Embed Size (px)
Citation preview

1 © 2013 The MathWorks, Inc.
MATLABで信号処理
~各種センサー信号を題材として~
MathWorks Japan
シニアアプリケーションエンジニア
竹本佳充

2
Agenda
1. センサーシステム設計の概要
2. センサーデータの解析
周波数解析
信号の遅延、類似性の評価等
3. センサーデータのフィルタリング
フィルタの種類と特徴
フィルタの設計
4. システムモデリングから実機テスト
固定小数点化
システムモデルへの展開
実装環境
5. まとめ

3
Agenda
1. センサーシステム設計の概要
2. センサーデータの解析
周波数解析
信号の遅延、類似性の評価等
3. センサーデータのフィルタリング
フィルタの種類と特徴
フィルタの設計
4. システムモデリングから実機テスト
固定小数点化
システムモデルへの展開
実装環境
5. まとめ

4
概要:センサーとは?
(出展:フリー百科事典「ウィキペディア(Wikipedia)」)
センサまたはセンサー(英: sensor。英語発音: /ˈsensɔːr/ センソー、/ˈsensə/ センサ)は、自然現象や人工物の機械的・電磁気的・熱的・音響的・化学的性質あるいはそれらで示される空間情報・時間情報を、何らかの科学的原理を応用して、人間や機械が扱い易い別媒体の信号に置き換える装置のことをいい…
概要
センサーは今日、日常生活のあらゆるところで使用されている。特に、自動車、機械、航空宇宙、医学、産業およびロボット工学などで大いに使用される…

5
概要:センサーの種類 時空間特性
●変位
ポテンショメータ, 差動トランス, 回転角センサー,
リニアエンコーダ
●回転数
タコジェネレータ, ロータリエンコーダ
●位置
光位置センサー (PSD), リミットスイッチ
●距離
超音波距離計, 静電容量変位計, 光学式測距, 電磁波測距
●速度
レーザードップラー振動速度計, レーザドップラー流速計
●角速度
ジャイロセンサー
●加速度
加速度センサー, 地震センサー
●一次元画像
リニアイメージセンサー
●二次元画像
CCDイメージセンサー, CMOSイメージセンサー
その他
液、硬度、電場、電流、電圧、電力、赤外線、放射線、湿度、
におい、流量、傾斜、振動、時間
物理特性
●力
ストレインゲージ(ひずみゲージ),
ロードセル, 半導体圧力センサー
●光
光センサー, 光電素子, フォトダイオード
●磁気
磁気センサー
●温度
接触式, サーミスタ, 抵抗測温体,
熱電対, 非接触式, 放射温度計
●音声
マイクロフォン
●化学
イオン濃度
●ガス濃度
出展:フリー百科事典「ウィキペディア(Wikipedia)

6
概要:センサーシステム
測定物
アナログ回路
センサ
ADC デジタル
信号処理 DAC
センサシステムは、信号処理技術と密接に関係
信号処理の基礎知識は必要
最適な信号処理システム設計環境が重要

7
概要:課題1
本来の周波数成分が
再現されない
0 0.05 0.1 0.15 0.2 0.25-1
-0.5
0
0.5
1cos波(時間軸)
時間[s]
0 0.05 0.1 0.15 0.2 0.25-1
-0.5
0
0.5
1cos波(時間軸)
時間[s]
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1
周波数[Hz]
cos波(周波数軸)
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1
周波数[Hz]
cos波(周波数軸)
信号の打ち切りによる影響
測定物
アナログ回路
センサ
ADC デジタル
信号処理 DAC
サイドローブ発生 サイドローブなし
0 100 200 300 400 500 600 700 800 900 1000-50
-40
-30
-20
-10
0
10
20
30
40
50
0 100 200 300 400 500-50
-40
-30
-20
-10
0
10
20
30
40
50
折り返し歪による影響
回避する
方法は?
打ち切り

8
概要:課題2
所望成分の取得
0 1 2 3 4 5 6-5
-4
-3
-2
-1
0
1
2
3
4
時間
0 10 20 30 40 50 60 70 80-80
-70
-60
-50
-40
-30
-20
-10
0
周波数 (Hz)
パワ
ー/周
波数
(dB
/Hz)
ピリオドグラム パワー スペクトル密度推定
0 10 20 30 40 50 60 70 800.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
周波数 (Hz)
時間
特定の周波数成分のみ取り出すには?
所望成分
不要成分
測定物
アナログ回路
センサ
ADC デジタル
信号処理 DAC

9
概要:課題3
ADC前処理とDAC後処理
DAC後のイメージ成分は、
アンチイメージングフィルタで除去
ADC周波数の1/2以上の成分は、
アンチエイリアシングフィルタで除去
最適なフィルタは?
測定物
アナログ回路
センサ
ADC デジタル
信号処理 DAC

10
概要:課題4
システムシミュレーション、
実機への展開
要素設計からアーキテクチャ評価へ
デジタル処理とアナログ処理の混載
フィードバックループシステムの安定性解析
固定小数点化がシステム性能に与える影響
実機評価環境の整備
測定物
アナログ回路
センサ
ADC デジタル
信号処理 DAC
これらを効果的に
実現する環境は?

11
Agenda
1. センサーシステム設計の概要
2. センサーデータの解析
周波数解析
信号の遅延、類似性の評価等
3. センサーデータのフィルタリング
フィルタの種類と特徴
フィルタの設計
4. システムモデリングから実機テスト
固定小数点化
システムモデルへの展開
実装環境
5. まとめ

12
信号の離散化
time[s]
サンプリング周期
Ts[s]
サンプリング周波数fs[Hz] =1/Ts[s]
時間軸方向の離散化:標本化(サンプリング)
振幅方向の離散化:量子化
量子化
最小ステップ
13
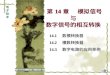
サンプリング定理
time[s]
アナログ
time[s]
デジタル
(サンプリング密)
元信号のfs/2[Hz]以上の成分は、
折り返し(エイリアシング)に影響を受ける
⇒2倍以上のサンプリング or アンチエイリアシング処理が必要
F time[s]
デジタル
(サンプリング粗) サンプリング
F
0 fs1/2 frequency[Hz]
fs1
frequency[Hz] 0 0
fs2/2 frequency[Hz]
F
fs2
エイリアシング

14
離散高速フーリエ変換:FFT
time[s]
FFT
frequency[Hz]
データタイプは複素数(振幅と位相の情報を持つ)
fs/2(ナイキスト)で折り返し
変換前と後で同じデータ点数
データ点数が多いほど、
周波数分解能は上がる 0 fs/2 fs
周波数分解能:
fs/データ数
DC成分 折り返し
Ni
N
N
k
kj
N
N
j
kj
N
e
where
kXNjxIFFT
jxkXFFT
/)2(
1
)1)(1(
1
)1)(1(
)()/1()(:
)()(:

15
窓関数
初期値と最終値の不連続性(打ち切り誤差)を低減(FFTの前処理)
⇒周波数成分の再現性向上
time[s]
window
初期値
最終値
不連続
初期値
最終値

16
主なスペクトル推定法
カテゴリ 特徴 メソッド名 関数名
パラメトリック法 信号自体からPSDを求める
比較的長いデータに有効
ピリオドグラム periodogram
ウェルチ pwelch
マルチテーパ― pmtm
ノンパラメトリック法 整形システムの係数推定により
PSDを求める
比較的短いデータに有効
ユール・ ウォーカー
pyuler
バーグ pburg
共分散 pcov
部分空間法
自己相関行列の固有解析・固有分解をベースとする
低S/N正弦波信号のスペクトル推定に有効
MUSIC pmusic
固有ベクトル peig
スペクトル推定法の種類と特徴

17
エイリアシング
Ex1_1) 信号のFFT(エイリアシングの確認)
0 0.2 0.4 0.6 0.8 1-2
-1
0
1
2
0 100 200 300 400 500-100
-50
0
50
右クリック
0 0.2 0.4 0.6 0.8 1-2
-1
0
1
2
0 100 200 300 400 500-100
-50
0
50
f1 = 10, f2 = 50 f1 = 10, f2 = 350
0 0.2 0.4 0.6 0.8 1-2
-1
0
1
2
0 100 200 300 400 500-100
-50
0
50
f1 = 10, f2 = 550
ナイキスト以上の成分は折り返す

18
Ex1_2) 信号のFFT(窓関数の効果)
0 0.2 0.4 0.6 0.8 1-2
-1
0
1
2
0 100 200 300 400 500-300
-200
-100
0
100
0 0.2 0.4 0.6 0.8 1-2
-1
0
1
2
97 98 99 100 101 102 103
-40
-20
0
20拡大
サイドローブの減衰大
(ハニング窓の特徴) メインローブが狭い
(ハミング窓の特徴)
>>wintool
ハミング
ハニング
Sig

19
0 1 2 3 4 5 6
x 10-3
-4
-3
-2
-1
0
1
2
3
4
時間
0 10 20 30 40 50-100
-90
-80
-70
-60
-50
-40
-30
-20
周波数 (kHz)
パワ
ー/周
波数
(dB
/Hz)
ピリオドグラム パワー スペクトル密度推定
0 1 2 3 4 5
x 104
1
1.5
2
2.5
3
3.5
4
4.5
5
x 10-3
周波数 (Hz)
時間
Ex1_3) スペクトログラム Sig
時変信号を
効果的に可視化
周波数成分は求まるが、時間の情報が欠落
FFT
ノッキングセンサの例
スペクトログラム

20
遅延量の推定
time[s]
time[s]
xサンプル
相互相関
(xcorr) 0
xサンプル
時間軸信号の類似性の指標
信号の遅延量推定に使用可能

21
周波数成分の類似性
周波数軸信号の類似性の指標
位相遅れ推定
frequency[Hz]
コヒーレンス
(mscohere)
frequency[Hz]
frequency[Hz]
共通成分
クロススペクトル
/位相推定
(cpsd) frequency[Hz]
位相遅れ

22
Ex1_4)遅延量測定
0 500 1000 1500 2000 2500 3000-0.01
-0.005
0
0.005
0.01
s1
0 500 1000 1500 2000 2500 3000-0.01
-0.005
0
0.005
0.01
s2
0 500 1000 1500 2000 2500 3000-0.01
-0.005
0
0.005
0.01
s3
Samples
-3000 -2000 -1000 0 1000 2000 3000-0.5
0
0.5
1
C21
Cross-Correlations
-3000 -2000 -1000 0 1000 2000 3000-0.5
0
0.5
1
C31
Samples
-350サンプルずれ
150サンプルずれ
相互相関関数の計算
振動センサー信号
相互相関(C21)
相互相関(C31)
s1
s2
s3
s1 s2 s3
振動センサの例
Sig

23
Ex1_5)周波数成分類似度推定
0 0.2 0.4 0.6 0.8 1-6
-4
-2
0
2
4
s1
Time Series
0 0.2 0.4 0.6 0.8 1-4
-2
0
2
4
6
s2
Time (secs)
0 100 200 300 400 500
0.05
0.1
0.15
0.2
P1
Power Spectrum
0 100 200 300 400 500
0.05
0.1
0.15
0.2
P2
Frequency (Hz)
35.1563 164.0625
0.75
Coherence Estimate
35.1563 164.0625
-87-60
Cross Spectrum Phase (deg)
Frequency (Hz)
コヒーレンス/クロススペクトルの計算
共通成分
-60°
-87°
コヒーレンス
位相
Sig

24
Sig 補足: 信号解析アプリ(sptool)
時間軸表示 スペクトル推定結果

25
補足: File Exchange http://www.mathworks.co.jp/matlabcentral/fileexchang
e
キーワード検索でデモをサーチ

26
Agenda
1. センサーシステム設計の概要
2. センサーデータの解析
周波数解析
信号の遅延、類似性の評価等
3. センサーデータのフィルタリング
フィルタの種類と特徴
フィルタの設計
4. システムモデリングから実機テスト
固定小数点化
システムモデルへの展開
実装環境
5. まとめ

27
種類
実現方法
フィルタの種類
フィルタ
ローパスフィルタ
バンドパスフィルタ
ハイパスフィルタ
f(Hz)
f(Hz)
f(Hz)
アナログフィルタ デジタルフィルタ
FIR IIR アクティブ パッシブ

28
y(n) = Σ b k x(n-k) 差分方程式: N
k=0
+
b1
b2
x(n) y(n) b0
FIRフィルタの構成
Z-1
Z-1
Z-1
x(n-1)
x(n-2)
bN
Z-1
x(n-N)
y(n) = b0*x(n) + b1*x(n-1)
+ b2*x(n-2) +・・・+ bN*x(n-N)
デジタルフィルタ:FIR

29
FIRフィルタの伝達関数
H(z) = = b(1)+b(2)Z-1+b(3) Z-2 +・ ・ +b(N+1)Z-N
1
(次数:N)
伝達関数
H(z)
入力
X(z)
出力
Y(z)
システム
)(
)()(
zX
zYzH
N
k
k
kZb0
1
)()1(
)()(
1 zXznx
zXnx
※Z変換
n
nZnxzX )()(
デジタルフィルタ:FIR (cont’d)

30
5点移動平均フィルタの例
デジタルフィルタ:FIR/MA
+
1/5
1/5
x(n) y(n) 1/5
Z-1
Z-1
Z-1
x(n-1)
x(n-2)
Z-1
x(n-4)
x(n-3)
1/5
1/5
+
x(n) y(n)
Z-1
Z-1
Z-1
x(n-1)
x(n-2)
Z-1
x(n-4)
x(n-3)
1/5
y(n) = 1/5*{x(n) +x(n-1)
+ x(n-2) +x(n-3)+x(n-4)}
1
1*5/1
4321 zzzz
差分方程式
伝達関数

31
y(n) = Σ b k x(n-k) a k y(n-k) 差分方程式: N
k=0
Σ N
k=1
+
Z-1
+
Z-1
Z-1
-a1
-a2
b1
b2
x(n) y(n) b0
IIRフィルタの構成
Z-1
Z-1
Z-1
Z-1
x(n-1)
x(n-2)
bN
Z-1
x(n-N) -aN
y(n-1)
y(n-2)
y(n-N)
デジタルフィルタ:IIR

32
IIRフィルタの伝達関数
H(z) = = b(1)+b(2)Z-1+b(3) Z-2 +・ ・ +b(N+1)Z-N
1+a(2)Z-1+a(3) Z-2 +・ ・ +a(N+1)Z-N
(次数:N)
N
k
k
kZb0
N
k
k
kZa1
1
※零点/極
)())((
)())(()(
21
210
N
N
zzz
zzzHzH
因数分解
零点
極
デジタルフィルタ:IIR (cont’d)

33
FIRフィルタとIIRフィルタとの比較
項目
FIR
(Finite Impulse
Response)
IIR
(Infinite Impulse
Response)
インパルス応答 有限 無限
次数 多い 少ない
フィードバック構造 なし あり
安定性 安定 不安定
群遅延特性 線形 非線形
H/Wコスト 高い 低い
速度 遅い 早い

34
IIRフィルタの種類と特徴
項目 バタワース チェビシェフⅠ型 チェビシェフⅡ型 楕円
通過域リップル なし あり なし あり
遮断域リップル なし なし あり あり
群遅延特性 ○ △ △ ×
特徴
リップル特性を持たないため、平坦な周波数特性が得られる
通過域リップルを大きくすることで、急峻なロールオフ特性が得られる
遮断域の減衰量を小さく指定することで、急峻なロールオフ特性が得られる
通過域と遮断域双方のリップルを制御可能なため、最も急峻なロールオフ特性が得られる
波形イメージ

35
Ex2_1)デジタルフィルタ設計手順 関数ベース(従来手法)
フィルタオブジェクトベース
仕様ベース
既述がシンプル
処理の可読性
フィルタの属性管理
豊富な解析機能
固定小数点化
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
-180
-160
-140
-120
-100
-80
-60
-40
-20
0
正規化周波数 ( ラジアン/サンプル)
振幅
(dB
)
振幅応答 (dB)
アルゴリズムの絞り込み
試行錯誤削減
Sig

36
Ex2_2)各種フィルタの特性比較
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-5
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
正規化周波数 ( ラジアン/サンプル)
振幅
(dB
)
振幅応答 (dB)
バタワース
チェビシェフ I 型
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-90
-80
-70
-60
-50
-40
-30
-20
-10
0
正規化周波数 ( ラジアン/サンプル)
振幅
(dB
)
振幅応答 (dB)
バタワース
チェビシェフ II 型
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-90
-80
-70
-60
-50
-40
-30
-20
-10
0
正規化周波数 ( ラジアン/サンプル)
振幅
(dB
)
振幅応答 (dB)
バタワースチェビシェフ I 型チェビシェフ II 型楕円
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-5
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
正規化周波数 ( ラジアン/サンプル)
振幅
(dB
)
振幅応答 (dB)
バタワースチェビシェフ I 型チェビシェフ II 型楕円
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0
5
10
15
20
25
30
35
40
45
正規化周波数 ( ラジアン/サンプル)
群遅
延 (
サン
プル
)
群遅延
バタワースチェビシェフ I 型チェビシェフ II 型楕円
バタワース vs チェビシェフⅠ
バタワース vs チェビシェフⅡ
バタワース vs
チェビシェフⅠ/チェビシェフⅡ/楕円
(振幅特性)
バタワース vs
チェビシェフⅠ/チェビシェフⅡ/楕円
(群遅延特性)
Sig

37
Ex2_3)フィルタ仕様と手法選択
フィルタ仕様
・IIR型
・サンプリング周波数: 100k[Hz]
・フィルタ次数:10次以下
バタワース(12次):NG
チェビシェフⅠ、Ⅱ、楕円(8次):OK
frequency[Hz]
Ap
Sig
0 1 2 3 4 5 6 7 8 9 10-70
-60
-50
-40
-30
-20
-10
0
周波数 (kHz)
振幅
(dB
)
振幅応答 (dB)
バタワースチェビシェフ I 型チェビシェフ II 型
楕円
Fst2 Fst1
Ast2 Ast1
・左側遮断周波数(Fst1): 3k[Hz]
・右側遮断周波数(Fst2): 9k[Hz]
・通過帯域(Fp1, Fp2):5~7k[Hz]
・通過帯域リップル(Ap):0.5[dB]
・遮断帯域減衰量(Ast1, Ast2): 40[dB]
Fp2 Fp1

38
Ex2_3)フィルタ仕様と手法選択
フィルタ仕様
・IIR型
・サンプリング周波数: 100k[Hz]
・フィルタ次数:10次以下
バタワース(12次):NG
チェビシェフⅠ、Ⅱ、楕円(8次):OK
バタワース(22次)、チェビシェフⅠ、Ⅱ(12次) :NG
楕円(8次):OK
frequency[Hz]
Ap
Sig
0 1 2 3 4 5 6 7 8 9 10-70
-60
-50
-40
-30
-20
-10
0
周波数 (kHz)
振幅
(dB
)
振幅応答 (dB)
バタワースチェビシェフ I 型チェビシェフ II 型
楕円
Fp2 Fp1
Fst2 Fst1
Ast2 Ast1
0 1 2 3 4 5 6 7 8 9 10-80
-70
-60
-50
-40
-30
-20
-10
0
周波数 (kHz)
振幅
(dB
)
振幅応答 (dB)
バタワースチェビシェフ I 型チェビシェフ II 型
楕円
・左側遮断周波数(Fst1): 3k[Hz]⇒4k[Hz]
・右側遮断周波数(Fst2): 9k[Hz]⇒8k[Hz]
・通過帯域(Fp1, Fp2):5~7k[Hz]
・通過帯域リップル(Ap):0.5[dB]
・遮断帯域減衰量(Ast1, Ast2): 40[dB]

39
フィルタ設計アプリ: filterbuilder
Filter Builder環境の起動
40
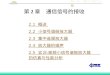
フィルタ設計アプリ: filterbuilder(cont’d)
フィルタの
方式を選択
周波数仕様、振幅仕様の設定
フィルタの種類を
選択

41
フィルタ設計アプリ: filterbuilder(cont’d)
振幅特性
位相特性
群遅延特性
各種情報
(フィルタの安定性、
使用するH/Wコスト等)

42
0 1 2 3 4 5 6
x 10-3
-4
-3
-2
-1
0
1
2
3
4
時間
0 5 10 15 20 25 30 35 40 45 50-100
-90
-80
-70
-60
-50
-40
-30
-20
周波数 (kHz)
パワ
ー/周
波数
(dB
/Hz)
ピリオドグラム パワー スペクトル密度推定
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 104
1
1.5
2
2.5
3
3.5
4
4.5
5
x 10-3
周波数 (Hz)
時間
0 5 10 15 20 25 30 35 40 45 50-100
-90
-80
-70
-60
-50
-40
-30
-20
周波数 (kHz)
パワ
ー/周
波数
(dB
/Hz)
ピリオドグラム パワー スペクトル密度推定
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 104
1
1.5
2
2.5
3
3.5
4
4.5
5
x 10-3
周波数 (Hz)
時間
Ex2_4)フィルタ処理(Ex1_3の続き) Sig
不要成分の除去

43
Ex2_5)適応フィルタの使用例
MHB(母親)
89回/分
3.5mV
FHB(胎児)
139回/分
0.25mV
0 0.5 1 1.5 2 2.5-4
-3
-2
-1
0
1
2
3
4
Time [sec]
Vol
tage
[m
V]
Maternal Heartbeat Signal
0 0.5 1 1.5 2 2.5-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time [sec]
Vol
tage
[m
V]
Fetal Heartbeat Signal
0 0.5 1 1.5 2 2.5-4
-3
-2
-1
0
1
2
3
4
Time [sec]
Vol
tage
[m
V]
Measured Signal
0 1 2 3 4 5 6 7-4
-3
-2
-1
0
1
2
3
4
Time [sec]
Vol
tage
[m
V]
Convergence of Adaptive Noise Canceller
Measured Signal
Error Signal
6 6.5 7 7.5-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Time [sec]
Vol
tage
[m
V]
Steady-State Error Signal
測定データ
f()を推定し、
MHB成分を
除去
残差
(復元されたFHB)
f( )
Sig/DSP
FHB
MHB f(MHZ) +
FHB +
noise

44
補足:Phased Array System Toolbox
レーダ方程式
レーダー波形解析
センサーアレイ解析

45
Agenda
1. センサーシステム設計の概要
2. センサーデータの解析
周波数解析
信号の遅延、類似性の評価等
3. センサーデータのフィルタリング
フィルタの種類と特徴
フィルタの設計
4. システムモデリングから実機テスト
固定小数点化
システムモデルへの展開
実装環境
5. まとめ

46
変数の固定小数点化 Sig/DSP/Fix
固定小数点長を設定
浮動小数点(リファレンス)と
固定小数点との比較
0 5 10 15 20 25 30 35 40 45
-70
-60
-50
-40
-30
-20
-10
0
周波数 (kHz)
振幅
(dB
)
振幅応答 (dB)
フィルター #1: 量子化
フィルター #1: リファレンス

47
Simulinkブロックの自動生成 Sig/DSP/Fix/SL
プリミティブブロックを使用 高抽象度ブロックを使用

48
Sig/DSP/Fix/SL Ex3_1) Simulink環境への展開
filterbuilderにより
自動生成されたブロック
時間軸波形 周波数軸波形
ノッキング
信号生成

49
Sig/DSP
統計値表示
・平均値
・RMS
・デューティ比
Time Scope Spectrum Analyzer
複素数表示
Peak検出
Max/Minホールド
MIDI Control 外部コントローラでパラメータ調整
I/O, 可視化系機能強化

50
Logic Analyzer System Object
– アナログおよびデジタル表示フォーマット
– Bin, Hex, Oct, Dec表示
– カーソルを合わせた箇所の値を表示
アナログ表示
デジタル(Hex)表示 デジタル
2値表示
I/O, 可視化系機能強化(cont’d) Sig/DSP

51
RoTH : Simulinkハードウエア連携機能 RoTH: Run on Target Hardware
Simulink単体でモデル組み込み実装を実現
LEGO
MINDSTORMS NXT
Arduino BeagleBoard/
PandaBoard
Student Version でも可能!
コンパイル/
実装
モデル
Gumstix Overo
Digilent
Analog Discovery Raspberry Pi
R2013a~
Cコード生成
(隠蔽化)

52
Ex3_2) Raspberry Pi 赤外線センサモデル
モーションセンサが動きを検知したタイミング実行
(Simulink標準デモとして提供)
画像データをセーブ
音声を再生
SL

53
補足: Cコード生成・検証オプション
MATLAB Coder
MATLABコードから等価なC
コードを生成
スタンドアローン化
アルゴリズムの配布
Simulink Coder
SimulinkモデルからCコード生成
プロトタイピング用
浮動小数点CPU向けコード
Embedded Coder
組込み用Cコード生成
固定小数点コード対応
各社IDEとリンク、デバッグの自動化
ターゲット用デバイスドライバブロック
デスクトップまたは組込み用Cコード生成および検証

54
補足: HDLコード生成・検証オプション
HDL Coder
Stateflow, MATLABコード、Simulink
モデルからHDL生成
ターゲット依存しないVHDL/Verilog
テストベンチ(HDL, Model)生成
FPGAベンダツールと連携
HDL Verifier
HDLシミュレータと協調シミュレーション
ModelSim / Incisive(NC Verilog)
FPGA-in-the-Loop
SystemC TLM 2.0生成
ASIC/FPGAに実装可能なコードを生成および検証
Filter Design HDL Coder
MATLABで設計したIIR/FIR/マルチレート・フィルタからHDL生成
ターゲット依存しないVHDL/Verilog
テストベンチ(HDL, Model)生成 Z-1
Z-1
Z-1
Z-1
+
+
+
+

55
補足:信号処理トレーニングコース
MATLABによる信号処理 Simulinkによる信号処理

56
Agenda
1. センサーシステム設計の概要
2. センサーデータの解析
周波数解析
信号の遅延、類似性の評価等
3. センサーデータのフィルタリング
フィルタの種類と特徴
フィルタの設計
4. システムモデリングから実機テスト
固定小数点化
システムモデルへの展開
実装環境
5. まとめ

57
まとめ1
センサーデータの解析
FFTをベースとした周波数解析基本環境
窓関数、スペクトル推定、相互相関等、豊富な信号処理関数ライブラリ
センサーデータの処理
与えられた仕様をもとにフィルタ設計
多様なフィルタ手法と、最適なフィルタ探索
Filterbuilder環境
システムモデリングから実機テスト
変数の固定小数点化
簡易実装環境
汎用性の高い自動コード生成機能

58
まとめ2
信号解析
フィルタリング
システム設計
実機評価
Signal
Processing
Toolbox
Simulink
DSP System
Toolbox
Fixed Point
Designer
Sig: Signal Processing Toolbox
DSP: DSP System Toolbox
Fix: Fixed Point Designer
SL: Simulink















![章非線形信号処理1 群(信号・システム)-- 9 編(ディジタル信号処理) 4 章非線形信号処理 (執筆者:棟安実治)[2011 年2 月受領] 概要](https://img.pdfslide.tips/doc/110x75/611d92297643e36cfc4331f7/cecc-1-cifffi-9-ciffci.jpg)