Embed Size (px)
Citation preview

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Lemming Robo
Bauanleitung und Dokumentation
Karl Zeilhofer, [email protected]
12. Juli 2017
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 1

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Inhaltsverzeichnis
1 Vorwort und Danksagung 4
2 Stuckliste 5
3 Vorbereitungen 63.1 Holzteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.1.1 Beschriftung Steher . . . . . . . . . . . . . . . . . . . . . . . . . . 63.1.2 Beschriftung Querbalken . . . . . . . . . . . . . . . . . . . . . . . . 83.1.3 Bohrungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2 Getriebemotoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4 Erste Lotubung 10
5 Module aufkleben 115.1 T-Stuck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115.2 Spannungsregler und Stecker . . . . . . . . . . . . . . . . . . . . . . . . . 115.3 Arduino, Lademodul und Lagesensor . . . . . . . . . . . . . . . . . . . . . 125.4 Motortreiber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135.5 Ultraschallsensoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
6 Der Stromlaufplan 14
7 Lotstutzen 15
8 Loten 168.1 Steckerkabel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168.2 Spannungsregler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
8.2.1 Pads verzinnzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178.2.2 Widerstande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178.2.3 Buchsenkabel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188.2.4 Masse-Brucke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188.2.5 Batteriedrahte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
8.3 Lademodul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208.4 Spannungsstabilisierung und -filterung . . . . . . . . . . . . . . . . . . . . 218.5 Ansteuerung des Motortreibers . . . . . . . . . . . . . . . . . . . . . . . . 22
9 Kabelbaume anfertigen 23
10 Verbauen der Kabelbaume 2510.1 Ultraschallsensoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2510.2 Motortreiber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2610.3 Leuchtdioden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 2

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
11 Verbleibende Verbindungen 2811.1 Getriebemotoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2811.2 Versorgung des Motortreibers . . . . . . . . . . . . . . . . . . . . . . . . . 29
12 Inbetriebnahme 2912.1 Uberprufen der Stromaufnahme . . . . . . . . . . . . . . . . . . . . . . . . 2912.2 Batterie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2912.3 Testsoftware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2912.4 Betriebssoftware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2912.5 Schaumrohr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2912.6 Reifen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3012.7 Justierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
13 Anhang 3113.1 Werkzeugliste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3113.2 Verbrauchsmaterialien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3113.3 Stromlaufplan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3113.4 Notizen zur Reglerstruktur . . . . . . . . . . . . . . . . . . . . . . . . . . 31
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 3

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
1 Vorwort und Danksagung
Der Lemming Robo wird nun schon zum dritten mal hier im Technologiezentrum imRahmen der Talentewoche gebaut.
Hierbei geht es um einen kleinen Roboter, der selbstandig auf 2 Radern balanciert,langsam nach vorne fahrt und mit Ultraschallsensoren auf Lenkbefehle reagiert.
Das gesamte Projekt ist quelloffen, d.h. die Plane, die Dokumentation und der Strom-laufplan konnen eingesehen, heruntergeladen, verandert und wiederverwendet werden.Das Werk unterliegt der Lizenz ”Creative Commons, Attribution-Share Alike 4.0 in-ternational”.
Online findet man das Projekt unter www.team14.at/lemming
Vielen Dank an all die Unterstutzer, allen voran das Technologiezentrum Kirchdorf.Weiters ein Danke an die Nordfels GmbH, fur die gesponserten Lithium-Zellen, ein
Danke an die Wurth Elektronik GmbH & Co. KG fur die Unterstutzung bei denBuchsenleisten, und ebenfalls ein großer Dank an die TCG-UNITECH GmbH, fur dieMaßanfertigung der gesponserten Lotkolbenstander.
Karl Zeilhofer, 11. Juli 2017
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 4

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
2 Stuckliste
Auflistung in chronologischer Reihenfolge.
1. 2x Holz, 200x40x19mm, Steher und Querbalken
2. 2x Getriebemotor
3. Arduino Nano
4. Lagesensor, MPU6050
5. 2x Spannungsregler, 5V, 1A
6. Batteriekabel (Buchsen- und Steckerkabel), JST, 5A
7. Lademodul, 400mA
8. Drahte, 0.25mm2, Radox 125 (lotbestandig)
(a) schwarz (sw), 164cm
(b) rot (rt), 123cm
(c) blau (bl), 108cm
(d) grun (anstatt bl −−), 68cm
9. Motortreiber, L9110S
10. 2x Ultraschallsensor, HS-SR04
11. 2x Lotstutzen
12. 2x Widerstand 0.1Ω (Ohm), 2W (braun, schwarz, silber)
13. 6x Kerko (Keramikkondensator) 100 nF, 50V
14. Elko (Aluminium Elektrolytkondensator) 1000 uF, 10V
15. 3x Buchsenleiste 4-polig, Wurth Elektronik, 661 004 151 922
16. 3x Buchsenleiste 8-polig, Wurth Elektronik, 661 008 151 922
17. 2x Leuchtdiode
18. 2x Widerstand 220Ω, 250mW (rot, rot, braun)
19. 4x Widerstand 1kΩ, 250mW (braun, schwarz, rot)
20. 2x Kabelbinder, 3.6x200mm
21. 2x Kabelbinder, 3.6x350mm
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 5

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
22. Schaumrohr, L=85mm
23. 4x Motorschraube, M3x25, Linsenkopf, Philips Nr. 1
24. 2x Lithium-Batterie, 18650, 3.7V, ca. 2000mAh
3 Vorbereitungen
3.1 Holzteile
3.1.1 Beschriftung Steher
Auf der Unterseite des Stehers schreibt jeder seinen Namen drauf.Die 4 großen Seiten des Stehers werden mit V fur vorne, H fur hinten, L fur links
und R fur rechts beschriftet. Unbedingt beachten, dass L und R auf der richtigen Seitestehen. In Fahrtrichtung nach vorne ist links links und rechts rechts.
Auf der rechten Seite werden wie dargestellt von oben Linien mit den Abstanden 15,20, 15 und 20mm gezeichnet, und an der vorderen Seite werden die 20mm-Felder mitUSB gekennzeichnet.
Auf der hinteren Seite wird die Hohe der Lotstutzen durch eine Linie und die Polaritatdurch Plus und Minus eingezeichnet.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 6

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 1: Rechte Steherseite fur Lademodul (oben) und Arduino (unten),hinten kommen die Lotstutzen
Auf der linken Seite machen wir Markierungen mit den Abstanden von oben weg mit15, 25, 15 und 10mm. Das 25mm-Feld beschriften wir an der vorderen Seite mit 5V furden Spannungregler und das 10mm-Feld bekommt vorne ein X fur den Stecker.
Die Vorderseite markieren wir fur den Motortreiber, der von unten 60mm weg istund ca. 30mm hoch ist.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 7

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 2: Linke Steherseite fur Spannungsregler und Batteriestecker
3.1.2 Beschriftung Querbalken
Eine der beiden großen Flachen wird mittig mit oben beschriftet, die andere mit unten.Eine schmale große Flache des Querbalkens wird mittig mit vorne beschriftet, die anderemit hinten und die 2 kleinen Seiten mit L und R. Hier bitte wieder unbedingt auf diekorrekte Seite von L und R achten!
Dann zeichnen wir oben verschiedene Hilfslinien ein, symmetrisch einmal von linksund einmal von rechts weg: 10, 10 und 20mm. Vom Rand nochmals 65mm fur dieBatterie-Markierung. Hier werden zusatzlich noch Plus und Minus eingezeichnet. Dieaußeren Hilfslinien sind fur die LED, die wir durch einen kleinen Kreis symbolisieren.Die Außenseite wird mit A”gekennzeichnet, die Innenseite mit ”K”. Diese Buchstabenbrauchen wir spater, um die LED richtig anschließen zu konnen. Der Ultraschallsensorwird mit einem mittigen Querstrich und einem Kreis angedeutet.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 8

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 3: Querbalken mit Markierungen fur LEDs, Ultraschall und Batterie
Auf der Unterseite markieren zwei Hilfslinien die Mitte, je 90mm vom Rand weg. DerLagesensor wird auch noch eingezeichnet, beachte, dass der Stecker an der Vorderseiteist.
Abbildung 4: Querbalken mit Markierungen fur LEDs, Ultraschall und Batterie
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 9

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
3.1.3 Bohrungen
Im Steher mussen im unteren Bereich Bohrungen fur die Motoraufnahme gemacht wer-den. Diese werden laut Zeichnung mittels Bohrschablone durchgehend gebohrt, 2 Lochermit 2.5mm und 2 Locher mit 8mm Durchmesser.
Abbildung 5: Bohrlocher im Steher fur die Motoraufnahme
3.2 Getriebemotoren
Der Motor muss aus dem Getriebe genommen, um 180 gedreht und wieder eingebautwerden. Somit schauen spater die Lotanschlusse nach außen zu den Reifen hin.
4 Erste Lotubung
Die Stiftleisten des Arduinos werden von oben durch die Platine gesteckt und dannverlotet.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 10

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 6: Stiftleisten, Arduino Nano
Die Lotstellen mussen sauber ausgefuhrt werden. Der Pin muss von Lotzinn um-schlossen sein. Das Lotzinn sollte sich schon nach innen wolben, also keine nach außengewolbte Kugel bilden. Kurzschlusse durfen auf keinen Fall gemacht werden.
Abbildung 7: Beispiel: saubere Lotstellen auf einer Industrieplatine
Ebenso wird der Lagesensor mit der geraden (nicht abgewinkelten) Stiftleiste be–stuckt.
5 Module aufkleben
5.1 T-Stuck
Zuerst werden die beiden Holzer zu einem T verklebt. Dabei unbedingt auf vorne undhinten, bzw. links und rechts achten! Reichlich Heißkleber auf die Flache, und die beidenKanten werden mit Kehlnahten ausgefugt.
5.2 Spannungsregler und Stecker
Anschließend werden der Spannungsregler und der Batteriestecker aufgebracht. Bitte aufrot/schwarz beim Stecker achten. Der Stecker wird auf das X geklebt. Die 5V-Ausgange
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 11

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
der Spannungsregler sind auf der Seite, wo wir vorhin 5V markiert haben.
Abbildung 8: Kehlnaht; Spannungsregler und Stecker, nach vorne gerichtet
5.3 Arduino, Lademodul und Lagesensor
Der Arduino, das Lademodul und der Lagesensor werden auf der rechten Seite ange-bracht. Der Arduino braucht hierzu reichlich Heißkleber direkt auf die beiden langenStiftleisten.
Abbildung 9: Arduino und Lademodul auf der rechten Seite
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 12

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 10: Lagesensor auf der rechten Seite, moglichst parallel zum Holz ausgerichtet.Die Stiftleiste ist an der Vorderseite
5.4 Motortreiber
Der Motortreiber wird an der Vorderseite mit den Schraubklemmen nach unten zeigendfixiert.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 13

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 11: Motortreiber
5.5 Ultraschallsensoren
Hier wird die Platine und das Aluminiumgehause mit reichlich Heißkleber fixiert, sodassder Sensor gerade nach vorne schaut, d.h. vertikal und parallel zu den Holzkanten. DieStiftleisten schauen zur Mitte hin.
Abbildung 12: Ultraschallsensoren
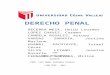
6 Der Stromlaufplan
Der Stromlaufplan beschreibt vollstandig die elektrischen Verbindungen des ganzen Ro-boters und befindet sich im Anhang. Er beschreibt neben den Modulen und den Leitun-
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 14

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
gen dazwischen auch die Drahtfarben und Drahtlangen und weitere Details.
Abbildung 13: Beispiel aus dem Stromlaufplan
Im obigen Beispiel sehen wir folgendes:
1. Eine Beschreibung: Ultraschallsensoren
2. Ort: links
3. Betriebsmittelkennzeichnung: A5 und P3, W1 bis W4
4. Leitungstyp: rt22 (steht fur rot, 22cm lang), bl22 −− (steht fur blau, 22cm lang,mit Strich markiert)
5. Modultyp: HC-SR04
6. Pinbezeichnungen: +5V, Trigger, Echo, GND
7. Pinnummern: 4,3,2,1
8. Versorgungssymbole: +5V (Pfeil nach oben, geht auf Lotstutze Plus), GND (gehtauf Lotstutze Minus)
7 Lotstutzen
Die Lotstutzen werden mit einen Philips-Schraubendreher der Große 1 auf der Mar-kierlinie in das Holz eingeschraubt. Mit dem Schraubendreher kann man vorher kleineKor–nungen in das Holz bohren, damit die Schrauben leichter anbeißen.
Die Polaritat sollte gut sichtbar bleiben und die beiden Schraubenkopfe sollten einenAbstand von 3-5mm haben, damit ein Kurzschluss ausgeschlossen ist.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 15

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 14: Lotstutzen
8 Loten
8.1 Steckerkabel
etwas kurzen, verdrillen und anloten (rot ist plus, schwarz minus). Davor werden dieSchrauben ordentlich verzinnt (Achtung: das dauert ein wenig, bis die Schrauben dieTemperatur erreichen).
Abbildung 15: Steckerkabel
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 16

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
8.2 Spannungsregler
8.2.1 Pads verzinnzen
Die 6 Pads auf jedem Spannungsregler werden verzinnt. Die Lotstellen sollten gleich–maßig rund und glanzend sein.
Abbildung 16: Spannungsregler, Pads verzinnen
8.2.2 Widerstande
Damit sich der Strom zwischen den beiden Spannungsregler gut aufteilt, werden derenPluspole uber je einen 0.1Ω-Widerstand zusammengefuhrt. Sie werden verdrillt und dortverlotet. Dann werden sie am Steher fixiert, sodass die langen Drahte dann gut bei den+5V-Pads der Spannungregler angeschlossen werden konnen.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 17

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 17: Spannungsregler, Widerstande
8.2.3 Buchsenkabel
Das Buchsenkabel wird am Minus-Pol des unteren Spannungsreglers und an der Mitte-lanzapfung der Widerstande angelotet.
Abbildung 18: Spannungsregler, Buchsenkabel
8.2.4 Masse-Brucke
Sie ist 30mm lang und verbindet die beiden Spannungsregler an den Minuspolen.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 18

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 19: Spannungsregler, Buchsenkabel
8.2.5 Batteriedrahte
Sie werden mit je 12cm schon mal an die Spannungsregler gelotet. Drahte so kurz wienotig abisolieren (3-4mm).
Abbildung 20: Batteriedrahte
Anschließend werden die Batteriedrahte an der Ruckseite mit Heißkleber fixiert.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 19

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 21: Batteriedrahte am Rucken fixiert
8.3 Lademodul
Es wird mit 7cm-langen Drahten mit einem der beiden Spannungsregler verbunden. Plusauf Plus, Minus auf Minus.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 20

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 22: Lademodul auf Spannungsregler
Abbildung 23: Lademodul auf Spannungsregler
8.4 Spannungsstabilisierung und -filterung
Der Elektrolytkondensator (Elko) und ein Keramikkondensator (Kerko) werden auf dieLotstutzen gelotet. Beim Elko ist unbedingt auf die Polaritat zu achten (Strich=Minus)!Die Beinchen des Keramikkondensators sollten eher kurz gehalten werden.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 21

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 24: Lademodul auf Spannungsregler
8.5 Ansteuerung des Motortreibers
In den Ansteuerleitungen zum Motortreiber sind 1kΩ-Widerstande geschaltet, um Sto–rungen Richtung Arduino zu unterdrucken. Der 100nF -Kerko hilft, die Spannung beihohen Frequenzen zu filtern.
Widerstande und Kondensator zuerst zurechtbiegen, und diese dann in eine dickeSpur Heißkleber drucken, abkuhlen lassen und anschließend mit reichlich Kleber fixieren.
Abbildung 25: Anstuerung des Motortreibers: Fixieren
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 22

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 26: Anstuerung des Motortreibers: Verloten mit den Pins
Abbildung 27: Anstuerung des Motortreibers: Kurzen auf 5mm
9 Kabelbaume anfertigen
Die Kabelbaume sind sehr sorgfaltig auszufuhren. Dabei halt man sich an die Angabendes Stromlaufplans. Wo moglich werden die Drahte immer verdrillt. Dies sieht nicht nurschoner aus, sondern es hilft auch die Schaltung robuster gegen Storungen zu machen.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 23

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 28: Buchsenleiste: beachte die 1er-Markierung links-unten im Bild
Die hier verwendeten Buchsenleisten haben sogenannte Schneidklemmen - eine dersichersten Verbindungstechniken uberhaupt. Dazu werden die einzelnen Drahte an derrichtigen Stelle von der richtigen Seite in den Stecker eingeschoben, bis sie auf derRuckseite plan mit dem Gehause sind. Die erste Buchse ist mit einem 1er gekennzeich-net. Sind alle Drahte am richtigen Platz, wird die Buchsenleiste mit einem Schraubstockverpresst. Alternativ kann man auch eine Wasserpumpenzange verwenden.
Abbildung 29: Kabelbaume
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 24

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 30: Kabelbaume
10 Verbauen der Kabelbaume
10.1 Ultraschallsensoren
Als erstes werden die beiden Kabelbaume fur die Ultraschallsensoren verbaut. Hierbeiist auf links und rechts zu achten, da sich die Drahtlangen um 2cm unterscheiden.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 25

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 31: Verkabeln der Ultraschallsensoren
10.2 Motortreiber
Buchsenleiste P5 wird beim Arduino eingesteckt, und dann die 4 Ansteuerleitungen,die Richtung Motortreiber gehen, passend abgelangt, abisoliert (3-4mm), verzinnt undverlotet. Anschließend mit Heißkleber fixiert und somit gegen Kurzschluss geschutzt.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 26

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 32: Ansteuerleitungen des Motortreibers
10.3 Leuchtdioden
Nun montieren wir noch die Leuchtdioden. In der Vorbereitung haben wir die Anschlussefur die LEDs gekennzeichnet mit A und K. A steht hier fur Außen, lAng oder Anode(Pluspol). K steht fur Kurz oder Kathode (Minuspol).
Die LEDs haben eben zwei unterschiedlich lange Beinchen, das ist entscheidend.Zuerst werden dies LEDs aufgeklebt, mit korrekter Polaritat.
Abbildung 33: LED: beachte kurz und lang
Dann das kurze Beinchen abwinkeln, das lange bis auf 5mm abzwicken und denWiderstand aufkleben.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 27

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Abbildung 34: LED mit Vorwiderstand
Abbildung 35: LED mit Vorwiderstand und verlotet
Die Lotstellen werden wieder mit Heißkleber fixiert und isoliert.
11 Verbleibende Verbindungen
11.1 Getriebemotoren
Die Motoren werden nun am Steher mit den Schrauben M3x25 fixiert und anschließendnoch zusatzlich mit Heißkleber gesichert. Zu beachten ist, dass der gelbe Nupsi nachaußen Richtung Reifen schaut, damit das Getriebegehause gut aufliegt.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 28

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
Bevor die Motoren nun verdrahtet werden, muss noch deren Drehrichtung bzw. Po-laritat festgestellt werden. Dazu werden sie mit einem Labornetzgerat mit Spannungversorgt. Schaut man auf den Wellenstummel, muss sich dieser im Uhrzeigersinn drehen.Der Plus-Anschluss wird dann mit einem Permanentmarker gekennzeichnet.
Anschließend bekommen die Motoren noch je 2 Entstor–kondensatoren (C4 bis C7),die elektrische Storungen mit dem Motorgehause kurzschließen. Hierbei muss das Ge–hauseblech ausreichend lange aufgeheizt werden, damit das Lotzinn gut verfließt undhaftet.
Dann werden sie verdrahtet, unbedingt die Polaritat beachten!
11.2 Versorgung des Motortreibers
Der Motortreiber braucht noch die Versorgungsleitungen, die sauber verdrillt von denLotstutzen zum Motortreiber verlegt werden.
12 Inbetriebnahme
12.1 Uberprufen der Stromaufnahme
Nun sollte alles bis auf die Batterie verdrahtet sein. Ist dies der Fall, und der Roboterwird dann von einem Labornetzteil mit 5V am Batteriestecker versorgt, sollte er ca.50mA aufnehmen. Bei erhotem Verbrauch sind alle Verbindungen und Lotstellen zuuberprufen.
12.2 Batterie
Wurde der Stromaufnahmetest bestanden, kann die Batterie verbaut werden. Diese wirdverklebt und zusatzlich mit Kabelbinder fixiert (2 Stuck, 3.6x200mm). Dann werden dieDrahte an den Batteriepolen angelotet.
ACHTUNG: nichts kurzschließen oder verpolen!
12.3 Testsoftware
Um alle Sensoren und Aktoren am Roboter testen zu konnen, wird eine spezielle Softwareaufgespielt.
12.4 Betriebssoftware
Wurde der vorherige Test bestanden, kann die endgultige Software aufgespielt werden.Herzlichen Gluckwunsch!
12.5 Schaumrohr
Das geschlitzte Schaumrohr wird uber die Batterie geklappt und mit den langen Kabel-bindern links und rechts fixiert.
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 29

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
12.6 Reifen
Bevor der Roboter nun selber fahren kann, mussen nur noch die Reifen montiert werden.Diese werden mit Superkleber auf dem Wellenstummel fixiert. Hierbei ist besondersdarauf zu achten, dass der Kleber nicht das Getriebe selbst verklebt.
12.7 Justierung
Die Regler-Software muss dann evt. noch etwas justiert werden, damit der Robo gut dasGleichgewicht halten kann.
Weitere Infos hierzu findest du auf www.team14.at/lemming
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 30

Bauanleitung, Lemming RoboTalentewoche, TIZ Kirchdorf
12. + 13. Juli 2017
13 Anhang
13.1 Werkzeugliste
1. Seitenschneider: fur Draht, Widerstande, Kondensatoren
2. Abisolierzange: es sind viele Drahtstucke zu verloten
3. Kombizange: ist zusammen mit einem starken Gummiring eine dritte Hand
4. Lotkolben: temperaturgeregelt, 350C, Hufeisenspitze (C-Form)
5. Lotkolbenstander: mit Lotschwamm (Vielen Dank an die TCG-Unitech)
6. Schraubendreher: PH1 zum fixieren der Motoren und der Lotstutzen am Holz
7. Schraubendreher: flach 3mm fur die Klemmen am Motortreiber
8. Heißklebepistole: zum fixieren der Module auf dem Holz
9. Standerbohrmaschine: fur das vertikale Holzstuck fur die Motoraufnahmen
10. Bohrer: 2.5mm fur M3-Schrauben und einen 8mm fur Auslasse
11. Heißluft 200C, fur Ausbesserungen beim Heißkleber
12. Computer mit Arduino IDE fur die Programmierung
13.2 Verbrauchsmaterialien
1. Heißklebesticks 11mm, ca. eine halbe Stange
2. Lotzinn 1mm, ca. 1-2m
3. Superkleber
4. Wasser fur die Lotschwamme
13.3 Stromlaufplan
13.4 Notizen zur Reglerstruktur
www.Team14.at | [email protected] | +43 7586 20559 | UID: ATU72284039
Team14 GesbR | Wengstraße 58 | A-4643 Pettenbach | IBAN: AT06203203210041309
lemming-anleitung-2017
Seite 31

12
34
56
12
34
56
A B C D
A B C D
Dat
e: 2
017-
07-1
1K
iCad
E.D
.A.
kica
d 4.
0.2+
dfsg
1-st
able
Rev
: 3.
4S
ize:
A4
Id: 1
/1
Tit
le:
Lem
min
g-R
ob
oF
ile: l
emm
ing_
robo
.sch
She
et: /
(c)
Tea
m14
, Kar
l Zei
lho
fer,
201
5-20
17C
reat
ive
Com
mon
s A
ttrib
utio
n S
hare
Alik
ew
ww
.team
14.a
t/lem
min
g
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
A10
Ard
uino
Nan
o V
3.0
D1/
Tx
D0/
Rx
Res
etG
ND
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
/MO
SI
D12
/MIS
O
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
VIN
GN
DR
eset
+5V A
7A
6S
CL/
A5
SD
A/A
4A
3A
2A
1A
0A
Ref
3V3
SC
K/D
13
BT
1Li
-Ion
1 2 3 4 5 6
A4
Sin
gle-
Cel
l-Li-B
MS
_5V
/1AB
AT
+
BA
T-
Cha
rge+
Cha
rge-
5.0V
+
5.0V
-
Ste
pU
p 5V
GN
D
1 2
A8 T
P40
56
BA
T+
BA
T-
USBB-Mini
Lade
mod
ul
+5V
1234
A5 H
C-S
R04
+5V
Trig
ger
Ech
oG
ND
1234
A6 H
C-S
R04
+5V
Trig
ger
Ech
oG
ND
AK
1 2 3 4
A11 T
CR
T50
00
Ref
lex-
Opt
okop
pler
CT
R >
50%
: 1-7
mm
12345678
A9
MPU6050-Modul
VCCGNDSCLSDAXDAXCLAD0INT
x
z
y
1 2 3 4
1 2 3 4 5 6
A7
L911
0S
VC
CG
ND
B-I
BB
-IA
A-I
AA
-IB
B-O
AB
-OB
A-O
AA
-OB
12
A2
Get
riebe
mot
or
+-
12
A1
Get
riebe
mot
or
+-
+5V R7
1k
R81k
+5V
GN
D
+5V
+5V
GN
D
GN
D
+5V
GN
D
+5V
rech
ts
links
Wird
der
Mot
or p
ositi
v ve
rsor
gt, d
reht
sic
h da
s R
ad im
Uhr
zeig
ersi
nn, w
enn
man
dra
uf s
chau
t. D
arau
s er
gibt
sic
h di
e P
olar
ität d
er M
otor
ansc
hlüs
se.
Ultr
asch
alls
enso
ren
Ard
uino
Nan
o V
3.0
mit
US
B, 3
2k F
lasc
h, 2
k R
AM
, 1k
EE
PR
OM
10 B
it A
DC
3 A
chse
n B
esch
leun
igss
enso
r: +
-2...
8g3
Ach
sen
Dre
hrat
ense
nsor
: +-2
50...
2000
°/s
16 B
it
Lini
ense
nsor
GN
D
AK
1 2 3 4
A12 T
CR
T50
00
Ref
lex-
Opt
okop
pler
CT
R >
50%
: 1-7
mm
R91k
GND
GN
D
Lini
ense
nsor
linke
Spu
r
rech
te S
pur
Ruh
estr
om: 8
0uA
(=
1.5
Jahr
e/A
h)
1 2
P1
JST Buchse
1 2
P2
JST Stecker
C3
100n
C2
100n
C1 10
00uF
1 2 3 4 5 6
A3
Sin
gle-
Cel
l-Li-B
MS
_5V
/1AB
AT
+
BA
T-
Cha
rge+
Cha
rge-
Ste
pU
p 5V
C4
100n
C5
100n
C6
100n
C7
100n
Lini
ense
nsor
en s
ind
optio
nal
R3
1k
R4
1k
R5
1k
R6
1k
Rei
hen-
Wid
erst
ände
sin
d zu
rS
töru
nter
drüc
kung
von
der
H-B
rück
e R
icht
ung
Mik
roco
ntro
ller!
R1
0R1
R2
0R1
Um
den
Str
om fü
r be
ide
Mot
oren
ber
eits
telle
n zu
kön
nen,
m
üsse
n zw
ei H
ochs
etzs
telle
r pa
ralle
l ver
wen
det w
erde
n.
rechtslinks
2 S
tk. 1
8650
er Z
elle
n pa
ralle
l(a
us a
lten
Not
eboo
k-A
kkus
)
Ladebuchse(USB Mini-B-Buchse)
US
B M
ini-B
-Buc
hse
zum
Pro
gram
mie
ren
Orie
ntie
rung
am
Rob
oter
:x-
Ach
se: n
ach
hint
en (
nega
tive
Läng
sach
se)
y-A
chse
: nac
h lin
ks (
posi
tive
Que
rach
se)
z-A
chse
: nac
h un
ten
(neg
ativ
e H
ocha
chse
)
5.0V
+
5.0V
-L
öts
tütz
e +
Lö
tstü
tze
-
12
W16
W17
W4
W18
W19
W20
W21
W22
W1
W2
W3
W5
W6
W7
W8
W9W10W11W12
W13
W14
W23
W24
W25
W26W27
W28
W29W30
W31
W32
W35
V3.
1: v
on S
chal
tpla
n au
f Str
omla
ufpl
an g
eänd
ert
V3.
2: D
raht
beze
ichn
unge
n, L
änge
n un
d F
arbe
nV
3.3:
LE
Ds
und
IDC
-Buc
hsen
leis
ten
hinz
ugef
ügt
neue
Dra
htbe
zeic
hnun
gen,
Län
gen
optim
iert
V3.
4: P
5, P
6 un
d P
7 ge
spie
gelt,
Tea
m14
,
B
ezei
chnu
ngen
rt12
rt12
sw12
sw12
rt22
rt20
sw20
sw22
bl20
bl20
--
bl22
--
bl22
sw5
rt7
sw7
bl10
bl10
bl10
bl10
rt15
rt10
sw20
bl9-
-
bl9
bl17--
sw10
sw10
rt10
rt10
direkt
dire
kt
rt
sw
direkt
direkt
direkt
direkt
dire
kt
dire
kt
1234
P3 1234
P4
12345678
P5
1 2 3 4
P6 1 2 3 4 5 6 7 8
P7
12345678
P8
sw12
rt12
R10
270R
R11
270R
A K
LED
2re
chts
A K
LED
1lin
ks
GN
DG
ND
rt sw
bl17
sw17
sw17
W15
W33
W34
W14
W36
W37 W
38
P3-
P8:
IDC
Buc
hsen
leis
ten
von
Wür
th E
lekt
roni
k Mot
ortr
eibe
r
Spa
nnun
gsre
gler
Spa
nnun
gsre
gler
Lage
sens
or
Leuchtdioden