Embed Size (px)
Citation preview

Matematicas II — GITI (2016–2017)
Leccion 2. POLINOMIOS DE TAYLOR
El teorema del valor medio en una calle de Beijing
1. POLINOMIOS DE TAYLOR
¿Como calcula un ordenador el valor del numero e?, ¿que hace la maquina desde que tecleamosexp(1) hasta que aparece 2.718281828459? El hardware de los ordenadores no incluye la funcionexponencial; los chips solo pueden sumar, restar, multiplicar, dividir y comparar. Una instruccioncomo exp(1) pone en marcha una serie prefijada de estas operaciones cuyo resultado es unaaproximacion de e que tiene la precision determinada por el fabricante.
Las funciones matematicas que consisten en sumar, restar, multiplicar o dividir numeros reales sonlos polinomios y cocientes de polinomios, y el teorema de Taylor —objeto central de esta leccion—es muy importante porque nos dice como estimar el error que cometemos al aproximar una funcionmediante polinomios. Como idea inicial, consideremos una curva y = f(x). Si fijamos un puntoa y tomamos un punto x cerca de a, ya sabes que el valor proporcionado por la recta tangente,y(x) = f(a) + f ′(a)(x − a), es una buena aproximacion de f(x), pero ¿cuanto de buena?, ¿y siajustamos una parabola en vez de una recta? Veamos estas ideas con un ejemplo.
Ejemplo. Consideremos la funcion exponencial f(x) = ex (su grafica esta en rojo en la partesuperior de la figura de la pagina siguiente). La recta tangente a su grafica para x = 0 es y = 1+x.Si aproximamos e = f(1) por el valor en la recta tangente para x = 1, obtenemos y = 2, que esbastante pobre. Esta recta tangente (en azul) es la unica recta y = p(x) = a + bx que verificap(0) = f(0) y p′(0) = f ′(0). Podemos intentar mejorar esta aproximacion construyendo unaparabola p(x) = a+ bx+ cx2 que cumpla p(0) = f(0), p′(0) = f ′(0) y p′′(0) = f ′′(0). Derivando eigualando se obtiene a = 1, b = 1 y c = 1/2, ası que la parabola es p(x) = 1+ x+ x2/2 (en verde),que proporciona para x = 1 una aproximacion algo mejor, p(1) = 2.5, del numero e.
20
2. Polinomios de Taylor 21
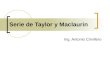
La curva exponencial (en rojo) y polinomios de aproximacion.
Podemos continuar ası para mejorar las aproximaciones. En el siguiente paso, con una cubica (ennaranja), obtendrıamos 2.67 y despues, con un polinomio de grado cuatro (en violeta), 2.71 queya tiene una precision de dos cifras decimales. En la figura anterior se puede observar como lossucesivos polinomios que se van construyendo de esta manera se van aproximando mejor a la curvaexponencial; el de grado cuatro es casi indistinguible de la propia exponencial.
Planteamiento. La idea, entonces, es ir construyendo polinomios que vayan coincidiendo conlos valores de una funcion y de sus derivadas en un punto y estudiar si estos polinomios se vanaproximando mejor a la funcion dada. Necesitaremos que la funcion que deseamos aproximarpueda derivarse varias veces, ası que empezaremos por darle un nombre a estas funciones.
Funciones de clase Cn y C∞. Sea I ⊂ R un intervalo. Se dice que una funcion f : I → R esde clase Cn en I cuando es n veces derivable en I y su derivada n-esima f (n) es continua en I. Elconjunto de todas las funciones de clase Cn en I se denota por Cn(I).
Si existen todas las derivadas de f en I entonces se dice que es de clase C∞ en I. El conjuntode todas las funciones de clase C∞ en I se denota por C∞(I); las funciones habituales de lasaplicaciones son de clase C∞ en los intervalos de trabajo.
Polinomio de Taylor. Sean I ⊂ R un intervalo abierto, a ∈ I y f una funcion de clase Cn(I).Entonces existe un unico polinomio p de grado menor o igual que n tal que
p(a) = f(a), p′(a) = f ′(a), p′′(a) = f ′′(a) . . . p(n)(a) = f (n)(a).
Dicho polinomio p se llama polinomio de Taylor de grado n de f centrado en a o alrededor de a ypuede expresarse como
p(x) = f(a) + f ′(a)(x− a) +f ′′(a)
2!(x− a)2 +
f ′′′(a)
3!(x− a)3 + · · ·+ f (n)(a)
n!(x− a)n,
donde n! = 1 · 2 · 3 · · · · · (n− 1) · n es el factorial de n (ver el Ejercicio 3 de la ultima seccion deesta leccion). El polinomio de Taylor tambien se suele escribir de forma mas compacta como
p(x) =n∑
k=0
f (k)(a)
k!(x− a)k
y, si se quiere especificar el grado del polinomio, a veces se escribe pn(x) para resaltar n.
Observemos que el polinomio de Taylor de grado 1 de f centrado en a es p(x) = f(a)+f ′(a)(x−a)cuya grafica es, precisamente, la recta tangente a la grafica de f en el punto (a, f(a)).

22 Matematicas II — GITI (2016–2017)
Polinomio de Maclaurin. En el caso especial en el que el centro es a = 0, el polinomio se llamapolinomio de Maclaurin de grado n de f y viene dado por
p(x) = f(0) + f ′(0)x+f ′′(0)
2!x2 +
f ′′′(0)
3!x3 + · · ·+ f (n)(0)
n!xn =
n∑k=0
f (k)(0)
k!xk.
Estos son los polinomios con los que se trabaja habitualmente porque, como vamos a ver enseguida,con ellos se pueden construir los polinomios de Taylor de las funciones habituales.
Polinomios de Maclaurin de las funciones mas habituales. (1) Si la funcion f es ella mismaun polinomio de grado m, entonces coincide con su polinomio de Maclaurin de grado m o superior.Si queremos su polinomio de Maclaurin de un grado inferior n < m, entonces basta con truncar laexpresion de f hasta el grado n.
(2) El polinomio de Maclaurin de grado n de la funcion exponencial ex es
p(x) = 1 +x
1!+
x2
2!+
x3
3!+ · · ·+ xn
n!.
(3) Si n = 2k + 1 es impar, el polinomio de Maclaurin de grado n de la funcion sen(x) es
p(x) = x− x3
3!+
x5
5!· · ·+ (−1)k
x2k+1
(2k + 1)!.
Si n es par, el polinomio de Maclaurin de grado n de sen(x) coincide con el de grado n− 1.
(4) Si n = 2k es par, el polinomio de Maclaurin de grado n de la funcion cos(x) es
p(x) = 1− x2
2!+
x4
4!− · · ·+ (−1)k
x2k
(2k)!.
Si n es impar, el polinomio de Maclaurin de grado n de cos(x) coincide con el de grado n− 1.
(5) El polinomio de Maclaurin de grado n de la funcion log(1+x), donde log(·) indica el logaritmoneperiano, es
p(x) = x− x2
2+
x3
3− · · ·+ (−1)n−1x
n
n.
(6) El polinomio de Maclaurin de grado n de la funcion binomial (1 + x)α, siendo el exponenteα ∈ R constante, es
p(x) = 1 +α
1!x+
α(α− 1)
2!x2 + · · ·+ α(α− 1) · · · (α− n+ 1)
n!xn.
El coeficiente que aparece en esta expresion se llama coeficiente binomial y se suele denotar por(α
n
)=
α(α− 1)(α− 2) · · · (α− n+ 1)
n!,
donde(αn
)se lee “α sobre n.” Con esta notacion, el polinomio p se escribe
p(x) = 1 +
(α
1
)x+
(α
2
)x2 + · · ·+
(α
n
)xn.
En el caso particular en que α es un entero positivo, digamos α = m, la expresion anterior no esmas que la conocida formula del binomio de Newton para desarrollar (1 + x)m en potencias de xsin tener que hacer todas las multiplicaciones.
En el caso particular en que α = −1 obtenemos que el polinomio de Maclaurin de f(x) =1
1 + xes
p(x) = 1− x+ x2 − x3 + · · ·+ (−1)nxn.

2. Polinomios de Taylor 23
Operaciones con polinomios de Maclaurin. Sean f y g dos funciones de clase Cn en unintervalo I que contiene al origen en su interior. Sean p y q sus respectivos polinomios de Maclaurinde grado n. Veamos como se obtienen, a partir de p y q, los polinomios de Maclaurin de algunasfunciones definidas en terminos de f y g.
Suma y producto por escalares: Si α y β son numeros reales, el polinomio de Maclaurin degrado n de αf + βg es αp+ βq.
Producto: El polinomio de Maclaurin de grado n de f · g es el polinomio que se obtiene alprescindir en el polinomio producto p · q de los terminos de grado mayor o igual que n+ 1.
Cociente: Si g(0) = 0, entonces el polinomio de Maclaurin de grado n de f/g es el polinomiocociente que se obtiene al dividir p entre q en potencias crecientes de x hasta grado n.
Derivada: Si f ′ es la derivada de f , entonces el polinomio de Maclaurin de grado (n − 1) de f ′
es el polinomio derivado p′.
Primitiva: Si F es un primitiva de f (es decir, F ′ = f en I), entonces el polinomio de Maclaurinde grado (n+ 1) de F es el polinomio P que es la primitiva de p que cumple P (0) = F (0).
Composicion: Si f(0) = 0, entonces el polinomio de Maclaurin de grado n de g(f(x)) es elpolinomio que se obtiene al suprimir en q(p(x)) los terminos de grado mayor que n. En particular,el polinomio de Maclaurin de grado n de g(xm) es el polinomio que se obtiene al suprimir en q(xm)los terminos de grado mayor que n.
Relacion entre los polinomios de Taylor y los de Maclaurin. Hemos visto los polinomiosde Maclaurin de las funciones mas habituales y las reglas para obtener a partir de ellas los de lasfunciones que aparecen en las aplicaciones. Los polinomios de Maclaurin permiten trabajar cercadel origen de coordenadas. ¿Que hacemos para trabajar cerca de un punto a = 0? Lo mas simplees hacer un cambio de variable: supongamos que queremos calcular el polinomio de Taylor p(x)de grado n de una funcion f(x) alrededor de un punto a = 0. Hacemos el cambio de variablet = x− a, consideramos la funcion g(t) = f(t+ a) y calculamos su polinomio de Maclaurin q(t) degrado n. Entonces p(x) = q(x− a) es el polinomio de Taylor de f alrededor de a que buscamos.
Estos resultados permiten calcular los polinomios de Taylor de la gran mayorıa de las funcionesque aparecen en la practica.
EJERCICIOS DE LA SECCION 1
Ejercicio 1. Construye los polinomios de Maclaurin de grado 3 de las siguientes funciones.
(1) f(x) = ex − sen(x) + 2 cos(x) (2) f(x) = (1 + x) cos(x) (3) f(x) = ex sen(x)
(4) f(x) =1 + x
1− x(5) f(x) =
1
1 + x2(6) f(x) = tan(x)
(7) f(x) = arctan(x) (8) f(x) =∫ x
0e−t2 dt (9) f(x) =
√1 + x2
(10) f(x) = e6x/(1 + log(1− x2)
)(11) f(x) = (1− 3x)2/3 (12) f(x) = e− sen(x)

24 Matematicas II — GITI (2016–2017)
Ejercicio 2. Construye los polinomios de Maclaurin de grado 4 de las siguientes funciones.
(1) f(x) = xe2x − e−x (2) f(x) =√1− x2 (3) f(x) = ex log(1− 3x)
(4) f(x) =x
1− x2(5) f(x) =
sen(x)
1 + x(6) f(x) =
log(1 + x)
1 + x+ x2
(7) f(x) = 3/(1 + x3
)(8) f(x) = arcsen(x) (9) f(x) = arccos(x)
(10) f(x) = 2−x (11) f(x) = (1 + x2)1/3 (12) f(x) = e1−cos(x)
(13) f(x) = senh(x) (14) f(x) = cosh(x) (15) f(x) =∫ t
0sen(x)
x dt
(16) f(x) = [sen(x)]2 (17) f(x) = sen(x2) (18) f(x) = sen(sen(x)
)Ejercicio 3. Construye los polinomios de Taylor de grado 3 de las funciones que se indican acontinuacion alrededor del punto dado.
(1) f(x) = sen(2x)− cos(x) alrededor de a = π. (2) f(x) =√x alrededor de a = 9.
(3) f(x) = x3 − x− 5 alrededor de a = −1. (4) f(x) = log(x) alrededor de a = 1.
(5) f(x) =sen(πx)
1 + xalrededor de a = 1. (6) f(x) =
1
xalrededor de a = −2.
(7) f(x) =√x/(2− x) alrededor de a = 1. (8) f(x) = x1/3 alrededor de a = 8.
2. APROXIMACION DE FUNCIONES
Resto de Taylor. La cuestion ahora es saber si, efectivamente, los polinomios de Taylor de unafuncion se aproximan bien a la propia funcion, al menos cerca del centro. Para ello, tenemos queestudiar el error que se comete al aproximar la funcion mediante sus polinomios de Taylor.
Sean I ⊂ R un intervalo, a un punto interior de I y f una funcion de clase Cn(I). Sea pn elpolinomio de Taylor de grado n de f centrado en a. La funcion rn(x) = f(x)− pn(x) que nos dala diferencia entre los valores que toma f y los que toma su polinomio de Taylor pn, es decir, elerror que se comete si aproximamos f(x) por pn(x), se llama n-esimo resto de Taylor de f en a.El Teorema de Taylor nos permite estimar el tamano de este error.
Teorema de Taylor. Sean I ⊂ R un intervalo, a un punto interior de I y f una funcion de claseCn+1(I). Sea pn el polinomio de Taylor de grado n de f centrado en a. Entonces, para cada x ∈ Iexiste un punto c (que depende de x y esta entre a y x) tal que
rn(x) = f(x)− pn(x) =f (n+1)(c)
(n+ 1)!(x− a)n+1.
Esta expresion del resto (hay otras que no estudiaremos) se conoce como forma de Lagrange y esimportante porque es facil analizar como influyen los terminos que aparecen en ella.
Por un lado, si x esta cerca de a, entonces (x−a)n+1 se hace mas pequeno conforme crece n, lo queayuda a que la aproximacion mejore, mientras que si esta lejos, entonces la aproximacion empeora.
Por otro lado, al crecer n, tambien crece, y muy rapidamente, el denominador (n + 1)!, lo quetambien contribuye a mejorar la aproximacion.
El factor f (n+1)(c), sin embargo, es mas problematico. Como desconocemos c, para tener una ideadel tamano de f (n+1)(c) hay que buscar una cota de f (n+1) en I lo que, aunque no siempre es facil,nos permitira dar una cota del error. En general, que el tamano de las derivadas sucesivas de unafuncion sea grande indica que su grafica oscila mucho, por lo que, en este caso, las aproximacionesno seran demasiado buenas. Volveremos sobre esto un poco mas adelante.

2. Polinomios de Taylor 25
Teorema del valor medio de Lagrange. Sea f : [a, b] → R una funcion continua en [a, b] yderivable en (a, b). Entonces existe un punto c ∈ (a, b) tal que f(b)− f(a) = f ′(c)(b− a).
Este teorema, que es simplemente el caso n = 0 del teorema de Taylor, es especialmente importanteporque, entre otras aplicaciones, es el que permite establecer que una funcion es creciente en unintervalo si su derivada es positiva en dicho intervalo y que es decreciente si su derivada es negativa.
Geometricamente, el teorema nos dice que c es un punto del intervalo en el que la recta tangente ala curva de ecuacion y = f(x) por el punto (c, f(c)) es paralela a la recta que pasa por los puntos(a, f(a)) y (b, f(b)) (tienes otras interpretaciones geometricas en los Ejercicios 8 y 9).
Interpretacion geometrica del teorema del valor medio.
Este teorema tambien puede interpretarse en terminos de velocidades de la siguiente manera: si[a, b] es un intervalo temporal, el teorema del valor medio nos dice que hay algun punto c delintervalo en el que la velocidad del movil f ′(c) coincide con la velocidad media en el tramo; en esteprincipio se basan los llamados radares de tramo.
Aproximacion de funciones. Si queremos emplear el teorema de Taylor para aproximar losvalores de una funcion f cerca de un punto a, de dicho teorema se deduce que el resto se hace muypequeno cerca de a. De hecho ocurre no solo que
lımx→a
rn(x) = lımx→a
f (n+1)(c)
(n+ 1)!(x− a)n+1 = 0
sino tambien que
lımx→a
rn(x)
(x− a)n= lım
x→a
f (n+1)(c)
(n+ 1)!(x− a) = 0.
Esto nos indica que si x esta cerca de a, entonces el polinomio de Taylor pn(x) esta cerca de f(x);es mas, cuando x → a, el resto rn(x) = f(x)− pn(x) tiende a cero mas rapidamente que (x− a)n.
Ejemplo. Veamos como se utiliza esta informacion para calcular de manera aproximada los valoresque toma una funcion y dar cotas del error de dicha aproximacion con el ejemplo concreto quevimos al comienzo. Vamos a usar el polinomio de Maclaurin de grado 15, p15, de ex para obtener

26 Matematicas II — GITI (2016–2017)
una aproximacion del numero e = e1, la base de los logaritmos neperianos y de la propia funcionexponencial. Para x = 1 tenemos
p15(1) = 1 +1
1!+
1
2!+
1
3!+
1
4!+ · · ·+ 1
15!= 2.7182818284589944 . . .
¿Cuanto de buena es esta aproximacion del numero e? Si usamos una calculadora que tiene unaprecision de 12 cifras decimales para hallar e1, obtenemos 2.718281828459, que coincide con la sumaanterior en sus primeros 12 decimales (porque el duodecimo se ha redondeado). Pero, ¿coincidenestas 12 cifras con las del numero e? Veamos que sı. De acuerdo con el teorema de Taylor existeun punto c ∈ [0, 1] tal que
e = e1 = p15(1) +ec
16!.
Puesto que 0 < c < 1, tenemos ec < e1 < 3 lo que, a su vez, implica
|e− p15(1)| =ec
16!<
3
16!< 1.433844× 10−13.
En consecuencia, todas las cifras de la aproximacion de e dada por 2.718281828459 son correctasporque el error (valga lo que valga) debe ser menor que 2× 10−13 = 0.0000000000002.
Indicaciones para acotar el error. Como dijimos antes, el error del polinomio de Taylor
error =f (n+1)(c)
(n+ 1)!(x− a)n+1
contiene tres factores que influyen de distinta manera. Por un lado, la precision aumenta cuandoelegimos n grande y x esta cerca de a, pero disminuye cuando n es pequeno o el valor de x se alejade a; por tanto, debemos elegir n suficientemente grande y restringir el valor maximo de |x − a|para que el error no exceda una cota especificada. Con respecto a f (n+1)(c), como no conocemosel valor del punto intermedio c, lo que se hace es buscar una cota superior M del factor |f (n+1)(c)|y tener en cuenta que el valor absoluto del error satisface la relacion
|error| = |rn(x)| ≤M |x− a|n+1
(n+ 1)!,
siendo M ≥ max{|f (n+1)(c)| : c esta entre a y x}. Lo que hemos hecho en el ejemplo anterior es,concretamente, tomar M = 3.
EJERCICIOS DE LA SECCION 2
Ejercicio 1. Aproxima el numero sen(0.5) usando el polinomio de Maclaurin de grado 5 y da unacota del error de la aproximacion. ¿Que ocurre si tomas el polinomio de grado 6? ¿De que gradotendrıas que tomar el polinomio de Maclaurin para asegurar que el error es menor que 10−10?
Ejercicio 2. Aproxima log(0.9) usando el polinomio de Maclaurin de grado 4 de log(1 + x) y dauna cota del error de la aproximacion. ¿De que grado tendrıas que tomar el polinomio de Maclaurinpara asegurar que el error cometido es menor que 10−10?
Ejercicio 3. Aproxima√1.3 usando el polinomio de Taylor de grado 4 de
√x en a = 1 y da una
cota del error de la aproximacion.

2. Polinomios de Taylor 27
Ejercicio 4. Aproxima 3√7 y 3
√9 usando el polinomio de Taylor de grado 4 de f(x) = 3
√x en
a = 8 y da una cota del error de estas aproximaciones.
Ejercicio 5. Halla el polinomio de Maclaurin de grado 6 de la funcion f(x) = arctan(x2) y evaluadicho polinomio en un punto adecuado para obtener un valor aproximado de arctan(0.36).
Ejercicio 6. Aproxima el valor de log(2) utilizando el polinomio de Maclaurin de grado 5 de lafuncion f(x) = log
((1 + x)/(1− x)
)en x = 1/3.
Ejercicio 7. Halla el polinomio de Maclaurin de grado 3 de la funcion f(x) = arctan(x) para
obtener un valor aproximado de∫ 1
0arctan(x2) dx.
Ejercicio 8. Usa polinomios de Maclaurin de grado 10 para obtener valores aproximados de lasllamadas integrales de Fresnel:
∫ x
0sen(t2) dt y
∫ x
0cos(t2) dt.
Ejercicio 9. Sea f : [a, b] → R una funcion continua en [a, b] y derivable en (a, b). Sea r la rectaque pasa por los puntos (a, f(a)) y (b, f(b)). Sea (c, f(c)) un punto de la curva y = f(x) en el quese hace maxima la distancia, medida verticalmente, entre dicho punto y la recta r. Prueba que ces uno de los puntos medios a los que se refiere el teorema del valor medio de Lagrange.
Ejercicio 9. Sea f : [a, b] → R una funcion continua en [a, b] y derivable en (a, b). Sea r la rectaque pasa por los puntos (a, f(a)) y (b, f(b)). Sea (c, f(c)) un punto de la curva y = f(x) en el quese hace maxima la distancia, medida perpendicularmente, entre dicho punto y la recta r. Pruebaque c es uno de los puntos medios a los que se refiere el teorema del valor medio de Lagrange.
3. INFINITESIMOS
Resolucion de indeterminaciones. Si queremos usar el teorema de Taylor para realizar eva-luaciones numericas, entonces no podemos prescindir de los valores del termino f (n+1)(c)/(n+ 1)!para acotar los errores. Sin embargo, hay aplicaciones en las que es suficiente con conocer el com-portamiento lımite cuando x → a, de manera que la magnitud de f (n+1)(c)/(n+ 1)! es irrelevantey basta con tener en cuenta que f(x) − pn(x) tiende a cero mas rapidamente que (x − a)n. Unade estas aplicaciones es la resolucion de indeterminaciones. En el curso anterior se han estudiadolas reglas de L’Hopital para resolver algunas indeterminaciones, basicamente las del tipo 0/0.
Regla de L’Hopital. Sean f y g dos funciones derivables en un intervalo abierto I ⊂ R. Seaa ∈ I un punto tal que f(a) = g(a) = 0. Supongamos que g(x) = 0 y g′(x) = 0 para todo x = a.Si existe el lımite del cociente de las derivadas
lımx→a
f ′(x)
g′(x)= L,
entonces tambien existe el lımite del cociente de las funciones y vale lo mismo:
lımx→a
f(x)
g(x)= L.
(Recordemos que la regla tambien vale para lımites cuando x → ±∞.)
A veces es complicado usar la regla de L’Hopital para resolver una indeterminacion. Por ejemplo,necesitarıamos derivar varias veces, obteniendo expresiones cada vez mas complicadas, para evaluar
lımx→0
sen(x4)(e2x − 1
)4 .Veamos como podemos usar los polinomios de Taylor para resolver este tipo de indeterminaciones.

28 Matematicas II — GITI (2016–2017)
Infinitesimos equivalentes. Cuando tenemos una indeterminacion de la forma 0/0, las funcionesnumerador y denominador son infinitesimos. Se dice que dos funciones f y u son infinitesimosequivalentes en un punto a cuando se cumple que
lımx→a
f(x) = lımx→a
u(x) = 0 y lımx→a
f(x)
u(x)= 1.
La utilidad de este concepto es que si tenemos una indeterminacion lımx→a
f(x)
g(x)de la forma
0
0y
disponemos, en el punto a, de un infinitesimo u equivalente a f y de un infinitesimo v equivalentea g, entonces
lımx→a
f(x)
g(x)= lım
x→a
f(x)
u(x)· u(x)v(x)
· v(x)g(x)
= lımx→a
u(x)
v(x).
Es decir, para resolver una indeterminacion de la forma 0/0, podemos sustituir las funcionesinvolucradas por infinitesimos equivalentes y simplificar el calculo del lımite. El ejemplo principalde infinitesimo equivalente a uno dado es el primer termino no nulo de sus polinomios de Taylorcentrados en dicho punto.
Cero de orden k. Sean I un intervalo, a un punto interior de I y f una funcion de clase Cn(I)que cumple, para un cierto k ≥ 1,
f(a) = 0, f ′(a) = 0, f ′′(a) = 0, . . . , f (k−1)(a) = 0, f (k)(a) = 0;
es decir, a es un cero de la propia funcion y de sus primeras k−1 derivadas, pero no de la derivadak-esima. Por analogıa con los polinomios, diremos que a es un cero de orden k de la funcion f .
Termino principal. Si a es un cero de orden k ≥ 1 de f , entonces el polinomio de Taylor de
grado k alrededor de a sera p(x) =f (k)(a)
k!(x − a)k y es el primer polinomio de Taylor que no es
nulo. Este primer polinomio no nulo se llama termino principal y verifica la siguiente propiedad:
lımx→a
f(x)
p(x)= 1
de manera que f y su termino principal son infinitesimos equivalentes en a.
En el ejemplo anterior, usando las propiedades de los polinomios de Maclaurin es facil ver que el
termino principal de sen(x4) es x4 y que el termino principal de(e2x − 1
)4es 16x4, ası que nos
quedarıa
lımx→0
sen(x4)(ex − 1
)4 = lımx→0
x4
16x4=
1
16.
Otros ejemplos de infinitesimos equivalentes. Si f es un infinitesimo en a y f es derivableentonces, usando la regla de L’Hopital, es facil ver que las siguientes funciones son infinitesimosequivalentes a f en a:
sen(f(x)
), tan
(f(x)
),
(ef(x) − 1
), log
(1 + f(x)
).
La ultima se usa, sobre todo, en indeterminaciones de la forma 1∞ de la siguiente manera: silımx→a
g(x) = 1, entonces log(g(x)
)y (g(x)− 1) son infinitesimos equivalentes en a.

2. Polinomios de Taylor 29
Con esto, el ejemplo anterior tambien puede resolverse usando que, por un lado, sen(x4) y x4 y,por otro lado,
(e2x − 1
)y 2x son parejas de infinitesimos equivalentes en 0, de manera que
lımx→0
sen(x4)(ex − 1
)4 = lımx→0
x4
(2x)4=
1
16.
EJERCICIOS DE LA SECCION 3
Ejercicio 1. Calcula los siguientes lımites usando la regla de L’Hopital (los dos primeros son losdos ejemplos de aplicacion de la regla propuestos en el libro de L’Hopital; los otros estan extraıdosde las pruebas de acceso).
(1) lımx→a
√2a3x− x4 − a
3√a2x
a− 4√ax3
(2) lımx→a
a2 − ax
a−√ax
(3) lımx→0
(ex − esen(x)
)/x2 (4) lım
x→0+x(log(x)
)2Ejercicio 2. Calcula los siguientes lımites.
(1) lımx→0
x− sen(x)
x sen(x)(2) lım
x→0
tan(sen(2x))
3x
(3) lımx→0
log(1 + x3)
x(1− cos(x))(4) lım
x→0
sen(x)− tan(x)
x(ex2 − cos(x2))
Ejercicio 3. Sea f la funcion dada por f(x) = 2−x∫ x
0e−t2dt. Calcula el polinomio de Maclaurin
de grado 4 de f y usalo para hallar lımx→0
2− f(x)− x2
x3 log(1− 2x).
Ejercicio 4. Sabiendo que lımx→0
log(x+ 1)− a sen(x) + x cos(3x)
x2es finito, calcula a y el valor de
dicho lımite hallando el polinomio de Maclaurin del numerador.
Ejercicio 5. Sabiendo que lımx→0
a sen(x)− xex
x2es finito, calcula el valor de a y el de dicho lımite.
Ejercicio 6. Sabiendo que lımx→0
x cos(x) + b sen(x)
x3es finito, calcula b y el valor del lımite.
Ejercicio 7. Determina los valores de a para los que la recta de ecuacion x = 0 es una asıntota
vertical de la curva y =log(1 + x2)− ax2
sen2(x2)
Ejercicio 8. Calcula, segun los valores de a > 0, el valor de lımx→0+
x tan(x)− 2 + 2 cos(x)
xa.
Ejercicio 9. Estudia en funcion de a ∈ R el valor de lımx→0
x3 cos(x)− x sen2(x)
sen(x)− x cos(ax).

30 Matematicas II — GITI (2016–2017)
Ejercicio 10. Calcula lımx→0
x(a− cos(x))
log(1− x3)segun los valores de a.
Ejercicio 11. Calcula lımx→0
1 + ax2 + ex sen(x)− esen(x)[log(1 + x)
]3 segun los valores de a.
Ejercicio 12. Calcula lımx→0+
(1− cos(a
√x))arctan(2x)
sen(x) log(1− x2
) segun los valores de a.
Ejercicio 13. Calcula a y b sabiendo que lımx→0
ax2 + bx+ 1− cos(x)
sen(x2)= 1.
Ejercicio 14. Halla los valores de los parametros a y b para los que las funciones
f(x) = ax− (sen(x))3 + bx3 y g(x) = x(1− cos(x))
verifican que el lımite lımx→0
f(x)
g(x)es un numero real no nulo. ¿Para que valores de a y b son las
funciones f y g infinitesimos equivalentes en 0?
Ejercicio 15. Calcula lımx→0
x sen(x)− bx2
(1− cos(x))(ea sen(x) − 1)2segun los valores de a y b.
Ejercicio 16. Calcula lımx→0
arctan(x2)− ax2
sen2(x)− bx2segun los valores de a y b.
Ejercicio 17. Halla lımx→0
xeax − sen(bx)
cx2 + x3segun los valores de a, b y c.
4. RESOLUCION NUMERICA DE ECUACIONES
Hemos recordado antes que las abscisas de los puntos de corte con el eje OX de una curva y = f(x)son las soluciones de la ecuacion f(x) = 0. Como ya sabes de algunos de los modelos matematicosy problemas que has estudiado en el bachillerato — la determinacion de los puntos de corte deuna curva con el eje OX es un ejemplo mas— el planteamiento de ecuaciones y su resolucion sonaspectos importantes de la aplicacion de las matematicas a la ciencia y la ingenierıa.
Dedicamos esta seccion al problema de resolver una ecuacion de la forma f(x) = 0, donde f es unafuncion continua en un intervalo [a, b]. Como dijimos antes, las soluciones de f(x) = 0 se llamanceros de la funcion f y tambien se llaman raıces en el caso particular en que f es un polinomio.
Salvo en casos muy particulares —por ejemplo, que f sea un polinomio de grado menor o igual que4— no se dispone de una formula que nos proporcione los ceros de f . En la practica, para resolverf(x) = 0 se utilizan metodos de aproximaciones sucesivas, que consisten en generar valores que sevan aproximando a una solucion de f(x) = 0 que, de esa forma, calculamos con toda la precisionque requiera la situacion en la que estemos trabajando. En esta seccion estudiaremos el metodode Newton, que permite obtener muy buenas aproximaciones de las soluciones de forma simple.
Los metodos de aproximaciones sucesivas son mas eficientes cuando se parte de una buena apro-ximacion inicial a la solucion. Es muy util ademas tener una idea clara de la situacion geometricapresente en el problema; eso nos ayudara a localizar buenas aproximaciones iniciales y a teneralgunas ideas previas sobre como funcionaran los metodos elegidos. Empezamos con el metodo debiseccion como tecnica para localizar la existencia de soluciones y obtener buenas aproximacionesiniciales. Este metodo se basa en el teorema del valor intermedio de Bolzano.

2. Polinomios de Taylor 31
Teorema del valor intermedio de Bolzano. Sea f : [a, b] → R una funcion continua tal quef(a) y f(b) tienen signos distintos. Entonces existe un punto x∗ ∈ (a, b) tal que f(x∗) = 0.
El metodo de biseccion. Elmetodo de biseccion consiste en utilizar este resultado para construirintervalos cada vez mas pequenos que contienen un cero. Por comodidad, tomemos a1 = a yb1 = b. Sea x1 = 1
2 (a1 + b1) el punto medio del intervalo. Si f(x1) = 0 ya tenemos una solucion.Si f(x1) = 0 entonces, dependiendo de que el signo de f(x1) sea igual que el de f(b1) o que el def(a1), o bien en el intervalo [a1, x1] o bien en el [x1, b1] hay una raız de la funcion f . Elegimosel intervalo adecuado y lo llamamos [a2, b2]; su longitud es la mitad del anterior. Repitiendo elproceso, conseguimos una sucesion de intervalos encajados cuya longitud tiende a cero y tal quetodos ellos contienen un cero de f . La sucesion (xn) que se genera se aproxima a un cero x∗ de fy el error que se comete puede ser estimado mediante la cota
|xn − x∗| ≤ 2−n(b− a) para todo n = 1, 2, . . .
Este metodo tiene el inconveniente de que es un poco lento, veamos un ejemplo.
Ejemplo. Queremos resolver la ecuacion x3 − 2x − 5 = 0. Si dibujamos la grafica del polinomiof(x) = x3 − 2x− 5 podemos ver que unicamente tiene una raız x∗ que, ademas, esta entre a = 2 yb = 2.2 porque f(2) = −1 < 0 y f(2.2) ≈ 1.25 > 0†. Vamos a utilizar el metodo de biseccion paracalcular x∗ con una precision de 10−3; es decir, tres cifras decimales.
Grafica del polinomio x3 − 2x− 5.
A partir del intervalo [2, 2.2] generamos x1 = 2.1 y como f(2.1) ≈ 0.061 > 0, sabemos x∗ estaen el intervalo [2, 2.1]. Tomamos ahora el punto medio x2 = 2.05 y como f(2.05) ≈ −0.484 < 0,sabemos x∗ esta en el intervalo [2.05, 2.1]. En el siguiente paso tomamos x3 = 2.075 y calculamosf(2.075) = −0.216 < 0, entonces x∗ esta en el intervalo [2.075, 2.1]. Continuando de esta maneraobtenemos (las cuentas estan hechas con todos los decimales que permite la maquina, pero solo semuestran los tres primeros)
x4 = 2.088, x5 = 2.098, x6 = 2.097, x7 = 2.095, x8 = 2.095
y como los tres primeros decimales de x7 y x8 coinciden, podemos asegurar que x∗ ≈ 2.095 con unaprecision de 10−3. La formula del error del metodo nos garantiza, de hecho, esta precision ya que|x8 − x∗| ≤ 2−8(0.2) ≈ 0.0008 < 10−3; es mas, la formula del error tambien predice que debemosdar 8 pasos para asegurar que alcanzamos la precision deseada ya que n = 8 es el primer numeropara el que 2−n(0.2) < 10−3.
Dar 8 pasos del metodo de biseccion supone evaluar la funcion 9 veces, lo que consume muchotiempo. Vamos a usar la aproximacion que proporciona el polinomio de Taylor de orden 1, la rectatangente, para generar el metodo de Newton, mucho mas rapido que el de biseccion.
†El sımbolo ≈ se lee “es aproximadamente igual a” y significa que las primeras cifras decimales del numero a laizquierda coinciden con las que se muestran a la derecha.

32 Matematicas II — GITI (2016–2017)
Construccion del metodo de Newton. Sea x∗ un cero de una funcion f y sea x0 un valoraproximado de x∗. Aplicando el teorema de Taylor al polinomio de grado 1 centrado en x0 resulta
f(x) = f(x0) + (x− x0)f′(x0) +
(x− x0)2
2f ′′(c),
donde c es un punto intermedio entre x y x0. Tomando x = x∗, y como f(x∗) = 0, tenemos
0 = f(x0) + (x∗ − x0)f′(x0) +
(x∗ − x0)2
2f ′′(c).
Si x0 es una buena aproximacion de x∗, despreciamos el cuadrado (x0 − x∗)2, que sera pequeno ynos queda 0 ≈ f(x0) + (x∗ − x0)f
′(x0). Ahora, despejando x∗, obtenemos
x∗ ≈ x0 −f(x0)
f ′(x0)= x1
y este valor x1 deberıa ser tambien una buena aproximacion de x∗, incluso mejor que x0.
Geometricamente, si tenemos en cuenta que la recta tangente a la curva y = f(x) en el punto(x0, f(x0)) viene dada por la ecuacion y = f(x0) + f ′(x0)
(x − x0
), entonces x1 es, precisamente,
el punto de corte de esta recta tangente con el eje OX.
¿Es, de verdad, x1 una aproximacion de x∗ mejor que x0? Para ver que, en general, la respuestaes afirmativa, tomemos la funcion g(x) = x − f(x)/f ′(x) y volvamos a aplicar el el teorema deTaylor, ahora al polinomio de grado 1 de la funcion g(x) alrededor de x∗. Puesto que, como secomprueba facilmente, g(x∗) = x∗ y g′(x∗) = 0, el teorema nos dice que hay un punto intermedioc entre x0 y x∗ tal que
x1 = g(x0) = g(x∗) + g′(x∗)(x0 − x∗) +g′′(c)
2(x0 − x∗)2 = x∗ +
g′′(c)
2(x0 − x∗)2
luego, pasando x∗ al primer miembro y tomando valor absoluto, obtenemos
|x1 − x∗| = |g′′(c)|2
|x0 − x∗|2
de manera que si |x0 − x∗| es pequeno, entonces |x1 − x∗| es aun mas pequeno, porque contiene eltermino |x0 − x∗| elevado al cuadrado; por ejemplo, si |x0 − x∗| ≈ 10−2, entonces |x1 − x∗| ≈ 10−4
(salvo que g′′ sea muy grande cerca de x∗).
La idea es, ahora, usar la misma construccion, pero partiendo de x1, para generar un punto
x2 = x1 −f(x1)
f ′(x1)cuya aproximacion a x∗ mejore la obtenida con x1, y ası, sucesivamente.
Veamos esta construccion en el caso del ejemplo anterior. Dibujamos la grafica del polinomiof(x) = x3 − 2x− 5 en el intervalo [2, 2.2] (la curva roja en la figura siguiente) y trazamos la rectatangente (en azul) a la curva en el punto de abscisa x0 = 2.2. Podemos ver que el punto de cortex1 de esta recta tangente con el eje OX esta mucho mas cerca de x∗ que 2.2.
Un paso del metodo de Newton.
2. Polinomios de Taylor 33
Este punto x1 viene dado por
x1 = x0 −f(x0)
f ′(x0)= 2.2− f(2.2)
f ′(2.2)= 2.2− 1.248
12.52= 2.1003.
Ahora repetimos el procedimiento, pero a partir de la nueva aproximacion x1 = 2.1003, obteniendo
x2 = x1 −f(x1)
f ′(x1)= 2.095;
esto es, el metodo proporciona, en solo dos pasos, el mismo valor aproximado de x∗ que se obtieneaplicando 8 pasos del metodo de biseccion; no hemos dibujado la nueva recta tangente y el puntox2 en el dibujo anterior porque son indistinguibles de la curva y el punto x∗.
El metodo de Newton. El metodo de Newton para hallar una solucion x∗ de una ecuacionf(x) = 0 consiste en determinar una buena aproximacion inicial x0 de la solucion x∗ y, a partir deella, construir la sucesion de aproximaciones
xn+1 = xn − f(xn)
f ′(xn)n = 0, 1, 2, . . .
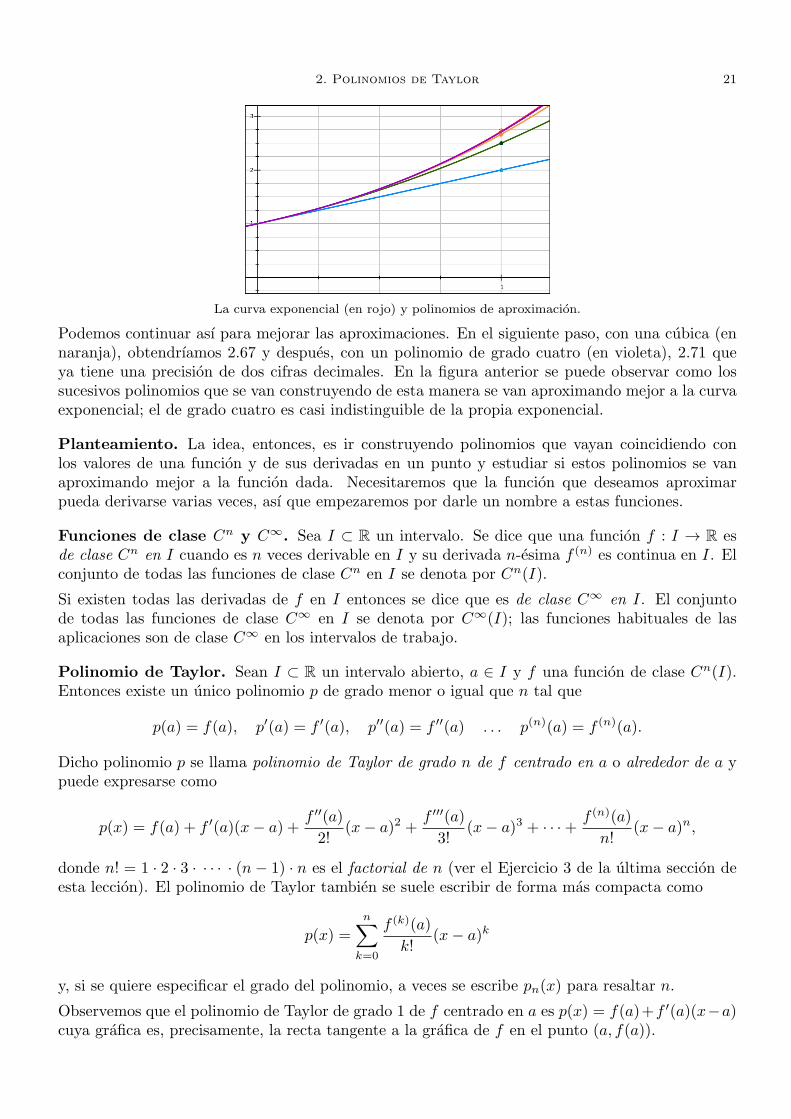
Interpretacion geometrica del metodo de Newton. Las aproximaciones proporcionadas porel metodo de Newton se obtienen construyendo una lınea quebrada de la siguiente manera: puntoen OX, vertical a la curva, recta tangente, corte de la tangente con OX (la nueva aproximacion),vertical a la curva, recta tangente, corte de la tangente con OX (la siguiente aproximacion), . . .
Construccion geometrica del metodo de Newton.
Si el punto inicial x0 esta lo suficientemente cerca de x∗, entonces puede asegurarse que las aproxi-maciones sucesivas x1, x2, x3, . . . se acercan a x∗ tanto como se quiera y de manera muy rapida; esdecir, con unos pocos pasos podemos determinar x∗ con toda la precision que haga falta; de hecho,como hemos visto antes, la velocidad de aproximacion es tal que el numero de cifras decimalescorrectas practicamente se dobla de una aproximacion a la siguiente.
Aproximacion de raıces cuadradas. Si queremos hallar la raız cuadrada de un numero a > 0,y aplicamos el metodo de Newton a la funcion f(x) = x2 − a. La iteracion nos queda
xn+1 =1
2
(xn +
a
xn
)n = 0, 1, 2, . . .

34 Matematicas II — GITI (2016–2017)
Se puede comprobar con unos cuantos casos que la rapidez de convergencia es realmente asombrosasi se compara con la forma habitual de hallar raıces cuadradas a mano. Vamos a usarlo para calcular√5: Empezando con x0 = 2, obtenemos
x1 =2 + 5/2
2= 2.25,
x2 =2.25 + 5/2.25
2= 2.236111111,
x3 =2.236111111 + 5/2.236111111
2= 2.236067978,
x4 =2.36067978 + 5/2.236067978
2= 2.236067978.
Estos valores se repiten a partir de aquı, luego√5 ≈ 2.236067978 con una precision de 9 decimales.
En general, si queremos usar el metodo de Newton puede, de hecho, que no tengamos formade asegurar que el punto inicial esta lo suficientemente cerca de la solucion. Para soslayar estadificultad, existen teoremas de convergencia global que garantizan la convergencia del metodo seacual sea el punto de partida dentro de un intervalo adecuado. Uno de los mas utiles es el siguiente.
Teorema de convergencia global de Newton-Fourier. Sea f : [a, b] → R una funcion de claseC2([a, b]) que cumple las siguientes condiciones:
(1) f cambia de signo en los extremos del intervalo, con lo que f tiene un cero x∗ en [a, b];(2) f ′(x) = 0 para todo x ∈ [a, b], de manera que f es estrictamente creciente o decreciente en
el intervalo, lo que garantiza que x∗ es el unico cero de f en [a, b];(3) f ′′(x) = 0 para todo x ∈ [a, b], de manera que la grafica de f es o bien concava o bien
convexa en [a, b], lo que garantiza que las iteraciones no se salen del intervalo.
Si tomamos como punto inicial x0 el extremo del intervalo [a, b] en el que f y f ′′ tienen el mismosigno, entonces las aproximaciones xn+1 = xn − f(xn)/f
′(xn), para n = 0, 1, 2, . . . , generadas porel metodo de Newton, convergen a x∗.
Algunas cuestiones practicas. Al aplicar el metodo de Newton surgen algunas cuestiones,basicamente relacionadas con que no podemos iterar indefinidamente. Por eso, debemos fijar unatolerancia ε, que mide la precision deseada, y un numero maximo de iteraciones.
¿Cuando detenemos las iteraciones? Fijada la tolerancia ε, deberıamos iterar hasta quepodamos asegurar que |xn − x∗| ≤ ε. Sin embargo, a diferencia de lo que ocurre con el metodo debiseccion, en el metodo de Newton no disponemos de una formula para calcular una cota del errorreal |xn − x∗| ası que las iteraciones se detienen cuando |xn − xn+1| < ε. Otra opcion, que puedeser preferible dependiendo de la situacion concreta, es detener las iteraciones cuando |f(xn)| < ε.En todo caso, dejamos de iterar cuando llegamos el numero maximo de iteraciones fijado.
¿Que hacemos si no se garantiza la convergencia? Si no podemos encontrar un intervaloen el que se pueda aplicar el teorema de convergencia global, lo que hacemos es iterar a ciegas,eligiendo un punto inicial x0 que nos parezca adecuado y analizando que pasa.
¿Que hacemos si no converge o converge despacio? Cuando converge, el metodo deNewton lo hace de forma muy rapida. Si se alcanza el numero maximo de iteraciones, puede serque, en nuestro caso concreto, no converja o que converja despacio. Esto puede deberse a variascausas. Lo usual sera que el valor inicial esta demasiado lejos del cero de f y sera necesario mejorarla aproximacion inicial dando varios pasos del metodo de biseccion.

2. Polinomios de Taylor 35
Otra causa comun de comportamiento lento o extrano del metodo es que el cero sea un ceromultiple de f , en cuyo caso f ′(x∗) = 0, o que haya dos ceros muy proximos, en cuyo caso f ′(x∗) esmuy pequeno. Para ver por que aparecen problemas cuando f ′(x∗) es cero o es muy pequeno (cosaque, por descontado, no sabemos de antemano) observemos que si xn esta cerca de x∗, entoncesf ′(xn) sera pequeno y al calcular el cociente para hallar xn+1 puede que aparezcan errores. Dehecho, si calculamos la derivada segunda g′′ de la funcion g(x) = x− f(x)/f(x) que hemos usadoantes, aparece [f ′(x)]3 en su denominador, luego si f ′(x∗) es cero o muy pequeno, el factor g′′(c)que obtuvimos al comparar la bondad de dos aproximaciones consecutivas puede hacerse grande.
¿Como hacemos los calculos? Si queremos hallar una raız de un polinomio, los calculospueden hacerse a mano usando el metodo de Ruffini; pero esto se hace muy pesado en cuantoempiezan a acumularse decimales. Para el resto de las funciones elementales, hay que usar unacalculadora o bien un programa de ordenador adecuado. Al final del guion se recomiendan una seriede portales de internet que contienen implementaciones de los metodos de biseccion y de Newton;te recomendamos que aprendas a usar alguno de ellos para poder comprobar los resultados queobtienes usando la calculadora.
EJERCICIOS DE LA SECCION 4
Ejercicio 1. Usa la calculadora y alguna de las paginas web que se citan al final del guion parahallar los ceros de las siguientes funciones con el metodo de biseccion y una precision de 10−2.
f1(x) = ex − 2− x, f2(x) = x sen(x)− 1, f3(x) = x3 + x− 1, f4(x) = 2−x − x.
Ejercicio 2. Utiliza el metodo de Newton para resolver las ecuaciones de los ejercicios anteriorescon la calculadora y alguna de las paginas web que se citan al final del guion.
Ejercicio 3. Usa el metodo de Newton para calcular con tres cifras decimales las raıces cuadradasde los numeros 8, 69, 111 y 1000 usando aproximaciones iniciales adecuadas.
Ejercicio 4. Utiliza el metodo de Newton para hallar una aproximacion de 3√7 resolviendo la
ecuacion f(x) = x3 − 7 = 0. Para ello, toma x0 = 2 como punto inicial de la iteracion y calculalas aproximaciones x1, x2 y x3. ¿Se garantiza la convergencia del metodo en este caso?
Ejercicio 5. Se quiere hallar 5√29 resolviendo la ecuacion f(x) = x5 − 29 = 0. Prueba que f
verifica las condiciones del teorema de convergencia global del metodo de Newton en el intervalo[1, 2], indica que punto x0 deberıa tomarse, de acuerdo con dicho teorema, como punto inicial paralas iteraciones y calcula las aproximaciones x1, x2 y x3.
Ejercicio 6. Queremos calcular la raız n-esima de un numero positivo a resolviendo la ecuacionf(x) = xn − a = 0 por el metodo de Newton.
(1) ¿Cual es la iteracion generada por el metodo de Newton?(2) Halla un intervalo en el que f verifique las condiciones del teorema de convergencia global.(3) Calcula las raıces cuartas de 20 y de 99 y las raıces sextas de 12 y 60.
Ejercicio 7. Utiliza la calculadora y alguna de las paginas web que se citan al final del guion pararesolver las siguientes ecuaciones en el intervalo indicado usando el metodo de Newton. Parte deun valor inicial adecuado y obten la solucion con una tolerancia de 10−3.
(1) x3 + x2 + x− 1 = 0 en el intervalo [0, 1].(2) xex = 1 en el intervalo [0, 1].(3) log(x) + x = 5 en el intervalo [3, 4].

36 Matematicas II — GITI (2016–2017)
Ejercicio 8. Calcula con un error menor que 10−3 la unica solucion real de 2x3 + 2x2 − 1 = 0.Para ello aplica el metodo de Newton, encontrando un intervalo donde se verifiquen las condicionesde teorema de convergencia global.
Ejercicio 9. Sea f(x) = log(1 + x) + 1 − 2x. Prueba que f verifica las condiciones del teoremade convergencia global del metodo de Newton en el intervalo [0, 1] e indica que punto x0 deberıatomarse, de acuerdo con dicho teorema, como punto inicial para las iteraciones.
Ejercicio 10. Para el polinomio f(x) = x3 − 5x2 − 2x+ 2 calcula:
(1) el numero de raıces reales que tiene,(2) para cada raız, un intervalo que la contenga y donde se verifiquen las condiciones del
teorema de convergencia global del metodo de Newton,(3) una aproximacion de dichas raıces aplicando dicho metodo con tres cifras decimales.
Ejercicio 11. Para el polinomio g(x) = x5 − 5x3 + 4x− 1 calcula:
(1) el numero de raıces reales que tiene,(2) para cada raız, un intervalo que la contenga y donde se verifiquen las condiciones del
teorema de convergencia global del metodo de Newton,(3) una aproximacion de dichas raıces aplicando dicho metodo con tres cifras decimales.
Ejercicio 12. Para el polinomio f(x) = 3x3 − 2x2 + 2 calcula:
(1) el numero de raıces reales que tiene.(2) para cada raız, un intervalo que la contenga y en el que se verifiquen las condiciones del
teorema de convergencia global del metodo de Newton.(3) para cada raız, la aproximacion con tres cifras decimales que se obtiene al aplicar el metodo
de Newton tomando como punto inicial el que establece el teorema de convergencia globalpara el intervalo determinado en el apartado anterior.
Ejercicio 13. Halla, trabajando con una precision de dos cifras decimales, el punto de corte dela curva logarıtmica y = log(x) con la hiperbola y = 1/x. Para ello, determina un intervalo dondepueda aplicarse el teorema de convergencia global de Newton-Fourier.
Ejercicio 14. Usa el metodo de Newton para hallar el punto mas alto de la curva dada encoordenadas polares por la ecuacion r = cos(3θ).
Ejercicio 15. Dibuja la curva de ecuacion r =(θ/π
)2para 0 ≤ θ ≤ 2π y encuentra las coorde-
nadas (x, y) de su punto mas alto. Para ello deberas resolver una ecuacion usando el metodo deNewton; hazlo probando en primer lugar que la solucion se obtiene para un angulo θ en el intervalo[π/2, 3π/4]; luego aplica adecuadamente el teorema de convergencia global trabajando con unaprecision de dos cifras decimales.
Ejercicio 16. Los circuitos electronicos de algunos de los primeros computadores solo podıansumar, restar y multiplicar, pero no dividir. Para hallar 1/a se puede aplicar el metodo de Newtona la funcion f(x) = a − 1/x. Comprueba que en la aplicacion del metodo a esta funcion no serequiere hacer divisiones y usalo para hallar 1/5, 1/2.2 y 1/1.37 con ocho cifras decimales.
Ejercicio 17. Sea f(x) = log(1 + x2) + 1− x2. Prueba que f cumple las condiciones del teoremade convergencia global de Newton-Fourier en [1, 2] y halla el cero que tiene la funcion f en [1, 2]usando el metodo de Newton con una precision de tres cifras decimales.

2. Polinomios de Taylor 37
Ejercicio 18. Prueba que la ecuacion e−x = 1−√1− x3 tiene solucion unica y determınala con
un error menor que 10−3 usando el metodo de newton con valor inicial x0 = 1.
Ejercicio 19. Comprueba que la ecuacion x = tan(x) tiene infinitas soluciones. Utiliza el metodode Newton para hallar sus dos primeras raıces positivas con una precision de tres cifras decimales.
Ejercicio 20. Se quiere obtener la solucion positiva mas grande de x3 − 3x + 1 = 0 con unaprecision de tres cifras decimales. Para ello, usa el metodo de Newton determinando un intervaloque la contenga y en el que se cumplan las condiciones del teorema de convergencia global.
Ejercicio 21. El punto x∗ = 1 es una raız simple del polinomio p(x) = x3 − 2x + 1 y una raızdoble del polinomio q(x) = x3 − 3x+ 2. Aplica el metodo de Newton partiendo de x0 = 1.2 paracomprobar que la velocidad de convergencia es sensiblemente inferior en el caso del polinomio q.
Ejercicio 22. En 1225, Leonardo de Pisa, tambien conocido como Fibonacci, hallo la solucionx∗ = 1.3688081078 de x3+2x2+10x = 20 con una precision de nueve cifras decimales. No explicocomo lo hizo y hasta la fecha sigue sin saberse, aunque la explicacion mas aceptada es que empleoun procedimiento similar al metodo de biseccion que se conoce con el nombre de metodo de laregula falsi o de la posicion falsa, que es una buena alternativa al metodo de Newton para resolverf(x) = 0 cuando no se puede calcular f ′ o no compensa por su complejidad.
Partimos de un intervalo [a1, b1] en el que g(a1)g(b1) < 0. Para definir el siguiente intervalo, seax1 ∈ [a1, b1] el punto de corte de la recta que une los puntos (a1, g(a1)) y (b1, g(b1)), es decir:
x1 := a1 − g(a1)b1 − a1
g(b1)− g(a1)=
a1g(b1)− b1g(a1)
g(b1)− g(a1).
Si g(x1) = 0, ya tenemos la raız. Si g(x1) = 0 tomamos como nuevo intervalo [a2, b2] aquel deentre [a1, x1] y [x1, b1] en el que g cambie de signo y repetimos el proceso.
Metodo de la regula falsi.
Emplea este metodo, ası como el de Newton para comparar la convergencia, para resolver laecuacion x3 + 2x2 + 10x− 20 = 0 trabajando en el intervalo [1, 2].

38 Matematicas II — GITI (2016–2017)
5. SUCESIONES Y SERIES
Iteracion y convergencia. La generacion de una sucesion de valores a1, a2, a3, . . . repitiendo, a partir de unaaproximacion inicial a0, la aplicacion de un mismo procedimiento para obtener cada termino an+1 a partir delanterior an se conoce como iteracion; el metodo de Newton es un ejemplo importante de metodo iterativo.
Una sucesion construida de esta manera se llama sucesion iterada y el objetivo de un metodo iterativo es que lasucesion de valores que se obtiene nos permita aproximarnos a la solucion de un problema tanto como marque laprecision que se requiera, en cuyo caso se dice que la sucesion converge a la solucion buscada. La iteracion es una
tecnica fundamental en la resolucion numerica mediante herramientas computacionales de muchos problemas deingenierıa.
La idea intuitiva de sucesion que converge —“se aproxima tanto como queramos”— a la solucion de un problemaes bastante clara pero, ¿como sabemos que, efectivamente, la sucesion generada por un cierto metodo converge?
Este es un problema delicado y no siempre facil. En esta seccion presentamos la nocion de sucesion convergente yalgunos ejemplos especiales.
Sucesion convergente. Se dice que una sucesion de numeros reales (an) = a0, a1, a2, . . . , an, . . . converge a un
numero real a si dado cualquier ε > 0, la precision fijada, existe un numero natural N tal que los valores de an paratodo n ≥ N verifican que |a− an| ≤ ε; es decir, todos los terminos de la sucesion a partir del N -esimo distaran dellımite a menos que la precision fijada. Esto se representa como a = lım
n→∞an, o bien a = lımn an, y se dice que a es
el lımite de la sucesion (an).
Esta definicion es analoga a la definicion de lımx→∞
f(x), el lımite de una funcion f(x) cuando x tiende a ∞ y la
pregunta clave es saber si una sucesion converge. Hay varios criterios y tecnicas para determinar si una sucesionconverge, pero su estudio general se escapa de los objetivos de esta asignatura; solo recogemos el que, probablemente,es el mas util e intuitivo.
Sucesiones monotonas y acotadas. Diremos que una sucesion de numeros reales (an) es monotona crecientecuando an ≤ an+1 para cada n = 0, 1, 2, . . . , mientras que se dice que (an) es monotona decreciente cuando
an ≥ an+1 para cada n = 0, 1, 2, . . .
Diremos que (an) esta acotada cuando existe M tal que |an| ≤ M para cada n = 0, 1, 2, . . .
Pues bien, toda sucesion monotona (creciente o decreciente) y acotada es convergente.
Sucesion divergente. Una sucesion (an) cuyos valores son tan grandes en tamano como queramos a partir de unodado no puede ser convergente y se dice que diverge, lo que se suele escribir como lımn an = ∞. Este es el caso delas sucesiones monotonas crecientes no acotadas.
Sucesion geometrica. Sea r un numero real. La sucesion 1, r, r2, r3, . . . , rn, . . . se llama sucesion geometrica derazon r y su comportamiento segun los valores de r es el siguiente:
(1) Si |r| < 1, entonces lımn rn = 0.(2) Si r = 1, entonces rn = 1 para cada n ∈ N y, por tanto, lımn rn = 1.
(3) Si r = −1, entonces la sucesion oscila entre los valores 1 y −1, ası que no converge.(4) Si |r| > 1, entonces lımn rn = ∞.
Sucesiones de potencias. Sea α un numero real. La sucesion 1, 2α, 3α, . . . , nα, . . . se llama sucesion potencialde exponente α y su comportamiento segun los valores de α es el siguiente:
(1) Si α < 0, entonces lımn nα = 0.(2) Si α = 0, entonces n0 = 1 para cada n ∈ N y, por tanto, la sucesion converge a 1.(3) Si α > 0, entonces lımn nα = ∞.
Ejemplo. Consideremos la sucesion geometrica de razon r = 1/2:
a0 = 1, a1 = 1/2, a2 = 1/4, a3 = 1/8, . . . an = 1/2n, . . .
La suma de los n-primeros terminos de esta sucesion es una nueva sucesion (sn) dada por
sn = a0 + a1 + a2 + · · ·+ an = 1 +1
2+
1
4+ · · ·+
1
2n= 2−
1
2npara cada n = 0, 1, 2, . . .

2. Polinomios de Taylor 39
Veamos una interpretacion geometrica de esta sucesion (sn): si dividimos un rectangulo de 2 × 1 por la mitad,luego una de sus mitades por la mitad en dos cuartos, luego uno de estos cuartos por la mitad en dos octavos y
ası sucesivamente, cada an representa una de estas mitades y sn representa la superficie que van acumulando estasmitades. Vemos que la sucesion (sn) tambien es convergente y su lımite vale 2, el area del rectangulo completo.
La serie geometrica de razon 1/2.
Decimos, en este caso, que la serie geometrica 1 +1
2+
1
4+
1
8+ · · · es convergente y su suma vale 2. Este es un
ejemplo ilustrativo de una situacion especial que aparece a menudo en las aplicaciones: la construccion de sumasacumuladas de los terminos de una sucesion previamente dada.
Serie numerica. Dada una sucesion de numeros reales a0, a1, a2, . . . , an, . . . , se define la suma parcial n-esimade dicha sucesion como sn = a0 + a1 + a2 · · ·+ an.
Se dice que la serie de termino general an, que se denota por∑
n an, es convergente cuando la sucesion (sn) de sussumas parciales converge, en cuyo caso su lımite s = limn sn se llama suma de la serie. Esto se representa como
s = a0 + a1 + a2 + · · ·+ an + · · · o bien como s =
∞∑n=0
an.
Cuando (sn) diverge, se dice que la serie es divergente.
La serie geometrica. Dados a = 0 y x, consideremos la serie
∞∑n=0
axn = a+ ax+ · · ·+ axn + · · ·
Esta serie se conoce como serie geometrica de razon x y primer termino a y es una serie convergente si, y solo si,
|x| < 1, en cuyo caso su suma es
∞∑n=0
arxn = limn→∞
a(1 + x+ x2 + x3 + · · ·+ xn) = limn→∞
a1− xn+1
1− x=
a
1− x.
En cursos anteriores has usado, de hecho, series geometricas de razon 1/10 para hallar la representacion de undecimal periodico como una fraccion. Por ejemplo, cuando escribimos 7.777 . . . lo que queremos decir es
7.777 . . . = 7 +7
10+
7
100+
7
1000+ · · · = 7 +
7
10+
7
102+
7
103+ · · · =
7
1− (1/10)=
70
9.
De hecho, la representacion decimal de los numeros reales no es mas que una expresion para la suma de una serie:
π = 3.14159 . . . = 3 +1
10+
4
102+
1
103+
5
104+
9
105+ · · ·
Mas adelante, utilizaras la serie geometrica en la asignatura Estadıstica e Investigacion Operativa del segundo
cuatrimestre.
Series de potencias. Si tomamos el polinomio de Maclaurin de grado n de la exponencial
pn(x) = 1 + x+x2
2+
x3
3!+ · · ·+
xn
n!,

40 Matematicas II — GITI (2016–2017)
cuyo resto vale rn(x) = ex − pn(x) =ec(x)
(n+ 1)!xn+1, entonces, es facil probar que
lımn→∞
(ex − pn(x)) = lımn→∞
ec(x)
(n+ 1)!xn+1 = 0,
con lo que podemos expresar ex como el lımite de la sucesion de sus polinomios de Maclaurin, es decir, como la
suma de una serie convergente, puesto que cada polinomio se obtiene del anterior sumando un nuevo termino:
ex = lımn→∞
pn(x) = lımn→∞
(1 + x+
x2
2+
x3
3!+ · · ·+
xn
n!
)=
∞∑n=0
xn
n!.
En otras palabras, podemos expresar la funcion exponencial como un polinomio infinito, lo que se conoce como unaserie de potencias. La importancia de los polinomios de Maclaurin radica aquı en que son las sumas finitas quees necesario conocer para construir la serie, la suma infinita. Al igual que la serie geometrica, utilizaras la serie
de potencias de la funcion exponencial en la asignatura Estadıstica e Investigacion Operativa del segundocuatrimestre.
Esto que hemos hecho para la exponencial y la serie geometrica a/(1 − x), expresarlas como series de potencias—polinomios infinitos— puede hacerse con la mayorıa de las funciones que aparecen en la practica, aunque unestudio profundo de este hecho escapa de los objetivos de la asignatura.
EJERCICIOS DE LA SECCION 5
Ejercicio 1. Calcula el lımite de las siguientes sucesiones y determina, en cada caso, un termino a partir del cualse puede asegurar que todos distaran del lımite menos que 10−4.
(1)(10−n
)n, (2)
(2 +
1
n2
)n
, (3)
(2n+ 4
n+ 1
)n
, (4)(e−n
)n.
Ejercicio 2. Dado un numero natural n se define el factorial de n, que se escribe n!, como el producto de todoslos numeros naturales desde el 1 hasta el propio n, es decir
n! = 1 · 2 · 3 · 4 · · · · · (n− 1) · n.
Ası, 1! = 1, 2! = 2, 3! = 6, 4! = 24, 5! = 120, . . . Por convencion, se toma 0! = 1.
Prueba que la sucesion (n!) de los factoriales crece muy rapidamente y diverge a infinito; en particular, prueba que
lımnn2
n!= 0 y que lımn
xn
n!= 0 para cualquier valor de x.
Ejercicio 3. Usa la forma de Lagrange del resto de Taylor para probar que si x ∈ R, entonces
sen(x) = x−x3
3!+
x5
7!−
x7
7!+ · · · cos(x) = 1−
x2
2!+
x4
4!−
x6
6!+ · · ·
Ejercicio 4. Usa la forma de Lagrange del resto de Taylor para probar que si x ∈ [0, 1), entonces
(1 + x)α =∞∑
n=0
(αn
)xn = 1 +
(α1
)x+
(α2
)x2 + · · ·+
(αn
)xn + · · · (α ∈ R)
log(1 + x) =∞∑
n=1
(−1)n−1 xn
n= x−
x2
2+
x3
3− · · ·+ (−1)n−1 x
n
n+ · · ·

2. Polinomios de Taylor 41
ALGUNAS NOTAS HISTORICAS.
Sobre los polinomios de Taylor. La tercera gran herramienta de los inventores del calculo infinitesimal, tras laderivada y la integral, fueron las series de potencias. Las series de potencias son “polinomios infinitos” en el sentido
que acabamos de ver con el ejemplo ex = 1 + x+x2
2+
x3
3!+ · · ·+
xn
n!+ · · ·
Probablemente, el ejemplo mas antiguo de una serie de potencias es la suma de los infinitos terminos de una
progresion geometrica de razon x que, como hemos visto, vale a+ ax+ ax2 + ax3 + ax4 + · · · =a
1− xsi |x| < 1. A
lo largo de la Edad Media matematicos de la India construyeron series de potencias para aproximar las funcionestrigonometricas, pero fueron Isaac Newton, Gottfried Leibniz, los Bernoulli (Jacques, Johann, Daniel y Nicholas),Leonhard Euler, Colin Maclaurin, Brook Taylor, y Joseph-Louis Lagrange quienes sistematizaron la teorıa de las
series de potencias, que no estudiaremos en este curso.
Una primera version del teorema de Taylor se esboza en un trabajo de James Gregory de 1671, pero la primera
version completa se atribuye a Brook Taylor en 1712. Senalemos tambien que la regla de L’Hopital recibe estenombre porque Guillaume Francois Antoine, marques de L’Hopital, dio a conocer la regla en su obra Analyse desInfiniment petits pour l’intelligence des lignes courbes, publicada en 1696 y que es el primer texto escrito sobrecalculo diferencial. Este texto se basa en las lecciones impartidas al marques por Johann Bernoulli, a quien debe
atribuirse, pues, la demostracion de la regla. La explicacion es que ambos habıan acordado que el marques compraba,junto con las lecciones, los derechos de los descubrimientos matematicos de Johann Bernoulli.
Sobre el metodo de Newton. El metodo para hallar raıces cuadradas que hemos visto ya era conocido por losastronomos de Babilonia y fue descrito por Heron de Alejandrıa (≈ 40 d. C.) y extendido a finales de la Edad Mediaal calculo de otras raıces por matematicos arabes y persas que tambien generaron metodos para resolver ecuaciones
polinomicas calculando, cada vez, una nueva cifra decimal de la solucion. Por ejemplo, el metodo que se describeen el Ejercicio 6 de la Seccion 4 fue descrito a comienzos del siglo xv por el matematico persa Al Kashi.
El metodo de Newton fue descrito por Isaac Newton en el manuscrito De analysi per aequationes numero terminoruminfinitas, escrito en 1669, pero no publicado hasta 1711 como primera parte de su Analysis per quantitatum series,fluxiones ac differentias; no obstante el metodo tambien fue dado a conocer por el propio Newton en 1673 y JohnWallis en 1685 como un algoritmo para resolver ecuaciones polinomicas; el ejemplo x3 − 2x− 5 = 0 que hemos visto
antes es, precisamente, el que utiliza Newton para exponerlo. Sin embargo, su presentacion es diferente de la quehemos usado aquı; de hecho, ni menciona la derivada, ni podrıa usarse para una ecuacion como xex − 1 = 0. Lo quehace Newton es escribir x∗ = 2+ p y, dado que la solucion esta cerca de x0 = 2, la diferencia p debe ser un numeropequeno. Ahora escribe (2 + p)3 − 2(2 + p)− 5 = 0 en forma desarrollada
8 + 12p+ 6p2 + p3 − 4− 2p− 5 = 0, es decir, p3 + 6p2 + 10p− 1 = 0.
Como p es muy pequeno, Newton desprecia los terminos p3 + 6p2, con lo que queda 10p − 1 = 0 y, por tanto,
p = 1/10 = 0.1. Con este valor de p se escribe ahora x1 = 2 + p = 2.1 y es facil ver que, para el caso de unpolinomio, este procedimiento de pasar de la aproximacion inicial x0 a x1 despreciando las potencias superiores de pal desarrollar el polinomio es exactamente escribir p = −f(x0)/f ′(x0). Tomando x1 = 2.1 como nueva aproximacionde x∗, de manera que x∗ = 2.1+q con q mas pequeno que p, Newton repite el procedimiento para hallar q = −0.005,
con lo que x∗ ≈ 2.095.
En 1690, Joseph Raphson incluyo en su libro Analysis aequationum universalis una descripcion simplificada del
metodo de Newton como un metodo puramente algebraico, solo para polinomios, pero lo da en terminos de apro-ximaciones sucesivas evitando los desarrollos polinomiales usados por Newton. En el ejemplo, Raphson dice quep puede calcularse, para x0 = 2 como p = (5 − 2x0 − x3
0)/(3x20 − 2), y ası sucesivamente, pero no reconoce en el
denominador el valor de la derivada. Por esta contribucion, en muchos textos el metodo de Newton se conoce comometodo de Newton-Raphson.
Finalmente, en 1740 Thomas Simpson describio el metodo tal como lo hemos hecho nosotros, como un metodoiterativo para resolver ecuaciones no lineales usando las propiedades de la derivadas y, ademas, lo extendio asistemas de dos ecuaciones con dos incognitas (que estudiaras en la asignatura de Metodos Matematicos desegundo curso); a el se le debe, entonces, buena parte del credito por la importancia y versatilidad del metodo.
El primer teorema de convergencia global fue dado por Fourier en 1818; a partir de este trabajo se han desarrolladodiversos teoremas de convergencia tanto para el caso de una ecuacion como de varias. El mas importante es,
probablemente, el dado en 1940 por Leonid V. Kantorovich (galardonado con el Premio Nobel de Economıa en1975), que puede aplicarse a situaciones muy generales.
Sobre el teorema del valor intermedio. Puede parecer extrano que el teorema del valor intermedio de Bolzanono fuera probado hasta 1817 por Bernard Bolzano. Hasta entonces nadie habıa puesto en duda que si la grafica

42 Matematicas II — GITI (2016–2017)
y = f(x) de una funcion continua en un intervalo tiene puntos a ambos lados del eje OX, entonces hay un puntox∗ en el que f(x∗) = 0. Si embargo, las crıticas a los fundamentos del calculo infinitesimal, surgidas a lo largo
del siglo xviii, llevaron a Bolzano a plantearse un nuevo modo de desarrollar esta disciplina. En su el trabajo de1817, Bolzano describio en terminos puramente aritmeticos los conceptos de lımite, convergencia y continuidad,planteando, de paso, el problema de formular la propia nocion de numero real. Un concepto clave para el desarrollode la fundamentacion rigurosa del calculo infinitesimal que se llevo a cabo a lo largo del siglo xix es el de sucesion
convergente, al que hemos dedicado la ultima seccion y que ya aparece en el trabajo de Bolzano y en el otro trabajopionero sobre estas cuestiones, el de Augustin Cauchy publicado en 1821.
Sobre sucesiones y series. Historicamente las series anteceden a las sucesiones; como hemos dicho, las series depotencias son la tercera gran herramienta de los inventores del calculo infinitesimal, tras la derivada y la integral.No obstante, los procedimientos de aproximaciones sucesivas existieron desde el origen de las matematicas. Ası,
Arquımedes obtuvo la aproximacion π ≈ 22/7 construyendo sucesiones de polıgonos regulares inscritos y circunscritosa un cırculo para aproximar su area por defecto y exceso, respectivamente. Sin embargo, el concepto de sucesionconvergente fue formalmente establecido a comienzos del siglo xix para el desarrollo de la fundamentacion rigurosa
del calculo infinitesimal que se llevo a cabo a lo largo del siglo.
Los trabajos de Bolzano y Cauchy citados antes pusieron en tela de juicio que toda la variedad de procedimientosde aproximacion que se habıan creado fueran realmente convergentes. La busqueda de nociones de convergencia
que fueran aritmeticamente rigurosas, alejadas de los peligros logicos a los que podıa conducir la mera intuiciongeometrica, acabo cristalizando en las nociones de lımites de funciones y de sucesiones numericas, ası como dediversas nociones de convergencia de sucesiones de funciones, que se utilizan hoy en dıa, notablemente a traves de
la escuela dirigida en Alemania por Karl Weierstrass.
El libro de Antonio Duran Historia, con personajes, de los conceptos del calculo, que puedes consultar en la
Biblioteca de la Escuela, contiene informacion mas extensa sobre estos temas.
Bibliografıa
G.L. Bradley y K.J. Smith, Calculo, vol. 1, Seccion 2.9 y Capıtulo 8.
R.E. Larson, R.P. Hostetler y B.H. Edwards, Calculo, vol. 1, Seccion 3.8 y Capıtulo 8.
G.B. Thomas, Jr., Calculo de una variable, Secciones 4.6, 10.8 y 10.9.
Paginas web de interes sobre los polinomios de Taylor:
http://www.wolframalpha.com
http://www.matematicasvisuales.com/html/analisis/analisis.html
Paginas web de interes para la resolucion numerica de ecuaciones:
http://keisan.casio.com/exec/system/1222999061
http://www.wolframalpha.com/
http://keisan.casio.com/exec/system/1244946907