-
Opracował mgr in�. Arkadiusz Krzempek Bielsko-Biała 2005
Akademia Techniczno-Humanistyczna w Bielsku-Białej Wydział
Budowy Maszyn i Informatyki
Katedra Technologii Maszyn i Automatyzacji
LABORATORIUM OBRABIAREK
INSTRUKCJA
Temat: Budowa i zasada sterowania manipulatora PR 16 P-A
-
Manipulator PR 16 P-A
1
1. Cel �wiczenia
Celem �wiczenia jest zapoznawanie z budow� i zasadami
programowania manipulatora PR 16 P-A.
2. Opis ogólny manipulatora PR 16 P-A
Manipulator PR 16 P-A wyposa�ony w układ sterowania numerycznego
przeznaczony jest do transportu mi�dzyoperacyjnego w zakresie
podawania i wymiany przedmiotów. Wyposa�ony jest w chwytak z dwoma
uchwytami przystosowanymi do wymiany przedmiotów ukształtowanych w
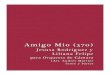
postaci wałków lub tulei. Manipulator składa si� z (rys.l):
− podstawy (5), − korpusu (4), − korpusu ramienia (3), −
ramienia (2) − chwytaków (l).
Rys.1. Podstawowe elementy manipulatora i mo�liwe ruch
Poszczególne ruchy manipulatora (ich zakres) s� sterowane poprzez
zderzaki mechaniczne. Manipulator PR 16 P-A mo�e wykonywa�
nast�puj�ce ruchy:
1. Wysuw korpusu ramienia (Y) – maksymalnie korpus mo�e ustawia�
si� w trzech pozycji pionowych, zale�nie od liczby zamontowanych
zderzaków.
-
Manipulator PR 16 P-A
2
2. Obrót (B), równie� mo�liwe jest ustawienie trzech pozycjach
(0-360°) na skali k�towej obrotu ramienia.
3. Wysuw ramienia (X) maksymalnie w trzech poło�eniach, zale�nie
od liczby zamontowanych zderzaków.
4. Obrót chwytaków w zakresie dwóch pozycji A(0-180°) oraz
minimalne przesuni�cie chwytaków w osi Z (mikroposuw).
W skład całego zespołu wchodz�: − szafa z układem sterowania i
pulpitem, − podajnik cz��ci, − przeno�nik ła�cuchowy.
W nast�pnych rozdziałach instrukcji opisano dokładniej
wymienione wy�ej elementy oraz sterowanie i obsług� manipulatora.
3. Dane techniczne manipulatora PR 16 P-A
− Ud�wig maksymalny
.................................................................................................
24 kg − Ud�wig
nominalny.....................................................................................................
16 kg − Wysoko�� podnoszenia minimalna i maksymalna (ustawienie w
trzech
pozycjach)
.......................................................................................................
0,07÷0.55 m − Zakres wysuwu ramienia (w trzech
pozycjach).....................................................
0,1÷1 m − Zakres k�ta obrotu kolumny (ustawienie w trzech
pozycjach)..................... 0,47÷6,28 rad − Pr�dko��
podnoszenia kolumny w osi Y
..................................................... 0,19÷0,08 m/s
− Pr�dko�� obrotu ramienia w
osi...........................................................................1,16
rad/s − Pr�dko�� wysuwu ramienia w osi X
......................................................................0,55
m/s − Pr�dko�� obrotu zespołu
chwytaków.....................................................................1,57
m/s − Zakres obrotu zespołu chwytaków (mo�liwo�� ustawienia dwóch
pozycji) ..... 0÷5,76 rad − Pozycjonowanie ruchów manipulatora:
w osi X
.......................................................... ± 0,0002
m w osi Y
.......................................................... ± 0,0003
m w osi B ........................................................
± 0,0002 rad
− Wymiary gabarytowe manipulatora: długo��
............................................................. 2024
mm
wysoko��..........................................................
1432 mm
szeroko��............................................................
800 mm
− Masa manipulatora 530 kg − Parametry zasilania:
cz�stotliwo�� pr�du....................................... 50 Hz
±2% napi�cie zasilania ............................................
3 x 380 V moc
zainstalowana...............................................2,1
VA
-
Manipulator PR 16 P-A
3
− Typ sterowania numerycznego
................................................................................
RS-1C Istnieje mo�liwo�� zaprogramowania 520 bloków. W jednym bloku
mo�e by�
wykonywana tylko jedna instrukcja (tj. jeden ruch). Nap�dy
ruchów: Wszystkie ruchy s� nap�dzane pneumatycznie powietrzem o
parametrach:
wydatek.............................................................
0,1 m3 /s ci�nienie
.............................................................0,6
MPa
Manipulator jest wyposa�ony we własny zasilaj�cy układ
pneumatyczny. 4. Przykład zastosowania i przestrze�
manipulatora
Manipulator PR16 P-A mo�e by� stosowany do pobierania
przedmiotów nieobrobionych z jednego transportera (np. pochylni –
wyposa�enie stanowiska laboratoryjnego) i zakładania nieobrobionych
przedmiotów na obrabiark�, gdzie nast�puje wymiana obrobionego ju�
przedmiotu na przedmiot nowy. Nast�pnie przedmiot obrobiony,
pobrany przez manipulator z obrabiarki, odkładany jest na kolejny
transporter (np. transporter ła�cuchowy – wyposa�enie stanowiska
laboratoryjnego), po czym manipulator powtarza te czynno�ci
cyklicznie.
Dla tego przykładu w punkcie 7 został napisany program steruj�cy
wraz z opisem kolejnych działa� oraz schemat tego układu (rys.5).
5. Opis trybu pracy r�cznej
Pulpit do obsługi r�cznej manipulatora (rys.2) słu�y do
nastawania wł�czników kra�cowych, tak aby w trybie pracy
automatycznej wszystkie zadane ruchy mechanizmów były dokładne i
jednoznacznie okre�lone. Za pomoc� przeł�cznika wyboru stanowiska
(1) wybieramy ruch, którym chcemy sterowa� (Manipulator – 0,
Pochylnia – 1, Transporter – 2) i po naci�ni�ciu przycisku
pozycjonujemy odpowiedni ruch. Po tej czynno�ci ustawia si�
wył�czniki kra�cowe. W ten sposób przeprowadza si� pozycjonowanie
wszystkich potrzebnych ruchów wykorzystywanych dalej w trybie pracy
automatycznej . Przeł�cznikiem (2) nastawiamy tryb pracy
manipulatora – r�czny lub automatyczny. Na pulpicie do obsługi
r�cznej znajduj� si� lampki kontrolne:
− gotowo�� pracy manipulatora sygnalizuje lampka, pozycja – 1, −
gotowo�� pracy układu Sterowania Numerycznego sygnalizuje lampka,
pozycja – 2, − prawidłowe zasilanie robota pr�dem 3 –fazowym,
pozycja – 3, − prac� krok po kroku mo�emy wł�czy� przeł�cznikiem,
pozycja – 5.
-
Manipulator PR 16 P-A
4
Rys.2. Widok pulpitu do obsługi r�cznej Na powierzchni czołowej
pulpitu znajduje si�:
− stacyjka z kluczykiem, − wył�cznik główny, − sygnalizacja
wł�czenia.
6. Programowanie pracy automatycznej
Programowanie pracy automatycznej przeprowadza si� wykorzystuj�c
pulpit programowania automatycznego (klawiatura) (rys.3). Program
przechowywany jest w pami�ci operacyjnej (ram). Przez wywołanie
opcji FUN program mo�na zapisa� w pami�ci EPROM. Nale�y pami�ta�
aby pami�� była pusta. Do pisania i realizacji programu nie jest
wymagane umieszczenie w gnie�dzie pami�ci EPROM nale�y jednak
pami�ta�, �e w przypadku wył�czenia szafy sterowniczej napisany
program zostanie utracony i trzeba go wprowadza� ponownie.
Pami�� EPROM mo�na wykasowa� przez na�wietlenie �wiatłem
ultrafioletowym lub długotrwałe na�wietlanie �wiatłem dziennym
dlatego pami�� EPROM nale�y przechowywa� w odpowiednim
pojemniku.
Wprowadzaniem i wykonywaniem programu steruje system operacyjny,
który jest wbudowany w szaf� steruj�c�.
-
Manipulator PR 16 P-A
5
Rys.3. Pulpit programowania oraz pami�� EPROM
Rys.4. Schemat rozmieszczenia klawiszy pulpitu programowania
DRC 3
CIF
INR 2
CALL
CHR 1
RET
NOP 0
LBL
STA 7
OPTI
LDA 6
MAIL
SUB 5
JIF
ADP 4
JUMP
CPL
OFF
STL
ON
LDL 9
LOUT
LDAI 8
LIN
SET
STOP
OR
PAUS
AND
TIME
RUN
IOCC
GOTO
UNIT
UNIT
CLR
2nd
HALT ––––– STEP
DEL
BTS
FUN
PRO
RST I
APLI
INS
FST
-
Manipulator PR 16 P-A
6
6.1. Opis poszczególnych, przycisków pulpitu programowania
(rys.4)
2nd – przycisk słó��cy do zmiany znaczenia przycisków pulpitu
(aktywne napisy górne).
CLR – ("CLEAR") druga funkcja przycisku 2nd. Podwójne
naci�ni�cie powoduje skasowanie wprowadzonej informacji.
UNIT – Po naci�ni�ciu na wy�wietlaczu pojawi si� napis unit.
Układ oczekuje na wpisanie kolejnego kroku programu.
UNIT – Druga opcja przycisku UNIT. Słu�y do zapisania kolejnego
kroku programu, ale bez sprawdzenia wykonania poprzednich
kroków.
ALOP – Klawisz słu��cy do wprowadzenia
arytmetyczno-logarytmicznej instrukcji programowania. Naci�ni�cie
klawisza powoduje wy�wietlenie ALOP na wy�wietlaczu.
GOTO – Druga opcja przycisku ALOP, która słu�y do zmiany
kolejno�ci kroków.
IOCC – Po naci�ni�ciu oczekiwana jest instrukcja wej�cia-wyj�cia
lub programowania biegunowego. Nowy krok jest programowany i
wstawiany w wybrane miejsce programu.
RUN – Druga opcja przycisku IOCC. Naci�ni�cie powoduje
uruchomienie programu zapisanego w pami�ci ram. Nale�y wprowadzi�
warto�� ”1”aby program został uruchomiony
PROG – wci�ni�cie przycisku powoduje przej�cie z trybu pracy
r�cznej w tryb pracy automatycznej. Słu�y do wł�czenia Układu
Sterowania Numerycznego i programowania. Ponowne naci�niecie
powoduje powrót do trybu pracy r�cznej.
FUN – (FUNCTION), druga opcja przycisku PROG. Po naci�ni�ciu
wykonywana jest pierwsza znaleziona w programie (szukana do przodu)
funkcja specjalna.
FST – (FORE STEP), naci�ni�cie powoduje wykonanie jednego kroku.
Na wy�wietlaczu zostanie pokazany nast�pny krok programu.
INS – (INSERT), druga opcja przycisku FST. Słu�y do wprowadzenia
jednej instrukcji w miejsce w którym zostanie wywołana. Zmiana jest
automatycznie zapisywana w pami�ci.
BST – (BACK STEP), naci�ni�cie powoduje zatrzymanie programu po
jednym kroku i wy�wietlenie na wy�wietlaczu bloku w którym program
został zatrzymany.
DEL – Przycisk ten powoduje usuni�cie wprowadzanego bloku
instrukcji.
STEP – Naci�ni�cie powoduje zatrzymanie programu i wy�wietlenie
nast�pnego bloku. Nast�pne naci�ni�cie spowoduje wykonanie
wy�wietlonego bloku, a po wykonaniu wy�wietlony zostanie nast�pny
blok itd. Jest to jedyny klawisz, który nie posiada drugiej funkcji
(HALT).
-
Manipulator PR 16 P-A
7
6.2. Opis znaczenia słów wprowadzanych z pulpitu w tekst
programu jako słowa
kluczowe (kolejno�� alfabetyczna)
CALL – wywołanie programu. CPL – odwrócenie logiczne zawarto�ci
rejestru operacyjnego. JIF – skok warunkowy do etykiety (je�li
rejestr operacyjny zawiera 1). JUMP – skok bezwarunkowy do
etykiety. LBL – pusta operacja, sama etykieta. LDL – przekazanie
zawarto�ci wskazanego rejestru do rejestru operacyjnego. LIN –
przekazanie zawarto�ci wskazanego wej�cia i wło�enie jej do
rejestru operacyjnego. LOUT - przekazanie zawarto�ci rejestru
operacyjnego na wskazane wyj�cie. NOP – pusta operacja. OFF –
ustawienie wskazanego wyj�cia na 0. ON – ustawienie wskazanego
wyj�cia na l. OPTI – uruchomienie równoległego procesu. PAUS –
postój w 1/10 sek. RET – powrót do podprogramu. RST – ustawienie
zawarto�ci wskazanego rejestru na 0. SET – ustawienie zawarto�ci
wskazanego rejestru na l. STOP – zatrzymanie wykonywania programu
lub pojedynczego procesu. UN_ – ruch wskazanej jednostki do
wskazanej pozycji. un_ – ruch wskazanej jednostki bez oczekiwania
na jego uko�czenie
6.3. Instrukcje do programowania ruchów robota Jednostka
pionowa
UN00 0 – synchronizacja, – o� obrabiarki, – odkładanie, UN00 1 –
odbieranie, – nad pozycj� odkładania, UN00 2 – nad pozycj�
odbierania.
Jednostka obrotowa UN01 0 – synchronizacja, UN01 1 – odbieranie
(lub odkładanie RTP2), UN01 2 – obrabianie, UN01 3 – odkładanie
(lub odbieranie RTP2).
-
Manipulator PR 16 P-A
8
Jednostka pozioma UN02 0 – synchronizacja, UN02 1 – przed
obrabiark� przy obrocie łapy, UN02 2 – odkładanie, UN02 3 – o�
obrabiarki, UN02 4 – obrabianie.
Obrót łapy UN03 0 – synchronizacja, – łapa przedmiotów nie
obrobionych (A) na dole, UN03 1 – łapa (A) w górze.
Przesuw łap UN04 0 – synchronizacja, – odbieranie, UN04 1 –
zakładanie do obrabiarki.
Łapa A UN05 0 – synchronizacja, – łapa A otwarta, UN05 1 – łapa
A zamkni�ta.
Łapa B UN05 0 – synchronizacja, – łapa B otwarta, UN05 1 – łapa
B zamkni�ta.
Wysuwacze UN10 0 – wysuwacz l zasuni�ty (synchronizacja), UN10 1
– wysuwacz l wysuni�ty, UN11 0 – wysuwacz l zasuni�ty
(synchronizacja), UN11 1 – wysuwacz l wysuni�ty3.
Podnoszenie stołów UN12 1 – podnoszenie stołu l, UN13 1 –
podnoszenie stołu 2.
Pochylnia UN14 0 – pochylnia w poziomie (synchronizacja), UN14 1
– pochylnia podniesiona.
Separator przygotówek UN15 0 – na dole (synchronizacja), UN15 1
– na górze.
Transporter UN20 1 – ruch transportera.
-
Manipulator PR 16 P-A
9
Podajnik cz��ci UN21 0 – podajnik na dole (synchronizacja), UN21
1 – podajnik na górze.
Wyrównywacz cz��ci UN21 0 – wyrównywacz odsuni�ty
(synchronizacja), UN21 1 – wyrównywacz dosuni�ty.
7. Przykładowy program Ka�da linia programu składa si� z
trzycyfrowej liczby porz�dkowej, słowa kluczowego i polecenia
(instrukcji) zakodowanego w postaci liczby pi�ciocyfrowej: pierwsze
dwie cyfry – nr aktualnej jednostki, pozostałe trzy – nr czynno�ci
wykonywanej przez dan� jednostk�. Przykład programu:
000 LBL 00 000 pocz�tek programu.
001 UN 00 002 ruch w pionie na pozycje 2.
002 UN 01 001 obrót na pozycj� l.
003 UN 14 001 podniesienie pochylni stołu.
004 UN 15 001 podniesienie widełek separatora przygotówek.
005 UN 02 002 wysuni�cie ramienia na pozycj� 2.
006 UN 05 001 zamkni�cie szcz�k dolnych.
007 UN 04 001 podniesienie głowicy chwytaka.
008 UN 00 002 cofni�cie ramienia do pozycji l.
009 UN 01 002 obrót robota na pozycj� 2.
010 UN 00 001 ruch w pionie na póz. l.
011 UN 02 002 wysuni�cie ramienia na pozycj� 2.
012 UN 00 002 opuszczenie głowicy chwytaka.
013 UN 05 000 otwarcie szcz�k dolnych.
014 UN 02 000 cofni�cie ramienia do pozycji 2.
015 UN 20 001 ruch o jedn� pozycj� przeno�nika ła�cuchowego.
016 UN 21 001 podniesienie "łapki" przeno�nika ła�cuchowego.
017 UN 22 001 dosuni�cie wyrównywacza cz��ci.
018 UN 01 000 obrót ramienia na pozycj� 0.
019 UN 03 001 obrót głowicy chwytaka o 180 stopni.
020 UN 21 000 opuszczenie przeno�nika.
-
Manipulator PR 16 P-A
10
021 UN 22 001 odsuni�cie wyrównywacza cz��ci.
022 UN 15 000 opuszczenie widełek separatora przygotówek.
023 UN 04 000 powrót głowicy chwytaka do poło�enia
pocz�tkowego.
024 UN 14 000 opuszczenie pochylni stołu.
025 JOMP 00 000 skok do pocz�tku programu.
026 RUN 00 001 uruchomienie programu. Wszystkie jednostki
uruchamiane przez powy�szy program uwidocznione s� na rysunku
stanowiska (rys.5) wraz z ich oznaczeniem liczbowym i z
zaznaczeniem numerów przyjmowanych przez nie pozycji.
Rys.5. Przykładowy schemat stanowiska 8. Zalecenia dotycz�ce
�wiczenia i sprawozdania
1. Podczas �wiczenia nale�y zaprogramowa� manipulator w taki
sposób, aby przenosił on w
okre�lony sposób przedmiot mi�dzy wyznaczonymi przez
prowadz�cego miejscami. 2. W sprawozdaniu nale�y umie�ci� krótki
opis manipulatora. 3. Opisa� zadanie, jakie ma wykona� manipulator
i umie�ci� szkic miejsca pracy i diagram. 4. Opisa� struktur�
programu. 5. Uwagi i wnioski ko�cowe.
Literatura
1. Dokumentacja Techniczno-Ruchowa manipulatora PR-16 P-A






![ü !Ê !å !Ý!é!ý 1!Y !Y%!Y !Y - shibata-cci.or.jp · Õ6Î b1 6 j b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶aí ¡ : b]b®blb·b &¿ ccccccb¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b¶b](https://img.pdfslide.tips/doc/110x75/5b1d9a8d7f8b9a64508b98f3/ue-e-a-yey-1y-yy-y-shibata-cciorjp-o6i-b1-6-j-bbbbbbbbbbbbbbbbbai.jpg)




![Nieprawidłowa synchronizacja turbogeneratora · [1] IEEE Std C50.13-2005 IEEE Standard for Cylindrical-Rotor 50 Hz and 60 Hz Synchronous Generators Rated 10 MVA and above. [2] Billinton](https://img.pdfslide.tips/doc/110x75/61483d2ccee6357ef9253977/nieprawidowa-synchronizacja-turbogeneratora-1-ieee-std-c5013-2005-ieee-standard.jpg)