-
BITS PilaniPilani Campus
Dynamic Force Analysis
Lecture-18 and 19 J S Rathore
-
BITS Pilani, Pilani Campus
2
Static Force analysis:
cgamF
cgJM
0F
0 M
Dynamic analysis has to be carried out
1) Situations, where inertial forces are comparable
with magnitudes of external forces
2) Operating speeds are high
Two or three force members FBD of links Pin reactions Stress
analysis and dimensions of links
-
BITS Pilani, Pilani Campus
3
Coupled Wheel Locomotion: Double crank mechanism
X
X
1. What would be maximum stress in
coupler AB?
2. Safe x-sectional dimension (X-X) ?
3. OR for given dimension and material
properties of AB, what would be
maximum possible speed of
crank/locomotive?
Locomotive is running at 120 Km/hr:
-
BITS Pilani, Pilani Campus
4
Dynamic Force analysis:
To complete analysis
1) Variation in velocity and acceleration
2) DAlembert principle
FBD Two or three force members Pin reactions Stress analysis and
dimensions of links
-
BITS Pilani, Pilani Campus
F2
Fn
F1
5
Motion of a rigid body subjected to
a system of forces:
cgamRF
JM
Newtons equation
R
e
CG
cga
Resultant force
Resultant torque
-
BITS Pilani, Pilani Campus
6
Motion of a rigid body subjected to
a system of forces:
0)( cgamF
0)( cgJM
D Alemberts Principle
Newtons equation
0 F
0 M
F2
Fn
F1CG
cgam
J
cga
cgamRF
JM
Resultant force
Resultant torque
-
BITS Pilani, Pilani Campus
7
Analytical method:
G3
aG3
3
3GamF
3
JM
0)( 3 GamF
0)( 3
JM
0 F
0 M
Newtons eq D Alemberts eq
W3
PA
PB
-
BITS Pilani, Pilani Campus
8
D Alembert Principle:
Dynamic problem is converted into static problem by having
Fictitious force (-macg) Inertia Force
Fictitious torque (-J) Inertia Torque
W3
PA
PB
aG3
3
- maG3
- J3
G3
-
BITS Pilani, Pilani Campus
9
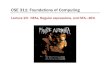
Four bar mechanism used in coupled wheel locomotion is as shown
in Fig. The
crank and follower, O2A and O4B, are of equal length of 600 mm
but of negligible
mass. The coupler AB is a rigid uniform circular rod of length
1000 mm, its total
mass being 12 kg. A torque M acts on the crank O2A, causing
coupler AB to move
with a linear acceleration aG3 = 25 45o m/s2 and an angular
acceleration AB = 60
rad/sec2 (CCW). Find:
1. The FBD of link AB, O4B & O2A.
2. Pin reactions PA and PB.
3. The minimum diameter of the
coupler required, if the allowable
bending stress of the material of the
coupler is 35 MPa.
4. Shifted inertia force in coupler AB.
Ex 1:
-
BITS Pilani, Pilani Campus
10
Soln: FBD
aG3
3
A
Torque M acts on the crank O2A, causing coupler AB to move with
a linear
acceleration aG3 = 25 45o m/s2 and an angular acceleration AB =
60 rad/sec
2
(CCW).
-
BITS Pilani, Pilani Campus
11
Soln: Pin reactions at A and B
A
From FBD of coupler AB
0xF
0AM Gives PBY = 224.93 N in positive y-direction
So PBX = 224.93 N in positive X-direction
So PAX = 12.8 N in negative x-direction
PBY
PBXPAX
PAY
300 N
0BM
So PAY = 104.925 N
05.83tan 1
AX
AYA
P
P
-
BITS Pilani, Pilani Campus
12
Soln: FBD
A
-
BITS Pilani, Pilani Campus
13
For minimum diameter of coupler AB, draw BMD of AB
3
32
d
Mbending
mm 32 d
Soln: Diameter of coupler AB
-
BITS Pilani, Pilani Campus
14
Soln: Shifted inertia force in AB
A
Shifted inertia force 300 N force at a distance
45cos3G
AB
ma
Je
me 2828.045cos300
60 Right from the centre of mass
e
300 N
-
BITS Pilani, Pilani Campus
15
Objectives:
Dynamic force analysis of 4-bar mechanism
aG3
3
Crank and follower with negligible mass External force/moment is
acting only on crank
DAlembert principle: Dynamic problem is converted into static
problem by having
Pseudo force (-macg) Pseudo torque (-J)
F2M2
-
BITS Pilani, Pilani Campus
16
Dynamic Force Analysis:
F3M3
F4F2M2
M4
aG22
DAlembert principle: Dynamic problem is converted into static
problem by having
Pseudo force (-macg) Pseudo torque (-J)
-
BITS Pilani, Pilani Campus
17
FBD
Fj,x = External force in the x-direction applied at CGj
Fj,y = External force in the y-direction applied at CGj
Mj = External Moment on the jth link applied at CGj
Lj = dj + fj
aG22
aG33
aG4
4
-
BITS Pilani, Pilani Campus
18
Link 2
222
2
2
22
2
222222222
2
2
cosf sinf- cosd- sind
1 0 1 0
0 1 0 1
k
a
a
m
P
P
P
P
M
F
F
yg
xg
Ay
Ax
yo
xo
y
x
aG2
2
Fj,x = External force in the x-direction applied at CGj
Fj,y = External force in the y-direction applied at CGj
Mj = External Moment on the jth link applied at CGj
Lj = dj + fj
-
BITS Pilani, Pilani Campus
19
Link 3
233
3
3
3
333333333
3
3
cosf- sinf cosd- sind
1 0 1 0
0 1 0 1
k
a
a
m
P
P
P
P
M
F
F
yg
xg
By
Bx
Ay
Ax
y
x
aG33
-
BITS Pilani, Pilani Campus
20
Link 4
244
4
4
4
4
4444444444
4
4
cosf- sinf cosd- sind
1 0 1 0
0 1 0 1
K
a
a
m
P
P
P
P
M
F
F
yg
xg
yo
xo
By
Bx
y
x
aG4
4
-
BITS Pilani, Pilani Campus
21
-
BITS Pilani, Pilani Campus
22
Assuming gravitational and frictional effects are negligible,
Determine all constraint forces
and driving torque (on link 2) required to produce the velocity
and acceleration conditions
specified.
m3 = 1.5 kg, m4 = 5 kg
JG2= 0.025 kg m2, JG3
= 0.012 kg m2, JG4= 0.054 kg m2
2 = 0, 3 = 119k rad/s2, 4 = 625k rad/s
2
AG3= [email protected] m/s2, AG4
= 104@233 m/s2
FC = 0.8 j kN.
RAO2= 60 mm
RO4O2= 100 mm
RBA = 220 mm
RBO4= 150 mm
RCO4= RCB =120 mm
RG3A= 90 mm
RG4O4= 90 mm
Ex 1: Problem 14.4 (Uicker-Shigley) p 536
-
BITS Pilani, Pilani Campus
23
Four bar mechanism used in coupled wheel locomotion is shown
in
Fig. The crank and follower, O2A and O4B, are of equal length
of
600 mm but of negligible mass. The coupler AB is a rigid
uniform
circular rod of length 1000 mm and its total mass being 15 kg.
If
the locomotive is running at constant speed of 120 km/hr
then
find:
1. The linear acceleration (aG3) and angular acceleration (AB)
ofcoupler AB.
2. The inertial loading on coupler AB.
Ex 2: Home assignment



























![Compiler Construction - Lecture : [1ex] Summer Semester ... · Lecture 3: Lexical Analysis II (Extended Matching Problem) Implementation of FLM Analysis (4) The Backtracking DFA I](https://img.pdfslide.tips/doc/110x75/60040cae2cef59565b19bc4a/compiler-construction-lecture-1ex-summer-semester-lecture-3-lexical-analysis.jpg)