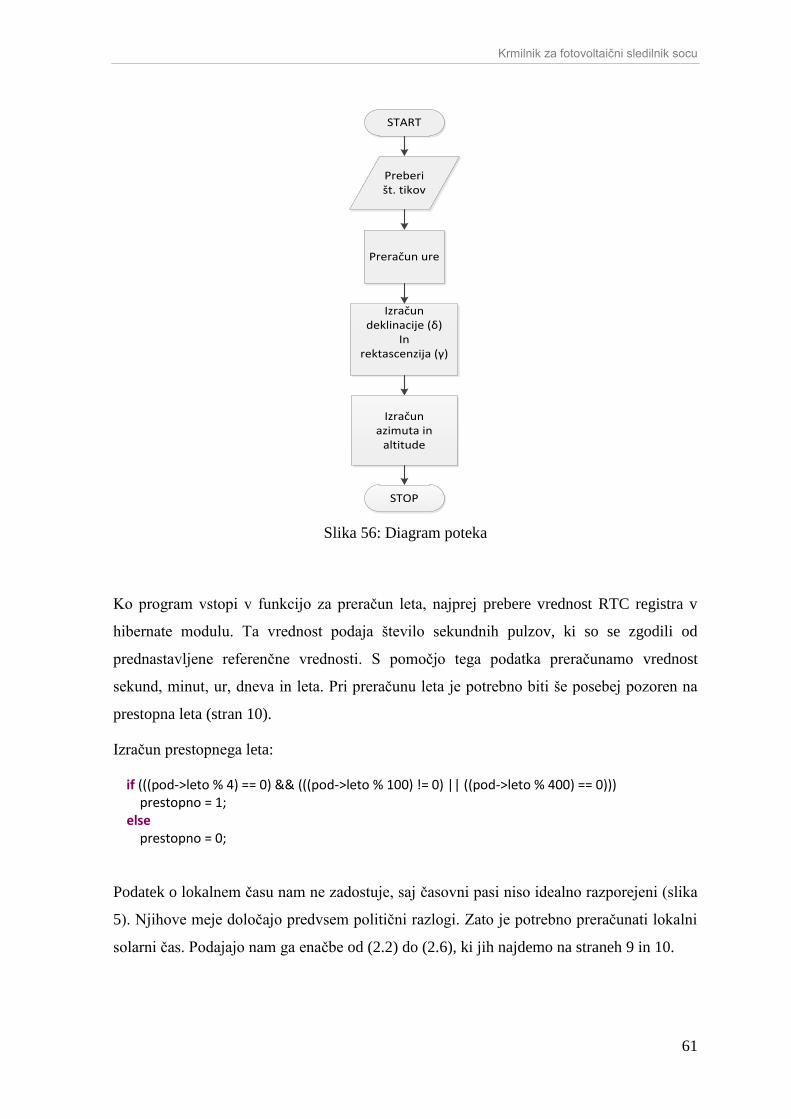
Krmilnik za fotovoltaični sledilnik socu
61
START
Preberišt. tikov
Preračun ure
Izračundeklinacije (δ)
Inrektascenzija (γ)
Izračun azimuta in
altitude
STOP
Slika 56: Diagram poteka
Ko program vstopi v funkcijo za preračun leta, najprej prebere vrednost RTC registra v
hibernate modulu. Ta vrednost podaja število sekundnih pulzov, ki so se zgodili od
prednastavljene referenčne vrednosti. S pomočjo tega podatka preračunamo vrednost
sekund, minut, ur, dneva in leta. Pri preračunu leta je potrebno biti še posebej pozoren na
prestopna leta (stran 10).
Izračun prestopnega leta:
if (((pod->leto % 4) == 0) && (((pod->leto % 100) != 0) || ((pod->leto % 400) == 0))) prestopno = 1; else prestopno = 0;
Podatek o lokalnem času nam ne zadostuje, saj časovni pasi niso idealno razporejeni (slika
5). Njihove meje določajo predvsem politični razlogi. Zato je potrebno preračunati lokalni
solarni čas. Podajajo nam ga enačbe od (2.2) do (2.6), ki jih najdemo na straneh 9 in 10.

Krmilnik za fotovoltaični sledilnik socu
62
Sledi preračun vrednosti deklinacije (δ), ki podaja kot med sončnimi žarki in ravnino
ekvatorja. Preračunavamo jo za določen dan v letu. Vrednost preračunavamo z enačbo
(2.1).
Rektascenzija (γ) je druga nebesna koordinata zraven deklinacije, ki jo je potrebno
preračunati. Njeno vrednost povečujemo za vsake 4min za 1°. Kot referenco za izračun pa
uporabljamo lokalni solarni čas, ki smo ga predhodno izračunali.
S pomočjo teh podatkov lahko sedaj preračunamo azimut (enačba 2.8) in altitudo (enačba
2.9), ki podajata položaj sonca na nebu, za dano lokacijo ob določenem času. Ta dva
podatka nam sedaj služita kot referenca regulatorja za dvoprostosno sledenje soncu.
Podatke izračunamo s klicom funkcije (solpos(pdat);), ki nam preračunane vredsnoti
vrne v strukturi pdat.
6.2.2 Meritev osvetljenosti
Prenos podatkov med posameznim senzorjem in mikrokrmilnikom se izvaja preko I2C
serijske komunikacije. V inicializaciji I2C modul na mikrokrmilniku definiramo kot
gospodarja, APDS-9301 svetlobni foto senzor pa kot sužnja. Hitrost nastavimo na
400Kbps s 7-bitnim naslovnim načinom. Pine smo definiratli kot (open-drain)
obojestranski liniji. Serijsko podatkovno linijo (SDA) in serijsko uro (SCL).
//nastavitev hitrosi -true pomeni komunikacijo gospodar/suženj z 400 kbps
I2CMasterInitExpClk(I2C0_MASTER_BASE, SysCtlClockGet(), true);
Pred branjem je potrebno vsak senzor programsko prižgati, kar storimo s postavitvijo
osmega bita v kontrolnem registru senzorja. Podatek o izmerjeni količini v senzorju je
16biten in je shranjen v dveh 8bitnih registrih, zato branje ponovimo dvakrat. Vsak 8bitni
podatkovni register preberemo posebej, nato pa programsko sestavimo podatek. Pri
komunikaciji s senzorji smo izhajali iz protokola za pisanje in branje na sužnja, ki sta
prikazana na sliki 29 in 30. Sledi primer kode v C programskem jeziku za branje prvega
osem bitnega podatka. Najprej je potrebno določiti naslov in sužnjev register, iz katerega
želimo brati.
//določimo naslov sužnja
I2CMasterSlaveAddrSet(I2C0_MASTER_BASE, 0x49, false);
//Izberemo register prvega 8 bitnega podatka
I2CMasterDataPut(I2C0_MASTER_BASE, 0x8C);
//pošiljanje gospodarja sužnju
I2CMasterControl(I2C0_MASTER_BASE, I2C_MASTER_CMD_SINGLE_SEND);
In nato preberemo 8 bitno vrednost, ki se nahaja v registru sužnja.
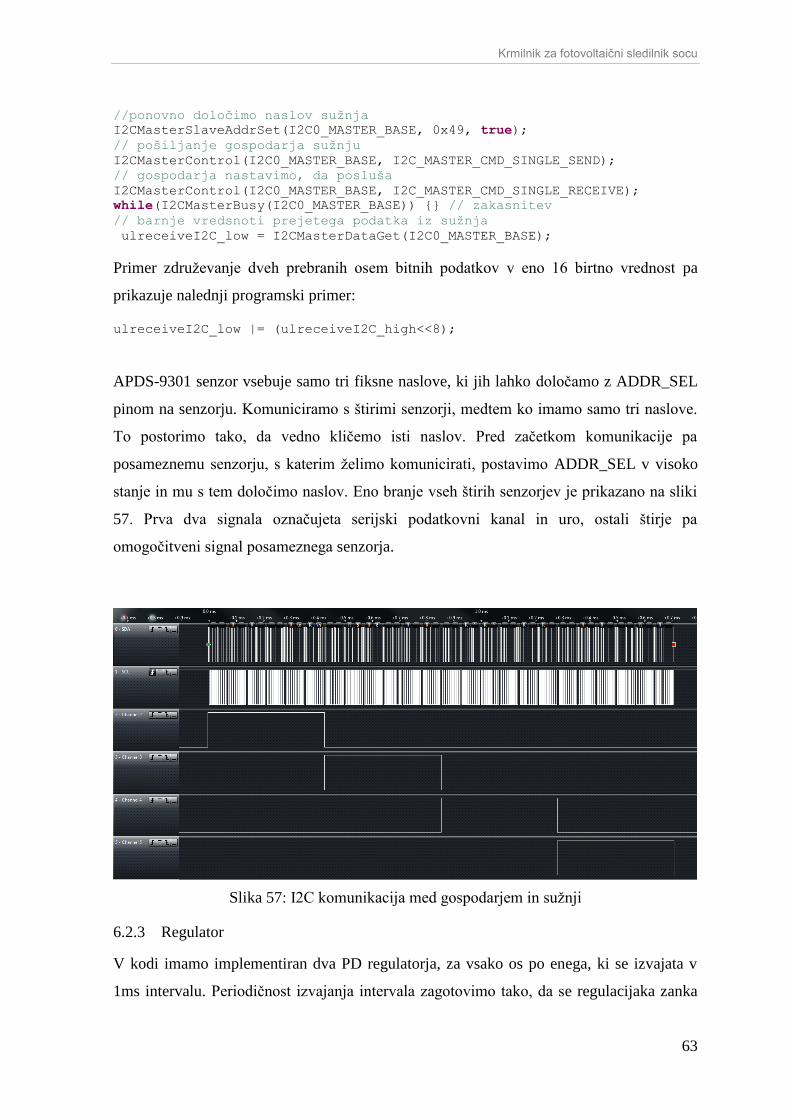
Krmilnik za fotovoltaični sledilnik socu
63
//ponovno določimo naslov sužnja
I2CMasterSlaveAddrSet(I2C0_MASTER_BASE, 0x49, true);
// pošiljanje gospodarja sužnju
I2CMasterControl(I2C0_MASTER_BASE, I2C_MASTER_CMD_SINGLE_SEND);
// gospodarja nastavimo, da posluša
I2CMasterControl(I2C0_MASTER_BASE, I2C_MASTER_CMD_SINGLE_RECEIVE);
while(I2CMasterBusy(I2C0_MASTER_BASE)) // zakasnitev
// barnje vredsnoti prejetega podatka iz sužnja
ulreceiveI2C_low = I2CMasterDataGet(I2C0_MASTER_BASE);
Primer združevanje dveh prebranih osem bitnih podatkov v eno 16 birtno vrednost pa
prikazuje nalednji programski primer:
ulreceiveI2C_low |= (ulreceiveI2C_high<<8);
APDS-9301 senzor vsebuje samo tri fiksne naslove, ki jih lahko določamo z ADDR_SEL
pinom na senzorju. Komuniciramo s štirimi senzorji, medtem ko imamo samo tri naslove.
To postorimo tako, da vedno kličemo isti naslov. Pred začetkom komunikacije pa
posameznemu senzorju, s katerim želimo komunicirati, postavimo ADDR_SEL v visoko
stanje in mu s tem določimo naslov. Eno branje vseh štirih senzorjev je prikazano na sliki
57. Prva dva signala označujeta serijski podatkovni kanal in uro, ostali štirje pa
omogočitveni signal posameznega senzorja.
Slika 57: I2C komunikacija med gospodarjem in sužnji
6.2.3 Regulator
V kodi imamo implementiran dva PD regulatorja, za vsako os po enega, ki se izvajata v
1ms intervalu. Periodičnost izvajanja intervala zagotovimo tako, da se regulacijaka zanka
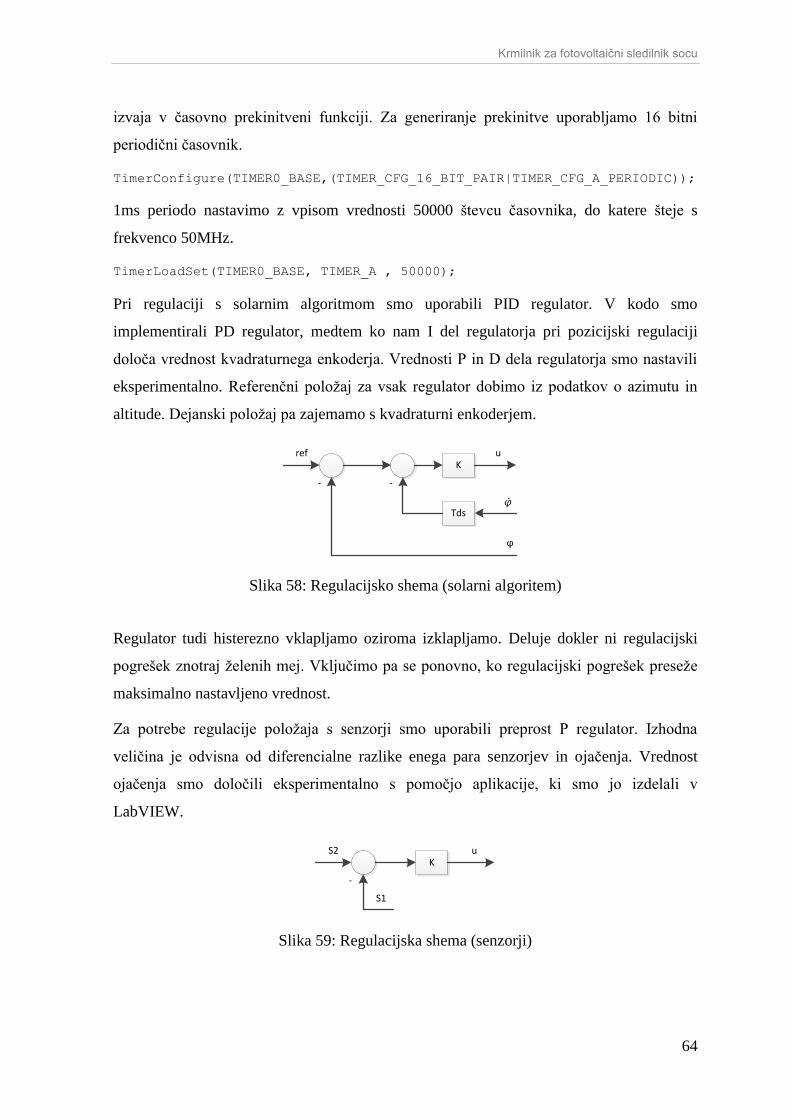
Krmilnik za fotovoltaični sledilnik socu
64
izvaja v časovno prekinitveni funkciji. Za generiranje prekinitve uporabljamo 16 bitni
periodični časovnik.
TimerConfigure(TIMER0_BASE,(TIMER_CFG_16_BIT_PAIR|TIMER_CFG_A_PERIODIC));
1ms periodo nastavimo z vpisom vrednosti 50000 števcu časovnika, do katere šteje s
frekvenco 50MHz.
TimerLoadSet(TIMER0_BASE, TIMER_A , 50000);
Pri regulaciji s solarnim algoritmom smo uporabili PID regulator. V kodo smo
implementirali PD regulator, medtem ko nam I del regulatorja pri pozicijski regulaciji
določa vrednost kvadraturnega enkoderja. Vrednosti P in D dela regulatorja smo nastavili
eksperimentalno. Referenčni položaj za vsak regulator dobimo iz podatkov o azimutu in
altitude. Dejanski položaj pa zajemamo s kvadraturni enkoderjem.
ϕ
Tds
Ku
- -
ref
Slika 58: Regulacijsko shema (solarni algoritem)
Regulator tudi histerezno vklapljamo oziroma izklapljamo. Deluje dokler ni regulacijski
pogrešek znotraj želenih mej. Vključimo pa se ponovno, ko regulacijski pogrešek preseže
maksimalno nastavljeno vrednost.
Za potrebe regulacije položaja s senzorji smo uporabili preprost P regulator. Izhodna
veličina je odvisna od diferencialne razlike enega para senzorjev in ojačenja. Vrednost
ojačenja smo določili eksperimentalno s pomočjo aplikacije, ki smo jo izdelali v
LabVIEW.
S1
Ku
-
S2
Slika 59: Regulacijska shema (senzorji)
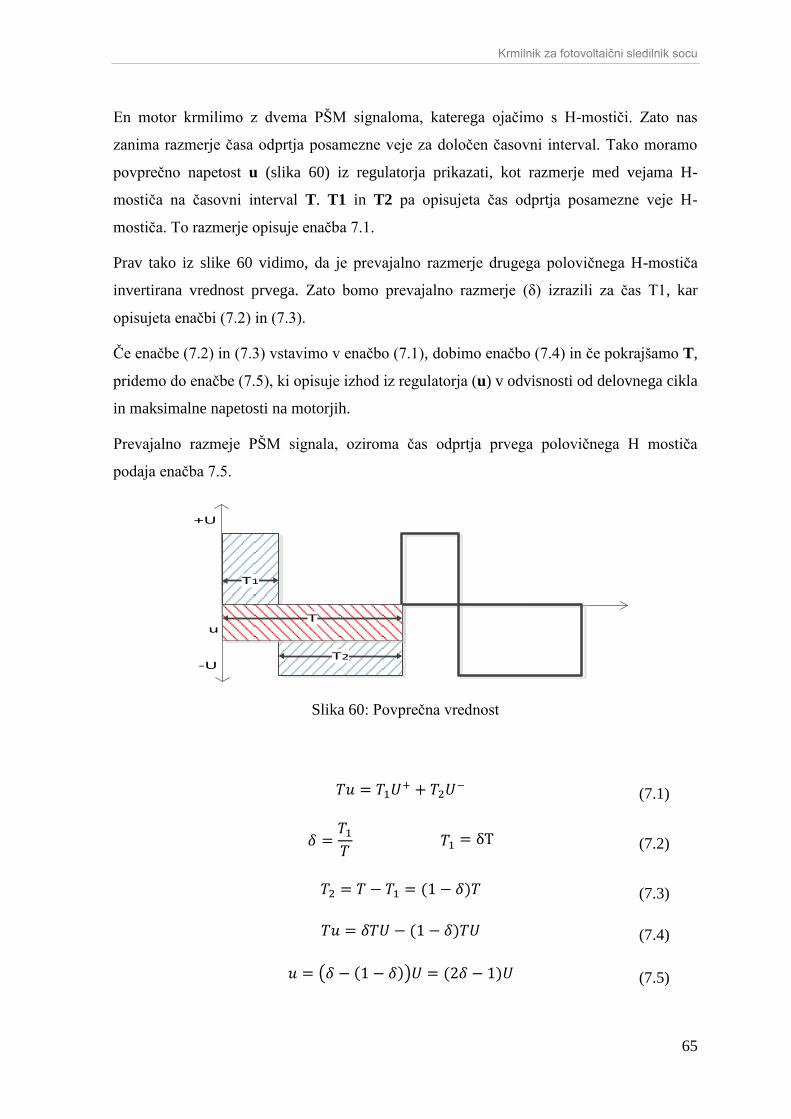
Krmilnik za fotovoltaični sledilnik socu
65
En motor krmilimo z dvema PŠM signaloma, katerega ojačimo s H-mostiči. Zato nas
zanima razmerje časa odprtja posamezne veje za določen časovni interval. Tako moramo
povprečno napetost u (slika 60) iz regulatorja prikazati, kot razmerje med vejama H-
mostiča na časovni interval T. T1 in T2 pa opisujeta čas odprtja posamezne veje H-
mostiča. To razmerje opisuje enačba 7.1.
Prav tako iz slike 60 vidimo, da je prevajalno razmerje drugega polovičnega H-mostiča
invertirana vrednost prvega. Zato bomo prevajalno razmerje (δ) izrazili za čas T1, kar
opisujeta enačbi (7.2) in (7.3).
Če enačbe (7.2) in (7.3) vstavimo v enačbo (7.1), dobimo enačbo (7.4) in če pokrajšamo T,
pridemo do enačbe (7.5), ki opisuje izhod iz regulatorja (u) v odvisnosti od delovnega cikla
in maksimalne napetosti na motorjih.
Prevajalno razmeje PŠM signala, oziroma čas odprtja prvega polovičnega H mostiča
podaja enačba 7.5.
T1
T2
Tu
+U
-U
Slika 60: Povprečna vrednost
(7.1)
(7.2)
( ) (7.3)
( ) (7.4)
( ( )) ( ) (7.5)
Krmilnik za fotovoltaični sledilnik socu
66
(
) (7.6)
Sledeči del programa prikazuje implementirano enačbo (7.6) v c programskem jeziku.
Celotna enačba (7.6) je še pomnožena z maksimalno vrednostjo prevajalnega razmerja.
p_razmerje = (int)(prevajalo_max*(0.5*((u/U) + 1.0)));
6.2.3.1 Kvadraturni enkoder
Podatke o položaju reguliranega mehanizma nam daje inkrementalni dajalnik, ki je fizično
nameščen na motorjih. Vrednosti nato beležimo s periferialnim kvadaturnim enkoderjem,
nameščenim v mikrokrmilniku. Zabeležena vrednost pa nam podaja dejanski položaj
reguliranega mehanizma. Za našo aplikacijo potrebujemo oba modula kvadraturnega
enkoderja, ker želimo beležiti položaj na obeh motorjih. Želimo karseda dobro resolucijo,
zato imamo definirano osveževanje pozicijskega števca z obema signaloma (PhA in PhB).
Ker enkoder ne daje indeksnega pulza, smo ga nastavili tako da se ponastavi, ko doseže
nastavljeno maksimalno vrednost pozicijskega števca. To vrednost smo nastavili na število
pulzov, ki jih enkoder doseže, ko se zavrti za 360 stopinj. Pri inicializaciji je potrebno
nastaviti pine kot vhode za kvadraturni enkoder. Spodnja programska primera prikazujeta
konfiguracijo QEI modula in branje vrednosti položaja iz registra.
//nastavitev enkoderja
QEIConfigure(QEI0_BASE,(QEI_CONFIG_CAPTURE_A_B|QEI_CONFIG_NO_RESET
|QEI_CONFIG_QUADRATURE|QEI_CONFIG_SWAP), 26000);
//branje vrednsoti enkoderja QEIPositionGet(QEI0_BASE);
6.2.3.2 Krmilni signal
Ker bomo motorja krmilili s H mostičem potrebujemo 4 PŠM signale. Po dva z isto
frekvenco in delovnim ciklom za posamezen motor. Od tega mora biti eden izmed signalov
posameznega PŠM bloka invertiran, da zadostimo potrebam za krmiljenje s H-mostičem.
Slika 61 prikazuje obliko pwm signala za krmiljenje enega motorja.
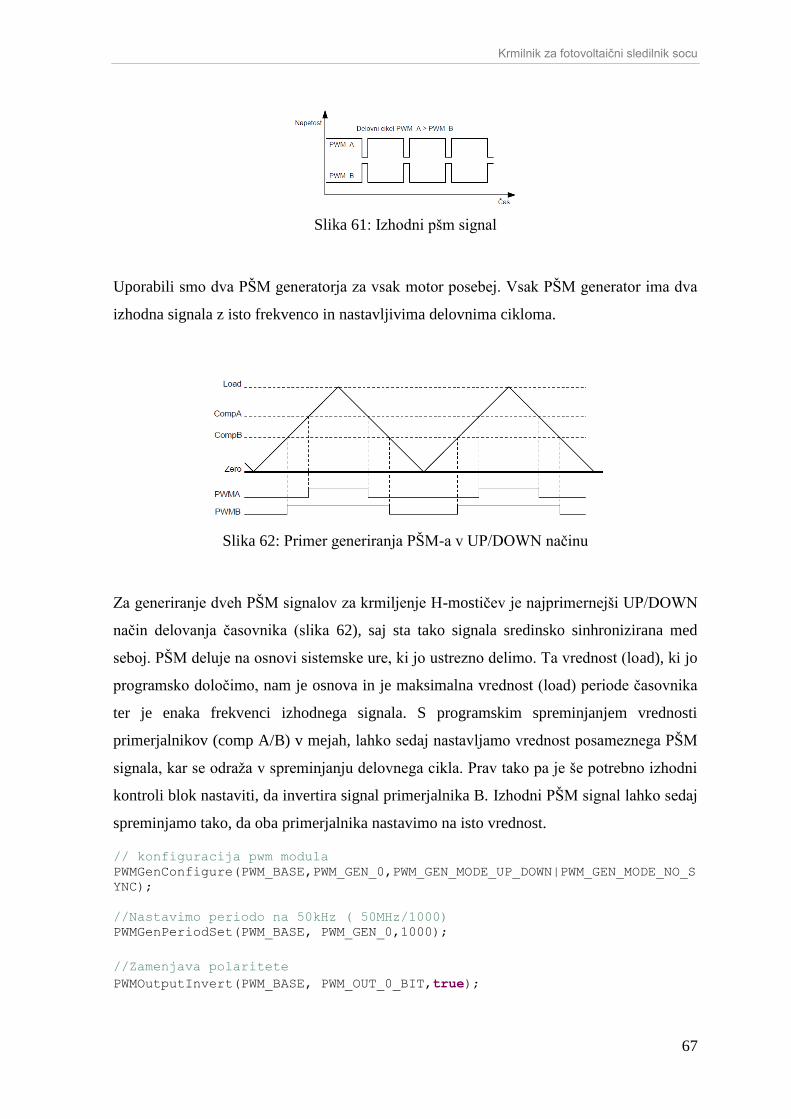
Krmilnik za fotovoltaični sledilnik socu
67
Slika 61: Izhodni pšm signal
Uporabili smo dva PŠM generatorja za vsak motor posebej. Vsak PŠM generator ima dva
izhodna signala z isto frekvenco in nastavljivima delovnima cikloma.
Slika 62: Primer generiranja PŠM-a v UP/DOWN načinu
Za generiranje dveh PŠM signalov za krmiljenje H-mostičev je najprimernejši UP/DOWN
način delovanja časovnika (slika 62), saj sta tako signala sredinsko sinhronizirana med
seboj. PŠM deluje na osnovi sistemske ure, ki jo ustrezno delimo. Ta vrednost (load), ki jo
programsko določimo, nam je osnova in je maksimalna vrednost (load) periode časovnika
ter je enaka frekvenci izhodnega signala. S programskim spreminjanjem vrednosti
primerjalnikov (comp A/B) v mejah, lahko sedaj nastavljamo vrednost posameznega PŠM
signala, kar se odraža v spreminjanju delovnega cikla. Prav tako pa je še potrebno izhodni
kontroli blok nastaviti, da invertira signal primerjalnika B. Izhodni PŠM signal lahko sedaj
spreminjamo tako, da oba primerjalnika nastavimo na isto vrednost.
// konfiguracija pwm modula
PWMGenConfigure(PWM_BASE,PWM_GEN_0,PWM_GEN_MODE_UP_DOWN|PWM_GEN_MODE_NO_S
YNC);
//Nastavimo periodo na 50kHz ( 50MHz/1000)
PWMGenPeriodSet(PWM_BASE, PWM_GEN_0,1000);
//Zamenjava polaritete
PWMOutputInvert(PWM_BASE, PWM_OUT_0_BIT,true);

Krmilnik za fotovoltaični sledilnik socu
68
//Nastavitev primerjalnikov
PWMPulseWidthSet(PWM_BASE, PWM_OUT_0, p_razmerje);
PWMPulseWidthSet(PWM_BASE, PWM_OUT_1, p_razmerje);
6.2.4 Uporabniški vmesnik
S pomočjo uporabniškega vmesnika lahko uporabnik spremlja najpomembnejše vrednosti
in vpliva na delovanje programa. Sestavljajo ga OLED disolay in tipke, ki so nameščene na
sami razvojni plošči. Za izpis uporabljamo že napisano funkcijo proizvajalca, s katero
lahko direktno izpisujemo vrednosti. Pred pričetkom uporabe funkcije je potrebna
predhodna konfiguracija, v kateri mu nastavimo frekvenco in omogočimo pine.
Primer izpisa števila:
usprintf((char*)buffer, "%5d",senzor->svetlobni_0);
RIT128x96x4StringDraw((const char *)buffer, 24, 24, 15);
Tipke s pomočjo katerih spreminjamo delovanje programa so definirane kot GPIO vhod.
6.2.5 Komunikacijski vmesnik
Za komunikacijo z računalnikom in MSP 430 uporabljamo asinhrono serijsko
komunikacijo. Ker komuniciramo z dvema različnima napravama uporabljamo dva
univerzalno asinhrona sprejemno/oddajna (UART) modula. Izvajata nam paralelne v
zaporedno oziroma zaporedne v paralelno, pretvorbo podatkov. Oblike paketov podatkov
za obe napravi sta enaki. Prenašamo jih v nereguliranih intervalih, ki jim rečemo bitni tok.
Paket podatkov nam sestavlja začetni (start) bita, 8 bitni podatek in končni (stop) bit.
Paritetnega bita ne uporabljamo.
Slika 63: UART paket podatkov
// Nastavitev uart modula za komunikacijo z računalnikom
UARTConfigSetExpClk(UART1_BASE, SysCtlClockGet(), 115200,
(UART_CONFIG_WLEN_8 | UART_CONFIG_STOP_ONE | UART_CONFIG_PAR_NONE));
Različna pa je baundna stopnja signaliziranja, ki določa število sprememb stanja
prenašalnega signala na liniji. Oziroma gre za hitrost, ki podaja število podsatkovnh bitov,
8podatkobnih bitov start stop
1
0
Krmilnik za fotovoltaični sledilnik socu
69
v eni sekundi. Nastavljeno imamo na 115.2 Kbps za komunikacijo z računalnikom in
9600bps za MSP. Efektivna hitrost podatkov je nižja, zaradi vključitve dodatnih bitov, kot
so paritetni bit, start bit in stop bit.
Z eZ430-RF2500 napravo komuniciramo preko prvega UART modula, preko katerega
posredno spremljamo vrednosti toka, ki ga proizvaja solarni panel. Komunikaciji z
računalnikom, kjer uporabljamo drugi UART modul, pa uporabljamo za prenašanje
vrednosti parametrov. Tako lahko na računalniku preko grafičnega vmesnika, spremljamo
delovanje mehanizma in nastavljamo vrednosti določenih parametrov. Podatki, ki jih
prejemamo se nam vpisuje v prejemni FIFO register.
Iz njega jih beremo s funkcijo: UARTCharGetNonBlocking(UART1_BASE);
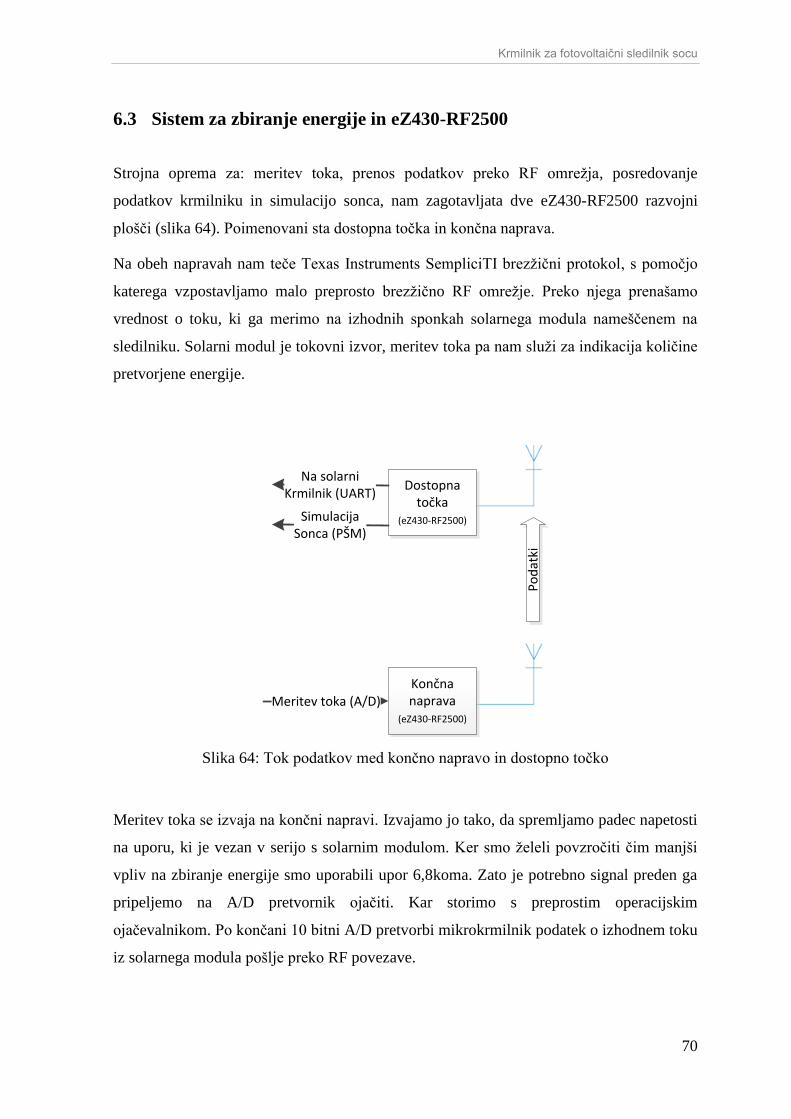
Krmilnik za fotovoltaični sledilnik socu
70
6.3 Sistem za zbiranje energije in eZ430-RF2500
Strojna oprema za: meritev toka, prenos podatkov preko RF omrežja, posredovanje
podatkov krmilniku in simulacijo sonca, nam zagotavljata dve eZ430-RF2500 razvojni
plošči (slika 64). Poimenovani sta dostopna točka in končna naprava.
Na obeh napravah nam teče Texas Instruments SempliciTI brezžični protokol, s pomočjo
katerega vzpostavljamo malo preprosto brezžično RF omrežje. Preko njega prenašamo
vrednost o toku, ki ga merimo na izhodnih sponkah solarnega modula nameščenem na
sledilniku. Solarni modul je tokovni izvor, meritev toka pa nam služi za indikacija količine
pretvorjene energije.
Dostopna točka
(eZ430-RF2500)
Končna naprava
(eZ430-RF2500)
Po
dat
ki
Meritev toka (A/D)
Na solarniKrmilnik (UART)
Simulacija Sonca (PŠM)
Slika 64: Tok podatkov med končno napravo in dostopno točko
Meritev toka se izvaja na končni napravi. Izvajamo jo tako, da spremljamo padec napetosti
na uporu, ki je vezan v serijo s solarnim modulom. Ker smo želeli povzročiti čim manjši
vpliv na zbiranje energije smo uporabili upor 6,8koma. Zato je potrebno signal preden ga
pripeljemo na A/D pretvornik ojačiti. Kar storimo s preprostim operacijskim
ojačevalnikom. Po končani 10 bitni A/D pretvorbi mikrokrmilnik podatek o izhodnem toku
iz solarnega modula pošlje preko RF povezave.
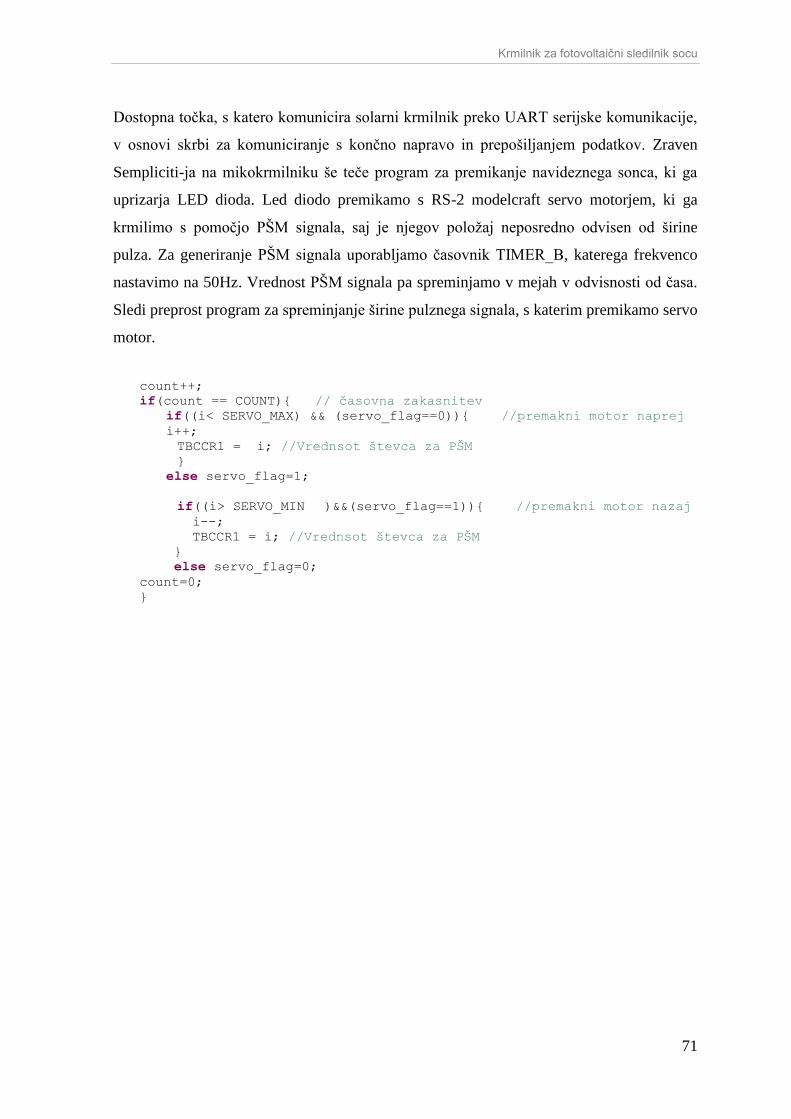
Krmilnik za fotovoltaični sledilnik socu
71
Dostopna točka, s katero komunicira solarni krmilnik preko UART serijske komunikacije,
v osnovi skrbi za komuniciranje s končno napravo in prepošiljanjem podatkov. Zraven
Sempliciti-ja na mikokrmilniku še teče program za premikanje navideznega sonca, ki ga
uprizarja LED dioda. Led diodo premikamo s RS-2 modelcraft servo motorjem, ki ga
krmilimo s pomočjo PŠM signala, saj je njegov položaj neposredno odvisen od širine
pulza. Za generiranje PŠM signala uporabljamo časovnik TIMER_B, katerega frekvenco
nastavimo na 50Hz. Vrednost PŠM signala pa spreminjamo v mejah v odvisnosti od časa.
Sledi preprost program za spreminjanje širine pulznega signala, s katerim premikamo servo
motor.
count++;
if(count == COUNT) // časovna zakasnitev
if((i< SERVO_MAX) && (servo_flag==0)) //premakni motor naprej
i++;
TBCCR1 = i; //Vrednsot števca za PŠM
else servo_flag=1;
if((i> SERVO_MIN )&&(servo_flag==1)) //premakni motor nazaj
i--;
TBCCR1 = i; //Vrednsot števca za PŠM
else servo_flag=0;
count=0;

Krmilnik za fotovoltaični sledilnik socu
72
6.4 Sledilni mehanizem
Za preizkus krmilnika za fotovoltaični sledilnik smo zgradili preprost sledilni mehanizem.
Uporabljamo komponente iz Lego NXT Mindstorm seta, in sicer Lego Technic gradnike
ter dva NXT motorja. Mehanizem smo zgradili tako, da se lahko giblje za 250° okoli x in
90° okoli y osi. Za gibanje okoli x osi skrbi motor M1, za gibanje okoli y osi pa motor M2.
X
Y
M2
M1
Slika 65: Sledilni mehanizem
Iz slike 65 je razvidno, da je med izhodnim gonilom NXT motorja in vrhom mehanizma,
zaradi potrebe po nižjih hitrostih, dodana še dodatna redukcija s prestavnim razmerjem
1:35.
S spremembo prestavnega razmerja pa se posledično spremeni tudi resolucija
inkrementalnega dajalnika. Vemo, da je razmerje med motorjem in inkrementalnim
dajalnikom 10:32. Ker smo dodali dodatne zobnike in s tem spremenili prestavno razmerje
med motorjem in vrhom je potrebno ponovno preračunati resolucijo na obrat. Ta je sedaj
25 200 pulzov/obrat, kar pomeni, da dobimo 70 pulzov za 1°.
Na sledilnik smo še namestil sistem za zbiranje in nadzorovanje sončne energije, svetlobne
senzorje in končna stikala.
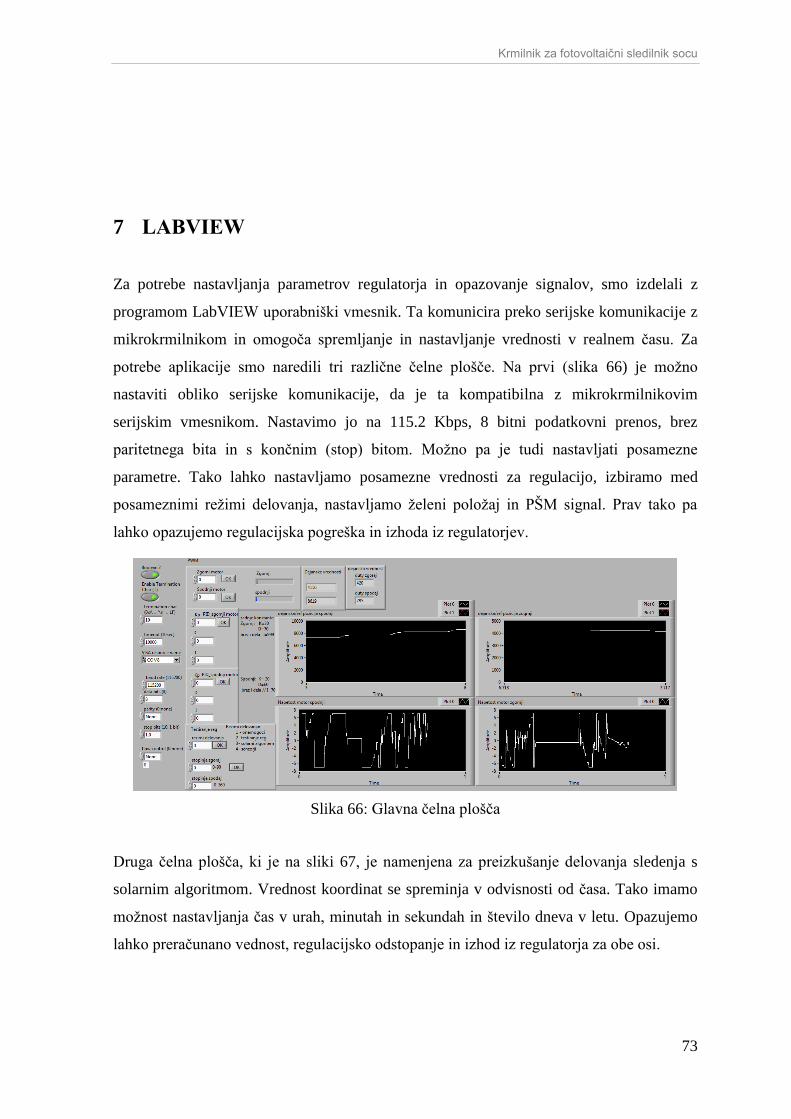
Krmilnik za fotovoltaični sledilnik socu
73
7 LABVIEW
Za potrebe nastavljanja parametrov regulatorja in opazovanje signalov, smo izdelali z
programom LabVIEW uporabniški vmesnik. Ta komunicira preko serijske komunikacije z
mikrokrmilnikom in omogoča spremljanje in nastavljanje vrednosti v realnem času. Za
potrebe aplikacije smo naredili tri različne čelne plošče. Na prvi (slika 66) je možno
nastaviti obliko serijske komunikacije, da je ta kompatibilna z mikrokrmilnikovim
serijskim vmesnikom. Nastavimo jo na 115.2 Kbps, 8 bitni podatkovni prenos, brez
paritetnega bita in s končnim (stop) bitom. Možno pa je tudi nastavljati posamezne
parametre. Tako lahko nastavljamo posamezne vrednosti za regulacijo, izbiramo med
posameznimi režimi delovanja, nastavljamo želeni položaj in PŠM signal. Prav tako pa
lahko opazujemo regulacijska pogreška in izhoda iz regulatorjev.
Slika 66: Glavna čelna plošča
Druga čelna plošča, ki je na sliki 67, je namenjena za preizkušanje delovanja sledenja s
solarnim algoritmom. Vrednost koordinat se spreminja v odvisnosti od časa. Tako imamo
možnost nastavljanja čas v urah, minutah in sekundah in število dneva v letu. Opazujemo
lahko preračunano vednost, regulacijsko odstopanje in izhod iz regulatorja za obe osi.
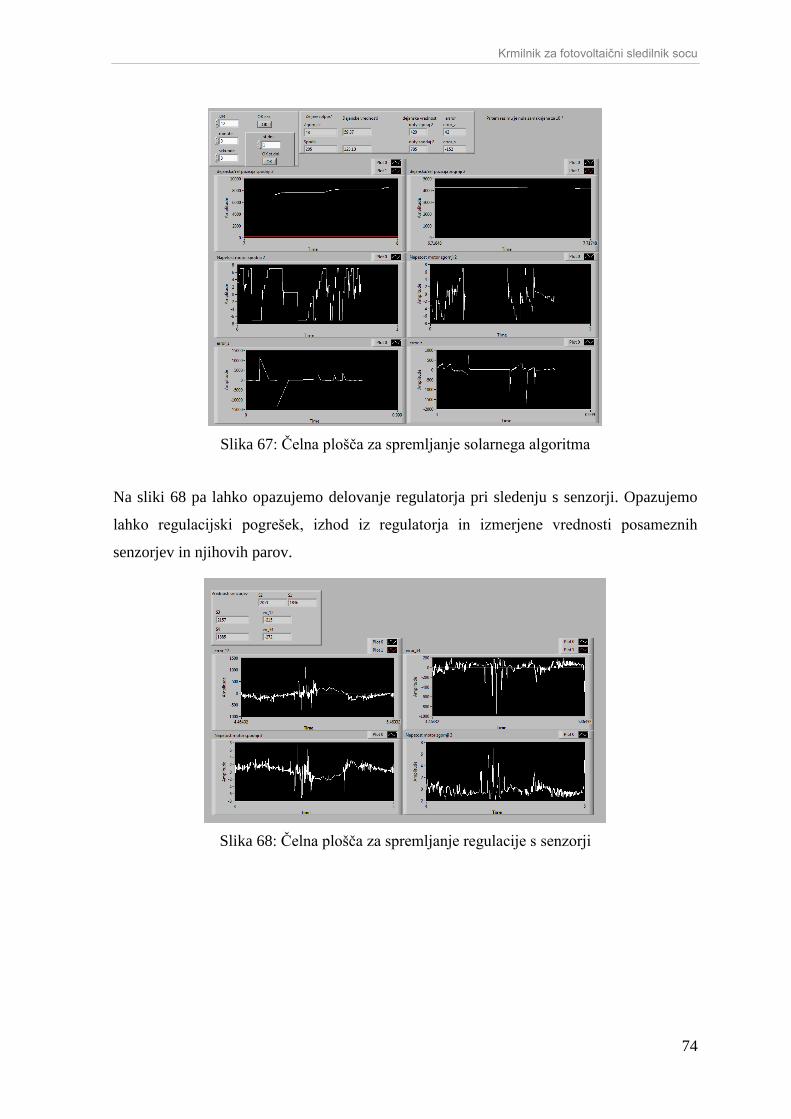
Krmilnik za fotovoltaični sledilnik socu
74
Slika 67: Čelna plošča za spremljanje solarnega algoritma
Na sliki 68 pa lahko opazujemo delovanje regulatorja pri sledenju s senzorji. Opazujemo
lahko regulacijski pogrešek, izhod iz regulatorja in izmerjene vrednosti posameznih
senzorjev in njihovih parov.
Slika 68: Čelna plošča za spremljanje regulacije s senzorji
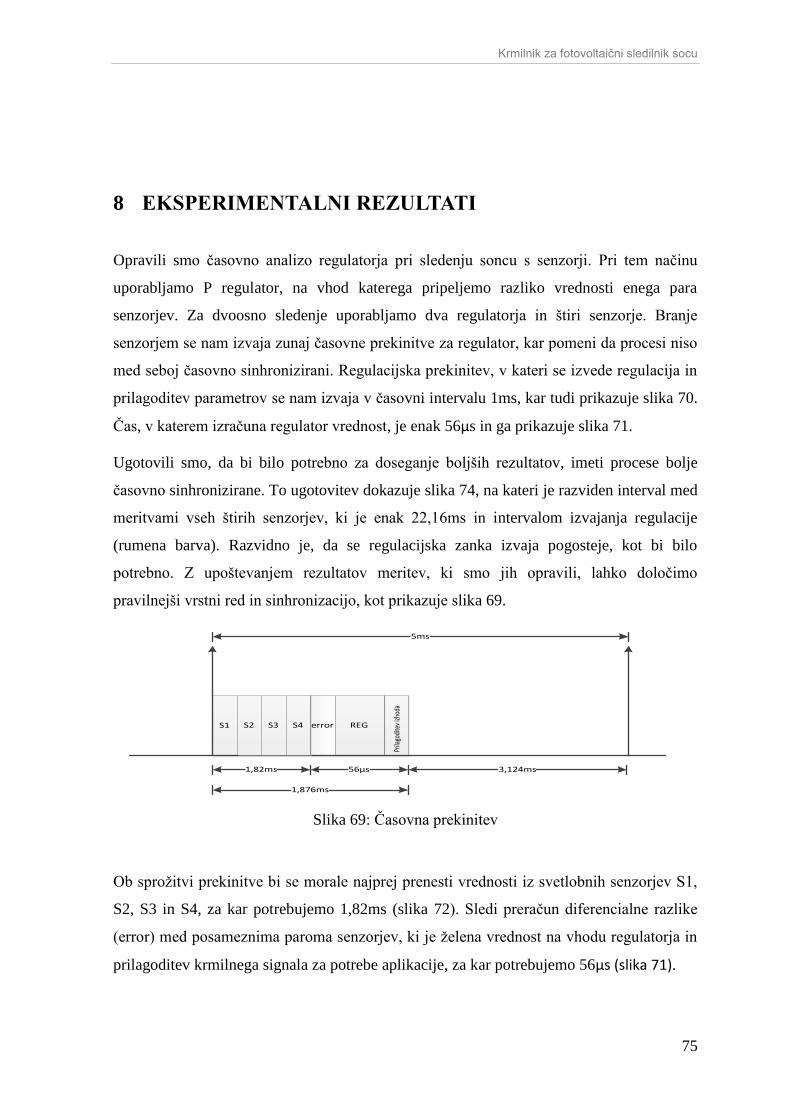
Krmilnik za fotovoltaični sledilnik socu
75
8 EKSPERIMENTALNI REZULTATI
Opravili smo časovno analizo regulatorja pri sledenju soncu s senzorji. Pri tem načinu
uporabljamo P regulator, na vhod katerega pripeljemo razliko vrednosti enega para
senzorjev. Za dvoosno sledenje uporabljamo dva regulatorja in štiri senzorje. Branje
senzorjem se nam izvaja zunaj časovne prekinitve za regulator, kar pomeni da procesi niso
med seboj časovno sinhronizirani. Regulacijska prekinitev, v kateri se izvede regulacija in
prilagoditev parametrov se nam izvaja v časovni intervalu 1ms, kar tudi prikazuje slika 70.
Čas, v katerem izračuna regulator vrednost, je enak 56μs in ga prikazuje slika 71.
Ugotovili smo, da bi bilo potrebno za doseganje boljših rezultatov, imeti procese bolje
časovno sinhronizirane. To ugotovitev dokazuje slika 74, na kateri je razviden interval med
meritvami vseh štirih senzorjev, ki je enak 22,16ms in intervalom izvajanja regulacije
(rumena barva). Razvidno je, da se regulacijska zanka izvaja pogosteje, kot bi bilo
potrebno. Z upoštevanjem rezultatov meritev, ki smo jih opravili, lahko določimo
pravilnejši vrstni red in sinhronizacijo, kot prikazuje slika 69.
errorS1 REGS2 S3 S4
5ms
1,82ms 56μs
1,876ms
3,124ms
Prila
godi
tev i
zhod
a
Slika 69: Časovna prekinitev
Ob sprožitvi prekinitve bi se morale najprej prenesti vrednosti iz svetlobnih senzorjev S1,
S2, S3 in S4, za kar potrebujemo 1,82ms (slika 72). Sledi preračun diferencialne razlike
(error) med posameznima paroma senzorjev, ki je želena vrednost na vhodu regulatorja in
prilagoditev krmilnega signala za potrebe aplikacije, za kar potrebujemo 56μs (slika 71).
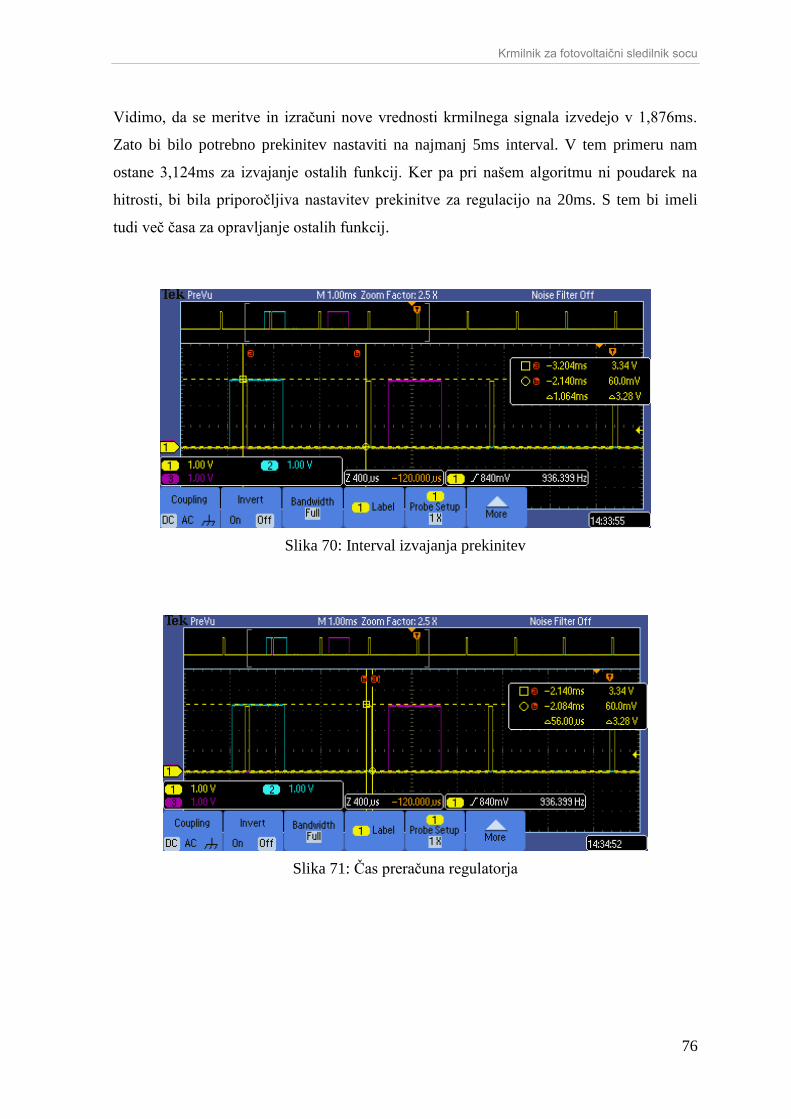
Krmilnik za fotovoltaični sledilnik socu
76
Vidimo, da se meritve in izračuni nove vrednosti krmilnega signala izvedejo v 1,876ms.
Zato bi bilo potrebno prekinitev nastaviti na najmanj 5ms interval. V tem primeru nam
ostane 3,124ms za izvajanje ostalih funkcij. Ker pa pri našem algoritmu ni poudarek na
hitrosti, bi bila priporočljiva nastavitev prekinitve za regulacijo na 20ms. S tem bi imeli
tudi več časa za opravljanje ostalih funkcij.
Slika 70: Interval izvajanja prekinitev
Slika 71: Čas preračuna regulatorja
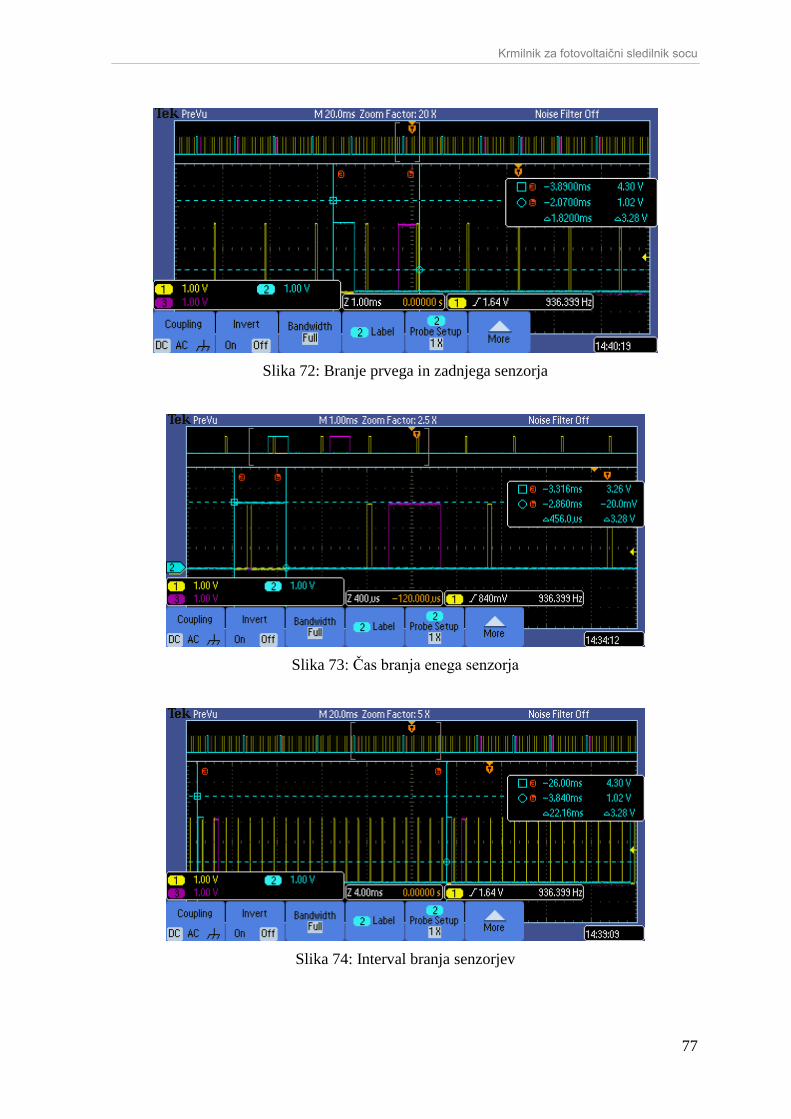
Krmilnik za fotovoltaični sledilnik socu
77
Slika 72: Branje prvega in zadnjega senzorja
Slika 73: Čas branja enega senzorja
Slika 74: Interval branja senzorjev
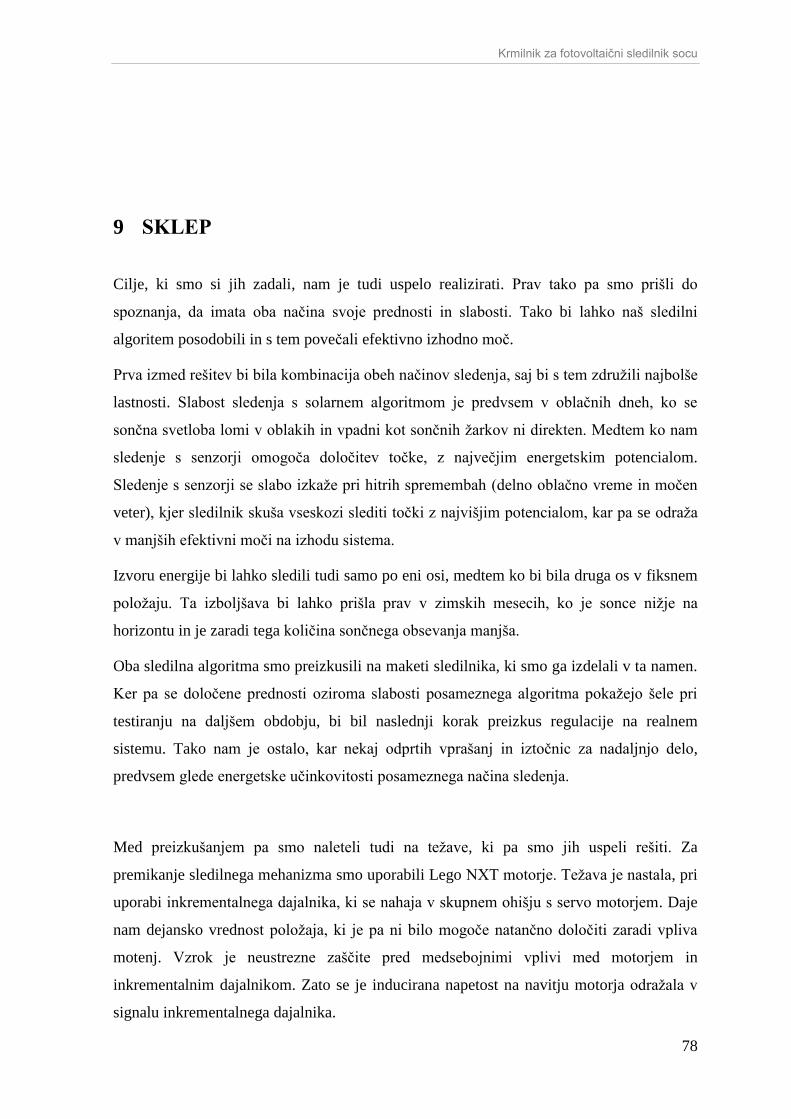
Krmilnik za fotovoltaični sledilnik socu
78
9 SKLEP
Cilje, ki smo si jih zadali, nam je tudi uspelo realizirati. Prav tako pa smo prišli do
spoznanja, da imata oba načina svoje prednosti in slabosti. Tako bi lahko naš sledilni
algoritem posodobili in s tem povečali efektivno izhodno moč.
Prva izmed rešitev bi bila kombinacija obeh načinov sledenja, saj bi s tem združili najbolše
lastnosti. Slabost sledenja s solarnem algoritmom je predvsem v oblačnih dneh, ko se
sončna svetloba lomi v oblakih in vpadni kot sončnih žarkov ni direkten. Medtem ko nam
sledenje s senzorji omogoča določitev točke, z največjim energetskim potencialom.
Sledenje s senzorji se slabo izkaže pri hitrih spremembah (delno oblačno vreme in močen
veter), kjer sledilnik skuša vseskozi slediti točki z najvišjim potencialom, kar pa se odraža
v manjših efektivni moči na izhodu sistema.
Izvoru energije bi lahko sledili tudi samo po eni osi, medtem ko bi bila druga os v fiksnem
položaju. Ta izboljšava bi lahko prišla prav v zimskih mesecih, ko je sonce nižje na
horizontu in je zaradi tega količina sončnega obsevanja manjša.
Oba sledilna algoritma smo preizkusili na maketi sledilnika, ki smo ga izdelali v ta namen.
Ker pa se določene prednosti oziroma slabosti posameznega algoritma pokažejo šele pri
testiranju na daljšem obdobju, bi bil naslednji korak preizkus regulacije na realnem
sistemu. Tako nam je ostalo, kar nekaj odprtih vprašanj in iztočnic za nadaljnjo delo,
predvsem glede energetske učinkovitosti posameznega načina sledenja.
Med preizkušanjem pa smo naleteli tudi na težave, ki pa smo jih uspeli rešiti. Za
premikanje sledilnega mehanizma smo uporabili Lego NXT motorje. Težava je nastala, pri
uporabi inkrementalnega dajalnika, ki se nahaja v skupnem ohišju s servo motorjem. Daje
nam dejansko vrednost položaja, ki je pa ni bilo mogoče natančno določiti zaradi vpliva
motenj. Vzrok je neustrezne zaščite pred medsebojnimi vplivi med motorjem in
inkrementalnim dajalnikom. Zato se je inducirana napetost na navitju motorja odražala v
signalu inkrementalnega dajalnika.

Krmilnik za fotovoltaični sledilnik socu
79
Prva izmed rešitev bi bila ozemljitev motorja, kar pa mehansko ni bilo mogoče. Zato smo
visokofrekvenčne motnje na signalnih žica iz inkrementalnega dajalnika kratko sklenili
proti masi z dodatnimi kondenzatorji.
Motnje pa so se nam prenašale tudi preko mase, zaradi česar smo zmanjšali frekvenco
PŠM signala z 250kHz na 50kHz in na izhode iz gonilnika za motorje dodali dodatne
tuljave in kondenzatorje. V serijo smo vezali tuljave vrednosti 680µH, s čimer smo
zmanjšali hitrost spreminjanja toka. Z dodatnimi 10nF kondenzatorji, ki smo jih vezali
proti masi, pa zmanjšali visokofrekvenčne motenje.
Prav tako so se nam motnje širile preko žic. Ta pojav smo odpravili z zamenjavo
obstoječih kablov s kabli z opletom, katerega smo vezali na maso.
Naslednja posodobitev za odpravo moten je bila, da smo vsak napetostni porabnik vezali v
svoj krog, ki je izhajal is skupne točke za maso in napetostnega vira. S tem smo zmanjšali
vpliv upornosti žic oziroma povezav.
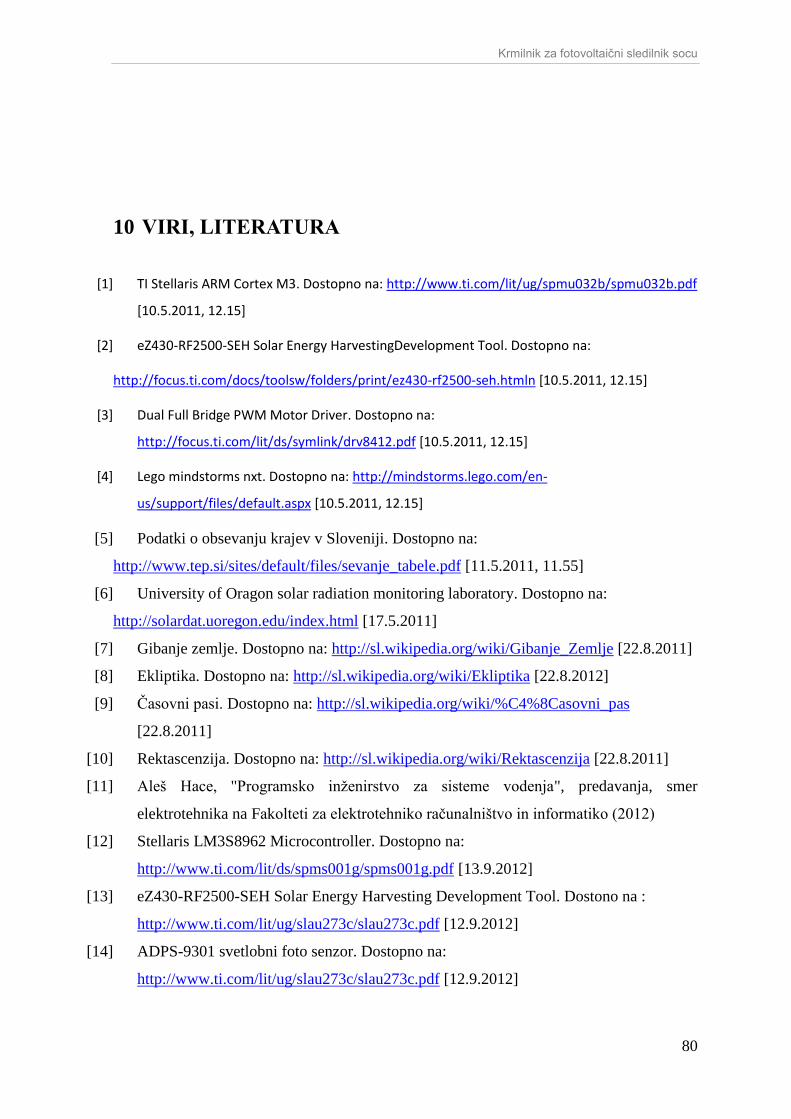
Krmilnik za fotovoltaični sledilnik socu
80
10 VIRI, LITERATURA
[1] TI Stellaris ARM Cortex M3. Dostopno na: http://www.ti.com/lit/ug/spmu032b/spmu032b.pdf
[10.5.2011, 12.15]
[2] eZ430-RF2500-SEH Solar Energy HarvestingDevelopment Tool. Dostopno na:
http://focus.ti.com/docs/toolsw/folders/print/ez430-rf2500-seh.htmln [10.5.2011, 12.15]
[3] Dual Full Bridge PWM Motor Driver. Dostopno na:
http://focus.ti.com/lit/ds/symlink/drv8412.pdf [10.5.2011, 12.15]
[4] Lego mindstorms nxt. Dostopno na: http://mindstorms.lego.com/en-
us/support/files/default.aspx [10.5.2011, 12.15]
[5] Podatki o obsevanju krajev v Sloveniji. Dostopno na:
http://www.tep.si/sites/default/files/sevanje_tabele.pdf [11.5.2011, 11.55]
[6] University of Oragon solar radiation monitoring laboratory. Dostopno na:
http://solardat.uoregon.edu/index.html [17.5.2011]
[7] Gibanje zemlje. Dostopno na: http://sl.wikipedia.org/wiki/Gibanje_Zemlje [22.8.2011]
[8] Ekliptika. Dostopno na: http://sl.wikipedia.org/wiki/Ekliptika [22.8.2012]
[9] Časovni pasi. Dostopno na: http://sl.wikipedia.org/wiki/%C4%8Casovni_pas
[22.8.2011]
[10] Rektascenzija. Dostopno na: http://sl.wikipedia.org/wiki/Rektascenzija [22.8.2011]
[11] Aleš Hace, "Programsko inženirstvo za sisteme vodenja", predavanja, smer
elektrotehnika na Fakolteti za elektrotehniko računalništvo in informatiko (2012)
[12] Stellaris LM3S8962 Microcontroller. Dostopno na:
http://www.ti.com/lit/ds/spms001g/spms001g.pdf [13.9.2012]
[13] eZ430-RF2500-SEH Solar Energy Harvesting Development Tool. Dostono na :
http://www.ti.com/lit/ug/slau273c/slau273c.pdf [12.9.2012]
[14] ADPS-9301 svetlobni foto senzor. Dostopno na:
http://www.ti.com/lit/ug/slau273c/slau273c.pdf [12.9.2012]
Krmilnik za fotovoltaični sledilnik socu
81
[15] Solar radiation. Dostopno na:
http://www.eecis.udel.edu/~honsberg/Eleg620/02_Solar_radiation.pdf [10.9.2012]
[16] I2C protokol. Dostopno na: http//www.cs.unc.edu/Research/stc/FAQs/Interfaces/I2C-
AN10216_1.pdf [10.9.2012]
Krmilnik za fotovoltaični sledilnik socu
82
11 PRILOGE
11.1 Naslov študenta
Ime in priimek: Anže Hohnjec
Naslov: Bistrica ob Sotli 10
Pošta: 3256 Bistrica ob Sotli, Slovenija
e-mail študenta: [email protected]
11.2 Kratek življenjepis
Rodil sem se 27.5.1989 v Celju. Osnovno šolo sem obiskoval v Bistrici ob Sotli. Zaradi
zanimanja za elektroniko sem šolanje nadaljeval v Celju, na srednji šoli za elektrotehniko.
Po končani srednji šoli pa sem nadaljeval s šolanjem na fakulteti za elektrotehniko,
računalništvo in informatiko na Univerzi v Mariboru.
Krmilnik za fotovoltaični sledilnik socu
83
Krmilnik za fotovoltaični sledilnik socu
84
Krmilnik za fotovoltaični sledilnik socu
85