Embed Size (px)
Citation preview

2
The Basics of NMR
2.1. NMR phenomenon
2.1.1. Precession of free spins
The phenomenon of Nuclear Magnetic Resonance (NMR) could be observed bystudying nuclei which possess both a magnetic moment and angular momentum.The hydrogen nucleus, a proton, has a spin angular momentum J and an associatedmagnetic moment μ . Since they are parallel to each other, we can write
Jγμ = , [2.1]
with γ being the gyromagnetic ratio. It is a constant, which has different values for
different nuclei. For protons 710257707.42/ ×=πγp
Hz/Tesla.
When a proton is placed in an external magnetic field B , the magnetic field willproduce a torque on the magnetic moment of amount B×μ . Hydrogen nuclei alsopossess an angular momentum and hence the nucleus acts as a gyroscope andprecesses about the external magnetic field. The equation of motion for thisprecession is
BJ ×= μdtd
. [2.2]
Since Jγμ = , we obtain
)( Bγμμ ×=dtd
. [2.3]
Magnetic Resonance Imaging for Groundwater Anatoly Legchenko© 2013 ISTE Ltd. Published 2013 by ISTE Ltd.

16 Mag
Assucorrespothe z -ax
Fig
A spwith the
f
The Lgyromagthe Larmemit ene
2.1.2.M
Whenoriented,
macrosc
dynamicof the bephysics [allows si
gnetic Resonanc
uming a laboonding unit vexis, precession
gure 2.1. Prece
in’s magneticLarmor frequ
γπω 2/ Bf ==
Larmor frequegnetic ratio γmor frequencyergy only at th
Macroscopic sp
n there is no, resulting in
opic magnetiz
cs of a singleehavior of the[ABR 61]. Thimplifying the
ce Imaging for G
oratory refereectors ( kji ,, )n of the magne
ession of the ma
c moment μ iuency
π2/B .
ency is the reis a constant
y is also a propheir Larmor fre
pin magnetiza
o external man zero macros
zation gradua
spin needs ae macroscopiche classical tree treatment of
Groundwater
ence frameand that the
etic moment is
agnetic moment
is precessing a
sonance frequt, which has dperty of the nuequency.
ation
agnetic fieldscopic magne
ally builds an
quantum mecc spin magneteatment is an af the NMR phe
with the axemagnetic fiels shown in Fig
t about an exter
about the app
uency of the mdifferent valuuclei. Magnet
B , the protoetization. Wh
equilibrium v
chanical explatization can beapproximationenomenon wit
es ( zyx ,, )ld B is appligure 2.1.
rnal magnetic fi
plied magnetic
magnetic nuclees for differentic nuclei can
on spins are ren B is app
value0
M . W
anation, the dee given usingn, but in manyth sufficient a
with theied along
field
c field B
[2.4]
ei. As thent nuclei,absorb or
randomlyplied, the
Whilst the
escriptiong classicaly cases, itccuracy.

The Basics of NMR 17
We assume that in the investigated area, the equilibrium spin magnetization for
protons per unit volume0
M is constant and that dVMM0
== M .0
M is
described by the Curie equation
T4N
22
0 kBM
γ= , [2.5]
where N is the number of protons per unit volume, T is the absolute temperature,is the Planck constant and the Boltzmann constant 23103805.1 −⋅=k [J/°]. Since
2810692.6N ⋅= [/m3] then0
30
10287.3 BM −⋅= at 293K (20°C).
Using the classical model, the NMR phenomenon can be described by a set ofequations proposed in 1946 by Felix Bloch [BLO 46]. The Bloch equations haveprovided, for liquid samples at least, in most cases a correct quantitative descriptionof the behavior of the magnetic resonance phenomenon.
In an arbitrary homogeneous magnetic field B , the equation of motion of themacroscopic spin magnetization M is
)( BMM ×= γdtd . [2.6]
Assuming that the applied magnetic field is the sum of a static field0
B and a
much smaller radio frequency field1
B , in the laboratory frame the Bloch equations
can be written as
,)(
,)(
,)(
2
2
1
0
T
M
dt
dM
T
M
dt
dM
T
MM
dt
dM
yy
y
xx
x
zz
z
+×=
+×=
−+×=
BM
BM
BM
γ
γ
γ
[2.7]

18 Magnetic Resonance Imaging for Groundwater
where10
BBB += ;1
T is called the longitudinal, or spin-lattice relaxation time;
and2
T the transverse, or spin-spin relaxation time. In the laboratory frame the
vector M is rotating about the static field0
B with the Larmor frequency
0 0Bω = −γ (clockwise). A linearly polarized, oscillating magnetic field applied in
the x -direction )cos(21
tBx
ω=B can be presented as two rotating components with
the angular frequency ω+ and ω− . Only co-rotating with the spin system part
(clockwise) with the amplitude1
B has an effect on the spin magnetization. The
field1
B will be the co-rotating component of the applied oscillating field. The
effect of the counter-rotating component is usually neglected.
In a reference frame, rotating around0
B with the angular frequency ω there is
an effective static field
)/(01
γω−+= BB kiBeff
, [2.8]
where γω/ component called the fictitious field.
In the rotating frame the Bloch equations can be rewritten as
.)(
,)(
,)(
2
2
1
0
T
M
dt
dM
T
M
dt
dM
T
MM
dt
dM
yyeff
y
xxeff
x
zzeff
z
+×=
+×=
−+×=
BM
BM
BM
γ
γ
γ
[2.9]

At th
and cons
[2.8] it fo
B
thus simp
d
d
d
In th
angle θas shown
Fig
he exact reson
sidering equa
follows that
1BiB
eff= ,
plifying the B
(
(
(
dt
dM
dt
dM
dt
dM
y
x
z
×=
×=
×=
M
M
M
γ
γ
γ
e equilibrium
between then in Figure 2.2
gure 2.2. Rotati
a) equilib
nance (0
ωω =
ations [2.4] we
Bloch equation
.)
,)
)
21
21
1
01
T
M
T
M
T
M
yy
xx
z
+×
+
−+
B
B
B
m, M is orient
spin magneti2a.
ion of the spin m
brium position;
0) the fictitio
e can write B
ns to
,
1
Mz
ted along the
zation and the
magnetization u
b) when a mag
ous field cance
0/0
=− γωB
external magn
e geomagnetic
under exact reso
gnetic field1
B
The Basics of
els the static
. Then, from
netic field0
B
c field is equa
onance ( =Δω
is applied
NMR 19
field0
B
equation
[2.10]
[2.11]
0and the
al to zero
0 ):

20 Mag
At th
with a c
M to ro
time t , t
M
M
M
where th
magnetiz
When
in the
(Figure 2
the frequ
rotating
Fi
gnetic Resonanc
he exact reson
arrier frequen
otate about B
the three comp
)cos(
)sin(
,0
MM
MM
M
z
y
x
θ
θ
=
=
=
he angle θ =
zation is sketc
n the resonan
rotating fram
2.3). The angu
uency offset (
frame frequen
igure 2.3. Rotaa) case Δω
ce Imaging for G
nance, when w
ncy equal to th
1in the yz ,
ponents of the
,
,
0
0
M
M
tBt11
γω ==
ched in Figure
nce conditions
me follows a
ular frequency
ωωω −=Δ0
ncy (ω ) and t
ation of the spinω> 0; b) commo
Groundwater
we apply a m
he Larmor fre
plane with t
e spin magnet
is called th
e 2.2b.
s are not respe
a precession
y of the preces
) between the
the applied ma
n magnetizationon case for any
magnetic field
equency it cau
the angular fre
tization are
he flip angle.
ected (0
ωω ≠
cone aroun
ssion ( 2 ωω =eff
e Larmor frequ
agnetic field f
under off-resonsign of Δω; c) c
1B along th
uses the magn
equency1
ω =
. The rotatio
0), the motion
d the effect2
12 ωω Δ+ ) de
uency (0
γω =
frequency (ω
nance conditioncase Δω< 0
he x -axis
netization
1Bγ= . At
[2.12]
on of the
n of spins
tive field
epends on
0Bγ ), the
11Bγ= ).
ns:

The Basics of NMR 21
The total precessional angle is given by tBtteffeff
γωθ ==)( . At time τ=t ,
the spin magnetization will, in general, have three components, which are [MAN 79]
.)cos(
,)sin(
,)cos(1
02
122
0
1
02
1 )(
MM
MM
MM
eff
eff
z
eff
eff
y
eff
eff
x
ω
τωωω
τωω
ω
τωω
ωω
+Δ=
=
−Δ
=
[2.13]
The magnetic resonance signal depends on the component of the nuclearmagnetization perpendicular to the static magnetic field (x,y plane). The
)Re(⊥
= MMy
component corresponds to the real part of the NMR signal and
)Im(⊥
= MMx
- to the imaginary part. The position of the magnetization vector
0M and its projection M
⊥after a magnetic field
1B being applied during time τ
)( τωθeff
= is shown in Figure 2.4. When 0=Δω , thex
M component is equal to
zero and hence the signal, which is thus proportional only toy
M has no phase shift
(Figure 2.4b). If 0≠Δω , then the signal will be a vector in the complex plane. Thephase shift depends on the sign and magnitude of the frequency offset. It isillustrated in Figure 2.4a for a positive frequency offset and in Figure 2.4c for anegative one. Obviously, the magnitude of the total spin magnetization is constant
zyxMMMM 222
02 ++= .

22 Mag
Formagnetizfact, whifrom the
2.2. NM
2.2.1. Lo
At thto a Bochangingfield), th
relaxatio
relaxatio
as
M
d
gnetic Resonanc
Figure 2.4.referen
demonstrationzation under tilst spins, whie resonance wi
MR relaxation
ongitudinal re
hermal equilibltzmann distrg the static mhe nuclear sp
on process cha
on time. In Bl
1(
(
0z
z
MM
dt
dM
−=
×= Mγ
ce Imaging for G
Precession of tnce frame cons
n purposes tthe resonanceich are at theill be only slig
elaxation
brium, nuclei aribution. Afteagnetic fieldpin system ret
aracterized by
och equations
).
)
1/
0
1
Tt
z
e
T
M
−
−+×B
Groundwater
the spin magnetsidering differen
the proportionand off-resonexact resonanghtly perturbe
are distributeder this equilibor irradiatingturns to equil
y a time1
T , c
s [2.7] the cha
,
1
zM−
tization in the tint frequency off
nality betweenance conditionce, will respoed at their equi
d among the ebrium distribusamples by alibrium with
called the spin
ange of zM
ilted rotatingffsets Δω
en magnitudeons is not respond strongly,ilibrium positi
energy levels aution is disruan oscillatingits surroundi
n-lattice or lon
with time is d
es of thepected. Inthose farion.
accordingupted (bymagneticings by a
ngitudinal
described
[2.14]

1T r
system a
environm
In or
magnetiz
that allcoherenc
the static
system
magnetizthe spin-
equilibri
disappea
Figur
reflects efficie
and its surrou
ment is weak
rder to illustr
zation M afte
the magneticce. Immediate
c field0
B , i
approaches
zation M is-lattice relaxa
ium along
aring without c
re 2.5. The spin
(duration τ):longitudinal r
ency of the ex
undings. When
1T will be lar
rate the effect
er application
c moments kely after the pu
is turned awa
equilibrium
correspondingation as a rotat
0B . The n
changing the a
magnetization
a) immediatelyrelaxation on th
xchange of the
n the couplin
rge, but strong
t of the longi
of a pulse of
keep the samulse is termin
ay at the angl
with the ti
gly decreasingtion of the ve
non-equilibrium
angle θ .
after applicatio
after the pulsehe spin magneti
e magnetic en
ng between th
g coupling wi
itudinal relax
f a magnetic fi
me precessingnated, M , wh
le θ (Figure
ime constant
g. It would bector M , in th
m magnetiza
on of a pulse of
is terminated;ization after a t
The Basics of
nergy between
he spin system
ll render1
T
xation1
T on
ield1
B , let u
frequency anich was orien
2.5a). Then,
t1
T and
e erroneous the yz , plane
ation M is
f a magnetic fie
b) effect of thetime interval td
NMR 23
n the spin
m and the
small.
n the spin
us assume
nd phasented along
, the spin
the spin
to presente, back to
s simply
eld1
B

24 Mag
2.2.2. Tr
The
magnetic
is originrandomly
magnetiz
magnetic
such an
( 0>⊥
M
nuclei to
iμ lose
yx, pla
constant
Figur
(durrelax
gnetic Resonanc
ransverse rela
macroscopic
c moments of
nally no phasy oriented a
zation onto
c field1
B is
orientation th
0 ) as shown
o exchange en
the phase co
ane as shown
2T , called th
re 2.6. The spin
ration τ): a) immxation with the
ce Imaging for G
axation
spin magneti
f individual sp
se coherenceand consequ
yx, plane i
applied, the m
hat a non-zero
in Figure 2.6
nergy with eac
oherence after
in Figure 2.6
he spin-spin o
magnetization
mediately aftertime constant T
Groundwater
ization M is
pins that also
of the maguently a proj
is equal to z
momentsi
μ
component o
6a. Because
ch other and
r each interact
6b, which cau
r transversal r
after applicatio
the pulse is terT2 on the spin m
a vector com
are vectors M
gnetic momenjection of th
zero ( 0=⊥
M
will have the
of M is gener
of the natura
with the envi
tion and begi
uses M⊥to d
relaxation tim
on of a pulse of
rminated; b) effmagnetization af
mposed of th
∑=i
iμM . Si
nts of spins,he macrosco
0 ). However
e same phase a
rated in the x
al processes th
ronment, the
in to spread a
diminish with
e.
f a magnetic fie
fect of the transvfter a time inter
e sum of
ince there
they areopic spin
r, after a
and lie in
y, plane
hat cause
moments
across the
h the time
eld1
B
verserval td

In Bl
M
d
Notezero (M
be at non
respectedrelaxatio
Since
different
precess a
slower (
phase co
character
Figur
(durrelax
loch equations
1(0
2
xx
MM
T
M
dt
dM
⊥−=
−=
that when th0⊥ →M ) the N
n-equilibrium
d. This is a fuons.
e the static m
t portions of th
at slightly dif
(i
ωωω Δ+=0
oherence (Fig
rized by the ti
re 2.7. The spin
ration τ): a) immxation with the t
s [2.7] the dec
).
,
2/Tt
y
e
dt
dM
−−
=
he transverseNMR signal c
with the envi
undamental di
magnetic field
he sample exp
fferent frequen
iω ). This pro
gure 2.7) and
ime constant T
magnetization
mediately aftertime constant T
cay of M⊥ is d
,
2
y
T
M−=
component oannot be mea
ironment so th
fference betw
d may not be
perience sligh
ncies, some f
ocess also ca
consequently
*2
T .
after applicatio
the pulse is terT2* on the spin m
described as
of the spin masured, but the
hat the limitat
ween the transv
e perfectly ho
tly different v
faster than the
auses the mom
y M⊥
will d
on of a pulse of
rminated; b) effmagnetization af
The Basics of
magnetizatione spin system
tion2 1
T T≤
versal and lon
omogeneous,
values0
B . He
e rotating fram
mentsi
μ to
diminish with
f a magnetic fie
fect of the transvafter a time inter
NMR 25
[2.15]
becomesmay still
is always
ngitudinal
nuclei in
ence they
me, some
lose the
h the rate
eld1
B
verserval td

26 Magnetic Resonance Imaging for Groundwater
Considering both the longitudinal and transverse relaxations,*2
T can be
approximated as [FUK81]
0
212*
1
2
11 BTTT
Δ++≅ γ , [2.16]
where0
BΔ characterizes inhomogeneity of the static magnetic field0
B and γ is
the gyromagnetic ratio.*2
T is the shortest relaxation time and122
* TTT ≤≤ . Often,
the effect of the longitudinal relaxation on*2
T may be neglected and*2
T can be
considered as
0
22*
11 BTT
Δ+≅ γ . [2.17]
During the NMR experiment (usually <2 s) distribution of the static magnetic
field0
B within the investigated sample does not change. Consequently, the
magnetic moments iμ are located in the same magnetic field, they have a constant
Larmor frequency0 0i i
constω ω ω= + Δ = and dephasing is regular tii
ωϕϕ Δ+=0
(Figure 2.7). Note that2
T characterizes dephasing caused by a random energy
exchange between spins and their environment what cause random dephasing
0i irandomφ φ φ= + Δ = (Figure 2.6). It is a notable difference between
*2
T and2
T
that is used for measuring2
T with the spin echo (SE) method.
2.2.3. Diffusion in non-homogeneous magnetic field
In the previous sections we assumed that nuclear spins do not change theirposition within the investigated sample. However, in liquids, spins can move by

The Basics of NMR 27
diffusive motion of the atoms. Hence, if the static magnetic field0
B is not
homogeneous or a field gradient is imposed then such a movement will cause the
magnetic momentsi
μ to change their Larmor frequency during one measuring
cycle, thus introducing additional dephasing. Such a dephasing will accelerate
relaxation of the NMR signal with the enhanced relaxation rate2D
T . In an infinite
fluid medium,2D
T is given by the following expression [CAR 54]
12/1 222
2
DtGT
D
γ= , [2.18]
where G is the spatial magnetic field gradient, D is the diffusion coefficient and tis the time during which diffusion will occur. Thus, the transverse relaxation rateenhanced by the effect of spin diffusion is given by
⎟⎠⎞⎜
⎝⎛ −−=
⊥ DTtTtMM
220//exp . [2.19]
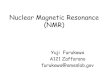
The diffusion coefficient depends on temperature and it can be calculated forwater using empirical function based on results reported by Sengers and Watson[SEN 86] (Figure 2.8).
Figure 2.8. Diffusion coefficient of water as a function of temperature

28 Magnetic Resonance Imaging for Groundwater
Equation [2.18] is valid only for an infinite fluid medium and for water in rocksit is only approximately correct. However, assuming that most of the spins do notexperience the presence of pore walls, we can use equation [2.18] to demonstrate the
relationship between2D
T and a spatial magnetic field gradient G . In porous
media, G may be imposed by magnetic particles that perturb the static magnetic
field0
B . In this case, the distribution of the magnetic field gradient within the
investigated sample may be non-uniform and2D
T can be calculated only
approximately. Let us assume that G is a first order approximation of an equivalent
inhomogeneity of the static magnetic field. Figure 2.9a shows estimated2D
T
versus a magnetic field gradient considering three values of the diffusion time.
Figure 2.9b presents dependence of the enhanced relaxation2D
T on the diffusion
time for different values of the field gradient G .
Figure 2.9. The enhanced relaxation rate T2D computed considering an inhomogeneous staticmagnetic field: a) T2D versus the spatial magnetic field gradient G assuming the diffusiontime t of 200, 400 and 800 ms; b) T2D versus diffusion time and considering three values of themagnetic field gradient G
When the distribution of the static magnetic field gradient G is unknown it can
be roughly estimated assuming22
* TT << in equation [2.17] as
2*0
1
TBG
γ≅Δ≅ , [2.20]

The Basics of NMR 29
where*2
T is an experimental value and GB ≈Δ0
is an estimate of a static magnetic
field inhomogeneity. The relationship between G and*2
T calculated using equation
[2.20] is shown in Figure 2.10. Figures 2.9 and 2.10 allow qualitative estimationof the enhanced relaxation rate caused by diffusion of spins. For example,
assuming*
7.5 ms2
T = , we obtain the corresponding value of the field gradient
005.0=G Gauss/cm (Figure 2.10). Then, Figure 2.9b allows the estimation of
2DT for, e.g., the diffusion time of 2000 ms as
28500 ms
DT = .
Figure 2.10. Estimated dependence of the relaxation timeconstant T2* on the magnetic field gradient G
Now, let us estimate the possible effect of2D
T on the transverse relaxation. In
equation [2.19] the transverse relaxation term is given by
)/11(/1/1/1222
xTTTD
+=+ , [2.21]

30 Magnetic Resonance Imaging for Groundwater
where22
/TTxD
= . Figure 2.11 shows that for obtaining less than 10% error in
the transverse relaxation term,2D
T must be ten times longer than2
T . This
condition can be respected either for a short diffusion time or for small values of thefield gradient (Figure 2.9b).
Figure 2.11. The relative error in the transverse relaxation termcaused by the enhanced relaxation versus T2D/T2 ratio
The numerical example presented in Figure 2.12a shows relaxation of thenuclear magnetization (equation [2.19]) as a function of diffusion time. For
computing, we assumed the following input: 52 10−= ×D cm2/s,2
400 msT = and
42.6752 10γ = × rad×s-1×Gauss-1. The results demonstrate shortening of therelaxation caused by spin diffusion and when relaxation graphs were fitted by anexponential function we obtain estimates of the amplitude and time constant.Figure 2.12b shows the relative error of estimation in comparison with the known
2T value. We can see that diffusion principally affects estimation of the relaxation
time2
T and the initial amplitude was estimated with a much smaller error.

The Basics of NMR 31
Figure 2.12. Demonstration of the effect of a field gradient on the relaxation rate:a) transverse relaxation versus diffusion time in different field gradients; b) relative errorof estimation of the amplitude and relaxation rate as a function of the field gradient
Note that for rocks, the estimates presented above should be considered only asqualitative because the internal field gradients of porous media are induced by themagnetic susceptibility variations that depend not only on the magnitude of thesevariations, but also on the pore and grain geometries. Understanding of the effect ofstrong internal field gradients on NMR measurements is very important, but it is avery complex problem that is beyond the scope of this book. Numerous attempts ofquantification of these effects have been reported [NEU 74; BEN 90; HÜR 98;ZHA 01; SUN 02; HÜR 02; FRE 06; POM 08; CHO 08; CHO 09; GRU 12], but itis recognized that quantification of the internal field gradients’ distribution andanalysis of experimental data remains very difficult.
2.3. NMR measurements
2.3.1. Free induction decay (FID)
For measuring the NMR signal, one or more coils are positioned around the
investigated sample. A static magnetic field0
B is usually created by a special
magnet but the Earth’s magnetic field can also be used. The simplest NMRexperiment consists of observing the free induction decay signal (FID). A pulse of
alternating current energizes the induction coil thus creating a magnetic field1
B
oscillating with the Larmor frequency00
Bγω = (Figure 2.13a). The pulse causes

32 Magnetic Resonance Imaging for Groundwater
rotation of the nuclear magnetization M around the x axis with the angularfrequency
11Bγω = . When the pulse is terminated M is turned at a flip angle
pτωθ1
= and the transverse component of the nuclear magnetization
0sin( )
yM M= θ produces measurable NMR signal (FID). The shape of the signal
envelope depends on the distribution of internal magnetic field gradients and mayhave exponential or Gaussian shape [SUK 01; GRU 11] as shown in Figure 2.13b.Oscillating with the Larmor frequency 0ω , the FID signal decays with the time
constant*2
T . For the exponential envelope
)cos()/exp()(002
*0
ϕω +−= tTtete , [2.22]
where0e and
0ϕ are the initial amplitude and initial phase respectively. For the
Gaussian envelope it may be approximated as
)cos()/(5.0exp)(00
22*
0ϕω +⎟
⎠⎞⎜
⎝⎛−= tTtete . [2.23]
In both cases the initial amplitude0e and relaxation time
*2
T can be obtained
directly from the FID signal.
Figure 2.13. Schematic presentation of the FID measuring procedure: a) nuclearmagnetization excitation pulse being applied; b) corresponding FID signal proportional
to the My component is drawn considering exponential and Gaussian envelopes

The
popularmethodscomponeapplying
Theequilibri
magnetic
(Figure
compone
starts de
compone
Figure 2recoveryin the –zd) a 90°nuclear m
FID signal is
methods are care based onent of nucleag different pul
inversion recium, the nuc
c field0
B (F
2.14b). The n
ent M⊥is ze
ecreasing with
ent 0M M− i
2.14. Evolutionmeasuring schz direction; c)pulse (duratio
magnetization |M
s also used fo
called the inven measuring thar magnetizatse sequences.
covery measuclear magneti
Figure 2.14a).
nuclear magn
ero and hence
h the time c
increases. Aft
n of the nucleaeme: a) equilibrelaxation of Mon τp /2) turns MM0-M| is turned
or measuring
ersion recoverhe FID signaltion, separate
uring schemezation M v
The first puls
netization Me no signal can
onstant1
T
ter a time dela
ar magnetizatibrium position;M with the timM in the –y dird along the +y a
the relaxation
ry and the satl generated ond from the e
e is presentevector is orie
e turns M at
is fully excit
n be measure
(Figure 2.14c
ay dτ the seco
ion M correspb) a 180° puls
me constant T1rection and a raxis
The Basics of
n time1
T . T
turation recovnly by the eqexcited comp
ed in Figureented along t
the flip angle
ted, but its tr
d (FID1=0). T
c) and an eq
ond pulse is ap
ponding to these of duration τduring time inrelaxed compon
NMR 33
The most
ery. Bothquilibriumonent by
2.14. Inthe static
e °=180θ
ransversal
Then, M
quilibrium
pplied.
inversionτp turns Mnterval τd;nent of the

34 Mag
The p
turns nu180°,90°compone
(equilibr
NMR sig
compone
between
measurin
For e
The FID
of1
T u
e
gnetic Resonanc
pulse has a v
clear magneti° sequence. Aent M is ori
rium)0
M M−
gnal (FID2) is
ents of the nu
the pulses τ
ng procedure i
Figure 2.15.
each value of
D2 amplitude p
sing the follow
⎜⎜
⎝
⎛−= 21)(
0ee
dτ
ce Imaging for G
value twice as
ization at theAfter the seconented in the
M turns in
s proportional
uclear magnet
dτ and measu
is shown in Fi
A typical seque
fd
τ position
plotted agains
wing equation
⎟⎟
⎠
⎞− )/exp(
1T
dτ
Groundwater
small as the
flip angle =θnd pulse is te–y direction
the +y direct
to the differe
tization.1
T
uring the cor
igure 2.15.
ence of inversio
of the pulses
st delayd
τ (
n
.
productp
τω1
°= 90 . This puerminated, theand the alrea
tion (Figure
ence between t
can be estim
rresponding F
on recovery for
s, the signal i
(bottom graph
p, and conseq
ulse sequencee non-relaxedady-relaxed co
2.14d). The m
the excited an
mated by varyi
FID2 signal. A
measuring T1
is plotted agai
h) allow the e
quently it
e is called(excited)omponent
measured
nd relaxed
ing delay
A typical
inst time.
estimation
[2.24]

The smethod
direction
measure
non-relaxsignal th
Figure 2recoverythe +y dirpulse (dumagnetiza
saturation recthe 90°,90° s
n and the FID
d (Figure 2.16
xed componehat is proportio
2.16. Evolutionmeasuring scherection; c) relaxuration τp ) turation |M0-M| is
covery measurequence is us
D1 signal cor
6b). The seco
nt M along tonal only to th
of the nucleaeme: a) equilibxation ofM witrns M in the –turned along th
ring scheme ised. After the
rresponding t
ond pulse is ap
the −z axis whhe relaxed com
ar magnetizatiobrium position;th the time cons–z direction anhe +y axis
s illustrated ine first pulse, M
to the initial
pplied after a
hich allows umponent M −
0
on M correspob) a 90° pulsestant T1 duringnd a relaxed co
The Basics of
n Figure 2.16M is turned
amplitude0e
delayd
τ . It
us to measureM− (Figure 2
onding to theof duration τp ttime interval τomponent of th
NMR 35
6. For thisin the +y
0can be
turns the
the FID22.16d).
saturationturns M in
τd; d) a 90°he nuclear

36 Mag
1T c
delay τ
amplitud
as
e
The
magnetic
common
obtain thprocedurresults.
TheMeasurevalue, buinverted.
the sampdifferent
gnetic Resonanc
Figure 2.17. A
can be estima
d. A typical
de plotted aga
⎜⎜
⎝
⎛−= ex1)(
0ee
dτ
saturation re
c field1
B w
n case for the
he same flip ares based on t
modified saements are carut it is prefer. The pulses p
ple. After thet for different
ce Imaging for G
A typical seque
ated by measu
l measuring p
ainst a time de
⎟⎟
⎠
⎞− )/xp(
1T
dτ
.
covery metho
within the inv
e surface NM
angle for diffethe specific fli
aturation recrried out usingrred that bothproduce the s
e first pulse, Mt portions of
Groundwater
ence of saturati
uring the FID
procedure is
elayd
τ (botto
od can be m
vestigated vol
MR. A non-un
rent portionsip angles (90°
overy schemg a θ,-θ sequepulses be ide
same flip angl
M is turnedthe sample (
on recovery for
D2 signal for
shown in Fi
om graph) allo
modified for a
lume is non-u
iform1
B re
of the sample° or 180°) may
me is presenence. The flipentical. The sle and hence
through the a(Figure 2.18b)
r measuring T1
different valu
igure 2.17. T
ows us to esti
applications w
uniform, whi
enders it impo
e and hence, my produce err
nted in Figuangle θ maysecond pulse h
21θθ −= in an
angle θ, whic). During a d
ues of the
The FID2
imate1
T
[2.25]
when the
ich is the
ossible to
measuringors in the
ure 2.18.have anyhas to beny part of
ch can bedelay dτ ,

relaxatioangle −θentire saOnly thevalues of
A typ
plotted a
the equa
e
where x
FID2 sig
Figure 2saturationτp turns Mduring athe +z dirflip angle
on occurs andθ and thus, thample is oriene relaxed comf the delay dτ
pical measuri
against a time
ation
⎜⎜
⎝
⎛−−= 1)(
0ee
dτ
000/ eex
ττ= i
gnal measured
2.18. Evolutionn recovery meaM in the z-y platime interval τdrection and a re -θ
then the secohe non-relaxednted along themponent produ
d .
ing procedure
e delay dτ (b
−−− exp()1(0
xτ
is due to possi
d when /dT⎛τ⎜
⎝
n of the nucleasuring schemeane at a flip and ; d) the seconrelaxed compon
ond pulse is ad componente +z axis andces the FID2
e is shown in
ottom graph)
⎟⎟
⎠
⎞− )/
1T
dτ ,
ible difference
10T ⎞→⎟
⎠.
ar magnetizati: a) equilibriumngle +θ ; c) red pulse (durationent of the nucle
applied. The pof the nuclea
d does not prosignal that is
n Figure 2.19
allows the es
es between the
ion M correspm position; b) tlaxation of M won τp but of invear magnetizat
The Basics of
pulse producear magnetizatoduce an NMmeasured for
. The FID2 a
stimation of
e pulses and e
ponding to thethe first pulse ofwith the time cverse polarity) ttion |M0-M| is t
NMR 37
es the fliptionin the
MR signal.r different
amplitude
1T from
[2.26]
0τe is the
e modifiedof durationconstant T1turns M inturned at a

38 Mag
Fig
2.3.2. Sp
The
heteroge
necessar
T
An Sa 90°,90allows u
Figursequence(Figuresrotatingfaster tha
gnetic Resonanc
gure 2.19. A typ
pin echo (SE)
SE techniqu
eneous static m
ry to respect th
*2 2 1
T T T<
SE can be obs0° sequence.us to obtain the
re 2.20 scheme. The first 902.20b, 2.16bclockwise wian the rotating
ce Imaging for G
pical sequence o
ue was devel
magnetic field
he following c
.
erved with diHowever, a 9e maximum am
matically show0° pulse sets tb) and the FIDith the Larmog frame and h
Groundwater
of modified satu
loped by Ha
d0
B [HAH 5
condition
fferent pulse90°,180° sequmplitude of th
ws the formatithe nuclear mD1 signal canor frequency ωhence they rota
uration recover
ahn for NMR
50]. For obser
sequences. Fouence is oftenhe SE signal.
ion of an SE cmagnetizationn be observed0ω some mag
ate clockwise
ry for measuring
R measureme
rving an SE si
or example, Hn preferred b
considering aM in the +yd. In a referengnetic momentwith a relativ
g T1
ents in a
ignal it is
[2.27]
Hahn usedbecause it
90°,180°directionnce framets iμ areve angular

The Basics of NMR 39
frequencyi
ωΔ+ . Some other magnetic moments are slower and rotate
counterclockwise with a relative angular frequencyi
ωΔ− . The local difference in
the Larmor frequency causes dephasing of the nuclear magnetization with the time
constant*2
T . Dephasing during the timed
τ (Figure 2.20c) causes the FID1 signal to
decrease. As*2 1
T T , M remains excited even when FID1 becomes zero, but
relaxation with the time constant1
T also takes place and an equilibrium component
0M M− grows (Figure 2.16c). The second pulse performs two actions. It sets the
non-relaxed component M along the –y axis as shown in Figure 2.20d and sets the
relaxed component0
M M− at the –z direction. In both cases the FID2 signal is
absent because M is oriented along the –y axis, remains dephased and the
transversal component of0
M M− is zero. However, if a sequence other than 90°,
180° is used or the second pulse is not perfect and produces an angle other than the180° flip angle, then the FID2 signal will appear. After the second pulse, magneticmoments iμ that are faster ( +Δωi ) are set behind the rotating frame but continue
rotating clockwise, and those that are slower (i
ωΔ− ) are set before the rotating
frame and rotate counterclockwise. At time τd after the second pulse, the dephasedcomponents of M will meet again along the –y axis thus producing the refocusing
effect (Figure 2.20e). The transverse relaxation with the time constant2
T cause
random dephasing and somei
μ will not refocus, which attenuates SE amplitude.
The SE measuring scheme (Figure 2.21) consists of transmitting two consecutive
pulses separated by a time intervald
τ . The SE signal can be observed at timed
τ
after the second pulse is terminated. The SE signal is composed of two FID signalscorresponding to the refocusing and following dephasing of the nuclearmagnetization as shown in Figure 2.21. The FID signal can also be observed.

40 Mag
Figure 2.b) the madurationthrough te) refocumacrosco
Figure 2.of two puimmediatrefocusing
gnetic Resonanc
.20. Graphicalacroscopic spinτp ; c) dephasinthe flip angle θusing of the mopic spin magne
.21. A schematiulses separatedtely after the cog pulse
ce Imaging for G
illustration of tn magnetizationng of the macro
θ=180° by a refmacroscopic maetizationM atte
ic presentationd by a time interresponding pu
Groundwater
the formation on M is turnedoscopic magneefocusing pulseagnetization duenuated by the t
of the SE measerval τd. The FIulse. The SE sig
of an SE signal:at the flip angtization in the xapplied at timuring a time itransversal rela
suring proceduFID1 and FID2gnal can be mea
: a) equilibriumgle θ=90°, byx-y plain; d) Mme τd after the finterval τd; f)axation
ure consisting ofsignals can beasured at time τ
m position;a pulse of
M is turnedfirst pulse;refocused
of injectione observedτd after the

The Basics of NMR 41
Formation of an SE is a phenomenon that depends on internal magnetic field
gradients and the shape of the signal may be complex. In a simple case, an SE
envelope can be considered as Gaussian as is given by [HAH 50]
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛ −−=
22*
2
2)(2
)2(exp)(
T
tete d
dSE
ττ
. [2.28]
For practical use it is convenient to present it as
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
Δ
−−=
5.02
2
236.0
)2(exp)(
t
tete d
dSE
ττ
, [2.29]
where5.0
tΔ is the half-width of the echo signal (the width of the echo envelope at
the level of one half of the maximum echo amplitude). Thus the relaxation time*2
T
can be easily estimated as*
0.520.424T t≈ ×Δ .
For calculating the SE amplitude we assume the mathematical and geometrical
interpretations presented in Hahn’s paper [HAH 50]. Under near-resonance
conditions, for pulses of equal intensity1
B and neglecting the relaxation and
molecular diffusion, M⊥can be calculated as [BLO 55]
20 1 2sin sin 0.5M M= −
⊥⎛ ⎞ ⎛ ⎞θ × θ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
, [2.30]
where111 p
B τγθ = and212 p
B τγθ = are the flip angles for corresponding pulses. If a
90°,180° pulse sequence is used then θθθ ==12
2 and consequently the SE
amplitude can be calculated as
( )30sinM M= −
⊥θ . [2.31]

42 Magnetic Resonance Imaging for Groundwater
Note, that after equation [2.30], the SE signal calculated using equation [2.31] isinsensitive to the polarity of the second pulse.
In practice, the SE signal can be measured after attenuation by relaxation and
molecular diffusion. Thus, the SE signal at a timed
τ2 is
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+−=⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
312exp
222
2
02d
d
GD
Tee
d
τγττ
, [2.32]
where G is the spatial magnetic field gradient and D is the diffusion coefficient.
If21222 −<< TGD
dτγ then the diffusion effect can be neglected and SEs can be
used for measuring the transverse relaxation time constant2
T . For that, SE
amplitude is measured for different values ofd
τ as shown in Figure 2.22a. Each run
consists of two pulses and one SE signal. Plotting SE amplitudes versus time
(bottom graph) one can estimate2
T from
)/2exp(202 Tee
ddττ −= . [2.33]
The Hahn’s SE is sensitive to the diffusion effect but it is also a time consuming
procedure. For that reason, more efficient methods for measuring2
T have been
developed. One of the most common is the CPMG method named after the authors:Carr and Purcell [CAR 54], and Meiboom and Gill [MEI 58]. The methodsupposes the application of a 90° pulse followed by a 180° pulse delayed at a time
dτ . The first echo measured at a time
dτ2 is the Hahn’s echo. Then, 180° pulses
separated by timed
τ2 are applied. Each pulse causes refocusing of the nuclear
magnetization and the formation of SEs as shown in Figure 2.22b.

F
The e
e
where n=
Note
time, an
the CPM
number
significais the timof the ecmethod r
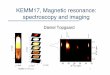
Figure 2.22. A sT2: a) Hah(90°, τd , 18
envelope of a
⎜⎜⎜⎜
⎝
⎛
−= 2exp0n
ne τ
=1,2,…,N is th
, that for mea
d hence dτ ,
MG method (
of echoes in
antly attenuateme efficiencycho train in onrequires N cyc
schematic drawhn’s echoes with80°, 2τd , 180°,
train of echo
+⎜⎜⎜⎜⎜⎜
⎝
⎛
31
2
2
d
GD
T
γτ
he number of
asuring2
T us
are progressi
(equations [2
the train N i
e the diffusionsince the metne measuring ccles.
wing showing typh (90°, 180° seq2τd ,…, 180° se
amplitudes al
⎟⎟⎟⎟
⎠
⎞
⎟⎟⎟⎟⎟⎟
⎠
⎞22d
G τ ,
echoes.
sing the Hahn
ively increase
.34]) dτ is
is increased.
n term. Anoththod allows thcycle. For the
ypical procedurquence); b) CPMequence) with a
llows the estim
n’s SE (equati
ed ( 2d
t = τ ).
constant ( t =
Thus, renderi
her advantagehe obtainmentsame number
The Basics of
res for measurinMG methoda train of SE
mation of2
T
ons [2.32] an
However, wh
2d
n= τ ) and
ing dτ small
of the CPMGt of the entirer of echoes, th
NMR 43
ng
as
[2.34]
d [2.33]),
hen using
only the
l, we can
G methodenvelopehe Hahn’s

44 Magnetic Resonance Imaging for Groundwater
For practical realization of the CPMG method, we should wait for a fulldephasing between the pulses. Thus,
*2
3d
Tτ > . [2.35]
At time2
2T relaxation is completed at approximately 85% and we can assume
the measuring cycle to be *2 2
2 6 2d
N N T Tτ = = . Hence the number of echoes N
will be given by
2*2
3
TN
T< . [2.36]
The CPMG method is also sensitive to homogeneity of the static magnetic fieldand to the imperfection of the excitation pulses. For example, if the pulses are
slightly different from 180° then they will cause an error in the2
T estimation.
These items have been discussed in detail in the literature, for example by Majumdar[MAJ 86a; MAJ 86b].