Embed Size (px)
Citation preview

마이크로프로그램된 제어마이크로프로그램된 제어(Microprogrammed Control)(Microprogrammed Control)
Lecture #7Lecture #7
강의 목차강의 목차
▶ Control Unit▶ Control Memory▶ Sequencing Microinstructions▶ Microprogram Example▶ Design of Control Unit▶ Nanostorage and Nanoprogram
2컴퓨터시스템구조
제어 장치 제어 장치 (1)(1)
▶ 제어 장치 (Control Unit)▷ 명령어 실행을 위해 요구되는 마이크로 연산들을 연속적으로
수행하는 제어 신호를 보냄으로써 명령어 실행을 제어▷ Control signal(that specify microoperations) in a bus-
organized system groups of bits that select the paths in multiplexers, decoders,
and arithmetic logic units
▶ 제어 장치 구현 방식▷ Hardwired Control▷ Microprogrammed Control
컴퓨터시스템구조 3
제어 장치 제어 장치 (2)(2)
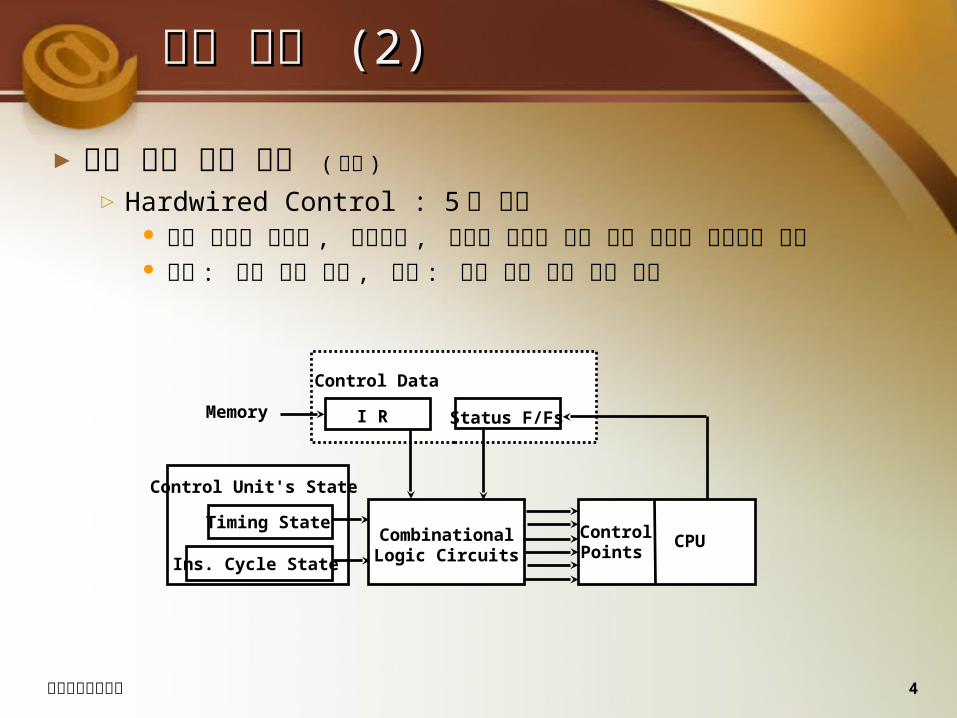
▶ 제어 장치 구현 방식 ( 계속 )▷ Hardwired Control : 5 장 참조
제어 논리가 게이트 , 플립플롭 , 디코더 그리고 다른 논리 장치를 이용하여 구현
장점 : 빠른 처리 속도 , 단점 : 설계 변경 시에 회로 변경
컴퓨터시스템구조 4
I R Status F/Fs
Control Data
CombinationalLogic Circuits
ControlPoints CPU
Memory
Timing State
Ins. Cycle State
Control Unit's State
제어 장치 제어 장치 (3)(3)
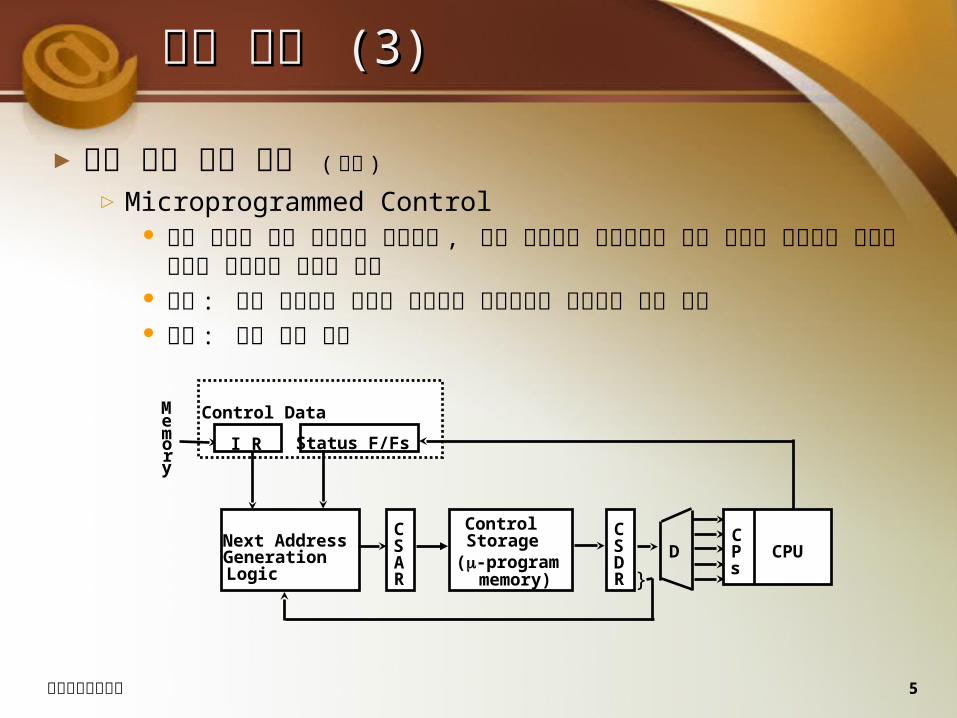
▶ 제어 장치 구현 방식 ( 계속 )▷ Microprogrammed Control
제어 정보를 제어 메모리에 저장하고 , 제어 메모리에 프로그램된 제어 정보를 이용하여 원하는 일련의 마이크로 연산을 실행
장점 : 제어 메모리에 저장된 마이크로 프로그램을 수정하여 기능 변경 단점 : 늦은 처리 속도
컴퓨터시스템구조 5
Status F/Fs
Control Data
Next AddressGenerationLogic
CSAR
ControlStorage
(-program memory)
Memory
I R
CSDR
CPs
CPUD
}
Microprogrammed Control UnitMicroprogrammed Control Unit (1)(1)
▶ 제어 워드 (Control Word)▷ 버스 구조의 시스템에서 멀티플렉서 , 디코더 등의 정보 전달 선택 및
산술논리연산장치의 역할 등을 결정하는 비트의 모임이 어떤 마이크로 연산을 수행할 것인지 결정
▷ 이러한 일련의 비트 모임을 ‘제어 워드’라 하며 , 특수한 제어 메모리에 저장
▶ 마이크로 명령어 (Microinstruction)▷ 하나 이상의 마이크로 연산을 정의▷ 제어 워드 (Control Word) 와 시퀀싱 워드 (Sequencing Word) 로 구성
제어 워드 - All the control information required for one clock cycle 시퀀싱 워드 - Information needed to decide the next
microinstruction address▷ 마이크로 프로그램 (microprogram) 을 작성하는 단위 (Vocabulary)
6컴퓨터시스템구조
Microprogrammed Control UnitMicroprogrammed Control Unit (2)(2)
▶ 마이크로 프로그램 (Microprogram)▷ 하나의 기계어 명령어 집합을 정상적으로 실행하기 위해 요구되는 모든
제어 신호를 생성하기 위해 제어 메모리에 저장된 프로그램▷ 마이크로 명령어로 구성
▶ 제어 메모리 (Control Memory or Control Storage)▷ 마이크로프로그램된 제어 장치에서 마이크로 프로그램을 저장하는
저장 장치▷ 초창기에는 read-only 메모리를 사용 Static
Microprogramming▶ Writeable Control Memory(Writeable Control
Storage:WCS)▷ 내용을 수정할 (writable) 수 있는 제어 메모리
-> Allows the microprogram can be changed-> Instruction set can be changed or modified
7컴퓨터시스템구조
Microprogrammed Control UnitMicroprogrammed Control Unit (3)(3)
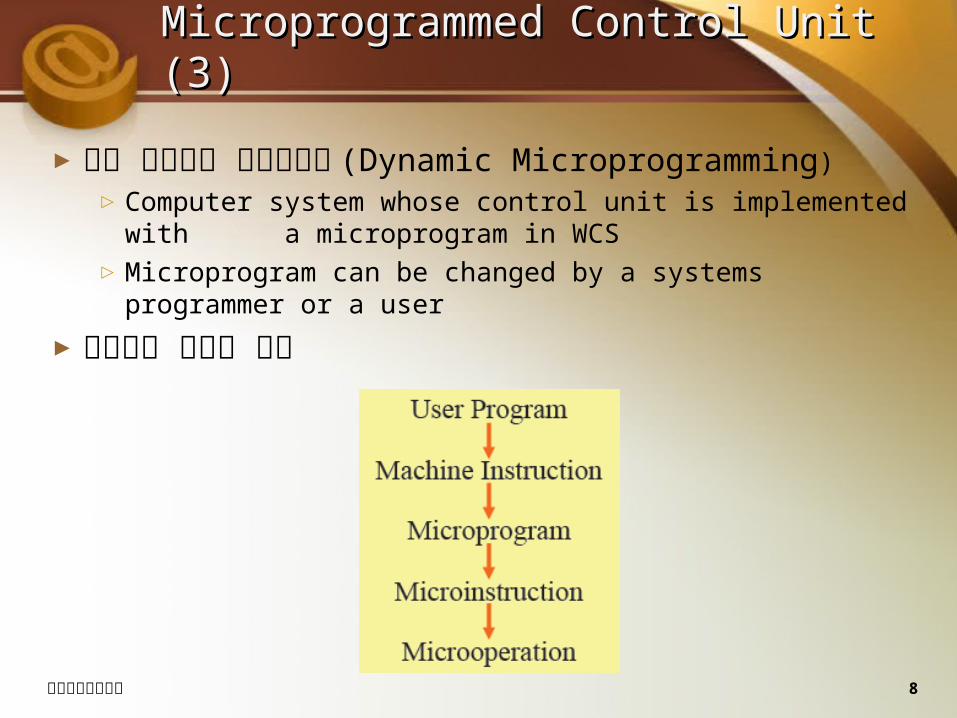
▶ 동적 마이크로 프로그래밍 (Dynamic Microprogramming)▷ Computer system whose control unit is implemented with
a microprogram in WCS▷ Microprogram can be changed by a systems programmer
or a user ▶ 마이크로 명령어 실행
8컴퓨터시스템구조
Microprogrammed Control UnitMicroprogrammed Control Unit (4)(4)
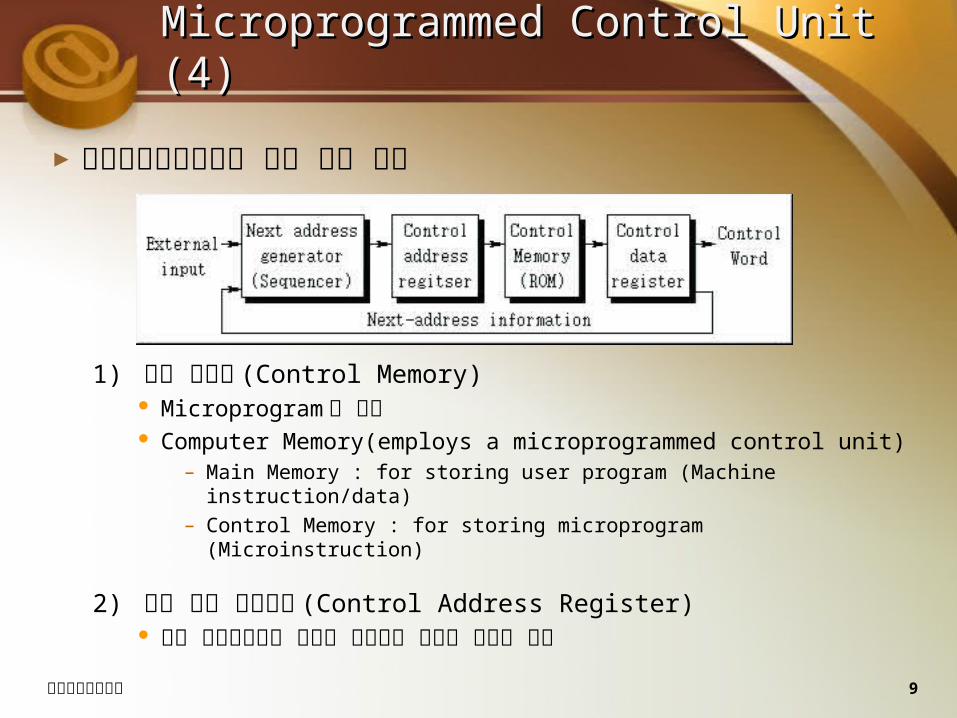
▶ 마이크로프로그램된 제어 장치 구성
1) 제어 메모리 (Control Memory) Microprogram 을 저장 Computer Memory(employs a microprogrammed control unit)
– Main Memory : for storing user program (Machine instruction/data)
– Control Memory : for storing microprogram (Microinstruction)
2) 제어 주소 레지스터 (Control Address Register) 제어 메모리로부터 읽어올 마이크로 명령어 주소를 지정
9컴퓨터시스템구조
Microprogrammed Control UnitMicroprogrammed Control Unit (5)(5)
▶ 마이크로프로그램된 제어 장치 구성3) 시퀀서 (Sequencer = Next Address Generator)
제어 메모리로부터 제어 명령어를 읽어올 주소 시퀀스를 생성 다음 마이크로 명령어의 주소는 입력에 따라 여러 가지 방법으로 결정
4) 제어 데이터 레지스터 (Control Data Register = Pipeline Register)
제어 메모리에서 읽어 온 마이크로 명령어를 저장 매 클럭 펄스마다 데이터 레지스터의 제어 워드에서 지정하는
마이크로 연산과 다음 마이크로 명령어를 읽어오는 동작을 동시에 수행
10컴퓨터시스템구조
주소 시퀀싱 주소 시퀀싱 (1)(1)▶ 주소 시퀀싱 (Address Sequencing)
▷ Sequencer(Next Address Generator)▷ 제어 메모리에 대한 일련의 접근 주소를 생성
▶ 루틴 (Routine)▷ 제어 메모리에 저장된 마이크로 명령어 그룹▷ 각 기계어 명령어는 명령어를 수행하는 루틴을 갖는다
▶ 맵핑 (Mapping)▷ Instruction Code Address in control memory(where routine is
located)▶ 제어 메모리 접근 주소 결정 방법
1) 제어 주소 레지스터를 하나 증가2) 무조건 분기와 상태 비트 조건에 따른 조건부 분기 3) 명령어 비트 (Op-code) 들로부터 제어 메모리 주소 맵핑4) 서브루틴을 호출하고 복귀하는 기능
11컴퓨터시스템구조
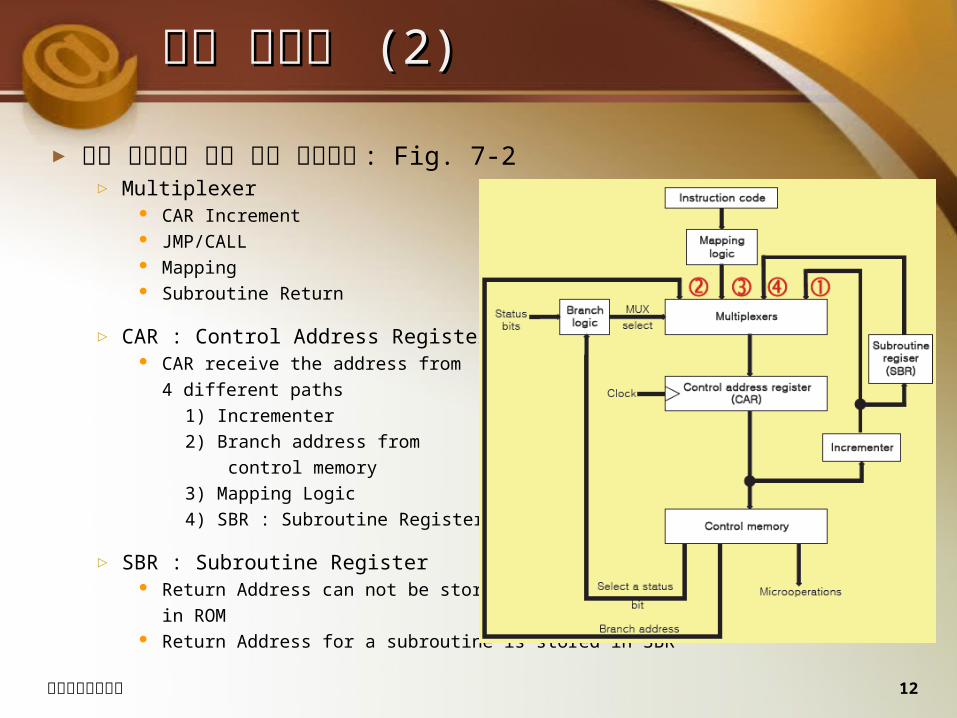
주소 시퀀싱 주소 시퀀싱 (2)(2)▶ 제어 메모리의 주소 생성 하드웨어 : Fig. 7-2
▷ Multiplexer CAR Increment JMP/CALL Mapping Subroutine Return
▷ CAR : Control Address Register CAR receive the address from
4 different paths1) Incrementer2) Branch address from control memory3) Mapping Logic4) SBR : Subroutine Register
▷ SBR : Subroutine Register Return Address can not be stored
in ROM Return Address for a subroutine is stored in SBR
12컴퓨터시스템구조
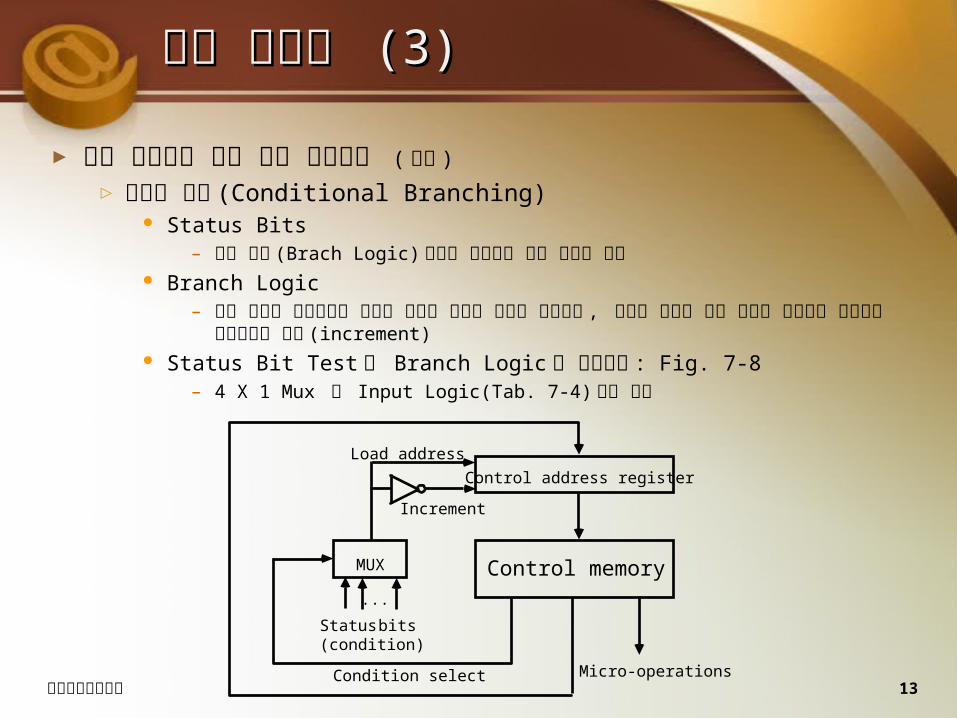
주소 시퀀싱 주소 시퀀싱 (3)(3)▶ 제어 메모리의 주소 생성 하드웨어 ( 계속 )
▷ 조건부 분기 (Conditional Branching) Status Bits
– 분기 논리 (Brach Logic) 에서의 선택적인 분기 동작을 제어 Branch Logic
– 특정 상태를 테스트하고 조건에 맞다면 주어진 주소로 분기하고 , 그렇지 않다면 바로 다음의 마이크로 명령어를 수행하도록 설정 (increment)
Status Bit Test 와 Branch Logic 의 실제회로 : Fig. 7-8– 4 X 1 Mux 와 Input Logic(Tab. 7-4) 으로 구성
13컴퓨터시스템구조
Control address register
Control memoryMUX
Load address
Increment
Status(condition)
bits
Micro-operationsCondition select
...
주소 시퀀싱 주소 시퀀싱 (4)(4)▶ 제어 메모리의 주소 생성 하드웨어 ( 계속 )
▷ 무조건부 분기 (Unconditional Branching) 제어 메모리로부터 분기 주소를 적재함으로써 구현 상태 비트 (status bit) 중에 하나를 항상 1 로 고정하고 이 상태 비트를 선택함
14컴퓨터시스템구조
주소 시퀀싱 주소 시퀀싱 (5)(5)▶ 제어 메모리의 주소 생성 하드웨어 ( 계속 )
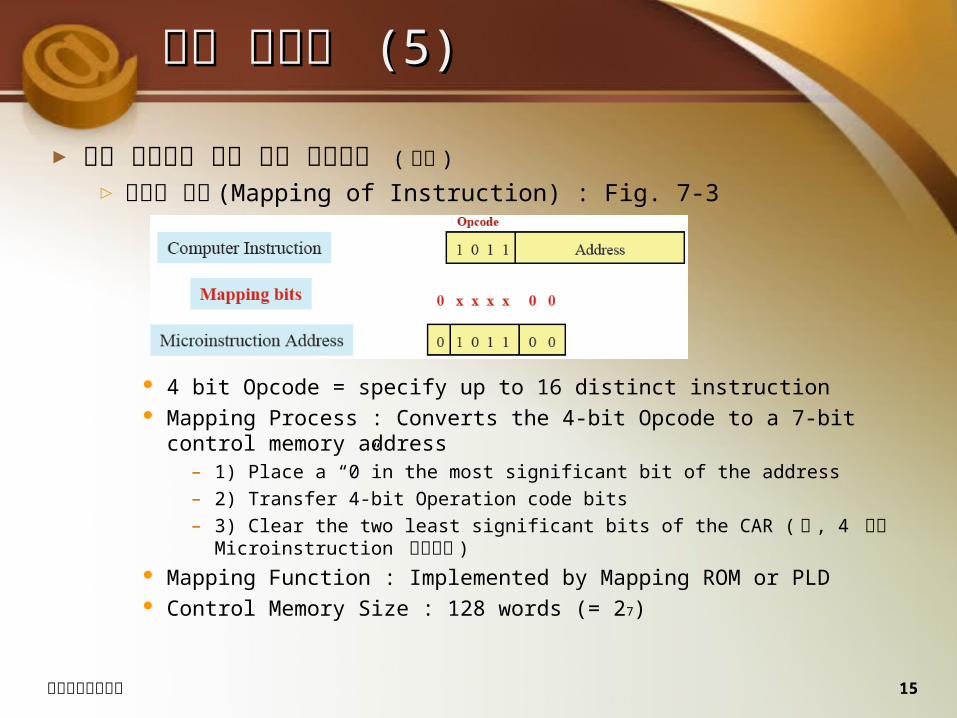
▷ 명령어 맵핑 (Mapping of Instruction) : Fig. 7-3
4 bit Opcode = specify up to 16 distinct instruction Mapping Process : Converts the 4-bit Opcode to a 7-bit control
memory address– 1) Place a “0”in the most significant bit of the address– 2) Transfer 4-bit Operation code bits– 3) Clear the two least significant bits of the CAR ( 즉 , 4 개의
Microinstruction 수용가능 ) Mapping Function : Implemented by Mapping ROM or PLD Control Memory Size : 128 words (= 27)
15컴퓨터시스템구조
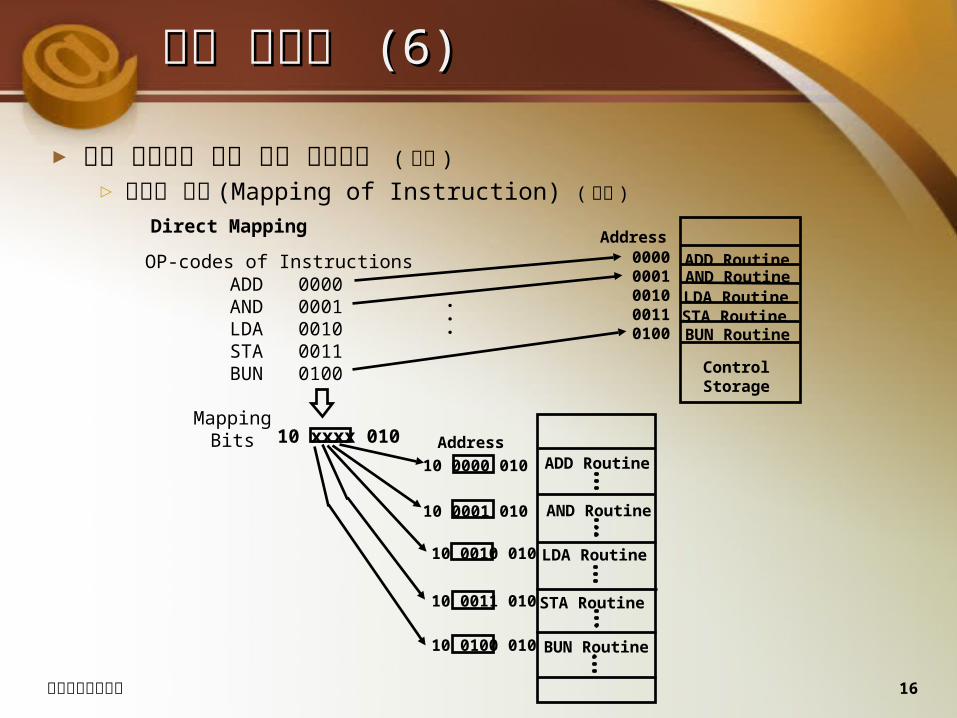
주소 시퀀싱 주소 시퀀싱 (6)(6)▶ 제어 메모리의 주소 생성 하드웨어 ( 계속 )
▷ 명령어 맵핑 (Mapping of Instruction) ( 계속 )
16컴퓨터시스템구조
ADD RoutineAND RoutineLDA RoutineSTA RoutineBUN Routine
ControlStorage
00000001001000110100
OP-codes of Instructions ADD AND LDA STA BUN
00000001001000110100
...
Direct Mapping
Address10 0000 010
10 0001 010
10 0010 010
10 0011 010
10 0100 010
MappingBits 10 xxxx 010
ADD Routine
Address
AND Routine
LDA Routine
STA Routine
BUN Routine
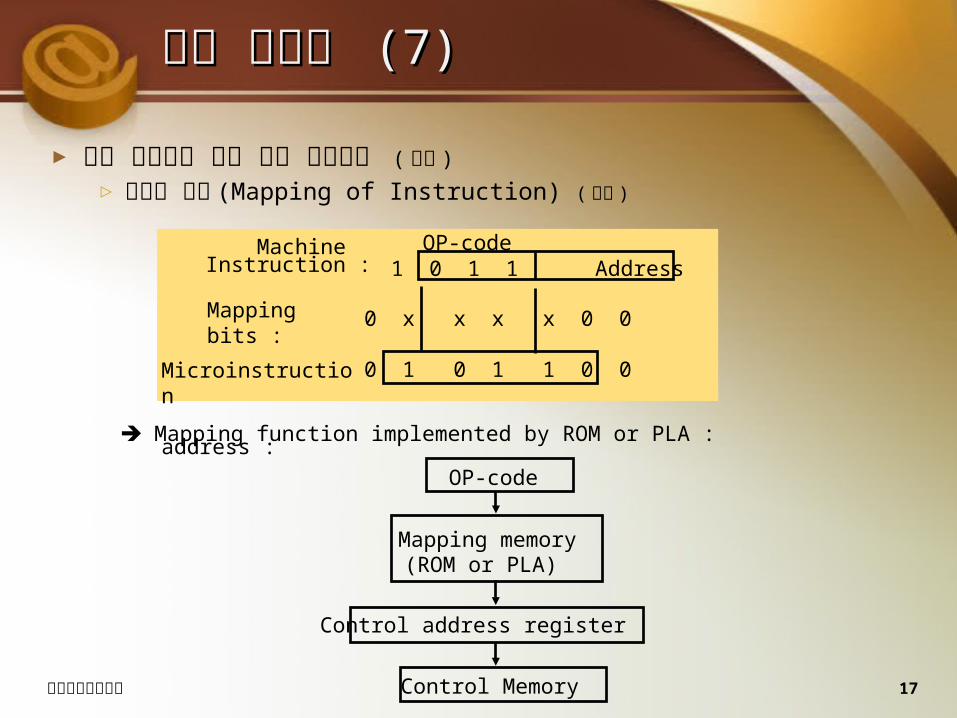
주소 시퀀싱 주소 시퀀싱 (7)(7)▶ 제어 메모리의 주소 생성 하드웨어 ( 계속 )
▷ 명령어 맵핑 (Mapping of Instruction) ( 계속 )
17컴퓨터시스템구조
Mapping function implemented by ROM or PLA :OP-code
Mapping memory(ROM or PLA)
Control address register
Control Memory
1 0 1 1 Address
OP-code
Mapping bits : Microinstruction
address :
0 x x x x 0 0
0 1 0 1 1 0 0
MachineInstruction :
주소 시퀀싱 주소 시퀀싱 (8)(8)▶ 제어 메모리의 주소 생성 하드웨어 ( 계속 )
▷ 서브루틴 (Subroutine) 다른 루틴에서 사용되는 프로그램 모듈 마이크로 프로그램 안에서
어디에서도 호출 가능 동일한 마이크로 코드 모임을 서브루틴화함으로써 제어 메모리를 절약 가능
– 예제 ) Memory Reference 명령에서 Operand 의 Effective Address 를 구하는Subroutine
» 표 . 7-2 에서 INDRCT( 여기에서 FETCH 와 INDRCT 는 Subroutine)» Subroutine 은 ORG 64, 즉 1000000 -1111111 에 위치 (Routine 은
0000000 -0111111) 서브루틴 호출과 반환
– 서브루틴 호출 동안에 반환 주소를 저장– 서브루틴 반환 시에 반환 주소를 재저장 ( 복원 )
» Last-In First Out(LIFO) Register Stack
18컴퓨터시스템구조
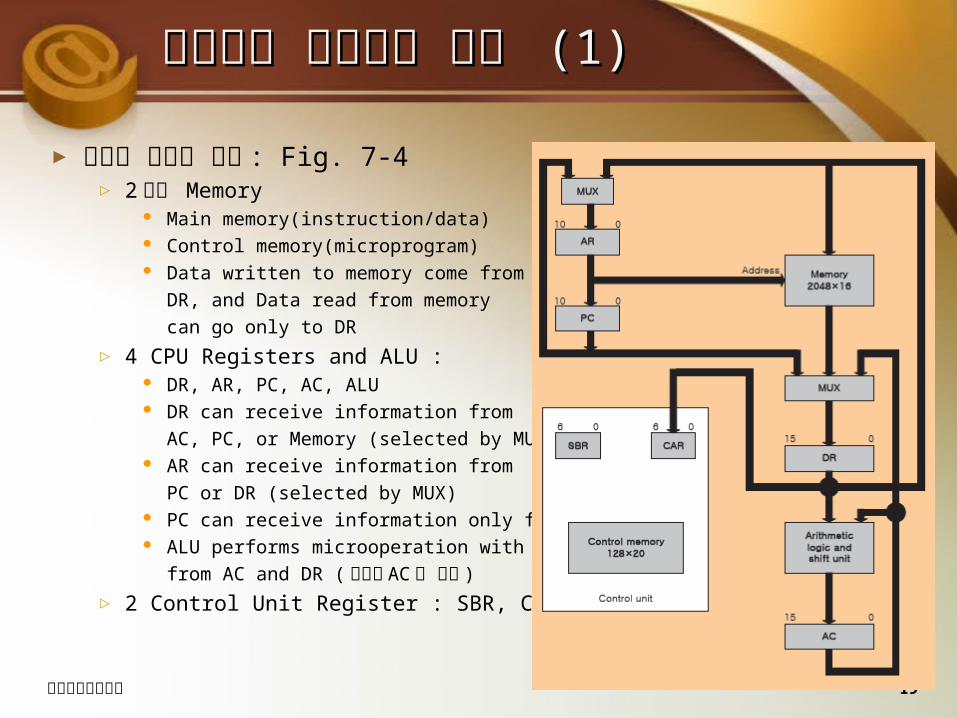
마이크로 프로그램 예제 마이크로 프로그램 예제 (1)(1)▶ 컴퓨터 하드웨 구성 : Fig. 7-4
▷ 2 개의 Memory Main memory(instruction/data) Control memory(microprogram) Data written to memory come from
DR, and Data read from memory can go only to DR
▷ 4 CPU Registers and ALU : DR, AR, PC, AC, ALU DR can receive information from
AC, PC, or Memory (selected by MUX) AR can receive information from
PC or DR (selected by MUX) PC can receive information only from AR ALU performs microoperation with data
from AC and DR ( 결과는 AC 에 저장 )▷ 2 Control Unit Register : SBR, CAR
19컴퓨터시스템구조
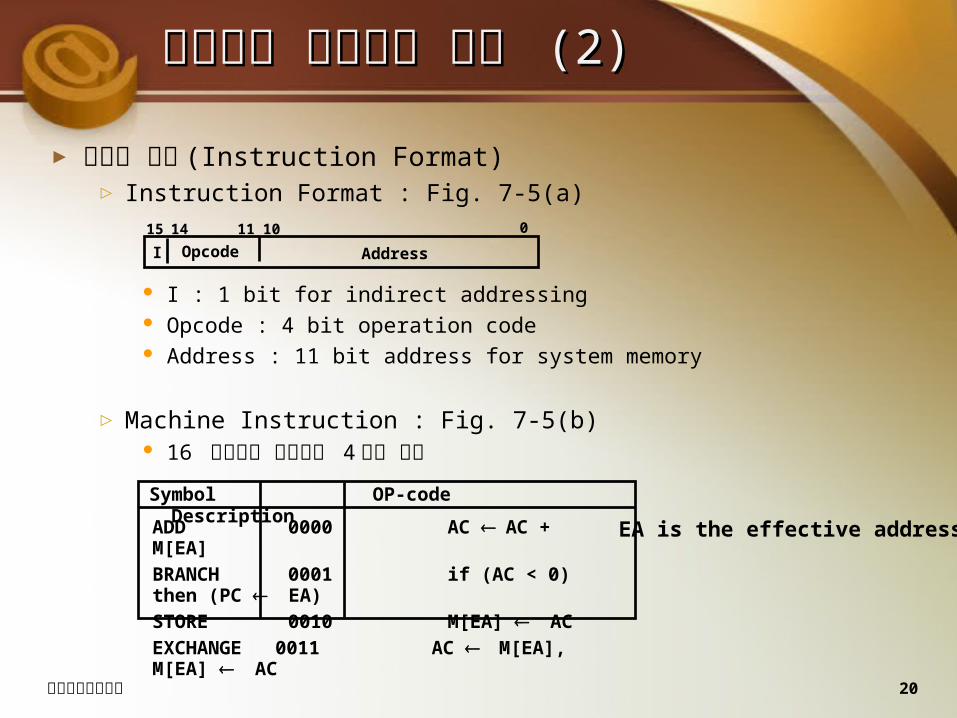
마이크로 프로그램 예제 마이크로 프로그램 예제 (2)(2)▶ 명령어 형식 (Instruction Format)
▷ Instruction Format : Fig. 7-5(a)
I : 1 bit for indirect addressing Opcode : 4 bit operation code Address : 11 bit address for system memory
▷ Machine Instruction : Fig. 7-5(b) 16 명령어가 가능하며 4 개만 표시
20컴퓨터시스템구조
EA is the effective address
Symbol OP-code Description
ADD 0000 AC AC + M[EA]BRANCH 0001 if (AC < 0) then (PC EA)STORE 0010 M[EA] ACEXCHANGE 0011 AC M[EA], M[EA] AC
I Opcode15 14 11 10
Address0
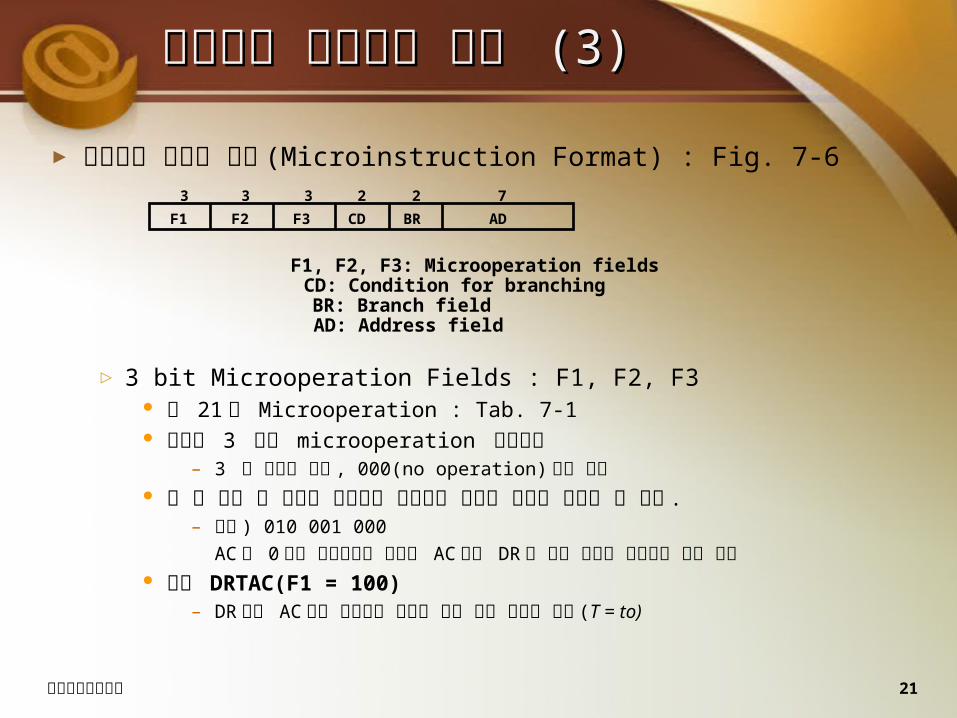
마이크로 프로그램 예제 마이크로 프로그램 예제 (3)(3)▶ 마이크로 명령어 형식 (Microinstruction Format) : Fig. 7-6
▷ 3 bit Microoperation Fields : F1, F2, F3 총 21 개 Microoperation : Tab. 7-1 동시에 3 개의 microoperation 실행가능
– 3 개 이하일 경우 , 000(no operation) 으로 채움 두 개 또는 그 이상의 충돌하는 마이크로 연산은 동시에 설정할 수 없음 .
– 예제 ) 010 001 000AC 를 0 으로 클리어하는 동시에 AC 에서 DR 를 빼는 동시에 수행하여 충돌 발생
기호 DRTAC(F1 = 100)– DR 에서 AC 로의 레지스터 전송을 다섯 개의 문자로 표현 (T = to)
21컴퓨터시스템구조
F1 F2 F3 CD BR AD3 3 3 2 2 7
F1, F2, F3: Microoperation fieldsCD: Condition for branching BR: Branch fieldAD: Address field
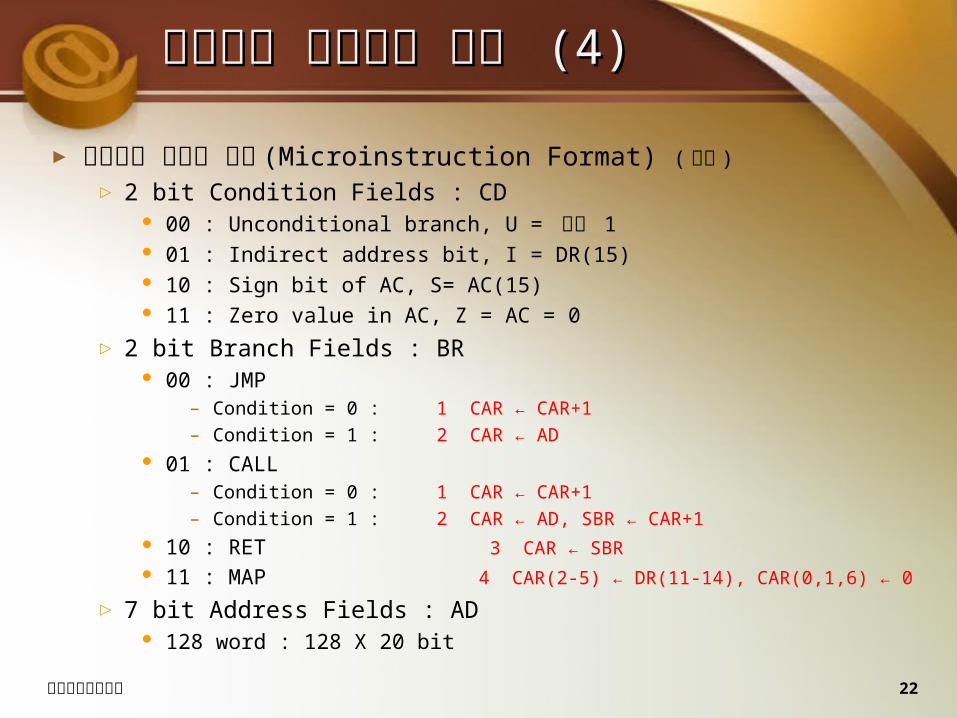
마이크로 프로그램 예제 마이크로 프로그램 예제 (4)(4)▶ 마이크로 명령어 형식 (Microinstruction Format) ( 계속 )
▷ 2 bit Condition Fields : CD 00 : Unconditional branch, U = 항상 1 01 : Indirect address bit, I = DR(15) 10 : Sign bit of AC, S= AC(15) 11 : Zero value in AC, Z = AC = 0
▷ 2 bit Branch Fields : BR 00 : JMP
– Condition = 0 : 1 CAR ← CAR+1– Condition = 1 : 2 CAR ← AD
01 : CALL– Condition = 0 : 1 CAR ← CAR+1– Condition = 1 : 2 CAR ← AD, SBR ← CAR+1
10 : RET 3 CAR ← SBR 11 : MAP 4 CAR(2-5) ← DR(11-14), CAR(0,1,6) ← 0
▷ 7 bit Address Fields : AD 128 word : 128 X 20 bit
22컴퓨터시스템구조
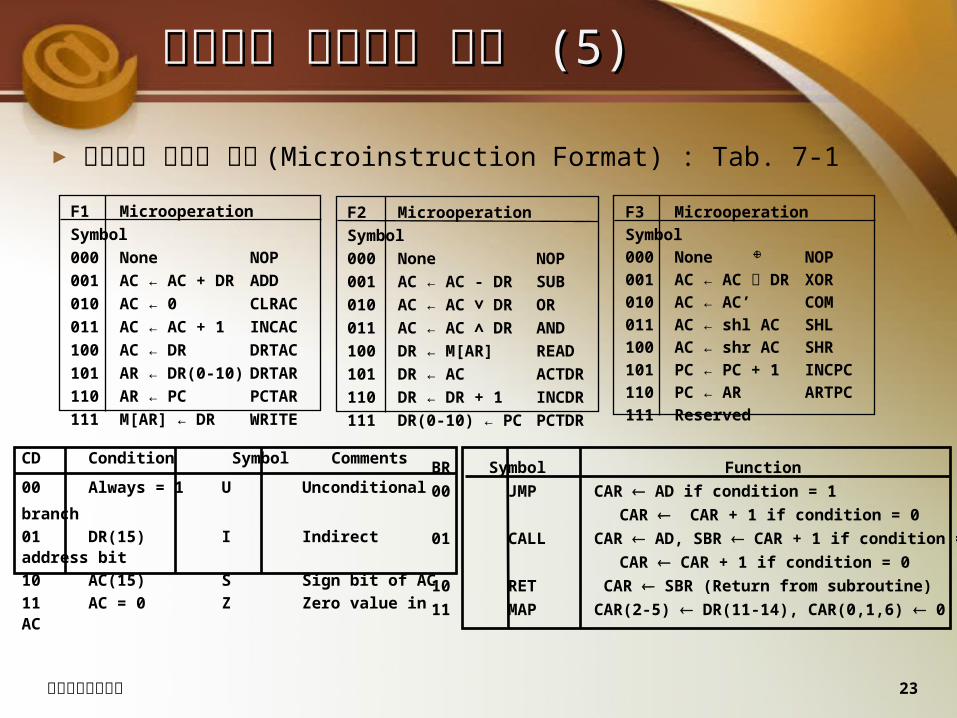
마이크로 프로그램 예제 마이크로 프로그램 예제 (5)(5)▶ 마이크로 명령어 형식 (Microinstruction Format) : Tab. 7-1
23컴퓨터시스템구조
F1 MicrooperationSymbol000 None NOP001 AC ← AC + DR ADD010 AC ← 0 CLRAC011 AC ← AC + 1 INCAC100 AC ← DR DRTAC101 AR ← DR(0-10)DRTAR110 AR ← PC PCTAR111 M[AR] ← DR WRITE
F2 Microoperation Symbol000 None NOP001 AC ← AC - DR SUB010 AC ← AC ∨ DR OR011 AC ← AC ∧ DR AND100 DR ← M[AR] READ101 DR ← AC ACTDR110 DR ← DR + 1 INCDR111 DR(0-10) ← PC PCTDR
F3 MicrooperationSymbol000 None NOP001 AC ← AC DR XOR010 AC ← AC’ COM011 AC ← shl AC SHL100 AC ← shr AC SHR101 PC ← PC + 1 INCPC110 PC ← AR ARTPC111 Reserved
○+
CD Condition Symbol Comments00 Always = 1 U Unconditional branch01 DR(15) I Indirect address bit10 AC(15) S Sign bit of AC11 AC = 0 Z Zero value in AC
BR Symbol Function00 JMP CAR AD if condition = 1
CAR CAR + 1 if condition = 001 CALL CAR AD, SBR CAR + 1 if condition = 1
CAR CAR + 1 if condition = 010 RET CAR SBR (Return from subroutine)11 MAP CAR(2-5) DR(11-14), CAR(0,1,6) 0
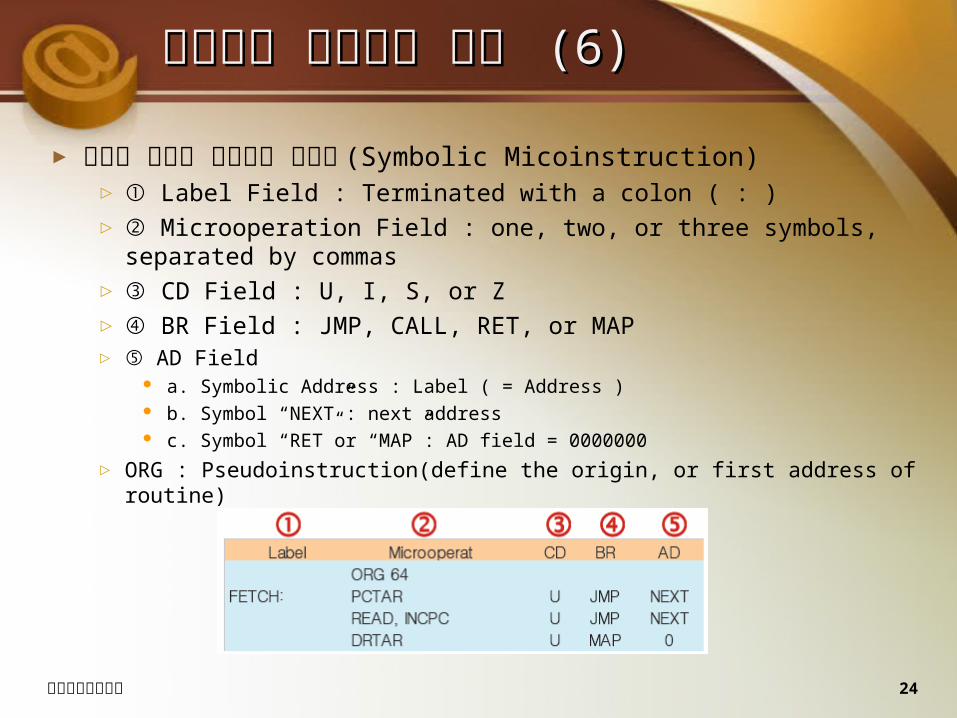
마이크로 프로그램 예제 마이크로 프로그램 예제 (6)(6)▶ 기호로 표시된 마이크로 명령어 (Symbolic Micoinstruction)
▷ ① Label Field : Terminated with a colon ( : )▷ ② Microoperation Field : one, two, or three symbols, separated by
commas▷ ③ CD Field : U, I, S, or Z▷ ④ BR Field : JMP, CALL, RET, or MAP▷ ⑤ AD Field
a. Symbolic Address : Label ( = Address ) b. Symbol “NEXT”: next address c. Symbol “RET”or “MAP”: AD field = 0000000
▷ ORG : Pseudoinstruction(define the origin, or first address of routine)
24컴퓨터시스템구조
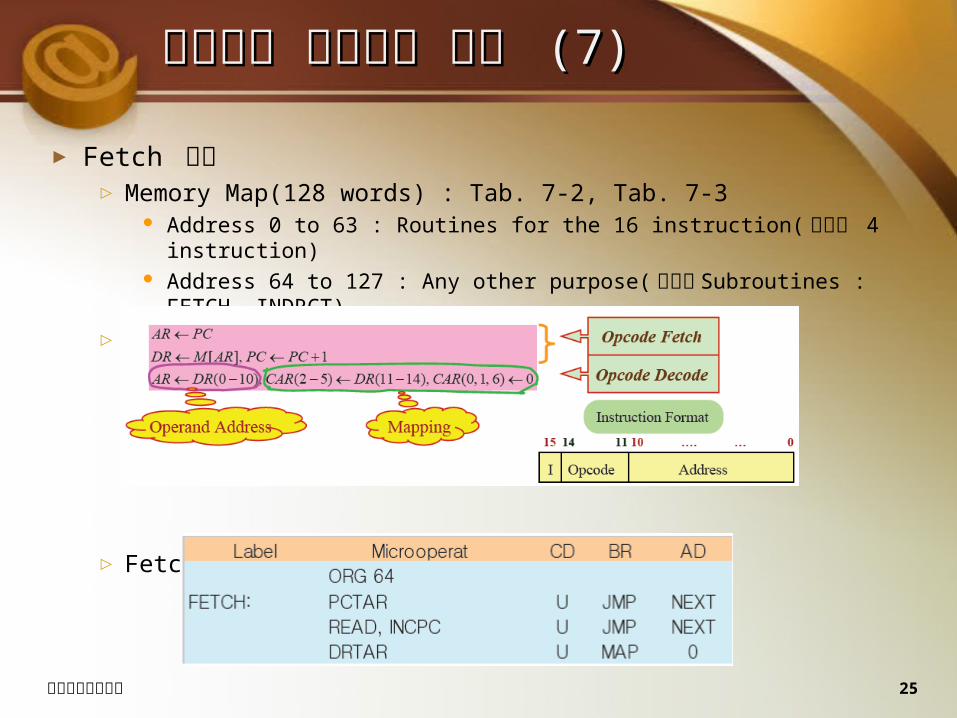
마이크로 프로그램 예제 마이크로 프로그램 예제 (7)(7)▶ Fetch 루틴
▷ Memory Map(128 words) : Tab. 7-2, Tab. 7-3 Address 0 to 63 : Routines for the 16 instruction( 현재는 4 instruction) Address 64 to 127 : Any other purpose( 현재는 Subroutines : FETCH,
INDRCT)▷ FETCH 서브루틴의 마이크로 명령어
▷ Fetch 서브루틴 : 주소 64 에서 시작
25컴퓨터시스템구조
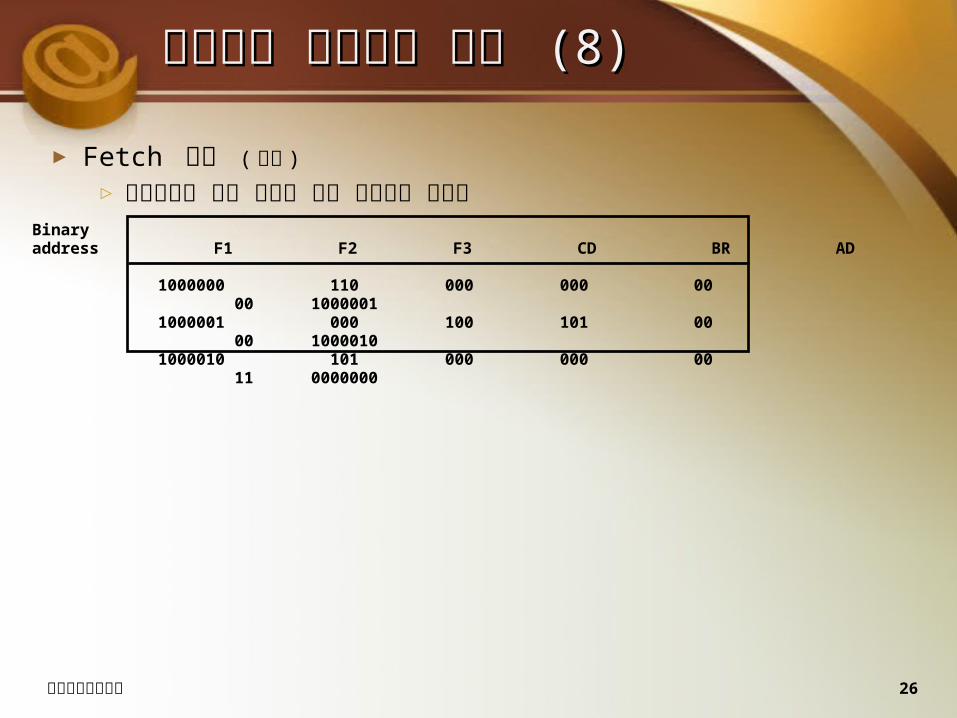
마이크로 프로그램 예제 마이크로 프로그램 예제 (8)(8)▶ Fetch 루틴 ( 계속 )
▷ 어셈블러에 의해 변환된 이진 마이크로 명령어
26컴퓨터시스템구조
1000000 110 000 000 00 00 10000011000001 000 100 101 00 00 10000101000010 101 000 000 00 11 0000000
Binaryaddress F1 F2 F3 CD BR AD
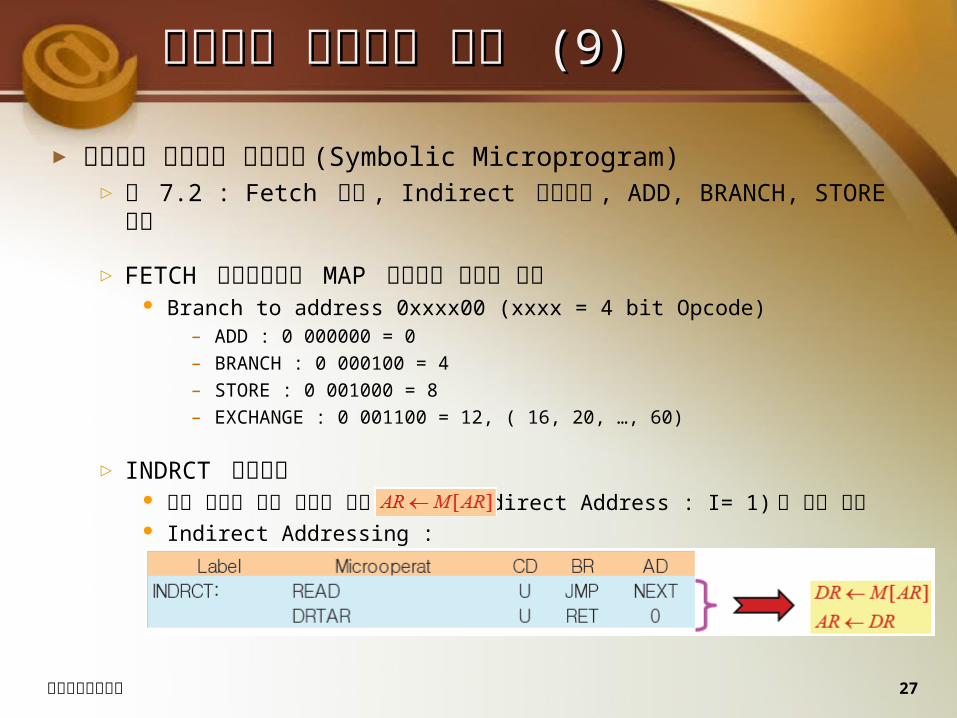
마이크로 프로그램 예제 마이크로 프로그램 예제 (9)(9)▶ 기호화된 마이크로 프로그램 (Symbolic Microprogram)
▷ 표 7.2 : Fetch 루틴 , Indirect 서브루틴 , ADD, BRANCH, STORE 루틴
▷ FETCH 서브루틴에서 MAP 마이크로 명령어 실행 Branch to address 0xxxx00 (xxxx = 4 bit Opcode)
– ADD : 0 000000 = 0– BRANCH : 0 000100 = 4– STORE : 0 001000 = 8– EXCHANGE : 0 001100 = 12, ( 16, 20, …, 60)
▷ INDRCT 서브루틴 기계 명령어 실행 루틴에 간접 주소 모드 (Indirect Address : I= 1) 인 경우
호출 Indirect Addressing :
– AR 이 지시하는 메모리 내용을 DR 에 읽은 후 , 다시 AR 에 써넣는다
27컴퓨터시스템구조
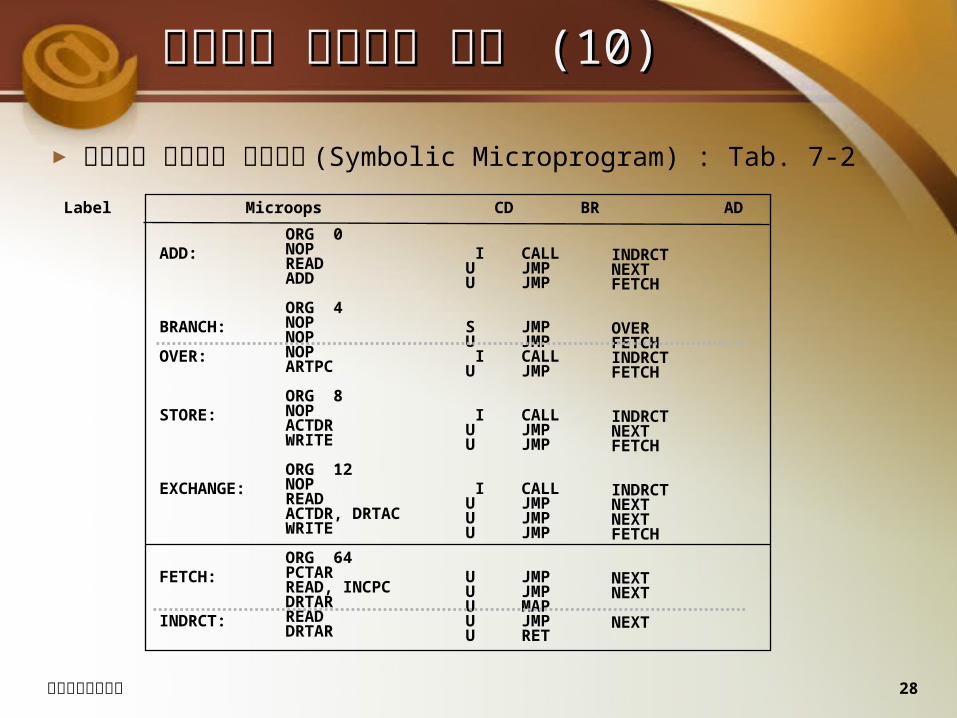
마이크로 프로그램 예제 마이크로 프로그램 예제 (10)(10)▶ 기호화된 마이크로 프로그램 (Symbolic Microprogram) : Tab. 7-2
28컴퓨터시스템구조
ORG 0NOPREADADDORG 4NOPNOPNOPARTPCORG 8NOPACTDRWRITEORG 12NOPREADACTDR, DRTACWRITEORG 64PCTARREAD, INCPCDRTARREADDRTAR
IUU
SU IU
IUU IUUU
UUUUU
CALLJMPJMP
JMPJMPCALLJMP
CALLJMPJMP
CALLJMPJMPJMP
JMPJMPMAPJMPRET
INDRCTNEXTFETCH
OVERFETCHINDRCTFETCH
INDRCTNEXTFETCH
INDRCTNEXTNEXTFETCH
NEXTNEXTNEXT
ADD:
BRANCH:OVER:
STORE:
EXCHANGE:
FETCH:
INDRCT:
Label Microops CD BR AD
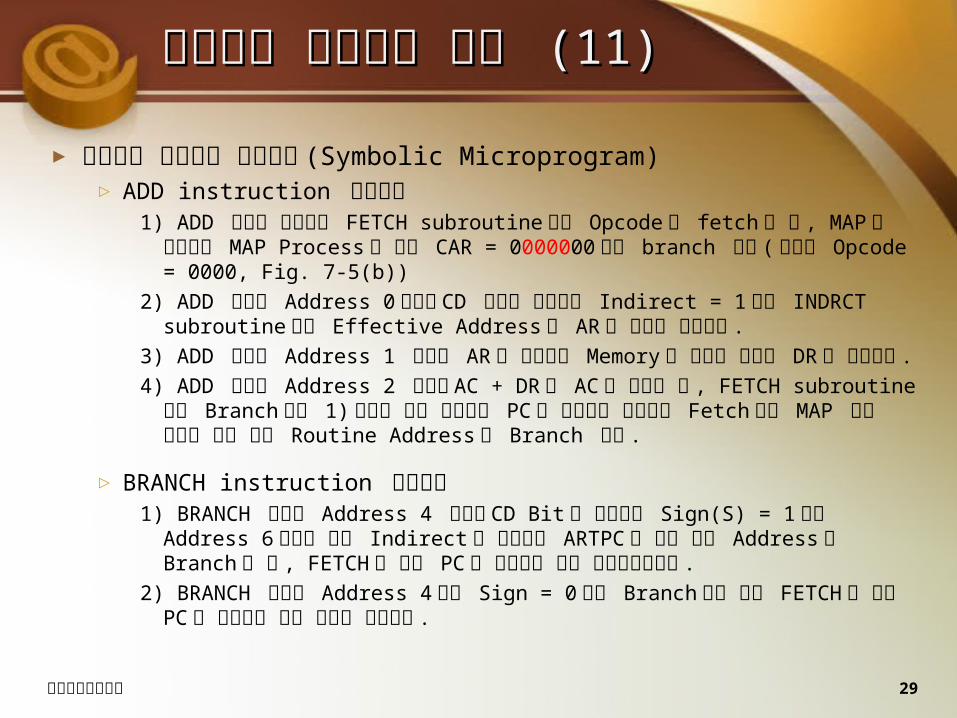
마이크로 프로그램 예제 마이크로 프로그램 예제 (11)(11)▶ 기호화된 마이크로 프로그램 (Symbolic Microprogram)
▷ ADD instruction 실행절차1) ADD 명령이 실행되면 FETCH subroutine 에서 Opcode 를 fetch 한 후 , MAP
이 실행되면 MAP Process 에 의해 CAR = 0000000 으로 branch 한다 ( 여기서 Opcode = 0000, Fig. 7-5(b))
2) ADD 명령의 Address 0 에서는 CD 비트를 검사하여 Indirect = 1 이면 INDRCT subroutine 에서 Effective Address 를 AR 에 써넣고 반환된다 .
3) ADD 명령의 Address 1 에서는 AR 이 지시하는 Memory 의 내용을 읽어서 DR에 써넣는다 .
4) ADD 명령의 Address 2 에서는 AC + DR 을 AC 에 저장한 후 , FETCH subroutine 으로 Branch 하면 1) 에서와 같은 방법으로 PC 가 지시하는 명령어를 Fetch 하여 MAP 수행 결과에 따라 해당 Routine Address 로 Branch 한다 .
▷ BRANCH instruction 실행절차1) BRANCH 명령의 Address 4 에서는 CD Bit 를 검사하여 Sign(S) = 1 이면
Address 6 번으로 가서 Indirect 를 검사하고 ARTPC 에 의해 해당 Address 로 Branch 한 후 , FETCH 에 의해 PC 가 지시하는 다음 명령을수행한다 .
2) BRANCH 명령의 Address 4 에서 Sign = 0 이면 Branch 하지 않고 FETCH 에 의해 PC 가 지시하는 다음 명령을 수행한다 .
29컴퓨터시스템구조
마이크로 프로그램 예제 마이크로 프로그램 예제 (12)(12)▶ 이진 마이크로 프로그램 (Binary Microprogram) : Tab. 7-3
▷ 기호화된 마이크로 프로그램은 어셈블러나 사람에 의해 직접 이진 코드로 변환되어야 제어 메모리에 적재할 수 있다
▷ 표 . 7-3 의 3 번지의 코드는 사용되지 않는 워드이기 때문에 모든 코드가 0 으로 채워져 있지만 CAR 값이 잡음 등으로 3 번지로 설정되는 경우를 고려하여 fetch 루틴으로 brach 하게 설정됨 .
▶ ROM 기반 제어 메모리 (Control Memory)▷ Most microprogrammed systems use a ROM for the control
memory Cheaper and faster than a RAM Prevent the occasional user from changing the architecture of the
system
30컴퓨터시스템구조
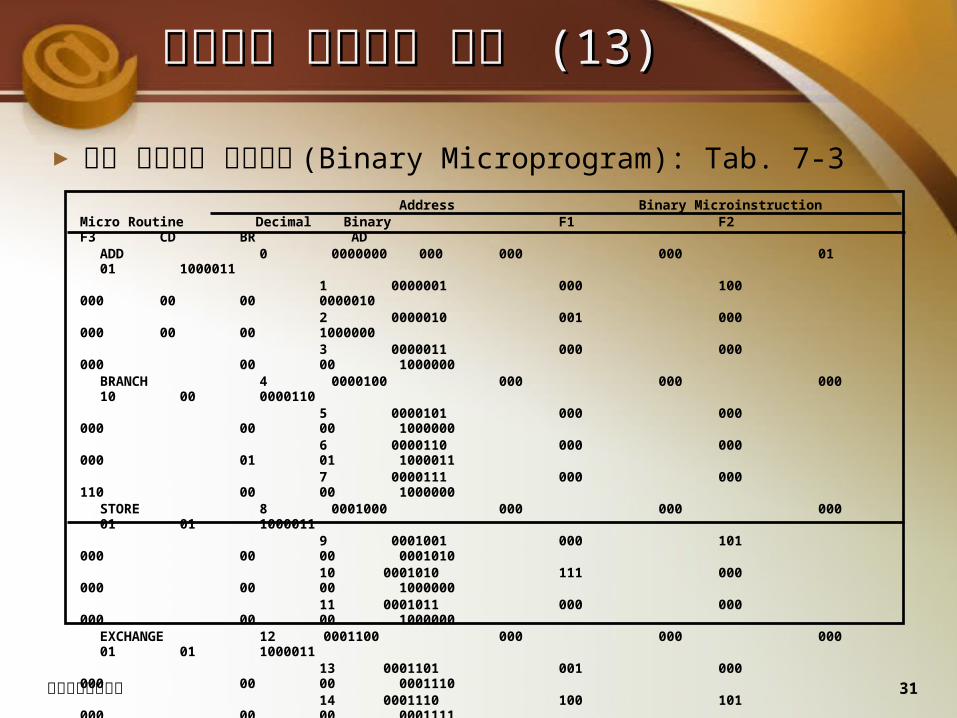
마이크로 프로그램 예제 마이크로 프로그램 예제 (13)(13)▶ 이진 마이크로 프로그램 (Binary Microprogram): Tab. 7-3
31컴퓨터시스템구조
Address Binary MicroinstructionMicro Routine Decimal Binary F1 F2 F3 CD BR AD
ADD 0 0000000 000 000 000 01 01 1000011
1 0000001 000 100 000 00 00 0000010 2 0000010 001 000 000 00 00
1000000 3 0000011 000 000 000 00 00
1000000 BRANCH 4 0000100 000 000 000 10 00
0000110 5 0000101 000 000 000 00 00 1000000 6 0000110 000 000 000 01 01 1000011 7 0000111 000 000 110 00 00 1000000
STORE 8 0001000 000 000 000 01 01 1000011
9 0001001 000 101 000 00 00 0001010 10 0001010 111 000 000 00 00 1000000 11 0001011 000 000 000 00 00 1000000
EXCHANGE 12 0001100 000 000 000 01 01 1000011
13 0001101 001 000 000 00 00 0001110 14 0001110 100 101 000 00 00 0001111 15 0001111 111 000 000 00 00 1000000
FETCH 64 1000000 110 000 000 00 00 1000001
65 1000001 000 100 101 00 00 1000010 66 1000010 101 000 000 00 11 0000000
INDRCT 67 1000011 000 100 000 00 00 1000100
68 1000100 101 000 000 00 10 0000000
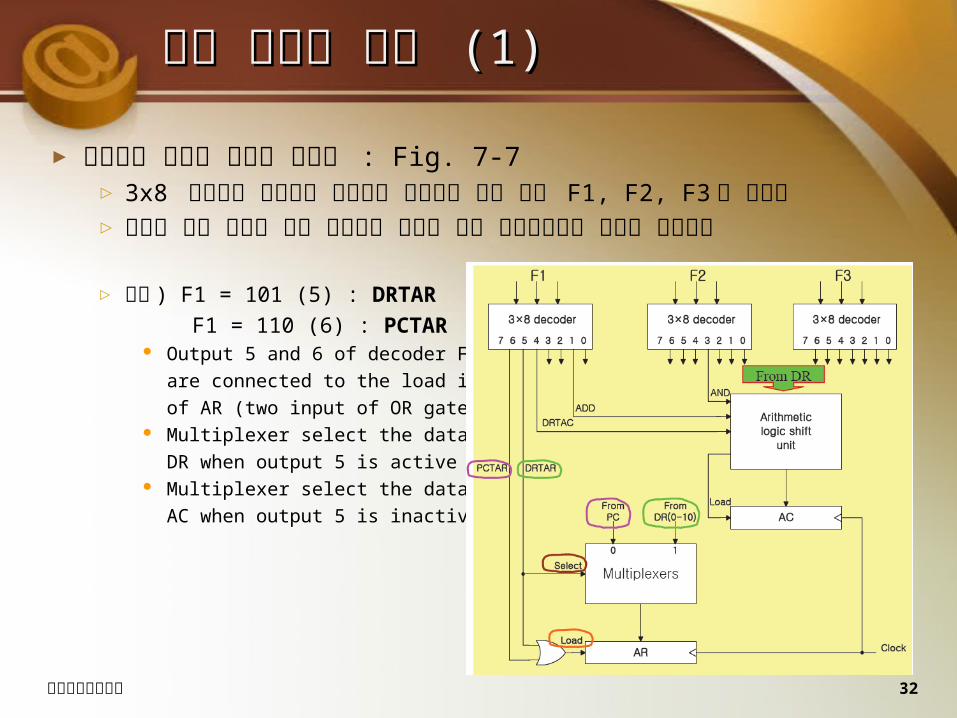
제어 장치의 설계 제어 장치의 설계 (1)(1)▶ 마이크로 명령어 필드의 디코딩 : Fig. 7-7
▷ 3x8 디코더를 사용하여 마이크로 명령어의 제어 워드 F1, F2, F3 를 디코딩
▷ 디코더 출력 신호는 해당 마이크로 연산을 실행 초기화시키는 장치에 연결된다
▷ 예제 ) F1 = 101 (5) : DRTAR F1 = 110 (6) : PCTAR
Output 5 and 6 of decoder F1are connected to the load input
of AR (two input of OR gate) Multiplexer select the data from
DR when output 5 is active Multiplexer select the data from
AC when output 5 is inactive
32컴퓨터시스템구조
제어 장치의 설계 제어 장치의 설계 (2)(2)▶ 마이크로 명령어 필드의 디코딩 : Fig. 7-7
▷ Arithmetic Logic Shift Unit Control signal of ALU in hardwired control: p. 164, Fig. 5-19, 20 Control signal will be now come from the output of the decoders
associated with the AND, ADD, and DRTAC.
33컴퓨터시스템구조
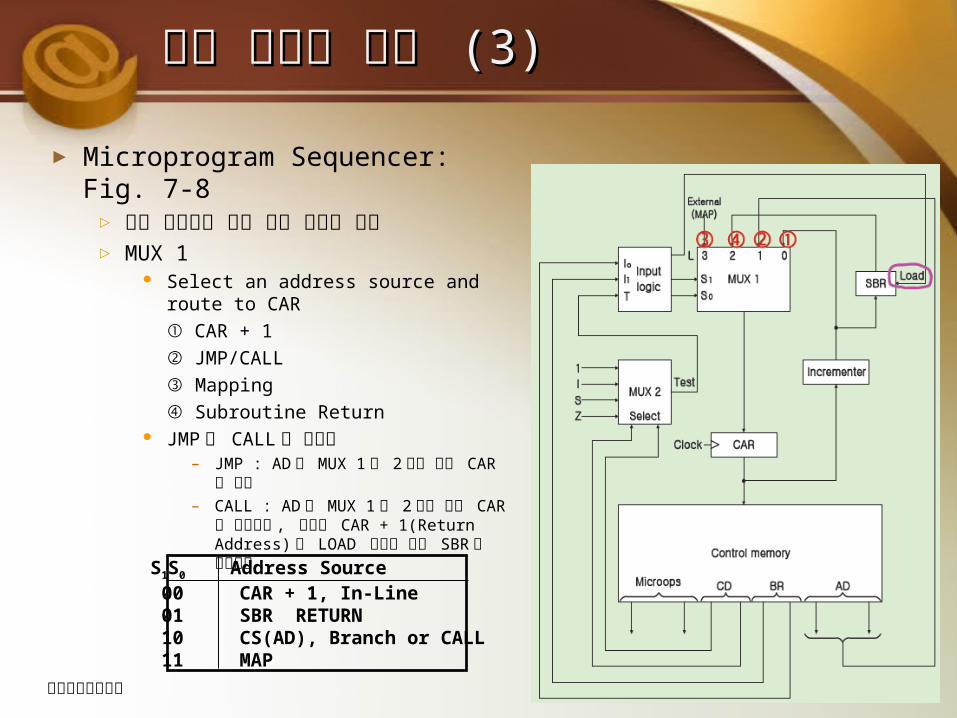
제어 장치의 설계 제어 장치의 설계 (3)(3)▶ Microprogram Sequencer: Fig.
7-8▷ 제어 메모리의 다음 접근 주소를 결정▷ MUX 1
Select an address source and route to CAR ① CAR + 1② JMP/CALL③ Mapping④ Subroutine Return
JMP 와 CALL 의 차이점– JMP : AD 가 MUX 1 의 2 번을 통해
CAR 로 전송– CALL : AD 가 MUX 1 의 2 번을 통해
CAR 로 전송되고 , 동시에 CAR + 1(Return Address) 이 LOAD 신호에 의해 SBR 에 저장된다 .
34컴퓨터시스템구조
S1S0 Address Source 00 CAR + 1, In-Line 01 SBR RETURN 10 CS(AD), Branch or CALL 11 MAP
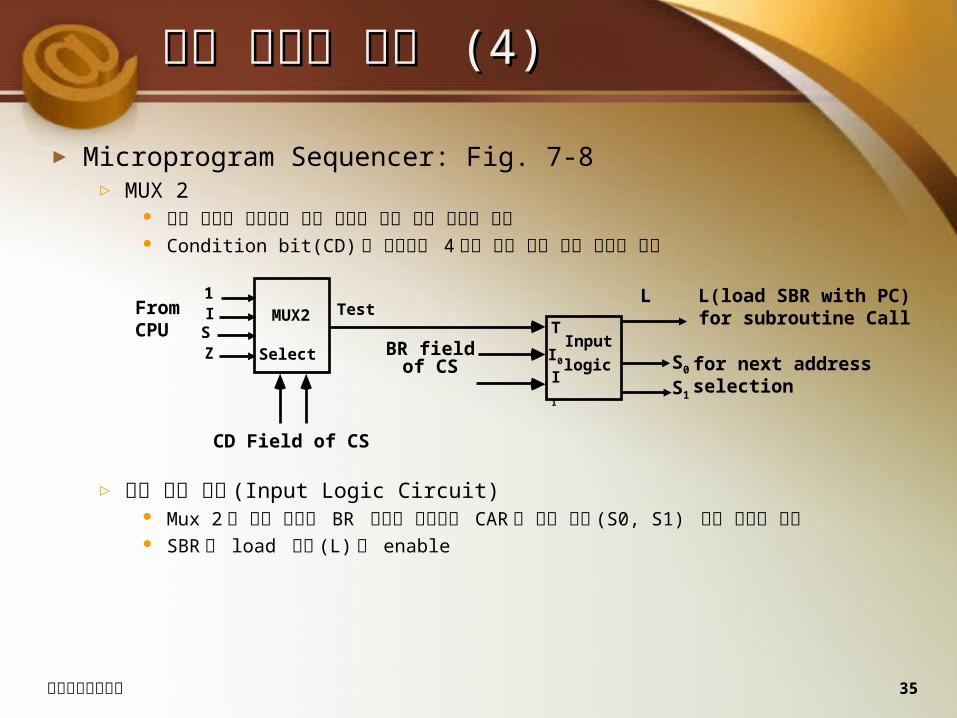
제어 장치의 설계 제어 장치의 설계 (4)(4)▶ Microprogram Sequencer: Fig. 7-8
▷ MUX 2 상태 비트를 검사하고 검사 결과를 입력 논리 회로에 적용 Condition bit(CD) 에 근거하여 4 개의 상태 비트 중에 하나를 선택
▷ 입력 논리 회로 (Input Logic Circuit) Mux 2 의 출력 신호와 BR 필드에 근거하여 CAR 의 소스 주소 (S0, S1) 중에 하나를
선택 SBR 의 load 입력 (L) 을 enable
35컴퓨터시스템구조
InputlogicI0
I1
TMUX2
Select
1I
SZ
Test
CD Field of CS
From CPU
BR fieldof CS
L(load SBR with PC) for subroutine Call
S0S1
for next addressselection
L
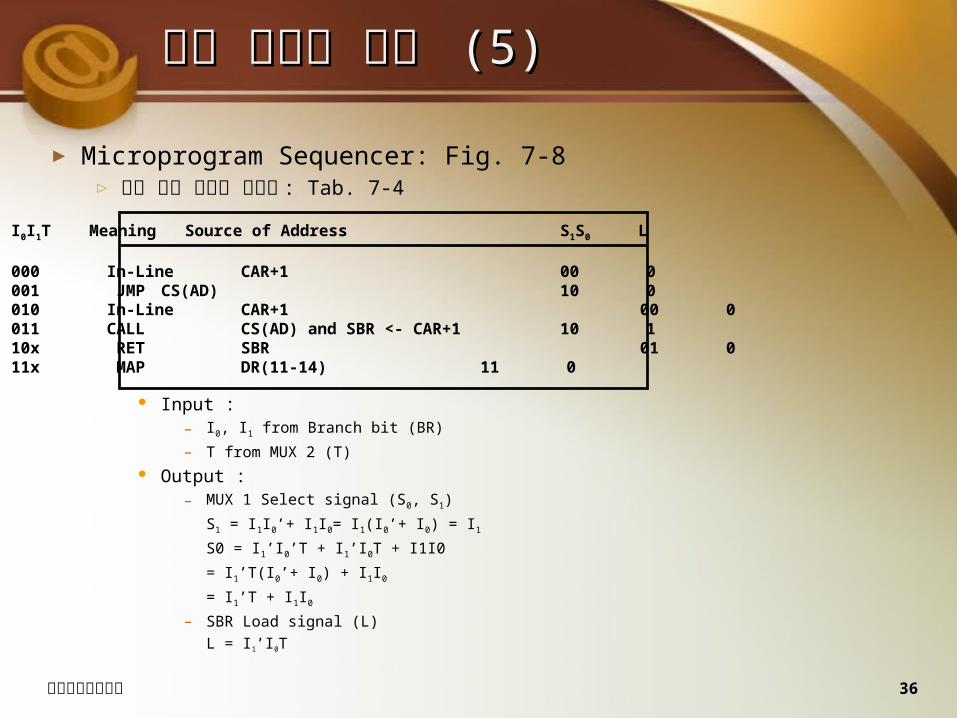
제어 장치의 설계 제어 장치의 설계 (5)(5)▶ Microprogram Sequencer: Fig. 7-8
▷ 입력 논리 회로의 진리표 : Tab. 7-4
Input :– I0, I1 from Branch bit (BR)– T from MUX 2 (T)
Output : – MUX 1 Select signal (S0, S1)
S1 = I1I0’+ I1I0= I1(I0’+ I0) = I1S0 = I1’I0’T + I1’I0T + I1I0= I1’T(I0’+ I0) + I1I0= I1’T + I1I0
– SBR Load signal (L) L = I1’I0T
36컴퓨터시스템구조
I0I1T Meaning Source of Address S1S0 L
000 In-Line CAR+1 00 0 001 JMP CS(AD) 10 0 010 In-Line CAR+1 00 0 011 CALL CS(AD) and SBR <- CAR+1 10 1 10x RET SBR 01 0 11x MAP DR(11-14) 11 0