Embed Size (px)
Citation preview

“AÑO DE LA INVERSION POR EL DESARROLLO RURAL Y LA SEGURIDAD ALIMENTARIA”
UNIVERSIDAD NACIONAL DE PIURA
PROEDUNP - SULLANA
FACULTAD DE INGENIERIA DE MINAS
Tema:LHD – Perfil Bajo
Curso: Maquinaria y Transporte Minero
Docente: Ing. Glicérido Taype
Alumno:Katherine Panta Tello
Sullana, 05 de Diciembre del 2013.
Página 1

INDICE
RESUMEN 03
CAPITULO I 06
- Objetivos 06
- Justificación 07
CAPITULO II:
- Antecedentes 09
- Bases Teóricas o Bases Sustantivas 09
- Operaciones Unitarias de la Minería Subterránea 14
CAPITULO III
- Contenido del Trabajo 16
- Cargador De Bajo Perfil – Lhd 20
CAPITULO IV
- Conclusiones 35
- Recomendación 36
BIBLIOGRAFIA 37
ANEXOS 38
RESUMEN
Página 2

CRITERIOS DE SELECCIÓN DE MAQUINA PARA LA MINERIA
SUBTERRANEA
Luego de producido el arranque de la roca de la corteza terrestre en el interior
de la mina, sea esta destinada a la planta de tratamiento o al depósito de
desmonte se procede a la etapa de acarreo. Si bien hay minas subterráneas
que siguen utilizando equipos sobre rieles, el estándar actual en las
operaciones mineras que emplean tecnología de punta es el cargador frontal
de bajo perfil popularmente conocido como Scoop, Loader o LHD (Load, Haul,
Dump) ya sea solo o en combinación con camiones volquetes. A esta
tecnología se le conoce como “Minería sin rieles” o “Trackless Mining”.
Los primeros LHD que se utilizaron en el Perú fueron las llamadas palas Cavo
(autocargadoras) desarrolladas por Atlas Copco en la década de 1960. Eran
estas máquinas sobre llantas accionadas por aire comprimido que trabajaban
cautivas en los tajeos y poseían una cuchara y una tolva. Ya en la década de
1970 empezaron a popularizarse los scooptrams desarrollados por la firma
Wagner (posteriormente adquirida por Atlas Copco) introducidos en el país por
Sermac, empresa liderada por el Ing. Robert Dickson de los cuales se derivan
los actuales cargadores subterráneos. Además de Wagner, se tuvo la
presencia de otras importantes marcas como Jarvis Clark, Eimco, France
Loader, Toro, hoy todas ellas integradas y de propiedad del gigante sueco
Sandvik. En los últimos años ha aparecido con mucho éxito en el mercado
peruano la marca Elphinstone de procedencia australiana propiedad de
Caterpillar.
Hasta hace poco, el cargador subterráneo mas popular en el Perú era el de
3.5yd3, en la actualidad lo es el de 6yd3. Si bien se sigue utilizando en el medio
minero la capacidad estándar de cuchara para denominar a los diferentes
modelos de cargadores subterráneos, lo importante a la hora de seleccionar el
cargador subterráneo es la capacidad de acarreo (tramming capacity)
expresada en toneladas de roca que es capaz de transportar en un viaje y la
cuchara es diseñada para un volumen compatible con esta capacidad en
Página 3

función al peso específico de la roca, el esponjamiento de esta al ser
fragmentada y el factor de llenado de la cuchara que se espera obtener. La
experiencia demuestra que muchas veces estos tres factores no son bien
estimados y resultamos con máquinas que trabajan sobrecargadas con
detrimento en su vida operativa debido a desgaste prematuro y mayores costos
de mantenimiento, o bien operan por debajo de su capacidad de diseño
requiriendo de mas viajes para mover una determinada cantidad de roca y por
ende haciéndolo a un mayor costo.
Evolución Tecnológica
El rango actual de modelos varía entre 1yd3 y 15yd3 de capacidad y la
selección depende de la compatibilización entre la cantidad de frentes de
trabajos simultáneos que tengo y las dimensiones de las galerías y cruceros
que puedo excavar económicamente. Así, en minería de veta angosta no es
posible por razones económicas contar con excavaciones de mas de 10m2 de
sección y se utilizan equipos de pequeña dimensión, en tanto en la gran
minería subterránea (caso de Cobriza por ejemplo) es posible superar los 20
m2 y utilizar máquinas de gran capacidad. En la mediana minería es común
encontrar galerías y cruceros de 4x4 m que permiten el uso de cargadores
subterráneos de tamaño intermedio. Otra diferencia estriba en el uso de
máquinas accionadas por motores diesel o por motores eléctricos. En la
actualidad predominan los equipos accionados por motores diesel debido a la
mayor flexibilidad que tienen para desplazarse, pero por razones tanto
ambientales como de costo operativo la tendencia a futuro parece ser hacia
equipos eléctricos o híbridos o bien operados con hidrógeno.
Las últimas innovaciones tecnológicas que encontramos en el mercado son las
de los equipos teleoperados, caso de la mina “El Teniente” en Chile por
ejemplo, en la cual las máquinas son operadas desde la superficie. Se ha
mejorado mucho la ergonomía en los modelos recientes que no son
teleoperados, las máquinas que pudimos observar en la reciente exposición
minera de las Vegas mostraban espaciosas cabinas, ya no solo techos
protectores, y con excelente visibilidad hacia delante y hacia atrás, protección
Página 4

contra el polvo y el ruido excesivo y muy buena iluminación, sistema
automático de cambios para facilitar al operador el concentrase en la carga o
descarga y en la conducción del vehículo. Los nuevos sistemas hidráulicos son
del tipo sensible a la carga que mediante dos bombas del tipo variable
trabajando al unísono, proveen el flujo y la presión exactos requeridos con el
consiguiente ahorro en energía y menor desgaste de los componentes
hidráulicos. Las distancias típicas de acarreo varían entre los 50 y los 400m
cuando la descarga es en echaderos en tanto para descargar en camiones
volquetes, es usual una distancia de alrededor de 100m. Otro factor importante
en el diseño de los cargadores subterráneos es la fuerza de rompimiento o
“breakout force”, esta es la que le permite ingresar en la ruma de roca y llenar
la cuchara de una sola vez sin esfuerzo excesivo. También es importante
compatibilizar la capacidad del cargador subterráneo con la de los camiones
volquetes con los que ha de trabajar, lo usual es que pueda llenar la tolva de
estos en tres o cuatro pases. Finalmente debemos considerar el factor altura,
cuanto mayor sea esta, mayor será la perdida de potencia del motor diesel, por
lo que en la mayoría de minas peruanas se emplean motores de mayor
capacidad al del modelo estándar diseñado por el fabricante.
1.CAPITULO I:
Página 5

1.1.Objetivos
El principal objetivo que se persigue con este proyecto es ofrecer una
síntesis lo más científica posible sobre la minería, que es el ámbito
geográfico donde se encuentran desde la antigüedad hasta nuestros
días. Esto supone contar con diversos especialistas, desde la
prehistoria hasta la historia contemporánea, a fin de poder abarcar
todos los períodos.
Un segundo objetivo que nos planteamos con este trabajo será la
realización de una gran carta o mapa arqueológico donde aparezcan
reflejadas todas las huellas que la minería ha dejado en nuestra tierra.
Para ello se aprovecharan los datos obtenidos por el Proyecto
Peñalosa y los datos publicados y otros autores para la minería
industrial.
Otro dato importante, sobre todo para épocas antiguas, que queremos
valorar es el papel de la mujer en las explotaciones no solo mineras
sino sobre todo metalúrgicas. Desde una perspectiva de la
arqueología de género intentaremos analizar no solo el rol femenino
sino también, por ejemplo, el papel desempeñado por los niños en
estos trabajos mineros.
En paralelo con la investigación de la minería extractiva otro objetivo
de este proyecto será estudiar todo el proceso de manufactura
metalúrgica posterior a la obtención del mineral.
Por último, es nuestra intención transformar todo el conjunto de datos
obtenidos en este proyecto en una monografía que refleje el papel de
la minería y de las tierras giennenses en el desarrollo histórico del sur
peninsular.
1.2.Justificaciones de la Investigación
Página 6

En las minas de roca dura, la extracción se realiza mediante
perforación y voladura. Primero se realizan orificios con perforadoras
de aire comprimido o hidráulicas. Luego se insertan barrenos en los orificios
y se provoca una explosión para fracturar la roca. Se carga la roca volada
hasta galerías de gran inclinación, por que la roca cae hacia un pozo de
acceso. Se la carga en unos contenedores llamados cucharones y se la
retira de la mina.
Distintos elementos constitutivos de una mina subterránea.
Si la explotación se va a realizar a cotas inferiores del terreno base,
entonces el acceso a las labores se realizará por un pozo (shaft) o
una rampa (decline spiral, decline). Los pozos cumplen
diversas funciones, entre otras permitir el acceso
y salida del personal de mina, la ventilación de las labores
mediante inyección de aire desde la superficie, y por supuesto,
el transporte del material extraído a la superficie. Las rampas por
su parte han ido ganando adeptos con gran velocidad en
la minería moderna. Estas permiten el acceso directo a la mina de
material rodado, lo que facilita las labores de transporte de mineral.
Dentro de la mina tenemos las galerías, que pueden ser en
dirección (de la masa mineralizada; drifts) o perpendiculares a
ésta, esto es, transversales (cross-cuts).
La conexión entre los distintos niveles de una mina se realiza por
pozos inclinados (raise, hacia arriba; winze, hacia abajo), que
sirven para el trasvase de mineral y movimiento del personal.
Tendremos niveles de producción, y por debajo de éstos, de
transporte de mineral.
Entre los equipos más comunes están los minadores (miners), las
perforadoras tipo Jumbo, los equipos de transporte tipo LHD (load-
haul-dump: carga-transporte-descarga), etc.
Página 7

Distintos elementos constitutivos de una mina subterránea.
Métodos más comunes de minería subterránea
o Hundimiento por subniveles (sublevel stoping) es
el método indicado para cuerpos mineralizados con fuerte
buzamiento (normalmente filones). El ancho de galería puede o
no coincidir con el del cuerpo mineralizado. El disparo (pega) se
prepara mediante perforaciones verticales en malla.
Página 8

CAPITULO II:
2.1. ANTECEDENTES:
Un LHD (por el ingles Load Haul Dump) es una de las
maquinarias mas usada en la mineria subterranea, ya que es parte
integral del proceso productivo de una mina, porque se encarga de
transportar el material recién dinamitado a los buzones de vaciado. Los
principales fabricantes de estas maquinas son CAT, SANDVIK y Atlas
Copco.
Además, es una de las máquinas de minería que se simulan en
empresas como Simumak y que sirven para practicar la conducción
antes de enfrentarse a la inseguridad del ambiente de la mina.
2.2. BASES TEORICAS O TEORIA SUSTANTIVAS:
o Hundimiento por subniveles (sublevel stoping). La última
voladura de roca se realizó en el subnivel superior. La
próxima será en el inferior. Note el diagrama radial de
disparo.
La mejora en los sistemas de perforación permitió alcanzar
distancias cada vez mayores (30 o más metros), lo que a su vez
posibilitó la implementación del método longhole stoping, para
cuerpos mineralizados de gran potencia y fuerte buzamiento. Este
método permite generar cámaras de hasta 50 m de altura (más
que la altura de la Facultad de Ciencias Geológicas: UCM). A
diferencia del método de hundimiento por subniveles, aquí se
Página 9

saca una tajada completa del cuerpo a la vez. El disparo se
realiza perforando desde varios subniveles, en abanico o en
diagrama radial.
o Longhole stoping. Note el diagrama de disparo en abanico
desde dos galerías.
Cámaras y pilares (room and pillar) se utiliza en cuerpos
horizontales o con poco buzamiento (mantos). Se dejan pilares de
roca para sostener el techo de la cámara. Estos pueden disponerse
de una manera regular (room and pillar s.s.) o irregular (casual
pillars, o room and pillar s.l.).
Página 10

o Método de cámaras y pilares (room and pillar). En este caso
los pilares siguen un espaciado regular.
Almacenamiento de zafras (shrinkage stoping) se utiliza
en cuerpos con fuerte buzamiento (filones), que presentan un
encajante que necesita soporte. A medida que
avanza el stoping hacia arriba se va sacando material por debajo.
o Almacenamiento de zafras (shrinkage stoping). A medida que
se avanza hacia arriba, se va extrayendo el mineral arrancado
por abajo.
Cámaras con relleno (cut and fill) opera con
un sistema similar al de almacenamiento de zafras, con la
diferencia substancial que el relleno no se realiza con el mismo
mineral arrancado, sino con materiales que son traídos desde
afuera, por ejemplo, limos o arenas. También pueden utilizarse a
estos efectos los estériles de la planta de flotación, lo cual tiene
innumerables ventajas ambientales. El método de entibación
cuadrada (square set stoping) es muy laborioso y hoy en día
prácticamente no se emplea. Es similar al proceso de cámaras
con relleno, pero además utiliza un esqueleto (entramado) de
cuadros rectangulares.
Página 11

o Cámaras con relleno (cut and fill). A diferencia del método
anterior, el relleno se Hundimiento de bloques (block caving)
resulta ideal en cuerpos irregulares de grandes dimensiones
como son los yacimientos tipo pórfido cuprífero. El requisito
técnico es que la roca a hundir sea fácilmente fragmentable.
Existen tres niveles principales: de hundimiento, de troceo
(grizzlies) y de transporte.
o Hundimiento de bloques (block caving), diagrama 3D. Cada
bloque puede tener dimensiones en el orden de 20 a 50 m de
lado en la base y más de 80 en la vertical.
Página 12

Hundimiento por pisos (sublevel caving) es utilizado
cuando la roca no es fácilmente fragmentable. En cierta manera
recuerda al método de sublevel stoping con la salvedad de que
las paredes son el mismo cuerpo mineralizado, y éstas se hacen
colapsar.
o Pisos de hundimiento (sublevel caving), esquema general.
Un túnel es una obra subterránea de carácter lineal cuyo
objeto es la comunicación de dos puntos, para realizar el transporte
de personas, materiales entre otras cosas. Normalmente es artificial.
Los túneles se construyen excavando en el terreno,
manualmente o con máquinas. Los sistemas habituales de
excavación subterránea son medios mecánicos, voladuras y manual:
Los medios mecánicos mediante minador puntual (rozadora),
minador a Seccion completa o TBM (Tunnel Boring Machine) o
con maquinaria convencional (martillo picador, excavadora...)
Perforación y voladura mediante explosivsos.
Manual, método derivado de la minería clásica del carbón de las
cuencas asturianas, en el que los operarios pican con martillo
Página 13

neumático la sección a excavar y otra partida de obreros
desescombran manual o semi-manualmente.
Un pozo es un orificio o túnel vertical perforado en la tierra,
hasta una profundidad suficiente para alcanzar lo que se busca,
normalmente una reserva de agua subterránea (originalmente)
del nivel freático o materias como el petróleo (pozo petrolífero).
Generalmente de forma cilíndrica, se suele tomar la precaución
de asegurar sus paredes con piedra, cemento o madera para
evitar su derrumbe.
2.3.OPERACIONES UNITARIAS DE LA
MINERÍA SUBETRRÁNEA
Las operaciones unitarias que se realizan durante la
extracción del mineral son: arranque, cargue, sostenimiento,
transporte y descargue. Enseguida se ofrece una
breve descripción de cada una de ellas.
OPERACIÓN DESCRIPCIÓN
ARRANQUE
Se utilizan métodos como el barreteo, la perforación y
voladura, y las máquinas cortadoras.
El barreteo es un método manual en el que un trabajador
extrae el carbón con la ayuda de un pico o barreta, con un
rendimiento muy bajo y muy costoso.
Las perforaciones se realizan a 1m o 1.5 m, distribuidas
de acuerdo con un patrón definido y se cargan los
explosivos para detonarlos posteriomente con una
secuencia predeterminada. De esta manera se arranca el
carbón o se afloja para extraerlo con mayor facilidad.
El método de máquinas cortadoras no se utiliza en el pais
por los elevados costos de inversión pero es conveniente
cuando se requiere mantener altos volumenes
de producción.
CARGUE Se efectúa manualmente con palas, o con máquinas cargo-
Página 14

transportadoras como la "Shutle Car".
SOSTENIMIENTO
Tiene como propósito evitar que las excavaciones se
derrumben o se cierren por efecto de las presiones internas
del macizo rocoso. Se puede utilizar madera, para el
entibamiento, o soportes mecánicos o hidráulicos.
TRANSPORTE
El transporte consiste en la movilización del mineral desde
el frente de trabajo hasta la superficie para lo cual se
emplean métodos manuales: cubetas empujadas,
malacates o métodos más eficientes como pequeños trenes.
DESCARGUE
Una vez el carbón llega a superficie es necesario
descargarlo, usualmente en una tolva acondicionada para
transferirlo a las volquetas, o vehículos similares, que lo
llevarán a su destino.
CAPITULO III:
Página 15

3.1 CONTENIDO DEL TRABAJO:
Concepto es cargar-transportar y descargar
Especialmente diseñado para trabajar en minería subterránea:
• Pequeños radios de giro
• Pequeño Ancho y alto
• Gran capacidad de tolva (pala)
• Buena velocidad de desplazamiento
• Cargar camiones, piques y piso
• Existen LHD Diesel y eléctricos
Estructura
Motor : potencia
Convertidor de torque
Transmisión
Frenos
Dirección
Servicios hidráulicos
Sistema hidráulico general
Cabina del operador
Página 16

Factores que afectan el rendimiento
Iluminación
Visibilidad
Estado de carpeta de rodado
Condiciones del área de carguío
Condiciones del área de descarga
Factor humano
Granulometría del mineral a cargar
Perdidas de Potencia
Altura sobre el nivel del mar
Temperatura
Selección de LHD
El tamaño del LHD es función del layout posible.
Estabilidad
Recuperación
Productividad: no solo esta relacionado con el tamaño del equipo,
considerar distancia al pique de traspaso
Tipo: eléctrico o diesel?.
Depende de los requerimientos y experiencia práctica
Página 17

Especificaciones de equipos LHD
LHD: eléctrico o Diesel?
ITEM LHD Diesel LHD eléctrico
Flexibilidad Flexibles y fáciles de mover no solo para cambiar el equipo en un nivel sino para usarlo en otras actividades como limpieza de calles y barro
Están limitados a la zona de producción
Limita el acceso a las zonas de trabajo
Se limita el uso de las unidades a otras tareas lo que es bueno
Reducción secundaria
Se puede realizar reducción secundaria detrás de
Se debe tener cuidado con los cables eléctricos
Tipo de LHD Largo Ancho Radio giro Capacidad cargamm mm mm kg
TamrockMicro-100 4597 1050 3191 1000EJC 61 5486 1448 3734 2727TORO 151 6970 1480 4730 3500EJC 100 D 7341 1702 5004 4540EJC 130 D 8407 1930 5511 5897TORO 301 8620 2100 5780 6200EJC 210 D 9957 2718 6553 9545TORO 400 9252 2440 6590 9600TORO 450 10003 2700 6537 12000TORO 1250 10508 2700 6672 12500TORO 1400 10508 2700 6887 14000TORO 650 11410 3000 7180 15000TORO 2500E 14011 3900 9440 25000Elphinstone1500 9195 2482 6400 90001700 10640 2720 6680 120002800 10697 3048 7390 16200WagnerHST-1A 5283 1219 3505 1361ST-2D 6593 1651 4700 3629ST - 3.5 8223 1956 5465 6000ST-1000 8530 2040 5800 10000ST-6C 9490 2610 6320 9525ST-7.5Z 9800 2590 12272ST-8B 10287 2769 7010 13608ST-15Z 12396 3404 8443 20412
Página 18

las maquinas
Ventilación Requieren de aire fresco en la frente
Operan bajo mínimos requerimientos de aire
Automatización • Es posible automatizar estos equipos.
• No se pueden hacer conexiones con barreras de seguridad eléctricas
• Es posible automatizar estos equipos.
• Se pueden hacer conexiones con barreras de seguridad eléctricas y la unidad de poder posibilitando el apagado del equipo en condiciones de emergencia.
Otros 䦋㌌㏒㧀좈琰茞 ᓀ㵂 Ü
Carga mejor
Alta disponibilidad
Menor costo capital
Silencioso
Mas frió
CONSIDERACIONES PARA ELEGIR EL TAMAÑO DEL LHD
Estabilidad: el tamaño de labores se determina por el área máxima
que puede ser expuesta sin soporte durante la etapa de desarrollo
Se deben considerar las dimensiones según legislación minera
Se debe considerar la ruta por la cual el equipo será introducido a
la mina
Recomendaciones prácticas
Ancho galería: ancho del equipo + 1.5 (m)
Altura galería: altura del equipo + 1.3 (m)
Largo estocada (visera – centro calle): altura tunel + largo de la maquina
Radio de curva (para velocidades adecuadas) : 2.5 * (IR + OR)/2
IR: radio de curva interno (m)
OR: radio de curva externo (m)
Página 19

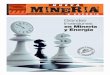
3.1.1. CARGADOR DE BAJO PERFIL – LHD R1300G
Página 20

ITEM ELEMENTOA Bastidor.B Neumático delantero izquierdo.C Luces delanterasD Cucharón y varillajeE Neumático delantero derecho.F Cilindro de la dirección.G Botella de lava parabrisas.H Tanque hidráulicoI Traba del bastidor de la dirección.J Neumático trasero derechoK Filtro de aíre.L Motor.M Tanque de combustible.N Depósito de lubricación automática.O Controles a nivel del sueloP Radiador.Q Luces traseras.R Tren de fuerza.S Neumático trasero izquierdo.T Ventanas.
Página 21

ITEM DESCRIPCIÓN
1 Respiradero del eje delantero 2 Rejilla del tubo de llenado de aceite
hidráulico 3 Filtros de aceite hidráulico 4 Rejilla magnética de la transmisión 5 Rejilla de succión eje posterior 6 Respiradero del eje trasero 7 Rejilla de succión del convertidor de
torque 8 Filtro secundario de combustible 9 Respiradero del cárter del motor 10 Filtro de llenado sistema de lubricación
automática 11 Filtro del sistema de lubricación
automática 12 Rejilla del tubo de llenado del tanque
de combustible 13 Filtro primario de combustible 14 Filtro de aceite del motor 15 Rejilla de succión eje delantero 16 Filtro del presurizador de la cabina 17 Filtro aire de retorno de la cabina 18 Filtro de aceite eje posterior 19 Filtro de aceite de la transmisión 20 Filtro de aceite eje delantero 21 Filtros de aire del motor
TREN DE POTENCIA:
Página 22

MOTOR
Modelo 3306 Cat DITA (SWIRL)
Vueltas del motor 2.200 rpm
Potencia bruta SAE J1995 182 hp / 136 kW
Potencia neta SAE J1349 160 hp / 119 kW
Calibre 105 mm
Carrera 127 mm
Cilindrada 6.600 cm3
ESPECIFICACIONES EN ORDEN DE TRABAJO
Carga útil nominal 6.800 kgPeso en orden de trabajo 27.750 kg
Carga límite en equilibrio estático 20.575 kgFuerza de desprendimiento 12.020 kg
PESOS
Vacío 20.950 kgEje delantero 8.160 kg
Eje trasero 12.970 kgCon carga 27.750 kg
Eje delantero 18.634 kgEje trasero 9.116 kg
CAPACIDADES DE LOS BALDES (CUCHARONES)
Capacidad del balde estándar 3.1 m3Ancho del balde 2.200 mm
Página 23

Capacidad de balde - Opción 1 2.4 m3Capacidad de balde - Opción 2 2.5 m3Capacidad de balde - Opción 3 2.8 m3Capacidad de balde - Opción 4 3.4 m3
TIEMPO DE CICLO HIDRAULICO
Subida 5.0 segundosDecarga 2.0 segundos
Bajada libre 2.3 segundosTiempo total 9.3 segundos
DIMENSIONES DE GIRO
Radio de giro exterior 5.741 mmOscilación del eje 10º
Angulo de articulación 42.5º
TRANSMISION
Avance 1 5.3 km / hora
Avance 2 10.1 km / hora
Avance 3 18.1 km / hora
Avance 4 26.1 km / hora
Retroceso 1 4.9 km / hora
Retroceso 2 9.2 km / hora
Retroceso 3 16.4 km / hora
Retroceso 4 25.9 km / hora
Página 24

Disposición general LHD
Disposición del LHD en el diseño y ángulo de la estocada
Página 25

Dimensiones típicas LHD
Dimensiones para distintos tamaños de equipos Largo Estocada
0
2
4
6
8
10
12
14
16
18
20
0 5 10 15 20 25 30
Capacidad del LHD (toneladas)
Min
imo
la
rgo
de
es
toc
ad
a (
m)
Página 26

Ancho/alto
0
1
2
3
4
5
6
0 5 10 15 20 25 30
Capacidad del LHD (toneladas)
An
ch
o d
e la
ga
lerí
a (
m)
0
1
2
3
4
5
6
0 5 10 15 20 25 30
Capacidad del LHD (toneladas)
Alt
o d
e la
ga
lerí
a (
m)
Página 27

LHD eléctricos- protección de cables
Los cables eléctricos deben ser reparados y tienen una vida util de 375 horas
(148-738).
La vida del cable depende de:
• Area de trabajo: protección del cable, agua, derrames de rocas.
• Mecanismo del carrete del cable
• Cables requieren de mantencion: recauchaje, testeo de corrientes, etc.
Página 28

• Calculo de rendimiento Equipos LHD
Datos de entrada:
• Capacidad del balde, Cb: depende del equipo
• Densidad in situ de la roca, d: (2,7 t/m3 típicamente)
• Esponjamiento e (depende de la fragmentación)
• Factor de llenado del balde Fll (0,7-0,8)
• Distancia cargado-Distancia vacío, Di, Dv (metros): layout del nivel de
producción
• Velocidad cargado,Vc: equipo, carga, seguridad, radio de giro
• Velocidad equipo vacío, Vc: equipo
• Tiempo de carga, T1 (min.): equipo y operador
• Tiempo de descarga, T2 (min.): layout
• Tiempo viaje equipo, T3 (min.): layout-velocidad del equipo
• Tiempo de maniobras T4, (min.): operador- layout
o Rendimiento LHD
o Numero de ciclos por hora
Ciclos/hora
Página 29
Nc=60T 1+T 2+T 3+T 4

Rendimiento horario
o Tonelada/hora
• Rendimiento LHD-camión
Datos de entrada:
• Capacidad del balde, Cb
• Capacidad del camión, Cc
• Densidad in situ de la roca, d: (2,7 t/m3 típicamente)
• Esponjamiento e
• Factor de llenado del balde Fll (0,7-0,8)
• Distancia cargado-Distancia vacío, Di, Dv (metros)
• Velocidad cargado,Vc
• Velocidad equipo vacío, Vc
• Tiempo de carga, T1 (min.)
• Tiempo de descarga, T2 (min.)
• Tiempo viaje equipo, T3 (min.)
• Tiempo de maniobras T4, (min.)
Rendimiento LHD-camión
Capacidad LHD
Numero de ciclos para llenar el camión
Numero de paladas
Factor llenado camión
Página 30
Reffectivo=Nc⋅Cb⋅Fll⋅ρ
(1+ε )
CLHD=CbF ll ρ
(1+ε )
Ncamion=CcC LHD
NP=entero (CcC LHD )F ll=
NP⋅CLHDCC

Rendimiento LHD-n camiones
Se requiere saturar al LHD, por lo tanto:
• n = numero de camiones para saturar al equipo
• T camión = Tiempo de viaje del camión no incluyendo el tiempo de
carga.
Costos Sistema LHD
Costo mano de obra
Costos operación
o Consumo combustible
-Consumo de insumos (cuchara, neumáticos, lubricantes)
Costos adquisición
o Equipo
o Vida útil
Costos mantención y reparación
Mantenciones menores
Mantenciones mayores
Costo operación = costo operación + costo mantención y reparación +
costo mano de obra
Página 31
T llenado−camion=Ncamion (T1+T2+T3+T 4 )
T llenado(n−1)camiones=N camion(n−1)(T 1+T 2+T 3+T 4 )
n≥C LHD(T camion )
Cc (T1+T2+T3+T 4 )+1

Operación de LHDs
Automatizado: toda la operación la realiza el software y hardware
Semi-autónomo: el carguío lo realiza el operador (telecomando)
mientras que la ruta se hace de forma autónoma.
Tele-comandado: toda la operación la realiza el operador desde
una estación de control
Manual: un operador controla el equipo en todas sus labores.
Hoy en día la mayor parte de las operaciones ocupa operación
manual.
Automatización de LHD
• Minas que buscan alta productividad o tienen escasez de personal
especializado buscan automatizar sus actividades subterráneas.
• En Chile se busca productividad y competencia (e.g. Mina El
Teniente ,Codelco)
• La automatización esta basados en tecnología de punta obtenida
en otras áreas de la ingeniería (robótica) para aquellas tareas más
bien repetitivas.
• Equipos son operados desde una sala de comando por medio de
software y hardware especializado. Un operador puede operar
varias maquinas (hasta 3 se han provado) de manera eficiente.
• Esta mas bien en el área de pruebas las que se han realizado en
algunas sectores de minas de la gran minería como lo son El
Teniente (Chile), Olimpic Dump (Australia), LKAB (Suecia)
Automatización de LHD
Por reducción secundaria y bolones se ha adoptado por equipos
semi-autónomos en las operaciones.
El tiempo de ciclo puede alcanzar un 30% menor
El costo de adquisición de la automatización es de un 40% mayor
que una manual
Página 32

Un operador puede operar hasta tres equipos. Cambio turno 5
minutos
Se requiere mano de obra especializada: en el taller mecánico se
necesita un ing. Eléctrico.
Costos de servicio y piezas es menor en equipos semi-autónomos
Desgaste de neumáticos es menor en equipos semi-autónomos
Costos de cuchara/ consumo de combustible/ consumo de
lubricantes y aceites igual que el equipo operado manualmente.
Un operador puede aprender a manejar el equipo en días mientras
lo que en operación manual puede tomar meses.
La zona en que trabaja el equipo se debe aislar por medio de
puertas o sensores (sistema de tags)
La maquina se apaga si encuentra un obstáculo pero los sistemas
actuales no pueden detectar personas o mas allá de 20 metros.
Sistema de navegación y Sala de control de LHD: equipos semi-
autónomos
Página 33

• El equipo es guiado la primera vez y aprende la ruta y las
velocidades de carga/descarga.
• El equipo de detiene a unos metros de la pila y del punto de
descarga donde el operador realiza las actividades.
• Este sistema requiere de redes y se están
probando/desarrollando sistemas de traspaso de información
inalámbricas.
• Sistema de Conducción: controla los movimientos del equipo
• Sistema de navegación: hace un profile de la galería para crear
un cuerpo en tres dimensiones
Caso estudio- PIPA NORTE EL Teniente
Página 34

CAPITULO IV:
4.1. CONCLUCIONES:
En conclusión podemos obtener que los equipos LHD. Son muy necesario en el ámbito de minería subterránea por que nos brinda más de lo demostrado en el trabajo si no que también debe tener y cumplir con los requerimientos como son:
o Iluminación.
o Estado de las pistas de rodado (derrame de carga, impacto en
componentes mecánicos, impacto sobre el operador, disminución de velocidad, desgaste de neumáticos que deberían durar 2000-2500 horas según catálogo 3000 horas y puede bajar a 1800 horas).
o Área de carguío (debe tener piso firme para que no se entierre el
balde y no genere esfuerzos que puedan dañar el equipo, por ejemplo al cilindro central de volteo).
o Granulometría del material a cargar (colpas muy grandes
disminuyen factor de llenado).
o Vías de tránsito y tráfico.
o Áreas de carga y descarga.
o Ventilación (polvo y falta de oxígeno).
o Altura sobre el nivel del mar (se pierde 1% de potencia cada 100
metros a partir de los 300 metros sobre el nivel del mar. Para alturas superiores a 1.500 msnm se adicionan turbos).
o Temperatura (cada 2 °C en ascenso se pierde 1% de potencia a
partir de los 20 °C).
o Interferencias con otras operaciones mineras, tales como
largadura y tronadura secundaria.
Página 35

4.2. RECOMENDACIONES
Estabilidad: el tamaño de labores se determina por el área máxima que
puede ser expuesta sin soporte durante la etapa de desarrollo
Se deben considerar las dimensiones según legislación minera
Se debe considerar la ruta por la cual el equipo será introducido a la
mina
Ancho galería: ancho del equipo + 1.5 (m)
Altura galería: altura del equipo + 1.3 (m)
Largo estocada (visera – centro calle): altura tunel + largo de la maquina
Radio de curva (para velocidades adecuadas) : 2.5 * (IR + OR)/2
IR: radio de curva interno (m)
OR: radio de curva externo (m)
Índices Operacionales.
Disponibilidad Física deberá ser superioral 85%.
Utilización no deberá bajar del 50%, entre 50 y 60% es aceptable, sobre el 60% es ideal.
Datos Operacionales Un LHDde8yd3cuestaalrededordelosUS$270.000, lo que significa un
costo deposición de 80545 US$/año, su vida útil se estima en 5años, el costo horario fluctúa entre los 35a50US$/hora.
Un equipo Toro 400D, obtuvo valores de disponibilidad física superiores al 90% en el primer año de operación, su vida útil se estima en 20000 horas considerando un Over haul realizado a las 15000 horas de operación.
Página 36

BIBLIOGRAFIA
Laubscher 2000, Horizontal LHD layouts en Block Caving Manual,
JKMRC, Universidad de Queensland.
LeFeaux, 1997. Apuntes de carguío y transporte. Universidad de Chile.
Jakola, R., Ward, R., Martin K. Rapid LHD advance using laser guidance
and 3D vision systems for block-cave mining applications. MassMin2004,
p. 665.
ICSII. International Caving Study
Página 37

ANEXOS
Página 38

Página 39