Embed Size (px)
DESCRIPTION
Larsen Lecture Notes
Citation preview

CHAPTER 1 : NUCLEAR REACTIONS IMPORTANT IN FISSION CHAIN
REACTIONS (Chapter 2, Duderstadt and Hamilton)
Spontaneous Radioactive Decay
- Rate Equations
- Half Life
Nuclear Collision Reactions
- Capture
- Scattering (n,γ)
- Fission (n,fission)
Microscopic Cross Sections
Macroscopic Cross Sections
- Number Density
- Mean Free Path
- Mean Free Time
- Mean Collision Frequency
Differential Scattering Cross Sections
- Scattering Angle
- Isotropic Scattering
- Linerly Anisotropic Scattering
Fission
- Fissile Nuclides
- Fissionable Nuclides
- Fission Cross Sections
- Fission Spectrum
- Fuels
- Fertile Nuclides
- Breeding
Resonances
Doppler Broading
1

Spontaneous Radioactive Decay (SRD)
Consider a certain type of atomic nucleus which undergoes SRD. Let:
N(t) = the probable number of these nuclei at time t
Q(t) = the rate (number per second) at which these nuclei are created by sources
Then, the general rate equation:
Rate of change of objects in a given state
= Rate at which objects enter the state
- Rate at which objects leave the state
implies
dN(t)dt
= Q(t) − (rate of SRD)
The term on the left hand side is ’net rate of change’. The first term and the second term on the right
hand side are ’gain term’ and ’loss term’, respectively.
For N>>1, we have the experimental and physically intuitive result
probable rate of SRD = λN(t),
where λ is the ’radioactive decay constant’. Therefore,
dN(t)dt
= Q(t) − λN(t) (1)
dN
dt+ λN(t) = Q
d(eλtN)dt
+ λN(t) = Q
N(t) = N(0)e−λt +∫ t
0
e−λ(t−t)Q(t) dt (2)
2

t
N(t)
λ
λ
2
1
1λ > λ( 2)
If Q = 0, then
N(t) = N(0)e−λt
We then have:
(probable) rate of SRD = λN(t) = λN(0)e−λt
(probable) number of SRD′s between t and t+ dt = = [ rate of SRD at time‘t ] dt = λN(0)e−λtdt
probability that a single nucleus will undergo SRD between t and t+dt=
= [λN(0)e−λtdt] / N(0) = [λeλt]dt = p(t)dt (3)
Check:
∫0
p(t) dt =∫
0
λe−λt dt = 1
We also have
probable (or mean) decay time = ζ
=∫ 1
0tp(t) dt
=∫0 λte
−λtdt = 1λ
Inaddition,
t1/2 = half − life = time required for the number of original nuclei to decrease by 1/2
3

N(t1/2) = 12N(0)
N(0)e−λt1/2 = 12N(0)
eλt1/2 = 2
t1/2 = ln2λ = 0.693
λ = 0.693t
Now, supposewehavearadioactivedecaychain
[Here X is the chemical symbol for a type of nucleus.] Then, the governing equations are
dN1(t)dt
= −λ1N1(t) + Q1(t)
dN2(t)dt
= −λ2N2(t) + λ1N1(t) + Q2(t)
dN3(t)dt
= −λ3N3(t) + λ2N2(t) + Q3(t)
Nuclear Collision Reactions (neutron-nucleus reactions)
Let
X= chemical symbol (i.e., H or C)
Z= atomic number
N= number of neutrons in a nucleus of X
A=Z+N= mass number of X
Then, the three important neutron-nucleus reactions are:
1) Capture (n,γ)
n01 + XZ
A → ( XZA+1 )∗ → XZ
A+1 + γ
2) Scattering (n,n) or (n,n)
n10 + XA
Z →
⎧⎪⎪⎪⎨⎪⎪⎪⎩
n10 + XA
Z [ elastic scattering (n,n)]
n10 + ( XA
Z )∗ [ inelastic scattering (n,n′)]
n10 + XA
Z + γ [ inelastic scattering (n,n′)]
3) Fission (n,fission)
n01 + X1
Z1A1
→ X2Z2A2
+ X3Z3A3
+ neutrons + energy
4

Here ∗ means ’excited state’. In elastic scattering, the kinetic energy of the nucleus is altered, but the nucleus
is not left in an excited state.
We need to describe these interactive processes mathematically, as we did with SRD. To do this, we intro-
duce various types of material cross sections. These cross sections will basically play the same role as the
radioactive decay constants, but with the following difference:
radioactive decay constant = [mean time between events (SRD)]−1
cross section = [mean distance between events (nuclear collisions)]−1
We have already shown the first of these equalities; later we will show the second.
Microscopic Cross Sections Consider a uniform, monoenergetic, pencil beam of neutrons, normally
incident on a very thin target material. Let
I = the number of neutrons / cm2/ sec incident on the target
T = the number of target nuclei / cm2
R = the number of reactions / cm2 / sec
thin target
area = a
I
Then, we define the ’microscopic cross section’ σ by:
R = σ I T
# / cm2 sec = cm2 . # / cm2 sec . # / cm2(4)
5

Thus,
σ = microscopic cross section = R / (IT) = (R/T)/I
=number of reactions per target nucleus per sec
number of incident neutrons per cm2 per sec(5)
or
σ
a=
number of reactions per target nucleus per sec
number of incident neutrons per sec
= probable number of reactions per target nucleus per incident neutron
We have the following microscopic scattering cross sections:
σγ : capture
σs : scattering
σf : fission
σe : elastic scattering
σin : inelastic scattering
Then,
σs = σe + σin
Also,
σa = absorption cross section (any event other than scattering)
= σf + σγ
σt = total cross section (any neutron-nucleus event)
= σs + σa
= σe + σin + σfσγ
σne = nonelastic cross section (any event other than elastic scattering)
= σt - σe
These quantities all usually depend on the speed v (or, the kinetic energy E = mv2/2) of the incident
neutrons.
6

Macroscopic Cross Sections Now let us consider a normal beam of neutrons incident on a target of
finite thickness, and let us define
N = the number of target nuclei / cm3
= the ’number density’ of target nuclei
I(x) = the probable number of uncollided neutrons / cm2 / sec that passes through x
In a very thin part of this slab, between x and x+dx, we define
dR(x) = the number of reactions / cm2 / sec between x and x+dx
x
I(x)
x x+dx
dT = the number of target nuclei/ cm2 between x and x+dx
= N dx
Then, by Eqn.(4),
dR(x) = σt . I . dT = σt . I . Ndx (6)
However, we also have, by definition,
dR(x) = I(x) − I(x+ dx) = I(x) − [I(x) + I′(x) dx] = − I
′(x) dx
Combining these two equations, we get
dI
dx= − N σt I (7)
We now define
7

Σt = N σt = macroscopic total cross section
=number of reactions / cm3
number of incident neutrons / cm2
Then the dimension of Σt is : [Σt] = length−1
Eqn.(7) now implies
I(x) = I(0) e−Σt x
Therefore, Eqn.(6) gives
probable number of interactions between x and x+dx =
= Σt I(x) dx = Σt I(0) e−Σtx dx
and so
p(x) dx = probability that a single neutron undergoes a collision between x and x+dx
= Σt e−Σtx dx
and, as with the case of spontaneous radioactive decay,
∫ ∞
0
p(x) dx = 1
∫ ∞
0
x p(x) dx = mean free path between collisions =1Σt
If v is the speed of a neutron, with
dimension of v = cm / sec dimension of Σt = cm−1
then
8

1 / (vΣt) = mean free time between collisions (dimension = sec)
We may define the following three statements
1) vΣt = mean collision frequency (dimension = sec−1)
= collision rate (number of collisions / sec) of a neutron with speed v
2) If there are n neutrons in a system, then n(vΣt) = number of neutrons in the system undergoing
collisions per sec.
3) n(vΣt) dt = number of neutrons in the system that undergoes collision in a time interval dt.
Σf = N σf = macroscopic fission cross section,
Σa = N σa = macroscopic absorption cross section,
etc., so the additive formulas for σ also apply to Σ:
Σf = Σe + Σin ,
Σa = Σγ + Σf , etc.
Also, if we have a homogenous mixture of nuclides X1, X2, ... with number densities N1, N2, ... and
microscopic cross sections σ1, σ2, ..., then for the mixture we have
Σ = N1 σ1 + N2 σ2 + ...
where any subscript (t,a,s, etc.) can be used on Σ and σ. In addition, if Ni depends on x and t, then
Σ(x, t, E) = N1(x, t) σ1(E) + N2(x, t) σ2(E) + ...
so Σ can depend on x and t.
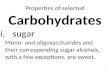
A typical plot of σt versus kinetic energy E of an incident neutron is given below:
9

E
(5)
(4)(3)
(2)
(1) σ (Ε)T
(1) wavelength of neutron >> interatomic spacing (σ = E−1/2)
(2) wavelength of neutron = interatomic spacing. (diffraction effects)
(3) potential (billiard ball) scattering; σ = geometrical cross section of the nucleus
(4) resonance effects; incident neutron energy = lowest energy levels in nuclei
(5) wavelength of neutron << 1, so interaction with nuclei is very small
Differential Scattering Cross Sections
Macroscopic cross sections describe the rate at which neutrons with speed v (or kinetic energy E = mv2/2)
undergo various types of interactions. However, they do not describe the results of these interactions. That
is, if a neutron is scattered, the macroscopic cross sections do not give the velocity or direction of the scat-
tered neutron. This information is described (probabilitically) by differential scattering cross sections.
Consider a neutron vith velocity vector
v = vx i + vy j + vz k
The speed of the neutron is
v = |v| = (v · v)1/2 = (v2x + v2
y + v2z)
1/2
and the ‘direction‘ or ‘angle‘ of the neutron is the unit vector
10

Ω = v / v = (vx/v) i + (vy/v) j + (vz/v) k
= Ωx i + Ωy i + Ωz k
= sin(θ) cos(φ) i + sin(θ) sin(φ) j + cos(θ) k
=√
1 − μ2 cos(φ) i +√
1 − μ2 sin(φ) j + cos(φ)k
y
x
z
j
i
k
sin cos
cos
sin
φθ
θ
θ φ θ
sin sinθ
φ
Ω
11

To compute the increment in area dΩ caused by increments dφ and dθ, we have
y
x
z
area = d Ω
sinsin
sin
θθ
θ
θ
θ+ θ
φ
φ+ φ
φ
d
d
d
φd
Since dμ = sin(θ)dθ,
then dΩ = sin(θ) dφ dθ
For any function of angle
f(Ω) = f(θ, φ) = f(μ, φ)
we have
∫4π
f(Ω) dΩ =∫ 2π
φ=0
∫ π
θ=0
f(θ, φ) sin(θ) dθ dφ =∫ 2π
φ=0
∫ 1
μ=−1
f(μ, φ) dμ dφ
Also,
12

E =1/2 m v2 (m = neutron mass) and dE = m v dv
Thus, the variables vx, vy , vz can be replaced by
E, Ω or E, θ, φ or E, μ, φ
Now, consider a neutron with initial energy E and direction ω, which undergoes a scattering event. We
define
ps(E,Ω → E‘,Ω‘) dE‘ dΩ‘ = the probability that the scattered neutron has final energy within dE‘
about E‘, and final direction within dΩ‘ about Ω‘
Then, we must have
∫4π
∫0
ps(E,Ω → E‘,Ω‘) dE‘ dΩ‘ = 1
We now define the macroscopic differential scattering cross section
Σs(E,Ω → E‘,Ω‘) = Σs(E) ps(E,Ω → E‘,Ω‘)
Then the following three statements are equivalent:
1) v Σs(E,Ω → E‘,Ω‘) dE‘ dΩ‘
= v Σs(E) ps(E,Ω → E‘,Ω‘ dE)
= the rate [probable number / sec] at which a neutron initially at state E, Ω, is scattered within dE‘ about
E‘ and within dΩ‘ about Ω‘.
2) If there are n neutrons in a system, then
n v Σs(E,Ω → E‘,Ω‘) dE‘ dΩ‘
= n v Σs(E) ps(E,Ω → E‘,Ω‘ dE)
= the number of neutrons in the system that are scattered from E, ω to within dE‘ and E‘ and within dΩ‘
about Ω‘ per second.
13

3) n v Σs(E,Ω → E‘,Ω‘) dE‘ dΩ‘ dt
= n v Σs(E) ps(E,Ω → E‘,Ω‘ dE)
= the number of neutrons in the system that are scattered from E, ω to within dE‘ about E‘ and within
dΩ‘ about Ω‘ in a time interval dt.
Also
∫ ∫Σs(E,Ω → E‘,Ω‘) dE‘ dΩ‘ =
∫ ∫Σsps(E,Ω → E‘,Ω‘) dE‘ dΩ‘ = Σs(E) (8)
This motivates the term ’differential’ scattering cross section; the integral of a ’derivative’ of a fuction is
the function, and the integral of a ’differential’ cross section is a cross section.
We may also define the microscopic differential cross section
σs(E,Ω → E′,Ω
′) = σsps(E,Ω → E
′,Ω
′)
Then
∫ ∫σs(E,Ω → E
′,Ω
′) dE
′dΩ
′= σs(E)
In most cases of interest, neutron scattering does not depend on the four variables that define Ω and Ω‘, but
rather on the single scalar variable Ω Ω‘ = cos(θ0) = μ0 where θ0 is the scattering angle:
all on this cone
are equally probableΩ
Ωθ o
’ Ω ’
_
__
14

Hence, we can write
σs(E,Ω → E′,Ω
′) = Σs(E → E
′,Ω ˙Ω
′) = Σs(E → E′ , μ0
If
Σs(E → E′, μ0) = Σso(E → E
′then scattering is isotropic. (9)
If
Σs(E → E′, μ0) = Σso(E → E
′+ 3 μ0 Σs1(E → E
′(10)
then scattering is linearly anisotropic. Otherwise, i.e in general, scattering is anisotropic.
15

Nuclear Fission
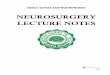
Fissile nuclides undergo fission when struck by low energy (about 1 ev) neutrons: U-233, U-235, Pu-
239, Pu-241
E (ev)10 1010
10
10
10
10
21−2
0
1
2
3
107
σ f (E) (barns)
Note that σf for small E can be several orders of magnitude larger than σf for large E.
Fissionable nuclides undergo fission when struck by high-energy (1 Mev) neutrons : Th-232, U-238, Pu-240,
Pu-242
E (ev)1. 10 2. 10 6. 10
1
2
7 7 7
thresholdenergy
σ f (E) (barns)
16

For fissionable nuclei σf = 1 barn for large E; this is much less than σf for fissile nuclei for low E. Only
fissile nuclei are capable, by themselves, of supporting a chain reaction.
Recall that
σa + σγ + σf
Thus, for a neutron that is absorbed, we can define
(E) = σγ(E) / σf (E) = (rate of capture) / (rate of fission) = capture to fission ratio
E10
5
10 1072−1
α (Ε)
Fission events produce :
(a) fissioned nuclei
(b) neutrons
(c) gammas, betas, neutrinos
(d) energy
In more detail,
(a) Fissioned Nuclei : charged, very energetic, neutron-rich. 80% of yhe energy release consists of kinetic
energy of these nuclei. β-decay accounts for another 4% after a delay time.
17

(b) Neutrons : about 99% appear within 10−14 sec (prompt)
about 1% appear within 0.2 to 55.0 sec (prompt)
Let us define
νE = the probable total number of neutrons ( prompt and delay ) released in a fission reaction
initiated by a neutron with energy E.
(11)
Ε (Mev)5 10 15
3
4
5
ν(Ε)
ν(Ε) = ν + ν Ε0 1
Also, let us define
χ(E) dE = the probability that a prompt, fission−produced neutron has energy between E and E+dE.
(12)
(∫ ∞
0
χ(E) dE = 1)
18

The prompt fission spectrum χ(E) is independent of the energy of the neutron that caused the fission.
1 2 3 E (Mev)
χ (Ε) (prompt)
Note that prompt fission-produced neutrons are fast, about 1 Mev.
Delayed neutrons are produced by a more complicated process:
X + X + prompt neutrons + neutrinos + A A1
0 1 2 3
An + X
1 2 3
X A
X A
2
2
4
4
− 11n+
prompt
− decay ( 0.2 to 55.0 )
(10 sec)−14
β
β + γ + k
19

It is customary to lump delayed neutrons into six precursor groups characterized by half-lives of 55.0,
22.0, 6.0, 2.0, 0.5, and 0.2 sec.
λi = decay constant of the i-th precursor group
βi = fraction of all fission neutrons emitted from i-th precursor group
β = Σ βi = total fraction of delayed neutrons
E (Mev)0.4 1
(composite delayed)χ (Ε)
(c) Gammas, Betas, Neutrinos :
gammas : 4% of energy (prompt)
betas : 4% of energy (delayed)
neutrinos : 5% of energy (lost)
20

(d) Energy:
Product % of energy Range Time delay
KE of fission products 80 < 0.01 cm prompt
prompt fast neutrons 3 10 - 100 cm prompt
γ-decay 4 100 cm prompt
fission product beta-decay 4 short delayed
neutrinos 5 infinite
other nonfission reactions 4 100 cm delayed
Note: About 97% of recoverable fission energy is deposited in the fuel material.
Fission Fuels:
Fissile : U-233, U-235, Pu-239, Pu-241
Fissionable : Th-232, U-238, Pu-240, Pu-242
Only U-235 is found in nature. But, fissile fuel can be produced by transmutation of fertile nuclei:
U + n U +
Np
Pu
(23 min)
(2.3 days)
1 239
239
239
238 γ
β
β
−
−
Th + n Th +
Pa
U
(22 min)
(27 days)
232 1 233
233
233
(protactinium)
β
β
−
−
γ
21

Let us define
η = average number of neutrons produced (by fission) per neutron absorbed in fuel.
Then, for a single fuel isotope (nuclide 1)
η1 =ν1σf1
σa1=
ν1σf1
σf1 + σγ1=
ν11 + σγ1
σf1
=ν1
1 + 1
For an infinite, homogenous medium of this material, a steady-state chain reaction is maintained if
η1 =ν1σf1
σa1=
ν1Σf1
Σa1= 1
For a mixture of N types of nuclei, a steady-state chain reaction is maintained if
η =
∑Nj=1 (νΣf )j∑Nj=1 Σaj
= 1
If η1 > 1, then excess neutrons are available for transmutation of fertile nuclei. For example, consider a
mixture of nuclide 1 and a fertile nuclide 2. Then, the mixture is stedy-state if
ν1Σf1Σa1 + Σa2
= 1, then ν1Σf1Σa1 = Σa2
η1 = 1 + Σa2Σa1
Now, if η1 = 2 , then Σa2 = Σa1
so fissile fuel is generated as fast as it is depleted.
If η1 > 2, then Σa2 > Σa1
and the system breeds fissile fuel. This is the principle behind the design of fast breeder reactors.
Resonances, Doppler Broadening: Various cross sections have resonance regions characterized by large
changes in σ for small changes in E. As the temperature of a material increases, incident neutrons see nuclei
with a larger range of kinetic energies, and the relative velocity between the neutron and nucleus becomes less
specifically tied to the energy of the neutron. Therefore, the fine details of the resonance become smeared out.
22

E
σ (Ε,Τ) σ (Ε,Τ)
EEΕ+ΔΕΕ Ε+ΔΕ
Τ
Τ
1
2
Τ < Τ1 2
This process is known as ’Doppler Broadening’. The Breit-Wigner formula (derived using quantum me-
chanics) describes this analytically.
23

CHAPTER 2 : FISSION CHAIN REACTIONS (AND NUCLEAR REACTORS)
(Chapter 3, Duderstadt and Hamilton)
Multiplication Factor,k
- Subcritical Reactor
- Critical Reactor
- Supercritical Reactor
Six Factor Formula
- Resonance Escape Probability
- Thermal Utilization Factor
- Fast Fission Factor
- Four Factor Formula
Conversion Ratio
Breeding Ratio
Thermal Reactors
Fast Reactors
Suppose an incident neutron causes a fission. The results are :
a) α, β, γ particles,
b) fissioned nuclei,
c) prompt and delayed neutrons (occuring in a certain ”fission generation”). Some of these (prompt and
delayed) neutrons are eventually absorbed, and some eventually leak out of the system. The rest, after pos-
sibly numerous scattering events, will lead to new fission neutrons occuring in the next ”fission generation”.
We define
k = multilication factor =number of neutrons in a given generation
number of neutrons in the previous generation
Then:
k < 1 : subcritical (number of neutrons → 0 in time)
1

k = 1 : critical (steady-state solution exists)
k > 1 : supercritical (number of neutrons → in time)
A more practical definition is
k0 =rate of neutron gain in reactor
rate of neutron loss in reactor=
G(t)L(t)
If neutrons are lost at a rate L(t), and if there are N(t) neutrons, then
l =N(t)L(t)
= mean neutron lifetime
Using the general rate equation
rate of change = rate of gain - rate of loss
we obtain
dNdt = G(t) − L(t) = k0L(t) − L(t) = (k0 − 1)L(t) = k0−1
l N(t)
N(t) = N(0) ek0−1
l t
N(t+ l) = N(0) ek0−1
l (t+l) = N(0) ek0−1
l tek0−1 = N(t) ek0−1
Hence,
k =N(t+ l)N(t)
= ek0−1
We have for k0 = 1,
k = ek0−1 = 1 + (k0 − 1) + 12 (k0 − 1)2 + ..... = k0 + O(k0 − 1)2
Also,
k > 1 if k0 > 1
k = 1 if k0 = 1
k < 1 if k0 < 1
Therefore, for criticality, k0 and k operationally mean the same, are equal for k = 1, and for k0 = 1
2

we have
k0 = k, N(t) = ek0−1
l t
The Six Factor Formulas : In thermal teactors, fission neutrons (= 107 ev) are produced that must slow
down to thermal energies (= 0.1 ev) before they are likely to create the next generation of fission neutrons.
The six-factor and four-factor formulas describe qualtitavely how various physical processes affect the mul-
tiplication factor k.
Fast Neutron
Leaks outDoes notleak out
absorbed whileslowing down
slows down tothermal energies
leaks outof system
absorbed insystem
absorbed innon−fuel
absorbed infuel
capturefission(thermal)
capture(fast)fission
neutronsproduced
ν
1− PP
1− pp
P 1− P
P 1− P
P 1− P
FNL
TNLTNL
AF AF
FF
FNL
PFNL = probability that a fast neutron does not leak out of the system,
p = probability that a fast neutron is not absorbed while slowing down = resonance escape probability,
3

PTNL = probability that a thermal neutron does not leak out of the system,
PAF = probability that a thermal neutron that is absorbed is absorbed in the fuel
= Σfuelf / ( Σfuelf + Σnonfuelf ) = f = thermal utilization factor
PF = probability that athermal neutron absorbed in the fuel produces a fission
= σfuelf / σfuela ( νPF = ηfuel)
γ = probable number of fast fission produced per fast neutron.
Then, if N1 = the number of neutrons in one generation and N2 = the number in the next generation,
N2 = N1 [ PFNL p PTNL PAF ν PF + γ ]
so
k = N2/N1 = PFNL p PTNL f ηfuel + γ
= PFNL p PTNL fηfuel [ PF NL p PT NL f ηfuel + γ
PF NL p PT NL f ηfuel ]
Thus we have the six-factor formula
k = PFNL p PTNL f ηfuel ε
where
ε = fast fission factor =probable number of neutrons from thermal + fast fissions
probable number of neutrons from thermal fissions
For an infinite medium, PFNL = PTNL = 1
and we get the four factor formula : k∞ = p f ηfuel ε
The six-factor and four-factor formulas show roughly how various different physical phenomena affect the
criticality of the reactor.
Conversion and Breeding; Thermal and Fast Reactors : We know return to the concept of creating fis-
sile fuel by transmutation:
238U + 1n → ... → 239Pu [ works best for fast neutrons]
4

232Th + 1n → ... → 233U [ works best for thermal neutrons]
We define:
ConversionRatio = CR =rate of fissile atom production
rate of fissile atom consumption
BreedingRatio = BR = CR if CR > 1
Now, consider an infinite hoogenous mixture of a fissile nuclide (1) and a fertile nuclide (2). Suppose the
mixture is critical. To obtain a formula that determines whether the mixture will breed, we write the criti-
cality condition as
η =ν1 Σf1
Σa1 + Σa2= 1
Then, the system breeds if
CR =Σa2Σa1
> 1 or Σa2 > Σa1
or ν1 Σf1 = Σa1 + Σa2 > 2Σa1
or
η1 =ν1 Σf1
Σa1=
ν1 Σf1
Σf1 + Σγ1=
ν11 + α1
> 2
Thermal Reactors : In thermal reactors, an average energy is comparable to the thermal neutron energy
(= 0.1 ev). Some characteristics of these reactors:
1. σf is largest for thermal neutrons, so it is relatively easy to maintain a chain reaction. Not much fuel
needed.
2. Light, low mass-number materials are used in the construction of these reactors to help moderate
(slow down) the fast neutrons. (In elastic collisions with light nuclei, neutrons lose much more kinetic energy
than they do with heavy nuclei.)
3. Relatively simple to build.
5

4. η = 2 in fuel, so it is difficult to breed.
Fast Reactors : In fast reactors, an average neutron energy is much higher than in thermal reactors
(= 10−5ev). Some characteristics:
1. σf is small, so it is relatively difficult to maintain a chain reaction. Considerably more fuel (30-40
times as much as in thermal reactors) is needed to maintain chain reaction.
2. Heavy, high mass-number materials are used in the construction of these reactors to inhibit the slowing
down of neutrons.
3. relatively complicated to build.
4. η > 2 in fuel, so it is possible to breed.
6

Comparison of Energy-Averaged ν, η, andσf in Thermal and Fast Reactors :
Thermal (LWR) Fast (LMFBR)
U235 Pu239 U235 Pu239
ν 2.4 2.9 2.6 3.1
η 2.0 1.9 2.1 2.6
σf 580 790 1.9 1.8
reflector
core
blanket U−238
(fast) core Pu
(thermal)
thermal reactor fast reactor
7

CHAPTER 2 PROBLEMS
2.1 D H, p. 100, problem 3-1.
2.2 D H, p. 100, problem 3-3.
2.3 D H, p. 100, problem 3-6.
2.4 D H, p. 100, problem 3-9.
2.5 Measurements on a critical thermal reactor indicate that for every 100 neutrons emitted in fission,
10 leak out while slowing down, 10 are absorbed while slowing down, and 10 leak out afyter being thermal-
ized. Also, 70% of the thermal absoptions occur in the fuel, and 2 fission neutrons are emitted for every
thermal absorption in the fuel. Calculate:
a) the fast non-leakage probability,
b) the resonance escape probability,
c) the thermal utilization factor,
d) the fast fission factor,
e) the infinite medium multiplication factor.
8

CHAPTER 3 : NEUTRON TRANSPORT AND DIFFUSION EQUATIONS (Chapter 4, Dud-
erstadt and Hamilton)
Density Fuctions
Angular Neutron Density
- probable number of neutrons in an infinitesimal element of phase space
- probable rate at which neutrons pass through an infinitesimal element of surface area
Delayed Neutrons
- Precursor Groups
Time-Dependent Neutron Transport Equation With Delayed Neutrons
- Initial and Boundary Conditions
Steady-State Transport Equation
Steady-State Transport in a Purely Absorbing Medium - Steady-State Transport in a Vacuum
- Method of Characteristics
- Decay from a Point Source
Angular Flux
Scalar Flux
Current
Discretized Representation of the Transport Equation
- Time Discretization
- Energy Discretization
– Multigroup Approximation
– One-Group Approximation
- Angular Discretization
– SN (Dissrete-Ordinates)
– PN (Spherical Harmonics)
- Representation of Macroscopic Scattering Cross Section
– Scattering Ratio, c
– Mean Scattering Cosine, μ0
- Spatial Discretization
- Iterative Methods
Special Geometries
- One-Dimensional Slab Geometry
1

– Integral Transport Equation
– SN Equations
– PN Equations
– Closure Relations
- One-Dimensional Spherical Geometry
- Two-Dimensional X,Y-Geometry
N-th Collided Flux Equations
One-Group Time-Dependent Diffusion Equation
- Initial Condition
- Boundary Conditions
– Prescribed Incident Flux
– Reflecting
– Extrapolated Endpoint (Extrapolation Distance)
- Interface Conditions
Energy-Dependent Diffusion Equation
2

Density Functions : Consider a bar consisisting of a mixture of materials that vary with position x. We
define the mass density function ρ of the rod by:
ρ(x) dx = the mass between x and x+dx,
then,∫ x2
x1ρ(x) dx = the mass between x1 and x2,
and ρ has units of mass per length. The concept of a density function plays a fundamental role in the
mathematical description of neutron transport and diffusion processes.
Angular Neutron Density : We define the angular density function n(r, E,Ω, t) by:
n(r, E,Ω, t) d3rdEdΩ (1)
= the probabale number of neutrons in d3r about , having energy within dE about E,
travelling with direction in the solid angle dΩ about Ω, at time t.
x
y
z
x
y
z
E E+dE
energy
dy dx
dz
d 3r = dx dy dz
rΩ
Ωd
Then, for example, if D is some domain in physical space, we have
[∫0 n(r, E,Ω, t) d3r ] dE dΩ = the probable number of neutrons in D, having energies within dE about
E and directions dΩ about Ω, at time t.
and
3

∫4π
∫ E2
E1
∫0n(r, E,Ω, t) d3r dE dΩ = the total number of neutrons in D, with energies between E1 and
E2, at time t.
Also, let us consider a surface with an area increment dA and a unit normal vector n at the point r:
r
n
area=dA
Ω
y
x
z
We wish to compute the rate at which neutrons at ( r, E,Ω, t) pass through dA. To do this, let us consider
neutrons at r, travelling in the direction Ω, with energy E [or speed v = (2E/m)1/2]. In time dt, the neutrons
travel a distance dτ = v dt:
n
r
volume=dV=dAds
ds
area=dA
Ω
τ
θ
θd
dsdτ = |cosθ| = |Ω · n|
dV = dA dS = dA |Ω · n| dτ = dA |Ω · n| v dt
4

Since neutrons travel a distance dτ in time dt, then every neutron in the volume dV at time t, having
direction Ω and speed v, will exit through dA between t and t+dt. Therefore,
number of neutrons that pass through dA in time dt = number of neutrons initially
in the volume ( and in dE about E, dΩ about Ω ) = ( n dE dΩ ) dV = ( n dE dΩ ) dA| Ω · n| v dt
and
v |Ω · n| n(r, E,Ω, t) dE dΩ dA
= the rate at which neutrons at r, within dE about E, within dΩ about Ω, pass through dA(2)
Now let us consider an arbitrary volume D with surface ∂D. At each point r ∈ ∂D letn= n(r) be the unit
outer normal vector. Then for fixed Ω, E, and t,
∂D∓ : that part of ∂D for which Ω · n >< 0
n
n
[∫∂D
vΩ · n n(r, E,Ω, t) dA ] dE dΩ
= [∫∂D+ vΩ · n n(r, E,Ω, t) dA ] dE dΩ − [
∫∂D− vΩ · n n(r, E,Ω, t) dA ] dE dΩ
= [ the rate at which neutrons flow out of D ] − [ the rate at which neutrons flow into D ]
or
[∫∂D
v Ω · n n(r, E,Ω, t) dA ] dE dΩ
= the net rate at which neutrons within dE about E and dΩ about Ω leak out of D = net leakage rate
(3)
Thus, integral can be positive or negative. If it is positive, then the rate of flow out of D is greater than the
rate of flow in. If it is negative, then the rate of flow in of D is greater than the rate of flow out.
5

Similarly, if S is a surface with a continuously varying normal vector n(r):
n
n
then
[∫S
v Ω · n n(r, E,Ω, t) dA ] dE dΩ (4)
= the net rate at which neutrons within dE about E and dΩ about Ω flow through S.
This integral can be positive or negative. If it is positive, then the net neutron flow is in the direction
of the normal vectors; otherwise, it is in the positive direction.
If the above expression is integrated over Ω, we also have:
[∫
4π
∫S
v Ω · n n(r, E,Ω, t) dA dΩ ] dE (5)
= the net rate at which neutrons within dE about E flow through S.
Again, this integral can be positive or negative, with the same meaning as before.
Now we shall derive an equation for n(x,E,Ω, t). We have, for any volume D, and for fixed E and Ω,
the general rate equation:
Rate of change of the neutrons for [r ∈ D, energies within dE about E, and directions dΩ about Ω]
= Rate of gain of neutrons [ r ∈ D, energies within dE about E, and directions dΩ about Ω ]
− Rate of loss of neutrons [ r ∈ D, energies within dE about E, and directions dΩ about Ω ](6)
However,
6

Rate of change of neutrons [r ∈ D, energies within dE about E, and directions dΩ about Ω]
=d
dt[
∫D
n(r, E,Ω, t) dr3 ] dE dΩ] = [∫D
n
t(r, E,Ω, t) dr3 ] dE dΩ ] (7)
Also
Rate of loss of neutrons in dE about E and direction dΩ about Ω =
Rate at which neutrons in dE about E and direction dΩ about Ω undergo collisions
+ leakage rate of neutrons in dE about E and direction dΩ about Ω out of D
= [∫D
v ΣT (E) n(r, E,Ω, t) d3r] dE dΩ + [∫∂D
v Ω · n n(r, E,Ω, t) d2r] dE dΩ (8)
Here we have set dr2 = dA , dr3 = dV
However, the Divergence Theorem (or Green’s Theorem) gives for a general vector function f(r):
∫∂D n · f(r)d2r =
∫D∇ · f(r)d3r ,
where
∇ = i ∂∂x + j ∂
∂y + k ∂∂z = gradient operator
Therefore,
∫∂D
n · [ v Ω n ] dr2 =∫D∇ · v Ω n dr3 =
∫Dv Ω · ∇ n dr3 ,
so Eqn.(3.8) can be written
Rate of loss of neutrons in dE about E and direction dΩ about Ω
= [∫D
[ v Ω · ∇ n(r, E,Ω, t) + v ΣT (E) n(r, E,Ω, t)] d3r ] dE dΩ (9)
Next,
7

Rate of gain into dE about E and direction dΩ about Ω
= Rate of gain into dE about E and direction dΩ about Ω due to scattered neutrons
+ Rate of gain into dE about E and direction dΩ about Ω due to prompt fission neutrons
+ Rate of gain into dE about E and direction dΩ about Ω due to delayed fission neutrons
+ Rate of gain into dE about E and direction dΩ about Ω due to interior sources
(10)
However,
Rate of gain due to scattered neutrons
= [∫D
[∫
4π
∫ ∞
0
v′Σs(E
′ → E,Ω′ · Ω) n(r, E
′,Ω
′, t) dE
′dΩ
′] d3r] dE dΩ (11)
Note : see Eqn.(1.9). Also,
Rate of gain due to prompt fission neutrons
= [∫D
χp(E)4π
[∫
4π
∫ ∞
0
[ 1 − β(E′) ] ν(E
′) v
′Σf (E
′) n(r, E
′,Ω
′, t) dE
′dΩ
′] d3r] dE dΩ (12)
Notes:
v′Σf (E
′) n(r, E
′,Ω
′, t) dE
′dΩ
′d3r = the fisison rate in dE
′about E
′, about dΩ
′about Ω
′, and d3r
about r,
ν(E′) = the total number of neutrons (prompt and delayed) produced in a fission event that is caused
by a neutron with energy E′,
β(E′) = the fraction of neutrons in a fission event, caused by a neutron with energy E
′, that are delayed,
[1 − β(E′)] ν(E
′) v
′Σf (E
′) n(r, E
′,Ω
′, t) dE
′dΩ
′] d3r = the rate at which prompt fission neutrons
are created by neutrons in dE′about E
′, about dΩ
′about Ω
′, and d3r about r,
χp(E) = prompt fission spectrum [∫ ∞0χp(E)dE = 1]
χp(E)4π dE dΩ = probability that a prompt neutron is emitted in dE about E, about dΩ about Ω.
8

Rate of gain due to delayed fission neutrons
= [∫D
Qd(r, E, t) d3r] dE dΩ (Qd to be determined) (13)
Rate of gain due to interior sources
= [14π
∫D
Q(r, E, t) d3r] dE dΩ (14)
Note: Interior sources are usually isotropic. The factor 4π is included as a normalization factor, so that
[∫
4π
∫ ∞
0
14π
∫D
Q(r, E, t) d3r] dE dΩ =∫ ∞
0
∫D
Q(r, E, t) d3r dE
= the total rate at which source neutrons are introduced in D.
Combining Eqns.(3.10)-(3.14), we get
Rate of gain into dE′about E
′, about dΩ
′about Ω
′, and d3r about r,
= [∫D
[∫ ∫
v′Σs n dE
′dΩ
′+χp(E)
4π
∫ ∫(1 − β) ν v
′Σf n dE
′dΩ
′+ Qd +
14πQ] d3r] dE dΩ (15)
Finally, combining Eqns.(3.6), (3.7), (3.9), and (3.15), we obtain
∫D
[dn
dt+ vΩ·∇n + vΣTn −
∫ ∫v
′ΣsndE
′dΩ
′ − p
4π
∫ ∫(1 − β)νv
′ΣfndE
′dΩ
′ − Qd − 14πQ]d3r = 0
Because D is arbitrary, the integrand [...] = 0. Thus, defining
ψ(r, E,Ω, t) = v n(r, E,Ω, t) = angular neutron flux, (16)
we obtain
1v
∂ψ
∂t+ Ω ·∇ψ + Σtψ =
∫ ∫Σs ψ dE
′dΩ
′+ p
4π
∫ ∫(1 − β) ν Σf ψ dE
′dΩ
′+ Qd +
14πQ (17)
Now we shall derive an expression for Qd:
Qd(r, E, t) d3r dE dΩ = the rate at which delayed neutrons are emitted in dE′
about E′, about dΩ
′
about Ω′, and d3r about r.
9

Recalling that delayed neutrons arise from fissioned nuclei that undergo spontaneous radioactive decay,
we define:
Cj(r, t)d3r = the probable number of fissioned nuclei in precursor group j, in d3r about r at time t. (The
decay constant for these nuclei is λj .)
χj(E) = the spectrum of neutrons emitted from precursor group j (∫ ∞0χjdE = 1)
βj(E) = the fraction of all fission neutrons, caused by a neutron with energy E, that are emitted from
the j-th precursor group.
β =∑6
j=1 βj(E) = the total fraction of delayed neutrons in a fission event caused by a neutron with
energy E.
Then, nuclei are introduced into j-th precursor group in d3r about r at the rate
[∫ ∞
0
∫4π
βj(E′) ν(E
′) v
′Σf (E
′) n(r, E
′,Ω
′, t) dE
′dΩ
′] d3r]
= [∫ ∞
0
∫4π
βj(E′) ν(E
′) Σf (E
′) ψ(r, E
′,Ω
′, t) dE
′dΩ
′] d3r]
Hence,
∂
∂tCj(r, t) + λj Cj(r, t) =
∫ ∞
0
∫4π
βj(E′) ν(E
′) v
′Σf (E
′) n(r, E
′,Ω
′, t) dΩ
′dE
′(18)
The rate at which precursor group j nuclei spontaneously decay is λj Cj , and hence this is the rate at which
group j neutrons are produced. Since the spectrum for these neutrons is χj(E) and
χj(E)4π dEdΩ = probability that a group j delayed fission neutron is emitted in dE about E and dΩ about Ω.
[∫ ∞0
∫4π
χj(E)4π dEdΩ =
∫ ∞0χj(E)dE = 1]
then
10

χj(E)4π λjCj(r, t)d3rdEdΩ = the rate at which delayed neutrons are emitted from the j-th precursor group
into d3r, dE about E and dΩ about Ω at time t.
Hence,
Qd(r, E, t) =∑6
j=1χj(E)
4π λjCj(r, t) ,
and Eqn.(3.17) becomes:
1v
∂
∂tψ(r, E,Ω, t) + Ω·∇ψ(r, E,Ω, t) + Σtψ(r, E,Ω, t) =
∫ ∞
0
∫4π
Σs(E′ → E,Ω
′ · Ω)ψ(r, E,Ω, t)dE′dΩ
′
+ p(E)4π
∫ ∞
0
∫4π
(1 − β(E′))νΣf (E
′)ψ(r, E,Ω, t)dE
′dΩ
′+ Qd(r, E, t) =
6∑j=1
χj(E)4π
λjCj(r, t) +14πQ(r, E, t)
(19)
This is the full time-dependent neutron transport equation with delayed neutrons; it is coupled with
Eqn.(3.18), which govern the precursor densities. (Note: in some formulations of these equations, the
4π factors are absent, but then χp(E), χj(E), and Q(r,E,t) have different normalizations.)
Some physics which is omitted from these equations :
1) Certain quantum mechanical effects,
2) Motion of the host material,
3) Statistical fluctuations in the neutron density n,
4) Neutron-neutron and ather rare interactions,
5) Forces (for example, gravity) on neutrons,
6) Temperature feedback (σt depends on temperature which depends on ψ).
Initial and Boundary Conditions : Eqns.(3.18) and (3.19) do not, by themselves, describe ψ; we also need
initial and boundary conditions. Physically, we expect that given all (interior and boundary) sources of
neutrons, the initial values of the angular flux and precursor densities, we should be able to determine ψ
and Cj uniquely. This expectation is correct, and it gives us the appropriate initial and boundary conditions.
Interior source of neutrons: 14π Q(r, E, t) r ∈ D, 0 < E <∞, t > 0
This known term is already in Eqn.(3.19).
11

Initial source of neutrons : we prescribe
ψ(r, E,Ω, 0) = ψi(r, E,Ω) r ∈ D, 0 < E <∞, |Ω| = 1, (20)
where ψi is known.
Boundary source of neutrons: we prescribe
ψ(r, E,Ω, 0) = ψb(r, E,Ω, t) r ∈ ∂D, 0 < E <∞, t > 0, Ω · n < 0, (21)
where ψb is known. Note that since n is the unit outer normal, Ω · n < 0 corresponds to all directions
Ω pointing into the spatial domain D. Therefore, we are free to prescribe the incoming or incident flux,
corresponding to Ω ·n < 0, but we cannot prescribe the outgoing or exiting flux, corresponding to Ω ·n < 0.
Initial values of the precursor densities:
Cj(r, 0) = Cij(r) r ∈ D, 1 < j < 6 (22)
where Cij are all known.
Eqns.(3.18)-(3.22) uniquely determine ψ and Cj in a given physical system D.
Note: an assumption implicit in this formulation is that nrutrons entering D through its outer boundary can
be arbitirarily chosen and are independent of the exiting fluxes. That is true only if the boundary of D is
convex:
12

D
exterior of D = ’vacuum’
1) convex
2) non-reentrant boundary
3) incident flux does not depend on the exiting flux
D
exterior of D= ’vacuum’
1) non-convex
2) reentrant boundary
3) incident flux does depend on the exiting flux
This problem can be cured by enlarging our definition of D to include some exterior points, so that the
new boundary is convex:
newboundary
13

Neutron transport problems are always solved in physical systems that are convex.
Transport Equation Without Delayed Neutrons: Set βj = β = Cj = 0. Then, Eqn.() becomes
1v
∂ψ
∂t+ Ω · ∇ψ + Σtψ =
∫ ∫Σsψ dE
′dΩ
′+
x
4π
∫ ∫ν Σf ψ dE
′dΩ
′+
14πQ (23)
+ initial condition (3.20) + boundary condition (3.21)
Steady-State Transport Equation Without Delayed Neutrons:
Ω · ∇ψ + Σtψ =∫ ∫
Σs ψ dE′dΩ
′+
x
4π
∫ ∫ν Σf ψ dE
′dΩ
′+
14πQ (24)
+ boundary condition (3.21)
Steady-State Transport Equation in a Purely Absorbing Medium: Set s = Σf = 0 ; then
Ω · ∇ψ + Σt ψ =14πQ (25)
+ boundary condition (3.21)
Steady-State Transport Equation in a Vacuum:
Ω · ∇ ψ = 0 (26)
+ boundary condition (3.21)
Equations (3.25) and (3.26) can be explicitly solved because these equations do not couple angle or en-
ergy. Eqn.() couples angle and energy, can be explicitly solved only in very special idealized cases.
Solution of the Steady-State Transport Equation in a Purely Absorbing Homogenous Medium: We consider
a convex homogenous domain D and
Ω · ∇ψ(r, E,Ω, t) + Σtψ(r, E,Ω, t) =14πQ(r, E, t) r ∈ D, |Ω| = 1
ψ(r, E,Ω) = ψb(r, E,Ω) r ∈ ∂D, Ω · n < 0 (27)
Eqn.(3.27) can be written
14

Ωx∂ψ
∂x+ Ωy
∂ψ
∂y+ Ωz
∂ψ
∂z+ ΣT ψ =
14πQ (28)
This is a first-order differential equation that can be solved by the method of characteristics. To do this, we
define a curve
r(s) = x(s) i + y(s) j + z(s) k
and
ψ(s, E,Ω) = ψ [ r(s), E,Ω ] = ψ [ x(s), y(s), z(s), E,Ω ]
Q(s, E) = Q[ r(s), E ] = Q[ x(s), y(s), z(s), E ]
Then,
∂ψ
∂s=
∂
∂sψ [ x(s), y(s), z(s), E,Ω ] =
dx
ds
∂ψ
∂x+
dy
ds
∂ψ
∂y+
dz
ds
∂ψ
∂z
Let us require x(s), y(s), and z(s) to satisfy:
dx
ds= Ωx,
dy
ds= Ωy,
dz
ds= Ωz , (29)
Then, ∂ψ∂s = Ωx∂ψ∂x + Ωy
∂ψ∂y + Ωz
∂ψ∂z
Hence, using Eqn.(3.28), we obtain the system of equations (3.29) and
∂ψ
∂s(s, E,Ω) + Σt(E) ψ(s, E,Ω) =
14πQ(s, E,Ω) (30)
We must impose ’initial conditions’ for this system. Let r0 = x0i+ y0j + z0k be any point on the boundary
of D for which Ω · n < 0. Then, we set
x(0) = x0, y(0) = y0, z(0) = z0 (31)
and
ψ(0, E,Ω) = ψb(ro, E,Ω) (32)
15

Solving Eqns.(3.29) and (3.31), we get
x(s) = x0 + Ωx , y(s) = y0 + Ωy , z(s) = z0 + Ωz
so r(s) = r0 + Ωs
Thus, for s > 0, r(s) tracks into D. In fact, the characteristic line r(s) for s > 0 traces the physical path of a
neutron as it enters the system at r0 and propagates inward in the direction Ω.
n
s
D
.
Ω
Ω
dD
r +so
Eqns.(3.30) and (3.32) now give
∂ψ
∂s+ Σtψ =
14πQ
∂ψ
∂seΣts =
14πQ eΣts
ψ(s) eΣts − ψ(0) =∫ s
0
Q(s′)
4πeΣts
′ds
′
ψ(s) = ψ(0) eΣts +∫ s
0
Q(s′)
4πe−Σt(s−s′ ) ds
′
= ψ(0) eΣts +∫ s
0
Q(s− τ)4π
e−Σtτ dτ
16

or
ψ(r0 + s, E,Ω) = ψb(r0, E,Ω) eΣt(E)s +∫ s
0
Q(r0 + Ω s− Ω τ, E,Ω)4π
e−Σt(E)τdτ (33)
Let us now change notation a bit. For s fixed point r in domain D and direction Ω, let
r0 = the intersection of ∂D with the line r + Ω τ, τ < 0
s = | r − r0 | (34)
s
ro
dD
r
Ω
Then, making contact with our previous notation, we have
r = r0 + sΩ , and Eqn.(3.33) becomes
ψ(r, E,Ω) = ψb (r0, E,Ω) e−Σt(E)s +∫ s
0
Q(r − Ωτ, E,Ω)4π
e−Σt(E) τ dτ (35)
Note that the above equation gives the exiting flux from a system.
Thus, uncollided neutrons decay exponentially with rate Σt(E). (We predicted this earlier, in Chapter
1 of these notes.) Now for some special cases:
17

’Vacuum’ Boundary Condition: ψb = 0. Eqn.(3.35) becomes
ψ(r, E,Ω) =∫ s
0
Q(r − Ω τ, E,Ω)4π
e−Σt(E) τ dτ
Therefore
φ(r, E) = scalar flux =∫
4π
∫ s
0
Q(r − Ω τ, E,Ω)4π
e−Σt(E) τ dτ
The variables s, Ω constitute a set of polar ccodinates with origin at the point r. Let us convert this set to
Cartesian ccordinates. We take
r′= r − sΩ (variable of integration)
τ = |r − r′ | (radius)
d3r′
= τ2 dτ dΩ = |r − r′ |2 dτ dΩ
and then we obtain
φ(r, E) =∫r′∈D
Q(r′, E)
4πe−Σt(E)| r−r′ |
| r − r′ |2 d3r′
(36)
Isotropic Point Source: If Q(r,E) is a delta-fuction source at r = r0, E = E0, i.e.,
Q(r, E) = δ(x− x0) δ(y − y0) δ(z − z0) δ(E − E0),
then
φ(r, E) =e−Σt(E0) |r−r0|
4π |r − r0|2δ(E − E0)
Therefore, the decay of the scalar flux away from a point source is as e−Σtr/r2, where r is the distance to the
point source.
Pure Streaming in a Vacuum: (Σt = Q = 0). Eqn.(3.35) reduces to
ψ(r, E,Ω) = ψb (r0, E,Ω)
18

Ω
r
ro
dD
D
Thus, the angular flux inside D consists of sloy of the free-streaming neutrons that enter D through its outer
boundary, and there is no exponential attenuation away from the boundary.
One-Dimensional Half-Space: Let D consist of the half-space z > 0, and let all quantities be indepen-
dent of x and y. Then for μ > 0, Eqn.(3.35) becomes
z
s=z/
r=xi + yj + zkz
z/s =cos
Ω
θθ
μ θ =μ
ψ(z, E, μ) = ψ(0, E, μ) e−Σt(E)s +∫ s
0
Q(z − μτ)4π
e−Σt(E) τ dτ
19

= ψb (E, μ) e−Σt(E)z/μ +∫ z /μ
0
Q(z − μτ)4π
e−Σt(E) τ dτ
= ψb (E, μ) e−Σt(E)z/μ +∫ z
0
Q(z − τ′)
4πe−Σt(E) τ
′/μ dτ
′(37)
For μ < 0, z = ∞, so
ψ(z, E, μ) =∫ ∞
0
Q(z + τ′, E)
4πe−Σt(E) τ
′/|μ|
|μ| dτ′
Some definitions:
n(r, E,Ω, t) = angular neutron density
ψ(r, E,Ω, t) = v n(r, E,Ω, t) = angular flux
φ(r, E, t) =∫4πψ(r, E,Ω, t) dΩ = scalar flux
J(r, E, t) =∫4π Ω ψ(r, E,Ω, t) dΩ = current
If e is a unit vector, then
J±(r, E, t) =∫Ω·e0 |Ω · e| ψ(r, E,Ω, t) dΩ = partial current
Note that if e is perpendicular to an area element dA, then
J+(r, E, t)dA = rate at which neutrons at (r,E,t) flow through dA in the direction of e.
J−(r, E, t)dA = rate at which neutrons at (r,E,t) flow through dA in the direction of -e.
ee
dAdA
J J+ −
20

J± > 0 [and J± are not vectors]
J± can not be determined without first specifying e.
J · e dA = (J+ − J−) dA = net rate at which neutrons flow through dA (+ if net flow is in direction of
e, - if net flow is in direction of -e)
Discretized Representation of the Transport Equation:
1) Time: The following scheme is stable for all Δt. Also, if Q is independent of t, it is accurate for
very large Δt.
ψn − ψn−1
v Δt+ Ω · ∇ ψn + Σt ψn =
∫ ∫Σs ψn dE
′dΩ
′+
14πQ
or
Ω · ∇ ψn + (Σt +1
v Δt) ψn −
∫ ∫Σs ψn dE
′dΩ
′=
14πQ +
ψn−1
v Δt
Thus, the time-dependent problem reduces to solving a steady-state problem within each time step. For
very large Δt,
Ω · ∇ ψn + Σt ψn −∫ ∫
Σs ψn dE′dΩ
′=
14πQ
and we obtain the correct equation for the steady-state solution.
2) Energy: (Multigroup approximation) We assume Emin ≤ E ≤ Emax and divide this large interval
into G smaller energy groups:
Emin = Ea < Ea−1 < ........ < E0 = Emax
Then, taking the transport equation
Ω · ∇ ψ + Σt(E) ψ =∫ Emax
Emin
∫4π
Σs(E′ → E,Ω
′ · Ω) ψ dΩ′dE
′+
14πQ
=G∑
g′=1
∫4π
∫ Eg′−1
Eg′
Σs(E′ → E,Ω
′ · Ω) ψ dE′dΩ
′+
14πQ,
21

we operate by∫ Eg−1
Eg(.) dE and we get
Ω · ∇(∫ Eg
Eg+1
ψ dE ) + (
∫ Eg
Eg+1Σt(E) ψ dE∫ Eg
Eg+1ψ dE
)∫ Eg
Eg+1
ψ dE
=G∑
g′=1
∫4π
(
∫ Eg
Eg+1
∫ Eg
Eg′+1
Σs(E′ → E,Ω
′ · Ω) ψ dE′dE
∫ Eg
Eg+1ψ dE′ )
∫ Eg
Eg+1
ψ dE′dΩ
′+
∫ Eg
Eg+1
Q dE
Thus, if we define
ψg (r,Ω) =∫ Eg
Eg+1
ψ (r, E,Ω) dE, (38)
Qg(r) =∫ Eg
Eg+1
Q(r, E) dE, (39)
Σtg(r) =
∫ Eg
Eg+1Σt(E)Ψ dE∫ Eg
Eg+1Ψ dE
(40)
Σs,g′→g(r,Ω′ · Ω) =
∫ Eg
Eg+1
∫ Eg′
Eg′+1
Σs(E′ → E,Ω
′ · Ω) ΨdE′
∫ Eg
Eg+1Ψ dE′
(41)
where Ψ(E) is a suitably approximate shape function, then we get the multigroup transport equations
Ω · ∇ ψg + Σt(E) ψg =G∑
g′=1
∫4π
Σs,g′→g(Ω′ · Ω) ψg′ (r,Ω) dΩ
′+
14πQg, g = 1, 2, ..., G(42)
Note: These equations are exact if for each g and g′
Σt(E) = constant [= Σtg] for Eg+1 < E < Eg,
Σs(E′ → E,Ω
′ · Ω) = function of Ω′ · Ω)
[= Σs,g′→g(Ω′ · Ω)ΔEg ] for Eg+1 < E < Eg, Eg′+1 < E < Eg′ ,
because the shape fuction then cancels out of the expression for Σtg and Σs,g′→g. They are also exact if
ψ(r, E,Ω) = ψ(r,Ω) Ψ(E),
where Psi(E) is the shape function, because then psi(E) cancels out of the expression for Σtg and Σs,g′→g.
This shows that to get good accuracy, the shape fuction Psi(E) must be representative of the energy-
dependence of ψ(r, E,Ω).
22

One-Group Approximation:
Ω · ∇ ψ(r,Ω) + Σt(r) ψ(r,Ω) =∫
4π
Σs(Ω′ · Ω) ψ(r,Ω) dΩ
′+
14πQ(r) (43)
3) Angle (SNandPN ) : There are two widely-used ways to discretize in angle. The first is the discrete-
ordinates or SN approximation, in which beutrons are assumed to travel only in discrete directions Ωm, m
= 1,2,....,N. With each of these discrete directions (or ordinates) we associate a section of the unit sphere
wm, and we make the approximation
∫f(Ω) dΩ �
N∑m=1
f(Ωm) wm
where, by the definition of the wm, 4π =∑Nm=1 wm
The set Ωmwm is a ’quadrature set’, and Eqn.(3.42) becomes
Ω·∇ ψg + Σt(E) ψg =G∑
g′=1
N∑m′=1
Σs,g′→g(Ωm′ ·Ωm) ψg′m′ wm′ +14πQg′ , 1 ≤ g ≤ G , 1 ≤ m ≤ N (44)
There are three discrete-ordinates or SN equations. Eqn.(3.44) holds in Cartesian geometries only. Boundary
conditions are obvious.
An alternative to SN is the spherical harmonics or PN method. Consider the various spherical harmonic
functions
Υlm(Ω) , −l ≤ m ≤ l , l = 0, 1, 2, ..... ,N
It is known that any reasonable function f(Ω) can be expanded as a linear combination of these func-
tions:
f(Ω) =∞∑l=0
l∑m=−l
flmΥlm(Ω)
Let us multiply Eqn.() by Υlm(Ω) and integrate over Ω. This produces a system of
23

[1 + 3 + 5 + ...... + (2N+1)] G = (2N + 1)2 G equations.
Next we insert the approximate expansion
ψg(r,Ω) �∞∑l=0
l∑m=−l
flmg(r)Υlm(Ω)
into this system. [Note that there are (2N + 1)2 G unknowns, flmg(r).] One then has a system with the
same number of equations as unknowns. [We will explicitly carry out this derivation later, in slab geometry.]
Note: Unlike the SN method, the derivation of boundary conditions for the PN equations is somewhat
problematical.
Explicit Representation for Σs(Ω′ · Ω) : In a given group, for the important linearly anisotropic scat-
tering, we set
Σs(Ω′ · Ω) =
14π
(Σs0 + 3 Ω · Ω′Σs1) (45)
To define Σs0 and Σs1, we shall need the identities
∫4π
dΩ = 4π,∫
4π
Ω′ · ΩdΩ =
∫4π
Ω′ · ΩdΩ′
= 0,∫
4π
(Ω′ · Ω)2dΩ =
∫4π
(Ω′ · Ω)2dΩ
′=
4π3,
We then have:
∫4π
Σs(Ω′ · Ω) dΩ =
14π
∫4π
Σs0 dΩ = Σs0
and
∫4π
(Ω′ · Ω) Σs(Ω
′ · Ω) dΩ =14π
∫4π
[ (Ω′ · Ω) Σs0 + 3 (Ω
′ · Ω)2] dΩ′
= Σs1 (46)
Now let ψ(Ω) be the angular flux at a fixed spatial point in a given group. Then,
[∫
4π
Σs(Ω′ · Ω) ψ(Ω
′) dΩ
′] dΩ = rate at which neutrons are scattered into dΩ about Ω,
24

so
∫4π
[∫
4π
Σs(Ω′ · Ω) ψ(Ω
′) dΩ
′] dΩ = rate at which neutrons are scattered
=∫
4π
[∫
4π
Σs(Ω′ · Ω) dΩ] ψ(Ω
′) dΩ
′=
∫4π
Σs0 ψ(Ω′) dΩ
′= Σs0
∫4π
ψ(Ω′) dΩ
′
Dividing this equation by Σt∫4πψ(Ω
′)dΩ
′, we get
Σs0Σt
=∫ ∫
Σs(Ω′ · Ω) ψ(Ω
′) dΩ
′dΩ
Σt∫4π ψ(Ω
′) dΩ′
=rate at which neutrons are scattered
rate at which neutrons undergo collisions
= mean number of scattered neutrons per collision = c. (47)
Next, we define
μ = mean scattering cosine
=∫ ∫
(Ω′ · Ω) Σs(Ω
′ · Ω) ψ(Ω′) dΩ
′dΩ∫ ∫
Σs(Ω′ · Ω) ψ(Ω
′) dΩ′ dΩ
=∫
[∫[(Ω
′ · Ω) Σs0 + 3 (Ω′ · Ω)2 Σs1] dΩ] ψ(Ω
′) dΩ
′
Σs0∫ψ(Ω
′) dΩ′ , for Ω
′ · Ω = 0,
=Σs1Σs0
Therefore, if Σs(Ω′ · Ω) can be written in the form of Eqn.(3.45), then
Σs0 = c Σt
Σs1 = μ0 Σs0 = c μ0 Σt
Σs(Ω′ · Ω) =
c Σt4π
(1 + 3 μ0 Ω′ · Ω) (48)
25

Usually, μ > 0, which is a consequence of the fact that forward-scattering is more probable than back-
scattering.
4) Spatial Discretizations: A lengthy topic. See NE 542.
5) Efficient Iterative Methods for Solving the Fully Discretized SN Equations: Another lenghty topic.
See also NE 542.
Special Geometries: The general steady-state one-group transport equation depends on five independent
variables: x, y, z, and Ω. This can be require an enormous amount of computer storage, even for prob-
lems with moderate numbers of discrete values of x, y, z, and Ω. However, in specialgeometries for which
symmetries occur, the number of independent variables can be reduced to a manageable number. We will
now describe one-dimensional slab geometry in detail, and then we will very briefly describe one-dimensional
spherical geometry and two-dimensional x, y-geometry.
26

One-Dimensional Slab Geometry: ψ = ψ(z, μ). Let us consider a situation in which all geometrical quan-
tities and all boundary conditions are independent of x and y, and all boundary conditions depend only on
the polar angle μ and not on the azimuthal angle φ:
kz
x,y−plane
Ω
θ
Ω =√
1 − μ2cosφi +√
1 − μ2sinφj + μk
μ = cosθ , ψ is independent of x, y, and φ
We have Eqn.(3.43):
Ω · ∇ ψ + Σt(E) ψ =14π
∫4π
Σs0 + 3 Ω · Ω′Σs1 ψ dΩ
′+
Q
4π(49)
However,
Ω · ∇ ψ = (Ωx∂
∂x+ Ωy
∂
∂y+ Ωz
∂
∂z) ψ(z, μ) = μ
∂ψ
∂z(z, μ)
and
14π
∫4π
(Σs0 + 3 Ω · Ω′Σs1) ψ dΩ
′
=14π
∫ 1
μ′=−1
∫ 2π
φ′=0
(Σ0 + 3 [ sqrt1 − μ2 sqrt1 − μ′2 (cosφ
′cosφ + sinφ
′sinφ) + μ
′μ] Σs1) ψ(z, μ
′) dφ
′dμ
′
27

=12
∫ 1
μ′=−1
(Σs0 + 3 μ · μ′Σs1) ψ(z, μ
′) dμ
′
Therefore, Eqn.(3.49) becomes
μ∂ψ
∂z(z, μ) + Σt ψ(z, μ) =
12
∫−1
1( Σs0 + 3 μ · μ′Σs1 ) ψ(z, μ
′) dμ
′+
Q(z)4π
(50)
It is customary to define
Ψ(z, μ) =∫ 2π
0
ψ(z, μ) dφ = 2 π ψ(z, μ),
and then
Ψ(z, μ) dμ dz = the total number of neutrons in dμ about μ, in dz about z, per unit area in the x, y−plane,
and Eqn.(3.50) becomes
μ∂Ψ∂z
(z, μ) + Σt Ψ(z, μ) =12[
∫−1
1( Σs0 + 3 μ · μ′Σs1 ) Ψ(z, μ
′) dμ
′+ Q(z) ] (51)
For the case of general anisotropic scattering, this equation generalizes to
μ∂Ψ∂z
(z, μ) + Σt Ψ(z, μ) =12(∫−1
1[∞∑n=0
(2n+ 1) Pn(μ) Pn(μ′) Σsn ] Ψ(z, μ
′dμ
′+ Q(z)) (52)
where Pn(μ) are the Legendre Polynomials:
P0(μ) = 1 , P1(μ) = μ , P2(μ) = 12 (3μ2 − 1) , . . . . . .
which satisfy the recursion relations
μPn(μ) = n2n+1Pn−1(μ) + n+1
2n+1Pn+1(μ)
and the orthogonality relations
∫ 1
−1
Pn(μ) Pm(μ) dμ =2
2n+ 1δnm (53)
28

Eqns.(3.51) and (3.52) typically hold on a slab −Z < z < Z. Using
μ > 0μ < 0
z
(neutrons flow to the right)(neutrons flow
to the left)
we see that incident boundary conditions for Ψ must be assigned as follows:
−Z Z
μ < 0
Ψ(−Ζ,μ) Ψ(Ζ ,μ)
μ > 0
so
Ψ(−Z, μ) = Ψb (μ) μ > 0
Ψ(Z, μ) = Ψb (μ) μ < 0(54)
If Ψb = 0 on either edge, then that edge is termed a vacuum boundary.
29

μ
z
−1
+1
Z−Z
boundary conditions imposedon edges denoted by
Other boundary conditions, based on physical symmetries, are also possible. For example, suppose that
Ψb = 0, Q(z) = Q(−z), Σt(z) = Σt(−z), Σs0(z) = Σs0(−z), and Σs1(z) = Σs1(−z) :
z = −Z z = 0 z = Z
.. .−z z
Q(z) = Q(−z)Σ (z) = Σ (−z)
Then, Ψ must have a similar type of symmetry about z = 0:
Ψ(z, μ) = Ψ(−z,−μ) [⇒ Ψ(0, μ) = Ψ(0,−μ) ] (55)
30

z = −Z z = 0 z = Z
.. .−z z
−μ μ
Thus, we can reformulate the problem for the smaller slab 0 < z < Z and assign reflecting boundary
conditions on the left edge:
0 Ζ
’vacuum’ boundary :’reflecting’ boundary :
Ψ(Ζ,μ) = 0 ,−1 < μ < 0
Ψ(0,μ) = Ψ(0,−μ)
Ψ(0, μ) = Ψ(0,−μ) [reflecting boundary]
Ψ(z, μ) = 0 , − 1 ≤ μ < 0 [vacuum boundary](56)
This reduces by a factor of two the amount of storage and arithmetic required to solve a problem.
Integral Transport Equation: Let us consider the following slab-geometry problem with Σt = 1 and Σs1 = 0 :
μ∂ψ
∂z(z, μ) + ψ(z, μ) =
c
2
∫−1
1ψ(z, μ′) dμ
′+
q(z)2
0 < z < L (57)
ψ(0, μ) = 0 , 0 < μ ≤ 1
ψ(L, μ) = 0 , − 1 ≤ μ < 0
31

Defining the scalar flux
φ(z) =∫−1
1 ψ(z, μ′) dμ
′(58)
we can write Eqn.(3.57) as
∂ψ∂z + 1
μ ψ = 12 μ(c φ + q)
∂∂zψ ez/μ = ez/µ
2μ (c φ + q)
For μ > 0,∫ z0 (·)dz′
gives
ψ(z, μ) ez/μ − ψ(0, μ) =∫ z
0
ez′/μ
2 μ[ c φ(z
′) + q(z
′) ] dz
′
for ψ(0, μ) = 0 ,
ψ(z, μ) =∫ z
0
e− (z−z′)/μ
2 μ[ c φ(z
′) + q(z
′) ] dz
′(59)
For μ < 0,∫ Lz
(·)dz′gives
ψ(L, μ) eL/μ − ψ(z, μ) =∫ L
z
ez′/μ
2 μ[ c φ(z
′) + q(z
′) ] dz
′for
ψ(L, μ) = 0 ,
ψ(z, μ) =∫ L
z
e(z′−z)/μ
−2 μ[ c φ(z
′) + q(z
′) ] dz
′(60)
Combining Eqns.(3.58)-(3.60), we obtain
φ(z) =∫ 1
0
ψ(z, μ) dμ +∫ 0
−1
ψ(z, μ) dμ
=∫ z
0
[∫ 1
0
e−(z−z′)/μ
2 μdμ] [ c φ(z
′) + q(z
′) ] dz
′
+∫ L
z
[∫ 0
−1
e−(z′−z)/−μ
−2 μdμ] [ c φ(z
′) + q(z
′) ] dz
′
However, for z′< z,
∫ 1
0
e−(z−z′)/μ
2 μdμ =
∫ 1
∞e−(z−z′)t(
−dtt
) =∫ ∞
1
e−(z−z′)tt dt
32

= E1( z − z′) = E1( | z − z
′ | ) (61)
and for z′> z,
∫ 0
−1
e−(z′−z)/−μ
−2μdμ =
∫ 0
1
e−(z′−z)/s
s(−ds) =
∫ 1
0
e−(z′−z)/s
sds
= E1( z′ − z ) = E1( | z − z
′ | )
Combining the last three equations, we find
φ(z) =12
∫ L
0
E1( | z − z′ | ) [ c φ(z
′) + Q(z
′)] dz
′(62)
This is the integral transport or Peierls equation for the scalar flux. It can be derived in any geometry and
with inhomogenous media, and non-vacuum boundary conditions. The only requirements is that scattering
be isotropic.
The Peierls equation has the advantage that is Ω is removed. However, it has the disadvantage that every
spatial point is explicitly coupled to every other point; the equation is spatially global, unlike the integro-
differential form of the transport equation, which is spatially local. Therefore, the Peierls equation is normally
used in computer codes only for small physical systems for which ona can safely make the approximation
that scattering is isotropic.
Discrete-Ordinates or SN Equations : Consider an angular quadrature set consisting of angles μm and
angular weights wm, 1 ≤ m ≤ N , satisfying
∑Nm=1 wm = 2 , wm > 0
μm = − μN+1−m , wm = wN+1−m (symmetry)
wN/2 + ....... + wm−1 < μm < wN/2 + ....... + wm N/2 + 1 ≤ m ≤ N
. . . .μ μ μ μ
ω ω ω ω
1 2
1 2
N−1 N
NN−1
The Gauss-Legendre Quadrature Sets satisfy these conditions; some of these sets are given at the end of this
33

chapter. For μ � μm, we can make the approximations
ψ(z, μ) � ψ(z, μm) ≡ ψm(z)
and
∫ 1
−1
ψ(z, μ′) dμ
′ � ψ(z, μ1) w1 + . . . . . + ψ(z, μN ) wN =N∑n=1
ψ(z, μn) wn
Therefore, the problem (3.57) can be approximated by
μmdψmdz
(z) + ψm(z) =12[c
N∑n=1
ψn(z) wn + q(z)] 0 < z < L (63)
ψm(0) = 0 1 ≤ m ≤ N/2 (μm > 0)
ψm(L) = 0 N/2 + 1 ≤ m ≤ N (μm < 0)
which is termed the discrete-ordinates or SN approximation. This approximation can be developed for any
transport geometry. Physically, it amounts to constraining neutrons to travel in only a finite set of directions
μ1, ...., μN , rather than an infinite set −1 ≤ μ ≤ 1.
Spherical Harmonics or PN Equations : We now make explicit use of the Legendre polynomials defined in
Eqn.(3.53):
P0(μ) = 1 , P1(μ) = μ , P2(μ) = 12 (3μ2 − 1) , .........
μPn(μ) = n2n+1Pn−1(μ) + n+1
2n+1Pn+1(μ) n ≥ 1 [P−1 = 0]
∫ 1
−1 Pn(μ)Pm(μ)dμ = 22n+1δnm n,m ≥ 0
It is known that for a reasonable function f(μ), one has the following Legendre polynomial expansion
f(μ) =∞∑n=0
2n+ 12
fn Pn(μ)
where
fn =∫ 1
−1
Pn(μ) f(μ) dμ = ′expansion coefficients′
34

Let us now define the angular flux moments
φn(z) =∫ 1
−1
Pn(μ) ψ(z, μ) dμ, n ≥ 0
Note that φ0 = scalar flux and φ1 = current.
We multiply Eqn.(3.57) by Pn(μ) and obtain
μ Pn(μ)∂ψ
∂z+ Pn(μ) ψ = Pn(μ)
12
[ c φ(z) + q(z)]
or
∂
∂z[
n
2n+ 1Pn−1(μ)ψ +
n+ 12n+ 1
Pn+1(μ) ψ] + Pn(μ) ψ = Pn(μ)12
[ c φ(z) + q(z)]
Now we operate by∫ 1
−1(·)dμ. For n = 0, we obtain
d
dzφ1(z) + (1 − c) φ0(z) = q(z)
For 1 ≤ n ≤ N , we obtain
n
2n+ 1dφn−1
dz(z) +
n+ 12n+ 1
dφn+1
dz(z) + φn(z) = 0
These are N+1 equations in N+2 unknowns φ0, φ1, ...., φN+1. The standart closure relation is simply to take
φN+1 = 0.
Then, we obtain the standart slab geometry PN equations, which have the same number of equations as
unknowns:
dφ1
dz+ (1 − c) φ0 = q
n
2n+ 1dφn−1
dz+
n+ 12n+ 1
dφn+1
dz+ φn = 0 1 ≤ n ≤ N − 1
N
2N + 1dφN−1
dz+ φN = 0 (64)
Normally, N is odd, so there are an even number of equations and unknowns φ0, φ1, ...., φN .
In principle, one solves these equations, and then ψ is obtained from
ψ(z, μ) �N∑n=0
2n+ 12
Pn(μ) φn(z)
35

However, in practice, one is usually only interested in φ0(x) and φ1(x), and the higher order moments are
usually discarded at the end of the calculation.
P3 Equations:
dφ1dz + (1 − c) φ0 = q
13dφ0dz + 2
3dφ2dz + φ1 = 0
25dφ1dz + 3
5dφ3dz + φ2 = 0
37dφ2dz + φ3 = 0
(65)
Eliminating φ1 and φ3, we obtain two coupled diffusion equations:
−13d2φ0dx2 + (1 − c) φ0 = q + 2
3d2φ2dx2 ,
−1121
d2φ2dx2 + φ2 = 2
15d2φ0dx2
(66)
P1 Equations:
dφ1dz + (1 − c) φ0 = q ,
13dφ0dz + φ1 = 0
(67)
Eliminating φ1, we obtain the single diffusion equation:
−13d2φ0
dx2+ (1 − c) φ0 = q
P1 or diffusion theory is a very common and useful approximation to transport theory, and later we will
discuss it in detail.
Note: Boundary conditions for the diffusion (P1) equations are known and well-accepted, and we will derive
them in the next chapter. However, boundary conditions for the general PN equations with N odd and geq3
are controversial.
One-Dimensional Spherical Geometry : We take Eqn.(3.49)
Ω · ∇ ψ + Σt(E) ψ =14π
∫4π
(Σs0 + 3 Ω · Ω′Σs1) ψ dΩ
′+
Q
4π(68)
36

with ψ = ψ(r, μ)
where
r = x i + y j + z k = spatial position
r = | r | = ( x2 + y2 + z2 )1/2 = distance to origin (69)
Ω = direction of neutron travel
μ = cosθ = Ω · ( r/r ) = ( x Ωx + y Ωy + z Ωz )/r (70)
z
x
y
r
r / r
θΩ
We note that if Ω is fixed and r is varied in any non-radial direction, then μ varies. Therefore, an uncollided
particle moves along a path in which r and μ both change. We have
Ω · ∇ ψ(r, μ) =∂ψ
∂r(Ω · ∇ r) +
∂ψ
∂μ(Ω · ∇ μ) (71)
However,
r2 = x2 + y2 + z2
37

2r ∂r∂x = 2x 2r ∂r∂y = 2y 2r ∂r∂z = 2z∂r∂x = x
r∂r∂y = y
r∂r∂z = z
r
so
Ω · ∇r = Ωx ∂r∂x + Ωy ∂r∂y + Ωz ∂r∂z= Ωx xr + Ωy yr + Ωz zr = μ
Also, by Eqn.(3.70),
∂μ∂x = ∂μ
∂
xΩx
+ yΩy
+ zΩz
r == Ωx
r − xΩx+yΩ
y+ zΩ
z
r2xr = Ω
x
r − μxr2
∂μ∂y = . . . . . . . . . =
Ωy
r − μyr2
∂μ∂z = . . . . . . . . . = Ω
z
r − μzr2
so
Ω · ∇ μ = Ωx∂μ∂x + Ωy
∂μ∂y + Ωz
∂μ∂z
= Ωx(Ω
x
r − μxr2 ) + Ωy(
Ωy
r − μyr2 ) + Ωz(
Ωz
r − μzr2 )
= 1r − μ
r
xΩx
+ yΩy
+ zΩz
r = 1−μ2
r
Hence, Eqn.(3.71) becomes
Ω · ∇ ψ(r, μ) = μ∂ψ
∂r+
1 − μ2
r
∂ψ
∂μ(72)
Next, we consider the scattering term
14π
∫( s0 + 3 Ω · Ω′
Σs1) ψ(r,Ω′ · r/r)dΩ′
The value of this integral cannot depend on our choice of angular coordinate system. Therefore, we can
choose this coordinate system to simplify the evaluation of the integral. In particular, for r fixed, we set
k = r/r
and we choose i and j in any suitable way. Then,
38

Ω =√
1 − μ2cosφi +√
1 − μ2sinφj + μk
Ω′=
√1 − (μ′)2cosφ
′i +
√1 − (μ′)2sinφ
′j + μ
′k
and dΩ′
= dφ′dμ
′
so
14π
∫(s0 + 3 Ω · Ω′
Σs1) ψ(r,Ω′ · r/r) dΩ′
= 14π
∫ 1
μ′=−1
∫ 2π
φ′=0(Σ0 + 3 [ sqrt1 − μ2 sqrt1 − μ
′2(cosφ′cosφ + sinφ
′sinφ) + μ
′μ ]‘Σs1) ψ(z, μ
′) dφ
′dμ
′
= 12
∫μ′=−1 1(Σs0 + 3 μ · μ′
Σs1) ψ(z, μ′) dμ
′
(73)
Using Eqns.(3.72) and (3.73), Eqn.(3.68) becomes:
μ∂ψ
∂r+
1 − μ2
r
∂ψ
∂μ+ Σt ψ =
12
∫ 1
−1
(Σs0 + 3 μ · μ′Σs1) ψ dμ
′+
Q(r)4π
(74)
Again, it is customary to define
Ψ(r, μ) =∫ 2π
0 ψ(r, μ)dφ = 2π ψ(r, μ)
so that
Ψ(r, μ)dμdV = Ψ(r, μ)dμ(4πr2)dr = the total number of neutrons in dμ about μ, in dr about r,
and Eqn.(3.74) becomes
μ∂Ψ∂r
(r, μ) +1 − μ2
r
∂Ψ∂μ
+ Σt Ψ(r, μ) =12[∫−1
1(Σs0 + 3 μ · μ′Σs1) Ψ(r, μ
′) dμ
′+ Q(r)] (75)
This equation holds for 0 < r < R and −1 ≤ μ ≤ 0 corresponds to directions pointing toward the center of
the sphere, and 0 < μ ≤ 1 corresponds to directions pointing away from the center of the sphere. Boundary
conditions to go with Eqn.(3.75) are therefore:
Ψ(R,μ) = Ψb(μ) , − 1 ≤ μ ≤ 0 (76)
[This prescribes the incident angular flux at the outer boundary.]
39

μ
rR
1
0
−1
boundary conditionsare applied here
Note: SN (discrete-ordinates) is trickier to apply here because of the angular derivative term. However, PN
(spherical harmonics) is just as easy as to apply. As before, P1 theory leads to a standart diffusion equation.
Two-Dimensional X,Y-Geometry: We again take Eqn.(3.49):
Ω · ∇ ψ + Σt(E) ψ =14π
∫4π
Σs0 + 3 Ω · Ω′Σs1 ψ dΩ
′+
Q
4π
ψ = ψ(x, y,Ω) [independent of z]
and ψ(x, y,Ω) = ψ(x, y,Ωr)
y
x
z
Ω
Ω θ
θr
cos
cos k
k−
40

Ω = sin(θ) cos(φ) i + sin(θ) sin(φ) j + cos(θ) k
Ωr = sin(θ) cos(φ) i + sin(θ) sin(φ) j − cos(θ) k
= reflection of Ω across the x,y-plane
Then,
Ωx∂ψ
∂x+ Ωy
∂ψ
∂y+ Σtψ =
14π
∫4π
Σs0 + 3 Ω · Ω′Σs1 ψ dΩ
′+
Q
4π(77)
where
Ωx = sin(θ) cos(φ) = μ
Ωy = sin(θ) sin(φ) = η
( Ωz = cos(θ) = ζ )
(78)
The surface of the unit sphere is defined by
1 = f( μ, η, ζ ) = μ2 + η2 + ζ2
and the unit outer normal for a point on the sphere is
n =∇f
| ∇f | =2 μ i + 2 η j + 2 ζ k2 (μ2 + η2 + ζ2)1/2
= μ i + η j + ζ k
z
x
y
n
μ η
Ω
= μ η ζ
ζ
μη
d d
d
i j k+ +
41

In the plane generated by n and k, we have
kn
d
d d
α
α
Ω
μ η
Therefore,
dμ dηdΩ = cosα = k · n = ζ =
√1 − μ2 − η2
Thus, dΩ = dμ dη√1 − μ2 − η2
and Eqn.(3.77) becomes:
μ∂ψ
∂x+ η
∂ψ
∂y+ Σt ψ
=14π
∫ ∫[ Sigmas0 + 3 (μ μ
′+ η η
′+ ζ ζ
′) Σs1 ]
ψ dμ′dη
′
√1 − (μ′)2 − (η′)2
+14π
∫ ∫[ Sigmas0 + 3 (μ μ
′+ η η
′+ ζ ζ
′) Σs1 ]
ψ dμ′dη
′
√1 − (μ′)2 − (η′)2
+Q
4π
=12π
∫ ∫[ Sigmas0 + 3 (μ μ
′+ η η
′) Σs1 ]
ψ dμ′dη
′
√1 − (μ′)2 − (η′)2
+Q
4π(79)
It is customary to define
Ψ(x, y, μ, η) = 2 ψ(x, y, μ, η)
so that
42

Ψ(x, y, μ, η) dx dy = dμ dη√1 − μ2 − η2
= the number of neutrons in dμ about μ, dη about η, dx about
x, dy about y, per unit length in z,
and Eqn.(3.79) becomes:
μ∂Ψ∂x
(x, y, μ, η) + η∂Ψ∂y
(x, y, μ, η) + Σt Ψ(x, y, μ, η)
= [12π
∫ ∫[ Sigmas0 + 3 (μμ
′+ ηη
′) Σs1 ] Ψ(x, y, μ
′, η
′)
dμ′dη
′
√1 − (μ′)2 − (η′)2
+ Q(x, y) ] (80)
This equation holds for −X < x < X and −Y < y < Y . Using
μ > 0η > 0
μ > 0η < 0
μ < 0η < 0
μ < 0η > 0
x
y
43

we find that incident boundary conditions for Ψ must be assigned as follows:
(0,0) μ < 0μ > 0
η < 0
η > 0
Ψ ( μ,η)μ,η)
Ψ ( μ,η)
μ,η)
YX X,y,
x,Y,
b
b
X, y,
Ψ ( b
x,−Y,
Ψ (−b
The function Ψb is defined at each point on the boundary, and for each incoming direction (μ, η). Then we
set Ψ = Ψb for all such points and directions.
If Ψb = 0 along a section of the boundary, then this section is termed a ’vacuum boundary’.
Other boundary conditions are possible, based on symmetry considerations. For example, suppose the
outer boundaries of the system are vacuum and
X
Y
.
. .
.(−x,y) (x,y)
(−x,−y) (x,−y)
44

Q(x,y) = Q(x,-y) = Q(-x,y) = Q(-x,-y), and similarly for Σt,Σs0,Σs1.
Then, Ψ must have a similar type of symmetry:
Ψ(x, y, μ, η) = Ψ(x,−y, μ,−η) = Ψ(−x, y,−μ, η) = Ψ(−x,−y,−μ,−η)
. .
..
Y
X(x,y)
(x,−y)(−x,−y)
(−x,y)
(−μ,−η) (μ,−η)
(μ,η)(−μ,η)
Thus, we can reformulate the problem in the firts quadrant and assign reflecting boundary conditions on the
left and bottom edges:
y
x
(’vacuum’)
(’vacuum’)
(’reflecting’)
(’reflecting’)
Ψ( μ,η)
Ψ(
Ψ(Ψ(
= Ψ(μ,η)
μ,η) = μ,η)Ψ( μ,η)
= 0
= 0μ < 0
η < 0Y
X
x, Y,
X, y,
x, 0, x, 0,μ, −η)
0, y,−
0, y,
45

This reduces by a factor of four the amount of storage and arithmetic required to solve this problem.
Finally, Sn and PN versions of Eqn.(3.80) are relatively easy to formulate.
N-th Collided Flux Equations: Suppose we wish to solve the transport problem
μ∂ψ
∂z+ Σt ψ =
Σs02
∫ 1
−1
ψ(z, μ′) dμ
′+
Q(z)2
0 < z < L (81)
ψ(0, μ) = ψl(μ) 0 < μ ≤ 1
ψ(L, μ) = ψr(μ) − 1 ≤ μ < 0
Let us consider the following recursive sequence of problems for functions ψ0, ψ1, ψ2, .....
We define ψ0 by the problem
μ∂ψ0
∂z+ Σt ψ0 =
Q(z)2
0 < z < L (82)
ψ0(0, μ) = ψl(μ) 0 < μ ≤ 1
ψ0(L, μ) = ψr(μ) − 1 ≤ μ < 0,
and for n ≥ 1, we define ψn in terms of ψn−1 by
μ∂ψn∂z
+ Σt ψn =Σs02
∫ 1
−1
ψn−1 dμ′
0 < z < L (83)
ψn(0, μ) = 0 0 < μ ≤ 1
ψn(L, μ) = 0 − 1 ≤ μ < 0
Then, adding up all of Eqns.(3.82) and (3.83), we obtain
μ ∂∂z [ ψ0 + ψ1 + ψ2 + . . . . . . ]
+ Σt [ ψ0 + ψ1 + ψ2 + . . . . . . . ]
= Q2 + Σs0
2
∫ 1
−1[ ψ0 + ψ1 + . . . . . . . ] dμ
′
c
Likewise,adding up all of the first boundary conditions of Eqns.(3.82) and (3.83), we obtain
[ψ0(0, μ) + ψ1(0, μ) + . . . . ] = ψl(μ) 0 < μ ≤ 1,
46

and adding up all of the second boundary conditions of Eqns.(3.82) and (3.83), we obtain
[ ψ0(L, μ) + ψ1(L, μ) + . . . . ] = ψr(μ) − 1 ≤ μ < 0
Therefore, if we define
ψ(z, μ) =∞∑n=0
ψn(z, μ) , (84)
then ψ satisfies the original problem (3.81). We have from problems (3.82) and (3.83):
ψn = the angular flux due to neutrons that have undergone exactly n collisions.
Thus, ψ0 = uncollided flux, ψ1 = once-collided flux, ....., ψn = n-th collided flux. These interpretations
are consistent with Eqn.(3.85), because then ψ is the sum of the angular fluxes of neutrons that have under-
gone all possible numbers of collisions.
The One-Group Diffusion Equation: Let us consider the following general-geometry one-group transport
problem:
1v
∂ψ
∂t+ Ω · ∇ ψ + Σt ψ =
14π
∫4π
(Σs0 + 3 Ω · Ω′Σs1) ψ dΩ
′+
Q
4π
=Σs04π
∫ψ dΩ
′+
3 Σs14π
Ω ·∫
Ω′ψ dΩ
′+
Q
4π
=Σs04π
φ +3 Σs14π
Ω · J +Q
4π
=14π
(Σs0 φ + 3 Σs1Ω · J + Q) (85)
where
φ =∫ψ dΩ
′= scalar flux
J =∫
Ω ψ dΩ′
= current(86)
Eqn.(3.86) holds for points r in a spatial domain D. The initial and boundary conditions to go with Eqn.(3.86)
are
ψ(r,Ω, 0) = ψi(r,Ω) (87)
47

ψ(r,Ω, t) = ψb(r,Ω, t) , r ∈ ∂D , Ω · n < 0 (88)
We wish to derive the full P1 approximation to this general problem. To do this, we need the identities
∫dΩ = 4π
∫Ω dΩ = 0∫
Ω Ω dΩ = 4π3 I
∫Ω Ω Ω dΩ = 0
(89)
Now, we first operate on Eqn.(3.86) by∫
(·)dΩ and get
1v
∂φ
∂t+ ∇ · J + (Σt − Σs0) φ = Q (90)
This is the ’balance’ or ’conversation’ equation. If we multiply Eqn.(3.91) by a small volume element d3r,
then each term has the following physical interpretation:
1v
∂φ
∂td3r + ∇ · J d3r + ( Σt − Σs0) φ d3r = Q d3r
- First term on the left: rate of change of φ in d3r
- Second term on the left: rate of leakage out of d3r
- Last term on the left: rate of absorption in d3r
- Term on the right: production rate due to source in d3r
Next, we operate on Eqn.(3.86) by∫
Ω(·)dΩ and get
1v
∂
∂tJ + ∇ ·
∫Ω Ω ψ dΩ + ( Σt − Σs1 ) J = 0 (91)
Eqns.(3.91) and (3.92) are exact. To close them (so that there are the same number of equations as un-
knowns) we must approximate the integral in Eqn.(3.92) using φ and J . We do this using
ψ(r, J, t) � 14π
[ φ(r, t) + 3 Ω · J(r, t) ] (92)
This approximates ψ in terms of spherical harmonic functions of order 0 and 1 in such a way that Eqn.()
are preserved. [Thus, this approximation sets to zero all spherical harmonic moments of ψ of order ≥ 2.]
48

Introducing Eqn.(3.93) into the integral in Eqn.(3.92), we obtain
∇ · ∫ Ω Ω ψ dΩ � ∇ · ∫ Ω Ω ( φ + 3 Ω · J ) dΩ , for Ω · J = 0 ,
= 14π∇ · ( 1
4π
∫Ω Ω dΩ) φ = 1
4π ∇ · (4π3 I) φ
= 13∇ · I φ = 1
3 ∇ φ
Hence, Eqn.(3.92) becomes
1v
∂
∂tJ +
13∇ φ + ( Σt − Σs1 ) J = 0
Defining
Σa = Σt − Σs0 ( absorption cross section )
ΣtR = Σt − Σs1 ( transport cross section )(93)
we obtain the general− geometryP1equations:
1v
∂
∂tφ + ∇ · J + Σa φ = Q , (94)
1v
∂
∂tJ +
13∇ φ + Σtr J = 0 (95)
The approximation that lead to these equations is valid provided ψ is nearly isotropic (of the form of Eqn.()
with |J | � φ), absorption is low, and space and time derivatives are weak:
φ = 0(1)
| J | = 0(∈)
| ∇ | = 0(∈)
∂/∂t = 0(∈2)
Σa = 0(∈2)
Q = 0(∈2) all for ∈� 1
(96)
This scaling is such that each term in Eqn.(3.95) is 0(∈2). However, applying this scaling to Eqn.(3.96), we
find
Σtr J = 0(∈)13 ∇ φ = 0(∈)
1v
∂∂t J = 0(∈3)
49

Thus, we can delete ∂J/∂t in Eqn.() [note that this is not an approximation for steady-state problems] and
obtain
J = − 13 Σtr
∇ φ = −D ∇ φ (97)
where
D(r) =1
3 Σtr(r)= diffusioncoefficient (98)
Now, using Eqn.(3.98) to eliminate J from Eqns.(3.95) and (3.96), we obtain the time-dependent diffusion
equation
1v
∂
∂tφ − ∇ ·D ∇ φ + Σa φ = Q (99)
[note that the second term on the left side of the above equation is approximate.]
and
ψ(r,Ω, t) � 14π
[ φ(r, t) − 1Σtr
Ω · ∇ φ(r, t) ] (100)
Note that the scaling (3.97) implies that each term in Eqn.(3.100) is O(∈2), and that the second term on
the right side of (3.101) is smaller than the first.
Eqn.(3.100) does not fully determine φ; initial and boundary conditions must also be derived. To obtain
the initial condition, we operate on Eqn.(3.88) by∫
(·)dΩ and obtain
φ(r, 0) =∫ψi (r,Ω, 0) dΩ (101)
Next, let us attempt to solve Eqn.(3.89) with the approximatio (3.101), i.e.,
ψb (r,Ω, t) =14π
[ φ(r, t) − 1Σtr
Ω · ∇ φ(r, t) ] r ∈ ∂D , Ω · n < 0 (102)
This boundary condition clearly cannot be satisfied, in general, for every direction Ω. Therefore, we shall
approximately satisfy it: we operate by
50

∫Ω·n<0
| Ω · n |(·) dΩ (103)
and obtain
∫Ω·n<0
| Ω · n | ψb(r,Ω, t) dΩ = J−(r, t)
= −∫
Ω·n<0
Ω · n 14π
( φ(r, t) − 1Σtr
Ω · ∇ φ(r, t) ) dΩ
= − 14π
∫Ω·n<0
Ω · n [ φ − 1Σtr
[ Ω − ( Ω · n ) n + ( Ω · n ) n ] · ∇ φ ] dΩ
= − 14π
∫Ω·n<0
Ω · n [ φ − 1Σtr
(Ω · n)(n · ∇) φ ] dΩ +1
4π Σtr[
∫Ω·n<0
Ω · n [ Ω − (Ω · n) n ] dΩ ]·∇ φ
for k = n and Ω · n by problem (3.18)
= − 14π
∫ 0
μ=−1
∫ 2π
φ=0
μ [ φ − 1Σtr
μ n · ∇ φ ] dφ dμ
= − 12
∫ 0
−1
[ μ φ − 1Σtr
μ2 n · ∇ φ ] dμ
= − 12
[ − 12φ − ‘
13 Σtr
n · ∇ φ ] =14
[ φ +2
3 Σtrn · ∇ φ ]
This yields the ’incident current’ or ’mixed boundary condition’
4 j−(r, t) = φ(r, t) +2
3 Σtr(r)n · ∇ φ(r) , r ∈ ∂D , n = unit outer normal (104)
The weight function |Ω · n| in Eqn.(3.104) is chosen for physical reasons (the incident partial current is
preserved). However, other weight functions can lead to slightly better results. For example, for ψb = 0, it
can be shown that ’the transport-corrected’ boundary condition
0 = φ(r, t) +0.7104Σtr
n · ∇ φ(r, t) r ∈ ∂D (105)
is more accurate than (3.105).
At a reflecting transport boundary, we can derive an exact diffusion boundary condition. Let us consider a
point r on the boundary of D at which
ψ(r,Ω) = ψ(r,Ωr) Ω · > 0 (106)
51

where Ωr is the reflection of Ω of the boundary:
n
Ω
Ω
Ω−(Ω.
Ω−(Ω
Ω.(
n)n
.n)n
n)n
r
Ωr = [ Ω − (Ω · n) n ] − (Ω · n) n = Ω − 2 (Ω · n) n
Ωr · n = − Ω · n (107)
Then, the transport current at this point satisfies
n · Jtr =∫n · Ω ψ dΩ
=∫n·Ω>0 [ n · Ω ψ(Ω) + n · Ωr ψ(Ωr) ] dΩ
=∫n·Ω>0
[ n · Ω ψ(Ω) − n · Ω ψ(Ω) ] dΩ = 0
Requiring the diffusion current to also satisfy this, we get, from (3.98), the following reflecting boundary
condition:
n · ∇ φ(r, t) = 0 r ∈ ∂D (108)
52

Finally, if the domain D has material discontinuities across an interface Γ:
then ψ is continuous across Γ, so [by Eqn.(3.87)] φtransport and J transport will be continuous:
material 1 material 2
rr
Γ
− +. .
φtransport (r+, t) = φtransport (r−, t)
J transport (r−, t) = J transport (r−, t)
We also require the diffusion scalar flux and current to be continuous across an interface.
Thus, using Eqn.(3.98), we obtain the interface conditions:
φ(r+, t) = φ(r−, t)
D(r+)∇ φ(r+, t) = D(r−) ∇ φ(r−, t)
Therefore, across an interface, φ will be continuous, but ∇ φ will be discontinuous:
Q = 0 Q = 0
Q > 0
Σ << 1
∼ ∼Σ ∼ 1Σ ∼ 1a
a
a
Eqns.(3.100), (3.102),(3.105),(3.109), and (3.110) now fully specify φ.
53

We have already stated that ψb = 0, then the boundary condition (3.105) can be replaced by the more
accurate condition (3.106). These can be written as
0 = φ(r, t) + λ n · ∇ φ(r, t) (110)
where
λ =
⎧⎨⎩
2/(3 Σtr) standart diffusion theory
0.7104/Σtr transport-corrected diffusion theory
Using
φ(r + λ∇, t) � φ(r) + λ n · ∇ φ(r, t) + λ2
2 (n · ∇)2 φ(r) + . . . .
= λ2
2 (n · ∇)2 φ(r) = 0(∈2) [ see Eqn. (3.97) ] ,
we see that Eqn.(3.110) can be approximated by the ’extrapolated endpoint condition’:
0 = φ(r + λ∇, t) r ∈ ∂D , n = unit outer normal (111)
true boundaries
extrapolated boundaries
λ λ
φ>0 , φ = φ
φ>0 ,
φ = − φ <0 < 0ddx
ddx
n.Vn.V
The constant λ in Eqns.(3.110)-(3.112) is termed the extrapolation distance.
54

Remarks: Because Eqn.(3.109) cannot be satisfied, the diffusion solution will be inaccurate at material
boundaries. However, a few mean free paths away from boundaries, it is often much more accurate.
transport solution
diffusion solution
vacuum boundary
dDD
z
Therefore, if a system is many mean free paths thick, the diffusion solution can be quite accurate in ’most’
of the system (i.e., away from boundaries and interfaces, where transport effects can dominate).
Derivation of One-Group Diffusion Theory by the Method of Successive Approximations:
To conclude this section on the one-group diffusion equation, we shall discuss the validity of the P1 method
for deriving this equation. The idea is to derive the diffusion equation by a different method that more
clearly demonstrates the validity of the assumptions used in the P1 method. We begin this derivation with
the slab geometry transport equation
μ∂ψ
∂z(z, μ) + Σt ψ(z, μ) =
12
[ Σs0∫ 1
−1
ψ(z, μ′) dμ
′+ Q(z) ] (112)
and we assume that the leakage term is small compared to the collision and scattering terms, i.e.,
μ∂
∂z� Sigmat or
μ
Σt∂
∂z� 1 (113)
Then, just using the inequality (3.114), we can derive the standart diffusion approximation
55

− d
dz
13Σt
d
dzφ(z) + Σa φ(z) = Q(z) (114)
to Eqn.(3.113) using the method of successive approximations. This derivation is of onterest because it
provides insight into the P1 method.
The successive approximations idea is simple: It says that if the leakage term is small, then it can be
approximated more crudely than the other terms, and in thr first approximation, we can ignore it altogether.
Doing this, Eqn.(3.113) reduces to
Σt ψ(z, μ) =12
[ Σs0∫ 1
−1
ψ(z, μ′) dμ
′+ Q(z) ] (115)
Thus, defining the scalar flux
φ(z) =∫ 1
−1
ψ(z, μ) dμ
we get from Eqn.(3.116)
Σt φ = Σs φ + Q ⇒ Σa φ = Q , (116)
and using this to eliminate Q from Eqn.(3.116), we obtain
Σt φ =12
[ Σs φ + Σa φ ] =12
[ Σt φ ]or
ψ(z, μ) = 12 φ(z)
(117)Eqns.(3.117) and (3.118) are the zero-th order (infinite medium) result.
To obtain a better approximation, we introduce the result (3.118) into the leakage term in Eqn.(3.113)
and obtain
μd
dz
φ
2+ Σt ψ =
12
[ Σs φ + Q ] (118)
Integrating over μ , (∫ 1
−1(·)dμ), we obtain
Σtφ = Σs φ + Q ⇒ Σa φ = Q (119)
and using this to eliminate Q in Eqn.(3.119), we get
μd
dz
φ
2+ Σt ψ =
12
[ Σs φ + Σa φ ] =12
Σt φ
56

Thus,
ψ(z, μ) =12
[ φ(z) − μ
Σtdφ
dz(z) ] (120)
This is the first order-result. We note that Eqns.(3.117) and (3.120) agree, but Eqn.(3.121) contains a (small)
correction term to (3.118).
To do netter, we use the result (3.121) in the leakage term in Eqn.(3.113) and get:
μ
2d
dz( φ − μ
Σtdφ
dz) + Σt ψ =
12
[ Σs φ + Q ] (121)
Integrating over μ, we obtain
− d
dz
13 Σt
d
dzφ(z) + Σa φ = Q , (122)
and using this result to eliminate Q from Eqn.(3.122), we get
μ
2d
dz(φ − μ
Σtdφ
dz) + Σt ψ =
12
[ Σs φ − d
dz
13 Σt
dφ
dz+ Σa φ =
12
[ Σt φ − d
dz
13Σt
dφ
dz]
or
ψ =12
[ φ − μ
Σtdφ
dx+
3μ2 − 13
(1Σt
d
dx) (
1Σt
d
dx) φ ] (123)
Eqn.(3.123) is the standart diffusion equation, and using
P0(μ) = 1 , P1(μ) = μ , P2(μ) = 3μ2−12
We see that Eqn.(3.124) is a Legendre polynomial expansion of the angular flux, with the coefficient of
P2 small compared to that of P1, and the coefficient of P1 small compared to that of P0. This justifies the
closure relation used in the P1 method; when space derivatives are weak, the P2 moment of the angular flux
is small, and it is consistent to set it to zero.
Finally, operating on Eqn.(3.124) by∫ 1
−1 μ (·) dμ ,
we obtain
J(z) =∫ 1
−1
μ′ψ(z, μ
′) dμ
′= − 1
3 Σtdφ
dz(z) ,
57

which is just Fick’s Law.
In summary, we have shown that in regions where space derivatives are weak; i.e., where scattering dom-
inates leakage, the assumptions underlying the P1 approximation are valid, and diffusion theory should be a
good approximation to transport theory.
The Energy-Dependent Diffusion Equation: Now let us consider the energy-dependent transport equa-
tion
1v
∂ψ
∂t+ Ω · ∇ ψ + Σt ψ
=14π
∫ ∫[ Σs0(E
′ → E) + 3 Ω′ · Ω Σs1(E
′ → E) ] ψ(r, E′,Ω
′, t) dΩ
′dE
′+
14π
Q(r, E, t) (124)
We wish to derive the P1 approximation for this more general equation. As before, we operate by∫
(·) dΩand
∫Ω (·) dΩ to obtain exactly
1v
∂φ
∂t+ ∇ · J + Σt φ =
∫[ Σs0(E
′ → E) φ(r, E′, t) dE
′+ Q(r, E
′, t) (125)
1v
∂J
∂t+ ∇ ·
∫Ω Ω ψ dΩ + Σt(E) J =
∫[ Σs1(E
′ → E) J(r, E′, t) dE
′(126)
To close these equations, we take
ψ(r, E′,Ω
′, t) � 1
4π[ φ(r, E, t) + 3 Ω · J(φ(r, E, t) ]
so that, as before,
∇ ·∫
Ω Ω ψ dΩ � 13∇ φ
and then we obtain the ’energy-dependent P1 equations’:
1v
∂φ
∂t(r, E, t) + ∇·J(r, E, t) + Σt φ(r, E, t) =
∫Σs0(E
′ → E) φ(r, E′, t) dE
′+ Q(r, E, t) , (127)
1v
∂J
∂t(r, E, t) +
13∇ φ(r, E, t) + Σt(E) J(r, E, t) =
∫Σs1(E
′ → E) J(r, E′, t) dE
′(128)
To proceed, approximations to terms (A, the first term in the left hand side of Eqn.(3.129)) and (B, the
58

right hand side of Eqn.(3.129)) are introduced:
(A): As in the one-group case, it is customary to set
1v
∂J
∂t= 0
( B): Here, one takes
Σs1(E′ → E) � Σs1(E
′) δ(E
′ → E) (129)
where
Σs1(E′) =
∫Σs1(E
′ → E) dE (130)
Then,
∫Σs1(E
′ → E) J(r, E′, t) dE
′ �∫
Σs1(E′) δ(E
′ → E) J(r, E′, t) dE
′= Σs1(E) J(r, E, t)
Although this is approximate,∫
(·) dE of this equation is exact because of Eqn.(3.131). Eqn.(3.129) now
becomes
13∇ φ + Σt J = Σs1 J
so, once again, we obtain Fick’s law
J(r, E, t) = −D(r, E) ∇ φ(r, E, t) (131)
D(r, E) =1
3 [ Σt ( D(r, E) ) − Σs1 ( D(r, E) ) ], (132)
and Eqn.(3.128) becomes the standart ’time and energy-dependent diffusion equation’:
1v
∂φ
∂t(r, E, t) − ∇ ·D(r, E) ∇ φ(r, E, t) + Σt(r, E) φ(r, E, t)
=∫
Σs0(r, E′ → E) φ(r, E
′, t) dE
′+ Q(r, E, t) (133)
Note that to derive this equation, we need to make an approximation [Eqn.(3.130)] that is not required for
the derivation of the one-group diffusion equation.
59

CHAPTER 4 : ONE-GROUP DIFFUSION THEORY (Chapter 5, Duderstadt and Hamilton)
Analytic One-Group Diffusion Theory
- Diffusion Coefficient
- Diffusion Length
- Jump Condition (across a delta source)
- Green’s Functions
Plane Source, Infinite Medium
Point Source, Infinite Medium
- Geometric Buckling
- Material Buckling
- k-Eigenvalue
- Reactivity
- Perturbation Theory
Inner Product
Adjoint Operator
Adjoint Boundary Conditions
Self-Adjoint Operator
Perturbation of k-Eigenvalue Problems
Numerical One-Group Diffusion Theory
- Fixed Source Problems
Spatial Mesh
Tridiagonal Matrix
Diagonally Dominant Matrix
Gaussian Elimination
- k-Eigenvalue (Criticality) Problems
Inverse Power Iteration Method
1

In this chapter we shall consider analytical and numerical solution methods for fixed source and eigen-
value problems in the one-group diffusion approximation derived in the previous chapter. First we shall work
out some fixed source problems that can be solved analtically.
Example 1: Plane source in an infinite homogeneous medium
Let us consider a delta-function source at x = x0, of strength S0:
− Dd2φ
dx2(x) + Σ φ(x) = S0 δ(x− x0)
or
φ′′(x) − 1
L2= − S0
Dδ(x− x0), (1)
where
D =1
3 Σtr= diffusion coefficient (2)
L =√D
Σa=
1√3 Σtr Σa
= diffusion length (3)
At x = x0, we want φ(x) to be continuous, but we shall allow φ′(x) to be discontinuous. Then, operating
on Eqn.(1) by∫ x0+∈x0−∈ (·) dx
we obtain
φ′(x0+ ∈) − φ
′(x0− ∈) − 1
L2
∫ x0+∈
x0−∈φ(x) dx = − S0
D
Now, letting ∈→ 0, we obtain the ’jump condition’
φ′(x0) − φ
′(x0) = − S0
D= 0 (4)
The diffusion problem can now be written
φ′′(x) − 1
L2= 0 x = x0 (5)
φ(x0) − φ(x0) = 0 (6)
φ′(x0) − φ
′(x0) = − S0
D(7)
2

φ(±∞) = 0 (infinite medium) (8)
Solutions of Eqn.(5) are φ = e±x/L. Therefore, Eqns.(5),(6),and (8) imply
φ(x) =
⎧⎨⎩
A e−(x−x0)/L x > x0
A e−(x0−x)/L x < x0
Then
φ′(x) =
⎧⎨⎩
− AL e−(x−x0)/L x > x0
AL e−(x−x0)/L x < x0
so Eqn.(7) implies
(− AL ) − (AL ) = − S0
D or A = S0L2D
and
φ(x) =S0L
2De| x−x0 |/L (9)
xxo
φ
If we have a source which is a sum of plane delta functions:
S(x) =∑Ii=1 Si δ(x− xi) then φ(x) = L
2D
∑Ii=1 Si e
−| x−xi |/L
3

Likewise, if the source is distributed,
S(x) =∫ ∞−∞ S(x
′) δ(x− x
′) dx
′
then φ(x) = L2D
∫ ∞−∞ S(x′) e−| x−x′ |/L dx
′=
∫ ∞−∞ G(x, x
′) S(x
′) dx
′
where
G(x, x′) =
L
2De−| x−x′ |/L (10)
is the ’infinite medium Green’s function for a plane source’.
Physical Interpretation of the Jump Condition: Using
J(x) = − Ddφ
dx(x) i = current,
the jump condition (4) can be written
[ −D dφdx (x0 + 0) ] + [ −D dφ
dx (x0 − 0) ] = S0
or [ i · J(x0 + 0) ] + [ − i · J(x0 − 0) ] = S0
or J+(x0 + 0) + J−(x0 + 0) S0 (J± = partial currents)
−i i
x xxo
o o + εε−
Thus, the rate at which neutrons are produced by the source (S0) equals the rate at which neutrons leak
away from the point x0.
4

Example 2: Point source in a finite homogeneous slab: (See Chapter 4 problems.)
Example 3: Point source in an infinite medium:
− 1r2
d
drD r2
dφ
dr+ Σa φ = S0
δ(r)4πr2
(11)
φ(∞) = 0 (12)
In spherical geometry, dV = 4πr2dr. Therefore, for all R > 0,
∫ R
0
S0δ(r)4πr2
dV = S0
∫ R
0
δ(r) dr = S0
so we have a point source of strength S0. Operating on Eqn.(11) by∫ ε0
(·) dV , we get
− 4π D r2 dφdr |ε0 + 4π
∫ ε0
Σa φ r2 dr = S0
Letting ε → 0, we obtain
S0 = limr→0
(4πr2)[ − Ddφ
dr(r) ] = lim
r→0(ar)J+(r) (13)
This says that the rate (S0) at which neutrons are produced by the delta function source at r=0 equals the
rate at which neutrons flow out of the sphere centered at r=0 with infinitely small radius. The problem thus
can be rewritten as
1r2
d
drr2
d
drφ − 1
L2φ = 0 0 < r < ∞ (14)
limr→∞φ(r) = 0 (infinite medium) (15)
limr→0
r2dφ
dr= − S0
4πD(limr→0
4πr2J+ = S0) (16)
Solutions of Eqn.(15) are:
φ(r) =e±r/L
r⇒
⎧⎨⎩
B er/L
r , r > 0
A e−r/L
r , r < 0
5

To satisfy Eqn.(16), we must ignore the solution that grows as r → ∞ and take
φ(r) =e−r/L
r
Then,
r2 dφdr = r2 A [ − 1
r2 e−r/L − 1rL e−r/L ]
= − A (1 + rL) e−r/L → −A forr = 0
so −A = − S04πD
or
φ(r) =S0
4πDe−r/L
r(17)
In cartesian geometry, with a delta function source of unit strength at r = r0, we obtain from Eqn.(18)
φ(r) = e−|r−r0|/L4πD |r − r0| = G(r, r0) = infinite medium Green′s function for a point source
Remark 1: Let us consider one neutron emitted per second, S0 = 1. Then, the probability that the neutron
is absorbed in dr about r is
Σa φ(r) dV = Σa φ(r) 42 dr = Σa ( 14πD
e−r/L
r ) 4πr2 dr
= Σa
D r e−r/L dr = rL2 e
−r/L dr ( L =√
DΣa
)
Thus, the root mean square distance between emission and absorption, < r2 >1/2, satisfies
< r2 > =∫ ∞0r2 [ r
L2 e−r/L ] dr = L2
∫ ∞0
( rL)3 e−r/L d( rL )
for t = rL ,
= L2∫ ∞0t3 e−t dt = L2 Γ(4) = 6 L2
so
< r2 >1/2 =√
6 L � 2.45 L (18)
Remark 1: For the case of a unit source (S0 = 1) and a pure absorber we have
6

D = 13 Σtr
= 13 (Σt−Σs1)
= 13 Σt
Σa = Σt − Σs0 = Σ , Σtr = Σt − Σs1 = Σt − μ0 Σs
L =√
DΣa
=√
13 Σt
1Σt
= 1√3 Σt
and Eqn.(18) gives
φdiff (r) =1
4π (1/3Σt)e−
√3Σt r
r=
3 Σt4π
e−√
3Σt r
r(19)
The exact transport scalar flux, from Eqn.(3.36), is
φtransp(r) =e− Σt r
4πr2(20)
Therefore, in this problem, diffusion theory is quite inaccurate.
Example 4: Shell source in a finite sphere: (See Chapter 2 problems)
Example 5: Finite slab geometry with a plane source:
The problem schematically has the form
vacuumboundary
vacuumboundary
material 2 material 2material 1
0 a / 2 a / 2 + b− a / 2 − b − a / 2
plane sources ofstrength So
xx o o−
and the specific equations are:
7

d2φdx2 − 1
L2 φ = 0 0 < x < x0 , x0 < x < a/2d2φdx2 − 1
L2 φ = 0 a/2 < x < a/2 + b [ + 23 Σtr
]dφdx (0) = 0 reflecting boundary condition
φ(x0 + 0) − φ(x0 − 0) , φ′(x0 + 0) − φ
′(x0 − 0) = − S0
D1jump conditions
φ(a2 + 0) = φ(a2 − 0) , D1dφdx (a2 + 0) = D2
dφdx (a2 − 0) interface conditions
φ( a2 + b + 2
3 Σtr) = 0 extrapolated endpoint boundary condition
φ( a2 + b ) + 2
3 Σtr
dφdx ( a
2 + b ) zero incident current boundary condition
a/2 a/2+b0 xo
The solution of this problem has the form
φ(x) =
⎧⎪⎪⎪⎨⎪⎪⎪⎩
A1 e−x/L1 + B1 e
x/L1 0 < x < x0
A2 e−x/L1 + B2 e
−x/L1 x0 < x < a/2
A3 e−x/L2 + B3 e
−x/L2 a/2 < x < a/2 + b
Now, we have two boundary conditions, two jump conditions, and two interface conditions to detrmine the
six constants Ai, Bi. Thus, the diffusion problem has been reduced to a purely algebric problem of solving
a linear system of six equations and six unknowns. (We will not carry out the details here.)
Example 6: Distributed source in a finite homogenous medium:
Now, we wish to solve
8

∇2 φ(r) − 1L2
φ(r) = − Q(r)D
r ∈ D+ [extrapolated domain] (21)
φ(r) = 0 r ∈ ∂D+ [extrapolated endpoint boundary condition] (22)
To do this, we construct eigenfunctions ψn(r) and eigenvalues B2n satisfying, for n ≥ 1,
∇2 ψn(r) + B2n ψ(r) = 0 r ∈ ∂D+ (23)
ψn(r) = 0 r ∈ ∂D+ (24)∫D+
ψ2n d
3r = 1 (25)
It is now possible to show (but we will not do this here) that
Having ψnandBn, we expand
Q(r) =∞∑n=1
Qn ψn(r) , (26)
where, by Eqn.(26),
Qn =∫D+
ψn(r′) Q(r
′) d3r
′(27)
We also expand
φ(r) =∞∑n=1
φn ψn(r) (28)
where φn are to be determined. Note that by Eqn.(25), the ’guess’ (29) satisfies the boundary condition
(23). Thus, it remains to shoose the constants φn so that the differential equation (22) is satisfied.
Introducing Eqns.(27) and (28) into (22), we obtain
∑∞n=1 φn (∇2 − 1
L2 ) ψn(r) =∑∞n=1 (− Qn
D ) ψn(r)
or∑∞
n=1 φn (B2n + 1
L2 ) ψn(r) =∑∞n=1 (Qn
D ) ψn(r)
Therefore,
9

φn = Qn
D1
B2n + 1/L2 = Qn
Σa + D B2n
for DL2 = Σa
so φ(r) =∑∞
n=1Qn
Σa + D B2nψn(r) =
∑∞n=1 ( 1
Σa + D B2n) [
∫D+ ψn(r
′) Q(r
′) d3r
′] ψn(r)∫
D+ [∑∞
n=1ψn(r) ψn(r
′)
Σa + D B2n
] Q(r′) d3r
′
∫D+ G(r, r
′) Q(r
′) d3r
′
(29)
where
G(r, r′) =
∞∑n=1
ψn(r) ψn(r′)
Σa + D B2n
= finite medium Green′s function
The eigenvalues B2n and eigenfunctions ψn can be explicitly constructed for certain geometries. For example,
for a slab with a reflecting boundary at x=0 and a vacuum boundary at x=a/2, we have
0 = ψ”n(x) + B2
n ψn(x) 0 < x < a2 + λ
= ψ′n(0) = 0
= ψn(a2 + λ) = 0∫ a
2 + λ
0 ψ2n(x) dx = 1
Then,
ψn(x) = 2√a + 2 λ
cos Bn(x)
Bn = (2 n − 1) πa + 2 λ n = 1, 2, 3, ........
(30)
We note that B1 < B2 < B3 < ..........
One-Speed Diffusion Theory for a Nuclear Reactor:
Let us now consider the following transport problem for a spatial domain D:
1vdψdt + Ω · ∇ ψ + Σt(E) ψ = 1
4π
∫Σs0 + 3 Ω · Ω′
Σs1 ψ(r,Ω′, t) dΩ
′
+ ν Σf
4π
∫ψ(r,Ω
′, t) dΩ
′+ Q(r,t)
4π , r ∈ D ,
ψ(r,Ω, 0) = ψi(r,Ω) r ∈ D
ψ(r,Ω, t) = 0 r ∈ ∂D , Ω · n < 0
The diffusion approximation to this problem is
1vdφdt − D ∇2 φ + Σa φ = ν Σf φ + Q ( r ∈ D+ )
φ(r, 0) = φi(r) =∫ψi(r,Ω) dΩ , ( r ∈ D+ )
φ(r, t) = 0 ( r ∈ ∂D+ ) ,
(31)
where
10

D = 13 Σtr
= 13 ( Σt − Σs1 )
Σa = Σt − Σs0 , Σtr = Σt − Σs1
D+ = extrapolated distance
As before, we consider eigenfunctions ψn(x) and eigenvalues B2n satisfying
∇2 ψn(r) + B2n ψn(r) = 0 r ∈ D+
ψn(r) = 0 r ∈ ∂D+
∫D+ ψn(r
′) ψm(r
′) d3r
′= δnm
B1 < B2 < B3 < . . . . . .
(32)
To solve problem (32), we write
Q(r, t) =∑∞
n=1Qn(t) ψn(r)
( Qn(t) =∫ψn(r) Q(r, t) d3r = known )
(33)
φ(r, t) =∑∞
n=1 φn(t) ψn(r)
( φn(t) =∫ψn(r) φ(r, t) d3r = unknown )
(34)
We note that because each eigenfunction ψn satisfies the boundary condition of problem (32), then φ sat-
isfies this boundary condition also. It remains to make φ satisfy the diffusion equation (32) and the initial
condition of this equation. Thus, introducing (34) and (35) into (32), we find
∑∞n=1[
1v φ
′n(t) ψn(r) − D φn(t) ∇2 ψn(r) + Σa φn(t) ψn(r)
− ν Σf φn(t) ψn(r) − Qn(t) ψn(r) ] = 0
or∑∞
n=1[1v φ
′n(t) + ( D B2
n + Σa − ν Σf ) φn(t) − Qn(t) ] ψn(r) = 0
Hence,
dφndt
(t) + λn φn(t) = v Qn(t) , (35)
λn = v ( D B2n + Σa − ν Σf ) (36)
Solving Eqn.(36), we get
φn(t) = φn(0) e−λnt + v
∫ t
0
Qn(t) e−λn(t−t′) dt′
(37)
Now, Eqn.(32) is satisfied, and initial condition of Eqn.(32) is satisfied if
φi(r) =∑∞
n=1 φn(0) ψn(r)
so φn(0) =∫D+ ψn(r) φi(r) d3r =
∫D+
∫4π ψn(r) ψi(r,Ω) dΩ d3r
11

Hence, the solution of the diffusion problem (32) is:
φ(r, t) =∑∞
n=1[ φn(0) e−λnt + v∫ t0Qn(t) e−λn(t−t′ ) dt
′] ψn(r) ,
where λn = v ( D B2n + Σa − ν Σf ) ( λ1 < λ2 < . . . . )
φn(0) =∫D+
∫4πψn(r) ψi(r,Ω) dΩ d3r
Qn(t) =∫ψn(r) Q(r, t) d3r
In a source-free medium, we set Q = Qn = 0 and get
φ(r, t) = φ1(0) e−λ1t ψ1(r) +∑∞n=2[ φn(0) e−λnt ψn(r)
= e−λ1t [ φ1(0) ψ1(r) +∑∞n=2[ φn(0) e−(λn−λ1)t ψn(r)
� e−λ1t φ1(0) ψ1(r) for t 1
Thus, λ1 determines the long-time behaviour of the system.
Definitions:
1.Geometric Buckling = B2g = B2
1 = the smallest eigenvalue of the diffusion problem (33 ) (38)
Examples:
B2g =
⎧⎪⎪⎪⎨⎪⎪⎪⎩
(πa )2 slab of width a, a = a+ 2λ (Eqn.(31))
(πa )2 + (πb)2 rectangle of width a, length b
(πa )2 + (πb)2 + (πc )
2 rectangular parallel piped of width a, length b, height c
2.Material Buckling = B2m = νΣf−Σa
D
3. A reactor is critical when a steady-state neutron flux can be sustained in the absence of sources, is
subcritical when the neutron flux tends to zero as t → ∞, and is supercritical when the neutron flux → ∞as t→ ∞. Because
λ1 = v ( D B21 + Σa − ν Σf ) = v D ( B2
1 − νΣf − ΣaD
) = v D ( B2g − B2
m )
then
12

supercritical iff λ1 < 0 iff B2g < B2
m
critical iff λ1 = 0 iff B2g = B2
m
subcritical iff λ1 > 0 iff B2g > B2
m
(39)
Criticality (k-Eigenvalues): Let us consider the transport k-eigenvalue problem
Ω · ∇ ψ + Σt(E) ψ − 14π
∫Σs0 + 3 Ω · Ω′
Σs1 ψ dΩ′
= 1kν Σf
4π
∫ψ dΩ
′r ∈ D
ψ(r,Ω, 0) = 0 r ∈ ∂D , Ω · n < 0
We seek the largest eigenvalue k for which a nonzero solution exists. Clearly,
supercritical iff k > 1
critical iff k = 1
subcritical iff k < 1
(40)
The diffusion approximation to this (homogenous medium) problem is:
− D ∇2 φ(r) + Σa φ(r) =1kν Σf φ(r) r ∈ D+ (41)
φ(r) = 0 ( r ∈ ∂D+ ) (42)
To solve this problem, let us again consider ψn(r), Bn satisfying (33). Then, ’guessing’ φ = ψn, Eqn.(43) is
satisfied and Eqn.(42) becomes:
− D ∇2 ψn + Σa ψn = 1kn
ν Σf ψn
or D B2n ψn + Σa ψn = 1
knν Σf ψn
therefore, kn = ν ΣfΣa + D B2
n
The largest kn occurs for the smallest Bn = B1 = Bg. Therefore, we obtain the explicit formula
kn =ν Σf
Σa + D B2g
=Σa + D B2
m
Σa + D B2g
(43)
We note that Eqns.(40) and (41) are consistent, because of Eqn.(44).
Remark: We can now make a connction between the largest k-eigenvalue of the diffusion problem (42),(43)
[or of the proceeding transport problem] and the multiplication factor k defined in Chapter 2. Using the
notation in Eqns.(42) and (43), let us suppose that the n-th fission generation is φ(n)(r) and let us define
13

the (n+1)-st fission generation to be the solution of the problem
− D ∇2 φ(n+1)(r) + Σa φ(n+1)(r) = ν Σf φ(n)(r) r ∈ D+
φ(n+1)(r) = 0 ( r ∈ ∂D+ )(44)
Then, φ(n+1) represents all the neutrons in the system that result from the fission source νΣfφ(n). According
to the definition on page 2-1, we should take
MF = multiplication factor =
∫D+ φ(n+1)(r) d3r∫D+ φ(n)(r) d3r
This definition, however, depends on the spatial variation of φ(n)(r); as we continuously change φ(n)(r), and
we would expect to continuously change MF. Therefore, let us modify the above definition as follows:
MF = largest possible ratio
∫D+ φ(n+1)(r) d3r∫D+ φ(n)(r) d3r
(45)
Now, how do we determine this? Using some higher-level mathematics that we cannot go into here, one
can show that it suffices to look only at fission-generations that reproduce their spatial shape, i.e.,that satisfy
φ(n+1)(r) = k φ(n)(r)
Then, Eqns.(45) and (46) become:
k [ − D ∇2 φ(n)(r) + Σa φ(n)(r) ] = ν Σf φ(n)(r) r ∈ D+
φ(n+1)(r) = 0 ( r ∈ ∂D+ )(46)
multiplication factor = largest k (47)
Now, because the problems (47) and (45) are identical, we have shown that the largest eigenvalue of either
of these problems is, in fact, the multiplication factor.
Definition:
reactivity = ρ =k − 1k
= 1 − 1k
(48)
Then,
supercritical iff ρ > 0
critical iff ρ = 0
subcritical iff ρ < 0
Perturbation Theory: One can obtain exact ’pencil-and-paper’ solutions of one-group diffusion problems
14

only for fairly special problems, typically having good spatial symmetries and (at worst) only a few spatial
regions. However, using perturbation theory, we can obtain approximate ’pencil-and-paper’ solutions of
problems that are nearly, but not exactly, of this type. The idea is to first obtain the exact solution of the
’nice’ problem that is close to the desired problem, and then to generate approximate correction terms. To
do this for eigenvalue problems, we must first intriduce the concepts of inner product, adjoint operator, and
adjoint boundary conditions.
Let L be a linear operator and let B(L) be the set of boundary conditions for L. So, let (,) denote an inner
product. Then tha adjoint operator L∗, together with the adjoint boundary conditions B(L∗), is defined to
satisfy
(g, Lf) = (L∗g, f)
Example: Let L be the ordinary differential operator
Lf(x) = − ddxD(x) d
dxf(x) + u(x) ddxf(x) + Σ(x)f(x) 0 < x < a (slab geometry)
Boundary Conditions
B(L): f(0) = 0, f(a) = 0
the inner product
(f, g) =∫ a0 f(x)g(x)dx
We will now construct L∗ and B(L∗). To do this we let f(x) be any function satisfying
B(L) : f(0) = f(a) = 0
(g, Lf) =∫ a0g(x) [ − d
dxD(x) dfdx + u(x) df
dx + Σ(x) f(x) ] dx
=∫ a0g ddxD
dfdx dx +
∫ a0g u df
dx dx +∫ a0g Σ f dx
= − [ g (D dfdx) |a0 − ∫ a
0dgdx D
dfdx dx ] + [ g u f |a0 − ∫ a
0d gudx f dx ] + [
∫ a0 (Σ g) f dx ]
= − g D dfdx |a0 + (D dg
dx) f |a0 − ∫ a0
( ddx D
dgdx ) f dx − ∫ a
0( ddxg u ) f dx +
∫ a0
(Σ g) f dx
= − [ g(a) D(a) f′(a) − g(0) D(0) f
′(0) ] +
∫ a0 [ − d
dx Ddgdx − d
dxu g + Σ g ] f dx
= (L∗g, f) ⇒ ( g , Lf ) = ( L∗g , f )
provided we define L∗ and B(L∗) as
L∗g(x) = − ddx D(x) d
dx g(x) − ddx u(x) g(x) + Σ(x) g(x)
B(L∗) : g(0) = 0 , g(a) = 0 ( Boundary condition )
We note that if u(x)=0, then L = L∗andB(L) = B(L∗). In this case, the operator L is self-adjoint.
15

L = L∗ ⇒ L is self − adjoint
L = [− ddx D
ddx + (ν Σf − Σa) ] = one speed diffusion equation
Theorem: Let L be self-adjoint, and let there exists a nonzero function f such that
if Lf = 0 (49)
then, the problem
Lg = Q (50)
has a solution if and only if (f,Q) = 0
Proof (one way only): Suppose Eqn.(51) has a solution. Then,
(f,Q) = (f, Lg) = (L∗f, g) = (Lf, g) = (0, g) = 0 for Lf = 0
Application: Let us consider the following ’unperturbed’ eigenvalue problem:
L φ0 = − ddx D
ddxφ0 + ( a − ν Σf
k0) φ0 = 0 0 < x < a for slab plane
φ0 = φ0(a) = 0 ,
which is solved by φ0, k0. We wish to compute the change in reactivity if νΣf is perturbed by a small
amount, i.e.,if
ν Σf (x) → ν Σf (x) + Δ ν Σf (x) ,
whereΔ ν Σf
ν Σf� 1
To solve this problem, we set
φ = φ0 + Δφ1k0
= 1 − ρ0
1k = 1 − ρ = 1 − ( ρ0 + Δρ0 ) = 1
k0− Δρ
Then, we want
− ddx D
ddxφ + ( Σa − ν Σf
k ) φ = 0
or 0 = − ddx D
ddx(φ0 + Δφ) + [Σa − ( 1
k0− Δρ) (ν Σf + Δ ν Σf )] (φ0 + Δφ)
= − ddx D
ddxφ + [ Σa − ν Σf
k0+ (Δρ)(ν Σf ) − 1
k0(Δ ν Σf ) + (Δρ)(Δ ν Σf ) ] (φ0 + Δφ)
=
16

Thus, we have
Lφ0 = 0 (L is self − adjoint)
and we want
L Δφ = ( Δ ν Σf
k0− (Δρ) ν Σf ) φ0
( Δ ν Σf
k0− (Δρ) ν Σf ) = Q
By the theorem, the existence of Δφ follows only if
0 = ( φ0, [ ΔνΣf
k0− (Δρ)νΣf ] φ0 )
=∫ a0φ0(x) [ ΔνΣf
k0− (Δρ)νΣf ] φ0(x) dx
Hence, we get the desired result:
Δρ =1k0
∫ a0 φ
20 ΔνΣf (x) dx∫ a
0 φ20 νΣf (x) dx
Remark: The general one-group diffusion operator
L φ(r) = − ∇ ·D(r) ∇ φ(r) + Σ(r) φ(r) r ∈ D
with boundary conditions
B(L) : φ(r) + b(r) n · ∇ φ(r) = 0 r ∈ ∂D
where b(r) is arbitrary, L is self-adjoint. Therefore, this type of theory can be applied in very general ways
in one-group diffusion calculations.
Numerical One-Group Diffusion Theory: We have seen that the use of ’analytical’ or ’pencil-and-paper’
methods for solving one-group diffusion problem is applicable only to a limited class of geometrically simple
(or, nearly simple) problems. For ’realistic’ problems that have complicated geometrical features, one must
obtain numerical solutions. Wewill now discuss how to do this in slab geometry.
17

To begin, let us consider the ’fixed-source’ diffusion problem:
L = − d
dxdd
dxφ(x) + Σa(x) φ(x) = Q(x) = Q0(x) + Q1(x) (51)
dφ
dx(0) = 0 (reflecting) (52)
φ(a) + 2 D(a)dφ
dx(a) = 0 (zero incident current) (53)
We impose a spatial mesh on the physical system:
x x x x x xΔ Δ Δ
Σ
1i I
I−1/2 I+1/2i+1/2i−1/23/21/2
ai
Q
D
=a0=
i
oi
where any material discontinuities coincide with the cell edges, xi+1/2. Thus, the cross-sections and the
source Q0i are assumed constant within each cell, as indicated above. We define fluxes φi+1/2 at cell edges,
and we assume that φ and Q1 are constant on each ith ’fivtitious cell’ (’centered’ at xi+1/2).
Δi = xi+1/2 − xi−1/2
Δi+1 = xi+3/2 − xi+1/2
xi = 12 (xi+1/2 + xi−1/2) = xi+1/2 − 1
2Δi
xi = 12 (xi+3/2 + xi+1/2) = xi+1/2 + 1
2Δi+1
Δi−1/2 = xi+1 − xi = 12 (Δi+1 − Δi) 1 ≤ i ≤ I − 1
Δ1/2 = 12 Δ1
ΔI+1/2 = 12 ΔI
18

Q
D
Q
D
Q
D
Q
DΣ Σ Σ Σ
Δ Δ ΔΔ
Δ Δ Δ
1
1 a1
o1
i ai
oi
i+1a
i+1
o,i+1
I aI
oI
i i+1 I
1/2 i+1/2
x x x x x x x
x x x x x x x1/2 3/2 i−1/2 i+1/2 i+3/2 I I+1/2
1/2 1 2 i i+1 I I+1/2
−1/2
I+1/2
Q Q Q
Φ Φ Φ
=a
=a
0=
0=
1,1/2
1/2 i+1/2
1,i+1/2
I+1/2
1,I+1/2
Now we intwgrate Eqn.(52) over xi < x < xi+1: (the i-th fictitious cell)
− [ D(xi+1)dφ
dx(xi+1) − D(xi)
dφ
dx(xi) ] +
∫ xi+1
xi
Σa(x) φ(x) dx =∫ xi+1
xi
[ Q1(x) + Q0(x) ] dx (54)
However, consistent with the above assumptions, we have at an ’interior’ (1 ≤ i ≤ I − 1) cell,
D(xi+1) dφdx (xi+1) = Di+1
φi+3/2 − φi+1/2
Δi+1,
D(xi) dφdx (xi) = Di
φi+1/2 − φi−1/2
Δi,∫ xi+1
xiΣa(x) φ(x) dx =
∫ xi+1
xiΣa(x) dx φi+1/2
= ( 12 Δi Σai + 1
2 Δi+1 Σa,i+1 ) φi+1/2
= (Δi Σai + Δi+1 Σa,i+1Δi + Δi+1
) (Δi + Δi+12 ) φi+1/2
= Σa,i+1/2 Δi+1/2 φi+1/2 ,∫ xi+1
xiQ0(x) dx = 1
2 Δi Q0i + 12 Δi+1 Q0,i+1
(Δi Q0i + Δi+1 Q0,i+1Δi + Δi+1
) (Δi + Δi+12 )
Q0,i+1/2 Δi+1/2 ,∫ xi+1
xiQ1(x) dx = Q1,i+1/2 Δi+1/2
Introducing these approximations into Eqn.(55), we obtain
− Di+1
Δi+1(φi+3/2 − φi+1/2) +
Di
Δi(φi+1/2 − φi−1/2) + Σa,i+1/2 Δi+1/2 φi+1/2 = (Q0,i+1/2 +Q1,i+1/2) Δi+1/2
19

or
− [Di
Δi] φi−1/2 + [
Di
Δi+Di+1
Δi+1+ Σa,i+1/2 Δi+1/2] φi+1/2 − [
Di+1
Δi+1] φi+3/2 = (Q0,i+1/2 +Q1,i+1/2) Δi+1/2 , 1 ≤ i ≤ I−1
(55)
Now we must consider the boundary cells and use the assigned boundary conditions. First, we integrate
Eqn.(52) over the leftmost cell 0 < x < x1 = Δ1/2 and use the boundary condition (53):
− D(x1)dφ
dx(x1) +
∫ x1
0
Σa(x) φ(x) dx =∫ x1
0
(Q0(x) + Q1(x)) dx
Consistent with the earlier discretization, we take:
- D1φ3/2−φ1/2
Δ1+ Σa1 φ1/2 Δ1/2 = (Q0,1 + Q1,1/2) Δ1/2
or
[D1
Δ1+ Σa1 Δ1/2] φ1/2 − [
D1
Δ1] φ3/2 = (Q0,1 + Q1,1/2) Δ1/2 (56)
Finally, we integrate Eqn.(52) over the rightmost cell xI < x < xI+1/2 and obtain
− D(a)dφ
dx(a) + D(xI)
dφ
dx(xI) +
∫ xI+1/2
xI
Σa(x) φ(x) dx =∫ xI+1/2
I
[Q0(x) + Q1(x)] dx (57)
However, the boundary condition (54) implies:
− D(a)dφ
dx(a) = − 1
2φ(a) (58)
Therefore, Eqn.(58) becomes
12φ(xI+1/2) + D(xI)
dφ
dx(xI) +
∫ xI+1/2
xI
Σa(x) φ(x) dx =∫ xI+1/2
I
[Q0(x) + Q1(x)] dx
Consistent with the earlier discretization, we take:
12φI+1/2 + DI
φI+1/2 − φI−1/2
ΔI+ ΣaI φI+1/2 ΔI+1/2 = (Q0I + Q1,I+1/2) ΔI+1/2
or
[12
+DI
ΔI+ ΣaI ΔI+1/2] φI+1/2 − [
DI
ΔI] φI−1/2 = (Q0I + Q1,I+1/2) ΔI+1/2 (59)
Eqns.(56),(57), and (60) can now be written in the following tridiagonal form: We define
Φi = φi−1/2 1 ≤ i ≤ I + 1
Bi = Ai + Ci + Σa,i−1/2 Δi−1/2 1 ≤ i ≤ I + 1(60)
20

Then,
(57) : B1 Φ1 − C1 Φ2 = S1
(56) : −Ai Φi− 1 + Bi Φi − Ci Φi+1 = Si 2 ≤ i ≤ I
(60) : −AI+1 ΦI + BI+1 ΦI+1 = SI+1
If we write this system in matrix notation, we find
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
B1 −C1 0 0 . . . . . .
−A2 B2 −C2 0 . . . . . .
0 −A3 B3 C3 0 . . ....
. . . . . . . . . . . .
. . . . . . . . . −AI BI CI
. . . . . . . . . . . . −AI+1 BI+1
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
Φ1
Φ2
. . .
. . .
. . .
ΦI+1
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
=
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
S1
S2
. . .
. . .
. . .
SI+1
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
This system is called tridiagonal, because inly the main diagonal and the two diagonals immediately above
and below the main diagonal have non-zero elements. Also, this matrix is diagonally dominant because each
diagonal element is greater then the sums of the absolute values of the off-diagonal elements on the same row:
Bi ≥ |Ai| + |Ci|
For these reasons, we can use Gaussian elimination to explicitly solve this system. To describe the logic
behind this method, let us consider a small 3x3 system:
B1 Φ1 − C1 Φ2 = S1 (61)
−A2 Φ1 + B2 Φ2 − C2 Φ3 = S2 (62)
−A3 Φ2 + B3 Φ3 = S3 (63)
The Gaussian elimination method has two parts. In part 1, this system is reduced to an ’upper triangle’
system. Then, in part 2, the upper triangle system is explicitly solved.
Part 1:
1. Define
u1 = B1 , v1 = S1 (64)
21

and write Eqn.(62) as
u1 Φ1 − C1 Φ2 = v1 (65)
2. Multiply by A2/u1:
A2 Φ1 − A2 C1
u1Φ2 =
A2
u1v1
Add this to Eqn.(63):
(B2 − A2 C1
u1) Φ2 − C2 Φ3 = S2 +
A2
u1v1
Define
u2 = B2 − A2 C1
u1, v2 = S2 +
A2
u1v1 (66)
and then
u2 Φ2 − C2 Φ3 = v2 (67)
3. Multiply (68) by A3/u2:
A3 Φ2 − A3 C2
u2Φ3 =
A3
u2v2
Add this to (64):
(B3 − A3 C2
u2) Φ3 = S3 +
A3
u2v2
Define
u3 = B3 − A3 C2
u2, v3 = S3 +
A3
u2v2 (68)
and then
u3 Φ3 = v3 (69)
This system (62)-(64) has now been converted to the upper triangle system:
u1 Φ1 − C1 Φ2 = v1 (70)
u2 Φ2 − C2 Φ3 = v2 (71)
22

u3 Φ3 = v3 (72)
Part 2:
4. Eqn.(66) → Φ3 = v3 / u3 ,
5. Eqn.(68) → Φ2 = (v2 + C2 Φ3) / u2 ,
6. Eqn.(70) → Φ1 = (v1 + C1 Φ2) / u1
This describes in detail the Gaussian elimination procedure for the simple 3x3 system. The algorithm
is simple and mechanical and can be applied to tridiagonal diagonally dominant system of any size. The
general Gaussian elimination procedure for such a system of I+1 equations
B1 Φ1 − C1 Φ2 = S1
−A2 Φ1 + B2 Φ2 − C2 Φ3 = S2
−Ai Φi−1 + Bi Φi − Ci Φi+1 = Si
−AI ΦI−1 + BI ΦI − CI ΦI+1 = SI
−AI+1 ΦI + BI+1 ΦI+1 = SI+1
(73)
is as follows:
1. Define
u1 = B1 , v1 = S1
and then, for i=2,3,....,I+1, define recursively
ui = Bi − Ai Ci−1
ui−1, vi = Si +
Ai Vi−1
ui−1
2. Now, take
ΦI+1 =1
uI+1vI+1
and then, for i=I, I-1, ....., 2,1, compute recursively
23

ΦI =1ui
(vi + Ci Φi+1)
This procedure explicitly solves Eqn.(71). Thus, we can explicitly obtain a numerical solution
Φi+1/2 = Φi+1 0 ≤ i ≤ I
of the fixed-source diffusion problem.
Remark: If the incident partial current on the right boundary is
I−(a) =14
[φ(a) + 2 D(a)dφ
dx(a)] = 0 [byEqn.(54)]
then the exiting partial current is
J+(a) =14
[φ(a) − 2 D(a)dφ
dx(a)] =
14
[φ(a) + φ(a)] =12φ(a) =
12φI+1/2
and the total current is:
J(a) = i · j(a) = J+(a) − J−(a) =12φI+1/2
Eigenvalue (Criticality) Calculations: In the above, we have considered the numerical solution of fixed source
problems. Let us now consider obtaining numerical solutions of the k-eigenvalue problem
− d
dxD(x)
d
dxφ(x) + Σa(x) φ(x) =
1kν Σf (x) φ(x) 0 < x < a (74)
dφ
dx(0) = 0 (75)
φ(a) + 2 D(a)dφ
dx(a) = 0 (76)
Note: The right hand side of equation (72) is discretized exactly like the absorption term Σaφ(x), or, like the
source Q1(x) in our treatment of fixed-source problems. We note that if φ(x) is a solution (an eigenfunction)
of this problem, then Aφ(x) is also a solution, for any constant A. Therefore, with no loss of generality, we
require φ(x) to satisfy the normalization condition
1a
∫ a
0
ν Σf φ(x) dx = 1 (77)
24

xa
reflectorreflector
core
zero incident current bcreflecting bc
The problem (72)-(74) is equivalent to the fixed source problem (52)-(54) if we set
Q(x) =1kν Σf φ(x)
However, we do not know k or φ, so we do not know Q. Nevertheless, we can determine Q by oterating.
Inverse Power Iteration Method: We construct a sequence of functions
φ0(x), φ1(x), φ2(x), . . . .
and constants k0, k1, k2, . . . .
that have the following properties:
1a
∫ a
0
ν Σf (x′) φn(x
′) dx
′= 1 n ≥ 0 (78)
φn(x) → φ(x) for n → ∞kn → k for n → ∞
We (typically) begin with the guesses
φ0(x) = [ 1a∫ a0 ν Σf (x
′) dx
′]−1 = constant
k0 = 1
Then, for any n ≥ 0, havinh an estimate φn(x) for the eigenfunction that satisfies Eqn.(76), and an
estimate kn for the eigenvalue, we generate improved estimates φn+1(x) and kn+1 as follows:
25

First, we solve the fixed source problem
− d
dxD(x)
d
dxφn+1/2(x) + Σa(x) φn+1/2(x) =
1kn
ν Σf (x) φn(x) 0 < x < a (79)
dφn+1/2
dx(0) = 0
φn+1/2(a) + 2 D(a)dφn+1/2
dx(a) = 0
Integrating Eqn.(77) over 0 < x < a and then rearranging, we obtain
kn =
∫ a0 ν Σf (x
′) φn(x
′) dx
′
∫ a0 ( − d
dxD(x′ ) ddxφ
n+1/2(x′) + Σa(x′ ) φn+1/2(x′ )) dx′
Now, using the most recent estimate of the scalar flux in this formula, we define
kn+1 =
∫ a0ν Σf (x
′) φn+1/2(x
′) dx
′
∫ a0 ( − d
dxD(x′) ddxφ
n+1/2(x′) + Σa(x′ ) φn+1/2(x′)) dx′
Dividing these last two equations, we obtain the simplier result
kn+1 = kn (1a
∫ a
0
ν Σf (x′) φn+1/2(x
′) dx
′) (80)
Finally, we renormalize φn+1/2(x′) by taking
φn+1(x′) =
φn+1/2(x′)
1a
∫ a0 ν Σf (x
′) φn+1/2(x′) dx′ (81)
so that Eqn.(76) is satisfied. The inverse power iteration method is now fully specified by Eqns.(77)-(79).
We stop iterating when k(n) and φ(n) are sufficiently converged, i.e., when
|k(n+1) − k(n)| < ε
and
max |φ(n+1)(x) − φ(n)(x)| < δ , 0 ≤ x ≤ a
Here ε and δ are preassigned numbers, typically ε = 10−5 and δ = 10−4.
Plane source in infinite medium: One of the most basic problem in neutron diffusion theory is the cal-
culation of the neutron flux from a plane source in an infinite medium.
The equation can be written as
Dd2φ
dx2− Σa φ = 0
26

with the boundary condition φ → 0 as x → ∞ and the source condition
12S0 = − D
dφ
dx, x > 0
where S0 is the source strength.
Now we set κ2 = Σa/D, we get the diffusion equation as
φ′′
= κ2 φ = 0
The general solution is
φ(x) = A e−κx + B eκx
Now B=0 to prevent φ → ∞ at x → ∞. To get A, we use the source condition. A and then φ are
determined as
A =S0
2 κ D, φ =
S0
2 κ De−κx
If we set L=1/κ , this is called the diffusion length. L is a measure of the distance they travel before
they are absorbed.
medium L (cm)
H2O 2.88
D2O 100
Be 23.6
C 50
The mean distance of travel from the source is
x =∫ ∞
−∞x φ(x) dx /
∫ ∞
−∞φ(x) dx = 0
The mean square distance of travel is
x2 =∫ ∞
−∞x2 φ(x) dx /
∫ ∞
−∞φ(x) dx = 2 L2
27

CHAPTER 5 : MULTIGROUP DIFFUSION THEORY (Chapter 7, Duderstadt and Hamil-
ton)
- Group Structure
Logarithmic
Directly Coupled
- g-th Energy Group
- Scalar Flux for the g-th Energy Group
- Spectral Function
- Multigroup Diffusion Approximation
- Group Collapse
- Removal Cross Section
- Fixed Source Problem
Power Iteration
Fission Source
Inner Iteration
Outer Iteration
- k-Eigenvalue Problems
Inverse Power Iterations
- One-Group Diffusion Approximation
- Two-Group Diffusion Approximation
- One and One-Half Group Approximation
1

We begin this chapter with the energy-dependent diffusion equation derived earlier in chapter-3:
1v
dφ
dt−∇·D∇φ+ Σtφ(r, E, t) =
∫Σs(E
′ → E)φ(r, E′, t)dE
′+ χ(E)
∫νΣf (E
′)phi(r, E
′, t)dE
′+Q(r, E, t)
(1)
which we assume to hold for points r in a spatial domain D, t > 0, and Emin < E < Emax.
The initial and boundary conditions to go with this equation are
φ(r, E, t) = φi(r, E) (2)
φ(r, E, t) + 2D(r, E) n · ∇ φ(r, E, t) = 0 r ∈ ∂D (3)
We shall now discretize the energy variable using the multigroup approximation. [This derivation will be
similar to the derivation of the multigroup transport equations outlined in chapter-3.]
To begin, we introduce a group structure
Emin = EG < ........ < Eg < Eg−1 < ....... < E0 = Emax
with the g-th energy group defined by
Eg < E < Eg−1
Often the group structure is chosen to be logarithmic, i.e., Eg−1/Eg = r > 1 (all g)
Then,
(E0E1
)(E1E2
)...........(EG−2EG−1
)(EG−1EG
) = rG = ( E0EG
)
so r = ( E0EG
)1/G
and hence we obtain the explicit formula
Eg = 1r Eg−1 = 1
r2 Eg−2 = ......... = 1rg E0 = (EG
E0)g/G E0
or
Eg = Eg/GG E
1−g/G0 , 0 ≤ g ≤ G (4)
Eqn.(1) can now be written
1v
dφ
dt−∇·D∇φ + Σtφ =
G∑g′=1
∫ Eg′−1
Eg′
Σs(E′ → E) φ dE
′+ χ(E)
G∑g′=1
∫ Eg′−1
Eg′
νΣf (E′) phi dE
′+Q (5)
2

We define the scalar flux for the g-th energy group
φg(r, t) =∫ Eg−1
Eg
phi(r, E′, t)dE
′
and integrate Eqn.(5) over Eg < E < Eg−1, obtaining
∂∂t
∫ Eg−1
Eg
1v φ dE − ∇ · ∫ Eg−1
EgD ∇ φ dE +
∫ Eg−1
EgΣt φ dE
=∑G
g′=1
∫ Eg′−1
Eg′ [
∫ Eg−1
EgΣs(E
′ → E) dE] φ(r, E′, t) dE
′
+ [∫ Eg−1
Egχ dE]
∑Gg′=1
∫ Eg′−1
Eg′ νΣf (E
′) φ dE
′+
∫ Eg−1
EgQ(r, E, t) dE
(6)
Now, we use the approximation
φ(r, E, t) � ψ(r, t) ϕ(E)
where ϕ(E) is a precomputed spectral function, to get, for each term in Eqn.(6),
∫ Eg−1
Eg
1v φ dE = [
∫ Eg−1
Eg
1v φ dE /
∫ Eg−1
Egφ dE] φg(r, t)
= [∫ Eg−1
Eg
1v ϕ dE /
∫ Eg−1
Egϕ dE] φg(r, t) = 1
vgφg(r, t)
(7)
∫ Eg−1
EgD ∇ φ dE � ∫ Eg−1
EgD ∇ ϕ ψ dE
= [∫ Eg−1
EgD ϕ dE] ∇ ψ(
∫ Eg−1
EgD ϕ dE /
∫ Eg−1
Egϕ dE) ∇ ∫ Eg−1
Egϕ ψ dE
� (∫ Eg−1
EgD ϕ dE /
∫ Eg−1
Egϕ dE) ∇ ∫ Eg−1
Egφ dE
= Dg(r) ∇ φg(r, t) ,
(8)
∫ Eg−1
EgΣt φ dE = (
∫ Eg−1
EgΣt φ dE /
∫ Eg−1
Egφ dE) φg
= (∫ Eg−1
EgΣt ϕ dE /
∫ Eg−1
Egϕ dE) φg
= Σtg(r) φg(r, t) ,
(9)
∫ Eg′−1
Eg′
∫ Eg−1
EgΣs(E
′ → E) dE φ(r, E′t) dE
′(∫ ∫
Σs(E′ → E) φ dE dE
′/
∫ g′−1
g′ φ dE′) φg′
� (∫ g′−1
g′∫ g−1
gΣs(E
′ → E) ϕ dE dE′/
∫ g′−1
g′ ϕ dE′) φg′
= Σs;g′ ,g(r) φg′ (r, t) ,
(10)
3

∫ Eg−1
Eg
χ dE = χg , (11)
( Note that∫ E0
EG
χ(E) dE = 1 which implies
G∑g=1
= 1 ) (12)
∫ Eg′−1
Eg′ νΣf (E
′) φ dE
′= (
∫ g′−1
g′ νΣf φ dE′/
∫ g′−1
g′ φ dE′) φg′
(∫ g′−1
g′ νΣf ϕ dE′/
∫ g′−1
g′ ϕ dE′) φg′
= (νΣf )g′ φg′ (r, t) ,
(13)
∫ Eg−1
Eg
Q(r, E, t) dE = Qg(r, t) (14)
Combining Eqns.(6)-(14), we obtain the following system of multigroup diffusion equations:
1vg
∂
∂tφg − ∇·Dg ∇φg + Σtg φg(r, t) =
G∑g′=1
Σsg′g φg′ + χg
G∑g′=1
(νΣf )g′ φg′ + Qg , 1 ≤ g ≤ G (15)
Summary:
1. Determine the spectral function ϕ(E) [D and H, Chapters 8, 9, and 10]
2. Determine group structure [EG < EG−1 < ..... < E0] [D and H, Chapter 8]
3. Determine multigroup constants [D and H, Chapter 7] [Eqns.(7)-(14)]
4. Solve Eqn.(13) [DH, Chapter 7. See below.]
Remark 1: The above procedure can also be used to performe a group collapse. The starting point is
not the energy-dependent diffusion equation (1), but rather a system of multigroup diffusion equations [of
the form (13)] with a ’large’ number G1 of groups, and the result is a similar system of multigroup diffusion
equations with fewer (G2) groups. To perform this group collapse , we need a spectral function χg defined
on the fine group structure. In doing this collapse, there is a trade-off: there is a loss in accuracy, due to
the reduction in the number of groups, but on the other hand the calculations required to solve the problem
become less expensive.
Remark 2: The above derivation of Eqn.(15) is exact if
a) ∂φ∂t = 0 and
4

b) D(E),Σt(E),Σs(E′ → E), χ(E), and νΣf (E) are constants for E and E
′in each energy group,
or
φ(r, E, t) = ψ(r, t) ϕ(E)
Structure of Σsg′g: In scattering process, high-energy neutrons lose energy and thermal neutrons gain
or lose energy. Therefore, if we have only one thermal energy group, then since
Σsg′g is the rate at which neutrons scatter from group g′to g.
Then
Σsg′g =
⎧⎨⎩
0 g′> g
≤ 0 g′ ≤ g
(16)
In addition, if the group structure is chosen carefully, it is sometimes possible to have
Σsg′g =
⎧⎪⎪⎪⎨⎪⎪⎪⎩
0 g′> g
≤ 0 g′
= g and g′ − 1 = g
0 g′ − 1 < g
In this case, the groups are said to be directly coupled; neutrons can scatter downward at most one group
at a time. Henceforth, we will assume that Eqn.(16) holds, but we will not assume that the groups are
directly coupled. Thus, if we define
Σrg = Σtg − Σsg′g = removal cross section for group g (17)
then Eqn.(15) can be written
1vg
∂
∂tφg − ∇ ·Dg ∇φg + Σrg φg =
g−1∑g′=1
Σsg′g φg′ + χg
G∑g′=1
(νΣf )g′ φg′ + Qg , 1 ≤ g ≤ G (18)
These are the multigroup diffusion equations with fission and downscattering (but no upscattering). The
appropriate initial and boundary conditions are:
φg(r, 0) = φig(r) , r ∈ D (19)
φg(r, t) + 2 D(r) n(r) · ∇ φg(r, t) = 0 , r ∈ ∂D , t > 0 (20)
5

These equations can be discretized in time and space exactly as in the previous chapter. Assuming that
this is done, one than has, even for steady-state problems, a much more complicated set of equations to
solve than in the one-group case that we considered in Chapter 4. Therefore, it is not feasible to solve these
equations by a direct method such as Gaussian elimination, and an iteration scheme must be used.
Power Iteration for Fixed Source Problems: For steady-state problems, Eqn.(18) can be written
−∇ ·D1 ∇φ1 + Σr1 φ1 = (χ1 F + Q1)
−∇ ·D2 ∇φ2 + Σr2 φ2 = (Σs12 φ1) + (χ1 F + Q2)...
−∇ ·DG ∇ φG + ΣrG φG = (∑G−1
g′=1Σsg′G φg′ ) + (χG F + QG)
where
F (r, t) =G−1∑g′=1
ν Σfg′ φg′ = fission source
This suggests the iteration scheme:
−∇ ·D1 ∇φ(n+1)1 + Σr1 φ
(n+1)1 = (χ1 F
(n) + Q1)
−∇ ·D2 ∇φ(n+1)2 + Σr2 φ
(n+1)2 = (Σs12 φ1) + (χ1 F
(n) + Q2)...
−∇ ·DG ∇ φ(n+1)G + ΣrG φ
(n+1)G = (
∑G−1g′=1
Σsg′G φ(n+1)
g′ ) + (χG F (n) + QG)
(21)
f (n+1)(r) =G∑
g′=1
ν Σfg′ φ(n+1)
g′ (r) (22)
The boundary condition for each of these equations is
φg(r) + 2 D(r) n(r) · ∇ φg(r) = 0 , r ∈ ∂D (23)
We stop iterating when the fission source is sufficiently converged, i.e., when
maxr∈D |f (n+1)(r) − f (n+1)(r)| < ε , (24)
where ε is a preassigned number, typically, ε = 10−5.
Remarks:
1. At each step in this scheme, one is only required to solve a one-group diffusion equation.
6

2. In one-dimensional problems, each one-group diffusion problem can be solved directly by Gauss elimina-
tion. However, in two or three dimensional problems, one must iterate to solve the equations that old within
each group. These iterations are called inner iterations .
3. A single sweep through all of Eqns.(21),(22),(23)) constitutes one outer iteration. Thus, a single outer
iteration consists of possibly many inner iterations in each group.
Inverse Power Iteration for Eigenvalue Problems: Multigroup k-eigenvalue problems typically have the
form
−∇ ·Dg ∇ φg + Σrg φg = (g−1∑g′=1
Σsg′g φg′ ) +1kχg
G∑g′=1
ν Σfg′ φg′ 1 ≤ g ≤ G, r ∈ D (25)
φg + 2 Dg n · ∇ φg = 0 , r ∈ ∂D (26)
We note that if the functions φg(r) satisfy this problem, then Aφg(r) also satisfies it for any constant A.
Therefore, we can make the solution functions φg(r) unique by specifying a normalization, such as:
∫D
(G∑
g′=1
ν Σfg′ φg′ (r)) d3r =
∫D
F (r) d3r =∫D
d3r = V
Physically, this states that the average value of the fission source F (r) across the system is unity.
The inverse power iteration method is defined as follows. We begin the (n+1)-st outer iteration with an
eigenvalue estimate k(n) and a fission source estimate F (n)(r) satisfying
1V
∫D
F (n)(r) d3r = 1 (27)
The first step is to determine φ(n+1/2)g by solving the following fixed-source problem:
−∇ ·Dg ∇ φ(n+1/2)g + Σrg φ
(n+1/2)g = (
∑g−1
g′=1Σsg′g φ
(n+1/2)
g′) + χg
k(n) F(n) , r ∈ D
φg + 2 D n · ∇ φg = 0 , r ∈ ∂D(28)
Next, we define
f (n+1/2)(r) =G∑
g′=1
ν Σfg′ φ(n+1/2)
g′ (r) , (29)
and then sum up Eqns.(21),(22),(23) over g and use∑χg = 1:
G∑g=1
(−∇ ·Dg ∇ φ(n+1/2)g + Σrg φ(n+1/2)
g −g−1∑g′=1
Σsg′g φ(n+1/2)
g′) =
1k(n)
F (n)
7

Now we integrate over the spatial domain D and solve for k(n):
k(n) =
∫DF (n)(r) d3r∫
D
∑Gg=1 [−∇ ·Dg ∇ φ
(n+1/2)g + Σrg φ
(n+1/2)g − ∑g−1
g′=1Σsgg′ φg′ ] d3r
Using the most recent estimate for thr scalar fluxes in this formula, we now define
k(n+1) =
∫DF (n+1/2)(r) d3r∫
D
∑Gg=1 [−∇ ·Dg ∇ φ
(n+1/2)g + Σrg φ
(n+1/2)g − ∑g−1
g′=1Σsgg′ φg′ ] d3r
Dividing these last two equations, we obtain the simpler result
k(n+1)
k(n)=
∫D F (n)(r) d3r∫
D F (n+1/2)(r) d3r
or
k(n+1) = k(n) [1V
∫D
F (n)(r) d3r] (30)
Finally, we normalize F (n+1/2)(r) and obtain
F (n+1)(r) =F (n+1/2)(r)
1V
∫D F (n+1/2)(r′) d3r
(31)
The inverse power iteration method is now specified by Eqns.(28)-(31).We stop iterating when
| k(n+1) − k(n) | < ε
and
maxr∈D | F (n+1)(r) − F (n)(r) | < δ
where ε and δ are preassigned (again, typically, ε = 10−5 and δ = 10−4).
Now we shall discuss some applications of Multigroup Diffusion Theory.
One-Group Diffusion Theory : Here one performs a group-collapse down to single energy group that
spans all neutron energies, from thermal to fast.
Eqn.(15) and χ1=1 reduce to tha familiar (from Chapter 4) result
1v1
∂
∂tφ1 − ∇ ·D1 ∇φ1 + Σa1 φ1 = νΣf1 φ1 + Q1
8

E = EE = E1 omin max
Clearly, this one-group model can only contain a limited amount of physics.
Two-Group Diffusion Theory : Here one performs a collapse down to two groups, one describing fast
neutrons and the other describing thermal neutrons.
E = EE = E E = 1 ev1 omin max
thermalgroup
fast group
The dividing energy E1 between the two groups is chosen so that
1) Σs21 = 0 (no neutrons scatter up from the thremal group to fast group)
2) χ2 = 0 (⇒ χ1 = 1) (all fission neutrons are fast)
Then, the general two-group k-eigenvalue problem
− ∇ ·D1 ∇φ1 + Σr1 φ1 = Σs21 φ2 + χ1k (νΣf1 φ1 + νΣf2 φ2)
− ∇ ·D2 ∇φ2 + Σr2 φ2 = Σs12 φ1 + χ2k (νΣf1 φ1 + νΣf2 φ2)
becomes
− ∇ ·D1 ∇φ1 + Σr1 φ1 =1k(νΣf1 φ1 + νΣf2 φ2) (32)
− ∇ ·D2 ∇φ2 + Σr2 φ2 = Σs12 φ1 (33)
9

with boundary conditions
φg + 2 Dg n · ∇ φg = 0 r ∈ ∂D g = 1, 2 (34)
To proceed with problem analytically, we shall replace the boundary conditions Eqn.(34) by the simpler
(and cruder) conditions
φg = 0 r ∈ ∂D g = 1, 2 (35)
Now we can solve the problem Eqn.(32), Eqn.(35) by taking
φg(r) = ϕg ψg(r) g = 1, 2 (36)
where ψg(r) satisfies the eigenvalue problem
2 ψ + B2g ψ = 0 r ∈ D
ψ = 0 r ∈ D
with B2g the geometric buckling. Then the boundary conditions Eqn.(35) are satisfied and Eqns.(32)-(34)
give (for constant cross sections)
(D1 B2g + Σr1)ϕ1 = 1
k ((νΣf )2 ϕ1 + (νΣf )2 ϕ2)
(D2 B2g + Σr2)ϕ2 = Σs12 ϕ1
This is an algebric eigenvalue problem for k. The solution is:
k =νΣf1
D1 B2g + Σr1
+νΣf2
D2 B2g + Σr2
− Σs12D1 B2
g + Σr1(37)
ϕ1 = A (D2 B2g + Σr2)
ϕ2 = A (Σs12)(38)
where A is a constant. By setting k=1, we obtain a criticality condition relating all the cross sections in the
problem to the geometric buckling.
Remark 1: This procedure will not woek with the original group-dependent boundary conditions Eqn.(34).
Remark 2: In Duderstadt Hamilton, pp. 297-298, it is shown that the formula Eqn.(37) can be identified
with the six-factor formula.
10

One and One-Half Group Diffusion Theory: In Eqns.(32)-(22), it is sometimes permissible to set D2 =
0, when the thermal neutron diffusion is unimportant. We then obtain from Eqn.(33),
φ2 =Σs12Σr2
φ1
and introducing this into Eqn.(32), we obtain the modified one-group or the one and one-half group equation
− ∇ ·D1 ∇φ1 + Σr1 φ1 =1k
(νΣf1 φ1 + νΣf2Σs12Σr2
) φ2
This single equation will be much easier to solve than the coupled system of two equations (32)-(22).
Multigroup Perturbation Theory: Let us now consider the multigroup k-eigenvalue problem
L φg = −∇ ·Dg ∇ φg + Σrg φg − (∑g−1
g′=1Σsg′g φg′ ) − 1
k χg∑G
g′=1 ν Σfg′ φg′ r ∈ D
= A φg − 1k B g
(39)
B(L) : φg + 2 Dg n · ∇ φg = 0 , r ∈ ∂D (40)
We suppose that we have consructed a (numerical or analytical) solution, which we denote simply by
φ0g and k, and we must ask: what effect will the small perturbation of a cross section in Eqn.(39) have on
the reactivity ρ = 1 − (1/k)? To answer this question, we must use perturbation theory. However, there
is a difficulty: in general, there is no way to define an inner product for which the multigroup operator L
is self-adjoint. Therefore, the perturbation theory used in Chapter 4 is not of direct use here. However, we
shall see that a rather simpler generilization of this theory is of use.
Let φ(r) denote a vector with G components, whose g-th component is φg(r). Then, for any two such vector
functions φ(r) and ζ(r), let us define the inner product
(φ, ζ) =G∑g=1
∫D
φg(r) ζg(r) d3r (41)
With this inner product, one can show that
L∗ φg = −∇ ·Dg ∇ φg + Σrg φg − (G∑
g′=g+1
Σsg′g φg′ ) − ν Σfgk
G∑g′=1
χg φg r ∈ D (42)
B(L∗) : φg + 2 Dg n · ∇ φg = 0 , r ∈ ∂D (43)
and therefore, L is not self-adjoint, and we cannot use the theorem on page 4-19. However, we can use the
following generalization of this theorem:
11

(Fredholm Alternative) Theorem: Let there exists a nonzero function φ0 such that
L φ0 = 0 and φ0 satisfiesB(L) (44)
Then, there exists a nonzero function φ∗0 such that
L0 φ∗0 = 0 and φ∗0 satisfiesB(L∗) (45)
and the problem
L g = Q (46)
has a solution if and only if
( φ∗0, Q) = 0
Reasonableness proof (one way only): If Eqns.(44),(45),(46) have solution, then
( φ∗0, Q ) = ( φ∗0, Lg ) = ( L∗φ∗0, g ) = ( 0, g ) = 0
Application: Letus return to the multigroup eigenvalue problem
L φ0 = (A − 1kB) φ0 (47)
where the operators A and B are defined in Eqn.(39). We wish to consider the effect on k of perturbations
in the operators A and B. Thus, we let
A → A + ΔA
B → B + ΔB
φ0 → φ0 + Δφ
and
1k = 1 − ρ → 1 − (ρ + Δρ) = 1
k − Δρ
Introducing these perturbations into Eqn.(47), we obtain
12

0 = [A → A + ΔA − ( 1k − Δρ)(B → B + ΔB)] (φ0 + Δφ)
= [(A − 1kB) + (ΔA − 1
kΔB + ΔρB)] (φ0 + Δφ) + O(Δ)
= [L + (ΔA − 1kΔB + ΔρB)] (φ0 + Δφ) + O(Δ2)
= L φ0 + L Δφ + (ΔA − 1kΔB + ΔρB) φ0 + O(Δ2)
= L Δφ + (ΔA − 1kΔB + ΔρB) φ0 + O(Δ2) for L φ0 = 0
or, deleting the O(Δ2) terms,
L Δφ = (−ΔA +1kΔB − ΔρB) φ0
Now, according to the Fredholm Alternative Theorem, a solution of this equation exists if and only if
0 = (φ∗0, (−ΔA +1k
ΔB − ΔρB) φ0)
or, rearranging,
Δρ =(φ0, (−ΔA + 1
kΔB) φ0)(φ∗0, B φ0)
This formula gives (to first order) the small change in ρ due to any small change in the operators A and B.
For example, if we alter the fission cross section
ν Σfg → ν ΣfgΔν Σfg
then
ΔA = = 0
ΔB φ0 = χg∑Gg′=1 Δν Σfg′ φ0g′
so
Δρ = 1k
(φ∗0 , ΔB φ0)
(φ∗0 , B φ0)
= 1k
∑G
g=1
∫D
[φ∗0g(r) χg
∑G
g′=1
Δν Σfg
′ φ0g′ (r)] d3r∑G
g=1
∫D
[φ∗0g(r) χg
∑G
g′=1
ν Σfg
′ φ0g′ (r)] d3r
= 1k
∫D
[∑G
g=1φ∗
0g(r) χg ] [∑G
g′=1
Δν Σfg
′ φ0g′ (r)] d3r∫
D[∑G
g=1φ∗
0g(r) χg
∑G
g′=1
ν Σfg
′ φ0g′ (r)] d3r
Remark 1: To use multigroup perturbation theory, one must compute two unperturbed eigen functions;
one corresponding to the forward operator L, the other to the adjoint operator L∗.
Remark 2: The Fredholm Alternative Theorem described here reduces to the problem on p. 4-19 when
L is self-adjoint.
13

Remark 3: The solution φ∗0 of the adjoint problem is called the ’importance function’, and in later chap-
ters we will see that it has other applications.
14

CHAPTER 6 : FAST SPECTRUM CALCULATIONS (Chapter 8, Duderstadt and Hamil-
ton)
- Introduction
- Elastic ’S-Wave’ or ’Potential’ Scattering
- Infinite Medium Spectrum Equation
- Slowing down Equation
- Hydrogen (A=1) With No Absorption
- Hydrogen (A=1) With an Infinitely Massive Absorber
Resonance Eacape Probability
- Slowing Down Density q(E)
- Neutron Lethargy
Scalar Flux, Collision Density
Elastic Scattering Probability Function
Slowing Down in Hydrogen Without Absorption
Slowing Down Density in Hydrogen
Mean Lethargy Gain per Collision ζ
Number of Collisions to Thermalize
Moderating Power and Moderating Ratio
Multigroup Structure
- Slowing Down in Nonabsorbing Media (Σa = 0) for A > 1
- Slowing Down in Absorbing Media (Σa > 0) for A > 1
- Infinite Medium Resonance Absorption
- A Close Look at Resonance Escape Probabilities
- Approximate Evaluations of Resonance Integrals
Narrow Resonance (NR) Approximation
Narrow Resonance Infinite Mass (NRIM) Approximation
- Slowing Down in a Finite Medium
Slowing Down in Hydrogen (A=1)
Age Approximation (A >> 1)
Continuous Slowing Down Approximation
Consistent Age Approximation (A >> 1)
Grueling-Goertzel Approximation (A >> 1 and A=1)
- Treatment of Spatial Dependence
Age-Diffusion (or ’Age’, ’Fermi Age’, ’Inconsistent Age’, or ’Continuous Slowing Down’) Theory
Fermi Age Equation
Muft-Gram Method, The B1 Method
1

In this chapter, we will consider the problem of computing energy spectra φ(E) for use in multigroup
diffusion calculations. There are three basic types of spectral approximations in common use:
1) Zero-th order approximation: The equations for φ(E) strictly apply only in infinite homogenous media
and contain no spatial dependence at all. [D and H, Chapters 8,9]
2) First-order approximation: ’Buckling’ terms are included in the equations for φ(E). [D and H, Chap-
ters 8,9]
3) Second-order approximation: Cross sections are averaged over a spatially heterogeneous unit cell (e.g.,
a fuel cell). [D and H, Chapter 10]
In this chapter, we will just consider the zero-th order and first-order approximations.
Physics important in various energy ranges:
105ev − 107ev (fast) : No upscattering
Doenscattering (elastic and inelastic)
Resonance absorption
Fission sources
1ev − 105ev (fast) : No upscattering
Doenscattering (elastic)
Resonance absorption
0 − 1ev (thermal) : Upscattering and downscattering
We will only treat elastic downscattering and certain types of resonancs absorption. Our analysis will be
most applicable in the 1ev − 105ev energy range, where inelastic scattering and upscattering are absent.
Elastic ’S-Wave’ or ’Potential’ Scattering: This is defined by
Σs(E′ → E) = Σs(E
′) P (E
′ → E) (1)
where
P (E′ → E) =
⎧⎨⎩
1(1 − α) E′ α E
′< E < E
′
0 otherwise(2)
2

E
E )
E’
P(E’
1
E’(1− α)
α = (A − 1A + 1
)2 , A = mass number of target nucleus (3)
We note that
∫ ∞0
P (E′ → E) dE =
∫ E′
αE′ dE′
(1 − α) E′ = 1∫ ∞0
Σs(E′ → E) dE = Σs(E
′)
(4)
Also,
αE′< E < E
′
E < E′
and αE′< E
E < E′
and E′< E / α
E < E′< E / α
Therefore, we can also write
P (E′ → E) =
⎧⎨⎩
1(1 − α) E′ E < E
′< E/α
0 otherwise(5)
The infinite medium spectrum equation is now defined as:
Σt(E) φ(E) =∫ ∞
0
Σs(E′ → E) φ(E
′) dE
′+ S(E) (6)
3

This is just the diffusion equation for an infinite medium, with no spatial dependence and the known
fission source χ(E) contained in S(E). Also, it is the transport equation for an infinite medium, with no
spatial dependence, an isotropic source S(E) containing χ(E), and written in terms of the scalar flux rather
than the angular flux. For 0 < E < 105ev, χ(E) = S(E) = 0. Also,for elastic scattering,
Σs(E′ → E) = 0 for E
′< E ,
and we obtain the slowing down equation
Σt(E) φ(E) =∫ E/α
E
Σs(E′)
(1 − α) E′ φ(E′) dE
′+ S(E) (7)
Hydrogen (A=1, α = 0) with no absorption (Σa = 0,Σt = Σs): For A=1 and α = 0, Eqn.(7) reduces to:
Σs(E) φ(E) =∫ ∞
0
Σs(E′)
E′ φ(E′) dE
′+ S(E) (8)
This equation can be solved analytically, by converting it to a first-order differential equation and then
solving this differential equation. We set
F (E) = Σt(E) φ(E) = Σs(E) φ(E) (9)
which is the collision rate density.
Then Eqn.(8) can be written
F (E) =∫ ∞
E
F (E′)
E′ dE′
+ S(E) (10)
To convert this into a differential equation, we need the following general formula:
d
dx
∫ a(x)
b(x)
f(x′, x) dx
′=
∫ b(x)
a(x)
∂f
∂x(x
′, x) dx
′+ f [b(x), x] b
′(x) − f [a(x), x] a
′(x) (11)
Differentiating Eqn.(10) with respect to E and using this formula, we get
F′(E) = − F (E) / E + S
′(E)
E F′(E) + F (E) = E S
′(E) + S(E) − S(E)
d
dEE F (E) =
d
dEE S(E) − S(E) (12)
To solve this differential equation, we need a boundary condition. Let us assume that
S(E) = 0 for E ≥ E0 (13)
4

Then, for E ≥ E0, Eqn.(12) gives
ddEE F (E) = 0 so,
E F (E) = C = constant or
F (E) = CE , E ≥ E0
What is the value of the constant C? If there is no source of neutrons for E ≥ E0, then there should be
no neutrons for E ≥ E0, so C=0. Hence,
F (E) = 0 , E ≥ E0, (14)
This is the proper boundary condition.
Now, integrating Eqn.(12) over E0 < E′< E, we obtain
E′F (E
′) |E0E = E
′S(E
′) |E0E − ∫ E0
E S(E′) dE
′
−E F (E) = − E S(E) − ∫ E0
E S(E′) dE
′
F (E) = S(E) + 1E
∫ E0
ES(E
′) dE
′
φ(E) =1
Σs(E)[S(E) +
1E
∫ E0
E
S(E′) dE
′] (15)
If we assume S(E) = 0 for E < E∗
then, for E < E∗, Eqn.(15) reduces to
φ(E) =1
Σs(E)1E
∫ E0
E∗S(E
′) dE
′] (16)
Thus, since Σs(E) = constant, we get
φ(E) � constant
E, E < E∗ (17)
In deriving this result, we assumed S(E) = 0 for E < E∗ and E0 < E.
If S(E) represents a fission source χ(E), then E0 � 108 ev and E∗ � 105 ev.
Hydrogen (A=1, α = 0) with an infinitely massive absorber: Eqn.(7) now becomes:
Σt(E) φ(E) =∫ ∞
E
Σs(E′) φ(E
′)
E′ dE′
+ S(E) (18)
(In a collision with an absorber nucleus, a neutron is either absorbed, or is scattered with the same energy.)
We define
Σt(E) φ(E) = F (E) = collision rate density (19)
5

EEoE*
S(E)
1
Ε Σ (Ε)sφ(Ε)= ( Σ (Ε )
Eo
E*
dE’ )s ’
and
A(E) =Σs(E)E Σt(E)
(20)
Then,
F (E) =∫ ∞E
Σs(E′) Σt(E
′) φ(E
′)
E′ Σt(E′ ) dE
′+ S(E)
=∫ ∞E
A(E′) F (E
′) dE
′+ S(E)
(21)
Hence,
F′(E) = − A(E) F (E) + S
′(E)
ddE (F − S) = − A F = − A (F − S) − A S
′
ddE (F − S) + A (F − S) = − A S
′
ddE (F − S) exp(− ∫ E0
EA(E
′′) dE
′′) = − A S
′exp(− ∫ E0
EA(E
′′) dE
′′)
Taking S(E0) = 0, so F (E0) = 0, we get
− (F (E) − S(E)) exp(− ∫ E0
E A(E′′) dE
′′) = − ∫ E0
E A(E′) S(E
′) exp(− ∫ E0
E A(E′′))
or
F (E) = S(E) +∫ E0
E S(E′) A(E
′) e
∫E
′
EA(E
′′) dE
′′dE
′
6

However,
A(E′) exp(
∫ E′
EA(E
′′) dE
′′)
= Σs(E′)
E′ Σt(E′) exp(
∫ E′ Σs(E′′
)
E′′ Σt(E′′ )
dE′′)
E
= Σs(E′)
E′ Σt(E′) exp(
∫ E′ 1E
′′ [1 − Σa(E′′
)
Σt(E′′ )] dE
′′)
E
= Σs(E′)
E′ Σt(E′) exp(ln(E
′
E ) − ∫ E′ Σa(E′′
)
Σt(E′′ )dE
′′)
E
= 1E [Σs(E
′)
Σt(E′ ) ] [exp( − ∫ E′ Σa(E
′′)
Σt(E′′ )dE
′′)]
E
= 1E u(E
′) p(E
′, E)
Therefore,
F (E) = S(E) +1E
∫ E0
E
S(E′) u(E
′) p(E
′, E) dE
′
or
φ(E) =1
Σt(E)[S(E) +
1E
∫ E0
E
S(E′) u(E
′) p(E
′, E) dE
′] (22)
In the absence of absorption, Σa = 0,Σs = Σt, u = p = 1, and Eqn.(22) reduces to Eqn.(15). Therefore,
u(E′) p(E
′, E) = the fraction of (source) neutrons with energy E
′that slow down to energy E
= the probability that a (source) neutron at energy E′will not be absorbed while slowing down to energy E.
(23)
But,
u(E′) =
Σs(E′)
Σt(E′)
= the probability that a neutron with energy E′is scattered (not absorbed) in its first collision
(24)
so,
p(E′, E) = exp( − ∫ E′ Σa(E
′′)
Σt(E′′ )dE
′′)
E
= probability that a neutron, which has initial energy E′and undergoes a scattering event, is not absorbed while slo
= resonance escape probability
(25)
Slowing Down Density: We define the slowing down density, q(r, E), by
q(r, E) d3r = the number of neutrons that slow down past E per second in d3r about r.
We have
7

energyE’EE’’(fixed) (E’>E)(E’’<E)
φ(r, E′) d3r dE
′= the flux of neutrons in d3r about r having energy indE
′about E
′,
so
Σs(E′ → E
′′) [φ(r, E
′) d3r dE
′] dE
′′= the number of neutrons within d3r about r that scatter from
within dE′about E
′to within dE
′′about E
′′per second.
Therefore,
q(r, E) =∫ E
E′′=0
[∫ E0
E′=EΣs(E
′ → E′′) φ(r, E
′) dE
′] dE
′′(26)
Using Eqn.(11), we obtain
∂∂E q(r, E) = [
∫ E0
E′=E Σs(E′ → E) φ(r, E
′) dE
′] + [
∫ EE′′=0 [−Σs(E→E
′′) φ(r, E)] dE
′′
However,
Σs(E′ → E) = 0 for E
′< E
Σs(E → E′′) = 0 for E
′′> E
so
∂∂E q(r, E) =
∫ E0
E′=E Σs(E′ → E) φ(r, E
′) dE
′ − ∫ E0
E′=0 Σs(E′ → E) dE
′φ(r, E)
= [Σt(E) φ − S] − [Σs(E)] φ
= − S(E) + Σa φ(r, E)
Again, for E > E0, we have S(E)=0, so φ(E)=0, so q(E)=0. Thus,
q(r, E′) |E0E = − ∫ E0
E S(E′) dE
′+
∫ E0
E Σa(E′) φ(E
′) dE
′
or
8

q(r, E) =∫ E0
E S(E′) dE
′ − ∫ E0
E Σa(E′) φ(E
′) dE
′
= the rate at which source neutrons are produced with ranges > E
= the rate at which neutrons with energies > E are absorbed.
(27)
This is a ’balance’ or ’conversation’ law, which must hold in a steady-state situation:
energy
(source neutrons with energy > E)
(neutrons with energy >E that are absorbed)
slow down pastenergy E
(neutrons that
)
The slowing-down density for hydrogen is explicitly given by:
q(E) =∫ EE′′=0 [
∫ E0
E′=E Σs(E′ → E
′′) φ(E
′) dE
′] dE
′′
=∫ EE′′=0 [
∫ E0
E′=EΣs(E
′)
E′ φ(E′) dE
′] dE
′′
= E∫ E0
E′=EΣs(E
′)
E′ Σt(E′) Σt(E
′) φ(E
′) dE
′
= E∫ E0
E′=E A(E′) F (E
′) dE
′
= E [F (E) − S(E)]
=∫ E0
E
S(E′) x(E
′) p(E
′, E) dE
′(28)
where u(E′) and p(E,E
′) are given by Eqns.(24)-(25).
Neutron Lethargy: Lethargy is a variable that is often used in slowing down calculations in place of the
energy variable; this is done because the slowing down equations become mathematically somewhat simplier.
To define lethargy, let E0 be the maximum neutron energy in a system. Then
u = ln(E0E ) = lethargy of a neutron with energy E
E = E0 e−u
(29)
9

E
u
Eo
We note that
1) u ¿ 0 ,
2) as E → 0, u → ∞.
Also,
u = ln(E0) − ln(E) , du = − dE
E(30)
If a neutron has initial energy Ei and (after one or more collisions) a final energy Ef < Ei, then
uf − ui = [ln(E0) − ln(Ef )] − [ln(E0) − ln(Ei)] = ln(EiEf
) (31)
We also note that:
3) uf − ui > 0 (as a neutron loses energy, it gains lethargy)
4) uf − ui is independent of E0 (the change in lethargy is independent of E0).
In many applications, u is a more convenient variable than E because the mathematical form of the slowing
down equation becomes simpler. We will now convert the slowing down equation to u.
Scalar Flux, Collision Density: We have
10

φ(E) dE = the flux of neutrons in dE about E
F(E) dE = Σt(E) φ(E) dE = the number of neutrons in dE about E that undergo collisions per sec. per
cm3.
We wish to define φ(u), f(u) such that
φ(u) |du| = the flux of neutrons in du about u
f(u) |du| = the number of neutrons in du about u that undergo collisions per sec. per cm3.
Thus, we want
φ(u) |du| = φ(E) dE
f(u) |du| = F (E) dE where du = − dEE
(32)
so
φ(u) = φ(E) |dEdu | = E φ(E)
f(u) = F (E) |dEdu | = E F (E)
= E Σt(E) φ(E) = Σt(E) φ(u) = Σt(u) φ(u)
(33)
where
Σt(u) = Σt(E) = Σt(E0 e−u)
From Eqn.(15), we have for the case of hydrogen with no absorption,
E F (E) = constant , E < E∗ ,
so
f(u) = E F (E) = constant , u < u∗
In more general situations, we have f(u) � constant. Hence, f(u) is easier to compute than F(E).
Elastic Scattering Probability Function: We have
P (E′ → E) dE = probability that a neutron undergoing a scattering at energy E
′, has final energy
11

within dE about E
P (E′ → E) =
⎧⎨⎩
1(1 − α) E′ α E
′< E < E
′
0 otherwise
We wish to define p(u′ → u)
p(u′ → u) |du| = P (E
′ → E) dE (34)
Thus, for αE′< E < E
′,
p(u′ → u) = P (E
′ → E) |dEdu | = E(1 − α) E′
= E0 e−u
(1 − α) E0 e−u′ = eu
′−u
1 − α
This holds forαE
′< E < E
′
or
αE0e−u′
< E0 e−u < E0 e
−u′
or
αe−u′< e−u < e−u
′
or
e−u′+lnα < e−u < e−u
′
or
−u′+ lnα < − u < − u
′
or
u′+ ln 1
α > u > u′
Thus,
αE′< E < E
′ → u′+ ln
1α
> u > u′
(35)
These inequalities can be rewritten as
E < E′< E/α → u − ln 1
α < u′< u
However, we cannot have E′> E0 or u
′< 0, so
E < E′< min(E0, E/α) → max(0, u − ln
1α
) < u′< u (36)
Therefore,
P (u′ → u) =
⎧⎨⎩
eu′−u
1 − α u′< u < u
′+ ln 1
α
0 otherwise(37)
12

and for the case of hydrogen (A=1, α=0), we have the simpler result
P (u′ → u) =
⎧⎨⎩
eu′−u u
′< u
0 otherwise(38)
Slowing Down in Hydrogen Without Absorption: From Eqn.(10),
E F (E) =∫ ∞
E
EF (E
′)
E′ dE′
+ E S(E)
or
f(u) =∫ 0
u′=u
E0e−u
E0e−uf(u
′) (−du′
) + s(u) (39)
or
f(u) =∫ u
0
eu′−u f(u
′) du
′+ s(u) (40)
Slowing Down Density in Hydrogen: We have
q(u) = q(E) = E [F (E) − S(E)]
= f(u) − s(u) =∫ u0eu
′−u f(u′) du
′
Therefore,
d
duq(u) = eu·u f(u) +
∫ u
0
[− eu′−u f(u
′)] du
′= f(u) − q(u)
so
ddu q(u) + q(u) = f(u)
q(0) = 0 [fromEqn.(40)](41)
This result, for A=1, is exact. Approximate results for A > 1 having a similar form will be derived later.
Mean Lethargy Gain per Collision: Let a neutron with initial energy E′
scatter off an atom with mass
number A, and let the neutron have final energy E. Then, the change in the lethargy of the neutron is:
u − u′
= lnE
′
E= Δu
13

Let us now define
ζ = mean lethargy gain
= < Δu >
=∫ ∞u′ (u − u
′) p(u
′ → u) du
=∫ u′
+ln 1α
u′ (u − u′) e−(u − u
′)
1 − α du
= 11 − α
∫ ln 1α
0t e−t dt
= 11 − α [−(1 + t) e−t]ln
1α
0
ζ = 1 + α (ln α
1 − α) α = (
A − 1A + 1
)2 (42)
We note that ζ depends only on A, the mass number of the nucleus, and is independent of the initial energy
E′. One can show
ζ � 1 , α � 0 (Asmall)
ζ � 1 − α2 � 1
A , α � 1 (Alarge)
and
α
ζζα
d
d
d ζd α
=
=−1/2
− ❏❏
Number of Collisions to Thermalize: If a neutron has initial energy Ei and (after one or more collisions),
a final energy Ef , than by Eqn.(31)
lnEiEf
= uf − ui = N < Δu > = N ζ
14

Hence,
N =1ζlnEiEf
(43)
where ζ is a function only of A, the mass number of the nucleus.
Moderating Power and Moderating Ratio: A goog moderator has:
large ζ, large Σs, small Σa
Hence, two figures of merit for moderators are:
moderating power = ζ Σs
moderating ratio = ζ Σs
Σa
(44)
(For a good moderator, these are >> 1.)
Multigroup Structure: Multigroup structures are typically chosen so that the gain in lethargy Δu is the
same for each group. Therefore, by Eqn.(31),
Δu = constant = lnEg−1Eg
, all g
so
E0
E1=
E1
E2= . . . . . =
Eg−1
Eg= . . . . =
EG−1
EG= eΔu (45)
Multiplying all these equations, we get
E0
EG= eG Δu so eΔu = (
E0
EG)1/G
Now, multiplying the first of g of Eqn.(45), we obtain
E0
Eg= (eΔu)G = (
E0
EG)g/G
Hence,
Eg = E0 (EGE0
)g/G = E1−g/G0 E
g/GG 0 ≤ g ≤ G
This formula explicitly gives the multigroup boundaries as a function of E0 = Emax, EG = Emin, and G
= the number of groups. This formula is identical to that given by Eqn.(5.2), so these multigroup structures
are logarithmic.
15

Slowing Down in Nonabsorbing Media(Σa = 0withA > 1) : ForΣa = 0,Σs = Σt, and therefore
Eqn.(7) becomes
F (E) =1
1 − α
∫ E/α
E
F (E′)
E′ dE′
+ S(E) ,
where, as usual,
F (E) = Σt(E) φ(E)
Equivalently,
E F (E) = 11 − α
∫ E/αE
E F (E′)
E′ dE′
+ E S(E)
f(u) = 11 − α
∫max(0,u−ln 1α )
uE0e
−u
E0e−u f(u′) (−du′
) + s(u)
or
f(u) =1
1 − α
∫ u
max(0,u−ln 1α )
eu′−u f(u
′) du
′+ s(u) (46)
This equation can be solved explicitly, but to do this we must consider succesive intervals of width Δu = ln(1/α).
First, we shall consider the interval 0 < u < ln(1/α):
f(u) =∫ u
0
eu′−u f(u
′) du
′+ s(u) (47)
f(0) = s(0) (48)
Then
f′(u) = 1
1 − α [f(u) − ∫ u0 eu
′−u f(u′) du
′] + s
′(u)
= 11 − α f(u) − [f(u) − s(u)] + s
′(u)
= α1 − α f(u) + s(u) + s
′(u)
= α1 − α [f(u) − s(u)] + 1
1 − α s(u) + s′(u)
so
(f − s)′ − α
1 − α (f − s) = 31 − α
dds(f − s) e−
α1 − αu = 1
1 − α e−α
1 − αu s(u)
Now, integrating from 0 to u, we get
[f(u) − s(u)] e−α
1 − αu =α
1 − α
∫ u
0
e−α
1 − αu′s(u
′) du
′
or
f(u) = s(u) +α
1 − α
∫ u
0
eα
1 − α (u−u′) s(u
′) du
′0 < u < ln 1/α (49)
16

Now, let us consider in general
ln 1α < u
Then, Eqn.(46) becomes
f(u) = s(u) +α
1 − α
∫ u
u−ln 1α
eu−u′s(u
′) du
′(50)
Differentiating with respect to u and using Eqn.(11) we obtain
f′(u) =
α
1 − α[f(u) − α f(u − ln
1α
)] − [f(u) − s(u)] + s′(u) (51)
This is a differential difference equation, which must be solved recursively, on succesive intervals. To show
this, let us define
fn(u) = f(u) for n ln1α
< u < (n+ 1) ln1α
(52)
Then, we have already determine f0(u) [it is given by Eqn.(49)]. Setting u = n ln 1/α, Eqn.(50) becomes
fn(n ln1α
) − s(n ln1α
) =αn
1 − α
∫ n ln 1α
(n−1) ln 1α
eu′fn−1(u
′) du
′(53)
Now, rewriting Eqn.(51), we get
(f − s)′
= 11 − α [f(u) − α f(u − ln 1
α )] − f + s
= α1 − α f(u) − α
1 − α f(u − ln 1α ) + s
= α1 − α (f − s) + 1
1 − α s − α1 − α f(u − ln 1
α )
so
(f − s)′ − α
1 − α (f − s) = 11 − α [s − α f(u − ln 1
α )]ddu (f − s) e−
α1 − α u = e
− α1 − α
u
1 − α [s − α f(u − ln 1α )]
Integrating from n ln 1α to u [with n ln 1
α < u < (n + 1) ln 1α ], we obtain
[fn(u) − s(u)] e−α
1 − α u − [ αn
1 − α
∫ n ln 1α
(n−1) ln 1α
eu′fn−1(u
′) du
′] e−
α1 − α u
= 11 − α
∫n ln 1
αu e
− α1 − α
u′
[s(u′ ) − α fn−1(u′ − ln 1
α )] du′
= 11 − α
∫n ln 1
αu e
− α1 − α
u′s(u′ ) du′ − α
11−α
1 − α
∫ u− ln 1α
(n−1) ln 1α
e− α
1 − αu′fn−1(u
′ ) du′
Hence,
17

fn(u) = s(u) + 11 − α
∫n ln 1
αu e
− α1 − α
(u−u′ )s(u′ ) du′
+ αn
1−α
1 − α (eα
1 − α u)∫ n ln 1
α
(n−1) ln 1α
eu′fn−1(u
′) du
′
− αn
1−α
1 − α (eα
1 − α u)∫ u− ln 1
α
(n−1) ln 1α
e−α
1 − α u′fn−1(u
′) du
′
(54)
This explicitly gives fn in terms of fn−1. Since we have already determined f0, then we can (in principle)
determine fn for all n ≥ 0. [In practice, it is best to use this relationship numerically.]
Now, in regions where S(u)=0, one can show that
fn(u) = fn−1(u) = C = constant
is a solution of Eqn.(54). Numerical calculations show that if S(u)=0, then we in fact have
fn(u) = � C , nsufficientlylarge
What is the value of the constant C? If we have exactly
fn(u) = C
then, because there is no absorption,
C = f(u) = E F (E) = E Σs(E) φ(E)
Now, by Eqns.(27) and (26), we have for E < E∗
∫ E0
E∗s(E) dE = q(E) =
∫ E
E′′=0
Σs(E′ → E
′′) φ(E
′) dE
′dE
′′
However, for a neutron with energy E′slowing down past E to E
′′,
we get
E < E′< E/α , α E
′< E
′′< E
which means that there are two possible ranges of E′and E
′′
so, using Eqns.(1) and (2),
18

α E’ E’’ E E’
∫ E0
E∗ s(E) dE =∫ E/αE′=E
∫ EE′=αE′
Σs(E′) φ(E
′)
(1 − α)E′ dE′′dE
′
=∫ E/αE′=E [
∫ EE′=αE′ C
(1 − α)(E′)2 dE′′]
= C1 − α
∫ E/αE′=E
E − α E′
(E′)2 dE′
= . . . . C [1 + α ln α1 − α ]
= C ζ
Hence,
f(u) � C =1ζ
∫ E0
E∗s(E) dE
or
Σt(E) φ(E) � 1E
1ζ
∫ E0
E∗s(E) dE (55)
This generalizes Eqn.(16) to the case A > 1.
Slowing Down with Absorption for A > 1: For an infinitely massive absorber, we can rewrite Eqn.(7) as
F (E) =1
1 − α
∫ E/α
E′=E
Σs(E′)
E′ Σt(E′)F (E
′) dE
′+ S(E) (56)
We can now proceed, as before, to obtain recursion relations for
fn(u) = f(u) n ln 1α < u < (n+ 1) ln 1
α
The resulting equations are useful in numerical work, but not in analytical work, so we will not derive
them here.
Infinite Medium Resonance Absorption: Heavy nuclei hacve sharp capture resonances that produce res-
onance absorption of neutrons as they slow down. High Energy resonances are not solved abd are difficult
to treat analytically. Low energy resonances are narrow and resolved, and can be treated analytically; we
19

shall do this here.
For hydrogen, with an infinitely massive absorber, we introduce S(E) = S0 δ(E − E0) into Eqn.(22)
and obtain [exactly, for E < E0]
Σt(E) φ(E) = S0 δ(E − E0) + 1E
∫ E0
E S0 δ(E′ − E0) u(E
′) p(E,E
′) dE
′
= 1E S0 u(E0) p(E,E0) + S0 δ(E − E0)
=1E
[S0 Σs(E0)
Σt(E0)] e
−∫
E0
E
Σa(E′)
E′ Σt(E
′ ) dE′
(57)
20

energyEoEi−1EiEi+1E
for a heavy nucleusσγ (Ε)
Εi +Ei−Δ Δ
EE3 E2
E Eo
1/E
1/EΣ (Ε)Σ (Ε)
a
t
1
21

EEEE E o123
E
Eo
a
tE’dE’
Σ (Ε )Σ (Ε )
’’
EE E E E3 2 1 o
1.0So u(E )o
E
E’dE’
Eo
E
a
t
exp [ − ]Σ (Ε )
Σ (Ε )
’
’
22

EoE1E2E3
E
o u(E )S
E(no absorption)
Σ (Ε) φ(Ε) = tSo u(E )
E E’dE’
E
Eo
exp[− ]Σ (Ε )’
Σ (Ε )’
From Eqn.(25),
pi = exp (− ∫ Ei+Δ
Ei−ΔΣa(E
′)
E′ Σt(E′)dE
′)
= probability that a neutron is not absorbed while slowing down past the i− th resonance
= i− th resonance escape probability
(58)
[Remark: In typical applications, we have for a single resonance,
pi � 1εi =∫ Ei+Δ
Ei−ΔΣa(E
′)
E′ Σt(E′) dE
′<< 1(59)These inequalities will be very important when we
later treat the case A > 1.] Now, normalizing F(E) so that F(E)=1/E for E1 < E < E0, we get (for
hydrogen) the following figure:
The phenomenon of resonance absorption is important for the following reasons:
1. It is a physical process that must be accounted for in the calculation of multigroup constants.
2. Reonance absorption in fertile material can lead to production of fissile material, and thus is impor-
tant for the accurate prediction of breeding ratios.
3. Resonance absorption plays a role in reactor kinetics. [As the temperature of a reactor increases,
the resonances broaden, the resonance escape probabilities pi decrease, and therefore the reactivity decreases.]
23

EEEEE3 2 1 o
F=1 / E
F (E)= 1 / E (no absorption)
F(E) for narrow, resolved resonance absorption
Note : the dips in this curve are exxagrated
F= P1 / EF = P1 P2 / E
F=P1 P2 P3 /E
A Closer Look at Resonance escape Probabilities: (Hydrogen, A=1) We shall now consider resonance
absorption in an infinite homogenous mixture of:
a) an absorber (denoted by A): a heavy isotope with well-resolved absorption resonances. WE require
this isotope to be heavy enough that the scattering of neutrons off it can be ignored (the neutron energy
loss is negligible).
b) a moderator consisting of hydrogen (denoted by H), with a constant Σt over a resonance and a neg-
ligible Σa = Σγ .
Also, we shall ignore inelastic scattering. Then, from Eqn.(25) and Fig.1,
p(E0→E) = exp (− ∫ Ei+Δ
Ei−ΔΣa(E
′)
E′ Σt(E′) dE
′)
= probability that a neutron at E0 which is scattered is not absorbed before slowing down to E
= exp [− ∑E<Ei<E0
∫ Ei+Δ
Ei−ΔΣa(E
′)
E′ Σt(E′ ) dE
′]
= exp [− ∑E<Ei<E0
εi]
= E<Ei<E0 e− εi
= E<Ei<E0 Pi (60)
We now consider a single Pi:
Pi = exp [−∫ Ei+Δ
Ei−Δ
NA σAγ (E′) + NH σHγ (E
′)
NA [σAγ (E′) + σAs (E′)] + NH [σHγ (E′) + σHs (E′)]dE
′
E′ ]
24

Then, near Ei,
σAs << σAγ [absorber scattering is small]
σHγ << σHs � constant [absorbercaptureissmall]
Thus,
Pi � exp [− ∫ Ei+Δ
Ei−Δ
NA σAγ (E
′)
NA σAγ (E′ ) + NH σH
s (E′)dE
′
E′ ](61)
Using the Breit-Wigner formula [D H, p.50], we obtain
σγ(E) = σ0ΓγΓ
ψ(g, x)
ψ(g, x) =g
2√π
∫ ∞
−∞
e−14 (x−y)2g2
1 + g2dg (62)
where
g = Γ( A4 Ei k T
) (A = mass number)
x = 2 (E − Ei
Γ )
and [D H, pp.26-27]:
Γγ = radioactive line width
Γ = total line width
Ei = energy at which resonance occurs
σ0 = value of the total cross section σt at Ei
k = Boltzman’s constant
T = temperature
Then, Eqn.(61) gives:
25

Pi = exp [− ∫ Ei+Δ
Ei−Δ
NA σ0ΓγΓ ψ
NA σ0ΓγΓ ψ + NH σH
s
dE′
E′ ]
= exp [− ∫ ∞−∞
ψ
ψ + (NH σH
s ΓNA σ0 Γγ
)
Γ2dx
′
Ei]
= exp [− ΓEi
∫ ∞0
ψ(g,x′)
ψ(g,x′ ) + βdx
′]
= exp [− ΓEi
J(g, β)] [This holds only for hydrogen]
In these equations, J is a decreasing function of β and a weakly decreasing function of ζ. Therefore,
1. As T increases, J increases, and Pi decreases. [This is the Doppler Effect: Resonances broaden, and
more neutrons are absorbed.]
2. As NH / NA increases, β decreases, so J decreases, so Pi increases. [Adding moderator material or
deleting absorber material decreases the number of absorptions.]
3. As Ei (the resonance energy) decreases, ζ increases, so J decreases weakly, so J/Ei increases weakly,
so Pi decreases. [As Ei decreases, more neutrons are absorbed.]
For T1 < T2 , Pi |T1 > Pi |T2
E E
T T1 2
φ
φ
E iEi
26

Resonance Escape Probabilities (and Integrals) for Non-Hydrogenous (A> 1) Moderators: We recall that
for a problem with no absorption,
φ(E) =S0
ζ E Σs(E)
To treat problems with resonance integrals, we shall assume that for a well-resolved resonance, F takes the
above form between resonances, i.e.,
EEEE2 1 o
(source energy)
Σ φ = ζ Ε
Σ φ = = ζ Ε ζ Ε
Σ φ = = ζ Ε ζ Ε
So
S P Po 1 2 Seff(3)
S Po 1 Seff(2)
s
s
s (no absorption)
Thus, the effective source driving the i-th resonance is
S(i)eff = S0 ( i−1
j=1 Pj )
and
Σs(E) φ(E) =S
(i)eff
ζϕi(E) Ei − Δ < E < Ei + Δ (63)
where
ϕi(E) � 1E
Ei − Δ < E < Ei−1 − Δ (64)
27

We now define
Pi = resonance escape probability for the i− th resonance
= effective source rate to resonance − absorption rate in resonanceeffective source rate to resonance
=S
(i)eff
−∫
Ei+Δ
Ei−ΔΣa(E) φ(E) dE
S(i)eff
= 1 − ∫ Ei+Δ
Ei−Δ Σa(E) φ(E)
S(i)eff
dE
= 1 − ∫ Ei+Δ
Ei−ΔΣa(E)Σs(E)
ϕ(E)ζ dE
= 1 − NA
Σs(Ei) ζ
∫ Ei+Δ
Ei−Δσa(E) ϕ(E) dE
= 1 − NAζ
IiΣs(Ei)
(65)
= e− NA
ζ
IiΣs(Ei) (66)
Then, the total resonance escape probability over all the resonances Ei between E < Ei < E0 is
P (E) = E<Ei<E0 Pi = exp [− NAζ
∑E<Ei<E0
IiΣs(Ei)
] (67)
where
Ii =∫ Ei+Δ
Ei−Δ
σa(E) ϕ(E) dE = resonance integral (68)
and where ϕi(E) is the flux, normalized to satisfy
ϕi(E) � 1E, Ei − Δ < E < Ei−1 − Δ (69)
(just above the resonance).
Example Problem 1: We wish to compute a multigroup cross section
Σag =
∫ Eg−1
Egσa(E) ϕ(E) dE∫ Eg−1
Egϕ(E) dE
We assume that the resonances Ei, 1 ≤ i ≤ I,
Eg < EI < . . . . < Ei < . . . < E1 < Eg−1
lie in this group, are well-resolved, and that all absorptions occur in these resonances.
Solution: We shall assume all Pi are very close to one [see Eqn.(59)]. Then, we have approximately [with
Σs(E) � constant]
28

ϕ(E) = 1E [ + O(ε)] so
Σag =NA
∫ Eg−1Eg
σa(E) 1E dE∫
Eg−1Eg
1E dE
[ + O(ε2) ]
=NA
∑I
i=1
∫iσa(E) ϕ(E) dE
lnEg−1
Eg
[ + O(ε2) ]
= NA
Δug
∑Ii=1 [ + O(ε2) ]
Example Problem 2: Show that the formulas Eqn.(58) [exact, for A=1] and Eqn.(66) [approximate, for
A ≥ 1] agree for A=1 and a narrow resonance:
εi =∫ Ei+Δ
Ei−Δ
Σa(E′)
E′ Σt(E′)dE
′<< 1 (70)
Solution: Let A=1. Then, normalizing ϕ(e) so that φ(E) = 1/E for E > Ei+Δ, Eqn.(57) exactly gives:
Σt(E) φ(E) = constantE exp [− ∫ E0
EΣa(E
′)
E′ Σt(E′) dE
′]
= constantE [ 1 + O(εi) ]
= Σt(Ei+Δ)E + O(εi) ]
= Σs(Ei+Δ)E + O(εi) ]
= Σs(Ei)E + O(εi) ]
so
1E Σt(E)
=φ(E)
Σs(Ei)+ O(εi) (71)
Now, by Eqn.(58),
Pi = e−εi = exp [− ∫i
Σa(E′)
E′ Σt(E′ ) dE
′]
= exp [− ∫i
Σa(E′) φ(E
′)
Σs(Ei)dE
′(1 + O(εi))]
= exp [− NA
Σs(Ei)
∫i
Σa(E′) φ(E
′) σs(Ei) dE
′(1 + O(εi))]
= exp [− NA
Σs(Ei)Ii + O(ε2i )]
For A=1, ζ = 1, and Eqn.(66) gives
Pi = exp [− NAΣs(Ei)
Ii]
Thus, the two formulas agree with a second-order O(ε2i ) error.
Approximate Evaluations of Resonance Integrals: Now we wish to compute the resonance integral
Ii =∫ Ei+Δ
Ei−Δ
σa ϕ(E) dE �∫i
σa ϕ(E) dE , (72)
29

where:
1. We have a uniform mixture of an absorber A and a moderator M, both with mass numbers ≥ 1,
2. φ(E) � 1/E for E above the resonance,
3. ΣMγ << ΣMs � constant across the resonance,
4. The sources introduce neutrons into the system with energies higher than the resonances.
The slowing down equation nera the resonance is then
Σt(E) ϕ(E) =∫ E0
E Σs(E′ → E) ϕ(E
′) dE
′
=∫ E0
E[ΣMs (E
′) PM (E
′ → E) + ΣAs (E′) PA(E
′ → E)] ϕ(E′) dE
′
� ∫ E/αM
EΣM
s ϕ(E′)
(1 − αM ) E′ dE′
+∫ E/αA
EΣA
s ϕ(E′)
(1 − αA) E′ dE′
(73)
For many resonances of interest in reactor analysis, the width of the resonance is much smaller than the
typical energy loss in collision with a moderator nucleus.
EEi Ei
EiEi
α M/
−Δ−Δ
2 Δ << Ε − Εα M
ii
30

Then, since φ(E′) � 1/E in almost all of the interval E < E
′< E/αM ,
∫ E/αM
EΣM
s ϕ(E′)
(1 − αM ) E′ dE′ � ΣM
s
(1 − αM )
∫ E/αM
E1
(E′)2dE
′
= ΣMs
(1 − αM ) (− 1E′ )E/αM
E
= ΣMs
(1 − αM ) (− αM
E − 1E′ )
= ΣMs
E ,
so Eqn.(74) becomes
Σt(E) ϕ(E) � ΣMsE
+∫ E/αA
E
ΣAs ϕ(E′)
(1 − αA) E′ dE′
(74)
Now we shall consider two cases:
Narrow Resonance (NR) Approximation: We assume that the resonance width is very small compared
to the average energy a neutron loses in a collision with an absorber nucleus. Then, as above,
∫ E/αA
E
ΣAs ϕ(E′)
(1 − αA) E′ dE′ � ΣAs
E
Thus, Eqn.(75) gives
Σt(E) ϕNR(E) =ΣMs + ΣAs
E=
Σs(Ei)E
so Eqn.(71) yields
Ii =∫i σa(E
′) ϕNR(E
′) dE
′
= Σs(Ei)∫i
σa(E′)
E′ Σt(E′ ) dE
′
= Σs(Ei)∫i
σa(E′)
E′ [ΣMt (E′ ) + ΣA
s (E′) + ΣAa (E′)] dE
′
= Σs(Ei)∫i
σa(E′)
E′ [ΣMs (Ei) + ΣA
s (Ei) + NA σAa (E′)] dE
′
=∫i
σa(E′)
E′ [1 + (NA / Σs) σa(E′)] dE
′(75)
Now we can use the Breit-Wigner formulas [Eqn.(62)].
Narrow Resonance Infinite Mass (NRIM) Absorber, or, Wide Resonance (WR) Approximation: Here we
assume that the mass number of the absorber is very large. Then αA � 1, and a resonance width is much
larger than the energy a neutron loses in a collision with an absorber nucleus. Because αA � 1,
∫ E/αA
E
ΣAs ϕ(E′)
(1 − αA) E′ dE′ � ΣAs (E) ϕ(E)
(1 − αA) E(E
αA− E) � ΣAs (E) ϕ(E)
31

so Eqn.(75) gives
Σt(E) ϕ(E) = ΣMs
E + ΣAs (E) ϕ(E) so
ϕNRIM (E) = ΣMs
E [Σt(E) − ΣAs (E)]
and then Eqn.(73) yields
Ii =∫i
σa(E) ΣMs
E [Σt(E) − ΣAs (E)]
dE
=∫i
σa(E) ΣMs
E [Σs(E) + ΣAs (E)] dE
=∫i
σa(E)E
[1 + (NA / ΣMs ) σa(E)] dE (76)
Again, we can use the Breit-Wigner formulas [Eqn.(62)] to obtain an explicit expression for these integrals.
Slowing Down in a Finite Medium: The basis of much of our analysis will be the lethargy-dependent P1
equations. To derive these, we start with the lethargy-dependent transport equation
μ ∂∂xψ(x, μ, u) + Σt(u) ψ(x, μ, u)
= 12
∫ u0
∫ 1
−1[Σso(u
′ → u) + 3 μ μ′Σs1(u
′ → u)] ψ(x, μ′, u
′) dμ
′du
′+ 1
2 S0(x, μ)
Setting
φ(x, μ) =∫ 1
−1ψ(x, μ
′, u) dμ
′= scalar flux ,
φ(x, μ) =∫ 1
−1 μ′ψ(x, μ
′, u) dμ
′= current ,
we get
μ ∂∂xψ + Σt ψ = 1
2
∫ u0 Σso(u
′ → u) φ(x, u′) du
′+ 3μ
2
∫ u0 Σs1(u
′ → u) j(x, u′) du
′S0(x, u)
Now, we set
ψ � 12
[ φ(x, u) + 3 μ j(x, u) ]
and operate by∫ 1
−1(·) dμ and
∫ 1
−1μ(·) dμ to obtain
d
dxj(x, u) + Σt(u) φ(x, u) =
∫ u
0
Σso(u′ → u) φ(x, u
′) du
′+ S0(x, u) (78)
13
d
dxφ(x, u) + Σt(u) j(x, u) =
∫ u
0
Σs1(u′ → u) j(x, u
′) du
′(79)
32

These are the lethargy-dependent P1 equations, with:
Σso(u′ → u) = Σs(u
′) eu
′−u
1 − α for u′< u < ln 1/α
= 0 otherwise(80)(80)
Σso(u′ → u) = Σso(u
′ → u) [A+ 1
2e
u′−u2 − A− 1
2e
u′−u2 ] (81)
Eqns.(79) and (80) form the basis of the most of the remaining work in this chapter. They are approximate
only because of the angular approximation made in the application of the P1 method. Because the scatter-
ing integrals in these equations are somewhat complicated, a rewriting of these integrals (for A=1) or an
approximation to these integrals (for A¿¿1) is usually also performed. (This only affects temrs that operate
on the u variable.)
To do this, we define the slowing down densities
qo(x, u) =∫ u
u′=0
∫ ∞
u′′=uΣso(u
′ → u′′) φ(x, u
′) du
′′du
′, (82)
q1(x, u) =∫ u
u′=0
∫ ∞
u′′=uΣs1(u
′ → u′′) j(x, u
′) du
′′du
′(83)
Differentiating Eqn.(83), we get
d
duqo =
∫ ∞
u′′=uΣso(u→ u
′′) φ(x, u) du
′′ −∫ u
u′=0
Σso(u′ → u) φ(x, u
′) du
′(84)
But, using Eqn.(81), we obtain
∫ ∞u′′=u Σso(u→ u
′′) du
′′=
∫ u+ln 1/α
uΣs(u)1 − α eu−u
′′du
′′
= Σs(u)1 − α eu (− e−u
′′)u+ln 1/αu
= Σs(u)1 − α eu [− e−u+lnα + e−u]
= = Σs(u)1 − α [− α + 1] = Σs(u) ,
so Eqn.(85) yields
d
duqo = Σs(u) φ(x, u) − intu
u′=0Σso(u
′ → u) φ(x, u′) du
′(85)
In a similar manner, Eqn.(84) yields
d
duq1 = [
∫ ∞
u′′=uΣso(u→ u
′′) ] du
′′j(x, u) −
∫ u
u′=0
Σs1(u′ → u) j(x, u
′) du
′(86)
However, using Eqn.(82), we obtain
33

∫ ∞u′′=u Σs1(u→ u
′′) du
′′=
∫ u+ln 1/α
u′′=uΣs(u)1 − α eu−u
′′[A+1
2 eu−u
′′2 − A−1
2 eu′′−u2 ] du
′′
= Σs(u)1 − α [e
32u A+1
2
∫ u+ln 1/α
u e−32u
′′du
′′ − e12u A−1
2
∫ u+ln 1/α
u e−12u
′′du
′′]
= Σs(u)1 − α [− A+1
3 e32u (e−
32u+ 3
2 lnα − e−32u) + (A − 1) e
12u (e−
12u+ 1
2 lnα − e−12u)]
= Σs(u)1 − α [− A+1
3 (α3/2 − 1) + (A − 1)(α1/2 − 1)]
= Σs(u) [A + 13
1 − α3/2
1 − α − (A − 1) 1 − α1/2
1 − α ]
= Σs(u) [A + 13
1 + α1/2 + α1 + α1/2 − (A − 1) 1
1 + α1/2 ]
= Σs(u) A + 11 + α1/2 [1 + α1/2 + α
3 − α1/2]
= Σs(u) A + 11 + α1/2
1 − 2 α1/2 + α3
= Σs(u) A + 11 + α1/2
(1 − α1/2)2
3
= 13 Σs(u) A + 1
1 + ( A − 1A + 1 )
[1 − A − 1A + 1 ]2
= 13 Σs(u) (A + 1)2
2 A [ 2A + 1 ]2
= 46 A Σs(u) = 2
3 A Σs(u)
Hence, if we define
μ0 =2
3 A(87)
then Eqn.(87) becomes
∂q1∂u
= μ0 Σso(u) j(x, u) −∫ u
u′=0
Σs1(u′ → u) j(x, u
′) du
′(88)
Inroducing Eqn.(86) into (79) and Eqn.(89) into (80), we get
∂j∂x(x, u) + Σt(u) φ(u) = Σs(u) φ(u) − ∂qo
∂x (x, u) + So(x, u)13∂φ∂x (x, u) + Σt(u) j(u) = μo Σs(u) j(u) − ∂q1
∂x (x, u)
or, defining
Σne(u) = Σt(u) − Σelastics (u) = nonelastic cross section
Σtr(u) = Σt(u) − μo Σs(u) = transport cross section(89)
we get
∂j
∂x(x, u) + Σne(u) φ(u) = − ∂qo
∂x(x, u) + So(x, u) (90)
13∂φ
∂x(x, u) + Σtr(u) j(u) = − ∂q1
∂x(x, u) (91)
This gives two equations in four unknowns. Eqns.(83) and (84) yield two other equations:
qo(x, u) =∫ u
u′=u−ln 1/α
∫ u+ln 1/α
u′′=u
Σs(u′)
1 − αeu
′−u′′φ(x, u
′) du
′′du
′(92)
34

q1(x, u) =∫ u
u′u−ln 1/α
∫ u+ln 1/α
u′′=u
Σs(u′)
1 − α[A + 1
2e
32 (u
′−u′′) − A − 1
2e
12 (u
′′−u′)] j(x, u
′) du
′′du
′(93)
However, the integral terms in these equations are too complicated to be of analytical use. To proced, we
shall consider special cases (for A=1) or approximations (for A >> 1).
Slowing Down in Hydrogen (A=1, α=0): Eqns.(93) and (94) become:
qo(x, u) =∫ uu′=0
∫ ∞u′′=u Σs(u
′) eu
′−u′′φ(x, u
′) du
′′du
′
=∫ uu′=0
Σs(u′) eu
′−u φ(x, u′) du
′ (94)
q1(x, u) =∫ uu′=0
∫ ∞u′′=u Σs(u
′) e3/2 (u
′−u′′) j(x, u
′) du
′′du
′
= 23
∫ uu′=0
Σs(u′) e3/2 (u
′−u) j(x, u′) du
′ (95)
These satisfy
∂qo
∂u = Σs(u) φ − qo∂q1∂u = 2/3 Σs(u) j − 3/2 q1
or
∂qo)(x,u) + qo(x,u) = Σs(u) φ(x,u)(96)
23∂q1)(x,u) + q1(x,u) = 4
9 Σs(u) j(x,u)(97)
These two equations are exact only for hydrogen (A=1). However, approximations that we will consider for
A >> 1 result in equations of this form, i.e.,
λo∂qo
∂u + qo = βo Σs φ ,
λ1∂q1∂u + q1 = β1 Σs j ,
(98)
with siutably defined constants λo, βo, λ1, andβ1.
Age Approximation: If A >> 1, then α � 1 and ln(1/α) � 0, so the interbals of integration in Eqns.(93)
and (94) are small. Hence, in the integrands we can use the following approximations:
Σs(u′) φ(x, u
′) � Σs(u) φ(x, u) + (u
′ − u) ∂∂uΣs(u) φ(x, u)
Σs(u′) j(x, u
′) � Σs(u) j(x, u) + (u
′ − u) ∂∂uΣs(u) j(x, u)
and get
qo = βo Σs(u) φ(x, u) − λo βo∂
∂uΣs(u) φ(x, u) (99)
q1 = β1 Σs(u) j(x, u) − λ1 β1∂
∂uΣs(u) j(x, u) (100)
35

where
βo(α) =∫ u
u′=u−ln 1/α
∫ u+ln 1/α
u′′=u
eu′−u′′
1 − αdu
′′du
′= . . . = 1 + α
ln α
1 − α= ζ , (101)
λo(α) βo(α) =∫ u
u′=u−ln 1/α
∫ u+ln 1/α
u′′=u
eu′−u′′
1 − α(u − u
′) du
′′du
′= . . . = ζ − α
2 (1 − α)ln2 ζ , (102)
β1(α) =∫ u
u′u−ln 1/α
∫ u+ln 1/α
u′′=u
11 − α
[A + 1
2e
32 (u
′−u′′) − A − 1
2e
12 (u
′′−u′)] du
′′du
′(103)
λ1(α) β1(α) =∫ u
u′u−ln 1/α
∫ u+ln 1/α
u′′=u
11 − α
[A + 1
2e
32 (u
′−u′′) − A − 1
2e
12 (u
′′−u′)] (u − u
′) du
′′du
′
(104)
We set
βo = ζ (correct)
β1 = 0 (inconsistent)
λo = λ1 = 0 [low-order; first derivative terms in Eqn.(100) and (101)]
and get
qo(x, u) = ζ Σs(u) φ(x, u)
q1(x, u) = 0
Taking q1 = 0 in Eqn.() and eliminating j from Eqn.(92), we obtain
− ∂∂x
13 Σtr(u)
∂∂xφ(x, u) + Σne(u) φ(x, u) = − ∂
∂uqo(x, u) + So(x, u)
qo(x, u) = ζ Σs(u) φ(x, u)(105)
which is called the inconsistent age equation, or the inconsistent P1 equations, or the continuous slowing
down approximation. [The term ’inconsistent’ is used because q1 has been simply set to zero.] We will return
to these equations later.
Consistent Age Approximation: Here, we set
βo = ζ (consistent)
β1 = Eqn.() (consistent)
36

λo = λ1 = 0 (low-order)
Then, Eqns.(100) and (101) reduce to
qo = ζ Σs(u) φ(x, u)
qo = β1 Σs(u) j(x, u)
and Eqns.(91) and (92) yield
∂∂x j(u, x) + Σne(u) φ(x, u) = − ζ ∂
∂uΣs(u) φ(x, u) So13
∂∂xφ(u, x) + Σtr(u) j(x, u) = − β1
∂∂uΣs(u) j(x, u)
(106)
Grueling-Goertzel Approximation: In Eqns.(100) and (101),
q0 = ζ Σs φ − λo∂∂uζ Σs φ
q1 = β1 Σs j − λ1∂∂uβ1 Σs j
we use
q0 = ζ Σs φ
q1 = β1 Σs j
to write
q0 = ζ Σs φ − λo∂∂uqo
q1 = β1 Σs j − λ1∂∂uq1
or
λo∂∂uqo + q0 = ζ Σs φ
λ1∂∂uq1 + q1 = β1 Σs j
(107)
We note that these equations are of the desired form [i.e., of Eqn.(99)] and that they actuall reduce to the
correct equations for hydrogen (A=1). Thus, they are correct for both large and small A, and they turn out
to be reasonably accurate for immediate A. Eqn.(108) are used in conjunction with Eqns.(91) and (92) to
yield four equations in four unknowns.
37

SUMMARY
∂∂x j(u, x) + Σne(u) φ(x, u) = − ∂
∂uqo(x, u) So(x, u)13
∂∂xφ(u, x) + Σtr(u) j(x, u) = − ∂
∂uq1(x, u)
λo∂∂uqo(x, u) + q0(x, u) = ζ Σs(u) φ(x, u)
λ1∂∂uq1(x, u) + q1(x, u) = β1 Σs(u) j(x, u)
(108)
λ0 β0 λ1 β1
Hydrogen (A=1) 1 1 2/3 4/9
Inconsistent Age (Continuous Slowing Down) 0 ζ 0 0
Consistent Age 0 ζ 0 Eqn.()
Grueling-Goertzel Eqn.() ζ Eqn.() Eqn.()
Treatment of Spatial Dependence (Three Ways): To continue this chapter, we shall describe three ways
to include the effects of spatial dependence in fat spectrum calculations. (All three of these methods assume
a homogenous spatial medium.)
1. Age diffusion theory, which combines diffusion theory in space with age theory in u,
2. Muft-Gam calculations, which use a buckling approximation in space applied to the lethargy-dependent
P1 equations,
3. The B1 method, which uses a buckling approximation in space applied to the lethargy-dependent trans-
port equation.
Age Diffusion [or Age, Fermi Age, Inconsistent Age, or Continous Slowing Down] Theory: The starting
point for this method is the lethargy-dependent diffusion Eqn.(106) with a delta function (in u) source:
− D(u) ∂2
∂x2φ(x, u) + Σne(u) φ(x, u) = − ∂∂uqo(x, u) + So(x) δ(u)
qo(x, u) = ζ Σs(u) φ(x, u)(109)
Eliminating φ, we obtain
∂
∂uqo(x, u) +
Σne(u)ζ Σs(u)
qo(x, u) =D(u)ζ Σs(u)
∂2
∂x2qo(x, u) + So(x) δ(u)
Now, defining
qo(x, u) = q(x, u) exp [−∫ u
0
Σne(u′)
ζ Σs(u′)du
′] (110)
we obtain
38

∂q∂u exp [− ∫ u
0Σne(u
′)
ζ Σs(u′ )du
′] + q exp [− ∫ u
0Σne(u
′)
ζ Σs(u′ )du
′] [− Σne
ζ Σs] + Σne
ζ Σsq exp [− ∫ u
0Σne(u
′)
ζ Σs(u′ )du
′]
= Dζ Σs
∂2
∂x2 q exp [− ∫ u0
Σne(u′)
ζ Σs(u′ ) du′] + So(x) δ(u)
or
ζ Σs(u)D(u)
∂q∂u = ∂2
∂x2 q + ζ Σs(u)D(u) exp [
∫ u0
Σne(u′)
ζ Σs(u′) du′] + So(x) δ(u)
= ∂2
∂x2 q + ζ Σs(0)D(0) So(x) δ(u)
(111)
Finally, we define the Fermi Age as
=∫ u
0
D(u′)
ζ Σs(u′)du
′[d
du=
D(u)ζ Σs(u)
] (112)
and we also define
q(x, u) = q(x, ) (113)
Then,
∂q
∂=
∂q
∂u
∂u
∂=
∂q
∂u
ζ Σs(0)D(0)
so Eqn.(112) becomes
∂q
∂=
∂2
∂x2q(x, ) + [
ζ Σs(0)D(0)
So(x)] δ(u) (114)
However, for � 0 and u � 0, Eqn.(113) gives
� uζ Σs(0)D(0)
= a u (115)
so u � 1a .
We have
δ(u) = δ(a
= a δ() =ζ Σs(0)D(0)
δ()) (116)
[ Proof:
∫ ∞−∞ δ(a ) f() d =
∫ ∞−∞ δ(t) f(at) a dt
= a∫ ∞−∞ δ(t) f(at) dt = a f(0) =
∫ ∞−∞ a δ() f() d ]
Therefore, Eqns.(115) and (116) yield
∂q
∂=
∂2
∂x2q(x, ) + So(x) δ() (117)
39

By Eqn.(113), u < 0 implies t < 0, and since q0(u) = 0 for u < 0, q = 0 for t < 0.
Operating on Eqn.(117) by∫ ε−ε(·) du, we obtain
q(x, ε) =∫ ε
0
∂2
∂x2q(x, ) d + So(x)
and letting ε→ 0, we get
q(x, 0+) = So(x)
Therefore, Eqn.(12) can be replaced by
∂q
∂=
∂2
∂x2q(x, ) > 0 (118)
q(x, 0) = So(x) ′initial condition′ (119)
Eqn.(118) is the Fermi Age Equation. It has the form of a standart time-dependent diffusion equation, with
playing the role of time. [Hence the term =’age’.] We note that is an increasing function of u. Hence,
E decreases → u increases → increases
Example Problem 1: Solve Eqn.(13) for an infinite medium with a planar source
So(x) = So δ(x − xo)
Solution:
q(x, ) = So1√4 π
e−(x − xo)2 / 4 (120)
[This is a special solution which cannot be derived by any of the methods we have described in these notes.]
Thus, as neutrons lose energy, they diffuse away from the source, and Eqn.(120) describes this quantita-
tively. The scalar flux is explicitly given by
φ(x, u) = qo(x,u)ζ Σs(u)
= 1ζ Σs(u) exp [− ∫ u
0Σne
ζ Σsdu
′] q
= 1ζ Σs(u) exp [− ∫ u
0Σne
ζ Σsdu
′] So 1√
4 πe−(x − xo)2 / 4
= 1ζ Σs(u) exp [− ∫ u
0Σne
ζ Σsdu
′] So 1√
4 π∫ 0
u Dζ Σs
e−(x − xo)2 / 4∫ 0 u D
ζ Σs
40

x
q o (x , )
xo
τ
τ
τ
τ
1
2
3
0 < τ < τ < τ1 2 3
Ε > Ε > Ε > Εο 1 2 3
Example Problem 2: Now let us consider a point source in an infinite, homogenous, three-dimensional
medium. Problem (118) generalizes to:
∂q∂ (x, y, z, ) = ( ∂
2
∂x2 + ∂2
∂y2 + ∂2
∂z2 )q(x, y, z, )
q(x, y, z, 0) = So δ(x − xo) δ(y − yo) δ(z − zo)
Solution:
q(r, ) = Soe−|r − ro|2 / 4
(4 π )3/2
[This is another special solution which cannot be derived by any of the methods we have described in these
notes.] From this result, we obtain
< r2 > =∫ ∫ ∫ |r − ro|2 e−|r − ro|2 / 4
(4 π )3/2 dx dy dz
= 4 π∫ ∞r=0 r2 e−r2 / 4
(4 π )3/2 r2 dr
= 1√4 π
(4 )5/2
3/2
∫ ∞0
r2
4 π e−r2 / 4 r2
4 π d r√4π
= 16√π
∫ ∞0
t4 e−t2dt
= 8√π
∫ ∞0
y3/2 e−y dy
= 8√π
Γ(5/2) = 8√π
32
12 Γ(1/2) = 6
Therefore,
41

< r2 > = 6 = the mean−square distance from the source that a neutron travels in slowing down to age
(121)
Muft-Gram Method: Here, one consistently solves Eqn.(109), but with an assumed aeparable form for
the spatial dependence:
φ(x, u) = φ(u) ei B x
j(x, u) = i j(u) ei B x
qo(x, u) = qo(u) ei B x
q1(x, u) = q1(u) ei B x
So(x, u) = So(u) ei B x
(122)
where B is the geometric buckling. [The idea is that f(x) = ei B x satisfies the equation
d2
dx2f(x) + B2 f(x) = 0 ,
which approximately describes the spatial variation of the angular flux.] Eqn.(109) reduce to
− B j(u) + Σne(u) φ(u) = − dduqo(u) So(u)
B3 φ(u) + Σtr(u) j(u) = − d
duq1(u)
λodduqo(u) + q0(u) = ζ Σs(u) φ(u)
λ1dduq1(u) + q1(u) = β1 Σs(u) j(u)
(123)
and we now have a system of equations with only one dependent variable u. This system is solved numeri-
cally. To show how this is done, we first introduce a group structure
u
u u
u
uu
1 n
1/2 3/2 n−1/2 n+1/20 =
(Usually, one takes Δu = constant). Then, integrating Eqn.(123) over the n-th group, we get
− B jn + Σne,n φn = − qo,n+1/2 − qo,n−1/2
Δu+ So,n
13B φn + Σtr,n jn = − q1,n+1/2 − q1,n−1/2
Δu
λoqo,n+1/2 − qo,n−1/2
Δu+ qo,n = ζ Σsn φn
42

λ1
q1,n+1/2 − q1,n−1/2
Δu+ q1,n = β1 Σsn jn
Now, we make the approximation
qk,n+1/2 − qk,n−1/2 � qk,n − qk,n−1 (k = 0, 1)
with
qk,−1 = 0 (k = 0, 1)
and we obtain
− B jn + Σne,n φn = − qo,n − qo,n−1
Δu+ So,n (124)
13B φn + Σtr,n jn = − q1,n − q1,n−1
Δu(125)
λoqo,n − qo,n−1
Δu+ qo,n = ζ Σsn φn (126)
λ1q1,n − q1,n−1
Δu+ q1,n = β1 Σsn jn (127)
These equations are now rearranged, Eqn.(126) and (127) yield
qo,n =λo qo,n−1 + Δu ζ Σsn φn
λo + Δu(128)
q1,n =λ1 q1,n−1 + Δu β1 Σsn jn
λ1 + Δu(129)
These are used to eliminate qon and q1n from Eqns.(124) and (125):
− B jn + Σne,n φn = qo,n−1 − ζ Σsn φn
λo + Δu + Son
13 B φn + Σtr,n jn = q1,n−1 − β1 Σsn jn
λ1 + Δu
The second of these equations is now solved for jn:
jn =q1,n−1 − B/3 (λ1 + Δu) φnβ1 Σsn + (λ1 + Δu) Σtr,n
(130)
and this is used to eliminate jn from the first:
φn =( qo,n−1λo + Δu ) + ( B q1,n−1
β1 Σsn + (λ1 + Δu) Σtr,n) + Son
( ζ Σsn
λo + Δu
) + (B2 (λ1 + Δu) / ζ
β1 Σsn + (λ1 + Δu) Σtr,n) (131)
Now, for n=1, q00 = q10 = 0, and
Eqn.(27) → φ1 → Eqn.(128) → q01
φ1 → Eqn.(130) → j1 → Eqn.(129) → q11
43

Having q01 and q11, we set n=2, and then
Eqn.(27) → φ2 → Eqn.(128) → q02
φ2 → Eqn.(130) → j2 → Eqn.(129) → q12
Eqns.(128)-(131) are solved recursively, in this manner, to get φn, jn, andq1n for all n ≥ 1.
B1 Method: Here we use the same separable spatial approximations as in the Muft-Gam method, but
the starting point is the lethargy-dependent transport equation (78) written below, rather than the lethargy-
dependent P1 equations:
μ ∂∂xψ(x, μ, u) + Σt(u) ψ(x, μ, u) = 1
2
∫ u0
Σso(u′ → u) φ(x, u
′) du
′
+ 3μ2
∫ u0
Σs1(u′ → u) j(x, u
′) du
′+ 1
2 So(x, u) ,(132)
where
φ(x, u) =∫ 1
−1
ψ(x, μ′, u) dμ
′, (133)
j(x, u) =∫ 1
−1
μ′ψ(x, μ
′, u) dμ
′, (134)
Using Eqns.(86) and (89), Eqn.(132) becomes:
μ ∂∂xψ(x, μ, u) + Σt(u) ψ(x, μ, u) = 1
2 [Σs(u) φ(x, u) − ∂∂uqo(x, u)]
+ 3μ2 [μo Σso(u) j(x, u) − ∂
∂uq1(x, u)] + 12 So(x, u)
(135)
Also, q0 and q1 are now approximated by Eqn.(109):
λo∂
∂uqo(x, u) + qo(x, u) = βo Σs(u) φ(x, u) (136)
λ1∂
∂uq1(x, u) + q1(x, u) = β1 Σs(u) j(x, u) (137)
Introducing the same assumed separable form for the spatial variation as before,
So(x, u) = So(u) ei B x
ψ(x, μ, u) = ψ(μ, u) ei B x
φ(x, u) = φ(u) ei B x
j(x, u) = i j(u) ei B x
qo(x, u) = qo(u) ei B x
q1(x, u) = q1(u) ei B x
into Eqn.(135), we get
Eqn.(135) → [i B u + Σt(u)] ψ =12
[Σs φ − d
duqo] +
3μ2
[μo Σso j − d
duq1] +
So2
(138)
44

Eqn.(133) → φ =∫ 1
−1
ψ dμ′
(139)
Eqn.(134) → i j =∫ 1
−1
μ′ψ dμ
′(140)
Eqn.(136) → λo∂
∂uqo(u) + qo(u) = βo Σs(u) φ(u) (141)
Eqn.(137) → λ1∂
∂uq1(u) + q1(u) = β1 Σs(u) j(u) (142)
Integrating Eqn.(138) over μ, we obtain
(i B) (i j) + Σt φ = Σs φ − d
duqo (143)
or
− B j(u) + Σne(u) φ(u) = − d
duqo(u) + So(u) (144)
Using Eqn.(144), we write Eqn.(138) as
ψ(μ, u) = 1i B μ − Σt(u)
12 [− B j(u) + Σt(u) φ(u)]
+ i μi B μ + Σt(u)
32 [μo Σs(u) j(u) − d
duq1(u)]
Integrating this equation over μ, we obtain (exactly)
φ(u) = (I1) [− B j(u) + Σt(u) φ(u)] + (I2) [μo Σs(u) j(u) − d
duq1(u)] (145)
where
I1 =12
∫ 1
−1
du
i B μ + Σt(u)= . . . =
1Btan−1 B
Σt(u)(146)
I2 =32
∫ 1
−1
i μ du
i B μ + Σt(u)= . . . =
3B
[1 − Σt(u)B
tan−1 B
Σt(u)] (147)
Eqns.(145)-(147) now give, after some rearranging,
B
3φ(u) + γ(u) Σt(u) j(u) = − d
duq1(u) (148)
γ(u) =B
3 Σt(u) tan−1 B
Σt(u)
1 − Σt(u)B tan−1 B
Σt(u)
− μoΣso(u)Σt(u)
(149)
Eqns.(141),(142),(144), and (148) are the basis of the B1 method. They are identical to Eqn.(123) if we
identify
Σtr(u) = γ(u) Σt(u)
45

Thus, numerical methods for solving the Muft-Gam equations can be used to numerically solve the B1 equa-
tions.
Remark 1: Because no approximation is made in the angular variable, the B1 method is more accurate
than the Muft-Gam method. [Eqn.(123)].
Remark 2: To give a feeling for the effect of the buckling terms in the Muft-Gam and B1 methods, let
us consider an ’inconsistent’ approximation in which we set q1 = 0 in the second of Eqn.(123) and ignore
the fourth of these equations. We then have the system:
− B j(u) + Σne(u) φ(u) = − dduqo(u) + So(u)
B3 φ(u) + Σtr(u) j(u) = 0
λodduqo(u) + qo(u) = ζ Σs(u) φ(u)
(150)
The second of these equations can be written
j(u) = − B
3 Σtr(u)φ(u)
and thus, the equation can be written
[B2
3 Σtr(u)φ(u) + Σne(u)] φ(u) =
qoλo
− ζ
λoΣs(u) φ(u) + S (151)
However, the third of Eqn.(150) gives
qo =βoλo
∫ u
0
e−(u−u′)/λo Σs(u
′) φ(u
′) du
′
so Eqn.(151) can be written
[B2
3 Σtr(u)φ(u) + Σne(u) +
ζ
λo] φ(u) =
βoλ2o
∫ u
0
e−(u−u′)/λo Σs(u
′) φ(u
′) du
′+ S(u) (152)
This is an equation only involving φ. The terms on the left side of this equation represent losses due to
collisions, while the terms on the right side represent gains due to downscattering into lethergyu and sources.
The spatial dependence here is represented by the term B2, which produces an effective increase in the col-
lision rate on the left side of the equation without corrsponding increase in the source on the right side.
Therefore, the space dependence here acts like an extra removal term; this is correct because the net effect
of the spatial variation is to allow neutrons to leak out of the system, and this is a loss mevhanism. The
larger the system the smaller is B, and hence the smaller is the leakage term in Eqn.(151).
46