Embed Size (px)
Citation preview

maj. Ing. Jan MAZAL, Ph.D.
Katedra vojenského managementu a taktiky
Univerzita obrany

Katedra vojenského managementu a taktiky
Zaměření na :
• Vojenský management
• Taktiku a krizové řízení
• Systémy velení a řízení (OTS/C4ISR/V21)
• Aplikace metod umělé inteligence v systémech taktické podpory
rozhodování
• Aplikace robotiky v bojových a nebojových operacích
Automatické řízení a navigace, obrazové a geografické analýzy
Optimalizace algoritmů pro náročné výpočty
Optimalizace taktického manévru
3D vizualizační systémy a interoperabilita s operačně taktickými systémy integrovanými do digitalizovaného bojiště

DMRK dálkový monitor radiační
kontaminace

• DMRK - v současném stavu


Prvotní experimenty
UGV 2006
Automatické rozpoznávání a
zaměřování cílů

Experimentální robot
pro automatickou
navigaci


LAFETA

Elektro-opticky naváděný
puškový granát • Komponenta systémů V21
• Možnosti zásahu cíle bez nutnosti jeho
přímé viditelnosti v okamžiku odpálení
střely
• Využitelnost jako optické sondy
• Duální systém navedení – s plochou
dráhou letu, nebo po balistické křivce

Graf průběhu měření
jednoho cyklu zážehu pulzní
mechaniky
Graf průběhu měření
deseti cyklů zážehu
pulzní mechaniky

Futuristický náhled na bojiště budoucnosti Futuristický náhled na bojiště budoucnosti

• Počítačová podpora vojenských aplikací není již
nijak výjimečná
• První pokusy matematicky modelovat bojové
situace sahají do šedesátých let minulého století
• Původní modely vycházely z velmi
aproximovaných předpokladů
Úvod

dva přístupy, a to:
Subjektivní, empiricko-intuitivní • Koncept rozvoje systémů C4ISTAR/ISR/V21,
• Expertní podpora rozhodovacích aktivit
Objektivní, exaktně-algoritmický • Algoritmicko-matematická – mající dopad na oblast vývoje
teoretické stránky algoritmických řešení
• Výpočetně-technologická – sledující rozvoj vyspělosti
počítačových systémů z výkonově-technologického hlediska
Systémový koncept a jednotlivé přístupy

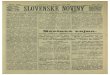
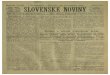
Integrovaný komplet vojáka
armády USA „Land Warrior“
• snížení počtů vojáků při současném
nárůstu jejich výkonu a efektivity
• začlenění vojáka a malé jednotky do
struktury digitalizovaného bojiště a
architektury C4ISTAR
• aplikace nových přístupů k vedení
bojové činnosti, organizace a
vybavení
Cíl zavádění integrovaných kompletů vojáka 21. století
Cíl zavádění integrovaných kompletů vojáka 21. století

Jádro C4I Modulárního bojového kompletu Vojáka 21. století Jádro C4I Modulárního bojového kompletu Vojáka 21. století

Řešen ve spolupráci s UO Brno
Hlavní řešitel VOP-026 Šternberk
FEM/UO – řešitel kompletní
softwarové vrstvy pro modulární
komplety V21
Na výstavě Future Soldier 2008
obdržel tento projekt stříbrnou cenu
za výsledné řešení, technologii a
inovace

• Integrace do struktury digitalizovaného bojiště
• Komplexní přehled o situaci na bojišti
• Digitalizace taktické administrativy (historie, kontrola doručení)
• Digitální hlasová komunikace
• Digitální přenos videa v reálném čase
• Systém včasného varování, poplachů a signálů
• Úkolování podřízených velitelem, plán úkolů
• Přehled velitele o stavu a situaci podřízených
• Podpora procesu rozhodování - taktická optimalizace přesunu, výpočet
viditelnosti a další.
• Dvě nezávislé datové radiové sítě
• Automatická retranslace dat
• Využitelnost pro další ozbrojené nebo záchranné složky

laserový
značkovač
Denní optický
zaměřovač náhlavní
komunikačn
í jednotka
přístroj nočního
vidění s hlavovým
zobrazovacím LCD
Ochranná přilba s
identifikačními
senzory
osobní
UKV / VKV
stanice
ovládací a
polohovací
jednotka
datový terminál
s modemem
a GPS/PPS
Zbraňový denní a noční
pozorovací a
zaměřovací systém
podvěsný
granátomet nebo
brokovnice
Přijímací
jednotka
GPS/PPS
Osobní zbraň
řídící jednotka
systému
systém
identifikace
vlastní/nepřítel
balistická vesta s
nosným
systémem ochranné brýle,
nákoleníky, rukavice,
chrániče sluchu a další
ochranné pomůcky
osobní dozimetr,
ochranná maska a
ostatní prostředky
PCHOJ
bateriový blok
s dobíjecími
články
tlumok, vak
na vodu,
potraviny,
vystrojovací a
nosné
prostředky
další volitelné a doplňkové
prostředky pro jednotlivé
moduly kompletu, družstvo,
četu nebo rotu zodolněná
klávesnice ruční zobrazovací LCD
rádiová stanice
UKV / VKV se
zesilovačem
vozidlová a
síťová dobíjecí
stanice Zaměřovací a
pozorovací přístroj
čety, pz družstva
(skupiny)
Modular combat system of the Czech Future
Soldier


Automatická puška CZ 805
Základní jádro MBK V21

Komunikace • Problémy spolehlivého spojení na velké vzdálenosti v
reálném čase
• Problémy u vysokých frekvencí v taktických
podmínkách
• Implementace komerčních technologií není vždy ideální
řešení
• Optimální pásmo 350-450 MHz pro vysokorychlostní
přenosy v taktických podmínkách
• Velký potenciál retranslace
• Vývoj nového vysokorychlostního rádiového modemu
(RACOM nabízí - 0.5Mbit v kanálu širokém 200KHz, -
stále nevyhovující)




In May 1997, IBM's Deep Blue
Supercomputer played a fascinating match
with the reigning World Chess Champion,
Garry Kasparov.
Game 1: 5/3/97: Kasparov wins
Game 2: 5/4/97: Deep Blue wins
Game 3: 5/6/97: Draw
Game 4: 5/7/97: Draw
Game 5: 5/10/97: Draw
Game 6: 5/11/97: Deep Blue wins



Matematický
model Řešení
Kritéria
velitele
(priority)
Kvantifikační
koeficienty
Kvantifikace
podmínek a vztahů
v modelu
Data a informace
o bojišti


• Fx= 1 − 0,002𝑥 0,7𝑒−
𝑥−200
100
2
+1−0,002𝑥
𝑥
1000+20

𝑓𝑂𝑢
=
1 − 0,002𝑛3 0,7𝑒−
𝑛3−200100
2
+1 − 0,002𝑛3
𝑛31000
+ 20
𝑛1 + 1 ×
tan− 𝑛2𝑛3
2
• n1 – vzdálenost od nejbližší vegetace
• 𝑑𝑉 = 𝑥 − 𝑀𝑉𝑥2 + 𝑦 − 𝑀𝑉𝑦
2+ 𝑧 − 𝑀𝑉𝑧
2
• n2 – rozdíl převýšení Vl. El. a Nep. El.
• 𝑑 𝑁𝑉 = 𝑦 − 𝑀𝐶𝑦
• n3 – vzdálenost k cíli
• 𝑑 𝐶 = 𝑥 − 𝑀𝐶𝑥2 + 𝑦 − 𝑀𝐶𝑦
2+ 𝑧 − 𝑀𝐶𝑧
2

Časově velmi
náročné výpočty



Optimal enemy distance position Optimal enemy distance position
Optimal cover conditions Optimal cover conditions
Optimal firing angle Optimal firing angle
Optimal path
search
Optimal path
search
Optimal security element location
optimization
Optimal strike
evaluation
Optimal strike
evaluation . . . N x M
Optimal path
search
Optimal path
search
Optimal strike
evaluation
Optimal strike
evaluation
,
Final integration, evaluation and
solution
Decision priority setting
Quantification criteria
setting
Quantification criteria
setting
Optimalizace prostoru
pro zaujetí léčky

Optimalizace prostoru
pro zaujetí léčky

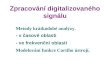
• Klíčová pro reálné aplikace je řešitelnost v
reálném čase
• Navyšování výkonu HW
• Implementace paralelních a distribuovaných
výpočtů (CUDA, OPEN CL, DirectX –
vertex/pixel shader)
• Algoritmicko-matematické optimalizace



Zvlněný terén
Hornatý terén
Rovinatý terén
0
100
200
300
400
500
600
700
800
900
1000
1100
3,80
5,06
6,50
8,12
9,92
11,9
0
14,0
6
16,4
0
18,9
2
21,6
2
24,5
0
27,5
6
30,8
0
34,2
2
Doba
řeše
ní v
[ms]
Plocha řešeného sektoru v [km2]
Metoda plovoucího horizontu
Metoda vyšetření řezu
Lineární (Metoda plovoucíhohorizontu)
Expon. (Metoda vyšetření řezu)
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
1300
1400
3,80
5,06
6,50
8,12
9,92
11,9
0
14,0
6
16,4
0
18,9
2
21,6
2
24,5
0
27,5
6
30,8
0
34,2
2
Dob
a ře
šení
v [m
s]
Plocha řešeného sektoru v [km2]
Metoda plovoucího horizontu
Metoda vyšetření řezu
Lineární (Metoda plovoucíhohorizontu)
Expon. (Metoda vyšetření řezu)
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
1300
1400
1500
1600
1700
1800
1900
2000
2100
2200
2300
2400
2500
2600
3,80
5,06
6,50
8,12
9,92
11,90
14,06
16,40
18,92
21,62
24,50
27,56
30,80
34,22
Doba
řeše
ní v [
ms]
Plocha řešeného sektoru v [km2]
Metoda plovoucího horizontu
Metoda vyšetření řezu
Lineární (Metoda plovoucíhohorizontu)
Expon. (Metoda vyšetření řezu)


72h X 90ms

SW je možno dále rozpracovat a obohatit o prvky
3D vizualizace

• NATO RTO a CD&E
• SAS 097 - Robotics Underpinning Future NATO Operations
• Iniciační jednání 25. – 27.4. 2012 (ČVUT)
• Vytvoření čtyřech virtual strenghts
• Autonomous Robotic Systems
Leader: Major Jan Mazal, PhD. University of Defense, Brno, Czech Republic
and Ing. Libor Preucil, CSc., ČVUT in Prague, Czech Republic
• Human-Robot Collaboration
Leaders: Dr. ir. Geert-Jan Kruijff, Deutsches Forschungszentrum für Kunstliche
Intelligenz GmbH, Saarbrücken, Germany and
Prof. Mark Neerincx, TNO, Soesterberg, The Netherlands.
• Multiple Robots Systems
Leaders: Dr. Bao Nguyen, DRDC - Centre for OR & Analysis, Canada and Dr.
Francesco Fedi, Sistemi Software Integrati, Italy
• Robotics Experiments < To be specified>
Leader: Mrs. Sonia Weill, Centre Analyse Technico - Operationnel de la
Défense, DGA, France

• Rozpracován CONOPS řešící cíle, problematiku, úkoly,
směřování, koordinaci a aplikaci výsledků - úzká návaznost na
koncepce a experimenty v CD&E
• Tematika zaujala US ARMY - Maneuver Center of Excellence
(MCoE) at Ft. Benning a RDCOM - TARDEC
• Jednání NATO/LCG/UGV – podzim Praha 2012
• Realizace společné laboratoře UO, ČVUT, VUT, VŠB – Center of
Advanced Robotic Systems
• Vstup VOP CZ a VTUL - prototypy – naplnění koncepce VaV a
návaznost na akvizice
• Hledání finančních zdrojů - program 907040 ???.

Cíl:
• najít způsob plné/částečné automatizace klíčových
procesů řízení vojenských operací vedoucí k navýšení
efektivity jejich provedení
Kde jsme:
• Vyvinuty varianty pokročilých algoritmů dílčích procesů
související s vedením taktických činností (taktický
manévr, optimalizace úderných aktivit, teorie pronásledování,
sledování, vizualizace, taktické komunikace, apod. )
• Vývoj systému V21/2
• Rozvíjená spolupráce s vojsky – hledání výchozích
scénářů
Concept Development

Kam směřujeme:
• Vývoj operačně –velitelského stanoviště
(kontejner)
• Integrace současného dostupného řešení do
systému V21 nové generace PASVŘ–
přírůstkovým způsobem
• Sestavení experimentálních sil – 4.BRN
• Navýšení robustnosti datově-komunikační
základny (UAV - retranslátor)
Concept Development

• plně interaktivní taktický virtuální simulátor,
• řadí se do kategorie tzv. „Serious Games“ (doslova „vážných her“),
• zaměřen na přípravu všech příslušníků pěších, výsadkových, mechanizova-
ných a tankových jednotek a jednotek námořní pěchoty od střelce až po velite-
le roty (praporu) pro plnění úkolů v soudobých operacích (cca 100 rolí),
• umožňuje velmi realisticky simulovat všechny druhy boje, přesuny, jiné
taktické činností včetně činností realizovaných při plnění operačních úkolů
v operacích NATO na podporu míru resp. mírových operací v souladu
s kapitolou VI. a VII. Charty OSN,
• specifikou simulátoru je orientace na co nejreálnější simulací operačního
prostředí soudobých operací s prvky asymetrického boje probíhajících v Iráku
a v Afghánistánu,
• otevřená architektura umožňuje přidávat další obsah různého druhu (prostředí,
vozidla a jednotky, zbraně, chování entit, skriptované funkce) a modularizaci
podle charakteru výcviku (modul CFF, modul CAS),

Základní moduly simulátoru VBS2

As Samawah Green Zone

Obyvatelstvo, pracující a bojovníci v Afghánistánu a Iráku

IED

• Skrze rozhraní HLA (High Level Architecture) nebo DIS (Distributed
Interactive Simulation)
• Účelem je ověření efektivity a kvantifikace klíčových koeficientů
• Nemůže nahradit reálné podmínky/cvičení


Joint Center for Robotics Focus Areas